INERTIAL, GOVERNOR, AND AGC ECONOMIC DISPATCH LOAD FLOW SIMULATIONS OF LOSS OF GENERATION CONTINGENCIES
Anuncio

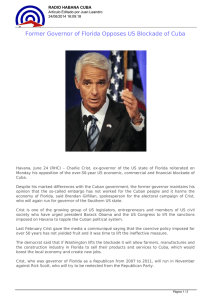
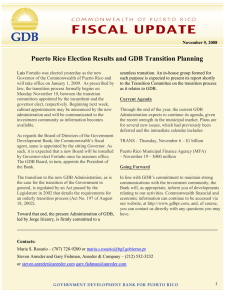
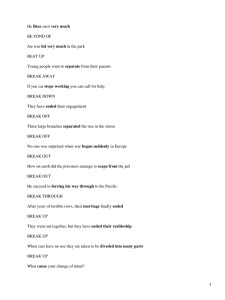
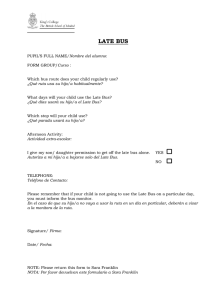
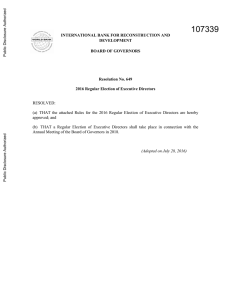
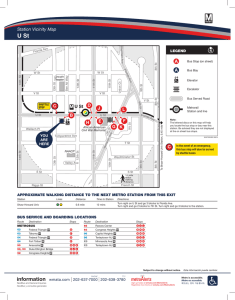
IEEE Transactions on Power Apparatus and Systems, Vol. PAS-104, No. 11, November 1985 3020 INERTIAL, GOVERNOR, AND AGC/ECONOMIC DISPATCH LOAD FLOW SIMULATIONS OF LOSS OF GENERATION CONTINGENCIES by R. Schlueter, Senior Member M. Lotfalian Michigan State University University of Evansville East Lansing, Michigan Evansville, Indiana P. Rusche D. Idizior Consumers Power Company Jackson, Michigan A. Yazdankhah L. Shu S. Tedeschi Michigan State University East Lansing, Michigan The transient phenomena associated with the loss of generation contingency is described i n this paper. The propagation of the disturbance, the time instant at which the inertial load flow captures a snapshot of the transient, and the time instant at which the governor load flow captures a snapshot of the transient is described. A method of determining the subset of generators that participate in governor load flow is described based on this discussion of the propagation and evolution of the transient phenomena associated with loss of generation contingencies. Finally, the application of inertial and governor load flow in planning is discussed. A description of the inertial and governor load flow program, developed for EPRI and residing in the EPRI Software Center, is described. Comparisons of the inertial load flow and governor load flow bus angles with a snapshot of the angles at t = .25 seconds and t = 10 seconds from EPRI Mid Term Stability simulation is presented for different contigencies on a 49 bus test system. The results not only indicate that the inertial and governor load flows are accurate but also that the inertial and governor load flow capture shapshots of the Mid Term Stability simulation at particular instants. Introduction The simulation of the transients for loss of generation contingencies can be performed using Transient/Mid Term [1] or Long Term Simulation [2] packages. The load flow simulation of loss of generation contingencies usually assigns the mismatch caused by the loss of generation contingency to a swing bus. Programs exist. that allow the mismatch to be split among all or some subset of the generators, according to participation factors. The participation factors could be proportional to inertia, generation capacity, AGC participation factors, or economic dispatch participation factors. The transients accompanying loss of generation contingencies are described in classical papers and books [3,4,5]. Although load flow programs have been written that allow inertial or governor distributior A paper recommended and approved 85 WM 055-9 by the IEEE Power System Engineering Committee of the IEEE Power Engineering Society for presentation at the IEEE/PES 1985 Winter Meeting, Niew York, New York, February 3 1985. Manuscript submitted made available for printing - August 30, 1984; December 12, 1984. 3, of the mismatch, use of such programs in planning only appears in regional planning documents that are not open literature. Moreover, there has never been any effort to determine whether the inertial load flow (inertial distribution of mismatch) captures a snapshot of the actual transient/mid term simulation of that contingency. Moreover, there never has been an effort to model the effect of governor deadband on the governor load flow (governor distribution of mismatch). Thus, there is confusion as to the similarity and differences between the inertial and governor load flow. 2.1 Formulation Qf InertiaS Load Flo Problems 1C1QpratQr o Oego Load Flo Formulation Load flow solutions provide bus voltage angles and power flows in the transmission system for specified generation and load conditions. To study the affect of generation response to a loss of generation or load contingency for inertial, governor, and AGC/operator distribution, the real electrical power to be delivered into the network for each distribution must be specified, and load flow equations must then be solved for unknown, wanted variables. The load flow equations can be written as: PGj(K) PDi QGi QDi= = i jEAi jcAi Qij ~~~~~~~~(1) jrAi *sincij + ViVjYijsin (6i-6j-otij) = V?Y Qi; ij = . Vi(Y - 1/2 VwVhYerCeS (: j Bij) - j) where: = set of buses connected to bus i PDi+jQDi = canplex power load at bus i PG(K)+jQGi = complex power from generation at Ai bus i ij= (900 - the impedance angle of line ij) Bi 1= the total charging susceptance of the line connecting buses i and j 0018-9510/85/1100-3020$01.00© 1985 IEEE a 3021 QGiMin < QGi < QGiMax for rGi(2) regulated buses QGi= reactive power generated by generator i These AC load flow equations can be solved given PDi + jQD at load buses, Vi and 6 at the swing bus, and PGtK) and Vi at generator buses. The variables caiculated by solving the load flow equations are V and 6i at load buses, losses at swing bus, and QG( an3 6. at generator buses. The load flow is calcu?ated under the constraint: Gi QGiMax QGiMin K Sj presented. The value of PGi(J) i = 1, 2, ...., N for the inertial load flow assumes that the acceleration of every generator is constant dwi/dt = dw0/dt, and thus: dwo Pmi =Mi dt = N d)0 dt z i=l (PMi.L (2a) FGi(O)) L - (2b) N Mi where: PGi(0) = real electrical power delivered to the network before loss of generation by er'eerator i PMi =PG(0) - APM = mechanical power sent to the generator after loss of generation APMi A PMi = rGi(0)O i = k i t k where k is the lost generator PGi(l) real electrical power delivered into the network by generator i after loss of generation for inertial distribution of mismatch power The va l ue PGi(2) i = 1, 2,.., M for the governor load flow assumes that the governor action is complete and that frequency is constant everywhere Aw=Aw0 so that: PGi (2) where: = N E = frequency response characteristic of generator i Y 4M FGi(3) = Pi where: MP < The inertial, governor , and AGC/operator load flows differ based on the generator injection PGi(K) for inertial (K = 1), governor (K = 2), and AGC/economic dispatch (K = 3) distributions described below. The formulas for calculating the injections PGi(K) for all generators for inertial (K 1), governor (K = 2), and AGC/economic dispatch (K - 3) distributions of loss of generation or load mismatch are now where: the real electrical power delivered into the network by generator i when governor frequency regulation is complete For the final distribution of power by the AGC/economic dispatch PGi(K) for (K = 3) satisfies: at PV buses where voltage is held to specified levels. PGi(l) = PMi -6iAwo (3a) (PMi- j(0)) i=l N o -w- M = number of generators on regulation. (3b) = = 1 (4b) (PM, - PGi(O)) i =1 number of generators participating in AGC/economic AElk = MP MP £y i= (4a) dispatch. PGi(3) yi = real power delivered to the network by generator i after economic dispatch or AGC action is complete = KAC/economic dispatch participation factor The load flow equations (1) are solved for bus voltage angles and power flow across the lines, given the values of PGi(K) from (2), (3), and (4) for the inertial, governor, and AGC/economic dispatch load flows, respectively. The inertial, governor, or AX/economic dispatch load flows are solved using Consumers Power Company Multiple Contingency Fast Decoupled Load Flow. The package can handle systems with 750 generators, 5500 lines, and 3000 buses. It requires a solved base case from a Philadelphia Electric Load flow. It is extremely fast and can solve an 800 bus AC load flow in approximately 1 second. It can determine either AC decoupled or DC load flow solutions. The mismatch for loss of generation contingencies can be distributed to all or a subset of buses by reading the appropriate distribution factors. The inertial or AGC/economic dispatch load flows for a set of contingencies can thus be solved by directly calling this program with the appropriate inertias (M.) as participation factors for inertial load flow or gi) participation factors for AGC/economic dispatch load flow and specifying the set of contingencies to be solved. The governor load flow is performed for a set of contingencies by use of a main program that calls this Multiple Contingency Fast Decoupled Load Flow to solve the inertial load flow for each of the contingencies. This program then analyzes the inertial load flow results for each contingency to determine a set of participating generators that would respond under governor load flow for each contingency. The governor load flow for each separate contingency is then simulated by calling the Multiple Contingency Fast Decoupled Load Flow for that contingency and setting the participation factors as the MW capacities (C.) for generators that will participate in governor load flow for that contingency. Participation factors for generators that do not participate in governor load flow for that contingency are set to be zero. This program thus can permit governor load flow simulation of a set of contingencies and is automated so that the user need not perform several separate calls to obtain governor load flows for a single loss of generation or a set of.loss of generation contingencies. 2.2 QMr.Wk Low El M1ling The inertial load f low is run in some large interregional transmission performance studies. The 3022 inertia constants for every generator in the interconnection must be specified to run this load flow. She AGC/economic dispatch load flow is sometimes run to study whether the redistribution of power for loss of generation contingencies in the particular utility of concern will cause thermal overload problems in the transmission system for that utility. The AGC participation or economic dispatch participation factors for the generators in that utility must be specified. The inertial load flow represents a snapshot of the transient when all generators experience identical decelerations due to the synchronizing action of the network-thO pu 1lls a ll the-generators toward a mean deceleration. The governor frequency regulation is initiated approximately six seconds after the loss of generation in order that the mismatch caused by the loss of generation contingency be eliminated. The subset of the generators on regulation that participate in supplying this mismatch power is unclear due to governor deadband. Thus, the power flows caused by governor load flow will be distinctly different than inertial load flow where AUJ generators in the interconnection respond. The AGC/economic dispatch load flow, which redistributes the mismatch from the subset of generators in the governor load flow to a preselected set of generators in the utility according to known participation factors, is again quite different from either the inertial or governor load flow. A method for determining the subset of the generators on regulation that participate in governor load f low is now derived. After inertial distribution of mismatch power, each generator is controlled- by its governor. A loss of generation contingency causes frequency deviation. Governor frequency regulation on each generator in the interconnection work together to arrest the change in frequency. This frequency regulation begins approximately six seconds after the disturbance occurs. When the governor frequency regulation is complete, frequency is constant at a deviation Aw 0 above nominal system frequency throughout the interconnection. Tlhe deviation of power at each generator from the governor model shown in Figure 1 is: C. Pi(3) W=M1i Apik(3 iw=i Awi = Si Awo (5) where Awi = radians/sec for all the generators w Ci OR frequency response characteristic of i= - generator i Ci =w capacity R = system of generator i regulation coefficient (R = .05) nominal systen frequency in radians/second The total mismatch *PMk is the sum of all the power w = changes. equal to AP and from (5) and (6): SiAEMk APik (3) = i i=l sa is approximately equal to MW capacity of generator (b divided by system regulation coefficient (R). The other factors involved in governor response are generator and turbine dampinq and load dependence on frequency, M -E i i=1 AFMk =w iX - This model of governor action that linearly relates generation change to frequency deviation is idealized. The governor deadband causes a generator to be insensitive to frequency deviation less than .036 Hz; if the frequency deviation sensed by a generator is greater than .036 Hz, the generator may still not respond to governor command if the unit is operating at a valve set point or if the generator is not under governor frequency regulation. The effects of governor deadband and valve set points have the effect of reducing the frequency response characteristics Si of generators electrically distant from the point of mismatch (bus k). The effects of the loss of generation on both the frequency and deceleration of generators electrically close to bus k are larger than at generators distant to bus k, as the effects of disturbance ripple out and ultimately achieve an inertial distribution. The large short transient initial frequency deviations close to disturbed bus k will overcome governor deadband and valve set point nonlinearities, making the generator's actual change in generation equal to 1.2% Ci. The generators far from the disturbance do not feel the large initial frequency transient but rather a slow exponential drop in frequency by .036 Hz. If the frequency transient does not exceed .036 Hz at a generator, that generator's governor deadband of 0.036 Hz prevents that governor from responding at all to the loss of generation at bus k. Thus, generators which experience a frequency transient above the nom.inal system frequency drop of A = .036 x 2 7 = 0.226 rad/sec experience a percentage change of generation equal to A PMi i=l ~i (6) 1 C. _= (- ) Awo p. u. Hz deadband Governor model of a generator. Figure 1. Since the Awi of all the generators are Awo, one obtains: = i 'wo i U x-2) = ( .05 1-) (-036 60 x 21 = 1.2% Ci = = .012 k (7) or a APMi change in generation. The generators electrically distant from the generator bus, that do not experience 3023 a frequency transient above .036 Hz, do not experience any change in generation and thus do not participate in governor regulation along with units not under governor frequency regulation. The frequency transient will always exceed .036 Hz at some buses in the. system no matter how small the loss of generation is since otherwise no other generator's governor will be able to detect the mismatch and this mismatch will continue to reduce system frequency as well as the local frequency near the bus at which the generation loss occurred. The larger the loss of generation is, the larger the local frequency transient is above .036 Hz. The frequency transient is not as large at buses further from the bus with the loss of generation induced mismatch because local generator governors have begun to pick up 1.2% of their megawatt nameplate capacity (Ci) and reduced the effective mismatch seen by generators further electrically from the disturbed bus k. The peak of the frequency transient occurs later and later as the frequency transient propagates from the disturbed bus and generators that have experienced the transient begin to produce their 1.2% C. contribution. This has been observed on both simulation and measurements for actual loss of generation contingencies. It is clear.that in order to model the governor response with deadband for the governor load flow one must determine the group of generator ieIk that respond to the loss of generation APM for the generator at bus k. The megawatt capacity of these generators CIk must satisfy from (7). 1.2% C E z iEIk =1.2% Ci = AMpm k (8) The 5ystem frequency change is APMk Aw ° i = APMk - =4 = 'Ik i SIk (woR k = .i (0.O5)wo (.012) - .0006 wo= .0006 (60 = (.036)2ar = x 2T1 Hz The generators i EIk are t.he generators that exlargest frequency deviations. he generators with the argest frequency changes wi 1 have the largest ang.le change from the time instant at which the disturbance at bus k occurs unti al1 generator buses are at their own peak frequency deviation. The peak frequency deviations at each bus occurs at a different time but al l occur shortly after al l buses experience the same acceleration and the snapshot of the transient is approximated by the inertial load flow. The change in generator bus angles 6 H(i k) - 6 0(i) (11) from smallest to largest should rank those generators with the largest frequency deviations sincP bus k wi l l have the largest, frequency and angle change. The set i£ Ik is obtained by adding up only the capacities of units that have governor frequency regulation as one goes down this ranking table until 1.2% E Cj > APMk iEIk (12) Units that do not have governor frequency regulations and thus do not,- participate in governor frequ'ency regulation are neglected in this summing of capacities in the ranking table. This procedure has been implemented in FORTRAN to analyze an output file from an inertial load flow produced by the-Consumers Power Company Multiple Contingency Fast Decoupled Load Flow in order to determine the set i cIk of generators that participate in governor load f low for a loss of generation contingency at bus k. The set Ik is then used to set governor response characteristics 6 to zero at generators ¢Ik in the governor load flow. .226 radians/sec perience the = [A6H(isk) - AdH(k,k)] Ci or Ad H(i k) is a measure of the magnitude of the frequency deviations at each bus i at the time instant when the inertial load flow captures a snapshot of the transient. Since the ranking of the magnitude of the frequency deviations at the time instant when the inertial load flow approximates the transient should be identical to the r-anking of the peak frequency deviations that occur at some short interval later, Ad H(i,k) can be used to rank the generators with the largest frequency deviations and thus determine the subset of generators iF Ik that participate in governor. The ranking of Generators ijel that have governors frequency regulation wi l l clearly have governor response characteristics icIk fo= .36 for loss of generation at bus k i i Rub H(i,k) = inertial load flow bus angle at generator i (10) where 6 0(i)= bus ang l e at generator i at the predisturbance base case condition It shoulI'd be noted that if a uti 1 ity loses its tie lines, a loss, of generation contingency can exceed 1.2% of the capacity of the uti l ity and then al l generators in the uti l ity wi l1l partici pate in the governor response. The above dePrivation and justificatibn of the method for determining the, generators that participate in governor load flow when governor deadband is considered is an important contributtion because it allows both characterization and simulation of the transient without actual time step integration of the nonlinear differential equations out to ?0 seconds. 2.3 Aipplication of Inertial and Governor Load Flows The long distance power transfers, as experienced in the. -PA [7] systeml or planned from Canada and the Midwest to replace oil generation in the Niortheast, utilize certain transmiiission corridors and bring loading much closer to their thernmal overload limits. A loss of oeneration contingency in the area receiving the transfer causes large inadvertent transfers over the same corri(ors providing the larqe planned transfers. These inadvertent transfers are due to inertial or governor distribution of the nmismatch from 3024 the loss of generation contingency and can be concentrated on just one corridor. The planned transfers can be distributed among several corridors by establishing the proper operating practice for each of the utilities in the interconnection where the transfers are planned. The inadvertent transfers cannot be distributed among the various corridor options but are dictated solely by the inertial or qovernor responses of generation in the interconnection and thus can be concentrated in just one or a relative few corridors. shown in Figure 2. The 49 bus test system was chosen since it was used and tested to validate the Mlid Term Stability Program, and the governor models for mid term stability studies were available for this system. Generator data, governor models, and base case load flow data used in this study are available through the EPRI Mid Term Stabi 1 ity Package [1] and, therefore, are not reproduced here. ALFA 4=16 ALSA 1=15 ALCA ALFA 17 T7 Thermal overload can cause loss of equipment life and sagging of lines that can lead to faults and other contingencies that ultimately can cause cascading outages and islanding. , _ AL.FA 2 Almost every major blackout and islanding problem can be associated with interconnection wide power flows. This problem is in great part associated with inertial and governor generation response. The load flow methods developed in this section al low direct assessment of stability and security problems due to generation response to loss of generation contingencies. The development of load flow models leads to a better understanding of the different power transfers associated with inertial and governor load flow time scales. The effects of these power flows on transmission qrids were also an objective. Lack of understanding of different power mismatch distributions in present planning methods, in some cases, caused improper use of the inertial load flow that was deve 1 oped af ter the 1965 b l ackout when records of the power flow experienced did not agree with ex i st i ng load f 1 ow ana l ys i s. The present planning methods have been considering the power flows due to qeneration response to loss of generation to be almost equal for inertial and governor distribution of mismatch power. Moreover, some conventional load flow programs are not able to address the stability and security problemns associated with inertial load flow and governor load flow. Miany present load flow techniqujes distribute the mismatch power to a large swing generator. This is not wJhat happens in a real power system, and the accuracy of this approximation to inertial or governor distribution wi 11 depend heavi ly on the representation of the system and the choice of the swing buis. The recently developed Mid Term stability Package [1] could be used to assess the stability for loss of generation contingencies, but this package cannot handle very large data bases required to analyze liarge interconnected networks associated with long distance power transfers where al l the generators must have governor turbine representation. Th'us, even if it is upgraded, it would be very computational ly expensive to run for the simulation time interval needed ( >20 seconds) to analyze governor response distribution. Thus, the lhWid Term Stability program can be used to determine inertial response to l oss of generation contingencies for large data bases but can at present only confirm governor response on smal 1 system data bases and then only at considerable computational cost. 3. Application of the Inertial and Governor Load Flow on a 49 Bus Test System To demonstrate the performance of the inertial and the governor load flow methods developed in Section 2, loss of generation contingencies were siviulated] using the inertial and governor load flow programis on the 49 bus Electric Power Research Institute (EPRI) test system. A schematic of this system is ALFA °ALFA _If 10 Zl 1=3 Z-2ETA I=40 0 0 RH ALIA ;llD_ _ _ _ 2 ZETA 0 _T12 RHO- ZETA .9 10TA 3=11 10 4 =10 BETA. I .=20 IAA I Q -1;~~~~~~~~~~~ Figure 2. 49 bus system transmission grid. The inertial and the governor load flow results will be compared with the M id Term Stability Program's results of the samne contingencies to verify the inertial and the governor load flows. The accuracy of the Mid Term Stability Program in the simulation of loss of generation contingencies out to the 10-20 seconds allows evaluation of the accuracy of the inertial and governor load flow simulation methods. Early results uncovered a steady state st.ability problem on the 49 bus test system. For the purpose of this research, this steady state stability problern had no effects on the results of the simulation in the time frame (.25 seconds) of inertial load flow and has little effect in the time frame (10 seconds - 10 minutes) of governor load flow if the magnituide of the loss of generation is large (>600 MW'') and thus dwarfs the effects of the ste-ady state oscillation. 3.1 Inertial Load Flow The EPRI Mid Term Stabi 1 ity Program was used to simulate the angle and frequency excursions for a 790 MiW loss of generation contincency at Zeta 3. The plot of frequency deviations for all generagiven in Figure 3 The frequency deviations tors is 3025 have approximately the same rate of change at t = 0.25 seconds just before generators in the Zeta system begin to oscillate against one another. Thus, the time instant t = .25 seconds is the instant at which the "snapshot" of the transient stabil ity simulation should resemble the quasi steady state condition given by the inertial load flow. The angle change from the base case load flow was determined at t = .25 seconds on the midterm transient stability simulation results such as shown in Figure 4 and tabulated in Table 1. The changes in bus angle for the inertial load flow from those in the base case load flow were also tabulated in Table 1. The angle change within each of the stiffly connected groups Alpha (1,4,28,31), Alpha (27,29), Alpha (24-26), Alpha (9-13), Rho (3-4), Zeta (1-4), and (Gama 1, Beta 1, Zeta 5) are nearly the same in both the inertial load flow and midterm stability simulation. These stiffly interconnected groups were determined [51 utilizing a coherency measure that can detect stiffly connected groups and the weak transmission boundary that connects such groups. The angle change from any generator in the reference group Beta 1, Gama 1, Zeta 5, to any generator in any of the other stiffly interconnected groups differs by 1.60 from comparing the inertial load flow and midterm stability simulations. The angle changes for generators within these groups or between groups other than the reference group are in excellent agreement by comparing the inertial load flow and midterm stability simulation results. The 1.60 error in the angle between generators in the reference group and any other generator not in that group in the inertial load flow may be due in part to the fact that al l mismatch is distributed inertially in the midterm stability simulat ion but only the loss of generation is distributed in the inertial load flow. Q 8 H o 40 cv o 8 6 c) I4 ¢i a 2.0 Figure U) Bus 4.10 3.0 Tine Figure 3. in Govern'or Load The governor Table Generator frecuency deviation for of 3.3 5 Seconds 790 generation at 11W.loss Zeta 3. Flow load flow calculated neglecting generation is greater than 1.2% of the generation capacity with governor regulation capabilities. The frequency changes from the base c'ase have approximately reached quasi-steady state condition afte'r t 10 seconds and governor deadband since t-he was 790 MW loss obf = thus the angle changes from base case at t =10 seconds, tabulated in Table 2, should represent the quasi-steady state condition predicted by the governor load flow. The change from base case angles for the governor load flow is also given in Table 2. 5.0 6.0 EPRI Midterm Stability Program at t=.25 seconds Governor Load Flow Alpha 1 Zeta .0 .o Angle Changes from Base Case Beta Gama Rho ~4- 3.0 Time in Seconds 4. Generator angle deviation for 790 MWJ loss of generation at Zeta 3. 1.6482 3.2520 4 1.6524 3.2700 9 2.3074 3.7820 10 2.3084 3.7820 11 2.3889 3 .8740 12 2.2414 3.8000 13 2.0864 3.5580 24 1.5249 2.6990 25 1.5247 2.6980 26 1.5249 2.6990 27 2.1101 3.7032 28 1.6597 3.1680 29 2.2781 3.8740 31 1.6217 3.1140 35 2.4231 4.5910 1 .3203 .1870 1 .3203 .1880 3 2.2027 4.0050 4 2.4337 3.9540 1 -4.6787 -3.5320 3 -17.0998 -16.1420 4 -7.7194 -6.4020 5 0.0000 0.0000 1. Generator bus angle changes from inertial load flow and EPRI midterm stability simulation at the inertial time frame. Comparison of the angle changes predicted by this governor load flow and the midterm stability simulation model indicates that the governor load flow predicts a consistent 90 smal'ler angle change at all buses other than in the stiffly interconnected group Beta 1, Gama 1 Zeta 5, containing the reference. The angle changes within Alpha (27,29), Alpha (24-26), Al-pha (9-13), Rho (3,4), Zeta (1-4) are nearly identical in both governor load flow and the midterm stability simulation. The angle changes between generators in each group and from group to group are in excel lent agreement reflecting the accuracy of the governor load flow. The only real error in the governor load flow is not predicting the angle difference between generators is any of these groups and the reference group 3026 Beta 1, Gama 1, and Zeta 5 which is due possibly to the fact that all mismatch is distributed by governor control in the midterm stability simulation but only the loss of generation is distributed in the governor load flow. The governor load flow and the midterm stability simu lation both used linear governor models without deadband because the 790 MW contingency was greater than 1.2% of the generation capacity of generation with governor controls. Thus, al 1 generators wil l participate and wil l participate proportional to their governor gain M =1 The midterm stability governor model used for the 49 bus example system did not uti l ize the long term Thus, no ef governor models that inc'lude deadband. fort was made to simulate loss of generation contingencies with generation losses of less than 1.2% of generation capacity where governor deadband would modify the participation of generators in governor load flow. The use of the governor deadband in the governor load flow is illustrated in the results for governor load flow on the Nanticoke post mortem in a subsequent paper. - of the transient trajectory determined by the inertial load flow. A description of the computer package developed for the EPRI Software Center to simulate the inertial and governor load flow is given. The application of the inertial and governor load flow in operation and planning are also discussed. The comparison of the inertial and governor load on the 49 bus test system with simulation of the same contingency on the EPRI Mid Term Stability Program. The testing is performed on this example system because (1) the EPRI package is the only one accurate enough to validate the accuracy of the inertial and governor load flow and verify its ability to capture snapshot of the transient trajectory associated with the time simulation and (2) because the EPRI package was validated on this test system. A comparison of the inertial and governor load flow with simulation and measurements of the line power flows and frequency for a post mortem of a large 2000 MW loss. of generation contingency was also made. These extensive results conf irm the accuracy of the inertial and The results for this post mortem governor load flows. will be presented in a subsequent paper. flow Referencs 1. 2. 3. Angle Changes from Base Case Stability Program at t=10 seconds Bus Governor Load Flow Alpha 1 4 9 10 11 12 13 24 25 26 27 28 29 31 35 Beta 1 Gama 1 3 Rho 4 Rho Zeta 1 Zeta 3 Zeta 4 Table 2. 28.5731 28.5769 28.7341 28.4984 27.8775 24.4408 24.4393 24.4408 26.3057 25.6085 26.6745 25.4991 29.3026 - .0531 - .0529 28.5341 29.2463 3.0343 -11.2391 - .4263 16.3780 16.3760 16.3780 0.0000 0.0000 20.8370 20.5670 .3710 -13.0190 - 2.595 Generator bus angle changes from the governor load flow and the mid-term Co=Jusilons A description of the transient phenomena associated.with loss of generation contingencies is presented in order to develop the equations that describe the inertial, governor, and AGC/economic dispatch load flows. A method for determining the subset of generators that experience peak frequency excursions above .036 hz and thus participate in governor load flow is presented. The procedure does not require time step integration of the system differential equations but only proper modeling of the transient propagation and proper interpretation of the snapshot Power, erfo rm Elecri stems, McGraw-Hill, New York, 1950 (MIT MA,, 1967). in Electrical Power Sstems Design, Chapman and Hall, London, 1966. 4. R.A. Hore, Advancl Studi 5. A.S. Debs, A.R. Bentson, "Security Assessment of Power Systems#," presented at the Engineering Foundation Conference on Systems Engineering for Power, New England College, Henniker, NH, August 17-22, 1975. 6. R.A. Schlueter, et al., "Method of Analysis of Generation's Governor Response and System Security," Report to EPRI under RP 1999-1, January, 1984. 7. C.W. Taylor, F.R. Nassief, T.L. Cresap, "Northwest Power Pool Transient Stability and Load Shedding Control for Generation Load Imbalances," IEEE Transactions on Power Apparatus and Systems, PAS-100, July, 1981, pp. 3486-3495. 14.2930 16.5190 18.0120 16.3230 -16.8460 R. Rudenberg, Transient Press, Cambridge, 19.2800 19.2800 19.2940 19.1880 18.6410 stability simulation at the governor time frame. 4.9 "Long-Term Power System Dynamics, Phase II," Final Report of EPRI Research Project 764-1, October, 1976. Governor 790 mw Loss Load Case z/z EPRI Midterm "Mid-term Simulation of Electric Power Systems," Ontario Report on EPRI Project 745, June, 1979. This research has been supported by the Electric Power Research Institute under RP-1999-1. The program manager was Jim Mitsche. The research support is gratefully acknowledged. 3027 Discussion C. W. Taylor (Bonneville Power Administration, Portland, OR): The authors' paper is thought-provoking and stimulates a number of questions and comments. In addition to the authors' references, Chapter 3 of a well known recent textbook includes a good discussion of the distribution of power impacts [1]. Following a power impact such as generation loss, power is distributed first according to synchronizing power coefficients (electrical closeness to disturbance), then by relative inertia values, then by governor action, and finally by AGC. There are considerable overlaps among these processes. For instance, a utility losing a generator has 10 minutes to cover the loss and restore system frequency. During this time generators and loads throughout the interconnection can respond to the frequency and voltage deviations. It should be emphasized that generation loss is a frequently occurring disturbance. In the western North American interconnection between December 1978 and March 1984, there were about 100 frequency excursions due to loss of 800 MW or more of generation. About 23 events involved 1350-2450 MW generation loss. Most of these disturbances did not cause problems. With increased transmission utilization in the future, however, loss of generation may become more important as regards transient and voltage stability, and thermal overload. I was surprised that t = 0.25 seconds was chosen as the time for the inertial power flow snapshot. This would be well before synchronizing swings are damped. A typical situation is shown on Fig. 3.8 of Ref. [1]. I was also surprised that a 0.036 Hz (0.06%) deadband or backlash width was chosen. The 0.06% deadband is based on old standards; deadbands on modern governors are much smaller. Hydro governors, for instance, have vibrating motors for dither modulation to reduce effective deadband. Ref. [2] provides further discussion One measure of effective deadband width is system frequency fluctuations during normal operations (closure of Ref. [3]). These are generally 0.01 Hz or less. The RMS value for system frequency deviaiton in the western North American interconnection is about 0.008 Hz [2]. Could the authors substantiate the 0.036 Hz deadband? The authors assume that the entire deadband width must be overcome for governor response. It is more likely that deadband positions would be randomly distributed and that most units in the interconnection would participate in frequency control. Exceptions would be units with valves wide open, units with governors blocked in raise direction, and units with unusually wide deadbands with unfavorable position within deadband. In the future, a significant proportion of generation could be from small dispersed generation without speed governors (overspeed control only). One way to represent deadband effects would be to assume larger regulation values for smaller frequency excursion. The area frequency regulation (ft = 1/R + D) noted during relatively large real system frequency excursions is 9 to 160o rather than the nominal value of near 5%. For the governor power flow, however, the actual value does not matter as long as each area has roughly the same proportion of active With some modification, I believe the authors' program could be used for voltage stability. The post-disturbance power flow would distribute the lost generation by some combination of governor, load (both voltage and frequency), and AGC response. The distribution would depend on the time after the disturbance, power plant response speed to AGC commands, etc. A simple and conservative approach would be the governor power flow with constant power loads. Assuming relatively slow AGC, this could represent post-disturbance conditions about 30-60 seconds after the power impact. Power flow convergence difficulties would indicate potential instability (usually voltage instability). Results could be compared with stability program results at the end of the simulation (say 10 seconds). Differences would be largely due to the load modeling and generation reactive capability assumptions. An interesting application in the western interconnection involves loss of a major ac or dc line followed by generator tripping (300-3000 MW) to maintain stability. AGC may be shut off because of tie line loss. Voltage stability or thermal overload (particularly series capacitor overload) is of interest. Do the authors' envision use of the program for voltage stability evaluation? In summary, the post-disturbance power flow for generation loss is an attractive idea. It is much simpler and faster than mid-term or longterm dynamic simulation. A significant difficulty with dynamic simulation is the lack of data bases for boilers, tap changing equipment, etc. REFERENCES [1] P. M. Anderson and A. A. Fouad, Power System Control and Stability, Iowa State University Press, Ames Iowa, 1977. [2] C. W. Taylor, K. Y. Lee, and D. P. Dave, "Automatic Generation Control with Governor Deadband Effects," IEEE Trans. on PowerApp. and Syst., vol. PAS-98, pp. 2030-2036, Nov./Dec. 1979. [3] C. Concordia, L. K. Kirchmayer, and E. A. Szymanski, "Effect of Speed-Governor Deadband on Tie-Line Power and Frequency Control Performance," AIEE Trans. on Power App. and Syst., vol. 75, pp. 429-435, Aug. 1957. Manuscript received March 1, 1985 governors. My opinion is thus that inertial and governor power flows should produce roughly similar results. By the time synchronizing swings have damped, however, the transition from inertialplus synchronizing swings to governor power flow is largely complete. For the problem described in the authors' Ref. [7], we considered use of an inertial power flow to develop arming criteria for controls for high speed tripping of up to 3000 MW of industrial load. However, it was difficult to relate inertial power flow results to the highly nonlinear transient stability problem. The transient stability representation is of very high dynamic order and one would not expect the static power flow to be an adequate approximation. In the authors' study, was the system stressed enough so that the 790 MW loss threatened transient stability? If not, what would be the purpose of the inertial power flow? Have the authors compared stability and inertial power flow results when the generation loss threatens transient stability? I disagree with the authors' conclusion that inertial power flow can replace transient stability evaluation by numerical integration. In Section 3.1 the distribution of power flow among corridors is stated to be due solely to the inertial or governor responses. Of course the relative impedance values of the corridors and other network considerations will partly determine corridor power flow. Regarding frequency sensitive loads, was damping applied at the generator or were the load injections modified? What assumptions were made for the voltage sensitivity of loads for each of the three types of power flows? What assumptions were made for transformer tap changing and other voltage controlled devices? For the PV busses was short-time overload capability represented in the values assumed? Qmax M. Lotfalian and R. Schlueter: The authors thank the discusser for his interest and comments. With reference to the questions posed by Mr. Taylor: (a) The time t = 0.25 seconds is when all the generators experience the same decelerations. The inertial load flow results agreed with the transient stability simulation results at t = 0.25 seconds. This time will vary with system size. The intertial time frame was 3-6 seconds based on a transient stability simulation of a 1980 MW loss of generation on the Nanticoke postmortem. (b) The standard 0.036Hz(0.06%) deadband width was selected based on the assumption that the generating units in the particular system under consideration had this deadband. The frequency measurements at six different sites at various distances from the Nanticoke station clearly showed a 0.036Hz quasi steady state change in frequency after the initial large frequency transient associated with the inertial response. Although a 0.036Hz deadband was appropriate for the system modeled for the Nanticoke postmortem, a different level of deadband could be utilized. (c) The assumption that the entire deadband width must be overcome depends on whether loads are increasing, decreasing, or relatively constant. If loads are decreasing through the system, then the assumption that the entire deadband width must be overcome would be valid. A smaller effective deadband width could be assumed if the system load level was not decreasing. (d) The governor and inertial load flow on the Nanticoke postmortem accurately reflected the measurements of power flow on lines and 3028 on utility transmission boundaries. The governor and inertial load flows were not identical. However if governor deadband was assumed smaller (0.036 Hz) and governor regulation was assumed to be larger than 5O70, then more generating units would participate in governor load flow. Whether the governor load flow would approximate the inertial load flow under the assumptions would depend on whether the inertial constant for all units in each area in the system is proportional to the sum of the governor constants of all units in each area. (e) The loads were considered as constant powers. The program is able to simulate the effect of tap changing transformers if desired. (f) In the study of 49 bus system, the 790 MW loss of generation stressed the system enough to threaten transient stability. (g) We agree with Mr. Taylor that the program can be used for voltage stability considering voltage and frequency sensitive load modeling. Manuscript received April 1, 1985