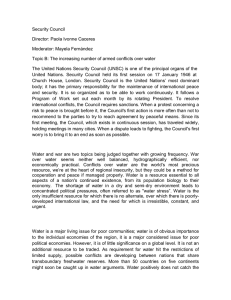
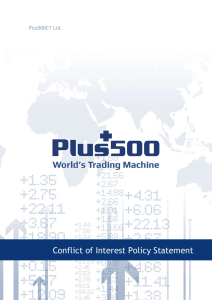
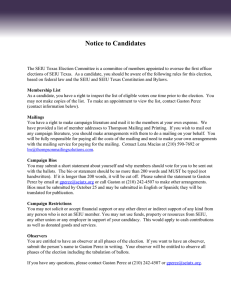
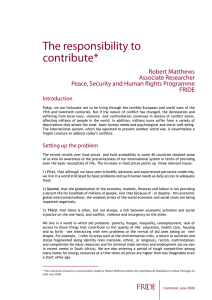
Bogota, Colombia Observers’ Manual for the Swedish TCT Training May 2-6, 2016 Prepared by: Christer Hyden (Lund University) Annie Chang (WRI) Natalia Lleras (WRI/Despacio) 1 | WRI.org Road safety analysis has traditionally relied solely on traffic crash data. The greatest drawback of crash-based approach is that it is reactive – a significant number of crashes need to occur and be recorded before action can take place. With the crash-based approach, a minimum of three to five years of crash data before and after implementation is needed for intervention evaluation. The following paradox ensues: road safety practitioners have to wait for crashes to occur in order to prevent them 1. The shortcomings of crash-based approach hamper safety analysis at a greater scale in developing countries due to the poor quality and reliability of crash data. In recent decades, surrogate safety has emerged as a proactive approach to road safety analysis. Surrogate safety offers reliable analytical methods that utilize observable non-crash traffic events and other surrogate data. Recent progress in sensing technologies and statistical modelling has made widespread adoption of surrogate safety feasible and inexpensive. To be useful for traffic safety applications, a surrogate measure should satisfy two conditions2: (i) a surrogate measure should be based on an observable non-crash event that is physically related in a predictable and reliable way to crashes; and (ii) there exists a practical method for converting the non-crash events into corresponding crash frequencies and/or severities. The most developed surrogate measure is traffic conflicts. A traffic conflict takes place when “two or more road users approach each other in space and time to such an extent that a crash is imminent if their movements remain unchanged.” Traffic conflicts are more frequent than traffic crashes and are of marginal social cost. As the process of a serious conflict is almost identical to that of a serious crash, traffic conflicts provide insight into the failure mechanism that leads to road collisions. The intuitive notion that conflicts are potential crashes, but of a lower degree of danger suggests that a continuum representation between conflicts and crashes can be assumed. In 1987, Hyden introduced a pyramidal visualization of the hypothesized continuum for road user interactions from normal, undisturbed passage, to a fatal traffic crash, as shown in the figure below. Hyden’s Safety Pyramid illustrates that non-conflicts form the majority of observed encounters while the observed frequency (or alternatively, probability) of occurrence decreases with increasing severity3. 2 | WRI.org 1 Saunier, N, N. Mourji, and B. Agard. 2011. Using data mining techniques to understand collision processes. Conference proceedings: Canadian Multidisciplinary Road Safety Conference, organized by Canadian Association of Road Safety Professionals, Halifax, Nova Scotia. 2 Tarko, A., G. Davis, N. Saunier, T. Sayed, and S. Washington. 2009. Surrogate measures of safety. White paper: Transportation Research Board ANB20(3) Subcommittee on Surrogate Measures of Safety, ANB20 Committee on Safety Data Evaluation and Analysis. 3 Chin, H. C. and S. T. Quek. 1997. Measurement of traffic conflicts. Safety Science 26 (3): 169-185. 3 | WRI.org The Swedish traffic conflict technique consists of a team of human observers who have been trained to recognize, assess, and record the frequency and severity of traffic conflicts. It focuses on situations where two road users would have collided had neither of them made any kind of evasive maneuver. In the Swedish TCT, the severity scale (in the continuum hierarchy) is established by applying two values: time-to-accident (TA) and conflicting speed (CS). TA is defined as the time remaining from when the evasive action is taken until the collision would have occurred if the road users had continued with unchanged speeds and directions. The TA value can be calculated based on the observer’s estimates of distances (D) and conflicting speed (CS), where: D= CS = distance of the relevant road user (evading road user) to the potential point of collision at the moment when the evasive action is taken speed of the relevant road user at the moment when evasive action is taken It is important to note that the speed of the road user who takes the evasive action is taken into account in determining conflict severity. TA values can be determined using TA Table. Together with estimated values of CS and TA, observers can determine whether the conflict was ‘serious’ or ‘non-serious’ using the Conflict Severity Diagram. Qualitatively, a serious conflict is characterized by suddenness and harshness in action of at least one of the road users involved. The relevant road user is the road user relevant for the defining of TA and CS values. This can be decided by either: If only one road user takes evasive action, then, the road user who takes the evasive action is the ‘relevant’ road user If both road users take evasive action, then, the road user whose combination of TA and CS produces the value with the lower risk is the ‘relevant’ road user 4 Adopted from “The Swedish Traffic Conflict Technique Observers’ Manual” by Lund University, Dr. Lars Ekman and Dr. Sverker Almqvist. 2001. 4 | WRI.org The following table can be used to determine time-to-accident (TA) values from observers’ estimates of conflicting speed (CS) and distance (D). TA is defined as the time remaining from when the evasive action is taken until the collision would have occurred if the road users had continued with unchanged speeds and directions. The TA value can be calculated based on the observer’s estimates of D and CS, where: D= CS = distance of the relevant road user (evading road user) to the potential point of collision at the moment when the evasive action is taken speed of the relevant road user at the moment when evasive action is taken The determined TA values will be used in determining the severity of the observed conflict. 5 | WRI.org The severity of the observed conflict can be determined by using the Conflict Severity Diagram below. Observers can determine whether the observed conflict is ‘serious’ or ‘non-serious’ using the previously derived values of TA and CS. 6 | WRI.org 7 | WRI.org The conflict study has to be conducted corresponding to an observation plan with especially trained observers. When studies are carried out with several observers at the same site the observation areas must be well defined in advance. It is not recommendable that the observer is the same person who has planned the countermeasures because of the risk of self-fulfilling results. It is also recommendable to change observer or observation teams with some intervals to keep their attention. Every conflict situation is recorded on a conflict recording sheet, by using the definition based on the estimates of speed and distances from where a TA-value can be calculated. Distances at the location should be recognized by either measuring or stepped out for making the estimations easier. Also speed estimations should be carried out in connection the actual location to familiarize the observer to the vehicle speeds on the site. This can be done with a hand held radar gun. According to the definition a serious conflict occur when two road users with crossing courses would have collide if they have continued with unchanged speed and directions, but some of the road users make an evasive action. All conflict situations over and to the left of the “border line” in the TA-graph have to be recorded. In order, not to miss any serious conflicts, situations just below the borderline should also be recorded. When the observer arrives to the study location, one should familiarize oneself with it. Is this the intersection to be studied? Which part or how is the observation area to be decided on for the conflict study. A good observation point is selected next. The main objective is to select a location that offers the observer a clear view of the decided observation area. For conflict observations, a location approximately 10 - 25 meters from the inter-section area is usually the best. If there is some elevation from the ground level it is favorable for a better overview. The location of the observation point should be noted on the conflict form, especially if the study will be used in a before and after study for the intersection. To obtain accurate conflict recordings, it is essential that the observers not influence passing road users. Ideally, the observer and the recording folder should be invisible. The 8 | WRI.org best practice is to blend into the natural life of the intersection to become inconspicuous, i.e. to look like the observer is waiting for someone. It is recommended that the conflict observations are conducted at the spot in the free air, (not from inside a vehicle or a café) because a lot of useful information and communication as gestures between road users otherwise can be lost. Observer comfort and, of course, safety are also important factors. For this reason the observation can be made of a team of observers. Suitable clothing and for example coffee or water for the breaks can be brought in personal equipment. For uniformity in the field study, observations should always start at the pre-scribed times, and observation periods should always be of the prescribed length. To start on time, the observer will have to arrive at the site at least 15 minutes before the observation period start. An important preliminary activity is to watch the traffic for a couple of minutes or more to be familiar with the major traffic movements, the signalization or traffic control characteristics, and any unusual activities. Whether the survey lasts for several hours or several days, the observation process normally consist of 1-hour observation periods. It is determined during the planning of the study how many days and observation periods per day are to be used for the conflict recordings. For each conflict situation should be recorded: 1. Time of day 2. Road user I and II, the primarily involved in the situation. These are stated and described in the sketch. If there are some other road users secondary involved they should also be mentioned. 3. Speed at the moment of the evasive action is taken. The speed can be estimated for both of the road users or only one, the one who make the evasive action. 4. Distances to the imaginary collision point, where the road users would have collide if they continued with unchanged speed and directions. 5. TA-value, calculated from the speed and distance via the table. 6. Evasive action: The most common evasive action for vehicles is breaking or swerving and for pedestrians stopping or running. 7. Sketch in which the road users movement and directions are shown. It is important to give such details in the sketch that it easily can be recognized in the evaluation phase. Some extra identification of the site is always worth-wile, typical geographical landmarks or localization of different shops or professional activities around in the intersection. 8. Description of the course of events. Besides the sketch the observer should give a short description of the events and how it was grasped. From the sketch and the description it should be evident the causes to the conflict situation. 9 | WRI.org During the observation periods the observer should make notes of violence’s to the rules of the site, hazardous behaviors, long waiting times and other factors of interests from a safety point of view. 10 | WRI.org