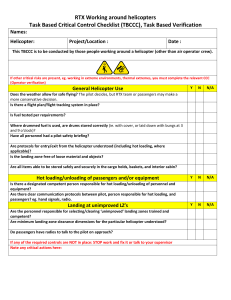
ISSN(Print) 1975-0102 ISSN(Online) 2093-7423 J Electr Eng Technol.2017; 12(?): 1921-718 http://doi.org/10.???/JEET.2017.12.3.1921 Fuzzy Model-Based Output-Tracking Control for 2 Degree-of-Freedom Helicopter Wook Chang*, Ji Hyun Moon** and Ho Jae Lee† Abstract – This paper addresses the control problem of a laboratory-level 2 degree-of-freedom helicopter. The exact fuzzy model in a Takagi – Sugeno form is constructed by the sector nonlinearity technique, and is then represented as a set of uncertain linear systems. Output-tracking controller is designed in terms of linear matrix inequalities and the closed-loop stability is rigorously analyzed. Experimental evaluation shows that the proposed method is of benefit to many real industrial plants. Keywords: Experimental helicopter, fuzzy model, output tracking, stability 2. Modeling 2.1 System Dynamics As shown in Fig. 1, the experiment system consists of a body and a supporting base. The main and the tail rotors are driven by two voltage inputs to control the pitch and the yaw angles of the body, respectively. Observing Fig. 2, the dynamics is derived as: Pr oo f re ad in Various control schemes have been developed for practical nonlinear plants, among which a successful one can be referred to fuzzy control in a Takagi–Sugeno (T– S) form. Achievements from theoretical standpoint in this area are actually too many to cite. To the contrary, its practical usefulness has not been sufficiently revealed. One can exemplify the applications to chaos [1-3], power systems [4], buck converters [5], and gas furnace [6]. We note that their effectivenesses are evaluated through numerical simulations. Motivated by the above, we address the output-tracking control problem of a laboratory-level experimental helicopter with 2 degree-of-freedom (DOF) [7]. Although the apparatus is not an actual but a simplified one, it exhibits main characteristics of the real helicopter, i.e., intrinsic instability, nonlinearity, and the cross-coupled dynamics [8, 9]. Hence, the problem of interest herein is yet practically valuable. In this paper, T–S fuzzy modeling of the 2-DOF helicopter is first performed by the aid of the sector nonlinearity technique [10]. For nonlinear output-tracking (regulation), a partial differential Francis–Isidori–Byrnes (F–I–B) equation should be involved. When a system is restricted to the T–S form, the F–I–B equation is reduced to a nonlinear ordinary differential form, which is still difficult or impossible to solve [11, 12]. The reason lies in the interaction among the fuzzy rules. In order to ease that burden, the fuzzy model is converted to a set of uncertain linear systems [13]. Based on that, the output-tracking controller to guarantee a uniform ultimate boundedness (UUB) is synthesized, where the exosystem state is regarded as disturbance. Since it is actually a deterministic, rather than unpredictable, input, the refined stability is investigated. Experiment results are included to demonstrate the effectiveness of the proposed method. Notations An ellipsis is adopted for long symmetric matrix expressions, e.g., g 1. Introduction Corresponding Author: Dept. of Electronic Engineering, Inha Univerity, Korea. ([email protected]) * Kitronyx, Korea.([email protected]) ** Dept. of Electronic Engineering, Inha Univerity, Korea. ([email protected]) Received: January 20, 2016; Accepted: November 4, 2017 (1) † Fig. 1. Experimental 2-DOF helicopter Copyright ⓒ The Korean Institute of Electrical Engineers This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/ licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited. 1921 Fuzzy Model-Based Output-Tracking Control for 2 Degree-of-Freedom Helicopter where is the pitch angle; is the yaw angle. The parameters are summarized in Table 1. Remark 1: The rotation of the main rotor causes a load on the rotor shaft that is in turn seen at the torque yaw axis. It is known as the parallel axis theorem [14]. Similarly, the rotation of the tail rotor causes a force acting on the body at a distance from the yaw about the pitch axis. axis as well as a torque and Let the input and the state be . Then the state-space equation for (1) is constructed by with slight abuse on the notation for the output , where and . 2.2 Fuzzy modeling To represent (2) as a T–S form, consider the following convex combination Solving this yields (2) ad in g From the fact that oo f re is determined, where we set rad, due to the structural restriction on the hinge between the body and the base. It results in the two-rule affine T–S fuzzy model of Fig. 2. Free body diagram of the 2-DOF helicopter Pr Table 1. System parameters of the experimental setup 1922 │ J Electr Eng Technol.2017; 12(1): 1921-718 Wook Chang, Ji Hyun Moon and Ho Jae Lee where , are known of compatible dimensions, where , is an unknown function matrix with . and The model (4) is then rewritten as (6) 3. Design Consider the exosystem g To deal with the non-vanishing perturbation , we introduce a new state . Defining , the augmented dynamics becomes ad in is the reference for where of generality, we assume following transform (3) where to track. Without loss . Consider the (7) oo f 2.3 Alternative representation re and take the controller of the form Pr To overcome strong nonlinear interactions among the fuzzy rules, (3) is represented as a set of uncertain linear systems [13]. Define an indicate function (8) and where equation are solutions to the following matrix The closed-loop system is given by is represented as a set of uncertain then (3) with linear systems in the form of (9) (4) where (5) in (5) is used not to Remark 2: Matrix represent real uncertainties but to lump all interactions among the local models in (3) in terms of uncertainty. Remark 3: Matrix (5) can be structured as follows: where . Due to Remark 3, . can be decomposed in the form of , Theorem 1: If there exist , and s.t. also , (10) http://www.jeet.or.kr │ 1923 Fuzzy Model-Based Output-Tracking Control for 2 Degree-of-Freedom Helicopter then in (6) tracks with UUB via (8), where . Proof: Define a Lyapunov function by . Then along (9) excluding is negative definite for all exosystems (i.e., fast-varying ) by using the approach of Filippov [17], where the trajectory of (3) is defined by a solution of the differential inclusion stands for the convex hull of a set. The where methodology to conduct this generalization will be addressed in the future research. if 4. Further Analysis is the deterministic external input, rather than Since an unpredictable disturbance, the more refined stability can be investigated. with some Assumption 1: Given any frozen , s.t. bounded . , Theorem 2: Theorem 1 guarantees that s.t., for re ad in g Congruence transforming the foregoing inequality with , changing variable , and using the Schur complement, we obtain (10). If this is true, we have where and oo f along (9). Moreover Pr is chosen so as to be . Define . One can easily agree that as long as , where is a compact set. According to the standard Lyapunov theorem, there exists a finite time s.t. enters at and remains for all . Thus is bounded and ultimately converges to . This implies that the claim follows. Remark 4: Several comments are made. ● Model (9) is represented as a state-dependent switched system, while (8) generates a time-driven reference signal. One may say that (9) contains time-dependent switching. In fact, it is not easy to distinguish between state- and timedependent switching, because trajectories under statedependent switching are also those under a suitably defined time-dependent one [15]. In view of that observation, (9) can be regarded as a time-dependent switched system. We know that stability of the time-dependent switching among stable systems can be determined via such as an average dwell time [16], which can be guaranteed if the exosystem is slowly varying). is suitably defined (i.e, ● It is also possible to cover the more general 1924 │ J Electr Eng Technol.2017; 12(1): 1921-718 Proof: Let to write (11) By expansion, we compute where (please see Appendix for details). Hence, (11) is rewritten as (12) Wook Chang, Ji Hyun Moon and Ho Jae Lee We know that , where s.t. , along . Thereby Let and Let Straightforward calculation of ) results in . along (12) (rather than and then the foregoing inequality can be majorized by and vanishes at , g is in ad in Since s.t. that It now holds Combining this with (15) results in which is contradictory, so we conclude . We will does not exist. From the oo f Continuity says that for and show by contradiction such a Lyapunov, we have re (13) and Pr (14) By continuity again, , as so (13) is (15) s.t. Construct a comparison system Therefore Integrating the both sides of (13) from It remains to show that whenever . From the theorem, we know majorized to to gives which can be shown to be asymptotic stable, by using a generalization of the invariance arguments in [18, Lemma . Then the comparison 5.3.71] under the property as . principle says that 5. Experimental Results The parameters for the experimental setup are tabulated in Table 1. Variables and , and their time-derivatives are measured through the encoders attached on the vertical and horizontal axis, respectively. The periods for analog to http://www.jeet.or.kr │ 1925 Fuzzy Model-Based Output-Tracking Control for 2 Degree-of-Freedom Helicopter digital conversion and vice versa are s, which is small enough to neglect the effects of the sampled data. Experiments are carried out according to the exosystem parameterized by for and for , signifying that is zero and sufficiently small in an average sense in the respective time intervals. . By Theorem 1 with The initial state is set to , we obtain ad in g with oo f re Fig. 3. Time responses of p and y by the proposed method: actual (solid) and desired (dashed) Pr s Time responses are shown in Fig. 3. Before ), and are well guided to the horizontal (i.e., s (i.e., ), all attitude. After angles of the controlled 2-DOF helicopter that have sustained the equilibrium quickly follow the desired sinusoidal trajectories with a bounded deviation, despite the nonlinear dynamic behavior. This result coincides with the stability analysis that we conclude in Theorem 2. Fig. 4 shows the control voltage inputs for the main rotor and the tail rotor. 6. Conclusions We discussed the modeling and the output-tracking control of the experimental 2-DOF helicopter. The fuzzy model in T--S form was derived and rearranged as a set of uncertain linear systems to exclude the interaction among fuzzy rules. The design condition was formulated in the linear matrix inequality format. The closed-loop stability was further analyzed. The experimental results have convincingly demonstrated the feasibility of the developed technique. 1926 │ J Electr Eng Technol.2017; 12(1): 1921-718 Fig. 4. Time responses of method and by the proposed Wook Chang, Ji Hyun Moon and Ho Jae Lee Reminding of (11), the chain rule gives [3] [4] [5] Integrating the foregoing derivative with respect to $\theta$, we have [6] ad in [7] [8] control of nonlinear systems with parametric uncertainties,” IEEE Trans. Fuzzy Syst., vol. 9, no. 2, pp. 369-379, 2001. W. Chang, J. B. Park, Y. H. Joo, and G. Chen, “Design of robust fuzzy-model-based controller with sliding mode control for SISO nonlinear systems,” Fuzzy Sets Syst., vol. 125, pp. 1-22, 2002. H. J. Lee and D. W. Kim, “Decentralized loadfrequency control of large-scale nonlinear power systems: Fuzzy overlapping approach,” J. Electr. Eng. Tech., vol. 7, no. 3, pp. 436-442, 2012. K.-Y. Lian and J.-J. Liou, “Output tracking control for fuzzy systems via output feedback design,” IEEE Trans. Fuzzy Syst., vol. 14, no. 5, pp. 628-639, Oct. 2006. K. Kiriakidis, “Fuzzy model-based control of complex plants,” IEEE Trans. Fuzzy Syst., vol. 6, no. 4, pp. 517-529, 1998. Q. Consulting, 2D Helicopter Experiment, 1998. M. Hernandez-Gonzalez, A. Alanis, and E. HernandezVargas, “Decentralized discrete-time neural control for a quanser 2-DOF helicopter,” Appl. Soft Comput., vol. 12, no. 8, pp. 2462-2469, 2012. B. Zhu, “Nonlinear adaptive neural network control for a model-scaled unmanned helicopter,” Nonlinear Dyn., vol. 78, no. 3, pp. 1695-1708, Jul 2014. K. Tanaka and H. O. Wang, Fuzzy Control Systems Design and Analysis : A Linear Matrix Inequality Approach. New York: Wiley, 2001. J. A. Meda-Campaña and B. Castillo-Toledo, “Exact output regulation for nonlinear systems described by Takagi-Sugeno fuzzy models,” IEEE Trans. Fuzzy Syst., vol. 20, no. 2, pp. 235-247, 2012. H. J. Lee, J. B. Park, and Y. H. Joo, “Comments on “Output tracking and regulation of nonlinear system based on Takagi-Sugeno fuzzy model,” IEEE Trans. Syst., Man, Cybern. B, vol. 33, no. 3, pp. 521-523, 2003. S.-G. Cao, N. W. Rees, and G. Feng, “Stability analysis and design for a class of continuous-time fuzzy control systems,” Int. J. Control, vol. 64, pp. 1069-1087, 1996. T. R. Kane and D. A. Levinson, Dynamics, Theory and Applications. McGraw-Hill, NY, 2005. D. Liberzon, Switching in Systems and Control, ser. Systems & Control: Foundations & Applications. Birkhäuser, 2003. J. P. Hespanha, Stabilization through hybrid control. Oxford, 2004, ch. Stabilization Through Hybrid Control. B. Samadi and L. Rodrigues, “A unified dissipativity approach for stability analysis of piecewise smooth systems,” Automatica, vol. 47, no. 12, pp. 2735-2742, 2011. M. Vidyasagar, Nonlinear Systems Analysis. SIAM, 2002. g Appendix [9] re [10] Pr oo f [11] [12] [13] Acknowledgements This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Korea government (Ministry of Science, ICT & Future Planning) (No. 2014R1A2A2A01005664). [14] [15] [16] References [1] [2] Z. Li, J. B. Park, and Y. H. Joo, “Chaotifying continuous-time T-S fuzzy system via discretization,” IEEE Trans. Circuits Syst. I, vol. 48, no. 10, pp. 12371243, 2001. H. J. Lee, J. B. Park, and G. Chen, “Robust fuzzy [17] [18] http://www.jeet.or.kr │ 1927 Fuzzy Model-Based Output-Tracking Control for 2 Degree-of-Freedom Helicopter ad in Ji Hyun Moon He received his B.S. and M.S. degrees from the Department of Electronic Engineering, Inha University, Incheon, Korea, in 2012, 2014, respectively. He is currently pursuing a Ph.D. degree at the same university. His research interests include fuzzy control systems, multi-agent systems and an underwater glider, and their applications. g Wook Chang He received his B.S., M.S., and Ph. D. degrees form the Department of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea, in 1994, 1996, and 2001, respectively. In 2001, he was a member of research staff at Samsung Advanced Institute of Technology. In 2010, he founded Sensible UI and successfully sold it to a UK company in 2012. In 2014, he founded another company Kitronyx, Inc. where he has been working as a Chief Executive Officer. His research interests include fuzzy control systems, digital redesign, multi-touch technologies, and pressure sensing technologies. Pr oo f re Ho Jae Lee He received his B.S., M.S., and Ph. D. degrees from the Department of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea, in 1998, 2000, and 2004, respectively. In 2005, he was a Visiting Assistant Professor with the Department of Electrical and Computer Engineering, University of Houston, Houston, TX. Since 2006, he has been with the School of Electronic Engineering, Inha University, Incheon, Korea, where he is currently an Associate Professor. His research interests include fuzzy control systems, hybrid dynamical systems, large-scale systems, and digital redesign. 1928 │ J Electr Eng Technol.2017; 12(1): 1921-718