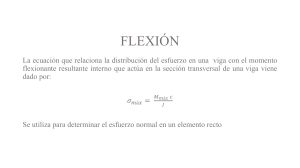
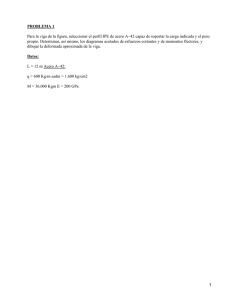
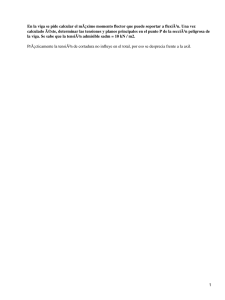
ÍNDICE Contenido ÍNDICE.............................................................................................................................................. 1 INTRODUCCIÓN ............................................................................................................................... 1 OBJETIVOS DE LA INVESTIGACIÓN .................................................................................................. 2 OBJETIVO GENERAL ..................................................................................................................... 2 OBJETIVOS ESPECÍFICOS .............................................................................................................. 2 1. CAPÍTULO 1.............................................................................................................................. 2 a. TIPOS DE VIGAS ................................................................................................................... 2 b. DEFINICIÓN DE FUERZA CORTANTE Y MOMENTO FLECTOR ............................................. 12 c. EQUILIBRANDO EL ELEMENTO DIFERENCIAL TENEMOS: .................................................. 21 d. TENSIÓN EN VIGAS ............................................................................................................ 24 INTRODUCCIÓN Las vigas son elementos cuya disposición en las estructuras es principalmente horizontal, aunque también pueden ser inclinadas, pero que en todo caso tienen la importante función de servir de apoyo de otros miembros estructurales que le transmiten las cargas verticales generadas por la gravedad, las cuales actúan lateralmente a lo largo de su eje. Gracias a estos elementos se pueden construir todo tipo de maquinarias y estructuras, tales como chasis de vehículos, soporte de maquinarias, vigas de puentes y edificaciones, etc. Esta condición hace que las vigas estén sometidas a esfuerzos diferentes a la tensión simple, representados por los esfuerzos de flexión. En este caso las fuerzas externas pueden variar de una sección a otra a lo largo de la viga, además la disposición de ellas, las condiciones de soporte y la geometría, genera en el interior de la misma la aparición de cuatro fuerzas llamadas resistentes. Si consideramos un sistema espacial tenemos: Fuerza Cortante, Fuerza Axial, Momento Flector, Momento Torsor. En el presente trabajo solo se considera el estudio de vigas a flexión pura y no uniforme, es decir bajo la aplicación de cargas externas que generan en su interior fuerzas cortantes y momentos flectores. Se estudia la relación que existe entre las fuerzas externas y las internas. Como varían estas últimas a lo largo de la viga, mediante la elaboración de diagramas de fuerzas cortantes y momentos flectores, a los fines de poder diseñar su dimensionado de manera económica con la condición más crítica de fuerza interna. Se estudia también por varios métodos, lo relacionado a las deformaciones producidas por el efecto de las fuerzas externas. Finalmente se aborda el tema de las vigas hiperestáticas, y la forma de encontrar las reacciones externas, utilizando las ecuaciones adicionales proporcionadas por las deformaciones. OBJETIVOS DE LA INVESTIGACIÓN OBJETIVO GENERAL Estudiar y comprender cargas y tipo vigas, reacciones en apoyo, así como fuerzas cortantes y momentos flexionantes con cargas concentradas. OBJETIVOS ESPECÍFICOS 1.- Definir las cargas en vigas, apoyos, reacciones en apoyos, fuerzas cortantes y momentos flexionantes con cargas concentradas. 2.- Analizar el comportamiento, interpretación y gráficas de las fuerzas cortantes y momentos flexionantes con cargas concentradas. 3.-Demostrar mediante ejercicios propuestos el comportamiento de las fuerzas cortantes y momentos flexionantes con cargas concentradas. 4.- Ejemplificar mediante gráficas las fuerzas de corte y momentos flexionantes con cargas concentradas. 1. CAPÍTULO 1 a. TIPOS DE VIGAS i. VIGAS En ingeniería y arquitectura se denomina viga a un elemento estructural lineal que trabaja principalmente a flexión. En las vigas, la longitud predomina sobre las otras dos dimensiones y suele ser horizontal. Una viga simplemente apoyada en sus extremos o viga simple, tiene una articulación en un extremo y un apoyo móvil sobre rodillos en otro. Una viga en Voladizo, o ménsula, se sujeta en un solo extremo, en un empotramiento que impide el giro en dicho extremo. Una viga con voladizos en ambos extremos, está apoyada mediante una articulación y un apoyo de rodillos, pero uno o los dos extremos sobresalen de los soportes. Todas estas vigas son estáticamente determinadas, ya que sus reacciones pueden determinarse directamente mediante las ecuaciones de equilibrio estático. ii. TIPOS DE VIGAS De acuerdo al número y tipo de los apoyos que soportan la viga, existen dos grandes grupos de vigas. 1. VIGAS ISOSTÁTICAS En estas vigas el número de reacciones externas coincide con el número de ecuaciones de equilibrio disponibles. No sobra ni falta reacciones para que el sólido permanezca en equilibrio estable, tiene grado de indeterminación (G.I) cero. A continuación, se muestran algunos ejemplos: Figure 1 Vigas isostáticas 2. VIGAS SIMPLEMENTE APOYADAS Es la que tiene un soporte de pasador en un extremo y un soporte de rodillo en el otro. La característica esencial de un soporte de pasador (o soporte articulado) es que impide la traslación en el extremo de una viga pero no su rotación. Figure 2 Vigas simplemente apoyadas En el extremo “A” de la viga no puede moverse en sentido horizontal o vertical, pero el eje de la viga puede girar en el plano de la figura. En consecuencia, un soporte de pasador es capaz de desarrollar una reacción de fuerza con componentes horizontal y vertical (HA y RA), pero no puede desarrollar una reacción de momento. 3. VIGA EN VOLADIZO Es la que está fijada en un extremo y en el otro libre. En el soporte fijo (o empotramiento), la viga no puede trasladarse ni girar, mientras que en el extremo libre puede hacer ambas cosas. Por lo tanto, en los empotramientos pueden existir fuerzas y momentos de reacción. Figure 3Viga en voladizo En el extremo “B” de la viga, el soporte de rodillo (o soporte simple) impide la traslación en dirección vertical pero no en la horizontal; por tanto, puede resistir una fuerza vertical (RB) más no una fuerza horizontal. De tal modo que el eje de la viga puede girar en B y en A. Las reacciones verticales en los soportes de rodillo y en los soportes de pasador pueden actuar hacia abajo o hacia arriba y la reacción horizontal en un soporte de pasador puede actuar hacia la derecha o hacia la izquierda. En las figuras las reacciones están indicadas por diagonales que atraviesan las flechas para distinguirlas de las cargas. 4. VIGA CON UN VOLADIZO Esta viga tiene un soporte de pasador y un soporte de rodillo. Figure 4 Viga con un voladizo Esta viga está simplemente apoyada en los puntos “A” y “B” (es decir tiene un soporte de pasador en A y un soporte de rodillo en B) pero además se extiende más allá del soporte en B. En el segmento BC en voladizo es similar a la viga en voladizo, excepto que el eje de la viga puede girar en el punto B. 5. VIGAS HIPERESTÁTICAS O ESTÁTICAMENTE INDETERMINADAS Normalmente se identifican por la forma en que están dispuestos sus soportes, por ejemplo, una viga empotrada en un extremo y simplemente apoyada en el otro (figura a) se llama viga en voladizo apuntalada o soportada. Las reacciones de la viga mostradas en la figura consisten en fuerzas horizontales y verticales en el extremo A y una fuerza vertical en el extremo B. Como solo hay tres ecuaciones independientes de equilibrio para esta viga, no es posible calcular las cuatro reacciones sólo por equilibrio. El número de reacciones que rebasan el número de ecuaciones de equilibrio se llaman grado de indeterminación estática. Entonces, una viga en voladizo soportada es estáticamente indeterminada de primer grado. Las reacciones sobrantes se llaman redundantes estáticas y deben seleccionarse en cada caso particular; por ejemplo, la reacción RB de la viga en voladizo apuntalada mostrada en la figura (a) puede tomarse cmi la reacción redundante. Dado que esta reacción está de más respecto a las necesarias para mantener el equilibrio, puede liberarse de la estructura quitando el soporte en B. Al suprimir el soporte en B, queda una viga en voladizo figura (b). La estructura que queda cuando las redundantes se liberan se llama estructura liberada o estructura primaria. La estructura liberada debe ser estable (para que sea capaz de soportar cargas) y debe ser estáticamente determinada (para que todas las fuerzas puedan determinarse sólo por equilibrio). Otra posibilidad para el análisis de la viga en voladizo apuntalada en la figura (a) es escoger el momento reactivo MA como la redundante. Entonces, cuando se elimina la restricción de momento en el soporte A la estructura liberada es una viga simple con un soporte de rodillo en el otro, figura (c). Un caso especial se presenta si todas las cargas que actúan sobre la viga son verticales figura (d). Entonces, la reacción horizontal en el soporte A es cero y quedan sólo tres reacciones, sin embargo, sólo se dispone de dos ecuaciones independientes de equilibrio, por lo que la viga es aun estáticamente indeterminada de primer grado. Si la reacción RB se escoge como redundante, la estructura liberada es una estructura simple. Otro tipo de viga estáticamente indeterminada, conocida como viga doblemente empotrada como en la figura (a). Esta viga tiene soportes empotradas en ambos extremos, con lo cual resultan un total de seis reacciones desconocidas (dos fuerzas y un momento en cada soporte). Puesto que sólo hay tres ecuaciones de equilibrio, la viga es estáticamente indeterminada de tercer grado. (Este tipo de viga también recibe los nombres de viga empotrada o viga apuntalada). Si seleccionamos las tres reacciones en el extremo B de la viga como redundantes y eliminamos las restricciones correspondientes, queda una viga en voladizo como estructura liberada (figura b). Si liberamos los dos momentos de empotramiento y una reacción horizontal, la estructura liberada es una viga simple (figura c) iii. TIPOS DE CARGAS Se presentan varios tipos de cargas que actúan sobre vigas. Cuando una carga se aplica sobre un área muy pequeña, puede idealizarse como una CARGA CONCENTRADA, que es una fuerza única. En la figura los ejemplos son las cargas P1, P2, P3 y P4. Cuando una carga se reparte sobre sobre el eje de una viga, se presenta como carga distribuida, como carga q de la parte (a) en la figura. Las CARGAS DISTRIBUIDAS se miden por su intensidad, que se expresa en unidades de fuerza, entre unidades de longitud. Una CARGA UNIFORMEMENTE DISTRIBUIDA o CARGA UNIFORME tiene intensidad constante q por unidad de distancia. Una carga variable tiene una intensidad que cambia con la distancia a lo largo del eje; por ejemplo, la CARGA LINEALMENTE VARIABLE de la figura 4-2b tiene una intensidad que varía en sentido lineal de q1 y q2. Otro tipo de carga es un par ilustrado por el momento M1 que actúa sobre la viga con voladizo. Añadir imagen 4-3 y 4-2 pag 272 y 273 iv. REACCIONES La determinación de las reacciones es el primer paso en el análisis de vigas, una vez conocidas las reacciones, pueden encontrarse los esfuerzos cortantes y los momentos flectores. Si una viga está soportada de manera estáticamente determinada, todas las reacciones pueden encontrarse a partir de diagramas de cuerpo libre y ecuaciones de equilibrio. Por ejemplo, determinemos las reacciones en la viga simple AB: Figure 5 reacciones Esta viga está cargada por una fuerza inclinada P1, una fuerza vertical P2 y una carga uniformemente distribuida de intensidad q. Nótese que la viga tiene tres reacciones desconocidas: una fuerza horizontal HA en el soporte de pasador y una fuerza vertical RB en el soporte de rodillo. Para una estructura plana como esta viga, sabemos por estática que podemos plantear tres ecuaciones de equilibrio independientes. Entonces, como tenemos tres reacciones desconocidas y tres ecuaciones de equilibrio, la viga es estáticamente determinada. La ecuación de equilibrio es: De donde obtenemos: Para encontrar las reacciones verticales en RA y RB escribimos ecuaciones de equilibrio por momento para los puntos B y A, respectivamente, considerando los momentos antihorarios como positivos: Despejamos RA y RB y obtenemos: Como segundo ejemplo, consideremos la viga en voladizo: Las cargas consisten en una fuerza inclinada P3 y en una carga distribuida linealmente variable. Esta última se representa con un diagrama trapezoidal de intensidad de carga que varía de q1 a q2. Las reacciones en el empotramiento son una fuerza horizontal HA, una fuerza vertical en RA y un par MA. El equilibrio de fuerzas en la dirección horizontal da: El equilibrio en la dirección vertical da: Para hallar esta reacción usamos el hecho de que la resultante de la carga distribuida es igual al área del diagrama trapezoidal de carga. La reacción de momento MA en el empotramiento se encuentra con una ecuación de equilibrio de momentos. En este ejemplo sumaremos momentos respecto al punto A para eliminar HA y RA de la ecuación de momentos. Además, con el fin de encontrar el momento de la carga distribuida, dividiremos el trapecio en dos triángulos, como lo hace la línea punteada en la figura (b). Cada triángulo de carga se puede reemplazar con su resultante, que es una fuerza con magnitud igual al área del triángulo y con su línea de acción a través del centroide del triángulo. El momento respecto al punto A de la parte triangular inferior de la carga es: En donde q1b/2 es la fuerza resultante (igual al área del diagrama triangular de carga) y L-2b/3 es el brazo de momento (respecto al punto A) de la resultante. El momento de la porción triangular superior de la carga se obtiene por medio de un procedimiento similar y la ecuación final del equilibrio de momentos (los antihorarios son positivos) es: De donde: Puesto que esta ecuación da un resultado positivo, el momento reactivo MA actúa en el sentido supuesto; es decir, antihorario. (Las expresiones para RA y MA pueden comprobarse tomando momentos respecto al extremo B de la viga y verificando que la ecuación resultante de equilibrio se reduzca a una identidad). La viga con un voladizo soporta una fuerza vertical P4 y un par de momento M1. Como no hay fuerzas horizontales actuando sobre la viga, la reacción horizontal en el soporte de pasador no existe y no tenemos que mostrarla sobre el diagrama de cuerpo libre. Para llegar a esta conclusión, usamos la ecuación de equilibrio para fuerzas en dirección horizontal. En consecuencia, quedan sólo dos ecuaciones independientes de equilibrio (ya sean dos ecuaciones de momento o una ecuación momento más la ecuación de equilibrio vertical). Escribimos dos ecuaciones de momento, la primera respecto al punto B y la segunda en relación con el punto A: Por lo tanto, las reacciones son: El análisis anterior demuestra cómo se calcula las reacciones de vigas estáticamente determinadas a partir de ecuaciones de equilibrio. b. DEFINICIÓN DE FUERZA CORTANTE Y MOMENTO FLECTOR En la figura se muestra una viga horizontal elemental, isostática de un solo tramo, con una carga puntual “P”, en la sección a-a se hace un corte imaginario para observar las fuerzas internas que aparecen para satisfacer las condiciones de equilibrio, tal como se muestra en el diagrama de cuerpo libre de abajo. Cuando una viga es cargada por fuerzas o pares, en el interior de la viga aparecen tensiones y deformaciones. Para hallarlos debemos encontrar primero las fuerzas internas y los pares internos que actúan sobre las secciones transversales de la viga. Para demostrar cómo se encuentran estas cantidades internas, consideremos una viga en voladizo AB cargada por una fuerza P en su extremo libre. Cortamos a través de la viga en una sección transversal mn localizada a una distancia x del extremo libre y aislamos la parte izquierda de la viga como un cuerpo libre. El cuerpo libre se mantiene en equilibrio por la fuerza P y las tensiones que actúan sobre la sección transversal cortada. Estas tensiones representan la acción de la parte derecha de la viga sobre la parte izquierda. En esta etapa del análisis no conocemos la distribución de las tensiones que actúan sobre la sección transversal; todo lo que sabemos es que la resultante de estas tensiones debe ser tal que mantenga el equilibrio del cuerpo libre. De la estática sabemos que, la resultante de las tensiones que actúan sobre la sección transversal puede reducirse a un esfuerzo cortante V y a un momento flector M. Puesto que la carga P es transversal al eje de la viga, ninguna fuerza axial existe en la sección transversal. El esfuerzo cortante y el momento flector actúan en el plano de la viga; es decir, el vector para el momento es perpendicular al plano de la figura. Los esfuerzos cortantes y los momentos flectores, al igual que las fuerzas axiales en arras y los pares internos de torsión en ejes o flecha, son las resultantes de las tensiones distribuidas sobre la sección transversal; por tanto, están cantidades se conocen en forma genérica como resultantes de tensión. Las resultantes de tensión en vigas estáticamente determinadas pueden calcularse a partir de ecuaciones de equilibrio. En el caso de la viga en voladizo, usamos el diagrama de cuerpo libre. Al sumar fuerzas en dirección vertical y tomar momentos respecto a la sección cortada, obtenemos: De donde x es la distancia desde el extremo libre de la viga hasta la sección transversal en que se van a determinar V y M. Entonces, con el uso de un diagrama de cuerpo libre y de dos ecuaciones de equilibrio, podemos calcular sin dificultad el esfuerzo cortante y el momento flector. i. FUERZA CORTANTE Del equilibrio de fuerzas verticales practicado a cualquiera de los dos segmentos de viga separados, aparece una fuerza interna “Va-a”, llamada resistente, debido a que se opone al efecto de las fuerzas activas externas, cuya dirección es perpendicular al eje longitudinal de la viga AB, el cual coincide a su vez con el eje “X” del sistema de referencia particular “XY” de la viga. Para el caso de vigas inclinadas la fuerza cortante Va-a, tiene la misma inclinación, puesto que se orienta según el eje particular de la viga y no según el sistema global vertical-horizontal. En este sentido se define la fuerza cortante como la sumatoria de la componente perpendicular al eje, de las fuerzas externas situadas a la izquierda o a la derecha de la sección de viga estudiada: La convención de signos más común, es aquella que considera positiva la fuerza cortante que hace deslizar hacia arriba, la porción de viga situada a la izquierda de la sección estudiada, en caso contrario se considera negativa. En otras palabras cuando la sumatoria de fuerzas a la izquierda de la sección es positiva la fuerza cortante tiene el mismo signo, igual para el caso contrario, tal como se muestra en el siguiente diagrama Fig 1.3.a. En la Fig. 1.3. b. se muestra la convención de signos desde el punto de vista de la deformación de un elemento diferencial situado justo en la sección a-a. ii. MOMENTO FLECTOR El equilibrio rotacional de los segmentos de viga estudiados se logra con la aparición del Momento Flector Ma-a, señalado en el diagrama de cuerpo 6 libre anterior. De esta manera este se puede definir como la sumatoria de los momentos de las fuerzas externas situadas a la izquierda o a la derecha de la sección estudiada, considerando que el plano de aplicación de las fuerzas es XY (hoja de papel), y la dirección del momento flector es perpendicular a éste, es decir el eje particular Z: En cuanto al signo del momento flector, es importante resaltar que este no depende de su sentido de rotación, tal como sucede con el momento de equilibrio, sino más bien de la curvatura que sufre la viga por la aplicación del mismo. De tal manera que una curvatura cóncava hacia arriba se considera positiva, lo contrario es negativo. En la siguiente figura se ilustra esta convención. Los momentos flectores positivos generan tracción o alargamiento en las fibras inferiores de la viga y compresión o acortamiento en las superiores, los negativos 7 producen lo contrario, como se muestra en la parte superior de la figura anterior. En los gráficos inferiores, de la figura anterior, se muestra el efecto de fuerzas individuales y el sentido de curvatura de la viga, considerando un empotramiento imaginario en la sección a-a. iii. RELACIÓN ENTRE CARGA Y MOMENTO FLECTOR Resulta particularmente importante, conocer no solo el valor del corte y del momento flexionante en un punto de la viga, sino más bien a lo largo de todo el elemento, debido a que en su diseño, se debe considerar la condición más desfavorable de esfuerzo resistente en el interior del sólido, por lograr esto se construyen los llamados diagramas de fuerza cortante y momento flector. La realización de estos diagramas requiere conocer la relación existente entre las cargas externas y las fuerzas internas de corte y momento flector. En el siguiente gráfico, se ha considerado una viga simplemente apoyada, con un sistema de cargas distribuida general “q”, de signo positivo, por tener sentido vertical hacia arriba. 1 y 2 representan dos secciones de la viga separadas una distancia dx. A la derecha se ha graficado en forma ampliada, el diagrama de cuerpo libre del elemento diferencial de viga contenido entre las secciones 01 y 02, que incluye tanto las fuerzas externas “q”, como las fuerzas internas V y M, las cuales se supusieron con signo positivo. Para la cara de la sección 01, los valores de fuerzas cortantes y momentos flexionantes son respectivamente V y M, mientras que para la sección 02, son los valores de la sección 01 más un cierto diferencial dV y dM respectivamente. iv. DIAGRAMAS DE ESFUERZO CORTANTE Y DE MOMENTO FLECTRO DIAGRAMAS DE ESFUERZO CORTANTE Y DE MOMENTO FLECTOR: Cuando diseñamos una viga, por lo general necesitamos saber cómo varían a lo largo de ella los esfuerzos cortantes y los momentos flectores. Los valores máximo y mínimo de estas cantidades resultan de especial importancia. La información correspondiente la dan las gráficas en que el esfuerzo cortante y el momento flector se trazan como ordenadas y la distancia x a lo largo del eje de la viga se traza como abscisa. Tales gráficas se llaman diagramas de esfuerzo cortante y de momento flector. v. CARGAS CONNCENTRADAS Comencemos con una viga simple AB que soporta una carga concentrada P. La carga P actúa a una distancia a del soporte izquierdo y a una distancia b del soporte derecho. Si consideramos la viga entera como cuerpo libre, podremos determinar con facilidad las reacciones en la viga a partir del equilibrio; los resultados son: 1 Carga concentrada en P Cortamos la viga en una sección a la izquierda de la carga P y a una distancia x del soporte en A. Después dibujamos un diagrama de cuerpo libre de la parte izquierda de la viga. De las ecuaciones de equilibrio para este cuerpo libre, obtenemos el esfuerzo cortante V y el momento flector M a la distancia x del soporte: 2 Diagrama de cuerpo libre de la parte izquiera de la viga Estas expresiones son válidas sólo para la parte de la viga a la izquierda de la carga P. A continuación, cortamos la viga a la derecha de la carga P (es decir, em la región axL) y dibujamos de nuevo un diagrama de cuerpo libre de la parte izquierda de la viga. De las ecuaciones de equilibrio para este cuerpo libre, obtenemos las siguientes expresiones para el esfuerzo cortante y el momento flector: 3 Nuevo diagrama de cuerpo libre, parte izquierda de la viga Teniendo en cuenta que estas ecuaciones son válidas sólo para la parte derecha de la viga. 4 Diagrama de esfuerzo cortante 5 Diagrama de momento flector Del primer diagrama vemos que el esfuerzo cortante en el extremo A de la viga (x=0) es igual a la reacción RA; luego permanece constante hasta el punto de aplicación de la carga P. En este punto, el esfuerzo cortante disminuye en forma abrupta una cantidad igual a la carga P. En la parte derecha de la viga, el esfuerzo cortante es constante de nuevo, pero numéricamente igual a la reacción en B. 6 Esfuerzo cortante en el extremo A El momento flector en la parte izquierda de la viga crece linealmente desde cero en el soporte hasta Pab/L bajo la carga concentrada (x=a). En la parte derecha, el momento flector otra vez es una función lineal de x, que varía desde Pab/L en x=a hasta cero en el soporte (x=L). De tal manera, el momento flector máximo es y ocurre bajo la carga concentrada: 𝑴𝒎𝒂𝒙 = 7 Momento flector en la parte izquierda de la viga 𝑷𝒂𝒃 𝑳 c. EQUILIBRANDO EL ELEMENTO DIFERENCIAL TENEMOS: 1. RELACIÓN CARGA – CORTE Por sumatoria de fuerzas verticales De esta manera se encuentran las siguientes relaciones: 1. La intensidad de la carga “q” define la variación de la pendiente del diagrama de corte. 2- Se puede calcular el corte en la sección 02, con el corte anterior en la sección 01, más el área del diagrama de carga existente entre las secciones 01 y 02: 2. RELACIÓN CORTE – MOMENTO Por sumatoria de momentos en el punto “0”. Las relaciones entre corte y momento son: 3. b. La Intensidad del diagrama de corte, define la variación de la pendiente del diagrama de Momentos, como se muestra a continuación: 4- Se puede calcular el momento en la sección 02, con el momento anterior en la sección 01, más el área del diagrama de corte existente entre las sección 01 y 02: d. TENSIÓN EN VIGAS Una vez conocidas las fuerzas generadas en el interior de la viga, es posible estudiar los esfuerzos que ellas producen. Se considerarán los esfuerzos normales producidos en la cara de la sección y los esfuerzos cortantes, paralelos a dichas caras. Para el primer estudio consideraremos que la viga está sometida a esfuerzo de flexión pura, es decir solo se consideran aquellas porciones de viga donde la fuerza cortante es cero, para el segundo estudio se trataran vigas sometidas a flexión no uniforme, es decir en presencia de fuerzas cortantes. Para ambos casos se harán las siguientes suposiciones: 1- Las secciones transversales serán planas antes y después de la aplicación de las fuerzas externas. 2- El material es homogéneo y cumple con la ley de Hooke. 3- El módulo de elasticidad “E”, es igual a tracción que a compresión. 4- La viga será recta y su sección constante en toda su extensión. 5Las cargas externas actúan en el plano que contiene la viga, según los ejes principales de la sección, y serán perpendiculares al eje longitudinal. 6- Las deformaciones se consideran pequeñas. i. Flexión pura y flexión no uniforme Flexión pura. Se refiere a la flexión de una viga bajo un momento flector constante; por tanto, ocurre solo en regiones de una viga donde el esfuerzo cortante es cero. Flexión no uniforme. Se refiere a la flexión en presencia de esfuerzos cortantes, lo que significa que el momento cambia al movernos a lo largo del eje de la viga. Para ejemplificar la flexión pura, consideremos una viga simple AB cargada por dos pares M1 que tienen la misma magnitud, pero actúan en direcciones opuestas. Estas cargas producen un momento flector constante M=M1, a todo lo largo de la viga. 8. Viga simple en flexión pura (M=M1) La viga simple cargada en forma simétrica es un ejemplo de viga que está parcialmente en flexión pura y parcialmente en flexión no uniforme. La región central de la viga está en flexión pura porque el esfuerzo cortante es cero y el momento flector es constante. Las partes de la viga cercana a los extremos se encuentran en flexión no uniforme porque están presentes los esfuerzos cortantes y los momentos flectores varían. 9. Viga simple con su región en flexión pura y sus regiones extremas en flexión no uniforme. 10. Diagramas de esfuerzo cortante y momento flector. CURVATURA DE UNA VIGA: Cuando se aplican cargas a una viga, el eje longitudinal adopta la forma de una curva. Las deformaciones y las tensiones resultantes en la viga se relacionan directamente con la curvatura de la curva de deflexión. Para entender el concepto de curvatura, consideremos una viga en voladizo sometida a una carga P que actúa en el extremo libre. 11. Viga con carga. La curva de deflexión lo vemos aquí: 12. Curva de deflexión. Para analizarlo, identificamos dos puntos, m1 y m2, sobre la curva de deflexión. El punto m1 se selecciona a una distancia arbitraria x del eje y y el punto m2 se localiza a una pequeña distancia ds a lo largo de la curvatura. En cada uno de estos puntos dibujamos una línea perpendicular a la tangente a la curva de deflexión; es decir, perpendicular a la curva misma. Estas líneas se cortan en el punto O', que es el centro de curvatura de la curva de deflexión. La distancia m1O' de la curva al centro de curvatura se llama radio de curvatura ρ y la curvatura κ se define como recíproco del radio de curvatura, entonces: 𝜿= 𝟏 𝝆 La curvatura es una medida de cuán agudamente esta doblada una viga. Si la carga sobre una viga es pequeña, ésta permanecerá casi recta, el radio de curvatura será muy grande y la curvatura muy pequeña. Si la carga se incrementa, la flexión aumentará, el radio de curvatura será más pequeño y la curvatura será mayor. De la geometría del triángulo O' m1 m2, obtenemos: 𝝆𝒅𝜽 = 𝒅𝒔 En donde dɵ (medido en radianes) es el ángulo infinitesimal entre las perpendiculares y ds es la distancia infinitesimal a lo largo de la curvatura entre los puntos m1 y m2. Combinamos ecuaciones y tenemos la ecuación para la curvatura: 𝜿= 𝟏 𝒅𝜽 = 𝝆 𝒅𝒔 La curvatura y el radio de curvatura son funciones de la distancia x medida a lo largo del eje x. se infiere que la posición O' del centro de curvatura depende también de la distancia x. La convención de signos para la curvatura depende de la orientación de los ejes coordenados. Si el eje x es positivo hacia la derecha y el eje y es positivo hacia arriba, la curva es positiva cuando la viga se flexiona con su concavidad hacia arriba (o convexa hacia abajo) y el centro de curvatura es negativa cuando la viga se flexiona con su concavidad hacia abajo (o convexa hacia arriba) y el centro de curvatura queda debajo de la viga. 13. Curva positiva. 14. Curva negativa. DEFORMACIONES. Consideremos una viga simplemente apoyada en 1 y 2, como se muestra en la siguiente figura, sometida a un sistema de cargas, que generan en el tramo central, fuerza cortante cero, de tal manera que solo actúa el momento flector en el elemento “abcd” estudiado en el gráfico de deformaciones de la Fig. 2. 1.a. De la observación del grafico de deformaciones, se desprende lo siguiente: - Las fibras “bd” se alargan (tracción). - Las fibras “ac” se acortan (compresión). - Entre las dos anteriores existe la fibra “ef” que no cambia su longitud, debido a que no tiene tensión. Las fibras “ef” tiene la misma longitud original “dx”, debido a que está situadas en lo que se llama línea neutra. Si ahora trazamos la linea “c’d' ” por “f” paralela a “ab”, se aprecia que “ac” se acorta en “cc’” mientras que “bd” se alarga en “dd’ ”. Si consideremos ahora la fibra genérica “gh” situada a la distancia “y” de la línea neutra, podemos apreciar cómo se alarga la distancia “hk”: δgh = hk = y dӨ. La deformación unitaria será entonces: Si se aplica Ley de Hooke: Esta es la fórmula del esfuerzo normal por flexión “σ”, en función del radio de curvatura “ρ” y de la distancia a la fibra estudiada “y”, medida desde la línea neutra. DEFORMACIONES LINEALES LONGUITUDINALES EN VIGAS: Las deformaciones lineales longitudinales en una viga pueden encontrarse analizando la curvatura de la viga y las deformaciones asociadas. Para este fin, consideremos la porción AB de una viga en flexión pura sometida a momentos flectores positivos M. Suponemos que la viga tiene inicialmente un eje longitudinal recto (el eje x en la figura) y que su sección transversal es simétrica respecto al eje y. Debido a la acción de momentos flectores, la viga se flexiona en el plano xy (plano de flexión) y su eje longitudinal toma una forma circular (curva ss). La vida se flexiona con la concavidad hacia arriba, que corresponde a una curvatura positiva. 15. a) Elevación de la viga. b) Sección transversal de la viga. 16. Viga deformada. Las secciones transversales de la viga, como las secciones mn y pq, permanecen planas y normales al eje longitudinal. Debido a las deformaciones por flexión, las secciones transversales mn y pq giran respecto de si mismas sobre ejes perpendiculares al plano xy. Las líneas longitudinales sobre la parte inferior de la viga se alargan, mientras que las de la parte superior se acortan. Así, la parte inferior de la viga está en tracción y la superior en compresión. En alguna parte entre la parte superior e inferior de la viga existe una superficie en la que las líneas longitudinales no cambian de longitud. Esta superficie, indicada por la línea punteada ss, se llama superficie neutra de la viga. Su intersección con cualquier plano transversal se llama eje neutro de la sección transversal. Por ejemplo, el eje z es el eje neutro de la sección transversal. Los planos que contienen las secciones transversales mn y pq en viga deformada se intersecan en una línea que pasa por el centro de curvatura O'. El ángulo entre estos planos se denota con dɵ y la distancia de O' a la superficie neutra ss es el radio de curvatura ρ. La distancia inicial dx entre los dos planos no cambia en la superficie neutra, por lo que ρdɵ=dx. Sin embrago, el resto de las líneas longitudinales entre los dos planos se alarga o se acorta, con lo se generan las deformaciones lineales ∈𝒙 . Para analizar estas deformaciones lineales, consideremos una línea longitudinal característica ef localizada dentro de la viga entre los planos mn y pq. Identificamos la línea ef por su distancia y desde la superficie neutra e la viga inicialmente recta. Estamos suponiendo ahora que el eje x se encuentra a lo largo de la superficie neutra de la viga no deformada. Cuando la viga se flexiona, la superficie neutra se mueve con la viga, pero el eje x permanece fijo en posición. Sin embargo, la línea longitudinal ef en la viga flexionada permanece a la misma distancia y desde la superficie neutra. La longitud L1 de la línea ef después que tiene lugar de flexión es: 𝑳𝟏 = (𝝆 − 𝒚)𝒅𝜽 = 𝒅𝒙 − En donde hemos sustituidos dɵ=dx/ρ. Puesto que la longitud original de la línea ef es dx, se infiere que su alargamiento es L1-dx o ydx/ρ. La deformación longitudinal correspondiente es igual al alargamiento dividido entre la longitud inicial dx; por tanto, la relación deformación-curvatura es: ∈𝒙 = − 𝒚 = −𝜿𝒚 𝝆 donde κ es la curvatura. Cuando en punto en consideración esta arriba de la superficie neutra, la distancia y es positiva. Si la curvatura también es positiva, entonces ∈𝒙 será una deformación negativa y representará un acortamiento. Por el contrario, si el punto en 𝒚 𝒅𝒙 𝝆 consideración está debajo de la superficie neutra, la distancia y será negativa y, si la curvatura es positiva, la deformación ∈𝒙 también será positiva y representará un alargamiento. Las deformaciones lineales longitudinales en una viga van acompañadas por deformaciones lineales transversales (es decir, deformaciones lineales en las direcciones y y z), debido a los efectos del coeficiente de Poisson; sin embargo, no se tienen tensiones transversales acompañantes porque las vigas tienen la libertad para deformarse en sentido lateral. (JOSE: 5.5 HASTA 5.12) TENSIONES MAXIMAS EN VIGAS: El análisis de las tensiones en una viga comienza con la determinación de las tensiones normal y tangencial que actúan sobre secciones transversales; por ejemplo, cuando es válida la ley de Hooke, podemos obtener las tensión normal y 𝛔=− 𝑴𝒚 𝑰 𝛕= 𝑽𝑸 𝑰𝒃 tangencial a partir de las fórmulas de la flexión y del cortante: En la fórmula de flexión, 𝛔 es la tensión normal que actúa sobre la sección transversal, M es el momento flector, y es la distancia desde el eje neutro e I es el momento de inercia del área de sección transversal con respecto al eje neutro. En el caso de la fórmula del cortante, 𝛕 es la tensión tangencial en cualquier punto en la sección transversal, V es el esfuerzo cortante, Q es el momento estático del área de la sección transversal hacia afuera del punto en la sección transversal donde se busca la tensión y b es el ancho de la sección transversal. Las tensiones normales se obtienen con la fórmula de la flexión tienen sus valores máximos a las distancias más grandes desde el eje neutro, mientras que las tensiones tangenciales que se obtienen con la fórmula del cortante suelen tenerlos en dicho eje. Las tensiones normales se calculan en la sección transversal de momento flector máximo y las tensiones tangenciales, en la sección transversal de esfuerzo cortante máximo. VIGAS DE SECCION TRANSVERSAL RECTANGULAR: 17. Viga simple con los puntos (A, B, C, D y E) Para los fines de este análisis, escogemos una sección transversal a la izquierda de la carga y luego seleccionamos cinco puntos (A, B, C, D y E) sobre un lado de la viga. El punto A está en la parte superior y el E en la parte inferior de la viga, el punto C está a la mitad de la altura de la viga, los puntos B y D se encuentran en posiciones intermedias. Si la ley de Hooke es aplicable, las tensiones normal y tangencial em cada uno de estos puntos se pueden calcular con facilidad mediante las fórmulas de flexión y de cortante. Puesto que estas tensiones actúan sobre la sección transversal, podemos dibujarlos sobre los elementos de tensión que tenga caras verticales y horizontales. 18. Tensiones normales y tangenciales que actúan sobre los elementos de tensión en los 5 puntos. En el punto A la tensión normal es de compresión y no hay tensiones tangenciales. De manera similar, en el punto E la tensión normal es de tracción y tampoco hay tensiones tangenciales. Así, los elementos en esas posiciones se encuentran en tensión uniaxial. En el eje neutro (punto C), el elemento está en cortante puro. En las otras dos posiciones (puntos B y D), actúan tensiones normales y tangenciales sobre los elementos de tensión. 19.Tensiones principales. Podemos observar cómo cambian las tensiones principales de arriba hacia debajo de la viga. En el punto A la tensión de compresión actúa en dirección horizontal y la otra tensión principal es cero. Conforme nos movemos al eje neutro, la tensión principal de compresión se inclina y en el eje neutro (punto C) actúa a 45° respecto a la horizontal. En el punto D, la tensión principal de compresión está aún más inclinado respecto a la horizontal y en el fondo de la viga su dirección se ha vuelto vertical (con la excepción de que ahora su magnitud es igual a cero). La dirección y la magnitud de la tensión principal de compresión varía continuamente desde la parte superior hasta la parte inferior de la viga. Si la sección transversal escogida se localiza en una región de momento flector grande, la tensión principal de compresión máxima se presenta en la parte superior de la viga (punto A) y la tensión principal de compresión mínima (cero) se manifiesta en el fondo de la viga (punto E). Si la sección transversal se halla en una región de momento flector pequeño y de esfuerzo cortante grande, entonces la tensión principal se compresión máxima está en el eje neutro. 20. Tensiones tangenciales máximas. Las tenciones tangenciales máximas arriba y en el fondo de la viga se presentan sobre planos a 45° (debido a que los elementos están en tensión uniaxial). En el eje neutro, las tensiones tangenciales máximas se dan sobre planos horizontales y verticales (porque él elemento está en cortante puro). En todos los puntos, las tensiones tangenciales máximas se manifiestan sobre planos orientados a 45° respecto a los planos principales. En regiones de fuerte momento flector, las tensiones tangenciales máximas se presentan en parte superior y en el fondo de la viga; en regiones de momento flector pequeño y esfuerzo cortante intenso, las tensiones tangenciales máximas se dan en el eje neutro. VIGAS DOBLE T: Las tensiones principales para otros perfiles de viga, como las doble T, se pueden analizar de manera similar a la descrita para vigas rectangulares. Procedemos igual que en el caso de la viga rectangular e identificamos los puntos A, B, C, D y E, de arriba al fondo de la viga. Los puntos B y D están en el alma, donde se encuentra el ala y el punto C se halla en el eje neutro. Las tensiones determinadas con las fórmulas de la flexión o del cortante son las mismas para ambos conjuntos de puntos. Los elementos de tensión en los puntos A, B, C, D y E se muestran en la parte (e) a la (i). estos elementos tienen la misma apariencia general que los de la viga rectangular; pero, por su puesto las tensiones son diferentes. Por lo general las tensiones principales máximas se dan en las partes superior e inferior de la viga (puntos A y E), donde las tenciones obtenidas con la fórmula de la flexión alcanzan sus valores máximos. Sin embargo, dependiendo de las magnitudes relativas del momento flector y esfuerzo cortante, las tensiones máximas se presentan a veces en la unión del alma con el ala (puntos B y D). Esto se debe a que las tensiones normales en los puntos B y D son solo ligeramente menores que aquellos puntos A y E. VIGAS COMPUESTAS O VIGAS MIXTAS: Son las vigas elaboradas con más de un material. Algunos ejemplos son: Vigas bimetálicas (como las usadas en termostatos), los tubos recubiertos de plástico y las vigas de madera reforzadas con placas de acero. Se han desarrollado muchos otros tipos de vigas compuestas recientemente, con la finalidad de ahorrar material y reducir peso; entre ellas tenemos: VIGAS SANDWICH. Se usan ampliamente en las industrias de aviación y aeroespacial, donde se requieren, pero ligero, alta resistencia y rigidez. También se usa en algunos objetos comunes como: esquíes, puertas, paneles de pared, entrepaños y cajas de cartón. Una viga sándwich característica consiste en dos tapas delgadas de material de relativamente de alta resistencia (como aluminio) separadas por un núcleo grueso de material ligero y de baja resistencia. Puesto que las tapas están a mayor distancia del eje neutro (donde las tensiones de flexión son máximas), funcionan en alguna medida como las alas de una viga L El núcleo sirve de relleno y da soporte a las tapas, estabilizándolas contra arrugamiento o pandeo. Es frecuente usar plásticos y espumas de peso ligero, panales y corrugaciones como núcleos. Deformaciones y tensiones Las deformaciones en las vigas compuestas se determinan a partir del mismo axioma básico que sirve para encontrar las deformaciones en vigas de un solo material; es decir, del principio de que las secciones transversales permanecen planas durante la flexión. Este axioma es válido para la flexión pura, sin importar la naturaleza del material; por tanto, las deformaciones lineales Ex en una viga compuesta varían linealmente de la parte superior a la inferior de la viga, tal como lo expresa la ecuación que repetimos a continuación 𝑦 𝜖𝑥 = − = −𝑘𝑦 𝑝 En esta ecuación, y es la distancia desde el eje neutro, p es el radio de curvatura y k es la curvatura. Si comenzamos con la distribución lineal de la deformación representada por la ecuación, podemos determinar las deformaciones y tensiones en cualquier viga compuesta. Para mostrar cómo se hace esto, consideramos la viga compuesta de la figura 6-3a, que consta de dos partes (marcadas 1 y 2 en la fig.) firmemente unidas entre sí, de modo que actúan como una sola viga sólida. Igual que en los análisis previos de vigas, suponemos que el plano xy es un plano de simetría y que el plano xz es el plano neutro de la viga; sin embargo, el eje neutro no pasa por el centroide del área de la sección transversal cuando la viga está hecha de dos materiales diferentes.1 con curvatura positiva, las deformaciones 𝜖𝑥 varían como en la figura 6-3c donde 𝜖𝐴 es la deformación de compresión en la parte superior de la viga, 𝜖𝐵 es la deformación de tracción en la parte inferior y 𝜖𝐶 es la deformación en la superficie de contacto. Observe que el cortante es cero en el eje neutro (eje z). Las tensiones normales que actúan sobre la sección transversal pueden obtenerse de las deformaciones usando las relaciones tensión – deformación de ambos materiales. Supongamos que los dos materiales se comportan de manera elástico lineal, por lo que la ley de Hooke para tensión uniaxial es válida, entonces las tensiones e los materiales se obtienen multiplicando las deformaciones por el módulo de elasticidad apropiado. Denotamos los módulos de elasticidad para los materiales 1 y 2 con E1 y E2 respectivamente, y también suponemos que E1 > E2 y obtenemos el diagrama de tensiones mostrado en la figura 6-3d. La tensión de comprensión en la parte superior de la viga es 𝜎𝐴 = 𝐸1 𝜖𝐴 y la tensión de tracción en la parte inferior es 𝜎𝐵 = 𝐸2 𝜖𝐵 . En la superficie de contacto, las tensiones en los dos materiales son distintas por que sus módulos son diferentes. En el material 1 , la tensión es 𝜎1𝐶 = 𝐸1 𝜖𝐶 y en el material 2 𝜎2𝐶 = 𝐸2 𝜖𝐶 . Con la ley de Hooke y la ecuación (6.1) podemos expresar las tensiones normales a la distancia y desde el eje neutro en términos de la curvatura: 𝜎𝑥1 = −𝐸1 𝑘𝑦 𝜎𝑥2 = −𝐸2 𝑘𝑦 En donde 𝜎𝑥1 es la tensión en el material 1 y 𝜎𝑥2 es la tensión en el material 2. Con ayuda de estas ecuaciones, podemos localizar el eje neutro y obtener la relación momento – curvatura. RELACIÓN ENTRE LAS FUERZAS EXTERNAS Y LAS TENSIONES, FÓRMULA DE FLEXIÓN: En el gráfico siguiente se muestra el diagrama de cuerpo libre del elemento de la fig. 2.1. a., en el espacio. Se aprecian la superficie, línea y eje neutro, cuyas fibras no están sometidas a esfuerzos. Obsérvese que las cargas externas P y q, están contenidas en el plano del eje principal que pasa por Y, y son perpendiculares al eje X, por lo cual no hay componentes de estas en X y Z. Ahora definimos la fibra rayada situada a una distancia “y” del eje neutro, cuya sección transversal es dA, la cual está sometida a las fuerzas normal σx∙dA, y a las fuerzas cortantes txy.dA y txz.dA. CONCLUSIONES: