Robótica
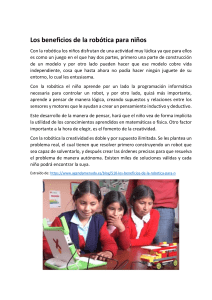
Elementos básicos de un robot
ACTUADORES
Y
SENSORES
Control
Actuadores
Sistema
electromecánico
Mundo
Sensores
Robot
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
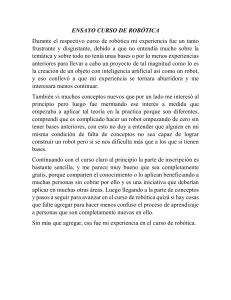
Motores de corriente continua
• Devanados en rotor
• Conmutación electromecánica (colector)
• Velocidad = f(Intensidad)
ACTUADORES
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
1
Robótica
Motores de corriente continua sin escobillas
• Devanados en estator
• Conmutación electrónica
• Sensores de posición del rotor
Motores paso a paso
• Permite control de posición en bucle abierto (si no se pierden
pasos)
Paso completo
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Motores de corriente alterna
M.A.S.
Robótica
Robótica
Miguel Ángel Salichs
Reductores
• Velocidad = f(frecuencia)
• Es necesario un control electrónico
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Medio paso
• Permiten aumentar el par / reducir la velocidad
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
2
Robótica
Tipos de sensores
•
•
•
•
•
SENSORES
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Tipos de sensores
•
•
•
•
•
M.A.S.
Robótica
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Sensores de posición / movimiento del robot
Posición / Movimiento del robot
Contacto
Distancia del entorno
Posición relativa de balizas activas
Posición relativa de objetos / reconocimiento de objetos
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Posición / Movimiento del robot
Contacto
Distancia del entorno
Posición relativa de balizas activas
Posición relativa de objetos / reconocimiento de objetos
• Sensores angulares
• Sensores inerciales
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
3
Robótica
Sensores de posición / movimiento del robot
Sensores de posición / movimiento del robot
Sensores angulares
Sensores angulares
• Potenciómetros
• Sincro/Resolvers
• Encoders
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Potenciómetros
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
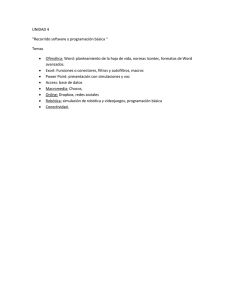
Sensores de posición / movimiento del robot
Sensores de posición / movimiento del robot
Sensores angulares
Sensores angulares
Sincro/Resolvers
Encoders
Sincro: 120º
Resolver: 90º
Incremental
Absoluto
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Miguel Ángel Salichs
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
4
Robótica
Sensores de posición / movimiento del robot
Sensores de posición / movimiento del robot
Sensores inerciales (I)
Sensores inerciales (II)
• Giróscopos mecánicos
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
• Otros tipos de giróscopos
Robótica
Miguel Ángel Salichs
Sensores de posición / movimiento del robot
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Sensores inerciales (IV)
• Acelerómetros
• Sistemas de Navegación Inercial (INS)
– La posición se mide integrando dos veces la señal de acelerómetros
• Pequeños errores crecen en el tiempo como consecuencia de la integración
M.A.S.
Miguel Ángel Salichs
Sensores de posición / movimiento del robot
Sensores inerciales (III)
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Robótica
Miguel Ángel Salichs
– Los ángulos se miden con giróscopos
– La posición se mide con acelerómetros
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
5
Robótica
Tipos de sensores
•
•
•
•
•
Sensores de contacto
Movimiento del robot
Contacto
Distancia del entorno
Posición relativa de balizas activas
Posición relativa de objetos / reconocimiento de objetos
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
• Sensores de tacto
– Todo / Nada
– Continuos
• Sensores de fuerza / par
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Tipos de sensores
Robótica
Miguel Ángel Salichs
Medida de distancia del entorno
• Principio físico
•
•
•
•
•
Movimiento del robot
Contacto
Distancia del entorno
Posición relativa de balizas activas
Posición relativa de objetos / reconocimiento de objetos
–
–
–
–
Tiempo de vuelo
Desfase
Triangulación
Intensidad
• Tipo de señal
– Radio (RAdio Direction And Ranging RADAR)
– Luz (LIght Direction And Ranging LIDAR)
• Ordinaria
• Laser
– Sonido (SOund Navigation And Ranging SONAR)
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
6
Robótica
Medida de distancia del entorno
Medida de distancia del entorno
Lidar
SONAR
• Mide el tiempo de vuelo
• Ventajas
• Principio físico
–
–
–
–
– Barato
• Desventajas
– Ancho del haz
– Reflexiones
– Lento
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Medida de distancia del entorno
Medida de distancia del entorno
LIDAR. Sistemas basados en medida de tiempo de vuelo
LIDAR. Sistemas basados en medida de desfase
• Envían un pulso muy breve
• Sistema de medida de distancia a un punto
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Tiempo de vuelo
Desfase
Intensidad
Triangulación
Robótica
Miguel Ángel Salichs
• Envían una señal continua
• Sistema de medida de distancia a un punto
• El rango de medida depende de la longitud de onda de la
modulación
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
7
Robótica
Medida de distancia del entorno
Medida de distancia del entorno
LIDAR. Medidas espaciales con sistemas puntuales
LIDAR. Comparación
• Para tener medidas espaciales son necesarios sistemas de
espejos que hagan el correspondiente barrido
• Los LIDAR basados en tiempo de vuelo son mejores que los
basados en medida de desfase en:
– Distancia
– Falta de ambigüedad de la medida
• Los LIDAR basados en medida de desfase son mejores que los
basados en tiempo de vuelo en:
– Precisión
Son los más usados en robótica
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
•
•
•
•
•
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
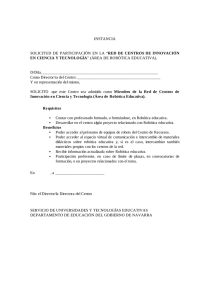
Medida de distancia del entorno
Medida de distancia del entorno
LIDAR. Sistemas basados en intensidad reflejada
LIDAR. Sistemas basados en triangulación (I)
Iluminación: IR
Detector: Sensor IR
Muy poco precisos
Solo para pequeñas distancias
La medida depende del color del objeto que refleja la luz
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Robótica
Robótica
Miguel Ángel Salichs
• Iluminación: Láser
• Detector: Cámara TV
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
8
Robótica
Medida de distancia del entorno
Tipos de sensores
LIDAR. Sistemas basados en triangulación (II)
• Iluminación: Láser / LED
• Detector: CCD / PSD
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
•
•
•
•
•
Robótica
Miguel Ángel Salichs
Medida de posición relativa de balizas activas
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Medida de posición relativa de balizas activas.
Balizas emisoras de campos magnéticos
• Baliza: Campo magnético terrestre
• Sensores: Brújulas magnéticas
• Tipos de balizas
–
–
–
–
–
Movimiento del robot
Contacto
Distancia del entorno
Posición relativa de balizas activas
Posición relativa de objetos / reconocimiento de objetos
Emisoras de campos magnéticos
Emisoras de campos gravitatorios
Emisoras de radio-frecuencia
Emisoras de ultrasonidos
Emisoras de luz
– Existen distintos tipos, basados en las diferentes formas de medir un
campo magnético.
– Sufren interferencias con líneas eléctricas y estructuras de acero.
• Medidas
– Distancia
– Orientación
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
9
Robótica
Medida de posición relativa de balizas activas.
Medida de posición relativa de balizas activas.
Balizas emisoras de campos gravitatorios
Balizas emisoras de señales de radio (I)
• Baliza: Campo gravitatorio terrestre
• Sensores: Inclinómetros
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
• Global Positioning System (GPS)
– Basado en medida de distancia a 4 satélites (por desfase)
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Medida de posición relativa de balizas activas.
Medida de posición relativa de balizas activas.
Balizas emisoras de señales de radio (II)
Balizas emisoras de señales de ultrasonidos
• GPS diferencial
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
M.A.S.
Robótica
• GPS basado en desfase de onda portadora
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
10
Robótica
Medida de posición relativa de balizas activas.
Tipos de sensores
Balizas emisoras de señales luminosas
•
•
•
•
•
• Balizas naturales
– Estrellas
Movimiento del robot
Contacto
Distancia del entorno
Posición relativa de balizas activas
Posición relativa de objetos / reconocimiento de objetos
• Balizas artificiales
– LEDs
– Tubos fluorescentes
– etc.
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Medida de posición relativa de objetos
Medida de posición relativa de objetos
Sistemas basados en marcas ópticas pasivas
• Marcas ópticas pasivas
• Reflectores
– Reflectores
– Marcas visuales
• Objetos naturales
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
• Marcas visuales
M.A.S.
11
Robótica
Medida de posición relativa de objetos
Medida de posición relativa de objetos
Objetos naturales
Objetos naturales
• Visión artificial
• Visión estereoscópica
– Una cámara (Flujo óptico)
– Dos cámaras
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
Univ. Carlos III de Madrid
Ing. de Sistemas y Automática
Robótica
Miguel Ángel Salichs
• Flujo óptico
M.A.S.
12