- Ninguna Categoria
Convertidores CC-CA: Inversores de Frecuencia Variable
Anuncio
257
CAPÍTULO
7
Convertidores cc-ca.
Inversores de
frecuencia variable
7.1
Introducción
El objetivo de un inversor conmutado o convertidor cc-ca, consiste en proporcionar a la
salida una tensión alterna senoidal de magnitud y de frecuencia controlable a partir de
una tensión continua de entrada.
Los convertidores cc-ca que aquí se presentan no deben confundirse con los inversores
controlados por fase. Un convertidor cc-ca controlado por fase y funcionando como
inversor sólo permite controlar la magnitud de la tensión de salida, no su frecuencia.
Además, requiere de la existencia de una fuente de alterna, que generalmente se trata de
la red. Esta fuente de alterna es la que provoca la conmutación de los interruptores. En
un convertidor conmutado cc-ca como los tratados en este capítulo, la tensión alterna de
salida es controlable en magnitud y frecuencia. No requiere de una fuente de alterna,
pero como contrapartida sus interruptores requieren de un circuito de apagado
adiccional.
Un inversor conmutado permite un flujo de potencia reversible, es decir, puede
funcionar bien como un inversor o bien como un rectificador. Sin embargo, debido a
que la mayor parte del tiempo la potencia fluye desde el lado de continua al lado de
alterna, este tipo de convertidor conmutado cc-ca recibe de forma general el nombre de
inversor.
Entre las principales aplicaciones de estos convertidores caben destacar las siguientes:
• Accionamientos de motores de alterna a velocidades variables:
• Control de velocidad en vehículos eléctricos, como trenes.
258
Cap. Convertidores cc-ca. Inversores de frecuencia variable
• Variación de la velocidad de bombas y compresores de forma que puedan
funcionar a la máxima eficiencia ante cargas variables.
• Control de velocidad en cintas transportadoras.
• Control de posición y velocidad en máquinas herramientas.
• Fuentes de alimentación initerrumpidas.
• Cambiadores de frecuencia.
• Alimentación de cargas alternas a partir de fuentes de energías alternativas que
producen corriente continua, como es el caso de las células fotovoltaicas.
• Fuentes de alimentación móviles.
Considérese la figura 7.1, que representa en diagrama de bloques el accionamiento de
un motor de corriente alterna. La tensión continua VD a la entrada del inversor se
obtiene al rectificar la tensión de red por medio de un rectificador no controlado o de
diodos, y filtrar la salida del mismo. Como salida se obtiene una onda senoidal que
alimenta al motor controlable en magnitud y en frecuencia.
FIGURA 7.1
Acccionamiento de un motor de corriente alterna.
+
motor
de ca
VD
50 Hz ca
_
Rectificador
de diodos
Filtro paso
bajo
Inversor
conmutado
En el frenado del motor, la energía cinética asociada con la inercia del motor y su carga
se convierte en energía eléctrica, esto es, el motor actúa como generador. Por tanto, el
convertidor de cc-ca funciona como rectificador, transfiriendo la potencia del lado de
alterna al lado de continua. Sin embargo, debido a la presencia del rectificador de
diodos, la energía recuperada durante el frenado no puede transferirse a la red, por lo
que tendría que disiparse a través de una resistencia en paralelo con el condensador.
En aplicaciones donde el frenado del motor se produce con relativa frecuencia, resulta
útil el empleo de otros montajes que permitan recuperar esta energía generada (frenado
regenerativo). Esto requiere que el convertidor que conecta la red al accionamiento del
motor de alterna (denominado convertidor 1 en la figura 7.2) permita un flujo de
potencia reversible variando el sentido de la corriente de salida.
Sec.
Introducción
FIGURA 7.2
259
Accionamiento de un motor de corriente alterna: frenado
regenerativo.
+
motor
de ca
VD
50 Hz ca
_
Convertidor 1
Filtro paso
bajo
Convertidor 2
Así, durante el funcionamiento normal del motor, el convertidor 1 funciona como
rectificador, transfiriendo el flujo de potencia desde el lado de alterna (red) al de
continua. Por su parte, el convertidor 2 actúa como inversor, transfiriendo energía del
lado de continua al de alterna (motor).
Durante el frenado regenerativo, es el convertidor 2 el que ejerce el papel de
rectificador al transferir la energía procedente del motor, y el convertidor 1 el que actúa
como inversor, al devolver esta energía de nuevo a la red.
Existen dos opciones para llevar a cabo la implementación del convertidor 1:
• Emplear dos convertidores controlados por fase conectados en antiparalelo
(frecuencia fija).
• Utilizar un inversor de los presentados en este capítulo (frecuencia variable).
Si en la primera de las opciones se emplease un único rectificador de tiristores, la
corriente siempre fluirá en un único sentido, siendo la tensión la que varía de polaridad,
para permitir su utilización como rectificador o como inversor. Funciona, por tanto, en
los cuadrantes I y II del plano v0-i0. Sin embargo, en esta aplicación se persigue
conseguir un convertidor en el que la tensión se mantenga constante y no varíe de
polaridad, siendo la intensidad la que, al variar su sentido, varíe el flujo de potencia
(funcionamiento en los cuadrantes I y IV del plano v0-i0). De ahí la necesidad de dos
convertidores de tiristores conectados en antiparalelo.
Este montaje presenta ciertos inconvenientes, algunos de los cuales son los siguientes:
• Factor de potencia bajo.
• La tensión VD del lado de continua se encuentra limitada por el ángulo de
excitación del segundo de los convertidores en su funcionamiento como
inversor.
260
Cap. Convertidores cc-ca. Inversores de frecuencia variable
• Podría existir fallo en la conmutación del convertidor que funcione como inversor
provocados por alteraciones de la tensión alterna de línea.
Por ello, se opta por la segunda de las opciones anteriores para implementar tanto el
convertidor 1 como el convertidor 2.
Atendiendo a la fuente continua de entrada, se distinguen dos grandes grupos de
inversores:
• Inversores de fuente de tensión (VSI: Voltage Source Inverters), donde la
alimentación en el lado de continua es una fuente de tensión conmutada. Son los
más empleados.
• Inversores de fuente de corriente (CSI: Current Source Inverters), donde la
alimentación en el lado de continua consiste en una fuente de corriente continua.
Se utilizan casi exclusivamente en accionamientos de motores de corriente
alterna de muy alta potencia.
Los inversores de fuente de tensión se dividen a su vez en tres categorías:
1.
Inversores por modulación de ancho de pulso (PWM). En estos inversores, la
entrada consiste en una tensión constante, por lo que puede obtenerse a partir de
la rectificación no controlada mediante diodos de la tensión de red (ver figura
7.1). El inversor controla la magnitud y la frecuencia de la tensión senoidal
alterna de salida. Para ello, emplea en la conmutación de sus interruptores la
modulación de ancho de pulso PWM. Son varias las estrategias que pueden
emplearse para gobernar la conmutación de los interruptores mediante PWM,
de forma que la tensión de salida sea lo más parecida a una senoidal. De todas
ellas, el esquema más utilizado es el denominado PWM senoidal, que se
abordará con detalle en este capítulo.
2.
Inversores de onda cuadrada. En estos inversores, la tensión de salida consiste
en una onda cuadrada. Un inversor de este tipo es capaz de controlar la
frecuencia de la tensión de salida, pero no su magnitud. Así, para controlar el
valor de esta tensión de salida se requiere variar la tensión de entrada, por lo que
debe proceder de un rectificador controlado, nunca de un rectificador de diodos.
3.
Inversores monofásicos por anulación de tensiones o inversores de onda cuasicuadradas (monofásica). Si la tensión alterna requerida es monofásica, resulta
posible controlar la magnitud y la frecuencia de la onda de salida a pesar de que
la entrada al inversor sea una tensión continua constante y en la conmutación de
los interruptores no se haya empleado la modulación por ancho de pulso. Por
tanto, estos inversores combinan caracterísiticas de los dos anteriores. Esta
técnica resulta válida únicamente en inversores monofásicos y no en los
trifásicos.
La onda de salida de los convertidores inversores que aquí se estudian, es una senoidal
a frecuencia fundamental que contiene una serie de armónicos. Al ser periódica la
Sec.
Introducción
261
salida, permite su desarrollo empleando series de Fourier, es decir, su representación
como una suma de términos senoidales.
Sea v(t) una onda periódica:
v(t) = v(t + T)
(7.1)
Su desarrollo en series de Fourier viene dado por:
∞
v(t) = V +
∑a
∞
n
sin ( nωt ) +
n=1
∑b
∞
n
cos ( nωt ) = V +
n=1
∑c
n
cos ( nωt – θ n )
(7.2)
n=1
donde:
2 T
1 2π
a n = --- ∫ v ( t ) sin ( nωt ) dt = --- ∫ v ( ϕ ) sin ( nϕ ) dϕ
T 0
π 0
(7.3)
2 T
1 2π
b n = --- ∫ v ( t ) cos ( nωt ) dt = --- ∫ v ( ϕ ) cos ( nϕ ) dϕ
T 0
π 0
(7.4)
cn =
2
2
an + bn
(7.5)
an
θ n = arctg ⎛ ----⎞
⎝ b n⎠
(7.6)
1 T
1 2π
V = --- ∫ v ( t ) dt = ------ ∫ v ( ϕ ) dϕ
T 0
2π 0
(7.7)
Si se elige de forma adecuada el origen de tiempos de la onda periódica, ésta puede
comportarse como una onda par, impar o alternada, simplificando su desarrollo en
series de Fourier. Así, si la onda es par:
v ( t ) = v ( –t )
(7.8)
el término an vale cero, por lo que sólo existirán términos cosenos.
Si la onda es impar:
v ( t ) = –v ( –t )
(7.9)
el valor medio V vale cero, así como el término bn, es decir, sólo existen términos senos.
Y si la onda es alternada:
T
v ( t ) = – v ⎛ t + ---⎞
⎝ 2⎠
(7.10)
262
Cap. Convertidores cc-ca. Inversores de frecuencia variable
se cumple que:
V = 0
a 2k = b 2k = 0
(7.11)
por lo que se eliminan todos los armónicos pares, quedando sólo los impares.
7.2
Conceptos básicos de los inversores conmutados
Para el estudio de las caracterísitcas básicas de los inversores conmutados, considérese
por simplicidad un inversor monofásico, representado en forma de diagrama de bloques
en la figura 7.3-a. En dicha figura, la tensión de salida del convertidor se filtra con el fin
de proporcionar una tensión v0 puramente senoidal.
El bloque inversor+filtro alimenta a una carga inductiva, como puede ser un motor de
corriente alterna, por lo que la corriente i0 irá retrasada respecto a la tensión v0, como
muestra la figura 7.3-b. En dicha figura se observa, además, que durante el intervalo 1,
v0 e i0 son ambas positivas, en tanto que en el intervalo 3 v0 e i0 son negativas. Por ello,
durante los intervalos 1 y 3, la potencia instantánea fluye desde el lado de continua al de
alterna ( p 0 ( t ) > 0 ) , correspondiendo así a su funcionamiento como inversor.
Por contra, durante los intervalos 2 y 4, v0 e i0 poseen polaridades contrarias. Así, la
potencia instantánea fluirá desde el lado de alterna al de continua ( p 0 ( t ) < 0 ) ,
funcionando como rectificador.
El inversor de la figura 7.3-a debe ser capaz de funcionar en los cuatro cuadrantes del
plano v0 -i0 en cada ciclo de la tensión senoidal de salida (ver figura 7.3-c).
El convertidor en puente completo presentado en el capítulo anterior (ver figura 7.39)
cumple también este requisito de funcionamiento en los cuatro cuadrantes. En él, la
tensión de salida v0 puede presentar polaridad positiva o negativa independientemente
del sentido o polaridad de la corriente de salida i0.
La figura 7.4 muestra una de las patas del convertidor en puente completo (por ejemplo,
la pata A). Todas las topologías de los inversores cc-ca descritos en el presente capítulo
se derivan de este convertidor de una única pata.
Con objeto de simplificar la explicación, se supondrá que en el circuito de la figura 7.4,
el punto medio ‘o’ de la tensión continua de entrada se encuentra accesible, aunque en
la mayoría de los inversores ni se requiere tal punto ni resulta accesible. En el análisis
de esta topología se considerará, además, que la tensión continua de entrada se
mantiene constante al valor VD.
Así, en primer lugar, se analizará el inversor de una pata descrito cuando se emplea la
conmutación mediante modulación de ancho de pulso para modelar la magnitud y la
frecuencia de la tensión alterna de salida. A continuación se estudian los inversores de
onda cuadrada, que constituyen un caso particular de los inversores con PWM.
Sec.
Conceptos básicos de los inversores conmutados
FIGURA 7.3
263
Inversor monofásico conmutado.
iD
i0
Inversor
VD
Filtro
monofásico
v0
Carga
(a)
v0
i0
t
0
4
2
1
3
(b)
i0
2
Rectificador
1
Inversor
v0
3
Inversor
4
Rectificador
(c)
FIGURA 7.4
Convertidor de una pata.
V
------D2
VD
TA+
A
o
V
------D2
DA+
TA-
DA-
i0
vAN
264
7.2.1
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Conmutación mediante modulación de ancho de pulso (PWM)
Para generar las señales que gobiernan la conmutación de los interruptores en los
convertidores cc-cc en puente completo analizados en el capítulo anterior, se
comparaba una onda repetitiva triangular con una tensión de control constante.
Controlando el tiempo de activación de cada interruptor, se controlaba la tensión media
de salida.
En un inversor, la modulación de ancho de pulso resulta algo más compleja, ya que no
sólo se pretende controlar la magnitud de la tensión de salida, sino también su
frecuencia. Así, para obtener una tensión senoidal de salida a la frecuencia f1 deseada,
se compara una señal de control senoidal a la frecuencia f1 con una onda triangular,
como muestra la figura 7.5-a. La frecuencia fs de esta onda triangular establece la
frecuencia de conmutación de los interruptores y recibe el nombre de frecuencia
portadora.
La señal de control vcontrol modula el ratio de conducción de los interruptores del
inversor y su frecuencia f1 coincide con la frecuencia fundamental de la tensión de
salida del convertidor. Por tanto, la tensión de salida del inversor no es una senoidal
perfecta, sino que contiene armónicos.
Se define el ratio de modulación de amplitud ma como el cociente entre los valores de
pico o amplitiudes de la tensión de control y de la onda triangular:
V̂ control
m a = --------------V̂ tri
(7.12)
Por otro lado, el ratio de modulación de frecuencia mf se define como el cociente entre
la frecuencia portadora y la frecuencia moduladora:
f
m f = ---s
f1
(7.13)
En el inversor de la figura 7.4, al comparar las señales vcontrol y vtri, se obtienen las
siguientes tensiones, independientemente del sentido de i0:
v control > v tri
T A + cerrado
v control < v tri
T A – cerrado
V
v A0 = ------D2
V
v A0 = – ------D2
(7.14)
Si se considera que los interruptores de una misma pata nunca estarán abiertos de forma
simultánea, la tensión de salida vA0 fluctúa entre los valores – V D ⁄ 2 y V D ⁄ 2 . La figura
7.5-b muestra la tensión vA0 y su componente a frecuencia fundamental (en línea de
trazos) para ma=0.8 y mf=15.
Sec.
Conceptos básicos de los inversores conmutados
FIGURA 7.5
265
Modulación de ancho de pulso.
vtri
vcontrol
t
(a)
1/fs
vA0
vA0, fundamental = (vA0)1
VD/2
t
-VD /2
vcontrol < vtri
TA- on; TA+ off
t=0
vcontrol > vtri
TA+ on; TA- off
(b)
El espectro de armónicos de vA0 normalizados al valor ( V̂ A0 ) n ⁄ ( V D ⁄ 2 ) queda
representado en la figura 7.6, para las condiciones indicadas en las figuras 7.5-a y 7.5-b.
De dicho espectro de armónicos, donde m a ≤ 1 , se deducen tres importantes
conclusiones:
1.
El valor de la tensión de pico del armónico de frecuencia fundamental ( V̂ A0 ) 1 es ma
veces V D ⁄ 2 , esto es:
266
Cap. Convertidores cc-ca. Inversores de frecuencia variable
FIGURA 7.6
Espectro de armónicos de vA0.
(VA0)n / (VD/2)
1
0.8
0.6
0.4
0.2
0
mf
1
(mf + 2)
2mf (2mf +1)
3mf
(3mf +2)
Armónicos n de f1
ma ≤ 1
VD
( V̂ A0 ) 1 = m a ------2
(8.15)
Para demostrar esta relación, considérese en primer lugar que la tensión vcontrol es
constante, como muestra la figura 7.7-a. Al compararla con la onda triangular se
obtiene la forma de onda de vA0 tal y como se dedujo en el capítulo anterior al
estudiar los convertidores en puente completo.
La valor medio VA0 de la tensión de salida en un periodo T S = 1 ⁄ f s vale:
v control⎞
V
V
V A0 = D 1 V D – ------D- = ⎛ 1 + -------------⎠ V D – ------D⎝
2
2
V̂ tri
∴V A0
v control V D
= -------------- ------2
V̂ tri
(7.16)
v control ≤ V̂ tri
Supóngase ahora que vcontrol varía muy poco en cada periodo de conmutación, esto es,
mf es grande como se observa en la figura 7.7-b. Por ello, puede considerarse que la
señal vcontrol permanece constante en cada periodo Ts, por lo que la ecuación 7.16
indica cómo varía la tensión media instantánea de vA0 de un periodo de control al
siguiente. Esta tensión media instantánea coincide con la componente de vA0 a
frecuencia fundamental.
Si se considera que vcontrol consiste en una senoidal a la frecuencia f 1 = ω 1 ⁄ 2π , esto
es, a la frecuencia fundamental de salida del inversor:
Sec.
Conceptos básicos de los inversores conmutados
FIGURA 7.7
267
Modulación de ancho de pulso senoidal.
vA0
Vtri
vcontrol
VD /2
VA0
0
t
-VD /2
(a)
vcontrol
vtri
t
(b)
v control = V̂ control sin ( ω 1 t )
(8.17)
V̂ control ≤ V̂ tri
(7.18)
donde:
Empleando las ecuaciones 7.17 y 7.18, la componente fundamental de la tensión de
salida ( v A0 ) 1 varía de forma senoidal y en fase con la tensión vcontrol:
VD
VD
V̂ control
( v A0 ) 1 = ---------------- sin ( ω 1 t ) ------- = m a sin ( ω 1 t ) -------,
2
2
V̂ tri
ma ≤ 1
(7.19)
Su amplitud vale:
VD
( V̂ A0 ) 1 = m a -------,
2
ma ≤ 1
(7.20)
esto es, varía de forma lineal con el ratio de amplitud ma, siempre y cuando se
cumpla que m a ≤ 1 . La región donde ma se encuentra comprendida entre cero y la
unidad se la denomina zona de modulación lineal.
2.
El ratio de modulación de frecuencia mf debe ser un número entero impar. De la
268
Cap. Convertidores cc-ca. Inversores de frecuencia variable
figura 7.5-b se deduce que, tomando mf como un entero impar (en la figura mf=15) la
onda de salida de vA0(t) tiene las siguientes características:
• vA0(t) es una función impar: v A0 ( t ) = – v A0 ( – t ) . Por tanto, en la descomposición
en series de Fourier sólo contendrá términos en seno (bn=0).
• vA0(t) es una función alternada: v A0 ( t ) = – v A0 ( t + T s ⁄ 2 ) . Así, en la
descomposición en serires de Fourier vA0(t) sólo tendrá armónicos impares, ya
que a 2k = b 2k = 0 .
Por tanto, si se elige mf de valor impar, la descomposición de serires de Fourier de la
tensión de salida vA0(t) sólo presentará armónicos senoidales de orden impar, excepto
en el caso de inversores PWM monofásicos con conmutación de tensión unipolar.
3.
Para ma comprendido entre cero y la unidad, la tensión de salida vA0(t) presenta
tensiones armónicas en bandas centradas en la frecuencia de conmutación y sus
múltiplos, es decir, en torno a los armónicos mf, 2mf, 3mf, etc. Además, al tratarse de
armónicos impares, éstos aparecerán a la frecuencia f n = nf 1 donde n es impar:
n = j mf ± k
(7.21)
Así, el armónico de orden n se corresponde con la n-enésima banda del ratio de
modulación de frecuencia en el tiempo j. Para n=1 se obtiene la frecuencia
fundamental. Si j es impar, sólo existen armónicos para valores pares de k, y si j es
par, éstos únicamente existirán para valores impares de k.
Si m f ≥ 9 , lo cual resulta habitual salvo en aplicaciones de muy alta potencia, las
amplitudes de los armónicos son prácticamente independientes de mf, aunque mf
defina la frecuencia a la que ocurren.
En lo referente a la elección de la frecuencia fs de conmutación de los interruptores y del
ratio de modulación de frecuencia mf, al presentar vA0(t) armónicos en bandas en torno a
fs y sus múltiplos, cuanto mayor sea la frecuencia portadora elegida mayores serán las
frecuencias a las que aparecen los armónicos.
Además, el filtrado de las tensiones armónicas será más fácil si éstas poseen altas
frecuencias. Por ello, resultaría deseable emplear una frecuencia portadora tan alta
como sea posible. Sin embargo, las pérdidas en los interruptores crecen de forma
proporcional a la frecuencia de conmutación. Por ello, la elección de fs debe atender al
compromiso entre el filtrado de armónicos y las pérdidas originadas en la conmutación
de los interruptores.
Por regla general, se considera como valor óptimo de fs el comprendido en el rango
entre los 6 y los 20 KHz. Así, en aplicaciones que tienen lugar a frecuencias de 50 ó 60
Hz, como puede ser el accionamiento de motores de corriente alterna (donde la
frecuencia fundamental de salida del inversor resulta en ocasiones mayor a los 200 Hz),
el ratio de modulación de frecuencia mf puede elegirse igual a 9 o incluso de menor
Sec.
Conceptos básicos de los inversores conmutados
269
valor si fs es menor que 2KHz. Por otro lado, mf debe valer un número superior a 100 si
fs es mayor que 20KHz.
La relación entre la señal triangular vtri y la señal de control vcontrol vienen dadas por el
valor de mf. Para analizar cómo afecta la elección del ratio de modulación de
frecuencias mf, supóngase, por ejemplo, mf=21 como el límite que separa valores de mf
altos y bajos. Se considera, además, que el ratio de modulación de amplitud ma es
menor o igual a la unidad (zona de modulación lineal).
Valores de mf pequeños: m f ≤ 21
1.
PWM síncrono. El PWM síncrono requiere que las señales vtri y vcontrol estén
sincronizadas. Para ello, mf debe ser entero. Este requisito justifica el uso del PWM
síncrono, ya que si se utilizase el asíncrono mf puede no ser entero, presentando la
tensión vA0(t) a la salida del inversor subarmónicos de la frecuencia fundamental que
no son deseables en tales aplicaciones. Se perderían así las ventajas de la
modulación PWM.
2.
mf debe ser un entero impar. Como se explicó con anterioridad, la elección de mf
impar simplifica el desarrollo en series de Fourier de la forma de onda a la salida del
inversor. Sin embargo, para los inversores monofásicos con tensión PWM unipolar,
esta regla resulta una excepción, como se discutirá en posteriores secciones.
3.
Las pendientes de las señales vcontrol y vtri deberían tener polaridades opuestas a su
paso por cero, como muestra la figura 7.5-a. Esto resulta particularmente importante
para valores muy pequeños de mf.
Valores de mf grandes: m f
> 21
Para valores altos de mf resulta preferible el empleo de PWM asíncrono, ya que
permiten obtener subarmónicos de amplitudes pequeñas. En este caso, es la frecuencia
de la onda triangular (que coincide con la de conmutación fs) la que se mantiene
constante y la frecuencia de la señal de control la que varía con el fin de obtener la
frecuencia de salida deseada en cada momento. Por ello, mf no siempre resulta un valor
no entero, dando lugar a la aparición de subarmónicos. Pero como para mf>>21 los
armónicos están a muy alta frecuencia, puede emplearse el PWM asíncrono, pues los
subarmónicos originados no aparecerán a frecuencias demasiado bajas. Sin embargo, si
el inversor alimenta a una carga como puede ser un motor de alterna, debe evitarse
emplear PWM asíncrono. Esto se debe a que los subarmónicos de frecuencia cero o
próxima a ésta, incluso aunque posean escasa amplitud, originarán grandes intensidades
claramente indeseables.
Sobremodulación : m a
> 1.
Hasta ahora se ha considerado que el inversor trabaja en la zona de modulación lineal,
en la que m a ≤ 1 , esto es, la amplitud de la onda de control resulta menor o igual que la
de la onda triangular.
270
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Son varias las ventajas de trabajar en la zona de modulación lineal. Una de ellas reside
en que la amplitud de la tensión de salida de frecuencia fundamental ( V̂ A0 ) 1 varía
linealmente con ma, como indica la ecuación 7.20. Además, los armónicos de la tensión
vA0(t) aparecen en la zona de alta frecuencia alrededor de la frecuencia de conmutación
y de sus múltiplos.
Sin embargo, al variar ma en el rango comprendido entre cero y la unidad, por la
ecuación 7.20 la amplitud de la tensión de salida de frecuencia fundamental no resulta
tan alta como cabría desear:
VD
( V̂ A0 ) 1 ≤ ------2
m a ≤ 1,
(7.22)
Con objeto de incrementar la amplitud de la componente de la tensión de salida de
frecuencia fundamental, se aumenta el valor de ma por encima de la unidad. Esto es lo
que se conoce como sobremodulación.
Pero el empleo de sobremodulación causa que la tensión de salida contenga muchos
más armónicos y a más bajas frecuencias que los que se producían en la zona de
modulación lineal, como se observa en la figura 7.8. Además, los armónicos con
amplitudes dominantes en la zona lineal pueden no ser dominantes en la zona de
sobremodulación.
FIGURA 7.8
Armónicos en la zona de sobremodulación: ma=2.5 y mf=15.
(VA0)n / (VD/2)
1.2
1
0.8
0.6
0.4
0.2
0
1
3
5
7
9 11 13 15 17 19 21 23 25 27
mf
Armónicos n
Sec.
Conceptos básicos de los inversores conmutados
271
Al contrario de lo que ocurría en la zona de modulación lineal, la amplitud de la tensión
de salida de frecuencia fundamental varía de forma no lineal con ma, y además resulta
dependiente del ratio de modulación de frecuencias mf. La figura 7.9 muestra el valor de
pico de la tensión de salida de frecuencia fundamental normalizada, ( V̂ A0 ) 1 ⁄ ( V D ⁄ 2 ) ,
como función del ratio ma.
FIGURA 7.9
Voltaje de salida en función de ma, con mf=15.
(VA0)1 / (VD/2)
4/π
1
Lineal
Onda
cuadrada
Sobremodulación
0
1
ma
3.24
mf = 15
Cuando se trabaja en la zona de sobremodulación, independientemente del valor de mf,
resulta aconsejable el empleo del modo de funcionamiento PWM síncrono, donde la
señal de control y la de onda triangular están sincronizadas y el ratio de modulación de
frecuencias mf debe ser entero. Si se emplease el modo de operación PWM asíncrono,
además de presentar la tensión de salida subarmónicos de la frecuencia fundamental,
este contenido de armónicos se hace mucho mayor al trabajar en la zona de
sobremodulación. Por ello, debe evitarse a toda costa.
Como se describirá en capítulos posteriores, la región de sobremodulación nunca debe
de estar presente en inversores que trabajan junto a fuentes de tensión ininterrumpidas,
ya que, en esta aplicación, debe evitarse al máximo cualquier distorsión de la tensión de
salida. Así, las tensiones armónicas deberían de aparecer a muy altas frecuencias con
objeto de facilitar el filtrado de las mismas. Por contra, en aplicaciones de inversores en
accionamientos de motores de inducción, donde la distorsión de la tensión de salida
resulta menos importante, se suele utilizar la zona de sobremodulación.
272
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Para valores de ma suficientemente grandes, la forma de onda de la tensión del inversor
se transforma desde un ancho de pulso modulado a una onda cuadrada, como se
discutirá en la siguiente sección. Así, como muestra la figura 7.9, en la región de
sobremodulación la amplitud de la tensión de salida de frecuencia fundamental está
comprendida entre los valores:
V
4 V
------D- < ( V̂ A0 ) 1 < --- ------Dπ 2
2
7.2.2
(7.23)
Inversor de onda cuadrada
En un inversor de onda cuadrada, cada interruptor del inversor de una pata representado
en la figura 7.4 se encuentra cerrado durante la mitad de un ciclo (180º). Esto da origen
a que la tensión alterna de salida vA0(t) consista en una onda cuadrada, como muestra la
figura 7.10-b.
Así, como se observa de la figura 7.10-a, un inversor de onda cuadrada es un caso
particular del inversor con conmutación PWM sobremodulado, donde el valor de ma
resulta tan elevado que la señal triangular y la tensión senoidal de control sólo
intersectan en el paso por cero de ésta última. Por ello, la tensión de salida, que oscila
entre los valores de V D ⁄ 2 y – V D ⁄ 2 , resulta independiente de la relación entre los
valores de pico de vtri y vcontrol, esto es, de ma (ver figura 7.9).
La onda cuadrada de salida es impar y alternada. De su análisis en series de Fourier se
obtiene:
1
a n = --π
∫
π
2π
VD
–V
1 4 V
------- sin ( nωt ) d( ωt ) + ∫ ---------D- sin ( nωt ) d( ωt ) = --- --- ------D2
2
n π 2
0
π
(7.24)
es decir, el valor de pico de frecuencia fundamental y las amplitudes de las
componentes armónicas de la tensión de salida para una tensión de entrada VD
determinada valen, de forma respectiva:
VD
4 VD
( V̂ A0 ) 1 = --- ------- = 1, 273 ⎛ -------⎞
⎝ 2⎠
π 2
(7.25)
y
( V̂ A0 ) 1
( V̂ A0 ) n = --------------n
n = 3, 5, 7, …
(7.26)
donde los armónicos de orden n únicamente toman valores impares (ver figura 7.11).
Sec.
Conceptos básicos de los inversores conmutados
FIGURA 7.10
273
Conmutación mediante onda cuadrada.
vcontrol
vtri
0
t
(a)
vA0
VD/2
0
t
-VD/2
1/f1
(b)
FIGURA 7.11
Armónicos en un inversor de onda cuadrada.
(VA0)1 / (VD/2)
1.4
1.2
1
0.8
0.6
0.4
0.2
0
1
3
5
7
9
11
13
n
(armónicos de f1)
274
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Una de las ventajas que presentan los inversores que emplean en la conmutación ondas
cuadradas reside en que sus interruptores únicamente cambian de estado dos veces en
cada ciclo. Esta característica reviste gran importancia en aplicaciones de muy alta
potencia, donde los semiconductores empleados poseen tiempos de encendido y
apagado elevados debido a la alta potencia que deben soportar. Además, al disminuir el
número de conmutaciones, las pérdidas también se reducen.
Por contra, al emplear en la conmutación una onda cuadrada, el inversor no es capaz de
regular la magnitud de la tensión de salida. Por ello, para controlar el voltaje de salida
se requierirá variar la tensión VD de entrada al inversor.
7.3
Inversores monofásicos
Existen dos tipos de inversores monofásicos: inversores de medio puente y los de
puente completo.
Los inversores de medio puente se corresponden con la topología básica de inversor de
una pata analizado en la sección precedente, por lo que omitirá aquí su discusión.
Los inversores en puente completo (ver figura 7.12) consisten en dos inversores de una
pata, y se emplean de forma generalizada en aplicaciones de alta potencia.
FIGURA 7.12
Inversor monofásico en puente completo.
iD
TA+
V
------D2
VD
DA+
TB+
DB+
i0
A
v0 = vA0 - vB0
o
B
V
------D2
TA-
DA-
TB-
DB-
Para una misma tensión de entrada VD, la tensión de salida en un inversor en puente
completo es el doble de la que se consigue con uno de medio puente. Por tanto, para el
mismo nivel de potencia, la corriente de salida y las intensidades a través de los
interruptores en un inversor en puente completo se reducen a la mitad de las obtenidas
en uno de medio puente. Esta característica es determinante a alta potencia, ya que
requiere menos interruptores en paralelo.
Sec.
Inversores monofásicos
275
En esta sección se estudian los inversores de puente completo según diferentes formas
de operación. Así, en primer lugar se presentan los inversores con conmutación por
modulación de ancho de pulso PWM, ya sea mediante tensión bipolar o unipolar. A
continuación se analizan los inversores de onda cuadrada y, por último, los que
controlan la tensión de salida a través de la técnica de anulación de tensiones.
7.3.1
Control mediante PWM con conmutación de tensión bipolar
Como se introdujo en el capítulo 6 al analizar los convertidores cc-cc en puente
completo, el control de la conmutación de los interruptores empleando la modulación
de ancho de pulso mediante tensión bipolar se realiza por parejas de interruptores de
signos opuestos y pertenecientes a patas contrarias. Así, los interruptores ( T A + , T B – )
forman una de las parejas y los interruptores ( T A – , T B + ) la otra.
Los interruptores pertenecientes a un mismo par se activan por una misma señal, esto
es, los dos se abren y se cierran a la vez. Además, siempre que una pareja se encuentre
activada, la otra permanecerá desactivada.
Con la conmutación mediante PWM, la forma de onda de la tensión de salida de la pata
A coincide con la salida del convertidor básico de una pata analizado con anterioridad.
Esta tensión de salida se obtiene de igual forma al comparar una señal triangular con
una tensión de control, como muestra la figura 7.13-a.
Así:
v control > v tri
v control < v tri
⇒
⎧ T A + on ⇒ v A0 = V D ⁄ 2
( T A + , T B – ) on ⎨
⎩ T B – on ⇒ v B0 = – V D ⁄ 2
⇒
⎧ T A – on ⇒ v A0 = – V D ⁄ 2
) on ⎨
⎩ T B + on ⇒ v B0 = V D ⁄ 2
( TA – , TB +
(7.27)
de donde se deduce que la salida de la pata B y de la pata A son inversas:
v A0 ( t ) = – v B0 ( t )
(7.28)
y que la tensión de salida del inversor v0(t) es el doble de la obtenida en un inversor
básico de una pata, como muestra la figura 7.13-b:
v 0 ( t ) = v A0 ( t ) – v B0 ( t ) = 2 v A0 ( t )
(7.29)
Al oscilar la tensión de salida entre los valores de VD y -VD, esto es, con doble polaridad,
esta forma de conmutación mediante modulación de ancho de pulso se la denomina de
tensión bipolar.
276
Cap. Convertidores cc-ca. Inversores de frecuencia variable
FIGURA 7.13
PWM con conmutación bipolar: ma= 0.8 t mf=15.
vtri
vcontrol
t
1/fs
(a)
v0
v0,1
VD
t
-VD
(b)
El análisis llevado a cabo para el inversor de una pata resulta válido para el inversor en
puente completo. Así, de las ecuaciones 7.20 y 7.29 se obtiene el valor de pico de la
componente de frecuencia fundamental de la tensión de salida en la zona lineal:
V̂ 01 = m a V D
( ma ≤ 1 )
(7.30)
por lo que los inversores en puente completo contendrán el mismo número de
armónicos que los de medio puente, pero su amplitud será el doble.
Para estos inversores, la zona de sobremodulación se encuentra comprendida entre:
4
V D ≤ V̂ 01 ≤ --- V D
π
(7.31)
Sec.
Inversores monofásicos
277
Al igual que en el inversor de medio puente, cuando el de puente completo trabaja en la
zona de sobremodulación consigue aumentar la amplitud de la tensión de salida a
frecuencia fundamental por encima de VD, pero a costa de elevar el número de
armónicos, presentes además a más bajas frecuencias.
Corriente iD en el lado de continua
Considérese un inversor en puente completo como el representado en la figura 7.14,
donde se asume que sus interruptores poseen una frecuencia de conmutación muy alta,
prácticamente infinita. Esto da origen a la aparición de armónicos de frecuencia
infinita, que afectan tanto en la tensión de salida v0 como a la intensidad de entrada iD.
Para su filtrado, se ha conectado un filtro en el lado de continua (entrada) y otro en el
lado de alterna (salida) del inversor, con valores de la bobina y del condensador
pequeños, tendiendo a cero. Por ello, la energía almacenada en los filtros puede
considerarse despreciable, es decir, la potencia instantánea a la entrada es igual a la
potencia instantánea a la salida:
p D ( t ) = p 0 ( t ) ⇒ V D i D∗ ( t ) = v 0 ( t ) i 0 ( t )
(7.32)
Teniendo en cuenta las suposiciones anteriores, la tensión v0 resulta una senoidal pura a
la frecuencia fundamental de salida ω1:
v 0 = v 01 =
FIGURA 7.14
iD*
VD
2 V 0 sin ( ω 1 t )
(7.33)
Inversor con filtros de alta frecuencia.
Inversor
Filtro ficticio
Carga
Filtro ficticio
i0
iD
Lcarga
Lf2
Lf1
Cf2
Cf1
fs → ∞ Lf , Cf → 0
1
1
V0
+
~
e0
f s → ∞ L f 2, C f2 → 0
Si se considera una carga inductiva, como podría ser un motor de corriente alterna y
donde e0 (ver figura 7.14) consiste en una senoidal pura a la frecuencia ω1, la intensidad
iD será una senoidal de frecuencia w1 pero desfasada φ grados respecto a v0:
i0 =
2 I 0 sin ( ω 1 t – φ )
(7.34)
De la ecuación 7.32:
v0 ( t ) i0 ( t )
i D∗ ( t ) = ------------------------VD
(7.35)
278
Cap. Convertidores cc-ca. Inversores de frecuencia variable
donde sustitutuyendo las expresiones 7.33 y 7.34:
2 V 0 sin ( ω 1 t ) 2 I 0 sin ( ω 1 t – φ )
i D∗ ( t ) = --------------------------------------------------------------------------------------------VD
(7.36)
Operando:
V0 I0
V0 I0
i D∗ ( t ) = -------------- cos φ – -------------- cos ( 2ω 1 t – φ ) = I D + i d2 =
VD
VD
(7.37)
I D – 2 I d2 cos ( 2ω 1 t – φ )
donde ID representa la componente a frecuencia cero de i D∗ :
V0 I0
I D = -------------- cos φ
VD
(7.38)
e Id2 el valor eficaz de la componente de frecuencia 2f1 de i D∗ :
1 V0 I0
I d2 = ------- -------------2 VD
(7.39)
Así, como muestra la ecuación 7.37, la intensidad i D∗ contiene una componente
continua ID, que es la responsable de la transferencia de potencia desde el lado de
continua al de alterna, y una componente senoidal de frecuencia doble a la fundamental.
La corriente iD de entrada al inversor consiste en la intensidad i D∗ más las componentes
de alta frecuencia debidas a las conmutaciones de los interruptores del inversor.
Aunque en el análisis se ha supuesto el caso ideal en que la tensión de entrada VD
permanece constante en todo momento, en la práctica ésta posee un pequeño rizado. De
forma general, la tensión de entrada resulta de rectificar y filtrar la tensión alterna de
línea. El rizado de la tensión en el condensador del filtro, que coincide con el rizado de
la tensión de entrada al inversor, se debe a dos razones principales:
• La rectificación de la tensión de línea no produce totalmente una tensión
continua.
• La intensidad iD de entrada al inversor viene dada por la corriente i D∗ más
componentes armónicas de alta frecuencia. La componente armónica a
frecuencia 2f1 produce rizado en la tensión del condensador que forma parte del
filtro, y por tanto en la tensión de entrada al inversor. El rizado debido a las
componentes armónicas de más alta frecuencia se considera prácticamente
despreciable.
7.3.2
Control mediante PWM con conmutación de tensión unipolar
En este modo de operación, los interruptores de la pata A y de la pata B del inversor en
puente completo se controlan de forma independiente comparando la tensión triangular
Sec.
Inversores monofásicos
279
vtri con las señales vcontrol y -vcontrol respectivamente. Así, para la pata A (ver figura 7.15a) se tiene que:
v control > v tri,
⎧ T A + on
⎨
⎩ T A – off
v AN = V D
v control < v tri,
⎧ T A – on
⎨
⎩ T A + off
v AN = 0
v A0 = V D ⁄ 2
(7.40)
v A0 = – V D ⁄ 2
(7.41)
y
La figura 7.15-b representa la tensión de salida vAN de la pata A del inversor respecto al
terminal negativo de entrada N. Para el control de la conmutación de los interruptores
de la pata B se compara -vcontrol con la misma señal triangular anterior, obteniendo las
siguientes relaciones (ver figura 7.15-c):
– v control > v tri,
⎧ T B + on
⎨
⎩ T B – off
v BN = V D
– v control < v tri,
⎧ T B – on
⎨
⎩ T B + off
v BN = 0
v B0 = V D ⁄ 2
(7.42)
v B0 = – V D ⁄ 2
(7.43)
y
Debido a la presencia de los diodos en antiparalelo con los interruptores, las tensión de
salida v0 (v0=vAN - vBN ) resulta independiente del sentido de i0.
Existen cuatro combinaciones diferentes del estado de los interruptores:
T A + , T B – on
⎧ i0 > 0
v0 = VD ⎨
⎩ i0 < 0
T A – , T B + on
⎧ i0 > 0
v0 = –VD ⎨
⎩ i0 < 0
conducen
TA + , TB –
conducen
DA + , DB –
conducen
DA – , DB +
conducen
TA – , TB +
T A + , T B + on
⎧ i0 > 0
v0 = 0 ⎨
⎩ i0 < 0
conducen
TA + , DB +
conducen
DA + , TB +
T A – , T B – on
⎧ i0 > 0
v0 = 0 ⎨
⎩ i0 < 0
conducen
DA – , TB –
conducen
TA – , DB –
(7.44)
280
Cap. Convertidores cc-ca. Inversores de frecuencia variable
FIGURA 7.15
Conmutación mediante PWM de tensión unipolar.
TA+ on
vcontrol > vtri
vcontrol
vtri
t
TB+ on
(-vcontrol) > vtri
-vcontrol
(a)
vAN
(b)
t
vBN
(c)
t
v0
VD
v01
t
(d)
Cuando una pareja de interruptores cambia de estado, la tensión de salida conmuta entre
0 y VD (VD y 0) o entre 0 y -VD (-VD y 0). Por ello, esta forma de control recibe el nombre
de PWM con conmutación de tensión unipolar. Además, el salto en la tensión de salida
se reduce a VD, esto es, a la mitad que en el caso de conmutación por PWM simple.
La frecuencia efectiva de conmutación en el PWM unipolar es el doble que para el caso
de PWM bipolar. Esta ventaja queda reflejada en el espectro de armónicos de la tensión
de salida, donde los armónicos más bajos aparecerán en bandas centradas en múltiplos
de 2fs.
En efecto, supóngase un inversor monofásico en puente completo con conmutación
mediante PWM unipolar en el que se elige el ratio de modulación de frecuencias mf de
valor par (nótese que en el caso de PWM bipolar mf debería ser impar). Como se
Sec.
Inversores monofásicos
281
observa en la figura 7.15, las formas de onda de las tensiones vAN y vBN se encuentran
desfasadas 180º de la frecuencia fundamental f1. Por tanto, las componentes armónicas
a la frecuencia de conmutación fs de vAN y vBN tendrán la misma fase:
( φ AN – φ BN ) fs = 180° m f = 0°
(7.45)
esto es, no existe componente armónica de la tensión de salida v0 a la frecuencia de
conmutación fs. Lo mismo ocurre para los armónicos n tal que n sea par, ya que la
diferencia de fase vale cero.
Por ello, al emplear PWM con conmutación unipolar se reducen de forma considerable
el número de armónicos respecto al de tensión bipolar. Así, en el primer caso, los
armónicos se sitúan en bandas centradas a 2fs y sus múltiplos, esto es:
m f par
n ( impar ) = k m f ± j
{ k par y j impar
(7.46)
mientras que en segundo existen armónicos en bandas centradas en fs y sus múltiplos:
m f impar
n ( impar ) = k m f ± j
⎧ k par ⇔ j impar
⎨
⎩ k impar ⇔ j par
(7.47)
Al igual que en caso de PWM simple, en PWM con conmutación de tensión unipolar
también se cumple que:
Zona lineal, ( m a ≤ 1 )
V̂ 01 = m a V D
Sobremodulacion, ( m a > 1 )
V̂ 01 ≤ V D
4
V D ≤ V̂ 01 ≤ --- V D
π
(7.48)
esto es, en la zona lineal para un mismo valor de ma, la tensión de salida a frecuencia
fundamental es la misma tanto en tensión bipolar como unipolar.
Corriente iD en el lado de continua.
Considérese el circuito de la figura 7.14. La corriente iD* de entrada al circuito es la
misma tanto si se emplea la conmutación mediante PWM de tensión bipolar como
unipolar. Sin embargo, al intensidad iD de entrada al inversor posee un mayor número
de armónicos si se emplea PWM simple.
7.3.3
Inversor de onda cuadrada
Los modos de funcionamiento PWM con conmutación de tensión bipolar y unipolar
degeneran en inversores de onda cuadrada cuando el ratio de modulación ma es tan
grande que la señal triangular y las de control vcontrol y -vcontrol sólo se cortan en el paso
por cero de éstas últimas (ver figura 7.16).
282
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Conmutación mediante onda cuadrada.
FIGURA 7.16
vcontrol
vcontrol
-vcontrol
PWM unipolar
PWM bipolar
vtri
vtri
0
t
0
t
v0
v0
0.5 / f1
VD
VD
-VD
-VD
0.5 / f1
0.5 / f1
0.5 / f1
1/f1
1/f1
Al igual que en los modos de funcionamiento anteriores, los interruptores conmutan en
parejas, siendo estas parejas las formadas por ( T A + , T B – ) por un lado, y ( T A – , T B + )
por otro. Los interruptores de un mismo par se activan y desactivan a la vez. Cada
pareja de interruptores se encuentra activada durante medio ciclo (D=0.5) de tal forma
que si una de ellas está activada la otra se encontrará desactivada.
Atendiendo a este modo de funcionamiento, la tensión de salida del inversor en puente
completo representado en la figura 7.12 viene dada por:
T A + , T B – on, ⇒
v AN = V D
T A – , T B + on, ⇒
v AN = 0
v BN = 0
v0 = VD
v BN = V D
v0 = –VD
(7.49)
cuya forma de onda queda representada en la figura 7.16.
La onda cuadrada obtenida es impar y alternada, por lo que al descomponerla en series
de Fourier únicamente contiene términos en seno de orden impar:
1
a n = --π
∫
π
2π
1 4
V D sin ( nwt ) d( wt ) + ∫ ( – V D ) sin ( nwt ) d( wt ) = --- --- V D
n π
0
π
(7.50)
Por tanto, el valor de pico de frecuencia fundamental y las amplitudes de las
componentes armónicas de la tensión de salida para una tensión de entrada VD
determinada valen respectivamente:
4
V̂ 01 = --- V D = 1, 273 V D
π
(7.51)
Sec.
Inversores monofásicos
283
y
V̂ 01
V̂ 0n = ------n
n = 3, 5, 7, 9, …
(7.52)
El principal inconveniente del empleo de una onda cuadrada para gobernar el estado de
los interruptores del inversor reside en la imposibilidad de controlar la magnitud de la
tensión de salida, comprendida entre VD y -VD. La única forma de regularla consiste en
variar la magnitud de la tensión de entrada, por lo que ésta no podría proceder de un
rectificador no controlado o rectificador de diodos.
Una gran ventaja del empleo de la conmutación mediante onda cuadrada consiste en
que cada interruptor únicamente cambia de estado dos veces por ciclo (D=0.5). Por ello
su uso resulta de gran utilidad en aplicaciones de muy alta potencia, donde los
semiconductores poseen tiempos de encendidos y apagados elevados. Además, a menor
número de conmutaciones la potencia perdida disminuye.
7.3.4
Control de la tensión de salida por anulación de tensiones
Esta forma de control sólo es posible en los inversores monofásicos en puente
completo. Se basa en la combinación de la conmutación de onda cuadrada y
modulación de ancho de pulso mediante tensión unipolar. Así, en el circuito de la figura
7.17-a, los inversores de cada una de las patas se controlan de forma independiente a los
de la otra para, al igual que en PWM unipolar, pero todos los interruptores se
encuentran activados durante medio periodo (D=0.5), como ocurre en los inversores de
onda cuadrada.
De este modo, resultan las formas de onda de vAN y vBN (y, por tanto, de v0) mostradas en
la figura 7.17-b, donde el ángulo α , denominado ángulo de solapamiento, indica el
intervalo en que los dos interruptores de arriba (TA+ y TB+) o los dos interruptores de
abajo (TA- y TB-) se encuentran activados de forma simultánea. Es decir, controlando α
se controla la magnitud de la tensión de salida.
Así, durante este ángulo de solapamiento, la tensión de salida vale cero ya que:
v AN = v BN
v 0 = v AN – v BN = 0
(7.53)
Por contra, cuando α es igual a cero, la forma de onda de la tensión de salida es
idéntica a la de un inversor de onda cuadrada en puente completo. La máxima amplitud
de la componente fundamental de la tensión de salida vale:
4
( V̂ 0 ) 1 = --- V D
π
(7.54)
284
Cap. Convertidores cc-ca. Inversores de frecuencia variable
FIGURA 7.17
Control de la tensión de salida de un inversor en puente completo
mediante anulación de tensiones.
iD
TA+
TB+
DA+
DB+
i0
A
VD
v0 = vA0 - vB0
B
TA-
TB-
DA-
DB-
(a)
vAN
TA+ on
TA- on
TA+ on
VD
α
θ=ω 1 t
180º
vBN
TB+ on
TB- on
TB+ on
TB- on
VD
θ =ω1 t
180º
TA+ , TB+
v0
TA- , TB-
TA- , TB+
TA+ , TB-
TA+ , TB+
TA+ , TB-
VD
α
β
origen de
tiempos
180º- α
180º- α
θ=ω 1 t
-VD
β=(90 - α/2)º
(b)
Si se elige de forma adecuada el origen de tiempos en la figura 7.17-b, la forma de onda
de v0 resulta una función par y alternada. Por tanto, su descomposición en series de
Fourier sólo presenta términos cosenos y además sus armónicos son de orden impar.
Así:
2 π⁄2
2 β
b n = V̂ 0n = --- ∫ v 0 cos ( nθ ) dθ = --- ∫ V D cos ( nθ ) dθ
π –π ⁄ 2
π –β
(7.55)
Sec.
Inversores monofásicos
285
de donde:
1 4
V̂ 0n = --- ⎛ --- V D sin ( nβ )⎞
⎠
n ⎝π
n entero impar
(7.56)
siendo β = π ⁄ 2 – α ⁄ 2 .
La figura 7.18 muestra la variación en la componente de frecuencia fundamental de la
tensión de salida, así como en sus tensiones armónicas en función del ángulo de
solapamiento α . Estos armónicos se encuentran normalizados con respecto a la
componente de frecuencia fundamental para un inversor de onda cuadrada (α=0)
FIGURA 7.18
Armónicos de la tensión de salida con control por cancelación de
tensiones.
1
Fundamental
Distorsion total
armónica
5º
3º
7º
0
60º
120º
180º
α
La figura 7.18 representa, asimismo, la distorsión total armónica THD, definida como
el cociente entre la suma de todos los valores eficaces de los armónicos excepto el
fundamental, y el valor eficaz del fundamental:
∞
∑ ( V̂
0n
⁄ 2)
2
n=3
THD = -------------------------------------V̂ 01 ⁄ 2
(7.57)
286
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Obsérvese que la distorsión armónica de la tensión de salida comienza disminuyendo
desde α = 0 , ya que la forma de onda cuadrada que genera difiere más de una
senoidal que la obtenida para valores de α pequeños (ver figura 7.17-b). Sin embargo,
a medida que el ángulo de solapamiento aumenta, esta semejanza con la senoidal es
cada vez menor. Debido a que para valores de α muy elevados existe mucha distorsión,
las curvas de los armónicos en la figura 7.18 se representan en líneas discontinuas.
7.3.5
Rizado en la tensión de salida de un inversor monofásico
Se denomina rizado de una onda periódica a la diferencia entre los valores instantáneos
de la onda y de su componente armónica a frecuencia fundamental. Para analizar el
rizado de la tensión de salida, considérese el circuito de la figura 7.19, que muestra un
inversor monofásico que alimenta a un motor de inducción, representado mediante su
esquema equivalente, esto es, por una bobina junto a una fem sonidal e0(t). En dicha
figura:
e0 ( t ) =
2 E 0 sin ( ω 1 t )
(7.58)
y
v L = v L1 + v rizado
FIGURA 7.19
(7.59)
Inversor monofásico.
i0
vL
L
VD
v0(t)
Inversor
monofásico
+
~
e0
Motor de
inducción
Debido a que e0(t) es senoidal de frecuencia f1, únicamente las componentes de tensión
y de corriente de frecuencia fundamental a la salida del inversor producen transferencia
de potencia efectiva a la carga.
La tensión de salida del inversor v0(t) contiene una componente de tensión a frecuencia
fundamental f1 (v01(t)) y una serie de tensiones a frecuencias múltiplos de la frecuencia
fundamental (vrizado(t)):
v 0 ( t ) = v 01 ( t ) + v rizado ( t )
donde:
(7.60)
Sec.
Inversores monofásicos
287
v 01 ( t ) = v L1 ( t ) + e 0 ( t )
(7.61)
Utilizando la notación vectorial para las componentes del primer armónico (ver figura
7.20) se tiene que:
V 01 = E 0 + V L1 = E 0 + jω 1 LI 01
FIGURA 7.20
(7.62)
Diagrama de fase para la componente del primer armónico.
V01
j(ω1L) I01 = VL1
φ
E0
I01
Por el principio de superposición, toda la componente de rizado de la tensión de salida
del inversor cae en la bobina:
v rizado ( t ) = v L ( t ) – v L1 ( t ) = v 0 ( t ) – v 01 ( t )
(7.63)
Por ello, el rizado de la intensidad de salida:
i rizado ( t ) = i 0 ( t ) – i 01 ( t )
(7.64)
se calcula a partir de la ecuación:
di rizado ( t )
v rizado ( t ) = L ---------------------dt
(7.65)
1 t
i rizado ( t ) = --- ∫ v rizado ( t ) dt + K
L 0
(7.66)
Así:
donde K es la constante resultante de la integración.
Eligiendo de forma adecuada el origen de tiempos, la constante K vale cero, por lo que
de las ecuaciones 7.63 y 7.66 se deduce que la corriente de rizado resulta independiente
de la potencia efectiva transferida a la carga.
A modo de ejemplo, considérese la figura 7.21-a que muestra la corriente de rizado en
un inversor monofásico de onda cuadrada y la figura 7.21-b que representa este rizado
pero para un inversor con conmutación PWM bipolar trabajando en su zona lineal
( m a ≤ 1 ) . En ambos casos, la componente a frecuencia fundamental de la tensión de
288
Cap. Convertidores cc-ca. Inversores de frecuencia variable
salida tiene la misma magnitud, lo cual requiere que la tensión VD de entrada al inversor
PWM sea mayor que la de entrada al de onda cuadrada.
FIGURA 7.21
Rizado a la salida de un inversor: (a) de onda cuadrada, (b) con
conmutación PWM bipolar.
v0
v01
t
vrizado=v0-v01
t
irizado
t
(a)
v01
v0
0
t
vrizado=v0-v01
0
t
irizado
0
t
(b)
Sec.
Inversores monofásicos
289
Sin embargo, el rizado de la intensidad de salida es mucho menor en el inversor PWM
que en el de onda cuadrada, por constituir éste último, precisamente, un caso particular
de inversor PWM sobremodulado. Además, los armónicos en el inversor PWM lineal
aparecen a más altas frecuencias. Estas características originan que las pérdidas en la
carga sean menores. Pero a medida que aumenta la frecuencia de conmutación, las
pérdidas en los interruptores son cada vez mayores. De ahí que deba existir un
compromiso en la elección de la frecuencia de conmutación fs del inversor, que
compense las pérdidas de potencia en la carga y en los interruptores.
7.3.6
Factor de utilización de interruptores en inversores monofásicos
Para analizar el factor de utilización de los interruptores en los inversores monofásicos,
ya sea en el modo PWM o en el de onda cuadrada, se supondrá en primer lugar que la
carga resulta lo suficientemente inductiva como para que la corriente que por ella
circula resulte una senoidal pura:
i 0 ( t ) = i 01 ( t ) = Î 0 sin ( ω 1 t )
(7.67)
De igual forma, se considerará que tanto la tensión como la intensidad de salida del
inversor se corresponden con sus valores máximos. La potencia aparente transferida a
la carga a frecuencia fundamental vale:
S = V 01 I 01 = V 01 I 0, max
(7.68)
donde I0,máx (=I01 por la ecuación 7.67) y V01 representan la corriente eficaz máxima y la
tensión eficaz correspondientes al primer armónico de la intensidad y de la tensión de
salida del inversor de forma respectiva.
En un interruptor se denomina VT a la tensión máxima que éste bloquea cuando se
encuentra abierto, e IT a la máxima intensidad que circula por él cuando está cerrado.
Así, el factor de utilización combinado de todos los interruptores del inversor se define
como:
Factor de utilizacion
V 01 I 0, max
S
= --------------------- = ----------------------q VT IT q VT IT
(7.69)
siendo q el número de interruptores del inversor.
A continuación se calcula el factor de utilización de los interruptores en inversores de
onda cuadrada y de PWM en modulación lineal en su tipología de medio puente y de
puente completo.
Factor de utilización en inversores de onda cuadrada
a) Medio puente
290
Cap. Convertidores cc-ca. Inversores de frecuencia variable
V·
2
π 2
4
D, max
• V 01 = ---------- ---------------
• V T = V D, max
• IT =
2 I 0, max
•q = 2
4 V D·, max
---------- -------------- I 0, max
2
π 2
1
Factor de utilizacion = ------------------------------------------------- = ------ ≈ 0, 16
2π
2 V D·, max 2 I 0, max
(7.70)
b) Puente completo
4
• V 01 = ---------- V D·, max
π 2
• V T = V D, max
• IT =
2 I 0, max
•q = 4
4
---------- V D·, max I 0, max
π 2
1
Factor de utilizacion = ------------------------------------------------- = ------ ≈ 0, 16
2π
4 V D·, max 2 I 0, max
(7.71)
Para un inversor de onda cuadrada, el factor de utilización de los interruptores
empleando las topologías de medio puente y de puente completo coinciden. Al ser el
número de interruptores en esta última topología el doble que en la de medio puente, se
duplica la potencia transferida a la carga.
Inversor PWM en modulación lineal: m a ≤ 1
La tensión eficaz de salida del primer armónico en un inversor PWM, ya sea en medio
puente como en puente completo, es menor que la obtenida en un inversor de onda
cuadrada en cualquiera de sus dos versiones. Si se supone que el inversor de onda
cuadrada y el de PWM se alimentan a la misma tensión y poseen idéntica corriente
máxima en la carga, el factor de utilización combinado de éste último resulta menor.
a) Medio puente
1
2
V·
2
D, max
• V 01 = ------- m a ---------------
Sec.
Inversores trifásicos
291
• V T = V D, max
• IT =
2 I 0, max
•q = 2
V D·, max
1
- I 0, max
------- m a -------------2
1
2
Factor de utilizacion = ---------------------------------------------------- = --- m a
8
2 V D·, max 2 I 0, max
(7.72)
b) Puente completo
1
2
• V 01 = ------- m a V D·, max
• V T = V D, max
• IT =
2 I 0, max
•q = 4
1
------- m a V D·, max I 0, max
1
2
Factor de utilizacion = ---------------------------------------------------- = --- m a
8
4 V D·, max 2 I 0, max
(7.73)
Al igual que ocurría en los inversores de onda cuadrada, el factor de utilización
empleando la topología de medio puente y la de puente completo coinciden. Además, al
aumentar en un factor de dos el número de interruptores en el inversor de puente
completo con respecto al de medio puente, se duplica la potencia transferida a la carga.
El factor de utilización en un inversor PWM trabajando en su zona lineal alcanza su
valor máximo cuando ma=1 y vale 0.125. Resulta así de menor valor que el de onda
cuadrada, cuya magnitud aproximada es de 0.16.
7.4
Inversores trifásicos
Los inversores trifásicos se emplean en la alimentación de cargas trifásicas. Así,
aplicaciones tales como fuentes ininterrumpidas de tensión alterna trifásica,
accionamientos de motores de corriente alterna trifásicos y conexión de fuentes que
producen enegía en continua (células fotovoltaicas) con las cargas trifásicas, utilizan
este tipo de inversores.
Son dos las técnicas para alimentar una carga trifásica. En la primera de ellas, se
emplean tres inversores monofásicos independientes, en el que cada uno de ellos
produce una tensión de salida de frecuencia fundamental desplazada 120º respecto a la
salida de los otros.
292
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Aunque este montaje pueda resulta preferible en algunas aplicaciones, ofrece los
siguientes inconvenientes:
• Requiere un transformador trifásico a la salida, donde los arrollamientos del
primario deben estar aislados entre sí y los del secundario pueden estar
conectados bien en estrella o bien en triángulo (ver figura 7.22).
FIGURA 7.22
VD
Inversor trifásico implementado como tres inversores monofásicos.
a
+
_
Inversor 1
b
Inversor 2
c
Inversor 3
• Este montaje requiere de 12 interruptores, con sus 12 diodos en antiparalelo
asociados a éstos. Además, si las salidas de los tres inversores monofásicos no se
encuentran perfectamente equilibradas en magnitud y en fase, las tensiones que
alimentan a la carga se encontrarán desequilibradas.
El inversor trifásico que se emplea con mayor frecuencia es el representado en la figura
7.23. Este inversor consta de tres patas, una por cada fase, y donde cada una de ellas se
corresponde con la configuración básica de inversores de una pata explicada en la
sección 7.2.
FIGURA 7.23
Inversor trifásico.
iD
TA+
V
------D2
VD
TB+
TC+
DB+
DA+
DC+
o
V
------D2
TB-
TA-
TC-
DAA
DBB
DC-
C
Sec.
Inversores trifásicos
293
La tensión de salida de cada una de las patas del inversor, por ejemplo la tensión vAN de
la pata A,, únicamente depende de la tensión de entrada VD y del estado de los
interruptores de esa pata, siendo independiente de la intendidad de salida si se considera
que siempre uno de los interruptores se encontrará activado, esto es, se desprecia el
blanking time o tiempo muerto y se asume la idealidad de los interruptores. Por tanto,
bajo estas suposiciones, la tensión de salida de un inversor trifásico no depende ni de la
magnitud ni de la dirección de i0.
Son dos los tipos de inversores trifásicos analizados en esta sección: los inversores
trifásicos con conmutación por PWM por un lado, y los inversores trifásicos de onda
cuadrada por otro. Ambos emplean como alimentación una fuente de tensión
conmutada (VSI).
7.4.1
Inversor trifásico con conmutación mediante PWM
Al igual que los inversores monofásicos, en un inversor trifásico el objetivo del empleo
de la modulación de ancho de pulso es modelar y controlar la tensión trifásica de salida
en magnitud y frecuencia a partir de una tensión de entrada VD constante. Para
conseguir a la salida un sistema de tensiones trifásico equilibrado empleando la
conmutación PWM, una única onda triangular se compara con tres tensiones de control
senoidales desfasadas entre sí 120º, como muestran las figuras 7.24 y 7.25-a.
FIGURA 7.24
Señal de control de cada una de las patas de un inversor trifásico.
vtri, f = fs
vcontrol,A
+
Señal de control
de la pata A
vcontrol,A > vtri
TA+ on, TA- off
vcontrol,A < vtri
TA+ off, TA- on
vcontrol,B > vtri
TB+ on, TB- off
vcontrol,B < vtri
TB+ off, TB- on
vcontrol,C > vtri
Tc+ on, TC- off
vcontrol,C < vtri
TC+ off, TC- on
senoidal f = f1, φ = 0º
vtri, f = fs
vcontrol,B
+
Señal de control
de la pata B
senoidal f = f1, φ = -120º
vtri, f = fs
vcontrol,C
senoidal f = f1, φ = -240º
+
Señal de control
de la pata C
294
Cap. Convertidores cc-ca. Inversores de frecuencia variable
FIGURA 7.25
Formas de onda en un inversor PWM trifásico.
vtri
vcontrol, A
vcontrol, B
vcontrol, C
t
(a)
vAN
VD
t
(b)
vBN
VD
t
(c)
vAB
Fundamental vLL1
t
(d)
Como se observa en la figura 7.25-b, el valor de la componente de contínua de la
tensión vAN, esto es, su valor medio, coincide con el de vBN. Por tanto, al igual que en el
caso de un inversor PWM monofásico en puente completo, el valor medio de la tensión
v AB = v AN – v BN vale cero. Idéntico resultado se obtiene en el resto de las tensiones de
línea.
En los inversores trifásicos interesa analizar el contenido en armónicos de las tensiones
de línea. Los armónicos de las tensiones de fase o de salida de cada una de las patas del
circuito, por ejemplo vAN en la figura 7.25-b, coincide con los armónicos de vA0 de un
inversor de una pata (ver figura 7.5) donde, si se se supone un valor de mf impar, estos
Sec.
Inversores trifásicos
295
armónicos son impares y se encuentran centrados en banda en torno a mf y sus
múltiplos.
Así, una vez obtenido el espectro de armónicos de las tensiones de fase, se intenta
reducir ahora el contenido de armónicos de las tensiones de línea. Para ello, considérese
las tensiones vAN y vBN a la salida de las patas A y B del inversor. Como muestran las
figuras 7.25-b y 7.25-c, estas tensiones de fase se encuentran desfasadas 120º de la
frecuencia fundamental:
( φ AN ) 1 – ( φ BN ) 1 = 120°
(7.74)
Por tanto, entre los armónicos de vAN y vBN a frecuencia fs, es decir, armónicos de orden
n=mf, existirá una diferencia de fase de:
( φ AN ) mf – ( φ BN ) mf = ( 120 m f )°
(7.75)
Así, si se elige mf impar y múltiplo de tres, esta diferencia de fase se hace nula al ser
múltiplo de 360º, es decir, se eliminan los armónicos de orden n=mf de la tensión de
línea vAB. De igual forma, todos los armónicos cuyo orden sea múltiplo impar de mf
también se anulan. Además, algunos de los armónicos dominantes que aparecen en los
inversores de una pata se eliminan en las tensiones de líneas de los inversores trifásicos.
Modulación lineal ( m a ≤ 1 )
En la zona lineal, la componente a frecuencia fundamental de la tensión de salida varía
linealmente con el ratio de modulación de la amplitud ma (ver figura 7.26). Las figuras
7.5-b y 7.25-b permiten obtener la expresión de la componente de frecuencia
fundamental de la pata A del inversor y su valor de pico, que son, respectivamente:
VD
( v A0 ) 1 = m a ------- sin ( ω 1 t )
2
(7.76)
VD
( V̂ A0 ) 1 = m a ------2
(7.77)
y
En un inversor trifásico, la tensión de línea de frecuencia fundamental viene expresada
como la diferencia de las tensiones de cada una de las fases a dicha frecuencia
fundamental. Así, por ejemplo, para v AB1 :
v AB1 = v A01 – v B01
(7.78)
donde v A01 viene dada por la expresión 7.76 y v B01 por la misma ecuación anterior pero
desfasada 120º respecto a ésta. Por tanto, la tensión compuesta v AB1 también es una
senoidal a la misma frecuencia que v A01 o v B01 , aunque su módulo o valor máximo es
3 veces el módulo de v A01 o de v B01 :
296
Cap. Convertidores cc-ca. Inversores de frecuencia variable
V̂ AB1 =
3 ( V̂ A0 ) 1
(7.79)
V̂ LL1 =
VD
3 m a ------2
(7.80)
por lo que en general:
Su valor eficaz vale:
3
V LL1 = ---------- m a V D ≈ 0, 612m a V D
2 2
(7.81)
donde al trabajar en la región de modulación lineal:
V LL1 ≤ 0, 612 V D
Sobremodulación ( m a
(7.82)
> 1)
La ventaja principal de utilizar un valor de ma menor o igual a la unidad reside en la
relación lineal entre la tensión eficaz de línea a frecuencia fundamental y el ratio de
modulación de la amplitud ma. Sin embargo, la tensión eficaz de línea no resulta tan
elevada como puediera ser necesario. Al contrario, se encuentra limitada a un valor
máximo de 0.612 VD, como indica la ecuación 7.82.
Para obtener valores eficaces de la tensión de línea a frecuencia fundamenta de mayor
magnitud, se requiere elevar ma por encima de la unidad, es decir, el valor de pico o
máximo de las tensiones de control de cada una de las fases es mayor que el de la forma
de onda triangular con la que se compara. Esta región recibe el nombre de zona de
sobremodulación.
Al igual que ocurría con los inversores PWM monofásicos, en los inversores PWM
trifásicos sobremodulados la relación entre el V LL1 y ma deja de ser lineal, como
muestra la figura 7.26.
Al emplear inversores trifásicos sobremodulados, aparecen más tensiones armónicas
que en la zona lineal. Sin embargo, los armónicos dominantes no poseen amplitudes tan
elevadas como la que tienen lugar cuando m a ≤ 1 . Por ello, cuando los inversores
trifásicos trabajan en sobremodulación, la potencia que se pierde en la carga como
consecuencia de las frecuencias armónicas no es tan grande como el número de
armónicos pudiera sugerir. En más, dependiendo de la naturaleza de la carga y de la
frecuencia de conmutación, las pérdidas debidas a los armónicos en sobremodulación
podrían resultar menores que las pérdidas debidas a armónicos en modulación lineal.
Sec.
Inversores trifásicos
FIGURA 7.26
297
Relación entre V LL1 ⁄ V D y m a en un inversor PWM trifásico.
VLL1 / VD
0.78
0.612
Lineal
Onda
cuadrada
Sobremodulación
0
7.4.2
1
3.24
mf = 15
ma
Inversor trifásico de onda cuadrada
Cuando el ratio de modulación de la amplitud ma adquiere valores elevados, el inversor
trifásico PWM sobremodulado degenera en uno de onda cuadrada. Aquí, cada
interruptor se encuentra activado durante 180º de la frecuencia fundamental y nunca
estarán cerrados ni abiertos simultáneamente los dos interruptores de una misma pata.
Además, existe un desfase de 120º entre la activación de un interruptor y el del mismo
nivel de la pata consecutiva. Por tanto, siempre habrá tres interruptores activados.
La figura 7.27 muestra las formas de onda de las tensiones de cada una de las fases y la
de línea vAB en un inversor de onda cuadrada.
Al igual que en el inversor de una pata, el valor máximo de la tensión de cada una de las
fases, por ejemplo la fase A, a la frecuencia fundamental vale:
4 VD
( V̂ A0 ) 1 = --- ------π 2
Así, la tensión de línea a frecuencia fundamental resulta
fase:
(7.83)
3 veces mayor que la de
298
FIGURA 7.27
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Inversor trifásico de onda cuadrada.
vAN
TA+
TA-
VD
0
ω1 t
180º
vBN
TB+
TB-
ω1 t
0
180º
vCN
TC+
TC-
TC+
ω1 t
0
vAB
vLL1
VD
ω 1t
0
( V̂ LL ) 1 =
4 VD
3 --- ------π 2
(8.84)
y su valor eficaz vale:
1
1
V LL1 = ------- ( V̂ LL ) 1 = ------2
2
esto es:
6
4 VD
3 --- ------- = ------- V D
π
π 2
(7.85)
Sec.
Inversores trifásicos
299
V LL1 ≈ 0, 78 V D
(7.86)
Por tanto, en un inversor de onda cuadrada, el valor eficaz de la tensión de línea es
mayor que en los inversores PWM en la zona lineal, e igual al máximo alcanzable en
los PWM sobremodulados.
Además, la tensión de salida o de línea en un inversor trifásico no depende de la
intensidad de salida, es decir, resulta independiente de la carga al considerar que nunca
dos interruptores de una misma pata estarán desactivados a la vez.
Respecto a los valores eficaces de la tensión de línea, al tratarse de una onda impar y
alternada, únicamente contendrá armónicos impares. Además, como se dedujo con
anterioridad, se eliminan también los armónicos de orden n si éste es múltiplo de tres.
Así:
V LL
6 VD
V LLn = ----------1 = ------- -------,
π n
n
n = 6k ± 1
(7.87)
Por tanto, la tensión de salida en un inversor trifásico de onda cuadrada contiene
armónicos cuya magnitud disminuye al aumentar el orden del armónico, esto es, al
aumentar la frecuencia.
Debido a la imposibilidad de regular en un inversor trifásico de onda cuadrada la
magnitud de la tensión de salida, se requiere que la tensión de entrada VD sea variable.
7.4.3
Factor de utilización de interruptores en inversores trifásicos
En el análisis del factor de utilización de los interruptores en los inversores trifásicos se
supondrá que el inversor alimenta a una carga lo suficientemente inductiva como para
que la corriente que circula a través de ella sea una senoidal pura, donde I0 representa el
valor eficaz de la intensidad:
i 0 ( t ) = i 1 ( t ) = Î 0 sin ( ω 1 t ) =
2 I 0 sin ( ω 1 t )
(7.88)
Sean VT el valor máximo de la tensión que un interruptor del inversor trifásico es capaz
de bloquear, e IT la intensidad máxima que puede circular por él:
V T = V D, max
(7.89)
I T = i 0, max =
2 I 0, max
Si VLL1 es el valor eficaz de la componente de frecuencia fundamental de la tensión de
línea, la potencia aparente a frecuencia fundamental transferida a la carga vale:
S =
3 V LL1 I 0, max
(7.90)
300
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Por tanto, el factor de utilización total o combinado en un inversor trifásico (6
interruptores) viene dado por:
Factor de utilizacion
V LL1
3 V LL1 I 0, max
1
= ------------------------------------------------ = ---------- --------------2 6 V D, max
6 V D, max 2 I 0, max
(7.91)
A continuación se analiza el factor de utilización máximo en un inversor trifásico PWM
en la zona de modulación lineal y otro de onda cuadrada. Se considerará que la tensión
de alimentación VD,máx y la corriente eficaz máxima en la carga I0,máx es la misma en
ambos caso
Inversor PWM en modulación lineal m a ≤ 1
Para calcular el factor de utilización total de los interruptores en un inversor trifásico, se
aplica la expresión 7.91 donde la tensión de línea eficaz del primer armónico viene dada
por la ecuación 7.81. Así:
3
---------- m a V D· max
1 2 2
1
Factor de utilizacion = ---------- -------------------------------------- = --- m a
V
8
D, max
2 6
(7.92)
que coincide con el factor de utilización de un inversor monofásico PWM lineal.
Inversor de onda cuadrada
En este caso, su tensión eficaz de línea a frecuencia fundamental viene expresada en la
ecuación 7.85. El factor de utilización, cuya expresión viene dada por:
6
------- V D, max
1
1
π
Factor de utilizacion = ---------- -------------------------- = ------ ≈ 0, 16
2π
V
D, max
2 6
(7.93)
coincide así con el de un inversor monofásico de onda cuadrada.
Por tanto, para los mismos parámetros VT e IT, al aumentar en un 50% el número de
interruptores del inversor, es decir, al pasar de un inversor monofásico a uno trifásico,
se aumenta en un 50% la potencia aparente transferida a la carga respecto al primero.
7.4.4
Rizado a la salida de un inversor trifásico
Considérese la figura 7.28, que muestra en diagrama de bloques un inversor trifásico
alimentando a un motor de corriente alterna. Cada una de estas fases viene representada
por medio de su esquema equivalente simplificado con respecto al neutro de la carga n.
Las tres fem eA(t), eB(t) y eC(t) se suponen senoidales puras a la frecuencia f1.
Sec.
Inversores trifásicos
FIGURA 7.28
301
Inversor trifasico y motor trifásico.
iA
iD
Carga
Inversor
trifáscico
VD
A
iB
B
L
~ eA(t)
iC
C
n
N
Si el sistema es equilibrado, se pueden relacionar las tensiones de salida vAN, vBN y vCN
referidas al neutro N del inversor, con las tensiones vAn, vBn y vCn referidas, en este caso,
al neutro n de la carga:
v An = v AN – v nN
(7.94)
v Bn = v BN – v nN
(7.95)
v Cn = v CN – v nN
(7.96)
De igual forma, la tensión en la carga de cada una de las fases puede expresarse como:
di A
v An = L ------- + e An
dt
(7.97)
di B
v Bn = L ------- + e Bn
dt
(7.98)
di C
v Cn = L ------- + e Cn
dt
(7.99)
Por otro lado, en un sistema trifásico de tres hilos se tiene que:
iA + iB + iC = 0
(7.100)
d
----- ( i A + i B + i C ) = 0
dt
(7.101)
y
De forma similar, bajo condiciones equilibradas de funcionamiento, las fuerzas
contraelectromotrices forman un sistema equilibrado de tensiones:
302
Cap. Convertidores cc-ca. Inversores de frecuencia variable
e An + e Bn + e Cn = 0
(7.102)
Sumando las ecuaciones 7.97, 7.98 y 7.99:
di
di
di
v An + v Bn + v Cn = L ⎛ ------A- + ------B- + ------C-⎞ + ( e An + e Bn + e Cn )
⎝ dt
dt
dt ⎠
(7.103)
y aplicando las expresiones 7.101 y 7.102 se obtiene que:
v An + v Bn + v Cn = 0
(7.104)
De igual forma, al sumar las ecuaciones 7.94, 7.95 y 7.96 y aplicar la expresión 7.104:
1
v nN = --- ( v AN + v BN + v CN )
3
(7.105)
Por tanto, las expresiones 7.94, 7.95 y 7.96 pueden reescribirse, de forma respectiva,
como:
1
1
2
v An = v AN – --- ( v AN + v BN + v CN ) = --- v AN – --- ( v BN + v CN )
3
3
3
(7.106)
1
1
2
v Bn = v BN – --- ( v AN + v BN + v CN ) = --- v BN – --- ( v AN + v CN )
3
3
3
(7.107)
2
1
1
v Cn = v CN – --- ( v AN + v BN + v CN ) = --- v CN – --- ( v AN + v BN )
3
3
3
(7.108)
Las tensiones vAn, vBn y vCn se pueden expresar también como la suma de su componente
armónica a frecuencia fundamental más una tensión de rizado. Así, por ejemplo, para la
fase A:
v An ( t ) = v An1 ( t ) + v rizado, A ( t )
(7.109)
Al ser eA(t) una senoidal pura a la frecuencia f1, al igual que en los convertidores
monofásicos, únicamente las componentes de frecuencia fundamental de la tensión de
fase v An1 ( t ) y de la intensidad de salida i A1 ( t ) son las responsables de la potencia
efectiva que se transmite a la carga. Así, del diagrama vectorial de la figura 7.29:
V An1 = E A + jω 1 LI A1
(7.110)
Aplicando el principio de superposición, toda la tensión de rizado de vAn(t) cae en la
bobina (ver figura 7.28). Así, de la ecuación 7.109:
v rizado, A ( t ) = v rizado, L ( t ) = v An ( t ) – v An1 ( t )
(7.111)
Sec.
Inversores trifásicos
FIGURA 7.29
303
Diagrama vectorial.
VAn1
(jω1L)IA1=VLA1
φ
EA
IA1
donde sustituyendo la expresión 7.106:
2
1
v rizado, A ( t ) = v rizado, L ( t ) = --- v AN ( t ) – --- ( v BN ( t ) + v CN ( t ) ) – v An1 ( t )
3
3
(7.112)
La intensidad de rizado resulta independiente de la potencia transferida a la carga, y
viene dada por:
1 t
i rizado, A = --- ∫ v rizado, A ( t ) dt + K
L 0
(7.113)
Si se elige de forma adecuada el origen de tiempos, la constante K se hace nula.
Idéntico análisis al efectuado con la fase A permite obtener la tensión y corriente de
rizado del resto de las fases.
Comparando un inversor trifásico PWM y uno de onda cuadrada, considerando que en
ambos casos la componente a frecuencia fundamental VAN1 de la tensión de salida
coinciden, se obtiene que el rizado de la intensidad de salida de cada fase es
significativamente menor en el primero de ellos, por presentar la tensión menos
armónicos que la del inversor de onda cuadrada trifásico.
7.4.5
Corriente en el lado de continua
De la misma forma a como se procedió con los inversores monofásicos, se estudian
aquí las formas de onda de la tensión y de la corriente de entrada en un inversor
trifásico con modulación de ancho de pulso. Para ello, supóngase que la tensión de
entrada VD se mantiene constante, sin rizado. Si se considera que la frecuencia de
conmutación del inversor es infinita, con objeto de eliminar los armónicos de la
intensidad y de la tensión de salida de forma que se correspondan con senoidales puras
a frecuencia fundamental, se introduce en el lado de alterna un filtro ficticio sin
almacenamiento de energía. Asimismo, para evitar que las componentes de alta
frecuencia pasen a la alimentación, se coloca otro filtro ficticio de iguales
características al primero a la entrada del inversor.
304
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Como los armónicos a filtrar a la entrada y a la salida del inversor son de frecuencia
infinita, los valores de la bobina y del condensador de ambos filtros ficticios son
prácticamente despreciables.
Debido a que los filtros no almacenan energía, la potencia instantánea a la entrada del
inversor coincide con la de salida del mismo:
V D i D∗ ( t ) = v An1 ( t ) i A ( t ) + v Bn1 ( t ) i B ( t ) + v Cn1 ( t ) i C ( t )
(7.114)
siendo i D∗ ( t ) la intensidad a la entrada del inversor en el lado de continua.
En condiciones equilibradas, las tensiones y las corrientes se encuentran desfasadas
120º unas de otras, esto es:
v An1 ( t ) =
2 V 0 sin ( ω 1 t )
iA ( t ) =
2 I 0 sin ( ω 1 t – φ )
v Bn1 ( t ) =
2 V 0 sin ( ω 1 t – 120° )
iB ( t ) =
2 I 0 sin ( ω 1 t – 120° – φ )
v Cn1 ( t ) =
2 V 0 sin ( ω 1 t – 240° )
iB ( t ) =
2 I 0 sin ( ω 1 t – 240° – φ )
(7.115)
donde φ es el ángulo de desfase entre la tensión y la intensidad de salida de cada una de
las patas del inversor. Sustituyendo las expresiones anteriores en 7.114:
2V 0 I 0
V D i D∗ ( t ) = -------------- [ sin ( ω 1 t ) sin ( ω 1 t – φ ) + sin ( ω 1 t – 120° ) sin ( ω 1 t – 120° – φ )
VD
(7.116)
+ sin ( ω 1 t – 240° ) sin ( ω 1 t – 240° – φ ) ]
se obtiene la intensidad i D∗ ( t ) :
3V 0 I 0
i D∗ ( t ) = -------------- cos ( φ ) = I D
VD
(7.117)
Del análisis anterior se deduce que la corriente i D∗ ( t ) sólo contiene una componente a
frecuencia φ , es decir, no contiene armónicos, al contrario de lo que ocurría con los
inversores monofásicos, donde i D∗ ( t ) contenía dos componentes: una a frecuencia cero
y otra de frecuencia doble a la fundamental. Sin embargo, la intensidad iD de entrada al
inversor contiene, además de a i D∗ ( t ) , componentes de alta frecuencia debido a las
conmutaciones del inversor.
7.4.6
Intervalos de conducción de interruptores y diodos en inversores
trifásicos
En todas las estructuras inversoras estudiadas, ya sea la topología básica de inversor de
una pata, ya sean inversores en puente completo monofásicos y trifásicos, la tensión de
salida no depende de la carga, sino únicamente del estado de activación de los
interruptores.
Sec.
Inversores trifásicos
305
Sin embargo, sí existe dependencia entre la duración del intervalo de conducción de
cada interruptor y el factor de potencia de la carga, esto es, del desfase entre la
intensidad y la tensión. A continuación se analizan los periodos de conducción de los
interruptores y de los diodos en antiparalelo a ellos asociados en inversores trifásicos de
onda cuadrada y PWM.
Inversor de onda cuadrada
En un inversor de onda cuadrada, cada interruptor está activado o cerrado durante 180º.
Sin embargo, no siempre que un interruptor está activado circula corriente por él. Para
determinar qué porcentaje de este tiempo de activación el interruptor se encuentra en
estado de conducción, supóngase al inversor trifásico alimentando a una carga donde el
ángulo de desfase de la intensidad respecto a la tensión es de 30º. La forma de onda de
vAN, representada en la figura 7.30, refleja el intervalo en que el interruptor TA+ está
activado (VAN=VD) y en que TA- se encuentra cerrado (VAN=0). Dicha figura muestra,
además, la intensidad de salida iA de la fase A.
FIGURA 7.30
Formas de onda de la fase A en un inversor de onda cuadrada.
vAn
vAn1
0
t
vAN
iA
t
DA-
DA+
TA+
TA-
306
Cap. Convertidores cc-ca. Inversores de frecuencia variable
De la figura anterior, dependiendo del sentido de la intensidad de la corriente y de la
tensión de salida, se deduce qué interruptor o qué diodo se encuentra en conducción en
cada momento:
⎧ T A + activado
v AN > 0 e i A < 0 ⎨
⎩ conduce D A +
⎧ T A + activado
v AN > 0 e i A > 0 ⎨
⎩ conduce T A +
⎧ T A – activado
= 0 e iA > 0 ⎨
⎩ conduce D A –
⎧ T A – activado
= 0 e iA < 0 ⎨
⎩ conduce T A –
(7.118)
v AN
v AN
De esta forma, aunque cada interruptor se encuentra activado durante 180º, el ángulo de
conducción es menor a 180º debido al factor de potencia de la carga.
A medida que el factor de potencia de la carga disminuye, en otras palabras, a medida
que aumenta el ángulo φ de retraso de la intensidad respecto de la tensión, el intervalo
de conducción de los diodos se hace mayor, en decrimento del intervalo de conducción
de los interruptores. Así, si la carga fuese resistiva pura (ángulo φ de desfase nulo) el
estado de conducción y de activación de los tiristores coinciden al no circular en ningún
momento intensidad por los diodos en antiparalelo.
Inversor PWM
La figura 7.31 muestra las formas de onda de las tensiones vAN, vBN y vCN, así como las
intensidades iA, iB e iC de un inversor trifásico con conmutación PWM, donde se ha
supuesto que la intensidad está retrasada 30º respecto de la tensión. Asimismo, se
considera que las formas de onda de las corrientes consisten en senoidales puras.
Las formas de onda de cada una de las tensiones de fase indica el estado de activación
de los interruptores asociados a esa pata. Así, por ejemplo, para la pata A (ver figura
7.31-a), v AN = V D cuando es el interruptor TA+ el que se encuentra activado, y
v AN = 0 si es el interruptor TA- el que está cerrado. Además, de la relación entre las
formas de onda de las tensiones e intensidades de fase se deduce cuál es el dispositivo
que se encuentra en conducción, bien un interruptor o bien un diodo.
Así, como se observa en la figura 7.31, hay momentos en que los dispositivos que
conducen son tres (uno de cada rama) de los conectados al terminal positivo (TA+, DA+,
TB+, DB+, TC+, DC+) y momentos en que los tres dispositivos que están en conducción
están conectados al terminal negativo (TA-, DA-, TB-, DB-, TC-, DC-). En estas situaciones,
la corriente iD suministrada por la fuente de continua vale cero, esto es, las tres fases
están cortocircuitadas, no existiendo transferencia de potencia de la fuente de continua
al lado de alterna.
La magnitud de la tensión de salida en un inversor PWM trifásico se controla,
precisamente, controlando la duración de los intervalos de tiempo en que las fases se
encuentran cortocircuitadas. Tales intervalos en que sólo conducen los dispositivos
conectados al terminal positivo o al negativo no se dan en los inversores de onda
Sec.
Inversores trifásicos
307
cuadrada, por lo que para controlar la magnitud de la tensión de salida se requiere variar
la tensión de entrada VD.
FIGURA 7.31
Formas de onda en un inversor trifásico PWM con un ángulo de
desfase de 30º.
vAN
iA
(a)
t
φ = 30º
vBN
(b)
t
iB
vCN
iC
(c)
t
conducen: (TA-, TB-, DC-)
7.5
conducen: (TA+, TB+, DC+)
Efecto del tiempo muerto en la salida de los inversores controlados
mediante PWM
En los análisis vistos hasta ahora, se han supuesto interruptores ideales, esto es, los dos
interruptores de una misma pata conmutan de forma simultánea. Sin embargo, en la
práctica, la conmutación entre interruptores no es inmediata, sino que éstos tardan un
determinado tiempo en encenderse y en apagarse. Por ello, para evitar un cortocircuito
en la fuente, cuando por un interruptor deja de circular corriente, el del nivel contrario
perteneciente a la misma pata no comienza a excitarse hasta pasado un determinado
tiempo, denominado blanking time o tiempo muerto. Este tiempo muerto se elige mayor
que el tiempo de apagado del interruptor.
308
Cap. Convertidores cc-ca. Inversores de frecuencia variable
El tiempo muerto t ∆ se escoge en cada inversor en función del semiconductor utilizado
como interruptor. Para los dispositivos más rápidos, como es el caso de los MOSFETs,
este tiempo entre conmutaciones resulta incluso menor a un microsegundo.
En esta sección se estudia, a partir de la tipología básica de los inversores, el efecto que
produce este tiempo muerto en las formas de onda resultantes del circuito. Para ello, se
considerará un período TS, donde al comparar la tensión vcontrol considerada constante
con una señal triangular, se obtienen los estados de activación de los interruptores. Este
análisis se aplicará, asimismo, a los inversores PWM monofásicos y trifásicos.
7.5.1
Efecto del tiempo tiempo en un inversor de una rama
La figura 7.32-a muestra las señales de activación de los interruptores considerados
ideales, esto es, con conmutación inmediata, en un inversor básico de una pata, en tanto
que la figura 7.32-b tiene en cuenta la presencia del tiempo muerto t ∆ cada vez que
tiene lugar la conmutación entre los interruptores.
Al estar abiertos los dos interruptores de una misma pata durante el tiempo muerto, la
tensión vAN depende, en este intervalo, del sentido de la corriente iA. Así, cuando la
intensidad iA es positiva, circula por el diodo denotado como DA-, dando lugar a una
salida de tensión nula (vAN=0). En cambio, cuando iA es negativa, es el diodo DA+
conectado al terminal positivo el que conduce, por lo que vAN=VD.
La forma de onda de la tensión vAN para iA>0 queda representada en la figura 7.32-c, y
para iA<0 en la figura 7.32-d. En ambos casos, se ha dibujado con línea de trazos el caso
ideal en el que t ∆ se considera despreciable. La diferencia de la tensión vAN para el caso
real (en presencia del tiempo muerto) y para el caso ideal (donde éste vale cero), viene
dada por:
v e = ( v AN ) ideal – ( v AN ) real
(7.119)
Promediando ve sobre un periodo de tiempo de la frecuencia de conmutación, se obtiene
el incremento de la tensión media VAN, que resulta positivo (pérdida de tensión) para
iA>0 (ver figura 7.32-c) y negativo (ganancia de tensión) para iA<0 (ver figura 7.32-d):
t∆
∆V AN = ----- V D
Ts
∆V AN
t
= – ----∆- V D
Ts
iA > 0
(7.120)
iA < 0
Como se deduce de la ecuación anterior, ∆V AN no depende de la magnitud de la
corriente iA, pero sí de su polaridad. Además, ∆V AN resulta proporcional a t ∆ y a la
frecuencia de conmutación fs (= 1/TS). Por tanto, a frecuencias de conmutación altas, se
aconseja el empleo de semiconductores rápidos que requieren de un tiempo muerto
pequeño.
Sec.
Inversores trifásicos
FIGURA 7.32
309
Efecto del tiempo muerto en un inversor básico de una pata.
vtri
vcontrol
0
t
(a)
Control TA+
0
t
Control TA0
t
Control TA+
0
t
(b)
t
∆
Control TA0
t
t
∆
Pérdida
vAN
(c)
Ideal
( iA > 0 )
0
Real
t
vAN
(d)
( iA < 0 )
Ideal
Real
0
t
Ganancia
310
7.5.2
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Efecto del tiempo muerto en inversores monofásicos en puente completo
con control mediante PWM con conmutación de tensión bipolar
Considérese ahora el inversor PWM en puente completo con conmutación bipolar
representado en la figura 7.33. Aquí, los interruptores conmutan de dos en dos, siendo
la primera pareja la formada por los interruptores (TA+ y TB-) y la segunda la compuesta
por (TA- y TB+). Además, se cumple que las intensidades iA e iB que circulan por cada una
de las ramas del circuito son opuestas, es decir, i A = – i B .
FIGURA 7.33
Inversor monofásico en puente completo.
iD
TA+
TB+
DA+
iA
A
VD
i0
TA-
DA-
DB+
iB
B
+ v0 _
TB-
DB-
N
Las figuras 7.34-a y 7.34-b muestran, respectivamente, las señales de activación de
cada par de interruptores cuando éstos se consideran ideales y cuando se tiene en cuenta
el tiempo muerto entre la conmutación de una y otra pareja de interruptores. Debido a
que durante el intervalo t ∆ todos los interruptores están abiertos de forma simultánea,
las tensiones vAN y vBN de salida de cada una de las ramas dependen del sentido de la
intensidad que circula por ellas. Así, cuando i A > 0 ( i B < 0 ) , conducen los diodos DA- y
DB+, por lo que:
v AN = 0,
i A > 0,
D A – on
v BN = V D,
i B < 0,
D B + on
(7.121)
En cambio, si i A < 0 y, por tanto, i B > 0 , son los diodos DA+ y DB- los que conducen al
estar directamente polarizados, dando lugar a las tensiones de salida:
v AN = V D,
i A < 0,
D A + on
v AB = 0,
i B > 0,
D B – on
(7.122)
Las figuras 7.34-c y 7.34-d muestran las tensiones vAN, vBN y v0 (= vAN - vBN) en uno y
otro caso, donde se ha representado con línea de trazos el estado ideal con t ∆ = 0 .
Sec.
Inversores trifásicos
FIGURA 7.34
311
Efecto del tiempo muerto en un inversor PWM en puente completo
con conmutación bipolar.
(a)
Control ( TA+, TB- )
0
t
Control ( TA-, TB+ )
t∆
0
t
Control ( TA+, TB- )
t∆
0
t
(b)
Control ( TA-, TB+ )
0
t
vAN , iA > 0
Ideal
Real
Pérdida
0
t
Ganancia
vBN , iB < 0
(c)
Ideal
Real
0
t
v0
Ideal
0
Real
Pérdida
t
Ganancia
vAN, iA < 0 Ideal
Real
Pérdida
Ideal
vBN, iB > 0
Real
0
t
(d)
0
t
v0
0
Ideal
Ganancia
Real
t
312
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Promediando la ecuación 7.119 en un periodo de control TS, se obtienen los
incrementos de las tensiones medias de salida de cada una de las patas del inversor y la
que alimenta a la carga en función del sentido de la intensidad de cada pata. Un
incremento positivo indica una pérdida o caída de tensión, en tanto que un incremento
negativo se traduce en una ganancia de tensión.
i 0 > 0:
t∆ VD
⎧ ∆V AN = -------------⎫
Ts ⎪
⎪
2t ∆ V D
i A > 0, i B < 0 ⎨
⎬ ∆V 0 = ∆V AN – ∆V BN = -------------Ts
t
V
∆
D⎪
⎪ ∆V BN = – -------------⎩
⎭
Ts
i 0 < 0:
t∆ VD
⎫
⎧ ∆V AN = – -------------Ts ⎪
⎪
–2 t∆ VD
i A < 0, i B > 0 ⎨
⎬ ∆V 0 = ∆V AN – ∆V BN = ----------------Ts
t
V
∆
D ⎪
⎪ ∆V BN = -------------⎩
Ts ⎭
7.5.3
(7.123)
Efecto del tiempo muerto en inversores monofásicos en puente completo
con control mediante PWM con conmutación de tensión unipolar
En este caso, los interruptores de una y de otra pata se controlan de forma
independiente. Las figuras 7.35-a y 7.35-b muestran, de forma respectiva, las señales
que determinan la secuencia de activación de los interruptores en el caso ideal, donde la
conmutación entre dos interruptores se produce de forma instantánea, y el caso real,
donde se ha tenido en cuenta un pequeño retraso entre el apagado de un interruptor y el
encendido del siguiente (tiempo muerto).
Durante el tiempo muerto todos los interruptores del inversor están desactivados y la
tensión de salida depende, en este intervalo, del sentido de la corriente de salida. Las
expresiones 7.121 y 7.122 deducidas para el caso de conmutación bipolar, resultan
válidas para inverores PWM con conmutación unipolar o simple. Bajo estas
consideraciones, las figuras 7.35-c y 7.35-d muestran las formas de las tensiones vAN,
vBN y la de salida v0 para i 0 = i A > 0 ( i B < 0 ) y para ( i 0 = i A ) < 0 ( i B > 0 )
respectivamente. Los incrementos medios de las tensiones de salida de cada rama del
circuito (considerado como ganancia si es de signo negativo y como pérdida en caso
contrario), resultantes de promediar la ecuación 7.119 según el sentido de las
intensidades que las atraviesan, vienen dados por:
VD t∆
∆V AN = -------------Ts
iA > 0
VD t∆
∆V AN = – -------------Ts
iA < 0
(7.124)
VD t∆
= -------------Ts
iB > 0
VD t∆
∆V BN = – -------------Ts
iB < 0
∆V BN
Sec.
Inversores trifásicos
313
Efecto del tiempo muerto en un inversor PWM en puente completo
con conmutación unipolar.
FIGURA 7.35
vtri
vcontrol
0
t
-vcontrol
Control TA+
0
t
Control TA(a)
t
0
Control TB+
t
0
Control TB0
t∆
t∆
t
Control TA+
t∆
0
t
Control TA(b)
t∆
0
t∆
t
Control TB+
0
t∆
t
Control TBt
0
Ideal
vAN, iA > 0
0
Real
Pérdida
Ideal
Ganancia
Real
Ideal
Real
vBN, iB < 0
(c)
t
t
0
v0
Pérdida
0
Ideal
vAN, iA < 0
0
vBN, iB > 0
(d)
Pérdida
Ideal
t
Real
Ganancia
t
Real
0
t
Ideal
Real
v0
0
Ganancia
t
314
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Restando las tensiones vAN y vBN de cada rama en un mismo instante de tiempo, se
obtiene la tensión v0 de salida del inversor. Nótese que debido a que los interruptores de
una y de otra pata se controlan de forma independiente, al restar las tensiones vAN y vBN,
los tiempos muertos no coinciden como ocurría para la conmutación bipolar, esto es, no
suman sus efectos en v0. Así:
VD t∆
∆V 0 = -------------Ts
VD t∆
∆V 0 = – -------------Ts
i0 > 0
Perdida
(7.125)
i0 < 0
Ganancia
Por tanto, como se desprende de la expresión anterior, la pérdida o ganancia de tensión
de salida para inversores PWM con conmutación unipolar resulta la mitad que para la
conmutación bipolar.
En inversores PWM en puente completo, si se considera que vcontrol es constante en un
periodo de control Ts y que los interruptores son ideales (no se tiene en cuenta el tiempo
muerto) el valor medio V0 de la tensión de salida en ese periodo de control vale:
VD
V 0 = -------- v control
V̂ tri
(7.126)
Como vcontrol varía en cada periodo Ts, la ecuación anterior indica la variación
instantánea del valor medio en un determinado periodo de la frecuencia fundamental:
VD
V 0 ( t ) = -------- v control ( t )
V̂ tri
(7.127)
La figura 7.36 representa, con trazo continuo, esta tensión media instantánea de salida
en función de vcontrol para interruptores ideales ( t ∆ = 0 ) , y con trazo discontinuo para
interruptores reales donde se tiene en cuenta los efectos del tiempo muerto. Nótese que
cuando la tensión de salida es positiva, V0 disminuye respecto a la obtenida con
interruptores ideales (∆V0>0). En cambio, si la tensión de salida es menor que cero, V0
aumenta respecto al caso ideal (∆V0<0).
Este mismo desarrollo descrito puede aplicarse a los choppers en puente completo
presentados en el capítulo anterior, donde vcontrol siempre posee un valor constante. Por
ello, la figura 7.36 resulta muy útil a la hora de determinar el efecto del tiempo muerto
en aplicaciones de tales convertidores en accionamientos de motores de continua.
Si la señal vcontrol en un inversor monofásico en puente completo fuese senoidal:
v control ( t ) = V̂ control sin ( ω 1 t ) , la tensión media instantánea de salida vale:
V̂ control
V 0 ( t ) = V D ---------------- sin ( ω 1 t ) = v 01 ( t )
V̂ tri
(7.128)
Sec.
Inversores trifásicos
FIGURA 7.36
315
Tensión media instantánea de salida en función de vcontrol para
interruptores ideales y en presencia del tiempo muerto.
V0
i0 < 0
∆V0
i0 > 0
∆V0
0
vcontrol
La figura 7.37 representa, con línea continua, la tensión media instantánea de salida
V0(t) (=v01(t)) a frecuencia fundamental en un inversor monofásico en puente completo
con interruptores considerados ideales ( t ∆ = 0 ) . Se supone que la carga que alimenta el
inversor es altamente inductiva, por lo que i0(t) se encuentra retrasada respecto a V0(t).
FIGURA 7.37
Efecto del tiempo muerto en la forma de onda senoidal de salida.
Ideal
V0(t)
0
t
Real
i0(t)
0
t
316
Cap. Convertidores cc-ca. Inversores de frecuencia variable
En presencia del tiempo muerto, la tensión media instantánea de salida a frecuencia
fundamenta se deforma respecto a la senoidal perfecta ideal cuando i0(t) pasa por cero.
Esta distorsión de V0(t) (=v01(t)) representada en la figura 7.37 con trazo discontinuo,
supone la aparición de armónicos de baja frecuencia múltiplos impares (pues la onda es
alternada) de la frecuencia fundamental, esto es, armónicos de orden tercero, quinto,
séptimo, etc., de la frecuencia fundamental.
7.5.4
Efecto del tiempo muerto en inversores PWM trifásicos
Para inversores PWM trifásicos, las formas de onda de los valores medios instántáneos
de las tensiones compuestas VAB(t), VBC(t) y VCA(t) consisten, en el caso de interruptores
ideales, en senoidales puras desfasadas 120º. En cambio, si los interruptores no son
ideales, el tiempo muerto provoca que VAB(t), VBC(t) y VCA(t) sufran una distorsión
cuando las intensidades iAB(t), iBC(t) e iCA(t) pasen por cero.
De esta forma, aparecen armónicos de baja frecuencia de orden: 6k ± 1 (k=1, 2, 3, ...)
de la frecuencia fundamental, esto es, armónicos impares múltiplos de la frecuencia
fundamental excepto aquellos múltiplos de tres.
7.6
Funcionamiento de convertidores cc-ca de frecuencia variable
como rectificador
Un convertidor de continua a alterna puede transferir potencia en ambos sentidos, es
decir, puede funcionar como inversor o como rectificador. Además, la transición entre
ambos modos de funcionamiento se produce de forma suave. Así, por ejemplo, cuando
se emplea un convertidor de estas características para alimentar a un motor de alterna,
la potencia fluye del lado de continua al lado de alterna durante el funcionamiento
normal del motor. Funciona, por tanto, como inversor. Sin embargo, durante el frenado
de éste, la potencia fluye del lado de alterna al de continua, funcionando así como
rectificador (ver figura 7.38).
FIGURA 7.38
Modos de funcionamiento de un convertidor cc-ca de frecuencia
variable.
LADO DE CONTÍNUA
LADO DE ALTERNA
Potencia
eléctrica
Motor
ca
Potencia
eléctrica
Motor
ca
Potencia
mecánica
Potencia
mecánica
Sec.
Funcionamiento de convertidores cc-ca de frecuencia variable como rectificador
317
En esta sección, se analiza el modo funcionamiento como rectificador de convertidores
cc-ca trifásicos de frecuencia variable, si bien los mismos principios que aquí se
exponen se aplican a los convertidores monofásicos.
Considérese así un inversor PWM trifásico como el de la figura 7.39 (en el que
únicamente se ha dibujado la fase A), que alimenta a un motor de corriente alterna. En
el análisis se supondrá que los interruptores son ideales, esto es, se desprecian los
armónicos de baja frecuencia. Además, los armónicos de alta frecuencia en torno a fs y
sus múltiplos se consideran, asimismo, despreciables.
FIGURA 7.39
Convertidor PWM trifásico alimentando a un motor de ca.
Inversor trifásico
iD
TA+
DA+
iA
A
A
VD
iB
B
iC
C
L
~ eA(t)
TA-
DA-
N
La figura 7.40 muestra el funcionamiento del convertidor como un inversor. Aquí, la
tensión VAn aplicada al motor se encuentra adelantada un ángulo δ respecto de EA. La
parte real de IA (IA)r, está en fase con EA, esto es, la corriente tiene sentido entrante al
motor y, por tanto, es éste el que consume potencia, configurando así su
funcionamiento como inversor.
FIGURA 7.40
Convertidor cc-ca funcionando como inversor.
VAn
j(ω1L)IA
δ
(IA)r
(IA)i
IA
EA
318
Cap. Convertidores cc-ca. Inversores de frecuencia variable
Si ahora es la tensión VAn la que se encuentra retrasada un ángulo δ respecto de EA, la
parte real de IA está en contrafase con EA, es decir, entre ambas existe una diferencia de
fase de 180º (ver figura 7.41). Por tanto, la potencia fluye desde el motor al lado de
continua del convertidor (intensidad saliente del motor), esto es, el circuito funciona
como rectificador.
FIGURA 7.41
Convertidor cc-ca funcionando como rectificador.
(IA)r
EA
δ
IA
j(w1L)IA
(IA)i
VAn
Los convertidores cc-ca pueden controlar la tensión VAn en magnitud (dentro de los
límites permitidos) y en fase, permitiendo ejercer el control sobre la magnitud de la
corriente IA y sobre el nivel de potencia transferida tanto en un sentido como en el otro.
Para ello, considérese la figura 7.25 que representa las formas de onda de un inversor
PWM trifásico. Si se supone que VD permanece constante, variando la amplitud de
vcontrol,A se controla la magnitud de la tensión VAn. Asimismo, desplazando vcontrol,A con
respecto a EA se varía la fase de VAn.
Para tener un sistema trifásico equilibrado de tensiones, las amplitudes de las señales de
control vcontrol,B y vcontrol,C para las fases B y C deben tener idéntica amplitud que la señal
de control de la fase A y estar desfasada respecto a ésta un ángulo de ± 120°
respectivamente.
Los convertidores cc-ca de este tipo funcionando principalmente como rectificadores se
utilizan de interfaz entre la red de energía eléctrica y los circuitos de electrónica de
potencia.
7.7
Inversor de corriente continua variable
Como se dedujo en secciones precedentes, la única forma de controlar la magnitud de la
tensión de salida en un inversor de onda cuadrada consiste en variar su tensión continua
de entrada. Esta tensión de alimentación variable procede de alguna otra etapa del
convertidor de potencia. A una disposición de este tipo, formada por un convertidor con
tensión de salida variable conectado a un inversor de onda cuadrada, se la denomina
inversor de corriente continua variable (variable dc-link inverter).
La figura 7.42 muestra un inversor de corriente continua variable, donde la tensión de
entrada al inversor de onda cuadrada se consigue a través de un convertidor buck. Pero
esta estructura no permite la realimentación de la salida alterna del inversor, ya que los
Sec.
Inversor de corriente continua variable
319
choppers de un único interruptor permiten sólo la transferencia de potencia en un
sentido.
FIGURA 7.42
Inversor de corriente continua variable.
T1
D1
VD
T3
D2
T2
Carga
T4
Convertidor buck
(tensión cc variable)
7.8
D3
D4
Inversor de onda cuadrada
Contenidos principales
1.
En este capítulo se han descrito los convertidores de continua a alterna, tanto
monofásicos como trifásicos, que a partir de una tensión continua de entrada
proporcionan una tensión de salida alterna senoidal (de una o de tres fases),
controlada en magnitud y frecuencia.
2.
Estos convertidores pueden funcionar bien como inversores, donde la potencia fluye
desde el lado de continua al de alterna, o bien como rectificadores, donde el flujo de
potencia tiene sentido contrario al anterior. La transición entre ambos modos de
funcionamiento se produce de forma suave.
3.
Un inversor de onda cuadrada permite controlar la frecuencia de la tensión de salida,
aunque no su magnitud. Para controlar la magnitud de la tensión de salida se hace
variar la tensión VD de entrada, por lo que ésta debe proceder de un rectificador
controlado, esto es, formado por tiristores. Al conjunto formado por un convertidor
con salida continua variable y un inversor de onda cuadrada recibe el nombre de
inversor de corriente continua variable. La tensión de salida de un inversor de onda
cuadrada contiene armónicos de bajo orden.
4.
Una variación del esquema de un convertidor de onda cuadrada, denominada técnica
de anulación de tensiones, permite controlar tanto la magnitud como la frecuencia de
la tensión de salida en inversores monofásicos de puente completo, aunque no en el
resto de las topologías.
5.
Un estudio comparativo entre los inversores PWM monofásicos con conmutación
bipolar y unipolar permite obtener que, en ambos casos, la tensión de salida
únicamente contiene armónicos impares. En los inversores de doble PWM, los
320
Cap. Convertidores cc-ca. Inversores de frecuencia variable
armónicos de la tensión de salida se sitúan en torno a 2fs y sus múltiplos, en tanto que
en los de PWM simple éstos lo hacen en torno a fs y sus múltiplos.
6.
En un inversor PWM trifásico, si se elige el ratio de modulación de frecuencia mf
impar y múltiplo de tres, se eliminan las tensiones armónicas múltiplos impares de
mf.
7.
Cuando el ratio de modulación de la amplitud ma es menor o igual que la unidad, se
dice que el inversor trabaja en la zona lineal. Cuando ma es mayor que la unidad, el
inversor trabaja en la región de sobremodulación.
8.
En la región lineal, la tensión de pico del armónico de frecuencia fundamental varía
de forma lineal con ma, y es independiente de mf. Los armónicos aparecen en la zona
de altas frecuencias, alrededor de la frecuencia de conmutación y de sus múltiplos.
9.
En la zona de sobremodulación, la amplitud de la tensión de salida a frecuencia
fundamental (que es mayor que la obtenida cuando m a ≤ 1 ) no varía de forma lineal
con ma, y además depende de mf. La tensión de salida contiene un mayor número de
armónicos y a frecuencias más bajas que los originados en la región lineal.
10.
El rizado de la tensión de salida, debido a la presencia de tensiones armónicas,
resulta independiente del nivel de potencia transferido a frecuencia fundamental. Sin
embargo, sí depende inversamente de la inductancia de la carga, dependencia que se
acrecienta a altas frecuencias.
11.
En la práctica, si se considera un inversor basado en la topología básica de una sola
pata, la conmutación entre los dos interruptores no se produce de forma instánea,
sino que entre el apagado de uno de ellos y el encendido del otro existe un pequeño
retraso denominado tiempo muerto (blanking time). Este tiempo muerto introduce
armónicos de baja frecuencia en la tensión de salida.
12.
Los convertidores cc-ca funcionando como rectificadores se emplean, de forma
general, como interfaz entre la red de energía eléctrica y los circuitos de electrónica
de potencia.
7.9
Problemas
La figura P-7.1 representa un inversor monofásico de media onda que alimenta a
una carga resistiva de valor R=2.4Ω. La tensión de entrada vale VD=48V. Se pide:
7.1.
a) Valor eficaz de la tensión de salida a frecuencia fundamental.
b) Potencia media consumida por la carga.
c) Corrientes máxima y media por cada transistor.
d) Máxima tensión que aguanta cada transistor en estado de bloqueo.
e) Distorsión armónica total (THD).
Sec.
Problemas
321
f) Explicar la función de los diodos. Dibujar las formas de onda v0(t) e i0(t) para una
carga puramente inductiva.
FIGURA P-7.1
i1
Q1
D1
VD/2
R
i0
0
VD
v0
VD/2
A
D2
i2
Q2
ib1
intensidad de base de Q1
π
ib2
2π
intensidad de base de Q2
La figura P-7.2 representa un inversor en puente completo. Se disparan los
transistores de forma que el funcionamiento sea el de un inversor de onda cuadrada.
La tensión de entrada VD vale 48V, y la carga es resistiva pura de valor R=2.4Ω.
7.2.
Se pide:
a) Valor eficaz de la tensión de salida a frecuencia fundamental (f=60Hz).
b) Potencia transferida a la carga.
c) Corrientes máxima y media por cada transistor.
d) Máxima tensión VT que aguanta cada transistor en estado de bloqueo.
e) Distorsión armónica total (THD).
f) Formas de onda de v0(t) e i0(t) para una carga inductiva pura. Explica las
diferencias respecto a una carga resistiva pura.
FIGURA P-7.2
VD/2
Q1
D1
Q3
D3
Q2
D2
Carga
VD/2
7.3.
Q4
D4
La figura P-7.3-a representa un inversor trifásico alimentado por una fuente de
322
Cap. Convertidores cc-ca. Inversores de frecuencia variable
continua con un punto neutro accesible. El inversor alimenta a una carga trifásica
equilibrada en estrella, de forma que el neutro de la fuente de continua y el neutro de
la carga se conectan. La figura P-7.3-b muestra las intensidades en las bases de los
transistores.
Se pide:
a) Formas de onda van(t), vbn(t) y vcn(t), indicando los puntos más significativos.
b) Valor eficaz de la tensión de línea a frecuencia fundamental.
c) Si Z=R, esto es, la carga es resistiva pura, calcular la intensidad máxima de fase a
frecuencia fundamental y la forma de onda de la intensidad de fase, indicando los
periodos de conducción de los dispositivos semiconductores.
d) Repetir el apartado c) si la carga fuese inductiva pura (Z=jLω).
e) Valor eficaz de la tensión de fase.
FIGURA P-7.3
Vdc
ib1
a
+
_
D1
Q1
Z
ib3
Q3
ib5
D3
Q5
D5
a
b
Vdc
Z
+
_
c
ib2
Z
b
Q2
D2
ib4
Q4
ib6
D4
(a)
ib1
ib2
ib3
π
wt
π
2π wt
ib4
2π/3
5π/3
wt
ib5
2π/3
5π/3
2π wt
ib6
π/3
π/3
(b)
4π/3
wt
4π/3
wt
c
Q6
D6
 0
0
Anuncio
Documentos relacionados

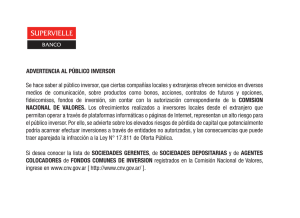
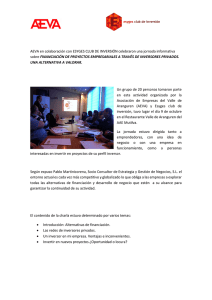
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados