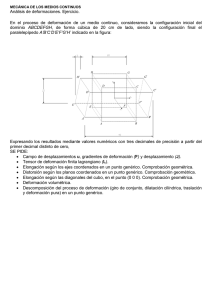
1 TEOREMA DE LOS TRABAJOS VIRTUALES. 1-Introducción El desarrollo que sigue se efectúa bajo las hipótesis del análisis lineal de estructuras. Se parte de considerar una esttructura solicitada por una fuerza P que crece lentamente desde 0 hasta su valor final.Consecuentemente dicha estructura se deforma acumulando energía potencial elástica. A continuación se grafica: Por el principio de equivalencia entre el trabajo y la energia se cumple que: Expresión que indica que el trabajo desarrollado por las fuerzas exteriores actuantes sobre la estructura es igual a la energia potencial elastica por esta acumulada.Queda aclarado además que el proceso mencionado es adiabático (sin intercambio de calor con el medio). Por otra parte durante la deformación se generan en la estructura fuerzas interiores llamadas fuerzas de reacción elástica.La función de las mismas es oponerse a los desplazazamientos relativos que se originan como consecuencia de dicho proceso.Finalmente el trabajo que desarrollan las fuerzas interiores en dichos desplazamientos relativos es siempre negativo. De esta forma la expresión anterior se puede escribir como sigue: Considérese ahora que la estructura cargada experimenta una deformación adicional no originada por la fuerza P. Dicha deformación cumple con la condición de ser pequeña y compatible con las condiciones de vínculo y recibe el nombre de deformación virtual. Gráficamente: Conocidos los conceptos que anteceden es posible enunciar el teorema de los trabajos virtuales. 2 2-Enunciado del Teorema de los Trabajos Virtuales. Si sobre una estructura actúa un sistema de fuerzas exteriores en equilibrio y la misma es virtualmente deformada, entonces el trabajo virtual desarrollado por dichas fuerzas es igual a la energía potencial elástica virtual acumulada por la estructura.. WV e = ∆UV El presente teorema se fundamenta en el principio de equivalencia. Comentario adicional al Teorema de los Trabajos Virtuales. Si la estructura es desplazada virtualmente en vez de deformada virtualmente (cuando la estructura se desplaza no hay variación de distancia entre sus puntos) la variación de energía potencial elástica virtual es nula tan simplemente porque el cuerpo no se deforma. Entonces la expresión del teorema de los trabajos virtuales es para este caso : WV e = 0 Elementos definidos por el teorema de los trabajos virtuales. Sistema equilibrado (SE): Se define como tal la estructura sometida a fuerzas en equilibrio. Desplazamiento virtual y deformación virtual (DV): Se considera bajo este título la estructura sometida a desplazamiento virtual o deformación virtual originada por una causa absolutamente independiente del sistema de fuerzas que actúa sobre la misma. 3 3-Aplicaciones del TTV. 3.1- Cálculo de magnitudes cinemáticas en sistemas isostáticos. Comentario previo. Desde el punto de vista práctico la deformación virtual (DV) se adopta coincidente con la deformación real de la estructura debido al estado de causa deformante que la solicita .La deformación real de la estructura cumple con la definición de deformación virtual. 3.1.1- Causa deformante fuerza La deformación virtual (DV) será: Es necesario generar ahora un sistema equilibrado (SE) cuyas fuerzas desarrollen trabajo en la deformación virtual ya conocida. En este caso se crea un SE constituido por la estructura original solicitada por una única fuerza de valor unitario, positivo y adimensional aplicada justo en coincidencia con la magnitud cinemática a determinar y que además debe resultar complementaria o correspondiente en la expresión de trabajo con dicha magnitud cinemática. Se dice que dos magnitudes ,una estática y la otra cinemática, son complementarias o correspondientes cuando el trabajo obtenido resulta máximo positivo. A continuación se ejemplifica: En función de lo expuesto el sistema equilibrado para el caso que se analiza será el que se muestra: 4 Cuando la magnitud estática posee una raya superior indica que es unitaria o que es provocada por una fuerza unitaria. Aplicando la expresión del TTV y evaluando la energía potencial elástica mediante el trabajo de las fuerzas interiores puede escribirse : Para causa deformante fuerza resulta que: Finalmente la expresión de cálculo de cualquier magnitud cinemática originada por causa deformante fuerza aplicando el TTV es: Para el caso analizado se desarrollan las funciones correspondientes a la DV y al SE. Si se observa la expresión del TTV aplicada al cálculo de magnitudes cinemáticas originadas por causa deformante fuerza, pueden distinguirse tres términos que indican el aporte de la deformación por flexión, esfuerzo de corte y esfuerzo normal al valor total de la mismas. 5 En estructuras formadas por barras, que son las que se analizan, la relación entre la longitud de la barra y la altura de la sección transversal es siempre mayor que dos . Este hecho es suficiente para garantizar que el aporte de la deformación por corte al valor total de la magnitud cinemática es despreciable frente al aporte de la deformación por flexión. Cuando la relación antes mencionada es menor que dos, ocurre que la influencia de la deformación por corte resulta importante, al mismo tiempo que no se cumple la hipótesis de conservación de las secciones planas luego de la deformación. Este caso tiene solución dentro del campo de la teoría matemática de la elasticidad. Finalmente la influencia de la deformación axíl deberá ser analizada en cada caso particular. Todo lo expresado en este párrafo será ampliado en la ejemplificación. Aplicando la expresión del TTV al caso en estudio, despreciando la deformación por corte y teniendo en cuenta que el esfuerzo axíl es nulo resulta: Ahora bien, si se analiza el resultado obtenido en la integral de la deformación por flexión resulta: La última expresión indica que si la función del SE es lineal, al igual que la función del DV y además la ordenada nula de ambas funciones coincide (en el caso analizado ambas funciones tienen ordenada nula en el extremo derecho),entonces el coeficiente de integración es igual a 1/3 que multiplica a las ordenadas máximas de ambas funciones y a la longitud de integración. Operando de igual forma con otras funciones tanto del SE como de la DV se podrán obtener otros coeficientes de integración que serán de interés en el desarrollo de los problemas. A continuación se tabulan los principales coeficientes de integración con los cuales pueden ser resueltos la totalidad de los problemas a abordar. 6 Nota: cada valor deberá ser reemplazado con su signo. A continuación se indica como a partir de los coeficientes de integración ya conocidos se pueden efectuar otras integraciones: Caso A El diagrama de la DV se puede descomponer en: En consecuencia resultara la integral: 7 Caso B Operando como en el caso A resulta: Caso C En función de lo ya explicado resulta: El resultado de la integración será: 8 Ejemplo n°1 Resolución Cálculos previos G = E/ 2(1+ ν)= 1.2x107KN/m2 E.IxG = 62500 KNm2 Cálculo de A = b.h = 0.1m2 G.A = 1,2x106 KN IxG= b. h3 /12= 2.083x10-3m4 E.A = 3x106 KN ηD Reacciones de vínculo y descomposición de cargas en la dirección de los ejes de barra. 9 Trazado de diagramas de características correspondientes a la deformación virtual (DV) y al sistema equilibrado SE Aplicando la expresión TTV : Para el caso de análisis resulta: 1 x ηD = (1/ 62500KNm2) . [1/3.(-7).(-455).5 + 1/6.(-7).(-200).5 + 1/3.(-7).(+11.25).5 + 1/6.(-4).(-455).5 + 1/3.(-4).(-200).5 + 1/3.(-4).(+11.25).5 + 1/3.(-4).(-200).4 + 1/3.(-4).(20).4]KNm3 + (1.2/1.2.106KN) [1/2.(0.6).(-60).5+(1/2).(-0.6).(-42).5+1/2.(-1).(-70).4 + 1/2.(-1).(-30).4]KNm + (1/ 3.106 KN) [(-0.8).(-56).5 + 1/2.(-0.8).(-24).5 + (1).(30).(4)]KNm ηD = 0.16126m Def. por flexión + 3.53.10-4m Def. por corte + 1.3066.10-4m Def. por normal Porcentaje de la influencia de la deformación por flexión, corte y normal Flexion: (0.16126m/ 0.16174366m) x100= 99.7 % Corte: (3.53X10-4m/ 0.16174366m) x100= 0.22 % Normal: (1.3066x10-4m/ 0.16174366m) x100= 0.08 % ηD = 0.16174366m 10 De los resultados obtenidos se puede inferir que: 1-La deformación por corte se puede despreciar “SIEMPRE” 2-La deformación por normal se puede despreciar siempre que el elemento estructural este sometido a flexión, puesto que, si su sección se dimensionó para soportar el esfuerzo de flexión, la deformación axíl resultará imperceptible. No se puede despreciar en el caso que el elemento solo este sometido a esfuerzo axíl (caso de reticulados) o bien en el caso de tensores o puntales que son elementos de pequeña sección transversal sometidos a tracción y compresión respectivamente. En general se puede decir que la incidencia de la deformación por esfuerzo axíl deberá ser analizada en cada caso particular. Ejemplo n°2 Resolución Calcular ∆θB E =3x107KN/m2 Se desprecia la deformación por corte y se analiza la deformación por esfuerzo axíl Cálculos previos EIxG = 3x107 KN /m2 x (0.2.0.53/12)m4= 62500KNm2 EA = 3x107 KN/m2 x (0.2.0.5) m2 = 3x106 KN Cálculo de ∆θB A continuación se trazan los diagramas de solicitaciones, obviando el cálculo de reacciones de vínculo y descomposición de cargas en el sentido de los ejes de barra. 11 Aplicando la expresión del TTV en este caso resulta: 1.∆θB = (1/ 62500KNm2 ) x [1/3.1.20KNm.√32m] + (1/3000000KN) .[(-15√2). (0.125√2). √32 +1/2.(-5√2). (0.125√2). √32 + 1/2.(15√2). (0.125√2). √32 ]KN= ∆θB = 6.034 x 10-4 + Deformación por flexión (-4.714 x 10-6) Deformación por axíl ∆θB = 5.98 x 10-4 radianes Obsérvese que la influencia en el resultado final de la deformación por esfuerzo axíl es inferior al 1% por lo que en este caso pudo haberse despreciado. Ejemplo n °3 Calculo de ηF Cálculo previo EA = 2.1x108KN/m2 . (0.042 – 0.0352) m2 = 78750KN 12 Aplicando la expresión del TTV : 1.ηF = (1/78750KN).2 [(-5√2).(-0.5√2).√32 + 5.0.5.4] KNm ηF = 4.8615 x10-4m 3.1.2- Causa deformante variación de temperatura Este estado de causa deformante actuando en sistemas isostáticos no origina solicitaciones (basta plantear ecuaciones de equilibrio) pero si deformaciones. En el caso de actuar en sistemas hiperestáticos origina deformaciones y solicitaciones motivo por el cuál resulta importante su estudio. En lo que sigue se interpreta la variación de temperatura actuando como causa deformante sobre una estructura. Supongase que la misma se construye en la Ciudad Autónoma de Bs As con una temperatura promedio de 20ºC. Además se encuentra expuesta exteriormente a la acción climática e interiormente es necesario acondicionarla a una temperatura de 15ºC (Ti = 15ºC). En verano la temperatura exterior puede ascender a 40°C y en invierno puede disminuir hasta 0°C. En consecuencia resultará en verano una variación de temperatura exterior de 20ºC centígrados (∆te = 20°C) y en invierno dicha variación será de -20ºC (∆te = -20°C). Con respecto a la variación de temperatura interior será siempre igual a -5ºC ( ∆Ti =-5°C). 13 Hipótesis Se considera variación lineal de temperatura entre la fibra superior y la fibra inferior de la sección transversal. En las estructuras formadas por barras la hipótesis enunciada funciona correctamente, pues se condice con resultados experimentales obtenidos. Cuando se trate de una estructura volumétrica, será necesario evaluar con mayor detenimiento cuál es la ley de variación que experimenta la temperatura entre un punto y otro de la misma. A continuación se analizan los esfuerzos que se originan en una estructura hiperestática sencilla sometida a variación de temperatura partiendo para ello de la siguiente estructura isostática: El corrimiento horizontal de la sección B será: térmica del material. ξB= λ.L.∆T, donde λ es el coeficiente de dilatación La fuerza horizontal a aplicar en B para que dicho corrimiento no se produzca será según ley de Hooke: HB = (E.A / L). ξB y reemplazando ξB resulta: HB = E.A.λ.∆T (de sentido contrario a ξB) Finalmente el valor de la tensión normal en B será σB = HB / A = E. λ.∆T La última expresión indica que la tensión normal es independiente del área de la sección transversal.Para determinado material (E,λ) la tensión solo resulta función de la variación de temperatura. Se puede observar que cuando se impide el corrimiento del punto B a partir de la fuerza HB, la situación del vínculo en B cambia de apoyo móvil a apoyo fijo y la estructura se transforma en hiperestática como sigue: Cuando en estructuras hiperestáticas solicitadas por variación de temperatura las tensiones toman valores incompatibles con la tensión admisible del material constitutivo de las mismas se recurre a las estructuras isostáticas que se deforman sin experimentar solicitaciones.Del simple planteo de ecuaciones de equilibrio por no existir fuerzas exteriores las reacciones de vinculo externo resultan nulas y como consecuencia las solicitaciones internas y las tensiones. 14 Se desarrolla en lo que sigue la determinación de una magnitud cinemática originada por variación de temperatura. Nuevamente se conoce la deformación virtual (DV) adoptándose como tal la deformación real de la estructura debido al estado de causa deformante variación de temperatura .O sea: El sistema equilibrado (SE) para este caso resulta: Aplicando la expresión general del TTV : En este caso es necesario conocer las expresiones de los diferenciales cinemáticos correspondientes a la deformación virtual cuando la causa deformante es variación de temperatura, tema que se desarrolla a continuación analizando un tramo de estructura de longitud diferencial. 15 De esta forma la expresión del TTV aplicada al cálculo de magnitudes cinemáticas cuando la causa deformante es variación de temperatura es: Como tanto el coeficiente de dilatación térmica del material como la variación de temperatura son constantes en la longitud de integración la expresión anterior se transforma como sigue: El primer término del segundo miembro de esta expresión cuantifica el aporte al valor total de la magnitud cinemática del giro relativo de las secciones. En cambio el segundo término de idéntico miembro representa el aporte al valor total de la magnitud cinemática del corrimiento relativo axíl baricéntrico de las secciones. En este caso ambas integrales son igualmente significativas y ninguna de ellas puede despreciarse.A continuación se analiza: Si por ejemplo ∆Ts = ∆Ti entonces el aporte del giro relativo de las secciones al valor total de la magnitud cinemática será nulo y el cien por ciento será aportado por el corrimiento relativo axíl baricéntrico de las mismas. En cambio si ∆Ts = -∆Ti y además la sección es simétrica respecto del eje baricéntrico horizontal el aporte del giro relativo de las secciones al valor total de la magnitud cinemática será del cien por ciento resultando nulo el aporte debido al corrimiento relativo axíl baricéntrico de las mismas. En consecuencia cuando la causa deformante es variacion de temperatura ningún término del segundo miembro puede ser despreciado. Cabe aclarar que las expresiones fueron deducidas en una barra horizontal, considerando la terna local de la misma y llamando ∆Ts a la variación de temperatura por encima del eje Z y ∆Ti a la variación de temperatura por debajo del eje Z. Para el caso general de una estructura con barras de cualquier dirección será: 16 Para finalizar con variación de temperatura se resuelve el caso planteado: Aplicando la expresión del TTV 1. ηC= (1.10-5 1/°c /0,4m).(30°C – 20°C) (1,25m .5m/2) + 1.10-5 1/°c . 25°c. 0 ηC= 7,8125 . 10 m Deformación por giro relativo Deformación por corrimiento relativo axil baricéntrico -4 Ejemplo n°4 Cálculo de ηD 17 La barra AB no presenta variación de temperatura en consecuencia no interviene en el valor final de ηD Aplicando la expresión del TTV: Para este caso resulta: 1.ηD =[(1x10-5 1/°C)/ 0.5m).(-5- 10)°C.(1.5m.6m/2)] + (1x10-5 1/°C) . 2.5°C . 0 = ηD = -1.35x10-3m El signo negativo solo significa que la sección asciende en vez de descender. El descenso fue supuesto al indicar el sentido de la fuerza unitaria hacia abajo en el sistema equilibrado (SE). Ejemplo n° 5 Cálculos previos: 18 Cálculo de la variación de temperatura en el baricentro de la sección transversal Barra AB (-15°C/40cm) = (∆TG/13.57cm) → ∆TG = - 5°C Barra BC (-20°C/40cm) = (∆TG/26.43cm) → ∆TG = 13.2°C Obsérvese que la determinación de la ordenada de variación de temperatura en el baricentro de la sección transversal (∆TG) solo es un problema geométrico. Cuando la sección es simétrica respecto del eje XG resultara: ∆TG = (∆Ts + ∆Ti )/2. Cálculo de ηC Aplicando la expresión del TTV : En este caso resulta: 1.ηC = (1x10-5 1/°c /0.4m).(0-20°C).(4m.4m/2) + 1x10-5 1/°c.(-5°C).(-1).4m = - 4x10-3m + 2x10-4m= Barra BC Barra AB ηC = -3.8x10-3m El signo negativo en el resultado final solo indica que el punto C experimenta un corrimiento de sentido contrario al supuesto. 19 3.1.3.1- Causa deformante cedimiento de vínculo externo Al fundar una estructura es posible que el suelo que le sirve de apoyo experimente asentamientos en correspondencia con las bases de la misma. Si el asentamiento es el mismo en todas ellas la estructura experimentará movimiento de cuerpo rígido. Cuando los asentamientos en correspondencia con las bases son distintos se habla de asentamientos diferenciales. En este caso es necesario distinguir que ocurre en una estructura isostática y en una estructura hiperestática: En una estructura isostática al ceder un vínculo la misma se convierte en un mecanismo de un grado de libertad, es decir pierde una condición de vinculo que es la asociada al cedimiento y entonces dicha estructura experimenta movimiento de cuerpo rígido. En definitiva cuando la estructura es isostática la misma se desplaza y no se deforma, por lo cual no se generan reacciones de vínculo externo ni tampoco solicitaciones internas. La estructura hiperstática bajo la acción de un cedimiento de vínculo externo se deforma tal como se muestra en la figura generándose solicitaciones que suelen resultar de valor significativo ya que, como se verá más adelante, las mismas son proporcionales a las características geométricas y mecánicas de la sección transversal. Es por eso que se hace necesario el estudio de la causa deformante cedimiento de vínculo externo. A continuación se procede al cálculo de magnitudes cinemáticas en una estructura isostática sometida a cedimiento de vínculo externo: 20 En este caso se conoce el desplazamiento virtual (DV) adoptándose como tal el desplazamiento real de la estructura debido al estado de causa deformante cedimiento de vínculo externo .O sea: El sistema equilibrado (SE) para este caso resulta: Aplicando la expresión del TTV : Los diferenciales cinemáticos correspondientes al desplazamiento virtual cuando el estado de causa deformante es cedimiento de vínculo externo resultan ser nulos justamente porque la estructura se desplaza y no se deforma. Es decir : De esta forma la expresión del TTV cuando la causa deformante es cedimiento de vínculo externo se reduce a : Se desarrolla a continuación el caso propuesto: Cálculo de ξc 21 Aplicando la expresión del TTV para este caso: WVE = 0 => 1. ξc + (+0,75 ).(0,02m) = 0 => El signo negativo solo significa que en el sistema equilibrado. ξc ξc = - 0,015m es de sentido contrario al supuesto al ubicar la fuerza unitaria Ejemplo n° 6 Cálculo de ∆θB Entonces aplicando la expresión del TTV para este caso: WVE = 0 => 1.∆θB + 0. 0.02m = 0 => Ejemplo n° 7 ∆θB = 0 22 Cálculo de ∆θBD Aplicando la expresión del TTV. WVE = 0 => 1.∆θBD + 0.0,003rad = 0 => ∆θBD = 0 3.1.3.2-Causa deformante cedimiento de vínculo interno. Por definición vinculo interno es aquel que conecta entre si partes de la estructura no vinculadas a tierra. Este cedimiento de vínculo carece de valor práctico como causa deformante en las estructuras reales, pero es muy útil como herramienta en la resolución de problemas de línea de influencia como se verá oportunamente. Por este motivo se desarrolla su estudio. A efectos de darle interpretación al cedimiento de vínculo interno se analiza lo siguiente: Si luego de haber cortado una barra en la sección A , se desea restituir la continuidad mediante tres bielas no concurrentes el esquema es el que sigue: Si ahora se elimina la biela c (podría haber sido la a) ocurre lo que sigue: Las partes I y II de la barra en la sección A pueden rotar entre sí en forma relativa. A este tipo de cedimiento de vínculo interno se lo denomina giro relativo en la dirección del momento flexor y se lo suele representar de la siguiente forma: 23 La representación indica que , supuesta fija la parte I, la parte II gira en sentido horario. En este caso la única fuerza del sistema equilibrado capaz de desarrollar trabajo en dicho cedimiento de vínculo interno es el momento flexor de la sección A . Ahora si se restituye la biela c pero se elimina la biela b resulta que: La partes I y II de la barra en la sección A pueden experimentar corrimiento relativo perpendicular al eje de barra. A este tipo de cedimiento de vínculo interno se lo suele llamar corrimiento relativo en la dirección del esfuerzo de corte y queda representado como sigue: La representación indica que, supuesta fija la parte I , la parte II se corre transversalmente al eje de y barra hacia abajo. La única fuerza del sistema equilibrado capaz de desarrollar trabajo en este cedimiento de vinculo interno es el esfuerzo de corte de la sección A. Condidérese ahora que las 3 bielas no concurrentes que vinculan la parte I y la parte II de la barra en la sección A adoptan la siguiente disposición: Si ahora se elimina la biela c, las partes I y II en la sección A pueden experimentar corrimiento relativo en dirección coincidente con el eje de barra. A este tipo de cedimiento de vinculo se lo denomina corrimiento relativo en dirección del esfuerzo normal y queda representado como sigue: La representación indica que, supuesta fija la parte I, la parte II se corre en dirección del eje de barra y hacia la izquierda. La única fuerza del sistema equilibrado capaz de desarrollar trabajo en el presente cedimiento de vínculo interno es el esfuerzo normal de la sección A. 24 Toda vez que una estructura isostática es sometida a un cedimiento de vínculo interno, la misma pierde una condición de vínculo (justamente el que cede) y se transforma en un mecanismo de un grado de libertad, por lo cuál el sistema se desplaza sin deformarse cumpliendo que: De esta forma la expresión de calculo del TTV aplicada al caso de cedimiento de vínculo externo sigue siendo válida cuando se trata de cedimiento de vinculo interno. O sea: A continuación se desarrolla el siguiente caso : Cálculo de ξD Aplicando la expresión del TTV en este caso resulta: WVE=0 => 1.ξD + (-4/7).(-0,01m)=0 => ξD = - 5,7143.10-3 m El signo negativo solo significa que en el sistema equilibrado. ξD es de sentido contrario al supuesto al ubicar la fuerza unitaria 25 Ejemplo n° 8 Cálculo de ηE Aplicando la expresión del TTV WVE = 0 =>1.ηE + (-1.5m).(-0.001) = 0 => ηE = -1.5x10-3m El signo negativo solo significa que la sección E asciende. Para finalizar se desarrollan dos ejemplos en los cuáles las tres causas deformantes actúan en conjunto. Se introduce además el concepto de apoyo elástico. 26 Ejemplo n° 9 Calcular ηD debido a los tres estados de causa deformante actuando simultáneamente. Resolución a - Por fuerzas Se desprecia la deformación por corte y se analiza la deformación por esfuerzo axíl. Cálculos previos EIxG = 62500KNm2 EA(barras AB y BC) = 3.000.000KN EA(barra CD) = 65973KN 27 Aplicando la expresión del TTV 1 .ηD,F = (1/62500KNm2) [1.(-4).(-440).6 + 1/3.(-4).(-440).4 +1/3.(-4).(60).4] KNm3 + Deformación por flexión. [(1/3000000KN)x(1.(-1).(-170).6 + (1/65973KN)x (1.(+1).(+50).6] KNm Deform. por Esf. normal ηD,F = 0.2013866m ↑ + 0.0048873m ↑ Def. por flexión 97.63% Def. por normal (Resulta despreciable) 2.37% ηD;fuerzas = 0.206274 m b - Por variación de temperatura Obsérvese que el SE es el mismo que hemos utilizado para la causa deformante fuerzas. Entonces: 28 Aplicando la expresión del TTV resulta: En este caso: 1.ηD;∆T = (1x10-5 1/°c /0.5m) . [(-20-0)°C.(4m.(-4m)/2)] + 1x10-5 1/°c.15°C. 1.6 m = Aporte del giro relativo Aporte del corrim. rel. axíl. baric. ηD;∆T = 3.2x10-3m + 9x10-4m = 4.1x10-3m ↑ 78% ↑ 22 % Obsérvese que en el caso de ∆T ninguno de los términos resulta despreciable. Entonces: ηD;∆T = 4.1x10-3m c -Por cedimiento de vínculo Aplicando la expresión del TTV resulta: WVE = 0 =>1.ηD;CV + (-4m).(0.001) = 0 => ηD;CV = 0.004m Entonces: ηD;TOTAL = ηD ;F + ηD;∆T + ηD;CV= 0.206274 m + 0.0041m + 0.004m ηD;TOTAL= 0.214374m 29 Ejemplo n° 10 Aclaración: El apoyo ubicado en B se denomina apoyo elástico. Se trata en este caso de un apoyo de primera especie capaz de reaccionar y deformarse en su dirección. Su deformación se relaciona al valor de la reacción a partir de su constante elástica. Cabe aclarar que la deformación es de signo opuesto a su reacción. A continuación se explica como se opera con el mismo: Calculo de ηC a- Por fuerzas Aplicando la expresión del TTV 1.ηC;F – 0,5.0,0025 m = (1/62500KN/m2) . 2.(1/3).1.25m.62.5KNm.2.5m ηC;F = 2.0833x10-3m └─────────┘ Def. por flexión 62.5% + 1.25X10-3m └────────┘ Def. por apoyo elástico 37.5% ηC;FUERZAS = 3.33X10-3m Obsérvese la importancia de la deformación del apoyo elástico en el valor final de ηC. 30 b- Por variación de temperatura Aplicando la expresión del TTV: 1 . ηC;∆T + 0,5.0 = 1x10-5 1/°c . (20-0)°C.(1.25m.5m/2) + 1x10-5 1/°C.10°C.0 ηC; ∆T = 6.25x10-4m c - Por cedimento de vínculo Aplicando la expresión del TTV WVE = 0 => 1.ηC;CV + (-0.5).(0.01m) = 0 => ηC;CV = 0.005m Obsérvese que en el caso de ∆T y CV no ha intervenido el apoyo elástico. Como se sabe estos dos estados de carga no generan fuerzas en sistemas isostáticos y como ya se explicó el apoyo elástico solo se podrá deformar si en él se genera reacción de vínculo. ηC;TOTAL = ηC;FUERZAS + ηC;∆T + ηC;CV = (3.33x10-3 + 6.25x10-4 + 0.005) m = 8.95833x10-3 m 31 3.2-Cálculo de magnitudes estáticas en sistemas isostáticos. En este caso se conoce el sistema equilibrado (SE). O sea: Entonces al sistema de un grado de libertad que se ha generado se le provoca un desplazamiento virtual de forma tal que solo la fuerzas aplicadas y la reacción de vínculo a determinar desarrollen trabajo virtual. Es decir: En un todo de acuerdo con la definición de desplazamiento virtual θ es muy pequeño y entonces se cumple que: θ en radianes ≈ sen θ ≈ tg θ y cos θ ≈1 Si ahora se aplica el TTV por tratarse de un desplazamiento virtual del sistema no existe cambio de forma del mismo entonces: ∆UV =0 → WVE = 0 O sea que: WVE = 0 → 50KN. Θ. 2m - (RA). θ. 4m= 0 → RA= 25KN SE DV SE DV ------------------------------------------------------------------------------------------------------------------------------------------