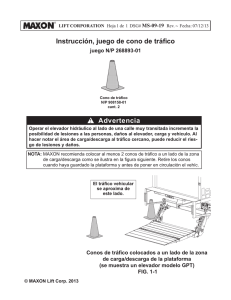
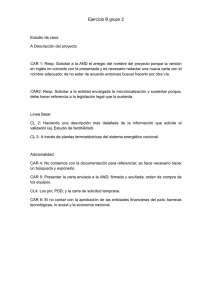
MANUAL DE AJUSTE Número:XT0229A12002A Junio de 2013 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 1/3 Fecha: 2013‐5‐23 Edición : A Registros de cambio Número Código de archivo Descripción de cambio Responsable Fecha 1 PM12405 Archivo nuevo Gui Zhengdong 2012-7-20 2 PM13615 Actualización de edición Xu Jun 2013.8.20 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 2/3 Fecha: 2013‐5‐23 Edición : A Índice 1. Introducción de producto------------------------------------------------------------------------------------1 1.1 Nombre de producto----------------------------------------------------------------------------------1 1.2 Imágenes de producto -------------------------------------------------------------------------------2 1.3 Estructura de producto ------------------------------------------------------------------------------2 1.4 Comunicaciones -------------------------------------------------------------------------------------10 2. Esfera adecuada ---------------------------------------------------------------------------------------------11 3. Condiciones de trabajo---------------------------------------------------------------------------------11 4. Introducciones de ajuste -----------------------------------------------------------------------------------12 4.1 Examen de condiciones en marcha de mantenimiento -----------------------------------------------12 4.2 Examen de potencia---------------------------------------------------------------------------12 4.3 Ajuste de parámetros de tracción ----------------------------------------------------------------14 4.4 Ajuste de tracción --------------------------------------------------------------------------------22 4.5 Examen de dirección de marcha de elevador--------------------------------------------------------25 4.6 Modo de funcionamiento de trotada--------------------------------------------------------------------25 4.7 Ajuste del sistema de referencia de posición ----------------------------------------------------------26 4.8 Preparación para la primera marcha con normalidad de elevador ----------------------------------27 4.9 Autoaprendizaje de ubicación de pozo del elevador-------------------------------------------------27 4.10 Funcionamiento normal---------------------------------------------------------------------------------28 4.11 Ajuste de posición de nivelación en funcionamiento normal--------------------------------30 4.12 Iniciar ajuste de comodidad --------------------------------------------------------------------30 4.13 Ajuste de comodidad en funcionamiento (baja frecuencia de vibración a alta velocidad )-------------------------------------------------------------------------------------------------------30 4.14 Ajuste de función ARD --------------------------------------------------------------------------------31 5. Tabla de funciones lógicas y parámetros de tracción ------------------------------------------33 5.1 Ajuste de parámetros lógicos ----------------------------------------------------------------------------33 5.2 Ajuste de parámetros de tracción y monitor----------------------------------------------64 6. Fallos comunes y solución---------------------------------------------------------------------------------71 6.1 Tabla de fallos lógicos comunes-----------------------------------------------------------------------71 6.2 Fallos comunes de tracción-----------------------------------------------------------------------74 Manual de ajuste HAMCB 7.3 Número: XT0229A12002A Números de páginas: 3/3 Fecha: 2013‐5‐23 Edición : A Otraos fallos---------------------------------------------------------------------------------------------------83 Manual de ajuste Número: XT0229A12002A Números de páginas: 1/106 Fecha: 2013‐5‐23 Edición : A HAMCB 1. Introducción de producto 1.1 Nombre de producto Tablero HAMCB es el núcleo del sistema de control S –CON, incluyendo OCSS(control de la operación), MCSS (control del funcionamiento), DBSS (control de tracción) y DCSS (control del sistema de puerta). HAMCB OCSS control de la operación INS,ERO interruptor para revisar circuito de seguridad Cables en serie C/C de cabina Cables en serie C/H de pantalla exterior Cables en serie G/H de botón exterior 1LS,2LS interruptor de desaceleración estación final ULZ, DLZseñal de la puerta MCSS control del funcionamiento velocidad Motor de tracción control de tracción DBSS control del sistema de puerta DCSS Motor de puerta cabina sobrecarga LWO contrapeso carga llena LWX Estructura de elevador 1 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 2/106 Fecha: 2013‐5‐23 Edición : A 1.2 Imágenes de producto Placa HAMCB 1.3 Estructura de producto 1.3.1 Diagrama de distribución de Circuito HAMCB Circuito de HAMCB:circuitos analógicos y circuitos digitales, Circuitos analógicos:circuito de alimentación eléctrica, circuito de comunicación y circuito de entrada/salida. 2 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 3/106 Fecha: 2013‐5‐23 Edición : A Circuito de interfaz de servidor, circuito de codificador, circuitos de detección analógica; Circuitos digitales:circuito CPU,circuito CPLD y otros circuitos periféricos; Área de entrada Área de entrada Área de entrada Área de circuitos digitales Diagrama HAMCB 3 / 106 Número: XT0229A12002A Manual de ajuste Números de páginas: 4/106 Fecha: 2013‐5‐23 Edición : A Entrada de alimentación Diagrama del cableado externo HAMCB función renivelación 1.3.2 Función de abrir puerta antes HAMCB Puerta de sala de Puerta de sala de planta superior planta de fondo 7 Todos puntos de entrada de puerta de seguridad 6 señal entrada de revisión hacia abajo 5 señal entrada de revisión hacia arriba 4 entrada de interruptor de seguridad 3 puntos de revisar Llamada en cabina 2 entrada de cerrar puerta de cuerda seguridad Llamada exterior entrada 7 Entrada de termistores de motor 6 LB SV detección de adherencia 5 Retroalimentación de freno de motor 4 Entrada de señal desaceleración forzada hacia arriba 3 Entrada de señal desaceleración forzada hacia abajo acepta datos 2 Entrada de señal renivelación hacia abajo 1 Entrada de señal renivelación hacia arriba envia datos 7 Entrada de señal nivelación hacia arriba 6 Entrada de señal nivelación hacia abajo 5 LB detección de adherencia 4 Entrada de señal ARD BS2 Retroalimentación de freno 2 SVT contacto entrada PVT contacto Diagrama del cableado externo 1.3.3 Botón de HAMCB, Interruptor DIP, Indicador y Descripción del Terminal 1.3.3.1 HAMCB-3.1 Introducción de Interruptor DIP 4 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 5/106 Fecha: 2013‐5‐23 Edición : A HAMCB Número SW1 SW2 1.3.3.2 Descripción Notas Llamada exterior de sala Activar / desactivar CHCS Abrir o cerrar la puerta Activar / desactivar DDO Introducción de Indicador de HAMCB Número +5VL Descripción 5V Fuente eléctrica normal RUN Brilla para indicar la comunicación normal GRP Brillante:En el estado de control del grupo Oscuro:No en estado de control del grupo ES Notas Brillante:Desconectado el circuito de seguridad Oscuro:Conmunicado el circuito de seguridad DW Brillante: Puerta de piso cerrada Oscuro: Puerta de piso no cerrada DOL Brillante: Válida señal de puerta abierta Oscuro: Inválida señal de puerta abierta DZ Brillante: Válida señal de zona de puerta Oscuro: Inválida señal de zona de puerta DFC Brillante: Puerta de cabina cerrada Oscuro: Puerta de cabina no cerrada DOB Brillante:Señal de puerta abierta Oscuro:Señal de puerta no abierta 1.3.3.3 Descripción del terminal de placa HAMCB 1.3.3.3.1 DC24V terminal de entrada de señal(P1) 8PIN WAGO caja de enchufe 721-138/001-000, Enchufe macho correspondiente 721-108/026-000 5 /106 Manual de ajuste Números de páginas: 6/106 Fecha: 2013‐5‐23 Edición : A HAMCB Número Nombre P1-1 no usado Máx. voltaje de entrada DC35V Mín. voltaje de entrada Número: XT0229A12002A Corriente de carga Explicación Mínimo:5.8mA; Máxima:10.6mA No usado DC19V Mínimo:5.8mA; Máxima: 10.6mA Detección del interruptor de freno de cinta P1-2 BS2 DC35V DC19V P1-3 no usado DC35V DC19V Mínimo:5.8mA; Máxima: 10.6mA P1-4 ARD DC35V DC19V Mínimo:5.8mA; Máxima: 10.6mA DC19V Mínimo:5.8mA; Máxima:10.6mA La señal de entrada Nivelación hacia abajo P1-5 DBD2 DC35V No usado Señal de entrada de ARD Detección de adherencias LB P1-6 2LV DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA P1-7 1LV DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA La señal de entrada Nivelación hacia arriba P1-8 COM1 DC24V / Interruptor de alimentación eléctrica DC24V 1.3.3.3.2 DC24V terminal de entrada de señal(P2) 8PIN WAGO 721-138/001-000 caja de enchufe,enchufe macho correspondiente 721-108/026-000 Número Nombre Máx. voltaje de entrada Mín. voltaje de entrada DC19V Corriente de carga Mínimo:5.8mA; Máxima:10.6mA Explicación Señal de entrada P2-1 UIS DC35V P2-2 DIS DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA Señal de entrada P2-3 /1LS DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA Entrada de desaceleración forzada de abajo P2-4 /2LS DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA Entrada de deceleración forzada de arriba P2-5 BS1 DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA Detección de interruptor de freno de cinta P2-6 DBD DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA LB, SW Detección de adherencias P2-7 SE DC35V DC19V Mínimo:5.8mA; Máxima:10.6mA Entrada de termistor del motor P2-8 COM2 DC0V / Renivelación hacia arriba Renivelación hacia abajo Interruptor de alimentación eléctrica DC0V 6 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 7/106 Fecha: 2013‐5‐23 Edición : A HAMCB 1.3.3.3.3 AC110V Terminal de entrada de señal(P3) 9PIN WAGO 721-239/001-000 caja de enchufe, enchufe macho correspondiente 721-209/026-000 Número Nombre P3-1 COM3 Máx. voltaje de entrada Mín. voltaje de entrada P3-2 AC127V /DW PE AC82V Corriente de carga / Explicación AC110V terminal común Mínimo:3.5mA; Máxima:5.4mA Entrada para cerrar la puerta de cadena de seguridad de sala P3-3 /ERO AC127V AC82V Mínimo:3.5mA; Máxima:5.4mA Entrada de operaciones de mantenimiento P3-4 /ES AC127V AC82V Mínimo:3.5mA; Máxima:5.4mA Entrada de interruptor de seguridad P3-5 UIB AC127V AC82V Mínimo:3.5mA; Máxima:5.4mA Revisar señal de entrada hacia arriba P3-6 DIB AC127V AC82V Mínimo:3.5mA; Máxima:5.4mA Revisar señal de entrada hacia abajo P3-7 DFC AC127V AC82V Mínimo:3.5mA; Máxima:5.4mA Toda la entrada de puerta de sala de seguridad de cabina P3-8 / / / / Reservado P3-9 / / / / Reservado 1.3.3.3.4 AC110V Terminal de salida de señal(P4): 4PIN WAGO 721-134/001-000 caja de enchufe, enchufe macho correspondiente 721-104/026-000 Número Nombre Tipo Máx. Capacidad de salida Explicación P4-1 LB NO 8A 30V DC; 8A 250V AC LB Relé eléctrico P4-2 / / / Reservado P4-3 COM-DFC COM 8A 30V DC; 8A 250V AC Circuitos de candado terminal común de control P4-4 UDX NO 8A 30V DC; 8A 250V AC Contactor UDX como 7 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 8/106 Fecha: 2013‐5‐23 Edición : A HAMCB 1.3.3.3.5 DC24V Terminal de salida de señal(P5) 6PIN WAGO 721-136/001-000 caja de enchufe, enchufe macho correspondiente 721-106/026-000 Número Nombre P5-1 COM1 Tipo ―― P5-2 DC NC 8A 30V DC; 8A 250V AC Salida de órden de cerrar la puerta P5-3 DO NO 8A 30V DC; 8A 250V AC Salida del órden de abrir la puerta P5-4 COM2 / 8A 30V DC; 8A 250V AC Externo 24VDC P5-5 RDC NC 8A 30V DC; 8A 250V AC Salida de órden de cerrar la puerta trasera P5-6 RDO NO 8A 30V DC; 8A 250V AC Salida de comando de abrir la puerta trasera Explicación Máx. Capacidad de salida 8A 30V DC; 8A 250V AC Externo 24VDC 1.3.3.3.6 Terminal de señal de comunicación en cabina interior, cabina exterior (P6) 4PIN WAGO 721-134/001-000 caja de enchufe, enchufe macho correspondiente 721-104/026-000 Número Nombre Explicación P6-1 L1 Cable de dato en serie de llamada en cabina interior P6-2 L2 Cable de dato en serie de llamada en cabina interior P6-3 L3 P6-4 L4 Cable de dato en serie de llamada en sala exterior Cable de dato en serie de llamada en sala exterior 1.3.3.3.7 Terminales de entrada de alimentación eléctrica(P7) 2PIN WAGO 721-132/001-000 caja de enchufe, enchufe macho correpondiente721-102/026-000 Número Nombre Máx. voltaje de entrada Mín. voltaje de entrada Explicación P7-1 24VDC DC29V DC19V 24VDC entrada de alimentación P7-2 0VDC DC29V DC19V 0VDC entrada de alimentación 8 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 9/106 Fecha: 2013‐5‐23 Edición : A 1.3.3.3.8 Terminal de comunicación en control de grupo(P8): 4PIN WAGO 721-134/001-000 caja de enchufe, enchufe macho correspondiente721-104/026-000 Número Nombre Explicación P8-1 RXB Cable de recepción de datos P8-2 RXA Cable de recepción de datos P8-3 TXB Cable de emisión de datos P8-4 TXA Cable de emisión de datos 1.3.3.3.9 Terminal de apertura adelantada/ Renivelación(P10) 2PIN WAGO 721-132/001-000 caja de enchufe, enchufe macho correspondiente 721-102/026-000 Número Nombre Explicación P10-1 LVC/ADO Apertura adelantada/ Renivelación P10-2 WDO Restablecimiento eléctrico 1.3.3.3.10 Terminal de la comunicación del servidor (X2):SVT 9PIN Tipo de conector de cable de soldadura-Enchufe D /9PIN/ Número Nombre Explicación J1-1 VCC 5VDC J1-2 VCC 5VDC J1-3 TXB Cable de emisión de datos J1-4 RXA J1-5 GND Cable de recepción de datos 0VDC J1-6 VCC 5VDC J1-7 TXA Cable de emisión de datos J1-8 RXB J1-9 GND Cable de recepción de datos 0VDC 1.3.3.3.11 Terminal de entrada de señal de cotificador(X3) PVT : Conector del cable-D-SUB 15PIN/ intensivo/curva/ caja de enchufe 9 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 10/106 Fecha: 2013‐5‐23 Edición : A HAMCB Tipo cotificador incremental (motores asíncronos) cotificador de Cable Blindado Pin cotificador 1 2 3 B- --- C+ 4 C- 7 5 6 A0V A+ 8 B+ 9 +5V/+8V 8 √ √ √ √ √ √ √ √ 12 √ √ √ √ √ √ √ √ 10 11 E+ E- 12 13 F+ F- √ √ √ 14 --- 15 --- √ coseno 1.4 Comunicaciones en serie Para resistir a la interferencia electromagnética, es necesaria la impedancia en el terminal de cables de comunicación. La maxima longitude de cable de comunicación de HAMCB es de 150m. Los valores de impedancia de placa absorbente terminal entre cabina interior y sala exterior son: 50Ω/0.47uf ; Cuando se usan llamadas exteriores comunes en paralelo o dos monitores en paralelo en control de grupo, los valores de impedancia de placa absorbente terminal son: 50Ω/0.47uf , los valores de impedancia de placa absorbente terminal de sala exterior son 75Ω/0.33uf, los valores de impedancia de placa absorbente terminal de SOM 75Ω/0.33uf, es decir SOM-75R, aparece como lo siguiente: Diagrama de placa absorbente 10 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 11/106 Fecha: 2013‐5‐23 Edición : A Diagrama de placa absorbente de llamada exterior común en paralelo NOTA:Cuando se usan llamadas exteriores comunes en paralelo o dos monitores en paralelo en control de grupo, necesitan cancelar las tapas de cortocircuito J8, J10, J15 y J16 en HAMCB-3.1 2. Esfera adecuada HAMCB necesita trabajar junto con Tracción CON8003/CON8005/CON8006 de nuestra empresa;Se usa comunicación en serie RSL tanto en llamada de la cabina interior y sala exterior como en el monitor de piso. 3. Condiciones de trabajo 1)Altitud inferior a 1000m; 2) La temperatura debe mantenerse entre 5 ~ 40 ℃ 3) La media humedad relativa mensual máxima es del 90 % en lugar de marcha y la media temperatura mínima mensual del este mes no supera 25 ℃ 4)Voltaje nominal de HAMCB:DC19V~29V ; 5) El aire de ambiente no debe contener gases corrosivos e inflamables ni polvo de conducción eléctrica. 11 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 12/106 Fecha: 2013‐5‐23 Edición : A HAMCB 4. Introducciones de ajuste 4.1 Examen de condiciones en marcha de mantenimiento Notas:Asegurarse de que todos los componentes mecánicos se hayan regulado antes de arrancar a lenta velocidad. Para más detalles, consultar las instrucciones de instalación. 4.1.1 Examen de armario de control Abrir la puerta del armario de control para comprobar si hay conexiones sueltas y daños en los componentes. Guardar bien los datos aleatorios y sustituir las piezas dañadas. Apretar todas las conexiones en el armario de control. Atención prestar especial atención a conexión de cable de alimentación, cables de potencia y líneas de resistencia de frenado. 4.1.2 Examen del cableado De acuerdo con el diagrama de cableado, comprobar la línea PVT, alambrado provisional de cable, alambrado provisional de interruptor de límite. Comprobar si el cable de tierra para de cada dispositivo está conectado a tierra. 4.1.3 Examen del aislamiento Desconectar la conexión entre cable de tierra y Hl. Desenchufar todos los componentes en HAMCB y desenchufar todos componentes de llamada, órden, señal de visualización y zona de puerta. Cambiar todos los interruptores de aire en la posición OFF y medir con metro de aislamiento la resistencia de aislamiento entre cable de tierra y HL, línea de alimentación, líneas de energía eléctrica de motor, circuito de seguridad, circuito de control, bobina del freno de cinta, motor de puerta, la iluminación. Asegurarse de que el valor de la resistencia de aislamiento esté dentro de un valor determinado. Conectar cable de tierra y componentes en HAMCB nuevamente. Circuito eléctrico Circuito de potencia y circuito de seguridad Circuito de control (incluido puerta), circuito de iluminación y circuito de señal Valor permitidode la resistencia de aislamiento ≥ 0.5MΩ ≥ 0.5MΩ Notas: Al probar la resistencia de aislamiento, hay que quitar el enchufe de tablero electrónico. Si no, podría hacer daño al tablero electrónico. 4.1.4 Examen de voltaje de entrada Desconectar los interruptores neumáticos de alimentación principal y de otros interruptores neumáticos en armario de control. Comprobar si la entrada de voltaje de tres fases esté dentro del alcance determinado (±10%). Reajustar la conexión de terminal de entrada de convertidor de frecuencia según el real voltaje de entrada (Si voltaje de entrada es de menos de 370V, conectar al 360V. Si voltaje de entrada es de entre 371V~390V, conectar al 380 V. Si voltaje de entrada es de entre 391V~410V, conectar al 400V. Si voltaje de entrada es más de 411V, conectar a 415V. Comprobar si voltaje entre C16 y C17 (voltaje de iluminación) es de 220V±10% y el indicador de alimentación de dispositivos de tracción es normal. (El indicador está debajo de HAMCB). 4.1.5 Examen de voltaje de salida de convertidor de frecuencia de control Cerrar el interruptores neumático de alimentación, comprobar si el voltaje de salida de convertidor está de acuerdo con diagrama (Cuando voltaje de entrada cumplen los requisitos, se perminte una tolerancia de error de ± 10 % de la salida de convertidor de frecuencia). 4.2 Examen de potencia 4.2.1 Examen del voltaje de entrada y salida de HAMCB 12 /106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 13/106 Fecha: 2013‐5‐23 Edición : A Desconectar la potencia, desenchufar todos los dispositivos en HAMCB. Después cerrar interruptor neumático CP2, medir con multímetro los pies 1,2 de P7 en HAMCB. Comprobar si el voltaje es DC24V±10%. Si no, comrpobar la línea entre LN, SWP y P7. 4.2.2 Examen de estado de alimentación eléctrica de HAMCB Desconectar el interruptor de alimentación principal y conectar todo componentes. Revisar la posición del interruptor SW1(CHCS)y SW2(DDO)en tablero eléctrico HAMCB. Interruptor DIP K7 tiene las siguientes funciones: SW1 (CHCS) -- ON:Funcionamiento normal; -- OFF:Cancelar la llamada de cabina exterior SW2 (DDO) -- ON:Funcionamiento normal; -- OFF:Cancelar el funcionamiento de puerta. Bloque de cortocircuito J1、J2、J3、J7、J8、J10、J11、J12、J15、J16 tiene las siguientes funciones: J1 U11 Interfaz de chip de programación J2 Interruptor de protección de parámetro de tracción J3 U1 Interfaz de chip de programación J7 Elección de alimentación eléctrica de cotificador(5V、8V) J8 J10 J15 J16 Elección de Absorción terminal de Comunicación J11 J12 Elección de tipo de cotificador, conexión de dos pasadores de la derecha representa uso de un cotificador incremental, conexión de dos pasadores de la izquierda representa uso de un cotificador de coseno Interfaz de servidor SVT tiene las siguientes funciones: SVT Interfaz de servidor Asegurarse de que el interruptor ERO de armario de control esté en modo de emergencia Asegurarse de que todas puertas de cabina estén cerradas Cerrar el interruptor de alimentación eléctrica principal Observar el Indicador de HAMCB. Comprobar la señal de entrada es correcta o no: Indicador DW Explicaciones Parpadeado: Línea a distancia en serie y guardián son normales Encendido: Alimentación eléctrica es normal (5V) Encendido: Acción a botón de parada de emergencia Encendido: La puerta de sala está cerrada DOL Encendido: (La puerta delantera o puerta trasera) DZ Encendido: RUN +5V ES Interruptor de apertura de puerta de llegada al posición Cabina está en zona de puerta 13 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 14/106 Fecha: 2013‐5‐23 Edición : A HAMCB DFC Encendido: Puerta de cabina 9501 y cadena de seguridad están cerradas DOB Encendido:Dispositivo de inversión de puerta (puerta delantera o trasera) está operado Notas:Si después de alimentación eléctrica el estado de indicador está diferente de los estados enumerados en la lista, comprobar el circuito y los parámetros relevantes. (Por lo general los parámetros de elevador se han establecido en la fábrica.) Todos parámetros de HAMCB y I/O son establecidos en la fábrica. Para más detalles consultar a tabla de parámetros relevantes HAMCB En caso necesario, comprobar parámetros siguientes: Parámetros Notas Configuración M-1-3-1-1 TOP Planta más Alta De acuerdo con contrato Contar desde 0 BOTTOM Planta más baja 0 M-1-3-1-2 DRIVE Tipos de tracción 0 0 DZ-TYP Modo de Nivelación Tipos de zona de puerta 1 M-1-3-1-3 DOOR Tipos de puerta 5 F:EN-DCL Definición señal de entrada DCL 1 F:DOL-D Definición señal de entrada DOL 0 M-1-3-1-4 NoDW_Chk Elección de detección de señal DW LV-MOD 4.3 Descripción Si tiene fución renivelación y apertura adelantada, establecer la configuración a 1 0 Ajuste de los parámetros de tracción 4.3.1 Enchufar el servidor en Interfaz SVT, apretar el 4 para acceder al menú de configuración de la contraseña, apretar el 3 para acceder al menú Módulo 1 de tracción, se muestra a continuación: MONITOR=1 DIAGNOSTICS=2 SETUP=3 CATEGORYA=1 CATEGORY=2 CATEGORY=3 Position =4 Apretar 1 para estado de tracción del monitoreo, y acceder al menú 2como en el esquema de arriba: Parámetros Descripción Valores de Monitoreo Notas Versión de software 001.01 M-3-1-1 Software version 14 /106 Car speed mm/s Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 15/106 Fecha: 2013‐5‐23 Edición : A Velocidad real de elevador Motor Speed RPM Velocidad del motor(Calculado según PG) Rotor position Posición de rotor(ángulo mecánico) Dictated vel mm/s Velocidad de reacción de cotificador 0~359.9 La velocidad dada (DBSS) Output voltage El voltaje de salida dado Mtr trq PU Corriente de torque (La cantidad La velocidad dada 0~900V 1.000 1.0-> límite de torque relativa de corriente de pardado) Output current Heat sink temp1 Corriente de salida Temperatura de radiador 1 Heat sink temp2 Temperatura de radiador 2 Parámetros Descripción M-3-1-2 DC link V 0~999.9A La temperatura real La temperatura real Valores de Monitoreo Sesgo de sensor de corriente de X - fase Y offset (A) Sesgo de sensor de corriente de Y - fase / Z offset (A) Sesgo de sensor de corriente de Z - fase / Speed gap(mm/s) / Distancia de instalación de desaceleración forzada (Parámetros correspondientes) Motor overload Integrador de sobrecarga del motor Parámetros M-3-1-3 Encoder pulse Integrador de sobrecarga del invertidor de frecuencia Descripción Valores de Monitoreo Estado de Pulso del cotificador 0~65535 Encoder Z num Enumeración Z-fase de codificador 0~65535 Encoder C POS Posición C- fase de codificador 0~65535 Encoder D POS Posición D- fase de codificador Prueba de Fabricantes 5 0~65535 Factory resd5 El sesgo de sensor de corriente real Frecuencia de salida Speed gap LS distance (mm) Drive overload Notas Voltaje de corriente recto de cable matriz Real voltaje X offset (A) Frequency (Hz) La corriente de salida real detectada Notas 0~65535 NOW FLOOR Piso actual 00 POSTION 000.00m INPUT1 Posición actual INPUT1 INPUT2 INPUT2 OUTPUT OUT 15 / 106 OUT CODE Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 16/106 Fecha: 2013‐5‐23 Edición : A OUT CODE Prepare to run Preparado para marchar (manual MCSS o DBSS) Load Precent Cantidad real de compensación de peso Bases Enabled Estado de DBSS Parámetros Descripción M-3-1-4 2LS (m) Posición 1 de desaceleración forzada arriba 4LS (m) Posición 2 de desaceleración forzada arriba 1LS (m) Posición 1 de desaceleración forzada abajo 3LS (m) Posición 2 de desaceleración forzada abajo Valores de Monitoreo Notas Bases es de 1m Apretar el botón 2 para Registro de fallos de monitoreo, y entrar en el menú 2 de Monitoreo de fallos, como se muestra siguiente: CURRENT FAULT=1 SAVE FAULT=2 CLEAR CURRENT FAULT=3 CLEAR ALL SAVE FAULT=4 Apretar el botón 3 para establecer parámetros, y entrar en el menú 2 de establecimiento de parámetros, como se muestra lo siguiente: Contract Data=1 Tune=2 Pr.ini=3 Height learn=4 LOAD=5 T.NTSD=6 Apretar el botón 1 para entrar en el menú 3 de establecimiento de parámetros, como se muestra siguiente: FIELD AJUST=1 VEL REGULATOR=2 BRAKE/DBR=3 MOTOR=4 TIMING=6 ENHANCED=9 LEVEL=0 Apretar el botón 2 para establecer parámetros; Apretar el botón 3 para realizar toda la inicialización de parámetros.Por favor, cuidado con este menú; Apretar el botón 4 para llevar a cabo autoaprendizaje de posición de pozo de elevador; Apretar el botón 5 para compensación de par, Para el elevador instalado con motor síncrono, hay que hacer posicionamiento automático de motor principal y autoaprendizaje de posición de pozo de elevador. Hay que establecer parámetros de motor y de cotificador, según M3-3-1-4 entrar en el menú de establecimiento de parámetros de motor, los datos específicos se introducen según placa de identificación del motor usado en obra. Los parámetros de cotificador están en FIELD AJUST=1. Entrar en Reajustes de parámetros actuales (los parámetros de fábrica son de 1.75m/s, tomando como un ejemplo el motro 11.7KW) 16 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 17/106 Fecha: 2013‐5‐23 Edición : A M3-3-1-1 Clave Visualización Explicación Valor de fábrica Ámbitos Notas:Ajustes de la máquina asincrónica son menos de 10 Inercia del sistema 40 Rotate dir Dirección de rotación 0 0、1 Pretrq trim(PU) Ganancia Pre- torque 1.00PU Nada 2048 0~10000 Inertia kg/m2 ENCODER PPR Impulsos del cotificador Encoder sort Tipos de cotificador Encoder dir Dirección de cotificador 1 M3-3-1-1 Duty speed[mm/s] Delay brk lftd[ms] Delay lft brk[ms] MTC Sw Pres?1/0 Type of motor Velocidad nominal Atraso de abrazo de freno de cinta Atrasode apertura de freno de cinta Detección de interruptor térmico del motor Tipos de motor NA cálculo automático 0: Onda cuadrada incremental 1: Onda coseno NA Sin permiso 500ms 0~9999ms 500ms 0~9999ms 1 0、1 0 0、1 Entrar en M3-3-1-2 para Ajuste de Parámetros de Regulador de velocida Clave Contenido SpdP1 gain SpdI1 gain ARD Speed (mm/s) ARD Run Direct SGP tran21 thr% M3-3-1-2 SGP tran21 band% Reset speed % Explicación Ganancia del regulador proporcional 1 Ganancia del regulador Integral 1 Velocidad de funcionamiento de ARD Dirección de funcionamiento de ARD SGP convertido en umbral 21 SGP convertdio en anchura de banda 21 Velocidad de reposición Valor predeterminado Ámbitos 1500 anulado 500 100 1~500 0 0~1 30 0~100 10 0~100 50 1~100 filter 1 Filtro de reacción de velocidad1 300 filter 2 Filtro de reacción de velocidad2 300 Track error mm/s Tolerancia Máxima de velocidad 500 1~1000 ETSC present(%) Coeficiente de protección ETSC 97 0~100 Feedback Feedback 0~300 ajuste de resonancia mecánica 17 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 18/106 Fecha: 2013‐5‐23 Edición : A HAMCB ETSC Enable(0/1) Protección de capacidad ETSC 0 0~1 Overspeed(PU) Ratio de velocidad en exceso 1.10 0~1.5 M3-3-1-3 es configuración del interruptor de freno de cinta Clave Contenido Explicación Valor de fábrica M3-3-1-3 Brk SW pres Detección de interruptor de freno de cinta 1 Ámbitos 0~1,0 sin detección 1 con detección Configuración de parámetros de motor está en M3-3-1-4, introducir datos específicos según placa de identificación del motor (ejemplo de motor de 11.7KW ): Clave M3-3-1-4 Contenido Explicación Valor de fábrica Ámbitos Rated power[KW] Potencia nominal 11.7 0.1~999.9KW Number of poles Polos del motor 24 2~100 Rated RPM Velocidad nominal 167 2~9999 Rated frq Frecuencia nominal 33.40 0.01~99.99 Rated voltage Voltaje nominal 340 10~999 Duty load[kg] Carga nominal 1000 10~9999 Corriente nominal 26.0 Rated I[A] Rated Trq (Nm) Torque nominal 0.1~999.9 669 Nota: Al usar máquina asíncrona, si placa de identificación del motor es sin parámetros, establecer el valor al 80. Valor de fábrica Ámbitos M3-3-1-6=TIMING Ajuste de Parámetros del temporizador Clave M3-3-1-6 Contenido Explicación Brk dect dlay ms Tiempo de detección de freno de cinta 0mm/s t lim (ms) Tiempo cero de la velocidad Brake settle(ms) APR time(ms) Tiempo de apertura del freno de cinta Tiempo de compensación de momento de fuerza al arranque 1000 0~2000 0 0~5000 1300 0~5000 200 100~900 M3-3-1-9=ENHACED,Ajuste de Parámetros aumentados Clave Visualización Explicación Valor de fábrica Ámbitos 18 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 19/106 Fecha: 2013‐5‐23 Edición : A HAMCB Floor number M3-3-1-9 Número de pisos Valor del contrato 02~55 Velocity normal Velocidad nominal de elevador 1748 0~10000 Accelera normal Velocidad acelerada 600 10~1500 Jerk0 normal más Velocidad acelerada 0 500 0~1500 Jerk1 normal más Velocidad acelerada 1 500 0~1500 Decelera normal Velocidad desacelerada 600 10~1500 Jerk2 normal más Velocidad acelerada 2 350 0~1500 Jerk3 normal más Velocidad acelerada 3 350 0~1500 Velocity inspect velocidad de mantenimiento 250 0~640 Accelera inspect Aceleración de mantenimiento 200 10~1500 100 0~500 20 10~40 Velocity learn Position gain Velocidad autoaprendizaje Ganancia de posición Velocity relevel Velocidad de Renivelación 30 0~100 Accelera relevel Aceleración de renivelación 300 10~1500 Decelera NTSD Desaceleración NTSD 1000 10~1500 200 0~1500 Atraso de zona de puerta 50 0~300 Diámetro de la polea 400 10~10000 Jerk NTSD Pos delay Shv diam(mm) NTSD tirón Gear ratio Ratio de desaceleración 1 001.0~100.0 Rope ratio Ratio de cuerda 2 01~06 0 0,1 Run enable Capacidad de marcha Notas:Al ajustar máquina asíncrona, los valores de Accelera normal, Jerk0 normal, Jerk1 normal, Decelera normal Jerk2 normal son establecidos al 150-250;el valor de Jerk3 normal se establece a 50-150. M3-3-1-0=LEVEL, ajuste de Parámetros de nivelación Clave Visualización Up level M3-3-1-0 Down level Explicación Parámetros de nivelación hacia arriba Parámetros de nivelación hacia abajo Valor de fábrica Ámbitos 000 0-500 000 0-500 19 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 20/106 Fecha: 2013‐5‐23 Edición : A HAMCB M3-3-5 =Load Ajuste del Parámetros de momento de fuera al arranque Clave Visualización Valor de fábrica Ámbitos 0-100, cuando en 0 Cancelar el ajuste de velocidad adicional speed low sect. Velocidad de elevador es menos del porcentaje de velocidad nominal de sección de velocidad 1 0 speed mid sect. Velocidad de elevador es más de la de 1y menos de ese porcentaje de velocidad nominal, sección 2. velocidad más del de 2, sección 3 0 0-100 speed Kp1 Sección de velocidad 1 coeficiente de ajuste de relación de supresión de la vibración 10 10-10000 speed Ki1 Sección de velocidad 1 coeficiente de ajuste de puntos de supresión de la vibración 10 10-10000 speed Kp2 Sección de velocidad 2 coeficiente de ajuste de relación de supresión 100 10-10000 speed Ki2 Sección de velocidad 2 coeficiente de ajuste puntos de supresión de la vibración 100 10-10000 speed Kp3 Sección de velocidad 3 coeficiente de ajuste de relación de supresión de la vibración 1000 10-10000 speed Ki3 Sección de velocidad 3 coeficiente de ajuste de puntos de supresión de la vibración 1000 10-10000 speed fliter Coeficiento de filtro de velocidad, cuanto mayor, más débil 40 1-1000 Pretorque delay Ajuste de Atraso pretorque desde la orden de freno de cinta 400 0-1000 Start inner Kp Coeficiente de ratio de ajustes de pretorque 2 0 0-10000 Start inner Ki Coeficiente de puntos de ajustes de pretorque 2 0 0-10000 Run source SVT=0 Fuente de órdenes 1 0,1 05 0-15 03 0-5 M3-3-5 Max Drive ErrorB clave Explicación Máx número permitido de fallos B Max Over Current Máx número permitido de fallos de sobrecorriente Start Ganancia del regulador proporcional al arranque Kp Visualización Explicación 0 Valor de fábrica 0~9999 Notas:Máquina asíncrona se establece a 0 Ámbitos 20 / 106 Start M3-3-5 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 21/106 Fecha: 2013‐5‐23 Edición : A Ganancia del regulador diferencial al arranque Ki 0~9999 Notas:Máquina asíncrona está en 0 0 Vs abnorm T 0.1s Tiempo de fallo de Código V NTSD PRESENT % Velocidad de deceleración forzada 10 0-45 097 0-200 DDP time (0.1s) Tiempo de protección fotoeléctrica nivelación 20 0-45 Distance Comp Comparación de distancia 00 0-99 Max fdbk error Número permitido máximo de fallo de reacción de corriente 3 0-5 Notas:Esquema de alcance de Parámetros de anillo de velocidad Esquema de alcance de parámetros Sección velocidad 3 ajuste de parámetros Sección velocidad 2 ajuste de parámetros Sección velocidad 1 ajuste de parámetros M3-3-1 (Menú Contraseña) Clave M3-3-1 (S7-S4-S1-S2) M3-3-1 (S3-S6-S9-S8) M3-3-1 (S4-S6-S1-S5) Contenido Drive size Switch frequency Explicación Valor de fábrica Ámbitos Tipos de tracción 7 7.5KW es 5, 15KW es 7, 18.5KW es 8, 22KW es 9, 30KW es 10, 37KW es 11 Frecuencia de interruptor 10 6—12 Ld0 1,8 veces de inductancia de eje D 13 1—99 Lq0 Ld(mh),Lq(mh) 1,8 veces de inductancia de eje Q 13 1—99 inductancia de eje D, del motor 8 1—99 21 / 106 Número: XT0229A12002A Manual de ajuste Números de páginas: 22/106 Fecha: 2013‐5‐23 Edición : A HAMCB Lq(mh) 8 0.42 1—99 Según configuración 3 3 es una máquina síncrona, 1 es máquina asíncrona Inductancia del eje Q , de motor Mutual resist Resistencia del estator Control methord Método de control Referencia de parámetros de inductancia de motor principal: Ld (mH) Especificaciones del motor Lq (mH) Lq0 (mH) Ld0 (mH) 513V,25A,159RPM,16P 10 10 10 0 513V,13A,167RPM,12P 13 13 18 18 340V,26A,167,12P 8 8 13 13 340V,26A,209RPM,12P 8 8 13 13 6 6 10 10 340V,11A,95,12P Notas:Si la placa del motor principal no muestra el valor de inductancia, se puede tomar esta tabla como referencia. En general, cuanto mayor el corriente nominal, la inductancia es menor. 4.4 Ajuste de tracción 4.4.1 Establecimiento del estado de operación M3319 Run enable M335 Run source 0 0 0 1 1 1 Estado permitido Parámetros de inicialización, operación manual Autoaprendizaje en pozo de elevador, la operación de mantenimiento Operación de mantenimiento, de marcha rápida, de reposición 4.4.2 Ajustes con motores síncronos Para motores síncronos , antes del ajustes de tracción, tiene que apretar botón de mantenimiento de hacia arriba o hacia abajo para hacer posicionamiento automático inmóvil. Ajustes de tracción a continuación 22 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 23/106 Fecha: 2013‐5‐23 Edición : A Inicio Establecimiento de parámetros del codificador Ajuste de tipo de tracción Establecimiento de parámetros del motor principal Fin 4.4.2.1 Posicionamiento automático estático de cotificador síncrono de acogida 1. El menú M3 -3-5 RUN FUENTE SVT se establece en 1 2. Importar parámetros correctos: parámetros de cotificador M3-3-1-1, establecer el valor Control mothed del menú de contraseña 4615 de M3-3-1 en 3, al mismo tiempo, establecer el valor Drive size del menú de contraseña 7412 de M3-3-1 en el tipo de tracción correspondiente, establecer Ld0, Lq0 del menú de contraseña 4615 de M3-3-1 al 13, y el valor de Ld, Lq en 8, confirmar los parámetros de M3-3-1- 4 3. Establecer cotificador Dir en 0. Cuando se usa línea V1, fases UVW son correspondientes una por una. Si se usa V2, cambiar dos fases UVW cualesquiera una por otra. En el servidor de monitoreo 3-1-1 Output current, apretar continuamente el botón del mantenimiento de hacia arriba o hacia abajo, la tracción hace posicionamiento automátic, lo cual dura 3-5s (Durante el posicionamiento, se necesita mantener apretado el botón de mantenimiento de hacia arriba o hacia abajo) y el motor emite zumbido de corriente. El valor de output current tiene que estar dentro del 10% de la corriente nominal. Después de posicionamiento, el motor funciona. Si el motor funciona con normalidad, la reacción de velocidad es correcta. Carga vacía de output current debe ser debajo de 1A. Si el motor vibra y hay fallos de current fdbk, debe cambiar dos fases UVW cualesquiera. Si después de reposicionamiento, el motor funciona bien, observar la dirección de marcha. Si la dirección es en contrario de la práctica, hay que cambiar la dirección de 3-3-1-1 Rotate dir; Al marchar hacia arriba, observar 3-1-3 Now Position. El aumento de los valores de monitorización significa que el sistema está normal. 4.4.2.2 Examen de puente del convertidor de frecuencia y la conexión de cotificador El motor síncrono usa cotificador de Alamania HEIDENHAIN (cotificador de rotación de coseno, con posición cero de referenciay y transductor de dos posiciones absolutas de coseno) 23 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 24/106 Fecha: 2013‐5‐23 Edición : A HAMCB Para diferentes cotificadores, puede que los ajustes de J7 del puente eléctrico de cotificador de HAMCB sean diferentes. Según el voltaje de cotificador se puede elegir 5V o 8V. La placa de puente HAMCB y cable de conexión de cotificador están hechos en fábrica. Si hay fallo en el el monitor del cotificador del servidor o el motor no funciona con normalidad, al asegurarse de que los parámetros son corretos, hay que examinar estos dos. Conexión del cable de cotificador como siguente: Interfaz Interfaz de cotificador Colores 1a Sin- Abs 10 6a Rosa(C-) Púrpura (D-) Cos- Abs 13 2a Amarillo y negro(A-) Sin- Inc 6 5a Rojo y negro (B-) Cos- Inc 1 7b Gris(C+) Amarillo (D+) Sin+ Abs 11 Cos+ Abs 12 Sin+ Inc 5 Cos+ Inc 8 +5V 9 2b 6b 3b 1b 5b Verde y negro(A+) Azul y negro (B+) Marrón verde(+5V) PIN exterior 0V 7 4a Blanca verde (0V) Negro(R-) Zero- 4 4b Rojo(R+) Zero+ 3 4.4.3 Ajuste de motores asíncronos Los motores asíncronos de engranaje generalmente están en compañía del cotificador incremental común, el número de impulso es 1024. No se necesita autoaprendizaje para este motor. Asegurarse de los parámetros de motor. Establecer Control mothed del menú de contraseña 4615 de M3-3-1 al 1, al mismo tiempo establecer el de Inertia kg/m2 de M3-3-1 entre1-10. Establecer los cuatro valores de inductancia Ld0, Lq0, Ld, Lq del menú de contraseña 4615 de M3-3-1, debajo del 2. En M3-3-5, establecer valores de START Kp, START Ki al 0. Elegir 8V para puente de voltaje J7. Conectar J11, J12 en cortocircuito a las dos agujas de la derecha. Elegir cotificador incremental, y se puede poner en marcha directamente; Veáse el diagrama esquemático eléctrico sobre la conexión de cable del cotificador. 1. Refiriéndose a los parámetros concretos, como aceleración y desaceleración, hay que hacer ajustes según situación en práctica. Explicación: Desde la dirección del eje de la polea de tracción (estator), si la polea de tracción gira en el sentido de las agujas del reloj, la cabina marcha hacia a arriba, si en contrario, se puede cambiar parámetro de Rotate dir de 3-3-1-1 para cambiar la dirección de marcha. 2. Ratio de desaceleración Gearbox ratio Este parámetro es ratio de engranaje del motor. Para el motor sin engranaje, establecer el parámetro en 1 (Ratio de desaceleración = 1) 3. Ratio de cuerda rope ratio Este parámetro es el resultado de ratio de engranaje de motor multiplicado por ratio de cuerda. Para el motor sin engranaje, establecer el parámetro en 2 (ratio de cuerda = 2) 24 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 25/106 Fecha: 2013‐5‐23 Edición : A 4. Pulley diameter Ajustar el diámetro de polea de tracción según el del motor principal. 5. Duty speed Velocidad nominal de elevador está de acuerdo con la siguiente ecuación. FSS × π × PD =V 60 × GR × RR FSS:Duty speed(rpm) PD:Pulley diameter (m) GR:Gearbox ratio RR:Rope ratio V:Duty line speed for lift (m/s) 4.5 Examen de dirección de marcha de elevador Entrar en modo de mantenimiento En la operación de trotada, hay que confirmar si las direcciones de marcha de elevador son mismas. Si no, hay que ajustarlo. En la operación de trotada, confirmar si las direcciones de marcha del elevador son mismas que la órden. En la operación de trotada hacia arriba, si elevador marcha hacia abajo (o en dirección contraria), eso significa que la marcha del elevador está en contrario de la de la órden. Entrar en menú de tracción HAMCB de M-3-3-1-1, cambiar parámetro de Rotate dir al contrario. Después guardar los parámetros, confirmar si la dirección de marcha del elevador es igual a la órden. 4.6 Modo de funcionamiento de trotada 4.6.1 Operación eléctrica de emergencia (ERO) Asegurarse de que el interruptor de la operación eléctrica de emergencia (ERO) está en estado de mantenimiento yel interruptor de mantenimiento en el tope de cabina (TCI) está en posición normal. Introducir (M-1-1-2) por con servidor, observar estado de tci, uib, dib, ero. En este momento, hay que aparecer “tci uib dib ERO”. Apretar a intervalos el botón de marcha arriba en la caja ERO, y “uib” en el servidor tiene que convertirse en “UIB” en mayúscula. Apretar a intervalos el botón de marcha abajo en la caja ERO, y “dib” en el servidor tiene que convertirse en “DIB” en mayúscula. Apretar continuamente el botón de marcha arriba, confirmar si el elevador marcha hacia arriba. Apretar continuamente el botón de marcha abajo, confirmar si el elevador marcha hacia abajo. 4.6.2 Marcha de mantenimiento del tope de cabina (TCI) Cambiar el interruptor de mantenimiento del tope de cabina (TCI) en posición de mantenimiento. Y cambiar el interruptor eléctrico de emergencia de la caja de control en la sala de máquina (ERO) en posición normal. (Notas: 25 / 106 Número: XT0229A12002A Manual de ajuste Números de páginas: 26/106 Fecha: 2013‐5‐23 Edición : A HAMCB Al subir al tejado de cabina para operar el interruptor de mantenimiento, hay que manejar según “Procedimiento de Operación en Tejado de Cabina”. Si no, el control de lógica lo protege y el elevador no puede funcionar. En este momento aparece “TCI-LOCK” en el servidor, al mismo tiempo destella el Indicador INS de la placa eléctrica del control de lógica.) En este instante, Tci en el servidor se convierte en TCI en mayúscula. Apretar al mismo timepo los botón de marcha arriba U y C, confirmar si el elevador marcha hacia arriba. Apretar al mismo timepo los botón de marcha arriba D y C, confirmar si el elevador marcha hacia abajo. Dejar el elevador marcha en estado de mantenimiento en el pozo de elevador cautelosamente, asegurarse de que no haya ningún obstáculo en el pozo de elevador que dificulta la marcha de elevador. Si hubiera obstáculos, hay que adoptar medidas adecuadas. En el tope de cabina, examinar y confirmar si el interruptor TES (interruptor de parada de emergencia en el tope cabina), EEC (interruptor de ventana de seguridad), SOS (Interruptor de alicatess de seguridad) y el interruptor de límite superior e inferior funcionan bien. 4.7 Ajuste de Sistema de referencia de posición 4.7.1 Ajuste de Interruptores de límite Ajustar la posición del interruptor de límtes según datos siguientes (La tolerancia de distancia no es más de 20mm). Se dertemina así los signos positivos y negativos: A la base de la posición de nivelación del piso más alto y del piso más bajo, marcar un símbolo en el carrril de guía que significa 00mm. Para el piso más alto, + significa encima del símbilo, - significa debajo del símbolo. Para el piso más bajo, + significa debajo del símbolo, - significa encima del símbolo. Velocidad (m/s) 1LS,2LS 5LS,6LS 7LS,8LS 0.5 -350 +50 150±50 0.75 -570 +50 150±50 1.0 -840 +50 150±50 1.50 -1610 +50 150±50 1.75 -2190 +50 150±50 2.00 -2000 +50 150±50 Notas:la distancia de aquí es la de la apertura de contacto del interruptor de límite y no es trayecto que la rueda rotante del interruptor de límite recorre con fuerza sobre el palo. 4.7.2 Ajuste de interruptor fotoeléctrico de cabina y placa contra luz de pozo de elevador Instalación y dimensiones de montaje del interruptor fotoeléctrico de cabina y placa contra luz de pozo de elevador se muestra a continuación 26 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 27/106 Fecha: 2013‐5‐23 Edición : A Longitud y cantidad de placas 250mm: pieza n piso n Colocar carga equilibrada en cabina (sobre 45% carga) Ajustar posición de 2 interruptores fotoeléctricos de nivelación (1LV: interruptor fotoeléctrico de nivelación superior; 2LV: interruptor fotoeléctrico de nivelación inferior) y hacer que la distancia entre ellos sea de sobre 60mm. Mantenerlos verticales y asegurarse de que el orden de instalación de interruptor fotoeléctric desde 1LV hasta 2LV, desde arriba hasta abajo. Conducir el elevador la posición de nivelación de cada piso. Ajustar placa contra luz de cada piso, coincidir la línea central de la misma con la de los dos fotoeléctrico(la distancia de la línea central a 1LV y a 2LV son 30mm respectivamente). Este ajuste afectará a la exactitud de la nivelación del elevador. 4.8 Preparación para la primera marcha con normalidad de elevador 4.8.1 Examen de circuito de seguridad y candado Asegurarse de que cada interruptor de seguridad de circuito de seguridad funciona bien. En estado de la marcha de mantenimiento, asegurarse de que al abrir cualquier interruptor de seguridad (OS, 8LS, 7LS, SOS, TES, PES, GS, DS, GSS), el elevador puede pararse. (Notas: no olvidar que el candado de puerta de cada piso puede funcionar bien). 4.8.2 Confirmación de señal de pozo de elevador Operar el elevador en ERO o TCI por completo. Comprobar señal de elevador de 1LV, 2LV en zona de la puerta, 1LS, 2LS de desaceleración forzada; entrar por servidor en SVT1 de M1-1-2 para comprobar señal entrada de placa HAMCB; 4.9 Autoaprendizaje de posición de pozo de elevador 4.9.1 Antes del autoaprendizaje de posición de pozo de elevador, hay que operar el elevador en ERO por completo, y observar y comprobar por servidor si la señal de interruptor fotoeléctrico y de desaceleración forzada de pozo de elevador funciona con normalidad. 4.9.2 Cuando el elevador está en posición de nivelación, DZ,1LV,2LV tienen que estar en mayúscula. Al marchar hacia abajo, primero inicia el fotoeléctrico, por lo cual 2LV y DZ se convierten en minúscula. Si marcha hacia arriba, lo contrario. 27 / 106 Número: XT0229A12002A Manual de ajuste HAMCB Números de páginas: 28/106 Fecha: 2013‐5‐23 Edición : A 4.9.3 Cuando el elevador se encuentra al lado del piso más bajo, inicia 1LS por lo que 1LS está en mayúscula; cuando el elevador se sitúa en el piso más alto, inicia 2LS y por lo que 2LS está en mayúscula. Cuando elevador se queda en pisos por media, 1LS, 2LS se convierten en minúscula. 4.9.4 Confirmar el valor Floor number de M-3-3-1-9 de tracción HAMCB, establecer RUN ENABLE en 0, establecer RUN SOURCE SVT de M3-3-5 en 1, y confirmar el valor TOP en M1-3-1-1. 4.9.5 Cambiar ERO y TCI a la posición normal. Operar con servidor la tracción M-3-3-4 y apretar el Shift+Entir para iniciar Autoaprendizaje de pozo de elevador. 4.9.6 Conducir el elevador a baja velocidad a la nivelación del piso más bajo y después proceder al autoaprendizaje de pozo de elevador con velociad de autoaprendizaje. Cuando el elevador llega la nivelación del piso más alto, se ha completado el autoaprendizaje. 4.9.7 Después de terminar con éxito el autoaprendizaje, cambiar el RUN ENABLE de M-3-3-1-9 en 1, la información de posición de pozo del elevador se guarda en M-3-1-4. Comprobar si la información es correcta o no. 4.9.8 Cambiar ERO en posición de mantenimiento, apretar el botón de marcha abajo a que la cabina entre en posición de no nivelación. Y después, cambiar ERO en posición normal, en ese momento, el elevador funciona en restablecimiento. Observar por servidor M-1-1-1, y en él hay que aparecer estado de COR y no se cambia el estado hasta que se restablezaca hasta el piso más bajo. Para entonces, hay que aparecer CHC en M1-1-1. 4.10 Funcionamiento normal 4.10.1 Según el esquema de conexión, comprobar si la dirección de estación remota RS5 es correcta y si el cableado de las puntas de tubos es correcto o no. 4.10.2 Conectar servidor en la interfaz de servidor SVT de HAMCB. Según tabla de parámetros y lista de entrada y salida de I/O, comprobar si todos los parámetros del EEPROM y todas direcciones de entrada y salida son correctos. 4.10.3 Introducir señal de llamada con servidor. 4.10.4 Introducir M-1-1-1 por orden y después introducir señal de llamada. Apretar el botón del número del piso. (el piso 1 corresponde a tecla 0, piso 2 a tecla 1, y así sucesivamente) 4.10.5 Apretar el botón azul (shift) y depués el de “ENTER”, el elevador puede llegar al piso por donde se hace la llamada. 4.10.6 Confirmar si todos funcionamientos pertinenetes sobre RS5 y RSEB son normales. 4.10.7 Observar con servidor Car speed en M-3-1-1 y operar el elevador por completo. Comprobar si el elevador si funciona a la velocidad en contrato. 28 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 29/106 Fecha: 2013‐5‐23 Edición : A Diagrama de secuencia de funcionamiento normal de elevador 29 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 30/106 Fecha: 2013‐5‐23 Edición : A Gráfico de funcionamiento normal del elevador 4.11. Ajuste de posición de nivelación en funcionamiento normal 4.11.1 Antes de ajuste eléctrico de nivelación, hay que asegurase de que las aletas de la zona superior de puerta están correctamente colocadas. 4.11.2 A la medida que marcha hacia abajo piso por piso, registrar la desviación de nivelación de cada piso. Y según la media desviación registrada, reajustar el valor de DOWN LEVEL en M-3-3-1-0. (en caso de que supera hay que reducir ese valor, en caso contrario, aumentarlo). 4.11.3 A la medida que marcha hacia arriba piso por piso, registrar la desviación de nivelación de cada piso. Y según la media desviación registrada, reajustar el valor de UP LEVEL en M-3-3-1-0. (en caso de que supera, hay que reducir ese valor, en caso contrario, aumentarlo). 4.11.4 Completar el ajuste de posición de nivelación. 4.12 Iniciar ajuste de comodidad: Situar el elevador en estados CHC, DDO y operarlo a marcha rápida. Observar si al arrancar la rueda de tracción hay vibración o deslizamiento. Si se registra vibración, significa que los parámetros no son bien encajados. Se puede entrar en M-3-3-1-1 y ajustar la inercia del sistema Inertia kg/m2, cada vez se puede aumentar o disminuir por 5. En general la mayor inercia del sistema hace que el elevador vibre al pararse y la menor inercia hacer que al elevador le falte potencia y el mismo sufra deslizamiento. En caso de que se haya ajustado la inercia del sistema pero no se haya mejorado la vibración o deslizamiento, hay que ajustar Start Kp y Start Ki de M-3-3-5. Si la rigidez del sistema es grande (sin ballesta sobre la cabina), se establece al Kp3000~7000, Ki150~700; Si la cabina va con ballesta, se establece al KP1000~3500, KI100~350; dentro de ese ámbito existe un valor de correlación óptimo de Kp, Ki. Si se ajuste Kp, Ki pero no se ha mejorado el deslizamiento, se puede ajustar APR time de M3-3-1-6 según el tiempo de atraso de la apertura de freno de cinta del motor. APR time es duración de salida de compensación del momento de fuerza al arranque. En general, el mejor valor de correlación de APR time está entre 100~400. Ajustar los parámetros arriba mencionados, y observar el funcionamiento del elevador, hasta que el mismo se quede en el mejor estado. 4.13 Ajuste de comodidad en funcionamiento (baja frecuencia de vibración a alta velocidad): Situar el elevador en estaods CHC, DDO y operarlo a marcha rápida. Observa si hay vibración en la rueda de tracción al cambiar la velocidad baja a la alta. Si se registra vibración, hay que iniciar el ajuste de sección de velocidad. Entrar en M-3-3-5 para ajustar los valores speed low sect y speed mid sect, dividir la velocidad en tres secciones. Si la velocidad de elevador es menor que el porcentaje de velocidad nominal speed low sect, es sección de velocidad 1; si la velocidad de elevador es mayor que speed low sect pero menor que el porcentaje de velocidad nominal speed mid sect, es sección de velocidad 2; si la velocidad de elevador es mayor que el porcentaje de velocidad nominal speed mid sect, es sección de velocidad 3. Ej. Para resolver la vibración de sección de velocidad 3, hay que ajustar speed Kp3, speed Ki3. Speed Kp3, speed Ki3, los cuales tienen un valor óptimo de correlación dentro del ámbito (Valor de la fábrica es de 1000, el ámbito a ajustar es de 10~10000). En el ajuste, aumentar o disminuir el valor al mismo tiempo, y cada vez en 200. Si hay vibración extraña durante el ajuste, hay que disminuir el parámetro al mismo tiempo y según convenga, hasta que el elevador se quede en el mejor estado. 30 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 31/106 Fecha: 2013‐5‐23 Edición : A 4.14 Ajuste de función RD: Durante el uso del elevador, si en el sistema la alimentación eléctrica se apaga de repente, y eso podrá causar que los pasajeros queden atrapados en la cabina. Para solucionar ese problema, el sistema integral ha diseñado un plan de emergencia en caso del apagón del elevador. El circuito principal del sistema y la fuente eléctrica adoptan un modo de suministro de energía UPS para operación de emergencia si se apaga la electricidad dentro del elevador. Al entrar en modo ARD el sistema, el elevador funciona a velocidad ARD Speed (mm/s) en M-3-3-1-2 y su dirección es la de carga ligera. Si en la primera marcha el elevador funciona en mala dirección, se puede ajustar parámetros de la dirección ARD Run Direct (Valor de fábrica es 0). Si se detecta señal de nivelación, se mantiene la puerta abierta y el elevador no vuelve a funcionar. Parámetros relacionados: Parámetros ARD‐Speed (mm/s) Valor por defecto 100 ARD‐Run Direct 0 EPO‐DC 0 Ámbito y función Función: Velocidad de marcha en rescate con electricidad en reserva de emergencia, también para la precisión de nivelación en la marcha de rescate. Ámbito de ajutes: 1-500; conforme a la nivelación el ámbito recomendado es 80-120 Función: dependiendo de si el motor está a la izquierda o a la derecha; Ámbito de ajutes: 0-1; Modo de instalación de motor a la izquierda = 0; Modo de instalación de motor a la derecha = 0; Función: después del rescate, tiempo de espera con la puerta abierta Ámbito de ajutes: 0-255(s); Diseño típico de circuito eléctrico 31 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 32/106 Fecha: 2013‐5‐23 Edición : A HAMCB Tracción Fuente eléctrica de Interruptor de convertidor de frecuencia 32 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 33/106 Fecha: 2013‐5‐23 Edición : A HAMCB 5 5.1 Tabla de funciones lógicas y Parámetros de tracción Ajustes de parámetros lógicos 5.1.1 Tabla de parámetros lógicos M1-3-1-1 No. symbol default range 0 TOP 7 1~31 El piso más alto 1 LOBBY 0 0~31 Estación básica 2 BOTTOM 0 0~31 El piso más bajo 3 CFT-P 255 0~255 Piso de comedor: >31 anulado 0~255 Tiempo de retención de la puerta abierta de piso de comdedor: Si MIN-H está más allá del tiempo determinado, usar tiempo de puerta en CFT-P. 0 (0.1) 25.5 s 4 CFT-NT 255 5 ARD-P 255 0~255 6 ARD-T 0 0~255 7 8 PKS-P PKS-TY 0 0 0~255 0~2 meaning remark (Parámetros en contrato) (Parámetros en contrato) Estación de base Si no hay llamadas exteriores, la cabina llega por el tiempo ARD-T, vuelve al piso ajustado. 0 (1) 31 > 31 anulado Notas:Sólo elevador individual Ajuste de atraso de modo ARD (volver automáticamente a la base de estación) 0 (10) 2550 s Elección de posición de servicio de cerrar elevador Al operar PKS, la cabina se mueve a la posición determinada. Después de cerrar y abrir una vez la puerta, el motor de elevador se apaga, y solo el botón de apertura de puerta es válido. 0 (1) 31 > 31 anulado Tipos de cerrar bajo el candado el elevador: 0 después de terminar el servicio de llamada, el elevador vuelve a la posición de aparcamiento y se para tras el tiempo de PKS-T. 1 igual que 0, pero después de pararse el elevador, el interruptor se cambia en ISC 2 igual que 0, después de pararse el elevador, la puerta se abre 33 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 34/106 Fecha: 2013‐5‐23 Edición : A HAMCB 9 No. 10 11 PKS-T symbol ATT ISC Tiempo de cerrar bajo candadao el elevador Tiempo de pararse la cabina tras PKS-P 0(1)255 s 5 0~255 default range meaning 0~2 Configuración del servicio de chófer: 0 Apretar continuamente DCB o RDCB hasta que la puerta está completamente cerrada 1 Apretar continuamente ATTU o ATTD hasta que la puerta está completamente cerrada 2 Igual al 0, la puerta se mantiene cerrada sin ninguna llamada 3 Función 0+destello 4 Función 1+destello 5 Función 2+destello 6 Función 0+destello+bip 7 Función 1+destello+bip 8 Función 2+destello+bip 0~4 Ajuste de servicio independiente: 0 Apretar continuamente CCB 1 Apretar continuamente DCB/RDCB 2 Iniciar el botón ISU/ISD de caja de control 3 Igual al CHCS (cerrar llamada exterior), apretar continuamente DCB/RDCB 4 Apretar por trotada CCB (car call to bottom) 5 Modo independiente VIP, no se muestra en el exterior de cabina 6 Función 1+ VIP independiente 7 Función 2+ VIP independiente 8 Función 3+ VIP independiente 9 Función 4+ VIP independiente 0 1 remark Permitir los servicios de inspección de seguridad IST (intermittent stop): Stop at IST-P if the car passes this landing. 12 EN-IST 0 0~7 0 Prohibir 1 Sólo hacia arriba 2 Sólo hacia abajo 3 Ambas direcciones 34 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 35/106 Fecha: 2013‐5‐23 Edición : A 5 Si inicia ISTS, sólo hacia arriba 6 Si inicia ISTS, sólo hacia abajo 7 Iniciar ISTS, sólo hacia abajo 13 IST-P 14 EN_CRT 255 0~255 1 0~1 default range 0 0~1 Inspección de seguridad de posición de parada: 0 (1) 31 >31 anulado Usar operación de contrato: 0 Operación de hacia arriba hasta el piso16 1 Operación de hacia arriba hasta el piso32 (Nueva edición de la dirección RS que define el contrato) M1-3-1-2 No. 0 1 2 3 symbol DRIVE EN-RLV HL-SET CR-DIR 0 0 0 meaning Tipos de tracción : 0 Sin función de apertura adelantada 1 Con función de apertura adelantada 0~1 Ajuste de renivelación 0 Anulado 1 Iniciado 0~2 Ajuste de luz/campana de llegada a estación 0 La luz y la campana en la misma salida 1 La luz y la campana en diferentes salidas 2 Usar plato generador 0~1 Ajuste de dirección de marcha de prioridad 0 Abajo 1 Arriba 4 EN-SHB 0 0~1 5 SPEECH 0 0~1 6 GCBTYP 0 0~2 remark Inicio del botón independiente de cabina 0 Operación normal de llamada exterior 1 Operación independiente de llamada exterior de puerta trasera Modo de vocero: 0 Sólo con información del piso en cabina 1 Con información del piso tanto en cabina como en llamada exterior Tipos de botón de control: 0 Prohibir 1 GCB-1 (prohibir órden de cabina; permitir parada en marcha) 2 GCB-2 (prohibir todas las órdenes) 35 / 106 7 No. EN-CRO symbol 0 0~7 default range 8 DZ-TYP 1 0~2 9 DZ-DLY 250 0~255 10 RLV-TY 0 0~1 11 RL-CNT 3 0~255 12 RL-DIS 255 0~255 13 RL-UIS 255 0~255 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 36/106 Fecha: 2013‐5‐23 Edición : A Lector de tarjeta: 0 Anulado 1 Lector de tarjeta de señal de contacto Se usan puntos de contacto CRC y Card-Rd Mask, C bit = 1: La órden de cabina siempre lo permite C bit = 0: La órden de cabina lo permite solo cuando se opera CRC 2 Conjunto de lector de tarjeta de contacto Se usan puntos de contacto CRSn y Card-Rd Mask, C bit = 1: La órden de cabina siempre lo permite C bit = 0: La órden de cabina lo permite solo cuando se opera CRSn correspondiente 3 Señal y lector de tarjeta de señal de multiples puntos de contacto Combinando el 1 y el 2, CRC y CRSn se puede usar al mismo tiempo 4 Sin operación de lector de tarjeta 5 Igual al 1, pero ISC cobija cualquier CRS 6 Igual al 2, pero ISC cobija cualquier CRS 7 Igual al 3, pero ISC cobija cualquier CRS meaning remark Código DZ: 0 DZ = 1LV 1 DZ = 1LV y 2LV 2 Operación POSY (Si no hay RLV tampoco hay ADO) Parada: DZ = 1LV y 2LV Después de parada: DZ = 1LV o 2LV Atraso DZ: 0 (0.004) 1 s (LV-MOD = 0) Tipos de renivelación RLV: 0 Renivelación RLV 1 Renivelación de atraso DRLV (usar DIS1) Límite del escalón de renivelación: 0 (1) 255 Tiempo de subida de nivelación (pérdida DIS): 0 (0.1) 25.5 s Tiempo de bajada de nivelación (pérdida UIS): 0 (0.1) 25.5 s 36 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 37/106 Fecha: 2013‐5‐23 Edición : A 0 (0.004) 1 s (tracción hidráulic) 14 15 16 17 18 RL-U-D RL-D-D PI-POS OLD-TYP INS-TYP 0 0 0 0 0 0~255 Nivelación atrasada hacia arriba: Precisión de parada en el ajuste de nivelación 0 (0.004) 1 s 0~255 Nivelación atrasada hacia abajo: Precisión de parada en el ajuste de nivelación 0 (0.004) 1 s 0~3 Ajuste de cambio de piso: 0 Según IP se muestra el cambio de piso 1 Según IP y DZ se muestra el cambio de piso 2 Al apartarse de la nivelación, se registra el cambio de piso 3 Al acercarse a la nivelación, se registra el cambio de piso 0~1 Modo de sobrecarga 0 En el modo OLD, cancelar todas órdenes registradas en la caja de control 1 En el modo OLD, no cancelar todas órdenes registradas en la caja de control ni registrarlas 0~1 Modo de mantenimiento sin molestia: 0 No iniciar modo de mantenimiento contra molestia 1 Iniciar modo de mantenimiento contra molestia M1-3-1-3 No. symbol default range 0 DOOR 5 0~13 1 REAR 0 0~13 2 DBP-TY 3 LR-T 1 0~1 240 0~255 meaning Tipos de puerta delantera: 5 Señal de modo relé eléctrico 12 Señal de modo de codificador remark Tipos de puerta trasera: 5 Señal de modo relé eléctrico 12 Señal de modo de codificador Tipos de circuito de puerta: 0 DBP funciona (4-relé eléctrico) MCS310 1 LVC funciona (3- relé eléctrico) MCS120 (M), MCS220 (M) Tiempo atrasado de iluminación (IO 0026): Después de parada y de atraso LR-T, se apagan luz de cabina y ELD Si LR-MODE=0 ó 1, ámbito es de 0 - 255 segundos Si LR-MODE=2 ó 3, ámbito es de 0 - 255 segundos 37 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 38/106 Fecha: 2013‐5‐23 Edición : A Elección de modo de atraso ventilador / iluminación (IO 0026): 0 LR Solo al cerrarse la puerta, tras segundos LR-T se activa (iluminación) 1 LR Aunque la puerta está abierta, tras segundos LR-T se activa también (ventilador) 2 LR Solo al cerrarse la puerta, tras minutos LR-T se activa (iluminación) 3 LR Aunque la puerta está abierta, tras minutos LR-T se activa también (ventilador) 4 LR-MODE 0 0~1 5 MAX-C 40 0~255 Tiempo de puerta de cabina 2: 0 (0.1) 25.5 s 6 MIN-H 40 0~255 Tiempo de puerta de cabina 1: 0 (0.1) 25.5 s 7 MIN-C 20 0~255 Tiempo de puerta de cabina 1: 0 (0.1) 25.5 s 8 MAX-H 60 0~255 Tiempo de puerta de cabina 2: 0 (0.1) 25.5 s 25~255 Modo de atraso DCP (Protección de atraso): Si el tiempo de abrir puerta es más de DCP-T, La cabina se retira de operación del control de grupo. Si inicia EN-NDG, la puerta vuelve a cerrar despacio. 25(1)255 s Tiempo de protección de puerta cerrada: Si la puerta no está cerrada completamente, en el tiempo DTC-T, la puerta vuleve a abrir. E intenta cerrar. Después de tres intentos con fracaso, elevador se cierra bajo candado. 10 (1) 254 s DTC-tiempo 255 anulado 9 DCP-T 50 10 DTC-T 20 10~255 No. symbol default range 11 12 DTO-T LOB-NT 20 40 meaning remark 10~255 Tiempo de protección de puerta abierta: Si la puerta no está abierta absolutamente, en el tiempo DTO-T. La puerta intenta volver a cerrar. E intenta abrir otra vez. Después de tres intentos con fracaso, el elevador se cierra bajo candado. 10 (1) 254 s DTO-tiempo 255 anulado 0~255 Puerta de estación básica: Si el tiempo es más de MIN-H, tal timepo de puerta se usa para LOBBY 38 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 39/106 Fecha: 2013‐5‐23 Edición : A 0 (0.1) 25.5 s 13 14 15 16 DHB-T F:EN-DCL F:DOL-D R:EN-DCL 17 R:DOL-D No. symbol 18 EN-DDO 120 1 0 1 0~1 Permitir válido el botón de la puerta del elevador CARGO2000 (IO 620,628) Tiempo de puerta DHB puede cancelarse. 0 Apretar DCB o cualquier botón interior para cancelar tiempo de retención de la puerta 1 (Tiempo por defecto de retención de la puerta DHB-T es 1s) 1 Apretar DCB o cualquier botón interior, o volver a apretar el DHB para cancelar el tiempo de retención de la puerta (Tiempo por defecto de retención de la puerta de DHB-T es 10s) 0~1 Establecer IO 694 permitir la entrada DCL 0 Sin interruptor DCL 1 Ajuste DCL en I/O694 Sólo se adopta para motores de puerta comunes. Si se establece EN-DCL=1, DCL llega cuanto antes, DC se libra, aunque DC-TYP=11 se programa. 0~255 Simulación automática DOL 0 Ajuste DOL en I/O 000 0.1 (0.1) 25.5s si en tiempo determinado no hay DOL, se simulará la señal DOL Notas: Sólo se adopta para motores de puerta comunes. 0~1 Establecer IO 695 permitir la entrada RDCL 0 Sin interruptor RDCL 1 Ajuste RDCL en I/O695 Sólo se adopta para motores de puerta comunes. Si se establece EN-DCL=1, DCL llega cuanto antes DC se libra, aunque DC-TYP=11 se progama. 0 0~255 Simulación automática RDOL 0 Ajuste RDOL en I/O 544 0.1 (0.1) 25.5s si en tiempo determinado no hay RDOL, se simulará la señal RDOL Notas: Sólo se adopta para motores de puerta comunes. default range meaning 0 0~2 remark Operacioón de puerta: Elegir ambas puertas delantera y trasera abiertas al mismo tiempo 39 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 40/106 Fecha: 2013‐5‐23 Edición : A 0 Prohibir esos parámetros 3 Ambas puertas responden a llamada interior y exterior 3 ambas puertas responden a llamada interior y responden según la llamada exterior 19 NO. IN 1LS 1 1~2 1LS número de zonas de puerta interiores 1 1 zona de puerta 2 2 zonas de puerta 20 NO. IN 2LS 1 1~2 2LS número de zonas de puerta interiores 1 1 zona de puerta 2 2 zonas de puerta 0~20 Tiempo de inspección sobre la función de puerta de sala en la nivelación cercana 0 No iniciar la inspección de la puerta de sala 5 Iniciar la inspección de puerta de sala 5 segundos 20 Iniciar la inspección de puerta de sala 20 segundos 21 22 CR-CHK-T EN-CK 0 2 0~5 Tiempo de cancelar la puerta CCB: 0 anulado 1 Usar CK 2 Usar CBC 3 Usar CK y CBC 4 Usar RCBC 5 Usar CK y RCBC Notas: CK = Tiempo de cancelar puerta con botón interior CBC=Cancelar órden interior registrada (al abrir la puerta apretar dos veces) RCBC= Cancelar órden interior registrada (al pararse o marchar el elevador, apretar dos veces) M1-3-1-4 No. 0 symbol GRP-NO default range meaning 1 1~4 Número control de grupo: 1 (1) 3 remark 1 GROUP 1 1~4 Cantidad de control de grupo 2 (1) 3 Notas:Para la edición CAC o ediciones más viejas, 4 controles de grupo se adoptan solo para más de 11 pisos Para edición DAA o edición más avanzadas, 4 controles de grupo solo se adoptan para LCB2-ASIC o más de 16 estaciones. 2 CNL 1 0~4 Número de elevadores parados en el lobby: 0 Prohibir parada de grupo en el lobby 40 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 41/106 Fecha: 2013‐5‐23 Edición : A 1 (1) 3 número de elevadores en sala Notas: establecer CNL=0 para evitar parada en lobby No. symbol default range meaning 3 MIT-ST 0 0~255 Tiempo del incio de MIT en punta de subida: Si, en MIT-ST, dos cabinas se aparta del lobby y tienen carga LNS, inicia MIT-ST. MIT-T 0 0~255 Tiempo de retirada de punta de subida: Si, en MIT-ST, dos cabinas se aparta del lobby y de la carga LNS, suspende MIT-ST. 4 MIT-VD 0 0~255 Intervalo de designación en punta de subida: Si hay llamada o alguna persona entra en cabina, una cabina asignada se aparta del lobby 5 6 MIT-DOOR 0 0~1 7 MIT-NLB 0 0~1 8 9 10 DUPK-P DUPK-G MOT-T 255 0 0 0~255 0~1 0~255 remark Estado de puerta de elevador en espera en la estación básica en punto de subida 0 Espera con puerta abierta 1 Espera con puerta cerrada Ajuste de volver al lobby en punta de subida 0 Volver a sala respondiendo a la órden 1 Volver a sala no respondiendo a la órden Posición de bordes de doble grupo en punta de subida: Se dividen en dos grupos de elevadores, si DUPK se activa, elegir DUPK-P para apartarse de grupo. 0 (1) 31 > 31 anulado Doble grupo en punta de subida: 0 Cabina pertenece al grupo 1. La cabina sirve para el lobby y todos pisos de DUPK-P, pero no responde a llamada exterior. 1 Cabina pertenece al grupo 2 La cabina sirve para el lobby y todos pisos de DUPK-P, y responde a llamada exterior. Tiempo de retirada MOT en punta de bajada: Si, en MOT, dos cabinas con carga llena se mueven al lobby, inicia MOT. Si la cabina no va al lobby o no tiene carga llena, y no es en el mismo tiempo, no inicia MOT. 41 / 106 Manual de ajuste HAMCB 11 EN-UCB 0 0~255 12 TFS-P 255 0~255 No. symbol default range 13 14 15 16 PARK-1 PARK-2 PARK-3 PARK-4 255 255 255 255 0~255 0~255 0~255 0~255 Número: XT0229A12002A Números de páginas: 42/106 Fecha: 2013‐5‐23 Edición : A Permitir no respondencia a llamada para arriba: 0 Cabina responde a llamada para arriba o abajo 1 Cabina sólo responde a llamada para abajo Cambio de posición de pisos: Si hay pisos altos y bajos en grupo, se transportan pasajeros en grupo. 0 (1) 31 > 31 anulado meaning remark Posición de parada del reloj en tiempo punta 1: Si PCLK1 se activa, la cabina se para en PARK-1 en lugar de ARD-P. PCLK1 tiene la más alta, y PCLK8 la más baja prioridad 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual Posición de parada del reloj en tiempo punta 2: Si PCLK2 se activa, la cabina se para en PARK-2 en lugar de ARD-P. PCLK1tiene la más alta, y PCLK8 la más baja prioridad 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual Posición de parada del reloj en tiempo punta 3: Si PCLK3 se activa, la cabina se para en PARK-3 en lugar de ARD-P. PCLK1 tiene la más alta, y PCLK8 la más baja prioridad 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual Posición de parada del reloj en tiempo punta 4: Si PCLK4 se activa, la cabina se para en PARK-4 en lugar de ARD-P. PCLK1 tiene la más alta, y PCLK8 la más baja prioridad. 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual 42 / 106 Manual de ajuste HAMCB 17 PARK-5 255 Número: XT0229A12002A Números de páginas: 43/106 Fecha: 2013‐5‐23 Edición : A 0~255 Posición de parada del reloj en tiempo punta 5: Si PCLK5 se activa, la cabina se para en PARK-5 en lugar de ARD-P. PCLK1 tiene la más alta, y PCLK8 la más baja prioridad. 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual 18 PARK-6 255 0~255 Posición de parada del reloj en tiempo punta 6: Si PCLK6 se activa, la cabina se para en PARK-6 en lugar de ARD-P. PCLK1 tiene la más alta, y PCLK8 la más baja prioridad. 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual No. symbol default range meaning 0~255 Posición de parada del reloj en tiempo punta 7: Si PCLK7 se activa, la cabina se para en PARK-7 en lugar de ARD-P. PCLK1 tiene la más alta, y PCLK8 la más baja prioridad. 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual Posición de parada del reloj en tiempo punta 8: Si PCLK7 se activa, la cabina se para en PARK-8 en lugar de ARD-P. PCLK1 tiene la más alta, PCLK8 la más baja prioridad. 0 (1) 31 > 31 anulado Notas: Sólo usa en elevador individual 19 PARK-7 255 remark 20 PARK-8 255 0~255 21 EN-ZBS 0 0~1 Permitir zona de sótano independiente: 0 Sin elevador libre parado en zona del sótano 1 1 elevador libre parado en zona del sótano 22 PRKDST 0 0~31 Para la distancia mínima de posición de parada al piso, se activa la función de volver a la estación básica. En parada realizada, si la distancia hasta el piso destino es grande, este parámetro ofrece número de piso 0 (1) 31 23 TPOS 1 2 0~255 Piso de inicio: 0 (1) 31 43 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 44/106 Fecha: 2013‐5‐23 Edición : A > 31 anulado 24 TPOS 2 3 0~255 Piso de terminación: 0 (1) 31 > 31 anulado 25 TDELAY 0 0~255 Tiempo de atraso: 0 (1) 255 s Prohibir examen de seguridad: Comprobar si TCI (I/O 691) se ha programado la válida dirección RS. 0 Usar examen de dirección de seguridad RSL 1 No verificar dirección Prohibir examen de seguridad DW en tiempo normal: 0 Revisar DW al abrir la puerta 1 No revisar DW en tiempo normal 26 NoAdrChk 1 0~1 27 NoDW_Chk 1 0~1 default range meaning 0~255 Piso anti-incendio: 0 (1) 31 > 31 anulado Notas: Parámetros son ignorados EFO-NC=1 0~255 Piso anti-incendio: 0 (1) 31 > 31 anulado Notas: Parámetros son ignorados EFO-NC=1 M1-3-1-5 No. 0 1 2 symbol EFO-P EFO-NC EFO-OP 0 0 0 remark 0~3 Función para sustituir anti-incendio EFO: Introducción EFO con fallo (ej. sensor de humo) da lugar a ignorar la función normal y se recupera 0 Sin alternativa 1 Volver al piso anti-incendio y luego manualmente se lo cancela 2 Servicio de bomberos se convierte en servicio de anti-incendio 3 Inicia funciones 1 y 2 al mismo tiempo 3 EFONDG 0 0~1 Cierre con velocidad para protección de pasajeros en incendio EFO 0 Cerrar con velocidad completa 1 Cerrar con velocidad en protección de pasajeros 4 EFO-REV 0 0~2 Permitir la reapertura EFO en servicio de Bombero 0 Todo está prohibido 1 Sólo SGS/DOS está permitido 44 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 45/106 Fecha: 2013‐5‐23 Edición : A 2 DOB y SGS/DOS están permitidos 5 6 EFO-MP EFO-SD 0 1 0~7 Servicio de bomberos, modo de prioridad EFO 1 Prioridad ISC (independiente) 2 Prioridad ATT (conductor) 4 Prioridad EHS (Servicios médicos de emergencia) Notas: Si desea utilizar estas funciones, puede sumar los valores (ej. Si necesitan 1 y 4 servicios, entra 1+4=5) 0~255 Estado del dispositivo de la señal de emergencia contra incendios: 0 operación sin zumbador 1 Anillo continuo 2 Siempre destella 3 No simpre alarma con sonido en emergencia (EPO)Siempre destella en emergencia 7 ASL-P 255 0~255 Servicio de piso alternativo en estado de emergenca anti-incendio: Si introduce el piso servicio alternativo, la cabina llega a ASL-P (piso alternativo) en lugar de EFO-P (piso anti-incendio) 0 (1) 31 > 31 anulado No. symbol default range meaning remark 45 / 106 Manual de ajuste HAMCB 8 9 EFS-TY EFSINI 10 1 0~10 0~31 Número: XT0229A12002A Números de páginas: 46/106 Fecha: 2013‐5‐23 Edición : A Tipos anti-incendio: 0 EFO La cabina llega al piso anti-incendio, se para y se mantiene la puerta abierta. 1 EFS 1 (Automatic) Si la cabina llega al piso anti-incendio, entrará automáticamente en el estado independiente ISC. 2 EFS 2 (Manual) Si la cabina llega al piso anti-incendio, puede cambiar en el estado independiente. 3 ANSI (SES I / II) 4 British Standard 5533 5 Estándares suizos 6 Norma Australiana Igual al EFS 2, pero la cabina puede estar en estado independiente (ISC) y con y interruptor ESK 7 Nueva Zelanda 8 EFS 2 (manual de ESK ESK) 9 Nueva Zelanda, con DCB 10 general Electricidad en reserva se activa EFS 1 Automático 2 Al operar independientemente ISS 4 Al operar ESK, ESK 8 Al operar CFS, CFS 16 Al operar 1EFS, 1EFS Notas: Si desea utilizar estas funciones, se suman los valores (Ej.:1+4=5) Notas: Sólo aplicable a EFS-TY=10 46 / 106 Manual de ajuste HAMCB 10 EFSCLD No. symbol 11 12 13 EFSOPD EFS-EX EFS-RC Número: XT0229A12002A Números de páginas: 47/106 Fecha: 2013‐5‐23 Edición : A Tipos para cerrar puerta en servicio de anti-incendio EFS 1 Elección interior en cabina(apretar continuamente) 2 Botón de Cierre (apretar continuamente) 4 Botón de inicio arriba/abajo 8 Botón de inicio CS 16 American Standard 32 Elección interior de cabina (apretar suavemente) Notas: Si desea utilizar estas funciones, se suman los valores (Ej.:2+4=6) Notas: Sólo aplicable a EFS-TY=10 3 0~63 default range meaning 0~15 Tipos para abrir la puerta en servicio de anti-incendio EFS 1 Siempre de forma automática 2 Mantener apretado el botón de DOB 4 Sólo abrir la puerta por primera vez 8 Función de retención de la puerta, si la puerta de cabina no está completamente abierta o cerrada (I/Os DDM, RDDM) Notas: Si desea utilizar estas funciones se suman los valores (Ej.: 2+4=6) Notas: Son válidos 1, 2, 4 y 6 Notas: Sólo aplicable a EFS-TY=10 0~3 Tipos de retirada en servicio anti-incendio EFS 0 Sólo el piso anti-incendio (EFO) 1 Nigún movimiento después de abrir la puerta 2 En cualquier piso después cerrar la puerta Notas: Sólo aplicable a EFS-TY=10 0~63 Tipos de llamada por la vuelta en servicio anti-incendio EFS 1 Tiempo muerto al cerrar EFK 2 EFK cerrado, elevador funciona 4 Cerrar EFK, elevador no funciona 8 Cerrar EFK, elevador no funciona, cierra la puerta 16 Cerrar EFK, elevador no funciona, abre la puerta 32 EFS1 Cancelar emergencia anti-incendio Notas: Si desea utilizar estas funciones se suman los valores (Ej.: 1+4=5) Notas: Sólo aplicable a EFS-TY=10 2 0 0 remark 47 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 48/106 Fecha: 2013‐5‐23 Edición : A HAMCB 14 15 16 No. 17 EF-I-LT EPO-P EQO symbol EPS-TYP 0 255 0 default 0 0~15 0~255 Bloqueo de introducción anti-incendio EFO/EFS 1 EFO se introduce el bloqueo 2 AEFO se introduce el bloqueo 4 EFK se introduce el bloqueo 8 ASL se introduce el bloqueo Notas: Si desea utilizar estas funciones se suman los valores (Ej.: 1+4=5) Notas: Sólo aplicable a EFS-TY=10 Posición de electricidad de emergencia EPO (emergency power Operation): 0 (1) 31 EPO A/C (ajuste de la posición) EPO E (escalera hidráulica: fondo) = 32 EPO B/D (el siguiente piso) EPO F (escalera hidráulica: El siguiente piso) >32 anulado Versión de operaciones en sismo: 0 California 1 Nueva Zelanda 0~1 range 0~132 meaning remark Servicio de prioridad rápido: Después de alcanzar al suelo, se da instrucción de EHS: xx0 Automático ISC independiente xx1 Volver a la normalidad xx2 CHCS cancelar automáticamente llamada exterior Antes de alcanzar al suelo designado, se da instrucciín de EHS: x0x Volver inmediatamente x1x Pararse en el siguiente piso elegido x2x Se permite registro de elección interior en marcha x3x serve all car calls Generalmente: 1xx Luz de Servicios Médicos(EHS-2) 5.1.2 Ajustes del funcionamiento para llamar al elevador Allowed ENABLE Masks (SVT Key Sequence M-1-3-3-1-GOON) Ajustes de Configuración de llamadas At level CUDE CUDE P R Remark 0 1100 0000 0 0 Parámetros de contrato 1 1110 0000 0 0 Parámetros de contrato 48 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 49/106 Fecha: 2013‐5‐23 Edición : A HAMCB 2 1110 0000 0 0 Parámetros de contrato 3 1110 0000 0 0 Parámetros de contrato 4 1110 0000 0 0 Parámetros de contrato 5 1110 0000 0 0 Parámetros de contrato 6 1110 0000 0 0 Parámetros de contrato 7 1110 0000 0 0 Parámetros de contrato 8 1110 0000 0 0 Parámetros de contrato 9 1110 0000 0 0 Parámetros de contrato 10 1110 0000 0 0 Parámetros de contrato 11 1110 0000 0 0 Parámetros de contrato 12 1110 0000 0 0 Parámetros de contrato 13 1110 0000 0 0 Parámetros de contrato 14 1110 0000 0 0 Parámetros de contrato 15 1110 0000 0 0 Parámetros de contrato 16 1110 0000 0 0 Parámetros de contrato 17 1110 0000 0 0 Parámetros de contrato 18 1110 0000 0 0 Parámetros de contrato 19 1110 0000 0 0 Parámetros de contrato 20 1110 0000 0 0 Parámetros de contrato 21 1110 0000 0 0 Parámetros de contrato 22 1110 0000 0 0 Parámetros de contrato 23 1110 0000 0 0 Parámetros de contrato 24 1110 0000 0 0 Parámetros de contrato At level CUDE 0000 P 0 R 0 Remark 25 CUDE 1110 Parámetros de contrato 26 1110 0000 0 0 Parámetros de contrato 27 1110 0000 0 0 Parámetros de contrato 28 1110 0000 0 0 Parámetros de contrato 29 1110 0000 0 0 Parámetros de contrato 30 1110 0000 0 0 Parámetros de contrato 31 1010 0000 0 0 Parámetros de contrato 49 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 50/106 Fecha: 2013‐5‐23 Edición : A HAMCB 5.1.3 Configuración de pantalla POSITION INDICATOR (SVT Key Sequence M-1-3-4-GOON) Configuración de pantalla At level 0 PI Display “-1” Left 37 Right 1 Parámetros de contrato Remark 1 “1” 10 1 Parámetros de contrato 2 “2” 10 2 Parámetros de contrato 3 “3” 10 3 Parámetros de contrato 4 “4” 10 4 Parámetros de contrato 5 “5“ 10 5 Parámetros de contrato 6 “6“ 10 6 Parámetros de contrato 7 “7“ 10 7 Parámetros de contrato 8 “8“ 10 8 Parámetros de contrato 9 “9“ 10 9 Parámetros de contrato 10 “10“ 1 0 Parámetros de contrato 11 “11“ 1 1 Parámetros de contrato 12 “12“ 1 2 Parámetros de contrato 13 “13“ 1 3 Parámetros de contrato 14 “14“ 1 4 Parámetros de contrato 15 “15“ 1 5 Parámetros de contrato 16 “16“ 1 6 Parámetros de contrato 17 “17“ 1 7 Parámetros de contrato 18 “18“ 1 8 Parámetros de contrato 19 “19“ 1 9 Parámetros de contrato 20 “20“ 2 0 Parámetros de contrato 21 “21“ 2 1 Parámetros de contrato 22 “22“ 2 2 Parámetros de contrato 23 “23“ 2 3 Parámetros de contrato 24 “24“ 2 4 Parámetros de contrato 25 “25“ 2 5 Parámetros de contrato 26 “26“ 2 6 Parámetros de contrato 27 “27“ 2 7 Parámetros de contrato 28 “28“ 2 8 Parámetros de contrato 29 “29“ 2 9 Parámetros de contrato At level 30 PI Display “30“ Left 3 Right 0 Parámetros de contrato 31 “31“ 3 1 Parámetros de contrato 32 “A“ 10 11 Parámetros de contrato Remark 50 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 51/106 Fecha: 2013‐5‐23 Edición : A 33 “B“ 10 12 Parámetros de contrato 34 “C“ 10 13 Parámetros de contrato 35 “D“ 10 14 Parámetros de contrato 36 “E“ 10 15 Parámetros de contrato 37 “F“ 10 16 Parámetros de contrato 38 “G“ 10 17 Parámetros de contrato 39 “H“ 10 18 Parámetros de contrato 40 “I“ 10 19 Parámetros de contrato 41 “J“ 10 20 Parámetros de contrato 42 “K“ 10 21 Parámetros de contrato 43 “L“ 10 22 Parámetros de contrato 44 “M“ 10 23 Parámetros de contrato 45 “N“ 10 24 Parámetros de contrato 46 “O“ 10 25 Parámetros de contrato 47 “P“ 10 26 Parámetros de contrato 48 “Q“ 10 27 Parámetros de contrato 49 “R“ 10 28 Parámetros de contrato 50 “S“ 10 29 Parámetros de contrato 51 “T“ 10 30 Parámetros de contrato 52 “U“ 10 31 Parámetros de contrato 53 “V“ 10 32 Parámetros de contrato 54 “W“ 10 33 Parámetros de contrato 55 “X“ 10 34 Parámetros de contrato 56 “Y“ 10 35 Parámetros de contrato 57 “Z“ 10 36 Parámetros de contrato 51 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 52/106 Fecha: 2013‐5‐23 Edición : A HAMCB 5.1.4 Configuración de la dirección I/O estándar Car-link I/O PIN BIT I ADD.4 I/O PIN BIT I ADD.5 7 E5 1 1 ANSS 0 E5 1 0 DOL 5 E6 2 0 LWS 1206 E6 2 0 DCL 6 E7 3 0 LNS 1203 E7 3 0 TCI 1595 E8 4 0 EFS 1117 E8 4 1 SGS E1 1 0 20 E1 1 0 CUDL 1092 E2 2 0 UCM 21 E2 2 0 CDDL 1093 E3 3 0 DCM 22 E3 3 0 OLS 23 E4 4 0 BUZ 24 E4 4 0 FSL I/O PIN BIT I ADD.6 I/O PIN BIT I ADD.7 1617/1 E5 1 0 DOB 1060 E5 1 0 ATK 1619/3 E6 2 0 DCB 1102 E6 2 0 ATU 4 E7 3 0 ISS 1103 E7 3 0 ATD 1132 E8 4 0 DHB 1106 E8 4 0 NSB 1618 E1 1 0 DOBL E1 1 0 1620 E2 2 0 DCBL E2 2 0 26 E3 3 0 LR E3 3 0 1259 E4 4 0 DHBL E4 4 0 I/O PIN BIT I ADD.8 I/O PIN BIT I ADD.9 32 E5 1 0 CB0 36 E5 1 0 CB4 33 E6 2 0 CB1 37 E6 2 0 CB5 34 E7 3 0 CB2 38 E7 3 0 CB6 35 E8 4 0 CB3 39 E8 4 0 CB7 32 E1 1 0 CTTL0 36 E1 1 0 CTTL4 33 E2 2 0 CTTL1 37 E2 2 0 CTTL5 34 E3 3 0 CTTL2 38 E3 3 0 CTTL6 35 E4 4 0 CTTL3 39 E4 4 0 CTTL7 I/O PIN BIT I ADD.10 I/O PIN BIT I ADD.11 40 E5 1 0 CB8 44 E5 1 0 CB12 41 E6 2 0 CB9 45 E6 2 0 CB13 42 E7 3 0 CB10 46 E7 3 0 CB14 52 / 106 Número: XT0229A12002A Manual de ajuste Números de páginas: 53/106 Fecha: 2013‐5‐23 Edición : A HAMCB 43 E8 4 0 CB11 47 E8 4 0 CB15 40 E1 1 0 CTTL8 44 E1 1 0 CTTL12 41 E2 2 0 CTTL9 45 E2 2 0 CTTL13 42 E3 3 0 CTTL10 46 E3 3 0 CTTL14 43 E4 4 0 CTTL11 47 E4 4 0 CTTL15 I/O PIN BIT I ADD.12 I/O PIN BIT I ADD.13 48 E5 1 0 CB16 52 E5 1 0 CB20 49 E6 2 0 CB17 53 E6 2 0 CB21 50 E7 3 0 CB18 54 E7 3 0 CB22 51 E8 4 0 CB19 55 E8 4 0 CB23 48 E1 1 0 CTTL16 52 E1 1 0 CTTL20 49 E2 2 0 CTTL17 53 E2 2 0 CTTL21 50 E3 3 0 CTTL18 54 E3 3 0 CTTL22 51 E4 4 0 CTTL19 55 E4 4 0 CTTL23 I/O PIN BIT I ADD.14 I/O PIN BIT I ADD.15 56 E5 1 0 CB24 60 E5 1 0 CB28 57 E6 2 0 CB25 61 E6 2 0 CB29 58 E7 3 0 CB26 62 E7 3 0 CB30 59 E8 4 0 CB27 63 E8 4 0 CB31 56 E1 1 0 CTTL24 60 E1 1 0 CTTL28 57 E2 2 0 CTTL25 61 E2 2 0 CTTL29 58 E3 3 0 CTTL26 62 E3 3 0 CTTL30 59 E4 4 0 CTTL27 63 E4 4 0 CTTL31 I/O PIN BIT I ADD.16 I/O PIN BIT I ADD.17 64 E5 1 0 CB32 68 E5 1 0 CB36 65 E6 2 0 CB33 69 E6 2 0 CB37 66 E7 3 0 CB34 70 E7 3 0 CB38 67 E8 4 0 CB35 71 E8 4 0 CB39 64 E1 1 0 CTTL32 68 E1 1 0 CTTL36 65 E2 2 0 CTTL33 69 E2 2 0 CTTL37 66 E3 3 0 CTTL34 70 E3 3 0 CTTL38 67 E4 4 0 CTTL35 71 E4 4 0 CTTL39 I/O PIN BIT I ADD.18 I/O PIN BIT I ADD.19 53 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 54/106 Fecha: 2013‐5‐23 Edición : A HAMCB 72 E5 1 0 CB40 76 E5 1 0 CB44 73 E6 2 0 CB41 77 E6 2 0 CB45 74 E7 3 0 CB42 78 E7 3 0 CB46 75 E8 4 0 CB43 79 E8 4 0 CB47 72 E1 1 0 CTTL40 76 E1 1 0 CTTL44 73 E2 2 0 CTTL41 77 E2 2 0 CTTL45 74 E3 3 0 CTTL42 78 E3 3 0 CTTL46 75 E4 4 0 CTTL43 79 E4 4 0 CTTL47 I/O PIN BIT I ADD.20 I/O PIN BIT I ADD.21 80 E5 1 0 CB48 84 E5 1 0 CB52 81 E6 2 0 CB49 85 E6 2 0 CB53 82 E7 3 0 CB50 86 E7 3 0 CB54 83 E8 4 0 CB51 87 E8 4 0 CB55 80 E1 1 0 CTTL48 84 E1 1 0 CTTL52 81 E2 2 0 CTTL49 85 E2 2 0 CTTL53 82 E3 3 0 CTTL50 86 E3 3 0 CTTL54 83 E4 4 0 CTTL51 87 E4 4 0 CTTL55 I/O PIN BIT I ADD.29 I/O PIN BIT I ADD.30 544 E5 1 0 RCB0 548 E5 1 0 RCB4 545 E6 2 0 RCB1 549 E6 2 0 RCB5 546 E7 3 0 RCB2 550 E7 3 0 RCB6 547 E8 4 0 RCB3 551 E8 4 0 RCB7 544 E1 1 0 RCTTL0 548 E1 1 0 RCTTL4 545 E2 2 0 RCTTL1 549 E2 2 0 RCTTL5 546 E3 3 0 RCTTL2 550 E3 3 0 RCTTL6 547 E4 4 0 RCTTL3 551 E4 4 0 RCTTL7 I/O PIN BIT I ADD.51 I/O PIN BIT I ADD.52 1118 E5 1 0 RSGS 1057 E5 1 0 RDOB E6 2 0 1059 E6 2 0 RDCB 1056 E7 3 0 RDOL E7 3 0 1207 E8 4 0 RDCL E8 4 0 1140 RDHB 54 / 106 Número: XT0229A12002A Manual de ajuste Números de páginas: 55/106 Fecha: 2013‐5‐23 Edición : A HAMCB 1076 E1 1 0 RCUDL 1057 E1 1 0 RDOBL 1077 E2 2 0 RCDDL 1059 E2 2 0 RDCBL 1075 E3 3 0 RFSL E3 3 0 1073 E4 4 0 ROLS 1260 E4 4 0 RDHBL I/O PIN BIT I ADD.53 I/O PIN BIT I ADD.54 1631 E5 1 0 DOOR-ST1 1634 E5 1 0 DOOR-ST1R 1632 E6 2 0 DOOR-ST2 1635 E6 2 0 DOOR-ST2R 1633 E7 3 0 DOOR-ST3 1636 E7 3 0 DOOR-ST3R E8 4 0 E8 4 0 E1 1 0 E1 1 0 E2 2 0 E2 2 0 E3 3 0 E3 3 0 E4 4 0 E4 4 0 PIN BIT I E5 1 0 E6 2 E7 1117 I/O DOS PIN BIT I ADD.59 1135 E5 1 0 EQS 0 17 E6 2 0 NU 3 0 18 E7 3 0 NUSD-1 E8 4 0 19 E8 4 0 NUG-1 1224 E1 1 0 LND E1 1 0 1089 E2 2 0 DN E2 2 0 1088 E3 3 0 UP 18 E3 3 0 NUSD 480 E4 4 0 CPC0 19 E4 4 0 NUG I/O PIN BIT I ADD.61 1298 E5 1 0 DCDS E6 2 0 E7 3 0 E8 4 0 E1 1 0 E2 2 0 E3 3 0 E4 4 0 1694 ADD.55 I/O EFK1 55 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 56/106 Fecha: 2013‐5‐23 Edición : A HAMCB Hall-link I/O PIN BIT I ADD.4 I/O PIN BIT I ADD.5 135 E5 1 1 UHB39 136 E5 1 0 UHB40 199 E6 2 0 DHB39 200 E6 2 0 DHB40 E7 3 0 E7 3 0 E8 4 0 E8 4 1 135 E1 1 0 UHTTL39 136 E1 1 0 UHTTL40 199 E2 2 0 DHTTL39 200 E2 2 0 DHTTL40 263 E3 3 0 UHL39 264 E3 3 0 UHL40 327 E4 4 0 DHL39 328 E4 4 0 DHL40 I/O PIN BIT I ADD.6 I/O PIN BIT I ADD.7 137 E5 1 0 UHB41 138 E5 1 0 UHB42 201 E6 2 0 DHB41 202 E6 2 0 DHB42 E7 3 0 E7 3 0 E8 4 0 E8 4 0 137 E1 1 0 UHTTL41 138 E1 1 0 UHTTL42 201 E2 2 0 DHTTL41 202 E2 2 0 DHTTL42 265 E3 3 0 UHL41 266 E3 3 0 UHL42 329 E4 4 0 DHL41 330 E4 4 0 DHL42 I/O PIN BIT I ADD.8 I/O PIN BIT I ADD.9 139 E5 1 0 UHB43 140 E5 1 0 UHB44 203 E6 2 0 DHB43 204 E6 2 0 DHB44 E7 3 0 E7 3 0 E8 4 0 E8 4 0 139 E1 1 0 UHTTL43 140 E1 1 0 UHTTL44 203 E2 2 0 DHTTL43 204 E2 2 0 DHTTL44 267 E3 3 0 UHL43 268 E3 3 0 UHL44 331 E4 4 0 DHL43 332 E4 4 0 DHL44 I/O PIN BIT I ADD.10 I/O PIN BIT I ADD.11 141 E5 1 0 UHB45 142 E5 1 0 UHB46 205 E6 2 0 DHB45 206 E6 2 0 DHB46 E7 3 0 E7 3 0 E8 4 0 E8 4 0 56 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 57/106 Fecha: 2013‐5‐23 Edición : A HAMCB 141 E1 1 0 UHTTL45 142 E1 1 0 UHTTL46 205 E2 2 0 DHTTL45 206 E2 2 0 DHTTL46 269 E3 3 0 UHL45 270 E3 3 0 UHL46 333 E4 4 0 DHL45 334 E4 4 0 DHL46 I/O PIN BIT I ADD.12 I/O PIN BIT I ADD.13 143 E5 1 0 UHB47 144 E5 1 0 UHB48 207 E6 2 0 DHB47 208 E6 2 0 DHB48 E7 3 0 E7 3 0 E8 4 0 E8 4 0 143 E1 1 0 UHTTL47 144 E1 1 0 UHTTL48 207 E2 2 0 DHTTL47 208 E2 2 0 DHTTL48 271 E3 3 0 UHL47 272 E3 3 0 UHL48 335 E4 4 0 DHL47 336 E4 4 0 DHL48 I/O PIN BIT I ADD.14 I/O PIN BIT I ADD.15 145 E5 1 0 UHB49 146 E5 1 0 UHB50 209 E6 2 0 DHB49 210 E6 2 0 DHB50 E7 3 0 E7 3 0 E8 4 0 E8 4 0 145 E1 1 0 UHTTL49 146 E1 1 0 UHTTL50 209 E2 2 0 DHTTL49 210 E2 2 0 DHTTL50 273 E3 3 0 UHL49 274 E3 3 0 UHL50 337 E4 4 0 DHL49 338 E4 4 0 DHL50 I/O PIN BIT I ADD.16 I/O PIN BIT I ADD.17 147 E5 1 0 UHB51 148 E5 1 0 UHB52 211 E6 2 0 DHB51 212 E6 2 0 DHB52 E7 3 0 E7 3 0 E8 4 0 E8 4 0 147 E1 1 0 UHTTL51 148 E1 1 0 UHTTL52 211 E2 2 0 DHTTL51 212 E2 2 0 DHTTL52 275 E3 3 0 UHL51 276 E3 3 0 UHL52 339 E4 4 0 DHL51 340 E4 4 0 DHL52 57 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 58/106 Fecha: 2013‐5‐23 Edición : A HAMCB I/O PIN BIT I ADD.18 I/O PIN BIT I ADD.19 149 E5 1 0 UHB53 150 E5 1 0 UHB54 213 E6 2 0 DHB53 214 E6 2 0 DHB54 E7 3 0 E7 3 0 E8 4 0 E8 4 0 149 E1 1 0 UHTTL53 150 E1 1 0 UHTTL54 213 E2 2 0 DHTTL53 214 E2 2 0 DHTTL54 277 E3 3 0 UHL53 278 E3 3 0 UHL54 341 E4 4 0 DHL53 342 E4 4 0 DHL54 I/O PIN BIT I ADD.20 I/O PIN BIT I ADD.21 E5 1 0 96 E5 1 0 UHB0 E6 2 0 E6 2 0 E7 3 0 E7 3 0 E8 4 0 E8 4 0 E1 1 0 E1 1 0 E2 2 0 E2 2 0 E3 3 0 E3 3 0 343 E4 4 0 DHL55 E4 4 0 I/O PIN BIT I ADD.22 I/O PIN BIT I ADD.23 97 E5 1 0 UHB1 98 E5 1 0 UHB2 161 E6 2 0 DHB1 162 E6 2 0 DHB2 E7 3 0 E7 3 0 E8 4 0 E8 4 0 97 E1 1 0 UHTTL1 98 E1 1 0 UHTTL2 161 E2 2 0 DHTTL1 162 E2 2 0 DHTTL2 225 E3 3 0 UHL1 226 E3 3 0 UHL2 289 E4 4 0 DHL1 290 E4 4 0 DHL2 I/O PIN BIT I ADD.24 I/O PIN BIT I ADD.25 99 E5 1 0 UHB3 100 E5 1 0 UHB4 163 E6 2 0 DHB3 164 E6 2 0 DHB4 E7 3 0 E7 3 0 E8 4 0 E8 4 0 215 215 DHB55 96 DHTTL55 224 UHTTL0 UHL0 58 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 59/106 Fecha: 2013‐5‐23 Edición : A HAMCB 99 E1 1 0 UHTTL3 100 E1 1 0 UHTTL4 163 E2 2 0 DHTTL3 164 E2 2 0 DHTTL4 227 E3 2 0 UHL3 228 E3 3 0 UHL4 291 E4 2 0 DHL3 292 E4 4 0 DHL4 I/O PIN BIT I ADD.26 I/O PIN BIT I ADD.27 101 E5 1 0 UHB5 102 E5 1 0 UHB6 165 E6 2 0 DHB5 166 E6 2 0 DHB6 E7 3 0 E7 3 0 E8 4 0 E8 4 0 101 E1 1 0 UHTTL5 102 E1 1 0 UHTTL6 165 E2 2 0 DHTTL5 166 E2 2 0 DHTTL6 229 E3 3 0 UHL5 230 E3 3 0 UHL6 293 E4 4 0 DHL5 294 E4 4 0 DHL6 I/O PIN BIT I ADD.28 I/O PIN BIT I ADD.29 103 E5 1 0 UHB7 104 E5 1 0 UHB8 167 E6 2 0 DHB7 168 E6 2 0 DHB8 E7 3 0 E7 3 0 E8 4 0 E8 4 0 103 E1 1 0 UHTTL7 104 E1 1 0 UHTTL8 167 E2 2 0 DHTTL7 168 E2 2 0 DHTTL8 231 E3 3 0 UHL7 232 E3 3 0 UHL8 295 E4 4 0 DHL7 296 E4 4 0 DHL8 I/O PIN BIT I ADD.30 I/O PIN BIT I ADD.31 105 E5 1 0 UHB9 106 E5 1 0 UHB10 169 E6 2 0 DHB9 170 E6 2 0 DHB10 E7 3 0 E7 3 0 E8 4 0 E8 4 0 105 E1 1 0 UHTTL9 106 E1 1 0 UHTTL10 169 E2 2 0 DHTTL9 170 E2 2 0 DHTTL10 233 E3 3 0 UHL9 234 E3 3 0 UHL10 297 E4 4 0 DHL9 298 E4 4 0 DHL10 59 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 60/106 Fecha: 2013‐5‐23 Edición : A I/O PIN BIT I ADD.32 I/O PIN BIT I ADD.33 107 E5 1 0 UHB11 108 E5 1 0 UHB12 171 E6 2 0 DHB11 172 E6 2 0 DHB12 E7 3 0 E7 3 0 E8 4 0 E8 4 0 107 E1 1 0 UHTTL11 108 E1 1 0 UHTTL12 171 E2 2 0 DHTTL11 172 E2 2 0 DHTTL12 235 E3 3 0 UHL11 236 E3 3 0 UHL12 299 E4 4 0 DHL11 300 E4 4 0 DHL12 I/O PIN BIT I ADD.34 I/O PIN BIT I ADD.35 109 E5 1 0 UHB13 110 E5 1 0 UHB14 173 E6 2 0 DHB13 174 E6 2 0 DHB14 E7 3 0 E7 3 0 E8 4 0 E8 4 0 109 E1 1 0 UHTTL13 110 E1 1 0 UHTTL14 173 E2 2 0 DHTTL13 174 E2 2 0 DHTTL14 237 E3 3 0 UHL13 238 E3 3 0 UHL14 301 E4 4 0 DHL13 302 E4 4 0 DHL14 I/O PIN BIT I ADD.36 I/O PIN BIT I ADD.37 111 E5 1 0 UHB15 112 E5 1 0 UHB16 175 E6 2 0 DHB15 176 E6 2 0 DHB16 E7 3 0 E7 3 0 E8 4 0 E8 4 0 111 E1 1 0 UHTTL15 112 E1 1 0 UHTTL16 175 E2 2 0 DHTTL15 176 E2 2 0 DHTTL16 239 E3 3 0 UHL15 240 E3 3 0 UHL16 303 E4 4 0 DHL15 304 E4 4 0 DHL16 I/O PIN BIT I ADD.38 I/O PIN BIT I ADD.39 113 E5 1 0 UHB17 114 E5 1 0 UHB18 177 E6 2 0 DHB17 178 E6 2 0 DHB18 E7 3 0 E7 3 0 E8 4 0 E8 4 0 60 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 61/106 Fecha: 2013‐5‐23 Edición : A HAMCB 113 E1 1 0 UHTTL17 114 E1 1 0 UHTTL18 177 E2 2 0 DHTTL17 178 E2 2 0 DHTTL18 241 E3 3 0 UHL17 242 E3 3 0 UHL18 305 E4 4 0 DHL17 306 E4 4 0 DHL18 I/O PIN BIT I ADD.40 I/O PIN BIT I ADD.41 115 E5 1 0 UHB19 116 E5 1 0 UHB20 179 E6 2 0 DHB19 180 E6 2 0 DHB20 E7 3 0 E7 3 0 E8 4 0 E8 4 0 115 E1 1 0 UHTTL19 116 E1 1 0 UHTTL20 179 E2 2 0 DHTTL19 180 E2 2 0 DHTTL20 243 E3 3 0 UHL19 244 E3 3 0 UHL20 307 E4 4 0 DHL19 308 E4 4 0 DHL20 I/O PIN BIT I ADD.42 I/O PIN BIT I ADD.43 117 E5 1 0 UHB21 118 E5 1 0 UHB22 181 E6 2 0 DHB21 182 E6 2 0 DHB22 E7 3 0 E7 3 0 E8 4 0 E8 4 0 117 E1 1 0 UHTTL21 118 E1 1 0 UHTTL22 181 E2 2 0 DHTTL21 182 E2 2 0 DHTTL22 245 E3 3 0 UHL21 246 E3 3 0 UHL22 309 E4 4 0 DHL21 310 E4 4 0 DHL22 I/O PIN BIT I ADD.44 I/O PIN BIT I ADD.45 119 E5 1 0 UHB23 120 E5 1 0 UHB24 183 E6 2 0 DHB23 184 E6 2 0 DHB24 E7 3 0 E7 3 0 E8 4 0 E8 4 0 119 E1 1 0 UHTTL23 120 E1 1 0 UHTTL24 183 E2 2 0 DHTTL23 184 E2 2 0 DHTTL24 247 E3 3 0 UHL23 248 E3 3 0 UHL24 311 E4 4 0 DHL23 312 E4 4 0 DHL24 61 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 62/106 Fecha: 2013‐5‐23 Edición : A I/O PIN BIT I ADD.46 I/O PIN BIT I ADD.47 121 E5 1 0 UHB25 122 E5 1 0 UHB26 185 E6 2 0 DHB25 186 E6 2 0 DHB26 E7 3 0 E7 3 0 E8 4 0 E8 4 0 121 E1 1 0 UHTTL25 122 E1 1 0 UHTTL26 185 E2 2 0 DHTTL25 186 E2 2 0 DHTTL26 249 E3 3 0 UHL25 250 E3 3 0 UHL26 313 E4 4 0 DHL25 314 E4 4 0 DHL26 I/O PIN BIT I ADD.48 I/O PIN BIT I ADD.49 123 E5 1 0 UHB27 124 E5 1 0 UHB28 187 E6 2 0 DHB27 188 E6 2 0 DHB28 E7 3 0 E7 3 0 E8 4 0 E8 4 0 123 E1 1 0 UHTTL27 124 E1 1 0 UHTTL28 187 E2 2 0 DHTTL27 188 E2 2 0 DHTTL28 251 E3 3 0 UHL27 252 E3 3 0 UHL28 315 E4 4 0 DHL27 316 E4 4 0 DHL28 I/O PIN BIT I ADD.50 I/O PIN BIT I ADD.51 125 E5 1 0 UHB29 126 E5 1 0 UHB30 189 E6 2 0 DHB29 190 E6 2 0 DHB30 E7 3 0 E7 3 0 E8 4 0 E8 4 0 125 E1 1 0 UHTTL29 126 E1 1 0 UHTTL30 189 E2 2 0 DHTTL29 190 E2 2 0 DHTTL30 253 E3 3 0 UHL29 254 E3 3 0 UHL30 317 E4 4 0 DHL29 318 E4 4 0 DHL30 I/O PIN BIT I ADD.52 I/O PIN BIT I ADD.53 127 E5 1 0 UHB31 128 E5 1 0 UHB32 191 E6 2 0 DHB31 192 E6 2 0 DHB32 E7 3 0 E7 3 0 E8 4 0 E8 4 0 62 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas:63/106 Fecha: 2013‐5‐23 Edición : A 127 E1 1 0 UHTTL31 128 E1 1 0 UHTTL32 191 E2 2 0 DHTTL31 192 E2 2 0 DHTTL32 255 E3 3 0 UHL31 256 E3 3 0 UHL32 319 E4 4 0 DHL31 320 E4 4 0 DHL32 I/O PIN BIT I ADD.54 I/O PIN BIT I ADD.55 129 E5 1 0 UHB33 130 E5 1 0 UHB34 193 E6 2 0 DHB33 194 E6 2 0 DHB34 E7 3 0 E7 3 0 E8 4 0 E8 4 0 129 E1 1 0 UHTTL33 130 E1 1 0 UHTTL34 193 E2 2 0 DHTTL33 194 E2 2 0 DHTTL34 257 E3 3 0 UHL33 258 E3 3 0 UHL34 321 E4 4 0 DHL33 322 E4 4 0 DHL34 I/O PIN BIT I ADD.56 I/O PIN BIT I ADD.57 131 E5 1 0 UHB35 132 E5 1 0 UHB36 195 E6 2 0 DHB35 196 E6 2 0 DHB36 E7 3 0 E7 3 0 E8 4 0 E8 4 0 131 E1 1 0 UHTTL35 132 E1 1 0 UHTTL36 195 E2 2 0 DHTTL35 196 E2 2 0 DHTTL36 259 E3 3 0 UHL35 260 E3 3 0 UHL36 323 E4 4 0 DHL35 324 E4 4 0 DHL36 I/O PIN BIT I ADD.58 I/O PIN BIT I ADD.59 133 E5 1 0 UHB37 134 E5 1 0 UHB38 197 E6 2 0 DHB37 198 E6 2 0 DHB38 E7 3 0 E7 3 0 E8 4 0 E8 4 0 133 E1 1 0 UHTTL37 134 E1 1 0 UHTTL38 197 E2 2 0 DHTTL37 198 E2 2 0 DHTTL38 261 E3 3 0 UHL37 262 E3 3 0 UHL38 325 E4 4 0 DHL37 326 E4 4 0 DHL38 63 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 64/106 Fecha: 2013‐5‐23 Edición : A HAMCB 5.2 I/O PIN BIT I ADD.60 10 E5 1 0 PKS E6 2 0 E7 3 E8 1061 I/O PIN BIT I E5 1 0 E6 2 0 0 E7 3 0 4 0 E8 4 0 E1 1 0 HUDL E1 1 0 1062 E2 2 0 HDDL E2 2 0 1664 E3 3 0 LNSL E3 3 0 1065 E4 4 0 PKL E4 4 0 I/O PIN BIT I ADD.62 E5 1 0 E6 2 0 E7 3 0 E8 4 0 1774 E1 1 0 WTL 1775 E2 2 0 GOL 1776 E3 3 0 MD_COR 1777 E4 4 0 MD_BTN 16 ADD.61 EFK Ajuste de parámetros de tracción y monitor 5.2.1 Tabla de parámetros tracción M3-3-1-0 No. 0 1 symbol Up level (mm) Down level (mm) default 000 000 range 0~500 meaning parámetros de nivelación hacia arriba 0~500 parámetros de nivelación hacia abajo remark M3-3-1-1 No. 0 symbol Inertia kg/m2 default 030.0 1 Rotate dir 1/0 0 2 Pretrq trim (PU) 3 Encoder PPR 02048 4 Encoder Sort 5 Encoder dir 6 Duty speed mm/s range 0~1 1.00 meaning inercia del sistema sentido de rotación Ganancia Pre- torque 0~10000 número de impulsos de cotificador 1 0~1 Tipos de cotificador 0 0 Dirección de cotificador Velocidad nominal 01748 remark 64 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 65/106 Fecha: 2013‐5‐23 Edición : A HAMCB 7 Dely brk lftd ms 0600 0~9999 8 Delay lft brk ms 0500 0~9999 9 MTC Sw Pres? 1/0 1 0~1 10 Type of motor 0 0~1 Atraso de abrazo de freno de cinta mantenimiento Atraso de apertura de freno de cinta mantenimiento Detección de interruptor térmico del motor Tipos de motor M3-3-1-2 No. 0 symbol Spdp1 gain default 01500 range 0~10000 Ganancia del regulador proporcional 1 meaning 1 SpdI1 gain 00500 0~10000 Ganancia del regulador Integral 1 2 ARD Speed (mm/s) 00100 1~500 Velocidad ARD 3 ARD Run Direct 00000 0~1 dirección de funcionamiento ARD 4 SGP tran21 thr % 030 0~100 SGP convertido en umbral 21 5 SGP tran21 band% 010 0~100 SGP convertido en anchura de banda21 6 Reset speed % 050 1~100 restablecer velocidad 7 feedback filter1 300 0~300 Filtro de realimentación de velocidad1 8 feedback filter2 300 0~300 Filtro de realimentación de velocidad2 9 Track Error mm/s 0500 0~1000 Tolerancia máxima velocidad 10 ETSC present(%) 00097 1~100 coeficiente de protección ETSC 11 ETSC Enable(0/1) 00000 0~1 Capacidad de protección ETSC 12 overspeed (PU) 1.10 0~1.5 Ratio de sobrevelocidad default 1 range 0~1 Detección de conmutador de freno de cinta range remark M3-3-1-3 No. 0 symbol Brk Sw Pres? 1/0 meaning remark M3-3-1-4 No. 0 symbol Rated Power(Kw) default 011.7 meaning potencia nominal de motor polos de motoer 1 Number of poles 024 2 Rated RPM 0167 3 Rated frq (Hz) 33.40 4 Rated voltage(V) 340 voltaje nominal de motor 5 Duty load (kg) 1000 6 Rated I (A) 026.0 carga nominal de motor corriente nominal de motor 7 Rated Trq (Nm) 0669 torque nominal de motor velocidad nominal de motor frecuencia nominal de motor remark Parámetros de contrato Parámetros de contrato Parámetros de contrato Parámetros de contrato Parámetros de contrato Parámetros de contrato Parámetros de contrato Parámetros de contrato M3-3-1-6 65 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 66/106 Fecha: 2013‐5‐23 Edición : A HAMCB No. 0 symbol Brk dect dlay ms default 1000 range 0~2000 meaning 1 0mm/s t lim (ms) 0000 0~5000 2 Brake settle(ms) 1300 0~5000 Tiempo de apertura del freno de cinta 3 APR time(ms) 200 100~900 Tiempo de inicio de compensación de momento de fuerza symbol Floor number default 02 range 2~55 meaning Número de plantas 1 Velocity normal 01000 0~10000 Velocidad nominal 2 Accelera normal 00600 10~1500 3 Jerk0 normal 00500 0~1500 Aceleración Tirón 0 4 Jerk1 normal 00500 0~1500 Tirón 1 5 Decelera normal 00600 10~1500 6 Jerk2 normal 00350 0~1500 7 Jerk3 normal 00350 0~1500 Desaceleración Tirón 2 Tirón 3 8 Velocity inspect 00200 0~640 Velocidad de revisión 9 Accelera inspect 00200 10~1500 Aceleración de revisión 10 Velocity learn 00100 0~500 Velocidad de autoaprendizaje 11 position gain 00020 10~40 12 Velocity relevel 00030 0~100 Ganancia de posición Velocidad de renivelación 13 Accelera relevel 00300 10~1500 14 Decelera NTSD 01000 10~1500 Aceleración de renivelación Desaceleración NTSD 15 Jerk NTSD 00200 0~1500 Tirón NTSD 16 pos delay (ms) 00100 0~300 Atraso de puerta 17 Shv diam (mm) 00400 10~10000 Diámetro de la polea 18 Gear ratio 001.0 1~100 Ratio de engranaje 19 Rope ratio 02 1~7 Ratio de cuerda 20 Run enable 0 0~1 Operación remark Tiempo de detecciónde freno de cinta Tiempo de 0mm/s M3-3-1-9 No. 0 remark M3-3-5 No. 0 symbol speed low sect. default 00000 1 speed mid sect. 00090 2 speed Kp1 00010 3 speed Ki1 00010 4 speed Kp2 00010 range meaning remark Coeficiente de ajuste de la gama de baja velocidad de seccións de curva Coeficiente de ajuste de la gama de alta velocidad de sección de curva Ganancia del regulador proporcional de sección de velocidad 1 Ganancia del regulador diferencial de sección de velocidad 1 Ganancia del regulador proporcional de sección de velocidad 2 66 /106 Manual de ajuste Número: XT0229A12002A Números de páginas: 67/106 Fecha: 2013‐5‐23 Edición : A HAMCB Ganancia del regulador diferencial de sección de velocidad 2 Ganancia del regulador proporcional de sección de velocidad 3 Ganancia del regulador diferencial de sección de velocidad 3 5 speed Ki2 00010 6 speed Kp3 01000 7 speed Ki3 01000 8 speed fliter 00040 9 Pretorque delay 00400 10 Start inner Kp 00000 Ganancia interna del regulador proporcional 11 Start inner Ki 00000 Ganancia interna del regulador diferencial 12 Run source SVT=0 0 Fuente de órdenes 13 Max Drive ErrorB 05 B Máxima tolerancia de errores 14 Max OVER CURRENT 003 Máxima tolerancia de errores de sobrecorrientes 15 Start Kp 2000 Ganancia del regulador proporcional 16 Start Ki 0200 Ganancia del regulador diferencial 17 VS abnorm t (s) 10.0 Tiempo de fallo Código V 18 NTSD Persent % 097 19 DDP Time (s) 020.0 20 Distance comp 00 Comparación de distancia 03 Número permitido de fallos de reacción de corriente 21 Max fdbk error M3-3-1(S4-S6-S1-S5) No. symbol 0 Control methord default 3 Filtrado de velocidad Filtrado inicial de señal de codificador Velocidad de desaceleración forzada Tiempo de protección fotoeléctrica en nivelación range 0~3 0~10 meaning Modode controlar motor remark Número de errores permitidos DBD 1 MAX DBD ERR 03 2 Rotor pos offset 00000 0~65535 Definición de anulado 3 induct d0(mH) 13.00 0.01~99.99 1,8 veces de inductancia del eje D 4 induct q0(mH) 13.00 0.01~99.99 1,8 veces de inductancia del eje D 5 induct d(mH) 08.00 0.01~99.99 Inductancia del eje D , inductancia del motor 6 mutual resist 00.41 0.01~99.99 Resistencia del estator 7 induct q(mH) 08.00 0.01~99.99 Inductancia del eje Q , inductancia del motor 8 Rotor Time (s) 00.28 0~10 9 No load current 011.6 0.1~999.9 Tiempo del rotor Valor sin carga 10 Enable time stop 00000 0~1 Limite del número de funcionamiento 11 Setuo run times 00000 0.01~99.99 Establecer el número de funcionamiento 12 Now run times 00000 0.01~99.99 Número actual de funcionamiento M3-3-1(S7-S4-S1-S2) 67 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 68/106 Fecha: 2013‐5‐23 Edición : A HAMCB No. 0 symbol Drive size default 007 range 0~21 meaning 1 Drv Rtd Volt (V) 0380 Voltaje nominal tracción 2 Drv I limit (A) 072.0 Límite de corriente de tracción 3 AC Line fscale V 1.000 0~2 Coeficiente de voltaje de entrada 4 Bus fscale (V) 1.000 0~2 Coeficiente de voltaje de matriz 5 2.00 1.5~2.0 Límite de corriente bajo 6 <3Hz Torque Lmt DC link ovt (V) 780 0~999 Voltaje sobrante del cable matriz 7 DC link uv (V) 380 0~999 Voltaje faltante de cable matriz 8 AC Line Input(V) 400 50~480 Voltaje nominal de entrada 9 Brake unit work 0.69 0~1 voltaje de tubo de freno de cinta M3-3-1(S7-S4-S1-S0) No. symbol 0 DZ in 2LS default 001 remark Tipos de tracción range 0~5 Número de zona de la puerta2LS meaning 1 DZ in 1LS 001 0~5 Número de zona de la puerta1LS 2 Demagnetic (%) 100 0~200 3 Start filter 01800 0~9999 Coeficiente de debilitamiento magnético Coeficientes de filtrado de la señal del cotificador 4 Door open speed 100 0~300 Velocidad de apertura adelantada 5 Mtr overload (s) 20 0~40 Tiempo de sobrecarga del motor remark M3-3-1(S3-S6-S9-S8) No. 0 symbol H_speed frq (Hz) default 10000 range 1 Min IGBT on t us 003.0 0~5.0 2 Pos Err Lim (mm) 0200 3 Switch frq (KHz) 10 Frecuencia de conmutación 4 Run time hour 00000 tiempo de duración hora 5 Run time minutes 00 meaning remark Frecuencia de conmutación en sección de alta velocidad Mínimo límite de pulso estrecho Distancia por posición errónea tiempo de duración minuto 68 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 69/106 Fecha: 2013‐5‐23 Edición : A 5.2.2 Menú de monitoreo de tracción M3-1-1 No. 0 symbol Software version range 1.01 meaning Edición de software 1 Car speed mm/s Velocidad real de elevador 2 Motor Speed RPM 3 Rotor position Velocidad de motor(según PG) Posición de rotor 4 Dictated v mm/s Dada la velocidad (DBSS) 5 Output voltage V Dado el voltaje de salida 6 Mtr trq PU Corriente de torques dada (cantidad relativa de corriente de torques) 7 Output current A 8 Heat sink temp1 Corriente de salida Temperatura del radiador 1 9 Heat sink temp2 Temperatura del radiador 2 remark M3-1-2 No. 0 symbol DC link V range meaning Voltaje de corriente continua 1 X offset (A) Sesgo sensor de corriente de Fase X 2 Y offset (A) Sesgo sensor de corriente de Fase Y 3 Z offset (A) Sesgo sensor de corriente de Fase Z 4 Frequency (Hz) 5 speed gap (mm/s) Frecuencia de salida Speed gap 6 LS distance (mm) Distancia para instalación de desaceleración forzada (Parámetros correspondientes) 7 Motor overload Integrador de sobrecarga del motor 8 Drive overload remark Integrador de sobrecarga de invertidor de frecuencia M3-1-3 No. 0 symbol Encoder pulse range meaning Estado del pulso del cotificador 1 Encoder Z num 2 Encoder C POS Recuento del codificador Z Posicion del codificador C 3 Encoder D POS Posicion del codificador D 4 Factory resd1 Prueba de Fabricante 1 5 Factory resd2 Prueba de Fabricante 2 6 Factory resd3 Prueba de Fabricante 3 remark 69 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 70/106 Fecha: 2013‐5‐23 Edición : A 7 Factory resd4 Prueba de Fabricante 4 8 Factory resd5 Prueba de Fabricante 5 9 Now floor Piso actual 10 Now position (m) 11 INPUT1 Posición actual INPUT1 12 INPUT2 INPUT2 No. 13 symbol OUTPUT 14 OUTPUT CODE OUT CODE 15 Prepare to run Prepararse a funcionar (manual o MCSS da DBSS) 16 LOAD Percent % 17 Bases Enabled Cantidad real de compensación de peso Estado DBSS range meaning remark OUT M3-1-4 No. 0 symbol 2LS (m) range meaning remark Desaceleración forzada hacia arriba posición 1 1 4LS (m) Desaceleración forzada hacia arriba posición 2 2 1LS (m) Desaceleración forzada hacia abajo posición 1 3 3LS (m) Desaceleración forzada hacia abajo posición 2 4 Floor 1A (m) Pozo tras autoaprendizaje posición 1ª 5 Floor 1B (m) Pozo tras autoaprendizaje posición 1ª 6 Floor 2A (m) Pozo tras autoaprendizaje posición 2ª 7 Floor 2B (m) Pozo tras autoaprendizaje posición 2ª … … … … … … 110 Floor 54A (m) Pozo tras autoaprendizaje posición 54ª 111 Floor 54B (m) Pozo tras autoaprendizaje posición 54ª 112 Floor 55A (m) Pozo tras autoaprendizaje posición 55ª 113 Floor 55B (m) Pozo tras autoaprendizaje posición 55ª 114 NOW PULSE(1000p) 70 / 106 Manual de ajuste HAMCB 6 Número: XT0229A12002A Números de páginas: 71/106 Fecha: 2013‐5‐23 Edición : A Fallos comunes y solución 6.1 Tabla de fallos lógicos comunes Entrar en M1-2-1 para ver el fracaso lógico, apretar Shift+2 entrando en el menú, apretar 1 y 2, se elimina el fallo lógico. Acontecimiento Causas posibles total runs Total funcionamiento a partir de último arranque Configuración - minutes on Minutos a partir de último arranque - Acaecimiento Causas posibles Configuración LS - Fault Señal de 2LS y 1LS no está normal destello infromación 1LS + 2LS on DBSS - Fault TCI - Lock 1LS y 2LS funcionan al mismo tiempo Convertidor de frecuencia no está listo El orden de mantenimiento de cabina no es correcto, hay que operar según lo siguiente. Abrir puerta. 2. Cambiar el interruptor de mantenimiento a normalidad.3.Cerrar puerta Si no, elevador no funcionará bien y el indicador en INS destellará. DBP - Fault Funciona elevador según orden correcto. Cuando no se detecta la señal de zona de puerta al pararse el elevador, se averiará el relé eléctrico LVC. Tal fallo se registra en EEPROM, sólo se opera el motor por el interruptor de mantenimiento de INS. Adr - Check La diección de estación remota especial no corresponde a la lista del estándar IO - TCI (691) = 16 - 3 1LS (692) = 16 - 1 2LS (693) = 16 - 2 71 / 106 Manual de ajuste Número: XT0229A12002A HAMCB start DCS! OCSS Acaecimiento a) Antes de DCS, no se puede funcionar con normalidad. b) Al funcionar, cuando el elevador se para en zona de puerta y la puerta queda abierta completamente (DOL activado), señal de cerrar puerta se activa (DW activado). Comprobar si el candado de puerta de tiene cortocircuito. Presiona M-1-3-5 para iniciar DCS! Notas: Si tiene que cancelar DCS, entra en M2-9, cambia dirección al 20008EF6:FF (Cuidado con esta operación) Causas posibles Números de páginas: 72/106 Fecha: 2013‐5‐23 Edición : A NoDW - Chk Configuración 0100 OpMode NAV 0101 EPO shutd. 0102 OpMode DTC La puerta no se puede cerrar con la normalidad en un tiempo determinado (Perder DCL, DFC o DW). DCL (694) RDCL (695) DOOR, REAR DTC-T 0103 OpMode DTO Puertas dentro del tiempo establecido no se pueden abrirse apropiadamente. DOL (000) RDOL (544) DOOR, REAR DTO-T 0104 OpMode DCP 0105 DBSS fault Fallo de tracción DRIVE 0106 PDS active Parte de interruptor de candado no se cierra PDD (784) Causas posibles Configuración LV-MOD, DZ-TYP MCSS Acaecimiento 0200 Pos. Count. 0201 correct. run Avería de tracción causa la anulación de OCSS. Puede activarse ese modo después del mantenimiento y antes del funcionamiento corregido. No puede funcionar EPO en emergencia de alimentación eléctrica. Cabina no puede contestar a la llamada o instrucciones en un plazo determinado (si la puerta está bloqueada por obstáculos) Al terminar de funcionar, las señales de puerta e IP no se encajan. Posiblemente, el tiempo de señal DZ e IP es tan corto que al sistema no le da tiempo a detectarlo. Operación corregida - NU(017) NUSD (018) NUSG (019) DCP-T (ej.Tras arranque, mantenimiento, NAV etc.) 72 / 106 Manual de ajuste HAMCB 0202 /ES in FR 0203 Número: XT0229A12002A Números de páginas: 73/106 Fecha: 2013‐5‐23 Edición : A Al funcionar a alta velocidad, la señal ES se activa. MD/AES, ES-TYP /ES in SR Al funcionar a baja velocidad, la señal ES se activa. MD/AES, ES-TYP 0204 TCI/ERO on TCI o ERO se opera. ERO-TYP 0205 SE-Fault Elevador no se puede iniciar debido a la pérdida de señal SE (examinar SKL, THB fusible etc.) 0207 DDP in FR Al funcionar a alta velocidad en tiempo determinado (DDP), no se deteca la señal del pozo (se pierde DZ). DDP 0208 DDP in SR Al funcionar a baja velocidad en tiempo determinado (3P), no se deteca la señal del pozo (se pierde DZ). 3P 0209 DDP in RS Al funcionar el rescate en tiempo determinado (3P), no se deteca la señal del pozo (se pierde DZ). 3P 0210 /DZ in NST Al pararse el elevador, no se deteca la señal. LV-MOD, DZ-TYP Acaecimiento Causas posibles Configuración 0211 /DFC in FR Circuito de seguridad se disconecta al funcionar rápidamente. - 0212 /DFC in SR Circuito de seguridad se disconecta al funcionar lentamente. - 0216 DZ missed 0224 J-Relay Control de lógica detecta que la fuente eléctrica de triple fase está defectuosa (por ejemplo, fase escasada o incorrecta) EN-J, J-T 0226 LS-fault Señal de desaceleración forzosa no está normal, se destella. - 0228 1LS+2LS on Se ha detectado señal UIS y DIS pero no recibe señal DZ. Posiblemente, hay fallo en Relé LV. Se detectan señales 1LS y 2LS al mismo tiempo. 0230 RSL Adr chk 0231 LSVF-W:/DR 0232 LSVF-W:/SC EN-RLV, DRIVE 1LS (692) 2LS (693) DRIVE C-TYPE Véase descripción en destello NoAdrChk Fallo en convertidor de frecuencia (no está dispuesto) DRIVE C-TYPE (see MCB) Al desacelerar, la velocidad de elevador está tan alta que no puede realizar la función de apertura adelantada de la puerta ADO o la de renivelación RLV〉. (see MCB) 0237 /DW in FR Desconecta circuito de puerta a alta velocidad. - 0238 /DW in SR Desconecta circuito de puerta a baja velocidad. 73 / 106 Manual de ajuste HAMCB DCSS Acaecimiento 0300 DBP: dfc_SE Causas posibles Números de páginas: 74/106 Fecha: 2013‐5‐23 Edición : A Configuración Al abrir la puerta o cuando la puerta queda totalmente abierta, DFC o SE (función ADO) no se lleva a cabo. EN-RLV DRIVE Se detecta señal DCL al estar totalmente abierta la puerta. DCL (694) RDCL (695) 0301 DCL in [ ] 0302 DCS:DW err En operación normal, se detecta circuito de puerta. NoDW-Chk 0303 DBP-Fault Véase destello de señal 'DBP-Fault' - 0304 DOL:alw. on Se detecta señal DOL al cerrar totalmente puerta; Aunque el fusible de puerta DO2000 se corta, aparece ese fallo también. DOL (000) RDOL (544) Causas posibles Configuración Dos estaciones remotas conectadas al la misma línea en serie usan una misma dirección - Se pierde la señal de sincronización de línea a distancia en serie - Causas posibles Configuración Datos no son correctos en paralelo /control de grupo - SSS Acaecimient o 0400 RSL parity 0401 RSL sync GROUP Acaecimient o 0500 RNG1 msg 6.2 Número: XT0229A12002A 0501 RNG1 time No recibe señales desde otro elevador en un tiempo determinado. GROUP 0502 RNG1 sio 0503 RNG1 tx Fallo en transmisión en paralelo /control de grupo Tiempo exordinario de la transmisión de datos en serie - Fallos comunes de tracción Entrar en M3-2-1para observer fallos actuales, en M3-2-2 para ver fallos pasados, en M3-2-3 para cancelar fallos actuales de tracción, en M3-2-4 para cancelar todos fallos, en M3-2-5 para tiempo de funcionamiento con electricidad. M3-2-5 tiempo de funcionamiento con electricidad-M3-2-2 tiempo de fallos pasados=tiempo contado desde el pasado fallo 74 /106 Manual de ajuste HAMCB Número 1 2 Pantalla IGBT Fault Over current 3 Motor overload Número Pantalla 4 Drive overload Nombre GBT/IPM Fallo de sección Fallo de corriente de tracción Sobrecarga de motor Nombre Sobrecarga de tracción Clase B Condiciones Sobrecorriente de módulo, cortocircuito de salida, puesta en marcha sin abrir el freno, y tal señal activadora proviene del módulo IPM IGBT module fault Número: XT0229A12002A Números de páginas: 75/106 Fecha: 2013‐5‐23 Edición : A Causas Posibles A, Cortocircuito en tracción U, V, W B, Freno de cinta no se abre, mientras que en la tracción ha salido corriente C, Durante la funcionamiento normal, mantenimiento, autoaprendizaje y la corrección del elevador, se rompe de repente el candado o el circuito de seguridad D, IGBT está dañada E, Tracción y tabla principal están mal conectadas B Sobrecorriente de módulo, cortocircuito de salida, puesta en marcha sin abrir el freno,o la corriente de carga es demasiado grande, rápida aceleración y desaleración, pequeñas especificaciones de tracción, rotura de módulo, puesta en marcha con cotificador deñado y tal señal activadora proviene del circuito de detección de corriente, Sensor Hall, Over currtent A, Cortocircuito en tracción U, V, W B, Freno de cinta no se abre, mientras que en la tracción ha salido corriente C, Durante la funcionamiento normal, mantenimiento, autoaprendizaje y la corrección del elevador, se rompe de repente el candado o el circuito de seguridad D, IGBT está dañada E, Los cables en filas están dañados F, Ángulo de posicionamiento está incorrecto G, Funcionamiento de motor sin fases J, pérdida run señal del cotificador A Las notas acumulados de corriente de salida del CPU sobrepasan un cierto valor, y causan avería por sobrecarga de motor. A, freno de cinta no se abre al funcionar elevador B, Ángulo de posicionamiento incorrecto C, Sobrecarga del elevador no funciona D, Coeficiente de protección es demasiado pequeño Clase A Condiciones Las notas acumulados de corriente de salida del CPU sobrepasan un cierto valor, y causan avería por sobrecarga de motor. Causa Posible A, Freno de cinta no se abre al funcionar elevador B, Ángulo de posicionamiento incorrecto C, Sobrecarga de elevador D, Coeficiente de protección es demasiado pequeño 75 /106 Manual de ajuste HAMCB 5 6 7 Overtemp DC link OVT DC link UVT 8 Overspeed Número Pantalla Sobretem peratura DC Línea sobreten sión DC Baja tensión Números de páginas: 76/106 Fecha: 2013‐5‐23 Edición : A A Sobretemperatura de módulo, incluidos IPM y Puente conmutador Temperatura en cualquier punto>85℃ A, Sensor de temperatura está dañado; B, Ventilador de tracción está dañado; C, Temperatura real de alta de refrigeración llega a esos grados; A 1, Si tabla de control CPU detecta señal de sobrepresión de hardwre, activa fallo de sobrepresión. 2, Si CPU detecta que voltaje de Línea DC sobrepasa el valor determinado por el software, inicia fallo de sobrepresión. DC bus voltage is overvltage A, Circuito de la resistencia de frenado está cortado; B, Voltaje de entrada externa está demasiado alto; C, Alimentar electricidad primero a la tabla y después a la tracción, lo cual puede causa avería por el impacto. A 1, Si tabla de control CPU detecta señal de sobrepresión de harware, activa fallo de sobrepresión. 2, Si CPU detecta que voltaje de Línea DC sobrepasa el valor determinado por el software, inicia fallo de sobrepresión. DC bus voltage is overvltage B Motor sobrevelocidad Nombre Número: XT0229A12002A Clase Velocidad de motor es mayor que velocidad nominal Overspeed(M3312) over speed Condiciones A, Voltaje de entrada RST es menos de 280V B, Base está sin electricidad; C, Parámetros “Bus fscale (V) ” no están correctos; D, Puente conmutador o Resistencia de arranque suave no funciona; A, Velocidad de “Velocity normal ” es demasiado rápida; B, Inercia “Inertia kg/m2” es demasiado; C Parámetros de cotificador, diámetro de la polea, ratio de cuerda etc. no están correctos; D, No hay salida de convertidor de frecuencia; Causa Posible 76 / 106 Manual de ajuste HAMCB 9 10 Track error PVT lost Fallo de seguimiento de velocidad Fallo de cotificador 11 Task orun Números de páginas: 77/106 Fecha: 2013‐5‐23 Edición : A B Si velocidad real detectada por la tabla CPU, en comparación con velocidad nominal, cumple las dos condiciones abajo, activa el fallo de avería de seguimiento de velocidad. ① abs (velocidad real -velocidad dada)> Velocidad nominal×Track error/100 ② Tiempo de duración es más que tiempo nominal the gap between actual speed and command speed is maore than "Track err" A, Freno de cinta no se abre al funcionar elevador; B, Angulo de posicionamiento no es correcto; C, Motor funciona, mientras que el cotificador no funciona; D, Señal de cotificador no está correcta E, Valor Track error es demasiado pequeño, puede ocurrir durante la marcha de mantenimiento B Pérdida señal de cotificador, o fallo en hardware de cotificador (ej.problema de alimentación eléctrica, corte de cable) the drive does not detect the encoder signal A, Cables de cotificador están desconectados o cortados B, Orden de fases de motor no está correcto o cuya dirección no es correcta. C, Número de impulses y ajustes de modelo de cotificador no son correctos D, Cable de cotificador y alambre de blindaje tienen cortocircuito B Tiempo extraordinario en la suspensión de tarea 1ms, 10ms y 40ms No puede cumplir toda la terea dutrante un tiempo de suspensión A, Frecuencia de PWM “Switch frq (KHz)” es demasiado grande; Pwm Tiempo extraordinario de suspensión de tarea Número: XT0229A12002A 77 /106 Manual de ajuste HAMCB 12 Número 13 Tune Moving Pantalla E2 write err 14 Mtr therml cntct 15 Brake dropped Desplazamie nto de del ángulo de cotificador y autoaprendiz aje Nombre Eeprom error de escritura y lectura Calientamiento de motor sobre el relé Fallo de Interruptor de freno de cinta 1 B Clase B D B En Autoaprendizaje del polo magnético y ángulos del cotificador si se mueve el rotor, fracasará el autoaprendizaje the movement of motor is too large during motor auto phasing Condiciones Tabla de control CPU, al conectarse a la electricidad, maneja la lectura y escirtura de EEPROM. Según ámbitos especiales se puede juzgar si EEPROM está normal o no. Si se sacan diferentes datos por 3 veces, activa fallo. Después de conectarse a la electricidad, si se realizan lectura y escritura de EEPROM, primero procede a escribir y después a volver a leer. Si datos son mismos, está normal. Si 3 veces con diferentes datos, Si se sacan diferentes datos por 3 veces, activa fallo. E2 write err Si la tabla CPU detecta el calientamiento del motor sobre el relé eléctrico y procede a protegerlo. The mortor overtemperature fualt is tripped; La tabla CPU detecta el estado de interruptor de freno de cinta, número: XT0229A12002A Números de páginas: 78/106 Fecha: 2013‐5‐23 Edición : A A, Distancia de freno de cinta es tan grande que el motor no lo abraza completamente ; B, Cotificador no está completamente fijado; Causa Posible A, Daños de chip de memoria de EEPROM ; A, Calentamienro de motor sobre el relé eléctrico (la temperautra del motor principal es tan alta que causa daño al relé eléctrico); B, Error en la conexión de cables A, La real acción en el freno de cinta no corresponde a lo establecido por el diseño B, Error en la conexión de cables; 78 / 106 Manual de ajuste HAMCB 16 Brake dropped 2 Fallo de Interruptor de freno de cinta 2 B Número Pantalla Nombre Clase 17 18 Brake Unit Fault Thyristor module fualt Fallo de unidad de frenado fallo de tiristor número: XT0229A12002A Números de páginas: 79/106 Fecha: 2013‐5‐23 Edición : A procede a comparar el estado de órden del freno de cinta mandado por el software con el estado real detectado, si C, Tiempo de freno de cinta es el resultado no es idéntico y sobrepasa el demasiado pequeño (tiempo nominal tiempo de detección del 500ms) ; interruptor del freno de cinta, activan los dos siguientes casos: ① No se abre durante la marcha ② No se cierra durante la parada The brake is not opened or closed completely Condiciones A Cuando el convertidor de frecuencia está en consumo de energía automático por el frenado, sin otros fallos, se detecta que la señal FIGT está en baja potencia y activa el tal fallo. the brake unit is defective A En la tabla de tracción hay circuitos de hardware que supervisa el estado del tiristor. Si funciona con normalidad, la caída de presión entre los dos polo del tiristor es muy pequeña. Si no funciona con normalidad, la caída es muy grande. Ese circuito del hardware supervisa la caida de presión y detecta los fallos. Causa Posible A, Frenado IGBT está dañado B, Resistencia de frenado está en cortocircuito; A, Tiristor está dañado 79 / 106 Manual de ajuste HAMCB 19 Número 20 DBD PICKUP Pantalla DDP Fault Fallo de contactor principal o contactor freno de cinta Nombre Disconexión Fotoeléctrica B1 Clase A La tabla CPU detecta el estado de entrada DBD, compara el estado de órden del contactor y del freno de cinta mandado por el software con el real estado de entrada DBD detectado, si los resultados no son idénticos y sobrepasan los 100ms, activa el fallo y procede a juzgar lo siguiente: ① UDX, LB cualquiera tiene salida, entrada de DBD es 0; ① UDX, LB ninguno tienen salida, entrada de DBD es 1; Máximo número de fallos está en MAX DBD ERROR. The feedback of SW&BY contactor are detected abnormal. Condiciones Tabla CPU detecta señal en marcha normal y restablecimiento. Si no hay señal en zona de puerta en tiempo determinado, activa fallo. No door zone sensor be detected during runing Número: XT0229A12002A Números de páginas: 80/106 Fecha: 2013‐5‐23 Edición : A A, Estado de LB o UDX real no está deacuerdo con el diseño. B, Primero se enchufa la tabla de alimentación LMCB, y luego la de DC30V; C, Al posicionar el motor principal, se ponen UDX y LB en cortocircuito, pero se pone M-3-3-5 RUN SOURCE al 1(auto); Causa Posible A, Interruptor fotoeléctrico está dañado, no hay señal de entrada B, DDP time es demasiado pequeño, en el restablecimiento (velocidad nominal es la mintad) puede aparecer ese fallo (En esa situación se tiene que mover interruptor de desaceleración forzada a los extremos, o escudar DDP, M335 DDP time se ajusta al 0.); 80 / 106 Manual de ajuste HAMCB 21 22 Vcode abnormal1 Vcode abnormal2 fallos de código V 1 fallos de código V 2 C C Cuando se para elevador y no responde al código V emitido por lógica, sobre pasa 100´´VS abnorm t(s)´´ms V coder abnormal 1 Tracción no está en nivelación en caso de velocidad cero, con ese motivo, el CPU lógico continúa enviando código SD de parada en la siguiente planta. Si la tabla CPU detecta ese estado durante más de 6 segundos, activa el fallo. V coder abnormal1 Al perderse la fuente eléctrica, Voltaje de cable matriz se baja, cuando es 23 Power lost Pérdida de alimentación principal 24 1LV NORMAL CLOSE 1LV fallo fotoeléctrico Pantalla Nombre Número C A Clase menos de DC380v, activa ese fallo. Cuando la potencia sube y llega hasta DC400v, fallo desaparece. Power lost número: XT0229A12002A Números de páginas: 81/106 Fecha: 2013‐5‐23 Edición : A A, Durante la prueba, el elevador no está en la posicón de nivelación, y no está en mantenimiento, ahora el Run enable está establecido en 0 B, Después del autoaprendizaje del pozo no se ajusta el Run enable a 1 C, En la marcha a alta velocidad, la señal DCF de repente se pierde pero se recupera. A, En la marcha de velocidad baja, se rompe el candado de puerta; B, Sin tabla de circuito de seguridad, se establece la función de apertura adelantada de puerta; A, Corte de energía/alimentación de energía normal B, Tabla de control está con electricidad pero tracción no C, Cables en filas no están enchufados 1LV señal fotoeléctrica Sigue, el elevador en marcha 1000mm 1LV be detected defective Condiciones Causa Posible 81 / 106 Manual de ajuste HAMCB 25 26 27 28 2LV normal closed Floor number err 2Lv fallo fotoeléctr ico o posición de elevador pérdida fallo de piso PARA. fallo de ABNORMAL parámetros Current AD Offst En parada, Corriente excesiva de cualquier fase de UVW A 2LV señal fotoeléctrica continúa, marcha de elevador 1000mm, O durante la marcha, número de pisos no es idéntico a al fotoeléctrico, o la distancia fotoeléctrica entre entrada y salida de elevador es diferente a la posición de autoaprendizaje en más de 1000mm 1LV be detected defective A Tras haber cumplido el Autoaprendizaje y con 2LS, piso que se ha aprendido no es idéntico a la altura de piso establecido. Floor number be Detected abnormal; A Frecuencia, velocidad del motor y número de pares de polos no están de acuerdo con N=60F/P the motor parameter is abnormal; B Al pararse el elevador, corriente de cualquier fase UVM es excesiva AD Offst is out of range Número: XT0229A12002A Números de páginas: 82/106 Fecha: 2013‐5‐23 Edición : A A los 200mm desde la posición de nivelación no hay cambio fotoeléctrico. Parámetros de piso no son correctos. A, Fallo en canal de muestreo, tabla principal o tabla de tracción; B, Sensor Hall no funciona; C, Cualquier fase UVW sufre cortocircuito a tierra; 82 / 106 Manual de ajuste HAMCB 6.3 número: XT0229A12002A Números de páginas: 83/106 Fecha: 2013‐5‐23 Edición : A Otros fallos Fallos de estado sistema Número Descripción 1 Número 2 Al parase bruscamente en la marcha rápida, si no llega a la nivelación, no puede seguir marchando. Descripción Al parase bruscamente en la marcha de mantenimiento, no puede seguir marchando. Causas posibles 1. Corte de señal de seguridad en marcha; 2. Corte de señal de candado corta en marcha; 3. Fallos en sistema en marcha; Causas posibles 1. Corte de señal de seguridad en marcha; 2. Corte de señal de candado corta en marcha; 3. Fallos en sistema en marcha; Método de confirmación 1. Luz ES se enciende, observa M112 por servidor, señal ES en mayúscula significa desconexión de circuito de seguridad 2. Luz DFC o DW se apaga, observa M112 por servidor, Señal dfc en minúscula dw en minúscula 3. Luz de fallo ERR siempre brilla, observa código de fallo actual M321. Si la luz de fallo ERR no está encendida, observa fallo histórico M322 o fallo lógico M121 Método de confirmación 1. Luz ES se enciende, observa M112 por servidor, señal ES en mayúscula significa desconexión de circuito de seguridad 2. Luz DFC o DW se apaga, observa M112 por servidor, Señal dfc en minúscula dw en minúscula 3. Luz de fallo ERR siempre brilla, observa código de fallo actual M321. Si la luz de fallo ERR no está encendida, observa fallo histórico M322 o fallo lógico M121 83 / 106 Manual de ajuste HAMCB 3 4 Número El elevador se para bruscamente en el autoaprendizaje en el pozo 1. Corte de señal de seguridad en marcha; 2. Corte de señal de candado corta en marcha; 3. Fallos en sistema en marcha; 4. Errores en el ajuste de número de plantas 1. Corte de señal de seguridad en marcha; 2. Corte de señal de candado corta en marcha; 3. Fallos en sistema en marcha; Al parase 4. Fallo del interruptor bruscamente en fotoeléctrico en marcha. Se la marcha de para al encontrar con la señal restablecimiento, de desaceleración forzada si no llega a la (1/2LS) base, no puede 5. Anormalidad de señal de seguir posición (1/2LS) en marcha y marchando. esta sigue saliendo, se para al encontrar con la señal fotoeléctrica. Descripción Causas posibles Número: XT0229A12002A Números de páginas: 84/106 Fecha: 2013‐5‐23 Edición : A 1. Luz ES se enciende, observa M112 por servidor, señal ES en mayúscula significa desconexión de circuito de seguridad 2. Luz DFC o DW se apaga, observa M112 por servidor, Señal dfc en minúscula dw en minúscula 3. Luz de fallo ERR siempre brilla, observa código de fallo actual M321. Si la luz de fallo ERR no está encendida, observa fallo histórico M322 o fallo lógico M121 4. Examina el valor TOP de M311 y Floor number de M3319. 1. Luz ES se enciende, observa M112 por servidor, señal ES en mayúscula significa desconexión de circuito de seguridad. Examinar condiciones de cada interruptor de seguridad. 2. Luz DFC o DW se apaga, observa M112 por servidor, señal dfc en minúscula significa desconexión de candado de puerta de sala, y dw en minúscula, desconexción de candado de puerta de cabina. 3. Luz de fallo ERR siempre brilla, observa código de fallo actual M321. Si ERR no se enciende, se puede observar código de fallo histórico M322 o código de fallo lógico M121 4. Si Señal 1/2LV, no importa si está en planta de nivelación o no, se muestra en mayúscula, significa fallo en interruptor fotoeléctrico. 5.Si señal 1/2LS de M112, no importa si está en la posición de desaceleración forzada o no, significa anormalidad de 1/2LS. Método de confirmación 84 / 106 Manual de ajuste HAMCB 5 Hasta Tope 1. Fallo de señal de desaceleración forzada; 2. Fallo de señal fotoeléctrica y no salida; 3. Distancia demasiado grande del resbalamiento en marcha; 4. Distancia demasiado grande del resbalamiento en parada; 5. Posiciones UIS/DIS en contrario, se renivela hasta tope; número: XT0229A12002A Números de páginas: 85/106 Fecha: 2013‐5‐23 Edición : A 1.En la marcha lenta, confirmar que señal de desaceleración forzada (1/2LS) de M112 aparace en mayúscula o siempre en minúscula antes de que el elevador se ponga en práctica de desaceleración. Significa fallo de señal de desaceleración forzada (1/2LS) 2. Si el elevador llega a la poscición de nivelación fondo/tope, 1/2LV de M112 no cambia en mayúscula. 3. Comprobar si la distancia de resbalamiento activa el interruptor de límite cuando el elevador arranca desde el tope. 4. Comprobar si la distancia de resbalamiento activa el interruptor de límite cuando el elevador arranca desde el fondo. 5.En marcha lenta, observar si orden de señal UIS/DIS de M112 es correcto o no. 6 Hasta fondo 7 Al iniciar el mantenimiento del elevador, ruido extraño en el motor principal y ERR encendido 8 Al iniciar el mantenimiento del elevador, sufre exceso de velocidad y no puede volver a funcionar 1. Fallo de señal de desaceleración forzada; 2. Fallo de señal fotoeléctrica y no salida; 3. Distancia demasiado grande del deslizamiento en marcha; 4. Distancia demasiado grande del deslizamiento en parada; 5. Posiciones UIS/DIS en contrario, se renivela hasta fondo; Fallo en tracción; 1. Fallo en tracción; 2. Corte de cables de cotificador; 1.En la marcha lenta, confirmar que señal de desaceleración forzada (1/2LS) de M112 aparace en mayúscula o siempre en minúscula mientras el elevador se pone en práctica de desaceleración. Significa fallo de señal de desaceleración forzada (1/2LS) 2. Si el elevador llega a la poscición de nivelación fondo/tope, se observa si 1/2LV de M112 está en mayúscula. 3. Comprobar si la distancia de deslizamiento activa el interruptor de límite cuando el elevador arranca desde el tope o el fondo. 4. Comprobar si la distancia de deslizamiento activa el interruptor de límite cuando el elevador se para hasta el fondo. 5.En marcha lenta, observar si orden de señal UIS/DIS de M112 es correcto o no. Observar fallo código actual M321.Si no hay, observar código histórico de fallo M322 1. Observar código de fallo actual M321 2. Medir el estado de cables de cotificador con multímetro 85 / 106 Manual de ajuste HAMCB 9 Número Elevador no funciona con apretar botones de mantenimiento hacia arriba o abajo. Descripción 10 Al apretar botón de mantenimiento de marcha arriba, elevador funciona pero al apretar botón hacia abajo, elevador no funciona. 11 Al apretar botón de mantenimiento de marcha abajo, elevador funciona pero al apretar botón hacia arriba, elevador no funciona. 12 13 14 Al apretar botón de mantenimiento de marcha abajo, elevador funciona pero al apretar botón hacia arriba, elevador se para después de funcionar un cierto tiempo. Al apretar botón de mantenimiento de marcha arriba, elevador funciona pero al apretar botón hacia abajo, elevador se para después de funcionar un cierto tiempo. Funciona sólo la marcha de mantenimiento, pero no puede funcionar la de autoaprendizaje en el pozo de elevador 1. No señal de seguridad; 2. No señal de candado; 3. No señal de puerta completamente cerrada; 4. Parámetros incorrectos; 5. Fallo en sistema; Causas posibles número: XT0229A12002A Números de páginas: 86/106 Fecha: 2013‐5‐23 Edición : A 1. Observa M112 por servidor, señal ES en mayúscula significa desconexión de circuito de seguridad. Examinar condiciones de cada interruptor de seguridad. 2. Observar M112 por servidor, señal dfc en minúscula significa desconexión de candado de puerta de sala, y dw en minúscula, desconexción de candado de puerta de cabina. 3.En caso de que DFC y DW de M112 están en mayúscula, señal de cierre de la puerta dcl está en minúscula. 4. RUN sourse SVT de M335 es 0. 5. Luz de fallo ERR siempre brilla, observa código de fallo actual M321. Si ERR no se enciende, se puede observar fallo histórico M322. Método de confirmación 1. Tabla de control no recibe orden hacia abajo 1.Al apretar botón de mantenimiento de marcha 2. Aparecen 1LS/ señal abajo, dib de M112 no cambia en mayúscula fotoeléctrica al mismo tiempo 2.Observar 1LS y 1LV en mayúscula de M112 1. Tabla de control no recibe órden hacia arriba 2. Aparece 1LS/ señal fotoeléctrica al mismo tiempo 1.Al apretar botón de mantenimiento de marcha arriba, uib de M112 no cambia en mayúscula 2.Observar 1LS y 1LV en mayúscula de M112 1. Observar el código de fallo actual M321. Si no hay que observar el de fallo histórico M322 1. Fallo en tracción; 2. Desmontar cables de resistencia de frenado, medir 2. Fallo de la resistencia de valores de resistencia con multímetro. Si resistencia frenado, causando sobrepresión está dañada, hay gran diferencia entre el valor de de cable matriz; resistencia medido y el de resistencia estándar en la caja de frenado 1. Fallo en tracción; 2. Fallo de la resistencia de frenado, causando sobrepresión de cable matriz; 1. Circuito de seguridad desconectadoen estado normal 2. Run enable no está en 0; 3. Sistema en modo de mantenimiento; 1. Observar el código de fallo actual M321. Si no hay, observar el de fallo histórico M322 2. Desmontar cables de resistencia de freando, medir valores de resistencia con multímetro. Si resistencia está dañada, hay gran diferencia entre el valor de resistencia medido y el de resistencia estándar en la caja de frenado 1. Señal ES de M112 en mayúscula, dfc o dw en minúscula. 2. Confirmar Run enable =1 en M3319 3. En M111 estado es INS, y en M112 ERO en mayúscula 86 / 106 Manual de ajuste HAMCB 15 Al terminar el autoaprendizaje, no puede llamar al elevador por servidor o por la llamada 16 Al apretar el botón de mantenimiento, el elevador resbala hacia el lado más pesado 17 En marcha normal, el elevador resbala al lado pesado pero luego marcha hacia la dirección correcta Número Descripción 18 Elevador llega al piso destino y funciona correctamente 1. Run enable no está en 0; 2. No funciona DCS, o no se cancela la marcha DCS ; 3. EN-CRT=0, no puede funcionar si supera el piso 16 4. Sistema no está en el estado IDLE. Número: XT0229A12002A Números de páginas: 87/106 Fecha: 2013‐5‐23 Edición : A 1. Confirmar que M3319 Run enable =0 2. Estado actual de M111 muestra Start DCS 3. Si supera el piso 16, en M1310 EN-CRT=0 4. Estado de elevador M111 no está en IDLE 1. Compensación de Pre1. Confirmar los valores M335 KP, KI y reajustarlos. torque inapropiado; 2. En M3312 Track error está en 0 2. Función track err blindada; 1、Compensación Pretorque inapropiado; 2、Tapa de cortocircuito J11/J12 de la tabla del control está mal conectado a la derecha o no se ha instalado J11/J12; Causas posibles Fallo en sistema; 1. Corte de señal de seguridad en marcha; 2. Corte de señal de candado corta en marcha; 3. Fallos en sistema en marcha; 1. Confirmar los valores M335 KP, KI y reajustarlos. 2. Tapa de cortocircuito J11/J12 de la tabla del control está mal conectado a la derecha o no se ha instalado J11/J12 Método de confirmación Observar código de fallo histórico M322 o fallo lógico M121 1. Luz ES se enciende, observar M112 por servidor, señal ES en mayúscula significa desconexión de circuito de seguridad. Examinar condiciones de cada interruptor de seguridad. 2. Luz DFC o DW se apaga, observar M112 por servidor, señal dfc en minúscula significa desconexión de candado de puerta de sala, y dw en minúscula, desconexción de candado de puerta de cabina. 3. Observar código de fallo histórico M322 o código de fallo lógico M121 19 Se para bruscamente el elevador en la marcha rápida normal y luego marchar correctamente 20 1. Interruptor de desaceleración forzada hacia Restablecimiento arriba no funciona o hacia arriba y distancia de instalación es llega hasta tope muy corta 2. Posición de tabla del piso del tope no es correcta 3. Fotoeléctrico no funciona 1. 2ls de M112 sigue en minúscula y sin acciones o la distancia entre la posición de acción y el piso de nivelación del tope es demasiado corta ( distancia 1m/s es 850mm, distancia 1.5m/s es 1750mm, distancia 1.75m/s es 2200mm) 2. La posición de tabla de tope está demasiado cerca de límite de arriba (estándar es de 150mm) 3. 1lv, 2lv de M112 cambia en mayúscula al cambiar el piso 21 1. Interruptor de desaceleración forzada hacia Restablecimient abajo no funciona o distancia de instalación es muy corta o hacia abajo y llega hasta fondo 2. Posición de tabla del piso del fondo no es correcta 3. Fotoeléctrico no funciona 1. 2ls de M112 sigue en minúscula y sin acciones o la distancia entre la posición de acción y el piso de nivelación del tope es demasiado corta ( distancia 1m/s es 850mm, distancia 1.5m/s es 1750mm, distancia 1.75m/s es 2200mm) 2. La posición de tabla de fondo está demasiado cerca de límite de abajo (estándar es de 150mm) 87 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 88/106 Fecha: 2013‐5‐23 Edición : A 3. 1lv, 2lv de M112 cambia en mayúscula al cambiar el piso 22 Al llegar al piso de destino, ha notado que sobrepasa el piso de nivelación al abrir la puerta 1. Posición de tabla no es correcta; 2. Distancia fotoeléctrica no es correcta; 23 Al llegar al piso de destino, ha notado que no alcanza al piso de nivelación al abrir la puerta 1. Posición de tabla no es correcta; 2. Distancia fotoeléctrica no es correcta; 1. En la marcha lenta, ajustar la posición de tablas en cada piso 2. Ajustar distancia fotoeléctrica entre arriba y abajo 24 Al arrancar el elevador, sacude con frecuencia alta 1. Incorrecto ajuste de Pretorque; 2. Incorreto posicionamiento del motor principal; 1. Comprobar valores M335 KP,KI 2. Comprobar parámetros de motor M3314 y Drive size de M331-7412 25 Al arrancar el elevador, hace ruido muy grande 1. Incorrecto ajuste de parámetros de motor principal y de convertidor de frecuencia, inercia, la inductancia, resistencia, onda portadora; 2. Incorrectos parámetros de compensación de momento de fuerza KP , KI; 3. Freno de cinta no se abre completamente; Número Descripción Causas posibles 1. Ajustes de parámetros de convertidor de frecuencia no son apropiados, tales como inercia, inductancia en exceso 2. Ajustes de la frecuencia de ondas portadoras inapropiados 1. Ajustes de parámetros de convertidor de frecuencia no son apropiados, tales como inercia, inductancia en exceso 2. Ajustes de la frecuencia de ondas portadoras inapropiados 26 En marcha, motor hace mucho ruido 27 En parada, hace mucho ruido 28 1. Sin marcha de autoaprendizaje Marcha a media 2. Incorrectos parámetros; (errore en ratio de cuerda, velocidad diámetro de la polea,Velocity normal) 1. En la marcha lenta, ajustar la posición de tablas en cada piso 2. Ajustar distancia fotoeléctrica entre arriba y abajo, y UP level de M3310, DOWN level 1.Comprobar parámetros de motor princial M3314 y Drive size de M331-7412, confirmar Inertia kg/m2 de M3311, Ld0, Lq0, Ld, Lq de M331-4615, Switch Frequency de M331-3698 2. Confirmar valor KP, KI de M335 3. Asegurar corta fisura de freno de cinta Método Comprobar parámetros de motor principal de M3314 y Drive size de M331-7412, Inertia kg/m2 de M3311, Ld0, Lq0, Ld, Lq, Switch frequency de M331-3698 Comprobar parámetros de motor principal de M3314 y Drive size de M331-7412, Inertia kg/m2 de M3311, Ld0, Lq0, Ld, Lq, Switch frequency de M331-3698 1. Comprobar si en M314 las alturas de interruptor de marcha y de cada piso son idénticas a la obra en práctica 2.Comprobar ratio de cuerda, diámetro de la polea, y Velocity normal de M3319 son idénticos a la práctica 88 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 89/106 Fecha: 2013‐5‐23 Edición : A Fallo de puerta Número 1 2 3 4 5 Número 6 Descripción Causas posibles Método de confirmación Puerta de elevador no abre al llegar al piso destino, pero abre en piso siguiente y después de 3 intentos, no funciona 1、Motor de puerta no es normal, no puede abrir completamente; 2、Señal DOL siempre existe; 1.Después de recibir señal DO, la puerta se queda bloqueada y no puede abrir absoluta o completamente 2. DOL de M112 siempre está en mayúscula cuando la puerta no está abierta completamente Puerta de elevador no abre al llegar al piso destino 1.Estado DDO; 2.Tipos de puerta no son correctamente ajustados; 3.Fallo en sistema al llegar a la estación no puede abrir puerta; 4.Cables de puerta no son correctos; 5.Parámetros de puerta no son correctamente ajustados, no responde a orden del sistema; 1. Estado de puerta M111 muestra DDO 2. Valor DOOR de M1315, modo de control de relé se establece al motor de puerta 5, modo de conmunicación al 12 3. Observar código de fallo de tracción M321 y código de fallo lógico M121 4. Comprobar cables de señal para abrir puerta 5. Comprobar parámetros de motor de puerta Al llegar al piso destino, se repite la apertura y cierre de puerta 1.Señal de pantalla se repite; 2.Direcciones de pantalla, protección electrónica y tabla de seguridad no son correctamente ajustadas. Siempre hay señal; 1. Siempre hay señal de pantalla Al llegar al piso destino, se repite la protección electrónica y tabla de apertura de puerta seguridad; sin cerrarla, salida 2. Siempre hay señal de señal de sobrecarga; de zumbador 1. Motor de puerta bloqueado; Puerta no se abre 2. Tabla de conversión del completamente y motor de puerta no está normal; 3. Parámetros LDR es se mantiene en estado de media incorrecto; 4. Entrada en modo de apertura mantenimiento al abrir puerta; Descripción Puerta no completamente cerrada y siempre en medio estado Causas posibles 1. En M112 LRD se repite tanto en mayúscula como en minúscula 2.En M132 comprobar dirección EDP, SGS, LRD 1. En M112 DOS, LRD,EDP siempre se repiten en mayúscula 2. M112 LWO siempre se repite en mayúscula 1. Comprobar si el motor de puerta está bloqueado por otras cosas 2. Comprobar señal de tabla de conversión para abrir y cerrar puerta y la de de pantalla 3. M1315 LDR=1 4. Al abrir y cerrar puerta observar si ERO de M112 ha cambiado en mayúscula Método de confirmación 1. Revisar si cabina de puerta está sin electricidad 1. Motor de puerta sin electricidad; 2. Revisar si en el piso pertinente la puerta de sala 2. Motor de puerta bloqueado; está bloqueada por alguna cosa 3. Entra en modo de mantenimiento 3.Al abrir y cerrar la puerta, revisar si ERO de al abrir y cerrar la puerta M112 cambia en mayúscula 7 Cerrar la puerta con Parámetros de motor de puerta fuerza y choque a incorrectos puerta de sala 8 Elevador funciona con puerta abierta Cortocircuito en candado de puerta Comprobar parámetros de motor de puerta En estado de puerta abierta, DFC y DW de M112 en mayúscula 89 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 90/106 Fecha: 2013‐5‐23 Edición : A Fallo en lamada interior y exterior Número Descripción Causas posibles 1. Foco de botón estropeado; 2. Circuito de foco de botón con problema; 3. RS5 estropeado; 1 Al apretar el botón de caja de control, no se enciende pero se activa 2 1, Fallo en comunicación, RS5 y RSL de tabla principal están mal conmunicados; 2. Fallo en dirección; Al apretar el botón 3. Fallo en ajustes de capacidad de caja de control, de responder a la llamada del no se enciende ni se piso; 4, Si solo un botón no responde, activa puede ser problema de botones o de cables en la caja de control Método de confirmación 1. Cambiarlo por un mejor botón, problema queda solucionado 2. Cambiarlo por un mejor botón, problema no queda solucionado 3. Cambiar tabla RS5 1. Revisar cables de conmunicación RSL 2. En M132 revisar dirección de botón de piso 3. En M1331 revisar ajustes de piso para responder a llamada 4. Cambiarlo por un mejor botón 3 Al apretar el botón de caja de control, se enciende pero no se activa 1. Fallos ocurridos en elevador en otros piso, persona o cosa obstaculiza mucho tiempo la pantalla 2. Fallo en el motor de puerta, no se puede cerrar al punto o no hay señal de candado de puerta, no puede marchar el elevador 4 Llegar al piso incorrecto 1. Revisar si hay piso ciego; 1. Comprobar si se ha establecido piso virtual 2. Revisar si la dirección IO de M132 es igual a la 2, dirección I/O no es lista de IO de esquema correcta Destello de botón en la marcha de elevador 1. Fallos de ajustes en la placa absorbente terminal 2. Señal RSL está interferida 3. Ajustes de dirección I/O incorrectos 1. Revisar si falta o se quema alguna placa absorbente terminal 2. Confirmar el aislamiento entre circuito de señal RSL y fuerte potencia eléctrica 3. Revisar si la dirección IO de M132 es igual a esquema 1. Ajuste de indicación incorrecto; 2. hay piso ciego, no se ha ajustado indicación de piso ciego; 1. Revisar indicación del piso M134 5 1.Revisar si hay persona o cosa que obstaculiza la puerta 2. En M112, dcl en minúscula, dfc o dw en minúscula Fallo de monitor 1 Número 2 Incorreta indicación del piso Descripción No imagen en monitor pero llamada normal al elevador Causas posibles Método de confirmación 1. Componente (H) no 1. Examinar componente (H) en el monitor conectado o mal 2. Cambiarlo por un mejor monitor para indicación conectado; 2. Monitor en mal estado; correcta 90 / 106 Manual de ajuste HAMCB 3 Parpadeo de monitor Mal monitor Número: XT0229A12002A Números de páginas: 91/106 Fecha: 2013‐5‐23 Edición : A Cambiarlo por un mejor monitor para indicación correcta Cambiarlo por un mejor monitor para indicación correcta 4 Falta de códigos en monitor 5 1. Continua ntrada de señal Indicación perpetua de carga llena 2. Monitor malo de marcha con 3. Ajuste de luz de carga carga llena llena, otro I/O 6 1. Continua ntrada de señal de anti-incendio Indicación perpetua 2. Monitor malo de anti- incendio 3. Ajuste de luz de anti-incendio, otro I/O 7 1. Continua ntrada de señal Indicación perpetua de sobrecarga 2. Monitor malo de marcha con 3. Ajuste de luz de sobrecarga sobrecarga, otro I/O 1. Revisar si existe entrada forzada de la dirección de LNS de M132 2. Cambiar monitor 3. Revisar si la dirección de LNSL de M132 coincide con otros ajustes de IO 1. Revisar si existe entrada forzada de la dirección de EFK de M132 2. Cambiar monitor 3. Revisar si la dirección de FSL de M132 coincide con otros ajustes de IO 1. Revisar si existe entrada forzada de la dirección de LWS de M132 2. Cambiar monitor 3. Revisar si la dirección de OLS de M132 coincide con otros ajustes de IO 8 Piso indicado está 1. Velocidad acelerada y adelantado por piso desacelerada en tracción es muy baja; en práctica Valores de Accelera normal y Decelera normal en M3319 son demasiado pequeños Mal monitor 91 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 92/106 Fecha: 2013‐5‐23 Edición : A Anexo 1 Tabla de IO IO Abreviatura Explicaciones en inglés Explicaciones 0 DOL Door Open Limit Límite de apertura de puerta 1 DOB Door Open Button Botón de apertura de puerta 2 EDP Electronic Door Protection Protección electrónica de puerta 3 DCB Door Close Button Botón de cierre de puerta 4 ISS Independent Service Switch Interruptor servicio independiente 5 LWO Load Weighing Overload Interruptor de sobrecarga 6 LNS / DIS Load Non Stop / DRLV Carga llena / DRLV 7 LWX / ACS ANS Load Weight / Anti Creep Interruptor contra molestia 8 UIS relevel down Renivelación Abajo 9 DIS relevel up Renivelación Arriba 10 CTL / PKS Car To Landing / Parking Switch Interruptor de Candado 11 PKS Parking Switch Interruptor de Candado 12 - - 13 CCTL Car Call to Top Landing Llamada Interior de Piso de Tope 14 CCBL Car Call to Bottom Landing Llamada Interior de Piso de Fondo 15 - - 16 EFK Emergency Fireman Keyswitch Interruptor Anti-incendio 17 NU Emergency power Fuente Eléctrica de Emergencia 18 NUSD-1 / NUSD Enable rescue operation Modo de Rescate 19 NUG-1 / NUG Enable normal operation Modo de Marcha Normal 20 CUDL Car Up Direction Light Luz de Arriba en Cabina 21 CDDL Car Down Direction Light Luz de Abajo en Cabina 22 OLS Over Load Signal Señal de Sobrecarga 23 BUZ Buzzer Zumbador 24 FSL Fireman Service Light Luz de Servicio de Bomberos 25 ( HEL ) res. for Hospital Emergency Light Luz de Servicio de Médicos 26 LR Light Relay Relé Eléctrico de Luz 27 NDG Ndging Cierre Lento 28 - - 29 STH Stop Signal Hall Señal de Parada en Sala 30 STC Stop Signal Car Señal de Parada en Cabina 31 DMD Demand 32 CB 00 / CTTL 00 Car Button 00 / Tell Tale Light 00 Botón de cabina/indicador piso 0 、、 、、 、、 95 CB 63 / CTTL 63 Car Button 63 / Tell Tale Light 63 Botón de cabina/indicador piso63 92 / 106 Manual de ajuste HAMCB 96 UHB 00 / UHTTL Up Hall Button 00 / Up Hall Tell Tale Light 00 00 、、 、、 、、 IO Explicaciones Abreviatura Número: XT0229A12002A Números de páginas: 93/106 Fecha: 2013‐5‐23 Edición : A Botón de Arriba en sala /indicador Piso 0 Explicaciones 159 UHB 63 / UHTTL Up Hall Button 63 / Up Hall Tell Tale Light 63 63 160 DHB 00 / DHTTL Down Hall Button 00 / Down Hall Tell Tale Light 00 00 Botón de Abajo en sala /indicador Piso 0 、、 、、 、、 DHB 63 / DHTTL Down Hall Button 63 / Down Hall Tell Tale Light 223 63 63 Botón de Abajo en sala /indicador Piso 63 Botón de Arriba en sala/indicador Piso 63 224 UHL 00 Up Hall Lantern 00 Luz de Llegada Arriba en Sala Piso 0 、、 、、 287 UHL 63 、、 Up Hall Lantern 63 Luz de Llegada Arriba en Sala Piso 63 288 DHL 00 Down Hall Lantern 00 Luz de Llegada Abajo en Sala Piso 0 、、 、、 351 DHL 63 、、 Down Hall Lantern 63 Luz de Llegada Abajo en Sala Piso 63 352 EHC 00 Emerg. Hosp. Call 00 Botón de Emergencia de Médico Piso 0 、、 、、 415 EHC 63 、、 Emerg. Hosp. Call 63 Botón de emergencia de médico Piso 63 416 FPD 00 Fire Proof Door 00 Puerta contra Fuego en Piso 0 、、 、、 479 FPD 63 、、 Fire Proof Door 63 Puerta contra Fuego en Piso 63 480 CPC 00 Car Position Contact 00 、、 、、 543 CPC 63 、、 Car Position Contact 63 544 RCB 00 / RCTTL Rear Car Button 00 / Rear Tell Tale Light 00 00 、、 、、 、、 RCB 63 / RCTTL 607 Rear Car Button 63 / Rear Tell Tale Light 63 63 608 RUHB 00 / RUHTTL Rear Up Hall Button 00 / Rear Up Hall Tell Tale 00 Light 00 Contactor de posición de cabina Piso 63 Botón Trasero de Cabina /Indicador Piso 0 Botón Trasero de Cabina/ Indicador Piso 63 Botón Trasero de Arriba de Sala / Indicador Piso 0 、、 、、 671 、、 RUHB 63 / RUHTTL Rear Up Hall Button 63 / Rear Up Hall Tell Tale Contactor de Posición de Cabina Piso 0 63 672 RDHB 00 / RDHTTL Light 63 Rear Down Hall Button 00 / Down Hall Tell Tale Botón Trasero de Arriba de Sala / Indicador Piso 63 Botón Trasero de Abajo de Sala en Piso 0/ Indicador 93 / 106 Manual de ajuste Número: XT0229A12002A Números de páginas: 94/106 Fecha: 2013‐5‐23 Edición : A HAMCB 00 Light 00 、、 、、 735 、、 RDHB 63 / RDHTTL Rear Down Hall Button 63 / Down Hall Tell Tale luz 63 Light 63 Botón Trasero de Abajo de Sala en Piso 63/ Indicador 736 RUHL 00 Rear Up Hall Lantern 00 799 RUHL 63 Rear Up Hall Lantern 63 800 RDHL 00 Rear Down Hall Lantern 00 Luz Trasera de Llegada Arriba de Sala en Piso 0 Luz Trasera de Llegada Arriba de Sala en Piso 63 Luz Trasera de Llegada Abajo de Sala en Piso 0 、、 、、 863 RDHL 63 、、 Rear Down Hall Lantern 63 Luz Trasera de Llegada Abajo de Sala en Piso 63 IO Explicaciones en inglés Explicaciones 864 REHC 00 Rear Emerg. Hosp. Call 00 Botón Traseso de Emergencia de Médico de Cabina en Piso 0 、、 、、 927 REHC 63 、、 Rear Emerg. Hosp. Call 63 Botón Traseso de Emergencia de Médico de Cabina en Piso 63 928 CRS 00 Card Reader Security 00 Señal de lector de tarjetas piso 0 、、 、、 991 CRS 63 、、 Card Reader Security 63 Señal de lector de tarjetas piso 63 992 SEC 00 Card Reader Security ( hall ) 00 Lector de tarjeta de sala 0 、、 、、 1055 SEC 63 、、 Card Reader Security ( hall ) 63 Lector de tarjeta de sala 63 1056 RDOL Rear Door Open Limit Límite de apertura de puerta trasera 1057 RDOB Rear Door Open Button 1058 REDP Rear Electronic Door Protection Botón de apertura de puerta trasera Protección de puertas trasera eléctrica 1059 RDCB Rear Door Close Button Botón de cierre de puerta trasera 1060 ATK Attendant Key Switch Interruptor del conductor 1061 HUDL Hall Up Direction Light Luz de dirección arriba 1062 HDDL Hall Down Direction Light Luz de dirección abajo 1063 GCB Up General Control Button Boton de control universal 1064 DDP Car Motion Control Signal Señal de control de cabina 1065 PKL Parking Light Luz de parada 1066 DCP Delayed Car Signal Señal de atraso al cerrar la puerta 1067 DTP Door Time Protection Tiempo de protección de puerta 1068 EPR Emergency Power Rescue Potencia de emergencia para rescate 1069 OOS1B Out of Service Break 1 Interrupción de servicio de retirada1 1070 OOS1M Out of Service Make 1 1071 OOS2B Out of Service Break 2 1072 OOS2M Out of Service Make 2 Inicio de servicio de retirada 2 1073 ROLS Rear Over Load Signal 1074 ( RHEL ) res. for Rear Hosp. Emerg. Light Señal de sobrecarga trasera Luz de emergencia de médico trasera abreviatura Inicio de servicio de retirada 1 Interrupción de servicio de retirada2 94 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 95/106 Fecha: 2013‐5‐23 Edición : A 1075 RFSL Rear Fireman Service Light 1076 RCUDL Rear Car Up Direction Lantern 1077 RCDDL Rear Car Down Direction Lantern 1078 RHUDL Rear Hall Up Direction Lantern 1079 RHDDL Rear Hall Down Direction Lantern Luz de servicio de bomberos trasera Luz de dirección arriba trasera de cabina Luz de dirección abajo trasera de cabina Luz de dirección arriba trasera de sala Luz de dirección abajo trasera de sala 1080 RIOTS Riot Operation Switch Interruptor contra explosión 1081 SR1 Gamma 160s speed 1 1082 SR2 Gamma 160s speed 2 1083 SR3 Gamma 160s speed 3 1084 RSTH Rear Stop signal hall Señal de parada trasera de sala 1085 RSTC Rear Stop Signal Car Señal de parada trasera de cabina 1086 MDD Passenger Move Detector 1087 RMDD Rear Passenger Move Detector 1088 UP Car direction Memory Up Señal de movimiento de pasajeros Señal de movimiento de pasajeros trasera Memoria de dirección arriba de cabina IO explicaciones Explicaciones 1089 DN Car Direction Memory Down Memoria de dirección abajo de cabina 1090 CDLU Car Direction Lantern Up Luz de dirección arriba de cabina 1091 CDLD Car Direction Lantern Down Luz de dirección abajo de cabina 1092 CDGU Car Direction Gong Up Reloj de dirección arriba de cabina 1093 CDGD Car direction Gong Down 1094 RCDLU Rear Car Direction Lantern Up 1095 RCDLD Rear Car Direction Lantern Down 1096 RCDGU Rear Car Direction Gong Up 1097 RCDGD Rear Car Direction Gong Down Reloj de dirección arriba de cabina Luz de dirección arriba de cabina trasera Luz de dirección abajo de cabina trasera Reloj de dirección arriba de cabina trasera Reloj de dirección abajo de cabina trasera 1098 ASL Alternate Service Landing 1099 FLT Drive Fault Contact Salida de fallo de tracción 1100 MTC Motor Temperature Contact 1101 OVH Drive Overheat Contact Salida de temperatura de motor Salida de calentamiento en exceso de motor 1102 ATTU Attendant Up Start Switch Interruptor de arriba independiente 1103 ATTD Attendant Down Start Switch Interruptor de abajo independiente 1104 FDLU Further Demand Up Lantern Luz de órden siguiente de arriba 1105 FDLD Further Demand Down Lantern Luz de órden siguiente de abajo 1106 NSB Non Stop Button Bóton de marcha directa 1107 NSL Non Stop Lantern Indicador de marcha directa 1108 INLC Independent Light Car Luz independiente de cabina 1109 INLH Independent Light Hall 1110 CHCSC Cut Hall Call Signal Car 1111 CHCSH Cut Hall Call Signal Hall Luz independiente de sala Corte señal de llamada de sala en cabina Corte señal de llamada de sala en sala abreviatura 95 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 96/106 Fecha: 2013‐5‐23 Edición : A 1112 PFL Power Fail Light Indicador de pérdida de potencia 1113 EPW Emergency Power Wait Espera de potencia de emergencia 1114 INS Car Inspection Signal 1115 FSR Fireman Service Relay 1116 EHS Emergency Hospital Service 1117 DOS / SGS Door Open Signal / Safety Gate Shoe Señal de inspección en cabina Relé eléctrico de servicio de bomberos Servicio de emergencia de médico Señal de apertura de puerta, tabla de seguridad 1118 RDOS / RSGS Rear Door Open Signal / Rear SGS Señal de apertura de puerta trasera, tabla de seguridad trasera 1119 LRD Light Ray Device Rayo de luz 1120 RLRD Rear Light Ray Device Rayo de luz trasero 1121 XEPR Not able to rescue 1122 CCOC Cut Car Calls for Car Cancelar orden de llamada para cabina 1123 CCOH Cut Car Calls for Hall Cancelar orden de llamada para sala 1124 HCCO Hall Call Cut Off Cancelar llamada de sala 1125 GCCO Group Call Cut Off Cancelar llamada de grupo 1126 CTLC Car to Landing / Car Parada de elevador en cabina 1127 CTLH Car to Landing / Hall Parada de elevador en sala 1128 ACSC Anti Crime Switch Car Interruptor contra crimen de cabina 1129 ACSH Anti Crime Switch Hall Interruptor contra crimen de sala IO explicaciones Explicaciones 1130 CHCC Cut Hall Call Car Cancelar llamada a sala en cabina 1131 DFD Disable Front Doors Cancelar puerta frontal 1132 DHB Door Hold Buttons Botón de retención de puerta 1133 DRD Disable Rear Doors 1134 EFKB Emergency Fireman Key Bypass 1135 EQS Earth Quake Switch 1136 EFO Emergency Fireman Operation 1137 ESH Emergency Service Hold Interruptor de terremoto Operaciones de emergencia de bombero Retención de servicio de emergencia 1138 ESK Emergency Service Keyswitch Interruptor de emergencia de servicio 1139 RB Reset Button 1140 RDHB Rear Door Hold Button 1141 AMCLK AM Clock Input Entrada permanente de reloj AM 1142 LPT Landing passing Tone 1143 WCOS Wild Car Operation Switch 1144 1MOTIM One more time signal 1145 ESSR Emergency Stop Switch Reset Parada pasada voz Interruptor de operación de cabina salvaje Señal de otra vez Restablecimiento del interruptor de parada de emergencia 1146 CRV Cancel Relevelling 1147 ZR Front Door Zone Relay abreviatura Cancelar operación de puerta trasera Interruptor vecino de emergencia en fuego Botón de reposición Botón de retención de puerta trasera Cancelar renivelación Relé eléctrico de zona de puerta frontal 96 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 97/106 Fecha: 2013‐5‐23 Edición : A 1148 RZR Rear ZR 1149 RNDG Rear Ndging Relay 1150 ISPS Independent Service Park Switch Relé eléctrico de zona de puerta trasera Relé eléctrico de zona de puerta trasera lenta Interruptor de aparcamiento de servicio independiente 1151 CRC Card Reader Contact Lector de tarjeta contactos 1152 SDB Special Door Open Button Botón para abrir la puerta especial 1153 RSDB Rear SDB SDB trasero 1154 GRIOT Group RIOT Grupo de control 1155 FPDL Fire Proof Door Light Indicador de puerta contra fuego 1156 AEPS Available for EPS Light Indicador de electricidad aviable 1157 EQCW Earthquake Counterweight Switch 1158 EQRS Earthquake Reset Signal Interruptor de reposición terremoto 1159 SSM1 Speech Synthesizer Command 1 Orden sintética de vocero 1 1160 SSM2 Speech Syn. Cmd. 2 Orden sintética de vocero 2 1161 SSM3 Speech Syn. Cmd. 3 Orden sintética de vocero 3 1162 SSM4 Speech Syn. Cmd. 4 Orden sintética de vocero 4 1163 SSM5 Speech Syn. Cmd. 5 Orden sintética de vocero 5 1164 SSM6 Speech Syn. Cmd. 6 Orden sintética de vocero 6 1165 SSM7 Speech Syn. Cmd. 7 Orden sintética de vocero 7 1166 SSMB Speech Syn. Busy Vocero sintético ocupdado 1167 SSMR Speech Syn. Reset Vocero sintético restablecido 1168 SSMS Speech Syn. Start Inicia vocero sintético 1169 LPTB Landing Passing Tone Buzzer Zumbido de pasar de parada 1170 CTLPC CTL park close door Puerta cerrada de aparcamiento 1171 CTLPO CTL park open door Puerta abierta de aparcamiento IO explicaciones Explicaciones 1172 ULV Gamma L Speed dictation Orden de velocidad 1173 RDZ Rear Door Zone Zona de puerta trasera 1174 CFSON Car Fireman Service On Servicio de bombero en cabina 1175 CFSST Car Fireman Service Start Inicip de servicio de bombero 1176 LHL Not used in this version 1177 BOS Boss Card - reader override 1178 SHAC Shabat Operation Switch 1179 SHAT Shabat Operation Timer 1180 SHLC Shabat Operation Light Car 1181 NDGL Nudging Light Indicador cierre lento de puerta 1182 SSMRL Speech Syn. Audio Relay Relé eléctrico de audio 1183 CBT Car Button Tone Orden por voz en cabina 1184 HCLR Handicap Call L. relay Relé eléctico en contra de órden abreviatura Interruptor de inpección de terremoto 97 / 106 Manual de ajuste HAMCB número: XT0229A12002A Números de páginas: 98/106 Fecha: 2013‐5‐23 Edición : A 1185 BUT Button Signal for REM Señal de botón inspección remota 1186 DO Door Opening for REM 1187 CPR Car Park Recognition REM 1188 NORM Normal Operation for REM Puerta abierta de inspección remota Reconocimiento de parada por inspección remota Comunicación normal por inspección remota 1189 LDO Limited Door Open 1190 RLDO Rear LDO 1191 8LS2 Limit Switch 8LS2 for Hydro 1192 LDT_ 5 50% of full load 1193 C2_1IN C2 : bolt 1 position in 1194 CR_2IN C2 : bolt 2 position in 1195 C2_1OUT C2 : bolt 1 position out 1196 C2_ 2 OUT C2 : bolt 2 position out 1197 C2_ DO_ 1IN C2 : move bolt 1 in 1198 C2_ DO_ 2IN C2 : move bolt 2 in 1199 C2_ DO_ 1OUT C2 : move bolt 1 out 1200 C2_ DO_ 2 OUT C2 : move bolt 2 out 1201 UP_ IN Up Inspection Button Botón de mantenimiento de arriba 1202 DN_ IN Down Inspection Button Botón de mantenimiento de abajo 1203 TCI Top of Car Inspection 1204 1LS Limit switch 1 LS 1205 2LS Limit switch 2 LS 1206 DCL Door Close Limit Switch 1207 RDCL Rear Door Close Limit Switch Mantenimiento de tope de cabina Interruptor de desaceleración forzada de abajo Interruptor de desaceleración forzada de arriba Interruptor de límite de puerta cerrada Interruptor de límite de puerta rerrada trasero 1208 DO_ BEL Door Open Bell Signal Señal de reloj de apertura de puerta 1209 - - 1210 IPU Impulse UP Impulso de arriba 1211 IPD Impulse DOWN Impulso de abajo 1212 SLU Short Landing Up Corto piso de arriba 1213 SLD Short Landing Down Corto piso de abajo IO explicaciones Explicación 1214 OFF input off Entrada cerrada 1215 ON input on Entrada iniciada 1216 C_ CHK C - Circuit check Signal 1217 TDOB Top of car Door Open Button 1218 TDCB Top of car Door Close Button 1219 RTDOB Rear Top of car DOB 1220 RTDCB Rear Top of car DCB 1221 EML Evacuation Message Light Señal de comprobación C-circuito Botón de apertura de puerta del tope de cabina Botón de cierre de puerta del tope de cabina Botón de apertura de puerta del tope de cabina trasero Botón de cierre de puerta del tope de cabina Indicador de mensaje de evacuación abreviatura 50% de sobrecarga 98 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 99/106 Fecha: 2013‐5‐23 Edición : A Indicador de mensaje de evacuación trasero Control remoto del piso principal 1222 REML Rear Evacuation Message Light 1223 MF Master Floor for REM 1224 LND Landing for REM Control remoto de nivelación 1225 OOS Out of Service for REM 1226 RISS Rear Independent Service Switch Fuera de servicio de control remoto Interruptor de servicio Independiente trasero 1227 RGCB Rear GCB 1228 EFL Emergency Fireman Light 1229 GOOL Group Out of Service Light 1230 DHDI Down Hall Direction Indicator Indicador de arriba en sala 1231 UHDI Up Hall Direction Indicator 1232 FR Fireman Operation Relay 1233 LNS - M LNS in machine room 1234 LWO - M LWO in machine room 1235 FCDGU Front Car Direction Gong Up 1236 FCDGD Front Car Direction Gong Down 1237 RRB Rear Reset Button Indicador de abajo en sala Relé eléctrico de operación de bombero Interruptor de marcha sin para por carga llena en sala de máquina Interruptor de sobrecargas en sala de máquina Reloj de dirección de arriba de delantero Reloj de dirección de abajo de delantero Botón de restablecimiento trasero 1238 XDSR Delayed Start Relay for LSCH-2 Atraso de inicio 1239 AT20LRD Light Ray Device for AT20 Entrada de rayo AT20 1240 AT20RLRD Rear Light Ray Device for AT20 Entrada de rayo AT20 trasera 1241 ITLH Incoming Traffic Light Hall 1242 OTLH Outgoing Traffic Light Hall 1243 ITLC Incoming Traffic Light Car 1244 OTLC Outgoing Traffic Light Car 1245 DPC Down Peak Clock Reloj de punta de subida 1246 UPC Up Peak Clock Reloj de punta de bajada 1247 DUPC Dual Up Peak Clock Reloj de punta de subida doble piso 1248 DUPL Dual Up Peak Light Reloj de punta de subida doble piso 1249 OOL Out Of Order Light Suspender indicador de servicio 1250 EQL Earthquake Light Indicador de terremoto 1251 ERL Express Running Light Indicador de marcha rápida 1252 FDL Further Demand Light Indicador de siguiente órden 1253 NSLH Non Stop Light Hall Indicador de dirección en sala 1254 ARL Auto Running Light Indicador de marcha automática 1255 IL In Use Light ( for SAPB ) Indicador en operación IO explicaciones Explicaciones abreviatura Indicador de emergencia de bombero Indicador de fuera de control de grupo 1256 SROS Separate Riser Operation Switch 1257 ISTS Intermittent Stop Switch Interruptor de parada intermitente 1258 HCOC Hall Call Cutoff from Car Llamada en sala 99 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 100/106 Fecha: 2013‐5‐23 Edición : A 1259 DHBL Door Hold Button Light 1260 RDHBL Rear Door Hold Button Light 1261 CHMI Chime Board Initiate Luz de botón de retención de puerta Luz de botón de retención de puerta trasera Iniciar de tabla de reloj 1262 CHMU Chime Board Up Direction Tabla de reloj hacia arriba 1263 SHBUZ Shabat Operation Door Buzzer 1264 SHLH Shabat Operation Light Hall 1265 PCLK 1 Park Car Clock 1 Reloj de aparcamiento 1 1266 PCLK 2 Park Car Clock 2 Reloj de aparcamiento 2 1267 PCLK 3 Park Car Clock 3 Reloj de aparcamiento 3 1268 PCLK 4 Park Car Clock 4 Reloj de aparcamiento 4 1269 PCLK 5 Park Car Clock 5 Reloj de aparcamiento 5 1270 PCLK 6 Park Car Clock 6 Reloj de aparcamiento 6 1271 PCLK 7 Park Car Clock 7 Reloj de aparcamiento 7 1272 PCLK 8 Park Car Clock 8 Reloj de aparcamiento 8 1273 CSA 1 Car Secure Access Button 1 1274 CSA 2 Car Secure Access Button 2 1275 CSA 3 Car Secure Access Button 3 1276 CSA 4 Car Secure Access Button 4 1277 CSA 5 Car Secure Access Button 5 1278 CSA 6 Car Secure Access Button 6 1279 CSAC Car Secure Access Clear Switch 1280 CSAK Car Secure Access Keyswitch 1281 CSAL Car Secure Access Light 1282 GSAK Group Secure Access Keyswitch 1283 GSAL Group Secure Access Light 1284 AEFO Alternative EFO 1285 ASLDOB Alternative Service Landing DOB 1286 EFODOB Emergency Fireman Operation DOB 1287 XEFO Override EFO 1288 APC 0 Absolute Position Contact 0 Salida absoluta 0 1289 APC 1 Absolute Position Contact 1 Salida absoluta 1 1290 APC 2 Absolute Position Contact 2 Salida absoluta 2 1291 APC 3 Absolute Position Contact 3 Salida absoluta 3 1292 APC 4 Absolute Position Contact 4 Salida absoluta 4 1293 APC 5 Absolute Position Contact 5 Salida absoluta 5 1294 APC 6 Absolute Position Contact 6 1295 TCIB Top of car Inspection Button Salida absoluta 6 Botón de mantenimiento en tope de cabina 1296 PDS Partition door Switch Interruptor de puerta aislada Segunda operación de emergencia de anti-incendio Aterrizaje de segunda operación de emergencia de anti-incendio Botón de apertura de puerta de emergencia de bombero 100 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 101/106 Fecha: 2013‐5‐23 Edición : A 1297 CMR CAM Relay IO explicaciones Explicaciones 1298 DCDS Disable- Call - And - Door Switch 1299 DCM Door Closing Management 1300 RDCM Rear Door Closing Management Cancelar llamadas o abrir la puerta Gestión en proceso de cierre de puerta Gestión en proceso de cierre de Puerta trasera 1301 STOP Stop Signal Señal de parada 1302 OLDL Overload Light 1303 NDG_M Nudging Signal in Machine Room 1304 RNDG_M Rear Nudging Signal in Machine Room 1305 LEV Level Signal for REM 1306 - - 1307 PI7S-RA CPI-3 /HPI-3 1308 PI7S-RB CPI-3 /HPI-3 1309 PI7S-RC CPI-3 /HPI-3 1310 PI7S-RD CPI-3 /HPI-3 1311 PI7S-RE CPI-3 /HPI-3 1312 PI7S-RF CPI-3 /HPI-3 1313 PI7S-RG CPI-3 /HPI-3 1314 PI7S-LB CPI-3 /HPI-3 1315 PI7S-LC CPI-3 /HPI-3 1316 PI7S-LG CPI-3 /HPI-3 1317 UD DOC-X: Up/Down 1318 REV DOC-X: Reversal 1319 TI Trouble Indicator for french SSM 1320 RREV DOC-X: Rear Reversal 1321 LWDE Load Weighing Device Electronical 1322 DESBR Disable ESB Relay (Generic Firemen Service) 1323 DDSR1 Disable DS Relay (Generic Firemen Service) 1324 DEECR Disable EEC Relay (Generic Firemen Service) 1325 DSGSR Disable SGS Relay (Generic Firemen Service) 1326 UHDL 00 Up Hall Direction Lantern 00 、、 、、 1389 UHDL 63 、、 Up Hall Direction Lantern 63 1390 DHDL 00 Down Hall Direction Lantern 00 Luz de llegada de arriba, en sala de piso 63 Luz de llegada de abajo, en sala de piso 0 、、 、、 1453 DHDL 63 、、 Down Hall Direction Lantern 63 Luz de llegada de abajo, en sala de piso 63 1454 OOL 00 Out Of Order Light 00 Luz de avería, piso 0 、、 、、 、、 abreviatura Indicador de sobrecarga Señal de cierre lento de puerta en sala de máquina Señal de cierre lento de puerta en sala de máquina trasera Señal de nivelación de supervisión remota Luz de llegada de arriba, en sala de piso 0 101 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 102/106 Fecha: 2013‐5‐23 Edición : A 1517 OOL 63 Out Of Order Light 63 Luz de avería, piso 63 1518 DOC 00 Door Open Contact 00 Contacto de puerta piso 0 、、 、、 1581 DOC 63 、、 Door Open Contact 63 Contactos de puerta piso 63 1582 BCP1 Binary Coded Position 1583 BCP2 Binary Coded Position IO Explicaciones Abreviatura Explicaciones 1584 BCP4 Binary Coded Position 1585 BCP8 Binary Coded Position 1586 BCP16 Binary Coded Position 1587 CPMT Car Position Message Trigger 1588 DCMT Door Close Message Trigger 1589 DOMT Door Open Message Trigger 1590 EMMT Emergency Message Trigger 1591 OLMT Overload Message Trigger 1592 DDMT Down Direction Message Trigger 1593 UDMT Up Direction Message Trigger 1594 DNMT Door Nudging Message Trigger 1595 1EFS 1st Emergency Fire Service Car 1596 2EFS 2nd Emergency Fire Service Car 1597 EFOL Emergency Fire Operation Light 1598 CRFL Car Returning to Floor Light 1599 EFLM Emergency Fire Light Machine Room 1600 EFLTC Emergency Fire Light Top of Car 1601 CSABUZ Buzzer for Car Secure Access 1602 AT20NDG Nudging for AT20 1603 AT20RNDG Rear Nudging for AT20 Cierre lento de puerta trasera AT20 1604 LRTS (OKR) Light Ray Test Start Iniciar la prueba de rayo 1605 LRCR Light Ray Check Relay 1606 RLRCR Rear Light Ray Check Relay 1607 LBG Light Beam Gate 1608 RLBG Rear Light Beam Gate 1609 ESBUZ Emergency Stop Buzzer 1610 DDSRC Disable DS relay contact (Korean Fire Service) 1611 DEMERC Disable Emergency relay contact (Korea) 1612 GSSI Group Successive Starting In 1613 GSSO Group Successive Starting Out 1614 DDSR2 Disable DS relay 2 (Korea) Desencadenantes de información sobre posición de cabina Desencadenantes de información sobre cierre de puerta Desencadenantes de información sobre apertura de puerta Desencadenantes de información sobre emergencia Desencadenantes de información sobre sobrecargas Desencadenantes de información sobre marcha de abajo Desencadenantes de información sobre marcha de arriba Desencadenantes de información sobre apertura de puerta lenta Sección 1 de servicio de emergencia de anti-incendio en cabina Sección 2 de servicio de emergencia de anti-incendio en cabina Indicador de operación de emergencia de anti-incendio Indicador de vuelta a nivelación Indicador de emergencia de incendio en sala de máquina Indicador de emergencia de incendio en tope de cabina Zumbido de salida de seguridad de cabina Cierre lento de puerta AT20 Comprobar el relé eléctrico con rayo Comprobar el relé eléctrico con rayo trasero Zumbador de parada de emergencia 102 / 106 Manual de ajuste Número: XT0229A12002A HAMCB Números de páginas: 103/106 Fecha: 2013‐5‐23 Edición : A 1615 DMOOS Dot Matrix OOS (PI=5,6) 1616 DMOLD Dot Matrix OLD (PI=5,6) 1617 GPIN1 General Purpose input 1 Entrada general 1 1618 GPOUT1 General Purpose output 1 Salida general 1 1619 GPIN2 General Purpose input 2 Entrada general 2 1620 GPOUT2 General Purpose output 2 Salida general 2 1621 GPIN3 General Purpose input 3 Entrada general 3 1622 GPOUT3 General Purpose output 3 Salida general 3 1623 GPIN4 General Purpose input 4 Entrada general 4 1624 GPOUT4 General Purpose output 4 Salida general 4 1625 GPIN5 General Purpose input 5 Entrada general 5 IO explicaciones Explicaciones 1626 GPOUT5 General Purpose output 5 Salida general 5 1627 1LV 1LV for CSP-5 1628 2LV 2LV for CSP-5 1629 TARGET enable DZ for CSP-5 1630 LBGCHK Light Beam Gate Check for CSP-5 1631 DOOR_ST1 ST1 for front DO2000 (DCSS5) Puerta frontal ST1 (motor DO2000, DCSS5 ) 1632 DOOR_ST2 ST2 for front DO2000 (DCSS5) Puerta frontal ST2 (motor DO2000, DCSS5 ) 1633 DOOR_ST3 ST3 for front+rear DO2000 (DCSS5) Puerta frontal ST3 (motor DO2000, DCSS5 ) 1634 DOOR_ST1R ST1 for rear DO2000 (DCSS5) Puerta trasera ST1 (motor DO2000, DCSS5 ) 1635 DOOR_ST2R ST2 for rear DO2000 (DCSS5) Puerta trasera ST2 (motor DO2000, DCSS5 ) 1636 DOOR_ST3R ST3 for rear DO2000 (DCSS5) 1637 DDM Deenergize Door Motor 1638 RDDM Deenergize Rear Door Motor abreviatura Puerta trasera ST3 (motor DO2000, DCSS5 ) 1639 EFSL 1640 CLR 1641 CLS 1642 DFO / DOP Door Fully Open Puerta totalmente abierta por inspección remota 1643 SPB In0 1644 SPB In1 1645 SPB In2 103 /106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 104/106 Fecha: 2013‐5‐23 Edición : A 1646 SPB In3 1655 Debug1 1656 Debug2 1657 DPP Disable Passenger Protection 1658 RPFL Rear Power Fail Light Desactivar protección a los pasajeros Indicador de la pérdida de potencia elétrica trasera 1659 RISPS Interruptor de la puerta de estación de base Interruptor de canal principal 1660 LDOS Lobby Door Open Switch 1661 MAS Maintenance Access Switch 1662 HCRC Hall Call Card Reader 1663 MPDL Motor Protection Device Light 1664 LNSL Load Non Stop Light 1665 CCOL Car Call Cutoff Light 1666 HCOL Hall Call Cutoff Light 1667 TBUZ Top of Car Buzzer 1668 RBTE Rope Break Test Enable 1669 RBTC Rope Break Trigger Contract Indicador de protección de motor Indicador de no parada con carga llena Indicador de cancelación de llamada interior Indicador de cancelación de llamada exterior de sala Zumbador del tope de cabina Prueba de capacidad de pinzas de cuerda Punto de desencadenante de pinzas de cuerda IO explicaciones Explicaicones Rear Door Fully Open Puerta trasera totalmente abierta 1676 BLD Blind Door Detección de piso ciego ARD 1677 REAR DR Rear Door flashboard Detección de puerta trasera ARD abreviatura 1670 RDFO / RDOP Lector de tarjeta para llamada de sala 1671 / 1672 / 1673 / 1674 / 1675 / 1678 / 1679 / 1680 / 1681 / 1682 / 1683 / 1684 / 1685 / 1686 AF 1687 / 1688 / 1689 / 1690 / 104 / 106 Manual de ajuste HAMCB Número: XT0229A12002A Números de páginas: 105/106 Fecha: 2013‐5‐23 Edición : A 1691 / 1692 / 1693 ATB Attendant Buzzer 1694 EFK1 Emergency Fireman Keyswitch 1710 CPCH 00 Car Position Contact 00 1711 CPCH 01 Car Position Contact 01 1712 CPCH 02 Car Position Contact 02 1713 CPCH 03 Car Position Contact 03 1714 CPCH 04 Car Position Contact 04 1715 CPCH 05 Car Position Contact 05 1716 CPCH 06 Car Position Contact 06 1717 CPCH 07 Car Position Contact 07 1718 CPCH 08 Car Position Contact 08 1719 CPCH 09 Car Position Contact 09 1720 CPCH 10 Car Position Contact 10 1721 CPCH 11 Car Position Contact 11 1722 CPCH 12 Car Position Contact 12 1723 CPCH 13 Car Position Contact 13 1724 CPCH 14 Car Position Contact 14 1725 CPCH 15 Car Position Contact 15 1726 CPCH 16 Car Position Contact 16 IO explicaciones abreviatura 1727 CPCH 17 Car Position Contact 17 1728 CPCH 18 Car Position Contact 18 1729 CPCH 19 Car Position Contact 19 1730 CPCH 20 Car Position Contact 20 1731 CPCH 21 Car Position Contact 21 1732 CPCH 22 Car Position Contact 22 1733 CPCH 23 Car Position Contact 23 1734 CPCH 24 Car Position Contact 24 1735 CPCH 25 Car Position Contact 25 1736 CPCH 26 Car Position Contact 26 1737 CPCH 27 Car Position Contact 27 1738 CPCH 28 Car Position Contact 28 1739 CPCH 29 Car Position Contact 29 1740 CPCH 30 Car Position Contact 30 1741 CPCH 31 Car Position Contact 31 1742 CPCH 32 Car Position Contact 32 Interruptor de emergencia de bombero 105 / 106 Manual de ajuste HAMCB 1743 CPCH 33 Car Position Contact 33 1744 CPCH 34 Car Position Contact 34 1745 CPCH 35 Car Position Contact 35 1746 CPCH 36 Car Position Contact 36 1747 CPCH 37 Car Position Contact 37 1748 CPCH 38 Car Position Contact 38 1749 CPCH 39 Car Position Contact 39 1750 CPCH 40 Car Position Contact 40 1751 CPCH 41 Car Position Contact 41 1752 CPCH 42 Car Position Contact 42 1753 CPCH 43 Car Position Contact 43 1754 CPCH 44 Car Position Contact 44 1755 CPCH 45 Car Position Contact 45 1756 CPCH 46 Car Position Contact 46 1757 CPCH 47 Car Position Contact 47 1758 CPCH 48 Car Position Contact 48 1759 CPCH 49 Car Position Contact 49 1760 CPCH 50 Car Position Contact 50 1761 CPCH 51 Car Position Contact 51 1762 CPCH 52 Car Position Contact 52 1763 CPCH 53 Car Position Contact 53 1764 CPCH 54 Car Position Contact 54 1765 CPCH 55 Car Position Contact 55 1766 CPCH 56 Car Position Contact 56 1767 CPCH 57 Car Position Contact 57 1768 CPCH 58 Car Position Contact 58 IO Explicaciones abreviatura 1769 CPCH 59 Car Position Contact 59 1770 CPCH 60 Car Position Contact 60 1771 CPCH 61 Car Position Contact 61 1772 CPCH 62 Car Position Contact 62 1773 CPCH 63 Car Position Contact 63 Número: XT0229A12002A Números de páginas: 106/106 Fecha: 2013‐5‐23 Edición : A 106 / 106