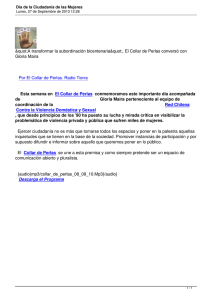
PRINCIPIOS DE ENSAMBLAJES ROTARIOS PARA EL CONTROL DIRECCIONAL Métodos de Control Direccional Ensamblaje Rotario El principio de Fulcrum – es usado para levantar ángulo (i.e. incrementar inclinación) El principio de Estabilización – es usado para mantener el ángulo y dirección El principio de Péndulo – es usado para bajar el ángulo Métodos de Control Direccional Ensamblaje Rotario El principio de Fulcrum – es usado para levantar ángulo (incrementar inclinación) Peso • El incremento en ángulo dependerá de lo siguiente: – incremento en la distancia del estabilizador de barrena al primer estabilizador de tubería – Incremento en inclinación del pozo – Reducción en el diámetro del drill collar – Incremento en peso sobre la barrena – Reducción en la velocidad de rotación Fuerza hacia el lado alto – Reducción en la tasa de flujo (formaciones suaves) Fuerza Calibre completo de estabilizador de barrena HERRAMIENTA ROTARIA FULCRUM ESTABILIZADOR DE COLUMNA DE FULLGAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR DRILL COLLAR DRILL COLLAR ESTABILIZADOR DE MECHA DE FULL GAUGE BARRENA CONSTRUYE 2.0 - 3.5/100’ DEPENDIENDO LA INCLINACION Y LOS PARAMETROS DE PERFORACION HERRAMIENTA ROTARIA FULCRUM ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRLL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR DRILL COLLAR ESTABILIZADOR DE MECHA DE FULL GAUGE BARRENA CONSTRUYE DE 1.5 - 2.5/100’ DEPENDIENDO LA INCLINACION Y LOS DE PARAMETROS DE PERFORACION HERRAMIENTA ROTARIA FULCRUM ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA LIGERAMENTE FUERA DE GAUGE DRILL COLLAR DRILL COLLAR CORTO ESTABILIZADOR DE MECHA DE FULL GAUGE BARRENA CONSTRUYE DE .5 - 1.5/100’ DEPENDIENDO DE INCLINACION Y LOS PARAMETROS DE PERFORACION HARRAMIENTA ROTARIA FULCRUM ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA FUERA DE GAUGE DRILL COLLAR ESTABILIZADOR DE MECHA DE FULL GAUGE BARRENA CONSTRUYE DE .5 - 1.0/100’ GRADUALMENTE EN SECCION DE TANGENTE Métodos de Control Direccional Ensamblaje Rotario (Empacado) El Principio de Fulcrum – es usado para levantar el angulo y direccion El Principio de Estabilizacion – es usado para mantener el angulo y direccion – alto rpm y suficiente peso sobre la barrena para perforar El Principio de Pendulo – es usado para bajar el angulo STABILIZACION Alta revolución Bajo WOB Este ensamblaje es bastante rígido con alto torque HERRAMIENTA ROTARIA EMPACADA DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR CORTO ESTABILIZADOR DE MECHA DE FULL GAUGE BARRENA HERRAMIENTA EMPACADA CON TENDENCIA A CONSTRUIR DE 0.1 - 0.5/100’ DEPENDIENDO DE LA FORMACION Y PARAMETROS DE PERFORACION HERRAMIENTA ROTARIA EMPACADA ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA FUERA DE GAUGE DRILL COLLAR CORTO ESTABILIZADOR DE MECHA DE FULL GAUGE BARRENA ESTA HERRAMIENTA DEBE MANTENER ANGULO DEPENDIENDO DE LA MEDIDA DEL PRIMER ESTABILIZADOR DE COLUMNA HERRAMIENTA ROTARIA EMPACADA ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR } ESTABILIZADORES DE COLUMNA DE FULL GAUGE DRILL COLLAR } ESTABILIZADORES DE COLUMNA Y MECHA DE FULL GAUGE BARRENA HERRAMIENTA EMPACADA USADO EN EXTREMOS GIROS DE MECHA TRICONICA Métodos de Control Direccional Ensamblaje Rotario El Principio de Fulcrum – El Principio de Estabilizacion – El principio de Péndulo – es usado para reducir angulo de inclinación – alto rpm y bajo peso sobre la barrena Peso sobre barrena HERRAMIENTA ROTARIA PENDULO DRILL COLLAR DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR BARRENA LA TASA DE CAIDA DEPENDE DE LA INCLINACION Y DEL DIAMETRO Y PESO DE LA HERRAMIENTA DE FONDO. TIRA ANGULO DE 1.5 - 2.0/100’ HERRAMIENTA ROTARIA PENDULO DRILL COLLAR DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE MECHA FUERA DE GAUGE BARRENA MENOR TASA DE CAIDA QUE EL ANTERIOR, TAMBIEN REDUCE GIRO DE MECHA HERRAMIENTA ROTARIA PENDULO DRILL COLLAR DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR CORTO (10’ a 15’) BARRENA CAIDA DE ANGULO GRADUAL 1/100’ DEPENDIENDO DE INCLINACION HERRAMIENTA ROTARIA PENDULO ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR ESTABILIZADOR DE COLUMNA DE FULL GAUGE DRILL COLLAR DRILL COLLAR BARRENA HERRAMIENTA CONSIDERADA MUY FUERTE PARA CAIDA DE ANGULO GENERALMENTE USADO EN POZOS VERTICALES EN FORMACION SUAVE Metodos de Control Direccional Ensamblaje Rotario Angulo de Buzamiento y Fuerza de Desviación Angulo Dog Leg A alto Buzamiento, la desviacion tiende buzamiento abajo A bajo Buzamiento, la desviacion tiende hacia arriba Metodos de Control Direccional Ensamblaje Rotario Angulo de Buzamiento y Fuerza de desviación 30° 35° 35° 35° – Inclinacion del Pozo = 30° – – Buzamiento real = 35° – Buzamiento efectivo = 30°+35°=65° – Buzamiento efectivo igual al angulo de buzamiento real (35°) – Habra una desviacion buzamiento abajo – Inclinacion del Pozo = 0° Habra una desviacion buzamiento arriba 35° – Inclinacion del Pozo = 35° – Angulo buzamiento real = 35° – Buzamiento efectivo – No habra fuerza de desviacion = 0° METODOS DE CALCULO DE CONTROL DERECCIONAL TANGENCIAL Asume que el pozo es paralelo ha la inclinacion y direccion del ultimo survey ANGULO PROMEDIO Asume que el pozo es paralelo al promedio simple de los ángulos de inclinación y dirección y realiza el cálculo entre dos estaciones de los extremos. MINIMA CURVATURA También conocido como el método del arco de circunferencia, asume que el pozo es un arco de circunferencia con mínima curvatura (máximo radio de curvatura) entre dos estaciones de registros direccionales. . METODOS DE CALCULO DE TRAYECTORIA DE POZOS Tangencial Angulo Promedio Minima Curvatura --- --- Tg (DL/2)*(180/PI)*(2/DL) TVD (m) L * Cos I2 L * Cos ((I2+I1)/2) (L/2)*( Cos I1 + Cos I2)*F N-S(m) L*Sen I2*Cos A2 L*Sen((I2+I1)/2)*Cos ((A2+A1)/2) (L/2)*(Sen I1*Cos A1+Sen I2*Cos A2)*F E-W(m) L*Sen I2*Sen A2 L*Sen((I2+I1)/2)*Sen ((A2+A1)/2) (L/2)*(Sen I1*Sen A1+Sen I2*Sen A2)*F Straight line factor ( F ) DL(°) Cos-1 ( Sen I1 * Sen I2 * Cos (A2-A1) + Cos I1 * Cos I2 ) DLS(°/30) ( DL/L)*30 BUR (°/30) (( I2 – I1)/L)*30 TURN (°/30) (( A2 – A1)/L)*30 Cierre ( m ) ( (N-S)2 + ( E-W)2 )1/2 Direcc.Cierre (°) Tg-1 ((E-W)/(N-S)) METODOS DE CALCULO DE TRAYECTORIA DE POZOS Metodo Angulo Promedio MD m Inc ° Az ° Long. Est m TVD N-S E-W TVD N-S 1 3029 19.3 111.6 --- --- --- --- 3024.17 -25.82 2 3058 22.7 112.7 29 3 3087 25.1 115.4 29 4 3117 27.0 116 30 Est PARCIALES TURN E-W DL ° DLS °/30m °/30m °/30m 48.85 0 0 0 0 BUR TURN TOTALES BUR Metodo Minima Curvatura MD m Inc ° Az ° Long. Est m TVD N-S E-W TVD N-S 1 3029 19.3 111.6 --- --- --- --- 3024.17 -25.82 2 3058 22.7 112.7 29 3 3087 25.1 115.4 29 4 3117 27.0 116 30 Est PARCIALES TOTALES RF E-W DL ° 48.85 0 - DLS °/30m °/30m °/30m 0 0 0