UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
1. INTRODUCCIÓN
En el presente curso estudiaremos consideraciones sobre aspectos primordiales en la medición de
variables, su representación mediante instrumentos adecuados a cada proceso. También
estudiaremos las diferentes técnicas existentes para el control de procesos en forma resumida.
En el desarrollo de las tecnologías aplicadas para la automatización de los procesos, se han
implementado a la vez técnicas de control novedosas, las cuales han sido importantes en el
desarrollo y mejoramiento de la productividad en todos los sectores productivos, de
telecomunicaciones y varias otras ramas en donde se aplica la tecnología especialmente la
medición y el tratamiento de las señales respectivamente.
En instrumentación y control se emplea un sistema especial de símbolos con el objeto de
transmitir de una forma más fácil y específica la información. Esto es indispensable en el diseño,
selección, operación y mantenimiento de los sistemas de control.
También es importante realizar bosquejos iniciales sobre el control que debe realizarse, ya sea con
diagramas de flujo, diagramas en graffcet u otro tipo de diagramación básica que sirve para el
diseño del controlador a implementar y los dispositivos necesarios, en la industria desde luego los
PLCs tiene el campo ganado no dejando de lado otros componentes o tecnologías que se
desarrollan paralelamente.
Las normas más importantes en el desarrollo e implementación de procesos de control e
instrumentación son los siguientes:
ANSI/ISA-S5.1 (Identificación y símbolos de instrumentación)
ANSI/ISA-S5.2 (Diagramas lógicos binarios para operaciones de procesos)
ISA-S5.3 (Símbolos gráficos para control distribuido, sistemas lógicos y computarizados)
ANSI/ISA-S5.4 (Diagramas de lazo de instrumentación)
ANSI/ISA-S5.5 (Símbolos gráficos para visualización de procesos)
Estas normas antes mencionadas se utilizan para realizar borradores, diagramas para análisis tanto
en instrumentación, descripciones funcionales, diagramas de flujo, identificación de instrumentos,
etc.
Un sistema de control básico sin acción de control realimentado se puede observar en la siguiente
figura donde no existe la acción de control respectiva. Pero si podemos observar el control que se
puede ejercer sobre la válvula observada en ese instante a la salida del intercambiador.
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Figura. Sistema básico de acción de control.
Si el intercambiador de calor mostrado en la figura anterior fuese manejado por una persona
tendríamos ya el uso de una realimentación al proceso y se observa en la siguiente figura.
Figura. Intercambiador con una persona en el lazo de control.
En la última figura se puede observar que el intercambiador está siendo controlado por una
persona, la cual revisando en forma visual la temperatura del intercambiador para poder realizar
la apertura o cierre de la válvula en forma manual. Las acciones que realiza son las de medir,
comparar, calcular y corregir para obtener la temperatura deseada.
Los elementos del sistema de control son los siguientes:
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Figura. Elementos de control en una planta.
Otra, manera de describir los elementos que componentes un sistema de control pueden
mencionarse los siguientes:
Figura. Elementos de control en un proceso.
1.1Nociones matemáticas para análisis de sistemas de control.
Dado el avance de los sistemas automáticos en la actualidad, la ingeniería ha avanzado en
hardware, en este sentido a la par se han desarrollado controladores que ayudan al mejor
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
desarrollo de hardware es decir su respuesta óptima en los procesos diversos en las industrias
que tienen procesos de diferentes tipos(manufactura, alimentos, comunicaciones, etc.).
Los tipos de controladores que en la actualidad se desenvuelven de forma aceptable son los
controladores
digitales, los cuáles están compuestos algoritmos computacionales
implementados en algún procesador específico o en cualquier computador; este tipo de
aplicación por computadora ha hecho posible el movimiento inteligente en robots
industriales, optimización de la economía, en combustibles, refinamiento de operaciones de
enseres y máquinas de uso doméstico.
La tendencia actual de controlar los sistemas dinámicos en forma digital en lugar de analógica
se debe principalmente a la disponibilidad de computadoras digitales de bajo costo y a las
ventajas de trabajar con señales digitales en lugar de señales en tiempo continuo.
Se puede definir al procesado digital de señales (PDS), al conjunto de técnicas y herramientas
para el tratamiento de señales en el dominio discreto o digital.
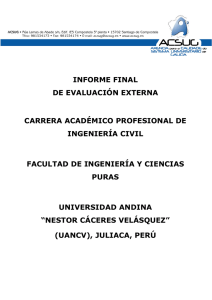
Los elementos básicos de un sistema de control es como se muestra a continuación, la salida
como se observa es una señal continua en la planta, la señal de error se convierte a forma
digital mediante un circuito de muestre y retención y el convertidor analógico-digital. La
computadora digital procesa las secuencias de números por medio de un algoritmo y produce
nuevas secuencias de números. En cada instante de muestreo se debe convertir un número
codificado (números binarios que consiste en 8 o mas dígitos binarios).
Esta operación que transforma señales continuas en datos de tiempo discreto se denomina
muestreo o discretización. La operación inversa que transforma datos que se encuentran en
tiempo discreto a señales continuas se denomina retención de datos, la cuál realiza la
reconstrucción de una señal en tiempo continuo a partir de una secuencia de datos en tiempo
discreto.
Este proceso de transformación de la información y su aplicación en un sistema de control se
puede observar en el siguiente gráfico:
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
X
S-H
y
convertidor
A-D
101
001
110
100
111
101
Computador
digital
Convertidor
D-A
Circuito de
Retención
Actuador
Planta o
Proceso
Reloj
Transductor
1.2 Señales, sistema y procesado de señal
Señal
Sistema
Señal
Discreta
v
10v
0
5
15
Procesado de
Señal
filtrado
Interpolación
predecir
Modelizar
1.3 Tipos de Señal
Una señal en tiempo continuo es aquella que se define sobre un intervalo continuo de tiempo,
en donde se puede representar por un intervalo continuo de valores o solamente un número
finito de valores distintos.
El proceso de representar una variable por medio de un conjunto de valores distintos se
denomina cuantificación, y la escala de valores se denomina valores cuantificados.
Existen los siguientes procesos para la conversión de la señal analógica (continua) a digital
(discreta):
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Muestreo
CUANTIFICACIÓN
CODIFICACIÓN
1.4 MUESTREO DE SEÑALES
Es el proceso de obtención de una secuencia temporizada a partir de una señal continua. Los
elementos de la secuencia se corresponden con los valores de la señal en determinados
instantes de tiempo, existen dos tipos de muestreo:
Podemos representar un muestreador de la siguiente forma:
X(t)
T
1.5 Análisis Frecuencial del Muestro
La relación entre la transformada de Fourier X(w) de una señal continua x(t) y la transformada de
fourier X(w) de una secuencia temporizada {xk}, que proviene del muestreo con periodo T de la
señal continua previa, viene dada por:
Χ (ω)=
1 ∞
2 πr
X ω+
∑
T r=−∞
T
(
)
Así si la transformada de Fourier de una señal continua X(w) viene representado por la figura a.
siguiente, la transformada de fourier de una secuencia muestreada con periodo T vendrá
determinado por la figura b. siempre que se cumpla las condiciones dadas por el teorema de
muestreo.
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
1
|X (w )|
w
Figura a. Módulo de la transformada de fourier de una señal continua.
|X
(w )|
1 /T
w
-3 /T
- / T
/ T
Figura b. Modulo de la Transformada de Fourier de una secuencia
Podemos determinar entonces la relación existente entre la transformada de Laplace X(s) de una
señal continua x(t) y la transformada de Laplace X(s) de una secuencia procedente del muestreo
con periodo T es:
1 ∞
2 πr
X ( s )= ∑ X s+ j
T r=−∞
T
(
)
1.6 Teorema del Muestreo.
Si la frecuencia de muestreo es lo suficientemente alta, comparada con la componente de más
alta frecuencia que se incluye en la señal en tiempo continuo, las características de amplitud
de la señal en tiempo continuo se puede preservar en la envolvente de la señal muestreada.
Para reconstruir la señal original a partir de una señal muestreada, existe una frecuencia
mínima que la operación de muestreo debe satisfacer. Se supone que la señal en tiempo
continuo x(t) tiene un espectro de frecuencia como el que se muestra en la figura siguiente,
esta señal no contiene ninguna componente de frecuencia arriba de w 1 radianes por segundo.
|X ( jw ) |
1
-w 1
w1
w
Fig. Un espectro de frecuencia
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Si ws esta definida como
2 π /T , donde T es el periodo de muestreo, es mayor que 2w 1, o
ω s >2 ω1
donde w1 es la componente de más alta frecuencia presente en la señal en
tiempo continuo x(t), entonces la señal x(t) se puede reconstruir completamente a partir de la
señal muestrada x*(t).
ω s >2 ω1 entonces, a partir del conocimiento de la señal
El teorema implica que si
muestreada, es teóricamente posible reconstruir con exactitud la señal en tiempo continuo
original.
Podemos definir este teorema desde el punto de vista de Nyquist, si la frecuencia más alta
contenida en una señal analógica x a(t) es Fmax=B y la señal se muestrea a una velocidad
Fm>2*Fmax ≡2B, entonces xa(t) se puede recuperar totalmente a partir de sus muestras
mediante la siguiente función de interpolación:
g(t )=
sen (2 π Bt )
2 π Bt
xa(t) se puede expresar como
∞
x a (t )=
∑
n=−∞
xa
n
n
g t−
Fm
Fm
( )( )
Donde xa(n/Fm)=xa(nT) ≡x(n) son las muestras de xa(t)
Cuando esta misma señal se reconstruye a una tasa de muestreo F N=2B, (B=ancho de banda),
la fórmula de reconstrucción es:
α
x a (t )=
∑
n=−α
xa
n
2B
( )
( (
sen 2 πB t−
(
2 πB t−
n
2B
n
2B
))
)
La reconstrucción de xa(t) a partir de x(n) supone la suma ponderada de una función de
interpolación g(t) que se desplaza en el tiempo g(t-nT), donde los coeficientes de ponderación
son las muestras x(n). Con este teorema se evita el efecto del aliasing (solapamiento).
1.7 CUANTIZACIÓN
Es la conversión de una señal en tiempo discreto con valores continuos en una señal en
tiempo discreto con valores discretos (señal digital). El valor de cada muestra se representa
mediante un valor seleccionado de un conjunto finito de valores (niveles de cuantificación).
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Este es un proceso irreversible y no invertible ya que siempre se produce pérdida de
información. Esto se fundamente en que al existir un número limitado de niveles, a distintos
valores continuos se les asigna un mismo valor discreto por lo que no se pueden obtener los
valores originales a partir de los valores cuantificados.
Existen estos conceptos en la cuantificación:
1.1.1.7 RECONSTRUCCIÓN
Un convertidor discreto continuo (D/A) obtiene una señal continua x(t) a partir de una secuencia
de datos x(n). Por tanto, un convertidor ideal, pasaría la secuencia
(
x (n)=A cos 2 π
F
n+φ
Fm
)
a la función: x(t )= A cos ( 2π Ft+φ )
Un convertidor D/A, mediante una función de interpolación, determina el valor de la señal entre
las muestras discretas. La interpolación se lleva a cabo mediante la expresión general
∞
x(t )= ∑ x(n) p(t−nT s )
n=−∞
Por tanto, un punto clave en la conversión es la conversión es la elección de la función de
interpolación. Para esto el teorema del muestreo especifica función de interpolación ideal. En la
práctica la conversión D/A se realiza normalmente combinando un conversor D/A con un circuito
de muestreo mantenimiento (sample and hold, S/H) seguido de un filtro pasa bajo ya que el
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
reconstructor ideal es no causal y de duración infinita, por tanto, no utilizable en la práctica.
Existen tres tipos básicos de mantenedores (retenedores).
Retenedor de orden cero
¿
x (t )=x (nT ), nT ≤t≤(n+1)T
Retenedor de orden uno
¿
x (t )=x (nT )+
x (nT )−x ((n−1 )T )
(t−nT ),
T
nT ≤t≤(n+1 )T
Interpolador lineal con retardo
¿
x ( t )=x (( n−1)T )+
x ( nT )−x ((n−1) T )
(t−nT ),
T
S a lid a
S a lid a
R e te n e d o r d e
o rd e n c e ro
R e te n e d o r
p r im e r o r d e n
nT ≤t≤(n+1)T
S a lid a
R e te n e d o r d e
p r im e r o r d e n c o n
in te r p o la d o r
Figura. Salida de los retenedores o mantenedores.
2 MEDICIONES EN CONTROL AUTOMÁTICO
Las mediciones en el campo de la automatización tiene diferentes técnicas debido a la
respuesta de los sensores, estos tienen diferentes tecnologías de fabricación, características y
tipo de señal de salida. Podemos mencionar algunos.
-
Sensores resistivos
-
Sensores capacitivos
-
Sensores inductivos
-
Sensores piezoeléctricos
Sensores optoelectrónicos
-
Sensores de efecto hall
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Son algunos de los tipos de sensores que se puede encontrar, dentro de cada tipo de señal
sensada, existe una característica física a la cual se puede también describir una variedad de
variables tales como temperatura, humedad, presión, flujo, fuerza, velocidad, aceleración,
distancia, etc.
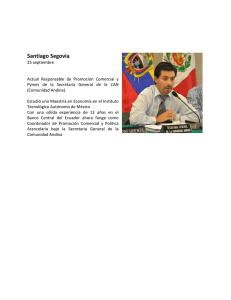
La realimentación mostrada en el ejemplo siguiente, tiene una señal en forma de flujo lo cual
completa el circuito para el proceso de medición, detección de error, controlador y elemento
final de control. A esto se le llama realimentación, y en general nosotros podemos decir que
este es un proceso de control realimentado.
En la mayoría de los casos a esto se le llama lazo realimentación porque se determina un
error y se realimenta la corrección para el proceso.
Figura. Adquisición de variable –presión, actuador neumático.
También podemos indicar del grafico anterior que se mide la variación de presión en el canal
mostrado, esta variación es convertida a la señal estándar de presión 3-15 psi. El convertidor
P/I cambia o transforma la presión a la señal 4-20mA, lo cual es enviado al controlador. La
salida del controlador es una señal de control de 4-20mA, lo cual se provee para el correcto
control de flujo, esta corriente es convertida a un rango de presión de 3-15 psi que emana del
conversor I/P que se aplica al actuador neumático. El actuador entonces realiza el ajuste de la
válvula.
En la figura siguiente a su vez muestra toda la operación de un sistema de control y se
condensa en el diagrama de bloques de operaciones de medición, error, detección, control y
elemento final de control.
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Figura. Diagrama de bloques del proceso de control realimentado.
Para la evaluación del sistema de control debemos tener las siguientes consideraciones:
-
La medida del desempeño de la variable usada, en los sistemas de control se le llama error,
donde es la diferencia entre la constante de referencia cuyo valor es r y la variable controlada
c(t).
-
Se considera los siguientes criterios para el control deseado.
-
El sistema debe tener Estabilidad.- en un sistema de control se puede causar debido al proceso
variable una inestabilidad.
-
El sistema en estado estable.- debe mostrar la mejor respuesta o estar regulado de la mejor
manera estado estable.
-
El sistema en estado transitorio.- debe mostrar la mejor respuesta posible o estar regulado en
estado transitorio.
-
Dentro de estos criterios podemos indicar que factores inherentes a los antes mencionados
son características de un sistema de control, como son:
-
Estabilidad
-
Regulación en estado estable
-
Regulación transitoria
-
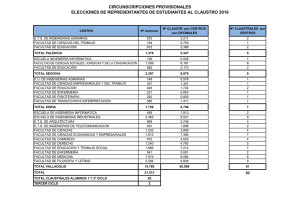
En la medición de sistemas de control podemos también describir el sistema de medición en
función de parámetros que indicaremos y describiremos mediante el gráfico siguiente:
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Figura.- generalización de un sistema de medición.
Donde debemos diferenciar que:
-
QUM.- Cantidad bajo medición (Quantity under measurement )
-
S.- Sensor
-
A.- Amplificador
-
SCF.- filtro acondicionador de señal (Signal Conditioning filter)
-
DSO.- Digital Storage oscilloscope
-
ATR.- Analog tape recorder
AAF.- Anti aliasing (lowpass) filter, n1= ruido acompañado de QUM, n2= ruido de la
electrónica, n3= ruido de la cuantización equivalente.
-
ADC.- Conversor Analógico a Digital
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
-
DC.- Digital Computer
-
MON.- monitor
-
KBD.- Teclado
1.3 TIPOS DE MEDICIÓN Y CARCATERÍSTICAS
1.3.1
Unidades estándar y definiciones
El sistema internacional de unidades (SI), es un estándar mundial en lo que refiere
a las normas y sistema internacional de unidades, el sistema está basado en 7
unidades físicas que a su vez tiene dos unidades complementarias.
Ejemplo 01.1.3.2
Representación de datos analógicos
Para realizar mediciones en sistemas de control, parte de las especificaciones es el
rango de la variable involucrada. Por ejemplo para el sistema de medición de
temperatura, tenemos el rango de temperatura especificada, por ejemplo: 20 120 °C, de forma similar en la salida se observa una señal de control continua que
va a la válvula. La señal está diseñada para que pueda funcionar en un rango a full
abertura y full cierre con toda la variación de la válvula característico de su rango.
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
Figura.- corriente eléctrica y presión neumática son de mucho conocimiento en la
transmisión de la información de la industria.
Ejemplo 02.-Suponer que el rango de temperatura de 20°C a 120°C es lineal
convertido de un estándar de corriente cuyo rango es de 20-40mA. Que corriente
da como resultado una temperatura de 66°C? Qué temperatura corresponde a
6.5mA?
Solución.La ecuación para la corriente es la siguiente:
, para lo cual nosotros conocemos que la corriente I= 4mA para
T=20°Cy que cuando I=20mA la temperatura es T=120°C
Solucionamos las dos ecuaciones simultáneas para lo cual nos queda:
ING. ABELARDO LEÓN MIRANDA
UNIVERSIDAD ANDINA NESTOR CÁCERES VELÁSQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES
MENCIÓN: AUTOMATIZACIÓN E INSTRUMENTACIÓN
De esta última expresión podemos deducir lo siguiente:
Despejando la ecuación anterior de la I0, tenemos:
Seguidamente obtenemos:
Para una corriente de 6.5mA
ING. ABELARDO LEÓN MIRANDA