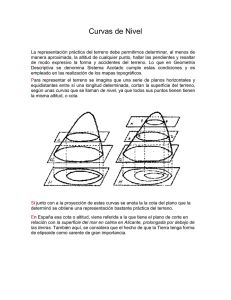
Ángulos: se llama así a la amplitud entre dos líneas de cualquier tipo que concurren en un punto común llamado vértice Los ángulos que se miden en topografía se clasifican en Horizontales o verticales dependiendo del plano en el que se midan: •Ángulos Horizontales: se forma por dos planos verticales con vértice común en un punto A •Ángulos verticales: se forma por una dirección AB con un plano Horizontal que poseen vértice común A PENDIENTE: es el grado de inclinación del terreno. Es la relación que existe entre el desnivel (delta Y) entre dos puntos (A y B) del terreno, y la distancia horizontal (delta X) que los separa. Se expresa en % o en grados Eclímetro: es un instrumento que sirve para determinar de forma indirecta la altura de un objeto de interés, por ejemplo, un árbol El eclímetro tiene 2 escalas de medidas: una en grados sexagesimales °, y otra en % de pendiente. Se utiliza la escala de % en pendiente para poder calcular la altura Para calcular se necesitan como datos: ➢ La distancia horizontal que hay desde el observador hasta el objeto a medir ➢ Pendiente1 al ápice del objeto ➢ Pendiente2 a la base del objeto UNIDAD 4: Levantamientos planimétricos- Cálculo de Superficies LEVANTAMIENTOS PLANIMÉTRICOS: Poligonación: consiste en unir los puntos A, B…, que quieren levantarse, formando un contorno poligonal midiendo sucesivamente sus lados AB, BC, .., que se denominan ejes, y los ángulos formados por 2 ejes consecutivos. Tipos: ➢ Poligonal abierta: cuando en la poligonal el punto final del último segmento coincide con el punto inicial del primero ➢ Poligonal carrada: cuando la poligonal termina en el mismo punto A de partida Cálculo de superficies: es posible calcular superficies de polígonos irregulares, con datos tomados en el terreno. Se puede hacer usando 2 métodos: ➢ Cálculo de superficies a partir de un levantamiento por coordenadas ortogonales: Teniendo un polígono irregular ABCDE, se traza una línea auxiliar AD sobre la cual se traza las perpendiculares que pasan por los vértices B y C. Quedan definidos los triángulos rectángulos S1 y S3, el trapecio S2, y el triángulo irregular S4. Entonces, se procede a calcular las superficies de forma analítica: • S1 y S3 con la fórmula de triangulo rectángulo • S2 con la fórmula de trapecio • S4 con la fórmula de Herón, para triángulos equiláteros ➢ Cálculo de superficies a partir de un levantamiento por radiación: Teniendo un polígono irregular ABCD, se ubica el nivel de anteojo en el punto E. A partir de ese punto y con la ayuda de una mira se determinan las distancias reducidas al horizonte EA, EB, EC, ED. Quedan determinados los triángulos equiláteros 1, 2, 3 y 4. Por último se procede a calcular las superficies de manera analítica: Sup.1= ½.sen a. EC. ED UNIDAD 5: Medición de Ángulos- Curvas de Nivel CURVAS DE NIVEL: son líneas imaginarias que unen puntos de igual cota o altura. Estas curvas se utilizan para representar en planta y elevación al mismo tiempo, la forma o configuración del terreno (relieve). Se representan de color marrón. La cota es el número que en un plano indica la altura de un punto respecto de un plano de comparación ➢ Cota absoluta: es la altura de un punto respecto del nivel medio del mar ➢ Cota relativa: es la altura de un punto respecto de un plano de comparación elegido al azar (arbitrario) Características: ➢ Todas las curvas se cierran sobre sí mismas, ya sea dentro de la zona considerada o fuera de ella ➢ No puede una curva dividirse o ramificarse ➢ No se pueden unir dos o más curvas en una sola ➢ Si en algún lado se cruzan, indica una cuenca o saliente en volada ➢ Si las curvas están muy separadas indican una pendiente suave y cuando están muy cercanas la pendiente es fuerte Equidistancia: Es la distancia vertical que separa 2 curvas sucesivas. La equidistancia es siempre constante Formas elementales del terreno: ➢ Mogote: las curvas de nivel de menor cota encierran a las de mayor cota. Es una elevación del terreno respecto al que le rodea. Su parte más alta es la cima o cumbre ➢ Vaguada: las curvas de nivel de mayor cota envuelven a las curvas de nivel de menor cota, también se la define como un curso permanente o temporal de un arroyo o rio y se representa gráficamente con curvas de nivel. Se representa en trazo azul. Es la línea de trazo que une los puntos de máx. altura. Línea que marca la parte más honda de un valle, y es el camino por donde van las aguas de las corrientes naturales ➢ Dorsal: las curvas de nivel de menor cota envuelven a las de mayor cota. Se vería como un filo de sucesivos cerros, también se la puede designar como la unión de los puntos de máx. altura. ➢Abra: es el lugar geográfico situado entre dorsales y flanqueado por 2 vaguadas. Es un accidente geográfico que consiste en un corte transversal de una cadena de montañas por las aguas de un rio. ➢ Cuenca Hidrográfica: es el área definida por dorsales, donde toda el agua que precipita sobre ella es captada por los cursos de agua (sea temporal o permanente) y eliminada por un punto en común. Los tipos de cuenca son: • Cuenca Exorreica: el agua que precipita es eliminada y llega al océano. Por ejemplo, el rio xibixibi • Cuenca Endorreica: el agua que precipita es eliminada y llega al océano. Por ejemplo, las lagunas de Yala • Cuenca Arreica: el agua que precipita y es eliminada se insume por infiltración y/o evaporación, no llegando al océano ni a una laguna Cálculo de desniveles y pendientes a partir de un plano de curvas de nivel. UNIDAD 6: Levantamientos altimétricos. Nivelaciones trigonométricas y geométricas DIFERENCIA DE NIVEL: es la distancia vertical entre 2 puntos NIVELACIÓN: es toda operación que se realiza para determinar la diferencia de altura (o de diferencia de nivel) entre 2 o más puntos ubicados sobre la superficie terrestre TIPOS DE NIVELACIÓN: de acuerdo con los métodos o instrumentos utilizados, la nivelación se clasifica en: ➢ Nivelación geométrica: es la operación topográfica que consiste en determinar la diferencia de altura entre 2 o más puntos. Se realiza con el auxilio del nivel de anteojo, a partir de visuales horizontales lecturas sobre miras verticales Hay 2 tipos: 1. NIVELACIÓN Geométrica simple: es la determinación del desnivel (DH) entre 2 puntos, efectuando lectura atrás (a) y lectura adelante(b), con el nivel en posición equidistante a 2 miras, la diferencia de lecturas correspondientes al hilo medio del retículo del nivel, efectuadas sobre las miras, da el desnivel entre ambos puntos. La distancia entre los puntos no debe ser superior a 160m 2. NIVELACIÓN Geométrica compuesta: Es una sucesión de nivelaciones simples encadenadas. La suma de lecturas atrás menos la suma de lecturas adelante es igual al desnivel entre los puntos extremos. Se realiza cuando la distancia entre los puntos extremos es superior a 160 m; o bien cuando la topografía del lugar presenta excesivas vaguadas, cambios de pendientes en trayectos cortos, etc. Si la cota de los puntos extremos de la poligonal no es conocida la nivelación será medida de ida y de vuelta. ➢ Nivelación trigonométrica: método de nivelación que utiliza ángulos verticales y distancias horizontales o inclinadas para la determinación del desnivel entre 2 puntos de manera indirecta, apoyándose en las leyes elementales de la trigonometría. El elemento utilizado es el teodolito ➢ Nivelación barométrica: es la menos precisa de las 3, aplica la ley física que indica que la presión varía de acuerdo con la altura, por lo tanto, se puede determinar la diferencia de altura utilizando un barómetro. Existen diferentes tipos de barómetros, generalmente empleamos los barómetros aneroides o altímetros. Nivel de Anteojo: consta básicamente de 2 elementos, además del trípode 1. El anteojo: resulta de la combinación de lentes convergentes. Este sistema va montado en un tubo que puede girar sobre su eje y se apoya en una base. Hay de 2 tipos (anteojo de imagen invertida y anteojo de nivel automático) 2. El nivel: puede ser tubular o esférico, de vidrio casi lleno en su totalidad de alcohol, éter o bencina; con una burbuja de aire mezclada con los vapores del líquido. Al calar la burbuja y permanecer así en todas las posiciones del anteojo, se tendría definido un plano horizontal; permitiendo determinar desniveles a partir de lecturas efectuadas sobre las miras Elementos del nivel: • Mirilla: ayuda a visualizar el objetico con facilidad Lente ocular; girando un tornillo del ocular se puede hacer nítida los hilos de retículo • Espejo del nivel esférico: nos ayuda a visualizar si se ha calado correctamente el nivel de burbuja • Limbo graduado: sirve para medir los ángulos de dos segmentos para aplicar luego el método de coordenadas polares • Tornillos calantes: son 3 nos permite posicionar el instrumento horizontalmente • Tornillos de enfoque: que nos permite hacer foco • Ejes de nivel; entonces teniendo presente los dos elementos, se definen 3 ejes: Eje vertical (EV), sobre el cual gira el anteojo Eje de colimación (EC), recta que une el centro óptico del objetivo y la cruz del retículo Eje de nivel; recta tangente al arco del toro de nivel tubular cuando la burbuja esta calada Calado del Nivel: ➢ 1er PASO 1) Calado grueso; luego de montado el nivel sobre el trípode e instalado sobre el terreno, se deberá hacer un calado grueso, esto se logrará subiendo o bajando la altura de las patas del trípode, una a la vez, hasta lograr que la burbuja del nivel esférico quede más o menos centrada 2) Calado Fino; se conseguirá utilizando los tornillos calantes (son 3). Primero; elegir 2 tornillos calantes y hacer coincidir el eje de colimación del nivel con la dirección formada por los dos tornillos ➢ 2do PASO: Con movimientos suaves de los dos tornillos, girar simultáneamente en sentido opuesto a los mismos hasta lograr que la burbuja del nivel esférico se dirija hacia el centro del nivel esférico ➢ 3er PASO: Girar a 90 el instrumento y mover suavemente el tercer tornillo calante hasta conseguir que la burbuja del nivel quede perfectamente en el centro ➢ 4to PASO: Si al girar libremente el instrumento, la burbuja permanece centrada sin desplazamiento alguno, el instrumento esta calado correctamente. Ya está en este punto está listo para realizar las lecturas. Lecturas: se realizan a 3 decimales; metros decímetros, centímetros y los milímetros se realizan por estimación, salvo que se utilice una mira de precisión Retículos: se observará por el ocular 3 hilos; superior, medio e inferior y sobre la mira estando lo más vertical posible, se realizan lecturas al milímetro ya que es una mira telescópica que en cada metro cambia de color, de rojo a negro, y cada E que se grafica en la mira tiene una distancia de 5cm y cada patita vale 1 cm Mira de lectura directa: en la imagen se ven números (0,9-10-11) que corresponden a decímetros que van en sentido creciente, vemos que el hilo medio está comprendido entre el rango de 10 y 11 decímetros, entonces podemos decir que para el hilo medio es 1m-0deci3cm. Para estimar los milímetros recordemos que cada patita valía 10mm, como esta en el medio seria 0,5 mm Mira de lectura invertida: ahora vemos que la escala crece de arriba para abajo, para este caso la lectura del hilo medio seria; como está comprendida entre el rango de 0,9 – 10 decímetros, podemos decir entonces que hay 0m-9decimetro-1cm- 4mm Perfil del Terreno: Es la representación gráfica del relieve del terreno por medio de una línea; la cual resulta de la intersección de un plano vertical con la superficie del terreno. Tipos de perfil: ➢ Perfil longitudinal: cuando la intersección del plano vertical ocurre a lo largo de una línea o dirección que interese a un determinado estudio ➢ Perfil transversal: es aquel que resulta de la intersección de un plano vertical en forma perpendicular a la línea o dirección considerada TAQUIMETRÍA: La taquimetría es un método de medición rápida pero no preciso. Se utiliza para el levantamiento de detalles donde es difícil el manejo de la cinta métrica, para proyectos de ingeniería civil u otros. El altímetro: es un instrumento de medición que indica la diferencia de altitud entre el punto donde se encuentra localizado y un punto de referencia; habitualmente se utiliza para conocer la altura sobre el nivel del mar de un punto. UNIDAD 8: Teledetección aplicadas a los recursos naturales TELEDETECCIÓN APLICADA A LOS RECURSOS NATURALES: Es la técnica de adquisición y posterior tratamiento de datos de la superficie terrestre desde sensores instalados en plataformas espaciales, en virtud de la interacción electromagnética existente entre la tierra y el sensor Sensores Remotos: son instrumentos (montados en satélites) que recogen Radiación Electromagnética reflejada o emitida por una superficie (la tierra u otro objeto), y la presenta apropiadamente para obtener información. Tipos de sensores: ➢ Sensores activos: Posee su propia fuente de energía electromagnética, la cual dirige hacia su objetivo para luego registrar la que este último refleja. Emiten energía y la reciben al ésta ser reflejada por objetos ➢ Sensores pasivos: Detecta la energía electromagnética reflejada y/o emitida naturalmente por el objetivo. Solo reciben y miden energía reflejada o emitida Formas de teledetección. Radiación electromagnética: La radiación electromagnética es una de muchas maneras como la energía viaja a través del espacio. El calor de un fuego que arde, la luz del sol, los rayos X que utiliza tu doctor, así como la energía que utiliza un microondas para cocinar comida, son diferentes formas de la radiación electromagnética. Mientras que estas formas de energía pueden verse muy diferentes una de otra, están relacionadas en que todas exhiben propiedades características de las ondas (=son simplemente perturbaciones en un medio físico particular o en un campo, que resultan en vibraciones u oscilaciones). Las características de este flujo energético pueden describirse por dos elementos: longitud de onda (λ) y frecuencia (F). La primera hace referencia a la distancia entre dos picos sucesivos de una onda, mientras que la frecuencia designa el número de ciclos pasando por un punto fijo en una unidad de tiempo. Ambos elementos están inversamente relacionados. c=λ.F siendo c = velocidad de la luz Espectro electromagnético y regiones principales: es el arreglo ordenado de todas las ondas electromagnéticas conocidas A la izquierda de espectro visible, encontramos los rayos ultravioletas (UV), los rayos X y los rayos gamma. Estas clases de radiación son dañinas para los organismos vivos, pues tienen frecuencias extremadamente altas (mucha energía). Es por esta razón que usamos loción bloqueadora en la playa (para bloquear los rayos UV provenientes del sol). Los rayos gamma son los más dañinos, pues son los más altos en frecuencia y en energía. Afortunadamente, nuestra atmósfera absorbe los rayos gamma que provienen del espacio, y así nos protege del daño. Como podemos ver, el espectro visible (la luz que podemos ver con nuestros ojos) es tan solo una pequeña fracción de las diferentes clases de radiación que existen. Esta entre 0,4 a 0,7 micrómetros A la derecha del espectro visible, encontramos las clases de energía que son menores en frecuencia (y por lo tanto mayores en longitud de onda) que la luz visible. Estas clases de energía incluyen los rayos infrarrojos (IR) (ondas de calor emitidas por los cuerpos térmicos), las microondas y las ondas de radio. Estos tipos de radiación nos rodean constantemente; no son dañinos, pues sus frecuencias son muy bajas. Las ondas de baja frecuencia tienen poca energía, y por lo tanto no son peligrosas para nuestra salud. Respuestas espectrales de los componentes de la superficie terrestre (reflectancia y firma espectral): REFLECTANCIA: Relación entre la energía radiante reflejada por un cuerpo y la energía incidente en él. La reflectancia o Albedo, se expresa generalmente en un porcentaje de la energía electromagnética reflejada por el cuerpo. FIRMA o CURVA ESPECTRAL: Para un determinado componente de la cobertura terrestre, es la expresión del conjunto de respuestas a la radiación incidente, ordenada según longitudes de onda. AZUL VERDE ROJO Visible= v , donde están el azul, verde y rojo Infrarrojo cercano o próximo = IRc Infrarrojo medio = IRm Factores que modifican las respuestas espectrales DE LA VEGETACIÓN DEL SUELO DEL AGUA Humedad Humedad Profundidad Salinidad Textura Materiales en suspensión (turbidez) Nutrientes Estructura Presencia de clorofila Enfermedades Composición química Estado (liquido o solido) Condiciones climáticas Contenido de carbonato Densidad de follaje Características del suelo SISTEMAS DIGITALES DE TELEDETECCIÓN: Concepto. IMAGEN: es la representación de un objeto producida por un aparato óptico o electrónico. La cualidad fundamental de las imágenes es la rapidez con que se transmite una elevada cantidad y variedad de datos. Síntesis y velocidad son las características principales ➢ Estructura de una imagen: esta formada por un conjunto de puntos llamados pixeles, de un mismo tamaño que dentro de un rectángulo definen una imagen. Esta estructura tiene incluidas coordenadas geográficas para cada pixel, MATRIZ DE DATOS es decir cada uno de los pixeles esta georreferenciado en la matriz hay filas y columnas, y la intersección entre fila y columna va generando celdas, donde cada celda es un pixel y la agrupación de todos los pixeles formando un recuadro total, que define el tamaño de la imagen. Cada una de estas imágenes representa una banda del espectro electromagnético Pixel ➢ ¿Qué información está dentro del pixel? El sensor adquiere la radiación reflejada por la superficie de la tierra Esta energía que recibe es traducida por el sensor a un nivel numérico llamado nivel digital (ND) o nivel de gris.De esa forma en ese pixel va a quedar caracterizada esa porción de la superficie del terreno por un numero (es decir el ND) y por las coordenadas Al hacer zoom en una imagen, se pude ver la matriz donde se ven los, pixeles y cada uno tienen un tono de gris distinto Entonces la computadora le asigna a cada tono de gris un valor digital comprendido entre 0 (color negro) y 255 (color blanco) ➢ Soporte de la información: las imágenes satelitales se las puede obtener en diferentes formatos: cintas, DVD, CD, papel. RESOLUCIÓN de sensores remotos: La teledetección, se basa en las diferentes respuestas espectrales de las cubiertas; por otra parte, una misma cubierta presenta variación en la respuesta con el tiempo; por lo tanto, el diseño de un satélite contempla las características espectrales, distribución espacial y variaciones temporales. En teledeteccion se trabaja con 4 tipos de resoluciones, importantes a la hora de determinar el tipo de imagen que mejor se adecue a un trabajo Tipos de resolución: 1. Resolución espacial: Es la mínima unidad de información incluida en la imagen: IFOV (Instantaneus Field of View/Campo de visión instantánea). Por lo general el IFOV, se corresponde con la mínima unidad de información de una imagen o elemento básico, denominado “pixel” (picture element). Es decir, toda la información que hay en un solo pixel es la misma información que tiene la superficie del IFOV. Ej. Landsat 30 m, CEBERS 20 m; Sentinel 10 m, SAC-C 175 m. 2. Resolución temporal: Alude a la frecuencia de paso o al tiempo de revisita del sensor. Se refiere a la periodicidad con que un sensor toma datos de la misma parte de la tierra. Ésta varía en función del objetivo del sensor: • Meteorológico: minutos. • Recursos naturales: (landsat: 16 días; Spot: 26 días; Ikonos: 3 a 5 días). 3. Resolución radiométrica: Hace referencia a la capacidad del sensor en detectar variaciones en la radiancia que recibe. Se trata de una codificación digital y se mide en bits. En la actualidad la mayoría de los sensores están codificados en 8 bits por píxel, ofreciendo 256 niveles. Existen sensores cuya resolución es mayor, entonces cuanto mayor resolución radiométrica tiene la imagen, mayor será la calidad de la representación gráfica. Por ejemplo, en una imagen de 8 bits seria → 28= 256 (tonos de grises) 4. Resolución espectral: Está dada por el número y ancho de las bandas que posee.Existen sensores que trabajan con una banda (radar), otros como los ópticos que trabajan con 3, 4, 5, 6 o 7 bandas; o los denominados hiperespectrales como el MODIS con 36 bandas ó el Hyperion que opera con 220 bandas. Dependiendo la cantidad de bandas con la que trabaje el sensor se va a obtener mayor o menor resolución espectral. Para el estudio de recursos naturales sensores que tienen una baja resolución espectral (de 4 a 6 bandas del espectro electromagnético) ANÁLISIS VISUAL: se basa en principios similares a los de la fotografía aérea; sin embargo, existen algunas pautas que no son comunes, o sea son propios de las imágenes satelitales, y esto se relaciona con la posibilidad de obtener información en diferentes bandas del espectro, como así también permite realizar estudios de tipo multitemporal. Criterios para el análisis visual: ➢ TONO/BRILLO: se manifiesta con variaciones de grises, correspondiendo el tono negro a superficies que no reflejan energía y el tono blanco, a la máxima intensidad de energía reflejada que capta el sensor. El tono de una misma cubierta varía según la banda del espectro electromagnético considerada. ➢ COLOR: el color que nuestros ojos aprecian está directamente relacionado con la energía reflejada por los objetivos en las diferentes longitudes de onda del espectro visible. Nuestro ojo es más sensible a las variaciones de color que a las variaciones tonales, por otra parte, las imágenes satélites permiten generar productos color, combinando la formación correspondiente a distintas bandas del espectro. El procedimiento para la formación del producto color consiste en la superposición de 3 bandas espectrales con 3 componentes color respectivamente Banda 4 (ROJO) Banda 3 (VERDE) Combinación de bandas Color natural OBJETO Vegetación sana Vegetación con estrés Agua clara Agua turbia Sombras Nieve Áreas urbanas Nubes ➢ Banda 2 (AZUL) Al tener las 3 bandas (rojo, verde, azul) por separado, se ven en tonos de grises, pero si se combinan esas tres bandas superponiéndose, la computadora generara una imagen a color (color natural) También se puede obtener otros colores dependiendo del tipo de combinación que se haga en la computadora: Si se combinan las bandas: verde, rojo e infrarrojo cercano, se obtendrá una imagen en color llamado (falso color compuesto estándar), con distintos tonos de rojo y magenta. Por q al combinar en la computadora se indico que en el infrarrojo todo objeto que tenga alta reflectancia lo pinte de color rojo. Por ejemplo, en esta imagen se puede apreciar que el mucho color magenta porque hay Falso color compuesto mucha vegetación, y la vegetación tiene Reflectancia. Claves elementales de color: COLOR Verde Amarillo Azul-verde Verde claro Azul con detalles visibles Blanco Blanco-grisácea Blanco IR (infrarrojo) COLOR Magenta/rojo Cian Azul oscuro Celeste Negro sin detalles visible Blanco Azul celeste Blanco tenue TEXTURA: es un carácter de conjunto y se refiere a la frecuencia en los cambios de tono de la imagen, se manifiesta a través de una aparente rugosidad o suavidad de la superficie. La textura de la imagen deriva de la relación entre el tamaño de los objetos y la resolución del sensor, como así también esta influenciada por el ángulo de iluminación. Por ejemplo en la siguiente imagen se puede apreciar que todo lo que se ve mas rugoso (con textura), son zonas de montañas. En cambio donde se ve mas liso o sueve, son zonas mas planas. ➢ PATRÓN DE DISEÑO: se refiere al ordenamiento espacial de los objetos con características tales que permiten su fácil identificación. Podemos definir 2 patrones: Patrones naturales: a) Patrón de drenaje; b) Patrón de relieve; c) patrón de vegetación natural Patrones culturales: a) Patrón de uso de la tierra: el parcelamiento con sus distintas formas regulares forman un patrón geométrico ➢ FORMA: este elemento permite reconocer en las imágenes, objetos de carácter individual, tales como: aeropuertos, hipódromos, parques industriales, cuerpos de agua, rasgos geológicos. ➢ TAMAÑO: es un criterio que tiene estrecha relación con la resolución espacial de las imágenes y con la escala de trabajo seleccionada; es un elemento importante, ya que ayuda a identificar determinados objetivos. ➢ ASOCIACIÓN: se entiende a la relación existente entre una determinada cubierta con elementos vecinos en la imagen. Un ejemplo son los cursos de agua muy angostos, que solo pueden ser identificados por su forma y asociándolos con la presencia de vegetación que se desarrolla en sus márgenes. ➢ CONTRASTE: relación entre el tono de una superficie y el de su área circundante. Permite identificar objetos cuyas dimensiones son inferiores a la del pixel; teniendo en cuenta este criterio, es posible delimitar caminos angostos, aun en imágenes con resolución espacial baja, siempre que las respuestas espectrales sean distintas. ➢ FENOLOGÍA: este es un criterio temporal, que está relacionado con las modificaciones que pueden manifestar ciertas cubiertas vegetales en relación a su ciclo fenológico. En la imagen se puede ver como cambian los colores de acuerdo al ciclo fenológico del cultivo ANÁLISIS ASISTIDO POR COMPUTADORA (digital): el procedimiento digital de imágenes o análisis digital, consiste en la manipulación, mejoramiento u extracción de información de las imágenes con el uso de computadoras. Este procesamiento puede realizarse en computadoras, porque las imágenes digitales son arreglos de datos numéricos ordenados en forma matricial. Una IMAGEN DIGITAL queda representada por una grilla o matriz de elementos (pixeles), donde cada elemento está ubicado en una determinada línea y columna de la matriz y tiene un valor entero correspondiente al brillo medio en el sector que comprende. Esta disposición de pixeles en una grilla se denomina formato ráster, en contraposición con el formato vectorial usado en computación grafica. Correcciones de la imagen: son procesos que tienden a eliminar cualquier anomalía detectada en la imagen, ya sea en su localización (georreferenciación), o en la radiometría de los pixeles que la conforman (Niveles Digitales) • Restauración de líneas o pixeles perdidos • Corrección de bandeado en la imagen • Correcciones atmosféricas • Correcciones de sombreado topográfico Realce: considera aquellas técnicas dirigidas hacia la mejora de la calidad visual de la imagen. Tratan de disponer mejor los datos para su análisis visual, de tal forma que sean más evidentes los rasgos de interés que representa la imagen • Ajuste del contraste • Ecualización del histograma Dentro de las clasificaciones digitales tenemos: CLASIFICACIÓN MULTIESPECTRAL: los sensores captan imágenes en distintas bandas del espectro electromagnético (bandas del visible, IR cerc., IR med. E IR ter), lo que se logra colocando filtros para cada banda entre el sensor y la imagen a captar. En este caso se obtiene una imagen multiespectral, es decir una imagen compuesta por tantas imágenes o planos como bandas son captadas. Cada plano o canal en una imagen en tonos de gris que representan la reflectancia del terreno en esa banda espectral. Estos planos pueden considerarse como “versiones distintas de una misma cosa” ❖ Si a tres cualesquiera de estos planos se les asignan los coleres azul, verde y rojo, se obtiene lo que se denomina una imagen en falso color. Si el valor de gris de un pixel en un plano es alto (ej. 255) y el plano este asociado al color rojo, entonces el color resultante de ese pixel tendrá una alta componente de rojo. CLASIFICACIÓN AUTOMÁTICA de una imagen: se emplea la capacidad de las computadoras para tomar decisiones y consiste en asociar e identificar cada pixel de la imagen a una categoría de cobertura (agua, vegetación, suelo, roca, cultivos, etc). La clasificación automática se divide en: ➢ Clasificación automática supervisada: el operario debe conocer algunas características del terreno, lo que le va a permitir delimitar sobre la imagen áreas representativas de cada una de las categorías; y a partir de ello poder extrapolar al resto de la imagen. ➢ Clasificación automática NO supervisada: este método define las clases espectrales presentes en la imagen a partir de la discriminación que puede realizar la computadora a partir de algoritmos matemáticos. PROGRAMA LANDSAT PROGRAMA SPOT PROGRAMA CBERS PROGRAMA SAC-C PROGRANA IKONOS PROGRAMA QUICKBIRD PROGRAMAS ESPACIALES RELATIVOS A RECURSOS NATURALES: Este programa se inició en 1972 con el lanzamiento del primer satélite, y el último fue puesto en órbita en 1999. En la actualidad, solo se encuentra operativo la plataforma Landsat5. Este es un programa de la NASA Este programa fue diseñado como un sistema operacional y comercial de observación de la tierra, fue establecido a iniciativa del gobierno de Francia. Es un programa de cooperación entre China y Brasil, con el objetivo de desarrollar un satélite de observaciones Este programa tiene tres satélites en orbita Es el 1er satélite argentino de observación de la tierra, diseñado para el estudio de ecosistemas terrestres y marinos, el monitoreo de la temperatura y contenido de vapor de agua de la atmosfera, la medición del campo magnético terrestre, estudios de estructura y dinámica de la atmosfera e ionosfera. Fue puesto en órbita en 2000 Satélite comercial de alta resolución, orbita la tierra cada 98 min a una altura de casi 680km en forma sincronizada con el sol. Es de origen norteamericano Fue puesto en órbita en octubre de 2001, circunda la tierra a 450 km de altura. la cuantificación de los datos de cada pixel se realiza a 11 bits APLICACIONES DE LA TELEDETECCIÓN: son múltiples y, además, muy variadas. En la agricultura las aplicaciones son: • Rendimientos de cultivos. • Política agrícola. • Seguimiento de catástrofes sobre cosechas. • Seguimiento de pastoreo nómada en los países más pobres del mundo. • Silvicultura. • Usos del suelo. UNIDAD 9: Sistema de Posicionamiento Global. SISTEMA DE REFERENCIA: es un conjunto de parámetros (ideales abstractos) fijados a priori, que van a marcar las pautas para referir o vincular otros sub conjuntos o puntos. Un sistema de referencia es en esencia una terna ordenada de ejes ortogonales, se van a definir las coordenadas geográficas y vamos a tener un eje Z, X e Y ➢ SISTEMA CAMPO INCHAUSPE 1969: tienen su origen en el punto astronómico fundamental del mismo nombre ubicado en las proximidades de la intersección del meridiano-62 con el paralelo-36 cerca de la ciudad de Pehuajó, en la provincia de Buenos Aires y se le asigno la característica dominante en la época para un punto Datum, es decir, coordenadas episódicas, latitud, longitud y acimut iguales a las astronómicas y tangencia entre el elipsoide y el geoide, es decir ondulación igual a cero. El elipsoide asociado fue el internacional del 1924, que ya había sido adoptado por la Argentina junto con la protección de Gauss Kruger por el instituto geográfico militar. Luego se realizaron trabajos de triangulación, compensación y definición de la res fundamental MARCO DE REFERENCIA: es el conjunto de elementos (físicos y visibles), que materializan y que sustentan el sistema. El marco de referencia fija la escala y la orientación del sistema en la realidad, están constituidos por puntos materializados en el terreno y ubicados con gran exactitud y precisión según alguno de los sistemas de referencia. Un ejemplo de marco de referencia es el POSGAR 94 ➢ POSGAR´94 (Posiciones Geográficas Argentinas del año 1994): el IGN (instituto geográfico nacional) adopto este marco de referencia como la materialización del sistema de referencia nacional. En resumen, el proyecto POSGAR permitió contar con una red de control geodésico compatible con las modernas tecnologías GIS y GPS, capaz de satisfacer las necesidades de la gran mayoría de los usuarios de geoposicionamiento. Como resultado, POSGAR’94 consta de 127 puntos bien distribuidos en el territorio nacional a razón de aproximadamente un punto cada doscientos kilómetros tanto en latitud cuanto en longitud. Las coordenadas finales se encuentran en el sistema WGS84 y fueron distribuidas por el IGM en 1995. DATUM: un sistema geodésico local queda definido por la elección de un elipsoide de referencia y por un punto origen (el datum), donde se establece su ubicación en relación con la forma física de la tierra (geoide). Concretamente el punto DATUM es aquel en el que se hace coincidir la vertical del lugar con la normal al elipsoide (desviación de la vertical nula) y generalmente se establece la condición de la tangencia entre el elipsoide y el geoide Cada datum esta compuesto por un elipsoide u por un punto llamado “fundamental”, en el que el elipsoide y la tierra son tangentes. De este punto se han de especificar longitud, latitud y acimut desde una dirección desde el establecida. TIPOS de DATUM: ➢ Datum centrado/ geocentrico: usa el centro de masa de la tierra como origen (WGS84, NAD83) ➢ Datum local: alinea su elipsoide lo mas proximo a la superficie de la tierra y en un area en particular (campo inchauspe) SISTEMA DE POSICIONAMIENTO GLOBAL (GPS): fundamentos. Este sistema fue concebido para determinar posiciones en tierra, mar, aire y espacio, partiendo de las posiciones conocidas de una constelación de satélites. Casa satélite emite una señal que es continuamente registrada por un receptor en la superficie terrestre. De este modo, si el reloj de que disponen tanto el satélite como el receptor están sincronizadas, se podrá calcular el tiempo de viaje de la señal, al saber en qué momento se emite la señal en el satélite y en qué momento se recibe en el receptor. Multiplicando este tiempo por la velocidad de la luz hallaremos la distancia entre cada satélite y receptor. Cada distancia define una esfera con centro en el satélite, y la intersección de 3 esferas nos daría analíticamente la posición del punto a través de sus 3 coordenadas tridimensionales (x, y, z) COMPONENTES: ➢ segmento espacial: contiene los satélites emisores de las señales, conocidos como constelación NAVSTAR, que consta de un mínimo de 24 satélites dispuestos en 6 planos orbitales, con 55° de inclinación con respecto al ecuador dispone además de algunos satélites de recambio por si alguno de los que están en funcionamiento fallasen ➢ segmento de control: es quien gobierna el sistema a través de 5 estaciones situadas en tierra con gran precisión. Estas estaciones realizan un seguimiento continuo de los satélites y pueden realizar cambios en la información trasmitida por los satélites. ➢ segmento de usuario: esta constituido por todos los equipos utilizados para la recepción de las señales emitidas por los satélites y empleados para el posicionamiento, la navegación o para la determinación del tiempo con precisión. Equipos: tipos y errores nominales. El navegador GPS. Elementos y terminología de la navegación. Configuración del equipo. Descripción y modificación de las pantallas. Registro e ingreso de posiciones. Navegación a un punto. Puntos próximos a la posición personal. Creación y recorrido de una ruta.