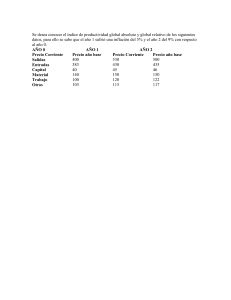
TECNOLÓGICO NACIONAL DE MÉXICO INSTITUTO TECNOLÓGICO DE SALINA CRUZ ACTIVIDAD TEMA 4 NOMBRE LOPEZ LOPEZ MIGUEL ANGEL SEMESTRE Y GRUPO 4B1 MATERIA SISTEMAS ELECTRÓNICOS CARRERA INGENIERÍA MECÁNICA DOCENTE ING. JOEL SÁNCHEZ CANO SALINA CRUZ OAXACA18 DE JUNIO DEL 2021 4. Circuitos combi nacionales y secuenciales. Los sistemas combinacionales están formados por un conjunto de compuertas interconectadas cuya salida, en un momento dado, esta únicamente en función de la entrada, en ese mismo instante. Por esto se dice que los sistemas combinacionales no cuentan con memoria. Los sistemas secuenciales en cambio, son capaces de tener salidas no solo en función de las entradas actuales, sino que también de entradas o salidas anteriores. Esto se debe a que los sistemas secuenciales tienen memoria y son capaces de almacenar información a través de sus estados internos. Un sistema combinacional puede tener n entradas y salidas m. Un sistema secuencial puede ser visto como una caja negra, en cuyo interior hay compuertas lógicas, que presentan una ecuación de conmutación circuitos combinacionales: las salidas dependen únicamente de las entradas circuitos secuenciales: las salidas dependen de las entradas y del tiempo Un circuito combinacional es un sistema que contiene operaciones booleanas básicas (AND, OR, NOT), algunas entradas y un juego de salidas, como cada salida corresponde a una función lógica individual, un circuito combinacional a menudo implementa varias funciones booleanas diferentes, es muy importante recordar este hecho, cada salida representa una función booleana diferente. Un ejemplo común de un circuito combinacional es el decodificador de siete segmentos, se trata de un circuito que acepta cuatro entradas y determina cuál de los siete segmentos se deben iluminar para representar la respectiva entrada, de acuerdo con lo dicho en el párrafo anterior, se deben implementar siete funciones de salida diferentes, una para cada segmento. Las cuatro entradas para cada una de estas funciones booleanas son los cuatro bits de un número binario en el rango de 0 a 9. Sea Del bit de alto orden de este número y A el bit de bajo orden, cada función lógica debe producir un uno (para el segmento encendido) para una entrada dada si tal segmento en particular debe ser iluminado, por ejemplo, el segmento y debe iluminarse para los valores 0000, 0010, 0110 y 1000. En la siguiente tabla se puede ver qué segmentos deben iluminarse de acuerdo al valor de entrada, tenga en cuenta que sólo se están representando valores en el rango de 0 a 9, los decodificadores para las pantallas de siete segmentos comerciales tienen capacidad para desplegar valores adicionales que corresponden a las letras A a la F para representaciones hexadecimales, sin embargo la mecánica para iluminar los respectivos segmentos es similar a la aquí representada para los valores numéricos. Un problema con la lógica secuencial es su falta de “memoria”. En teoría, todas las funciones de salida en un circuito combinacional dependen del estado actual de los valores de entrada, cualquier cambio en los valores de entrada se refleja (después de un intervalo de tiempo llamado retardo de propagación) en las salidas. Desafortunadamente las computadoras requieren de la habilidad para “recordar” el resultado de cálculos pasados. Éste es el dominio de la lógica secuencial. La unidad de memoria más básica es el flip-flop Set/Reset. Aunque recordar un bit sencillo es importante, la mayoría de los sistemas de cómputo requieren recordar un grupo de bits, esto se Logra combinando varios flip-flop en paralelo, una conexión de este tipo recibe el nombre de registro. A partir de aquí es posible implementar diferentes circuitos como registros de corrimiento y contadores, éstos últimos también los conocemos como circuitos de reloj. Con los elementos mencionados es posible construir un microprocesador completo. En general, un circuito secuencial está compuesto por circuitos combinacionales y elementos de memoria. Se dice que en un circuito secuencial la salida actual depende de la entrada actual y del estado actual del circuito. La diferencia principal entre un circuito combinacional y un circuito secuencial es que en el segundo caso hay una realimentación de una señal de salida hacia la entrada. Se puede ver que la salida de la compuerta OR es realimentada y se utiliza como entrada de la compuerta AND inferior. Esto significa que la salida (F) de este circuito digital dependerá de las entradas (A y B), pero también dependerá de la salida F (la salida que se realimenta) que se haya dado, un instante antes. En otras palabras, la salida F depende de las entradas A y B y del valor que tenía esta salida, previamente. 4.1. Codificadores y decodificadores Codificadores Un codificador es un circuito combinacional con un conjunto de entradas (2N) y un número de salidas N cuyo propósito es mostrar en la salida el código binario correspondiente a la entrada activada. Por ejemplo, un codificador de 4 entradas X0, X1, X2, X3 y 2 salidas S0, S1. Si se activa la entrada X0 mediante la introducción de un 1, el código mostrado a la salida será S0S1=00. Y así para el resto de las entradas: X1 activará una salida 01, X2 activará una salida 10 y X3 activará una salida 11. Obsérvese que el valor en binario de la salida en su conjunto 00, 01,10, 11 es igual al número decimal de la entrada activada 0,1,2,3 que acompaña a la letra ‘X’. Las funciones algebraicas de un codificador se pueden deducir a partir de su funcionamiento. Por ejemplo, en el caso de que se disponga de un codificador de 4 entradas (y dos salidas) éstas serán: S0 = X1 + X3 S1 = X0 + X2 Para ello, se ha tenido en cuenta que la salida S0 sólo vale 1 para los valores 1 y 3 (en decimal) o 01 y 11 (en binario). La salida S1 sólo vale 1 para los valores 2 y 3 (en decimal) o 10 y 11 (en binario). Para obtener estas funciones se ha considerado que nunca va a producirse una combinación a la entrada que tenga más de un 1 y por lo tanto, no importa el valor que produce a la salida esa situación. Todo ello lo podríamos resumir en la siguiente tabla de verdad resumida en la que sólo se han puesto 4 combinaciones de las 24=16 posibles. Las celdas sombreadas en azul son las salidas. X3 X2 X1 X0 S1 S0 0 0 0 1 0 0 0 0 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 Si en algún momento se activarán más de una entrada, la salida no estaría definida, es decir, no se puede saber a priori qué valor se obtendría. Dependiendo de cómo se haya diseñado puede haber variaciones entre unos dispositivos y otros. Codificador con prioridad En la explicación anterior se ha supuesto que únicamente una de las entradas X0, X1, X2, X3 puede estar activa (con un 1) a la vez. Esto es cierto para algunas aplicaciones. Sin embargo, hay otras aplicaciones para las cuales es posible que estén activadas (con un 1) más de una entrada a la vez. En este caso el circuito debe estar diseñado para establecer una prioridad o precedencia entre las entradas para determinar en cada caso cual es la que realmente se indica a la salida. Podemos escribir la siguiente tabla de verdad en la que hacemos uso de condiciones don’t care (marcadas con ‘x’). Las celdas sombreadas en azul son las salidas. X3 X2 X2 X1 S1 S0 0 0 0 1 0 0 0 0 1 X 0 1 0 1 X X 1 0 1 X X X 1 1 La interpretación de esta tabla es la siguiente: si la entrada X3 está a 1 no importa cuál sea el valor del resto de entradas ya que el código 11 a la salida (el correspondiente a 3, valor decimal de X3). Esto significa que es la más prioritaria frente a las demás. Para que se active la salida 10 (correspondiente a 2, valor decimal de X2), es necesario que X2=1 pero también que X3=0 (o sea, que no esté activada). Dado que X2 es prioritaria frente a X1 y X0, se pone un valor ‘x’ en esas entradas. Finalmente, se puede deducir que la X0 es la menos prioritaria de todas porque para que se active su código a la salida, es necesario, además de que esté a 1 (o sea, activada), que todas las demás estén a 0 (o sea, desactivadas). En este caso, las funciones resultantes, obtenidas mediante la aplicación de mapas de Karnaugh, serán: S0 = X1·X2′ + X3 S1 = X2 + X3 Decodificadores Los decodificadores efectúan la operación inversa de los codificadores. Disponen de un conjunto N de entradas y un conjunto 2N de salidas. Cuando aparece un código binario a la entrada, se activa (tiene un 1) la salida identificada con el número decimal equivalente. En el siguiente ejemplo, se plantea un codificador de 2 a 4, que tiene la siguiente tabla de verdad (las celdas sombreadas en azul son las salidas): E1 0 0 1 1 E0 0 1 0 1 Z3 0 0 0 1 Z2 0 0 1 0 Z1 0 1 0 0 Z0 1 0 0 0 En esta tabla se disponen dos entradas E1, E0 y 4 salidas Z3, Z2, Z1 y Z0. Se activará un 1 en la salida correspondiente al código introducido en la entrada. Las funciones de salida son bastante sencillas de obtener a partir de esta tabla de verdad: Z3 = E1·E0 Z2 = E1·E0′ Z1 = E1’·E0 Z0 = E1’·E0′ 4.2. Multiplexores y demultiplexores Los multiplexores o selectores de datos hacen que podamos transmitir el dato de entrada que nosotros queremos en cada momento a una salida determinada. Los demultiplexores son el circuito inverso al multiplexor. Sirven para dirigir la información digital procedente de diversas fuentes a una única línea para ser transmitida a través de dicha línea a un destino común, es decir, que puede servir para comunicarnos vía serie. Multiplexores Un multiplexor o mux es un circuito combinacional, permite que, teniendo varias entradas podamos, a través de un selector, poder trasmitir en la salida el dato que queramos. Un multiplexor tiene D entradas, una única salida y E entradas de selección, que cumplen la fórmula D=2E (las entradas de selección son proporcionales a las entradas del multiplexor). Un multiplexor puede tener, por ejemplo, 8 entradas (10 a 17), 3 selectores (S0, S1 y S2), una E (terminal de inhibición) que tiene que estar conectado a masa para que funcione el multiplexor y por último la salida Z y Z (donde nos da la salida negada). Hay distintos tipos de multiplexores de 2, 4, 8, 16... entradas, de paralelo a serie. Sus aplicaciones son muy variadas, los podemos encontrar en generadores de las funciones lógicas, display multiplexor de 7 segmentos, etc. Multiplexor de dos entradas Este multiplexor tiene dos entradas D0 y D1, una salida S y una selector E. Cuando el selector E esté en la posición 1 en la salida, tendremos lo mismo que en la entrada D1, mientras que cuando el selector está en 0 tendremos en la salida los datos de D0. Por lo tanto, la ecuación de salida nos quedará: S=D0-E+D1-E Nota: Existen los multiplexores de interruptores electrónicos, que su principal diferencia está en que el selector lo tienen eléctrico, es decir, que va dando impulsos dependiendo del nivel lógico que hay en el terminal de control. Multiplexor de cuatro entradas Este multiplexor tiene 4 entradas, 2 selectores y una salida. Vemos que cumple la fórmula D=2E, ya que tenemos cuatro entradas, por lo tanto, E (selectores) serán dos. Sólo nos interesa la entrada seleccionada las otras entradas no influyen en la salida. Con la combinación de El y E2 podemos saber el dato que sale, 0 0 l^Dl, 1 0^>D2y 1. Nota: Un multiplexor sea cual sea el número de entradas tendrán aproximadamente el mismo tipo de tabla, pero con más variables de entrada, más variables de selector, pero no de salida, cómo máximo tendrá una salida normal y otra con la misma negada. Multiplexores para la conversión de paralelo a serie Primero de todo hemos de saber que la transmisión de datos de un sistema electrónico a otro se efectúa a través de un conductor llamado bus de datos. La forma más rápida de trasmitir los datos sería en transmisión en paralelo, con un cable para cada dato. Pero el problema es que saldría muy caro, por lo tanto, se ha creado la transmisión en serie. Esta transmisión lo que hace es pasar por el mismo cable todos los datos, de uno en uno, aunque sea más lento que en paralelo. Por lo tanto, podemos decir que cualquier multiplexor pasa de un número de entradas en paralelo a una salida en serie, seleccionando cada vez una. Demultiplexores Los demultiplexores o demux son circuitos combinacionales que hacen la función contraria al multiplexor, es decir, pasa de una entrada a 8 salidas dependiendo del selector. Siempre tiene una entrada de datos, unas entradas de selección E y unas salidas S. Donde se cumple que S=2E. Hay diferentes tipos de demultiplexores de 2, 4, 8,... salidas, hemos de tener en cuenta que se tratan de salidas no entradas como en el multiplexor. Otro tipo de demultiplexor es el convertidor serie-paralelo, que podría ser cualquiera de los dichos anteriormente, ya que su principal función es pasar los datos que les llegan a través de un sólo cable a varias salidas, dependiendo de los selectores. Un ejemplo sería conectar un codificador donde le llegan 4 datos, con dos salidas (S0 y S1) que conectadas en serie con un demultiplexor en las entradas de selección (E0 y El) y una entrada de datos (una palabra de 4 bits D0,D1, D2, D3 uno cada vez), saldrían los mismos datos pero en las distintas salidas del demultiplexor. Demultiplexor de dos salidas La selección de E determina el camino que toma el dato que hay en D. Demultiplexor de cuatro salidas Un demultiplexor de cuatro salidas tiene dos selectores y como todos los demultiplexores una sola entrada. La tabla de la verdad sólo tendría valor la salida que marca el selector en cada momento, mientras que las otras están a cero. 4.3. Flip-flops y contadores binarios Un contador binario se puede construir con flip-flops J-K tomando la salida de una celda como la entrada de clock del siguiente. Las entradas J y K de cada flip-flop se conectan a 1 (alta), para producir una conmutación con cada ciclo del clock de entrada. Por cada dos conmutaciones de la primera celda, se produce una conmutación en la segunda celda, y así sucesivamente hasta la cuarta celda. Esto produce un número binario igual al número de ciclos de la señal de clock en la entrada. Este dispositivo se denomina a veces contador de "propagación". El mismo dispositivo es útil como divisor de frecuencia. Los de (FF) FLIP-FLOP compuertas digitales. están constituidos por una combinación Estas compuertas están conectadas de tal manera que es posible almacenar información. Estas compuertas están realimentadas y deben lograr cierta estabilidad para poder almacenar información. El "Flip-flop" es el nombre común que se le da a los dispositivos de dos estados, que sirven como memoria básica para las operaciones de lógica secuencial. Los Flip-flops son ampliamente usados para el almacenamiento y transferencia de datos digitales y se usan normalmente en unidades llamadas "registros", para el almacenamiento de datos numéricos binarios. flip-flop set/ reset El flip-flop de tipo set/reset, se activa (set) a un estado de alto en el lado Q, por medio de una señal de "set", y se mantiene en ese valor, hasta que se desactiva a una señal baja, por medio de una entrada en el lado de reset. Esto se puede implementar como el latch de puerta NAND o el latch de puerta NOR, y tambien como versión con pulso de clock (sincronizado). Una desventaja del flip-flop S/R, es que las entradas S=R=0 da un resultado ambiguo y debe evitarse. El flip-flop J-K consigue superar este problema. El Flip-Flop D El "flip-flop" tipo D, sigue a la entrada, haciendo transiciones que coinciden con las de la entrada. El término "D", significa dato; este "flip-flop" almacena el valor que está en la línea de datos. Se puede considerar como una celda básica de memoria. Un "flip-flop" D, se puede hacer con un "flipflop" "set/reset", uniendo la salida set (estado alto) con la salida reset (estado bajo), a través de un inversor. El resultado se puede sincronizar. Flip-Flop J-K El "flip-flop" J-K, es el más versátil de los flip-flops básicos. Tiene el carácter de seguimiento de entrada del flip-flop D sincronizado, pero tiene dos entradas, denominadas tradicionalmente J y K. Si J y K son diferentes, la salida Q toma el valor de J durante la subida del siguiente pulso de sincronismo. Si J y K son ambos low (bajo), entonces no se produce cambio alguno. Si J y K son ambos high (alto), entonces en la siguiente subida de clock la salida cambiará de estado. Puede realizar las funciones del flip-flop set/reset y tiene la ventaja de que no hay estados ambiguos. Puede actuar también como un flip-flop T para conseguir la acción de permutación en la salida, si se conectan entre sí las entradas J y K. Esta aplicación de permutar el estado, encuentra un uso extensivo en los contadores binarios. El Flip-Flop T El flip-flop T o "toggle" (conmutación) cambia la salida con cada borde de pulso de clock, dando una salida que tiene la mitad de la frecuencia de la señal de entrada en T. Es de utilidad en la construcción de contadores binarios, divisores de frecuencia, y dispositivos de sumas binarias en general. Se puede hacer a partir de flip-flops J-K, llevando ambas entradas J y K a alta (high). Construcción de un flip-flop T desde un flip-flop J-K 4.4. Registros de corrimiento Un registro de corrimiento es un circuito secuencial síncrono capaz de contractar varios bits de información. El formato de esta información puede ser de dos tipos: Serie: los bits se transfieren uno a continuación del otro por una misma línea. Paralelo: se intercambian todos los bits al mismo tiempo, utilizando un número de líneas de transferencia igual al número de bits. Contadores de registro de corrimiento En los contadores de registro de corrimiento se utiliza retroalimentación, lo cual significa que la salida del último flip-flop del registro se conecta en retroceso con el primer flip-flop en alguna forma. Contador de anillo El contador de registro de corrimiento más simple es un registro de corrimiento circulante conectado que el ultimo ff desplace su valor al primer ff. Los ff se conectan de modo que la información se corra de izquierda a derecha de Q-0 a Q-3. En muchos casos solo hay un 1 el registro y se hace que circule alrededor del registro en tanto se apliquen los pulsos del reloj. Por esta razón se le denomina contador de anillo. Contador Johnson El contador de anillo básico se puede modificar ligeramente para producir otro tipo de contador de registro de corrimiento, que tendrá propiedades un tanto diferentes. El contador Johnson o de anillo trenzado se construye exactamente en la misma forma que un contador de anillo normal, excepto que la salida invertida del ultimo ff se conecta a la entrada del primer ff. 4.5. Memorias ROM, RAM y EPROM. RAM La memoria de acceso aleatorio (RAM) es la ubicación de almacenamiento temporal para datos y programas a los que accede la CPU. Esta memoria es volátil; por lo tanto, su contenido se elimina cuando se apaga la computadora. Cuanta más RAM tenga una computadora, mayor capacidad tendrá para almacenar y procesar programas y archivos de gran tamaño, además de contar con un mejor rendimiento del sistema.La memoria RAM (Random Access Memory Module o memoria de acceso aleatorio) es un tipo de memoria que utilizan los ordenadores para almacenar los datos y programas a los que necesita tener un rápido acceso. Se trata de una memoria de tipo volátil, es decir, que se borra cuando apagamos el ordenador, aunque también hay memorias RAM no volátiles (como por ejemplo las memorias de tipo flash.Los datos almacenados en la memoria RAM no sólo se borran cuando apagamos el ordenador, sino que tambien deben eliminarse de esta cuando dejamos de utilizarlos (por ejemplo, cuando cerramos el fichero que contiene estos datos).Estas memorias tienen unos tiempos de acceso y un ancho de banda mucho más rápido que el disco duro, por lo que se han convertido en un factor determinante para la velocidad de un ordenador. Esto quiere decir que, dentro de unos límites, un ordenador irá más rápido cuanta mayor sea la cantidad de memoria RAM que tenga instalada, expresada en MegaBytes o GigaBytes. ROM: (Read Only Memory) es un chip que viene incorporado a la tarjeta madre. La memoria ROM es memoria no volátil. Las ROM se emplean para almacenar información de configuración del sistema, programas de arranque o inicio, soporte físico y otros programas que no precisan de actualización constante. Es un medio de almacenamiento utilizado en ordenadores y dispositivos electrónicos, que permite sólo la lectura de la información y no su borrado, independientemente de la presencia o no de una fuente de energía. Los datos almacenados en la ROM no se pueden modificar, o al menos no de manera rápida o fácil. Se utiliza principalmente para contener el firmware u otro contenido vital para el funcionamiento del dispositivo, como los programas que ponen en marcha el ordenador y realizan los diagnósticos. PROM: Es una memoria digital donde el valor de cada bit depende del estado de un fusible (o anti fusible), que puede ser quemado una sola vez. Por esto la memoria puede ser programada (pueden ser escritos los datos) una sola vez a través de un dispositivo especial, un programador PROM. Estas memorias son utilizadas para grabar datos permanentes en cantidades menores a las ROMs, o cuando los datos deben cambiar en muchos o todos los casos. Programación: una PROM común se encuentra con todos los bits en valor 1 como valor por defecto de las fábricas; el quemado de cada fusible, cambia el valor del correspondiente bit a 0. La programación se realiza aplicando pulsos de altos voltajes que no se encuentran durante operaciones normales (12 a 21 voltios). El término Read-only (sólo lectura) se refiere a que, a diferencia de otras memorias, los datos no pueden ser cambiados (al menos por el usuario final). EPROM: Es un tipo de chip de memoria ROM no volátil inventado por el ingeniero Dov Flohman. Está formada por celdas de FAMOS (Floating Gate Avalanche-Injection Metal-Oxide Semiconductor) o “transistores de puerta flotante”, cada uno de los cuales viene de fábrica sin carga, por lo que son leídos como 1 (por eso, una EPROM sin grabar se lee como FF en todas sus celdas). Se programan mediante un dispositivo electrónico que proporciona voltajes superiores a los normalmente utilizados en los circuitos electrónicos. Las celdas que reciben carga se leen entonces como un 0. Las EPROM pueden venir en diferentes tamaños y capacidades. Así, para la familia 2700 se pueden encontrar: Tipo de EPROM Tamaño — bits Tamaño — Bytes Longitud (hex) Última dirección (hex) 1702, 1702A 2 Kbits 256 100 000FF 2704 4 Kbits 512 200 001FF 2708 8 Kbits 1 Kbytes 400 003FF 2716, 27C16 16 Kbits 2 KBytes 800 007FF 2732, 27C32 32 Kbits 4 KBytes 1000 00FFF 2764, 27C64 64 Kbits 8 KBytes 2000 01FFF 27128, 27C128 128 Kbits 16 KBytes 4000 03FFF 27256, 27C256 256 Kbits 32 KBytes 8000 07FFF 27512, 27C512 512 Kbits 64 KBytes 10000 0FFFF 27C010, 27C100 1 Mbits 128 KBytes 20000 1FFFF 27C020 2 Mbits 256 KBytes 40000 3FFFF 27C040 4 Mbits 512 KBytes 80000 7FFFF 27C080 8 Mbits 1 Mbytes 100000 FFFFF EEPROM: Son las siglas de Electrically-Erasable Programmable Read-Only Memory (ROM programable y borrable eléctricamente). Es un tipo de memoria ROM que puede ser programado, borrado y reprogramado eléctricamente, a diferencia de la EPROM que ha de borrarse mediante un aparato que emite rayos ultravioletas. Son memorias no volátiles. Las celdas de memoria de una EEPROM están constituidas por un transistor MOS, que tiene una compuerta flotante (estructura SAMOS), su estado normal está cortado y la salida proporciona un 1 lógico. 4.6. Convertidor a/d y d/a. Convertidor Digital-Analógico Los convertidores digitales analógico (DAC: Digital te Analog Converter) traducen las palabras entregadas en binario por una computadora u otro circuito a niveles analógicos proporcionales al valor binario presentado. Uno de las utilizaciones más próximas a nosotros son los convertidores DAC de los compacts disc”. Un DAC se utiliza para convertir los datos digitales grabados en un disco compacto en una señal de audio de alta fidelidad. La resolución de un DAC es el número de niveles analógicos que es capaz de generar a la salida y está directamente relacionado con el número de bits que componen las palabras binarias que admite a su entrada. “Settling Time” Es el término utilizado para indicar el tiempo requerido para que la señal analógica se estabilice después de un cambio en a entrada binaria. Normalmente se especifica como el tiempo necesario que tarda para que en la salida se estabilice la señal cuando cambia únicamente el bit menos significativo (LSB) de la palabra binaria de entrada. La precisión La precisión es otro factor muy importante en un DAC, normalmente se especifica dentro del rango de 1/2 a 2 LSB. Cuanto menor sea el valor de la precisión, más se acercará el valor de salida al valor esperado. red de resistencias ponderadas La técnica de red de resistencias ponderadas es el sistema más antiguo y sencillo de convertir bits digitales en una señal analógica. Se basa en que cada bit de una palabra binaria se utiliza para controlar un interruptor a través del cual se alimenta una resistencia cuyo valor es directamente proporcional al peso (posición) del bit en cuestión. red de resistencias r-2r Con esta técnica se puede conseguir la conversión digital-analógica con tan sólo dos valores diferentes de resistencias. El control de los interruptores es el mismo que en el caso anterior, pero la diferencia básica con el anterior es que éste funciona por tensión en lugar de corriente. Convertidor Analógico-Digital Un convertidor analógico/digital (ADC: Analog to Digital Converter) se utiliza para convertir señales analógicas en un determinado número de bits digitales. El resultado es una palabra digital que es la representación binaria del valor del nivel analógico de la señal en el momento de su conversión. La resolución da un ADC al igual que en un DAC es el nº de bits con los cuales el ADC puede representar una señal analógica. Un ADC de 4 bits, tiene una resolución de cuatro bits, y puede representar una señal analógica con 24 (16) palabras digitales diferentes. Un ADC de 8 bits puede representar una señal analógica con 256 palabras digitales diferentes. Un convertidor de 12 bits puede representar una señal analógica con 4096 palabras digitales diferentes. El tiempo de conversión es otro aspecto importante en un ADC. Como se puede observar, la conversión de una señal analógica en una palabra digital es un proceso que requiere un determinado tiempo. Se necesita un determinado tiempo para muestrear la señal analógica, digitalizarla. y presentar el resultado a la salida del convertidor. El tiempo de conversión es el período de tiempo requerido para completar el proceso. Puede ser desde microsegundos (para convertidores muy rápidos) a milisegundos (convertidores muy lentos). Puesto que una conversión A/D es un proceso sincronizado muy exacto, se necesita una señal de reloj en la mayoría de los casos. Teoría del Muestreo Para digitalizar una señal fielmente, el convertidor deberá tomar muestras al menos al doble de la frecuencia máxima de la señal analógica de entrada. Esta velocidad de muestreo se conoce también como “Frecuencia de Nyquist”. Considerando una señal analógica sinusoidal de 10 Hz aplicada a un ADC ideal, la mínima velocidad de muestreo sería 2 x 10 Hz = 20 Hz, de forma que por cada ciclo de señal se tomarían dos muestras digitales. Para mejorar a fidelidad de la señal digitalizada se podrían tomar más muestras en el mismo período de tiempo. Un muestreo de 8 puntos por ciclo, requiere una frecuencia de muestreo ocho veces superior a la frecuencia de Nyquist. La relación existente entre la frecuencia de la señal de entrada y la frecuencia de muestreo es muy importante.