")
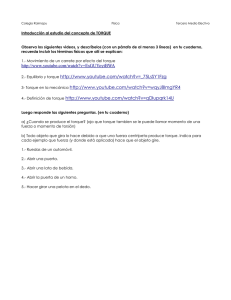
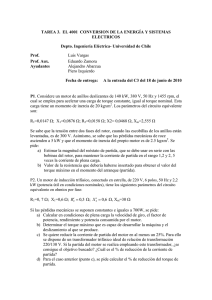
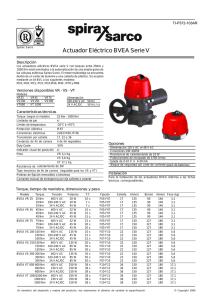
Sistemas Electromecánicos Luciano Chiang Sánchez SISTEMAS ELECTROMECÁNICOS © CAPÍTULO 5 MOTORES DE CORRIENTE CONTINUA 2016 Luciano Chiang S, Ph.D. 1 Sistemas Electromecánicos Luciano Chiang Sánchez Contenido 5 Motores Eléctricos Corriente Continua (CC) .............................................................. 3 5.1 Principios de Operación......................................................................................................... 3 5.1.1 Configuración Básica (Mecanismo de D’Arsonval) ...................................................... 3 5.1.2 Obtención de Torque Neto en el Motor CC. Solución por medio de conmutador. ....... 7 5.1.3 Mejoramiento de capacidad incorporando mayor número de espiras activas y conectándolas en serie. Enrollamiento continuo. ...................................................................... 11 5.1.4 5.2 Uso de Interpolos ......................................................................................................... 16 Modelo Electromecánico de Motor CC ............................................................................... 18 5.2.1 Modelo Teórico Básico ................................................................................................ 18 5.2.2 Eficiencia Electromecánica .......................................................................................... 19 5.2.3 Reacción de Armadura (desviación modelo teórico básico) ........................................ 20 5.3 Formas de Conexión del Campo Magnético del Estator cuando se usa Bobina ................. 23 5.3.1 Conexión Shunt ............................................................................................................ 23 5.3.2 Conexión Serie ............................................................................................................. 23 5.4 Motor Universal ................................................................................................................... 27 5.5 Control de velocidad en motores eléctricos CC .................................................................. 28 5.5.1 Modulación de Pulsos (PWM) ..................................................................................... 29 5.5.2 Control de Velocidad en Motores CC de imanes permanentes .................................... 30 5.6 Ejemplos Resueltos.............................................................................................................. 33 5.7 Resumen del Capítulo .......................................................................................................... 51 2 Sistemas Electromecánicos Luciano Chiang Sánchez 5 Motores Eléctricos Corriente Continua (CC) 5.1 Principios de Operación El motor de corriente continua es un tipo de motor que funciona en base a una fuente de alimentación de voltaje continua. Sus características de operación son relativamente lineales por lo que se presta para aplicaciones de control de movimiento. En este último caso se conocen también como servomotores. Durante una época pasada fue el motor preferido para aplicaciones de precisión y control de movimiento, pero actualmente ha sido remplazado por otros tipos de motores con mejores prestaciones. No obstante dada su simpleza y por razones históricas se le puede encontrar con frecuencia en máquinas de alto torque (vehículos eléctricos, winches, motor de limpia vidrios), herramientas eléctricas (taladros, atornilladores) y juguetes varios. 5.1.1 Configuración Básica (Mecanismo de D’Arsonval) Hemos visto en el capítulo anterior que en virtud del Principio de Lorentz, un conductor de longitud 𝑙, por el cual circula una corriente 𝑖, ante la presencia de un campo magnético 𝐵⃗ , experimenta una fuerza en dirección transversal tanto a su eje longitudinal como al campo magnético. 𝐹⃗ 𝑖𝑙⃗ 𝐵⃗ Se puede aprovechar este efecto para convertir energía eléctrica en energía mecánica. Nos interesa particularmente el caso de energía mecánica en forma rotacional por sus múltiples aplicaciones. Entonces podemos pensar en una configuración elemental donde la barra conductora está forzada a girar alrededor de un eje. El campo magnético es generado por imanes permanentes o por una bobina. El flujo se establece a través del estator formado por planchas laminadas, ello para evitar el efecto de corrientes parásitas. El flujo cierra el circuito atravesando tanto la holgura de aire entre rotor y estator como el rotor mismo formado también por láminas de acero. El rotor sostiene a las espiras conductoras por las cuales circula corriente eléctrica. 3 Sistemas Electromecánicos Luciano Chiang Sánchez Figura 1 . Configuración elemental para la obtención de Torque De tal modo que la trayectoria de la barra conductora está contenida en una circunferencia de radio r, como se muestra en la figura siguiente: Figura 2. Torque sobre una espira 4 Sistemas Electromecánicos Luciano Chiang Sánchez Se puede demostrar que en la espira giratoria solo contribuyen con torque al eje las barras que van en sentido longitudinal paralelo al eje, no así las barras en sentido radial. Si la barra conductora longitudinal se encuentra en una posición angular cualquiera respecto de la horizontal, entonces se produce sobre dicha barra una fuerza mecánica y por ende un torque respecto al eje de rotación dados por las siguientes expresiones: F1 ilB j T ilBr cos k Vemos que la fuerza 𝐹 sobre la barra conductora es constante si la corriente y el campo magnético se mantienen constantes. Sin embargo el torque T respecto al eje de rotación depende de la posición 𝜃, por lo que no es constante. Un segundo efecto de gran importancia que hay que considerar es que cuando la espira comienza a girar por efecto del torque, entonces se genera espontáneamente una fuerza electromotriz inducida en la espira. Esta fuerza electromotriz inducida se puede calcular de dos maneras. a) Por Ley de inducción de Faraday ∅ 𝐵𝐴 sin 𝜃 𝐵𝐴 sin 𝜔𝑡 Luego 𝑑∅ 𝜀 𝐵𝐴𝜔 cos 𝜔𝑡 𝑑𝑡 b) Por Ley de Lorentz A causa del movimiento angular de rotación del conductor surge una segunda fuerza que se puede cuantificar mediante la ley de Lorentz. 𝐹⃗ 𝐹⃗ 𝑞 𝜔⃗ 𝑟⃗ 𝐵⃗ 𝑞 𝜔𝑟 𝑞 𝑣⃗ sin 𝜃𝚤̂ 𝐵⃗ cos 𝜃 𝚥̂ 𝐵𝚤̂ 𝑞 𝜔𝑟𝐵 cos 𝜃 𝑘 Pero recordemos que 𝐸⃗ 𝐹⃗ 𝑞 𝜔𝑟𝐵 cos 𝜃 𝑘 También recordemos que 𝜀 𝐸⃗ ∙ 𝑑𝑙⃗ 𝜔𝑟𝐵 cos 𝜃 𝑘 ∙ 𝑙 𝑘 𝜔𝑟𝑙𝐵 cos 𝜃 Como se trata de dos conductores en la espira que participan en forma activa, entonces tenemos 𝜀 2𝜔𝑟𝑙𝐵 cos 𝜃 5 Sistemas Electromecánicos Luciano Chiang Sánchez Y como 𝐴 2𝑟𝑙 Entonces llegamos a que 𝜀 𝑑∅ 𝐵𝐴𝜔 cos 𝜃 𝑑𝑡 𝐵𝐴𝜔 cos 𝜔𝑡 La diferencia de potencial que se origina por el giro de la espira, se conoce como contrafuerza electromotriz, y tiene el efecto de oponerse a la corriente que circula por la espira, y por ende reduce el torque de salida. La configuración anterior no es apta para ser utilizada directamente como motor por motivos que se explican a continuación. No obstante, aun así es comúnmente utilizada como dispositivo para medir corrientes en amperímetros analógicos. Se conoce como el mecanismo de D’Arsonval. Para ello se incorpora un resorte angular que mantiene a la espira normalmente en un ángulo =0 respecto de la horizontal. Al circular una corriente, la barra se mueve hasta que la deflexión del resorte angular se equilibra con el torque producido por la corriente. La magnitud de giro de la espira resulta proporcional a la corriente que circula aunque no de un modo lineal, lo que explica por qué la escala de lectura de los amperímetros analógicos no es uniforme. B r F=ilxB 0 F Figura 3. Mecanismo de D’Arsonval La configuración anterior no es apropiada para ser utilizada como motor ya que el torque útil al cabo de un giro completo es cero, tal como se aprecia en la siguiente figura donde se ha graficado el torque T en función de la posición angular con el motor girando a velocidad angular constante: 6 Sistemas Electromecánicos Luciano Chiang Sánchez Torque y cfem en motor CC de 1 espira 1,5 % del Max 1 0,5 0 0 1 2 3 4 5 6 7 ‐0,5 ‐1 ‐1,5 Teta [rad] 100% T 100% E Figura 4. Torque producido por una sola espira En la práctica, para lograr un motor de corriente continua útil, se introducen tres mejoras constructivas al dispositivo elemental explicado en esta sección, formado por una espira rotatoria por donde circula una corriente eléctrica ante la presencia de un campo magnético externo. a) Uso de conmutador y mayor número de espiras para obtener torque unidireccional con poco “ripple” (oscilaciones) b) Enrollamiento continuo del rotor para tener todas las espiras activas simultáneamente c) Uso de Interpolos para alinear plano neutro de conmutación con plano neutro de torque 5.1.2 Obtención de Torque Neto en el Motor CC. conmutador. Solución por medio de Para obtener torque neto en la dirección deseada en el mecanismo descrito en la sección anterior se recurre a un componente especial que permite invertir el sentido de la corriente justo en el momento en que el torque cambia de signo. Este dispositivo se llama colector o conmutador, y permite compensar el cambio de signo geométrico (debido al cambio de signo de cos ), cambiando oportunamente el sentido de la corriente que circula, y así el sentido del torque se mantiene constante. Este dispositivo se muestra en la Figura 5. 7 Sistemas Electromecánicos Luciano Chiang Sánchez v=r B T=ilrB cos F=ilxB =Blv cos r carbones colector (-) (+) F Figura 5. Introducción del colector (conmutador) El colector o conmutador es un anillo que gira solidario al eje del rotor. Está dividido en segmentos no conductores (en blanco) y segmentos conductores (achurados) conectados solidariamente a las espiras. Llamaremos delgas a estos segmentos conductores. El voltaje se entrega a las barras conductoras a través de carbones fijos al estator sobre los cuales desliza el colector. Estos carbones se presionan contra el colector a través de resortes. El colector por su parte está conectado a las barras a través de conductores radiales (no se han dibujado por motivos de claridad), y el circuito eléctrico se completa a través de una barra radial que conecta las barras longitudinales formando la espira. La polaridad de la espira se invierte en cuanto cruza el eje vertical en virtud del colector y de este modo la corriente cambia de sentido, lo que a su vez permite mantener constante el signo del torque durante una vuelta completa. Así, con la introducción de un colector, el torque a lo largo de una vuelta completa del rotor de una espira se ve de la siguiente manera: 8 Sistemas Electromecánicos Luciano Chiang Sánchez Torque y cfem en motor 1 espira y colector 1,5 % del Max 1 0,5 0 0 1 2 3 4 5 6 7 ‐0,5 ‐1 ‐1,5 Teta [rad] 100% T 100% E Figura 6. Torque en espira con colector Se observa en la Figura 6 que el torque es siempre positivo aunque pulsante, lo que se logra por efecto del colector y la conexión por contacto deslizante a través de carbones a la fuente de poder. Sin embargo desde el punto de vista mecánico no es conveniente tener un torque pulsante ya que el mecanismo conducido sufriría vibraciones que probablemente lo dañarían. Para minimizar este problema se agregan más subdivisiones en el colector y se incluyen tantas más espiras. En la configuración de la Figura 7 se ha incluido una segunda espira y el colector ha quedado subdividido en cuatro segmentos no conductores y cuatro segmentos conectados a cada uno de los extremos de las espiras conductoras. Nótese que ahora cada espira queda energizada durante la mitad de un giro completo, y se van alternando entre sí. Nótese además que las espiras quedan energizadas durante la porción angular en que el torque obtenido es más alto, es decir para valores del ángulo 𝜃 en torno a cero. 9 Sistemas Electromecánicos Luciano Chiang Sánchez B v=r F=ilxB (+) =Blv (-) F Figura 7. Dos espiras con colector La Figura 8 permite visualizar el efecto de subdividir el colector y añadir más espiras al rotor. Las curvas representan el uso de 4 y 8 subdivisiones en el colector, vale decir 2 y 4 espiras. Cabe indicar que en la práctica el número de espiras y subdivisiones en un motor eléctrico puede ser alto, ya sea por ejemplo 16, 32 o más. Con ello se logra que el torque resultante sea cada vez más constante y sin la presencia de lo que se conoce como “ripple” (oscilaciones). Torque y cfem en motor cc con múltiples espiras 1,5 % del Max 1 0,5 0 0 1 2 3 4 5 6 7 ‐0,5 ‐1 ‐1,5 Teta [rad] 100% T x 2 100% E x 2 100% T x 4 100% E x 4 Figura 8. Torque para un rotor con colector y múltiples espiras De tal manera que para la espira activa tenemos 𝑇 2𝐵𝑙𝑟𝑖 cos 𝜃 𝐵𝐴𝑖 cos 𝜔𝑡 , 𝜃 𝜃 𝜃 10 Sistemas Electromecánicos Luciano Chiang Sánchez Y si a la espira le aplicamos un voltaje externo a través de carbones por los que desliza el colector tenemos por Kirchoff la siguiente ecuación 𝑉 𝑖𝑅 𝜀 𝑖𝑅 𝐵𝐴𝜔 cos 𝜃 pequeños entonces obtenemos torque y Para números de delgas grandes, es decir, 𝜃 fuerza electromotriz inducida aproximadamente constantes. Y recordando que ∅ 𝐵𝐴, podemos escribir 𝑇 𝑉 𝐾∅𝑖 𝑖 𝑅 𝐾∅𝜔 Donde K es un coeficiente de ajuste del modelo. 5.1.3 Mejoramiento de capacidad incorporando mayor número de espiras activas y conectándolas en serie. Enrollamiento continuo. Se puede aumentar significativamente el torque proporcionado por el motor descrito en la sección anterior si se aplica un esquema de conexión tal que todas las espiras contribuyan simultáneamente al torque total. En la secuencia de figuras a continuación se ilustra tal esquema de conexión donde todas las espiras están activas simultáneamente. Cabe notar que este esquema es el usado en la práctica para un máximo aprovechamiento de la capacidad del motor, y dependiendo del tamaño, el colector se puede subdividir para usar un número de espiras grande. En el ejemplo mostrado más abajo tenemos un rotor con 4 ranuras. Cada ranura contiene dos conductores de espiras distintas, por lo tanto hay 4 espiras en el rotor. El colector a su vez está dividido en 4 sectores, con material de aislación eléctrica insertado entremedio. La explicación para un rotor de 4 espiras es fácilmente extendible a un rotor con mayor número. La forma de enrollar este rotor de 4 espiras a modo de ejemplo se muestra en la figura siguiente. Nótese que corresponde a un enrollamiento continuo, es decir el punto de término conecta con el punto de partida, sin importar cuál es la espira inicial. El enrollamiento del rotor da lugar a un circuito cerrado. 11 Sistemas Electromecánicos Luciano Chiang Sánchez 3 4 1 4 2 2 3 1 Figura 9. Esquema de enrollamiento continuo para un rotor de 4 delgas en el conmutador En las figuras a continuación el sentido de giro es en sentido contrario al reloj y el campo magnético B tiene dirección de derecha a izquierda. Se muestra los patrones de circulación de corriente que se establecen en distintas posiciones angulares del rotor.. x x 3 4 1 ° ° 4 (-) (+) 2 x x 2 3 1 ° ° Figura 10. El patrón de circulación de corriente para el ángulo 𝜽 𝟗𝟎° de la espira 1 como referencia. La corriente tiene el mismo sentido de circulación a cada lado del eje de simetría vertical (plano neutro de conmutación). 12 Sistemas Electromecánicos Luciano Chiang Sánchez x (-) (+) Figura 11. Se muestra el patrón de circulación de corriente para el ángulo 𝜽 𝟗𝟎° de la espira 1. La corriente tiene el mismo sentido de circulación a cada lado del eje de simetría vertical. Sin embargo, la espira 1 y 3 están inactivas pues el voltaje entre sus extremos es nulo mientras se atraviesa por esta posición singular. - + Figura 12. Se observa el patrón de circulación de corriente para el ángulo 𝜽 𝟗𝟎° de la espira 1. La corriente tiene el mismo sentido de circulación a cada lado del eje de simetría vertical. Nótese que el sentido de circulación de las espiras 1 y 3 se invirtió, respecto del caso 𝜽 𝟗𝟎°, y por ende se mantiene el sentido del torque, con lo que se logra un funcionamiento continuo del motor. 13 Sistemas Electromecánicos Luciano Chiang Sánchez A continuación se muestra el esquema de una bobina en un enrollamiento continuo en un motor CC. Figura 13. 1 espira en configuración de enrollamiento continuo. En la figura a continuación se observa el rotor de motor de CC con todas las espiras instaladas en configuración de enrollamiento continuo o sin fin. Por cada ranura corren 2 espiras, por lo tanto existen tantas espiras como ranuras en el núcleo. 14 Sistemas Electromecánicos Luciano Chiang Sánchez Figura 14. Rotor de Motor CC con enrollamiento continuo completo. Figura 15. Diagrama esquemático del motor CC mostrando una espira del enrollamiento continuo 15 Sistemas Electromecánicos Luciano Chiang Sánchez 5.1.4 Uso de Interpolos Cuando la corriente que circula por el rotor es grande, el campo magnético generado por la corriente que circula por las espiras (B rotor) distorsiona el campo magnético generado por los imanes (B estator), de modo que el plano neutro de conmutación eléctrica ya no es perpendicular al campo magnético resultante. En otras palabras el plano neutro de conmutación eléctrica ya no coincide con el plano neutro de torque. Por esta razón las espiras contribuyen con torque negativo durante parte del ciclo de rotación. Esto se muestra esquemáticamente en la figura siguiente. B rotor B resultante B estator - + Plano neutro de torque efectivo Plano neutro de corriente y torque ideal Figura 16. Rotación del plano neutro de torque respecto del plano neutro de conmutación. Se aprecia en la figura anterior que la corriente en las espiras no cambia de dirección oportunamente, por lo que en parte del giro generan torques de signo contrario, por tener durante un lapso de tiempo el mismo sentido de la corriente a ambos lados del plano neutro de torque. Para corregir este problema, en motores de CC de altas prestaciones se introducen bobinas a 90° del campo magnético del estator (B estator), llamadas interpolos. El objeto de estas bobinas es anular el 16 Sistemas Electromecánicos Luciano Chiang Sánchez campo magnético generado por el rotor (espiras), de modo que el plano neutro de conmutación eléctrica coincida con el plano neutro de torque. En la figura siguiente se muestra como el plano neutro de torque es reposicionado mediante las bobinas interpolo. Cuando estos planos no coinciden, además de la contribución negativa de torque en partes del ciclo, se producen problemas de arco eléctrico en el conmutador. Bobina Interpolo B interpolo B rotor B estator B resultante - + Plano neutro de corriente y torque ideal Plano neutro de torque efectivo Figura 17. Alineamiento de plano neutro de conmutación y plano neutro de torque mediante el uso de interpolos 17 Sistemas Electromecánicos Luciano Chiang Sánchez 5.2 Modelo Electromecánico de Motor CC 5.2.1 Modelo Teórico Básico El motor convencional de corriente continua requiere la existencia de un campo magnético para que se genere un torque al circular corriente por los devanados del rotor, como hemos visto en la sección anterior. El uso de imanes permanentes para generar este campo magnético es común, y en este caso la magnitud de éste se puede considerar constante. En tal caso el modelo del motor eléctrico se puede modelar mediante los siguientes circuitos. Ra i V =K T=Ki J c Text Figura 18. Circuito Eléctrico-mecánico de un Motor de CC Las ecuaciones correspondientes al modelo anterior se pueden escribir de la siguiente manera: 1 V K M ia Ra K ia JM c M Text donde V PWM * voltaje batería Volts K constante geométrica del motor Flujo Magnético [Weber] ω Velocidad angular del rotor rad/s M i a Corriente de Armadura amp R a Resistenci a de Armadura ohm TM Torque del Motor Nm La potencia que es capaz de dar el motor está dada por 𝑃 𝑇 𝜔 Pero 𝜔 𝑉 𝑖 𝑅 𝐾∅ 𝑉 𝑇 𝑅 𝐾∅ 𝐾∅ 18 Sistemas Electromecánicos Luciano Chiang Sánchez Luego 𝑃 𝑉 𝑇 𝑇 𝑅 𝐾∅ 𝐾∅ La anterior es la ecuación de una parábola invertida. El máximo se obtiene en 𝑑𝑃 𝑑𝑇 0 Entonces 𝑑𝑃 𝑑𝑇 0 𝑉 𝑇 𝑅 𝐾∅ 𝐾∅ 𝑇 𝑅 𝐾∅ 𝑉 𝐾∅ 𝑉 2𝑅 2𝐾∅ 𝑉 4𝑅 Se obtiene que 𝑇∗ 𝑉 𝐾∅ 2𝑅 𝜔∗ 𝑉 2𝐾∅ Y también Luego la potencia máxima es 𝑃∗ 𝑇 ∗ 𝜔∗ Por otra parte haciendo el análisis correspondiente podemos deducir que 𝜔 𝑇 𝑉 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑡𝑒ó𝑟𝑖𝑐𝑎 𝑚á𝑥𝑖𝑚𝑎 𝐾∅ 𝑉 𝐾∅ 𝑡𝑜𝑟𝑞𝑢𝑒 𝑡𝑒ó𝑟𝑖𝑐𝑜 𝑚á𝑥𝑖𝑚𝑜 𝑅 Se puede apreciar a partir de las ecuaciones anteriores que el valor de 𝐾∅ determina la máxima velocidad y máximo torque. Por lo tanto para aplicaciones específicas los motores se diseñan variando el valor de 𝐾∅ con el objeto de alcanzar magnitudes de velocidad y torque deseadas, lo cual se logra sin sacrificar potencia. 5.2.2 Eficiencia Electromecánica Obtendremos a continuación la eficiencia electromecánica. Tenemos que la potencia mecánica que entrega el motor está dada por: 19 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑃 𝑇 ∙𝜔 𝑇 𝑉 𝑇 𝐾∅ 𝑃 𝑉 𝑇 𝑅 𝐾∅ 𝐾∅ 𝑇 𝐾∅ 𝑅 La forma de la curva de potencia de salida es una parábola inversa en función del torque opuesto al giro del motor. Por otra parte la potencia eléctrica de entrada es: 𝑃 𝑉𝑖 𝑉 𝑇 𝐾∅ Por lo tanto la eficiencia de conversión electromecánica 𝜂 es: 𝑉 𝑇 𝐾∅ 𝑃 𝑃 𝜂 𝜂 1 𝑇 𝐾∅ 𝑇 𝑉 𝐾∅ 𝑇 𝑅 𝑉 ∙ 𝐾∅ 𝑅 Por lo tanto, la eficiencia de conversión electromecánica decae linealmente con el torque de salida del motor. La eficiencia a máxima potencia es: 𝜂∗ 1 𝑇∗ 𝑅 𝑉 ∙ 𝐾∅ 1 𝑉 ∙ 𝐾∅ 𝑅 2𝑅 𝑉 ∙ 𝐾∅ 𝜂∗ 1 2 0,5 1 La eficiencia de la conversión electromecánica a potencia máxima es de un 50%. La eficiencia máxima es de 100% cuando el torque de salida es cero. Si consideramos adicionalmente las pérdidas por roce al interior del motor se alcanzan rendimientos del orden del 95% o más para cargas pequeñas de trabajo relativas al torque a potencia máxima. En general los motores de CC se diseñan para operar con cargas pequeñas respecto a la potencia máxima para que la eficiencia sea adecuada, es decir por ejemplo del 85% hacia arriba. 5.2.3 Reacción de Armadura (desviación modelo teórico básico) Con respecto al modelo anterior es necesario hacer la salvedad que en la práctica pueden existir desviaciones significativas puesto que principalmente por razones económicas se hace operar a los motores tanto CC como otros tipos, en condiciones de saturación del flujo magnético en el fierro. Es decir que cuando el motor opera con altas corrientes de armadura en este caso el valor de K tiende a disminuir proporcionalmente al aumento de la corriente. En la tabla siguiente se muestra el comportamiento de K medido para un motor DC de imanes permanentes que posee una resistencia de armadura Ra=0,5 [ohm]. Este motor está conectado a la salida con un reductor de N=5. Obsérvese también que el voltaje de entrada al motor disminuye en función de la corriente de 20 Sistemas Electromecánicos Luciano Chiang Sánchez armadura, y este efecto se explica por la existencia de una resistencia interna RB en la batería de plomo-ácido de 24 volts nominal empleada. Corriente Armadura[A] 3,0 4,7 7,0 9,7 15,3 30,0 22,0 35,0 40,0 RPM Voltaje [V] =KV 3.400 24,95 23,45 3.285 24,60 22,25 3.215 24,60 21,10 3.110 24,45 19,60 2.905 24,13 16,48 2.450 23,05 8,05 2.700 23,00 12,00 2.200 22,70 5,20 2.100 22,25 2,25 0,0659 0,0647 0,0627 0,0602 0,0542 0,0314 0,0424 0,0226 0,0102 A medida que aumenta la corriente de armadura el valor de K disminuye por efecto de la saturación del hierro. Este fenómeno se conoce como la reacción de armadura, y explica la disminución de la capacidad del motor respecto de un modelo ideal donde no se produce saturación magnética en el hierro (estator o rotor). En el gráfico siguiente se observa gráficamente el efecto de la reacción de armadura. Variación de K por efecto armadura 0,0700 0,0600 0,0500 K 0,0400 [Nm/A] 0,0300 0,0200 0,0100 0,0000 y = ‐2E‐05x2 ‐ 0,0007x + 0,0683 Kfi Polinómica (Kfi) 0,0 10,0 20,0 30,0 40,0 50,0 Corriente Armadura [A] El efecto de disminución del K produce el siguiente comportamiento del Torque del motor, que se aparta de un modelo ideal donde el valor de K se mantiene constante. 21 Sistemas Electromecánicos Luciano Chiang Sánchez Torque Efecto de Reacción de Armadura en el Torque 2,0000 1,8000 1,6000 1,4000 1,2000 1,0000 0,8000 0,6000 0,4000 0,2000 0,0000 y = 0,0511x + 0,0649 Torque [Nm] Ideal [Nm] Polinómica (Torque [Nm]) Lineal (Ideal [Nm]) 0,0 10,0 20,0 30,0 40,0 50,0 Corriente de Armadura [A] La capacidad mecánica efectiva del motor resulta en este caso como se muestra en el gráfico a continuación. 22 Sistemas Electromecánicos Luciano Chiang Sánchez El efecto de la reacción de armadura en el motor del ejemplo se manifiesta esencialmente en una curva de torque que no es lineal, aunque sí posee un rango aproximadamente lineal en este caso para velocidades mayores a 575 rpm de salida en el reductor o para corrientes menores a 17 A. 5.3 Formas de Conexión del Campo Magnético del Estator cuando se usa Bobina A continuación analizaremos las formas convencionales aplicadas para generar el campo magnético, cuando se usa una bobina para este efecto. 5.3.1 Conexión Shunt Consiste en generar el campo magnético del estator mediante una bobina en paralelo con el circuito del rotor, tal como se aprecia en la siguiente figura. Figura 19. Circuito Motor CC con campo por conexión Shunt En este caso el comportamiento del motor es similar al comportamiento obtenido con un motor con campo generado por imanes permanentes. 5.3.2 Conexión Serie Esta conexión de realiza conectando la bobina de campo en serie con el enrollamiento del rotor, con lo cual se logran grandes torques de partida, ya que al aumentar la corriente de armadura, lo que hace aumentar a su vez la fuerza del campo, con lo que el torque aumenta aún más que en el caso de la conexión shunt. 23 Sistemas Electromecánicos Luciano Chiang Sánchez Ra iF V ia RF =K T=Ki J c Text Figura 20. Circuito Motor CC con campo por conexión en serie (Motor Universal) En el caso del motor en serie el campo magnético generado por el estator depende de la misma corriente de armadura, ya que tenemos que: 𝑇 𝐾∅𝑖 Pero en este caso con bobina de campo en serie con la armadura tenemos, 𝐾∅ 𝐾𝑖 Luego 𝑇 𝐾𝑖 Esto quiere decir que un motor CC con corriente de campo conectada en serie es capaz de producir un gran torque de partida. A la partida del sistema, la velocidad de rotación del motor es cero, y por lo tanto la corriente de armadura al partir será muy alta, ya que no hay fem inducida 𝜀 𝐾∅𝜔 que limite 𝑖 . Por ende, se puede obtener un torque de muy alta magnitud, dado que el torque es proporcional al cuadrado de 𝑖 . En la práctica, debido a la saturación del circuito magnético en este motor se logra en realidad un comportamiento casi lineal del Torque en función de la corriente de armadura para todo el rango de corrientes. Ello en contraste con el caso de motores con campo generado por bobinas en paralelo (shunt) o imanes permanentes, donde por efecto de la saturación el torque no es linealmente proporcional y su valor tiende a saturarse rápidamente con el incremento de la corriente de armadura, como se advierte en la figura siguiente. 24 Sistemas Electromecánicos Luciano Chiang Sánchez Figura 21. Comportamiento Comparativo Conexión Bobina de Campo La curva de omega vs torque se puede derivar remplazando la expresión de la corriente en la ecuación de voltaje, es decir 𝑇 𝐾 𝑖 Luego consideremos que 𝑅 𝑅 𝑅 Podemos escribir entonces 𝑇 𝑅 𝐾 𝑉 𝐾 𝑇 𝜔 𝐾 Luego, 𝜔 𝜔 𝑇 𝑅 𝐾 √𝐾´ 𝑇 𝑉 𝑅 √𝐾´ 𝑇 𝐾´ 𝑉 La potencia de salida del motor es 25 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑃 𝑃 𝑇𝜔 𝑉 √𝑇 𝑅 𝑇 𝐾´ √𝐾´ á á La potencia máxima se obtiene para 𝑑𝑃 á 0 𝑑𝑇 Es decir 1 𝑉 𝑇 2 √𝐾´ 𝑅 𝐾´ 1 𝑉 𝐾´ 4 𝑅 𝑇∗ 0 Luego la Potencia máxima es 𝑉 𝑃∗ á 𝑉 𝐾´ √𝐾´ 4𝑅 𝑃∗ 𝑅 1 𝑉 𝐾´ 𝐾´ 4 𝑅 𝑉 4𝑅 á Por otra parte, el máximo torque se obtiene para 𝜔 𝑉 0, por lo tanto 𝑅 𝐾´ 𝐾´ 𝑇 0 𝑉 𝐾´ 𝑅 𝑇 Ejemplo 5-1 Desarrolle la ecuación del movimiento para un vehículo de masa M con 4 ruedas de masa m y radio R, traccionado por un motor CC con campo conectado en serie. T_M, _M N M R, m f 26 Sistemas Electromecánicos Luciano Chiang Sánchez Solución Desde el punto de vista mecánico, la ecuación del movimiento es: 𝐼 𝜔 𝑇 La inercia equivalente es 𝐼 : 3 4 𝑚 2 𝐼 𝑅 𝑁 𝑀 Pero para un motor CC con bobina de campo en serie tenemos 𝑉 𝑇 𝑅 𝐾´ 𝐾´ 𝜔 Luego la ecuación del movimiento es la siguiente: 3 4 𝑚 2 𝑀 𝑅 𝜔 𝑁 𝑉 𝐾´ 𝜔 𝑅 𝐾´ La ecuación anterior indica un comportamiento no lineal de la variable 𝜔 . La solución de esta ecuación diferencial no lineal requiere de un método numérico de integración. Por otra parte, la ecuación que resulta si se utiliza un motor CC con campo conectado en paralelo (shunt), para efectos comparativos es: 3 4 𝑚 2 𝑀 𝑅 𝜔 𝑁 3 4 𝑚 2 𝑀 𝑅 𝜔 𝑁 𝑉 𝐾∅ 𝑅 𝐾∅ 𝑅 𝐾∅ 𝑅 𝜔 𝜔 𝑉 𝐾∅ 𝑅 La ecuación anterior es una ecuación diferencial lineal de primer orden, cuya solución es 𝜔 𝑉 1 𝐾∅ ∅ 𝑒 Donde 𝐼 3 4 𝑚 2 𝑀 𝑅 𝑁 5.4 Motor Universal Cabe notar que el motor con corriente de campo conectada en serie puede funcionar también alimentado por una fuente de poder de corriente alterna, lo que es una afortunada casualidad. Esto es posible ya que la dirección del campo magnético queda sincronizada con la dirección de la circulación de la corriente gracias a que la bobina de campo y el devanado del rotor están conectados en serie. Al cambiar de sentido la corriente en las espiras debido al voltaje alterno 27 Sistemas Electromecánicos Luciano Chiang Sánchez también cambia el sentido de la corriente en la bobina de campo, invirtiéndose el sentido del campo magnético al mismo tiempo. Por ello el signo de torque se mantiene positivo, aunque cambie el sentido de la corriente. El circuito del motor entonces se puede modelar como en la figura siguiente: Ra =K V cos t ia Rf T=Ki Jr c T ext Figura 22 Modelo Motor CC Universal Por lo tanto las señales en el circuito tendrán la siguiente forma (en el rango lineal) Figura 23. Comportamiento de señales en motor de CC Se puede observar en la Figura 23. Comportamiento de señales en motor de CC en que 𝐵 e 𝑖 siempre tiene el mismo signo, por lo que el producto 𝑇 𝐾∅𝑖 mantiene el signo (o sentido) independiente de la oscilación senoidal de la fuente de voltaje. 5.5 Control de velocidad en motores eléctricos CC 28 Sistemas Electromecánicos Luciano Chiang Sánchez Existen dos formas de control de velocidad de motores CC comúnmente usadas. La primera es aplicable a motores con campo generado por bobina, y consiste en controlar la corriente que circula por la bobina. De esta manera se controla el K del motor, y por ende se puede variar la velocidad de operación para una carga dada, ya que la velocidad del motor queda determinada por el valor efectivo de K. Esta forma de control se conoce como Control de Velocidad por Corriente de Campo. No es aplicable a motores CC con campo obtenido por imán permanente, ya que el campo magnético en este caso es fijo y no se puede cambiar. La segunda forma de control es a través del control de la corriente de armadura. En este caso el esquema de control consiste en mantener la corriente de armadura mediante la pulsación del voltaje de alimentación. Esta forma se conoce como Control de Velocidad por Corriente de Armadura, o también control PWM (Pulse Width Modulation o Modulación de Pulsos), que es la forma más común de implementarlo. Explicaremos este esquema de control a continuación. 5.5.1 Modulación de Pulsos (PWM) La modulación de pulsos consiste en activar y desactivar la fuente de voltaje a intervalos regulares tal como se muestra en la figura a continuación. El voltaje estará activado en una porción del ciclo y desactivado en la porción restante. La corriente debería aumentar y disminuir cíclicamente. No obstante, si la frecuencia de encendido y apagado es alta, la corriente logra mantenerse en un valor casi constante, con decaimiento y crecimiento imperceptibles. V T_on i_armadura T_off t[seg] El valor numérico de la modulación de pulsos está dado por: 𝑃𝑊𝑀 𝑇 𝑇 𝑇 ∙ 100 29 Sistemas Electromecánicos Luciano Chiang Sánchez Una PWM de 100% indica que la fuente de voltaje está permanentemente conectada. Por otra parte una PWM de 0% indica que la fuente de voltaje está permanentemente desconectada. Valores intermedios de la PWM permiten operar como si el voltaje aplicado fuera la fracción correspondiente del voltaje máximo. Es decir una PWM de 75% por ejemplo, equivale a aplicar un voltaje continuo de 0,75 𝑉 í al motor. Ejemplo 5-2 Un motor de CC con imanes permanentes se modula a 5 KHz con un voltaje de alimentación de 12V. Si el 𝐾∅ del motor es 0,05, cual deberán ser los valores del duty-cycle para alcanzar una velocidad de alrededor de 1800 rpm sin carga. Solución: Tenemos 𝑇 𝜔 100% 𝑑𝑢𝑡𝑦𝑐𝑦𝑐𝑙𝑒 𝑇 𝑑𝑢𝑡𝑦𝑐𝑦𝑐𝑙𝑒 ∙ 𝑇 𝑇 0,0002 1 0,0002 𝑠 5000 𝑉 12 𝑟𝑎𝑑 240 𝐾∅ 0,05 𝑠 1.800 ∙ 2𝜋 60 0,7854 240 0,7854 ∙ 0,0002 0,00015708 𝑠 0,00015708 4,292𝑒 5 𝑠 5.5.2 Control de Velocidad en Motores CC de imanes permanentes a) Control de Velocidad Unidireccional por PWM a lazo abierto. Significa que no hay realimentación para corregir el error respecto a una velocidad precisa. i V D C B S iBE E Figura 24. Control Unidireccional 30 Sistemas Electromecánicos Luciano Chiang Sánchez Se puede realizar un control de velocidad unidireccional de motores DC con campo generado por imanes permanentes o con bobina de campo conectada en paralelo, de acuerdo al circuito de la figura anterior. El transistor BJT permite o cierra el paso de la corriente entre colector y emisor en forma alternativa activado por la corriente de base generada a través de un circuito apropiado. Este transistor se debe operar completamente abierto o completamente en corto circuito. Para esto último es necesario saturar el transistor de modo que la potencia disipada en el propio transistor sea mínima. La corriente de saturación necesaria para saturar el transistor depende de la corriente que circula entre el colector y emisor de acuerdo a las características del transistor. También se puede usar un transistor de potencia MOSFET o IGBT, con lo que se puede pulsar el transistor con un voltaje. La modulación de pulsos (PWM) consiste en pulsar la corriente de base con una frecuencia fija variando la proporción de tiempo encendido versus apagado, y de este modo se obtiene una variación de velocidad. El diodo del circuito actúa mientras el transistor mantiene cerrado el paso de la corriente de colector, permitiendo recircular la corriente por el motor. Mientras dura la desconexión del transistor, la corriente del motor disminuye paulatinamente disipándose en la resistencia del propio motor. La presencia del diodo impide que se generen voltajes excesivos por efecto de la desactivación del transistor, que pueden dañar el transistor al sobrepasar el máximo voltaje de bloqueo, y también dañar el devanado del motor. En la porción de tiempo en que el transistor está saturado el circuito equivalente es como en la Figura 25.a. En la porción de tiempo en que el transistor está abierto (paso de la corriente impedido), el circuito equivalente es como en la Figura 25.b, y la corriente re-circula disipándose en los enrollamientos del rotor. i V D i (b) (a) Figura 25. Corriente en con transistor saturado (a) y bloqueado (abierto) (b) b) Circuito H para control bidireccional de Velocidad El circuito H permite el control bidireccional de la velocidad ademán de la magnitud, y se ilustra en la figura siguiente. 31 Sistemas Electromecánicos Luciano Chiang Sánchez V C C B B FWD REV E E C C B B E E FWD PWM REV Figura 26. Esquema Circuito H V i V i (b) (a Figura 27. Circuito H con transistores en dirección Clockwise (por ejemplo) saturados (a) y bloqueados (abiertos) (b) 32 Sistemas Electromecánicos Luciano Chiang Sánchez En un sentido de giro los transistores están activados por ejemplo como se ilustra en la Figura 27. Se logra entonces que la dirección de corriente tenga un sentido determinado. La modulación de pulsos a su vez hace que durante parte del tiempo la corriente circule como en (a), y el resto del tiempo que recircule como en (b), de modo que el voltaje efectivo aplicado al motor es la fracción PWM del voltaje nominal de la fuente externa. c) Circuito Totem para control bidireccional de velocidad Figura 28. Circuito de Control Totem de Velocidad Bi-direccional Esta es otra forma usada para el control bidireccional de velocidad en motores de CC. Tiene la desventaja que requiere fuente de voltaje negativa. 5.6 Ejemplos Resueltos Ejemplo 5-3 Determine el torque y velocidad de subida de la carga en el sistema de la figura siguiente, traccionado por un motor de CC con campo generado por imanes permanentes. r p1 RT r p2 Mg Figura 29. Esquema Ejemplo 33 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑉 𝑖 𝑅 𝐾∅𝜔 Por otra parte en régimen permanente, es decir a velocidad constante tenemos 𝑇 Y 𝑀𝑔𝑟 𝑟 𝑀𝑔𝑟 𝑟 𝑇 𝐾∅𝑖 Obtenemos ahora la corriente de armadura 𝑖 en régimen permanente 𝑟 𝑀𝑔𝑟 𝑟 𝐾∅ 𝑖 Por lo tanto la velocidad del motor en equilibrio es 𝑉 𝜔 𝑣 𝜔 𝑟 𝑉 𝑖 𝑅 𝐾∅ 𝑟 𝜔 𝑟 𝑟 𝑟 𝑀𝑔𝑟 𝑟 𝐾∅ 𝐾∅ 𝑟 𝑟 𝑟 𝑉 𝑟 𝑀𝑔𝑟 𝑟 𝐾∅ 𝐾∅ La potencia instantánea es entonces 𝑃 𝑉 𝑟 𝑀𝑔 𝑟 𝑟 𝑀𝑔𝑣 𝑟 𝑀𝑔𝑟 𝑟 𝐾∅ 𝐾∅ La potencia máxima que da el motor es 𝑃 𝑉 4𝑅 Es necesario que 𝑃 𝑃 Ejemplo 5-4 Un vehículo con tracción por motor eléctrico de CC sube por una pendiente como se muestra en la figura. a) ¿A qué velocidad sube el vehículo por la pendiente? b) Determine el valor de la reducción de trasmisión que hará que el vehículo suba a máxima velocidad por la pendiente. 34 Sistemas Electromecánicos Luciano Chiang Sánchez v N T_M, _M m R F_T Figura 30. Esquema ejemplo Solución La fuerza de tracción que requiere el vehículo es 𝑚𝑔 sin 𝜃 𝐹 La relación entre la velocidad v del vehículo y la velocidad angular del motor eléctrico está dada por 𝜔 𝑣 𝑁 𝑅 𝑇 𝐹 𝑅 𝑁 El torque que debe proporcionar el motor es Las ecuaciones que rigen el comportamiento del motor en régimen permanente son 𝑉 𝐾∅ 𝜔 𝐾∅ 𝑖 𝑇 La curva de 𝜔 𝑣𝑠 𝑇 es entonces 𝑉 𝐾∅ 𝜔 𝑖𝑅 𝑇 𝑅 𝐾∅ Remplazando en las ecuaciones anteriores podemos escribir 𝑖 𝐹 𝑅 𝑁 𝐾∅ 35 Sistemas Electromecánicos Luciano Chiang Sánchez Por lo tanto la velocidad que alcanza el vehículo para subir es: 𝑉 𝑅 𝐾∅ 𝑁 𝑣 𝐹 𝑅 𝑅 𝑁 𝐾∅ Para encontrar el valor máximo de v dado N, entonces hacemos 𝑑𝑣 𝑑𝑁 0 Por lo tanto 𝑉𝑅 1 𝐾∅ 𝑁 2 𝐹 𝑅 𝑅 1 𝐾∅ 𝑁 0 De donde se obtiene que 𝑁∗ 𝐹 𝑅 1 𝑉 𝐾∅ 2 𝑅 Pero sabemos que el Torque de motor en potencia máxima está dado por: 𝑇∗ 1 𝑉 𝐾∅ 2 𝑅 Esto nos indica que para obtener la máxima velocidad del vehículo se debe operar el motor en el punto de potencia máxima, de este modo se aprovechará la capacidad del motor en forma óptima. Ejemplo 5-5 Un motor eléctrico de corriente continua se alimenta con un voltaje de 12 V. Se mide mediante un tacómetro la velocidad sin carga (2450 rpm) y con un amperímetro de tenazas la corriente sin carga (0,1 A). Con un multímetro se mide la resistencia eléctrica entre bornes, que es de 0,5 ohm. Estime a) La potencia máxima b) La eficiencia máxima c) La potencia en el punto de eficiencia máxima Solución a) Tenemos 𝑉 𝑖 𝑅 𝐾∅𝜔 Luego 36 Sistemas Electromecánicos Luciano Chiang Sánchez 𝐾∅ 𝑉 𝑖 _ 𝑅 𝜔 𝑇 Entonces 𝑉 4𝑅 𝑉 2𝐾∅ 𝑇 0,1 ∙ 0,5 2𝜋 2450 ∙ 60 0,04658 𝑉 ∙ 𝐾∅ 12 ∙ 0,04658 1,18 𝑁𝑚 𝑅 0,5 𝐾∅𝑖 _ 0,04658 ∙ 0,1 𝑇 𝑃 12 12 ∙ 12 4 ∙ 0,5 𝑃 0,004658 12 2 ∙ 0,0458 72 0,6 71,4 𝑊 La eficiencia en el punto de potencia máxima es 𝑃 𝑉𝑖 ∗ 𝜂 71,4 𝑉 12 ∙ 2𝑅 71,4 12 12 ∙ 2 ∙ 0,5 0,4958 b) 𝐾∅𝑖 𝜂 𝑉 𝑇 𝑖 𝑅 𝐾∅ 𝑉 𝑇 𝑖 𝑅 𝐾∅ 𝑉𝑖 𝑉∙𝑖 La eficiencia máxima se obtiene cuando 𝑉𝑖 𝑉𝑖 𝑇 2𝑖 𝑅 𝑅 𝐾∅ 𝜕𝜂 𝜕𝑖 𝑉 𝑇 𝑅 𝑖 𝐾∅ 0 𝑉 𝑉𝑖 𝑖 𝑅 𝑇 𝐾∅ 𝑉 𝑇 𝑅 𝑖 𝐾∅ 𝑉𝑖 𝑉𝑖 𝑅 𝑖 ∗∗ 𝜂 𝑖 ∗∗ 1,549 𝑇 𝑉 𝐾∅𝑅 𝑇 𝑉 𝐾∅ 0 0,004658 ∙ 12 0,04658 ∙ 0,5 0,04658 ∙ 1,549 0,004658 ∙ 0 12 1,549 1,549 ∙ 0,5 0,04658 12 ∙ 1,549 0,8751 c) 𝑃∗∗ 𝜂𝑉𝑖 ∗∗ 0,8751 ∙ 12 ∙ 1,549 16,26𝑊 37 Sistemas Electromecánicos Luciano Chiang Sánchez Ejemplo 5-6 Un motor de CC con campo generado por imanes permanentes posee un 𝐾∅ 0,05 y una resistencia 𝑅 0,25. Se alimenta con un voltaje de 24V. Si el rotor pesa 5 kg y tiene un diámetro de 100 mm, estime, a) ¿Cuál es la velocidad de régimen sin carga? b) ¿Cuánto se demora en alcanzar la velocidad de régimen sin carga una vez conectado a la fuente de poder partiendo desde el reposo? Considere la fricción despreciable. Solución a) La velocidad de régimen sin carga es 𝑉 𝐾∅ 𝜔 24 0,05 480 𝑟𝑎𝑑/𝑠 b) Las ecuaciones que rigen la dinámica del motor son las siguientes 𝑉 𝑖 𝑅 𝐾∅𝑖 Eliminando 𝑖 obtenemos 𝐾∅𝜔 𝐽 𝜔 𝑉 𝐽 𝑅 𝜔 𝐾∅ 𝜔 𝐾∅ 𝜔 𝐽 𝑅 𝐾∅𝜔 Re-arreglando tenemos 𝑉𝐾∅ 𝐽 𝑅 Aplicando transformada de Laplace tenemos 𝑠Ω 𝑠 𝜔 𝐾∅ Ω 𝑠 𝐽 𝑅 𝜔 Ω 𝑠 𝑉𝐾∅ 𝑠𝐽 𝑅 𝑉𝐾∅ 𝑠𝐽 𝑅 0 𝑠 1 𝐾∅ 𝐽 𝑅 Aplicando la transformada inversa tenemos 38 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑉 1 𝐾∅ ω 𝑡 ∅ 𝑒 donde 1 𝑚𝑟 2 𝐽 1 5 ∗ 0,05 2 0,00625 Finalmente podemos escribir ω 𝑡 480 1 𝑒 , Ejemplo 5-7 ¿Cuál es la aceleración y corriente en el instante de partida de un motor CC e imanes permanentes que posee un 𝐾∅ 0,075 y una resistencia 𝑅 0,4. Se alimenta con un voltaje de 48V, el rotor 2 𝑁𝑚. pesa 10 kg y tiene un diámetro de 150 mm, y la carga de trabajo constante es 𝑇 𝐽 1 𝑚𝑟 2 1 10 ∙ 0,075 2 0,028125 En la partida tenemos corriente de stall, luego 𝑉 𝑅 𝑖 48 0,4 120 𝐴 El torque proporcionado por el motor es, 𝐾∅𝑖 𝑇 0,075 ∙ 120 9 𝑁𝑚 Luego la aceleración en el instante de partida está dada por 𝐽 𝜔 𝑇 𝑇 Entonces en el instante de la partida la aceleración será 𝜔 𝑇 𝑇 𝐽 9 2 0,028125 248,9 𝑟𝑎𝑑 𝑠 Ejemplo 5-8 El sistema de la figura representa un sistema electromecánico para levantar peso. Consiste en un motor eléctrico CC conectado a un reductor de engranajes de dientes rectos. La salida del reductor está conectada a un dispositivo de tuerca-tornillo que transforma el movimiento rotatorio en movimiento lineal. El tornillo posee un paso p. Estime el tiempo que demora el sistema en levantar la carga M una altura de 1 metro. 39 Sistemas Electromecánicos Luciano Chiang Sánchez Solución Desde el punto de vista eléctrico tenemos la siguiente ecuación: 𝑉 𝑖 𝑅 𝑇 𝐾∅𝜔 𝐾∅𝑖 Desde el punto de vista mecánico formularemos la ecuación que rige el movimiento a través de la ecuación de Lagrange para y. 𝜕𝐿 𝑑 𝜕𝐿 𝐹 𝜕𝑦 𝑑𝑡 𝜕𝑦 40 Sistemas Electromecánicos Luciano Chiang Sánchez Con 𝐿 𝐾 𝑈 Tenemos 𝐾 1 𝑀 2 1 𝐽 2 𝑚 𝑦 1 𝐽 2 𝐽 𝜔 𝐽 𝜔 Por configuración cinemática tenemos 𝜔 𝜔 𝜔 𝜔 𝑦 𝑍 𝑍 2𝜋 𝑝 2𝜋 𝑍 𝑝 𝑍 2𝜋 𝑦 𝑁 𝑝 𝑦 𝜔 𝑁 Por trasmisión de torque tenemos (conservación de la energía despreciando pérdidas) 𝑝 𝐹 2𝜋 𝑇 𝑇 𝑇 𝑇 𝑍 𝑍 𝑍 𝑝 𝐹 𝑍 2𝜋 𝑝 𝐹 2𝜋𝑁 Luego 𝐾 1 𝑀 2 𝑚 𝐽 𝐽 4𝜋 𝑝 𝑈 𝐽 𝑀 𝐽 4𝜋 𝑝 𝑍 𝑍 𝑦 1 𝑀 𝑦 2 𝑚 𝑔𝑦 Derivando obtenemos 𝜕𝐿 𝑀 𝑦 𝜕𝑦 𝑑 𝜕𝐿 𝑀 𝑦 𝑑𝑡 𝜕𝑦 𝜕𝑈 𝜕𝑦 𝑀 𝑚 𝑔 41 Sistemas Electromecánicos Luciano Chiang Sánchez 𝐹 𝑇 𝑀 𝑦 𝑀 𝑚 𝑔 2𝜋 𝑍 𝑍 𝑝 𝑀 𝜔 𝑍 2𝜋 𝑝 𝑍 𝑀 𝑍 𝑝 𝑍 𝜔 𝑀 𝑍 𝑍 2𝜋 Remplazando en la ecuación de circuito eléctrico tenemos 𝑇 𝑀 𝑉 𝑅 𝑍 𝑀 𝜔 𝐾∅ 𝑍 𝜔 𝐾∅ 𝑅 𝑇 𝑅 𝐾∅ 𝐾∅𝜔 𝑍 𝜔 𝑍 𝑚 𝑔 𝑚 𝑔 𝐾∅𝜔 𝑉 𝐾∅ 𝑍 𝑅 𝑍 𝑅 𝑍 𝑝 𝑀 𝐾∅ 𝑍 2𝜋 𝑚 𝑔 𝑅 𝑍 𝑝 𝑀 𝐾∅ 𝑍 2𝜋 𝑉 𝑚 𝑔 La solución a esta ecuación partiendo desde el reposo es: 𝜔 1 𝑉 𝐾∅ 𝑅 𝑍 𝑝 𝑀 𝐾∅ 𝑍 2𝜋 ∅ 𝑚 𝑔 1 𝑒 El tiempo que se demora en recorrer 1 metro es el tiempo que se demora el motor en girar 2𝜋 𝑍 𝜃 1 𝑝 𝑍 Luego el tiempo queda determinado por la solución a la ecuación 1 2𝜋 𝑍 𝑝 𝑍 𝜔 𝑑𝑡 Ejemplo 5-9 Indique cuales serían los efectos en la velocidad y torque de un motor de CC si se cambia el enrollamiento de la bobina de campo por un alambre del doble de diámetro. Solución Si la geometría de la bobina de campo y del motor se mantiene sin alteraciones tenemos 𝑁 𝐴 𝜋𝑑 42 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑁 𝑁 𝐴 𝜋𝑑 𝑁 𝑑 𝑑 Por lo tanto la relación de flujos queda 𝑑 ∅ 𝑑 ∅ ∅ 4 Luego, la velocidad sin carga del motor con el nuevo enrollamiento está dado por: 𝜔 𝑉 𝐾∅ 4𝑉 𝐾∅ 4𝜔 La velocidad sin carga del motor con el nuevo enrollamiento es 4 veces la velocidad sin carga original. Ejemplo 5-10 Un vehículo a tracción eléctrica está configurado con un motor idéntico de CC con campo generado por imanes permanentes en cada rueda trasera. Los motores se conectan en serie. Si cada motor 0,1 y el vehículo pesa 250 kg, qué velocidad alcanza en una subida larga posee un 𝐾∅ 0,12, 𝑅 con un 10% de pendiente, y se alimenta con una batería de 48V. El motor está conectado directamente a la rueda del vehículo de 18” de diámetro. 43 Sistemas Electromecánicos Luciano Chiang Sánchez Solución Si los motores están conectados en serie la corriente que pasa por cada uno es la misma. Eléctricamente tenemos 2𝑖 𝑅 𝑉 𝐾∅𝜔 𝐾∅𝜔 Asumimos que el vehículo describe una trayectoria en línea recta, por lo tanto 𝜔 𝜔 𝜔 Por lo tanto 𝑉 2𝑖 𝑅 2𝐾∅𝜔 Por el lado del Torque tenemos 𝑇 𝐾∅𝑖 Por equilibrio de fuerzas en régimen permanente tenemos 2𝑇 𝑟 Entonces 𝑖 𝑚𝑔𝑟 sin tan 2𝐾∅ 𝜔 𝑉 𝑣 0,1 𝑚𝑔 sin tan 250 ∙ 9,8 ∙ 18 ∙ 0,0254 2 ∙ 0,0995 2 ∙ 0,12 2𝑖 𝑅 2𝐾∅ 𝜔𝑟 0,1 48 2 ∙ 232,2 ∙ 0,1 2 ∙ 0,12 6,5 ∙ 18 ∙ 0,0254 2 232,2𝐴 6,5𝑟𝑎𝑑/𝑠 1,486 𝑚/𝑠 Ejemplo 5-11 Una bicicleta a tracción eléctrica está configurada con un motor de CC con campo generado por imanes permanentes en cada rueda. Los motores se conectan en forma independiente cada uno a una batería de 48V. El motor trasero posee un 𝐾∅ 0,12 𝑦 𝑅 0,1 y el motor trasero un 0,05 𝑦 𝑅 0,05. La bicicleta y conductor juntos pesan 100 kg. a) ¿Qué velocidad 𝐾∅ alcanza en una subida larga con un 20% de pendiente, y b) ¿Cuánta potencia entrega cada motor? Cada motor está conectado directamente a una rueda de aro 26”. Solución La fuerza de tracción total sobre la bicicleta es la aportada por cada motor 𝑇 𝑟 𝑇 𝑟 𝑚𝑔 sin tan 0,2 44 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑇 100 ∙ 9,8 ∙ 26 ∙ 0,0254 2 ∙ 0,196 𝑇 63,42 Por otra parte, si ninguna de las ruedas patina, entonces 𝜔 𝜔 𝜔 Luego 𝑇 𝑅 𝐾∅ 𝐾∅ 𝑉 𝑉 𝑇 𝑅 𝐾∅ 𝑇 𝑅 𝐾∅ 20𝑇 𝑉 𝑇 𝑅 𝐾∅ 𝐾∅ 1 𝐾∅ 6,944𝑇 1 𝐾∅ 560 Obtenemos por tanto 𝑇 𝑇 y 𝑉 𝜔 𝑣 𝜔𝑟 37,13 26,29 𝑇 𝑅 𝐾∅ 𝐾∅ 48 26,29 ∙ 0,1 0,12 0,12 217,43 ∙ 26 ∙ 0,0254 2 𝑃 𝑃 37,13 ∙ 217,43 26,29 ∙ 217,43 217,43 71,8𝑚/𝑠 8.073,2𝑊 5.716,3𝑊 Ejemplo5-12 Un motor eléctrico de CC con campo generado por bobina tiene los siguientes parámetros conectado en shunt: 𝐾∅ 0,15, 𝑅 0,1 𝑦 𝑅 0,25. Compare el Torque de stall que se obtiene cuando el campo se conecta en shunt con el que se obtiene conectando el campo en serie. El voltaje disponible es 24 V. Solución En conexión shunt tenemos 𝑉 𝑅 𝑖 𝑇 _ 𝐾∅ 24 96𝐴 0,25 𝑉 24 0,15 ∙ 𝑅 0,1 36 𝑁𝑚 45 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑉 𝜔 _ 𝐾∅ 24 0,15 160 𝑟𝑎𝑑/𝑠 Ahora en el caso de conexión en serie asumiendo que la saturación del circuito magnético es leve tenemos: 𝐾∅ 𝐾 𝑖 𝐾∅ 0,15 96 𝑖 𝑉 _ 𝐾𝑖 𝑅 𝑅 1,56 ∙ 10 24 0,1 0,25 68,6 𝐴 Luego 𝑇 𝐾𝑖 _ _ 1,56𝑒 3 ∙ 68,6 7,34 𝑁𝑚 Por otra parte 𝜔 _ 𝑉 𝐾∅ 𝑉 → ∞ 𝑝𝑢𝑒𝑠 𝑖 → 0 𝐾𝑖 Ejemplo 5-13 Se usan 2 winches diferentes para levantar simultáneamente un peso de 1.000 kg. Cada winche está traccionado por un motor de CC con campo generado por bobina conectada en serie. Los parámetros del primer winche son 𝐾 0,0015, 𝑅 𝑅 0,4, 𝑉 48, 𝑁 100, 𝑟 0,3, y para el segundo motor son 𝐾 0,0020, 𝑅 𝑅 0,5, 𝑉 48, 𝑁 120, 𝑟 0,25. Determine a) El máximo peso que se puede levantar b) La velocidad de izamiento de equilibrio 46 Sistemas Electromecánicos Luciano Chiang Sánchez Solución La fuerza de izamiento total es la suma de las fuerzas de ambos winches, es decir 𝐹 𝐹 𝑇 𝐹 𝑁 𝑇 𝑟 𝑁 𝑟 En la partida la velocidad de ambos motores es cero, y por lo tanto cada motor entrega torque de stall, por lo tanto 𝐾 𝐹 𝐹 0,0015 ∙ 𝑅 𝑉 𝑅 𝑁 𝐾 𝑟 48 0,4 0,3 ∙ 100 0,002 ∙ 𝑅 𝑉 𝑅 𝑁 𝑟 48 0,5 0,25 El máximo peso que se puede levantar es 𝐹 16.046,36 𝑁 ∙ 120 7200 8847,4 16047,36 𝑁 1.637,5 𝑘𝑔 En régimen permanente la velocidad de ambos motores debe ser igual si la velocidad de equilibrio es menor a la velocidad sin carga de ambos motores. Ejemplo 5-14 En la figura un motor de CC con bobina de campo conectada en serie, arrastra un objeto pesado. Obtenga 47 Sistemas Electromecánicos Luciano Chiang Sánchez a) b) c) d) Aceleración de Partida del bloque Corriente de Partida Potencia Mecánica de Régimen Permanente Potencia Eléctrica de Régimen Permanente V m R a+R f m rotor m tambor N K’ r T r m 48 0,6 10 50 50 0,01 0,25 0,05 r_T, J_T J_m, K’, R_af N M=5.000,0 Tenemos que en la partida los cuerpos están en reposo, de modo que la velocidad del motor es cero, que es la condición de stall. Luego para un motor de CC con bobina de campo en serie tenemos: 𝑖 𝑉 _ 𝑅 𝐾𝑖 𝑇 _ 48 80 𝐴 𝑅 0,6 0,01 ∙ 80 64 𝑁𝑚 La carga estática sobre el motor es 𝑇 𝑁 𝑇 𝐹 ∙𝑟 𝑁 𝜇𝑀𝑔𝑟 𝑁 0,2 ∙ 5.000 ∙ 9,8 ∙ 0,25 50 Para efectos de la aceleración la inercia equivalente es: 𝐽 𝐽 𝐽 1 10 ∙ 0,05 2 𝐽 𝑁 𝑀𝑟 𝑁 1 50 ∙ 0,25 2 50 1 𝑚 2 𝑟 1 𝑚 𝑟 2 𝑁 1 5.000,0 ∙ 0,25 2 50 49 𝑁𝑚 1 𝑀𝑟 2 𝑁 0,075625 𝐾𝑔 𝑚 Por lo tanto, 48 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑇 𝑇 𝜔 64 49 0,075625 𝐽 198,3 𝑟𝑎𝑑/𝑠 En régimen permanente tenemos 𝑇 𝑇 Por otra parte, 𝑇 𝐾 𝑖 49 0,01 70 Luego podemos despejar la velocidad en régimen permanente, 𝑉 𝜔 𝑉 𝑖 𝑅 𝑖 𝑅 𝐾𝑖 𝑅 𝑅 𝐾𝑖 𝜔 48 70 ∙ 0,6 0,01 ∙ 70 8,57 La potencia eléctrica es 𝑃 𝑉𝑖 48 ∙ 70 3360𝑊 La potencia mecánica es 𝑃 𝑇 𝜔 49 ∙ 8,57 420𝑊 Ejemplo 5-15 Un carro de ferrocarril se usa para trasladar carga pesada al interior de una nave industrial. El carro de ferrocarril es tirado por un cable conectado a un motor con tambor para enrollar el cable. El motor es de CC con imanes permanentes para el campo magnético. Si el carro se mueve sobre un plano, y el coeficiente de rodadura es muy pequeño entonces a) deduzca una expresión para estimar el tiempo que se demora en adquirir 0.99 x la máxima velocidad. Asuma los siguientes valores: Peso del carro de ferrocarril Peso de la carga Diámetro Rueda Reducción N Voltaje Armadura K Ra (resistencia de armadura) d tambor 20 ton 100 ton 0,9 m 100 60 Volts 0,4 0,08 0,6 49 Sistemas Electromecánicos Luciano Chiang Sánchez Todas otras masas pequeñas b) Considera usted que el motor empleado es el adecuado, si es que la distancia del recorrido es de 40 metros. ¿Qué porcentaje de la velocidad máxima se alcanza a desarrollar en el trayecto? El motor está diseñado para trabajar de manera óptima al 85% de la velocidad sin carga. Considere que los motores se diseñan para operar en régimen permanente al 80%-90% de la velocidad sin carga y de este modo tener un rendimiento entre el 85% y 95% y una máxima vida útil. Solución a) Por la segunda ley de Newton tenemos, 𝐹 𝑀 𝑀 𝑎 𝑀 𝑀 𝜔 𝑟 Por equilibrio de Torque tenemos 𝑇 𝐹 𝑟 El torque del motor es Luego 𝑀 𝑀 𝜔 𝑁 1,08 𝜔 𝑇 𝑇 𝜔 𝜔 𝑟 𝑇 /𝑁 ∙𝑁 20.000 ó ó 100.000 ó 𝜔 100 0,3 La corriente que proporciona el motor es 𝑖 Por lo tanto si 1,08𝜔 𝐾∅ 1,08 𝜔 0,4 2,7𝜔 50 Sistemas Electromecánicos Luciano Chiang Sánchez 𝑖 𝑅 𝐾∅𝜔 𝑉 Remplazando obtenemos 2,7𝜔 𝑅 0,216𝜔 𝐾∅𝜔 60 0,4𝜔 60 La solución de la ecuación diferencial de primer orden es 150 1 𝜔 , 𝑒 Obtenemos el tiempo necesario para alcanzar el 99% de la velocidad de régimen permanente 1 𝑒 , 1,852𝑡 𝑡 , 0,99 , ln 0,01 , 2,48 𝑠𝑒𝑔 b) Calculamos el tiempo mínimo posible para recorrer los 40 metros considerando una velocidad constante de régimen permanente durante todo el trayecto Tenemos que la velocidad del carro está dada por, 𝑣 𝜔 𝑁 ó 150 ∙ 0,3 1 100 ∙𝑟 𝑒 , 0,45 1 𝑒 , Obtenemos el tiempo que se demoraría el carro en recorrer los 40 metros a velocidad de régimen permanente, 𝑡 40 0,45 88, 9 𝑠𝑒𝑔 Es decir el motor está la mayor parte del tiempo con carga igual a cero ya que se demora aproximadamente 2,89 segundos en llegar a régimen permanente y el resto del ciclo (que demora como mínimo 88,9 segundos) trabaja sin carga, es decir del orden de: % 2,89 ∙ 100 88,9 3,25% Por tanto la combinación motor-reductor está bien escogida. 5.7 Resumen del Capítulo Un motor CC se caracteriza porque se alimenta de una fuente de voltaje continua, y la corriente que consume también es continua. 51 Sistemas Electromecánicos Luciano Chiang Sánchez Un componente clave en el motor CC es el colector, una pieza montada en el eje del rotor, que permite conmutar el sentido de la corriente que circula por las barras del rotor con el objeto de mantener un torque unidireccional en todo momento. El colector se conecta a los polos de la batería mediante contactos deslizantes, usualmente dos bloques de carbono, ya que este material reduce el torque de fricción y permite un buen contacto eléctrico. El enrollamiento de la armadura, es decir de las espiras en el rotor de un motor CC es continuo, con lo que se logra que todas las espiras del rotor contribuyan simultáneamente al torque proporcionado por el motor. El campo magnético en el motor CC se obtiene o por imanes permanentes o por una bobina eléctrica. En el caso de usar una bobina para obtener el campo magnético, ésta se puede conectar en paralelo con la armadura (conexión shunt) o en serie. En el primer caso (shunt) se obtiene un comportamiento lineal del motor 𝜔 𝑣𝑠 𝑇𝑜𝑟𝑞𝑢𝑒 , mientras que en el segundo caso se obtiene un comportamiento donde se puede obtener mayor magnitud de torque. El modelo matemático para un motor CC en conexión shunt es el siguiente: 𝑉 𝐾∅𝜔 𝑖 𝑅 𝑇 𝐾∅𝑖 Esto da lugar a la siguiente relación lineal de 𝜔 𝑣𝑠 𝑇𝑜𝑟𝑞𝑢𝑒 𝜔 𝑉 𝐾∅ 𝑅 𝐾∅ 𝑇 No obstante cuando el torque es alto, y por ende la corriente también, el campo magnético se satura, y el motor ya no se comporta linealmente, perdiendo velocidad a una mayor tasa El modelo matemático para una conexión en serie es el siguiente 𝑉 𝐾´ 𝑖 𝜔 𝑖 𝑅 𝑇 𝐾𝑖 Un motor CC puede funcionar alimentado con un voltaje alterno. Estos motores poseen una inductancia propia poco significativa, de modo que al cambiar la polaridad de alimentación al motor cambia el sentido de circulación de la corriente pero al mismo tiempo cambia la dirección del campo magnético, de modo que el sentido del torque no cambia. Por esta razón el motor con campo conectado en serie también se conoce como motor universal pues puede funcionar tanto con alimentación de voltaje continuo como alterno. 52 Sistemas Electromecánicos Luciano Chiang Sánchez La magnitud y dirección de la velocidad del motor se puede controlar mediante un circuito H y modulación de pulsos PWM. El valor aplicado PWM se ajusta digitalmente, entre 0 y 100%. Mediante este circuito el voltaje efectivo aplicado al motor es el siguiente, 𝑉 𝑃𝑊𝑀 ∙ 𝑉 53