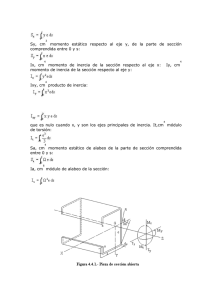
VIBRACIONES MECANICAS Y BALANCEO QUE ES UN BALANCEO MECANICO El balanceo es la técnica de corregir o eliminar fuerzas y momentos de inercia indeseables. Estas fuerzas pueden provocar vibraciones que a veces pueden alcanzar amplitudes peligrosas. Incluso aunque no lo fueran, las vibraciones aumentan los esfuerzos y someten a los cojinetes a cargas repetidas que provocan la falla prematura por fatiga de las piezas. ISO 1940 CONTIENE NORMAS DE EVALUACIÓN DE LA CALIDAD DEL EQUILIBRADO DE LOS ROTORES MÁS COMUNES. ESTA DIRECTRIZ SE REFIERE SOLAMENTE A LOS ROTORES RÍGIDOS, ES DECIR, A LOS ROTORES QUE, A SU VELOCIDAD DE FUNCIONAMIENTO, SÓLO SE DEFORMAN DE MANERA DESDEÑABLE BAJO LA INFLUENCIA DE LA FUERZA CENTRÍFUGA. CABE DESTACAR QUE LA NORMA ISO 1940 NO ES UN DOCUMENTO NORMATIVO Y DE NINGUNA MANERA UNA ACEPTACIÓN DE NORMAS. ECUACIONES PARA EL BALANCEO Si el rotor gira alrededor del eje x con una velocidad angular constante, sobre cada masa elemental m estará aplicada una fuerza de inercia P y esta fuerza producirá un momento M en el centro de masa. Estas fuerzas se denominan fuerzas de inercia centrífugas. La magnitud para una masa m, alejada del eje de giro una distancia r, se calcula mediante la fórmula: P = mrm² = donde: P= es la fuerza de inercia centrífuga en [N]; m= la masa en [kg]; r= el radio de giro en[m]; w= la velocidad angular en [s-1]; n= el número de revoluciones por minuto. FUERZA DE INERCIA Y SUS MOMENTOS El signo del vector indica que la fuerza de inercia está dirigida, en la misma dirección del radio , a partir del eje de rotación . Se elige el plano de coordenadas x,y, tal que pase por el centro de masas S del cuerpo. La fuerza de inercia P origina, respecto a los ejes z,y, los momentos MZ y My. Para determinar estos momentos se descompone la fuerza de inercia en los componentes cosθ y sinθ, paralelos a los ejes y, z. El momento resultante se determina: El ángulo se obtiene de la relación de momentos: DESBALANCEO UNIDADES DE DESBALANCE El desbalance puede ser definido como el peso que ha ser agregado o removido en un radio de corrección. Las unidades de peso pueden ser cualquier unidad conveniente de medición la cual toma en cuenta el peso del equipo disponible y el tamaño de toda la unidad de medición. Gramos (g), onzas (oz) y kilogramos (kg) son las unidades más comunes. Ocasionalmente los Newton (N) son utilizados, pero para uso práctico deben ser convertidos a unidades de peso disponibles, las unidades de longitud usualmente corresponden a las unidades de longitud de los dibujos de los estándares de los fabricantes. Las más comunes son pulgadas (in), milímetros (mm), centímetros (cm) y metros (m). Las más comunes combinaciones usadas para especificar desbalance son onza-pulgada (oz-in), gramos-pulgada (g-in), gramo-milímetro (g-mm), gramo-centímetro (g-cm) y kilogramo-metro (kg-m). EL DESBALANCEO ES UNA DE LAS CAUSAS MAS FRECUENTE DE ALTA VIBRACION EN MAQUINARIAS ROTATIVAS ES MUY IMPORTANTE SU ATENCIÓN OPORTUNA POR QUE CON EL TIEMPO PUEDE AUMENTAR SIGNIFICATIVAMENTE LA HOLGURA EN AGUJERO DETERIORAR LOS RODAMIENTOS DETERIORAR LA ESTRUCTURA AUMENTAR EL CONSUMO ENERGETICO REDUCIR EL TIEMPO DE VIDA DE LA MAQUINA EL DESBALANCEO SE DEBE AL AUMENTO O REDUCCION DE MASA EN EL ROTOR EL CUAL MODIFICA SU HOMOGENIDAD Y COMO CONSECUENCIA EL CENTRO DE MASA DEL ROTOR NO COINCIDE CON SU CENTRO GEOMETRICO GENERANDO FUERZAS Y MOMENTOS DE INERCIA INDESEABLES ESTO PUEDE SER CAUSADO POR MATERIAL PARTICULADO QUE EN EL PROCESO SE VA ADHIRIENDO AL ROTOR A LA PERDIDA DE MATERIAL DEL ROTOR POR ABRASION PERDIDA DE MASAS DE BALANCEO ENTRE OTRAS DESBALANCE ESTÁTICO EL DESEQUILIBRIO ESTÁTICO ES AQUEL QUE PODEMOS ENCONTRAR COLOCANDO EL ROTOR EN UNAS PARALELAS Y DEJÁNDOLO QUE GIRE POR SI MISMO HASTA QUE SE PARA. LA PARTE MAS PESADA DEL CONJUNTO DEL ROTOR QUEDARÁ EN LA PARTE BAJA Y LA MENOS PESADA EN LA PARTE ALTA DEL ROTOR. SI UN ROTOR SOLO TIENE DESEQUILIBRIO ESTÁTICO, ES DECIR QUE EL DESEQUILIBRIO ESTÁ DISTRIBUIDO EN TODA SU LONGITUD Y EN UN MISMO ÁNGULO, EL COMPORTAMIENTO EN EL MOMENTO DE GIRAR SERÁ COMO SE REPRESENTA EN LA FIGURA SIGUIENTE; EL EJE DE GIRO Y EL DE INERCIA SE SEPARAN, EN PARALELO, UNA DISTANCIA QUE DEPENDE DE LA FUERZA GENERADA POR EL DESEQUILIBRIO. PARA COMPENSAR EL DESEQUILIBRIO ESTÁTICO PODEMOS COLOCAR UNA MASA EN CADA LADO Y EN SENTIDO CONTRARIO AL DESEQUILIBRIO O BIEN UNA MASA EN EL CENTRO DEL ROTOR DE UN VALOR IGUAL A LA SUMA DEL DESEQUILIBRIO ESTÁTICO. DESBALANCE DINAMICO El desequilibrio dinámico es aquel que aparece cuando el rotor está en rotación, es decir que no podríamos detectarlo en unas paralelas como el estático y para ello es imprescindible colocar el rotor en una máquina equilibradora. Los pesos P1 y P2 ejercen cada uno de ellos una fuerza en el mismo sentido pero una a cada lado del eje de rotación (flechas negras) de forma que el rotor se mantiene equilibrado estáticamente; pero cuando este rotor gire a su velocidad de funcionamiento se presentaran unas fuerzas F1 y F2 provocadas por los pesos P1 y P2 dando lugar a un par de fuerzas, desequilibrio dinámico, que causará el desplazamiento del eje de giro y el eje de inercia y provocara vibraciones cuya intensidad dependerá del tamaño de P1 y P2 y de la velocidad de giro del rotor. EL COMPORTAMIENTO DE LAS FUERZAS CENTRÍFUGAS DEL ROTOR, CUANDO EL DESEQUILIBRIO ES DINÁMICO. COMO EL ROTOR ESTARÁ ALOJADO EN SOPORTES DE RODAMIENTOS, TRANSMITIRÁ LA VIBRACIÓN, A TRAVÉS DE ÉSTOS, AL CONJUNTO MÁQUINA QUE LO SOPORTA. CENTRO DE GRAVEDAD El término centro de gravedad se puede considerar como el centro de masa. Su alineamiento diferiría solo en cuerpos largos en los que la fuerza gravitacional de la tierra no es la misma para todos los componentes del cuerpo. CENTRO DE MASA El centro de masa es el punto del cuerpo donde se concentra el valor de todas sus masas. Si un vector de fuerza pasa a través de este punto el cuerpo se moverá en línea recta, sin rotación. La segunda ley de Newton del movimiento describe este movimiento como F= m a, donde la suma de fuerzas F, actuando sobre un cuerpo es igual al producto de la masa (m), por la aceleración (a). EJES GEOMÉTRICOS El eje geométrico se conoce también como eje de rotación. Este eje de rotación es determinado ya sea por la superficie sustentadora rotatoria, la cual existe en la pieza de trabajo, o por la superficie de montado EJE DE INERCIA PRINCIPAL Cuando una parte no tiene forma de disco y tiene longitud a través del eje de rotación, ésta gira en el espacio libre sobre una línea. Esta línea es llamada “eje principal de inercia”, el centro de masa es un punto sobre esta línea. Cuando el eje de inercia principal coincide con el eje de rotación, la parte girará sin fuerzas de desbalance. ALINEACIÓN Alineación de ejes incorrecta y correcta A. Desalineación paralela (o descentramiento) B. Desalineación angular C. Alineación correcta Las posibles consecuencias de una desalineación de ejes afectan gravemente a los resultados de cualquier empresa: Aumento de la fricción y, por tanto, del consumo energético. Averías prematuras de rodamientos y retenes. Averías prematuras de ejes y acoplamientos. Fugas excesivas del lubricante de la obturación. Fallo de los acoplamientos y los tornillos de fijación. Mayor vibración y ruido. ¿Qué métodos se pueden utilizar para alinear ejes? A. Regla: Precisión = mala, Velocidad = buena, Facilidad de uso = buena B. Relojes comparadores: Precisión = buena, Velocidad = mala, Facilidad de uso = mala C. Alineación de ejes con láser: Precisión = buena, Velocidad = buena, Facilidad de uso = buena