- Ninguna Categoria
Transductores: Adquisición de Datos y Procesamiento de Señales
Anuncio
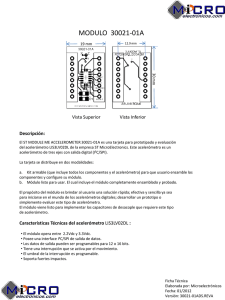
CAPITULO III ADQUISICIÓN DE DATOS Y PROCESAMIENTO DE SEÑALES 3.1 TRANSDUCTORES. El ser humano posee la sensibilidad de percibir condiciones del entorno que lo rodea como temperatura, cantidad de luz, formas, etc., a través de los diferentes sentidos, pero esta percepción esta limitada por ser cualitativa, cuando se requiere una apreciación cuantitativa los elementos llamados sensores son los garantes de esta apreciación, pudiendo ser este un elemento eléctrico, mecánico o químico, el cual es capaz de convertir una característica del entorno físico en una medida cuantitativa, cada sensor se basa en un principio de transducción: conversión de energía de una forma en otra. Entonces se puede llevar una señal física, a una representación eléctrica interpretable por un sistema eléctrico – electrónico, a través de los llamados transductores. Un buen transductor no debe agregar falsos componentes a la señal, y debería producir señales uniformes en todo el rango de frecuencias que nos interesa. Figura 3.1, Posición de los transductores Fuente: Los autores Para el desarrollo del proyecto la adquisición de las señales de vibración, velocidad y corriente, serán implementados los siguientes sensores: 1 Ø Acelerómetro. Ø Tacómetro. Ø Sensor de corriente. Ø Sensor del voltaje. Estas señales serán llevadas a un CAS (circuito acondicionador de señal) para su acondicionamiento de manera que puedan ser digitalizadas por la tarjeta de adquisición de datos y subidas al computador para su análisis. Figura 3.2. Esquema del equipo Fuente: Los autores 3.1.1 ACELERÓMETRO. La medición de aceleración es importante en varias situaciones que involucran sistemas mecánicos. Entre ello las vibraciones. La medición de vibraciones es útil tanto para evaluar los esfuerzos que se producen en diferentes máquinas y su efecto, incluso para rastrear el origen de diversos tipos de ruidos. Figura 3.3. Acelerómetro. Fuente: Los autores. 3.1.1.1 REQUERIMIENTOS: Ø El sensor debe aplicarse de manera no invasiva. 2 Ø La señal de salida deberá conservar todas las características de la señal censada. Ø La señal de salida del sensor deberá poder ser acondicionada a un nivel de voltaje compatible con el sistema de adquisición de datos. Ø Deberá poseer un ancho de banda de 0-5000 Hz. 3.1.1.2 MODELO MATEMÁTICO. La medición de aceleración puede realizarse midiendo la fuerza necesaria para acelerar un objeto de masa conocida, para lo cual a su vez bastará medir la deflexión de un resorte que sostiene a dicha masa. Figura 3.2 K objeto vibrante m F X Y Figura 3.4. Modelo físico al cual se basa el funcionamiento de los acelerómetros integrados. Fuente: Los autores La disposición muestra un objeto vibrante cuya aceleración se desea medir. Sobre el mismo está montado el dispositivo de medición formado por una masa m y un resorte con constante elástica k. Lo que se desea medir es la segunda derivada del desplazamiento del objeto vibrante, es decir x '' t at 3.1 La dificultad de medir la aceleración inercial directamente nos obliga a medir deformación x (t) y y (t) del resorte. Ahora llamamos F a la fuerza aplicada por el resorte a la masa m y que es la relación entre deformación y la aceleración F k x mx '' y 3.2 De donde se obtiene una ecuación diferencial que relaciona x e y x '' ky kx 3 3.3 Aplicamos la transformada de Laplace con las condiciones iniciales nulas tenemos: Y s 1 Donde 0 X s m k X s s 2 s 1 3.4 2 0 k m es la frecuencia natural o frecuencia de resonancia del sistema, si hacemos X-Y: X s X s 2 s 1 2 0 Y s s 1 0 2 1 0 s 2 As 3.5 0 Donde A(s) es la transformada de la aceleración, se puede ver que la deformación del resorte es aproximadamente proporcional a la aceleración, cuando xt yt 1 2 at 0 3.6 0 Una vez reducido el problema de medir aceleración al de medir una deformación geométrica, existen varios enfoques posibles para resolverlo. Uno sería utilizar una celda de carga. Otro, aplicar el efecto piezoeléctrico que exhiben algunos cristales, otro, transformar la deformación en una variación de capacitancia, que luego puede medirse eléctricamente. 3.1.1.3 GENERALIDADES DEL ACELERÓMETRO. Los acelerómetros son dispositivos para medir aceleración y vibración. Estos dispositivos convierten la aceleración de gravedad o de movimiento, en una señal eléctrica analógica proporcional a la fuerza aplicada al sistema, o mecanismo sometido a vibración o aceleración. Esta señal analógica indica en tiempo real, la aceleración instantánea del objeto sobre el cual el acelerómetro está montado. 4 Los acelerómetros miden la aceleración en unidades “g”. Un g se define como la fuerza gravitacional de la tierra aplicada sobre un objeto o persona. Los acelerómetros son direccionales, esto quiere decir que sólo miden aceleración en un eje. Para monitorear aceleración en tres dimensiones, se emplea acelerómetros multiejes (ejes x, y, z) los cuales son ortogonales. La clasificación principal de los acelerómetros se constituye en dos grupos: Ø Pasivos Ø Activos. Los acelerómetros pasivos envían la carga generada por el elemento sensor (puede ser un material piezoeléctrico), y debido a que esta señal es muy pequeña, estos acelerómetros requieren de un amplificador externo para incrementar la señal. Los acelerómetros activos incluyen circuitos internos para convertir la carga del acelerómetro a una señal de voltaje, pero requieren de una fuente constante de corriente para alimentar el circuito. 3.1.1.4 PRINCIPIO DE FUNCIONAMIENTO DEL ACELERÓMETRO PIEZOELÉCTRICO. Mide la fuerza de inercia generada cuando una masa sísmica es afectada por un cambio de velocidad. Se puede considerar al acelerómetro piezoeléctrico como el transductor estándar para medición de vibración en máquinas. Se produce en varias configuraciones, pero la ilustración del tipo a compresión sirve para describir el principio de funcionamiento. Este se basa en el principio de que cuando se comprime un retículo cristalino piezoeléctrico, se produce una carga eléctrica proporcional a la fuerza aplicada. Cuando una materia está sujeta a una fuerza, se genera una carga eléctrica entre sus superficies. 5 q d 33 F u d 33 d F e33 A A área del d F electródo grosor fuerza q c arg a u voltaje d 33 , e33 cons tan tes piezoeléctricas Figura 3.5. Elemento piezoeléctrico en forma de disco. Fuente: Los autores. Se puede apreciar en la figura 3.5 el elemento piezoeléctrico tiene forma circular, este elemento puede ser de cristales de cuarzo o materiales sintéticos como cerámicos. El elemento sensor de un acelerómetro piezoeléctrico consiste en dos partes principales: Ø Material piezoeléctrico Ø Masa sísmica El material piezoeléctrico esta conectado en forma rígida a la base del sensor. La llamada masa sísmica se adjunta a la otra parte. Cuando el acelerómetro es sometido a vibración, se genera una fuerza que actúa sobre el elemento piezoeléctrico. De acuerdo con la ley de Newton (F=m.a) esta fuerza es igual al producto de la masa sísmica y la aceleración. Por efecto piezoeléctrico una señal de carga eléctrica aparece en la salida, proporcional a la fuerza aplicada dado que la masa sísmica es constante la carga de la salida también es proporcional a al aceleración de la masa. F m.a sencibilidad Bqa q a sencibilidad Bua de c arg a de voltaje u a Figura 3.6. Posición de la masa sísmica. Fuente: Los autores 6 Como se menciono anteriormente el material piezoeléctrico puede variar, siendo el cuarzo uno de los más utilizados. Algunos materiales son capaces de funcionar a temperaturas más altas que el Cuarzo. Si se incrementa la temperatura de un material piezoeléctrico, se debe cuidar de no llegar al llamado "punto Curie" o " temperatura Curie" ya que se pierde la propiedad piezoeléctrica. Una vez que esto pasa, el transductor está defectuoso y no se puede reparar. Los niveles más bajos de aceleración que puede detectar son determinados únicamente por el ruido del sistema electrónico y el límite de los niveles más altos es la destrucción del mismo elemento piezoeléctrico. Este rango de niveles de aceleración puede abarcar un rango de amplitudes de alrededor de 10, lo que es igual a 160 dB. Ningún otro transductor puede igualar esto. El acelerómetro piezoeléctrico es muy estable sobre largos periodos. Mantendrá su calibración si no se le maltrata. Las dos maneras de que se puede dañar un acelerómetro son la exposición a un calor excesivo y la caída en una superficie dura. Si se cae de una altura de más de 60cm, en un piso de concreto, o en una cubierta de acero, se debe volver a calibrar el acelerómetro para asegurarse que el cristal no se cuarteó. Una pequeña cuarteadura causará una reducción en la sensibilidad y también afectará de manera importante a la resonancia y a la respuesta de frecuencia. El rango de frecuencias del acelerómetro es amplio y se extiende desde frecuencias muy bajas en algunas unidades hasta varias decenas de Kilo hertzios. La respuesta de alta frecuencia está limitada por la resonancia de la masa sísmica, junto con la elasticidad del piezoelemento. Esa resonancia produce un pico importante en la respuesta de la frecuencia natural del transductor y eso se sitúa normalmente alrededor de 30 Khz. para los acelerómetros que se usan normalmente. Una regla general es que un acelerómetro se puede usar alrededor de 1/3 de su frecuencia natural, figura 3.5b. Valores por encima de esta frecuencia se acentuarán debido a la respuesta resonante, pero se pueden usar si se toma en cuenta este efecto. Fb lim ite de baja frecuencia F0 frecuencia de calibración Fr frecuencia de resonancia 7 (a) (b) Figura 3.7(a), 3.7(b). Régimen de trabajo del acelerómetro Fuente: Metra Mess, ‘‘Teoría del Piezoeléctrico’’, www.MMF.de. Comparados con otros tipos de transductores de aceleración (resistivos, capacitivos, piezoresistivos, reluctancia, elemento vibrante, servo, etc.), los acelerómetros piezoeléctricos tienen las siguientes ventajas: Ø Un rango de medición bastante elevado, bajo ruido de salida Ø Excelente linealidad en todo su rango dinámico Ø Amplio rango de frecuencias Ø Tamaño Compacto Ø No lleva partes movibles 3.1.1.5 CONSTRUCCIÓN DE LOS ACELERÓMETROS. Existen diversos materiales de cristales piezoeléctricos, que son útiles en la construcción de acelerómetros. Entre los materiales más comunes se tiene Metaniobato cerámico, Zirconato, Titanato y cristales naturales de cuarzo. La figura 3.6 muestra esquemáticamente el acelerómetro. Dichos elementos se encuentran comprimidos por una masa, sujeta por una tuerca y perno axial asegurada en la base y todo el conjunto dentro de una caja metálica. Este dispositivo junto con los circuitos eléctricos asociados se puede usar para la medida de velocidad y desplazamiento además de la determinación de formas de onda y frecuencia. Una de las ventajas principales de este tipo de transductor es que se puede hacer tan pequeño que su influencia sea despreciable sobre el dispositivo vibrador. 8 Figura 3.8. Componentes internos de un acelerómetro activo, cuyo efecto físico de funcionamiento es la comprensión Fuente: Metra Mess, Teoría del Piezoeléctrico, www.MMF.de. Cristales Cerámicos Cristales de Cuarzo Cristales piezoeléctricos hechos por el hombre Alta sensibilidad de Salida Mas barato Baja temperatura de operación Cristales piezoeléctricos naturales Baja sensibilidad de Salida Costo Elevado Alta temperatura de operación Tabla 3.1 Comparación entre cristales de cuarzo y cristales cerámicos. Fuente: Los autores. 3.1.1.6 TIPOS DE ACELERÓMETROS PIEZOELÉCTRICOS. Existen tres tipos de acelerómetros piezoeléctricos: Ø Por Compresión (Compresión) Ø Por Cortante (Shear) Ø Por Doblamiento (Bending) Lar razón para la utilización de diferentes sistemas piezoeléctricos esta en función de su actitud individual para diversas tareas de medición y sensibilidad a las diferentes influencias ambientales. ANEXO 3.1 9 3.1.1.7 ACONDICIONADORES DE SEÑAL IEPE (Integrated Electonics Piezo Electric) ó ICP (Integrated Circuit Piezolectric). Como se menciono en la sección 3.1.1.5, existen actualmente dos tipos acelerómetros piezoeléctricos Ø Solo piezoeléctrico el cual genera cargas eléctricas en función de la carga física aplicada, este puede trabajar a una temperatura superior al ICP Ø El ICP es el que incorpora en su encapsulado un seguidor de tensión de ganancia unidad, a más de elementos de amplificación. Los cuales incorporan bondades como: salida ICP (mV/g), adecuado para conexión directa a instrumentación universal, versiones con ganancia 0.1, 1 y 10 mV/pC, Conector BNC de salida, La salida de voltaje de máximo esta determinado por el circuito electrónico interno regularmente oscila entre 4-8 voltios, con sensibilidad de 1V/g. La mayoría de los acelerómetros que hoy en día se usan en la industria son del tipo ICP, lo que quiere decir que tienen un preamplificador interno de circuito integrado. Este preamplificador recibe su energía de la polarización de la corriente directa por el alambre de la misma señal, así que no se necesita alambrado suplementario. El acelerómetro ICP tendrá un límite de baja frecuencia, debido al mismo amplificador y este se sitúa generalmente a 1 Hz para la mayoría de las unidades disponibles comercialmente. Algunas unidades fueron diseñadas especialmente para ir hasta [0, 1] Hz si se necesita datos de muy baja frecuencia. Cuando se usa un acelerómetro ICP se debe tener cuidado de no exponerlo a niveles de aceleración donde el voltaje de salida rebasara varios voltios. Si no, se sobrecargará el preamplificador interno y el resultado será una distorsión. Cuando se conecta un acelerómetro ICP a la fuente de energía, el amplificador necesita unos segundos para estabilizarse. Durante este tiempo cualquier dato que la unidad recogerá será contaminado por las lentas variaciones del voltaje. Por esa razón, los recopiladores de datos deben de tener un retraso integrado, para asegurar que la unidad está en condición estable. Si el retraso es demasiado breve, la forma de onda de tiempo tendrá una rampa de voltaje en forma exponencial superpuesta sobre los datos y en el espectro se verá una característica creciente de muy baja frecuencia 10 a veces llamada bajada de esquí. Este se debe evitar, ya que compromete el rango dinámico de la medición. 3.1.1.8 MÉTODOS DE MONTAJE. El método de montaje del acelerómetro, varia el valor de la frecuencia de resonancia, siendo más útil montarlo en la superficie a monitorear con tornillo, ya que mantiene el rango de frecuencia para el acelerómetro. Figura 3.9.Curvas modulo de vibración Vs. Frecuencia de trabajo, a diferentes tipos de montaje. Fuente: WILCOXON,’’Vibration monitoring solutions at your fingertips”www.honeywell.com/sensotec Figura 3.10. Métodos de montaje del acelerómetro Fuente: Metra Mess, ‘‘Teoría del Piezoeléctrico’’, www.MMF.de Como se trata de un acelerómetro uniaxial, la toma de datos triaxiales se puede hacer mediante tres acelerómetros como se muestra en la figura 3.10 (f), existen 11 acelerómetros triaxiales pero por cuestiones de costo se puede efectuar el montaje mencionado siempre que se disponga de espacio (costo del acelerómetro triaxial 1250 dólares, costo de un acelerómetro uniaxial 185)27. El acelerómetro uniaxial también detecta la vibración en otro eje pero es una señal baja, es preferible colocar el acelerómetro e ir tomando las señales por cada uno de los ejes X Y y Z La sensibilidad de la aceleración del eje transversal es baja en un 5% de sensibilidad sobre el eje de trabajo. Figura 3.11.Sensibilidad de cruce entre ejes. Fuente: Metra Mess, ‘‘Teoría del Piezoeléctrico’’, www.MMF.de 3.1.1.9 MONTAJE DEL CABLE AL ACELERÓMETRO. Es importante el manejo de cables y conectores. En el acelerómetro es común el uso del cable coaxial y si este se expone a condiciones de doblado o tensionado pudiera ser que existieran cambios de capacitancia, en consecuencia adicionando cargas en la señal (efecto llamado “triboelectric”), afectando las mediciones de baja frecuencia, para ello se aconseja sujetar el cable con rines, amarras en cadena o sujetadores clips. Como se ve en la figura, 3.12, a mas de considerar que el cable de sensores con carga de salida no debe exceder los 10 m, Los conectores deben estar absolutamente limpios y libres de impurezas para reducir el ruido, Los acelerómetros IEPE no necesitan cables especiales de bajo ruido, etc. 27 Costo consultado en www.omega.com 12 Figura 3.12.Métodos de tratamientos del cable. Fuente: Metra Mess, ‘‘Teoría del Piezoeléctrico’’, www.MMF.de 3.1.1.10 CONEXIÓN A TIERRA DEL ACELERÓMETRO. Cuando se enlaza dos partes eléctricamente activas, que tienen conexiones a tierra diferentes, cada una de estas partes puede diferir en el nivel de tensión (milivoltios), suficiente para afectar la lectura tomada por el acelerómetro ya que se trata de una señal baja (1V/g) adicionando o sustraendo valor a la señal, figura 3.13. Se puede corregir esta anomalía a partir de tres métodos: Ø Conectando las dos partes activas a la misma tierra (siempre y cuando la distancia no exceda 10m), figura 3.14 Ø Aislarse eléctricamente el acelerómetro de la estructura a monitorear, este método compromete al valor de la frecuencia natural como se vio en la sección 3.1.1.7, considerando la figura 3.15 Ø Utilizar acelerómetros que ya están provistos de aislamiento interno, mostrado en la figura 3.16 ÁQUINA ATERRADA 0 Figura 3.13 La diferencia de potencial entre las masas del la maquina y el monitor distorsiona la señal Figura 3.14 El interconectar eléctricamente masas a tierra elimina la distorsión de la señal 13 Figura 3.15 El aislamiento en el montaje del acelerómetro, también suprime la distorsión en la señal. Figura 3.16 Existen acelerómetros provistos de aislamiento interno. Fuente: Las figuras 3.13, 3.14, 3.15 y 3.16, los autores 3.1.2 SENSOR DE VOLTAJE. 3.1.2.1 REQUERIMIENTOS: Ø El sensor debe aplicarse de manera no invasiva Ø La señal de salida deberá conservar todas las características de la señal censada Ø La señal de salida del sensor deberá poder ser acondicionada a un nivel de voltaje compatible con el sistema de adquisición de datos Ø Deberá poseer un ancho de banda de 0-500Hz Tabla 3.2 Consideraciones para el sensor de voltaje: Fuente: Los Autores. 14 3.1.2.2 PARÁMETROS DE SELECCIÓN: Para la medición del voltaje de alimentación del motor se empleara divisores de tensión por cada una de las líneas, de esta manera podemos obtener un nivel de tensión pico menor a 10 voltios, magnitud que puede ser admitida por la tarjeta de adquisición de datos, siendo el voltaje en la resistencia de menor valor, la que proporcionara la señal de voltaje, ya que dentro de sus características se encuentra la linealidad el voltaje y la fase será el reflejo de la fuente de alimentación de cada línea. ANEXO 3.3 3.1.3 SENSOR DE CORRIENTE. 3.1.3.1 REQUERIMIENTOS: Ø Un método no invasivo Ø Deberá poder medir un rango de corriente de al menos la nominal o a plena carga del motor evaluado Ø La señal de salida deberá contener todas las características de la señal de corriente censada Ø Deberá tener un ancho de banda de 0-500 Hz. 3.1.3.2 PARÁMETROS DE SELECCIÓN: Tabla 3.3. Consideraciones para la elección del sensor de voltaje. Fuente los Autores. Para la adquisición del la magnitud de corriente que circula en cada una de las líneas que alimenta al motor, se empleara el uso de sensores de corriente que basan su 15 funcionamiento en el principio físico del efecto Hall, cuya propiedad física propicia la medición tanto en corriente alterna así como en corriente continua. ANEXO 3.4 Figura 3.17. Sensores de corriente, Efecto Hall Fuente: Los autores. 3.1.3.3 EFECTO HALL. Cuando una placa metálica transmite una corriente eléctrica y se halla situada en un campo magnético perpendicular a la dirección de la corriente, se desarrolla por encima de la placa un campo eléctrico transversal, es decir, perpendicular al sentido de la corriente. Este campo, denominado campo de Hall, es la resultante de fuerzas ejercidas por el campo magnético sobre las partículas de la corriente eléctrica, sean positivas o negativas, o positivas en un sentido y negativas en el otro. Este fenómeno tiene dos consecuencias principales. La primera es que la acumulación de cargas en un lado de la placa, en el campo así creado, implica que el otro lado tiene una carga opuesta, creándose entonces una diferencia de potencial. La segunda es que la carga positiva posee un potencial superior al de la carga negativa. La medida del potencial permite, por tanto, determinar si se trata de un campo positivo o negativo. 16 3.1.4 TACÓMETRO. 3.1.4.1 REQUERIMIENTOS: Ø Un método no invasivo. Ø Deberá poder medir un rango de velocidad nominal. Ø La señal de salida deberá poder mostrar en forma proporcional la velocidad de giro a la frecuencia de la señal. Ø Deberá tener un ancho de banda de 0-720 Hz. A más de las variables eléctricas consideradas en el desarrollo del proyecto es importante tener en cuenta el dato de velocidad de giro del motor, ya que análisis de orden hace referencia a los eventos sucedidos por revolución. Medir la velocidad en la flecha del rotor, implica convertir la una señal de movimiento en una señal eléctrica de la cual se presenta como un tren de pulsos a una frecuencia igual a la del giro del motor multiplicado por el numero de tomas de señal, con lo cual se pueden conocer los efectos que suceden con cada uno de los parámetros del motor desde que arranca hasta alcanzar su velocidad nominal a mas de que se puede saber a que velocidad puede presentarse el fenómeno de resonancia con la estructura que sostiene el motor. El tacómetro empleado censa la velocidad a partir del corte de señal de luz infrarroja en el receptor a través de una rueda con una serie de muescas (24), esto producida un tren de pulsos fácilmente interpretable como frecuencia. ANEXO 3.5. Figura 3.18. Adquisición de la señal de velocidad Fuente: Los autores. 17 3.2 ADQUISICIÓN DE SEÑALES. La adquisición de señales tiene por objeto digitalizar la señal analógica del transductor y llevarla al computador La mayor parte de adquisición hoy en día son basados en la PC, o en algún tipo de microprocesador que se adapte a un conversor Analógico – Digital y transfiere sus lecturas a una memoria externa Para la elaboración de nuestro sistema hemos considerado varias opciones de comunicación como se muestran en la tabla 3.4 TIPO DISPOSITIVOS INTERNOS MEDIO TARJETAS PLUG-IN PUERTO PARALELO PUERTO SERIAL DISPOSITIVOS EXTERNOS TARGETAS PC PUERTO USB DISPOSITIVOS INDEPENDIENTES INTERFACES REGISTRADOR DE DATOS PC A IEEE 488 CARACTERISTICAS VELOCIDAD LO MÁS RÁPIDA POSIBLE, NO J J J J COMPLICADA VELOCIDAD RÁPIDA, PORTÁTIL, FÁCIL EXPANSIÓN DE CANALES Y CONEXIÓN DE SEÑAL VELOCIDAD LENTA, PORTÁTIL, FÁCIL CONEXIÓN DE SEÑAL VELOCIDAD MEDIA A RÁPIDA, MUY PORTÁTIL, CANALES Y CONEXIÓN DE SEÑAL LIMITADOS VELOCIDAD VARIABLE DE ACUERDO A LA VERSIÓN, AUTOINSTALBLE EN EL MOMENTO DE CONEXIÓN, MUY PORTÁTIL, FÁCIL CONEXIÓN DE SEÑAL BAJA VELOCIDAD, PORTÁTIL, CONEXIÓN DE SEÑAL FACIL, NO NECESITA PC A EN EL SITO DE PRUEBAS VELOCIDAD DE TRANSFERENCIA BAJA, CAPACIDADES DEPENDEN DEL INSTRUMENTO ESPECÍFICO Tabla 3.4 Opciones de comunicación para la adquisición de señales. Fuente: Los autores El sistema USB se ha vuelto bastante popular en la versión 2.0 siendo esta la más actual y rápida a 12Mbits/s que es útil para aplicaciones sencillas en tiempo real 3.2.1 CARACTERÍSTICAS DEL SISTEMA DE ADQUISICIÓN Ø Amplitud de la señal de entrada. Ø Frecuencia máxima de señal. Ø Ancho de Banda. Ø Tipo de conversor Analógico Digital. Ø Rango de resolución ADC. Ø Relación señal a ruido de cuantización. (SQNR). 18 Ø Muestreo. Ø Filtro Antialiasing. Ø Configuración de la señal de entrada al ADC. Ø Fuentes de ruido. 3.2.1.1 AMPLITUD DE ENTRADA. En los diferentes canales de entrada los valores de voltaje de ingreso están en el rango de 6V . Mientras que la tarjeta admite valores tierra común) y 10V RSE (referidos a 20V en configuración diferencial, con 8 y 4 canales de entrada respectivamente. 3.2.1.2 FRECUENCIA MÁXIMA DE LA SEÑAL. Cuando se realice las pruebas de medición de la corriente, la máxima frecuencia que alcanza la señal será f máx 60 1 2s s 1 180Hz 28. Mientras que cuando se realice las pruebas de vibración la máxima frecuencia que puede alcanzar el acelerómetro es de 6000 Hz, por lo que para la adquisición de las señales se adjuntaran filtros antialiasing. Para considerar el ancho de banda elevamos la frecuencia de la señal de corriente a 500 Hz, para no tener una atenuación de 3 dB. a 180Hz, mientras que para la medición de aceleración el filtrado se tendrá un ancho de banda de 5000Hz. 3.2.1.3 CONVERSIÓN ANALÓGICO DIGITAL. El ADC puede ser Flash, que tiene un buen rendimiento en cuanto a velocidad pero tiene alto costo, y puede ser también de aproximaciones sucesivas que toma un mayor tiempo en la digitalización. En la implementación del sistema, puede utilizarse cualquiera de los dos tipos de ADC, ya que la velocidad de transformación no será imprescindible y la frecuencia de trabajo no se acercara a la frecuencia de corte del dispositivo ya que la banda es en banda base. 28 Frecuencia de bandas laterales máxima, cuando el deslizamiento es igual 1, sección 2.3 19 3.2.1.4 RANGO DE RESOLUCIÓN DEL ADC El rango del dispositivo debe concordar con los requerimientos del sistema de adquisición. Como se menciona 3.2.1.1 el rango de voltaje máximo a cubrirse es de e -6V a 6 V, en cuanto a las medidas de voltaje corriente y velocidad, mientras que para el parámetro de aceleración, el acelerómetro entrega una tensión de 30mV/g, al ser de tipo pasivo, de acuerdo a las normas mostradas en el ANEXO 3 el mínimo valor a considerar seria 0,3 g para evaluar el nivel de vibración. Con lo que tendríamos que adquirir la señal de voltaje en aceleración a un mínimo valor de 10mV (sin considerar la etapa de amplificación) La resolución del dispositivo es determinada por el número de bits de salida ADC D 2N R 3.7 R Resolución en voltios D Rango dinámico de la señal en voltios N Número de bits del conversor ADC n log 2 log D R 6V 10mV log 2 log n 10bits de resolución Entonces con 10 bits de resolución se puede leer un mínimo de 10mV de lectura sin distorsión y SQRN tendría un equivalente de: SQRN 20Log Dseñal Druido Dseñal Druido SQNR 20 log SQNR N 20 log( 2) SQNR 6,02 N SQNR 60dB 20 3.8 20 log Dseñal Dseñal 2N 3.2.1.5 MUESTREO. La frecuencia de muestreo depende de la frecuencia máxima que se quiera analizar. Para esta consideración se debe tomar en cuenta el teorema de Shannon – Nyquist de muestreo para evitar el Aliasing, por ello será necesario que las señales de voltaje y corriente se muestreen a un rate de 1500 S/s, para el muestreo de la velocidad a 1800 S/s y para la señal de vibración a 15KS/s. Para el análisis digital se adquirirán 6400 muestras por canal, la arquitectura del sistema expone que un máximo 3 canales trabajen a la vez mediante la múltiplexación o muestreo simultaneo. 3.2.1.6 FILTRO ANTIALISING. Este efecto es eliminado considerando limitar el rango de frecuencias de la señal admitida, interponiendo un filtro pasabajo entre la salida del instrumento analógico y la entrada de la etapa de muestreo. 3.2.1.6.1 FORMACIÓN DE ALIASIS. Si tenemos una señal en el tiempo encerrada en un intervalo de 0 a T, ¿Cuál es el número de muestras necesarias para que la señal pueda ser procesada?, la transformada de Fourier de la señal es: T y t .e Y f 2 j ft dt 3.9 0 Si el segmento esta limitado entre 0 y T la transformada de Fourier también esta limitado entre –F y F ( en la practica el segmento es de longitud finita y el espectro se limita con un filtro pasa bajo ), entonces para definir a la señal habrá que muestrear ya sea la señal en el tiempo y(t) o el especto Y(f) a frecuencias iguales al llamado “intervalo de NIQUIST” 1/T dentro del intervalo –F a F por lo que el número requerido de muestras será: N 2F 1 T 2FT 21 3.10 En cambio si muestreamos el segmento f(t) con el “intervalo de NIQUIST” 1/(2F) entonces el número de muestras requeridas será: N T 1 2F 2FT 3.11 Esto indica que se necesita igual número de muestras, si se muestrea la señal y(t) en el tiempo o el espectro Y(f) con el “intervalo de NYQUIST”. En la ecuación anterior 3.11 podemos deducir que el máximo intervalo de muestreo es 1/(2F) por lo que, si para maestrear se emplea un intervalo menor que 1/(2F), se tomara mayor cantidad de muestras con consiguiente desperdicio de tiempo en el cálculo y de memoria. Por lo contrario, se muestrea a un intervalo mayor que 1/(2F), se tomaran menos muestras que las necesarias, siendo imposible reconstruir la señal, confundiéndose las frecuencias en el espectro, este efecto se identifica como ALIASING o en español ALIASIS. Figura 4.19. Muestreo menor a la frecuencia de Nyquist se torna como una señal de menor frecuencia Fuente: SCHEFFER,Cornelius, PRACTICAL MACHINERY VIBRATION ANALYSIS AND PREDICTIVE MAINTENANCE, 2004, p 57. Entonces para muestrear una señal se necesita dos muestras por periodo para poder definir una componente de frecuencia en la señal original. Por lo tanto la mayor frecuencia que puede se copiada fielmente será: f NIQUIST fN 2 22 3.12 A esta frecuencia se le conoce como la frecuencia de NYQUIST, las componentes de la señal original y(t) cuyas frecuencias superen la frecuencia de NYQUIST, aparecerán en el espectro por debajo de f NIQUIST confundiéndose con las componentes de la señal original. En la mayoría de los analizadores modernos, la frecuencia de muestreo esta puesta a 2. 56 veces la frecuencia límite del filtro. 3.2.1.7 EFECTO DE LEAKAGE Si una forma de onda senoidal esta pasando a través del nivel cero, al principio y al final de la grabación de tiempo, eso es si la grabación de tiempo abarca exactamente un número entero de ciclos de la forma de onda, el espectro FFT resultante consistirá de una sola línea con la amplitud y la frecuencia correcta. Si por otra parte, el nivel de la señal no está en cero, en ambas partes de la grabación de tiempo, la forma de onda será truncada y eso provocará una discontinuidad en la señal de la que se tomó muestras. Esta discontinuidad no está bien manejada por el proceso FFT y el resultado es que el espectro está ungido desde una sola línea en las líneas vecinas. A este se le dio el nombre de fugas. Figura 4.20 Transformada de Fourier ideal-real Fuente: Los autores Inevitablemente la señal registrada tiene que ser truncada en el tiempo, lo que equivale a encerrara dentro de una ventana en el tiempo, realizando este procedimiento de la señal antes de calcular la FFT. Ya que sino se lo hace aparecen fugas tal como se menciona anteriormente, lo que hace la ponderación es reducir el efecto de las fugas, vigilando que el nivel de la señal este en cero al principio y al final de la grabación de tiempo. Esto se hace multiplicando los datos recopilados por 23 una función llamada "ventana" o "ponderada" Las ventanas son funciones matemáticas usadas con frecuencia en el análisis y el procesamiento de señales para evitar las discontinuidades al principio y al final de los bloques analizados. Una señal de longitud voluntariamente limitada, los diferentes tipos de ventanas existentes son: 1. Rectangular (básica, sin ventana) 2. Flat top 3. Hanning 4. Hamming 5. Kaiser Bessel 6. Blackman 7. Barlett. La función que mejor se adapta al tipo de señales manejadas en el proyecto es la ventana de Hanning, que es diferente la ventana de Hamming que hoy es obsoleta. 3.2.1.7.1 LA VENTANA HANNING Figura 4.21. Atropamiento de la señal en los niveles de cero al inicio y final Fuente: Los autores La ventana Hanning llamada por su inventor Von Hann, tiene la forma de un ciclo de una onda cosenoidal, a que se agrega 1 para que así siempre sea positivo. Los valores de la señal muestreada se multiplican por la función Hanning y el resultado se ve en la gráfica. Noten que las extremidades de la grabación de tiempo fueron forzadas hacia cero sin tomar en cuenta que está haciendo la señal de entrada. La ventana Hanning realiza un buen trabajo, forzando las extremidades hacia cero, pero también agrega distorsión a la forma de onda que se está analizando, bajo la 73 forma de modulación de amplitud, eso es la variación en amplitud de la señal sobre la grabación de tiempo Figura 4.22. La ponderación de Hanning no es adecuada para transitorios Fuente: Los autores La ventana Hanning siempre se debe usar con señales continuas y no para señales transientes. La razón es que la forma del transiente será distorsionada por la forma de la ventana. y la frecuencia y el contenido de un transiente están íntimamente conectados con su forma. El nivel medido también será fuertemente distorsionado. Aunque el transiente estuviera en el centro de la ventana de Hanning, el nivel medido sería dos veces el nivel actual, debido a la corrección de la amplitud, aplicada por el analizador cuando esta usando el efecto de ponderado Hanning. Una señal ponderada Hanning esta solamente presente por la mitad. La otra mitad fue removida por el proceso de la ventana. Esta no presenta problemas con una señal perfectamente suave, y continua como una onda senoidal, pero la mayoría de las señales que queremos analizar, como firmas de vibraciones de máquinas no son perfectamente suaves. Si ocurre un pequeño cambio en la señal cerca del inicio o del final de la grabación en tiempo, o bien se analizará a un nivel mucho más bajo que su nivel verdadero, o se puede pasar totalmente desapercibido. 3.2.1.8 CONFIGURACIÓN DE LA SEÑAL DE ENTRADA AL DISPOSITIVO Principalmente existen dos formas de adquirir señales: referidas a tierra y diferenciales o flotantes este ultimo hace presencia al tomar la señal de voltaje ya que 74 se conectan directamente en la red pública y el punto común de empalme no puede ser enlazada a la tierra de referencia por un alto grado de ingerencia de ruido es por ello que se implemento un hardware como se ve en el ANEXO 3.2 en la etapa diferencial, de esta forma refiriendo la señal a la tierra común del sistema. 3.2.1.9 FUENTES DE RUIDO EN EL SISTEMA DE ADQUISICIÓN. CARACTERISTICA RUIDO CONDUCTIVO NATURALEZA DEL LEY DE OHM RUIDO IMPEDANCIA DE LOS CABLES FUENTES DE RUIDO DIFERENTE DE CERO FORMA DE ATENUARLOS USAR CABLES PEQUEÑOS Y RELATIVAMENTE GRUESOS DE ACUERDO A LA CORRRIENTE QUE MANEJEN FRECUENCIA A LA TODAS QUE SE PRESENTAN RUIDO CAPACITIVO RUIDO INDUCTIVO RUIDO RADIANTE RUIDO DE CUANTIZACIÓN CAMPO ELÉCTRICO CAMPO MAGNÉTICO ONDAS EFECTO DE ELECTROMAGNÉ CUANTIZACIÓN DE LA TICAS CONVERSIÓN A/D LÁMPARAS FLUORECENTES IONIZACIOÓN DEL AMBIENTE, CLIMA LLUVIOSO CABLES CERCANOS, MAQUINAS ELECTRICAS, AMBIENTE INDUSTRIAL SEÑALES DE TELEVISIÓN RADIO Y TELEFONÍA FORRAR LOS CABLES Y ATERRAR LOS FORROS USAR PARES TRENZADOS FILTROS AUMENTAR EL NÚMERO PASABAJOS Y DE BITS DEL CABLES CORTOS CONVERSOR A/D FRECUENCIA INDUSTRIAL, ALTAS FRECUENCIAS 60Hz, PRINCIPALMENT ALTA E FRECUENCIAS FRECUENCIA QUE CIRCULEN EN LOS CABLES CONVERSOR A/D TODAS LA FRECUENCIAS Tabla 3.5 Tipos de ruido que pueden distorsionar la señal Fuente: Los autores. 3.2.2 ESPECIFICACIONES DEL SISTEMA DE ADQUISICIÓN. En resumen, las características mínimas del sistema para la implementación serán: Ø Sistema que utilice una interfaz USB Ø El sistema debe tener un rango de 6V y una resolución mínima de 10 bits Ø El sistema debe tener la capacidad de muestreo de alrededor de 15KS/s Ø Debe tener por lo menos 3 canales de muestreo simultáneo o por múltiplexación Ø Las conexiones deben tener aislamiento capacitivo conectado a tierra, ser en par trenzado, a más de implementar sistema de CAS para el tratamiento de las señales. 75 3.3 ACONDICIONAMIENTO DE SEÑALES. Ø Mejora las señales para mejor calidad en medición Ø Alimenta o excita sensores Ø Lee información del sensor Ø Protege al usuario y al sistema 3.3.1 INTRODUCCIÓN. Figura 3.23, Conjunto de dispositivos Fuente: Análisis Espectral, www.sonotest.com Los sistemas de adquisición de datos (DAQ) basados en PC y dispositivos insertables o dispositivos externos (DAQ 6009) son usados en un amplio rango de aplicaciones en los laboratorios, en el campo y en el piso de una planta de manufactura. Típicamente, los dispositivos DAQ insertables son instrumentos de propósito general diseñados para medir señales de voltaje. El problema es que la mayoría de los sensores y transductores generan señales que debe acondicionar antes de que un dispositivo DAQ pueda adquirir con precisión la señal. Este procesamiento es conocido como acondicionamiento de señal, incluye funciones como amplificación, filtrado y aislamiento eléctrico en el caso del proyecto desarrollado. 3.3.2 AMPLIFICADORES DE INSTRUMENTACIÓN. Por lo general las señales que recibimos de un transductor deben ser amplificadas propiciando una impedancia de entrada alta y una impedancia de salida baja, para este fin se utilizan los amplificadores operacionales, ya que tienen las siguientes características: 76 Ø Resistencia de entrada alta (orden de cientos de MŸ) Ø Resistencia de salida baja (debajo de 1Ÿ) Ø Gran ganancia de lazo abierto (orden de 1E4 a 1E6) Ø Gran CMRR (common mode rejection ratio) Ø Buen rango de frecuencias de operación Ø Baja sensibilidad a las variaciones de la fuente de alimentación Ø Gran estabilidad al cambio de temperatura en el ambiente 3.3.3 AMPLIFICACIÓN. Cuando los niveles de voltaje que va a medir son muy pequeños, la amplificación se usa para maximizar la efectividad de su digitalizador. Al amplificar la señal de entrada, la señal acondicionada usa más efectivamente el rango del convertidor analógico-digital (ADC) y mejora la precisión y resolución de la medición. El proceso de amplificación esta aplicado a los sensores de corriente y al acelerómetro, debido a que el voltaje es estos es de 287 mV a 3A y 30mV/g respectivamente, el grado de amplificación para la señal de corriente y voltaje es de 10. En el caso de las señales de velocidad y voltaje no amplifican ya que medida esta en el orden de voltios. 3.3.4 FILTRADO. Un filtro eléctrico o filtro electrónico es un elemento que discrimina una determinada frecuencia o gama de frecuencias de una señal eléctrica que pasa a través de él, pudiendo modificar tanto su amplitud como su fase. Si clasificamos de acuerdo a su ganancia pueden ser: Ø Filtros pasivos: los que atenuarán la señal en mayor o menor grado. Se implementan con componentes pasivos como condensadores, bobinas y resistencias. Ø Filtros activos: son los que pueden presentar ganancia en toda o parte de la señal de salida respecto a la de entrada. En su implementación suelen aparecer amplificadores operacionales. Si clasificamos de acuerdo al comportamiento con la frecuencia pueden ser: 77 Ø Filtro paso bajo: Es aquel que permite el paso de frecuencias bajas, desde frecuencia 0 o continua hasta una determinada. Presentan ceros a alta frecuencia y polos a bajas frecuencia. Ø Filtro paso alto: Es el que permite el paso de frecuencias desde una frecuencia de corte determinada hacia arriba, sin que exista un límite superior especificado. Presentan ceros a bajas frecuencias y polos a altas frecuencias. Ø Filtro pasa banda: Son aquellos que permiten el paso de componentes frecuenciales contenidos en un determinado rango de frecuencias, comprendido entre una frecuencia de corte superior y otra inferior. Ø Filtro elimina banda: Es el que dificulta el paso de componentes frecuenciales contenidos en un determinado rango de frecuencias, comprendido entre una frecuencia de corte superior y otra inferior. Ø Filtro multibanda: Es el que presenta varios rangos de frecuencias en los cuales hay un comportamiento diferente. Ø Filtro variable: Es aquel que puede cambiar sus márgenes de frecuencia También pueden clasificarse de acuerdo al método de diseño: Ø Filtro de Butterworth, con una banda de paso suave y un corte agudo El filtro de Butterworth es uno de los filtros electrónicos más básicos, diseñado para producir la respuesta más plana que sea posible hasta la frecuencia de corte. En otras palabras, la salida se mantiene constante casi hasta la frecuencia de corte, luego disminuye a razón de 20, 40, 60, etc. dB por década según sea la configuración. El filtro de Butterworth más básico es el típico filtro paso bajo de primer orden, el cual puede ser modificado a un filtro pasa alto o añadir en serie otros formando un filtro pasa banda o elimina banda y filtros de mayores órdenes Visto en un diagrama de Bode con escala logarítmica, la respuesta decae linealmente desde la frecuencia de corte hacia menos infinito. Para un filtro de primer orden son 20 dB por década (aprox. -6dB por octava). Ø Filtro de Chevyshev, con un corte agudo pero con una banda de paso con ondulaciones 78 Ø Filtros elípticos o filtro de Cauer, que consiguen una zona de transición más abrupta que los anteriores a costa de oscilaciones en todas sus bandas Ø Filtro de Bessel, que, en el caso de ser analógico, aseguran una variación de fase constante, lineal Figura 3.24, Efecto de atenuación de los principales filtros Fuente: Los autores. 3.3.5 AISLAMIENTO. Las señales de voltaje fuera del rango del digitalizador pueden dañar el sistema de medición y ser peligrosas para el operador. Por esta razón, normalmente es preciso tener el aislamiento y la atenuación para proteger al sistema y al usuario de voltajes relativamente altos o picos de voltaje. También se puede necesitar aislamiento si el sensor está en un plano de tierra diferente al del sensor de medición (como un termopar montado en una máquina). 3.6 ENTORNO DE LABVIEW. 3.6.1 ¿QUÉ ES LABVIEW? LabVIEW (Laboratory Virtual Instrument Engineering Workbench) es un lenguaje de programación gráfico (lenguaje G), para el diseño de sistemas de adquisición de datos, instrumentación y control. 79 LabVIEW es a la vez compatible con otras herramientas de programación de distintitos lenguajes por ello puede trabajar con programas de otra área de aplicación, como por ejemplo Matlab o C. Tiene la ventaja de que permite una fácil integración con hardware, específicamente con tarjetas de medición, adquisición y procesamiento de datos (incluyendo adquisición de imágenes). 3.6.2 APLICACIONES DE LABVIEW. LabVIEW tiene su mayor aplicación en sistemas de medición, como monitoreo de procesos y aplicaciones de control, un ejemplo de esto pueden ser sistemas de monitoreo en transportación, Laboratorios para clases en universidades, procesos de control industrial. LabVIEW es muy utilizado en procesamiento digital de señales (wavelets, FFT, Total Distorsion Harmonic TDH), procesamiento en tiempo real de aplicaciones biomédicas, manipulación de imágenes y audio, automatización, diseño de filtros digitales, generación de señales, entre otras, etc. Figura 3.25 Sistema de adquisición de señales. Fuente: NATIONAL INSTRUMENTS, Introduction LABVIEW for Control Desing and simulation, www.ni.com 3.6.3 FUNCIONES DE LABVIEW. La programación G (gráfica) de LabVIEW consta de un panel frontal y un panel de código. En el panel frontal es donde se diseña la interfase de usuario y se ubican los 80 controles e indicadores. En el panel de código se encuentran las funciones. Cada control que se utiliza en la interfaz tiene una representación en el panel de código, igualmente los indicadores necesarios para entregar la información procesada al usuario tienen un icono que los identifica en el panel de código o de programación. Los controles pueden ser boléanos, numéricos, strings, un arreglo matricial de estos o una combinación de los anteriores; y los indicadores pueden ser como para el caso de controles pero pudiéndolos visualizar como tablas, gráficos en 2D o 3D, browser, entre otros. Figura 3.26.Panel frontal y panel de programación en LABVIEW Fuente: Los autores. Las funciones pueden ser VIs prediseñados y que pueden ser reutilizados en cualquier aplicación, estos bloques funcionales constan de entradas y salidas, igual que en un lenguaje de programación estándar las funciones procesan las entradas y entregan una o varias salidas, estos VI pueden también estar conformados de otros SubVIs y así sucesivamente, de esta forma se pueden representar como un árbol genealógico donde un VI se relaciona o depende de varios SubVIs. LabVIEW tiene VIs de adquisición de datos e imágenes, de comunicaciones, de procesamiento digital de señales, de funciones matemáticas simples, hasta funciones que utilizan otros programas como Matlab o HiQ para resolver problemas, otras más complejas como "nodos de formula" que se utilizan para la resolución de ecuaciones editando directamente estas como en lenguajes de programación tradicionales y definiendo las entradas y las salidas. LabVIEW también se puede utilizar para graficar en tres dimensiones, en coordenadas polares y cartesianas, tiene disponibles herramientas para análisis de circuitos RF como la Carta de Smith, tiene aplicaciones en manejo de audio y se puede comunicar con la tarjeta de sonido del computador para trabajar conjuntamente. Entre sus muchas funciones especiales se encuentran las 81 de procesamiento de imágenes, como capturar una imagen a través de una tarjeta de adquisición como la PCI-1408 (monocromática), analizarla y entregar respuestas que difícilmente otros sistemas realizarían. Otra característica se encuentra en el flujo de datos, que muestra la ejecución secuencial del programa, es decir, una tarea no se inicia hasta no tener en todos sus variables de entrada información o que las tareas predecesoras hayan terminado de ejecutarse. Debido al lenguaje gráfico el compilador con que cuenta LabVIEW es más versátil ya que sobre el mismo código de programación se puede ver fácilmente el flujo de datos, así como su contenido. 3.6.4 LABVIEW PARA REGISTRO DE DATOS. LabVIEW proporciona utilidades para registro de datos y manejo de alarmas, así como tendencias históricas y en tiempo real. Ya sea que esté coleccionando datos de los productos de adquisición de datos de National Instruments, objetivos de LabVIEW Real-Time, módulos Compact FieldPoint o CompactRIO, o controladores de lógica programable, puede rápidamente configurar las E/S que desee y usar el Módulo Datalogging and Supervisory Control (DSC) de LabVIEW para adquirir datos de manera automática. Los datos históricos son almacenados en una base de datos compatible con SQL 92 y ODBC 2.5, para que pueda utilizar herramientas estándar de extracción de datos para extraer la información y usarla en otras partes de la empresa. Debido a que puede utilizar el Módulo de LabVIEW DSC para registrar los datos en cualquier máquina de su red de trabajo, puede seleccionar una sola máquina para funcionar como servidor de su base de datos para todas sus aplicaciones o elegir distribuir los datos en numerosas máquinas en red. Adicionalmente, las ayudas intuitivas en LabVIEW le ayudan a desarrollar aplicaciones de registro de datos con muy poca o nula programación. Usando LabVIEW, puede fácilmente almacenar información por medio de un archive CSV, Excel, o XML para análisis fuera de línea. El análisis de orden fuera de línea le ayuda a predecir mantenimientos como lo es el cambio de valores antes de que fallen. LabVIEW también puede escribir en bases de datos si lo requiere. El menú de la ventana correspondiente a al panel frontal de controles contiene las opciones como: 82 NUMERIC.- Para la introducción y visualización de cantidades numéricas. BOOLEAN.- Para la entrada y visualización de valores boléanos (encendido apagado) STRING Y TABLE.- Para la entrada y visualización de texto LIST Y RING.- Para visualizar y/o seleccionar una lista de opciones ARRAY Y CLUSTER.- Para agrupar elementos PATH Y REFNUM.- Para gestión de archivos. GRAPH.- Para presentar gráficamente datos DECORACIONES.- Para introducir decoraciones en el panel frontal. 3.6.5 CARACTERÍSTICAS DE LA TARJETA DE ADQUISICIÓN DE DATOS. EL modulo NI de adquisición de datos DAQ multifunción USB – 6009 de NATIONAL INSTRUMENTS (NI), es una opción de adquisición a bajo costo, con el sistema plug-and-play USB de conexión. A pesar de que la tarjeta no es de muestreo simultáneo para los ocho canales, posee las siguientes características de adquisición: On Demad, Finite y Continuos (Sobre la Demanda, Finito y Continua, es el caso para la elaboración de un osciloscopio 83 donde se puede designar únicamente dos canales de trabajo obteniendo excelentes resultados a un rate de 10000Hz. REQUERIMIENTOS DEL SISTEMA CARACTERISTICAS DE LA DAQ 6009 SISTEMA DE ADQUISICION, INTERFAZ USB COMUNICACIÓN USB 2.0 FULL SPEED RANGO DE VOLTAJE -6 +6 v RANGO DE VOLTAJE -10 +10 v EL ADC PUEDE SER POR APROXIMACIONES SUCESIVAS O FLAH EL ADC DEBERIA TENER UNA RESOLUCIÓN DE 10 BITS EL SQNR DEBE SER DE AL MENOS 60dB ADC POR APROXIMACIONES SUCESIVAS RESOLUCIÓN 14 BITS SQNR = 82 dB RATE 15KS/s RATE 48KS/s, ENVIO DE DATOS MEDIANTE BÚFER DIRECTO A MEMORIA RAM TRES CANALES CON MUESTREO SIMULTANEO O MULTIPLEXACIÓN 8 CANALES DE ENTRADA ANALOGICOS REFERIDOS A TIERRA O 4 DIFERENCIALES, MUESTREO POR MULTIPLEXACIÓN, 10E/S DIGITALES Tabla 3.7. Comparación entre requerimientos y disponibilidades con la tarjeta DAQ 6009 NI Fuente: Los autores. TRANSDUCTOR SENSOR DE ACELERACIÓN SENSOR DE VELOCIDAD SENSOR DE CORRIENTE L1 SENSOR DE CORRIENTE L2 SENSOR DE CORRIENTE L3 SENSOR DE VOLTAJE L1 SENSOR DE VOLTAJE L2 SENSOR DE VOLTAJE L3 RELACIÓN DE UNIDADES 30mV / g. 719,5Hz / 1800 rpm 61,667mV / A 61,667mV / A 61,667mV / A 3,76V / 127V 3,76V / 127V 3,76V / 127V ACONDICIONAMIENTO DE SEÑAL TRANDUCTORES -CAS FILTRO GANANCIA CAS-DAQ 2do ORDENN, BUTTERWORTH 5000Hz SEGUIDOR DE VOLTAJE 4 FILTRO DC 2do ORDEN, BUTTERW ORTH 750Hz 1 SEGUIDOR DE VOLTAJE 2do ORDEN, BUTTERWORTH 500Hz 10 2do ORDEN, BUTTERWORTH 500Hz 10 SEGUIDOR DE VOLTAJE SEGUIDOR DE VOLTAJE 2do ORDEN, BUTTERWORTH 500Hz 10 AMPLIFICADOR DE INSTRUMENTACIÓN 2do ORDEN, BUTTERWORTH 500Hz 1 AMPLIFICADOR DE INSTRUMENTACIÓN 2do ORDEN, BUTTERWORTH 500Hz 1 AMPLIFICADOR DE INSTRUMENTACIÓN 2do ORDEN, BUTTERWORTH 500Hz 1 - Tabla 3.8. Resumen del sistema de acondicionamiento de señal. Fuente: Los autores Figura 3.27, Tarjeta de adquisición de datos DAQ 6009 Fuente: Los Autores. 84 General Form ato Físico So por te par a S O T ip os de M edi da F am il i a d e P ro duc tos U SB W i ndow s, Li nux , M a c OS V oltaje S erie B Entrada Analógica N úm ero d e Can ales Ve loc i dad de M ue str eo R eso lu ción Mue streo Sim ultán eo R ang o de Vo lt aje Má x im o Prec i si ón del R an go R ang o de Vo lt aje Mí ni mo Prec i si ón del R an go N úm ero d e Ran gos Mem ori a I nterna 8 SE /4 DI 4 8 k S/ s 1 4 bi ts No -10 ..10 V 1 38 m V -1. .1 V 3 7.5 mV 8 5 12 B Salida Analógica N úm ero d e Can ales R az ón d e A ct ual iza ción R eso lu ción R ang o de Vo lt aje Má x im o Prec i si ón del R an go R ang o de Vo lt aje Mí ni mo Prec i si ón del R an go C apa cidad de Corrie nte (Ca nal/Tot al) 2 1 50 S /s 1 2 bi ts 0 ..5 V 7 mV 0 ..5 V 7 mV 5 m A/1 0 m A E/S Digital N úm ero d e Can ales T em pori za ci ón N iveles Lógicos Máx im o Ra ngo de E ntra da Máx im o Ra ngo de S ali da En tr ada de F l uj o d e Co rr i ent e F iltro s de En tr ada Prog ra ma bles Sa li da de F l uj o de C o rri ent e C apa cidad de Corrie nte (Ca nal/Tot al ) T em pori za dor W atc hdog ¿ So por ta Es tado s de E nce ndi do Pr ogra m ab le s? ¿ So por ta Proto co lo de Sinc r oniza ci ón para E/S ? ¿ So por ta E/S d e P atr one s? 1 2 DIO S oftw ar e TT L 0 ..5 V 0 ..5 V S inkin g, S ourci ng No S inkin g, S ourci ng 8 .5 m A /102 m A No No No No Contadores/T emporizadores N úm ero d e Con tado re s/T e mp oriz ad ores R eso lu ción F r ecu enc i a M áx im a de l a F uent e En trada M ín im a d e A nc ho d e P ul so N iveles Lógicos R ang o M áx im o Es tabil i dad de T i em po Si nc r oni z ac ión G P S G ener ac i ón de P ulso O perac iones a B úf er Eli mi na ci ón de Rebot es 1 3 2 bi ts 5 MH z 1 00 n s TT L 0 ..5 V 5 0 pp m No No Sí No Temporización/Disparo/Sincronización Bu s de S incr oniz ac ió n (RT S I) Disparo No D igita l Tabla 3.8 Características generales DAQ 6009. Fuente: NATIONAL INSTRUMENT, USB 6009, www.highlights.ec 85
 0
0
Anuncio
Documentos relacionados







Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados