Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética Simulación dinámica de Máquinas de corriente directa Autor: Merlyn Orduñez Ruiz Tutor: Ing. Arian Ramos Martínez Santa Clara 2010 "Año 52 de la Revolución" Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética TRABAJO DE DIPLOMA Simulación dinámica de Máquinas de corriente directa Autor: Merlyn Orduñez Ruiz E-mail: [email protected] Tutores: Ing. Arian Ramos Martínez Dpto. de Eléctroenergética Facultad de Ing. Eléctrica. UCLV. E-mail: [email protected] Santa Clara 2010 "Año 52 de la Revolución" Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Eléctrica autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad. _____________________ Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada. _____________________ _____________________ Firma del Autor Firma del Jefe de Departamento donde se defiende el trabajo _____________________ Firma del Responsable de Información CientíficoTécnica Tarea técnica Trabajo de diploma: Título a desarrollar por el diplomante: “Simulación dinámica de máquinas de corriente directa”. 1. Búsqueda, organización y análisis de la información sobre modelos dinámicos con énfasis en motores de C.D. 2. Confección de un material docente como apoyo bibliográfico a los temas de Máquinas de C.D. 3. Implementación de modelos dinámicos de motores de C.D., para diferentes estados de operación, empleando las herramientas disponibles en el Simulink del Matlab. 4. Búsqueda de parámetros reales de diferentes motores y efectuar simulaciones de los ficheros confeccionados con dichos parámetros. 5. Escritura del Trabajo. . . Firma del diplomante Firma del tutor Resumen Este trabajo aborda la teoría y aspectos generales de las máquinas de corriente directa. Su objetivo general es la confección e implementación de diferentes modelos dinámicos en el Simulink, que no es más que un paquete de programas, para realizar análisis virtuales en MATLAB, capaces de simular los diferentes estados de operación de las máquinas de corriente directa, para contribuir a ampliar el material docente e investigativo utilizado por los estudiantes de 3er año de la carrera de Ingeniería Eléctrica y como apoyo a la disciplina de Máquinas Eléctricas en el nuevo plan de estudio. Introducción Con el desarrollo de la electrónica de potencia y de los accionamientos eléctricos en la actualidad, los motores de corriente alterna ganan, cada vez más, mayor campo de aplicaciones en la industria. Esto reduce las aplicaciones de las máquinas de corriente directa. No obstante, existen procesos industriales que requieren de un suave y riguroso control de velocidad, es ahí donde las máquinas de corriente directa encuentran su aplicación principal, por lo que resulta de importancia para el ingeniero eléctrico conocer el funcionamiento y explotación de de dichas máquinas. Con los cambios de planes de estudios, los temas relacionados con las máquinas de corriente directa, se han reducido. En la actualidad la disciplina de Máquinas Eléctricas cuenta con muy poco material docente para realizar análisis virtuales en MATLAB, es por esto que desde el curso pasado se viene trabajando en la confección de modelos dinámico de las diferentes máquinas eléctricas. Los temas relacionados con las máquinas de corriente directa serán incluidos dentro de una nueva asignatura llamada: Conversión Electromecánica. Por estas razones nos planteamos la siguiente situación problémica: ¿Cómo contribuir a ampliar el material docente utilizado por los estudiantes de 3er año de la carrera de Ingeniería Eléctrica en los temas de Máquinas de C.D. con la confección de diferentes modelos dinámicos en MATLAB? Para dar respuesta a este problema de investigación se lleva a cabo este trabajo de diploma que tiene como objetivo general el siguiente: Confeccionar en MATLAB diferentes modelos dinámicos capaces de simular los diferentes estados de operación de las máquinas de corriente directa. Para cumplir dicho objetivo general se definió un conjunto de objetivos específicos, estos son: 1. Búsqueda, organización y análisis de la información sobre modelos dinámicos con énfasis en motores de C.D. 2. Confección de un material docente como apoyo bibliográfico a los temas de Máquinas de C.D. que serán impartidos. 3. Autopreparación en MATLAB y en especial el SimPower System Tool Box del Simulink. 4. Implementación de modelos dinámicos de motores de C.D., para diferentes estados de operación, empleando las herramientas disponibles en el MATLAB Simulink. 5. Búsqueda de parámetros reales de diferentes motores y efectuar simulaciones de los ficheros confeccionados con dichos parámetros. 6. Escritura del Trabajo. En general el trabajo consistió en confeccionar en MATLAB cinco proyectos, los cuales brindan la posibilidad de hacer un análisis dinámico de la máquina de corriente directa, bajo diferentes estados de operación. El proyecto uno permite el análisis de las condiciones necesarias para el arranque de un generador paralelo; el segundo el arranque por resistencia de un motor, el tercero el comportamiento de un motor bajo los diferentes tipos de frenaje, el cuarto el motor serie universal alimentado con corriente alterna y con corriente directa y el quinto la operación en el cuarto cuadrante de un motor serie. La estructura establecida para este informe de trabajo de diploma consta de tres secciones fundamentales: la introducción, el cuerpo del trabajo y la conclusiva. La sección introductoria abarca la terea técnica, el resumen y la introducción del trabajo. El cuerpo del trabajo se dividió en tres capítulos que dan respuesta a los objetivos específicos el capítulo una aborda los aspectos teóricos fundamentales de las máquinas de corriente directa, sus características constructivas, devanados, regímenes de operación, arranque y tipos de frenajes. En el capítulo dos se da una descripción del procedimiento seguido para la confección de los proyectos y de las características de éstos, también se brinda una guía de cómo trabajar con los proyectos y los resultados que se pueden obtener. El capítulo tres muestra diferentes resultados obtenidos de las simulaciones realizadas con los cinco proyectos, se presentan las principales características que cada uno brinda y otras que pueden ser obtenidas si se desean. La sección conclusiva contiene las conclusiones, recomendaciones, las referencias bibliográficas y la bibliografía. Para analizar las temáticas abordadas en este trabajo se consultaron diferentes fuentes documentales lo que posibilitó una mejor comprensión de la temática y con ello un esclarecimiento de la estrategia a seguir. El análisis teórico de la máquina de corriente directa y su operación en diferentes estados de trabajo se desarrollo tomando como referencia los textos: An Introduction To Electrical Machines ans Transformers de George McPherson y Direct-current Machinery de Charles S. Siskind. La confección de los programas en MATLAB y de los ficheros en Simulink se efectúa a partir de lo planteado en Dinamic Simulation of Electric Machinery de Chee-Mun Ong. Otros aspectos se toman de diversos artículos y textos que aparecen referenciados en el cuerpo del trabajo. Capítulo 1. Fundamentos teóricos de las máquinas de corriente directa. 1.1. Introducción. Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de interacciones electromagnéticas. Algunos de los motores eléctricos son reversibles, pueden transformar energía mecánica en eléctrica, funcionando como generadores. Los motores eléctricos de tracción usados en locomotoras realizan a menudo ambas tareas, si se los equipa con frenos regenerativos. Son ampliamente utilizados en instalaciones industriales, comerciales y particulares. Pueden funcionar conectados a una red de suministro eléctrico o a baterías. Así, en automóviles se están empezando a utilizar en vehículos híbridos para aprovechar las ventajas de ambos. Su fácil control de posición, momento y velocidad la han convertido en una de las mejores opciones en aplicaciones de control y automatización de procesos. También se construyen motores de CC con el rotor de imanes permanentes para aplicaciones especiales. La principal característica del motor de corriente directa es la posibilidad de regular la velocidad desde vacío a plena carga. 1.2. Características constructivas de la máquina de C.D. Las máquinas de C.D. están esencialmente constituida por una parte fija, llamada estator, que da soporte mecánico al aparato y tiene un hueco en el centro generalmente de forma cilíndrica cuya función principal es establecer el campo magnético, y otra parte giratoria, llamada rotor; es generalmente de forma cilíndrica y su función es proporcionar el momento electromagnético para mover la carga. Se le llama armadura a la parte más involucrada en la conversión de la energía eléctrica a mecánica o viceversa, en el caso de las máquinas de corriente directa, la armadura es el rotor, al igual que en la máquina sincrónica y a diferencia de la máquina asincrónica. Figura 1.1.Partes fundamentales de la máquina de C.D. El rotor está formado esencialmente por: ¾ Eje: Formado por una barra de acero fresada. Imparte la rotación al núcleo, devanado y al colector. ¾ Núcleo: Se localiza sobre el eje. Fabricado con capas laminadas de acero electrotécnico de 0,5 mm de espesor aisladas unas de otras [1], su función es proporcionar un trayecto de baja reluctancia entre los polos para la circulación del flujo magnético producido por los devanados de excitación. Las laminaciones tienen como objetivo reducir las corrientes parásitas en el núcleo. El acero del núcleo debe ser capaz de mantener bajas las pérdidas por histéresis. Este núcleo laminado contiene ranuras y dientes a lo largo de su superficie para albergar al devanado de armadura. ¾ Devanado de armadura: Consta de bobinas aisladas entre sí y entre el núcleo de la armadura. Estas bobinas están alojadas en las ranuras, y están conectadas eléctricamente a las delgas del colector, el cual debido a su movimiento rotatorio, proporciona un camino de conducción conmutado. ¾ Colector: Denominado también conmutador, está constituido de láminas de material conductor llamadas delgas, separadas entre sí y del centro del eje por un material aislante, para evitar cortocircuito con dichos elementos. El colector se encuentra sobre uno de los extremos del eje del rotor, de modo que gira con éste y está en contacto con las escobillas. El colector hace función de rectificador mecánico cuando la máquina trabaja en régimen de generador, y función de inversor mecánico cuando trabaja en régimen de motor. ¾ Cojinetes: Son las piezas que sirven de apoyo y fijación del eje del rotor. El estator constituye la parte fija de la máquina. Su función es suministrar el flujo magnético que será usado por la máquina para su funcionamiento. Está formado por: ¾ Yugo: Denominado también armazón, tiene dos funciones principales: servir como soporte y proporcionar una trayectoria de retorno al flujo magnético producido por los devanados de excitación, para completar el circuito magnético. ¾ Polos: Compuestos por láminas de material ferromagnético altamente remanente de 0,5 a 1 mm de espesor [1] y por el devanado de excitación, se encuentran fijados al armazón o carcaza del estator. Su función es proporcionar un campo magnético uniforme. ¾ Escobillas: Las escobillas están fabricadas de carbón, y poseen una dureza menor que la del colector, para evitar que éste se desgaste rápidamente. Se encuentran albergadas por los portaescobillas. Ambos, escobillas y portaescobillas, se encuentran en una de las tapas del estator. La función de las escobillas es transmitir el voltaje y la corriente de la fuente de alimentación hacia el colector y, por consiguiente, al devanado del rotor. La función del portaescobillas es mantener a las escobillas en su posición de contacto firme con las delgas del colector. Esta función la realiza por medio de resortes, los cuales hacen una presión moderada sobre las escobillas contra el colector. Esta presión debe mantenerse en un nivel intermedio pues, de ser excesiva, la fricción desgastaría tanto a las escobillas como al colector; por otro lado, de ser mínima esta presión, se produciría lo que se denomina: chisporroteo, que es cuando aparecen chispas entre las superficies del colector y las escobillas, debido a que no existe un buen contacto. Los componentes de la máquina de corriente directa se pueden apreciar claramente en la figura 1.1. 1.3. Principio de funcionamiento de la máquina de C.D. Los motores de corriente directa se basan en un principio de funcionamiento, el cual establece que si un conductor por el que circula una corriente eléctrica se encuentra dentro de la acción de un campo magnético, éste tiende a desplazarse perpendicularmente a las líneas de acción del campo magnético. El conductor tiende a funcionar como un electroimán debido a la corriente eléctrica que circula por el mismo adquiriendo de esta manera propiedades magnéticas, que provocan, debido a la interacción con los polos ubicados en el estator, el movimiento circular que se observa en el rotor del motor. Partiendo del hecho de que cuando pasa corriente por un conductor produce un campo magnético, además si lo ponemos dentro de la acción de un campo magnético potente, el producto de la interacción de ambos campos magnéticos hace que el conductor tienda a desplazarse produciendo así la energía mecánica. Dicha energía es comunicada al exterior mediante un dispositivo llamado flecha. Según la Ley de Lorentz, cuando un conductor por el que pasa una corriente eléctrica se sumerge en un campo magnético, el conductor sufre una fuerza perpendicular al plano formado por el campo magnético y la corriente, siguiendo la regla de la mano derecha, con módulo: F = B ⋅l ⋅ I [1.1] Donde: F: Fuerza ejercida sobre los conductores. I: Intensidad de la corriente que circula por el conductor en. l: Longitud del conductor. B: Inducción magnética. 1.4. Excitación de las máquinas de C.D. Los devanados de excitación de la máquina de C.D. son los encargados de establecer el flujo magnético principal en el entrehierro. Éstos se conectan en serie, paralelo o una combinación de ambos, llamada compuesta. El devanado de excitación serie, como su nombre lo indica, se conecta en serie con el circuito de armadura, por lo que por ambos circula la misma corriente. Este tipo de devanado de excitación se construye con alambre grueso y de pocas vueltas para así lograr una baja resistencia eléctrica y una menor caída de voltaje en el mismo. El devanado paralelo se conecta en paralelo con el circuito de armadura, este se construye con alambre fino y muchas vueltas, por lo que presenta una alta resistencia eléctrica. La máquina puede tener excitación compuesta, con dos devanados de excitación, uno conectado en serie y otro en paralelo; en este caso el devanado paralelo aporta la mayor parte de la fuerza magnetomotriz total; si por el devanado serie circula la corriente de armadura, la máquina presenta un devanado compuesta largo, si circula la corriente de línea, presenta un devanado compuesto corto. Si los campos magnéticos producidos por ambos campos están en el mismo sentido, el campo compuesto es acumulativo, pero si están en sentidos contrarios, es diferencial. Según el tipo de excitación que presente la máquina, pueden ser nombradas de las formas siguientes: Serie, paralelo o compuesta. Hay cinco clases principales de máquinas de C.D. de uso general: a) Máquinas con excitación en paralelo. b) Máquinas con excitación serie. c) Máquinas con excitación compuesta. d) Máquinas con excitación independiente. e) Máquinas de imán permanente. Además de los anteriores, existen otros tipos que son utilizados en electrónica: ¾ Motor paso a paso ¾ Servomotor ¾ Motor sin núcleo 1.5. Generadores de C.D. Los generadores de corriente directa son máquinas que producen tensión, su funcionamiento se reduce siempre al principio de la bobina giratorio dentro de un campo magnético. Si una armadura gira entre dos polos magnéticos fijos, la corriente en la armadura circula en un sentido durante la mitad de cada revolución, y en el otro sentido durante la otra mitad. Para producir un flujo constante de corriente en un sentido, o corriente continua, en un aparato determinado, es necesario disponer de un medio para invertir el flujo de corriente fuera del generador una vez durante cada revolución. Los generadores de corriente continua funcionan normalmente a voltajes bastante bajos para evitar las chispas que se producen entre las escobillas y el conmutador a voltajes altos. El potencial más alto desarrollado para este tipo de generadores suele ser de 1500 V. En algunas máquinas más modernas esta inversión se realiza usando aparatos de potencia electrónica, como por ejemplo rectificadores de diodo. El campo magnético de un generador se puede obtener mediante un imán permanente (magneto) o por medio de polos. En este último caso, los polos se excitan mediante la circulación de una corriente por los devanados de excitación a través de una fuente independiente o por autoexcitación, es decir, la propia corriente producida en la armadura sirve para crear el campo magnético en las bobinas del campo de excitación. Existen tres tipos de máquinas según sea la forma en que estén acoplados los devanados de excitación y la armadura: en serie, en paralelo y compuesta. Los generadores de corriente directa se clasifican según el método que usan para proporcionar corriente de campo de excitación. Un generador con excitación serie tiene su campo en serie respecto a la armadura. Un generador con excitación en derivación, tiene su campo conectado en paralelo a la armadura. Un generador con excitación compuesta tiene parte de sus devanados de excitación conectados en serie y parte en paralelo. Los dos últimos tipos de generadores tienen la ventaja de suministrar un voltaje relativamente constante, bajo cargas eléctricas variables. El de excitación en serie se usa sobre todo para suministrar una corriente constante a voltaje variable. 1.5.1. Principio de funcionamiento Haciendo girar una espira en un campo magnético se induce una f.e.m. en sus conductores. La tensión obtenida en el exterior a través de un anillo colector y una escobilla en cada extremo de la espira tiene carácter senoidal. Conectando los extremos de la espira a unos semianillos conductores aislados entre sí, conseguiremos que cada escobilla esté siempre en contacto con la parte del estator que presenta una determinada polaridad. Durante un semiperiodo se obtiene la misma tensión alterna pero, en el semiperiodo siguiente, se invierte la conexión convirtiendo el semiciclo negativo en positivo. El estator suele tener muchas más espiras y el anillo colector está dividido en un mayor número de partes o delgas, aisladas entre sí, formando lo que se denomina el colector. Las escobillas son de grafito o carbón puro montado sobre el portaescobillas que mediante un resorte aseguran un buen contacto. Al aumentar el número de delgas, la tensión obtenida tiene menor ondulación acercándose más a la tensión continua que se desea obtener. 1.6. Motores de C.D. Los motores de C.D., tienen amplia aplicación en la industria del transporte y otras instalaciones donde se requiera amplia y suave regulación de velocidad. En los motores con excitación independiente, las corriente de armadura, Ia, y de línea, IL, son iguales, Ia = IL, a diferencia de los motores paralelos o compuestos donde la corriente que consume el motor se divide entre la corriente de armadura y la corriente de excitación. 1.6.1. Motor con excitación en paralelo. El motor con excitación en paralelo, conocido también como motor paralelo, en derivación o shunt, tiene las bobinas del campo de excitación conectadas en paralelo con la armadura y por lo tanto el campo es independiente de las variaciones de la corriente de la armadura; de este modo el momento electromagnético desarrollado varía en forma directa con la corriente de armadura. Por lo general en un motor paralelo, las variaciones de velocidad en vacío a plena carga es aproximadamente el 10% de la velocidad sin carga. Por esta razón los motores con excitación en paralelo se consideran corno motores de velocidad relativamente constante. En el instante del arranque, el momento motor que se desarrolla es menor que el motor serie. Al disminuir la intensidad de la corriente consumida, el régimen la velocidad de operación apenas sufre variación. Con variaciones apreciables de la carga, la velocidad de operación sufre pocos cambios, es un motor con excelente regulación de velocidad. Los motores de corriente directa en derivación son adecuados para aplicaciones en donde se necesita velocidad constante a cualquier ajuste del control o en los casos en que es necesario un rango apreciable de velocidades. El motor en derivación se utiliza en aplicaciones de velocidad constante, como en los accionamientos para los generadores de corriente continua en los grupos motogeneradores de corriente directa. Los devanados de excitación principales de un motor paralelo, están construidos de muchas vueltas y de alambre delgado, por lo que la resistencia del campo de excitación principal es muy grande y la corriente que circula por estos es muy pequeña. El valor de la corriente de campo permanece constante mientras no se modifique la tensión de la línea, ni la resistencia del circuito en el cual se halla incluido el devanado de excitación principal, lo cual también determina que es constante el valor del flujo en el entrehierro. En cambio, la corriente en el devanado de armadura presenta una situación diferente, ya que esta es afectada por la resistencia interna de los devanados y por la fem inducida en los devanados de armadura del rotor, que se encuentra en movimiento. Esta fem se opone al voltaje de alimentación por lo que se conoce como fuerza contraelectromotriz, Eg, inducida en el circuito de armadura. La fuerza contraelectromotriz es proporcional a la velocidad del motor y al flujo magnético en el entrehierro. E g = K a φδ ω [1.2] Alguna de las principales características de estas tipos de motores son las siguientes: ¾ Momento de arranque menor que en el motor serie. ¾ Muy estable. ¾ Requiere reóstato de arranque en el inducido. ¾ Utilizado en máquinas herramientas. Figura 1.2. Circuito equivalente de un motor paralelo. Del circuito equivalente de la figura 1.2 se puede deducir que: IL = Ia + IF [1.3] Aplicando la ley de tensiones de Kirchoff IF = VT RF [1.4] 1.6.2. Motor Serie. Se designa así al motor de corriente directa cuyo devanado de excitación principal está conectado en serie con el devanado de armadura, Por lo tanto, la corriente de excitación es también la corriente que circula por el circuito de armadura y la misma que corriente que consume el motor. Los devanados de excitación principales están construidos de pocas vueltas y con conductor de gran sección, por lo que presentan una baja resistencia. El motor serie se caracteriza por tener un elevado momento de arranque, por lo que se usa en aplicaciones en las cuales la carga requiere un alto momento de arranque, como en la tracción eléctrica, grúas, malacates, bombas hidráulicas de pistón y en general en aquellos procesos donde lo importante sea vencer un momento de gran precisión en la velocidad. El motor serie de C.D. no debe operar nunca en vacío, pues se va de revoluciones, debido a que la velocidad de un motor de corriente directa aumenta al disminuir el flujo en el entrehierro y, en el motor serie. Al estar en vacío, la corriente consumida es muy pequeña, solo la necesaria para vencer las pérdidas rotacionales y, como es la misma que circula por los devanados de excitación, el flujo magnético en el entrehierro es muy pequeño y la velocidad excesivamente alta. Alguna de las principales características de estas tipos de motores son las siguientes: ¾ Momento de arranque muy elevado. ¾ Difícil control de velocidad. ¾ Requiere reóstato de arranque. ¾ Se utiliza para tracción eléctrica. La potencia es casi constante a cualquier velocidad. Le afectan poco la variaciones bruscas de la tensión de alimentación, ya que un aumento de esta provoca un aumento de la intensidad de la corriente y, por lo tanto, del flujo magnético y de la fuerza contraelectromotriz, estabilizándose la intensidad de la corriente consumida. Figura 1.3. Circuito equivalente de un motor serie de C.D. El devanado de excitación principal, conectado en serie con el circuito de armadura, es recorrido por la corriente total. Por consiguiente, la excitación del campo magnético aumenta mucho en el arranque. Esto implica que los motores serie de C.D. tengan un gran momento de arranque. Los motores serie de C.D presentan una pésima regulación de velocidad, con cargas muy pesadas la velocidad de operación es muy pequeña y en vacío, excesivamente alta. Para variaciones grandes de carga, su velocidad de operación varía mucho. El momento electromagnético depende directamente de la intensidad del campo magnético. Con una carga elevada la rotación de la armadura será más lenta, esto reduce la fuerza contraelectromotriz en la armadura y aumenta la corriente a través de la misma, aumentando la intensidad del campo. Por consiguiente una carga elevada origina tanto un aumento en el flujo magnético de la armadura como en el flujo magnético del campo y de esta manera el momento electromagnético del motor es incrementado. Si no existe carga en el motor y se le aplica un voltaje constante, la única oposición a la velocidad del motor es la fuerza contraelectromotriz y las pérdidas rotacionales; al ir adquiriendo velocidad el motor, la fuerza contraelectromotriz aumenta dado que la velocidad de corte de líneas de fuerza aumenta y la corriente a través de la armadura disminuye. Una disminución en la corriente de armadura significa una disminución en la corriente del campo debido a que ambos devanados están en serie, produciendo un debilitamiento del campo. Los motores serie tienen un alto par de arranque, por esta razón nuca deben de arrancarse sin carga, debido a que el motor alcanzaría una velocidad peligrosa. 1.6.3. Motor Compuesto. El motor compuesto, es una combinación del motor serie y el motor paralelo. Este tipo de motor tiene dos devanados diferentes de excitación: uno formado de un gran número de vueltas de alambre delgado conectado en paralelo con la armadura, y el otro formado de pocas vueltas de alambre grueso conectadas en serie con la armadura. El motor compuesto, dispone de las características del motor serie y las del motor paralelo. El flujo del campo serie varia directamente a medida que la corriente de armadura varía, y es directamente proporcional a la carga. El campo serie se conecta de manera tal que su flujo se añade al flujo del campo principal shunt. Los motores compuestos se conectan normalmente de esta manera y se denominan como compuesto acumulativo. Figura 1.4. Circuito equivalente del motor compuesto largo. Esto provee una característica de velocidad que no es tan dura o plana como la del motor shunt, ni tan suave como la de un motor serie. Un motor compuesto tiene un limitado rango de debilitamiento de campo; la debilitación del campo puede resultar en exceder la máxima velocidad segura del motor sin carga. Los motores de corriente directa compuestos son algunas veces utilizados donde se requiera una respuesta estable de momento constante para un rango de velocidades amplio. Alguna de las principales características de estas tipos de motores son las siguientes: ¾ Momento de arranque más elevado que el motor paralelo. ¾ Muy estable. ¾ Requiere reóstato de arranque en el inducido. ¾ Utilizado en máquinas herramientas y para tracción. ¾ En estos motores la FEM en reposo es cero, y por consiguiente, la corriente y el momento de arranque sólo quedan limitados por la resistencia del circuito de armadura. El motor compuesto puede ser acumulativo o diferencial. El motor compuesto acumulativo es aquel cuyos campos en serie y paralelo se conectan de tal modo que se suman y se refuerzan entre sí; este tipo de motor es el que más se usa porque un incremento en la carga, decrece la velocidad y aumenta considerablemente el momento electromagnético. También posee un gran momento de arranque. Por consiguiente un motor compuesto acumulativo es de velocidad relativamente constante, desarrolla grandes potencias para cargas pesadas y tiene buen momento de arranque. Figura 1.5. Circuito equivalente del motor compuesto corto. En este tipo de motor el campo en serie se opone al campo en paralelo y el campo total se debilita cuando la carga aumenta. Esto permite que la velocidad se incremente con el aumento de carga hasta una situación segura de operación. Como el momento de arranque es muy bajo rara vez se usa el motor compuesto diferencial. Estos motores pueden ser de conexión larga o corta. Esta clasificación se debe a la corriente que circula por el campo serie. Cuando por el campo serie circula la corriente de armadura, estamos en presencia de un motor compuesto con conexión larga, y cuando por el campo serie circula la corriente de línea, estamos en presencia de un motor compuesto con conexión corta. Para ambas conexiones el motor compuesto puede ser tanto acumulativo como diferencial. 1.7. Arranque de motores de C.D. Se denomina arranque de un motor al régimen transitorio en el que se eleva la velocidad del mismo desde el estado de reposo, velocidad igual cero, hasta el estado de operación estable. En los motores de C.D. la FEM inducida en reposo es cero, y por consiguiente, la corriente y el momento de arranque sólo quedan limitados por la resistencia del circuito de armadura, ecuación 1.5. Para impedir que la corriente por la armadura en el arranque tome un valor excesivo, es preciso insertar, en serie con el circuito de armadura, un reóstato de arranque, cuya resistencia esté calculada para que la intensidad de corriente en el arranque se encuentre dentro de los valores reglamentados. I arr = VT Ra [1.5] Los motores de corriente directa pueden arrancar por diferentes procedimientos actuando sobre el voltaje. Los métodos de arranque más utilizados son: ¾ Arranque directo de la línea. ¾ Arranque por resistencia. ¾ Disminuyendo el voltaje de alimentación mediante dispositivos electrónicos de rectificación controlada. Los motores de corriente directa de pequeña capacidad se pueden arrancar al conectar directamente el motor al voltaje de línea. Los motores con capacidad nominal de 2 Hp o más en general requieren un arrancador con voltaje reducido. El voltaje reducido para el arrancador se obtiene al emplear resistencias en serie con el circuito de armadura del motor, o bien, al hacer variar el voltaje de alimentación a la armadura. Se puede usar control manual o magnético. 1.7.1. Arranque de motores de corriente directa por resistencia. Para este tipo de arranque se coloca temporalmente en serie con la armadura pasos de resistencia, nunca más de tres, para así limitar la corriente de arranque a valores permisibles. Estos pasos de resistencia pueden ser cortocircuitados, o retirados, manual o automáticamente a medida que el rotor va incrementando su velocidad. La figura 1.6 muestra el circuito de arranque con tres pasos de resistencia, R1, R2 y R3, de un motor paralelo, a través de los contactos, C1, C2 y C3, son los encargados de cortocircuitar las resistencias del arrancado, estos contactos pueden accionar por límites de corriente o cada un tiempo determinado. Figura 1.6. Circuito de un arranque por resistencia de un motor paralelo. Para determinar el valor de los pasos de resistencia, primeramente debemos establecer los valores mínimo y máximo entre los cuales va a variar la corriente de arranque en la armadura. El valor máximo de la corriente de arranque usualmente está limitado por el chispeo en los contactos delga escobilla en el proceso de conmutación, normalmente es menor que dos veces la corriente de armadura nominal para motores sin devanados compensadores [2], como máximo 3,5 veces el valor de la corriente nominal en motores bien compensados [2]. El valor mínimo de la corriente durante el proceso de arranque debe garantizar un momento de arranque lo suficientemente alto para que la aceleración del motor sea aceptable, este valor normalmente está entre 1,1 y 1,3 veces la corriente de armadura nominal. Siguiendo el procedimiento siguiente se pueden calcular los pasos de resistencia del arrancador: ( Ra + R1 + R2 + R3 ) = VT − Vesc I a max [1.6] Donde: Ra: resistencia total del circuito de armadura. R1, R2, R3: valores de resistencia de los pasos de arrancador. VT: Voltaje de alimentación. Vesc: Caída de voltaje en las escobillas. Iamáx: Valor de corriente máximo durante el proceso de arranque. ( Ra + R2 + R3 ) = ( Ra + R3 ) = ( Ra ) = I a min ( Ra + R1 + R2 + R3 ) [1.7] I a max I a min ( Ra + R2 + R3 ) I a max [1.8] I a min ( Ra + R3 ) I a max [1.9] Donde: Iamin: Valor mínimo de la corriente durante el proceso de arranque. 1.8. Frenaje eléctrico de Motores de C.D. Algunos motores eléctricos son frenados mediante dispositivos mecánicos operados magnéticamente. Otros, con frenados reostáticos. En los frenajes mecánicos existe el inconveniente que el frenado depende fundamentalmente del estado de las superficies rasantes y en los frenos reostáticos aparece el problema de los relays y otros dispositivos electromecánicos, desgastables y sujetos a fallas. Ambos sistemas requieren una mantención periódica. Un frenaje eléctrico es aquel en que el momento electromagnético producido sobre la armadura está en sentido contrario a la velocidad de rotación. A continuación se describen los tres tipos de frenajes eléctricos siguientes: por inversión, dinámico y regenerativo. 1.8.1. Frenaje por inversión. Este sistema es utilizado en algunas aplicaciones especiales como por ejemplo, algunas laminadoras las cuales deben detenerse súbitamente para luego cambiar su sentido de giro. Esto se efectúa sin suspender la excitación del motor e invirtiendo la tensión en la armadura, la figura 1.7 muestra el circuito equivalente de un motor paralelo, los cambios a realizar para implementar un frenaje por inversión se muestran en la figura 1.8. En el instante en que se ha invertido la tensión, el voltaje aplicado a la armadura y la fuerza contraelectromotriz son casi iguales y aditivas, luego, para no ocasionar daños por el impulso de sobre corriente es necesario intercalar en serie una resistencia que es usualmente un 85% mayor que la resistencia de arranque normal. El valor de esta resistencia se puede calcular de la manera siguiente: RI = (VT − Vesc ) + E g I aF − Ra Donde: IaF: Valor máximo de la corriente de armadura durante el proceso de frenaje. Este tipo de frenaje puede ser utilizado para detener el motor y para invertir el sentido de giro de la máquina. Figura 1.7. Circuito de un motor paralelo Figura 1.8. Diagrama de conexión de un frenaje por inversión 1.8.2. Frenaje Dinámico. En este tipo de frenaje el motor es llevado rápidamente a reposo haciendo uso de la acción generativa del mismo. Si los terminales de la armadura son desconectados y se conecta a la armadura una resistencia de valor bajo, manteniendo la excitación, entonces se produce una detención del motor ya que la fuerza electromotriz produce una corriente en la resistencia con lo que la energía cinética acumulada en las partes rotatorias se disipa rápidamente en forma de calor, la figura 1.9 muestra un diagrama de conexión para realizar un frenaje dinámico en un motor paralelo. El valor de la resistencia es determinante en la rapidez, con lo que se consume la energía mecánica y por ello el tiempo requerido para frenar, generalmente se ha adoptado un valor de esta resistencia tal que produzca un impulso inicial del orden de 180% del valor inicial, sin embargo puede ser traspasado para frenados más violentos permitiendo mayores corrientes y el consiguiente chisporroteo en el colector. Esta forma de frenado sin embargo, no provee un frenado constante ya que a medida que la velocidad baja, en forma proporcional baja la generación, al principio el frenado es máximo y luego va reduciéndose a cero cuando el motor se detiene. Esto significa que el motor no está bloqueado cuando el motor no gira, luego se hace necesaria la existencia de frenado mecánico que provea este bloqueo. Figura 1.9. Diagrama de conexión de un frenaje dinámico Si bien el frenado no es constante, es posible hacerlo controlando la excitación del generador, para lo cual basta con implementar un control realimentado mediante tiristores. 1.8.3. Frenaje Regenerativo. El término frenaje regenerativo, a diferencia de los anteriores en que el motor es llevado a completo reposo, se aplica a un sistema donde la carga ejerce momento negativo sobre el motor, impulsándolo como si fuese un generador logrando devolver energía a la fuente. Este tipo de frenado es una modificación del frenado dinámico, requiere que la fem inducida en el circuito de armadura sea mayor que el voltaje de la fuente. Esto significa que la velocidad de operación debe ser mayor que la ideal de vacío, condición que es posible alcanzar solamente si la carga es de un carácter persecutorio, como en un ferrocarril en marcha cuesta abajo, un ascensor que está descendiendo o un automóvil cuesta abajo. Fuera del exceso de velocidad, se puede general si se aumenta la intensidad de excitación lo suficiente como para superar la tensión de la fuente; en otros casos, cuando varios motores impulsan una carga común, puedes ser conectados en diversas combinaciones serie o paralelo. El frenado regenerativo es de aplicación también, cuando se desea mantener limitada la velocidad de una carga dada. 1.9. Devanados de C.D. El devanado de armadura es el elemento más importante de las máquinas. El elemento fundamental de cada devanado de armadura es la bobina, la cual está compuesta de una o varias vueltas en serie y con sus extremos conectados a delgas del colector .Los devanados de armadura más comunes son los siguientes: devanado lazo y devanado ondulado; aunque existen también devanados que son combinación de los antes mencionados. Los terminales de la bobina de un devanado lazo están conectados a delgas adyacentes o muy cercanas unas de otras. Los terminales de bobina de un devanado ondulado, se conectan a delgas separadas aproximadamente dos veces el paso polar. No pueden estar conectados exactamente a dos veces el paso polar. A pesar de que en un devanado ondulado los terminales de bobina se sueldan a delgas lejanas, dos veces el paso polar, y en uno lazo se sueldan a delgas adyacentes el potencial eléctrico entre las delgas que existe en ambos casos es prácticamente el mismo. Los costados de una misma bobina de la armadura están situados debajo de polos adyacentes de diferente polaridad de modo que las fems que se inducen en ellos son aditivas alrededor de la bobina. Los terminales de la bobina se sueldan a las delgas del colector en correspondencia al devanado utilizado, los cuales se conectan al circuito externo a través de las escobillas. Capítulo 2. Proyectos para la simulación dinámica de máquinas de C.D. 2.1. Introducción. Este capítulo aborda acerca de la estructura de los cinco proyectos implementados para la simulación dinámica de máquinas de C.D., para los estados de operación siguientes: arranque y operación de un generador paralelo de C.D., arranque por resistencia de un motor excitado independientemente, el comportamiento de un motor bajo los diferentes métodos de frenaje, operación del motor serie universal alimentado con corriente alterna y con corriente directa y la operación en el cuarto cuadrante de un motor serie. 2.2. MATLAB y Simulink. El nombre de MATLAB proviene de la contracción de los términos MATrix LABoratory Es un entorno de computación y desarrollo de aplicaciones totalmente integrado orientado para llevar a cabo proyectos en donde se encuentren implicados elevados cálculos matemáticos y la visualización gráfica de los mismos. MATLAB integra análisis numérico, cálculo matricial, proceso de señal y visualización gráfica en un entorno completo donde los problemas y sus soluciones son expresados del mismo modo en que se escribirían tradicionalmente, sin necesidad de hacer uso de la programación tradicional. En los medios universitarios MATLAB se ha convertido en una herramienta básica, tanto para los profesionales, investigadores y estudiantes de centros docentes, como una importante herramienta para el dictado de cursos universitarios. En el mundo industrial MATLAB está siendo utilizado como herramienta de investigación para la resolución de complejos problemas planteados en la realización y aplicación de modelos matemáticos en ingeniería. MATLAB es la disponibilidad de los toolboxes especializados. Estos son paquetes especializados, orientados a ingenieros, científicos y otros tipos de profesionales técnicos. Para este trabajo se utilizó el paquete Simulink. Este es un paquete de programas para modelar, simular y analizar sistemas dinámicos. Soporte de sistemas lineales y no lineales, modelados en tiempo continuo, muestreados o un híbrido de los dos. Los sistemas pueden ser también multifrecuencias. Dadas las potencialidades que presenta el MATLAB, se decidió confeccionar los diferentes proyectos para el análisis de máquinas de C.D. 2.3. Estructura general de los proyectos. Cada proyecto confeccionado consta de dos ficheros. Uno es un programa con extensión .m, encargado de inicializar la simulación. Al ejecutar este fichero se crean todas las variables a través de las cuales se dan a conocer los parámetros nominales y datos necesarios de la máquina de C.D., guardándolos en el espacio de trabajo del MATLAB. A través de la ventana de comandos del MATLAB, este fichero va dando las instrucciones a seguir para la simulación y devolviendo diferentes gráficas. El otro es el fichero confeccionado en el Simulink de MATLAB (.mdl), el cual es el diagrama matemático de la máquina de C.D. para cada caso en específico confeccionado con los diferentes bloques del Simulink. Para lograr una interacción entre ambos ficheros del MATLAB (fichero .m y fichero .mld) se utilizó la sentencia keyboard en los ficheros .m. Cuando este comando es utilizado, llegado su momento detiene la ejecución y le da el control al usuario, esto se indica través de la letra k en la ventana de comandos del MATLAB, al ocurrir esto las diferentes variables pueden ser estudiadas y cambiadas, al igual que pueden ser utilizados todos los comandos del MATLAB y todas sus aplicaciones, este es el momento en que podemos ejecutar los ficheros .mdl en nuestros proyectos. Tecleando la palabra clave return se devuelve el control al fichero .m para que continúe su ejecución. Para realizar el análisis de cualquiera de los proyectos confeccionados, primeramente debe ejecutarse el fichero .m y luego poner en marcha la simulación (fichero.mdl) con los parámetros de simulación más adecuados, por último, seguir las orientaciones que va dando el fichero .m en la ventana de comandos del MATLAB para obtener los diferentes gráficos. 2.4. Proyecto 1: Arranque y operación de un generador paralelo de C.D. En este proyecto se implementó la simulación de un generador paralelo autoexcitado de C.D. Permite estudiar las condiciones necesarias de flujo remante, sentido de rotación y conexión de los devanados de excitación con respecto al circuito de armadura, para que el generador logre la autoexcitación, levante voltaje y opere satisfactoriamente. La ecuación del devanado de campo es la siguiente: V f = I f (R f + Rrh ) + L f dI f dt [2.1] Donde: Rf: Resistencia del devanado de excitación. Rrh: Resistencia del reóstato conectado en serie con el circuito de excitación. Lf: Inductancia del devanado de excitación. El devanado de armadura está representado por un devanado equivalente en cuadratura con el devanado de excitación. Utilizando la ecuación característica del generador, el valor promedio del voltaje en los terminales del circuito de armadura puede expresarse de la forma siguiente: E g = I a Ra + Laq dI a + Vt + Vesc dt [2.2] Donde: Eg: Fem inducida en los devanados de armadura Ia: Corriente de armadura Ra: Resistencia del circuito de armadura Laq: Inductancia del circuito de armadura Vt: Voltaje en los terminales del generador Vesc: Caída de voltaje en las escobillas Además: E a = k a φδ ω [2.3] Donde: ka: Constante de armadura φδ : Flujo en el entrehierro ω : Velocidad de operación Se consideró la velocidad a la cual se mueve el rotor del generador constante, por lo que no se hace necesario el uso de la ecuación para variación de la velocidad del rotor. En caso de que se desee implementar la simulación de la variación de velocidad, utilizando el convenio de que el momento es positivo en la dirección de la rotación del rotor, se debe utilizar la ecuación del movimiento del rotor siguiente: M em + M mec = J dω + Dω m dt M em = k aφδ (− I a ) = Eg0 ω0 (− I a ) [2.4] [2.5] La saturación magnética implica la relación no lineal existente entre la corriente de campo y el flujo magnético por polo. Los efectos de la saturación magnética y la velocidad del rotor sobre la fem inducida en el circuito de armadura, pueden ser determinados con el uso de la característica de vacío a una velocidad conocida y la escala de velocidad siguiente: Eg ω = k aφδ = Eg0 ω0 [2.6] Si se desprecia la saturación magnética, el flujo magnético en el entrehierro es proporcional a la corriente de excitación, por lo tanto, k aφδ puede ser sustituido por k f I f . La figura 2.1 muestra el fichero confeccionado en el Simulink de MATLAB (S1.mdl) para la simulación. Figura 2.1 Diagrama de bloque de un generador paralelo de C.D. El fichero de MATLAB: M1.m es el encargado, primeramente, de establecer los parámetros nominales y los datos tales como: potencia nominal, corriente nominal de armadura, resistencia del circuito de armadura, resistencia del devanado de excitación, las inductancias del los devanados de excitación y de armadura, valor de la carga conectada a los terminales del generador, entre otras; estos datos pueden ser cambiados por el usuario en dependencia de la máquina que se quiera analizar. Luego grafica la característica de magnetización del material ferromagnético de la máquina, la cual fue obtenida a una velocidad de 200 rad/seg. También es el encargado de graficar los principales parámetros para el análisis del generador de C.D. Para que un generador paralelo logre autoexcitarse, el sentido de rotación del motor primario y el flujo remante debe tener un sentido y una polaridad respectivamente tal que, el voltaje que se induzca en el circuito de armadura (Eg) haga circular una corriente por el devanado de excitación, cuyo flujo asociado tenga la misma dirección y sentido que el flujo remanente y de esta forma se logre la autoexcitación. En el fichero S1.mdl el flujo remanente es representado indirectamente en la característica de magnetización cuando la corriente de excitación es cero, la polaridad del flujo remante puede cambiarse remplazando el valor de 1 por el de -1 en el bloque llamado field polarity, la dirección de la rotación del motor primario es representada con el signo de la velocidad de rotación en el bloque wm_. Si se desprecian las caídas de voltaje en los elementos pasivos del devanado de armadura, en las escobillas y en la resistencia de excitación, el voltaje en los terminales de armadura del generador puede determinarse por la intersección de la característica de campo, cuya pendiente depende del valor de la resistencia de campo y del reóstato conectado en serie con el circuito de excitación, y de la característica de magnetización. Cuando la pendiente de la característica de campo es lo suficientemente grande para sobrepasar la rodilla de saturación, el generador no va a levantar voltaje y por tanto no va a poder autoexcitarse, esto sucede cuando el valor de resistencia del reóstato conectado en serie con el circuito de excitación tiene un valor elevado. Igual ocurre cuando el rotor del generador es movido a una velocidad baja. Todas estas condiciones pueden ser estudiadas y analizadas con la utilización de los ficheros del proyecto 1. 2.5. Proyecto 2: Arranque por resistencia de un motor paralelo. Este proyecto se confeccionó para el análisis del arranque por resistencia de un motor excitado independientemente. Los ficheros M2.m y S2.mdl pueden utilizarse para: el estudio transitorio de un arranque directamente desde la línea de alimentación; el arranque por resistencia quitando los pasos de resistencia, teniendo como límites valores de corriente por la armadura, y retirando los pasos de resistencia cada cierto intervalo de tiempo. El fichero M2.m es el encargado de establecer los parámetros nominales y los datos del motor, además también establece los límites mínimo y máximo entre los cuales va a variar la corriente de arranque durante este proceso, estos datos pueden ser ofrecidos por el usuario. También se encarga de calcular el valor que deben tener los pasos de resistencia del arrancador a partir de los datos obtenidos anteriormente. Después de correr la simulación brinda una serie de gráficas de mucha utilidad para el análisis del proceso de arranque. Para la simulación se asume que el campo de excitación se encuentra energizado y en estado estable en el momento de comenzar el proceso de arranque. Se asume también que la fem inducida en el circuito de armadura (Eg) es proporcional al flujo magnético en el entrehierro y a la velocidad del rotor, como se puede apreciar en la ecuación 2.3. Además, el momento electromagnético desarrollado por el motor es: M em = k aφδ I a [2.7] Cuando el rotor está detenido, ω m y Eg son cero. En el arranque por resistencia, el motor arranca con un voltaje de alimentación constante, y se conectan en serie con la armadura pasos de resistencias, nunca más de tres, para así lograr que los valores de la corriente de armadura estén dentro de valores permisibles durante el período de arranque. El límite superior de corriente lo determina el proceso de conmutación de los pasos de resistencia y el límite inferior se encarga de mantener un valor aceptable de aceleración en el rotor. Una simple representación de un motor de C.D. excitado independientemente con circuito de arranque se muestra en la figura 2.2. La figura 2.3 muestra el fichero confeccionado en Simulink, S2.mdl, para el análisis del arranque por resistencia de dicho motor. Figura 2.2. Arranque por resistencia de un motor de C.D. excitado independientemente. Figura 2.3. Fichero para el análisis de un arranque por resistencia. Aplicando una LKV en el circuito de armadura obtenemos: Vt = I a Ra + Laq dI a + E g + Vesc dt [2.8] La ecuación del movimiento del rotor es la siguiente: M em + M mec − Dω ω m = J dω m dt [2.9] Donde: Mmec: Momento mecánico de la carga Dw: Coeficiente de amortiguamiento J: Inercia del rotor Las ecuaciones 2.8 y 2.9 pueden plantearse de forma integral de la forma siguiente: t 1 I a (t ) = Laq ω m (t ) = 1 J ∫ (V t − Vesc − I a Ra − E a )dt + I a (0 ) [2.10] + M mec − Dω ω m ) + ω m (0 ) [2.11] 0 t ∫ (M em 0 Durante el proceso de arranque la corriente por la armadura varía entre un valor mínimo de corriente (Imin) y un valor máximo (Imax) seleccionados, la conmutación de los tres pasos de resistencia en el fichero S2.mdl se accionan cuando la corriente de armadura disminuye hasta el valor límite mínimo (Iamin). Los contactos, C1, C2, y C3, están inicialmente abiertos. Cuando el contacto principal MC, se cierra para el arranque del motor, la corriente de arranque inicial será limitada a su valor superior (Imax), por los tres pasos de resistencia y la resistencia del circuito de armadura. Como el rotor aumenta en velocidad, la fuerza contraelectromotriz, Eg, aumentará correspondientemente con la velocidad, lo que provoca la disminución de la corriente de armadura. Cuando la corriente de arranque disminuye hasta alcanzar su valor límite mínimo, el contacto C1 se cierra y es cortocircuitado el primer paso de resistencia, r1. Cuando se pone en cortocircuito dicho paso (r1), la corriente de armadura aumenta nuevamente, y el momento junto con esta, aumentando la aceleración del rotor. Como la fuerza contraelectromotriz Eg, aumenta con el incremento de la velocidad, la corriente de armadura disminuirá otra vez. Cuando la corriente de armadura disminuye otra vez al límite inferior, el paso de resistencia r2, es cortocircuitado por el contacto, C2. El mismo proceso se repite hasta que el último paso de resistencia, r3, se pone en cortocircuito, dejando solamente la resistencia del circuito de armadura. 2.6. Proyecto 3: Métodos de frenaje. En las máquinas de C.D., un frenaje eléctrico se logra cuando el momento electromagnético y el sentido de rotación del motor están en sentido contrario, cuando la máquina pasa a trabajar del primer al segundo o cuarto cuadrante. Esto se logra invirtiendo el sentido de circulación de la corriente por la armadura. Aunque un cambio de la polaridad del campo de excitación también da lugar a un cambio de sentido del momento electromagnético, pero éste método se emplea muy poco, porque la constante de tiempo para la inversión del flujo es mucho más larga que para la corriente. Este proyecto, permite analizar la operación de la máquina en el segundo cuadrante de la característica de velocidad contra momento electromagnético, para ello se implementaron los tipos de frenajes siguientes: Frenaje por inversión o contracorriente: para lograr este tipo de frenaje se invierte la polaridad del voltaje de alimentación de la armadura, esto trae consigo la inversión del sentido de circulación de la corriente por la armadura. En el momento de aplicar el frenaje la corriente de armadura puede alcanzar valores por encima del nominal, por lo que se utiliza una resistencia en serie con el circuito de armadura para limitar dicha corriente. En este caso el motor pasa a trabajar en el segundo cuadrante, frenándose, hasta que se detiene y comienza a girar en sentido contrario, pasando a trabajar al tercer cuadrante. Este método de frenaje puede ser utilizado para detener el motor o para invertir el sentido de giro del mismo. Frenaje por inversión o contracorriente en el cuarto cuadrante: éste es un caso especial para este tipo de frenaje, es utilizado fundamentalmente para descender cargas de momento constante a una velocidad determinada, se logra conectando resistencia en serie con el circuito de armadura, para de esta forma aumentar la pendiente de la característica mecánica del motor de forma tal que el cruce de esta, con la característica de la carga ocurra en el cuarto cuadrante, en este caso el momento de la carga es mayor que el momento electromagnético desarrollado por el motor, y esto provoca que el rotor gire en sentido contrario. Esto corresponde a la operación del mismo en el cuarto cuadrante de la característica de momento contra velocidad. Frenaje dinámico: para lograr este tipo de frenaje se desconecta la armadura del circuito de alimentación dejando el devanado de excitación conectado, la armadura se cortocircuita a través de una resistencia para limitar la corriente por esta, de este modo se logra invertir el sentido de circulación de la corriente por la armadura y por tanto el momento electromagnético, pasando a trabajar el motor en el tercer cuadrante. Este método de frenaje se utiliza para detener el motor. Este proyecto se divide en dos partes, o dos subproyectos. Uno es el encargado de simular los frenajes: dinámico y por inversión de un motor paralelo excitado independientemente, y el otro, por su parte, simula un frenaje para descender cargas, operando la máquina en el cuarto cuadrante de la característica mecánica de velocidad contra momento, los dos casos para el mismo tipo de motor. Para simplificar la simulación, se asumió que el devanado de excitación opera en sus condiciones nominales. Además, se despreciaron la caída de voltaje en las escobillas y los efectos de la reacción de armadura. Para la simulación de los frenajes dinámicos y por inversión el fichero M3A.m, es el encargado de establecer los parámetros y datos nominales del motor, además de devolver mediante gráficas el comportamiento de las principales variables, corriente por la armadura y la velocidad, además debe ser especificado por el usuario el valor de la corriente de armadura, en el momento que comienza el frenaje. La figura 2.4 muestra el diagrama de bloques confeccionado para la simulación de dichos frenajes, fichero S3A.mdl. Figura 2.4 Diagrama de bloque para frenajes dinámico y por inversión. Los ficheros M3A.m y S3A.mdl también son utilizados para la simulación de un frenaje regenerativo. Esto se logra cambiando la carga pasiva conectada al motor por una carga activa, que sería un generador de onda seno. Dentro del bloque Timing motorin2generating, el cual es un generador de paso, hay que asignarle al parámetro step time, un valor mayor al tiempo de simulación, de forma tal que los interruptores C1 y C2 no se activen durante la simulación. Para la simulación del frenaje por inversión en el cuarto cuadrante el fichero M3B.m es el encargado de establecer los parámetros y datos nominales del motor, además de devolver mediante gráficas el comportamiento de las principales variables, corriente por la armadura y la velocidad. La figura 2.5 muestra el diagrama de bloques confeccionado para la simulación de dicho frenaje, fichero S3B.mdl. Figura 2.5 Diagrama de bloque para un frenaje por inversión en el cuarto cuadrante. 2.7. Proyecto 4: Motor serie universal. Un motor universal, es un motor serie de C.D., que se diseña para funcionar con una fuente de C.A. Las características de un motor universal son alta velocidad de vació y alto momento de arranque. Debido a la alta velocidad de operación, estos motores son de baja potencia en comparación con otras máquinas de C.A. Si la corriente total de la armadura es I a = I m cos ωt , la corriente de armadura que circula por las diferentes ramas en paralelo esta dado por: Ic = 1 I m cos ωt a [2.12] En una máquina serie, el flujo producido por la corriente alterna, Ia, será alterno también. De esta manera el flujo por polo puede expresarse como: ns ∑ B(θ , t )Lτ = φ i =1 m cos ωt [2.13] Como se vio en el capítulo anterior, el momento electromagnético desarrollado por un motor de corriente directa es: M em = pZ φI a = K aφδ I a 2πa [2.14] Sustituyendo la ecuación 2.13 en la 2.14 obtenemos: M em = PZ φ m I m cos 2 ωt 2πa [2.15] El valor promedio del momento es: M em = PZ φ m I m 2na 2 [2.16] La figura 2.6 muestra la simulación en Simulink del fichero S4.mdl, correspondiente al diagrama de bloques de un motor universal. El correspondiente fichero M4.m, crea las variables a utilizar en la simulación en el espacio de trabajo de MATLAB. Figura 2.6. Diagrama de bloques de un motor serie universal. En la simulación, el interruptor, Sw4AC, controla el voltaje de alimentación al circuito de armadura, así sea de C.D. o de C.A. Un generador de paso, Tmech, es el encargado de permitir el cambio del momento de la carga. 2.8. Proyecto 5. Frenaje de un motor serie en el cuarto cuadrante. Este proyecto, se confeccionó para la simulación de un motor serie de C.D., operando en el primer y cuarto cuadrante, este es el caso especial de un frenaje por inversión, el cual se utiliza para ascender y descender cargas de momento constante. Cuando la carga está siendo ascendida la máquina trabaja como motor, operando en el primer cuadrante de la característica de momento contra velocidad. En este caso la velocidad del rotor y el momento electromagnético tienen el mismo sentido, por lo que la velocidad aumenta en sentido positivo hasta que alcanza el estado estable, o hasta que cambie el régimen de operación. Cuando el motor pasa a trabajar en el cuarto cuadrante, el momento de la carga es mayor que el momento electromagnético, por lo que la carga arrastra al motor y este comienza a trabajar en el régimen de frenado. La velocidad de descenso de la carga puede ser ajustada con la conexión de una resistencia en serie con el circuito de armadura. El proyecto realiza dos simulaciones con dicho motor, una primera encargada de simular el descenso de una carga, alimentado a voltaje nominal, y con una resistencia conectada en serie con el circuito de armadura y una segunda encargada de simular el descenso de la misma carga, pero haciendo cero el voltaje de alimentación, y colocando una resistencia en serie con el circuito de armadura de un valor más pequeño que el anterior. La simulación de dichos casos devuelve el comportamiento del motor a través de diferentes características como son: la velocidad, el momento, la corriente y la fem inducida en el circuito de armadura contra el tiempo, del motor serie trabajando en el cuarto cuadrante bajo las condiciones antes mencionadas. Además devuelve la característica mecánica natural del motor, y las características mecánicas para cada una de las simulaciones, al agregarle resistencia en serie con el circuito de armadura. La figura 2.7 muestra la simulación en Simulink del fichero S5.mdl, correspondiente al diagrama de bloques de un motor serie. El correspondiente fichero M5.m, crea las variables a utilizar en la simulación en el espacio de trabajo de MATLAB. Figura 2.6. Diagrama de bloques de un motor serie. Capítulo 3. Resultados de la simulación de los proyectos confeccionados. 3.1. Introducción. En este capítulo se muestran los resultados de las simulaciones de los cinco proyectos confeccionados. Para esto se tuvo en cuenta diferentes tipos de motores en relación a las características de cada proyecto. Se muestran algunas de las principales características obtenidas de las simulaciones, así como otras de gran importancia que pueden ser obtenidas por el usuario de ser necesario. 3.2. Proyecto 1: Arranque y operación de un generador paralelo de C.D. 3.2.1. Generador de C.D. directa trabajando en vacío. Los ficheros M1.m y S1.mdl son los encargados de la simulación del arranque y operación de un generador paralelo de C.D. Para el análisis y demostración de este proyecto, se empleó una máquina con los datos siguientes: Potencia nominal: 2 hp Inductancia del devanado de excitación: 10 H Voltaje nominal: 125 V Inductancia del devanado de armadura: 18 mH Corriente de armadura nominal: 16 A Velocidad nominal: 1750 rpm Resistencia de armadura: 0.24 Ω Resistencia de campo: 111 Ω La característica de magnetización de la máquina, obtenida a 2000 rpm, se muestra en la figura 3.1. Para analizar el comportamiento de los principales parámetros de la máquina, se colocó una resistencia de carga con un valor lo suficientemente elevado, Rload = 106 Ω, para simular un circuito abierto, obteniéndose las gráficas siguientes: 1. Fem de armadura en función del tiempo (Eg vs t) 2. Voltaje en los terminales de armadura en función del tiempo (Vt vs t) 3. Corriente de excitación en función del tiempo (If vs t) 4. Momento electromagnético en función del tiempo (Mem vs t) 5. Corriente de armadura en función del tiempo (Ia vs t) Figura 3.1. Característica de magnetización. Figura 3.2. Característica de Eg vs. t para el generador trabajando en vacío. La figura 3.2 muestra la característica de la fem inducida en el devanado de armadura en función del tiempo. Puede apreciarse que el valor de la misma es 146 V, superior al voltaje nominal del generador, valor que no es admisible en la práctica porque puede provocar daños severos o deterioro en el aislamiento del devanado de armadura y entre las delgas del colector. Para evitar esto, es necesario colocar una resistencia variable, en serie con el circuito de excitación, o disminuir la velocidad del rotor; el primero de estos dos métodos es el más utilizado. La figura 3.3 muestra la característica de la corriente de excitación en función del tiempo, con el generador trabajando en vacío. Figura 3.3. Característica de If vs. T para el generador en vacío. 3.2.2 Generador de C.D. trabajando en vacío con resistencia en el circuito de excitación. Como se muestra en la figura 3.2, la fem inducida en el devanado de armadura alcanza un valor mayor que el voltaje nominal. Para disminuir esta fem a su valor nominal se colocó en serie con el devanado de excitación una resistencia de 25 Ω. La figura 3.4 muestra la característica de Eg vs. t del generador en vacío con resistencia en serie con el circuito de excitación. Figura 3.4. Característica de Eg vs. t del generador en vacío con resistencia en serie con el circuito de excitación. Puede apreciarse la disminución que sufre la corriente de excitación debido a la colocación de la resistencia en serie con el circuito de excitación, en comparación al valor que tenía anteriormente, y esto puede verse, comparando las figuras 3.3 y 3.5. Figura 3.5. Característica de la corriente de excitación vs. t, del generador en vacío con resistencia en serie con el circuito de excitación. 3.2.3. Inversión del flujo remanente y el sentido de rotación. Una de las condiciones necesarias para que un generador autoexcitado paralelo levante voltaje, es la existencia de flujo remanente y que exista una adecuada conexión entre el circuito de armadura y el devanado de excitación. Para la simulación de una conexión inadecuada, se le cambió el signo al bloque field polarity, manteniéndose el generador en vacío. Bajo estas condiciones el generador no levanta voltaje, esto se aprecia en la figura 3.6. Figura 3.6. Fem inducida en el circuito de armadura del generador en vacío, con una inadecuada conexión entre los circuitos de armadura y excitación. El comportamiento del generador con un incorrecto sentido de giro, es similar al caso anterior, no levanta voltaje. El cambio del sentido de rotación del rotor del generador se logró cambiando el signo del bloque wm, manteniéndose el generador en vacío. La figura 3.7 muestra el comportamiento de la fem inducida en el circuito de armadura e para estas condiciones. Figura 3.7. Fem inducida en el circuito de armadura, del generador en vacío con un incorrecto sentido de giro. Las condiciones para que el generador no levante voltaje, fueron vistas anteriormente, estas son: la inadecuada conexión entre los circuitos de armadura y de excitación, así como un incorrecto sentido de giro de la máquina, solo que estas condiciones se tienen que ver por separado, no pueden ser llevadas a cabo al mismo tiempo porque de ser así la máquina no sufre ningún cambio, y sigue funcionando normalmente. 3.2.4. Aumento de la resistencia de campo y disminución de la velocidad del rotor. Otra condición necesaria para que un generador autoexcitado levante voltaje es tener una resistencia en el devanado de excitación menor que cierto valor crítico para una velocidad determinada o mover el rotor del generador a una velocidad mayor que cierto valor crítico para una resistencia en el devanado de excitación determinada. Se aumentó el valor de la resistencia conectada en serie con el devanado de excitación, hasta 45Ω. El resultado se muestra en la figura 3.8. Como se puede apreciar el voltaje inducido en el devanado de armadura es de 27 V. Figura 3.8. Fem inducida en el circuito de armadura, del generador en vacío con una resistencia en el devanado de excitación mayor que el valor crítico. La velocidad de rotación del rotor se disminuyó a 1500 rpm, con una resistencia de 25 Ω en serie con el circuito de excitación. Este valor de velocidad es menor que el valor crítico para esta resistencia en el circuito de excitación, por tanto, bajo estas condiciones, el generador no levanta voltaje. La figura 3.9 muestra el comportamiento de la fem inducida en el circuito de armadura bajo estas condiciones. Figura 3.9. Fem inducida en el circuito de armadura, del generador en vacío al disminuir la velocidad del rotor. 3.3. Proyecto 2: Arranque por resistencia de un motor excitado independientemente. Los ficheros M2.m y S2.mdl son los encargados de la simulación del arranque por resistencia de un motor excitado independientemente de C.D. Para el análisis y demostración de este proyecto, se empleó una máquina con los datos siguientes: Potencia nominal: 10 hp Voltaje nominal: 220 V Caída de voltaje en las escobillas: 2 V Velocidad nominal: 1490 rpm Corriente nominal: 34 A Resistencia de armadura: 0.3 Ω Inductancia de armadura: 12 mH Inercia del rotor: 2.5 kgm2 Estos ficheros devuelven la característica de corriente de armadura contra tiempo durante el proceso de arranque. Se realizaron dos simulaciones: una, cuando el motor se arranca directo de la línea y otra cuando se arranca con resistencia conectada en serie con el circuito de armadura. 3.3.1. Arranque directo de la línea de un motor de C.D. excitado independientemente. Se simuló el arranque directo de la línea, o sea, sin conectar pasos de resistencia en serie con su circuito de armadura, del motor en vacío. Esto se logra dándole valores de cero a los bloques r1, r2 y r3 pertenecientes al fichero S2.mdl. La figura 3.10 muestra la característica de corriente de armadura contra tiempo para este caso. Figura 3.10. Característica de la corriente de armadura contra el tiempo, con arranque directo del motor en vacío. Como se aprecia en la figura 3.10, en el proceso de arranque para la simulación de la corriente de armadura contra el tiempo, con arranque directo del motor en vacío, ocurre un pico en la característica, donde la corriente alcanza un valor de 440 A, el cual está muy por encima del nominal, por lo que este método de arranque no se hace recomendable, ya que, al tomar un valor tan elevado la corriente puede dañar los conductores de la armadura. Este método de arranque solo es propicio para motores pequeños, en el orden de los cientos de watts [1]. 3.3.2. Arranque por resistencia de un motor de C.D. excitado independientemente. Se simuló un arranque por resistencia del motor antes planteado. Esto se logró primeramente definiendo en el fichero M2.m los valores máximo, 120 A, y mínimo, 75 A, entre los cuales va a variar la corriente de armadura durante el proceso de arranque. Este fichero se encarga de calcular los valores de los pasos de resistencia necesarios para el arranque, bajo las condiciones especificadas por el usuario. A continuación se muestran las gráficas del comportamiento de la fem, la corriente y la velocidad para el caso analizado. Figura 3.11. Fem inducida en el devanado de armadura, para un arranque por resistencia de un motor de C.D. excitado independiente. Figura 3.12. Corriente de armadura para un arranque por resistencia de un motor de C.D. excitado independiente. Figura 3.13. Velocidad contra tiempo para un arranque por resistencia de un motor de C.D. excitado independiente. Se pueden realizar simulaciones donde se obtengan estas características referentes al mismo motor pero con carga. Para esto es necesario el cambio del valor del bloque Tmech del fichero S2.mdl, el cual representa la carga mecánica acoplada al motor. A través de estos ficheros, también se logra una simulación para un arranque por resistencia retirando los pasos de resistencia dado un tiempo determinado, tiempo que es controlado por el usuario a través de los bloques C1, C2 y C3 del fichero S2.mdl. 3.4. Proyecto 3: Métodos de frenaje. Los ficheros M3A.m y S3A.mdl, así como M3B.m y S3B.mdl son los encargados de la simulación de los diferentes tipos de frenaje de un motor excitado independientemente de C.D. Para el análisis y demostración de este proyecto, se empleó una máquina con los datos siguientes: Potencia nominal: 2 hp Voltaje nominal: 125 V Velocidad nominal: 1750 rpm Corriente nominal: 16 A Resistencia de armadura: 0.14 Ω Inductancia de armadura: 18 mH Inercia del rotor: 0.5 kgm2 3.4.1. Frenajes por inversión y dinámico. Se simularon los frenajes por inversión y dinámico del motor de C.D. Esto se logró estableciendo en primer lugar, en el fichero M3A.m, el valor que va a alcanzar la corriente de armadura, siendo este, 2.5IaN. Además se define en el bloque Tload, el tipo de carga conectada al motor, que en este caso es del tipo ventilador, Mcarga = 0.01+3.189·10-4·ω2. Las figuras 3.14 y 3.15 muestran el comportamiento, de la corriente de armadura y la velocidad de operación en función del tiempo. Figura 3.14. Característica de la corriente de armadura contra el tiempo, para un frenaje por inversión. Figura 3.15.Característica de velocidad de operación contra el tiempo, para un frenaje por inversión. De las figuras 3.14 y 3.15 puede apreciarse que en el primer segundo de simulación, el motor se encuentra trabajando en estado estable. Cuando se invierte el voltaje de alimentación, la corriente de armadura invierte su sentido, al ocurrir esto, el momento electromagnético invierte también su sentido y el motor comienza a frenarse y la corriente por la armadura a disminuir. Al detenerse el motor comienza a girar en sentido contrario hasta llegar a su nuevo punto de operación en el 3er cuadrante. La característica de la figura 3.16 también muestra este comportamiento del motor. Figura 3.16. Característica de momento contra velocidad, para un frenaje por inversión. El fichero S3A.mdl devuelve al espacio de trabajo del MATLAB un vector y de seis columnas, en cada columna se encuentra los valores de cada una de las variables del motor durante toda la simulación, en la primera columna están los valores del tiempo; en la segunda, corriente de armadura; en la tercera, momento electromagnético; en la cuarta, velocidad de operación y en la quinta, la fem inducida en el circuito de armadura. La característica de la figura 3.16 puede obtenerse escribiendo en la ventana de comandos del MATLAB las sentencias siguientes: >>figure >> plot(y(:,3),y(:,4)) >> grid Las figuras 3.17 y 3.18 muestran el comportamiento de la corriente de armadura y de la velocidad de operación del motor al aplicar un frenaje dinámico. Figura 3.17. Característica de corriente contra tiempo, para un frenaje dinámico. Figura 3.18. Característica de velocidad contra tiempo, para un frenaje dinámico. Figura 3.19. Característica de momento contra velocidad para un frenaje dinámico. En las figuras 3.17 y 3.18 pueden apreciarse que en el primer segundo de simulación, el motor se encuentra trabajando en estado estable. Cuando se hace cero el voltaje de alimentación y la armadura es cortocircuitada a través de una resistencia, la corriente de armadura invierte su sentido, al ocurrir esto, el momento electromagnético invierte también su sentido y el motor comienza a frenarse y la corriente por la armadura a disminuir, hasta que el mismo se detiene. La característica de la figura 3.19 muestra la característica mecánica del motor al aplicarle el frenaje dinámico al motor. La característica de la figura 3.19 se obtiene utilizando el mismo procedimiento descrito anteriormente para la obtención de la característica de la figura 3.16. 3.5. Proyecto 4: Motor serie universal. Los ficheros M4.m y S4.mdl, son los encargados de crear las variables a utilizar en el espacio de trabajo de MATLAB y de la simulación de un motor serie. Para la simulación se utilizó un motor que tiene los parámetros siguientes: Potencia nominal: 325 W Frecuencia nominal: 60 H Voltaje nominal: 120 Vrms Resistencia de armadura: 0.6 Ω Velocidad nominal: 2800 rev/min Corriente de armadura: 3.5 Arms Inductancia del campo serie: 26 mH Inductancia de armadura: 10 mH Resistencia de campo: 0.152 Ω Inercia del rotor: J= 0.015 kgm2 La figura 3.20 muestra la característica de magnetización de la máquina obtenida a una velocidad de 1500 rev/min. Figura 3.20. Característica de magnetización. Primeramente se hizo un análisis transitorio del proceso de arranque de un motor serie, alimentado con un voltaje alterno, Vt = 120 2 sen(ωt) V, y el momento de carga igual a 1.1084 N.M. Obteniéndose las características de la corriente de armadura, Ia, la fem inducida en el devanado de armadura, Eg, el momento electromagnético, Mem, y la velocidad del rotor, ω, para el arranque. Tomando una escala amplia de tiempo para obtener las mismas variables cuando la máquina ha logrado un estado estable. Las figuras 3.21, 3.22, y 3.23 muestran el comportamiento transitorio de las principales variables del motor en el arranque. Figura 3.21. Fem inducida en el devanado de armadura para el arranque de un motor serie universal. Figura 3.22. Característica de la corriente de armadura contra el tiempo para el arranque de un motor serie universal. Figura 3.23.Característica de momento contra el tiempo para el arranque de un motor serie universal. De las figuras 3.22 y 3.23, se observa primeramente que mientras que la corriente de armadura del motor es alterna, es decir, que toma valores positivos y negativos, el momento electromagnético es pulsante, pero siempre positivo, esto se debe a que el momento desarrollado por el motor es proporcional al cuadrado de la corriente de armadura. Es por esta razón que el motor serie universal puede ser alimentado con un voltaje alterno. En la simulación del motor alimentado con C.A. se realizó un cambio en el momento de la carga, disminuyendo este a la mitad, de esta manera se obtuvieron las características de Ia y Mem, de la respuesta de la máquina con el cambio del estado de carga. En las figuras 3.24 y 3.25 puede apreciarse notablemente la reducción de la corriente de armadura y del momento electromagnético desarrollado con la disminución de la carga. Figura 3.24. Característica de la corriente de armadura contra el tiempo para un motor alimentado con C.A. Figura 3.25. Característica de momento contra el tiempo para un motor alimentado con C.A. Se sustituyó la fuente de C.A. por una de C.D. del mismo valor rms, 120 V. Con la fuente de voltaje de C.D., se repitió la simulación del arranque con una carga de momento igual a la mitad del nominal. Obteniéndose las curvas de Ia, y Mem contra el tiempo, de la respuesta transitoria del proceso de arranque. Se aprecia la diferencia en la magnitud de Ia, y la respuesta a un cambio del momento de la carga del motor para cada tipo de alimentación. Las figuras 3.25 y 3.26 muestran las características de corriente de armadura y momento electromagnético contra tiempo cuando el motor es alimentado con C.D. Figura 3.25. Característica de la corriente de armadura contra el tiempo para un motor alimentado con C.D. Figura 3.25. Característica de momento contra el tiempo para un motor alimentado con C.D. 3.6. Proyecto 5: Operación en el cuarto cuadrante de un motor serie. Los ficheros M5.m y S5.mdl, son los encargados de crear las variables a utilizar en el espacio de trabajo de MATLAB y de la simulación en el cuarto cuadrante de un motor serie. Para la simulación se utilizó un motor que tiene los parámetros siguientes: Inercia del rotor: J= 0.5 kgm2 Potencia nominal: 1500 W Voltaje nominal: 125 V Resistencia de armadura: 0.24 Ω Velocidad nominal: 1425 rev/min Inductancia del campo serie: 18 mH Corriente de armadura: 3.5 Arms Resistencia de campo: 0.2 Ω Inductancia de armadura: 44 mH La figura 3.26 muestra la característica de magnetización de la máquina obtenida a una velocidad de 1500 rev/min. Se realizó una simulación del motor serie descendiendo una carga de momento constante e igual al nominal, a una velocidad de 41.9 rad/s, alimentado a un voltaje nominal de 125 V, para esto fue necesario conectar en serie con la armadura una resistencia de 13.236 Ω, el fichero M5.m es el encargado de calcular el valor de dicha resistencia. Para este punto de operación la corriente que circula por el circuito de armadura alcanza un valor de 11.64 A. Las figuras 3.27, 3.28, 3.29 y 3.30 muestran el comportamiento de la velocidad, del momento, la corriente y la fem inducida en el circuito de armadura en el tiempo, respectivamente, del motor serie trabajando en el cuarto cuadrante bajo las condiciones antes mencionadas. Figura 3.26. Característica de magnetización del motor serie. Figura 3.27. Característica de velocidad de operación contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Figura 3.28. Característica del momento electromagnético contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Figura 3.29. Característica de la corriente de armadura contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Figura 3.30. Característica de la fem de armadura contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Este proyecto brinda la posibilidad de simular el descenso de la misma carga de momento constante, a la misma velocidad, pero haciendo cero el voltaje de alimentación, y colocando una resistencia en serie con el circuito de armadura de valor 2.667 Ω. Las figuras 3.31, 3.32, 3.33 y 3.34 muestran el comportamiento de la velocidad, del momento, la corriente y la fem inducida en el circuito de armadura en el tiempo, respectivamente, del motor serie trabajando en el cuarto cuadrante bajo las condiciones antes mencionadas. Figura 3.31. Característica de velocidad de operación contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Figura 3.32. Característica de momento electromagnético contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Figura 3.33. Característica de corriente de armadura contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. Figura 3.34. Característica de la fem inducida en el circuito de armadura contra tiempo del motor serie trabajando en el primer y cuarto cuadrante. En la figura 3.35 se observan tres curvas, la número 1 representa a la máquina trabajando en régimen motor, la número 2 el régimen de frenaje para Vt = Vnom y una resistencia conectada en serie con el circuito de armadura de 13.236 Ω, y la número 3 el régimen de frenaje con Vt = 0 y una resistencia conectada en serie con el circuito de armadura de 2.667 Ω. Figura 3.35. Característica del momento electromagnético contra la velocidad de operación del motor serie trabajando en el primer y cuarto cuadrante. Conclusiones En el desarrollo de este trabajo se confeccionaron en el Simulink del MATLAB cinco proyectos, los cuales brindan la posibilidad de hacer un análisis dinámico de las máquinas de corriente directa, bajo los regímenes de operación siguientes: arranque y operación de un generador paralelo de C.D., arranque por resistencia de un motor excitado independientemente, el comportamiento de un motor bajo los diferentes métodos de frenaje, operación del motor serie universal alimentado con corriente alterna y con corriente directa y la operación en el cuarto cuadrante de un motor serie. Como resultado de la búsqueda bibliográfica se confeccionó un material docente que recoge los aspectos teóricos fundamentales de la máquina de C.D., como apoyo bibliográfico a los temas de Máquinas de C.D. que serán impartidos dentro de una nueva asignatura del nuevo plan de estudio. Los proyectos confeccionados son capaces de modelar satisfactoriamente los diferentes estados de operación de las máquinas de C.D. empleando las herramientas disponibles en el Simulink del MATLAB, así como también devuelven gráficas de gran utilidad que reflejan el comportamiento de las principales variables de la máquina de C.D. en el tiempo. De las simulaciones realizadas se obtuvieron resultados satisfactorios expuestos en el capítulo tres, los cuales se alcanzaron a partir de parámetros reales de motores diferentes capacidades. Recomendaciones Como recomendaciones o vías de continuidad al trabajo se proponen las siguientes: 1. Extender las simulaciones dinámicas a las máquinas sincrónicas y asincrónicas, para realizar análisis virtuales en Matlab, y así enriquecer la bibliografía de la disciplina de Máquinas Eléctricas. 2. Aplicar los resultados de este trabajo de diploma en la asignatura de Conversión Electromecánica, para ampliar y mejorar con la ayuda del Matlab los materiales docentes e investigativos para la implementación del nuevo plan de estudios a partir del próximo curso escolar. Referencias bibliográficas 1. Voldek A. I. Máquinas Eléctricas. En 2 tomos. Editorial Pueblo y Educación, La Habana, (1985): 431 pp. 2. Chee-Mun Ong, Dinamic Simulation of Electric Machinery, School of Electrical & Computer Engineering, Purdue Univefsitv West Lafayette, Indiana (1997). Bibliografía 1. Allessi Trollip, Stephen M, Stanley R. Computer Based Instruction. Methods and Development. Second Edition. Editora Prentice Hall. New Jersey, (1991): 512 pp. 2. Banks Jerry, Gibson Randall. Selecting Simulation Software. IIE Solutions. (mayo 1997): pp. 3. Blázquez Miriam. Investigación sobre Medios Computacionales para apoyar el aprendizaje en la disciplina Máquinas Eléctricas. Tesis de Maestría. UCLV. Cuba, (1996): 90 pp. 4. Chee-Mun Ong, Dinamic Simulation of Electric Machinery, School of Electrical & Computer Engineering, Purdue Univefsitv West Lafayette, Indiana (1997). 5. De Marcos J., Fernández A., Alonso C. Modelado y Simulación del Control Electrónico de Motores con PSPICE. II Congreso de Tecnologías Aplicadas a la Enseñanza de la Electrónica, TAEE 96, Universidad de Sevilla. Vol. 1, (1996): 134 – 138 pp. 6. Delgado Ramón. Diseño de motores de Corriente Directa. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1993): 62 pp. 7. Díaz Milagros. Programa para determinar características de motores eléctricos. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1990): 66 pp. 8. Eirin Melvin. Programa para el análisis transitorio de los motores compuestos y serie de C. D. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1994): 46 pp. 9. Espinosa Francisco, et al. Modelado de un motor de DC. Diseño, simulación y construcción del sistema de control de velocidad. II Congreso de Tecnologías Aplicadas a la Enseñanza de la Electrónica, Universidad de Sevilla, España, Vol. 3, (1996): 108-113 pp. TAEE 96, 10. González F. y Novak, J. Aprendizaje significativo. Técnicas y aplicaciones. Serie Educación y Futuro, Editorial Cincel. (1993): 263 pp. 11. Hernández Alicia. Proyecto de Investigación: Desarrollo de Medios de Enseñanza Asistida por Computadoras para las Máquinas Eléctricas. Dpto. Electroenergética, UCLV, Cuba, (1997): 12 pp. 12. Hernández Susana. Programa para el análisis del estado transitorio, en los motores en derivación de C.D. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1988): 36 pp. 13. Ivanov - Smolenski, A. V. Máquinas Eléctricas. En 3 tomos. Editorial MIR Moscú, (1984): 1200 pp. 14. Kloeffler Royce, Kerchner Russell, Brennman Jesse. Direct-Current Machinery. The Macmillan Company, New York. (1957): 395 pp. 15. Kostenko M., Piotrovsky L. Máquinas Eléctricas. Editorial Pueblo y Educación, La Habana, (1968): 713 pp. 16. Langsdorf Alexander. Principios de las Máquinas de Corriente Continua. Sexta edición. Ediciones del Castillo S.A. España, (1968): 371 pp. 17. Lorenzo Daniel. Algoritmo computacional de diseño de motores de Corriente Directa. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1996): 47 pp. 18. Mandariote Walker. Software para el Recálculo de Motores de C.D. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1997): 32 pp. 19. Mazo M., et al. Equipo didáctico para el control de motores DC, brushless y paso – paso. II Congreso de Tecnologías Aplicadas a la Enseñanza de la Electrónica, TAEE 96, Universidad de Sevilla. Vol. 2, (1996): 183 – 197 pp. 20. McPherson George, Laramore Robert D. An Introduction to Electrical Machines and Transformers. Second Edition. Reimpreso en Cuba. 571 pp. 21. Ordoñez José, Reyes Arístides. Aplicación de la computación a la enseñanza de la asignatura Máquinas Eléctricas de C.D. Revista Cubana de Educación Superior. Vol.VII (2), (1988): 19-25 pp. 22. Siskind Charles. Direct - Current Machinery. First Edition. Editora McGrawHill. USA. (1952): 319 pp. 23. Slemon G., Straughen A. Electric Machines. Addison-Wesley Publishing Co. Canadá, (1982): 575 pp. 24. Syed A. Nasar. Teoría y Problemas de Máquinas Eléctricas. Serie de Compendios SCHAUM. McGraw-Hill, México, (1987): 208 pp. 25. Toscano Vivían. Sistema computacional para el análisis de los estados transitorios en el motor de Corriente Directa. Trabajo de Diploma. Dpto. de Electroenergética, Fac. Ing. Eléctrica, UCLV, Cuba, (1995): 35pp. 26. The Matlab Curriculum Series. The Student Edition of Matlab. The Math Works Inc. Prentice Hall, New York. (1992): 494 pp. 27. Voldek A. I. Máquinas Eléctricas. En 2 tomos. Editorial Pueblo y Educación, La Habana, (1985): 431 pp. 28. Zerquera Mariano, et al. Programas para la Simulación de las Máquinas Eléctricas. Taller Iberoamericano sobre la Enseñanza de la Ing. Eléctrica. CIPEL: Ciudad de la Habana, Cuba, (1996).
 0
0
Anuncio
Documentos relacionados


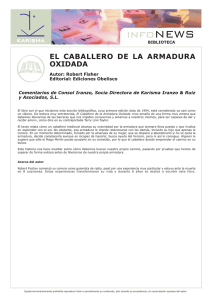

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados