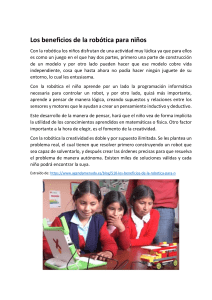
DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 1 DE 9 FECHA DE EMISIÓN: 08/09/2021 ELABORÓ: Cuerpo Académico de Sistemas Productivos / Mecatrónica FECHA DE REALIZACIÓN:14/09/2021 REVISÓ: Cuerpo Académico de Sistemas Productivos / Mecatrónica APROBÓ: M. en E. Felipe de Jesús García Gutiérrez ASIGNATURA: Robótica UNIDAD TEMÁTICA: Unidad I TEMA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica CUATRIMESTRE: 4 NÚMERO DE PARTICIPANTES DEL EQUIPO: 7 DURACIÓN: LUGAR: Casa Profesor: Felipe de Jesús Arriaga Estudiantes: - Alvarez del Castillo Ledezma Guillermo Palma Cervantes Jorge Martínez Chávez Oscar Brian Ortega Ramírez Gutierrez Vargas Arturo Alejandro Díaz huerta Noé MARCO TEÓRICO DE LA PRÁCTICA: El software de simulación permite mostrar de manera gráfica y simulada como quedará un sistema de producción, incluyendo obviamente dentro de líneas de producción brazos robóticos que ejecutarán operaciones de ensamble, soldadura, pintura, moldeado, transferencia de materiales, clasificación de piezas, etc. Robótica Página 1 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS NO. DE PRÁCTICA: 1 TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica FECHA: 14/09/2021 PÁGINA 2 DE 9 Es importante mencionar que en internet hay posibilidad de descargar, a modo de evaluación y de manera gratuita, software de simulación y modelamiento de robots. Software de simulación Una de las tantas aplicaciones que permiten este tipo de simulaciones es el software Cassimir Educational con el que se puede modelar, diseñar y simular sistemas de producción robotizados. La importancia que tiene dentro de empresas es que automatiza varios procesos dando la facilidad y rapidez de la producción en estas dado esto no dudo que seguirá avanzando y actualizando esta rama. Este software está disponible en la web para que toda persona interesada en el tema lo pueda evaluar por un determinado periodo de tiempo. Posee una amigable interfaz de diseño y programación que permite un fácil manejo. Asimismo, cuenta con una librería de elementos que contiene modelos de robots, pinzas, herramientas, alimentadores neumáticos, sensores, PLC’s, etc. OBJETIVO DE LA PRÁCTICA Identificación de características y especificaciones de Software de programación cossimir IR Profesional para Robótica • MATERIAL: N/A Robótica • • EQUIPO: Computadora Software Cassimir • HERRAMIENTA: N/A Página 2 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 3 DE 9 PROCEDIMIENTO PASO 1: Descargar la aplicación de Casimi IR, en nuestro caso nos basamos en un video de YouTube para obtener la aplicación. Paso 2: Entramos a la aplicación y miraremos que nos sale pantalla en blanco entonces iremos a la parte superior izquierda en donde dice “ File clic y después en Project wizard”. Robótica Página 3 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 4 DE 9 Paso 3: Nos abrirá una ventana en donde podemos poner el nombre de nuestro proyecto, el nombre del programa, el nombre del creador y una descripción del proyecto, después de llenar eso ponemos NEXT. Robótica Página 4 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 5 DE 9 Paso 4: Nos abrirá otra pestaña en donde podemos elegir el robot con el que vamos a trabajar en mi caso nos platican que el RV_2AJ es el que está en la universidad, después en leguaje de programación elegiremos el MELFA-BASIC IV y damos FINISH. Paso 5: Nos abrirá 4 ventanas, en la primera ventana tendremos una imagen 3d de nuestro robot, en la segunda ventana podremos guardar los pasos que se van haciendo en el robot, se van enumerando los movimientos, en la tercera ventana es en donde nosotros tendremos que utilizar un lenguaje de programación para ordenar como es que va a trabajar el robot, en la cuarta ventana es de mensajes, ahí nos dará algunas notificaciones de si tenemos errores o no los hay. Robótica Página 5 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 6 DE 9 Paso 6: En la parte superior tendremos una barra de herramientas en donde tendremos herramientas como: • New que es nuevo documento • Save que es para guardar el documento • Copy que es para copiar • Renumber esta es importante ya que cuando programamos en la tercera venta antes mencionada le damos en renumber y automáticamente te enumera los pasos de acuerdo con un sistema numeral. • Tenemos la opción de Move, Rotate y Zoom esto lo podemos usar para mover el robot ver todos sus ángulos • Tenemos dos opciones para compilar estas opciones son importantes ya que las usaremos para ir guardando los pasos o como su nombre lo dice ir compilando las indicaciones. • Tenemos una opción de Star que es para cuando ya terminamos de programar y queremos ver como se mira la simulación del robot. • En potra barra superior podemos encontrar Edit que lo importante de ahí es que podemos reiniciar nuestro robot en RESET WORKCELL sin que se borre la compilación. • Estas serían algunas de las funciones que el software nos ofrece aún hay más, pero estas son las que más o menos ubico, se me olvidaba que hay otras opciones en donde podemos poner algunas cajas u objetos para que el robot los mueva de un lugar a otro. Robótica Página 6 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 7 DE 9 Paso 7: Hay una opción especial que es Extras en donde está la opción Teach-In en donde nos abrirá una ventanita en donde tendremos opciones para mover los brazos del robot ya sea para la izquierda o derecha, arriba y abajo, en donde dice Jog Overriide esta opción es para darle la velocidad de movimiento al robot, en otra opción que aparece es XYZ Jog ahí nos aparece un plano tipo cartesiano en donde podemos centrar bien nuestro robot. Estos solo son algunas de las características que podemos decir del software COSIMIR IR PROFECIONAL. Robótica Página 7 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 8 DE 9 RESULTADOS. Con base a la investigación que realizamos pudimos percatar las características y funcionamiento del software, así mismos no tuvimos ninguna complicación para su instalación. CONCLUSION. No es raro oír sobre la implementación de robots en las diversas aplicaciones en la industria mundial. Existe una gran variedad de modelos y sistemas robotizados como también una gran cantidad de empresas que los proveen. Estas empresas tienen a su disposición software de modelamiento que les permite simular la manera en que una aplicación robotizada funcionará dentro de una planta de producción automatizada, para facilitar de esta manera la tarea de toma de decisiones y elegir o no la adecuación o creación de un sistema robotizado. Para tal efecto, el software de simulación permite mostrar de manera gráfica y simulada como quedará un sistema de producción, incluyendo obviamente dentro de líneas de producción brazos robóticos que ejecutarán operaciones de ensamble, soldadura, pintura, moldeado, transferencia de materiales, clasificación de piezas, etc. BIBLIOGRAFÍA Se deben consultar libros además de páginas de internet y todo referente al marco teórico de la práctica 1. Vázquez, I. A. C., Morales, N. R., Portilla, L. R. V., & Montes, G. S. (2016). Interfaz para retroalimentación con sistema de visión para un proyecto dentro de fábrica virtual. Cultura Científica y Tecnológica, (52). 2. LUHR, S. D., VILLEGAS, S. A., & NORIEGA, S. H. Comisión Revisora. 3. Camargo Montaño, A., García Meneses, M., Carmen, D., & Ortiz Robles, I. (2005). Visualización Cartesiana de un robot antropomórfico virtual en lazo cerrado. 4. Izurrategui, C. E., Martínez, M. G., Rodríguez, J. B., & Sáenz, J. M. M. EXPERIENCIA DOCENTE EN LA IMPARTICIÓN DE PRÁCTICAS DE LABORATORIO DE LA ASIGNATURA DE CONTROL Y PROGRAMACIÓN DE ROBOTS. 5. Olivares Cuadrado, A. M., & González Guzmán, C. A. (2008). Diseño de sistemas automatizados utilizando herramientas de simulación. Automatización de sistema paletizador de envases metálicos, estudio e implementación en simulación. Robótica Página 8 DIRECCIÓN DE CARRERA DE MECATRÓNICA Y SISTEMAS PRODUCTIVOS TITULO DE LA PRÁCTICA: Inspección visual de características y especificaciones de Software de programación cossimir IR Profesional para Robótica NO. DE PRÁCTICA: 1 FECHA: 14/09/2021 PÁGINA 9 DE 9 6. Hernández, R., & Virley, A. (2013). DISEÑO Y PROGRAMACIÓN DE UNA MESA DE ENTRENAMIENTO DE ROBÓTICA INDUSTRIAL. - Robótica Página 9