.pdf")
INTRODUCCIÓN AL CÁLCULO DIFERENCIAL
INTRODUCCIÓN
PRECÁLCULO
1.1Conjuntos de números. Representación. Intervalos abiertos y cerrados. Sucesión.
Concepto. Funciones reales de una variable real. Concepto. Variables dependientes e
independientes. Dominio, codominio y Rango. Gráfico.
El conjunto de los números naturales o enteros positivos ℕ es:
ℕ = {1, 2, 3, … , 𝑛, 𝑛 + 1 , … };
Éstos son una parte de los números enteros ℤ:
ℤ = {… , −(𝑛 + 1), −𝑛, … , −3, −2, −1, 0, 1, 2, 3, … , 𝑛, 𝑛 + 1, … }.
A los números ℤ− = {… , −(𝑛 + 1), −𝑛, … , −3, −2, −1} se les conoce como enteros negativos.
Entonces, los números enteros están constituidos por los enteros negativos, el cero y los
naturales. A los números naturales también se los conoce como números enteros positivos. En
símbolos:
ℤ = ℤ− ∪ {0} ∪ ℕ
que se lee: “el conjunto de los números enteros ℤ es igual a la unión del conjunto de los
números enteros positivos, el cero y el conjunto de los números naturales”.
A su vez, los números enteros son una parte (un subconjunto) de los números racionales ℚ:
𝑝
ℚ = { | 𝑝 ∈ ℤ ∧ 𝑞 ∈ ℤ ∧ 𝑞 ≠ 0},
𝑞
𝑝
que se lee: ℚ es el conjunto de las fracciones numéricas de la forma 𝑞 donde 𝑝 y 𝑞 son enteros,
y además 𝑞 no puede ser igual a cero.
𝑎
Observemos que todo número entero 𝑎 se puede escribir como una fracción 1, entonces
claramente todos los números enteros están incluidos en el conjunto de los números
racionales. Esto se abrevia ℤ ⊂ ℚ.
Usando la notación decimal, todo número racional se puede escribir como una expresión
decimal periódica, por ejemplo:
1
1
= 0,333 … ; = 0,142857142857 …
3
7
Otros números son los irracionales 𝐼, es decir, aquellos cuyas expresiones decimales son no
periódicas. Son números irracionales: los salidos de una raíz o radicales:
√2 = 1,414213562 …
y los números trascendentes, es decir, los números irracionales que no salen de una raíz sino
de una operación trascendental:
𝜋 = 3,141592653589 … , 𝑒 = 2,718281828 …
Los números racionales ℚ e irracionales 𝐼 constituyen los números reales ℝ. Se abrevia así:
ℝ = ℚ ∪ 𝐼.
Orden en la recta de los números reales
A los números reales se les suele representar (o ubicar) en una recta en la cual hay un punto
fijo 0 llamado origen, una unidad de longitud y un sentido.
pág. 1
Si a partir del origen marcamos la unidad de longitud consecutivamente en un mismo sentido,
obtendremos una sucesión de puntos extremos cuya distancia al origen es, respectivamente,
1, 2, 3… Estos puntos representan a los números naturales.
Los puntos extremos que se obtienen al marcar repetidamente la unidad de longitud en el
sentido contrario al caso anterior representan a los números negativos.
𝑝
Además hay puntos cuya distancia al origen es el racional | |. Es decir, si dividimos cada unidad
𝑞
en 𝑞 partes iguales y tomamos 𝑝 de ellas, en cualquier sentido, encontramos un punto nuevo.
Además de los puntos cuya distancia al origen es un número racional, también se encuentran
puntos cuya distancia al origen es un irracional. Por ejemplo, si representamos un triángulo
rectángulo isósceles cuyos catetos midan 1, por el teorema de Pitágoras la hipotenusa mide
√12 + 12 = √2, entonces podemos marcar un punto cuya distancia al origen sea √2.
A todo punto de la recta le corresponde un número real y sólo uno, y a dos números reales
diferentes le corresponden dos puntos distintos.
Es costumbre dibujar horizontal a la recta y considerar positivos a los números cuyos puntos
correspondientes estén a la derecha del 0, y negativos a los números cuyos puntos estén a la
izquierda del 0.
Un número 𝑎 que pertenezca a los reales (𝑎 ∈ ℝ) es positivo si está a la derecha del cero, esto
se denota 𝑎 = (+) o mejor aún: 𝑎 > 0 o bien 0 < 𝑎. En caso contrario, el número 𝑎 es
negativo si está a la izquierda del cero, esto se denota 𝑎 = (−) o mejor: 𝑎 < 0 o bien 0 > 𝑎.
Un número 𝑎 se dice que es mayor que un número 𝑏 (𝑎 > 𝑏) o bien si ocurre que 𝑎 está a la
derecha de 𝑏, o bien que 𝑏 está a la izquierda de 𝑎. Caso contrario, se dice que 𝑎 es menor que
𝑏 (o bien 𝑎 < 𝑏).
Intervalos abiertos y cerrados
Supongamos que tenemos dos números reales 𝑎, 𝑏 tales que 𝑎 < 𝑏.
pág. 2
Los intervalos son conjuntos de números reales que se definen de la siguiente manera:
1. Intervalo abierto
El intervalo abierto que va desde 𝑎 hasta 𝑏 se define como el conjunto de números reales
comprendidos entre 𝑎 y 𝑏, es decir, los números reales mayores que 𝑎 y al mismo tiempo
menores que 𝑏. Los paréntesis indican que los números 𝑎 y 𝑏 no están en el intervalo abierto.
(𝑎, 𝑏) ≔ {𝑥 ∈ ℝ | 𝑎 < 𝑥 < 𝑏 } = {𝑥 ∈ ℝ | 𝑥 > 𝑎 ∧ 𝑥 < 𝑏}
2. Intervalo cerrado
El intervalo cerrado que va desde 𝑎 hasta 𝑏 se define como el conjunto de números reales
comprendidos entre 𝑎 y 𝑏 inclusive, es decir, los números reales mayores o iguales que 𝑎 y
menores o guales que 𝑏. Los corchetes indican que los números 𝑎 y 𝑏 sí están en el intervalo
cerrado.
[𝑎, 𝑏] ∶= {𝑥 ∈ ℝ | 𝑎 ≤ 𝑥 ≤ 𝑏} = {𝑥 ∈ ℝ | 𝑥 ≥ 𝑎 ∧ 𝑥 ≤ 𝑏}
OBS.: El círculo pintado sobre 𝑎 significa que 𝑥 puede tomar el valor de 𝑎. Si el círculo no está
pintado, entonces 𝑥 NO puede tomar el valor de 𝑎.
3. Intervalo semiabierto (o semicerrado, o abierto/cerrado)
4. Intervalos infinitos
pág. 3
Resumen
Notación por intervalos
(𝑎, 𝑏)
[𝑎, 𝑏]
(𝑎, 𝑏]
[𝑎, 𝑏)
(−∞, 𝑏]
(−∞, 𝑏)
[𝑎, +∞)
(𝑎, +∞)
Notación por conjuntos
{𝑥 ∈ ℝ | 𝑎 < 𝑥 < 𝑏}
{𝑥 ∈ ℝ | 𝑎 ≤ 𝑥 ≤ 𝑏}
{𝑥 ∈ ℝ | 𝑎 < 𝑥 ≤ 𝑏}
{𝑥 ∈ ℝ |𝑎 ≤ 𝑥 < 𝑏}
{𝑥 ∈ ℝ |𝑥 ≤ 𝑏}
{𝑥 ∈ ℝ |𝑥 < 𝑏}
{𝑥 ∈ ℝ |𝑥 ≥ 𝑎}
{𝑥 ∈ ℝ |𝑥 > 𝑎}
Clasificación
Abierto
Cerrado
Abierto en 𝑎, cerrado en 𝑏
Abierto en 𝑏, cerrado en 𝑎
Cerrado en 𝑏, infinito
Abierto en 𝑏, infinito
Cerrado en 𝑎, infinito
Abierto en 𝑎, infinito
Los paréntesis () se utilizan para incluir a ±∞ y para excluir al extremo del intervalo cuando
este extremo es un número finito.
Los corchetes [] se utilizan para incluir al extremo del intervalo cuando este extremo es un
número finito.
Valor absoluto
En la recta de los números reales, el valor absoluto de un número real es la distancia de 𝑎 al
origen, que se denota como 𝑑(𝑎, 0).
Ejemplo: | − 8| = 𝑑(−8,0) = 8, |5| = 𝑑(5,0) = 5
Propiedades del valor absoluto
𝑥 𝑠𝑖 𝑥 ≥ 0
1. |𝑥| = {
. En general, para cualquier estructura dentro de la barra |.|:
−𝑥 𝑠𝑖 𝑥 < 0
𝑓(𝑥) 𝑠𝑖 𝑓(𝑥) ≥ 0
4𝑥 − 1 𝑠𝑖 4𝑥 − 1 ≥ 0
1’. |𝑓(𝑥)| = {
. Ejemplo: |4𝑥 − 1| = {
.
−(4𝑥 − 1) 𝑠𝑖 4𝑥 − 1 < 0
−𝑓(𝑥)𝑠𝑖 𝑓(𝑥) < 0
4
2. |𝑥| ≥ 0
3. |𝑥| = 0 ⇔ 𝑥 = 0
4. −|𝑥| ≤ 𝑥 ≤ |𝑥|
𝑛
𝑛
5. √𝑥 2 = |𝑥|. En general si 𝑛 es par: √𝑥 𝑛 = |𝑥|; si 𝑛 es impar: √𝑥 𝑛 = 𝑥 si 𝑛 es impar
6. |𝑥 ∙ 𝑦| = |𝑥| ∙ |𝑦|. En particular, 6’. |𝑥| = | − 𝑥|.
𝑥
|𝑥|
7. |𝑦| = |𝑦|
8. |𝑥|2 = |𝑥 2 | = 𝑥 2 . Eso significa que se puede prescindir de la barra de valor absoluto.
9. |𝑥|𝑛 = |𝑥 𝑛 | = 𝑥 𝑛 si n es par.
10. |𝑥|𝑛 = |𝑥 𝑛 | para todo 𝑛 ∈ ℤ.
11. Si 𝑎 es una constante positiva entonces |𝑥| < 𝑎 se puede escribir como −𝑎 < 𝑥 < 𝑎.
|𝑥| < 𝑎 tiene por solución el conjunto de los 𝑥 que satisfacen las dos condiciones al mismo
tiempo: 𝑥 < 𝑎, 𝑥 > −𝑎.
11’. Si 𝑎 es una constante negativa entonces |𝑥| < 𝑎 tiene por solución al conjunto vacío.
(Las propiedades 11 y 11’ son análogas para la desigualdad |𝑥| ≤ 𝑎).
12. Si 𝑎 es una constante positiva entonces |𝑥| > 𝑎 tiene dos soluciones: la que sale de 𝑥 > 𝑎 y
la que sale de 𝑥 < −𝑎.
12’. Si 𝑎 es una constante negativa entonces |𝑥| > 𝑎 tiene por solución al conjunto ℝ.
(Las propiedades 12 y 12’ son análogas para la desigualdad |𝑥| ≥ 𝑎).
13. |𝑎 + 𝑏| ≤ |𝑎| + |𝑏| para todo 𝑎, 𝑏 ∈ ℝ.
14. |𝑎 − 𝑏| ≤ |𝑎| + |𝑏| para todo 𝑎, 𝑏 ∈ ℝ.
14. |𝑎 − 𝑏| ≥ |𝑎| − |𝑏| para todo 𝑎, 𝑏 ∈ ℝ.
Repaso de Desigualdades
1. Si a los miembros de una desigualdad se suma o resta una misma cantidad, el signo de la
desigualdad no varía.
Así, dada la desigualdad 𝑎 > 𝑏, podemos escribir
𝑎+𝑐 > 𝑏+𝑐 𝑦 𝑎−𝑐 > 𝑏−𝑐
Consecuencia:Un término cualquiera de una desigualdad se puede pasar de un miembro al otro
cambiándole el signo.
2. Si los dos miembros de una desigualdad se multiplican o dividen por una misma cantidad
positiva, el signo de la desigualdad no varía.
Así, dada la desigualdad 𝑎 > 𝑏 y siendo 𝑐 una cantidad positiva, podemos escribir:
𝑎 𝑏
𝑎𝑐 > 𝑏𝑐 𝑦
>
𝑐 𝑐
Consecuencia:Se pueden suprimir denominadores en una desigualdad, sin que varié el signo de
la desigualdad, porque ello equivale a multiplicar todos los términos de la desigualdad, o sea sus
dos miembros, por el MCM de los denominadores.
3. Si los dos miembros de una desigualdad se multiplican o dividen por una misma cantidad
negativa, el signo de la desigualdad SÍ varía.
Así, si en la desigualdad 𝑎 > 𝑏 multiplicamos ambos miembros por – 𝑐, tendremos: −𝑎𝑐 < −𝑏𝑐
1
𝑎
𝑏
Y dividiéndolos por – 𝑐, o sea multiplicando por − , tendremos: − < −
𝑐
𝑐
𝑐
Consecuencia: Si se cambia el signo a todos los términos, o sea a los dos miembros de una
desigualdad, el signo de la desigualdad varia porque equivale a multiplicar los dos miembros de
la desigualdad por −1.
5
4. Si los dos miembros de una desigualdad son positivos y se elevan a una misma potencia
positiva, el signo de la desigualdad no varía.
Así, si en la desigualdad 𝑎 < 𝑏, por ejemplo, 𝑎 y 𝑏 son cantidades positivas, entonces 𝑎𝑛 < 𝑏 𝑛 .
5. Si los dos miembros de una desigualdad son positivos y se elevan a una misma potencia
negativa, el signo de la desigualdad SÍ varía.
Así, si en la desigualdad 𝑎 < 𝑏, por ejemplo, 𝑎 y 𝑏 son cantidades positivas, entonces
𝑎−𝑛 > 𝑏 −𝑛 .
Método de Bolzano
El siguiente método para resolver desigualdades se basa en un Teorema, llamado de Bolzano, o
del Valor Medio, el cual veremos con más profundidad en el Capítulo 2.
Algoritmo:
Dato: Desigualdad factorizable, y/o con variable en el denominador: 𝑓(𝑥) > 𝑔(𝑥) … (*)
Respuesta: Intervalo/s que verifican la desigualdad original.
Pasos:
1. Resolver las operaciones indicadas y factorizar el primer miembro de la desigualdad:
𝑓(𝑥) − 𝑔(𝑥) > 0 … (**)
2. [Cálculo Auxiliar] Resolver las pequeñas ecuaciones 𝑓 = 0, donde las 𝑓 son los factores del
1er miembro 𝑓(𝑥) − 𝑔(𝑥), en el numerador o en el denominador. Los valores de 𝑥 serán los
extremos de los intervalos abiertos.
3. Elegir valores de 𝑥 que pertenezcan a los intervalos abiertos hallados en el paso 2, EXCEPTO
los extremos de los intervalos. La elección es arbitraria.
*Si la 𝑥 elegida verifica la desigualdad original (*), o la equivalente (**), entonces el intervalo
que lo contiene también verifica la desigualdad original.
*Si la 𝑥 elegida NO verifica la desigualdad original (*), o la equivalente (**), entonces el
intervalo que lo contiene tampoco verifica la desigualdad original.
4. Finalmente, verificar la desigualdad original (*) para los extremos de los intervalos abiertos.
*Si estos valores verifican, entonces cierran los intervalos abiertos.
*Si estos valores no verifican, entonces los intervalos permanecen abiertos.
Ejemplo: Desigualdad de segundo grado
Resolver 2𝑥 3 − 5𝑥 2 + 2𝑥 ≤ 0 ⟹ 𝑥 (2𝑥 2 − 5𝑥 + 2) ≤ 0
Los extremos de los intervalos abiertos son: 𝑥=0; 𝑥 =
−(−5)+√(−5)2 −4∗2∗2
2∗2
= {2; 1/2}, entonces
tenemos los extremos de los intervalos abiertos.
6
La siguiente tabla muestra los intervalos abiertos generados, los valores de 𝑥 que pertenecen a
tales intervalos y la prueba de verificación de la desigualdad.
(−∞; 0)
−1
SÍ
Intervalo
𝑥 ∈ 𝐼𝑛𝑡𝑒𝑟𝑣𝑎𝑙𝑜
Verifica la desigualdad?
(0; 0,5)
0
NO
(0,5; 2)
1
SÍ
(2, +∞)
3
NO
Ejemplo: Desigualdad con incógnita en el denominador
𝑥
𝑥
Resolver 2𝑥−3 ≥ 5 ⟹ 2𝑥−3 − 5 ≥ 0 ⟹
𝑥−5(2𝑥−3)
2𝑥−3
≥0 ⟹
−9𝑥+15
2𝑥−3
≥0
15
= 1,666 …
9
3
= 1,5.
2
Según el numerador, un extremo de intervalo es −9𝑥 + 15 = 0 ⟹ 𝑥 =
Según el denominador, un extremo de intervalo es 2𝑥 − 3 = 0 ⟹ 𝑥 =
De acuerdo a la tabla:
Intervalo
𝑥 ∈ 𝐼𝑛𝑡𝑒𝑟𝑣𝑎𝑙𝑜
Verifica la desigualdad?
(−∞; 1,5)
0
NO
(1,5; 1,666 … )
1,6
SÍ
(1,666 … ; +∞)
2
NO
Finalmente, 𝑥 = 1,5 no verifica la desigualdad original (denominador=cero, la división por cero
no está permitida) pero 𝑥 = 1,666 … sí (resulta 5 ≥ 5, lo cual es cierto).
La solución de la desigualdad es (1,5; 1,666 … ]
Conjuntos
Es toda colección de elementos diferentes.
Notación: 𝐶 = {𝑎, 𝑒, 𝑖, 𝑜, 𝑢}.
Tipos de conjuntos
Conjunto vacío: es aquel que no tiene ningún elemento. Se denota con ∅.
Conjunto finito: es aquel cuya cantidad de elementos es finita. Ej:, el conjunto
unitario, {𝑒} (tiene un único elemento).
Conjunto infinito: es aquel cuya cantidad de elementos es infinita.
Operaciones con conjuntos
Pertenencia de un elemento a un conjunto: cuando un elemento simple está en el conjunto,
se denota 𝑥 ∈ 𝐶 (el elemento 𝑥 pertenece a un conjunto C).
Inclusión de un sub-conjunto en otro conjunto: cuando todos los elementos de un conjunto
pertenecen además a otro conjunto, habitualmente con más elementos que el primer
conjunto. Se denota 𝐴 ⊂ 𝐶 (el conjunto A está incluido en el conjunto C).
7
Unión de conjuntos: la unión de dos conjuntos 𝐴
y 𝐵, que se denota como 𝐴 ∪ 𝐵, es un tercer
conjunto formado por los elementos que
pertenecen por lo menos a uno de los 2 conjuntos
dados.
Ejemplo:
𝐴 = {1,2,3,4,5},
𝐵 = {2,4,6,8}.
Entonces: 𝐴 ∪ 𝐵 = {1,2,3,4,5,6,8}.
Intersección de conjuntos: la intersección de dos
conjuntos 𝐴 y 𝐵, que se denota como 𝐴 ∩ 𝐵, es
un tercer conjunto formado por los elementos
que pertenecen al mismo tiempo a los 2
conjuntos.
Ejemplo:
𝐴 = {1,2,3,4,5},
Entonces: 𝐴 ∩ 𝐵 = {2,4}.
𝐵 = {2,4,6,8}.
Diferencia de conjuntos: la diferencia de 𝐴 menos
𝐵, que se denota como 𝐴 − 𝐵 (o también 𝐴\𝐵,
denotada para así para separarla de la diferencia
de números reales), es el conjunto de los
elementos de A que no pertenecen a B.
Ejemplo: 𝐴 = {1,2,3,4,5}, 𝐵 = {2,4,6,8}. Entonces:
𝐴\𝐵 = {1,3,5}, 𝐵\𝐴 = {6,8}.
8
UNIDAD 1
FUNCIONES DE UNA VARIABLE REAL
1.1 Función real de variable real. Concepto. Variables dependientes e independientes.
Dominio, codominio y rango. Gráfico
Definición: Una función que va del conjunto 𝑨 al conjunto 𝑩 (se abrevia: 𝑓: 𝐴 → 𝐵) es una
regla de correspondencia, donde a todo elemento de 𝐴 se le asocia un único elemento
correspondiente en 𝐵. El conjunto 𝐴 de todos los valores de entrada es el dominio, y el
conjunto 𝐵 al que pertenecen los valores de salida se llama codominio.
Cuando existe una correspondencia entre 𝑥 ∈ 𝐴, 𝑦 ∈ 𝐵 la función se denota 𝑦 = 𝑓(𝑥):
* a la variable 𝑥 se le llama argumento, valor de entrada, variable independiente o
preimagen de y (según la función 𝒇).
* a la variable 𝑦, también llamada variable 𝑓(𝑥), se le llama valor de salida, variable
dependiente (porque el valor de 𝑦 depende del valor asignado a 𝑥), o imagen de x (según la
función 𝒇) .
Partes de una función
Definición. Las partes de una función 𝑦 = 𝑓(𝑥) son:
(i) una ley de correspondencia, que puede ser por ej., una fórmula, una ley de decisión
verdadero/falso, etc. que describe la relación entre 𝑥 e 𝑦.
(ii) el dominio de definición (o simplemente dominio), o conjunto inicial, que se define
como el conjunto de valores que puede tomar la variable independiente, para que la ley de
correspondencia quede bien definida.
(iii) el codominio, o conjunto final, que se define como un conjunto al cual pertenecen las
imágenes de la función, pero que también puede contener otros elementos que no son
imagen.
(iv) el rango, o conjunto imagen, o recorrido, que es el conjunto de elementos del
codominio que tiene una preimagen correspondiente en el dominio.
9
En una regla de correspondencia que define una función, el papel de la variable 𝑥 es
simplemente el de un hueco a rellenar. Por ejemplo, la función dada por
𝑓(𝑥) = 2𝑥 2 − 4𝑥 + 1
puede describirse como
𝑓( ) = 2( )2 − 4( ) + 1
donde se usan paréntesis en lugar de 𝑥. Para efectuar 𝑓(2), basta con colocar un −2 dentro de
cada paréntesis.
Aunque es frecuente usar 𝑥 e 𝑦 como variables, se pueden utilizar otros símbolos, todos
definen la misma función:
𝑓(𝑡) = 2𝑡 2 − 4𝑡 + 1; 𝑓(𝑠) = 2𝑠 2 − 4𝑠 + 1; 𝑓(𝑥 + ∆𝑥) = 2(𝑥 + ∆𝑥)2 − 4(𝑥 + ∆𝑥) + 1; 𝑒𝑡𝑐.
Observemos que no todos los elementos del codominio pertenecen al rango.
Ejemplo: Sea 𝑓: ℝ → ℝ, 𝑓(𝑥) = 𝑥 2 , vemos que 𝑥 2 no puede ser negativo, entonces los
números negativos pertenecen al codominio, pero no al rango.
Gráfica de funciones.
Una función 𝑓 establece un conjunto de pares ordenados
(𝑥, 𝑦). El conjunto de puntos (𝑥, 𝑓(𝑥)) en el sistema de
coordenadas cartesianas es la gráfica de 𝒇.
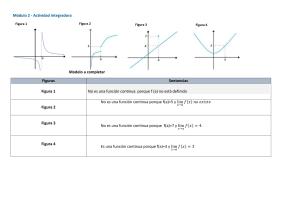
Una condición necesaria y suficiente para que una curva plana
sea la gráfica de una función es que cualquier recta vertical
corte a la curva en a lo más un punto.
Así, una curva de esta forma, por ejemplo, no puede ser la
gráfica de función alguna porque hay ciertas rectas verticales
que la cortan en más de un punto.
Criterio de la recta vertical
Una gráfica (conjunto de puntos (x,y)) en el plano cartesiano define a y función de x si y sólo si
ninguna recta vertical intersecta a la gráfica en más de un punto.
10
𝑥+1
Ejemplo. Hallar el dominio de 𝑦 = 𝑙𝑜𝑔 (3 − |𝑥−3|)
Solución. Como los logaritmandos deben ser cantidades positivas, resulta:
3−|
𝑥+1
𝑥+1
𝑥+1
𝑥+1
<3
|>0 ⟹ 3> |
| ⟹ |
| < 3 ⟹ −3 <
𝑥−3
𝑥−3
𝑥−3
𝑥−3
𝑥+1
−3 <
… (1)
Que genera el sistema de desigualdades: { 𝑥+1 𝑥−3
, que se debe cumplir al mismo
< 3 … (2)
𝑥−3
tiempo. Como son desigualdades fraccionarias, vamos a resolver cada una por el Método de la
Ley de los Signos, revisando las fracciones positivas o negativas.
Solución de (1)
−3 <
⟹
𝑥+1
𝑥+1
⟹
> −3 ⟹
𝑥−3
𝑥−3
(𝑥 + 1) + 3(𝑥 − 3)
𝑥+1
+3>0 ⟹
>0
𝑥−3
𝑥−3
𝑥 + 1 + 3𝑥 − 9
4𝑥 − 8
4(𝑥 − 2)
𝑥−2
>0 ⟹
>0 ⟹
>0 ⟹
>0
𝑥−3
𝑥−3
𝑥−3
𝑥−3
Intervalo
𝑥 ∈ 𝐼𝑛𝑡𝑒𝑟𝑣𝑎𝑙𝑜
Verifica la
desigualdad?
(−∞, 2)
1
(2 , 3)
2,5
(3, +∞)
4
SI
NO
SI
CS1 = (−∞, 2) ∪ (3, +∞)
Solución de (2)
(𝑥 + 1) − 3(𝑥 − 3)
𝑥+1
𝑥+1
10 − 2𝑥
<3 ⟹
−3<0 ⟹
<0 ⟹
<0
𝑥−3
𝑥−3
𝑥−3
𝑥−3
Intervalo
𝑥 ∈ 𝐼𝑛𝑡𝑒𝑟𝑣𝑎𝑙𝑜
Verifica la
desigualdad?
(−∞, 3)
2
(3 , 5)
4
(5, +∞)
6
SI
NO
SI
CS2 = (−∞, 3) ∪ (5, +∞)
11
Finalmente: 𝐷𝑜𝑚 𝑓 = 𝐶𝑆1 ∩ 𝐶𝑆2 = (−∞, 2) ∪ (5, +∞). Se intersecta porque la variable 𝑥
debe pertenecer a los dos conjuntos solución al mismo tiempo. Notar la ausencia de puntos en
la gráfica de la función en el intervalo [2, 5].
1.2 Correspondencias entre conjuntos. Tipos. Aplicaciones entre conjuntos. Tipos.
Definición. (i) El producto cartesiano 𝑨 × 𝑩 se define como el conjunto de pares (𝑎, 𝑏)
donde 𝑎 ∈ 𝐴 y 𝑏 ∈ 𝐵.
(ii) La correspondencia 𝒇 entre el conjunto A y el conjunto B es un subconjunto del
producto cartesiano 𝐴 × 𝐵.
(iii) En una correspondencia 𝑓: 𝐴 → 𝐵, a un par (𝑎, 𝑏) donde 𝑎 ∈ 𝐴 y 𝑏 ∈ 𝐵 se le llama
grafo.
En una correspondencia se definen:
* el conjunto inicial: conjunto del cual provienen los grafos.
* el conjunto final: conjunto en el cual desembocan los grafos.
* el conjunto original: subconjunto del conjunto inicial que contiene a los elementos asociados
a un grafo, llamados preimágenes.
* el conjunto imagen: subconjunto del conjunto final que contiene a los elementos asociados a
un grafo, llamados imágenes.
Tipos de correspondencia
1. Inyectiva: Cuando cada elemento del conjunto imagen
es imagen de un solo elemento del conjunto original.
12
2. Sobreyectiva: Cuando el conjunto imagen coincide con
el conjunto final y por tanto todo elemento del conjunto
final es imagen de al menos un elemento del conjunto
inicial.
3. Unívoca: Cuando cada elemento del conjunto original
tiene como máximo una imagen de manera que de cada
elemento del conjunto inicial puede partir una o ninguna
flecha hacia el conjunto final.
4. Multívoca: Cuando existe algún elemento del conjunto
inicial que tiene dos o más imágenes.
OBS.: Todas las funciones son correspondencias unívocas, pero no toda correspondencia llega
a ser función.
Ejemplo: La correspondencia 𝑓: ℝ → ℝ, 𝑓(𝑥) = log(𝑥) NO es función, porque no todo
elemento de ℝ tiene imagen (ej., los números negativos no tienen logaritmo).
Ejemplo 2: La correspondencia 𝑓: ℝ → ℝ, 𝑥 = 𝑦 2 es biunívoca: para cada preimagen 𝑥 existen
dos imágenes: 𝑦1 = +√𝑥, 𝑦2 = −√𝑥. Entonces, tampoco puede ser función, porque a cada
preimagen debe corresponder una única imagen.
1.3 Función inyectiva, sobreyectiva y biyectiva. Concepto. Representación.
Función inyectiva.
Definición. Una función 𝒇(𝒙) es inyectiva (o “uno a uno”) si a diferentes elementos del
dominio le corresponden diferentes elementos del codominio:
𝑥1 ≠ 𝑥2 ⟹ 𝑓(𝑥1 ) ≠ 𝑓(𝑥2 )
Test de inyectividad (Método numérico)
Si encontramos dos números 𝑥1 ≠ 𝑥2 tales que 𝑓(𝑥1 ) = 𝑓(𝑥2 ), entonces 𝑓 no es inyectiva.
Ejemplo: En 𝑓(𝑥) = 𝑥 2 + 2; vemos que 2 ≠ −2 pero 𝑓(2) = 𝑓(−2) = 6. Entonces 𝑓 no es
inyectiva.
OBS.: Si 𝑥1 ≠ 𝑥2 pero 𝑓(𝑥1 ) ≠ 𝑓(𝑥2 ), para apenas algunos valores de 𝑥1 y 𝑥2 , no se puede
asegurar que 𝑓 sea inyectiva.
13
Test de inyectividad (Método gráfico)
Una comprobación gráfica de la inyectividad de una función es cuando cualquier recta
horizontal (paralela al eje 𝑥) corta a la misma, como máximo, en un punto.
Test de inyectividad (Método analítico)
Para saber si una función es inyectiva o no, reemplazamos la variable 𝑥 en 𝑓(𝑥) por las
variables auxiliares 𝑎 y 𝑏, y resolvemos la ecuación 𝑓(𝑎) = 𝑓(𝑏).
Si la única condición para la igualdad anterior es 𝑎 = 𝑏, entonces 𝑓 es inyectiva. Si, en caso
contrario, encontramos otra condición donde se verifica 𝑎 ≠ 𝑏 pero 𝑓(𝑎) = 𝑓(𝑏), entonces 𝑓
NO es inyectiva.
Ejemplo 1: Demostrar que 𝑓(𝑥) = 𝑥 3 es inyectiva.
Demostración: Consideramos que existen 𝑎, 𝑏 en el dominio tales que 𝑓(𝑎) = 𝑓(𝑏) en el
codominio; si reemplazamos 𝑥 por 𝑎 y 𝑏 tenemos:
𝑎3 = 𝑏 3 ⟹ 𝑎3 − 𝑏 3 = 0 ⟹ (𝑎 − 𝑏)(𝑎2 + 𝑎𝑏 + 𝑏 2 ) = 0
que consta de dos opciones: (i) la evidente, 𝑎 − 𝑏 = 0 ⟹ 𝑎 = 𝑏;
(ii) la otra opción: 𝑎2 + 𝑎𝑏 + 𝑏 2 = 0 ⟹ 𝑎 =
−𝑏 ± √𝑏2 −4∙1∙𝑏2
2
=
−𝑏 ± √−3𝑏2
.
2
Como no hay valores de 𝑏 que devuelvan valores reales de 𝑎, la opción (ii) es un absurdo.
Entonces, si 𝑓(𝑎) = 𝑓(𝑏) entonces necesariamente 𝑎 = 𝑏: la función 𝑓 es inyectiva.
Ejemplo 2: Demostrar que 𝑓(𝑥) = 𝑥 2 no es inyectiva.
Demostración: Si consideramos que existen 𝑎, 𝑏 en el dominio tales que 𝑓(𝑎) = 𝑓(𝑏) en el
codominio, si reemplazamos 𝑥 por 𝑎 y 𝑏 tenemos:
𝑎2 = 𝑏 2 ⟹ 𝑎2 − 𝑏 2 = 0 ⟹ (𝑎 − 𝑏)(𝑎 + 𝑏) = 0
que consta de dos opciones: (i) la evidente, 𝑎 − 𝑏 = 0 ⟹ 𝑎 = 𝑏;
(ii) la otra opción: 𝑎 + 𝑏 = 0 ⟹ 𝑎 = −𝑏, es decir, encontramos 𝑎 ≠ 𝑏 pero 𝑓(𝑎) = 𝑓(𝑏),
entonces 𝑓 no es inyectiva
14
Función sobreyectiva
Definición. Una función 𝒇(𝒙) es sobreyectiva (o suprayectiva, o suryectiva, o simplemente
“sobre”) si a todo elemento del codominio le corresponde una o más pre imágenes en el
dominio.
Es decir, 𝑓: 𝐴 → 𝐵 es sobreyectiva si para todo 𝑦 ∈ 𝐵 existe al menos un 𝑥 ∈ 𝐴 tales que
𝑓(𝑥) = 𝑦. En este caso 𝒇 es sobreyectiva si el rango de la función es igual al codominio de la
función.
Test de sobreyectividad (método gráfico)
Una comprobación gráfica de la sobreyectividad de una función es cuando todas las ordenadas
del codominio tienen asociado un punto de la gráfica. Si la gráfica en cambio no alcanza a
todas las ordenadas del codominio, la función NO es sobreyectiva.
Test de sobreyectividad (método analítico)
Para saber si una función es o no sobreyectiva procuramos, a partir de la regla de
correspondencia 𝑦 = 𝑓(𝑥), despejar la variable 𝑥 para que ahora dependa de la variable 𝑦. Así
se genera una función auxiliar 𝑥 = 𝑔(𝑦).
Hallamos el dominio de 𝑔, que será el rango de todos los valores de 𝑦 para los cuales existe un
valor de 𝑥. Ese será el rango de 𝑓.
Si 𝑅𝑎𝑛(𝑓) = 𝐶𝑜𝑑𝑜𝑚(𝑓), entonces 𝑓 es sobreyectiva.
Si 𝑅𝑎𝑛(𝑓) ≠ 𝐶𝑜𝑑𝑜𝑚(𝑓), entonces 𝑓 NO es sobreyectiva.
Ejemplo: Determinar si la función𝑓: ℝ ⟶ ℝ; 𝑓(𝑥) = 𝑥 2 + 2𝑥 + 5 es sobreyectiva o no.
Solución: Despejamos 𝑦 para que dependa de 𝑥:
𝑦 = 𝑥 2 − 2𝑥 + 5 ⟹ 0 = 𝑥 2 − 2𝑥 + 5 − 𝑦 (𝑒𝑐. 2° 𝐺𝑟𝑎𝑑𝑜) ⟹ 𝑥 =
2 ± √4 − 4(5 − 𝑦)
2
Para que haya 𝑥 ∈ ℝ, la condición es 4 − 4(5 − 𝑦) ≥ 0 ⟹ 4 − 20 + 4𝑦 ≥ 0 ⟹ 4𝑥 ≥ 16
15
⟹ 𝑦 ≥ 4.
Como 𝑅𝑎𝑛(𝑓) = [4, +∞) ≠ ℝ = 𝐶𝑜𝑑𝑜𝑚(𝑓), entonces 𝑓 NO es sobreyectiva.
Observación sobre la inyectividad/sobreyectividad de las funciones
No todas las funciones inyectivas son sobreyectivas ni todas las funciones sobreyectivas son
inyectivas. Además, la condición inyectiva/sobreyectiva de una función podría depender del
dominio y el codominio.
Ejemplo: Sea 𝑓(𝑥) = 𝑥 2 . Se pueden dar las siguientes posibilidades:
(1) Si 𝑓: ℝ → ℝ, entonces 𝑓 no será inyectiva ni biyectiva.
(2) Si 𝑓: ℝ+ → ℝ, entonces 𝑓 será inyectiva pero no será sobreyectiva.
(3) Si 𝑓: ℝ → ℝ+ , entonces 𝑓 no será inyectiva pero será sobreyectiva.
(4) Si 𝑓: ℝ+ → ℝ+ , entonces 𝑓 será inyectiva y sobreyectiva, por tanto será biyectiva.
Función biyectiva
Definición. Una función 𝒇(𝒙) es biyectiva si es inyectiva y sobreyectiva al mismo tiempo.
1.4 Clasificación de las funciones:
1.4.1 Elementales y compuestas
En Cálculo se utilizan fundamentalmente unas pocas funciones, llamadas funciones
elementales, a partir de ellas se pueden construir las funciones compuestas, que son
funciones resultantes de mezclar 2 o más funciones entre sí. Entonces, conviene conocer a
fondo estas funciones elementales.
Ejemplo: Una función como 𝑦 = cos(𝑥 2 − 2𝑥 − 3) es llamada función compuesta, porque
está formada por dos funciones elementales: (1) la función coseno, (2) la función polinómica.
1.4.2 Función elemental algebraica y trascendente
Una función 𝑓 elemental dada mediante una expresión matemática, puede clasificarse en:
a) Algebraica: si en f, la variable 𝑥, sólo se presenta con operaciones algebraicas: suma,
producto, cociente, potencia de exponente constante, radicación de índice constante. Son
funciones algebraicas: las funciones racionales (enteras y fraccionarias) e irracionales.
b) Trascendente: si la variable se presenta no sólo con operaciones algebraicas. Las funciones
trascendentes que se presentarán con frecuencia en este estudio son: las funciones
exponenciales, logarítmicas, trigonométricas (e inversas) e hiperbólicas (e inversas).
1.4.3. Funciones racionales: constantes, lineales, cuadráticas, cúbicas, de grado n, etc.
Si la variable 𝑥 está afectada sólo de exponentes enteros. Puede ser:
16
Entera: si los exponentes de 𝑥 son solo enteros positivos, o también, si 𝑥 no figura
como denominador en la expresión;
Ejemplos: 𝑓(𝑥) = 2 (función constante), 𝑓(𝑥) = 3𝑥 − 5 (función lineal),
𝑓(𝑥) = 3𝑥 2 − 2𝑥 + 7(función cuadrática), 𝑓(𝑥) = 𝑥 3 − 3𝑥 2 + 3𝑥 − 1 (función
cúbica), 𝑓(𝑥) = 𝑥 𝑛 (𝑛 ∈ ℕ) (función potencia), 𝑓(𝑥) = 3𝑥 5 − 4𝑥 3 + 2𝑥 2 (función
polinómica, de grado 5).
Fraccionaria: si algún exponente de 𝑥 es negativo o, también, si 𝑥 figura en el
denominador de la expresión.
Ejemplo: 𝑓(𝑥) = 2𝑥 3 + 4𝑥 −4 − 7𝑥 −7; 𝑓(𝑥) =
2𝑥 3 −7
3𝑥−2
1.4.4 Función irracional
Si la variable 𝑥 está afectada de exponentes fraccionarios o, también, si 𝑥 figura bajo un signo
radical.
5
Ejemplo: 𝑓(𝑥) = 𝑥 2/3 + 𝑥 1/3 ; 𝑓(𝑥) = √𝑥 2 + 2
1.4.5 Función exponencial: 𝑓(𝑥) = 𝑎 𝑥 donde 𝑎 > 0 y 𝑎 ≠ 1.
Función logarítmica: 𝑓(𝑥) = log 𝑎 (𝑥) donde 𝑎 > 0 y 𝑎 ≠ 1. Si 𝑎 = 𝑒 = 2,71828 …, la función
se escribe: 𝑓(𝑥) = log 𝑒 (𝑥) = ln(𝑥) y se llama función logaritmo natural de x.
1.4.6 Funciones trigonométricas:
(1) 𝑓(𝑥) = sin(𝑥) , 𝑥 ∈ ℝ
(2) 𝑓(𝑥) = cos(𝑥), 𝑥 ∈ ℝ
𝜋
(3) 𝑓(𝑥) = tan(𝑥), 𝑥 ∈ ℝ\{2 + πk | k ∈ ℤ}
(4) 𝑓(𝑥) = cot(𝑥), 𝑥 ∈ ℝ\{πk | k ∈ ℤ}
𝜋
(5) 𝑓(𝑥) = sec(𝑥), 𝑥 ∈ ℝ\{ + πk | k ∈ ℤ}
2
(6) 𝑓(𝑥) = csc(𝑥), 𝑥 ∈ ℝ\{πk | k ∈ ℤ}
La variable 𝑥 se expresa generalmente en radianes (𝜋 radianes = 180°).
Funciones trigonométricas inversas:
𝜋
𝜋
(1) 𝑓(𝑥) = sin−1 (𝑥) = arcsin(𝑥) , − 2 ≤ 𝑓(𝑥) ≤ + 2
(2) 𝑓(𝑥) = cos−1(𝑥) = arccos(𝑥), 0 ≤ 𝑓(𝑥) ≤ 𝜋
𝜋
𝜋
(3) 𝑓(𝑥) = tan−1 (𝑥) = arctan(𝑥) , − 2 ≤ 𝑓(𝑥) ≤ + 2
(4) 𝑓(𝑥) = cot −1(𝑥) = arccot(𝑥) , 0 < 𝑓(𝑥) < 𝜋
(5) 𝑓(𝑥) = sec −1(𝑥) = arcsec(𝑥) , 0 ≤ 𝑓(𝑥) ≤ 𝜋
𝜋
𝜋
(6) 𝑓(𝑥) = csc −1 (𝑥) = arccsc(𝑥) , − 2 ≤ 𝑓(𝑥) ≤ + 2
OBS.: Para funciones trigonométricas, el exponente −1 de sin−1 (𝑥) NO significa que
1
,
sin(𝑥)
sino que es solamente la función inversa de 𝑦 = sin(𝑥).
17
1.4.7 Funciones hiperbólicas:
(1) 𝑓(𝑥) = sinh(𝑥) =
(2) 𝑓(𝑥) = cosh(𝑥) =
(3) 𝑓(𝑥) = tanh(𝑥) =
𝑒 𝑥 − 𝑒 −𝑥
2
𝑒 𝑥 + 𝑒 −𝑥
(4) 𝑓(𝑥) = coth(𝑥) = 𝑒 𝑥 − 𝑒 −𝑥
𝑒 𝑥 + 𝑒 −𝑥
2
2
(5) 𝑓(𝑥) = sech(𝑥) = 𝑒 𝑥 + 𝑒 −𝑥
𝑒 𝑥 − 𝑒 −𝑥
𝑒 𝑥 + 𝑒 −𝑥
2
(6) 𝑓(𝑥) = csch(𝑥) = 𝑒 𝑥 − 𝑒 −𝑥
Algunas propiedades de las funciones hiperbólicas son:
(1) cosh2(𝑥) − sinh2(𝑥) = 1
(2) 1 − tanh2 (𝑥) = sech2 (𝑥)
(3) coth2 (𝑥) − 1 = csch2(𝑥)
(4) sinh(−𝑥) = − sinh(𝑥) ; cosh(−𝑥) = cosh(𝑥) ; tanh(−𝑥) = −tanh(𝑥)
Funciones hiperbólicas inversas:
(1) 𝑓(𝑥) = 𝑎𝑟𝑔𝑠𝑖𝑛ℎ(𝑥) = sinh−1 (𝑥) = ln(𝑥 + √𝑥 2 + 1); para todo 𝑥
(2) 𝑓(𝑥) = 𝑎𝑟𝑔𝑐𝑜𝑠ℎ(𝑥) = cosh−1(𝑥) = ln(𝑥 + √𝑥 2 − 1); para 𝑥 ≥ 1
1
1+𝑥
); para |𝑥| <
2
1−𝑥
1
𝑥+1
= 2 ln (𝑥 − 1); para 𝑥 ≠ 0
(3) 𝑓(𝑥) = 𝑎𝑟𝑔𝑡𝑎𝑛ℎ(𝑥) = tanh−1(𝑥) = ln (
(4) 𝑓(𝑥) = 𝑎𝑟𝑔𝑐𝑜𝑡ℎ(𝑥) = coth−1 (𝑥)
(5) 𝑓(𝑥) = 𝑎𝑟𝑔𝑠𝑒𝑐ℎ(𝑥) = sech−1(𝑥) = ln (
1 + √1 − 𝑥 2
);
𝑥
1
𝑥
(6) 𝑓(𝑥) = 𝑎𝑟𝑔𝑐𝑠𝑐ℎ(𝑥) = csch−1(𝑥) = ln ( +
1
para 0 < 𝑥 ≤ 1
√𝑥 2 + 1
);
|𝑥|
para 𝑥 ≠ 0
OBS.: Para funciones hiperbólicas, el exponente −1 de y = sinh−1(𝑥) NO significa que 𝑦 =
1
,
sinh(𝑥)
sino que indica solamente la función inversa de 𝑦 = sinh(𝑥).
1.4.8 Funciones no elementales
Son funciones que no se pueden expresar con una única fórmula matemática elemental,
simple o compuesta, sino a través de una combinación de varias leyes de correspondencia o
varias fórmulas. Algunas de las funciones no elementales básicas son:
Función valor absoluto de 𝒙: 𝑎𝑏𝑠(𝑥) = |𝑥| =
𝑥 𝑠𝑖 𝑥 ≥ 0
.
{
−𝑥 𝑠𝑖 𝑥 < 0
+1 𝑠𝑖 𝑥 > 0
Función signo de 𝒙: 𝑠𝑔𝑛(𝑥) = { 0 𝑠𝑖 𝑥 = 0
−1 𝑠𝑖 𝑥 < 0
18
Función techo de 𝒙
Si 𝑥 es entero, devuelve el mismo número entero.
Si 𝑥 no es entero, devuelve el menor número entero
sucesor de 𝑥.
𝑐𝑒𝑖𝑙𝑖𝑛𝑔(𝑥) = ⌈𝑥⌉ = min{𝑘 ∈ ℤ | 𝑥 ≤ 𝑘}
Función piso (o suelo) de 𝒙
Si 𝑥 es entero, devuelve el mismo número entero.
Si 𝑥 no es entero, devuelve el mayor número entero
antecesor de 𝑥.
𝑓𝑙𝑜𝑜𝑟(𝑥) = ⌊𝑥⌋ = max{𝑘 ∈ ℤ |𝑥 ≤ 𝑘}
Función redondeo de 𝒙
El redondeo es el proceso de descartar cifras en la
expresión decimal de un número.
*Si 𝑥 es entero, devuelve el mismo número entero.
*Si 𝑥 no es entero, y su parte decimal es < 1/2,
devuelve el número entero antecesor de 𝑥.
*Si 𝑥 no es entero, y su parte decimal es ≥ 1/2,
devuelve el número entero sucesor de 𝑥.
𝑟𝑜𝑢𝑛𝑑(𝑥) = 𝑓𝑙𝑜𝑜𝑟(𝑥 + 0,5)
Resumen: Clasificación de funciones
19
1.4.9 Funciones definidas por intervalos o a trozos.
Definición. Una función definida por intervalo o a trozos 𝑓(𝑥) es una función en la cual hay
2 o más fórmulas, y la fórmula utilizada para definir las relaciones depende del intervalo o
trozo de dominio en que el valor de entrada 𝑥 se encuentre. Solemos encontrar una función
𝑓ó𝑟𝑚𝑢𝑙𝑎 1 𝑠𝑖 𝑥 ∈ 𝐷𝑜𝑚1 𝑓
a trozos de esta manera: 𝑓(𝑥) = {𝑓ó𝑟𝑚𝑢𝑙𝑎 2 𝑠𝑖 𝑥 ∈ 𝐷𝑜𝑚2 𝑓.
𝑓ó𝑟𝑚𝑢𝑙𝑎 3 𝑠𝑖 𝑥 ∈ 𝐷𝑜𝑚3 𝑓
−2𝑥 + 3 𝑠𝑖 𝑥 < 3
Ejemplo: 𝑓(𝑥) = { 3
𝑠𝑖 3 ≤ 𝑥 ≤ 5
𝑥 2 − 20 𝑠𝑖 𝑥 > 5
1.4.10 Método de expresión de funciones: Implícita y explícita. Funciones paramétricas.
(1) Mediante tablas:
Ejemplo: La función 𝑓(𝑥) = 𝑥 2 se puede representar mediante la siguiente tabla:
x
y=f(x)
-1,5
2,25
-1
1
-0,5
0,25
0
0
0,5
0,25
1
1
1,5
2,25
2
4
(2) Mediante fórmulas analíticas
2.1 Función explícita
En esta forma es posible señalar la variable 𝑦 como función de una combinación de
operaciones sobre la variable 𝑥, y se denota 𝑦 = 𝑓(𝑥).
1
Ejemplos: 𝑦 = 𝑥 2; 𝑦 = ln (𝑥); 𝑦 = sin(√𝑥 2 )
2.2 Función implícita
En esta forma en el primer miembro aparece una expresión combinada con variables 𝑥 e 𝑦,
igualada a cero, se denota 𝐹(𝑥, 𝑦) = 0.
Ejemplos: 𝑥 2 + 𝑦 2 = 1 ; 𝑥𝑦 2 − 𝑥 2 ∙ sin(𝑦) = 0;
OBS.: Usualmente cuando una función está expresada implícitamente, hay casos en los que no
es posible expresar explícitamente 𝑦 en función de 𝑥. En cada caso, queda a cargo de uno
evaluar si es posible o no despejar la variable 𝑦.
2.3 Función paramétrica
Cuando 𝑥 e 𝑦 se expresan mediante una 3ra. variable llamada parámetro, se denota:
𝑥 = 𝑓1 (𝑡)
.
{
𝑦 = 𝑓2 (𝑡)
𝑥 = sin(𝑡)
Ejemplo: {
𝑦 = cos(𝑡)
OBS.: En algunos casos es posible eliminar el parámetro 𝑡 y hallar una fórmula explícita o
implícita entre 𝑥 e 𝑦.
20
1.4.11 Funciones pares e impares. Propiedades.
Definición. (i) Una función f es par si 𝑓(𝑥) = 𝑓(−𝑥).
(ii) Una función f es impar si 𝑓(𝑥) = −𝑓(−𝑥).
Test de paridad/imparidad (Método numérico)
Si encontramos dos números 𝑎 y −𝑎, del mismo valor absoluto y de signos contrarios, pero
𝑓(−𝑎) ≠ ±𝑓(𝑎), entonces 𝑓 no es par ni impar.
Ejemplo: Si 𝑓(𝑥) = (𝑥 − 3)2 , basta con elegir 𝑎 = 1, luego: 𝑓(−1) = 16, 𝑓(1) = 4; entonces
𝑓 no es par ni impar.
OBS.: Si 𝑓(−𝑎) = ±𝑓(𝑎) solamente para un/os valores de 𝑎, no se puede asegurar que 𝑓 sea
par o impar.
Test de paridad/imparidad (Método analítico)
Para averiguar si una función es par/impar, reemplazamos la variable 𝑥 de la función 𝑓(𝑥) por
−𝑥. Por simple inspección, tratamos de observar si 𝑓(−𝑥) es igual o no a +𝑓(𝑥) o a −𝑓(𝑥).
𝑥2
Ejemplo: Para la función 𝑓(𝑥) = |𝑥|, resulta que 𝑓(−𝑥) =
(−𝑥)2
|−𝑥|
; pero (−𝑥)2 = 𝑥 2 y |−𝑥| = |𝑥|
por propiedad de valor absoluto. Reemplazando queda 𝑓(−𝑥) =
𝑥2
|𝑥|
= 𝑓(𝑥), y 𝑓 es par.
1.4.12 Funciones Directas e inversas. Propiedades. Simetría de la gráfica de funciones.
Definición. Sea 𝑓: 𝐴 → 𝐵, 𝑦 = 𝑓(𝑥) una función biyectiva. La función inversa de f, o inversa
de la función 𝒇, es la función 𝑓 −1 : 𝐵 → 𝐴, 𝑥 = 𝑓 −1 (𝑦) donde:
*𝑥, que era preimagen de 𝑦 según 𝑓, ahora es imagen de 𝑦 según 𝑓 −1 .
*𝑦, que era imagen de 𝑥 según 𝑓, ahora es preimagen de 𝑥 según 𝑓 −1 .
En los tests de sobreyectividad, vimos que al despejar 𝑥 para que dependa de 𝑦 se genera una
función nueva, 𝑥 = 𝑔(𝑦). Entonces, se puede concluir que 𝑔 = 𝑓 −1 , es decir, 𝑥 = 𝑓 −1 (𝑦).
Sin embargo, es costumbre que el argumento de 𝑓 −1 también se denomine 𝑥, por eso algunas
veces se requiere sustituir 𝑥 por 𝑦 y viceversa, quedando 𝑦 = 𝑓 −1 (𝑥).
𝑥+1
Ejemplo: Hallar la función inversa de 𝑦 = 𝑥−4.
Solución: Procuramos despejar 𝑥 para que dependa de 𝑦:
𝑦(𝑥 − 4) = 𝑥 + 1 ⟹ 𝑥𝑦 − 4𝑦 = 𝑥 + 1 ⟹ 𝑥𝑦 − 𝑥 = 1 + 4𝑦 ⟹ 𝑥(𝑦 − 1) = 1 + 4𝑦
Finalmente queda 𝑥 =
Entonces, si 𝑓(𝑥) =
1+4𝑦
.
𝑦−1
𝑥+1
,
𝑥−4
Intercambiando 𝑥 por 𝑦 queda 𝑦 =
1+4𝑥
.
𝑥−1
entonces la función inversa es 𝑓 −1 (𝑥) =
OBS.: 𝑓 −1 (𝑥) NO significa
funciones la abreviatura 𝑓
−1
1
.
𝑓(𝑥)
1+4𝑥
.
𝑥−1
A menos que se diga lo contrario, cuando hablamos de
significa “inversa de 𝑓”.
21
Propiedades de las funciones inversas
1. El rango de una función inversa es igual al dominio de su función original y, recíprocamente,
el rango de una función es igual al dominio de su función inversa.
𝑅𝑎𝑛(𝑓 −1 ) = 𝐷𝑜𝑚(𝑓); 𝑅𝑎𝑛(𝑓) = 𝐷𝑜𝑚(𝑓 −1 )
2. La función compuesta resultante entre una función y su inversa es conmutativa, y es igual a
la variable 𝑥.
𝑓(𝑓 −1 (𝑥)) = 𝑓 −1 (𝑓(𝑥)) = 𝑥
3. Recíprocamente, si la función compuesta entre 2 funciones es conmutativa e igual a la
variable 𝑥, entonces las 2 funciones originales son una inversa de la otra.
𝑓(𝑔(𝑥)) = 𝑔(𝑓(𝑥)) = 𝑥 ⟹ 𝑓 = 𝑔−1 ; 𝑔 = 𝑓 −1
4. La gráfica de la función inversa 𝑓 −1 puede obtenerse a partir de su función original 𝑓
reflejando la gráfica de la función 𝑓 sobre la recta 𝑦 = 𝑥, es decir, la recta bisectriz del 1° y 4°
cuadrantes.
1.4.13 Funciones monótonas. Funciones crecientes y decrecientes.
Definición. Una función 𝑓: 𝐴 → 𝐵 es monótona si conserva el orden de las imágenes de la
función. Existen 5 tipos de funciones monótonas:
𝑓 es creciente (o no decreciente) si 𝑥1 < 𝑥2 siempre implica 𝑓(𝑥1 ) ≤ 𝑓(𝑥2 ).
𝑓 es decreciente (o no creciente) si 𝑥1 < 𝑥2 siempre implica 𝑓(𝑥1 ) ≥ 𝑓(𝑥2 ).
𝑓 es estrictamente creciente si 𝑥1 < 𝑥2 siempre implica 𝑓(𝑥1 ) < 𝑓(𝑥2 ).
𝑓 es estrictamente creciente si 𝑥1 < 𝑥2 siempre implica 𝑓(𝑥1 ) > 𝑓(𝑥2 ).
𝑓 es constante si 𝑥1 < 𝑥2 siempre implica 𝑓(𝑥1 ) = 𝑓(𝑥2 ).
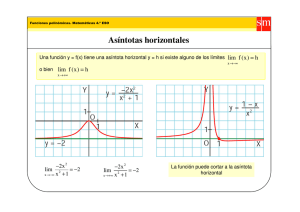
Para analizar el crecimiento o no de
una función, se supondrá siempre que
la variable 𝑥 es siempre creciente, a fin
de observar el comportamiento de la
variable 𝑦.
En la siguiente figura, a la izquierda
tenemos una función creciente; a la
derecha, una función decreciente.
22
OBS.: Como es difícil que una función 𝑓 sea monótona en
todo su dominio, se puede afirmar que 𝑓 es monótona por
partes si se puede partir su dominio de manera que en cada
una de las partes la función sea monótona.
Función acotada (o limitada)
Definición. (i) Una función 𝒇 es acotada superiormente si existe algún número 𝑀 tal que
𝑓(𝑥) ≤ 𝑀 para todo 𝑥 ∈ 𝐷𝑜𝑚 𝑓. Al número 𝑀 se le llama cota superior de las imágenes 𝑓.
(ii) Una función 𝒇 es acotada inferiormente si existe algún número 𝑚 tal que 𝑓(𝑥) ≥ 𝑚
para todo 𝑥 ∈ 𝐷𝑜𝑚 𝑓. Al número 𝑀 se le llama cota inferior de las imágenes 𝑓.
(iii) Una función 𝒇 es acotada si es acotada superior e inferiormente.
1.5 Operaciones elementales con funciones.
Definición. Sean 𝑓 y 𝑔 dos funciones con dominios que se intersecan, es decir, existen
números reales 𝑥 tales que 𝑥 ∈ 𝐷𝑜𝑚 𝑓 y 𝑥 ∈ 𝐷𝑜𝑚 𝑔, al mismo tiempo. Se definen las
siguientes combinaciones algebraicas de nuevas funciones:
(i) función suma/diferencia, o suma/diferencia de 2 funciones: es la función
(𝑓 ± 𝑔)(𝑥) = 𝑓(𝑥) ± 𝑔(𝑥)
y su dominio es 𝐷𝑜𝑚(𝑓 ± 𝑔) = 𝐷𝑜𝑚 𝑓 ∩ 𝐷𝑜𝑚 𝑔.
(ii) función producto, o producto de 2 funciones: es la función
(𝑓𝑔)(𝑥) = 𝑓(𝑥) ∙ 𝑔(𝑥)
y su dominio es 𝐷𝑜𝑚(𝑓𝑔) = 𝐷𝑜𝑚 𝑓 ∩ 𝐷𝑜𝑚 𝑔.
(iii) función cociente, o cociente de 2 funciones: es la función
𝑓
𝑓(𝑥)
( ) (𝑥) =
𝑔
𝑔(𝑥)
𝑓
y su dominio es 𝐷𝑜𝑚 (𝑔) = 𝐷𝑜𝑚 𝑓 ∩ 𝐷𝑜𝑚 𝑔\ {𝑥 | 𝑔(𝑥) = 0}
Ejemplo: Si 𝑓(𝑥) = log(𝑥 + 10), 𝑔(𝑥) = log(5 − 𝑥), calcular: (a) 𝑓 + 𝑔, (b) 𝑓 − 𝑔, (b) 𝑓𝑔,
(c) 𝑓/𝑔, (d) el dominio de cada función nueva.
Solución:
(𝑓 + 𝑔)(𝑥) = 𝑓(𝑥) + 𝑔(𝑥) = log(𝑥 + 10) + log(5 − 𝑥) = log(𝑥 + 10)(5 − 𝑥)
𝑥 + 10
(𝑓 − 𝑔)(𝑥) = 𝑓(𝑥) − 𝑔(𝑥) = log(𝑥 + 10) − log(5 − 𝑥) = log (
)
5−𝑥
(𝑓𝑔)(𝑥) = 𝑓(𝑥)𝑔(𝑥) = log(𝑥 + 10) log(5 − 𝑥)
23
𝑓
𝑓(𝑥) log(𝑥 + 10)
( ) (𝑥) =
=
𝑔
𝑔(𝑥)
log(5 − 𝑥)
𝐷𝑜𝑚(𝑓 + 𝑔) = 𝐷𝑜𝑚(𝑓 − 𝑔) = 𝐷𝑜𝑚(𝑓𝑔) = 𝐷𝑜𝑚(𝑓) ∩ 𝐷𝑜𝑚(𝑔) = (−10, +∞) ∩ (−∞, 5) = (−10,5)
𝑓
𝐷𝑜𝑚 ( ) = 𝐷𝑜𝑚 (𝑓) ∩ 𝐷𝑜𝑚 (𝑔)\ {𝑥 | 𝑔(𝑥) = 0}, y log(5 − 𝑥) = 0
𝑔
⟹5−𝑥 =1 ⟹𝑥 =4
𝑓
𝐷𝑜𝑚 ( ) = (−10,5)\{4} = (−10,4) ∪ (4,5)
𝑔
1.6 Composición de funciones
Definición. Dadas dos funciones 𝑔: 𝐴 → 𝐶 y 𝑓: 𝐶′ → 𝐵 (donde 𝐶′, el dominio de 𝑓, está
contenida en el rango de 𝑔), la función compuesta f ° g es la función:
𝑓°𝑔: 𝐴 → 𝐵
𝑓°𝑔(𝑥) = 𝑓(𝑔(𝑥))
La siguiente figura nos muestra las relaciones entre 𝑓, 𝑔 y 𝑓 °𝑔. El orden de operaciones de
𝑓(𝑔(𝑥)) es el que sigue: primero, si 𝑥 ∈ 𝐷𝑜𝑚(𝑔) hallamos 𝑔(𝑥), luego vemos si 𝑔(𝑥) ∈
𝐷𝑜𝑚(𝑓), si es así hallamos 𝑓(𝑔(𝑥)).
Ejemplo: Sea 𝑓(𝑥) = 𝑥 2 + 1 y 𝑔(𝑥) = 3𝑥 + 5.
(a) Encontrar 𝑓 °𝑔(𝑥)
(b) Encontrar 𝑔 °𝑓(𝑥)
Solución. (𝑎) 𝑓 ° 𝑔(𝑥) = 𝑓(𝑔(𝑥))
𝑓(𝑥) = 𝑥 2 + 1
𝑓( ) = ( )2 + 1
2
𝑓( 𝒈(𝒙)) = ( 𝒈(𝒙)) + 1
𝑓(𝑔(𝑥) = (3𝑥 + 5)2 + 1
𝑓(𝑔(𝑥)/) = 9𝑥 2 + 30𝑥 + 26
(𝑏) 𝑔 ° 𝑓(𝑥) = 𝑔(𝑓(𝑥))
𝑔(𝑥) = 3𝑥 + 5
𝑔( ) = 3 ∙ ( ) + 5
𝑔( 𝒇(𝒙)) = 3(𝒇(𝒙)) + 5
𝑔(𝑓(𝑥)) = 3(𝑥 2 + 1) + 5
𝑔(𝑓(𝑥)) = 3𝑥 2 + 8
Dominio de la función compuesta
Es igual al conjunto de números reales tales que pertenezcan al dominio de la primera función
evaluada, y que el resultado de esta función pertenezca al dominio de la segunda función
evaluada.
En 𝑓(𝑔(𝑥)), el orden es calcular: primero 𝑔(𝑥), luego 𝑓(𝑔(𝑥)). Entonces, resulta:
𝐷𝑜𝑚(𝑓 ° 𝑔) = {𝑥 ∈ ℝ | 𝑥 ∈ 𝐷𝑜𝑚(𝑔); 𝑔(𝑥) ∈ 𝐷𝑜𝑚(𝑓)}
24
Ejemplo: Si 𝑓(𝑥) =
1
𝑥 2 −1
y 𝑔(𝑥) = √4 − 𝑥, hallar 𝑓(𝑔(𝑥)) y su dominio.
Solución: 𝑓(𝑔(𝑥)) = 𝑓(√4 − 𝑥) =
1
1
2
(√4−𝑥) −1
= |4−𝑥|−1.
Como debe cumplirse 𝑥 ∈ 𝐷𝑜𝑚(𝑔) y 𝑔(𝑥) ∈ 𝐷𝑜𝑚(𝑓): resolvemos las dos condiciones.
𝑥 ∈ 𝐷𝑜𝑚(𝑔)
𝑔(𝑥) ∈ 𝐷𝑜𝑚(𝑓)
4−𝑥 ≥0
[𝑔(𝑥)]2 − 1 ≠ 0
|4 − 𝑥| ≠ 1
−𝑥 ≥ −4 … (−1)
𝑥≤4
𝑥 ≠ {3; 5}
Finalmente, los valores de 𝑥 que cumplen al mismo tiempo las dos condiciones son los
números del dominio de la función compuesta.
𝐷𝑜𝑚(𝑓 °𝑔) = (−∞, 4]\{3} = (−∞, 3) ∪ (3,4).
OBS.: Notemos que si solamente se hubiera evaluado la fórmula de la composición, el dominio
habría sido ℝ\ {3; 5}, que es incorrecto. Se sugiere respetar la definición para calcular el
dominio de una función compuesta.
𝑥 − 3 𝑠𝑖 𝑥 ≥ 0
Ejemplo: Determinar 𝑓 °𝑔 si 𝑓(𝑥) = { 3√𝑥 𝑠𝑖 𝑥 ≥ 0 y 𝑔(𝑥) = { 1
.
𝑠𝑖 𝑥 < 0
𝑥 + 2 𝑠𝑖 𝑥 < 0
𝑥
Solución: Sean:
𝑓1 (𝑥) = √𝑥 𝑠𝑖 𝑥 ≥ 0, 𝑓2 (𝑥) = 𝑥 3 + 2 𝑠𝑖 𝑥 < 0, 𝑔1 (𝑥) = 𝑥 − 3 𝑠𝑖 𝑥 ≥ 0, 𝑔2 (𝑥) =
1
𝑥
𝑠𝑖 𝑥 < 0
Efectuamos todas las composiciones posibles de un trozo de 𝑓 con un trozo de 𝑔.
(1°) 𝑓1 °𝑔1 :
𝐷𝑜𝑚(𝑓1 °𝑔1 ) = {𝑥 ∈ ℝ | 𝑥 ∈ 𝐷𝑜𝑚(𝑔1 ); 𝑔1 (𝑥) ∈ 𝐷𝑜𝑚(𝑓1 )}
𝑥 ∈ 𝐷𝑜𝑚(𝑔1 )
𝑥≥0
𝑔1 (𝑥) ∈ 𝐷𝑜𝑚(𝑓1 )
𝑔1 (𝑥) ≥ 0
𝑥−3≥0
𝑥≥3
𝐷𝑜𝑚(𝑓1 °𝑔1 ) = [3, +∞); y 𝑓1 (𝑔1 (𝑥)) = √𝑔1 (𝑥) = √𝑥 − 3.
(2°) 𝑓1 °𝑔2 :
𝐷𝑜𝑚(𝑓1 °𝑔2 ) = {𝑥 ∈ ℝ | 𝑥 ∈ 𝐷𝑜𝑚(𝑔2 ); 𝑔2 (𝑥) ∈ 𝐷𝑜𝑚(𝑓1 )}
𝑥 ∈ 𝐷𝑜𝑚(𝑔2 )
𝑔2 (𝑥) ∈ 𝐷𝑜𝑚(𝑓1 )
1
𝑥<0
≥0
𝑥
𝑥>0
𝐷𝑜𝑚(𝑓1 °𝑔2 ) = ∅ , porque no hay valor de 𝑥 que cumpla las dos condiciones al mismo tiempo.
(3°) 𝑓2 °𝑔1:
𝐷𝑜𝑚(𝑓2 °𝑔1 ) = {𝑥 ∈ ℝ | 𝑥 ∈ 𝐷𝑜𝑚(𝑔1 ); 𝑔1 (𝑥) ∈ 𝐷𝑜𝑚(𝑓2 )}
𝑥 ∈ 𝐷𝑜𝑚(𝑔1 )
𝑔1 (𝑥) ∈ 𝐷𝑜𝑚(𝑓2 )
𝑥≥0
𝑥−3<0
𝑥<3
3
𝐷𝑜𝑚(𝑓2 °𝑔1 ) = [0, 3); y 𝑓2 (𝑔1 (𝑥)) = (𝑔1 (𝑥)) + 2 = (𝑥 − 3)3 + 2 = 𝑥 3 − 9𝑥 2 + 27𝑥 − 25.
(4°) 𝑓2 °𝑔2
𝐷𝑜𝑚(𝑓2 °𝑔2 ) = {𝑥 ∈ ℝ | 𝑥 ∈ 𝐷𝑜𝑚(𝑔2 ); 𝑔2 (𝑥) ∈ 𝐷𝑜𝑚(𝑓2 )}
25
𝑥 ∈ 𝐷𝑜𝑚(𝑔2 )
𝑥<0
𝑔2 (𝑥) ∈ 𝐷𝑜𝑚(𝑓2 (𝑥))
1
<0
𝑥
𝑥<0
3
1 3
𝐷𝑜𝑚(𝑓2 °𝑔2 ) = (−∞, 0); y 𝑓2 (𝑔2 (𝑥)) = (𝑔2 (𝑥)) + 2 = (𝑥) + 2 =
1 + 2𝑥 3
.
𝑥3
Finalmente, concluimos que:
1 + 2𝑥 3
𝑠𝑖 𝑥 < 0
3
𝑥
𝑓(𝑔(𝑥)) =
𝑥 3 − 9𝑥 2 + 27𝑥 − 25 𝑠𝑖 0 ≤ 𝑥 ≤ 3
{
√𝑥 − 3 𝑠𝑖 𝑥 > 3
26
CAPÍTULO 2
LÍMITE DE FUNCIONES DE UNA VARIABLE REAL
2.1 Sucesiones. Sucesiones convergentes y divergentes. Límites de sucesiones. Operaciones
con sucesiones.
Definición: Supongamos que a cada número natural 𝑛 se le ha puesto en correspondencia
un cierto número real 𝑥𝑛 . La lista de elementos {𝑥1 , 𝑥2 , 𝑥3 , … } se le llama sucesión, cada
elemento 𝑥𝑛 = 𝑥(𝑛), donde 𝑛 = 1, 2, 3, …, se llama elemento (o término) de la sucesión y
𝑛, su posición.
A partir de la definición, se puede decir que la sucesión es un caso particular de función:
Definición: La sucesión es una función definida sobre el conjunto de los números naturales
y que toma valores del conjunto de los números reales, y se denota 𝑥: ℕ → ℝ.
Ejemplos:
1
1
1. 𝑥𝑛 = 1/𝑛2 , así: 𝑥1 = 1, 𝑥2 = 4 , 𝑥3 = 9 , 𝑒𝑡𝑐.
3
𝑛
2. 𝑥𝑛 = √𝑛, así: 𝑥1 = 1, 𝑥2 = √2, 𝑥3 = √3, 𝑒𝑡𝑐.
Límite de una sucesión. Sucesiones convergentes
Definición: El número 𝐿 se llama límite de una sucesión 𝑥𝑛 (se escribe: lim 𝑥𝑛 = 𝑎 o
𝑛→∞
simplemente lim 𝑥𝑛 = 𝐿), si para todo 𝜀 > 0, por más pequeño que se elija, existe un
número natural 𝑛0 tal que ∀𝑛 > 𝑛0 ⟹ |𝑥𝑛 − 𝐿| < 𝜀.
Las sucesiones convergentes son sucesiones cuyos límites son finitos.
Notar que |𝑥𝑛 − 𝐿| < 𝜀 ⟺ −𝜀 < 𝑥𝑛 − 𝐿 < +𝜀 ⟺ 𝐿 − 𝜀 < 𝑥𝑛 < 𝐿 + 𝜀
1
Ejemplo: La sucesión 𝑥𝑛 = 𝑛 es convergente, con lim
1
1
entonces 𝑥𝑛 = 𝑛 < 𝑛
0
1
𝑛→∞ 𝑛
1
1
= lim (𝑛) = 0. En efecto, si 𝑛 > 𝑛0
⟹ |𝑥𝑛 | < 𝑛 (porque |𝑥𝑛 | = 𝑥𝑛 ya que 𝑥𝑛 > 0). Entonces, por simple
0
1
inspección, se puede tomar 𝐿 = 0 y 𝜀 = 𝑛 .
0
27
𝜋
Ejemplo: La sucesión 𝑥𝑛 = sin ( 2 𝑛) NO es convergente. En efecto, como 𝑥𝑛 oscila entre −1, 0
y +1, entonces para un 𝜀 < 1 no es posible encontrar un 𝑛0 tal que |𝑥𝑛 | < 𝜀. La definición de
sucesión convergente nos pide hallar 𝑛0 para todo 𝜀 pequeño.
Propiedades de las sucesiones convergentes
Si 𝑥𝑛 e 𝑦𝑛 son sucesiones, 𝑘 es una constante, lim 𝑥𝑛 = 𝑋 y lim 𝑦𝑛 = 𝑌, entonces:
(a) lim(𝑥𝑛 ± 𝑦𝑛 ) = lim(𝑥𝑛 ) ± lim(𝑦𝑛 ) = 𝑋 ± 𝑌
(b) lim(𝑥𝑛 ∙ 𝑦𝑛 ) = lim(𝑥𝑛 ) ∙ lim(𝑦𝑛 ) = 𝑋 ∙ 𝑌
(c) lim(𝑘𝑥𝑛 ) = 𝑘 ∙ lim(𝑥𝑛 ) = 𝑘 ∙ 𝑋, en particular lim 𝑘 = 𝑘
x
yn
(d) lim ( n ) =
lim(𝑥𝑛 )
lim(𝑦𝑛 )
=
𝑋
𝑌
siempre que 𝑌 ≠ 0
(e) lim(ln(𝑥𝑛 )) = ln(lim(𝑥𝑛 )) = ln(𝑋)
(f) lim(𝑎 𝑥𝑛 ) = 𝑎lim(𝑥𝑛 ) = 𝑎 𝑋
(g) lim(𝑥𝑛 )𝑘 = (lim 𝑥𝑛 )𝑘 siempre que 𝑘 > 0 y 𝑥𝑛 > 0
𝑦
(h) lim(𝑥𝑛 𝑛 ) = (lim(𝑥𝑛 ))lim(𝑦𝑛 ) = 𝑋 𝑌
Relaciones entre sucesiones convergentes
(a) Si 𝑥𝑛 es una sucesión convergente y 𝑥𝑛 ≥ 0 ∀𝑛 ∈ ℕ, entonces lim(𝑥𝑛 ) ≥ 0.
(b) Si 𝑥𝑛 , 𝑦𝑛 son sucesiones convergentes y 𝑥𝑛 ≤ 𝑦𝑛 ∀𝑛 ∈ ℕ entonces lim(𝑥𝑛 ) ≤ lim(𝑦𝑛 ).
(c) Si 𝑥𝑛 , 𝑦𝑛 , 𝑧𝑛 son sucesiones convergentes y 𝑥𝑛 ≤ 𝑦𝑛 ≤ 𝑧𝑛 ∀𝑛 ∈ ℕ y lim(𝑥𝑛 ) = lim(𝑧𝑛 ),
entonces lim(𝑥𝑛 ) = lim(𝑦𝑛 ) = lim(𝑧𝑛 ).
Sucesiones acotadas
Definición: Una sucesión es acotada si existe 𝑀 ∈ ℝ tal que |𝑥𝑛 | < 𝑀 ∀𝑛 ∈ ℕ.
Obs.: Toda sucesión convergente es acotada, pero no toda sucesión acotada es convergente.
2
Ejemplo: 𝑥𝑛 = sin (𝜋𝑛) es acotada, pero sus valores oscilan entre 0,1,0, −1, 0,1,0, −1 …
Sucesiones monótonas
Definición: Una sucesión 𝑥𝑛 es monótona creciente si 𝑥1 ≤ 𝑥2 ≤ ⋯ ≤ 𝑥𝑛 y es monótona
decreciente si 𝑥1 ≥ 𝑥2 ≥ ⋯ ≥ 𝑥𝑛 .
Teorema de la convergencia monótona
Una sucesión de números reales monótona es convergente si y sólo si es acotada.
Sucesiones divergentes
Definición: Las sucesiones divergentes son sucesiones cuyos límites son infinitos. Es decir:
el lim(𝑥𝑛 ) = ±∞ si para todo 𝑀 > 0, por más grande que se elija, existe un número
natural 𝑛0 tal que ∀𝑛 > 𝑛0 ⟹ 𝑥𝑚 > 𝑀 ó 𝑥𝑛 < −𝑀.
Propiedades de las sucesiones divergentes
Una sucesión es divergente si y sólo si no es acotada:
(a) si 𝑥𝑛 es creciente y no acotada, entonces lim(𝑥𝑛 ) = +∞.
28
(b) si 𝑥𝑛 es decreciente y no acotada, entonces lim(𝑥𝑛 ) = −∞.
Relaciones entre sucesiones divergentes
Si 𝑥𝑛 e 𝑦𝑛 son sucesiones divergentes y 𝑥𝑛 ≤ 𝑦𝑛 ∀𝑛 ∈ ℕ, entonces:
(a) si lim(𝑥𝑛 ) = +∞, entonces lim(𝑦𝑛 ) = +∞.
(b) si lim(𝑦𝑛 ) = −∞, entonces lim(𝑥𝑛 ) = −∞.
Infinitésimos
Definición: La sucesión 𝑥𝑛 es un infinitésimo (o una cantidad infinitamente pequeña)
cuando 𝑛 tiende a +∞ si el valor de la sucesión tiende a cero, es decir: lim 𝑥𝑛 = 0.
El concepto de “infinitésimo” puede interpretarse de la siguiente manera: así como un décimo
significa 1/10, un centésimo significa 1/100, y un milésimo significa 1/1000, el valor de un
infinitésimo sería, aproximadamente, el 1 sobre la potencia de diez que tiene infinitos ceros.
En la práctica, una cantidad suficientemente grande de ceros ya implica que esa cantidad es un
infinitésimo. Sin embargo, distintas cantidades de ceros implican distintos órdenes de
infinitésimos (infinitésimos “mayores” o “menores” que otros).
Comparación de infinitésimos
Definición: Si 𝑥𝑛 e 𝑦𝑛 son infinitésimos, se dice que:
𝑥
(1) 𝑥𝑛 e 𝑦𝑛 son infinitésimos del mismo orden si lim 𝑦𝑛 = 𝑘 , valor finito real y no nulo.
𝑛
(1.1) 𝑥𝑛 e 𝑦𝑛 son infinitésimos equivalentes (se abrevia 𝑥𝑛 ~ 𝑦𝑛 , y se lee “𝑥𝑛 es infinitésimo
𝑥
equivalente a 𝑦𝑛 ”) si lim 𝑦𝑛 = 1.
𝑛
(2) 𝑥𝑛 es de orden superior a 𝑦𝑛 si lim
𝑥𝑛
𝑦𝑛
= 0.
(2.1) 𝑥𝑛 es de orden p respecto a 𝑦𝑛 (donde 𝑝 ∈ ℝ) si lim
𝑥𝑛
(𝑦𝑛 )𝑝
= 𝑘, valor finito real y no
nulo.
Infinitos
Definición: Si 𝑥𝑛 e 𝑦𝑛 son sucesiones divergentes (“son infinitas”), se dice que:
𝑥
(1) 𝑥𝑛 e 𝑦𝑛 son infinitos del mismo orden si lim 𝑦𝑛 = 𝑘 , valor finito real y no nulo.
𝑛
(1.1) 𝑥𝑛 e 𝑦𝑛 son infinitos equivalentes (se abrevia 𝑥𝑛 ~ 𝑦𝑛 , y se lee “𝑥𝑛 es infinito
𝑥
equivalente a 𝑦𝑛 ”) si lim 𝑦𝑛 = 1.
𝑛
𝑥
(2) 𝑥𝑛 es de orden superior a 𝑦𝑛 si lim 𝑦𝑛 = ∞.
𝑛
(2.1) 𝑥𝑛 es de orden p respecto a 𝑦𝑛 (donde 𝑝 ∈ ℝ) si lim
𝑥𝑛
(𝑦𝑛 )𝑝
= 𝑘, valor finito real y no
nulo.
En la práctica, se sondea primeramente un valor 𝑝 ∈ ℤ ó 𝑝 ∈ ℚ.
29
Cálculo de límites de sucesiones
Cuando se calculan límites de sucesiones pueden producirse indeterminaciones de uno de los
siguientes tipos, que pueden resolverse utilizando operaciones algebraicas, sustituyendo
infinitésimos o infinitos por sus equivalentes, o utilizando el Criterio de Stolz.
1. ∞ − ∞ (NO necesariamente es igual a cero)
0
2. 0 (NO necesariamente es igual a uno ni a cero)
3.
±∞
(NO
±∞
4.
5.
6.
7.
0 ∙ ±∞ (NO necesariamente es igual a cero ni a infinito)
00 (NO necesariamente es igual a cero ni a uno)
1±∞ (NO necesariamente es igual a cero ni a infinito ni a uno)
∞0 (NO necesariamente es igual a infinito ni a cero)
necesariamente es igual a ±1)
OBSERVACIÓN: NO SON INDETERMINACIONES:
12.
1. (+∞) + (+∞) = +∞;
0
𝑘
= 0;
13. ±∞ ± 𝑘 = ±∞;
2. (−∞) + (−∞) = −∞;
14. 𝑘 ∙ (±∞) = ±∞ (si 𝑘 ≠ 0);
3. (±∞) ∙ (±∞) = ±∞;
15.
±∞
0
= ±∞;
5. (+∞)−∞ = (+∞)+∞ = +∞ = 0;
16.
0
±∞
= 0;
6. 0+∞ = +∞;
17. si 0 ≤ 𝑘 ≤ 1, 𝑘 +∞ = 0;
4.
(+∞)+∞ = +∞;
1
1
1
18. si 𝑘 > 1, 𝑘 +∞ = +∞
7. 0−∞ = 0+∞ = 0;
8.
±∞
𝑘
= ±∞ (donde 𝑘 es finito);
9.
𝑘
±∞
= 0;
10.
±∞
±𝑘
= ±∞;
11.
𝑘
0
19. si 𝑘 < 0, 𝑘 +∞ es oscilante, se
concluye que el límite no existe;
20. si 𝑘 > 0, 0𝑘 = 0;
21. si 𝑘 < 0, 0𝑘 = +∞:
22. 𝑘 0 = 1.
= ±∞;
Criterio de Stolz
∞
Para indeterminaciones de límites de sucesiones, del tipo , es útil un método ideado por el
∞
matemático austriaco O. Stolz (1842-1905):
Teorema: (Criterio de Stolz) Sean 𝑎𝑛 y 𝑏𝑛 sucesiones de números positivos, tales que:
Opción 1: lim 𝑎𝑛 = 0, 𝑏𝑛 es monótona decreciente y lim 𝑏𝑛 = 0, o bien:
Opción 2: lim 𝑎𝑛 = ∞, 𝑏𝑛 es estrictamente monótona y divergente (estrictamente
creciente y lim 𝑏𝑛 = +∞, o también: 𝑏𝑛 estrictamente decreciente y lim 𝑏𝑛 = −∞),
se afirma que:
lim
𝑎𝑛+1 −𝑎𝑛
𝑏𝑛+1 −𝑏𝑛
= 𝐿 si y sólo si lim
𝑎𝑛
𝑏𝑛
=𝐿
30
𝑛
10+𝑛
𝑛→∞ √
Ejemplo: Calcular lim
Solución: Dividimos el numerador y el denominador entre 𝑛:
𝑛
𝑛
1
1
1
1
𝑛
lim
= lim
= lim
= lim
=
= + = +∞
𝑛→∞ √10 + 𝑛
0
√10 + 𝑛
10 + 𝑛
10 1
√
√ 2+
√ 102 + 1
2
𝑛
𝑛
∞
𝑛
𝑛
∞
Ejemplo: Calcular lim
𝑛!
𝑛→∞ 𝑛𝑛
.
Solución 1: Por definición de factorial y de potencia por multiplicación abreviada, podemos
desarrollar como sigue:
lim
𝑛 ∙ (𝑛 − 1) ∙ (𝑛 − 2) … ∙ 2.1
𝑛 𝑛−1 𝑛−2
2 1
= lim ( ∙
∙
∙…∙ ∙ )
𝑛 ∙ 𝑛 ∙ 𝑛 ∙ …∙ 𝑛 ∙ 𝑛
𝑛
𝑛
𝑛
𝑛 𝑛
1
2
2
1
= (lim 1) ∙ (lim 1 − ) ∙ (lim 1 − ) … ∙ (lim ) ∙ (lim )
𝑛
𝑛
𝑛
𝑛
Como los límites son finitos (varían entre 1 y 0), el producto de los límites es igual a cero.
1
2∙3∙…∙(𝑛−1)∙𝑛
)
𝑛∙𝑛∙…∙𝑛
Solución 2: Sean 𝑥𝑛 = 0, 𝑦𝑛 = 𝑛 ∙ (
𝑛!
1
= 𝑛𝑛 y 𝑧𝑛 = 𝑛. Vemos que 𝑥𝑛 ≤ 𝑦𝑛 ≤ 𝑧𝑛
1
(porque 𝑦𝑛 es una sucesión de términos positivos, y cada término 𝑦𝑛 es menor que 𝑛 porque
su denominador es mayor que su numerador), además lim 𝑥𝑛 = 0 (el límite de una constante
1
𝑛
es la misma constante) y lim 𝑧𝑛 = lim ( ) = 0, finalmente por teorema del Sandwich:
lim 𝑦𝑛 = lim
𝑛!
𝑛𝑛
= 0.
ln(𝑛)
.
𝑛→∞ 𝑛
Ejemplo: Hallar lim
Solución: Como 𝑎𝑛 = ln(𝑛) y 𝑏𝑛 = 𝑛 son sucesiones divergentes, es posible aplicar el Criterio
de Stolz:
𝑎𝑛
𝑎𝑛+1 − 𝑎𝑛
ln(𝑛 + 1) − ln(𝑛)
𝑛+1
𝑛+1
= lim
= lim
= lim (𝑙𝑛 (
)) = ln (lim (
))
𝑛→∞ 𝑏𝑛
(𝑛 + 1) − 𝑛
𝑏𝑛+1 − 𝑏𝑛
𝑛
𝑛
lim
1
1
ln (lim (1 + 𝑛)) = ln (1 + ∞) = ln(1 + 0+ ) = 0.
𝑛
Ejemplo: Hallar lim √𝑎.
𝑛→∞
𝑛
1
+
Solución: lim √𝑎 = lim (𝑎𝑛 ) = 𝑎1/∞ = 𝑎0 = 1.
𝑛→∞
2.2 Límite de funciones de variable real. Definición, existencia y unicidad.
Definición: Sea 𝑓 una función definida en los alrededores de un punto 𝑎 (no es
estrictamente necesario que 𝑓 esté definida en 𝑥 = 𝑎). Una función 𝒚 = 𝒇(𝒙) tiene límite 𝑳
cuando 𝒙 tiende a un valor real 𝒂 (se abrevia: lim 𝑓(𝑥) = 𝐿.) si para cualquier número 𝜀 >
𝑥→𝑎
0, tan pequeño como se quiera, existe un número 𝛿 > 0 (también muy pequeño) tal que,
para todo 𝑥 cercano a 𝑎, 0 < |𝑥 − 𝑎| < 𝛿 si y sólo si |𝑓(𝑥) − 𝐿| < 𝜀
31
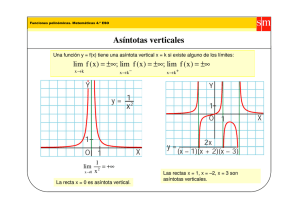
Gráficamente esta definición rigurosa
significa que cuando el argumento "𝒙"
toma valores en el intervalo (𝑎 − 𝛿, 𝑎 +
𝛿) la variable "𝒚" tomará valores en (𝐿 −
𝜖, 𝐿 + 𝜖), para que la gráfica quede
encerrada en un rectángulo limitado por
dichos intervalos, salvo tal vez en el
punto 𝑥 = 𝑎 donde la función puede no
estar definida (porque 𝑥 = 𝑎 no está en
el dominio de la función) o porque la
variable "𝒚" toma un valor diferente a 𝐿.
Notar que:
|𝑥 − 𝑎| < 𝛿
⇔ −𝛿 < 𝑥 − 𝑎 < +𝛿
⇔ 𝑎− 𝛿 < 𝑥 < 𝑎+𝛿
|𝑓(𝑥) − 𝐿| < 𝜀
⇔ − 𝜀 < 𝑓(𝑥) − 𝐿 < +𝜀
⇔ 𝐿 − 𝜀 < 𝑓(𝑥) − 𝐿 < 𝐿 + 𝜀
Ejemplo: Estimar numéricamente el siguiente límite:
𝑥
lim 𝑥+1 – 1 = 1.
𝑥→0 √
Notar que la función 𝑓(𝑥) =
𝑥
√𝑥+1 – 1
no está bien
definida cuando 𝑥 = 0. De los valores numéricos de la
tabla, uno puede estimar que el límite vale 2.
x -0,01
y 1,99499
-0,001
1,9995
-0,0001
1,99995
0
ERROR
0,0001
2,0005
0,001
2,005
0,01
2,00499
Ejemplo: Demostrar por definición de límite que lim 4𝑥 − 5 = 3
𝑥→2
Solución: El primer requisito de la definición es que 𝑓(𝑥) = 4𝑥 − 5 esté bien definida cerca de
𝑥 = 2, lo cual es cierto. Ahora se debe demostrar que para cualquier número 𝜀 > 0, tan
pequeño como se quiera, existe un número 𝛿 > 0 tal que,
0 < |𝑥 − 𝑎| < 𝛿 si y sólo si |𝑓(𝑥) − 𝐿| < 𝜀 … [1]
Empezamos con
|(4𝑥 − 5) − 3| < 𝜀
|4𝑥 − 8| < 𝜀
|4(𝑥 − 2)| < 𝜀
4|𝑥 − 2| < 𝜀
𝜀
|𝑥 − 2| <
4
𝜀
Finalmente, cualquier número 𝛿 < 4 satisface las dos desigualdades descritas en [1]. Esto
demuestra que el límite es correcto.
32
Límites laterales.
Definición: (i) Una función 𝒚 = 𝒇(𝒙) tiene límite lateral 𝑳 cuando 𝒙 tiende al valor “𝒂” por
la derecha (y se abrevia: lim+ 𝑓(𝑥) = 𝐿) si para cualquier número 𝜀 > 0, tan pequeño
𝑥→𝑎
como se quiera, existe un número 𝛿 > 0 (también muy pequeño) tal que, para todo 𝑥
cercano a 𝑎,
𝑎 < 𝑥 < 𝑎 + 𝛿 si y sólo si |𝑓(𝑥) − 𝐿| < 𝜀
(ii) Una función 𝒚 = 𝒇(𝒙) tiene límite lateral 𝑳 cuando 𝒙 tiende al valor “𝒂” por la
izquierda (y se abrevia: lim− 𝑓(𝑥) = 𝐿) si para cualquier número 𝜀 > 0, tan pequeño como
𝑥→𝑎
se quiera, existe un número 𝛿 > 0 (también muy pequeño) tal que, para todo 𝑥 cercano a
𝑎,
𝑎 − 𝛿 < 𝑥 < 𝑎 si y sólo si |𝑓(𝑥) − 𝐿| < 𝜀
La abreviatura para el límite lateral es:
Existencia y unicidad del límite de una función
Teorema (existencia): La condición necesaria y suficiente para que una función 𝑓 tenga
límite cuando 𝑥 → 𝑎 es que los límites laterales por la izquierda y por la derecha de 𝑥 = 𝑎
existan y sean iguales.
Teorema (unicidad): Si el lim 𝑓(𝑥) existe, este tiene que ser único.
𝑥→𝑎
Ejemplo: Determine lim
2𝑥
.
𝑥→3 𝑥−3
Solución: Notamos por simple inspección que
2𝑥
6
lim
2𝑥
𝑥→3+ 𝑥−3
6
= 0+ = +∞, mientras que
lim− 𝑥−3 = 0− = −∞ (donde 0+ significa “cantidad aproximada a cero pero positiva” y 0−
𝑥→3
significa “cantidad aproximada a cero pero negativa”). Como los límites laterales no son
2𝑥
iguales, se concluye que el lim
𝑥→3 𝑥−3
Ejemplo: Determine lim
1
1
𝑥→1 1+𝑒 𝑥−1
no existe.
.
33
Solución: Notamos por simple inspección que lim+
1
mientras que lim−
1
𝑥→1 1+𝑒 𝑥−1
=
1
𝑥→1
1
1
1
1
1+𝑒 𝑥−1
=
1
1
1+𝑒 0+
1
1
= 1+𝑒 +∞ = +∞ = 0,
= 1+𝑒 −∞ = 1+0+ = 1. Como los límites laterales no son
1
1+𝑒 0−
1
iguales (0 ≠ 1), se concluye que el lim
1
𝑥→1 1+𝑒 𝑥−1
no existe.
2.3 Propiedades de los límites de funciones de variable real.
(a) (Teorema del Sandwich) Si 𝑓, 𝑔, ℎ son funciones tales que 𝑓(𝑥) ≤ 𝑔(𝑥) ≤ ℎ(𝑥), 𝑥 → 𝑎, y
además lim 𝑓(𝑥) = lim ℎ(𝑥) = 𝐿, entonces lim 𝑔(𝑥) = 𝐿. (El uso del teorema se limita a la
𝑥→𝑎
𝑥→𝑎
𝑥→𝑎
demostración de algunos límites notables)
(b) (Operaciones elementales con límites) Si 𝑐 es una constante real, lim 𝑓(𝑥) = 𝐿 y
𝑥→𝑎
lim 𝑔(𝑥) = 𝑀 entonces:
𝑥→𝑎
*Límite de una constante: lim 𝑐 = 𝑐,
𝑥→𝑎
*Suma o resta: lim 𝑓(𝑥) ± 𝑔(𝑥) = lim 𝑓(𝑥) ± lim 𝑔(𝑥) = 𝐿 ± 𝑀,
𝑥→𝑎
𝑥→𝑎
𝑥→𝑎
*Producto por una constante: lim 𝑐 ∙ 𝑓(𝑥) = 𝑐 ∙ lim 𝑐 ∙ 𝑓(𝑥) = 𝑐 ∙ 𝐿,
𝑥→𝑎
𝑥→𝑎
*Producto: lim 𝑓(𝑥) ∙ 𝑔(𝑥) = lim 𝑓(𝑥) ∙ lim 𝑔(𝑥) = 𝐿 ∙ 𝑀,
𝑥→𝑎
*Cociente:
𝑓(𝑥)
lim
𝑥→𝑎 𝑔(𝑥)
=
𝑥→𝑎
𝐿
= 𝑀,
lim 𝑔(𝑥)
lim 𝑓(𝑥)
𝑥→𝑎
𝑥→𝑎
𝑥→𝑎
siempre que 𝑀 ≠ 0,
lim 𝑔(𝑥)
*Potencia: lim 𝑓(𝑥) 𝑔(𝑥) = [lim 𝑓(𝑥)]𝑥→𝑎
𝑥→𝑎
𝑥→𝑎
= 𝐿𝑀 ,
*Logaritmo: lim [ log(𝑓(𝑥))] = log (lim 𝑓(𝑥)) = log(𝐿).
𝑥→𝑎
𝑥→𝑎
Es decir, los límites operados se pueden descomponer en 2 o más límites; y recíprocamente, 2
o más límites pueden transformarse en un único límite.
sin(𝑥)
𝑥→0 𝑥
Ejemplo: Aplicar el Teorema del Sandwich para demostrar que lim
=1
Solución: Supondremos que 𝑥 se mide en radianes. De hecho, todos los límites
trigonométricos suponen que el argumento de las funciones está en radianes. En la siguiente
figura, se muestra un sector del círculo trigonométrico (de radio 1) comprendido entre dos
triángulos auxiliares.
Al multiplicar cada expresión por 2/𝑠𝑒𝑛(𝜃) resulta:
1
𝜃
≥
≥1
cos(𝜃)
sin(𝜃)
Tomando sus recíprocos e invirtiendo las desigualdades queda:
34
sin(𝜃)
≤1
𝜃
Esta desigualdad es válida para el primer cuadrante, pero también para el cuarto cuadrante, ya
cos(𝜃) ≤
sin(−𝜃)
sin(𝜃)
que cos(−𝜃) = cos(𝜃) y −𝜃 = 𝜃 . Este análisis demuestra que el límite existe a la
derecha de 𝜃 = 0, pero también a la izquierda.
sin(𝜃)
𝜃→0 𝜃
Como lim cos(𝜃) = 1 y lim 1 = 1, por el Teorema del Sandwich resulta lim
𝜃→0
𝜃→0
= 1.
2.4 Límites infinitos.
Definición: (i) Una función 𝒚 = 𝒇(𝒙) tiene límite +∞ cuando 𝒙 tiende al valor “𝒂” si para
cualquier número 𝑀 > 0, tan grande como se quiera, existe un número 𝛿 > 0 (muy
pequeño) tal que, para todo 𝑥 cercano a 𝑎,
0 < |𝑥 − 𝑎| < 𝛿 si y sólo si 𝑓(𝑥) > 𝑀
La abreviatura para el límite lateral es: lim 𝑓(𝑥) = +∞.
𝑥→𝑎
(ii) Una función 𝒚 = 𝒇(𝒙) tiene límite −∞ cuando 𝒙 tiende al valor “𝒂” si para cualquier
número 𝑀 > 0, tan grande como se quiera, existe un número 𝛿 > 0 (muy pequeño) tal
que, para todo 𝑥 cercano a 𝑎,
0 < |𝑥 − 𝑎| < 𝛿 si y sólo si 𝑓(𝑥) < −𝑀
La abreviatura para el límite lateral es: lim 𝑓(𝑥) = −∞.
𝑥→𝑎
2.5 Límites en el infinito
Definición: (i) Una función 𝒚 = 𝒇(𝒙) tiene límite 𝑳 cuando 𝒙 tiende a +∞ si para cualquier
número 𝑀 > 0, tan grande como se quiera, existe un número 𝜀 > 0 (muy pequeño) tal
que, para todo 𝑥 cercano a 𝑎,
𝑥 > 𝑁 si y sólo si |𝑓(𝑥) − 𝐿| < 𝜀
La abreviatura para el límite lateral es: lim 𝑓(𝑥) = 𝐿.
𝑥→+∞
(ii) Una función 𝒚 = 𝒇(𝒙) tiene límite 𝑳 cuando 𝒙 tiende a −∞ si para cualquier número
𝑁 > 0, tan grande como se quiera, existe un número 𝛿 > 0 (muy pequeño) tal que, para
todo 𝑥 cercano a 𝑎,
𝑥 < −𝑁 si y sólo si |𝑓(𝑥) − 𝐿| < 𝜀
La abreviatura para el límite lateral es: lim 𝑓(𝑥) = 𝐿.
𝑥→−∞
35
Límites infinitos en el infinito
Definición: Una función 𝒚 = 𝒇(𝒙) tiene límite infinito cuando 𝒙 tiende a +∞ (se abrevia
lim 𝑓(𝑥) = 𝐿.) si para cualquier número 𝑁 > 0, tan grande como se quiera, existe un
𝑥→+∞
número 𝑀 > 0 (también muy grande) tal que, para todo 𝑥 cercano a 𝑎,
𝑥 > 𝑁 si y sólo si 𝑓(𝑥) >
2.6 Límites indeterminados
Se conocen como límites indeterminados a aquellos límites de la forma 𝑓(𝑥) − 𝑔(𝑥), 𝑓(𝑥)𝑔(𝑥)
o 𝑓(𝑥) 𝑔(𝑥) tales que conocemos los límites de 𝑓 y 𝑔 pero el valor de la función completa es
desconocido. Las indeterminaciones deben entenderse como símbolos, y no como operaciones
legítimas entre números reales. Estas son indeterminaciones:
1. ∞ − ∞ (NO necesariamente es igual a cero)
0
2. 0 (NO necesariamente es igual a uno ni a cero)
3.
±∞
(NO
±∞
4.
5.
6.
7.
0 ∙ ±∞ (NO necesariamente es igual a cero ni a infinito)
00 (NO necesariamente es igual a cero ni a uno)
1±∞ (NO necesariamente es igual a cero ni a infinito ni a uno)
∞0 (NO necesariamente es igual a infinito ni a cero)
necesariamente es igual a ±1)
OBSERVACIÓN: NO SON INDETERMINACIONES:
1
1. (+∞) + (+∞) = +∞;
7. 0−∞ = 0+∞ = +∞;1
2. (−∞) + (−∞) = −∞;
8.
±∞
𝑘
= ±∞ (donde 𝑘 es finito);
3. (±∞) ∙ (±∞) = ±∞;
9.
𝑘
±∞
= 0;
10.
±∞
±𝑘
= ±∞;
4.
(+∞)+∞
5.
(+∞)−∞
6. 0+∞ = 0;
= +∞;
=
1
(+∞)+∞
=
1
+∞
= 0;
Solo cierto si 𝑏𝑎𝑠𝑒 → 0+ . Si 𝑏𝑎𝑠𝑒 → 0− el
límite podría no existir. [WA 29/5/2018]
1
36
11.
𝑘
0
= ±∞;
12.
0
𝑘
= 0;
17. si 0 ≤ 𝑘 ≤ 1, 𝑘 +∞ = 0;
18. si 𝑘 > 1, 𝑘 +∞ = +∞
19. si 𝑘 < 0, 𝑘 +∞ es oscilante, se
13. ±∞ ± 𝑘 = ±∞;
concluye que el límite no existe;
14. 𝑘 ∙ (±∞) = ±∞ (si 𝑘 ≠ 0);
15.
±∞
0
= ±∞;
16.
0
±∞
= 0;
20. si 𝑘 > 0, 0𝑘 = 0;
21. si 𝑘 < 0, 0𝑘 = +∞:
22. 𝑘 0 = 1.
2.7 Operaciones elementales con límites de funciones. Estrategias para el cálculo de límites
a) (Cálculo auxiliar) Todos los límites pueden evaluarse numéricamente antes de resolverse
(ej.: si 𝑥 → 0, probar con 𝑥 = 0,01 y −0,01; si 𝑥 → 5, probar con 𝑥 = 4,99 y 5,01; si 𝑥 → ∞,
probar con un número 𝑥 muy grande, digamos, 𝑥 = 10000). Sin embargo, nunca olvidar la
solución analítica es la más importante.
b) (Cálculo auxiliar) Si 𝑥 → 𝑎 y 𝑎 es finito, evaluar los límites laterales numéricamente. Si los
límites laterales son distintos, entonces existe evidencia de que el límite no existe, y que las
estrategias analíticas van a fallar.
b) La expresión 𝑥 → 𝑎 puede interpretarse como 𝑥 ≅ 𝑎. A veces, una sustitución directa de
𝑥 = 𝑎 en la expresión ya avisa si el límite es determinado o indeterminado.
c) Indeterminación de la forma ∞ − ∞: en la mayoría de los casos basta con efectuar las
operaciones indicadas: si es resta de fracciones, resolver la resta; si aparecen expresiones
irracionales, utilizar estrategias de racionalización.
d) Indeterminación de la forma 0/0: cuando sólo aparecen funciones racionales (polinomio en
un numerador y un denominador) basta con descomponer en factores el numerador y el
denominador.
e) Indeterminación de la forma ∞/∞: en la mayoría de los casos basta con dividir el
numerador y denominador por la mayor potencia de 𝑥, además de artificios matemáticos.
f) Indeterminación de la forma 0 ∙ ∞: como la expresión es 𝑓(𝑥) ∙ 𝑔(𝑥), la estrategia consiste
𝑓(𝑥)
𝑔(𝑥)
en convertir esa expresión a 1/𝑔(𝑥) ó 1/𝑓(𝑥), derivando en la indeterminación 0/0 o ∞/∞.
g) Luego de la aplicación de alguna estrategia, es buena idea intentar de vuelta la sustitución
directa.
OBS.: Observar que las operaciones recién indicadas NO siempre levantan la indeterminación,
pudiendo necesitarse más de una estrategia para resolver los límites.
Ejemplo: Resolver lim
𝑥 𝑛 −1
𝑥→∞ 𝑥−1
.
0
0
Solución: Por sustitución directa el límite resulta en , una indeterminación.
37
Factorizando el numerador queda:
𝐿 = lim
𝑥 𝑛 −1
𝑥→1 𝑥−1
= lim
(𝑥−1)∙(𝑥 𝑛−1 +𝑥 𝑛−2 +⋯+𝑥 2 +𝑥+1)
𝑥−1
𝑥→1
= lim 𝑥 𝑛−1 + 𝑥 𝑛−2 + ⋯ + 𝑥 2 + 𝑥 + 1.
𝑥→1
Intentando nuevamente sustitución queda:
𝐿 = 1 + 1 + ⋯ + 1 (𝑛 𝑣𝑒𝑐𝑒𝑠) = 𝑛.
Ejemplo: Resolver lim
cos2 (𝑥)−2 cos(𝑥)+1
2 cos(𝑥)−2
𝑥→0
Por sustitución directa resulta 0/0.
Factorizando queda:
𝐿 = lim
cos2(𝑥)−2 cos(𝑥)+1
2 cos(𝑥)−2
𝑥→0
(cos(𝑥)−1)2
= lim 2(cos(𝑥)−1) = lim
𝑥→0
cos(𝑥)−1
𝑥→0
2
0
= 2 = 0.
𝑥 5 −2𝑥 3 +4𝑥 2 −10𝑥−12
.
3𝑥 4 −𝑥 3 −9𝑥 2 −4
𝑥→2
Ejemplo: Resolver lim
Solución: Cuando los polinomios son de grado muy grande, factorizar no siempre es muy fácil.
En estos casos se podría utilizar el esquema de Ruffini y dividir numerador y denominador por
el factor que está creando la indeterminación (cuando 𝑥 → 𝑎, probablemente sea 𝑥 − 𝑎).
𝐿 = lim
𝑥→2
𝑥 5 −2𝑥 3 +4𝑥 2 −10𝑥−12
3𝑥 4 −𝑥 3 −9𝑥 2 −4
Ejemplo: Resolver lim
= lim
𝑥→2
(𝑥−2)(𝑥 4 +2𝑥 3 +2𝑥 2 +8𝑥+6)
(𝑥−2)(3𝑥 3 +5𝑥 2 +𝑥+2)
= lim
𝑥 4 +2𝑥 3 +2𝑥 2 +8𝑥+6
𝑥→2
3𝑥 3 +5𝑥 2 +𝑥+2
31
= 24.
√1+𝑥+𝑥 2 – 1
𝑥→0
𝑥
.
Solución: Una forma de eliminar la indeterminación es racionalizando numerador y/o
denominador:
2
(√1 + 𝑥 + 𝑥 2 – 1)(√1 + 𝑥 + 𝑥 2 + 1)
(√1 + 𝑥 + 𝑥 2 ) − 1
√1 + 𝑥 + 𝑥 2 – 1
𝐿 = lim
= lim
= lim
𝑥→0
𝑥→0
𝑥→0 𝑥 (√1 + 𝑥 + 𝑥 2 + 1)
𝑥
𝑥 (√1 + 𝑥 + 𝑥 2 + 1)
𝐿 = lim
1+𝑥+𝑥 2 −1
𝑥→0 𝑥 (√1+𝑥+𝑥 2 + 1)
= lim
𝑥 (𝑥+1)
𝑥→0 𝑥 (√1+𝑥+𝑥 2 + 1)
=
0+1
√1+1
1
= 2.
2.8 Infinitésimos y cantidades infinitamente grandes. Definición. Clasificación. Comparación.
Infinitésimos
Definición: La función 𝑓: 𝐴 → 𝐵 es un infinitésimo (o una cantidad infinitamente pequeña)
cuando 𝑥 tiende a 𝑎 si el valor de la función tiende a cero, es decir: lim 𝑓(𝑥) = 0.
𝑥→𝑎
Propiedades de los infinitésimos
1. El producto de una constante finita y no nula por un infinitésimo es otro infinitésimo.
38
2. El producto de dos infinitésimos es otro infinitésimo
3. La suma algebraica (suma/resta) de una cantidad finita de infinitésimos en 𝑥 → 𝑎, es otro
infinitésimo en el mismo punto.
4. El producto de un infinitésimo por una función acotada cuando 𝑥 → 𝑎 es otro infinitésimo
en el mismo punto.
5. El límite de toda expresión de la forma 𝐼(𝑥). 𝑓(𝑥);
𝑓(𝑥)
𝐼(𝑥)
𝐼(𝑥)
o 𝑓(𝑥), donde 𝐼(𝑥) es un infintésimo,
no varía si se sustituye 𝐼(𝑥) por una expresión equivalente.
OBS.: No se puede sustituir un infinitésimo por su equivalente si aquel está sumando o
restando a alguna 𝑓(𝑥).
Comparación de infinitésimos
Definición: Si 𝑓 y 𝑔 son infinitésimos cuando 𝑥 → 𝑎, se dice que:
𝑓(𝑥)
(1) 𝑓 y 𝑔 son infinitésimos del mismo orden si lim 𝑔(𝑥) = 𝑘, valor finito real y no nulo.
𝑥→𝑎
(1.1) 𝑓 y 𝑔 son infinitésimos equivalentes (se abrevia 𝑓 ~ 𝑔, y se lee “𝑓 es infinitésimo
𝑓(𝑥)
𝑔(𝑥)
𝑥→𝑎
equivalente a 𝑔”) si lim
= 1.
(2) 𝑓 es de orden superior a 𝒈 si lim
𝑓(𝑥)
𝑥→𝑎 𝑔(𝑥)
= 0.
𝑓(𝑥)
(2.1) 𝑓 es de orden n respecto a 𝒈 si lim [𝑔(𝑥)]𝑛 = 𝑘, valor finito real y no nulo.
𝑥→𝑎
El concepto de “orden superior” significa que 𝑓(𝑥) es “más infinitesimal” que 𝑔(𝑥) cuando
𝑥 → 𝑎. Dicho de otra manera, 𝑓(𝑥) “tiene más ceros” que 𝑔(𝑥).
OBSERVACIÓN: Para la determinación de límites en un punto 𝑥 → 𝑎, en las operaciones de
producto y cociente, un infinitésimo puede sustituirse por su equivalente en ese punto.
Infinitos
Definición: La función 𝑓: 𝐴 → 𝐵 es un infinito (o una cantidad infinitamente grande)
cuando 𝑥 tiende a 𝑎 si el valor de la función tiende a un infinito, es decir: lim 𝑓(𝑥) = ±∞.
𝑥→𝑎
Comparación de infinitos
Definición: Si 𝑓 y 𝑔 son infinitos cuando 𝑥 → 𝑎, se dice que:
𝑓(𝑥)
(1) 𝑓 y 𝑔 son infinitos del mismo orden si lim 𝑔(𝑥) = 𝑘, valor finito real y no nulo.
𝑥→𝑎
(1.1) 𝑓 y 𝑔 son infinitos equivalentes (se abrevia 𝑓 ~ 𝑔, y se lee “𝑓 es infinito equivalente a
𝑓(𝑥)
𝑔”) si lim 𝑔(𝑥) = 1.
𝑥→𝑎
(2) 𝑓 es de orden superior a 𝒈 si lim
𝑓(𝑥)
𝑥→𝑎 𝑔(𝑥)
= ±∞.
𝑓(𝑥)
(2.1) 𝑓 es de orden n respecto a 𝒈 si lim [𝑔(𝑥)]𝑛 = 𝑘, valor finito real y no nulo.
𝑥→𝑎
2.9 Estrategias para el cálculo de límites (continuación)
39
Para la determinación de límites en un punto, en las operaciones de producto y cociente, un
infinitésimo o una función que tiende a infinito puede sustituirse por su equivalente en ese
punto.
Indeterminaciones de las formas ∞𝟎 , 𝟎𝟎 , 𝟏∞
Para estos límites se ejecuta el siguiente artificio matemático: 𝑓(𝑥) 𝑔(𝑥) = 𝑒 𝑔(𝑥)∙ln(𝑓(𝑥)) ,
lim 𝑔(𝑥)∙ln(𝑓(𝑥))
entonces: lim 𝑓(𝑥)𝑔(𝑥) = 𝑒𝑥→𝑎
𝑥→𝑎
.
Indeterminaciones de la forma 𝟏∞
Sabiendo que si lim 𝑓(𝑥) = 1 y que ln(𝑓(𝑥)) ~ 𝑓(𝑥) − 1, puede aplicarse:
𝑥→𝑎
lim 𝑔(𝑥)∙ln(𝑓(𝑥))
lim 𝑓(𝑥)𝑔(𝑥) = 𝑒𝑥→𝑎
𝑥→𝑎
lim 𝑔(𝑥)∙(f(x)−1)
= 𝑒𝑥→𝑎
Infinitésimos equivalentes. Orden de infinitos. Límites notables
Cuando 𝑥 → 0
Cuando 𝑥 → 1
Infinitésimo
Equivalente
sin(𝑘𝑥)
𝑘𝑥
tan(𝑘𝑥)
𝑘𝑥
arcsin(𝑘𝑥)
𝑘𝑥
arctan(𝑘𝑥)
𝑘𝑥
(𝑘𝑥)2
2
𝑥2
2
𝑥
1 − cos(𝑘𝑥)
1 − cos(𝑥)
ln(𝑥 + 1)
𝑒 𝑘𝑥 − 1
𝑘𝑥
𝑥
2
𝑥
𝑛
𝑘𝑥
√𝑥 + 1 − 1
𝑛
√𝑥 + 1 − 1
(1 + 𝑥)𝑘 − 1
1
Infinitésimo
ln(x)
sin(𝑥 − 1)
Orden de Infinitos
𝑎𝑥
= ∞ si 𝑎 > 1
𝑥→∞ 𝑥 𝑝
𝑝
𝑥
lim
= ∞ si 𝑎 >
𝑥→∞ log𝑎 (𝑥)
lim
Ejemplo: Resolver lim
sin(𝑥)
1
Límites notables
lim
sin(𝑥)
𝑥→0
𝑥
=1
1 𝑥
lim (1 + ) = 𝑒
𝑥→∞
𝑥
lim(1 + 𝑥)1/𝑥 = 𝑒
𝑒𝑘
(1 + 𝑘𝑥)𝑥
Equivalente
𝑥−1
𝑥−1
𝑥→0
.
𝑥→0 √1−cos(𝑥)
Solución 1: Por sustitución directa, resulta 0/0. Por racionalización:
𝐿 = lim
𝑥→0 √1
sin(𝑥)
− cos(𝑥)
= lim
𝑥→0 √1
sin(𝑥) √1 + cos(𝑥)
− cos(𝑥) √1 + cos(𝑥)
= lim
𝑥→0
sin(𝑥)√1 + cos(𝑥)
√1 − cos 2 (𝑥)
sin(𝑥)√1 + cos(𝑥)
𝑥→0
sin(𝑥)
= lim
𝐿 = lim √1 + cos(𝑥) = √2.
𝑥→0
40
Solución 2: Por fórmula trigonométrica: √
1−cos(𝑥)
2
𝑥
2
𝑥
2
𝑥
2
= sin ( ) y sin(𝑥) = 2 sin ( ) cos ( ).
Entonces:
𝐿 = lim
sin(𝑥)
𝑥→0 √1−cos(𝑥)
= lim
𝑥
2
𝑥
2
2 sin( ) cos( )
𝑥→0
√2
𝑥
sin( )
2
2cos(0)
=
√2
= √2.
Solución 3: Cuando 𝑥 → 0, existen 2 pares de infinitésimos equivalentes: sin(𝑥) ~ 𝑥;
1 − cos(𝑥)~
𝐿 = lim
𝑥2
2
, los cuales pueden sustituirse en la división.
sin(𝑥)
𝑥→0 √1−cos(𝑥)
= 𝐿 = lim
𝑥
𝑥→0 √𝑥2
√2 𝑥
𝑥→0 𝑥
= lim
= √2.
2
Ejemplo: Hallar lim 𝑥 cot(𝑥)
𝑥→0
Solución: Por sustitución directa resulta 0. ∞, otro tipo de indeterminación. Entonces
transformamos la multiplicación en una división:
𝑥
tan
(𝑥)
𝑥→0
𝐿 = lim 𝑥 cot(𝑥) = lim
𝑥→0
resulta: 𝐿 = lim
𝑥 cos(𝑥)
𝑥
𝑥→0
= lim
𝑥→0
𝑥
1
sin(𝑥)
cos(𝑥)
𝑥 cos(𝑥)
.
𝑥→0 sin(𝑥)
= lim
Como sin(𝑥)~𝑥 cuando 𝑥 → 0,
= lim cos(𝑥) = cos(0) = 1.
𝑥→0
2𝑥+3 𝑥+1
Ejemplo: Hallar lim (
)
𝑥→∞ 2𝑥+1
.
Solución: Se intenta calcular primero el límite de la base elevado al límite del exponente.
2𝑥+3 𝑥+1
)
𝑥→∞ 2𝑥+1
𝐿 = lim (
2𝑥+3 lim (𝑥+1)
= ( lim 2𝑥+1)𝑥→∞
𝑥→∞
2𝑥+3
𝑥→∞ 2𝑥+1
. Para la base: 𝐵 = lim
2𝑥 3
+𝑥
𝑥→∞ +1
𝑥 𝑥
= lim 2𝑥𝑥
2
= 2 = 1.
Para el exponente: 𝐸 = lim (𝑥 + 1) = ∞. Entonces 𝐿 = 𝐵𝐸 = 1∞ , una indeterminación.
𝑥→∞
lim 𝑔(𝑥).[𝑓(𝑥)−1]
Utilizamos la fórmula: lim 𝑓(𝑥) 𝑔(𝑥) = 𝑒 𝑥→∞
𝑥→∞
(2𝑥+3)−(2𝑥+1)
]
2𝑥+1
lim (𝑥+1).[
𝐿 = 𝑒 𝑥→∞
lim (𝑥+1).[
= 𝑒 𝑥→∞
2
2𝑥+1
]
lim
2𝑥+3
−1]
2𝑥+1
lim (𝑥+1).[
= 𝑒 𝑥→∞
2𝑥+2
= 𝑒 𝑥→∞2𝑥+1 = 𝑒
2𝑥 3
𝑥 +𝑥
lim 2𝑥
𝑥→∞ +1
𝑥 𝑥
.
2
= 𝑒2 = 𝑒1 = 𝑒.
2.10 Continuidad de las funciones en un punto y en un dominio real.
Definición: (i) Una función 𝒇 es contínua en un punto 𝑥 = 𝑎 si lim 𝑓(𝑥) = 𝑓(𝑎).
𝑥→𝑎
(ii) Una función 𝑓 es continua en un conjunto A del dominio (ej., 𝑓 es continua en un
intervalo), si 𝑓 es continua en todos los puntos 𝑥 ∈ 𝐴.
(iii) Una función 𝑓 es continua por la izquierda en un punto 𝑥 = 𝑎 si lim− 𝑓(𝑥) = 𝑓(𝑎).
𝑥→𝑎
(iv) Una función 𝑓 es continua por la derecha en un punto 𝑥 = 𝑎 si lim+ 𝑓(𝑥) = 𝑓(𝑎).
𝑥→𝑎
Geométricamente, una función continua en cada número de un intervalo puede pensarse
como una función cuya gráfica no tiene interrupciones. La gráfica de una función continua
puede dibujarse sin levantar la pluma del papel.
41
OBS.: Los siguientes tipos de funciones
elementales no compuestas son continuas en
todo punto 𝒙 de sus dominios:
*funciones polinomiales
*funciones racionales
*funciones raíz
*funciones trigonométricas
*funciones trigonométricas inversas
*funciones exponenciales
*funciones logarítmicas
Continuidad de funciones compuestas
Si 𝑓: 𝐴 → 𝐵 y 𝑔: 𝐵 → 𝐶 son funciones, 𝑓 es continua en 𝑎 ∈ 𝐴 y 𝑔 es continua en 𝑏 = 𝑓(𝑎) ∈ 𝐵
entonces la función compuesta ℎ = 𝑓 °𝑔: 𝐴 → 𝐶 es continua en 𝑎. Expresando en forma de
límite:
lim 𝑔(𝑓(𝑥)) = 𝑔(𝑓(𝑎)) = 𝑔(lim 𝑓(𝑥))
𝑥→𝑎
𝑥→𝑎
Propiedades de las funciones continuas
Teorema (Cauchy – Bolzano): Si una función 𝑓 es contínua en un intervalo [𝑎, 𝑏] y el
producto 𝑓(𝑎) ∙ 𝑓(𝑏) es negativo, entonces existe un 𝑐 ∈ [𝑎, 𝑏] tal que 𝑓(𝑐) = 0.
Es decir, si la función 𝑓 es contínua en [𝑎, 𝑏] y si en
los extremos 𝑥 = 𝑎 y en 𝑥 = 𝑏 los valores
numéricos de las variables 𝑦 son de signos
contrarios, entonces debe haber una 𝑥 = 𝑐 entre
𝑎 y 𝑏 tal que el valor de 𝑦 es cero.
Un uso del Teorema de Bolzano es en la búsqueda
de todas las raíces de ecuaciones.
Ejemplo. Hallar las raíces de la ecuación
4𝑥 3 − 6𝑥 2 + 3𝑥 − 2 = 0.
Solución. Sea 𝑓(𝑥) = 4𝑥 3 − 6𝑥 2 + 3𝑥 − 2. Vemos que 𝑓(1) = −1 y que 𝑓(2) = 12, entonces
𝑓(𝑎) ∙ 𝑓(𝑏) es negativo. Como 𝑓 es una función polinomial, por tanto continua, entonces por
el Teorema de Bolzano existe un número 𝑐 entre 1 y 2 tal que es raíz de la ecuación, es decir,
𝑓(𝑐) = 0.
Aplicando de nuevo el Teorema de Bolzano entre 1 y 2, vemos que 𝑓(1,2) = −0,128 y que
𝑓(1,3) = 0,548, 𝑓(𝑎) ∙ 𝑓(𝑏) es negativo. Como 𝑓 es una función polinomial, por tanto
continua, existe un número 𝑐 entre 1,2 y 1,3 tal que 𝑓(𝑐) = 0.
42
Aplicando una vez más el Teorema de Bolzano entre 1,2 y 1,3, vemos que 𝑓(1,22) =
−0,007 ≈ 0 y que 𝑓(1,23) = 0,056 ≈ 0, entonces podemos concluir (con cierta tolerancia al
error) que una de las raíces de la ecuación es 𝑥 ≈ 1,22 ó 𝑥 ≈ 1,23 (en la práctica, podemos
1,22+1,23
tomar el valor medio: 𝑥 ≈
= 1,225. Como 𝑓(𝑎) ∙ 𝑓(𝑏) es negativo, el Teorema de
2
Bolzano puede aplicarse varias veces a conveniencia.
Teorema (del Valor Medio, o de Darboux): Si una función 𝑓 es contínua en un intervalo
[𝑎, 𝑏] y además 𝑓(𝑎) ≠ 𝑓(𝑏), entonces para todo 𝑦 ∈ (𝑓(𝑎), 𝑓(𝑏)) existe 𝑥 ∈ (𝑎, 𝑏) tal que
𝑓(𝑥) = 𝑦.
Es decir, si la función 𝑓 es contínua en [𝑎, 𝑏] y si
en los extremos 𝑥 = 𝑎 y en 𝑥 = 𝑏 los valores
numéricos de las variables 𝑦 no son iguales,
entonces para la variable y toma todos los
valores intermedios comprendidos entre 𝑓(𝑎) y
𝑓(𝑏).
Notar que el Teorema de Bolzano también es un
caso particular del Teorema de Valor Medio.
2.11 Discontinuidad. Concepto. Tipos. Gráficos.
Definición: (i) Una función 𝒇 es discontinua evitable en un punto 𝑥 = 𝑎 si lim 𝑓(𝑥) ≠
𝑥→𝑎
𝑓(𝑎), es decir, la función 𝑓 tiene límite, pero 𝑓(𝑎) no está definida o no es igual a ese
límite, la discontinuidad se evita redefiniendo 𝑓(𝑎) = lim 𝑓(𝑥).
𝑥→𝑎
(ii) Una función 𝒇 es discontinua de 1ra. especie si los límites laterales son distintos. Si
ambos límites laterales son finitos ( lim− 𝑓(𝑥) = 𝑘1 ; lim+ 𝑓(𝑥) = 𝑘2 pero 𝑘1 ≠ 𝑘2 ),
𝑥→𝑎
𝑥→𝑎
entonces 𝒇 es discontinua de salto finito. Si uno de los límites laterales es ±∞ , entonces 𝒇
es discontinua de salto infinito.
(iii) Una función 𝒇 es discontinua de 2da. especie si alguno de los límites laterales (o
ambos) no existe.
43
La función 𝑓 es: (a) continua por la derecha pero discontinua de 2da especie en 𝑥 = 𝑎,
continua en 𝑥 = 𝑐, discontinua evitable en 𝑥 = 𝑑, notar que 𝑙í𝑚𝑖𝑡𝑒 ≠ 𝑓(𝑑), continua por la
izquierda pero discontinua de 2da especie en 𝑥 = 𝑏. En el ejemplo (b), f es discontinua de 2da
especie en 𝑥 = 𝑎 y 𝑏, y discontinua de salto finito en 𝑥 = 𝑐
La función 𝑓 es discontínua de salto infinito en 𝑥 = 𝑎.
44
CAPÍTULO 3
DERIVADA DE FUNCIONES DE UNA VARIABLE REAL
Introducción
En la vida encontramos situaciones de cambio en todo momento. En Economía, por ejemplo,
conocer la rapidez con la que cambia la inflación, las tasas de interés, etc., son útiles para
tomar decisiones; conocer la rapidez con la que crece una población, o la tasa de contagio de
una enfermedad, etc., son datos importantes en un gobierno para hacer planes y definir
acciones; en Medicina, la rapidez con la que crece un tumor es un dato importante para emitir
un diagnóstico o para que compañías farmacéuticas desarrollen medicamentos, en Física e
Ingeniería tratamos de medir la variación de una magnitud física en función de otra, por
ejemplo, la presión en función de la temperatura o la corriente eléctrica en función del voltaje.
Así como éstos, podemos encontrar muchos ejemplos más en los cuales identificamos
situaciones de cambio. El modelo matemático que trata de predecir la razón de cambio de una
variable en función a otra (ej., como varía la tasa de interés de una cuenta de ahorro en
función al tiempo) es la derivada de una función.
3.1 Definición de la derivada de una función
Cociente incremental
Definición: Dada una función 𝑦 = 𝑓(𝑥), (1) se define el incremento del argumento x, y se
escribe ∆𝑥, como la diferencia entre dos valores distintos del argumento 𝑥.
∆𝑥 = ℎ = (𝑎 + ℎ) − 𝑎 = 𝑥𝑓 − 𝑥𝑖 = 𝑥2 − 𝑥1
(2) Se define el incremento del argumento y, y se escribe ∆𝑦, como la diferencia entre dos
valores distintos de la variable 𝑦 cuando el argumento 𝑥 adopta dos valores distintos. Así:
∆𝑦 = 𝑦𝑓 − 𝑦𝑖 = 𝑓(𝑥2 ) − 𝑓(𝑥1 )
o también: ∆𝑦 = 𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥).
(3) Se define el cociente incremental como el cociente
∆𝑦
.
∆𝑥
Derivada de una función
Definición: Sea 𝑓 una función real de variable real 𝑓: 𝐴 → ℝ. Se dice que la función 𝒇 es
𝑓(𝑎+ℎ)−𝑓(𝑎)
ℎ
ℎ→0
derivable (o también: 𝒇 es diferenciable) en 𝒂 ∈ 𝑨 si el límite lim
existe y es
finito.
A la fórmula general, para cualquier 𝑥:
𝑦 ′ = lim
ℎ→0
𝑓(𝑥+ℎ)−𝑓(𝑥)
ℎ
o también 𝑦 ′ = lim
∆𝑥→0
𝑓(𝑥+∆𝑥)−𝑓(𝑥)
∆𝑥
se le llama derivada de la función, función derivada o simplemente derivada.
También se define la derivada de una función de esta manera: 𝑦′ = lim
∆𝑦
∆𝑥→0 ∆𝑥
.
45
*
Entonces, la derivada de una función es otra función que trata de describir la razón de cambio
de una variable en función de la otra, en particular cuando la variación de la segunda variable
es muy pequeña.
Función derivable en un interalo
Si 𝑓: 𝐴 → ℝ e 𝐼 ⊆ 𝐴 es un intervalo del dominio 𝐴, se dice que 𝑓 es derivable en 𝐼 si 𝑓 es
derivable para todo 𝑥 ∈ 𝐼.
Significado geométrico. Recta tangente a una curva 𝒚 = 𝒇(𝒙) en un punto 𝒙 = 𝒂.
De entre todas las rectas que pasan
por el punto 𝑃(𝑎, 𝑓(𝑎)), la recta
tangente es la que mejor aproxima las
propiedades de la curva 𝑦 = 𝑓(𝑥) en
las proximidades de 𝑥 ≠ 𝑎.
Suponiendo que una recta secante
pasa por 𝑃 y por 𝑄(𝑎 + ℎ, 𝑓(𝑎 + ℎ)),
su pendiente es:
𝑓(𝑎 + ℎ) − 𝑓(𝑎)
𝑚𝑃𝑄 =
ℎ
Entonces, la recta secante 𝑃𝑄 se irá
aproximando a la recta tangente
𝑡 conforme ℎ → 0. Entonces, puede
decirse que la pendiente de la recta
tangente es el límite de la pendiente de
la recta secante:
𝑓(𝑎 + ℎ) − 𝑓(𝑎)
𝑚 = lim 𝑚𝑃𝑄 = lim
ℎ→0
ℎ→0
ℎ
Derivadas laterales
Definición: La derivada lateral de 𝒇 por la izquierda de 𝑥 = 𝑎 es:
𝑓 ′ (𝑎− ) = lim−
ℎ→0
𝑓(𝑎 + ℎ) − 𝑓(𝑎)
𝑓(𝑥) − 𝑓(𝑎)
= lim−
.
𝑥→𝑎
ℎ
𝑥−𝑎
La derivada lateral de 𝒇 por la derecha de 𝑥 = 𝑎 es:
𝑓 ′ (𝑎− ) = lim+
ℎ→0
𝑓(𝑎 + ℎ) − 𝑓(𝑎)
𝑓(𝑥) − 𝑓(𝑎)
= lim+
.
𝑥→𝑎
ℎ
𝑥−𝑎
46
Derivabilidad y continuidad
Teorema: Si la función 𝑓 es una función derivable en 𝑥 = 𝑎, entonces también es contínua
en 𝑥 = 𝑎.
Sin embargo, la afirmación recíproca no es verdadera. Es decir, si 𝑓 es una función contínua
en 𝑥 = 𝑎, no se puede asegurar que 𝑓 sea derivable en 𝑥 = 𝑎.
Existencia y unicidad de la derivada de una función en un punto
Teorema: Una función 𝑓 es derivable en 𝑥 = 𝑎 si se cumplen 2 condiciones: (i) 𝑓 es
continua en 𝑥 = 𝑎, y (ii) las derivadas laterales por la izquierda y por la derecha existen y
son iguales.
Corolario: Una función 𝑓 a trozos es derivable en 𝑥 = 𝑎, extremo de un dominio entre 2
trozos, si 𝑓 es continua en 𝑥 = 𝑎 y además las derivadas laterales según cada trozo son
iguales.
OBS.: Tres maneras para que 𝑓 no sea derivable en 𝑥 = 𝑎:
(a) Una esquina o pico, (b) una discontinuidad, (c) una tangente vertical
−𝑥 𝑠𝑖 𝑥 < 0
Ejemplo: Analizar la derivabilidad de la función 𝑓(𝑥) = { 2
en 𝑥 = 0.
𝑥 𝑠𝑖 𝑥 ≥ 0
Solución 1:
Como
𝑓(𝑥)−𝑓(0)
𝑥−0
𝑥→0
lim−
−𝒙−02
𝑥→0 𝑥−0
= lim−
𝑓(𝑥)−𝑓(0)
𝑥−0
𝑥→0
= − 1 y lim+
𝒙𝟐 −02
𝑥→0 𝑥−0
= lim+
= lim 𝑥 = 0,
𝑥→0
puede observarse que las derivadas laterales no son iguales, por tanto 𝑓 no es derivable en
𝑥 = 0.
Solución 2:
−1 𝑠𝑖 𝑥 < 0
Derivando cada trozo resulta: 𝑓 ′ (𝑥) = {
.
2𝑥 𝑠𝑖 𝑥 ≥ 0
Como 𝑓 ′ (0− ) = −1 y 𝑓 ′ (0+ ) = 2 ∙ 0 = 0, las derivadas laterales no son iguales, por tanto 𝑓 no
es derivable en 𝑥 = 0.
47
Derivadas por definición: cómo resolver
Para hallar la derivada de una función dada 𝑦 = 𝑓(𝑥) basándose en la definición general de
derivada, es necesario:
1) dar al argumento 𝑥 un incremento ∆𝑥, dar a la variable 𝑦 un incremento de ∆𝑦:
𝑦 + ∆𝑦 = 𝑓(𝑥 + ∆𝑥)
𝑓(𝑥) + ∆𝑦 = 𝑓(𝑥 + ∆𝑥)
2) hallar el incremento correspondiente de la variable dependiente:
∆𝑦 = 𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
3) formar el cociente incremental, es decir, la razón del incremento de la variable
dependiente sobre el incremento del argumento:
∆𝑦 𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
=
∆𝑥
∆𝑥
4) calcular la derivada, definida como el límite del cociente incremental cuando ∆𝑥 → 0:
∆𝑦
𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
𝑦 ′ = lim
= lim
.
∆𝑥→0 ∆𝑥
∆𝑥→0
∆𝑥
OBS.: Este método general de cálculo de derivadas lo emplearemos para obtener las derivadas
de algunas funciones elementales. Sin embargo, es importante aclarar que no todas las
derivadas de funciones se calculan de esta forma, ya que estudiaremos algunas reglas de
aplicación directa, que harán que el cálculo de la derivada de una función sea más breve.
Notaciones de la derivada
(1) Notación de Leibniz: *
𝑑𝑦
𝑑𝑥
𝑑𝑓
𝑑
𝑑
= 𝑑𝑥 = 𝑑𝑥 (𝑓) …derivada primera (𝑑𝑥 se lee: “la derivada con
respecto a 𝑥 de…”).
𝑑2𝑦
𝑑
𝑑𝑦
𝑑𝑛𝑦
𝑑
𝑑
* 𝑑𝑥 2 = 𝑑𝑥 (𝑑𝑥 )… derivada segunda
𝑑
𝑑
𝑑𝑦
* 𝑑𝑥 𝑛 = 𝑑𝑥 (𝑑𝑥 (𝑑𝑥 (… 𝑑𝑥 (𝑑𝑥 ))))… derivada enésima
(2) Notación de Lagrange: *𝑦′… se lee “derivada primera de y” o simplemente “𝑦 prima”.
* 𝑦’𝑥 … se lee “derivada primera de 𝑦 (respecto a 𝑥)”.
* 𝑦’’… se lee “derivada segunda de 𝑦”, o “𝑦 segunda”
* 𝑦′′′…se lee “derivada tercera de 𝑦”, o “𝑦 tercera”)
* 𝑦 (4) , 𝑦 (5) , … , 𝑦 (𝑛) … se lee “derivada cuarta, derivada quinta,…, derivada enésima de 𝑦”, etc.
El orden de derivación va entre paréntesis,
(3) Notación de Newton: 𝑦̇ , 𝑦̈ , 𝑦
⃛ … derivada primera, segunda y tercera. No se utiliza para
derivadas de orden mayor que 3.
(4) Notación de Euler: 𝐷𝑦… derivada primera (se lee “la derivada de 𝑦”)
* 𝐷 2 𝑦… derivada segunda
* 𝐷 3 𝑦… derivada tercera
48
* 𝐷𝑥𝑛 𝑦… derivada enésima (el subíndice indica “respecto a la variable 𝑥”)
OBS.: En este curso utilizaremos las notaciones de Leibniz y Lagrange. Por razones históricas,
la notación de Newton es de uso más común en aplicaciones físicas (posición, velocidad,
aceleración), mientras que la notación de Euler tiene aplicaciones directas en la resolución de
ecuaciones diferenciales.
3.2 Reglas de derivación
Teorema 1. La derivada de una constante es igual a cero, es decir, si 𝑦 = 𝐶 donde 𝐶 ∈ ℝ
es constante, entonces 𝑦 ′ = 0.
Teorema 2. Un factor constante de una función se puede escribir como factor de la función
derivada, es decir, si 𝑦 = 𝐶 ∙ 𝑓(𝑥), donde 𝐶 es constante, entonces 𝑦 ′ = 𝐶 ∙ 𝑓 ′(𝑥).
Teorema 3. La derivada de la suma de un número finito de las funciones derivables es igual
a la suma de las derivadas de estas funciones, es decir, si 𝑦 = 𝑢 + 𝑣 entonces 𝑦 ′ = 𝑢′ + 𝑣′.
Teorema 4. La derivada del producto de dos funciones derivables es igual al producto de la
derivada de la primera función por la segunda, más el producto de la primera función por la
derivada de la segunda, es decir, si 𝑦 = 𝑢 ∙ 𝑣, entonces 𝑦 ′ = 𝑢′ ∙ 𝑣 + 𝑢 ∙ 𝑣′.
Teorema 5. La derivada de una fracción (cociente entre dos funciones) es igual a otra
fracción que tiene por denominador el cuadrado del denominador original, y que tiene por
numerador al producto de la derivada del numerador original por el denominador original,
menos el producto del numerador original por la derivada del denominador original. En
𝑢
otras palabras, si 𝑦 = 𝑣 , entonces 𝑦 ′ =
𝑢′ 𝑣−𝑢 𝑣 ′
.
𝑣2
Teorema 6 (Regla de la cadena). La derivada de una función compuesta 𝑦 = 𝑓(𝑔(𝑥)) se
desarrolla de la siguiente manera: 𝑦 ′ = 𝑓′(𝑔(𝑥)) ∙ 𝑔′(𝑥), es decir, es igual al producto
entre la derivada de la función 𝑓 (compuesta con la función 𝑔) por la derivada de la función
𝑑𝑦
𝑑𝑦 𝑑𝑢
𝑔. Dicho de otra forma, 𝑑𝑥 = 𝑑𝑢 ∙ 𝑑𝑥 , donde 𝑢 = 𝑔(𝑥) es una variable auxiliar.
Con respecto a la Regla de la cadena, trabajamos del exterior hacia el interior:
Ejemplo: Hallar la derivada de 𝑦 = sin(3𝑥 4 ).
Solución: Como la derivada de sin(𝑥) es cos(𝑥), pero está siendo evaluada para la función
interior (𝑥 ↔ 3𝑥 4 ), queda cos(3𝑥 4 ). Además, la derivada de 3𝑥 4 es 3 ∙ 4𝑥 3 . Finalmente, por
Regla de la Cadena:
𝑦 ′ = cos(3𝑥 4 ) ∙ 3 ∙ 4𝑥 3 = 12𝑥 3 cos(3𝑥 4 ).
Ejemplo: Hallar la derivada de 𝑦 = sinh(𝑥) =
𝑒 𝑥 −𝑒 −𝑥
.
2
1
1
Solución: Vemos que la función se puede escribir como 𝑦 = 2 𝑒 𝑥 − 2 𝑒 −𝑥 . El segundo término
contiene una función exponencial 𝑒 𝑥 pero evaluada en la función interior (𝑥 ↔ −𝑥), entonces
su derivada debe ser resuelta por Regla de la Cadena:
49
1
1
1
1
1
1
𝑦 ′ = (𝑒 𝑥 )′ − (𝑒 −𝑥 )′ = 𝑒 𝑥 − (𝑒 −𝑥 ∙ (−𝑥)′ ) = 𝑒 𝑥 − 𝑒 −𝑥 (−1)
2
2
2
2
2
2
Finalmente:
1
1
𝑦 ′ = 𝑒 𝑥 + 𝑒 −𝑥 = cosh(𝑥)
2
2
3.3 Derivada de funciones elementales
3.3.1 Funciones elementales algebraicas
Teorema. La derivada de una función algebraica potencia, de base variable 𝑥 y exponente
constante 𝑛 (𝑛 ∈ ℝ) es igual a al producto de 𝑛 por la potencia de 𝑥 con exponente
disminuido en una unidad. Es decir, si 𝑦 = 𝑥 𝑛 entonces 𝑦 ′ = 𝑛 ∙ 𝑥 𝑛−1
Ejercicio: Hallar la derivada de 𝑦 = 𝑥 𝑛 por definición de derivada.
Solución.
1) 𝑦 + ∆𝑦 = (𝑥 + ∆𝑥)𝑛
𝑥 𝑛 + ∆𝑦 = (𝑥 + ∆𝑥)𝑛
2) ∆𝑦 = (𝑥 + ∆𝑥)𝑛 − 𝑥 𝑛
Según el binomio de Newton tenemos que:
(𝑥 + ∆𝑥)𝑛 − 𝑥 𝑛 = {𝑥 𝑛 + 𝐶𝑛1 𝑥 𝑛−1 ∆𝑥 + 𝐶𝑛2 𝑥 𝑛−2 (∆𝑥)2 + ⋯ + 𝐶𝑛𝑛+1 𝑥(∆𝑥)𝑛−1 + (∆𝑥)𝑛 } − 𝑥 𝑛
y se cancelan las 𝑥 𝑛 . Además, por propiedades del número conbinatorio, 𝐶𝑛1 = 𝑛.
∴ ∆𝑦 = 𝑛𝑥 𝑛−1 ∆𝑥 + 𝐶𝑛2 𝑥 𝑛−2 (∆𝑥)2 + ⋯ + 𝐶𝑛𝑛+1 𝑥(∆𝑥)𝑛−1 + (∆𝑥)𝑛
∆𝑦
= 𝑛𝑥 𝑛−1
∆𝑥
∆𝑦
lim
= lim
∆𝑥→0 ∆𝑥
∆𝑥→0
3)
4) 𝑦 ′ =
+ 𝐶𝑛2 𝑥 𝑛−2 ∆𝑥 + ⋯ + 𝐶𝑛𝑛+1 𝑥(∆𝑥)𝑛−2 + (∆𝑥)𝑛−1
[𝑛𝑥 𝑛−1 + 𝐶𝑛2 𝑥 𝑛−2 ∆𝑥 + ⋯ + 𝐶𝑛𝑛+1 𝑥(∆𝑥)𝑛−2 + (∆𝑥)𝑛−1 ]
Todos los términos con factores ∆𝑥 se anulan, excepto 𝑛𝑥 𝑛−1 , y queda 𝑦 ′ = 𝑛 𝑥 𝑛−1 .
3.3.2 Funciones trascendentes trigonométricas
Teorema. La derivada de una función trigonométrica seno es igual a la función
trigonométrica coseno. Es decir si 𝑦 = 𝑠𝑒𝑛(𝑥) entones 𝑦 ′ = cos(𝑥).
Ejemplo: Hallar la derivada de 𝑦 = 𝑠𝑒𝑛(𝑥) por definición de derivada.
Solución.
𝑦 + ∆𝑦 = 𝑠𝑒𝑛(𝑥 + ∆𝑥)
𝑠𝑒𝑛(𝑥) + ∆𝑦 = 𝑠𝑒𝑛(𝑥 + ∆𝑥)
∆𝑦 = 𝑠𝑒𝑛(𝑥 + ∆𝑥) − 𝑠𝑒𝑛(𝑥)
Por transformación de resta en producto:
50
(𝑥 + ∆𝑥) − 𝑥
(𝑥 + ∆𝑥) + 𝑥
) cos (
)
2
2
∆𝑦
2
∆𝑥
∆𝑥
=
𝑠𝑒𝑛 ( ) cos (𝑥 + )
∆𝑥 ∆𝑥
2
2
∆𝑥
𝑠𝑒𝑛 ( )
∆𝑦
2 cos (𝑥 + ∆𝑥 )
=
∆𝑥
∆𝑥
2
2
∆𝑦 = 2𝑠𝑒𝑛 (
∆𝑦
∆𝑥→0 ∆𝑥
Finalmente: 𝑦 ′ = lim
Si ∆𝑥 → 0, entonces 𝑡 =
= lim
∆𝑥
2
∆𝑥→0
𝑡→0
𝑠𝑒𝑛(𝑡)
𝑡→0 𝑡
cos (𝑥 +
∆𝑥
)
2
→0
𝑦 ′ = lim
porque lim
∆𝑥
)
2
∆𝑥
2
𝑠𝑒𝑛(
𝑠𝑒𝑛(𝑡)
∙ lim cos (𝑥
𝑡
∆𝑥→0
+
∆𝑥
)
2
= cos(𝑥),
= 1 (es un límite notable).
Teorema. La derivada de una función trigonométrica coseno es igual al negativo de la
función trigonométrica seno. Es decir si 𝑦 = cos(𝑥) entones 𝑦 ′ = − sin(𝑥).
3.3.3 Funciones trascendentes exponenciales y logarítmicas.
Teorema. La derivada de la función exponencial 𝑦 = 𝑒 𝑥 es nuevamente 𝑦 ′ = 𝑒 𝑥 .
𝑑
Ejemplo: Demostrar por definición de derivada que 𝑑𝑥 (𝑒 𝑥 ) = 𝑒 𝑥 .
Solución:
𝑦 + ∆𝑦 = 𝑒 𝑥+∆𝑥
𝑒 𝑥 + ∆𝑦 = 𝑒 𝑥+∆𝑥
∆𝑦 = 𝑒 𝑥+∆𝑥 − 𝑒 𝑥
∆𝑦 𝑒 𝑥+∆𝑥 − 𝑒 𝑥
=
∆𝑥
∆𝑥
∆𝑦
∆𝑥→0 ∆𝑥
𝑦 ′ = lim
𝑒 𝑥+∆𝑥 −𝑒 𝑥
∆𝑥
∆𝑥→0
= lim
𝑒 𝑥 ∙𝑒 ∆𝑥 −𝑒 𝑥
𝑒 𝑥 (𝑒 ∆𝑥 −1)
lim
∆𝑥
∆𝑥
∆𝑥→0
∆𝑥→0
= lim
𝑒 ∆𝑥 −1
∆𝑥→0 ∆𝑥
= 𝑒 𝑥 ∙ lim
(porque 𝑒 𝑥 no
varía con respecto a ∆𝑥, se puede asumir que es constante y extraer del límite)= 𝑒 𝑥 ∙ lim
∆𝑥
∆𝑥→0 ∆𝑥
(porque por teoría de infinitésimos equivalentes 𝑒 ∆𝑥 − 1 ~ ∆𝑥 cuando ∆𝑥 → 0).
Finalmente 𝑦 ′ = 𝑒 𝑥 .
1
𝑥
Teorema. La derivada de la función logarítmica 𝑦 = log 𝑎 𝑥 es la función 𝑦 ′ = ∙ log 𝑎 𝑒, o
1
también: 𝑦 ′ = 𝑥∙ln(𝑎).
Ejemplo: Demostrar por definición de derivada que
𝑑(log𝑎 𝑥)
𝑑𝑥
1
= 𝑥 ∙ log 𝑎 𝑒.
Solución:
𝑦 + ∆𝑦 = log 𝑎 (𝑥 + ∆𝑥)
51
log 𝑎 (𝑥) + ∆y = log a (𝑥 + ∆𝑥)
∆𝑦 = log 𝑎 (𝑥 + ∆𝑥) − log 𝑎 (𝑥)
𝑥 + ∆𝑥
∆𝑦 = log 𝑎 (
)
𝑥
𝑥 + ∆𝑥
∆𝑦 log 𝑎 ( 𝑥 )
=
∆𝑥
∆𝑥
∆𝑥
∆𝑦 log 𝑎 (1 + 𝑥 )
=
∆𝑥
∆𝑥
Dividiendo numerador y denominador entre 𝑥 queda:
1
∆𝑥
∆𝑦 𝑥 log 𝑎 (1 + 𝑥 )
=
∆𝑥
∆𝑥
𝑥
1
∆𝑥
∆𝑦 𝑥 log 𝑎 (1 + 𝑥 )
=
∆𝑥
∆𝑥
𝑥
Sea 𝑡 =
∆𝑥
𝑥
una variable auxiliar: si ∆𝑥 → 0 entonces 𝑡 → 0.
Calculamos la derivada como límite:
1
∆𝑥
1
log 𝑎 (1 + 𝑥 )
log 𝑎 (1 + 𝑡)
∆𝑦
𝑥
𝑦 = lim
= lim
= lim 𝑥
∆𝑥
∆𝑥→0 ∆𝑥
∆𝑥→0
𝑡→0
𝑡
𝑥
1
Como 𝑥 no depende de 𝑡, puede extraerse del límite como factor. Por cambio de base:
′
ln(1 + 𝑡)
1
1
ln(1 + 𝑡)
ln(𝑎)
𝑦 ′ = ∙ lim
=
∙ lim
.
𝑥 𝑡→0
𝑡
𝑥 ∙ ln(𝑎) 𝑡→0
𝑡
Finalmente, por infinitésimos equivalentes ln(1 + 𝑡) ~𝑡 cuando 𝑡 → 0. Reemplazando queda:
1
t
1
𝑦′ =
∙ lim =
.
𝑥 ∙ ln(𝑎) 𝑡→0 𝑡 𝑥 ∙ ln(𝑎)
Nuevamente por cambio de base:
1
1
𝑦′ =
= ∙ log 𝑎 (𝑒)
log 𝑎 (𝑎) 𝑥
𝑥∙
log 𝑎 (𝑒)
3.3.4 Funciones trascendentes hiperbólicas
Teorema. (1) La derivada de la función seno hiperbólico 𝑦 = sinh(𝑥) es el coseno
hiperbólico: 𝑦 ′ = cosh(𝑥).
(2) La derivada de la función coseno hiperbólico 𝑦 = sinh(𝑥) es el seno hiperbólico: 𝑦 ′ =
sinh(𝑥).
52
Derivadas de orden superior
Supongamos que la función 𝑦 = 𝑓(𝑥) es derivable en un segmento (𝑎, 𝑏). Los valores de la
derivada 𝑓′(𝑥) dependen de 𝑥, es decir, la derivada 𝑦 ′ = 𝑓′(𝑥) también es función de 𝑥.
′
Derivando la primera derivada obtenemos 𝑦 ′′ = (𝑓 ′ (𝑥)) ⟹ 𝑦 ′′ = 𝑓′′(𝑥) obtenemos la
llamada segunda derivada de la función original 𝑓(𝑥). Análogamente, derivando la segunda
derivada obtenemos la tercera derivada, y así sucesivamente.
Definiciones: (1) La derivada de primer orden, o derivada primera, es la función 𝑦 ′ =
𝑓′(𝑥).
(2) La derivada de segundo orden, o derivada segunda, es la derivada de la primera
derivada, y se denomina por el símbolo 𝑦 ′′ = 𝑓 ′′ (𝑥) = (𝑓 ′ (𝑥))′.
(3) La derivada de tercer orden, o derivada tercera, es la derivada (de primer orden) de la
segunda derivada, y se denomina por el símbolo 𝑦 ′′′ = 𝑓 ′′′ (𝑥) = (𝑓 ′′ (𝑥))′.
(4) En general, la derivada de orden n, o derivada enésima, es la derivada (de primer
orden) de la derivada de orden anterior o (n-1), y se denomina por el símbolo 𝑦 (𝑛) =
𝑓 (𝑛) (𝑥) = (𝑦 (𝑛−1) )′.
3.3.5 Derivada de funciones directas e inversas
Teorema. Si 𝑓 es una función biyectiva en un intervalo del dominio, derivable en el punto
𝑎 ∈ 𝐼𝑛𝑡𝑒𝑟𝑣𝑎𝑙𝑜 y su inversa es derivable en un punto 𝑏 = 𝑓(𝑎), entonces (𝑓 −1 )′ (𝑏) =
1
.
𝑓′(𝑎)
Teorema 2. Si para la función 𝑦 = 𝑓(𝑥) existe una función inversa 𝑥 = 𝑓 −1 (𝑦), tal que las
derivadas de 𝑓 y 𝑓′ son no nulas, entonces se verifica:
𝑦𝑥′ = 1⁄𝑥 ′
𝑦
Ejemplo: Hallar la derivada de 𝑦 = arcsin(𝑥)
Solución: La inversa de 𝑦 = arcsin(𝑥) es 𝑥 = sin(𝑦), entonces 𝑥 ′ = cos(𝑦).
1
1
Luego, 𝑦𝑥′ = 𝑥 ′ = cos(𝑦). Pero cos(𝑦) = √1 − sin2 (𝑦) = √1 − 𝑥 2 porque 𝑥 = sin(𝑦).
𝑦
Finalmente: 𝑦𝑥′ =
1
√1−𝑥 2
.
Ejemplo: Hallar la derivada de 𝑦 = arcsinh(𝑥).
Solución: La función inversa de 𝑦 = arcsinh(𝑥) es 𝑥 = sinh(𝑦), entonces 𝑥 ′ = cosh(𝑦).
1
1
Luego, 𝑦𝑥′ = 𝑥 ′ = cosh(𝑦). Pero cosh2(𝑦) − sinh2(𝑦) = 1 ⟹ cosh(𝑦) = √1 + sinh2(𝑦) =
𝑦
√1 +
𝑥 2.
Finalmente: 𝑦𝑥′ =
1
√1+𝑥 2
3.3.7 Derivada de funciones implícitas
Una función implícita es aquella que no queda expresada claramente en forma de variable “y”
como función de la variable “x”. Dada una función de manera implícita en la ecuación
53
𝐹(𝑥, 𝑦) = 0, si queremos calcular la derivada de 𝑦 respecto de 𝑥 debemos considerar a 𝑦 =
𝑓(𝑥) como una función en términos de la variable independiente 𝑥.
Ejemplo: Obtener la derivada de 6𝑥 2 𝑦 + 5𝑦 3 + 3𝑥 2 + 𝑥 2 𝑦 2 = 0.
Solución: El término 6𝑥 2 𝑦 se considera como el producto de dos funciones, por lo que se
deriva como un producto:
𝑑
(6𝑥 2 𝑦) = (12𝑥) ∙ 𝑦 + 6𝑥 2 ∙ 𝑦′
𝑑𝑥
El término 5𝑦 3 se deriva por Regla de la Cadena, por estar 𝑦 = 𝑓(𝑥) compuesta dentro de la
función 5 ⋅ ( )3 :
𝑑
(5𝑦 3 ) = 5 ⋅ 3𝑦 2 ⋅ 𝑦 ′ = 15𝑦 2 𝑦 ′
𝑑𝑥
El término 3𝑥 2 se deriva normalmente:
𝑑
(3𝑥 2 ) = 3 ∙ 2𝑥 = 6𝑥
𝑑𝑥
El término 𝑥 2 𝑦 2 se deriva como un producto:
𝑑 2 2
(𝑥 𝑦 ) = (𝑥 2 )′ ∙ 𝑦 2 + 𝑥 2 ∙ (𝑦 2 )′ = 2𝑥𝑦 2 + 𝑥 2 . 2𝑦 ∙ 𝑦′
𝑑𝑥
Finalmente:
12𝑥𝑦 + 6𝑥 2 𝒚′ + 15𝑦 2 𝒚′ + 6𝑥 + 2𝑥𝑦 2 + 2𝑥 2 𝑦𝒚′ = 0
Despejando 𝑦’ resulta:
12𝑥𝑦 + 6𝑥 + 2𝑥𝑦 2
𝑦′ = − 2
,
6𝑥 + 15𝑦 2 + 2𝑥 2 𝑦
es decir, una función de las dos variables 𝑥 e 𝑦.
3.3.8 Derivada de funciones expresadas por ecuaciones paramétricas
Frecuentemente una variable "𝑦" no necesariamente aparece en función de la otra "𝑥" sino
que ambas coordenadas se expresan cómo funciones de una nueva variable llamada
parámetro (habitualmente se denota con una letra "𝑡") dando lugar a las llamadas ecuaciones
paramétricas.
Teorema. Supongamos que la representación paramétrica de una función 𝑓 es: {
𝑥 = 𝑥(𝑡)
.
𝑦 = 𝑦(𝑡)
La primera derivada de "𝑦" respecto a "𝑥" se calcula de la siguiente forma:
𝑦′
𝑦′(𝑡)
𝑑𝑦
𝑦 ′ = 𝑥𝑡′ = 𝑥′(𝑡) o, dicho de otra manera, 𝑑𝑥 =
𝑡
𝑑𝑦
𝑑𝑡
𝑑𝑥
𝑑𝑡
.
Demostración. Como no hay función directa de 𝑦 respecto a 𝑥, sino que hay un parámetro
intermedio 𝑡 (y además 𝑡 depende de 𝑥 según la inversa de la función 𝑥 = 𝑥(𝑡)), vale aplicar la
regla de la cadena para funciones compuestas:
𝑑𝑦
𝑑
𝑑𝑦 𝑑𝑡 𝑑𝑦 1
𝑦′ =
=
(𝑦(𝑡(𝑥))) =
∙
=
∙
𝑑𝑥 𝑑𝑥
𝑑𝑡 𝑑𝑥 𝑑𝑡 𝑑𝑥
𝑑𝑡
Finalmente queda la relación:
54
𝑑𝑦
𝑑𝑦
𝑦 =
= 𝑑𝑡 .
𝑑𝑥
𝑑𝑥
𝑑𝑡
𝑥 = 𝑎(𝑡 − sin(𝑡))
Ejemplo. Hallar la derivada de la función: {
.
𝑦 = 𝑎(1 − cos(𝑡))
Solución. 𝑥𝑡′ = 𝑎(𝑡 − sin(𝑡))′𝑡 = 𝑎(1 − cos(𝑡)).
𝑦𝑡′ = 𝑎(1 − cos(𝑡))′𝑡 = 𝑎 ∙ sin(𝑡).
Entonces:
′
𝑦′
𝑎∙sin(𝑡)
sin(𝑡)
𝑦 ′ = 𝑦𝑥′ = 𝑥𝑡′ = 𝑎∙(1−cos(𝑡)) = 1−cos(𝑡) =
𝑡
𝑡
2
𝑡
2
2 sin( )cos( )
𝑡
2
2 sin2( )
𝑡
= 2 cot(2). Como 𝑥 e 𝑦 dependen de 𝑡, la
primera derivada de 𝑦 respecto a 𝑥 también depende de 𝑡.
Derivada de 2do orden de funciones paramétricas
Teorema. La segunda derivada de "𝑦" respecto a "𝑥" de una función paramétrica
𝑥 = 𝑥(𝑡)
se calcula de la siguiente forma:
{
𝑦 = 𝑦(𝑡)
𝑑2 𝑦 𝑦𝑡′′ ∙ 𝑥𝑡′ − 𝑦𝑡′ ∙ 𝑥𝑡′′
=
𝑑𝑥 2
𝑥𝑡′3
Demostración. Para hallar la segunda derivada, vamos a derivar la primera derivada:
𝑑2 𝑦
𝑑 𝑦′(𝑡)
=
(
)
2
𝑑𝑥
𝑑𝑥 𝑥′(𝑡)
En el cálculo de derivadas primeras se puede observar que la primera derivada no es función
directa de 𝑥, sino que depende del parámetro 𝑡 (aun siendo una primera derivada “con
respecto a 𝑥”). Entonces, se dice que la primera derivada es una función 𝜑(𝑡), y por Regla de
la Cadena:
𝑑 𝑦 ′ (𝑡)
(
)
′ (𝑡)
2
𝑦
𝑑 𝑦 𝑑𝜑 𝑑𝜑 𝑑𝑡 𝑑𝜑 1
𝑑𝑡 𝑥 ′ (𝑡)
= 𝜑(𝑡) ⟹ 2 =
=
∙
=
∙
=
… (1),
𝑥′(𝑡)
𝑑𝑥
𝑑𝑥
𝑑𝑡 𝑑𝑥 𝑑𝑡 𝑑𝑥
𝑥𝑡′
𝑑𝑡
otra función de 𝑡.
El numerador es una derivada por cociente
𝑑 𝑦 ′ (𝑡)
𝑦𝑡′′ ∙ 𝑥𝑡′ − 𝑦𝑡′ ∙ 𝑥𝑡′′
( ′ )=
𝑑𝑡 𝑥 (𝑡)
𝑥𝑡′2
Reemplazando en (1) queda la expresión del teorema:
𝑦𝑡′′ ∙ 𝑥𝑡′ − 𝑦𝑡′ ∙ 𝑥𝑡′′
2
𝑑 𝑦
𝑦𝑡′′ ∙ 𝑥𝑡′ − 𝑦𝑡′ ∙ 𝑥𝑡′′
𝑥𝑡′2
=
=
𝑑𝑥 2
𝑥𝑡′
𝑥𝑡′3
3.3.9 Funciones expresadas en coordenadas polares
En este caso, 𝜌 = 𝑓(𝜃) no es más, sino una función cuya variable independiente es el ángulo 𝜃
(medido siempre en radianes), y cuya variable dependiente de 𝜃 es 𝜌, el radio vector.
55
Tabla de propiedades de la derivación
Suma/resta de funciones
𝑦 = 𝑓(𝑥) ± 𝑔(𝑥)
𝑦 ′ = 𝑓 ′ (𝑥) ± 𝑔′ (𝑥)
Multiplicación de 1
función por una
constante
𝑦 = 𝐶 ∙ 𝑓(𝑥)
𝑦 ′ = 𝐶 ∙ 𝑓′(𝑥)
Multiplicación de 2
funciones
𝑦 = 𝑓(𝑥) ∙ 𝑔(𝑥)
𝑦 ′ = 𝑓 ′ (𝑥) ∙ 𝑔(𝑥) + 𝑓(𝑥) ∙ 𝑔′(𝑥)
División de 2 funciones
𝑓(𝑥)
𝑦=
𝑔(𝑥)
Composición de 2
funciones
(Regla de la cadena)
Exponenciación de
funciones
(derivada logarítmica)
𝑦 = 𝑓(𝑔(𝑥));
o también 𝑦 = 𝑓(𝑢) con
𝑢 = 𝑔(𝑥)
𝑦 = [𝑓(𝑥)] 𝑔(𝑥)
o también
ln(𝑦) = 𝑔(𝑥) ∙ ln(𝑓(𝑥))
𝑦′ =
𝑓 ′ (𝑥) ∙ 𝑔(𝑥) − 𝑓(𝑥) ∙ 𝑔′(𝑥)
2
(𝑔(𝑥))
𝑦 ′ = 𝑓 ′ (𝑢) ∙ 𝑢𝑥′ ;
luego cambiar 𝑢 con 𝑔(𝑥)
𝑦′
𝑓′(𝑥)
= 𝑔′ (𝑥) ∙ ln(𝑓(𝑥)) + 𝑔(𝑥) ∙
𝑦
𝑓(𝑥)
donde 𝑦 = [𝑓(𝑥)] 𝑔(𝑥)
56
Tabla de derivadas de funciones elementales
Función constante
𝑦=𝐶
𝑦′ = 0
Función identidad
𝑦=𝑥
𝑦′ = 1
Función potencia
(base variable, exp.
Constante)
𝑦 = 𝑢𝑛 ; 𝑛 ∈ ℝ
𝑦 ′ = 𝑛 ∙ 𝑢𝑛−1 ∙ 𝑢′
Función raíz cuadrada
𝑦 = √𝑢
Función exponencial
(base constante, exp.
Variable)
𝑦 = 𝑎𝑢
∙ 𝑢′
2√𝑢
𝑦 ′ = 𝑎𝑢 ∙ ln(𝑎) ∙ 𝑢′
𝑦 = 𝑒𝑢
𝑦 ′ = 𝑒 𝑢 ∙ 𝑢′
Función logarítmica
𝑦 = log 𝑎 (𝑢)
Función logaritmo natural
𝑦 ′ = ln(𝑢)
Funciones trigonométricas
𝑦 = sin(𝑢)
1
∙ 𝑢′
𝑢 ∙ ln(𝑎)
1
𝑦 ′ = ∙ 𝑢′
𝑢
′
𝑦 = cos(𝑢) ∙ 𝑢′
𝑦 = cos(𝑢)
𝑦 ′ = − sin(𝑢) ∙ 𝑢′
𝑦 = tan(𝑢)
𝑦 ′ = sec 2(𝑢) ∙ 𝑢′
𝑦 = 𝑐𝑜𝑡𝑎𝑛(𝑢)
𝑦 ′ = − csc 2(𝑢) ∙ 𝑢′
𝑦 = sec(𝑢)
𝑦 ′ = sec(𝑢) ∙ tan(𝑢) ∙ 𝑢′
𝑦 = 𝑐𝑜𝑠𝑒𝑐(𝑢)
𝑦 ′ = − csc(𝑢) ∙ 𝑐𝑜𝑡(𝑢) ∙ 𝑢′
𝑦′ =
1
𝑦′ =
1
Funciones trigonométricas
inversas
𝑦 = arcsen(u) o también
𝑦 = sin−1(𝑢)
𝑦 = arccos(u) o también
𝑦 = 𝑐𝑜𝑠 −1 (𝑢)
𝑦 = arctan(u) o también
𝑦 = 𝑡𝑎𝑛−1 (𝑢)
∙ 𝑢′
√1 − 𝑢2
1
𝑦′ = −
∙ 𝑢′
√1 − 𝑢2
1
𝑦′ =
∙ 𝑢′
1 + 𝑢2
Funciones hiperbólicas
𝑦 = sinh(𝑢)
𝑦 ′ = cosh(𝑢) ∙ 𝑢′
𝑦 = cosh(𝑢)
𝑦 ′ = sinh(𝑢) ∙ 𝑢′
𝑦 = tanh(𝑢)
𝑦 ′ = sech(𝑢) ∙ 𝑢′
Funciones hiperbólicas
inversas
𝑦 = asinh(𝑢) o también
𝑦 = sinh−1(𝑢)
𝑦 = acosh(𝑢) o también
𝑦 = 𝑐𝑜𝑠ℎ−1(𝑢)
𝑦 = atanh(𝑢) o también
𝑦 = 𝑡𝑎𝑛ℎ−1(𝑢)
𝑦′ =
𝑦′ =
𝑦′ =
1
√𝑢2 + 1
1
∙ 𝑢′
∙ 𝑢′
√𝑢2 − 1
1
𝑦′ =
∙ 𝑢′
1 − 𝑢2
57
3.4 Diferencial de una función. Definición
A continuación, introduciremos dos variables nuevas, 𝑑𝑥 y 𝑑𝑦, con la propiedad de que si su
cociente existe, este será igual a la derivada de primer orden.
Definición: Dada una función 𝑦 = 𝑓(𝑥) diferenciable (derivable). La diferencial (de primer
orden) de la función, 𝑑𝑦, se define como el producto de la derivada de la función por la
diferencial de la variable independiente, 𝑑𝑥, que a su vez se define exactamente igual al
incremento del argumento, ∆𝑥.
𝑑𝑦 = 𝑓 ′ (𝑥) ∙ 𝑑𝑥
𝑑𝑥 = ∆𝑥 = 𝑥2 − 𝑥1
A diferencia del diferencial del argumento 𝒙, o 𝑑𝑥, que siempre es igual al incremento de la
función ∆𝑥, la variable 𝑑𝑦 siempre depende del valor de 𝑥. Si se le da un valor específico de 𝑑𝑥
y se le da un valor particular del dominio de la función al argumento 𝑥, entonces el valor
numérico de 𝑑𝑦 está determinado.
3.4.1 Interpretación geométrica del diferencial e incremento de una función
Sean 𝑃(𝑥, 𝑓(𝑥)) y 𝑄(𝑥 + ∆𝑥, 𝑓(𝑥 + ∆𝑥)) puntos sobre la curva de la función 𝑦 = 𝑓(𝑥). El
cambio correspondiente en 𝑦 es ∆𝑦 = 𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥). En el gráfico, el incremento ∆𝑦 se
representa por el segmento ̅̅̅̅̅
𝑄𝑆.
̅̅̅̅ es la derivada 𝑓′(𝑥). En la gráfica, esa pendiente también
La pendiente de la recta tangente 𝑃𝑅
̅̅̅̅ y 𝑃𝑆
̅̅̅̅. En el gráfico, el incremento ∆𝑥 = 𝑑𝑥 se
es igual al cociente entre los segmentos 𝑅𝑆
̅̅̅̅.
representa por el segmento 𝑃𝑆
𝑚 = 𝑓 ′ (𝑥) =
̅̅̅̅
𝑅𝑆
̅̅̅̅ = 𝑓 ′ (𝑥) ∙ ̅̅̅̅
⟹ 𝑅𝑆
𝑃𝑆 = 𝑓 ′ (𝑥) ∙ ∆𝑥 = 𝑓(𝑥) ∙ 𝑑𝑥 = 𝑑𝑦
̅̅̅̅
𝑃𝑆
58
̅̅̅̅.
Por tanto, el diferencial 𝑑𝑦 se representa en el gráfico por el segmento 𝑅𝑆
Notamos entonces que el incremento ∆𝑦 representa la cantidad que la curva 𝑦 = 𝑓(𝑥) se
levanta o cae alrededor de la 𝑥, mientras que el diferencial 𝑑𝑦 es la cantidad que la recta
tangente se levanta o cae, cuando la variable 𝑥 cambia en una cantidad ∆𝑥.
Cálculo aproximado
Si se desea calcular el valor aproximado de funciones, alrededor de un valor conocido exacto
de la misma función, se supone que el incremento de la función (desde el valor exacto hasta el
valor aproximado) es aproximadamente igual a su diferencial.
Δ𝑦 ≈ 𝑑𝑦
𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥) ≈ 𝑓 ′ (𝑥)𝑑𝑥
Lo que nos da la siguiente:
Regla (Cálculo aproximado de funciones). El valor de una función, 𝑓(𝑥 + ∆𝑥), se considera
aproximadamente igual a la siguiente relación:
𝑓(𝑥 + ∆𝑥) ≈ 𝑓(𝑥) + 𝑓′(𝑥)∆𝑥
donde:
𝑥: valor del argumento de una función, tal que el cálculo de la función 𝑓(𝑥) es exacto.
𝑥 + ∆𝑥: valor del argumento, cuya función 𝑓(𝑥 + ∆𝑥) se desea calcular aproximadamente.
𝑓′(𝑥): valor de la primera derivada, evaluada en el valor 𝑥 dado,
∆𝑥: valor del incremento (o decremento) de la variable independiente 𝑥.
Ejemplo: Calcular el valor aproximado de cos(61°).
1
Solución: Sea 𝑓(𝑥) = cos(𝑥) ⟹ 𝑓 ′ (𝑥) = − sin(𝑥). Como el valor de cos(60°) = 2 es
𝜋
3
conocido y exacto, supondremos 𝑥 = 60° = . Así: 𝑥 + Δ𝑥 = 61° ⟹ ∆𝑥 = 61° − 60° = 1° =
𝜋
.
180
Entonces:
𝑓(𝑥 + ∆𝑥) ≈ 𝑓(𝑥) + 𝑓′(𝑥) ∙ ∆𝑥;
cos(61°) ≈ cos(60°) + (− sin(60°)) ∙
1
cos(61°) ≈ 2 + (−
𝜋
√3
) ∙ 180
2
𝜋
;
180
= 0,4848.;
cos(61°) ≈ 0,4848𝟖𝟓𝟎𝟎𝟓𝟐𝟗.
Comprobando con una calculadora observamos que esta devuelve 0,4848𝟎𝟗𝟔𝟐𝟎𝟐𝟒. Los
errores del cálculo aproximado se perciben recién a partir de la 5ta. cifra decimal.
Ejemplo 2: Calcular el valor aproximado de tan(44°29′45′′).
1
Solución: Sea 𝑓(𝑥) = tan(𝑥) ⟹ 𝑓 ′ (𝑥) = cos2(𝑥). Como el valor de tan(45°) = 1 es conocido y
𝜋
exacto, supondremos 𝑥 = 45° = 4 . Así: 𝑥 + Δ𝑥 = 44°29′ 45′′ ⟹ ∆𝑥 = 44°29′ 45′′ − 45° =
−0°30°15′′ = −0,008799.
Entonces:
59
𝑓(𝑥 + ∆𝑥) ≈ 𝑓(𝑥) + 𝑓′(𝑥) ∙ ∆𝑥;
1
tan(44°29′ 45′′ ) ≈ tan(45°) + (cos2(45°)) ∙ (−0,008799);
tan(44°29′ 45′′ ) ≈ 0.982𝟒𝟎𝟐.
Comprobando con una calculadora observamos que esta devuelve 0,982𝟓𝟓𝟒𝟑𝟐𝟒. Los errores
del cálculo aproximado se perciben recién a partir de la 4ta. cifra decimal.
Diferenciales de segundo orden y de orden superior
Como la diferencial de primer orden, 𝑑𝑦 = 𝑓 ′ (𝑥)𝑑𝑥, es una función nueva de la variable
independiente 𝑥 (𝑔(𝑥) = 𝑓 ′ (𝑥)𝑑𝑥), se puede hablar de la diferencial de esta función 𝑔.
La diferencial de la diferencial de una función se denomina diferencial de segundo orden, y se
denota por 𝑑(𝑑𝑦) = 𝑑2 𝑦. La notación 𝑑(𝑑𝑦) se lee: “diferencial de la diferencial de una
función 𝑦 = 𝑓(𝑥)”.
Por la definición de diferencial de primer orden de la función g:
𝑑2 𝑦 = 𝑔′ (𝑥)𝑑𝑥 = [𝑓 ′ (𝑥)𝑑𝑥]′𝑑𝑥
Pero 𝑑𝑥 es una cantidad constante que no depende de 𝑥, entonces puede tomarse como
factor constante de la derivación. Así queda:
𝑑2 𝑦 = 𝑓 ′′ (𝑥)(𝑑𝑥)2
En general, puede calcularse las diferenciales de cualquier orden según la siguiente regla:
Definición. La diferencial de orden enésimo se define como la diferencial de la diferencial
de orden (n-1)-ésimo de la función, y se calcula como sigue:
𝑑𝑛 𝑦 = 𝑓 (𝑛) (𝑥) ∙ (𝑑𝑥)𝑛
3.5 Teoremas fundamentales del Calculo Diferencial. Teorema de Rolle, Lagrange o Valor
medio, de Cauchy y de L’Hospital.
Teorema (de Rolle). Si una función 𝑓 es continua en el intervalo [𝑎, 𝑏] y derivable en todos
los puntos interiores de este, tal que 𝑓(𝑎) = 𝑓(𝑏), entonces existe por lo menos un punto
𝑐 entre 𝑎 y 𝑏 (𝑎 < 𝑐 < 𝑏) en el que la derivada se reduce a cero: 𝑓 ′ (𝑐) = 0. El valor de
𝑐 puede ser único, como puede haber más de un valor.
Interpretación geométrica: Si una recta horizontal corta a la curva de la función en 𝑥 = 𝑎 y
𝑥 = 𝑏 y la curva es continua (al menos entre entre 𝑎 y 𝑏), entonces habrá al menos una recta
tangente horizontal en el punto 𝑥 = 𝑐, con 𝑐 entre 𝑎 y 𝑏. Puede haber más de una recta
tangente horizontal.
60
Observación. Si la función 𝑓 es tal que no tiene derivada en todos los puntos del segmento
[𝑎, 𝑏], el Teorema de Rolle puede ser falso: puede no existir 𝑐 tal que 𝑓 ′ (𝑐) = 0.
Teorema (de Lagrange). Si la función 𝑓 es continua en el intervalo [𝑎, 𝑏] y derivable en
todos los puntos interiores del mismo, entonces existe un punto 𝑐 entre 𝑎 y 𝑏 (𝑎 < 𝑐 < 𝑏)
tal que
𝑓(𝑏)−𝑓(𝑎)
𝑏−𝑎
= 𝑓′(𝑐)
Interpretación geométrica: Si una recta corta a la
curva de una función 𝑦 = 𝑓(𝑥) en 2 puntos: 𝑥 = 𝑎 y
𝑥 = 𝑏, entonces existe al menos una recta tangente
a la curva y paralela a la recta secante, en algún
punto 𝑥 = 𝑐, con 𝑐 entre 𝑎 y 𝑏.
Aplicación del Teorema de Lagrange: demostración de desigualdades
Ejemplo: Demostrar por el Teorema de Lagrange que arctan(𝑥) < 𝑥 siempre que 𝑥 > 0.
Estrategia general:
(1) Elegir funciones 𝑓(𝑥) continuas y derivables en su dominio, que aparezcan en la
desigualdad que se quiere demostrar (tesis). Algunas candidatas son las funciones
elementales: funciones potenciales, irracionales, exponenciales, logarítmicas, trigonométricas,
trigonométricas inversas, etc.
Una vez elegida la 𝑓(𝑥), hallar su derivada 𝑓′(𝑥) y así hallar 𝑓′(𝑐).
(2) Identificar la desigualdad base (hipótesis), el menor número será 𝑎 y el mayor será 𝑏.
(3) A partir de la desigualdad base (hipótesis), reconstruir 𝑓′(𝑐).
(4) En la desigualdad obtenida en el paso (3), reemplazar 𝑓′(𝑐) por
𝑓(𝑏)−𝑓(𝑎)
.
𝑏−𝑎
(5) Con las transformaciones correspondientes, continuar hasta llegar a la tesis.
Solución
1
1
⟹ 𝑓 ′ (𝑐) =
.
2
1+𝑥
1 + 𝑐2
(2) 𝐶𝑜𝑚𝑜 0 < 𝑥 ⟹ 𝑎 = 0; 𝑏 = 𝑥 ⟹ 𝑓(𝑎) = arctan(0) = 0; 𝑓(𝑏) = arctan(𝑥)
(1) 𝑓(𝑥) = arctan(𝑥) ⟹ 𝑓 ′ (𝑥) =
61
𝑎<𝑐<𝑏⟹0<𝑐<𝑥
1
(3) 02 < 𝑐 2 < 𝑥 2 ⟹ 1 < 1 + 𝑐 2 ⟹
< 1 ⟹ 𝑓 ′ (𝑐) < 1
1 + 𝑐2
𝑓(𝑏) − 𝑓(𝑎)
arctan(𝑥) − 0
(4)
<1 ⟹
< 1 ⟹ arctan(𝑥) < 𝑥; 𝑞. 𝑒. 𝑑.
𝑏−𝑎
𝑥−0
Teorema (de Cauchy). Si 𝑓 y 𝑔 son continuas en el intervalo [𝑎, 𝑏] y derivables en todos los
puntos interiores del mismo, y si además 𝑔′(𝑥) ≠ 0 para todo 𝑥 del intervalo, entonces
existe un punto 𝑐 entre 𝑎 y 𝑏 (𝑎 < 𝑐 < 𝑏) tal que
𝑓(𝑏) − 𝑓(𝑎) 𝑓 ′ (𝑐)
=
𝑔(𝑏) − 𝑔(𝑎) 𝑔′(𝑐)
𝟎 ∞
3.6 Cálculo de límites con indeterminaciones 𝟎 ; ∞ ; 𝟎 ∙ ∞. Regla de L’Hôpital
Teorema.
(Regla de L’Hôpital para levantar indeterminaciones que pueden
transformarse al caso 0/0) (se pronuncia: /lopital/)
Sean 𝑓 y 𝑔 funciones tales que
(Hipótesis 1) 𝑓(𝑎) = 𝑔(𝑎) = 0, o
(Hipótesis 2) 𝑓 y 𝑔 no estén definidas en 𝑥 = 𝑎 pero lim 𝑓(𝑥) = lim 𝑔(𝑥) = 0. Si además:
𝑥→𝑎
𝑥→𝑎
(Hipótesis común) 𝑓 y 𝑔 son derivables en un intervalo abierto (𝑎 − 𝛿, 𝑎 + 𝛿) que contiene
a 𝑎, y 𝑔′(𝑥) ≠ 0 en el intervalo, entonces:
𝑓(𝑥)
𝑓 ′ (𝑥)
𝐿 = lim
= lim ′ ,
𝑥→𝑎 𝑔(𝑥)
𝑥→𝑎 𝑔 (𝑥)
𝑓′ (𝑥)
𝑥→𝑎 𝑔′ (𝑥)
siempre que el nuevo límite lim
exista.
En otras palabras,
la Regla de L’Hôpital para límites de fracciones consiste en levantar algunas
indeterminaciones que se pueden transformar al caso 0/0, derivando el numerador y el
denominador POR SEPARADO y evaluando el límite resultante.
Advertencia: NO CONFUNDIR con la Regla del Cociente para la derivación, que NO SE UTILIZA
EN NINGÚN CASO DE INDETERMINACIÓN DE LÍMITES.
𝑓 ′ (𝑥)
𝑓(𝑥)
Advertencia 2: El límite 𝐿 = lim 𝑔(𝑥) puede existir pero si lim 𝑔′ (𝑥) no existe, entonces no se
𝑥→𝑎
𝑥→𝑎
debe aplicar la Regla de L´Hôpital.
Ejemplo: 𝐿 = lim
𝑥→+∞
𝑥+sin(𝑥)
𝑥
= 1 pero lim
𝑥→+∞
1+cos(𝑥)
1
no existe porque cos(𝑥) oscila entre −1 y
+1 cuando 𝑥 → +∞.
62
Observación 1. Si las funciones derivadas 𝑓′ y 𝑔′ vuelven a cumplir las hipótesis de la regla de
L’Hôpital, entonces:
𝑓 ′ (𝑥)
𝑓 ′′ (𝑥)
𝐿 = lim
= lim
𝑥→𝑎 𝑔′(𝑥)
𝑥→𝑎 𝑔′′(𝑥)
Esto significa que según la Regla de L’Hôpital, podría aplicarse la derivada de primer,
segundo, tercer orden y así sucesivamente hasta levantar la indeterminación.
Observación 2. Si 𝑔′ (𝑥) = 0 pero 𝑓′(𝑥) ≠ 0, el teorema de L’Hôpital se aplica a la razón
𝑔(𝑥)
𝑓(𝑥)
inversa 𝑓(𝑥), que tiende a cero, cuando 𝑥 → 𝑎. Por lo tanto, la razón 𝑔(𝑥) tiende a ±∞ (verificar
si 𝑔′(𝑥) tiende a 0+ ó 0− ).
Observación 3. La Regla de L’Hôpital también se puede aplicar si
lim 𝑓(𝑥) = 0 y
𝑥→±∞
lim 𝑓(𝑥) = 0, es decir, cuando x tiende al infinito.
𝑥→±∞
∞
Indeterminación de la forma ∞
𝑓(𝑥)
∞
1/𝑔(𝑥)
0
Si lim 𝑔(𝑥) = ∞, entonces por fracción compleja lim 1/𝑓(𝑥) = 0. Como la fracción equivalente
𝑥→𝑎
1/𝑔(𝑥)
1/𝑓(𝑥)
𝑥→𝑎
cumple la hipótesis del Teorema, se concluye que es posible aplicar la Regla de
L´Hôpital a indeterminaciones
∞
,
∞
porque pueden transformarse a 0/0. Simplemente
derivamos el numerador y el denominador que tienden al infinito, una o más veces hasta
levantar la indeterminación.
Indeterminación de la forma ∞ − ∞
Las indeterminaciones de este tipo pueden representarse como:
𝑓(𝑥) 𝑚(𝑥)
lim
−
𝑥→𝑎 𝑔(𝑥)
𝑝(𝑥)
Resolviendo la resta indicada queda:
𝑓(𝑥)𝑝(𝑥) − 𝑚(𝑥)𝑔(𝑥)
lim
𝑥→𝑎
𝑔(𝑥)𝑝(𝑥)
Entonces, intentamos reducir la fracción a una forma más simple. Si la fracción cumple la
hipótesis de L’Hôpital, aplicamos la regla.
Indeterminación de la forma 𝟎 ∙ ∞
Podemos abordar expresando el producto 𝑓(𝑥) ∙ 𝑔(𝑥) como un cociente (fracción compleja),
𝑓(𝑥)
𝑔(𝑥)
así queda una fracción 1/𝑔(𝑥) (ó 1/𝑓(𝑥)) a la cual se le puede aplicar L’Hôpital.
Ejemplos
sin(5𝑥) 0
(sin(5𝑥))′
5 cos(5𝑥) 5 cos(0) 5
= ⟹ lim
= lim
=
=
𝑥→0
𝑥→0
𝑥→0
3𝑥
0
(3𝑥)′
3
3
3
2 sin(𝑥) − sin(2𝑥) 0
2 cos(𝑥) − 2cos(2𝑥) 0
(2) lim
= ⟹ (𝐿′𝐻ô𝑝𝑖𝑡𝑎𝑙) lim
=
𝑥→0
𝑥→0
𝑥 − sin(𝑥)
0
1 − 𝑐𝑜𝑠(𝑥)
0
(1) lim
63
(este límite necesita más de una Regla de L’Hôpital)
−2 sin(𝑥) + 4 sin(2𝑥) 0
lim
=
𝑥→0
sin(𝑥)
0
(otra vez L’Hôpital)
−2 cos(𝑥) + 8cos(2𝑥) −2 + 8
lim
=
=6
𝑥→0
cos(𝑥)
1
𝑘
1
𝑘
cos (𝑥 ) ∙ 𝑘 ∙ (− 2 )
sin(𝑥 )
0
𝑥 = lim cos (𝑘 ) ∙ 𝑘 = 𝑘
(3) lim
= ⟹ (𝐿′ 𝐻ô𝑝𝑖𝑡𝑎𝑙) lim
1
1
𝑥→+∞
𝑥→+∞
𝑥→+∞
0
𝑥
− 2
𝑥
𝑥
𝑥𝑛 ∞
(4) lim 𝑥 𝑛 𝑒 −𝑥 = lim 𝑥 = .
𝑥→+∞
𝑥→+∞ 𝑒
∞
1
−𝑥
𝑛
porque 𝑒 = 𝑒 𝑥 , como la derivada enésima de 𝑥 es cero, y la de 𝑒 𝑥 es 𝑒 𝑥 de vuelta, queda
0
,
𝑒𝑥
es decir, el límite es igual a 0.
Comentarios: Si bien la regla de L´Hôpital es muy potente, las estrategias del capítulo 2
continúan vigentes y se pueden seguir utilizando.
¡No olvidar verificar numéricamente el resultado, antes de la aplicación de estrategias!
1
1
− 2 = ∞−∞
2
𝑥
𝑥→0 sin (𝑥)
Reduciendo a un mínimo común denominador queda:
∗
𝑥 2 − sin2(𝑥)
0
lim
=
𝑥→0 𝑥 2 ∙ sin2 (𝑥)
0
Si uno intenta aplicar L’Hôpital varias veces en el límite (*), puede observar que la aparición de
varios términos con factores "𝑥" ó "sin(𝑥)" mantiene la indeterminación 0/0, sin importar el
orden de derivación.
(5) lim
Entonces, sustituimos el denominador factorizado 𝑥 2 ∙ sin2 (𝑥) por su infinitésimo equivalente
𝑥4.
𝑥 2 − sin2 (𝑥)
2𝑥 − sin(2𝑥)
2 − 2cos(2𝑥)
lim
= (𝐿′ 𝐻ô𝑝𝑖𝑡𝑎𝑙) lim
= (𝐿′ 𝐻ô𝑝𝑖𝑡𝑎𝑙) lim
4
3
𝑥→0
𝑥→0
𝑥→0
𝑥
4𝑥
12𝑥 2
4sin(2𝑥)
8cos(2𝑥) 1
= (𝐿′ 𝐻ô𝑝𝑖𝑡𝑎𝑙 ) lim
= (𝐿′ 𝐻ô𝑝𝑖𝑡𝑎𝑙 ) lim
=
𝑥→0
𝑥→0
24𝑥
24
3
3.7 Ecuación de la recta tangente y de la
normal a una curva plana.
Sea una curva cuya ecuación es 𝑦 = 𝑓(𝑥).
Tomemos en esta curva un punto
𝑀(𝑥1 , 𝑦1 ) y escribamos la ecuación de la
recta tangente a la curva dada en el punto
𝑀, suponiendo que esta recta tangente no
sea paralela al eje de ordenadas (eje 𝒚).
64
La ecuación de una recta, de coeficiente angular o pendiente 𝑚, que pasa por el punto 𝑀, es
de la forma: 𝑦 − 𝑦1 = 𝑚(𝑥 − 𝑥1 ) ∀𝑃(𝑥, 𝑦) ∈ 𝑎 𝑙𝑎 𝑟𝑒𝑐𝑡𝑎.
Definiciones. Se definen los siguientes elementos geométricos en función de una abscisa
dada 𝑥1 , su ordenada la imagen 𝑦1 = 𝑓(𝑥1 ) y el valor numérico de la primera derivada,
𝑓 ′ (𝑥1 ):
1) Recta tangente: es la recta que pasa por el punto 𝑃(𝑥1 , 𝑦1 ) y pendiente 𝑚 𝑇 = 𝑓′(𝑥1 ),
siempre que 𝑓’(𝑥1 ) exista y sea finito:
𝑦 − 𝑦1 = 𝑓′(𝑥1 ) ∙ (𝑥 − 𝑥1 )
2) Recta normal (o perpendicular a la tangente): es la recta que pasa por el punto
1
𝑃(𝑥1 , 𝑦1 ) y pendiente 𝑚𝑁 = − 𝑓′(𝑥 ), siempre que 𝑓’(𝑥1 ) exista y sea finito no nulo:
1
1
𝑦 − 𝑦1 = −
∙ (𝑥 − 𝑥1 )
𝑓′(𝑥1 )
OBS.:
Si 𝑓’(𝑥1 ) = 0, la recta tangente será horizontal: 𝑦 = 𝑦1 , la normal será vertical: 𝑥 = 𝑥1 .
3.7.1 Longitudes de la tangente, normal, sub tangente y sub normal
̅̅̅̅ , es el segmento de la recta tangente
Definiciones. 1) Segmento tangente: 𝑃𝑄
comprendido entre el punto 𝑃(𝑥1 , 𝑦1 ) y el eje 𝑂𝑥. Su valor está dado por:
𝑦1
𝑦
2
𝑇=| ′
∙ √1 + (𝑓 ′ (𝑥1 )) | = | ′ ∙ √1+(𝑦 ′ )2 |
𝑓 (𝑥1 )
𝑦
𝑥=𝑥1 ,𝑦=𝑦1
̅̅̅̅, es el segmento de la recta normal comprendido entre el punto
2) Segmento normal: 𝑃𝑅
𝑃(𝑥1 , 𝑦1 ) y el eje 𝑂𝑥. Su valor está dado por:
2
𝑁 = |𝑦1 ∙ √1 + (𝑓 ′ (𝑥1 )) | = |𝑦 ∙ √1+(𝑦 ′ )2 |
𝑥=𝑥1 ,𝑦=𝑦1
̅̅̅̅̅, es la proyección del segmento tangente sobre el eje 𝑂𝑥.
3) Segmento subtangente: 𝑄𝑀
Su valor está dado por:
𝑦1
𝑦
𝑆𝑇 = | ′
| = | ′|
𝑓 (𝑥1 )
𝑦 𝑥=𝑥 ,𝑦=𝑦
1
1
̅̅̅̅̅, es la proyección del segmento normal sobre el eje 𝑂𝑥. Su
4) Segmento subnormal: 𝑀𝑅
valor está dado por:
𝑆𝑁 = |𝑦1 ∙ 𝑓 ′ (𝑥1 )| = |𝑦 ∙ 𝑦′|𝑥=𝑥1 ,𝑦=𝑦1
3.7.4 Angulo entre dos curvas
Definición: Los ángulos de intersección de dos curvas cuyas funciones son 𝑓 y 𝑔 se definen
como los ángulos formados por las rectas tangentes a las curvas en su punto de
intersección. Pueden calcularse con la fórmula
𝑚1 − 𝑚2
tan(𝜙) =
1 + 𝑚1 𝑚2
′ (𝑥).
donde 𝑚1 = 𝑓′(𝑥) y 𝑚2 = 𝑔
Si 𝜙 = 90°, se dice que las curvas son ortogonales entre sí.
65
Ejemplo. Halle los ángulos de intersección de las curvas 2𝑥 2 + 𝑦 2 = 20 y 4𝑦 2 − 𝑥 2 = 8.
Solución. Al resolver el sistema de ecuaciones de las curvas se obtiene 𝑦 2 = 4, entonces 𝑦 =
±2. Los puntos de intersección son 4: (±2√2, 2) y (±2√2, −2). Para la primera curva: 𝑦 ′ =
−
2𝑥
,
𝑦
mientras que para la segunda curva, 𝑦 ′ =
(2√2, 2), por ej., resulta que 𝑚1 = −
2∙2√2
2
𝑥
.
4𝑦
Reemplazando las coordenadas del punto
= −2√2 para la primera curva, y 𝑚2 =
2√2
4∙2
=
√2
.
4
Reemplazando 𝑚1 y 𝑚2 en la ecuación de ángulo entre 2 curvas resulta tan(𝜙) → ∞ (ya que
𝑚1 𝑚2 = −1), por lo tanto 𝜙 = 90°. Las curvas son ortogonales.
3.7.5 Interpretación geométrica de la derivada de una función dada en coordenadas polares
Notación. 𝜌 (se lee /ro/): es el radio vector,
𝜃 (se lee /tita/): es el ángulo entre el radio vector y el eje polar,
𝜑 (se lee /fi/) es el ángulo que la recta tangente a la curva, en el punto 𝑃(𝜌, 𝜃), forma con
el eje polar,
𝜇 (se lee /miu/) es el ángulo formado entre el radio vector y la recta tangente.
A menos que algún problema diga lo contrario, tendremos cuidado de utilizar esta
notación.
Supongamos que tenemos una curva cuya función está dada en coordenadas polares:
𝜌 = 𝑓(𝜃).
Además, utilicemos las fórmulas para transformar las coordenadas polares en rectangulares:
𝑥 = 𝜌 cos(𝜃), 𝑦 = 𝜌 sin(𝜃)
Combinando estas ecuaciones resulta la siguiente ecuación paramétrica:
𝒙 = 𝒇(𝜽) 𝐜𝐨𝐬(𝜽), 𝒚 = 𝒇(𝜽) 𝐬𝐢𝐧(𝜽)
Las ecuaciones en negritas constituyen la función paramétrica de la curva, de parámetro 𝜃.
Pendiente de la recta tangente a la curva
Por las ecuaciones en coordenadas rectangulares: 𝑚 𝑇 = tan(𝜑) = 𝑓′(𝑥).
Al ser 𝑓 ahora una función paramétrica en coordenadas polares, esa definición cambia:
𝑑𝑦 𝑑𝑦/𝑑𝜃
𝑚 𝑇 = tan(𝜑) =
=
𝑑𝑥 𝑑𝑥/𝑑𝜃
Como 𝑥 = 𝜌 cos(𝜃), 𝑦 = 𝜌 sin(𝜃), queda:
𝑑
(𝑓(𝜃) sin(𝜃))
𝑑𝜃
tan(𝜑) =
𝑑
(𝑓(𝜃) cos(𝜃))
𝑑𝜃
Por Regla del Producto en el numerador y el denominador POR SEPARADO:
𝑑
𝑑
(𝑓(𝜃)) ∙ sin(𝜃) + 𝑓(𝜃) ∙ 𝑑𝜃 (sin(𝜃))
𝑑𝜃
tan(𝜑) =
𝑑
𝑑
∙ cos(𝜃) + 𝑓(𝜃) ∙
(cos(𝜃))
𝑑𝜃 (𝑓(𝜃))
𝑑𝜃
66
Finalmente, como 𝜌 = 𝑓(𝜃), queda la fórmula para hallar la pendiente de la recta tangente a
la curva de función 𝝆 = 𝒇(𝜽) en un punto 𝑴(𝝆, 𝜽):
tan(𝜑) =
𝜌′ sin(𝜃) + 𝜌 cos(𝜃)
𝜌′ cos(𝜃) − 𝜌 sin(𝜃)
Ahora, supongamos que se cuenta con el
ángulo 𝜇. Por el Teorema de Ángulo Exterior a
un Triángulo,
𝜇 = 𝜑 − 𝜃*
*OBSERVACIÓN: No siempre es así, depende
de las posiciones relativas de 𝜇, 𝜃 y 𝜑. Se utiliza
esta relación a modo de ejemplo.
tan(𝜇) = tan(𝜑 − 𝜃) =
Sustituyendo
tan(𝜑) =
efectuando
las
correspondientes, queda:
tan(𝜑) − tan(𝜃)
1 + tan(𝜑) tan(𝜃)
𝜌′ sin(𝜃)+𝜌 cos(𝜃)
𝜌′ cos(𝜃)−𝜌 sin(𝜃)
y
transformaciones
𝜌′ sin(𝜃) + 𝜌 cos(𝜃) sin(𝜃)
−
𝜌′ cos(𝜃) − 𝜌 sin(𝜃) cos(𝜃)
tan(𝜇) =
𝜌′ sin(𝜃) + 𝜌 cos(𝜃) sin(𝜃)
1+ ′
∙
𝜌 cos(𝜃) − 𝜌 sin(𝜃) cos(𝜃)
[𝜌′ sin(𝜃) + 𝜌 cos(𝜃)] cos(𝜃) − [𝜌′ cos(𝜃) − 𝜌 sin(𝜃)] sin(𝜃)
[𝜌′ cos(𝜃) − 𝜌 sin(𝜃)] cos(𝜃) + [𝜌′ sin(𝜃) + 𝜌 cos(𝜃)] sin(𝜃)
Finalmente, queda la fórmula para hallar el ángulo 𝝁 entre un radio vector y la recta
tangente a la curva de función 𝝆 = 𝒇(𝜽).
tan(𝜇) =
tan(𝜇) =
𝜌
𝜌′
Ejemplo. Demostrar que la recta tangente a la espiral logarítmica 𝜌 = 𝑒 𝑘𝜃 (𝑘: constante)
forma con el radio vector un ángulo constante.
Solución. En efecto, vemos que
𝜌
𝑒 𝑘𝜃
1
tan(𝜇) = = 𝑘𝜃
=
𝜌′ 𝑒 ∙ 𝑘 𝑘
1
Entonces: 𝜇 = tan−1 (𝑘) es constante.
67
3.8 Razón de cambio
Si una cantidad "𝑦" es función del tiempo “𝑡" (si "𝑦" varía con el tiempo "𝑡"), la razón de
cambio de "𝑦" con respecto a "𝑡" es su derivada,
𝑑𝑦
.
𝑑𝑡
Si dos o más variables varían con el
tiempo y dependen entre sí por medio de una ecuación, la relación entre sus o de cambio
puede ser encontrada derivando implícitamente ambos lados de la ecuación (con respecto al
tiempo).
Ejemplo: Una escalera de 25 m reposa sobre una pared
vertical. Si la base de la escalera resbala y se aleja de la
pared a 3 m/s, ¿cuán rápido baja la parte superior de la
escalera cuando la base de la misma está a 7 m de la
pared?
Solución: Sea 𝑥 la distancia de la base de la escalera a
la base de la pared, y sea 𝑦 la distancia de la parte
superior de la escalera a la base de la pared. Como la
base de la escalera se aleja de la pared a una razón de 3
m/s,
𝑑𝑥
𝑑𝑡
= 3, hay que hallar
𝑑𝑦
𝑑𝑡
cuando 𝑥 = 7. Por
Teorema de Pitágoras:
𝑥 2 + 𝑦 2 = (25)2 = 625
Esta es la relación entre 𝑥 e 𝑦. Al derivar ambos miembros respecto a 𝑡 se obtiene
2𝑥
Como
𝑑𝑥
𝑑𝑡
𝑑𝑥
𝑑𝑦
+ 2𝑦
=0
𝑑𝑡
𝑑𝑡
= 3, 𝑥 = 7 ⟹ 72 + 𝑦 2 = 252 ⟹ 𝑦 = 24 m, reemplazando queda:
𝑑𝑦
𝑑𝑦
𝑑𝑡
2 ∙ 7 ∙ 3 + 2 ∙ 24 ∙ 𝑑𝑡 = 0 ⟹
7
= − 8 m/s.
El signo (-) puede interpretarse como un movimiento en sentido contrario al semieje 𝑦
positivo. Hay que tener cuidado porque esa es la velocidad de movimiento del extremo "𝒚”
en ese instante, podría variar en otro instante dado de tiempo y con otra condición dada.
Ejemplo: De un depósito cónico sale agua a una razón de 1 𝑚3 /𝑠. Si el radio de la base del
depósito es de 4 m, y la altura es de 8 m, determine la razón a la que el nivel de agua
desciende cuando está a 2 m de la parte superior.
1
Solución: La fórmula para el volumen V de un cono es 3 𝜋𝑟 2 ℎ, donde 𝑟 es el radio de la base y
ℎ es la altura.
Sea 𝑟 el radio y ℎ la altura de la superficie del agua en el instante 𝑡, y sea 𝑉 el volumen del
𝑟
ℎ
1
agua en el cono (ver figura). Por semejanza de triángulos, 4 = 8 , de donde 𝑟 = 2 ℎ.
Entonces, 𝑉 =
1
3
𝜋𝑟 2 ℎ =
1
12
𝜋ℎ3 . Derivando miembro a miembro:
𝑑𝑉
𝑑𝑡
=
1
𝜋
12
∙ 3ℎ2 ∙
𝑑ℎ
𝑑𝑡
⟹
68
𝑑𝑉
𝑑𝑡
1
4
= 𝜋ℎ2
𝑑ℎ
.
𝑑𝑡
Cuando el nivel de agua está a 2 m de la parte superior, la altura es ℎ = 8 − 2 = 6, y como
𝑑𝑣
𝑑𝑡
= −1 𝑚3 /𝑠 (el signo (-) denota pérdida de volumen) entonces:
𝑑ℎ
𝑑𝑡
=
4 𝑑𝑉
𝜋ℎ 2 𝑑𝑡
⟹
𝑑ℎ
𝑑𝑡
=
4
𝜋 ∙62
∙ (−1) = −
1
9𝜋
𝑚/𝑠, es decir, el nivel de agua desciende a esa
razón de cambio en ese instante de tiempo.
69
CAPÍTULO 4
EXTREMOS DE FUNCIONES DE UNA VARIABLE REAL
4.1 Máximos y mínimos absolutos y relativos. Definiciones. Teoremas.
Definiciones. (1) Se dice que la función 𝒇(𝒙) tiene un máximo absoluto en el punto 𝒙 = 𝒂,
si el valor de la variable “𝑦" es aquí mayor que para cualquier punto 𝑥 del dominio de 𝑓. Es
decir, la función tiene un máximo en 𝑥 = 𝑎 si 𝑓(𝑎) ≥ 𝑓(𝑥) para cualquier 𝒙 ∈ 𝑫𝒐𝒎 𝒇.
(2) Se dice que la función 𝒇(𝒙) tiene un mínimo absoluto en el punto 𝒙 = 𝒂, si el valor de la
variable “𝑦" es aquí menor que en cualquier punto 𝑥 del dominio de 𝑓. Es decir, la función
tiene un mínimo en 𝑥 = 𝑎 si 𝑓(𝑎) ≤ 𝑓(𝑥) para cualquier 𝒙 ∈ 𝑫𝒐𝒎 𝒇.
Los valores máximo y mínimo absolutos son los extremos absolutos de la función.
En el siguiente ejemplo, la
función
𝑦 = 𝑓(𝑥)
alcanza
mínimos absolutos en 𝐴 y 𝐵
porque para todo valor de 𝑥 la
el valor de la imagen 𝑦 será
mayor o igual que el mínimo
absoluto. Por el contrario, 𝐶 NO
contiene un máximo absoluto,
porque existen otros valores de
𝑥 tales que la imagen 𝑦 es
mayor que en ese punto.
Definiciones. (1) Se dice que la función 𝒇(𝒙) tiene un máximo relativo en el punto 𝒙 = 𝒂, si
su valor es aquí mayor que en cualquier punto 𝑥 de cierto intervalo que contiene a 𝑥 = 𝑎.
Es decir, la función tiene un máximo en 𝑥 = 𝑎 si 𝑓(𝑥) ≤ 𝑓(𝑎) para cierto ∆𝒙 positivo o
negativo suficientemente pequeño en valor absoluto.
(2) Se dice que la función 𝒇(𝒙) tiene un mínimo relativo en el punto 𝒙 = 𝒂, si su valor es
aquí menor que en cualquier punto 𝑥 de cierto intervalo que contiene a 𝑥 = 𝑎. Es decir, la
función tiene un mínimo en 𝑥 = 𝑎 si 𝑓(𝑥) ≥ 𝑓(𝑎) para cierto ∆𝒙 positivo o negativo
suficientemente pequeño en valor absoluto.
Los valores máximo y mínimo relativos son los extremos relativos de la función.
70
En el ejemplo anterior, se observa que C es un máximo relativo, pero no un máximo absoluto.
OBS.: Es un error suponer que el valor numérico del máximo o mínimo relativo, que
abreviamos 𝑓(𝑎), ya es respectivamente el mayor y el menor valor de la función 𝑓(𝑥) en todo
su dominio. En el punto del máximo, la función tiene el mayor valor sólo en comparación con
los valores que esta tiene en los puntos 𝑥 suficientemente próximos al punto 𝑥 = 𝑎 que nos
devuelve el valor máximo. En el punto del mínimo, la función tiene el menor valor sólo en
comparación con los valores que esta tiene en los puntos 𝑥 suficientemente próximos al
punto 𝑥 = 𝑎 que nos devuelve el valor mínimo.
4.1.1 Extremos relativos de funciones derivables
Teorema (Condición necesaria para la existencia de un máximo o un mínimo relativos en
funciones DERIVABLES)
Si la función 𝑓 es derivable en cierto dominio y tiene un máximo relativo o mínimo relativo
en el punto 𝑥 = 𝑎 de ese dominio, su derivada en ese punto es igual a cero, es decir.
𝑓 ′ (𝑎) = 0.
La afirmación recíproca no es cierta: si una función tiene derivada nula en 𝑥 = 𝑎, no
necesariamente tiene máximo relativo o mínimo relativo. En el gráfico anterior, 𝑓(𝑥) = 𝑥 3 +
1 tiene derivada cero en 𝑥 = 0 pero 𝑓(𝑥) > 1 para 𝑥 > 0 y 𝑓(𝑥) < 1 para 𝑥 < 0, entonces
𝑓(0) no puede ser
máximo relativo ni
mínimo relativo, por
estar
comprendido
entre dos valores de la
variable 𝑦 en su
vecindad,
digamos,
entre 𝑦 = 0,9 y 𝑦 =
1,1.
4.1.2 Extremos relativos de funciones no derivables
En los siguientes ejemplos explicaremos que en los puntos 𝑥 = 𝑎 donde la función no tiene
derivada, o la derivada tiende al infinito, puede haber máximos o mínimos (absolutos o
relativos), pero puede ocurrir también que en 𝑥 = 𝑎 no haya ni uno ni otro.
Ejemplo 1.
𝑓(𝑥) = |𝑥 − 1| =
𝑥 − 1 𝑠𝑖 𝑥 ≥ 1
.
{
1 − 𝑥 𝑠𝑖 𝑥 < 1
no tiene derivada en 𝑥 =
1 porque sus derivadas
laterales son diferentes:
71
1 𝑠𝑖 𝑥 > 0
𝑓 ′ (𝑥) = {
,
−1 𝑠𝑖 𝑥 < 0
pero tiene un mínimo total (relativo y absoluto).
Ejemplo 2.
𝑓(𝑥) = (1 − 𝑥
3⁄
2⁄
2
3)
no tiene
derivada en 𝑥 = 0 porque
𝑓 ′ (𝑥) → ∞ cuando 𝑥 → 0,
𝑓
′ (𝑥)
=−
√1 − 𝑥 2⁄3
3
√𝑥
y solamente cuenta con
derivadas laterales en 𝑥 = 1
(derivada por la izquierda) y 𝑥 = −1 (derivada por la derecha).
3
Ejemplo 3. Para 𝑓(𝑥) = √𝑥 , 𝑓’(𝑥) también se hace infinita en 𝑥 = 0, 𝑓 ′ (𝑥) =
1
3
3 √𝑥 2
pero la
función no tiene máximo ni mínimo allí.
4.1.3 Puntos críticos
Definición. Los valores 𝑥 = 𝑎 del argumento, en los que la derivada 𝑓′(𝑥) se hace igual a
cero o tiene discontinuidad, se llaman puntos críticos (de primer orden).
ADVERTENCIA: No todo punto crítico contiene un valor máximo o mínimo. Sin embargo, si la
función tiene un máximo o mínimo, debe estar necesariamente en un punto crítico.
Teorema (Condición necesaria para la existencia de un máximo o un mínimo relativos en
CUALQUIER FUNCIÓN)
Si la función 𝑓 tiene un máximo relativo o mínimo relativo en el punto 𝑥 = 𝑎 de ese
dominio, su función derivada en ese punto es igual a cero o tiene discontinuidad.
72
OBS.: El signo de la derivada permanece invariable en el intervalo abierto entre dos puntos
críticos. Esta afirmación se puede demostrar por el Teorema de Bolzano para la función 𝑓′.
4.1.4 Análisis del máximo y mínimo (relativos) de una función derivable mediante la primera
derivada
Regla general (para buscar máximos y mínimos relativos): criterio de la Primera Derivada
Dada una función 𝑦 = 𝑓(𝑥): 1. Hallar 𝑓′(𝑥).
2. Hallar los puntos críticos del argumento 𝑥:
a. resolviendo 𝑓 ′ (𝑥) = 0,
b. determinando los valores de 𝑥 que hacen que 𝑓′(𝑥) sea discontinua.
3. Sea 𝑥 = 𝑐 un punto crítico. Analizar el signo de la primera derivada a la izquierda y a la
derecha de 𝑐.
CASO 1: Si 𝑓 ′ (𝑥) > 0 a la izquierda de 𝑐 y 𝑓 ′ (𝑥) < 0 a la derecha, entonces 𝑓 alcanza un
máximo relativo.
CASO 2: Si 𝑓 ′ (𝑥) < 0 a la izquierda de 𝑐 y 𝑓 ′ (𝑥) > 0 a la derecha, entonces 𝑓 alcanza un
mínimo relativo.
CASO 3: Si 𝑓′(𝑥) tiene el mismo signo a izquierda y derecha de 𝑐, entonces 𝑓 no tiene
máximo ni mínimo.
4.1.5 Análisis del máximo y mínimo (relativos) de una función derivable mediante la segunda
derivada
Teorema. Si 𝑓 ′ (𝑐) = 0, entonces la función tiene un máximo relativo cuando 𝑓 ′′ (𝑐) < 0 y
tiene un mínimo relativo cuando 𝑓 ′′ (𝑐) > 0.
73
Regla general (para buscar máximos y mínimos relativos): criterio de la Segunda Derivada
Dada una función 𝑦 = 𝑓(𝑥): 1. Hallar 𝑓′(𝑥).
2. Hallar los puntos críticos del argumento 𝑥:
a. resolviendo 𝑓 ′ (𝑥) = 0,
b. determinando los valores de 𝑥 que hacen que 𝑓′(𝑥) sea discontinua.
3. Sea 𝑥 = 𝑐 un punto crítico. Analizar el signo de la segunda derivada a la izquierda y a la
derecha de 𝑐.
CASO 1: Si 𝑓 ′′ (𝑐) < 0, entonces 𝑓 alcanza un máximo relativo.
CASO 2: Si 𝑓 ′′ (𝑐) > 0, entonces 𝑓 alcanza un mínimo relativo.
CASO 3: Si 𝑓 ′′ (𝑐) = 0, entonces NO SE PUDE SABER si 𝑓 tiene un máximo relativo en 𝑥 = 𝑐,
por lo que hay que analizar por el criterio de la primera derivada.
OBSERVACIÓN: Notar que estos métodos NO definen si se tiene un máximo o mínimo
absoluto. Para ellos, se pide comparar todos los máximos y mínimos relativos entre sí y con el
rango de la función dada.
4.1.6 Intervalos de monotonía: crecimiento y decrecimiento
Teorema. Sea 𝑓 una función contínua en [𝑎, 𝑏] y derivable en (𝑎, 𝑏):
(1) si 𝑓 ′ (𝑥) > 0 para todo 𝑥 entre 𝑎 y 𝑏 entonces 𝑓 es estrictamente creciente en (𝑎, 𝑏).
(2) si 𝑓 ′ (𝑥) < 0 para todo 𝑥 entre 𝑎 y 𝑏 entonces 𝑓 es estrictamente decreciente en (𝑎, 𝑏).
(3) si 𝑓 ′ (𝑥) = 0 para todo 𝑥 entre 𝑎 y 𝑏 entonces 𝑓 es estrictamente constante en (𝑎, 𝑏).
Para buscar los intervalos de monotonía, creamos intervalos abiertos cuyos extremos sean los
puntos de discontinuidad de la función original y/o los puntos críticos, y verificamos el
teorema anterior.
4.2 Concavidad y convexidad. Definición. Teoremas
74
Definición. Sea 𝑓 una función continua en [𝑎, 𝑏] y derivable en (𝑎, 𝑏).
(1) Se dice que la curva es convexa hacia arriba (o simplemente convexa) en (𝑎, 𝑏) si todos
los puntos de la curva están por debajo de cualquier recta tangente a la curva en este
intervalo, que se llamará de convexidad. En otras palabras, 𝑓 es función convexa en el
intervalo (𝑎, 𝑏).
(1) Se dice que la curva es convexa hacia abajo (o simplemente cóncava) en (𝑎, 𝑏) si todos
los puntos de la curva están por encima de cualquier recta tangente a la curva en este
intervalo, que se llamará de concavidad. En otras palabras, 𝑓 es función cóncava en el
intervalo (𝑎, 𝑏).
4.2.1 Puntos de inflexión
Definición. Los valores 𝑥 = 𝑎 del argumento, que separan un intervalo de concavidad de
un intervalo de convexidad (o viceversa, de convexidad a concavidad) se llaman puntos de
inflexión.
4.2.2 Análisis de puntos críticos que desemboquen en puntos de inflexión
Regla general (para buscar máximos y mínimos): Dada una función 𝑦 = 𝑓(𝑥).
1. Hallar 𝑓′′(𝑥).
2. Hallar los puntos críticos de segundo orden del argumento 𝑥:
a. resolviendo 𝑓 ′′ (𝑥) = 0,
b. determinando los valores de 𝑥 que hacen que 𝑓′′(𝑥) sea discontinua.
3. Sea 𝑥 = 𝑐 un punto crítico de segundo orden. Analizar el signo de la derivada segunda a
la izquierda y a la derecha de 𝑐.
CASO 1: Si los signos de 𝑓′′(𝑥) a la izquierda y a la derecha de 𝑥 = 𝑐 son diferentes,
entonces hay un punto de inflexión.
CASO 2: Si los signos de 𝑓′′(𝑥) a la izquierda y a la derecha de 𝑥 = 𝑐 son iguales, entonces
no hay punto de inflexión.
*OBS.: Existe un criterio de tercera derivada para saber si la función pasa de convexa a
cóncava (𝑓 ′′′ (𝑐) > 0), de cóncava a convexa (𝑓 ′′′ (𝑐) < 0) o si no hay punto de inflexión en 𝑐
(𝑓 ′′′ (𝑐) = 0).
75
4.2.3 Intervalos de concavidad y convexidad
Teorema. Sea 𝑓 una función continua en [𝑎, 𝑏] y derivable en (𝑎, 𝑏).
(1) Si 𝑓 ′′ (𝑥) > 0 para todo 𝑥 entre 𝑎 y 𝑏, entonces 𝑓 es una función cóncava en (𝑎, 𝑏).
(2) Si 𝑓 ′′ (𝑥) < 0 para todo 𝑥 entre 𝑎 y 𝑏, entonces 𝑓 es una función convexa en (𝑎, 𝑏).
(3) Si 𝑓 ′′ (𝑥) = 0 para todo 𝑥 entre 𝑎 y 𝑏, entonces 𝑓 no es cóncava ni convexa en (𝑎, 𝑏).
Para buscar los intervalos de concavidad/convexidad, creamos intervalos abiertos cuyos
extremos sean los puntos de discontinuidad de la función original y/o los puntos críticos de
segundo orden, y verificamos el teorema anterior.
4.3 Asíntotas. Definición. Clasificación.
Frecuentemente es preciso estudiar la curva de una función 𝑦 = 𝑓(𝑥), y así también la
variación de la función correspondiente cuando la abscisa o la ordenada de un punto sobre la
curva, o ambas, tienden al infinito (en valor absoluto). En algunas funciones se puede observar
el caso de que su curva representativa se aproxima indefinidamente a una recta, al tender el
punto hacia el infinito.
Definición: Si la distancia entre una recta 𝑟 y un punto 𝑃 desplazable sobre la curva de una
función 𝑦 = 𝑓(𝑥) tiende a cero cuando el punto 𝑃 tiende al infinito, esta recta recibe el
nombre de asíntota de la curva.
4.3.1 Clasificación
4.3.1.1 Asíntotas verticales
Definición: Si lim− 𝑓(𝑥) = ±∞ o si lim+ 𝑓(𝑥) = ±∞, entonces la recta 𝑥 = 𝑎 es una
𝑥→𝑎
𝑥→𝑎
asíntota vertical de la curva.
Es decir, para determinar las asíntotas verticales, es necesario encontrar los valores 𝑥 = 𝑎 que,
al aproximarse a los mismos por la izquierda o por la derecha (o por ambos lados), el valor de
la variable 𝑦 tienda al infinito.
Observaciones:
1. Una función puede tener infinitas asíntotas verticales.
2. En las funciones racionales las asíntotas verticales se hallan en los valores de 𝐱 que
anulan el denominador.
3. La gráfica de la función no puede cortar a las asíntotas verticales.
76
4.3.1.2 Asíntotas horizontales
Definición: Si lim 𝑓(𝑥) = 𝑏 o bien si lim 𝑓(𝑥) = 𝑏, entonces la recta 𝑦 = 𝑏 es una
𝑥→ −∞
𝑥→ +∞
asíntota horizontal de la curva.
Observaciones:
1. Una función tiene como máximo dos asíntotas horizontales.
2. La gráfica de la función puede cortar a las asíntotas horizontales.
3. Para funciones racionales:
Si el grado del numerador es menor que el grado del denominador, la recta 𝑦 = 0 (el
eje OX) es una asíntota horizontal.
Si el grado del numerador y el del denominador son iguales, la recta 𝑦 = 𝑏 será una
asíntota horizontal (𝑏 indica el cociente entre el numerador y el denominador).
Si el grado del numerador es una unidad mayor que el del denominador, la función
presenta una asíntota oblícua. No hay asíntotas horizontales.
Si el grado del numerador es dos o más unidades mayor que el del denominador,
entonces hay asíntota horizontal.
4.3.1.3 Asíntotas oblícuas
Definición: La función 𝑦 = 𝑓(𝑥) cuenta con una asíntota oblícua, si y sólo si estos límites
existen y son finitos:
𝑓(𝑥)
𝑥→±∞ 𝑥
𝑚 = lim
… pendiente de la asíntota oblícua
𝑏 = lim 𝑓(𝑥) − 𝑚𝑥 … ordenada al origen de la asíntota oblícua
𝑥→±∞
Entonces, la asíntota oblícua tiene la forma 𝑦 = 𝑚𝑥 +.
Para determinar los valores de 𝑚 y 𝑏 tenemos en cuenta que cuando 𝑥 → ∞ la recta y la curva
tienen valores próximos, es decir:
𝑓(𝑥) ≈ 𝑚𝑥 + 𝑏; o también: lim {𝑓(𝑥) − (𝑚𝑥 + 𝑏)} = 0, … (*)
𝑥→∞
Dividiendo entre 𝑥:
lim {
𝑥→∞
𝑓(𝑥)
𝑏
−𝑚− }=0,
𝑥
𝑥
𝑏
𝑥
y como → 0 cuando 𝑥 → ∞, se tiene:
𝑓(𝑥)
𝑥→∞ 𝑥
𝑚 = lim
y conociendo 𝑚 hallamos 𝑏 con la relación (*).
77
Observaciones:
1.
2.
3.
4.
Una función puede tener como máximo dos asíntotas oblícuas.
Si una función tiene asíntota oblicua, entonces no tiene asíntota horizontal.
Si una función tiene asíntota horizontal, entonces no tiene asíntota oblícua.
Si en una función racional el grado del numerador es dos o más unidades mayor que el
del denominador, entonces no hay asíntota oblícua.
𝑥2 − 2
Ejemplo: 𝑓(𝑥) = 2𝑥 + 3
3
Asíntota vertical: 𝑥 = − 2
1
Asíntota oblícua: 𝑦 = 2 𝑥 −
3
4
Asíntota horizontal: no tiene, por tener
asíntota oblícua,
4.4 Esquema general para el análisis de funciones
El análisis de funciones se reduce generalmente a la determinación de los siguientes
elementos:
(1) El dominio y el rango de la función.
(2) Los puntos de discontinuidad de la función.
(3) Los puntos de máximo y mínimo, absoluto y relativo, de la función.
(4) Los intervalos de crecimiento y decrecimiento de la función.
(5) Los puntos de inflexión.
(6) Los intervalos de concavidad y convexidad de la función.
(6) Las asíntotas de la gráfica de la función.
Este análisis permite construir la gráfica de una función, con más detalles que los obtenidos en
el Capítulo 1. A veces resulta más conveniente trazar los elementos de la gráfica
simultáneamente con el análisis.
78
Observación 1: Si la función estudiada 𝑦 = 𝑓(𝑥) es par, será suficiente analizar la función y
construir su gráfica para los valores positivos del argumento. Para los valores negativos del
argumento la gráfica de la función se construye teniendo en cuenta que una función par tiene
su gráfica simétrica respecto al eje de ordenadas.
Observación 2: Si la función estudiada 𝑦 = 𝑓(𝑥) es impar, será suficiente analizar la función
para los valores positivos del argumento. La gráfica de esta función es simétrica respecto al
origen de coordenadas.
4𝑥
Ejemplo: Analizar la función 𝑔(𝑥) = 𝑥 2 +4. Hallar:
1) Sus máximos y mínimos relativos e intervalos de crecimiento y decrecimiento
2) Sus puntos de inflexión e intervalos de concavidad y convexidad
3) Sus asíntotas
Solución: Vemos que en la primera derivada:
𝑔′ (𝑥) =
4(𝑥 2 + 4) − 4𝑥(2𝑥) 16 − 4𝑥 2 4(4 − 𝑥 2 )
= 2
=
= 0 ⟹ 𝑥 = ±2
(𝑥 + 4)2 (𝑥 2 + 4)2
(𝑥 2 + 4)2
La segunda derivada devuelve:
Análisis de máximos/mínimos relativos e intervalos de monotonía:
𝑥∈
Intervalo*
𝑥 ∈ (−∞, −2)
𝑥 = −2
𝑥 ∈ (−2, +2)
𝑥 = +2
𝑥 ∈ (+2, +∞)
-3
0
3
𝑔′ es…
−
0
+
0
−
𝑔′′ en el
punto
crítico es…
Entonces
𝑥 es
y el intervalo es de…
decrecimiento
+
mín. rel .
crecimiento
−
máx. rel.
decrecimiento
* Se puede elegir CUALQUIER valor de 𝑥 perteneciente al intervalo.
Como el rango de la función es [−1, +1], y los mínimos y máximos absolutos ocurren cuando
𝑥 = ±2, se concluye que los máximos relativos también son absolutos.
79
Además: 𝑔′′ (𝑥) =
8𝑥(𝑥 2 −12)
(𝑥 2 +4)
= 0 ⟹ 𝑥 = 0; ±√12
Análisis de puntos de inflexión e intervalos de concavidad/convexidad:
𝑥∈
Intervalo*
𝑥 ∈ (−∞, −√12)
𝑔′′ es…
−4
𝑔′′′ en el
pto. crítico
de 2° orden
es…
−
+
𝑥 ∈ (−√12, 0)
𝑥=0
−2
+
−
𝑥 ∈ (0, +√12)
+2
0
−
0
+
𝑥 = +√12
+4
y el intervalo es
de…
convexidad
0
𝑥 = −√12
𝑥 ∈ (+√12, +∞)
Entonces 𝑥 es
pto. inflexión
concavidad
pto. inflexión
convexidad
pto. inflexión
+
concavidad
Análisis de asíntotas
Como 𝑔(𝑥) es una función racional cuyo denominador no se anula, se concluye que no tiene
asíntota vertical.
Para asíntota horizontal:
4𝑥
𝑥→∞ 𝑥 2 +4
𝑦 = lim 𝑓(𝑥) = lim
𝑥→∞
4⁄
𝑥
𝑥→∞ 1+4⁄𝑥 2
= lim
0
= 1 = 0 . Entonces, 𝑔 tiene una asíntota horizontal en
𝑦 = 0.
Como 𝑔 tiene asíntota horizontal, se concluye que no tendrá asíntota oblicua.
4.5 Optimización
Un problema de optimización consiste en optimizar (minimizar o maximizar) el valor de una
variable. En otras palabras se trata de calcular o determinar el valor mínimo o el valor máximo
de una función de variable real 𝑦 = 𝑓(𝑥).
80
Se debe tener presente que la variable que se desea minimizar o maximizar debe ser
expresada como función de otra de las variables relacionadas en el problema.
En ocasiones es preciso considerar las restricciones que se tengan en el problema, ya que éstas
generan igualdades entre las variables que permiten la obtención de la función que se quiere
minimizar o maximizar.
En este tipo de problemas se debe contestar correctamente las siguientes preguntas:
(1) ¿Cuál es la magnitud que se desea optimizar? (es decir, hallar su valor máximo o mínimo)
(2) ¿La magnitud de la pregunta (1) depende de otra única magnitud? Si es así, cuál es el valor
de la 2da magnitud que hace que la 1ra magnitud sea máxima o mínima? ¿Cuál es el valor
máximo o mínimo de esa 1ra magnitud?
𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑 𝑚á𝑥𝑖𝑚𝑎 𝑜 𝑚í𝑛𝑖𝑚𝑎 = 𝑓(𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑 2)
(2) Si existen más de dos magnitudes: ¿qué restricciones o relaciones adicionales aparecen en
el problema? Por ej., alguna relación explícita o implícita entre las otras magnitudes:
𝐺(𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑 2, 𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑 3) = 0
Luego, intentar hallar una relación explícita 𝑦 = 𝑔(𝑥) entre las magnitudes, y reemplazar esta
relación en la ecuación de la parte (2).
Ejemplo 1. Una caja con base cuadrada y parte superior abierta debe tener un volumen de
50 𝑚3 . Encuentre las dimensiones (lado de base, altura) que minimicen la cantidad de material
que va a ser usado, si se sabe que se debe comprar planchas de material a 10.000 Gs por 𝑚2 .
¿Cúanto material deberá comprarse?
Solución. La idea central del problema es comprar la menor cantidad posible de 𝑚2 para
ahorrar dinero. Concluimos que el área 𝑨 debe ser mínima.
𝐴 = á𝑟𝑒𝑎 𝑙𝑎𝑡𝑒𝑟𝑎𝑙 + á𝑟𝑒𝑎 𝑑𝑒 1 𝑏𝑎𝑠𝑒
𝐴 = 𝑃𝑒𝑟í𝑚𝑒𝑡𝑟𝑜 𝑑𝑒 𝑏𝑎𝑠𝑒 ∙ ℎ + 𝐿2
𝐴 = 4𝐿ℎ + 𝐿2 … (1)
Como 𝐴 depende de 𝐿 y ℎ, buscamos una relación implícita entre
𝐿 y ℎ. Esta relación se da por el volumen: 𝐿2 ℎ = 50, de donde ℎ =
50
. Reemplazando en (1):
𝐿2
𝐴 = 4𝐿 (
50
) + 𝐿2 ⟹
𝐿2
𝐴 = 𝐿2 + 200𝐿−1
Derivamos A en función de L e igualamos a cero:
𝑑𝐴
2𝐿3 − 200
= 2𝐿 − 200𝐿−2 = 0 ⟹
=0
𝑑𝐿
𝐿2
⟹
3
𝐿 = √100 𝑚 ≈ 4,64 𝑚
81
⟹ ℎ=
50
≈ 2,32 𝑚
4,642
Verificando los valores de A a izquierda y a derecha de 4,64 m, y también en 4,64 m:
Derivando nuevamente A en función de L:
𝑑2 𝐴
= 2 + 400𝐿−3 > 0,
𝑑𝐿2
con lo cual se demuestra que el valor de L hallado nos devuelve el área mínima:
𝐴 = 4 ∙ 4,64 ∙ 2,32 + 4,642 = 64,58 𝑚2
1
Ejemplo 2. El costo total de producción de 𝑥 unidades diarias de un artículo es 4 𝑥 2 − 35𝑥 +
25 dólares. Demostrar que el costo de producción diaria de una unidad del artículo tiene un
mínimo relativo y hallar dicho valor.
1
4
1
2
Solución. Sea 𝑦 = 𝑥 2 + 35𝑥 + 25. Derivando e igualando a cero: 𝑦 ′ = 𝑥 − 35 = 0, de
1
donde 𝑥 = 70 unidades. Derivando de vuelta queda 𝑦 ′′ = > 0, con lo que se justifica que se
2
tiene un costo mínimo.
82