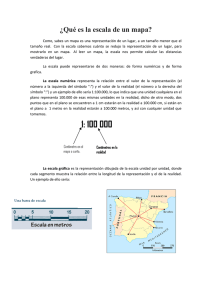
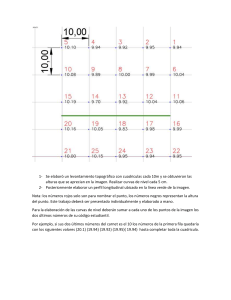
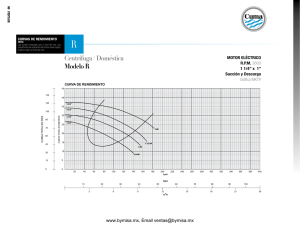
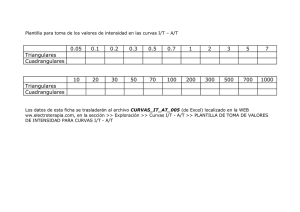
Geometria diferencial de curvas y superficies 13 de octubre de 2022 2 Índice general 1. CURVAS 1.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2. Curvas parametrizadas . . . . . . . . . . . . . . . . . . . . 1.3. Curvas regulares; longitud de arco . . . . . . . . . . . . . . 1.4. El producto vectorial en R3 . . . . . . . . . . . . . . . . . 1.5. La teorı́a local de curvas parametrizadas por la longitud de 1.6. La forma canónica local . . . . . . . . . . . . . . . . . . . 1.7. Propiedades locales de las curvas planas . . . . . . . . . . . . . . . . . . . . . . arco . . . . . . 2. Superficies regulares 2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Superficies regulares . . . . . . . . . . . . . . . . . . . . . . 2.3. Imágenes inversas de valores regulares . . . . . . . . . . . . . 2.4. El plano tangente; la diferencial de una aplicación . . . . . . 2.5. La primera forma fundamental; área . . . . . . . . . . . . . 2.6. Orientación de superficies . . . . . . . . . . . . . . . . . . . 2.7. Una caracterización de las superficies compactas orientables 2.8. Una definición geométrica de área . . . . . . . . . . . . . . . 3. Geometrı́a de la aplicación de Gauss 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 6 9 10 10 10 10 . . . . . . . . 11 11 11 11 11 11 11 11 11 13 4 ÍNDICE GENERAL Capı́tulo 1 CURVAS 1.1. Introducción La geometrı́a diferencial de curvas y superficies presenta dos aspectos. Uno, que podrı́a denominarse geometrı́a diferencial clásica, se remonta a los comienzos del calculus (cálculo infinitesimal). En lı́neas generales, la geometrı́a clásica el estudio de propiedades locales de curvas y superficies. Por propiedades locales entendemos aquellas que dependen únicamente del comportamiento de la curva o superficie en el entorno de un punto. Los métodos que han demostrado por sı́ mismos ser adecuados para el esutdio de tales propiedadesson los del calculus (cálculo infinitesimal). Por esta razón las curvas y superficies a considerar en geometrı́a diferencial estarán definidas mediante funciones que pueden diferenciarse un cierto número de veces. EL otro aspecto es la denominada geometrı́a diferencial global. Aquı́ se estudia la influencia de las propiedades locales sobre el comportamiento total de la curva o superficie. Volveremos a este aspecto de la geometrı́a diferencial posteriormente en el libro. Quizás es el estudio de superficies la parte más interesante y representativa de la geometrı́a diferencial clásica. Sin embargo, algunas propiedades locales de las curvas aparecen de manera natural mientras se estudian las superficies. Por ello usaremos este primer capı́tulo para ofrecer un tratamiento breve de curvas. El capı́tulo se ha organizado de manera que un lector interesado principalmente en superficies pueda leer únicamente las secs. de la 1.2 hasta la 1.5. Las secciones de la 1.2 hasta la 1.4 esencialmente contienen materia de carácter introductorio (curvas parametrizadas, longitud de arco, producto vectorial), que probablemente se conocerá de otros cursos y se introduce aquı́ por completitud. La sección 1.5 es el corazón del capı́tulo y contiene la materia de curvas requerida para el estudio de superficies. Para aquellos deseen ir un poco más lejos del tema de curvas, hemos incluido las secciones 1.6 y 1.7. 5 6 1.2. CAPÍTULO 1. CURVAS Curvas parametrizadas Denotaremos por R3 al conjunto de tripletes (x, y, z) de números reales. Nuestro objetivo es caracterizar ciertos subconjuntos de R3 (que se llamarán curvas) que son, en cierto sentido, uno-dimensionales y a los que puedan aplicarse los métodos de cálculo diferencial. Una manera natural de definir tales subconjuntos es a través de funciones diferenciables. Decimos que una función real de una variable real es diferenciable (o suave)si admite, en todos los puntos, derivadas de todas las órdenes (que son automáticamente continuas). Una primera definición de curva, no del todo satisfactoria pero suficiente para los propósitos del capı́tulo, es la siguiente. DEFINICIÓN Una curva parametrizada diferenciable es una aplicación diferenciable α : I → R de un intervalo I = (a, b) de la recta real R en R3 . La palabra diferenciable en esta definición significa que a es una correspondencia que aplica cada t ∈ l en un punto α(t) = (x(t), y(t), z(t)) ∈ R2 de forma que las funciones x(t), y(t), z(t) son diferenciables. La variable t se denomina parámetro de la curva. La palabra intervalo se toma en sentido generalizado, de forma que no excluyamos a = −∞, b = +∞. Si denominamos por x′ (t) la primera derivada de x en el punto t y usamos notaciones similares para las funciones z e y, el vector (x′ (t), y ′ (t), z ′ (t)) = α′ (t) ∈ R3 se denomina vector tangente (o vector velocidad de la curva a en t. El conjunto imagen α(I) ⊂ R3 se denomina la traza de α. Como se ilustra en el ejemplo 5 más abajo, se debe tener cuidado en distinguir una curva parametrizada, que es una aplicación, de su traza, que es un suconjunto de R3 . Una advertencia sobre la terminologı́a. Mucha gente usa el término ≪ infinitamente diferenciable ≫ para funciones que admiten derivadas de todos los órdenes y reserva la palabre ≪ diferenciable ≫ para dar a entender que únicamente se pide la existencia de la primer derivada. No seguiremos aquı́ esta metodologı́a. Ejemplo 1. La curva difernciable dada por: α(t) = (a cos t, a sen t, bt), t ∈ R, tiene como traza en R3 una hélice de paso 2πb sobre el cilindro x2 + y 2 = a2 . Aquı́ el parámetro t mide el ángulo que forma el eje x con la recta que une el origen O con la proyección del punto α(t) sobre el plano xy(véase la fig. 1-1). Ejemplo 2. La aplicaión α : R → R3 dada por α = (t2 , t3 ), t ∈ R es una curva parametrizada diferenciable que tiene como traza la fig. 1-2. Nótece que α′ (0) = 0, 0); o sea, el vector velocidad es cero para t = 0. Ejemplo 3. La aplicación α : R → R⊭ dada por α(t) = (t3 − 4t, t2 − 4), t ∈ R, es una curva parametrizada diferenciable (fig. 1-3). Nótese que α(2) = α(−2) = (0,0); es decir, la aplicación α no es inyectiva. 1.2. CURVAS PARAMETRIZADAS 7 Ejemplo 4. La aplicación a : R → R2 dada por a(t) = (t, |t|), t ∈ R, no es una curva parametrizada diferenciable, ya que |t| no es diferenciable en t = 0 (fig. 1-4). Ejemplo 5. Las dos curvas parametrizadas distintas: α(t) = (cos t, sen t) β(t) = (cos 2t, sen 2t) donde t ∈ (0 − ε, 2π + ε), ε > 0, tienen la misma traza, a saber, el cı́rculo x2 + y 2 = 1. Nótese que el vector velocidad de la segunda curva es el doble del de la primera (fig. 1-5). 8 CAPÍTULO 1. CURVAS Ahora recordaremos brevemente algunas propiedades del producto interior* (o punto de vectores en R3 . Sea u = (u1 , u2 , u3 ) ∈ R3 , y definamos su norma (o longitud) por q |u| = u21 + u22 + u23 . Geométricamente, |u| es la distancia del punto (u1 , u2 , u3 ) al origen O = (0, 0, 0). Sean ahora u = (u1 , u2 , u3 ) y v = (v1 , ω2 , v3 ) de R3 , y sea θ, 0 ≤ θ ≤ π, el ángulo formado por los segmentos Ou y Ov. El producto interior u · v se define por (fig. 1-6) u · v = |u| |v| cos θ Se verifican las siguientes propiedades: 1. Supóngase que u y v son vectores no nulos. Entonces u · v = 0 sı́ y sólo sı́ u es ortogonal a v. 2. u · v = v · u 3. λ(u · v) = λu · v = u · λv 4. u · (v + w) = u · v + u · w Una expresión útil para el producto interior se obtiene como sigue. Sean e1 = (1, 0, 0), e2 = (0, 1, 0) y e3 = (0, 0, 1). Se comprueba fácilmente que ei · ej = 1 si i = j y que ei · ej = 0 si i ̸= j, donde i, j = 1, 2, 3. Ası́, escribinedo: u = u1 e1 + u2 e2 + u3 e3 , v = v1 e1 + v2 e2 + v3 e3 , 1.3. CURVAS REGULARES; LONGITUD DE ARCO 9 y usando las propiedades 3 y 4, obtenemos: u · v = u1 v2 + u2 v2 + u3 v3 . De esta expresión se sigue que si u(t) y v(t), t ∈ I, son curvas diferenciables, entonces u(t) · v(t) es una función diferenciable, y d (u(t) · v(t)) = u′ (t) · v(t) + u(t) · v ′ (t). dt 1.3. Curvas regulares; longitud de arco Sea a : I → R3 10 CAPÍTULO 1. CURVAS 1.4. El producto vectorial en R3 1.5. La teorı́a local de curvas parametrizadas por la longitud de arco 1.6. La forma canónica local 1.7. Propiedades locales de las curvas planas Capı́tulo 2 Superficies regulares 2.1. Introducción 2.2. Superficies regulares 2.3. Imágenes inversas de valores regulares 2.4. El plano tangente; la diferencial de una aplicación 2.5. La primera forma fundamental; área 2.6. Orientación de superficies 2.7. Una caracterización de las superficies compactas orientables 2.8. Una definición geométrica de área 11 12 CAPÍTULO 2. SUPERFICIES REGULARES Capı́tulo 3 Geometrı́a de la aplicación de Gauss 13