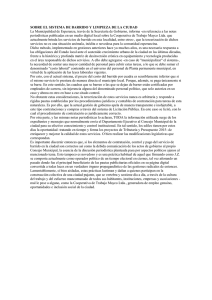
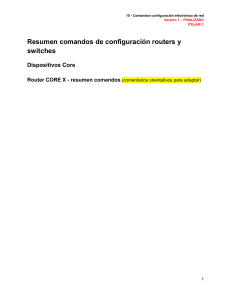
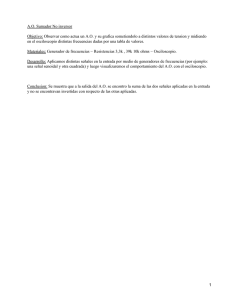
Examen Instrumentación Bloque 1 1. Explique el binomio Sensor-Transductor. El sensor es el elemento directamente en contacto con la magnitud a medir, su finalidad es captar esa magnitud para posteriormente transformarla y obtener una salida eléctrica. Por otro lado, el transductor acopla la magnitud a medir al sistema de medida. 2. Describa el Dominio de los Datos. Los diferentes modos de codificar la información se llama Dominio de Datos. Una división general sería: dominio eléctrico y dominio no eléctrico. • Dominio no Eléctrico: las propiedades físicas y químicas que son de interés concreto radican en estos dominios de datos. o Dominio físico y químico. o Posición de una escala. o Presentación analógica. o Presentación digital. • Dominio Eléctrico: Las distintas modalidades de codificar como cantidades eléctricas se pueden subdividir en dominios analógicos, dominios de tiempo y domino digitales (excepto la presentación digital). 3. Describa un Sistema de Instrumentación. Un sistema de instrumentación es una estructura compleja que agrupa un conjunto de instrumentos, un dispositivo o sistema en el que se mide, unas conexiones entre estos y, por último, y no menos importante, unos programas que se encargan de automatizar el proceso y de gestionar la repetibilidad del proceso. 4. Explique la diferencia entre el concepto de Exactitud y Precisión. La precisión se refiere a la dispersión del conjunto de valores obtenidos de mediciones repetidas de una magnitud. Cuanto menos es la dispersión, mayor es la precisión. Por otro lado, la exactitud se refiere a cuán cerca del valor real se encuentra el valor medido. 5. Enumere y descriaba los tipos de error. Error absoluto: es la diferencia entre el resultado y el valor de la magnitud. Error relativo: es el cociente entre el error absoluto y el valor de la magnitud, que por ser indeterminado se sustituye por el valor convencionalmente verdadero. Error sistemático: es la resta entre la media aritmética de un número infinito de medidas del mismo valor de una magnitud, efectuadas en condiciones de repetibilidad, y el valor de la magnitud. 1 Error aleatorio: es la diferencia entre el resultado de una medida y la media aritmética de un número un número infinito de medidas de a misma magnitud realizadas en condiciones de repetibilidad y con suficiente resolución. Error dinámico: en condiciones dinámicas, el error varía considerablemente debido a que los instrumentos tienen características comunes a los sistemas físicos. Ocasiona retardos y absorción de energía en el proceso. Error estático: ocurre cuando el proceso está en condiciones de régimen permanente. Normalmente se origina por las limitaciones de los dispositivos de medición debido a las leyes físicas que gobiernan su comportamiento. Error lineal: Máxima desviación con respecto a la recta proporcional. Error no lineal: Máxima diferencia entre los valores de la curva de calibración y la recta que mejor se sujeta a esa curva. 6. Identifique el sensor con el comportamiento de la gráfica y sus puntos característicos. Se trata de una galga extensométrica. 7. Identifique las diferencias entre los sensores piezoeléctrico y piezrroesistivo. El efecto piezorresistivo se debe a la variación de la resistencia de un conductor o semiconductor cuando es sometido a un esfuerzo mecánico. El cambio, el efecto piezoeléctrico consiste en la aparición de una polarización eléctrica en un material al desformarse bajo la acción de un esfuerzo. Para los sensores piezrresistivos el conductor es un hilo metálico, y si se usa un material semiconductor se trata de un material tipo N o tipo P. Los materiales naturales piezoeléctricos son el cuarzo y la turmalina, y los artificiales son las cerámicas piezoeléctricas. 2 8. Identifique y explique el funcionamiento de tres sensores generadores. Termopar: es un sensor de temperatura constituido por dos metales diferentes cuya característica principal es que produce una tensión proporcional a la diferencia de temperatura entre los puntos de unión de ambos metales. Se rige por los efectos Seebeck (conversión de energía térmica en eléctrica) y Thompson (absorción o liberación de calor por parte de un conductor homogéneo con temperatura no homogénea por el que circule corriente), principalmente. Piezoeléctrico: se rige por el efecto piezoeléctrico, el cual consiste en la aparición de una polarización eléctrica en un material al desformarse bajo la acción de un esfuerzo. Piroeléctrico: se rige por el efecto piroeléctrico, el cual es análogo al piezoeléctrico, pero en la aparición de cargas eléctricas cuando se deforma un material, aquí se trata de la aparición de cargas superficiales en una dirección determinada cuando el material experimenta un cambio de temperatura. Se debe al cambio de polarización espontánea al variar la temperatura. 9. Enumere y defina las limitaciones de los sensores capacitivos. Efecto de los Bordes: problema de dispersión de campo eléctrico en los bordes. Aislamiento entre placas: baja respuesta temporal. Capacidades parásitas: debido a que una de las superficies puede ponerse a tierra. Cables de conexión: deben ser apantallados para evitar las interferencias capacitivas. Alta impedancia de salida: la impedancia decrece cuanto mato sea la frecuencia de alimentación. 10. Enumere y defina las ventajas de los sensores capacitivos. Error de carga mínimo. Contacto mecánico: No hay contacto mecánico directo, y no habría por tanto errores de fricción ni de histéresis y además no hay que hacer mucha fuerza para desplazar el elemento móvil. Estabilidad y reproducibilidad muy elevadas: Al no depender C de las propiedades de conductividad de las placas, no afectan en este sentido los cambios de temperatura, ni hay envejecimiento, ni derivas temporales. Alta resolución. No producen campos magnéticos o eléctrico grandes. Linealidad: Es posible tener una salida proporcional a la magnitud de interés, incluso en el caso de una variación de la distancia entre placas. 11. Efectos concurrentes en los termopares. Efecto Seebeck, Efecto Peltier, Efecto Thompson, Efecto Seebeck-Peltier-Thompson. 3 12. Termopares y sus efectos. Los termopares se basan en los efectos Seebeck, Peltier, Thompson y Seebeck-PeltierThompson y son reversibles, al contrario que el efecto Joule. • Efecto Seebeck: o Conversión de energía térmica en energía eléctrica. o Diferencia de potencial: ▪ Depende de los metales, de la diferencia de temperatura entre las uniones. ▪ SA,B no es constante y depende de T, y suele crecer al aumentar T. ▪ La f t.e.m. depende solo de la diferencia de temperatura entre las uniones de los metales. • Efecto Peltier: o Consiste en el calentamiento o enfriamiento de una unión entre dos metales distintos al pasar corriente por ellos. o Efecto reversible: ▪ El hecho de que el calor intercambiado por unidad de superficie de la unión sea proporcional a la corriente y no a su cuadrado, marca la diferencia respecto al efecto Joule. • Efecto Thompson: o Absorción o liberación de calor por parte de un conductor homogéneo con temperatura no homogénea por el que circula una corriente. • Efecto Seebeck-Peltier-Thompson: o La energía termoelectromotriz producida debe coincidir con la energía térmica neta transformada. o El efecto Seebeck es el resultado de los efectos Peltier y Thompson. 13. Autocalentamiento. Se trata de un termistor NTC Autocalentamiento: Se alcanza una temperatura por encima del ambiente y cae la tensión en sus bornes, B, C, D. En esta zona el termistor es sensible a cualquier efecto que altere el ritmo de disipación de calor. Esto permite aplicarlo a las medidas de caudal, nivel, conductividad calorífica. A la velocidad de extracción de calor fija el termistor es sensible a la potencia eléctrica de entrada, aplicándose al control de nivel de tensión o de potencia. 4 *Corrientes altas: Tensión proporcional a corriente, hasta el punto A. *Corriente máxima: Corriente máxima no peligrosa, E. Bloque 2 1. A: Dibuje el diagrama de bloques del Osciloscopio Analógico. B: Etiquete en el diagrama sus elementos. C: Describa brevemente cada uno de dichos elementos. Display: El TCR genera electrones mediante un sistema de enfoque electroestático (basado en tensiones continuas) forman un haz de luz fino y, tras acelerarlos para aumentar su velocidad, son proyectados sobre la pantalla, recubierta intencionalmente con material fluorescente. Atenuador: encargado de reducir/disminuir la amplitud de la señal de entrada. (Adapta rango de señal de entrada al tamaño de la pantalla). Amplificador de puerta: suministra una tensión mientras dura el barrido horizontal, y da una tensión nula en los demás casos. De este modo, se suprime el haz cuando vuelve a la izquierda una vez acabado el barrido y mientras se espera el disparo. Disparo: circuito que hace que el barrido se inicie siempre en el mismo punto, de modo que si es repetida la señal se obtiene una representación persistente a base de la supervisión de fragmentos iguales a la señal de entrada. La luminosidad depende del tiempo de incidencia del haz de cada punto de la pantalla. Mientras dura un barrido se bloquea el disparo. Línea de retardo: elemento encargado de compensar el tiempo que se tarda en procesar la señal. Da tiempo a los circuitos de disparo y la baso de tiempo de su señal. Amplificador de deflexión: consta de varias etapas con ganancia fija con la que se minimizan los problemas de estabilidad → tensión diferencial. 5 Control horizontal: generador de barrido que produce una señal con forma de diente de sierra cuya pendiente es positiva, muy lineal y controlable desde el exterior. 2. A: Dibuje el diagrama de bloques de un Analizador Lógico. B: Explique brevemente el objetivo de este equipo de medida. El objetivo de este equipo reside en la captura de un equipo digital y los muestra para su posterior análisis. Es un instrumento de medida que captura y representa grupos de señales digitales (al mismo tiempo), sin importar el valor exacto de su amplitud. Puede ser utilizado para la detección de errores hardware y software, en cualquier sistema digital (captura los datos de un circuito digital y lo muestra para su posterior análisis, como un osciloscopio). C: Describa brevemente cada uno de sus elementos. Display: en la pantalla del analizador lógico se observa unas filas y/o columnas de datos, la cual cada uno representa un canal. (Interfaz con el usuario). Data probase: detecta los niveles eléctricos de las señales conectadas los canales de entrada al analizador lógico (por encima de umbral → “1”, sino “0”). Memory: Elemento encargado de almacenar las muestras para posteriormente procesarlo y visualizar la forma de onda de os cuales, de forma continuada durante un proceso de adquisición. Sequence controller: unidad encargada de controlar la adquisición de las muestras. Dicha adquisición se puede programar utilizando un reloj interno (Internal clock) o tomando como referencia los flancos de subida o bajada de un reloj externo (clock probes). Se encarga de detener la adquisición y detectar la aparición de una nueva condición de disparo. Clock probes: Se encarga de detener la adquisición y detectar la aparición de una nueva condición de disparo. 6 Procesador: se encarga de preparar la información para su posterior presentación en la unidad de visualización. 3. Suponga una instalación en a que hay dos cables dispuestos en paralelo. Dichos cables están formados por un cable identificado como A que posee un hilo conductor único (Ac) y su aislante. El segundo cable (Identificado como B) está compuesto por un hilo conductor central (Bc) y una pantalla metálica alrededor (Bm). Tras una inspección, se observa que el primer cable (A) circula una corriente compuesta de múltiples componentes alternas. También se ha comprobado que han conectado en el segundo cable a tierra por ambos extremos su hilo central conductor (Bc) y se emplea la malla para transmitir la seña del sensor (Bm). El sensor posee una resistencia de 1K (Rs) y está conectado mediante la pantalla metálica (Bm) a la entrada de un operacional. a. Dibuje un esquema/croquis de planteamiento. b. Razone si existe algún tipo de ruido e identifique el acoplamiento que lo origina. c. Dibuje el circuito equivalente (esquema) del/los acoplamientos que explicita en el apartado b. d. Deduzca el ruido en función de la frecuencia para el conductor Bm. 7 Temas Bloque 2 IEEE-488 Explicación breve de los eventos numerados del 1 al 11 (IEEE-488) (Interfaz GPIB) H ≥ + 2.0V L ≤ + 0.8 V Transferencia de datos (señales del bus): • • • • DIO: línea de datos. DAV: Datos válidos (Línea de protocolo). NRFD: No listo para datos (Línea de protocolo). NDAC: No listo para datos (Línea de protocolo). Hanshake Generalmente los instrumentos que se conectan para formar un sistema de medida tienen distintas velocidades de respuesta a los comandos que se envían por el bus. De tal modo que la transmisión deber ser asíncrona par que el instrumento más lento no pierda información. Se soluciona usando un protocolo de líneas: • • DAV: manejado por el transmisor, indica que el dato que se encuentra en el bus de datos es válido para ser interpretado por los equipos conectados. NRFD: manejado por el receptor para indicar que no se encuentra en condiciones de recibir. El transmisor debe comprobar que está en alto para declarar DAV como true. 8 • NDAC: manejado por el receptor. En falso indica que se encuentra liso para recibir nuevo dato. Transmisor se pone a DAV=falso y se pueden cambiar los datos sobre el bus. 1. Al comienzo de un ciclo de transferencia: el transmisor de la información o fuente inicializa la línea de protocolo de DAV en alto, dato que se encuentra en el bus no es válido para ser interpretado por los equipos conectados. 2. Los receptores inicializan las líneas de protocolo NRFD y NDAC colocándolos en bajo, es decir, no están preparados para recibir ni han aceptado el dato. 3. Verificado que las líneas NRFD y NDAC no están ambos en alto, el transmisor entonces envía la información a través de las líneas de datos (DIO). En caso contrario, se da la condición de error. 4. Retardo del transmisor para estabilizar (establecer) los datos sobre las líneas de dato. 5. Todos los receptores están en condiciones de recibir los datos, las líneas NRFD de cada uno de los mismos se coloca en alto. 6. La fuente, al detectar que todas las líneas NRFD están en alto, coloca a la línea DAN en bajo para indicar que los datos están establecidos y son válidos (pueden ser aceptados). 7. Los equipos establecen el NRFD en bajo indicando que ya no están preparados para recibir datos, aceptando posteriormente el dato, realizando este proceso de acuerdo a su velocidad de respuesta. 8. El dispositivo más rápido coloca su línea NDAC en alto indicando que se ha recibido el dato. (Línea NDAC permanece en cero lógico debido al resto de receptores). 9. Una vez todos los receptores han colocado la línea NDAC en alto y por tanto, han recibido los datos. 10. La fuente detecta que la línea NDAC está en alto, colocando la línea DAC en alto, indicando a lo receptores que el dato en las líneas DIO debe ser considerado como no válido. 11. El transmisor cambia los datos sobre las líneas DIO (en 11 no hay) y se repite el proceso en caso de haber más datos. Describir comando monolineales y multilineales del IEEE-488 Existen 5 líneas dedicadas al control general de la interfaz, conocidos como comandos unilíneas para diferenciarlos de los comandos universales o multilínea que son palabras reservadas con un significado específico. 9 Línea de control o comandos unilíneas • • • • • ATN (attention): Es gestionado por el control y determina si el bus (DIO) se encuentra en modo comando (ATN = verdadero) o dato (ATN = falso). Activa a nivel bajo y es monitorizada por todos los instrumentos conectados a BUS. IPC (Interface Clear): es gestionada por el control y bloquea y finaliza cualquier transferencia en curso. SRQ (Servie Request): es utilizado por uno o más instrumentos para indicar la necesidad de atención puede actuar como una interrupción a la secuencia de eventos. El controlador, en línea en colector abierto, debe hacer un sondeo (serie o paralelo) para saber quién solicita su atención y porqué. RENC (Remote Enable): Es gestionada por el control del sistema. Cuando su valor es verdadero todos los instrumentos con capacidad para funcionar en modo remoto deben activar esta opción cuando se direccionan como receptores. En falso, los instrumentos retornan a modo local. EOI (End or Identify): cuando el comando ATN sea verdadero, esta línea es usada por el control del sistema para ejecutar un sondeo paralelo. Si ATN es falso, esta línea es utilizada por el transmisor activo para indicar que el dato transmitido es el último byte de la transferencia en curso. Comandos multilínea • • • • • • • LLO (Local Lockout): deshabilita el modo local, tos instrumento conectado al bus conmuta a modo remoto cuando se activa la línea REN o es direccionado. DCL (Device Clear): provoca que todos los dispositivos retomen a un estado predeterminado. PPU (Parallel Pol Uncofigure): desconfigura el sondeo paralelo, quedando en estado ocioso (no reconocen el sondeo). SPE (Serial Poll Enable): Habilita el sondeo serie. SPD (Serial Polling Disable): deshabilita el sondeo serie. UNL (Unlisten): des direcciona a todos los instrumentos que se encuentran como receptores en ese momento, desautorizándoles la escucha en el bus. UNT (Untalk): Des direcciona al transmisor activo, desautorizando la escritura en el bus. Describe el bus IEEE-488. El bus IEEE-488 transfiere datos y órdenes entre los elementos componentes de un sistema a través de 16 líneas que se dividen en 3 grupos, así como, 8 líneas de tierra: • • • Bus de datos: compuesto por 8 líneas (DIO 1-DIO 8), sobre los cuales los mensajes son transitorios en la forma de bytes consecutivos (bit-paralelo; bytes en serie). Control de transferencia de los bytes: utiliza 3 líneas de paralelo (DAV, NRFD, NDAC) destinados al manejo del protocolo de comunicación (handshake). Administración general e la interfaz: utilizando las 5 líneas restantes (ATN, IFC, REN, SRQ y EOI). 10 Los elementos están conectados en paralelo a las líneas de señal. Es importante impedir que se transmitan 2 o más informaciones simultáneas y a su vez lograr que la información destinada a uno o varios dispositivos sea aceptada sólo por el o los dispositivos especificados. Líneas de protocolo, se definen 3 tipos de dispositivos: • • • Transmisor: instrumento capaz de transmitir datos a través del bus. Receptor: todo instrumento o dispositivo capaz de recibir datos digitales a través de bus. Controlador: capaz de administrar las comunicaciones a través del bus (designar transmisores y receptores, interrumpir y ordenar acciones internas). Un dispositivo puede ser receptor/transmisor. Las características mecánicas, eléctricas y funcionales definidas en la norma, imponen una serie de limitaciones en el funcionamiento del sistema de interacción. Las más importantes son: • • • Como máximo pueden estar 15 elementos al bus simultáneamente. Velocidad máxima de transferencia de 1Mbyte. Distancia de cableado limitada a 2 metros entre elementos, sin suponer los 20 metros en total. Para ar lugar a la comunicación, cada instrumento tiene un “nombre” o “dirección” formado por un número con los 5 bytes menos significativos del byte, pudiéndose formar 31 combinaciones (0-30). Transferencia asíncrona. Características eléctricas basadas en el uso de la tecnología TTL para los circuitos transcriptores. Estado lógico 0 = Falso 1 = Verdadero Software de control → norma IEEE-488. Nivel de señal +2,0V (nivel alto) +0,8V (nivel bajo) Tipos de sondeo: • Sondeo en serie: el controlador integra a cada uno de los dispositivos conectados, comienza enviando un comando específico (SPE) habilitando el sondeo y luego direcciona secuencialmente a cada uno, éste le envía a su byte de estado y se indica si se solicita servicio, así como si hay un error o si tiene un dato disponible para inviar. Al finalizar el proceso el control envía un SPD y un UNT. • Sondeo en paralelo: el control puede verificar 8 dispositivos simultáneamente para determinar su estado (DIO 1- DIO 8) colectivamente, un grupo de equipos pueden responder mediante una AND lógica de sus grupos de estado por una sola línea. 11 SCPI SCPI (Estándar Commands for Programmable Instrumentation) es el resultado en 1990 de una mejora de la norma IEEE-488.2 por parte de un consorcio de empresas fabricantes de instrumentos electrónicos. Dicha norma define un conjunto de órdenes/comandos de programación estándar para todos los instrumentos desarrollados de acuerdo con la misma. Sus objetivos residen en: • • • • Facilita el aprendizaje y uso de los comandos y los datos. Facilita la comprensión del programa al unificar comandos y estructura de datos. Posibilita la rápida situación de equipos. Disminuye el coste de desarrollo. Jerarquía de protocolos 1. Normaliza la sintaxis y los elementos de los mensajes y especifica unas capacidades mínimas de la interfaz. • Deja a la elección del usuario la definición de los comandos de dispositivos salvo excepciones. • Aplicable a otros tipos de interfaz (VXI, RS232) en la transmisión de datos basados en mensajes. 2. Conjunto de órdenes normalizadas/Formato de intercambio de datos. • Compatibilidad: o Vertical: misma categoría de equipos (voltímetro-voltímetro) (1). o Horizontal: entre equipos de diferente categoría (vatímetro-voltímetro) (2). o Funcional: entre diferentes tipos de funciones (Analizador de funcionesvoltímetro) (utiliza una función) (3). (1) Dos instrumentos del mismo tipo tienen controles idénticos. (2) Dos instrumentos capaces de hacer una misma medición, independientemente de la técnica usada. (3) Se realiza una similar función mediante una misma orden. 12 Modelo de instrumento El modelo SCPI es usado como un medio para conseguir la compatibilidad entre instrumentos, dándose los tres tipos de compatibilidad. Modelo básico de instrumentación. Medida Generación de señal En la norma SPI se agrupan los comandos jerarquicamente en forma de árbol, agrupados en varios subsistemas o familias cada uno de ellas identificando con un bloque funcional el Instrumento. • Memoria: cada nemotécnico usado en la construcción de cabeceras de control de instrumentos cuenta con una representación larga y otra corta, pudiéndose de so maneras. 13 El estándar IEEE-488.2 limita la longitud de una cabecera a 12 caracteres, incluyendo cualquier sufijo. SCPI define reglas para la generación de memorias que conforman las cabeceras de control. Guía → estructura jerárquica. • Sintaxis de comandos comunes: • Sintaxis de comandos específicos: 14 Osciloscopio Diagrama de bloques de un osciloscopio analógico: Los osciloscopios analógicos se basan en el tubo de rayos catódicos (TCR). Consiste en un tubo de vacío con elementos de enfoque capaces de producir un haz estrecho de electrones que se enfoca en un blanco fosforescente (la pantalla) y al que se dota de un sistema dinámico para variar el haz en direcciones verticales y horizontales. Un punto en la pantalla se corresponde con la amplitud de la señal que se representa y en la abscisa es proporcional al intervalo de tiempo transcurrido desde un punto de referencia. • Display: El TCR genera electrones mediante un sistema de enfoque electroestático (basado en tensiones continuas) forman un haz de luz fino y, tras acelerarlos para aumentar su velocidad, son proyectados sobre la pantalla, recubierta intencionalmente con material fluorescente. • Atenuador: encargado de reducir/disminuir la amplitud de la señal de entrada. (Adapta rango de señal de entrada al tamaño de la pantalla). 15 • Amplificador de puerta: suministra una tensión mientras dura el barrido horizontal, y da una tensión nula en los demás casos. De este modo, se suprime el haz cuando vuelve a la izquierda una vez acabado el barrido y mientras se espera el disparo. • Disparo: circuito que hace que el barrido se inicie siempre en el mismo punto, de modo que si es repetida la señal se obtiene una representación persistente a base de la supervisión de fragmentos iguales a la señal de entrada. La luminosidad depende del tiempo de incidencia del haz de cada punto de la pantalla. Mientras dura un barrido se bloquea el disparo. • Línea de retardo: elemento encargado de compensar el tiempo que se tarda en procesar la señal. Da tiempo a los circuitos de disparo y la baso de tiempo de su señal. • Amplificador de deflexión: consta de varias etapas con ganancia fija con la que se minimizan los problemas de estabilidad → tensión diferencial. • Control horizontal: generador de barrido que produce una señal con forma de diente de sierra cuya pendiente es positiva, muy lineal y controlable desde el exterior. Tener en cuenta el impulso del barrido → Generación del diente de sierra, modo de trabajo del control horizontal: 16 Canales multilínea Lo habitual para dos señales de entrada es tener un único haz y dos sistemas de preampliación y atenuación en la desviación vertical. Un conmutado permite compartir el amplificador final de desviación vertical. • • • • Canales independientes. Canales en modo troceado: trocea sucesivamente un fragmento de cada cenal a lo largo de un barrido. Canales en modo alterno: alterna la señal de cada canal en cada barrido completo. Suma o resta de ambos canales. Osciloscopio digital El núcleo funcional es el convertidor S/D y las distintas unidades de memoria. Motivación: • • • • • • Captura de eventos de corta duración no repetitivos. Eliminar el parpadeo. Comparación de formas de onda. Aumento de resolución. Almacenamiento. Análisis de los datos (estadísticas, características…). Tipos de muestro: • • Secuencial. Aleatorio. Osciloscopio Analógico vs Osciloscopio Digital • • • • Alta interactividad con el CRT Bajo precio CRT o Señal mínima de refresco o Velocidad de refresco o Parpadeo Precisión de la medida o Sistema o Subjetividad del operario 17 Analizador Lógico El objetivo de este equipo reside en la captura de un equipo digital y los muestra para su posterior análisis. Es un instrumento de medida que captura y representa grupos de señales digitales (al mismo tiempo), sin importar el valor exacto de su amplitud. Puede ser utilizado para la detección de errores hardware y software, en cualquier sistema digital (captura los datos de un circuito digital y lo muestra para su posterior análisis, como un osciloscopio). • Display: en la pantalla del analizador lógico se observa unas filas y/o columnas de datos, la cual cada uno representa un canal. (Interfaz con el usuario). • Data probase: detecta los niveles eléctricos de las señales conectadas los canales de entrada al analizador lógico (por encima de umbral → “1”, sino “0”). • Memory: Elemento encargado de almacenar las muestras para posteriormente procesarlo y visualizar la forma de onda de os cuales, de forma continuada durante un proceso de adquisición. • Sequence controller: unidad encargada de controlar la adquisición de las muestras. Dicha adquisición se puede programar utilizando un reloj interno (Internal clock) o tomando como referencia los flancos de subida o bajada de un reloj externo (clock probes). Se encarga de detener la adquisición y detectar la aparición de una nueva condición de disparo. • Clock probes: Se encarga de detener la adquisición y detectar la aparición de una nueva condición de disparo. • Procesador: se encarga de preparar la información para su posterior presentación en la unidad de visualización. 18 Analizador de Señales Un analizador de señales es un equipo electrónico de medida que permite visualizar en un apantalla componentes espectrales en un espectro de frecuencias de las señales presentes en la entrada, pudiendo ser cualquier tipo se onda eléctrica, acústica u óptica. Similar al osciloscopio, pero en base de frecuencias en lugar de tiempo. Para llevar una señal del dominio del tiempo al dominio de la frecuencia, empleamos el análisis de Fourier. Análisis de espectro Muestreo y digitalización • • • S/H Teorema de Shannon Criterio de Nyquist • Características del conversor A/D • Filtro Antialiasing o Filtro paso bajo ideal vs real o Filtro digital • Eventanado (darles prioridad a unas muestras y menos a otras) o Selección del tipo de ventana o Lóbulos Laterales (side lobes) o Error en los extremos (scalloping) o Ancho de banda de Ruido equivalente Operación en tiempo Real • Para la reconstrucción exacta de una señal periódica continua, la frecuencia de muestreo debe ser al menos 2 veces superior a su frecuencia máxima El antialiading es aplicar técnicas para evitar los efectos desagradables del aliasing y obtener superficies más firmes y menos pixelados posibles Superheterodino Básico Controles o o o o Frecuencia Span (el ancho de banda que yo quiero ver, el barrido que ancho tiene) Nivel de refencia Otros o Velocidad de barrido o BW Resolution o Rango Dinámico 19 20 Tema 7: Interferencia, Apantallamiento y Puesta a Tierra. Interferencia: Ruido, todo lo que molesta. EMC/EMI: Compatibilidad ▪ ▪ EMI: En emisión, en modo común y en modo diferencial. EMS: En inmunidad o susceptibilidad. Las personas escuchamos hasta 16KHz (normalmente). Hasta 30MHz funcionan los circuitos sencillos. A partir de 30MHz funcionan los microcontroladores. Hay que medir en modo común y en modo diferencial. En modo común se mide el acoplamiento en modo capacitivo y en modo diferencial, en modo inductivo. La forma no adecuada de la puesta a tierra puede afectar al circuito. Cualquier transistor que se ponga en marcha produce ruido térmico. Hay que saber identificar al generador y al receptor para buscar la solución. ▪ ▪ ESD: Diodos que se encuentran en inversa, cuando el circuito funciona correctamente no actúan, pero cuando al circuito va a entrar una gran carga de corriente éstos actúan impidiendo que entre al circuito. La masa es un punto virtual, que definimos como cero y la tierra en la conexión directa a tierra (donde está el cero absoluto). Hay una diferencia de potencial entre masa y tierra. Filtrar es costoso, implica trabajar en un rango de frecuencias distinto al que se quiere medir. Ordenar los componentes en función de la interferencia ayuda a reducir el ruido. Poner dos cables en paralelo hace que aparezca un acoplamiento. 21 Condensador C2G desaparece porque la malla es tierra, por lo que e condensador se encontrará entre tierra y tierra. Si la malla se pone a tierra no habrá acoplamiento a través de la malla. Siempre hay que poner la malla a tierra. Los condensadores paralelos se suman. No poner un cable a masa ya que hace crecer el ruido. Se colocan las baterías de condensadores para almacenar la energía reactiva. Ahora trabajamos con bobinas, por lo tanto, trabajaremos con corrientes y el circuito tiene que ser cerrado. (Acoplo inductivo). Acoplo capacitivos: Se trabaja con condensadores, por lo tanto, se trabaja con tensiones. TDR: Generador + osciloscopio unidos por un cable, que hace pulsimetría. Sirve para saber donde hay cambios; donde se encuentra el cable deteriorado, por ejemplo. Poner dos mallas a tierra produce un acoplamiento triple. La tierra, aunque se define como cero, varía en función de los efectos externos, por lo que se produce una señal. Poner una sola tierra y colocar una carga flotante, es una solución al acoplamiento triple. 22 1º Circuito: malo campo magnético. 2º Circuito: malo campo magnético. 3º Circuito: bueno campo magnético pero malo acoplamiento. Para eliminar un campo magnético hay que colocar otro de misma magnitud, pero sentido contrario, lo que de manera práctica es imposible de hacer. La tierra del osciloscopio tiene que ser la misma que la de la fuente de alimentación. Acoplamiento 23 Atenuación Cable coaxial El cable coaxial y el par trenzado a bajas frecuencias apenas hay diferencias. Para frecuencias altas es mejor el par trenzado (me da que es el cable coaxial no el par trenzado), pero a muy altas frecuencias es muy caro. 24