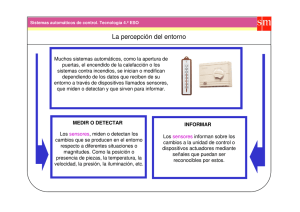
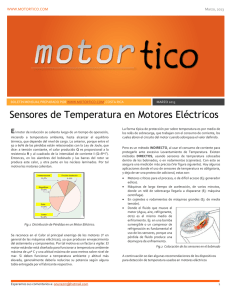
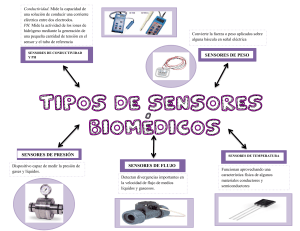
1.Definición de proceso tecnológico Llamamos proceso tecnológico al método de resolución de problemas, o satisfacción de requisitos, siguiendo una secuencia lógica y ordenada. Este método se puede aplicar para cualquier actividad, porque las fases y métodos son comunes, aunque la complejidad sea variable. (también conocido con otras expresiones, p.ej. “método de proyectos, proyecto tecnológico”) Secuencia del proceso tecnológico Aunque podemos encontrar diferentes esquemas vamos a tomar a tomar la referencia del siguiente: Necesidad o problema Búsqueda de información Generación de ideas Selección de idea Diseño Planificación Fabricación Evaluación Memoria Comercialización En la industria prevalecen las soluciones más eficientes Chindogu Es un concepto japonés de difícil traducción, en una palabra. Representa la idea de algo ingenioso, pero carente de utilidad No todas las soluciones son buenas… Brainstorming o lluvia de ideas Consiste en crear un grupo de trabajo con participantes que han de aportar ideas de forma colectiva, no ha de haber restricciones de ningún tipo y la generación de una idea puede servir de base para desarrollar otras. Lo importante es la generación de ideas, más que la calidad o detalles, y la dinámica de crear nuevos pensamientos que de forma individual serían poco probables. Puntos clave: • Generamos varias ideas • Análisis (pros y contras), manteniendo siempre el concepto “brainstorming” • Selección de una idea 2.Definiciones de Mecatrónica Como definición general, la mecatrónica permite la automatización con sistemas de control mediante la integración de: mecánica, electricidad, electrónica, programación y control. Sistemas Consiste en establecer una estructura cerrada con una entrada y una salida, donde el interés principal es conocer la relación entre estas dos variables. Tipos de sistemas En mecatrónica se pueden trabajar con sensores, sistemas de medición, control, accionamiento, microprocesadores, etc. Se podrían establecer múltiples divisiones, pero existe una clasificación principal en función de su finalidad: Sistemas de medición Sistemas de control Ejemplo Tenemos un tanque de con 2 sistemas: - Medición: sondas de temperatura y presión - Control: mediante un SCADA SCADA (Supervisory Control And Data Acquisition) Supervisión, Control y Adquisición de Datos Es un sistema informatizado (software) que permite controlar y supervisar procesos industriales de forma automática y a distancia. Sistemas de control Sirven para mantener constante la variable medida (en tiempo u otro parámetro). Por tanto, es imprescindible tener un sistema de medición para realizar un sistema de control. Existen 2 tipos de sistemas de control: Sistemas de control de lazo abierto Sistemas de lazo abierto En estos sistemas tenemos una entrada que produce una salida. Lógicamente, la entrada y la salida están relacionadas de una forma determinada y toda variación de la primera produce el cambio de la segunda, pero la salida no afecta a la entrada. Ejemplos de sistemas de lazo abierto: Ducha Una persona que se está duchando, abre o cierra una llave de paso variable y lo hace según la cantidad deseada de agua y su temperatura. Entrada: agua Controlador: la persona (que decide si abre o cierra y en que cantidad) Actuador (sobre el sistema): llaves de paso Salida: caudal de agua Microondas Introducimos el tiempo de funcionamiento en el display y la comida se calentará más o menos tiempo. Que quede poco caliente o recalentada dependerá del valor inicial, pero una vez introducido el valor el resultado no variará Sistemas de control de lazo cerrado Sistemas de lazo cerrado En los sistemas de lazo cerrado, la salida vuelve a alimentar la entrada (retroalimentación). Se detecta el error o variación sobre el valor esperado, y el sistema responde según la desviación. De forma general, los sistemas de lazo cerrado son más completos y exactos. Al poder retroalimentar el sistema, se obtiene mayor control y precisión que en un sistema abierto, pudiendo también trabajar de forma autónoma Ejemplo: Controlador PID Sistema lazo cerrado vs lazo abierto Los sistemas de lazo abierto por lo general son más económicos y fiables que los de lazo cerrado, porque tienen menos elementos. Mayor simplicidad implica menos costes y más fiabilidad, pero se hace a costa de perder capacidad de control. 3.Controlador PID Son muy habituales y conocidos en la industria los controladores PID, con capacidad para realizar el control en 3 formas: P = proporcional I = integral D = derivativo Tipos de acción El controlador PID puede trabajar con distintas acciones y combinaciones: P, PI, PD y PID. Efecto del procedimiento Sin recurrir a expresiones matemáticas, explicado de forma simplificada: • Proporcional: mide el error detectado en la última lectura respecto al setpoint. Es decir, actúa sobre el error instantáneo (ver offset) • Integral: mide el error acumulado en un intervalo de tiempo, actúa sobre acumulación de error en un intervalo • Derivativo: mide la velocidad de variación en el error en cada instante. No mide la cantidad de error sino cómo evoluciona y su estabilidad (velocidad) Control proporcional La necesidad de mejorar el control llevó a introducir el control proporcional. En estos controladores la señal de accionamiento es proporcional a la señal de error del sistema. Ejemplo En la cisterna del váter hay una boya, su posición determina la apertura de la entrada y su caudal. En este caso el error es sobre el nivel de referencia. Control integral Su expresión es: Calcula la integral de la señal de error e(t) dentro de un intervalo de tiempo definido y le aplica un coeficiente Ki (equivalente al Kp pero para la acción integral). Es decir, la integral es la suma o acumulación de la señal de error. A medida que pasa el tiempo pequeños errores se suman para hacer que la acción integral sea cada vez mayor y poder reducir el error del sistema en régimen permanente. Ventajas Puede anular el error de off-set, al sumar todos los errores acumulados en un periodo de tiempo determinado. Desventajas La desventaja de utilizar la acción integral consiste en que esta añade una cierta inercia al sistema (respuesta inicial es más lenta que no empieza a ser efectiva hasta haber transcurrido cierto tiempo) En determinadas condiciones el sistema puede ser más inestable. Control derivativo Es proporcional a la derivada de la señal de error e(t). Es decir, a la "velocidad" del error. Se aplica un coeficiente (Kd), análogo a las constantes del control proporcional e integral. El control proporcional intenta corregir el error y con las inercias sobrepasamos el punto de referencia, con un sobrepulso y oscilaciones en torno a la referencia. El control integral alarga los tiempos de respuesta porque se establece un intervalo de control. Para evitar estos problemas, el control derivativo reconoce la velocidad a la que el sistema se acerca a la referencia para poderlo frenar con antelación y evitar que la sobrepase y hacerlo con un tiempo de reacción rápido. La acción derivativa proporciona reacción ante los errores, pero si hace que el sistema reaccione muy rápidamente, lo convierte en “nervioso”. En determinadas aplicaciones puede acortar la vida útil de los elementos al provocar respuestas continuas ante la más mínima perturbación. El ajuste de los parámetros de un PID es una función muy crítica que depende de diferentes variables y que debe realizarse correctamente para conseguir sistemas con buena regulación Conceptos clave Medición: Valor obtenido con un instrumento de medición (sensor o transductor) Set Point (SP): También llamado “Consigna” o “Punto de ajuste” Es el valor de referencia para un ajuste y al que debe tender la variable controlada. Dependiendo del proceso será un valor fijo o regulable. Error: Es la desviación entre el Setpoint y la medición (variable de proceso, PV) e = consigna - medición = SP – PV Observar que el signo negativo representa una medición por encima del Set Point. Ganancia: Mide la relación entre la variación de entrada y la salida Afecta a la suavidad o brusquedad en tiempo de respuesta y amplitud. Puede modificar el comportamiento final y valores inadecuados provocar inestabilidad y oscilaciones Oscilación y sobreimpulso Reacción lenta, no alcanza Set Point. ganancia > 1 amplifica la respuesta (la imagen) ganancia = 1 error y respuesta son iguales ganancia< 1 disminuye la respuesta Ajuste de la ganancia (Kp) Aumentar la acción proporcional tiene los siguientes efectos: 1) Aumenta la velocidad de respuesta del sistema 2) Disminuye el error del sistema en régimen permanente 3) Aumenta la inestabilidad del sistema Son positivos y deseables los puntos 1) y 2), pero el punto 3) es negativo y debe intentar minimizarse. Por tanto debe buscarse un punto de equilibrio con el que se consigue suficiente rapidez de respuesta del sistema y reducción del error, sin que el sistema sea demasiado inestable. Banda proporcional (BP): Es la inversa de la ganancia: Esta forma de representar la ganancia es habitual en los fabricantes de controladores y actuadores. Es una forma de decir que, si la ganancia es alta, el actuador produce el mismo resultado con menos acción y viceversa Off-set: Desajuste o Error estacionario Variación que existe entre el valor de consigna (Set Point) y el valor alcanzado en la variable de proceso. Ejemplo: Set Point = 226ºC Temperatura de estabilización del controlador = 215ºC Off-set = 11ºC Nota: para minimizarlo se usa la función integral (I) 5.Sensores y transductores Los sensores y transductores son elementos imprescindibles en la mecatrónica. Por analogía a una persona, los sensores y los transductores serían equivalentes a nuestros sentidos y el sistema nervioso que procesa los estímulos. Sin esos estímulos y sentidos, no podríamos sentir, ni interactuar con nuestro entorno. Transductores Son dispositivos capaces de transformar un determinado tipo de energía de entrada en otra forma de energía diferente a la salida. Pero la transformación exige que sea siempre de forma relacionada. Las formas de relación pueden ser diversas, pero en general se relaciona una magnitud física con una señal eléctrica. Ejemplos de clases de transductores: Electromecánicos, electromagnéticos, electroquímicos, electroacústicos, fotoeléctricos, piezoeléctricos, termoeléctricos... Tipos de transductores Según la forma de transformación, existen dos tipos de transductores: Sensores: detectan formas de energía (p.ej. luz o fuerza) y las convierten en una salida de información legible por un sistema eléctrico-electrónico Actuadores: funcionan en sentido opuesto a un sensor. Recibe información eléctricaelectrónica y produce una salida, consistente en alguna forma de energía física (p.ej. movimiento) Una transformación puede ser bidireccional, ejemplo: entre sonido y electricidad: Micrófono, convierte la energía sonora en eléctrica (sensor) Altavoz, convierte la señal eléctrica en sonido (actuador) Sensores Todo sensor es un tipo de transductor, con la particularidad, de que siempre está en contacto con la magnitud a medir. Es decir, las magnitudes miden fenómenos físicos con los que existe alguna forma de contacto directo. Ejemplo: sensores de temperatura, humedad, fuerza, deformación, acidez, luz, sonido, contacto, proximidad, etc. Pero no basta con el simple contacto, porque el sensor mide la magnitud de una señal determinada y produce una señal relacionada. Es imprescindible que exista la relación, en caso contrario, no podríamos realizar mediciones útiles o interpretables. Ejemplo: en el termómetro de mercurio la relación temperatura-dilatación se aprovecha para equipararla a una medición, pero esa relación sigue una relación definida. Clasificación de los sensores Existen muchísimos tipos de sensores y también clasificaciones muy variadas. Algunos ejemplos de clasificación son: Principio de funcionamiento Señal generada Nivel de integración Principio físico Etc. Principio de funcionamiento Se clasifican en: Activos: Generan señales representativas de las magnitudes a medir en forma autónoma, sin requerir fuente de alimentación externa. Pasivos: Generan señales representativas de las magnitudes a medir requiriendo de una fuente de alimentación externa. Señal generada Se clasifican en: Digitales: frente a un estímulo pueden cambiar entre 2 estados (no existe estado intermedio), por ejemplo: entre 0 y 1, entre 0 y 5 V, etc. Analógicos: la señal está comprendida entre un campo de valores (infinitas posiciones) e instantáneos (varían en el tiempo). Los más habituales son de 4-20 mA. Nivel de integración Se clasifican en: Discretos: Sensor en el que el circuito de acondicionamiento se realiza mediante componentes electrónicos separados e interconectados entre sí. Integrados: Sensor y circuito acondicionador construidos en un único circuito integrado Inteligentes: Realizan al menos alguna de las siguientes funciones: - Cálculos numéricos - Comunicación en red (No una punto a punto) - Autocalibración y autodiagnóstico - Múltiples medidas con identificación del sensor Principio físico de funcionamiento Existen múltiples sensores según los principios de funcionamiento. Por ejemplo: - Resistivos Capacitivos Inductivos Fotoeléctricos Interruptores Etc. Capacitivos Son sensores que se comportan como condensadores eléctricos, sometidos a un voltaje adquieren una carga eléctrica. Formados por placas conductoras, son muy utilizados en detectores de nivel en que el fluido afecta las propiedades del dieléctrico. Ventajas Los sensores capacitivos permiten detectar toda clase de materiales, incluso no metálicos Pueden “ver” a través de algunos materiales (muy utilizados como niveles). Desventajas Sensibles a condiciones ambientales (humedad, temperatura, suciedad, etc.). Poco selectivo de los materiales de detección Inductivos Se utilizan para detectar materiales ferrosos, pueden detectar también metales no ferrosos pero con distancias de sensado (alcance) menores (acero inoxidable, aluminio, etc.). Disponen de bobinas internas que provocan un campo magnético interno, pero al acercar el objeto a detectar, se produce una alteración del campo que es detectada. Ventajas No le afectan las condiciones ambientales (humedad, suciedad, colores, etc.) No tiene zonas ciegas No tiene partes móviles (mantenimiento) Desventajas Alcance reducido No detectan todos los materiales Sensibilidad a la presencia de campos magnéticos Señal digital y analógica Es una de las principales clasificaciones entre sensores y se relaciona con el tratamiento de la señal. La información (lectura) se puede procesar según dos sistemas de señales: Señal analógica Señal digital Señal analógica En el sistema analógico la señal es continua y puede tomar múltiples valores. Ejemplo: la temperatura puede tener infinitos valores dentro de un rango medido Distintos valores: 24ºC, 27ºC, 29ºC… Pero estos valores, también se pueden tomar con diferentes precisiones: 30.2ºC 30.218ºC (más precisión) 30.21845236789047ºC (aún más precisión) Ventajas Poco consumo de ancho de banda La señal se procesa en tiempo real Calidad más fiel a la realidad Más económica Desventajas Resulta complicado solucionar fallos o una transmisión fallida El contenido se degrada al realizar copias Señal digital La señal digital adopta el sistema binario: formado por 0 y 1 Sólo existen estos 2 valores y cada uno se corresponde con una condición concreta. El valor 0 se interpreta como: 0, No, falso, tensión baja, nulo, apagado... El valor de 1 corresponde a: 1, Sí, verdadero, tensión alta, encendido… Ejemplo: una lámpara está encendida o apagada (estado binario), pero nunca puede estar en un punto intermedio. Ventajas Menor afectación por el “ruido” Permite la regeneración infinita sin pérdida de calidad Facilidad para el procesamiento de la señal Puede ser amplificada y reconstruida al mismo tiempo Cuenta con sistemas de detección y corrección de errores Desventajas Necesidad de conversión A/D y D/A Necesidad de sincronización de tiempos Tx / Rx (transmisión-recepción) Mayor requerimiento de ancho de banda Incompatibilidad con las señales analógicas 6.Motores y actuadores Actuadores Los actuadores transforman energía recibida (neumática, hidráulica o eléctrica) para producir un efecto en un proceso o elemento (desplazar, posicionar, girar, presionar, etc.) Para controlar la acción se necesita de un sistema o elemento de control. Según la forma de control, los procesos pueden llegar a automatizarse. Ejemplos de control: - microprocesador - válvula manual - electroválvula - final de carrera - etc. Clasificación de los actuadores Se pueden establecer diversas clasificaciones, entre las principales: Por la fuente de energía: Neumáticos Hidráulicos Eléctricos Por tipo de movimiento: Rectilíneos. P.ej. los cilindros Rotativos. P. ej. los motores Actuadores eléctricos Entre los distintos tipos de actuadores destacan los eléctricos, que son los más extendidos en la industria. El principal actuador de tipo eléctrico es el motor eléctrico. Tipos de motores eléctricos Existen diferentes tipos de motores eléctricos. Los principales son: Motor CC (corriente continua, DC en inglés) Motor CA (corriente alterna, AC en inglés) Servomotores Motor Paso a Paso (PaP) Curvas características de motores La mayoría de motores son asíncronos, su velocidad de trabajo es menor a la teórica. Por ello, los fabricantes elaboran curvas características que proporcionan la velocidad y par para distintos para distintos niveles de carga. Observando una curva genérica se observan algunos detalles: La intensidad alcanza el máximo en el momento del arranque (velocidad = 0) La corriente decrece al aumentar la velocidad Nunca se alcanza la velocidad teórica (habría consumo nulo y no es posible) El par motor es variable (según velocidad) El par resistente es variable (según velocidad) La velocidad de trabajo está en el punto en que se igualan par motor y resistente La zona de trabajo estable está entre el punto del par máximo y la velocidad teórica Alimentación de los motores Existen diferentes clasificaciones y familias, pero la forma de alimentación es una de las principales, determinando los siguientes tipos de motores: Motores de CC (Corriente Continua) Motores de CA (Corriente Alterna) Motores universales (pueden funcionar en CC y CA) Motores CC (Corriente Continua) El estator o inductor (parte fija) equivale a los polos de un imán. El rotor o inducido (parte giratoria) al ser alimentado por corriente continua (CC) genera un campo magnético, por lo que también actúa como un imán. El colector dispone de las correspondientes delgas. Las escobillas permiten el paso de la corriente al eje en rotación. Principio de funcionamiento El principio de funcionamiento es la repulsión entre el rotor y el estator, basada en que los imanes de la misma polaridad se repelen. Secuencia: (1) Los imanes de la misma polaridad se repelen y provocan un par de giro (2) El colector gira y las delgas con él, se alcanza una zona de transición sin impulso, pero el movimiento continúa por la inercia. (3) Las delgas han girado 180º, las que estaban en el positivo pasan al negativo y viceversa. Se vuelve a producir el efecto de repulsión. (1) Se vuelve a la posición inicial y se repite el proceso indefinidamente. Tipos de conexión Pueden tener diferentes tipos de conexión según se conecten los devanados del inductor y el inducido: Excitación independiente: Inductor e inducido se alimentan de fuentes diferentes En serie: Inductor e inducido tienen los devanados conectados en serie En paralelo: Inductor e inducido tienen los devanados conectados en paralelo Compuesta (compound): Con 2 devanados inductores, uno en serie y otro en paralelo Sentido de giro El sentido de giro se relaciona con la polaridad de alimentación: Regulación de velocidad en motor CC La regulación de velocidad se puede hacer de diversas formas: Regulando la tensión. Normalmente la caída de tensión se hace mediante resistencias (mala eficiencia energética), lo que provoca una pérdida de potencia y par motor importantes. El resultado es que es cada vez es menos utilizado. Potenciómetro con un PWM (Pulse Width Modulation). Tiene las ventajas de mantener el par, permitir un ajuste más fino y mayor eficiencia energética al evitar las pérdidas en las resistencias. Motor CA (Corriente Alterna) En el caso de los motores de CA la velocidad de giro depende de 2 factores: Numero de polos: Siempre es un número par (2, 4, 6…) y forma parte del diseño constructivo del motor Frecuencia de alimentación: En todo el mundo es de 50 Hz, a excepción del continente americano y algunos países que es de 60 Hz Velocidad del motor: ns = velocidad de sincronismo (velocidad máxima teórica) f = frecuencia (Hz) p = pares de polos (siempre número par) Ejemplo: motor de 2 polos (1 imán) a 50 Hz tiene una velocidad de 3000 rpm motor de 2 polos (1 imán) a 60 Hz tiene una velocidad de 3600 rpm Un motor de 4 polos (2 imanes) a 50 Hz tiene una velocidad de 1500 rpm Un motor de 4 polos (2 imanes) a 60 Hz tiene una velocidad de 1800 rpm Funciones de los variadores Son muy variadas, se indican algunas de las principales: Control de velocidad (variación de frecuencia) Conversiones CC-CA Control del par Limitar las corrientes de arranque Crear rampas de aceleración y/o deceleración Inversiones de giro Etc. Servomotor Es un motor eléctrico que puede ser controlado en velocidad y posición (a diferencia de los motores normales de CC y CA). Puede girar un cierto ángulo en base a una señal generada en un circuito de control externo. Partes de un servomotor Normalmente un servomotor se compone de: Motor de corriente continua (2 cables de alimentación) Circuito de control (1 cable de señal) Sensor de posición, que puede ser un potenciómetro Conjunto de engranajes: permiten controlar la posición exacta, evitando que el movimiento sea libre y además aumentan el par motor. Características Las principales: Alta precisión de posicionamiento Alta velocidad de respuesta Gran par de arranque y parada Control del par Mantienen un par nominal incluso parados Ahorran energía, sólo consumen cuando lo requiere el sistema Opcional: algunos servomotores incorporan frenos mecánicos de bloqueo cuando se corta la energía (ascensores, centros de mecanizado, máquinas de corte, etc.) Opcional: se pueden hacer sistemas maestro-esclavo, donde un servomotor controla a otros, creando sistemas de transmisiones virtuales. Regulación Normalmente la regulación se realiza por PWM (control del ancho de pulso). Se usa una señal que habitualmente tiene un periodo de 10 a 20 ms y al inicio se generan los pulsos que indican la posición. Por ejemplo: 1 ms es un extremo 2 ms el otro extremo 1,5 ms el punto neutro Cambiando el ancho de pulso cambia la posición Ejemplo: Motor paso a paso (PaP) (stepper motor) En estos motores se aplica el principio de la atracción magnética, para mover el rotor a las posiciones de unos imanes. Convierte una serie de impulsos eléctricos en desplazamientos angulares discretos y en función de unas entradas de control gira una cantidad de grados (paso o medio paso). El servomotor utiliza la rotación continua de un motor CC controlando el giro con el circuito de control integrado, mientras que los motores paso a paso utilizan múltiples electroimanes para definir la posición El giro se puede obtener aplicando una secuencia de excitación adecuada, que hace que el eje pueda dar vueltas completas. Los motores pueden girar un paso o medio paso y existen diferentes diseños, por lo que se pueden obtener diferentes grados. Ver detalles del fabricante. Paso: grados de salto entre 2 imanes consecutivos Medio paso: se obtiene excitando 2 imanes de forma que el rotor queda en medio Ventajas de los motores paso a paso Las principales ventajas son: Más económicos No precisan sensor de posición ni de velocidad Simplicidad absoluta en el ajuste de parámetros Permiten velocidades desde muy bajas a medias libres de vibraciones Mantienen una determinada posición a velocidad cero sin vibraciones Menores tensiones de alimentación en las bobinas Ventajas de los servomotores Las principales ventajas son: Alcanzan velocidades mayores. Mantenimiento del par máximo a mayores velocidades. Mayores rampas de aceleración y frenado. 7.Unión P-N y semiconductores Diodos y transistores Metales y no metales Las propiedades de un material están muy relacionadas con la última capa de electrones. De forma general un átomo tiene carga neutra. Es decir, tiene el mismo número de protones en el núcleo y con carga positiva que de electrones en sus capas y con carga negativa. Los electrones se van colocando en capas, y cuando se completa una, se forma otra nueva y más alejada del núcleo. Dependiendo del átomo, tendrá más o menos electrones en la última capa. Podemos entenderlos con la regla del octeto: Regla del octeto: para adquirir una configuración estable, los iones de los elementos tienen la tendencia a completar sus últimas capas con 8 electrones Metales Los materiales metálicos tienen tendencia a ceder electrones, lo que explica que sean conductores. Ejemplo: tengo un átomo de cobre con un electrón en su última capa, le proporciona más estabilidad cederlo que conservarlo, y es más fácil ceder un electrón que ganar 7. No metales Los materiales no metálicos tienen tendencia a recibir electrones (directamente o compartiéndolos) Ejemplo: un átomo de flúor tiene 7 electrones en su última capa, buscará obtener ese electrón que falta, antes que ceder esos 7. Semiconductores Son los materiales esenciales en los que se basa la electrónica. Los más utilizados son el Silicio (Si) y Germanio (Ge), que son compuestos no metálicos con 4 electrones en su última capa Por la regla del octeto, buscan alcanzar 8 electrones en su última capa. Lo hacen compartiendo los electrones con un átomo contiguo (enlace covalente). Mediante una estructura cristalina se logra la apariencia de 8 eDopado del material Introduciendo impurezas (lo que conoce como “dopar”), se puede variar el número de electrones y huecos disponibles. Al silicio o germanio les introducimos otros elementos en una pequeña proporción. Se utilizan elementos con 5 e- para tener exceso de electrones, en lo que se conoce como tipo N (ejemplos de elementos: Sb, As, P) Se utilizan elementos con 3 e- para tener huecos, en lo que se conoce como tipo P (ejemplos de elementos: B, Al, Ga) Diodos Dispositivo electrónico de dos electrodos (basado en una unión P-N) por el que circula la corriente en un solo sentido. Polarización Cuando la corriente fluye en el sentido correcto (polarización directa) se comporta como un interruptor cerrado (con su caída de tensión de 0,7 V**) Cuando la corriente fluye en sentido contrario al diodo (polarización inversa) se comporta como un interruptor abierto Simbología Si consideramos el símbolo como una flecha, la dirección coincide con la dirección apuntada, pero no puede ir al revés. Fluye de positivo a negativo. Detalle constructivo Está construido desde una unión PN, alrededor de la cual se coloca un encapsulado y los terminales de conexión Diagrama del diodo Al polarizar en directa, enseguida alcanzamos el umbral que permite la circulación de corriente (0,7 V). En polarización inversa no hay circulación apreciable. Salvo que produzcamos un efecto avalancha (Vr), que en la práctica puede destruir un diodo normal. Polarización inversa Cuando la corriente fluye en el sentido contrario al diodo (polarización inversa) se comporta como un interruptor abierto. Si aumentamos mucho el voltaje conseguiremos que circule la corriente por un efecto avalancha, pero destruiremos el diodo al quemarlo. Puente de diodos Se utilizan para rectificar la corriente alterna. En el ejemplo tenemos un generador de corriente alterna y entre los terminales positivos y negativos del puente de diodos colocamos una carga. Independientemente de la fase que entregue la CA, conseguimos que la carga siempre reciba la misma polaridad. 8.Electrónica digital: transistores y el sistema binario Conversión de decimal a binario Una de las primeras cosas que necesitamos, para operar en binario, es establecer una relación respecto al sistema decimal. En sistema decimal trabajamos en base 10 y sabemos que añadir o quitar un 0 a una cifra altera su valor. Cuando llegamos al 9, para aumentar el valor hay que añadir otro dígito. En cualquier número, la posición determina el “peso” del dígito. El valor de cada posición es el que se corresponde con su base: 1, 2, 4, 8, 16… El resultado es la suma de los valores representativos. Si el valor es 0, no se toma para el cálculo. Ejemplo: Conversión de decimal a binario (método de las bases) División entre 2 Método de las bases