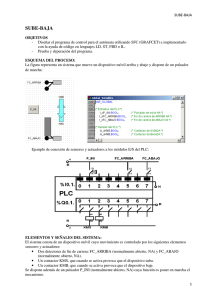
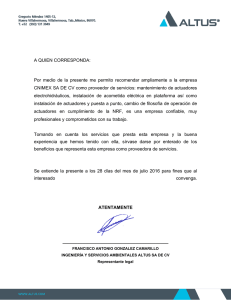
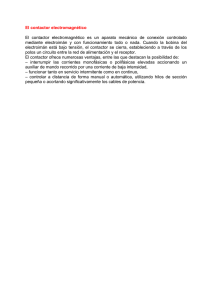
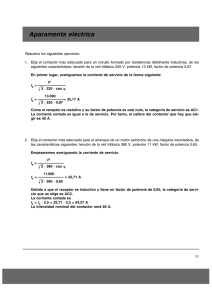
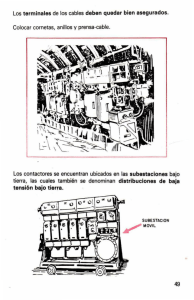
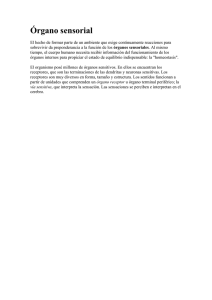
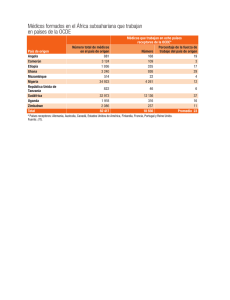
1/1 Automatización (Cód. 600013) Automatismos eléctricos I: circuitos de mando Escuela Politécnica Superior UNIVERSIDAD DE ALCALÁ Esquemas Actuadores Índice 1 Esquemas 2 Actuadores 3 Receptores 4 Ejercicios 5 Apéndices Receptores Ejercicios Apéndices 2/23 motor / 3, tipo LC1-. KM3: 1 contactor 3P + NC, calibre In motor / 3, tipo LC1-. F1: en serie con los arrollamientos del motor, 1 relé de protección térm calibre In motor / 3, tipo LR2-. • Auxiliares de control: S1-S2: unidades de control, tipo XB2-B, XA2-B. • Auxiliares de equipos: – envolventes, tipo ACM… – repartidores de potencia, tipo AK2-, AK3-, AK5– auxiliares de montaje, tipo DZ6-, AM1-, AM3-, AF1– auxiliares de cableado, tipo AK2auxiliares de conexión, tipo AB1-, AB3-, DB6-, DZ5-, AT1-, AR1-, AB ABA-, ABE-, ABL-. acoplados en triángulo debe corresponderse con la tensión de Receptores Ejercicios la red de alimentación. Q1: calibre In motor. F1: calibre In motor / 3. KM1: calibre In motor / 3. KM2-KM3: calibre In motor / 3. Apéndices Partes de un automatismo eléctrico Ej. arrancador estrella-triángulo con seccionador portafusibles: Q1 : 2 1 5/L3 1/L1 Circuito de control 13 2 – Q2 – Q1 95 14 6 4 2 – Q1 96 21 3 5 1 3 5 – S1 – KM2 53 6 2 – F1 4 5 3 14 – S2 1 M1 3 13 13 22 6 4 2 6 6 4 4 V1 – KM1 2 2 U1 – KM3 W1 – KM2 1 3 5 1 – F1 54 6 67 55 68 56 † 21 – KM1 – KM3 A2 – KM1 Q1 : 6 202 A1 A1 A1 22 – KM3 22 V2 W2 U2 Cableado recomendado para invertir el sentido de rotación del motor (motor normalizado visto desde el extremo del eje) – KM2 A2 V1 W1 U1 – KM2 M1 3 A2 4 – KM1 2 V2 Esquema de potencia. Representa los elementos que transportan la energía para alimentar los receptores de gran consumo (fundamentalmente motores). 3/L2 Circuito de potencia U2 Esquema de mando. Representa la parte de control del automatismo. En él figuran los elementos de mando, medida, señalización y regulación. 7 Referencias de los equipos catalogados: • Equipos completos (cableados potencia y control), sin relé de protecció en chasis, tipo LC3-. • Equipos en cofres, sin relé de protección térmica, con o sin se portafusibles, en cofre estanco, tipo LE3-. W2 La descripción estructural/procesal de un automatismo eléctrico se realiza con dos esquemas: Funcionamiento del circuito de control Impulso en S2. Cierre de KM1. Cierre de KM2 por KM1 (53-54). Automantenimiento de KM1-KM2 por KM2 (13-14). Apertura de KM1 por KM2 (55-56). Cierre de KM3 por KM1 (21-22) y KM2 (67-68). Parada: impulso en S1. 3/23 14 Actuadores 21 Esquemas Esquemas Actuadores Receptores Ejercicios Apéndices Auxiliares de mando Los elementos que aparecen en el esquema de mando se denominan auxiliares de mando: Actuadores Transforman una acción externa al automatismo en una señal eléctrica. Ej.: pulsador, finales de carrera. Receptores Consumen energía eléctrica para realizar algún trabajo o señalizar alguna acción. Ej.: avisador acústico, contactor. 4/23 Esquemas Actuadores Índice 1 Esquemas 2 Actuadores 3 Receptores 4 Ejercicios 5 Apéndices Receptores Ejercicios Apéndices 5/23 Esquemas Actuadores Receptores Ejercicios Apéndices 6/23 Pulsadores Pulsador Elemento electromecánico de conexión y desconexión. Para activarlo hay que actuar sobre él, pero al eliminar la actuación, el pulsador se desactiva por sí mismo. Ejemplos de pulsadores NA = NO = Contacto normalmente abierto. NC = Contacto normalmente cerrado. Esquemas Actuadores Receptores Ejemplo de circuito con pulsador # IIIII LII " *) )+ ** ), IIEP) K) IIE() K) IIE(* K* K* IIIII 2II K* K) IIE(+ LM4<161IN.6;. LM4<161IO3:1 ?7456. Ejercicios Apéndices $ 7/23 % Esquemas Actuadores Receptores Ejercicios Apéndices Interruptores Elemento electromecánico de conexión y desconexión al que hay que accionar para activarlo y también para desactivarlo. Su nombre, atendiendo a las normas, es pulsador con enclavamiento. Ej. Interruptor con mando mecánico manual «de seta» 8/23 Esquemas Actuadores Receptores Ejercicios Apéndices Conmutadores Elemento electromecánico de conexión y desconexión, que tiene una posición de reposo y varias de accionamiento, pudiendo comportarse estas como interruptor o como pulsador. Ej. conmutador de tres posiciones con enclavamiento y mando mecánico manual rotatorio 9/23 o manual de palanca acia la izquierda bloqueado Esquemas Actuadores Ejercicios Apéndices 10/23 – S1 Receptores nico manual de pulsador Acoplamiento mecánico sin embrague – S1 Control por reloj eléctrico cobloqueo manualactivado, de palanca con – S1 mático) acia manual la izquierda bloqueado nico de tirador Acoplamiento mecánico con embrague – S1 icomanual manualdedellave pulsador Acoplamiento mecánico sin embrague co – S1 mático) o manual de palanca con S1 mático) –– S1 nico manual de tirador Acoplamiento mecánico con embrague – S1 nico manual de pulsador Mandos mecánicos: Acoplamiento mecánico sin embrague co manual de llave – S1 mático) co manual derotativo palanca Estandariz S1 mático) nico manual Traslación: 1 derecha, –– S1 manual de pulsador icomanual manual tirador Acoplamiento mecánico con embrague co dedemanivela –– S1 S1 nche) 2 izquierda, o manual de llave – S1 mático) manualrotativo de tirador – S1 Estandariz en ambos sentidos nico manual Traslación: 13 de derecha, – S1 Ej.: pulsador con mando roldana nico manual de tirador Acoplamiento mecánico con embrague co manual de manivela – S1 nche) 2 izquierda, manual rotativocon co manual de palanca – S1 (final deRotación: carrera) mático) nico manual 1-2enunidireccional, – S1 ambos sentidos ico manual rotativo Traslación: 13 derecha, ulsador de desenganche ––S1 S1 en el sentido de la flec oche) manual de manivela manual «de seta» – S1 2 izquierda, – S1 co 3 enunidireccional, ambos sentidos icomanual manual de palanca Rotación: 1-2 – S1 3 en ambos sentidos – S1 nico manual rotativo Traslación: 1 derecha, ! ulsador de desenganche – S1 en el sentido de la flec manual de palanca co manual S1 nche) 2 nico manualdedellave volante Rotación limitada en ambos sentidos ––S1 3 izquierda, en ambos sentidos ico manual Rotación: 1-2 unidireccional, ana S1 ––S1 3 en ambos sentidos manual de llave ulsador de desenganche ! S1 en el sentido de la flech –– S1 co manual nico manualde depalanca volante con Rotación limitada en ambos sentidos – S1 3 ambos sentidos desenganche automático –– S1 S1 ico manual Rotación: 1-2enunidireccional, ana ! co manual S1 en el sentido de la flec nico manualde demanivela pedal Mecanismo de desactivación libre –– S1 de roldana manual de volante Rotación limitada en ambos sentidos yicoroldana S1 3 en ambos sentidos ––S1 na – S1 co manual de llave – S1 de leva nico manual de pedal Mecanismo de desactivación libre – S1 ecto de proximidad Cortocircuito fusible – S1 nico manual de volante Rotación limitada en ambos sentidos y roldana – S1 pulsador de desenganche – nico manual de acceso – S1 S1 ico manual de pedal Mecanismo de desactivación libre te motor eléctrico Mandos eléctricos ––S1S1 ecto de proximidad Cortocircuito fusible y roldana – S1 M co manual de manivela ! S1 nico manual de acceso por efecto de proximidad ––S1 ce Cortocircuitode fusible con percutor icomotor manual de pedal Mecanismo desactivación libre ––S1 te eléctrico S1 ana S1 M –– S1 por roce nico manual accesomecánica – S1 mulación dede energía ce Cortocircuito fusible con percutor e motor eléctrico † S1 160 –––S1 pulsador de desenganche S1 Accionadores de dispositivos eléctricos eléctricos Materiales y otros elem Materiales y otros elem M Esquemas Actuadores Índice 1 Esquemas 2 Actuadores 3 Receptores 4 Ejercicios 5 Apéndices Receptores Ejercicios Apéndices 11/23 Elemento mecánico de conexión con una sola posición de reposo y accionado generalmente mediante electroimán. A1 A2 5/L3 13/NO 3P+N 14 T3/6 3-pole contactors LC1-K, LC7-K, LP1-K 3 P + N/O A1 Debe soportar las condiciones de sobrecarga de servicio (arranque de motores), pero no otras (cortocircuitos). 12/23 Schemes A2 Debe ser capaz de establecer, soportar e interrumpir la corriente que circula por el circuito en condiciones normales de funcionamiento. Apéndices 22015_Ver3.00-EN.fm Page 41 Thursday, Octo 3/L2 Contactor (relé) Ejercicios T2/4 Receptores 1/L1 Actuadores T1/2 Esquemas 4-pole contactors, 9 A LC1-K, LC7-K, LP1-K Esquemas Actuadores Receptores Constitución de un contactor Electroimán: elemento motor del contactor. Partes: Circuito magnético: parte móvil + fija. Bobina. Contactos principales (polos): elementos encargados de establecer e interrumpir la corriente del circuito de potencia. Según su número pueden ser bipolar, tripolar o tetrapolar. Contactos auxiliares: se utilizan en el circuito de mando. Instantáneos: NC, NA o una combinación de ambos. Temporizados. Ejercicios Apéndices 13/23 Esquemas Actuadores Receptores Ejercicios Apéndices Funcionamiento de un contactor Automatismos 6 El contactor Bobina sin alimentar L A1 1 3 A2 2 4 N www.aulaelectrica.es f.el.contactor Industriales 5 13 21 6 14 22 Funcionamiento del contactor Bobina alimentada KM x L 2 14/23 A1 1 3 A2 2 4 5 13 21 6 14 22 KM x N 2 4 4 6 6 14 14 1 1 22 22 3 3 5 5 13 13 L N 21 21 22 13 14 L N 21 21 22 13 14 5 6 5 6 3 4 3 4 1 2 1 2 Cámaras de contactos paraauxiliares el contactor Cámarasauxiliares de contactos para el contactor Industriales Receptores Cámaras de contactos auxiliares para el contactor Ejercicios Apéndices 15/23 Esquemas Actuadores Bloques de contactores auxiliares Bloque auxiliar bloques ociar bloques de debloques de easociar pueden asociar sociar de la capacidad ntan así la capacidad n así la bloques capacidad ue incrementan así n así la capacidad manejar, incluidos anejar, incluidos ontactos a manejar, incluidos manejar, incluidos dos). Puede aumentarse Bloque auxiliar Bloque auxiliar Bloque auxiliar el número de contactos auxiliares de un contactor, mediante bloque suele que auxiliar suele el acoplamiento de bloques de contactos auxiliares. Sus contactos cambian tactor yauxiliar el bloque auxiliar suele oque auxiliar suele en elpermiten acoplamiento. el acoplamiento. que el acoplamiento. Contactor Contactor n el acoplamiento. simultáneamente con los del propio contactor. Contactor Contactor Figura Figura 21. 21. Figura 21. armadura móvil), madura móvil), se se móvil), se el martillo (armadura madura móvil),los selos más deademás conmutar de conmutar abajo, de conmutar los s de conmutar los del contactor uperior del contactor erior del contactor én la parte superior perior del contactor ados bloques de svan los los bloques de adosados los bloques de os bloques de sus contactos, o 33 NO33 NO o suslos contactos, o contactos, en conmuten sus sus contactos, o es33elNOcaso como escaso el como caso aada como es el exión retardada da como es el caso Figura 21. 1L1 1L13L2 3L25L3 5L31L1 5L3 3L2 1L1 NO1321 NO NC21 13 13 33 NO KM xKM x KM x A1 A1 1 13 35A1 5 131 3 5 13 1 A1 KM x A2 A2 2 24 46A2 6 142 14 A2 2 4 6 13 213 21 533 3313 21 33 14 22 22 44 4414 4 6 44 22 14 Figura Figura 22. 22. Figura 22. 14 84 84 62 6222 72 72 54 22 22 54 54 62 4 6 54 14 84 62 72 22 NO 22 NC A1 33 NO A2 NO1422 NO NC22 NC A2 14 6T32T1 4T26T34 3 NO NO 22 NC A2 6T3 4T2 NO1321 NO NC21 13 13 61 71 71 53 213 21 553 53 83 83 61 13 6121 61 71 21 53 83 NC A1 1L1 1L13L2 3L25L3 5L31L1 5L3 3L2 1L1 A1 A1 1 13 35A1 5 131 3 5 13 1 A1 KM xKM x KM x KM x A2 A2 2 24 46A2 6 142 14 A2 2 4 6 NO 21 44 22 34 NO 2T1 83 NO NO 61 NC 71 NC 83 NO O53 61 NO NC61 83 NC NO53 71 NC NC71 NO 61 NC 71 NC 83 NO 5L3 3L2 13 33 NO 13 Delay). A1 34 NO34 2T1NO 2T14T2 34 NO 34 NO tactos, NC 3321 NO33 NO33 14 34 NO34 NO NO 21 NC A1 71 NO 21 NC NC A1 A1 5L3 3L2 13 NO 21 A2 6T3 4T2 NC A1 A1 83 83 NO NO 61 NC 71 NC 83 NO 53 NO53 61 NO NC61 83 NC NO53 71 NC NC71 53 NO 61 NC 71 NC 83 NO 84 72 Delay). 84 NO NO 62 NC 72 NC 84 NO O54 62 NO NC62 84 NC NO54 72 NC NC72 NO 62 NC 72 NC 84 NO Figura Figura 23. 23. Figura 23. máticas ma y un A2 14 NO1422 NO NC22 NC A2 NO 22 NC A2 62 2NC 84 NO NO 6T3NC 14 72 54 NO54 62 NO 84 NC NO54 NC T1 72 NC 6T3 62 2NC T1 7214 4NO T2 224T2 4T284 NO 6T3 NC A2 2T1 54 NO 62 2NC T1 72 NC 4T284 NO 6T3 A1A1 A1 A1 A1A1 A1 A1 1L1 1L13L2 3L25L3 5L31L1 3L2 5L3 Esquemas Actuadores Receptores Ejercicios Apéndices 16/23 Ej. circuito de enclavamiento (prioridad a la parada) ! " # #3=>1/>3 *)E**I2# #3=>1/>3 ++E+,I2! IIIII KII #3=>1/>3 )+E),I2! $ )+ F16/01 IIEL) )+ IIEM) ), *) IIEM) ), ++ IIEM) ** +, *) R161;1 IIEL* ** !) IIEM) N) IIE() N* N) IIE(+ N* N* IIIII 2II !* N) IIE(* "357=1I#3=>1/>36 KO4<161IP.6;. KO4<161IQ3:1 ?7456. Si se pulsan Marcha y Parada a la vez, la Parada tiene prioridad. % & Esquemas Actuadores Receptores Ejercicios Apéndices Ej. circuito de enclavamiento (prioridad a la marcha) ! " * + $ , IIIII KII ) # )+ IIEL) )+ *) IIEM) ), IIEM) ), ++ IIEM) ** +, L)BI<9A81;36IF16/01 L*BI<9A81;36IO161;1 *) M)BI6.APIF16/01QO161;1 IIEL* ()BIAR4<161ID.6;. (*BIAR4<161I63:1 (+BI>7456. ** !) IIEM) N) IIE() N* IIIII 2II !* )+J),IISII* *)J**IISII+ ++J+,IISII, T.U.6.=/718I/69V1;18 N) IIE(* N) IIE(+ N* N* % 17/23 Esquemas Actuadores Receptores Figura 21. Ejercicios Apéndices 1L1 3L2 1L1 13 NO 21 18/23 5L3 3L2 1L1 Relé temporizador (con retardo) Figura 21. 21. Figura marcha dura móvil), se el martillo (armadura móvil), se se el martillo (armadura móvil), eyconmutar los bajo, además de conmutar los a abajo, además de conmutar los del contactor es excitada, y el martillo (armadura móvil), se orbobina del contactor ncausa labloques parte superior del contactor bién la parte superior del contactor del campo magnético hacia abajo, además de conmutar los os de adosados bloques detambién alcontactos, van adosados bloques de 3 5 del 13 21 33 33desplaza NO propios del contactor, laA1parte1superior contactor svan o loslos 3 35 NO en conmuten sus contactos, o 33 NO bien conmuten sus contactos, o 33van A1 1 1de nte de material cual adosados los A1 bloques omo es el caso plástico- en la KM x xión retardada como es el caso onexión retardada como es el caso auxiliares, haciendo que éstos, o bien conmuten o 44 KMsus x x contactos, KM 14 22 A2 2 4 6 mecanismo para la conexión-desconexión retardada como A2es A2el2caso 24 4 6 ues temporizadores neumáticos. 34 NO NC 3L2 5L3 5L3 Figura 21. A1 13 NO 13 21NONC 21 NCA1 A1 Los contactos asociados se abren o se cierran un tiempo después del 5 3 5 1 A1 cambio de estado de su órgano de mando. 33 NO 13 1321 21 33 33 33 NO 33 NO 6 21 13 33 NO 14 1422 22 14 33 44 44 KM x NO 22 NC A2 A2 2 4 6 Retardo a la desconexión Retardo a la conexión Figura 22.22. Figura Activación: los contactos basculan es encontrar de uno, dos y cuatro contactos, Figura 22. Activación: los contactos basculan instantáneamente. Cámara de un contacto. después delA1 tiempo regulado. 3 5 1 Cámara de cuatro contactos. Desactivación: los contactos A1 A1 1 1 3 3 5 5 KM x Desactivación: los contactos 5 KM KM x x A1 a1 la 3 posición e contactos temporizados vuelven de reposo A2 2 4 6 Delay). ON Delay). A2 A2 2 a 2 4 la 46 6 KM x vuelven instantáneamente rdo a la conexión (TON, Timer ON Delay). tras elA2tiempo regulado. 2 4 6 Delay). Delay). a.FF posición de reposo. do a la desactivación (TOF, Timer OFF Delay). 34 NO 2T1 6T3 4T2 14 NO 14 22NONC 22 34 NO 342T1 NO 2T1 4T2 34 NO 34 NO e contactos NC-NOFigura 22. actos, ontactos, NCA2 A2 1L1 3L2 1L1 NO 21 NC NC 71 NC 83 NO 13 21 14 22 61 53 3L2 5L3 5L3 A1 13 NO 13 21NONC 21 NCA1 A1 71 83 13 1321 21 53 5361 61 71 71 83 83 53 NO 61 NC 71 NC 83 NO 53 NO NO NC 5361NONC 6171NC 83 NO 7183 NC 53 NO NO NC 5361NONC 6171NC 83 NO 7183 NC 53 NO 61 NC 71 NC 83 NO 54 84 72 14 1422 22 54 5462 62 72 72 62 NC 72 NC 84 NO igura 23. 22 61 71 83 NO 22 NC 54 62 72 84 A2 54 NO 62 NC 72 NC 84 NO NC 3L2 5L3 5L3 A1 A1 13 NO 13 21NONC 21 NCA1 A1 A 2A 2 24.b Figura 24. 2T1 24.a NO 22 4T2 NC 10 10 10 NOA2 NO 68 6T3 1 1 5 5 1 1 NC TOF TOF TOF TOF 10 NC 5 30 14 56 24.b 24.b NO 30 10 TOF TOF 58 58NO 66 66 5 NO 30 30 NC 30 66 A2 NC 67 30 10 1 14 NC 65 57 0,1 24.a 24.a 5 55 0,1 24.a Figura 24.24. Figura 57 57 65 65 5 A1 2 NO 0,1 TOF TON 58 68 68 NC 0,1 NO 1 1 0,1 56 56 5 0,1 68 5 30 67 67 10 NO NC 30 NC 10 10 NO 21 1L1 3L2 1L1 A1 0,1 30 5L3 3L2 1L1 13 0,1 30 55 55 0,1 NO 30 10 10 1 TOF TOF TON TON 56 0,1 10 5 A 1A 1 1 0,1 1 5 0,1 0,1 NO 5 1 30 0,1 igura 24. 14 53 4T2 5 NC 21 54 NO 62 2NC T1 72 NC 4T284 NO 6T3 14 NO 14 22NONC 22 NCA2 A2 54 NO 84 NC NO NCT2 5462NO 846TNO 3 6T3 2NC T16272 2NC T1 472 Figura 23.23. Figura b. máticas eumáticas A1 A1 A 1A 1 Figura 23. ma y un goma y un nte, las cámaras temporizadas neumáticas dario al solidario al mo elemento principal un fuelle de goma y un ción deldeldentro de él. Un tornillo solidario al ulación agonista A2 A2 ón. cisión. NC uelle-cámara, servirá para la regulación del A 2A 2 NC NO NO 55 NCde precisión. 65 67 57 se consideran instrumentos TOF ON 13 84 84 14 54 NO NO NC 5462NONC 6272NC 84 NO 7284 NC 1 44 5L3 3L2 13 1 22 34 NO 1L1 5 14 4T2 6T3 6T3 NC NO 14 22NONC 22 NC NCA2 58 A2 2T1 2T1 4T2 4T2 6T3 6T3 24.b 66 ) Esquemas Actuadores Receptores Ejercicios Apéndices 19/23 IIIII LII Relé temporizador: diagrama de tiempos )+ IIER) )+ ST IIER* ), IEQ!) ), ST IEQ!* SU SU * !) IEQ!) !) M) IEQ!* !* M) IIE(* M* M* IIIII 2II !* IIE() LN4<161IO.6;. LN4<161IP3:1 + S1 t 10 S2 20 KA1 A1-A2 t 10 20 10 20 KA2 A1-A2 t 10 KA1 67-68 t 20 TKA1 TKA2 KA2 67-68 t , 10 20 10 20 H1 t t 10 20 10 20 H2 t Esquemas Actuadores Índice 1 Esquemas 2 Actuadores 3 Receptores 4 Ejercicios 5 Apéndices Receptores Ejercicios Apéndices 20/23 Esquemas Actuadores Receptores Ejercicios Apéndices Ejercicio 1— Semáforo para peatones Problema En un paso de cebra se encuentra un semáforo para peatones. Mediante la actuación de un pulsador se deberá desarrollar la conocida secuencia de «rojo» para vehículos y «verde» para peatones. A los vehículos les corresponderá una fase amarilla de 5 s y una fase roja de 25 s. La fase verde para los peatones debe durar solamente 20 s. Dibujo esquemático: 21/23 Esquemas Actuadores Índice 1 Esquemas 2 Actuadores 3 Receptores 4 Ejercicios 5 Apéndices Receptores Ejercicios Apéndices 22/23 Esquemas Actuadores Receptores Ejercicios Apéndices 23/23 HHHHH MHH Tablas de verdad de algunas configuraciones de contactos )+ HHEF) *) HHEF* ), )+ HHEF+ ** )+ HHEF- ), ), )+ HHEF, ), N) HHE() 2HH N* HHHHH N) HHE(* N) HHE(+ N* N) HHE(, N* )+ HHEFO N* ),