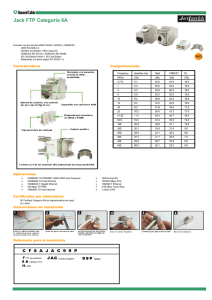
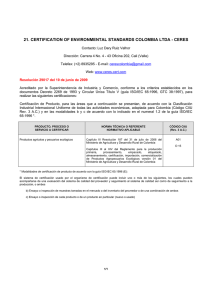
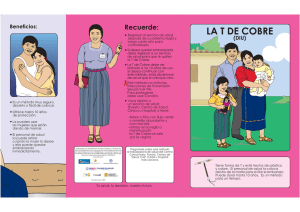
Introduccion al Sysmac Configuracion hardware IEC conceptos Sysmac Sysmac Studio conceptos basicos Programacion basica Configuración básica del Hardware Características principales. El MAC (machine automation controller) representa una diferencia sustancial respecto a los pasados controladores de Omron, algunas diferencias significativas son: Utiliza un procesador Intel Atom operando en tiempo real. La velocidad de ejecución del programa ha mejorado mucho comparada vs los PLC. Ethernet/IP integrado para redes entre controladores e interfaces de operación. EtherCAT integrado para redes de I/O, servos, sistemas de visión, y mas. Unidad de control de movimiento integrado en todas las CPU’s (hasta 64 ejes dependiendo del modelo). • Conexión a base de datos integrada (algunos modelos). • Control de Robot cinemáticos (algunos modelos). • Conexión con módulos de I/O, módulos de aplicaciones especiales y módulos de comunicación de la serie CJ. • • • • • Configuración básica del Hardware CPU Hardware La configuración mínima para la serie NJ incluye una fuente de poder CPU y tapa final. Existen dos opciones para la selección de la fuente de poder, la alimentación puede ser AC o DC Ambos tipos proporcionan un bus de 5 VDC para los módulos de expansión Cada fuente de poder posee una terminal de salida para conocer el estado de RUN La CPU se conecta del lado izquierdo de la fuente La fuente de la serie PLC CJ no puede ser usada con la serie NJ Existe una gran variedad de opciones de CPU para la serie NJ, pero hay características comunes para todos los modelos, estas son: Puerto de programación USB. Puerto de red Ethernet/IP Puerto de red EtherCAT Bateria Slot para memoria SD Configuración básica del Hardware # 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Nombre Slider SD Memory card connector CPU unit operator indicators SD Memory card power supply switch Dip switch Battery connector Battery Peripheral USB port Built-in Ethernet/IP port Built-in Ethernet/IP port operation indicators Unit conector ID information indication Built-in EtherCAT port Built-in EtherCAT port operation indicators DIN track mounting pins Configuración básica del Hardware Expansión local Es posible adicionar módulos de la serie CJ en el lado derecho de la CPU del NJ. Hasta 10 módulos pueden ser conectados directamente. Los módulos se conectan uno al otro sin necesidad de una base (black plane). Al estar totalmente ensamblado este es montado sobre riel DIN dentro de un gabinete de control. Configuración básica del Hardware Desde la unidad de control I/O se conecta el cable hacia una unidad de interface I/O Una fuente de poder de NJ debe ser montado al lado izquierdo de la unidad de interface Hasta 10 módulos pueden ser conectados al lado derecho de la unidad de interface I/O Una tapa final debe ser usada para terminar el rack Configuración básica del Hardware Expansión de E/S en red El puerto EtherCAT incorporado en la CPU puede ser usado para adicionar señales de E/S al controlador. EtherCAT es un protocolo abierto basado en Ethernet, operando a 100 MB y soporta hasta 192 nodos, existe una amplia gama de módulos de E/S disponibles así como diferentes proveedores. Configuración básica del Hardware A. B. C. D. E. F. G. H. I. J. K. L. M. N. O. P. Q. R. SD memory card connector DIP switch SD memory card power supply DIN tack mounting hook Input terminal block Input indicator Unit hookup guides NX Bus Connector Option board slot Output indicator Output terminal block CPU unit status indicator Battery connector Battery slot Built-in EtherCAT port Built-in Ethernet port SD memory card cover End cover CPU unit status indicator NX unit configuration Configuración básica del Hardware Los cabezales NX-EC201 ó NX-ECC202 son los que permiten expandir la cantidad de E/S de la red. El sistema se ensambla rápidamente y se coloca sobre un riel DIN. Es necesario instalar una tapa final después del último modulo del rack. Hasta 63 módulos NX pueden ser conectados a un cabezal. El adaptador de comunicación ocupa un simple nodo en la red. La configuración se realiza totalmente desde el Sysmac Studio. La configuración puede ser descargada directamente a través de la red cuando se está conectado a la CPU NJ o vía puerto USB del adaptador de comunicación. El adaptador de comunicación requiere una fuente de alimentación de 24 vdc. Posee 2 puertos EtherCAT (entrada y salida). Terminal de conexiones removible para fácil cableado. Los switch rotatorios (2) son utilizados para ajustar el número de nodo. Para números superiores a 100 el dip switch se colocara en On. Configuración básica del Hardware IEC conceptos Qué es EtherCAT? EtherCAT (Ethernet para el control de tecnología de automatización) es un protocolo abierto que consigue tiempo real (determinismo y sincronía) sobre una red Ethernet estándar y que permite el control de E/S, seguridad, ejes, VFD’s, visión artificial, etc. EtherCAT es más rápido que algunos buses paralelo, funciona a una velocidad de 100 Mbauds en modo full dúplex, aquí algunos datos de las velocidades que consigue: 256 E/S digitales en 11µs 1,000 E/S digitales en 30 µs 200 E/S analógicas (16 bits) en 50 µs 100 ejes en 100 µs 12,000 E/S digitales en 350 µs IEC conceptos IEC conceptos Comparativa de datos de una red real compuesta por: 40 ejes (20 bytes E, 20 Bytes S) 2,000 E/S digitales y 200 analogicas Distribuidas en 50 estaciones con un total de 560 terminales y una longitud de 500 mts IEC conceptos Principio de funcionamiento (“On the fly”) La tecnología EtherCAT supera las limitaciones del sistema de otras tecnologías de Ethernet. El paquete de datos ya no es recibido y entonces interpretado y copiado como proceso de datos en cada conexión. En lugar de ello, la trama de Ethernet se procesa sobre la marcha en el chip FMMU (Unidad de gestión de memoria de bus de campo) de cada nodo esclavo, leyendo solo los datos que le son dirigidos mientras el telegrama es enviado al dispositivo siguiente. IEC conceptos IEC conceptos EtherCAT es determinista Matemáticamente cuando una función devuelve siempre el mismo valor, se dice que es determinista. Esto a nivel de un bus de campo se refiere a que el intervalo (tiempo) en que establece la comunicación es conocido y constante. IEC conceptos EtherCAT es síncrono. Sincronía se refiere a que coincide en el tiempo. A nivel de bus de campo se refiere a que todas las salidas son efectivas en el mismo instante. Los módulos esclavos de EtherCAT disponen de un reloj de 64 bits con resolución de 1ns. Cada esclavo pone en marcha el cronometro cuando llega el telegrama y lo para cuando vuelve de regreso de esta forma cada esclavo mide su retraso hasta el final del recorrido. El maestro obtiene así el tiempo de cada esclavo y puede calcular la distancia de retraso entre los mismos, de esta forma puede sincronizar todos los relojes de los esclavos con un margen de nanosegundos. IEC conceptos Estandar IEC 6113-3 Es el primer esfuerzo real para estandarizar los lenguajes de programación utilizados en el desarrollo de aplicaciones de automatización industrial. La norma posee las siguientes partes: Parte 1 Vista general Establece las definiciones e identifica las principales características, significativas a la selección y aplicación de los controladores programables y sus periféricos asociados. Parte 2 Hardware Especifica los requisitos del equipo y pruebas relacionadas para los controladores programables (PLC) y sus periféricos asociados. Parte 3 Lenguaje de programación Define como un conjunto mínimo, los elementos básicos de programación. Reglas sintácticas y semánticas para los lenguajes de programación usados más comúnmente, incluyendo los lenguajes gráficos de diagramas de escalera y diagramas de bloque de funciones y los lenguajes textuales de lista de instrucciones y texto estructurado. Así como los principales campos de aplicación, pruebas aplicables y los medios por los cuales los fabricantes pueden expandir o adaptar esos conjuntos básicos a sus propias implementaciones de control. IEC conceptos Parte 4 Guías de usuario Un reporte técnico que proporciona una vista general y guías de aplicación del estándar para los usuarios finales de los controladores programables. Parte 5 Especificación del servicio de mensajería. Define la comunicación de datos entre controladores programables y otros sistemas electrónicos usando el “Manufacturing Message Specification” (MMS, acorde al ISO/IEC 9506) Parte 6 Programación lógica difusa. Define los elementos básicos de programación de “lógica difusa” para su uso en controladores programables. Parte 7 Guías para la aplicación e implementación de lenguajes de programación. Proporciona una guía para los desarrolladores de software para los lenguajes de programación definidos en la parte 3 IEC conceptos De manera práctica se divide el estándar en dos partes: 1. Elementos comunes 2. Lenguajes de programación. Elementos comunes Tipos de datos. La tipificación de los datos previene errores en una etapa temprana. Es usado para definir el tipo de cualquier parámetro utilizado. Esto evita por ejemplo que se divida una fecha entre un entero. Los tipos de datos comunes son: Boolean, Integer, Real, Byte y Word Tambien Date, Time_of_Day y String, basados en ellos uno puede definir sus propios tipos de datos, llamados “Tiopos de datos derivados” Variables Son únicamente asiganadas a direcciones de hardware explicitas (por ejemplo entradas y salidas) en la confirguracion, recursos o programas. De esta manera se le da a los programas un nivel de independencia de alto nivel del hardware, soportando la reutilización del código. El enfoque visibilidad (visibilidad) de las variables es normalmente limitado a la unidad de organización en la cual son declaradas (por ejemplo local). Esto significa que sus nombres pueden ser usados nuevamente sin ningún conflicto en otras partes, eliminando otra fuente de errores. Si las variables requieren un alcance global, deben ser declaradas como tal. IEC conceptos Configuración, recursos y tareas. Dentro de una configuración, se pueden definir una o más tareas. Estas tareas controlan la ejecución de un conjunto de programas y/o bloques de función. Las tareas pueden ser ejecutadas periódicamente o a la ocurrencia de algún evento disparador, por ejemplo el cambio en una variable. Los programas están constituidos por diferentes elementos de software escritos en cualquiera de los lenguajes definidos por IEC. Típicamente un programa consiste de una red (network) o funciones y bloques de función que son capaces de intercambiar datos. Las funciones y los bloques de función son los bloques de construcción básicos y contienen una estructura de datos y un algoritmo. Comparemos lo anterior con un PLC convencional: Este contiene recursos corriendo una tarea, corriendo un programa. IEC 61131-3 le agrega a esto mucho mas, haciéndolo abierto a mayores capacidades tales como multiprocesamiento y conducción por sucesos. IEC conceptos IEC conceptos IEC conceptos Unidades de organización del programa. En IEC 61131-3 los Programas, Bloques de Función y Funciones son llamados Unidades de Organización de Programa (program organization units o POUs). Funciones IEC define Funciones Estándar y Funciones Definidas por el Usuario. Las funciones estándar son por ejemplo: ADD (suma), ABS (absoluto), SQRT (cuadrado) SIN (seno), etc. Las funciones definidas por el usuario (basadas en las funciones estándar), una vez definidas pueden ser re-usadas una y otra vez. Bloques de Función (Function Blocks FBs) Los Bloques de Función son los equivalentes a los circuitos integrados y representan una función de control especializada. Contienen datos así como el algoritmo así que pueden conservar información de su estado. Esto las diferencia de las funciones. Nota: Una función siempre da la misma salida para las mismas entradas. Un bloque de Función no, ya que puede tomar en cuenta como llego a su estado actual. IEC conceptos Programas Con los bloques constructivos mencionados anteriormente se puede decir que un programa es una red de funciones y bloques de función. Un programa puede ser escrito en cualquiera de los lenguajes de programación definidos en el estándar. Lenguajes de programación. Dentro del estándar se definen 4 lenguajes de programación, se definen sintaxis y semántica. Una vez que usted los aprendió, puede aplicarlos a una gran cantidad de sistemas que están basados en estos estándares. Los lenguajes se dividen en tipo textual y tipo gráfico. Textuales Lista de instrucción (instruction list-IL) Texto estructurado (Structured Text-ST) Graficos Diagrama de escalera (Ladder diagram-LD) Diagrama de bloque de funciones (Function Block Diagram- FBD) IEC conceptos IEC conceptos Sysmac Studio actualmente soporta los lenguajes LD y ST Unidades de organización de programa (POU) Un proyecto se compone de varios tipos diferentes de los objetos. Estos objetos se conocen como POU y tarea. Cada proyecto puede contener múltiples POU. Cada POU estará contenida en una tarea. El objeto nivel más bajo en la estructura del programa de un programa compatible con la norma IEC es la unidad de la organización del programa, o POU. A POU es un segmento del código de programa para la aplicación. Los POU se pueden escribir en cualquiera de los lenguajes de programación disponibles. En lugar de un programa grande como métodos anteriores, un proyecto debe dividirse en partes más pequeñas, más manejables POU. Esto puede hacer que la solución de problemas mucho más fácil, ya que cada POU puede contener una pequeña pieza del programa completo. Un ejemplo típico es segmentar el código del programa en base a las diversas secciones de una máquina, de esta manera, solamente esa sección de código debe ser revisada cuando hay un problema con la máquina