- Ninguna Categoria
Estonian Finnish Physics Olympiad Problems & Solutions
Anuncio
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2003-2014)
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2003)
Tallinn 2003
Complete solution of each subquestion gives two
points. You have five hours for solving.
1. Volleyball (8 points)
2) A wire is made of different alloys, its heat resistivity ρ as a function of the coordinate along the
wire is given in the attached graph. The crosssection area of the wire is S = 1 mm2 , its length
l = 4 cm. Find the heat flux through the wire,
if one end of the wire is kept at the temperature
100◦ C, and the other end — at 0◦ C.
I(mA)
the brick velocity change during a semi-period is
negligible? Further we assume that this condition is satisfied.
10
2) The brick is kept in motion along x-axis by a
force Fx in such a way that the mean brick velocity is v. Sketch graphically the dependance
5
Fx (v).
ρ (Km/W)
3) The brick is kept in motion along (horizontal)
y-axis by a force Fy in such a way that the mean
U(V)
0,3
0,2
0,4
brick velocity is v. Find the dependance Fy (v).
0
0,1
0,2
4) Until now we have ignored the dependance
tunnel diode
Uin
of the friction coefficient on the sliding velocity.
(input-signal)
Further let us assume this dependance is given
Uout
0,1
E
R
by the graph below. The brick is kept in motion
(output-signal)
along x-axis by a force Fx in such a way that the
x(cm)
1) Find the current in the circuit, if Uin + E = mean brick velocity is v. Sketch graphically the
3
2
4
0
1
dependance Fx (v) taking u = 34 w0 .
0,08 V.
µ
2) Find the output voltage Uout 0 if Uin = 0 V.
µ
1
3) Find the output signal Uout − Uout 0 if Uin =
1 mV.
3. Gravitation (6 points)
4) The input signal is given in the graph below. µ0
1) Find the free falling acceleration g0 at the sur- Sketch the output signal as a function of time.
I(mV)
face of such a spherical planet, which has mass 1
M and material density ρ (in what follows, M
w
and ρ are assumed to be constant).
_
_
Consider a simplified model of a volleyball: a thin
spherical envelope filled with air. The envelope
material is non-stretchable, easily foldable. The
excess pressure inside the ball ∆p = 20 kPa, the
ball radius R = 10 cm and mass m = 400 g (the
air mass inside the ball is negligible). You can
neglect the dependence of the excess pressure on
the deformation of the ball.
1) The ball is pressed between two parallel rigid
plates, the distance between of which is 2R − 2h
(so that the height of the deformed segments is
h = 1 cm). Find the force between the ball and a
plate N .
2) Ball moves with velocity v0 = 2 m/s and hits
a rigid wall. Find the maximal height of the deformed segment hm . . .
3) . . . and the collision time τ .
4) For small excess pressures, the ball can lose
its spherical shape even in those points, which
are not in touch with the wall. Which condition
t (ms)
between the quantities ∆p, R, m and h has to 2) Is it possible that at the surface of a non2
1
be satisfied in order to ensure that such a loss of spherical planet, there is a point with free falling
acceleration g > g0 ? Motivate your answer.
sphericity is negligible?
3) For which planet shape the maximum of the -1
2. Heat flux (4 points)
free falling acceleration is achieved? Answer can
Heat resistivity is equal to the ratio of the tem- be given in polar coordinates, the expression can 5. Vibration (10 points)
perature difference between the end-points of a contain one unspecified constant.
Consider a smooth horizontal surface, which is
wire of unit cross-section and unit length, and
moved periodically back and forth along the hothe heat flux (unit: W) through this wire.
rizontal x-axis: during the first semi-period τ ,
the surface velocity is u, during the second semi1) Microprocessor of power P = 90 W has a 4. Tunnel diode (8 points)
period — −u. A brick of mass m is put on that
water-cooling system. The chip and flowing water are separated by a copper plate of thickness Tunnel diode is a semi-conductor device, similar surface; the friction coefficient between the surd = 5 mm and cross-section area s = 100 mm2 . to the ordinary diode, the volt-amper characte- face and brick is µ, free falling acceleration is g.
What is the temperature difference between the ristic of which is given in the attached graph. The 1) The brick has initial x-directional velocity v.
processor and water? The copper heat resistivity circuit below describes a simple amplifier. The Which condition between the quantities g, µ, v,
is ρ = 2,6 mm·K/W.
resistance R = 10 Ω, battery voltage E = 0,25 V. and τ has to be satisfied in order to ensure that
w0
w0
w0
5) The brick is put on the surface, there are no
external forces. What is the brick’s terminal
velocity v? Provide the answer as a function of
u.
case when the pulses are of variable polarity: for
the 2n-th pulse, the electric field is +E, and for
A particle of mass m and charge q is in a hothe 2n+1st pulse −E. Find the particles average
mogeneous magnetic field with induction B (the
velocity, (vectorially) averaged over the cyclotron
vector is parallel to the z-axis). The characterisperiod.
tic time of the system is the cyclotron period of
the particle TB = 2πm/Bq. The system is si- 7. Telescope (12 points)
tuated in between two parallel electrodes, which
As it is well known, a telescope makes it possibcan be used to create an homogeneous, parallel
le to see the stars in daylight. Let us study the
to the x-axis electric field E.
problem in more details. Consider a simplified
1) The particle is at rest. At the moment of time
model of the eye: a single lens with focal length
t = 0, the electric field E is switched on; after a
f = 4 cm and diameter d = 3 mm creating an
short time interval τ (τ TB ), it is switched off,
image on screen (retina). The model of a telescoagain. What will be the trajectory of the particle?
pe is similar: a lens of focal length F = 2 m and
2) Let px and py denote the x- and y compo- diameter D = 20 cm creating an image in focal
nents of the momentum of the particle. Sketch plane (where eg. a film can be put). In your calcuthe trajectory of the particle in (px , py )-plane lations, the following quantities can be used: the
and depict the vectors of the momentum for the density of the light energy radiated from a unit
moments of time tn = nTB /4 (n = 1, 2, 3 and Solar surface in unit time w (the light power
0
4).
surface density); the ratio of the star and Sun
3) Consider the situation when the on-off switc- distances q = 4 · 105 (we assume that the star
hing of the electric field is done periodically, is identical to the Sun); Solar angular diameter
starting with t = 0, after equal time intervals φ ≈ 9 mrad. Remark: If the answer contains w0
∆t = TB /4. Sketch the particle trajectories in then numerical answer is not required.
(px , py )- and (x, y)-planes.
1) Consider a sheet of paper, the normal of which
4) Let the period be short, ∆t TB (but still is directed towards the Sun. What is the surmuch longer than the duration of pulse, ∆t face density of the light power w1 arriving to the
τ ). Show that after the n-th pulse (at the time sheet from the Sun?
moment tn = n∆t), the momentum of the par- 2) Find the net power P2 of the light, which is
ticle can be represented as the sum of n vectors focused by the telescope into the image of the
pi , where all the component-vectors are equal star.
in modulus (the modulus being independent of 3) Assume that blue sky is as bright as a sheet
n), and the neighboring vectors (
pi and pi+1 , of gray paper illuminated by Sun. You may asi = 1, 2, . . .) have equal angles between them.
sume that in the direction, perpendicular to the
5) Consider the limit case ∆t → 0, so that sheet, the ratio of the light power scattered by
Eτ /∆t → Ek (Ek denotes the time-average of the paper into a 1-steradian space angle, to the
the elctric field). Sketch the particles trajectory net light power arriving to the sheet, is α ≈ 0,1
in (px , py )-plane and express the particles mean (this corresponds to the dissipation of ca 70 %
velocity (vectorially; averaged over the cyclotron light energy in the gray paper). What is the surperiod) via the quantities Ek and B.
face density of the light power in the focal plane
6) Let us return to the non-zero (but still small, of the telescope w3 , due to the blue sky?
∆t TB ) time-intervals. Let us consider the 4) While studying the star image, let us ignore
6. Charged particle (12 points)
all the effects other than diffraction. Estimate
the surface density of the light power in the center of the star image w2 (in the focal plane of the
telescope), due to the light arriving from the star.
5) Provide an expression for the ratio of the surface densities of the light powers k in the middle of the star image, and in a point farther away
from it.
6) Is it possible to see a star in daylight using a
telescope? Plain eye? Motivate yourself.
8.
Experiment (12 points)
Determination of attraction force between iron
plate and a permanent magnet as a function of
distance. Tools: iron plate, wooden brick, ruler,
dynamometer, paper stripes.
Attention! the permanent magnets are very strong, keep them far from credit cards etc.
Avoid also hitting them against each other and
against the iron plate, because they are fragile
and can be broken.
1) Determine the static and dynamic coefficients
of friction between the iron plate and a paper
stripe. Draw the scheme of your set-up.
2) (4 points) Determine the attraction force between the iron plate and a magnet for those distances which allow direct usage of dynamometer.
Draw the scheme of your set-up.
3) (4 points) Determine the attraction force between the iron plate and a magnet for smaller
distances. For that purpose, you can use the
wooden brick sliding down an inclined plate and
hitting the magnet. You do not need to study the
zero-distance (direct contact of magnet and iron
plate) case. Draw the scheme of your set-up. Depict all the measurement result graphically.
4) Join two permanent magnets by a bridge made of a piece of iron (a) as shown in figure. Put
a stripe of paper (b) on the iron plate (c) and put
the system of magnets upon it. Determine the
attraction force between the system of magnets
and iron plate.
N
S
S
N
a
b
c
Solutions
1. Volleyball (8 pts)
1) F = ∆pS, where S = πr2 is the segment base surface. It is easy to see that r2 = (2R − h)h,
hence F = ∆pπh(2R − h) ≈ 120 N.
2) During the collision the ball is deformed as
shown in Figure: the envelope is not stretchable,
hence it retains the spherical shape (except where in touch with the wall). Using the approximation h R we can neglect the term h2 in the
expression for the force. Then, the force is proportional to h, ie. the ball behaves as a spring of
stiffness k = 2πR∆p. According to the energy conservation
law mv 2 = 2πR∆ph2 , hence
h = v m/2πR∆p ≈ 11 mm.
h(2R−h) < 4R2 . This condition is always satisfied, no additional constraint is needed. Notice
that we considered only the worst case requiring
the largest compensating force when the force of
inertia is normal to the surface. Remark: The case of stretchable envelope is completely different,
sphericity disappears over all the surface (try to
press a balloon against a glass!).
2.
Heat flux (4 pts)
1) The heat flux P = ∆T s/ρd, hence ∆T =
P ρd/s ≈ 12 K.
2) By a constant heat flux P , the temperature
change along the wire ∆T = P ρ∆x/S, where ∆x is a displacement along the wire. Hence
the temperature drop t1 − t2 = P S/S, where
S is the surface under the graph. Thus, P =
(t1 − t2 )S/S. Using the graph we find S ≈
50 Kcm2 /W and P ≈ 20 mW.
3.
2) F = 0, when |v| < u; F = µmg, when
1) For voltages below 0.08V, the graph is almost a |v| > u.
straight line corresponding to a constant resis- 3) The x-component of the frictional force
out, the y-component is left:
tance RD = 0.05 V/6.5 mA ≈ 7.7 Ω. Hence cancels in average
√
2
F = µmgv/ v + u2 .
I = (Uin + E)/(R + RD ) ≈ 4.5 mA.
2) The output voltage can be found graphically: 4) F = [µ(v + u) + µ(v − u)]mg, if v > u and
the diode voltage U (I) = E − IR, hence, the F = [µ(u + v) − µ(u − v)]mg, if v < u (F > 0
intersection point of the graph and the straight means that F and v are opposite to each other).
line U = E − IR, gives us the diode current It is easy to see that by small values of v, the force
6 mA; then, the output voltage IR = 60 mV starts linearly decreasing [with F (v = 0) = 0]
(see the graph).
(F < 0 implies that force and velocity are in
4.
Tunnel diode (8 pts)
I(mA)
10
5
U(V)
Gravitation (6 pts)
0
3) This is the
half of the harmonic
oscillations
period, τ = π m/2πR∆p = πm/2R∆p ≈
18 ms.
4) Let us use the ball’s system of reference. The
envelope surface element dS is exerted by the
force of inertia dFi = amdS/4πR2 , where a =
∆pπh(2R − h)/m. Thus, dFi = ∆ph(2R −
h)dS/4R2 . In order to keep the spherical shape, this force has to be compensated by the force
due to the excess pressure dFr = ∆pdS, hence
the same direction). At u = v, the graph exerts
a jump, F becomes positive, and starts decreasing. The attached graph presents a sketch
of the effective friction coefficient; the construction has been based on the lengths µk1 =
µ(w0 /2) − µ(w0 ), µk2 = µ(w0 /4) − µ(5w0 /4),
and µk3 = µ(0) − µ(3w0 /2).
0,1
0,2
0,3
0,4
1) g0 = γM/R2 , where R can be found from the
3) One millivolt input shifts the line intersecrelationship 43 πR3 ρ = M . Hence,
ting the graph a little-bit sideward, but the shift
4πρ 2/3
g0 = γM (
) .
is so small that the graph can be approximated
3M
by a straight line. The cotangent of the slope of
2) Taking a piece of ground from a certain point
that line gives us the differential resistance of the
of the planet surface and carrying it into another
diode, Rd = −16 Ω. Then, a small change in
point, the free fall acceleration can be changed
the input voltage ∆U will lead to a current chan(the sign of the change depends on the direction
ge ∆I given by the relationship (R + Rd )∆I =
of the transport).
∆U ; hence, ∆I = ∆U/(Rd + R). The output
3) Let use the polar coordinates with the origin voltage change ∆Uout = IR = R∆U/(Rd +
at the point where the free fall acceleration is to R), and the amplification factor ∆Uout /∆U =
be maximized. Let the axis φ = 0 be given by the R/(Rd + R) ≈ 1.7. Consequently, the output
direction of the acceleration. Carrying a small voltage is 1.7 mV, and . . .
piece of ground from a point (r1 , φ1 ) to anot- 4) the output graph is exactly the same as the inher point (r2 , φ2 ) must keep the modulus of the put graph, except that it is vertically stretched by
acceleration vector g constant, i.e. the vector of a factor of -1.7.
the small change must be perpendicular to the
vector g. Consequently, cos φ1 /l12 = cos φ2 /l22 , 5. Vibration (10 pts)
√
hence l = l0 cos φ.
1) µmgτ v.
µ
µ1
µk2
µ0
µk3
µk1
w
µef
ekt
w0
_
w0
5) The rest position is unstable, if u < w0 : the
particle obtains the (stable) velocity u. If u > w0 ,
the rest position is stable, and the particle velocity remains 0.
6.
Charged particle (12 pts)
1) The particle acquires the velocity v = Eqτ /m
and starts moving along a circle of radius R, with
mv 2 /R = Bvq, hence R = Eτ /B.
px
4
py 3
1
2
2)
px
py
endpoint of the particles momentum lies on that
circle. Thus, averaged over the moments of time
2n∆t, the average velocity is vx = −Eqτ /2m.
For odd number of impulses, one has to add
the lastly given momentum P = (Eqτ, 0);
hence, a similar circle is formed, except that the
center is shifted by P : the center coordinates are
mvx = Eqτ /2, mvy = 0. Correspondingly,
averaged over the moments of time 2n∆t, the
average velocity is vx = +Eqτ /2m. Averaged
over all the moments of time, the final result is
vx = vy = 0.
3)
P r’es
4) Let us consider the vectorial sum of the momenta given to the particle in different moments of time. During the time interval ∆t, all
the component-vectors are rotated by the angle
2π∆t/TB = τ Bq/m. Thus, with each impulse,
a vector P with modulus P = Eqτ is added; the
angle between the lastly added vector, and the
previously added vector is α = ∆tBq/m.
P1
P
P2n
re
s
P2
5) All these vectors, when added according The figure represents the net moment Pres after
to the triangle rule, form a circle of radius 2n-th impulse, and also the net impulse Pres
for
R = P/ sin α → P/α = Ek m/B. another time moment 2n ∆t. For an odd numpx
ber of impulses, the pattern is exactly the same,
except that all the vectors have opposite direcpy
tion (because the lastly added component, the
vertical vector, has opposite direction).
7.
Telescope (12 pts)
Hence, the average velocity vy = −R/m = 1) The light flux density decreases inversely proEk /B, vx = 0.
portionally to the square of the distance, the6) Two subsequent momenta along x-axes result refore w1 = w0 Rp2 /L2p , where Rp is the solar
in net moment along y-axes Py = P α. The radius, and Lp — the solar distance. Due to
sequence of such moment pairs form a (near- φ = 2Rp /Lp , we obtain w1 = w0 φ2 /4.
ly) circle (actually, regular equilateral polygon), 2) The previous result can be applied to the
composed of vectors (with modulus Py ), the star flux density, which is q −2 w1 ; hence P2 =
angle between of which is 2α (see Fig.). The ra- 14 πD2 w1 q −2 = w0 π(φD/4q)2 .
dius of the circle is Py /2α = P/2 = 12 Eqτ , 3) The paper surface area S radiates towards
and its center coordinates are mvx = −Eqτ /2, the lens of the telescope the power P3 =
mvy = 0. After an even number of impulses, the w1 αS( π4 D2 /L2 ), where L is the telescope dis-
tance. The image of this piece of paper has
size s = SF 2 /L2 ; thus, w3 = P3 /s =
w1 α( π4 D2 /F 2 ) = w0 απ(φD/4F )2 .
4) The angular distance of the first diffraction
minimum (using the single slit approximation
— circle is actually not a slit) is λ/D. Hence,
the bright circle radius can be estimated as
δ = F λ/D. Consequently, w2 = P2 /πδ 2 =
w0 (φD2 /4qF λ)2 .
5) k = (w2 +w3 )/w3 = 1+(απ)−1 (D/λq)2 ≈
4 (assuming λ ≈ 500 nm).
6) k − 1 ∼ 1 (or k − 1 > 1) means that the star
can be easily seen (as is the case for the telescope); k − 1 1 means that the star cannot be
seen (for the eye, k − 1 ≈ 1 · 10−4 ).
8.
Experiment (12 pts)
1) We incline the plate until sheet starts sliding:
√ the static coefficient is found as µstatic =
h/ l2 − h2 , where h is height of the plate endpoint, and l — the plate length. Now we push
the sheet laying on the plate slightly, and find
the inclination angle, for which the sheet will slide down with a constant velocity;
we use again
√
the formula µkinetic = h/ l2 − h2 . The reasonable numerical values are µstatic ≈ 0.37 and
µkinetic ≈ 0.29.
2) We put several paper stripes on the plate, and
the magnet on the top of them. We make a
loop of cord, put it around the magnet, and pull
it using the dynamometer sideward (sliding the
whole system of paper and magnet). The attraction force F ≈ N (where N is the reaction force)
is found as the ratio of the reading of the dynamometer Fd and the appropriate friction coefficient (depends, which reading is taken: either
the maximal one, or the one corresponding to sliding), F ≈ Fd /µ. The distance d is measured
in the number of paper stripes (one stripe had
a thickness of ≈ 0.2 mm). For large distances
(approximately d > 4 mm), the weight of the paper Fp stripes and magnet is no longer negligib-
le, the accuracy of the results can be enhanced by
subtracting this weight from N : F = Fd /µ−Fp .
3) We use a similar set-up, except that smaller
number of paper stripes is used (totaling up to
around 2 mm), and a steep slope of the plate.
We let the brick slide down the slope and hit
on the magnet. We keep the falling height and
plate slope constant, and measure the sliding
path, which is covered by the papers and the
magnet after having been hit by the brick. This
path is inversely proportional to the attraction
force N . If this path turns out to be too short
for an accurate measurement (for very small
distances between the magnet and the plate),
several brick hits can be used. In that case,
the single-hit path can be found as the measured path, divided by the number of hits. The
constant of proportionality can be found by
comparing the results of this and previous question, for those distances, which are covered by
both measuring techniques. Reasonable measurement results are given in the attached graph.
F /N/
30
25
20
15
10
5
d /mm/
0
0
1
2
3
4
5
6
4) The same technique as in the case of previous
question is applied, except that a larger number
of hits has to be used (≈ 10 − −20). Reasonable result for d = 0.2 mm (one paper stripe)
is F ≈ 270 N. Note that the result is much larger than the double result in the case of a single
magnet; this is due to closing the ferromagnetic
loop of magnetic field lines.
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2004)
1. Rubber fiber (12 pts)
Fibers made of elastic rubber can be stretched to
lengths l, much longer than the length in undeformed state l0 . For such rubbers, the net volume
of the fiber remains constant.
1) Express the cross-sectional area S of such a fiber in a deformed state via its length l and initial
dimensions l0 , S0 (1 pt).
2) For small deformations of an elastic material,
the stretching force F and deformation x are related to each other by the Hooke’s law F = k0 x,
where the stiffness k0 = E0 S0 /l0 and E0 is the
Young’s modulus of the rubber. For non-small
(possibly large, l ≫ l0 ) deformations of elastic
rubber, however, the Hooke’s law is substituted
by a non-linear law, F (l) = a + bl (breaking
of this law at very large values of l will not be
studied here). Express the constants a and b in
terms of l0 , S0 , and E0 (2 pt).
3) Suppose such a fiber is stretched by some
force up to the length l. A small change ∆F of
the stretching force results in a small change in
the length ∆l ≪ l. Express ∆F in terms of l, l0 ,
S0 , E0 , and ∆l (1 pt).
4) Suppose a small body is fixed to an one end
of the fiber and the system is put into rotation
around the other end of the fiber. In the case of
a circular motion of the body, express the length
of the fiber l via l0 , S0 , E0 , and the kinetic energy
of the body K (the kinetic energy of the fiber and
gravity can be neglected). (1.5 pts)
5) Let us analyse a slightly non-circular motion
of the body. Let us describe the motion of the
system by the length change of the fiber r(t) =
l(t) − l(0), the radial vr (t) and tangential vt (t)
velocities of the body (the components respectively parallel and perpendicular to the fiber). The
initial values of these quantities are designated
as L ≡ l(0), Vr ≡ vr (0), and Vt ≡ vt (0). The
values L and Vt are chosen so that if the initial
radial velocity were zero, the motion would be
circular. Write down two independent equations
relating r(t), vr (t), and vt (t) to each other (using
also the mass of the body m, together with the
parameters L, Vr , Vt , l0 , S0 , E0 ). (3.5 pts).
6) Find the relationship between r(t) and vr (t)
(containing also the parameters m, L, Vr , Vt , l0 ,
S0 , E0 ) assuming that |r| ≪ L, and find the period T of small oscillations of r(t). Simplify the
expression of T for L ≫ l0 (3 pts).
2.
Planets (6 pts)
the main optical axis and the straight line lay in
the same (x, y) surface. Hint: use the coordinate
system, where the origin coincides with the center of the lens and represent lines algebraically,
e.g. y = ax + b. Make use of the formula of thin
lens f −1 = x−1 − x′−1 (x > 0 and x′ are the
x-coordinates of a point and its image, respectively) (2 pts).
2) In figure (a), draw the image of the given line
and indicate, which parts of the image are virtual, and which are real (2 pts).
Two planets move along circular orbits around
a star of mass M = 2.0 · 1030 kg; gravitational
constant G = 6.67 · 10−11 m3 /kg ·s2 . The dependence of the angular distance between a planet and the star on time, as seen from the other
planet, is depicted in figure.
3) Photographer wants to take a photo of a field
of flowers. In order to get image where all the
flowers (both the close and far ones) are sharp,
he has to use a lens with tilt-shift (TS) capabilities (either an ordinary camera with TS lens,
or a large-format camera, where the entire lens
compartment can be freely positioned). The
field of flowers (which extends effectively to infinity) and the image of its distant edge, together
with the image plane are depicted in figure (b).
Reconstruct the position of the lens, the focal
length of which is provided as a scale (2 pts).
1) What is the ratio of the radii of the planets k
(2 pts)?
2) Determine the value of the unit on the vertical
axis (or express it in terms of k, if you were unable to find it) (2 pts).
3) What are the orbital radii of the planets, if the
unit on the horizontal axis equals to one year
4. Transparent film (6 pts)
(2 pts)?
A thick glass plate is coated by a thin transparent
3. Tilt-shift lens (6 pts)
film. The transmission spectrum of the system is
1) Show that an image of a straight line created depicted in graph (light falls normal to the plate).
by a thin lens is also a straight line. Consider The refractive index of the film n ≈ 1.3. What is
two-dimensional geometry only, i.e. assume that the thickness of the film d?
5.
4th order ellipse (6 pts)
4
4
4th order ellipse is defined by equation xa4 + yb4 =
1, where a and b are the lengths of the half- axes.
Consider an homogeneous cylinder, the crosssection of which is 4th order ellipse. The position of the cylinder is measured by the angle
0 ≤ ϕ ≤ π/2 between the vertical direction and
a longer half-axes, see figure.
1) What are the equilibrium positions of the cylinder laying on an horizontal surface (3.5 pts)?
2) Sketch on graph the net torque of gravity and
surface reaction forces with respect to the contact point of the cylinder and surface as a function of ϕ (0 ≤ ϕ ≤ π/2). For the axis of torque,
you do not need to indicate any quantitative scale (1.3 pts).
3) Which equilibrium positions are stable and
which are not? Motivate your answer (1.2 pts).
6. Magnets (6 pts)
Passive air-cooling (9 pts)
b
Certain type of magnetic toys are made up of
ferromagnetic spheres and permanent magnets
of cylindrical shape. These building blocks can
be used to build, for instance, a tetrahedron, see
figure (letter “N ” marks the northern end of a
magnet). Assume that all these permanent magnets are identical and each of them alone can
create a magnetic flux Φ (assuming the both
ends of the magnet are in contact with a Ushaped large piece of ferromagnetic material, so
that a closed ferromagnetic contour is formed).
Assume also that due to high magnetic permeability of the material of the building blocks, all
the magnetic field lines are constrained inside of
them (i.e. in the surrounding medium, the magnetic inductance B = 0).
contain also the parameters defined above) (2
Consider a passive cooling system depicted in pts).
figure. Cold air (at normal conditions: p0 = 5) What is the temperature T of the outflowing
105 Pa, T0 = 293 K) flows over the heat sink of a air? In your calculations, you may use approxichip of power dissipation P = 100 W, into a ver- mation T − T0 ≪ T0 (2 pts)?
tical pipe of length L = 1 m and cross-sectional
area S = 25 cm2 . After passing the pipe, air
enters the ambient room. Assume that the air 8. Loop of wire (7 pts)
inside the pipe becomes well mixed; neglect the
Consider a rectangular loop of wire with dimenviscous and turbulent friction of air inside the pisions a = 0.03 m and b = 1.0 m, one side
pe and heat sink. Air can be considered as an
of which is parallel to another long straight wiideal gas with adiabatic exponent γ = 1.4 and
re carrying current I0 = 1000 A, at distance
molar mass µ = 29 g/mol.
l = 0, 01 m, see figure. The magnetic inductance
of such current is plotted as a function of the distance from the wire in attached graph. The Ohmic resistance of the loop is R = 1, 0 Ω, the in- 9. Experiment (15 pts)
ductance is negligible.
The black box contains a nonlinear element
(active resistance) and a capacitor, connected
sequentially. Find the capacitance C of the capacitor (5 pts) and the V − I characteristic of
the nonlinear element (6 pts). Note that (a) the
I0
electrolytic capacitor accepts only one polarity
of charge (indicated by the colors of the output
wires of the black box); (b) the V − I characteristic cannot be expected to be symmetric with
respect to I = 0. However, you are requested
l
a
to study the range I > 0 corresponding to the
discharge of the capacitor. Tabulate your measu1) Express heat capacitance at constant pressure
rement data and draw appropriate graphs (4 pts).
cp via quantites γ and R (1 pt).
Experimental equipment: batteries, wires, multi2) Find a relationship between the outflowing air
meter, stopwatch, graphic paper.
1) Calculate the magnetic flux Φ through the
density ρ and temperature T (the relationship
loop (2 pts).
may contain also the parameters defined above)
2) At a certain moment of time, the current in
(2 pts).
3) Find a relationship between the air flow ve- the long wire is switched off. What is the net
locity in the pipe v and outflowing air density ρ charge Q flowing through a fixed cross-section
(the relationship may contain also the parame- of the wire of the loop (3 pts)?
7.
b
b
1) Let us designated the fluxes in each permanent magnet (magnets A–F in figure) by ΦA –
ΦF . Write down equation relating ΦA , ΦB , and
ΦC to each other (and possibly to Φ) (1 pt).
2) Write down equation relating ΦA , ΦB , and
ΦF to each other (and possibly to Φ) (1 pt).
3) Find the ratio ΦF /ΦC (1 pt).
4) Find the magnetic fluxes in each permanent
magnet (2 pts).
5) Which of the magnets is the most difficult one
to remove? Motivate your answer (1 pts).
ters defined above) (2 pts).
4) Express the power disspation P in terms of
the air flow velocity v, the outflowing air temperature T , and density ρ (the relationship may
3) What is the net momentum p given to the
loop during the switch-off of the current (express
it in terms of Q and the given quantities, if you
were unable to calculate Q) (2 pts)?
and maximum, t1 ≈ 1.2, and between neighbouring
minima t2 ≈ 4.6 (in graph units), respecti1) Volume conservation: Sl = S0 l0 , hence S =
k
vely.
µ = tt12 = π−2 arcsin
≈ 0.261, hence
2π
S0 l0 /l.
1
2) At the limit of small deformations, F (l) = a+ k = sin[( 2 − µ)π] ≈ 1.47 ≈ 1.5.
b
2
2
l ≈ a − bx/l0 = k0 x, hence E0 S0 /l0 = −b/l0 , 2) For the maximal angular displacement ϕm ,
hence b = −E0 S0 l0 (1 pt). Besides, at l = l0 , sin ϕ = k = sin[( 1 − µ)π], hence ϕ =
m
m
2
F = 0 (0.5 pts), hence a + bl = 0 and a = E0 S0 ( 1 − µ)π = 0.75 rad ≈ 3.6 units. Therefore, the
2
(1 pt).
unit is ϕm /( 21 − µ)π ≈ 4.8.
l0 δl
3) ∆F ≈ dF
dl dl = E0 S0 l2 .
4) Newton II law: E0 S0 (1 − ll0 ) = 2K/l, hence 3) If the angular velocities of the planets are ω1
and ω2 , the seeming angular velocity (as seen
l = l0 + E2K
.
0 SO
5) Conservation of angular momentum: lvt = from the system, where both star and the obserL
LVt , hence vt = Vt L+r
(1.5 pts). Conservation ver planet are at rest) is ω = ω1 − ω2 . From
m 2
2
the Newton II law, GM ri−2 = ωi2 ri , where
of energy: 2 (vt + vr ) + E0 S0 (r − l0 ln r+L
L )=
m
2
2
i = 1, 2 q
and ri is the planet’s orbital radius.
2 (Vt + Vr ) (2 pts).
√
6) Substituting vt from the angular momen- So, ωi = GM ri−3 and ω = GM (r2−1.5 −
√
tum conservation law into the energy equation r−1.5 ) = GM r−1.5 (1 − k −1.5 ). Finally, the
1
1
L 2
2
2
2
2
we obtain m
2 [Vt ( L+r ) + vr ] + E0 S0 (r − square of the observed period T = (2π/ω) =
m
2
2
2
3
−1.5
2
2
l0 ln r+L
)
=
(V
+
V
)
(0.4
pts).
Furtt
r
4π r1 /GM (1 − k
) and r1 = [T GM (1 −
L
2
her we make use of condition |r| ≪ L and k −1.5 )2 /4π2 ]1/3 . Using T ≈ 4.6 years≈ 1.45 ·
L 2
substitute ( L+r
) ≈ 1 − 2 Lr + 3( Lr )2 (0.4 108 s, we arrive at r1 ≈ 2.5 · 1011 m; corresponr+L
pts), ln L ≈ Lr − 12 ( Lr )2 (0.4 pts). Line- dingly, r2 = kr1 ≈ 3.7 · 1011 m.
ar in r terms cancel out due to the condition
E0 S0 (1 − lL0 ) = mVt2 /L (0.4 pts). So, we arrive
1
r 2
m 2
2 r 2
2
at m
2 [3Vt ( L ) + vr ] + 2 E0 S0 l0 ( L ) = 2 Vr
(0.4 pts). This is the energy conservation law for
a pendulum consisting of a spring with effective 3. Tilt-shift lens (6 pts)
stiffness keff = (3mVt2 + E0 S0 l0 )L−2 and of a
x′ f
body with effective
mass meff = m (0.5 pts).
So, From f −1 = x−1 − x′−1 we obtain x = x′ +f .
p
√
T = 2πL/ 3Vt2 + E0 S0 l0 m−1 ≈ 2πL/ 3Vt Since the ray passing through the centre of a lens
without refraction, from similar triangles we ob(0.3+0.2 pts).
tain the relationship between the y-coordinates
′
2. Planets (6 pts)
f
of the image: y = y ′ xx′ = xy′ +f
. Substituting
′
1) First method: determine the tangents to the into y = ax + b we result in y f = a x′ f + b,
x′ +f
x′ +f
graph at the points where the curve crosses the
x′
′
′
′
hence y = ax + b( f + 1) = x (a + fb ) + b,
horizontal axis, a1 ≈ −2.8 and a2 ≈ 16 (in
which defines also a straight line.
−k
graph units), respectively. Then, a2 = ω 1+k
k
and a2 = ω 1−k
. The graph units will cancel out 1) First we notice that the line, its image, and
from the ratio of these to tangents, ε = − aa12 = lens plane intersect in one point, because the
1+k
1−ε
image of that point of the line which lays at the
1−k ≈ 5.7, hence k = 1+ε ≈ 1.4.
Second method (more precise): determine lens plane, coincides with itself. Now, it is easy to
the distances between neighbouring minimum construct the image, see the figure.
1. Rubber fiber (12 pts)
2) First we notice that the distance of the image
of the far end of the field (let us designate it by A)
from the focal plane equals to the focal length f .
So, the lens plane must touch the circle of radius
f , drawn around A, see figure. Next we notice
that there is one such ray connecting far end of
the field and its image, which does not refract —
the one passing through the enter of the lens, see
figure.
4.
Transparent film (6 pts)
The short-wavelength oscillations on the graph
are due to the diffraction on the film, therefore the local maximum condition is 2dn =
λN = cN/ν. So, 2dnν = cN and 2dn(ν +
δ)ν = c(N + 1), hence 2dnδν = c and d =
c/2nδν. In order to measure the distance between two maxima more precisely, we take a
longer frequency interval , e.g. ∆ν = 80 THz
and count the number of maxima between them,
m ≈ 34. Consequently, δν = ∆ν/m ≈
2.35 THz, and d ≈ 50 µm
5.
4th order ellipse (6 pts)
1) There are trivial positions ϕ = 0 and ϕ =
π/2. Besides, there is a position between these
two. At the equilibrium, the vector from the origin to the touching point ~r = (x, y) has to be
perpendicular to the tangent at that point. In order to find the tangent, let us differentiate the el3
3
lipse formula: 4 xa4 dx + 4 yb4 dy = 0, hence, with
3 4
dx = 1, dy = − xy3 ab 4 , a tangent vector is ~τ =
[1, −( xy )3 ( ab )4 ]. The vectors are perpendicular,
if the scalar product is zero: x − y( xy )3 ( ab )4 , i.e.
y
y
b 2
b 2
x = ( a ) = ϕ = arctan x = ( a ) .
2) Around each zero ϕ changes sign. At ϕ = 0,
small increase in ϕ will result in a torque trying
to return to the initial position, i.e. the torque
becomes negative. So, the graph looks like the
one below.
3) If the derivative of the graph at equilibrium
point is negative, the position is stable; otherwise it is unstable. ϕ = 0 and ϕ = π/2 are stable,
ϕ = ( ab )2 is unstable.
6. Magnets (6 pts)
1) Each permanent magnet can be considered
as a solenoidal molecular current at the surface
of the magnets. Suppose that each magnet has
net surface current I. Consider triangular contour going through the interiors of the magnets
A, B, C. According to the circulation theorem
for that contour, the circulation BA l + BB l +
BC l is proportional to the overall molecular current through that contour: BA l + BB l + BC l =
3kI. Here, BA designates magnetic inductance
inside the magnet A; BB and BC are defined
analogously. For a single magnet attached to a
massive U-shaped ferromagnetic, the circulation
theorem yields B0 l = kI (where B0 is the magnetic inductance inside the magnet; the contribution to the circulation inside a massive Ushaped ferromagnetic can be neglected, because
the magnetic field there is much smaller than inside the magnet). So, BA + BB + BC = 3B0
and ΦA + ΦB + ΦC = 3Φ.
2) There are no sources of magnetic field lines
(and hence of the flux), so ΦA = ΦB + ΦF .
3) Due to symmetry, ΦF /ΦC = 1.
4) Upon using symmetry, ΦF = ΦC and ΦD =
ΦB . From the circulation theorem for the triangle CDE, ΦC + ΦE − ΦB = Φ. From the noflux-source condition for the vertex with magnets E, C, B we obtain ΦE = ΦC − ΦB . Together with the equations form questions 1 and
2, ΦA = 32 Φ, ΦC = ΦF = Φ, ΦB = ΦD =
ΦE = 12 Φ.
5) The larger the flux, the more difficult to remove a magnet, because the magnetic flux needs to
go through the air gap which will be formed (enlarging the magnetic energy), when starting the
removal. So, the answer is “A”.
process is by constant pressure, otherwise there would be huge acceleration due to pressure
drop).
3) Different air densities inside and outside the
pipe give rise to small residual (as compared to
the static pressure distribution inside the pipe)
pressure difference between the open ends of the
pipe, ∆p = −∆ρgL. This pressure difference is
responsible for the acceleration of the air, from
zero, up to the velocity of the air flow v. The momentum balance for small time interval τ yields
S∆pτ = ρ(Svτ )v, hence (ρ0 − ρ)gL = ρv 2 . .
Here, the cold air density ρ0 = p0 µ/RT0. Finalp0 µ
ly, ( RT
− ρ)gL = ρv 2 .
0
γ
4) Heat flux: P = γ−1
R(T − T0 )Svρ/µ.
5) From the result of question 2, we obtain
∆ρ
= − ∆T
From the result of question
ρ
T .
µ0 I/2πl and B1 = µ0 I/2π(l + a), we end
a
0I
up with dp = Rb µ2π
l(l+a) dΦ. Using the rea+l
0
sult of first question, dΦ = bµ
2π ln l dI, i.e.
bµ0 2
a
a+l
dp = ( 2π ) Rl(l+a) ln l IdI. Finally, p =
a(bµ0 I0 )2
8π 2 Rl(l+a)
−6
ln a+l
kg·m/s2 .
l ≈ 2.08 · 10
The same result could have been obtained
using the graph and approach used in the alternative solution of the question 1.
9.
Experiment (15 pts)
The idea: take readings of discharge current, as
a function of time. The surface area under the
graph is the outflown charge Q. Taking the readings of voltage U0 and U1 at the beginning and
at the end of discharge, we obtain Q/C = U0 −
U1 , i.e. C = Q/(U0 −U1 ). As for V-I characteristic, interrupt from time to time discharge, take
∆ρ
v2
3, ρ = − gL . Substituting these values in- reading of discharge current I just before interto the equation obtained for question 4, P = ruption, measure voltage U , and continue discγ
v3
harging. Collect enough data to draw V-I characγ−1 R gL T Sρ/µ. Using the gas equation, this
γ gL P
3
simplifies to v = γ−1 S p0 . So, T = T0 [1 + teristic.
γ gL P 2/3
( γ−1
/gL] ≈ 322 K.
S p0 )
8.
Loop of wire (7 pts)
1) At the distance r from the current I0 , the
0 I0
magnetic induction B = µ2πr
. Then, the
R l+a
flux through the contour Φ = l Bbdx =
R l+a bµ0 I0
bµ0 I0
a+l
2πx dx = 2π ln l .
l
Alternatively, we can find it using the graph
by determining the area S under the curve, from
r = r1 = 0, 01 m to r = r2 = 0, 04 m:
S ≈ 0, 28 mT·m, further, Φ = Sb = 280 µWb.
2) After switching off the current, the flux through the tends to zero. From the Ohm’s law
dΦ
R dq
dt = dt , hence Rdq = dΦ, i.e. RQ = ∆Φ =
Φ. Finally, Q = Φ/R = 280 µC.
3) We calculate the force as difference between
7. Passive air-cooling (9 pts)
the forces at the two loop segments parallel
1) Using γ = cp /cV and cp = cV + R we arrive to the straight line: F1 = biB1 and F2 =
γ
at cp = γ−1
R.
biB2 , where i = R−1 dΦ
dt . So, dp = (F1 −
ρ
2) From the ideal gas equation, p0 = µ RT (the F2 )dt = bR−1 (B1 − B2 )dΦ. Using B1 =
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2005)
1. Rock Climber (6 points)
2.
Magnetic break (12 points)
Foucault currents can be used to decelerate moving metal objects, e.g. a rotating disc. Consider
the following simple model. For the sake of simplicity, the disc is substituted by a “circular railway”, see Figure. Plastic “can” of radius r =
15 cm, mass m = 100 g, and height h = 1 cm
consists of a homogeneous disc (the bottom of
the “can”), and of a much thinner cylindrical wall.
Along the edges of the cylinder, there are two
wire rings (“rails”), which are connected with a
set of parallel wire bars (“sleepers”). Both the
“sleepers” and “rails” are made of a copper wire
of diameter δ = 0,2 mm; the distance between
the “sleepers” L = αh, where α = 0,3. Frictionless rotation of the system is decelerated with an
homogeneous magnetic field (B = 1 T) in the
slit between the poles of a permanent magnet,
see Figure. Assume that the homogeneous field
fills a region of rectangular cross-section, equal
to the area between three subsequent “sleepers”
(i.e. of size h × 2αh). Outside of that region, the
1) Assume that the distance between the climber field is negligible. The specific resistance of the
−8
and the last carabiner is L (see Figure). If the copper ρ = 1.724 · 10 Ωm.
climber happens to fall, the distance between the
highest carabiner and the climber will reach a
maximal value l (afterwards, the elasticity of the
rope starts lifting the climber). Which inequality
S
N
αh
should be satisfied for l ? (1.5 pts)
h
A rock climber of mass m = 80 kg ascends along
a vertical rock. For self-protection, the climber
uses the following method. One end of an elastic
rope is anchored to the ground. The rope goes
through smooth protection loops (carabiners),
which are anchored to the rock. The height of the
last carabiner is H = 20 m. The other end of the
rope goes through a special braking clip which
is tied to the harness of the climber. During the
climb, this clip keeps rope tight, but enables the
climber to lengthen protective part of the rope.
(Assume that the rope between the clip and carabiners is always tight) When falling, the maximum acceleration must not exceed amax = 5g
(to protect from injuries). You may assume that
the rope is always vertical, the distance between
the clip and the centre of mass of the climber is
very small, and friction between the rope and carabiners is negligible. Relationship between the
strain and stress of the rope is sketched on the
graph below.
2α
h
2) Find the maximal safe length L between the
climber and the last carabiner (upon reaching of
which he has to anchor a next carabiner; 4.5 pts).
B
σ(kN)
L
6
2r
A
Suppose the system is motionless.
H
4
2
10
20
30 ε(%)
istance between
A and B is approximately given
by R0 = R[ α(α + 2) − α] (2 pts).
Now suppose the system is rotating with an
angular speed ω = 1 rad/s, and the “rails” are
uncut.
3) Sketch an equivalent DC circuit, so that the
currents through the resistors are equal to the
currents in the respective “railway” elements:
“sleepers” and “rail” segments (between subsequent “sleepers”; 2 pts).
4) Using the above obtained results, prove that
the (Joule) dissipation power is given by formula
P = kB 2 ω 2 /R, and express the constant k
(3 pts).
5) Find the decelerating torque M (2 pts).
6) Prove that the angular speed will vanish as
ω = ω0 e−t/τ , and determine the time constant
τ (2 pts).
3.
Ballistic rocket (8 p)
A rocket is launched from a pole of the Earth
with the first cosmic velocity (near-Earth orbital velocity) in such a way that it lands at the
Equator. The radius of the Earth R = 6400 km.
1) Find the longer semi-axes a of the rocket’s orbit (1.5 pts).
2) What is the maximal height of the rocket’s orbit h (from the Earth’s surface; 3.5 pts)?
3) What is the rocket’s flight time τ (3 p)?
Remark: The mechanical energy of a planet rotating around a star E = −GM m/2a, where G
is the gravitation constant, M — the star mass,
m — the planet mass, and a — the orbit’s longer
semi-axes (zero potential energy corresponds to
an infinite departure). The surface area of an ellipse S = πab, where b is the shorter semi-axes.
4.
with water; there are holes of net cross-sectional
area S2 along the perimeter of the tank, which
are open for the operating regime of the pump.
The height of the tank from the free water surface of the reservoir is h (the height of the tank
itself is small). An electric engine keeps the vessel rotating at the angular velocity ω. The water
density is ρ, the air pressure — p0 , and the saturated vapour pressure — pk . Assume the water flow to be laminar (neglect the energy of vortices) and neglect the friction. Inside the tank,
there are metal blades, which make the water rotating together with the tank.
Water pump (10 p)
1) Find the resistance R of a single “sleeper” Consider the following construction of a water
(1 pt).
pump. A vertical tube of cross-sectional area S1
2) Suppose the “rails” are cut near the end-points leads from an open water reservoir to a cylindric
of a certain “sleeper” A and B. Prove that the res- rotating tank of radius r. All the vessels are filled
1) Calculate the pressure p2 at the perimeter of
the tank, when all the holes are closed (2 p).
2) From now on, all the holes are open. Find the
velocity v2 of the water jets with respect to the
ground (2 p).
3) If the tank rotates too fast, the pump efficiency
drops due to cavitation: the water starts “boiling” in some parts of the pump. Find the highest
cavitation-free angular speed ωmax (3 pts).
4) If the power of the electric engine is P ,
what is the theoretical upper limit of the volume
productivity of the pump µmax (volume of the
pumped water per unit time)?
5. Anemometer (6 points)
Anemometer is a device measuring flow rate of
a gas or a fluid. Let us look the construction
of a simple laser-anemometer. In a rectangular pipe with thin glass walls flows a fluid (refractive index n = 1,3), which contains light
dissipating particles. Two coherent plane waves
with wavelength λ = 515 nm and angle α =
4◦ between their wave vectors, are incident on
a plate so that (a) angle bisector of the angle
between wave vectors is normal to one wall of
the pipe and (b) pipe is parallel to the plane
defined by wave vectors. Behind the pipe is a
photodetector, that measures the frequency of
changes in dissipated light intensity.
6.
Mechano-electrical oscillator (7 points)
Mechanical and electrical processes are sometimes strongly coupled. Very important examples are systems containing piezoelectric materials, e.g. quartz resonator. Here we investigate
a somewhat simpler situation.
There are two metal plates with area S and
mass m. One plate is situated atop of the other
one. Plates are connected to each other with
springs, whose total spring constant is k and
what are made of insulator. The lower plate is
mounted on a steady base. Equilibrium distance
between the plates is X0 .
x
flow
1) How long is the (spatial) period ∆ of the interference pattern created along x-axis (see Figure;
1) Let us assume that there is a small vertical
2 pts)?
shift x of the upper plate from its equilibrium po2) Let the oscillation frequency of the photo- sition. Derive acceleration ẍ of x in terms of sysmeter signal be ν = 50 kHz. How large is the tem parameters. What is the angular frequency
fluid’s speed v? What can be said about the dir- ω0 of the small vertical oscillations of the upper
ection of the fluid flow (2 pts)?
plate (1 pts)?
3) Let us consider a situation, when the 2) Plates are now connected to a constant high
wavelengths of the plane waves differ by δλ = voltage source, so that they form a capacitor.
4,4 fm (1 fm= 10−15 m). What is the frequency Electrostatic force between the plates causes an
of signal oscillations now (fluid’s speed is the additional shift of the upper plate. The equilibsame as in previous section)? Is it possible to de- rium distance between the plates is now X1 . Determine the flow direction with such a device (2 rive expressions of the electrical attractive force
Fe and voltage applied to the plates U in terms
pts)?
of X0 , X1 , S, m and k (2 pts).
photodetector
3) System is set to oscillate again, keeping
voltage U constant. Let x stand still for the shift
from the equilibrium position. Derive an expresd
re
w a ve 1
tte
sion for the acceleration ẍ of x in terms of X0 ,
a
sc ht
g
X
1 , S, m, k and shift x. What is the angular freli
quency ω1 of upper plate’s small vertical oscillations
(2 pts)?
2
wave
4) Let us modify the situation of the previous
question and connect an inductor with inductance L in series to the capacitor and voltage
source. We describe the situation in terms of
plate shift x and capacitor’s charge q. Derive expressions for the accelerations ẍ and q̈ in terms
of X0 , X1 , S, m, k, x and q. Which angular frequencies of harmonic oscillation are possible in
the system? (2 pts)
P(W)
300
200
100
7.
Heat exchange (8 points)
1) Consider a simplified model of the air ventilation system of a house using a passive heat exchanger. The exchanger consists of a metal plate
of length x and width y and thickness d dividing
the air channel into two halves, one for incoming
cold air, and another for outgoing warm air. Both
channels have constant thickness h, air flow velocity is v see Figure. Thermal conductance of
the metal is σ (the heat flux through a unit area
of the plate per unit time, assuming that the temperature drops by one degree per unit thickness
of the plate). Specific heat capacity of the air by
constant pressure is cp , air density is ρ (neglect
its temperature dependance). You may assume
that the air is turbulently mixed in the channel,
so that the incoming and outgoing air temperatures Tin and Tout depend only on the coordinate
x (the x-axes is taken parallel to the flow velocity), i.e. Tin ≡ Tin (x) and Tout ≡ Tout (x). Assuming that the inside and outside temperatures
are T0 and T1 , respectively, what is the temperature T2 of the incoming air at the entrance to the
room (4 pts)?
cold air
metal plate
200
8.
400
o
600T( C)
Balloon (8 points)
Find the mass of the balloon (including the
gas inside it). Equipment: balloon (floats in
air), digital scales, rope, measuring tape, rope
fasteners, dynamometer, paper sheets for folding
and rough angle measurements, 100-g weight,
thread.
Remark: You may find it useful to know that
if a rope is tied around a balloon so that the tension of the rope is T , the excess pressure inside
the balloon is ∆p, the angle between the tangents of the balloon envelope near the rope is 2α
(average over the perimeter; see Figure), and the
radius of the circular loop formed by the rope is
R, then ∆p = T tan α/R2 . The universal gas
constant R = 8.31 J/K·mol, the molar mass of
air µ = 29 g/mol.
2α
warm air
2) Attached is a plot of the heat exchange rate P
of the wire of an electric heater as a function of
temperature (assuming the room temperature is
T0 = 20◦ C). The operating temperature of the
wire is T1 = 800◦ C. The heater is switched off;
find the time after which the temperature of the
wire will drop down to T2 = 100◦ C. The heat capacitance of the wire is C = 10 J/K (4 pts).
9.
Mechanical black box (7 points)
There is something small inside the cylindrical
“black box”. Find the mass of it, as well as the
friction coefficient between it and the inner surface of the box. Equipment: black box, ruler, a
wooden plank, timer, scales.
1. Rock Climber
1) In the case of falling, the acceleration should not exceed 5g , which
means that σ(ε)
m − g < 5g . Maximum strain is the solution of the following equation σ(ε) = 6gm = 6×9.8 sm2 ×80kg = 4.7kN . According
to the graph, ε = 0.315; hence, l < 0.315(L + H) + L
2) In the case of falling, the climber reaches the lowest point, when its
velocity become zero. This means that the energy absorbed by the rope
becomes equal to the change of the potential energy:
E = mg(2L + x),
where x = l − L. Energy absorbed by the rope is given by
E=
σ(ε)dx =
0.31
σ(ε)dε ≈ 564.8N
S(ε) =
4) Electromotive force in the sleeper is E = Bvh. Energy is dissipated
E2
into heat P = Rcircuit
. where Rcircuit = 12 (RR + 2αR + R),
Rcircuit =
Thus,
(L + H)S(ε) = mg(2L + x) = mg(2L + ε(L + H)),
hence
H(mgε − S(ε))
≈ 5.08m.
S(ε) − mg(ε + 2)
So, the new carabiner must be anchored within next L = 5.08 m.
2. Magnetic brake
1) Sleeper is a simple cylindrical conductor:
ρh
R = δ 2 ≈ 5.59mΩ.
(2) π
2) Length of the railway element is αR, hence the resistance is R2 =
αR. Main ideas: first - we can imagine that railway is infinite; second
— the resistance (RR ) of this infinit array remain same even if we cut
of one periodic element. Hence,
R(2R2 + RR )
.
RR =
2R2 + RR + R
After solving the equation
RR = −R2 ± R22 + 2R2 R = R22 + 2R2 R − R2
and noting that the negative solution of the equation has to be dropped
(it does not have physical meaning), we arrive at
α(α + 2) − α).
3) Important ideas:
P =
R(
2B 2 ω 2 r2 h2
α(2 + α) + α + 1)
Eventually,
2r2 h2
k= ≈ 2.12 × 10−6 .
α(2 + α) + α + 1
5) Since the power equls to M ω = P , the torqe can be found as
M=
P
2B 2 ωr2 h2
=
≈ 0.39 mNm.
ω
R( α(2 + α) + α + 1)
6) Disc has a momentum of inertia eual to I = 12 mr2 ; the angular
dω
acceleration ε = M
I = dt . Consequently (using decelerating M),
kB 2 ω
dω
=− .
IR
dt
If we group the variables I and t into different side of the equation, we
obtain
kB 2
dω
dt =
.
IR
ω
Integrating the both sides of the equation yields
• electromotive force is generated when conductors move in magnetic field;
t
0
2
kB
dt = −
IR
• There is always two sleepers moving between magnets (in magnetic field);
ω = ω0 e −
• Those sleepers act as a sources of electromotive force (like a battery);
3. Ballistic rocket
• those sleepers also have internal resistance R.
1 R( α(2 + α) + α + 1).
2
Consequently
L=
RR = R(
A
R
0
O
σ(ε)dε.
We know that the maximal value is ε = 0.315, which makes it possible
to calculate the integral numerically, as the area under the graph.
C
αR
σ(ε)(L + H)dε = (L + H)
B
O’
Notice also that we can take account symmetry and connect points
with equal potential; this allows us later to simplify cyclic railway to
previously solved infinite (actually, very long) railway. We can also see
that there is no current between the two sleepers residing in the magnetic field (there is no potential difference), hence we can disconnect
them. So, we can obtain two indipendent (almost) infinite railways and
both have their own source of elecromotive force.
kB 2
IR
ω
ω0
t, and finally τ =
2
dω
kB
ω
⇒
t = −ln ,
ω
IR
ω0
IR
kB 2
≈ 2.9s.
1) The net energy depends only on the longer semi-axes. Hence, the
longer semi-axes is the same as in the case of near-Earth orbit: a = R.
2) The ellipse has a property that the sum of lengths from each point on
the orbit to the both foci of the orbit is constant (equals to 2a). Hence,
the other focus (i.e. which is not the centre of Earth) is at the distance R
from both the launching point and landing point, see Fig. So, the√height
h = |CB| = |OB| − R; since |OB| = R + 12 |OO | = R(1 + 22 ), we
finally obtain h = √R2 .
3) The ratio of the flight time to the period along the elliptic orbit
equals to the ratio of two surface areas: the one painted dark grey
in Fig, and the overall area of the ellipse. The rotation period is the
same as in the case of
near-Earth orbit (due to Kepler’s third law),
T = 2πR/v = 2π R/g . The dark gray surface area is calculated as the sum of half of the ellipse area, and a
triangle area. So,
√
τ = T · ( π2 R · √R2 + R2 /2)/πR · √R2 = (π + 2) R/g.
4. Water pump
1) Let us consider the process in the system, rotating together with the
tank. Then, there is a potential energy related to the centrifugal force:
r
Uc = 0 ω 2 rdr = 12 ω 2 r2 . So, the pressure p2 = p0 − ρgh + 12 ω 2 r2 .
2) From the Bernoulli formula, 12 ρu2 = p2 − p0 = 12 ω 2 r2 − ρgh, hence
the squared velocity in the rotating reference system u2 = ω 2 r2 − 2gh.
2
2 2
2 2
The
laboratory speed v2 = u + ω r = 2(ω r − gh), i.e. v2 =
2
2
2(ω r − gh).
3) The point of lowest pressure pm inside the pump is the upmost point
of the tube. Using the Bernoulli formula, p0 = pm + ρgh + 12 ρv12 ,
where the velocity in the
tube can be found from the continuity condition: S1 v1 = S2 u = S2 ω 2 r2 − 2gh. Therefore, pm = p0 − ρgh −
1
2 2
ρ(ω 2 r2 − 2gh)( S
) . Notice that the “boiling” starts when pm = pk .
2
S1
2 2
k
So, ωm r = 2gh + ( p0 −p
− gh)( SS21 )2 ; finally we obtain
ρ
ωm = r
−1
2gh +
p0 − pk
− gh
ρ
S1
S2
2
.
4) The maximal productivity is apparently achieved for the highest efficiency. The efficiency is highest, when the residual velocity is lowest:
u → 0, and ω → √
ωmin . According to the results of the second question, ωmin = r−1 2gh. So, the √
minimal residual velocity of the water streams is vmin = ωmin r = 2gh. The associated lost power is
2
1
µvmin
= µgh. The useful power is associated with the potential ener2
gy increase (by gh),i.e. the total power P = 2µgh. Hence, µ = P/2gh.
5. Anemometer
1) First we need to find the angle after the refraction β : For small incidence angles we find approximately β = α/n. In the liquid, the wavelength is decreased n times: λ = λ/n. The requested wavelength
can be found as the distance between the lines connecting the intersection points of the equal phase lines of the two beams. Alternatively (and
in a simpler way), it is found as the difference of the two wavevectors:
k = kβ , where k = 2π/λ = 2πn/λ is the wavevector of the incident
beams. So, ∆ = 2π/k = λ/α ≈ 7,4 µm.
2) The scattered light fluctuates due to the motion of the scattering
particles; the frequency is ν = v/∆ = vα/λ. There is no way to determine the direction of the flow, but the modulus is obtained easily:
v = νλ/α ≈ 0.37 m/s.
3) The spatial structure of the interference pattern remains essentially
unchanged (the wavelength difference is negligible). However, the pattern obtains temporal frequency δω = δ(c/λ) ≈ cδλ/λ2 . The velocity
of the interference pattern u = ∆δω = αc δλ
λ . If the fluid speed is
v ≈ 0.37 m/s, then the relative speed of the pattern and the fluid is
ν = αc δλ
± v , depending on the direction of the flow (in both cases,
λ
ν ≈ 740 kHz). So, the output frequency allows us to determine the
flow direction as long as we can be sure that the interference pattern
velocity is larger than the flow velocity.
6. Mechano-electrical oscillator
k
1) From the Newton’s second law, mẍ = −kx, hence ẍ = − m
x, hence
ω = k/m.
2) From the Gauss’ law, the charge on the plate Q = Sε0 E =
Sε0 U/X1 . The force acting on it Fe = k(X0 − X1 ) = Q E, where E is the average electric field (averaged over the charges). Let us
look at the charge layer (at the surface of the plate) with a high magnification: the electric field there depends linearly on the net charge
inwards (in the plate) from the current point. Therefore, the average
field is just the arithmetic average of the fields on both sides of the layer:
E = E/2. Finally, Fe = k(X0 − X1 ) = QE/2 (this result could
have been obtained from energetic considerations, using infinitesimal
virtual displacement of the plate andthe energy conservation law). So,
Fe = S2 ε0 (U/X1 )2 , hence U = X1 2k(X0 − X1 )/Sε0 .
3) If the plates move by x, the change of the force due to electric field
d S
is δFe = x| dX
ε0 (U/X1 )2 | = Xx1 Sε0 (U/X1 )2 ; bearing in mind
1 2
that S2 ε0 (U/X1 )2 = k(X0 − X1 ), we obtain δFe = 2 Xx1 k(X0 − X1 ).
There is also force cahnge due to elasticity: δFk = −kx; the two forces
have opposite sign (while approaching the discs, δFk tries to push back,
0
and δFe tries to pull disks even closer). So, δF = −kx[1 − 2( X
X1 −
X0
X0
k
1)] = −kx(3 − 2 X1 ). Finally, ẍ = δF/m = −x m (3 − 2 X1 ), and
ω=
k
m (3
0
− 2X
X1 )
4) Now we have two oscillating variables, x and q . First, we write down
d
the equation due to Kirchoff ’s laws: Lq̈ = − Cq − xQ dX
C −1 . He1
re, the second term describes the voltage change on the capacitor due
to the change of the capacitance (we approximate the real change by
differential, valid for small shifts x). Note that C −1 = X1 /Sε0 and
Q = Sε0 U/X1 ; hence
−1
d
dX1 C
= 1/Sε0 , and
x
q
−U
.
C
X1
Here, the sign of the second term assumes that the x-axes is directed
upwards (there is no current in the inductance and Lq̈ = 0, if the voltage on the capacitor keeps constant; for increasing charge q > 0, this
assumes increasing capacitance, i.e. x < 0; in a full agreement with the
signs of the above expression).
The second equation describes the Newton second law. First we note that the expression for Fe can be rewritten as Fe = Q2 /2Sε0 . So,
if the charge on the plate does not change (q = 0), neither does chand
Q2 /2Sε0 = qQ/Sε0 . The infinitesimal force
ge Fe . So, δFe = q dQ
changes (δFk and δFe ) can be simply added:
mẍ = −kx − qQ/Sε0 .
Now, let us look for a sinusoidal solution of circular frequency ω .
Then, ẍ = −ω 2 x and q̈ = −ω 2 q . Substituting this into the two above
obtained equations, we find
(Lω 2 − C −1 )q = xU/X1
.
(ω 2 m − k)x = qQ/Sε0
This has a non-zero solution for x and q only if
(Lω 2 − C −1 )(ω 2 m − k) = U Q/X1 Sε0 .
Bearing in mind that U Q/X1 = 2k(X0 − X1 ) and C = ε0 S/X1 , we
can rewrite the equation as
(ε0 SLω 2 − X1 )(ω 2 m − k) = 2k(X0 − X1 ).
Introducing ω02 = k/m and ω12 = X1 /ε0SL we canfurther rewrite as
X0
ω 4 − ω 2 (ω12 + ω02 ) + ω02 ω12 3 − 2
= 0.
X1
Therefore,
2ω 2 = ω12 + ω02 ± ω14 + ω04 + 2ω12 ω02 (X0 X1−1 − 5),
3
0
i.e. this system has two eigenfrequencies, if X
X1 < 2 (and becomes unstable, otherwise).
Lq̈ = −
7. Heat exchange
1) It is easy to see that the temperature profile along the plate is linear,
and the temperature difference ∆T between the two plates is constant,
∆T ≡ T0 − T2 . Indeed, then the heat exchange rate q (per unit plate
area) is also constant, which in its turn corresponds to a linear temperature profile. Let us use a reference frame moving together with the
incoming air. Then, the temperature increase rate at a given point is
Ṫ = v(T2 − T1 )/x. Then, the heat balance for a air element of volume
V = s × h is written as ρshcp Ṫ = q = sσ∆T /d = sσ(T0 − T2 )/d.
So, ρshcp v(T2 − T1 )/x = sσ(T0 − T2 )/d, hence
xσT0 + ρhcp vdT1
T2 =
.
xσ + ρhcp vd
2) Rewriting the heat balance equation P
=
−C dT
as
dt
−1
dt
=
−CP dT we conclude that time can be found
via the area S under the graph, where P −1 is plotted
versus the temperature as t
=
SC .
The graph data:
T (K)
100 200 300 400 500 600 700 800
P (W)
13
30
55
83
122 177 258 395
100P −1 7.7
3.3
1.8
1.2
.82
.57
.39
.25
Substituting the region with smooth boundaries with a superposition
of trapezoids we find S ≈ 12 K/W. Consequently, t = 120 s.
8. Balloon
We can measure the lift of the ball by attaching a weight M = 100 g to it
and taking the reading of the scales F/g = m+M −ρV = 73.4 g, where ρ = µp0 /RT ≈ 1.2 g/l. Hence, ρV −M = 27.6 g. So, we need to determine the volume of the ball. To that end, we tighten the rope around
the ball as tightly as the fasteners can hold (note that smaller tension
values would results in a too small volume decrease, and hence, in a large uncertainty of the final answer). We weight the ball with rope (93.3
g) and subtract the mass of the rope (19.1 g) to find ρV − M = 28.4 g,
where V is the ball volume, when the rope is tightened. Hence, the
volume decrease ∆V = V − V = (28.4 − 27.6)/1.2 l≈ .67 l. Later, we determine the maximal tension in rope (which can be hold by
fasteners) with dynamometer, T ≈ 30 N. We also estimate the average
angle tan α ≈ 1.4. The radius of the loop is calculated from the measurement of the perimeter, R ≈ 15 cm. According to the given formula,
these data correspond to ∆p ≈ 1900 Pa. Due to gas law, ∆p
≈ ∆V
,
p0
V
≈
33
l.
Therefore,
M
=
ρV
−
27.6
g
≈
12
g.
hence V ≈ p0 ∆V
∆p
9. Mechanical black box
First we determine the coefficient of friction as follows. We make sure
that the object is at the bottom of the box. We put the box on the plank
so that the axes of the cylinder is parallel to the axes of the plank. We
start inclining the plank so that the bottom of the cylindrical box gets
higher. We determine the angle of the plank α, when the object starts
sliding: it hits the cover of the box. It is convenient to put the cover
(and the rim of the cover) of the box hanging slightly over an end of the
plank. In that case, object hiting the cover of the box results in box falling down from the plank. We measure the tangent of the plank at that
moment: µ = tan α = 0.17 ± 0.2.
Now we turn the axes of the cylinder perpendicular to the axes of
the plank, but keep lying on its side. We start again inclining the plank
and determine the angle β , at which the box starts rolling down. Assuming that the object is small (as compared to the radius of the box),
the following relationship can be derived: M sin β = m(sin α − sin β),
where m is the mass of the object and M — the mass of the empty box.
25±3
Using sin α = 60±5
350 and sin β = 350 we obtain M/m = 35/25 =
1.4 ± 0.2. From the measurement of the net weight M + m = 10.4 g
we find m = 10.4 g/2.4 = (4.3 ± 0.4) g. Note that the actual mass was
4.5 g.
The mass ratio can be, in principle, determined from the period of
small oscillations, T ≈ 0.4 s. Then, if we estimate the moment of inertia of the system box+object as (M + m)r2 , where r is the radius of the
m g
cylinder, then I ϕ̈ = −mrgϕ, i.e. ω 2 = m+M
r . Using r = 16 mm
g 2
2
M+m
we obtain m = r T /4π = 3.9. This result, however, is rather
approximate, because it is difficult to measure such a short oscillation
period (at the high dissipation rate). Furthermore, the period is taken
to the second power, this explains the unrealistic result (so,it does not
make sense to try to improve the approach by taking account the geometric factors for the calculation of the moent of inertia of the box etc).
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2006)
1.
Drying (12 p)
r > 100%
According to the wide-spread belief, it is useful
to keep window open wen drying laundry even if
the relative humidity outside is 100%, because
the temperature of the incoming air rises and
thereby the relative humidity drops. Let us analyse, do these arguments hold, when heating is
switched o.
air
ure
air
ure
Suppose that inside a room, the volume of
V1 = 20 m3 from inside at the temperatt1 = 25 C◦ is mixed with the volume of
V2 = 10 m3 from outside at the temperatt2 = 1 C◦ . The specic heat of the air (by
xed pressure)
cp = 1005 J/(kg·K)
can be as-
sumed to be constant for the given temperature
range; the heat exchange with the medium can
4)
is formed)?
through the LED, it emits light.
If you happened to obtain
r > 100%
then
the oversaturated vapour breaks down into a fog
which contains tiny water droplets. In that case,
what is the mass
m
of the condensed water (i.e.
the total mass of the water droplets)? Air dens3
ity ρ0 = 1,189 Kg/m ; latent heat of vaporization for water
2.
q = 2500 kJ/kg.
If a capacitor of capacitance
Photography (7 p)
istor of resistance
voltage will approach exponentially its asymp−t/RC
totic value: U = E ± U0 e
.
camera lens used for this photo.
You can as-
sume that images created by this camera lens
are identical to ones created by ideal thin lens
of matching focal length and diameter.
Let a large vessel be lled with an incompress-
the vapour.
ible dielectric liquid of density of mass density
ρm
Sucking (7 p)
(the relative dielectric permeability
ε ≈ 1).
not change i.e. that the volume of the mixed air
This liquid carries homogeneous volume charge
V = V1 + V2 .
ρe which is so small that the electric
E0 created by it is negligible: E0 ρe ≪ gρm ,
where g is the free fall acceleration. Surface tenof density
What is the temperature of the mixed air
T?
ρ (g/m3)
eld
sion can be also neglected. All the heights will
be measured from the unperturbed height of the
liquid surface.
2,0
−q
A point charge
sign is brought to the height
H,
of opposite
due to which a
kink is formed on the liquid surface.
1)
2)
1,5
Determine the height of the kink
a.
If the height of the charge is slowly decreased,
at which height
h
the liquid will start owing to
the point charge?
4.
Electric experiment (12 p)
Find
1,0
the
capacitance
of
an
unknown
capa-
citor and estimate the experimental uncertainty.
Equipment:
red light emitting diode (LED),
three resistors one of resistance
0
0
5
10
15
20
t ( C)
25
3) The graph below shows the dependence of the
saturated vapour density for water as a function of temperature.
Before mixing, both the
interior and exterior air had relative humidity
of
r
r0 = 100%.
What is the relative humidity
of the mixed air (if it happens to increase
then assume that an oversaturated vapour with
E
an electromotive force
3.
2)
and res-
end of the page, determine the diameter of the
lect the possibility of (partial) condensation of
Prove that the total volume of the air will
C
are connected in series to
By taking measurements from the photo at the
be neglected. For the time being, you may neg-
1)
R
of resistance
R2 = 6.2kΩ,
R1 = 1.5kΩ
one
and one of unknown
resistance; a battery of unknown electromotive
force (internal resistance is smaller than 500Ω),
wires, timer, unknown capacitor.
Remarks: below is provided a typical
V −I
curve of a LED; during this experiment, the
V −I
curve of the LED can be approximated
with that of an ideal diode, cf. graph.
value of the opening voltage
not known.
Uc
The
of the LED is
When there is a non-zero current
then the capacitors
5.
Empty bag (12 p)
6.
Car (7 p)
between the entry and exit points is
l (see gure)
ing from rest, as shown in gure.
able fabric, impermeable for air, which has sur-
meter of its wheel
face mass density
σ;
l.
its perimeter
less than its length
L
is much
If this bag is lled with
air, it resembles a sausage. The bag is laid on
a horizontal smooth oor (coecient of friction
µ = 0).
The excess pressure inside the bag is
the free fall acceleration g.
p,
The density of air
d = 1 m,
total, see gure.
The dia-
µ = 1.
b;
The
of those ions which hit
B,
which diverges near the maximum of the func-
ergy per impact parameter range
riers which can driven over with such a car, as.
axis (i.e. wheels rotate without friction), and the
1)
1) Find the width of the contact surface between
driving wheels are
the centre of the detector via the quantities
1)
2)
3)
l, U
2)
Prove that the tension in the bag's fabric
T = αx + β , where x is the height of the given
point P above the oor, and nd the coecient
α. Remark: fabric's tension is (loosely speaking) the force per unit length. Actually, fabric's
2)
rear axis.
Suppose that the car has four-wheel-drive,
and the road barrier is substituted with a wall.
Let the highest point of the bag be at height
from the oor. What is the tension
T1
at this
highest point? Express your answer in terms of
(or
α,
if you were unable to answer
the previous question).
C
4)
Hint: consider the force balance between two
α
Now let us assume that
r
is negligibly small,
Due to dierence in energies, the
within the range from
7.
Mass-spectrometer(9 p)
mass-spectrometer is given.
It is a device for
T
P
T x
to
M + δM .
of the mass-
8.
Optics experiment (10 p)
The sub-
Equipment: a cylindrical bottle lled with wa-
stance under investigation is ionised by heat-
ter and having a millimetre scale across half of
measuring the masses of molecules.
ing up to a temperature
T
on a hot lament
The ions are accelerated using voltage
U.
At
and
l
M − δM
δM
spectrometer?
In the gure below, a simplied scheme of a
Assuming that p ≫ σg , determine the quantb−a
ity ε = b+a , where b is the width of the bag.
c
of those ions which can still hit the
What is the resolving power
rst, let us neglect the thermal energy of the
b
∆φ
eU ≫ kT ).
halves of the bag.
4)
b
enter the detector;
but we cannot neglect the thermal eects (still
(molecules undergo a single-electron ionisation).
a
M + ∆M will
range width ∆M .
to
detector can be hit by ions of dierent masses,
gure).
p
Because of the nite size of the
detector?
Hint: consider the force balance for a small
and
r (r ≪ l).
Under the assumptions of the previous ques-
angles
acting across
piece of fabric (using the vertical cut shown in
α(b).]
tion, what is the width of the range of the exit
an horizontal cut of the sausage.
a, σ
radius
detector entrance, ions within a mass range from
3)
describe the fabric's tension here with a single
a
tion
The entrance to the detector is a circle with
nd the
ponent along the sausage's axis. Thus, we can
3)
M
e.
by driving slowly against the wall?
sible; here, however, we neglect the force com-
T
and
M − ∆M
sion, because dierent force directions are pos-
number, the force per unit length
Express the mass
Would it be possible to rise the front of the car
tension is not as simple concept as a rope's ten-
falls onto the droplet with all pos-
b < r, the light en∆b is 2I0 πb∆b;
hence, the energy per exit angle interval ∆α
−1
is ∆I/∆α = 2I0 πb∆b//∆α = 2I0 πb(dα/db)
,
Determine the maximal height of those road bar-
front wheels;
I0
sible impact parameters
suming that there is no drag in the non-driving
c.
ions (eU
≫ kT ,
where
e
is elementary charge
its perimeter (seen when looking through the
bottle); measuring tape.
1)
Determine, how long arc of the bottle's meas-
uring scale could be seen simultaneously if looking at it through the bottle from a very distant
A nar-
point (much larger than the bottle's diameter),
row beam of accelerated ions enters a region
assuming that the observation point lies at the
with magnetic eld.
height of the millimetre scale.
k
the Boltzmann's constant).
For the sake of simpli-
city, let us assume that the region has a rect-
2)
angular shape, and the magnetic eld is ho-
determine the angular radius of a rainbow (the
mogeneous inside it.
Using the results of the previous experiment
The magnetic elds de-
angle between a ray coming to the observer's eye
ects the ions and depending on their mass, they
from a rainbow, and the axis of the cone formed
may hit the detector. Let us assume that those
by other such rays).
ions which hit the centre of the detector enter
has a max-
the angular radius of the rainbow equals to
tensity
marks the position of the car's centre of mass.
is negligible.
the bag and the oor
α
the maximal exit angle [indeed, if light of in-
sketch is drawn using correct proportions, point
C
The exit angle
imum as a function of the impact parameter
coecient of fric-
tion between the wheels and ground
Note that
the internal reection is only partial, and not
A car attempts driving over a road barrier, startA cylindrical bag is made from a freely deform-
the droplet after second refraction.
Remark:
Rainbow is formed due to those
and exit the region with magnetic eld perpen-
rays which enter a spherical water droplet, re-
dicularly with its boundary, and the distance
ect once from its surface internally, and exit
1. Drying
1) Let the number of moles of cold and warm air be
ν1 and ν2 ; letCV designate the molar heat capacitance at a fixed volume. Then the total change of internal energy is ∆U = CV [ν1 (T − T1 ) + ν2 (T −
T2 ) = (CV p0 /R)(V − V1 − V2 ) (using the ideal
gas law). Internal energy change must be equal to the
work of the external pressure: (CV p0 /R)(V − V1 −
V2 ) = p0 (V − V1 − V2 ), hence V − V1 − V2 (since
CV /R 6= 1).
2) The molar amount of gas (p0 /R)(V1 /T1 +
V2 /T2 ) = (p0 /R)(V1 + V2 )/T∗ , hence T∗ = (V1 +
V2 )/(V1 T1−1 + V2 T2−1 ), i.e. t∗ ≈ 16,5 ◦ C.
3) The vapor mass ma = ρa (t1 )V1 + ρa (t2 )V2 ,
the mass of saturating vapor at the given temperature mak = ρa (t∗ )(V1 + V2 ). Relative humidity
r = ma /mak , because at the fixed temperature, the pressure is proportional to the density. So,
r = ρ̃a /ρa (t∗ ), where the weighted average of the
vapor ρ̃a = [ρa (t1 )V1 + ρa (t2 )]/(V1 + V2 ) — this
value can be found from the graph as the coordinate
of the point C : we draw the line at + b, connecting
points A and B , and take the reading for the point C
lying on the line at∗∗ +b ≈ 1,68 g/m3 at t∗∗ = 17 ◦ C
(this value divides the interval [t2 ; t1 ] in the proportions V1 : V2 ). The saturating vapor pressure at the
given temperature is found as the coordinate of the
point D: pa (t∗ ) ≈ 1,38 g/m3 . Finally we obtain
r ≈ 1,22 = 122%.
ρ (g/m3)
B
2,0
C’
1,5
C
2. Photographing
Let us notice that at the lower part of the photo, there are few brighter spots of regular circular shape and
clear edges — unlike all the rest at the smudged (out
of focus) part of the image. This can be only due to
the point sources in that far area. Let the distance
of the linear from the lens be l, and the distance between the sensor and the focus — x. Then, according
to the Newton formula, x(l −f ) = f 2 , where f is the
= fx . Let the spot diamefocal distance; hence l−f
f
ter be δ . Then the lens diameter d = δ fx = δ l−f
. Let
f
the size of the image of the linear be a, and the size
l
. From the
of the linear itself — A. Then A = a x+f
l−f
l−f
1
lens formula, x+f = f l , hence A = a f . Comparing with the previous result we obtain d = δA/a,
i.e. the lens diameter equals to the spot diameter,
using the scale of the linear. From the figure, we find
d = 17 mm.
3. Sucking
1) Let x be the horizontal axes, and y — the vertical axes. At the liquid surface, the potential energy
of a unit volume is constant (so that the liquid will
not flow towards the lower potential energy). So, the
formula for the height χ(x) of the liquid surface is
1
given by Πvp = ρm gχ − 4πε
ρe q/r = 0, where
0
E
D
1,0
p
A
0
4) In order to find the condensating mass, we write
down heat balance: cp ρ0 ∆t = q[ρ̃a − ρa (t∗ + ∆t)],
where ∆t is the temperature change due to the condensation. By designating t∗ + ∆t = τ we can rewrite the balance as ρa (τ ) = ρ̃a − cp ρ0 (τ − t∗ )/q .
So, we need to find the intersection point E of the
curve ρa (τ ) with the line ρ̃a − cp ρ0 (τ − t∗ )/q =
ρ̃a − 0,478 g·m−3 K−1 · (τ − t∗ ) (line C 0 E in Fig.).
Using the graph we find ∆ρ ≈ 0,25g/m3 — this is
the length of the line with arrows. So, the condensating mass ∆m = ∆ρ(V1 + V2 ) ≈ 7,5g.
Thus, when meteorologists tell us that at the
meeting point of cold and hot air, there are heavy
rains, the phenomenon can be explained by this
problem.
5
10
15
20
t (0C)
25
r =
x2 + (χ − H)2 is the distance of the given
point from the charge. Let us designate χ0 ≡ χ(0).
From the previous formula we obtain (bearing in
mind that for x = 0 we have r = H − χ0 ) the result
ρe q
1
χ0 (χ0 − H) + 4πε
= 0. Using the designation
0 ρm g
ρe q
1
4πε0 ρm g
= A, the result can be written as
p
1
χ0 = (H − H 2 − 4A).
2
2) It is clear that flowing starts at the point x =
0, where the fluid surface is the highest. When
the flowing starts, this surface point [with coordinates (0, χ0 )] realizes the potential energy maximum,
when moving along the y -axes towards the charge.
1
So, the function Π(y) = ρm gy − 4πε
ρe q/(h − y)
0
has a maximum at y = H0 . This gives us two equations:
1
ρm gχ0 − 4πε
ρe q/(h − χ0 ) = 0,
0
1
ρm g − 4πε0 ρe q/(h − χ0 )2 = 0.
Comparing these, we find h = 2χ0 and χ20 =
1
4πε0 ρe q/ρm g , hence
h=
p
ρe q/πε0 ρm g.
4. Electrical experiment
We start with charging the capacitor (waiting long
enough, to allow equalizing the voltages of the source
and the capacitor, of the order of the discharge time
below). The capacitor will be discharge on the diode
and two resistances (the unknown one r is parallel
to the diode), using the scheme in the figure. We
perform two experiments using for the sequentially
connected resistor R the both supplied resistors with
known resistance, R = R1 and R = R2 .
r
R
Initial voltage of the capacitor U0 = E ; the voltage
drop on the diode is constant (while emitting light)—
exactly as on a voltage source. Therefore, the voltage
on the capacitor approaches that value exponentially:
U − Uc = (E − Uc )e−t/RC .
Diode stops burning, when all the current I = (U −
Uc )/R goes through the unknown resistor, I =
Uc /r. Thus, at the fading moment (t = τ ):
r(E − Uc )e−τ /RC = RUc .
Rewriting the latter equality for the both experiments,
r(E − Uc )e−τ1 /R1 C = R1 Uc .
r(E − Uc )e−τ2 /R2 C = R2 Uc .
Dividing these and taking the logarithm results in
τ2
τ1
R1
C=(
−
)/ ln
.
R2
R1
R2
Performing for both cases 3–5 measurements
and finding the average (τ1 ≈ 37 s, τ2 ≈ 32,4 s), we
find C ≈ 13 µF.
5. Empty sack
1) The pressure at the floor P = p + σg , hence
p
σLg = (p + σg)c, from which c = L/( σg
+ 1).
2) Here we provide a solution departing from the
recommendations (finding the other solution is left
for the reader). Let the tension of the material at
some contact point with floor P0 be T0 . Consider
the energy balance of a piece of material between the
points P and P0 for a tiny virtual displacement δ ,
tangential everywhere to the material (thus, the shape of the material is preserved). The potential energy
change (per unit length of the sack) is σδgx (because
the piece of material of length δ will get from the floor
to the height x); the work done equals to (T − T0 )δ .
The energy balance yields T = σgx + T0 , hence
α = σg .
3) The force balance between the left and right halves
of the sack can be written as T1 + T0 = pa. Bearing
in mind that T0 = T1 −σga, we find T1 = (p+σg) a2 .
4) The force balance between the lower and upper
halves of the sack: 2T2 + L1 σg = pb, where T2 is
the tension at the widest point, and L1 ≈ L/2 —
is the length of the upper half. The tension T grows
linearly with the height, and the widest point is approximately at the half height; hence 2T2 ≈ T1 +T0 =
pa. Substituting it into the first equation, we obtain
p(b − a) = Lσg/2. Taking into account that the
sack is almost of a circular cross-section, we write
π(b + a) ≈ 2L; hence, we finally obtain ε ≈ πgσ
4p .
6. Car
1) Let us consider the force balance projected to the
horizontal axes. The only force, which could create
a non-zero projection, is the resultant of the friction
and reaction force, applied by the corner of the delimiter. Due to the balance, this must be also zero,
i.e. this resultant
force is directed vertically, hence
√
H = d4 (2 − 2) ≈ 15 cm.
2) Consider the torque balance with respect to the
point O — the intersection point of the lines of the
resultant force applied to the rear wheel by ground,
and of the gravity force (vertical line through C ). At
the equilibrium, the line of the reaction force applied
to the front wheel by the delimiter must go through
the same point. Thus, the intersection point of the
line OP with the wheel gives us the corner of the delimiter (P is the center of the front wheel). Using the
scale of the figure yields H ≈ 10 cm.
3) Consider the torque balance with respect to the
point Q — intersection point of the lines of the
resultant forces applied to the touching points of
the front- and rear wheels with the wall and floor,
respectively. Only the gravity force can contribute to
the net torque; since Q lies leftwards to the center of
mass, this torque rotates car rising its front. So, the
front will start rising.
Q
O
case of very large distance (black line d). In the latter case, the ray (in Fig, a) is refracted at the entrance
to the bottle by a certain angle ; when observing from
smaller distances, one ray (b in Fig) is refracted by the
same angle. These two rays coincide after rotation by
an angle β around the center of the bottle. So, the
part of the scale, given by the gray line in Fig, is longer than the black line at least by 2Rβ . We should
perform the measurements with as large L as possible; the result of the measurement is to be adjusted
by subtracting 2Rβ , where β = arcsin(l/2L).
a
β
b
C
R
L
c d
l
P
7. Mass-spectrometer
1) The trajectory of a charged particle
√ in the magnetic field is circle of radius R = l/ 2. Lorenz force
is responsible for the acceleration, Bev = M v 2 /R,
hence BeR = p. Substituting p2 = 2M U e =
B 2 e2 R2 , we obtain
M = B 2 l2 e/4U.
2) Now, the radius can be√R ± r. Approximate calculus yields ∆R/R
= r 2/l ≈ ∆M/2M , hence
√
∆M ≈ M r2 2/l, i.e.
√
∆M = B 2 lre/ 2U.
3) Ion leaves the magnetic field at the distance r before (or after) performing
a quarter of the circle. So,
√
∆ϕ ≈ r/R = r 2/l.
4) Certain initial energy kT implies that the terminal
energy U e+kT = e(U +kT /e); this is equivalent to
the change of the voltage by δU = kT /e. Using approximate calculus and the result of the first question,
we obtain: δM = dM
dU kT /e, i.e.
δM = B 2 l2 kT /4U 2 .
8. Optical experiment
1) Looking at the bottle from a distance reveals that
the central part of the scale is not reversed, unlike the
image at the extreme edge of the bottle. The turning
point corresponds to an one end of the visible part of
the glued scale (the other end-point is symmetrically situated). Looking from smaller distances results
in large visible part (Gray line c in Fig.), than in the
β
Alternatively, we can measure c by different values of
L, and present the results on graph. It makes sense
to use 1/L as the scale for the horizontal axes. Then,
L = ∞ represents the origin, to which the curve can
be easily extrapolated).
The measurements yield d ≈ 22 mm (by R =
31 mm).
2) Comparing the ray geometry for the previous
problem (in connection to the piece scale c), and the
ray geometry in the rainbow, it turns out that the geometry is actually identical, with d2 = R α2 , see Fig. So,
α = d/R. Using the data from the previous part,
α ≈ 41◦ .
α/2
α/2
d
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2007)
1. Wire (7 pts)
A conducting wire is formed of a cylindrical copper core with a diameter
of a = 2,5 mm. The core is wrapped in a concentric, cylindrical aluminium coating, the total diameter of the wire being b = 4 mm. A current
of I = 2,4 A flows through the wire. The specific resistivity of copper is
ρc = 0,0168 · 10−6 Ω·m and of aluminium, ρa = 0,028 · 10−6 Ω·m.
1) What are the current densities j in different parts of the wire (current
density is defined as the current per cross-section area)?
2) What is the magnetic inductance B1 at the distance c = 1 cm from
the axis of the wire?
3) What is the magnetic inductance B2 at the surface between the copper and aluminium?
R
~ =
~ dl
Remark It may be useful to know the circulation theorem: B·
µ0 I , where the integral is taken along a closed trajectory (loop) and I is
the net current flowing though that loop; µ0 = 4π · 10−7 H·m−1 . This
formula is completely analogousRto the formula for the work done by a
~.
force along a trajectory: F~ , A = F~ · dl
2. Pendulum (7 pts)
Consider an elastic rod, the mass and the compressibility of which (i.e.
the length change) can be neglected in this problem. It can be assumed
that if one end of the rod is firmly fixed, and a force F is applied to the
other end of the rod, perpendicularly to the rod at the point of application, then the rod takes a form of a circle segment. The radius of that
circle is inversely proportional to the force, R = k/F , where the factor
k is a characteristic of the rod.
F
R
1) Let the rod be fixed vertically, at its bottom end, and a ball of mass m
be attached to its upper end. Knowing the factor k, the length of the rod
l, and the free fall acceleration g , find the period of small oscillations of
the ball. In this question, you may assume that gml k.
2) What is the maximal mass M of the ball, which can be stably held on
such a vertical rod?
Remark: you may use approximate expressions sin x ≈ x − x3 /6
and cos x ≈ 1 − x2 /2 (for x 1).
3. Temporal focusing (10 pts)
Suppose that at the point A, there is a source of thermal electrons (of
negligible thermal energy), which are accelerated initially by the voltage U0 = 36 V in horizontal direction (see figure). At the path of
the electrons, there are two voltage gaps B and C of negligible size,
at the distance a from each other. These gaps receive a voltage signal
UC (t) = −UB (t) ≡ U (t) from a waveform generator. We can assume that |U (t)| U0 . The electrons starting at different moments of
time are to be gathered together (focused) at the probe D, which is at
distance b from the gap C . In order to analyze this setup, answer the
following questions.
A e
U(t)
B
D
C
a
b
1) Assuming that U (t) ≡ 0, what is the time needed for the electrons
to travel from the gap B to the probe D?
2) Find the same travel time assuming that the voltage U (t) ≡ U U0
is constant (your approximating expression should be a linear function
of U ).
3) What functional equation should be satisfied for the waveform U (t)
in order to ensure the focusing of all the electrons at the probe D. Solve
this equation by assuming a b and |U (t)| U0 .
4) The waveform generator yields a periodic signal of period T in such
a way that the profile U (t) is followed up to achieving some maximal
value Um ; after that, the voltage drops immediately to 0 and the process
starts repeating. What is the fraction of electrons missing the time
focus at the probe D?
4. Coefficient of friction (12 pts)
Equipment: a wooden brick, a spherical ball, board and ruler (the mass
ration of the brick and ball is provided).
1) Determine the static coefficient of friction between the board and
the brick.
2) Determine the static coefficient of friction between the ball and the
brick.
5. Rotating disk (7 pts)
A lamp is attached to the edge of a disk, which moves (slides) rotating
on ice. The lamp emits light pulses: the duration of each pulse is negligible, the interval between two pulses is τ = 100 ms. The first pulse is
of orange light, the next one is blue, followed by red, green, yellow, and
again orange (the process starts repeating periodically). The motion of
the disk is photographed using so long exposure time that exactly four
pulses are recorded on the photo (see figure). Due to the shortness of
the pulses and small size of the lamp, each pulse corresponds to a colored dot on the photo. The colors of the dots are provided with lettering:
O— orange, S — blue, P —red, R — green, and K — yellow). The friction
forces acting on the disk can be neglected.
1) Mark on the figure by numbers (1–4) the order of the pulses (dots).
Motivate your answer. What can be said about the value of the exposure
time?
2) Using the provided figure, find the radius of the disk R, the velocity
of the center of the disk v and the angular velocity ω (it is known that
ω < 60 rad/s). The scale of the figure is provided by the image of a line
of length l = 10 cm;
6. Truck (7 pts)
1) A rope is put over a pole so that the plane of the rope is perpendicular
to the axes of the pole, and the length of that segment of the rope, which
touches the pole is l, much shorter than the radius of the pole R, see figure (a). To the one end of the rope, a force T is applied; the sliding of
the rope can be prevented by applying a force T1 to the other end of the
rope. Express the ratio T1 /T via l, R, and µ, where µ is the coefficient
of friction between the rope and the pole.
2) Answer the first question, if l is not small (i.e. without the assumption
l R).
Remark: you may use equality
lim (1 + nx)1/x = en .
x→0
3) The rope makes exactly n = 2 winds around the pole. One end of the
rope is attached to a truck standing on a slope (slanting angle φ = 10◦ );
the mass of the truck m = 20 t, see figure (b). Find the force F , needed
to apply to the other end of the rope, in order to keep the truck at rest.
Use the numerical value µ = 0,3. All the other friction forces acting
upon the truck can be neglected.
4) How does the answer change, if the cross-section of the pole is not
circular, but instead, egg-shaped? Motivate your answer.
(a)
T1
(b)
T
7. To the Mars (10 pts)
In this problem, we study a project for flying to Mars. At the first stage,
the space ship switches on the rocket engines and obtains an initial velocity v0 . You may assume that during the first stage, the height of the
space ship (from the surface of the Earth) remains much smaller than
the radius of the Earth R0 = 6400 km. At the second stage, the space
ship performs a ballistic motion in the gravity field of the Earth: upon
achieving a height, which is much larger than the radius of the Earth R0 ,
but much smaller than the orbital radius of the Earth, Re = 1.5·108 km.
1) Find the relationship between the residual velocity v1 (with respect
to the Earth) at the end of the second stage, and the quantities v0 , R0 ,
and the free fall acceleration at the surface of the Earth g (for the subsequent questions you may use the numeric value g ≈ 9.8 m/s2 ).
At the third stage, the space ship performs a ballistic motion in the
gravity field of the Sun, up to reaching an immediate neighborhood of
the Mars. The trajectory is chosen by minimizing the residual launch
velocity v1 (required for achieving the Mars).
2) Sketch the trajectory.
3) Find the flight time T . You may use the following numeric data: the
orbital velocity of the Earth ve = 30 km/s, orbital radius of the Mars
Rm = 2.3 · 108 km.
4) Find the previously considered launch velocity v0 and the terminal
(i.e. at the end of the third stage) velocity vt of the space ship with respect to the Mars.
5) The required mass of the fuel M can be found from the formula
v = u ln[(M + m)/m], where u is the speed of the gas at the outlet
of the engine (with respect to the space ship), and m is the useful mass
of the ship (when all the fuel is exhausted). You may assume m M
and use the numerical value u = 1 km/s. Find, how much more fuel
is needed for the Mars flight, as compared to simply escaping the Earth
gravity field, if the useful space ship mass is equal in both cases.
8. Laser (12 pts)
Apparatus: Laser (wavelength λ = 650 nm), ruler, stand, a strip of reflecting material, a sheet of paper with a circular hole (in your pack of paper sheets), pencil. Note that the reflecting material provided to you is
coated with a layer of densely packed tiny glass spheres of equal diameter.
1) Describe the position and geometry of the diffraction pattern, which
can be observed, when the laser beam falls onto the strip; use different
incidence angles.
2) Provide a qualitative (approximate) explanation for the observed phenomenon.
3) Estimate the diameter of these glass spheres.
1. Wire (7 pts)
1) Using the Ohm’s law in differential form, E = ρj , and noting that the
electric field must be the same both in the core and in the coating, we
conclude jc ρc = ja ρa ⇒ jc = æa ρa /ρc . On the other hand, the net
current I = π4 [a2 jc + (b2 − a2 )ja ] = π4 ja (b2 − a2 + a2 ρa /ρc ), hence
I
4
≈ 0.15A/mm2 ; jc ≈ 0.25A/mm2 .
ja =
π b2 + a2 (ρa − ρc )/ρc
2) Writing down the circulation theorem for a circular concentric loop
of radius c around the straight wire, 2πcB1 = µ0 I , we obtain B1 =
µ0 I/2πc = 2 Ic · 10−7 H·m−1 = 4.8 · 10−5 T .
3) Using the technique as before, but noting that the current flowing
through the smaller loop of radius a/2 is Ic = jc π4 a2 , we obtain
B2 = µ0 Ic /πa = µ0 jc a/4 = πjc a · 10−7 H·m−1 = 2.0 · 10−4 T .
3) For the changing voltage, we can use the result of the previous question, but the voltage value should be taken at the moment of electron
passing the gap. Also, the terminal velocity is changed, v1 − v0 is related to the change of the kinetic energy e[U (t + ta ) − U (t)]. The travel
time of the later electrons passing B at a certain moment of time t > 0
should as much shorter as it was delayed, i.e.
r
m
t1 − t2 =
{a[U (0) − U (t)] + b[U (t + ta ) − U (t)]} = t,
8U03 e
where the flight time ta ≈ a/v0 [since U U0 ]. Using the suggested
approximation, we obtain
r
m
b[U (t + a/v0 ) − U (t)]} = t.
8U03 e
If we seek a quadratic solution U (t) = At2 + Bt, we get
2. Pendulum (7 pts)
1) The smallness of the oscillations means that the angle of the arc formed by the rod is small, α = l/R 1. Therefore, the force returning
the ball is almost horizontal, F = k/R = kα/l, and the horizontal
displacement of the ball is x = R(1 − cos α) ≈ Rα2 /2 = lα/2, hence
α = 2x/l.
For horizontal equation of motion, we can neglect the gravity force,
which is of the order of mgα αk/l; the right-hand side here hap2
pens p
to be the elastic force. So, mẍ = −kα/l
p = −2kx/l , hence
ω = 2k/m/l; the period T = 2π/ω = πl 2m/k .
2) Elastic energy of the rod depends apparently only on its shape, i.e.
on the curvature radius R, or, equivalently, on the binding
R x angle α.
First, we derive the expression for that energy: Πr = 0 F dx =
R
(2kx/l2 )dx = kx2 /l2 = kα2 /4. This is to be compared with the
change of the gravitational potential energy Πg = −mg(l − R sin α) =
−mgl(1 − sin α/α) ≈ −mglα2 /6. So, the vertical position is stable, if
kα2 /4 − mglα2 /6 > 0, i.e. 3k > 2mgl.
Remark: a simple-minded force balance of the ball to the direction,
perpendicular to the rod leads to another result k > mgl. This is not
correct, because if we bind the rod with a force applied to its tip, small
displacements of the tip are not perpendicular to the rod (as one might
think). In particular, this means that if there are both perpendicular
force F and tangential tension T in the rod, the curvature radius R will
depend also on the tension T . In our solution, we avoided such kind
of complications by noting that the elastic energy depends only on the
shape of the rod (if we bind the rod with some force F while keeping
T = 0, we don’t need to bother about this effect).
3. Temporal focusing (10 pts)
p
1) Apparently, t0 = (a + b)/v0 = (a + b) m/2U0 e.
2) Apparently, t = a/va + b/vb ≈ t0 − [a(va − v0 ) + b(vb − v0 )]/v02 .
On the other hand, for constant voltage U (t), vb = v0 . For the interval
between B and C , we have ∆(mv 2 /2) ≈ mv0 (va − v0 ) = −U e. So,
r
U a
m
t = t0 + U ea/mv03 = t0 +
.
U0 2 2U0 e
t
2Ata (t + ta /2) + Bta =
b
So,
r
r
r
8U03 e
.
m
p
8U03 e
8U03 e 2eU0 /m
4U02 e
/2ta b =
=
,
m
m
ab
mab
and B = −Ata . Finally we obtain
p
4U02 e
t t − a m/2U0 e .
U (t) =
mab
4) Lost are those electrons, which are in the interval between B and C ,
when the voltage drops to 0. The duration of the time interval, when
these werepemitted, is τ = a/v0 . So, the asked fraction is given by
τ /T = Ta m/2U0 e.
A=
4. Coefficient of friction (12 pts)
1) This is a straightforward question: we measure the tangent of the
slope of the board, when the brick starts sliding, µ1 = tan α1 , for the
given setup, µ1 ≈ 0.24.
2) We put the ball and brick together on the slope, the ball touching
both the brick and board and being upwards on the slope. So, the ball
pushes the brick down and the sliding is expected to take place for somewhat smaller sloping angles. For the given setup, that critical angle
turns out to give tan β ≈ 0.12.
Now we need to express µ knowing µ2 ≈ 0.24 and β =
arctan 0.12. First we write the torque balance for the ball with respect to the touching pint with the board: mgR sin β = µNR + NR,
where N is the pressure force between the ball and the brick. Hence,
mg
N = µ+1
sin β .
Now, we use the normal (to the board) force balance for the brick,
to find the pressure force between the board and the brick: N2 =
M g cos β + µmg
µ+1 sin β . Finally, we have the tangential force balance
for the brick:
mg
µm
sin β + M g sin β = µ2 g M cos β +
sin β .
µ+1
µ+1
This equation can be simplified to
h
i
m
m
+ µ + 1 = µ2 (µ + 1) cot β + µ
,
M
M
from where
µ=
m
M
+ 1 − µ2 cot β
.
m
µ2 (cot β + M
)−1
Using the measured values we get µ ≈ 0.2.
5. Rotating disk (7 pts)
1) We notice that there is no image of the orange pulse, hence it must
have taken place immediately before the shutter release. So the blue
pulse is first, red — the second etc. The exposure time must have been
triple and quadruple flash interval, 300 ms < t < 500 ms.
2) The displacement of the lamp between two subsequent pulses can be
represented as the sum of two components: ~ri = ~v τ +2R sin(ωτ /2)~ei ,
where each next unit vector ~ei+1 is rotated with respect to the previous
one (~ei ) by angle ωτ . So, if the starting points of the displacement vectors ~ri coincide, then the end-points must be on a circle, at equal angular distances ωτ from each other, see figure.
In our case we redraw the displacement vectors 1, 2 and 3 as vectors
with common origin, P~A, P~B , and P~C . Since the starting points of the
vectors 2R sin(ωτ /2)~ei are brought together to the point O, their endpoints lay on the circle, the center of which can be found as the center
of the circle drawn around the triangle ABC .
B
2
3
2
O
P
1
1
A
L
3
C
The velocity of center of the disk is found as the ratio of the
length P O and the interval τ : v ≈ 65 cm/s. The angular velocity
is found as the ratio of the angle 6 AOB = 6 BOC and the interval τ : ω ≈ 23 rad/s. Radius of the disk is found from the length
|OA| = 2R sin(ωτ /2) = 2R sin 6 BOC ≈ 1.5R; using the scale of
the figure, 1.5R ≈ 8 cm and R ≈ 5 cm.
6. Truck (7 pts)
1) First, since l is small, T1 ≈ T . From the radial force balance, N ≈
T α = T l/R, where α is the angle, by which the direction of the rope is
changed. From the tangential balance, T1 = T − µN = T (1 − µα).
2) If the angle is not small, we divide the touching segment into M
small segments and use the previous result: Ti+1 = Ti (1 − µα/M ). So,
TM = T (1 − µα/M )M → T e−µα (as M → ∞). So, T 0 = T e−µl/R .
3) Using the previous formula and the provided numerical values (α =
2π ), we obtain
T = M g sin φe−µα ≈ 800 N.
4) If we re-examine the solution to the second question, we notice that
we haven’t used the assumption of cylindrical shape. What matters, is
just the rotation angle of the tangent to the rope. So, the answer does
not change for egg-like cross-section.
7. To the Mars (10 pts)
1) Apparently v12 = v02 − 2gR0 .
2) The trajectory is ellipse touching Earth orbit at its perihelion and
Mars orbit at its apohelion..
3) According to the Kepler’s third law, the time T = 21 T0 (a/Re )3/2 ,
where T0 = 1 year is the period of Earth and a = (Re + Rm )/2 is the
longer semi-axes of the trajectory. Numerically, T = 0, 70 years.
4) The full energy (kinetic plus potential) of the space ship is E =
−Gm/2a = −Gm/(Re + Rm ) = −Gm/Re + m
(v1 + ve )2 . So,
2
2
Rm
2
Rm
1
2 (v1 + ve ) = G Re (Re +Rm ) = ve Re +Rm and
v1 = ve
r
!
2Rm
−1
Re + Rm
≈ 0.095ve ≈ 2.86 km/s.
√
Hence, v0 = 11.22 + 2.862 = 11.6 km/s.
The relative speed near the Mars can be written using the appropriate change of indices in the expression for v1 (alternatively, it can be
found analogously to v1 ):
we first find the speed with respect to Sun from the expression of
the total energy: v3 =
v3 = vm
r
!
2Re
−1
Re + Rm
≈ −0.106ve
r
Re
≈ −2.59 km/s.
Rm
5) Apparently Mi = mevi /u , so that Ma /Mb = e(va −vb )/u = e0.4 ≈
1.5.
8. Laser (12 pts)
1) These are concentric circles reflected back towards the laser. They
can be seen, if laser light is directed through the hole in the paper and
the paper is used as the screen. The position and size of the circles is independent of the incidence angle (for large incidence angles, the circles
will be somewhat elongated along the direction of slanting).
2) The exact calculation of the diffraction pattern on such microspheres
is very difficult task, evidently beyond the possibilities of an olympiad
problem. So, we have to work as a detective, drawing conclusions from
the observed data. First, the diffraction pattern is not where the reflection form the stripe would be; so, it doesn’t work as a reflecting diffraction grating. If the packing were regular, and the optical path difference
(required for the diffraction) were gathered due to scattering on neighboring spheres, there would be a pattern, characteristic to diffraction
on crystal lattices (regularly positioned spots). If the optical path difference were gathered due to scattering on neighboring spheres, with irregular packing, the path difference would be random, and hence, the
diffraction pattern would be also random. This would not explain the
regular circular pattern.
On the other hand, if the optical path difference were gathered on
a single sphere, the pattern would be axially symmetric, as is the sphere
itself. So, this fits well with all the experimental observations (except
for slight elongation of the circles for large incidence angles, which may,
perhaps, be explained by the refraction in the coating layer).
On a single sphere, the light is reflected partially back on the front
surface, and partially refracts into the sphere, reflects internally and refracts back into the air (in our rough analysis, we neglect multiple partial
reflections). For beams falling close to the axes of the sphere, the outgoing beams are reflected almost in the opposite direction. So, in its
central part, the sphere acts almost like a reflecting disk.
In our very rough model, we substitute the spheres by disks of approximately the same diameter as the spheres, oriented perpendicularly
to the incident beam. Then, all the microspheres provide maxima and
minima in the same directions.
3) We measure the diameter of the first dark ring d ≈ 1.1 cm, and the
distance between the laser and the strip l ≈ 80 cm. Then, the diameter
of the spheres can be estimated as the diameter of the effective lightreflecting disk, D ≈ λl/d ≈ 50 µm.
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2008)
Eestonian-Finnish Olympiad - 2008
1. Dumbbell
(a)
(6 points)
Two perfectly elastic identic balls of mass m are connected by
a spring of stiness k so that a dumbbell-like system is formed.
That dumbbell lays at rest on a slippery horizontal surface (all
the friction forces can be neglected). Third ball (identic to the
ones making up the dumbbell) approaches coaxially the dumbbell
from the left side with velocity v (see Figure). Fourth ball (identic
Ti nano-disk heater thermal
to the other ones) lays coaxially rightwards to the dumbbell.
temperature sensor bridge
1) Find the velocity of the centre of mass of the dumbbell after
1) Find the thermal resistance R between the microcalorimeter
being hit by the ball approaching from the left.
and the wafer (i.e. the ratio of the temperature dierence and
2) For which distances L between the dumbbell and the right- heat ux).
most ball, the nal velocity of the latter will be exactly the same,
For questions (ii) and (iii), use quantity R, without substias the initial velocity v of the leftmost ball?
tuting it via the answer of question (i).
v
L
2) Write down the heat balance equation for the microcalorimeter
and nd the temperature of the microcalorimeter as a function of
time T (t) [you may seek it in the form T = T + ∆T sin(ωt + ϕ)].
3) In order to study the thermal properties of the Ti-nanodisks,
the amplitude of the sinusoidal oscillations of T (t) should change
by as large as possible value, as a response to a small change of
2. Microcalorimeter
C (which is caused by the Ti-disks). Find the optimal circular
frequency ω .
A microcalorimeter is a thin circular silicon nitride membrane, 4) We have assumed that the temperature prole along the
thermally isolated from the surroundings, except that it is bridges is linear, i.e. their heat capacity can be neglected. For
thermally connected to the wafer by four thin and narrow thermal high frequencies ω & ω , this is not the case. Estimate the critbridges (see Figure). The microcalorimeter is equipped with a ical frequency ω in terms of κ, l, specic heat c and density ρ of
small heater in the middle of the membrane and a similar struc- the bridge material.
ture on the edge of the membrane working as a thermometer.
This micro calorimeter is used to study the thermal properties of
nanoscale Ti disks (light tiny dots in Fig). The thermal power of
the heater depends sinusoidally on time, P = P cos(ωt) (negative power implies a withdrawal of heat). The circular frequency ω 3. Tractor
is suciently low, so that for any moment of time t, the temperature of the microcalorimeter T (t) can be considered constant Provided sketches (a) and (b) are made on the basis of satelacross its entire surface, and the temperature prole along the lite images, preserving proportions. They represent tractors, tothermal bridges can be considered linear. The wafer, to which gether their smoke trails. The tractors were moving along the
the bridges are connected, is large and thick enough, so that its roads in the direction indicated by the arrows. The velocity of
temperature T can be considered to be constant all the time. the tractors was v = 30 km/h. For sketch (a), the direction
Each of the four bridges have length L and cross sectional area of all
S ; the thermal conductance of them is κ. Thermal conductance of wind is indicated by another arrow.
is dened as the heat ux (measured in Watts) per surface area, 1) Using the provided sketch, nd the wind speed for case (a).
assuming that the temperature drop is 1 C per 1 m. The heat
capacity of the microcalorimeter (with Ti-disks) is C .
2) Using the provided sketch, nd the wind speed for case (b).
0
(9 points)
0
c
c
0
(6 points)
0
0
◦
(b)
4. Magnetic eld
(6 points)
Magnetic eld with inductance B (parallel to the z-axis) lls the
region x + y < R . Let us consider an electron of velocity
v = RBe/m (where e is its charge and m its mass).
1) Sketch the trajectory of the particle, if initially, it moves along
the line y = 0 towards the region lled with magnetic eld.
2) How long time does the electron spend inside the magnetic
eld?
3) Now, let us consider the situation, when initially the electron
moves along the line y = a (a < R). Find the angle α, by which
the electron is inclined after passing through magnetic eld.
2
5. Ball
2
(9 points)
2
ruler, a glass ball, sheet of paper, marker. Find the
coecient of friction between the glass ball and the ruler. Estimate the uncertainty of you result.
Equipment:
6. Rectier
(8 points)
A voltage rectier is made according to the circuit depicted in
Figure. The load R = 10 kΩ is fed with DC, equal to I = 2 mA.
In what follows we approximate the U-I characteristic of the diode with the curve depicted in Figure. The relative variation of
the current at the load has to satisfy the condition ∆I/I < 1%.
9. Asteroid
(7 points)
It is believed that the impacts of the Earth with asteroids have
played an important role in the history of Earth. In this problem, you are required to study such an impact. As an example, let us use the orbital data of the Apollo asteroid. Its
perihelion is 0.65 AU, i.e. its closest distance from the Sun is
r = βR, where β = 0.65 and R denotes the radius of the
Earth's orbit; its aphelion is 2.3 AU, i.e. its farthest distance
from the Sun is r = αR, where α = 2.3. In your calculations, you may use the orbital velocity of Earth, v = 30 km/h,
Earth radius R = 6400 km, and the free fall acceleration at the
Earth's surface, g = 9.8 m/s . You may also use the formula
E = −GmM/2a, expressing the total energy of a body of mass
m, which moves along an elliptic orbit of longer semiaxis a, in
the gravity eld of a much heavier body of mass M . You may
assume that the orbital planes of the Earth and of the asteroid
coincide, and that they rotate in the same direction around the
Sun.
1) Find the velocity v of the asteroid in the vicinity of the Earth,
in the Sun's system of reference, neglecting the eect of Earth's
attraction.
2) Find the radial and tangential components v and v of that
velocity (i.e. the components, respectively parallel and perpendicular to the vector, drawn from the centre of the Sun to current
position of the asteroid).
3) Find the same velocity components u and u in the Earth's
system of reference.
4) Find the velocity of the asteroid w, immediately before entering the Earth's atmosphere (at the height h = 100 km from the
Earth's surface).
1
2
0
0
2
Find the average power dissipation at the diode at the working
regime of such a circuit.
2) Determine the amplitude of the AC voltage (with frequency
ν = 50 Hz), which has to be applied at the input of the circuit.
3) Find the required capacitance C .
4) Find the average power dissipation at the diode during the
rst period (of AC input voltage) immediately following the application of AC voltage to the input of the circuit.
1)
7. Fire
(6 points)
r
t
There is wet wood burning in a replace on the ground. Seven
meters above ground, the smoke is at a temperature of t = 40 C.
Disregard the exchange of heat with the surrounding air and assume that the atmospheric pressure at the ground is constant in
time and equal to p = 1000 hPa; the air temperature t = 20 C
is independent of height . Assume that the smoke represents an
ideal gas of a molar mass µ = 29 g/mol (i.e. equal to the molar 10. Glass plate
Laser (λ = 650 nm), thin glass plate, lens, ruler.
mass of the air), and of a molar specic heat at constant volume
C = 2.5R; universal gas constant R = 8.31 J/kg · K. How high NB! glass plate is xed to a stand; avoid touching the glass itself
(because its edges are sharp, and because it can break easily).
will the smoke column rise?
Find the thickness of the plate and estimate the uncertainty
of the result. Draw the scheme of your experimental setup.
8. Electron
Electron rests at the origin. At the moment of time t = 0, an
electric eld is switched in: its modulus is constant and equal to
E , but its direction rotates with a constant circular velocity ω
in the x − y plane. At the moment t = 0, it is directed along the
x-axes.
1) Find the average velocity of the electron over a long time
interval for t > 0.
2) Sketch the trajectory of the electron and calculate the geometrical characteristics of it.
7
0
1
0
◦
◦
r
t
(10 points)
Equipment:
V
(5 points)
0
1 Actually,
during day time, this is not the case: air temperature decreases with height. However, during evening and night, due to heat radiation, the lower layers of air cool more rapidly than upper layers, and it
may easily happen that the temperature is roughly independent of height.
The heat contained in the bridge must be comparable with the 2) Circular part of the trajectory is a quarter of the full circle,
heat,
which ows through it during one half-period (if it is much so t = πR/2v.
1) During the rst collision, we can neglect the eect of the
the stationary linear prole will develop very soon). So, 3) Let O be the centre of the circular orbit of the electron and B
spring, because during the collision time, the balls almost don't smaller,
the intersection point of the trajectory with the region boundmove, hence the spring doesn't deform. Two absolutely elastic AcρSL ≈ AκS/(Lω ); hence,
ary. The polygon COBO is rhomb, because all the sides are
ω ≈ κ/cρL .
identic balls exchange velocity during a central collision. So, the
equal to R. So, the line BO is vertical (because O C is vertical
rst ball will remain at rest, and the second one will obtain the
and
BO is parallel to it). Hence, the inclination angle of the
velocity v. So, the velocity of the centre of mass of the dumbbell 3. Tractor
electron is
is v/2.
π
a
α = ∠CO B = ∠AOB + ∠AOC = − arcsin .
2) After the impact, the dumbbell will oscillate in the sys2
R
tem √of reference of its centre of mass with circular frequency
5. Ball
ω = 2k/m (balls oscillate so that the middlepoint of the spring
is at rest; twice shorter spring has a twice larger stiness).
Due to the energy conservation law, the only way for the
fourth ball to acquire the velocity v is such that all the other
balls remain at a complete rest after the interaction. Therefore,
before the impact of the third and fourth balls, the third ball must
have velocity v (and the second ball must be at rest). This is the
opposite phase of the moment, when the dumbbell started its
motion. Hence, the travel time t of the dumbbell must be a halfinteger multiple of the period T = 2π√m/2k. For that phase
of oscillation, the spring is, again, undeformed, i.e. the travel
We lay one of the rulers horizontally on the table. Then, we put
distance of the centre of mass is also L. So, 2L/v = T (n + ),
the ball on that ruler, and the other ruler laying on the ball. With
hence
(
)
nger, we keep one end of the second ruler in contact with the
1 √
L = πv n +
m/2k.
rst ruler and nd the closest stable position of the ball (resulting
2
in the largest inclination angle of the second ruler), see Figure.
1) Let us draw from an arbitrary point B on the road a line par2. Microcalorimeter
we consider the torque balance (for the ball) with respect to
allel to the direction of the wind, and let it intersect the smoke Now,
the
ball
ruler touching point B. Gravity force has no torque,
1) Every bridge has thermal resistance L/κS ; so, the overall restrail at point C . Then, the smoke emitted by the tractor at B because and
it
is
to the centre of the ball O. So, the resultant
istance is R = L/4κS.
has travelled the distance |BC| = ut, where u is the wind speed. vector of the applied
friction
reaction forces at C must have also zero
2) The power dissipation P results in an heat ux through the
Tractor itself has travelled the distance |AB| = v t. So, we can torque, i.e. it has to goandthrough
B . At the threshold of sliding, the
bridges, Φ = ∆T /R, and in the change of the heat contained in measure
the microcalorimeter, Q̇ = C Ṫ = C∆Ṫ (here, dot denotes the late the distances |AB| and |BC from the gure and calcu- angle between this vector and the surface normal CO is arctan µ.
So, µ = tan ∠BCO = tan ∠OAB = |OB|/|AB| = R/|AB|. The
time derivative). So,
|BC|
18 mm
u=v
=
30 km/h ≈ 13 km/h.
radius of the ball R ≈ 40 mm can be measured by rolling the ball
P cos(ωt) = C∆Ṫ + ∆T /R.
|AC|
42 mm
Now, we can search the√ solution as ∆T = A cos(ωt + ϕ), and 2) If the second tractor (at the right-hand-side) had started some- on the ruler by angle 2π. The distance |AB| can be measured
denote ψ = arcsin(Cω/ √C ω + R ). Then,
what earlier, the two tractors had been at the crossroad simul- directly using the ruler. Several measurements are needed, to
taneously. Now, the tractors would be at the same distance from nd the critical position of the ball more accurately.
P cos(ωt) = A C ω + R √cos(ωt + ϕ − ψ).
the crossroad, i.e. for the current position of the second tractor We have used one ruler as the basis, because if the surface has
So, we must have ϕ = ψ( and A = P / C√ω + R , i.e.)
C , |OC| = |AO| = v t (this is how we nd the point C ). Its smaller coecient of friction than the ruler, the sliding starts at
P cos ωt + arcsin(Cω/ C ω + R )
√
T =T +
.
smoke
trail can be found as a line, parallel to its smoke trail at the point B, hence we are not able to obtain the required result.
C ω +R
its
actual
position B. Such a meeting of the tractors would have 6. Rectier
; it been resulted
3) The amplitude of the oscillations is A = √
crossing of the smoke trails. which would be 1) Since none of the DC current through the load can come from
must be as sensitive with respect to the small changes of C , i.e. now in positionin Dthe, with
OD = ut. So, we nd
dA/dC must be maximal by modulus. dA/dC = P (C ω +
the capacitor, all must come through the diode. Hence, the aver|OD|
27 mm
=
30 km/h ≈ 21 km/h.
u=v
R )
Cω ; if we denote x = (Cω) , we need to minimize the
age current through the diode is also I = 2 mA, and the average
|AO|
39 mm
following function
of
x
:
power
dissipation is obtained by multiplying it with the diode
[
]
4. Magnetic eld
ln (dC/dA) = 3 ln(x + R ) − ln x + ln C.
voltage u = 1 V: P = 2 mW.
Upon taking derivative and putting it equal to 0, we obtain 1) Since the radius of the cyclotron orbit is equal to the radius 2) If the diode is open, Uload(t) = U cos(ωt) − u. If the di3x = x + R , from where x = R
of the region R, the trajectory is given by the curve DABE in ode is closed [i.e. U cos(ωt) < Uload(t) + u], the capacitor dis√ /2, i.e.
the Figure (AB is a circle fragment).
ω = 1/ 2CR.
charges through the load. However, the relative change of the
1. Dumbbell
4)
(6 points)
′
c
c
′
2
′
(6 points)
′
(9 points)
1
2
(9 points)
0
0
0
2
2
0
−2
2
−2
2
2
0
2
0
0
2
−2
2
2
−2
0
−2
2
P0
(8 points)
C 2 ω 2 +R−2
−2 −3/2
0
2
2
−2
2
−2
−2
2
2
0
(6 points)
0
0
voltage of the capacitor has to be small (otherwise ∆I/I would We can integrate these equations over time (bearing in mind that
not be small). The respective load voltage as a function of time initial velocity is zero):
is sketched in the Figure. So, we can use the above written
mẋ = −eE ω sin ωt,
Kircho's law with Uload(t) ≈ IR, hence U = IR + u = 21 V.
mẏ = eE ω (1 − cos ωt).
Now, we can integrate once more, bearing in mind that the initial
coordinates are zero:
0
0
−1
eE0
(cos ωt − 1),
mω 2
eE0
eE0
y=
cos ωt +
t.
mω 2
ωm
x=
The change of the voltage of the capacitor during the discharge
cycle can be estimated as ∆U = ∆Q/C , where the capacitor's
charge drop ∆Q = It, and t is the discharge time. Since the discharge cycle occupies almost all the period (see Figure), we can
use t ≈ 1/ν . Further, ∆I/I = ∆U/U = ∆Q/CU = ∆Q/CIR =
1/CRν . Hence, C ≥ 100/Rν = 200 µF.
4) Initially, the capacitor is empty, so that the charge owing
through the capacitor during the rst cycle is Q = CIR. Hence,
the average power P = Quν = CIRuν = 200 mW.
1
7. Fire
(6 points)
The smoke will rise until its density becomes equal to the density
of the air at the same height. Since the molar masses and pressures of the smoke and air are equal, this implies also equal temperatures (pressures are equal, because otherwise, there would be
no mechanical equilibrium). Temperature of the smoke will drop
with increasing height due to adiabatic expansion. If we combine the law of the adiabatic process pV = Const with the ideal
gas law (pV /T ) = Const, we obtain p /T = Const. Taking a logarithm and dierential from this equation, we obtain
= 0, hence we can use approximate expression
(γ − 1) − γ
for the require temperature change
So, the electron performs circular motion in the system of reference, moving with velocity (parallel to the y-axis) u = .
The radius of the orbit is R = . In the laboratory system,
this is a cycloid (the curve drawn by a point on the edge of
a rolling disk); the distance between the neighbouring loops is
∆ = 2πu/ω = 2πR.
dp
p
γ−1
γ
dT
T
γ − 1 ∆p
20 K = ∆T = T
.
γ
p
∆p = ρgh
ρ = pµ/RT ≈ 1.2 kg/m3
γ = cp /cV = (cV + R)/cV
We can use
, where
density. Also, we can substitute
we obtain
R
hence
µgh
∆T =
,
cV + R R
(
cV ) ∆T R
h= 1+
≈ 2040 m.
R
µg
(7 points)
The longer semiaxis is a = (r + r ) = (α + β)R. So, the
full energy of the asteroid at the Earth's location is
1)
1
2
1
Bearing in mind that
, we can rewrite this as
v02
= v02 −
α+β
So, we obtain
v = v0
1 2
v .
2
Tangential component can be found from the angular momentum conservation law: v = v β, where the velocity at the
perihelion can√be found analogously to v:
2)
r
(
vp = v0
2
1
1
−
β
α+β
p
√
)
= v0
2α
≈ 37.5 km/h.
α+β
is the air So,
√
. So,
2α
≈ 24.4 km/h.
v =v β
α+β
Radial component √
t
0
vr =
v 2 − vt2 ≈ 24.4 km/h.
The required components can be found by subtracting the
Earth's orbital velocity. Apparently u = v , and
3)
r
ut = vt − v0 ≈ −5.6 km/h.
(5 points)
Let us write the Newton's II law for x- and y-components of the 4) When the asteroid approaches Earth's surface along the parabolic orbit, the energy due to the Earth gravity force gR is added
electrons coordinates:
to
its kinetic energy√in the Earth's system of reference:
mẍ = −eE ω cos ωt,
0
0
mÿ = eE0 sin ωt.
w=
There are two possible setups. First,
we consider the interference of the
beams, reected from the upper and
lower surfaces of the glass plate, see
Figure, upper drawing. Second, we
direct the beam on the edge of the
plate. As a result, on the screen, there
will be almost the same diraction
pattern, as from a single slit (lower
drawing in the Figure).
In the rst case, we need to calculate the optical path difference, see Figure. ∆l = 2(n|CD| − |AB|) = 2(nd/ cos β −
d sin β sin α) = 2d(n/ cos β − sin α/n); we keep in mind that
sin β = sin α/n.
We need to nd such a change in α,
which gives rise to the change of ∆l by λ (this corresponds
to a transition from one diraction minimum to another one):
∆α ·
= λ. Then, we can relate the measured quantity, the distance between the minima on the screen a = L∆α
(where L is the path length |AB| + |BC|) to the plate thickness.
= 2d(sin α/ cos β − sin 2α/n) = 2d sin α(cos β −
2 cos α/n). So, Lλ = 2ad sin α(cos β − 2 cos α/n); hence,
d = Lλ/2a sin α(cos β − 2 cos α/n). We can easily measure
α and calculate β ; for n, we can use typical value n ≈ 1.4, or use
the Brewster angle α measurement to nd n = tan α . For the
precise measurement of a, we count several, e.g. 10, inter-minima
intervals, and divide the distance between the farthest minima by
10.
In the second case, the angular distance between the minima
is given by ∆α = 2λ/d, so that a = 2Lλ/d and d = 2Lλ/a.
Numerically, the thickness was d ≈ 0.20 mm.
2
d(∆l)
dα
√
2[1 − (α + β)−1 ] ≈ 34.5 km/h.
r
8. Electron
1
2
2
γM
1
γM
E
=−
= v2 −
.
m
2a
2
R
v02 = γM
R
γ
γ
eE0
ωm
eE0
ω2 m
9. Asteroid
(10 points)
−1
0
3)
10. Glass plate
u2t + u2r + 2gR0 ≈ 27.4 km/h
d(∆l)
dα
−2
2
−2
−2
B
B
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2009)
Estonian-Finnish Olympiad - 2009
1. Boat (9 points) Consider a boat of effective mass m, which
moves along the (horizontal) x-axes, and for which the friction
force of the water is given by Ff = −αv , where v is the velocity
of the boat. (Effective mass is somewhat larger than the real mass,
because any change of the boat’s velocity incurs a velocity change
of those regions of water, which are close to the boat; hence, the
boat’s inertia is complemented by the inertia of the surrounding
water.)
i) Prove that during this motion,
v + kx = Const,
and find the factor k .
ii) Now, a boy of mass M moves inside the boat, back and forth,
with velocity u(t) (also, along the x-axis). What term must be
added to the conservation law v + kx = Const, to describe this
situation?
iii) Now, let the boat rest initially close to the coast and ready to
depart. The boy jumps from the coast into the boat, turns around
and jumps back to the coast. The horizontal component of the
boy’s velocity during the first jump was u1 , and during the second
jump −u2 . What is the maximum distance s travelled by the boat?
Neglect the effect of a vertical motion on the horizontal friction
force of the water.
2. Nanoclock (10 points)
Nanotechnology allows controllable fabrication of very small
structures. Let us consider a tiny homogeneously charged thin
ring, having a radius R and carrying a positive net charge Q.
i) Find the electric potential ϕ at a point P , which is on the axes
of the ring, at a distance z from the centre of the ring.
ii) Find the electric field E at the point P .
iii) Show that the force acting on an electron moving along the
symmetry axes in the vicinity of the centre of the ring (|z| ≪ R)
is harmonic (i.e. depends linearly on z ).
iv) Define the frequency of oscillations of such an electron. Use
numerical values R = 1µm and Q = 1.0 × 10−13 C.
v) Now, let us assume that the electron can perform also off-axis
movements. Is the position at the symmetry centre of the ring (onaxis, z = 0) stable or unstable? Motivate your answer.
Hint: You may use the approximate formula
(1 + x)α ≈ 1 + αx + 12 α(α − 1)x2 .
3. Ball (8 points) A homogeneous ball of radius R and mass m is
thrown horizontally onto a table at the moment of time t = 0. Its
initial velocity before contact is purely horizontal and equal to v ;
it is non-rotating. Coefficient of kinetic friction between the table
and the ball is µ.
i) Find the moment of time t, when the ball stops sliding, i.e. starts
rolling without sliding.
ii) Calculate the angular velocity of the ball ω∗ and its total
mechanical energy E∗ at the moment when it stops sliding. In the
case of a hollow sphere, would the energy E∗ be larger or smaller
than in the case of a homogeneous ball?
iii) Now, assume that the horizontal surface is treated so that
the coefficient of kinetic friction depends on the horizontal
coordinate x as µ = a + b cos x (with a > b). Find the
expression for the terminal mechanical energy E∗′ in this new case.
iv) Now, let us return to the case of constant kinetic friction
coefficient µ. However, let us assume that the surface is not
perfectly rigid (e.g. covered by a felt cloth). This gives rise to a
second friction force — the rolling friction force Fr = µr mg .
Unlike the kinetic friction force, it is not tangential to the touching
point of the ball and the surface. Instead, it can be interpreted as
the horizontal component of the surface reaction force (the entire
reaction force is, of course, normal to the surface), see Fig. Find
the expression for the terminal mechanical energy E∗′′ in this case.
What is the most important (qualitative) difference between the
expressions for E∗ and E∗′′ ?
Hint: The moment of inertia of a ball is I = 25 M R2 .
4. Black box (9 points) Equipment: electrical black box with three
outlets, battery, voltmeter.
It is known that inside the black box, there are three resistors
(connected with wires in an unknown manner), the smallest of
which is R1 = 100 Ω. Find the value of the largest resistor R3 .
What can be said about the middle-valued resistor R2 ? Estimate
the uncertainties of your results.
i) Find the current through the resistors R1 and R2 at the moment
of time t1 = 5 ms.
ii) Find the current through the resistors R1 and R2 at the
moment of time t2 = 15 ms.
iii) What is the net charge passing through the resistor R2 ?
9. Stratostat (5 points)
i) Show that the pressure of an isothermal gas of molar mass µ
follows the law p = p0 e−αz , where p0 is the pressure at the origin,
and z is the height. Find the constant α. The temperature is T , the
free fall acceleration is g .
ii) Consider a stratostat, the envelope of which (a freely
deformable non-elastic sack) is filled at the Earth’s surface by
helium to the volume fraction of β = 10%. At which height h
does the helium expand so that it fills the entire volume of the
stratostat? The molar masses of the air and helium are µa =
29 g/mol and µHe = 4 g/mol, respectively. You may neglect
the temperature variations of the atmosphere, and use the value
T = 250 K.
10. Wedge (5 points) A wedge of mass M is kept at rest on an
horizontal surface, and a block of mass m is kept on the wedge at
the height h from the surface. The angle of the wedge is α, see
Fig. There is no friction neither between the block and wedge nor
Hint: you may use a model, according to which the already between the surface and the wedge. The system is released into
broken part of the soap film gathers into a single front and moves a free motion. Find the time t needed for the block to reach the
all together towards the still preserved part of the film.
surface.
8. Magnetic pulse (7 points) Consider an electric circuit
consisting of a coil of negligibly small inductance, consisting of
N = 10 turns and with the surface area of a single loop S =
10 cm2 ), resistors R1 = R2 = 3 Ω, capacitor C = 0.2 F,
and an inductance L = 1H , connected as shown in Fig. At the
moment of time t = 0, a magnetic field, parallel to the axis of
the coil is switched on. The inductance of the magnetic field starts
growing linearly, starting from B = 0 until the maximal value
B = 1 T is achieved at t = 10 ms. Further, the inductance of
the magnetic field remains constant (and equal to 1T).
5. Pencil (6 points) Equipment: pencil, paper, ruler.
Determine the coefficient of friction of the pencil’s graphite
core against the paper. Estimate the uncertainty.
6. Spring (7 points) Equipment: helical spring of known mass
m = 19 ± 0.5 g, measuring tape, a load of unknown mass.
Determine the mass of the load. Estimate the uncertainty.
7. Soap film (6 points) Lord Rayleigh had in 1891 a lecture about
taking photos of physical processes. Among others, he showed a
photo of a soap film, which is falling apart (see Fig.). Instead of a
flash, he used an electric spark (well, nowadays the flashes are also
based on electric sparks). Estimate, how precise must have been
the timing, i.e. estimate the time for a soap film to fall apart. Let
the thickness of the soap film be h = 1 µm, the ring diameter
D = 10 cm and the surface tension σ = 0.025 N/m.
Estonian-Finnish Olympiad - 2009
1. Boat (9 points)
i) From the Newton II law, m dv
+ α dx
= 0. Multiplying this
dt
dt
α
dx = 0. Integrating (i.e.
equation by dt, we obtain dv + m
summing over all the small increments dx and dv ) this equation
leads us to
α
v + x = Const,
m
α
i.e. k = m
.
ii) We proceed in the same way as before, but we need to add the
+ α dx
=
interaction force between the boat and the boy: m dv
dt
dt
du
M dt . [Note that since the right-hand-side of this equation is
the interaction force, it goes to zero, if the boy leaves the boat.
Therefore, if we want to keep this equation correct even after the
boy leaves the boat at the moment of time t = t∗ , we must assume
u(t) ≡ u(t∗ ) for t > t∗ .] Similarly to the previous section, we
obtain
α
M
u(t) + x = Const.
v+
m
m
iii) We use the conservation law of the previous section, and
compare the value of the left-hand-side immediately before the
boy lands into the boat with its value after a very long time.
Bearing in mind that we need to substitute u(t → ∞) = −u2
(see above), we obtain
M
M
α
u1 + 0 = 0 −
u2 + s.
0+
m
m
m
So,
M
s=
(u1 + u2 ),
α
i.e. the result is independent of how long time did the boy spend
in the boat.
2. Nanoclock (10 points)
i) All the√charges of the ring are at the same distance from the point
P , l = R2 + z 2 . So, according to the superposition principle,
the potential is the sum of potential of all the charges,
√
ϕ = kQ/ R2 + z 2 .
ii) E = − dϕ
= kQz/(R2 + z 2 )3/2 .
dz
iii) For |z| ≪ R we may approximate (R2 + z 2 )3/2 ≈ R3 , so
that E =≈ kQz/R3 .
3
2
iv) From the Newton II law,
q mz̈ = −ekQz/R , i.e. ω =
ekQ
1
ekQ/mR3 and f = 2πR
≈ 5.6 × 1012 Hz.
mR
v) At the origin, there are no charges; hence, the electric field
lines cannot neither start nor end there. Consider a tiny coaxial
cylinder embracing the origin. The field lines exit the cylinder
through its bottom and top surfaces (because there is an electric
field E =≈ kQz/R3 ). Hence there must be field lines entering
the cylinder through its side surface. This implies a radial repelling
force for an electron situated at that surface, i.e. instability.
Remark: In the same way, one can prove a theorem,
electrostatic equlibria are always unstable.
3. Ball (8 points) A straightforward way to solve parts i), ii),
and iii) is to use conservation of angular momentum with respect
to any axis laying on the surface (there is no torque with respect
to these axes). Angular momentum at the beginning: L0 =
mvr . Rolling ball is always rotating around the touching point
with the ground (although the location of that point is constantly
changing). From Steiner’s theorem we know that for a rotation
axis that is located at the distance r form the center of mass, the
moment of inertia is I ′ = I + mr 2 . Therefore the angular
momentum for rotating ball is L′ = I ′ ω and clearly L0 = L′ ,
mvr
therefore mvr = (I + mr 2 )ω, ω = I+mr
2.
i) The torque with respect to center of mass: M = mgµr . Since
M ∆t = I∆ω , and the sliding stops when angular speed has
Iω
reached value ω , we obtain the corresponding time: t = mgµr
=
Iv
.
gµ(I+mr 2 )
mvr
and E∗ = 12 (mv∗2 +
I+mr 2
2 2 2
m v r
= 2(I+mr
2 ) . If I increases then E∗
Iω∗2 ) =
1
(mr 2 ω∗2 + Iω∗2 )
decreases.
2
iii) Since we didn’t make any assumptions about the functional
form of µ while deriving w∗ , the results w∗ and E∗ of ii) are still
valid.
iv) The net force F = Fµ +Fr causes the decrease of translational
velocity: m∆v = F ∆t, v ′ (t) = v − (µ + µr )gt. The sliding
stops when ω(t) = v ′ (t)/r . Note that the torque with respect to
center of mass is only caused by kinetic frictional force, therefore
ω(t) = mgµr
t. We get an equation for the time of the termination
I
mgµr 2
Iv
of sliding: I t = v − (µ + µr )gt, t = gµ(I+mr
2 )+gµ I .
r
mvr
′′
The corresponding angular speed ω∗ = I+mr2 + µr I , and energy
ii) Clearly, ω∗ =
µ
E∗ ′′ = 12 (I + mr 2 )ω∗2 . Clearly, E∗ ′′ < E∗ .
4. Black box (9 points) Independetly of whether there is a
triangular or a star connection, one can measure the ratio of the
resistances a pair of resistors by connecting the battery to two
outlets — let these be the outlets 1 and 3, and measuring the
voltages between the outlets 1 and 2, and between the outlets 2
and 3. For a star connection,
R3
V23
=
,
R1
V12
where Ri denotes the resistor closest to the i-th outlet; for a
triangular connection,
V12
R3
=
,
R1
V23
where Ri denotes the resistor farthest away from the i-th outlet;
for a triangular connection,
In such a way we find
R3
R2
R3
≈ 4,7,
≈ 3,3, and
≈ 1,4,
R1
R2
R1
implying R1 = 100 Ω, R2 = 140 Ω and R3 = 470 Ω; or
R1
R2
R1
≈ 4,7,
≈ 3,3, and
≈ 1,4,
R3
R3
R2
R3 = 100 Ω, R2 = 330 Ω and R1 = 470 Ω. So, we can
conclude that the largest resistance is 470 Ω, and the middlevalued resistance is either 330 Ω or 140 Ω.
5. Pencil (6 points) We put the pencil with its graphite end against
a horizontal sheet of paper, and push the other end with a fingertip
(without holding between the fingers and thereby possibly giving
a torque to it). Then, there will be a purely longitudinal stress
inside the pencil (there is no bending of the pencil). If we push
strongly enough, we may neglect the weight of the pancil in the
balance of torque with respect to the fingertip. So, equilibrium
implies that the resultant force of the friction and reaction forces at
the graphite end are along the axis of the pencil. This is possible, if
tan α ≤ µ, where α is the angle between the pencil and a vertical
line. So, we increase α wile pushing the pencil, and determine
the position α0 , when the√pencil starts sliding; tan α0 can be
calculated as tan α0 = x/ l2 − x2 , where l is the length of the
pencil, and x is the length of the projection of the pencil onto a
horizontal plane.
6. Spring (7 points) First, we measure the lengthening of the
spring under its own weight. The relative lengthening of each loop
is propotional to the order number of the loop. So, the average
value of those legth increments is half of the largest increment (for
the topmost loop). The topmost loop is deformed by the weight
of the whole spring, hence the average deformation corresponds
to the half-weight of the spring,
kx1 = mg/2.
Now we add a load to the lower end of the spring and measure
the new deformation x2 . Since the additional weight of the load
increases the stress of all the loops by the same value M g , each
loop is deformed additionally by the same length increment. The
sum of those additional increments is x2 − x1 ; according to the
Hook’s law, k(x2 − x1 ) = M g . So, xx12 − 1 = 2M
, and
m
m x2 − x1
M=
≈ 6 g.
2
x1
7. Soap film (6 points) Suppose the area of a broken part of the
soap film is S . The corresponding surface energy is ES = 2σS .
The mass of the soap water that was previously located at the
broken part is m = Shρ, where ρ = 103 kg/m3 . Assuming
that the surface energy is transformed to the kinetic energy of
the moving front, we get an equation for the speed of the
q front:
4σ
2σS = 12 mv 2 , 4σS = Shρv 2 . Therefore v =
=
hρ
q
4 · 0.025
m/s = 10m/s and we can estimate the time of
10−6 · 103
1
breakup of the soap film to be t = D/v = 100
s.
8. Magnetic pulse (7 points) Since we can neglect the inductance
of the coil, it performes as a voltage source, which outputs U =
N SB/τ = 1 V during the time period between t = 0 ms and
10 ms, and 0 V otherwise. The characteristic time scales of the
RC and LC cirquits are τ1 = R1 C = 0.6 s and τ2 = L/R2 ≈
0.3 s. So, for both cirquits, the processes are very fast, i.e. the
capacitor is effectively short-circuited, and almost all the voltage
falls on the inductance.
i) According to the considerations given above, I1 = U/R1 ≈
0.33 A. As for I2 , it starts growing from 0 A at t = 0 at a rate,
given by L dI
= U , i.e. I2 = U t1 /L = 5 mA.
dt
ii) When the voltage U is switched off (at t = τ = 10 ms),
the capacitor will (almost completely, because t2 − τ ≪ R1 C )
retain the charge it has accumulated, Q = I1 τ . All the voltage
of the capacitor (Q/C ) will fall on the resistor R1 , so that I1′ =
Q/R1 C = U τ /R12 C ≈ 5.6 mA. As for the inductance, it will
retain (almost completely, because t2 − τ ≪ L/R2 ) the current
it has acquired during the first 10 ms, I2′ = U τ /L = 10 mA.
iii) Since the current in R2 will decay very slowly, as compared
to its growth during the first 10 ms, we can neglect the charge
passing thorugh it during t < τ . Then we can write the Kirhoff ’s
law in the form L dI
+R2 dq
= 0, from where LdI +R2 dq = 0,
dt
dt
and L∆I = −R2 ∆q . Since ∆I = −I2′ , we obtain ∆q =
LI2′ /R2 = 3.3 mC.
9. Stratostat (5 points)
i) Consider the pressure difference at heights z + dz and z : dp =
−ρgdz (the difference is simply due to the weight of the layer
dz ). The density can be found using the state equation of ideal
µp
µg
. Therefore p1 dp
.
gas: pV = m
RT, ρ = m
= RT
= − RT
µ
V
dz
Note that we have a derivative of a logarithm: p1 dp
= d lndzp(z) .
dz
µg
Therefore ln(p/p0 ) = −αz, p = p0 e−αz , where α = RT
.
Alternatively, we can derive this law from the Boltzmann
distribution for the particle density n = n0 e−U/kT , where U
is the potential energy of a molecule. Bearing in mind that for a
constant temperature, the pressure is propotional to the density,
we obtain p = p0 e−U/kT . Substituting U = mgz = NµA gz and
R = kNA , we obtain the same result as above.
ii) Clearly, the pressures inside and outside of the stratostat are
equal and depending on the height as p = p0 e−αz , where
ag
α = µRT
. For helium inside the sack pV = const. Let the
volume of the stratostat be VS , therefore p0 βVS = pVS , where
p is the pressure at the height, where helium has filled the entire
ag
volume. Since p = βp0 , we obtain µRT
h = − ln β, h =
RT
1
ln β , h = 17 km.
µa g
10. Wedge (5 points) The center of mass of the system doesn’t
move, therefore M u = mvh , where u and vh are the horisontal
components of the velocities of the wedge and block in the lab
frame at some instant of time. In the wedge’s frame, the block has
m
). Since the
horisontal velocity v ′ = vh + u = vh (1 + M
block is sliding down the wedge, the vertical component of the
block has to be v↓ = v ′ tan α. The total kinetic energy in the lab
frame EK = 12 (M u2 + mvh2 + mv↓2 ). Substituting the relevant
quantities and simplifying, we obtain
m
M
Ek = v↓2 β, where β ≡
cot2 α + 1.
2
M +m
The kinetic energy equals to the change in potential energy:
m
2
′
βv
↓ = ∆EP = mg(h − h ). By differentiating and noting
2
that dh = dt · v↓ , we get βdv↓ = gdt, t = βg v↓max . From the
q
above written energy conservation law we get v↓max = 2gh
; so
β
r q
M
we finally have t = 2βh
= 2h
cot2 α + 1 .
g
g
M+m
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2010)
Estonian-Finnish Olympiad - 2010
1. Charges in E (8 points) Two particles (the blue and the red)
of mass m are connected with a spring, the stress-free length of
which is L and stiffness k ; the blue carries charge q (q > 0)
and the red is chargeless. In the region x > 0, there is an
homogeneous electric field E , antiparallel to the x-axis; In the
region x < 0, there is no electric field. Initially, the “dumbbell”
of charges moves in region x < 0 with velocity v , parallel to the
x-axis; the dumbbell’s axis is also parallel to the x-axis and the
spring is stress-free. It is known that after a while, the dumbbell
moves in the region x < 0 with velocity −v , and that the red
particle never enters the region x > 0. Also, the spring’s length
achieves minimum only once.
i) (2.5 pt) How long time τ does the blue particle spend in the
region x > 0?
The process takes place exactly as described, if one equality
and one inequality are satisfied for the quantities m, v , k , q , E
and L.
ii) (3 pt) Which equality must be satisfied?
iii) (2.5 pt) Which inequality must be satisfied?
2. Thermos bottle (6 points) In order to study the thermal
properties of a thermos bottle, let us model it as two concentric
spherical vessels, with radii R1 = 7 cm and R2 = 10 cm. The
gap between the walls of the vessels contains vacuum (hence, the
heat conductivity can be neglected).
i) (3,5 pt) Find the radiative heat flux (i.e. transmitted heat per
unit time) between the walls of the bottle, assuming that the
ambient temperature is T2 = 293 K and the inner sphere is
filled with liquid nitrogen at the boiling temperature T1 = 77 K.
The emissivities of all the surfaces are equal to that of stainless
steel: ε = 0.1. Remark: The emitted heat flux per unit area
is given Stefan-Boltzmann’s law P = εσT 4 , where σ =
5.67 × 10−8 W/m2 K4 (assuming that ε is independent of the
wavelength.
ii) (2,5 pt) Estimate, how long time does it take for a full
evaporization of the liquid nitrogen (the vapor escapes through an
over pressure valve). For the liquid nitrogen, density ρ = 810 g/l
and latent heat for vaporization λ = 5.580 kJ/mol). NB! If you
were unable to find P (for question i), express the evaporization time
symbolically (i.e. using the symbol P ).
3. Tyrannosaur (T. Rex) (6 points) Paleontologists have
discovered tracks of a tyrannosaur where the footprints of the
same leg are A = 4.0 meters apart. They have also recovered
a piece of a tyrannosaur leg bone that has bone cross-sectionalo
area N = 10000 times that of a chicken (which the tyrannosaur
is related to).
i) (3 pt) Knowing that the chicken leg is approximately l =
15 cm tall, estimate the length of a tyrannosaur leg L. You may
assume that the length of a leg scales as the length of the whole
animal, and that the bone stress (force per area) is the same for
both animals. Is your result consistent with the step length A?
ii) (3 pt) Estimate the natural walking speed of the tyrannosaur by
approximating the walking motion of a leg with a freely oscillating
pendulum motion. State clearly all the assumptions you make.
4. Ball (6 points) Massive spherical ball has a mass M = 100 kg;
an attempt is made to roll the ball upwards, along a vertical wall,
by applying a force F to some point P on the ball. The coefficient
of friction between the wall and the ball is µ = 0.7.
i) (5 pt) What is the minimal force Fmin required to achieve this
goal?
ii) (1 pt) On a side view of the ball and the wall, construct
geometrically the point P , where the force has to be applied to,
together with the direction of the applied force.
5. Elastic thread (10 points) Equipment: ruler, tape, an elastic
thread, a wooden rod, marker, a known weight.
The purpose of this problem is to study the elastic properties
of an elastic thread for large relative deformations ε = (l −
l0 )/l0 , where l0 and l are the lengths in initial and stretched states,
respectively. If the Hook’s law were valid, the ratio F/ε of the
elastic force F and ε would be constant: F/ε = SE , where S is
the cross-section area of the thread and E — the Young modulus
of the thread material.
i) Collect the data needed to plot the ratio F/ε as a function
ε, up to ε ≈ 4. Plot the appropriate graph, and indicate the
uncertainties.
ii) By making assumption that the Young modulus E = F/Sε
remains constant, study, how does the volume of the thread
depend on ε. Plot the appropriate graph.
6. Charges in B (5 points) There is an homogeneous, parallel to
the z -axis magnetic field of inductance B in region x > 0. In
region x < 0, there is no field. There are two particles of mass m
and charge q . Initially, the particles have coordinates y = z = 0,
and respectively x = −L0 and x = −2L0 (with L0 > 0).
Initial velocity of both particles is v , along the x-axis, towards the
magnetic field. Neglect the electrostatic repulsion force of the two
charges.
i) (1,5 pt) Sketch the trajectory of the first particle, and the
dependance of its y -coordinate on time.
ii) (3,5 pt) Sketch the distance L between the particles as a
function of time t, assuming that πmv/Bq > L. What is the
minimal distance Lmin ?
7. Satellite (5 points)
i) (3 pt) A large ball of mass m1 is kept at the height h from the
floor (so that the center of the ball is at the height h + d/2, where
d is its diameter). A small ball of mass m2 is placed upon the
large one, and the system is released (so that it starts falling). To
which height (from the floor) will the small ball rise, assuming that
the collision between the lower ball and ground, and the collision
between the balls are absolutely elastic, and m1 ≫ m2 ?
ii) (2 pt) Consider the following satellite launching project. There
are N absolutely elastic balls of masses m1 ≫ m2 ≫ ... ≫
mN : the first ball (the heaviest) is the lowest; the second ball is
placed on top of the first; the third — on top of the second etc.
The upmost ball is supposed to become a satellite, i.e. to obtain
the velocity vN = 7.8 km/s). The lowest ball is at the height
h = 1 m from the floor, and the system is released. What should
be the number of balls N ? What should be the mass of the lowest
ball, if mi /mi+1 = 10, and the mass of the satellite MN = 1 kg?
8. Sprinkler (3 points)
A sprinkler has a shape of hemisphere, which has small holes
drilled into the spherical part of its surface. From these small
holes, water flows out with velocity v = 10 m/s. Near
the sprinkler, the water flow is distributed evenly over all the
directions of the upper half-space. The sprinkler is installed at the
ground level so that its axis is vertical. In what follows, the air
resistance can be neglected, and the dimensions of the sprinkler
can be assumed to be very small.
i) (1.5 pt) Find the surface area of the ground watered by the
sprinkler.
i) (2 pt) What is the coefficient of friction, assuming a four-wheel
ii) (1.5 pt) At which distance from the sprinkler is the watering drive?
Because of a manual gear change, there is time period of
intensity (mm/h) the highest?
τ1 = 0.5 s, during which there is no driving force (so that the
9. Power supply (6 points)
car decelerates due to air friction). Except for that period, the
acceleration follows the law given by the graph. As a result, the
terminal velocity vt = 40 m/s is reached τ2 = 1.0 s later than it
would have been reached, if there were no delay caused by the gear
change. Upon reaching the terminal velocity, the car continues
moving at constant speed. In your calculations, you can assume
i) (2 pt) Consider the cirquit given in Fig (a), where the diode that the air friction was constant during the gear change period.
can be assumed to be ideal (i.e. having zero resistance for forward ii) (2,5 pt) At which speed the gear was changed?
current and infinite resistance for reverse current. The key is iii) (2,5 pt) How many meters shorter distance will be covered
switched on for a time τc and then switched off, again. The input during the first 100 seconds, as compared to ideal acceleration (i.e.
and output voltages are during the whole process constant and without the delay due to the gear change)?
equal to Ui and Uo , respectively (2Ui < Uo ). Plot the graphs 11. Black box (10 points) Equipment: a black box, multimeter,
battery, timer (on the screen).
of input and output currents as functions of time.
Determine the electrical scheme inside the black box, and the
ii) (2 pt) Now, the key is switched on and off periodically; each
values
of all the resistors inside it. Estimate the characteristics of
time, the key is kept closed for time interval τc and open — also
other
electrical
components. It is known that apart from the wires,
for τc . Find the average output current.
the total number of components is three.
iii) (2 pt) Now, cirquit (a) is substituted by cirquit (b); the switch
is switched on and off as in part ii. What will be the voltage on
the load R, when a stationary working regime has been reached?
You may assume that τc ≪ RC , i.e. the voltage variation on the
load (and capacitor) is negligible during the whole period (i.e. the
charge on the capacitor has no time to change significantly).
10. Ice-rally (7 points) The car accelerates on a slippery ground
so that the wheels are always at the limit of slipping (e.g. via using
an electronic traction control). Such an acceleration would result
in the velocity vs time graph as given in the Figure.
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2011)
Estonian-Finnish Olympiad - 2011
1. Spool (12 points) A spool with inner radius r and outer radius
R lies on a horizontal table; the axis of the spool is horizontal. A
weightless rope is wound around the inner part as shown in the
picture. The loose end of the rope makes an angle α with the horizont (the angle α can be also negative). The moment of inertia of
the spool is J and mass — M . In what follows you may assume
that the spool rolls on the table without slipping.
i) (2 pts ) We pull the loose end of the rope with velocity u (parallel to the loose part of the rope; that loose part can be thought
to be very long). What is the velocity of the spool?
ii) (3 pts) Suppose now that the spool is at rest, and we apply force
F to the loose end of the rope (parallel to the loose part of the
rope). What is the acceleration of axis of the spool?
iii) (2 pts) How large does the coefficient of friction µ need to be
(as a function of α) to ensure that there is no slipping between the
spool and the table?
iv) (1.5 pts) Now the spool rolls, again, with velocity u; however
there is no rope. The spool hits a threshold of height H (see Figure); the impact is perfectly inelastic. What is the speed v of the
spool immediately after the impact?
v) (1.5 pts) What is the speed w of the spool after rolling over the
threshold? Assume that u is such that the spool will roll over the
threshold without losing contact with its edge.
vi) (2 pts) If the speed u is too large, u > u0 , the spool will jump
up and lose contact with the edge of the threshold. Determine u0 .
2. Capacitor (6 points) An ideal plate capacitor has plates with
area A and separation d and is charged so that the electric field
between the plates equals to E .
i) (2 pts) Find the energy density of the electric field inside the
capacitor and the total energy of the field.
ii) (1.5 pts) What is the force required to keep the plates separated?
iii) (2.5 pts) Now, this capacitor is submerged into distilled water
of dielectric permittivity ε = 80; the electric field between the
plates equals still to E . What is the hydrostatic pressure between
the plates if the atmospheric pressure is p0 and the pressure of the
water column can be neglected?
3. Charged cylinder (8 points) Dielectric cylinder of radius r
carries a charge of surface density σ on its cylindrical surface and
rotates with angular velocity ω .
i) (3 pts) Determine the magnetic induction B inside the cylinder. Remark: if you wish, you can use the expression for the inductance L = µ0 N 2 S/l of a solenoidal coil of radius r , length
l ≫ r , area of cross-section S and number of loops N .
ii) (3 pts) A radial conducting wire connects the axis of the cylinder with the cylindrical surface (it rotates together with the cylinder). Find the electromotive force (voltage) E between the ends
of the wire.
iii) (2 pts) Suppose that the wire connecting the axis of the cylinder with the cylindrical surface is not radial and has an arbitary
shape (still, there are no segments protruding outside the cylinder). Show that E does not depend on the shape of the wire.
4. Black box (10 points) Equipment: a black box with three terminals, voltmeter, timer. Inside the black box, there are two capacitors and a battery, connected as shown in Figure. The capacitance C1 = (3400 ± 400)µF; you are asked to determine the
capacitance C2 and estimate the ucertainty. Remark: the terminal
“+” is a wire, long enough to be conected to either terminal “A” or
terminal “B”.
5. Plutonium decay (3 points) Plutonium is an unstable element,
a Pu239 atom decays with a half-life of τ1/2 = 24 000 years
by creating smaller nuclei, including an α-particle. Find the αparticle flux density (i.e the number of passing nuclei per unit
time and per unit cross-sectional area) near the surface of a plate
of Pu239 . The plate has thickness d = 1 mm; its width and
length are much larger than that. The density of plutonium ρ =
19 800 kg/m3 . Remark: half-life is the period of time it takes
for a substance undergoing decay to decrease in size (in the number of particles) by half. The mass of an atom of Pu239 is m0 =
3.84 × 10−25 kg.
6. Violin string (9 points) The motion of a bow puts a violin
string into a periodic motion. Let us make a simplified model of
this process. The string has elasticity and inertia, so we substitute
it by a block of mass m, fixed via a spring of stiffness k to a motionless wall and laying on a frictionless horizontal surface. The
bow is substituted by a horizontal plate, which is pressed with
constant force N downwards, and which moves with a constant
velocity u, parallel to the axis of the spring, see Figure. The static
coefficient of friction between the plate and the block is µ1 , and
the kinetic coefficient of friction is µ2 < µ1 . So, as long as the
plate does not slide with respect to the block, the coefficient of
friction equals to µ1 ; as soon as there is some slip, it decreases
down to µ2 .
i) (2 pts) For questions (i) and (ii), let us assume that the speed
of the plate u is very small as compared to the maximal velocity of
the block. What is the maximal velocity of the block vmax (maximized over time)?
ii) (2 pts) Sketch qualitatively the graph of the displacement of the
block as a function of time and indicate on the graph the durations
of the prominent stages of the block motion (graph segments).
iii) (1,5 pts) Now, let us abandon the assumption about the smallness of u. Sketch qualitatively the graph of the velocity of the block
as a function of time.
iv) (2,5 pts) Determine the amplitude A of the block’s oscillations.
v) (1 pt) Which condition (strong inequality, ≫ or ≪) must be
satisfied for u in order to ensure that the oscillations will be almost
harmonic?
7. Vacuum bulb (8 points) Let us study how a vacuum can be
created inside a bulb by pumping. Let the volume of the bulb be
V , and the pump consist in a piston moving inside a cylinder of
volume αV , where α ≪ 1. The pumping cycles starts with piston
being pulled up; when the pressure inside the cylinder becomes
smaller than inside the bulb, a valve VA (connecting the cylinder
and the bulb) opens and remains open as long as the piston moves
up. When piston is released, it starts moving down, at that moment, the valve VA closes. As long as the valve VA is open, the
pressures of the bulb and the cylinder can be considered as equal
to each other. When the piston moves down, the pressure in the
cylinder increases adiabatically until becoming equal to the outside pressure p0 = 105 Pa; at that moment, another valve VB
opens leting the gas out of the cylinder. When the piston reaches
the bottommost position, there is no residual air left inside the
cylinder. Now, the piston is ready for being lift up: the valve VB
closes and VA opens, marking the beginning of the next pumping
cycle. The air inside the bulb can be considered isothermal, with
the temperature being equal to the surrondin temperature T0 . The
adiabatic exponent of air γ = cp /cV = 1.4.
i) (2 pts) How many pumping cycles N needs to be done to reduce the pressure inside bulb from p = p0 down to p = βp0 ,
where β ≪ 1?
ii) (2 pts) What is the net mechanical work done during such a
pumping (covering all the N cycles)?
iii) (2 pts) What is the temperature of the air released from the
cylinder to the surroundings at the end of the pumping process
(when the pressure inside the bulb has become equal to βp0 )?
iv) (2 pts) According to the above described pumping scheme,
there is a considerable loss of mechanical work during the period
when the piston is released and moves down. Such a loss can
be avoided if there is another pump, which moves in an opposite phase: the force due to outside air pressure pushing the piston
down can be transmitted to the other pump for lifting the piston
up. What is the net mechanical work done when such a pumping
scheme is used?
8. Heat sink (6 points) Consider a heat sink in the form of a copper plate of a constant thickness (much smaller than the diameter
d of the plate). An electronic component is fixed to the plate, and a
temperature sensor is fixed to the plate at some distance from that
compnent. You may assume that the heat flux (i.e. power per unit
area) from the plate to the surrounding air is proportional to the
difference of the plate temperature at the given point (the coefficient of proportionality is constant over the entire plate, including
the site of the electronic component).
i) (2 pts) The electronic component has been dissipating energy
with a constant power of P = 35 W for a long time, and the average plate temperature has stabilized at the value T0 = 49 ◦ C.
Now, the component is switched off, and the average plate temperature starts dropping; it takes τ = 10 s to reach the value
T1 = 48 ◦ C. Determine the heat capacity C (units J/◦ C) of the
plate. The capacities of the electronic component and the temperature sensor are negligible.
ii) (4 pts) Now, the electronic component has been switched off
for a long time; at the moment t = 0, a certain amount of heat
Q is dissipated at it during a very short time. In the Figure and
Table, the temperature is given as a function of time, as recorded
by the sensor. Determine the dissipated heat amount Q.
t (s)
T (◦ C)
t (s)
T (◦ C)
0
20.0
400
39.9
20
20.0
600
33.4
30
20.4
800
27.9
100
32.9
1000
24.4
200
41.6
1200
22.3
300
42.2
1400
21.2
9. Coefficient of refraction (10 points) Equipment: A thick glass
plate having the shape of a half-cylinder, a glass prism, a container
with an unknown liquid, a laser pointer, graph paper, ruler.
i) (5 pts) Determine the coefficient of refraction of the halfcylindrical glass plate and estimate the uncertainty of the result.
ii) (5 pts) Determine the coefficient of refraction of the liquid and
estimate the uncertainty of the result.
Estonian-Finnish Olympiad - 2011: solutions
Using the result of the previous task, we can use this equation directly to obtain an expression for the minimal allowed value of the
coefficient of friction:
J
r
− MR
2 cos α
R
µmin =
Mg
J
1 + MR
− sin α
2
F
1. Spool (12 points) i) First solution. The momentary rotation
centre of the spool is the contact point P with the floor (since
this point is at rest). So, the velocity of the spool is u′ = Rω ,
where ω is the angular velocity. Consider triangle P OA, where A
is defined as the point where the loose end of the rope meets the
inner part of the spool at the current moment of time, but which is iv) The angular moment of the spool with respect to the edge of
actually a point of the spool, i.e. it rolls together with the spool); the threshold conserves during the impact (since the impact force
O is the centre of the spool. Let us denote 6 P AO = β ; it is easy has zero arm):
v
u
to see that 6 AOP = π − α. The velocity ~vA of the point A
⇒
M u(R − H) + J = J + M R2
R
R
is perpendicular to P A and, hence, forms angle β with the loose
!
H/R
end of the rope. Its projection to the rope equals to u, therefore
v =u 1−
J
vA = u/ cos β . Further, ω = vA /l,√where l = |AP | can be
1 + MR
2
2
2
found from the cosine theorem: l = R + r + 2Rr cos α. v) From the energy conservation law we obtain immediately
2
2
The angle β can be found using the sine theorem for the triangle
2 v
2 w
α
(J
+
M
R
)
=
(J
+
M
R
)
+ 2M gH ⇒
AOP : sin β = R sin
.
Combining
everything
together
we
end
l
R2 s
R2
up with
2gH
uR
uR
w = v2 −
J .
u′ = √ 2
.
=
1 + MR
2
|R cos α + r|
R cos2 α + r 2 + 2Rr cos α
vi)
The
spool
is
the
most
prone
to
jumping
immediately after the
Second solution. Let us decompose the velocity ~vA into two
impact;
the
gravity
force
needs
to
be
large
enough to bind the
components: the tangential component (parallel to the rope)
centre
of
mass
to
the
rotational
motion
around
the edge of the
equals (by modulus) to u; let us denote the radial component as
threshold:
ur . Since the distance between O and A is constant, the projecM v2
R−H
g
tion of the velocities of O and A to the line OA are equal:
≤g
⇒ v2 ≤
(R − H) ⇒
R
R
M
ur = v sin α ⇒ v = ur / sin α ⇒ ω = ur /R sin α.
r
J
1 + MR
g
2
The vertical component of the velocity of the point A remains un(R − H)
u0 =
J
H .
M
1
+
−
changed if we switch the laboratory system of reference with the
MR2
R
2. Capacitor (6 points)
system associated with point O ; hence,
i) The energy is W = CU 2 /2 = 12 ε0 Ad E 2 d2 = 12 ε0 AdE 2 ;
u sin α − ur cos α = ωr sin α = ur r/R ⇒
hence, the energy density w = W/Ad = 12 ε0 E 2 .
ur
uR
v=
=
.
ii) There are two ways to calculate the force. First, we notice that
sin α
R cos α + r
the innermost charges q at the capacitor plates are affected by the
ii) (2 pts) The easiest way to solve this part is to use the energy
electric field E, therefore there is a force qE acting upon these. The
balance for infinitesimal displacement of the cylinder and apply
outermost charges, however, have no electric field around them
the answer to the previous question:
(because outside the inter-plate space, there is no electric field).
J
J
M 2
F u · dt = d
v 1+
= M vdv 1 +
⇒Due to the Gauss law, the electric field decreases linearly with the
2
M R2
M R2
net charge left below the level of the current point (i.e. towards
dv
Fu
F cos α + Rr
the inter-plate space). Therefore, the electric field averaged over
=
a=
=
·
.
J
J
the charges is just half of the maximal value E : hEi = 12 E , and
dt
M
M v 1 + MR
1
+
2
MR2
net force acting on the plate is F = Q hEi = CEd hEi =
iii) Let us write the force balance projection to the horizontal axis the
1
2
ε
assuming that the spool is at the edge of slipping, i.e. the friction 2 0 AE .
The second way includes writing the energy balance for a small
force Ff = µmin N , where N = mg − F sin α is the normal
2
displacement of a plate: F · δd = δ(Q2 /2C) = 2εQ0 A δd =
force:
M a = F cos α + µmin N = F cos α + µmin (M g − F sin α). 12 C 2 E 2 d · δd ⇒ F = 12 ε0 AE 2 .
iii) Let us push away part of the water from the inter-plate space
so that there will be a small region of plate area dA, where there is
no water between the plates (here, ∆p is the pressure difference
between the inter-plate space and the outside regions). By doing
so, we perform work d · δA · ∆p, and increase the capacitor’s energy:
Q2 d 1
1
2
δW = δ(Q /2C) =
−
.
2ε0 εA ε(A − δA) + δA
So,
Q2 d(ε − 1) · δA
1
δW =
= ε0 E 2 d(ε − 1) · δA;
2
2
2ε0 ε A
2
comparing this with the pressure work d · δA · ∆p we conclude
that
1
1
∆p = ε0 E 2 (ε − 1) ⇒ p = p0 + ε0 E 2 (ε − 1).
2
2
3. Charged cylinder (8 points)
i) Moving surface charge creates a solenoidal surface current with
the surface density j = σv = σωr . From the circulation theorem for a rectangular loop embracing a segment of surface cur= jl, where l is the length of the surface current
rent we obtain Bl
µ0
segment (so that jl gives the current flowing through the loop).
Hence, B = µ0 j = µ0 σωr .
, where S is the area covered
ii) Using formula E = dΦ
= B dS
dt
dt
by the wire, we obtain E = Bωr 2 /2. Indeed, during a small time
interval dt, the wire covers a equilateral triangle of side lengths r ,
r , and rωdt; its area is apparently r 2 ωdt/2. By using the earlier
obtained expression for B we end up with
E = µ0 σω 2 r 3 /2.
iii) We need to show that from the previous task, dS
is independdt
ent of the wire shape. First we note that due to rotational symmetry, dS
, it cannot depend on the rotation angle, i.e. dS
≡ Ṡ =
dt
dt
Const. Further we note that regardless of the wire shape, during
the entire rotation period 2π/ω , the whole circle area is covered;
Ṡ · 2π/ω = πr 2 ⇒ Ṡ = r 2 ω/2.
4. Black box (10 points) There are several ways to perform this
task. First one can notice that if two capacitors discharge at the
same resistor, starting with equal voltages and ending also with
equal voltages, the ratio of the discharge times equals to the ratio
of the capacitances (because for each given voltage, the discharge
currents are the same, but larger capacitor has more charge — proportionally to the capacitance). Therefore we can first charge the
known capacitor (using the battery), and let it discharge on the
voltmeter (which has some finite resistance), measuring the time
t1 required for it to reach a pre-defined final voltage. Then we need
to repeat the procedure with the other capacitor and measure the
time t2 and calculate
C2 = C1 t2 /t1; the uncertainty is estimated
∆t1
2
1
as ∆C1 = C1 t1 + ∆t
+ ∆C
.
t2
C1
It is recommended to check the negligibility of the leak current
across the plates of the capacitor. To this end, one can charge a capacitor, measure the voltage, remove the voltmeter and wait for
some time (of the order t1 and t2 ), and check again the voltage.
Another way is to discharge completely one capacitor by
short-circuiting its terminals and charge the other capacitor up to
the voltage of the battery. Further, we connect the terminals A
and B so that the capacitors re-distribute the charge Q = EC1
and take the same voltage: Q1 /C1 = (Q − Q1 )/C2 ⇒ Q1 =
QC1 /(C1 + C2 ) = EC12 /(C1 + C2 ). Consequently, the new
voltage (which we measure) is U = Q1 /C1 = EC1 /(C1 +C2 ),
from where C2 = ( UE − 1)C1 .
5. Plutonium decay (3 points)
Let the number of Pu239 -atoms be reduced during time interval
t = 1 s by a factor of 1 − λ (with λ ≪ 1). Then, during the
time period of τ1/2 , it is reduced by a factor of (1 − λ)τ1/2 /t ≈
e−λτ1/2 /t = 12 ⇒ λ = t ln 2/τ1/2 . Therefore, the number of
atom decay events is Nd = N t ln 2/τ1/2 , where N = ρdS/m0
is the number of atoms, i.e. the α-particle flux is Φ = Nd /2St
(where the factor 2 accounts for the fact that the particles are emitted towards the both sides of the plate). Upon bringing all the expressions together, we obtain
ρd ln 2
Φ=
≈ 2.36 × 1013 m−2 · s−1 .
2τ1/2 m0
6. Violin string (9 points)
i) When the plate slides, there is a constant friction force µ2 N
acting upon the block, which means that the equilibrium deformation of the spring is x0 = µ2 N/k ; the net force acting upon the
block (due to spring and friction) is given by F = −kξ , where
we have defined ξ = x − x0 . Therefore, while sliding, the block
oscillates harmonically around the point ξ = 0. Slipping starts
when the static friction will be unable to keep equilibrium, i.e.
at kx = µ1 N , which corresponds to ξ0 = (µ1 − µ2 )N/k .
If the plate moves slowly, the block is released with essentially
missing kinetic energy, and the energy
conservation law yields
p
1
1
2
2
kξ
=
mv
⇒
v
=
ξ
k/m
.
max
0
0
max
2
2
ii) As mentioned, when the plate slides, the motion of the block is
harmonic, i.e. the graph of x(t) is a segment of a sinusoid; when
there is no sliding, the block moves together with the plate, i.e. the
graph of x(t) is a straight line. At the moment when slipping starts
or stops, the oscillatory speed is equal to the speed of plate, i.e. the
straight line is tangent to the sinusoid. The length of a straight segment can be calculated as
T1 = 2ξ0 /u = 2(µ1 − µ2 )N/ku;
the sinusoidal segment p
corresponds to a half-period and therefore
has a length of T2 = π m/k .
iii) The speed v(t) = dx
is the derivative of x(t); therefore, the
dt
sinusoidal segment of x(t) will correspond to a sinusoidal segment of v(t), and a straight segment of x(t) — to a horizontal
segment of v(t). The resulting graph is depicted below.
iv) Let the amplitude of the oscillations be A, i.e. the sinusoidal
p
segments follow the law ξ(t) = A cos(ωt), where ω = k/m.
Correspondingly, v(t) = Aω sin(ωt) ⇒ A sin(ωt) =
v(t)/ω ; hence, for any point at a sinusoidal segment, ξ 2 +
v 2 /ω 2 = A2 . At a point, where a sinusoid and a straight line
meet, the straight line and sinusoid have equal values for ξ =
ξ0 = (µ1 − µ2 )N/k and v = u. Consequently,
(µ1 − µ2 )2 N 2 /k2 + u2 /ω 2 = A2 ⇒
1q
A=
(µ1 − µ2 )2 N 2 + u2 mk.
k
v) The oscillations will be almost harmonic when the straight segments are very short,
√i.e. when u/ω ≫ (µ1 − µ2 )N/k ⇒
u ≫ (µ1 − µ2 )N/ mk.
7. Vacuum bulb (8 points)
i) Each pumping cycle reduces the number of molecules inside
the bulb by a factor of (1 − α); therefore, after N cycles, the
number of molecules (and hence, the pressure) by a factor of
β = (1 − α)N ≈ e−N α ⇒
ln β
N =−
.
α
ii) Majority of the pumping cycles are done when the pressure inside the bulb is negligible as compared to the outside pressure.
During such a cycle, a work equal to p0 V α is done. Therefore,
A ≈ N p0 V α = p0 V | ln β|.
iii) Due to adiabatic law, pV γ = Const; when combined with
the gas law pV ∝ T we obtain pγ−1 ∝ T γ . During the last
downwards motion of the piston, the pressure inside the cylinder
1
is increased by a factor of 1/β ; thus, T = T0 β γ −1 .
iv) According to the modified pumping scheme, the work/energy
loss is only due to the release of the hot air. Note that if we had
a cylinder of volume V , we could be able to create vacuum inside
there using only one pumping motion, i.e. by performing work
A = p0 V and without any energy loss. Now, we perform an excess work, which is converted into internal energy of the released
hot air, which needs to be calculated. Let ξ = pp0 be an intermediate rarefaction factor; then, we can apply the previous result
to calculate the internal energy of released air, if its quantity is dν
1
moles: dU = T0 (ξ γ −1 − 1)cV dν . Let us note that the nump0 V
0 ξV
ber of moles inside the bulb is ν = pRT
⇒ dν = RT
dξ . So,
0
0
R
1
1
−1
cV
c
V
U = p0 V R 0 (ξ γ − 1)dξ = (γ − 1)p0 V R . Now, recall
1
that γ = cp /cV = 1 + cRV , hence cRV = γ−1
and U = p0 V .
This gives us the energy loss due to heating the released air; another p0 V is required for loss-free creation of the vacuum. Hence,
the total required work is A = 2p0 V .
8. Heat sink (6 points)
i) When the average temperature is stable at T0 , all the power dissipated at the electronic component is eventually given to the air:
the air is being heated with power P . As the heat flux depends linearly on the temperature difference between a point on the plate
and the air, the average heat flux and therefore the net power dissipated into the air depends linearly on the average temperature of
the plate. The average temperature determines the radiated power.
Now consider the situation after the heating has ended. The
average temperature is initially the same, so the radiated heat
power is initially still P . By the definition of heat capacity, an
infinitesimal heat amount given to the surroundings is dQ =
−C dTavg with the minus sign encoding the direction of the heat
flow. Thus, at the first moment, P = dQ
= −C dTdtavg . Assumdt
ing that during τ the average temperature depends approximately
linearly on time (because T0 − T1 = 1 ◦ C is much less than the
dT
τ
0
usual ambient temperature), dtavg ≈ T1 −T
and C ≈ T0P−T
=
τ
1
◦
350 J/ C. Actually the graph of Tavg (t) is slightly curved downwards (as it is an exponential eventually stabilizing at the ambient
temperature) and initially somewhat steeper, so C is a bit smaller.
ii) The average temperature of the heat sink falls off exponentially,
therefore, if the “tail” of the given graph turns out to be exponential, we can presume the “tail” depicts the situation where the
sensor is sensing the average temperature and the initial “bump”
in the temperature distribution has evened out. Extrapolating the
exponential to t = 0 we get the initial average temperature Tavg,0
(immediately after the Q has been dissipated into the sink) and,
by Q = C(Tavg,0 − Tamb ), the heat Q. The ambient temperature Tamb can be read off from the beginning of the given graph
where the sensor’s surroundings have not yet heated up. This is
furthermore a check for the assumption T0 − T1 ≪ Tamb made
in the first part of the solution. From the table, Tamb = 20.0 ◦ C.
Let us analyse the (yet hypothetical) exponential Tavg −Tamb
ought to obey, so that eventually we expect T ∼ Tavg =
t
Tamb + Tc e− tc where Tc and tc are, respectively, a characteristic
temperature and a characteristic time. (The “∼” means “is asymptotical to” or “approaches”.) We plot ln(T − Tamb ) using the data
from the table. Then approximate the “tail” linearly (valuing the
end of it most) to get ln[(T − Tamb )/◦ C] ∼ 4.89 − 300t s .
Therefore Tc ≈ e4.89 ◦ C ≈ 133 ◦ C. On the other hand,
plugging t = 0 into our exponential function shows that
Tavg,0 − Tamb = Tc and, finally, Q = CTc ≈ 46 700 J.
Actually, quite a good result can be obtained without replotting anything, by just considering the last three datapoints
of the table. Denote ∆Ti ≡ Ti − Tamb . If the times t3 −
t2 = t2 − t1 , then with an exponential we should observe
that ∆T3 /∆T2 = ∆T2 /∆T1 . The last three timepoints are
good indeed, so we check ∆T1 = 4.4 ◦ C, ∆T2 = 2.3 ◦ C
and ∆T3 = 1.2 ◦ C. Their ratios are ∆T3 /∆T2 ≈ 0.522 and
∆T2 /∆T1 ≈ 0.523, a splendid match. This confirms the exponential “tail”. As in every equal time interval the ∆T is multiplied by the same number (that is the essence of exponentials),
3
t t−t
3
2
2
Tc = ∆Tavg,0 = ∆T3 × ∆T
≈ 114 ◦ C. From this,
∆T3
Q ≈ 39 900 J. This is discrepant from our previous calculation,
but not too much: Tc is exponentially sensitive to the T -intercept
of the straight line fitted to the “tail” (its crossing point with the
T -axis) on the logarithmic plot. The bump has still not yet disappeared completely enough.
9. Coefficient of refraction (10 points)
i) We direct the laser beam radially into the semi-cylinder: perpendicularly through its cylindrical surface. The beam enters the
plate without refraction and reaches the opposing flat face at the
axis of the cylinder. Depending on the angle between that face and
the beam, there may or may not be a refracting beam, but there is
always a reflecting (from the flat face) beam . We rotate the semicylinder around its axis to find the position, when the refracting
beam appears/disappears; the angle α between the flat face and
the incident beam correspond to the angle of complete internal
reflection, i.e. n = 1/ cos α. We can measure cos α using the
graph paper: we draw the beam as a segment AO and the flat face
of the semi-cylinder as a line BO so that 6 ABO = π/2; then,
n = |AO|/|BO|. The uncertainty can be found using the formula ∆n = n( ∆|AO|
+ ∆|BO|
) and by estimating the uncer|AO|
|BO|
tainties of the direct length measurements ∆|AO| and ∆|BO|.
ii) We drop the liquid on the prism and press it against the flat face
of the semi-cylindrical plate. Further we study the complete internal reflection at the boundary between the semi-cylinder and
prism (which is filled with the liquid) by repeating the above
described experiment. Thereby we measure new lengths A′ O
and B ′ O ; the condition of complete internal reflection is now
n/nl = |A′ O|/|B ′ O| ⇒ nl = n|B ′ O|/|A′ O|, where nl
stands for the coefficient of refraction of the liquid. The uncer′
′
O|
O|
tainty is now calculated as ∆nl = nl ( ∆|A
+ ∆|B
+ ∆n
).
|A′ O|
|B ′ O|
n
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2013)
Estonian-Finnish Olympiad 2013 The focal length of its camera f = 4.3 mm been bent into the shape of a square with
1. PRISM (8 points)
i) (4 points) A right prism that has an
equilateral triangular base with length a is
placed in a horizontal slit between two tables,
so that one of the side faces is vertical. How
small can the width d of the slit be made before the prism falls out of the slit? There is no
friction between the prism and the tables and
the prism is made of a homogeneous material.
The edges of the slit are parallel.
and the diameter of the lens D = 1.8 mm. The
sensor is w = 4.6 mm wide corresponding to
N = 3264 pixels.
3. MISSION TO MARS (7 points) A crew of
astronauts is going to be sent to explore the
polar region of Mars and search for buried
water ice. Their spaceship will travel from
Earth to Mars along an elliptic transfer orbit
tangential to the orbits of both planets. Despite its shortcomings, this orbit is commonly
used in space travel due to its relatively good
fuel economy. Future manned missions to
ii) (4 points) Now the prism is placed in the
Mars are very likely based on this kind of
slit so that one of its side faces is horizontal.
transfer. In this problem you will examine
How small can the width l of the slit be made
some aspects of this orbit.
before that position becomes unstable?
The mean orbital radius of Mars is R a =
1
.
52
AU. The mean orbital radius of Earth
a
i)
ii)
is R g = 1 AU = 149 600 000 km. Mars has a
mean radius of r a = 3397 km and surface
a
gravity g a = 3.71 m/s2 . Earth has a mean
radius of r g = 6371 km.
side length a. At some point on the wire is
a small ideal current source that keeps current I flowing in the circuit in all situations.
The magnetic moment m of a planar circuit
is given by the relation m = I A , with vector
~ pointing in the normal direction of the cirm
cuit according to the right hand rule ( A is the
area bounded by the circuit).
i) (3 points) The dipole is placed inside a
~ , so that the
homogeneous magnetic field B
~
~ and B is θ . Find the angles
angle between m
θs and θu that correspond to stable and unstable equilibria, respectively. Calculate the
amount of work (w) needed to rotate the dipole from θs to θu . Give your answer in terms
of m and B.
We can use this model to calculate the
magnetic properties of materials containing
unpaired electrons that have negligibly weak
interactions with one another. Let us consider a sample of material with n such uni) (1 point) Find the orbital period T a of paired electrons per unit volume, placed in~
l
d
Mars, i.e. find the length of Martian “year” side a homogeneous magnetic field B. Due
to spin, each unpaired electron acts as a
in Earth years.
small magnetic dipole. However, owing to the
2. CELLPHONE CAMERA (6 points) A photographer focussed his camera to distance L ii) (1.5 points) How long ( t t ) does a one-way quantum nature the electron, the projection
~ can only be
of its magnetic moment along B
and took a photo. On the photo, all farther trip to Mars take?
objects (up to infinity) turned also out to be iii) (1.5 points) The spaceship is put into this µB or −µB (µB is called the Bohr magneton).
sharp. Additionally, all closer objects down orbit by using a powerful rocket. It is more ii) (4 points) Calculate M , the magnetic moto distance s were sharp.
efficient to burn fuel as a short burst when ment per unit volume of the sample, if the
i) (4 points) What is the minimum pos- the spaceship is still near Earth. How much temperature of the material is T and the exadditional speed (∆v1 ) does the booster have ternal magnetic field is B.
sible L?
to be able to give to the spaceship to enter the
ii) (2 points) Find the corresponding s.
transfer orbit, starting from the north pole? 5. FRICTION OF A STRING (8 points)
Measure the dynamic coefficient of friction
Background. We consider the image of Neglect the air resistance.
µ1 between the ballpoint pen and the string.
a pointlike object to be sharp if its image is iv) (1.5 points) Estimate the ∆v needed to
2
Estimate the uncertainty. It might help that
smaller than one pixel on the sensor. Oth- enter a circular orbit close to Mars.
the dynamic coefficient of friction between
erwise the image is blurry. The lens of the
the pencil and the same string was measured
v)
(1.5
points)
What
is
the
minimal
duration
camera may be viewed as a convex lens. The
beforehand and µ2 = 0.20 ± 0.01 was obtained.
of
the
trip
to
Mars
and
back?
camera is focussed by changing the distance
Equipment: dynamometer, string, ballbetween the sensor and the lens.
4. MAGNETIC DIPOLES (7 points) Let us
point pen, pencil and weight.
consider
the
following
model
for
a
magnetic
Parameters. Calculate the answer for a
cellphone made by a well-known company. dipole. Some wire with no resistance has
Estonian-Finnish Olympiad 2013 8. ZENER DIODE (7 points) An inductance come to a halt.
6.
SPHERE AND CYLINDER (7 points) A
sphere and a cylinder are lying on an inclined
surface with inclination angle α. Both have
mass m and radius r . The bodies are released
from equal initial heights H . The moments of
inertia of the sphere and the cylinder are, respectively, I sph = 52 mr 2 and I cyl = 21 mr 2 . The
coefficient of friction between the surface and
the bodies is µ.
L and a capacitor C are connected in series
with a switch. Initially the switch is open
and the capacitor is given a charge q 0 . Now
the switch is closed.
iv) (2 points) Find the decrease ∆ q in the
maximum positive value of the capacitor’s
charge q after one full oscillation. How long
does it take before oscillation halts?
10. RESISTIVE HEATING (8 points) Measure the resistor. You are not asked to estimate the uncertainty.
Equipment: resistor, voltage source (batteries), ammeter, calorimeter, thermometer,
i) (1 point) What are the charge q on the 9. GLASS CYLINDER (7 points) In the fol- stopwatch.
capacitor and the current I in the circuit as lowing figure, there is a half-cylinder, made
The calorimeter has V = 0.80 dl of water
functions of time? Draw the phase diagram of glass and put on a paper with stripes (the and m = 27 g of aluminum, specific heat caa
of the system — the evolution of the system inter-stripe distance is everywhere the same). pacity of water c = 4.2 J/(K · g) and of aluw
on a I − q graph — and note the curve’s para- Find the coefficient of refraction of the glass. minum c = 0.90 J/(K · g). Internal resistance
a
meters. Note the direction of the system’s
of the batteries will vary. Your set of batteries
i) (2 points) Which of the bodies comes down evolution with arrow(s).
may become depleted, spares are available.
faster? What was the relative lag of the
A Zener diode is a non-linear circuit eleslower body γ = ( t 2 − t 1 )/ t 1 ? The times t 1 and
ment that acts as a bi-directional diode: it
t 2 , respectively, denote the traveling times of
allows the current to flow in the positive dirthe faster or the slower body. Assume that
ection when a forward voltage on it exceeds
the rolling occurs without slipping.
a certain threshold value, but it also allows
ii) (2.5 points) Find the minimal angle of a current to flow in the opposite direction
inclination α0 for which the cylinder starts when exposed to sufficiently large negative
to slide in addition to rolling.
voltage. Normally the two voltage scales are
iii) (2.5 points) If α → 90◦ , the bodies obvi- quite different, but for our purposes we will
ously lose contact with the surface and fall take a Zener diode with the following voltdown in free fall with equal times. What ampere characteristics: for forward currents,
is the minimal angle of inclination αm , for the voltage on the diode is Vd , for reverse
which both the sphere and the cylinder come currents, the voltage on the diode is −Vd ,
for zero current the voltage on the diode is
down with equal times?
−Vd < V < Vd .
7. BURNING WITH A LENS (7 points) SunNow we connect the inductance L, the carays are focused with a lens of diameter
d = 10 cm and focal length of f = 7 cm to a pacitor C all in series with a switch and a
black thin plate. Behind the plate is a mirror. Zener diode. The switch is initially open. The
Angular diameter of the Sun is α = 320 and capacitor is again given the charge q 0 > CVd
its intensity on the surface of the Earth is and the switch is then closed.
I = 1000 W/m2 , Stefan-Boltzmann constant ii) (2 points) Make a drawing of the phase
σ = 5.670 × 10−8 W/(m2 K4 ).
diagram for the system. Note the direction of
i) (4 points) Find the temperature of the
heated point of the plate.
the system’s evolution with arrow(s).
iii) (2 points) Does the evolution of the sysii) (3 points) Using thermodynamic argu- tem only necessarily stop for q = 0? Find the
ments, estimate the maximal diameter of the range of values of q on the capacitor for which
the evolution of the system will necessarily
lens for which this model can be used.
Estonian-Finnish Olympiad 2013 ii) (4 points) Let the corners be denoted
by A and B, and the tip of the prism (at
Solutions
1. PRISM (8 points)
i) (4 points) The prism is acted on by three
~ l from the left-hand
forces: reaction force R
table, directed perpendicularly to the prism’s
~ r from the right-hand
face; reaction force R
table, directed horizontally (with its point
of action to be determined yet); and gravitational force mg, directed vertically and applied at the triangle’s centre. (Considering a
planar triangular cross-section of the prism
is enough.)
~r
On the verge of falling out, the force R
is applied at the lower corner of the triangle.
If a body in equilibrium is acted on by three
forces, then their lines of action must intersect at one point. This is because otherwise
the torque of one of those forces would not be
zero with respect to the intersection of the
lines of action of the two other forces.
its equilibrium position) by C . Let us consider a small rotation of the prism (assuming it remains in contact with the corners).
The trajectory of the tip is a circle ascribed
around the triangle ABC (it follows from the
property of the inscribed angles because the
6 ACB remains equal to 60◦ ). The radius of
p
that circle r = l / 3; its centre will be denoted
by O . Once the prism rotates by angle α, so
that the new position of the tip will be D , the
central angle 6 COD = 2α. Hence, the tip is
raised by r − r cos(2α) ≈ 2 r α2 . The height of
the centre of mass P of the prism is raised
because the tip is raised, and lowered because the vertical projection of the segment
CP is reduced p
by |CP |(1 − cos α) ≈ |CP |α2 /2.
Here, |CP | = a/ 3. So, the original position
is stable if pa α2 /2 < 2 pl α2 , hence l > 14 a.
3
a
3
the values of a and b gives
f2
³
f+ L
1 + η/D
η ´2
f2
=
=f
≈ f 1+
f+
s
1 − η/D
1 − η/D
D
µ
¶
2η
≈ f 1+
.
D
Let’s consider that the camera is focused
to distance L and the image is formed exactly
on the sensor’s plane. The object’s distance L
and its image’s distance a (corresponds to p0
on the figure) are related by the lens formula
1
1
1
L + a = f , thus
µ
¶
Lf
Lf
f
f2
Lf
=
≈
1+
= f+ ,
a=
L− f
L(1 − f /L)
L
L
L
where the approximation (1 + x)−1 ≈ 1 − x (for
small x) was used. Image’s distance exceeds
the focal length by ∆a = a − f = f 2 /L.
Finally, f 2 / s = 2 f η/D , or s = 12 D f /η = L/2 ≈
2.75 m.
3. MISSION TO MARS (7 points)
i) (1 point) We can find the orbital period
of Mars from Kepler’s third law R a 3 /R g 3 =
T a 2 /T g 2 , giving t t ≈ 1.87 yr.
ii) (1.5 points) Again, we can use Kepler’s
third law to calculate half of the orbital
period.
tt =
T g (R a + R g )3/2
2
(2R g )3/2
≈ 0.707 yr.
iii) (1.5 points) Background. ∆v is important, because the sum of all ∆v determines
As the distance between
the triangle’s
i) (4 points) The light coming from an in- how much fuel is needed for a given mission.
p
finitely far away object will pass the focal The fuel needed is exponential of total ∆v and
P P0
centre and its side is 63 a, the distance
point F and form a cone which is cut by the is described by Tsiolkovsky rocket equation.
~
~
between
the points of action of R l and Rpr is
p
α
sensor’s plane. The diameter d of the cut on
3
3
1
1
◦
◦
Kinetic energy per unit mass of such a
6 a cos 30 = 4 a. Thus, d = 4 a cos 30 = 8 a.
α
the sensor’s plane can be found from similar
transfer
orbit where it intersects the Earth’s
triangles d /D = ∆a/ f , thus d = D f /L. Taking
GM
GM
orbit
is
− R g +Rs a + R g s . Using the orbital
into account the sharpness condition d ≤ η,
2α O
A
B
of Earth we can substitute
where η = w/ N is the size of a single element angular speed
4π2 R 3g
of the sensor, we find that the limiting value GM s = T . The speed at the beginning of
g
p
of L is L = D f /η = D f N /w ≈ 5.5 m.
the
transfer
orbit becomes
3
DC
6 a
s
ii) (2 points) We’ll now find the shortest disµ
¶
a
l
1
1
tance s satisfying the sharpness condition.
v t0 = 2GM s
−
≈ 32.7 km/s
R g R g + Ra
m~
g ~
Object at distance s will have an image at
Rl
2. CELLPHONE CAMERA (6 points) The distance b = f + f 2 /s and the light passing the
distance L is often called hyperfocal distance lens will converge behind the sensor’s plane . 0 The speed in Earth’s inertial frame is
1
a
in photography and it was calculated more forming a cone. The diameter d 2 of the cone’s v t0 = v t0 − v g ≈ 2.94 km/h. To achive that, we
4
than one hundred years ago by Louis Derr cut with the sensor’s plane can be calculated first need to escape Earth’s gravity, so
v Ã
(the figure is taken from his book Photo- from similar triangles: d 2 /D = ( b − a)/ b. Ac!
u
~r
R
u v0t 2 GM g
graphy for students of physics and chemistry, counting for sharpness condition d 2 = η, we
0
t
∆ v1 = 2
+
.
published in 1906).
2
rg
d
can express b = a/(1 − η/D ), and substituting
—1—
Using the surface gravity of Earth we can
GM
substitute r g g = g g r g so ∆v1 ≈ 11.2 km/s.
iv) (1.5 points) We can calculate the speed
of the transfer orbit where it intersects the
orbit of Mars from Kepler’s second law v t1 =
v t0 /1.52 ≈ 21.5 km/s. The speed of the spacecraft relative to Mars is v0t1 ≈ 3.25 km/s. The
speed of the spacecraft once near Mars surface is
v Ã
!
u
u v0t 2
1
t
vt m = 2
+ r a g a ≈ 5.98 km/s
2
Since the speed of low Mars orbit is v e a =
p
r a g a ≈ 3.55 km/s, we need to brake for
∆v2 ≈ 2.43 km/s.
v) (1.5 points) The Earth–Sun–Mars angle
α at the launch of the mission needs to
be α = π − wa t t ≈ 0.77 for the spacecraft to
reach Mars. Likewise for the return trip
β = π − w g t t ≈ −1.301. If we go to the corotating frame of referense with earth, we can
see that the minimal time between those two
2π−α+β
angles is wa −w g ≈ 1.96 yr. The minimal duration of the trip is therefore longer by t t , giving
2.67 yr.
4. MAGNETIC DIPOLES (7 points)
i) (3 points) There is no torque on the square
if θ = 0 or θ = π, so one of them is stable
and the other unstable. If we start from
θ = 0 and turn the square to some θ , but
keep two sides of the square perpendicular
~ , Lorentz forces on these two sides give a
to B
torque τ = −BIa · a sin θ = −Bm sin θ towards
decreasing θ . By symmetry, we get the same
result if we keep the other keep two sides
~ . It is posof the square perpendicular to B
sible to conclude that the torque depends
only on θ (at least near θ = 0), not on the
exact orientation of the square. Since torque
acts to restore θ = 0, we find that θs = 0 and
θu = π. To find the work to get from θs to
θu , we can again keep two sides perpendicu~ - the answer cannot depend on the
lar to B
path, so we choose the simplest one. Integrating τ = Bm sin θ from θ = 0 to π gives us
w = 2Bm.
ii) (4 points) Let us denote the number
of electrons (per unit volume) with magnetic moment projection +µB as n + and the
ones with −µB as n − . Their sum is always
the same, n + + n − = n. Also, in thermal
equilibrium, their ratio is given by nn−+ =
³
´
2µ B
exp − k BT , where k B is Boltzmann’s conB
stant. Solving the equations, we can find
n + and n − . The total magnetic moment per
~ ) is given by
unit volume (in the direction of B
M = µB ( n + − n − ). After substituting,
³
´
2µ B
¶
µ
1 − exp k BT
µB B
B
³
´
M = µB N
.
= µB n tanh
2µB B
kB T
1 + exp
kB T
Additional comments. We see B and M
~ is
always have the same sign, therefore M
~
parallel with B. This makes sense, as we
~ ) orientation
~ parallel to B
saw that θ = 0 ( m
had lowest energy. The graph of M vs B goes
to µB n for very large B or to −µB n for very
~ ). At B = 0,
small B (all spins aligned with B
M = 0 as well, since both spin orientations
have the same energy. Around zero, the curve
is linear, as tanh x ≈ x for small x gives us
M≈
5.
µ2B nB
kB T .
FRICTION OF A STRING (8 points)
Let’s first calculate the difference of tension
force T between two ends of a sliding string
arced over a cylinder by an angle α. Furthermore, let’s look at a short piece of the arc
that subtends an angle d α. On one hand,
dT = µ dR is the friction force acting on the
piece, where dR is the reaction force. On the
other hand, dR ≈ T d α, because both ends
of the piece are pulled by a force with a ra-
dial component of T d2α (where α is measured stant acceleration a ∥ directed parallel to the
in radians). Therefore, we get a differen- surface. Let’s express a ∥ from the equation
tial equation: dT = µT d α or d ln T = µ d α, v2 = 2a ∥ x:
whence T = T0 eµα .
a ∥ = g sin α/(1 + k).
As a solution to the problem, we can measThe times are now easy to calculate as t =
ure the change of the tension force for differv/a ∥ , giving
π
3π
5π
ent angles α (for example, 2 , π, 2 , 2π, 2
µ
¶1
etc. for several turns; however, keeping the
p
2
2H
t = 1+k
.
strings vertical offers better precision) and
2
g sin α
plot ln T with respect to α. The slope of the
Replacing k s = 25 for sphere and k c = 12 for
graph is the µ to be measured.
Extra solution (not as exact). Those who cylinder, we find that the sphere is faster by
cannot derive the necessary formula can still a relativesfactor
r
do the experiment by doing the same meas1 + kc
15
−1 =
− 1 ≈ 0.035.
γ=
urements and noting from the plot that the
1 + ks
14
relationship between α and T looks exponential. Thus, we can make an ansatz that ii) (2.5 points) As found in previous subpart,
T = T0 X µα : as α = 0 must correspond to the acceleration’s parallel component to the
T = T0 , we cannot reasonably write the µ slope a ∥ is smaller than the contribution by
anywhere else without over-complicating the gravity g sin α. The difference is contributed
formula. Now, we can re-measure the given by the friction force F f = mg sin α− ma ∥ . Slidpencil (it may be reasonably enough approx- ing starts, if the necessary friction reaches
imated with a cylinder here; more exact ap- the maximal value Fmax = µ N = µ mg cos α.
proaches exist) and conclude that X ≈ 2.7. Equating the two expressions gives
From there on, the calculation is the same.
mg sin α − mg sin α/(1 + k) = µ mg cos α,
6. SPHERE AND CYLINDER (7 points)
1+k
tan α = µ
.
i) (2 points) Since no energy is lost due to
k
friction on sliding, the change in potential For the cylinder the limiting angle is α =
0
energy ∆E p = mgH is transformed to kinetic arctan(3µ).
energy consisting of both translational and
rotational motion. Taking into account the iii) (2.5 points) When the maximal friction
force is reached, the motion goes into rolling
rolling condition v = ω r , we have
and sliding mode, where the total force com1
1
ponent along the surface is given by the dif∆E p = E k = mv2 + I ω2
2
2
ference of gravity and friction:
1
1
1
= mv2 + kmv2 = (1 + k) mv2 ,
F∥ = mg sin α − Fmax = mg sin α − µ mg cos α.
2
2
2
where general expression I = kmr 2 for mo- We note that the acceleration in this mode
ment of inertia is used. Therefore, v2 = does not depend on the moment of inertia any
2 gH /(1 + k).
more.
On the other hand, the bodies travel disCalculating the limiting angle of slipping
tance x = H / sin α along the slope with a con- mode also for the sphere αsph = arctan( 72 µ) >
—2—
α0 shows that for all angles larger than
αm = αsph both bodies are in the slipping
mode and thus have equal accelerations and
arrival times.
7. BURNING WITH A LENS (7 points) The
solar energy flux which is focused by the lens
to the image of the Sun can be calculated
as P = π4 d 2 I ; the image of the Sun radiates
according to the Stefan-Boltzmann law with
the total power P = π4 (α f )2 σT 4 . From the
heat balance we obtain π4 d 2 I = π4 (α f )2 σT 4 ,
hence
v
s
u
u d
I
t
T=
≈ 4500 K.
αf σ
Due to the second law of thermodynamics,
it is impossible to direct heat energy from a
lower temperature body to a higher temperature body. Hence, the image temperature
cannot exceed the temperature of the Sun.
Now we can use the known temperature of
Sun T0 = 6000 K, but it is better to use the
Stefan-Boltzmann law for solar radiation flux
density: near the Sun’s surface, I 0 = σT04 ,
with the total flux of P t = 4πR 2s I 0 . Near
the Earth, the total flux P t = 4πL2 I ; here,
R s is the Sun’s radius, and L — the orbital
radius of the Earth. From here we obtain
I = I 0 R 2s /L2 = σT04 R 2s /L2 ; using the previous
result,
s
d Rs
T = T0
.
αf L
the frequency ω = p 1 and we can immedi- summarize the equations as follows:
LC
ately write q( t) = q 0 cos ω t, while I ( t) = q̇( t) =
q
if q̇ < 0
L q̈ + = Vd
−ω q 0 sin ω t.
C
q
Note that
L q̈ + = −Vd
if q̇ > 0
C
1
q2 + 2 I 2 = q20 (sin2 ω t + cos2 ω t) = q20 ,
Let us introduce the new variables q 1,2
ω
such that q 1 = q − CVd and q 2 = q + CVd .
and therefore the phase diagram of the sys- Then we can rewrite the two equations above
tem is an ellipse centred at the origin, with in a more familiar form:
semi-axes q 0 and ω q 0 . Alternatively, this req1
lation comes directly from the conservation
L q̈ 1 +
=0
if q̇ < 0
C
of energy:
q2
L q̈ 2 +
=0
if q̇ > 0
C
q20
LI 2 q2
+
= E0 =
.
Thus the introduction of the diode only serves
2
2C
2C
to shift the equilibrium points for the othBy looking at q and I a quarter-period erwise simple harmonic orbits. For q̇ > 0,
later from t = 0, say, it’s not hard to see that the equilibrium point is q 2 = 0 or q = −CVd ,
the system must evolve in a clockwise sense while for q̇ < 0 it is q = CVd . So the orbit will
on the phase diagram. Note that in this in- consist of half-ellipses in the upper and the
stance, only q = 0 is an equilibrium point: lower parts of the I − q diagram, centred at
for all non-zero q there will be never-ending q = −CVd for the upper half and at q = CVd
for the lower half. As the evolution is continuoscillations in the circuit.
ous, these half-ellipses will join up at I = 0.
I
I
Note that we have the right to talk about
half- and full periods because the oscillations still happen at the immutable frequency
ω = p 1 . Therefore the time between the
LC
two maxima is just a full period of oscillation,
T = 2ωπ .
Once q( t) has a zero derivative inside the
region bounded by ±CVd , it will remain at
that particular value forever. For a large initial
¯ ¯q 0 , we expect there to be approximately
¯ q0 ¯
| q0 |
total oscillations.
¯ ∆ q ¯ = 4CV
d
GLASS CYLINDER (7 points) The axis
of the half-cylinder is where the stripe and
its image coincide (form a straight line). The
front edge of the half-cylinder is at the 28th
line, counting from the axis, hence the radius
of the cylinder R ≈ 28. Let us consider the
refracting ray s which is very close to a total
internal reflection. One can see the images
of 20 lines (ca 20.2, to be more precise), when
counting from the central line upwards; the
upper edge of the half-cylinder coincides with
9.
−CVd
CVd
q
which means that d ≤ 2 f .
8. ZENER DIODE (7 points)
i) (1 point) Kirchoff’s 2nd law gives L İ + ii) (2 points) Now the sign of the voltage on
1
q/C = 0 or q̈ + LC
q = 0. This is the equa- the diode depends on the direction of the cur- iii) (2 points) We can see on the diagram
q
tion of a simple harmonic oscillator with rent, giving either of L q̈ + C ± Vd = 0. We can that there is a “dead zone” between ±CVd
—3—
iv) (2 points) Let’s use the phase diagram
to figure this out. Suppose the capacitor
initially has the charge q 0 À CVd . Then
the charge will first swing to the other way
of CVd and will become q T /2 = CVd − ( q 0 −
CVd ) = 2CVd − q 0 . Then it will perform the
other half-oscillation around −CVd and the
charge at the end of that is q T = −CVd +
(−CVd − (2CVd − q 0 )) = q 0 − 4CVd , and therefore ∆ q = −4CVd .
More exactly, the distance from the “dead
zone” is initially | q 0 |− CVd and decreases during each half-oscillation by 2CVd .jThe total
k
| q 0 |−CVd
number of half-oscillations is N =
2CVd
p
π
and the total time t = N T2 = N ω
= N π LC .
q
Let us note that αL = 2R s , hence
s
d
T = T0
≤ T0 ,
2f
(for I = 0). If a trajectory reaches any of
the points in that segment, it will stay there
forever. The extent of that region is 2CVd .
the 42nd line at the background.
the perpendicular of the paper surface. The Measure the temperature at the end, after
◦
So, the ray s arrives at the camera at incidence angle of the ray s is α + β ≈ 45.9 , waiting a bit or stirring the calorimeter. We
want to get maximum temperature difference
the angle α = arcsin(28/42) ≈ 41.8◦ with re- hence n = 1/ sin(α + β) ≈ 1.39.
2
spect to the plane of the paper. The pro- 10. RESISTIVE HEATING (8 points) After for precise measurement. Since P = R I ,
jection of the refraction point to the paper noting the temperature of the calorimeter,
Q X
≈ ∆ t( I n /2 + I n+1 /2)2 ,
surface lies at the distance a = 28 sin α = connect the batteries, resistor (in the calorR
2
n
28 /42 ≈ 18.7 lines from the axis. There- imeter) and ammeter in series. Choose a
( c a m a + c w m w ) ∆T
fore, before refraction, ray s forms an angle convenient time interval ∆ t and note the amR= P
.
2
◦
n ∆ t( I n /2 + I n+1 /2)
β = arcsin[(20.2 − 18.7)/(28 cos α)] ≈ 4.1 with meter reading until batteries are depleted.
—4—
The resistance used was R = 0.47 Ω ± 5%.
In the described circuit the batteries were
depleted in 10 to 15 minutes and the temperature of the calorimeter rose by 7 to 10
degrees.
ESTONIAN FINNISH PHYSICS OLYMPIAD
PROBLEMS & SOLUTIONS (2014)
Estonian-Finnish Olympiad 2014 iv) (2 points) Assuming that Vmax À V0 , Sun?
1. DC-DC CONVERTER (8 points) In order
to obtain high voltage supply using a battery,
the following circuit is used.
An electromagnetic switch K 1 connects a battery of electromotive force E to an inductor
of inductance L: it is closed if there is no current in the inductor (a spring keeps it closed),
but if the inductor current reaches a critical
value I 0 , magnetic field created by the inductor pulls it open. Due to inertia, once the
key is open, it takes a certain time τK to close
again even if the current falls to zero.
what is the average power dissipation on the
diode?
iii) (1.5 points) What is the speed of the
spaceship in the Earth’s frame of reference
v) (2 points) Now, let the key K 2 be closed, when the distance from the Earth is much
and let us assume simplifyingly
that V0 = 0; larger than the Earth’s radius, but still much
p
also, RC À τL and τK > π LC . Suppose that shorter than the distance to the Sun?
the circuit has been operated for a very long iv) (2.5 points) Answer the previous question
time. Find the average voltage on the res- without making the approximation α ≈ 0°.
istor.
v) (1.5 points) What is the speed of the spacevi) (1 point) Find the amplitude of voltage ship in the Earth’s frame of reference when
variations on the resistor.
the distance from the Earth is much smaller
2. WASTE PROJECT (8 points) In 2114, than the Earth’s radius?
Europarliament decided that all radioact- 3. MAGNETS (6 points) To explore the force
ive wastes need to be sent to the Sun, so between two small magnets, the following
as to avoid contamination of Earth and or- experiment is performed. One of the magbital space. In what follows, you can use the nets is hanged from a thread with length
following numerical data: duration of one l = 1 m. Other magnet is moved slowly closer
year T = 365.25 days, orbital speed on Earth while keeping the axes of the magnets alv0 = 29.8 km/s, angular diameter of Sun as ways on the same horizontal line. At the
seen from the Earth α = 0.5°, radius of the moment when the distance between the magEarth R = 6400 km, free fall acceleration at nets is d = 4 cm and the hanged magnet has
1
the Earth’s surface g = 9.81 m/s2 .
moved x = 1 cm from initial position, bal-
According to the project, the waste is sent
to
the
Sun using ballistic spaceships: the enFor the diode D you may assume that
gine
operates
only during a short period of
its current is zero for any reverse voltage
time
during
which
the displacement of the
(VD < 0), and also for any forward voltage
spaceship
remains
much shorter than the
smaller than the opening voltage V0 (i.e. for
radius
of
Earth.
In
the
Earth’s frame of refer0 < VD < V0 ). For any non-zero forward curence,
the
spaceship
obtains
a velocity opposrent, the diode voltage VD remains equal to
ite
to
the
orbital
velocity
of
Earth
in the Sun’s
V0 .
frame of reference. Further, the ship moves
You may express your answers in terms along a ballistic trajectory until it hits the
of L, E , I 0 , V0 , R , and the capacitance C (see Sun. The trajectory is such as to minimize
figure).
the consumption of fuel.
i) (1 point) At first, let the key K 2 be open. If i) (1 point) Sketch the trajectory of the spacethe initial inductor current is zero, how long ship.
time τL will it take to open the key K 1 ?
As a first approximation, calculations can
ii) (1 point) Assuming (here and in what be done when neglecting the angular size of
follows) that L/R ¿ τK ¿ τL , plot the in- the Sun (i.e. by putting α ≈ 0°); you can use
ductor current as a function of time t (for this approach for the next two questions.
0 ≤ t < 3τL ).
ii) (1.5 points) How long will it take for the
iii) (1 point) What is the maximal voltage spaceship to travel from the Earth to the
Vmax on the resistor R ?
1
ance is lost and the magnets pull together. By
making the assumption that the pulling force
between the magnets Fm depends on the distance d according to the relation Fm ∝ d −n ,
find the value of the exponent n.
4.
SUPERBALLS (5 points) n + 1 elastic
balls are dropped so that they are exactly
above each other, with a very small gap
between each. Bottom ball has a mass of m 0 ,
the one above has a mass of f m 0 , next f 2 m 0
and so on, until the topmost ball with mass
f n m 0 , where f < 1. At the moment when the
bottom ball touches the ground, all the balls
are moving with the speed v.
i) (1 point) After the collision between the
two bottommost balls, what is the speed v1
of the second ball from the bottom?
ii) (3 points) What is the speed of the topmost ball vn after all collisions?
iii) (1 point) How many times higher would
that ball fly compared to the initial drop
height h? Take f = 0.5 and n = 10.
It maybe useful that that sequence a 0 = 1,
a k+1 = a k α + β has a general term a n = αn +
n
β αα−−11 , where α and β are constants.
5.
PLANCK’S CONSTANT (8 points) In a
simplistic model, light emitting diodes can be
considered to only pass current when lit, and
then they have a constant voltage drop Vt =
E
e across them. E = h f is the energy of the
light quanta emitted and e = 1.60 × 10−19 C
is the elementary charge. Speed of light in
vacuum c = 3.00 × 108 m/s.
You have a assorted light emitting diodes
numbered 1–6, each with a R = 680 Ω series
resistor. From the datasheets it is known
for the peak wavelengths of the diodes to
be 940 nm, 620 nm, 590 nm, 525 nm, 470 nm,
and 450 nm.
i) (2 points) Find out which wavelength corresponds to which diode.
ii) (4 points) Measure the Planck’s constant h that corresponds to our simplistic
model. This does not have to correspond to
real Planck’s constant.
iii) (2 points) Estimate the uncertainty.
Equipment: voltage source (batteries)
with an unknown voltage, ammeter, assorted light emitting diodes with series resistor.
Take care not to short the battery with the
ammeter. You may ignore the internal resistances of the batteries and the ammeter.
6.
RUNNING ON ICE (4 points) A boy is
running on a large field of ice with velocity
v = 5 m/s toward the north. The coefficient of
friction between his feet and the ice is µ = 0.1.
Assume as a simplification that the reaction
force between the boy and the ice stays constant (in reality it varies with every push,
but the assumption is justified by the fact
that the value averaged over one step stays
constant).
i) (2 points) What is the minimum time necessary for him to change his moving direction to point towards the east so that the final
speed is also v = 5 m/s?
placed at a distance l = N λ (where N is a
large integer) from the point source, and the
interference pattern is observed on a screen
which is placed to a distance L À l from the
point source (see figure).
3R
Cv
is sparse, so that the mean free path of the
molecules is much larger than a. Assume
that v2 ¿ c s where c s is the speed sound in
the atmosphere surrounding the cube.
2R
10.
R
✠
✡
✝
✆☎
☎✄
✂✁
0
100
200
T(K)
300
i) (1 point) What is the total heat energy of
such a cube at the initial temperature T0 ?
Now, the cube has 5
ii) (3 points)
faces painted in white (reflects all relevant
wavelengths) and one face painted in black
ii) (2 points) What is the shape of the optimal
(absorbs all these waves). The cube is surtrajectory called?
rounded by vacuum at a very low temperat7. SPIN SYSTEM (8 points) Let us consider
ure (near absolute zero); there is no gravity
In what follows we use the x, y, and z coa system of N independent magnetic dipoles
field. Initially, the cube is at rest; as it cools
(spins) in a magnetic field B and temperature ordinates as defined in the figure. The screen down due to heat radiation, it starts slowly
T . Our goal is to determine some properties is parallel to the mirror and lies in the y − z- moving. Estimate its terminal speed v .
1
of this system by using statistical physics. It plane.
is known that the energy of a single spin is i) (2 points) At which values of the y- iii) (2 points) At very low temperatures,
the heat capacitance of aluminium is proE = ² m, where m = ± 21 and ² = αB.
coordinate (for z = 0) are the interference
portional to T 3 , where T is its temperati) (2 points) What is the probability p ↑ for maxima observed on the screen? You may ure. Which functional dependance f ( t) dea spin to be in exited state, i.e. have positive assume that y ¿ L.
scribes the temperature as a function of time
energy?
ii) (1 point) Sketch the shape of few smallest- [T = A · f (Bt), where A and B are constants]
ii) (2 points) What is the average value of sized interference maxima on the screen (in for such very low temperatures under the
assumptions of the previous question?
the total energy E s of the spin system as a y − z-plane).
function of B and T ?
iii) (2 points) Now the flat screen is replaced iv) (3 points) Now, the cube has 5 faces
iii) (2 points) Using high temperature ap- with a spherical screen of radius L, centred covered with a thermal insulation layer (you
around the point source. How many interfer- may neglect heat transfer through these
proximation T À αBm
k , simplify the expresence maxima can be observed?
faces). One face is left uncovered. The cube
sion of E .
✟
✞
s
iv) (2 points) Using high temperature ap- 9. THERMAL ACCELERATION (9 points)
Consider a cube of side length a = 1 cm, made
proximation T À αBm
k , find the heat capacity
of aluminium (density ρ = 2.7 g/cm3 , molar
C of the spin system.
mass M A = 23 g/mol). The heat capacitance
8. MIRROR INTERFERENCE (5 points) of one mole of aluminium is given as a funcA point source S emits coherent light of tion of temperature in the graph below. The
wavelength λ isotropically in all directions; speed of light c = 3 × 108 m/s, universal gas
thus, the wavefronts are concentric spheres. constant R = 8.31 J/(kg · K). The initial temThe waves reflect from a dielectric surface perature of the cube is T = 300 K.
0
is surrounded by hydrogen atmosphere at
a very low temperature (molar mass of hydrogen molecules M H = 2 g/mol). The cube
starts cooling down due to heat transfer to
the surrounding gas; you may neglect the
heat radiation. Initially, the cube is at rest;
as it cools down, it starts slowly moving. Estimate the order of magnitude of its terminal
speed v2 . Assume that the surrounding gas
YOUNG’S MODULUS OF RUBBER
(12 points) The linear Hooke’s law for a
rope made from an elastic material is supposed to held for small relative deformations
ε = x/L (which is also called “strain”), where
L is the undeformed length of the rope, and x
is the deformation. Once ε becomes too large,
the force-deformation relationship F = kx is
no longer linear; what is “too large” depends
on the material. For very elastic materials
which can reach relative deformations considerably large than one, it may happen that
the linear Hooke’s law with a constant stiffness k fails, but if we take into account the
change of the cross-sectional area S of the
rope with k = ES /L, where E is the Young’s
modulus of the elastic material, such a nonlinear Hooke’s law remains valid. In that
case we can say that there is still a linear
stress-strain relationship σ = E · ε, where the
stress σ = F /S .
i) (7 points)
Measure the relationship
between the stress σ and strain ε in a rubber
string and plot it.
ii) (5 points) From your plot determine the
Young’s modulus E with its uncertainty, and
the maximum strain εm until which it applies.
Note: the diameter of the thread is to be
measured using the diffraction of laser light.
Equipment: rubber thread, stand, measuring tape, 15 hex nuts with a known mass,
a plastic bag for hanging a set of nuts to the
thread, a green laser (λ = 532 nm), a screen.
WARNING: AVOID LOOKING INTO
A LASER BEAM, THIS MAY DAMAGE
YOUR EYES!
1.
interval when the diode is open, we can also neg-
DC-DC converter
1)
(1 pt) From the Kircho 's voltage law for
L and E , E = L dI
, hence
dt
= Et/L. From I0 = EτL /L we obtain
the loop consisting of
I
lect the presence of the diode since
Hence, the current
i
V0 Vmax .
LC -loop changes in
from i = I0 and end-
in the
time sinusoidally, starting
hence its trajectory is an ellips with longer semiaxis equal to
proportionality coecient. Then
RE /2.
According to the Kepler's
3/2
III law, the period on such an orbit is 2
times shorter than the Earth's orbital period
T.
0
∆Fm = Fm
(d)∆d =
because
∆d = −∆x.
kn
∆x,
dn+1
Therefore
τL = LI0 /E.
2) (1 pts) Once the current I0 is reached, the key
is opened; the current trough L cannot change
i = 0 (then the diode will close disconnecting the LC -loop). During that process, the
2
1
magnetic energy of the inductor 2 LI0 is conver-
3)
ted into the electric eld energy of the capacitor,
needs to be zero; hence, in the Earth's frame
instantaneously and therefore is forced to ow
is described by this problem)
which is later released as heat on the resistor.
of reference, it is opposite to the orbital ve-
have two equations with two unknowns (n and
When the stationary regime is achieved, the en-
locity of the Earth and by modulus equal to
k):
ergy lost by the capacitor during one period (of
v0 = 29.8 km/s.
4) The speed vS
R.
through the resistor
Since the characteristic
time of this current loop (consisting of
is very short (L/R
τK ),
L
and
R
the current decays
ing when
τL ) as the heat dissipation on the res2
Q = Vav
τL /R must be equal to the energy
duration
very fast and becomes essentially equal to zero
istor
while the key is still open. Now there is no cur-
received from the inductor; so,
rent through the inductor, so that the key will
r
close again and the process will start repeating
from the beginning.
As a result we'll have a
periodic graph as shown in gure.
I
I0
2
Vav
τL
1
= LI02 ⇒ Vav = I0
R
2
6)
LR
=
2τL
r
EI0 R
.
2
found as
qC = τL Vav /R
(owing to
RC τLC ,
the relative change of the capacitor's voltage
is small).
3)
Hence, the voltage drop is found as
∆V = qC /C = τL Vav /(RC).
maximal values, so that the amplitude
maximal when the current is maximal, which
happens immediately after the switch is opened;
I0 so that Vmax = RI0 .
Vmax V0 , we can neglect
U0 =
the maximal current is
4)
(2 pts) Due to
the eect of the diode; so we have the Kircho 's
dq
dI
voltage law L dt = RI = R dt (here we expressed the current via the charge q which ows
through the resistor). Integration over a single
cycle (when the inductor current drops from
down to
0)
yields
LI0 = R∆q ,
I0
hence the charge
own through the resistor (and through the diode)
∆q = I0 L/R.
During that cycle, the diode
V0 ,
A = V0 ∆q
had a constant voltage
so the electric eld
performed work
which was released
as heat in the diode. So, the average power dissipation
(2 pts) Now, since the characteristic time of
RC -loop
is very large, the capacitor main-
2.
1)
Waste project
the Earth's orbit needs to be as large as posit to the elliptical orbit), hence the full orbital
GM m
energy of the ship E = − 2a
needs to be as
small as possible. Here, M is the mass of the
Sun,
m
the mass of the space ship, and
the longer semiaxis. So,
a
a needs to be as large as
possible, which means that the perihelion needs
2a = RE + rS ,
where
the Earth and
rS
RE
is the orbital radius of
the radius of the Sun. The
=−
2a
RE + rS
r
vS =
=−
Re
+
2
Part of the initial kinetic energy in the
Sun
2)
If we neglect the radius of the Sun, the space
RC TLC ), we can neg-
ship needs to fall directly to the Sun, which
lect the presence of the resistor. During the time
means that its initial orbital speed must be zero,
2
vE
+ 2gR ≈ 29.2 km/s.
Magnets
net: the downwards directed gravity force
T~ ,
is almost equal to
mg ,
horizontal projection is expressed as
l
kn
mg
=
.
dn+1
l
4.
Superballs
1)
During
the
bottom-most
collision
ball
will
−(x/l)mg ,
x = 1 cm
is the length of the thread and
the
its
oor,
the
speed
and
v0 = v . Let the k-th ball move up with a
vk ; we'll consider the collision between
this and (k + 1)-st ball, which moves down with
the velocity v . In the frame of reference of the
vk −f v
centre of mass, u =
; hence, after the
1+f
collision the upwards velocity equals to vk+1 =
−f v
2
= 1+f
vk + 1−f
v . With v0 = v , we
v + 2 vk1+f
1+f
3−f
4
can conclude that v1 = 1+f v = 1+f − 1 v . 2)
speed
velocity
One can see that if we apply the recurrent formula repetitively, the result at the n-th step will
n
2
vn = 2 1+f
− 1 v.
3) Now we need to relate the speeds to the jump2
2
ing heights via v = 2gh0 and vn = 2ghn ; hence,
hn /h0 =
~m .
F
so that its
with
retain
change the direction of the velocity; its upwards
m~g ,
Since the thread's angle is very small, the mod-
T~
kn
mg
−
= 0;
dn+1
l
xmg
k
=
,
dn
l
which is directed along the
thread, and the horizontal magnetic force
ulus of
Thus we
this can be rewritten as
be
There three forces acting on the hanging magthe tension force
k
xmg
−
= 0,
dn
l
∆F = 0.
d/n = x, hence
n = d/x = 4.
of the potential energy due to the gravitational
GME m
= gmR hence
pull of the Earth, ∆Π =
R
2
2
vE
u
gR + 2 = 2 . Here, ME is the Earth's mass
and u is the launching speed. So,
3.
∆x.
equations we obtain
√
2rS
α
= v0 2 sin
≈ v0 α.
R E + rS
2
Numerically this yields vS ≈ 2.8 km/s; the speed
in the Earth's frame of reference vE = v0 − vS ≈
27.0 km/s.
vS = v0
p
If we divide the corresponding sides of the two
GM 2rS
.
R E R E + rS
r
u=
kn
mg
−
dn+1
l
At the limit case of the loss of stability (which
,
This expressing can be rewritten by using equal2
GM
as
ity v0 = R
rE
∆F =
in the Sun's frame of reference
hence
where
resulting trajectory is depicted below.
LC -loop is
and as the current to the resistor
can be neglected (since
−
sible (we need to decelerate the ship to bring
rbit
TLC = 2π LC
In order to
minimize the fuel consumption, the speed near
opens, the diode will open, and the capacitor
formed. That
√ loop admits oscillations of period
In the Sun's frame of reference, the speed
is found from the expression for the total energy,
GM m
GM m
GM m
mvS2
5)
The trajectory is a very elliptical ellipse, peri-
helion of which is within the Sun.
of time when the diode is closed. Once the key
is connected to the inductor so that a
of the period, so that
Earth's frame of reference goes to the change
tains its charge (and voltage) during that period
K1
I0
.
2RE
Earth’s o
the
τL Vav
I0 L
∆V
=
=
2
2RC
2C
r
to lie at the surface of the Sun, in which case
A
V0 I0 L
V0 E
P =
=
=
.
τL
RτL
R
5)
The amplitude is
half of the dierence between the minimal and
(1 pt) The voltage through the resistor is
t=2
(1 pt) The charge which ows away from
the capacitor when the diode is closed can be
t
t is half
T ≈ 64.6 days.
The travel time
−5/2
For
f = 0.5
p
vn /v0 =
2
2
1+f
n
− 1.
n = 10 we obtain that the nal
ca 1200 larger than the initial one.
and
height will be
5.
s Planck's constant
(the displacement from the initial position). The
1)
net horizontal force
battery, we can observe the light of the emit-
equilibrium
ted light; the mapping is as follows:
is stable if
F = Fm − (x/l)mg . At the
point F = 0. The equilibrium point
a small (virtual) displacement ∆x
gives rise to a returning force
∆x
∆F = ∆Fm −
mg
l
which needs to push towards the equilibrium
point. Let F
= kd−n , where k is an unknown
m
When we connect each of the diodes to the
940 nm 620 nm red, 590 nm orgreen; 470 nm blue; 450 nm
invisible (infrared),
ange,
525 nm
violet.
2)
We can measure the current
I
through the
diode (which is also the current through the resistor
R),
so that the voltage on the diode would
be
Vd = E − IR,
but we don't know the battery
voltage. However, we do know that the diode's
voltage equals approximately to the photon's
energy
Ep
hc/(λe).
if we plot
Ep =
IR = E − Vd ,
expressed in electron volts,
Since we expect that
IR
versus
1/λ,
we should obtain a
straight line
IR = E −
3)
h =
which allows us to calculate
The major source of the uncertainty is not
the instrument uncertainties, but the departure
of the real diode data from the simplistic model.
Therefore we can try to t the data points with
dierent straight lines making the slope
A
as
steep as possible (while still keeping a reasonable t with the data points, and also as at
as possible; the uncertainty of
∆A = 21 (Amax − Amin ), and ∆h
6.
1)
For small values of the argument of the hy-
over all the photons, the perpendicular to the
those molecules which collide with the cube at
perbolic tangent, the last expression can be ap2
proximated as E ≈ −N /4kT .
surface normal components cancel out (photons
low temperatures to the overall momentum re-
go to all the directions).
mains still small.
4)
the parallel component can be estimated just as
pk ∼ Ec .
According to the denition of the heat capa2
2
dE
city, C = dT = N /4kT .
8.
Mirror interference
1)
1 hc
.
λ e
We can measure the slope of the straight line
A = hc/e,
eA/c.
3)
A is found
= h∆A/A.
as
For a position
α = y/L
angle
the arriving rays form an
imation; the angle is in radians). Then, the optical path dierence between the reected and
2
direct rays is ∆ = 2l cos α ≈ 2N λ − N λα .
Since there is an additional phase shift for the
reected rays at the reection from optically
denser dielectric material, the total phase shift
2
is ϕ = 2π∆/λ = 4πN − π(2N α − 1). At the
maxima, this equals to
is an integer.
2π(2N − n),
Let us
vx − vy point A with
n
r
r
2)
n + 0.5
⇒ yn = L
N
n = 0, 1, . . . N .
n + 0.5
,
N
x-axis,
n
the max-
ima form on the screen concentric circles; the
plane: we need to move from the
pitch between the neighbouring circles becomes
(v, 0)
(0, v)
to a point
B
with coordinates
while having a constant speed. Indeed,
the velocity of a point in the
vx − vy -plane
is
the acceleration of the body, which has here a
constant modulus
µg .
Obviously,√the fastest
path √
is a straight line of length
v 2,
so that
smaller as the order number
radii
form a sequence
√
3)
number of maxima
stant, the trajectory is the same as for a body
A
9.
According to Boltzmann's distribution, p↑ =
· e−m , where the constant A can be found
from the condition that the probability of having either up or down orientation is one:
e−/2 + A · e/2 = 1, hence
A·
1
1
A = −/2kT
=
.
2 cosh(/2kT )
e
+ e/2kT
Thus,
2)
e−/2kT
p↑ = −/2kT
.
e
+ e/2kT
The average energy is the weighted average
of up- and down-state energies for a single spin,
multiplied by the number of spins:
−/2kT
/2kT
N e
−e
N
E=
=−
tanh(/2kT ).
2 e−/2kT + e/2kT
2
ϕmax = 4πN + π
and
ϕmin = π .
The
1)
hence
S
σ
is the Stefan-Boltzmann con-
the radiating area. This simpli-
es to
4)
T = 0,
Using the graph we nd
this as the area under the curve, q ≈ R·560 J/K.
3
The number of moles ν = a ρ/MA ≈ 0.117 mol,
Q = qν ≈ 546 J.
2) Each photon of frequency ν radiated by the
cube carries away heat energy equal to E = hν ,
and carries momentum p = h/λ = hν/c = E/c.
If the photon departs at the angle α with rehence the total heat energy
The setup is as follows. The rubber thread
is xed to the stand, and the plastic bag is xed
to the free end of the thread. The hex nuts are
added, one-by-one, into the bag, starting with
zero and ending with 15. The laser light is directed to the thread and the diraction pattern
is observed on the screen (which is a vertically
xed sheet of graphic paper on a support). The
diraction pattern from a wire is the same as
from a single slit (the superposition of the Huygens sources from those two cases gives a full set
and opposite wave amplitudes and equal intensities). So, if we measure on the screen the dis-
a
between such maxima which are separ-
ated by
n (e.g. n = 10) periods of the diraction
tance
pattern then using small-angle-approximation,
nλ/d = a/L,
where
In the case of a hydrogen atmosphere, the
that the molecules colliding with the coated
they came, but uncoated face gives away heat
energy, and the molecules leave at higher temIf we assume that the departing
a part of the energy is transferred), then the
where
vT =
p
RT /MH
1/vT ,
is the thermal speed of
the molecules after the collision with the cube
for the motion along the surface normal. So we
3
estimate a ρv ∼ Q/vT , hence
v∼
Q
ρa3
r
d
the thread dia-
The strain is calculated by making markings on
the thread and measuring the distance
MH
≈ 180 m/s.
RT
b between
these in a stretched state,
b − b0
,
b0
ε=
faces bounce back with the same speed as the
momentum-to-heat ratio is estimated as
is the distance from the
d = nLλ/a.
momentum is given to the cube due to the fact
perature.
L
thread to the screen and
meter. So,
dT
= −Bt ⇒ T = A · e−Bt .
T
when particles of dierent masses collide, only
For the heat energy of one mole of material
no heat energy by
is a constant,
stant, and
1)
Young's modulus of rubber
elds from those two cases must provide equal
cube (which serves us only as an estimate Thermal acceleration
dq = Cv dT .R There is
T
hence q =
Cv dT .
0
A
10.
of sources on a at wave front, hence the electric
Q
v ∼ 3 ≈ 0.67 mm/s.
ρa c
molecules have the same temperature as the
m = (ϕmax − ϕmin )/2π = 2N.
in the Earth's eld of gravity a parabola.
1)
3 ≈ 1.73,
only within a hemisphere, the phase shift varies
2)
Spin system
1 = 1,
Since the reected rays can reach the screen
between
7.
grows (using the
etc).
t = v 2/µg ≈ 7.2 s.
Since the direction of the acceleration is con-
n
length unit dened by the
√ smallest√radius, the
5 ≈ 2.23,
momentum equals to
The heat balance at very low temperatures
3
4
can be written as AT dT = −σST dt, where
Since the rays of a given order number
form a xed angle with the
1/c, the overall
Q/c. Thus, a3 ρv ∼ Q/c,
same for all the photons, equal to
3)
consider the this graphically using the
coordinates
Since the momentum-energy ratio is the
1
If we apply the exact factor 3 (obtained above
via integration), we end up with v ≈ 0.22 mm/s.
maxima is written as
where
During the process, the velocity vector needs
where
If we want to obtain an exact result, we need
to integrate over all the directions while keeping
in mind that the light intensity is proportional to
cos α.
So, the momentum
R 2 averaged over all the
1
directions p̄k = Ec 2π
cos αdΩ, where the solid
angle dierential dΩ = 2π sin αdα. Therefore, p̄k =
R
R π/2 2
π/2
E
E
.
sin α cos2 αdα = E
cos αd cos α = 3c
c
c
0
0
Therefore, the condition for the
α=
Running on ice
to change its direction by 90 degrees.
y,
(we use the small-angle approx-
The average value of
where
b0
is the length in a non-strained state.
The stress is calculated as
σ=
where
and
m
N
4N mg
,
πd2
is the number of hex nuts in the bag
the mass of a single nut.
The data
are plotted in a graph; linear relationship corresponds to a straight line.
The uncertainties
are calculated using the rule of relative uncertainties, either using Pythagorean or simple addition, e.g.
∆ε = ε∆b
where
∆b ≈ 0.5 mm
2
1
+
b − b0
b0
,
is the length measurement
uncertainty. Similarly,
∆σ = 2σ
It should be noted that in fact, one should have
∆d
.
d
been careful with such an estimate, because the
These uncertainties are marked in the graph as
spect to the surface normal then the componE
ent parallel to the surface normal pk = c cos α.
thermal speed is at the denominator. This will
error bars.
increase the relative contribution of the heat ra-
2)
The total momentum given by the photons to
diated at low temperatures.
value of
the cube equals by modulus to the total mo-
maining heat at low temperatures is propor4
tional to T , and therefore the contribution of
mentum carried by the photons; when averaged
However, the re-
Using the plot, we need to determine such a
ε = ε∗
that for
ε1 > ε ∗ ,
it is impossible
to draw a straight line intersecting the error bars
of all the data points with
ε1 < ε ∗ .
 0
0
Anuncio
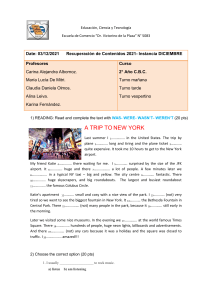
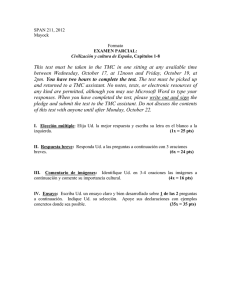
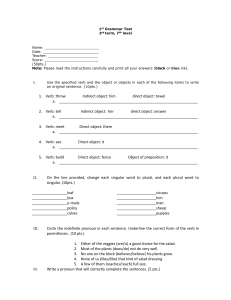
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados