Tesi di Diploma Accademico di 1° livello in
TECNICO DI SALA DI REGISTRAZIONE
Digital modeling of a bucket-brigade
device chorus:
the chorus ensemble section of the
Vermona Piano Strings
Diplomando: Moro Giulio
Matricola: 00137
Relatore: M° Bernardini Nicola
This work is made available under the terms of the Creative
Commons Attribution-ShareAlike 3.0 license.
http://creativecommons.org/licenses/by-sa/3.0/
Table of Contents
Acknowledgments............................................................................................................7
1- Introduction.........................................................................................................................8
1.1 Abstract........................................................................................................................8
1.2 Objectives of the present work....................................................................................8
1.3 Modeling of analog musical instruments....................................................................9
1.3.1 Approaches.........................................................................................................11
1.3.1.1 Sampling....................................................................................................11
1.3.1.2 Structured sampling...................................................................................13
1.3.1.3 Spectral models..........................................................................................14
1.3.1.4 Virtual analog.............................................................................................14
1.3.2 Virtual analog signal processing........................................................................16
1.3.2.1 Fields of application...................................................................................17
1.3.2.2 Techniques used.........................................................................................18
1.4 Modeling of bucket-brigade devices.........................................................................20
1.4.1 The BBD model.................................................................................................20
1.4.1.1 Anti-aliasing and reconstruction filters......................................................21
1.4.1.2 The delay line.............................................................................................21
1.4.1.3 Frequency-dependent insertion gain..........................................................22
1.4.1.4 Noise..........................................................................................................22
1.4.1.5 Harmonic distortion...................................................................................23
1.4.2 Implementations................................................................................................23
1.4.3 Open points........................................................................................................24
1.5 Principle of operation................................................................................................25
1.6 BBD circuit topology................................................................................................27
2- Overview of the Vermona Piano Strings...........................................................................28
2.1 Block Diagram...........................................................................................................29
2.2 Tone generator...........................................................................................................30
2.3 Keying circuit............................................................................................................32
3
2.4 Piano section..............................................................................................................33
2.4.1 Envelope............................................................................................................33
2.4.2 Three band equalizer..........................................................................................34
2.4.3 Presets................................................................................................................35
2.5 Strings section...........................................................................................................35
2.5.1 Envelope............................................................................................................35
2.5.2 Three band equalizer..........................................................................................36
2.5.3 Presets................................................................................................................36
2.6 The chorus section.....................................................................................................37
2.6.1 The ST1 board...................................................................................................37
2.6.1.1 The BBD....................................................................................................37
2.6.1.2 The clock circuit.........................................................................................38
2.6.1.3 The anti-aliasing filter................................................................................39
2.6.1.4 The reconstruction filter.............................................................................40
2.6.2 Modulation.........................................................................................................42
3- Data acquisition and analysis............................................................................................44
3.1 The Fast Fourier Transform.......................................................................................44
3.1.1 Windowing.........................................................................................................45
3.1.2 FFT size.............................................................................................................46
3.1.3 Overlapping.......................................................................................................46
3.1.4 Spectrum scattering...........................................................................................46
3.2 Computations on the spectrum..................................................................................47
3.2.1 Estimate power and amplitude of a peak...........................................................47
3.2.2 Signal to Noise Ratio (SNR)..............................................................................48
3.2.3 Power Spectral Density (PSD)...........................................................................49
3.2.4 Total Harmonic Distortion (THD) ....................................................................50
3.3 Measurement setup....................................................................................................51
3.3.1 Modifications to the ST1 board.........................................................................51
3.3.2 Equipment and connections...............................................................................53
3.3.3 Calibration.........................................................................................................55
4
3.4 Measurements............................................................................................................56
3.4.1 Background noise..............................................................................................56
3.4.2 Frequency response...........................................................................................58
3.4.3 Harmonic distortion...........................................................................................62
3.4.4 Frequency response of the reconstruction filter.................................................64
3.4.5 Control voltages and LFO.................................................................................65
3.4.5.1 CV-frequency relation................................................................................66
3.4.5.2 LFO waveforms.........................................................................................66
4- The digital model..............................................................................................................68
4.1 Overview...................................................................................................................68
4.2 Bandlimited interpolation..........................................................................................68
4.2.1 The implementation of the “digital DAC/ADC”...............................................73
4.3 The resample software...............................................................................................75
4.3.1 The time register................................................................................................76
4.3.1.1 Bitwise operators........................................................................................77
4.3.1.2 Use of bitwise operators in resample.........................................................78
4.3.2 The filter table....................................................................................................80
4.4 The BBDresample software.......................................................................................82
4.4.1 The BBD buffer.................................................................................................83
4.4.2 Using circular buffers........................................................................................85
4.4.3 The signal flow..................................................................................................86
4.4.4 Aliasing .............................................................................................................87
4.4.4.1 Non-bandlimited input signal.....................................................................88
4.4.4.2 Spectral periodicization at the BBD output...............................................88
4.4.4.3 Harmonic distortion inside the BBD..........................................................88
4.4.4.4 Aliasing in the model.................................................................................89
4.4.5 The delay line.....................................................................................................89
4.4.6 Choosing proper bandlimited interpolation filter..............................................96
4.4.7 The filters...........................................................................................................97
4.4.8 The waveshaper.................................................................................................99
5
4.4.9 Noise................................................................................................................101
4.4.10 The onboard LFO...........................................................................................102
4.5 Modeling the characteristics of the Vermona Piano String chorus in BBDresample
........................................................................................................................................104
4.5.1 General parameters..........................................................................................104
4.5.2 Parameters of the filters of the ST1 board......................................................104
4.5.2.1 The anti-aliasing filter..............................................................................105
4.5.2.2 The reconstruction filter...........................................................................107
4.5.3 Parameters of the TDA1022............................................................................109
4.5.3.1 Noise .......................................................................................................109
4.5.3.2 Frequency-dependent insertion gain........................................................109
4.5.3.3 Harmonic distortion.................................................................................110
4.5.3.4 Presets......................................................................................................112
4.6 Comparing the modeled and physical devices........................................................113
4.6.1 Harmonic-distortion.........................................................................................114
4.6.2 Aliasing............................................................................................................114
4.6.3 Modulation.......................................................................................................115
5Conclusions.......................................................................................................................116
5.1 Future work..............................................................................................................118
Appendix A – Octave code..................................................................................................120
thd.m.............................................................................................................................120
retrieving_filter_coeff.m...............................................................................................124
cawa.m .........................................................................................................................125
Appendix B – C code..........................................................................................................127
Appendix C – Tables...........................................................................................................130
Appendix D - Illustrations...................................................................................................132
Figure index........................................................................................................................151
Illustration index.................................................................................................................152
Bibliography........................................................................................................................154
6
Acknowledgments
A work like the one described in this thesis is authored by one person
(me) but it makes considerable use of many contributions. Among these,
I would like to thank Prof. Julius Orion Smith III and Colin Raffel for their
paper on bucket-brigade devices [1], quoted countless times throughout
this thesis, and in particular Prof. Smith for kindly replying to several emails of mine asking details and in-depth explanations.
The tutoring of Prof. Matteo Costa in these last years has been very
precious for the analog analysis part of this paper, while I'd like to thank
my supervisor Prof.Nicola Bernardini for bearing with me during all this
enduring time.
7
1-
1.1
INTRODUCTION
Abstract
This work analyzes the characteristics of an analog chorus device
based on the TDA1022 bucket-brigade device and suggests a digital
model of it. The chorus device examined is the one that can be found in
the Vermona Piano Strings which uses three identical boards equipped
with one TDA1022 integrated circuit. The outputs of the boards can be
mixed in different ways according to eight fixed presets. The clock of
each board is modulated by a low frequency oscillator. Analysis of these
presets are performed and modeled as well.
1.2
Objectives of the present work
The aim of the present work is that of producing a software
implementation of the model proposed by Raffel and Smith in the paper
“Practical modeling of bucket-brigade circuits”([1]) applied to the
modeling of BBD-based chorus circuits as those found in the Vermona
Piano Strings. The implementation must be both flexible and efficient, so
8
that it can easily be adapted to other similar devices and it must be able
to perform realtime computations.
A different implementation of the delay line than those currently
available must be developed. This new implementation must allow any
ratio between the system sampling rate and the clock of the BBD, must
provide LFO modulation capability and must use an higher quality
interpolation method.
Measurements must be taken of the performances of the physical
device and their results must be used to refine the model.
Analysis of the measurements and retrieving of the parameters of the
TDA1022 are performed via GNU Octave scripts which are made
available to the reader in order to let him analyze similar devices and
simulate them in the provided software .
1.3
Modeling of analog musical instruments
The process of digitization of electronic instruments is rapidly
developing in many forms and for many different purposes.
As reported by Välimäki et al in [22], this need arises primarily from
the inevitable aging of analog components and circuits, which sooner or
later come to a day when they are no longer serviceable and must be
replaced by their virtual counterpart. “This development follows, after a
long delay, the development of digital audio recording equipment and
digital storage systems […], the new fully digital studios and the use of
PCs in music production aroused the dream of replacing musical
instruments and all other musical devices with software. In addition to
9
achieving a fully digital system, it was desired to reduce the number of
connections, error sources, and physical devices, which can be large,
expensive, and laborious to maintain. Typical examples of today's virtual
music
technology
are
guitar
amplifier
models,
virtual
analog
synthesizers and filters, and virtual musical instruments, such as digital
pianos.” [22]
An entirely different reason from which arises the need for digitization
and modeling of electrophones (as named by C. Sachs in [2]), or rather –
to be more specific – electronic, electroacustic and electromechanical
musical instruments, is that of “active preservation” of the equipment
used in electroacustic music production. In spite of his relatively short
story, electroacustic instruments have a number of characteristics that
make their preservation difficult. Electronic and computerized means of
music production allowed musical composers of the second half of the
XX century to compose by sounds and not only notes. The fast evolution
in analogue and digital electronic equipment, caused by rapid advances
in electronics and by the large demand of the consumer market, led the
electrophones to a fast obsolescence. Furthermore, many custom-made
– or custom-modified – devices have been used in the compositions and
performances of both electroacustic and popular music. Actually, it was
not unusual for a composer – especially for the pioneers of electroacustic
music – to work side-by-side with a technician who would help him in
interfacing with these new means of expression and would build new
equipment – when needed – or modify the existing devices in order to
suit specific needs, as for the work of Henri Pousser with Antonio Lietti at
Studio di Fonologia in Milan [3].
While passive preservation consists in
devices
from
external
agents
without
10
preserving the physical
altering
the
electronic
components, active preservation is defined by Avanzini and Canazza in
[3] as the set of actions aimed at keeping alive a musical composition,
by transferring the recordings and the instruments into the digital
domain,
thus
allowing
performance
and
functionality
both
for
musicological research and for philological analysis. Of course, digital
modeling of the analog devices is expected to play a major role in this
field, and some case studies are reported in [3].
1.3.1
Approaches
In the process of digitization of an electronic musical instrument or of
an audio effect processor, one of these approaches is usually taken, as
outlined by Smith in [4]:
•
sampling
•
structured sampling
•
spectral models
•
virtual analog
1.3.1.1
Sampling
The simplest way of reproducing the sound of an instrument is
recording it and then reproducing it. This approach has been taken since
the end of the 1960's with the first magnetic-tape samplers, the most
notable of which was the Mellotron, and later on, since the mid 70's, by
digital samplers. During the 1980s hybrid synthesizers began to use
short samples (such as the attack phase of an instrument) along with
digital synthesis to create more realistic imitations of instruments than
11
had previously been possible. Limiting factors at the time were the cost
of physical memory (RAM) and the limitations of external data storage
devices, and this approach made best use of the tiny amount of memory
available to the design engineers. Akai pioneered many processing
techniques, such as crossfade, looping and "time stretch" to shorten or
lengthen samples without affecting pitch and vice versa. The sounds
played by the first samplers could not even aim at being defined
“realistic”: the quality of the audio converters and the small memory
simply did not allow for it. Nowadays sampling is extensively used in
audio production, often combined with sequencing and various audio
transforming processes, and it is not uncommon to use sampled sounds
of
acoustic
and
electronic
instruments
even
in
high-end
audio
productions.
The recording effort needed in the creation of a high-quality fullysampled instrument is enormous: “for each possible input condition
(such as a key-press on a keyboard, pedal press, etc.) the sound
produced has to be recorded in the desired acoustic space (which itself
can
be
a
recording
parameter).
[…]
dimensions
of
expressive
performance are invariably limited.” - states Smith in [4], and explains
that while impressive highly-accurate results can be obtained for
keyboard instruments, provided an enormous amount of samples is
recorded, instruments which make use of continuous interaction
between the player and the instrument, such as bowed and pluckedstrings, winds and brass cannot be accurately emulated by the exclusive
use of sampling, as this would prevent the player from using the multiple
continuous dimensions of control which are part of the sound of the
instrument (such as vibrato and glissato on a violin) .
12
While sample-based sound synthesis can be frustrating for the
performing musician, its best feature is the high quality of the ultimate
sound to the listener: the sound quality is limited only by the quality of
the original recordings and subsequent signal processing.
1.3.1.2
Structured sampling
Structured sampling involves the sampling of some fundamental
characteristics of the sound source, such as its impulse response,
instead of the generated acoustic pressure wave. A proper choice of the
characteristics sampled can offer the desired balance between audio
quality and flexibility, and between the memory usage and the
computation power needed for synthesis.([4]) For instance, sampling the
total impulse response of a bank of n filters placed in series would
provide low memory usage (just one impulse-response is sampled) and
low computational cost (just one impulse-response has to be applied to
the signal), while sampling the impulse-response of each of the filters
would require n times memory space and n times computational cost (n
impulse-responses are to be applied to the signal), while giving the
added flexibility of disabling or altering individual filters.
1.3.1.3
Spectral models
Spectral models are inspired by the mechanics of hearing. Typically
they are based on the Fourier Transform, but there are also signal
models, such as Linear Predictive Coding (LPC) whose success derives
from how well they match spectral characteristics of hearing (Smith in
[6]). Additionally, Frequency-Modulation (FM) synthesis is typically
developed by tweaking FM parameters to match short-term audio
13
spectra. Other well known signal models rooted in the spectral point of
view include the phase vocoder, additive synthesis, and so-called
spectral modeling synthesis.
1.3.1.4
Virtual analog
Physical modeling of an acoustic musical instrument is a process of
digital emulation that is based on the recreation of a model of the
physical components of the instrument and his parts, such as the
vibrating strings of a violin, the wood body of a guitar, the membranes of
drums.
Virtual analog modeling can be seen as a parallel approach to
physical modeling, where what is emulated is not what the listener ear
perceives, as in sampling or spectral-model synthesis, but the underlying
electronic circuit that generates it. Non-linear and time-varying systems
are often involved in both virtual analog and acoustic models.
Instruments and equipment subject that have been often modeled
include tube amplifiers, loudspeaker cabinets, synthesizers and effect
processors. “It is possible” - states Välimäki in [22] - “to imagine a
virtual guitar amplifier in which the user could change the device's
component values or circuit connections and hear in real time the
resulting change in the amplifier's tone.”
The Virtual Analog (VA) approach shows some major advantages over
the above mentioned methods:
•
flexibility: once the model of a system is computed, the effect of
variations that may occur on its parameters – component values,
user adjustable parameters – are easy to compute
14
•
scalability: after modeling a block of a circuit, this can be reused in
other models that include the same block
•
interaction: physical models are desirable when many dimensions
of
expressive
control
are
needed.
This
is
generally
best
appreciated by performing musicians, as audience members only
hear the final music played, and cannot judge the quality of the
interaction between the player and the instrument
•
the internal state is automatically maintained: sample-based
models should in principle index each acoustic recording by not
only the input state, but also by the internal state of the
instrument (which is prohibitive and rarely done). Physical models,
in contrast, propagate some kind of simulation of the internal
state, so that realistic interactions between the external inputs and
the internal state are provided “for free” ([4])
•
prediction: a properly-computed model could be used to predict
the state of the system outside the ranges it has been designed
for.
Of course there are also some drawbacks, such as:
•
they are more computationally expensive than a sample-based
system. For this reason simplifications in the model often occur in
order to retain real-time performances.
•
the model must really sound like the instrument or effect it is
imitating. In some cases this can be difficult to achieve. Thus it can
be difficult to generate exactly the right timbre throughout the
control space. For this reason, many expressive sound synthesizers
15
employ both modeling structure and measured data as in
structured sampling ( 1.3.1.2)
1.3.2
Virtual analog signal processing
Taken from [4]: “The term "Virtual Analog" (VA) is commonly used for
describing digital implementations of analog circuitry employed for
generation, enhancement or processing of musical sounds. The typical
approach to the development of virtual analog algorithms consists of
starting with the reference analog circuit and, from there, developing a
digital implementation that will mimic the behavior of the analog
reference
while
providing
improved
flexibility
and,
perhaps,
incorporating additional features; extending its range of applicability; or
enhancing its performance.”
Despite being a recently-born field of study, VA benefits extensively
from the physical modeling and electronic circuit analysis and simulation
literature. As computer performances
increased, the techniques and
algorithms initially intended for simulation purposes could lately be
applied to real time sound processing.
1.3.2.1
Fields of application
Virtual analog audio signal processing is applied to the emulation of
several different musical instruments and sound processing equipment,
including, most notably, instrument tube amplifiers and loudspeaker
cabinets, analog synthesizers down to their individual components such
as filters and oscillators, effect boxes such as overdrive, distortion,
chorus, flanger, delay, filter, effect processors such as compressors and
16
spring and plate reverberators, more complex systems such as
electromechanical organs and electric pianos and even the challenging
percussion, string, wind and brass instruments, which high degree of
expressiveness is difficult to replace with a computer simulation.
1.3.2.2
Techniques used
Many techniques have been proposed over the years in order to
implement virtual analog modeling, most of which are taken from the
physical modeling theory. Here are some:
•
Wave
Digital
Filter:
in
[7]
nonlinear
wave
digital
network
approaches are applied to analog modeling for the purposes of
sound synthesis and effects modeling. A Wave Digital Filter (WDF)
is a particular kind of digital filter based on physical modeling
principles. Unlike most digital filter types, every delay element in a
WDF can be interpreted physically as holding the current state of a
mass or spring (or capacitor or inductor) [8]. Pakarinen and
Karjalainen describe in their paper a wave digital triode model for
realtime tube amplifier emulation.
•
Nonlinear discrete-time state-space model: in [9] a nonlinear
discrete-time state-space description is presented which allows
real-time modeling of nonlinear analog circuits. A similar effort can
be found in [10].
•
Volterra series:
truncated versions of Volterra series are usually
involved in the simulation of weakly nonlinear systems. In [11],
Hèlie uses and optimizes them in order to derive a digital
simulation of the well-known Moog ladder filter, which has been an
essential part of several analog synthesizers .
17
•
Nonlinear analog circuits as filter networks : the analysis of a
similar device – the VCS-3 ladder filter – is performed with a
different approach in [12]
by Civolani and Fontana, where a
method for digitizing nonlinear analog circuits as filter networks in
a manner that preserves the original circuit structure is shown.
•
Bandlimited synthesis: in [13] Välimäki, Smith and et al. introduce
alternative algorithms for generating approximately bandlimited
discrete-time versions of classical
waveforms, such as the
sawtooth waveform. The resulting signals can be used as
oscillators in digital subtractive synthesis of musical tones.
•
Direct
physical
modeling
of
electromechanical
or
acoustic
instruments and devices have been undertaken, by addressing
spring reverberation in [14], acoustic piano in [15], brass and
trombone in [16], bow control in the violin in [17],
circular thin
shells of spherical geometry in [18], tubular bells in [19], circular
membrane percussions in [20]
1.4
Modeling of bucket-brigade devices
As for the digital modeling of bucket-brigade devices, the specific
topic of this work, few documents are available from literature. A brief
review is given in [21]: “Bucket brigade delay lines have been widely
used in chorus and delay processors since the 1970s. A sample and hold
was used with a network of switched capacitors to delay an input signal
according to an externally applied clock. However, as the charge
representing the input signal is transferred from one capacitor to the
18
next, a small amount bleeds to adjacent capacitors, and the output
acquires a mild lowpass characteristic. In addition, while the charge is
propagating through the delay line, it decays to the substrate. In this
way, louder signals are distorted.”. This generic definition is not entirely
compatible with what proposed by Raffel and Smith in [1], where the
“mild lowpass characteristic” is regarded to as caused by the BBD itself
only in those applications in which half the clock frequency(the Nyquist
limit) is close to or into the audio range (e.g.: echoes and delays), and it
is nevertheless often masked by the effect of the drastic anti-aliasing
and reconstruction filters accompanying the device.
1.4.1
The BBD model
In [1], Colin Raffel and Julius Smith provide a full physical model of
Bucket Brigade Devices, with practical guidelines to its implementation.
Accessory
circuits
such
as
companders
and
anti-aliasing
and
reconstruction filters are taken into consideration, as well as the inherent
noise, frequency response and harmonic distortion caused by the device
itself. A brief review of the topics discussed is reported below, with the
exception of companders which generally are not used in chorus
devices.
1.4.1.1
Anti-aliasing and reconstruction filters
BBD filters often consist of Sallen-Key type circuits in series. Typically
a third order filter for anti-aliasing and a third order followed by a second
order filter for reconstruction. The transfer functions of the filters are
reported and the developer is suggested to compute the transfer
19
function of the series which corresponds to the product of the single
transfer functions, and then use a numerical method to retrieve the
coefficients of an IIR filter, such as the equation-error method
implemented in the function invfreqz in Octave Forge and Matlab. A
matlab script for calculating filter coefficients based on filter component
values is provided.
1.4.1.2
The delay line
Concerning the delay line model, Raffel and Smith write: “The most
accurate implementation would involve a software delay line of fixed
length matching the number of delay stages in the BBD circuit being
modeled. This delay line would take in a new input sample and output a
delayed sample at a rate determined by an artificial clock frequency.”
As the artificial clock frequency of the BBD, which is time-variable,
and the input/output sampling frequency of the system are not
necessarily related, some kind of interpolation is needed to ensure that
the correct values are read from and written to the delay line. The
aliasing effect caused by the discrete time behaviour of the BBD is thus
reproduced, as well as the pitch-change effect caused by variations in
the clock frequency.
1.4.1.3
Frequency-dependent insertion gain
One relatively minimal effect of the constant transfer of charge
between thousands of capacitors results in unintentional imperfections.
One is a frequency-dependent insertion gain. This gain effectively acts
as a low-pass filter with a cutoff frequency determined by the clock rate
of the BBD. This effect can be thought of as a result of the BBD’s
20
capacitors not being able to react to changes in the input signal which
occur at a frequency close to the Nyquist limit. As a result, the extremity
of this filtering varies with the number of clock stages. In general, the
insertion gain tends to be between 0 and 2 dB at low frequencies, but
falls off slowly to between -4 and -6 dB at the Nyquist limit for any given
clock rate.
1.4.1.4
Noise
Although one of the purposes of a digital model might be to create a
noise-free system, a truly accurate model would involve the insertion of
low-amplitude noise immediately before or after the delay line.
Furthermore, in devices with a feedback loop, noise can make the device
to self oscillate, and thus should be implemented. The appropriate noise
level for a specific BBD can be measured or found in the device’s
datasheet.
1.4.1.5
Harmonic distortion
The unavoidable total harmonic distortion is reported to be about 1%
for every 1024 stages of BBD. This distortion is reported to be almost
amplitude-independent. Therefore its digital implementation by means
of a polynomial waveshaper should require multiple sets of polynomial
functions.
1.4.2
Implementations
Two implementations of the above described model are currently
available.
21
The first is provided by one of the authors of the paper, Colin Raffel,
and can be found in [23]. The code provided uses the Synthesis Tool Kit
([24]) library and is a straightforward implementation of the model that
uses some simplifications of the model proposed: the delay line uses
linear interpolation between samples instead of a more sophisticate
resampling interpolator; the waveshaper coefficients are static and not
dynamic as proposed in 1.4.1.5. The only effect available from this
implementation is the feedback delay.
Another implementation is that made by Tristan Bayfield, a student
of Simon Fraser University, California, as a final project for a
Computational Modelling For Sound Synthesis Course [24]. His job takes
the form of an AU plugin and includes
two distinct effects: feedback
delay and flanging. This implementation is even simpler than that of
Raffel as it does not make use of any waveshaping function, while using
linear interpolation as well. The source code reported in [24] does not
show
the
LFO
modulator
reported
in
Bayfield's
accompanying
description.
1.4.3
Open points
Both implementations proposed in 1.4.2 are limited by the fact that
the clock of the BBD must be lower than the sampling rate of the
system, and the use of linear interpolation. As a direct consequence of
the fact that the implemented delay line must have a lower sampling
rate than the system and that the output is not resampled back to
system sample rate, the very same sample may be output multiple
times in a row. Moreover neither of the two provides a mean of
modulating the clock frequency of the BBD.
22
The first issue is not necessarily to be concerned about when working
with delay and echo devices, as the clock frequency of BBD-based
delays is often lower than the sampling rates typically used in digital
audio processing. On the other hand, flanger and chorus devices, as the
ones addressed in the present document, often use higher clocks – up to
100KHz, and therefore this implementation cannot be fitted to these
devices. A more satisfactory model of the delay line must be found
which is free by these constraints.
On the other hand, linear interpolation is depicted by Crochiere and
Rabiner in ([26], 4.3.11) as “non useful in the interpolation of signals
which are not highly bandlimited, because of the high side-lobes of the
linear interpolator function”, but its use is nevertheless
widespread
because of its simplicity, low computational cost and the small number
of samples involved in the interpolation (just two). Hence, addressing a
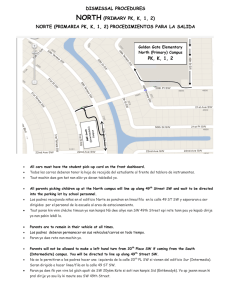
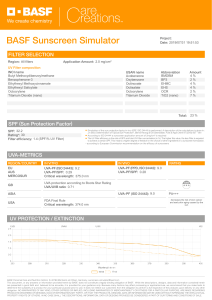
Figure 1 A antiphase-clock Bucket-Brigade circuit (TDA1022)
23
new implementation of the model, a higher-quality interpolator should
be used in order to achieve better sonic results.
Moreover, both of the implementations are devoted to the modeling
of
delay
devices,
while
choruses
and
flangers
have
different
characteristics, such as higher clock rates, lower harmonic distortion,
different filters and clock modulation. A basic implementation of such a
device would fill this lack allowing for further expansions of the model
proposed by Raffel and Smith in [1].
1.5
Principle of operation
The bucket-brigade device is an analog IC that realizes a time delay,
it was invented in 1968 by Sangster at Philips. By that time digital delay
devices performing the same tasks had already been conceived, but
BBD's remained a cheaper and widely used alternative until the 1980's.
Their name derives by the fact that they contain many charge-holding
elements which receive their charge by the previous and pass it on to
the following similarly to people passing buckets of water when fighting
a fire.
The principle of operation is well described in [1]: “The input signal is
sampled in time and passed into a series of typically thousands of
capacitors and MOS transistor switches. The charge in each capacitor
stage is passed into the subsequent stage at a rate determined by an
external clock signal. […] schemes using two out-of-phase clock signals
developed by Sangster and Reticon Corporation allowed the device to be
used practically in audio systems.” This topology is shown in Figure 1.
Thanks to these improvements, the BBD effectively functions as a time24
delay system that falls into the uncommon category of discrete-time, but
non-digital circuitry.
The clock signal that controls the charge transfer between capacitors
sets the sampling frequency of the system and the delay time of the
device. The total delay time is thus:
t=
1.6
number of stages
2f
(1)
BBD circuit topology
Illustration XVIII reports the topology of a typical chorus/flanger BBDbased device. As aliasing is a characteristic that the BBD shares with
purely digital devices, the input stage is preceded by an anti-aliasing
filter, and the output is followed by a reconstruction filter. The clock
frequency is modulated by a low frequency oscillator. If the clock
frequency at acquisition time differs from that at output time, an effect
of pitch-shifting is obtained, which is the principle at the base of the
chorus and flanger effects. If the difference in the clock frequencies is so
small that no audible pitch-shifting effect is perceived, a phaser effect is
obtained instead.
25
2 - OVERVIEW OF THE VERMONA
PIANO STRINGS
The Vermona Piano Strings is an analogue keyboard instrument
produced by DDR company Vermona during the late seventies. It is a 61keys (F to F) polyphonic synthesizer aimed at reproducing piano and
strings sounds. The sound produced is very far from being a faithful
reproduction of the acoustic instruments, but it rather focuses on a
couple of the most significant features of the real sound and mimics
them by means of electronics.
In this instrument the piano sound is characterized by a percussive
note with a short decay time which stops playing as the key is released.
It is possible to let the note sustain after the key is released by pressing
the sustain pedal while the key is held down. On the other hand the
strings sound does not stop immediately as the key is released but it
rather sustains and fades out gently. The sounds are processed through
a chorus section.
There are eight presets available, four are for “piano” sounds and four
for “strings” sounds. Only one of the presets can be activated at a time.
The four presets of each section correspond to different settings of the
chorus section. A three band equalizer is provided for each section, as
well as a global output volume. A slider labeled “sustain” acts as decay
control for pianos and as release control for strings. By connecting a
sustain pedal (a normally closed monostable switch) to the proper
26
connector, the sound of the piano notes slowly decays after the key has
been released, thus adding “release” to the envelope of the notes. A
“sustain long” switch on the front panel of the machine accomplishes
the same result.
All of the circuit schemes of this chapter have been taken from the
Vermona Piano Strings schematic diagrams[27] except for Figure 2 and
Figure 11.
2.1
Block Diagram
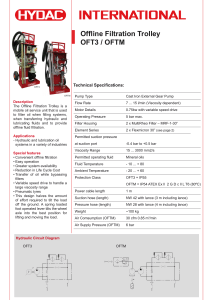
Figure 2: Block diagram of the Vermona Piano Strings
27
Like most other strings machines of the time (such as Eminent-Arp
Solina, Eko Stradivarius, Crumar Performer, Roland RS-202, Logan String
Ensemble and many others), the basic block structure is derived from
the “classic” electronic organ block structure (consisting of a master
oscillator, a top-octave generator and dividers), whereas the added
keying circuitry provides attack/sustain facilities and three identical BBDbased boards along with an LFO modulator form the chorus ensemble
section.
2.2
Tone generator
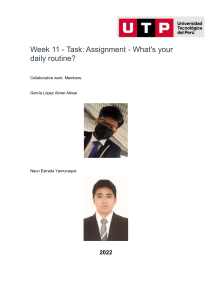
Figure 3 The master clock and top octave generator
circuit
The master oscillator (consisting of L1, T1,T2 and associated
components) outputs a “smoothed” pulse wave at a clock rate of about
700KHz.
28
Figure 4 The top-octave generator
output waveform.
Figure 5 The master oscillator output
waveform.
The top-octave generator (IS1 MM5555 and IS2 MM5556) takes the
output of the master oscillator and outputs twelve square waves – one
for each note of the tempered chromatic scale – whose frequencies are
then divided several times (7 times for the F's and 6 times for the other
tones) by IS3...11 U112D (7-stage binary frequency divider) . The output
waveform of the dividers is a square wave.
29
2.3
Keying circuit
The square wave tones generated by the frequency dividers are then
routed to the keying circuits. The keying circuit of each key is fed with
the fundamental note and one or two upper harmonics, passively mixed
in 1:1:1 proportion (mixing resistors are R1-R45). The notes of the
highest octave have only one upper harmonic, while the others have
two. Waveforms resulting from these sums are reported in Figure 7 and
Figure 8.
A BJT NPN transistor in a common-base configuration amplifies the
blend of waveforms according to the voltage across a capacitor(C1-C16),
Figure 6: Keying circuit, oscillator mixer and
envelope generators
30
and feds its output to a common bus through a resistor(R46-R61) which
value depends on the octave of the key. From lower to higher octave,
resistor values are: 560k, 390k, 270k, 180k, 120k. The gain of the
subsequent octave with respect to the first can be calculated as
20*log(Ri/560k), and is respectively: 0dB, 3.6dB, 6.8dB, 10.3dB, 13.8dB.
Figure 8: The waveform resulting
Figure 7 The waveform resulting
from the sum of the fundamental square from the sum of the fundamental square
wave and his second harmonic.
wave and two of its harmonics.
2.4
Piano section
2.4.1
Envelope
A sustain pedal can be connected to the Piano Strings. It must contain
a monostable normally closed SPST switch. It is wired in series with the
“sustain long” switch, and thus can be used to switch to “sustain long”
mode while playing, acting in a way similar to that of a traditional piano
sustain pedal.
31
2.4.2
The
piano
Three band equalizer
section
features
three
controls
labeled
“spinet”,
“clavichord”, “piano”. In spite of the labels, these are not register
controls, but are rather the level control of three different filters. The
“spinet” is a passive 6dB/oct high pass filter, the “clavichord” is just an
attenuator, and the “piano” is an active resonant filter.
Figure 9 Three band equalizer for the piano section
32
2.4.3
Presets
"direct": no chorus is applied to the signal.
"slow": only the slow sinewave is used as CV for the chorus. Only the
output of the first stage is used and mixed at a 1:1 rate with the "direct"
signal.
"chor1": only the slow sinewave is used as CV for the chorus, though
this time all of the three stages are used, and their outputs are mixed
together a a 1:1:1 rate.
"chor2": the CV waveform is the sum of the slow and fast sinewaves,
all three stages are used and their outputs are mixed together at a 1:1:1
rate.
2.5
2.5.1
Strings section
Envelope
The envelope of the strings sound consists of on Attack-Release
envelope which has a slow attack time and a long release time. The
“sustain long” switch has no effect on this envelope.
33
2.5.2
Three band equalizer
The strings section features three controls labeled “cello”, “viola”,
“violine”, which are the controls for a three-band 6dB/octave passive
equalizer. The “cello” is a low pass, while the “viola” and “violine” are
high pass.
Figure 10 Three-band equalizer for the
strings section
2.5.3
Presets
"direct": no chorus is applied to the signal.
"fast": the CV waveform is built up of the fast sinewave and a DC
bias. Only the output of the first stage is used and mixed at a 1:1 rate
with the "direct" signal(the schematics read "vibrato" for this preset,
though it is in fact a chorus).
"chor1": only the slow sinewave is used as CV for the chorus, though
this time all of the three stages are used, and their outputs are mixed
together a a 1:1:1 rate.
34
"chor2": the CV waveform is the sum of the slow and fast sinewaves,
all three stages are used and their outputs are mixed together at a 1:1:1
rate.
2.6
The chorus section
The chorus section consists of three ST1 boards and a modulation
section. The ST1 board contains the TDA1022 BBD, anti-aliasing and
reconstruction filters and a clock generator circuit; it has an input for the
audio signal, an input for the modulation signal and an audio output.
The modulator consists of two LFO's running at different frequencies.
Both of them are three-phases sinusoidal oscillators and therefore have
three outputs each, providing access to different phases of the same
wave. The routing of the modulation signals to the ST1 boards and the
mixing of the outputs of the latter is controlled by the presets buttons,
as explained in the presets sections above.
2.6.1
2.6.1.1
The ST1 board
The BBD
Whereas the schematics call for a TCA350Y as the BBD device for the
chorus section, the actual specimen in exam have a TDA1022 that
replaces it. Other specimens are known to use the same IC. The two
were probably similar IC's which could be easily swapped at the factory
seconding availability. While the TCA350Y is a 8-pin DIL IC, the TDA1022
has 16 pins, 8 of which are not connected. The TDA1022 is therefore
35
mounted on a small adapter board which provides pinout matching and
two additional resistors. The circuit on the board has been reverseengineered and its circuit diagram is shown in Figure 11.
Figure 11 schematics of the adapter board that matches the
TDA1022 to the pinout of the TCA350Y
2.6.1.2
The clock circuit
The clock circuit is an astable multivibrator built around transistors T2
and T3 and capacitors C4 and C5. Control of clock frequency via CV is
provided by T1, and R5 is an onboard trimmer
that controls the
maximum amount of modulation that can come from T1. Oscillation
frequency of this circuit – without any external CV applied – is about
100KHz.
36
Figure 12 Schematics of the ST1 board
2.6.1.3
The anti-aliasing filter
The anti-aliasing filter simply consists of a first order passive RC high
pass filter consisting of R2 and C7. The cutoff frequency is ([28], VII-95)
f cAA=
1
=
2 RC 2
1
=10.261KHz
R2 C t
(2)
and the filter has a slope of 6dB/Octave
In this board the clock frequency of the BBD is approximately
f =65000Hz , thus the Nyquist frequency of is f N =f /2=32250Hz . If the
signal present at the input of the BBD should have some spectral
components in the range 45000Hz - 85000Hz , these would be aliased in
37
in the audio band for the Shannon-Nyquist theorem. The attenuation of
this filter at 45KHz – which is about 2 octaves above f cAA – is 12dB.
2.6.1.4
The reconstruction filter
The reconstruction filter consists of two low pass second-order SallenKey active filters in series. They are followed by a passive high-pass filter
(C13 and R23) which has a nominal cutoff of
F cH =
1
=33.9 Hz
2 R 23 C 13
(3)
Figure 13 Typical second-order Sallen-Key filter
The circuit diagram of a generic Sallen-Key low pass filter is shown in
Figure 13. The transfer function is ([28] VII-162):
Vo s
1
= 2 2
Vi s
s R C 1 C 2 2 RC 2 1
(4)
The transfer function of the two filters in series is given by the
product of
the individual transfer functions. Being C1 and C2 the
38
capacitors in the first filter and C3 and C4 the respective capacitors in
the second filter, the transfer function of the series of the two is:
4
4
3
3
s R C 1 C 2 C 3 C 4 2 s R C2 C 4 C1 C3
1
s R 2 C 1 C 2 4 C 2 C 4 C3 C 4
2
2 s R C2 C4
1
(5)
The transfer function of each of the filters and of the series has been
computed on the basis of the values of the capacitors and resistance of
the ST-1 board and they are all plotted in Illustration I. The first has
nominal cutoff Fc1 and quality factor Q1 ([28] VII-162)
F c1=
1
2
1
=8598.2 Hz
R14 R 15 C 8 C9
1 C9
=3.4
Q 1=
2 C8
(6)
, while the second has a nominal cutoff Fc2 and a quality factor Q2 of
Fc2=
1
2
1
=4733.2 Hz
R18 R19 C 10 C 11
1 C10
=1.3
Q 2=
2 C 11
(7)
The transfer function of the series has a wide resonant band
comprised between 1KHz and 9KHz, and a -3dB cutoff at about 10KHz.
The theoretical slope of each of the filters is 12dB/oct, while that of the
series is 24dB/oct. These values are not immediately visible off the
graph, as they
are reached only higher in the frequency range. The
39
highpass is a first order passive, and with its 38Hz cutoff and a slope of
6dB/oct does not influence much the total transfer function .
Figure 14 Schematics of the two modulation sources
2.6.2
Modulation
The piano strings features two Low Frequency Oscillator (LFO) which
generate sinewave Control Voltages(CV's) that are used to drive the
chorus stages (Figure 14). The faster has a nominal frequency of about
6Hz, while the slower has a nominal frequency of about 0.6Hz. The LFO's
are built as three phase oscillators, providing three outputs each with a
40
different phase of the same waveform: 0°, 120°, 240°. The topology is
the same in the two oscillators and they differ almost only for the values
of the timing capacitors and for the output resistors. The waveforms as
reported in the original schematics diagram are shown here in Figure
15 .
Figure 15 waveforms of the slow(left) and fast(right) LFO
41
3DATA
ANALYSIS
3.1
ACQUISITION
AND
The Fast Fourier Transform
The Fast Fourier Transform (FFT) is an algorithm to compute the
Discrete Fourier Transform(DFT) and its inverse. The DFT is a function
that transforms a digital signal from the time domain to the frequency
domain. The result of an FFT is an ordered set of complex values which
are the respective coefficients of a set of sinusoids ranging from 0 to
Fs
f spaced in frequency by
f =F s / N where N is the number of
points of the time-domain signal on which the transform is computed.
This representation is often referred to as the spectrum of the signal.
Given a complex number k =a bi where a is the real part, i is the
imaginary unit
i=
1
and b is the imaginary part, the magnitude of k
is defined as magnitude k = a2 b 2 and the phase
of k is
=arctan b / a
. Similarly, the magnitude spectrum and the phase spectrum can be
obtained by computing the magnitude and phase of the values of the
complex spectrum.
Most of the analysis performed here involve the use of Fast Fourier
Transform including noise, frequency response, harmonic distortion.
Proper windowing, slicing and overlapping have to be used for each
analysis type. Here's a brief explanation of each of these techniques,
which is a review of the detailed descriptions found in [29].
42
3.1.1
Windowing
Windowing techniques help to
reduce spectral leakage in FFT
analysis. Spectral leakage is the result of an assumption in the FFT
algorithm that the time record is exactly repeated throughout all time
and that signals contained in a time record are thus periodic at intervals
that correspond to the length of the time record. If the time record has a
nonintegral number of cycles, this assumption is violated and spectral
leakage occurs. A window is a properly designed function which is
usually normalized to an amplitude of 1 and has an x-axis scaled in such
a way that its values at x=0 and x=FFTsize are 0. For an example see
the plot of a Hann function in Illustration II. The function is multiplied by
the analyzed samples before computing the FFT. Each window has its
own characteristics and effects and very often one that is well suited for
a task would not perform well in a different task, and vice versa. The
windowing of the input data is equivalent to convolving the spectrum of
the original signal with the spectrum of the window.
Windowing
functions
by
can
thus
be
schematically
characterized
some
characteristics of their own spectrum.
Hann function is often referred to as the “universal window” for it has
a rather narrow main lobe, and a rather low maximum side lobe level,
along with a high side-lobe roll-off. This translates into good frequency
resolution and low spectral leakage. Flat top window is less good at
frequency resolutions, as the main lobe is quite large but features a very
good amplitude accuracy, which could be useful in precision-critical
amplitude measurements. Uniform or rectangular windows may be
useful for broadband random signals, as in noise analysis.
43
3.1.2
FFT size
FFT size is the number of samples used for computing an FFT. It
influences the frequency resolution, as the size of each frequency bin of
an FFT of length N is : f bin=F s / N where Fs is the sampling rate. Choosing
larger N allows for better frequency resolution but needs more samples,
thus limiting time resolutions. The analyses performed in the present
work do not need narrow time resolutions, as no transients are present
among test tones, so FFT size can be as large as needed for frequency
resolution.
3.1.3
Overlapping
Overlapping is a technique that performs multiple FFT analyses where
each sample is used in general by more than one analysis. The signal is
sliced into sets of contiguous samples that partially overlap. This allows ,
for
a given FFT size, to get more FFT's out of a given number of
samples, making available more spectra for averaging, thus reducing the
noise variance as described above. By averaging the overlapped
spectra, the amplitude of the averaged spectrum must be rescaled of a
proper factor in order to maintain unitary gain.
3.1.4
Spectrum scattering
One problem of looking at noise with an FFT is that the obtained
spectrum is inherently noisy. In fact,due to Parseval's theorem, the
variance
2
n
of the spectrum is simply the variance of the noise, or, in
44
2
other words
n
= x n2 . In a scattered plot the outer edges extend to
approximately to
3
n
which means that the upper
visual edge of a
noise spectrum is always at
xn 3
2
n
= 4xn
2
(8)
which is 6dB above the expected value in the power spectrum. By
averaging multiple spectra it is possible to reduce the variance , in
particular by averaging na spectra,
n
reduces to
n
/
na . The
averaging of multiple smaller-sized FFT is thus preferable over a single
longer one, especially for noise or noisy measurements. [36]
3.2
3.2.1
Computations on the spectrum
Estimate power and amplitude of a peak
Because of the window spreading effect and/or the fact that the
analyzed frequency may not be centered in the analysis bin, the total
power at a given frequency is spread in the spectrum over more than
one bin. The amount of this spreading is proportional to the main lobe
width of the window. To get an estimate of the power at a certain
frequency, the powers of the surrounding bins must be summed and
divided by the noise power bandwidth of the window. For a given bin j
where a peak in the spectrum is detected, the estimated power and
amplitude of the peak are:
45
j 3
Power i
Estimated power=
j 3
(9)
noise power bandwidth of the window
j 3
Amplitude i
Estimated amplitude=
The span
j 3
(10)
noise power bandwidth of the window
±3 is reasonable because is greater than the main lobe
width of most windows, but can be adjusted for less or more depending
on the noise of the spectrum and the separation between adjacent
peaks. For frequencies centered in a bin, the span could be lower. This
method performs correctly only for spectra made up of discrete
frequencies components, it is not valid for a continuous spectrum, a
noise spectrum or a spectrum where the peaks are closer to each other
less than 2 times the span, as they would influence each others' power.
3.2.2
Signal to Noise Ratio (SNR)
When plotting the spectrum of a signal some peaks will emerge which
are generated by the signal itself and there will be a noise floor at lower
amplitude. This noise floor will often be many dB's below the rated signal
to noise ratio (SNR) of the system. This is because the SNR is an
indication of the total noise power, which is spread all over the
spectrum. Furthermore, the represented amplitude will vary depending
on the number of points of the FFT. This happens because what is
represented in the noise floor of a power spectrum is the narrowband
noise level in each FFT bin. Therefore the noise floor of a N-length FFT
46
f =F s /N . In other words, the noise level
power spectrum depends on
at each frequency line reads as if it were measured through a
f Hz
filter centered at that frequency line. Consequently, for a given sampling
rate, doubling the number of points acquired reduces the noise power
that appears in each bin by 3 dB. Discrete frequency components
theoretically have zero bandwidth and therefore do not scale with the
number of points or frequency range of the FFT. To compute the signal to
noise ratio of a spectrum, a sum must be performed of all the power
spectrum bins excluding DC and any peaks, and this will result in a
number close to the system's rating. What is important here is that
peaks can be measured well below the SNR level. For a noise spectrum
without peaks, SNR (in dB) can be computed as
N /2 1
SNR=10 log10
(11)
1/ Power i
i=1
3.2.3
Because
Power Spectral Density (PSD)
of
noise-level
scaling
with
f ,
spectra
for
noise
measurement are often displayed in a normalized format called power or
amplitude spectral density. This normalizes the power or amplitude
spectrum to the spectrum that would be measured by a 1 Hz-wide
square filter, a convention for noise-level measurements. The level at
each frequency line then reads as if it were measured through a 1 Hz
filter centered at that frequency line.
Power spectral density is computed as
PSD=
Power spectrum
f ×Noise Power Bandwidthof the window
47
(12)
The spectral density format is appropriate for random, chirp or noise
signals but inappropriate for discrete frequency components because the
latter theoretically have zero bandwidth and do not rescale well this way.
3.2.4
Total Harmonic Distortion (THD)
A non-linear system fed with a sinusoidal signal shows at the output a
distorted signal that is not purely sinusoidal: it contains harmonics that
were not present in the input signal. This is called non-linearity distortion
or harmonic distortion. Two conflicting definition of total harmonic
distortion exist. One, which is power-based, says that THD is the ratio
between the sum of the harmonics powers(excluding the fundamental)
and the power of the fundamental; the other is instead amplitude-based,
and says that the THD is the ratio between the sum of the rms amplitude
values of the harmonics(excluding the fundamental) and the rms value
of the fundamental. The latter definition is the more often used in audio
and electronics measurements, and best fits the measurement reported
in the TDA1022 datasheet, where the formula used for the measurement
of THD is not specified. So this definition is the one that will be adopted
in the rest of this work. The percentage THD relative to the first n
harmonics is thus ([28], XVII.10.22):
i=n
V 2i
thd % =100
i=2
V1
48
(13)
3.3
3.3.1
Measurement setup
Modifications to the ST1 board
For the tests, the BBD board was pulled off the Vermona and put in a
custom made aluminium case. Inputs and outputs were provided by
panel-mount 1/4” jack sockets, some of which provided with an internal
switch used to open the circuit at chosen test points and normalize some
inputs to ground. A panel-mount potentiometer provided fine tuning of
the BBD clock. A through-hole pin was mounted on the case to give the
oscilloscope probe access to the clock oscillator. The panel controls and
connections include:
•
DC power in – coaxial socket 5.5x2.1mm
•
AC-coupled input to BBD, normalized to ground – jack socket
•
BBD output – jack socket
•
DC-coupled input to BBD – jack socket – this acts also as a direct
output
•
reconstruction filter input, normalized to BBD output – jack socket
•
clock potentiometer
•
CV in, normalized to ground – jack socket
•
reconstruction filter in – jack socket
•
reconstruction filter out – jack socket
•
clock out – metal pin
49
On the board itself a bunch of modifications were made:
•
an external stabilized linear power supply of 14.2V DC was used to
power on the device
•
C101, a 100uF electrolytic capacitor, was placed across power
supply rails and, along with C3 helps to stabilize the power supply
•
to provide correct biasing of 5.6V to the BBD input, a passive
voltage divider network made of a 22k and a 33k resistor was
added
•
C102, a coupling 47uF solid tantalum electrolytic capacitor was
placed in series with the BBD input
•
R2 and C7 which constituted the anti-aliasing filter were removed
•
the anti-aliasing filter was replaced by C103, a 820pF ceramic disc
capacitor, was placed from the BBD input to ground, thus forming
with the divider network resistors a passive low pass filter with
cutoff
aliasing
f c=
1
=14704Hz which acts as a smooth anti2 C R101 R102
filter
for
the
BBD,
which
F =100KHz and a Nyquist frequency
has
a
clock
frequency
F n=F / 2=50KHz of 50KHz.
The decision to use a first order low pass with a rather high cutoff
is that the signal is already bandlimited by the soundcard and that
F
is far above the audio range. This is mostly for filtering out RF
interferences, which would be possibly aliased into audio band.
•
VR1, a 10k linear potentiometer was connected across Gnd and
Vcc. Its wiper was wired to the CV input of the clock oscillator. This
is used for regulating the clock frequency F
by the insertion of a jack into the CVin input
50
, and is deactivated
In the first place the sleeve connections of the output jacks were
automatically switched so that only one of the sleeves of the
inputs/outputs jacks at a time was connected to ground. This was
intended to avoid ground loops and get a cleaner recording. After
connections were made, it was discovered that providing grounding to
all of the cable shields gave less noise and better overall results, so the
original device was updated this way. Laboratory ground loops were also
avoided, so that the only the oscilloscope was connected to electric
earth.
3.3.2
Equipment and connections
Hardware used for the measurements included a Beckman Industrial
9012 – 20MHz dual analog oscilloscope, a total of two Yamaha i88x
firewire soundcards and two computers.
The oscilloscope was used to check and tune clock frequency. The
clock runs in the range of 100KHz, and consists of square waves, so no
soundcard could have been used in place of this.
Each of the Yamaha's features on channel one a high impedance
input. These are the only inputs used; one is used for recording the
reference signal, and one for the processed signal. From now onwards
they will be referred to respectively as input1 or reference input and
input 2 or processed input. Only one output of one of the soundcards is
used to output test signals. The two i88x's use Yamaha proprietary bus
mLan which transfers audio over a firewire connection. A firewire cable
connects the two i88x's together while another firewire cable goes to a
computer. Due to the fact that nowadays firewire interfaces are almost
51
impossible to be found on a PC, an Apple MacBook running Mac OS X
Snow Leopard has been used, where the mLANGraphicPatchbay software
is used to make available the input and output channels as necessary to
Reaper. Reaper is a multi-platform DAW which supports scripting to
automatize procedures. A python script has been written which
automatizes the playback and recording of various test tones at different
amplitudes, assigning properly formatted
filenames and using dialogs
and audio alerts to request the user for altering physical connections
when required, for instance when background noise is to be measured
and input to the device has to be disconnected[ link to the scripts ]. A
different computer was used for data analysis, a desktop PC running
Ubuntu Linux 10.04 Lucid Lynx . The software used for analysis was GNU
Octave 3.6.3
with Gnuplot 4.6 patchlevel 2 as graphic backend.
Synchronization of files between the two PC's was taken care of by a
shell script which used rsync to transfer the files over the LAN.
The Yamaha i88x analog outputs are capable, when used as
unbalanced, of providing an output voltage of up to 12V peak-to-peak .
Since the level of the signal fed to the BBD in practical applications is
much lower and in the Vermona itself it rarely rises above 2V peak-topeak, and the full output level would clip the Hi-z inputs even when their
gain is set to minimum, it was chosen to set the maximum output level
to -12dBFS. From now onward, 0dBFS will be considered this level, which
is the maximum output level used. This 0dBFS corresponds to an output
of 2.8 V peak-to-peak (1.697 Vrms) .
Setup for noise, frequency response and thd analysis: test signal is
fed into the BBD input, reference signal is recorded at “BBD DC input”,
processed signal is recorded at
BBD output. A dummy jack plug is
52
plugged into the LPF in , thus disconnecting it from the output of the
BBD.
Setup for frequency response of the reconstruction filter: test signal is
fed into reconstruction filter in, reference signal is recorded with a mono
y-cable in parallel with the input to reconstruction filter, processed signal
is recorded at reconstruction filter out.
Setup for CV-frequency relation: the negative probe of a digital
voltmeter (DVM) is connected to ground while the positive one is placed
at the CV input of the clock generator. The ground of the oscilloscope is
connected to the ground of the TS-1 while the probe is connected to the
“Clock out” metal pin.
3.3.3
Calibration
Setting the time scale of the oscilloscope to 10uS/div, and the voltage
scale to 2V/div, clock is set to 100KHz
by adjusting the panel
potentiometer.
Calibration for noise, frequency response and thd analysis: A 129Hz
sinewave is output by the computer at 0dBFS, gains are individually set
so that the level of each channel on the Reaper monitoring meter are at
-2.0dB. The clip led on the input will stay on at higher levels, but this is
of no concern, as it is built to light up 3dB before clipping. Input 2 gain is
set higher than input 1, because the BBD chip attenuates signal. As the
i88x doesn't provide on the gain pot itself the gain values, the difference
in gain between the two channels has been measured this way: a mono
y-cable has been connected from the soundcard output to both inputs,
and a test signal at -6dBFS has been output. The input meters now show
53
a relative difference of 5.2dB, with input 2 been the highest. Connections
are then restored back for recording as they were during calibration.
Calibration for frequency response of the reconstruction filter: gain of
channel 1 and 2 are set at minimum.
3.4
Measurements
Each measurement reports an introductory table where are defined
the test tones used, the levels (in dBFS) at which the output has been
set for each tone, and the duration of the recording time for each level
and each tone.
As a general rule, when the spectrum of only one of the channels is
plotted at a time, no correction occurs on the gain. When on the same
plot appear the spectra of both channels, a gain correction is applied so
to compensate for the different gain settings described in 3.3.3.
3.4.1
Background noise
Test tones
No test tone was used for this measurement. The output
of the BBD has been recorded with no output from the
soundcard.
Levels
n/a
Duration
100s
Multiple 8192-points FFT's with overlap of 0.5 have been performed
and the sum of their results have been averaged, thus reducing the
54
variance and the scattering of the noise spectrum. A rectangular window
has been used. The total number of FFT performed on a 100s time
sample is about n=
Fst
44100×100×2
=
=1076
N overlap
8192
Because of the wide variance of the noise spectrum, it has been
decided to use the mean of the spectra of the four 100-seconds
measurements taken as a basis for further considerations. The Power
Spectral Density has been computed as described in 3.2.3 and is plotted
in Illustration III.
On this spectrum, SNR has been measured as in (11), and results in
SNR= 67.782dB, whereas the TDA1022 datasheet provides 74dB as a
typical value [29].
By analyzing in details the spectrum of the noise can be noticed that
at 50, 100 and 200 Hz are present some peaks, though at low level
(Illustration IV). These are most likely caused by AC ripple in the power
supply or AC hum induced by the 50Hz power line into the device or the
connecting cables. Other smaller peaks are found in the 3500-4500 Hz
range (Illustration V)
Apart from these spurious frequencies – which anyhow lie more than
100dB below full scale – the noise floor can be seen constant at about
-108dB in the 20 – 2000Hz range and then it rises almost linearly from
-108dB to about -101dB in the 2 – 20 KHz range (7dB/decade).
55
3.4.2
Frequency response
Test tones
Linear chirp tone from 0 to 22050Hz
Levels
[0 -2 -4 -6 -8 -10 -12 -14 -16]
Duration
100s
The chirp tone is a time-swept cosine wave. Analyzing a chirp tone
with a single rectangular window generates a heavy ripple at the lower
and upper limits of the
spectrum, due to the fact that there exist a
discontinuity at the extremes of the chirp tone. This happens even if the
chirp is forced to start and end at – or around – 0. By analyzing a chirp
tone with a single Hann window, of course the frequencies that are not
centered in the time domain will result attenuated in the spectrum.
Using multiple overlapped FFT's windowed with Hann produce a ripple
due to the non perfectly unitary summation of the overlapping windows,
as this would cause some time fragments to be weighted less than
others, which results in some frequencies been weighted less than
others. The ripple issue does not show up in the transfer function, as the
ripples in the spectrum of input and output signal cancel each other.
Having considered all of the above, two different analysis methods
have been used for the chirp tones: to print the frequency response of
the system along with the frequency response of the reference signal,
multiple FFT's of size N = 65536, overlapped by 0.5 and with Hann
windowing have been performed on both signals. As for the transfer
function, a single FFT have been performed on the full length of each
signal.
56
Using slicing and Hann windowing in a chirp tone FFT analysis always
cause to lose amplitude in the response in the lower and upper bands of
the spectrum because applying the windowing to the first half of the first
and the second part of the last slices of signal , these will result
attenuated by the multiplication for the window functions, and this
attenuation is not compensated by overlapping – as happens in the rest
of the signal. Being that in a chirp tone each frequency is present only at
a given instant, attenuating the time samples will reduce the amplitude
of the frequencies present in those samples. The frequency f t at time t
is for a linear chirp that starts at t=0 with a frequency f 0 and ends at
T 1 with a frequency f 1
f1 f0
t
T1
f t=f 0
(14)
In this case is f 0=0, f 1 =22050, T1=100s . The first time instant where
the
amplitude
of
the
window
is
t 1=N / 2/ F s=32768/ 44100Hz=0.743s from which derives
last
t2=T1
time
instant
where
the
amplitude
32768
N
=100
=99.257s from which derives
2F s
44100
unitary
is
f t1=163.84Hz . The
is
unitary
is
f t2=21886Hz , so the
pass band of this analysis is from 163Hz to 21886 Hz. Being 20Hz –
20000Hz the passband of interest for us, only the range of frequencies
163Hz – 20000Hz will be considered ,which approximately correspond to
the FFT bins
bin l=110 at frequency
f l=163.47Hz and
bin h=13458 at
frequency f h=20000Hz . Because of the spreading effect of windowing,
though, reduction in amplitude will be effective also on the surrounding
bins. Furthermore, as the processed channel is delayed by the BBD of
57
about 130 samples with respect to the reference channel, there will be
small differences between the two, but barely noticeable.
The frequency response obtained with an output level of -10dB is
shown in Illustration VI. As can be seen, the reference itself is not linear
because its signal is taken after the anti-aliasing filter consisting of C103
(see 3.3.1). The processed signal is about 4.8dB below the reference.
This is coherent with the values provided by the datasheet, which gives
for “Attenuation from input to output at 1KHz”: a typical value of 4dB,
and a maximum value of 7dB.
The transfer function of the BBD is computed by dividing the complex
values of the processed spectrum by the reference (Illustration VII). The
response is almost flat ( ±0.1dB ) up to 5KHz and then slowly decreases
by 2dB in the range 5KHz – 20KHz. This response is not drastically
different from that reported on the datasheet, shown in Illustration XXIX,
which states a flat response up to 15KHz and -0.5dB at 20KHz for a clock
of 100KHz. The phase response looks a bit weird in the graph. This is
caused by the delay generated by the BBD, which is, for a clock of
100KHz as used in these tests, on the basis of (1):
t=
512
=0.025s
2 105 Hz
(15)
Which corresponds – at the sampling-rate Fs=44100 – to a delay of
nd =t F s=112.9
(16)
samples. By compensating the above mentioned delay by discarding
the first 113 samples of the processed signal before computing the FFT,
the resulting phase plot shown in Illustration VIII is much more
conventional.
58
A cumulative phase-compensed plot of multiple transfer functions at
different input levels shows that the amplitude and phase behaviour is
pretty much consistent across levels, with the higher levels showing a
response which is a little weaker than the others, especially at lower
frequencies (Illustration XXX). This denotes a little compression at higher
levels, which causes the harmonic distortion which will be analyzed in
3.4.3 . Anyway, we are talking of some ±0.1dB between the 0dB and the
-16dB curve, so it is not much relevant.
By watching at Illustration XXIX is furthermore possible to guess what
happened in the lower band of our analysis, where we could not
investigate because of the limits in the passband of the acquisition
soundcard: the response is expected to be flat down to 0Hz.
Two spectrograms are shown in Illustration IX and Illustration X of the
processed signal with a test signal of, respectively, 0dB and at -10dB.
They show an evident harmonic distortion – which will be analyzed in
greater detail in 3.4.3 – and aliasing, too. Notice that the frequencies
plotted here go up to 22050Hz, that is above the passband of the
soundcard. The aliasing in the 20000-22050Hz range, which is evident in
the lower-order harmonics folding their higher part into the audio band,
is caused by the soundcard ADC, whose anti-aliasing filter is set for
minimizing attenuation in the passband, by letting some aliasing fold
below Nyquist but above the nominal passband.
Another cause of aliasing, which generates inside the TDA1022, are
the upper harmonics getting above the Nyquist frequency of the BBD
which are then aliased in the audio band. In Illustration IX up to 6
harmonics can be recognized at lower frequencies, before they rise
above 22050Hz. The 6th harmonic of a 22050Hz sinusoid is at a
59
frequency of 132.3Hz. The BBD is driven by a clock of 100KHz, thus the
Nyquist frequency of the BBD is 50KHz. For a frequency to be aliased in
the visible band (<22.05KHz), it has to be between 77.5KHz and
122.5KHz. A set of systems of linear inequalities has been solved for
knowing exactly which harmonics are supposed to be aliased and at
which frequency. The results are:
2nd :
no aliasing
3rd :
no aliasing
4th :
f 0 19375
5th:
f 0 15500
6th: 12917 f 0 20417
(17)
which correspond to what can be seen in the spectrogram plot.
3.4.3
Harmonic distortion
Test tones
Sinewaves at 123.82Hz, 500.65Hz, 1001.29Hz
Levels
[0 -1 -2 -3 -4 -5 -6 -7 -8 -9 -10 -11 -12 -13 -14 -15 -16 -17
-18 -19 -20 -21 -22 -23 -24 -25 -26 -27 -28 -29 -30]
Duration
8s
The test tones used here have uncommon frequencies. These
frequencies have been properly chosen to be close to the common
choices of 1000Hz, 500Hz and 100Hz, but taking care that they are
centered in a frequency bin of the FFT that was going to be performed
on them. This ensures reduction of the spectral leakage and more
precise measurements for the computation of harmonics strength and
total harmonic distortion. The lower value has been chosen to be far
from 100Hz as this frequency already showed up in the background
60
noise measurements as being occupied by the harmonics of the 50Hz
power AC line hum.
As for this analysis, multiple FFT's with N=8192 have been performed
on the signal, using Hann window and a 0.5 overlap.
A plot of the spectrum of the processed signal using a 1001.29KHz
sinusoid at 0dBFS shows that the amplitude of the first 8 harmonics is
well above the noise floor. It can be safely assumed for the following
measures that any peak above -90dB in the range 2000Hz-20000Hz is
above the noise floor and thus can be originated only by harmonics
generated by the non linearities of the BBD.
Using the thd.m script (Appendix A), the magnitude of the first 8
harmonics is calculated for each of the signals recorded,
with the
threshold set to -90dB and THD is computed as in (13). The harmonic
analysis of amplitudes from 0 to -30 and harmonics up to Nyquist
frequency of a 1001Hz sinusoid is reported in Table 3.
Smith and Raffel in [22, page 5] report that the unavoidable total
harmonic distortion of an N -stage BBD is
thd % =100 1.01N / 1024 1
(18)
In this case N=512, so thd as given by this formula should be of 0.5%.
The datasheet of the TDA1022 reports that thd is dependent on the RMS
value of Vs, showing a thd of about 0.3% for Vs below 2Vrms, and then a
steep increase to over 5% at 3Vrms (Illustration XXVI). The measured
trend of the total harmonic distortion vs the RMS input voltage is shown
in Illustration XIV. The measured values show THD steadily rising from
0.068% at 0.07 Vrms to 1.5% at 1Vrms (maximum output voltage used
for testing).
61
Raffel and Smith ( [1] page 6) continue reporting that measurements
made on a BBD with thousands of stage show the 2nd and 3rd harmonic
decrease linearly in magnitude with the 4th and higher harmonics
at
almost imperceptibly low magnitude. Analysis of harmonic content of a
sinusoid at 1001Hz at various levels of Vs is shown in figure Illustration
XI.
As shown in Illustration XII, levels from -5dB to -20dB all behave
similarly between them, with a noticeably loud 2nd – placed more than
40dB below the fundamental - and
3rd – placed a few dB below the
previous – while higher harmonics are almost imperceptible. This results
are quite different from those reported by Raffel and Smith, which were
in turn referred to a different BBD with more than 4 times the stages of
the TDA1022. The distortion detected here could thus have a different
cause than that showed by Raffel and Smith. It could be caused not by
the delay line charge transfer but by distortion of the MOS transistors.
3.4.4
Frequency response of the reconstruction filter
Test tones
Linear chirp tone from 0 to 22050Hz
Levels
[-4 -8 -12]
Duration
100s
The transfer function has been calculated with a single FFT on the
entire file length, with a rectangular window.
The measured transfer function for the reconstruction filter is shown
in Illustration XIII. It stands out that this is quite different from the total
transfer function computed in 2.6.1.4 and plotted in Illustration I. A sideby-side comparison of the two is plotted in Illustration XXVII. Apart from
62
the influences of the high pass filter, differences between the theoretical
and measured values could be due mainly to:
•
drift in the component values: the Sallen-Key filters are quite
sensitive to component values, especially for high quality
factors (Q). The quality factor here is not very high, but the
components have more than 35 years, and their values could
have drifted from the nominal value more than the nominal
tolerance.
•
non-ideal input and output impedances: because of the real
input and output impedances, the coupling of the two filters
may yield different results than if the impedances were ideal,
that is if the input impedance were infinite and the output were
0. This has already been pointed out by Gleason in [10].
The above points could be investigated further by measuring the
individual response of each filter and measuring effective component
values, but this would be beyond the scope of the present document.
The digital model in 4.5.2 will try to mimic the measured behaviour of
the filter by implementing an IIR filter. The filter coefficients can be
nevertheless easily edited by the user in order to meet a different
frequency response.
3.4.5
Control voltages and LFO
These measurements were taken without scientific intent as the
equipment available could not provide enough accuracy. In fact they rely
on the use of a DVM and an analog oscilloscope which have no means of
being connected to the PC to perform analytical analyses. Most PC audio
63
interfaces like most audio equipment have a DC-blocking capacitor at
their input that do not allow measurements of DC voltages nor of slowly
varying waveforms – such as those of the LFO's . These measurements
have therefore been taken just in order to get an idea of what are the
clock frequencies, how they are related with the control voltage and if
the LFO waveforms are corresponding to the ones shown in the
schematics
3.4.5.1
CV-frequency relation
The oscilloscope is used to measure the period length of the clock
frequency. The clock period is measured at different CV tension levels
obtained by rotating VR1,
The results are tabulated in Table 2 and
graphed in Illustration XVI.
The relation is almost linear with
F
decreasing as CVin increases.
GNU Octave function polyfit has been used in order to retrieve the
coefficients of a first order interpolating polynomial, which can be used
to retrieve the value of
F
for each value of CVin. Such interpolating
function is:
F phi = 4235.96 CVin 102045.54
3.4.5.2
(19)
LFO waveforms
By watching the LFO waveforms as represented on the oscilloscope
display, the following stands out:
•
The slow waveform is not at all similar to the left waveform in
Figure 15. It can be roughly described as a periodic signal of
frequency 0.6Hz which has brief positive and negative spikes of
64
about +-6V. This cannot be considered a complete description, but
what can be derived from this is that the actual waveform is very
different from that in Figure 15, probably due to something that
has gone wrong in the electronic circuit. The DC voltage is about
8V, and the spikes are in the range 1.5V-14.5V. These values,
substituted in (19) give that the stationary clock frequency is
F
[F
S0
=68157Hz , and the frequency is modulated in the range
Sl
=40624Hz , F
Sh
=95691 Hz] . This results in a modulation width
of
wS=
•
F
S0
F
F
Sl
F
=
F
Sh
F
S0
Sh
=0.40
(20)
Sh
The fast waveform instead seems very close to the image in Figure
15. When the “fast” preset is active, the DC voltage is 9V and a
peak amplitude of about 2V. The (19) gives that the stationary
clock frequency is F
in the range
[F
Sl
F0
=63921Hz , and the frequency is modulated
=55450Hz , F
Sh
=72394 Hz] . This results in a
modulation width of of
wS=
F
F0
F
F
Fl
=
F
F0
F
Fh
F
Fh
=0.13
(21)
Fh
When the active preset is “Chorus 2” the fast sinewave sums to the
above described slow one without the 9V DC offset, as discussed in
2.5.3.
65
4-
4.1
THE DIGITAL MODEL
Overview
An existing software library, called resample which allows samplingrate conversion of audio files has been modified to implement the model
of BBD devices applied to the chorus section of the Vermona Piano
Strings. This eventually lead to the creation of new software called
BBDresample which is a command-line audio processing tool that allow
the user to choose between the different modulation presets of the
Vermona Piano Strings or even use custom parameters and modulation
waveforms provided by the user. Before discussing the BBDresample
software,
the
interpolation
technique
used
as
well
as
some
characteristics of the original resample software are reviewed. Images
used in this section to illustrate the behaviour of resample are taken
from the original description of the software made by the author J. O.
Smith himself in [30].
4.2
Bandlimited interpolation
Smith introduces bandlimited interpolation of discrete-time signals as
as: “... a basic tool having extensive application in digital signal
processing. In general, the problem is to correctly compute signal values
at arbitrary continuous times from a set of discrete-time samples of the
66
signal amplitude. In other words, we must be able to interpolate the
signal between samples. Since the original signal is always assumed to
be bandlimited to half the sampling rate, (otherwise aliasing distortion
would occur upon sampling), Shannon's sampling theorem tells us the
signal can be exactly and uniquely reconstructed for all time from its
samples by bandlimited interpolation. [ … ] Since Shannon's sampling
theorem says it is possible to restore an audio signal exactly from its
samples, it makes sense that the best digital audio interpolators are
based on that theory. Such "ideal" interpolation is called bandlimited
interpolation.”
A conceptually simple analog-based method for resampling is
proposed in ([26] page 22) as can be seen in Figure 16.
Figure 16 Analog-based resampling method
A time-discrete x0(n) signal is converted by a DAC into the timecontinuous signal xa(t). The continuous signal is then sampled by a
sampling-function H into the signal x1(m) which is at a different
sampling-rate than x0(n). Of course using a pair of DAC and ADC would
be pretty expensive and their imperfections would introduce errors.
A fully-digital interpretation of this method would involve the use of
the ideal D/A formula in place of the “physical” D/A ([30], page 5) :
y t =
x nT s h s t nT s
x t
n=
where Ts =1/Fs is the time duration of a sample and
67
(22)
h s t =sinc F s t =
sin
Fs t
Fst
(23)
is a filter function that performs anti-aliasing filtering. Although the
sinc function has a discontinuity in the origin, its limit in the origin is 1,
and thus it is assumed to have unitary value at zero. In Illustration XV
can be noticed that at any non-zero integer its value is zero.
When resampling from a sample rate Fs to a new sample rate F's , the
sinc function must be properly chosen as:
h s t =min {1,
F 's
}sinc min{F s , F ' s }t
Fs
(24)
where the scale factor in front of the sinc functions maintains unity
gain in the passband, and the Fs chosen for the sinc function assures
aliasing-free resampling.
Equation (22) can be written as a convolution:
y t = x h s t . This
new form shows that to compute the signal y(t), the filter function hs is
applied to the signal x(n).
The interpretation of (22) which will be used from now on is that to
obtain the interpolation at time t, the signal samples must be shifted
under one sinc function so that time t in the signal is translated under
the peak of the sinc function, then the output is computed as a linear
combination of signal samples where the coefficient of each sample is
given by the value of the sinc function at that location.
Two points must be noted here: first, when t=nTs ,that is when an
output sample is required on a sample instant, the only contribution to
the output will be that of the sample n itself, as the other samples are
multiplied each for one of the zeros of the sinc function; second, this
68
principle can be extended to the fact that when upsampling to Fs'= kFs
where k is a positive integer, every kjth output sample will be exactly
equal to the jth input sample.
(22) cannot be implemented in the real world as the ideal lowpass
filter impulse response hs extends from
to
, and an equally
infinite number of samples should be used and summed, it is necessary
to limit the impulse response to a finite number Nzc of zero crossings,
and being m the index of x so that mTs<t and (m+1)Ts>t , the (22)
becomes
m N zc
y t =
(25)
x nT s h s t nT s
n=m N zc
The ideal lowpass filter has the frequency response shown in Figure
17
Figure 17 Ideal low pass filter response
69
Figure 18 Response of a truncated ideal low pass filter
As shown in [30, page 6], limiting the length of the filter impulse by
simply truncating it, or rather windowing it with a rectangular window
centered over the origin, is not a good idea, as shown by the resulting
frequency response in Figure 18 , where can be seen that the stop band
is only 20dB below the passband.
Figure 19 Response of a Kaiser windowed ideal low pass filter
70
By using a different window, a way better response can be obtained,
as in Figure 19 , where a Kaiser window has been used, and this results
in the stopband being more than 80dB below the passband.
4.2.1
The implementation of the “digital DAC/ADC”
As explained in 4.3.2, only half of the filter response is stored in the
table. That is the reason why (25) has to be implemented in resample in
three subsequent steps, consisting of :
h end
x n i [h l iL
v=
h l iL ]
(26)
i=0
(27)
P=1 P
h end
v =v
x n 1 i [h l iL
h l iL ]
(28)
i=0
(29)
y=v
Where v is a temporary variable, P is the concatenation of the
rightmost two fields of the time register, as described above, and h is
the table of the differences of hs and L is the number of samples per zero
crossing in the filter table. The term
[h l iL
h l iL ] is the linear
interpolation of the value of the filter at the point given by P.
As can be seen, the filter table is traversed twice, in (26) to apply the
left wing of the filter and in (28) to apply the right wing. In between the
two, the time register is updated in (27).
The sum at (26) and (28) is performed by the FilterUD function in the
filterkit.c file, which prototype is :
71
in filterkit.c
409. WORD FilterUD( HWORD Imp[], HWORD ImpD[],
410.
UHWORD Nwing, BOOL Interp,
411. HWORD *Xp, HWORD Ph, HWORD Inc, UHWORD dhb)
where Imp is a pointer to the filter table, ImpD is a pointer to the
table of differences, and Nwing is the length of these tables. Interp is a
boolean value which means “interpolate between filter table values” . If
it is 0, no interpolation is performed and a value of the table is used
instead. *Xp is the pointer to the current input sample, Ph is the phase
into the filter table, Inc must be -1 when applying the left wing of the
filter, and +1 when applying the right wing. It corresponds to the
coefficient of 1 in the argument of x() in (26) and (28). dhb is the step
through the filter table.
The FilterUD function is called twice by the SrcUD function in
resamplesubs.c, first as:
SrcUD() in resamplesubs.c
165. v = FilterUD(Imp, ImpD, Nwing, Interp, Xp,
(HWORD)(*Time&Pmask),-1, dhb);
166.
167. v += FilterUD(Imp, ImpD, Nwing, Interp, Xp+1,
(HWORD)((((*Time)^Pmask)+1)&Pmask),1, dhb);
Where *Time&Pmask at row 165 is the P part of the time register, as
defined in (34).
Lines 165 and 167 differ only for arguments 4, 5 and 6 (*Xp, Ph and
Inc in the prototype). Line 165 corresponds to equation
(26),
the
difference in argument 5 (Ph) corresponds to the update in the P part of
the time register as in (27) and line 167's Xp+1 corresponds to the
increment of n in (28).
72
This implementation of the bandlimited interpolation does not allow
the step in the filter response to be greater than 2 zero crossings, i.e. the
filter cutoff frequency cannot be greater than the greater of the two
frequencies involved in the resampling.
4.3
The resample software
The methods and strategies outlined in the previous section have
been implemented by Julius Smith from the Stanford University in a
software called simply resample, which is written in C , is currently at
release 1.8.1 and licensed under the LGPL license. This software is a
command-line resampling tool that relies on the soundlib library for input
and output of soundfiles in many different formats. The many-times
cited [30] contains a detailed description of the implementation and an
analysis of approximation errors due to the use of finite-length impulse
responses and fixed-point computations, and the reader is referred to it
for further details not reported here.
Three aspects will be reviewed here:
•
the time-register
•
the filter table
•
the implementation of (25), the “digital DAC ADC”
resample processes input data in batches of 4096 samples, which are
passed to the functions SrcUp and SrcUD. The first is used when
upsampling, while the other could be used both while upsampling and
downsampling. Being SrcUp slightly faster, resample uses it for
73
upsampling and SrcUD for downsampling. In the prospective of making a
time varying sampling-rate conversion tool, we will use and refer to only
the SrcUD function in the following paragraphs, as it gives more
flexibility.
Resample
uses
fixed-point
values
throughout
his
computation
process. Practically, this means that (almost) all of the values and the
numbers inside the program are treated as integers, and floating-point
values are converted to integer as soon as possible. This allows for
faster computation, but has two major drawbacks. The first is that the
precision is finite and less than would have been made available by
using floating-point values. Nevertheless, with proper choices of the
length of the filter and the interpolation index the resulting error is of the
same order as the quantization error of a 16bit fixed-point audio file(a
detailed analysis of the approximations error can be found in section 3.6
of ). The second drawback is that there are a series of conventions and
tricks in the coding that must be outlined in order to let the first-time
reader understand what's going on.
4.3.1
The time register
The time register is a variable in resample called Time that is a 32bit
unsigned int which identifies the relative position of the present t instant
in the input signal. For the above mentioned efficiency's sake, this
variable contains not one but three values at once as can be seen in
Figure 20.
74
Figure 20 the Time variable
n is the index into the input signal buffer, l is the initial value in the
filter table, and
is the interpolation factor between two values in the
filter table. These fields have each respectively nn nl n bits. The sum nn +
nl + n is 32 by definition, and nl have been chosen to be 8 and n 7, in
this implementation. The concatenation of l and
is considered as a
value comprised between 0 and 1, and is interpreted as the relative
position of the time instant t between the sample n and n+1.
In resample the value nl is named Nhc, and n is named Na, and the
sum of the two is Np.
4.3.1.1
Bitwise operators
To access the values stored in this variable individually, a set of
operators is used which relies on operators that act at the level of the
binary representation of the value, which are reported below. To
understand them, it is necessary to convert the decimal number to its
binary representation (denoted by the leading 0x), apply the operator
and then convert back to decimal.
75
Name
Symbol
Meaning
Bitwise AND
a&b
Performs a bit-by-bit 4 & 7
comparison of two
0x100 & 0x111 =
integers, and
0x100 4
applies the logical
AND to each bit-pair
Bitwise
a^b
Performs a bit-by-bit 4^7 0x100 & 0x111 =
0x011 3
comparison of two
integers, and
applies the logical
XOR to each bit-pair
a << b
Shifts the bit
representation of a
to the left of b
bytes, discards
bytes as needed
X-OR
Left bit-shift
Right bit-shift a >> b
4.3.1.2
Example
Shifts the bit
representation of a
to the right of b
bytes, discards
bytes as needed
3<<5
0x00000011 << 5 =
0x01100000
96
25>>2
0x11001 >> 2 =
0x00110
6
Use of bitwise operators in resample
In particular binary shifts are used in resample to extract the value of
n by Time the following is used:
n=Time
(30)
Np
, while to increment the value of n by the integer k :
Time =Np
To retrieve the values of l and
k
(31)
, the so called “masks” are used in
conjunction with the bitwise and. Pmask and Amask are defined as
76
follows. Note the use of parenthesis around the bitshift operators,
needed as they have lower precedence than the sum and minus
operators.
Pmask= 1
Np
Amask= 1
1=32767=0x111111111111111
(32)
Na
(33)
1=127=0x1111111
To retrieve the concatenation of l and
from the Time variable, the
following is used:
la=Time & Pmask
While to retrieve
(34)
from the above calculated concatenation :
=la & Amask
(35)
resample uses a normalized sample rate, this means that the sampling
rate of the system is considered to be Fs=1 , while the output sampling
rate Fs' is defined as the ratio between the output and the input
sampling rate, which ratio is stored in the variable factor
main() in resample.c
187. double factor = newsrate / (double)insrate;
For instance, the time increment to step between the t time instants
at which a value of (25) is required is dtb:
SrcUD() in resamplesubs.c
193. dt = 1.0/factor;
period */
194. dtb = dt*(1<<Np) + 0.5;
representation */
And the increment is performed as
77
/* Output sampling
/* Fixed-point
SrcUD() in resamplesubs.c
213. *Time += dtb;
4.3.2
The filter table
For the implementation of (25), resample uses a pre-computed table
of values of a symmetric finite-impulse-response(FIR) filter hs, between
which values linearly interpolates to compute the required value hs(tnTs). In fact, being the impulse response symmetrical, only half of the
values are stored, for better memory efficiency. For better computational
efficiency in calculating the linear interpolation, also a table of the
differences between the elements of hs is stored.
Npc=2 n =256
l
(36)
is defined as the number of look-up values available for the lowpass
filter between the beginning of its impulse response and the "cutoff
time" of the filter.
The cutoff time is defined as the reciprocal of the
lowpass filter cut off frequency in Hz. For example, if the lowpass filter
were a sinc function, Npc would be the index of the impulse-response
lookup-table corresponding to the first zero-crossing of the sinc function.
The filter table is fixed, but we have seen in (24) that the proper filter
function must be chosen as – in the case of an ideal sinc function –
sinc(min{Fs,Fs'}). To simulate this with a fixed filter-table,
what is
changed for a given conversion factor is the sampling-period of the filter.
This is achieved by defining the step in the filter table at each iteration
of the sum in (25) , dh, and its fixed-point equivalent dhb, as:
78
SrcUD() in resamplesubs.c:
196. dh = MIN(Npc, factor*Npc);
period */
197. dhb = dh*(1<<Na) + 0.5;
representation */
/* Filter sampling
/* Fixed-point
Code 1 choice of the step in the filter-table
To better understand what's going on, the values discussed above are
illustrated in Figure 21
4.4
The BBDresample software
The resample software has been heavily modified in order to
implement a model of a BBD based signal processor and this turned it
into a new software, called BBDresample.
Modifications to the source files of the original resample software
include:
–
minor modifications to the main function in resample.c and to the
resample and resampleWithFilter functions in resamplesubs.c
provide an interface for the use of presets and modulation options
–
the audio samples are now internally stored and processed as
floating-point instead of integer. Conversion to fixed-point occurs
when writing the output file
–
the SrcUD function has been entirely rewritten and offers now
multiple interpolating delay lines
–
functions
lfoGen,
reinitLfoGen,
waveshaper,
filtiir
added
resamplesubs.c provide LFO, waveshaping, IIR filter capabilities
79
in
–
minor modifications to the FilterUD function in filterkit.c allow for
the use of circular buffers
–
minor, undocumented modifications to other source files
The most relevant introductions are reviewed in this chapter which
explains the DSP algorithms used, while the following focuses on the
selection of the parameters used in the software in order to emulate the
behaviour of the chorus section of the Vermona Piano Strings.
4.4.1
The BBD buffer
The BBD device is represented as an array where the samples are
stored and read. As given by (1), the number Ns of samples stored in a
BBD is half the number of stages in the device. Representing this in the
digital domain would require a buffer where samples are stored. Being
the number of samples limited, the buffer could consist of an array of
fixed size where a read pointer and a write pointer move in order to get
input and output samples. While the BBD operation relies on shifting the
elements
from
the
input
towards
the
output,
this
would
be
computationally expensive because at each read/write cycle all but one
of the elements of the array should be moved in memory. Therefore this
array must be used as a circular buffer, that is a fixed-size buffer that is
used as if it were connected end-to-end.
When no interpolation is performed only one buffer sample – the
target sample – is needed per output sample. When any kind of
interpolation is performed, there arises the need to get access to more
than just the target sample per each output sample. Using linear
interpolation only one previous sample would be sufficient. When using
80
different interpolation techniques such as bandlimited interpolation,
many samples may be needed before and after the target sample.
As a consequence of this, a buffer consisting of an array containing
Ns values would not be suited for the task to be accomplished here. The
length of the buffer should be greater than Ns in order to provide the
necessary padding samples around the target sample to be used in
interpolation. Each target sample should then be read Ns samples earlier
81
than the last written sample. The minimum number of padding values
needed is determined by the number of samples needed by the
interpolation method used. In this implementation an arbitrarily high
number of 100 samples on each side of the target sample has been
chosen.
As the software developed will be able to simulate the behaviour of
multiple BBD-based device working in parallel on the same input signal,
the
circular
buffers,
one
for
each
BBD,
will
be
stored
in
a
multidimensional array.
#define BBDBUCKS 512 /* Number of stages in the BBD */
#define BBDDEL (BBDBUCKS/2) /* Number of stored samples
in the BBD */
#define BBDOFF 100
/*padding in the BBD array */
#define BBDSIZE (BBDDEL+2*BBDOFF) /* Total size of the
BBD array*/
#define NUMBER_OF_BBDS 3
FLOAT bbd[NUMBER_OF_BBDS][BBDSIZE]={0};
The bbd array itself as well as other array variables which are related
to it, will be indexed throughout the program with the subscript index
[ch] where ch is the channel considered. These variables are declared
and used in the SrcUD function and are:
static
static
static
static
static
UWORD T2[NUMBER_OF_BBDS];
UWORD oldBBDevent[NUMBER_OF_BBDS];
UWORD nextBBDevent[NUMBER_OF_BBDS];
UWORD nextTevent[NUMBER_OF_BBDS];
int BBDindex[NUMBER_OF_BBDS]={0};
82
4.4.2
Using circular buffers
To access elements in an array the index of the element must be
provided. Common operations on indexes are those of sum and
difference. To maintain the index between the lower and upper limits of
the array after these operations, the modulus operator is used.
Being j an index into an array of size S, when j is incremented by a
positive quantity k, the resulting index will be:
j
( j + k )%S
(37)
where "%" denotes the modulus operator.
When j is decremented by a positive quantity k<=S, the resulting
index will be:
j
( j k + S )%S
(38)
In order to read and write into a circular buffer two pointers are
generally used, as the distance between the two is variable. The
BBDresample software always reads from the buffer BBDDEL values
before the write index. For this reason only the write index is stored in
the BBDindex[ch] variable, and the read pointer is calculated when
needed as BBDindex[ch]-BBDDEL, applying the formula above.
This method of accessing array elements had to be implemented in
two core functions of resample , i.e. SrcUD and FilterUD. Most notably,
the FilterUD prototype was modified from
WORD FilterUD( HWORD Imp[], HWORD ImpD[], UHWORD Nwing,
BOOL Interp, HWORD *Xp, HWORD Ph, HWORD Inc, UHWORD dhb)
to
83
FLOAT FilterUD(HWORD Imp[], /*pointer to a table of
filter values*/
HWORD ImpD[], /*pointer to a table of differences of
filter values*/
UHWORD Nwing,/*length of the tables*/
BOOL Interp,/*use linear interpolation between filter
values*/
HWORD Xp, /*index in the input signal*/
HWORD Ph, /*location between samples in the input
signal*/
HWORD Inc, /*-1 performs left wing, +1 performs right
wing*/
UHWORD dhb,/*step in the filter impulse response*/
FLOAT X[],/*array containing the input signal*/
HWORD length);/*length of the input array to be used as
circular buffer. If this is 0, doesn't use circular
buffer*/
4.4.3
The signal flow
The block diagram of a typical BBD based chorus device constituted
of three BBD IC's and accessory circuits is shown in Illustration XVII,
where the clock generator is omitted for clarity. The three delay lines are
placed
in
parallel,
each
with
it's
own
anti-aliasing
filter
and
reconstruction filter. A representation of a single delay line and
associated circuits is shown instead in Illustration XVIII.
Here the BBD box is expanded in order to show the signal processing
that happen in there after what stated by Raffel and Smith in [1] and
reviewed here in 1.4.1. The order in which these processings are to be
applied to the signal is not specified. Noise, harmonic distortion and the
low pass filter resulting from frequency-dependent insertion gain are all
added to the signal right inside the delay line. A very accurate model
84
would consider the charge loss and its consequences for each element
of the delay line at each clock cycle, but this would require an
exaggerate number of computations, that an implementation aimed at
real-time signal processing could not bear. A real time model would add
these effects immediately before or after the delay line.
The signal flow that has been implemented in BBDresample is shown
in Illustration XIX. Harmonic distortion is generated by means of a
waveshaper, which is placed after the interpolator. Noise is added to the
signal after the waveshaper and before the delay line.
It has been decided not to implement neither filtering of the noise nor
the low pass filter resulting from the frequency-dependent insertion gain.
In fact, their contribution is not relevant, as both of them would affect
only the higher frequencies of the spectrum, well above the cutoff
frequency of the reconstruction filter.
On top of that, in the assumption that the anti-aliasing and
reconstruction filters are linear for the low amplitudes of the output
signal of the BBD, as stated in ([1] , 4.4) and in order to save
computation resources, these filters can be applied just once each, the
anti-aliasing filter before splitting the signal to three BBD's and the
reconstruction filter after the sum of the outputs of the BBD's but before
the point where an amount of the dry input signal is summed to the
processed signal. The resulting block diagram is shown in Illustration XX.
4.4.4
Aliasing
In a physical (analog) circuit involving a BBD IC, frequency aliasing
originates mainly from three sources:
85
•
non-bandlimited signal at BBD input
•
spectral periodicization at the BBD output
•
harmonic distortion inside the BBD
4.4.4.1
Non-bandlimited input signal
The anti-aliasing filter should provide a bandlimited signal to the input
of the BBD. Bandlimited means in this case that the time-continuous
signal which is sampled respects the Nyquist criterion, that is it does not
contain any frequency above half of the sampling frequency. This kind of
aliasing could occur in case of inadequately designed anti-aliasing-filters,
or in case the input signal has an harmonic content different than the
one the filter was designed for.
4.4.4.2
Spectral periodicization at the BBD output
When a discrete-tome signal is converted back to continuous time,
the spectral periodicization that characterizes the discrete-time signal
persists in the continuous-time signal. Reconstruction filters placed after
the BBD output are designed to remove the unwanted harmonic content
by cutting off frequencies above half of the sampling rate.
4.4.4.3
Harmonic distortion inside the BBD
Even if anti-aliasing filter is properly designed resulting in a properly
bandlimited input signal at the input of the BBD, whatever harmonic
content should be added inside the BBD, that is in the discrete-time
domain, could cause frequency aliasing in the very same manner as
usually happens in digital signal processing. If harmonic distortion occurs
86
inside the BBD, for instance, the generated harmonics could be aliased if
they should rise above the Nyquist frequency of the system, that is half
the BBD clock rate. This effect was plainly visible in the results of the
measurements taken in 3.4.2.
4.4.4.4
Aliasing in the model
A digital model of the BBD should allow the above mentioned aliasing
manifestations to occur. For this to happen, the interpolating filter must
be set to cutoff at the system sampling rate both at the input and at the
output of the BBD.
If the clock of the digital-BBD is lower than the system sampling rate,
the full spectrum of the input signal, already processed by the antialiasing filter, can reach the input of the digital-BBD and possibly alias.
Similarly, the output of the digital-BBD is allowed to
output its full
spectrum, which will be then filtered by reconstruction filters.
If the clock of the BBD is higher than the system sampling rate, these
effects will not be noticeable. This is - otherwise – the same behaviour
that would show the analog circuit, as long as the input signal is limited
to the audio range.
4.4.5
The delay line
According to [1], a proper model of the delay line would consist of a
fixed-length delay line which artificial sampling-rate is uncorrelated with
the working input/output sampling-rate of the software itself. The
artificial sampling-rate must be time-varying and must be modulated by
an external source. The analog equivalents are obvious: for the fixed87
length delay line the charge-holding elements of the BBD and for the
artificial sampling-rate the clock signal that drives the BBD, and the
modulation source is the LFO. As the two sampling-frequencies are
asynchronous, there will be the need for some kind of interpolation in
order to make a sample available at each of them at the exactly time
instant when it is required.
The delay line is implemented in the SrcUD() function, which is the
core of BBDresample . It reads and writes to the delay line – the bbd[]
arrays – using bandlimited interpolation by means of the FilterUD
function. It allows multiple delay line to run in parallel, process the same
batch of samples, and sum their outputs – properly scaled – to the
output buffer. The number of delay lines available is defined at compile
time by the NUMBER_OF_BBDS flag. The number of delay lines used is
decided at runtime on the basis of the preset chosen. The clock of the
delay line is modulated by an internal LFO – computed by the lfoGen
function – or by an external LFO, passed by the user as the right channel
of the input file.
Although this implementation has been prototyped in Octave, C-style
pseudo-code is the best fit illustrating the algorithm, as Octave uses
different rules for indexing arrays which result in overly-complicated
code.
BBDDEL /* Number of stored samples in the BBD*/
BBDSIZE /* Total size of the BBD array*/
X[] input buffer
Y[] output buffer
bbd[BBDSIZE] BBD buffer
T2 sampling increment of the BBD clock
Nx number of samples to process
Time elapsed time in samples
88
Time=0
nextBBDevent=0 /*when it's time to write a sample in
the BBD*/
oldBBDevent=0-T2 /*previous value*/
nextTevent=0 /*when it's time to read from the BBD
and write to output*/
1.
while ( Time<Nx ){
2.
if (Time==nextBBDevent){
3.
BBDindex=circularAdd(BBDindex,1) //increment
in the circular buffer
4.
Xp=floor(T)/*integer part of T, index in the
input array*/
5.
w=fract(T)/*fractional part of T*/
6.
bbd[ch][BBDindex]=interp( X, T, w ) /*an
arbitrary interpolating function*/
7.
oldBBDevent=nextBBDevent /*save old*/
8.
nextBBDevent=Time+T2 /*schedule next*/
9.
}
10.
if (*Time==nextTevent){
11.
rread=circularSubtract(BBDindex,
BBDDEL)/*read index in the BBD: subtraction in
the circular buffer */
12.
w=(Time-oldBBDevent)/T2 /*relative position
of T between bbd[rread] and
bbd[rread-1] */
13.
Yp=floor(Y) /*index in the output array*/
14.
Y[Yp]=interp(BBD,rread,w)
15.
nextTevent=Time+1 /*schedule next*/
16.
}
17.
Time=MIN(nextTevent,nextBBDevent[ch])
18.
}
Code 2 pseudo-code of the delay line implementation
NextBBDevent is the next time at which an input must be fed to the
BBD, while nextTevent is the next time an output sample is needed. At
each iteration of the while loop the current Time is compared with the
time of the scheduled events. If one matches, the associated actions are
performed and the event is rescheduled. At the end of each iteration, the
89
new Time is set as the lesser of the scheduled events. This is a fullyasynchronous implementation. In this way, at each iteration at least one
event takes place and is rescheduled. Two events at the same Time can
happen as well, as is the case of the first iteration. Moreover, events of
a given type – be it BBDevent or Tevent – can take place whatever
number of times between two consecutive events of the other type. In
fact, this is limited only by the size of the BBD array, as discussed in
4.4.1. Note that Tevents take place only at integer values of Time as they
are the times when an output sample is required.
Interp() is a generic interpolating function which takes as parameters
the array, the index in the array to be interpolated and the fractional
index
between the indexed element and the next. These three
parameters are enough both for a simple linear interpolation and a more
elaborate bandlimited interpolation. Retrieving the indexing parameters
when reading from the input buffer is pretty straightforward, being them
respectively the integer and the fractional part of the current Time.
Otherwise, when reading from the BBD array things are slightly more
complicated. While the index in the array is easily computed with a
subtraction in the circular buffer (line 11), the fractional part needs to be
calculated as the ratio between the time elapsed since oldBBDevent and
the sampling increment T2 of the bucket-brigade clock (line 12). The
result is always in [0,1), as it would be 1 only if nextBBDevent ==Time,
but it is not possible because even if nextBBDevent were equal to Time
at the beginning of the iteration, it would have been updated at line 8
with a new value greater than Time. Figure 22 illustrates the method
used and the variables involved. T1 is the sampling increment of the
system frequency. The interpolating function will need to access some
elements before and after the one indexed by rread. Therefore,
90
appropriate padding must be reserved in the BBD array, as discussed in
4.4.1
The clock frequency of the BBD and its sampling increment T2 do not
need to be time-invariant and thus they can be modulated by an LFO.
In the implementation above, no effect is applied to the signal other
than the resampling itself. The extended implementation in Code 3
shows the multiple-channel processing, the LFO modulator and the
points where distortion, noise and filtering are applied to the signal. Only
lines that have been introduced here for the first time have comments.
BBDDEL
Number of samples stored in the BBD
91
BBDSIZE Total size of the BBD array
Y[]={0} /*output buffer must now be initialized to
0*/
channels /*number of BBD devices used in parallel*/
bbd[channels][BBDSIZE]={0} /*this is now a
multidimensional array*/
BBDindex[channels]={0}/*these variables are now
arrays*/
oldBBDevent[channels]={Time-T2}/*these variables are
now arrays*/
nextBBDevent[channels]={Time}/*these variables are
now arrays*/
T2fixed /*sampling period of the BBD clock when no
LFO is applied*/
width /*modulation width, expressed as percentage of
the BBD clock*/
cleanWidth /*amplitude of the clean signal summed
with the dry signal*/
1.
X=filter(X) /*anti-aliasing filter applied to the
whole buffer*/for (ch=0;ch<channels;ch++){
2.
Time=startTime;
3.
nextTevent=Time;
4.
Yp=0;
5.
6.
while ( Time<Nx ){
7.
if (Time==nextBBDevent){
8.
lfo=lfoGen(ch,Time) /*an lfo generator*/
9.
T2=T2fixed/(width*lfo+1)/*lfo modulates
clock frequency, that is 1/T2 */
10.
BBDindex[ch]=circularAdd(BBDindex[ch],1)
11.
Xp=floor(T)
12.
w=fract(T)
13.
v=interp( X, T, w )
14.
v=waveshaper(v) /*applying waveshaper*/
15.
v+=noiseAmplitude*noise()/*adding noise*/
16.
bbd[ch][BBDindex[ch]]=v
17.
oldBBDevent[ch]=nextBBDevent[ch]
18.
nextBBDevent[ch]=Time+T2
19.
}
92
20.
if (*Time==nextTevent){
21.
rread=circularSubtract(BBDindex[ch],
BBDDEL)
22.
w=(Time-oldBBDevent[ch])/T2
23.
Yp=floor(Y)
24.
Y[Yp]+=interp(bbd[ch],rread,w)/channels
25.
nextTevent=Time+1
26.
}
27.
Time=MIN(nextTevent,nextBBDevent[ch])
28.
}
29.
}
30.
Y2=filterIIR(Y) /* reconstruction iir filter
applied to the whole buffer*/
31.
Y2+=cleanWidth*X /* clean signal mixed with the
output signal */
Code 3 Full pseudo-code of the delay line, including LFO modulation and insertion
points for noise, waveshaping and filtering
The most efficient multi-channel implementation is the one outlined
here, where the for loop iterating through the channels is outside the
while loop which iterates through time. Although this calls for
reinitializing Time, nextTevent and Yp variables at each for iteration, it is
much faster than nesting the for loop inside the while.
The waveshaping function is applied after the interpolation and
before writing the sample to the bbd buffer. In this way the harmonic
distortion that the waveshaper generates may rise above the Nyquist
frequency of the BBD and then possibly foldback in the audio range,
which is intended as explained in 4.4.4.3.
If needed, a fraction of the input signal can be summed to the output
(line 31).
This pseudo code implementation is split in BBDresample between
the SrcUD and the resampleWithFilter functions. The for and while loop
93
reside in the SrcUD function while the filter processing and the mix with
the dry signal take place in resampleWithFilter. The SrcUD function has
been entirely rewritten but it still uses the same fixed-point time-register
method as used in resample. With the aid of the explanations in 4.3.1
and of the pseudo-code above, the reader should easily understand its
code, which can be found in Appendix B.
4.4.6
Choosing proper bandlimited interpolation filter
Bandlimited interpolation is performed by the FilterUD function, which
is basically the same as it was in resample apart from the modifications
outlined in 4.4.2. Filtering, waveshaping and LFO are provided by some
new functions which are reviewed below.
The steps into the interpolating filters are chosen so that the cutoff
frequency is fixed to system Fs. As stated by (24), a properly chosen sinc
function for sampling-rate conversion should have a frequency that is
the lower of the two sampling rates involved. This would set the
interpolating filter cutoff frequency at the Nyquist frequency of the lower
of the sampling rates, thus ensuring aliasing-free resampling.
In this application, though, as discussed in 4.4.4.4, a certain kind of
aliasing is desirable and the cutoff frequency of both resampling filters
must be fixed at system sampling rate. In order to fulfill this constrain,
the filter steps to pass to the FilterUD() function must be properly
chosen.
Being Fs the system sampling-rate and
F
the BBD sampling rate,
when converting from system to BBD sampling rate, the converting
factor is
94
factor ' =
F
Fs
(39)
To place the filter cutoff at system frequency, the filter step must be
unitary, as if factor' was 1. In resample this translates, as seen in Code
1, to a filter step of Npc.
When converting back from BBD to system sampling rate, the
converting factor is
factor ' '=
Fs
F
(40)
To place the filter cutoff at system frequency, the filter step must be
factor''. In resample this translates to a filter step of factor times Npc.
Unfortunately, the implementation used does not allow a filter step
greater or equal to 2*Npc. This value must thus be limited and defined
as
dh=MIN(2*Npc-1,Npc*T2lfo);
This means that – in the current implementation – the interpolating
filter will have effects in the audio band whenever the clock frequency is
below half the upper frequency limit of the audio range, that is when
F
10Khz .
4.4.7
The filters
In this implementation, filtering can be performed through both Finite
Impulse Response and Infinite Impulse Response filters. The filtiir()
function provides these capabilities, as shown in Code 4.
95
The function requires as parameters a pointer to an array x[]
containing samples of the input signal, its length lengthx, and an array
where the output samples are to be written, y[]. The pointers passed
must be properly placed in the input and output array. The filtiir function
requires that x[] is Blgt positions into the x array, and y[] is Algt positions
into the output array. Applying IIR filters in place is not possible, as the
output is a function of both input and output values and input values
cannot be overwritten. y[] is the first element of the array that is written
by the function. Applying filters to batches of samples – as is usually
done – needs to remember a number of previous input and output
samples between batches.
The code of filtiir is a straightforward implementation of the IIR filter
algorithm ([31]):
N
y n=
i =0
M
bi x n i
ai y n i
(41)
i=1
Where bi and ai are the filter coefficients and x and y are respectively
the input and output signal. The output signal is a function of both the
input elements – in the first summation – and of the previously output
elements in the second summation. This second summation is known as
the recursive part of the filter.
1.
2.
3.
4.
#define Blgt 5
#define Algt 5
FLOAT filtiir(FLOAT x[],int lengthx, FLOAT y[]){
static double A[Algt]={1.000000,2.099811,2.439923,-1.502647,0.483548};
5.
static double
B[Blgt]={0.010773,0.043093,0.064640,0.043093,0.01077
3};
6.
int n,i,iend;
96
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
double out=0;
for (n=0;n<lengthx;n++){
out=0;
for(i=0;i<Blgt;i++){
out+=B[i]*x[n-i];
}
for (i=1;i<Algt;i++){
out-=A[i]*y[n-i];
}
y[n]=out;
}
}
19. Code 4 The filtiir() function
4.4.8
The waveshaper
Waveshaping is a type of distortion synthesis which consists in
applying to the signal a non-linear function. The distortion generated by
a waveshaper is harmonic, which means that the spectral components
added in the output signal are multiples of the harmonics that were
present in the input signal. The choice of a polynomial function as
waveshaping function allows to limit the band of the resulting signal. In
fact, a polynomial function of degree N will add to the input signal up to
N harmonics ([32]). On this basis it can be easily predicted whether
passing a given digital signal through a waveshaper will generate
aliasing in the signal.
Computing polynomial functions of a high degree can be very CPUintensive. An alternative to computing polynomial functions on-the-fly is
to read pre-computed values from a table. While on-the-fly computing
method gives a continuous response, and allows for inputs >1 or <-1, on
97
the other hand the table-lookup method gives a quantized response,
thus the table should be very large or else interpolation between its
samples would be needed. Furthermore the input values must be clipped
in the range [1,1). It has been found that with a non-interpolated table of
65536 samples and polynomials up to the third degree the two methods
are equally faster, while for higher degrees the table-lookup method is
much more efficient and has no limitations in the degree of the
polynomial, and can also use tables that origin from other kinds of
functions. As the purpose of this software is to be flexible and scalable, a
function for each method has been written, while only the table-lookup
one is actually called by the program.
#include "wash1.h"
double washtable(double a){/*WAVESHAPER look up table of
length WAVESHAPER_N
must be declared in included
files.*/
if (a>MAX_SIGNAL) return WAVESHAPER[WAVESHAPER_N-1];/*a
must be limited between MAX_SIGNAL
and MIN_SIGNAL, otherwise it is
clipped*/
if (a<MIN_SIGNAL) return WAVESHAPER[0];
return WAVESHAPER[(int)((a+1)/2.0*WAVESHAPER_N+.5)];
}
#define WASHCOEFF_N 7
double
washcoeff[WASHCOEFF_N]={1.004788129644182,0.4950691592538
86,-0.313495276667667,0.133623824894141,0.042531730800134,1.024943394186864,0.005144271811968};
//~ double washcoeff[WASHCOEFF_N]={6,5,4,3,2,1,0};
double washcompute(double a){
int i;
double out=washcoeff[WASHCOEFF_N-1];
98
for(i=1;i<WASHCOEFF_N;i++){
out+=pow(a,i)*washcoeff[WASHCOEFF_N-i-1];
}
return out;
}
Code 5 Waveshaping functions
The table-lookup implementation needs that the waveshaper values
are in a properly-formatted external header file “wash1.h”. An Octave
script is provided in [37] which, given the coefficients of a polynomial
function, computes the values and writes the wash1.h file.
4.4.9
Noise
For the noise generator an algorithm developed in 1997 by Makoto
Matsumoto and Takuji Nishimura which is known as “Mersenne twister”
is used [33]. This pseudo-casual random generator has a period of
219937 1 iterations, which is greater than 4.3 106001 . The generated
numbers are equidistributed and this runs faster than other generators
of the same class. The function used is based on the program coded by
Matsumoto and Nishimura in 1997 and successive modifications, which
is distributed under BSD license, and can thus be incorporated in this
project as long as the license and disclaimer are included along with the
source code. The modifications that have been done to the original code
make the noise() function output 32bit floating-point values in the range
[-1,1). The algorithm is initialized at each program run by calling the
initNoise function and seeding it with the return value of the C time().
99
As mentioned in 4.4.3 the noise has not been filtered. The value
returned by noise() is simply multiplied by the desired noise amplitude.
Given a SNR ratio in dB, the amplitude of the noise can be expressed as
noiseAmp=10
SNR
20
(42)
4.4.10 The onboard LFO
The “onboard” LFO capability is provided by the lfoGen function which
prototype is
double lfoGen(int preset, int channel, UWORD uTime,
double sysFs)
The uTime variable is the time in fixed-point format, as used in the
rest of the program and as explained in great detail in 4.3.1. Internally,
the lfoGen function converts it to floating-point time expressed in
seconds in the variable Time. The function switches the given preset and
channel and returns a floating-point value. An example of a return from
the function is shown here for the preset 2:
switch (channel){
case 0 :
return .5*sin(pi2*Time*fslow+phs) +
famp/2*sin(pi2*Time*ffast+phf);
case 1 :
return .5*sin(pi2*Time*fslow+phs+ph1) + .
5*famp*sin(pi2*Time*ffast+phf+ph1);
case 2 :
return .5*sin(pi2*Time*fslow+phs+ph2) +
famp/2*sin(pi2*Time*ffast+phf+ph2);
}
100
Where
pi2=2
and ffast and fslow are the frequencies of –
respectively – the fast and slow sinewaves. The phase argument of the
sin() function deserves a particular attention. ph1 and ph2 are the
relative phases of the second and third output – respectively – of the
three-phases oscillators and are constants defined as
static double ph1=2*M_PI/3;/*phase of second modulator*/
static double ph2=2*M_PI*2/3;/*phase of third modulator*/
Global variables phs and phf, on the other hand, are initialized to 0
and then updated by function reinitLfoGen at the end of SrcUD().
void reinitLfoGen(UWORD Time, double sysFs){
double t=(Time/32768.0 - Xoff)/sys;
phs+= t*fslow*2*M_PI;
phs=fmod(phs,2*M_PI);
phf+= (t*ffast)*2*M_PI;
phf=fmod(phf,2*M_PI);
}
This function takes as argument the fixed-point time at the moment
when SrcUD() is returning to the caller, which corresponds to the elapsed
samples, subtracts Xoff (padding offset in the input buffer) samples and
calculates the phase of each LFO at that time and stores these value in
the phs and phf variables, so that when, at the next call of the function,
the *Time variable in SrcUD resets, the phase of the LFO's is preserved.
The LFO modulates the clock frequency of the BBD, so that, being
F s2 =
1
the clock frequency when the amplitude of the LFO is zero and
T s2
w the modulation width in the range [0,1), the frequency at time t is
given by
101
F s2 t = F s2 F s2 w lfo t = F s2 1 w lfo t
(43)
And the sampling period Ts2 becomes
T s2 t =
1
F s2 t
=
F s2
T s2
1
=
1 w lfo t
1 w lfo t
(44)
4.5
Modeling the characteristics of the
Vermona Piano String chorus in BBDresample
4.5.1
General parameters
As seen in 2.6, the chorus section of the Vermona Piano Strings
consists of three ST1 boards, each including a TDA1022 IC, a clock
oscillator, anti-aliasing and reconstruction filters. The modulation is
provided by two three-phases LFO's.
The number of stages in a TDA1022 is 512 and the number of delay
lines available is 3, so in BBDresample the following constants must be
defined:
#define BBDBUCKS 512
#define NUMBER_OF_BBDS 3
4.5.2
Parameters of the filters of the ST1 board
Two methods are outlined here for retrieving the coefficients of an IIR
filter for a given frequency response. The analog-based method used for
the anti-aliasing filter retrieves the filter coefficients analytically by
102
starting from the Laplace transform of a given analog system. On the
other hand, the method used for the reconstruction filters takes as
parameter the measured frequency response of a system and fits to it
an arbitrary-length IIR filter.
4.5.2.1
The anti-aliasing filter
The frequency response of the anti-aliasing filter has not been
measured. Nonetheless. its behaviour is supposed to be adhering to the
theoretical one, as
the output impedance of the operational amplifier
that drives its input is low and the input impedance of the TDA1022
which follows it is that of a MOS, so quite high. It has been implemented
in the form of a IIR filter. The coefficients of the filter can be computed
on the basis of the transfer function of the analog filter in the Laplace
domain by transforming it in the Z-transform domain by means of the
bilinear transform. This method allows to retrieve the coefficients of a
time-discrete IIR filter which frequency response is equal to that of the
analog filter considered starting by the Laplace transform of the analog
filter.
The Laplace transform of a first order passive analog low pass filter is
given by [31]:
G s =
c
s
(45)
c
Where
c
=2
fc
(46)
is the cutoff frequency of the filter. The bilinear transform equation is
:
103
s=
2 z 1
Ts z 1
(47)
Where Ts is the sampling period of the digital system. Substituting the
(47) in the (45), the Z-transform of the system is:
G z =
Y z
c
=
X z
2 z 1
Ts z 1
1 z
=
c
2
cT s
1
1
1
(48)
2
cT s
The coefficients of the numerator and denominator polynomials are
the coefficients of the IIR filter.
Equation (2) gives a cutoff frequency for the anti-aliasing filter
FcAA=10261Hz. By substituting this into (46) and considering a sampling
frequency Fs=44100 and Ts=1/Fs :
cAA
T s=2
f cAA
1
1
=2 10261
=1.4619
Fs
44100
(49)
At last the (48) can be written for the anti-aliasing filter of the TS1
board as:
1 z
G z=
1
2
1.4619
1
1
2
z
1.4619
=
1
1 z 1
2.368 0.368z
1
(50)
The filter coefficients for the anti-aliasing filter are then:
B={1,1}
A={2.368 , 0.368}
(51)
The computed transfer function of an IIR filter with these coefficients
is shown in Illustration XXI. Octave function first_order_low_pass_coeff() ,
which source code can be found in [37], can be used to compute the
104
coefficients of a first order passive lowpass filter, given the resistance
and capacitance values of the analog components.
In BBDresample the anti-aliasing filter is defined by the following
parameters:
int AAfilter_Blgt=2;
int AAfilter_Algt=2;
double AAfilter_B[AAfilter_Blgt]={1,1};
double Aafilter_A[AAfilter_Algt]={2.367982,-0.367982};
4.5.2.2
The reconstruction filter
The measurements made on the device in 3.4.4 revealed that the
actual behaviour of the reconstruction filters on the ST1 board is quite
different from that calculated in 2.6.1.4. Nevertheless, the measured
behaviour is the one that has been emulated in BBDresample.
In order to compute the filter coefficients for a given frequencyresponse, any of a
number of digital filter design techniques can be
used. An highly-accurate low-order IIR filter can be obtained by using the
invfreqz Octave function. This function implements an FFT-based
equation-error method which minimizes the error in the frequency
domain [34].
By means of the the retrieving_filter_coeff.m Octave script, which can
be found in Appendix A, one of the files recorded in 3.4.4 is read, the
transfer function of the second channel against the first channel is
computed and it is passed to the invfreqz function which returns the
filter coefficients. The filter is then applied to the reference signal and
the transfer function of the filter is computed and plot along with the
measured one. The plot for a filter length of 5 is shown in Illustration
105
XXII. As can be seen, the frequency response and the phase response
match almost exactly above 100Hz. The high pass filtering in the
measured frequency response is caused by the coupling high-pass filter
placed at the output of the reconstruction as already discussed in
2.6.1.4. The filter coefficients retrieved with this method do not show the
effect of this filter as the invfreqz function weighs uniformly the values of
the desired frequency response, and this the range 20Hz-100Hz is small
compared to the 22050Hz of the audio band. By weighing differently the
frequency response by passing an additional parameter to invfreqz, or
by increasing the order of the filter, the frequency response of the filter
can be made more similar to the measured one. It has been decided,
nonetheless, that this high-pass filtering is non-necessary in this digital
implementation, as it is mainly a consequence of an electronic constrain
rather than a precise choice of the designer of the circuit, and
furthermore its audible effect in the audio band is limited.
The parameters retrieved for the reconstruction filter with the method
above are defined in BBDresample as follows:
int RECfilter_Blgt=5;
int RECfilter_Algt=5;
double RECfilter_B[RECfilter_Blgt]={-0.000970280898205,
0.025084538676200, 0.098919471890114, 0.055388793738097,
-0.000448162789216};
double RECfilter_A[RECfilter_Algt]={1.000000000000000,
-1.908763376321394, 1.945435616960158,
-1.088255269315177, 0.330561974978888};
106
4.5.3
Parameters of the TDA1022
4.5.3.1
Noise
As previously discussed, noise filtering has not been modeled in this
implementation. The three main reasons that have lead to this decision
are:
•
filtering noise would have minimal effect on the overall result,
because the spectrum of the noise is almost flat in the passband of
the reconstruction filters and shows a maximum gain of about +6dB
at higher frequencies which would be attenuated by the filters
•
filtering noise would be computationally expensive, as an additional
FIR or IIR filter should be employed here
•
noise is generally an unwanted feature in an audio effect and the
user would most likely want to turn it off
From the measurements made in 3.4.1 results that SNR= 67.782dB,
so the noise amplitude must as given by (42) is:
noiseAmp=10
SNR
20
=10
67.782 /20
=0.00040823
(52)
In BBDresample the following constant must be defined:
double NOISEAMP=0.00040823
4.5.3.2
Frequency-dependent insertion gain
As seen from the measurements made on the TDA1022 in 3.4.2,
frequency-dependent insertion gain is mostly non-relevant for the high
107
clock frequencies used in chorus devices. The effect of the -2dB gain
that has been measured at 20KHz would be almost canceled by the
reconstruction filter which have a gain of -40dB at 20KHz. Generally
speaking, as stated in [1], the global transfer function of the filters is
usually such that frequencies near the Nyquist frequency are already so
much attenuated that the effect of frequency-dependent insertion gain
can be ignored.
4.5.3.3
Harmonic distortion
Raffel and Smith in ([1], page 6) suggest the use of a waveshaper in
order to model the harmonic distortion of the BBD. Only the first three
harmonics are considered of relevance, as the higher ones have a
negligible amplitude. It also reports that
the characteristics of the
measured harmonic distortions are similar for a wide range of
amplitudes and the relative amplitude of the harmonic peaks is almost
amplitude-independent, thus making it difficult to approximate the
harmonic distortion with just one waveshaper. The harmonic distortion
generated by a waveshaper is in fact by definition amplitude-dependent.
Otherwise, as reported in 3.4.3,
the measurements made on the
TDA1022 reveal a different kind of distortion. It was then attempted to
fit a single waveshaping function to a wide range of amplitudes and
measure the difference between the computed and the measured
values.
The harmonic distortion measured on the 1001.29Hz sinusoids in the
range of amplitude from 0dB to -20dB is shown in Illustration XI . Of the
amplitudes shown, only those in the range [0 -13] show the presence of
both the 2nd and 3rd harmonic. Only the sinusoids inside this range
108
were taken into account for the following analysis, which are devoted to
find a waveshaping polynomial function of third degree, being relevant
only the first three harmonics.
For each of these input levels the amplitude of the first three
harmonics of the output signal was computed using the thd.m script
(Appendix A). The reference signal showed a little amount of harmonic
distortion ( less than -75dB for the second harmonic and -100dB for the
third). The amplitudes of the harmonics measured in the input signal
were subtracted from the respective amplitudes in the inputs signal,
weighted by the ratio between the amplitude of the output and input
fundamentals. A waveshaping polynomial function of order three has
been fitted to these values, using a custom script that writes a linear
system with appropriate coefficients by means of a Pascal triangle and
cosine multiplication formulas and solves it. See cawa.m in Appendix A.
After all of the waveshaping functions had been computed, each of
them has been evaluated between the +and- amplitude of the reference
file with a step of 0.001, and the points obtained have been used to
compute a polynomial fit of 3rd degree using Octave's polyfit function.
The computed waveshaping functions have then been applied to each
input signal in the range [-6 -18], and the magnitude of the obtained
signals was compared with that of the measured output. The difference
between the measured and computed magnitudes have been plotted
and the mean squared error (MSE) of the estimator has been computed
for each harmonic and as a global for each reference level. MSE values
are reported in Table 1.
Surprisingly, the polyfit function returned the worst results by far (
Illustration XXIII), reporting differences of more than 20dB on the third
109
harmonics. Of the other waveshaping functions, the minimum MSE was
obtained from the one based on the -7dB signal Illustration XXIV. For
each harmonic the difference between the measured and the computed
amplitude of the first and second harmonic is comprised across all the
measured range between -1.2dB and +0.6 dB.
The resulting polynomial function is:
y=0.075x 3 0.01768x 2 0.91289x 0.0058932
(53)
The graph of the function in the [-1 ,1] range is plotted in Illustration
XXV. The coefficients retrieved with this method have been used for the
waveshaping function in the BBDresample software:
int WASHCOEFF_N=4;
double WASHCOEFF[WASHCOEFF_N]={0.074999901728955,
0.017679532761088, 0.912890447963023,
-0.005893177587029};
4.5.3.4
Presets
At each program run the user can choose a preset via the -p
command-line switch. Each preset sets the BBDclock, the presence of
the direct channel in the output mix, the number of delay lines to
process, the rescale divisor and the modulation width of the lfo. The
values for the Vermona Piano Strings are shown below, and have been
retrieved in 2.4.3, 2.5.3, 2.6.2, 3.4.5.2.
switch (preset){
case 0 :/*slow*/
channels=1;
direct=1;
110
rescale=2;
BBDclock=63821;
modwidth=40;
break;
case 3 :/*fast*/
channels=1;
direct=1;
rescale=2;
modwidth=13;
BBDclock=68175;
break;
case 1:/*chor1*/
case 2:/*chor2*/
channels=3;
direct=0;
rescale=3;
modwidth=40;
BBDclock=63821;
break;
4.6
Comparing the modeled and physical
devices
In this section some of the tests performed in Part 3 on the physical
device are performed on the digital model and the results are compared.
Unfortunately by the time of this final tests one of the ST1 boards had
ceased working and thus tests on presets that involved more than one
board could not be performed. Furthermore, as discussed in 3.4.5, the
slow LFO was not working properly so the only test involving modulation
was performed on the fast LFO.
111
4.6.1
Harmonic-distortion
By typing the following code on the command line
BBDresample -p 4 -w 0 -b -g 0.5 sin1001.wav BBDhd.wav;
The test tone sin1001 is processed by BBDresample in dry-only mode
and without modulation, bypassing the filters. The result of the
comparison is shown in Illustration XXVIII. The harmonic contents of the
two signals nearly match for the first three harmonics, while higher
harmonics are not showing in the modeled signal as the order of the
polynomial waveshaping function has been limited to 3, as discussed in
4.5.3.3.
4.6.2
Aliasing
BBDresample -e -p 4 -w 0 -b cref.wav out.wav;
The chirp test tone is processed by BBDresample in dry-only mode
and without modulation, bypassing the filters. In this test the clock of the
BDB is set to 100KHz. The results are shown in Illustration XXXI. In order
to allow the upper harmonics to alias and foldback, a polynomial
waveshaper of the 7th degree has been used.
This test shows that the delay line implementation gives the expected
results with respect to spectral aliasing. The upper harmonics generated
inside the BBD by harmonic distortion fold back around the Nyquist
frequency of the BBD and eventually fold back in the audio band.
112
4.6.3
Modulation
BBDresample -p 5 -w 20 -b -g 0.5 sin500.wav
BBDmodulate.wav
A sinewave at 500Hz is processed by BBDresample with the fast LFO
and a 20% modulation width. The filters are bypassed. The clock of the
BBD is set to 68175Hz. The same processing has been recorded from the
TS1 board. The spectrogram of the obtained signals is shown in
Illustration XXXII.
The two spectrograms are very similar between each other. While the
modulation width and the modulation frequency match,
a zoomed-in
view (Illustration XXXIII) shows that the modulating waveforms appear to
be slightly different. Probably the analog fast LFO has a waveform that is
not a pure sinusoid but has also some higher harmonics which influence
the modulated response. Nevertheless, the results obtained by the
model in this respect show a significant adherence to the behaviour of
the modeled device.
113
5 CONCLUSIONS
The physical model of a Bucket Brigade Device circuit as proposed by
Raffel and Smith has been implemented in a new software called
BBDresample, based on the existing software resample written by Smith
himself. BBDresample provides multiple resampled modulated delay
lines that emulate the behaviour of BBD's, along with anti-aliasing and
reconstruction IIR filters, waveshaping harmonic distortion, noise and an
on-board multiple LFO generator. BBDresample is distributed under LGPL
license.
The core of the software is the delay line, which overcomes the
intrinsic limitations of the previously available implementations reviewed
in 1.4.2, by allowing for any ratio between the BBD clock and the system
sampling rate and using bandlimited
interpolation for resampling
purposes. By properly setting the BBD frequency and modulation width,
a wide range of flanging and chorus effects can be obtained. This solid
delay line core can be reused in other applications involving emulations
of BBD's such as reverberators, phasers and delays.
The software currently emulates the filters, non-linearities and
presets of the TS1 chorus boards of the Vermona Piano Strings, a strings
machine from the late seventies made in DDR by Vermona. GNU Octave
scripts that have been used for the analysis and definition of the
parameters are provided to the reader and could easily be re-used in
order to perform an analogue analysis of a similar device, and possibly
use it to expand the effect library of BBDresample.
114
Bucket-brigade devices are one of the few circuitry that belong to the
uncommon category of discrete-time, but non-digital circuitry. In spite of
their non-digital nature, being them discrete-time they suffer of spectral
aliasing. Proper anti-aliasing filtering always show up in BBD based
circuits but some aliasing is nevertheless generated by the harmonic
distortion that takes place inside the device itself. Furthermore, many
delay and flanger units have a clock whose Nyquist frequency falls inside
the audio range. The aliasing generated by the BBD is a characteristic of
the analog device that has been taken into account and recreated in this
implementation. The interpolating filters have a cutoff frequency fixed to
the system Nyquist frequency and the waveshaper which causes
harmonic distortion is placed right after the first interpolator which
marks the beginning of the discrete-time domain of the BBD. In this way,
the harmonic distortion takes place “inside” the BBD, which output is
then resampled back to system sampling rate.
The comparison between the model and the modeled device has
been performed by processing the same test tones in the digital model
and in the physical device, and the results are promising. The delay line
behaves as expected, correctly aliasing the frequencies above the
Nyquist frequency of the BBD. The modulation effects could not be
compared extensively with the physical device as the electronic slow
LFO showed a different waveform than the sinewave graphed in the
schematics, but there was no mean of analyzing it, as none of the
soundcards available was able to acquire a waveform with such a low
frequency (0.6Hz). The comparison with the modulation of the faster LFO
proved to be successful as the resulting effects are very closelysounding, even though a zoom in the spectrogram of both the digital-
115
processed and the analog-processed signals reveals that the latter
seems to be modulated by a non-perfect sinewave.
5.1
Future work
Though the software presently has a command-line-only interface, a
plugin version is currently under development in order to make the
underlying algorithm available for realtime signal processing in a DAW or
other realtime audio processing environments such as PureData,
SuperCollider etc.
The current implementation with multiple delay lines resampled using
bandlimited interpolation is rather computationally expensive. While
BBDresample is able to perform command-line processing much faster
than realtime, using the same algorithm in a realtime environment along
with possibly a huge amount of other plugins running may require some
simplifications in the algorithm, i.e. reducing the length of the
interpolation convolution, replacing the interpolation algorithm with a
faster one, enlarging the look-up table of the filter used for bandlimited
interpolation and thus avoid the linear interpolation presently used while
reading from the lookup table.
Furthermore, the resampling bandlimited interpolator used, which is
almost entirely based on that of resample, has some constraints that
limit the frequency of the interpolating filter
to a maximum value of
twice the clock of the BBD. This means that for very low (<10Khz)
clocks the aliased frequencies cannot be entirely reconstructed. This is
mostly of no concern as the reconstruction filters would usually cutoff
them nonetheless.
116
As for the modeling of the Vermona Piano Strings, a proper
digitization of the LFO waveforms is missing and should be performed in
order to recreate a more realistic LFO model, as the
implementation uses simple sinewaves.
117
presently
APPENDIX A – OCTAVE CODE
thd.m
# [harmonics pthd]=thd(outsml,F,[, threshold=-Inf verbose=1
"lin" "db" "f0" "l10" "pNaN"])
# Performs a thd analysis of the spectrum oustml. Default
values are shown above.
#
# harmonics is a matrix containing
# in the first col the magnitude,
# in the second the bin frequency,
# in the third the bin number,
# in the fourth the power.
# in the fifth the order of the harmonic
# if two values are requested, pthd is the percentage of thd
# outsml must be a real FFT , could be dB's(should be
normalized to 0) or linear (should be normalized to 1)
# assumes that outsml has been retrieved using a Hann function.
# Otherwise, column 4 must be multiplied by 1.5 and then
divided by the noise-power bandwidth of the window (1 for
rectangular).
# Other columns are unaffected.
# F is the frequency vector of the FFT
# threshold is the threshold below which the harmonic is not
detected
# If verbose is a "no" , no output will be displayed on the
terminal, otherwise a pretty-formatted table containing the
results is printed
# f0 0 is the frequency assumed to be fundamental, if not
provided tries autodetect
# l10 10 is the maximum number of harmonics returned. 0 means
no limit (limited by f0 and Fs/2)function [harmonics,
thdp]=thd(outsml,F,varargin
# if harmonics in the explicit limit range are below the
explicit threshold and a "pad" or "p[value]" argumentis passed
(such as pNaN,
# they will be shown as [value] if specified or as "-Inf" or
"0" depending on the lin/dB method used
function [harmonics, thdp]=thd(outsml,F,varargin)
if !isnumeric(F) || length(F)!=length(outsml)
118
usage("second argument must be an array of frequencies of the
same length as outsml")
endif
if columns(outsml)>1
outsml=outsml';
endif
verbose=1;
pad=0;
threshold=-Inf;
limit=0;
#tries to guess if data is dB or linear, and defaults to dB
if min(outsml)<0 && max(outsml)<=0
lin=0;
elseif min(outsml)>=0
lin=1;
else lin=0;
endif
if numel(varargin)>0
for i=1:length(varargin)
check=varargin{i};
if ischar(check)
if strcmpi(check,"no")
verbose=0;
elseif strcmpi(check,"yes")
verbose=1;
elseif strcmpi(check,"lin")
lin=1;
elseif strcmpi(check,"db")
lin=0;
elseif strcmpi(check,"pad")
pad=1;
elseif strcmpi(check(1),"p")
pad=1;
padd=str2num(check(2:end));
elseif check(1)=="f"
f0=str2num(check(2:end));
elseif check(1)=="l"
limit=str2num(check(2:end));
endif
else
threshold=check;
endif
endfor
endif
if lin==0
linv="dB";
119
form=" %8.2f ";
else linv="linear";
form=" %8.6f ";
endif
hfs=length(outsml);
if exist("f0","var")
[n fundbin]=min(abs(F-f0));
else %tries to autodetect
[fundval fundbin]=max([-Inf; -Inf; -Inf; outsml(4:end)]);
%ignores first two bins
endif
i=fundbin;
harmonics=[];
harmanalysisstring=[];
c=1;
while i<=hfs-3 && i>0
if outsml(i)>=threshold
harmonics(end+1,1)=outsml(i);%magnitude
harmonics(end,2)=F(i);%frequency
harmonics(end,3)=i;%bin
linval= outsml(i-3:i+3);
if !lin
linval=10.^(linval/20);
endif
harmonics(end,4)=sum(linval.^2);
harmonics(end,5)=c;%order
harmanalysisstring=[harmanalysisstring;
sprintf([" %3d | %5d | %9.3f |" form "| %.9f"],
harmonics(end,5), harmonics(end,3), harmonics(end,2),
harmonics(end,1), harmonics(end,4))];
endif
i+=fundbin-1;
range=clip([i-2 : i+2],[1 hfs]);
[harmval harmbin]=max(outsml(range));
harmbin+=i-3;
i=harmbin;
if c==limit break; endif
c++;
endwhile
if length(harmonics)==0
if verbose disp("No bin was above the set threshold"); endif
thdp=NaN;
return
endif
120
# thdp=100*sum(harmonics(2:end,4))/harmonics(1,4); # power
definition
thdp=100*sqrt(sum(harmonics(2:end,4))/harmonics(1,4)); #
amplitude definition
if pad && limit && rows(harmonics)<limit
if !exist("padd","var")
if lin==1
padd=0;
else
padd=-Inf;
endif
endif
harmonics=[harmonics; zeros(limit-rows(harmonics),5)];
for c=1:limit
if harmonics(c,5)!=c
harmonics(c:end+1,:)=[padd 0 0 0 c; harmonics(c:end,:)];
endif
endfor
harmonics=harmonics(1:limit,:);
endif
if verbose
sumup=[ "data has been treated as " linv "."];
sumup=[sumup; sprintf("\nStrongest harmonic found at bin %d,
bin frequency %f;\nExtimated frequency (mean of diffs) is %f;
",
harmonics(1,3), harmonics(1,2),
mean(diff(harmonics(:,2))) ) ];
sumup=[sumup; sprintf("Threshold as been set to %.1f\n\n thd
is %f%%",threshold,thdp)];
disp([
"\n---------------------"
"\nHarmonic analysis:"
sumup
"\norder| bin | frequency | magnitude | power"
harmanalysisstring]);
endif
121
retrieving_filter_coeff.m
#given an input file containing reference and processed
signals, computes the transfer function and retrieves the
#coefficients of a stable IIR filter of given length which
#approximates the given transfer function.
nA=4; #order of the denominator polynomial
nB=4; #order of the numerator polynomial
x=wavread("chirp1001Hz_100s_-2dB.wav"); #file must be
deal(x,y)
X=fft(x)(1:end/2);
Y=fft(y)(1:end/2);
Z=Y./X;
stereo
binsize=fs/(length(Z)*2);
F=[0:binsize:fs/2-binsize]';
[B,A]=invfreqz(Z,pi*F/(fs/2),nA,nB);
if max(abs(roots(A)))>1 #if there are poles outside the unitary
circle
warning("filter instable, trying to polystab it")
A=polystab(A); #may induce phase distorsions
endif
y2=filter(B,A,x);
Y2=fft(y2)(1:end/2);
Z2=dec(Y2./X,decim);
B*=1/(max(abs(Z2))); #normalization
122
cawa.m
# function as=cawa(harm,amplitude=1,lin)
# CAlculates WAveshaper coefficients
# given an array harm of harmonic strength and the
amplitude=max(abs(input)) of the input signal computes the
waveshaper coefficients
# harm must contain the amplitudes of the first harmonics,
ordered as follows:
# [
dc
fund
2nd
3rd
. . . . ]
# Tries to automatically detect if the input is given as dB or
linear, or this could be specified with the
# third parameter "lin" or "dB"
function as=cawa(harm,a=1,lin)
Nmax=10; #maximum number of harmonics computable, additional
values are ignored
if !exist("lin","var")
if max(harm)<=0
lin="dB";
elseif max(harm)<=1 && min(harm)>=0
lin="lin";
else error("Couldn't guess if lin or dB, please specify with
the second parameter \"lin\" or \"dB\".");
endif
endif
if strcmpi(lin,"db")
harm=10.^(harm/20);
endif
if rows(harm)<columns(harm) #rotates if harm is row
harm=harm';
endif
for N=length(harm):-1:1 #removes 0 paddings from the end of
harm
if harm(N)!=0 && harm(N)!=NaN
break
endif
endfor
pascal=trpascal(N); #retrieves a N-by-N lower triangular matrix
filled with the coefficients of the pascal triangle
M=zeros(N);
M(1,end)=1;
#sets up a linear system of equations
for k=1:N-1 #row length
m=(k/2);
123
per=1/2^(k-1);
for j=1:k
h=( abs(round(m-j) ) -1 )*2+1+1-mod(k,2);
val=a^k*pascal( k,j)/(2^(k-1));
M(h+1,N-k)+=val;
endfor
endfor
harm=harm(1:N);
as=M\harm; #solves the linear system
124
APPENDIX B – C CODE
int SrcUD(
FLOAT X[],/*pointer to the first element to be processed in
the input buffer*/
FLOAT Y[],/*pointer to the first element to be written in the
input buffer*/
UWORD *Time,/*the time accumulator*/
UHWORD Nx,/*number of samples to process*/
UHWORD Nwing,/*number of samples in the filter table*/
UHWORD LpScl,/*unitary gain rescale factor of the filter
table*/
HWORD Imp[],/*pointer to a table of filter values*/
HWORD ImpD[],/*pointer to a table of differences filter
values*/
BOOL Interp, /*use filter interpolation?*/
FLOAT X2[], /*pointer to the first element of the external lfo
buffer*/
int channels, /*number of channels to process*/
double rescale,/*rescale coefficient for output samples*/
int onboard,/*use onboard lfo?*/
double sysFs)/*system sampling rate*/
{
extern double bbd[];
extern double gain;
extern double BBDclock;/*BBD clock frequency*/
extern double modwidth;/*BBD modulation width*/
static BOOL init =0;
static double T2f;/*step through bbd samples, floating point*/
static UWORD T2i;/*step through bbd samples, fixed point*/
static UWORD T2[NUMBER_OF_BBDS];/*intialized below*/
static double T2lfo;
static int BBDindex[NUMBER_OF_BBDS]={0};
static double amp1;
static double amp2;
static double lfo=0;
double z0,z1,w; /*interpolator parameters*/
UWORD wi;
int Xp;
int ch;
int rread;
double width=modwidth/100;
double v;
static UWORD t;
/*time variables*/
static UWORD oldBBDevent[NUMBER_OF_BBDS];/*initialized below*/
125
static UWORD nextBBDevent[NUMBER_OF_BBDS];/*initialized below*/
static UWORD nextTevent;
double dhw; UWORD dhbw;
if (!init){/*first time initialization*/
for (ch=0;ch<channels;ch++){
oldBBDevent[ch]+=*Time-T2[0];
nextBBDevent[ch]+=*Time;
T2[ch]=T2i;
amp1=gain*.9;
amp2=(2-gain)*.4;
}
initNoise(time(NULL));/*seed noise generator*/
T2f=sysFs/BBDclock;
T2i=(UWORD)(T2f*(1<<Np)+.5);
init=1;
}
else{ /*reinizialization*/
for (ch=0;ch<channels;ch++){
oldBBDevent[ch]+=*Time-nextTevent;
nextBBDevent[ch]+=*Time-nextTevent;
}
}
UWORD startTime=*Time;
UWORD endTime=0;
FLOAT *Ystart = Y;
for (ch=0;ch<channels;ch++){
*Time=startTime;
nextTevent=*Time;
Y=Ystart;
while ( *Time-startTime >>Np < Nx ){
Xp = *Time>>Np;
/* index of X[] to current input sample */
if (*Time==nextBBDevent[ch]){
if (onboard==1)
lfo=lfoGen(ch,*Time,sysFs);
else lfo=X2[Xp]; /*external lfo, no interpolation performed*/
T2lfo= T2f/(width*lfo+1);
dhw = Npc; /* Filter sampling period min(Fs,Fs')*/
dhbw = dhw*(1<<Na) + 0.5;
/* Fixed-point representation*/
T2[ch]=(UWORD)( (T2lfo)*(1<<Np) +.5);
BBDindex[ch]=(BBDindex[ch]+1)%BBDSIZE; /*increment in the
circular buffer*/
w=(*Time&Pmask)/32768.0; /*relative position between X[Xp] and
X[Xp+1] of the current time instant */
v = FilterUD(Imp, ImpD, Nwing, Interp, Xp, (HWORD)
(*Time&Pmask),-1, dhbw, X,0);
/* Perform left-wing inner product */
v += FilterUD(Imp, ImpD, Nwing, Interp, Xp+1,(HWORD)
((((*Time)^Pmask)+1)&Pmask),1, dhbw, X,0);
/* Perform right-wing inner product */
126
bbd[ch][BBDindex[ch]]= washcompute(v*amp1) + noise()*NOISEAMP;
oldBBDevent[ch]=*Time;
nextBBDevent[ch]=*Time + T2[ch];
}
if (*Time==nextTevent){
dhw = MIN(2*Npc-1,Npc*T2lfo); /* Filter sampling period */
dhbw = dhw*(1<<Na) + 0.5;
/* Fixed-point representation*/
rread=(BBDindex[ch]-BBDDEL+BBDSIZE-1)%BBDSIZE;
z0=bbd[ch][ rread ];
z1=bbd[ch][ (rread+1)%BBDSIZE];
w=(*Time-oldBBDevent[ch])/(double)(T2[ch]);
wi=(UWORD)(w*32767+.5);
v = FilterUD(Imp, ImpD, Nwing, Interp, rread, (HWORD)
(wi&Pmask),-1, dhbw, bbd[ch],BBDSIZE);
/* Perform left-wing inner product */
v += FilterUD(Imp, ImpD, Nwing, Interp, (rread+1)%BBDSIZE,
(HWORD)((((wi)^Pmask)+1)&Pmask),1, dhbw,
bbd[ch],BBDSIZE);
/* Perform right-wing inner product */
*Y++=*Y+ T2lfo*amp2*v/rescale;
nextTevent=*Time+(1<<Np);
}
*Time=MIN(nextTevent,nextBBDevent[ch]);
}
endTime=MAX(endTime,*Time);
}
reinitLfoGen(*Time,sysFs);
t=endTime;
return (Y - Ystart);
/* Return the number of output samples */
}
127
APPENDIX C – TABLES
Reference 1st harmonic 2nd harmonic 3rd harmonic
level
MSE
MSE
MSE
POLYFIT
0.01
15.43
99.67
0
0.3
0.49
0.11
-1
0.02
1.03
0.21
-2
0.01
0.74
0.11
-3
0.01
0.57
0.11
-4
0.01
0.44
0.12
-5
0
0.34
0.12
-6
0
0.28
0.12
-7
0
0.26
0.12
-8
0
0.26
0.12
-9
0
0.28
0.14
-10
0
0.31
0.15
-11
0.01
0.34
0.17
-12
0.01
0.38
0.18
-13
0.01
0.42
0.2
Total MSE
20.85
0.32
0.45
0.31
0.24
0.2
0.16
0.14
0.13
0.13
0.14
0.16
0.17
0.19
0.21
Table 1 Errors in the harmonic amplitudes for different 3rd degree polynomial
waveshaping functions
CV Voltage Time/Div (s)
(V)
1.5
5.00E-006
2.5
5.00E-006
3.5
5.00E-006
4.5
5.00E-006
5.5
5.00E-006
6.5
5.00E-006
7.5
5.00E-006
8.5
5.00E-006
9.5
5.00E-006
10.5
5.00E-006
11.5
5.00E-006
12.5
5.00E-006
13.5
5.00E-006
Divs
Periods
8.4
8.6
9.2
9.6
7.6
8.2
8.6
9.2
9.6
7
7.4
8.2
8.8
4
4
4
4
3
3
3
3
3
2
2
2
2
Table 2 measures of the clock frequency F
voltages
128
Frequency
(Hz)
95238.10
93023.26
86956.52
83333.33
78947.37
73170.73
69767.44
65217.39
62500.00
57142.86
54054.05
48780.49
45454.55
of the TDA1022 at different CV
Input
Input
level
level T.H.D Amplitudes(dB)
h2
h3
h4
h5
h6
(dBFS)
(Vrms)
(%)
h1
0
0.99
1.3
-1.97
-40.62
-47.52
-56.13
-64.14
-72.45
-1
0.88 1.08
-2.96
-42.95
-51.18
-61.36
-70.2
-80.35
-2
0.79 0.92
-3.94
-45.13
-54.49
-66.34
-75.85
-87.3
-3
0.7
0.8
-4.93
-47.27
-57.6
-71.09
-81.36
NaN
-4
0.62
0.7
-5.92
-49.4
-60.61
-75.63
-86.71
NaN
-5
0.56 0.61
-6.91
-51.53
-63.62
-79.96
NaN
NaN
-6
0.5 0.53
-7.9
-53.66
-66.62
-84.34
NaN
NaN
-7
0.44 0.46
-8.89
-55.78
-69.63
-88.4
NaN
NaN
-8
0.39
0.4
-9.89
-57.89
-72.64
NaN
NaN
NaN
-9
0.35 0.36
-10.88
-59.98
-75.67
NaN
NaN
NaN
-10
0.31 0.31
-11.88
-62.05
-78.69
NaN
NaN
NaN
-11
0.28 0.28
-12.88
-64.11
-81.73
NaN
NaN
NaN
-12
0.25 0.24
-13.87
-66.17
-84.73
NaN
NaN
NaN
-13
0.22 0.22
-14.87
-68.22
-87.7
NaN
NaN
NaN
-14
0.2 0.19
-15.87
-70.26
NaN
NaN
NaN
NaN
-15
0.18 0.17
-16.87
-72.28
NaN
NaN
NaN
NaN
-16
0.16 0.15
-17.87
-74.28
NaN
NaN
NaN
NaN
-17
0.14 0.13
-18.87
-76.31
NaN
NaN
NaN
NaN
-18
0.12 0.12
-19.87
-78.31
NaN
NaN
NaN
NaN
-19
0.11 0.11
-20.87
-80.35
NaN
NaN
NaN
NaN
-20
0.1 0.09
-21.87
-82.36
NaN
NaN
NaN
NaN
-21
0.09 0.08
-22.87
-84.33
NaN
NaN
NaN
NaN
-22
0.08 0.08
-23.87
-86.3
NaN
NaN
NaN
NaN
-23
0.07 0.07
-24.87
-88.24
NaN
NaN
NaN
NaN
-24
0.06
0
-25.87
NaN
NaN
NaN
NaN
NaN
-25
0.06
0
-26.87
NaN
NaN
NaN
NaN
NaN
-26
0.05
0
-27.87
NaN
NaN
NaN
NaN
NaN
-27
0.04
0
-28.86
NaN
NaN
NaN
NaN
NaN
-28
0.04
0
-29.86
NaN
NaN
NaN
NaN
NaN
-29
0.04
0
-30.86
NaN
NaN
NaN
NaN
NaN
-30
0.03
0
-31.86
NaN
NaN
NaN
NaN
NaN
Table 3 Harmonic distortion of the TDA1022 at different input levels. Threshold was set to -90dB
129
h7
-78.82
-88.11
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
h8
-84.58
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
NaN
APPENDIX D - ILLUSTRATIONS
Illustration I frequency response of the Sallen-Key filters
Illustration II The Hann function
130
Illustration III background noise PSD
Illustration IV background noise PSD (detail)
131
Illustration V background noise PSD(detail)
Illustration VI Frequency response of the TDA1022
132
Illustration VII transfer function of the TDA1022
Illustration VIII transfer function of the TDA1022 after phase correction
133
Illustration IX Spectrogram of the TDA1022 response to a linear chirp with a test amplitude of 0dB
Illustration X Spectrogram of the TDA1022 response to a linear chirp with a test amplitude of
-10dB
134
Illustration XI measured harmonic amplitudes with a sine wave input at different levels
Illustration XII measured harmonic amplitudes with a sine wave input at different levels (detail)
135
Illustration XIII measured transfer function of the reconstruction filter
Illustration XIV measured total harmonic distortion of the TDA1022 Vs input level
136
Illustration XV the sinc function sinc t =sin
t
t
Illustration XVI CV-frequency relation of the BBD clock oscillator
137
138
139
140
Illustration XXI transfer function of the low pass anti-aliasing filter
Illustration XXII measured and computed transfer functions for the reconstruction filter
141
Illustration XXIII difference between the real harmonic amplitude and the one computed using a
waveshaping function with the coefficients returned by polyfit()
Illustration XXIV difference between the real harmonic amplitude and the one computed using a
waveshaping function with the coefficients based on the harmonic distortion at -7dB
142
Illustration XXV the waveshaping function implemented in BBDresample
Illustration XXVI THD of the TDA1022(from original
datasheet [29])
143
Illustration XXVII comparative plot of the measured and computed transfer functions of the
reconstruction filter
Illustration XXVIII: comparative plot of the real and modeled harmonic content
144
Illustration XXIX frequency-dependent insertion gain (from the TDA1022
datasheet)
Illustration XXX transfer function of the TDA1022 after phase correction at multiple test levels
145
146
Illustration XXXII spectrograms of a 500Hz sine tone processed by the physical device(top) and by BBRresample(bottom)
147
Illustration XXXIII spectrograms of a 500Hz sine tone as processed by the physical device(top) and by BBRresample(bottom)
148
FIGURE INDEX
Figure 1 A antiphase-clock Bucket-Brigade circuit (TDA1022)........................................................22
Figure 2: Block diagram of the Vermona Piano Strings.....................................................................26
Figure 3 The master clock and top octave generator circuit...............................................................27
Figure 4 The top-octave generator output waveform.........................................................................28
Figure 5 The master oscillator output waveform................................................................................28
Figure 6: Keying circuit, oscillator mixer and envelope generators...................................................29
Figure 7 The waveform resulting from the sum of the fundamental square wave and two of its
harmonics............................................................................................................................................30
Figure 8: The waveform resulting from the sum of the fundamental square wave and his second
harmonic.............................................................................................................................................30
Figure 9 Three band equalizer for the piano section...........................................................................31
Figure 10 Three-band equalizer for the strings section......................................................................33
Figure 11 schematics of the adapter board that matches the TDA1022 to the pinout of the
TCA350Y............................................................................................................................................35
Figure 12 Schematics of the ST1 board..............................................................................................36
Figure 13 Typical second-order Sallen-Key filter...............................................................................37
Figure 14 Schematics of the two modulation sources........................................................................39
Figure 15 waveforms of the slow(left) and fast(right) LFO...............................................................40
Figure 16 Analog-based resampling method......................................................................................66
Figure 17 Ideal low pass filter response.............................................................................................68
Figure 18 Response of a truncated ideal low pass filter.....................................................................69
Figure 19 Response of a Kaiser windowed ideal low pass filter........................................................69
Figure 20 the Time variable...............................................................................................................74
Figure 21 Illustration of waveforms and parameters of the interpolating function............................81
Figure 22 graphical representation of the parameters used by a generic interpolating function........90
149
ILLUSTRATION INDEX
Illustration I frequency response of the Sallen-Key filters...............................................................130
Illustration II The Hann function......................................................................................................130
Illustration III background noise PSD..............................................................................................131
Illustration IV background noise PSD (detail)..................................................................................131
Illustration V background noise PSD(detail)....................................................................................132
Illustration VI Frequency response of the TDA1022........................................................................132
Illustration VII transfer function of the TDA1022............................................................................133
Illustration VIII transfer function of the TDA1022 after phase correction.......................................133
Illustration IX Spectrogram of the TDA1022 response to a linear chirp with a test amplitude of 0dB
...........................................................................................................................................................134
Illustration X Spectrogram of the TDA1022 response to a linear chirp with a test amplitude of
-10dB.................................................................................................................................................134
Illustration XI measured harmonic amplitudes with a sine wave input at different levels ..............135
Illustration XII measured harmonic amplitudes with a sine wave input at different levels (detail). 135
Illustration XIII measured transfer function of the reconstruction filter..........................................136
Illustration XIV measured total harmonic distortion of the TDA1022 Vs input level.....................136
Illustration XV the sinc function ......................................................................................................137
Illustration XVI CV-frequency relation of the BBD clock oscillator..............................................137
Illustration XVII block diagram of a typical chorus device with multiple BBD's...........................138
Illustration XVIII block diagram of a single delay line....................................................................138
Illustration XIX the signal flow of the BBD model as implemented in BBDresample ...................139
Illustration XX block diagram implemented in BBDresample........................................................140
Illustration XXI transfer function of the low pass anti-aliasing filter...............................................141
Illustration XXII measured and computed transfer functions for the reconstruction filter..............141
Illustration XXIII difference between the real harmonic amplitude and the one computed using a
waveshaping function with the coefficients returned by polyfit()....................................................142
Illustration XXIV difference between the real harmonic amplitude and the one computed using a
waveshaping function with the coefficients based on the harmonic distortion at -7dB...................142
Illustration XXV the waveshaping function implemented in BBDresample....................................143
Illustration XXVI THD of the TDA1022(from original datasheet [29])..........................................143
Illustration XXVII comparative plot of the measured and computed transfer functions of the
reconstruction filter...........................................................................................................................144
Illustration XXVIII: comparative plot of the real and modeled harmonic content...........................144
Illustration XXIX frequency-dependent insertion gain (from the TDA1022 datasheet)..................145
Illustration XXX transfer function of the TDA1022 after phase correction at multiple test levels..145
150
Illustration XXXI spectrograms of a linear chirp tone as processed by the physical device(top) and
by BBRresample(bottom).................................................................................................................146
Illustration XXXII spectrograms of a 500Hz sine tone processed by the physical device(top) and by
BBRresample(bottom)......................................................................................................................147
Illustration XXXIII spectrograms of a 500Hz sine tone as processed by the physical device(top) and
by BBRresample(bottom).................................................................................................................148
151
BIBLIOGRAPHY
[1] Raffel C. and Smith J.O. "Practical modeling of bucket-brigade device circuits", Proc. of the
13th Int. Conference on Digital Audio Effects (DAFx-10), Graz, Austria , September 6-10, 2010
[2] Sachs C. “The history of musical instruments”, 1940
[3] Canazza S. and Avanzini F. “Virtual analogue instruments:an approach to active preservationof
the Studio di Fonologia Musicale”, in The Studio di Fonologia - A Musical Journey, 2012, edited
by Maddalena Novati and John Dack, published by Ricordi
[4] Smith, J.O. "Physical Audio Signal Processing", http://ccrma.stanford.edu/~jos/pasp/, online
book, accessed 15/4/2013
[5]"Sampler(musical instrument)", http://en.wikipedia.org/wiki/Sampler_(musical_instrument) ,
accessed 16/4/2013
[6] Smith, J.O. "Spectral audio signal processing", https://ccrma.stanford.edu/~jos/sasp/, online
book, accessed 15/4/2013
[7] De Sanctis and G. Sarti A., "Virtual Analog Modeling in the Wave-Digital Domain" in IEEE
transactions on audio, speech, and language processing, vol. 18, no. 4, May 2010
[8] Fettweis A. "Wave digital filters theory and practice" in Proceedings of the IEEE, vol. 74, no. 2,
february 1986
[9] Yeh D.T., Abel J.S., Smith J.O. "Automated Physical Modeling of Nonlinear AudioCircuits For
Real-Time Audio Effects--Part I:Theoretical Development", in IEEE transactions on audio, speech,
and language processing, vol. 18, no. 4, May 2010
[10] Gleason B., "Real-time digital modeling of analog circuitry for audio applications", Worcester
Polytechnic Institute, 2010, http://www.wpi.edu/Pubs/E-project/Available/E-project-042910160139/unrestricted/Bryan_Gleason_MQP.pdf
[11] Hélie T. "Volterra Series and State Transformation for real-time simulations of audio circuits
including saturations: application to the Moog ladder filter", in IEEE transactions on audio, speech,
and language processing, vol. 18, no. 4, May 2010
[12] Civolani M. and Fontana F. "Modeling of the EMS VCS3 Voltage-Controlled Filter as a
nonlinear filter network", in IEEE transactions on audio, speech, and language processing, vol. 18,
no. 4, May 2010
[13] Abel J., Nam J., Smith J.O. and Välimäki V. "Efficient Antialiasing Oscillator Algorithms
Using Low-Order Fractional Delay Filters", in IEEE transactions on audio, speech, and language
processing, vol. 18, no. 4, May 2010
[14] Bilbao S. and Parker J. "A Virtual Model of Spring Reverberation", in in IEEE transactions on
audio, speech, and language processing, vol. 18, no. 4, May 2010
[15] Bank B., Fontana F. and Zambon S. "A Modal-Based Real-Time Piano Synthesizer", in IEEE
transactions on audio, speech, and language processing, vol. 18, no. 4, May 2010
[16] Matignon D., Mignot R., Hélie T. "Digital waveguide modeling for wind instruments: building
a state-space representation based on the webster-lokshin model", in IEEE transactions on audio,
speech, and language processing, vol. 18, no. 4, May 2010
[17] Blaauw M., Bonada J., Guaus E., Maestre E., Perez, A. "Statistical Modeling of Bowing
Control Applied to Violin Sound Synthesis", in IEEE transactions on audio, speech, and language
processing, vol. 18, no. 4, May 2010
[18] Bilbao S. "Percussion Synthesis Based on Models of Nonlinear Shell Vibration", in IEEE
152
transactions on audio, speech, and language processing, vol. 18, no. 4, May 2010
[19] Koch T., Popp C. and Rabenstein, R. "Tubular Bells: A Physical and Algorithmic Model", in
IEEE transactions on audio, speech, and language processing, vol. 18, no. 4, May 2010
[20] Avanzini F., Marogna R. "A Modular Physically Based Approach to the Sound Synthesis of
Membrane Percussion Instruments", in IEEE transactions on audio, speech, and language
processing, vol. 18, no. 4, May 2010
[21] Abel J.S., Fontana F., Lazzarini V., Pakarinen J., Valimaki V., "Recent Advances in Real-Time
Musical Effects,Synthesis, and Virtual Analog Models", Manuscript for Eurasip Jasp, special issue
on musical applications of real-time signal processing, Dec. 2011
[22] Fontana F., Smith J.O., Välimäki V., Zolzer U. "Introduction to the Special Issue on Virtual
AnalogAudio Effects and Musical Instruments", in IEEE transactions on audio, speech, and
language processing, vol. 18, no. 4, May 2010
[23] Raffel C., "Model of a Bucket Bridage Device delay using STK" ,
http://colinraffel.com/software/bbdmodeling/echo.cpp, computer software, accessed 16/4/2013
[24] Cook P.R. and Scavone G. P., "STK, The Synthesis ToolKit", computer software,
https://ccrma.stanford.edu/software/stk/, accessed 16/4/2013
[25] Bayfield T. "Digital Modeling of Analog Delay Effects Employing the Bucket Brigade Device",
final project for the Computational Modelling for Sound Synthesis course 2012,
http://www.cs.sfu.ca/~tamaras/cmpt889projects/tristan/index.html, accessed 13/8/2012
[26] Crochiere R. E. and Rabiner L. R "Multirate digital signal processing", 1983, ISBN 0-13605162-6, Prentice-Hall, Inc.
[27] Vermona Piano Strings Schematics, Vermona
[28] Biondo G. and Sacchi E. "Manuale di elettronica e telecomunicazioni", 1996, Hoepli
[29] Harvey A.F. and Cerna M. "The Fundamentals of FFT-Based Signal Analysis and
Measurement", Application Note 04, National Instruments, 2000
[29] TDA1022 datasheet,
http://www.datasheetcatalog.com/datasheets_pdf/T/D/A/1/TDA1022.shtml
[30] Smith J.O. "Digital Audio Resampling Home Page", online book,
https:/ccrma.stanford.edu/~jos/resample/, accessed 18/8/2012
[31] Panella E. and Spalierno G., "Sistemi a dati campionati, trasformata Z, filtri digitali" in Corso
di Elettronica 3, Edizioni Cupido
[32] Puckette M., "Waveshaping" in Theory and Techniques of Electronic Music” , online book,
http://crca.ucsd.edu/~msp/techniques/v0.08/book-html/node74.html, accessed 20/9/2012
[33] Matsumoto M. and Nishimura T. "Mersenne Twister noise generation algorithm", computer
software, http://www.math.sci.hiroshima-u.ac.jp/~m-mat/MT/MT2002/emt19937ar.html, accessed
15/4/2013
[34] Smith J. O. "An FFT-based equation-error method", in Introduction to digital filters with audio
applications, online book,
https://ccrma.stanford.edu/~jos/filters/FFT_Based_Equation_Error_Method.html, accessed
10/4/2013
[35] Beckmann P. E. and Russell A. "Efficient Arbitrary Sampling Rate Conversion With Recursive
Calculation of Coefficients" in IEEE transactions on signal processing, vol. 50, no. 4, april 2002
[36] Schmid H., “How to use the FFT and Matlab’s pwelch function for signal and noise
simulations and measurements” Institute of Microelectronics, University of Applied Sciences NW
Switzerland, 2012
[37] Home page of the BBDresample project https://github.com/giuliomoro/BBDresample
153