Laboratorio 1
Temas
1.
2.
3.
4.
Matrices
Funciones matemáticas básicas
Generación de gráficas
Generar señales
Generar matrices
A = [3 5 2;6 6 45;8 45 26];
A1 = [3, 5, 2;6, 6, 45;8, 45, 26];
B = [2 5 32;8 45 26;7 4 9];
C1 = B(1:2,2:3)
sqrt
Operación de matrices
C = A + B;
D = A*B;
F = det(A);
G = inv(B);
H = (inv([2 3 12;56 55 3;7 6 78]))*[21;9;0];
Generación de vectores
K = [0:0.1:10]; %genera arreglo de 101 elementos
Funciones trigonometricas
J = sin(K);
L = sin(K + pi);
Imprimir gráficas
plot(K,J,K,L,'*')
grid
title('curva senoidal')
xlabel('x')
Guía de laboratorio 2
Ejemplo 1:
//Código en scilab
p = poly([0 32 12 1],'s','c') // poly escribe el polinomio es este caso s3+12s2+32s+0s
n = 32;
gf=syslin('c',n/p);
//define un sistema lineal
se=pfss(gf)
// pfss realiza la separación en fracciones parciales
Respuesta:
se(1)
1
-s
se(2)
-2
-----4+s
se(3)
1
-----8+s
Ejemplo 2:
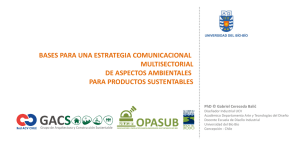
Grafique la respuesta escalón de la función de transferencia fs2, en un rango de tiempo de 0 a 10
segundos.
1
𝑓𝑠2 =
𝑠+1
//Código en scilab
s=%s //necesario para interpreta la variable “s”
t=0:0.5:10;
y3 = (1);
y4 = (s+1);
fs2 = syslin('c',y3/y4); //define un sistema lineal.
fs1=csim('step',t,fs2); //da la respuesta en el tiempo
plot2d(t,fs1,2);
Figura 1. Respuesta a la entrada escalón
de la función de transferencia fs2.
Para más información sobre el comando csim escriba en la consola: help scim
Ejemplo2
A=[-1,0.5;-1,0];B=[0;1];C=[1,0];
t=[0:0.1:12]
S1=syslin('c',A,B,C)
fs1=csim('step',t,S1);
plot2d(t,fs1,2)
Práctica
Grafique la respuesta escalón de:
G(s)=(10s+4)/(s^2+4s+4)
G(s)=1/s^2+0.2s+1
Guía de Laboratorio 3
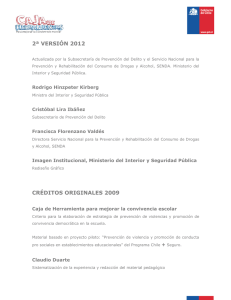
Ejemplo 1: Respuesta de un sistema representado en espacio de
estados con entrada escalón.
t=0:0.1:12;
A=[-1 0.5;-1 0];
B=[0;1];
C=[1 0];
D=[0];
y=step(A,B,C,D,1,t);
plot(t,y)
%La respuesta y es la figura 1.
Figura 1
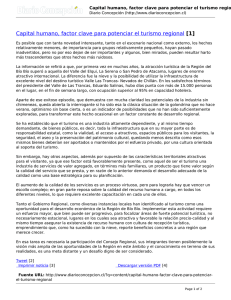
Ejemplo 2: Para una entrada exponencial u, se utiliza el comando
lsim. A,B,C,D son del ejemplo 1.
u=exp(-t);
z=lsim(A,B,C,D,u,t);
plot(t,z)
%La respuesta z es la figura 2.
Figura 2
Ejercicio:
Obtenga la respuesta de los siguientes sistemas:
1. A=[0 1 0;0 0 1;-2 -5 -4] B=[-7;19;-43] C=[1 0 0] D=[2]
2. A=[-4 -1;3 1] B=[1; 1] C=[1 0]
3. A=[-5 -1;3 -1] B=[2;5] C=[1 2]
Laboratorio 4
Sistemas de control 1
Ingeniería Biomédica
Ejemplo 1:
s=%s
y3 = 1;
y4 =(s+1)*(s+2)*(s+3)*(s+6);
fs2 = syslin('c',y3/y4);
evans(fs2)
Práctica graficar el lugar de las raíces de:
Y=
45.8030
(s*(s+7))+(45.803);
Laboratorio 5
Obtenga la respuesta a la entrada delta Kronecker
G(z)=
0.4673𝑧−0.3393
𝑧 2 −1.5327𝑧+0.6607
num=[0 0.4673 -0.3393];
den=[1 -1.5327 0.6607];
x=[1 zeros(1,40)];
y=filter(num,den,x)
Obtener la respuesta:
num=[0 0.5151 -0.1452 -0.2963 0.0528];
den=[1 -1.8528 1.5906 -0.6642 0.0528];
x= ones(1,41);
y=filter(num,den,x);
k=0:40;
v=[0 41 0 2];
axis(v);
plot(k,y,'o')
Obtener la respuesta delta Kronecker de:
G(z)=
G(z)=
𝑧(𝑧+2)
(𝑧−1)2
𝑧
; para 30 valores
; para 30 valores
𝑧 2 −𝑧−1
𝑧 −3
G(z)=
;
(1−𝑧 −1 )(1−0.2𝑧 −1 )
Laboratorio 6
Ejemplo de discretización:
s=%s
t=0:0.01:2;
y3 = 7.8734*(s+10);
y4 = s*(s+1)+(7.8734*(s+10));
fs2 = syslin('c',y3/y4);
fs1=csim('step',t,fs2);
plot2d(t,fs1,2);
xgrid();
fs3=ss2tf(dscr(fs2,0.1));
v1=0:0.1:2;
u=ones(1:21);
u1=[v,u];
y=flts(u,fs3);
k=0:20;
v=[0 41 0 2];
//axis(v);
plot(v1,y,'o')
Resolver:
Obtenga el sistema muestreado a 0.5 segundos. ¿Qué se puede
concluir al comparar con el sistema muestreado a 0.1
segundos?