Microcontrolador PIC
Ing. Diego Vásconez,Mg
1
Introducción
Microcontroladores
2
Introducción
Microcontroladores
3
Microcontroladores
• Son circuitos integrados que incorporan todos los
bloques funcionales de un Sistema
Microprocesador en un único encapsulado.
• Necesitan una tensión continua (5V, 3.3V, 2.5V,
1.5V...) y un oscilador para funcionar.
• Interpretan (decodifican) combinaciones de bits
(instrucciones) y generan señales digitales internas
y/o externas.
• Ejecutan de manera continua una secuencia de
instrucciones (programa) que permite controlar un
sistema o subsistema electrónico.
4
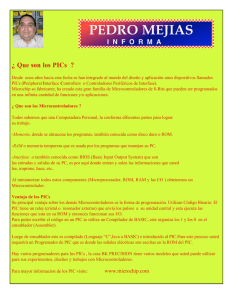
Sistema mínimo microprocesador
El sistema mínimo está basado en la estructura de von Newman.
• Sus bloques básicos son los siguientes:
• CPU, Central Process Unit o Unidad Central de Proceso. Formada por dos
bloques: Unidad de Control y Unidad de Proceso.
• Memoria, donde residen las instrucciones del programa y sus datos.
• Módulos E/S, elementos encargados de recibir y entregar información al
exterior.
Los tres módulos están conectados entre sí por medio de los Buses de
Comunicación. Cada bus está formado por un conjunto de conductores por los
cuales se transmite la información digital.
5
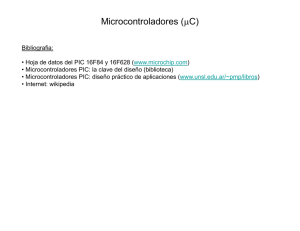
Microprocesadores y
microcontroladores
6
Microprocesadores y
microcontroladores
7
Microcontroladores PIC.
Características
•
•
•
•
•
•
•
Eficiencia del código: permiten gran compactación de
programas
Rapidez de ejecución: a f de 20MHz 5 millones de instr./seg.
Seguridad en acceso: Separa memoria de datos y de
programa
Juego reducido de instrucciones
Compatibilidad de pines y código entre dispositivos (familias)
Gran variedad de versiones en distintos encapsulados (8 - 84
pines)
Herramientas de desarrollo software y hardware abundantes y
de bajo coste
8
Familias de PIC
Familia PIC16C5X
•
•
•
•
Encapsulados de 14, 18, 20 y 28 pines
Instrucciones de 12 bits
Juego de 33 instrucciones
Es la familia base de partida de los PIC
Familia PIC16CXXX/16FXXX
• Encapsulados desde 18 hasta 68 pines (DIP, SSOP, PLCC,
QFP)
• Instrucciones de 14 bits en Memoria de Programa
• Juego de 35 instrucciones
• Gran variedad de módulos integrados
9
Familia PIC16CXXX/16FXXX
• Puertos de Entrada/Salida
• Puerto Esclavo Paralelo (PSP)
• Temporizadores/contadores (TMR0, TMR1, TMR2)
•
Captura / Comparación / PWM (CCP1 y CCP2)
• Conversión Analógica / Digital (A/D)
• Transmisor Receptor Asíncrono Síncrono Universal (USART)
• Puerto Serie Síncrono (BSSP ó MSSP)
• Memoria EEPROM de datos
• FLASH EEPROM de programa modificable desde el código
10
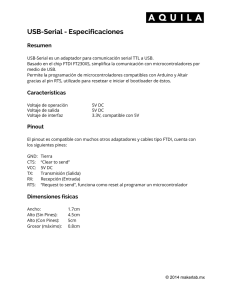
Familia PIC16CXXX/16FXXX
• Microcontrolador
• PIC16F877
• (gama media)
PIC. Proceso de diseño
• Diseño software: el micro sin un programa cargado en su
memoria no hace nada, cuando el micro esté grabado con un
programa eficiente el conjunto empezará a funcionar
• Diseño del programa y escritura del código fuente en
ensamblador o en C
• Pruebas, verificación y modificación del código:
Simulación del programa (puro software) o emulación
dentro del circuito de aplicación (software y hardware)
• Grabación del código máquina en la memoria del
microcontrolador
–Emulación o
–Depuración sobre
–PCB
–Edición del código,
–1ª depuración y
–simulación
Tecnología Electrónica
–Grabación del micro
12
 0
0