Implementación de un
control de ganancia
ajustable para
regular la velocidad de
un motor DC
1
Representación de
sistemas de control
mediante su diagrama de
bloques
2
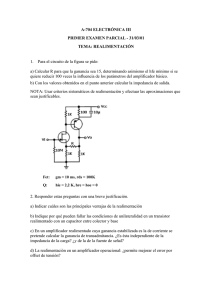
Diagrama de bloques de un sistema retroalimentado
r(t ) = Entrada de referencia.
e(t ) = Señal de error.
v(t ) = Variable regulada.
m(t ) = Variable manipulada.
p(t ) = Señal de perturbación.
y(t ) = Variable controlada.
b(t ) = Variable de retroalimentación como resultado de haber
detectado la variable controlada
por medio del sensor.
3
Ejemplos
Sistema de control de nivel con solenoide
Diagrama de bloques del sistema
4
Control de posición angular de una carga
Diagrama de bloques
5
Implementación de un
control de ganancia
ajustable para
regular la velocidad
de un motor DC
6
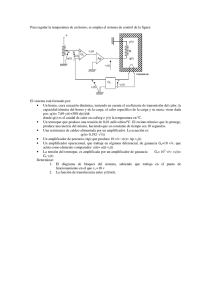
Diagrama esquemático y diagrama de bloques del sistema de control
7
Para poner en marcha el sistema, se hacen las siguientes configuraciones:
• Entrada de referencia (o comportamiento deseado)
• Comparador
• Amplificador de ganancia ajustable
1. Entrada de referencia (o comportamiento deseado)
En los sistemas de control de lazo cerrado se espera que el proceso por controlar
alcance un cierto valor de estado estable, una vez que se haya extinguido el régimen
transitorio.
Puesto que las formas de onda de estado estable y de entrada son iguales (aunque no
necesariamente de la misma magnitud), es necesario que el usuario introduzca una
entrada que indique una referencia; en este caso será una señal tipo escalón.
8
2. Comparador
En todas las configuraciones se usará el amplificador
operacional MC1741 (o LM741).
El comparador se logra mediante un opamp en
configuración de sumador algebraico, donde las R
son de 100 K, según se indica en la figura
9
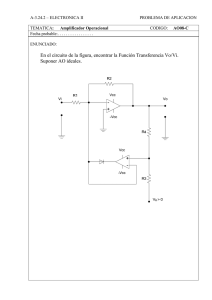
3. Amplificador de ganancia ajustable
Uno de los resultados más importantes de los sistemas
retroalimentados es el hecho de llevar a cabo variaciones de
ganancia, con lo que se logrará modificar las características de
respuesta de los sistemas de control. En principio se muestra un
amplificador cuya ganancia está dada por la función de
transferencia G(s) = −R2/R1.
El circuito mostrado es un amplificador inversor. El voltaje de
salida en el terminal 6, dado por Vo = (−R2/R1)Vi , la terminal
número 3 de entrada no inversora está referida a tierra.
10
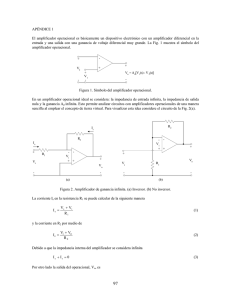
Para corregir el signo negativo de la configuración anterior,
se debe emplear otro amplificador inversor en cascada, con
ganancia unitaria, considerando que R1 = 10 K. Para la
etapa del amplificador en sí, R2 se elige de 1 K, y R3 es una
resistencia variable (potenciómetro lineal) de 100 K, con lo
que es posible variar la ganancia del amplificador en un
rango de 0 < Kp < 100 unidades. Lo anterior es
precisamente un control proporcional Kp , cuya función de
transferencia es: G(s)= Kp =−R3/R2
11
La variación de ganancia de voltaje no tendrá la
potencia necesaria para mover al motor de CD, por
lo que se hace necesario colocar un amplificador de
potencia. Esto se logra al agregar dos transistores
de potencia: PNP y NPN (TIP32 y TIP31,
respectivamente). La identificación de terminales se
observa en la figura.
12
La figura siguiente contiene el circuito
amplificador de potencia conectado a la salida
del conjunto de amplificadores operacionales.
13
El proceso por controlar es propiamente la
velocidad del motor, por lo que se considera un
motor de CD de imán permanente, con
características de 6 a 12 voltios y máximo de 1
ampere.
Para lograr una regulación automática de velocidad
se deberá agregar un sensor cuya función será
detectar el torque producido por el motor y generar
un voltaje proporcional a dicho torque. Tal
comportamiento corresponde a un tacómetro, y
puede ponerse en marcha por medio de un motor
de CD adicional, conectado al revés; este segundo
motor debe tener características análogas al
primero de ellos. La configuración resultante se
observa en la figura dada a continuación.
14
• Proceso por controlar y sensor
15
Una vez que se han definido y puesto en marcha
individualmente todos y cada uno de los
elementos a considerar para formar una
configuración de lazo cerrado, se procederá a
llevar a cabo la conexión entre componentes
con el propósito de obtener la configuración
final.
16
Sistema retroalimentado de control de velocidad;
las etapas I a V son, respectivamente: la referencia,
el comparador, la ganancia ajustable, el proceso por
controlar y el sensor.
17
 0
0