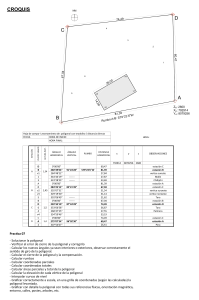
www.satunsat.com Módulo 1:Descripción de la Estación Total Módulo 2: Accesorios Módulo 3: Estacionando Módulo 4: Métodos Topográficos Módulo 1: Descripción de la Estación Total ¿QUE ES UNA ESTACIÓN TOTAL? Es un instrumento topográfico de última generación, que integra en un solo equipo medición electrónica de distancias y ángulos, comunicaciones internas que permiten la transferencia de datos a un procesador interno o externo y que es capaz de realizar múltiples tareas de medición, guardado de datos y cálculos en tiempo real. Además dispone de los elementos ópticos y mecánicos, imprescindibles en todos los taquímetros Estructura básica de la Estación Total Los componentes óptico y mecánico no difieren de los que llevan los teodolitos y taquímetros clásicos de uso en topografía. La diferencia, y gran ventaja de la Estación Total es la componente electrónica en cuanto a memoria interna para almacenar datos de campo, que la hace más versátil y rápida que los instrumentos clásicos. A. EL COMPONENTE MECÁNICO. El esqueleto de la Estación Total En primer lugar vamos a hacer una división de su estructura en tres bloques fundamentales: 1. Bloque A: Está constituido por la alidada que es la componente móvil de la estación y puede girar en torno a un eje vertical (principal). 2. Bloque B: Aquí está alojado el limbo horizontal. Puede moverse solidariamente a la alidada o quedar fijo con respecto a ella. 3. Bloque C: Es la base nivelante. Sirve para nivelar la estación y unirla a un trípode. Va a quedar siempre fija respecto de los movimientos de la alidada. Los Ejes de la Estación total: Mecánicamente tenemos 3 ejes de movimiento, que generan tres planos al producirse la rotación entorno a ellos: 1. Eje Principal: Es el eje de giro de la Alidada que es la parte móvil de la estación . 2. Eje secundario o de Muñones Su función es servir de eje de giro del anteojo. Le permite cabecear describiendo planos verticales. El eje secundario es perpendicular al principal. 3. Eje de colimación. Se encuentra en el anteojo. Pasa por su centro y lo atraviesa longitudinalmente. Es perpendicular a su vez al eje secundario. B. EL COMPONENTE ÓPTICO El Anteojo El anteojo de la Estación Total está basado en el principio del anteojo astronómico. Su función es la de poder hacer punterías a objetos o referencias para definir direcciones con precisión. Estos son sus principales componentes: Objetivo : Lo forman dos o más lentes, con la finalidad de formar una imagen real e invertida del objeto. B. Ocular: Son dos lentes que tienen como función principal la amplificación de las imágenes. También llevan acoplados unos prismas que invierten de nuevo la imagen para ser vista en posición normal. Otra función es la de enfocar el retículo. C. Retículo; Es una especie de diafragma situado en el tubo ocular donde está grabada la cruz filar. Esta cruz es la que permite hacer punterías con precisión. La imagen superior nos muestra la visión que se tiene a través del anteojo cuando hace una correcta puntería con la cruz filar hacia un prisma. D. Montura Lo forman tres tubos, donde van montados el ocular y el objetivo, y que además llevan un engranaje que permite alargar o acortar el anteojo para enfocar correctamente. La plomada Es un dispositivo que va incorporado en la base nivelante de la estación, nos permite situar o estacionar el aparato exactamente sobre el punto que queramos. La plomada está materializada por un rayo óptico que tiene la dirección de la línea de la plomada, o vertical, de manera que a través de un pequeño anteojo podemos ver el punto de estación y centrar el instrumento. Esta línea también puede materializarse mediante un rayo láser (plomada laser),que tiene la ventaja de permitir el el centrado a simple vista, sin lentes o prismas de por medio, aunque también sin aumentos. C. EL COMPONENTE ELECTRÓNICO a. Lectura electrónica de limbos b. Medida electrónica de distancias c. La gran diferencia de las Estaciones Totales respecto al resto de teodolitos y taquímetros es la integración de un complemento electrónico sólido y potente que permite tareas tales como, almacenamiento interno de medidas de campo y cálculos en tiempo real además de las ya habituales medida electrónica de distancias y lectura electroóptica de limbos que veremos más adelante. Para poder realizar todo ello las estaciones incorporan un microprocesador. Pero también es necesario un interfaz que permita al usuario manejar, controlar y gestionar adecuadamente todas las funciones de la estación. Esta interactividad necesaria para extraer datos de la Estación o imponerlos se consigue gracias a una pantalla de cristal líquido en la que se pueden visualizar valores, comandos o características de configuración y un teclado que permite “hablar” con el microprocesador. Existe gran variedad de sistemas según la gama del equipo. Hay Estaciones con un teclado mínimo que permite realizar operaciones básicas: o Encendido / apagado. o Selección de distancias. o Elección de funciones especiales. o Introducción de ordenes. o Confirmación. o Iluminación de la pantalla. Las operaciones de trabajo, la imposición de datos (coordenadas iniciales, ángulo horizontal, Temperatura, etc) y la selección de operaciones se realiza por software, a través de la pantalla, “navegando” con el cursor. Otros equipos disponen de todo esto más un completo teclado alfanumérico para escribir, activar funciones, dar órdenes, medir, grabar, transmitir, activar plomada láser, etc. Hay teodolitos electrónicos que carecen de dispositivo de almacenamiento y cálculo de datos, pero que tienen la posibilidad de conectar un colector externo de datos, convirtiendo así el teodolito en una estación En este caso el teodolito tiene un procesador interno que controla todas sus funciones y que activa los sistemas de medición electrónica de ángulos y distancias. Pero este procesador no tiene capacidad de guardado de datos. Por ello es necesario incorporar un colector externo. Los colectores externos, además de almacenar datos, suelen estar dotados de potente software de cálculo y gestión de datos, siendo capaces además de controlar los sistemas de medición de la estación. También puede conectarse a estaciones Totales que no tengan muy desarrolladas sus funciones de cálculo para completarlas. De hecho, es desde este elemento y no desde la estación desde donde se realiza todo el proceso de medición. Puertos de comunicación de una estación total La conexión a la libreta electrónica externa con la estación se realiza a través de un puerto serie. Este mismo puerto nos permite establecer comunicación entre la estación total y un PC, cuando se trata de una estación total con libreta electrónica interna. Accesorios a los componentes mecánicos 1.Niveles Para conseguir un funcionamiento óptimo de una estación, es necesario que su eje principal guarde una perfecta verticalidad, según la dirección de la gravedad en el punto donde se encuentre. Para garantizar que esto es así se incorporan a la alidada unos dispositivos que llamamos niveles. Tipos de niveles: - De aproximación o niveles esféricos: sensibilidad entre 4' y 10'. - Niveles de precisión o de burbuja, también conocidos como niveles tóricos: sensibilidad entre 30"y 60". - - Niveles electrónicos: sensibilidad de 5"/división (2mm). Nivel esférico. - Descripción: El nivel esférico está constituido por una caja metálica, cerrada superiormente por una tapa de cristal, que tiene la cara interior esférica. Este nivel, lo mismo que el tórico, esta lleno casi por completo de éter o bencina, dejando un pequeño espacio o burbuja, lleno de vapores del líquido y de aire, que ocupa siempre la parte más alta del casquete esférico. Sobre la tapa de cristal, y en su parte externa, hay señalados varios círculos concéntricos que sirven para facilitar el centrado de la burbuja, que es de forma circular, y que tiene lugar cuando su centro coincide con el de los círculos, en este momento el plano tangente en el centro del nivel es horizontal; este plano debe ser paralelo al fondo de la caja cuando el nivel esta corregido. Si el nivel es poco sensible no tiene tornillo de corrección y sale de fábrica ya corregido, sin que exista posibilidad de ulteriores correcciones. - ¿Cuándo se emplean los niveles esféricos? Cuando no se requiere una gran precisión en la verticalidad de los instrumentos y para conseguir rápidamente una nivelación aproximada en aparatos de precisión, que después se perfecciona con un Nivel tórico. - Descripción: consiste este nivel en un tubo de vidrio en forma de segmento tórico, también lleno en casi su totalidad de éter, quedando una burbuja de aire mezclada con los vapores del líquido,. El tubo de vidrio va montado, como puede verse en la figura en un cilindro metálico, abierto solamente por la parte central de su cara superior. Para corregir los defectos de la nivelación de la estación, éstas disponen de un compensador vertical automático de líquido reflectante, de esta forma se garantiza que el cero vertical esté en el cenit. 2.Base nivelante Se encuentra en la parte inferior de la estación y tiene forma de triángulo equilátero en cuyos vértices se encuentran 3 tornillos nivelantes. Estos tornillos tienen la misión de nivelar la estación (controlan los niveles) de modo que el eje principal quede vertical. La base nivelante sirve también de unión de la estación con el trípode. Módulo 2: Accesorios Una estación total requiere una serie de elementos accesorios que permitan ejecutar todas sus funciones. En este módulo se hace una revisión de la mayoría de ellos. Baterías y otras fuentes de energía. Las baterías suelen ser de níquel cadmio o de hidruro metálico. Son fuentes de alimentación muy eficaces y fiables Existen baterías para insertar en taquímetros, teodolitos y niveles digitales, y baterías externas para todos los instrumentos. El tamaño, peso y duración serán los parámetros a considerar en la elección de una batería. Cargadores. Los cargadores garantizan un óptimo estado de carga de las baterías. Estabilizan la corriente de carga también cuando se producen fluctuaciones de tensión y aseguran una larga vida de las mismas. Presentan indicadores luminosos para informar del estado de carga de la batería. La luz roja activada indica que el cargador está conectador a la red. Una luz ámbar indica que se está efectuando un vaciado de la batería para después realizar una carga completa. Una luz verde señala que se está cargando la batería (intermitente) o que la carga ha finalizado (continua).No obstante la codificación de colores en estos indicadores depende del diseño decido por cada marca comercial, por lo que debemos consultar el manual correspondiente para cada caso. Un sistema alternativo es el empleo de energía fotovoltaica para la alimentación de la estación total en campo. Prismas. Prismas especiales. Batería de prismas. Para obtener el máximo provecho del alcance y la precisión de los taquímetros se emplean prismas. Los prismas permiten el retorno de la onda emitida por el distanciómetro desde grandes distancias. Pueden emplearse un solo prisma o una batería de ellos, con una disposición similar a la de la figura. Los prismas se fabrican a partir de vidrio óptico de alta calidad y cumplen las tolerancias más exigentes. Las superficies de reflexión tienen una capa de protección, con el fin de que la suciedad o el empañamiento no reduzca su elevado grado de efectividad. Bastones telescópicos aplomadores. Soportan el prisma para la radiación de puntos. Sostenidos por trípodes o bípodes especiales pueden servir para fijar las bases de una poligonal, minimizando parte del error de dirección Ocular Acodado. Empleado para poder realizar la visualización en condiciones difíciles en las cuales el anteojo se encuentra en una posición complicada para su utilización. Declinatoria. La Declinatoria es una aguja magnética dispuesta en el interior de un tubo unido al instrumento. Cuando mirando a su través veamos la aguja en coincidencia con el eje, estará el tubo en la dirección de la meridiana magnética, circunstancias que utilizaremos para comprobar que el instrumento está orientado. La Declinatoria, en algunos aparatos se muestra en la alidada, mientras en otros, va unida al limbo acimutal; En este caso, a veces, no es permanente su posición sino que puede hacerse girar alrededor del instrumento e inmovilizarla en la posición conveniente. Cables de comunicación. Necesarios para comunicar la Estación Total con el ordenador o con la Libreta electrónica. Radioteléfonos. La transmisión inalámbrica de datos de medición se implantó en la topografía de nuestros días. Además del ahorro de personal y tiempo, este método ofrece la ventaja de que transmite los datos sin errores. Trípode. Descripción: están formados por tres pies de madera o de metales ligeros que sostienen el soporte en el que apoya el aparato. Utilidad: sirven para situar y nivelar el instrumento, de manera que la altura del anteojo sobre el suelo quede adecuada a la estatura del operador. Nos permite manejar cómodamente el instrumento en cuestión. Los trípodes deben ser ligeros y fácilmente transportables. Los trípodes de metal son más sensibles a las vibraciones del terreno por lo que son menos aconsejables para trabajos en los que se de esta situación con frecuencia. Este es el caso de la topografía de obra, donde el trasiego de maquinaria pesada es habitual. La base se sujeta al trípode por medio de un tornillo hueco de sujeción que se acopla a un orificio roscado justo en su centro. Un buen trípode debe ser sólido, manejable, y apto para facilitar la puesta en estación. La primera condición es obvia, conduciendo a la utilización de trípodes metálicos, o de madera fuerte y dura. La segunda condición ha desterrado el uso de trípodes de patas rígidas, imponiendo las patas de varias piezas, capaces de extenderse y recogerse telescópicamente. La tercera condición facilita la operación de hacer pasar la vertical del instrumento, o eje principal, por el punto señalado sobre el terreno, o punto de estación. Algunas casas han construido sus aparatos de manera que se unen al trípode por medio de una plataforma nivelante o de algún otro tipo de adaptador del que se puede quitar el instrumento mientras que el adaptador queda fijo al trípode. Ello permite colocar en este último un prisma con la seguridad de que ha quedado exactamente en el mismo sitio que antes ocupaba la estación; de esta manera, el prisma puede ser visado desde un nuevo punto de estación con la seguridad de que no hay excentricidad y se reduce el error de dirección. Este método llamado centrado forzoso, es de gran utilidad en poligonales de precisión y triangulaciones.Se intercambian alternativamente aparato y prisma, con la seguridad de que ambos quedan automáticamente centrados sobre el punto de estación. Flexómetros y cintas métricas. El flexómetro nos permite medir la altura de instrumento en cada estacionamiento del equipo La cinta métrica puede ser un elemento auxiliar importante, que permite completar las observaciones, con mediciones, por ejemplo, de elementos que baste con croquizar sobre el plano. Módulo 3: Estacionando ¿Qúe es una base? Es un punto del terreno debidamente señalizado, de coordenadas conocidas, para desde ellas apoyar todo nuestro trabajo topográfico de campo. Todas las medidas que se tomen en campo con el equipo, se harán desde alguna de estas bases del trabajo. A. Elección del emplazamiento de una base. Deben estar situadas en lugares con visibilidad y proximidad a la zona de trabajo. También es necesario que exista al menos visibilidad con otra base del proyecto. El emplazamiento se intentará que sea lo más accesible y cómodo posible. B. Señalización de una base. La señalización conviene que sea visible, y reconocible sin ambigüedad por el personal encargado de las mediciones de campo, o por nosotros mismos. Pero al mismo tiempo no demasiado llamativa, sobre todo si se encuentran en lugares de libre tránsito, para no ser destruidas ni movidas por personas ajenas. La estabilidad ha de ser buena, de modo que no existan holguras, en el caso de los clavos, y finura en el caso de pinturas. TIPOS DE SEÑALES: Las señales, según la finalidad que se persiga, pueden ser: - Permanentes: han de permanecer indefinidamente en el terreno y han de servir de apoyo a posibles trabajos posteriores, tales como replanteos, deslindes, parcelaciones, cotas sobre el nivel del mar, etc.; - Semipermanentes: basta con que permanezcan en el terreno durante el tiempo que se invierta en los trabajos. - Provisionales : Permiten hacer visuales angulares a puntos señalizados sobre el terreno para ser empleados como referencias. EL ESTACIONAMIENTO Objetivo El objetivo no es otro que el conseguir la verticalidad del eje principal del aparato con la mayor precisión posible y que esta vertical pase por la base o punto de estación; cuando esto se consigue se dice que el equipo está en estación. Para poner en estación un aparato, se siguen varios pasos A. Colocación del trípode. Desplegamos las patas telescópicas del trípode hasta una altura que consideremos suficiente del modo que se muestra a continuación: Apoyamos las patas sobre el punto de estacionamiento Extendemos las tres patas, intentando centrar la plataforma del trípode sobre el punto señalado para estacionar: B. Colocación y amarre de la estación al trípode. La estación se coloca y sujeta al trípode mediante la base nivelante. Esta se fija al trípode mediante un tornillo de sujeción: C. Centrado del equipo sobre el punto de estacionamiento: Lo hacemos con la ayuda de la plomada que incorpora la estación. Esta puede ser una plomada óptica o una plomada láser como en el caso que nos ocupa. Al activar la plomada láser aparece un puntero láser sobre el terreno en la dirección del eje principal del equipo (si se trata de una plomada óptica, observamos a través de un visor incorporado a la estación una cruz que indica igualmente la dirección del eje principal). Para obtener un centrado perfecto, el puntero láser debe reflejarse sobre el punto de estacionamiento. Para conseguirlo, desplazamos el eje principal del equipo. Manteniendo el trípode apoyado sobre una única pata rotamos todo el conjunto entorno a ella El eje principal pasará por el punto-estación cuando se observe el terreno esta imagen: D. Nivelación de aproximación. Una vez que el eje principal pasa por el punto de estacionamiento hay que nivelar, es decir conseguir la verticalidad del eje principal. Para ello buscamos la horizontalidad del plano sobre el que descansa la estación total, o lo que es lo mismo, la perfecta verticalidad del eje principal. La guía para la primera nivelación es el nivel esférico del que va dotada la estación. Se obtiene la horizontalidad perseguida cuando la burbuja queda enmarcada por el círculo: Para conseguir nuestro objetivo desplegamos o plegamos las patas del trípode sin levantarlas del suelo, aflojando el tornillo de presión. Según la posición de la burbuja actuaremos sobre una pata u otra y la plegaremos o la desplegaremos. En el caso que refleja la imagen, desplegamos la pata manipulada y la burbuja en el círculo se introduce en el círculo. . E. Nivelación de precisión A continuación se hará una nivelación de precisión. Esta nivelación se realiza por medio de los tornillos nivelantes de la base de nivelación. El indicador del grado de horizontalidad será un nivel tórico o en algunos equipos más evolucionados un nivel electrónico. Manipulación de los tornillos de nivelación. Los tres tornillos definen un plano. La nivelación consiste en hacer bascular este plano entorno al eje que definen dos tornillos y a otro eje perpendicular a este y que pase por el tornillo restante. Actuando sobre el tornillo A, giramos el plano alrededor del eje formado por los tornillos B y C. Obtendremos el siguiente resultado: Si giramos a continuación los tornillos B y C simultáneamente, basculamos el plano alrededor de un eje que pasa por el tornillo A y que es perpendicular al eje que definen los tornillos B y C. Una vez hecho esto, tendremos el nivel tórico o de precisión calado. Esto lo comprobaremos el resultado de la nivelación girando la alidada en varias posiciones, retocando algún tornillo si es preciso. Finalmente quedará el instrumento estacionado, y estará listo para su empleo. Módulo 4: Métodos Topográficos ¿Qué se mide en campo? Las medidas u observaciones de campo son ángulos y distancias. Estas se miden directamente con la estación total como ya sabemos. Pulsa aquí para medir un ángulo y una distancia Los ángulos así obtenidos se llaman lecturas. Se miden respecto de una dirección fija y el sentido positivo es el de las agujas del reloj también llamado retrógrado, que es el usado normalmente en trigonometría .Este sentido puede ser cambiado en el menú de configuración aunque no va a ser lo normal ni mucho menos ya que los programas de cálculo trabajan con los ángulos en sentido retrógrado. El vértice de los ángulos observados va a ser siempre el punto de estación (P). La dirección fija es la que marca la posición en el limbo horizontal En los ángulos verticales, el origen o dirección fija, es la dirección del cenit. Analicemos los ángulos horizontales. La dirección fija, llamada “cero del instrumento” (figura anterior), es un concepto importante, y es la dirección definida por el punto de estación y por la posición del cero en el limbo. La posición cero del limbo puede ser cambiada a nuestra conveniencia. En principio, en los limbos electrónicos el cero se configura cuando encendemos la estación en la dirección que ocupa en ese momento la alidada. La otra dirección que va a definir el ángulo la marca lógicamente el punto observado, donde se coloca el jalón con el prisma. Cuando hacemos varios estacionamientos en un mismo trabajo, como va a ocurrir casi siempre, la dirección del cero del instrumento va a ser en principio diferente en cada estacionamiento, dependiendo de la posición de la alidada en el momento del encendido, por ello, esta dirección definida en el encendido no puede ser tomada como referencia fija. Una dirección de referencia universal y que se toma es la del Norte Geográfico. A la diferencia angular que existe entre el cero del instrumento y el Norte se le denomina Desorientación ( ). En todos los estacionamientos que efectuemos es muy importante conocer la desorientación que exista, o bien hacerla cero ,es decir, trabajar con el aparato orientado ( = 0). Cálculos con ángulos y distancias. Los datos que vamos a observar en campo son, como hemos dicho, ángulos (cenitales y horizontales) y distancias. Pero estos datos, aunque precisos no nos permiten realizar directamente cálculos como áreas, distancias, perímetros de polígonos, desniveles o la confección de un plano o mapa topográfico. Para acceder a todo esto es necesaria la definición de un sistema de referencia cartesiano y un origen de altitudes sobre el que posicionar los puntos del terreno medidos. Los sistemas cartesianos quedan definidos con un par de ejes ortogonales (eje de abscisas o eje X y eje de ordenadas o eje Y), de este modo, cada punto del terreno quedará situado en un plano por un par de coordenadas (x, y) también llamadas coordenadas rectangulares referidas al origen de los ejes. La coordenada Z va a ser la altitud sobre un plano de referencia (en España la referencia oficial es el nivel medio del mar en Alicante). Definición de un sistema cartesiano en campo Para definir un sistema cartesiano en la zona de trabajo lo primero que hemos de escoger es una dirección para los ejes .La más adecuada es la del Norte Geográfico, que haremos coincidir con el eje de las Y. La del eje de las X será por tanto la dirección Este –Oeste. Como vemos en la figura ,desde P ,definimos en campo la posición de un punto Q, mediante el ángulo ,que es el tomado desde el Norte y d, distancia plana o reducida . d, son denominadas coordenadas polares. es llamado acimut, y es el ángulo que forma cualquier dirección con el Norte Geográfico en sentido retrógrado. Para que los ángulos horizontales leídos en la estación sean acimutes tengo que orientar previamente el instrumento (fijar el cero en el Norte), o ,conocida la desorientación, hacer el siguiente cálculo: Cálculo de coordenadas rectangulares. Una vez resuelto el problema de pasar de lecturas a acimutes tendré que pasar, para cada punto, de coordenadas polares (que son los datos obtenidos de la observación) a coordenadas rectangulares. Los cálculos son sencillos desde el punto de vista trigonométrico, y los van a realizar de forma inmediata los programas de aplicación topográficos, o desde la propia estación. Sin embargo es preciso tener claros los principios básicos de esta transformación: En la figura tenemos 1. El coseno se define como el cociente entre el lado contiguo al ángulo y la hipotenusa 2. La tangente se define como el cociente entre el cateto opuesto y el cateto contiguo al ángulo 3. Si trasladamos el triangulo generado con la observación desde un punto P hacia otro Q, sobre un sistema de referencia: En esta figura tenemos donde son los incrementos y respectivamente Vamos a emplear las expresiones 1 y 2, para hacer el paso de coordenadas polares a rectangulares: En Efecto: Conocidas las coordenadas de P Distancia punto de estación, el acimut (de P a Q) y la , podemos hallar las coordenadas rectangulares de Q haciendo: Si aplicamos estas expresiones a todos los puntos del trabajo, ya podré situarlos en un plano con facilidad, crear un dibujo, y hacer de forma rápida cálculos tales como distancias entre puntos, perímetros, áreas, etc... En este proceso, como vemos, es imprescindible que el sistema de referencia sea único para todo el trabajo. Lo que no es tan importante es que la dirección del eje de las Y sea la del Norte. En muchas ocasiones dada la imposibilidad de definir con exactitud esta dirección, resulta más práctico definir un norte ficticio o particular de proyecto, el cual va a desempeñar la misma función que el Geográfico, es decir, ser origen de los acimutes, y eje de las Y del sistema cartesiano. La única variación apreciable va a ser la de la orientación y posición a nivel general de todo el trabajo, pero no va a afectar a la forma y dimensiones del mismo, que es lo que en la mayoría de las veces nos va a interesar. Cálculo de coordenadas polares En ocasiones, va a ser necesario el paso contrario, es decir conocidas las coordenadas cartesianas de los puntos, obtener entre ellos sus coordenadas polares. Esto lo haremos para generalmente para obtener datos de replanteo, o para calcular ángulos entre direcciones. Vamos a suponer, como se ve en la figura, que tenemos dos puntos (P y Q) definidos en un sistema cartesiano (por ejemplo un mapa o plano) donde el eje Y es coincidente con el Norte. Los datos de partida de que disponemos son A partir de ellos vamos a calcular la distancia d, de P a Q, y el acimut El cálculo de la distancia, según la geometría analítica es inmediato, siendo su expresión: Para calcular el acimut entre Q y P aprovechamos la expresión núm.3 que vimos anteriormente: que es lo mismo que Expresión que nos da finalmente el acimut entre dos puntos. y por tanto Pero en el cálculo de los acimutes vamos a distinguir en qué cuadrante se encuentre Q respecto de P, y tendremos que sumar una cantidad según este en uno u otro, como ahora veremos. Esto es así por que todos los acimutes han de ir referidos al eje de las Y (Norte), y no a los ejes propios de cada cuadrante como ocurre normalmente en trigonometría. Trabajar orientados y georreferenciados. Al llegar a la zona de trabajo y estacionar, hemos de conocer las coordenadas (x, y) del punto de estación. Estas coordenadas pueden ser las del sistema oficial en España (UTM),u otras inventadas por nosotros por ejemplo los valores X= 1000, Y=1000 En cuanto a la orientación, que es definir la dirección que va a tener el cero del instrumento, puedo hacerla al Norte Geográfico, o a un norte ficticio o particular de proyecto también inventado por nosotros. ¿Cómo orientar? Necesitamos las coordenadas de la base de estación y las de otra base del mismo proyecto (base de referencia), visible desde la estación. A nivel práctico orientar es obligar a que la lectura horizontal desde el punto de estación al punto observado (2º base conocida) coincida con el acimut entre ambos. De este modo conseguimos que el cero del instrumento coincida con el norte y que la desorientación sea cero. Estas condiciones de observación se conservan mientras el equipo de medición permanezca estacionado en ese punto. Todas las lecturas tomadas serán acimutes. con lo cual El acimut se obtiene con las coordenadas de las bases, pasando de rectangulares a polares. Estas coordenadas pueden ser oficiales o particulares. En caso de que sean particulares la orientación es al norte ficticio. Si la bases tienen sus coordenadas en el sistema oficial, la orientación es al Norte Geográfico(o dicho exactamente con, estaré trabajando georreferenciado. Una vez definida cual va a ser la dirección Norte, ésta será la misma para todas las bases del proyecto, donde una vez orientados los ceros de aparato marcarán direcciones paralelas. Es posible trabajar desorientados, aunque en este caso será necesario conocer la desorientación respecto al Norte, y aplicársela en gabinete a todas las lecturas medidas. Para ello es indispensable haber realizado una observación a la referencia. Georreferenciación Trabajar georreferenciado, no es en absoluto necesario en todos los casos, sobre todo en pequeños proyectos o taquimétricos, pero en otros es necesario y exigible para relacionarlos con la cartografía oficial o con otros proyectos, siendo esta la mejor manera de unificar los sistemas de coordenadas. En ocasiones será necesario georreferenciar un trabajo. Esto significa que tendré que girar el trabajo para orientarlo al Norte Geográfico, y desplazarlo en X y en Y para hacer coincidir los orígenes de los sistemas de referencia. Esto se resuelve con una transformación bidimensional de semejanza, también llamada Helmert 2D que realizan todos los programas de topografía. Bastará introducir las coordenadas de dos puntos de mi trabajo en los dos sistemas de referencia, que estén lo más alejados posible entre sí para reducir los errores. Para no ceñirnos al mínimo de puntos sería mejor introducir un total de tres o cuatro puntos para prevenir posibles errores y ajustar mejor el resultado. La altitud de los puntos (coordenada Z) no crea problemas de orientación, pero sí hay que definir con la mayor exactitud posible el plano origen. Para ello basta con conocer la altitud oficial de al menos un punto del proyecto. Esto no resulta fácil dado el pésimo estado de la Red de Nivelación de Alta Precisión, por lo que resultará más practico interpolarla de la cartografía disponible de mayor escala, de la zona. Métodos Planimétricos Entendemos por métodos planimétricos al conjunto de operaciones necesarias para implantar en la zona de trabajo puntos o bases de coordenadas X e Y conocidas, suficientes para realizar con la precisión necesaria el trabajo propuesto. Más adelante describiremos los métodos altimétricos, que proporcionan la Z a todos esos puntos. Cuando nuestra zona de trabajo es grande, o no es totalmente visible desde un solo punto, tendré que definir varios ,en un mismo sistema de coordenadas georreferenciado o no. Uno de los métodos más precisos y habituales que me permite definir tantos puntos como desee, es la poligonal, también llamada itinerario. La poligonal Es un método tanto planimétrico como altimétrico, aunque en principio nos vamos a ceñir a su componente planimétrica. La poligonal permite obtener las coordenadas de una serie de bases (en la figura 1,2 y 3) apoyándonos en dos bases ya existentes (A y B) llamadas base de partida y de llegada respectivamente; o al revés según el sentido de la observación adoptado en el itinerario. También se emplea una orientación de partida (A=>Ref1) y una orientación de llegada para la obtención del cierre angular (B=>Ref2) El primer paso será diseñar y señalizar en el terreno convenientemente las bases o estaciones que van a formar la poligonal, de manera que desde cada una de ellas sea visible la anterior y la siguiente. Procuraremos también que que la distancia entre ellas (ejes) sea similar, y que no haya en el itinerario giros bruscos, de esta manera se reducen los errores. El error accidental que más nos va a afectar es el de dirección por lo que huiremos de ejes cortos en la medida de lo posible y extremaremos el buen posicionamiento tanto de la estación, como del prisma durante las observaciones. Es importante tener también en cuenta que las estaciones de la poligonal van a ser empleadas para medir posteriormente (replanteos, radiaciones, etc) por lo que tendremos en cuenta que el emplazamiento sea el adecuado para el trabajo posterior a realizar y haya visibilidad ,facilidad para estacionar, etc... Tipos de poligonal Desde un punto de vista geométrico hay dos tipos: a. Abierta o encuadrada: La base de llegada es distinta que la de salida, y tiene coordenadas conocidas. Si en la llegada tenemos una visual de cierre o referencia podremos calcular el error de cierre angular, comparando el acimut teórico calculado con el arrastrado en la poligonal. Por lo tanto necesitaremos: Dos puntos de coordenadas conocidas A y Ref1 para iniciar el itinerario Dos puntos de coordenadas conocidas B y Ref2 para cerrar el itinerario b. cerrada: La base de llegada coincide con la de partida. Para calcular el error de cierre angular, se utiliza la misma referencia que la de salida. Por lo tanto necesitamos: Dos puntos de coordenadas conocidas A y Ref que permitirán iniciar y cerrar el itinerario. Si la poligonal no termina en un punto de coordenadas conocidas quedará colgada por lo que no será posible el cálculo de su error de cierre, siendo indetectable cualquier equivocación cometida. Observación en campo Una vez escogidas y señalizadas las bases, pasamos a su observación: Paso 1: Observación angular (horizontal) a la referencia. Esta observación nos permitirá realizar el itinerario orientados o en su defecto conocer la desorientación y aplicarla en gabinete a posteriori. orientación Paso 2: Observación de las bases de la poligonal. Paso 3: Observación angular (horizontal) a una referencia desde la base de llegada para obtener el error de cierre angular. El método que se sigue es el conocido como Moinot: Se observan todas las visuales entre bases, es decir desde cada una de ellas a la anterior y posterior, en posiciones de círculo directo e inverso (para eliminar errores sistemáticos). Caso 1: Poligonales cerradas. La observaciones a realizar, siguiendo el ejemplo de la figura 2, serán: A=>Ref , A=>1; 1=>A 1=>2; 2=>1, 2=>3; 3=>2, 3=>A; A=>3; A=>Ref Esta secuencia de observaciones garantiza la correcta orientación de la figura poligonal (A, 1, 2, 3, A) evitando el giro del conjunto con respecto al Norte, pivotando en torno al punto A Otra alternativa sería: A=>Ref, A=>1,A=>3; 1=>A 1=>2; 2=>1, 2=>3; 3=>2, 3=>A; En este caso controlamos la geometría de la figura y obtenemos error de cierre angular, pero no así el posible giro del conjunto con respecto al Norte que se comprobaría con una nueva visual A=>Ref. La ventaja es que ahorramos un estacionamiento en campo. Caso 2: Poligonales encuadradas. Las observaciones a realizar, siguiendo el gráfico de la figura 1, serán: A=>Ref1, A=>1; 1=>A, 1=>2; 2=>1, 2=>3; 3=>2, 3=>B; B=>3, B=>Ref2 Se calcula :Angulo horizontal, ángulo vertical, distancia geométrica. Se puede trabajar orientado en cada una de las bases, o desorientado y calcular la desorientación a posteriori. Esto último es posible siempre que se siga escrupulosamente el método antes mencionado, ya que al tener visuales recíprocas ,es decir, desde una estación a la anterior, puedo ir “arrastrando” la desorientación de una estación a otra y calcular acimutes sin problema. Todos los programas de aplicación topográficos nos ofrecen la opción de cálculo de poligonales. Como se ve en la figura la estaciones de un itinerario se enlazan por medio de la distancia y el acimut inverso Practica de observación de una poligonal: En esta práctica vamos a utilizar la función de orientación de la estación y vamos a trabajar con el instrumento orientado desde cada una de las bases. El cálculo de un itinerario Existe una gran variedad de aplicaciones informáticas que resuelven el problema, algunas de ellas van incorporadas en las Estaciones Totales, pero para poder interpretar los errores de cierre y la precisión alcanzada en las observaciones, es preciso conocer ,en términos generales como es el proceso de cálculo de una poligonal. El cálculo tiene dos fases,: 1.Cálculo del cierre angular. Se trata de obtener el error final cometido en el acimut en el punto de llegada comparando, como dijimos, el acimut calculado por coordenadas entre la base de llegada y una referencia, con el acimut que se va arrastrando en la poligonal de una base a otra. El error de cierre angular es en la Referencia de llegada Este error está provocado por los pequeños errores accidentales que se van cometiendo sucesivamente de estación en estación, y que hacen que me vaya desviando de la dirección ideal. La tolerancia en la que este error es asimilable es donde de la poligonal. es el número de bases El error de cierre angular, si es tolerable, se reparte entre los acimutes de las bases, para hacerlo cero. Habrá que procurar que el número de bases no sea muy grande para que no crezca mucho el error angular. 2. cálculo de los incrementos de X e Y entre las bases. Para ello se utilizan los acimutes ya compensados, y las distancias reducidas, obtenidas de las geométricas observadas en campo una vez hecho el promedio entre una y su recíproca Con estos datos se pasa de coordenadas polares a rectangulares de forma inmediata. Calculamos los incrementos en ordenadas y abscisas para cada punto del itinerario respecto del anterior, que es desde el que se observa Una vez que tenemos los incrementos calculados, los sumaré algebraicamente con su signo, y se los añadiré a su vez a las coordenadas conocidas del punto de partida. Teóricamente deberían coincidir con las del punto de llegada, pero debido a los errores accidentales cometidos en la medida de la distancia, esto no va a ser así. Aparece, por tanto, un nuevo error que tendré que compensar, el error de cierre en coordenadas, que será la diferencia entre las coordenadas de llegada reales y las calculadas Tendré que valorar la tolerancia o no de este error en función de la precisión exigible a mi trabajo, teniendo en cuenta la transmisión de errores que se va a producir. Por ejemplo: Mi objetivo es hacer un replanteo con una precisión de 10cm. En la poligonal previa tengo un error de cierre de 8cm en X y en Y. Si el itinerario tiene cuatro bases y las distancias son similares, reparto el error entre las cuatro, quedando cada base con un error final de 2cm. Por tanto tengo un margen de aprox. 9.8cm. de error para cometer en el replanteo si eso es posible, daré por bueno el error de la poligonal, si el margen resultante es demasiado estrecho,(por ej. 2cm.),no podré dar por buena la poligonal. En caso de ser el error tolerable se realiza una compensación del error repartiéndolo entre las bases proporcionalmente a las distancias entre ellas, de forma que se asigna más corrección a las distancias mayores. Por último, con los incrementos compensados se van calculando las coordenadas absolutas de las bases ,desde la base de salida y ya están listas para ser utilizadas para una radiación o un replanteo. Métodos auxiliares para la determinación de bases Son métodos de menor precisión que la poligonal ,pero que complementan a esta. Cuando la zona de trabajo es amplia con muchos recovecos, a veces sería necesaria una poligonal con muchas bases para que la visibilidad fuese completa desde ellas, con la consiguiente acumulación de errores. Para evitar esto haremos una poligonal, que cubra de forma general la zona, densificando luego esta con algunos de los métodos que citamos a continuación ,para tener visibilidad de los sitios más ocultos. Vamos a centrarnos en dos de estos métodos: 1.Base libre. El método de la base libre consiste en obtener las coordenadas de un punto a partir de las de dos bases conocidas. Sólo se estaciona en el punto cuyas coordenadas quiero obtener ,y se miden ángulos verticales y horizontales y distancias a las bases de coordenadas conocidas. 2.Destacado. El método del destacado tiene la ventaja de que sólo se necesita visibilidad a una base, y no a dos como en la base libre. Pero en su contra está el no tener comprobación alguna ,y no ser más rápido que la base libre ya que hay que efectuar dos estacionamientos, uno en la base y otro en el propio destacado. El método de observación en campo es el siguiente: En primer lugar una vez escogido y señalizado el punto destacado, se radia desde la base .Se miden ángulos horizontales y verticales en posiciones de círculo directo e inverso, y distancia. A es, por ejemplo, una base de una poligonal observada anteriormente, y Dest. es el punto destacado que se saca a partir de esa base. orientamos el instrumento en A , utilizando otra base de la poligonal, visamos a A y obtenemos el acimut de A a Dest. .Medimos la distancia y obtenemos sin dificultad las coordenadas de Dest: Debemos recordar que estos métodos sirven para obtener puntos auxiliares y no basar todo el trabajo en puntos obtenidos de esta manera, por su menor precisión y comprobación. Tampoco sacaremos un punto auxiliar a partir de otro que ya sea auxiliar a su vez. Ejemplo Para hacer el levantamiento taquimétrico de la zona que aparece en la figura se ha observado la poligonal cerrada formada por las bases A, B, C y D. Sin embargo, los edificios hacen imposible la visibilidad completa desde las bases a todos los puntos de la zona. Como no se ha querido llevar la poligonal por todos los sitios, ya que crecería mucho el número de bases y con ello el error de cierre, se opta por definir puntos auxiliares, al margen de la poligonal, y que no afectan a la precisión de ésta. Las zonas rayadas en verde representan los lugares que no son visibles desde ninguna base de la poligonal y se hace necesario implantar un punto, para desde él radiar esas zonas ocultas. Desde B se saca un destacado (Dest.),y desde la Base Libre se observan A y D Radiación y Levantamientos taquimétricos En muchas ocasiones la finalidad de un trabajo topográfico es la producción de un plano de la zona , bien en soporte analógico (papel),o bien en soporte digital. En ambos casos el objetivo es situar sobre el plano con la precisión adecuada los elementos existentes en el terreno en esa zona de trabajo. Para lograr esto ,como se ve en la anterior figura se dota a la zona de los puntos de coordenadas conocidas necesarios, para desde ellos hacer la radiación de los puntos que definan los detalles de los elementos a representar. Por ejemplo y siguiendo con la misma figura, para dibujar en un plano los edificios y la carretera debería radiar al menos las esquinas de las casas, y los márgenes de la carretera cada cierta distancia. El número de puntos a radiar crece si el grado de detalle requerido es mayor, es decir cuando la escala de representación es mayor. Si la escala que va a tener el plano es de 1/2000,a lo mejor sólo es necesario radiar los puntos mencionados anteriormente ,pero si la escala es 1/500 seguramente tendremos que radiar además otros puntos de la fachada ,la línea central de la carretera, y otros pequeños detalles. Cuando el levantamiento es taquimétrico también habremos de representar el relieve con curvas de nivel, por eso en aquellas zonas donde no haya elementos planimétricos que definir radiaremos puntos llamados de relleno, para completar la información altimétrica de la zona de manera homogénea. ¿Qué es radiar un punto? Radiar un punto es hacer puntería en el desde una base, y tomar ángulo horizontal, ángulo vertical, y distancia (geométrica o reducida). La precisión exigida en este proceso es menor que en la poligonal, el destacado o la base libre, por ello es suficiente con hacer las visuales en posición de círculo directo. Con estos datos puedo obtener de forma inmediata las coordenadas X,Y,Z de los puntos radiados. El error accidental que se comete al radiar un punto aumenta con la distancia de éste a la base. Esto es así por que el error transversal que produce un error angular dado es mayor a medida que el punto está más alejado. El error longitudinal también aumenta con la distancia. La distancia máxima de radiación es aquella a partir de la cual el error transversal o longitudinal cometido al radiar un punto es mayor que la precisión requerida para el plano. Precisiones Para entender la precisión planimétrica a exigir al plano vamos a explicar el concepto de límite de percepción visual. El límite de percepción visual (LPV) es una limitación física del ojo humano y esta relacionada con el poder separados del ojo. Es la mínima magnitud que el ojo puede percibir sobre un papel. Se estima en torno a los 0.2mm. De este modo un error igual o menor a 0.2mm.en la posición planimétrica de un punto no será detectado por el ojo. A la hora de acometer un levantamiento , definida la escala de representación, calcularé cuanto representan en el terreno esos 0.2mm. Ejemplo Se pide la realización de un plano de la zona de la figura a escala 1/1000. Antes de comenzar a definir bases y observar una poligonal se calcula la precisión final total a alcanzar. Esta será : Limite percepción visual x denominador escala Es decir Por tanto 20 cm es el margen que tengo de error y que iré cometiendo desde la observación de la poligonal hasta el método final que es la radiación. Por último calcularé el Si para obtener la distancia máxima de radiación , sabemos que precisión = Por tanto La planificación de los métodos a realizar, así como el número de bases necesarias en el proyecto se hará también en función de esta distancia máxima de manera que no se vea superada en ningún caso. Hay que tener en cuenta el error previo cometido en la poligonal u otros métodos empleados y no apurar totalmente esa distancia máxima. Métodos altimétricos Se trata de las observaciones y cálculos necesarios para dotar a cada punto del proyecto de cota o altitud. En el sistema de coordenadas rectangulares es la coordenada Z. Desde un punto de vista geométrico aparecen dos tipos de distancia. La Distancia Geométrica es la distancia “real”,que en el espacio tridimensional, existe entre A y B. La Distancia Reducida es la proyección de la Geométrica sobre el plano horizontal. Esta es la distancia que se representa en los planos, y con la que se calculan coordenadas en el paso de rectangulares a polares. La distancia geométrica es siempre mayor que la reducida. El otro cateto del triángulo es el desnivel, o diferencia de cota entre A y B. Trigonométricamente : También puede expresarse en función de la distancia Reducida: Por tanto el método altimétrico que vamos a utilizar es la nivelación trigonométrica Nivelación trigonométrica Para nivelar un punto trigonometricamente, a partir de otro de Z conocida realizaremos los siguientes pasos: 1. Una vez estacionada la estación total correctamente, se toma el ángulo cenital (V),al punto que se desea medir, y la distancia, bien geométrica o reducida. 2. El ángulo cenital se toma al centro del prisma, que está a una altura m sobre el punto a medir. 3. El centro de medida de ángulos y distancias (intersección de los ejes principal y secundario)se encuentra a una altura i sobre A y ha de ser tenido en cuenta al calcular el desnivel. La expresión que calcula el desnivel queda: Si se expresa a partir de la distancia reducida: En todos los métodos planimétricos que hemos visto anteriormente, se toman ángulos cenitales para también calcular desniveles de forma trigonométrica. En el método poligonal se van a obtener los desniveles entre estaciones, de forma directa y recíproca, como ocurría con las distancias. Entre las estaciones A y B se obtienen dos desniveles, el definitivo será la media aritmética de los valores absolutos de ambos. Para una poligonal con varias estaciones, voy a tener un itinerario altimétrico, donde la suma de los distintos desniveles entre estaciones ha de ser teóricamente la diferencia de cota entre las bases de partida y llegada. Esto no va a ser así debido a los errores accidentales cometidos durante la nivelación, y va a aparecer un error de cierre en Z: Todas las Estaciones Totales calculan automáticamente el desnivel entre dos puntos ,y lo muestran en pantalla si así lo configuro. Existen dos errores que afectan considerablemente al desnivel observado, El error de esfericidad El error de refracción. Aunque las estaciones totales lo corrigen automáticamente, vamos a ver sus fundamentos. En el caso de la esfericidad se debe a que la Tierra no es plana y por ello el desnivel real entre dos puntos no se establece respecto de un plano horizontal como veíamos en la primera figura, sino en uno curvo. Por ello siempre se mide desnivel de menos y hay que añadir una corrección positiva. Su valor es: Donde D es la distancia reducida entre ambos puntos, y R el radio de la tierra, considerado de forma aproximada 6370 Km. El error de refracción es provocado por que la visual del ángulo cenital sufre una curvatura al propagarse por el medio atmosférico, que tiene un cierto índice de refracción, que además es variable con las condiciones ,altitud, etc... Esta curvatura del rayo visual es “hacia abajo” lo que hace que veamos los objetos más altos de lo que realmente están. Este efecto es menor que el de la esfericidad y de sentido contrario, es decir la corrección es negativa: Donde K es un coeficiente de refracción adoptado en España .Su valor es 0.08. Lo que se suele hacer por motivos prácticos es fundir ambas en una sola corrección. Esta corrección conjunta es : Finalmente el desnivel definitivo entre dos puntos será: Precisión altimétrica Hay que distinguir en primer lugar ,cual es la finalidad del trabajo. En el caso de un replanteo cada elemento tiene asociada una precisión posicional altimétrica que estará definida en el pliego de condiciones. En los levantamientos taquimétricos la precisión se estima entre 1/3 y 1/4 de la equidistancia entre curvas de nivel a representar.