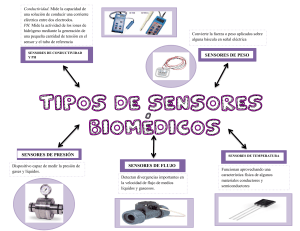
MARCO TEORICO: El hombre puede experimentar sensaciones como calor, frio, duro o blando, fuerte o desagradable, pesado o liviano; esto viene desde los comienzos de la humanidad. Pero si hablamos de los sensores electrónicos es vaga la información de quien creo el primer sensor de ka historia. Solo sabemos que los sensores están ahí y los vemos utilizando hace mucho tiempo. Por ejemplo vemos una válvula que cierra su paso al llenarse un estanque, o el sistema de regadío de una casa en particular o quizás el aviso de sobre peso en un ascensor cualquiera. . El primer sensor de proximidad fue el que presento por primera vez al mundo Pepperl Fush en 1958; un sensor inductivo que hoy sigue a la vanguardia de la innovación. El primer sensor inteligente fue desarrollado por Honeywell en el año 1969. Nació como una solución al problema de compensación de temperatura en los sensores. El primer sensor CCD usado en las cámaras fotográficas digitales fue inventado por Willard Boyle en el año 1969. El sensor infrarrojo fue descubierto por William Herschel. Los sensores están en todas partes. Toma tu casa, por ejemplo. Algunos en el refrigerador, otros en el sistema de calefacción, algunos distribuidos en los fusibles del sistema eléctrico, algunos distribuidos en varios termostatos y dispositivos móviles como teléfonos inteligentes o relojes inteligentes... Vivimos en ciudades rodeadas por ellas, y el Internet de las Cosas promete tener 50 mil millones de sensores registrando datos para el 2020. Como en el siglo XXI, donde han reducido drásticamente su precio y su conectividad, creemos que son algo nuevo. Nada más lejos de la realidad. El primer sensor conectado de la historia data de 1874, con la participación de científicos franceses, una montaña de 4.695 metros de altura y un nuevo tipo de tecnología de onda corta. Por ahora, debes entender. ¿PARA QUÉ SON LOS SENSORES? Esencialmente, un sensor es una herramienta que registra una cantidad. Los antiguos termómetros de mercurio eran un ejemplo perfecto no sólo de un sensor sino también de un indicador. Además de registrar la temperatura por la expansión del mercurio en un tubo, lo mostraron con líneas colocadas a diferentes alturas para indicar los grados. La mayoría de nosotros pensamos en los sensores de los que más se nos habla. Las variables cotidianas como la temperatura, la humedad, la velocidad, la presión... y otros pocos. Pero hay cientos de tipos de sensores. La radiación solar, los medidores inductivos o de tensión (que miden las deformaciones) son sólo algunos de los menos mencionados. Hoy en día, un sensor sin conexión (incluso si está conectado a una simple red Bluetooth o a un procesador por cable) no tiene sentido. Sin embargo, la mayoría de los sensores han sido conectados a absolutamente nada a lo largo de la historia. Y todavía hay millones de ellos que sólo miden e informan con precisión sin usar ningún tipo de red. Por ejemplo, los sensores de presión que ves en la imagen de arriba PIONEROS EN EL CAMPO DE LOS SENSORES CONECTADOS El primer sensor de temperatura controlada de la historia se atribuye a Daniel Gabriel Fahrenheit y era muy similar en su forma al que se ha conservado hasta hace poco. Después de probar varios materiales (la investigación y el desarrollo de la época), decidió en 1714 utilizar un termómetro de vidrio con mercurio en su interior. Durante más de un siglo, los termómetros fueron mejorados por varios científicos, en su mayoría franceses. Y se colocaron donde podían o se dejaron. Hasta que las primeras pruebas de radio llamaron la atención de estos científicos, que se preguntaban si valía la pena conocer la temperatura de un punto remoto. La mayoría de los libros de historia mencionan 1873 como el año en que Maxwell formuló la teoría de las ondas electromagnéticas; 1887 como el año en que Hertz descubrió las ondas de radio; y 1894 como el año en que Tesla demostró públicamente que las transmisiones de radio eran viables. Pero en 1874 - décadas antes de que la Torre Eiffel se convirtiera en una gigantesca antena con un sistema de cableado de arriba a abajo - un equipo francés decidió que los parisinos disfrutarían conociendo la temperatura en la cima del Mont Blanc. Así como la velocidad del viento, su dirección y la altura de la superficie de la nieve. El experimento probablemente resultó ser un fiasco. Faltaban años para comprender cómo se transmitían los datos de onda corta, y el Mont Blanc estaba a no menos de 550 km. de distancia. Pero fue un hito, y la estación meteorológica se convirtió en el primer sensor conectado en 1874. EL MUNDO TIENDE A SER INALÁMBRICO La palabra "inalámbrico" se ha puesto de moda hoy en día, probablemente porque en los siglos XIX y XX teníamos el objetivo de llenar el mundo de cables. En 1926, mucho después del experimento del Mont Blanc, Tesla dijo en una entrevista que la radio era el futuro. "Cuando la radio se desarrolle perfectamente, todo el planeta se convertirá en un gran cerebro, que ya lo es, con todas las cosas siendo partículas de un todo real y rítmico... y las herramientas que usaremos para hacerlo serán increíblemente simples comparadas con nuestros teléfonos actuales. Un hombre podrá llevar uno de estos en su bolsillo". Las estaciones de radio predichas por Arthur C. Clarke en 1957 Vale la pena detenerse un momento y pensar - desde nuestra cómoda perspectiva actual que es fácil combinar algo con otra cosa - lo que logísticamente requiere que una estación meteorológica se instale en una montaña cubierta de nieve de 4.695 metros de altura a más de 550 km del punto de recepción. Y vale la pena, porque gracias a estos experimentos casi absurdos ahora tenemos un nuevas tecnologías innovadoras para avanzar como humanos. Un sensor de proximidad : es un transductor que detecta objetos o señales que se encuentran cerca del elemento sensor. Existen varios tipos de sensores de proximidad según el principio físico que utilizan. Los más comunes son los interruptores de posición, los detectores capacitivos, los inductivos y los fotoeléctricos, como el de infrarrojos. Interruptores de posición El final de carrera o sensor de contacto (también conocido como "interruptor de límite") o limit switch, son dispositivos eléctricos, neumáticos o mecánicos situados al final del recorrido de un elemento móvil, como por ejemplo una cinta transportadora, con el objetivo de enviar señales que puedan modificar el estado de un circuito. Internamente pueden contener interruptores normalmente abiertos (NA), cerrados (NC) o conmutores (2) dependiendo de la operación que cumplan al ser accionados. Generalmente estos sensores están compuestos por dos partes: un cuerpo donde se encuentran los contactos y una cabeza que detecta el movimiento. Su uso es muy diverso, empleándose, en general, en todas las máquinas que tengan un movimiento rectilíneo de ida y vuelta o sigan una trayectoria fija, es decir, aquellas que realicen una carrera o recorrido fijo, como por ejemplo ascensores, montacargas, robots, etc. Capacitivos La función del detector capacitivo consiste en señalar un cambio de estado, basado en la variación del estímulo de un campo eléctrico. Los sensores capacitivos detectan objetos metálicos, o no metálicos, midiendo el cambio en la capacitancia, la cual depende de la constante dieléctrica del material a detectar, su masa, tamaño, y distancia hasta la superficie sensible del detector. Los detectores capacitivos están construidos sobre la base de un oscilador LC. Debido a la influencia del objeto a detectar, y del cambio de capacitancia, la amplificación se incrementa haciendo entrar en oscilación el oscilador. El punto exacto de esta función puede regularse mediante un potenciómetro, el cual controla la realimentación del oscilador. La distancia de actuación en determinados materiales, pueden por ello, regularse mediante el potenciómetro. La señal de salida del oscilador alimenta otro amplificador, el cual a su vez, pasa la señal a la etapa de salida. Cuando un objeto conductor se acerca a la cara activa del detector, el objeto actúa como un condensador. El cambio de la capacitancia es significativo durante una larga distancia. Si se aproxima un objeto no conductor, (>1) solamente se produce un cambio pequeño en la constante dieléctrica, y el incremento en su capacitancia es muy pequeño comparado con los materiales conductores. Este detector se utiliza comúnmente para detectar material no metálico: papel, plástico, madera, etc. ya que funciona como un condensador. Inductivos Los sensores inductivos de proximidad han sido diseñados para trabajar generando un campo magnético y detectando las pérdidas de corriente de dicho campo generadas al introducirse en él los objetos de detección férricos. El sensor consiste en una bobina con núcleo de ferrita, un oscilador, un sensor de nivel de disparo de la señal y un circuito de salida. Al aproximarse un objeto "metálico", se inducen corrientes de histéresis en el objeto. Debido a ello hay una pérdida de energía y una menor amplitud de oscilación. El circuito sensor reconoce entonces un cambio específico de amplitud y genera una señal que conmuta la salida de estado sólido o la posición "ON" y "OFF". El funcionamiento es similar al capacitivo; la bobina detecta el objeto cuando se produce un cambio en el campo electromagnético y envía la señal al oscilador, luego se activa el disparador y finalmente al circuito de salida hace la transición entre abierto o cerrado. Fotoeléctricos El receptor de rayos infrarrojos suele ser un fototransistor o un fotodiodo. El circuito de salida utiliza la señal del receptor para amplificarla y adaptarla a una salida que el sistema pueda entender. La señal enviada por el emisor puede ser codificada para distinguirla de otra y así identificar varios sensores a la vez. Esto es muy utilizado en la robótica en casos en que se necesita tener más de un emisor infrarrojo y solo se quiera tener un receptor. Existen tres tipos de sensores fotoeléctricos, los sensores por barrera de luz, reflexión sobre espejo o reflexión sobre objetos. Ultrasónico Los sensores de ultrasonidos son detectores de proximidad que trabajan libres de roces mecánicos y que detectan objetos a distancias de hasta 8 m. El sensor emite impulsos ultrasónicos. Estos se reflejan en un objeto, el sensor recibe el eco producido y lo convierte en señales eléctricas, las cuales son elaboradas en el aparato de valoración. Estos sensores trabajan solamente en el aire, y pueden detectar objetos con diferentes formas, superficies y de diferentes materiales. Los materiales pueden ser sólidos, líquidos o polvorientos, sin embargo han de ser deflectores de sonido. Los sensores trabajan según el tiempo de transcurso del eco, es decir, se valora la distancia temporal entre el impulso de emisión y el impulso del eco. Este sensor al no necesitar el contacto físico con el objeto ofrece la posibilidad de detectar objetos frágiles, como pintura fresca; además, detecta cualquier material, independientemente del color, al mismo alcance, sin ajuste ni factor de corrección. Los sensores ultrasónicos tienen una función de aprendizaje para definir el campo de detección, con un alcance mínimo y máximo de precisión de 6 mm. El problema que presentan estos dispositivos son las zonas ciegas y el problema de las falsas alarmas. La zona ciega es la zona comprendida entre el lado sensible del detector y el alcance mínimo en el que ningún objeto puede detectarse de forma fiable. Magnético Los sensores de proximidad magnéticos son caracterizados por la posibilidad de distancias grandes de la conmutación, disponible de los sensores con dimensiones pequeñas. Detectan los objetos magnéticos (imanes generalmente permanentes) que se utilizan para accionar el proceso de la conmutación. Los campos magnéticos pueden pasar a través de muchos materiales no magnéticos, el proceso de la conmutación se puede también accionar sin la necesidad de la exposición directa al objeto. Usando los conductores magnéticos (ej. hierro), el campo magnético se puede transmitir sobre mayores distancias para, por ejemplo, poder llevarse la señal de áreas de alta temperatura. La motivación. Inicialmente la atención se concentro en el procesamiento de la señal generada por el sensor para mejorar la compensación de la temperatura y lograr una señal normalizada. Mas tarde la atención se centro en mejorar los sistemas digitales derivados de la conversión de la señal analógica a digital, como la comunicación remota y la direccionalidad. Esta ultima consiste en la posibilidad de conocer en que punto se encuentra el sensor. El desarrollo mas reciente esta orientado a los test de manufactura e integración para mejorar la fabricación de los sensores, con el fin de reducir los costos y mejorar la relación precio-prestaciones- Esto incluye el diseño de nuevos dispositivos con arquitecturas optimizadas: lo mas simple que se puedan realizar, pero conservando los beneficios alcanzados a lo largo de su historia. El nacimiento. El primer sensor inteligente nació como una solución al problema de compensación de temperatura en los sensores. Lo desarrollo Honeywell en los años 60, para el sistema de aire en los aviones DC-9. Estaba formado por dos piezoresistores que median la presión y dos capacitores para crear un desplazamiento de fase. Estos elementos estaban re alimentados y conectados a un inversor para crear un oscilador. La frecuencia de salida era proporcional a la constante de tiempo RC, y por ende a la presión. Tiempo después Toyota Research presento otro sensor de presión similar. Ambas empresas, sin imaginárselo, estaban empezando una revolución sin par en las tecnologías de sensado, que aun hoy continua. La siguiente generación la introdujo nuevamente Honeywell en los años 80. La presento en dos aplicaciones: Una para el control de procesos y otra para aplicaciones aeroespaciales. Ambos estaban formados por un grupo de sensores multiplexeados, conectados a un convertidor V/F (Tensión frecuencia) La frecuencia obtenida la procesada un microprocesador tipo DSP, y la salida se llevaba a un convertidor D/A. La salida era acorde al estándar analógico de 4 mA a 20 mA. El software tenia compensación de la presión estática, calibración remota del rango, direccionabilidad y diagnostico. Los sensores eran de presión diferencial estática y temperatura en el caso del control de procesos y presión absoluta y temperatura en el caso aeroespacial. APLICACIÓN DE LOS SENSORES PIEZOELÉCTRICOS Los materiales piezoeléctricos, tanto sensores como actuadores son utilizados en muchas áreas de la ciencia (medicina, ingeniería eléctrica, ingeniería mecánica, ingeniería aeroespacial, bioelectrónica, ingeniería de materiales, geología, ingeniería espacial, física.). • Aeroespacio: Sistemas de expulsión, pruebas, experimentos, • Balística: Combustión, explosión, detonación y sonidos en distribución de presión. • Biomecánica: mecanismos ortopédicos, neurología, cardiología rehabilitación, monitoreo de sistemas vitales • Ingeniería: Sistemas de control, sistemas de combustión, modelamiento de sistemas, sismografía. APLICACIÓN DE LOS SENSORES INFRARROJOS Domésticas Para aplicaciones domésticas, los sensores infrarrojos se utilizan en electrodomésticos de línea blanca tales como hornos microondas, por ejemplo, para permitir la medición de la distribución de la temperatura en el interior. Estos dispositivos se usan también en el control climático de la casa para detectar oscilaciones de la temperatura en un local. Este planteamiento permite que el sistema de climatización reaccione antes que la temperatura del local varíe. Los sensores infrarrojos también se pueden utilizar como sensores de gas. Ciencias médicas y biológicas Una tendencia en el diagnóstico médico es desarrollar nuevos métodos de diagnóstico no invasores. Los sensores infrarrojos ofrecen una solución para ciertos procedimientos de reconocimiento, por ejemplo, los de mama y de músculos. Otra aplicación médica para los sensores infrarrojos es la medición instantánea de la temperatura del cuerpo, es decir, como un termómetro remoto. Seguridad Aérea y Territorial Los sensores infrarrojos están siendo utilizada por las fuerzas armadas. Los sistemas infrarrojos de monitorización del campo, tanto fijos como portátiles, sustituyen cada vez más a los sistemas refrigerados por su reducido consumo de energía. Automovilismo En la industria automovilística, los sensores infrarrojos se usan en el campo de la seguridad y el confort en la conducción. Monitorización del tráfico y carreteras, sistemas antiniebla, de los neumáticos y frenos, mejoras de la visión del conductor y detección de los ocupantes sentados para la activación de airbags inteligentes son algunas de las aplicaciones anteriores, por su banda el control de la temperatura de la cabina y la monitorización de la calidad del aire constituyen las más recientes. Periféricos de TI y Productos de Consumo Una de las aplicaciones futuras es la integración de un termostato para las mediciones de la temperatura de los cuerpos y objetos integrados en los teléfonos móviles. APLICACIONES DE LOS SENSORES QUÍMICOS Sensores para la monitorización de oxígeno por fibra óptica instalados en una estación depuradora de aguas residuales, en un compostador piloto y en un fermentador de laboratorio. Sensores ópticos para la monitorización de oxígeno, temperatura, dióxido de carbono, pH, hierro, sulfuro, alcoholes, humedad relativa, DBO, detergentes, glucosa y colesterol (varios de ellos ya patentados). Asimismo, hemos ensayado ya la aplicación de algunos de ellos a la tecnología de alimentos, el control de procesos industriales y, más recientemente, al análisis y seguimiento de especies químicas de interés medioambiental. SENSORES ULTRASÓNICOS Los sensores ultrasónicos se utilizan para averiguar las distancias a que se encuentran posibles obstáculos y para vigilar un espacio; están integrados en los parachoques de vehículos p. ej. para facilitar entrada y salida de aparcamientos y las maniobras de estacionamiento. El gran ángulo de abertura que se obtiene con el empleo de varios sensores (cuatro en la parte trasera y de cuatro a seis en la parte delantera) permite determinar con ayuda de la "triangulación" la distancia y el ángulo en relación con un obstáculo. El alcance de detección de un sistema de tal clase cubre una distancia de aprox. 0,25 a 1,5 m. SENSORES LÁSER SENSOR LASER VISIBLE ACTIVO PARA DETECCION DE PRESENCIA Y DETERMINACIÓN DE LAS DIMENSIONES Y DE LA VELOCIDAD DE LOS VEHÍCULOS EN CIRCULACIÓN.
 0
0
Anuncio
Documentos relacionados








Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados