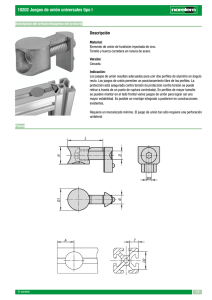
Ventaja mecánica Según (González, 2008) La ventaja mecánica de un mecanismo o una transmisión se define como el cociente entre la fuerza o momento disponible en el punto o eslabón de salida y la fuerza o momento que es necesario aplicar en la entrada. Representa la multiplicación de esfuerzo conseguida por ese mecanismo o transmisión. La potencia 𝑃 en un sistema mecánico se define como el producto punto o escalar del vector de fuerza 𝐹 y el vector de velocidad 𝑉 en cualquier punto: Según (Norton, 2009) 𝑃 = 𝐹. 𝑉 (1.1a) 𝑃 = 𝐹𝑥 𝑉𝑥 + 𝐹𝑦 𝑉𝑦 En un sistema rotatorio, la potencia P se transforma en el producto del par de torsión T y de la velocidad angular w la que, en dos dimensiones, tiene la misma dirección (z): 𝑃 = 𝑇𝑤 (1.2b) La potencia fluye a través de un sistema pasivo y: 𝑃𝑒𝑛𝑡 = 𝑃𝑠𝑎𝑙 + 𝑝é𝑟𝑑𝑖𝑑𝑎𝑠 (1.3c) La eficiencia mecánica se define como: 𝑃 𝜀 = 𝑃𝑠𝑎𝑙 (1.4d) 𝑒𝑛𝑡 Los sistemas de mecanismos articulados pueden ser muy eficientes si están bien hechos con cojinetes de baja fricción en todos los pivotes. Las pérdidas con frecuencia menores al 10%. Por simplicidad, en el análisis siguiente se supondrá que las pérdidas son cero (es decir, un sistema conservador). Entonces, si 𝑇𝑒𝑛𝑡 y 𝑊𝑒𝑛𝑡 representan par de torsión y velocidad angular de entrada y Tsal y wsal representan par de torsión y velocidad angular de salida, entonces: 𝑃𝑒𝑛𝑡 = 𝑇𝑒𝑛𝑡 𝑊𝑒𝑛𝑡 𝑃𝑠𝑎𝑙 = 𝑇𝑠𝑎𝑙 𝑊𝑠𝑎𝑙 𝑃𝑠𝑎𝑙 = 𝑃𝑒𝑛𝑡 𝑇𝑠𝑎𝑙 𝑊𝑠𝑎𝑙 = 𝑇𝑒𝑛𝑡 𝑊𝑒𝑛𝑡 (1.5e) (1.6f) 𝑇𝑠𝑎𝑙 𝑊𝑠𝑎𝑙 = 𝑇𝑒𝑛𝑡 𝑊𝑒𝑛𝑡 Observe que la relación de par de torsión 𝑚 𝑇 = 𝑇𝑠𝑎𝑙 /𝑇𝑒𝑛𝑡 es la inversa de la relación de la velocidad angular. La ventaja mecánica (𝑚𝐴 ) se define como: 𝑚𝐴 = (1.7e) 𝐹𝑠𝑎𝑙 𝐹𝑒𝑛𝑡 Si se supone que se aplican las fuerzas de entrada y salida con los radios 𝑟𝑒𝑛𝑡 y 𝑟𝑠𝑎𝑙 , perpendiculares a sus vectores de fuerza respectivos, 𝐹𝑠𝑎𝑙 = 𝑇𝑠𝑎𝑙 𝑟𝑒𝑛𝑡 (1.8f) 𝐹𝑒𝑛𝑡 = 𝑇𝑒𝑛𝑡 𝑟𝑠𝑎𝑙 Al sustituir las ecuaciones 1.8f y 1.7b se obtiene una expresión en función del par de torsión. 𝑇 𝑟 𝑚𝐴 = (𝑇𝑒𝑛𝑡 ) (𝑟 𝑠𝑎𝑙 ) 𝑠𝑎𝑙 𝑒𝑛𝑡 (1.9a) Al sustituir la ecuación 1.6f en la ecuación 1.9c se obtiene 𝑊𝑠𝑎𝑙 𝑟𝑙 𝑚𝐴 = ( )( ) 𝑊𝑒𝑛𝑡 𝑟𝑠𝑎𝑙 y al sustituir la ecuación 1.10b se obtiene 𝑊4 𝑊2 = 𝑂4 𝐵 𝑠𝑒𝑛 𝜇 𝑂2 𝐴 𝑠𝑒𝑛 𝑣 = 𝑚𝐴 (1.10b) 𝑂4 𝐵 𝑠𝑒𝑛 𝜇 𝑟𝑒𝑛𝑡 𝑚𝐴 = ( )( ) 𝑂2 𝐴 𝑠𝑒𝑛 𝑣 𝑟𝑠𝑎𝑙 (1.11c) En el grafico se muestra que cualquier elección de 𝑟𝑒𝑛𝑡 y 𝑟𝑠𝑎𝑙 , la ventaja mecánica responde a los cambios de los ángulos 𝑣 y 𝜇 de manera opuesta a la de la relación de velocidad angular. Si el ángulo de transmisión m se va a cero (lo que no se quiere que suceda) la ventaja mecánica también se va a cero, lo que es indiferente para la suma de fuerza de torque de entrada aplicada; pero cuando el ángulo ν se va a cero (lo que puede y hace dos veces por ciclo en un mecanismo de Grashof), ¡la ventaja mecánica se vuelve infinita! Gráfico 1: Mecanismo agarrotamiento “triturador de roca” Éste es el principio de un mecanismo triturador de roca, como se muestra en la grafico 1 Una fuerza moderada aplicada al eslabón 2 puede generar una fuerza enorme en el eslabón 4 para triturar la roca. Desde luego, no se puede esperar alcanzar la salida teórica de una fuerza o par de torsión infinito, ya que las resistencias de los eslabones y juntas limitarán las fuerzas y pares de torsión máximos obtenibles. Otro ejemplo común de un mecanismo que aprovecha esta ventaja mecánica teóricamente infinita en la posición de agarrotamiento son unas pinzas de presión ViseGrip. Estas dos relaciones, la relación de velocidad angular y la ventaja mecánica, proporcionan índices de mérito útiles sin dimensiones, mediante los cuales se puede juzgar la calidad relativa de varios diseños de mecanismos que pueden proponerse como soluciones Bibliografía González, A. P. (2008). Ventaja mecánica. Enciclopedia Virtual de Ingeniería Mecánica. Norton, R. L. (2009). Diseño de máquinarias. Estado de México: McGRAWHILL/INTERAMERICANA E.