Estimación de los Parámetros del
Modelo Matemático del Generador
Sincrónico
Hernán Mauricio Sánchez Jaramillo
Universidad Nacional de Colombia
Facultad de Minas, Departamento de Energía Eléctrica y Automática
Medellín, Colombia
2015
Estimación de los Parámetros del
Modelo Matemático del Generador
Sincrónico
Hernán Mauricio Sánchez Jaramillo
Trabajo final de maestría como requisito parcial para optar al título de:
Magister en Ingeniería – Ingeniería Eléctrica
Director:
Prof. Jairo José Espinosa Oviedo Ph.D.
Línea de Investigación:
Sistemas de Potencia
Universidad Nacional de Colombia
Facultad de Minas, Departamento de Energía Eléctrica y Automática
Medellín, Colombia
2015
A mi hijo Tomás y a mi esposa María Paula
por su paciencia aliento y soporte.
Agradecimientos
Al Dr. Jairo José Espinosa O y Dr. Jorge Enrique Gómez. por su direccionamiento y
valioso aporte al éxito de este trabajo.
A X.M. S.A. ESP, María Nohémi Arboleda y Juan Carlos Morales por creer y patrocinar
este proyecto.
Resumen y Abstract
V
Resumen
Este trabajo presenta la estimación de los principales parámetros del modelo dinámico
del generador sincrónico, a través de la técnica de optimización basada en sensibilidad
de trayectoria. Actualmente en la literatura han sido propuestas diversas técnicas para
determinar los parámetros del modelo del generador, sin embargo algunas son muy
invasivas y requieren montajes especiales y tener el generador fuera de línea, otras,
como las que consideran el generador en operación continua, dependen de la ocurrencia
de eventos que no necesariamente hacen identificables todos los parámetros del modelo.
La técnica de sensibilidad de trayectorias fue seleccionada no solo porque permite una
completa representación de las dinámicas lineales y no lineales del generador y su
sistema de excitación, sino porque presenta gran eficiencia en la búsqueda de
parámetros en problemas de ajuste de curvas mediante la minimización del error entre
las variables medidas y las simuladas.
El desarrollo del trabajo parte del modelamiento del generador sincrónico y de la solución
de las ecuaciones diferenciales no lineales que componen el modelo de orden 5 que se
encuentra comúnmente en la literatura. Posteriomente se incluye un modelo típico de
regulador de tensión, el cual juega un importante papel en la dinámica eléctrica del
generador. A continuación, se diseña una pequeña red eléctrica de prueba que simula el
generador bajo prueba, líneas de transmisión, una carga y un equivalente dinámico del
sistema. Se plantean las ecuaciones algebraico-diferenciales para la red de prueba,
encontrándose su solución en el tiempo mediante una técnica de integración númerica.
Finalmente la red de prueba es usada por la metodología de estimación para evaluar la
función objetivo enfocada en minimizar el error entre la simulación y los registros de una
prueba mediante la variación iterativa de los parámetros del modelo del generador.
Por último, para evaluar la robustez del algoritmo de estimación se realizaron múltiples
escenarios para los cuales se corrió la metodología, encontrándose excelentes
resultados en cuanto a la precisión de la estimación de parámetros y la usabilidad de la
VI
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
técnica implementada tanto en ambiente de prueba en planta como en operación normal,
registrando la dinámica del generador ante eventos en la red de transmisión. No obstante
se encontrarón limitaciones en la convergencia del algoritmo de estimación relacionadas
con la desviación inicial de los parámetros del modelo, lo cual limita su uso a
desviaciones no mayores al 20%. Igualmente los ruidos própios de medición imponen
dificultades adicionales para la obtención de buenos resultados, lo que hace necesario la
utilización de instrumentos de medición con alta precisión.
Como producto del presente trabajo se propone una herramienta que puede mejorar
notablemente el desempeño de los modelos de los generadores sincrónicos que tienen
incertidumbre en sus parámetros, usando registros provenientes de pruebas muy simples
sobre el sistema de excitación, o eventos comunes en la red de transmisión.
Palabras clave: Modelo generador sincrónico, Sensibilidad de trayectorias,
Estimación de parámetros, Sistema de excitación, Sistemas no lineales.
Abstract
This work is presents the estimation of the main parameters for the dynamic model of
synchronous generators through an optimization technique based on Trajectory
Sensitivity. Currently in the literature several techniques are proposed to determine the
model parameters for the generator: However some are very invasive and require special
assemblies and the setting of the generator off-line. Others consider the generator in
continuous operation but rely on the occurrence of events that not necessarily makes all
model parameters identifiable. The Trajectory sensitivity technique was selected, not only
because it allows a complete representation of linear and no linear dynamics, but also
because it presents high efficiency in the search for parameters in curve fitting problems
by minimizing the error between measured variables and simulated ones.
Estimación de los Parámetros del Modelo Matemático del Generador
VII
Sincrónico
The development of this work begins with the modeling of a synchronous generator and
the solution of nonlinear differential equations that summarises the 6th order model which
is commonly found in the literature. A common model for excitation system is also
included, since it plays an important role in the dynamics of the generator. Then, a small
test grid is designed to simulate the generator under test, transmission lines, a load and a
dynamic equivalent for the system. Algebraic-differential equations for the test network
are stated, finding its solution in time domain by a numerical integration technique.
Finally the test network is used by the estimation methodology to evaluate the objective
function focused on minimizing the error between simulation and test records. This is
done varying iteratively the generator model parameters.
Finally to assess the robustness of the estimation algorithm, multiple scenarios were ran
through the methodology. Excellent results were found in terms of accuracy of the
parameter estimation and the technique usability in both, test environment in plan and in
normal operation recording the dynamics of the generator to events in the transmission
network. However, limitations were found in the convergence of the estimation algorithm
related to the initial deviation of the model parameters, limiting it to deviations below 20%.
Likewise, measurement noise imposes additional difficulties in obtaining good results,
demanding the use of highly accurate measuring instruments.
As result of this work, a tool that can significantly improve the performance of
synchronous generators models with uncertainity in parameters, using records from very
simple tests on the system, or common events in the transmission network is proposed.
Keywords: Synchronous generator model, Trajectories Sensitivity, Parameter
estimation, Excitation system, Nonlinear systems.
Contenido
VIII
Contenido
Pág.
1
Estimación de Parámetros en Generadores Síncronos .......................................... 5
1.1
1.2
Introducción ......................................................................................................... 5
Diferentes aproximaciones al tema de estimación de parámetros de generadores
....................................................................................................................... 6
1.2.1 Pruebas de Corto - Circuito ............................................................................. 6
1.2.2 Pruebas de Rechazo de Carga ........................................................................ 8
1.2.3 Pruebas de Respuesta en Frecuencia ........................................................... 11
1.2.4 Pruebas usando perturbaciones .................................................................... 12
1.2.5 Usando los Operadores de Reactancia ......................................................... 12
1.2.6 Análisis de los Datos de Diseño ..................................................................... 12
1.2.7 Identificación del modelo y estimación de sus parámetros con base en datos
operativos................................................................................................................. 13
1.2.8 Conclusiones. ................................................................................................ 13
2
Sensibilidad de trayectoria para estimación de parámetros ................................ 14
2.1 Introducción ....................................................................................................... 14
2.2 Metodología de estimación de parámetros ......................................................... 14
2.2.1 Selección de variables medidas ..................................................................... 14
2.2.2 Selección del modelo matemático.................................................................. 15
2.2.3 Proceso de estimación de parámetros ........................................................... 15
2.2.4 Funciones de sensibilidad de trayectoria ....................................................... 16
2.2.5 Función objetivo y su minimización ................................................................ 18
3
Modelo del Generador Sincrónico y su sistema de excitación ............................ 23
3.1 Modelo del Generador Sincrónico ...................................................................... 23
3.1.1 Modelo Eléctrico ............................................................................................ 24
3.1.2 Modelo Mecánico........................................................................................... 31
3.1.3 Modelo General ............................................................................................. 33
3.2 Modelo del Sistema de Excitación ...................................................................... 35
3.2.1 Sistemas de excitación DC ............................................................................ 37
3.2.2 Sistemas de excitación AC ............................................................................ 38
3.2.3 Sistemas de excitación Estáticos ................................................................... 38
4
Modelo del Sistema de Transmisión Acoplado al Generador Sincrónico ........... 41
4.1 Métodos de integración numérica ...................................................................... 41
4.2 Descripción del sistema de potencia modelado.................................................. 44
4.3 Metodología para la simulación dinámica del modelo de prueba........................ 46
4.3.1 Sistema en por unidad (p.u.) .......................................................................... 46
IX
Contenido
4.3.2 Construcción de la matriz Ybarra....................................................................47
4.3.3 Cálculo de las corrientes de las inyecciones ..................................................48
4.3.4 Cálculo de las condiciones iniciales................................................................49
4.3.5 Solución de Ecuaciones Diferenciales y Algebráicas en el Tiempo. ...............50
4.4 Validación del Modelo ......................................................................................... 54
5
Estimación de parámetros del generador a través de la técnica de sensibilidad
del trayectorias 58
5.1
Implementación de la técnica de estimación basada en sensibilidades de
trayectoria ..................................................................................................... 58
5.1.1 Selección de variables de entrada, salida, algebráicas, estado y parámetros 58
5.1.2 Selección de los eventos a ser simulados ......................................................59
5.1.3 Metodología de estimación de parámetros .....................................................60
5.2 Resultados ......................................................................................................... 71
5.2.1 Sensibilidad al error inicial en los parametros.................................................72
5.2.2 Caso 3: Estimación de todos los parámetros simultaneamente. Sensibilidad a
la estimación de variaciones aleatorias. ....................................................................82
5.2.3 Caso 4: Estimación de todos los parámetros considerando eventos externos –
Incremento de carga .................................................................................................88
5.2.4 Caso 5: Estimación de todos los parámetros considerando eventos externos –
Corto-circuito y apertura de línea ..............................................................................92
5.2.5 Caso 6: Estimación de todos los parámetros considerando el ruido de
medición ...................................................................................................................97
5.3 Resumen y observaciones................................................................................ 105
6
Conclusiones y recomendaciones........................................................................107
6.1
6.2
Conclusiones .................................................................................................... 107
Recomendaciones ............................................................................................ 108
X
Contenido
Lista de figuras
Pág.
Figura 1 Corriente en el estator después de aplicado el cortocircuito [6] .......................... 7
Figura 2 Determinación de constantes de tiempo [6] ........................................................ 8
Figura 3 Tensión en terminales después del rechazo de carga (eje de directo) [6] .......... 9
Figura 4 Tensión en terminales después del rechazo de carga (eje de cuadratura) [6] . 10
Figura 5 Proceso de estimación de parámetros............................................................. 16
Figura 6 Metodología de estimación de parámetro ......................................................... 21
Figura 7 Devanados del generador sincrónico y sus ejes [1] .......................................... 25
Figura 8 Representación del generador sincrónico en tres juegos de devanados ficticios
[1] ................................................................................................................................... 27
Figura 9 Circuitos equivalentes del generador: (a) eje directo; (b) eje de cuadratura ..... 29
Figura 10 Diagrama general del sistema de excitación de unidades de generación [18] 36
Figura 11 Modelo para sistema de excitación DC tipo DC1A [18] ................................... 37
Figura 12 Modelo para sistema de excitación AC tipo AC1A [18] ................................... 38
Figura 13 Modelo del sistema de excitación estático [43] ............................................... 39
Figura 14 Modelo del regulador de tensión simplificado ................................................. 40
Figura 15 Modelo de red usado para la estimación de parámetros ................................ 44
Figura 16 Diagrama fasorial del generador usado para su inicialización [2] .................... 49
Figura 17 Condiciones iniciales simulación comparativa – Flujo de Cargas ................... 55
Figura 18 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante un escalón de +2% en la tensión de referencia del AVR. ....................................... 55
Figura 19 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante un escalón de -2% en la tensión de referencia del AVR. ........................................ 56
Figura 20 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante un incremento de 100 MW y 50 MVar en la carga de la barra 2. ............................ 57
Figura 21 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante la reducción de 100 MW y 50 MVar en la carga de la barra 2. ................................ 57
Figura 22 Implementación de la la metodología de estimación de parámetros propuesta
sobre un generador real ................................................................................................. 61
Figura 23 Resultados estimación Tq0'' Caso 1: Estimación de todos los parámetros
simultaneamente. Desviación del 30% del valor real. ..................................................... 76
Figura 24 Resultados estimación Xq' Caso 2: Estimación de todos los parámetros
simultaneamente. Determinación de la máxima desviación. ........................................... 81
Figura 25 Resultados estimación Xd'' Caso 2: Estimación de todos los parámetros
simultaneamente. Determinación de la máxima desviación. ........................................... 82
XI
Contenido
Figura 26 Resultados Caso 3: Estimación simultanea de parámetros con variaciones
aleatorias ........................................................................................................................ 84
Figura 27 Resultados estimación Caso 3: Estimación de todos los parámetros
simultaneamente. Sensibilidad a la estimación de variaciones aleatorias. Ejemplo de
desviación aleatoria alrededor del 30% de los parámetros reales ................................... 86
Figura 28 Resultados estimación Caso 3: Estimación de todos los parámetros
simultaneamente. Sensibilidad a la estimación de variaciones aleatorias, con desviación
aleatoria de alrededor del 20% de los parámetros reales. ............................................... 88
Figura 29 Resultados estimación Caso 4: Estimación de todos los parámetros
considerando eventos externos – Incremento de carga, desviación aleatoria alrededor del
20% ................................................................................................................................ 90
Figura 30 Resultados estimación Caso 4: Estimación de todos los parámetros
considerando eventos externos – Incremento de carga, desviación aleatoria alrededor del
30% del valor real ........................................................................................................... 92
Figura 31 Red de prueba para evento externo – Falla 3F en cercanías de barra 2 ......... 93
Figura 32 Resultados estimación Caso 5: Estimación de todos los parámetros
considerando eventos externos – Corto-circuito y apertura de línea, desviación aleatoria
alrededor del 20% del valor nominal ............................................................................... 95
Figura 33 Resultados estimación Caso 5: Estimación de todos los parámetros
considerando eventos externos – Corto-circuito y apertura de línea, con desviación
aleatoria alrededor del 30% del valor real ....................................................................... 97
Figura 34 Resultados estimación Caso 6: Sensibilidad al ruido de medición ................ 100
Figura 35 Resultados estimación Caso 6: Comparación de resultados del proceso de
estimación para diferentes niveles de ruido de medición .............................................. 102
Figura 36 Resultados estimación Caso 6: Comparación de señales medidas filtradas
antes del proceso de estimación ................................................................................... 103
Figura 37 Resultados estimación Caso 6: Comparación de resultados del proceso de
estimación. Filtro pasa bajos Vs. Filtro de media móvil ................................................. 104
XII
Contenido
Lista de tablas
Pág.
Tabla 1 Parámetros de generadores del sistema de potencia de prueba ....................... 45
Tabla 2 Parámetros de líneas, transformadores y cargas del sistema de potencia de
prueba ............................................................................................................................ 46
Tabla 3 Caso 1: Desviación de Xd del -30% ................................................................... 72
Tabla 4 Caso 1: Desviación de Xq'del -30% ................................................................... 73
Tabla 5 Caso 1: Desviación de Xd'del -30% ................................................................... 73
Tabla 6 Caso 1: Desviación de Xd''del -30% .................................................................. 73
Tabla 7 Caso 1: Desviación de Xq''del -30% .................................................................. 74
Tabla 8 Caso 1: Desviación de Td0'del -30% ................................................................. 74
Tabla 9 Caso 1: Desviación de Td0'' del -30% ............................................................... 74
Tabla 10 Caso 1: Desviación de Tq0'' del -30% ............................................................. 75
Tabla 11 Caso 2: Desviación de Xd del -20% ................................................................. 77
Tabla 12 Caso 2: Desviación de Xq' del -16% ................................................................ 77
Tabla 13 Caso 2: Desviación de Xd' del -16% ................................................................ 78
Tabla 13 Caso 2: Desviación de Xd'' del -17% ............................................................... 78
Tabla 15 Caso 2: Desviación de Xq'' del -10% ............................................................... 78
Tabla 16 Caso 2: Desviación de Td0' del -17% .............................................................. 79
Tabla 17 Caso 2: Desviación de Td0'' del -17% ............................................................. 79
Tabla 18 Caso 2: Desviación de Tq0'' del -20% ............................................................. 79
Tabla 19 Especificación de casos con sensibilidad a la variación aleatoria inicial del
vector de parámetros...................................................................................................... 83
Tabla 20 Caso 3: Desviación aleatoria de todos los parámetros alrededor del 30% ....... 85
Tabla 21 Caso 3: Desviación aleatoria de todos los parámetros alrededor del 20% ....... 87
Tabla 22 Caso 4: Desviación aleatoria de todos los parámetros alrededor del 20% ....... 89
Tabla 23 Caso 4: Desviación aleatoria de todos los parámetros alrededor del 30% ....... 90
Tabla 24 Caso 5: Desviación aleatoria de todos los parámetros alrededor del 20% ....... 94
Tabla 25 Caso 5: Desviación aleatoria de todos los parámetros alrededor del 30% ....... 96
Tabla 26 Caso 6: Sensibilidad del algoritmo de estimación al ruido de medición............ 99
Introducción
En los sistemas de potencia modernos es altamente reconocida la importancia de los
modelos matemáticos del sistema que proporcionan la capacidad de realizar un amplio
rango de estudios sobre el comportamiento del mismo. Uno de los elementos claves de
este modelo general es el generador sincrónico, el cual junto con sus sistemas de control
de velocidad y excitación aportan el mayor número de dinámicas, e influencian de
manera directa las decisiones que deben tomarse en las etapas de planeación, las
cuales a su vez impactan directamente el costo operativo, la seguridad y la confiabilidad
de la operación. Por esta razón, trabajar en el mejoramiento de los modelos actuales de
los generadores y sus controles es de vital importancia para lograr emular de forma más
precisa el comportamiento dinámico del sistema.
Un gran número de trabajos se han realizado en el campo de estimación de los
parámetros del modelo del generador, usando por ejemplo técnicas de optimización para
minimizar el error entre la respuesta simulada y la real de los generadores ante
perturbaciones en el sistema.
La falta de correlación entre los resultados del modelo y el comportamiento real del
generador, puede derivar en conclusiones equivocadas a la hora de realizar estudios de
planeación eléctrica. Por ejemplo podría conducir a una parametrización equivocada de
controles de velocidad, tensión o incluso de protecciones del generador que pondrían
poner en riesgo, no solo la integridad del generador sino del propio sistema de potencia
al que este se conecta.
El cálculo de las generaciones de seguridad depende en general de la determinación
precisa de las restricciones eléctricas y operativas, las cuales a su vez son establecidas a
través de la simulación del comportamiento del sistema ante diferentes perturbaciones.
La falta de precisión en la simulación de las diferentes contingencias, puede derivar en la
sobre estimación de los recursos mínimos de generación que deben estar en línea para
garantizar la seguridad operativa, lo cual acarrea sobrecostos para la demanda; o peor
2
Introducción
aún las generaciones de seguridad podrían ser subestimadas, poniendo en riesgo la
atención confiable de la demanda.
Desde el punto de vista de las técnicas de estimación sobre los parámetros del modelo
del generador, podrían listarse las características más convenientes que debería tener
dicha técnica:
Facilidad para la medición de variables de salida del generador: esto implica en
muchas ocasiones que las ecuaciones diferenciales del modelo original del
generador deban ser modificadas para lograr acomodarse a las variables que
pueden ser medidas y están normalmente disponibles en campo.
Pruebas en operación continua: con esto se pretende determinar los parámetros
del modelo sin necesidad de remover el generador de operación y con la mínima
intervención posible sobre sus sistemas de control o protecciones.
Tratamiento de no linealidades: la metodología diseñada debe funcionar
adecuadamente al permitir el modelamiento detallado de no linealidades del
sistema tales como los límites en tensión o corriente del sistema de excitación, la
saturación del generador o límites de integración y salida de los controladores.
Robustez en la identificación de parámetros: esto se refiere a la capacidad de la
técnica de estimación para determinar con precisión los parámetros del modelo
bajo diferentes estados operativos y eventos que exciten las diferentes dinámicas
del mismo.
De acuerdo con lo anterior, el objetivo general del presente trabajo es el desarrollo de
una metodología de optimización que permita estimar los parámetros eléctricos del
modelo tipo VI de la máquina sincrónica [1], [2], [3], con el propósito de ajustar la
respuesta dinámica del modelo a la realidad.
Con el propósito de dar cumplimiento a los objetivos del trabajo, el presente documento
se estructura de la siguiente forma:
En el Capitulo 1 se presenta un resumen del estado del arte a la fecha en el tema de
estimación de parámetros del modelo del generador sincrónico. Se discuten las
principales tendencias y se habla sobre sus ventajas y desventajas.
En el Capitulo 2 se presenta de forma funcional la metodología de estimación de
parámetros basada en el uso de la técnica de sensibilidad de trayectoria aplicada a la
Introducción
3
estimación de parámetros de sistemas dinámicos. De igual forma se detalla el soporte
matemático necesario que compone dicha técnica.
El Capitulo 3 presenta la fundamentación matemática y la deducción básica del modelo
del generador sincrónico que es objeto de estudio en el presente trabajo. Igualmente se
proponen modelos matemáticos comúnmente usados para representar los principales
tipos de sistemas de excitación y se presenta el modelo del sistema de excitación que es
usado en el generador de prueba.
El Capitulo 4 describe la metodología llevada a cabo para simular el generador sincrónico
conectado a un sistema de transmisión, asi mismo, se detalla el procedimiento
matemático para su modelamiento y la comparación de resultados de simuación entre el
desarrollo realizado y una herramienta profesional para simulación de la dinámica de
sistemas de potencia (DigSilent Power Factory).
En el Capitulo 5 se detalla la implementación de la técnica de sensibilidad de trayectorias
para la estimación de los parámetros del generador en prueba, incluyendo la obtención
explicita de las sensibilidades. Adicicionalmente se corre el algorítmo de estimación ante
diferentes escenarios con el objetivo de evaluar el desempeño de la metodología
implementada
Finalmente en el Capitulo 6, con base en los resultados obtenidos, se presentan las
conclusiones y recomendaciones para trabajos futuros.
1 Estimación de Parámetros en Generadores
Síncronos
1.1 Introducción
En este capítulo se realiza una revisión del estado del arte en el tema de estimación de
parámetros de generadores sincrónicos. Un gran número de trabajos se han realizado en
este campo, usando por ejemplo técnicas de optimización para minimizar el error entre la
respuesta simulada y la real de los generadores ante perturbaciones en el sistema. Se
plantea la posibilidad de comenzar la optimización, partiendo de unos parámetros semilla
con base en los parámetros informados por los fabricantes. El objetivo de la optimización
es encontrar el conjunto óptimo de parámetros que mejor reproduzca el comportamiento
dinámico del generador. Es de resaltar que algunas de las técnicas encontradas en la
literatura han sido adoptadas por IEEE [4] para este propósito. En términos generales se
puede concluir que existen dos aproximaciones bien diferenciadas para abordar el
problema de encontrar los mejores parámetros del modelo matemático del generador. El
primero considera que la estructura del modelo matemático que describe la dinámica del
generador es conocida y parte de la determinación de los parámetros usando mediciones
de la respuesta de la unidad a pruebas o eventos en operación normal. La segunda
aproximación parte de asumir que no se conoce la estructura del modelo matemático del
generador y por lo tanto la estimación de sus parámetros se enfoca en las técnicas de
estimación de caja-negra, basadas en las entradas y salidas del sistema que se quiere
estimar [5]. Adicionalmente las técnicas de estimación pueden clasificarse según las
siguientes características:
De acuerdo a la técnica de estimación empleada; lineal o no lineal.
De acuerdo con el dominio en el que trabaja la técnica de estimación; tiempo o
frecuencia.
De acuerdo a al dominio temporal considerado para determinar los parámetros;
transitorio o permanente.
6
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
De acuerdo al modo de operación del generador; en operación normal
sincronizada a la red o fuera de línea.
1.2 Diferentes aproximaciones al tema de estimación de
parámetros de generadores
En los siguientes numerales se describe de forma general como funcionan los diferentes
aproximaciones para abordar este problema.
1.2.1 Pruebas de Corto - Circuito
Esta es tal vez la prueba más conocida para hallar los parámetros del modelo
matemático del generador. Su importancia reside no solo en el número de parámetros
que pueden ser determinados con esta metodología, sino en que determina la base
teórica de los parámetros estándar actualmente de uso casi universal. Aunque esta forma
de determinar los parámetros del generador define la base del modelo matemático, la
inconveniencia de aplicar corto – circuitos al generador la hace poco recomendable en
nuestro entorno, debido a la logística necesaria para llevar a cabo la prueba, sumado al
esfuerzo electromecánico al que sería sometido el generador durante su aplicación.
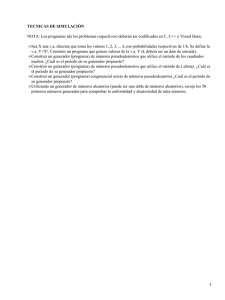
La prueba consiste en aplicar un cortocircuito en bornes del generador mientras este se
encuentra rodando a velocidad nominal en vacío. Al aplicar el corto, aparecen corrientes
en el estator que contienen componentes simétricas (alternadas) y asimétricas
(componentes continuas). El comportamiento típico de la corriente en la fase fallada se
presenta en la siguiente figura:
Capítulo 1
7
Figura 1 Corriente en el estator después de aplicado el cortocircuito [6]
Puede observarse como los valores instantáneos de la corriente decaen con una
envolvente que termina en un valor de corriente de estado estacionario Is. El
comportamiento de la corriente en el tiempo puede expresarse de la siguiente forma:
𝐼𝑎𝑐 = 𝐼𝑠 +
−𝑡
−𝑡
′
𝐼0′ 𝑒 𝑇𝑑
′′
𝐼0′′ 𝑒 𝑇𝑑
+
(1.1)
Dónde:
Is : corriente eficaz de cortocircuito en régimen permanente.
𝐼0′ : valor eficaz inicial de la componente alterna transitoria.
𝐼0′′ : valor eficaz inicial de la componente alterna subtransitoria
Las amplitudes de las componentes alternas de la corriente del estator pueden calcularse
en términos de las reactancias de eje directo usando el principio de superposición:
𝑥𝑑 =
𝑥𝑑′ =
𝑥𝑑′′ =
𝐸0
(1.2)
𝐼𝑠
𝐸0
𝐼𝑠 +𝐼0′
𝐸0
𝐼𝑠 +𝐼0′ +𝐼0′′
(1.3)
(1.4)
8
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝐼𝑎𝑐 = 𝐸0 (
1
𝑥𝑑
+(
1
′
𝑥𝑑
−
1
𝑥𝑑
)𝑒
−𝑡
𝑇′𝑑
+(
1
′′
𝑥𝑑
−
1
′
𝑥𝑑
)𝑒
−𝑡
𝑇′′
𝑑
)
(1.5)
Siendo 𝐸0 el valor eficaz de la tensión en bornes de la máquina antes del cortocircuito.
La constantes de tiempo transitoria y subtransitoria del modelo del generador pueden
deducirse gráficamente de las siguientes figuras:
Figura 2 Determinación de constantes de tiempo [6]
𝑇𝑑′ corresponde al tiempo necesario en segundos para que 𝐼 ′ decrezca hasta 1/e0.5 o el
60.06% de su valor inicial, mientras que 𝑇𝑑′′ corresponde al tiempo neceario para que 𝐼 ′′
decrezca hasta 1/e o el 36.8% de su valor inicial.
Algunos inconvenientes de la identificación de parámetros por cortocircuito es el de ser
un método gráfico el cual involucra errores de percepción, además de que solo entrega
información sobre los parámetros de eje directo del generador, además para poder
llevarlo a cabo el generador debe salir de operación.
1.2.2 Pruebas de Rechazo de Carga
Este tipo de pruebas es similar a las pruebas de corto – circuito, en cuanto a que están
diseñadas para calcular los parámetros del modelo matemático del generador. Estas
pruebas se basan en la definición de ciertas condiciones iniciales del generador, con el
fin de excitar únicamente, ya sea los parámetros de eje directo o los de cuadratura, luego
de establecer estas condiciones iniciales se provoca el rechazo de carga de la unidad, y
se registran la evolución temporal de la corriente y tensión de campo del generador, así
Capítulo 1
9
como la tensión en terminales, información con la cual se calculan posteriormente los
parámetros del modelo. El principal inconveniente para la aplicación en campo de este
tipo de pruebas se basa en la logística necesaria para alimentar el campo del generador
con una tensión constante durante la prueba, montaje que puede ser muy complicado de
implementar en algunas plantas. Adicionalmente la precisión de los parámetros
calculados depende de que las condiciones iniciales de la prueba garanticen que el
generador trabaje en una región no saturada, hecho que puede ser difícil o imposible de
lograr en ciertas plantas.
Para el desarrollo de estas pruebas en el eje directo el generador debe estar conectado a
la red con cero potencia activa y entregando potencia reactiva, de esta forma el flujo solo
existirá en el eje directo y la corriente del estator estará alineada al eje directo, lo que
supone 𝑖𝑞 = 0, adicionalmente se debe tener cuidado que no se opere el generador en la
zona saturada, lo cual implica una condición ligeramente subexcitada. Con estas
condiciones cumplidas se abre súbitamente el interruptor del generador y se registra la
tensión en terminales del generador. Con el uso de la siguiente gráfica, que presenta el
comportamiento típico de la tensión ante el rechazo de carga, se determinan los
′
′′
parámetros 𝑥𝑑 , 𝑥𝑑′ , 𝑥𝑑′′ , 𝑇𝑑0
, 𝑇𝑑0
.
Figura 3 Tensión en terminales después del rechazo de carga (eje de directo) [6]
Con el uso de las siguientes relaciones pueden estimarse las reactancias de eje directo:
10
𝑥𝑑 =
𝑥𝑑′ =
𝑥𝑑′′ =
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝐶
(1.6)
𝐼𝑑0
𝐵
(1.7)
𝐼𝑑0
𝐴
(1.8)
𝐼𝑑0
Para determinar los parámetros del eje de cuadratura, se debe operar el generador de tal
forma que toda la corriente en el estator quede alineada al eje de cuadratura, por lo que
𝑖𝑑 = 0. Para lograr esto se requiere ajustar la potencia reactiva de tal forma que el ángulo
de carga coincida con el ángulo entre la tensión y la corriente en terminales. En este
punto se realiza el rechazo de carga. En la siguiente figura se presenta la tensión en
terminales después del rechazo de carga.
Figura 4 Tensión en terminales después del rechazo de carga (eje de cuadratura)
[6]
Usando la anterior figura y las siguientes ecuaciones se determinan los parámetros del
eje de cuadratura.
𝑥𝑞 =
𝑥𝑞′′ =
√𝐴2 −𝐶 2
𝐼𝑠𝑞0
√𝐴2 −𝐶 2 −√𝐵2 −𝐶 2
𝐼𝑠𝑞0
(1.9)
(1.10)
Capítulo 1
11
Para determinar la potencia reactiva con la que debe hacerse el rechazo de carga deben
realizarse múltiples rechazos de carga hasta minimizar las variaciones en la corriente de
campo. Esto hace que esta prueba sea muy exigente para los generadores y sus
sistemas electromecánicos, lo que hace la prueba poco práctica.
1.2.3 Pruebas de Respuesta en Frecuencia
Este tipo de pruebas hoy día representan el estado del arte en el campo de identificación
de parámetros de generadores sincrónicos. Estos métodos han probado en los últimos
años su valor, incluso son llamados a reemplazar las pruebas de corto – circuito y
rechazo de carga.
Este tipo de pruebas se puede descomponer a su vez en dos tipos básicos, pruebas con
unidad parada y pruebas con unidad sincronizada y en operación.
El concepto básico detrás de estas pruebas es la inyección de señales de diferentes
frecuencias en el estator del generador para excitar los diferentes parámetros del
modelo, mientras el devanado del rotor es cortocircuitado. Se registran las mediciones y
se calculan los parámetros con base en estos datos. Se han presentados objeciones al
método de generador parado, en cuanto que no se consideran los efectos sobre los
parámetros de la rotación del generador. Para considerar este efecto se proponen las
pruebas de respuesta en frecuencia con unidad girando y sincronizada a la red. Esta
prueba requiere la unidad operando cerca de sus condiciones nominales. Los parámetros
se determinan al analizar los cambios que se producen en las respuestas grabadas
durante la prueba en las señales de potencia activa, reactiva, tensión en terminales y de
campo, corriente de campo y velocidad de la unidad, cuando se inyectan a través del
campo señales de frecuencia variables. La metodología de estimación de los parámetros
del modelo parte de un proceso iterativo cuyo objetivo es encontrar el mejor conjunto de
parámetros que minimicen las diferencias entre la respuesta real del generador y la
simulación del mismo en las mismas condiciones de la prueba. El principal inconveniente
de esta aproximación consiste en que no está muy claro como la simulación dinámica del
sistema al cual se conecta el generador bajo prueba afecta el comportamiento del
modelo.
12
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
1.2.4 Pruebas usando perturbaciones
En este tipo de pruebas se registra el comportamiento transitorio del generador ante la
aplicación de perturbaciones en el campo. Las perturbaciones pueden aplicarse en la
señal de referencia de tensión del regulador de voltaje de la unidad, o directamente a
través del devanado de campo. En [7] se usan de perturbación especiales llamadas
PRBS ( Pseudo Random Bynary Sequence) que consisten en señales binarias aleatorias
que se inyectan con un generador de señales a través de la tensión de referencia del
AVR (Automatic Voltage Regulator). No obstante se debe aclarar que esta metodología
no permite la estimación de todos los parámetros del modelo al tiempo. El juego de
parámetros que se puede estimar depende en alto grado del tipo de perturbación
inyectada. En las pruebas en campo se debe tener cuidado en el dimensionamiento de la
señal, para evitar pérdida de estabilidad del generador si la señal es demasiado grande o
falta de observabilidad de los parámetros en el caso contrario.
1.2.5 Usando los Operadores de Reactancia
Este método representa un híbrido entre el método de Respuesta en Frecuencia y
pruebas de cortocircuito. Parte de la determinación con la técnica de respuesta en
frecuencia de las reactancias de eje directo y cuadratura del generador, y luego la
aplicación del método de cortocircuito para determinar a través de una transformación
exacta los parámetros circuitales con la información de corrientes derivadas de la prueba
[8]. Aunque no se han mostrado trabajos calificando la calidad de las estimaciones a
través de este método es claro que tiene la ventaja de combinar las bondades de ambas
aproximaciones.
1.2.6 Análisis de los Datos de Diseño
El modelamiento del generador sincrónico partiendo de sus características física
contractivas no es un campo nuevo, sin embargo en los últimos años se han presentado
avances significativos en este materia, cuando se tienen en cuenta el modelamiento a
través del análisis de elementos finitos [9] [10], el cual ha mostrado ser capaz de reflejar
en el modelo, no solo las características dinámicas que requieren normalmente los
estudios eléctricos, sino comportamientos físicos y mecánicos como temperaturas y
Capítulo 1
13
estrés de materiales, hasta características de respuesta en frecuencia. No obstante se
requiere todavía más trabajo para acomodar esta técnica a cualquier diseño de
generador e incorporar igualmente los efectos rotacionales en la respuesta del modelo.
1.2.7 Identificación del modelo y estimación de sus parámetros
con base en datos operativos.
En estos métodos se recolectan diferentes variables de entrada y salida del generador,
para estimar los parámetros del modelo, usando variadas técnicas de optimización cuya
función objetivo es la minimización del error entre el comportamiento real y simulado [11].
Es posible identificar los parámetros del modelo, usando la respuesta del generador a
eventos normales en el sistema de potencia. Los datos de registradores de falla son
útiles en este propósito y para derivar los parámetros del modelo, se ha usado técnicas
matemáticas como Expansión en Series Ortogonales, Estimadores basados en funciones
no lineales y Técnicas de optimización Heurísticas como: Algoritmos Genéticos,
Enjambre de Partículas, Gradiente, Recocido Simulado, etc.
1.2.8 Conclusiones.
En general existe un gran número de publicaciones abordando tanto los métodos en el
dominio del tiempo como en el dominio de la frecuencia. Muchos investigadores
proponen que una vez estimados los parámetros del modelo desde alguno de los
dominios, se hagan nuevas pruebas en el otro dominio para validar los resultados
obtenidos.
Dado que los generadores sincrónicos juegan un papel fundamental en la determinación
del comportamiento dinámico del sistema de potencia, es clara la importancia de trabajar
en el mejoramiento de sus modelos matemáticos. Después de casi tres cuartos de siglo
de la publicación del primer trabajo en modelamiento del generador sincrónico, los
avances en esta materia son muy significativos, no obstante continúan publicándose
nuevas aproximaciones que mejoran los trabajos precedentes, lo cual reafirma la
relevancia de este tema de investigación.
2 Sensibilidad de trayectoria para estimación
de parámetros
2.1 Introducción
En este capítulo se presentará el uso de la técnica de sensibilidad de trayectoria aplicada
a la estimación de parámetros de sistemas dinámicos. Es importante recordar que para
este caso el problema de estimación consiste en encontrar los parámetros de un modelo
cuya formulación matemática es conocida, con el objetivo de emular de la forma más
precisa posible el comportamiento dinámico del generador sincrónico. El modelo
matemático del generador, como se verá más adelante, se compone de ecuaciones que
relacionan las entradas y las salidas con los parámetros y en muchos casos con las
derivadas de algunas salidas y variables internas.
2.2 Metodología de estimación de parámetros
En general, el proceso de estimación de parámetros pasa por tres etapas:
Selección de variables medidas.
Selección del modelo matemático.
Estimación de parámetros.
2.2.1 Selección de variables medidas
La primera etapa se trata de la determinación de las variables que serán medidas para
alimentar el algoritmo de estimación. Debe considerarse que las variables seleccionadas
en este paso sean de fácil medición y registro en campo, además de evitar aquellas que
sean ruidosas o que requieran un alto grado de filtrado para evitar resultados deficientes
en el proceso de estimación. Por otra parte, dado que es necesario realizar pruebas
Capitulo 2
15
especiales o para excitar las diferentes dinámicas del sistema, se debe considerar que
las variables medidas tengan suficiente información para realizar el proceso de
estimación y evitar que el problema quede mal condicionado por la poca información.
Adicionalmente es comun encontrar que dependiendo del estímulo aplicado al sistema,
es posible la estimación de algunos parámetros y otros no, en este punto se deben
buscar otros tipos de eventos para excitar los parámetros “no visibles”.
2.2.2 Selección del modelo matemático
En esta etapa se busca determinar el modelo más simple que represente de forma más
adecuada el comportamiento que se desea estudiar. Por ejemplo, en estudios de
controles, protecciones y transitorios electromagnéticos donde es muy importante
considerar las diferentes interacciones dinámicas entre los generadores, la estructura a
seleccionar debería ser la de un modelo clásico [1], [2] transitorio o subtransitorio,
dependiendo de la precisión que se desee lograr. Si en el estudio a realizar solo es
importante la respuesta de los generadores en el estado estcionario, el modelo puede ser
representado por una fuente de tensión en serie con la reactancia de eje directo. No
obstante, para aplicación de esta metodología de estimación de parámetros, se debe
conocer la estuctura matemática del modelo.
2.2.3 Proceso de estimación de parámetros
Como es de esperarse, y partiendo del objetivo principal de la metodología, se trata de
encontrar los parámetros que hagan que el desempeño dinámico del modelo sea lo más
parecido posible al comportamiento físico del generador ante una perturbación dada.
Usualmente este problema se trata a través de una técnica de optimización iterativa que
trata de minimizar una función objetivo 𝐽(𝑝) cuyo valor depende de los parámetros a
estimar . Para lograr esto se usa como función objetivo alguna norma de un vector de
error. La idea es que la técnica de optimización determine en cada iteración un nuevo
juego de parámetros con alguna regla que llegue al resultado óptimo lo más
eficientemente posible. En cada iteración, cada juego de parámetros es probado en el
modelo mediante la simulación del evento predefinido y el valor de la función objetivo es
calculado, hasta que se lográ el mínimo de 𝐽(𝑝). En la siguiente figura se ilustra en forma
funcional el procedimiento de estimación descrito:
16
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Sistema real
Nuevos
parámetros
𝑝
Evento de
entrada
Técnica de
optimización
min{ 𝐽(𝑝)}
Función
objetivo 𝐽(𝑝)
Proceso
iterativo
matemático
Modelo
matemático
Figura 5 Proceso de estimación de parámetros
2.2.4 Funciones de sensibilidad de trayectoria
Las funciones de sensibilidad de trayectoria son necesarias para la aplicación del método
de optimización. En el caso de modelos estáticos, los cuales carecen de derivadas de
sus variables en el tiempo, la verificación de las condiciones de optimalidad requieren del
cálculo de las derivadas de las funciones no lineales con respecto a los parámetros, con
el fin de encontrar los parámetros que minimizan la función objetivo. De manera análoga,
para el caso de sistemas dinámicos modelados a través de ecuaciones de estado, la
optimización requiere del cálculo de las derivadas de las salidas con respecto a los
parámetros para encontrar los parámetros que minimizan la función objetivo. En este
caso, estas derivadas son llamadas funciones de sensibilidad de trayectoria.
La estimación de los parámetros del modelo del generador sincrónico, usando
minimización por mínimos cuadrados no lineales y sensibilidades de trayectoria, es
usada en [12], [13], [14].
De forma general, el sistema de ecuaciones que reflejan la dinámica de un sistema,
puede representarse de la siguiente manera:
𝑥̇ = 𝑓(𝑥, 𝑧, 𝑝, 𝑢)
0 = 𝑔(𝑥, 𝑧, 𝑝, 𝑢)
Capitulo 2
17
𝑦 = ℎ(𝑥, 𝑧, 𝑝, 𝑢)
(2.1)
Donde:
𝑥(𝑡) es el vector de estados del sistema
𝑥̇ (𝑡) es el vector de derivadas con respecto al tiempo de los estados del sistema
𝑦(𝑡) es el vector de salidas del sistema
𝑝 es el vector de parámetros del sistema
𝑢(𝑡) es el vector de entradas del sistema
𝑧(𝑡) es el vector de variables algebráicas del sistema
Las funciones de sensibilidad de trajectoria expresan las derivadas parciales del vector
de salidas con respecto al vector de parámetros, esto es:
𝜕𝑦(𝑡)
𝜕𝑝𝑖
.
Al derivar parcialmente con respecto al parámetro 𝑝𝑖 las ecuaciones 2.1, obtenemos lo
siguiente:
𝑑 𝜕𝑥
𝑑𝑡 𝜕𝑝𝑖
0=
𝜕𝑦
𝜕𝑝𝑖
=
𝜕𝑓(𝑥,𝑧,𝑝,𝑢)
𝜕𝑥
𝜕𝑔(𝑥,𝑧,𝑝,𝑢)
=
𝜕𝑥
∙
𝜕ℎ(𝑥,𝑧,𝑝,𝑢)
𝜕𝑥
∙
𝜕𝑥
𝜕𝑝𝑖
∙
𝜕𝑥
𝜕𝑝𝑖
+
𝜕𝑥
𝜕𝑝𝑖
+
𝜕𝑓(𝑥,𝑧,𝑝,𝑢)
𝜕𝑧
𝜕𝑔(𝑥,𝑧,𝑝,𝑢)
+
𝜕𝑧
∙
𝜕ℎ(𝑥,𝑧,𝑝,𝑢)
𝜕𝑧
∙
𝜕𝑧
𝜕𝑝𝑖
∙
𝜕𝑧
𝜕𝑝𝑖
+
𝜕𝑧
𝜕𝑝𝑖
+
𝜕𝑓(𝑥,𝑧,𝑝,𝑢)
𝜕𝑝𝑖
𝜕𝑔(𝑥,𝑧,𝑝,𝑢)
+
𝜕𝑝𝑖
𝜕ℎ(𝑥,𝑧,𝑝,𝑢)
𝜕𝑝𝑖
(2.2)
Las ecuaciones 2.2 son llamadas sensibilidad de trayectoria para el parámetro 𝑝𝑖 . Nótese
que la solución de las ecuaciones 2.1 no depende de la solución de 2.2, mientras que la
solución de 2.2 depende de la solución de 2.1. Por lo anterior el sistema de ecuaciones
2.1 que tiene la representación del modelo del generador sincrónico, debe ser resuelto
antes del 2.2. Ambos sistemas de ecuaciones son sistemas dinámicos no lineales,
normalmente resueltos por metodos de integración numéricos. En este trabajo se usará
el método trapezoidal implicito para la resolución de las ecuaciones diferenciales del
generado, al igual que para el cálculo de las sensibilidades de trayectoria.
18
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
En algunos casos en los que las funciones 𝑓 y 𝑔 no son diferenciables con respecto a
los parámetros 𝑝, o sus derivadas son muy complejas de expresar explicitamente, se
puede usar un método alternativo que permite aproximar dichas derivadas de la siguiente
forma. Llamemos 𝑝0 el vector de parámetros iniciales y 𝑝1 el vector de parámetros
siguiente, cuya 𝑖-esima componente está dada por 𝑝𝑖1 = 𝑝𝑖0 + Δ𝑝𝑖 , siendo 𝑝𝑖 un
pequeño incremento en el parámetro 𝑖-esimo. Sea 𝑥0 , 𝑦0 y 𝑧0 las trayectorias en el
tiempo obtenidas de la solución de las ecuaciones 1.11 con el uso de los parámetros 𝑝0
y sea 𝑥1 , 𝑦1 y 𝑧1 las trayectorias en el tiempo obtenidas con el uso de los parámetros
𝑝1 . Con base en las definiciones anteriores, las sensibilidades de trayectoria pueden ser
aproximadas por:
𝜕𝑥(𝑡)
𝜕𝑝𝑖
𝜕𝑧(𝑡)
𝜕𝑝𝑖
𝜕𝑦(𝑡)
𝜕𝑝𝑖
≈
≈
≈
𝑥1 (𝑡)−𝑥0 (𝑡)
Δ𝑝𝑖
𝑧1 (𝑡)−𝑧0 (𝑡)
Δ𝑝𝑖
𝑦1 (𝑡)−𝑦0 (𝑡)
Δ𝑝𝑖
(2.3)
Las sensibilidades de trayectoria, además de ser usadas como la principal entrada del
método de optimización, también brindan información importante en el proceso de
estimación de parámetros, al indicar que grado de influencia tienen los parámetros en las
salidas
seleccionadas.
Matemáticamente
se
puede
determinar
el
grado
de
condicionamiento numérico del problema de estimación al obtener la relación entre el
menor y mayor valores propios de la matriz
𝜕𝑦(𝑡)
𝜕𝑝
[15]. Los problemas mal condicionados
no entregaran observabilidad de los parámetros en las salidas seleccionadas.
2.2.5 Función objetivo y su minimización
Antes de hablar de la función objetivo, es conveniente determinar cuales deben ser las
condiciones de optimalidad que deben cumplirse para la minimización de funciones
irrestrictas. Para esto se hace primero la siguiente definición:
Capitulo 2
19
Dada una función 𝑓: 𝑅 𝑛 → 𝑅. Un punto 𝑥 ∗ 𝜖 𝑅 𝑛 , es llamado un mínimo local si existe un
escalar 𝛿 > 0 tal que 𝑓(𝑥 ∗ ) ≤ 𝑓(𝑥) para cualquier 𝑥 tal que ‖𝑥 − 𝑥 ∗ ‖ < 𝛿 . Además
si 𝑓(𝑥 ∗ ) ≤ 𝑓(𝑥) para cualquier 𝑥 𝜖 𝑅 𝑛 , entonces 𝑥 ∗ es llamado mínimo global de 𝑓.
Son condiciones suficientes para la obtención de un mínimo irrestricto de 𝑓:
∇𝑓(𝑥 ∗ ) = 0. (El gradiente de 𝑓(𝑥) evaluado en 𝑥 ∗ debe ser cero
d𝑇 𝐻 (𝑥 ∗ )𝑑 > 0, ∀𝑑 ∈ 𝑅𝑛 | 𝑑 ≠ 0 .( La matriz Hessiana debe ser definida
positiva en el punto 𝑥 ∗ .)
Como ya se ha expuesto anteriormente, la técnica usada en este trabajo para estimar los
parámetros del modelo matemático del generador sincrónico, está basada en la
minimización de una función objetivo que reduce el error entre el comportamiento
dinámico de las salidas medidas y las simuladas. Esta es precisamente la formulación de
la función objetivo, que puede ser expresada de la siguiente manera:
Se define la función 𝐽(𝑝), que depende del vector de parámetros del modelo del
generador sincrónico, como la integral de las diferencias entre las salidas medidas y ls
obtenidas por el modelo mediante la simulación de una perturbación dada, y para un
juego dado de parámetros. Esta definición corresponde a la formulación del método de
mínimos cuadrados para el intervalo de tiempo 𝑇.
1
𝑇
𝐽(𝑝) = ∫𝑡=0(𝑦𝑚𝑒𝑑 − 𝑦𝑠𝑖𝑚 )𝑇 (𝑦𝑚𝑒𝑑 − 𝑦𝑠𝑖𝑚 ) 𝑑𝑡
2
(2.4)
Donde:
𝑦𝑚𝑒𝑑 denota el vector de salida medido del sistema real
𝑦𝑠𝑖𝑚 es el vector solución de salida del modelo (2.1)
𝑇 es el tiempo final de simulación
En la ecuación 1.14 el termino
1
2
aparece para simplificar posteriormente los cálculos.
La ecuación 1.14 también puede ser escrita de la siguiente forma:
20
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝑇
1
𝐽(𝑝) = ∫𝑡=0(𝑦𝑚𝑒𝑑 − 𝑦𝑠𝑖𝑚 )2 𝑑𝑡
2
(2.5)
o en forma discreta:
𝑇
1
2
𝐽(𝑝) = ∑(𝑦𝑚𝑒𝑑 𝑖 − 𝑦𝑠𝑖𝑚 𝑖 )
2
𝑖=0
De acuerdo con la primera condición de suficiencia vista arriba, para minimizar 𝐽(𝑝)
debe encontrarse un 𝑝∗ tal que ∇𝐽(𝑝∗ ) = 0. Por lo tanto derivando 2.5 con respecto al
vector de parámetros se obtiene:
𝜕𝐽(𝑝)
𝜕𝑝
𝑇
= ∫𝑡=0(𝑦𝑠𝑖𝑚 − 𝑦𝑚𝑒𝑑 )
𝜕𝑦𝑠𝑖𝑚
𝜕𝑝
𝑑𝑡
(2.6)
Se define 𝐺 (𝑝) como:
𝐺 (𝑝 ) = −
𝜕𝐽(𝑝)
𝜕𝑝
𝑇
= ∫𝑡=0 (
𝜕𝑦𝑠𝑖𝑚 𝑇
𝜕𝑝
) (𝑦𝑚𝑒𝑑 − 𝑦𝑠𝑖𝑚 ) 𝑑𝑡
(2.7)
El método iterativo de Newton puede ser usado para resolver la ecuación no lineal (2.7),
partiendo de un vector de parámetros iniciales 𝑝 = 𝑝(0) .
Para determinar los parámetros de la 𝑖-esima iteración se usa la siguiente ecuación:
𝑝(𝑘+1) = 𝑝(𝑘) − Γ −1 (𝑝)𝐺(𝑝)|𝑝=𝑝(𝑘)
(2.8)
Donde Γ(p) es la matriz jacobiana de 𝐺(𝑝), la cual se calcula derivando G(p) con
respecto al vector de parámetros 𝑝.
Γ(p) =
𝜕𝐺(𝑝)
𝜕𝑝
𝑇
= − ∫𝑡=0 (
𝜕2 𝑦𝑠𝑖𝑚
𝜕𝑝2
𝑇
𝑇
𝜕𝑦𝑠𝑖𝑚 𝑇 𝜕𝑦𝑠𝑖𝑚
) 𝜕𝑝 𝑑𝑡
𝜕𝑝
) (𝑦𝑚𝑒𝑑 − 𝑦𝑠𝑖𝑚 ) 𝑑𝑡 + ∫𝑡=0 (
Despreciando los términos de segundo orden Γ(p) puede ser aproximada por:
𝑇
Γ(p) ≈ ∫𝑡=0 (
𝜕𝑦𝑠𝑖𝑚 𝑇 𝜕𝑦𝑠𝑖𝑚
𝜕𝑝
)
𝜕𝑝
𝑑𝑡 |𝑝=𝑝(𝑘)
(2.10)
(2.9)
Capitulo 2
21
En términos prácticos, la implementación del algoritmo de estimación usa 𝑦𝑚𝑒𝑑 y 𝑦𝑠𝑖𝑚
como señales discretas en el tiempo, por lo cual las integrales de las ecuaciones 2.6 y
2.8 se convierten en sumatorias.
Finalmente para resumir el proceso de estimación de parámetros, en la siguiente figura
se presenta la estructura metodológica usada en este trabajo:
Definición de la
estructura del modelo
Definición de entradas, salidas,
estados y parámetros del modelo
Definición del evento a
simular
Actualizar el vector de parámetros
𝑝(𝑘+1) = 𝑝(𝑘) − Γ −1 (𝑝)𝐺(𝑝)|𝑝=𝑝(𝑘)
Definición del vector de
parámetros semilla p (0)
Cálculo de
Solución ecuaciones del modelo
𝑥̇ (𝑡) = 𝑓(𝑥(𝑡), 𝑝, 𝑢(𝑡))
𝑦(𝑡) = 𝑔(𝑥(𝑡), 𝑝, 𝑢(𝑡))
𝜕𝐽(𝑝)
= 𝐺(𝑝) =
𝜕𝑝
𝜕𝐽(𝑝)
𝜕𝑝
𝑇
(𝑦𝑠𝑖𝑚 − 𝑦𝑚𝑒𝑑 )
𝑡=0
𝜕𝑦𝑠𝑖𝑚
𝑑𝑡
𝜕𝑝
Cálculo de Γ(p)
𝜕𝑦𝑠𝑖𝑚 𝑇 𝜕𝑦𝑠𝑖𝑚
(
)
𝑑𝑡 |𝑝=𝑝(𝑘)
𝜕𝑝
𝜕𝑝
𝑡=0
𝑇
Cálculo de 𝐽(𝑝)
𝑇
Γ(p) ≈
1
2
𝐽(𝑝) = ∑(𝑦𝑚𝑒𝑑 𝑖 − 𝑦𝑠𝑖𝑚 𝑖 )
2
𝑖=0
Cálculo sensibilidad de trayectoria de salidas
𝐽(𝑝) < 𝜀
𝑑 𝜕𝑥(𝑡) 𝜕𝑓(𝑥(𝑡), 𝑝, 𝑢(𝑡)) 𝜕𝑥(𝑡) 𝜕𝑓(𝑥(𝑡), 𝑝, 𝑢(𝑡))
=
∙
+
𝑑𝑡 𝜕𝑝𝑖
𝜕𝑥
𝜕𝑝𝑖
𝜕𝑝𝑖
𝜕𝑦(𝑡) 𝜕𝑔(𝑥(𝑡), 𝑝, 𝑢(𝑡)) 𝜕𝑥(𝑡) 𝜕𝑔(𝑥(𝑡), 𝑝, 𝑢(𝑡))
=
∙
+
𝜕𝑝𝑖
𝜕𝑥
𝜕𝑝𝑖
𝜕𝑝𝑖
Fin
Figura 6 Metodología de estimación de parámetro
3 Modelo del Generador Sincrónico y su
sistema de excitación
Para la metodología de estimación de parámetros utilizada en este trabajo, es necesario
el conocimiento detallado del modelo matemático del sistema de potencia y el generador
sincrónico. Adicionalmente el modelo dinámico del sistema de excitación es de vital
importancia, dado que este tiene alto grado de influencia en la determinación de los
parámetros eléctricos del generador.
En este capitulo se presenta de forma general el modelo matemático que representa la
dinámica del generador sincrónico por medio de ecuaciones diferenciales.
3.1 Modelo del Generador Sincrónico
Existen dos tipos principales de máquinas sincrónicas, las de rotor liso y las de polos
salientes. Las de rotor liso son usadas frecuentemente en plantas termoeléctricas, cuya
caracteristica más notable es la alta velocidad de rotación de sus ejes, la cual es
proporcionada por su turbina. La construcción del rotor de forma cilindrica, se hace
necesaria para reducir las altas fuerzas centrifugas y el rozamiento con el aire que se
generaría en este tipo de máquinas al girar a altas velocidades. Las unidades de
generación de polos salientes, por el contrario, son más usadas conectadas a turbinas de
bajas velocidades, típicas en centrales hidráulicas que aprovechan caídas de agua.
El principio de funcionamiento del generador sincrónico se basa en la alimentación de
una bobina ubicada en el rotor, alimentada por una tensión en corriente contínua,
llamada devanado de campo. Mediante el giro contínuo del rotor se produce una fuerza
magnetomotriz en los arrollamientos del estator por el principio de inducción magnética.
Esta fuerza creada por el campo magnético giratorio del devanado de campo cortando
las espiras del estator, produce una tensión y corriente senoidales en el estator, cuya
frecuencia está determinada por el número de pares de polos y la velocidad del rotor.
24
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Dado que la operación del sistema de potencia y del mismo generador no es estable todo
el tiempo, algunas variaciones en la potencia de la turbina, la carga o la tensión en el
estator, pueden provocar oscilaciones en el rotor que afectan la estabilidad de la
máquina. Por esta razón los fabricantes comunmente adicionan devanados extra
cortocircuitados en las cabezas polares, con el proposito de amortiguar estas
oscilaciones y hacer mucho más estable la operación de los generadores. Estas bobinas
son llamados devanados amortiguadores. Los modelos matemáticos detallados deben
considerar las dinámicas aportadas por los devanados de campo, estator y
amortiguadores para una correcta representación del generador.
En términos prácticos el modelamiento matemático de la máquina sincrónica puede
separarse en la dinámica eléctrica y la mecánica.
3.1.1 Modelo Eléctrico
El modelamiento matemático puede ser llevado a cabo considerando un marco de
referencia fijo en el estator, en cuyo caso las variables electromagnéticas tendrían
variación en el tiempo, debido al movimiento del rotor, y a que el circuito magnético entre
estator y rotor sería diferente en cada instante de tiempo, con lo cual el modelamiento se
torna en un problema muy complejo. Con el fin de hacerlo mucho más simple se ha
usado un marco común de referencia que rota conjuntamente con el rotor y que deriva en
que las tensiones y corrientes del estator son transformadas en dos conjuntos de
variables ortogonales. Una de ellas alineadas con el flujo magnético del devanado de
campo llamado eje directo y la otra alineado con un eje 90 eléctricos atrasado con
respecto al primero, llamado eje de cuadratura. Esta manipulación es llamada
transformación de Park o dq0 [16].
Para ilustrar la ubicación de los ejes de referencia y los devanados de rotor, estator y
amortiguadores, se presenta la siguiente figura, que además es la base para la
determinación final del modelo del generador.
Capitulo 3
25
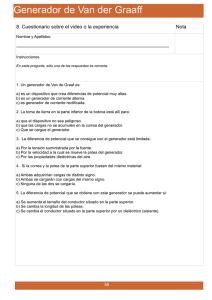
Figura 7 Devanados del generador sincrónico y sus ejes [1]
En la anterior figura se presenta un diagrama esquemático de la sección transversal de
un generador sincrónico trifásico, con devanados de estator (A, B y C), un devanado de
rotor (F) y dos devanados amortiguadores, uno en el eje directo (D) y otro en el eje de
cuadratura (Q). El centro de la fase A es tomado como referencia. El diagrama de la
Figura 7 cumple con las convenciones de IEEE recomendadas en [17]. Para el desarrollo
del modelo matemático se asume lo siguiente:
El devanado trifásico del estator es simétrico.
Las capacitancias de todos los devanados pueden ser despreciadas.
Todos los devanados distribuidos pueden ser representados de forma
concentrada.
El cambio en la inductancia de los devanados del estator debido a la posición del
rotor es sinusoidal y no contiene armónicos.
Las pérdidas por histéresis son despreciables, pero las asociadas a las corrientes
de eddy pueden ser incluidas en el modelo de los devanados amortiguadores.
En
los
estados
transitorio
y subtransitorio
la
velocidad
del
rotor
es
aproximadamente la velocidad sincrónica (ω ≈ 𝜔𝑛 ).
Todos los circuitos magnéticos son lineales y no presentan saturación, además su
inductancia no varía con la corriente.
26
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Para transformar las variables de corriente y tensión del marco de referencia abc a dq0,
se usa la matriz de transformación W, así:
1
1
1
√2
√2
√2
2
2
𝐖 = √3 cos 𝛾
cos (𝛾 − 3 𝜋)
[ sen 𝛾
sen (𝛾 − 3 𝜋)
2
2
cos (𝛾 + 3 𝜋)
(3.1)
2
sen (𝛾 + 3 𝜋)]
i0
i𝐴
[i𝑑 ] = 𝐖 [i𝐵 ]
i𝑞
i𝐶
La transformada inversa igualmente puede ser usada:
iABC = W −1 i0dq
Dado que las variables de los devanados de campo y amortiguadores ya se encuentran
en el marco de referencia del rotor, el conjunto completo de ecuaciones de corriente
puede ser escrito de la siguiente forma:
[
i0𝑑𝑞
W 0 i𝐴𝐵𝐶
]=[
][
]
i𝑓𝐷𝑄
0 𝐼 i𝑓𝐷𝑄
y usando la transformada inversa,
−1
i𝐴𝐵𝐶
[i ] = [W
𝑓𝐷𝑄
0
0] [ i0𝑑𝑞 ]
1 i𝑓𝐷𝑄
La siguiente figura muestra el arreglo de los devanados de acuerdo con su acoplamiento
magnético en el marco de referencia dq0:
Capitulo 3
27
Figura 8 Representación del generador sincrónico en tres juegos de devanados ficticios
[1]
Se observan tres juegos de devanados perpendiculares entre si; tres en el eje directo,
dos en el eje de cuadratura y uno en el eje 0.
Los flujos magnéticos pueden expresarse en términos de las inductancias mutuas y
propias y las corrientes en cada devanado en el marco de referencia dq0 de la siguiente
forma:
𝐿𝑑
𝜓𝑑
[ 𝜓𝑓 ] = [ 𝑘𝑀𝑓
𝜓𝐷
𝑘𝑀𝐷
[
𝜓𝑞
𝐿𝑞
] = −[
𝜓𝑄
𝑘𝑀𝑄
𝑘𝑀𝑓
𝐿𝑓
𝐿𝑓𝐷
𝑘𝑀𝐷 𝑖𝑑
𝐿𝑓𝐷 ] [ 𝑖𝑓 ]
𝐿𝐷 𝑖𝐷
𝑘𝑀𝑄 i𝑞
][ ]
𝐿𝑄 i𝑄
(3.2)
(3.3)
Donde k = √3⁄2, Mf es la inductancia mutua entre el devanado de campo y el de eje
directo, MD la inductancia mutua entre el devanado amortiguador D y el de eje directo,
MQ la inductancia mutua entre el devanado amortiguador Q y el de eje de cuadratura, LfD
la inductancia mutua entre el devanado de eje directo y el de campo y las Li las
inductancias propias del devanado i.
Para el circuito de la Figura 7 podemos escribir las ecuaciones de las tensiones así:
28
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝑅𝐴
𝜈𝐴
𝜈𝐵
𝜈𝐶
−𝜈𝑓 =
0
[ 0 ]
[
𝑅𝐵
𝑅𝐶
𝑅𝑓
𝑅𝐷
𝜓𝐴
𝑖𝐴
𝜓𝐵
𝑖𝐵
𝑖𝐶
𝑑 𝜓𝐶
−𝑖𝑓 − 𝑑𝑡 𝜓𝑓
𝑖𝐷
𝜓𝐷
𝑖
[𝜓𝑄 ]
𝑅𝑄 ] [ 𝑄 ]
En forma compacta las tensiones se pueden expresar asi:
𝝂𝐴𝐵𝐶
𝑹𝐴𝐵𝐶
[𝝂 ] = − [
𝑓𝐷𝑄
𝑹𝑓𝐷𝑄
𝐢𝐴𝐵𝐶
𝑑 𝚿𝐴𝐵𝐶
] [𝐢 ] − 𝑑𝑡 [𝚿 ]
𝑓𝐷𝑄
(3.4)
𝑓𝐷𝑄
Donde R ABC y R fDQ son matrices de resistencia diagonales de los devanados A,B y C y
de campo, amortiguador en D y amortiguador en Q. Los términos con Ψ denotan el flujo
magnético concentrado en el devanado correspondiente.
Al pasar las variables de la ecuación 3.4 al marco de referencia dq0 y después de aplicar
un poco de algebra tenemos la siguiente expresión:
𝝂0𝑑𝑞
𝑹𝐴𝐵𝐶
[𝝂 ] = − [
𝑓𝐷𝑄
𝑹𝑓𝐷𝑄
][
𝐢0𝑑𝑞
𝚿̇0𝑑𝑞
]−[
] + [𝛀
𝐢𝑓𝐷𝑄
̇
𝚿𝑓𝐷𝑄
0
][
𝚿0𝑑𝑞
]
𝚿𝑓𝐷𝑄
(3.5)
Donde:
𝛀𝚿0𝑑𝑞
0 0
= [0 0
0 1
0
0 𝜓0
−𝜔𝜓
𝜓
]
[
]
=
[
−1
𝑞]
𝑑
𝜔𝜓𝑑
0 𝜓𝑞
La ecuación 3.5 sin el término ΩΨ0dq describe la ley de Kirchhoff de tensiones para el
circuito de la Figura 8. El término ΩΨ0dq describe las tensiones electromagnéticas
inducidas en los devanados del estator debido a la rotación del campo magnético.
Si se considera el generador bajo operación balanceada, entonces no se tendrá
secuencia 0. Adicionalmente, si se asume que los cambios en la velocidad alrededor del
punto de operación son muy pequeños (ω ≈ ωn ) y que las tasas de variación en el flujo
magnético ψ̇d y ψ̇q son igualmente muy pequeñas, comparadas con las tensiones
electromagnéticas rotacionales ωψq y ωψd , entonces la ecuación 3.5 puede ser
expresada en forma expandida en un conjunto de ecuaciones diferenciales y otro de
ecuaciones algebráicas de la siguiente forma:
Capitulo 3
𝝂𝑑
[𝝂 ] ≈ − [ 𝑅
𝑞
𝜓̇𝑓
𝑅𝑓
[𝜓̇𝐷 ] = − [ 0
0
𝜓̇
𝑄
29
𝐢𝑑
−𝜓𝑞
] [𝐢 ] + 𝜔 [
]
𝜓𝑑
𝑅 𝑞
0
𝑅𝐷
0
(3.6)
0 𝑖𝑓
𝜈𝑓
0 ] [𝑖 𝐷 ] + [ 0 ]
𝑅𝑄 𝑖𝑄
0
(3.7)
Las ecuaciones 3.6 y 3.7, junto con las ecuaciones 3.2 y 3.3 constituyen el modelo
completo del generador sincrónico considerando despreciables las tasas de cambio en
los flujos magnéticos. No obstante, para que este modelo pueda ser usado en estudios
sistémicos, debe ser simplificado y expresado en forma diferente para que pueda ser
acoplado a las ecuaciones de red del sistema de potencia.
Típicamente los modelos del generador usados en análisis de sistemas de potencia se
encuentran expresados en términos del comportamiento del generador en sus fases
temporales; esto es: estado estacionario, transitorio y subtransitorio. Al determinar como
el flujo magnético afecta las tensiones electromotrices en cada uno de estos estados
temporales, pueden deducirse circuitos equivalentes en el eje directo y en el eje de
cuadratura que representan el comportamiento eléctrico del generador. Estos circuitos
son fuentes de tensión transitoria y subtransitoria, conectados a través de reactancias de
eje directo y cuadratura en estados estacionario, transitorio y subtransitorio. En la
siguiente figura se presentan los circuitos equivalentes del modelo del generador
sincrónico cuando se desprecia la resistencia del estator.
Figura 9 Circuitos equivalentes del generador: (a) eje directo; (b) eje de cuadratura
Las reactancias de los circuitos equivalentes están en función de las inductancias propias
y mutuas vistas anteriormente:
X𝑑′ = ωL′𝑑 ,
X𝑑′′ = ωL′′𝑑 ,
X𝑞′ = X𝑞 = ωL′𝑞 ,
X𝑑 = ωL𝑑
30
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
con
L′𝑑 = L𝑑 −
L′′𝑑 = L𝑑 −
𝑘 2 − 𝑀𝑓2
𝐿𝑓
𝑘 2 𝑀𝑓2 𝐿𝐷 + 𝑘 2 𝑀𝐷2 𝐿𝑓 − 2𝑘𝑀𝑓 𝑘𝑀𝐷 𝐿𝑓𝐷
𝐿𝐷 𝐿𝑓 − 𝐿2𝑓𝐷
L′𝑞 = L𝑞
Al estudiar en los estados estacionario, transitorio y subtransitorio, como el flujo rotativo
del estator penetra en el devanado del rotor, cuando un disturbio ocurre, se pueden
deducir las ecuaciones que gobiernan el comporatmiento de las tensiones en eje directo
y cuadratura para los circuitos de la Figura 9.
′ ̇′
T𝑑0
𝐸𝑞 = E𝑓 − E𝑞′ + 𝐼𝑑 (X 𝑑 − X𝑑′ )
(3.8)
′ ̇′
T𝑞0
𝐸𝑑 = −E𝑑′ − 𝐼𝑞 (X𝑞 − X𝑞′ )
(3.9)
′′ ̇ ′′
T𝑑0
𝐸𝑞 = E𝑞′ − E𝑞′′ + 𝐼𝑑 (X𝑑′ − X𝑑′′ )
(3.10)
′′ ̇ ′′
T𝑞0
𝐸𝑑 = E𝑑′ − E𝑑′′ − 𝐼𝑞 (X𝑞′ − X𝑞′′ )
(3.11)
Las constantes de tiempo que acompañan las derivadas de las fuerzas electromotrices
de eje directo y cuadratura en el lado redecho de las ecuaciones 3.8 a 3.11 representan
como decaen estas tensiones, en los estados transitorios y subtransitorios, depués de
ocurrida una perturbación. Estas constantes de tiempo igualmente son expresadas en
términos de las inductancias propias y mutuas del generador:
′
T𝑑0
=
′′
T𝑑0
L𝑓
𝑅𝑓
L2𝑓𝐷 1
= (𝐿𝐷 −
)
𝐿𝑓 𝑅𝐷
′′
T𝑞0
=
L𝑄
𝑅𝑄
Capitulo 3
31
Dado que no hay devanado de campo en el eje de cuadratura para el modelo de la
Figura 8, no se tiene constante de tiempo transitoria en el eje de cuadratura.
3.1.2 Modelo Mecánico
Para
completar
el
conjunto
de
ecuaciones
necesarias
para
representar
el
comporatmiento del generador, se requiere de un modelo apropiado de su dinámica
mecánica.
Se parte de la segunda ley de Newton aplicada a masas rotativas. El momento de inercia
J multiplicado por la aceleración angular θ̈m es igual al torque acelerante aplicado sobre
el eje:
𝐽𝜃̈𝑚 = 𝑇𝑎 = 𝑇𝑚 − 𝑇𝑒
(3.12)
Donde θm representa el ángulo mecánico del rotor del generador medido con respecto a
una referencia fija, y Ta es el torque acelerante, el cual sale de la diferencia entre el
torque mecánico y el torque eléctrico aplicado sobre el eje del generador.
Al igual que para la determinación del modelo en la parte eléctrica, desde la punto de
vista mecánico, es conveniente definir un nuevo marco de referencia, girando
solidariamente con el rotor a la velocidad sincrónica; esto con el fin de simplificar los
cálculos. El ángulo del rotor con respecto a esta nueva referencia rotativa será ahora
llamado δm , y estará dado por:
𝜋
𝛿𝑚 (𝑡) = 𝜃𝑚 (𝑡) − (ω𝑛 𝑡 + 𝛼 + )
2
π
Donde ωn es la velocidad nominal (sincrónica) y (ωn t + α + 2 ) define el marco de
referencia girante. Si se asume que en t = 0 se encuentran alineados el eje de
cuadratura con el eje de referencia fijo en el estator, entonces α será el ángulo de
desfase entre la referencia fija en el estator y la referencia girante. Adicionalmente δ sería
el ángulo entre el eje de cuadratura y el marco de referencia girante. Al aplicar esta
premisa, la ecuación 3.12 puede ser escrita de la siguiente forma en el marco de
referencia girante:
̈ = 𝑇𝑎 = 𝑇𝑚 − 𝑇𝑒
𝐽𝛿𝑚
(3.13)
32
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Con el fin de expresar las ecuaciones del generador en términos eléctricos, es
conveniente cambiar el ángulo mecánico delta δm , en ángulo eléctrico δe , el cual
determina el desfase entre el eje del campo magnético rotativo que se produce en el
estator y el eje de cuadratura. La relación entre los ángulos eléctrico y mecánico se da en
función del número de polos del rotor p:
𝛿𝑒 =
𝑝
𝛿
2 𝑚
Por su parte la velocidad del campo giratorio se define de forma similar:
𝜔𝑒 = 𝛿𝑒̇ =
𝑝
𝛿̇
2 𝑚
Usando el concepto de ángulo eléctrico la ecuación 3.13 puede ser escrita de la siguiente
forma:
2𝐽
𝑝
2𝐽
𝛿𝑒̈ = 𝑝 𝜔̇ 𝑒 = 𝑇𝑎 = 𝑇𝑚 − 𝑇𝑒
(3.14)
En los modelos matemáticos del generador es comúnmente usada la constante de
inercía H en reemplazo del momento de inercia J. La constante de inercia se define como
la energía almacenada en el rotor a velocidad nominal dividida por la potencia aparente
nominal Sn . H se relaciona con J de la siguiente forma:
𝐽ω2𝑛
𝐻=
2𝑆𝑛
S
Donde TB = ωn se define como el torque base.
n
La velocidad angular nominal eléctrica del campo giratorio estára dada por:
𝜔𝑛𝑒 =
𝑝
𝜔
2 𝑛𝑚
De acuerdo a las anteriores definiciones, la ecuación 3.14 puede ser escrita de la
siguiente forma:
2𝐻
𝜔𝑛𝑒
𝜔̇ 𝑒 =
𝑇𝑚
𝑇𝐵
𝑇
− 𝑇𝑒
𝐵
(3.14)
Capitulo 3
33
Si se definen los valores en p.u. de los torques y la velocidad eléctrica como:
𝜔
𝜔𝑢 = 𝜔 𝑒 , 𝑇𝑚𝑢 =
𝑛𝑒
𝑇𝑚
𝑇𝐵
, 𝑇𝑒𝑢 = 𝑇𝐵 , entonces la ecuación 3.14 será:
2𝐻𝜔̇ 𝑢 = 𝑇𝑚𝑢 − 𝑇𝑒𝑢
(3.15)
Si se considera que la velocidad angular ωm tiene variaciones muy pequeñas durante
transitorios, se puede considerar que el momento angular del rotor Mm = Jωm es
relativamente constante. Si se multiplica la ecuación 3.15 en ambos extremos por ωm , se
obtiene una nueva ecuación que incorpora el momento angular Mm . La anterior hipótesis
incorpora un error en la formulación, que puede ser compensado por la inclusión de un
nuevo término en la ecuación; el amortiguamiento mecánico D. Aplicando lo anterior, la
ecuación 3.15 queda:
𝑀𝑚 𝜔̇ 𝑚 + 𝐷𝜔𝑚 = 𝑃𝑚 − 𝑃𝑒
(3.16)
M y H se relacionan de la siguiente forma:
𝑀=
𝐻
𝜋𝑓0
Sustituyendo M en la ecuación 3.16 y despejando la derivada de la velocidad se tiene:
1
𝜔̇ 𝑢 = 2𝐻 (𝑃𝑚 − 𝑃𝑒 − 𝐷𝜔𝑢 )
(3.17)
𝛿̇ = 𝜔𝑢
(3.18)
Esta última ecuaución se conoce como la ecuación de oscilación (swing equation) y en
conjunto con la definición de velocidad angular δ̇, conforman el modelo dinámico de la
parte mecánica del generador.
3.1.3 Modelo General
Como se ha visto durante este capítulo, el modelo del generador comprende un conjunto
de ecuaciones que representan la dinámica eléctrica en conjunto con un modelo
mecánico. Las ecuaciones 3.8 a 3.11 acompañadas de las ecuaciones 3.17 y 3.18
permiten generar una serie de modelos de complejidad y precisión decrecientes. En la
34
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
literatura se le da a cada modelo un número, que representa el número de ecuaciones
diferenciales requeridas en su composición, a mayor número de ecuaciones diferenciales
mayor será la precisión del mismo.
Para este trabajo se ha usado un modelo de alto grado de precisión. Se trata del modelo
de orden 5, que cuenta con las siguientes variables de estado:
𝜔̇ , 𝛿̇ , 𝐸̇𝑞′ , 𝐸̇𝑞′′ , 𝐸̇𝑑′′
En este modelo en particular se desprecia el efecto transitorio del flujo magnético
penetrando en el rotor durante transitorios en el eje de cuadratura. Esto significa que
Ed′ = 0 y X q = X q′. Con este supuesto, la ecuación diferencial 3.9 es eliminada, y el
conjunto de ecuaciones que modelan el comportamiento del generador es el siguiente:
𝜔̇ =
𝜔𝑛
2𝐻
(𝑃𝑚 − 𝑃𝑒 − 𝐷(𝜔 − 𝜔𝑛 ))
(3.19)
𝛿̇ = 𝜔 − 𝜔𝑛
(3.20)
′ ̇′
T𝑑0
𝐸𝑞 = E𝑓 − E𝑞′ + 𝐼𝑑 (X𝑑 − X 𝑑′ )
(3.21)
′′ ̇ ′′
T𝑑0
𝐸𝑞 = E𝑞′ − E𝑞′′ + 𝐼𝑑 (X𝑑′ − X 𝑑′′ )
(3.22)
′′ ̇ ′′
T𝑞0
𝐸𝑑 = E𝑑′ − E𝑑′′ − 𝐼𝑞 (X ′𝑞 − X 𝑞′′ )
(3.23)
Las ecuaciones diferenciales del este modelo deben ser complementadas con la
ecuaciones algebráicas necesarias que permiten conocer las corrientes y tensiones en
eje directo y cuadratura, el funcíon de las variables de estado, además de las potencias
activa y reactiva. Las siguientes son las ecuaciones algebráicas que compelmentan el
modelo:
𝑅
𝑉𝑑
E′
[ 𝑉 ] = [ 𝑑′ ] − [ ′
E𝑞
−X𝑑
𝑞
X 𝑞′ 𝐼𝑑
][ ]
𝑅 𝐼𝑞
(3.24)
P𝑒 = E𝑑′′ 𝐼𝑑 + E𝑞′′ 𝐼𝑞 + 𝐼𝑑 𝐼𝑞 (X𝑑′′ − X𝑞′′ ) − 𝑅(𝐼𝑑2 + 𝐼𝑞2 )
(3.25)
Q𝑒 = E𝑑′′ 𝐼𝑞 − E𝑞′′ 𝐼𝑑 − 𝐼𝑑 2 X𝑑′′ −𝐼𝑞 2 X𝑞′′ − 𝑅(𝐼𝑑 𝐼𝑞 )
(3.26)
Capitulo 3
35
Se debe apuntar que todos las variables y parámetros de este modelo están expresados
en p.u.
3.2 Modelo del Sistema de Excitación
El principal objetivo del sistema de excitación de un generador es proveer la tensión
adecuada al devanado de campo del generador. Normalmente el sistema de excitación
comprende un regulador de tensión como uno de los principales subsistemas de un
conjunto de funciones de control y protección que conforman el sistema de excitación. Su
función es la de mantener un nivel predefinido en la tensión en terminales del generador,
a través de la manipulación de la tensión y corriente de campo para compensar las
variaciones en la tensión de la red.
Una de las características mas notables de los sistema de excitación es su alta velocidad
de respuesta comparada por ejemplo con la dinámica del sistema de control de
velocidad. Esto se debe principalmente a que la dinámica eléctrica de los generadores es
mucho más rápida que la mecánica, sumado a la llegada de la electrónica de potencia
que ha permitido un control mucho más veloz y de mayor precisión sobre la tensión de
campo.
Un sistema de excitación está compuesto por un regulador o controlador de tensión y un
amplificador o excitatriz. El regulador mide la tensión en terminales y la compara con el
valor de referencia para calcular el error o desviación. El error es amplificado y usado
para comandar la excitratriz, que a su vez controla la magnitud de la tensión y corriente
del campo del generador.
En el estandar IEEE 421.5 de 2005 [18] se presentan en detalle una gran cantidad de
modelos de sistemas de excitación que pueden ser usados en estudios de estabilidad
dinámica
para
sistemas
de
potencia
y
que
representan
adecuadamente
el
comportamiento de diferentes tipos de sistemas de excitación que se encuentran
típicamente instalados en unidades de generación.
En la siguiente figura se presenta un diagrama general en el que se puede apreciar la
conectividad de la mayoría de las funciones de control y protección que se encuentran
comprendidas dentro del sistema de excitación.
36
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Figura 10 Diagrama general del sistema de excitación de unidades de generación [18]
En la Figura 10 se presenta de forma esquemática la relación de la mayoría de las
funciones que comprenden el sistema de exitación de los generadores.
Los elementos de control de la excitación realizan los cálculos necesarios del
error respecto a las variables a controlar, como tensión y corriente de campo.
La excitatriz proporciona la tensión en corriente directa para el devanado de
campo. En los sistemas modernos esta tensión es suministrada por rectificadores
compuestos de tiristores manejados a través del control.
Los transductores de tensión en terminales y la compensación de carga se
encargan de calcular un valor de tensión RMS para el procesamiento del control y
adaptar la medida del voltaje en terminales para evitar oscilaciones de potencia
reactiva entre unidades de una misma planta o controlar la tensión mas allá del
transformador elevador de un generador.
Los limitadores del sistema de excitación (OEL – Over Excitation Limiter y UEL –
Under Excitation Límiter) se encargan de proteger por sobrecalentamiento el
devanado de campo en la región de entrega de potencia reactiva, o por
sobrecalentamiento en los terminales del núcleo del estator o pérdida de
estabilidad angular en la región de absorción de potencia reactiva.
Otras funciones adicionales como el PSS ( Power System Stabilizer) o
estabilizador de sistemas de potencia, se encargan de mejorar la estabilidad, no
Capitulo 3
37
solo del generador, sino de amortiguar oscilaciones del modo de oscilación local
del generador y oscilaciones inter-área o intra-planta.
Algunos de los tipos de excitación más representativos para unidades de generación se
presentan a continuación, según dicho estándar [18].
3.2.1 Sistemas de excitación DC
Los sistemas de excitación DC pueden considerase bastante antiguos y en desuso, estos
han sido reemplazados por los AC y en los íltimos años por los ST. Los sistemas de
excitación DC usan generadores en corriente continua rotando solidariamente con el eje
del rotor del generador al cual alimentan su campo. Las excitatrices (generadores DC)
pueden estar autoexcitadas o con excitación independiente. En ambos casos el regulador
de tensión controla la excitación de la excitatriz, con la cual a su vez se genera la tensión
deseada para el campo del generador. Un modelo comúnmente usado para representar
la dinámica de los sistemas de excitación DC se presenta en la siguiente figura:
5
1
2
4
3
Figura 11 Modelo para sistema de excitación DC tipo DC1A [18]
Al sumador 1 llegan la señal del estabilizador de sistemas de potencia 𝑉𝑠 , la tensión
deseada en tensión en terminales de referencia 𝑉𝑅𝐸𝐹 , la tensión en terminales medida 𝑉𝐶
y la tensión estabilizante de la excitatriz 𝑉𝐹 . Los bloques 2 y 3 son usados para mejorar la
estabilidad de la tensión y compensar la dinámica de la excitatriz. Normalmente son
excluyentes y si se ajusta uno, el otro deberá ser anulado. Los bloques dentro de 5 son
usados para modelar el comportamiento dinámico de la excitatriz rotativa. La constante
de tiempo 𝑇𝐸 representa el retardo de la excitatriz, 𝐾𝐸 refleja el ajuste del reóstato de la
38
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
excitatriz autoexcitada y la función 𝑉𝑥 la saturación de la excitatriz. Finalmente, la salida
𝐸𝑓𝑑 es la tensión con la que se alimenta el campo del generador.
3.2.2 Sistemas de excitación AC
Este tipo de sistemas de excitación usan una alternador AC rotando solidariamente con
el eje de la turbina en conjunto con un sistema de rectificación que puede ser estático o
rotativo para alimentar el devanado de campo del generador. En la siguiente figura se
presenta un modelo comunmente usado para representar la dinámica de este sistema de
excitación.
Figura 12 Modelo para sistema de excitación AC tipo AC1A [18]
Este modelo representa un sistema de excitación AC con rectificadores no controlados.
La excitatriz no emplea autoexcitación y su excitación es suministrada por diodos
rotativos.
3.2.3 Sistemas de excitación Estáticos
Estos tipos de sistemas de excitación son los más modernos y hoy día los más
comúnmente usados para alimentar el devanado de campo de los generadores. Entre las
ventajas de estos sistemas de excitación se cuentan sus altas velocidades de respuesta,
el incremento de la estabilidad del generador, la simplicidad y facilidad de mantenimiento
de sus componentes, además de su flexibilidad que lleva a la posibilidad de implementar
una serie de funcionalidades adicionales para el control y protección operativas del
generador.
Capitulo 3
39
Los sistemas de excitación estática usan un puente rectificador compuesto por tiristores,
cuyo ángulo de disparo es controlado por la acción del controlador del sistema de
excitación.
Para este trabajo se seleccionó un sistema de excitación estática tipo Silco V de Vatech
que valida el comportamiento del regulador de tensión de las unidades de Guavio en el
sistema colombiano. En la siguiente figura se presenta el modelo implementado en
DigSilent Power Factory para dicho sistema de excitación.
Figura 13 Modelo del sistema de excitación estático [43]
En la anterior figura se presenta el modelo completo incluyendo los limitadores del
sistema de excitación y los limitadores de tensión de techo y la referencia; igualmente se
muestra el modelo de compensación de corriente reactiva y transductores de tensión en
terminales, que serán omitidos en el modelamiento en este trabajo, dado que las
perturbaciones realizadas para la estimación de parámetros son de pequeña señal, por lo
que siempre se trabaja en la región lineal del AVR. Adicionalmente, el modelo del
transductor de tensión en terminales se omitirá dadas sus bajas constantes de tiempo. El
40
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
bloque de compensación de carga no se modela, ya que sus parámetros están ajustados
en cero en el regulador original en la planta.
Teniendo en cuenta las consideraciones anteriores el modelo lineal del regulador de
tensión usado en este trabajo puede resumirse de acuerdo a la siguiente figura.
𝐸𝑓
𝑚𝑎𝑥
_
𝑉𝐶
Σ
𝐾𝐴
𝐸𝑓
+
𝑉𝑅𝐸𝐹
𝐸𝑓
𝑚𝑖𝑛
Figura 14 Modelo del regulador de tensión simplificado
De acuerdo con la figura enterior la ecuación que representa el comportamiento del
regulador de tensión es la siguiente:
𝐸𝑓 > 𝐸𝑓 𝑚𝑎𝑥
→
𝐸𝑓 𝑚𝑎𝑥
E𝑓 = {𝐸𝑓 𝑚𝑖𝑛 < 𝐸𝑓 > 𝐸𝑓 𝑚𝑎𝑥 → 𝐾𝐴 (𝑉𝑅𝐸𝐹 − 𝑉𝐶 )
𝐸𝑓 < 𝐸𝑓 𝑚𝑖𝑛
→
𝐸𝑓 𝑚𝑖𝑛
donde Ef es la tensión de campo, K A es la ganancia del regulador de tensión, VREF es la
tensión de referencia y VC es la tensión en los terminales medida.
Nótese que este modelo no presenta variables de estado, por lo que la ecuación que lo
representa es algebráica dado el carácter de control proporcional del AVR.
4 Modelo del Sistema de Transmisión
Acoplado al Generador Sincrónico
En este capítulo se describe la metodología llevada a cabo para simular el generador
sincrónico conectado a un equivalente dinámico de red de transmisión, y finalmente se
presentan los resultados de este modelamiento y la comparación de resultados de
simuación entre el desarrollo realizado para este trabajo y una herramienta profesional
para simulación de la dinámica de sistemas de potencia (DigSilent Power Factory).
4.1 Métodos de integración numérica
La simulación del sistema de transmisión, considerando por supuesto a los generadores,
es una herramienta muy útil para el planeamiento, el análisis de estabilidad y el
entrenamiento en su operación. Los modelos individuales para el sistema de excitación y
el generador fueron presentados en los capítulos anteriores y representadosen
ecuaciones diferenciales y algebráicas. El modelo de la red de transmisión y los
elementos estáticos como líneas, transformadores, compensaciones y carga está
compuesto de ecuaciones algebraicas de la forma:
g(𝑥, 𝑦) = 0
(4.1)
La dinámica de elementos como el generador y sus controles, la carga y dispositivos
HVDC o FACTS es modelada a través de ecuaciones diferenciales de la forma:
𝑥̇ = 𝑓(𝑥, 𝑦)
(4.2)
La solución conjunta de estos dos conjuntos de ecuaciones define el estado
𝑦=0
(4.1𝑥=𝑓𝑥,𝑦
(4.2)
pueden
ser
solucionadas usando la solución particionada, muchas veces llamada solución alternada
o la solución simultánea, llamada solución combinada. En la solución particionada las
ecuaciones diferenciales son solucionadas usando métodos de integración explicitos
42
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
estándar, resolviendose cada ecuación algebráica de forma separada para cada paso de
integración. En la solución simultánea se usan métodos de integración implicitos con el
fin de convertir las ecuaciones diferenciales en un conjunto de ecuaciones algebráicas y
combinarlas con las demás ecuaciones algebráicas existentes, y de esta forma
solucionar de forma conjunta todas las ecuaciones algebráicas obtenidas.
Normalmente la solución de la ecuaciones diferenciales que representan sistemas físicos
complejos no es posible obtenerla de forma analítica, por lo que deben emplearse
métodos de integración numéricos que puedan encontrar una serie de valores
(𝑥1 , 𝑥2 , … , 𝑥𝑘 , … ) que satisfagan la ecuación 𝑥̇ = 𝑓(𝑥, 𝑡) para los instantes de tiempo
(𝑡1 , 𝑡2 , … , 𝑡𝑘 , … ). Para lograr esto los métodos de integración calculan el valor de 𝑥𝑘+1
conociendo los valores previos (… , 𝑥𝑘−2 , 𝑥𝑘−1 , 𝑥𝑘 ) . Las diferentes formulaciones para
encontrar estos valores generalmente caen en uno de dos métodos, paso simple o
Runge-kutta o paso múltiple o predictor – corrector. Ambos métodos son usados en la
solución de ecuaciones en sistemas de potencia [20].
Para solucionar la ecuación diferencial𝑥= 𝑓(𝑥, 𝑦)
(4.2) el valor de
𝑥𝑘+1 puede ser calculado usando la formulación de Adams integrando la función 𝑓(𝑥, 𝑡) a
lo largo del tiempo entre 𝑡𝑘 y 𝑡𝑘+1 , o integrando 𝑥(𝑡) a lo largo de su trayectoria entre 𝑥𝑘 y
𝑥𝑘+1 .
En la formulación Adams usada en el método de integración de paso múltiple o predictor
– corrector, la función 𝑓(𝑥, 𝑡) es aproximada por la serie 𝑤(𝑡) en el intervalo de tiempo
sobre el cual se integra:
𝑡𝑘+1
𝑥𝑘+1 = 𝑥𝑘 +
𝑡𝑘+1
𝑓(𝑥, 𝑡)𝑑𝑡 ≈ 𝑥𝑘 +
𝑡𝑘
𝑤(𝑡)𝑑𝑡
𝑡𝑘
Donde la serie 𝑤(𝑡) está compuesta por 𝑟 valores de 𝑓(𝑥, 𝑡). Los coeficientes de esta
serie dependen de los valores de 𝑓(𝑥, 𝑡) en cada punto individual. Por lo tanto la formula
de integración se convierte en:
𝑥𝑘+1 = 𝑥𝑘 + ℎ(∑𝑟𝑗=1 𝑏𝑗 𝑓𝑘+1−𝑗 + 𝑏0 𝑓𝑘+1 )
4.3
Donde la función 𝑓𝑖 = 𝑓(𝑥(𝑡𝑖 )) es el valor de la función en un punto 𝑡𝑖 y ℎ es el tamaño
del paso de integración. 𝑟 es llamado el orden del método de integración.
Capitulo 4
43
Si 𝑏0 = 0 entonces la formulación de integración es llamada explicita o Adams-Bashforth.
Si 𝑏0 ≠ 0 entonces la formulación de integración es llamada implicita o Adams-Moulton.
En esta formulación el polinomio 𝑤(𝑡) es calculado usando los valores conocidos de
iteraciones anteriores de (… , 𝑓𝑘−2 , 𝑓𝑘−1 , 𝑓𝑘 ) y el valor desconocido de 𝑓𝑘+1 con el fin de
interpolar la función 𝑓(𝑥, 𝑡) en el intervalo (𝑡k , 𝑡k+1 ).
La aproximación de primer orden de la familia de soluciones de Adams es llamada
formulación de Euler, la cual puede ser expresada en forma explicita o implicita. La
aproximación de segundo orden en la familia de soluciones de Adams es llamada la regla
trapezoidal, en la cual el polinomio 𝑤(𝑡) representa el área de un trapecio bajo la línea
que une los puntos 𝑓𝑘 y 𝑓𝑘+1 .
Cuando se trata del error intrínseco de cada método de integración, los métodos
implicitos superan los métodos explicitos dado que estos conllevan menores errores,
adicionalmente, y como es de esperarse, a medida que la seríe 𝑤(𝑡) es representada por
más términos el error se reduce mucho más. Dado que un factor determinante para
garantizar la estabilidad de la solución de las ecuaciones diferenciales es el error
intrinseco del método de integración, en este trabajo se seleccionó el método trapezoidal
implicito para la solución de las ecuaciones diferenciales. El método trapezoidal implicito
usa la siguiente formulación para calcular 𝑥𝑘+1 :
ℎ
2
𝑥𝑘+1 = 𝑥𝑘 + (𝑓𝑘+1 + 𝑓𝑘 )
4.4
Una desventaja de los métodos implicitos es que el valor de 𝑥𝑘+1 no puede ser calculado
directamente.
Dado que el valor desconocido 𝑥𝑘+1 se encuentra en ambos lados de la ecuación, este
tendrá que ser aproximado de forma iterativa si 𝑓(𝑥, 𝑡) es una función no lineal, el cual es
el caso de las ecuaciones que representan el generador sincrónico.
ℎ
El método más simple para resolver la ecuación 𝑥𝑘+1 = 𝑥𝑘 + 2 (𝑓𝑘+1 + 𝑓𝑘 )
4.4 es denominado iteración funcional, el cual consiste en realizar una
serie de substituciones de acuerdo con la siguiente formula:
ℎ
ℎ
(𝑙+1)
(𝑙)
𝑥𝑘+1 = 𝑥𝑘 + 𝑓(𝑥𝑘 ) + 𝑓(𝑥𝑘+1 )
2
2
44
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
donde el superíndice denota el número de la iteración (𝑙). El proceso iterativo finaliza
(𝑙)
ℎ
cuando error cuadrático entre 𝑥𝑘+1 y 𝑥𝑘 + 2 𝑓(𝑥𝑘 ) sea inferior a una pequeña tolerancia 𝜀,
esto es cuando:
(𝑙) 2
√[(𝒙𝑘+1 ) ] ∙
2
ℎ
[(𝒙𝑘 + 𝒇(𝑥𝑘 )) ] ≤ 𝜀
2
(𝑙)
donde 𝒙𝑘+1 es el vector de las variables de estado del paso 𝑘 + 1 en la iteración 𝑙 y 𝒇(𝑥𝑘 )
es el vector de funciones de estado del paso 𝑘.
4.2 Descripción del sistema de potencia modelado
Para el desarrollo del trabajo de estimación de los parámetros del generador sincrónico
se partió de un modelo de generador sincrónico conectado a través de su transformador
elevador a una línea de transmisión que va a una subestación intermedia con carga, otra
linea de transmisión desde esta última subestación hasta un equivalente inercial del resto
del sistema. En la siguiente figura se observa el sistema de potencia modelado:
Figura 15 Modelo de red usado para la estimación de parámetros
En el modelo de la Figura 15, el generador bajo estudio está representado por un
generador hidráulico de 270MVA de 13.8kV. El transformador elevador tiene una
capacidad de 270MVA con relación de transformación 13.8kV a 230kV. Las líneas de
transmisión son cada una de 230kV y una longitud de 50km. El caso inicial tiene una
carga en la barra 2 de 100MW y 50Mvar. El equivalente de red está representado por un
generador con los mismos parámetros iniciales del generador bajo prueba, sin embargo,
este tiene una capacidad de 10,500MVA correspondientes aproximadamente a la
máxima carga esperada del sistema de potencia colombiano.
Capitulo 4
45
En la siguientes tablas se presentan los parámetros de los diferentes elementos de este
sistema de potencia.
Tabla 1 Parámetros de generadores del sistema de potencia de prueba
Generadores
Parámetro
Unidad
Generador de Prueba
Equivalente de Red
H[Sgn]
D
rstr
Xd
Xq
Td0'
Td0''
Tq0''
Xd'
Xq'
Xd''
Xq''
s
4
5
p.u.
0
0
p.u.
0
0
p.u.
1.15
1.15
p.u.
0.4026
0.4026
s
7.75
7.75
s
0.0608
0.0608
s
0.0607
0.0607
p.u.
0.3483
0.3483
p.u.
0.3217
0.3217
p.u.
0.2501
0.2501
p.u.
0.3155
0.3155
46
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Tabla 2 Parámetros de líneas, transformadores y cargas del sistema de potencia de
prueba
Líneas
Parámetro
R
X
B
Unidad
Línea 1
Ω/km
0.05
Ω/km
0.5
μs/km
2
Parámetro
Ucc
Unidad
Trafo Elevador
p.u.
0.1
Línea 2
0.05
0.5
2
Transformadores
Cargas
Parámetro
np
nq
kpf
kqf
Unidad
Carga Barra 2
-
1.4
-
1.6
-
0
-
0
Con este sistema de prueba se pretende simular el comportamiento dinámico que tendría
un generador sincrónico de polos salientes conectado a través de una línea de
transmisión a un sistema relativamente fuerte.
4.3 Metodología para la simulación dinámica del modelo
de prueba
Antes de abordar en la práctica la metodología para la estimación de parámetros del
generador sincrónico, las ecuaciones algebráicas y diferenciales del modelo de los
generadores, sus controles y los elementos de la red deben ser resueltas conjuntamente
para determinar finalmente el comportamiento de las variables de estado los voltajes y
corrientes en todos los puntos del sistema de potencia. A continuación se presenta el
procedimiento general seguido para encontrar la solución dinámica en el tiempo del
sistema de prueba de la Figura 15 ante un evento predeterminado.
4.3.1 Sistema en por unidad (p.u.)
El primer paso consiste en llevar todos los parámetros del sistema a p.u., lo que asegura
que las reactancias de todos los elementos de la red queden en una base común y los
cálculos matemáticos que se harán después sean ejecutados de forma coherente.
Capitulo 4
47
Para el caso particular del sistema de prueba, se seleccionó una potencia base de
100MVA. Por lo tanto la potencia aparente de cada uno de los generadores, su inercia,
todas sus reactancias y las de cada línea de transmisión deben se llevadas a esta base
común de la siguiente forma:
𝑆
𝑆𝐺(𝑝.𝑢) = 𝑆 𝑛𝐺𝑖
𝑏𝑎𝑠𝑒
𝑋𝐺𝑖
𝑋𝑖(𝑝.𝑢) = 𝑆
𝐺(𝑝.𝑢)
𝑋𝑡(𝑝.𝑢) = 𝑆
𝑋𝑡
𝑏𝑎𝑠𝑒
𝑋𝐿(𝑝.𝑢) =
𝑅𝐿(𝑝.𝑢) =
𝑌𝐿(𝑝.𝑢) =
𝑋𝐿 𝐿𝑆𝐺(𝑝.𝑢)
𝑉𝐿2
𝑋𝐿 𝐿𝑆𝐺(𝑝.𝑢)
𝑉𝐿2
𝑋𝐿 𝐿𝑆𝐺(𝑝.𝑢)
𝑉𝐿2
Potencia del generador en su nueva base
Reactancia 𝑖 del generador en su nueva base
Reactancia del transformador elevador en su nueva base
Reactancia de línea en su nueva base
Resistencia de línea en su nueva base
Admitancia de línea en su nueva base
Donde, 𝑆𝑏𝑎𝑠𝑒 es la nueva potencia base común, 𝑆𝑛𝐺𝑖 es la potencia nominal del
generador, 𝑋𝐺𝑖 denota cada una de las reactancias del generador (𝑋𝑑 , 𝑋𝑞, 𝑋𝑑′ , …. etc.), 𝑋𝐿
es la reactancia serie de línea, 𝐿 es la longitud de la línea y 𝑉𝐿 es su tensión.
4.3.2 Construcción de la matriz Ybarra
Después de haber calculado los valores de todas las reactancias en su nueva base, se
procede al cálculo de la matriz Ybarra o matriz de admitancias de la red. Para estructurar
esta matriz se asume en primer lugar que el sistema no tiene inyecciones, es decir no se
consideran los generadores ni las cargas. Para el sistema bajo prueba el cálculo se
realiza de la siguiente forma:
𝑌(1,1) = 𝐺𝐿 + 𝑗(𝐵𝐿 + 𝑌𝐿 ⁄2) , 𝑌(1,2) = 𝑌(2,1) = −𝐺𝐿 − 𝑗𝐵𝐿
𝑌(2,2) = 2(𝐺𝐿 + 𝑗(𝐵𝐿 + 𝑌𝐿 ⁄2)) , 𝑌(2,3) = 𝑌(3,2) = −𝐺𝐿 − 𝑗𝐵𝐿
1
1
𝑡
𝑡
𝑌(3,3) = 𝐺𝐿 + 𝑗(𝐵𝐿 + 𝑌𝐿 ⁄2) − 𝑗 𝑋 , 𝑌(3,4) = 𝑌(4,3) = 𝑗 𝑋
𝑌(4,4) = −𝑗
1
𝑋𝑡
48
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
En la diagonal se suman las admitancias de todos los elementos conectados a cada
nodo. Fuera de la diagonal se asigna el negativo de la suma de todos los elementos
entre nodos. Finalmente la Ybarra será:
𝑌𝑏𝑎𝑟𝑟𝑎
𝑌(1,1)
𝑌(2,1)
=
0
[ 0
𝑌(1,2)
𝑌(2,2)
𝑌(3,2)
0
0
𝑌(2,3)
𝑌(3,3)
𝑌(4,3)
0
0
𝑌(3,4)
𝑌(4,4) ]
4.3.3 Cálculo de las corrientes de las inyecciones
Para el cálculo de las corrientes de las inyecciones se debe partir de la solución
preexistente de un flujo de carga para un estado operativo dado del sistema bajo prueba.
Para este trabajo se realizó una corrida de flujo de carga convencional en DigSilent
Power Factory, del cual pueden extraerse los valores de las tensiones y sus ángulos con
respecto al nodo slack, el cual se localizará en el equivalente de red (nodo 1). De esta
forma, el vector de tensiones puede escribirse como:
𝑉 = 𝑉1 ∢𝜃1
𝑉2 ∢𝜃2
𝑉3 ∢𝜃3
𝑉4 ∢𝜃4
𝑇
Por lo que las inyecciones de corriente y las potencias aparentes calculadas en cada
nodo en forma vectorial serán:
𝐼 = 𝑌𝑏𝑎𝑟𝑟𝑎 𝑉
𝑆 = 𝑉𝐼 ∗
Al llegar al proceso iterativo donde se resuelven las ecuaciones diferenciales y
algebráicas del sistema, se deben calcular las corrientes que inyectan los generadores a
la red. Por lo tanto se debe agregar a la 𝑌𝑏𝑎𝑟𝑟𝑎 la admitancia equivalente Norton de cada
generador:
𝑌𝑁𝑜𝑟𝑡 =
1
(𝑟𝑠𝑡𝑟 − 𝑗 2 (𝑋𝑑′′ + 𝑋𝑞′′ ))
𝑟𝑠𝑡𝑟 2 + 𝑋𝑑′′ 𝑋𝑞′′
𝑌(1,1) = 𝑌(1,1) + 𝑌𝑁𝑜𝑟𝑡 1
𝑌(4,4) = 𝑌(4,4) + 𝑌𝑁𝑜𝑟𝑡 4
Capitulo 4
49
Adicionalmente se debe calcular la saliencia subtransitoria de ambos generadores, la
cual igualmente interviene en el cálculo de la corriente inyectada por estos componentes
al sistema:
′′
𝑌𝑠𝑎𝑙
=
1
(𝑟𝑠𝑡𝑟 + 𝑗 2 (𝑋𝑑′′ − 𝑋𝑞′′ ))
𝑟𝑠𝑡𝑟 2 + 𝑋𝑑′′ 𝑋𝑞′′
4.3.4 Cálculo de las condiciones iniciales
En este punto se deben calcular las condiciones iniciales de las diferentes variables de
estado que componen el modelo, tanto del generador bajo prueba, como del equivalente
de red. Adicionalmente otras variables que entran en juego en el proceso deben ser
inicializadas. En general, las condiciones iniciales están basadas en el diagrama fasorial
del generador presentado en la Figura 16.
Figura 16 Diagrama fasorial del generador usado para su inicialización [2]
A continuación se presentan las ecuaciones que componen la inicilaización de las
variables mencionadas.
Para cada generador se calculan las siguientes variables que dependen del despacho de
potencia activa, tensión en terminales y corrientes calculadas en el paso anterior:
𝜔 = 𝜔𝑛 = 2𝜋 ∗ 60
𝑃𝑚 = ℛ𝑒(𝑆)
Potencia mecánica.
50
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝐸𝑞 = 𝑉 + 𝐼(𝑟𝑠𝑡𝑟 + 𝑗𝑋𝑞 )
𝛿 = 𝑎𝑛𝑔(𝐸𝑞′ )
Tensión eje de cuadratura
Tensión transitoria eje de cuadratura
𝐼𝑑 = −𝑠𝑒𝑛(𝛿)ℛ𝑒(𝐼) + 𝑐𝑜𝑠(𝛿)ℐ𝑚(𝐼)
Corriente eje directo
𝐼𝑞 = 𝑐𝑜𝑠(𝛿)ℛ𝑒(𝐼) + 𝑠𝑒𝑛(𝛿)ℐ𝑚(𝐼)
Corriente eje directo
𝑉𝑑 = −𝑠𝑒𝑛(𝛿)ℛ𝑒(𝑉) + 𝑐𝑜𝑠(𝛿)ℐ𝑚(𝑉)
Tensión eje directo
𝑉𝑞 = 𝑐𝑜𝑠(𝛿)ℛ𝑒(𝑉) + 𝑠𝑒𝑛(𝛿)ℐ𝑚(𝑉)
Tensión eje directo
𝐸𝑞′′ = 𝐼𝑑 𝑟𝑠𝑡𝑟 − 𝐼𝑑 𝑋𝑑′′ + 𝑉𝑞
Tensión subtransitoria eje de cuadratura
𝐸𝑑′′ = 𝐼𝑞 𝑋𝑞′′ + 𝑉𝑑
Tensión subtransitoria eje directo
𝐸𝑞′ = −𝐼𝑑 (𝑋𝑑′ + 𝑋𝑑′′ ) + 𝐸𝑞′′
Tensión transitoria eje de cuadratura
𝐸𝑑′ = 0
Tensión transitoria de eje directo
𝐸𝑓𝑑 = 𝑎𝑏𝑠(𝐸𝑞 ) − 𝐼𝑑 (𝑋𝑑 − 𝑋𝑞 )
Tensión de campo
𝑃𝑒 = 𝐸𝑑′′ 𝐼𝑑 + 𝐸𝑞′′ 𝐼𝑞 + (𝑋𝑑′′ − 𝑋𝑞′′ )𝐼𝑑 𝐼𝑞 − 𝑟𝑠𝑡𝑟(𝐼𝑑 2 + 𝐼𝑞 2 )
Potencia eléctrica activa
𝑄𝑒 = 𝐸𝑑′′ 𝐼𝑞 − 𝐸𝑞′′ 𝐼𝑑 − 𝑋𝑑′′ 𝐼𝑑 2 − 𝑋𝑞′′ 𝐼𝑞 2 − 𝑟𝑠𝑡𝑟(𝐼𝑑 − 𝐼𝑞 )
Potencia eléctrica reactiva
𝑉𝑟𝑒𝑓 = 𝑎𝑏𝑠(𝑉) + 𝐸𝑓𝑑/𝑘𝑝
Tensión de referencia del AVR
𝑃2
𝑄2 = 𝑔(𝑉, 𝑓, 𝑓𝑎𝑠𝑒, 𝑆)
Carga en el nodo 2.
Donde 𝑔(𝑉, 𝑓, 𝑓𝑎𝑠𝑒, 𝑆) calcula la carga en función de la tensión y la frecuencia [21].
→
𝑔(𝑉, 𝑓, 𝑓𝑎𝑠𝑒, 𝑆) = {𝑡=0
𝑡≠0 →
ℛ𝑒(𝑆2 )
𝑉 𝑛𝑝
[𝑃2 𝑜 ( ) (1+𝑘𝑝𝑓 (𝑓−𝑓0 )/𝑓0
𝑉0
ℐ𝑚(𝑆2 )
}
𝑉 𝑛𝑞
) (1+𝑘𝑞𝑓 (𝑓−𝑓0 )/𝑓0 ]
𝑉0
𝑄2 𝑜 (
4.3.5 Solución de Ecuaciones Diferenciales y Algebráicas en el
Tiempo.
Como se ha visto anteriormente el proceso para la solución de las ecuaciones
diferenciales del modelo del generador, se resuelven en conjunto con las ecuaciones de
la red en un proceso iterativo que usa la formulación del método trapezoidal implicito. En
este método se trata de estimar el valor de la variable de estado en el paso futuro, lo cual
debe hacerse de forma iterativa de la siguiente forma:
Capitulo 4
51
1. Repetir el siguiente proceso desde 𝑡 = 0 hasta 𝑡 = 𝑡𝑖𝑒𝑚𝑝𝑜 𝑑𝑒 𝑠𝑖𝑚𝑢𝑙𝑎𝑐𝑖ó𝑛 −△ 𝑡,
donde △ 𝑡 es el paso de integración seleccionado, típicamente 0.01 segundos.
2. 𝑡 = 𝑡 +△ 𝑡
contador de tiempo
3. 𝑝 = 𝑝 + 1
índice para almacenar resultados numéricos de variables
4. Calcular variables de estado en 𝑡 = 𝑡𝑝 para cada generador usando formulación
del método trapezoidal:
𝛿𝑡𝑝
△ 𝑡 𝜔𝑛
(𝑃 − 𝑃𝑒 − 𝐷(𝜔 − 𝜔𝑛 ))
2 2𝐻 𝑚
△𝑡
=𝛿+
(𝜔 − 𝜔𝑛 )
2
𝜔𝑡𝑝 = 𝜔 +
𝐸𝑓𝑑𝑡𝑝 = (𝑉𝑟𝑒𝑓 − 𝑎𝑏𝑠(𝑉)) 𝑘𝑝
𝐸𝑞′ 𝑡 = 𝐸𝑞′ +
△𝑡 1
𝑝
𝐸𝑞′′ 𝑡 = 𝐸𝑞′′ +
𝑝
𝐸𝑑′′ 𝑡 = 𝐸𝑑′′ +
𝑝
2
′ [𝐸𝑓𝑑
𝑇𝑑0
△𝑡 1
− 𝐸𝑞′ + 𝐼𝑑 (𝑋𝑑 − 𝑋𝑑′ )]
𝐸𝑞′ − 𝐸𝑞′′ + 𝐼𝑑 (𝑋𝑑′ − 𝑋𝑑′′ )
′′
2 𝑇𝑑0
△𝑡 1
[𝐸𝑑′ − 𝐸𝑑′′ − 𝐼𝑞 (𝑋𝑞′ − 𝑋𝑞′′ )]
′′
2 𝑇𝑞0
5. Estructurar vector de estado en el paso 𝑡 = 𝑡𝑝 con los estados calculados para
cada generador:
𝒙𝑡𝑝 = [𝜔𝑡𝑝
𝛿𝑡𝑝 𝐸′𝑞 𝑡
𝑝
𝐸′′𝑞 𝑡
𝑝
𝐸′′𝑑 𝑡𝑝 ]
6. Si el tiempo de un evento en la red se ha alcanzado, se deben recalcular las
nuevas tensiones de la red considerando los cambios que sean necesarios en la
matriz de admitancias, la carga o las condiciones de los generadores; esto de
acuerdo al evento programado. Para validar el desempeño del modelo, en este
caso se documenta el presente procedimiento simulando un evento de
incremento de carga △ 𝑆 en el nodo 2:
𝑃2
𝑄2
𝑇
= 𝑔(𝑉, 𝑓, 𝑓𝑎𝑠𝑒, 𝑆 +△ 𝑆)
𝑉 = 𝑌𝑏𝑎𝑟𝑟𝑎 𝐼 −1
52
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
7. Se inicializan el error, el error máximo, el contador de iteraciones y el número
máximo de iteraciones para estimar el valor de las variables de estado en el paso
𝑡 = 𝑡𝑝+1 .
𝐸𝑟𝑟𝑚𝑎𝑥 = 10−5
𝑘𝑚𝑎𝑥 = 100
𝐸𝑟𝑟 = 500
𝑘=0
8. En este paso se realiza el proceso iterativo para la estimación de los valores en
𝑡 = 𝑡𝑝+1 de las variables de estado.
Se compara el error cuadrático entre el vector de estado de la iteración 𝑘 y el
vector de estado del paso 𝑡 = 𝑡𝑝 . Si este error es menor que 𝐸𝑟𝑟𝑚𝑎𝑥 = 10−5 se ha
llegado a la convergencia y se puede retornar al paso 1 para continuar en el
siguiente paso de integración en el tiempo.
8.1 Si el error es mayor a 𝐸𝑟𝑟𝑚𝑎𝑥 se comienza incrementando el contador de
iteraciones, recalculando las inyecciones en la red y luego las tensiones con
base en los valores actuales de las variables de estado para cada generador.
𝑘 =𝑘+1
𝐸′′ = −𝑠𝑒𝑛(𝛿)𝐸′′𝑑 + cos(𝛿) 𝐸′′𝑞 + 𝑗 cos(𝛿) 𝐸′′𝑑 + 𝑠𝑒𝑛(𝛿)𝐸′′𝑞
′′
′′
∗
′′
𝐼 = 𝑌𝑁𝑜𝑟𝑡 𝐸 + 𝑌𝑠𝑎𝑙
(𝐸 − 𝑉) 𝑒 (2𝑗𝛿)
𝑃2
𝐼2 =
𝑄2 = 𝑔(𝑉, 𝑓, 𝑓𝑎𝑠𝑒, 𝑆 +△ 𝑆)
(−𝑃2 + 𝑗𝑄2 )
𝑉2 ∗
𝐼3 = 0
𝑉 = 𝑌𝑏𝑎𝑟𝑟𝑎 𝐼 −1
8.2 Con los fasores de tensión calculados y los valores de las variables de estado
se calcula la potencia eléctrica de los generadores. Después de calcular las
componentes de tensión y corriente en eje directo y cuadratura:
𝑉𝑑 = −𝑠𝑒𝑛(𝛿)ℛ𝑒(𝑉) + 𝑐𝑜𝑠(𝛿)ℐ𝑚(𝑉)
Capitulo 4
53
𝑉𝑞 = 𝑐𝑜𝑠(𝛿)ℛ𝑒(𝑉) + 𝑠𝑒𝑛(𝛿)ℐ𝑚(𝑉)
𝐼𝑑 =
(𝐸𝑑′′ − 𝑉𝑑 )𝑟𝑠𝑡𝑟 − (𝐸𝑞′′ − 𝑉𝑞 )𝑋𝑞′′
𝑟𝑠𝑡𝑟 2 + 𝑋𝑑′′ 𝑋𝑞′′
𝐼𝑞 =
(𝐸𝑞′′ − 𝑉𝑞 )𝑟𝑠𝑡𝑟 − (𝐸𝑑′′ − 𝑉𝑑 )𝑋𝑑′′
𝑟𝑠𝑡𝑟 2 + 𝑋𝑑′′ 𝑋𝑞′′
𝑃𝑒 = 𝐸𝑑′′ 𝐼𝑑 + 𝐸𝑞′′ 𝐼𝑞 + (𝑋𝑑′′ − 𝑋𝑞′′ )𝐼𝑑 𝐼𝑞 − 𝑟𝑠𝑡𝑟(𝐼𝑑 2 + 𝐼𝑞 2 )
𝑄𝑒 = 𝐸𝑑′′ 𝐼𝑞 + 𝐸𝑞′′ 𝐼𝑑 − 𝑋𝑑′′ 𝐼𝑑 2 − 𝑋𝑞′′ 𝐼𝑞 2 − 𝑟𝑠𝑡𝑟(𝐼𝑑 − 𝐼𝑞 )
8.3 Con la potencia eléctrica calculada, y los cálculos de las variables de estado
en 𝑡 = 𝑡𝑝 , se calculan las variables de estado en 𝑡 = 𝑡𝑝+1 usando la
formulación del método trapezoidal implícito. Igualmente se define el vector de
estado en la iteración 𝑘.
𝜔𝑘 = 𝜔𝑡𝑝 +
𝛿𝑘 = 𝛿𝑡𝑝 +
△ 𝑡 𝜔𝑛
2 2𝐻
(𝑃𝑚 − 𝑃𝑒 − 𝐷(𝜔 − 𝜔𝑛 ))
△𝑡
(𝜔 − 𝜔𝑛 )
2
𝐸𝑞′ 𝑘
△𝑡 1
[𝐸𝑞′ 𝑡 + 2 ′ [𝐸𝑓𝑑𝑡𝑝 + 𝐼𝑑 (𝑋𝑑 − 𝑋𝑑′ )]]
𝑇𝑑0
𝑝
=
△𝑡
1+ ′
2𝑇𝑑0
𝐸𝑞′′ 𝑘
△𝑡 1
𝐸𝑞′′ 𝑡 + 2 ′′ 𝐸𝑞′ + 𝐼𝑑 (𝑋𝑑′ − 𝑋𝑑′′ )
𝑇𝑑0
𝑝
=[
]
△𝑡
1 + ′′
2𝑇𝑑0
𝐸𝑑′′ 𝑘
△𝑡 1
𝐸𝑑′′ 𝑡 + 2 ′′ [𝐸𝑑′ − 𝐼𝑞 (𝑋𝑞′ − 𝑋𝑞′′ )]
𝑝
𝑇𝑞0
=
△𝑡
1 + ′′
2𝑇
𝑞0
[
]
𝒙𝑘 = [𝜔𝑘
𝛿𝑘 𝐸′𝑞 𝑘 𝐸′′𝑞 𝑘 𝐸′′𝑑 𝑘 ]
8.4 Se calcula el error cuadrático entre el vector de estado de la iteración 𝑘 y el
vector de estado del paso 𝑡 = 𝑡𝑝 .
2
2
2
2
𝑬𝒓𝒓 = (𝜔𝑘 − 𝜔𝑡𝑝 ) + (𝛿𝑘 − 𝛿𝑡𝑝 ) + (𝐸𝑞′ 𝑘 − 𝐸𝑞′ 𝑡 ) + (𝐸𝑞′′ 𝑘 − 𝐸𝑞′′ 𝑡 ) + (𝐸𝑑′′ 𝑘 − 𝐸𝑑′′ 𝑡 )
𝑝
𝑝
𝑝
2
54
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
8.5 Se asigna al vector de estados en 𝑡 = 𝑡𝑝 el valor calculado del vector de
estados en la iteración 𝑘.
𝒙𝑡𝑝 = 𝒙𝑘
se procede al paso 8.1
9. Se calculan las variables de interés como vectores que se van llenando con cada
iteración de tiempo para ser presentadas como resultados de la simulación.
𝑉𝑒𝑙4 (𝑝) = 𝜔4𝑡𝑝
Velocidad angular generador bajo prueba
𝛿4 (𝑝) = 𝛿4𝑡𝑝
Ángulo del rotor generador bajo prueba
𝜃4 (𝑝) = 𝑎𝑛𝑔(𝑉4 )
Ángulo de la tensión en terminales generador bajo prueba
𝑃𝑒 4 (𝑝) = 𝑃𝑒 4
Potencia eléctrica generador bajo prueba
𝑡𝑝
𝐴𝑏𝑠𝑉4 = 𝑎𝑏𝑠(𝑉4 )
Magnitud tensión generador bajo prueba
𝑃𝑒 4 (𝑝) = 𝑃𝑒 4
Potencia eléctrica generador bajo prueba
𝑡𝑝
4.4 Validación del Modelo
Con el objetivo de determinar la validez del modelo presentado, se implementó un código
en Matlab con la metodología de simulación detallada anteriormente, y se comparó su
desempeño con el mismo modelo de red implementado en DigSilent Power Factory. Se
corrieron simulaciones en ambas herramientas para determinar la respuesta del
generador bajo prueba a diferentes perturbaciones en el sistema como incrementos y
reducciones de carga y escalones en la tensión de referencia del regulador de tensión
(AVR) del generador bajo prueba.
Las condiciones iniciales de todas las simulaciones, derivadas del flujo de carga que
representa un estado operativo del sistema se presentan en la siguiente figura:
Capitulo 4
55
Figura 17 Condiciones iniciales simulación comparativa – Flujo de Cargas
Para verificar la validez del modelo implementado tanto para el generador como para el
sistema de excitación se realizaron simulaciones de escalones del ± 2% en la tensión de
referencia del regulador de tensión de la unidad bajo prueba. Los resultados de las
simulaciones para una ventana de tiempo de 10 segundos se presentan en las siguientes
figuras.
Figura 18 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante un escalón de +2% en la tensión de referencia del AVR.
56
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Figura 19 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante un escalón de -2% en la tensión de referencia del AVR.
En la Figura 18 y Figura 19 se presenta en trazo rojo la respuesta de las principales
variables de salida del modelo implementado en Matlab, y en trazo azul se muestran las
mismas variables para el moedelo implementado en DigSilent Power Factory. Se observa
que la respuesta de ambos modelos a los eventos de cambio súbito en la referencia del
regulador de velocidad es muy similar, probando que el modelo del generador y la red
desarrollado en Matlab, siguiendo la metodología de resolución de ecuaciones
diferenciales descrito más arriba en este trabajo es válido y representa de forma
adecuada el comportamiento del generador para eventos internos. Para hacer más
extensiva la validación del modelo, se realizaron igualmente eventos de incremento y
reducción súbita de la demanda de la barra 2 de 100 MW y 50 Mvar, con el fin de
verificar el desempeño del modelo del generador y la red para eventos externos. En las
siguientes figuras se presenta de forma comparativa la evolución de las principales
variables del generador bajo prueba ante los eventos descritos.
Capitulo 4
57
Figura 20 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante un incremento de 100 MW y 50 MVar en la carga de la barra 2.
Figura 21 Comparación entre el modelo en DigSilent y Matlab del generador bajo prueba
ante la reducción de 100 MW y 50 MVar en la carga de la barra 2.
De los análisis comparativos entre los modelos implementados en Matlab y DigSilent,
puede concluirse un alto grado de correlación para las variables de salida estudiadas y
para diferentes eventos tanto externos al generador, como en su sistema de excitación.
Esto demuestra la validez de la metodología para la solución conjunta de las ecuaciones
diferenciales y algebráicas que representan el generador sincrónico y su interacción con
la red.
5 Estimación de parámetros del generador a
través de la técnica de sensibilidad de
trayectorias
En este capítulo se describe la implementación de la técnica de sensibilidad de
trayectorias a la estimación de los parámetros eléctricos del generador sincrónico bajo
prueba, con el uso de la red equivalente presentada en el capítulo anterior.
Adicionalmente se realizan diferentes sensibilidades a la estimación de parámetros y se
presentan los resultados obtenidos.
5.1 Implementación de la técnica de estimación basada
en sensibilidades de trayectoria
En el capítulo 2 se presenta la formulación matemática de la técnica de estimación
basada en sensibilidad de trayectoria. En el presente capítulo se ahondará en la
implementación de esta metodología mediante la descripción de los pasos seguidos
hasta la obtención final de los mejores parámetros estimados del generador.
5.1.1 Selección de variables de entrada, salida, algebráicas,
estado y parámetros
Como ya se explicó en el Capitulo 2, la estimación de parámetros del modelo del
generador se basa en la minimización de las diferencias en las variables de salida entre
los datos recogidos de una prueba o la respuesta a un evento externo y la simulación de
estos eventos usando el modelo del generador. De esta forma es de gran importancia la
selección de las variables más adecuadas para ser asignadas como las salidas 𝑦𝑚𝑒𝑑 en
la formulación del problema, que puedan efectivamente ser medidas en campo sobre el
generador. En este caso se seleccionaron como salidas 𝑦 las señales de potencia activa
y reactiva. Estas pueden ser obtenidas facilmente mediante PMUs o registradores de alta
Capitulo 5
59
resolución instaladas en bornes del generador. Al mismo tiempo dentro de estas
variables se encuentra información sobre la respuesta eléctrica y mecánica del
generador. Variables de estado como el ángulo del rotor 𝛿 que es de muy dificil medición
y 𝜔 que es propensa a contener alto niveles de ruido, deben ser seleccionadas solo en
los casos en los que se cuente con la infraestructura necesaria para su adquisición y
filtrado.
Como variables de entrada 𝑢 del modelo se selecciona la tensión de campo (E𝑓 ) que es
controlada por el AVR.
Como variables algebráicas 𝑧 se seleccionan las corrientes en el eje directo y cuadratura
(𝐼𝑑 , 𝐼𝑞 ).
Como variables de estado 𝑥 se seleccionan todas las especificadas en el modelo del
generador de orden 5 (𝜔, 𝛿, E𝑞′ , E𝑞′′ , E𝑑′′ ).
Como parámetros 𝑝 a estimar se seleccionan los parámetros eléctricos (X𝑑 , X 𝑞′ , X 𝑑′ ,
′
′′
′′
X𝑑′′ , X𝑞′′ , T𝑑0
, T𝑑0
, T𝑞0
).
Adicionalmente se debe proporcionar al algorítmo de estimación de las ecuaciones
necesarias por medio de las cuales se calculen las salidas, estados y variables
algebráicas en términos de todas las variables y parámetros, tal como se presenta en las
ecuaciones 2.1.
5.1.2 Selección de los eventos a ser simulados
La determinación de los eventos que pueden ser usados para excitar las diferentes
dinámicas del modelo del generador es otro elemento clave a la hora de estimar los
parámetros del mismo. Por ejemplo si solo se pretende realizar una estimativa sobre los
parámetros mecánicos del modelo (inercia 𝐻 o coeficiente de amortiguamiento 𝐷), es
necesario seleccionar eventos en los cuales los torques eléctrico y mecánico difieran
dinámicamente en forma suficiente para garantizar un buen condicionamiento del
problema de optimización. Un ejemplo de este tipo de eventos puede ser un rechazo de
carga, una falla o un desbalance carga–generación de la red. En este trabajo se asumen
conocidos los parámetros mecánicos del generador, los cuales pueden ser mucho más
60
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
facilmente estimados que los eléctricos, mediante pruebas de rechazo de carga, tal como
se describe en [22].
Si se trata de la estimación de los parámetros eléctricos del generador, como es el objeto
de este trabajo, se deben excitar las dinámicas internas más rápidas (transitorias y
subtransitorias) del generador. Esto puede ser realizado mediante la simulación de corto
circuito en la red externa, o inyección de escalones en la tensión de referencia del AVR
por ejemplo.
En este trabajo se usarán cambios rápidos en la referencia de tensión en terminales en el
regulador de tensión de la unidad bajo prueba. Con este evento se excitan las dinámicas
eléctricas internas del generador y mediante la adquisición de las potencias activa y
reactiva en bornes del generador, se realiza la estimación de parámetros.
5.1.3 Metodología de estimación de parámetros
Una vez definida la estructura de variables y seleccionados los eventos a ser simulados,
se realizan corridas de todos los eventos que se usarán para estimar los parámetros,
usando el set de parámetros entregados por el fabricante del generador, con el fin de
grabar en un archivo de resultados el comportamiento de las variables de salida (𝑃 y 𝑄).
Ya que no se disponen de datos reales para los eventos requeridos en el generador bajo
prueba, estos son reemplazados por simulaciones usando los parámetros a los cuales se
quiere llegar como resultado del proceso de estimación. Estas serán a partir de este
momento considerados como las salidas medidas 𝑦𝑚𝑒𝑑 .
Una vez obtenidas las salidas medidas, se alteran los parámetros reales del generador
en un factor determinado, con los cuales se define un vector de parámetros semilla. Este
vector que tiene un error implicito se ingresa al algoritmo de optimización el cual itera
hasta alcanzar un número máximo de iteraciones, o el error 𝐽(𝑝) sea menor a una
pequeña tolerancia.
Una vez se alcance convergencia, se extráen los parámetros resultantes y se calculan
los errores de estimación con base en los parámetros reales. Todo esto se hace con el
objetivo de verificar si la metodología de estimación converge de forma aceptable
nuevamente a valores cercanos a los parámetros originales.
Capitulo 5
61
En la siguiente figura se describe de forma gráfica la metodología propuesta, para el caso
de aplicación a un generador real:
Generador de Prueba
𝑉
Evento
𝑉𝑅𝐸𝐹
G
AVR
𝑃, 𝑄
PMU
C.I. 𝑉0 , 𝑃0 , 𝑄0
𝑦𝑚𝑒𝑑 = 𝑃, 𝑄
Solución del modelo
𝑥̇ (𝑡) = 𝑓(𝑥(𝑡), 𝑝, 𝑢(𝑡))
𝑦(𝑡) = 𝑔(𝑥(𝑡), 𝑝, 𝑢(𝑡))
𝑦𝑠𝑖𝑚 = 𝑃, 𝑄
Algoritmo de estimación de parámetros
𝑝(0) Parámetros
semilla
- +
𝑇
1
2
𝐽(𝑝) = ∑(𝑦𝑚𝑒𝑑 𝑖 − 𝑦𝑠𝑖𝑚 𝑖 )
2
𝑖=0
𝑝(𝑘) Parámetros
finales
𝐽(𝑝) < 𝜀
Sensibilidades
𝜕𝑦
𝜕𝑝𝑖
𝜕𝑦𝑠𝑖𝑚 𝑇 𝜕𝑦𝑠𝑖𝑚
(
)
𝑑𝑡 |𝑝=𝑝(𝑘)
𝜕𝑝
𝜕𝑝
𝑡=0
𝑇
Γ(p) ≈
𝜕𝐽(𝑝)
= 𝐺(𝑝) =
𝜕𝑝
𝑇
(𝑦𝑠𝑖𝑚 − 𝑦𝑚𝑒𝑑 )
𝑡=0
𝜕𝑦𝑠𝑖𝑚
𝑑𝑡
𝜕𝑝
𝑝(𝑘+1) = 𝑝(𝑘) − Γ −1 (𝑝)𝐺(𝑝)|𝑝=𝑝(𝑘)
Figura 22 Implementación de la la metodología de estimación de parámetros propuesta
sobre un generador real
62
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
5.1.3.1Sensibilidades de trayactoria
La metodología de estimación de parámetros propuesta en este trabajo se basa en la
determinación de las derivadas parciales de las salidas 𝑃 y 𝑄 con respecto al vector de
parámetros, las cuales entregan al algoritmo información de la sensibilidad de cada
parámetro en las variables medidas. En este subcapitulo se presenta el proceso de
cálculo para las sensibilidades de las salidas con respecto a los parámetros de forma
explicita.
De acuerdo con las ecuaciones 2.1, a continuación se presentan las ecuaciones que
describen el modelo del generador bajo estudio en acople con el modelo de la red de
transmisión:
Las funciones 𝑥̇ = 𝑓(𝑥, 𝑧, 𝑝, 𝑢) que describen los estados del sistema son las
siguientes:
𝜔𝑛
(𝑃𝑚 − 𝑃𝑒 )
𝑓1
2𝐻
𝜔 − 𝜔𝑛
𝑓2
′
′
′
𝑥̇ = 𝑓 (𝑥, 𝑧, 𝑝, 𝑢) = 𝑓3 = [E𝑓 − E𝑞 + 𝐼𝑑 (X𝑑 − X𝑑 )]⁄T𝑑0
𝑓4
[E′𝑞 − E′′𝑞 + 𝐼𝑑 (X′𝑑 − X′′𝑑 )]⁄T′′𝑑0
[𝑓5 ]
′
′′
′
′′
′′
[[E𝑑 − E𝑑 − 𝐼𝑞 (X𝑞 − X𝑞 )]⁄T𝑞0 ]
(5.1)
Las ecuaciones algebráicas de la forma 0 = 𝑔(𝑥, 𝑧, 𝑝, 𝑢 ), que relacionan las variables
del sistema son:
(𝐸0 cos(𝛿) − E′𝑞 )⁄(X′𝑑 + Z𝐿 ) − 𝐼𝑑
𝑔1
]
0 = 𝑔(𝑥, 𝑧, 𝑝, 𝑢) = [𝑔 ] = [
2
(𝐸 sen(𝛿) + E′ )⁄(X′ + Z ) − 𝐼
0
𝑑
𝑞
𝐿
(5.2)
𝑞
Donde: E0 es la magnitud de la tensión del nodo de referencia del sistema y ZL es la
magnitud de la reactancia serie de las líneas y el transformador elevador de la máquina
bajo prueba
Y las salidas 𝑦 = ℎ(𝑥, 𝑧, 𝑝, 𝑢) están descritas a través de las siguientes ecuaciones:
𝑦 = ℎ(𝑥, 𝑧, 𝑝, 𝑢) = [
E′′𝑑 𝐼𝑑 + E′′𝑞 𝐼𝑞 + 𝐼𝑑 𝐼𝑞 (X′′𝑑 − X′′𝑞 )
ℎ1
] = [ ′′
]
ℎ2
E𝑑 𝐼𝑞 − E′′𝑞 𝐼𝑑 − 𝐼𝑑 2 X′′𝑑 −𝐼𝑞 2 X′′𝑞
(5.3)
Capitulo 5
63
De acuerdo con la ecuación 2.2 el cálculo de las sensibilidades de trayectoria define un
conjunto adicional de ecuaciones diferenciales que puede ser escrito de la siguiente
forma:
Sea:
𝜕𝑥
𝑝
= 𝜆𝑥𝑖 , la sensibilidad del vector de estados con respecto al parámetro i
𝜕𝑝𝑖
𝜕𝑧
𝜕𝑝𝑖
𝜕𝑦
𝜕𝑝𝑖
𝑝
= 𝜆𝑧 𝑖 , la sensibilidad del vector de variables algebráicas con respecto al parámetro 𝑖
𝑝
= 𝜆𝑦𝑖 , la sensibilidad del vector de salidas con respecto al parámetro 𝑖
Entonces las sensibilidades de trayectoria están dadas por:
𝜕𝑓(𝑥,𝑧,𝑝,𝑢)
𝜕𝑓(𝑥,𝑧,𝑝,𝑢)
𝜕𝑓(𝑥,𝑧,𝑝,𝑢)
𝑝
𝑝
𝑝
𝜆̇𝑥𝑖 =
∙ 𝜆𝑥 𝑖 +
∙ 𝜆𝑧 𝑖 +
𝜕𝑥
0=
𝑝
𝜕𝑔(𝑥,𝑧,𝑝,𝑢)
𝜆𝑦𝑖 =
𝜕𝑥
𝜕𝑧
𝜕ℎ(𝑥,𝑧,𝑝,𝑢)
𝜕𝑥
𝑝
∙ 𝜆𝑥 𝑖 +
𝑝
𝜕𝑝𝑖
𝜕𝑔(𝑥,𝑧,𝑝,𝑢)
∙ 𝜆𝑥 𝑖 +
𝜕𝑧
𝑝
∙ 𝜆𝑧 𝑖 +
𝜕ℎ(𝑥,𝑧,𝑝,𝑢)
𝜕𝑧
𝑝
𝜕𝑔(𝑥,𝑧,𝑝,𝑢)
𝜕𝑝𝑖
∙ 𝜆𝑧 𝑖 +
𝜕ℎ(𝑥,𝑧,𝑝,𝑢)
(5.4)
𝜕𝑝𝑖
Una vez obtenidas las derivadas parciales de las funciones 𝑓, 𝑔 y ℎ con respecto 𝑥, 𝑦 y 𝑧
la solución de este conjunto de ecuaciones diferenciales puede ser calculada de la
misma forma como se resuelven las ecuaciones diferenciales del modelo del generador a
través de integración trapezoidal implicita; incluyendo estas ecuaciones en la rutina que
resuelve las ecuaciones del modelo del generador.
Como ejemplo ilustrativo a continuación se determina el conjunto de ecuaciones
diferenciales que componen el cálculo de la sensibilidad de trayectoria para el parámetro
𝑋𝑑 :
Al expandir las derivadas parciales para la ecuación 5.4 se obtiene:
𝜕𝑓 X
𝜕𝑓 X
X
𝜆̇𝜔𝑑 = 1 𝜆𝜔𝑑 + 1 𝜆𝛿𝑑 +
𝜕𝜔
𝜕𝛿
𝜕𝑓1
𝜕E′𝑞
X
𝜆E𝑑′ +
𝑞
𝜕𝑓1
𝜕 E′′𝑞
X
𝜆E𝑑′′ +
𝑞
𝜕𝑓1
𝜕 E′′𝑑
X
𝜆E𝑑′′ +
𝑑
𝜕𝑓1
𝜕 𝐼𝑑
X
𝜆𝐼𝑑𝑑 +
𝜕𝑓1 X𝑑
𝜆
𝜕 𝐼𝑞 𝐼𝑞
+
𝜕𝑓1
𝜕 X𝑑
64
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝜕𝑓 X
𝜕𝑓 X
X
𝜆̇𝛿 𝑑 = 2 𝜆𝜔𝑑 + 2 𝜆𝛿𝑑 +
𝜕E′𝑞
𝜕𝑓 X
𝜕𝑓 X
X
𝜆̇E𝑑′ = 3 𝜆𝜔𝑑 + 3 𝜆𝛿𝑑 +
𝜕E′𝑞
𝜕𝑓 X
𝜕𝑓 X
X
𝜆̇E𝑑′′ = 4 𝜆𝜔𝑑 + 4 𝜆𝛿𝑑 +
𝜕E′𝑞
𝜕𝜔
𝜕𝛿
𝜕𝜔
𝑞
𝜕𝛿
𝜕𝜔
𝑞
𝜕𝛿
𝜕𝑓 X
𝜕𝑓 X
X
𝜆̇ 𝑑′′ = 5 𝜆𝜔𝑑 + 5 𝜆𝛿𝑑 +
𝜕𝜔
E𝑑
0=
0=
𝜕𝑔1
𝜕𝜔
𝜕𝑔2
𝜕𝜔
X
𝜆P𝑑 =
X
𝜆Q𝑑 =
𝜕𝛿
X
𝜆𝜔𝑑 +
X
𝜆𝜔𝑑 +
𝜕ℎ1
𝜕𝜔
𝜕ℎ2
𝜕𝜔
𝜕𝑔1
𝜕𝛿
𝜕𝑔2
𝜕𝛿
X
𝜆𝜔𝑑 +
X
𝜆𝜔𝑑 +
X
𝜆𝛿 𝑑 +
X
𝜆𝛿 𝑑 +
𝜕ℎ1
𝜕𝛿
𝜕ℎ2
𝜕𝛿
𝜕𝑓2
𝜕𝑓3
𝜕𝑓4
𝜕𝑓5
𝜕E′𝑞
𝜕𝑔1
𝜕E′𝑞
𝜕𝑔2
𝜕E′𝑞
X
𝜆𝛿 𝑑 +
X
𝜆𝛿 𝑑 +
X
𝜆E𝑑′ +
𝑞
𝜆E𝑑′ +
𝑞
𝜕 E′′𝑞
𝜆E𝑑′ +
𝜕 E′′𝑞
X
X
𝑞
X
𝜆E𝑑′ +
𝑞
X
𝜆E𝑑′ +
𝑞
X
𝜆E𝑑′ +
𝜕ℎ1
𝜕E′𝑞
𝜕ℎ2
𝜕E′𝑞
𝜕𝑓2
𝜕 E′′𝑞
𝑞
𝜕𝑓3
𝜕𝑓4
𝜕𝑓5
𝜕E′′𝑞
𝜕𝑔1
𝜕 E′′𝑞
𝜕𝑔2
𝜕 E′′𝑞
X
𝜆E𝑑′ +
𝑞
X
𝜆E𝑑′ +
𝑞
X
𝜆E𝑑′′ +
𝜕𝑓2
𝑞
𝜕 E′′𝑑
𝜆E𝑑′′ +
𝑞
𝜕 E′′𝑑
𝜆E𝑑′′ +
𝜕 E′′𝑑
X
X
𝑞
X
𝜆E𝑑′′ +
𝑞
X
𝜆E𝑑′′ +
𝑞
X
𝜆E𝑑′′ +
𝜕ℎ1
𝜕 E′′𝑞
𝜕ℎ2
𝜕 E′′𝑞
𝑞
𝜕𝑓3
𝜕𝑓4
𝜕𝑓5
𝜕E′′𝑑
𝜕𝑔1
𝜕E′′𝑑
𝜕𝑔2
𝜕E′′𝑑
X
𝜆E𝑑′′ +
𝑞
X
𝜆E𝑑′′ +
𝑞
X
𝜕𝑓2
E𝑑
𝜕 𝐼𝑑
X
𝜕𝑓3
𝜆 𝑑′′ +
𝜆E𝑑′′ +
𝑑
X
𝜕𝑓4
E𝑑
𝜕 𝐼𝑑
X
𝜕𝑓5
E𝑑
𝜕 𝐼𝑑
𝜆 𝑑′′ +
𝜆 𝑑′′ +
X
𝜆E𝑑′′ +
𝑑
X
𝜆E𝑑′′ +
𝜕ℎ1
𝜕 E′′𝑑
𝜕ℎ2
𝜕 E′′𝑑
𝜕 𝐼𝑑
𝑑
𝜕𝑔1
𝜕 𝐼𝑑
𝜕𝑔2
𝜕 𝐼𝑑
X
𝜆E𝑑′′ +
𝑑
X
𝜆E𝑑′′ +
𝑑
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑑𝑑 +
𝜕ℎ1
𝜕 𝐼𝑑
𝜕ℎ2
𝜕 𝐼𝑑
𝜕𝑓2 X𝑑
𝜆
𝜕 𝐼𝑞 𝐼𝑞
+
𝜕𝑓3 X𝑑
𝜆
𝜕 𝐼𝑞 𝐼𝑞
+
𝜕𝑓4 X𝑑
𝜆
𝜕 𝐼𝑞 𝐼𝑞
+
𝜕𝑓5
𝜕 𝐼𝑞
𝜕𝑔1
𝜕 𝐼𝑞
𝜕𝑔2
𝜕 𝐼𝑞
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑑𝑑 +
X
𝜆𝐼𝑞𝑑 +
X
𝜆𝐼𝑞𝑑 +
X
𝜆𝐼𝑞𝑑 +
𝜕ℎ1
𝜕 𝐼𝑞
𝜕ℎ2
𝜕 𝐼𝑞
𝜕𝑓2
𝜕 X𝑑
𝜕𝑓3
𝜕 X𝑑
𝜕𝑓4
𝜕 X𝑑
𝜕𝑓5
𝜕 X𝑑
𝜕𝑔1
𝜕 X𝑑
𝜕𝑔2
𝜕 X𝑑
X
𝜆𝐼𝑞𝑑 +
X
𝜆𝐼𝑞𝑑 +
𝜕ℎ1
𝜕 X𝑑
𝜕ℎ2
𝜕 X𝑑
(5.5)
Cada una de las derivadas parciales del conjunto de ecuaciones anterior puede ser
calculada analiticamente. Para facilitar la obtención de estas derivadas se implementó en
Matlab un código que usa la funcionalidad de cálculo simbólico. Dicho código puede ser
consultado en el Anexo B. El siguiente conjunto de ecuaciones muestra el resultado del
cálculo de dichas derivadas parciales reemplazadas en las ecuaciones 5.5 para el
parámetro 𝑋𝑑 :
Sensibilidades con respecto a 𝑋𝑑
X
𝜆̇𝜔𝑑 = 0
X
X
𝜆̇𝛿 𝑑 = 𝜆𝜔𝑑
X
X
X
𝜆̇E𝑑′ = (𝐼𝑑 − 𝜆E𝑑′ + 𝜆𝐼𝑑𝑑 (X𝑑 − X′𝑑 ))⁄T′𝑑0
𝑞
𝑞
Capitulo 5
65
X
X
X
X
𝜆̇E𝑑′′ = (𝜆E𝑑′ − 𝜆E𝑑′′ + 𝜆𝐼𝑑𝑑 (X′𝑑 − X′′𝑑 ))⁄T′′𝑑0
𝑞
𝑞
𝑞
X
X
X
𝜆̇ 𝑑′′ = (−𝜆 𝑑′′ − 𝜆𝐼𝑞𝑑 (X′𝑞 − X′′𝑞 ))⁄T′′𝑞0
E𝑑
E𝑑
X
X
X
0 = −𝜆𝐼𝑑𝑑 − 𝜆E𝑑′ ⁄(X′𝑑 + Z𝐿 ) − (𝐸0 𝜆𝛿 𝑑 sen(𝛿))⁄(X′𝑑 + Z𝐿 )
𝑞
X
X
0 = −𝜆𝐼𝑞𝑑 + (𝐸0 𝜆𝛿 𝑑 cos(𝛿))⁄(X′𝑞 + Z𝐿 )
X
X
X
X
X
𝜆P𝑑 = 𝜆𝐼𝑑𝑑 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞𝑑 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝜆E𝑑′′ + 𝐼𝑞 𝜆E𝑑′′
𝑞
𝑑
X
X
X
X
X
𝜆Q𝑑 = 𝜆𝐼𝑞𝑑 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑑 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 ) − 𝐼𝑑 𝜆E𝑑′′ + 𝐼𝑞 𝜆E𝑑′′
𝑞
(5.6)
𝑑
El conjunto de ecuaciones diferenciales (5.6) se resuelve conjuntamente con las
ecuaciones diferenciales del modelo del generador y la red para encontrar las
X
X
sensibilidades de las salidas con respecto a los parámetros 𝜆P𝑑 y 𝜆Q𝑑 .
El mismo procedimiento anterior es aplicado al cálculo de las sensibilidades con respecto
a los demás parámetros del modelo del generador. Las siguientes ecuaciones definen
estas sensibilidades:
Sensibilidades con respecto a 𝑋𝑞 ′
′
X
𝜆̇𝜔𝑞 = 0
′
′
X
X
𝜆̇𝛿 𝑞 = 𝜆𝜔𝑞
′
′
′
X
X
X
𝜆̇ 𝑞′ = (𝜆𝐼𝑑𝑞 (X𝑑 − X′𝑑 ) − 𝜆 𝑞′ )⁄T′𝑑0
E𝑞
E𝑞
′
′
′
E𝑞
E𝑞
E𝑞
′
X
X
X
X
𝜆̇ 𝑞′′ = (𝜆 𝑞′ − 𝜆 𝑞′′ + 𝜆𝐼𝑑𝑞 (X′𝑑 − X′′𝑑 ))⁄T′′𝑑0
66
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
′
′
E𝑑
E𝑑
′
X𝑞
X𝑞
X𝑞
𝜆̇ ′′ = (−𝐼𝑞 − 𝜆 ′′ − 𝜆𝐼𝑞 (X′𝑞 − X′′𝑞 ))⁄T′′𝑞0
X′
X′
X′
𝑞
𝑞
𝑞
0 = −𝜆𝐼𝑑 − 𝜆 ′ ⁄(X′𝑑 + Z𝐿 ) − (𝐸0 𝜆𝛿 sen(𝛿))⁄(X′𝑑 + Z𝐿 )
E𝑞
X′
2
X′
0 = (E′𝑑 − 𝐸0 sen(𝛿))⁄(X′𝑞 + Z𝐿 ) − (𝜆𝐼𝑞𝑞 + 𝐸0 𝜆𝛿 𝑞 cos(𝛿))⁄(X′𝑞 + Z𝐿 )
X′
X′
X′
X′
X′𝑞
E𝑑
E′′𝑞
𝑞
𝑞
𝑞
𝑞
𝜆P = 𝜆𝐼𝑑 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝜆 ′′ + 𝐼𝑞 𝜆
X′
X′
X′
X′
X′𝑞
E𝑞
E′′𝑑
𝜆Q𝑞 = 𝜆𝐼𝑞𝑞 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑞 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 ) − 𝐼𝑑 𝜆 𝑞′′ + 𝐼𝑞 𝜆
(5.7)
Sensibilidades con respecto a 𝑋𝑑 ′
′
X
𝜆̇𝜔𝑑 = 0
′
′
X
X
𝜆̇𝛿 𝑑 = 𝜆𝜔𝑑
′
′
′
X
X
X
𝜆̇E𝑑′ = (𝜆𝐼𝑑𝑑 (X𝑑 − X′𝑑 ) − 𝜆E𝑑′ − 𝐼𝑑 )⁄T′𝑑0
𝑞
𝑞
′
′
′
𝑞
𝑞
𝑞
′
X
X
X
X
𝜆̇E𝑑′′ = (𝜆E𝑑′ − 𝜆E𝑑′′ + 𝜆𝐼𝑑𝑑 (X′𝑑 − X′′𝑑 ) − 𝐼𝑑 )⁄T′′𝑑0
′
′
E𝑑
E𝑑
′
X
X
X
𝜆̇ 𝑑′′ = (−𝜆 𝑑′′ − 𝜆𝐼𝑞𝑑 (X′𝑞 − X′′𝑞 ))⁄T′′𝑞0
X′
2
X′
X′
0 = (E′𝑞 𝐸0 cos(𝛿))⁄(X′𝑑 + Z𝐿 ) − 𝜆E𝑑′ ⁄(X′𝑑 + Z𝐿 ) −𝜆𝐼𝑑𝑑 − (𝐸0 𝜆𝛿 𝑑 sen(𝛿))⁄(X′𝑑 + Z𝐿 )
𝑞
X′
X′
0 = (𝐸0 𝜆𝛿 𝑑 cos(𝛿))⁄(X′𝑞 + Z𝐿 ) − 𝜆𝐼𝑞𝑑
X′
X′
X′
X′
X′
𝜆P𝑑 = 𝜆𝐼𝑑𝑑 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞𝑑 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝜆 𝑑′′ + 𝐼𝑞 𝜆E𝑑′′
E𝑑
X′
X′
X′
X′
X′𝑑
𝜆Q𝑑 = 𝜆𝐼𝑞𝑑 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑑 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 ) − 𝐼𝑑 𝜆E𝑑′′ + 𝐼𝑞 𝜆
𝑞
Sensibilidades con respecto a 𝑋𝑑 ′′
E′′𝑑
𝑞
(5.8)
Capitulo 5
67
′′
X
𝜆̇𝜔𝑑 = 0
′′
′′
X
X
𝜆̇𝛿 𝑑 = 𝜆𝜔𝑑
′′
′′
′′
X
X
X
𝜆̇E𝑑′ = (𝜆𝐼𝑑𝑑 (X𝑑 − X′𝑑 ) − 𝜆E𝑑′ )⁄T′𝑑0
𝑞
𝑞
′′
′′
′′
𝑞
𝑞
𝑞
′′
X
X
X
X
𝜆̇E𝑑′′ = (𝜆E𝑑′ − 𝜆E𝑑′′ + 𝜆𝐼𝑑𝑑 (X′𝑑 − X′′𝑑 ) − 𝐼𝑑 )⁄T′′𝑑0
′′
′′
E𝑑
E𝑑
′′
X
X
X
𝜆̇ 𝑑′′ = (−𝜆 𝑑′′ − 𝜆𝐼𝑞𝑑 (X′𝑞 − X′′𝑞 ))⁄T′′𝑞0
X′′
X′′
X′′
0 = −𝜆E𝑑′ ⁄(X′𝑑 + Z𝐿 ) −𝜆𝐼𝑑𝑑 − (𝐸0 𝜆𝛿 𝑑 sen(𝛿))⁄(X′𝑑 + Z𝐿 )
𝑞
X′′
X′′
0 = (𝐸0 𝜆𝛿 𝑑 cos(𝛿))⁄(X′𝑞 + Z𝐿 ) − 𝜆𝐼𝑞𝑑
X′′
X′′
X′′
X′′
X′′
E𝑑
𝑞
𝜆P𝑑 = 𝜆𝐼𝑑𝑑 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞𝑑 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝐼𝑞 + 𝐼𝑑 𝜆 𝑑′′ + 𝐼𝑞 𝜆E𝑑′′
X′′
X′′
X′′
X′′
X′′𝑑
𝑞
E′′𝑑
𝜆Q𝑑 = 𝜆𝐼𝑞𝑑 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑑 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 ) − 𝐼𝑑 2 −𝐼𝑑 𝜆E𝑑′′ + 𝐼𝑞 𝜆
Sensibilidades con respecto a 𝑋𝑞 ′′
′′
X
𝜆̇𝜔𝑞 = 0
′′
′′
X
X
𝜆̇𝛿 𝑞 = 𝜆𝜔𝑞
′′
′′
′′
X
X
X
𝜆̇ 𝑞′ = (𝜆𝐼𝑑𝑞 (X𝑑 − X′𝑑 ) − 𝜆 𝑞′ )⁄T′𝑑0
E𝑞
E𝑞
′′
′′
′′
E𝑞
E𝑞
E𝑞
′′
X
X
X
X
𝜆̇ 𝑞′′ = (𝜆 𝑞′ − 𝜆 𝑞′′ + 𝜆𝐼𝑑𝑞 (X′𝑑 − X′′𝑑 ))⁄T′′𝑑0
′′
′′
E𝑑
E𝑑
′′
X
X
X
𝜆̇ 𝑞′′ = (𝐼𝑞 − 𝜆 𝑞′′ − 𝜆𝐼𝑞𝑞 (X′𝑞 − X′′𝑞 ))⁄T′′𝑞0
(5.9)
68
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
X′′
X′′
X′′
0 = −𝜆 𝑞′ ⁄(X′𝑑 + Z𝐿 ) −𝜆𝐼𝑑𝑞 − (𝐸0 𝜆𝛿 𝑞 sen(𝛿))⁄(X′𝑑 + Z𝐿 )
E𝑞
X′′
X′′
0 = (𝐸0 𝜆𝛿 𝑞 cos(𝛿))⁄(X′𝑞 + Z𝐿 ) − 𝜆𝐼𝑞𝑞
X′′
X′′
X′′
X′′
X′′𝑞
E𝑑
E′′𝑞
𝑞
𝑞
𝑞
𝑞
𝜆P = 𝜆𝐼𝑑 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) − 𝐼𝑑 𝐼𝑞 + 𝐼𝑑 𝜆 ′′ + 𝐼𝑞 𝜆
X′′𝑞
X′′𝑞
X′′𝑞
X′′𝑞
X′′𝑞
E𝑞
E′′𝑑
𝜆Q = 𝜆𝐼𝑞 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 ) − 𝐼𝑞 2 −𝐼𝑑 𝜆 ′′ + 𝐼𝑞 𝜆
Sensibilidades con respecto a 𝑇𝑑0
(5.10)
′
′
T
𝜆̇𝜔𝑑0 = 0
′
′
′
′
T
T
𝜆̇𝛿 𝑑0 = 𝜆𝜔𝑑0
′
2
T
T
T
′
𝜆̇E𝑑0
= 𝜆𝐼𝑑𝑑0 (X𝑑 − X′𝑑 )⁄T′𝑑0 − (E𝑓 − E′𝑞 + 𝐼𝑑 (X𝑑 − X′𝑑 ))⁄T′𝑑0 − 𝜆E𝑑0
′
′ ⁄T𝑑0
𝑞
𝑞
′
′
′
𝑞
𝑞
𝑞
′
T
T𝑑0
T𝑑0
T𝑑0
′
′′
′′
𝜆̇E𝑑0
′′ = (𝜆 ′ − 𝜆 ′′ + 𝜆𝐼𝑑 (X𝑑 − X𝑑 ))⁄T𝑑0
E
E
′
′
E𝑑
E𝑑
′
T
T𝑑0
T𝑑0
′
′′
′′
𝜆̇ 𝑑0
′′ = (−𝜆 ′′ − 𝜆𝐼𝑞 (X𝑞 − X𝑞 ))⁄T𝑞0
T′
T′
T′
′
′
𝑑0
𝑑0
0 = −𝜆E𝑑0
′ ⁄(X𝑑 + Z𝐿 ) −𝜆𝐼𝑑 − (𝐸0 𝜆𝛿 sen(𝛿))⁄(X𝑑 + Z𝐿 ) −
𝑞
T′𝑑0
(𝐸0 𝜆𝛿 sen(𝛿))⁄(X𝑑′ + Z𝐿 )
T′
T′
0 = (𝐸0 𝜆𝛿 𝑑0 cos(𝛿))⁄(X′𝑞 + Z𝐿 ) − 𝜆𝐼𝑞𝑑0
T′
T′
T′
T′𝑑0
𝜆P𝑑0 = 𝜆𝐼𝑑𝑑0 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞𝑑0 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝜆
T′
T′
T′
T′
T′𝑑0
𝜆Q𝑑0 = 𝜆𝐼𝑞𝑑0 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑑0 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 )−𝐼𝑑 𝜆E𝑑0
′′ + 𝐼𝑞 𝜆
𝑞
Sensibilidades con respecto a 𝑇𝑑0 ′′
′′
T
𝜆̇𝜔𝑑0 = 0
E′′𝑑
E′′𝑑
T′
+ 𝐼𝑞 𝜆E𝑑0
′′
𝑞
(5.11)
Capitulo 5
69
′′
′′
′′
′′
T
T
𝜆̇𝛿 𝑑0 = 𝜆𝜔𝑑0
′′
T
T
T
′
𝜆̇E𝑑0
= 𝜆𝐼𝑑𝑑0 (X𝑑 − X′𝑑 )⁄T′𝑑0 − 𝜆E𝑑0
′
′ ⁄T𝑑0
𝑞
𝑞
′′
′′
′′
𝑞
𝑞
𝑞
′′
T
T𝑑0
T𝑑0
T𝑑0
′′
′′
′
′′
′
′′
′′ 2
′
′′
′′
𝜆̇E𝑑0
′′ = 𝜆 ′ ⁄T𝑑0 − 𝜆 ′′ ⁄T𝑑0 − (E𝑞 − E𝑞 + 𝐼𝑑 (X𝑑 − X𝑑 ))⁄T𝑑0 + 𝜆𝐼𝑑 (X𝑑 − X𝑑 )⁄T𝑑0
E
E
′′
′′
E𝑑
E𝑑
′′
T
T𝑑0
T𝑑0
′
′′
′′
𝜆̇ 𝑑0
′′ = (−𝜆 ′′ − 𝜆𝐼𝑞 (X𝑞 − X𝑞 ))⁄T𝑞0
T′′
T′′
T′′
′
′
𝑑0
𝑑0
0 = −𝜆E𝑑0
′ ⁄(X𝑑 + Z𝐿 ) −𝜆𝐼𝑑 − (𝐸0 𝜆𝛿 sen(𝛿))⁄(X𝑑 + Z𝐿 )
𝑞
T′′
T′′
0 = (𝐸0 𝜆𝛿 𝑑0 cos(𝛿))⁄(X′𝑞 + Z𝐿 ) − 𝜆𝐼𝑞𝑑0
T′′
T′′
T′′
T′′𝑑0
𝜆P𝑑0 = 𝜆𝐼𝑑𝑑0 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞𝑑0 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝜆
T′′
T′′
T′′
T′′
E′′𝑑
Sensibilidades con respecto a 𝑇𝑞0 ′′
′′
T
𝜆̇𝜔𝑞0 = 0
′′
′′
′′
′′
T
T
𝜆̇𝛿 𝑞0 = 𝜆𝜔𝑞0
′′
T
T𝑞0
T𝑞0
′
′
′
𝜆̇ 𝑞0
′ = 𝜆𝐼𝑑 (X𝑑 − X𝑑 )⁄T𝑑0 − 𝜆 ′ ⁄T𝑑0
E𝑞
E𝑞
′′
′′
′′
E𝑞
E𝑞
E𝑞
′′
T
T𝑞0
T𝑞0
T𝑞0
′′
′′
′
′′
′′
𝜆̇ 𝑞0
′′ = 𝜆 ′ ⁄T𝑑0 − 𝜆 ′′ ⁄T𝑑0 + 𝜆𝐼𝑑 (X𝑑 − X𝑑 )⁄T𝑑0
′′
′′
E𝑑
E𝑑
′′
T
T𝑞0
T𝑞0
′
′′
′′
′′
′
′
′′
′′ 2
𝜆̇ 𝑞0
′′ = (−𝜆 ′′ − 𝜆𝐼𝑞 (X𝑞 − X𝑞 ))⁄T𝑞0 + (E𝑑 − E𝑑 + 𝐼𝑞 (X𝑞 − X𝑞 ))⁄T𝑞0
T′′𝑞0
0 = −𝜆
E′𝑞
T′′
T′′
⁄(X′𝑑 + Z𝐿 ) −𝜆𝐼𝑑𝑞0 − (𝐸0 𝜆𝛿 𝑞0 sen(𝛿))⁄(X′𝑑 + Z𝐿 )
T′′
+ 𝐼𝑞 𝜆E𝑑0
′′
T′′𝑑0
𝜆Q𝑑0 = 𝜆𝐼𝑞𝑑0 (E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑑0 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 )−𝐼𝑑 𝜆E𝑑0
′′ + 𝐼𝑞 𝜆
𝑞
E′′𝑑
𝑞
(5.12)
70
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
T′′
T′′
0 = (𝐸0 𝜆𝛿 𝑞0 cos(𝛿))⁄(X′𝑞 + Z𝐿 ) − 𝜆𝐼𝑞𝑞0
T′′
T′′
T′′
T′′𝑞0
𝜆P𝑞0 = 𝜆𝐼𝑑𝑞0 (E′′𝑑 + 𝐼𝑞 (X′′𝑑 − X′′𝑞 )) + 𝜆𝐼𝑞𝑞0 (E′′𝑞 + 𝐼𝑑 (X′′𝑑 − X′′𝑞 )) + 𝐼𝑑 𝜆
T′′𝑞0
T′′𝑞0
𝜆Q = 𝜆𝐼 𝑞
T′′
T′′𝑞0
(E′′𝑑 − 2𝐼𝑞 X′′𝑞 ) − 𝜆𝐼𝑑𝑞0 (E′′𝑞 + 2𝐼𝑑 X′′𝑑 )−𝐼𝑑 𝜆
E′′𝑞
E′′𝑑
T′′𝑞0
+ 𝐼𝑞 𝜆
E′′𝑞
T′′𝑞0
+ 𝐼𝑞 𝜆
E′′𝑑
(5.13)
5.1.3.2 Hessiano, Gradiente del error y actualización de
parámetros
Las ecuaciones 5.6 a 5.13 son resueltas en cada iteración de la metodología de
estimación, para obtener las sensibilidades de las salidas con respecto a los parámetros
para cada vector de parámetros a ser probado. Con la solución de estas ecuaciones
diferenciales se compone la matriz de sensibilidades
𝜕𝑦𝑠𝑖𝑚
𝜕𝑝
=[
X′
X′
X′′
X′′
T′
T′′
𝜕𝑦𝑠𝑖𝑚
𝜕𝑝
de la siguiente forma
T′′
𝜆P𝑑
X
𝜆P𝑞
𝜆P𝑑
𝜆P𝑑
𝜆P𝑞
𝜆P𝑑0
𝜆P𝑑0
𝜆P𝑞0
X
𝜆Q𝑑
X′
𝜆Q𝑞
X′
𝜆Q𝑑
X′′
𝜆Q𝑑
X′′
𝜆Q𝑞
T′
𝜆Q𝑑0
T′′
𝜆Q𝑑0
T′′𝑞0
]
(5.14)
𝜆Q
p
Se debe anotar que cada 𝜆y𝑖 es en realidad una trayectoria en el tiempo, por lo que la
matriz
𝜕𝑦𝑠𝑖𝑚
𝜕𝑝
es un tensor con el tiempo como la tercera dimension.
A continuación se calcula el gradiente del error de mínimos cuadrados entre las salidas
medidas y las simuladas:
𝐺 (𝑝 ) = −
𝜕𝐽(𝑝)
𝜕𝑝
= ∑𝑇𝑡=0 (
𝜕𝑦𝑠𝑖𝑚 𝑇
𝜕𝑝
) (𝑦𝑚𝑒𝑑 − 𝑦𝑠𝑖𝑚 )
(5.15)
Esta matriz tendrá dimensiones 8X1 dado que toda la serie es sumada punto a punto en
el tiempo para obtener un valor representativo de la entrada correspondiente.
El paso siguiente consiste en el cálculo aproximado de la matri Hessiana, que
corresponde a las segundas derivadas de las salidas con respecto a los parámetros:
Γ(p) ≈ ∑𝑇𝑡=0 (
𝜕𝑦𝑠𝑖𝑚 𝑇 𝜕𝑦𝑠𝑖𝑚
)
𝜕𝑝
𝜕𝑝
(5.16)
Capitulo 5
71
La matriz Hessiana tiene una dimensión de 8X8, ya que esta compuesta de la sumatoria
en la dimensión del tiempo de cada uno de los componentes.
Finalmente con la matriz Hessiana y el gradiente del error se actualiza en cada iteración
el vector de parámetros:
𝑝(𝑘+1) = 𝑝(𝑘) − Γ −1 (𝑝)𝐺(𝑝)
(5.17)
De esta forma se tiene un nuevo vector de parámetros que en cada iteración reduce el
error entre las salidas registradas y las simuladas.
5.2 Resultados
Con el propósito de evaluar el desempeño de la metodología implementada, se
calcularon una serie de sensibilidades que ponen a prueba el algorítmo de estimación de
parámetros ante diferentes escenarios. Primero se diseñaron casos para determinar
cuales son las desviaciones máximas iniciales en los parámetros individualmente que
permiten obtener buenos resultados de estimación. Adicionalmente se corrieron múltiples
casos con diferentes rangos de desviación aleatoria en todos los parámetros del modelo
para determinar la probabilidad de convergencia del algorítmo y finalmente se presentan
los resultados de la metodología de estimación usando como registros de salida, las
variaciones dinámicas del generador bajo prueba ante eventos en la red externa como
cambios de carga y corto–circuitos.
Los resultados de cada caso se describen en términos del error de estimación 𝐸𝑒 de los
parámetros obtenidos con respecto al vector de parámetros reales. Con este indicador se
cuantifica para cada parámetro, que tan alejada fue la estimación comparado con el
parámetro real correspondiente. De esta forma, entre más cercano sea este indicador a
cero para un parámetro dado, la estimación será de mejor calidad para ese parámetro.
La siguiente expresión cuantifica dicho error:
𝐸𝑒 =
100(𝑃𝑟 −𝑃𝑒 )
𝑃𝑟
donde:
𝑃𝑟 : Es el vector de parámetros reales
(5.18)
72
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝑃𝑒 : Es el vector de parámetros estimados
Igualmente se presenta para cada caso evaluado la evolución con el número de
iteraciones de la función objetivo de la metodología 𝐽(𝑝), y la comparación entre la
simulación del evento seleccionado con los parámetros iniciales, los parámetros
estimados y las mediciones, para la tensión en terminales, la potencia activa y la potencia
reactiva.
El proceso de estimación de parámetros se califica como bueno cuando el algorítmo
converge y la mayoría de parámetros son estimados con errores inferiores al 5%, pero
algún parámetro termina con errores superiores al 5%. El mismo proceso es calificado
como muy bueno cuando se logra la convergencia del algorítmo y todos los parámetros
son estimados con errores inferiores al 5%. Finalmente el proceso se califica como no
exitoso cuando no se logra la convergencia del algorítmo de estimación.
5.2.1 Sensibilidad al error inicial en los parametros
Estas sensibilidades tienen como objetivo determinar la robustez de la metodología de
estimación a la variación inicial de los parámetros del modelo del generador. Con esto se
determina el rango de variación máximo para el cual el algorítmo de estimación arroja
buenos resultados.
5.2.1.1 Caso 1: Estimación de todos los parámetros
simultaneamente. Desviación del 30%.
En este caso se alteraron todos los parámetros del generador uno a uno con variaciones
del 30% del parámetro real y se corrió el algorítmo de estimación para cada caso. El
algorítmo se parametrizó para estimar simultáneamente todos los parámetros del
modelo, aún cuando solo uno de ellos presenta variación respecto al real.
Tabla 3 Caso 1: Desviación de X 𝑑 del -30%
Parámetro
X𝑑
X𝑞′
X𝑑′
X𝑑′′
Desviación
inicial [%]
-30
0
0
0
𝐸𝑒 [%]
16
2,95
4,56
6,12
𝐽(𝑝)
0,013
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
Capitulo 5
X𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
73
20,5
1,32
-7,24
20,8
0
0
0
0
por máximo número
de iteraciones (20)
Tabla 4 Caso 1: Desviación de X 𝑞′ del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
-30
0
0
0
0
0
0
𝐸𝑒 [%]
20,1
44
35
10
29,2
-19
-20,3
20,4
𝐽(𝑝)
0.17
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
por máximo número
de iteraciones (20)
Tabla 5 Caso 1: Desviación de X 𝑑′ del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
-30
0
0
0
0
0
𝐸𝑒 [%]
-20,1
-19,7
13,5
16
20,3
-20,04
18,7
18,9
𝐽(𝑝)
0,029
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
por máximo número
de iteraciones (20)
Tabla 6 Caso 1: Desviación de X 𝑑′′del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
-30
0
0
0
0
𝐸𝑒 [%]
-20,5
-20,1
18
16
20,3
-20
20,8
20,4
𝐽(𝑝)
0,029
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
por máximo número
de iteraciones (20)
74
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Tabla 7 Caso 1: Desviación de X 𝑞′′del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
-30
0
0
0
𝐸𝑒 [%]
2,92
1,99
-7,88
20,8
16
3,38
19,7
20,6
𝐽(𝑝)
0,023
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
por máximo número
de iteraciones (20)
′
Tabla 8 Caso 1: Desviación de Td0
del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
0
-30
0
0
𝐸𝑒 [%]
-2,9
1,02
7,12
-4,56
11,67
16
3,56
20,1
𝐽(𝑝)
0,044
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
por máximo número
de iteraciones (20)
′′
Tabla 9 Caso 1: Desviación de T𝑑0
del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
0
0
-30
0
𝐸𝑒 [%]
-2,9
1,02
7,12
-4,56
11,67
16
3,56
20,1
𝐽(𝑝)
0,044
No.
Iteraciones
Comentario
20
La estimación no es
buena. El algoritmo
no encuentra
convergencia. Para
por máximo número
de iteraciones (20)
Capitulo 5
75
′′
Tabla 10 Caso 1: Desviación de T𝑞0
del -30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
0
0
0
-30
𝐸𝑒 [%]
0,332
0,589
0,148
0,167
4,366
0,139
-0,389
18,142
𝐽(𝑝)
7,9x10-6
No.
Iteraciones
Comentario
5
La estimación es
buena. El algoritmo
converge. Sin
embargo la
estimación del
′′
parámetro T𝑞0
mejora pero el error
es significativo.
Con base en los resultados para el Caso 1 puede concluirse que la metodología no
consigue estimar con resultados aceptables los parámetros del modelo del generador de
forma simultánea, cuando se parte de desviaciones iguales o superiores al 30% del
parámetro a estimar. Solo es posible una mejor estimación para el caso del parámetro
′′
T𝑞0
el cual fue el único caso de convergencia de la metodología. Para este último caso
se presentan los resultados gráficos del proceso de estimación en las siguientes figuras:
(a)
76
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
(b)
(c)
′′
Figura 23 Resultados estimación Tq0
Caso 1: Estimación de todos los parámetros
simultaneamente. Desviación del 30% del valor real.
La Figura 23 (a) presenta el progreso del error de estimación para cada uno de los
parámetros del modelo del generador. Para este caso puede observarse un error de
estimación final menor al 5% para todos los parámetros y una reducción del error inicial
para el parámetro modificado al 18%. La Figura 23 (b) presenta la evolución de la función
objetivo y su convergenia por debajo del nivel de tolerancia en la iteración 5. La Figura 23
(c) presenta de forma conparativa la simulación del evento de escalón en la referencia
del AVR del generador, usando los parámetros inciales, los estimados y las mediciones.
Se observa que la estimación realizada en este caso reduce de forma casi imperceptible
el error en las variables medidas.
Capitulo 5
77
5.2.1.2 Caso 2: Estimación de todos los parámetros
simultaneamente. Determinación de la máxima desviación.
En este caso se corrió iterativamente el algoritmo de estimación partiendo de
desviaciones cercanas al 20% para encontrar la máxima desviación de cada parámetro
que permite la convergencia del algorítmo y produce una buena estimación. Al igual que
en caso anterior, el algorítmo se parametrizó para estimar simultáneamente todos los
parámetros del modelo, aún cuando solo uno de ellos presenta variación respecto al real.
En las siguientes tablas se presentan los resultados para este nuevo caso:
Tabla 11 Caso 2: Desviación de X 𝑑 del -20%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
-20
0
0
0
0
0
0
0
𝑬𝒆 [%]
4
0,003
0,0013
0,011
0,03
0,002
0,002
0,003
𝑱(𝒑)
7.13x10-6
No.
Iteraciones
Comentario
2
La estimación es
muy buena. La
convergencia se da
en 2 iteraciones. El
parámetro a estimar
baja a un error del
4%
Tabla 12 Caso 2: Desviación de X 𝑞′ del -16%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
-16
0
0
0
0
0
0
𝑬𝒆 [%]
-0,033
-0,051
-0,012
-0,006
-0,29
-0,007
0,040
-1,28
𝑱(𝒑)
1.55x10-6
No.
Iteraciones
Comentario
7
La estimación es
muy buena. La
convergencia se da
en 7 iteraciones. El
parámetro a estimar
baja a un error del
0.05%
78
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Tabla 13 Caso 2: Desviación de X 𝑑′ del -16%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
-16
0
0
0
0
0
𝑬𝒆 [%]
-0,0036
-0,0059
-0,001
0,001
-0,034
-0,0008
0,0055
-0,3205
𝑱(𝒑)
1.98x10-6
No.
Iteraciones
Comentario
10
La estimación es
muy buena. La
convergencia se da
en 10 iteraciones. El
parámetro a estimar
baja a un error del
0.01%
Tabla 14 Caso 2: Desviación de X d′′ del -17%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
-17
0
0
0
0
𝑬𝒆 [%]
0,01
0,0165
0,0022
0,4
0,098
0,002
-0,007
0,0429
𝑱(𝒑)
5.4x10-6
No.
Iteraciones
Comentario
7
La estimación es
muy buena. La
convergencia se da
en 7 iteraciones. El
parámetro a estimar
baja a un error del
0.4%
Tabla 15 Caso 2: Desviación de X q′′ del -10%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
-10
0
0
0
𝑬𝒆 [%]
0,007
0,0111
0,0019
0,0025
0,0805
0,0014
-0,0049
0,1055
𝑱(𝒑)
8.8x10-7
No.
Iteraciones
Comentario
7
La estimación es
muy buena. La
convergencia se da
en 7 iteraciones. El
parámetro a estimar
baja a un error del
0.08%
Capitulo 5
79
′
Tabla 16 Caso 2: Desviación de T𝑑0
del -17%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
0
-17
0
0
𝑬𝒆 [%]
0,0101
0,0187
0,0065
0,0027
0,114
0,4
-0,014
0,0628
𝑱(𝒑)
7.03x10-6
No.
Iteraciones
Comentario
6
La estimación es
muy buena. La
convergencia se da
en 6 iteraciones. El
parámetro a estimar
baja a un error del
0.4%
′′
Tabla 17 Caso 2: Desviación de T𝑑0
del -17%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
0
0
-17
0
𝑬𝒆 [%]
0,0072
0,0124
0,007
0,006
0,0732
-0,0005
0,4
0,0158
𝑱(𝒑)
2.53x10-6
No.
Iteraciones
Comentario
5
La estimación es
muy buena. La
convergencia se da
en 5 iteraciones. El
parámetro a estimar
baja a un error del
0.4%
′′
Tabla 18 Caso 2: Desviación de T𝑞0
del -20%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
0
0
0
0
0
0
0
-20
𝑬𝒆 [%]
0,124
0,218
0,061
0,031
1,395
0,049
-0,194
7,649
𝑱(𝒑)
5.22x10-6
No.
Iteraciones
Comentario
2
La estimación es
buena. La
convergencia se da
en 2 iteraciones. El
parámetro a estimar
baja a un error del
7.6%
Con base en los resultados para este caso de sensibilidad, se puede conlcuir que las
variaciones individuales de los parámetros que pueden se estimados con buenos
resultados por el algorítmo de estimación desarrollado, se encuentran entre el 10% y
20% del parámetro real. En general, para variaciones superiores al 20% con respecto al
80
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
parámetro real el algoritmo de estimación no converge; sin embargo muchos de los
resultados para los casos sin convergencia todavía pueden ser de ayuda, ya que mejoran
el desempeño del modelo al llevarlo a representar de forma más cercana el
comportamiento del sistema simulado.
Para los casos donde la desviación inicial de cada parámetro es positiva, se realizaron
las mismas simulaciones, obteniendose mejores resultados, en cuanto a que la mayoría
de los parámetros soportan variaciones entre el 15% y 25% con respecto al valor inicial
con convergencia del algorítmo de estimación.
En la siguiente figura se presenta un ejemplo del proceso de convergencia de la
metodología, para la estimación de los parámetros del modelo del generador al alterar el
parámetro 𝑋𝑞′ al 16% de su valor real:
(a)
(b)
Capitulo 5
81
(c)
Figura 24 Resultados estimación 𝑋𝑞′ Caso 2: Estimación de todos los parámetros
simultaneamente. Determinación de la máxima desviación.
La Figura 24 muestra el proceso de convergencia para la estimación de todos los
parámetros del modelo del generador. Se observan los excelentes resultados obtenidos.
Para ilustrar el proceso de estimación considerando errores iniciales positivos en los
parámetros, se presenta en la siguiente figura la estimación para un error inicial del 25%
en el parámetro 𝑋𝑑′′ .
(a)
82
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
(b)
(c)
Figura 25 Resultados estimación X 𝑑′′ Caso 2: Estimación de todos los parámetros
simultaneamente. Determinación de la máxima desviación.
El anterior ejemplo muestra que el algorítmo implementado puede estimar los parámetros
con desviaciones iniciales de hasta el 25%del valor nominal.
5.2.2
Caso 3: Estimación de todos los parámetros
simultaneamente. Sensibilidad a la estimación de
variaciones aleatorias.
Con el objetivo de estimar los parámetros del modelo del generador de una forma más
realista, se realizarón una serie de corridas del algorítmo diseñado, considerando
variaciones aleatorías en los parámetros iniciales en diferentes rangos.
Capitulo 5
83
La metodología inicial de estimación de parámetros se modificó para que de forma
automática se corran cien casos de estimación para cada caso, cada uno partiendo de un
vector de parámetros iniciales con desviaciones aleatorias en diferentes rangos
especificados.
En la siguiente tabla se especifica en más detalle los casos de estimación realizados:
Tabla 19 Especificación de casos con sensibilidad a la variación aleatoria inicial del
vector de parámetros
Caso No.
Desviación inicial [%]
Número de Casos
5
10
15
20
25
30
35
40
45
50
100
100
100
100
100
100
100
100
100
100
1
2
3
4
5
6
7
8
9
10
Para cada caso de estimación la metodología determina de forma automática si se ha
llegado o no a la convergencia del algorítmo.
En la siguiente figura se presenta un resumen de los resultados obtenidos para todos los
casos de estimación desarrollados.
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Número de Casos con
Convergencia
84
110
100
90
80
70
60
50
40
30
20
10
0
0
5 10 15 20 25 30 35 40 45 50 55 60
Desviación Inicial del Vector de Parámetros [%]
Figura 26 Resultados Caso 3: Estimación simultanea de parámetros con variaciones
aleatorias
Dado que para cada nivel de variación inicial en el vector de parámetros se corrieron
gran número de casos de estimación, se podrían aproximar de forma general los
resultados de la Figura 26 a la probabilidad de convergencia del algorítmo de estimación
con base en las desviaciones aleatórias de los parámetros del modelo del generador
sincrónico. Puede concluirse que para desviaciones aleatorias dentro de ±15 % de los
parámetros reales, el algorítmo tendrá una probabilidad de éxito del 70% de encontrar
convergencia y los parámetros entregados aproximarán de una forma muy precisa el
comportamiento dinámico del modelo del generador.
Los resultados también indican que aunque se tienen bajas probabilidades de encontrar
una solución con desviaciones aleatorias de los parámetros entre el 15% y el 35%,
todavía es posible encontrar casos con resultados aceptables que mejoran el desempeño
del modelo. No obstante, es claro, que para desviaciones en los parámetros superiores al
35% el algorítmo no tiene probabilidades de encontrar convergencia, lo cual limita su uso
para modelos con parámetros demasiado desviados de la realidad.
Con el fin de detallar de mejor forma los resultados en este caso de sensibilidad, a
continuación se presentan casos particulares donde se describe el proceso de
convergencia del algorítmo.
Capitulo 5
85
Tabla 20 Caso 3: Desviación aleatoria de todos los parámetros alrededor del 30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
4,694
-24,944
-17,532
-27,569
-9,344
27,857
-20,947
-26,039
𝑬𝒆 [%]
-2,37
-0,83
4,57
-2,05
-1,84
13,43
3,196
-25,21
𝑱(𝒑)
0.0283
No.
Iteraciones
Comentario
20
La estimación falla.
El algoritmo no
converge y se
presentan errores
de estimación
cercanos al 25% en
algunos parámetros
La Figura 27 muestra el proceso de convergencia para la estimación de todos los
parámetros del modelo del generador para una desviación aleatoria inicial del vector de
parámetros de alrededor del 30%. El algorítmo de estimación no converge a los
parámetros reales. Los parámetros finales obtenidos conservan desviaciones importantes
respecto a los valores esperados.
(a)
86
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
(b)
(c)
Figura 27 Resultados estimación Caso 3: Estimación de todos los parámetros
simultaneamente. Sensibilidad a la estimación de variaciones aleatorias. Ejemplo de
desviación aleatoria alrededor del 30% de los parámetros reales
A continuación se presentan los resultados de un caso exitoso de estimación típico que
considera una desviación aleatoria alrededor del 20% en el vector de parámetros inicial.
Capitulo 5
87
Tabla 21 Caso 3: Desviación aleatoria de todos los parámetros alrededor del 20%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
-8,37
-10,19
8,96
-7,19
-6,2
13,49
15,24
0,06
𝑬𝒆 [%]
0,0023
0,0049
0,0047
0,0005
0,0435
0,0032
0,0005
0,0778
𝑱(𝒑)
2.01x10-6
No.
Iteraciones
Comentario
5
La estimación es
muy buena. El
algoritmo converge
y los errores de
estimación son
inferiores al 0.05%.
Para este caso los resultados del proceso de convergencia se presentan en la siguiente
figura:
(a)
(b)
88
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
(c)
Figura 28 Resultados estimación Caso 3: Estimación de todos los parámetros
simultaneamente. Sensibilidad a la estimación de variaciones aleatorias, con
desviación aleatoria de alrededor del 20% de los parámetros reales.
Puede observarse como todos los parámetros son progresivamente llevados al valor real,
así como la simulación para las variables más representativas presenta una alta
coherencia con las señales registradas.
5.2.3 Caso 4: Estimación de todos los parámetros considerando
eventos externos – Incremento de carga
Con el objetivo de determinar si la metodología de estimación de parámetros puede ser
usada para identificar los parámetros del modelo del generador sincrónico mientras este
se encuentra en operación normal y se presentan eventos en la red de transmisión, se
diseñó un escenario donde se produce una reducción súbita de carga en la barra 2 de la
Figura 17, simulando un evento de desconexión de carga en el sistema. La reacción
dinámica del generador de estudio es registrada por medio de las variables de salida y se
toma como el vector de salidas medidas 𝑦𝑚𝑒𝑑 . En este caso, se parte de un vector de
parámetros iniciales con una desviación aleatoria y se estiman simultaneamente todos
los parámetros del modelo del generador.
A continuación se presentan los resultados del proceso de estimación para un caso en el
que la desviación inicial del vector de parámetros es del 20%:
Capitulo 5
89
Tabla 22 Caso 4: Desviación aleatoria de todos los parámetros alrededor del 20%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
2,45
4,73
-10,62
-11,81
12,52
0,41
2,18
-0,20
𝑬𝒆 [%]
0,00518
0,0234
-0,0149
-0,0164
0,124
0,0039
0,027
-0,19
𝑱(𝒑)
4.5x10-6
No.
Iteraciones
Comentario
5
La estimación es
muy buena. El
algoritmo converge
en 5 iteraciones y
los errores de
estimación son
inferiores al 0.2%.
Para este caso los resultados del proceso de convergencia se presentan en la siguiente
figura:
(a)
(b)
90
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
(c)
Figura 29 Resultados estimación Caso 4: Estimación de todos los parámetros
considerando eventos externos – Incremento de carga, desviación aleatoria
alrededor del 20%
Se observa que el proceso de estimación en este caso es muy efectivo y los parámetros
son correctamente identificados, haciendo que la simulación del evento corresponda de
forma muy precisa con los datos registrados.
En contraste con el caso anterior a continuación se presentan los resultados del proceso
de estimación de parámetros considernado el mismo evento de reducción de carga en el
sistema, con una desviación inicial de los parámetros alrededor del 30%.
Tabla 23 Caso 4: Desviación aleatoria de todos los parámetros alrededor del 30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
-12,56
-15,28
13,44
-10,78
-9,306
20,24
22,86
-0,21
𝑬𝒆 [%]
-0,29
-0,13
0,51
0,22
2,17
4,29
7,43
-0,15
𝑱(𝒑)
0.0026
No.
Iteraciones
Comentario
20
La estimación no es
muy buena. El
algoritmo no
converge sin
embargo el modelo
mejora y los errores
de estimación son
inferiores al 8%.
Capitulo 5
91
Para este caso los resultados del proceso de convergencia se presentan en la siguiente
figura:
(a)
(b)
92
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
(c)
Figura 30 Resultados estimación Caso 4: Estimación de todos los parámetros
considerando eventos externos – Incremento de carga, desviación aleatoria
alrededor del 30% del valor real
De la anterior figura se puede concluir que aunque el algorítmo de estimación no
converge, los parámetros obtenidos en la iteración 20 son mucho más cercanos a los
parámetros reales, lo que hace que la simulación del evento de pérdida de carga sea
muy cercana a la realidad. Para variaciones aleatorias superiores al 30% en el vector de
parámetros las probabilidades de convergencia son muy bajas y los errores de
estimación son mayores.
5.2.4 Caso 5: Estimación de todos los parámetros considerando
eventos externos – Corto-circuito y apertura de línea
Al igual que en el caso anterior, se pretende determinar si la metodología de estimación
puede ser usada para identificar los parámetros del modelo del generador aprovechando
su respuesta dinámica ante eventos en la red externa. En este caso se modificó la red de
prueba, para adicionar una línea entre los nodos 2 y 3, con el proposito de simular un
corto-circuito trifásico en cercanías de la barra 2, durante 100 ms y posteriormente
provocar la salida de la línea fallada. La respuesta del generador sujeto a la prueba de
estimación es registrada, antes y durante el evento para generar el vector de mediciones
ymed . En la siguiente figura se presenta la nueva red y sus condiciones iniciales.
Capitulo 5
93
Carga
G
~
236.9000 kV
1.0300 p.u.
0.0000 deg
82.2123 MW
121.5275 Mvar
-81.2226 MW
-116.9237 ..
Línea 2
Equivalente
de Red
300.0000 MW
150.0000 Mvar
-109.3887 MW
-16.5382 Mvar
110.0000 MW
17.6066 Mvar
Línea 3
-109.3887 MW
-16.5382 Mvar
223.0331 kV
0.9697 p.u.
-1.8920 deg
1
0.0000 MW
0.0000 M..
Generador Trafo Elevador
Bajo Estudio
Línea 1
110.0000 MW
17.6066 Mvar
-220.0000 MW
-35.2131 Mvar
226.1584 kV
0.9833 p.u.
1.1759 deg
2
82.2123 MW
121.5275 Mvar
3
220.0000 MW
54.2282 Mvar
220.0000 MW
54.2282 Mvar
~
G
13.8000 kV
1.0000 p.u.
5.9292 deg
4
Figura 31 Red de prueba para evento externo – Falla 3F en cercanías de barra 2
Para la estimación de los parámetrosDelta
del Carga
modelo del generador bajo estudio
considerando el evento descrito, se partío de un vector de parámetros con una
desviación aleatoria alrededor del 20%. Los resultados del proceso de estimación se
resumen en la siguiente tabla:
94
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Tabla 24 Caso 5: Desviación aleatoria de todos los parámetros alrededor del 20%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
-15.64
-18.37
-1.89
14.45
14.03
9.7
-13.63
-0.56
𝑬𝒆 [%]
-0.0021
-0.0095
-0.0008
0.0016
-0.05
-0.0016
0.0008
-0.12
𝑱(𝒑)
3.6x10-6
No.
Iteraciones
Comentario
14
La estimación es
muy buena. El
algoritmo converge
en 14 iteraciones y
los errores de
estimación son
inferiores al 0.12%.
Para este caso los resultados del proceso de convergencia se presentan en la siguiente
figura:
(a)
Capitulo 5
95
(b)
(c)
Figura 32 Resultados estimación Caso 5: Estimación de todos los parámetros
considerando eventos externos – Corto-circuito y apertura de línea, desviación
aleatoria alrededor del 20% del valor nominal
De la figura anterior puede observarse como el algorítmo reduce el error de estimación
con el paso de las iteración y los parámetros estimados convergen a los parámetros
reales, con lo cual se logra que la simulación del evento sea muy ajustada a los registros.
El algorítmo se corrió nuevamente para el mismo evento externo considerando una
desviación aleatoria del 30% de los parámetros iniciales del modelo del generador.
Los resultados de esta corrida se presentan en la siguiente tabla:
96
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Tabla 25 Caso 5: Desviación aleatoria de todos los parámetros alrededor del 30%
Parámetro
X𝑑
X 𝑞′
X 𝑑′
X 𝑑′′
X 𝑞′′
′
T𝑑0
′′
T𝑑0
′′
T𝑞0
Desviación
inicial [%]
8.9
-19.85
-5.12
-2.98
-25.03
12.85
-15.43
0.95
𝑬𝒆 [%]
3x10-5
4x10-5
4x10-5
4x10-5
-0.025
0.31
1.73
0.003
𝑱(𝒑)
5x10-6
No.
Iteraciones
Comentario
5
La estimación es
muy buena. El
algoritmo converge
en 5 iteraciones y
los errores de
estimación son
inferiores al 2%.
Para este caso los resultados del proceso de convergencia se presentan en la siguiente
figura:
(a)
(b)
Capitulo 5
97
(c)
Figura 33 Resultados estimación Caso 5: Estimación de todos los parámetros
considerando eventos externos – Corto-circuito y apertura de línea, con desviación
aleatoria alrededor del 30% del valor real
En este caso se encontró convergencia del algorítmo de estimación para un vector de
parámetros iniciales con una desviación aleatoria alrededor del 30%. Los resultados son
muy buenos y los parámetros convergen a los parámetros reales.
5.2.5 Caso 6: Estimación de todos los parámetros considerando
el ruido de medición
El objetivo de este caso de sensibilidad se enfoca en determinar como es afectado el
algorítmo de estimación de parámetros al considerar los ruidos propios de medición de
las variables usadas como base para el proceso de estimación.
El ruido de medición se encuentra asociado a la precisión de los instrumentos de medida,
por lo que a mayor precisión, menores serán los niveles de ruido en las señales usadas
para realizar la estimación.
Para simular el ruido en las variables medidas de potencia activa y reactiva, se generaron
componentes con ruido que se suman a la señal sin ruido para la tensión en terminales y
la corriente en el estator del generador bajo prueba. A partir de las nuevas señales de
tensión y corriente, se obtienen las potencias.
98
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
El ruido de medición se simula como una función aleatoria con distribución normal con
media igual a la señal medida (sin ruido) y desviación estándar igual al error de escala
completa de cada uno de los medidores. Con base en lo anterior, las señales de tensón y
corriente afectadas por el ruido de medición simulado se pueden expresar de la siguiente
forma:
𝑉𝑟𝑢𝑖𝑑𝑜 = 𝑉 + 𝑉 (
𝑒𝑓𝑠𝑉
100
𝑒𝑓𝑠𝐼
𝐼𝑟𝑢𝑖𝑑𝑜 = 𝐼 + 𝐼 (
100
∙
∙
𝑉𝑛
𝑉𝑓𝑠
𝐼𝑛
𝐼𝑓𝑠
) 𝑁(0,1)
) 𝑁(0,1)
(5.19)
(5.20)
donde:
𝑉 : Es la tensión en terminales sin ruido [p.u.]
𝑒𝑓𝑠𝑉 : Es el error de escala completa del instrumento de medición en tensión [%]
𝑉𝑛 : Es la tensión nominal en bornes del generador (𝑉𝑛 = 13.8 𝑘𝑉)
𝑉𝑓𝑠 : Es la tensión de escala completa del instrumento de medición, para este caso:𝑉𝑓𝑒 =
20 𝑘𝑉
𝐼: Es la corriente en el estator sin ruido referida a la base del generador [p.u.]
𝑒𝑓𝑠𝐼 : Es el error de escala completa del instrumento de medición en corriente [%]
𝐼𝑛 : Es la tensión nominal en bornes del generador, para este caso: 𝐼𝑛 =
270 𝑀𝑉𝐴⁄(√3 ∙ 13.8 𝑘𝑉) = 11.296 𝑘𝐴
𝐼𝑓𝑠 : Es la corriente de escala completa del instrumento de medición, para este caso 𝐼𝑓𝑒 =
20 𝑘𝐴
𝑁(0,1): Es la función de densidad de probabilidad normal estándar
Después de calcular las señales medidas de tensión y corriente considernado el ruido de
medición, se calculan las potencias activa y reactiva de acuerdo a las siguientes
expresiones.
Capitulo 5
99
𝑃𝑒_𝑟𝑢𝑖𝑑𝑜 = 𝑉𝑟𝑢𝑖𝑑𝑜 𝐼𝑟𝑢𝑖𝑑𝑜 cos(𝐴𝑛𝑔(𝑉 ) − 𝐴𝑛𝑔(𝐼))
(5.21)
𝑄𝑒_𝑟𝑢𝑖𝑑𝑜 = 𝑉𝑟𝑢𝑖𝑑𝑜 𝐼𝑟𝑢𝑖𝑑𝑜 sen(𝐴𝑛𝑔(𝑉 ) − 𝐴𝑛𝑔(𝐼))
(5.22)
Con el uso de las ecuaciones 5.19 a 5.22 se realizaron simulaciones de la respuesta del
generador ante un evento de cambio súbito en la referencia de tensión del AVR; cada
una considerando niveles crecientes en los errores de escala completa 𝑒𝑓𝑠𝑉 y 𝑒𝑓𝑠𝐼 y
asumiendo en todos los casos los parámetros reales del generador. Como resultado se
generó un conjunto de variables medidas 𝑦𝑚𝑒𝑑 con componentes de ruido dado por 𝑒𝑓𝑠𝑉
y 𝑒𝑓𝑠𝐼 entre 0 y 3%. Para cada uno de estos conjuntos se corrió el algorítmo es
estimación partiendo del mismo vector de parámetros iniciales con una desviación inferior
al 20% y se evaluaron los resultados obtenidos. En las siguientes tablas se presentan
dichos resultados:
Tabla 26 Caso 6: Sensibilidad del algoritmo de estimación al ruido de medición
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰
5
𝑬𝒆𝒎𝒂𝒙
[%]
2.9
Algorítmo converge, excelente estimación
3.3x10-6
6
2.9
Algorítmo converge, excelente estimación
0.005
9.6x10-6
7
2.9
Algorítmo converge, excelente estimación
0.0075
4.5x10-6
6
2.9
Algorítmo converge, excelente estimación
0.01
1.3x10-5
20
2.9
0.0125
1.02x10-5
20
2.9
0.015
1.3x10-5
20
2.9
0.02
2.3x10-5
20
2.9
0.025
3.7x10-5
20
2.9
0.03
4.5x10-5
20
2.9
0.06
1.9x10-4
20
3.1
0.08
3.1x10-4
20
2.9
0.1
6x10-4
20
5
0.14
0.0011
20
4.8
Algorítmo muy cerca de convergencia. El error se reduce y
el modelo mejora
Algorítmo muy cerca de convergencia. El error se reduce y
el modelo mejora
Algorítmo muy cerca de convergencia. El error se reduce y
el modelo mejora
Algorítmo cerca de convergencia. El error se reduce y el
modelo mejora
Algorítmo cerca de convergencia. El error se reduce y el
modelo mejora
Algorítmo cerca de convergencia. El error se reduce y el
modelo mejora
Algorítmo no converge. El error se reduce y el modelo
mejora
Algorítmo no converge. El error se reduce y el modelo
mejora
Algorítmo no converge. El error se reduce y el modelo
mejora
Algorítmo no converge. El error se reduce y el modelo
mejora
𝑱(𝒑)
𝑰𝒕𝒆𝒓
0
2.9x10-6
0.0025
[%]
Resultado
100
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰
𝑱(𝒑)
𝑰𝒕𝒆𝒓
0.18
0.0015
20
𝑬𝒆𝒎𝒂𝒙
[%]
7
0.22
0.0025
20
10.6
0.26
0.0032
20
6.9
0.3
0.004
20
11
[%]
Resultado
Algorítmo no converge. El error se reduce a la mitad y el
modelo mejora
Algorítmo no converge. El error se reduce poco pero el
modelo mejora
Algorítmo no converge. El error se reduce poco pero el
modelo mejora
Algorítmo no converge. El error se reduce poco pero el
modelo mejora
En la siguiente figura se presenta en forma gráfica la evolución del error 𝑱(𝒑) con la
precisión en la medida. La calidad de la estimación y la convergencia del algorítmo son
determinadas a través de error 𝑱(𝒑)
Figura 34 Resultados estimación Caso 6: Sensibilidad al ruido de medición
La anterior figura muestra el comportamiento fuertemente no lineal de la calidad de la
estimación de parámetros, al considerar cada vez menor precisión en la medición. Se
observa como a partir de errores de escala completa mayores a 0.08 % se deteriora
fuertemente la calidad de la estimación.
A modo comparativo en las sigiuentes figuras se presentan los resultados del proceso de
estimación para cinco niveles de ruido diferentes, correspondientes a errores de escala
completa 𝑒𝑓𝑠𝑉 y 𝑒𝑓𝑠𝐼 de 0 %, 0.0075 %, 0.02 %, 0.1 % y 0.3%
Capitulo 5
101
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰 de 0 [%]
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰 de 0.0075 [%]
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰 de 0.02 [%]
(a)
(b)
(c)
102
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰 de 0.1 [%]
(d)
𝒆𝒇𝒔𝑽 y 𝒆𝒇𝒔𝑰 de 0.3 [%]
(e)
Figura 35 Resultados estimación Caso 6: Comparación de resultados del proceso de
estimación para diferentes niveles de ruido de medición
Para concluir el análsis de sensibilidad al ruido de medición se seleccionó un caso
particular con un errores de escala completa 𝑒𝑓𝑠𝑉 = 0.2% y 𝑒𝑓𝑠𝐼 = 0.3%, típicos de
medidores convensionales en bornes del generador, y se filtraron las señales con ruido
antes de aplicar el proceso de estimación. Las señales filtradas resultantes se tomaron
como variables medidas y se aplicó el proceso de estimación. Para este caso se
diseñaron dos tipos de filtro, uno pasa bajos y otro de media móvil.
En las siguiente figura se presentan en forma comparativa las señales con ruido
originales y las filtadas con cada uno de los dos tipos de filtro:
Capitulo 5
103
Señales con ruido 𝒆𝒇𝒔𝑽 = 𝟎. 𝟐% y 𝒆𝒇𝒔𝑰 = 𝟎. 𝟑% Vs. Señal con filtro pasa bajos
(a)
Señales con ruido 𝒆𝒇𝒔𝑽 = 𝟎. 𝟐% y 𝒆𝒇𝒔𝑰 = 𝟎. 𝟑% Vs. Señal con filtro de media móvil
Figura 36 Resultados estimación Caso 6: Comparación de señales medidas filtradas
antes del proceso de estimación
En la siguiente figura se presenta el resultado del proceso de estimación de parámetros
usando como datos medidos las señales filtradas a través de un filtro pasa bajos:
(b)
104
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
Resultados con filtro pasa bajos
Resultados con filtro de media móvil
(a)
(b)
Figura 37 Resultados estimación Caso 6: Comparación de resultados del proceso de
estimación. Filtro pasa bajos Vs. Filtro de media móvil
De la figura anteriro puede observarse que el suso de filtros para reducir el ruido derivado
de la medición, no conduce a buenos resultados del proceso de estimación. Esto puede
explicarse a que los filtros usados cambian la fase de las oscilaciones que se producen
después de la perturbación, lo cual altera de forma significativa el error 𝑱(𝒑), el cual es un
parámetro determinante en la estimación.
Con esta sensibilidad puede concluirse que el filtrado de las señales medidas en busca
de reducir el ruido de medición, no lleva a mejores resultados de estimación si se toma
como base la aplicación de la metodología a las señales originales con contenido de
ruido.
De acuerdo con los resultados para la sensibilidad al ruido de medición pueden
concluirse lo siguiente:
En forma general puede decirse que el ruido de medición afecta en forma
determinante el proceso de identificación de parámetros y conduce a la no
convergencia del algoritmo de estimación para errores de escala completa
mayores a 0.0075 %.
Capitulo 5
105
Aunque no se alcanza la convergencia a partir del error de escala completa
mensionado, el algoritmo logra mejorar de forma apreciable el comportamiento
dinámico del modelo, reduciendo el error entre la simulación y las mediciones.
Este comportamiento es verificado para errores de escala completa inferiores a
0.14%.
Para errores de escala completa en los equipos de medición mayores a 0.15%,
adicionalmente a no lograr convergencia, el algoritmo produce resultados
parciales de baja calidad.
La aplicación de filtros convencionales como pasa bajos o media móvil a las
señales medidas, reduce el ruido de medición pero afecta negativamente el
proceso de estimación, conduciendo a la no convergencia del algoritmo y
produciendo resultados no confiables.
5.3 Resumen y observaciones
De acuerdo con los casos estudiados en las sensibilidades a eventos externos, puede
concluirse que el algorítmo de estimación diseñado puede ser usado con éxito
aprovechando la operación normal del generador y el registro de variables como tensión
y potencias activa y reactiva ante perturbaciones externas en el sistema como eventos de
cambio de carga o cortocircuitos en cercanías al generador.
Con base en los resultados presentados en este capítulo, puede concluirse que la
metodología de estimación de parámetros diseñada presenta excelentes resultados al
lograr la correcta identificación de los parámetros del modelo del generador, pudiendo ser
usada tanto bajo ambiente de pruebas en planta al inyectar escalones en la referencia de
tensión del AVR como ante eventos en la red externa. La efectividad del algorítmo se
reduce a medida que los parámetros inicilales se desvían de los reales. Los resultados
indican que para desviaciones inferiores al 20% el algorítmo encontrará con alta
probabilidad parámetros muy cercanos a los reales.
Aun cuando la metodología de estimación de parámetros produce en general buenos
resultados, se debe resaltar una limitación importante relacionada con el ruido del
proceso de medición. Los análisis realizados en este sentido muestran la necesidad de
instrumentos de medición con precisiones extremadamente altas para hacer su uso
106
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
viable en aplicaciones reales. Por otra parte se puede trabajar en el mejoramiento del
algorítmo de estimación para hacerlo mucho más robusto frente al ruido de medición, al
realizar por ejemplo la estimación de parámetros por etapas, abordando primero la
solución del problema para los parámetros con mayores sensibilidades y etapas
posteriores de estimación para otros parámetros, igualmente se puede pensar en usar
diferentes tipos de eventos y determinar cuales se prestan para determinar ciertos
parámetros, mietras se dejan otros fijos a la espera de eventos que hagan viable su
estimación.
6 Conclusiones y recomendaciones
6.1 Conclusiones
A medida que se alcanzan nuevos límites en el cada vez más estresado sistema de
potencia, es cada vez más importante refinar los modelos matemáticos del sistema. Esta
demostrado que la planeación correcta del sistema depende en gran medida de los
modelos con los que se planea y opera el sistema, estos modelos requieren de gran
precisión si se pretenden dar las señales adecuadas para garantizar la calidad y
seguridad operativas. En este orden de ideas, la determinación y validación de los
parámetros del modelo dinámico, no solo del generador sino del resto de elementos del
sistema de potencia es una necesidad plenamente justificada. Esta tesis hizo una
revisión básica del estado del arte en torno al tema de estimación de parámetros del
modelo del generador sincrónico. Se evidenciaron una gran cantidad de aproximaciones
para dar respuesta a este requerimiento y se concluyó que todavía sigue siendo un tema
de gran interés académico y por lo tanto se pueden esperar mayores avances en esta
materia.
El presente trabajo de tesis presentó una metodología que entrega buenos resultados, al
tiempo que exije la menor intervención posible sobre el generador y sus controles
asociados.
Se desarrolló una metodología de estimación de parámetros basada en sensibilidad de
trayectoria que puede mejorar ostensiblemente los modelos de generadores sincrónicos
usados para la planeación del sistema. Aunque los buenos resultados están limitados a
desviaciones máximas cercanas al 20% de los parámetros, la técnica implementada es
una buena herramienta para la estimación de los parámetros del generador. En muchos
casos, aun cuando no se logre la convergencia del algoritmo para desviaciones de los
parámetros superiores al 20%, los resultados parciales mejoran el modelo del que
inicialmente se ha partido, lo cual extiende la aplicabilidad de la herramienta propuesta.
Mediante el diseño casos de sensibilidad adicionales, pudo comprobarse que la
metodología de estimación propuesta no solo puede ser aplicada con éxito en ambientes
de prueba controlados sobre el sistema de excitación, sino también a través de la captura
del comportamiento dinámico del generador como respuesta a eventos externos en la red
de transmisión. Se estableció que pueden usarse los registros ante eventos de cambio
de carga súbitos y cortocircuitos en cercanías al generador.
Aunque la técnica de estimación implementada entrega en general muy buenos
resultados, se observaron limitaciones, no solo en casos donde las desviaciones en los
108
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
parámetros son mayores al 20%, sino en casos en los que los ruidos propios del proceso
de medición son los típicos. Esto hace que deban usar medidores de muy alta precisión.
Se demostró igualmente que la aplicación de técnicas de filtrado convensionales no
llevan a mejores estimaciones.
6.2 Recomendaciones
Para dar continuidad al mejoramiento de la herramienta propuesta, se debe
trabajar en el incremento de la robustez de la misma; entendiendo la robustez
como la capacidad del algoritmo para converger y dar excelentes resultados para
desviaciones
iniciales
mayores
al
20%
en
los
parámetros
iniciales.
Adicionalmente se debe trabajar en la tolerancia del algoritmo a los errores de
medición para extender su uso con medidores comunes.
Con base en el análisis realizado a las sensibilidades y con el objetivo de mejorar
la robustez es posible profundizar en variantes a la metodología propuesta, tales
como la realización de la estimación de parámetros en dos o más fases, basadas
en la estimación de los parámetros con sensibilidades más grandes en las
primetras etapas, para continuar con la estimación de los parámetros con
menores sensibilidades en etapas posteriores.
Un camino paralelo de desarrollo debe encaminarse al uso de mediciones de las
variables de salida del generador a través de PMUs (Unidades de Medición
Fasorial) y su posible aplicación para medir el ángulo del rotor del generador, con
lo cual se podría mejorar el proceso de estimación.
Bibliografía
[1]
J. Machowski, J. W. Bialek, and J. R. Bumby, Power system dynamics stability
and control. Chichester, U.K.: Wiley, 2008.
[2]
P. Kundur, Power system stability and control. New York: McGraw-Hill, 1994.
[3]
P. C. Krause, Analysis of electric machinery and drive systems, 2nd ed. New York:
IEEE Press, 2002.
[4]
Institute of Electrical and Electronics Engineers and IEEE-SA Standards Board,
IEEE guide for test procedures for synchronous machines. Part I, Part II, Acceptance and
performance testing. Test procedures and parameter determination for dynamic analysis.
New York: Institute of Electrical and Electronics Engineers, 2010.
[5]
M. Ghomi and Y. N. Sarem, “Review of synchronous generator parameters
estimation and model identification,” in Universities Power Engineering Conference, 2007.
UPEC 2007. 42nd International, 2007, pp. 228–235.
[6]
E. P. T. Cari, “Estimaçao dos Parmetros da màquina sìncrona e seu sistema de
excitaçao.” Dissertaçao de Mestrado apresentada `a Escola de Engenharia de São
Carlos, da Universidade de São Paulo, 2005.
[7]
M. Karrari and O. P. Malik, “Identification of physical parameters of a synchronous
generator from on-line measurements,” in IEEE Power Engineering Society General
Meeting, 2003, 2003, vol. 3, p. -.
[8]
I. M. Canay, “Determination of the model parameters of machines from the
reactance operators xd(p), xq (p) (evaluation of standstill frequency response test),” IEEE
Trans. Energy Convers., vol. 8, no. 2, pp. 272–279, Jun. 1993.
[9]
J. W. Dougherty and S. H. Minnich, “Finite Element Modeling of Large Turbine
Generators; Calculations Versus Load Test Data,” IEEE Trans. Power Appar. Syst., vol.
PAS-100, no. 8, pp. 3921–3929, Aug. 1981.
[10]
K. Weeber, “Determination of dynamic parameters of large hydro-generators by
finite-element simulation of three-phase sudden short-circuit tests,” in Electric Machines
and Drives Conference Record, 1997. IEEE International, 1997, pp. MC1/13.1–MC1/13.3.
[11]
H. B. Karayaka, A. Keyhani, G. T. Heydt, B. L. Agrawal, and D. A. Selin,
110
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
“Synchronous generator model identification and parameter estimation from operating
data,” IEEE Trans. Energy Convers., vol. 18, no. 1, pp. 121–126, 2003.
[12]
E. P. T. Cari, L. F. C. Alberto, and N. G. Bretas, “A methodology for parameter
estimation of synchronous generators based on trajectory sensitivity and synchronization
technique,” in IEEE Power Engineering Society General Meeting, 2006, 2006, p. 6 pp.–.
[13]
M. T. Mendoza, E. Ruppert, and J. C. P. Suni, “Using trajectory sensitivity for
different models and operation conditions for synchronous generator parameter
estimation,” in 2010 XIX International Conference on Electrical Machines (ICEM), 2010,
pp. 1–6.
[14]
J. J. Sanchez-Gasca, C. J. Bridenbaugh, C. E. J. Bowler, and J. S. Edmonds,
“Trajectory sensitivity based identification of synchronous generator and excitation system
parameters,” IEEE Trans. Power Syst., vol. 3, no. 4, pp. 1814–1822, Nov. 1988.
[15]
L. . Aguirre, “Controllability and observability of linear systems: some noninvariant
aspects,” IEEE Trans. Educ., vol. 38, no. 1, pp. 33–39, Feb. 1995.
[16]
Concordia, C., “Synchronous Machines. Theory and Performance.” John Wiley &
Sons, Inc., Nwe York-1951.
[17]
“Recommended Phasor Diagram for Synchronous Machines,” IEEE Trans. Power
Appar. Syst., vol. PAS-88, no. 11, pp. 1593–1610, Nov. 1969.
[18]
“IEEE Recommended Practice for Excitation System Models for Power System
Stability Studies,” IEEE Std 4215-2005 Revis. IEEE Std 4215-1992, pp. 0_1–85, 2006.
[19]
A. Ioinovici, Computer-aided analysis of active circuits. New York: M. Dekker,
1990.
[20]
W. H. Press, Ed., Numerical recipes in C: the art of scientific computing, 2nd ed.
Cambridge ; New York: Cambridge University Press, 1992.
[21]
DIgSILENT GmbH, “DIgSILENT Technical Documentation - General Load Model,
Build 507 30.10.2008.” 2008.
[22]
Institute of Electrical and Electronics Engineers. and IEEE-SA Standards Board.,
IEEE guide for test procedures for synchronous machines. Part I, Part II, Part I, Part II,.
New York: Institute of Electrical and Electronics Engineers, 2010.
[23]
Chen, Y., Zhang, C., Hu, Z. e Wang, X. (2000). A new approach to real time
measurement of power angles of generators at different locations for stability control,
IEEE Power Engineering Society Winter Meeting 2: 1237–1242.
[24]
IEEE Committee Report. "Current Usage and Suggested practices in Power
System Stability Simulations for Synchronous Machines", IEEE Transactions on Energy
Conversion, Vol. EC- I, No. 1, March 1986, pp. 77-93.
Bibliografía
[25]
111
H. Saadat, Power System McGraw-Hill Inc., 1999.
[26]
Dandeno P.L., Kundur, P., Poray, A-T, Coultes, ME,, "Validation of
Turbogenerator Stability Models by Comparison with Power System Tests", IEEE Trans.
on Power Apparatus and Systems, Vol. PAS-100, No. 4, April 1981. pp. 1637- 1645.
[27]
Dandeno, P.L., Poray, A.T.," Development of Detailed Turbogenerator Equivalent
Circuits from Standstill Frequency Response Measurements", IEEE Trans. on Power
Apparatus and Systems, Vol. PAS-100, No. 4, April 198 1. pp. 1646- 1655.
[28]
Canay, I.M., "Determination of Model Parameters of Machines From The
Reactance Operators Xd(s), Xq(s)", IEEE Trans. on Energy Conversion. Vol. EC-8, No. 2,
June 1993, pp.272-279.
[29]
Minnich,S.H., Schulz, R.P ., Baker, D.H., Farmer, R.G. ,Sharma, D.K.,Fish,J.H.,
"Saturation Functions For Synchronous Generators From Finite Elements", IEEE Trans.
on Energy Conversion, Vol. EC-2, No. 4. Dec. 1987, pp. 680-692.
[29]
Zali, S. M. Ariffin, A. E. Mohamed, A. e A., H. (2000). Implementation of
synchronous machine parameter derivation in matlab, IEEE TENCON 2000. Proceedings
1: 218–223.
[30]
Vermeulen, H., Strauss, J. M. e J.M., S. (2002). Online estimation of synchronous generator parameters using prbs perturbations, IEEE Transactions on Power
System 17: 694–700.
[31]
Weeber, K. (1997). Determination of dynamic parameter of large hydrogenerators by finite element simulation of three phase sudden short circuit tests, Electric
Machines and Drives Conference Record 10.
[32]
Soliman, S. A. e Alkandari, A. (1996). Optimal parameter estimation of synchronous machines from the digitized sudden short-circuit armature current, IEEE
AFRICON 4th 1.
[33]
Tomovic, R. (1963). Sensitivity Analysis of Dynamic System, McGraw-Hill.
[34]
Touhami, O., Guesbaoni, H. e Iung, C. (1994). Synchronous machine parameter
identification by a multitime scale technique, IEEE Transactions on Industry Applications
30.
[35]
Tso, S. K. e Cheung, S. P. (1994). Consideration of excitation control for transient
stability assessment, Proccedings of the Third IEEE Conference on Control Application 1:
485–490.
[36]
HUANG, Z.; KOSTEREV, M.; GUTTROMSON, R.; NGUYEN, T. Model validation
with hybrid dynamic simulation. Power Engineering Society General Meeting, 2006. IEEE,
p. 9 pp.–, June 2006.
112
Estimación de los Parámetros del Modelo Matemático del Generador Sincrónico
[37]
HUANG, Z.; KOSTEREV, M.; GUTTROMSON, R.; NGUYEN, T. Model validation
of power system components using hybrid dynamic simulation. Power Engineering
Society General Meeting, 2007. IEEE, p. 9 pp.–, June 2007.
[38]
HUANG, Z.; YANG, B.; KOSTEREV, D. Benchmarking of planning models using
recorded dynamics. IEEE Power and Energy Society Power Systems Conference and
Exposition 2009, Seattle, WA, 2009.
[39]
CIPRIANI, E.; COSTA, A. J. A. S. Ana ́lise de observabilidade e criticidade de
medi- das na estimac ̧ ̃ao de estados em sistemas de potˆencia considerando medi ̧c ̃oes
fasoriais sincronizadas. Congresso Brasileiro de Autom ́atica - CBA, Bonito, MS,
Setembro 2010.
[40]
ARRILLAGA, J.; ARNOLD, C. P.; HARKER, B. J. Computer Modelling of Electrical
Power Systems. [S.l.]: John Wiley & Sons, 1983.
[41]
BURTH, M.; VERGHESE, G. C.; V ́eLES-REYES, M. Subset selection for
improved parameter estimation in on-line identification of a synchronous generator. IEEE
Transactions on Power Systems, 1999.
[42]
ONG, Chee – Mung, “Dynamic Simulation of Electric Machinery”, Prentice
Hall,1998.
[43]
EMGESA, “Informe de Homologación C.H. El Guavio – Unidad 1, Informe Técnico
EE-ES-2012-324”, Estudios Eléctricos, 28 de septiembre de 2102.
A. Anexo 1: Código en Matlab Para la
Simulación del Sistema de Potencia de
Prueba
Anexo 1
114
El siguiente código es usado para simular el generador sincrónico bajo prueba conectado
al sistema de potencia de la Figura 15. Este script es usado como una función que es
llamada por el optimizador en cada iteración para obtener las sensibilidades de
trayectoria de las salidas con respecto a los parámetros y las salidas simuladas con un
juego de parámetros de entrada. Las condiciones iniciales del sistema y el evento
simulado deben ser modificadas en este script para el caso correspondiente a las salidas
reales registradas.
function [ycalc,tiempo,Lambda_y] = Modelo_Gen_AVR_P_Sens_Explicitas (P)
%% Modelo de generador sincrÛnico - trafo elevador - linea conectado a
barra infinita.
% este modelo representa una maquina sincrÛnica con el modelo de
% quinto orden Machowski pg. 455, Este modelo considera que Xq'= Xq y
Ed'= 0:
%
%
%
%
%
wp = (wn/2H)(Pm - Pe)
dp = w - wn
Eq'p = (Efd - Eq' + Id(Xd - Xd'))/T'd0
Eq''p = (Eq' - Eq'' + Id(Xd' - Xd''))/T''d0
Ed''p = (Ed' - Ed'' - Iq(Xq' - Xq''))/T''q0
% Pe = Ed''Id + Eq''Iq + (Xd'' - Xq'')IdIq
% Qe = Ed''Iq - Eq''Id - Xd''Id^2 - Xq''Iq^2 - re*(Id-Iq)
%
%% Define por teclado el evento a simular
%
clear all
%
disp('Defina el evento a simular');
%
disp('1 >>> Step Vref AVR Gen4, 2 >>> Incremento de Carga Nodo2,
3 >>> ReducciÛn de Carga Nodo2 4 >>> Sin evento');
%
evento= input('Tipo de Evento =');
%
disp('Defina el tiempo del evento en segundos');
%
Tevento= input('Tevento =');
Tend=10;
% Tiempo total de simulaciÛn
dt=0.01;
% paso integracion
evento=1;
% Tipo de evento
Tevento=0.05;
% Tiempo de ocurrencia del evento
%% Reserva espacio en memoria para las variables de resultados, haciendo
vectores de ceros con el
% n˙mero de puntos a simular
numpuntos=1+(Tend/0.01);
speed1=zeros(1,numpuntos);
speed4=zeros(1,numpuntos);
Delta1=zeros(1,numpuntos);
Delta4=zeros(1,numpuntos);
Ve4=zeros(1,numpuntos);
teta1=zeros(1,numpuntos);
teta2=zeros(1,numpuntos);
teta4=zeros(1,numpuntos);
Anexo 1
fehz1=zeros(1,numpuntos);
fehz4=zeros(1,numpuntos);
fehz2=zeros(1,numpuntos);
PE1=zeros(1,numpuntos);
PE4=zeros(1,numpuntos);
PM1=zeros(1,numpuntos);
PM4=zeros(1,numpuntos);
AbsV1=zeros(1,numpuntos);
AbsV2=zeros(1,numpuntos);
AbsV3=zeros(1,numpuntos);
AbsV4=zeros(1,numpuntos);
AngV1=zeros(1,numpuntos);
AngV2=zeros(1,numpuntos);
AngV3=zeros(1,numpuntos);
AngV4=zeros(1,numpuntos);
AbsI1=zeros(1,numpuntos);
AbsI4=zeros(1,numpuntos);
AngI1=zeros(1,numpuntos);
AngI4=zeros(1,numpuntos);
Q1=zeros(1,numpuntos);
Q4=zeros(1,numpuntos);
tiempo=zeros(1,numpuntos);
% Sensibilidades
Lamda_Pe_Xd=zeros(1,numpuntos);
Lamda_Qe_Xd=zeros(1,numpuntos);
Lamda_Pe_Xqp=zeros(1,numpuntos);
Lamda_Qe_Xqp=zeros(1,numpuntos);
Lamda_Pe_Xdp=zeros(1,numpuntos);
Lamda_Qe_Xdp=zeros(1,numpuntos);
Lamda_Pe_Xdpp=zeros(1,numpuntos);
Lamda_Qe_Xdpp=zeros(1,numpuntos);
Lamda_Pe_Xqpp=zeros(1,numpuntos);
Lamda_Qe_Xqpp=zeros(1,numpuntos);
Lamda_Pe_Tdp0=zeros(1,numpuntos);
Lamda_Qe_Tdp0=zeros(1,numpuntos);
Lamda_Pe_Tdpp0=zeros(1,numpuntos);
Lamda_Qe_Tdpp0=zeros(1,numpuntos);
Lamda_Pe_Tqpp0=zeros(1,numpuntos);
Lamda_Qe_Tqpp0=zeros(1,numpuntos);
%% Par·metros en p.u. con Sbase=100MVA
SBase=100;
% Barra infinita (BI).
| Generador bajo estudio
% Se modela como un Gen
| m·quina de Guavio
% de Sn1=10000MVA.
| Sn4=270MVA.
%
|
Sn1=10000;
Sn4=270;
Base1=Sn1/SBase;
Base4=Sn4/SBase;
r1=0/Base1;
r4=0/Base4;
Xd1=1.15/Base1;
Xd4=P(1);
Xq1=0.4026/Base1;
Xq4=P(2);
Xdp1=0.3483/Base1;
Xdp4=P(3);
Xqp1=Xq1;
Xqp4=P(2);
Xdpp1=0.2501/Base1;
Xdpp4=P(4);
Xqpp1=0.3155/Base1;
Xqpp4=P(5);
115
Anexo 1
H1=5*Base1;
Kd1=0;
Tdp01=7.75;
Tdpp01=0.0608;
Tqpp01=0.0607;
116
H4=4*Base4;
Kd4=0;
Tdp04=P(6);
Tdpp04=P(7);
Tqpp04=P(8);
% Trafo Elevador 13.8/230kV, tap en posisicon central, Xt=10%
SnT=270;
Base=SnT/SBase;
Xt=0.1/Base;
% Tipo de lÌnea a 230kV, 50km, X=0.5Ohm/km, R=0.05Ohm/km, YL=2uS/km
L=50;
XL=0.5;
RL=0.05;
YL=2;
VL=230;
Xl=XL*L*(SBase/VL^2);
Rl=RL*L*(SBase/VL^2);
Yl=YL*L/(SBase/VL^2)/1000000;
Gl=Rl/(Rl^2+Xl^2);
Bl=-Xl/(Rl^2+Xl^2);
Yl=Yl/2;
% Par·metros AVR
kp=52.4;
% ti=0.2;
%% ConstrucciÛn de Ybarra sin inyecciones (sin Generadores ni cargas)
% En la diagonal se suman todos los elementos conectados a cada nodo
Y(1,1)=complex(Gl,Bl+Yl) ;
Y(2,2)=2*complex(Gl,Bl+Yl);
Y(3,3)=complex(Gl,Bl+Yl)+complex(0,-1/Xt);
Y(4,4)=complex(0,-1/Xt) ;
% Fuera de la diagonal se pone el negativo de la suma de todos los
elementos entre nodos
Y(1,2)=-complex(Gl,Bl);
Y(2,1)=-complex(Gl,Bl);
Y(2,3)=-complex(Gl,Bl);
Y(3,2)=-complex(Gl,Bl);
Y(3,4)=-complex(0,-1/Xt);
Y(4,3)=-complex(0,-1/Xt);
Y(4,1)= 0;
Y(1,4)= 0;
Y(3,1)= 0;
Y(1,3)= 0;
Y(4,2)= 0;
Y(2,4)= 0;
%% El caso se monta en DigSilent Power Factory 14.1.3 y se corre flujo
de carga sin depencia de tensiÛn.
% de este flujo salen como resultado los siguientes voltajes y ·ngulos
DegtoRad = pi/180; %llevar grados a radianes
MagV = [1.03; 0.9604; 0.9834; 1.0000];
AngV = [0.00; -1.8955; 4.3162; 9.0690]*DegtoRad;
% Vector de voltajes en los nodos
V = [complex(MagV(1)*cos(AngV(1)), MagV(1)*sin(AngV(1)));
complex(MagV(2)*cos(AngV(2)), MagV(2)*sin(AngV(2))); ...
Anexo 1
117
complex(MagV(3)*cos(AngV(3)), MagV(3)*sin(AngV(3)));
complex(MagV(4)*cos(AngV(4)), MagV(4)*sin(AngV(4)))];
%% C·lculo de la corriente de las inyecciones en cada nodo y con esta se
calculan las potencias S de las
% inyecciones en cada nodo
I=Y*V;
S=[V(1)*conj(I(1)), V(2)*conj(I(2)), V(3)*conj(I(3)), V(4)*conj(I(4))];
% Se comparan los valores de S obtenidos y se comprueba que corresponden
% a los del DigSilent
%
%% Se agrega a Ybarra las Y Norton equivalente de los generadores y se
calcula la saliencia
YNort1 = complex(r1,-0.5*(Xdpp1+Xqpp1))/(r1^2+Xdpp1*Xqpp1);
%
Notas de clase Joen
YNort4 = complex(r4,-0.5*(Xdpp4+Xqpp4))/(r4^2+Xdpp4*Xqpp4);
%
Notas de clase Joen
Y(1,1)= Y(1,1)+YNort1;
Y(4,4)= Y(4,4)+YNort4;
% C·lculo de la saliencia subtransitoria. Se requiere m·s adelante
para
% calcular la corriente inyectada por los generadores
Ysalpp1 = complex(r1,0.5*(Xdpp1-Xqpp1))/(r1^2+Xdpp1*Xqpp1);
Ysalpp4 = complex(0,0.5*(Xdpp4-Xqpp4))/(r4^2+Xdpp4*Xqpp4);
%% Carga de la barra 2 P=300MW, Q=150MVar. Se corrige con la fucniÛn
CargaVF que recalcula P y Q con los
% Factores de dependencia del voltaje y la frecuencia
[P2,Q2] = CargaVf (abs(V(2)), 60, 0, -S(2));
%% C·lculo de las condiciones iniciales de la m·quina bajo estudio y
la barra infinita
wn=60*2*pi();
w1=wn;
w4=wn;
Pm1=real(S(1));
Pm4=real(S(4));
Eq1=V(1)+ complex(r1,Xq1)*I(1);
Eq4=V(4)+
complex(r4,Xq4)*I(4);
% Diagrama fasorial gen
Kundur pg. 183
delta1=angle(Eq1);
delta4=angle(Eq4);
% Diagrama fasorial gen Kundur pg. 183
Id1=-sin(delta1)*real(I(1))+cos(delta1)*imag(I(1)); Id4=sin(delta4)*real(I(4))+cos(delta4)*imag(I(4));
% Notas de clase joen
pg. 25
Iq1=cos(delta1)*real(I(1))+sin(delta1)*imag(I(1));
Iq4=cos(delta4)*real(I(4))+sin(delta4)*imag(I(4));
% Notas de clase
joen pg. 25
Vd1=-sin(delta1)*real(V(1))+cos(delta1)*imag(V(1)); Vd4=sin(delta4)*real(V(4))+cos(delta4)*imag(V(4));
% Notas de clase joen
pg. 25
Vq1=cos(delta1)*real(V(1))+sin(delta1)*imag(V(1));
Vq4=cos(delta4)*real(V(4))+sin(delta4)*imag(V(4));
% Notas de clase
joen pg. 25
Eqpp1=r1*Id1-Id1*(Xdpp1)+Vq1;
Eqpp4=r4*Id4Id4*(Xdpp4)+Vq4;
% Notas de clase joen pg. 19
Edpp1=Iq1*(Xqpp1)+Vd1;
Edpp4=Iq4*(Xqpp4)+Vd4;
% Notas de clase
joen pg. 19
Anexo 1
118
Eqp1=-Id1*(Xdp1-Xdpp1)+Eqpp1;
Xdpp4)+Eqpp4;
Edp1=0;
Edp=Iq*(Xqp-Xqpp)+Edpp;
Efd1=abs(Eq1)-(Xd1-Xq1)*Id1;
Xq4)*Id4;
Chee Mun Ong M1.m
Eqp4=-Id4*(Xdp4% Derivada = 0 en ecuacion de Eqpp
Edp4=0;
% ---->
% Derivada = 0 en ecuacion de Edpp
Efd4=abs(Eq4)-(Xd4% Machowsky fig. 11.8 y Aparece en
Pe1=(Edpp1*Id1+Eqpp1*Iq1)+(Xdpp1-Xqpp1)*Id1*Iq1-r1*(Id1^2+Iq1^2);
% Machowsky Eq. 11.102
Qe1=(Edpp1*Iq1-Eqpp1*Id1)-Xdpp1*Id1^2-Xqpp1*Iq1^2-r1*(Id1-Iq1);
Pe4=(Edpp4*Id4+Eqpp4*Iq4)+(Xdpp4-Xqpp4)*Id4*Iq4-r4*(Id4^2+Iq4^2);
% Machowsky Eq. 11.102
Qe4=(Edpp4*Iq4-Eqpp4*Id4)-Xdpp4*Id4^2-Xqpp4*Iq4^2-r4*(Id4-Iq4);
Vref=abs(V(4))+Efd4/kp;
%xAVR=Efd4;
% CI AVR control P
% CI AVR control PI
% CI Sensibilidades
L_w_Xd=0; L_delta_Xd=0; L_Eqp_Xd=0; L_Eqpp_Xd=0; L_Edpp_Xd=0; L_Id_Xd=0;
L_Iq_Xd=0;
L_w_Xqp=0; L_delta_Xqp=0; L_Eqp_Xqp=0; L_Eqpp_Xqp=0; L_Edpp_Xqp=0;
L_Id_Xqp=0; L_Iq_Xqp=0;
L_w_Xdp=0; L_delta_Xdp=0; L_Eqp_Xdp=0; L_Eqpp_Xdp=0; L_Edpp_Xdp=0;
L_Id_Xdp=0; L_Iq_Xdp=0;
L_w_Xdpp=0; L_delta_Xdpp=0; L_Eqp_Xdpp=0; L_Eqpp_Xdpp=0; L_Edpp_Xdpp=0;
L_Id_Xdpp=0; L_Iq_Xdpp=0;
L_w_Xqpp=0; L_delta_Xqpp=0; L_Eqp_Xqpp=0; L_Eqpp_Xqpp=0; L_Edpp_Xqpp=0;
L_Id_Xqpp=0; L_Iq_Xqpp=0;
L_w_Tdp0=0; L_delta_Tdp0=0; L_Eqp_Tdp0=0; L_Eqpp_Tdp0=0; L_Edpp_Tdp0=0;
L_Id_Tdp0=0; L_Iq_Tdp0=0;
L_w_Tdpp0=0; L_delta_Tdpp0=0; L_Eqp_Tdpp0=0; L_Eqpp_Tdpp0=0;
L_Edpp_Tdpp0=0; L_Id_Tdpp0=0; L_Iq_Tdpp0=0;
L_w_Tqpp0=0; L_delta_Tqpp0=0; L_Eqp_Tqpp0=0; L_Eqpp_Tqpp0=0;
L_Edpp_Tqpp0=0; L_Id_Tqpp0=0; L_Iq_Tqpp0=0;
%% Proceso alternado hasta compatibilizar ecuaciones de red y de
m·quinas
p=0; t=-dt;
% para el primer paso sea t=0
while t<Tend-dt
t=t+dt;
% Incrementa el tiempo con dt
p=p+1;
% Incrementa el punto actual
eventoactivado=0;
% disp(['t=', num2str(t)]);
% Muestra el tiempo actual en la
ventana de command
%% El mÈtodo trapezoidal sirve para resolver las ecuaciones
% diferenciales del generador. Este mÈtodo debe estimar los valores
% futuros (en p+1) de las variables de estado. El mÈtodo trapezoidal
se
% enuncia asÌ:
% sea dy/dx = f(x,y)
% Se debe minimizar el error cuadratico E, dado por E =
Anexo 1
119
sqrt(sumatoria (y(p+1)-y(p))^2)
% para y(p+1) = y(p) + (dt/2)*(f(x(p),y(p)) + f(x(p+1),y(p+1))
% Para cada dt calcula los valores actuales de las variables de
estado de los generadores
% y de acuerdo al mÈtodo trapezoidal calcula el tÈrmino y(p) +
(dt/2)*(f(x(p),y(p))
w1old = w1+(0.5*dt*wn/(2*H1))*(Pm1-Pe1-Kd1*(w1-wn));
w4old = w4+(0.5*dt*wn/(2*H4))*(Pm4-Pe4-Kd4*(w4-wn));
delta1old = delta1+0.5*dt*(w1-wn);
delta4old = delta4+0.5*dt*(w4-wn);
% Aqui vamos a poner a funcionar el AVR, usar un AVR P, luego un PI
y luego el de guavio°°°°
Efd4 = (Vref-abs(V(4)))*kp;
%xoldAVR = xAVR+0.5*dt*Kp*(Vref-abs(V(4)))/Ti;
%dEfd4 = xAVR+Kp*(Vref-abs(V(4)));
Eqp1old = Eqp1+(0.5*dt/Tdp01 )*(Efd1-Eqp1+Id1*(Xd1-Xdp1));
Eqp4old = Eqp4+(0.5*dt/Tdp04 )*(Efd4-Eqp4+Id4*(Xd4-Xdp4));
%Edp1old = Edp1+(0.5*dt/Tqp01)*(-Edp1-Iq1*(Xq1-Xqp1));
%Edp4old = Edp4+(0.5*dt/Tqp04)*(-Edp4-Iq4*(Xq4-Xqp4));
Eqpp1old = Eqpp1+(0.5*dt/Tdpp01)*(Eqp1-Eqpp1+Id1*(Xdp1-Xdpp1));
Eqpp4old = Eqpp4+(0.5*dt/Tdpp04)*(Eqp4-Eqpp4+Id4*(Xdp4-Xdpp4));
Edpp1old = Edpp1+(0.5*dt/Tqpp01)*(Edp1-Edpp1-Iq1*(Xqp1-Xqpp1));
Edpp4old = Edpp4+(0.5*dt/Tqpp04)*(Edp4-Edpp4-Iq4*(Xqp4-Xqpp4));
% Sensibilidades con respecto a Xd
L_w_Xd_old = L_w_Xd+0.5*dt*0;
L_delta_Xd_old = L_delta_Xd+0.5*dt*L_w_Xd;
L_Eqp_Xd_old = L_Eqp_Xd+0.5*dt*(Id4/Tdp04 - L_Eqp_Xd/Tdp04 +
(L_Id_Xd*(Xd4 - Xdp4))/Tdp04);
L_Eqpp_Xd_old = L_Eqpp_Xd+0.5*dt*(L_Eqp_Xd/Tdpp04 - L_Eqpp_Xd/Tdpp04
+ (L_Id_Xd*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Xd_old = L_Edpp_Xd+0.5*dt*(-L_Edpp_Xd/Tqpp04 - (L_Iq_Xd*(Xqp4
- Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Xqp
L_w_Xqp_old = L_w_Xqp+0.5*dt*0;
L_delta_Xqp_old = L_delta_Xqp+0.5*dt*L_w_Xqp;
L_Eqp_Xqp_old = L_Eqp_Xqp+0.5*dt*((L_Id_Xqp*(Xd4 - Xdp4))/Tdp04 L_Eqp_Xqp/Tdp04);
L_Eqpp_Xqp_old = L_Eqpp_Xqp+0.5*dt*(L_Eqp_Xqp/Tdpp04 L_Eqpp_Xqp/Tdpp04 + (L_Id_Xqp*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Xqp_old = L_Edpp_Xqp+0.5*dt*(- Iq4/Tqpp04 - L_Edpp_Xqp/Tqpp04
- (L_Iq_Xqp*(Xqp4 - Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Xdp
L_w_Xdp_old = L_w_Xdp+0.5*dt*0;
L_delta_Xdp_old = L_delta_Xdp+0.5*dt*L_w_Xdp;
L_Eqp_Xdp_old = L_Eqp_Xdp+0.5*dt*((L_Id_Xdp*(Xd4 - Xdp4))/Tdp04 L_Eqp_Xdp/Tdp04 - Id4/Tdp04);
L_Eqpp_Xdp_old = L_Eqpp_Xdp+0.5*dt*(Id4/Tdpp04 + L_Eqp_Xdp/Tdpp04 L_Eqpp_Xdp/Tdpp04 + (L_Id_Xdp*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Xdp_old = L_Edpp_Xdp+0.5*dt*(- L_Edpp_Xdp/Tqpp04 -
Anexo 1
120
(L_Iq_Xdp*(Xqp4 - Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Xdpp
L_w_Xdpp_old = L_w_Xdpp+0.5*dt*0;
L_delta_Xdpp_old = L_delta_Xdpp+0.5*dt*L_w_Xdpp;
L_Eqp_Xdpp_old = L_Eqp_Xdpp+0.5*dt*((L_Id_Xdpp*(Xd4 - Xdp4))/Tdp04 L_Eqp_Xdpp/Tdp04);
L_Eqpp_Xdpp_old = L_Eqpp_Xdpp+0.5*dt*(L_Eqp_Xdpp/Tdpp04 - Id4/Tdpp04
- L_Eqpp_Xdpp/Tdpp04 + (L_Id_Xdpp*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Xdpp_old = L_Edpp_Xdpp+0.5*dt*(- L_Edpp_Xdpp/Tqpp04 (L_Iq_Xdpp*(Xqp4 - Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Xqpp
L_w_Xqpp_old = L_w_Xqpp + 0.5*dt*0;
L_delta_Xqpp_old = L_delta_Xqpp + 0.5*dt*L_w_Xqpp;
L_Eqp_Xqpp_old = L_Eqp_Xqpp + 0.5*dt*((L_Id_Xqpp*(Xd4 - Xdp4))/Tdp04
- L_Eqp_Xqpp/Tdp04);
L_Eqpp_Xqpp_old = L_Eqpp_Xqpp + 0.5*dt*(L_Eqp_Xqpp/Tdpp04 L_Eqpp_Xqpp/Tdpp04 + (L_Id_Xqpp*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Xqpp_old = L_Edpp_Xqpp + 0.5*dt*(Iq4/Tqpp04 L_Edpp_Xqpp/Tqpp04 - (L_Iq_Xqpp*(Xqp4 - Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Tdp0
L_w_Tdp0_old = L_w_Tdp0 + 0.5*dt*0;
L_delta_Tdp0_old = L_delta_Tdp0 + 0.5*dt*L_w_Tdp0;
L_Eqp_Tdp0_old = L_Eqp_Tdp0 + 0.5*dt*((L_Id_Tdp0*(Xd4 - Xdp4))/Tdp04
- (Efd4 - Eqp4 + Id4*(Xd4 - Xdp4))/Tdp04^2 - L_Eqp_Tdp0/Tdp04);
L_Eqpp_Tdp0_old = L_Eqpp_Tdp0 + 0.5*dt*(L_Eqp_Tdp0/Tdpp04 L_Eqpp_Tdp0/Tdpp04 + (L_Id_Tdp0*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Tdp0_old = L_Edpp_Tdp0 + 0.5*dt*(- L_Edpp_Tdp0/Tqpp04 (L_Iq_Tdp0*(Xqp4 - Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Tdpp0
L_w_Tdpp0_old = L_w_Tdpp0 + 0.5*dt*0;
L_delta_Tdpp0_old = L_delta_Tdpp0 + 0.5*dt*L_w_Tdpp0;
L_Eqp_Tdpp0_old = L_Eqp_Tdpp0 + 0.5*dt*((L_Id_Tdpp0*(Xd4 Xdp4))/Tdp04 - L_Eqp_Tdpp0/Tdp04);
L_Eqpp_Tdpp0_old = L_Eqpp_Tdpp0 + 0.5*dt*(L_Eqp_Tdpp0/Tdpp04 L_Eqpp_Tdpp0/Tdpp04 - (Eqp4 - Eqpp4 + Id4*(Xdp4 - Xdpp4))/Tdpp04^2 +
(L_Id_Tdpp0*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Tdpp0_old = L_Edpp_Tdpp0 + 0.5*dt*(- L_Edpp_Tdpp0/Tqpp04 (L_Iq_Tdpp0*(Xqp4 - Xqpp4))/Tqpp04);
% Sensibilidades con respecto a Tqpp0
L_w_Tqpp0_old = L_w_Tqpp0 + 0.5*dt*0;
L_delta_Tqpp0_old = L_delta_Tqpp0 + 0.5*dt*L_w_Tqpp0;
L_Eqp_Tqpp0_old = L_Eqp_Tqpp0 + 0.5*dt*((L_Id_Tqpp0*(Xd4 Xdp4))/Tdp04 - L_Eqp_Tqpp0/Tdp04);
L_Eqpp_Tqpp0_old = L_Eqpp_Tqpp0 + 0.5*dt*(L_Eqp_Tqpp0/Tdpp04 L_Eqpp_Tqpp0/Tdpp04 + (L_Id_Tqpp0*(Xdp4 - Xdpp4))/Tdpp04);
L_Edpp_Tqpp0_old = L_Edpp_Tqpp0 + 0.5*dt*((Edpp4 - Edp4 + Iq4*(Xqp4
- Xqpp4))/Tqpp04^2 - L_Edpp_Tqpp0/Tqpp04 - (L_Iq_Tqpp0*(Xqp4 Xqpp4))/Tqpp04);
% Asigna las frecuencias iniciales y en el resto de pasos
Anexo 1
121
if p>1; fehz1(p)=fehz1(p-1);fehz2(p)=fehz2(p-1);fehz4(p)=fehz4(p-1);
else fehz1(p)=60.;fehz2(p)=60.;fehz4(p)=60.;end
%
%% C·lcula nueva Ybus, P y Q de la carga, considerando los eventos
en la red
distancia=Tevento-t;
if t>(0.9999*Tevento) && t<(1.000999*Tevento);
if evento==1; %Step en Vref AVR Gen4
% disp (['t=', num2str(t), 'Step en Vref AVR Gen4']);
Vref=0.98*Vref;
Efd4 = (Vref-abs(V(4)))*kp;
eventoactivado=1;
elseif evento==2; %incremento de carga barra 2 de 500MW (300 -->
800)
% disp (['Aumenta carga Barra2 en t=', num2str(t)])
[P2,Q2] = CargaVf (abs(V(2)), fehz2(p), -1, 1+1i*0.5); %500MW,
250Mvar
eventoactivado=1;
elseif evento==3; %DisminuciÛn de carga barra 2 de 150MW (300 -->
150)
% disp (['Disminuye carga Barra2 en t=', num2str(t)])
[P2,Q2] = CargaVf (abs(V(2)), fehz2(p), -1, -1-1i*0.5);
eventoactivado=1;
elseif evento==4; %Sin Evento
disp (['No hay eventos', num2str(t)])
eventoactivado=1;
end
end
%
if eventoactivado==1;
% Y\I equivale a inversa(Y)*I
V=Y\I; end;
% Recalcula las tensiones en la red, usando
inyecciones del paso anterior
Vestado_old=[w1;w4;delta1;delta4;Eqp1;Eqp4;Edp1;Edp4;Eqpp1;Eqpp4;Edpp1;E
dpp4;
L_w_Xd;L_delta_Xd;L_Eqp_Xd;L_Eqpp_Xd;L_Edpp_Xd;
L_w_Xqp;L_delta_Xqp;L_Eqp_Xqp;L_Eqpp_Xqp;L_Edpp_Xqp;
L_w_Xdp;L_delta_Xdp;L_Eqp_Xdp;L_Eqpp_Xdp;L_Edpp_Xdp;
L_w_Xdpp;L_delta_Xdpp;L_Eqp_Xdpp;L_Eqpp_Xdpp;L_Edpp_Xdpp;
L_w_Xqpp;L_delta_Xqpp;L_Eqp_Xqpp;L_Eqpp_Xqpp;L_Edpp_Xqpp;
L_w_Tdp0;L_delta_Tdp0;L_Eqp_Tdp0;L_Eqpp_Tdp0;L_Edpp_Tdp0;
L_w_Tdpp0;L_delta_Tdpp0;L_Eqp_Tdpp0;L_Eqpp_Tdpp0;L_Edpp_Tdpp0;
L_w_Tqpp0;L_delta_Tqpp0;L_Eqp_Tqpp0;L_Eqpp_Tqpp0;L_Edpp_Tqpp0]; % Se
define vector de variables de estado del paso anterior
Errmax=1e-5;
kmax=100;
Err=99;
Anexo 1
122
k=0;
% Calcula variables de estado en la iteracion actual
while Err>Errmax && k<kmax;
k=k+1;
% Contador de iteraciones para estimar las variables de estado
% Calcula las inyecciones y luego las tensiones en la red con
base en los
% valores actuales de las variables de estado de los generadores
Epp1=complex(-sin(delta1)*Edpp1+cos(delta1)*Eqpp1 ,
cos(delta1)*Edpp1+sin(delta1)*Eqpp1);
Epp4=complex(-sin(delta4)*Edpp4+cos(delta4)*Eqpp4 ,
cos(delta4)*Edpp4+sin(delta4)*Eqpp4);
I(1)=YNort1*Epp1+Ysalpp1*conj(Epp1-V(1))*exp(1i*2.*delta1); %V(1)*YNort1 Con este termino no converge
I(4)=YNort4*Epp4+Ysalpp4*conj(Epp4-V(4))*exp(1i*2.*delta4); %V(4)*YNort4 Con este termino no converge
% Carga de la barra 2
[P2,Q2] = CargaVf (abs(V(2)), fehz2(p), 1, 0.);
I(2)=complex(-P2,Q2)/conj(V(2));
I(3)=0;
% Recalcula las tensiones de la red con las corrientes
inyectadas
V=Y\I;
% Con los fasores de tensiÛn calcula las frecuencias de la red
% Con las tensiones recalcula Vd, Vq, Id, Iq y Pe que deberÌan
tener los
% generadores
Vd1 = -sin(delta1)*real(V(1))+cos(delta1)*imag(V(1));
Vq1 = cos(delta1)*real(V(1))+sin(delta1)*imag(V(1));
Vd4 = -sin(delta4)*real(V(4))+cos(delta4)*imag(V(4));
Vq4 = cos(delta4)*real(V(4))+sin(delta4)*imag(V(4));
Id1 = ((Edpp1-Vd1)*r1-(Eqpp1-Vq1)*Xqpp1)/(r1^2+Xdpp1*Xqpp1);
Id4 = ((Edpp4-Vd4)*r4-(Eqpp4-Vq4)*Xqpp4)/(r4^2+Xdpp4*Xqpp4);
Iq1 = ((Eqpp1-Vq1)*r1+(Edpp1-Vd1)*Xdpp1)/(r1^2+Xdpp1*Xqpp1);
Iq4 = ((Eqpp4-Vq4)*r4+(Edpp4-Vd4)*Xdpp4)/(r4^2+Xdpp4*Xqpp4);
Pe1 = (Edpp1*Id1+Eqpp1*Iq1)+(Xdpp1-Xqpp1)*Id1*Iq1r1*(Id1^2+Iq1^2);
Pe4 = (Edpp4*Id4+Eqpp4*Iq4)+(Xdpp4-Xqpp4)*Id4*Iq4r4*(Id4^2+Iq4^2);
% Calcula variables de estado actuales con las ecuaciones en
diferencias usando mÈtodo trapezoidal implÌcito
w1 = w1old+(0.5*dt*wn/(2*H1))*(Pm1Pe1+Kd1*wn);%/(1+0.5*dt*wn*Kd1/(2*H1)); % ojo con el signo de +Kd1*wn
podria se w4 = w4old+(0.5*dt*wn/(2*H4))*(Pm4Pe4+Kd4*wn);%/(1+0.5*dt*wn*Kd4/(2*H4));
delta1 = delta1old+0.5*dt*(w1-wn);
delta4 = delta4old+0.5*dt*(w4-wn);
Eqp1 = (Eqp1old+(0.5*dt/Tdp01)*(Efd1+Id1*(Xd1Xdp1)))/(1+0.5*dt/Tdp01);
Eqp4 = (Eqp4old+(0.5*dt/Tdp04)*(Efd4+Id4*(Xd4Xdp4)))/(1+0.5*dt/Tdp04);
% Edp1
% Edp4
= Edp1+(0.5*dt/Tqp01)*(-Edp1-Iq1*(Xq1-Xqp1));
= Edp4+(0.5*dt/Tqp04)*(-Edp4-Iq4*(Xq4-Xqp4));
Anexo 1
123
Eqpp1 = (Eqpp1old+(0.5*dt/Tdpp01)*(Eqp1+Id1*(Xdp1Xdpp1)))/(1+0.5*dt/Tdpp01);
Eqpp4 = (Eqpp4old+(0.5*dt/Tdpp04)*(Eqp4+Id4*(Xdp4Xdpp4)))/(1+0.5*dt/Tdpp04);
Edpp1 = (Edpp1old+(0.5*dt/Tqpp01)*(Edp1-Iq1*(Xqp1Xqpp1)))/(1+0.5*dt/Tqpp01);
Edpp4 = (Edpp4old+(0.5*dt/Tqpp04)*(Edp4-Iq4*(Xqp4Xqpp4)))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Xd
L_w_Xd = L_w_Xd_old + 0.5*dt*0;
L_delta_Xd = L_delta_Xd_old + 0.5*dt*L_w_Xd;
L_Eqp_Xd = (L_Eqp_Xd_old + 0.5*dt*(Id4/Tdp04 + (L_Id_Xd*(Xd4 Xdp4))/Tdp04))/(1+0.5*dt/Tdp04);
L_Eqpp_Xd = (L_Eqpp_Xd_old + 0.5*dt*(L_Eqp_Xd/Tdpp04 +
(L_Id_Xd*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Xd = (L_Edpp_Xd_old + 0.5*dt*(-(L_Iq_Xd*(Xqp4 Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Xqp
L_w_Xqp = L_w_Xqp_old + 0.5*dt*0;
L_delta_Xqp = L_delta_Xqp_old + 0.5*dt*L_w_Xqp;
L_Eqp_Xqp = (L_Eqp_Xqp_old + 0.5*dt*((L_Id_Xqp*(Xd4 Xdp4))/Tdp04))/(1+0.5*dt/Tdp04);
L_Eqpp_Xqp = (L_Eqpp_Xqp_old + 0.5*dt*(L_Eqp_Xqp/Tdpp04 +
(L_Id_Xqp*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Xqp = (L_Edpp_Xqp_old + 0.5*dt*(- Iq4/Tqpp04 (L_Iq_Xqp*(Xqp4 - Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Xdp
L_w_Xdp = L_w_Xdp_old + 0.5*dt*0;
L_delta_Xdp = L_delta_Xdp_old + 0.5*dt*L_w_Xdp;
L_Eqp_Xdp = (L_Eqp_Xdp_old + 0.5*dt*((L_Id_Xdp*(Xd4 Xdp4))/Tdp04 - Id4/Tdp04))/(1+0.5*dt/Tdp04);
L_Eqpp_Xdp = (L_Eqpp_Xdp_old + 0.5*dt*(Id4/Tdpp04 +
L_Eqp_Xdp/Tdpp04 + (L_Id_Xdp*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Xdp = (L_Edpp_Xdp_old + 0.5*dt*(-(L_Iq_Xdp*(Xqp4 Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Xdpp
L_w_Xdpp = L_w_Xdpp_old + 0.5*dt*0;
L_delta_Xdpp = L_delta_Xdpp_old + 0.5*dt*L_w_Xdpp;
L_Eqp_Xdpp = (L_Eqp_Xdpp_old + 0.5*dt*((L_Id_Xdpp*(Xd4 Xdp4))/Tdp04))/(1+0.5*dt/Tdp04);
L_Eqpp_Xdpp = (L_Eqpp_Xdpp_old + 0.5*dt*(L_Eqp_Xdpp/Tdpp04 Id4/Tdpp04 + (L_Id_Xdpp*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Xdpp = (L_Edpp_Xdpp_old + 0.5*dt*(-(L_Iq_Xdpp*(Xqp4 Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Xqpp
L_w_Xqpp = L_w_Xqpp_old + 0.5*dt*0;
L_delta_Xqpp = L_delta_Xqpp_old + 0.5*dt*L_w_Xqpp;
L_Eqp_Xqpp = (L_Eqp_Xqpp_old + 0.5*dt*((L_Id_Xqpp*(Xd4 Xdp4))/Tdp04))/(1+0.5*dt/Tdp04);
Anexo 1
124
L_Eqpp_Xqpp = (L_Eqpp_Xqpp_old + 0.5*dt*(L_Eqp_Xqpp/Tdpp04 +
(L_Id_Xqpp*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Xqpp = (L_Edpp_Xqpp_old + 0.5*dt*(Iq4/Tqpp04 (L_Iq_Xqpp*(Xqp4 - Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Tdp0
L_w_Tdp0 = L_w_Tdp0_old + 0.5*dt*0;
L_delta_Tdp0 = L_delta_Tdp0_old + 0.5*dt*L_w_Tdp0;
L_Eqp_Tdp0 = (L_Eqp_Tdp0_old + 0.5*dt*((L_Id_Tdp0*(Xd4 Xdp4))/Tdp04 - (Efd4 - Eqp4 + Id4*(Xd4 Xdp4))/Tdp04^2))/(1+0.5*dt/Tdp04);
L_Eqpp_Tdp0 = (L_Eqpp_Tdp0_old + 0.5*dt*(L_Eqp_Tdp0/Tdpp04 +
(L_Id_Tdp0*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Tdp0 = (L_Edpp_Tdp0_old + 0.5*dt*(- (L_Iq_Tdp0*(Xqp4 Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Tdpp0
L_w_Tdpp0 = L_w_Tdpp0_old + 0.5*dt*0;
L_delta_Tdpp0 = L_delta_Tdpp0_old + 0.5*dt*L_w_Tdpp0;
L_Eqp_Tdpp0 = (L_Eqp_Tdpp0_old + 0.5*dt*((L_Id_Tdpp0*(Xd4 Xdp4))/Tdp04))/(1+0.5*dt/Tdp04);
L_Eqpp_Tdpp0 = (L_Eqpp_Tdpp0_old + 0.5*dt*(L_Eqp_Tdpp0/Tdpp04 (Eqp4 - Eqpp4 + Id4*(Xdp4 - Xdpp4))/Tdpp04^2 + (L_Id_Tdpp0*(Xdp4 Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Tdpp0 = (L_Edpp_Tdpp0_old + 0.5*dt*(- (L_Iq_Tdpp0*(Xqp4 Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Sensibilidades de los estados con respecto a Tqpp0
L_w_Tqpp0 = L_w_Tqpp0_old + 0.5*dt*0;
L_delta_Tqpp0 = L_delta_Tqpp0_old + 0.5*dt*L_w_Tqpp0;
L_Eqp_Tqpp0 = (L_Eqp_Tqpp0_old + 0.5*dt*((L_Id_Tqpp0*(Xd4 Xdp4))/Tdp04))/(1+0.5*dt/Tdp04);
L_Eqpp_Tqpp0 = (L_Eqpp_Tqpp0_old + 0.5*dt*(L_Eqp_Tqpp0/Tdpp04 +
(L_Id_Tqpp0*(Xdp4 - Xdpp4))/Tdpp04))/(1+0.5*dt/Tdpp04);
L_Edpp_Tqpp0 = (L_Edpp_Tqpp0_old + 0.5*dt*((Edpp4 - Edp4 +
Iq4*(Xqp4 - Xqpp4))/Tqpp04^2 - (L_Iq_Tqpp0*(Xqp4 Xqpp4))/Tqpp04))/(1+0.5*dt/Tqpp04);
% Calcula sensibilidades algebr·icas con respecto a Xd
L_Id_Xd = -L_Eqp_Xd/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Xd*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Xd = (abs(V(1))*L_delta_Xd*cos(delta4))/(Xqp4 + 2*Xl + Xt);
% Calcula sensibilidades algebr·icas con respecto a Xqp
L_Id_Xqp = - L_Eqp_Xqp/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Xqp*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Xqp = (Edp4 - abs(V(1))*sin(delta4))/(Xqp4 + 2*Xl + Xt)^2 +
(abs(V(1))*L_delta_Xqp*cos(delta4))/(Xqp4 + 2*Xl + Xt);
% Calcula sensibilidades algebr·icas con respecto a Xdp
L_Id_Xdp = (Eqp4 - abs(V(1))*cos(delta4))/(Xdp4 + 2*Xl + Xt)^2 L_Eqp_Xdp/(Xdp4 + 2*Xl + Xt) - (abs(V(1))*L_delta_Xdp*sin(delta4))/(Xdp4
+ 2*Xl + Xt);
L_Iq_Xdp = (abs(V(1))*L_delta_Xdp*cos(delta4))/(Xqp4 + 2*Xl +
Anexo 1
125
Xt);
% Calcula sensibilidades algebr·icas con respecto a Xdpp
L_Id_Xdpp = - L_Eqp_Xdpp/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Xdpp*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Xdpp = (abs(V(1))*L_delta_Xdpp*cos(delta4))/(Xqp4 + 2*Xl +
Xt);
% Calcula sensibilidades algebr·icas con respecto a Xdpp
L_Id_Xqpp = - L_Eqp_Xqpp/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Xqpp*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Xqpp = (abs(V(1))*L_delta_Xqpp*cos(delta4))/(Xqp4 + 2*Xl +
Xt);
% Calcula sensibilidades algebr·icas con respecto a Tdp0
L_Id_Tdp0 = - L_Eqp_Tdp0/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Tdp0*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Tdp0 = (abs(V(1))*L_delta_Tdp0*cos(delta4))/(Xqp4 + 2*Xl +
Xt);
% Calcula sensibilidades algebr·icas con respecto a Tdpp0
L_Id_Tdpp0 = - L_Eqp_Tdpp0/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Tdpp0*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Tdpp0 = (abs(V(1))*L_delta_Tdpp0*cos(delta4))/(Xqp4 + 2*Xl
+ Xt);
% Calcula sensibilidades algebr·icas con respecto a Tqpp0
L_Id_Tqpp0 = - L_Eqp_Tqpp0/(Xdp4 + 2*Xl + Xt) (abs(V(1))*L_delta_Tqpp0*sin(delta4))/(Xdp4 + 2*Xl + Xt);
L_Iq_Tqpp0 = (abs(V(1))*L_delta_Tqpp0*cos(delta4))/(Xqp4 + 2*Xl
+ Xt);
% Sensibilidades de las salidas con respecto a Xd
L_Pe_Xd = L_Id_Xd*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) + L_Iq_Xd*(Eqpp4
+ Id4*(Xdpp4 - Xqpp4)) + Id4*L_Edpp_Xd + Iq4*L_Eqpp_Xd;
L_Qe_Xd = L_Iq_Xd*(Edpp4 - 2*Iq4*Xqpp4) - L_Id_Xd*(Eqpp4 +
2*Id4*Xdpp4) - Id4*L_Eqpp_Xd + Iq4*L_Edpp_Xd;
% Sensibilidades de las salidas con respecto a Xqp
L_Pe_Xqp = L_Id_Xqp*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Xqp*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) + Id4*L_Edpp_Xqp +
Iq4*L_Eqpp_Xqp;
L_Qe_Xqp = L_Iq_Xqp*(Edpp4 - 2*Iq4*Xqpp4) - L_Id_Xqp*(Eqpp4 +
2*Id4*Xdpp4) - Id4*L_Eqpp_Xqp + Iq4*L_Edpp_Xqp;
% Sensibilidades de las salidas con respecto a Xdp
L_Pe_Xdp = L_Id_Xdp*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Xdp*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) + Id4*L_Edpp_Xdp +
Iq4*L_Eqpp_Xdp;
L_Qe_Xdp = L_Iq_Xdp*(Edpp4 - 2*Iq4*Xqpp4) - L_Id_Xdp*(Eqpp4 +
2*Id4*Xdpp4) - Id4*L_Eqpp_Xdp + Iq4*L_Edpp_Xdp;
% Sensibilidades de las salidas con respecto a Xdpp
Anexo 1
126
L_Pe_Xdpp = L_Id_Xdpp*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Xdpp*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) + Id4*Iq4 + Id4*L_Edpp_Xdpp +
Iq4*L_Eqpp_Xdpp;
L_Qe_Xdpp = L_Iq_Xdpp*(Edpp4 - 2*Iq4*Xqpp4) - L_Id_Xdpp*(Eqpp4 +
2*Id4*Xdpp4) - Id4^2 - Id4*L_Eqpp_Xdpp + Iq4*L_Edpp_Xdpp;
% Sensibilidades de las salidas con respecto a Xqpp
L_Pe_Xqpp = L_Id_Xqpp*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Xqpp*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) - Id4*Iq4 + Id4*L_Edpp_Xqpp +
Iq4*L_Eqpp_Xqpp;
L_Qe_Xqpp = L_Iq_Xqpp*(Edpp4 - 2*Iq4*Xqpp4) - L_Id_Xqpp*(Eqpp4 +
2*Id4*Xdpp4) - Iq4^2 - Id4*L_Eqpp_Xqpp + Iq4*L_Edpp_Xqpp;
% Sensibilidades de las salidas con respecto a Tdp0
L_Pe_Tdp0 = L_Id_Tdp0*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Tdp0*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) + Id4*L_Edpp_Tdp0 +
Iq4*L_Eqpp_Tdp0;
L_Qe_Tdp0 = L_Iq_Tdp0*(Edpp4 - 2*Iq4*Xqpp4) - L_Id_Tdp0*(Eqpp4 +
2*Id4*Xdpp4) - Id4*L_Eqpp_Tdp0 + Iq4*L_Edpp_Tdp0;
% Sensibilidades de las salidas con respecto a Tdpp0
L_Pe_Tdpp0 = L_Id_Tdpp0*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Tdpp0*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) + Id4*L_Edpp_Tdpp0 +
Iq4*L_Eqpp_Tdpp0;
L_Qe_Tdpp0 = L_Iq_Tdpp0*(Edpp4 - 2*Iq4*Xqpp4) L_Id_Tdpp0*(Eqpp4 + 2*Id4*Xdpp4) - Id4*L_Eqpp_Tdpp0 + Iq4*L_Edpp_Tdpp0;
% Sensibilidades de las salidas con respecto a Tdpp0
L_Pe_Tqpp0 = L_Id_Tqpp0*(Edpp4 + Iq4*(Xdpp4 - Xqpp4)) +
L_Iq_Tqpp0*(Eqpp4 + Id4*(Xdpp4 - Xqpp4)) + Id4*L_Edpp_Tqpp0 +
Iq4*L_Eqpp_Tqpp0;
L_Qe_Tqpp0 = L_Iq_Tqpp0*(Edpp4 - 2*Iq4*Xqpp4) L_Id_Tqpp0*(Eqpp4 + 2*Id4*Xdpp4) - Id4*L_Eqpp_Tqpp0 + Iq4*L_Edpp_Tqpp0;
if eventoactivado==1
fehz1(p)=fehz1(p-1);
frec igual a la del paso anterior
fehz2(p)=fehz2(p-1);
frec igual a la del paso anterior
fehz4(p)=fehz4(p-1);
frec igual a la del paso anterior
elseif p==1;
fehz1(p)=60;
fehz2(p)=60;
fehz4(p)=60;
else fehz1(p)=FreqHz(angle(V(1)),teta1(p-1),dt);
frec con la desviaciÛn angular
fehz2(p)=FreqHz(angle(V(2)),teta2(p-1),dt);
con la desviaciÛn angular
fehz4(p)=FreqHz(angle(V(4)),teta4(p-1),dt);
con la desviaciÛn angular
end
% Hace la
% Hace la
% Hace la
% Calcula
% Calcula frec
% Calcula frec
Anexo 1
127
% Cálculo del error cuadratico
Vestado_new=
[w1;w4;delta1;delta4;Eqp1;Eqp4;Edp1;Edp4;Eqpp1;Eqpp4;Edpp1;Edpp4;
L_w_Xd;L_delta_Xd;L_Eqp_Xd;L_Eqpp_Xd;L_Edpp_Xd;
L_w_Xqp;L_delta_Xqp;L_Eqp_Xqp;L_Eqpp_Xqp;L_Edpp_Xqp;
L_w_Xdp;L_delta_Xdp;L_Eqp_Xdp;L_Eqpp_Xdp;L_Edpp_Xdp;
L_w_Xdpp;L_delta_Xdpp;L_Eqp_Xdpp;L_Eqpp_Xdpp;L_Edpp_Xdpp;
L_w_Xqpp;L_delta_Xqpp;L_Eqp_Xqpp;L_Eqpp_Xqpp;L_Edpp_Xqpp;
L_w_Tdp0;L_delta_Tdp0;L_Eqp_Tdp0;L_Eqpp_Tdp0;L_Edpp_Tdp0;
L_w_Tdpp0;L_delta_Tdpp0;L_Eqp_Tdpp0;L_Eqpp_Tdpp0;L_Edpp_Tdpp0;
L_w_Tqpp0;L_delta_Tqpp0;L_Eqp_Tqpp0;L_Eqpp_Tqpp0;L_Edpp_Tqpp0]; % Se
define vector de variables de estado del paso actual
Resta_Vestado= Vestado_new-Vestado_old;
Err= sqrt(dot(Resta_Vestado,Resta_Vestado));
Vestado_old= Vestado_new;
end
%% Arregla ·ngulo delta para hacerlo continuo antes de guardarlo
if delta1>pi;
delta1= delta1-2*pi;
elseif delta1<-pi; delta1=delta1+2*pi;
end
if delta4>pi;
delta4= delta4-2*pi;
elseif delta4<-pi; delta4=delta4+2*pi;
end
if k >= kmax; disp('Max Num Iter sin convergencia...');pause; end
%% Escribe en los vectores reservados los valores calculados para el
paso actual
speed1(p)=w1/(2*pi*60);
speed4(p)=w4/(2*pi*60);
Delta1(p)=delta1;
Delta4(p)=delta4;
teta1(p)=angle(V(1));
teta2(p)=angle(V(2));
teta4(p)=angle(V(4));
PE1(p)=Pe1;
PE4(p)=Pe4;
PM1(p)=Pm1;
PM4(p)=Pm4;
AbsV1(p)=abs(V(1)); AngV1(p)=angle(V(1))/DegtoRad;
AbsV2(p)=abs(V(2)); AngV2(p)=angle(V(2))/DegtoRad;
AbsV3(p)=abs(V(3)); AngV3(p)=angle(V(3))/DegtoRad;
Anexo 1
128
AbsV4(p)=abs(V(4)); AngV4(p)=angle(V(4))/DegtoRad;
AbsI1(p)=abs(I(1)-V(1)*YNort1); AngI1(p)=angle(I(1)V(1)*YNort1)/DegtoRad;
AbsI4(p)=abs(I(4)-V(4)*YNort4); AngI4(p)=angle(I(4)V(4)*YNort4)/DegtoRad;
Q1(p)=(Edpp1*Iq1-Eqpp1*Id1)-Xdpp1*Id1^2-Xqpp1*Iq1^2-r1*(Id1-Iq1);
Q4(p)=(Edpp4*Iq4-Eqpp4*Id4)-Xdpp4*Id4^2-Xqpp4*Iq4^2-r4*(Id4-Iq4);
Ve4(p)=Efd4;
Lamda_Pe_Xd(p)=L_Pe_Xd;
Lamda_Qe_Xd(p)=L_Qe_Xd;
Lamda_Pe_Xqp(p)=L_Pe_Xqp;
Lamda_Qe_Xqp(p)=L_Qe_Xqp;
Lamda_Pe_Xdp(p)=L_Pe_Xdp;
Lamda_Qe_Xdp(p)=L_Qe_Xdp;
Lamda_Pe_Xdpp(p)=L_Pe_Xdpp;
Lamda_Qe_Xdpp(p)=L_Qe_Xdpp;
Lamda_Pe_Xqpp(p)=L_Pe_Xqpp;
Lamda_Qe_Xqpp(p)=L_Qe_Xqpp;
Lamda_Pe_Tdp0(p)=L_Pe_Tdp0;
Lamda_Qe_Tdp0(p)=L_Qe_Tdp0;
Lamda_Pe_Tdpp0(p)=L_Pe_Tdpp0;
Lamda_Qe_Tdpp0(p)=L_Qe_Tdpp0;
Lamda_Pe_Tqpp0(p)=L_Pe_Tqpp0;
Lamda_Qe_Tqpp0(p)=L_Qe_Tqpp0;
tiempo(p)=t;
end
%% Convierte de p.u. a MW la potencia elÈctrica y de rad a deg los
·ngulos
PE1(1:p)= PE1(1:p)*100;
PE4(1:p)= PE4(1:p)*100;
Q1(1:p)= Q1(1:p)*100;
Q4(1:p)= Q4(1:p)*100;
Delta1(1:p)= Delta1(1:p)/DegtoRad;
Delta4(1:p)= Delta4(1:p)/DegtoRad;
%% Grafico sensibilidades
% figure
%
subplot(3,3,1),plot(tiempo,Lamda_Pe_Xd(1,:),'black',tiempo,Lamda_Qe_Xd(1
,:),'red');
%
subplot(3,3,2),plot(tiempo,Lamda_Pe_Xqp(1,:),'black',tiempo,Lamda_Qe_Xqp
(1,:),'red');
%
subplot(3,3,3),plot(tiempo,Lamda_Pe_Xdp(1,:),'black',tiempo,Lamda_Qe_Xdp
(1,:),'red');
%
subplot(3,3,4),plot(tiempo,Lamda_Pe_Xdpp(1,:),'black',tiempo,Lamda_Qe_Xd
pp(1,:),'red');
%
subplot(3,3,5),plot(tiempo,Lamda_Pe_Xqpp(1,:),'black',tiempo,Lamda_Qe_Xq
pp(1,:),'red');
%
subplot(3,3,6),plot(tiempo,Lamda_Pe_Tdp0(1,:),'black',tiempo,Lamda_Qe_Td
Anexo 1
129
p0(1,:),'red');
%
subplot(3,3,7),plot(tiempo,Lamda_Pe_Tdpp0(1,:),'black',tiempo,Lamda_Qe_T
dpp0(1,:),'red');
%
subplot(3,3,8),plot(tiempo,Lamda_Pe_Tqpp0(1,:),'black',tiempo,Lamda_Qe_T
qpp0(1,:),'red');
%% LAS SIGUIENTES CURVAS SIRVEN PARA COMPARAR LAS TRES SIMULACIONES EN
LA BARRA 4
%
% subplot (2,2,1),plot (tiempo(1:p),AbsV4(1:p),'LineWidth',2);
% set (gca, 'FontSize',12);
title('Bus Voltage (p.u.)');
xlabel('Tiempo(seg)');
% ylabel('(p.u.)', 'FontSize',14);
grid on; hold on
% %
% subplot (2,2,2),plot (tiempo(1:p),fehz4(1:p),'LineWidth',2);
% set (gca, 'FontSize',12);
title('Frequency (Hz)');
xlabel('Tiempo(seg)');
% ylabel('(Hz)', 'FontSize',14);
grid on; hold on
% %
% subplot (2,2,3),plot (tiempo(1:p),PE4(1:p),'LineWidth',2);
% set (gca, 'FontSize',12);
title('Active Power (MW)');
xlabel('Tiempo(seg)');
% ylabel('(MW)', 'FontSize',14);
grid on; hold on
% %
% subplot (2,2,4),plot (tiempo(1:p),Q4(1:p),'LineWidth',2);
% set (gca, 'FontSize',12);
title('Reactive Power (Mvar)');
xlabel('Tiempo(seg)');
% ylabel('(Mvar)', 'FontSize',14);
grid on; hold on
%
% Dig= load ('/Users/mauriciosanchez/Google Drive/Tesis/Documento
Tesis/Resultados/Validacion_Modelo_Res_Step_Down_AVR_Dig.txt','-ascii');
% Dig=Dig';
%
% subplot (3,2,1),plot
(tiempo(1:p),AbsV4(1:p),'r',tiempo(1:p),Dig(1,1:p),'b');
% set (gca, 'FontSize',12);
title('TensiÛn en Terminales
(p.u.)');
xlabel('Tiempo(seg)');
% ylabel('(p.u.)', 'FontSize',14);
grid on; hold on
%
% subplot (3,2,2),plot
(tiempo(1:p),fehz4(1:p),'r',tiempo(1:p),Dig(2,1:p),'b');
% set (gca, 'FontSize',12);
title('Frecuencia (Hz)');
xlabel('Tiempo(seg)');
% ylabel('(Hz)', 'FontSize',14);
grid on; hold on
%
% subplot (3,2,3),plot
(tiempo(1:p),PE4(1:p),'r',tiempo(1:p),Dig(3,1:p),'b');
% set (gca, 'FontSize',12);
title('Potencia Activa (MW)');
xlabel('Tiempo(seg)');
% ylabel('(MW)', 'FontSize',14);
grid on; hold on
%
% subplot (3,2,4),plot
(tiempo(1:p),Q4(1:p),'r',tiempo(1:p),Dig(4,1:p),'b');
% set (gca, 'FontSize',12);
title('Potencia Reactiva (Mvar)');
Anexo 1
130
xlabel('Tiempo(seg)');
% ylabel('(Mvar)', 'FontSize',14);
grid on; hold on
%
% subplot (3,2,5),plot
(tiempo(1:p),Ve4(1:p),'r',tiempo(1:p),Dig(5,1:p),'b');
% set (gca, 'FontSize',12);
title('TensiÛn de Campo (p.u.)');
xlabel('Tiempo(seg)');
% ylabel('(Mvar)', 'FontSize',14);
grid on; hold on
%
% subplot (3,2,6),plot
(tiempo(1:p),speed4(1:p),'r',tiempo(1:p),Dig(6,1:p),'b');
% set (gca, 'FontSize',12);
title('Velocidad (p.u.)');
xlabel('Tiempo(seg)');
% ylabel('(Mvar)', 'FontSize',14);
grid on; hold on
%% Guarda las salidas como variables medidas en una prueba
% P4med_StepVref=PE4(1:p)/Sn4;
% Q4med_StepVref=Q4(1:p)/Sn4;
% ymed_PQ=[P4med_StepVref;Q4med_StepVref];
% save ymed_PQ.mat ymed_PQ;
%% Salidas en p.u.
P4calc_StepVref = PE4(1:p)/Sn4;
Q4calc_StepVref = Q4(1:p)/Sn4;
ycalc = [P4calc_StepVref;Q4calc_StepVref];
%% Sensibilidades de las salidas con respecto a los par·metros
dy_dXd = [Lamda_Pe_Xd(1,:);Lamda_Qe_Xd(1,:)];
dy_dXqp = [Lamda_Pe_Xqp(1,:);Lamda_Qe_Xqp(1,:)];
dy_dXdp = [Lamda_Pe_Xdp(1,:);Lamda_Qe_Xdp(1,:)];
dy_dXdpp = [Lamda_Pe_Xdpp(1,:);Lamda_Qe_Xdpp(1,:)];
dy_dXqpp = [Lamda_Pe_Xqpp(1,:);Lamda_Qe_Xqpp(1,:)];
dy_dTdp0 = [Lamda_Pe_Tdp0(1,:);Lamda_Qe_Tdp0(1,:)];
dy_dTdpp0 = [Lamda_Pe_Tdpp0(1,:);Lamda_Qe_Tdpp0(1,:)];
dy_dTqpp0 = [Lamda_Pe_Tqpp0(1,:);Lamda_Qe_Tqpp0(1,:)];
Lambda_y =
permute(cat(3,dy_dXd,dy_dXqp,dy_dXdp,dy_dXdpp,dy_dXqpp,dy_dTdp0,dy_dTdpp
0,dy_dTqpp0),[1 3 2]);
%% Compara graficamente las salidas medidas con las simuladas
% figure
% load('ymed_PQ.mat');
% subplot (2,1,1),plot
(tiempo(1:p),P4calc_StepVref(1,1:p),'r',tiempo(1:p),ymed_PQ(1,1:p),'blac
k')
% hold on
% subplot (2,1,2),plot
(tiempo(1:p),Q4calc_StepVref(1,1:p),'r',tiempo(1:p),ymed_PQ(2,1:p),'blac
k')
% hold on
end
B. Anexo 2: Código en Matlab Para la
obtención del sistema de ecuaciones con
derivadas
parciales
para
sensibilidades de trayectoria
el
cálculo
de
Anexo 2
132
Con el siguiente código se pueden calcular de forma simbólica las ecuaciones
diferenciales que definen las sensibilidades de trayectoria para las salidas 𝑃 y 𝑄. En el
ejemplo presentado en este script se desarrolla el cálculo para las sensibilidades con
′′
respecto a 𝑇𝑞0
. Si se desean calcular sensibilidades de trayectoria para otros parámetros,
se debe reemplazar el término Tqpp0 por el parámetro correspondiente.
% C·lculo simbolico de derivadas quinto orden Machowski pg. 455,
% Este modelo considera que Xq'= Xq y Ed'= 0:
%
%
%
%
%
%
Ecuaciones
wp = (wn/2H)(Pm - Ed''Id - Eq''Id + (Xq'' - Xd'')IdIq)
dp = w - wn
Eq'p = (Efd - Eq' + Id(Xd - Xd'))/T'd0
Eq''p = (Eq' - Eq'' + Id(Xd' - Xd''))/T''d0
Ed''p = (Ed' - Ed'' - Iq(Xq' - Xq''))/T''q0
clear all
syms wn w4 delta4 Eqp4 Eqpp4 Edpp4 Edp4 Id4 Iq4 Efd4 Pm4 Pe4 Qe4 H4 wn4
Xd4 Xdp4 Xdpp4 Xqp4 Xqpp4 Tdp04 Tdpp04 Tqpp04 E0 Zl ...
L_w_Tqpp0 L_delta_Tqpp0 L_Eqp_Tqpp0 L_Eqpp_Tqpp0 L_Edpp_Tqpp0...
L_Id_Tqpp0 L_Iq_Tqpp0...
L_Pe_Tqpp0 L_Qe_Tqpp0...
%% [xp]=[f(x,z,p,u)]
a = (wn/(2*H4))*(Pm4-Pe4);
b = w4-wn;
c = (Efd4-Eqp4+Id4*(Xd4-Xdp4))/Tdp04;
Eqp+Id*(Xd-Xdp))/Tdp0
d = (Eqp4-Eqpp4+Id4*(Xdp4-Xdpp4))/Tdpp04;
Eqpp+Id*(Xdp-Xdpp))/Tdpp0
e = (Edp4-Edpp4-Iq4*(Xqp4-Xqpp4))/Tqpp04;
Iq*(Xqp-Xqpp))/Tqpp0
Ecuaciones de estado
% dw = (wn/(2*H))*(Pm-Pe)
% dd = w-wn
% dEqp = (Efd-
%% [0]=[g(x,z,p,u)]
m = (E0*cos(delta4)-Eqp4)/(Xdp4+Zl)-Id4;
Eqp)/(Xdp+Zl)
n = (E0*sin(delta4)-Edp4)/(Xqp4+Zl)-Iq4;
Edp)/(Xqp+Zl)
Ecuaciones algebr·icas
% Id = (E0*cos(d)-
% dEqpp = (Eqp% dEdpp = (Edp-Edpp-
% Iq = (E0*sin(d)-
%% [y]=[h(x,z,p,u)]
Ecuaciones algebr·icas
salidas
r = Edpp4*Id4+Eqpp4*Iq4+(Xdpp4-Xqpp4)*Id4*Iq4;
% Pe =
Edpp*Id+Eqpp*Iq+(Xdpp-Xqpp)*Id*Iq
s = Edpp4*Iq4-Eqpp4*Id4-Xdpp4*Id4^2-Xqpp4*Iq4^2;
% Qe = Edpp1*Iq1Eqpp1*Id1-Xdpp1*Id1^2-Xqpp1*Iq1^2
%% [df/dTqpp04]
dL_w_Tqpp0
= diff(a,w4)*L_w_Tqpp0 + diff(a,delta4)*L_delta_Tqpp0 +
diff(a,Eqp4)*L_Eqp_Tqpp0 + diff(a,Eqpp4)*L_Eqpp_Tqpp0 +
Anexo 2
diff(a,Edpp4)*L_Edpp_Tqpp0 + diff(a,Id4)*L_Id_Tqpp0 +
diff(a,Iq4)*L_Iq_Tqpp0 + diff(a,Tqpp04)
dL_delta_Tqpp0 = diff(b,w4)*L_w_Tqpp0 + diff(b,delta4)*L_delta_Tqpp0
diff(b,Eqp4)*L_Eqp_Tqpp0 + diff(b,Eqpp4)*L_Eqpp_Tqpp0 +
diff(b,Edpp4)*L_Edpp_Tqpp0 + diff(b,Id4)*L_Id_Tqpp0 +
diff(b,Iq4)*L_Iq_Tqpp0 + diff(b,Tqpp04)
dL_Eqp_Tqpp0
= diff(c,w4)*L_w_Tqpp0 + diff(c,delta4)*L_delta_Tqpp0
diff(c,Eqp4)*L_Eqp_Tqpp0 + diff(c,Eqpp4)*L_Eqpp_Tqpp0 +
diff(c,Edpp4)*L_Edpp_Tqpp0 + diff(c,Id4)*L_Id_Tqpp0 +
diff(c,Iq4)*L_Iq_Tqpp0 + diff(c,Tqpp04)
dL_Eqpp_Tqpp0 = diff(d,w4)*L_w_Tqpp0 + diff(d,delta4)*L_delta_Tqpp0
diff(d,Eqp4)*L_Eqp_Tqpp0 + diff(d,Eqpp4)*L_Eqpp_Tqpp0 +
diff(d,Edpp4)*L_Edpp_Tqpp0 + diff(d,Id4)*L_Id_Tqpp0 +
diff(d,Iq4)*L_Iq_Tqpp0 + diff(d,Tqpp04)
dL_Edpp_Tqpp0 = diff(e,w4)*L_w_Tqpp0 + diff(e,delta4)*L_delta_Tqpp0
diff(e,Eqp4)*L_Eqp_Tqpp0 + diff(e,Eqpp4)*L_Eqpp_Tqpp0 +
diff(e,Edpp4)*L_Edpp_Tqpp0 + diff(e,Id4)*L_Id_Tqpp0 +
diff(e,Iq4)*L_Iq_Tqpp0 + diff(e,Tqpp04)
%% [dg/dTqpp04] = 0
cero = diff(m,w4)*L_w_Tqpp0 + diff(m,delta4)*L_delta_Tqpp0 +
diff(m,Eqp4)*L_Eqp_Tqpp0 + diff(m,Eqpp4)*L_Eqpp_Tqpp0 +
diff(m,Edpp4)*L_Edpp_Tqpp0 + diff(m,Id4)*L_Id_Tqpp0 +
diff(m,Iq4)*L_Iq_Tqpp0 + diff(m,Tqpp04)
cero1 = diff(n,w4)*L_w_Tqpp0 + diff(n,delta4)*L_delta_Tqpp0 +
diff(n,Eqp4)*L_Eqp_Tqpp0 + diff(n,Eqpp4)*L_Eqpp_Tqpp0 +
diff(n,Edpp4)*L_Edpp_Tqpp0 + diff(n,Id4)*L_Id_Tqpp0 +
diff(n,Iq4)*L_Iq_Tqpp0 + diff(n,Tqpp04)
%% [dh/dTqpp04]
L_Pe_Tqpp0 = diff(r,w4)*L_w_Tqpp0 + diff(r,delta4)*L_delta_Tqpp0 +
diff(r,Eqp4)*L_Eqp_Tqpp0 + diff(r,Eqpp4)*L_Eqpp_Tqpp0 +
diff(r,Edpp4)*L_Edpp_Tqpp0 + diff(r,Id4)*L_Id_Tqpp0 +
diff(r,Iq4)*L_Iq_Tqpp0 + diff(r,Tqpp04)
L_Qe_Tqpp0 = diff(s,w4)*L_w_Tqpp0 + diff(s,delta4)*L_delta_Tqpp0 +
diff(s,Eqp4)*L_Eqp_Tqpp0 + diff(s,Eqpp4)*L_Eqpp_Tqpp0 +
diff(s,Edpp4)*L_Edpp_Tqpp0 + diff(s,Id4)*L_Id_Tqpp0 +
diff(s,Iq4)*L_Iq_Tqpp0 + diff(s,Tqpp04)
133
+
+
+
+