Fuerzas de fijación y momentos
de empotramiento en vigas
Edición revisada
𝑊
43 y más
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐴
𝐵
𝐿/2
𝐿/2
𝑊 = 𝑤𝑜 𝑒 𝑎𝑥
𝑒𝑥𝑝𝑜𝑛𝑒𝑛𝑐𝑖𝑎𝑙
𝑤0
Ortiz David
Palomino Alex Henrry
𝐴
𝐵
𝐿
Miranda Albert Richard
Martínez Hugo
ACERCA DE LOS AUTORES
David Ortiz Soto (México)
Ingeniero Civil egresado de la Universidad Nacional Autónoma de
México (UNAM), FES Aragón, con Maestría en Ingeniería Civil, área
de estructuras, efectuada en el Instituto Politécnico Nacional (IPN),
Escuela Superior de Ingeniería y Arquitectura (ESIA), UZ, donde fue
representante de la comunidad estudiantil de posgrado.
Actualmente se encuentra desarrollando el protocolo del doctorado
en la Facultad de Ingeniería, UNAM.
Es docente activo y secretario de la carrera de Ingeniería Civil en el Tecnológico Nacional de México,
Instituto Tecnológico de Iztapalapa III. Durante el 2015 y el 2016 fue profesor en la ESIA UZ IPN.
Entre las asignaturas que imparte o ha impartido están Estática, Estructuras Isostáticas, Mecánica
de Materiales, Fundamentos de la Mecánica de Medio Continuo, Análisis Estructural, Análisis
Estructural Avanzado y Dinámica Estructural. De igual manera es catedrático de la Universidad
DeLaSalle Bajío (León, Guanajuato) a nivel posgrado, donde dicta el curso de Ingeniería de
Cimentaciones en la Maestría en Estructuras.
El Maestro en Ingeniería David Ortiz ha participado en calidad de ponente de conferencias, cursos y
talleres en diversos congresos, simposios y ciclos de conferencias nacionales e internacionales,
contando ya con cuatro giras a Sudamérica. Ha disertado de manera destacada en universidades
tales como UJED (Durango), ITS Lagos de Moreno (Jalisco), ITI III y ESIA UZ IPN (Cd. de México),
TESJI (Estado de México), ITT (Tlaxiaco, Oaxaca), UJCM (Moquegua, Perú), UPT (Tacna, Perú),
UTO (Oruro, Bolivia), UPEA (La Paz, Bolivia), UPS (Quito, Ecuador) y UNACH (Chimborazo,
Ecuador). En agosto del 2016 impartió una conferencia y un workshop en el Encuentro Nacional de
Estudiantes de Arquitectura, organizado por UNEA, con sede en Oruro, Bolivia.
Ha escrito y compartido para su descarga gratuita los libros:” Estructuras Isostáticas en 2D:
Problemas Resueltos”, “Resolución de Armaduras en 2D con el Método Matricial de la Rigidez”,
“Análisis de Estructuras: Problemas Resueltos”. Sus obras literarias se han caracterizado por
contener mensajes de toque social, de reflexión y hasta cierto punto contestatarios.
Ha presentado sus libros en el programa “Profesionistas por el progreso” de la televisora ASTL.TV
del Consejo Nacional de Egresados Politécnicos, así como en el programa “Ingenio civil” de Nuestra
Voz Radio: La voz del pueblo organizado.
Forma parte del equipo de editores de la web de Ingeniería civil más destacada de América Latina,
civilgeeks.com.
Alex Henrry Palomino Encinas (Perú)
Bachiller en Ingeniería Civil de la Universidad Nacional de
Cajamarca (UNC). Cuenta con especialización en cálculo y diseño
de concreto armado y albañilería, estructuras de contención y
cimentaciones, reservorios, puentes, así como en evaluación y
diseño por desempeño de edificios.
Ha participado en calidad de ponente de conferencias, cursos y talleres en diversos congresos y
ciclos de conferencias nacionales e internacionales. Realizó su primera gira internacional en Bolivia,
teniendo intervenciones destacadas en la UTO (Oruro) y la UPEA (La Paz) en el 2015. En ese mismo
año disertó nuevamente en Bolivia. En enero del 2016 impartió su primera conferencia en América
del Norte dentro del evento “Primera Jornada Internacional de Ingeniería Civil” en el Tecnológico
Nacional de México, Instituto Tecnológico de Iztapalapa III.
Es autor de los siguientes manuales, de los cuales ha compartido algunas de sus partes para su
descarga gratuita: “Manual para los estudiantes del ETABS”, “Diseño de cimentaciones superficiales
con el uso de SAFE- teoría y práctica”, “Diseño de reservorios apoyados de concreto armado con
SAP 2000”, “Cálculo y diseño de edificios de concreto armado con ETABS”, “Manual de análisis
estático y dinámico- NTE E.030”, “Manual de AutoCAD Estructural Detailing”, entre otros.
Ha publicado diversos videos tutoriales de Ingeniería Estructural y actualmente se dedica a dictar
cursos especializados de forma independiente sobre distintos temas de Ingeniería Estructural. Forma
parte del equipo de editores de la web de Ingeniería civil más destacada de América Latina,
civilgeeks.com.
Albert Richard Miranda Sivila (Bolivia)
Licenciatura en Ingeniería Civil en la Universidad Católica Boliviana “San
Pablo” (Graduado por Excelencia). Maestría en Ingeniería Civil, área de
Estructuras, en la ESIA UZ IPN, México (Graduado con Mención
Honorífica).
Dentro de su experiencia laboral está: a) Sub Gerente Técnico,
Departamento de Ingeniería. VSL Corporation México SA de CV. Análisis
y diseño de estructuras postensadas (Julio de 2014 - a la fecha);
b) Ingeniero de Proyecto, Departamento de Ingeniería. VSL Corporation México SA de CV. Análisis y
diseño de estructuras postensadas (Febrero de 2014 - Junio de 2014);
c) Consultor en Diseño de
ingeniería y Supervisión de Proyectos de Obras Civiles (Puentes, Edificios, Colegios). Empresa
Consultora Unión S.R.L-Bolivia. (Octubre de 2009- Diciembre 2011); d) Profesor de Asignatura,
Universidad Católica Boliviana “San Pablo”, asignaturas: Estática I, Estática II, Fundaciones I. (Agosto
de 2009- Diciembre 2011).
Participó como ponente de una conferencia en la “Primera Jornada Internacional de Ingeniería Civil”
en el Tecnológico Nacional de México, Instituto Tecnológico de Iztapalapa III.
Hugo Martínez Hernández (México)
Ingeniero Civil egresado del Instituto Politécnico Nacional (IPN),
Escuela Superior de Ingeniería y Arquitectura (ESIA), UZ. Ahí mismo
estudió la Maestría en Ingeniería Civil, área de estructuras, en la
Sección de Estudios de Posgrado e Investigación, graduándose con
mención honorífica. Actualmente efectúa el doctorado en la Escuela
Superior de Ingeniería Mecánica (ESIME) del IPN.
Desde el 2015 hasta la fecha es docente de la ESIA UZ IPN, en la que imparte asignaturas como
Estructuras Isostáticas, Mecánica de Materiales y Análisis Estructural.
Ha sido invitado por diversas Instituciones para impartir cursos y conferencias. Destacan sus
participaciones en la FES Aragón (UNAM), ESIA Tecamachalco (IPN) e Instituto Tecnológico de
Iztapalapa III.
Es coautor en el libro” Estructuras Isostáticas en 2D: Problemas Resueltos”.
Ha disertado sobre temas de Ingeniería en “Profesionistas por el progreso” de la televisora ASTL.TV
del Consejo Nacional de Egresados Politécnicos, así como en el programa “Ingenio civil” de Nuestra
Voz Radio: La voz del pueblo organizado.
Fuerzas de fijación y momentos de
empotramiento en vigas
43 y más
Fuerzas de fijación y momentos de
empotramiento en vigas
43 y más
Ortiz Soto David
Universidad Nacional Autónoma de México
Facultad de Estudios Superiores Aragón
Instituto Politécnico Nacional
Escuela Superior de Ingeniería y Arquitectura
Tecnológico Nacional de México
Instituto Tecnológico de Iztapalapa III
Universidad DeLa Salle Bajío
Alex Henrry Palomino Encinas
Universidad Nacional de Cajamarca
Facultad de Ingeniería
Albert Richard Miranda Sivila
Universidad Católica Boliviana “San Pablo”
Instituto Politécnico Nacional
Escuela Superior de Ingeniería y Arquitectura
Martínez Hernández Hugo
Instituto Politécnico Nacional
Escuela Superior de Ingeniería y Arquitectura
Escuela Superior de Ingeniería Mecánica
Revisión Técnica Internacional (Bolivia):
Ms. Luis Cabrera Fernández
Universidad Técnica de Oruro
Facultad Nacional de Ingeniería
Universidad Autónoma Juan Misael Saracho
México 2016
Datos de catalogación bibliográfica
Ortiz, D., Palomino, A. H., Miranda, A. R., et al.
Fuerzas de fijación y momentos de empotramiento en vigas
Primera edición
INDEPENDIENTE, México, 2016
Distribuidora virtual oficial: CivilGeeks
Número de Registro de Obra 03-2018-072610390400-01
Área: Ingeniería
Formato: Carta 21.6 cm x 27.9 cm
Reservados todos los derechos. Se aclara que los autores del presente libro han colocado el
contenido de este para su descarga gratuita y permiten su libre difusión sin fines lucrativos.
Únicamente ellos están facultados para la venta de esta obra en físico.
Por consiguiente, no está permitida la reproducción total o parcial de este libro, ni su
tratamiento informático, ni la transmisión de ninguna forma o cualquier medio, ya sea
electrónico, mecánico, por fotocopia, por registro u otros métodos con fines lucrativos u
otros propósitos que no tengan el consentimiento previo por escrito de los autores, según
sea el caso.
DERECHOS RESERVADOS 2018, por David Ortiz Soto, Alex Henrry Palomino Encinas, Albert
Richard Miranda Sivila y Hugo Martínez Hernández. Obra inscrita en el Registro Público del
Derecho de Autor, SEP, INDAUTOR.
Impreso en México
DEDICATORIAS
Ortiz David
Dedico de manera especial este libro a Dios, a mis padres Clara y Antonio, así como a mis hermanos
José Carlos y Antonio.
A mis abuelas Paulina Ramírez y Juana Marín.
A mis sobrinos Diego y Antonio.
A Fidel, Anahí y Guadalupe.
He sido bendecido por el apoyo y afecto que me ha brindado cada uno de los miembros de mi familia
a lo largo de mi vida, lo cual les agradezco infinitamente, incluyendo a aquellos que se han
adelantado (abuelos Rafael y Antonio, y tía Lucía).
A mis alumnos del Instituto Politécnico Nacional, Escuela Superior de Ingeniería y Arquitectura (UZ),
y del Tecnológico Nacional de México, Instituto Tecnológico de Iztapalapa III.
Con toda sinceridad, les doy las gracias a todos mis amigos, compañeros, profesores y colegas que
siempre me han respaldado.
A todas las personas de México y del extranjero que directa o indirectamente me han apoyado y/o
han depositado su confianza en mí.
A los lectores por su incondicional apoyo, pues gracias a ellos mi filosofía está más viva que nunca...
“La información no es sólo para el que la paga, es para todos” y “No hay fronteras ni banderas para
el conocimiento”.
Palomino Alex Henrry
Dedico este libro a todas las personas que con su apoyo sincero han contribuido a encaminar mi
sendero hacia la superación constante, permitiéndome encontrar en la escritura una forma libre de
expresarme, con ideas objetivas; con humildad, contribuyendo con la educación superior teniendo
siempre en mente que tenemos cierta obligación de transmitir lo que sabemos a las nuevas
generaciones de profesionales que nos siguen. Porque el conocimiento académico debe ser libre y
sin políticas de restricción, dedico este libro a todos los estudiantes de ingeniería en el mundo.
En lo personal, dedico este libro a mis padres, Edmundo Palomino Bazán y Rudí Encinas Vega y a
mis hermanos Miguel, Franco, Dorisa, Carlos y hermana menor Iris.
A todos los ingenieros del Perú y el extranjero que desde el inicio me han dado su apoyo y respaldo,
en especial al Ing. Napoleón Franklin Cueva Guerra y compañero de promoción, el Ing. Christian
Gonzalo Salcedo Malaver.
A todos mis amigos de mi entorno, tanto del Perú como del extranjero, muchas gracias por esa
confianza depositada.
V
DEDICATORIAS
Miranda Albert Richard
Dedico esta obra a quienes necesitan un empujoncito adicional para comprender el comportamiento
estructural y no se rinden, a quienes buscan superarse día a día a pesar de las dificultades, a quienes
la carencia de recursos no significa un pretexto para la ignorancia, a quienes no se conforman con
lo aprendido en las aulas y buscan más, a quienes la venganza no los consume sino que les renueva
las fuerzas para luchar, a quienes el espíritu de superación puede más que la injusta desigualdad
que gobierna nuestro mundo. No hay pretextos válidos, no hay venganzas justificadas, hay historia
aprendida y un mundo esperando por mejores personas en mente y corazón.
Martínez Hugo
A mis padres y hermanos, por su apoyo incondicional.
A mis amigos, que siempre han estado a mi lado en todo momento.
Todos los autores
En primera instancia, agradecemos enormemente al Máster de Bolivia Luis Cabrera Fernández por
el apoyo que nos brindó con la revisión técnica de esta obra, así como por su gran amistad, por ende,
le rendimos un homenaje por su brillante trayectoria como ingeniero civil.
A la memoria de Hugo…Dedicamos de manera especial este libro a un gran amigo boliviano, el Ing.
Hugo Moreno Parada, egresado de la Facultad Nacional de Ingeniería, Universidad Técnica de
Oruro. Luego de su partida a la presencia de Dios, siempre lo recordaremos como una gran persona
y un excelente colega.
A Sheila Sotomayor y John Rojas, creadores de la web Civilgeeks.com, la cual es la distribuidora
virtual oficial de esta y todas nuestras obras literarias. A todas las demás webs que también nos
apoyan con la difusión de este texto.
A todas las Universidades de los diferentes países de América del Norte y del Sur que nos han
brindado un espacio para disertar en distintos eventos. A la UJED (Durango), ITS Lagos de Moreno
(Jalisco), ITI III y ESIA UZ IPN (Cd. de México), TESJI (Estado de México), ITT (Tlaxiaco, Oaxaca),
UJCM (Moquegua, Perú), UPT (Tacna, Perú), UTO (Oruro, Bolivia), UPEA (La Paz, Bolivia), UPS
(Quito, Ecuador) y UNACH (Chimborazo, Ecuador). A todos los estudiantes, docentes y directivos
que han contribuido para que ello sea posible y que además han hecho que nuestras estancias sean
de las mejores experiencias en nuestras vidas.
A la Unión Nacional de Estudiantes de Arquitectura de Bolivia.
A las Instituciones en las que nos hemos formado académicamente a nivel de Licenciatura y
Posgrado.
A los lectores, esperando que el contenido de este libro sea de su agrado y utilidad. Sin el apoyo de
ellos nada de esto sería posible.
VI
MENSAJE DE DAVID ORTIZ SOTO
Ante los recientes ataques que hemos sufrido algunos escritores altruistas en la escena de la
Ingeniería Estructural, tales como los intentos de sabotaje a los cursos de Alex Henrry o el hecho de
que webs oportunistas cobren dinero por descargar los aportes que Alex, Ph. D. Genner Villarreal y
yo hacemos cuando nosotros mismos, teniendo los derechos de autor, los colocamos para su
descarga gratuita, no me resta más que decir que seguiremos viendo a la literatura como una forma
de expresión para evidenciar un sistema injusto y perseguir nuestros ideales, aunque a algunos no
les parezca y por más que nos intenten derribar. Andaremos por la misma brecha de contribuir a
"Una educación universal, de calidad y al alcance de todos" como dice Genner, siempre pensaremos
que "La información no es sólo para el que la paga, es para todos", que "No hay fronteras ni banderas
para el conocimiento" y que "La clave está en ver a tus alumnos como el futuro para el gran cambio
que requerimos y no como tu competencia" como lo he venido promoviendo o como cita Alex
"Seguiremos escribiendo en favor de la comunidad de ingeniería en todo el mundo fomentando el
buen uso y las buenas prácticas"..."Larga vida a la escena autogestiva y altruista de la Ingeniería
Civil".
VII
MENSAJE DE ALEX HENRRY PALOMINO ENCINAS
Empiezo este mensaje expresando mi infinito agradecimiento a todos ustedes que a través de mis
publicaciones hemos podido entablar amistad y compartido experiencias sobre temas de Cálculo,
Análisis y Diseño en la rama de Ingeniería Estructural. Todas nuestras publicaciones se realizan con
el objetivo de hacer saber a la comunidad que existen procedimientos y documentos que nos
permiten realizar ciertas acciones y ayudar en la toma de decisiones durante el proceso de diseño
de un proyecto cualquiera, esto es, que todo lo que han podido consultar hasta ahora tiene un
sustento técnico y criterios basados en los documentos que se hacen mención.
La filosofía de difusión de conocimiento de forma libre la tenemos bien clara y eso es lo que nuestro
grupo ha venido fomentando durante este corto tiempo que estamos activamente publicando a
menudo y como resultado de ello hemos recibido la aprobación del público objetivo porque damos a
conocer nuestra metodología y soluciones a inquietudes que muy pocas veces se logra encontrar o
se encuentra restringida ya sea por cuestiones de idioma o por cuestiones económicas.
Siempre nos realizan consultas, pero no a todos se les puede responder ese mismo día, ya que en
mi caso particular no solamente estoy escribiendo sobre temas de ingeniería, sino que también me
encuentro trabajando en el desarrollo de proyectos y eso suele hacerles pensar que somos
mezquinos en cuanto a compartir conocimiento se refiere. En esta aclaración quiero que sepan que
deben ser insistentes en cuanto a sus consultas ya que no son los únicos que preguntan.
Recientemente me di cuenta de los cientos de solicitudes de mensajes que tenía y me apena no
poderles haber respondido a tiempo y quiero pedirles disculpas por este inconveniente.
Por otro lado, debido a la manera original de exponer los temas de ingeniería estructural sustentados
de la mejor manera posible, nuestros seguidores nos han venido pidiendo desde el inicio que
desarrollemos cursos con temas específicos aplicativos a proyectos reales de ingeniería, petición
que gustosamente hemos sabido atender respondiendo con desarrollos detallados de uso y manejo
adecuado de software acompañado siempre de la teoría que lo sustenta, permitiéndonos demostrar
hipótesis y afirmaciones durante las exposiciones; acciones que nos han otorgado un prestigio y
trayectoria como ponentes y escritores, ya que nuestro trabajo es reconocido en todas partes del
mundo teniendo hasta peticiones de traducción al idioma inglés.
Hemos recibido invitaciones a participar en diversos eventos académicos nacionales e
internacionales, creo yo, en recompensa por nuestro trabajo realizado y reconocimiento que, por
supuesto, en respuesta a ello no realizamos ningún cobro por impartir talleres o clases enfocadas.
Este prestigio y trayectoria ganados de manera limpia, compitiendo siempre con conocimientos, ha
llevado a algunas personas a tener actitudes indeseables con supuestas campañas de desprestigio
y hasta decir que el material que entregamos es de otra persona, afirmación que para quienes nos
conocen es del todo ridícula, demostrando la poca educación personal que tienen, ya que mediante
cuentas de Facebook o correo electrónico sin identificación han intentado sabotear, sin éxito,
nuestras actividades.
Desde diversas partes del mundo les agradecemos el habernos tomado en cuenta. Seguiremos
escribiendo en favor de la comunidad de ingeniería en todo el mundo fomentando el buen uso y las
buenas prácticas.
Saludos cordiales.
VIII
MENSAJE DE LOS AUTORES
43 y más
A lo largo de nuestra corta trayectoria como escritores siempre hemos demostrado a través de las
obras escritas una gran solidaridad con los diferentes movimientos de lucha social y estudiantil.
En este libro brindamos un homenaje a los 43 estudiantes mexicanos desaparecidos de forma injusta
por el gobierno, en Ayotzinapa, Guerrero, México, de ahí que la portada tenga un 43; enseguida del
número citado aparecen las palabras “y más”, porque pretendemos evidenciar que los caídos,
oprimidos y marginados por el sistema somos muchos más. Nuestra portada básicamente de negro
es en alusión al luto que el pueblo mexicano vive hoy en día por tantos asesinatos injustos e impunes.
En ella, nuestros nombres se encuentran teñidos de rojo, en efecto, por la sangre derramada de un
pueblo que exige justicia y dignidad.
Va por aquellos que están luchando por un mundo mejor.
Dejamos en claro que toda clase de autoritarismo es reprobatoria y le decimos ¡no! al terrorismo de
Estado en México, ni en ningún país, de modo que repudiamos todo aquello que atente contra los
derechos humanos.
En todos los rincones del planeta, de distintas formas, pero todos unidos, conscientes y organizados
seguiremos resistiendo. Pensamos que América Latina es sólo una, y aún el mundo entero lo es.
A la memoria de los 43 normalistas…
Ofrenda elaborada por estudiantes de la Escuela Superior de Ingeniería y Arquitectura (UZ) IPN
dentro de sus instalaciones en la que se rinde un homenaje a los 43 estudiantes normalistas
IX
POEMAS Y FRASES POR DAVID ORTIZ SOTO
David Ortiz Soto, de nacionalidad mexicana, es un novel escritor de
Ingeniería. Su pasión por la poesía lo ha llevado a componer poemas
empleando un lenguaje propio de la Ingeniería Civil. El amor a su
profesión también ha propiciado que ingenie frases acordes a la
misma.
A continuación, se presentan algunos de sus poemas y frases con
más acogida por el público de la carrera citada.
Enamórate de un Ingeniero Civil o de una Ingeniera Civil
"Enamórate de un Ingeniero Civil para que te construya una gran historia de amor, te diseñe espacios
hermosos en tu vida, te modele un mundo lleno de felicidad y haga que vivas momentos máximos
junto a él…Él será siempre un soporte para ti y opondrá máxima resistencia ante solicitaciones
negativas, no permitiendo grandes deformaciones en una relación que siempre llevará al esfuerzo
admisible, incluso hasta el esfuerzo último, pero nunca a la falla, debido a que el límite del amor
cuando de él tienda hacia ti, será simple y sencillamente infinito".
"Enamórate de una Ingeniera Civil para que te construya una gran historia de amor, te diseñe
espacios hermosos en tu vida, te modele un mundo lleno de felicidad y haga que vivas momentos
máximos junto a ella…Ella será siempre un soporte para ti y opondrá máxima resistencia ante
solicitaciones negativas, no permitiendo grandes deformaciones en una relación que siempre llevará
al esfuerzo admisible, incluso hasta el esfuerzo último, pero nunca a la falla, debido a que el límite
del amor cuando de ella tienda hacia ti, será simple y sencillamente infinito”.
By David Ortiz Soto
X
Un Ingeniero Civil sin limitantes
"No trates de ponerme un muro de longitud infinita para detener mis sueños, porque hallaré la
escalera de longitud ideal y la inclinaré a un ángulo necesario con respecto a la horizontal para
esquivarlo y seguir adelante."
By David Ortiz Soto
"Para un Ingeniero civil o una Ingeniera civil la distancia no sería un problema en una relación de
amor dado que puede despejarla de cualquier ecuación que la contenga, como la de la velocidad."
By David Ortiz Soto
"Ingeniería Civil, más que una profesión, una pasión e inspiración y un estilo de vida en sí."
By David Ortiz Soto
"Ingeniería Civil, tu habilidad de razonamiento e ingenio serán exigidos al máximo...Ahí donde
rendirse está prohibido."
By David Ortiz Soto
XI
Eres tú la persona que ama un Ingeniero Civil
Eres tú ese factor de seguridad que cubrirá mis fallas, incluso las de valores críticos.
Eres tú mi única variable de respuesta y mi constante en este mundo de infinitas variables.
Eres tú la mezcla perfecta de belleza e inteligencia diseñada para darle alta resistencia a nuestra
relación de amor estructuralmente estable.
Eres tú quien representa ese cimiento de longitud infinita y profundidad necesaria capaz de sostener
el peso propio de mis sueños.
Y soy yo quien será capaz de construir un muro con los ladrillos que te lancen quienes desean verte
caer.
Eres tú el principio para la superposición de mi cariño, respeto y amor por ti.
Aunque solicitaciones negativas quieran propiciar condiciones que lleven nuestra relación a la
frontera, nosotros preferimos darle siempre continuidad.
Eres tú la cuantía balanceada que fija los parámetros necesarios para mi irrefutable buen
comportamiento estructural.
Eres tú indudablemente mi línea de conducción a la felicidad
Siempre iremos de la mano siguiendo esa ruta crítica que nos lleve a la mejor toma de decisiones.
Juntos opondremos máxima resistencia ante los esfuerzos cortantes que intenten separarnos, pues
una conexión ha fijado nuestros corazones entre sí eternamente.
Eres tú ese momento máximo que me inspiró a escribir estas líneas.
By David Ortiz Soto
XII
PREFACIO
El libro se ha escrito con la finalidad de contribuir en la formación académica de los estudiantes de
Ingeniería Civil, Arquitectura, Ingeniería Mecánica u otras carreras con afinidad, no obstante, también
se pretende que esta obra sirva de apoyo a los profesores que dictan los cursos de Análisis
Estructural y Mecánica de Materiales.
El énfasis de este libro es deducir las fórmulas de las “Fuerzas de Fijación y los Momentos de
Empotramiento” en vigas sometidas a distintos tipos de cargas con base en el método de
flexibilidades (de igual forma conocido como el método de las fuerzas). El uso de estas fórmulas es
necesario cuando se realiza el análisis estructural de una viga o un pórtico con el método de la rigidez
matricial o el método de Cross.
El método de flexibilidades es útil para determinar las fuerzas reactivas en los soportes de estructuras
hiperestáticas y se basa en el principio de superposición. Básicamente, plantea que una estructura
estáticamente indeterminada es equivalente a la suma de causas y efectos de una serie de
estructuras isostáticas, considerando la compatibilidad del desplazamiento de las mismas. Cabe
mencionar que solo es aplicable a un sistema estructural que responde en su rango elástico y lineal.
A continuación, se proporciona el enfoque seguido en esta obra. Exactamente 32 vigas
hiperestáticas son analizadas minuciosamente hasta el cálculo de sus reacciones en los apoyos. Las
solicitaciones aplicadas a las estructuras obedecen a fuerzas puntuales y distribuidas, y momentos
distribuidos y puntuales. Las cargas distribuidas actúan total o parcialmente sobre la longitud de la
estructura y pueden adquirir las siguientes formas: uniforme, variación lineal, parabólica, senoidal,
circular, elíptica, logarítmica, entre otras.
XIII
CONTENIDO
1 VIGA BIEMPOTRADA CON CARGA PUNTUAL APLICADA AL CENTRO DEL CLARO ..................................... 1
2 VIGA BIEMPOTRADA CON CARGA DISTRIBUIDA UNIFORME ......................................................................... 10
3 VIGA BIEMPOTRADA CON CARGA TRIANGULAR .............................................................................................. 15
4 VIGA BIEMPOTRADA CON CARGA TRIANGULAR SIMÉTRICA ........................................................................ 20
5 VIGA BIEMPOTRADA CON CARGA TRAPEZOIDAL .......................................................................................... 26
6 VIGA BIEMPOTRADA CON CARGA PARABÓLICA ............................................................................................ 31
7 VIGA BIEMPOTRADA CON CARGA DE ENJUTA PARABÓLICA ....................................................................... 37
8 VIGA BIEMPOTRADA CON CARGA LOGARÍTMICA ........................................................................................... 42
9 VIGA BIEMPOTRADA CON MOMENTO CONCENTRADO APLICADO AL CENTRO DEL CLARO ................... 48
10 VIGA BIEMPOTRADA CON CARGA PUNTUAL APLICADA EN UN PUNTO ARBITRARIO DEL CLARO ...... 51
11 VIGA BIEMPOTRADA CON MOMENTO APLICADO EN UN PUNTO ARBITRARIO DEL CLARO .................. 55
12 VIGA BIEMPOTRADA CON CARGA INCLINADA EN UN PUNTO ARBITRARIO DEL CLARO ....................... 58
13 VIGA BIEMPOTRADA CON CARGA SENOIDAL ................................................................................................ 63
14 VIGA BIEMPOTRADA CON MOMENTO DISTRIBUIDO UNIFORME ................................................................. 72
15 VIGA BIEMPOTRADA CON CARGA CIRCULAR DE UN CUARTO ................................................................... 75
16 VIGA BIEMPOTRADA CON CARGA ELÍPTICA DE UN CUARTO ..................................................................... 80
17 VIGA CON SOPORTES ARTICULADO Y FIJO CON CARGA PUNTUAL APLICADA AL CENTRO DEL CLARO
..................................................................................................................................................................................... 84
18 VIGA CON SOPORTES ARTICULADO Y FIJO CON CARGA DISTRIBUIDA UNIFORME ............................... 86
19 VIGA CON SOPORTES ARTICULADO Y FIJO CON CARGA TRIANGULAR SIMÉTRICA .............................. 88
20 VIGA CON SOPORTES ARTICULADO Y FIJO CON CARGA PARABÓLICA ................................................... 90
21 VIGA CON SOPORTES ARTICULADO Y FIJO CON CARGA TRIANGULAR ................................................... 92
22 VIGA CON SOPORTES ARTICULADO Y FIJO CON CARGA DE ENJUTA PARABÓLICA ............................. 94
23 VIGA BIEMPOTRADA CON CARGA DISTRIBUIDA PARCIALMENTE UNIFORME ......................................... 96
24 VIGA BIEMPOTRADA CON CARGA TRIANGULAR PARCIALMENTE DISTRIBUIDA ................................... 100
25 VIGA CON CARGA DISTRIBUIDA PARCIALMENTE UNIFORME CON UN APOYO EMPOTRADO Y OTRO
ARTICULADO .......................................................................................................................................................... 103
26 VIGA CON CARGA TRIANGULAR DISTRIBUIDA PARCIALMENTE CON UN APOYO EMPOTRADO Y OTRO
ARTICULADO .......................................................................................................................................................... 105
27 VIGA CON TRES CARGAS EQUIDISTANTES CON UN APOYO EMPOTRADO Y OTRO ARTICULADO ..... 108
28 VIGA DOBLEMENTE EMPOTRADA CON CARGA UNIFORME CONCENTRADA EN UNA ZONA CENTRAL
................................................................................................................................................................................... 111
29 VIGA EMPOTRADA-ARTICULADA CON CARGA UNIFORME CONCENTRADA EN UNA ZONA CENTRAL
................................................................................................................................................................................... 117
30 VIGA DOBLEMENTE EMPOTRADA CON CARGA TRIANGULAR EN UNA PORCIÓN IZQUIERDA ............ 119
31 VIGA EMPOTRADA-ARTICULADA CON CARGA TRIANGULAR EN UNA PORCIÓN IZQUIERDA .............. 124
32 VIGA EMPOTRADA-ARTICULADA CON MOMENTO APLICADO EN UN PUNTO ARBITRARIO DEL CLARO
................................................................................................................................................................................... 126
BIBLIOGRAFÍA ......................................................................................................................................................... 129
XV
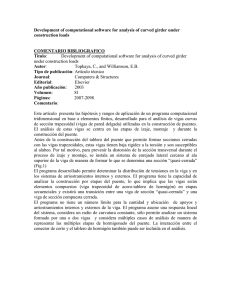
1 VIGA BIEMPOTRADA CON CARGA PUNTUAL
APLICADA AL CENTRO DEL CLARO
𝑃
𝐴
𝐵
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 1
SOLUCIÓN
Verificación del grado de indeterminación
En primer lugar debe determinarse el grado de indeterminación de la estructura real (𝐸𝑅), figura
1-a, para saber cuántas restricciones hiperestáticas eliminar; ese mismo número nos indicará la
cantidad de ecuaciones simultáneas a plantear más adelante para la resolución del problema. Con
base en el diagrama de cargas, figura 1-b, hay 𝑟 = 6 incógnitas de reacción, las cuales son 𝑅𝐴𝑋 , 𝑅𝐴𝑌 ,
𝑀𝐴 , 𝑅𝐵𝑋 , 𝑅𝐵𝑌 y 𝑀𝐵 (cabe mencionar que cuando se identifican las reacciones en los soportes, el
sentido de cada una de ellas debe ser supuesto arbitrariamente al desconocerse la magnitud
correspondiente), así mismo, no se tiene alguna condición impuesta por la construcción (articulación
o rótula, conector cortante, etc.), es decir, 𝑐 = 0 . Por otra parte, existen 𝑛 = 3 ecuaciones de
equilibrio en el plano, que son ∑ 𝑀 = 0, ∑ 𝐹𝑋 = 0, ∑ 𝐹𝑌 = 0.
𝑃
𝑅𝐴𝑋
𝑅𝐵𝑋
𝐴
𝑀𝐴
𝐵
𝐿/2
𝑀𝐵
𝐿/2
𝑅𝐴𝑌
(b)
𝑅𝐵𝑌
A partir de la ecuación +→ ∑ 𝐹𝑋 = 0, dado que la viga no está sometida a cargas horizontales, se
obtiene directamente que 𝑅𝐴𝑋 y 𝑅𝐵𝑋 son nulas. Por consiguiente, ahora únicamente se tienen 𝑟 = 4
fuerzas reactivas y 𝑛 = 2 ecuaciones de la Estática. En consecuencia, la viga es estáticamente
1
Fuerzas de fijación y momentos de empotramiento en vigas
indeterminada o hiperestática de segundo grado ya que 𝑟 > (𝑛 + 𝑐), puesto que 4 > (2 + 0) con una
diferencia de 4 − 2 = 2.
Elección de las reacciones redundantes o fuerzas correctivas
Como la viga es estáticamente indeterminada en grado dos, hay dos redundantes, lo cual significa
que existe tal cantidad de fuerzas en exceso de las fuerzas primarias o son sobrantes o
superabundantes de las necesarias para mantener el equilibrio estático. Las redundantes deben
seleccionarse de tal modo que al suprimirlas de la viga, esta sea isostática y estable. Por lo tanto,
para el tipo de vigas doblemente empotradas se cuenta con dos alternativas: 1) eliminar los
momentos reactivos o 2) retirar un momento y una reacción vertical con un punto de aplicación
coincidente.
Basándose en la opción 2, se opta porque 𝑅𝐴𝑌 y 𝑀𝐴 sean las redundantes, pero tome en cuenta que
de la misma opción, las fuerzas correctivas pueden ser 𝑅𝐵𝑌 y 𝑀𝐵 , o bien, de la opción 1, se pudo
haber considerado como fuerzas sobrantes a 𝑀𝐴 y 𝑀𝐵 . Cuando ya se tiene un buen dominio del
método de secciones, es más fácil visualizar la alternativa mayormente conveniente para hacer
menos tedioso el análisis.
Planteamiento de la estructura primaria
Con lo anterior, es posible idealizar una nueva estructura denominada estructura primaria o isostática
fundamental (𝐸𝑃); como se dejó entrever previamente, se trata de convertir la viga hiperestática en
una isostática y estable desapareciendo precisamente las redundantes seleccionadas. Siendo así,
la capacidad de la viga para resistir 𝑅𝐴𝑌 y 𝑀𝐴 se elimina si se quita el empotramiento en 𝐴. Esta
estructura liberada forzosamente debe soportar las carga reales, figura 1-c.
𝑃
𝑅𝐵𝑋 = 0
𝐴
𝐵
𝑥
𝐿/2
𝐿/2
𝑀𝐵 =
𝑃𝐿
2
𝑅𝐵𝑌 = 𝑃
Estructura primaria (𝐸𝑃) ⟹ 𝑀
(c)
Principio de superposición
Aquí se esquematiza claramente que la estructura estáticamente indeterminada puede ser igual a la
suma de una serie de estructuras estáticamente determinadas compuesta por la estructura primaria
y otro número de estructuras igual a la cantidad de redundantes (𝐸𝑅𝑑𝑖 ). Por lo tanto, la estructura
real es igual a la adición de la estructura liberada sometida a: A) las cargas reales, figura 1-c, y B) la
acción individual de cada una de las reacciones redundantes (con un sentido propuesto de forma
indistinta), figuras 1-d y 1-e. Para este ejercicio se tiene
2
Fuerzas de fijación y momentos de empotramiento en vigas
𝐸𝑅 = 𝐸𝑃 + 𝐸𝑅𝑑1 + 𝐸𝑅𝑑2
𝐴
𝐵
𝐿/2
𝐿/2
𝑅𝐴𝑌
Estructura liberada con fuerza redundante 𝑅𝐴𝑌 aplicada (𝐸𝑅𝑑1 )
(d)
𝑀𝐴
𝐴
𝐵
𝐿/2
𝐿/2
Estructura liberada con momento redundante 𝑀𝐴 aplicado (𝐸𝑅𝑑2 )
(e)
Contrariamente a la viga de la figura 1-a, las vigas representadas en las figuras 1-c, 1-d y 1-e
experimentan de forma respectiva un desplazamiento vertical o deflexión en 𝐴 (𝛿𝑉𝐴 ) y una pendiente
o rotación en 𝐴 (𝜃𝐴 ) dado que no hay soporte alguno en ese nodo que los impida.
Suponga que tales deflexiones y pendientes son iguales a una cierta cantidad. Entonces, para la
viga 𝐸𝑃 se tiene que 𝛿𝑉𝐴𝐸𝑃 = 𝑑1 y 𝜃𝐴𝐸𝑃 = 𝑑2 . A su vez, para la viga 𝐸𝑅𝑑1 tenemos que
𝛿𝑉𝐴𝐸𝑅𝑑 = 𝑅𝐴𝑌 (𝑓11 ) y 𝜃𝐴𝐸𝑅𝑑 = 𝑅𝐴𝑌 (𝑓21 ). De forma análoga, en la viga 𝐸𝑅𝑑2 , 𝛿𝑉𝐴𝐸𝑅𝑑 = 𝑀𝐴 (𝑓12 ) y
1
1
2
𝜃𝐴𝐸𝑅𝑑 = 𝑀𝐴 (𝑓22 ). Posteriormente se ofrecerá una explicación de la razón por la cual se empleó la
2
nomenclatura citada.
Planteamiento de las ecuaciones de compatibilidad geométrica
Para obtener ecuaciones adicionales que coadyuven a la solución del problema hacemos uso del
principio de superposición formulado en el apartado precedente y tomamos en cuenta la
compatibilidad del desplazamiento vertical y la pendiente en el empotramiento 𝐴; por lo tanto, las
ecuaciones de compatibilidad para la deflexión en 𝐴 y la rotación en 𝐴 son, respectivamente
𝛿𝑉𝐴 𝐸𝑅 = 𝛿𝑉𝐴𝐸𝑃 + 𝛿𝑉𝐴𝐸𝑅𝑑 + 𝛿𝑉𝐴𝐸𝑅𝑑 − − − (1 − 1)
1
2
𝜃𝐴 𝐸𝑅 = 𝜃𝐴 𝐸𝑃 + 𝜃𝐴 𝐸𝑅𝑑 + 𝜃𝐴 𝐸𝑅𝑑 − − − (1 − 2)
1
2
Si en la viga 𝐸𝑅 tanto el desplazamiento vertical como la rotación en 𝐴 no existen debido a que la
reacción vertical y el momento reactivo del soporte en 𝐴 los impiden, entonces 𝛿𝑉𝐴 𝐸𝑅 = 𝜃𝐴 𝐸𝑅 = 0.
Efectuando las sustituciones correspondientes en las ecuaciones (1 − 1) y (1 − 2), el sistema de
ecuaciones de compatibilidad geométrica pasa a ser el siguiente:
3
Fuerzas de fijación y momentos de empotramiento en vigas
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (1 − 3)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (1 − 4)
Cada desplazamiento del punto de aplicación de la acción redundante 𝑅𝑖 o 𝑀𝑖 en la dirección de
esta, producido al actuar la carga original sobre la estructura liberada es expresado por 𝑑𝑖 . Estos en
conjunto se denominan incompatibilidades geométricas porque en la estructura real no ocurren.
Los coeficientes de flexibilidad 𝑓𝑖𝑗 anteriores conforman la matriz de flexibilidad de la estructura y
pueden calcularse sencillamente si en la estructura liberada aplicamos una carga unitaria
correspondiente a cada fuerza redundante (𝐸𝐶𝑢𝑖 ), figuras 1-f y 1-g.
𝑅𝐵𝑋 = 0
𝐴
𝐵
𝑥
𝑀𝐵 = 𝐿
𝐿/2
𝐿/2
1
𝑅𝐵𝑌 = 1
Estructura liberada con fuerza vertical unitaria aplicada en 𝐴 (𝐸𝐶𝑢1 ) ⟹ 𝑚1
(f)
1
𝑅𝐵𝑋 = 0
𝐴
𝐵
𝑥
𝐿/2
𝐿/2
𝑀𝐵 = 1
𝑅𝐵𝑌 = 0
Estructura liberada con momento unitario aplicado en 𝐴 (𝐸𝐶𝑢2 ) ⟹ 𝑚2
(g)
Entonces, directamente de la viga 𝐸𝐶𝑢1 tenemos que la deflexión y la rotación en 𝐴 son equivalentes
de forma respectiva a un determinado valor de 𝛿𝑉𝐴𝐸𝐶𝑢1 = 𝑓11 y 𝜃𝐴𝐸𝐶𝑢1 = 𝑓21 . Así mismo, para la viga
𝐸𝐶𝑢2 , 𝛿𝑉𝐴𝐸𝐶𝑢2 = 𝑓12 y 𝜃𝐴𝐸𝐶𝑢2 = 𝑓22 .
Cálculo de las incompatibilidades geométricas y de los coeficientes de flexibilidad
En resumen, para poder resolver el sistema simultáneo de ecuaciones (1 − 3) y (1 − 4), el cual nos
permite calcular las redundantes, en las vigas visualizadas en las figuras 1-c, 1-f y 1-g es necesario
4
Fuerzas de fijación y momentos de empotramiento en vigas
conocer cuánto valen el desplazamiento vertical en 𝐴 dado que 𝑅𝐴𝑌 (fuerza reactiva vertical en el
empotramiento del punto 𝐴) fue suprimida y la pendiente en 𝐴 debido a que 𝑀𝐴 (momento reactivo
en el empotramiento del punto 𝐴) fue eliminado.
Los desplazamientos requeridos pueden obtenerse con cualquiera de los métodos apropiados del
análisis estructural; en la presente obra se empleará el método del principio del trabajo virtual (es
lo más recomendable) y se considerarán únicamente las deformaciones debidas a la flexión. En
términos generales, este principio indica que debe incorporarse una carga ficticia unitaria sobre la
viga descargada en el punto y en la dirección donde se requiere conocer el desplazamiento. Si debe
determinarse la pendiente, se coloca un momento de par virtual unitario en el punto.
Para asociar a los momentos internos (se obtendrán a partir del método de secciones) con las
estructuras, le hemos denominado 𝑀 a la viga primaria, 𝑚1 a la viga liberada con fuerza vertical
unitaria aplicada en 𝐴 y 𝑚2 a la viga liberada con momento unitario aplicado en 𝐴. Es importante
recordar que las coordenadas 𝑥 a emplear y las direcciones positivas de los momentos internos entre
las tres estructuras recién mencionadas deben ser iguales. En las figuras 1-c, 1-f y 1-g se puede
observar que usaremos únicamente la coordenada 𝑥 para determinar la energía de deformación,
cuyo origen se asocia en 𝐴, es positiva hacia la derecha y es válida para 0 ≤ 𝑥 ≤ 𝐿, pero el lector
puede usar otra u otras coordenadas distintas que sean apropiadas para cubrir la longitud de la viga.
Con base en el principio del trabajo virtual, se tiene
𝐿2
𝑑1 = 𝛿𝑉𝐴𝐸𝑃 = ∫
𝐿1
𝐿2
𝑓11 = 𝛿𝑉𝐴𝐸𝐶𝑢1 = ∫
𝐿1
𝐿1
𝑑2 = 𝜃𝐴𝐸𝑃 = ∫
𝐿1
𝑀𝑚2
𝑑𝑥 − − − (𝐼𝐼)
𝐸𝐼
𝐿2
𝑚1 𝑚1
𝑑𝑥 − − − (𝐼𝐼𝐼)
𝐸𝐼
𝐿2
𝑓12 = 𝛿𝑉𝐴𝐸𝐶𝑢2 = ∫
𝐿2
𝑀𝑚1
𝑑𝑥 − − − (𝐼)
𝐸𝐼
𝑓21 = 𝜃𝐴𝐸𝐶𝑢1 = ∫
𝐿1
𝐿2
𝑚2 𝑚1
𝑑𝑥 − − − (𝑉)
𝐸𝐼
𝑓22 = 𝜃𝐴𝐸𝐶𝑢2 = ∫
𝐿1
𝑚1 𝑚2
𝑑𝑥 − − − (𝐼𝑉)
𝐸𝐼
𝑚2 𝑚2
𝑑𝑥 − − − (𝑉𝐼)
𝐸𝐼
Note que para determinar 𝑑1 se requiere de la combinación apropiada de los momentos internos 𝑀
y 𝑚1 ; algo análogo ocurre con las expresiones restantes. En todas las vigas de este libro, 𝐸𝐼 es
constante.
A continuación se calculan las reacciones y los momentos internos en las vigas isostáticas de las
figuras 1-c, 1-f y 1-g.
Considere que la función del momento flector será discontinua en los puntos donde el tipo o la
magnitud de la carga distribuida cambia, o bien donde se apliquen fuerzas concentradas. La carga
distribuida, así como la fuerza concentrada, o una de sus componentes, actúan perpendicularmente
al eje longitudinal de la viga. Además de lo anterior, habrá discontinuidad en cada punto donde se
aplique algún momento de par.
Viga 𝐸𝑃, figura 1-c.
Al aplicar las ecuaciones de equilibrio en una secuencia y emplear los resultados calculados
previamente, se obtiene
5
Fuerzas de fijación y momentos de empotramiento en vigas
+→ ∑ 𝐹𝑋 = 0 ⇒∴ 𝑅𝐵𝑋 = 0
+↑ ∑ 𝐹𝑌 = 0 ⇒ −𝑃 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = 𝑃
𝐿
𝑃𝐿
+ ∑ 𝑀𝐵 = 0 ⇒ −𝑃 ( ) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
2
2
Se formulan los momentos internos 𝑀. Las funciones de momento serán discontinuas en el punto
de aplicación de la carga 𝑃, así que se requiere de efectuar dos cortes perpendiculares al eje
longitudinal de la viga para definir 𝑀 a lo largo de la estructura, figuras 1-h y 1-i.
0 ≤ 𝑥 ≤ 𝐿⁄2
𝑀1
𝐴
𝑥
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
(h)
𝑀1 = 0
𝑃
𝐿⁄ ≤ 𝑥 ≤ 𝐿
2
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑀2
𝐴
𝑥 − 𝐿/2
𝐿/2
𝐿
𝑃𝐿
−𝑀2 − 𝑃 (𝑥 − ) = 0 ⇒ 𝑀2 = −𝑃𝑥 +
2
2
𝑥
(i)
Viga 𝐸𝐶𝑢1 , figura 1-f.
Las fuerzas reactivas en el apoyo empotrado 𝐵 son resultado de
+→ ∑ 𝐹𝑋 = 0 ⇒∴ 𝑅𝐵𝑋 = 0
+↑ ∑ 𝐹𝑌 = 0 ⇒ 1 − 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = 1
+ ∑ 𝑀𝐵 = 0 ⇒ 1(𝐿) − 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 = 𝐿
Se deduce el momento interno 𝑚1 . Como no hay discontinuidad de carga, la viga se secciona
ortogonalmente a su eje en una sola ocasión, figura 1-j.
6
Fuerzas de fijación y momentos de empotramiento en vigas
0≤𝑥≤𝐿
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
−𝑀1 + (1)(𝑥) = 0 ⇒ 𝑀1 = 𝑥
1
(j)
Viga 𝐸𝐶𝑢2 , figura 1-g.
Las reacciones en el empotramiento 𝐵 equivalen a
+→ ∑ 𝐹𝑋 = 0 ⇒∴ 𝑅𝐵𝑋 = 0
+↑ ∑ 𝐹𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = 0
+ ∑ 𝑀𝐵 = 0 ⇒ −1 + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 = 1
Se infiere el momento interno 𝑚2 a partir de la figura 1-k.
1
0≤𝑥≤𝐿
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
−𝑀1 − 1 = 0 ⇒ 𝑀1 = −1
(k)
Obsérvese que la coordenada 𝑥 seleccionada conlleva a que no haya necesidad de determinar las
reacciones con el fin de encontrar los momentos internos.
Enseguida se presenta el cálculo de las incompatibilidades geométricas, empleando las ecuaciones
(𝐼) y (𝐼𝐼).
𝐿⁄
2
1
𝑑1 = [∫
𝐸𝐼 0
𝐿
(0)(𝑥)𝑑𝑥 + ∫ (−𝑃𝑥 +
𝐿⁄
2
𝐿
=
𝑃𝐿
1 𝐿
𝑃𝐿
) (𝑥)𝑑𝑥 ] = ∫ (−𝑃𝑥 2 +
𝑥) 𝑑𝑥
2
𝐸𝐼 𝐿⁄
2
2
3
2
1
𝑃
𝑃𝐿 2
1
𝑃
𝐿
𝑃𝐿 2
𝐿
1
7𝑃𝐿3 3𝑃𝐿3
5𝑃𝐿3
[− 𝑥 3 +
𝑥 ] = [− (𝐿3 − ( ) ) +
(𝐿 − ( ) )] = (−
+
)=−
𝐿⁄
𝐸𝐼
3
4
𝐸𝐼
3
2
4
2
𝐸𝐼
24
16
48𝐸𝐼
2
𝑑2 =
𝐿⁄
2
1
[∫
𝐸𝐼 0
𝐿
(0)(−1)𝑑𝑥 + ∫ (−𝑃𝑥 +
𝐿⁄
2
7
𝑃𝐿
) (−1)𝑑𝑥 ]
2
Fuerzas de fijación y momentos de empotramiento en vigas
=
1 𝐿
𝑃𝐿
1 𝑃
𝑃𝐿 𝐿
1 𝑃
𝐿 2
𝑃𝐿
𝐿
∫ (𝑃𝑥 − ) 𝑑𝑥 = [ 𝑥 2 −
𝑥] = [ (𝐿2 − ( ) ) −
(𝐿 − )]
𝐸𝐼 𝐿⁄
2
𝐸𝐼 2
2 𝐿⁄2 𝐸𝐼 2
2
2
2
2
=
1 3𝑃𝐿2 𝑃𝐿2
𝑃𝐿2
(
−
)=
𝐸𝐼
8
4
8𝐸𝐼
Ahora se muestra el cálculo de los coeficientes de flexibilidad, aplicando las ecuaciones (𝐼𝐼𝐼) hasta
(𝑉𝐼).
𝑓11 =
𝐿
1 𝐿
1 𝐿
1 1
1
𝐿3
(𝐿3 − 03 ) =
∫ (𝑥)(𝑥)𝑑𝑥 = ∫ 𝑥 2 𝑑𝑥 = [ 𝑥 3 ] =
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 3
3𝐸𝐼
3𝐸𝐼
0
𝑓21 =
𝐿
1 𝐿
1 𝐿
1 1
1
𝐿2
(𝐿2 − 02 ) = −
∫ (𝑥)(−1)𝑑𝑥 = − ∫ 𝑥𝑑𝑥 = − [ 𝑥 2 ] = −
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 2
2𝐸𝐼
2𝐸𝐼
0
𝑓12 =
𝐿
1 𝐿
1 𝐿
1 1
1
𝐿2
(𝐿2 − 02 ) = −
∫ (−1)(𝑥)𝑑𝑥 = − ∫ 𝑥𝑑𝑥 = − [ 𝑥 2 ] = −
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 2
2𝐸𝐼
2𝐸𝐼
0
Obsérvese que como una consecuencia del teorema de Maxwell de los desplazamientos recíprocos,
se cumple que 𝑓12 = 𝑓21 . De forma más generalizada, se tiene que 𝑓𝑖𝑗 = 𝑓𝑗𝑖 , lo cual hace que mientras
más grande sea el grado de hiperestaticidad, más se evita el cálculo de varios coeficientes de
flexibilidad.
𝑓22 =
1 𝐿
1 𝐿
1
1
𝐿
∫ (−1)(−1)𝑑𝑥 = ∫ 𝑑𝑥 = [𝑥]𝐿0 = (𝐿 − 0) =
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼
𝐸𝐼
𝐸𝐼
Cálculo de las redundantes
Al sustituir los coeficientes en el sistema simultáneo de ecuaciones (1 − 3) y (1 − 4), se tiene
−
5𝑃𝐿3
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (1 − 5)
48𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
𝑃𝐿2
𝐿2
𝐿
−
𝑅𝐴𝑌 + 𝑀𝐴 = 0 − − − (1 − 6)
8𝐸𝐼 2𝐸𝐼
𝐸𝐼
Despejando 𝑀𝐴 de las expresiones (1 − 5) y (1 − 6) respectivamente, resulta
5𝑃𝐿3
𝐿3
−
𝑅𝐴𝑌
48𝐸𝐼
3𝐸𝐼
𝑀𝐴 =
− − − (1 − 7)
2
𝐿
−
2𝐸𝐼
𝑀𝐴 =
−
𝑃𝐿2
𝐿2
+
𝑅
8𝐸𝐼 2𝐸𝐼 𝐴𝑌 − − − (1 − 8)
𝐿
𝐸𝐼
Igualando la ecuación (1 − 7) con la ecuación (1 − 8) y simplificando da
5𝑃𝐿3
𝐿3
𝑃𝐿2
𝐿2
3
3
2
2
2
−
𝑅
−
+
𝑅
48𝐸𝐼 3𝐸𝐼 𝐴𝑌 = 8𝐸𝐼 2𝐸𝐼 𝐴𝑌 ⇒ ( 𝐿 ) (5𝑃𝐿 − 𝐿 𝑅 ) = (− 𝐿 ) (− 𝑃𝐿 + 𝐿 𝑅 )
𝐴𝑌
2
𝐿
𝐿
𝐸𝐼 48𝐸𝐼 3𝐸𝐼
2𝐸𝐼
8𝐸𝐼 2𝐸𝐼 𝐴𝑌
−
𝐸𝐼
2𝐸𝐼
1
𝑃
𝐿4
𝐿4
𝑃𝐿4
5𝑃𝐿4
1
1
𝑃
24
−
𝑅
+
𝑅
=
−
⇒
−
𝑅
=
−
𝑃
⇒
𝑅
=
⇒∴ 𝑅𝐴𝑌 =
𝐴𝑌
𝐴𝑌
𝐴𝑌
𝐴𝑌
2
2
2
2
1
3(𝐸𝐼)
4(𝐸𝐼)
16(𝐸𝐼)
48(𝐸𝐼)
12
24
2
12
8
Fuerzas de fijación y momentos de empotramiento en vigas
Si se reemplaza el resultado previamente obtenido en la expresión (1 − 7), entonces
5𝑃𝐿3
𝐿3 𝑃
𝑃𝐿3
−
( ) −
𝑃𝐿
48𝐸𝐼
3𝐸𝐼
2
𝑀𝐴 =
= 16𝐸𝐼
⇒∴ 𝑀𝐴 =
𝐿2
𝐿2
8
−
−
2𝐸𝐼
2𝐸𝐼
La magnitud positiva obtenida tanto para 𝑅𝐴𝑌 como 𝑀𝐴 indicó que tales redundantes tienen el mismo
sentido que el propuesto para su correspondiente carga unitaria. En caso de haber resultado
negativas, simplemente el sentido es opuesto al observado en la figuras 1-d y 1-e.
Ecuaciones de equilibrio
Como las reacciones redundantes ya han sido calculadas, los valores de las reacciones
desconocidas faltantes pueden deducirse aplicando las ecuaciones de equilibrio al diagrama de
cargas de la figura 1-l.
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐴 = 0 ⇒ −
𝑃
𝑃
− 𝑃 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
2
2
𝑃𝐿
𝐿
𝑃
𝑃𝐿
+ 𝑃 ( ) − (𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
8
2
2
8
𝑃
𝑀𝐴 =
𝑃𝐿
𝐴
8
𝐿/2
𝑅𝐴𝑌 =
𝑀𝐵
𝐵
𝐿/2
𝑃
2
𝑅𝐵𝑌
(l)
Finalmente, en la figura 1-m se muestran las reacciones en los empotramientos 𝐴 y 𝐵 de la viga real.
𝑃
𝑀𝐴 =
𝑃𝐿
𝐴
8
𝐵
𝐿/2
𝑅𝐴𝑌 =
𝑃
2
𝑀𝐵 =
𝐿/2
𝑅𝐵𝑌 =
(m)
9
𝑃
2
𝑃𝐿
8
2 VIGA BIEMPOTRADA CON CARGA DISTRIBUIDA
UNIFORME
𝑊
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 2
SOLUCIÓN
Verificación del grado de indeterminación
Como en toda viga doblemente empotrada que no soporta carga axial, pero soporta carga que es
perpendicular a su eje longitudinal, para la viga de la figura 2-a en automático se infiere que las
reacciones horizontales de los empotramientos 𝐴 y 𝐵 son nulas, en consecuencia, la estructura es
estáticamente indeterminada en grado dos.
Elección de las reacciones redundantes
Si se seleccionan como fuerzas redundantes las mismas que en la viga resuelta anteriormente, es
decir, 𝑅𝐴𝑌 y 𝑀𝐴 , el problema se reducirá notablemente ya que muchos cálculos se repetirían, tales
como los momentos internos 𝑚1 y 𝑚2 , y los coeficientes de flexibilidad 𝑓11 , 𝑓21 , 𝑓12 y 𝑓22 .
Planteamiento de la estructura primaria
Se suprime el empotramiento 𝐴 de la viga real con la finalidad de eliminar las redundantes 𝑅𝐴𝑌 y 𝑀𝐴 .
La viga liberada que soporta las cargas reales se muestra en la figura 2-b.
𝑊
𝐴
𝐵
𝐿
(b)
10
Fuerzas de fijación y momentos de empotramiento en vigas
Principio de superposición y sistema de ecuaciones de compatibilidad geométrica
Como se vio en la viga 1, conviene que cuando la viga liberada se somete a la acción individual de
cada una de las reacciones redundantes, estas últimas sean unitarias. El principio de superposición
aplicado a la viga real se observa esquemáticamente en la figura 2-c.
𝑀
𝑊
𝑚1
𝐸𝑅 =
𝐴
𝐵
+
𝑥
𝐴
1(𝑑𝑒 𝑅𝐴𝑌 )
𝐿
𝐵
𝑥
𝐿
𝑚2
+
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(c)
El sistema resultante es como el sistema de ecuaciones (1 − 3) y (1 − 4) de la viga mostrada en la
figura 1-a.
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (2 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (2 − 2)
Cálculo de las incompatibilidades geométricas y de los coeficientes de flexibilidad
Estos coeficientes se obtienen directamente aplicando las ecuaciones 𝐼 hasta 𝑉𝐼 del ejercicio
precedente. Para ello, se determinan en primera instancia los momentos internos de las vigas de la
figura 2-c. Como el origen de la coordenada 𝑥 se eligió en 𝐴, el cálculo de las reacciones en el
empotramiento 𝐵 se vuelve innecesario para este fin.
Se deduce el momento interno 𝑀 con base en la viga primaria. La distribución de la carga actuante
no presenta discontinuidad, así que sólo será necesario efectuar un corte perpendicular al eje de la
viga para definir 𝑀 a lo largo de la estructura. Por consiguiente, se secciona la viga en un punto
arbitrario (intermedio en el segmento 𝐴 − 𝐵) a una distancia 𝑥 del punto 𝐴.
En la figura 2-d se proporciona un diagrama de cuerpo libre del segmento de viga con longitud 𝑥.
Para la carga distribuida se ha determinado: a) la carga concentrada equivalente, es decir, la
magnitud de la fuerza resultante de la carga, que es igual al área bajo la curva de carga (en este
caso, por ser carga uniforme es el área del rectángulo) y b) el centroide de dicha área a través del
11
Fuerzas de fijación y momentos de empotramiento en vigas
cual pasa la línea de acción de la resultante, o sea, se halla el punto de aplicación de la resultante
(para una carga uniforme distribuida se tiene que se ubica a la mitad de la longitud sobre la cual
actúa).
𝑊(𝑥)
0≤𝑥≤𝐿
𝑊
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑀1
𝐴
𝑥
𝑊𝑥 2
−𝑀1 − 𝑊(𝑥) ( ) = 0 ⇒ 𝑀1 = −
2
2
𝑥/2
𝑥
(d)
Luego, se retoman los momentos internos 𝑚1 y 𝑚2 de las figuras 1-j y 1-k.
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se calculan las incompatibilidades geométricas.
𝐿2
𝑑1 = ∫
𝐿1
𝐿
𝑀𝑚1
1 𝐿
𝑊𝑥 2
1 𝐿
𝑊𝑥 3
1
𝑊𝑥 4
𝑊𝐿4
𝑑𝑥 = ∫ (−
) (𝑥)𝑑𝑥 = ∫ (−
) 𝑑𝑥 =
[−
] =−
𝐸𝐼
𝐸𝐼 0
2
𝐸𝐼 0
2
2𝐸𝐼
4 𝐿⁄
8𝐸𝐼
2
𝐿2
𝑑2 = ∫
𝐿1
𝐿
𝑀𝑚2
1 𝐿
𝑊𝑥 2
1 𝐿 𝑊𝑥 2
1
𝑊𝑥 3
𝑊𝐿3
𝑑𝑥 = ∫ (−
) (−1)𝑑𝑥 = ∫ (
) 𝑑𝑥 =
[−
] =
𝐸𝐼
𝐸𝐼 0
2
𝐸𝐼 0
2
2𝐸𝐼
3 𝐿⁄
6𝐸𝐼
2
Evidentemente, los coeficientes de flexibilidad son los mismos que se tienen en la viga 1.
𝐿2
𝑓11 = ∫
𝐿1
𝐿2
𝑚1 𝑚1
𝐿3
𝑑𝑥 =
𝐸𝐼
3𝐸𝐼
𝑓12 = 𝑓21 = −
𝐿2
2𝐸𝐼
𝑓21 = ∫
𝐿1
𝐿2
𝑓22 = ∫
𝐿1
𝑚1 𝑚2
𝐿2
𝑑𝑥 = −
𝐸𝐼
2𝐸𝐼
𝑚2 𝑚2
𝐿
𝑑𝑥 =
𝐸𝐼
𝐸𝐼
Cálculo de las redundantes
Al reemplazar los resultados obtenidos en las ecuaciones (2 − 1) y (2 − 2), se obtiene
−
𝑊𝐿4
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (2 − 3)
8𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
𝑊𝐿3
𝐿2
𝐿
−
𝑅 + 𝑀 = 0 − − − (2 − 4)
6𝐸𝐼 2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
12
Fuerzas de fijación y momentos de empotramiento en vigas
Se resuelve el sistema simultáneo de ecuaciones (2 − 3) y (2 − 4), empleando el método de Cramer.
𝐿3
𝐿2
𝑊𝐿4
𝑅𝐴𝑌 −
𝑀𝐴 =
− − − (2 − 5)
3𝐸𝐼
2𝐸𝐼
8𝐸𝐼
−
𝐿2
𝐿
𝑊𝐿3
𝑅𝐴𝑌 + 𝑀𝐴 = −
− − − (2 − 6)
2𝐸𝐼
𝐸𝐼
6𝐸𝐼
Con base en las ecuaciones (2 − 5) y (2 − 6), se tienen los siguientes determinantes
𝐿3
∆= | 3𝐸𝐼2
𝐿
−
2𝐸𝐼
𝐿2
3
2
2
4
𝐿4
𝐿4
2𝐸𝐼 = [( 𝐿 ) ( 𝐿 )] − [(− 𝐿 ) (− 𝐿 )] = 𝐿
−
=
|
3𝐸𝐼 𝐸𝐼
2𝐸𝐼
2𝐸𝐼
3(𝐸𝐼)2 4(𝐸𝐼)2 12(𝐸𝐼)2
𝐿
𝐸𝐼
−
𝑊𝐿4
∆𝑅𝐴𝑌 = | 8𝐸𝐼 3
𝑊𝐿
−
6𝐸𝐼
𝐿3
∆𝑀𝐴 = | 3𝐸𝐼2
𝐿
−
2𝐸𝐼
𝐿2
4
2
3
5
5
5
2𝐸𝐼 = [(𝑊𝐿 ) ( 𝐿 )] − [(− 𝐿 ) (− 𝑊𝐿 )] = 𝑊𝐿 − 𝑊𝐿 = 𝑊𝐿
|
8𝐸𝐼 𝐸𝐼
2𝐸𝐼
6𝐸𝐼
8(𝐸𝐼)2 12(𝐸𝐼)2 24(𝐸𝐼)2
𝐿
𝐸𝐼
−
𝑊𝐿4
3
3
4
2
6
6
6
8𝐸𝐼 | = [( 𝐿 ) (− 𝑊𝐿 )] − [(𝑊𝐿 ) (− 𝐿 )] = − 𝑊𝐿 + 𝑊𝐿 = 𝑊𝐿
3
2
2
3𝐸𝐼
6𝐸𝐼
8𝐸𝐼
2𝐸𝐼
18(𝐸𝐼)
16(𝐸𝐼)
144(𝐸𝐼)2
𝑊𝐿
−
6𝐸𝐼
𝑅𝐴𝑌
𝑊𝐿5
∆𝑅
𝑊𝐿
24(𝐸𝐼)2 𝑊𝐿
= 𝐴𝑌 =
=
⇒∴ 𝑅𝐴𝑌 =
𝐿4
∆
2
2
12(𝐸𝐼)2
𝑊𝐿6
∆𝑀𝐴 144(𝐸𝐼)2 𝑊𝐿2
𝑊𝐿2
𝑀𝐴 =
=
=
⇒∴
𝑀
=
𝐴
𝐿4
∆
12
12
2
12(𝐸𝐼)
Ecuaciones de equilibrio
Por lo tanto, a partir del diagrama de cargas de la figura 2-e, resulta
𝑊𝐿
𝑊
𝑀𝐴 =
𝑊𝐿2
𝐴
12
𝑅𝐴𝑌 =
𝑊𝐿
2
𝑀𝐵
𝐵
𝐿/2
𝐿
(e)
13
𝑅𝐵𝑌
Fuerzas de fijación y momentos de empotramiento en vigas
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐴 = 0 ⇒ −
𝑊𝐿
𝑊𝐿
− 𝑊𝐿 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
2
2
𝑊𝐿2
𝐿
𝑊𝐿
𝑊𝐿2
(𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
+ 𝑊𝐿 ( ) −
12
2
2
12
Finalmente, la viga queda como la que se muestra en la figura 2-f.
𝑊
𝑀𝐴 =
𝑊𝐿2
𝐴
12
𝑅𝐴𝑌 =
𝐵
𝑊𝐿
2
𝑀𝐵 =
𝐿
(f)
14
𝑅𝐵𝑌 =
𝑊𝐿
2
𝑊𝐿2
12
3 VIGA BIEMPOTRADA CON CARGA
TRIANGULAR
𝑊
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 3
SOLUCIÓN
Principio de superposición
Puesto que la carga axial es insignificante, la viga de la figura 3-a es hiperestática de grado dos. La
reacción vertical y el momento reactivo, ambos del extremo 𝐴, se considerarán como redundantes.
Entonces, la capacidad de la viga para soportar 𝑅𝐴𝑌 y 𝑀𝐴 se anula si se elimina el empotramiento 𝐴.
La figura 3-b muestra cómo la viga real es igual a la suma de una serie de vigas más simples.
𝑊
𝑀
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝐿
+
𝐴
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
1
𝑥
𝐵
𝐿
(b)
15
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad
Con referencia al nodo 𝐴 de la figura 3-b, se requiere
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (3 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (3 − 2)
Se secciona la viga primaria para obtener el momento interno 𝑀. En la figura 3-c se muestra un
diagrama de cargas de la sección cortada. En la figura 3-d, se proporciona un esquema para
determinar por triángulos semejantes el valor en función de 𝑥 de la intensidad 𝑊´.
0≤𝑥≤𝐿
𝐴𝐼𝐼 𝐴𝐼
𝑊
𝑊
𝑥൰
𝐿
𝑊
𝑊− 𝑥
𝐿
𝑊 − ൬𝑊 −
𝐼𝐼
𝑊´
𝐼
𝑀1
𝐴
2𝑥/3
𝑥/2
𝑥
(c)
𝑊
𝑊´
𝑐𝑜𝑟𝑡𝑒
𝐴
𝑥
𝐵
𝐿−𝑥
𝐿
(d)
𝑊
𝑊´
𝑊(𝐿 − 𝑥)
𝑊
=
⇒ 𝑊´ =
=𝑊− 𝑥
𝐿
𝐿−𝑥
𝐿
𝐿
Se observa que del corte se origina una carga trapezoidal. Esta se divide en una distribución uniforme
y una triangular para mayor facilidad. En la figura 3-c se indican las fuerzas resultantes 𝐴𝐼 y 𝐴𝐼𝐼 (áreas
16
Fuerzas de fijación y momentos de empotramiento en vigas
bajo el rectángulo y el triángulo), las cuales vienen aplicadas en el centroide de sus respectivas
áreas. Recuerde que para un área triangular, el centroide se ubica a las dos terceras partes de la
base, y tal distancia se mide desde el punto del “pico”.
El equilibrio estático del cuerpo libre implica que
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
(𝑥) (𝑊 − (𝑊 −
−𝑀1 −
𝑊
𝑥))
𝐿
2
𝑊
1
൬ 𝑥൰ − (𝑥) ൬𝑊 − 𝑥൰ ൬ 𝑥൰ = 0
3
𝐿
2
2
(
)
𝐴𝐼
𝐴𝐼𝐼
−𝑀1 + ൬−
𝑊
𝑊
𝑊
2
𝑊
1
𝑥 + 𝑥 − 𝑥 2 ൰ ൬ 𝑥൰ + ൬−𝑊𝑥 + 𝑥 2 ൰ ൬ 𝑥൰ = 0
2
2
2𝐿
3
𝐿
2
−𝑀1 −
𝑊 3 𝑊 2 𝑊 3
𝑊𝑥 3 𝑊𝑥 2
𝑥 − 𝑥 + 𝑥 ⇒ 𝑀1 =
−
3𝐿
2
2𝐿
6𝐿
2
Por otra parte, de los ejercicios previos, se sabe que
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se calculan los desplazamientos y giros requeridos. Para las incompatibilidades geométricas
tenemos
𝐿2
𝑑1 = ∫
𝐿1
𝐿
𝑀𝑚1
1 𝐿 𝑊𝑥 3 𝑊𝑥 2
1 𝐿 𝑊𝑥 4 𝑊𝑥 3
1 𝑊𝑥 5 𝑊𝑥 4
𝑑𝑥 = ∫ (
−
) (𝑥)𝑑𝑥 = ∫ (
−
) 𝑑𝑥 = [
−
]
𝐸𝐼
𝐸𝐼 0
6𝐿
2
𝐸𝐼 0
6𝐿
2
𝐸𝐼 30𝐿
8 0
=
𝐿2
𝑑2 = ∫
𝐿1
1 𝑊 5
𝑊
11𝑊𝐿4
(𝐿 ) − (𝐿4 )] = −
[
𝐸𝐼 30𝐿
8
120𝐸𝐼
𝐿
𝑀𝑚2
1 𝐿 𝑊𝑥 3 𝑊𝑥 2
1 𝐿
𝑊𝑥 3 𝑊𝑥 2
1
𝑊𝑥 4 𝑊𝑥 3
𝑑𝑥 = ∫ (
−
) (−1)𝑑𝑥 = ∫ (−
+
) 𝑑𝑥 = [−
+
]
𝐸𝐼
𝐸𝐼 0
6𝐿
2
𝐸𝐼 0
6𝐿
2
𝐸𝐼
24𝐿
6 0
=
1
𝑊𝐿4 𝑊𝐿3
𝑊𝐿3
[−
+
]=
𝐸𝐼
24𝐿
6
8𝐸𝐼
17
Fuerzas de fijación y momentos de empotramiento en vigas
Los coeficientes de flexibilidad son
𝐿3
3𝐸𝐼
𝑓11 =
𝑓21 = −
𝐿2
2𝐸𝐼
𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
Reemplazando los valores previos en las ecuaciones (3 − 1) y (3 − 2) da
−
11𝑊𝐿4
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (3 − 3)
120𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
𝑊𝐿3
𝐿2
𝐿
−
𝑅 + 𝑀 = 0 − − − (3 − 4)
8𝐸𝐼 2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
Resolviendo el sistema de ecuaciones (3 − 3) y (3 − 4), resulta
𝐿3
∆= | 3𝐸𝐼2
𝐿
−
2𝐸𝐼
11𝑊𝐿4
∆𝑅𝐴𝑌 = | 120𝐸𝐼3
𝑊𝐿
−
8𝐸𝐼
𝐿2
𝐿4
2𝐸𝐼 =
|
12(𝐸𝐼)2
𝐿
𝐸𝐼
−
𝐿2
4
2
3
5
5
5
2𝐸𝐼 = [(11𝑊𝐿 ) ൬ 𝐿 ൰] − [(− 𝐿 ) (− 𝑊𝐿 )] = 11𝑊𝐿 − 𝑊𝐿 = 7𝑊𝐿
|
120𝐸𝐼 𝐸𝐼
2𝐸𝐼
8𝐸𝐼
120(𝐸𝐼)2 16(𝐸𝐼)2 240(𝐸𝐼)2
𝐿
𝐸𝐼
−
𝐿3
∆𝑀𝐴 = | 3𝐸𝐼2
𝐿
−
2𝐸𝐼
11𝑊𝐿4
3
3
4
2
6
6
120𝐸𝐼 | = [( 𝐿 ) (− 𝑊𝐿 )] − [(11𝑊𝐿 ) (− 𝐿 )] = − 𝑊𝐿 + 11𝑊𝐿
3
3𝐸𝐼
8𝐸𝐼
120𝐸𝐼
2𝐸𝐼
24(𝐸𝐼)2 240(𝐸𝐼)2
𝑊𝐿
−
8𝐸𝐼
=
𝑅𝐴𝑌
𝑊𝐿6
240(𝐸𝐼)2
7𝑊𝐿5
∆𝑅
7𝑊𝐿
240(𝐸𝐼)2 7𝑊𝐿
= 𝐴𝑌 =
=
⇒∴ 𝑅𝐴𝑌 =
4
𝐿
∆
20
20
12(𝐸𝐼)2
𝑊𝐿6
∆𝑀𝐴 240(𝐸𝐼)2 𝑊𝐿2
𝑊𝐿2
𝑀𝐴 =
=
=
⇒∴ 𝑀𝐴 =
4
𝐿
∆
20
20
12(𝐸𝐼)2
18
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio
Si se aplican las ecuaciones de la estática en el diagrama de cargas de la figura 3-e, se obtiene la
viga final, figura 3-f.
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐴 = 0 ⇒ −
7𝑊𝐿 𝑊𝐿
3𝑊𝐿
−
+ 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
20
2
20
𝑊𝐿2 𝑊𝐿 𝐿
3𝑊𝐿
𝑊𝐿2
(𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
+
൬ ൰−
20
2 3
20
30
𝑊𝐿/2
𝑊
𝑀𝐴 =
𝑊𝐿2
𝐴
20
𝑅𝐴𝑌 =
𝑀𝐵
𝐵
𝐿/3
7𝑊𝐿
𝑅𝐵𝑌
𝐿
20
(e)
𝑊
𝑀𝐴 =
𝑊𝐿2
𝐴
20
𝑅𝐴𝑌 =
𝑀𝐵 =
𝐵
7𝑊𝐿
𝐿
20
(f)
19
𝑅𝐵𝑌 =
3𝑊𝐿
20
𝑊𝐿2
30
4 VIGA BIEMPOTRADA CON CARGA
TRIANGULAR SIMÉTRICA
𝑊
𝐴
𝐵
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 4
SOLUCIÓN
Principio de superposición
A simple vista, la viga de la figura 4-a es estáticamente indeterminada de segundo grado. Se siguen
tomando como redundantes a 𝑅𝐴𝑌 y 𝑀𝐴 . Note como para remover tales fuerzas sobrantes, se requiere
de retirar el empotramiento 𝐴. En la figura 4-b se muestra el principio de superposición para esta
viga.
𝑀
𝑊
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
𝐿/2
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿/2
+
𝐴
1
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
20
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad
Con referencia al punto 𝐴 de la figura 4-b, se requiere
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (4 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (4 − 2)
Como siempre, los momentos internos 𝑀 se obtienen a partir de la viga liberada con cargas reales.
Dado que la distribución de la carga que actúa a lo largo de esta viga presenta una discontinuidad
(en la mitad del claro 𝐴 − 𝐵), deben efectuarse dos cortes perpendiculares al eje de la viga.
Corte en el primer tramo. Se secciona la viga a una distancia 𝑥 de 𝐴 en un punto arbitrario antes de
𝐿/2, es decir, antes de que la intensidad de la carga con variación lineal alcance el valor de 𝑊. El
diagrama de cuerpo libre de la sección cortada se visualiza en la figura 4-c.
0 ≤ 𝑥 ≤ 𝐿⁄2
Note que la intensidad de la carga de triangulo rectángulo se encuentra en proporción, es decir,
𝑊 𝑊´
2𝑊
=
⇒ 𝑊´ =
𝑥
𝐿
𝑥
𝐿
2
𝐴𝐼
𝑊´ = 2
𝑊
𝑥
𝐿
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
2𝑊
(
𝑥) (𝑥) 𝑥
𝑊𝑥 3
−𝑀1 − [ 𝐿
] ( ) = 0 ⇒ 𝑀1 = −
2
3
3𝐿
𝑀1
𝐴
𝑥/3
𝑥
𝐴𝐼
(c)
Corte en el tramo segundo tramo. Se secciona la viga a una distancia 𝑥 de 𝐴 en un punto arbitrario
justo después de 𝐿/2. En la figura 4-d se observa el diagrama de cargas para este segmento de viga
con longitud 𝑥.
𝐿⁄ ≤ 𝑥 ≤ 𝐿
2
Con base en la figura 4-e, empleando conceptos básicos de trigonometría, se deduce el punto de
intensidad 𝑊´´ de carga.
𝑊
𝑊´´
𝑊(𝐿 − 𝑥)
2𝑊
=
⇒ 𝑊´´ =
= 2𝑊 −
𝑥
𝐿
𝐿
𝐿−𝑥
𝐿
2
2
21
Fuerzas de fijación y momentos de empotramiento en vigas
2
𝐴𝐼𝐼𝐼
3
𝑊
2
𝐼𝐼𝐼
1
𝐴
2
1
𝐴𝐼𝐼
𝐴1
𝐿
(𝑥 − )
𝐿
(𝑥 − )
𝑊´´ = 2𝑊 −
2
2𝑊
𝑥
𝐿
𝑊 − 𝑊´´
𝐼𝐼
𝑊
𝑀2
1 𝐿
( )
3 2
𝐴
𝑐𝑜𝑟𝑡𝑒
𝐵
𝐿−𝑥
𝑥
𝑥 − 𝐿/2
𝐿/2
𝑊´´
𝐿/2
𝐿/2
𝑥
(e)
(d)
𝐴1
𝐴𝐼𝐼
𝐿
( ) (𝑊)
1 𝐿
𝐿
𝐿
2𝑊
1
𝐿
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0 ⇒ − ( 2
) (( ) ( ) + 𝑥 − ) − (𝑥 − ) (2𝑊 −
𝑥) ( ) (𝑥 − )
2
3 2
2
2
𝐿
2
2
𝐿
2𝑊
(𝑥 − ) (𝑊 − (2𝑊 −
𝑥))
2
𝐿
−
2
𝐿
( ) (𝑥 − ) − 𝑀2 = 0
3
2
2
(
)
𝐴𝐼𝐼𝐼
−(
−(
𝑊𝐿 𝐿
𝐿
𝐿
2𝑊
𝑥 𝐿
𝐿
2𝑊
𝑥 𝐿
) ( + 𝑥 − ) − (𝑥 − ) (2𝑊 −
𝑥) ( − ) − (𝑥 − ) (−𝑊 +
𝑥) ( − ) − 𝑀2 = 0
4
6
2
2
𝐿
2 4
2
𝐿
3 6
𝑊𝐿
𝐿
𝐿
𝑊
𝑊𝐿 𝑊
𝐿
𝑊
𝑊𝐿 2𝑊 2 𝑊
) (𝑥 − ) − (𝑥 − ) (𝑊𝑥 − 𝑥 2 −
+ 𝑥) − (𝑥 − ) (− 𝑥 +
+
𝑥 − 𝑥) − 𝑀2
4
3
2
𝐿
2
2
2
3
6
3𝐿
3
=0
−
𝑊𝐿
𝑊𝐿2
𝑊
𝑊𝐿
𝑊
𝑊𝐿
𝑊
𝑊𝐿2 𝑊𝐿
𝑥+
− 𝑊𝑥 2 + 𝑥 3 +
𝑥 − 𝑥2 +
𝑥 − 𝑥2 −
+
𝑥
4
12
𝐿
2
2
2
2
4
4
𝑊 2 𝑊𝐿
2𝑊 3 𝑊 2 𝑊𝐿
𝑊𝐿2 𝑊 2 𝑊𝐿
𝑥 −
𝑥−
𝑥 + 𝑥 −
𝑥+
+ 𝑥 −
𝑥 − 𝑀2 = 0
3
6
3𝐿
3
6
12
3
6
𝑀2 =
𝑊 3
𝑊𝐿
𝑊𝐿2
𝑥 − 𝑊𝑥 2 +
𝑥−
3𝐿
2
12
22
Fuerzas de fijación y momentos de empotramiento en vigas
Luego, los momentos internos de las vigas liberadas que soportan una unidad de las reacciones
redundantes son, respectivamente
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
0≤𝑥≤𝐿
𝑀1 = −1
0≤𝑥≤𝐿
Entonces,
𝐿2
𝑑1 = ∫
𝐿1
𝐿⁄
2
𝑀𝑚1
1
𝑑𝑥 = [∫
𝐸𝐼
𝐸𝐼 0
=
𝐿⁄
2
1
[∫
𝐸𝐼 0
(−
(−
𝐿
𝑊𝑥 3
𝑊
𝑊𝐿
𝑊𝐿2
) (𝑥)𝑑𝑥 + ∫ ( 𝑥 3 − 𝑊𝑥 2 +
𝑥−
) (𝑥)𝑑𝑥 ]
3𝐿
3𝐿
2
12
𝐿⁄
2
𝐿
𝑊 4
𝑊
𝑊𝐿 2 𝑊𝐿2
𝑥 ) 𝑑𝑥 + ∫ ( 𝑥 4 − 𝑊𝑥 3 +
𝑥 −
𝑥) 𝑑𝑥 ]
3𝐿
3𝐿
2
12
𝐿⁄
2
𝐿
=
𝐿
1
𝑊 5 ⁄2
𝑊 5 𝑊 4 𝑊𝐿 3 𝑊𝐿2 2
{[−
𝑥 ] +[
𝑥 − 𝑥 +
𝑥 −
𝑥 ] }
𝐸𝐼
15𝐿
15𝐿
4
6
24
0
𝐿⁄
2
=
1
𝑊
𝐿 5
𝑊
𝐿 5
𝑊
𝐿 4
𝑊𝐿 3
𝐿 3
𝑊𝐿2 2
𝐿 2
{[−
(( ) )] + [
(𝐿5 − ( ) ) − (𝐿4 − ( ) ) +
(𝐿 − ( ) ) −
(𝐿 − ( ) )]}
𝐸𝐼
15𝐿 2
15𝐿
2
4
2
6
2
24
2
=
𝐿2
𝑑2 = ∫
𝐿1
𝑊𝐿4
1
31 15 7
1
11𝑊𝐿4
(−
+
−
+
− )=−
𝐸𝐼
480 480 64 48 32
192𝐸𝐼
𝐿⁄
2
𝑀𝑚2
1
𝑑𝑥 = [∫
𝐸𝐼
𝐸𝐼 0
𝐿⁄
2
1
= [∫
𝐸𝐼 0
(
(−
𝐿
𝑊𝑥 3
𝑊
𝑊𝐿
𝑊𝐿2
) (−1)𝑑𝑥 + ∫ ( 𝑥 3 − 𝑊𝑥 2 +
𝑥−
) (−1)𝑑𝑥 ]
3𝐿
3𝐿
2
12
𝐿⁄
2
𝐿
𝑊𝑥 3
𝑊
𝑊𝐿
𝑊𝐿2
) 𝑑𝑥 + ∫ (− 𝑥 3 + 𝑊𝑥 2 −
𝑥+
) 𝑑𝑥 ]
3𝐿
3𝐿
2
12
𝐿⁄
2
𝐿
𝐿
1
𝑊 4 ⁄2
𝑊 4 𝑊 3 𝑊𝐿 2 𝑊𝐿2
= {[
𝑥 ] + [−
𝑥 + 𝑥 −
𝑥 +
𝑥] }
𝐸𝐼 12𝐿
12𝐿
3
4
12
0
𝐿⁄
2
=
1
𝑊
𝐿 4
𝑊
𝐿 4
𝑊
𝐿 3
𝑊𝐿 2
𝐿 2
𝑊𝐿2
𝐿
{[
(( ) )] + [−
(𝐿4 − ( ) ) + (𝐿3 − ( ) ) −
(𝐿 − ( ) ) +
(𝐿 − )]}
𝐸𝐼 12𝐿 2
12𝐿
2
3
2
4
2
12
2
=
𝑊𝐿3 1
5
7
3
1
7𝑊𝐿3
(
−
+
−
+ )=
𝐸𝐼 192 64 24 16 24
96𝐸𝐼
23
Fuerzas de fijación y momentos de empotramiento en vigas
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = 𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
En consecuencia, el sistema de ecuaciones de flexibilidades es
−
11𝑊𝐿4
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (4 − 3)
192𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
7𝑊𝐿3
𝐿2
𝐿
−
𝑅𝐴𝑌 + 𝑀𝐴 = 0 − − − (4 − 4)
96𝐸𝐼 2𝐸𝐼
𝐸𝐼
Que equivale a
𝐿3
𝐿2
11𝑊𝐿4
𝑅𝐴𝑌 − 𝑀𝐴 =
− − − (4 − 5)
3
2
192
−
𝐿2
7𝑊𝐿3
𝑅𝐴𝑌 + 𝐿𝑀𝐴 = −
− − − (4 − 6)
2
96
Por lo tanto,
𝐿3
∆= | 3 2
𝐿
−
2
11𝑊𝐿4
∆𝑅𝐴𝑌 = | 192 3
7𝑊𝐿
−
96
𝐿3
∆𝑀𝐴 = | 3 2
𝐿
−
2
𝐿2
4
2| = 𝐿
12
𝐿
−
𝐿2
4
2
3
5
5
5
2 = [(11𝑊𝐿 ) (𝐿)] − [(− 𝐿 ) (− 7𝑊𝐿 )] = 11𝑊𝐿 − 7𝑊𝐿 = 𝑊𝐿
|
192
2
96
192
192
48
𝐿
−
11𝑊𝐿4
3
3
4
2
6
6
6
192 = [(𝐿 ) (− 7𝑊𝐿 )] − [(11𝑊𝐿 ) (− 𝐿 )] = − 7𝑊𝐿 + 11𝑊𝐿 = 5𝑊𝐿
|
3
96
192
2
288
384
1152
7𝑊𝐿3
−
96
𝑅𝐴𝑌
𝑊𝐿5
∆𝑅𝐴𝑌
𝑊𝐿
𝑊𝐿
=
= 48
=
⇒∴ 𝑅𝐴𝑌 =
𝐿4
∆
4
4
12
5𝑊𝐿6
∆𝑀𝐴
5𝑊𝐿2
5𝑊𝐿2
𝑀𝐴 =
= 1152
=
⇒∴
𝑀
=
𝐴
𝐿4
∆
96
96
12
24
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio
Finalmente, a partir de la figura 4-f, se tienen las siguientes reacciones en el empotramiento 𝐵, figura
4-g.
+↑ ∑ 𝐹𝑌 = 0 ⇒
𝑊𝐿
𝐿
1
𝐿
1
𝑊𝐿
− ( ) (𝑊) ( ) − ( ) (𝑊) ( ) + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
4
2
2
2
2
4
+ ∑ 𝑀𝐴 = 0
−
5𝑊𝐿2
𝐿
1 2 𝐿
𝐿
1 𝐿 1 𝐿
𝑊𝐿
5𝑊𝐿2
(𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
+ ( ) (𝑊) ( ) ( ) ( ) + ( ) (𝑊) ( ) ( + ( )) −
96
2
2 3 2
2
2 2 3 2
4
96
𝐿
1
( ) (𝑊) ( )
2
2
𝑀𝐴 =
𝐿
1
( ) (𝑊) ( )
2
2
𝑊
5𝑊𝐿2
96
𝑅𝐴𝑌 =
𝐴
𝑊𝐿
4
1 𝐿
2 𝐿
( )
3 2
𝑀𝐵
𝐵
( )
(f)
3 2
𝐿/2
𝑅𝐵𝑌
𝐿/2
𝑊
(g)
𝑀𝐴 =
5𝑊𝐿2
𝐴
96
𝑅𝐴𝑌 =
𝑀𝐵 =
𝐵
𝑊𝐿
𝐿/2
4
25
𝐿/2
𝑅𝐵𝑌 =
𝑊𝐿
4
5𝑊𝐿2
96
5 VIGA BIEMPOTRADA CON CARGA
TRAPEZOIDAL
𝑊1
𝑊2
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 5
SOLUCIÓN
Principio de superposición
Por inspección, la viga de la figura 5-a es hiperestática de grado dos. Se considera que 𝑅𝐴𝑌 y 𝑀𝐴 son
las fuerzas reactivas redundantes, de tal modo que se podrán determinar directamente con el método
de flexibilidades. La remoción de las fuerzas superabundantes implica eliminar el empotramiento 𝐴.
En la figura 5-b se observa la aplicación del principio de superposición.
𝑊1
𝑀
𝑊2
𝑚1
𝐸𝑅 =
𝐴
𝑥
+
𝐵
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝐿
+
𝐴
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
26
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad
Con referencia al punto 𝐴 de la figura 5-b, se requiere
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (5 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (5 − 2)
Se puede notar que la viga isostática fundamental soporta una carga cuya intensidad varía
linealmente desde 𝑊1 en el punto 𝐴 hasta 𝑊2 en el punto 𝐵. Entonces, una sola región se distingue
en esta estructura. El momento interno 𝑀 se infiere de tomar momentos alrededor del punto del corte
en el cuerpo libre de la figura 5-c. No obstante, previo a la aplicación de la ecuación de equilibrio
citada, debe calcularse el punto de intensidad 𝑊´ de carga en función de 𝑥, figura 5-d.
0≤𝑥≤𝐿
𝐴𝐼𝐼
2𝑥/3
𝐴𝐼
𝑊1
𝑊1 − 𝑊´
𝑊´ = 𝑊1 +
𝐼𝐼
𝑊2
𝑊1
𝑥−
𝑥
𝐿
𝐿
𝐼
𝐴
𝑀1
𝑥/2
𝑥
(c)
𝑊´
𝑊1 − 𝑊2
𝑌
𝑊1
𝑊2
𝐴
𝑐𝑜𝑟𝑡𝑒
𝑥
𝐵
𝐿−𝑥
𝐿
(d)
27
Fuerzas de fijación y momentos de empotramiento en vigas
𝑊1 − 𝑊2
𝑌
=
𝐿
𝐿−𝑥
𝑌=
(𝑊1 − 𝑊2 )(𝐿 − 𝑥) 𝑊1 𝐿 − 𝑊1 𝑥 − 𝑊2 𝐿 + 𝑊2 𝑥
𝑊2
𝑊1
=
= 𝑊1 − 𝑊2 +
𝑥−
𝑥
𝐿
𝐿
𝐿
𝐿
𝑊´ = 𝑊2 + 𝑌 = 𝑊2 + 𝑊1 − 𝑊2 +
𝑊2
𝑊1
𝑊2
𝑊1
𝑥−
𝑥 = 𝑊1 +
𝑥−
𝑥
𝐿
𝐿
𝐿
𝐿
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑊2
𝑊1
1
−𝑀1 − (𝑥) (𝑊1 +
𝑥−
𝑥) ( 𝑥) −
𝐿
𝐿
2
(𝑥) (𝑊1 − (𝑊1 +
𝑊2
𝑊
𝑥 − 1 𝑥))
𝐿
𝐿
2
[
]
𝐴𝐼
𝐴𝐼𝐼
−𝑀1 − (𝑥) (
𝑀1 =
2
( 𝑥) = 0
3
𝑊1
𝑊2 2 𝑊1 2
1
𝑊2
𝑊1
𝑥+
𝑥 −
𝑥 ) − ( 𝑥 2 ) (−
𝑥+
𝑥) = 0
2
2𝐿
2𝐿
3
𝐿
𝐿
𝑊1 𝑥 3 𝑊2 𝑥 3 𝑊1 𝑥 2 𝑊2 𝑥 3 𝑊1 𝑥 3 𝑊1 𝑥 3 𝑊2 𝑥 3 𝑊1 𝑥 2
−
−
+
−
=
−
−
2𝐿
2𝐿
2
3𝐿
3𝐿
6𝐿
6𝐿
2
Los momentos internos de las otras dos vigas isostáticas son
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se necesita de los siguientes desplazamientos y pendientes
𝐿2
𝑑1 = ∫
𝐿1
𝑀𝑚1
1 𝐿 𝑊1 𝑥 3 𝑊2 𝑥 3 𝑊1 𝑥 2
𝑑𝑥 = ∫ (
−
−
) (𝑥)𝑑𝑥
𝐸𝐼
𝐸𝐼 0
6𝐿
6𝐿
2
𝐿
1 𝐿 𝑊1 𝑥 4 𝑊2 𝑥 4 𝑊1 𝑥 3
1 𝑊1 𝑥 5 𝑊2 𝑥 5 𝑊1 𝑥 4
11𝑊1 𝐿4 𝑊2 𝐿4
= ∫ (
−
−
) 𝑑𝑥 = [
−
−
] =−
−
𝐸𝐼 0
6𝐿
6𝐿
2
𝐸𝐼 30𝐿
30𝐿
8 0
120𝐸𝐼
30𝐸𝐼
𝐿2
𝑑2 = ∫
𝐿1
𝑀𝑚2
1 𝐿 𝑊1 𝑥 3 𝑊2 𝑥 3 𝑊1 𝑥 2
𝑑𝑥 = ∫ (
−
−
) (−1)𝑑𝑥
𝐸𝐼
𝐸𝐼 0
6𝐿
6𝐿
2
𝐿
=
1 𝐿
𝑊1 𝑥 3 𝑊2 𝑥 3 𝑊1 𝑥 2
1
𝑊1 𝑥 4 𝑊2 𝑥 4 𝑊1 𝑥 3
𝑊1 𝐿3 𝑊2 𝐿3
∫ (−
+
+
) 𝑑𝑥 = [−
+
+
] =
+
𝐸𝐼 0
6𝐿
6𝐿
2
𝐸𝐼
24𝐿
24𝐿
6 0
8𝐸𝐼
24𝐸𝐼
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = 𝑓12 = −
28
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
Fuerzas de fijación y momentos de empotramiento en vigas
Al reemplazar los resultados en las ecuaciones (5 − 1) y (5 − 2), se tiene
−(
11𝑊1 𝐿4 𝑊2 𝐿4
𝐿3
𝐿2
+
)+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (5 − 3)
120𝐸𝐼
30𝐸𝐼
3𝐸𝐼
2𝐸𝐼 𝐴
(
𝑊1 𝐿3 𝑊2 𝐿3
𝐿2
𝐿
+
)−
𝑅𝐴𝑌 + 𝑀𝐴 = 0 − − − (5 − 4)
8𝐸𝐼
24𝐸𝐼
2𝐸𝐼
𝐸𝐼
Al resolver el sistema el sistema simultáneo de ecuaciones previo, se obtiene
𝐿3
∆= | 3 2
𝐿
−
2
𝐿2
4
2| = 𝐿
12
𝐿
−
11𝑊1 𝐿4 𝑊2 𝐿4
𝐿2
+
−
11𝑊1 𝐿4 𝑊2 𝐿4
𝐿2
𝑊1 𝐿3 𝑊2 𝐿3
120
30
2|
(𝐿)]
∆𝑅𝐴𝑌 = ||
=
[(
+
)
−
[(−
)
(−
(
+
))]
3
3
|
𝑊1 𝐿
𝑊2 𝐿
120
30
2
8
24
−(
+
)
𝐿
8
24
=
𝐿3
3
∆𝑀𝐴 = || 2
𝐿
−
2
11𝑊1 𝐿5 𝑊2 𝐿5 𝑊1 𝐿5 𝑊2 𝐿5 7𝑊1 𝐿5 𝑊2 𝐿5
+
−
−
=
+
120
30
16
48
240
80
11𝑊1 𝐿4 𝑊2 𝐿4
+
𝐿3
𝑊1 𝐿3 𝑊2 𝐿3
11𝑊1 𝐿4 𝑊2 𝐿4
𝐿2
120
30 |
+
))] − [(
+
) (− )]
3
3 | = [( ) (− (
𝑊1 𝐿
𝑊2 𝐿
3
8
24
120
30
2
−(
+
)
8
24
=−
𝑅𝐴𝑌
𝑊1 𝐿6 𝑊2 𝐿6 11𝑊1 𝐿6 𝑊2 𝐿6 𝑊1 𝐿6 𝑊2 𝐿6
−
+
+
=
+
24
72
240
60
240
360
7𝑊1 𝐿5 𝑊2 𝐿5
+
∆𝑅𝐴𝑌
7𝑊1 𝐿 3𝑊2 𝐿
7𝑊1 𝐿 3𝑊2 𝐿
=
= 240 4 80 =
+
⇒∴ 𝑅𝐴𝑌 = (
+
)
𝐿
∆
20
20
20
20
12
𝑊1 𝐿6 𝑊2 𝐿6
+
∆ 𝑀𝐴
𝑊1 𝐿2 𝑊2 𝐿2
𝑊1 𝐿2 𝑊2 𝐿2
𝑀𝐴 =
= 240 4 360 =
+
⇒∴ 𝑀𝐴 = (
+
)
𝐿
∆
20
30
20
30
12
Ecuaciones de equilibrio
Se dibuja un diagrama de cargas colocando las redundantes calculadas, figura 5-e. Si en él se
aplican las ecuaciones de la estática, se obtienen las reacciones faltantes, figura 5-f.
+↑ ∑ 𝐹𝑌 = 0 ⇒ (
(𝐿)(𝑊1 − 𝑊2 )
7𝑊1 𝐿 3𝑊2 𝐿
3𝑊1 𝐿 7𝑊2 𝐿
+
) − (𝐿)(𝑊2 ) − [
] + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = (
+
)
20
20
2
20
20
𝐴1
𝐴2
29
Fuerzas de fijación y momentos de empotramiento en vigas
+ ∑ 𝑀𝐴 = 0 ⇒ − (
(𝐿)(𝑊1− 𝑊2 ) 𝐿
𝑊1 𝐿2 𝑊2 𝐿2
𝐿
3𝑊1 𝐿 7𝑊2 𝐿
+
) + 𝑊2 (𝐿) ( ) + (
)( ) − (
+
) (𝐿) + 𝑀𝐵 = 0
20
30
2
2
3
20
20
∴ 𝑀𝐵 = (
𝑊1 𝐿2 𝑊2 𝐿2
+
)
30
20
𝐴2
2𝐿/3
𝑊1
𝐴1
𝐿/2
2
𝑀𝐴 = (
𝑊 1 𝐿2
20
+
𝑅𝐴𝑌 = (
𝑊 2 𝐿2
30
𝑊2
1
)
𝐴
7𝑊1 𝐿
+
20
3𝑊2 𝐿
20
𝑀𝐵
𝐵
𝐿
𝑅𝐵𝑌
)
(e)
𝑊1
𝑊2
𝑀𝐴 = (
𝑊 1 𝐿2
20
+
𝑅𝐴𝑌 = (
𝑊 2 𝐿2
30
7𝑊1 𝐿
20
)
𝐴
+
3𝑊2 𝐿
20
)
𝐵
𝐿
(f)
30
𝑀𝐵 = (
𝑅𝐵𝑌 = (
𝑊 1 𝐿2
3𝑊1 𝐿
20
30
+
+
𝑊 2 𝐿2
20
7𝑊2 𝐿
20
)
)
6 VIGA BIEMPOTRADA CON CARGA
PARABÓLICA
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐴
𝐵
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 6
SOLUCIÓN
Principio de superposición
Para la viga de la figura 6-a, los tres grados de libertad en 𝐴 están restringidos, no obstante, la
eliminación del soporte izquierdo conllevaría a que el desplazamiento vertical y la pendiente, ambos
del punto 𝐴, no se encuentren impedidos. La figura 6-b muestra como la viga real es igual a la
adición de una serie de vigas más sencillas.
𝑀
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
𝐿/2
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿/2
+
𝐴
1
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
31
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad
Si tomamos en cuenta la compatibilidad del desplazamiento vertical y la pendiente en el
empotramiento 𝐴, figura 6-b, se tiene
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (6 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (6 − 2)
Se analiza la viga primaria.
Inicialmente se efectúa un análisis de la carga cuya intensidad es descrita por una curva en forma
de parábola. La ecuación que define la intensidad parabólica puede expresarse de la siguiente forma:
𝑦 = 𝑎𝑥 2 + 𝑏𝑥 + 𝑐 − − − (𝐼)
Si se toma como origen el punto 𝐴, los tres puntos conocidos de la curva son
𝐿
2) 𝑒𝑛 𝑥 = , 𝑦 = 𝑊
2
1) 𝑒𝑛 𝑥 = 0, 𝑦 = 0
3) 𝑒𝑛 𝑥 = 𝐿, 𝑦 = 0
Es posible construir un sistema de ecuaciones reemplazando cada uno de los puntos anteriores de
manera individual en la ecuación (𝐼) con la finalidad de calcular las constantes 𝑎, 𝑏 y 𝑐.
0 = 𝑎(0)2 + 𝑏(0) + 𝑐 ⇒ 0𝑎 + 0𝑏 + 𝑐 = 0 − − − ①
𝐿 2
𝐿
𝐿2
𝐿
𝑊 = 𝑎( ) +𝑏( )+𝑐 ⇒ 𝑎 + 𝑏 +𝑐 = 𝑊 −−−②
2
2
4
2
0 = 𝑎(𝐿)2 + 𝑏(𝐿) + 𝑐 ⇒ 𝐿2 𝑎 + 𝐿𝑏 + 𝑐 = 0 − − − ③
Se resuelve el sistema simultáneo de ecuaciones ① hasta ③ con el método de Cramer. Cada
determinante de orden 3x3 se calcula empleando la regla de Sarrus.
0
𝐿2
Δ=|
4
𝐿2
0 1
𝐿
1
2
𝐿 1
0
0
𝐿3
𝐿3
𝐿3
𝐿
| = (0 + 0 + ) − (0 + 0 + ) = −
4
2
4
2
𝐿
0
0 1 |0
𝐿
1 |𝑊
2
𝐿 1 |0
0
𝐿
| = (0 + 0 + 𝑊𝐿) − (0 + 0 + 0) = 𝑊𝐿
2
𝐿
0
1
0
𝑊
1
0
1
Δa = |𝑊
0
𝐿2
Δb = |
4
𝐿2
|0
𝐿2
|
4
| 𝐿2
0
𝐿2
Δc = |
4
𝐿2
|0
𝐿2
|
4
| 𝐿2
0 0
𝐿
𝑊
2
𝐿 0
𝑊 | = (0 + 0 + 0) − (0 + 0 + 𝐿2 𝑊) = −𝐿2 𝑊
0
|0
𝐿2
|
4
| 𝐿2
0
𝐿
| = (0 + 0 + 0) − (0 + 0 + 0) = 0
2
𝐿
32
Fuerzas de fijación y momentos de empotramiento en vigas
𝑎=
Δa 𝑊𝐿
𝑊
=
= −4 2
−𝐿3
Δ
𝐿
4
𝑏=
Δb −𝐿2 𝑊
𝑊
=
=4
−𝐿3
Δ
𝐿
4
𝑐=
Δc
0
=
=0
−𝐿3
Δ
4
En consecuencia, al sustituir estos valores en la expresión (𝐼), se tiene que
𝑦 = −4
𝑊 2
𝑊
𝑥 +4 𝑥
𝐿2
𝐿
Como no hay discontinuidad de carga a lo largo de la estructura primaria, sólo se efectuará un corte
perpendicular al eje longitudinal de la viga, entonces, no importa si tal seccionamiento se hace antes
o después de que la carga distribuida alcanza una intensidad de 𝑊.
En la figura 6-c se proporciona un diagrama de cargas del segmento de viga con longitud 𝑥. Previo
a efectuar el equilibrio estático en el cuerpo libre para deducir la función del momento 𝑀, se
determina la carga concentrada equivalente 𝐴𝐼 de la fuerza distribuida y su punto de aplicación 𝑥̅𝐼 .
0≤𝑥≤𝐿
𝐴𝐼
𝑦 = −4
𝑊 2
𝑊
𝑥 +4 𝑥
2
𝐿
𝐿
𝑀1
𝐴
𝑥 − 𝑥̅𝐼
𝑥̅𝐼
𝑥
(c)
La fuerza resultante de la carga distribuida seccionada es
𝐿2
𝑥
𝐴𝐼 = ∫ 𝑑𝐴 = ∫ 𝑦𝑑𝑥 = ∫ (−4
𝐿1
3 𝑥
−4
0
𝑊 2
𝑊
𝑊 𝑥 2
𝑊 𝑥
𝑥
+
4
𝑥)
𝑑𝑥
=
−4
∫
𝑥
𝑑𝑥
+
4
∫ 𝑥𝑑𝑥
𝐿2
𝐿
𝐿2 0
𝐿 0
2 𝑥
𝑊 𝑥
𝑊 𝑥
4𝑊
4𝑊 2
4𝑊
2𝑊 2
[𝑥 − 02 ] = − 2 𝑥 3 +
[ ] + 4 [ ] = − 2 [𝑥 3 − 03 ] +
𝑥
𝐿2 3 0
𝐿 2 0
3𝐿
2𝐿
3𝐿
𝐿
y su ubicación es
𝐿2
𝑥
𝑊 2
𝑊
∫ 𝑥̃ 𝑑𝐴 ∫𝐿1 𝑥𝑦𝑑𝑥 ∫0 𝑥 (−4 𝐿2 𝑥 + 4 𝐿 𝑥) 𝑑𝑥
𝑥̅𝐼 =
= 𝐿2
=
𝑥
𝑊
𝑊
∫ 𝑑𝐴
∫𝐿 𝑦𝑑𝑥
∫0 (−4 2 𝑥 2 + 4 𝐿 𝑥) 𝑑𝑥
1
𝐿
Como el denominador ya fue resuelto, se atiende al numerador.
𝐿
∫ 𝑥 (−4
0
𝑊 2
𝑊
𝑊 𝐿 3
𝑊 𝐿 2
𝑥
+
4
𝑥)
𝑑𝑥
=
−4
∫
𝑥
𝑑𝑥
+
4
∫ 𝑥 𝑑𝑥
𝐿2
𝐿
𝐿2 0
𝐿 0
33
Fuerzas de fijación y momentos de empotramiento en vigas
𝑥
𝑥
𝑊 𝑥4
𝑊 𝑥3
−4𝑊 4
4𝑊 3
𝑊
4𝑊 3
[𝑥 − 04 ] +
[𝑥 − 03 ] = − 2 𝑥 4 +
= −4 2 [ ] + 4 [ ] =
𝑥
𝐿 4 0
𝐿 3 0
4𝐿2
3𝐿
𝐿
3𝐿
𝑊 4 4𝑊 3
2 𝑥 + 3𝐿 𝑥
∴ 𝑥̅𝐼 = 𝐿
𝑎 𝑙𝑎 𝑑𝑒𝑟𝑒𝑐ℎ𝑎 𝑑𝑒 𝐴
4𝑊
2𝑊 2
− 2 𝑥3 +
𝑥
𝐿
3𝐿
−
Tomando momentos alrededor del punto del corte, se obtiene
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑊
4𝑊 3
− 2 𝑥4 +
𝑥
4𝑊 3 2𝑊 2
3𝐿
𝐿
−𝑀1 − (− 2 𝑥 +
𝑥 ) (𝑥 −
)=0
4𝑊
2𝑊 2
3𝐿
𝐿
− 2 𝑥3 +
𝑥
𝐿
3𝐿
−𝑀1 − (−
4𝑤 4 2𝑤 3 𝑤 4 4𝑤 3
𝑊
2𝑊 3
𝑥 +
𝑥 + 2𝑥 −
𝑥 ) ⇒ 𝑀1 = 2 𝑥 4 −
𝑥
3𝐿2
𝐿
𝐿
3𝐿
3𝐿
3𝐿
Además,
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Por consiguiente,
𝑑1 =
=
1 𝐿 𝑊 5 2𝑊 4
1 𝑊 6 2𝑊 5 𝐿 𝑊𝐿4 2𝑊𝐿4
7𝑊𝐿4
∫ ( 2𝑥 −
𝑥 ) 𝑑𝑥 = [
𝑥
−
𝑥
]
=
−
=
−
𝐸𝐼 0 3𝐿
3𝐿
𝐸𝐼 18𝐿2
15𝐿
18𝐸𝐼 15𝐸𝐼
90𝐸𝐼
0
𝑑2 =
=
1 𝐿 𝑊 4 2𝑊 3
∫ (
𝑥 −
𝑥 ) (𝑥)𝑑𝑥
𝐸𝐼 0 3𝐿2
3𝐿
1 𝐿 𝑊 4 2𝑊 3
∫ (
𝑥 −
𝑥 ) (−1)𝑑𝑥
𝐸𝐼 0 3𝐿2
3𝐿
1 𝐿
𝑊
2𝑊 3
1
𝑊 5 𝑊 4 𝐿
𝑊𝐿3 𝑊𝐿3 𝑊𝐿3
∫ (− 2 𝑥 4 +
𝑥 ) 𝑑𝑥 = [−
𝑥 + 𝑥 ] =−
+
=
2
𝐸𝐼 0
3𝐿
3𝐿
𝐸𝐼 15𝐿
6𝐿
15𝐸𝐼 6𝐸𝐼 10𝐸𝐼
0
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = 𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
De tal modo que el sistema simultáneo de ecuaciones (6 − 1) y (6 − 2) se convierte en
−
7𝑊𝐿4
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (6 − 3)
90𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
𝑊𝐿3
𝐿2
𝐿
−
𝑅 + 𝑀 = 0 − − − (6 − 4)
10𝐸𝐼 2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
34
Fuerzas de fijación y momentos de empotramiento en vigas
Entonces, las fuerzas correctivas son resultado de
𝐿3
∆= | 3 2
𝐿
−
2
7𝑊𝐿4
∆𝑅𝐴𝑌 = | 90 3
𝑊𝐿
−
10
𝐿3
∆𝑀𝐴 = | 3 2
𝐿
−
2
𝐿2
4
2 =𝐿
|
12
𝐿
−
𝐿2
4
2
3
5
5
5
2 | = [(7𝑊𝐿 ) (𝐿)] − [(− 𝐿 ) (− 𝑊𝐿 )] = 7𝑊𝐿 − 𝑊𝐿 = 𝑊𝐿
90
2
10
90
20
36
𝐿
−
7𝑊𝐿4
3
3
4
2
6
6
6
90 = [(𝐿 ) (− 𝑊𝐿 )] − [(7𝑊𝐿 ) (− 𝐿 )] = − 𝑊𝐿 + 7𝑊𝐿 = 𝑊𝐿
|
3
10
90
2
30
180
180
𝑊𝐿3
−
10
𝑅𝐴𝑌
𝑊𝐿5
∆𝑅𝐴𝑌
𝑊𝐿
𝑊𝐿
=
= 36
=
⇒∴ 𝑅𝐴𝑌 =
4
𝐿
∆
3
3
12
𝑊𝐿6
∆𝑀𝐴
𝑊𝐿2
𝑊𝐿2
𝑀𝐴 =
= 180
=
⇒∴ 𝑀𝐴 =
4
𝐿
∆
15
15
12
Ecuaciones de equilibrio
Estas se aplican al diagrama de cargas de la figura 6-d. La carga concentrada equivalente de la
carga distribuida con intensidad parabólica es
𝐿
𝐴1 = ∫ (−4
0
𝑊 2
𝑊
4𝑊
4𝑊 2
2
[𝐿 − 02 ] = 𝑊𝐿
𝑥 + 4 𝑥) 𝑑𝑥 = − 2 [𝐿3 − 03 ] +
2
𝐿
𝐿
3𝐿
2𝐿
3
y su línea de acción se ubica en
𝐿
𝑊
𝑊
−4𝑊 4
4𝑊 3
4
𝑊𝐿2
4
3
−𝑊𝐿2 + 𝑊𝐿2
∫0 𝑥 (−4 2 𝑥 2 + 4 𝐿 𝑥) 𝑑𝑥
1
2 [𝐿 − 0 ] + 3𝐿 [𝐿 − 0 ]
3
𝐿
4𝐿
𝑥̅1 =
=
=
= 3 = 𝐿
𝐿
𝑊 2
𝑊
2
2
2
𝑊𝐿
𝑊𝐿
𝑊𝐿 2
∫0 (−4 2 𝑥 + 4 𝐿 𝑥) 𝑑𝑥
3
3
3
𝐿
Así que,
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐴 = 0 ⇒ −
𝑊𝐿 2
𝑊𝐿
− 𝑊𝐿 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
3
3
3
𝑊𝐿2 2
𝐿
𝑊𝐿
𝑊𝐿2
(𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
+ 𝑊𝐿 ( ) −
15
3
2
3
15
35
Fuerzas de fijación y momentos de empotramiento en vigas
𝐴1 =
2𝑊𝐿
3
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑊
𝑀𝐴 =
𝑊𝐿2
𝐴
15
𝑅𝐴𝑌 =
𝑊𝐿
𝑀𝐵
𝐵
𝑥̅1 = 𝐿/2
𝐿/2
𝑅𝐵𝑌
3
(d)
En la figura 6-e se muestran las reacciones en los empotramientos 𝐴 y 𝐵 de la viga hiperestática.
𝑊
𝑀𝐴 =
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑊𝐿2
𝐴
15
𝑅𝐴𝑌 =
𝑊𝐿
𝑀𝐵 =
𝐵
𝐿/2
𝐿/2
𝑅𝐵𝑌 =
3
(e)
36
𝑊𝐿
3
𝑊𝐿2
15
7 VIGA BIEMPOTRADA CON CARGA DE ENJUTA
PARABÓLICA
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 7
SOLUCIÓN
Principio de superposición
Se obtendrá una solución directa para la reacción vertical y el momento, ambos del punto 𝐴, a través
del método de la fuerza, por lo que estas se escogen como fuerzas sobrantes. Entonces, el principio
de superposición aplicado a la viga real, figura 7-a, es el que se muestra esquemáticamente en la
figura 7-b.
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑀
𝑚1
+
𝐸𝑅 =
𝐴
𝑥
𝐵
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝐿
+
𝐴
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
37
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad
Con referencia al punto 𝐴 de la figura 7-b, se requiere
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (7 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (7 − 2)
Se analiza la viga liberada con cargas reales.
Se sigue el siguiente procedimiento para determinar tanto el área bajo la curva y como su centroide
de área para una enjuta parabólica.
La ecuación de una parábola es
(𝑥 − ℎ)2 = 2𝑝(𝑦 − 𝑘) − − − ①
Donde
𝑝 = Distancia entre el foco y la recta directriz
ℎ,𝑘 = Coordenadas del vértice de la parábola
Si se considera que el origen está en 𝐴 y que el vértice de la parábola se ubica en ese mismo punto,
entonces
𝑉 = (ℎ, 𝑘) = (0,0)
Sustituyendo ℎ = 𝑘 = 0 en la expresión algebraica ① y despejando 𝑦, tenemos
(𝑥 − 0)2 = 2𝑝 (𝑦 − 0) ⇒ 𝑥 2 = 2𝑝𝑦
𝑦=
Dado que
1
2𝑝
1 2
𝑥 −−− ②
2𝑝
es una constante 𝑐, la ecuación ② pasa a ser
𝑦 = 𝑐𝑥 2 − − − ③
El valor de 𝑐 puede obtenerse despejándolo de la expresión ③.
𝑐=
𝑦
−−−④
𝑥2
En este caso se sabe que en 𝑥 = 𝐿, 𝑦 = 𝑊. Sustituyendo las coordenadas del punto conocido en la
ecuación ④, resulta
𝑐=
𝑊
−−− ⑤
𝐿2
Al reemplazar la ecuación ⑤ en la ecuación ③, se obtiene la ecuación final de la curva en la que
𝑦 representa la intensidad de la carga y 𝑥 la posición.
𝑊
𝑦 = 2 𝑥2
𝐿
38
Fuerzas de fijación y momentos de empotramiento en vigas
Se secciona la viga primaria. Con base en la figura 7-c, se calcula 𝑀.
0≤𝑥≤𝐿
𝐴𝐼 =
1𝑊 3
𝑥
3 𝐿2
𝑊 2
𝑥
𝐿2
𝑦=
𝐴
𝑀1
𝑥
3
𝑥̅𝐼 = 𝑥
4
4
𝑥
(c)
La fuerza resultante de la carga distribuida seccionada es
𝐿2
𝑥
𝑥
𝐴𝐼 = ∫ 𝑑𝐴 = ∫ 𝑦𝑑𝑥 = ∫ (
𝐿1
0
𝑊 2
𝑊 𝑥 2
𝑊 𝑥3
𝑊 𝑥 3 − 03
1𝑊 3
𝑥
)
𝑑𝑥
=
∫
𝑥
𝑑𝑥
=
[
]
=
[
]=
𝑥
2
2
2
2
𝐿
𝐿 0
𝐿 3 0 𝐿
3
3 𝐿2
y su punto de aplicación es
𝑥̅𝐼 =
∫ 𝑥̃ 𝑑𝐴
=
∫ 𝑑𝐴
𝐿2
∫𝐿 𝑥𝑦𝑑𝑥
1
𝐿2
∫𝐿 𝑦𝑑𝑥
1
=
𝑥
𝑊
∫0 𝑥 ( 2 𝑥 2 ) 𝑑𝑥
𝐿
1𝑊 3
𝑥
3 𝐿2
𝑥
𝑊 𝑥4
𝑊 𝑥 4 − 04
𝑊 𝑥 3
1𝑊
∫0 𝑥 𝑑𝑥 𝐿2 [ 4 ]0 𝐿2 [ 4 ] 4 2 𝑥 4 3
2
𝐿
=
=
=
= 𝐿
= 𝑥
1𝑊 3
1𝑊 3
1𝑊 3
1𝑊 3 4
𝑥
𝑥
𝑥
𝑥
3 𝐿2
3 𝐿2
3 𝐿2
3 𝐿2
Se calcula el momento interno 𝑀. La suma de momentos respecto del punto del corte para el
cuerpo libre de la figura 7-c conlleva a
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0 ⇒ −𝑀1 − (
1𝑊 3 1
𝑊𝑥 4
𝑥
)
(
𝑥)
=
0
⇒
𝑀
=
−
1
3 𝐿2
4
12𝐿2
Luego, los momentos internos para las vigas liberadas sometidas a una unidad de las fuerzas
redundantes son
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se calculan las incompatibilidades geométricas.
𝑑1 =
1 𝐿
𝑊𝑥 4
𝑊𝐿4
(𝑥)𝑑𝑥
∫ (−
)
=
−
𝐸𝐼 0
12𝐿2
72𝐸𝐼
39
Fuerzas de fijación y momentos de empotramiento en vigas
𝑑2 =
1 𝐿
𝑊𝑥 4
𝑊𝐿3
∫ (−
) (−1)𝑑𝑥 =
2
𝐸𝐼 0
12𝐿
60𝐸𝐼
Los coeficientes de flexibilidad siguen siendo los mismos que los obtenidos en las vigas previas.
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = 𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
Si se reemplazan estos valores en las ecuaciones (7 − 1) y (7 − 2), se tiene
−
𝑊𝐿4
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (7 − 3)
72𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
𝑊𝐿3
𝐿2
𝐿
−
𝑅 + 𝑀 = 0 − − − (7 − 4)
60𝐸𝐼 2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
Al resolver el sistema, resulta
𝑅𝐴𝑌 =
𝑊𝐿
15
𝑀𝐴 =
𝑊𝐿2
60
Ecuaciones de equilibrio
La fuerza resultante de la carga distribuida tipo enjuta parabólica es
𝐿
𝐴=∫ (
0
𝑊 2
1
𝑥 ) 𝑑𝑥 = 𝑊𝐿
𝐿2
3
y su línea de acción, figura 7-d, se localiza a una distancia
𝐿
𝑊
∫0 𝑥 ( 2 𝑥 2 ) 𝑑𝑥 3
𝐿
𝑥̅ =
= 𝐿 𝑎 𝑙𝑎 𝑑𝑒𝑟𝑒𝑐ℎ𝑎 𝑑𝑒 𝐴
𝐿 𝑊 2
4
∫0 ( 2 𝑥 ) 𝑑𝑥
𝐿
1
𝑊𝐿
3
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑀𝐴 =
𝑊𝐿2
60
𝐵
𝐴
𝐿/4
3𝐿/4
𝑅𝐴𝑌 =
𝑊𝐿
𝑅𝐵𝑌
15
(d)
40
𝑀𝐵
Fuerzas de fijación y momentos de empotramiento en vigas
Las reacciones desconocidas restantes, figura 7-e, se obtienen de
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐴 = 0 ⇒ −
𝑊𝐿 1
4𝑊𝐿
− 𝑊𝐿 + 𝑅𝐵𝑌 = 0 ⇒ 𝑅𝐵𝑌 =
15 3
15
𝑊𝐿2 1
3
4𝑊𝐿
𝑊𝐿2
(𝐿) + 𝑀𝐵 = 0 ⇒ 𝑀𝐵 =
+ 𝑊𝐿 ( 𝐿) −
60
3
4
15
30
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑀𝐴 =
𝑊𝐿2
60
𝑀𝐵 =
𝐵
𝐴
𝐿
𝑅𝐴𝑌 =
𝑊𝐿
𝑅𝐵𝑌 =
15
(e)
41
4𝑊𝐿
15
𝑊𝐿2
30
8 VIGA BIEMPOTRADA CON CARGA
LOGARÍTMICA
𝑦 = 𝑙𝑛(1 + 𝑥 2 )
𝐵
𝐴
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 8
SOLUCIÓN
Principio de superposición, figura 8-b. Se optó por suprimir el empotramiento 𝐴.
𝑀
𝑦 = 𝑙𝑛(1 + 𝑥
2)
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
𝐿/2
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿/2
+
𝐴
1
𝐿
𝑚2
𝐴
𝐵
(𝑑𝑒 𝑀𝐴 )
1
𝑥
𝐿
(b)
Ecuaciones de compatibilidad. Al considerarse la compatibilidad del desplazamiento vertical y la
pendiente en el empotramiento 𝐴, figura 8-b, tenemos
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑌 + 𝑓12 𝑀𝐴 − − − (8 − 1)
0 = 𝑑2 + 𝑓21 𝑅𝐴𝑌 + 𝑓22 𝑀𝐴 − − − (8 − 2)
42
Fuerzas de fijación y momentos de empotramiento en vigas
Se secciona la viga isostática fundamental en un punto arbitrario (intermedio en el segmento 𝐴 − 𝐵)
a una distancia 𝑥 de 𝐴; en la figura 8-c se proporciona un diagrama de cuerpo libre del segmento de
viga con longitud 𝑥, en el que se observan la fuerza resultante 𝐴𝐼 de la carga distribuida logarítmica,
así como su punto de aplicación 𝑥𝐼 , para definir al momento interno 𝑀.
0≤𝑥≤𝐿
𝐴𝐼
𝑦 = 𝑙𝑛(1 + 𝑥 2 )
𝑀1
𝐴
𝑥−𝑥
ത𝐼
𝑥
ത𝐼
𝑥
(c)
Se determina la resultante de la carga variable logarítmica.
𝐿2
𝑥
𝐴𝐼 = ∫ 𝑑𝐴 = ∫ 𝑦𝑑𝑥 = ∫ 𝑙𝑛(1 + 𝑥 2 )𝑑𝑥
𝐿1
0
Se procede a resolver la integral de manera indefinida.
∫ 𝑙𝑛(1 + 𝑥 2 )𝑑𝑥
Sea
𝑢 = 𝑙𝑛 (1 + 𝑥 2 )
𝑑𝑣 = 𝑑𝑥
Entonces
𝑑𝑢 =
2𝑥
𝑑𝑥
1 + 𝑥2
𝑣 = ∫ 𝑑𝑣 = ∫ 𝑑𝑥 = 𝑥
Al integrar por partes tendremos
∫ 𝑢𝑑𝑣 = 𝑢𝑣 − ∫ 𝑣𝑑𝑢
∫ 𝑙𝑛(1 + 𝑥 2 )𝑑𝑥 = (𝑙𝑛(𝑥 2 + 1))(𝑥) − ∫(𝑥) (
La integral que obtuvimos, ∫
𝑥2
1+𝑥 2
2𝑥
𝑥2
) 𝑑𝑥 = 𝑥 ∙ 𝑙𝑛(𝑥 2 + 1) − 2 ∫
𝑑𝑥
2
1+𝑥
1 + 𝑥2
𝑑𝑥, es más sencilla que la original pero todavía no es obvia, así
que efectuamos lo siguiente para resolverla:
43
Fuerzas de fijación y momentos de empotramiento en vigas
∫
𝑥2
𝑑𝑥 = ∫ 𝑥 2 (1 + 𝑥 2 )−1 𝑑𝑥
1 + 𝑥2
Esta última integral es del tipo:
∫(𝑥 𝑚 )(𝑎 + 𝑏𝑥 + 𝑐𝑥 2 )𝑛 𝑑𝑥 =
−
𝑥 𝑚−1 (𝑎 + 𝑏𝑥 + 𝑐𝑥 2 )𝑛+1
𝑏(𝑛 + 𝑚)
−
∫ 𝑥 𝑚−1 (𝑎 + 𝑏𝑥 + 𝑐𝑥 2 )𝑛 𝑑𝑥
𝑐(2𝑛 + 𝑚 + 1)
𝑐(2𝑛 + 𝑚 + 1)
𝑎(𝑚 − 1)
∫ 𝑥 𝑚−2 (𝑎 + 𝑏𝑥 + 𝑐𝑥 2 )𝑛 𝑑𝑥
𝑐(2𝑛 + 𝑚 + 1)
En este caso, 𝑚 = 2, 𝑎 = 1, 𝑏 = 0, 𝑐 = 1 y 𝑛 = −1.
Sustituyendo y simplificando, se tiene
∫(𝑥 2 )(1 + 𝑥 2 )−1 𝑑𝑥 =
−
La integral obtenida, ∫
𝑥 2−1 (1 + 𝑥 2 )−1+1
(0)(−1 + 2)
−
∫ 𝑥 2−1 (1 + 𝑥 2 )−1 𝑑𝑥
1(2(−1) + 2 + 1) 1(2(−1) + 2 + 1)
1(2 − 1)
𝑑𝑥
∫ 𝑥 2−2 (1 + 𝑥 2 )−1 𝑑𝑥 = 𝑥 − ∫
1(2(−1) + 2 + 1)
1 + 𝑥2
𝑑𝑥
1+𝑥 2
, ya es de solución obvia, pues directamente se sabe que
∫
𝑑𝑥
= 𝑎𝑟𝑐 tan(𝑥)
1 + 𝑥2
Por lo tanto,
∫
𝑥2
𝑑𝑥 = ∫ 𝑥 2 (1 + 𝑥 2 )−1 𝑑𝑥 = 𝑥 − 𝑎𝑟𝑐 tan(𝑥)
1 + 𝑥2
En consecuencia,
∫ 𝑙𝑛(1 + 𝑥 2 )𝑑𝑥 = 𝑥 ∙ 𝑙𝑛(1 + 𝑥 2 ) + 2(𝑎𝑟𝑐 tan(𝑥) − 𝑥)
La integral definida resulta ser
𝑥
∫ 𝑙𝑛(1 + 𝑥 2 )𝑑𝑥 = [𝑥 ∙ 𝑙𝑛(1 + 𝑥 2 ) + 2(𝑎𝑟𝑐 tan(𝑥) − 𝑥)]0𝑥
0
= [𝑥 ∙ 𝑙𝑛(1 + 𝑥 2 ) + 2(𝑎𝑟𝑐 tan(𝑥) − 𝑥)] − [(0)𝑙𝑛(1 + 02 ) + 2(𝑎𝑟𝑐 tan(0) − 0)]
= 𝑥 ∙ 𝑙𝑛(1 + 𝑥 2 ) + 2(𝑎𝑟𝑐 tan(𝑥) − 𝑥)
Se determina la ubicación de la carga concentrada previa.
𝐿2
(𝑥 2 + 1)𝑙𝑛(𝑥 2 + 1) 𝑥 2
𝑥
2
−
∫ 𝑥̃ 𝑑𝐴 ∫𝐿1 𝑥𝑦 𝑑𝑥 ∫0 𝑥(𝑙𝑛(1 + 𝑥 ))𝑑𝑥
2
2
𝑥̅𝐼 =
= 𝐿2
=
=
𝑥
𝑥 ∙ 𝑙𝑛(𝑥 2 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝑥) − 𝑥)
∫ 𝑑𝐴
∫0 𝑙𝑛(1 + 𝑥 2 )𝑑𝑥
∫ 𝑦 𝑑𝑥
𝐿1
El denominador de la expresión anterior, ya había sido resuelto. A continuación se detalla el
procedimiento para esclarecer la forma en que se obtuvo el valor del numerador.
44
Fuerzas de fijación y momentos de empotramiento en vigas
La integral en forma indefinida es
∫ 𝑥(𝑙𝑛(1 + 𝑥 2 ))𝑑𝑥
1
Esta se resuelve como sigue. Sea 𝑧 = 1 + 𝑥 2 . Entonces 𝑑𝑧 = 2𝑥𝑑𝑥, y por tanto 𝑥𝑑𝑥 = 𝑑𝑧. Así, la
2
regla de sustitución da
1
∫ 𝑥(𝑙𝑛(1 + 𝑥 2 ))𝑑𝑥 = ∫ 𝑙𝑛(𝑧)𝑑𝑧
2
La integral que obtuvimos, ∫ 𝑙𝑛(𝑧)𝑑𝑧, es más sencilla que la original pero todavía no es obvia, así
que aplicamos la regla del producto para derivación para resolverla.
Sea
𝑢 = 𝑙𝑛(𝑧)
𝑑𝑣 = 𝑑𝑧
Entonces
1
𝑑𝑢 = 𝑑𝑧
𝑧
𝑣=𝑧
Al integrar por partes tendremos ∫ 𝑢 𝑑𝑣 = 𝑢𝑣 − ∫ 𝑣 𝑑𝑢, es decir,
1
∫ 𝑙𝑛(𝑧)𝑑𝑧 = (𝑙𝑛(𝑧))(𝑧) − ∫ 𝑧 ( 𝑑𝑧) = 𝑧𝑙𝑛(𝑧) − ∫ 𝑑𝑧 = 𝑧 ∙ 𝑙𝑛(𝑧) − 𝑧 = 𝑧[𝑙𝑛(𝑧) − 1]
𝑧
Por lo tanto,
1
∫ 𝑥(𝑙𝑛(1 + 𝑥 2 ))𝑑𝑥 = 𝑧[𝑙𝑛(𝑧) − 1]
2
Sustituyendo 𝑧 = 1 + 𝑥 2 en la ecuación anterior se obtiene
1
∫ 𝑥(𝑙𝑛(1 + 𝑥 2 ))𝑑𝑥 = (1 + 𝑥 2 )[𝑙𝑛(1 + 𝑥 2 ) − 1]
2
Así, tenemos
𝑥
𝑥
1
∫ 𝑥(𝑙𝑛(1 + 𝑥 2 ))𝑑𝑥 = [ (1 + 𝑥 2 )[𝑙𝑛(1 + 𝑥 2 ) − 1]]
2
0
0
(𝑥 2 + 1)𝑙𝑛(𝑥 2 + 1) 𝑥 2
1
1
= [ (1 + 𝑥 2 )[𝑙𝑛(1 + 𝑥 2 ) − 1]] − [ (1 + 02 )[𝑙𝑛(1 + 02 ) − 1]] =
−
2
2
2
2
Por consiguiente, la función del momento flector 𝑀 es
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
45
Fuerzas de fijación y momentos de empotramiento en vigas
(𝑥 2 + 1)𝑙𝑛(𝑥 2 + 1) 𝑥 2
−
2
2
−𝑀1 − [𝑥 ∙ 𝑙𝑛(𝑥 2 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝑥) − 𝑥)] [𝑥 −
]=0
𝑥 ∙ 𝑙𝑛(𝑥 2 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝑥) − 𝑥)
𝑀1 = −
𝑥 2 ∙ 𝑙𝑛(𝑥 2 + 1) 𝑙𝑛(𝑥 2 + 1)
3
+
− 2𝑥 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝑥) + 𝑥 2
2
2
2
Los momentos internos de las dos vigas isostáticas restantes de la figura 8-b, son
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se calculan los desplazamientos necesarios empleando el método del trabajo virtual.
𝑑1 =
=
1 𝐿
𝑥 2 ∙ 𝑙𝑛(𝑥 2 + 1) 𝑙𝑛(𝑥 2 + 1)
3
∫ (−
+
− 2𝑥 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝑥) + 𝑥 2 ) (𝑥)𝑑𝑥
𝐸𝐼 0
2
2
2
1
𝐿4 ∙ 𝑙𝑛(𝐿2 + 1) 𝐿2 ∙ 𝑙𝑛(𝐿2 + 1) 𝑙𝑛(𝐿2 + 1) 2𝐿3 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) 7𝐿4 𝐿2
[−
+
+
−
+
− ]
𝐸𝐼
8
4
24
3
16 24
𝑑2 =
=
1 𝐿
𝑥 2 ∙ 𝑙𝑛(𝑥 2 + 1) 𝑙𝑛(𝑥 2 + 1)
3
∫ (−
+
− 2𝑥 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝑥) + 𝑥 2 ) (−1)𝑑𝑥
𝐸𝐼 0
2
2
2
1 𝐿3 ∙ 𝑙𝑛(𝐿2 + 1) 𝐿 ∙ 𝑙𝑛(𝐿2 + 1)
𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) 11𝐿3 𝐿
[
−
+ 𝐿2 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) −
−
+ ]
𝐸𝐼
6
2
3
18
3
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = −
𝐿2
2𝐸𝐼
𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
El sistema de ecuaciones de flexibilidades resulta en
1
𝐿4 ∙ 𝑙𝑛(𝐿2 + 1) 𝐿2 ∙ 𝑙𝑛(𝐿2 + 1) 𝑙𝑛(𝐿2 + 1) 2𝐿3 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) 7𝐿4 𝐿2
𝐿3
𝐿2
[−
+
+
−
+
− ]+
𝑅𝐴𝑌 −
𝑀 − − − (8 − 3)
𝐸𝐼
8
4
24
3
16 24
3𝐸𝐼
2𝐸𝐼 𝐴
1 𝐿3 ∙ 𝑙𝑛(𝐿2 + 1) 𝐿 ∙ 𝑙𝑛(𝐿2 + 1)
𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) 11𝐿3 𝐿
𝐿2
𝐿
[
−
+ 𝐿2 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) −
−
+ ]−
𝑅 + 𝑀 = 0 − − − (8 − 4)
𝐸𝐼
6
2
3
18
3
2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
Por lo tanto,
𝑅𝐴𝑌 =
6(𝐿4 − 1)𝑙𝑛(𝐿2 + 1) + 𝐿(24(𝐿2 + 1)𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿(19𝐿2 + 18))
=𝐴
12𝐿3
𝑀𝐴 =
6(𝐿4 + 6𝐿2 − 3)𝑙𝑛(𝐿2 + 1) + 𝐿(96𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 13𝐿(𝐿2 + 6))
=𝐵
72𝐿2
Ecuaciones de equilibrio. Por último, se calculan las reacciones en el empotramiento 𝐵 aplicando
las ecuaciones de equilibrio en el diagrama de la figura 8-d.
46
Fuerzas de fijación y momentos de empotramiento en vigas
𝐴1
𝑦 = 𝑙𝑛(1 + 𝑥
𝑀𝐴 = 𝐵
2)
𝐴
𝑀𝐵 = 𝐷
𝐵
𝑥̅1
𝑅𝐴𝑌 = 𝐴
𝐿
𝑅𝐵𝑌 = 𝐶
(d)
La carga concentrada equivalente de la carga distribuida con intensidad logarítmica es
𝐿
𝐴1 = ∫ 𝐿𝑛(1 + 𝑥 2 )𝑑𝑥 = 𝐿 ∙ 𝑙𝑛(𝐿2 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿)
0
y su línea de acción se localiza a una distancia de
(𝐿2 + 1)𝑙𝑛(𝐿2 + 1) 𝐿2
−
2
2
𝑥̅1 = 𝐿
=
𝑎 𝑙𝑎 𝑑𝑒𝑟𝑒𝑐ℎ𝑎 𝑑𝑒 𝐴
2
2
𝐿 ∙ 𝑙𝑛(𝐿 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿)
∫0 (𝑙𝑛(1 + 𝑥 ))𝑑𝑥
𝐿
∫0 𝑥(𝑙𝑛(1 + 𝑥 2 ))𝑑𝑥
El equilibrio estático del cuerpo libre estriba en
+↑ ∑ 𝐹𝑌 = 0 ⇒
6(𝐿4 − 1)𝑙𝑛(𝐿2 + 1) + 𝐿(24(𝐿2 + 1)𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿(19𝐿2 + 18))
12𝐿3
−[𝐿 ∙ 𝑙𝑛(𝐿2 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿)] + 𝑅𝐵𝑌 = 0
∴ 𝑅𝐵𝑌 =
6(𝐿4 + 1) ∗ 𝐿𝑛(𝐿2 + 1) − 𝐿(24𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) + 𝐿(5𝐿2 − 18))
=𝐶
12𝐿3
6(𝐿4 + 6𝐿2 − 3)𝑙𝑛(𝐿2 + 1) + 𝐿(96𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 13𝐿(𝐿2 + 6))
+ ∑ 𝑀𝐴 = 0 ⇒ − [
]
72𝐿2
(𝐿2 + 1)𝑙𝑛(𝐿2 + 1) 𝐿2
−
2
2
+[𝐿 ∙ 𝑙𝑛(𝐿2 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿)] [
]
2
𝐿 ∙ 𝑙𝑛(𝐿 + 1) + 2(𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) − 𝐿)
6(𝐿4 + 1) ∗ 𝐿𝑛(𝐿2 + 1) − 𝐿(24𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) + 𝐿(5𝐿2 − 18))
−[
] (𝐿) + 𝑀𝐵 = 0
12𝐿3
∴ 𝑀𝐵 =
6(𝐿4 + 3) ∗ 𝐿𝑛(𝐿2 + 1) − 𝐿(48𝑎𝑟𝑐𝑡𝑎𝑛(𝐿) + 𝐿(7𝐿2 − 30))
=𝐷
72𝐿2
47
9 VIGA BIEMPOTRADA CON MOMENTO
CONCENTRADO APLICADO AL CENTRO DEL
CLARO
𝑀
𝐴
𝐵
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 9
SOLUCIÓN
Principio de superposición, figura 9-b.
𝑀
𝐸𝑅 =
𝐴
𝑚1
𝑀
𝐵
𝑥
𝐿/2
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝐿/2
+
𝐴
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
Ecuaciones de compatibilidad.
0 ≤ 𝑥 ≤ 𝐿⁄2
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
𝑀1 = 0
(c)
48
Fuerzas de fijación y momentos de empotramiento en vigas
𝐿⁄ ≤ 𝑥 ≤ 𝐿
2
𝑀
𝑀2
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥 − 𝐿/2
𝐿/2
−𝑀2 − 𝑀 = 0 ⇒ 𝑀2 = 𝑀
𝑥
(d)
Se toman momentos alrededor del punto del corte en cada seccionamiento para deducir las
funciones de los momentos 𝑀, figuras 9-c y 9-d.
Se retoman los siguientes momentos internos
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
0≤𝑥≤𝐿
𝑀1 = −1
0≤𝑥≤𝐿
Se requiere de
𝑑1 =
𝑑2 =
𝑓11 =
𝐿⁄
2
1
[∫
𝐸𝐼 0
𝐿
(0)(𝑥)𝑑𝑥 + ∫ (𝑀)(𝑥)𝑑𝑥 ] =
𝐿⁄
2
𝐿⁄
2
1
[∫
𝐸𝐼 0
𝐿3
3𝐸𝐼
3𝑀𝐿2
8𝐸𝐼
𝐿
(0)(−1)𝑑𝑥 + ∫ (𝑀)(−1)𝑑𝑥 ] = −
𝐿⁄
2
𝑓21 = −
𝐿2
2𝐸𝐼
𝑓12 = −
𝐿2
2𝐸𝐼
𝑀𝐿
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
Las ecuaciones de compatibilidad necesarias son
3𝑀𝐿2
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (9 − 1)
8𝐸𝐼
3𝐸𝐼
2𝐸𝐼 𝐴
−
𝑀𝐿
𝐿2
𝐿
−
𝑅 + 𝑀 = 0 − − − (9 − 2)
2𝐸𝐼 2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
La solución del sistema de ecuaciones (9 − 1) y (9 − 2) corresponde a
𝑅𝐴𝑌 = −
3𝑀
3𝑀
⇒∴ 𝑅𝐴𝑌 =
2𝐿
2𝐿
𝑀𝐴 = −
49
𝑀
𝑀
∴ 𝑀𝐴 =
4
4
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio, figura 9-e. Las reacciones restantes son
+↑ ∑ 𝐹𝑌 = 0 ⇒ −
+ ∑ 𝑀𝐴 = 0 ⇒
3𝑀
3𝑀
+ 𝑅𝐵𝑌 = 0 ⇒ 𝑅𝐵𝑌 =
2𝐿
2𝐿
𝑀
3𝑀
𝑀
+ 𝑀 − ( ) (𝐿) + 𝑀𝐵 = 0 ⇒ 𝑀𝐵 =
4
2𝐿
4
𝑀
𝑀𝐴 =
𝑀
𝐴
4
𝑅𝐴𝑌 =
𝑀𝐵
𝐵
𝐿/2
3𝑀
2𝐿
𝐿/2
𝑅𝐵𝑌
(e)
Las reacciones en los empotramientos 𝐴 y 𝐵 se muestran en la figura 9-f.
𝑀
𝑀𝐴 =
𝑀
𝐴
4
𝑅𝐴𝑌
3𝑀
=
2𝐿
𝑀𝐵 =
𝐵
𝐿/2
𝐿/2
𝑅𝐵𝑌 =
(f)
50
3𝑀
2𝐿
𝑀
4
10 VIGA BIEMPOTRADA CON CARGA PUNTUAL
APLICADA EN UN PUNTO ARBITRARIO DEL
CLARO
𝑃
𝐴
𝐵
𝑎
𝑏
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 10
SOLUCIÓN
Principio de superposición, figura 10-b.
𝑃
𝑀
𝐸𝑅 =
𝐴
𝑚1
𝐵
𝑥
𝑎
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝑏
+
𝐴
𝐿 =𝑎+𝑏
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿 =𝑎+𝑏
(b)
Ecuaciones de compatibilidad. Se deducen los momentos internos 𝑀 con base en las figuras
10-c y 10-d.
51
Fuerzas de fijación y momentos de empotramiento en vigas
0≤𝑥≤𝑎
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0 ⇒ 𝑀1 = 0
𝑥
(c)
𝑃
𝑎 ≤𝑥 ≤𝑎+𝑏
𝑀2
𝐴
𝑎
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥−𝑎
−𝑀2 − 𝑃(𝑥 − 𝑎) = 0 ⇒ 𝑀2 = −𝑃𝑥 + 𝑃𝑎
𝑥
(d)
Los momentos internos 𝑚1 y 𝑚2 , corresponden a
𝑚1 ⟹
𝑚2 ⟹
𝑀1 = 𝑥
𝑀1 = −1
0≤𝑥 ≤𝑎+𝑏
0≤𝑥 ≤𝑎+𝑏
Se calculan las incompatibilidades geométricas.
𝑎+𝑏
𝑎
𝑎+𝑏
𝑎+𝑏
1
1
1 −𝑃𝑥 3 𝑃𝑎𝑥 2
𝑑1 = [∫ (0)(𝑥)𝑑𝑥 + ∫ (−𝑃𝑥 + 𝑃𝑎)(𝑥)𝑑𝑥] = [∫ (−𝑃𝑥 2 + 𝑃𝑎𝑥)𝑑𝑥 ] = [
+
]
𝐸𝐼 0
𝐸𝐼 𝑎
𝐸𝐼
3
2 𝑎
𝑎
=
=
=
1 −𝑃(𝑎 + 𝑏)3 𝑃𝑎(𝑎 + 𝑏)2
−𝑃(𝑎)3 𝑃𝑎(𝑎)2
{(
+
)−(
+
)}
𝐸𝐼
3
2
3
2
1
𝑃
𝑃
𝑃
{(− (𝑎3 + 3𝑎𝑏 2 + 3𝑎2 𝑏 + 𝑏 3 ) + 𝑎(𝑎2 + 2𝑎𝑏 + 𝑏 2 )) − ( 𝑎3 )}
𝐸𝐼
3
2
6
1
𝑃
𝑃
𝑃
𝑃
𝑃
𝑃𝑎𝑏 2 𝑃𝑏 3
(− 𝑎3 − 𝑃𝑎𝑏 2 − 𝑃𝑎2 𝑏 − 𝑏 3 + 𝑎3 + 𝑃𝑎2 𝑏 + 𝑎𝑏 2 − 𝑎3 ) = −
−
𝐸𝐼
3
3
2
2
6
2𝐸𝐼
3𝐸𝐼
𝑑2 =
𝑎
𝑎+𝑏
𝑎+𝑏
1
1
[∫ (0)(−1)𝑑𝑥 + ∫ (−𝑃𝑥 + 𝑃𝑎)(−1)𝑑𝑥 ] = [∫ (𝑃𝑥 − 𝑃𝑎)𝑑𝑥]
𝐸𝐼 0
𝐸𝐼 𝑎
𝑎
𝑎+𝑏
1 𝑃𝑥 2
= [
− 𝑃𝑎𝑥]
𝐸𝐼 2
𝑎
=
1 𝑃(𝑎 + 𝑏)2
𝑃(𝑎)2
{(
− 𝑃𝑎(𝑎 + 𝑏)) − (
− 𝑃𝑎(𝑎))}
𝐸𝐼
2
2
52
Fuerzas de fijación y momentos de empotramiento en vigas
=
1 𝑃 2
𝑃
1 𝑃
𝑃
𝑃
𝑃𝑏 2
{( (𝑎 + 2𝑎𝑏 + 𝑏 2 ) − (𝑃𝑎2 + 𝑃𝑎𝑏)) − (− 𝑎2 )} = ( 𝑎2 + 𝑃𝑎𝑏 + 𝑏 2 − 𝑃𝑎2 − 𝑃𝑎𝑏 + 𝑎2 ) =
𝐸𝐼 2
2
𝐸𝐼 2
2
2
2𝐸𝐼
Se determinan los coeficientes de flexibilidad.
𝑎+𝑏
𝑓11 =
1 𝑎+𝑏
1 𝑎+𝑏
1 𝑥3
∫ (𝑥)(𝑥)𝑑𝑥 = ∫ 𝑥 2 𝑑𝑥 = [ ]
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 3 0
=
(𝑎 + 𝑏)3
3𝐸𝐼
𝑎+𝑏
𝑓21 =
1 𝑎+𝑏
1 𝑎+𝑏
1 𝑥2
∫ (𝑥)(−1)𝑑𝑥 = ∫ −𝑥𝑑𝑥 = [ ]
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 2 0
𝑓12 = 𝑓21 = −
𝑓22 =
=−
(𝑎 + 𝑏)2
2𝐸𝐼
(𝑎 + 𝑏)2
2𝐸𝐼
1 𝑎+𝑏
1 𝑎+𝑏
1
𝑎+𝑏
∫ (−1)(−1)𝑑𝑥 = ∫ 𝑑𝑥 = [𝑥]𝑎+𝑏
=
0
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼
𝐸𝐼
Las ecuaciones de compatibilidad necesarias son
−(
(𝑎 + 𝑏)3
(𝑎 + 𝑏)2
𝑃𝑎𝑏 2 𝑃𝑏 3
+
)+
𝑅𝐴𝑌 −
𝑀𝐴 = 0 − − − (10 − 1)
2𝐸𝐼
3𝐸𝐼
3𝐸𝐼
2𝐸𝐼
𝑃𝑏 2 (𝑎 + 𝑏)2
𝑎+𝑏
−
𝑅𝐴𝑌 +
𝑀𝐴 = 0 − − − (10 − 2)
2𝐸𝐼
2𝐸𝐼
𝐸𝐼
Al resolver el sistema de ecuaciones (10 − 1) (10 − 2), se tienen los siguientes valores para las
fuerzas redundantes
𝑅𝐴𝑌 =
(3𝑎 + 𝑏)𝑏 2 𝑃 (3𝑎 + 𝑏)𝑏 2 𝑃 𝑃𝑏 2
𝑃𝑏 2 3𝐿 − 2𝑏
(3(𝐿
=
=
−
𝑏)
+
𝑏)
=
(
)
(𝑎 + 𝑏)3
(𝐿)3
𝐿3
𝐿2
𝐿
𝑃𝑏 2
𝑏
= [ 2 (3 − 2 )]
𝐿
𝐿
𝑀𝐴 =
𝑎𝑏 2 𝑃
𝑃𝑎𝑏 2
𝑃𝑎𝑏 2
=
=
𝑎2 + 2𝑎𝑏 + 𝑏 2 (𝑎 + 𝑏)2
𝐿2
Ecuaciones de equilibrio, figura 10-e. Por lo tanto,
+↑ ∑ 𝐹𝑌 = 0 ⇒
𝑅𝐵𝑌 =
(3𝑎 + 𝑏)𝑏 2 𝑃
− 𝑃 + 𝑅𝐵𝑌 = 0
(𝑎 + 𝑏)3
𝑎2 (𝑎 + 3𝑏)𝑃 𝑃𝑎2 (𝑎 + 3𝑏) 𝑃𝑎2
𝑃𝑎2
=
= 3 (𝑎 + 3(𝐿 − 𝑎)) = 3 (3𝐿 − 2𝑎)
3
3
(𝑎 + 𝑏)
𝐿
𝐿
𝐿
53
Fuerzas de fijación y momentos de empotramiento en vigas
=
𝑃𝑎2 3𝐿 − 2𝑎
𝑃𝑎2
𝑎
(
) = [ 2 (3 − 2 )]
2
𝐿
𝐿
𝐿
𝐿
𝑃
𝑀𝐴 =
𝑅𝐴𝑌 = [
𝑃𝑎𝑏 2
𝐿2
𝑃𝑏2
𝐿2
𝐴
𝑀𝐵
𝐵
𝑎
𝑏
𝑏
(3 − 2 )]
𝑅𝐵𝑌
𝐿
𝐿
(e)
+ ∑ 𝑀𝐴 = 0 ⇒ −
𝑃𝑎𝑏 2
𝑃𝑎2 (𝑎 + 3𝑏)
(𝑎 + 𝑏) + 𝑀𝐵 = 0
+
𝑃𝑎
−
(𝑎 + 𝑏)2
(𝑎 + 𝑏)3
𝑀𝐵 =
𝑃𝑎2 𝑏
𝑃𝑎2 𝑏
= 2
2
(𝑎 + 𝑏)
𝐿
Las fuerzas de fijación y los momentos de empotramiento perfecto se muestran en la figura 10-f.
𝑃
𝑀𝐴 =
𝑃𝑎𝑏2
𝐴
𝐿2
𝐵
𝑎
𝑅𝐴𝑌 = [
𝑃𝑏2
𝐿
2
𝑏
𝑏
(3 − 2 )]
𝐿
𝑀𝐵 =
𝑅𝐵𝑌 = [
𝐿
(f)
54
𝑃𝑎2
𝐿
2
𝑃𝑎2 𝑏
𝐿2
𝑎
(3 − 2 )]
𝐿
11 VIGA BIEMPOTRADA CON MOMENTO
APLICADO EN UN PUNTO ARBITRARIO DEL
CLARO
𝑀
𝐴
𝐵
𝑎
𝑏
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 11
SOLUCIÓN
Principio de superposición, figura 11-b.
𝑀
𝐸𝑅 =
𝐴
𝑚1
𝑀
𝐵
𝑥
+
𝐴
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝑏
𝑎
+
𝐵
𝑥
𝐿 =𝑎+𝑏
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿 =𝑎+𝑏
(b)
55
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad. Se calculan los momentos flexionantes 𝑀 a partir de las figuras
11-c y 11-d.
0≤𝑥≤𝑎
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
𝑀1 = 0
(c)
𝑀
𝑎 ≤𝑥 ≤𝑎+𝑏
𝑀2
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑎
𝑥−𝑎
−𝑀2 + 𝑀 = 0 ⇒ 𝑀2 = 𝑀
𝑥
(d)
Se tienen siguientes momentos internos 𝑚1 y 𝑚2
𝑚1 ⟹
𝑀1 = 𝑥
0≤𝑥 ≤𝑎+𝑏
𝑚2 ⟹
𝑀1 = −1
0≤𝑥 ≤𝑎+𝑏
El desplazamiento vertical y la pendiente en 𝐴 de la estructuras primaria son, respectivamente
𝑑1 =
𝑎
𝑎+𝑏
(2𝑎 + 𝑏)(𝑏𝑀)
1
[∫ (0)(𝑥)𝑑𝑥 + ∫ (𝑀)(𝑥)𝑑𝑥 ] =
𝐸𝐼 0
2𝐸𝐼
𝑎
𝑑2 =
𝑎
𝑎+𝑏
1
𝑏𝑀
[∫ (0)(−1)𝑑𝑥 + ∫ (𝑀)(−1)𝑑𝑥 ] = −
𝐸𝐼 0
2𝐸𝐼
𝑎
Por otra parte, los coeficientes de flexibilidad corresponden a
𝑓11 =
(𝑎 + 𝑏)3
3𝐸𝐼
𝑓21 = −
(𝑎 + 𝑏)2
2𝐸𝐼
𝑓12 = −
(𝑎 + 𝑏)2
2𝐸𝐼
𝑓22 =
𝑎+𝑏
𝐸𝐼
Se plantea el sistema de ecuaciones de compatibilidad geométrica y se calculan las reacciones
redundantes.
(2𝑎 + 𝑏)(𝑏𝑀) (𝑎 + 𝑏)3
(𝑎 + 𝑏)2
+
𝑅𝐴𝑌 −
𝑀𝐴 = 0 − − − (11 − 1)
2𝐸𝐼
3𝐸𝐼
2𝐸𝐼
56
Fuerzas de fijación y momentos de empotramiento en vigas
−
𝑏𝑀 (𝑎 + 𝑏)2
𝑎+𝑏
−
𝑅𝐴𝑌 +
𝑀𝐴 = 0 − − − (11 − 2)
2𝐸𝐼
2𝐸𝐼
𝐸𝐼
Si se resuelve el sistema simultáneo de ecuaciones lineales (11 − 1) y (11 − 2) da
𝑅𝐴𝑌 = −
𝑀𝐴 =
6𝑀𝑎𝑏
6𝑀𝑎𝑏
6𝑀𝑎𝑏
= − 3 ⇒∴ 𝑅𝐴𝑌 =
(𝑎 + 𝑏)3
𝐿
𝐿3
−(2𝑎 − 𝑏)(𝑏𝑀) −(2𝑎 − 𝑏)(𝑏𝑀) 𝑀𝑏 𝑏 − 2𝑎
=
=
(
)
(𝑎 + 𝑏)2
𝑎2 + 2𝑎𝑏 + 𝑏 2
𝐿
𝐿
𝑀𝑏 𝑏 − 2(𝐿 − 𝑏)
𝑀𝑏 3𝑏
(
)=
( − 2)
𝐿
𝐿
𝐿 𝐿
Ecuaciones de equilibrio, figura 11-e.
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐵𝑌 −
6𝑀𝑎𝑏
6𝑀𝑎𝑏
= 0 ⇒ 𝑅𝐵𝑌 =
3
𝐿
𝐿3
+ ∑ 𝑀𝐴 = 0
−(
𝑀𝐵 =
−(2𝑎 − 𝑏)(𝑏𝑀)
6𝑀𝑎𝑏
(𝑎 + 𝑏) + 𝑀𝐵 = 0
)+𝑀−
2
2
(𝑎 + 𝑏)3
𝑎 + 2𝑎𝑏 + 𝑏
−𝑎(𝑎 − 2𝑏)𝑀 𝑀𝑎 −𝑎 + 2𝑏
𝑀𝑎 −𝑎 + 2(𝐿 − 𝑎)
=
(
)=
(
)
2
(𝑎 + 𝑏)
𝐿
𝐿
𝐿
𝐿
=
𝑀𝑎 2𝐿 − 3𝑎
𝑀𝑎
3𝑎
(
)=
(2 − )
𝐿
𝐿
𝐿
𝐿
𝑀
𝑀𝐴 =
𝑀𝑏 3𝑏
𝐿
(
𝐿
− 2)
𝐴
𝐵
𝑎
𝑅𝐴𝑌 =
𝑀𝐵 =
𝑏
6𝑀𝑎𝑏
𝐿
𝐿3
(e)
57
𝑅𝐵𝑌 =
6𝑀𝑎𝑏
𝐿3
𝑀𝑎
𝐿
(2 −
3𝑎
𝐿
)
12 VIGA BIEMPOTRADA CON CARGA INCLINADA
EN UN PUNTO ARBITRARIO DEL CLARO
𝑃
𝛼
𝐴
𝐵
𝑎
𝑏
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 12
SOLUCIÓN
Principio de superposición
En primera instancia, resolvemos la fuerza 𝑃 en sus componentes rectangulares horizontal y vertical,
figura 12-b1. Luego, hacemos uso de un primer principio de superposición, figura 12-b, en el que la
viga resultante sería igual a la suma de las causas y los efectos de las vigas que se muestran en las
figuras 12-b2 y 12-b3.
𝑃 sin 𝛼
𝑃 sin 𝛼
𝑃 cos 𝛼
𝐴
𝐵
=
𝐴
𝐵
𝑏
𝑎
𝑎
𝑏
(b1)
+
(b2)
(b)
𝑃 cos 𝛼
𝐵
𝐴
𝑎
𝑏
(b3)
58
Fuerzas de fijación y momentos de empotramiento en vigas
La viga que se observa en la figura 12-b2 corresponde a un tipo de viga como la mostrada en la
figura 10-a, en la que 𝑃 = 𝑃 sin 𝛼. En consecuencia,
𝑃 sin 𝛼
𝑀𝐴 =
(𝑃 sin 𝛼)𝑎𝑏2
𝐴
𝐿2
𝐵
𝑎
𝑅𝐴𝑌 = ቈ
(𝑃 sin 𝛼)𝑏2
𝐿
2
𝑀𝐵 =
(𝑃 sin 𝛼)𝑎2 𝑏
𝐿2
𝑏
𝑏
൬3 − 2 ൰
𝑅𝐵𝑌 = ቈ
𝐿
𝐿
(𝑃 sin 𝛼)𝑎2
𝐿
2
𝑎
ቀ3 − 2 ቁ
𝐿
(c)
A continuación se resuelve la viga representada en la figura 12-b3. Debido a que tal estructura no
soporta cargas verticales, directamente se infiere, a partir de la aplicación de las ecuaciones de
equilibrio para momentos y fuerzas verticales, que 𝑅𝐴𝑌 , 𝑀𝐴 , 𝑅𝐵𝑌 y 𝑀𝐵 son nulas. Dado que aún se
dispone de la ecuación de equilibrio para fuerzas horizontales y se tienen dos incógnitas reactivas,
𝑅𝐴𝑋 y 𝑅𝐵𝑋 , esta viga es estáticamente indeterminada en grado uno. Se elige como fuerza redundante
a 𝑅𝐴𝑋 .
El principio de superposición para la viga 12-b3 se muestra en la figura 12-d.
𝑁
𝑃 cos 𝛼
𝑃 cos 𝛼
𝐴
=
𝐵
𝐵
𝐴
𝑥
𝑏
𝑎
𝑏
𝑎
𝐸𝑅´
𝐸𝑃´
𝑛
(𝑑𝑒 𝑅𝐴𝑌 )
+
1
𝐵
𝐴
𝑥
𝑎
𝑏
𝐸𝑅𝑑´
(d)
Ecuación de compatibilidad. La ecuación de flexibilidad para el desplazamiento horizontal en 𝐴 es
∆𝐻𝐴𝐸𝑅´ = ∆𝐻𝐴𝐸𝑃´ + ∆𝐻𝐴𝐸𝑅𝑑´ − − − (12 − 1)
59
Fuerzas de fijación y momentos de empotramiento en vigas
Expresando la ecuación (12 − 1) en términos de la incógnita, se tiene
0 = 𝑑1 + 𝑓11 𝑅𝐴𝑋 = 0 − − − (12 − 2)
Se determinan las fuerzas normales 𝑁 con base en las figuras 12-e y 12-f.
0≤𝑥≤𝑎
𝑁1
𝐴
+→ ∑ 𝐹𝑋 = 0
𝑥
𝑁1 = 0
(e)
𝑃 cos 𝛼
𝑎 ≤𝑥 ≤𝑎+𝑏
𝑁2
𝐴
𝑎
+→ ∑ 𝐹𝑋 = 0
𝑥−𝑎
𝑁2 − 𝑃 cos 𝛼 = 0 ⇒ 𝑁2 = 𝑃 cos 𝛼
𝑥
(f)
Se deduce la fuerza normal 𝑛 a partir de la figura 12-g.
0≤𝑥 ≤𝑎+𝑏
1
𝑁1
𝐴
+→ ∑ 𝐹𝑋 = 0
𝑥
𝑁1 + 1 = 0 ⇒ 𝑁1 = −1
(g)
Al emplear la ecuación para determinar la deformación axial, se tiene que la incompatibilidad
geométrica es
𝐿2
𝑑1 = ∫
𝐿1
𝑎 (0)(−1)
𝑎+𝑏 (𝑃
𝑁𝑛
cos 𝛼)(−1)
𝑃 cos 𝛼 𝑎+𝑏
[𝑥]𝑎
𝑑𝑥 = ∫
𝑑𝑥 + ∫
𝑑𝑥 = −
𝐴𝐸
𝐴𝐸
𝐴𝐸
𝐴𝐸
0
𝑎
=−
𝑃 cos 𝛼
𝑃𝑏 cos 𝛼
[(𝑎 + 𝑏) − (𝑎)] = −
𝐴𝐸
𝐴𝐸
60
Fuerzas de fijación y momentos de empotramiento en vigas
o también
𝑑1 =
𝑁𝑛𝐿´ (0)(−1)(𝑎) (𝑃 cos 𝛼)(−1)(𝑏)
𝑃𝑏 cos 𝛼
=
+
=−
𝐴𝐸
𝐴𝐸
𝐴𝐸
𝐴𝐸
Por otra parte, el coeficiente de flexibilidad es
𝐿2
𝑓11 = ∫
𝐿1
𝑎+𝑏 (−1)(−1)
𝑁𝑛
1
1
𝑎+𝑏
[𝑥]𝑎+𝑏
[(𝑎 + 𝑏) − (0)] =
𝑑𝑥 = ∫
𝑑𝑥 =
=
𝑎
𝐴𝐸
𝐴𝐸
𝐴𝐸
𝐴𝐸
𝐴𝐸
0
o también
𝑓11 =
𝑛𝑛𝐿´ (−1)(−1)(𝑎 + 𝑏) 𝑎 + 𝑏
=
=
𝐴𝐸
𝐴𝐸
𝐴𝐸
Nota: Para las ecuaciones anteriores, 𝐿´ no es necesariamente la longitud de la viga, más bien hace
referencia a la longitud del tramo analizado.
A continuación se sustituyen los resultados obtenidos para los desplazamientos horizontales en el
punto 𝐴 de cada viga en la ecuación (12 − 2)
−
𝑃𝑏 cos 𝛼 𝑎 + 𝑏
+
𝑅 = 0 − − − (12 − 3)
𝐴𝐸
𝐴𝐸 𝐴𝑋
Al resolver la ecuación lineal (12 − 3), resulta
𝑅𝐴𝑋
𝑃𝑏 cos 𝛼
𝑃𝑏 cos 𝛼 (𝑃 cos 𝛼)(𝑏)
= 𝐴𝐸
=
=
𝑎+𝑏
𝑎+𝑏
𝐿
𝐴𝐸
La reacción restante desconocida se obtiene de
+→ ∑ 𝐹𝑋 = 0 ⇒ −𝑃 cos 𝛼 +
(𝑃 cos 𝛼)(𝑏)
𝑏
𝐿−𝑏
+ 𝑅𝐵𝑋 = 0 ⇒ 𝑅𝐵𝑋 = (𝑃 cos 𝛼) ൬1 − ൰ = (𝑃 cos 𝛼) ൬
൰
𝐿
𝐿
𝐿
= (𝑃 cos 𝛼) (
(𝑎 + 𝑏) − 𝑏
(𝑃 cos 𝛼)(𝑎)
)=
𝐿
𝐿
Las reacciones de los empotramientos 𝐴 y 𝐵 para la viga 12-b3 se esquematizan en la figura 12-h.
𝑅𝐴𝑋 =
(𝑃 cos 𝛼)(𝑏)
𝑅𝐵𝑋 =
𝑃 cos 𝛼
𝐿
𝐵
𝐴
𝑎
𝑏
(h)
61
(𝑃 cos 𝛼)(𝑎)
𝐿
Fuerzas de fijación y momentos de empotramiento en vigas
Finalmente, con base en el principio de superposición ilustrado en la figura 12-b, las fuerzas de
fijación y los momentos de empotramiento perfecto para la viga de la figura 12-a, son los que se
muestran en la figura 12-i.
𝑀𝐴 =
𝑅𝐴𝑋 =
𝑃
(𝑃 sin 𝛼)𝑎𝑏2
𝐿2
(𝑃 cos 𝛼)(𝑏)
𝛼
𝐴
𝐿
𝐵
𝑎
𝑅𝐴𝑌 = ቈ
(𝑃 sin 𝛼)𝑏2
𝐿
2
𝑀𝐵 =
(𝑃 sin 𝛼)𝑎2 𝑏
𝑅𝐵𝑋 =
𝐿2
(𝑃 cos 𝛼)(𝑎)
𝑏
𝑏
൬3 − 2 ൰
𝐿
𝐿
(i)
62
𝑅𝐵𝑌 = ቈ
(𝑃 sin 𝛼)𝑎2
𝐿
2
𝐿
𝑎
ቀ3 − 2 ቁ
𝐿
13 VIGA BIEMPOTRADA CON CARGA SENOIDAL
𝑊 = 𝑤0 sen
𝑤0
𝜋𝑥
𝐿
𝐵
𝐴
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 13
SOLUCIÓN
Principio de superposición, figura 13-b. Se eligen como fuerzas redundantes a las reacciones del
empotramiento 𝐵.
𝑀
𝑤0
𝑊 = 𝑤0 sen
𝜋𝑥
𝐿
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
𝐿/2
+
𝐴
𝐵
𝑥
𝐿/2
+
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐵 )
𝐵
𝑥
𝐿
(b)
63
1
(𝑑𝑒 𝑅𝐵𝑌 )
1
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de compatibilidad. Inicialmente se analiza la estructura primaria. Para el cálculo de
las reacciones en los soportes de esta estructura liberada sometida a las solicitaciones reales, se
sigue el siguiente procedimiento:
Se calcula la fuerza resultante de la carga distribuida cuya intensidad varía de forma senoidal
hallando el área bajo la curva.
𝐿2
𝐴 = ∫ 𝑑𝐴 = ∫ 𝑊𝑑𝑥
𝐿1
𝐿
𝐴 = ∫ 𝑤𝑜 𝑠𝑒𝑛 (
0
𝐿
𝜋𝑥
𝜋𝑥
) 𝑑𝑥 = 𝑤𝑜 ∫ 𝑠𝑒𝑛 ( ) 𝑑𝑥
𝐿
𝐿
0
Primero se resuelve la integral previa de forma indefinida. Sea 𝑢 =
𝜋𝑥
𝐿
𝜋
, entonces 𝑑𝑢 = 𝑑𝑥, en
𝐿
𝐿
consecuencia 𝑑𝑥 = 𝑑𝑢. Al aplicar la regla de sustitución, resulta
𝜋
∫ 𝑠𝑒𝑛 (
𝜋𝑥
𝐿
𝐿
𝐿
𝐿
𝜋𝑥
) 𝑑𝑥 = ∫ 𝑠𝑒𝑛 𝑢 ∙ 𝑑𝑢 = ∫ 𝑠𝑒𝑛𝑢 𝑑𝑢 = (−𝑐𝑜𝑠𝑢) = − 𝑐𝑜𝑠 ( )
𝐿
𝜋
𝜋
𝜋
𝜋
𝐿
Así, considerando la solución de la integral de forma definida, se tiene
𝐴 = −𝑤𝑜
𝐿
𝜋𝑥 𝐿
𝐿
𝐿
𝐿
[𝑐𝑜𝑠 ( )] = −𝑤𝑜 [𝑐𝑜𝑠(𝜋) − 𝑐𝑜𝑠(0)] = −𝑤𝑜 (−1 − 1) = 2𝑤𝑜
𝜋
𝐿 0
𝜋
𝜋
𝜋
Se determina el brazo de palanca de la resultante calculando el centroide de área.
𝐿2
𝐿
𝜋𝑥
∫ 𝑥̃ 𝑑𝐴 ∫𝐿1 𝑥𝑊 𝑑𝑥 ∫0 𝑥 [𝑤𝑜 𝑠𝑒𝑛 ( 𝐿 )] 𝑑𝑥
𝑥̅ =
= 𝐿2
=
𝐿
𝜋𝑥
∫ 𝑑𝐴
∫𝐿 𝑊 𝑑𝑥
∫0 𝑤𝑜 𝑠𝑒𝑛 ( 𝐿 ) 𝑑𝑥
1
El denominador ya fue resulto. Enseguida se resuelve el numerador. La integral en forma indefinida
es
∫ 𝑥 [𝑤𝑜 𝑠𝑒𝑛 (
𝜋𝑥
𝜋𝑥
)] 𝑑𝑥 = 𝑤𝑜 ∫ 𝑥𝑠𝑒𝑛 ( ) 𝑑𝑥
𝐿
𝐿
𝜋𝑥
Ahora se aplica la integración por partes, ∫ 𝑢𝑑𝑣 = 𝑢𝑣 − ∫ 𝑣𝑑𝑢. Aquí 𝑢 = 𝑥 y 𝑑𝑣 = 𝑠𝑒𝑛 ( ) 𝑑𝑥. Por
𝐿
𝜋𝑥
𝐿
𝜋𝑥
𝐿
𝜋
𝐿
consiguiente, 𝑑𝑢 = 𝑑𝑥 y 𝑣 = ∫ 𝑑𝑣 = ∫ 𝑠𝑒𝑛 ( ) 𝑑𝑥 = − 𝑐𝑜𝑠 ( ). En consecuencia,
𝑤𝑜 ∫ 𝑥𝑠𝑒𝑛 (
= −𝑤𝑜
𝜋𝑥
𝐿
𝜋𝑥
𝐿
𝜋𝑥
) 𝑑𝑥 = 𝑤𝑜 (𝑥 (− 𝑐𝑜𝑠 ( )) − ∫ (− 𝑐𝑜𝑠 ( )) 𝑑𝑥)
𝐿
𝜋
𝐿
𝜋
𝐿
𝐿
𝑥𝜋
𝜋𝑥
𝐿 𝐿
𝑥𝜋
𝑥𝜋
(𝑥𝑐𝑜𝑠 ( ) − ∫ (𝑐𝑜𝑠 ( )) 𝑑𝑥) = 𝑤𝑜 {[ 𝑠𝑒𝑛 ( ) − 𝑥𝑐𝑜𝑠 ( )]}
𝜋
𝐿
𝐿
𝜋 𝜋
𝐿
𝐿
Finalmente, la solución de la integral de forma definida es
𝐿
∫ 𝑥 [𝑤𝑜 𝑠𝑒𝑛 (
0
𝜋𝑥
𝐿 𝐿
𝑥𝜋
𝑥𝜋 𝐿
)] 𝑑𝑥 = 𝑤𝑜 {[ 𝑠𝑒𝑛 ( ) − 𝑥𝑐𝑜𝑠 ( )] }
𝐿
𝜋 𝜋
𝐿
𝐿 0
64
Fuerzas de fijación y momentos de empotramiento en vigas
𝑤𝑜
𝐿 𝐿
𝐿
{[ [𝑠𝑒𝑛(𝜋)] − (𝐿)[𝑐𝑜𝑠(𝜋)]] − [ [𝑠𝑒𝑛(0)] − (0)[𝑐𝑜𝑠(0)]]}
𝜋 𝜋
𝜋
= 𝑤𝑜
𝐿
𝐿
𝐿2
(𝐿 − 0) = 𝑤𝑜 (𝐿 − 0) = 𝑤𝑜
𝜋
𝜋
𝜋
Entonces, el punto de aplicación de la fuerza resultante viene dado por
𝐿2
2
𝜋 = 𝐿 = 1𝐿
𝑥̅ =
𝐿 2𝐿 2
2𝑤𝑜
𝜋
𝑤𝑜
Se identifican las reacciones del empotramiento 𝐴. En la figura 13-c se observa el diagrama de
cargas de la viga primaria.
𝐴 = 2𝑤0
𝐿
𝜋
𝑤0
𝑊 = 𝑤0 sen
𝜋𝑥
𝐿
𝑀𝐴
𝑅𝐴𝑋
𝐴
𝑅𝐴𝑌
𝐵
𝐿/2
𝑥̅ = 𝐿/2
(c)
Al aplicar las ecuaciones de equilibrio, se obtiene
𝐿 𝐿
𝐿2
+ ∑ 𝑀𝐴 = 0 ⇒ (2𝑤𝑜 ) ( ) − 𝑀𝐴 = 0 ⇒ ∴ 𝑀𝐴 = 𝑤𝑜
𝜋 2
𝜋
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 − 2𝑤𝑜
𝐿
𝐿
𝐿
= 0 ⇒ 𝑅𝐴𝑌 = 2𝑤𝑜 ⇒ ∴ 𝑅𝐴𝑌 = 2𝑤𝑜
𝜋
𝜋
𝜋
+→ ∑ 𝐹𝑋 = 0 ⇒∴ 𝑅𝐴𝑋 = 0
Los resultados son presentados en la figura 1-14d. Dado que la carga distribuida no presenta
discontinuidad, la función de momento no será discontinua a lo largo de la estructura. El origen del
sistema coordenado se selecciona en el extremo empotrado 𝐴.
65
Fuerzas de fijación y momentos de empotramiento en vigas
𝐿
𝜋
𝐴 = 2𝑤0
𝑤0
𝑀𝐴 = 𝑤𝑜
𝑊 = 𝑤0 sen
𝜋𝑥
𝐿
𝐿2
𝜋
𝐴
𝑅𝐴𝑌 = 2𝑤𝑜
𝐵
𝑥
𝐿/2
𝑥̅ = 𝐿/2
𝐿
𝜋
(d)
Se emplea el método de secciones para deducir el momento 𝑀. A continuación, en la figura 1-14e,
se proporciona un diagrama de cuerpo libre del segmento de viga con longitud 𝑥. Teniendo la función
que define a la carga armónica, la resultante de la distribución actuante y su punto de aplicación se
encuentran de la manera usual.
0≤𝑥≤𝐿
𝑊 = 𝑤0 sen
𝑀𝐴 = 𝑤𝑜
𝐿2
𝜋
𝑅𝐴𝑌 = 2𝑤𝑜
𝑥
𝐴𝐶 = ∫ 𝑤𝑜 𝑠𝑒𝑛 (
0
𝐴𝐶
𝜋𝑥
𝐿
𝐴
𝑀1
𝑥̅𝐶
(e)
𝑥 − 𝑥̅𝐶
𝐿
𝑥
𝜋
𝜋𝑥
𝐿
𝜋𝑥 𝑥
𝐿
𝜋𝑥
) 𝑑𝑥 = 𝑤𝑜 [−𝑐𝑜𝑠 ( )] = 𝑤𝑜 {− [𝑐𝑜𝑠 ( ) − 𝑐𝑜𝑠(0)]}
𝐿
𝜋
𝐿 0
𝜋
𝐿
66
Fuerzas de fijación y momentos de empotramiento en vigas
= 𝑤𝑜
𝐿
𝜋𝑥
[1 − 𝑐𝑜𝑠 ( )]
𝜋
𝐿
𝐿 𝐿
𝜋𝑥
𝜋𝑥 𝑥
𝑥
𝜋𝑥
𝑤
{[
𝑠𝑒𝑛
(
)
−
𝑥𝑐𝑜𝑠
(
)] }
𝑥
[𝑤
𝑠𝑒𝑛
(
)]
𝑑𝑥
𝑜
∫
𝑜
∫ 𝑥̃ 𝑑𝐴
𝜋 𝜋
𝐿
𝐿 0
0
𝐿
𝑥̅𝐶 =
= 1𝐿2
=
=
𝑥
𝜋𝑥
𝐿
𝜋𝑥
∫ 𝑑𝐴
∫𝐿 𝑦 𝑑𝑥
∫0 𝑤𝑜 𝑠𝑒𝑛 ( 𝐿 ) 𝑑𝑥
𝑤𝑜 [1 − 𝑐𝑜𝑠 ( )]
1
𝜋
𝐿
𝐿
2
∫𝐿 𝑥𝑦 𝑑𝑥
𝐿
𝜋𝑥
𝜋𝑥
𝐿
{[ 𝑠𝑒𝑛 ( ) − 𝑥𝑐𝑜𝑠 ( )] − [ [𝑠𝑒𝑛(0)] − (0)[𝑐𝑜𝑠(0)]]}
𝜋
𝐿
𝐿
𝜋
𝑥̅𝐶 =
𝜋𝑥
1 − 𝑐𝑜𝑠 ( )
𝐿
𝐿
𝜋𝑥
𝜋𝑥
𝑠𝑒𝑛 ( ) − 𝑥𝑐𝑜𝑠 ( )
𝜋
𝐿
𝐿
=
𝜋𝑥
1 − 𝑐𝑜𝑠 ( )
𝐿
Tomando momentos alrededor del punto del corte, tenemos
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝐿
𝜋𝑥
𝜋𝑥
𝑠𝑒𝑛 ( ) − 𝑥𝑐𝑜𝑠 ( )
𝐿2
𝐿
𝜋𝑥
𝜋
𝐿
𝐿 ] + 2𝑤 𝐿 (𝑥) = 0
−𝑀1 − 𝑤𝑜 − 𝑤𝑜 [1 − 𝑐𝑜𝑠 ( )] [𝑥 −
𝑜
𝜋𝑥
𝜋
𝜋
𝐿
𝜋
1 − 𝑐𝑜𝑠 ( )
𝐿
𝑀1 = −𝑤𝑜
𝐿2
𝐿
𝐿
𝜋𝑥
𝐿
𝐿2
𝜋𝑥
𝐿
𝐿2
− 𝑤𝑜 [𝑥 − 𝑠𝑒𝑛 ( )] + 2𝑤𝑜 𝑥 = 𝑤𝑜 2 𝑠𝑒𝑛 ( ) + 𝑤𝑜 𝑥 − 𝑤𝑜
𝜋
𝜋
𝜋
𝐿
𝜋
𝜋
𝐿
𝜋
𝜋
Se determina el momento 𝑚1 a partir de la estructura liberada sometida a la acción de una unidad
de la fuerza redundante 𝑅𝐵𝑌 y el equilibrio interno de la misma, figuras 13-f y 13-g.
𝐿
𝐴
𝑥
𝐵
𝐿
1
1
(f)
0≤𝑥≤𝐿
𝐿
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
𝐿 − 1(𝑥) − 𝑀1 = 0 ⇒ 𝑀1 = 𝐿 − 𝑥
1
(g)
67
Fuerzas de fijación y momentos de empotramiento en vigas
Se calcula el momento 𝑚2 con base en la estructura liberada que soporta como carga al momento
redundante unitario, figura 13-f, y su correspondiente seccionamiento, figura 13-g.
1
𝐴
𝐵
𝑥
1
𝐿
(f)
0≤𝑥≤𝐿
1
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
−1 − 𝑀1 = 0 ⇒ 𝑀1 = −1
(g)
Enseguida se determinan las incompatibilidades geométricas 𝑑1 y 𝑑2 .
𝑑1 =
=
+
𝐿
1
𝐿2
𝜋𝑥
𝐿
𝐿2
[∫ (𝑤𝑜 2 𝑠𝑒𝑛 ( ) + 𝑤𝑜 𝑥 − 𝑤𝑜 ) (𝐿 − 𝑥)𝑑𝑥 ]
𝐸𝐼 0
𝜋
𝐿
𝜋
𝜋
𝐿
𝐿
𝐿
1
𝐿3
𝜋𝑥
𝐿2
𝐿3
[∫ (𝑤𝑜 2 𝑠𝑒𝑛 ( )) 𝑑𝑥 + ∫ (𝑤𝑜 𝑥) 𝑑𝑥 − ∫ (𝑤𝑜 ) 𝑑𝑥 ]
𝐸𝐼 0
𝜋
𝐿
𝜋
𝜋
0
0
𝐿
𝐿
𝐿
1
𝐿2
𝜋𝑥
𝐿
𝐿2
[− ∫ (𝑤𝑜 2 𝑠𝑒𝑛 ( )) 𝑥𝑑𝑥 − ∫ (𝑤𝑜 𝑥 2 ) 𝑑𝑥 + ∫ (𝑤𝑜 ) 𝑥𝑑𝑥 ]
𝐸𝐼
𝜋
𝐿
𝜋
𝜋
0
0
0
Para mayor facilidad, se resuelven las integrales previas de manera individual.
𝐿
∫ (𝑤𝑜
0
𝐿3
𝜋𝑥
𝐿3 𝐿
𝜋𝑥
𝐿3
𝐿
𝐿4
𝑠𝑒𝑛
(
))
𝑑𝑥
=
𝑤
∫
𝑠𝑒𝑛
(
)
𝑑𝑥
=
(𝑤
)
(2
)
=
2𝑤
𝑜
𝑜
𝑜
𝜋2
𝐿
𝜋2 0
𝐿
𝜋2
𝜋
𝜋3
𝐿
𝐿
∫ (𝑤𝑜
0
𝐿2
𝐿2 𝐿
𝐿2 𝑥 2
1 𝐿4
𝑥) 𝑑𝑥 = 𝑤𝑜 ∫ 𝑥𝑑𝑥 = 𝑤𝑜 [ ] = 𝑤𝑜
𝜋
𝜋 0
𝜋 2 0 2
𝜋
𝐿
∫ (𝑤𝑜
0
𝐿
∫ (𝑤𝑜
0
𝐿3
𝐿3 𝐿
𝐿3
𝐿4
) 𝑑𝑥 = 𝑤𝑜 ∫ 𝑑𝑥 = 𝑤𝑜 [𝑥]𝐿0 = 𝑤𝑜
𝜋
𝜋 0
𝜋
𝜋
𝐿2
𝜋𝑥
𝐿2 𝐿
𝜋𝑥
𝐿2 𝐿2
𝐿4
𝑠𝑒𝑛
(
))
𝑥𝑑𝑥
=
𝑤
∫
𝑥𝑠𝑒𝑛
(
)
𝑑𝑥
=
(𝑤
)
(
)
=
𝑤
𝑜
𝑜
𝑜
𝜋2
𝐿
𝜋2 0
𝐿
𝜋2 𝜋
𝜋3
68
Fuerzas de fijación y momentos de empotramiento en vigas
𝐿
𝐿
∫ (𝑤𝑜
0
𝐿 2
𝐿2 𝐿
𝐿 𝑥3
1 𝐿4
𝑥 ) 𝑑𝑥 = 𝑤𝑜 ∫ 𝑥 2 𝑑𝑥 = 𝑤𝑜 [ ] = 𝑤𝑜
𝜋
𝜋 0
𝜋 3 0 3
𝜋
𝐿
∫ (𝑤𝑜
0
𝐿2
𝐿2 𝐿
1 𝐿4
) 𝑥𝑑𝑥 = 𝑤𝑜 ∫ 𝑥𝑑𝑥 = 𝑤𝑜
𝜋
𝜋 0
2
𝜋
Por consiguiente,
𝑑1 =
1
𝐿4 1 𝐿4
𝐿4
𝐿4 1 𝐿4 1 𝐿4
1
𝑤𝑜 𝐿4
𝐿4
(2𝑤𝑜 3 + 𝑤𝑜 − 𝑤𝑜 − 𝑤𝑜 3 − 𝑤𝑜 + 𝑤𝑜 ) = (−
+ 𝑤𝑜 3 )
𝐸𝐼
𝜋
2
𝜋
𝜋
𝜋
3
𝜋 2
𝜋
𝐸𝐼
3 𝜋
𝜋
=−
𝐿
1
𝐿2
𝜋𝑥
𝐿
𝐿2
[∫ (𝑤𝑜 2 𝑠𝑒𝑛 ( ) + 𝑤𝑜 𝑥 − 𝑤𝑜 ) (−1)𝑑𝑥 ]
𝐸𝐼 0
𝜋
𝐿
𝜋
𝜋
𝑑2 =
=
=
=
1
𝐿4
𝑤𝑜 3 (𝜋 2 − 3)
3𝐸𝐼
𝜋
𝐿
1
𝐿2
𝜋𝑥
𝐿
𝐿2
[∫ (−𝑤𝑜 2 𝑠𝑒𝑛 ( ) − 𝑤𝑜 𝑥 + 𝑤𝑜 ) 𝑑𝑥 ]
𝐸𝐼 0
𝜋
𝐿
𝜋
𝜋
𝐿
𝐿
𝐿
1
𝐿2
𝜋𝑥
𝐿
𝐿2
[∫ (−𝑤𝑜 2 𝑠𝑒𝑛 ( )) 𝑑𝑥 − ∫ (𝑤𝑜 𝑥) 𝑑𝑥 + ∫ (𝑤𝑜 ) 𝑑𝑥 ]
𝐸𝐼 0
𝜋
𝐿
𝜋
𝜋
0
0
1
𝐿2
𝐿
𝐿 𝐿2
𝐿2
1
𝐿3 1 𝐿3
𝐿3
[(−𝑤𝑜 2 ) (2 ) + (−𝑤𝑜 ) ( ) + (𝑤𝑜 ) (𝐿)] = (−2𝑤𝑜 3 − 𝑤𝑜 + 𝑤𝑜 )
𝐸𝐼
𝜋
𝜋
𝜋 2
𝜋
𝐸𝐼
𝜋
2
𝜋
𝜋
=
1 1 𝐿3
𝐿3
1
𝐿3
( 𝑤𝑜 − 2𝑤𝑜 3 ) =
𝑤𝑜 3 (𝜋 2 − 4)
𝐸𝐼 2
𝜋
𝜋
2𝐸𝐼
𝜋
Por otra parte, los coeficientes de flexibilidad 𝑓11 hasta 𝑓22 son resultado de
𝑓11 =
𝐿
1 𝐿
1 𝐿
1 1
𝐿3
∫ (𝐿 − 𝑥)(𝐿 − 𝑥)𝑑𝑥 = ∫ (𝐿 − 𝑥)2 𝑑𝑥 = [ (𝐿 − 𝑥)3 ] =
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 3
3𝐸𝐼
0
𝑓21 = 𝑓12 =
𝐿
1 𝐿
1 𝐿
1 1
𝐿2
∫ (𝐿 − 𝑥)(−1)𝑑𝑥 = − ∫ (𝑥 − 𝐿)𝑑𝑥 = − [ (𝑥 − 𝐿)2 ] = −
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 2
2𝐸𝐼
0
𝑓22 =
1 𝐿
𝐿
∫ (−1)(−1)𝑑𝑥 =
𝐸𝐼 0
𝐸𝐼
Se formula y se resuelve el sistema de ecuaciones de compatibilidad geométrica para la obtención
de los valores de las fuerzas sobrantes.
−
1
𝐿4
𝐿3
𝐿2
𝑤𝑜 3 (𝜋 2 − 3) +
𝑅𝐵𝑌 −
𝑀 = 0 − − − (13 − 1)
3𝐸𝐼
𝜋
3𝐸𝐼
2𝐸𝐼 𝐵
1
𝐿3
𝐿2
𝐿
𝑤𝑜 3 (𝜋 2 − 4) −
𝑅𝐵𝑌 + 𝑀𝐵 = 0 − − − (13 − 2)
2𝐸𝐼
𝜋
2𝐸𝐼
𝐸𝐼
69
Fuerzas de fijación y momentos de empotramiento en vigas
𝐿3
3
𝐿2
−
( 2
1
𝐿4 2
𝐿2
𝐿3
(𝜋
𝑤
−
3)
𝑅
2 (𝑅𝐵𝑌 ) = 3 𝑜 𝜋 3
3
⇒ ( 𝐵𝑌 ) =
3
𝑀𝐵
𝑀𝐵
1
𝐿
𝐿2
2
− 𝑤𝑜 3 (𝜋 − 4)
𝐿
−
)
( 2 𝜋
)
( 2
−
12
3
𝑅
( 𝐵𝑌 ) = ( 𝐿
𝑀𝐵
6
𝐿2
−
−1
𝐿2
2
𝐿
)
1
𝐿4
𝑤𝑜 3 (𝜋 2 − 3)
3 𝜋
1
𝐿3
− 𝑤𝑜 3 (𝜋 2 − 4)
( 2 𝜋
)
𝐿
1
𝐿4
6
𝑤𝑜
𝑤𝑜 3 (𝜋 2 − 3)
2
𝜋
𝐿) 3 𝜋
=(
)
4
𝐿2
1
𝐿3 2
2𝑤𝑜 3
(𝜋 − 4)
− 𝑤
)
𝐿 ( 2 𝑜 𝜋3
𝜋
Se detallan las operaciones matriciales.
𝑅𝐵𝑌 = (
12 1
𝐿4 2
6
1
𝐿3 2
𝐿
𝐿
(𝜋
(𝜋 − 4)) = 4𝑤𝑜 3 (𝜋 2 − 3) − 3𝑤𝑜 3 (𝜋 2 − 4)
)
(
𝑤
−
3))
+
(
)
(−
𝑤
𝑜
𝑜
3
3
2
3
𝐿
3 𝜋
𝐿
2 𝜋
𝜋
𝜋
= 4𝑤𝑜
𝐿
𝐿
𝐿
𝐿
𝐿
− 12𝑤𝑜 3 − 3𝑤𝑜 + 12𝑤𝑜 3 = 𝑤𝑜
𝜋
𝜋
𝜋
𝜋
𝜋
∴ 𝑅𝐵𝑌 = 𝑤𝑜
𝐿
𝜋
6 1
𝐿4
4 1
𝐿3
𝐿2
𝐿2
𝑀𝐵 = ( 2 ) ( 𝑤𝑜 3 (𝜋 2 − 3)) − ( ) ( 𝑤𝑜 3 (𝜋 2 − 4)) = 2𝑤𝑜 3 (𝜋 2 − 3) − 2𝑤𝑜 3 (𝜋 2 − 4)
𝐿
3 𝜋
𝐿 2 𝜋
𝜋
𝜋
= 2𝑤𝑜
𝐿2 2
𝐿2
(𝜋 − 3 − 𝜋 2 + 4) = 2𝑤𝑜 3
3
𝜋
𝜋
∴ 𝑀𝐵 = 2𝑤𝑜
𝐿2
𝜋3
La matriz inversa de la matriz de flexibilidades se obtuvo con base en el método de Gauss-Jordan.
𝐿3
3
𝐿2
−
( 2
𝐿2
1
2 1 0 ~(
𝐿2
0 1
−
𝐿
)
2
3
𝑅 ⇒ 𝑅1
𝐿3 1
−
−
3
2𝐿
𝐿
𝐿2
2
𝐿2
3
𝐿
( ) (− ) + 𝐿 =
2
2𝐿
4
3
3
3
~ (1 − 2𝐿 𝐿
6
0
1
𝐿2
4
𝑅 ⇒ 𝑅2
𝐿 2
4 3
6
( )( ) = 2
𝐿 2𝐿
𝐿
3 3
1 −
2𝐿 𝐿3
0) ~ (
𝐿
3
1
0
4
2𝐿
3
𝐿3
0
0
)
1
𝑅1 + 𝑅2 ⇒ 𝑅2
𝐿2 3
3
( ) ( 3) + 0 =
2 𝐿
2𝐿
12 6
0
1 0 𝐿3 𝐿2
)~(
)
4
0 1 6 4
𝐿
𝐿2 𝐿
3
𝑅 + 𝑅1 ⇒ 𝑅2
2𝐿 2
(
3
6
3 12
) ( 2) + 3 = 3
2𝐿 𝐿
𝐿
𝐿
70
(
3 4
6
)( ) + 0 = 2
2𝐿 𝐿
𝐿
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio, figura 13-h. Se calculan las reacciones restantes.
𝐴 = 2𝑤0
𝐿
𝜋
𝑤0
𝑀𝐴
𝑊 = 𝑤0 sen
𝐴
𝑅𝐴𝑌
𝜋𝑥
𝐿
𝑀𝐵 = 2𝑤𝑜
𝐵
𝐿/2
𝑥̅ = 𝐿/2
𝑅𝐵𝑌 = 𝑤𝑜
𝐿
𝜋
(h)
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 − 2𝑤0
𝐿
𝐿
𝐿
+ 𝑤𝑜 = 0 ⇒∴ 𝑅𝐴𝑌 = 𝑤𝑜
𝜋
𝜋
𝜋
𝐿
𝐿 𝐿
𝐿2
𝐿2
+ ∑ 𝑀𝐵 = 0 ⇒ (𝑤𝑜 ) (𝐿) − 𝑀𝐴 − (2𝑤0 ) ( ) + 2𝑤𝑜 3 = 0 ⇒∴ 𝑀𝐴 = 2𝑤𝑜 3
𝜋
𝜋 2
𝜋
𝜋
En la figura 13-i se muestran las reacciones de los soportes 𝐴 y 𝐵.
𝐴 = 2𝑤0
𝑤0
𝑀𝐴 = 2𝑤𝑜
𝐿
𝜋
𝑊 = 𝑤0 sen
𝐿2
𝐴
𝜋3
𝑅𝐴𝑌 = 𝑤𝑜
𝐿
𝐵
𝜋𝑥
𝐿
𝑀𝐵 = 2𝑤𝑜
𝐿/2
𝑥̅ = 𝐿/2
𝑅𝐵𝑌 = 𝑤𝑜
𝜋
(i)
71
𝐿
𝜋
𝐿2
𝜋3
𝐿2
𝜋3
14 VIGA BIEMPOTRADA CON MOMENTO
DISTRIBUIDO UNIFORME
𝑊
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 14
SOLUCIÓN
Principio de superposición, figura 14-b. Se obtendrá una solución directa para las reacciones del
empotramiento izquierdo de la viga.
𝑀
𝑊
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
1
𝐿
+
𝐴
𝐿
𝑚2
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
Ecuaciones de compatibilidad. Se secciona la viga en un punto arbitrario (intermedio en el
segmento 𝐴 − 𝐵) a una distancia 𝑥 del punto 𝐴, figura 14-c. Previo al cálculo del momento 𝑀,
72
Fuerzas de fijación y momentos de empotramiento en vigas
considérese que la carga de par uniformemente distribuida se reemplaza por un momento resultante
igual al área del rectángulo cuyo punto de aplicación puede estar en cualquier parte de la estructura.
𝑊
0≤𝑥≤𝐿
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑀𝑅 = 𝑊𝑥
𝑊𝑥 − 𝑀1 = 0 ⇒ 𝑀1 = 𝑊𝑥
𝑥
(c)
A partir de las vigas con fuerzas redundantes unitarias aplicadas, se conoce que
𝑚1 ⟹
𝑀1 = 𝑥
𝑚2 ⟹
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se determinan las incompatibilidades geométricas y los coeficientes de flexibilidad.
𝑑1 =
𝑑2 =
𝐿
1 𝐿
1 𝐿
1 1
𝑊𝐿3
∫ (𝑊𝑥)(𝑥)𝑑𝑥 = ∫ 𝑊𝑥 2 𝑑𝑥 = [ 𝑊𝑥 3 ] =
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 3
3𝐸𝐼
0
𝐿
1 𝐿
1 𝐿
1
1
𝑊𝐿2
∫ (𝑊𝑥)(−1)𝑑𝑥 = ∫ −𝑊𝑥𝑑𝑥 = [− 𝑊𝑥 2 ] = −
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 2
2𝐸𝐼
0
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = −
𝐿2
2𝐸𝐼
𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
Se calculan las fuerzas superabundantes con base en el siguiente sistema de ecuaciones de
flexibilidades:
𝑊𝐿3
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (14 − 1)
3𝐸𝐼 3𝐸𝐼
2𝐸𝐼 𝐴
−
𝑊𝐿2
𝐿2
𝐿
−
𝑅 + 𝑀 = 0 − − − (14 − 2)
2𝐸𝐼 2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
𝐿3
𝑅
3
( 𝐴𝑌 ) =
𝑀𝐴
𝐿2
−
( 2
−
−1
𝐿2
2
𝐿
𝑊𝐿3
12
3
3
= (𝐿
2
6
𝑊𝐿
( 2 )
𝐿2
−
)
6
𝑊𝐿3
−
−𝑊
𝐿2 )
3
=(
)
4
0
𝑊𝐿2
𝐿 ( 2 )
Puesto que se obtuvo una magnitud negativa para 𝑅𝐴𝑌 , el sentido de esta reacción es opuesto al
que se propuso en la figura 14-b.
∴ 𝑅𝐴𝑌 = 𝑊
73
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio, figura 14-d.
𝑊
𝑀𝐴 = 0
𝐴
𝑀´𝑅 = 𝑊𝐿
𝑅𝐴𝑌 = 𝑊
𝑀𝐵
𝐵
𝐿
𝑅𝐵𝑌
(d)
+↑ ∑ 𝐹𝑌 = 0 ⇒ −𝑊 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = 𝑊
+ ∑ 𝑀𝐵 = 0 ⇒ (−𝑊)(𝐿) + 𝑊𝐿 + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 = 0
Por consiguiente, los momentos de empotramiento perfecto para la viga mostrada en la figura 14-a
son nulos, tal como se muestra en la figura 14-e.
𝑊
𝐴
𝑅𝐴𝑌 = 𝑊
𝐵
𝐿
(e)
74
𝑅𝐵𝑌 = 𝑊
15 VIGA BIEMPOTRADA CON CARGA CIRCULAR
DE UN CUARTO
𝑊=𝑟
𝐶𝑖𝑟𝑐𝑢𝑛𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎
Estructura real (𝐸𝑅)
(a)
Figura 15
𝐴
𝐵
𝐿=𝑟
𝑊=𝑟
𝑀
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐴
1(𝑑𝑒 𝑅𝐴𝑌 )
𝐿=𝑟
𝐵
𝑥
𝐿
𝑚2
+
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
75
Fuerzas de fijación y momentos de empotramiento en vigas
SOLUCIÓN
Principio de superposición, figura 15-b. Se eligen como reacciones redundantes a 𝑅𝐴𝑌 y 𝑀𝐴 .
Ecuaciones de compatibilidad. Se secciona la estructura primaria tal como se muestra en la figura
15-c. Se determina el área bajo la curva. Si el centro de la circunferencia se ubica justamente en el
origen del sistema coordenado, entonces la ecuación de esta, con radio 𝑟, es
𝑥 2 + 𝑦 2 = 𝑟 2 ⇒ 𝑦 = √𝑟 2 − 𝑥 2
Se calcula la fuerza resultante 𝑅 de la porción de carga con distribución de forma circular.
𝑥
𝑅 = ∫ √𝑟 2 − 𝑥 2 𝑑𝑥
0
0≤𝑥≤𝑟
𝑊=𝑟
𝐶𝑖𝑟𝑐𝑢𝑛𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎
𝑅
(c)
𝑥ҧ
𝑥 − 𝑥ҧ
𝑀1
𝐴
𝑥
La integral se resuelve empleando el método de sustitución trigonométrica. Con base en la figura
15-d, se tiene
𝑟
𝑥
cos 𝜃 =
𝜃
√𝑟 2 − 𝑥 2
⇒ 𝑟 cos 𝜃 = √𝑟 2 − 𝑥 2
𝑟
sin 𝜃 =
√𝑟 2 − 𝑥 2
(d)
𝑥
⇒ 𝑟 sin 𝜃 = 𝑥
𝑟
𝑑(𝑟 sin 𝜃) 𝑑𝑥
=
⇒ 𝑟 cos 𝜃 𝑑𝜃 = 𝑑𝑥
𝑑𝜃
𝑑𝜃
76
Fuerzas de fijación y momentos de empotramiento en vigas
En consecuencia,
𝑥
𝑥
𝑅 = ∫ 𝑟 cos 𝜃 𝑟 cos 𝜃 𝑑𝜃 = 𝑟 2 ∫ (cos 𝜃)2 𝑑𝜃 =
0
0
𝑟2 𝑥
∫ (𝜃 + sin 𝜃 cos 𝜃)𝑑𝜃
2 0
𝑥
𝑟2
𝑥 𝑥 √𝑟 2 − 𝑥 2
= [arcsin +
]
2
𝑟 𝑟
𝑟
0
=
𝑟2
𝑥 𝑥
0 0
{[arcsin + 2 √𝑟 2 − 𝑥 2 ] − [arcsin + 2 √𝑟 2 − 02 ]}
2
𝑟 𝑟
𝑟 𝑟
1
𝑥
= (𝑟 2 arcsin + 𝑥 √𝑟 2 − 𝑥 2 )
2
𝑟
Enseguida se calcula el centroide de área 𝑥ҧ .
3
𝑟 3 (𝑟 2 − 𝑥 2 ) ⁄2
𝑥
−
∫0 (𝑥)(√𝑟 2 − 𝑥 2 ) 𝑑𝑥
3
3
𝑥ҧ =
=
1 2
𝑥
1
𝑥
(𝑟 arcsin + 𝑥√𝑟 2 − 𝑥 2 )
(𝑟 2 arcsin + 𝑥√𝑟 2 − 𝑥 2 )
2
𝑟
2
𝑟
Se escribe la ecuación de momento 𝑀. Tomando momentos alrededor del punto del corte en la
porción de viga que se indica en la figura 15-c, tenemos
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
3
𝑟 3 (𝑟 2 − 𝑥 2 ) ⁄2
−
1 2
𝑥
3
3
− [ (𝑟 arcsin + 𝑥 √𝑟 2 − 𝑥 2 )] [𝑥 −
] − 𝑀1 = 0
1 2
𝑥
2
𝑟
(𝑟 arcsin + 𝑥√𝑟 2 − 𝑥 2 )
2
𝑟
3⁄
2
1
𝑥
1
𝑟 3 (𝑟 2 − 𝑥 2 )
𝑀1 = (− 𝑟 2 arcsin ) (𝑥) − 𝑥 2 √𝑟 2 − 𝑥 2 + −
2
𝑟
2
3
3
No obstante,
3⁄
2
(𝑟 2 − 𝑥 2 )
1
− 𝑥 2 √𝑟 2 − 𝑥 2 −
2
3
1
1
= − ( 𝑥 2 √𝑟 2 − 𝑥 2 + (𝑟 2 − 𝑥 2 ) (√𝑟 2 − 𝑥 2 ))
2
3
1
1
1
1
1
= − (√𝑟 2 − 𝑥 2 ) ( 𝑥 2 + 𝑟 2 − 𝑥 2 ) = − (√𝑟 2 − 𝑥 2 ) ( 𝑟 2 + 𝑥 2 )
2
3
3
3
6
Por consiguiente,
1
𝑥
𝑟3
1
1
𝑀1 = (− 𝑟 2 arcsin ) (𝑥) + − (√𝑟 2 − 𝑥 2 ) ( 𝑟 2 + 𝑥 2 )
2
𝑟
3
3
6
𝑥
− ((3𝑟 2 arcsin ) (𝑥) − 2𝑟 3 + (√𝑟 2 − 𝑥 2 )(2𝑟 2 + 𝑥 2 ))
𝑟
=
6
Enseguida se deducen las funciones de momento 𝑚1 y 𝑚2 a partir de las figuras 15-e y 15-f.
77
Fuerzas de fijación y momentos de empotramiento en vigas
0≤𝑥≤𝑟
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
−𝑀1 + (1)(𝑥) = 0 ⇒ 𝑀1 = 𝑥
1
(e)
1
0≤𝑥≤𝑟
𝑀1
𝐴
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
−𝑀1 − 1 = 0 ⇒ 𝑀1 = −1
(f)
Se calculan los desplazamientos 𝑑𝑖 y 𝑓𝑖𝑗 .
𝑥
2
3
2
2
2
2
1 𝑟 − ((3𝑟 arcsin 𝑟 ) (𝑥) − 2𝑟 + (√𝑟 − 𝑥 )(2𝑟 + 𝑥 ))
𝑑1 = ∫ (
) (𝑥) 𝑑𝑥
𝐸𝐼 0
6
=−
(15𝜋 − 26)|𝑟 5 |
180𝐸𝐼
𝑥
2
3
2
2
2
2
1 𝑟 − ((3𝑟 arcsin 𝑟 ) (𝑥) − 2𝑟 + (√𝑟 − 𝑥 )(2𝑟 + 𝑥 ))
𝑑2 = ∫ (
) (−1) 𝑑𝑥
𝐸𝐼 0
6
=
(15𝜋 − 32)(𝑟)|𝑟 3 |
96𝐸𝐼
𝑓11 =
1 𝑟
𝑟3
∫ (𝑥)(𝑥)𝑑𝑥 =
𝐸𝐼 0
3𝐸𝐼
𝑓12 =
1 𝑟
𝑟2
∫ (−1)(𝑥)𝑑𝑥 = −
𝐸𝐼 0
2𝐸𝐼
𝑓21 =
1 𝑟
𝑟2
∫ (𝑥)(−1)𝑑𝑥 = −
𝐸𝐼 0
2𝐸𝐼
𝑓22 =
1 𝑟
𝑟
∫ (−1)(−1)𝑑𝑥 =
𝐸𝐼 0
𝐸𝐼
Se plantea el sistema de ecuaciones de compatibilidad geométrica.
−
(15𝜋 − 26)|𝑟 5 | 𝑟 3
𝑟2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (15 − 1)
180𝐸𝐼
3𝐸𝐼
2𝐸𝐼 𝐴
(15𝜋 − 32)(𝑟)|𝑟 3 | 𝑟 2
𝑟
−
𝑅 + 𝑀 = 0 − − − (15 − 2)
96𝐸𝐼
2𝐸𝐼 𝐴𝑌 𝐸𝐼 𝐴
78
Fuerzas de fijación y momentos de empotramiento en vigas
De resolver el sistema simultáneo de ecuaciones (15 − 1) y (15 − 2), resulta
𝑅𝐴𝑌 =
(15𝜋 + 64)𝑟 2
240
∴ 𝑅𝐴𝑌 =
𝑀𝐴 =
(56 − 15𝜋)𝑟 3
120
∴ 𝑀𝐴 =
(15𝜋 + 64)
𝑊𝐿
240
(56 − 15𝜋)
𝑊𝐿2
120
Ecuaciones de equilibrio, figura 15-g. Se determina la fuerza resultante de la distribución de carga
como el área del cuarto de círculo.
𝑥
𝑅´ = ∫ √𝑟 2 − 𝑥 2 𝑑𝑥 =
0
𝜋𝑟 2 𝜋
= 𝑊𝐿
4
4
El punto de aplicación de tal fuerza medido desde 𝐴, resulta ser
𝑟3
𝑟
∫0 (𝑥)(√𝑟 2 − 𝑥 2 ) 𝑑𝑥
4𝑟 4𝐿
𝑥ҧ ´ =
= 32 =
=
𝜋𝑟 2
𝜋𝑟
3𝜋 3𝜋
4
4
𝑊=𝑟
𝐶𝑖𝑟𝑐𝑢𝑛𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎
𝑅´ =
𝑀𝐴 =
(56 − 15𝜋)
𝑊𝐿2
120
𝑅𝐴𝑌 =
𝐴
(15𝜋 + 64)
𝑊𝐿
240
𝜋
𝑊𝐿
4
𝐵
4𝐿
𝑥ҧ ´ =
3𝜋
𝐿=𝑟
𝑀𝐵 =
𝑅𝐵𝑌 = (
(15𝜋 − 32)
𝑊𝐿2
240
3𝜋 4
− ) 𝑊𝐿
16 15
(g)
Por consiguiente,
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐵 = 0 ⇒ −
(15𝜋 + 64)
𝜋
3𝜋 4
𝑊𝐿 − 𝑊𝐿 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = ( − ) 𝑊𝐿
240
4
16 15
(56 − 15𝜋)
(15𝜋 + 64)
(15𝜋 − 32)
𝜋
4𝐿
𝑊𝐿2 + (
𝑊𝐿) (𝐿) − ( 𝑊𝐿) (𝐿 − ) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
𝑊𝐿2
120
240
4
3𝜋
240
79
16 VIGA BIEMPOTRADA CON CARGA ELÍPTICA
DE UN CUARTO
𝑊
𝐸𝑙𝑖𝑝𝑠𝑒
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 16
𝑊
𝑀
𝐸𝑙𝑖𝑝𝑠𝑒
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐴
1(𝑑𝑒 𝑅𝐴𝑌 )
𝐿=𝑟
𝐵
𝑥
𝐿
𝑚2
+
𝐴
(𝑑𝑒 𝑀𝐴 )
𝐵
1
𝑥
𝐿
(b)
80
Fuerzas de fijación y momentos de empotramiento en vigas
SOLUCIÓN
Principio de superposición, figura 16-b. Se han seleccionado como fuerzas sobrantes a las
reacciones del empotramiento 𝐴.
Ecuaciones de compatibilidad. Se aplica el método de secciones a la estructura primaria, figura
16-c. La ecuación de una elipse cuyo centro se encuentra situado en el origen es
𝑥2 𝑦2
𝑥2 𝑊 2
√1 −
+
=
1
⇒
𝑦
=
𝑊
= √𝐿 − 𝑥 2
𝐿2 𝑊 2
𝐿2
𝐿
Se determina la fuerza concentrada equivalente 𝑅 de la porción de carga con distribución de forma
elíptica.
𝑥
𝑅=∫
0
𝑊 2
𝑊 2
𝑥
√𝐿 − 𝑥 2 𝑑𝑥 =
(𝐿 arcsin + 𝑥 √𝐿2 − 𝑥 2 )
𝐿
2𝐿
𝐿
Se calcula el punto de aplicación 𝑥̅ de 𝑅.
𝑥̅ =
𝑥
𝑊
∫0 (𝑥) ( 𝐿 √𝐿2
3⁄
2
((𝐿2 − 𝑥 2 )
− 𝑥 2 ) 𝑑𝑥
𝑊 2
𝑥
(𝐿 arcsin + 𝑥√𝐿2 − 𝑥 2 )
2𝐿
𝐿
=
− 𝐿3 ) (𝑊)
−
3𝐿
𝑊 2
𝑥
(𝐿 arcsin + 𝑥√𝐿2 − 𝑥 2 )
2𝐿
𝐿
‘
0≤𝑥≤𝐿
𝑊
𝑅
𝑥
ത
𝐸𝑙𝑖𝑝𝑠𝑒
𝑥 − 𝑥̅
𝑀1
𝐴
𝑥
(c)
Con base en la figura 16-c se deduce el momento interno 𝑀.
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
81
Fuerzas de fijación y momentos de empotramiento en vigas
3⁄
2
((𝐿2 − 𝑥 2 )
−[
− 𝐿3 ) (𝑊)
−
𝑊 2
𝑥
3𝐿
(𝐿 arcsin + 𝑥√𝐿2 − 𝑥 2 )] 𝑥 −
− 𝑀1 = 0
𝑊
𝑥
2𝐿
𝐿
2
(𝐿 arcsin + 𝑥√𝐿2 − 𝑥 2 )
2𝐿
𝐿
[
]
𝑀1 = −
𝑊𝐿𝑥 arcsin
2
𝑥
2
2
2
2
2
2
2
2
𝐿 + 𝑊(𝑥 − 𝐿 )√𝐿 − 𝑥 − 𝑊𝑥 √𝐿 − 𝑥 + 𝑊𝐿
3𝐿
2𝐿
3
3
𝑥
𝑊 (3𝐿2 𝑥 arcsin + 2(𝐿2 − 𝑥 2 ) ⁄2 + 3𝑥 2 √𝐿2 − 𝑥 2 − 2𝐿3 )
𝐿
𝑀1 = −
6𝐿
Los momentos internos de las vigas con fuerzas redundantes unitarias aplicadas son
𝑚1 ⟹
𝑀1 = 𝑥
𝑚2 ⟹
𝑀1 = −1
0≤𝑥≤𝐿
0≤𝑥≤𝐿
Se calculan las incompatibilidades geométricas.
3
𝑥
𝑊 (3𝐿2 𝑥 arcsin + 2(𝐿2 − 𝑥 2 ) ⁄2 + 3𝑥 2 √𝐿2 − 𝑥 2 − 2𝐿3 )
1 𝐿
𝐿
𝑑1 = ∫ (−
) (𝑥)𝑑𝑥
𝐸𝐼 0
6𝐿
=−
𝑑2 =
(15𝜋 − 26)𝑊𝐿4
180𝐸𝐼
3
𝑥
𝑊 (3𝐿2 𝑥 arcsin + 2(𝐿2 − 𝑥 2 ) ⁄2 + 3𝑥 2 √𝐿2 − 𝑥 2 − 2𝐿3 )
1 𝐿
𝐿
∫ (−
) (−1)𝑑𝑥
𝐸𝐼 0
6𝐿
=
(15𝜋 − 32)𝑊𝐿3
96𝐸𝐼
Los coeficientes de flexibilidad se presentan enseguida.
𝑓11 =
𝐿3
3𝐸𝐼
𝑓21 = −
𝐿2
2𝐸𝐼
𝑓12 = −
𝐿2
2𝐸𝐼
𝑓22 =
𝐿
𝐸𝐼
Se formula el sistema de ecuaciones de flexibilidades.
−
(15𝜋 − 26)𝑊𝐿4
𝐿3
𝐿2
+
𝑅𝐴𝑌 −
𝑀 = 0 − − − (16 − 1)
180𝐸𝐼
3𝐸𝐼
2𝐸𝐼 𝐴
(15𝜋 − 32)𝑊𝐿3
𝐿2
𝐿
−
𝑅𝐴𝑌 + 𝑀𝐴 = 0 − − − (16 − 2)
96𝐸𝐼
2𝐸𝐼
𝐸𝐼
82
Fuerzas de fijación y momentos de empotramiento en vigas
Entonces,
𝑅𝐴𝑌 =
(15𝜋 + 64)
𝑊𝐿
240
∴ 𝑀𝐴 =
(56 − 15𝜋)
𝑊𝐿2
120
Ecuaciones de equilibrio, figura 16-d. Se calcula la carga resultante de la distribución de fuerza
elíptica.
𝑥
𝑅´ = ∫
0
𝑊 2
𝜋
√𝐿 − 𝑥 2 𝑑𝑥 = 𝑊𝐿
𝐿
4
El centroide de área corresponde a
𝑊𝐿2
𝑟
∫0 (𝑥)(√𝑟 2 − 𝑥 2 ) 𝑑𝑥
4𝐿
𝑥̅ ´ =
= 𝜋3 =
2
𝜋𝑟
𝑊𝐿 3𝜋
4
4
En consecuencia,
+↑ ∑ 𝐹𝑌 = 0 ⇒
+ ∑ 𝑀𝐵 = 0 ⇒ −
(15𝜋 + 64)
𝜋
3𝜋 4
𝑊𝐿 − 𝑊𝐿 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 = ( − ) 𝑊𝐿
240
4
16 15
(56 − 15𝜋)
(15𝜋 + 64)
𝜋
4𝐿
𝑊𝐿2 + (
𝑊𝐿) (𝐿) − ( 𝑊𝐿) (𝐿 − ) + 𝑀𝐵 = 0
120
240
4
3𝜋
∴ 𝑀𝐵 =
𝑊
(15𝜋 − 32)
𝑊𝐿2
240
𝑅´ =
𝜋
𝑊𝐿
4
𝐸𝑙𝑖𝑝𝑠𝑒
𝑀𝐴 =
(56 − 15𝜋)
𝑊𝐿2
120
𝑅𝐴𝑌 =
(15𝜋 + 64)
𝑊𝐿
240
𝐴
𝐵
4𝐿
𝑥̅ ´ =
3𝜋
𝐿
(d)
83
𝑀𝐵 =
𝑅𝐵𝑌 = (
(15𝜋 − 32)
𝑊𝐿2
240
3𝜋 4
− ) 𝑊𝐿
16 15
17 VIGA CON SOPORTES ARTICULADO Y FIJO
CON CARGA PUNTUAL APLICADA AL CENTRO
DEL CLARO
Estructura real (𝐸𝑅)
(a)
Figura 17
SOLUCIÓN
Principio de superposición, figura 17-b. La viga que se muestra en la figura 17-a tiene un grado
de indeterminación estática de uno. La fuerza sobrante seleccionada corresponde a 𝑅𝐴𝑌 . Tome en
cuenta que también puede elegirse al momento reactivo de 𝐵 como redundante, en ese caso, el
empotramiento debe ser reemplazado por un apoyo articulado.
(b)
Ecuación de compatibilidad. Con 𝑑1 y 𝑓11 calculados en la viga que se muestra en la figura 1-a, se
tiene
−
5𝑃𝐿3
𝐿3
+
𝑅 = 0 − − − 17 − 1
48𝐸𝐼 3𝐸𝐼 𝐴𝑌
84
Fuerzas de fijación y momentos de empotramiento en vigas
Al despejar la incógnita, se obtiene
𝑅𝐴𝑌
5𝑃𝐿3
5
48𝐸𝐼
⁄ 3 ⇒∴ 𝑅𝐴𝑌 =
=
𝑃
𝐿
16
3𝐸𝐼
Ecuaciones de equilibrio, figura 17-c.
+↑ ∑ 𝐹𝑌 = 0 ⇒
5
11
𝑃 − 𝑃 + 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
𝑃
16
16
𝐿
11
3
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑃 ( ) − 𝑃 𝐿 + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
𝑃𝐿
2
16
16
𝑃
𝐵
𝐴
𝑅𝐴𝑌 =
5
16
𝐿/2
𝑀𝐵 =
𝐿/2
𝑃
𝑅𝐵𝑌 =
(c)
85
11
16
𝑃
3
𝑃𝐿
16
18 VIGA CON SOPORTES ARTICULADO Y FIJO
CON CARGA DISTRIBUIDA UNIFORME
𝑊
𝐵
𝐴
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 18
SOLUCIÓN
Principio de superposición, figura 18-b.
𝑀
𝑊
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐴
1
𝐿
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿
(b)
Ecuación de compatibilidad. Con 𝑑1 y 𝑓11 determinados al analizar la viga que se indica en la figura
2-a, resulta
−
𝑊𝐿4
𝐿3
+
𝑅 = 0 − − − (18 − 1)
8𝐸𝐼 3𝐸𝐼 𝐴𝑌
En consecuencia,
𝑅𝐴𝑌
𝑊𝐿4
3
= 8𝐸𝐼⁄𝐿3 ⇒∴ 𝑅𝐴𝑌 = 𝑊𝐿
8
3𝐸𝐼
86
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio, figura 18-c. Se calculan las reacciones desconocidas restantes son
3
5
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑊𝐿 − 𝑊𝐿 + 𝑅𝐵𝑌 = 0 ⇒⇒∴ 𝑅𝐵𝑌 = 𝑊𝐿
8
8
𝐿
5
𝑊𝐿2
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑊𝐿 ( ) − 𝑊𝐿(𝐿) + 𝑀𝐵 = 0 ⇒⇒∴ 𝑀𝐵 =
2
8
8
𝑊
𝑀𝐵 =
𝐵
𝐴
𝐿
3
𝑅𝐴𝑌 = 𝑊𝐿
8
𝑅𝐵𝑌 =
(c)
87
5
8
𝑊𝐿
𝑊𝐿2
8
19 VIGA CON SOPORTES ARTICULADO Y FIJO
CON CARGA TRIANGULAR SIMÉTRICA
𝑊
𝐴
𝐵
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 19
SOLUCIÓN
Principio de superposición, figura 19-b.
𝑊
𝑀
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
𝐿/2
+
𝐴
1
𝐿/2
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿
(b)
Ecuación de compatibilidad. Con base en los resultados para 𝑑1 y 𝑓11 de la viga que se observa
en la figura 4-a, tenemos
−
11𝑊𝐿4
𝐿3
+
𝑅 = 0 − − − (19 − 1)
192𝐸𝐼 3𝐸𝐼 𝐴𝑌
Por consiguiente,
88
Fuerzas de fijación y momentos de empotramiento en vigas
𝑅𝐴𝑌
11𝑊𝐿4
11
= 192𝐸𝐼⁄𝐿3 ⇒∴ 𝑅𝐴𝑌 =
𝑊𝐿
64
3𝐸𝐼
Ecuaciones de equilibrio, figura 18-c. Finalmente,
+↑ ∑ 𝐹𝑌 = 0 ⇒
11
𝑊𝐿
21
𝑊𝐿 −
+ 𝑅𝐵𝑌 = 0 ⇒⇒∴ 𝑅𝐵𝑌 =
𝑊𝐿
64
2
64
+ ∑ 𝑀𝐴 = 0
𝐿
1 2 𝐿
𝐿
1 𝐿 1 𝐿
21𝑊𝐿
5𝑊𝐿2
(𝐿) + 𝑀𝐵 = 0 ⇒ ⇒∴ 𝑀𝐵 =
( ) (𝑊) ( ) ( ) ( ) + ( ) (𝑊) ( ) ( + ( )) −
2
2 3 2
2
2 2 3 2
64
64
𝑊
𝐴
𝑅𝐴𝑌 =
11
𝑊𝐿
64
𝐵
𝐿/2
𝑀𝐵 =
5𝑊𝐿2
𝐿/2
𝑅𝐵𝑌 =
(c)
89
21
𝑊𝐿
64
64
20 VIGA CON SOPORTES ARTICULADO Y FIJO
CON CARGA PARABÓLICA
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐵
𝐴
𝐿/2
𝐿/2
Estructura real (𝐸𝑅)
(a)
Figura 20
SOLUCIÓN
Principio de superposición, figura 20-b.
𝑊
𝑀
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
𝐿/2
+
𝐴
1
𝐿/2
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿
(b)
Ecuación de compatibilidad. De acuerdo con los resultados obtenidos para 𝑑1 y 𝑓11 de la viga que
se muestra en la figura 6-a, se tiene
−
7𝑊𝐿4
𝐿3
+
𝑅 = 0 − − − (20 − 1)
90𝐸𝐼 3𝐸𝐼 𝐴𝑌
90
Fuerzas de fijación y momentos de empotramiento en vigas
Entonces,
𝑅𝐴𝑌
7𝑊𝐿4
7
= 90𝐸𝐼⁄𝐿3 ⇒∴ 𝑅𝐴𝑌 =
𝑊𝐿
30
3𝐸𝐼
Ecuaciones de equilibrio, figura 20-c. Las fuerzas reactivas en el soporte 𝐵 son
2
7𝑊𝐿
13
+↑ ∑ 𝐹𝑌 = 0 ⇒ − 𝑊𝐿 +
+ 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
𝑊𝐿
3
30
30
2
𝐿
13
𝑊𝐿2
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑊𝐿 ( ) − 𝑊𝐿(𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
3
2
30
10
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐵
𝐴
𝑅𝐴𝑌 =
7
𝑊𝐿
30
𝐿/2
𝑀𝐵 =
𝐿/2
𝑅𝐵𝑌 =
(c)
91
𝑊𝐿2
10
13
𝑊𝐿
30
21 VIGA CON SOPORTES ARTICULADO Y FIJO
CON CARGA TRIANGULAR
𝑊
𝐴
𝐵
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 21
SOLUCIÓN
Principio de superposición, figura 21-b.
𝑀
𝑊
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐴
1
𝐿
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿
(b)
Ecuación de compatibilidad. Retomando los valores de 𝑑1 y 𝑓11 obtenidos al analizar la viga que
se muestra en la figura 3-a, da
−
11𝑊𝐿4
𝐿3
+
𝑅 = 0 − − − (21 − 1)
120𝐸𝐼 3𝐸𝐼 𝐴𝑌
92
Fuerzas de fijación y momentos de empotramiento en vigas
De modo que
𝑅𝐴𝑌
11𝑊𝐿4
11
= 120𝐸𝐼⁄𝐿3 ⇒∴ 𝑅𝐴𝑌 =
𝑊𝐿
40
3𝐸𝐼
Ecuaciones de equilibrio, figura 21-c.
+↑ ∑ 𝐹𝑌 = 0 ⇒ −
+ ∑ 𝑀𝐴 = 0 ⇒
𝑊𝐿 11𝑊𝐿
9
+
+ 𝑅𝐵𝑌 = 0 ⇒∴ 𝑅𝐵𝑌 =
𝑊𝐿
2
40
40
𝑊𝐿 𝐿
9
7𝑊𝐿2
( ) − 𝑊𝐿(𝐿) + 𝑀𝐵 = 0 ⇒∴ 𝑀𝐵 =
2 3
40
120
𝑊
𝐴
𝑅𝐴𝑌 =
11
40
𝑀𝐵 =
𝐵
𝐿
𝑊𝐿
𝑅𝐵𝑌 =
(c)
93
7𝑊𝐿2
9
𝑊𝐿
40
120
22 VIGA CON SOPORTES ARTICULADO Y FIJO
CON CARGA DE ENJUTA PARABÓLICA
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐵
𝐴
𝐿
Estructura real (𝐸𝑅)
(a)
Figura 22
SOLUCIÓN
Principio de superposición, figura 22-b.
𝑊
𝑀
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝑚1
𝐸𝑅 =
𝐴
𝐵
𝑥
+
𝐴
1
𝐿
𝐵
𝑥
(𝑑𝑒 𝑅𝐴𝑌 )
𝐿
(b)
Ecuación de compatibilidad. Remitiéndonos a los cálculos de la viga indicada en la figura 7-a para
𝑑1 y 𝑓11 , la ecuación de flexibilidad resulta ser
−
𝑊𝐿4
𝐿3
+
𝑅 = 0 − − − (22 − 1)
72𝐸𝐼 3𝐸𝐼 𝐴𝑌
94
Fuerzas de fijación y momentos de empotramiento en vigas
La solución de la ecuación (22 − 1) implica
𝑅𝐴𝑌
𝑊𝐿4
= 72𝐸𝐼⁄
⇒∴ 𝑅𝐴𝑌 =
𝐿3
3𝐸𝐼
1
𝑊𝐿
24
Ecuaciones de equilibrio, figura 22-c.
+↑ ∑ 𝐹𝑌 = 0 ⇒ −
+ ∑ 𝑀𝐴 = 0 ⇒
𝑊𝐿 𝑊𝐿
7
+
+ 𝑅𝐵𝑌 = 0 ⇒ 𝑅𝐵𝑌 =
𝑊𝐿
3
24
24
𝑊𝐿 3
7
𝑊𝐿2
( 𝐿) − 𝑊𝐿(𝐿) + 𝑀𝐵 = 0 ⇒ 𝑀𝐵 =
3 4
24
24
𝑊
𝑃𝑎𝑟á𝑏𝑜𝑙𝑎
𝐵
𝐴
𝑅𝐴𝑌 =
1
𝑊𝐿
24
𝑀𝐵 =
𝐿
𝑅𝐵𝑌 =
(c)
.
95
𝑊𝐿2
7
𝑊𝐿
24
24
23 VIGA BIEMPOTRADA CON CARGA
DISTRIBUIDA PARCIALMENTE UNIFORME
W
A
B
a
L
Estructura real (𝐸𝑅)
(a)
Figura 23
SOLUCIÓN
Principio de superposición y ecuaciones de compatibilidad
Tal como se han venido desarrollando en los ejemplos anteriores para vigas doblemente empotradas
con carga axial nula, las condiciones de frontera para la viga que se muestra en la figura 23-a son
las mismas y su grado de hiperestaticidad también, por lo tanto, de igual manera es hiperestática de
grado dos. No obstante, para inducir una variación en el análisis para este tipo de estructuras, se
han seleccionado a los momentos de reacción 𝑀𝐴 y 𝑀𝐵 como redundantes. Entonces, la aplicación
del principio de superposición quedaría justo como se muestra en la figura 23-b.
M
W
A
B
a
𝐸𝑅 =
+
(de MA)
1
dA
m1
B
𝑥
𝑥
L
L
+
Con referencia a los puntos 𝐴 y 𝐵 de la figura 23-b,
se tiene que
0 = 𝑑1 + 𝑓11 𝑀𝐴 + 𝑓12 𝑀𝐵 − − − (23 − 1)
0 = 𝑑2 + 𝑓21 𝑀𝐴 + 𝑓22 𝑀𝐵 − − − (23 − 2)
(de MB)
m2
A
𝑥
L
La estructura primaria pudo haberse planteado con el apoyo fijo en A; sin embargo, esto tiene muy
poca importancia ya que como es sabido, no habría reacción horizontal en 𝐴 o 𝐵.
96
(b)
1
d
B
Fuerzas de fijación y momentos de empotramiento en vigas
Incompatibilidades geométricas y coeficientes de flexibilidad
El siguiente paso consiste en calcular las reacciones y escribir las ecuaciones de momentos internos
para todas las vigas isostáticas que se muestran en la figura 23-b. Para la estructura primaria
𝑅𝐴𝑌 = 𝑊𝑎 (1 −
𝑎
2𝐿
), para la primera complementaria 𝑅𝐴𝑌 =
1
1
y para la segunda también 𝑅𝐴𝑌 = .
𝐿
𝐿
Nótese que solamente se están considerando las reacciones en 𝐴, esto es porque el cálculo de la
acción interna se realizará empleando una coordenada 𝑥 de izquierda a derecha, siendo innecesaria
la participación de las reacciones en 𝐵 para este fin. Para determinar los momentos 𝑀, se tienen dos
regiones a analizar y se requiere de realizar dos cortes, figuras 23-c y 23-d. Enseguida se deducen
los momentos internos 𝑚1 y 𝑚2 con base en las figuras 23-e y 23-f.
𝑊(𝑥)
0≤𝑥≤𝑎
W
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
A
𝑊𝑎 (1 −
𝑎
)
2𝐿
𝑥
𝑎
−𝑀1 − 𝑊(𝑥) ( ) + 𝑊𝑎 (1 − ) (𝑥) = 0
2
2𝐿
𝑀1
𝑥/2
𝑀1 = 𝑊 [𝑎 (1 −
𝑥
𝑎
𝑥2
) (𝑥) − ]
2𝐿
2
(c)
𝑊(𝑎)
W
𝑎≤𝑥≤𝐿
A
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑎
𝑎
−𝑀2 − 𝑊(𝑎) (𝑥 − ) + 𝑊𝑎 (1 − ) (𝑥) = 0
2
2𝐿
𝑎
𝑎
𝑀2 = 𝑊𝑎 [(1 − ) (𝑥) − (𝑥 − )]
2𝐿
2
1
dA
1
𝐿
𝑀2
a
𝑎
𝑊𝑎 (1 − )
2𝐿
𝑥
(d)
0≤𝑥≤𝐿
𝑀1
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
1
𝑥
−𝑀1 − 1 + (𝑥) = 0 ⇒ 𝑀1 = − 1
𝐿
𝐿
𝑥
(e)
97
Fuerzas de fijación y momentos de empotramiento en vigas
0≤𝑥≤𝐿
A
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
1
𝐿
1
𝑥
−𝑀1 + (𝑥) = 0 ⇒ 𝑀1 =
𝐿
𝐿
𝑀1
𝑥
(f)
Las incompatibilidades geométricas son resultado de
𝑎 (𝑊 [𝑎 (1
−
𝑑1 = ∫
0
𝑎
𝑥2
𝑥
𝑎
𝑎
𝑥
) (𝑥) − ]) ( − 1)
𝐿 (𝑊𝑎 [(1 −
) (𝑥) − (𝑥 − )]) ( − 1)
2𝐿
2
𝐿
2𝐿
2
𝐿
𝑑𝑥 + ∫
𝑑𝑥
𝐸𝐼
𝐸𝐼
𝑎
=
𝑎 (𝑊 [𝑎 (1
−
𝑑2 = ∫
0
𝑊𝑎2
𝑎2
(𝑎 − 𝐿 − )
6𝐸𝐼
4𝐿
𝑎
𝑥2
𝑥
𝑎
𝑎
𝑥
) (𝑥) − ]) ( )
𝐿 (𝑊𝑎 [(1 −
) (𝑥) − (𝑥 − )]) ( )
2𝐿
2
𝐿
2𝐿
2
𝐿 𝑑𝑥
𝑑𝑥 + ∫
𝐸𝐼
𝐸𝐼
𝑎
=
𝑊𝑎2
𝑎2
(𝐿 − )
12𝐸𝐼
2𝐿
Luego, los coeficientes de flexibilidad, 𝑓𝑖𝑗 , son
𝑓11 = ∫
𝐿(
0
𝑥
𝑥
− 1) ( − 1)
𝐿
𝐿
𝐿
𝑑𝑥 =
𝐸𝐼
3𝐸𝐼
𝑓21 = ∫
𝐿(
0
𝑓12 = ∫
𝐿(
0
𝑥 𝑥
) ( − 1)
𝐿
𝐿 𝐿
𝑑𝑥 = −
𝐸𝐼
6𝐸𝐼
𝑓22 = ∫
𝑥
𝑥
− 1) ( )
𝐿
𝐿 𝑑𝑥 = − 𝐿
𝐸𝐼
6𝐸𝐼
𝐿(
0
𝑥 𝑥
)( )
𝐿 𝐿 𝑑𝑥 = 𝐿
𝐸𝐼
3𝐸𝐼
Cálculo de redundantes y reacciones faltantes
Las ecuaciones (23 − 1) y (23 − 2) se convierten en
𝑊𝑎2
𝑎2
𝐿
𝐿
(𝑎 − 𝐿 − ) +
𝑀𝐴 −
𝑀 − − − (23 − 3)
6𝐸𝐼
4𝐿
3𝐸𝐼
6𝐸𝐼 𝐵
𝑊𝑎2
𝑎2
𝐿
𝐿
0=
(𝐿 − ) −
𝑀𝐴 +
𝑀 − − − (23 − 4)
12𝐸𝐼
2𝐿
6𝐸𝐼
3𝐸𝐼 𝐵
0=
En consecuencia,
𝑀𝐴 =
𝑊𝑎2
𝑎 𝑎
[6 + (3 − 8)]
12
𝐿 𝐿
𝑀𝐵 = −
𝑊𝑎3 𝑎
(3 − 4)
12𝐿
𝐿
98
Fuerzas de fijación y momentos de empotramiento en vigas
Las demás reacciones se calculan de manera sencilla con aplicación de las ecuaciones de la
estática, colocando los valores de las redundantes ya calculadas, figura 23-g.
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 + 𝑅𝐵𝑌 − 𝑊𝑎 = 0
+ ∑ 𝑀𝐴 = 0 ⇒ −
𝑊𝑎2
𝑎 𝑎
𝑊𝑎2 𝑊𝑎3 𝑎
[6 + (3 − 8)] +
−
(3 − 4) − 𝑅𝐵𝑌 𝐿 = 0
12
𝐿 𝐿
2
12𝐿
𝐿
∴ 𝑅𝐵𝑌 =
∴ 𝑅𝐴𝑌 = 𝑊𝑎 −
𝑊𝑎3
𝑎
(2 − )
2𝐿2
𝐿
𝑊𝑎3 𝑊𝑎4 𝑊𝑎
𝑎2
𝑎
+
=
[2
−
(2 − )]
2
3
2
𝐿
2𝐿
2
𝐿
𝐿
W
𝑀𝐴 =
𝑊𝑎2
12
𝑅𝐴𝑌
𝑎
𝑎
𝐿
𝐿
[6 + (3 − 8)]
A
B
a
𝑀𝐵 = −
L
𝑊𝑎
𝑎2
𝑎
=
[2 − 2 (2 − )]
2
𝐿
𝐿
𝑅𝐵𝑌 =
(g)
99
𝑊𝑎3
12𝐿
𝑎
[3 − 4]
𝑊𝑎3
𝑎
(2 − )
2𝐿2
𝐿
𝐿
24 VIGA BIEMPOTRADA CON CARGA
TRIANGULAR PARCIALMENTE DISTRIBUIDA
W
A
B
b
a
L
Estructura real (𝐸𝑅)
(a)
Figura 24
SOLUCIÓN
Principio de superposición y ecuaciones de compatibilidad
Se obtendrá una solución directa para los momentos reactivos en los puntos 𝐴 y 𝐵. El principio de
superposición se ilustra en la figura 24-b.
W
M
𝐸𝑅 =
𝑥
A
C
B
+
(de MA)
1
dA
b
a
m1
B
𝑥
L
L
+
Se plantean las ecuaciones para determinar las
redundantes.
m2
A
0 = 𝑑1 + 𝑓11 𝑀𝐴 + 𝑓12 𝑀𝐵 − − − (24 − 1)
0 = 𝑑2 + 𝑓21 𝑀𝐴 + 𝑓22 𝑀𝐵 − − − (24 − 2)
𝑥
L
100
(b)
(de MB)
1
d
B
Fuerzas de fijación y momentos de empotramiento en vigas
Incompatibilidades geométricas y coeficientes de flexibilidad
Con relación a la estructura primaria, se tiene que 𝑅𝐴𝑌 =
𝑊𝑏2
6𝐿
. El análisis para el cálculo de las
funciones de momento 𝑀 se realiza con base en la coordenada 𝑥 con origen en 𝐴 y positiva hacia la
derecha. Puesto que esta viga no está cargada en toda su longitud, sino que solamente en una parte
̅̅̅̅ y 𝐶𝐵
̅̅̅̅),
(longitud 𝑏), se requiere de seccionar a la estructura en un sitio intermedio en cada tramo (𝐴𝐶
tal como se muestra en las figuras 24-c y 24-d.
0≤𝑥≤𝑎
A
𝑀1
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
x
𝑊𝑏 2
6𝐿
−𝑀1 +
𝑊𝑏 2
𝑊𝑏 2
(𝑥) = 0 ⇒ 𝑀1 =
(𝑥)
6𝐿
6𝐿
(c)
𝑊
(𝑥 − 𝑎)2
2𝑏
𝑊𝑏
6𝐿
𝑎≤𝑥≤𝐿
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
C
A
2
𝑊
(𝑥 − 𝑎)
𝑏
𝑀2
a
−𝑀2 −
(𝑥 − 𝑎)
𝑥−𝑎
3
𝑥
𝑊
𝑊𝑏 2
(𝑥 − 𝑎)3 +
(𝑥) = 0
6𝑏
6𝐿
𝑀2 =
𝑊𝑏 2
𝑊
(𝑥) − (𝑥 − 𝑎)3
6𝐿
6𝑏
(d)
Las incompatibilidades geométricas se calculan enseguida.
𝑎(
𝑑1 = ∫
𝑊𝑏 2
𝑥
(𝑥)) ( − 1)
6𝐿
𝐿
𝐸𝐼
0
𝐿(
𝑑𝑥 + ∫
𝑎
𝑊𝑏 2
𝑊
𝑥
(𝑥) − (𝑥 − 𝑎)3 ) ( − 1)
6𝐿
𝐿
6𝑏
𝑑𝑥
𝐸𝐼
2
=
𝑎(
𝑑2 = ∫
0
𝑊𝑏 2
𝑥
(𝑥)) ( )
6𝐿
𝐿
𝐸𝐼
=
𝑊𝑏
𝑏2
𝐿2
(
− )
12𝐸𝐼 10𝐿 3
𝐿(
𝑑𝑥 + ∫
𝑎
𝑊𝑏 2
𝑊
𝑥
(𝑥) − (𝑥 − 𝑎)3 ) ( )
6𝐿
𝐿
6𝑏
𝑑𝑥
𝐸𝐼
𝑊𝑏 2 20𝐿2 + 3𝑏 2 − 15𝐿𝑏
[
]
360𝐸𝐼
𝐿
101
Fuerzas de fijación y momentos de empotramiento en vigas
Se retoman los coeficientes de flexibilidad obtenidos en la resolución de viga que se muestra en la
figura 23-a.
𝑓11 =
𝐿
3𝐸𝐼
𝑓12 = −
𝐿
6𝐸𝐼
𝑓21 = −
𝐿
6𝐸𝐼
𝑓22 =
𝐿
3𝐸𝐼
Cálculo de redundantes y reacciones faltantes
Al sustituir los valores en el sistema de ecuaciones (24 − 1) y (24 − 2), da
𝑊𝑏 2 𝑏 2
𝐿2
𝐿
𝐿
(
− )+
𝑀𝐴 −
𝑀 − − − (24 − 3)
12𝐸𝐼 10𝐿 3
3𝐸𝐼
6𝐸𝐼 𝐵
𝑊𝑏 2 20𝐿2 + 3𝑏 2 − 15𝐿𝑏
𝐿
𝐿
0=
[
]−
𝑀𝐴 +
𝑀 − − − (24 − 4)
360𝐸𝐼
𝐿
6𝐸𝐼
3𝐸𝐼 𝐵
0=
Teniendo en cuenta que 𝐿 − 𝑎 = 𝑏, resulta
𝑀𝐴 =
𝑊𝑏 3
𝑏
(5 − 3 )
60𝐿
𝐿
𝑀𝐵 = −
𝑊𝑏 2
(10𝐿2 + 3𝑏 2 − 10𝐿𝑏)
60𝐿
Sin embargo, la expresión que define a 𝑀𝐵 puede reducirse de la siguiente manera, considerando
que 𝑏 = 𝐿 − 𝑎:
𝑀𝐵 = −
𝑊𝑏 2 𝑏 2
𝑎
(3 2 + 10 )
60
𝐿
𝐿
Empleando los resultados previos y al aplicar las ecuaciones de equilibrio en el plano, figura 24-e,
tenemos
+↑ ∑ 𝐹𝑌 = 0 ⟹ 𝑅𝐴𝑌 + 𝑅𝐵𝑌 =
+ ∑ 𝑀𝐵 = 0 ⟹ 𝑅𝐴𝑌 𝐿 +
∴ 𝑅𝐴𝑌 =
𝑊𝑏
2
𝑊𝑏 2 𝑏 2
𝑎
𝑊𝑏 𝑏
𝑊𝑏 3
𝑏
(3 2 + 10 ) −
( )−
(5 − 3 ) = 0
60
𝐿
𝐿
2 3
60𝐿
𝐿
𝑊𝑏 3
𝑏
(5 − 2 )
2
20𝐿
𝐿
∴ 𝑅𝐵𝑌 =
𝑊𝑏
𝑏2
𝑏
[10 − 2 (5 − 2 )]
20
𝐿
𝐿
𝑊𝑏
2
W
(e)
𝑀𝐴 =
𝑊𝑏3
60𝐿
𝑅𝐴𝑌 =
𝑏
5 + 3 ൨
𝐿
𝑊𝑏 3
𝑏
(5 − 2 )
20𝐿2
𝐿
A
B
b
a
L
102
𝑏
3
𝑀𝐵 =
𝑅𝐵𝑌 =
𝑊𝑏2
60
[3
𝑏2
𝑎
−
4
]
𝐿2
𝐿
𝑊𝑏
𝑏2
𝑏
[10 − 2 (5 − 2 )]
20
𝐿
𝐿
25 VIGA CON CARGA DISTRIBUIDA
PARCIALMENTE UNIFORME CON UN APOYO
EMPOTRADO Y OTRO ARTICULADO
W
A
B
b
a
L
Estructura real (𝐸𝑅)
.
(a)
Figura 25
SOLUCIÓN
Principio de superposición, figura 25-b. La viga que se muestra en la figura 25-a es estáticamente
indeterminada de primer grado.
W
𝑀
A
B
𝐸𝑅 =
b
a
𝑥
(de MA)
1
dA
+
m1
B
𝑥
L
L
(b)
Ecuación de compatibilidad. Se escribe la ecuación de flexibilidad para el desplazamiento angular
en 𝐴.
0 = 𝑑1 + 𝑓11 𝑀𝐴 − − − (25 − 1)
A
(c)
𝑊𝑏
2𝐿
2
0≤𝑥≤𝑎
𝑀1
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0 ⇒ 𝑀1 =
𝑥
103
𝑊𝑏 2
(𝑥)
2𝐿
Fuerzas de fijación y momentos de empotramiento en vigas
𝑊(𝑥 − 𝑎)
W
𝑎≤𝑥≤𝐿
A
𝑀2
a
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥−𝑎
𝑊𝑏 2
2𝐿
𝑀2 =
𝑥−𝑎
2
𝑥
𝑊𝑏 2
𝑊
(𝑥) − (𝑥 − 𝑎)2
2𝐿
2
(d)
Se escriben los momentos 𝑀 a partir de las figuras 25-c y 25-d. En consecuencia,
𝑎(
𝑑1 = ∫
0
𝑊𝑏 2
𝑥
(𝑥)) ( − 1)
2𝐿
𝐿
𝐸𝐼
𝐿(
𝑑𝑥 + ∫
𝑎
𝑊𝑏 2
𝑊
𝑥
(𝑥) − (𝑥 − 𝑎)2 ) ( − 1)
𝑊 𝑏 4 − 2𝐿2 𝑏 2
2𝐿
2
𝐿
𝑑𝑥 =
(
)
𝐸𝐼
24𝐸𝐼
𝐿
𝑓11 =
𝐿
3𝐸𝐼
Al reemplazar los valores de 𝑑1 y 𝑓11 en la ecuación (25 − 1), obtenemos
0=
𝑊 𝑏 4 − 2𝐿2 𝑏 2
𝐿
𝑊𝑏 2
(2𝐿2 − 𝑏 2 )
(
)+
𝑀𝐴 ⇒∴ 𝑀𝐴 =
24𝐸𝐼
𝐿
3𝐸𝐼
8𝐿
Ecuaciones de equilibrio, figura 25-e.
+↑ ∑ 𝐹𝑌 = 0 ⟹ 𝑅𝐴𝑌 + 𝑅𝐵𝑌 = 𝑊𝑏
+ ∑ 𝑀𝐵 = 0 ⟹ 𝑅𝐴𝑌 𝐿 −
∴ 𝑅𝐴𝑌 =
𝑊𝑏 2
𝑏2
(6 − 2 )
8𝐿
𝐿
𝑊𝑏 2
𝑏
(2𝐿2 − 𝑏 2 ) − 𝑊𝑏 ( ) = 0
8𝐿
2
∴ 𝑅𝐵𝑌 =
𝑊𝑏
𝑏
𝑏2
[8 − (6 − 2 )]
8
𝐿
𝐿
𝑊𝑏
W
(e)
𝑀𝐴 =
𝑊𝑏 2
(2𝐿2 + 𝑏 2 )
8𝐿
𝑅𝐴𝑌
A
B
b
a
𝑊𝑏 2
𝑏2
=
(6 − 2 )
8𝐿
𝐿
L
104
𝑏
2
𝑅𝐵𝑌 =
𝑊𝑏
𝑏
𝑏2
[8 − (6 − 2 )]
8
𝐿
𝐿
26 VIGA CON CARGA TRIANGULAR DISTRIBUIDA
PARCIALMENTE CON UN APOYO EMPOTRADO Y
OTRO ARTICULADO
W
B
A
b
a
L
Estructura real (𝐸𝑅)
(a)
Figura 26
SOLUCIÓN
Principio de superposición, figura 26-b.
W
M
A
B
𝐸𝑅 =
+
(de MA)
1
dA
m1
B
b
a
L
L
𝑥
𝑥
(b)
Ecuación de compatibilidad. Se escriben las ecuaciones para el momento 𝑀, figuras 26-c y 26-d.
105
Fuerzas de fijación y momentos de empotramiento en vigas
0≤𝑥≤𝑎
A
𝑀1
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑥
𝑊𝑏 2
3𝐿
𝑀1 =
𝑊𝑏 2
(𝑥)
3𝐿
(c)
𝑃1 𝑃2
𝑎≤𝑥≤𝐿
W
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑃1 =
𝑊
(𝑎 + 𝑏 − 𝑥)
𝑏
𝑊
(𝑥 − 𝑎)2
2𝑏
A
𝑥−𝑎
𝑃2 = 𝑊(𝑥 − 𝑎) [1 −
]
𝑏
𝑀2 =
𝑊𝑏 2
𝑊
𝑥−𝑎
𝑊
(𝑥) − (𝑥 − 𝑎)2 [1 −
] − (𝑥 − 𝑎)3
3𝐿
2
𝑏
3𝑏
𝑊𝑏 2
3𝐿
𝑀2
a
𝑥−𝑎
L
(d)
Se calcula la incompatibilidad geométrica.
𝑎(
𝑑1 = ∫
0
𝑊𝑏 2
𝑥
(𝑥)) ( − 1)
3𝐿
𝐿
𝐸𝐼
𝐿(
𝑑𝑥 + ∫
𝑎
𝑊𝑏 2
𝑊
𝑥−𝑎
𝑊
𝑥
(𝑥) − (𝑥 − 𝑎)2 [1 −
] − (𝑥 − 𝑎)3 ) ( − 1)
3𝐿
2
𝐿
𝑏
3𝑏
𝑑𝑥
𝐸𝐼
=
𝑊𝑏 2 3𝑏 2 − 5𝐿2
(
)
90𝐸𝐼
𝐿
El coeficiente de flexibilidad es
𝑓11 =
𝐿
3𝐸𝐼
Entonces,
0=
𝑊𝑏 2 3𝑏 2 − 5𝐿2
𝐿
(
)+
𝑀 − − − (26 − 1)
90𝐸𝐼
𝐿
3𝐸𝐼 𝐴
∴ 𝑀𝐴 =
𝑊𝑏 2
𝑏2
(5 − 3 2 )
30
𝐿
106
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuaciones de equilibrio, figura 26-e.
+↑ ∑ 𝐹𝑌 = 0 ⟹ 𝑅𝐴𝑌 + 𝑅𝐵𝑌 =
+ ∑ 𝑀𝐵 = 0 ⟹ 𝑅𝐴𝑌 𝐿 −
∴ 𝑅𝐴𝑌 =
∴ 𝑅𝐵𝑌 =
𝑊𝑏 2
𝑏2
𝑊𝑏 2𝑏
(5 − 3 2 ) −
( )=0
30
𝐿
2 3
𝑊𝑏 2
𝑏2
(5 − 2 )
10𝐿
𝐿
𝑊𝑏
𝑏
𝑏2
[5 − (5 − 2 )]
10
𝐿
𝐿
W
𝑀𝐴 =
𝑊𝑏 2
𝑏2
(5 − 3 2 )
30
𝐿
𝑅𝐴𝑌
𝑊𝑏
2
𝑊𝑏
2
B
A
b
a
𝑊𝑏 2
𝑏2
=
(5 − 2 )
10𝐿
𝐿
L
(e)
107
2
𝑏
3
𝑅𝐵𝑌 =
𝑊𝑏
𝑏
𝑏2
[5 − (5 − 2 )]
10
𝐿
𝐿
27 VIGA CON TRES CARGAS EQUIDISTANTES
CON UN APOYO EMPOTRADO Y OTRO
ARTICULADO
P
P
P
A
B
a
a
a
a
L
Estructura real (𝐸𝑅)
(a)
Figura 27
SOLUCIÓN
Principio de superposición, figura 27-b.
P
P
P
A
𝐸𝑅 =
B
a
a
a
a
+
(de MA)
1
dA
m1
B
L
L
𝑥
𝑥
(b)
Ecuación de compatibilidad. Se deducen los momentos internos 𝑀, figuras 27-c, 27-d, 27-e y
27-f.
0≤𝑥≤𝑎
A
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑀1 = 6
𝑃𝑎
6
𝐿
𝑃𝑎
(𝑥)
𝐿
𝑀1
𝑥
(c)
108
Fuerzas de fijación y momentos de empotramiento en vigas
P
𝑎 ≤ 𝑥 ≤ 2𝑎
A
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑀2
a
𝑃𝑎
6
𝐿
𝑀2 = 6
𝑥−𝑎
𝑥
𝑃𝑎
(𝑥) − 𝑃(𝑥 − 𝑎)
𝐿
(d)
P
2𝑎 ≤ 𝑥 ≤ 3𝑎
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
𝑀3 = 6
P
A
𝑃𝑎
(𝑥) − 𝑃(2𝑥 − 3𝑎)
𝐿
6
𝑃𝑎
𝐿
𝑀3
a
a
𝑥 − 2𝑎
𝑥
(e)
P
P
P
3𝑎 ≤ 𝑥 ≤ 𝐿
A
𝑀4
a
a
𝑃𝑎
6
𝐿
+ ∑ 𝑀𝑐𝑜𝑟𝑡𝑒 = 0
a
𝑥 − 3𝑎
𝑥
𝑀4 = 6
𝑃𝑎
(𝑥) − 3𝑃(𝑥 − 2𝑎)
𝐿
(f)
Se determina la incompatibilidad geométrica.
𝑎 (6
𝑑1 = ∫
𝑃𝑎
𝑥
(𝑥)) ( − 1)
𝐿
𝐿
𝐸𝐼
0
3𝑎 (6
∫
2𝑎
2𝑎 (6
𝑑𝑥 + ∫
𝑃𝑎
𝑥
(𝑥) − 𝑃(𝑥 − 𝑎)) ( − 1)
𝐿
𝐿
𝐸𝐼
𝑎
𝑃𝑎
𝑥
(𝑥) − 𝑃(2𝑥 − 3𝑎)) ( − 1)
𝐿
𝐿
𝐸𝐼
𝐿
𝑑𝑥 + ∫
(6
𝑃𝑎
𝑥
(𝑥) − 3𝑃(𝑥 − 2𝑎)) ( − 1)
𝐿
𝐿
3𝑎
=
𝑃𝑎2 7𝐿2 + 128𝑎2 − 70𝐿𝑎
(
)
𝐸𝐼
𝐿
109
𝑑𝑥
𝐸𝐼
𝑑𝑥
Fuerzas de fijación y momentos de empotramiento en vigas
El coeficiente de flexibilidad es
𝑓11 =
𝐿
3𝐸𝐼
Por consiguiente,
0=
𝑃𝑎2 7𝐿2 + 128𝑎2 − 70𝐿𝑎
𝐿
(
)+
𝑀 − − − (27 − 1)
𝐸𝐼
𝐿
3𝐸𝐼 𝐴
∴ 𝑀𝐴 =
15
15
𝑃𝑎 =
𝑃𝐿
8
32
Ecuaciones de equilibrio, figura 27-g.
+↑ ∑ 𝐹𝑌 = 0 ⟹ 𝑅𝐴𝑌 + 𝑅𝐵𝑌 = 3𝑃
+ ∑ 𝑀𝐵 = 0 ⟹ 𝑅𝐴𝑌 𝐿 −
∴ 𝑅𝐴𝑌 =
63
𝑃
32
∴ 𝑅𝐵𝑌 =
33
𝑃
32
P
𝑀𝐴 =
P
P
A
15
𝑃𝐿
32
𝑅𝐴𝑌
15
𝑃𝐿 − 6𝑃𝑎 = 0
32
B
a
a
a
L
63
=
𝑃
32
(g)
110
a
𝑅𝐵𝑌 =
33
𝑃
32
28 VIGA DOBLEMENTE EMPOTRADA CON
CARGA UNIFORME CONCENTRADA EN UNA
ZONA CENTRAL
𝑞
Estructura real (𝐸𝑅)
(a)
A
B
𝑐
C
𝑐
D
𝐿Τ2
𝐿Τ2
=
𝑞
Estructura Primaria (𝐸𝑃)
A
B
𝑐
𝑀
C
𝑐
𝑥
𝑥
D
𝑥
𝐿Τ2
𝐿Τ2
+
𝑚1
Estructura liberada con una
unidad de fuerza redundante
𝑅𝐷𝑌 aplicada (𝐸𝑅𝑑1 )
A
B
𝑐
C
𝑐
𝑥
𝑥
D
𝑥
(de RDY)
1
d
𝐿Τ2
𝐿Τ2
+
Estructura liberada con una
unidad de momento redundante
𝑀𝐷 aplicado (𝐸𝑅𝑑2 )
A
B
C
𝑥
𝑐 𝑥
𝑐
𝐿Τ2
𝐿Τ2
(b)
Figura 28
111
𝑥
(de MD)
1
d
𝑚2
D
Fuerzas de fijación y momentos de empotramiento en vigas
SOLUCIÓN
Verificación del grado de indeterminación
Analizando el grado de indeterminación de la estructura que se muestra en la figura 28-a se puede
observar que esta tiene seis incógnitas de reacción, lo cual significa que no puede resolverse
aplicando directamente las ecuaciones del equilibrio estático: ∑ 𝐹𝑋 = 0, ∑ 𝐹𝑌 = 0 y ∑ 𝑀𝑂 = 0.
La ecuación ∑ 𝐹𝑋 = 0 se satisface directamente dado que no existen componentes horizontales en
las fuerzas externas, por lo cual quedan cuatro reacciones incógnitas con dos ecuaciones por utilizar.
Esto nos lleva a la conclusión de que se trata de una estructura indeterminada de grado dos, de
modo que se requieren dos ecuaciones adicionales para poder calcular el valor de las reacciones
incógnitas.
Tales ecuaciones a agregar se obtienen a partir de un análisis de compatibilidad de deformaciones,
utilizando además de los principios de equilibrio del cuerpo rígido, la propiedad de deformabilidad de
las estructuras.
Principio de superposición
La viga indeterminada que se muestra en la figura 28-a puede presentarse como la suma o
superposición lineal de todas las estructuras estáticamente determinadas que se muestran en la
figura 28-b al elegir como fuerzas redundantes a 𝑅𝐷𝑌 y 𝑀𝐷 .
El principio de superposición indica que la respuesta estructural total de una estructura frente a un
sistema de cargas exteriores es igual a la suma de las respuestas particulares del mismo sistema
ante cada una de las cargas aplicadas simultáneamente o una a una. Esto solo es aplicable a un
sistema estructural que responde en su rango elástico y lineal.
Con la ayuda de tal principio y de considerar la deformabilidad de las estructuras es posible obtener
las dos ecuaciones adicionales que requerimos para el cálculo de las cuatro reacciones incógnitas.
La compatibilidad de deformaciones nos indica que las deformaciones de la estructura indeterminada
deben ser igual a las deformaciones del sistema determinado equivalente. Analicemos las
deformaciones en el nodo 𝐷 de la estructura liberada; las cargas reales producirán en tal nodo un
desplazamiento 𝑑1 hacia abajo y una rotación 𝑑2 en sentido horario, por otro lado, la carga unitaria
en 𝐷 un desplazamiento 𝑓11 hacia arriba y una rotación 𝑓21 en sentido antihorario y finalmente el
momento unitario inducirá en el punto 𝐷 un desplazamiento 𝑓12 hacia arriba y una rotación 𝑓22 en
sentido antihorario. Analizando las condiciones de frontera en la estructura indeterminada, se
observa que el nodo 𝐷 está totalmente restringido al desplazamiento vertical y a la rotación, por lo
que las ecuaciones de compatibilidad pueden escribirse de la siguiente manera:
𝑑1 + 𝑅𝐷𝑌 𝑓11 + 𝑀𝐷 𝑓12 = 0 − − − (28 − 1)
𝑑2 + 𝑅𝐷𝑌 𝑓21 + 𝑀𝐷 𝑓22 = 0 − − − (28 − 2)
Las ecuaciones (28 − 1) y (28 − 2) son las adicionales requeridas para obtener los valores de las
reacciones en los soportes de la estructura indeterminada.
112
Fuerzas de fijación y momentos de empotramiento en vigas
Cálculo de las incompatibilidades geométricas y de los coeficientes de flexibilidad
Se calculan los desplazamientos desconocidos 𝑑1 , 𝑑2 , 𝑓11 , 𝑓12 , 𝑓21 y 𝑓22 . tomando en cuenta
únicamente las deformaciones por flexión, es decir, despreciando las deformaciones por cortante.
Se escriben las ecuaciones para los momentos internos 𝑀, figura 28-c. Obsérvese en la figura 28-b
que para realizar los seccionamientos en la viga liberada se ha elegido una coordenada 𝑥, positiva
hacia la izquierda, para cada región distinta de la estructura. Los orígenes asociados a estas son los
puntos 𝐷, 𝐶 y 𝐵.
𝑀2 + 𝑞 ∙ 𝑥 ∙
𝑀3 + 𝑞 ∙ 2𝑐 ∙ (𝑥 + 𝑐) = 0
𝑥
=0
2
𝑞
𝑀2 = − 𝑥 2
2
𝑀3 = −2𝑞𝑐 2 − 2𝑞𝑐𝑥
𝑞
𝑀1 = 0
A
B
𝑐
C
𝑐
D
𝐿Τ2
𝐿Τ2
(c)
Se calculan los momentos 𝑚1 , figura 28-d.
𝐿
𝑀3 − 1 ∙ (𝑥 + 2𝑐 + − 𝑐) = 0
2
𝐿
𝑀2 − 1 ∙ (𝑥 + − 𝑐) = 0
2
𝐿
𝑀3 = 𝑐 + + 𝑥
2
𝐿
𝑀2 = −𝑐 + + 𝑥
2
A
B
𝑐
C
𝑐
(d)
113
𝑀1 = 𝑥
D
1
d
𝐿Τ2
𝐿Τ2
𝑀1 − 1 ∙ 𝑥 = 0
Fuerzas de fijación y momentos de empotramiento en vigas
Se determinan los momentos 𝑚2 , figura 28-e.
𝑀1 = 1
𝑀3 = 1
(e)
A
𝑀2 = 1
B
C
𝑐
1
d
D
𝑐
𝐿Τ2
𝐿Τ2
Cálculo del desplazamiento 𝑑1 .
𝐿
𝑑1 =
𝐿
1 2−𝑐
𝐿
1 2𝑐
𝑞
𝐿
1 2−𝑐
∫ (−2𝑞𝑐 2 − 2𝑞𝑐𝑥) ∙ (𝑐 + + 𝑥) 𝑑𝑥 + ∫ (− 𝑥 2 ) ∙ (−𝑐 + + 𝑥) 𝑑𝑥 + ∫ 0 ∙ 𝑥𝑑𝑥
𝐸𝐼 0
2
𝐸𝐼 0
2
2
𝐸𝐼 0
Desarrollando los productos por separado, se tiene
𝐿
(−2𝑞𝑐 2 − 2𝑞𝑐𝑥) ∙ (𝑐 + + 𝑥) = −2𝑞𝑐 3 − 𝑞𝑐 2 𝐿 − 2𝑞𝑐 2 𝑥 − 2𝑞𝑐 2 𝑥 − 𝑞𝑐𝐿𝑥 − 2𝑞𝑐𝑥 2
2
𝐿
(−2𝑞𝑐 2 − 2𝑞𝑐𝑥) ∙ (𝑐 + + 𝑥) = −2𝑞𝑐 3 − 𝑞𝑐 2 𝐿 − (4𝑞𝑐 2 + 𝑞𝑐𝐿)𝑥 − 2𝑞𝑐𝑥 2
2
𝑞
𝐿
𝑞𝑐 𝑞𝐿
𝑞
(− 𝑥 2 ) ∙ (−𝑐 + + 𝑥) = ( − ) 𝑥 2 − 𝑥 3
2
2
2
4
2
En consecuencia,
𝐿
1 2−𝑐
1 2𝑐 𝑞𝑐 𝑞𝐿
𝑞
𝑑1 = ∫ [−2𝑞𝑐 3 − 𝑞𝑐 2 𝐿 − (4𝑞𝑐 2 + 𝑞𝑐𝐿)𝑥 − 2𝑞𝑐𝑥 2 ]𝑑𝑥 + ∫ [( − ) 𝑥 2 − 𝑥 3 ] 𝑑𝑥
𝐸𝐼 0
𝐸𝐼 0
2
4
2
𝐿
−𝑐
1
4𝑞𝑐 2 + 𝑞𝑐𝐿 2 2𝑞𝑐 3 2
𝑑1 = [−(2𝑞𝑐 3 + 𝑞𝑐 2 𝐿)𝑥 − (
)𝑥 −
𝑥 ]
𝐸𝐼
2
3
0
𝑑1 =
𝑑1 =
𝑑1 =
+
1 𝑞𝑐 𝑞𝐿 3 𝑞 4 2𝑐
[( − ) 𝑥 − 𝑥 ]
𝐸𝐼 6 12
8
0
2
3
1
𝐿
4𝑞𝑐 2 + 𝑞𝑐𝐿 𝐿
2𝑞𝑐 𝐿
[−(2𝑞𝑐 3 + 𝑞𝑐 2 𝐿) ( − 𝑐) − (
) ( − 𝑐) −
( − 𝑐) ]
𝐸𝐼
2
2
2
3 2
1 𝑞𝑐 𝑞𝐿
𝑞
+ [( − ) (2𝑐)3 − (2𝑐)4 ]
𝐸𝐼 6 12
8
1
𝑞𝑐 2 𝐿2
4𝑞𝑐 2 + 𝑞𝑐𝐿 𝐿2
[−𝑞𝑐 3 𝐿 + 2𝑞𝑐 4 −
+ 𝑞𝑐 3 𝐿 − (
) ( − 𝑐𝐿 + 𝑐 2 )
𝐸𝐼
2
2
4
4
2𝑞𝑐 𝐿3 3𝑐𝐿2 3𝑐 2 𝐿
1
4𝑞𝑐
2𝑞𝑐 3 𝐿
−
( −
+
− 𝑐 3 )] + [
−
− 2𝑞𝑐 4 ]
3 8
4
2
𝐸𝐼 3
3
1
𝑞𝑐 2 𝐿2 𝑞𝑐 2 𝐿2
𝑞𝑐𝐿3 𝑞𝑐 2 𝐿2 𝑞𝑐 3 𝐿 𝑞𝑐𝐿3 𝑞𝑐 2 𝐿2
2𝑞𝑐 4
[2𝑞𝑐 4 −
−
+ 2𝑞𝑐 3 𝐿 − 2𝑞𝑐 4 −
+
−
−
+
− 𝑞𝑐 3 𝐿 +
𝐸𝐼
2
2
8
2
2
12
2
3
3
3
4𝑞𝑐 4 2𝑞𝑐 3 𝐿
1
𝑞𝑐
𝐿
5𝑞𝑐𝐿
+
−
− 2𝑞𝑐 4 ] = [−
−
]
3
3
𝐸𝐼
6
24
114
Fuerzas de fijación y momentos de empotramiento en vigas
Cálculo del desplazamiento 𝑑2 .
𝐿
𝐿
1 2−𝑐
1 2𝑐
𝑞
1 2−𝑐
𝑑2 = ∫ (−2𝑞𝑐 2 − 2𝑞𝑐𝑥) ∙ 1𝑑𝑥 + ∫ (− 𝑥 2 ) ∙ 1𝑑𝑥 + ∫ 0 ∙ 1𝑑𝑥
𝐸𝐼 0
𝐸𝐼 0
2
𝐸𝐼 0
𝑑2 =
𝑑2 =
𝑑2 =
𝑑2 =
𝐿
2𝑐
1
1
𝑞
−𝑐
[−2𝑞𝑐 2 𝑥 − 𝑞𝑐𝑥 2 ]20 + [− 𝑥 3 ]
𝐸𝐼
𝐸𝐼 6
0
2
1
𝐿
𝐿
1
𝑞
[−2𝑞𝑐 2 ( − 𝑐) − 𝑞𝑐 ( − 𝑐) ] + [− (2𝑐)3 ]
𝐸𝐼
2
2
𝐸𝐼 6
1
𝐿
𝐿2
1
4𝑞𝑐 3
[−2𝑞𝑐 2 ( − 𝑐) − 𝑞𝑐 ( − 𝑐𝐿 + 𝑐 2 )] + [−
]
𝐸𝐼
2
4
𝐸𝐼
3
1
𝑞𝑐𝐿2
4𝑞𝑐 3
1
𝑞𝑐 3 𝑞𝑐𝐿2
[−𝑞𝑐 2 𝐿 + 2𝑞𝑐 3 −
+ 𝑞𝑐 2 𝐿 − 𝑞𝑐 3 −
] = [−
−
]
𝐸𝐼
4
3
𝐸𝐼
3
4
Cálculo del desplazamiento 𝑓11 .
𝐿
𝑓11 =
1 𝐿
1 𝑥3
𝐿3
∫ 𝑥 ∙ 𝑥 𝑑𝑥 = [ ] =
𝐸𝐼 0
𝐸𝐼 3 0 3𝐸𝐼
Cálculo de los desplazamientos 𝑓12 𝑦 𝑓21 .
𝐿
𝑓12 = 𝑓21 =
1 𝑥2
1 𝑥2
𝐿2
∫ 𝑥 ∙ 1 𝑑𝑥 = [ ] =
𝐸𝐼 𝑥1
𝐸𝐼 2 0 2𝐸𝐼
Cálculo del desplazamiento 𝑓22 .
𝑓22 =
1 𝐿
1
𝐿
∫ 1 ∙ 1 𝑑𝑥 = [𝑥]𝐿0 =
𝐸𝐼 0
𝐸𝐼
𝐸𝐼
Cálculo de las reacciones redundantes
Reemplazando los valores de 𝑑1 , 𝑑2 , 𝑓11 , 𝑓12 , 𝑓21 y 𝑓22 en las ecuaciones (28 − 1) y (28 − 2), da
1
𝑞𝑐 3 𝐿 5𝑞𝑐𝐿3
𝐿3
𝐿2
[−
−
] + 𝑅𝐷𝑌 (
) + 𝑀𝐷 (
) = 0 − − − (28 − 3)
𝐸𝐼
6
24
3𝐸𝐼
2𝐸𝐼
1
𝑞𝑐 3 𝑞𝑐𝐿2
𝐿2
𝐿
[−
−
] + 𝑅𝐷𝑌 (
) + 𝑀𝐷 ( ) = 0 − − − (28 − 4)
𝐸𝐼
3
4
2𝐸𝐼
𝐸𝐼
Despejando 𝑀𝐷 de la ecuación (28 − 4), resulta
𝑀𝐷 =
𝑞𝑐 3 𝑞𝑐𝐿
𝐿
+
− ( ) 𝑅𝐷𝑌 − − − (28 − 5)
3𝐿
4
2
115
Fuerzas de fijación y momentos de empotramiento en vigas
Sustituyendo la en la ecuación (28 − 3), se llega a
(−
𝑞𝑐 3 𝐿 5𝑞𝑐𝐿3
𝐿3
𝐿2 𝑞𝑐 3 𝑞𝑐𝐿
𝐿
−
) + ( ) 𝑅𝐷𝑌 + ( ) [
+
− ( ) 𝑅𝐷𝑌 ] = 0
6
24
3
2
3𝐿
4
2
−
𝑞𝑐 3 𝐿 5𝑞𝑐𝐿3
𝐿3
𝑞𝑐 3 𝐿 𝑞𝑐𝐿3
𝐿3
−
+ ( ) 𝑅𝐷𝑌 +
+
− ( ) 𝑅𝐷𝑌 = 0
6
24
3
6
8
4
(
𝐿3
𝑞𝑐𝐿3
) 𝑅𝐷𝑌 =
⟹∴ 𝑅𝐷𝑌 = 𝑞𝑐
12
12
De modo que
𝑀𝐷 =
𝑞𝑐 3 𝑞𝑐𝐿
𝐿
𝑞𝑐 3 𝑞𝑐𝐿
+
− ( ) 𝑞𝑐 ⟹∴ 𝑀𝐷 =
−
3𝐿
4
2
3𝐿
4
Ecuaciones de equilibrio
Las demás reacciones se calcularán con las ecuaciones de equilibrio estático. Los resultados finales
se muestran en la figura 28-f.
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 + 𝑅𝐷𝑌 − 2𝑞𝑐 = 0
𝑅𝐴𝑌 = 2𝑞𝑐 − 𝑞𝑐 ⟹∴ 𝑅𝐴𝑌 = 𝑞𝑐
𝐿
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑀𝐴 + 2𝑞𝑐 ( ) − 𝑅𝐷𝑌 𝐿 − 𝑀𝐷 = 0
2
𝑀𝐴 + 𝑞𝑐𝐿 − 𝑞𝑐𝐿 − (
∴ 𝑀𝐴 =
𝑞𝑐 3 𝑞𝑐𝐿
−
)=0
3𝐿
4
𝑞𝑐 3 𝑞𝑐𝐿
−
3𝐿
4
𝑞
𝑀𝐴 =
𝑞𝑐 3 𝑞𝑐𝐿
−
3𝐿
4
A
B
𝑐
C
𝑐
𝑅𝐴𝑌 = 𝑞𝑐
𝐿Τ2
𝐿Τ2
(f)
116
D
𝑀𝐷 =
𝑅𝐷𝑌 = 𝑞𝑐
𝑞𝑐 3 𝑞𝑐𝐿
−
3𝐿
4
29 VIGA EMPOTRADA-ARTICULADA CON CARGA
UNIFORME CONCENTRADA EN UNA ZONA
CENTRAL
𝑞
D
Estructura real (𝐸𝑅)
(a)
A
B
𝑐
C
𝑐
𝐿Τ2
𝐿Τ2
=
𝑞
Estructura Primaria (𝐸𝑃)
A
B
𝑐
𝑀
C
𝑐
𝑥
𝑥
D
𝑥
𝐿Τ2
𝐿Τ2
+
Estructura liberada con una
unidad de fuerza redundante
𝑅𝐷𝑌 aplicada (𝐸𝑅𝑑1 )
D
A
B
𝑐
C
𝑐
𝑥
𝑥
𝑥
𝑚1
(de RDY)
1
d
𝐿Τ2
𝐿Τ2
(b)
Figura 29
SOLUCIÓN
Principio de superposición, figura 29-b. Se selecciona a 𝑅𝐷𝑌 como fuerza superabundante.
117
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuación de compatibilidad. Retomando los resultados obtenidos para la incompatibilidad
geométrica 𝑑1 y el coeficiente de flexibilidad 𝑓11 de la viga mostrada en la figura 28-a, obtenemos
𝑑1 + 𝑅𝐷𝑌 𝑓11 = 0 − − − (29 − 1)
1
𝑞𝑐 3 𝐿 5𝑞𝑐𝐿3
𝐿3
[−
−
] + 𝑅𝐷𝑌 (
) = 0 − − − (29 − 2)
𝐸𝐼
6
24
3𝐸𝐼
Despejando 𝑅𝐷𝑌 de la ecuación (29 − 2), se llega a
𝑅𝐷𝑌 =
𝑞𝑐 3 5𝑞𝑐
+
2𝐿2
8
Ecuaciones de equilibrio, figura 29-c. Las reacciones faltantes son
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 + 𝑅𝐷𝑌 − 𝑞2𝑐 = 0
𝑅𝐴𝑌 = 2𝑞𝑐 −
𝑞𝑐 3 5𝑞𝑐
𝑞𝑐 3 11𝑞𝑐
−
⟹∴
𝑅
=
−
+
𝐴𝑌
2𝐿2
8
2𝐿2
8
𝐿
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑀𝐴 − 𝑞2𝑐 ( ) + 𝑅𝐷𝑌 𝐿 = 0
2
𝑀𝐴 − 𝑞𝑐𝐿 + (
𝑞𝑐 3 5𝑞𝑐
+
)𝐿 = 0
2𝐿2
8
𝑀𝐴 − 𝑞𝑐𝐿 +
𝑞𝑐 3 5𝑞𝑐𝐿
+
=0
2𝐿
8
∴ 𝑀𝐴 = −
𝑞𝑐 3 3𝑞𝑐𝐿
+
2𝐿
8
𝑞
𝑀𝐴 = −
𝑞𝑐 3 3𝑞𝑐𝐿
+
2𝐿
8
𝑅𝐴𝑌 = −
𝑞𝑐 3 11𝑞𝑐
+
2𝐿2
8
D
A
B
𝑐
C
𝑐
𝑅𝐷𝑌 =
𝐿Τ2
𝐿Τ2
(c)
118
𝑞𝑐 3 5𝑞𝑐
+
2𝐿2
8
30 VIGA DOBLEMENTE EMPOTRADA CON
CARGA TRIANGULAR EN UNA PORCIÓN
IZQUIERDA
q
Estructura real (𝐸𝑅)
(a)
A
B
a
C
b
L
=
q
𝑀
Estructura Primaria (𝐸𝑃)
A
B
𝑥
a
b
L
C
𝑥
+
𝑚1
Estructura liberada con una
unidad de fuerza redundante
𝑅𝐶𝑌 aplicada (𝐸𝑅𝑑1 )
A
C
B
𝑎
𝑏
𝑥
𝑥
𝐿
(de RCY)
1
d
+
Estructura liberada con una
unidad de momento redundante
𝑀𝐶 aplicado (𝐸𝑅𝑑2 )
A
(de MC)
1
d
𝑚2
C
B
𝑥
𝑎
𝑏
𝐿
(b)
Figura 30
119
𝑥
Fuerzas de fijación y momentos de empotramiento en vigas
SOLUCIÓN
Principio de superposición, figura 30-b. Se han seleccionado como fuerzas redundantes a las
reacciones del empotramiento derecho.
Ecuaciones de compatibilidad
Las ecuaciones de flexibilidad para el sistema estructural son las siguientes:
𝑑1 + 𝑅𝐶𝑌 𝑓11 + 𝑀𝐶 𝑓12 = 0 − − − (30 − 1)
𝑑2 + 𝑅𝐶𝑌 𝑓21 + 𝑀𝐶 𝑓22 = 0 − − − (30 − 2)
Cálculo de las incompatibilidades geométricas y de los coeficientes de flexibilidad
Se emplea una primera coordenada 𝑥 para analizar el segmento 𝐶 − 𝐵 con origen en 𝐶 y una
segunda coordenada 𝑥 para comprender el tramo 𝐵 − 𝐴 con origen situado en el punto 𝐵.
Se determinan los momentos 𝑀 con base en las figuras 30-c y 30-d.
q
𝑞(𝑎 − 𝑥)
𝑎
𝑀1
C
𝑥
𝑀2
𝑥
(c)
B
C
b
(d)
𝑀1 = 0
𝑀2 +
𝑀2 = −
𝑞(𝑎 − 𝑥)
𝑥
𝑞(𝑎 − 𝑥) 𝑥 2𝑥
∙ 𝑥 ∙ + [𝑞 −
]∙ ∙
=0
𝑎
2
𝑎
2 3
𝑞𝑥 2 𝑞𝑥 3 𝑞𝑥 2 𝑞𝑥 2 𝑞𝑥 3
𝑞𝑥 2 𝑞𝑥 3
+
−
+
−
=−
+
2
2𝑎
3
3
3𝑎
2
6𝑎
Se escriben las ecuaciones de momento 𝑚1 a partir de las figuras 30-e y 30-f.
𝑀1
𝑥
𝑀2
C
𝑥
B
(f)
120
b
1
1
(e)
C
Fuerzas de fijación y momentos de empotramiento en vigas
𝑀1 − 1 ∙ 𝑥 = 0 ⇒ 𝑀1 = 𝑥
𝑀2 − 1 ∙ (𝑥 + 𝑏) = 0 ⇒ 𝑀2 = 𝑏 + 𝑥
Se deducen los momentos internos 𝑚2 de acuerdo con las figuras 30-g y 30-h.
1
𝑀1
1
𝑀2
C
𝑥
𝑥
B
C
b
(g)
(h)
𝑀1 = 1
𝑀2 = 1
Se calcula el desplazamiento 𝑑1 .
𝑑1 =
1 𝑎
𝑞𝑥 2 𝑞𝑥 3
1 𝑏
∫ (−
+
) ∙ (𝑏 + 𝑥)𝑑𝑥 + ∫ 0 ∙ 𝑥𝑑𝑥
𝐸𝐼 0
2
6𝑎
𝐸𝐼 0
No obstante,
(−
𝑞𝑥 2 𝑞𝑥 3
𝑞𝑏𝑥 2 𝑞𝑥 3 𝑞𝑏𝑥 3 𝑞𝑥 4
+
) ∙ (𝑏 + 𝑥) = −
−
+
+
2
6𝑎
2
2
6𝑎
6𝑎
De modo que
𝑎
𝑑1 =
1 𝑎
𝑞𝑏𝑥 2 𝑞𝑥 3 𝑞𝑏𝑥 3 𝑞𝑥 4
1
𝑞𝑏𝑥 3 𝑞𝑥 4 𝑞𝑏𝑥 4 𝑞𝑥 5
∫ (−
−
+
+
) 𝑑𝑥 = [−
−
+
+
]
𝐸𝐼 0
2
2
6𝑎
6𝑎
𝐸𝐼
6
8
24𝑎 30𝑎 0
𝑑1 =
1
𝑞𝑏𝑎3 𝑞𝑎4 𝑞𝑏𝑎3 𝑞𝑎4
1
𝑞𝑏𝑎3 11𝑞𝑎4
(−
−
+
+
) = (−
−
)
𝐸𝐼
6
8
24
30
𝐸𝐼
8
120
Se calcula el desplazamiento 𝑑2 .
𝑎
𝑑2 =
1 𝑎
𝑞𝑥 2 𝑞𝑥 3
1 𝑏
1
𝑞𝑥 3 𝑞𝑥 4
∫ (−
+
) ∙ 1𝑑𝑥 + ∫ 0 ∙ 1𝑑𝑥 = [−
+
]
𝐸𝐼 0
2
6𝑎
𝐸𝐼 0
𝐸𝐼
6
24𝑎 0
𝑑2 =
1
𝑞𝑎3 𝑞𝑎3
1
𝑞𝑎3
(−
+
) = (−
)
𝐸𝐼
6
24
𝐸𝐼
8
Se calcula el desplazamiento 𝑓11 .
𝐿
𝑓11 =
1 𝐿
1 𝑥3
𝐿3
∫ 𝑥 ∙ 𝑥 𝑑𝑥 = [ ] =
𝐸𝐼 0
𝐸𝐼 3 0 3𝐸𝐼
Se calculan los desplazamientos 𝑓12 𝑦 𝑓21 .
𝐿
𝑓12 = 𝑓21 =
1 𝐿
1 𝑥2
𝐿2
∫ 𝑥 ∙ 1 𝑑𝑥 = [ ] =
𝐸𝐼 0
𝐸𝐼 2 0 2𝐸𝐼
121
Fuerzas de fijación y momentos de empotramiento en vigas
Se calcula el desplazamiento 𝑓22 .
𝑓22 =
1 𝐿
1
𝐿
∫ 1 ∙ 1 𝑑𝑥 = [𝑥]𝐿0 =
𝐸𝐼 0
𝐸𝐼
𝐸𝐼
Cálculo de las reacciones redundantes
Al sustituir los valores de 𝑑1 , 𝑑2 , 𝑓11 , 𝑓12 , 𝑓21 y 𝑓22 en las ecuaciones (30 − 1) y (30 − 2), se llega a
1
𝑞𝑏𝑎3 11𝑞𝑎4
𝐿3
𝐿2
(−
−
) + 𝑅𝐶𝑌 (
) + 𝑀𝐶 (
) = 0 − − − (30 − 3)
𝐸𝐼
8
120
3𝐸𝐼
2𝐸𝐼
1
𝑞𝑎3
𝐿2
𝐿
(−
) + 𝑅𝐶𝑌 (
) + 𝑀𝐶 ( ) = 0 − − − (30 − 4)
𝐸𝐼
8
2𝐸𝐼
𝐸𝐼
Al despejar 𝑀𝐷 de la ecuación (30 − 4), resulta
𝑀𝐶 =
𝑞𝑎3
𝐿
− ( ) 𝑅𝐶𝑌 − − − (30 − 5)
8𝐿
2
Combinando la expresión (30 − 5) con la expresión (30 − 3), tenemos
[−
−
𝑅𝐶𝑌 =
𝑞𝑏𝑎3 11𝑞𝑎4
𝐿3
𝑞𝑎3
𝐿
𝐿2
−
] + 𝑅𝐶𝑌 ( ) + [
− ( ) 𝑅𝐶𝑌 ] ( ) = 0
8
120
3
8𝐿
2
2
𝑞𝑏𝑎3 11𝑞𝑎4
𝐿3
𝑞𝑎3 𝐿
𝐿3
𝐿3
𝑞𝑏𝑎3 𝑞𝑎3 𝐿 11𝑞𝑎4
−
+ 𝑅𝐶𝑌 ( ) +
− ( ) 𝑅𝐶𝑌 = 0 ⇒ ( ) 𝑅𝐶𝑌 =
−
+
8
120
3
16
4
12
8
16
120
3𝑞(𝐿 − 𝑎)𝑎3 3𝑞𝑎3 11𝑞𝑎4
3𝑞𝑎3 3𝑞𝑎4 3𝑞𝑎3 11𝑞𝑎4
3𝑞𝑎3 2𝑞𝑎4
−
+
= 𝑅𝐶𝑌 =
−
−
+
⟹∴ 𝑅𝐶𝑌 =
−
3
2
3
2
3
2
3
2𝐿
4𝐿
10𝐿
2𝐿
2𝐿
4𝐿
10𝐿
4𝐿2
5𝐿3
Reemplazando 𝑅𝐷 en la ecuación (30 − 5), se obtiene
𝑀𝐶 =
𝑞𝑎3
𝐿 3𝑞𝑎3 2𝑞𝑎4
𝑞𝑎3 3𝑞𝑎3 𝑞𝑎4
𝑞𝑎3 𝑞𝑎4
− ( )( 2 −
)
=
−
+
⟹∴
𝑀
=
−
+ 2
𝐶
8𝐿
2
4𝐿
5𝐿3
8𝐿
8𝐿
5𝐿2
4𝐿
5𝐿
Ecuaciones de equilibrio, figura 30-i.
+↑ ∑ 𝐹𝑌 = 0
𝑅𝐴𝑦 + 𝑅𝐶𝑌 −
𝑞𝑎
𝑞𝑎 3𝑞𝑎3 2𝑞𝑎4
= 0 ⇒∴ 𝑅𝐴𝑌 =
−
+
2
2
4𝐿2
5𝐿3
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑀𝐴 − (
𝑀𝐴 −
𝑞𝑎 2𝑎
) ( ) + 𝑅𝐶𝑌 𝐿 + 𝑀𝐶 = 0
2
3
𝑞𝑎2
3𝑞𝑎3 2𝑞𝑎4
𝑞𝑎3 𝑞𝑎4
+( 2 −
)
𝐿
−
+ 2 =0
3
4𝐿
5𝐿3
4𝐿
5𝐿
122
Fuerzas de fijación y momentos de empotramiento en vigas
𝑀𝐴 =
𝑞𝑎2 3𝑞𝑎3 2𝑞𝑎4 𝑞𝑎3 𝑞𝑎4
−
+
+
− 2
3
4𝐿
5𝐿2
4𝐿
5𝐿
∴ 𝑀𝐴 =
𝑞𝑎2 𝑞𝑎3 𝑞𝑎4
−
+ 2
3
2𝐿
5𝐿
q
𝑀𝐴 =
𝑞𝑎2
3
−
𝑅𝐴𝑌 =
𝑞𝑎3
2𝐿
𝑞𝑎
2
−
+
𝑞𝑎4
A
5𝐿2
3𝑞𝑎3
4𝐿2
+
B
a
L
2𝑞𝑎4
5𝐿3
(i)
123
b
C
𝑅𝐶𝑌 =
𝑀𝐶 = −
𝑞𝑎3 𝑞𝑎4
+ 2
4𝐿
5𝐿
3𝑞𝑎3
2𝑞𝑎4
4𝐿2
−
5𝐿3
31 VIGA EMPOTRADA-ARTICULADA CON CARGA
TRIANGULAR EN UNA PORCIÓN IZQUIERDA
q
Estructura real (𝐸𝑅)
(a)
A
C
B
a
b
L
=
q
𝑀
Estructura Primaria (𝐸𝑃)
A
B
𝑥
a
b
L
C
𝑥
+
𝑚1
Estructura liberada con una
unidad de fuerza redundante
𝑅𝐶𝑌 aplicada (𝐸𝑅𝑑1 )
A
C
B
𝑎
𝑏
𝑥
𝐿
𝑥
(de RCY)
1
d
(b)
Figura 31
SOLUCIÓN
Principio de superposición, figura 31-b. Se ha optado porque 𝑅𝐶𝑌 sea la fuerza sobrante.
124
Fuerzas de fijación y momentos de empotramiento en vigas
Ecuación de compatibilidad. Con 𝑑1 y 𝑓11 ya calculados al analizar la viga que se muestra en la
figura 30-a, obtenemos
𝑑1 + 𝑅𝐶𝑌 𝑓11 = 0 − − − (31 − 1)
1
𝑞𝑏𝑎3 11𝑞𝑎4
𝐿3
(−
−
) + 𝑅𝐶𝑌 (
) = 0 − − − (31 − 2)
𝐸𝐼
8
120
3𝐸𝐼
Despejando 𝑅𝐶𝑌 de la ecuación(31 − 2), resulta
𝑅𝐶𝑌 =
3𝑞𝑏𝑎3 33𝑞𝑎4 3𝑞(𝐿 − 𝑎)𝑎3 33𝑞𝑎4 3𝑞𝑎3 3𝑞𝑎4 33𝑞𝑎4
+
=
+
=
−
+
8𝐿3
120𝐿3
8𝐿3
120𝐿3
8𝐿2
8𝐿3
120𝐿3
∴ 𝑅𝐶𝑌 =
3𝑞𝑎3 𝑞𝑎4
−
8𝐿2
10𝐿3
Ecuaciones de equilibrio, figura 31-c. Por último,
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 + 𝑅𝐶𝑌 −
∴ 𝑅𝐴𝑌 =
𝑞𝑎 3𝑞𝑎3 𝑞𝑎4
−
+
2
8𝐿2
10𝐿3
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑀𝐴 − (
𝑀𝐴 −
𝑞𝑎
=0
2
𝑞𝑎 2𝑎
) ( ) + 𝑅𝐶𝑌 𝐿 = 0
2
3
𝑞𝑎2
3𝑞𝑎3 𝑞𝑎4
+( 2 −
)𝐿 = 0
3
8𝐿
10𝐿3
∴ 𝑀𝐴 =
𝑞𝑎2 3𝑞𝑎3 𝑞𝑎4
−
+
3
8𝐿
10𝐿2
q
𝑀𝐴 =
𝑞𝑎2
3
−
𝑅𝐴𝑌 = −
3𝑞𝑎3
8𝐿
𝑞𝑎
2
+
𝑞𝑎4
3
−
A
10𝐿2
3𝑞𝑎
8𝐿2
B
a
L
4
+
𝑞𝑎
10𝐿3
(c)
125
C
b
𝑅𝐶𝑌 =
3𝑞𝑎3 𝑞𝑎4
−
8𝐿2
10𝐿3
32 VIGA EMPOTRADA-ARTICULADA CON
MOMENTO APLICADO EN UN PUNTO ARBITRARIO
DEL CLARO
𝑚
Estructura real (𝐸𝑅)
A
B
a
C
b
L
(a)
=
𝑀
𝑚
Estructura Primaria (𝐸𝑃)
A
a
𝑥
B
C
b
𝑥
L
+
𝑚1
Estructura liberada con una
unidad de fuerza redundante
𝑅𝐶𝑌 aplicada (𝐸𝑅𝑑1 )
A
C
B
𝑎
𝑏
𝑥
𝐿
𝑥
(de RCY)
1
d
(b)
Figura 32
SOLUCIÓN
Principio de superposición, figura 32-b. Se obtendrá el valor de 𝑅𝐶𝑌 directamente una vez que se
aplique el método de las fuerzas.
Ecuación de compatibilidad. Se calculan los momentos internos 𝑀, figuras 32-c y 32-d.
126
Fuerzas de fijación y momentos de empotramiento en vigas
𝑚
𝑀1
𝑀2
C
𝑥
B
𝑥
C
b
(d)
(c)
𝑀1 = 0
𝑀2 + 𝑚 = 0 ⇒ 𝑀2 = −𝑚
Se escriben las ecuaciones de momento 𝑚1 a partir de las figuras 30-e y 30-f.
𝑀1
𝑥
𝑀2
C
𝑥
B
C
b
1
1
(f)
(e)
𝑀1 − 1 ∙ 𝑥 = 0 ⇒ 𝑀1 = 𝑥
𝑀2 − 1 ∙ (𝑥 + 𝑏) = 0 ⇒ 𝑀2 = 𝑏 + 𝑥
Se determina el desplazamiento 𝑑1 .
𝑑1 =
1 𝑎
1 𝑏
1 𝑎
∫ (−𝑚) ∙ (𝑥 + 𝑏)𝑑𝑥 + ∫ 0 ∙ 𝑥𝑑𝑥 = ∫ −(𝑚𝑥 + 𝑚𝑏)𝑑𝑥
𝐸𝐼 0
𝐸𝐼 0
𝐸𝐼 0
𝑎
1
𝑚𝑥 2
1
𝑚𝑎2
𝑑1 = [−
− 𝑚𝑏𝑥] = [−
− 𝑚𝑏𝑎]
𝐸𝐼
2
𝐸𝐼
2
0
Se determina el desplazamiento 𝑓11 .
𝐿
𝑓11 =
1 𝐿
1 𝑥3
𝐿3
∫ 𝑥 ∙ 𝑥 𝑑𝑥 = [ ] =
𝐸𝐼 0
𝐸𝐼 3 0 3𝐸𝐼
La ecuación de flexibilidad queda del siguiente modo:
1
𝑚𝑎2
𝐿3
[−
− 𝑚𝑏𝑎] + 𝑅𝐶𝑌 (
) = 0 − − − (32 − 1)
𝐸𝐼
2
3𝐸𝐼
127
Fuerzas de fijación y momentos de empotramiento en vigas
Entonces,
𝑅𝐶𝑌 =
3𝑚𝑎2 3𝑚𝑏𝑎 3𝑚𝑎2 3𝑚(𝐿 − 𝑎)𝑎
+ 3 =
+
2𝐿3
𝐿
2𝐿3
𝐿3
𝑅𝐶𝑌 =
3𝑚𝑎2 3𝑚𝑎 3𝑚𝑎2 3𝑚𝑎 3𝑚𝑎2
+ 2 − 3 = 2 −
2𝐿3
𝐿
𝐿
𝐿
2𝐿3
Ecuaciones de equilibrio, figura 31-g.
+↑ ∑ 𝐹𝑌 = 0 ⇒ 𝑅𝐴𝑌 + 𝑅𝐶𝑌 = 0
∴ 𝑅𝐴𝑌 = −
3𝑚𝑎 3𝑚𝑎2
+
𝐿2
2𝐿3
+ ∑ 𝑀𝐴 = 0 ⇒ 𝑀𝐴 − 𝑚 + 𝑅𝐶𝑌 𝐿 = 0
𝑀𝐴 − 𝑚 + (
3𝑚𝑎 3𝑚𝑎2
−
)𝐿 = 0
𝐿2
2𝐿3
𝑀𝐴 = 𝑚 −
3𝑚𝑎 3𝑚𝑎2
+
𝐿
2𝐿2
𝑚
𝑀𝐴 = 𝑚 −
3𝑚𝑎
𝐿
𝑅𝐴𝑌 = −
2
+
3𝑚𝑎
2𝐿
3𝑚𝑎
𝐿
2
A
2
a
L
3𝑚𝑎
2𝐿
C
b
2
+
B
3
(g)
128
𝑅𝐶𝑌 =
3𝑚𝑎
𝐿2
−
3𝑚𝑎2
2𝐿3
BIBLIOGRAFÍA
González, O. (2011). Análisis Estructural. México: LIMUSA.
Hibbeler, R. (2012). Análisis Estructural. México: PEARSON.
Villarreal, G. (2009). Análisis Estructural. Perú: INDEPENDIENTE.
Magdaleno, C. (1978). Análisis Matricial de Estructuras Reticulares. México: INDEPENDIENTE.
Beaufait, W. F.(1977). Análisis Estructural. Colombia. PRENTICE/HALL.
Beer, F., Johnston, E. & Elliot, R.(2007). Mecánica Vectorial para Ingenieros: Estática. México:
MCGRAWHILL.
Villarreal, G. (2011). Estática: Problemas Resueltos. Perú: INDEPENDIENTE.
Fitzgerald, R. (2011). Resistencia de Materiales. México: ALFAOMEGA.
Ortiz D., Marcos M., Hugo M., et al. (2014). Estructuras Isostáticas en 2D: Problemas Resueltos.
México: INDEPENDIENTE.
Ortiz, D. (2013). Tesis: Problemario de Análisis de Estructuras Isostáticas e Hiperestáticas para
Vigas, Marcos y Armaduras. México: UNAM.
129
Fuerzas de fijación y momentos de
empotramiento en vigas
El libro se ha escrito con la finalidad de contribuir en la formación académica de los estudiantes de
Ingeniería Civil, Arquitectura, Ingeniería Mecánica u otras carreras con afinidad, no obstante, también
se pretende que esta obra sirva de apoyo a los profesores que dictan los cursos de Análisis
Estructural y Mecánica de Materiales.
El énfasis de este libro es deducir las fórmulas de las “Fuerzas de Fijación y los Momentos de
Empotramiento” en vigas sometidas a distintos tipos de cargas con base en el método de
flexibilidades (de igual forma conocido como el método de las fuerzas). El uso de estas fórmulas es
necesario cuando se realiza el análisis estructural de una viga o un pórtico con el método de la rigidez
matricial o el método de Cross.
El método de flexibilidades es útil para determinar las fuerzas reactivas en los soportes de estructuras
hiperestáticas y se basa en el principio de superposición. Básicamente, plantea que una estructura
estáticamente indeterminada es equivalente a la suma de causas y efectos de una serie de
estructuras isostáticas, considerando la compatibilidad del desplazamiento de las mismas. Cabe
mencionar que solo es aplicable a un sistema estructural que responde en su rango elástico y lineal.
A continuación, se proporciona el enfoque seguido en esta obra. Exactamente 32 vigas
hiperestáticas son analizadas minuciosamente hasta el cálculo de sus reacciones en los apoyos. Las
solicitaciones aplicadas a las estructuras obedecen a fuerzas puntuales y distribuidas, y momentos
distribuidos y puntuales. Las cargas distribuidas actúan total o parcialmente sobre la longitud de la
estructura y pueden adquirir las siguientes formas: uniforme, variación lineal, parabólica, senoidal,
circular, elíptica, logarítmica, entre otras.
Número de Registro de Obra 03-2018-072610390400-01