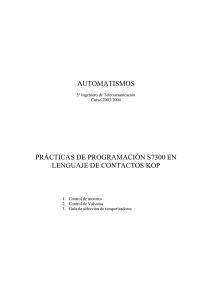
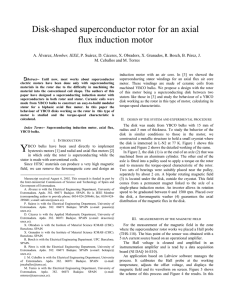
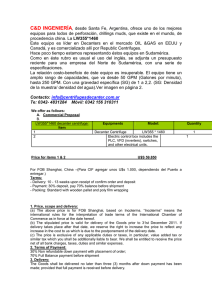
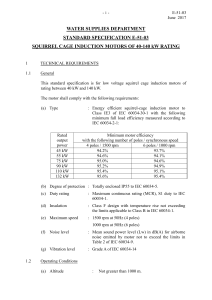
Distribution Automation Handbook Section 8.11 Motor Protection Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 2 Contents 8.11 Motor Protection............................................................................................................................ 3 8.11.1 Introduction .............................................................................................................................. 3 8.11.2 Thermal Behavior and Thermal Protection .............................................................................. 3 8.11.2.1 8.11.2.2 8.11.2.3 8.11.2.4 8.11.2.5 8.11.3 Protection against External Network Disturbances ............................................................... 12 8.11.3.1 8.11.3.2 8.11.3.3 8.11.4 STATOR EARTH-FAULT PROTECTION .................................................................................................................................. 15 SHORT CIRCUIT AND INTER-WINDING FAULT PROTECTION ................................................................................................. 16 Additional Protection Functions for Synchronous Motors ..................................................... 16 8.11.5.1 8.11.5.2 8.11.5.3 8.11.5.4 8.11.6 UNBALANCE PROTECTION .................................................................................................................................................. 12 VARIATION IN SUPPLY VOLTAGE AND FREQUENCY ............................................................................................................ 13 OUT-OF-PHASE RE-ENERGIZING PROTECTION .................................................................................................................... 13 Protection against Insulation Failures ................................................................................... 15 8.11.4.1 8.11.4.2 8.11.5 THERMAL MODEL ................................................................................................................................................................ 3 FREQUENT STARTUP SUPERVISION ....................................................................................................................................... 6 OVERLOAD PROTECTION ...................................................................................................................................................... 8 STARTUP SUPERVISION AND STALL PROTECTION .................................................................................................................. 9 OVERHEATING PROTECTION ............................................................................................................................................... 11 POLE SLIPPING PROTECTION............................................................................................................................................... 16 LOSS-OF-EXCITATION PROTECTION .................................................................................................................................... 17 DIODE FAILURE SUPERVISION ............................................................................................................................................ 18 ROTOR EARTH-FAULT PROTECTION .................................................................................................................................... 19 Examples ................................................................................................................................. 19 8.11.6.1 8.11.6.2 8.11.6.3 HV-INDUCTION MOTORS ................................................................................................................................................... 19 SYNCHRONOUS MOTOR WITH BRUSHES .............................................................................................................................. 20 BRUSHLESS SYNCHRONOUS MOTORS ................................................................................................................................. 22 Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 3 8.11 Motor Protection Motor protection is described in references [8.11.1] to [8.11.9]. 8.11.1 Introduction Electric motors are exposed to many kinds of disturbances and stress. Part of the disturbances is due to imposed external conditions such as over- and undervoltage, over- and underfrequency, harmonics, unbalanced system voltages and supply interruptions, for example autoreclosing that occurs in the supplying network. Other possible causes of external disturbances are dirt in the motor, cooling system and bearing failures or increase of ambient temperature and humidity. Stress factors due to abnormal use of the motor drive itself are frequent successive startups, stall and overload situations including mechanical stress. The above stress and disturbances deteriorate the winding insulation of the motor mechanically and by increased thermal ageing rate, which may eventually lead to an insulation failure. The purpose of the motor protection is to limit the effects of the disturbances and stress factors to a safe level, for example, by limiting overvoltages or by preventing too frequent startup attempts. If, however, a motor failure takes place, the purpose of the protection is to disconnect the motor from the supplying network in due time. 8.11.2 Thermal Behavior and Thermal Protection Motor overload condition is mainly a result from abnormal use of the motor, harmonics or unbalanced supply voltages. They all increase the motor losses and cause additional heating. As the temperature exceeds the rated limits specified for the insulation class in question, the winding insulation deterioration accelerates. This will shorten the expected lifetime of the motor and may lead in some point to an electrical fault in the winding. Thus, the thermal overload protection can be considered being the most important protection function in addition to the short circuit protection of the motor. Usually also authorities require that motors are equipped with thermal overload protection. 8.11.2.1 Thermal Model The thermal behavior of the stator and the rotor during startups and during constant overload situations differs significantly from each other. Due to this fact, the dynamics of the motor heating and cooling is typically modeled separately for the stator and for the rotor. Implementing the thermal overload protection in this way, it can be set to follow the thermal state of the motor optimally, and good and accurate protection against both short and long-time overload conditions can be accomplished, which allows the full use of the available capacity. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 4 The protection operates according to the model that is the most critical one in the prevailing operating conditions. Thus, the thermal model for the stator and for the rotor can be written as: )( − t /τ −t /τ ∆Θ S = p S ⋅ ( I / I N ) 2 ⋅ ∆Θ NS ⋅ 1 − e 1 S + (1 − p S ) ⋅ ( I / I N ) 2 ⋅ ∆Θ NS ⋅ 1 − e 2 S ( ) ( )( ) − t /τ −t /τ ∆Θ R = p R ⋅ ( I / I N ) 2 ⋅ ∆Θ NR ⋅ 1 − e 1 R + (1 − p R ) ⋅ ( I / I N ) 2 ⋅ ∆Θ NR ⋅ 1 − e 2 R ( ) ( (8.11.1) ) (8.11.2) where ∆θ S , R is the temperature rise of the stator or the rotor (ºC) pS ,R is the weighting factor for the short time constant of the stator or the rotor (winding conductors) is the measured phase current, typically the highest phase current is the rated current of the protected machine I IN ∆θ NS , NR τ 1S ,1R τ 2S ,2 R t is the temperature rise (ºC) with the rated current under sustained load, the stator or the rotor is the short heating / cooling time constant of the stator or the rotor (winding conductors) is the long heating / cooling time constant of the stator or the rotor (stator or rotor body) is the time The estimated temperature of the stator and the rotor can then be obtained by adding the prevailing ambient temperature to the calculated temperature rises. For the ambient temperature, either a constant maximum value can be given as a setting value or it can be measured by the IED with the related functionality. The model must also take into account the fact that a running motor heats up and cools down according to the same time constant but in a standstill the long time constant for cooling can be much longer than that for heating, depending on the cooling system. This is important especially in providing adequate protection against too frequent starting. The values of τ1, τ2, ∆θN, IN and p are set according to the motor type in question. The time constants and weighting factors for the stator and the rotor can also be extracted from the thermal limit curve of the machine by assuming that the heating is proportional to the square of the load current. The value of the rated temperature rise depends on the insulation class of the machine, and it is obtained by subtracting the assumed ambient temperature from the highest allowed temperature. Table 8.11.1 shows the temperature limits for insulation classes B, F and H. Table 8.11.1: Insulation classes in accordance with IEC 60034-1 Insulation Class Definition o Highest “hot spot” temperature ( C) B F H 130 155 180 Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 5 Highest operating temperature (oC) 120 145 165 Highest operating temperature when short-time ambient temperature does not exceed 40 (oC) 80 105 125 With typical squirrel gage induction machines, the maximum temperature is according to class F, but the maximum temperature rise according to class B. The purpose of this is to obtain additional thermal margin, and to extend the lifetime of the insulation. Also, a typical squirrel gage rotor of an induction machine is not insulated, so the temperature rise can usually be higher than in the stator without increasing the risk of damage. However, a rotor temperature of 250oC must not be exceeded. However, adequate thermal modeling can also be accomplished by using a single-time-constant model but treating the normal loading and overload situations in a different way. In this kind of modeling, the thermal behavior has two different thermal characteristic curves; one describing short and long-time overloads, that is, modeling the motor ”hot spot” behavior, and the other keeping track of the thermal background, that is, modeling the motor parts with a slower heat absorption, such as the stator body. Equations 8.11.3, 8.11.4 and 8.11.5 represent this kind of modeling. Equations 8.11.3 and 8.11.4 are valid when the measured motor current exceeds the rated current IΝ: 2 ( ) (8.11.3) ( ) (8.11.4) I Θ A = 1.05 ⋅ I N ⋅ 1 − e −t /τ ⋅100 % I Θ B = 1.05 ⋅ I N ⋅ 1 − e −t /τ ⋅ p % 2 where ΘA ΘB I τ p is the thermal level describing motor parts having fast heat absorption, that is, ”hot spot” behavior is the thermal background history level describing motor parts having slow heat absorption, for example stator body is the measured phase current is the selected time constant is the selected weighting factor for the thermal history When an overload situation ends, that is, the measured current becomes lower than the rated current, the thermal level describing the ”hot spot” behavior is taken down to the thermal background level in a relatively short period. This constitutes the thermal behavior modeling of the motor when the hot spot temperature will cool down due to the effect of the other parts of the motor, after which Equation 8.11.5 is valid. I Θ B = 1.05 ⋅ I N 2 ⋅ p − Θ p ⋅ 1 − e −t /τ + Θ p % ( ) (8.11.5) Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 6 where Θp is the calculated thermal level when the current goes below the rated current setting, for example after a startup Figure 8.11.1 illustrates the behavior of the single-time-constant modeling in accordance with Equations 8.11.3, 8.11.4 and 8.11.5. A thermal level of 0% corresponds to the ambient temperature, and 100% the maximum allowed temperature. Figure 8.11.1: The behavior of the single-time-constant thermal model The purpose of the single-time-constant modeling is not to try to model the protected motor as accurately as possible. Typically, its accuracy is sufficient for supervising the thermal state of the motor and in this way allowing the normal use of the motor drive for which it is designed to with a suitable margin. The parameters of the model are then selected based on this assumption, and they are typically easily derived from the basic data of the motor. 8.11.2.2 Frequent Startup Supervision In order not to shorten the expected lifetime of the motor, there must be an adequate time interval between successive startups. Therefore, a certain starting frequency, that is, the number of startups per hour specified for the motor, must not be exceeded. Especially during successive startups, the temperature of the rotor rises and drops rapidly whereas the temperature of the stator changes much more slowly. At rated load, the temperature of the rotor is much lower than the temperature of the stator. If after a startup the motor is running for some time before stopping, the rotor has enough time to cool down. Then whether a restart can be done or not depends totally on the stator temperature, which can be a limiting factor. On the other hand, if the initial start had been done from a cold condition and it failed for some reason, then whether a restart can be done or not depends now totally on the rotor temperature, which can be a limiting factor instead. If the initial start had been done from hot condition, then the limiting factor is again the stator temperature. Figure 8.11.2 illustrates this kind of thermal behavior simulated with the two-time-constant model for the stator and for the rotor. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 7 Trip level 10 90 % 9 80 % 8 70 % 7 6 Stator 50 % 40 % Rotor 30 % 2 Current 10 % 1 0% 0 50 100 Time [s] 150 200 Trip level 100 % 0 250 10 90 % Thermal level (%) 4 3 20 % 9 80 % 8 Stator 70 % 7 Rotor 60 % 6 50 % 5 40 % 4 Trip (unsuccesful start) 30 % 20 % 3 2 Current 10 % 1 0% 0 0 Figure 8.11.2: 5 × IN 60 % × IN Thermal level (%) 100 % 500 1000 Time [s] 1500 Temperatures of the rotor and stator according to the two-time-constant model when two startups have been done from cold condition (top) and when one successful startup and one unsuccessful startup have been done from hot condition (bottom). Supervision of successive startups can be done by using a simple counter-function: a certain amount of starting seconds is allowed in certain period. The disadvantage of this method is that it does not assort stalled or undervoltage startups from normal ones. Figure 8.11.3 shows an example of this kind of counterfunction, the setting values of which are the sum of the allowed starting seconds and the countdown rate. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 8 starts inhibited Figure 8.11.3: Operation and setting of a restart inhibit counter when six consecutive startups are performed. The starting time is 2.5 s, and no more than 6 starts per hour are allowed. A better and more accurate way to protect the motor against too frequent starting is to make use of the thermal model and to determine and set a restart inhibit temperature limit: if the estimated rotor or stator temperature exceeds this limit, a further restart attempt is inhibited. For example, a restart inhibit level for the example of Figure 8.11.2 could be set at 55%, which is based on the estimated 45% increase in thermal level for a single startup. 8.11.2.3 Overload Protection A minor overload does not cause a motor failure immediately but it will eventually shorten the expected lifetime. On the other hand, a constant overload can be a sign of some kind of disturbance in the process in which the motor drive is being used. Thus, a two-stage overload protection is preferred. The alarming stage gives an indication that the rated load of the motor with a possible margin has been exceeded. This function can be implemented by a pre-warning temperature level setting in the thermal model. The pre-warning alarm gives the operator some time to find out the possible source of the overload and to attempt to remove it. If the overload becomes higher, for example 10-15%, the tripping stage starts and trips the motor feeder in due time unless the source of the overload has disappeared before that. According to the thermal model, tripping takes place when the estimated thermal level exceeds 100%. Figure 8.11.4 shows an example of the thermal behavior when the motor is running on a constant cyclic overload. These curves have been simulated using the two-time-constant model for the stator and for the rotor. In this case, the pre-warning level is exceeded and the operator is notified. As a result, the tripping is prevented as the loading of the motor becomes suitably reduced. It can also be concluded from Figure 8.11.4 that a comprehensive overload protection in fact requires the use of the two-time-constant model for the rotor and for the stator, and in this way, the full utilization of the available capacity of the motor is ensured. However, adequate protection can also be implemented using the single-time-constant model, which is set to allow the normal use of the motor drive with a suitable margin. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 9 Trip level 100 % 9 80 % 8 Stator 70 % 7 60 % 6 Rotor 50 % 5 40 % 4 30 % 3 20 % 2 Current 10 % 1 0% 0 0 Figure 8.11.4: × IN Thermal level (%) 10 Prior alarm level 90 % 1000 2000 3000 Time [s] 4000 5000 6000 Temperatures of the rotor and the stator according to the two-time-constant model when the motor is running in constant cyclic overload. Pre-warning level is set to 90%. The ambient temperature has a high impact on the motor loadability as shown in Table 8.11.2. For this to be fully utilized, the protection scheme must be equipped with a sensor for measuring the ambient temperature, which is then used for compensating the thermal model. Alternatively, the ambient temperature can be taken into account when selecting the start current setting of the protection. Table 8.11.2: Effect of ambient temperature on the loadability of the motor Ambient temperature o Allowed output C % of rated output 30 107 40 100 45 96 50 92 55 87 60 82* 70 65* 80 50* *) Output power and lubrication according to the contract. 8.11.2.4 Startup Supervision and Stall Protection The starting current of induction motors varies between 5…7·IN whereas with synchronous motors that are started as induction motors the current range is between 3…4·IN. Slip ring induction motors that are started with the help of controllable external rotor resistors the current does not exceed the rated current. The starting current decays differently depending on the resistance of the rotor circuit. If the resistance is relatively high like with LV-motors, the starting current decays more rapidly as the rotating speed increases. With HV-motors, the rotor resistance is low, meaning that the starting current remains at a rather constant level until the end of the start. Figure 8.11.5 shows different starting current characteristics. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 10 Figure 8.11.5: Different starting current characteristics If the allowable stall time of the motor is longer than the normal starting time and if the operating characteristic of the thermal overload protection can be set below the time/current characteristics defining stall and thermal withstand, no dedicated stall protection is necessarily required. However, in case of stall the operation time of the thermal overload protection can become significantly long, imposing the motor to unnecessarily high thermal and mechanical stress. This depends on the margin between the stall withstand and the set overload protection characteristic. Therefore, a dedicated stall protection, which trips the motor feeder as fast as possible in case of stall, is recommended. One way to implement the protection is to use the I2·tprinciple, in which the setting is based on the motor starting current and time. The starting time allowed by the function depends on the measured current, so that the set Is2·ts remains constant. The advantage of this principle is that it takes into account the prolonged starting time due to undervoltage. Other possibility is to apply an inverse-time overcurrent function supervised by an offset-mho underimpedance function, Figure 8.11.6. The overcurrent function is set below the safe stall withstand time/current. In case of a successful startup, the underimpedance function starts but resets before the overcurrent function operates. Whereas in case of an extended startup, the underimpedance function remains started and tripping takes place when the overcurrent function operates. Figure 8.11.6 shows an example of motor impedance behavior during a startup. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 11 120 closing MCB, t=0 s normal operating point, t=2 s Impedance (Ω, 6.6 kV level) 100 80 60 Z< reset 40 20 radius setting of the mho-circle 0 0.5 1 Time (sec) 1.5 2 120 Z< Reactance (Ω, 6.6 kV level) 100 & 3I> 80 Tripping characteristic 60 Alt. tripping characteristic 40 t=2 s normal operating point 20 t=0 s 0 0 Figure 8.11.6: 20 40 60 80 100 Resistance (Ω, 6.6 kV level) 120 Measured impedance during a startup: Impedance as a function of time (top). Impedance trace in relation to the proposed setting of the offset-mho underimpedance function (bottom). In addition, by applying a high-set overcurrent stage whose start current setting is controlled by the information whether the machine is being started or if it is already running, a running stall protection can be implemented: During startup, the operating current is set well above the starting current, whereas during running the setting is automatically halved. Therefore, in case of running stall the motor feeder is tripped after a short delay. Protection against extended starting for motors with starting time longer than the safe stall withstand time, external tacho switch signal must be provided: The activation of this signal in due time indicates that the startup has been successful, and no tripping follows. 8.11.2.5 Overheating Protection The motor temperature can rise above the rated values allowed for the stator and for the rotor even if the motor is not actually being overloaded. Possible reasons for this are dirt in the motor, failures in the cooling system or harmonic currents. Especially in case of variable frequency drives, overheating may take place if the motor is being loaded with rated current simultaneously with low rotating speed because of the increased losses and reduced cooling. Therefore, a protection function that is measuring only current may not Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 12 detect these conditions. Thermal protection may be completed by a direct temperature measurement by sensors and an overtemperature function that operates based on the set temperature. The fact that the bearing is about to fail indicates itself by an increased temperature. Sleeve type bearings that are typically used with bigger machines can be equipped with temperature-measuring sensors, and a similar protection function for the stator overheating can be used against bearing overheating. In addition, the overheating protection can further be completed with a function that supervises the temperature of the coolant, whose temperature can exceed the allowable limit due to, for example, rise in the ambient air or cooling water temperature or failure in the heat exchanger. To implement theprotection, temperature sensors need to be placed suitably to measure the coolant temperature. 8.11.3 Protection against External Network Disturbances 8.11.3.1 Unbalance Protection Unbalance in the supply voltage is typically due to a broken phase condition somewhere in the upstream network. This may result from single-phase fuse failure or pole discrepancy of a circuit breaker or a disconnector. In addition, unequal loading of the phases causes unequal voltage drops, and thus a slight unbalance in the supply voltage may result. Unsymmetrical faults are causes of short-term unbalance conditions. Unbalanced phase currents are a source of negative-sequence current in the motor, generating a magnetic flux component rotating in the opposite direction compared to the rotation direction of the motor shaft. The frequency of this flux component is 2-s, where s is the slip frequency in p.u, and it induces currents of this frequency in the rotor. This results in a slight negative torque, and especially to increased copper and eddy current losses. Because of the high frequency of the induced currents in the rotor, the skin effect causes the resistance of the rotor to increase compared to the corresponding DC-resistance. Thus, one unit of negativesequence current causes higher heating effect than one unit of positive-sequence current. The current distribution between the phases depends on the cause and nature of the unbalance and on the motor characteristics. Figure 8.11.7 shows an example how the motor loss is increased as the supply voltage and as a result, the phase currents become unbalanced. It has been assumed that the loss is directly proportional to IL2 and the skin effect has been neglected (IL=phase current). In addition, the calculation of the average loss assumes perfect thermal conductivity between the phases. The results in Figure 8.11.7 have been calculated by varying the amplitude and phase angle of each phase voltage in turn. Considering the above, a separate unbalance protection is required to protect the motor running with unbalanced supply voltage unless the heating effect of the negative-sequence current has been adequately taken into account by the thermal model used in the overload protection. Unbalance also causes mechanical problems like vibration. Therefore, at least severe unbalance should always be detected, and a dedicated unbalance protection based on, for example,the magnitude of the negative-sequence current, is recommended. Inverse time characteristic should be preferred and the operation time should be selected so that the normal use of the motor is allowed, especially the starting of the machine, when in practice some negativesequence current may be measured. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 13 Figure 8.11.7: 8.11.3.2 Effect of unbalanced supply voltage on the copper loss of an HV-induction motor with |Z1|/|Z2|=6.5. By multiplying this ratio by the negative-sequence voltage, the corresponding negative-sequence current can be estimated. ILMAX =maximum phase current, ILMIN =minimum phase current. Variation in Supply Voltage and Frequency In most cases, motors can be approximated as volt-independent loads with constant V/Hz-ratio: A decrease in the supply voltage will be followed by an increase in the phase current. As long as the V/Hz-ratio is nearly at a constant level, the variations in voltage and frequency do not cause any specific harm for the motor. In this case, undervoltage condition causes an increase in the phase current, and overloading of the motor may take place, which is then detected by the thermal overload protection. Increase in the V/Hz-ratio increases the flux density in the motor, resulting in some point in saturation effects in the normally flux carrying parts of the motor. This gives rise to excitation current and stray fluxes flowing outside the normally flux carrying parts, which are then greatly heated by the induced eddy currents. Typically, protection against sustained under- and overvoltage is arranged. This protection operates in case of overvoltage in the order of 10-20%. Undervoltage protection is set to trip in case of total loss of voltage, so that when the voltage returns, simultaneous restart of all the motors is prevented. 8.11.3.3 Out-of-Phase Re-Energizing Protection Abnormally high starting current can be produced in a motor if energized shortly after a supply interruption. The resulting current can be higher than the normal starting current imposing to excessive thermal and mechanical stress, which may result in direct motor damage. After the supply interruption, voltage and frequency measured from the motor terminals start to decay. This decay results in the phase angle, voltage and frequency difference between the source side and motor terminal voltages (US and UM, Figure 8.11.8). The rate of the decay depends on the motor type and drive characteristics. An example of this is shown in Figure 8.11.8. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 14 Frequency and voltage difference 0 df(t) df (%), dU (%) -10 ~ -20 dU(t) -30 -40 0 0.05 0.1 0.15 Interruption time (sec) 0.2 Phase angle difference 100 US 90 deg. limit 80 dph (deg) SCB 60 40 UM 20 MCB 0 0 M 0.05 0.1 0.15 Interruption time (sec) 0.2 Vectorial Volts/Herz difference (p.u) V/Hz (p.u) 1.5 1 0.5 0 Figure 8.11.8: 1.33 p.u. limit 0 0.05 0.1 0.15 Interruption time (sec) 0.2 Example of difference quantities (dph, df, dU) between the source side and motor terminal voltage during a short supply interruption. The shaded area represents the time window possible for re-energizing. Whether a reclosing to a single source, that is, closing the source circuit breaker, SCB in Figure 8.11.8, can be done or not depends on how the magnitudes of the above difference quantities develop during the interruption and on the length of the interruption. Figure 8.11.8 shows a possible time window for the reclose to take place without a risk of motor damage. The example is based on the requirement that the resultant vectorial voltage difference in per unit volts per hertz on the motor rated voltage, and the frequency base must not exceed a value of 1.33 p.u (ANSI C50.41-2000) at the instant the reclose is completed. In addition, the phase angle difference must not exceed 90° at the instant the reclose is completed. It can be concluded, for example, that this motor drive can tolerate short supply interruptions (< 0.1second) such as a high-speed autoreclose in the incoming line. However, in case of longer supply interruptions (up to a few seconds), this Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 15 motor must be disconnected before the supply is restored to avoid the possibility of re-energizing in out-ofphase condition. The detection of the loss-of-supply condition and the initiation of the tripping of the motor feeder circuit breaker, MCB in Figure 8.11.8, when required, typically undervoltage, underfrequency or loss-of-power functions, or a combination of these can be applied. 8.11.4 Protection against Insulation Failures 8.11.4.1 Stator Earth-fault Protection As the winding insulation deteriorates due to ageing processes, instantly imposed severe thermal or mechanical stress may exceed the withstanding level, leading to an insulation breakdown. Usually, this results in an earth fault, where the fault current flows through the stator iron plates. If the current is less than 10A, only alarming protection can typically be considered. With a higher fault, current tripping is recommended as the damages to the stator iron may become substantial. Figure 8.11.9 shows the dependence of the earthfault current magnitude/time on the resulting damages. 15 No damages 14 Small weld scars on surface Duration of earth-fault current [s] 13 12 Small weld scars ( ) 11 Small burn scars ( ) 10 9 Dimension of burn scars 10 mm. 8 7 6 5 Severe burn scars ( ) 4 3 2 1 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 Earth-fault current [A] Figure 8.11.9: Dependence of earth-fault current/time on the resulting damages The protection is implemented by a residual overcurrent function using a ring core CT or residual connection of the phase CTs for measurement. This function also constitutes the earth-fault protection of the supplying cable. Features of the ring core CT-measurement: • CT-ratio can be chosen freely according to the magnitude of the earth-fault current in the network • CT-ratio can be the same for every feeder • Apparent residual current minimized during startup of the motor • High accuracy over wide range of earth-fault current: from 0.01·Ipn to 10·Ipn, Ipn=rated primary current of the ring core CT Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 16 • • Can even measure primary earth-fault currents that are lower than 0.5 A To be used whenever high sensitivity is required Features of the residual connection of the phase CTs: • Ratio must be chosen according to the load current of the motor feeder • Stabilizing by means of settings (longer time delays, less sensitive settings), interlocking with residual overvoltage function and/or with external stabilizing resistor connected in the secondary circuit • Accuracy defined by apparent residual current due to CT errors and load current • Due to CT-errors, the sensitivity is typically limited to 0.1·Ipn, Ipn=rated primary current of the phase CT • To be used in networks where the motor rated current compared to the earth fault current is low If tripping protection is used in combination with the ring core CT-measurement, it is recommended that interlocking with the residual overvoltage function is used. During healthy condition, the residual overcurrent function is blocked by the residual overvoltage function. In case of fault, this blocking is removed and tripping is allowed. This kind of arrangement is needed especially when more than one cable is supplying the motor in question and the parallel connection of ring core CTs is required, or when CTs with variable ratio are used and very sensitive settings are applied. In the latter case, leakage fluxes may generate apparent residual current in the secondary circuit, increasing the risk of false operation of the protection. 8.11.4.2 Short Circuit and Inter-winding Fault Protection Sustained earth fault in the motor can develop to a short circuit fault between the phase windings. Another possible cause is the out-of-phase re-energizing during autoreclosing when high mechanical stress may shake and vibrate the windings so that the insulation between the windings breaks. This kind of fault must be tripped as fast as possible to minimize further damages. Usually a high-set overcurrent stage is used for the protection. This function also constitutes the short circuit protection of the supplying cable. Also with bigger machines, differential protection can be considered if the neutral point with suitable CTs is available. 8.11.5 Additional Protection Functions for Synchronous Motors 8.11.5.1 Pole Slipping Protection This protection is usually applied for motors that can be imposed to a sudden and instant overload. If the overload exceeds the pullout torque, the motor falls out of step, that is, loses synchronism and starts to slip poles. An indication of this condition is that the motor draws high current at low power factor. Other possible causes of pole slipping are failures in the excitation circuit (short circuit, open circuit), supply interruptions and reduced supply voltage. High currents and torques resulting from pole slipping can loosen and abrade the stator windings, stress the shaft and couplings and cause stator and rotor overheating, which can lead to a motor failure either instantaneously or cumulatively. An example of the motor behavior during out-of-step condition is shown in Figure 8.11.10. The protection can be based on direction and magnitude of reactive and active power or on the corresponding underimped- Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 17 ance criterion. It should be noted that the tripping of these functions must be ensured by suitable means if there is a danger that the protection may reset during the slip cycles and before the operation timer elapses. 2 1.5 OPERATING AREA Q> -> 0.65 0.1 0s 0.85 s 1 Active Power (p.u) 0.5 0.4 0.3 0.2 0.6 normal operating point 0.5 0.8 0 0.7 0.75 capability diagram (PQ-diagram) -0.5 -1 -1.5 -2.5 -2 -1.5 -1 -0.5 0 Reactive Power (p.u) 0.5 1 Figure 8.11.10: Example of motor behavior during pole slipping due to overload (applied at t=0sec): PQ-trace in relation to the PQ-diagram of the machine and the operating characteristic of the proposed directional power protection. 8.11.5.2 Loss-of-excitation Protection Loss of excitation due to short circuit or open circuit condition in the excitation circuit results in the underexcitation condition, where the machine draws reactive power from the network. Also with a reduced excitation, the power output of the machine decreases, and if the load cannot be reduced, the machine eventually falls out of step and starts to slip poles. Figure 8.11.11 shows an example of this kind of behavior. Typically, an under-reactance function is used to detect this condition, and with suitable settings, the machine can be tripped well before it falls out of step without impairing the security of the protection. Other possibility is to apply directional power-based protection similarly as above. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 18 2 Active Power (p.u) 1.5 normal operating point 0.8 0.6 0.4 0.2 0 s 1.1 0.9 0.7 0.5 0.3 0.1 1 1 1.2 1.4 0.5 1.3 1.5 s 0 capability diagram (PQ-diagram) OPERATING AREA X< -0.5 -1.5 -1 -0.5 0 Reactive Power (p.u) 0.5 1 Figure 8.11.11: Example of motor behavior during loss-of-excitation condition (applied at t=0sec): PQ-trace in relation to the PQ-diagram of the machine and the operating characteristic of the proposed under-reactance protection in PQ-plane. 8.11.5.3 Diode Failure Supervision With brushless machines, it is necessary to supervise the rotating diodes in the rotor circuit in order to get an alarm from an open or short-circuited diode. In many instances, there are fuses in series with the diodes meaning that a diode short circuit will turn to an open circuit condition. Supervision can be implemented by an overcurrent function (INF >) that measures harmonic currents from the -DC-excitation circuit of the excitation machine, Figure 8.11.12. In case of diode failure, harmonic current of twice the excitation frequency (fe) will appear in this DC-circuit. Similarly, harmonic current of twice the rated frequency will be induced in the excitation circuit of the motor in case of unbalanced supply condition of the main circuit. Ue, fe Inf > Figure 8.11.12: Rotating diode supervision M Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 19 8.11.5.4 Rotor Earth-fault Protection Earth-fault protection of machines with brushes can be implemented with an injection device and with simple overcurrent function (I0 >) as shown in Figure 8.11.13. The device injects AC-voltage between the DCcircuit and earth. In case of an earth fault, the AC-circuit closes and current starts to flow, which is then measured by the overcurrent function. Connection capacitor is needed in order to prevent the DC-current from flowing in the measuring circuit. With brushless machines, the occurrence of an earth fault is so unlike in practice that protection is typically not required. VDC brushes IDC M tfault IDC VDC I0 > IRELAY IRELAY tfault Figure 8.11.13: The principle of rotor earth-fault protection for a machine with brushes. An earth fault in the rotor occurs at tfault. 8.11.6 Examples 8.11.6.1 HV-induction Motors Figure 8.11.14 shows the proposed protection functions for a directly started large HV-induction motor. The functions have been implemented with a multifunctional IED and are listed as follows: • Short circuit and inter-winding fault protection (50, 51) • Running stall protection and startup supervision based on overcurrent (51LR, 51S) • Startup supervision based on I2*t or on tacho switch input including frequent startup supervision Σtsi (48, 14, 66) • Thermal overload protection (49M) • Unbalance protection based on negative-sequence overcurrent (46) • Undercurrent protection to detect loss-of-load condition (37) • Earth-fault protection of the stator and the supplying cable (51N, 50N) • Overheating protection based on direct temperature measurement by temperature sensors (26) Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 20 • • Phase reversal protection (46R) Undervoltage, overvoltage and residual overvoltage protection for supervising the supplying network (59, 27, 59N) 3U> 59 3U< 27 U0 > 59N 3I> 51 50 I2 > 46 3I< 37 Is t, n<,Σ t si 2 48, 14, 66 M 3 49M θ> 26 I0> 51N 50N 3I ,3I 46R 3I> 51LR 51S Figure 8.11.14: Protection functions of a large HV-induction motor 8.11.6.2 Synchronous Motor with Brushes Figure 8.11.15 shows the proposed protection functions for a reactor-started synchronous motor. The functions have been implemented with a multifunctional IED and are similar to the protection functions of the above induction motor, except that the protection has now been completed with differential protection (87M), rotor earth-fault protection (64R), bearing overtemperature protection (38), under-reactance protection (40) and pole-slipping protection (32P, 32Q, 55). The differential protection is based on the fluxbalancing principle with the motor and its terminals inside the zone of protection. Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 21 U> 59 P>/Q> 32PQ U< 27 X< 40 I2 > 46 55 Is t, n<, Σ t si 2 48, 14, 66 3 θ> 49M 3I ,3I 46R 3I> 51 50 I0R> 64R 3I> 51LR 51S 3I< 37 26 38 I0> 51N 50N 3∆I> 87M Excitation M Figure 8.11.15: Protection functions of a synchronous motor with brushes Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 22 8.11.6.3 Brushless Synchronous Motors Figure 8.11.16 shows the proposed protection functions for a directly started synchronous motor. The functions have been implemented with a multifunctional IED and are basically similar to the protection functions of the above synchronous motor, except that the protection has additionally been completed with rotating diode supervision. U> 59 3∆I> 87M U< 27 P>/Q> 32PQ X< 40 55 Is t, n<,Σ t si 2 48, 14, 66 49M θ> 26 I0> 51N 50N ,3I 46R 3I> 51 50 3I> 51LR 51S I2 > 46 3I< 37 G 3 3I M Inf > Figure 8.11.16: Protection functions of a brushless synchronous motor Distribution Automation Handbook (prototype) 1MRS757291 Power System Protection 8.11, Motor Protection 23 References [8.11.1] Hakola, T.: "Application guide for protection of synchronous machines", ABB Relays, 1982 [8.11.2] Hakola T.: "Moottorin suojaus", Sovellusohje, ABB Transmit Oy, 1992 [8.11.3] "Machine Terminal REM 54_, Technical Reference Manual", ABB Oy Distribution Automation, 2006. [8.11.4] "TOL3Dev, 3-phase Thermal Overload Protection for Devices, FB manual", ABB Oy Distribution Automation, 2006 [8.11.5] "Motor Protection Calculation Tool for SPAM 150 C, User’s Manual and Technical Description", ABB Transmit Oy, 2002 [8.11.6] "TOL3Dev (3-phase Thermal Overload Protection) setting calculation tool", ABB Oy, 2005 [8.11.7] "American National Standard for Polyphase Induction Motors for Power Generation Stations", ANSI/IEEE Publication Std C50.41-2000. [8.11.8] "Rotating electrical machines", IEC Publication 60034-1, 2004 [8.11.9] "Network Protection & Automation Guide", Areva T&D 2006 Document revision history Document revision/date History A / 07 October 2010 First revision Disclaimer and Copyrights The information in this document is subject to change without notice and should not be construed as a commitment by ABB Oy. ABB Oy assumes no responsibility for any errors that may appear in this document. In no event shall ABB Oy be liable for direct, indirect, special, incidental or consequential damages of any nature or kind arising from the use of this document, nor shall ABB Oy be liable for incidental or consequential damages arising from use of any software or hardware described in this document. This document and parts thereof must not be reproduced or copied without written permission from ABB Oy, and the contents thereof must not be imparted to a third party nor used for any unauthorized purpose. The software or hardware described in this document is furnished under a license and may be used, copied, or disclosed only in accordance with the terms of such license. Copyright © 2010 ABB Oy All rights reserved. Trademarks ABB is a registered trademark of ABB Group. All other brand or product names mentioned in this document may be trademarks or registered trademarks of their respective holders. This page is intentionally left blank. This page is intentionally left blank. This page is intentionally left blank. ABB Oy, Distribution Automation P.O.Box 699 Visiting address: Muottitie 2A FI-65101 Vaasa, FINLAND Phone: +358 10 22 11 Fax: +358 10 22 41094 www.abb.com/substationautomation © Copyright 2011 ABB. All rights reserved. 1MRS757291 A Contact information