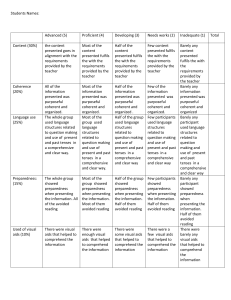
Finance and Stoch (2006) 10: 367–393 DOI 10.1007/s00780-006-0009-1 O R I G I NA L PA P E R A. S. Cherny Weighted V@R and its properties Received: 21 July 2005 / Accepted: 14 December 2005 / Published online: 21 April 2006 © Springer-Verlag 2006 Abstract The paper deals with the study of a coherent risk measure, which we call Weighted V@R. It is a risk measure of the form ρµ (X ) = TV@Rλ (X )µ(dλ), [0,1] where µ is a probability measure on [0, 1] and TV@R stands for Tail V@R. After investigating some basic properties of this risk measure, we apply the obtained results to the financial problems of pricing, optimization, and capital allocation. It turns out that, under some regularity conditions on µ, Weighted V@R possesses some nice properties that are not shared by Tail V@R. To put it briefly, Weighted V@R is “smoother” than Tail V@R. This allows one to say that Weighted V@R is one of the most important classes (or maybe the most important class) of coherent risk measures. Keywords Capital allocation · Coherent risk measures · Determining set · Distorted measures · Minimal extreme measure · No-good-deals pricing · Spectral risk measures · Strict diversification · Tail V@R · Weighted V@R Mathematics Subject Classification (2000) 91B16 · 91B30 JEL Classification G10 · G11 · G12 A. S. Cherny Faculty of Mechanics and Mathematics, Department of Probability Theory, Moscow State University, 119992 Moscow, Russia E-mail: [email protected] Tail Var = ES 368 A. S. Cherny 1 Introduction Historic overview. The theory of coherent risk measures is a very new, important, and rapidly evolving branch of modern financial mathematics. This concept was introduced by Artzner et al. [4,5]. Since then, many papers on the topic have followed; surveys of the modern state of the theory are given in [19], [22, chapter 4], and [30]. In some sources, the theory of coherent risk measures and related topics is already called the “third revolution in finance” (see [33]). A very important class of coherent risk measures is given by Tail V@R (the L^\infty terms Average V@R, Conditional V@R, and Expected Shortfall are also used). Tail V@R of order λ ∈ [0, 1] is a map ρλ : L ∞ → R (we have a fixed probability space (Ω, F , P)) defined by A Importancia do Tail Var ρλ (X ) = − inf E X, Q∈Dλ Q Riqueza where Dλ is the set of probability measures Q that are absolutely continuous with descontada respect to P with ddQ ≤ λ−1 . (From the financial point of view, X is the discounted P P & L of some financial transaction.) The importance of Tail V@R is seen from a result of Kusuoka [25], who proved that ρλ is the smallest law invariant coherent risk measure that dominates V@Rλ (we recall the precise formulation in section 2). This suggests that Tail V@R is one of the best coherent risk measures. For more information on Tail V@R, see [3], [18, section 6], [19, section 7], [22, section 4.4], [30, section 1.3]. However, there exists a risk measure, which is, in our opinion, much better than Tail V@R. It is given by ρµ (X ) = ρλ (X )µ(dλ), (1.1) [0,1] where µ is a probability measure on [0, 1]. We call this risk measure Weighted V@R and its study is the goal of this paper. First of all, let us give two arguments in favor of Weighted V@R over Tail V@R: • (Financial argument) Tail V@R of order λ takes into consideration only the λ-tail of the distribution of X ; thus, two distributions with the same λ-tail will be assessed by this measure in the same way, although one of them might clearly be better than the other (see Figure 1). On the other hand, if the right endpoint of supp µ is 1, then ρµ depends on the whole distribution of X . Por isso que ao usar o W VaR, conseguimos ter uma ideia melhor da distribuicao como um todo. Na ES olhamos ate um determinado quantil \lambda. Ja nessa W VaR, iremos `somar todos os quantis no intervalo [0,1]`. Fig. 1 These two distributions have the same λ-tails (qλ is the λ-quantile), so that TV@Rλ coincides on them. However, the distribution on the right stochastically dominates the distribution on the left Weighted V@R and its properties 369 • (Mathematical argument) If the weighting measure µ satisfies the condition supp µ = [0, 1], then ρµ possesses some nice properties that are not shared by ρλ . In particular, various optimization problems have a unique solution (see section 5). The paper [21] provides some further financial arguments in favor of Weighted V@R. It might seem rather surprising that the risk measure, which we call here Weighted V@R, was considered by actuaries already in the early 1990s, i.e., before the papers of Artzner et al.; see, for example, [20,34] (see also the paper [35], which appeared at the same time as [4]). These papers are related to an object termed distorted measure. This is a functional on random variables defined as 0 ρ(X ) = ∞ Ψ (F(x))dx + (Ψ (F(x)) − 1)dx, −∞ 0 (1.2) Relacao do W VaR com as medidas distorcidas. where Ψ : [0, 1] → [0, 1] is an increasing concave function with the properties Ψ (0) = 0, Ψ (1) = 1, and F is the distribution function of X . It turns out that the class of these functionals (with different Ψ ) is exactly the class of Weighted V@Rs (with different µ). For risk measures on L ∞ , this equivalence can be found in [22, Theorem 4.64] or [30, Theorem 1.51]; for risk measures on L 0 , this equivalence is proved in section 3 of this paper. The first appearance of ρµ in the framework of coherent risk measures is in the paper of Kusuoka [25]. He proved that any law invariant comonotonic coherent risk measure is of this form. In the same paper, he proved that any law invariant risk measure has the form supµ∈M ρµ , where M is a set of probability measures on [0, 1] (we recall the precise formulations in section 2). Some further considerations of ρµ can be found in the papers of Acerbi [1,2], who uses the term spectral risk measures for this class. Furthermore, Carlier and Dana [11] provided a representation of the determining set of Weighted V@R (the definition of this notion is given below). This Discussão interessante representation is recalled in section 4. sobre os espaços Structure of the paper. According to the classical definition, a coherent risk measure is defined on bounded random variables. However, for financial applications, it is almost necessary to extend this notion to the space of all random variables. Indeed, most distributions used in theory (for example, the lognormal one) are unbounded. In this paper, we consider coherent risk measures defined on the space L 0 of all random variables. This is done as follows. According to the basic representation theorem, a functional ρ : L ∞ → R is a coherent risk measure Fatou Property é usada quando o if and only if it admits a representation meu espaço amostral é arbitrário. ρ(X ) = − inf EQ X, Q∈D X ∈ L∞ (1.3) with some set D of probability measures that are absolutely continuous with respect to P. For finite Ω, this was proved in [5]; for arbitrary Ω, this was proved by Delbaen [18]; in the latter case, an additional continuity assumption called the Fatou property should be imposed on ρ. Following [15,16], we take the representation (1.3) with L ∞ replaced by L 0 as the definition of a coherent risk measure 370 A. S. Cherny on L 0 . The expectation EQ X is understood as EQ X + − EQ X − with the convention ∞ − ∞ = −∞ so that EQ X is well defined for any Q and X . Thus, ρ takes on values in the extended real line [−∞, ∞]. Section 2 contains some basic definitions as well as known results on Tail V@R and Weighted V@R. In section 3, we provide two representations of Weighted V@R. These are the extensions of (1.1) and (1.2) to L 0 . Clearly, different sets D might define the same coherent risk measure. However, among all the sets that define the same risk measure ρ, there exists a largest one (it has the form D = {Q P : EQ X ≥ −ρ(X ) for any X }). We call it the determining set of ρ. Finding the structure of this set is important. For example, in [15, section 2], we considered the no-good-deals pricing technique based on coherent risk measures. According to this technique, the interval of fair prices of a contingent claim F is {EQ F : Q ∈ D ∩ R}, where R is the set of risk-neutral measures and D is the determining set of a risk measure ρ, which serves as an input to this technique. Furthermore, the solutions of various other financial problems given in [15,16] are expressed through the determining set. In section 4, we provide two representations of the determining set of Weighted V@R, both of which are given in different terms than the one in [11]. The main result of section 5 is that ρµ (X + Y ) < ρµ (X ) + ρµ (Y ) provided that supp µ = [0, 1] and X , Y are not comonotone (in particular, the latter condition is satisfied if the distribution of (X, Y ) has a joint density). We call this the strict diversification property. This property is very important from the viewpoint of financial mathematics because it leads to the uniqueness of the solutions of various optimization problems based on the coherent risk measures. In [15], we introduced the notion of an extreme measure. The class of extreme measures for a coherent risk measure ρ and a random variable X is defined as Xρ (X ) = Q ∈ D : EQ X = inf EQ X ∈ (−∞, ∞) , Q ∈D where D is the determining set of ρ. This notion was found to be very convenient and important. In particular, the solutions of several optimality pricing problems, the solution of the equilibrium pricing problem, and the solution of the capital allocation problem are expressed through extreme measures (see [15,16]). Moreover, the risk contribution introduced in [15] is expressed through extreme measures. In general, the set Xρ (X ) can contain more than one point. However, as shown in section 6, for ρ = ρµ with µ({0}) = 0, there exists a unique element of Xρ that is the smallest in the convex order. We call it the minimal extreme measure. This notion is of importance for financial mathematics as it allows one to select a (unique) distinguished solution of the problems like capital allocation or optimality pricing, which possesses some nice properties. We call it the central solution. One of the most important goals of modern financial mathematics is to narrow the no-arbitrage price intervals of contingent claims as they are known to be unacceptably wide in most incomplete models. Several ways to do that have Weighted V@R and its properties 371 been proposed in the literature. One of them consists in considering actively traded derivatives as basic assets. In particular, a popular model is based on treating as basic assets the European call options on a fixed asset with a fixed maturity and different strike prices. The corresponding model was first studied by Breeden and Litzenberger [9] and Banz and Miller [7]. A literature review of this model is given in [23]. Let us also mention the paper [14, section 6], in which this model was analyzed from the general viewpoint of fundamental theorems of asset pricing. Recently, another (very promising) way to narrow fair price intervals has been proposed. It is known as no-good-deals pricing. This technique was first considered by Cochrane and Saá-Requejo [17] and Bernardo and Ledoit [8]. An important feature of this theory is that there exists no canonical definition of a good deal (in particular, [17] and [8] employ different definitions). Carr et al. [12] (see also the review paper [13]) and Jaschke and Küchler [24] proposed variants of no-good-deals pricing based on coherent risk measures. These techniques were further developed in [15] and [32]. In section 7, we combine the two ways of narrowing fair price intervals described above. Namely, we apply the no-good-deals pricing technique from [15] to the model with European options as basic assets. This leads to a “double reduction” of fair price intervals. The risk measure employed is Weighted V@R. In fact, the results of section 7 provide a description of risk-neutral densities that correctly price traded call options and are “not far” from the real-world density, the “distance” being measured with the help of a coherent risk measure. Let us remark that the study of the interplay between risk-neutral and real-world densities is a very popular topic of modern financial mathematics (see, in particular, the papers [6,10,26]). Section 8 deals with a Markowitz-type optimization problem of the form EP X −→ max, X ∈ A, ρ(X ) ≤ c, (1.4) where ρ is a coherent risk measure, c ≥ 0, and A is the set of possible discounted P & Ls that can be obtained by using various trading strategies in the model under consideration. Let us remark that in [27], Markowitz proposed to consider an alternative of his mean-variance optimization problem with variance replaced by semivariance S(X ) = E((X − EX )− )2 (clearly, variance is not a good measure of risk because it penalizes profits in the same way as losses). In (1.4), the risk is measured in a coherent way. Let us remark that problems of type (1.4) were considered in [2,16,28,29]. Here we provide a solution of (1.4) for the case, where ρ is Weighted V@R and the model is complete, i.e., A = {X ∈ L 1 (Q) : EQ X = 0}, where Q is a given measure (the unique risk-neutral measure). Classical examples of a complete model are the Black-Scholes model and the Cox–Ross–Rubinstein model. One more example is the option-based model considered in section 7 (if we assume that the options on a basic asset with a fixed maturity and all the positive strikes are traded, then this model is complete). Our solution shows that the optimalstrategy typically consists in buying binary options with the payoff dQ I dP ≤ c∗ , where c∗ is the optimal threshold explicitly calculated in section 8 (see Figure 5). 372 A. S. Cherny 2 Basic definitions Let (Ω, F , P) be a probability space. It will be convenient for us to deal not with coherent risk measures, but with their opposites called coherent utility functions (this enables one to get rid of numerous minus signs). Definition 2.1 A coherent utility function on L ∞ is a map u : L ∞ → R with the properties: (a) (Superadditivity) u(X + Y ) ≥ u(X ) + u(Y ); (b) (Monotonicity) If X ≤ Y , then u(X ) ≤ u(Y ); (c) (Positive homogeneity) u(λX ) = λu(X ) for λ ∈ R+ ; (d) (Translation invariance) u(X + m) = u(X ) + m for m ∈ R; P → X , then u(X ) ≥ lim supn u(X n ). (e) (Fatou property) If |X n | ≤ 1, X n − The corresponding coherent risk measure is ρ(X ) = −u(X ). The theorem below was established in [5] for the case of a finite Ω (in this case the axiom (e) is not needed) and in [18] for the general case. We denote by P the set of probability measures on F that are absolutely continuous with respect to P. Throughout the paper, we identify measures from P (these are typically denoted by Q) with their densities with respect to P (these are typically denoted by Z ). Theorem 2.2 A function u satisfies conditions (a)–(e) if and only if there exists a nonempty set D ⊆ P such that u(X ) = inf EQ X, X ∈ L ∞ . Q∈D (2.1) Now, we use the representation (2.1) to extend coherent utility functions to the space L 0 of all random variables. Definition 2.3 A coherent utility function on L 0 is a map u : L 0 → [−∞, ∞] defined as u(X ) = inf EQ X, X ∈ L 0 , Q∈D (2.2) where D is a nonempty subset of P and EQ X is understood as EQ X + − EQ X − with the convention ∞ − ∞ = −∞. Clearly, a set D, for which representations (2.1) and (2.2) are true, is not unique. However, there exists a largest such set given by {Q ∈ P : EQ X ≥ u(X ) for any X }. Definition 2.4 We call the largest set, for which (2.1) (resp., (2.2)) is true, the determining set of u. Remark 2.5 (i) Clearly, the determining set is convex. For coherent utility functions on L ∞ , it is also L 1 -closed. However, for coherent utility functions on L 0 , it is not necessarily L 1 -closed. As an example, take a positive unbounded random variable X 0 such that P(X 0 = 0) > 0 and consider D0 = {Q ∈ P : EQ X 0 = 1}. Clearly, the determining set D of the coherent utility function u(X ) = inf Q∈D0 EQ X satisfies D0 ⊆ D ⊆ {Q ∈ P : EQ X 0 ≥ 1}. On the other hand, the L 1 -closure of D0 contains a measure Q0 concentrated on {X 0 = 0}. Comb convexa das medidas de prob estão em \mathcal{P}??? Weighted V@R and its properties 373 (ii) Let D be an L 1 -closed convex subset of P . Define a coherent utility function u by (2.1) or (2.2). Then D is the determining set of u. Indeed, assume is greater than D, i.e., there exists Q0 ∈ D \D. that the determining set D ∞ Then, by the Hahn–Banach theorem, we can find X 0 ∈ L such that EQ0 X 0 < inf Q∈D EQ X , which is a contradiction. Now, we recall some basic facts related to Tail V@R. The next definition applies both to L ∞ and to L 0 . Definition 2.6 Tail V@R is the risk measure corresponding to the coherent utility function u λ (X ) = inf EQ X, Q∈Dλ where λ ∈ [0, 1] and dQ Dλ = Q ∈ P : ≤ λ−1 . dP Clearly, u 0 (X ) = essinf ω X (ω). The following well-known proposition provides two representations of Tail V@R with λ > 0. Throughout the paper, we denote by qλ (X ) the right λ-quantile of X , i.e., qλ (X ) = inf{x : P(X ≤ x) > λ} (we use the convention inf ∅ = +∞). Proposition 2.7 (i) Let λ ∈ (0, 1], X ∈ L 0 . Then for any Z ∗ ∈ Dλ such that λ−1 on {X < qλ (X )}, ∗ Z = (2.3) 0 on {X > qλ (X )}, we have u λ (X ) = EP X Z ∗ . Conversely, if u λ (X ) > −∞, then any Z ∗ ∈ Dλ such that u λ (X ) = EP X Z ∗ satisfies (2.3). (ii) Let λ ∈ (0, 1], X ∈ L 0 . Then xQ(dx) + cqλ (X ), u λ (X ) = λ−1 (−∞,qλ (X )) where Q = LawP X and c = 1 − λ−1 Q((−∞, qλ (X ))). Proof (i) We assume that EP X − < ∞ and λ ∈ (0, 1) (the other cases are analyzed trivially). Without loss of generality, qλ (X ) = 0. Then, for any Z ∈ Dλ , X Z − X Z ∗ = X (Z − λ−1 )I (X < 0) + X Z I (X > 0) ≥ 0. Furthermore, the a.s. equality here is possible only if Z satisfies (2.3). (ii) This is an immediate consequence of (i). The importance of Tail V@R is seen from a result of Kusuoka [25] which is stated below (its proof can also be found in [22, Theorem 4.61] or [30, Theorem 1.48]). Recall that a coherent utility function u is called law invariant if u(X ) depends only on the distribution of X . 374 A. S. Cherny Theorem 2.8 Assume that (Ω, F , P) is atomless. Let λ ∈ [0, 1] and u be a law invariant coherent utility function on L ∞ such that u ≤ qλ . Then u ≤ u λ . We now introduce the basic object of the paper. Definition 2.9 (i) Weighted V@R on L ∞ is the risk measure corresponding to the coherent utility function u µ (X ) = u λ (X )µ(dλ), X ∈ L ∞ , [0,1] where µ is a probability measure on [0, 1]. (ii) Weighted V@R on L 0 is the risk measure corresponding to the coherent utility function u µ (X ) = inf EQ X, X ∈ L 0 , Q∈Dµ where Dµ is the determining set of u µ on L ∞ . Thus, we have used the following scheme to define u µ on L 0 : MUITO IMPORTANTE!!! u λ on L ∞ −→ u µ on L ∞ −→ Dµ −→ u µ on L 0 . Let us now recall two results of Kusuoka [25] (the proofs can also be found in [22, Corollary 4.58, Theorem 4.87] or [30, Corollary 1.45, Theorem 1.58]), which show the importance of Weighted V@R in view of the law invariance property. Recall that random variables X and Y are comonotone if (X (ω2 ) − X (ω1 ))(Y (ω2 ) − Y (ω1 )) ≥ 0 for P × P-a.e. ω1 , ω2 ; a coherent utility function u is comonotonic if u(X + Y ) = u(X ) + u(Y ) whenever X and Y are comonotone. Theorem 2.10 (i) On an atomless probability space, a coherent utility function u on L ∞ is law invariant and comonotonic if and only if it has the form u = u µ with some probability measure µ. (ii) On an atomless probability space, a coherent utility function u on L ∞ is law invariant if and only if it has the form u = inf µ∈M u µ with some collection M of probability measures on [0, 1]. Remark 2.11 It is easy to check that Tail V@R is in fact a weighted average of λ V@Rs, i.e., u λ (X ) = 0 qs (X )ds. Hence, Weighted V@R is also a weighted average of V@Rs, which supports the term we are using (otherwise, we should have called it “Weighted Tail V@R”). 3 Representation of Weighted V@R For X ∈ L 0 and λ ∈ (0, 1], we set −1 on {X < q (X )}, λ λ ∗ Z λ (X ) = c on {X = qλ (X )}, 0 on {X > qλ (X )}, where c ∈ [0, λ−1 ] is such that EP Z λ∗ = 1. (3.1) Weighted V@R and its properties 375 Lemma 3.1 Let λ ∈ (0, 1], X ∈ L 0 , and f be an increasing function. Then u λ ( f (X )) = EP f (X )Z λ∗ (X ). Proof Without loss of generality, qλ (X ) = 0 and f (0) = 0. Then, for any Z ∈ Dλ , we can write f (X )Z − f (X )Z λ∗ (X ) = f (X )(Z − λ−1 )I (X < 0) + f (X )Z I (X > 0) ≥ 0. Theorem 3.2 (i) Suppose that µ({0}) = 0. Then, for X ∈ L 0 , we have u µ (X ) = EP X Z µ∗ (X ), where Z µ∗ (X ) = Z λ∗ (X )µ(dλ). (0,1] (ii) We have u µ (X ) = u λ (X )µ(dλ), X ∈ L 0 , (3.2) [0,1] where [0,1] f (λ)µ(dλ) is understood as with the convention ∞ − ∞ = −∞. [0,1] Proof (i) Any Z ∈ Dµ can be represented as f + (λ)µ(dλ)− (0,1] [0,1] f − (λ)µ(dλ) Z λ µ(dλ) with Z λ ∈ Dλ (see Theorem 4.4 below). Due to Lemma 3.1, EP (m ∨ X ∧ n)Z = [EP (m ∨ X ∧ n)Z λ ]µ(dλ) (0,1] ≥ [EP (m ∨ X ∧ n)Z λ∗ (X )]µ(dλ) (0,1] = EP (m ∨ X ∧ n)Z µ∗ (X ), m, n ∈ Z. Obviously, EP X Z µ∗ (X ) = lim lim EP (m ∨ X ∧ n)Z µ∗ (X ) n→∞ m→−∞ (3.3) and the same is true for Z µ∗ (X ) replaced by Z . Thus, EP X Z ≥ EP X Z µ∗ (X ), so that u µ (X ) = EP X Z µ∗ (X ). (ii) Suppose first that µ({0}) = 0. Due to Lemma 3.1, ∗ EP (m ∨ X ∧ n)Z µ (X ) = u λ (m ∨ X ∧ n)µ(dλ), m, n ∈ Z. (0,1] Obviously, u λ (X )µ(dλ) = lim (0,1] lim n→∞ m→−∞ (0,1] u λ (m ∨ X ∧ n)µ(dλ). 376 A. S. Cherny Fig. 2 The structure of Ψµ Combining this with (3.3) and the result of (i), we get (3.2). Now, let µ({0}) = α > 0. Then µ = αδ0 + (1 − α) µ and it follows from Theorem 4.4 that Dµ = α Dδ0 + (1 − α)D µ . If X is not bounded below, then, clearly, both sides of (3.2) are equal to −∞. If X is bounded below, then u µ (X ) = αu 0 (X ) + (1 − α)u µ, µ (X ) and (3.2) for µ follows from (3.2) for which was proved above. In order to provide another representation of Weighted V@R, let us consider the function x µ({0}) + λ−1 µ(dλ)dy, x ∈ (0, 1], Ψµ (x) = (3.4) 0 (y,1] 0, x = 0. Clearly, Ψµ is increasing, concave, Ψµ (0) = 0, and Ψµ (1) = 1 (Figure 2). In fact, (3.4) establishes a one-to-one correspondence between functions with these properties and probability measures µ on [0, 1] (for details, see [22, Lemma. 4.63] or [30, Lemma. 1.50]). Further properties of Ψµ are Ψµ (0+) = Ψµ (0+) = µ({0}), λ−1 µ(dλ), Ψµ (1−) = µ({1}). (0,1] Theorem 3.3 For X ∈ L 0 , 0 u µ (X ) = − −∞ ∞ Ψµ (F(x))dx + (1 − Ψµ (F(x)))dx, (3.5) 0 where F is the distribution function of X , and we use the convention ∞−∞ = −∞. Weighted V@R and its properties 377 Proof It is seen from (3.2) that u µ (X ) = lim lim u µ (X mn ), n→∞ m→−∞ where X mn = m ∨ X ∧n. Similar limit relation holds for the right-hand side of (3.5) (one should consider the distribution function Fmn of X mn ). For bounded X , the statement of the theorem is known (see [22, Theorem 4.64] or [30, Theorem 1.51]), so that the result for general X is obtained by passing to the limit. Remark 3.4 (i) Some important regularity properties of µ can be expressed in terms of Ψµ . For example, Ψµ (0+) = 0 if and only if µ({0}) = 0 (this condition will be important in sections 6 and 7; note also that this condition is equivalent to the lower semi-continuity of u µ on L ∞ ); Ψµ is strictly concave if and only if supp µ = [0,1] (this condition will be important in sections 5 and 8). (ii) Integrating (3.5) by parts, we get u µ (X ) = xdΨµ (F(x)) = EP Y, R where Y is a random variable with the distribution function Ψµ ◦ F. 4 Representation of the determining set We begin with three auxiliary lemmas. The notation µ ν means that ν dominates µ in the monotone order, i.e., µ((−∞, x]) ≥ ν((−∞, x]) for any x. Lemma 4.1 If µ ν, then Dµ ⊇ Dν . , F P) such Proof There exist random variables ξ , η on some probability space (Ω, that Law ξ = µ, Law η = ν, and ξ ≤ η a.s. (see [31, section 1.A]). We can write u µ (X ) = E P ϕ(ξ ), u ν (X ) = E P ϕ(η), where ϕ(λ) = u λ (X ). As ϕ is increasing, u µ ≤ u ν . Clearly, this implies that Dµ ⊇ Dν . Lemma 4.2 If µn tend to µ weakly and µn µ, then Dµ = n Dµn . Proof Suppose that there exists Q0 ∈ n Dµn\Dµ . As Dµ is L 1 -closed, we can apply the Hahn–Banach theorem, which yields X 0 ∈ L ∞ such that EQ0 X 0 < inf Q∈Dµ EQ X 0 . Thus, supn u µn (X 0 ) ≤ EQ0 X 0 < u µ (X 0 ). On the other hand, u µn (X 0 ) → u µ (X 0 ) since u λ (X0 ) is continuous in λ. The obtained contradiction yields the inclusion Dµ ⊇ n Dµn . The reverse inclusion follows from the previous lemma. Lemma 4.3 Let µ = N Dµ = n=1 an Dλn . N n=1 an δλn , where λ1 > · · · > λ N ≥ 0. Then 378 A. S. Cherny N Proof With no loss of generality, λ N = 0. Denote n=1 an Dλn by D. Clearly, D is convex. It is seen from Proposition 2.7(i) that, for any X ∈ L ∞ , the minimum of := N −1 an Dλn is attained. By James’ theorem, expectations EP X Z over Z ∈ D n=1 is weakly compact. We have D = D +a N P , which is the sum of a convex weakly D compact set and a convex weakly closed set. An application of the Hahn–Banach theorem shows that D is L1 -closed. Obviously, u µ (X ) = inf Q∈D EQ X for any X ∈ L ∞ . Taking into account Remark 2.5(ii), we get Dµ = D. Theorem 4.4 We have Dµ = Z λ µ(dλ) : Z (λ, ω) is jointly measurable [0,1] and Z λ ∈ Dλ for any λ ∈ [0, 1] . (4.1) Proof Denote the right-hand side of (4.1) by D. Set µn = n−1 k=1 k −1 k n−1 µ , δ k−1 + µ , 1 δ n−1 , n ∈ N. n n n n n Due to Lemma 4.3, D ⊆ Dµn , and by Lemma 4.2, D ⊆ Dµ . Let us prove the reverse inclusion. Clearly, D is convex. Arguing in the same way as in the previous proof, we conclude that D is L 1 -closed. Take µn = µ n 1 k −1 k 0, µ δ1 + , δ k , n ∈ N. n n n n n k=2 Due to Lemma 4.3, Dµn ⊆ D, and therefore, u µn ≥ u, where u(X ) = inf Q∈D EQ X . As u µn (X ) → u µ (X ) for any X ∈ L ∞ , we get u µ ≥ u on L ∞ . Employing the Hahn–Banach argument, we get Dµ ⊆ D. Now, we describe another representation of Dµ , which was obtained by Carlier and Dana [11] (the proof can also be found in [22, Theorem 4.73] or [30, Theorem 1.53]). Theorem 4.5 We have Dµ = {Q ∈ P : Q(A) ≤ Ψµ (P(A)) for any A ∈ F } 1 qs (Z )ds ≤ Ψµ (x) ∀x ∈ [0, 1] , = Z ∈ L 0 : Z ≥ 0, EP Z = 1, 1−x where qs is the s-quantile and Ψµ is given by (3.4). Weighted V@R and its properties 379 Fig. 3 The structure of Φµ For the needs of sections 7 and 8, we now provide one more representation of Dµ . Let us consider the conjugate to the function Ψµ , Φµ (x) = sup [Ψµ (y) − x y], x ∈ R+ . y∈[0,1] Clearly, Φµ is decreasing, convex (Figure 3), and has the properties Φµ (x) = 1 − x, x ≤ µ({1}), Φµ (x) > 1 − x, x > µ({1}), λ−1 µ(dλ), Φµ (x) > µ({0}), x < (0,1] Φµ (x) = µ({0}), x ≥ λ−1 µ(dλ), (0,1] lim Φµ (x) = µ({0}). x→∞ Furthermore, Ψµ (x) = inf [Φµ (y) + x y], x ∈ (0, 1]. y∈R+ Theorem 4.6 We have Dµ = Z ∈ L 0 : Z ≥ 0, EP Z = 1, and EP (Z − x)+ ≤ Φµ (x) ∀x ∈ R+ . (4.2) Proof Let Z ∈ Dµ . Take x ∈ R+ and set y = P(Z > x). Using Theorem 4.5, we get + 1 EP (Z − x) = qs (Z )ds − x y ≤ Ψµ (y) − x y ≤ Φµ (x). 1−y 380 A. S. Cherny Now, let Z belong to the right-hand side of (4.2). Take x > 0 and set y = q1−x (Z ). For y > y, we have EP (Z − y )+ − EP (Z − y)+ ≥ (y − y )P(Z > y) ≥ (y − y )x, while for y < y, we have EP (Z − y )+ − EP (Z − y)+ ≥ (y − y )P(Z ≥ y) ≥ (y − y )x. Thus, 1 qs (Z )ds = EP (Z − y)+ + x y = inf [EP (Z − y )+ + x y ] y ∈R + 1−x ≤ inf [Φµ (y ) + x y ] = Ψµ (x). y ∈R + By Theorem 4.5, Z ∈ Dµ . 5 Strict diversification and optimization Let us introduce the notation L 1µ = {X ∈ L 0 : u µ (X ) > −∞ and u µ (−X ) > −∞}. For more information on the L 1 -spaces related to coherent risk measures, see [15, subsection 2.2]. Theorem 5.1 Suppose that supp µ = [0, 1]. For X, Y ∈ L 1µ , we have u µ (X + Y ) > u µ (X ) + u µ (Y ) (5.1) if and only if X and Y are not comonotone. Proof The “only if” part for bounded X and Y is a consequence of Theorem 2.10 (i). The statement for unbounded X and Y is obtained by passing to the limit with the help of the representation L 1µ = X ∈ L 0 : lim sup EQ |X |I (|X | > n) = 0 , n→∞ Q∈D µ which was proved in [15, subsection 2.2]. Let us prove the “if” part. Suppose that (5.1) is not true. Combining the representation (3.2) with the property u λ (X + Y ) ≥ u λ (X ) + u λ (Y ), we conclude that u λ (X + Y ) = u λ (X ) + u λ (Y ) for µ-a.e. λ ∈ [0, 1]. As supp µ = [0, 1] and the functions u λ are continuous in λ, we get u λ (X + Y ) = u λ (X ) + u λ (Y ) for any λ ∈ [0, 1]. In view of Proposition 2.7(i), for any λ ∈ (0, 1], there exists Z λ∗ ∈ Dλ such that EP X Z λ∗ = u λ (X ) and EP Y Z λ∗ = u λ (Y ). It is seen from Proposition 2.7(i) that this is possible only if P(X < qλ (X ), Y > qλ (Y )) = 0, λ ∈ (0, 1], P(X > qλ (X ), Y < qλ (Y )) = 0, λ ∈ (0, 1]. From this it is easy to deduce that P((X, Y ) ∈ f ((0, 1])) = 1, where f (λ) = (qλ (X ), qλ (Y )). Thus, X and Y are comonotone. Weighted V@R and its properties 381 Remark 5.2 Without the condition supp µ = [0, 1], the theorem does not hold. In particular, it does not hold for Tail V@R. Property (5.1) can be called the strict diversification property. It holds in particular if X and Y are independent, or if X and Y have a joint density (with respect to Lebesgue measure). The strict diversification property leads to the uniqueness of a solution of several optimization problems based on coherent risk measures that were considered in [16]. Let us briefly describe two of them. Let S0 ∈ Rd be the vector of initial prices of several assets and S1 the d-dimensional random vector of their terminal discounted prices. Let H ⊆ Rd be a convex cone of possible trading strategies, so that the discounted P & L of a strategy h ∈ H is h, S1 − S0 . The problem is EP h, S1 − S0 −→ max, h ∈ H, ρ(h, S1 − S0 ) ≤ c, (5.2) where ρ is a coherent risk measure and c ≥ 0 (this problem is a particular case of (1.4)). In [16, subsection 2.2], we presented a geometric solution of this problem. Here we give a sufficient condition for the uniqueness. Corollary 5.3 Let u = u µ with supp µ = [0, 1]. Suppose that each component of S1 belongs to L 1µ , S1 has a density with respect to Lebesgue measure, and sup EP h, S1 −S0 < ∞, where sup is taken over h ∈ H such that ρ(h, S1−S0 ) ≤ c. Then a solution of (5.2) (if it exists) is unique. Proof Let h ∗ , h ∗ be different solutions. By Theorem 5.1, h = (h ∗ + h ∗ )/2 satisfies ρ(h, S1 − S0 ) < c. Taking (1 + ε)h with a small ε > 0, we get a strategy that performs better than h ∗ , h ∗ . Remark 5.4 Without the assumption supp µ = [0, 1], the statement above is not true (see [16, subsection 2.2]). Consider now a single-agent optimization problem. Thus, in addition to the objects introduced above, we have a random variable W , which describes the current endowment of some agent. Consider the problem u(W + h, S1 − S0 ) −−→ max . h∈H (5.3) In [16, subsection 2.5], we gave a geometric solution of this problem. Theorem 5.1 yields Corollary 5.5 Let u = u µ with supp µ = [0, 1]. Suppose that each component of S1 belongs to L 1µ , S1 has a density with respect to Lebesgue measure, W ∈ L 1µ , and suph∈H u µ (W + h, S1 − S0 ) < ∞. Then a solution of (5.3) (if it exists) is unique. 382 A. S. Cherny 6 Minimal extreme measure and capital allocation The following definition was introduced in [15]. Definition 6.1 Let u be a coherent utility function on L 0 with the determining set D. Let X ∈ L 0 . We call a measure Q ∈ D an extreme measure for X if EQ X = u(X ) ∈ (−∞, ∞). The set of extreme measures for u = u µ is denoted by Xµ (X ). It is seen from Theorem 3.2(i) that Xµ (X ) = ∅ provided that µ({0}) = 0 and X ∈ L 1µ . Proposition 6.2 Suppose that µ({0}) = 0 and X ∈ L 1µ . Then an element Z = (0,1] Z λ µ(dλ) ∈ Dµ (here we use the representation of Dµ provided by Theorem 4.4) belongs to Xµ (X ) if and only if λ−1 Zλ = 0 a.e. on {X < qλ (X )}, a.e. on {X > qλ (X )} for µ-a.e. λ. Proof For Z = (0,1] Z λ µ(dλ) ∈ D, we have EP X Z = lim lim EP (m ∨ X ∧ n)Z lim [EP (m ∨ X ∧ n)Z λ ]µ(dλ) n→∞ m→−∞ = lim n→∞ m→−∞ (0,1] (EP X Z λ )µ(dλ). = (6.1) (0,1] The inclusion X ∈ L 1µ implies that the function λ → EP X Z λ is µ-integrable. An application of Proposition 2.7(i) completes the proof. It is seen from the above proposition that if X has a continuous distribution, then Xµ (X ) consists of a unique element Z = g(X ), where g(x) = λ−1 µ(dλ), x ∈ R (6.2) [F(x),1] and F denotes the distribution function of X . If Law X has atoms, then clearly Xµ (X ) need not be a singleton. However, it turns out that there exists a minimal element of Xµ (X ) with respect to the convex stochastic order. Weighted V@R and its properties 383 Theorem 6.3 Suppose that µ({0}) = 0 and X ∈ L 1µ . Let ∗ Z µ (X ) = Z λ∗ (X )µ(dλ), (0,1] where Z λ∗ (X ) is defined by (3.1). Then, for any Z ∈ Xµ (X ) and any convex function f : R+ → R+ , we have EP f (Z µ∗ (X )) ≤ EP f (Z ). Moreover, Z µ∗ (X ) is the unique element of Xµ (X ) with this property. Proof For an arbitrary Z = (0,1] Z λ µ(dλ) ∈ Xµ (X ), Proposition 6.2 implies that Z λ∗ (X ) = EP (Z λ | X ) for µ-a.e. λ. By Fubini’s theorem, Z µ∗ (X ) = EP (Z | X ). An application of Jensen’s inequality yields the first statement. Now, suppose that there exists another minimal (in the convex order) element Z of Xµ (X ). Then Z := (Z µ∗ (X ) + Z )/2 belongs to Xµ (X ) and, for a strictly Z ) < EP f (Z µ∗ (X )), which is convex function f with linear growth, we get EP f ( a contradiction. Definition 6.4 We call the measure Q∗µ (X ) = Z µ∗ (X )P the minimal extreme measure for X . The minimal extreme measure admits a representation similar to (6.2). Let F denote the distribution function of X . Then, for any λ ∈ (0, 1], Z λ∗ (X ) = gλ (X ), where 1 − λ−1 F(x−) I (F(x−) < λ < F(x)) + λ−1 I (λ ≥ F(x)). F(x) − F(x−) gλ (x) = Hence, Z µ∗ (X ) = g(X ), where 1 − λ−1 F(x−) µ(dλ) + g(x) = F(x) − F(x−) (F(x−),F(x)) λ−1 µ(dλ). [F(x),1] The following statement will be used in financial applications below. Theorem 6.5 Suppose that µ({0}) = 0 and X, Y ∈ L 1µ . Let (ξn ) be a sequence of random variables such that ξn ∈ L 1µ , each ξn is independent of (X, Y ), and P ξn − → 0. Then EQ∗µ (X +ξn ) Y −−−→ EQ∗µ (X ) Y. n→∞ Proof Denote qλ = qλ (X ), qλn = qλ (X + ξn ). Then, for λ ∈ (0, 1], −1 on {X < q }, −1 on {X + ξ < q n }, λ n λ λ λ Z λ∗ (X ) = cλ on {X = qλ }, Z λ∗ (X + ξn ) = cλn on {X + ξn = qλn }, 0 0 on {X > qλ }, on {X + ξn > qλn }. Fix λ ∈ (0, 1]. By Fubini’s theorem, EP (Z λ∗ (X + ξn ) | X, Y ) = f λn (X ), where f λn (x) = λ−1 Fn (qλn − x) + cλn Fn (qλn − x), x ∈ R 384 A. S. Cherny and Fn (x) = P(ξn < x), Fn (x) = P(ξn = x). Obviously, qλn → qλ , and therefore, f λn → λ−1 on (−∞, qλ ), f λn → 0 on (qλ , ∞). Employing the normalization condition EP f λn (X ) = 1, we conclude that f λn (qλ ) → cλ . Thus, a.s. f λn (X ) −−→ Z λ∗ (X ). As 0 ≤ f λn ≤ λ−1 , we get EP Y Z λ∗ (X + ξn ) = EP Y f λn (X ) −−−→ EP Y Z λ∗ (X ), λ ∈ (0, 1]. n→∞ Note that u λ (Y ) ≤ EP Y Z λ∗ (X + ξn ) ≤ −u λ (−Y ). Furthermore, it follows from the inclusion Y ∈ L 1µ and the representation (3.2) that the functions λ → u λ (Y ) and λ → u λ (−Y ) are µ-integrable. Applying now (6.1), we complete the proof. Remark 6.6 Without the assumption that ξn is independent of (X, Y ), the theorem does not hold. As an example, consider X = 0, ξn = Y /n. Then Q∗µ (X ) = P, while Q∗µ (ξn ) = Q∗µ (Y ). Let us now present a financial application of the notion of the minimal extreme measure. It is related to the capital allocation problem. Delbaen [19, section 9] proposed the following formulation of this problem. Let X 1 , . . . , X d be random variables meaning the discounted P & Ls produced by several components of a firm. Let ρ be a coherent risk measure. A capital allocation between X 1 , . . . , X d is a vector x 1 , . . . , x d such that d d i X = xi , (6.3) ρ i=1 ∀h , . . . , h ∈ R+ , ρ 1 d i=1 d i h X i ≥ i=1 d hi x i . (6.4) i=1 From the financial point of view, x i is the contribution of the ith component to the total risk of the firm, or, equivalently, the capital that should be allocated to this component. In order to illustrate the meaning of (6.4), consider the example h i = I (i ∈ J ), where J is a subset of {1, . . . , d}. Then (6.4) means that the capital allocated to a part of the firm does not exceed the risk carried by that part. It was proved in [15, subsection 2.4] under the assumption u(X i ) > −∞, u(−X i ) > −∞, i = 1, . . . , d (here u = −ρ) that the set of capital allocations has the form d 1 d i , (6.5) −EQ (X , . . . , X ) : Q ∈ Xρ X i=1 where Xρ denotes the set of extreme measures corresponding to ρ. Suppose now that u = u µ with µ({0}) = 0. It is seen from Proposition 6.2, that if i X i has a continuous distribution, then a capital allocation is unique. But in general, this is not the case. For example, if X 2 = −X 1 , then the set of capital allocations is the interval [a, b] in R2 , where a = (−u µ (X 1 ), u µ (X 1 )), b = (u µ (−X 1 ), −u µ (−X 1 )). Weighted V@R and its properties 385 However, if u = u µ with µ({0}) = 0, then there exists a particular element of (6.5), namely x0 = −EQ∗µ ( X i ) (X 1 , . . . , X d ) (for the example considered above, x0 = (−EP X 1 , EP X 1 )). We call x0 the central solution of the capital allocation problem. Its role is as follows. Let us disturb X i , i.e., we pass from X i to X ni = X i + ξni , where each ξni is independent of (X 1 , . . . , X d ), ξni ∈ L 1µ , and i P X n is a singleton, ξni − → 0. If i ξni has a continuous distribution, then Xµ i 1 d so that the capital allocation xn between X n , . . . , X n is unique. By Theorem 6.5, xn → x0 . 7 Pricing in an option-based model Let S0 ∈ (0, ∞) be the initial price of some asset and S1 a positive random variable describing its terminal discounted price. Let K ⊆ R+ be the set of strike prices of traded European call options on this asset with maturity 1 and let ϕ(K ), K ∈ K be the price at time 0 of the option that pays (S1 − K )+ at time 1. The set A= N + h n [(S1 − K n ) − ϕ(K n )] : N ∈ N, K n ∈ K, h n ∈ R n=1 is the set of P & Ls that can be obtained in the model under consideration (we assume that 0 ∈ K, which corresponds to the possibility of trading the underlying asset). We also fix a coherent utility function u. According to [15], we say that the model satisfies the no-good-deals (NGD) condition if there exists no X ∈ A with u(X ) > 0. Now, let F ∈ L 0 be the payoff of some contingent claim. According to [15], we say that a real number z is an NGD price of F if there exist no X ∈ A, h ∈ R with u(X + h(F − z)) > 0. The set of NGD prices will be denoted by INGD (F). It was proved in [15, subsection 3.1] (under some additional conditions that are automatically satisfied for u = u µ provided that µ({0}) = 0) that the NGD condition is satisfied if and only if D ∩ R = ∅, where D is the determining set of u and R is the set of risk-neutral measures, which in this model has the form R = {Q ∈ P : EQ (S1 − K )+ = ϕ(K ) for any K ∈ K} (the notation P was introduced in section 2). Furthermore, for F ∈ L 0 such that u(F) > −∞ and u(−F) > −∞, INGD (F) = {EQ F : Q ∈ D ∩ R}. (7.1) We give below more concrete versions of these results for u = u µ . Let us introduce the notation 386 A. S. Cherny Fµ = ψ : ψ is a convex function R+ → R+ , ψ+ (0) ≥ −1, lim ψ(x) = 0, ψ|K = ϕ|K , ψ ∼ P0 , and x→∞ + dψ (y) − x P0 (dy) ≤ Φµ (x) for any x ∈ R+ . dP0 R+ denotes the right-hand derivative, ψ is the second derivative taken in Here ψ+ (b) − ψ (a)) with the conventhe sense of distributions (i.e., ψ ((a, b]) = ψ+ + tion ψ ({0}) = ψ+ (0) + 1, P0 = LawP S1 , and Φµ is the function introduced in section 4. Theorem 7.1 Let u = u µ with µ({0}) = 0. (i) The NGD condition is satisfied if and only if Fµ = ∅. (ii) For F = f (S1 ) ∈ L 1µ , we have f (x)ψ (d x) : ψ ∈ Fµ . INGD (F) = R+ Proof (i) Let us prove the “only if” part. By the result mentioned above, there exists Q ∈ Dµ ∩ R. The function ψ(x) := EQ (S1 − x)+ is convex, lim x→∞ ψ(x) = 0, and set g(x) = EP (Z | S1 = x). Then and ψ|K = ϕ|K . Denote Z = ddQ P + ψ(x) = EP (S1 − x) g(S1 ) = (y − x)+ g(y)P0 (dy), x ∈ R. R+ (0) ψ+ This representation shows that ≥ −1 and ψ = gP0 . By Theorem 4.6, (g(y) − x)+ P0 (dy) = EP (g(S1 ) − x)+ ≤ EP (Z − x)+ ≤ Φµ (x), x ∈ R, R+ so that ψ ∈ Fµ . Let us prove the “if” part. Take ψ ∈ Fµ and set g = ddψP , Q = g(S1 )P. Then 0 Q ∈ P . The inequality EQ (g(S1 ) − x)+ = (g(y) − x)+ P0 (dy) ≤ Φµ (x), x ∈ R+ , R+ combined with Theorem 4.6, shows that Q ∈ Dµ . Furthermore, EQ (S1 − K )+ = (y − K )+ ψ (dy) = ψ(K ) = ϕ(K ), R+ so that Q ∈ R. K ∈ K, Weighted V@R and its properties 387 (ii) Take z ∈ INGD (F). By (7.1), z = EQ f (S1 ) with some Q ∈ Dµ ∩ R. The proof of (i) shows that z = EP f (S1 )g(S1 ) = f (x)g(x)P0 (dx) = f (x)ψ (dx), R+ R+ where g(x) = EP ddQ | S1 = x and ψ = EQ (S1 − ·)+ ∈ Fµ . P Conversely, take z = where Q = g(S1 )P, g = by (7.1), z ∈ INGD (F). R+ f (x)ψ (dx) with ψ ∈ Fµ . Then z dψ dP0 . The proof of (i) shows that Q ∈ = EQ f (S1 ), Dµ ∩ R, and 8 Optimization in a complete model Let (Ω, F , P) be a probability space. We consider a complete model, in which an agent can obtain by trading any P & L from the class A = {X ∈ L 1 (Q) : EQ X = 0}, where Q is a fixed probability measure, which is absolutely continuous with respect to P. Clearly, problem (1.4) is equivalent to the problem RAROC(X ) −−−→ max, X ∈A where (8.1) if EP X > 0 and u(X ) ≥ 0, +∞ RAROC(X ) = EP X otherwise. −u(X ) We take u = u µ , where µ = δ1 (otherwise u µ (X ) = EP X , and the above problem is meaningless). Let Φµ be the function defined in section 4 and set ϕ(x) = EP (Z 0 − x)+ , x ∈ R+ , where Z 0 = ddQ . We assume that there exists no X ∈ A with u µ (X ) > 0 (indeed, P for such X we would have RAROC(X ) = ∞). In view of the results of [15, subsection 3.2], this is equivalent to the inclusion Q ∈ Dµ . This, in turn, is equivalent to the inequality ϕ ≤ Φµ (see Theorem 4.6). For α ≥ 1, we set ϕα (x) = αϕ x − 1 + 1 , x ∈ R+ , α i.e., the graph of ϕα is the α-stretching of the graph of ϕ with respect to the point (1, 0) (see Figure 4). Set α∗ = sup{α: ϕα ≤ Φµ }, β = µ({1}), 388 A. S. Cherny Fig. 4 The structure of Φµ , ϕ, and ϕα γ = (0,1] λ−1 µ(dλ), and Z = α∗ Z 0 − α∗α−1 , so that ϕα∗ (x) = EP (Z − x)+ . ∗ Note that the left-hand and the right-hand derivatives of ϕα∗ are given by (ϕα∗ )− (x) = −P(Z ≥ x), x > 0, (8.2) = −P(Z > x), x ≥ 0. (8.3) (ϕα∗ )+ (x) Theorem 8.1 Suppose that µ = δ1 , Q = P, and ϕ ≤ Φµ . (i) We have sup X ∈A RAROC(X ) = (α∗ − 1)−1 . (ii) If α∗ > 1 and (ϕα∗ )+ (β) > −1, then P(Z = β) > 0 and any random variable of the form X = bI B + cI B c , where B ⊆ {Z = β} and b > 0 > c are such that EQ X = 0, is optimal for (8.1). (iii) If α∗ > 1, γ < ∞, and either ϕα∗ (γ ) = Φµ (γ ) > 0 or Φµ (γ ) = 0 and (ϕα∗ )− (γ ) < 0, then P(Z ≥ γ ) > 0 and any random variable of the form X = bI B + cI B c , where B ⊆ {Z ≥ γ } and b < 0 < c are such that EQ X = 0, is optimal for (8.1). (iv) If α∗ > 1 and there exists x0 ∈ (β, γ ) such that ϕα∗ (x0 ) = Φµ (x0 ), then P(Z > x0 ) > 0 and any random variable of the form X = bI B +cI B c , where B = {Z > x0 } and b < 0 < c are such that EQ X = 0, is optimal for (8.1). If moreover supp µ = [0, 1] and x0 is the unique point of (β, γ ), at which ϕα∗ = Φµ , then an optimal element of A is unique up to multiplication by a positive constant. (v) If α∗ > 1, but neither of conditions (ii)–(iv) is satisfied, then the maximum in (8.1) is not attained. Remark 8.2 (i) It is easy to check that if µ has no gap near 1, i.e., µ((1−ε, 1)) > 0 for any ε > 0, then (Φµ )+ (β) = −1. Similarly, if µ has no gap near 0, i.e., µ((0, ε)) > 0 for any ε > 0, then (Φµ )− (γ ) = 0. Thus, the situation of (ii) (resp., (iii)) can be realized only if µ has a gap near 1 (resp., near 0). Another verification of these statements follows from the arguments in the proof of (v) below. (ii) In many natural complete models (for instance, in the Black–Scholes model), we have essinf ω Z 0 (ω) = 0. Then ϕ(ε) > 1 − ε for any ε > 0, Weighted V@R and its properties 389 and hence, α∗ = 1. By Theorem 8.1 (i), sup X ∈A RAROC(X ) = ∞. A sequence of elements X n ∈ A with RAROC(X n ) → ∞ is provided by X n = I (Z ≤ n −1 ) − Q(Z ≤ n −1 ). Proof of Theorem 8.1 (i) Take R ∈ (0, ∞). It follows from the result in [15, subsection 3.2] that sup X ∈A RAROC(X ) ≤ R if and only if 1 1+ R Z0 − ∈ Dµ . R 1+ R In view of Theorem 4.6, this is equivalent to the conditions Z 0 ≥ ∀x ≥ 0, EP Note that EP 1+ R R 1+ R R Z0 − Z0 − 1 1+ R + 1 1+ R −x −x + 1 1+R and ≤ Φµ (x). (8.4) = ϕα(R) (x), x ∈ R+ , where α(R) = 1+R R . Thus, (8.4) is satisfied if and only if ϕα(R) ≤ Φµ . Set h = essinf ω Z 0 (ω). Note that ϕ(h) = 1 − h and ϕ(h + ε) > 1 − h − ε for any ε > 0. As Φµ (0) = 1, we conclude that the condition ϕα(R) ≤ Φµ automati1 . As cally implies that (1 − h)α(R) ≤ 1, which, in turn, is equivalent to Z 0 ≥ 1+R a result, sup RAROC(X ) ≤ R ⇐⇒ ϕα(R) ≤ Φµ ⇐⇒ α(R) ≤ α∗ ⇐⇒ R ≥ (α∗ − 1)−1 . X ∈A (ii) The inequality EP (Z − x)+ = ϕα∗ (x) ≤ Φµ (x), x ∈ R+ , (8.5) combined with Theorem 4.6, shows that Z ∈ Dµ . Consequently, Z ≥ β, and it follows from (8.3) that P(Z = β) > 0. Due to Theorem 4.4, we can write Z = [0,1] Z λ µ(dλ) with Z λ ∈ Dλ . As Z 1 = 1, we deduce that, for µ-a.e. λ ∈ [0, 1), Z λ = 0 P-a.e. on {Z = β}. Then, due to the structure of X , for µ-a.e. λ ∈ [0, 1], we have EP X Z λ = u λ (X ). Thus, EP X Z = u µ (X ). Applying now the equality 0 = EP X Z 0 = α∗ − 1 1 α∗ − 1 1 EP X + EP X Z = EP X + u µ (X ), α∗ α∗ α∗ α∗ we deduce that RAROC(X ) = (α∗ − 1)−1 , so that X is optimal. (iii) Consider first the case ϕα∗ (γ ) = Φµ (γ ) > 0. Due to (8.5), Z ∈ Dµ , so that we can write Z = [0,1] Z λ µ(dλ) = ξ + η, where ξ = (0,1] Z λ µ(dλ) and η = µ({0})Z 0 . As Z λ ≤ λ−1 , we get ξ ≤ γ , so that ϕα∗ (γ ) = EP (Z − γ )+ ≤ EP η = µ({0}) = Φµ (γ ). 390 A. S. Cherny The fact that this inequality should be an equality means that P(ξ = γ ) > 0 and −1 η = 0 P-a.e. outside {ξ = γ }. This implies that, for µ-a.e. λ ∈ (0, 1], Z λ = λ P-a.e. on Z > γ and Z 0 = 0 P-a.e. outside Z > γ . The proof is now completed in the same way as in (ii). Now, consider the case Φµ (γ ) = 0 and (ϕα∗ )− (γ ) < 0. As Φµ (γ ) = µ({0}), we get µ({0}) = 0. Thus, Z = (0,1] Z λ µ(dλ). As Z λ ≤ λ−1 , we get Z ≤ γ . It follows from (8.2) that P(Z = γ ) > 0. This implies that, for µ-a.e. λ ∈ (0, 1], Z λ = λ−1 P-a.e. on {Z = γ }. The proof is now completed in the same way as in (ii). (iv) Set λ0 = inf x ∈ [0, 1] : λ−1 µ(dλ) ≤ x0 (x,1] λ−1 µ(dλ), r = l= , λ−1 µ(dλ). [λ0 ,1] (λ0 ,1] Consider the case µ({λ0 }) > 0 (the other case is simpler). It is easy to see that x ∈ [l, r ] and Φµ is linear on [l, r ]. In view of the convexity of ϕα∗ , this implies that ϕα∗ = Φµ on [l, r ]. As (λ0 ,1] Z λ dµ ≤ l, we get ϕα∗ (l) = EP (Z − l)+ ≤ EP Z λ µ(dλ) = µ([0, λ0 ]). (8.6) [λ0 ,1] Furthermore, λ0 Φµ (l) = Ψµ (λ0 ) − lλ0 = (G(x) − l)dx = − xdG(x) = µ([0, λ0 ]), [0,λ0 ] 0 (8.7) where G(x) = (x,1] λ −1 µ(dλ). In a similar way, we check that ϕα∗ (r ) = EP (Z − r )+ ≤ EP Z λ µ(dλ) = µ([0, λ0 )) = Φµ (r ). (8.8) (λ0 ,1] As the inequalities in (8.6) and (8.8) should be equalities, we conclude that there exists a set B such that Z λ = λ−1 a.e. on B for λ ≥ λ0 and Z λ = 0 a.e. on B c for λ ≤ λ0 . The proof of the first part of (iv) is now completed in the same way as in (ii). Let us now prove the uniqueness. Let X be optimal for (8.1). Then X is not degenerate since otherwise it must be equal to 0. Thus, we can find c ∈ R such that λ0 = P(X ≤ c) belongs to (0, 1). The analysis of the proof of (ii) shows that u µ (X ) = EP X Z . Consequently, for µ-a.e. λ ∈ [0, 1], u λ (X ) = EP X Z λ , where Z λ are taken from the representation Z = [0,1] Z λ µ(dλ). This means that, for µ-a.e. λ ∈ (λ0 , 1], Z λ = λ−1 P-a.e. on {X ≤ c} and, for µ-a.e. λ ∈ [0, λ0 ], Weighted V@R and its properties 391 Z λ = 0 P-a.e. outside {X ≤ c}. Consequently, for x0 = (λ0 ,1] λ−1 µ(dλ), we have EP (Z − x0 )+ = µ([0, λ0 ]). Calculations similar to (8.7) show that µ([0, λ0 ]) = Φµ (x0 ). Moreover, as λ0 ∈ (0, 1) and supp µ = [0, 1], we have x0 ∈ (β, γ ). Since such an x0 is unique, we conclude that X takes only two values. Thus, any optimal X has the form bI B + cI B c with some B ∈ F and some constants b < c. It is clear from the reasoning given above that P(B) is determined uniquely. Using the same arguments as in the proof of Corollary 5.3, we deduce that different optimal elements must be comonotone. Consequently, B is determined uniquely, so that an optimal strategy is unique up to multiplication by a positive constant. (v) Assume the contrary, i.e., the existence of an optimal element X . As X is not degenerate, we can find c ∈ R such that λ0 = P(X ≤ c) belongs to (0, 1). Arguing in the same way as above, we prove that ϕα∗ (x0 ) = Φµ (x0 ), where x0 = (λ0 ,1] λ−1 µ(dλ). We now consider three cases. Case 1. Assume that x0 = β. This means that µ((λ0 , 1)) = 0. The arguments given above show that, for µ-a.e. λ ∈ [0, λ0 ], Z = 0 P-a.e. outside {X ≤ c}. Consequently, Z = β P-a.e. on {X > c}, so that (ϕα∗ )+ (β) = −P(Z > β) > −1. Thus, in this case the conditions of (ii) are satisfied. Case 2. Assume that x0 = γ . This means that µ((0, λ0 )) = 0. If µ({0}) > 0, then ϕα∗ (γ ) = Φµ (γ ) = µ({0}) > 0, so that the conditions of (iii) are satisfied. Now, assume that µ({0}) = 0. Then Φµ (γ ) = 0. The arguments given above show that, for µ-a.e. λ ∈ [λ0 , 1], Z λ = λ−1 P-a.e. on {X ≤ c}. As µ([0, λ0 )) = 0, we get Z = (0,1] λ−1 µ(dλ) = γ P-a.e. on {X ≤ c}, so that (ϕα∗ )− (γ ) = −P(Z = γ ) < 0. Thus, in this case the conditions of (iii) are satisfied. Case 3. Assume that x0 ∈ (β, γ ). Then the conditions of (iv) are satisfied. Corollary 8.3 Suppose that supp µ = [0, 1], Q = P, ϕ ≤ Φµ , and α∗ > 1. There exists an optimal element of A if and only if there exists x 0 ∈ (β, γ ) such that ϕα∗ (x0 ) = Φµ (x0 ). An optimal element is unique up to multiplication by a positive constant if and only if such an x0 is unique. Proof The proof of point (v) shows that, under the condition supp µ = [0, 1], the situations of (ii), (iii) are not realized. Now, the statement follows from Theorem 8.1. The financial interpretation of the obtained results is as follows. In most natural situations, the optimal strategy consists in buying the binary option with the payoff dQ I Z ≤ x0 = I Z 0 ≤ α∗−1 (x0 − 1) + 1 = I ≤ c∗ . dP The geometric recipe for finding c∗ is given in Figure 5. 392 A. S. Cherny Fig. 5 The form of c∗ References 1. Acerbi, C.: Spectral measures of risk: a coherent representation of subjective risk aversion. J Bank Finance 26, 1505–1518 (2002) 2. Acerbi, C.: Coherent representations of subjective risk aversion. In: Szegö, G. (ed.) Risk measures for the 21st century, pp. 147–207. New York: Wiley 2004 3. Acerbi, C., Tasche, D.: On the coherence of expected shortfall. J Bank Finance 26, 1487– 1503 (2002) 4. Artzner, P., Delbaen, F., Eber, J.-M., Heath, D.: Thinking coherently. Risk 10(11), 68–71 (1997) 5. Artzner, P., Delbaen, F., Eber, J.-M., Heath, D.: Coherent measures of risk. Math Finance 9, 203–228 (1999) 6. Bakshi, G., Kapadia, N., Madan, D.: Stock return characteristics, skew laws, and the differential pricing of individual equity options. Rev Financ Stud 16, 101–143 (2003) 7. Banz, R., Miller, M.: Prices of state-contingent claims: some estimates and applications. J Bus 51, 653–672 (1978) 8. Bernardo, A., Ledoit, O.: Gain, loss, and asset pricing. J Polit Econ 108, 144–172 (2000) 9. Breeden, D.T., Litzenberger, R.H.: Prices of state-contingent claims implicit in option prices. J Bus 51, 621–651 (1978) 10. Bliss, R., Panigirtzoglou, N.: Recovering risk aversion from options. J Financ 59, 407–446 (2004) 11. Carlier, G., Dana, R.A.: Core of convex distortions of a probability. J Econ Theory 113, 199–222 (2003) 12. Carr, P., Geman, H., Madan, D.: Pricing and hedging in incomplete markets. J Financ Econ 62, 131–167 2001 13. Carr, P., Geman, H., Madan, D.: Pricing in incomplete markets: from absence of good deals to acceptable risk. In: Szegö, G. (ed.) Risk measures for the 21st century, pp. 451–474. New York: Wiley 2004 14. Cherny, A.S.: General arbitrage pricing model: probability approach. Lecture Notes in Mathematics (2006, in press) Available at: http://mech. math.msu.su/∼cherny 15. Cherny, A.S.: Pricing with coherent risk. Preprint, available at: http://mech. math.msu.su/∼cherny 16. Cherny, A.S.: Equilibrium with coherent risk. Preprint, available at: http://mech. math.msu.su/∼cherny 17. Cochrane, J.H., Saá-Requejo, J.: Beyond arbitrage: good-deal asset price bounds in incomplete markets. J Polit Econ 108, 79–119 (2000) 18. Delbaen, F.: Coherent risk measures on general probability spaces. In: Sandmann, K., Schönbucher, P. (eds.). Advances in Finance and Stochastics. Essays in honor of Dieter Sondermann. pp. 1–37. Berlin Heidelberg New York: Springer 2002 19. Delbaen, F.: Coherent monetary utility functions. Preprint, available at http://www. math.ethz.ch/∼delbaen under the name “Pisa lecture notes” 20. Denneberg, D.: Distorted probabilities and insurance premium. Methods Oper Res 52, 21–42 (1990) Weighted V@R and its properties 393 21. Dowd, K.: Spectral risk measures. Finance Eng News, electronic journal available at: http://www.fenews.com/fen42/risk-reward/ risk-reward.htm 22. Föllmer, H., Schied, A.: Stochastic finance. An introduction in discrete time. 2nd edn. New York: Walter de Gruyter 2004 23. Jackwerth, J.: Option-implied risk-neutral distributions and implied binomial trees: a literature review. J Derivatives 7, 66–82 (1999) 24. Jaschke, S., Küchler, U.: Coherent risk measures and good deal bounds. Finance Stoch 5, 181–200 (2001) 25. Kusuoka, S.: On law invariant coherent risk measures. Adv Math Econ 3, 83–95 (2001) 26. Liu, X., Shackleton, M., Taylor, S., Xu, X.: Closed-form transformations from risk-neutral to real-world distributions. Preprint, available at: http://www.lancs.ac.uk/ staff/afasjt/unpub.htm 27. Markowitz, H.: Portfolio selection. New York: Wiley 1959 28. Rockafellar, R.T., Uryasev, S.: Optimization of conditional Value-At-Risk. J Risk 2, 21–41 (2000) 29. Rockafellar, R.T., Uryasev, S., Zabarankin, M.: Master funds in portfolio analysis with general deviation measures. J Bank Finance 30 (2006) 30. Schied, A.: Risk measures and robust optimization problems. Lecture notes of a minicourse held at the 8th symposium on probability and stochastic processes. Available on request at: http://www.math.tu-berlin.de/∼schied 31. Shaked, M., Shanthikumar, J.: Stochastic orders and their applications. New York: Academic Press 1994 32. Staum, J.: Fundamental theorems of asset pricing for good deal bounds. Math Finance 14, 141–161 (2004) 33. Szegö, G.: On the (non)-acceptance of innovations. In: Szegö, G. (ed.) Risk measures for the 21st century, pp. 1–9. New York: Wiley 2004 34. Wang, S.: Premium calculation by transforming the layer premium density. ASTIN Bull 26, 71–92 (1996) 35. Wang, S., Young, V., Panjer, H.: Axiomatic characterization of insurance prices. Insur Math Econ 21, 173–183 (1997)