")
--
1·
.>:
,
L
I~
-.
\
"
--
.:
Por:
Luis Enrique García Reyes
Profesor de Ingeniería Civil
UNIVERSIDAD DE LOS ANDES
Facultad de Ingeniería
Departamento de Ingeniería Civil
Bogotá, Colombia
1998
------------'-.,
'-
Contenido
Contenido
Prefacio
Prólogo
i
ix
:
xi
SECCION - I - SISTEMAS DINAlIDCOS
DE UN GRADO DE LIBERTAD
Cnl'Uuro 1
(;(;lV{;El~OS
1.1
1.2
1.3
lA
1.5
1.6
1.7
1.8
B ...lSffCOS lJI!) DIJ.VJ.l1'UC...1
Introducción
Leyes de Newton
Grados de libertad
Masa, peso y sistema de unidades
Rigidez
Traba] o y energía
Amortiguamiento
1.7.1 Generalidades
1.7.2 Amortiguamiento viscoso
1.7.3 Amornguarníer,.o de Coulomb
1.7A Amortiguamiento histerético
Tipos de excitación dinámica
3
-+
:i
6
8
~
10
11
lJ
1I
12
12
13
CUJ)ítulo 2
.SIS'l'El'LlS DIJ.VLUTICflS DE lIN GBlllJII DE 1..I BERTAlJ
2.1
2.2
2.3
2.-+
2.5
2.6
Vibración libre no amortiguada
Vibración libre amortiguada
2.2.1 Amortiguamiento crítico
2.2.2 Amortiguamiento mayor que el crítico
2.2.3 Amortiguamiento menor que el crítico
2.2A Decremento logarítmico
Vibraciones forzadas armónicas
_
Vibraciones transitorias
2.-+.1 Respuesta a un impulso
2.-+.2 Excitación arbitraria
Excitación en la base
La energía en la respuesta dinámica
,
1S
20
2L
23
23
2:i
27
31
32
33
35
38
CUJ)ít.ub.) 8
OIITEN{;ION m: lA
3.1
3.2
3.3
:j.-+
·~--
lrnSI~UEST.i:llJI..lVA...."ICA
Introducción
Integral de convolución
Método de la aceleración lineal
Método Beta de Newrnark
-+3
-+3
-+8
51
'inál1l1ca esrruc(.(UUI UP"L"""
3.5
3.6
3.7
3.8
u
...
_~_
Otros métodos
Sistemas no lineales
Solución en el dominio de la frecuencia
Uso del computador
:
55
55
59
63
CA."itnlo 4
SIS~IOS~ SI:S~"OGRi-ULlS y ~1(;ELEROGlliU1AS
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
Introducción
65
Causas de los temblores
65
4.2.1 Tectónica y sisrnicidad global
65
4.2.2 Failas geológicas
67
4.2.3 Mecanismo focal
68
4.2.-4 Premonitorios y réplicas
68
Ondas sísmicas
69
Sismogramas
69
Magnitud del sismo
69
4.5.1 Definición de la magnitud de Richter
69
70
4.5.2 Tipos de magnitud
4.5.3 Magnitud de algunos sismos importantes
71
Intensidad del sismo
72
4.6.1 Escala de intensidades de Mercalli Modificada (ltvIJv1)
72
4.0.2 Mapas de isosistas
73
Tectónica y sismicidad colombiana
74
74
4.7.1 Emplazamiento tectónico
74
4.7.2 Sistemas de f'allamiento
75
4.7.3 Sísmícidad colombiana
Acelerogramas
77
4.8.1 Acelerógrafos de movimiento fuerte
77
4.8.2 Registros acelerográficos
77
4.8.3 Definición de los movimientos máximos del terreno
79
4.8A Efecto de las condiciones locales del suelo
80
4.8.S Variación v atenuación de los movimientos sísmicos con la distancia 81
4.8.6 Tipos de temblores según el aceierograrna
83
Estudios de amenaza sísmica
85
4.9.1 Metodología
85
4.9.2 Amenaza sísmica en Colombia
87
Predicción de sismos
96
Cnl,itnlo ;;
ESPECTBfJS DE llESPlJESTA
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
Introducción
Obtención del espectro de respuesta
Relación entre Sal Sv y Sd
Representación tripartita
Influencia de los movimientos máximos del terreno
Relación entre las diferentes componentes
Espectros de algunos sismos
Espectros de Fourier
Programas para el calculo de espectros
ii
97
98
101
102
104
105
109
114
116
(;nlJiíul() 6
SlSTE61l-lS l1\TEL1STIC()S I)EUlV GBAl)() DE LIBERT.lU)
6. I
G.2
6.3
6A
6.5
6.6
6.7
6.8
Introducción
Respuesta histereríca
6.2.1 Materiales y elementos estructurales elásticos e ínelásrícos
G.2.2 Concreto estructural
6.2.3 Acero estructural
6.2.-4 Mampostería estructural
Modelos matemáticos de histéresis
6.3.1 Generalidades
6:3.2 Elastoplástico
6.3.3 Modelo de Rarnberg-Osgood
6.3A Modelos con degradación de la rigidez
Conceptos de ductilidad, tenacidad
y capacidad de disipación de energía
Respuesta elástica equivalente él inelástica
Efecto de la respuesta ínelástica en el espectro
6.G.1 Sistemas elastoplásticos
Espectro de desplazamientos totales
Espectro de aceleraciones máximas
6.6.2 Sistemas con rigidez degradante
Principio de las deformaciones iguales
Programa de computador "RESDIN" para la obtención de la
de la respuesta dinámica elástica e inelástica
I 17
I 18
1I 8
123
128
131
13-1:
13-4
135
139
1-43
148
152
154
1,3-1:
156
159
1GO
16-4
169
CCIIJUul() 7
.6J.JJl'DHEl\.TOS SIS6HCOS DE DISEÑO
7.1
7.2
Introducción
,
Espectros elásticos de diseño
7.2.1 Espectros promedio de Housner
7.2.2 Método de Newmark-Hall
7.2.3 Método de Newrnark-Blurne-Kapur
7.2A Método de Shibata-Sozen
7.2.5 Comparación de resultados
Espectros inelásticos de diseño
7.3.1 Introducción
7.3.2 Método de Newmark-Hall
7.3.3 Procedimiento de Riddell y Newmark
7.3.-1: Procedimiento de Shíbata-Sozcn
Efecto en la forma del espectro de la magnitud
distancia, duración y tipo de suelo en el sitio
7A.l Efecto de la magnitud y la distancia a la falla
7A.2 Efecto de la duración del sismo
7A.3 Efecto de las condiciones geotécnicas locales
Procedimiento del ATC-3
Procedimiento del Uniform Building Code
Procedimiento del NEHRP-94
Estudios de amplificación de onda
Familias de acelerogramas
Espectros de diseño de los códigos sísmicos
7.7.1 Desarrollo histórico del espectro en los códigos sismicos
7.7.2 Forma del espectro del ATC-:1
7.7.3 Forma del espectro de las nuevas normas sísmicas colombianas
0
7.3
7A
7.5
7.6
7.7
iii
0
173
I 7-1:
17-4
176
179
182
18-4
187
187
188
190
192
1~)-I:
19-1:
196
197
198
199
200
20-1:
208
210
210
211
2 [{i
7.8
7.7A Forma del espectro del Código de Ciudad de México de 1993
7.7.5 Forma del espectro del Uniform Building Code (UBC-94)
7.7.6 Forma del espectro del NEHRP-94
7.7.7 Forma del espectro del Eurocódigo-S
Comentarios sobre la selección de los
movímíentos sísmicos de diseño
219
221
223
225
228
SECCI@N - II - SISTEMAS DINAMICOS DE
VARIOS GRADOS DE LIBERTAD
ClI.j,Uulo S
11\TIlODUCCION Al.l ANALlSlS
1tl¡-tTI~IClAL DE ESTRUC'J.'lI1lAJ...~
8.1
8.2
8.3
8A
8.5
8.6
8.7
8.8
Definiciones
8.1.1 Introducción
8.1.2 Algebra lineal
8.1.3 Operaciones con matrices
8.1.4 Propiedades y operaciones con vectores
Sistemas de coordenadas y su transformación
Matriz de rigidez de un elemento de pórtico plano
Principio de contragradiente
Matriz de rigidez de un elemento en coordenadas globales
Ensamblaje de la matriz de rigidez de la estructura
Apoyos de la estructura
Solución para fuerzas estáticas por el método de rigidez
232
233
234
235
238
239
244
252
253
255
258
260
Cl1l,itulo !-)
illVAl..llSlt9 J.1lilTillCLU AVil.LVZill~{'
1'" lELE¡~1El\.TOS PINITOS
9. ~
9.2
9.3
9.4
9.5
9.G
9.7
Introducción
273
Igualación de grados de libertad
273
Condensación de grados de libertad
278
Subesrructuración
281
Casos especiales
282
~1.5.1
Articulaciones y liberación de grados de libertad en los elementos. 282
9.5.2 Nudos rígidos
~86
9.5.3 Deformaciones por cortante
289
9.5A Efecto de la variación por temperatura
290
Otros tipos de elemento
295
9.6.1 Definiciones
295
9.6.2 Elemento de cercha plana
297
9.6.3 Elemento de cercha espacial
298
9.6.-! Elemento de pórtico plano
299
~J.6.5
Elemento de parrilla
301
9.6.6 Elemento de pórtico espacial
302
Elementos finitos
304
~).7.1
Introducción
304
~l. 7.2
Procedimiento de análisis utilizando elementos finitos
305
-.:-------------------
9.7.3
9.7.-l
9.7.5
9.7.6
Tipos de elementos
Formulación de la matriz de rigidez de] elemento
Ejemplo de análisis utilizando elementos finitos
Algunas observaciones sobre el uso de los elementos finitos
306
307
312
:1] 7
C~ll)Uul()1 (J
ECU11ClflNES IIE Ef~UlLI11IU(lllnv111'UCflEN SISTEl'L~~ IIl~
l~tl='I(IS Gl=.rWOS DE LIIIEI=.TAD
10.1
10.2
10.3
JOA
1O.,)
Introducción
Vibración libre
Ecuaciones de equilibrio para excitación arbitraria
Ecuaciones de equilibrio para excitación en la base
Ecuación de Lagrange
(;(fIJilulo 11
lIJl~ill""ZA(;ION',l1V1U.lIC.ll DE
11.1
11.2
11.3
11.-l
11.5
11.6
321
321
323
32·"¡'
326
L-l ES'J'l='VCTIJB.il
Introducción
Masa distribuida y masa concentrada
11.2.1 Masa distribuida
11.2.2 Masa concentrada
Idealización de la rigidez
11.3.1 Diafragma rígido
11.3.l(a) Se genera la matriz de ruiidez de cada pórtico
11.3.1(b) Se hacen las vigas inextensibles debido al efecto
de diafragma rígido
1l.3.1(c) Se ajustan los grados de libertad verticales
11.3.l(d) Se condensan los grados de libertad
,
rotacionales de los nudos
11.3.l(e) Transformación de los grados de libertad del pórtico,
de un despiazarniento por piso a las tres qrudos de
libertad por piso de cada diafragma
11.3.l(f) Ensamblaje de la matriz de rigidez de
toda la estructura
] 1.3.1 (g) Se determina la matriz de masa de
toda la estructura
] 1.3.l(h) Ecuaciones de equilibrio dinámico de
toda la estructura
] 1.3. 1(i) Obtención de las fuerzas en los elementos una
vez se conocen los desplazamientos de los grados
de libertad de los diafragmas
11.3.1U) Algunas observaciones acerca de la idealizacion
de diafragma rígido toda la estructura
11.3.2 Diafragma flexible
11.3.3 Diafragmas rígidos unidos por elementos flexibles
Sistemas sin diafragma
Excitación en varios apoyos
Acople estático y acople dinámico
/'
329
329
330
333
339
3-W
34-l
345
346
347
:H8
351
:3 SI
:3 SI
353
35-l
36-l
372
373
373
380
Inic(I estructuren lIjJlI(
(n«. ,u .u..... " ._.~
Cnl,itulol2
SOLlJCION DE LA BESl·UESTA lJI1Vl1l'HCA PARA.
SISTE~JAS CON tr¡-UUOS GllAlJOS DE LIBEIITAD
12.1
12.2
12.3
12.4
12.5
12.6
12.7
Introducción
Solución modal para el caso no amortiguado
Ortogonalidad de los modos naturales
Desacoplaje de las ecuaciones de movimiento
Vibración libre con condiciones iniciales
Análisis me '::'dl con amortiguamiento
Solución integrando las ecuaciones de movimiento
385
385
392
394
396
401
404
Cl41,ituW 18
bmTOIJ(JS AT(;~mlUCOS EN EL ANALISIS l'IODAL
13.1
13.2
13.3
13.4
13.5
13.6
Introducción
Método directo
Metodo del barrido
Merodo de Iacobí
Método de iteración en un subespacio
Cociente de Rayleigh
405
405
406
410
419
420
Cnl,itulo 14
ANALISlS ¡JIOD..\L CRONOl-,OGl(;O
14.1
Introducción
Vibración forzada armónica
14.3 Vibraciones transitorias
14.4 Excitación en la base
14.5 Análisis modal planar para excitación en la base
14.6 Análisis modal tridimensional para excitación en la base de sistemas con
diafragma rígido
14.7 Análisis modal para excitación en la base
de sistemas con diafragma flexible
14.8
Excitación en varios apoyos y sistemas sin. diafragma
1~.2
423
424
432
438
441
450
469
490
Cnl,itulo 1 s
ANIU"ISIS .L"OIJJ.tL ESPECTlfAL
15.1
15.2
15.3
15.4
15.5
Introducción
Formulación del análisis modal espectral
Métodos de combinación de la respuesta modal
]5.3.1 Generalidades
15.3.2 Método de la raíz cuadrada de la suma de los cuadrados (RCSC)
15.3.3 Método de la combinación cuadrática completa (CCC)
15.3A Combinación de componentes horizontales
Número de modos a emplear
El método de la fuerza horizontal equivalente
505
505
519
519
519
528
53]
547
548
~----------------------~
.
pi
11
-------"'=
A la pri,nera lectlu-a de
la Dinámica de Garcia
He aquí un libro que no sufre de los pecados de sus predecesores; un libro que
empieza en el principio y termina en el final sin trazar meandros entre los dos
extremos. No está escrito como un catálogo y tampoco pretende incluirlo todo. Significa
más bien un compromiso.
La dinámica es una ciencia madura. Entretanto, el diseño sísmico no es ni una
ciencia ni ha alcanzado su madurez. La aplicación de la dinámica a la ingeniería fue
forzada inicialmente por la necesidad de entender el comportamiento de las máquinas.
En este sentido, la dinámica aplicada contiene todo un arsenal de algoritmos creadores y
brillantes introspecciones aplicables a mecanismos bien definidos, excitados por
movímientos bien definidos, así mismo cuando no de carácter invariante. Ahora bien,
aplicrr la dínárnica a estructuras cuyas características de rigidez y resistencia no se
conocen plenamente y tampoco están excitadas por movimientos agudamente descritos
- antes o incluso después del evento sísmico - requiere una perspectiva diferente y muy
diferentes aptitudes. La tarea que se impuso el autor de preparar un texto referente a
las estructuras, es ante todo una de resistir la tentación de parafrasear los textos
consagrados, tales como aquellos escritos por Den Hartog y por .lacobseu-Ayre, antes de
acometer el asunto de las estructuras.
Decir que el autor de este libro, Luis E. García, ha alcanzado la proeza de
mantener el objetivo en las estructuras es un dictamen que requiere el concurso de
muchos lectores durante un período largo del tiempo. Pero es innegable que se las ha
ingeniado para trazar un camino recto. Y es a este respecto que el libro representa una
rara adición a la literatura sobre dinámica estructural. Quizás su descripción correcta
sea expresar que es el segundo texto que se mantiene fiel a las estructuras siendo el
primero el tomo escrito por Biggs y publicado hace más de tres décadas. Ahora, afirmar
que el alcance, la certeza y la cohesión del texto de García es remíníscente del clásico de
Biggs es un elogio a ambos tratados. En la misma vena, puede decirse que la "Dinámica
Estructural" de García es un digno compañero de la "Ingeniería Sísmica" de Sarria.
¿Quién hubiera pensado que Colombia abriría las más amplias "puertas a la percepción"
de la ingeniería sísmica?
El encaminamiento del texto no sorprende puesto que el autor García, a la
manera de Tiresias en el mito antiguo, ha experimentado íntimamente el mundo desde
dos puntos de vista diametralmente opuestos: el académico y el pragmático en su caso.
El suma años de ejemplar profesorado y posee la reputación de haber pisado la frontera
donde se desarrolla el diseño automatizado de estructuras; esto simultáneamente con
desempeñarse como socio principal de una muy productiva firma dedicada al diseño
estructural. El ha enseñado. El ha diseñado. El texto muestra las huellas típicas de las
dos experiencias. La erudición es inmaculada. Las explicaciones son completas;
comienzan en la ciencia y culminan en la ingeniería práctica. Es este un libro que
pertenece igu almente bien a la mesa de trabajo del estudiante y a la biblioteca del
profesional. Se puede aprender de él, así como utilizarlo como referencia fácil para
problemas de diseño, y para lograr una mejor compresión de las bases de los
procedimientos de análisis.
Quizás el logro fundamental del libro es su Capítulo 5 dedicado a los espectros
lineales de respuesta, aspecto esencial para entender los problemas del diseño, que el
1 El Profesor Sozen ha dejado saber que el título de este prólogo es un préstamo deliberado ek john Keats en
su poema titulado "On Iirst looking ihto Chapmans Horner".
l' i i
autor no considera íníra-dígrutarem explicar hasta en los detalles más simples. Su
paciencia y experticía con la materia tratada son admirables.
Se ha dicho que nada grande ha sido logrado sin entusiasmo. Este libro ha sido
escrito con entusiasmo. Ha sido escrito con base en la doble experiencia de la clase y de
la práctica. Debe perdurar.
METE A. SaZEN
Profesor de Ingeniería Civil
Purdue Uníversity
Lafayette, Indiana, USA
Enero de 1998
~-_._-----------------------
Prólogo
Estas notas sobre dinámica estructural, están enfocadas primordialmente al
análisis y diseño de estructuras, dentro del ámbito de ingeniería civil, y con el énfasis
principal en las solicitaciones sísmicas. Aunque los principios de la dinámica estructural
datan de mucho tiempo atrás, su aplicación a la ingeniería sísmica se remonta a solo
algunas décadas. El presente trabajo nace como unas notas de clase del curso de pregrado
del mismo nombre, el cual se dictó por primera vez en el segundo semestre de 1973 en la
Universidad de los Andes en Bogotá. A través de los años se han mantenido dentro del
contexto eminentemente práctico que ha tenido el curso. La intención es que sirva de libro
de texto para un curso de un semestre en el tema, aunque el material en algunos apartes
es más extenso de lo que se alcanza a cubrir durante las horas de clase.
El tema se ha dividido en dos grandes secciones: una correspondiente a sistemas
dinámicos elásticos e inelástícos de un grado de libertad (Capítulos 1 a 7) y la segunda
correspondiente a sistemas dinámicos de varios grados de libertad (Capítulos 8 a 17).
En la primera sección se inicia, Capítulo 1, con las Leyes de Newton y los
fundamentos de la rigidez, la masa y el amortiguamiento. El Capítulo 2 trata los sistemas
lineales de un grado de libertad para los casos de vibración libre, no amortiguada y
amortiguada, vibraciones forzadas armónicas, vibraciones transitorias y el tema de
excitación causada por movírníentos en la base del sistema, el cual se emplea
directamente en el estudio de estos sistemas ante excitaciones sísmicas. Por último se
discute el tema de la transferencia e intercambio de energía en la respuesta dinámica. El
Capítulo 3 se dedica a los métodos matemáticos y numéricos para obtener la respuesta
dinámica de sistemas lineales de un grado de libertad. El Capítulo ..J: consiste en una breve
introducción a la sismología y a la evaluación de la amenaza sísmica. El Capítulo 5 trata
los espectros elásticos de respuesta de los sismos. El Capítulo (j discute los sistemas
ineIásticos dinámicos de un grado de libertad. Por último el Capítulo 7 trata los
movírníentos sísmicos de diseño, sus características y los procedimientos para obtenerlos.
La segunda sección sobre sistemas de varios grados de libertad, se inicia con una
introducción al análisis matricial de estructuras (Capítulos 8 y 9) con un enfoque directo a
su empleo en la dinámica estructural, En el Capítulo 10 se plantean las ecuaciones de
equilibrio para sistemas dinámicos de varios grados de libertad. El Capítulo 11 trata la
idealización dinámica de la estructura, y los diferentes enfoques y conceptos que deben
tenerse en cuenta al idealizar dinámicamente las construcciones. En el Capítulo 12 se
plantea la solución de las ecuaciones dinámicas de equilibrio para el caso linealmente
elástico. El Capítulo 13 resume los métodos más empleados en la actualidad para la
obtención de los modos y frecuencia de vibración de las estructuras. El Capítulo 1..J: trata
el análisis cronológico de la respuesta dinámica de sistemas lineales de varios grados de
libertad y el Capítulo 15 la solución espectral de la respuesta de sistemas lineales de
varios grados de libertad.
Se ha escogido en la presentación el sistema internacional de medidas (SI), el cual
por ser un sistema consistente de unidades, es el más apropiado para el trabajo en
dinámica estructural, además de ser el sistema de uso obligatorio en las nuevas normas
sismo resistentes colombianas. Las referencias se indican por medio de [autor, año]
dentro del texto y el final en la Bibliografía se listan los diferentes trabajos empleados
ix
~_.,"--_.:"':"':~-..!..." --~--------------
como referencia en orden alfabético por apellido del autor, seguido por el año de
publicación.
Los ejemplos se desarrollaron empleando diferentes programas de computador,
pero en general están realizados utilizando hojas electrónicas de cálculo, principalmente
Excel" de Microsoft", el programa Mathlab" producido por The Math Works Ine. ©, el
programa CAL91, desarrollado por el profesor E. Wilson de la Universidad de California,
Berkeley. Además muchos de los ejemplos se realizaron empleando los programas
RESDIN, y ESPECTRO, desarrollados por el autor. El programa CAL91 se puede obtener a
través de NISEE (National Information Servíce for Earthquake Engineering - Davis Hall,
University of California, Berkeley). Los programas RESDlN y ESPECTRO se pueden obtener
en la Asociación Colombiana de Ingeniería Sísmica (Carrera 20 N 8-1-1-1, Oficina 502,
Bogotá, Colombia - Teléfono 530-0826 - Fax 530-0827), o solicitar por emaiI a:
<aisrli"uniandes.edu.co>. Para estudiantes, previa presentación del carnet vigente, el
programa CAL91 puede obtenerse gracias a una generosa autorización de su creador -- el
profesor E. Wilsoo -- al costo de reproducción del material, en el Departamento de
Ingeniería Civil de la Universidad de los Andes en Bogotá (Carrera 1a N 18A-lO - Bloque \IV
- 2 Piso, Apartado Aéreo -1976 Bogotá, Colombia - Teléfonos 281-51-18 o 28-1-9911
Ext.2811 y 2812).
El autor agradece cualquier observación o comentario que pueda mejorar el
contenido o la presentación del presente trabajo. Estos comentarios pueden ser enviados
al siguiente emai1: -clugarciaauniandes.edu.co>, o al Departamento de Ingeniería Civil de
la Universidad de los Andes, Bogotá.
Luis E. García
Bogotá, Febrero de 19~)8
~----------------------x
Capitulo 1
Conceptos básicos de dinénnica
1.1 Introducción
La dinámica, dentro del contexto de la mecaruca, es el estudio de los cuerpos, o
conjuntos de partículas, en movimiento. La dinámica se divide en dos campos: la
cinemática, la cual estudia la geometría del movímiento, relacionando el
desplazamiento, la velocidad, la aceleración y el tiempo, sin hacer referencia a las
causas del movimiento: y la cinética, la cual estudia la relación entre las fuerzas que
actúan sobre un cuerpo, la masa del cuerpo y su movímiento, permitiendo predecir los
movtmíentos que causan las fuerzas, o determinar las fuerzas necesarias para producir
un movimiento dado.
Cuando un cuerpo se desplaza de una posición de equilibno estable, el cuerpo tiende a
volver a esta posición al verse afectado por la acción de fuerzas que tienden a
restaolecer la situación de equilibrio; este puede ser el car., de las fuerzas
gravitacionales en UT;. péndulo, o de las fuerzas elásticas impuestas por un resorte en el
caso de una masa apoyada en él. En general en el instante que el cuerpo vuelve a su
posición de equilibrio tiene alguna velocidad que lo lleva más allá de esa posición,
presentándose una oscilación alrededor del punto de equilibrio. Estas oscilaciones en el
campo de la mecánica se denominan vibraciones mecánicas.
Si el cuerpo se considera como una unidad y se desprecian las deformaciones relativas
entre sus diferentes partes se aplican los principios de la dinámica de cuerpos rígidos.
Cuando es apropiado tener en cuenta los desplazamientos relativos entre las diferentes
partes del cuerpo, se aplican los principios de la dinámica de cuerpos flexibles.
La dinámica estructural estudia las vibraciones de cuerpos flexibles, aunque en muchos
casos las deformaciones relativas entre algunas partes de la estructura son de un orden
de magnitud tan pequeño, que pueden aplicarse los principios de la dinámica de
cuerpos rígidos en algunas porciones de la estructura.
La dinámica estructural se ha desarrollado ampliamente a partir de la apancion del
computador digital. Sus fundamentos se remontan más de dos siglos y medio atrás,
pero puede decirse que el enfoque moderno proviene de las últimas cuatro décadas. No
sobra advertir que en la actualidad existen numerosos textos de dinámica estructural
que cubren con mayor profundidad muchos de los temas tratados aquí, algunos son las
referencias [Berg, 1989), [Biggs, 1964], [Boiton, 1994], [Clough y Penzien, 19931,
[Chopra, 1980], [Chopra, 1995], [Craig, 1981), [Fertis, 1995], [Humar, 1990], [Hurty y
Rubinstein, 1964], [Meirovitch, 19671, [Meirovitch, 1975], [Paz, 1991], iShabana, 19891,
[Thomson, 1972], y [Timoshenko, Young y Weaver, 1974J.
2 Leyes de Newton
El problema del movimiento y sus causas fue durante siglos uno de los temas centrales
de la filosofía. Solo hasta la época de Galileo y Newton fue posible, gracias a ellos, un
gran avance en su entendimiento. Isaac Newton (1642-1727), nacido en Inglaterra en el
mismo año de la muerte de Galileo, fue el arquitecto de lo que actualmente se conoce
con el nombre de mecánica clásica. Newton llevó a la madurez las ideas de Galileo y de
otros que le precedieron.
Las conclusiones a que llegó Newton sobre el tema están resumidas en sus tres leyes,
las cuales son el fundamento de la estática y de la dinámica, tanto de cuerpos rígidos
como de cuerpos flexibles:
1 a Ley de Newton: "Todo cuerpo permanece en su estado de reposo, o movimiento
uniforme rectilíneo, a menos que sea obligado a cambiar ese estado debido a la
aplicación de cualquier tipo de fuerzas."
Esta primera ley de Newton se conoce también con el nombre de Ley de Inercia. Los
marcos de referencia sobre los cuales se aplica son conocidos con el nombre de marcos
inerciales. Estos marcos de referencia están fijos con respecto a una estrella distante, o
se mueven a velocidad constante con respecto a ella. Es importante anotar también que
la 1 a ley de Newton es válida tanto para cuerpos sobre los cuales no actúa ninguna
fuerza, como para aquellos sobre los cuales actúan varias fuerzas cuya resultante es
nula.
2 a Ley de Newton: "La fuerza que actúa sobre un cuerpo y causa su movimiento, es igual
a la tasa de cambio del momentum del cuerpo. "
Dado que el momenturn Q, es igual a la masa del cuerpo por su velocidad, se puede
expresar matemáticamente como:
dx
(1-1)
Q=rnv=rn-=mX
dt
donde:
Q
rn
v
x
momentum del cuerpo
masa del cuerpo
velocidad del cuerpo
desplazamiento del cuerpo o coordenada de localización del mismo
De acuerdo con la 2 a ley de Newton y baio el supuesto de que la masa del cuerpo
permanece constante, las fuerzas que actúan sobre el cuerpo son iguales a la tasa de
cambio del momentum:
dQ
dt
d
dt
dv
dt
dx
..
F=-=-(rnv)=rn-=rn-=rnx=rna
dt
(1-2)
donde:
F
a
resultante de las fuerzas que actúan sobre el cuerpo
aceleración del cuerpo
Por lo tanto la 2 d ley de Newton puede expresarse también como: La resultante de las
fuerzas que actúan sobre un cuerpo es igual a la masa del cuerpo multiplicada por su
aceleración.
k-o- - - - - - - - - 4
Es importante anotar que la 1<1 ley de Newton es un caso especial de la segunda ley, Ya
que si la aceleración es cero, entonces la resultante de las fuerzas también es igual a
cero. En este caso el cuerpo está en reposo, o se mueve a una velocidad constante. La
aceleración cero conduce a lo que llamamos estática, mientras que los casos de
aceleración diferente de cero nos lleva al campo de la dinámica.
Con posterioridad a Newton, D'Alernberr (1717-1783) sugirió que la ecuación (1-2) se
escribiera de una manera similar a la ecuación de equilibrio en estática (F = O), en la
forma que se conoce como principio de D'Alembert:
0-3)
F-ma=O
El principio de D'Alernbert hace evidente que la denominada fuerza inercial (ma) actúa
en la dirección opuesta a la dirección de la aceleración del cuerpo.
3<1 Ley de Newron: "A toda acción se opone siempre una reacción de igual magnitud; o
las acciones mutuas entre dos cuerpos son siempre iguales y opuestas. "
La 3<1 ley de Newton permite extender las dos leyes anteriores a cuerpos compuestos
por varios componentes o, cuando se fracciona un cuerpo en varias partes, a definir las
fuerzas que obran sobre éstas. Este procedimiento se conoce como cuerpo libre, donde
una fracción de un cuerpo se aísla de las otras partes y de esta manera se obtienen las
fuerzas sobre los componentes. En el punto de aislamiento del cuerpo libre se tiene una
fuerza de igual magnitud, pero opuesta en dirección, aplicada a cada una de las partes.
Las tres leyes de Newton son las bases sobre las cuales se desarrolla la dinámica de
cuerpos rígidos y la dinámica estructural y se aplican repetidamente durante el
desarrollo de la teoría de la dinámica estructural.
1.3 Grados de libertad
I
El número de grados de libertad de
un sistema, desde el punto de vista de
la dinámica, corresponde al número
mínimo de coordenadas necesarias
para definir la posición en el espacio
y en el tiempo de todas las partículas
de masa del sistema. Cuando se trata
de sistemas rígidos, en los cuales no
puede haber desplazamiento relativo
entre las partículas de masa, las
propiedades de la masa se pueden
describir referidas a su centro de
masa. Esto conduce a lo que se
conoce como sistemas de masa
concentrada. Cuando la masa hace
parte de un elemento flexible tenemos
un sistema de masa distribuida y por
consiguiente se puede hablar de un
número ínñníro de grados de libertad.
--
-------
~--------::::.~~
Ii.
~
~
..:::-_==~-:-
__
_~
7171m
(a) viga vibrando transversalmente
dx
(b) tmsa ástribuida con infinito número de grados de libertad
..
777T777
(e) masa concentrada con número finito de grados de libertad
Figura 1-1 - Grados de libertad
Para aclarar estos conceptos, por ejemplo en una' 'iga simplemente apoyada que está
vibrando transversalmente, como indica la Figura 1-1(a), la masa proviene de la masa
propia del material de la viga. Si se toma una longitud diferencial de la viga, Figura
l-l(b), esta longitud diferencial también tiene una masa diferencial. Para describir la
posición de cada uno de estos elementos diferenciales de masa se necesita un número
-
,,·"~-'2".-------------
iluí111icCl est ructurol aplicada al (lISí'l/u :"'''",''"
infinito de grados de libertad. Esto se resuelve por medio de una función matemática
continua. Este mismo caso se puede visualizar acumulando porciones de la masa en
algunos puntos escogidos y tratándolas allí como varias masas concentradas, tal como
se muestra en la Figura l-l(c).
La cantidad de lugares donde se concentre la masa va a depender de la precisión que se
requiera en la solución del problema y de otros factores que se harán evidentes más
adelante. Los sistemas de masa concentrada, en la medida que el número de puntos
donde ésta se concentre se haga mayor, tienden en el límite a convertirse en sistemas
contínuos,
1.4 Masa, peso y sistema de unidades
La masa, m, es una medida de la cantidad de materia. El peso, W, es una medida de la
fuerza necesaria para impartir una aceleración dada a una masa. En la tierra, al nivel del
mar, la aceleración que impone la gravedad del planeta se denomina g y tiene un valor
aproximado de 9.81 m/s- (= 9806.65 rnm/s-, por acuerdo internacional, para ser
exactos). Por lo tanto el peso W que tiene una masa ID en la tierra, al nivel del mar, es
igual al producto W =mg.
Se ha escogido en la presentación el sistema internacional de medidas (S1), el cual por
ser un sistema consistente de unidades, es el más apropiado para el trabajo en
dinámica. Los ingenieros por muchos años utilizaron el sistema métrico tradicional, o
sistema mks (metro-kilogramo-segundo), cuyas unidades son distancia, fuerza y ríempo.
En este úírirno sistema el kilogramo es una unidad de peso, correspondiente al peso de
m, litro de agua al nivel del mar, por esta razón es una unidad de fuerza que muchas
veces se denomina kilogramo-fuerza (kgf), La tonelada dentro de este sistema
corresponde también a una unidad de fuerza y tiene un valor de 1000 kgf. En el sistema
SI las unidades son distancia, masa y tiempo. Como unidad de distancia se utiliza el
metro (m), como unidad de masa el kilogramo (kg) y como unidad de tiempo el segundo
(s). Dentro de este sistema la unidad de fuerza es el Newton (N), definido como la
fuerza que impone una aceleración de 1 m/s? a una masa de 1 kg.
El sistema SI se estableció en la Decimoprimera Conferencia Mundial de Pesos y
Medidas, que tuvo lugar en Sevres, Francia, en 1960. El sistema está basado en siete
unidades básicas, que son para longitud el metro (m), para masa el kilogramo (kg), para
tiempo el segundo (s), para corriente eléctrica el amperio (A), para temperatura el kelvin
(K), para intensidad luminosa el candela (cd) y para cantidad de substancia el mol (mol).
Estas unidades tienen definiciones físicas. Por ejemplo el metro (m) es la longitud de la
trayectoria que viaja la luz en el vacío durante un intervalo de tiempo equivalente a
1/299 792 -158 de segundo; y el kilogramo (kg) es igual a la masa de un prototípo
internacional de iridio-platino, que conserva la Oficina Internacional de Pesos y Medidas
en Sevres, Francia. A continuación se presentan algunos conceptos básicos del sistema
SI y se dan algunas conversiones que serán útiles para aquellas personas que no estén
familiarizadas con él. Las unidades que se utilizan en el texto son las siguientes:
Unidades básicas:
distancia:
masa:
tiempo:
el metro (m).
el kilogramo (kg),
el segundo (s).
Unidades suplementarías:
ángulo plano:
el radian (rad)
Unidades derivadas:
frecuencia:
fuerza:
esfuerzo:
el hertz (Hz)
l Hz = 1 s 1
el newron (N) l N == l kg· mis"
el pascal (Pa)
1 Pa = 1 N/m 2
•
energía, trabajo
joule (J)
IJ=lNom
El sistema SI utiliza los siguientes prefijos: exa, E, (1018); peta, P, (1015); tera, T, (10 12 ) ;
giga, G, (10 9); mega, 1\1, (lOG); kilo, k, (10 3 ) ; mili, m, (10 3) ; micro, ¡J., (10 6 ) ; nano, n, (lO9);
pico, p, (lO 12); femto, f, (1015); Yatto, a, (10 18).
El sistema SI requiere que se diferencie claramente entre masa y peso, en lo cual se
distingue de los sistemas de unidades "gravítacionales". La masa de un cuerpo es
independiente de su localización. Puede estar en el ecuador o en el polo, sumergido en
agua, o en la Luna, y esto no afecta su masa pues la masa es la cantidad de materia que
posee el cuerpo. La unidad de masa es el kilogramo (kg), la cual es igual a la del
prototipo internacional (el cual tiene aproximadamente una masa igual a la de un
decímetro cúbico, o sea un litro, de agua al nivel del mar). La atracción gravitacional de
la tierra impone a un cuerpo en caída libre una aceleración g, cuyo valor varía
aproximadamente del orden 0.5 por ciento sobre la superficie de la tierra, pero que se le
ha dado un valor fijo estándar de 9.80() G')O m/s". Por lo tanto se requiere una fuerza
de 9.80G G:)U N para sostener una masa de 1 kg sobre la superficie de la tierra, esto se
conoce como el peso del cuerpo. Generalmente la masa de un cuerpo se obtiene
pesándolo, o sea comparando la atracción graviracional de la masa con la de otra
conocida por medio de una balanza; de ahí la confusión común entre masa y peso. En el
sistema métrico original se definió una unidad de fuerza equivalente a la que obtendría
una masa unitaria al ser acelerada un g. Esta unidad se conoce como el
kilogramo-fuerza (kgf) o kilopondio, y corresponde a 9.806 65 N. Análogamente, para
efectos de medir presión, o esfuerzo, en el sistema SI se utiliza el pascal (1 Pa = 1
N/m 2 ) , lo cual corresponde a valores relativamente pequeños, por esto se emplea el
megapascal (1 MPa = 10" Nzrn"), el cual corresponde a 10.197 kgf'/crn".
Con el fin de evitar confusión en el uso del sistema SI, existen las siguientes reglas
aceptadas internacionalmente respecto a la sintaxis que debe emplearse:
•
•
•
•
•
•
•
Nunca se intercambian minúsculas y mayúsculas: mm y no 1v1M, o kg y no KG.
Los símbolos no se alteran en el plural: kg, y no kgs,
No se deja espacio entre el prefijo y el símbolo: ¡\IPa y no M Pa.
No se agrega punto al final del símbolo, a menos que sea el punto final de una
oración.
Los símbolos no son abreviaturas, por lo tanto: Pa y no Pase, m y no mts.
En los productos de símbolos se utiliza un punto levantado: kN . m.
En los cocientes se utiliza un solo simbolo de división, o pueden utilizarse potencias
negativas: kg/(m s), o kg m 10 SI, pero no kg/rn/s.
Puede utilizarse punto, o coma, para indicar los decimales. dependiendo de la'
costumbre local. Esto significa que ninguno de los dos se debe utilizar para separar
grupos de dígitos, para esto se utiliza un blanco. Eiemplo: g = 9.806 650 m/s",
Para números menores que la unidad, no se omite el cero inicial: 0.123 y no .123.
Debe haber siempre un espacio entre el número y las unidades: 12.3 rrr/s, excepto
cuando se trata de grados celsius: 12C.
Las unidades cuyo nombre es el apellido de un científico, se emplean con
mayúscula: N, Pa, etc., pero cuando se refiere a ellas no se utiliza la mayúscula:
pascales, etc.
o
•
•
•
•
o
Nota: Para facilitar la solución de problemas de dinámica estructural, cuando se utiliza
el sistema internacional de unidades (5J), se recomiendan dos alternativas: (a) emplear
masas en I\Ig (rnegagramos = 1000 kg) Y rigideces en kN/m donde kN/m =
J 000 kg
m/s- l/m = 1000 ' kg/s 2 , o sea que son totalmente equivalentes pues las
masas se van a multiplicar por aceleraciones en m/s- y las rigideces por m; o (b)
emplear masas en kg y rigideces en Nyrn, caso en el cual dado que 1 N = I kg mis",
las cuales también son equivalentes.
o
o
o
7
._._--
->--~",
- -. . . .- - - - - - - - - - - - - -
s Rigidez
Todo cuerpo elástico que sea sometido a fuerzas externas, ya sean estáticas o
dinámicas, sufre una deformación. .1a,~e_define como la relación entre estas
fuerzas externas y las_deforn:Hl.J:iOllg::Lqu~ ellas inducen en el cuerpo, ÉICasomassimple
corresponde a un resorte helícoídal, como el que-semüéstra esquemáticamente en la
Figura 1-2(a).
P
,,--",,,_P
u
(a)
(b)
Figura 1-2 - Relación fuerza-deplazamiento para un resorte
Cuando el resorte se estira debido a la aplicación de una fuerza P en uno de sus
extremos, estando el otro extremo adherido a un apoyo, las deformaciones son
resistidas por medio de un trabajo interno que está asociado con la magnitud de la
deformación del extremo libre. La relación entre la fuerza que resiste el resorte y la
deformación entre sus extremos tiene la forma mostrada en la Figura 1-2(b). En general
esta relación no es totalmente lineal, pero cuando las deformaciones son pequeñas se
puede idealizar como una linea recta.
rígidez.es;porlo
-tanto, la relación entre las ,.fuerz.as
ylos desplazamientos
y
La
-,
)---- - '
usualmente se._d_e.:gomina.pQr, medio de la letra k. Matemáticamente se expresa por
medio de la siguiente relación:
,.'
-
---
k=P
(1--1:)
u
El mismo concepto se puede extender a cuerpos elásticos que tienen otras formas. Es el
caso, por ejemplo, mostrado en la Figura 1-3, en la cual se aplica una fuerza en la punta
de una viga en voladizo, lo cual causa en su extremo libre un desplazamiento, u, en la
dirección de la fuerza.
Figura 1-3 - Relación fuerza-deplazamiento para un voladizo
Utilizando los principios de la resistencia de materiales es posible demostrar que para
el voladizo presentado en la Figura 1-3, la deflexíón u, está dada por:
PL3
3EI
u='--
donde L es la luz de la viga, E es el módulo de elasticidad del material de la viga, e 1 es
el momento de inercia de la sección de la viga. En este caso la rigidez k, está dada por:
k = P = 3EI
U
L3
k-o- - - - - - - - - - - - - 8
---~-,-------
La rigidez puede también definirse como la fuerza que debe aplicarse al sistema para
obtener una deformación unitaria en la misma dirección y sentido de la carga.
.-\ continuación se presentan varios casos comunes de rigidez para diferentes sistemas:
Tabla 1-1- Rigidez de algunos sistemas elásticos
Resortes en serie:
k=
k2
k¡
1
1
1
-+k
k¡
2
Resortes en paralelo:
k¡
k=k¡+k 2
k2
Barra sometida a fuerza axial:
~
AE
k=L
1--..
i--L---j
"
Barra sometida a torsión:
k= JG
L
@ ¿G}
'.
Barra en voladizo:
k = 3EI
t=L~
e
-,~"._,~"
Barra simplemente apoyada, fuerza transversal en
el centro de la luz:
¡
~
l·
L
K
~
L
3
·1
-
Barra empotrada-empotrada, fuerza transversal en
el centro de la luz:
F
~
1L
~
k =!?2EI
.
L3
"1
Barra empotrada-simplemenie apoyada, fuerza
transversal en el centro de la luz:
FU::¿j
l·
L
,,;
-~
k = 768E!
7L3
-1
"
Barra simplemente apoyada, fuerza transversal en
el cualquier punto:
l;=1
a
L
_....-~,
,
:;111, .
~\\
·1
k = 3EII~
a 2b2
..
~,-~
"
.. ,--
.6 Trabajo y energía
El trabajo realizado por una fuerza al recorrer una distancia, Figura 1-4(a), está dado
por la siguiente expresión:
L
(l-S)
w= fFdl=FL
o
Dibujando un gráfico, como el mostrado en la Figura 1-4(b), en el cual se presenta el
valor de la fuerza P, contra la distancia recorrida L, es evidente a partir de la ecuación
(I-S), que el trabajo realizado por la fuerza es igual al área bajo la curva que describe el
valor de la fuerza, con respecto a su variación con la distancia recorrida, en este caso
una línea recta horizontal,
F~
I
p
L
(a)
u
(b)
Figura 1-4 - Trabajo realizado por una fuerza
En el caso de una fuerza que se aplica en el extremo de un resorte, el valor de la fuerza
es cero cuando se inicia el desplazamiento, y al final su valor es igual al producto ku.
F
P t----,
".--0)_0
inicio
I
---
,.-"""'Q)_P
fin
x
x
(a)
u
(b)
Figura 1-5 - Trabajo realizado por una fuerza que deforma un resorte
En este caso, que se muestra en la Figura loS, el área bajo la curva corresponde al
trabajo realizado por la fuerza, el cual es equivalente a la energía de deformación
acumulada en el resorte.
x
x
o
o
[1]X =-kx
1
w= fPdu= fkudu= -ku 2
2
o
2
(1-6)
2
La energía de deformación, o energía potencial, acumulada en un resorte que es
mantenido en un estado de deformación por una fuerza, es igual a:
1
E p =-kx
2
2
(1-7)
donde x es la deformación relativa entre los extremos del resorte.
k--------10
Cuando una masa m se encuentra en movimiento, la energía cinética que lleva la masa
es:
1
E C =-rnv
2
(1-8)
2
donde v es la velocidad de la masa. En todo sistema conservativo la energía total es
invariante, por esta razón la suma de la energía cinética y la energía potencial es igual a
una constante:
(1-9)
y la derivada contra el tiempo de la energía es:
(1-10)
1.7 Amortiguamiento
1.7.1 Generalidades
En general en todo cuerpo en movimiento, este último tiende a disminuir con el tiempo.
La razón de esta disminución está asociada con una. perdida de la energía presente en el
sistema. Esta pérdida de energía es producida por fuerzas de amortiguamiento o de
fricción que obran sobre el sistema. La energía, ya sea cinética o potencial, se
transforma en otras formas de energía tales como calor o ruido. Estos mecanismos de
transformación de energía son complejos y no están totalmente entendidos, aún hoy en
día. No obstante, existen varias formas de describir estos fenómenos que en alguna
medida se ajustan a la observación. A continuación se presentan algunas de las formas
más utilizadas para describir los fenómenos de amortiguamiento.
1.7.2 Amortiguamiento viscoso
Un cuerpo que se encuentra en movimiento dentro de un fluido tiende a perder energía
cinética debido a que la viscosidad del fluido se opone al movímíenro. Esta pérdida de
energía cinética está directamente asociada con la velocidad de] movimiento. La
descripción matemática del fenómeno de amortiguamiento viscoso es la siguiente:
(1-11)
donde:
Fa
e
x
fuerza producida por el amortiguador
constante del amortiguador
velocidad relativa entre los dos extremos del amortiguador
En general se representa por medio del diagrama de la Figura 1-6(a), el cual recuerda los
amortiguadores utilizados en los automóviles, los cuales son amortiguadores viscosos
pues producen un efecto de amortiguamiento al forzar el paso de un fluido viscoso a
través de unos orificios en el émbolo de un pistón de acción doble.
11
.'I.(Uluca eSl,rUCI.lU(U
~-.
U1J(I'LU-UU
_
(a)
(b)
Figura 1-6 - Relación fuerza-velocidad para un amortiguador viscoso
El amortiguamiento víscoso se presta para una descripción matemática simple, lo cual
permite resolver las ecuaciones diferenciales de movimiento de un sistema dinámico sin
mayor problema. Por esta razón se utiliza aún en casos en los cuales la descripción
matemática no corresponde exactamente al fenómeno físico.
'.7.3 Amortiguamiento de Coulomb
Este amortiguamiento corresponde al fenómeno físico de fricción entre superficies
secas. La fuerza de fricción es igual al producto de la fuerza normal a la superficie N, y
el coeficiente de fricción, /.l.
Se supone que el amortiguamiento de
Coulomb es independiente de la velocidad
del movimíento, una vez éste se inicia.
Siempre se opone al movimiento, por lo
tanto tiene el signo contrario al de la
velocidad.
Matemáticamente se puede expresar por
medio de la ecuación (1-12):
J.LN
Figura 1-7 - Amortiguamiento de Coulomb
(I -1
donde:
Fa
11
N
fuerza producida por el amortiguamiento
coeficiente de fricción dinámica (adimensional)
fuerza normal a la superficie de fricción
Su tratamiento matemático no puede realizarse por medio de funciones continuas,
debido a que depende del signo de la velocidad, lo que introduce complejidad a la
solución.
1.7.4 Amortiguamiento histeréttco
La histéresis es un fenómeno por medio del cual dos, o más, propiedades físicas se
relacionan de una manera que depende de la historia de su comportamiento previo. Este
tipo de amortiguamiento se presenta cuando un elemento estructural es sometido a
inversiones en el sentido de la carga aplicada cuando el material del elemento se
encuentra en el rango inelástico o no lineal. El hecho de que la curva de carga tenga una
trayectoria diferente a la curva de descarga conduce a que no toda la energía de
deformación acumulada en el elemento se convierta en energía cinética en el ciclo de
descarga. Dependiendo del tipo de material la forma tanto de la curva de carga como la
de descarga varia. A modo íh.stratívo, en la Figura 1-8 se muestra el comportamiento,
en términos de fuerza-deformación, de un elemento estructural construido con un
~--------------------12
material inelastíco durante unos ciclos de carga y descarga, incluyendo reversión del
sentido de las fuerzas aplicadas,
En la figura se ha marcado la fuerza de
fluencia Fy , a partir de la cual hay deformación
sin que se presente un aumento en la fuerza.
Una vez se invierte el movimiento, se inicia el
ciclo de descarga, y el material reacciona de
una manera diferente a cuando fue cargado,
hasta cuando llega a la fluencia en el lado
opuesto, -F y •
F
u
La acumulación de energía de deformación
corresponde al área bajo la curva de carga,
Figura 1-9(a). Cuando el sistema descarga la
-~=----+-- -F;,
energía que el sistema transfiere para
convertirse en energía cinética corresponde al
Figura 1-8 - Curva fuerza-deformación
área bajo la curva de descarga, Fígura 1-9(b).
para un material inelástico
La diferencia entre las dos áreas corresponde
a energía disipada por el sistema y que se
convierte en calor, ruido u otros tipos de energía, Figura 1-9(c).
Ft
Fy-r------==-......,
u
I
(a) ciclo de carga
u
(b) ciclo de descarga
(c) energía disipada
Figura 1-9 - Disipación de energía en un sistema inelástico
Aunque en algunos casos el comportamiento histerético de los elementos estructurales
puede describirse por medio de modelos relativamente simples como
modelo
elasto-plástico, en la gran. mayoría de los casos hay necesidad de recurrir a modelos
matemáticos más complejos. En el Capítulo ti se hace una descripción detallada de
estos fenómenos para diferentes materiales estructurales.
1.8 Tipos de excitación dinámica
Toda estructura se ve afectada numerosas veces durante su vida por efectos dinámicos
que van desde magnitudes despreciables, hasta efectos que pueden poner en peligro su
estabilidad. Dentro de los tipos de excitación dinámica que pueden afectar una
estructura, o un elemento estructural, se cuenta (véase la Figura 1-10) entre otros:
Causada por equipos mecánicos - Dentro de este grupo están los efectos causados por
maquinarias y equipos que tengan componentes que roten o se desplacen
periódicamente.
Causada por impacto - El hecho de que una masa sufra una colisión con otra, induce
una fuerza impulsiva aplicada sobre las dos masas, la cual induce vibraciones.
Causada por explosiones - Una explosión produce ondas de presión en el aire, o
movímienros del terreno. -\mbos efectos afectan estructuras localizadas cerca
del lugar de la explosión.
18
Causada por el viento - La intensidad de las presiones que ejercen el viento sobre las
estructuras varía en el tiempo. Esto induce efectos vibratorios sobre ellas.
Causada por olas - En las estructuras hidráulicas las olas inducen efectos dinámicos
correspondientes a las variaciones del empuje hidráulico sobre ellas.
Causada por sismos - El efecto sobre las estructuras de los movímíentos del terreno
producidos por la ocurrencia de un sismo conduce a vibraciones importantes de
la estructura.
fuerza
equipos
mecánicos
~Í\
. ~V~-,
I
impacto
[1_
tiempo
•
explosiones
viento
t---------t-'--------------t--------------t
olas
P
.~~~'-'" ""'
'?"::~
.....•......•...•.•..•..•..••.....•...
Í\
tiempo
VV~
aceleración
sismos
~ •. .AhA
r
'~VV
.H Uempo
'V
Figura 1-10 - Tipos
"V'
d~
excitación dinámica
14
s
Capitulo 2
Sisie"UUj dinán.icos de
un grado ele libertad
2.1 Vibración libre no amortiguada
En la Figura 2-l(a) se muestra un sistema elástico de un grado de libertad compuesto
por una masa m, la cual puede deslizar sin fricción sobre una superficie horizontal y
cuya posición se describe por medio de la coordenada x, y por un resorte-que conecta la
masa con un apoyo inmóvil,
_mX
ID
kx_
(a)
(b)
Figura 2-1 - Sistema elástico de un grado de Iibf'!rtad
Bajo el supuesto de que la fuerza ejercida para deformar el resorte, ya sea en tensión o
en compresión, es proporcional a la deformación y siendo k la Oí),; ante de
proporcionalidad, o rigidez, podernos determinar la fuerza que ejerce el resorte por
medio de:
(2-1)
donde:
Fr
k
x
fuerza ejercida por el resorte (N)
rigidez del resorte (N/m)
desplazamiento relativo entre los dos extremos del resorte (m)
La fuerza inercial que se tiene en la masa m debido a la aceleración a, está dada, según
la segunda ley de Newron, por:
F¡ =-mx
(2·2)
donde:
F¡
m
x
fuerza inercial que obra sobre la masa (N)
masa (kg)
aceleración de la masa (m/5 2 )
lB
inámica estructural ajJunlUlI (((
u ..,,, •• ~ " . __..
_
Esta fuerza inercial obra en la dirección contraria a la dirección de la aceleración.
Aplicando el procedimiento de "cuerpo Libre" en la masa, Figura 2-l(b), se obtienen las
dos fuerzas que obran sobre la masa, correspondientes a la fuerza ejercida por el
resorte y la fuerza inercial. Por lo tanto, aplicando el principio de D'Alernbert:
Fr
F¡ = k x + m x = O
-
(2-3)
Así se obtiene la siguiente ecuaClOn de equilibrio, correspondiente a una ecuación
diferencial lineal homogénea de segundo orden:
m x s-k x e
(2-4)
ü
Dividiendo por m y llamando cJ- la constante klm, se obtiene:
(2-5)
y la solución de esta ecuación diferencial (2-5) es:
(2-6)
x(t) = Asen(rot)+ B cos(rot)
donde A Y B dependen de lascondiciones iniciales que indujeron el movtmíentoPor lo
tanto, si se define x, como el desplazamiento que tenía la masa en el momento t=O y Vo
como su velocidad también en el tiempo t=O, se obtiene:
Xo
(2-7)
= Asen(roO)+Bcos(roO)=B
Ahora derivando la ecuación (2-6):
x = Arocos(rot) -
(2-8)
B rosen(rot)
que al tiempo t=O es igual a:
Vo
= Arocos(mO)-Broscn(roQ) = Aro
(2-9)
y entonces
A=~
(2-10)
ro
Por lo tanto la solución de la ecuación (2-5) se convierte en:
x(t) = (
~ )sen(rot) + X o cos(rot)
(2-11)
donde:
Vo
x,
ro
velocidad de la masa en el instante t=O (m/s)
desplazamiento de la masa en el instante t=O (m)
frecuencia natural del sistema (rad/s)
El haber introducido un desplazamiento y una velocidad iniciales a la masa hace que
ésta oscile con un movimiento periódico: a partir del momento (1=0) en que se
introdujeron estas condiciones iniciales. En la Figura 2-2 se presenta el gráfico del
desplazamiento de la masa con respecto al tiempo, correspondiente a la solución de la
ecuación (2-11).
~-~----~-i6
h
x
. -...
- ' - ..:..
penodo T
b:~;~i~;~.:.c;:.!.;.;.¡.-.i¡~~;iF,lt
~':> ro-o: "'.~J
..
Figura 2-2 - Desplazamiento de la masa en .el tiempo ante
condiciones iniciales de desplazamiento y velocidad
.-
. ",
"'''',.,-.,~~_
Puede verse que se trata de un movimiento periódico. Esta periodicidad hace que el
valor de x sea el mismo cada (21t1ro) segundos. Por lo tanto, es posible definir los
siguientes términos:
ro =
f
¡g;
=
frecuencia natural del sistema en radianes por segundo (rad/s)
=-ro = frecuencia natural del sistema en ciclos por segundo o Hertz (Hz
21t
2It
T =-
ro
ó L/s)
=-1 = período natural del sistema en segundos (s)
f
Estas relaciones se han enmarcado para resaltar su importancia.
============================================
Eiemplo 2-1
UItCiL CCiLjCiL qlH' tiene IH'LCiL f'l'LCiLSCiL 1Itr. 1000 kg es soltCiLlltCiL lItesllte 1 metro lite CiLLtluu soine eL centro lite
LCiL LllZ lite I1HCiL VigCiL sif'npLef'lte/tte CiLYJ0I:1UlltCiL. de m(A,sa ~tcspreciabLe. La VigCiL tievLe IU'La L,u L de
10 ID 1:1 SIl, secciólt tielte 0.20 m de CiL/tdw p(lr 0.50 m de CiLLto_ Estri constrtÜdCiL de IU'L I'ltCiLteriCiLL
(HijO f'ltódlÚO de eLasiicidallt E es 25 000 MPa. Elt La Fig/UCiL 2-3 se mlH'strCiL eL sistel1tCiL.
masa 1000 kg - 0.2 m
-t-t
m
O•S m
sección
10m
.Figura 2-3 - Viga sobre la cual se deja caer una masa
SILIJOIticltdo (,j1H' LCiL CUjCiL (,jlted(A. toLuLI1te/tLe udlwrid(A, U Lu vigCiL a pwtir deL flwlnel1Jo deL
CCillt(A,clo LfticiaL detlf' en('()l1trarse I1HU dcscriYJCión deL l'ltovimiel'Lto OSCiLlA-torio ql1t' se genera.
17
~-
.; __ ._,._.'c_.... ,--·",,,,,,,~·
_
rílnicH est r!IClUnll
<lJllIllHl" u . . . . ,,~ •• ~ __ ,_,
L14 vvuixil1tU cüjlexiém. vertiml ¡/lIte tiene L14 vig14 I:J l14sJw'Yl14S vnrixÜ1tlA's tljlte se iVLdli'(~ft ev¡, L14
vig14.
EL rrimfr f'l14S0 elt L14 soLI·tción consiste eltjormltLrítr el I1wdeLo de 1m sistem14 de H,vl- grÓl.do de
líl'iertcu;t íjlte tWS remtit14 descritlir el I1wvü'ltieJtto osciL14torio Cj'~.e se geltem. Es evidev¡,te íjlte
IUt14 vez L14 C14jrít se w;ULÍere rít Lrít vigrít se tiene IUt síste mrít dil1út1tico elt el (I1.rítL LiA. 11t14Srít r¡roviev\,('
solamente de tiA. C14j14 drítdo CjH.e l14 vigrít tiene VltiA.SiA. deswecirítble. L14 rigidez del sistem14 es L14
rigic;{,ez de L14 vigrít. Como LiA. mj14 me verucaünenre L14s dcjtexiovl-es de L14 vig14 serúvltrcutsversrítLes a Sil lli2. p¡.:Hrít obtener lrít rigidez se etebe deLermiVLrítr L14 dEflexiém de l14 vigrít elt eL
ceutro de L14 LHZ (sitio etd imr1f,1,cto) rl14m ,uta carga ,utitaria colometiA. aLLí. taL COl11.O se
1'ltltCstm en Lrít FiglH14 2-4.
Figura 2-4 - Deflexión de la viga ante una carga unitaria
UtiLiZlA.Itdo Clt14Lqlüem ete Los tnétoetos cLúsicos de resistettcirít de materiaLes ¡·mm mLc,üar
dejlexiOltes en vigas (úrea momento. vigrít col1:Íllga(,1.rít. etc.) es yJosibLe obtener (véase La seccíón
1.5) la siglüeVLte eXf'lresiólt yJam la dEflexiólt CI1, el centro de Lrít L/lZ de la viga:
pe
0=48EI
dOltdc
LHZ de La vigrít = 10 m
l1wd,tLo cte eLasticid14d del mrítlerirítL de lrít vigrít = 25000.MPa
VlWl1telttO de inercirít de liA. sección de liA. viga = 0.53 . 0.2/12 = 0.002 ()83 m 1
L
E
I
Dado íjltC P =k () . entonces
= P = P 48 El = 48 El
o PU
L3
k
I:J /'lar Lo
tanto
3
k = 48·25000· 0.002083/10 = 2.S MPa'
[a l'ltaS14 ID [-'te lct mja es 1000 kg. r10r lo tanto
elt mdiaites rJor seglutdo. se obtíene de:
ro= {k =
V;¡
6
2.5.10 N/m
1000
kg
=
ID
6
= 2.5 '10 Nlm
lrítJrec'teltü{~. 11,14tltml
del sistema (viga + mjrít).
2
2.5.103 kg·m·s- 1m =50 rctd/s
kg
slljreCltelt(Íct en ciclos por segl-tlteto
f
lj
= roI21t = SO/21t = 7.96 Hz
--
SIl, f'leriodo elt segl1.netos
T
= l/f = 117.96 = 0.126 s
~-- - - - - - - - - - - - - - - - - - - - - - - - - ...
18
b [ •
Cavi, tJase CI1 ío wtt.erior. se rJl1.ede p~aVl-tear ~a ecnaciólt d.ífere¡·u:ia~ de eqlúLíbrío segt'ut la
eW.a(ÍóVl- (2-4-). en la Cltal se ~"a tOlnlA.ÚO COVVLO niveL úe reJerevu:ia (x=O). et niveL al C/HA.L se
el.lLCOvLtraría LIA. vigu con Lu caja coLocaliLa lelttaVlteltte. o sea aL l'tÍveL liLe La liLeJLexíón estútica oe'
de Luviga evt eL centro liLe S11. L,1Z (oe = WIk = rnglk):
mx+kx=O
o ividieJtliLo por m
:
La soLnciém. de uCIi.Crdo con Lu emaciém (2-11). es:
x(t) = ( :; )sen(cot) + X o cos(cot)
Alwra. eli. f'i f1UH11.f'-I1.W deL ÍfnrJlA.uo úe La caja con LIA. vigu. eL cl1.aL se dCJÍlte conto t=O. eL
desrJLazalniento de Lu VHIA.Sa es cero. por Lo tanto Xo=O.
Para OtJtcfter LIA. veLociúlA.d qlv~ tievlf La VltaSU, eJt eL 11WI1tfltW deL impacto se debe obte/ter La
vefoci(;{.llÍ.d qttf Lielte La caju riesfJl1·rs rie I"utl('r ({A.íIAG. 1m Inetrn. La energí(;j, cÍltéticcl (mv2/ 2) ¡;jltf
tiene Lu cuja en eL num1eltlo del lmplA.ClO es uJlüA.L lA. La ellergf",¡, rJotevtciaL qli.C líe/te av"tes de
soLtarLa (wh). Por Lo tWtto:
mv2/2 = wh Ij dado qlle rn = w/g. sc.ohtíene v2 = 2gh.
v2 = 2gh = 2 . 9.8 . 1 = 19.6 m 2/s2
Lu vcLoddad de La caja el1. eL V11CHnenlO deL Íln!',acto es. entonces.
v =4.43 mis
Por lo taltlo V o es 4.43 mis Ij La rieJkxiém CI1 el cel11ro de /IJ. LIE en CltlA.Lqlúer instr;uHe úesyntés
rieL ilnr,acto se fJllede o!'ltener de:
x(t) = (vJro) sen(cot) + x, cos(rot) =(4.43/50) sen(50t) + (O) cos(50t)
x(t)
(m)
0.10
0.08
0.06
/
0.04
I
0.02
1/
0.00
-0.02
-0.04
-0.06
-0.08
-0.10
0.00
..---...
/
\
i\
,\
! \
¡
i
/
i
\
I
\
\..
:/
0.10
--
\
/
I
I /
\
-~
\
I
I
I
0.0886 sen(50t)
\
I
"-'f
0.05
I
/b",
-,
=:
0:15
;~
,\... _ ./ -l
0.20
tiempo t (s)
Figura 2-5 - Deflexión de la viga en el centro de la luz
0.25
~{¡l1UC(J eSITU("((U «' "pi"
Innl
U'
.
La f'l'táxünu cieflexLól'L ciLnávvüca 0We tiene Lu viga eVL SIl, centro de La LHz se ,presel1ta evi, d
il1stul'Lte Cltul'LCÍO 50t = rrJ2, o sea CI{,w1cio t = rrJ100 = 0.0314 s. lJ esta citjLexióvL tiene IH'L valor de
0.0886
ID,
igltaL u La uvnpLitltci de LujlH1Ción SÜ11150iciaL.
LG1, máximujlterza ü'Lt'rciu[ lijlte impCH'Le el VlwvilnLento (/\, LCA viga es iglÜAJ a Lajlterzu estáUcu
Gjlte ILUI'lrfu l'Lecesiciuci de colocar /"lrMa ohtener LIA l'l'LisH'La oLeflexiól'L de 0.0886 ro, o se«.
0.0886 k = 0.0886' 2.5' 106 = 221500 N
A esta vl1Lsmü Jlterzu se J1aecie LLegur cuLwJw'LoLo Lü l'l'Láximu üceLerüció~'L Id Vl11üüYlLicál1oLoLa
por Lu Vl'Lüsü. Lü emudóv\' de La aceLerüciól'L se ouuene derivando dos veces COI'Ltrü el tiempo La
eCltució\'L cid aesYJLcuamie~tto Gj/U' se obtuvo (/\'1'Lterioff'J'LCf'Lte. La cltüL se presenta ae rtltevo (/\,
cm'Lti~'L1 t(/\,dÓi'l:
x(t)
=0.0886 sentcot)
aerLVÜi'LoLo IU'LÜ vez se ohtíerte [ü eC/tadól'L de LuveLoda(/\,d:
x(t)
=0.0886 ro cosúot)
x(t) = -0.0886 (f)2 sen(rot) = -221.5 sen(rot)
Lu Vl'Láxiina üceLerüdól'L se r1reSel'Lta C/ttimao 50t =rr/2. o sea Cltünclo t =rr/l00 = 0.0314 s. o sea
Clt(/\'i'1d.O el despLcuamiel'LLo t(/\,m~)Lél'L es máxLvno. 11 tiene ai1 vaíor de -221.5 mls2 . Por Lo t(/\,l'Lto Lü
máxLm(/\,jaerzü üterciuL correspol'Lae ü:
F¡ =-m x
= -1000, -221.5 = 221500 N
Opte es el mismo valor oL! te~üdo unte rioff'J'Lel'Lte.
vaLe L(/\, pei'LÜ (esaLt(/\,r Lvl eltCrVlte aifert:ftCirA lijltf se ()LJtev~drí~l. si [CA. mja se c.o!üu,,,- sin dejarLu
caer. caso en el clt(/\,L La cargü SO~'lYe Lu vLgu sería 1000 kg x 9.8 mls2 = 9800 N 11 La máxLVl'L(/\,
atjLexiÓi'L verticaL Gjlte tel'LoLrfu Lu vigü serfu oe = PIk = 9800/2.5 . 106 = 0.004 ro = 4 mm. Debe
üavertirse qlte Lüs oLeJLexim'Lt's o~lte~'Littas correSpm'Laef'L It~ticamef'Lte ü Lu YItMte DiLl'LáVltlca. !j (;jIte
La vLga tiene IU'L(/\' agLexLÓi'L e'trÁlLca. COi'L 1m valor Lg/taL a 4 mm. o seu Gjlte Las osciLacimtes
oLil'Lávl'LLc.as SOi'L aeJLexLmtes reLatwas COVi, respecto a esta atjLexLÓf'L estática.
•
2.2 Vibración libre amortiquada
Los movimientos oscilatorios tienden a disminuir con el tiempo hasta desaparecer. Esto
se debe al amortiguamiento que se presenta, el cual hace que parte de la energía se
disipe. Las causas de este amortiguamiento están asociadas con diferentes fenómenos
dentro de los cuales se puede contar la fricción de la masa sobre la superficie de apoyo,
el efecto del aire que rodea la masa, el cual tiende a impedir que ocurra el movírníenro,
la no linealidad del material del resorte, entre otros.
Existen numerosas maneras de describir matemáticamente el efecto de fricción. Dentro
de estos modelos, uno de los más utilizados es el que se conoce como
amortiguamiento viscoso (véase la Sección 1.7). E~ el amortiguamiento viscoso la
l . : - - - - . - - - - - - -20- - - - - - - - - - - - - -
-
~_.L
fuerza de amortiguamiento es directamenteproporcional a la velocidad relativa entre
los-e:~r~ill-os-del ~lmortlguaaor, lo cual sé puede descriºiJ;:_p_or!lH~di9j;ie.lasiguiente
ecuación:
(2 -12)
donde:
Fa
e
X
fuerza producida por el amortiguador (N)
constante del amortiguador (N· s/rn)
velocidad relativa entre los dos extremos del amortiguador (mis)
En la Figura 2-6 se muestra un sistema lineal amortiguado de un grado de libertad. El
grado de libertad está descrito por la ordenada x, la cual indica la posición de la masa
m. A esta masa, colocada sobre una superficie sin fricción, están conectados un resorte
con constante de rigidez k y un amortiguador cuya constante es c.
-mX°
kxID
cx(a)
(b)
Figura 2-6 - Sistema tlneel amortiguado de un grado de libertad
De la aplicación del procedimiento de cuerpo libre sobre la masa, se obtienen las tres
fuerzas que obran sobre ella, correspondientes a la fuerza del resorte F" descrita por la
ecuación (2-1); la fuerza inercial producida por la aceleración de la masa, dada por la
ecuación (2-2) y por la fuerza ejercida por el amortiguador dada en la ecuación ('2-12).
Utilizando el principio de D'Alembert puede plantearse la siguiente eruación:
(2-13)
y al reemplazar las definiciones de las diferentes fuerzas:
(2 -14)
kx-t-cx>- (-mi) = O
lo cual conduce a la siguiente ecuación diferencial lineal homogénea de segundo orden:
mx t-cx-t kx
e
(2 -15)
Il
La ecuación característica de la ecuación anterior es:
(2-16)
cuyas raíces son:
-4mk
A= -C+~C2
-
(2-17)
2m
o sea
-c+Jc 2 -4mk
A1 = - - - - - 2m
(2-17a)
21
~Dillánlica
eszruceur«r
({Pll~UUu <.. ".~_.
_
"'"
.",
y
_C_~C2 -4mk
A2 = - - - - - 2m
(2-17b)
Por lo tanto la solución de la ecuación diferencial de equilibrio del sistema (2-1 S), es:
(2 -18)
donde:
constante que depende de las condiciones iniciales del movimiento
constante que depende de las condiciones iniciales del movimiento
base de los logaritmos neperianos
.
A
B
e
Existen tres casos de solución para la ecuación anterior dependiendo del valor del
radical de la ecuación (2-17), los cuales se presentan a continuación.
2.2.1 Amortiguamiento critico
Cuando el radical de la ecuación (2-17) es igual a cero la cantidad de amortiguamiento
e, se denomina amortiguamiento crítico y se define como Ce Y se obtiene así:
C~ -4mk= O
(2-19)
por lo tanto
Ce
(2-20)
= 2-Jmk = 2.Jmk(m I m) = 2moo
Definiendo
entonces:
é.
como el coeficiente de amortiguamiento crítico, igual al cociente ele¿
c=2~moo
(2-21)
que al ser reemplazado en las ecuaciones (2-17a) y (2-17b) se obtiene:
=[-~+ ~~2 -1 Joo
(2-22)
A2=[-~-J~2-1Joo
(2-23)
Al
y
Ahora, los tres casos de interés se han convertido en ~ = 1, ~ > 1 y ~ < 1, que se
denominan amortiguamiento igual, mayor y menor del crítico, respectivamente.
Para el caso de amortiguamiento igual al crítico (~= 1):
(2-24)
Debido a la doble raíz la solución para el movimiento x, es del tipo:
(2-25)
~-----Reemplazando las condiciones iniciales se obtiene:
22
(2-26)
donde x, Y V o son el desplazamiento y la velocidad iniciales respecttvamente.
X..,
i
------------=~~""""""---->-
t
Figura 2-7 - Respuesta de un sistema con amortiguamiento igual al crítico
Este es un movimiento aperiódico pues no hay oscilación, como puede verse en la
Figura c¿-7. Este es el caso en el cual el sistema regresa de la manera más rápida a su
condición de reposo.
2.2.2 Amortiguamiento mayor que el critico
,...
En este caso ~ > 1. Tomando los valores de
introduciéndolos en la ecuación (2-18),
11.1
y
11.2
de las ecuaciones (2-22) y (2-23) e
(2-18)
se obtiene:
x(t) =
e-~cot[ A e ~~2-lcot + B e _~~2_l cot]
(2-27)
A Y B son constantes arbitrarias que dependen de las condiciones iniciales. En este caso
el movímíenro también es aperiódico como en el caso de amortiguarníento critico, con leí
diferencia que el movimiento decrece más lentamente que cuando se tiene
amortiguamiento igual al crítico, .
2.2.3 Amortiguamiento menor que el critico
Corresponde a la posibilidad de mayor interés por cuanto se presenta vibración. La gran
mayoría de aplicaciones prácticas en vibraciones están regidas por este caso debido al
hecho de que la gran mayoría de los sistemas estructurales tiene valores de
amortiguamiento bajos. En este caso ~_..'S._!:_ Tomando los valores de 11.1 y A2 de las
ecuaciones (2-22) y (2-23) puede verse que la parte interna de los radicales es negativa,
por lo tanto la solución es imaginaria:
(2-28)
Aplicando la transformación de Euler, la cual se expresa como:
e iy
= cos(y)+isen(y)
e -iy = cos(y) - i sen(y)
(2-29a)
(2-29b)
I.JIIUlIIU\,
\.t:
'-,~,H. . . . "' ...... ,~. ~
__
se obtiene una forma no imaginaria de la ecuación (2-28):
(2-30)
Al resolver las constantes e y D para las condiciones iniciales de desplazamiento inicial
y velocidad inicial vo , se obtiene:
Xo,
(2-31)
donde COa se conoce como la frecuencia amortiguada y está definida por:
(2-32)
El movimiento disminuye de amplitud exponencialmente como se muestra en la Figura
2-8. La porción oscilatoria tiene un período un poco mayor que el que tendría un
sistema no amortiguado con la misma rigidez y masa:
= 21t =
T
a
roa
21t
(2-33)
Jl- ~2 ro
x
Xo
-f------+----I-------\----I---~--.~~t
Figura 2-8 - Respuesta de un sistema con amortiguamiento menor del crítico
Ejemplo 2-2
UtiLlZCJtVLcto los dlíttos ctel Ejeml'llo 2-1, e~t el Cltlítl se ctejó caer IUtlil. Clil.jeA. COV11UteA. mlil.slít cte 1000
kg sobre ItVLeA. vigeA.1j UptE' el sistemlít CO~1jIUttO ttene IHtlítjrecl,te¡teieA. It¡;ültml cte 50 rad/s. se cteseeA.
enrontrar leA. ~n(;ixúltlít lítnt~litltct cteL v¡lOvif'nie~tto ctlítcto (~HR el sistemlít eA.hom tíeVlR It~t
lítI11Ortigltlil.mie¡tto e cte 5000 N • slm.
EL coejtcteate cte eA.f'lwrtiglteA.mieltto crítico,
e
2mro
~=--=
5000
2·1000,50
~,
se obtie¡te cte:
=0.05=5%
Dlil.uto qlH' el co\ficie¡tte cte tJLf11.ortiglleA.f11.ÍeVl,to crítico c.'> I1tCVWI' ql{e llil. luüalil.u1. el 111OVÚ1ÜCVltO
estú aescrilO por:
ll--- - - ~ - - - - - ~----
24
L.
AL rcel1wLazar Los vaLores ay¡roynados, tol·nuvLus
ud ejel1ty¡Lo ).-1, se ov,UeI1e:
U;¿-'/;):,;
F;){:(H<n~\ ur:
roa
x(t)
(m)
=
".i
0;;::::,,<
Jl- ~2 ro = Jl- (0.05)2 50 = 49.94 rad/s
0.10 - , - - - - - - - - , - - - - - - - - - - , - - - - - - , - - - - - - - , - - - - - - - - - ,
0.08 t----~-~-+----------t
0,06 r---;'--------Cl~-----T--~-_r~-o;;T""--_¡_----.:.--,-_j
,
0,04 +---cr----~--,-0.02 +-F-----++----r-------u----+------'li~___1--------I
O.00 -f--+--+--+---+---+-~..___._--+----+___1-r--+_;+----+---+----+--+~-+---+-t--+---+-----;!
-0.02 t--------+---\\;----t------¡'I----+-----"'~----_fF1
-0,04 t--------+------'\~--t---.H----+-.----~
"",,=--,-~~
-0,06 +-------+-----v''''-::----"1c/-cf-------+-------f'<-0.08 +-------+-----~---"1c/_0,10.L--------"------'---------L.-------'--0.00
0,05
0.10
0.15
0.20
0.25
t (s)
Figura 2-9 - Deflexión de la viga en el centro de la luz
EL In6tximo vl1ovimieltto ocnrre rara sen(ro"t) = 1. o sea rara ro"t
= rrJ(2ro,,) =0.0315 s. La Ul11rLitl1.u en este i/1stcmtc es:
= rrJ2
t
_ -2.5'0.a31S[ _
4.43
x-e
_ 1] _ U.~243· 4.43 - O082 m
o
49.94
F¡ =0.082 k
-
- .
49.94
=205 000 N
EstajI1.cI'Za es mClwr CjI1.C Lu I/jltC se Otlt/1VO eH eL Fjcl1ly¡Ln 2-1 sü'\. ctI1wrtigl1cu1ÜeJ1to. En Ju
Fígltra 2-9 se ml1.cstra tu resrJt1k'sta ae Lu vigu el'\. eL CUSO u/1wrtigltudo
L) 0 1'10
l
á 1w rtign a d o (Ejf'f11rJLo 7.-1),
•
2.2.4 Decremento logarítmico
Existen diferentes métodos para obtener el coeficiente de amortiguamiento crítico, S. SI
se conocen las amplitudes de los picos de oscilaciones sucesivas, xn , Xn+1< Xn+2, ... , tal
como se muestra en la Figura 2-10, es posible ver que el intervalo de tiempo entre picos
sucesivos es el período amortiguado Ta .
liílllicu estructural ajJIICU(UI
(Ir
({.:,ellll
.7"."",,_
Tomando el cociente entre la amplitud de dos picos sucesivos
ecuación (2-31), es posible obtener:
Xi
-~Ol(t·-t. ¡)
--=e
.. + =e"~01fa
XJX¡+l
Y por medio de la
(2-]-l)
Xi+l
El logaritmo natural de este cociente se conoce con el nombre de decremento
logarítmico:
(2-35)
a partir del cual es posible calcular
~:
(2-36)
X
Figura 2-10 - Cálculo del decremento logarítmico
El valor del decremento logarítmico para valores pequeños de b se convierte en:
(2-37)
Por lo tanto, disponiendo de un registro de las oscilaciones es posible entonces
determinar el coeficiente de amortiguamiento crítico con facilidad. Cuando el
movimiento decrece muy poco, debido a que el amortiguamiento es pequeño, el valor
del decremento logarítmico puede obtenerse comparando las amplitudes localizadas n
ciclos aparte por medio de:
(X.)
1
b=-ln
-'n
Xi+o
(2-38)
L...- - - - - - - - - - - -26- - - - - - - - - - - - -
_ _ _ _di
•
lIIl
------------_.-----
Ejemplo 2-3
EL 11wvLvvLÍevLtCl CVL vLbmdéll1 LLbre áe IU1 sLstel1tu áecredó áe Juta am¡r¡LLtliá áe 0.155 ID a 0.006
ID aL cMJO ác 22 cíctos. Se áescu saber wúL es eí corjiúcnte áe af1Wrügl1W1ÜelttcJ críüco áe1
sLsLema. S.
Lu soL/telón es:
1 (0.155)
b = -In
- - = 0.1478 Y
2~
0.006
(0.~:78)
s= -;====== 0.0235 = 2.35%
1+(0.~:78r
•
2.3 Vibraciones forzadas armónicas
En la Figura 2 -11 se presenta un sistema de un grado de libertad a cuya masa se le
aplica una fuerza que varía en el tiempo con una periodicidad constante. Esta fuerza
periódica puede describirse por medio de Fosen(Qt), de la cual podemos decir que su
máximo valor es F o Y que tiene una frecuencia de Q rad/s. Del cuerpo libre es posible
plantear la siguiente ecuación de equilibrio:
mx + ex + kx = Fosen(Qt)
(2-39)
_mx
ex
(al
(hJ
Figura 2-11 - Sistema de un grado de libertad sometido a excitación armónica
La solución de esta ecuación diferencial no homogénea de segundo orden se divide en
dos partes: una solución homogénea y una solución particular. La soluciónhomogénea
corresponde a la respuesta ante las condiciones iniciales, la cualse rige por la ecuación
(2-1~) Y dependiendo del valor del coeficiente del amortiguamiento crítico tiene las
diferentes soluciones planteadas anteriormente. La solución particular depende de la
fuerza externa que se le impone al sistema. Es importante anotar que la parte de la
respuesta correspondiente a la solución homogénea desaparece pasado algún tiempo
pues el amortiguamiento la diminuye; por lo tanto, sólo la solución particular es de
interés cuando ha transcurrido algún tiempo después de iniciado el movimiento.
Puede suponerse que la solución particular tiene la siguiente forma:
x = Xsen(Qt -
(2-40)
<1»
donde:
X
<1>
es la amplitud del movimiento (m)
es el desfase de la respuesta con respecto
¿: Iél
excitación (rad)
9_1
En la Figura '2~1::¡)se muestra la amplificación dinámi~~_en ~'unci~n del coc~en~e en:re la:"
frecuencias, (Q/ro). Es importante anotar que la arnpliñcación esta dada en función del
29
:CIJillálllica est rllC(llr(l1 (I[>ucuczu Ul "''''''·HU .'-......_"
.-----------"'----------------------
Al derivar contra el tiempo la ecuación (2-40) se llega a:
x = XQcos(Qt- <ji)
(2-41)
y derivando nuevamente:
x=_XQ2 sen(Qt-<jI)
(2-42)
Reemplazando (2-40), (2-41) Y (2-42) en (2-39), y pasando todos los términos al lado
derecho de la ecuación, se obtiene:
Fosen(Qt) + mXQ2 sen(Qt -
<1» -
cXQcos(Qt - <ji) - kXsen(Qt -
<1»
=O
(2-43)
Para describir el movimiento puede utilizarse un sistema cartesiano en el cual alrededor
de su origen rotan unos vectores correspondientes a cada uno de los términos de la
ecuación (2-43). El eje de las abcisas corresponde a la línea de referencia sobre la cual se
mide el ángulo Qt. La ecuación de equilibrio (2-43) se representa por medio de la
proyección de sus términos sobre el eje vertical. Los vectores correspondientes a cada
uno de los términos de la ecuación rotan con respecto al origen, y su posición se
describe por medio del ángulo apropiado. En la Figura 2-12 se presenta de esta manera
la ecuación (2-43).
XcQ
Figura 2-12 - Respuesta a la excitación armónica como vectores que rotan
El conjunto de vectores que rotan está en equilibrio, pues su suma vectorial conduce
nuevamente al inicio del primer vector. Al sumar los vectores correspondientes a {k X} y
{XmQ2} se obtiene la representación mostrada en la Figura 2-13.
xcn
eje de referencia
Figura 2-13 - Respuesta a la excitación armónica como vectores que rotan
Allí es posible, utilizando el teorema de Pitágoras, encontrar:
(2-44)
de donde podemos calcular la magnitud de X
(2-45)
~----- ,
---- .
28
~.
,
y el ángulo de desfase ~ con respecto a la excitación:
eQ
(2-46)
tau<!l=--k_mQ2
Realizando las transformaciones apropiadas, las ecuaciones anteriores se convierten en:
(;)
(2-45a)
[I-(~rr +H~)J
tan =
2~(~)
ó
1-(~)
(2-46a)
2
La ecuación (2-45) describe un fenómeno clásico de resonancia. Cuando el coeficiente de
amortiguamiento crítico ;, es igual a cero y la relación entre frecuencias (Q/ro), es igual a
la unidad, el denominador de la ecuación (2-45) es cero y por lo tanto la amplificación
se convierte en infinito.
3.0,------,-----rr-.,.-..,.,------r----,------¡-----,
\-----t- 1; = 0.0
2.5 +--------j---H-~""'k_----'H---+----__t----_+_---__J
U-------t-1; = 0.1
2.0 +-------j---IJ'-I---+-+---\t---+--------j----
-
-
-l
.
\-\\---t-1; =0.2
Fo /k
1.5 +------!---/>~--__+_--+\\_-+___,,____~:_+----+_
0.5
+--------j--------="""i-=-=""-=----?"l--;;:~"""'-_+---
0.0·c¡:·----1------4-----+----4----i-------j
0.0
0.5
1.5
1.0
2.0
2.5
3.(J
QjO)
Figura 2-14 - Amplificación dinámica
El hecho de que el amorríguamíento no sea cero indica que este denominador es
diferente de cero y por lo tanto la amplificación, aunque de magnitud importante, tiene
un valor finito. Es posible demostrar que el máximo valor de X se obtiene cuando:
(2-47)
..... ~"" "
,
En la Figura 2-14)se muestra la amplificación dinámica en función del cociente entre las
frecuencias, (Q/ro). Es importante anotar que la amplificación está dada en función del
29
~1D;.1JIlIUIHIlU Il:·~"·.u""",u,."" "~r'-,-
;;.."
..
1,.
-
desplazamiento estático del sistema (F.,Ik), el cual corresponde a la deflexión que
tendría el sistema si la fuerza F, se aplica muy lentamente.
En algunos casos es conveniente expresar la ecuación (2-40) como una suma de un seno
y un coseno, en vez de un seno más un ángulo de desfase. Definiendo ~ = Q/ro y
utilizando sen(a - y) =sella cosy - cosa seny, obtenemos:
(2-48)
y
Fo
k
2
x(t)=
(2-49)
[(1-132)sen(Qt)-21;13cos(Qt)]
[1-/32] + [21;/3]2
Ejemplo 2-4
UV\, taltCjlte ete l/l.glta con It,ftl/l. sección
I10 rizoIttl/l.L etc 1 ID 2 etc árca está
colocarte eit Ll/l. plll.ltc ';Itperior ete luta
COLIHitlta ttdJ/ül/l.r ete 8 ID ete aLtiva
cltlja secció.: tiOte IUt cHárnetro d =
0.25 ID con 1~.ltl/l. rJured t = 0.01 ID ae
espesor Ij COltstnüal/l. de /Ut rnateril/l.L
COV\, 1m fiWdltLO de e Lus ticidaet E =
200000 MPa.
área = 1 m 2
h
8m
no
D
0.25m
EVI. Ll/l. rJwte iviferior eteL tWtCjlie ILl/l.1j
Ime-{. bmi1vlu (,1(' (.\.gl~.a Wtf ejerce liVl.a
Jlterzl/l. horizol1.taL l/l.Yf1w!'LÍm ete Fo =
100 N con lutl/l.jrecltevLcLl/l. Q = 5 rad/s.
EL tlll.ltCj/{.(' Vl/l.(ÍO ÍI'LCLtiljcltdo Ll/l.
coL/u1tltl/l.. tievLf IUtU rnl/l.Sl/l. de 500 kg.
EL l/l.vJtOrtiglil/l.I1Úeltto ctcL sistenll/l. es ~
=2% de t crítico.
0001 m
seccion de la columna
Figura 2-15 - Tanque de agua
Elt Ll/l. Fígltxu 2-15 se rnlteSUu corno está etiSpl1.eStO el sistenua. Se desea Sl/l.lJCr Ll/l. aLluyu deL
ugltiA. cieL tl/l.ltCj/1.e rJl/l.YU Ll/l. CltiA.L se preseJll,t.aVl. Las Incixilnl/l.sjlterziA.S horizoVl.tl/l.Les illal1.cietl/l.S r10r LiA.
bornlll/l.1j el VJtOl1tefltojLector (¡111.e proetlM:nl estasJ'terzlíLS en Ll/l. lIase ete La coLIUnltl/l..
EL sisterna p/1.ede ideaLizarse corno lUla coLlunltiA. ea voLctetizo COI'L IUliA. Inl/l.sa ell La purte
saperior. AL upLimr Ima Jlterza horizol'LtaL P el'L La piA.rte s¡tperior ete La coLt.trnVl.a es posibLe
obtener por cltl/l.LCj/üer rnét.odo de resistenci« de li1.ateril/l.Les (véiA.sf La Secciólt 1.5) La sigl1.Íel'Lt.e
reLacLóVl.:
P= k S = 3EI 8
L3
80
_-1-.
E = 200 000 MPa
3/S = n- 0.01 . (0.25)3/ = 6.14 . 10-5 m"
1t t d
8
L=Sm
1=
entonces
k = 3'200000'6.14.10-5/8 3 = 72 000 N/m
La ntL1SL1 corresrlO/tae L1 LIA, mL1SL1 deL t.UltqIH?
U LL1 coL/tf'ltVLL1, mús LL1 deL L1g/1Ü U¡I1.e cont.e/tgL1
eL t.Wtu¡ /1,e
2
m = mtan+col + magua = 500+ h- 1 m ,1000 kg / m:' = 500+ 1000h (kg)
LL1jreutcnci(A, ItL1w,mL deL sistentL1 es:
{k
ro =
I
72000
V-;;; = ~ 500+1000h
rad/seg
Ui Inúxi¡'1114 jl1.e/7.l1 I wrizcllttuL se y¡rodltcC' cl1.wtdo se ticlte LL1 múxintL1 w1tpLitI1.&t () scu
cl1,wldo sc preselt1.l1L rcsOltL1ltciL1. Esto OrJ1rrc' c/t,L1ltdo eL cociente fJjro es igl1.L1L L1:
Q =
ro
ro =
~l- 2V = ~1- 2(0.02)2
72000
500+1000h
=Q =5
= 0.9996 == 1.0
rad / seg
2-500
h= 72000/5
=2.38 m
1000
til'/'lC' /HtL1 L1LUuu ig/~,14L 14 2.3~ m se preseltt14 L14 múxiln14 Lv0Llí.t'ltciu 'de Lu
CUl15Uíi14 por Lu tJo/'ÜJ14 í,tl' L1gt~,L1, LL1 múx¿mn, 14mpLit/~,d de L14 defiexiált lLOriZ0I1tuL
se obtie/'Lt' por nteaio {¡Le Lu eCl1,uciólL (2-45):
C/1wtdo eL ug/tU
Vi~JmCiém
(~ )
( 100 )
l72000
[l-(~rr +s(~)r
LL1 múxim,L1jI1.erZU es por Lo tWtto,
P = k X = 72 000 . 0.035 = 2520 N
U et InúxÍlno ''lWI1telttO en Lu b14se de LL1 COLl1./'lUtU es
M = P L = 2520 . 8 = 20 160 N . m
i
.".'----~-,
.........- - - - - - - - - - - - - - - - - -
•
:31
Dinámica estructural aplicada a/
(/Isellu
'')'''''''nv
2.4 Vibraciones transitorias
La determinación de la respuesta de un sistema de un grado de libertad que se ve
afectado por una excitación que no es ni periódica ni armónica presenta un grado de
complejidad mayor. No obstante, el planteamiento matemático de su solución es
relativamente sencillo. En muchos casos prácticos donde se tienen excitaciones que no
se prestan a una descripción matemática hay necesidad de recurrir a métodos
numéricos para obtener la solución. Desde la aparición del computador la alternativa de
utilizar soluciones por medio de métodos numéricos ha cobrado mayor popularidad y
puede afirmarse que aún en muchos casos para los cuales existe solución trascendental,
se recurre al computador. A continuación se presentan los fundamentos matemáticos
del problema, y posteriormente en el Capítulo 3, la solución por medio de métodos
numéricos.
2.4.1 Respuesta a un impulso
Un impulso es una fuerza de gran
magnitud que actúa durante un tiempo
muy corto.
fuerza
t
El efecto del impulso está definido por
dos parámetros, el valor de la fuerza y su
duración. En la Figura 2-16 se muestra un
impulso cuya fuerza tiene una magnitud
F y que obra por un instante de tiempo At.
La magnitud del impulso
por:
F
está definida
F
tiempo, t
~t
Figura 2-16 -Impulso
t+t.t
F = fFdt
(2-50)
t
Utilizando la segunda ley de Newton, ecuación (1-2), la cual se puede expresar corno:
dv
(2- 51)
F=ma=mdt
Aceptando que la derivada de la velocidad es expresable corno un diferencial se
obtendría:
F=m
Av
(2-52)
At
y al reordenar:
(2-53)
F .M=mAv
por lo tanto la magnitud del impulso
U;} cambio en velocidad, m Av.
F = FM, es
equivalente a la masa multiplicada por
Al aplicar lo anterior a un sistema elástico de un grado de libertad imponiendo un
impulso a la masa del sistema, o sea una fuerza de magnitud definida por en intervalo
~------...;.---
de tiempo muy corto, se le está produciendo un cambio de velocidad Llv, que es
equivalente a:
Llv = F M
(2-54)
m
Por lo tanto, el sistema sufre un cambio de velocidad pero no de desplazamiento. Esto
es totalmente equivalente a imponer una condición inicial de velocidad vo , mientras que
la condición inicial de desplazamiento Xo, es nula. La condición inicial de velocidad es:
F
v=o
m
(2 - 55)
Entonces para un sistema no amortiguado en vibración libre con condiciones iniciales,
ecuación (2-11), la respuesta al impulso para cualquier tiempo t después de su
aplicación es:
[ F
'1
1 (
x(t)= ( ;; )sen(rot)= mro Fen~rot)
V
(2-56)
y análogamente para el sistema amortiguado, ecuación (2-31), se obtiene:
(2-57)
que al incluir la definición de ro" se convierte en:
58)
Es evidente que esta ecuacion adolece de la claridad que requiere la definición de
impulso: "Es una fuerza de gran magnitud que actúa durante UD tiempo muy corto".
Desde el punto de vista de ingeniería "gran" y "corto" no pasan de ser apreciaciones
imperfectas sobre un fenómeno. Lo anterior se aclara en el numeral siguiente, donde
esta definición se utiliza para plantear una integración clásica.
Basta recordar que el término F = FM provino de expresar como diferencias las
derivadas de la 2 a Ley de Newton y que por lo tanto al expresarla nuevamente en
términos diferenciales F = F dt, Y para un impulso aplicado en cualquier tiempo r las
ecuaciones (2-56) y (2-58) se pueden expresar diferencíalmente como:
~
¡
.
F('t)
mro
{
}
dx = --sen ro(t - 't) d't
(2-59)
y para el caso con amortiguamiento:
!
I
I
dx e
F('t)
mro~
e-~0l(t-'t){sen[~1_~2 ro(t-'t)]}d't
(2-60)
. jJillallllca
eSI Hll(((llll ..1'.. "
..... '"
.....
2.4.2 Excitación arbitraria
Cuando un sistema como el mostrado en la Figura 2-17 se somete a una excitación
arbitraria expresada en términos de fuerza, como la indicada en la Figura 2-18, es
posible dividirla en una serie de impulsos que se aplican en el tiempo 't y que tienen una
duración dt.
F
F(t}
o
t
d1:
1:
Figura 2-17 - Sistema lineal amortiguado
Figura 2-18 - Excitación Arbitraria
Al integrar el efecto de cada uno de estos impulsos diferenciales variando r; se obtiene
para el caso sin amortiguamiento:
t
fo
x(t) = di =
l'
-f
F('t)sen{ro(t- 't)}d't
meo o
(2-61)
y para el caso con amortiguamiento: ,
(2-62)
Estas integrales se conocen como integrales de convolución o de Duhamel, y
corresponden a la solución particular del sistema. Si hay condiciones iniciales hay
necesidad de adícíonarles la solución homogénea, ecuaciones (2-11) Y (2-31)
respectivamente,
Ejemplo 2-5
Uv\, SlStt'I1tl/l. ae IUt gmao ae LLbertC/ta siv¡,
l/l.VVWrÜUIIW'lÜenlo 1;=0. es sometido l/l. Ll/l.
jlterzC/t VltOstmal/l. en Ll/l. Fig/tm 2-19. covwcLdC/t
con eL ItOVl"tLlre aeJlutCiéHt escl/l.Lón.
Debe
encontrarse
Ll/l.
res¡m,estC/t
eVI,
aeSpLlil.Zl/l.VlÜeJtlO rJl/l.m c/tGlLCj/üer tleVl1po t.
Figura 2-19 - Ejemplo 2-4
Excitación con una función escalón
UtLLiZl/l.ltao Ll/l. eCI1-l/l.cLóv¡, (2-61) se obuene.
•
x(t)
t
=-J.-f F('t)sen{ro(t- 't)}d't =
P
t
f sen{ID(t- 't)}d't
mIDo
_0
mro o
p 0 [ .!.COS{ID(t- 't)} ]' = -º-(lp
=_
cosrot)
meo ro
o
k
84
--~._---_.
__
.-
---- -- ---
[Ii, Lu Fignm 2-20 se I1tl1-estm eL gráfico de Lu resYJI1-estu. Los f1táxil1wS valores de La resYJI1-estu se
otJtieVLeVL CltGUi,GLO cos(rot) es ig/taL a -1.0. Lo CIt.uL ocurre pum valores GLe rot = 1t, 31t, 57t, ...... , etc.
FL vuíor fltW<i'·lt(J DjH.e tiene La resYJltesta es:
2.0
1/ 'J
1.8
1.4
1.2
Po
k
1.0
/
0.8
0.6
/1
I
I
iI
!
i
/
0.2
I
/1
o
1\
/
\
/
./
\
1
"\
1/
1\
/
I
0.4
0.0
f\
1\
I
1/
1.6
1/
,
i\
I
I
1
I
/
1
I
I
I
I
1\../
21t
1t
31t
rot
Figura 2-20 - Ejemplo 2-5 - Respuesta a la función escalón
2.5 Excitación en la. base
El caso en el cual la excitación del sistema proviene de un movimiento en su base es
muy importante en la dinámica estructural, pues la excitación sísmíca
este tipo
de respuesta del sistema. En la Figura 2-21 se presenta la idealización de un sistema
dinámico de un grado de libertad para este caso.
,;<'nada x
La ordenada x, describe el movirníento de la base de la estru:
corresponde a la posición de la masa. Los otros parámetros son los mismos de los
sistemas estudiados anteriormente.
amor#guador
elemento
estrucusrst
(a)
Figura 2-21 - Sistema sometido a excitación en su base
Al hacer cuerpo libre de la masa del sistema puede verse que la fuerza inercial,
ecuación (2-2), está dada por:
F¡ =-mx
L
(2-G3)
La fuerza en el resorte, o elemento estructural, está descrita por la constante del resorte
multiplicada por el desplazamiento relativo entre sus extremos, ecuación (2 -1):
(2-64)
De igual manera la fuerza ejercida por el amortiguador, ecuación (2-12), se determina
por medio de la constante del amortiguador multiplicada por la velocidad relativa entre
sus extremos:
(2-65)
Al aplicar el principio de D'Alembert se obtiene:
(2-66)
Lo cual conduce a la siguiente ecuación diferencial de equilibrio:
(2-67)
Si se define la variable u para describir el desplazamiento relativo entre la masa y la
base de apoyo del sistema, entonces:
(2-68)
que al derivarla contra el tiempo conduce a:
(2-69)
y al derivarla nuevamente:
"
.,
u= x-x o
"
(2-70)
y
1
Reemplazando (2-6P», ('2-69) y (2-70) en la ecuación (2-67) se obtiene la siguiente
ecuación:
mu-s cú-e ku « -mxo
(2-71)
La cual indica que un sistema al que se le introduce movímiento en su base es
equivalente a un sistema con su base fija al cual se le aplica una fuerza igual a la masa
del sistema multiplicada por el negativo de la aceleración del terreno. Utilizando la
ecuación (2-62) se obtiene la siguiente solución para la respuesta del sistema:
(2-72)
Ejemplo 2-6
sistevl1lít de Itl1 grlítdo de lil-wrtlítd COl1lítmortigH,lítVltiel1to 1;: como I:'l mo:.tmGÍo en llít Figlulít
2-22, es sometirto lít IHtlít lítcelemcióvl, en SIl, blítse tlítl corno se maestm en lu FigIWA, 2-23(í~). Llít
Cltlítl correspoVLde lít lu SltVlllít (,1e dos JIUtCiOlteS eSClítLÓVL COVltO ml1,eslm llít Figlulít 2-23(l-I), Llít
lítcelemciélll del terreno :lo, es 0.20g Ij el tiemr}o t, de C{,IH'ucióft de lu lítceLemdém es de 10 s.
UVI,
3f)
!
1
¡
r
,
!
I!
Debe eVlcmtlmrse ~u resYJltestu e~t ténninos de des/'l~CílZwniento YJum w,u~qlúer tievn/'lo t. /'lum
sistelnu con IUt /'leríot'to T, t'te 2 s l:1 1m coeJiciente t'te íHltortig/twniento crítico~, de 5%.
IHt
o
o
t
--1--X
iI
o
ta
t
(a)
301--------t
-30'-(b)
Figura 2-23 - Ejemplo 2-6
Aceleración en la base
Figura 2-22 - Ejemplo 2-6 - Sistema
sometido a excitación en su base
utiLizultdo
~iIL e(/.üAÚÓ~t
(2-72) se olltievle YJum O~ t < t,.:
Por medio t'te Lu sig/üente soLltción de L¡;l integmL:
fe
ay
sen(\3y)dy =
e
2
ay
a +\3
2
[asen(\3y) -
í3 cos(\3y)]
AL reuLizur Lus ütteWilLLes corres/'l0ltdiCltU's se LLegr~ YJum t z t,., u:
:37
_
~., lJitUl/lllCa eSIJ"U("HUHI "JJ"~l"'"
«, « ... "
.. "
".".
,--"
Pam 11,v\, sistema COVL 11,11. perroeto T. etc 2 s U I1YL cotJieievLte ete a¡1tortigljwnie~tto crítico ~. etc
con ¡uta aeeLemciÓlt eteL terreno ao. etc O.20g U 11,11. tiCfltpO t, ete et¡uació¡t etc La aecLcm.cióvl.
etc 10 s. se obtiene La respl1.esta f1tostmeta en La FLglua 2-24.
5%,
0.2
0.1
u(t)
I
I
0.0
(ro)
-0.1
-0.2
-0.3
-004
o
2
4
6
8
10
12
14
16
18
20
t (s)
Figura 2-24 - Respuesta
•
2.6 La energía en la respuesta dinámica
En la Sección 1.6 8e discutió el trabajo asociado con la deformación de un elemento
estructural elástico, representado por medio de un resorte, y la energía de deformación
que se tiene, mientras el elemento se mantenga deformado, ecuación (l-7). Así mísrno,
se presentó la energía cinética asociada con una masa que esté desplazándose
dinámicamente con una velocidad, ecuación (l-8). Por tratarse de un sistema
conservativo, el cual no recibe ni disipa energía, ésta última se mantiene constante.
Energía Cinética
Energía Potencial
!
I
,
Figura 2-25 - Energía durante la vibración libre
88
_J
-
En la Figura 2-25 se muestran los estados de energía de un sistema dinámico, no
amortiguado, durante dos ciclos de vibración inducida por el desplazamiento inicial
forzado de una masa apoyada elásticamente.
Se le impone a la masa una deformación inicial, correspondiente a "o. En ese instante la
única energía que existe en el sistema es la energía potencial, acumulada como energía
de deformación en el resorte. Esta energía corresponde a:
- 1 kx 2
E P-"2
o
(2-73)
como se dedujo en la ecuacion (1-7). El sistema no tiene ninguna fuente de energía
diferente a ésta. Al soltar la masa, esta tiende a volver a su posición de equilibrio,
donde el resorte no tiene ninguna distensión; y por lo tanto no tiene ninguna energía
acumulada que le impida estar en un estado de reposo. Al iniciar su búsqueda del
estado de reposo se desplaza hacia su posición de equilibrio adquiriendo una velocidad,
como resultado de su tendencia intrínseca de mantener la energía constante dentro del
sistema. La adquisición de velocidad hace que la masa, o el sistema, adquiera una
energía cinética, que se expresa a través de su velocidad instantánea, dada por la
ecuación (1-8):
(2-7-!)
donde v, es esa velocidad instantánea. En el punto en que el resorte llega a su situación
de cero distensión, expresada a través de un desplazamiento x = O en la gráfica 2-25,
toda la energía potencial que tenia el resorte se ha <onvertidc en energía cinética. Dado
que este sistema no tiene amortiguamiento, la energía dentro de él se mantiene
constante; y se produce una situación perpetua de intercambio de energía potencial y
cinética que produce, a su vez, un estado perpetuo de oscilación pues la energía no
disminuye, ni escapa del sistema. Esto simplemente prueba, de una manera intuítíva, lo
postulado en la Sección l.G.
Anteriormente se presentó la forma como puede evaluarse la respuesta dinámica de un
sistema amortiguado sometido a vibración libre, en la cual se imponen unas
condiciones iniciales de deformación, velocidad, o ambos; o vibración forzada donde Se
impone una fuerza periódica que actúa sobre la masa; o una excitación en su base por
medio de la imposición de unos movimíentos en su base.
En las secciones 2.2 a 2.;), se presentaron las diferentes soluciones al problema del
movimiento en este tipo de sistemas, a través de una formulación en una ecuación
diferencial de equilibrio dinámico.
mx s- cx + kx = P(t)
(2 -7 S)
Al reemplazar cada uno de 10s términos, por su denominación, obtenemos
(2-76)
fuerza
fuerza
fuerza
fuerza
inercial
en el amortiguador
én el resorte
externa aplicada
35)
---------------------_._--_.
__ ....
_-_.
':;:.
-----------"-----------
Si imponemos un desplazamiento diferencial dx, y se integra, se obtiene el trabajo que
hacen todas estas fuerzas durante un desplazamiento x.
x
d2
x
dx
x
x
dx+ J c-dx+ Jkxdx= fFEdx
fo ID-idt
o dt
o
o
(2-77)
o
(2-78)
Esta última ecuación nos da el balance de energía del sistema en cualquier instante t,
siendo EA la energía disipada por el amortiguador y EE la energía que aporta la
excitación al sistema.
Para el trabajo de la fuerza inercial, reemplazando:
d 2x dx
.
d 2x
dx .
.2
dx ee x dt y - =
se
obtiene
--dx=-xdt=1.
x dt
2
2
dt'
dt
dt
2
dt
(2-79)
que en (2-77), conduce a
x
d2
t
E c = J ID ~ dx = ID
o dt
o
f t x2dt
(2-80)
Por lo tanto la energía cinética en cualquier instante t, es:
(2 -81)
Para el trabajo de la fuerza del amortiguador:
x
EA =
d
t
2dt
Jo c~dx=
f
cx
dt
o
(2-82)
Para el trabajo de la fuerza del resorte:
x
E p = fkxdx =
o
t lu2
{2-83}
Por lo tanto la energía potencial acumulada en el resorte en cualquier instante tes:
(2-8-l)
El lado derecho de la ecuación (2-77) corresponde al trabajo realizado por la fuerza que
induce la excitación. Por lo tanto, para cualquier instante t la energía está distribuida de
acuerdo con:
f
t
t
o
o
t IDx2 + cx 2dt+t k x2 = fFE(t)xdt
(2-8 S)
40
Tomemos el caso de excitación armónica de una fuerza de amplitud F o Y frecuencia a,
donde FE(t)=Fo sen(at). En la Sección 2.3 se dedujo que la respuesta del sistema se puede
describir por medio de la siguiente ecuación:
(2-86a)
x=Xsen(Qt-<jI)
y la velocidad:
(2-8Gb)
x = X a cos(at - <ji)
donde X está dado por:
(2-87)
y
(2-88)
Reemplazando la ecuación (2-8Gb) en la ecuación (2-82) correspondiente a la energía
disipada por el amortiguador, obtenemos:
EA =
=
t
t
t
o
o
o
f cJi:: 2 dt = f c[X.Qcos(Qt-<jI)tdt = cX 2Q2f cos2(Qt - <jI)dt
cX 2Q2
2
(2-89)
[t-sen(Qt-<jI)ocos(Qt-<jI)]
Aplicando la anterior ecuación a un ciclo de respuesta correspondiente a t
obtenemos:
=21ÚQ,
(2-90)
¡
!
De igual manera, para la energía que impone la excitación durante un ciclo:
2~/Q
EE= fFE(t)xdt=
o
2~/Q
fFosen(Qt)XQcos(Qt-<\l)dt=1tFoXsen<\l
(2-91)
o
Utilizando seno = Xd2/Fo (véase la Figura 2 -13), Y c = 29000, obtenemos:
(2-92)
Que es exactamente igual a la energía que disipa el amortiguador durante el mismo
ciclo. En ambos casos la energía es proporcional al cuadrado de la amplitud de
respuesta, x', La variación en la energía cinética, Ec , durante un ciclo completo es cero,
pues la velocidad al inicio y a la terminación del ciclo es la misma. De igual manera la
energía potencial en el resorte, E p , es la misma al comienzo y al final del ciclo, pues el
desplazamiento es el mismo en los dos instantes. Esto quiere decir que el intercambio
de energía, en este caso entre la que entra y la que se disipa, ocurre solamente entre la
excitación y el amortiguador.
1
41
Para el caso de excitación en la base, la ecuación diferencial que rige la respuesta se
obtuvo en la Sección 2.5, y está dada por:
(2-93)
mü+ cu-í- ku = -mxo
donde u es el desplazamiento relativo entre la masa y la base de la estructura, pues
u =x-xs, Este caso es exactamente igual al planteado en la ecuación (2-75), solo que en la
energía que entra al sistema debido a la excitación, hay necesidad de reemplazar:
(2-94)
y
t
u
f
EE = (-mxo)du=
o
-mf Xo udt
(2-95)
o
Esta energía está medida con respecto a la velocidad relativa entre la masa y su base. Si
tomamos el caso no amortiguado, la solución de la respuesta del sistema es:
_lt
u(t) =
-f
xo('t)sen[ro(t - 't)]d't
ro o
(2-96)
y derivando contra t y haciendo las transformaciones trigonométricas apropiadas:
t
=-f Xo('t)co.;~ro(t-'t)]d't
úít)
o
t
(2-97)
t
f
f
o
o
= - cos(rot) Xo('t)cos(ro't)d't - sen(rot) Xo( 't)sen(ro't)d't
Ahora reemplazando (2-97) en la ecuación (2-95), y dividiendo por m:
~
2E
__
E
m
=
.
J xo(t)cos(rot)dt· Jxo('t)cos(o}t)d:t-r Jxo(t}sen(wt)dt· f xoCt)gen(on)d.'!:
o
t
t
t
o
o
o
(2-98)
Cambiando la variable 't por t, obtenemos la siguiente expresión para la energía medida
con respecto a la base de la estructura, que induce el acelerograma a un sistema sin
amortiguamiento:
(2-99)
Posteriormente, en la Sección 5.8, se verá que el lado derecho de la ecuación (2-99)
corresponde al espectro de Fourier del acelerograma.
l. -------,------
¡
~.
f
¡
I
II
,
•
Capitulo 4
SisJJ1OS, sislnogrcu.UJS y
acererogranJaS
4.1 Introducción
El presente texto no pretende cubrir temas tan amplios y especializados como son la
sismología y la ingeniería sísmica. No obstante para efectos de poder explicar algunos
aspectos fundamentales de la respuesta sismica de estructuras se requieren algunos
conocimientos básicos sobre estas disciplinas. Las personas interesadas en ampliar sus
conocimientos sobre el tema deben dirigirse a publicaciones especializadas como la
referencia [Sarria, 1995al.
4.2 Causas de los temblores
4.2.1 Tectónica y sismicidad global
Al aceptar la comunidad científica el hecho de que la corteza terrestre está en un estado
permanente de cambio, la explicación sobre las causas de los sismos fue adquiriendo
connotaciones cada vez más realistas. La corteza terrestre es relarívarnent.
)~"da. Se
extiende hasta profundidades de 70 km en los océanos y 150 km bajo los continentes.
Es muy válida la analogía, I Gere y Shah, 19841. de que al comparar la Tierra con un
huevo duro, la corteza tendría un espesor semejante a la cáscara y ésta estaría
fracturada en una serie de fragmentos que en la Tierra se conocen con el nombre de
placas tectónicas.
i
~
Figura 4-1 - Placas tectónicas de la Tierra
l
6.5
_
1
¡
t
Figura 4-3 - Zona de subducción
En general las fronteras entre placas tectónicas no son superficies de fallamiento
simples y únicas. El movimiento relativo entre las dos placas se extiende a grupos de
fallas paralelas a la subducción y los sismos no solo ocurren en estas fallas sino
también en fallas transversales a las fronteras entre placas, formadas también por los
movírníenros entre ellas.
4.2.2 Fallas geológicas
Las fallas geológicas que son capaces de producir sismos se conocen con el nombre de
fallas activas. Los esfuerzos que induce en la corteza terrestre el movimiento entre
placas en la subducción producen fallamientos dentro de la placa, algunas veces
alejados de la zona de subducción. En razón de lo anterior, la acumulación de energía
causada por la imposición de movímíento puede conducir a deslizamientos pequeños,
pero permanentes. En este caso no se presentan sismos.
Cuando la fricción entre las superficies del fallamíento es alta se produce lo que se
llama un engatillamiento de la falla. Cuando la energía acumulada vence esta fricción se
presenta un deslizamiento súbito de la falla, asociado con la liberación de la energía
acumulada, lo cual produce el sismo.
(a) Falla transeurrente de desplazamiento izquierdo
(b) Faifa transeurrente de desplazamiento derecho
(e) Faifa de desplazamiento normal
(d) Falla de desplazamiento inverso
Figura 4-4 - Tipos de movimiento en las fallas geológicas
I
1
En la Figura -l--l se muestran los típos de fallamiento de acuerdo con el movimiento en
la falla. La distancia de A a B corresponde al desplazamiento de la falla. En los casos
mostrados en las Figuras +4 (a) y (b), la falla presenta desplazamiento lateral, con la
dirección del movímienro identificado como derecho o izquierdo. Nótese que la
dirección del movimíenro es independiente del lado que se tome como referencia. Las
fallas de desplazamiento normal, Figura 4-4(c) presentan movimiento normal a la falla
pero no hay desplazamiento lateral. En los casos de desplazamiento inverso, Figura
e:
Dinámica estructural aplicada al diseño
SISllllCO
4-4(d), el movimiento también es normal a la falla sin desplazamiento lateral,
presentándose compresión entre dos puntos opuestos localizados a través de la falla.
Las tasas de desplazamiento relativo en las fallas varían entre unos milímetros por año
hasta un máximo cercano a 100 mm/año. El desplazamiento súbito que se presenta al
ocurrir un sismo en la falla puede variar entre menos de 100 mm y hasta 10 metros.
Hay evidencia de grandes desplazamientos ocurridos durante sismos importantes. Por
ejemplo el sismo de San Francisco, California, ocurrido el 18 de Abril de 1906,
involucró 430 km de la falla de San Andrés. El movimiento en la falla fue
principalmente horizontal alcanzando un máximo de 6 metros al norte de San
Francisco. El máximo desplazamiento vertical observado fue del orden de un metro.
4.2.3 Mecanismo focal
-\Al ocurrir un sismo, el punto donde se inicia la ruptura es el punto donde comienza la
liberación de energía del sismo, y se conoce con el nombre de hipocentro o foco del
sismo. Para un sismo pequeño es razonable considerar el hípocentro como el punto
donde se libera la energía. En un sismo grande donde la ruptura puede involucrar
cientos de kilómetros cuadrados de superficie de falla, el punto de inicio de la
liberación de energía sigue siendo el hipocentro del temblor, pero en general no es
descriptivo de la zona de fallarniento. El epicentro es la proyección sobre la superficie
de la Tierra del hipocentro y la profundidad focal es la profundidad del hipocentro,
medida desde el epicentro. La distancia focal es la distancia al hipocentro desde un
punto cualquiera de referencia.
Dado que la superficie de la roca en la falla no es lisa ni uniforme, la propagación de la
ruptura a través de ella no ocurre a una velocidad constante, sino a través de una serie
de movimientos súbitos. Esto explica, en alguna manera, la forma irregular y aleatoria
de las ondas que produce el sismo. La zona de ruptura se extiende a partir del foco en
todas las direcciones, llegando hasta la superficie en algunos casos. En la medida que el
foco es más profundo, las características de la roca allí son diferentes, debido a la
mayor presión y temperatura a que se encuentran sometidas comparativamente con las
de la roca en la superficie; esto conduce a que la forma como ocurre la ruptura sea
diferente. La explicación prevaleciente en la actualidad esta asociada con cambios en el
volumen de la roca, como consecuencia de cambios en el estado de fase del material
que las compone, algo similar al cambio de volumen que le ocurre al agua cuando la
temperatura baja de 4' C, [Bolt, 1993b], aunque existen diversas teorías al respecto.
En general los sismos se dividen en: superficiales, cuando ocurren a profundidades
menores de 70 km, de foco intermedio, entre 70 y 300 km, Y profundos cuando su
profundidad es mayor de 300 km. Existen registros de sismos hasta profundidades de
700 km. Desde el punto de vista de los efectos del Sismo, definitivamente, entre más
superficial, mayor su predisposición de producir daños. En aquellas regiones de la
Tierra donde existen cadenas montañosas importantes, suelen presentarse sismos
dentro de toda la gama de profundidades, mientras en aquellas regiones donde la
corteza terrestre es delgada, hay una mayor preponderancia de los sismos superficiales.
4.2.4 Premonitorios y réplicas
En algunos casos se presentan uno o varios sismos pequeños, antes de la ocurrencia del
evento prin-;:lP~l. Estos eventos se conocen con el nombre de ~prf!monitQdQs. De igual
con posterioridad a un sismo importante, se presentan temblores de menor
magnitud, a los que se les conoce con el nombre de riP-Jicas. Sólo los sismos
superficiales y de profundidad moderada producen réplicas, las cuales son de gran
importancia para determinar el plano de falla, y esta es la razón por la cual se instalan
redes sismológicas móviles con posterioridad a un sismo de importancia.
manera;'
68
I[
¡,
I
4.3 Ondas sísmicas
La energía liberada por el sismo se propaga por medio de varíos típos de ondas sísmicas.
Las ondas de cuerpo que se generan en el punto de ruptura incluyen ondas P (primarias
u ondas de dílatgdónt las cuales manifiestan desplazamientos de las partículas en la
misma dirección de la propagación de la onda, y º!1Jlª~S (~gcunclliJ::ü.1§ u ondas dé
cortante) que manifiestan desplazamientos de las partículas en la dirección
perpendicular a la dirección de propagación.
Cuando las ondas llegan a la superficie, se reflejan pero al mismo tiempo inducen
ondas.de super{jcie¡ entre las cuales se cuentan las olH:l~~_ª~_R..ª-l'..lejfLh Y las º-l'Jdas de
Love--(Ondas R y L respectivamente). Las ondas de Love producen movímíenios
horizontales transversales a la dirección de propagación. Las ondas de Rayleigh
producen rnovimíentos circulares semejantes al de las olas en el mar. La amplitud de
estas ondas decrece marcadamente con la profundidad medida desde la superficie.
4.4 Sismoqramas
Uno de los instrumentos empleados en sismología es el sismógrafo, el cual es adecuado
para registrar sismos que ocurren a distancias apreciables, inclusive de miles de
kilómetros. Los sismógrafos, en general, se salen de rango de medición cuando el sismo
ocurre cerca a su localización. El registro obtenido por este instrumento se denomina
sismoqrama. En la Figura 4-5 se muestra un sismograma.
Figura 4-5· Sismograma
Allí puede identificarse la llegada en el tiempo de las ondas P y de las ondas S. Dado
que la velocidad de propagación de las dos ondas es dif'erente, siendo mayor la de la
onda P; utilizando la diferencia en tiempo entre las llegadas de las dos ondas, es posible
determinar la distancia a que ocurrió el sismo. Conociendo los sismogramas de varias
estaciones es posible localizar el hipocenrro del sismo con base en las distancias
determinadas de los tiempos entre llegadas de las ondas.
J 4.5 Magnitud del sismo
I
4.5.1 Definición de la magnitud de Richter
1
I
~
i
La_magnitud del sismo es una medida de la. energíaJ!b~rªdapor~L Es una medición
instlJ:!l]le:ltal y se calcula.a.oamr.del.sísmograma. Fue definida por C. Richter en 193:)
de-ahí su'nom6iéde magnitud de Richter. Su definición original era para sismos locales,
o cercanos, como el logaritmo en base la de la amplitud de la máxima onda sísmica
(véase la Figura 4-5), expresada en milésimos de milímetro, registrada en un sismógrafo
marca Wood-Anderson, localizado a 100 km del epicentro. Existe un procedimiento para
ajustar la medición cuando el registro se toma a distancias diferentes de 100 km. En
general todo sismógrafo tiene definidas las relaciones correspondientes para ajustar los
valores medidos a los del sismógrafo wood-Anderson.
La definición original de la magnitud de Richter, también conocida como magnitud local
(Md, no especificaba el tipo de ondas a utilizar en la determinación de la amplitud,
l
•..cc>- _ _.•. :-.0:-..
69
_
J.
1)1//(11111('(( eSl r1L('ULHU
"e"" 'H,~II'"''
(1/)(1(:(((((( Ul ' ....
pues simplemente indicaba que debía ser la mayor amplitud. La magnitud local es muy
sensitiva al tipo de instrumento empleado y a la distancia a la cual se realizó el registro.
No obstante estas limitaciones la magnitud local correlaciona de una manera bastante
buena con el daño que produce el sismo a las edificaciones, por esta razón se sigue
calculando su valor en muchos casos. La definición de la magnitud se ha extendido
posteriormente, para ser utilizada en diferentes métodos para calcular la distancia
epicentral, los cuales dependen de la escogencia de la amplitud de la onda sísmica
apropiada. La magnitud es una escala que no tiene ni mínimo ni máximo aunque en
alguna medida debe existir un límíje superior impuesto por las características
mecánicas de las rocas que componen la corteza terrestre, lo cual se aprecia en los
gráficos de número de eventos contra magnírud, en los cuales se puede apreciar un
cruce en la curva, volviéndose asintótica a un valor cercano a 9. La magnitud máxima
registrada hasta la actualidad ha sido del orden de 8.g.
4.5.2 Tipos de magnitud
La práctica actual en los observatorios sismológicos es utilizar dos procedimientos para
el cálculo de la magnitud, los cuales difieren de la definición original de Richter. La
necesidad de disponer de dos escalas proviene del hecho de que los temblores
profundos producen sismogramas de tipología diferente a los de sismos superficiales.
En general los sísmogramas de temblores profundos no manifiestan trenes de ondas
superficiales mientras que éstos si se manifiestan en un sismograma de un temblor
superficial. Dado que en ambos tipos de sismos se presentan ondas P la magnitud se
evalúa utilizando estas ondas y se conoce con el nombre de magnitud de ondas de
cuerpo (mb) (o magnitud de onda P). El período de vibración al cual se realiza la
medición de la magnitud m, es generalmente de 1 s, dado que la mayoría de los
instrumentos de la red sismológica mundial son sisn..:'grafos de período corto del orden
de un segundo. Algunas veces se empleen instrumentos de período largo, con
respuestas predominantes en el rango de :> a 15 s, en la determinación de la magnitud
de ondas de cuerpo, y en estos casos la magnitud así determinada se denomina mB.
En los sismos superficiales el sismograma generalmente presenta trenes de ondas dé
superficie por lo tanto es práctica común utilizar la amplitud máxima dentro del tren de
ondas superficiales. La magnitud calculada de esta manera se llama magnitud de ondas
de superficie CM.). Existen correlaciones locales que permiten convertir la magnitud de
una escala a la otra, las cuales provienen de aquellos casos en que es posible definir las
dos, debido a que se presentan ondas de superficie en el sismograma. En general los
valores de ITIb obtenidos para el mismo sismo son menores que los valores de MsExisten además otras definiciones de magnitud, como puede ser ta magnitud de
momento sísmico (Mw) la cual se evalúa utilizando el momento sísmico que se calcula
multiplicando la rigidez de la roca por el área de fallamiento y por el desplazamiento en
la falla, lo cual tiene unidades de momento (fuerza por distancia).
La energía liberada por el sismo se ha correlacionado con la magnitud por medio de la.
siguiente ecuación:
loglO E = 4.8 + 105M s
(4-1)
con la energía E expresada en joules. Esto indica que por cada cambio de una unidad en
la magnitud 12. energía liberada aumenta en 10 1 5 = 32 joules por lo tanto un sismo de
magnitud 8 libera aproximadamente 32 veces la energía de un sismo de magnitud 7.
Desde el punto de vista de los efectos del sismo en las estructuras, se considera que
una magnitud 5 es el límite inferior de los sismos que causan daños.
~--- - - - - - - - ... __
.-
------------~---
70
-r • ,>/81110S. S/SIlIOgrlI11lU.';
.tJ aceleroqra
4.5.3 Magnitud de algunos sismos importantes
A continuación se relacionan las características de algunos sismos importantes en el
mundo y en Colombia, para los cuales hay un cálculo de la magnitud.
f
•(.
!
t
t
I
l
Tabla 4-1- Magnitud y víctimas de algunos sismos importantes en el mundo
Año
1906
190G
1!.)06
1906
1908
1920
1922
1923
1927
1935
E)3~)
1939
19-16
19-19
1057
19CiO
1960
196-4
19G~
I
iI
I
I
¡,
1965
1970
1971
1972
1976
1976
1977
1980
1985
1985
1986
1987
1988
1989
]990
Mes
Ene
Mar
Abr
Ago
Die
Die
Nov
Sep
¡\lay
May
Ene
Die
NO\
\go
Jul
Feb
l\lay
Mar
¡un
Mar
May
Feb
Die
Feb
.fuI
Mar
Día
31
16
18
17
28
16
11
J
n
30
-l
26
10
:)
28
29
21
28
16
28
31
\)
l~)9~
Ju:J.
199-l
Ene
23
-4
27
-4
23
3
19
10
6
7
17
16
28
17
1995
Ene
17
Nov
Mar
Sep
Oct
Mar
Die
Ocr
juí
Localización
Costa Pacífica de Colombia cerca a Tumaco
Kagí, Formosa
San Francisco, USA.
Valparaiso. Chile
Messína Italia
Kansu, China
.xtacama. Perú
kwanto, Japón
"Jan Chan. China
Quetta. Pakistán
Chillán. Chile
Frztncan. Turquía
Ancash, Perú
.xmbato, Ecuador
\léxico
Agadír. Marruecos
Sur de Chile
Alaska, US.-\
Níígata, Japón
Valparaiso. Chile
Perú
San Fernando. California. lISA
Managua. Nicaragua
Guatemala
Tangshan, China
Vracea, Rumania
Sur de Italia
Valparalso, Chile
l\lichoacán. México
San Salvador. El Salvador
Ecuador. frontera con Colombia
Spitak..Armenia
Loma Prieta. California. USA
l.uzón. Filipinas
t.ar.clers. California. ¡Si\.
Northrídge, California. USA
Kobe, Japón
M,= /.5
M,= 6.8
M,= 7.2
Muertos
~OO
1300
700
2 O 000
120000
180 000
600
143000
200000
30000
30000
30000
1 -lOO
6000
S5
1-4 000
5700
131
36
(-i00
66000
65
S (lOO
22 ooo
2SO 000
2 000
3000
177
9 SOO
1 000
] 000
250UO
63
1 7(10
1
60
5000
Tabla 4-2 - Magnitud y profundidad de algunos sismos colombianos
Año
1900
1907
1907
1979
1979
1983
1992
199-l
1995
1995
Mes
Ene
Feb
Día
31
lul
29
23
Nov
9
Dic
12
Mar
31
18
6
19
8
Oct
[un
Ene
Feb
Localización
Costa Pacífica cerca a Tumaco
Huila
Santander
Quindío. Risaralda y Caldas
Costa Pacifica cerca a Tumaco
Popayán
Murindó. límite Antíoquia Chocó
Páez, límite Cauca Huila
Tauramena. Casanare
Calima. Valle
I
l
Magnitud
m= 8.9
M,= 7.1
M,=8.2
M,= 8.6
M,= 7.5
M,= 8.5
M,=8A
M,= 8.2
M,= 8,3
M,= 7.5
M,= 7.7
M,= 7.9
M,= 73
M,= 6.8
M,= 7.8
M,= 5.9
M,= 8.5
M,= 8.6
M,= 7A
M,= 7.5
M,= 7.8
M,= 6.5
M,= 6.2
M,= 7.9
M,= 7.6
M,= 7.2
M,= 7.2
M,= 7.8
M,= 7.9
M,= S.-l
M,= 7.0
M,= 7.0
M,= 7.0
M,= 7.8
71
Magnitud
m = 8.9
mb= 6.3
mb= 6.0
M,=6A
M,= 7.8
ms > 5.5
M,= 7.2
M,=6A
mb= 6.5
mb= 6.-4
Prof, (km)
!'
60
160
80
40
12
15
< 20
15
90
Muertos
-lOO
98
;¡
:u
500
300
30
500-1000
10
S
tituünica estructural apticada al diseñ«» sísmico
1.6 Intensidad del sismo
l.6.1 Escala de intensidades de Mercalti modificada (IMM)
La intensidad de un sismo es por otro lado una lTledi9ªJQtalm~nte subjeti\"a de los
efectos que.elsismo causa en un lugar determinado, la cual se realiza por medio de
observadores, que se desplazan a ~las --aIfereJlfesionas afectadas por el sismo y allí
asignan la intensidad para cada sitio, de acuerdo con los efectos observados. Por lo
tanto no es una medida única para un sismo, dado que el efecto producido en
diferentes lugares por el mismo sismo es distinto y que en la medida que el lugar se
encuentre más alejado de la zona epicentral menores serán los efectos. La escala más
utilizada en el ámbito mundial para describirla es la escala de intensidades de Mercalli
modificada (If\H\f).
En esta escala de acuerdo con los efectos en el sitio se asigna la intensidad dentro de
valores que van de uno (I-!\Hvf) a doce (XII-MM). Es importante tener en cuenta que los
periodistas al reportar los sismos tienden a confundir magnitud con intensidad y es
muy claro que se trata de dos medidas totalmente diferentes y que se utilizan para
describir efectos totalmente distintos. A continuación se presenta la escala de
intensidades de Mercalli modificada:
ESCAIA DE Il\T"fENSIDADES DE MERCALLI MODIFICADA
Tipos de Mampostería
Mampostería tipo A . Buen diseño. ejecución y morteros. Reforzada. especialmente para cargas laterales y
amarrada por medio de acero y concreto. Diseñada para cargas laterales.
Mampostería tipo B - Buena ejecución y morteros. Reforzada. pero no diseñada especialmente para resistir
cargas laterales.
Mampostería tipo C . Ejec:ución y morteros ordinarios. Con buenas trabas en las esquinas de los muros. pero
ni diseñada ni reforzada para resistir cargas laterales.
Mampostería tipo D - Materiales débiles. como adobe. morteros pobres. bajo nivel de calidad de la mano de
obra. Débil para resistir cargas laterales.
Valor de la
Descripción
Intensidad
I
II
III
IV
V
VI
VIl
No es sentido.
Sentido por personas quietas. en pisos altos o favorablemente localizadas.
Sentido dentro de las edificaciones. Objetos colgantes se balancean. Se siente vibración similar a
la del paso de un camión liviano. Es posible estimar la duración. Puede no ser reconocido como
un .emblor.
Objetos colgantes se balancean. Se siente vibración similar a la del paso de un camión pesado. o
sensación de que un objeto pesado está sacudiendo las paredes. Los automóviles estacionados se
balancean. Las ventanas. platos y puertas vibran produciendo sonido. Los vidrios tintinean. La
loza colocada en aparadores se golpetea. En el rango superior de IV. las paredes de madera y sus
marcos crujen.
Sentido afuera. es posible estimar la dirección. Se despiertan las personas durmiendo. Los
líquidos se mueven y algunos se derraman. Objetos pequeños inestables se desplazan o vuelcan.
Las puertas se balancean. abren o cierran. Persianas y cuadros se mueven. Los relojes de péndulo
se detienen o cambian de ritmo.
Sentido por todos. Muchos se asustan y corren hacia afuera. Hay dificultad para caminar. Se
rompen ventanas. loza y cristal. Objetos y libros se caen de los aparadores. Los cuadros se caen
de las paredes. Los muebles se mueven o vuelcan. Pañetes débiles y mampostería tipo D se
agrietan. Campanas pequeñas tañen (iglesias y escuelas). Los árboles y arbustos se mueven
visiblemente. o producen ruido.
Dificultad para permanecer parado. Es notado por los conductores de vehículos. Objetos colgantes
se mecen. Daño a mampostería tipo D, incluyendo grietas. Chimeneas débiles se rompen en el
punto en que sobresalen del tejado. Caida de pañetes. ladrillos sueltos. enchapes en piedra.
baldosines. cornisas. parapetos no arriostrados y decoraciones arquítectórucas. Algunas grietas en
mampostería tipo C. Ondas en los charcos. el agua se enturbia con barro. Pequeños
deslizamíentos y hundimientos en los taludes de arena o grava. Las campanas grandes tañen. Se
dañan canales de irrigación de concreto.
72
1.
VIII
IX
X
I
1
t
1
I
I
I
l
XI
XII
Se afecta la conducción de vehículos. Daños a mampostería tipo C. con colapso parcial. Algún
daño a mampostería tipo B. ningún daño en mampostería tipo A. Caída del estucado y de algunas
paredes de mampostería. Desplazamiento y caída de chimeneas. silos en las fábricas.
monumentos. torres. tanques elevados. Casas de madera movidas sobre sus cimientos cuando no
están ancladas a ellos. paneles sueltos de las paredes caen hacia afuera. Pilotes de madera en mal
estado se parten. Se caen ramas de los árboles. Cambios en el flujo y temperatura de fuentes.
aljibes y pozos. Grietas en terrenos húmedos y en taludes inclinados.
Pánico general. Mampostería tipo D destruida. mampostería tipo C apreciablemente dañada.
inclusive con colapso total. mampostería tipo B seriamente dañada. Daño general a las
fundaciones. Casas de madera que no estén ancladas se salen de sus cimientos. y sus marcos se
mueven. Daños graves en represas. Rotura de tubos enterrados. Agrietamientos evidentes en el
suelo. En zonas aluviales brota arena y barro. aparecen fuentes y se forman cráteres de arena.
La gran mayoría de las casas de mampostería y madera destruidas. incluyendo sus cimentaciones.
Algunas estructuras y puentes de madera bien construidos destruidos. Daños graves a presas.
diques y terraplenes. Deslizamientos grandes. El agua se sale en las orillas de canales. ríos. lagos.
etc. Arena y barro se mueve horizontalmente en las playas y en terreno plano. Los rieles de
ferrocarril alcanzan a doblarse algo.
Los rieles de ferrocarril se doblan totalmente. Tuberías enterradas totalmente fuera de servicio.
Destrucción casi total. Grandes masas de roca desplazadas Las líneas de visión y nivel
distorsionadas durante el movimiento, Se presentan objetos lanzados al aire.
Es importante anotar que las prácticas constructivas locales afectan la manera como se
asignan las intensidades, por esta razón muchos países han desarrollado sus propias
escalas de intensidad. Otro aspecto está asociado con la influencia que tiene la
frecuencia con que ocurran sismos dañinos, pues entre más infrecuentes hay tendencia,
por parte de los observadores locales, a asignar intensidades mayores, y entre más
frecuentes, menores.
4.6.2 Mapas de isosistas
Una vez se ha determinado la intensidad en diferentes lugares, es posible definir un
mapa de isosistas en el cual se dibujan contornos de áreas afectadas por la misma
intensidad. Rutinariamente estos mapas se evalúan con posterioridad a la ocurrencia de
sismos importantes. A modo de ejemplo, en la Figura 4-6 se presenta el mapa de
isosistas del sismo de Murindó, del 18 de Octubre de 1992, el cual tuvo una magnitud
Ms = 7.2 Yuna profundidad de 15 km [Martínez, et al., 1994J.
GA
SAN J SE DEL GU
•
L
_
Figura 4-6 - Mapa de isosistas del sismo del 18 de Octubre de 1992
lillÚ1llica estructuren apllcauu
(/1
" .:>"", "
{(I.",.:trv ..
L7 Tectónica y sismicidad colombiana
1.7.1 Emplazamiento tectónico
El emplazamiento tectónico de Colombia es complejo pues en su territorio convergen la
placa de Nazca, la placa Suramericana y la placa Caribe, como se ve en la Figura -1-1. El
límite entre las placas Suramericana y Caribe está aún indefinido. La geología
estructural del país ha sido estudiada con diferentes grados de detalle. En general los
sistemas principales de fallamíento han sido identificados gracias a estudios mineros y
de exploración petrolera. Además se han realizado exploraciones geológicas detalladas
para los grandes proyectos hidroeléctricos. También existen numerosos trabajos sobre
tectónica colombiana realizados por el Ingeominas.
4.
-so
-74
-72
-70
-68
I
i
AR CARI8¡E
I
•
SAN ANDRES
ISu.!
12
10
8
j
I
OCEANO
PACIFICO!
6
z
o
I
---+-----+----+------1 o
f------'------J'-t-+----t'="="r~-_+--
falla
f---+--+-------+----+-----+--+--+-----+-+---+------1-2
PERU
'---
--L
---'-
..L....
-'-
..L.... _ _= ~ ' = : : : _ - - - ' - - - - - - - - '-4
LET/e/A
Figura 4-7 - Principales sistemas de fallamiento en Colombia
4.7.2 Sistemas de fallamiento
El fallamiento predominante en el país tiene dirección norte sur, coincidiendo con la
dirección de las tres cordilleras. El principal accidente sismorectóníco es la zona de
subduccion en el Océano Pacífico. Es causada por el doblamiento de la placa de Nazca
74
1
cuando subduce bajo la placa Suramericana. Hay evidencia de su existencia en la costa
colombiana del Pacifico desde los 8° de latitud norte hasta un punto al sur de la línea
ecuatorial. Su capacidad de producir sismos extremadamente fuertes ha sido conocida
de tiempo atrás. El sismo del 12 de Diciembre de 1979 definitivamente fue producido
por ella. Con base en la graficación de los eventos sísmicos en cortes E\V en la zona, es
posible establecer que se desarrolla una zona de Benioff(la zona de Benioff es el plano
que conforman los hípocentros de estos eventos) con actividad variable y con capacidad
de producir sismos hasta profundidades de 120 a 130 km. Además de la zona de
subducción existen en el territorio nacional un gran número de fallas geológicas
sísmícamente activas. En la Figura -1:-7 se muestran los principales sistemas de
Iallamíento, [Carcía, et al., 1996].
4.7.3 Sismicidad colombiana
1
f
t
¡
1
1
I,
El primer evento sísmico en el país, del cual se tiene registro escrito ocurrió en l3GG
causando daños graves en las recientemente fundadas ciudades de Popayan y CdU.
Existen registros de numerosos sismos históricos desde la colonia y hasta 1922 en que se
instaló el primer sismógrafo en el país. Este grupo de sismos del catálogo consiste en
293 eventos. La información sobre ellos es de calidad variada, algunos están muy bien
documentados, de otros simplemente se menciona la fecha. En [Ramirez, 1975] se hace
una descripción de ellos.
A partir de 1922 se dispone de información obtenida instrumentalmente, sobre lo que
se denomina sismos instrumentales. Desde 1957 hasta 1992 estuvieron en
funcionamiento siete estaciones sismológicas permanentes en el país, las cuales fueron
operadas por el Instituto Geofísico de los Andes Colombianos, adscrito a la Universidad
javeriana de Bogotá.
A partir de 1993 la R5NC - Red Sismológica Nacional de Colombia ha sido operada por
el Departamento de Geofísica del Ingeominas, existiendo además el Observatorio
Sismológico del Sur Occidente, operado por la Universidad del Valle en Cali. El sistema
de la red sismológica nacional fue inaugurado en 1993. Actualmente cuenta con veinte
estaciones, con capacidad de procesamiento remoto de vía satélite. El procesamiento en
tiempo real se realiza en la ciudad de Bogotá. Hay en operación en la actualidad más de
ciento cincuenta acelerógrafos .autónomos digitales de movimiento fuerte, los cuales
cubren la mayoría del territorio nacíonal. Las fechas presentadas en la Tabla -1:-3, son
importantes para efectos de la hísroría sísmica del país:
Tabla 4-3 - Fechas importantes en la sismología colombiana
Año
b66
192:!
1957
19!13
t
I
1
Evento
Primer sismo del uue se tiene rezístro escrito
Instalación de! nrimcr sísmózrafo en el oaís
Red sufícíentement« densa nara ooder calcular profundidad
Entra en operación la red sismológica nacional
Durante 1969 Y 1970 se formó el primer catálogo de sismos colombianos en la
Universidad de los Andes en Bogotá bajo la dirección del Profesor Alberto Sarria. En
1979 Interconexión Eléctrica S.A., ISA, auspició la formación de un catálogo más
completo, en el cual se procesaron la gran mayoría de los sismogramas existentes. Este
trabajo fue realizado por el Profesor Sarria en asocio con el Instituto Geofísico de los
Andes. Este catálogo contenia 3886 eventos entre históricos e instrumentales. En 1982
se realizó una nueva actualización del catálogo dentro del proyecto SISRA del Centro
Regional de Sismología para América del Sur, CERESIS. Esta actualización llevó el
número de eventos procesados a -4 78-4. En 1~)88 Interconexión Eléctrica S. A., IS-'\,
realizó una nueva actualización, con la cual el número de eventos llegó a ;) ,")37.
Actualmente este catálogo se amplía día a día con los datos de la red simológica.
75
-._------------------
)inámica estructural aplicada al diseno sismico
-82
-16
·18
-74
-12
·10
_"'UAS_
'·ARCODEOABS6tI
2·SAHlA801AN"
I------+----j----+-----.,f------j------j ~::~~
14
'·BOCOHO
'·SOLNAR
7·B~AtlARTA-NOtlrE
I-B
•
HGA-$TAMARTA-SUJI
5AHANORES
4.(
12
P
.1
10
o
o
1)
o
21
l
o
o
o
o
BR SIL
o
' - -_ _--L
o
- L_ _=~=--L---------'-4
---L_ _. _ . . l -_ _-----'
Figura 4--8- LocalizacIón epicentral de los sismos con M,
~
4 (1566-1995)
Para la elaboración de los mapas de amenaza sísmica de la nueva versión de la Normas
Sismo Resistentes Colombianas, NSR-98, [AIS, 1998], se actualizó nuevamente el
catálogo, utilizando información de los catálogos anteriores, además de nuevos datos
suministrados por la Red Sismológica Nacional, el Observatorio Sismológico del Sur
Occidente de la Universidad del Valle, y el Instituto de Geofísica de la Universidad
Iaveriana. Contiene 11 088 eventos, [Carcía et al., 1996J. A continuación se dan algunas
estadísticas de este catálogo.
Tabla 4--4- Características del catálogo sísmico colombiano
Características
Contenido total de eventos (1566-1995)
Sismos no instrumentales (1566-1922)
Sismos instrumentales (1922-1995)
Sismos de 1957 a 1995
Sismos de 1957 a 1995 con M, > 3.00
Sismos de 1957 a 1995 con M, > ·-LOO
N' Sismos
11088
293
10796
10 546
3255
1 18j
En la Figura 4-8 se dibujaron los epicentros de todos los sismos con magnitud M, mayor
que cuatro del catálogo anterior. Además se dibujaron los alineamientos de los 32
sistemas de fallamiento principales del país. Es notorio que los accidentes tectónicos
más importantes del país, por el número de sismos generados, son la Lona de
subducción en la costa del Pacífico, el nido de Bucaramanga, donde se presentan gran
76
,~
subducción en la costa del Pacifico, el nido de Bucaramanga, donde se presenta gran
cantidad de sismos en la misma localización y a la misma profundidad, la zona del
antiguo departamento de Caldas, y el sistema de fallas frontal de la Cordillera Oriental,
e! cual recorre todo e! píedemonte de los Llanos Orientales.
4.8 Aceleroqramas
4.8.1 Aceleroqratos de movimiento fuerte
r
Para efectos de ingeniería la información producida por los sismogramas tiene poco
interés fuera de su utilización en estudios de amenaza sísmica, pues permiten definir la
localización y magnitud de los eventos sísmicos que se incluyen en los catálogos. Por
está razón se desarrolló otro tipo de instrumentos llamados acelerógrafos de
movimiento fuerte, como el mostrado en la Figura -!-9(a). Existen diversas clases de
ellos. Hay instalados en el mundo una gran cantidad del tipo mostrado en la Figura
-!-9(a), el cual registra sobre papel fotográfico. Recientemente se han popularizado
instrumentos que registran digitalmente la señal recibida, como el mostrado en la
Figura -!-9(b).
1
!
1
1
I
(a)
(b)
Figura 4--9- Aceleróyrafos de mcvimiento fuerte
En general el acelerógrafo consta de una serie de componentes dentro de los que se
cuentan: un disparador que activa el instrumento al detectar que está ocurriendo un
movimiento con aceleraciones mayores de un valor determinado o umbral de disparo,
un grupo de tres péndulos que pueden oscilar el' dos direcciones horizontales
ortogonales y en dirección vertical. un medio de registro de las oscilaciones de los
péndulos, ya sea fotográfico o digital y por último un reloj que marca de una manera
precisa el tiempo que transcurre durante el registro de la señal. A diferencia de los
sismógrafos, los acelerógrafos están diseñados para registrar aceleraciones muy altas.
Por esta razón son los instrumentos adecuados para registrar las aceleraciones del
terreno durante la ocurrencia de un sismo fuerte.
4.8.2 Registros aceleroqráficos
El registro obtenido por el acelerógraf'o se denomina aceleroqrama y corresponde a los
valores de aceleración horizontal del terreno medidos en dos direcciones horizontales
ortogonales y los valores de la aceleración vertical. El acelerograma se digitaliza cuando
se registra en papel fotográfico y se corrige para una serie de errores producidos por la
misma digitalización así como para tener en cuenta el hecho de que se pierde parte de
la información inicial mientras e! mecanismo de disparo de! acelerógraf'o activa su
l
77
Dinámica estructural aplicada al atseno
SISrt/U;u
funcionamiento. En [Hudson, 1979]
corrección.
OAg
se describen en detalle estos procesos de
Acel. máx. del terreno = 0.348g
Temblor del Imperial Va/ley, cal. - Registro "El Centro" - Mayo 18140- Comp. SOOE
, ''''1 r'l'"""". ...."'..,¡•.¡¡... • ...
~'~"!fI"\"
rr~.
.~.
.(lAg
Acel. máx. del terreno = 0.316g
<
s,
~
OAg
0.4g
Acel. máx. del terreno =
blor de Loma Prieta, cal. - Registro "Corralllos" - Octubre 17189- Comp. N-S
f Temblor de Chíle - Regist~.~~i;~
j;
O.~
Acel. máx. dellerreno = 0.363g
Mar" - Marzo 3185- Comp. N-S
"~!·~W~~~~A(fII#o.·W.NAP,/'l¡~¡P'/'1i'lPtV~I/l{l~of'Iirt\I,I\\rv.,""'Il\""""~"''fl/\''·M¡•• _ _""""",-----~---------.(l.4g
_ 4g
u.
.(l.4g
r Temblor de Mlyag~Ken-Old, Japón - Registro "Toho/CUUniverslty, Sendai" - Junio 12/78 - Comp. N-S
Ace/. mlÍX. del terreno =: O.263g
f:4~f~~i~
o 4g ( Temblor de México· Registro "Sen - secretaria de Transporte" • 5ep'~9/85
l
4~,
O
~~
:om;.
E~W
r,
A.
AceL máx. del terrenD = U.171g
..,
......
o~VVV-~VV
T~~W
5
ro
0
ro
_
~
~
e
G
~
55
60
65
70
75
80
Figura 4-10 - ."celerogramas de algunos sismos importantes
En la Figura 4-10 se muestran los acelerogramas de seis sismos importantes, cuya
descripción es la siguiente:
El Centro - Corresponde a la componente N-S del registro tomado en El Centro,
California, del temblor del Imperial Valley, de Mayo 18 de 1940. Tiene una aceleración
horizontal máxima del :H.8% de la gravedad. Fue por muchos años el registro
acelerográfico más fuerte, tomado cerca de la falla que lo causó, de que se disponía en
el mundo. Está registrado en un sitio donde hay cerca de 300 m de aluvión denso entre
la superficie del suelo y la roca.
Castaic - Componente N21E del registro tomado en Castaic Old Ridge Route, del
temblor de San Fernando, California, del 9 de Febrero de 1971. Tiene una aceleración
horizontal máxima del 31.6% de la gravedad.
Corralitos - Registro tomado en Corralitos, localizado en el Eureka Canyon, del temblor
de Loma Prieta, California, del 17 de Octubre de 1989. Tiene una aceleración horizontal
máxima del 62.9% de la gravedad.
Viña del Mar - Registro tomado en Viña del Mar del temblor de Chile de Marzo 3 de
1985. Tiene una aceleración horizontal máxima del 36.3% de la gravedad. Corresponde
e un registro típico de la zona de subducción de la costa del Pacífico de Suramérica.
Miyagi - Registro tomado en Sendai, Japón, del sismo de Miyagi-Ken-Oki, Japón, del 12
de Junio de 1978. Tiene una aceleración horizontal máxima del 26.3% de la gravedad.
México - Registro tomado en la Secretaría de Transporte de la ciudad de México D. F.,
del temblor de México del 19 de Septiembre de 108:1. El temblor se originó en el Océano
Pacífico cerca al estado de Michoacán, a más de 400 km de distancia de la Ciudad de
78
<._~~./
...... ::., .......
~~--'-'
Mexíco. Tiene una aceleración horizontal rnaxima del 16.1% de la gravedad.
Corresponde a un registro tomado en la superficie de un valle donde hay depósitos de
arcilla entre la roca y la superficie, los cuales amplificaron la onda sísmica.
Es importante
así como las
blando, como
registrados en
hacer notar las características aleatorias de los movimientos registrados,
diferencias importantes entre los acelerogramas registrados en suelo
son el de Míyagí y el de Ciudad de México, en comparación con los
roca o aluvión, como son El Centro, Castaic, Corralítos y Viña del Mar.
4.8.3 Definición de los movimientos máximos del terreno
Si un acelcrograma se integra contra el tiempo, se obtiene el registro de las velocidades
que describió el terreno durante el sismo; y si se integra nuevamente se determinan los
desplazamientos del terreno.
En la Figura 4·11 se muestra para el temblor de El Centro de Mayo 18 de 1940, el
registro original de aceleraciones, el de velocidades del terreno, que se obtuvo al
integrar el de aceleraciones y el de desplazamientos del terreno, que a su vez proviene
de integrar el de velocidades del terreno. En los gráficos se han marcado los máximos
para la aceleración del terreno (Ate = 3.417 rn/s-, equivalente a O.348g), la velocidad del
terreno (Vte = 0334 mis), y el desplazamiento del terreno (D¿ = 0.109 m).
4,------,-----------,------,---------,-----..--------¡
3
------,
2
I
-----,-------- I
A celeraci6 n
del terreno
o
(mi.')
-1
-2 - i - - - f - J - ' 4 - - ' - - - - ' - - - \ - - L - - - - f - - - - - - - + - - - -
t-7h---+-----I
- - - - - - -- '+
-----i------+-------1
--L
'--
-3
-4 -'----
O
30
20
10
40
50
60
0.4
0.3
0.2
Velocidad
del terreno
0.1
(mis)
-<J. 1
VI
0.0
~
~
r
-<J.2
111'1
'1..". J'" !J' v
/lI.
J
.....
A. .II'l\Ai
r\
M
-mI
~
.~
"
-v
r"f-....
'V
V
VI
-<J.J
-0.4
It
.
ft A
/In 11
- - - - - - - - - - ----- - - - -
j
O
10
30
20
40
60
50
0.15
Q
0.10
I\A Il
Desplazamiento 0.05
1/ -\ r \ r-,
del terreno
0.00
(m)
I
.f
v v \
I
\1 1\1
-<J.05
-<J. 10
1\
/\
\
\_"\:
'V
.J
\7
1/\
'\-:J
p
-
'---""V
v--...
-<J. 15
O
10
20
30
40
60
50
tiempo (s)
Figura 4-11 - Temblor del Imperial Valley, "E: Centro'" - Mayo 18 de 1940 - Movimientos
máximos del terreno: Ale 3.417m1s 2 , V,. 0.334 mis y Ole 0.109 m
=
=
=
La relación que puede existir entre estos tres parámetros ha sido estudiada desde hace
algún tiempo. En [Newmark, 1968] y /Newmark, 1969], N. M. Newmark indicaba que la
siguiente relación era siempre válida;
I
i
(-4-2)
y que en general:
Dinámica estructural aplicada al diseño sismico
(-l-3)
Estudios posteriores realizados por B. Mohraz, [Mohraz, 1976], para diferentes tipos de
suelo, indican las relaciones entre los diferentes movimientos máximos del terreno,
evaluadas en la media estadística, dadas en la Tabla 4--5.
Tabla 4-5 - Relaciones entre los movimientos máximos del terreno
Tipo de suelo
V.JAte
(l1l/s)/~
At.D.J(V te )l
Roca
0.61
5.3
Menos de 9 m de aluvión sobre la roca
De l¡ a (iO m ele aluvión sobre la roca
Mas de 60 m de aluvión
0.76
0.76
1.22
.r.s
5.1
3.9
D.JAte
(mi!!)
0.20
0.28
030
0.58
B. Seed, fSeed y Idriss, 1982], indica que a pesar de que los valores de Vw/A te varían con
la distancia al lugar de ocurrencia del sismo, para distancias menores de
aproximadamente 50 km, los siguientes valores, en (m/sl/g son representativos: 0.55
para roca, 1.10 para depósitos de suelos rígidos de profundidad menor a 60 m, y 1.35
para depósitos de suelos rígidos con mas de 60 m de profundidad.
Más adelante, en los Capítulos 6 y 7 se verá que los movi .entos sís c s de diseñ_o/$e
e ti ativos de los movímí
. ximos el terreno.
4.8.4 Efecto de las condiciones locales del suelo
El efecto de los sismos se ve Influenciado enormemente por las características locales
del suelo, en la zona afectada. Dentro de estos efectos se cuentan grandes avalanchas o
deslizamientos, corno la que produjo el sismo de Páez en Colombia, del 6 de Junio de
1994-, en el cañón del río Páez en el Huila. En aquellos casos en los cuales el suelo
consiste en material granular suelto, el movírniento cíclico del sismo tiende a
compactarlo, lo cual conduce al desarrollo de exceso de presión de poros lo cual, a su
vez, puede causar licuación del suelo. Este fenómeno se observó en los márgenes de los
ríos cercanos al epicentro, durante el sismo de Murindó el18 de Octubre de 1992.
Por otro lado, desde hace mucho tiempo se sabe que la estratigrafía del suelo en el
lugar tiene una influencia importante en los daños observados. Solo en la medida que se
tuvo mayor cantidad de acelerógrafos en lugares cercanos al epicentro, fue posible
observar las variaciones en los acelerogramas, dependiendo de las condiciones del suelo
subyacente en el sitio del acelerógrafo. ¡¡a rigidez del suelo y sus características de
amortiguamiento, así como la magnitud del sismo y su distancia hipocentral, tienen
gran influencia. Un caso clásico de este tipo de fenómenos es la enorme amplificación
de las ondas sísmicas en el valle donde se encuentra localizada Ciudad de México, corno
se muestra en la Figura 4-10, en el registro del sismo del 19 de Septiembre de 1985.
Las variaciones que se presentan, a partir de los movimientos registrados en roca,
consisten en una amplificación de las ondas sísmicas con frecuencias de víbracíón
similares a las dominantes del depósito de suelo; un aumento en la duración del sismo;
y un aumento de las aceleraciones, velocidades y desplazamientos observados.
A modo de ejemplo de las variaciones que se pueden obtener, en la Figura 4--12 se
muestran tres registros del sismo de Tauramena, Casanare, del 19 de Enero de 1995,
todos ellos obtenidos por la Red Simológica Nacional de Colombia. El sismo de
80
\
Taurarnena tuvo una magnitud m, de 6.5, fue localizado en las coordenadas 5.01 N Y
7.. 1:.08 W, y tuvo una profundidad de alrededor de 15 km.
Presa San Rafael - La Calera (Cund.)
0.075
0.050
0.025
Acel(~)ción 0.000
-0.025
AA
1 .,~
,<tJ!!lax p.'{lU 9
'1"1 ., .. ""1"
1
~
-0.050
-0.075
o
10
40
30
20
50
60
70
80
70
80
El Rosal (Cund.)
0.075
I
I
0.050
0.025
r
Aceleración O000 !
(g)
.
!
-0.025
-0.050
-0.075
~
¡
If!..'!x 0.015
'1'
v
I
I
L
[
I
O
10
20
---r
I
I
I
I
I
I
50
60
!
40
30
Bogotá O. C. - Sede Ingeominas - Carrera 30 x Calle 53
0.075
0.050
0.025
I
t-
Aceleración
I
(g)
0.000
I
I
I
I
i
-0.025
-0.050
-0.075
t
O
11
~
-V' W'/
¡
d\~ !ntl A~'"
I
I
10
A
VlVV IV V ""
v
"V
t\
V
v ~vIL
"
v
maxO.06 9
20
40
30
50
60
70
80
tiempo (s)
Figura 4-12 - Registros acelerográficos del sismo de Tauramena de Enero 19 de 1995.
f
{
El primer registro fue obtenido en la población de La Calera, al oriente de Bogotá. El
acelerógrafo está instalado en roca en uno de los túneles de la presa de San Rafael. La
distancia del instrumento al epicentro es de 134 km. El segundo registro, se obtuvo en
la población de El Rosal, localizada en el costado occidental de la Sabana de Bogotá. El
instrumento está instalado también en roca y su distancia al epicentro es de 156 km. El
tercer registro se obtuvo en la sede de lngeominas en la ciudad de Bogotá (Carrera 10
con Calle 53). En este lugar el suelo está caracterizado por un depósito de arcilla de un
poco más de 180 m de espesor. La capa superficial está preconsolídada en su primeros
3 a S m, con resistencias relativamente buenas, debajo de la cual se encuentra la arcilla
normalmente consolidada de muy baja resistencia en la parte superior, pero con
aumento de la resistencia con la profundidad. Es importante anotar la amplificación de
las aceleraciones máximas del terreno, y el cambio en el contenido frecuencial de los
registros. En [YamÍn y Ojeda, 1995], [Espinosa, 1995j se presenta información para el
caso especifico de Bogotá, respecto a la amplificación sísmica que producen sus suelos.
Recientemente se concluyó la micro zonificación de la ciudad de Bogotá [Ingeominas y
Universidad de los Andes, 19971, en la cual se tipifican desde este punto de vista los
suelos de la ciudad, y se dan espectros de diseño para las diferentes zonas.
4.8.5 Variación y atenuación de los movimientos sismicos con la distancia
La variación de la intensidad de los movimientos sísmicos con respecto a la distancia
del lugar al sitio donde se inició la liberación de la energía ha sido estudiada por
muchos años. En general el tratamiento inicial que se le dio estuvo basado en mapas de
isosistas como el presentado en la Figura 4-6. En la medida que aumentó la cantidad de
81
Dinámica estructural apticaaa
U/
atserto
:>I:>/lll<"v
instrumentos en diferentes regiones del mundo, se obtuvieron registros acelerográficos
que permitieron realizar correlaciones entre alguno de los parámetros de movimiento
máximo del terreno, con respecto a la distancia recorrida por las ondas sísmicas. Estas
correlaciones se ajustan con respecto a la magnitud del sismo. La definición de la
distancia es de gran importancia, pues hay necesidad de distinguir entre la distancia
epícentral, la distancia hipocentral y la menor distancia a la falla que causó el sismo.
Las relaciones de atenuación, en general tienen la forma:
(q- ..!)
Donde a es la aceleración máxima horizontal del acelerograma, en cm/s": ID es la
magnitud Ms del sismo; r es la distancia más cercana a la falla que genera el sismo en
km, y CI a C4 son constantes obtenidas por medio de regresiones.
En los estudios de amenaza sísmica que se han realizado en el país, [Sarria, 1995a],
fGarcia et al., 1996], se han utilizado tradicionalmente tres ecuaciones, y el promedio
aritmético de los coeficientes de ella. Estas ecuaciones son las dos ecuaciones de
Donovan, fDonovan, 1973] y la ecuación de MacGuire, [MacGuire, 1974J Estas son las
ecuaciones que se dan a continuación y que se grafican logarítmícamente en la Figura
4-13.
Donovan 1
a = 1320 e 0.580m (r + 25) -1.520
(-l-S)
Donovan 2
a
= 1080 eO. 5OOm (r + 25)-1.320
(q-6)
MacGuire
a = 472.3 eO.640m (r + 25) -1.301
(-lo. 7)
Promedio
a
= 957.43 e 0.573m (r + 25)-1.380
~.
(-l-8 )
10 - , - - - - - - - - - - - , - - - - - - - - - - - - - , - - - - - - - - - - ,
--01-M5
....... 01-M6
....... 01-M7
....... 01-MB
_ _ 02-M5
_ _ D2-M6
_ _ 02-M7
_ _ 02-MB
_ _ MG-M5
_ _ MG-M6
_ _ MG-M7
_ _ MG-MB
-e-PR-M5
-e-PR-M6
-e-PR-M7
-e-PR-MB
100
10
1000
Distancia (km)
Figura 4-13 .. Efecto de la distancia y la magnitud en varias ecuaciones de atenuación
82
I11l.'.
En la Figura -1:-1-1: se muestra la primera ecuación de Donovan en un gráfico aritmético.
El que la aceleración no varíe demasiado en el campo lejano es consistente con la
información que se dispone en la actualidad. Indudablemente, los efectos en el campo
cercano tienen grandes variaciones, mayores en proporción, que en el campo lejano.
I
1.2
t
§
:se
0.8
¡¡
'C
o
"'e"
e
0.6
<
0.4
'o
'0
~
<J
f
I
0.2
¡
C.O
¡
I
,
1
t
o
50
100
150
200
250
300
Distancia (km)
Figura 4-14 - Variación con la distancia y la magnitud para la ecuación DOIl!(Jv;;m 1
4.8.6 Tipos de temblores según el aceleroqrama
Los registros acelerograficos, varían para eventos producido»
.tes
sismogénicas, e inclusive para sismos producidos por la misma falla. Un ejemplo de
esto es el caso de "El Centro" en California, allí se tienen registros acelerogr.iñcos de
eventos ocurridos en 193-l, EHO y 1919. Aunque los tres eventos fueron producidos
por la misma falla, los tres tienen aceleraciones máximas del terreno diferentes y
duraciones diferentes.
Newmark y Rosenblueth, INewmark y Rosenblueth, 1971], clasíñcan los temblores de la
siguiente manera, según su acelerograma:
Tipo 1 - El acelei ograma prácticamente consiste en un pulso único. En la Figura -l-13 se
muestra un registro acelerográñco de este tipo de sismo. Registros de este tipo sólo se
obtienen a distancias cercanas al epicentro, sólo en terreno firme, y únicamente durante
sismos superficiales. Cuando estas condiciones no se cumplen, las múltiples reflexiones
y difracciones de las ondas sísmicas cambian la naturaleza del movímíenro. Este tipo de
sismos se ha presentado en Agadír en 1960, Libia en 1963, Skopio en 1963 y San
Salvador en 1965. Muy seguramente el sismo de Popayán de Marzo 31 de 1983 fue de
este tipo. Este tipo de registros se obtienen en temblores de magnitud moderada (3.-1 a
6.2), con foco superficial (menos de 30 km), y los efectos se sienten como un pulso
unidireccional, más fuerte en una dirección que en la opuesta. Excita períodos de
vibración cortos, del orden de 0.2 segundos.
1
oo
0,-,
nnamica estructuren
UpllL'UUU Ul UI.)Cf/u
.)l">"""~
0.10
0.05
Aceleración
0.00
(g)
-0.05
-0.10
0.0
0.5
1.0
1.5
2.0
tiempo (s)
Figura 4-15 - Acelerograma del temblor de Port Hueneme de Marzo 18 de 1958
4.
Tipo 2 -
Están representados por un movímiento extremadamente irregular de
duración moderada. El sismo de "El Centro" de 19-10, es el ejemplo clásico de este tipo
de registros (Figura 4-16). Está asociado con distancias focales moderadas y ocurren
únicamente en suelo firme. La gran mayoría de los sismos que se generan en el Anillo
Circumpacífico son de este tipo. Excitan un amplio rango de períodos de vibración (con
un mínimo entre 0.05 y 0.5 segundos, y un máximo entre 2.5 y 6 segundos).
Generalmente tienen la misma forma en las tres direcciones principales.
0.4
!
0.3
0.2
Acelención 0.1
O
(g)
-0.1
-0.2
-0.3
-0.4
.,1
I
~
r
\Ill
-O.34Bn
.1
~.'
1111" 1
30
20
40
50
60
Figura 4-16 - Acelerograma del temblor de "El Centro" Mayo 18 de 1940
Tipo 3 - Un movimiento del terreno de mucha duración y que manifiesta períodos de
vibración muy definidos. En la Figura 4-17 se muestra el acelerograma registrado en
suelo blando del sismo de Ciudad de México de Septiembre 19 de 1985, el cual es un
ejemplo clásico de este tipo de sismos. Esta es la consecuencia de sismos de los tipas
anteriores que son filtrados a través de estratos de suelo blando, en los cuales las ondas
sísmícas sufren reflexiones sucesivas en las fronteras entre estratos.
29
I
I
40
60
BO
100
120
140
160
lBO
Tiempo (s)
Figura 4-17 - Acelerograma del temblor de México de sep. 19 de 1985, comp. EW
Tipo 4 - Este tipo de movimiento comprende aquellos casos en los cuales se presentan
deformaciones permanentes a gran escala del terreno. En los lugares de interés se
puede presentar licuación o grandes deslizamientos. El temblor de Alaska de 1964 es
un ejemplo clásico de este tipo de movimientos. así como el temblor de Nígata, Japón,
del mismo año.
84
J
i
tiempo (s)
O
i
I
I
10
O
b
In" W TI"lIlI
JH.
f
Esta clasificación de sismos fue postulada hace más de 25 años, y sigue siendo vigente.
Newmark y Rosenblueth planteaban que las técnicas analíticas prevalecientes en ese
entonces permitían el estudio de los primeros tres tipos de registros, quejándose de la
falta de registros del primer tipo. Colombia perdió en ese aspecto una gran oportunidad
debido a la ausencia de un acelerógrafo en Popayán en 1983. Con respecto al cuarto
tipo, Newmark y Rosenblueth, indicaban que los conocimientos del momento no
permitían la construcción de una estructura sobre un suelo que sufriera deformaciones
del tipo indicado allí. Esto sigue siendo válido en la actualidad.
4.9 Estudios de amenaza sísmica
4.9.1 Metodología
En la actualidad existen diversas tipologías de estudios de amenaza sísmica,
dependiendo del fin para el cual se realizan. Un tipo de estudios de amenaza sísmica,
son aquellos que se realizan para obras de gran importancia, cuya falla debido a un
sismo puede ser catastrófica, y que se realizan para fijar parámetros de diseño, los
cuales sólo son utilizables para diseño de la obra propuesta. Otro tipo, corresponde a
aquellos que se realizan dentro del contexto de una reglamentación de construcción
sismo resistente, con el fin de fijar parámetros comparativos dentro del territorio de
aplicabilidad de la norma, conduciendo a mapas de zonificación sísmica. Un tercer tipo
corresponde a los estudios de micro zonificación, en los cuales una ciudad, o una región
relativamente pequeña, se estudia con respecto a la respuesta sísmica esperada en
diferentes lugares, agrupando en microzonas aquellos sitios que tienen características
similares. La metodología a emplear varía según el típo de estudio, pero existen
caracreristícas comunes, y en algunos casos sólo se diferencian por el alcance mismo de
los estudios que se realizan. A continuación se presenta la metodología general,
indicando en qué casos se utiliza ese paso, dentro de los tipos de estudios anunciados
anteriormente. La presentación está basada en [Bolt, 1989], adaptada a lo que ha sído
práctica en el país.
Tabla 4-6 - Metodología en los estnaios
d~
ame,.,aza sísmicll
""
"',::,:
<::s <::s
Etapas mínimas a realizar
""
.:::!
""s:::
~~
"':se
1:>.
<::s~
"'-l<.J
•
•
•
•
•
•
al:>.
.§
~(:J
ti~
~R
l.
2.
:J,
_--_ ...-
,~ ..
...
~
Consideraciones aeoloaicas
Obtención de la información geológica existente sobre la región, con
especial interés en la neotectónica regional. incluyendo identificación de los
movímíentos recientes en la corteza causados por sismos.
Compilación de las fallas activas en la región. con la definición del tipo de
movimiento (lateral, normal. etc).
En algunos casos hay necesidad de realizar trabajo de campo. Es de
particular ímportancia definir el tipo de movímíentos que han ocurrido en
el Holoceno (últimos 10 000 años). por medio de evaluación de los
desplazamientos de la capa de suelo. dataciones por medio de Carbono 14
de materiales orgánicos obtenidos ele trincheras de exploración de las
fallas. v otros métodos.
----------~---_
8;,
~
....
_._-
8
'>,:s
..l:le
amenaza sismica
tu'~
s:::
'e
'>l'¡:¡
EV"J
l:~
en un estudio de
¡¿E
•
cs'S
'- s:::
~'"
""E::
~
•
Jínámica estructural aplicada al diseno
4.
5.
6.
7.
1.
2.
3.
4.
1.
2.
3.
1.
L
SISI1lICV
Elaboración de mapas de la geología estructural en una zona
suficientemente amplia para cubrir las fuentes sismogénicas cuyos eventos
puedan afectar el sitio de interés. prestando especial atención a los
escarpes en la roca. los efectos díferenciales de la erosión. y los
desplazamientos de las capas superftctales de materiales sedimentarios.
Este tipo de mapas debe mostrar los tipos de roca. las estructuras de
superficie. y las fallas locales. incluyendo estimativos acerca de su longitud.
continuidad v tino de movimiento Que han sufrido.
En el caso de fallas que estén localizadas inmediatamente debajo del sitio
de interés. deben llevarse a cabo exploraciones por métodos geofísicos.
con el fin de determinar la localización de rupturas recientes de las fallas y
~"ros lineamientos. Dentro de los métodos geofísicos que SE utilizan están
las mediciones de resistividad eléctrica y de gravirnetria, a lo largo de un
perfil perpendicular a la falla. Otro tipo de información que es de
importancia. consiste en la búsqueda de evidencia de segmentación de la
longitud total de la falla. tales como superposición de alineamientos. o
cambios en el altneamíento zeneral
Descripción de deslizamientos, asentamientos. doblamientos de estratos.
inundaciones Dar avenidas o tsunamis en el lugar.
Verificación de los niveles de agua freátíca, con el fin de determinar si
existen barreras dentro de la tabla de agua. las cuales pueden ser asociadas
con fallas. o afectar la respuesta del suelo durante un sismo.
Información sismolóqica
Documentación detallada de la historia sísmíca de la región. Se deben
preparar catálogos sísmicos de los eventos que se han sentido en el sitio.
ESlOS catálogos deben contener la fecha. la localización. la profundidad. la
magnitud y la intensidad de Mercallí, para cada sismo. Esta información
elebe ilustrarse nor medio de manas regionales.
Elaboración. donde la información lo permita, de curvas de recurrencia de
la frecuencia de sismos regionales. incluyendo magnitudes pequeñas. El
estimativo de la frecuencia de ocurrencia de sismos dañinos se puede
estimar de e",,,s estadísticas.
Estudio de los registros acelerográficos disponibles, de los reportes de
daños y toda la información de intensidades locales existente sobre la
rezíón donde está localizado el sitio de interés.
Elaboración de estimativos de la máxima intensidad de Mercalli en terreno
firme. cercano al sitio. que debe haberse sentido con los sismos
irnnortantes que han afectado el sitio.
Dettntctán de los sismos de diseño
Por medio de modelos probabilisticos apropiados. utilizando la
información geológica y sismológica. se definen curvas de recurrencia de
los parámetros relevantes del sismo de diseño. Estos parámetros
generalmente son la aceleración máxima en roca del sismo de diseño. 013
intensidad de Mercallí en roca o suelo firme. La interpretación de estas
curvas de recurrencia requiere la introducción de valores correctivos
provenientes ele las incertidumbres asociadas con la información y la
defirlición de un período de retorno promedio del sismo de diseño. En
muchos casos se definen diferentes sismos de diseño. correspondientes a
diferentes estados límites (Estado Limite Ultimo o de colapso. o Estado
Límite de Servicio o umbral de daño).
En lo posible. deben definirse las fallas geológicas cuya ruptura pueda
ocurrir. indicando el tipo de mecanismo de desplazamiento (lateral normal.
etc.). A pesar de las numerosas incertidumbres asociadas con ello. debe
estimarse la profundidad focal. la longitud de ruptura y el desplaz arníento
esperado. nara los eventos de diseño.
Cuando se trata de una zonífícacíón. deben elaborarse mapas donde se
agrupan aquellas regiones o sitios donde los parámetros de los sismos de
diseño tienen valores semejantes. conformando así zonas de amenaza
sísmica similar.
Estudios qeotécnicos
Identificación y estudio de aspectos geotécnicos y geológicos locales.
referentes a la posición y espesores de la estratificación dominante y la
nrofundidad de la roca de base.
Estudio de las propiedades. desde el punto de vista de ingeniería de los
suelos superficiales que afecten la decisión del tipo de fundaciones a
emplear. Dentro de esta etapa deben detectarse. utilizando sondeos.
apiques, etc., estratos de arenas sueltas y saturadas que puedan sufrir
licuación: también denósít os prol undos de arcillas blandas
86
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
~
•
•
•
•
•
•
•
•
•
4...i.t.
... -
1I
3.
-4.
I
5.
.
l•,
G
l.
~J
"" .. ..,
Definición de las propiedades del suelo tales como: peso específico,
contenido de humedad, resistencia al cortante, comportamiento bajo
cargas cíclicas a través del módulo dinámico de cortante. valores de la
capacidad de amortiguamiento h.isterético. Estas propiedades deben
establecerse utilizando mediciones en el sitio. o ensayos de laboratorio
sobre muestras obtenidas de los sondeos.
Determinación de las velocidades de las anclas P y S. utilizando
correlaciones o por medio de procedimientos de medición en el sitio
(técnicas cross-hole o down-hole).
Deflnicíón de unas curvas de transferencia de los suelos localizados entre
roca y la superficie, las cuales permiten deflnir las variaciones. de
amplificación o deamplífícacíón, de las ondas sísmicas para los diferentes
períodos de vi-º~ación de interés.
Estudio de los efec¡,~=, d.' 3f'"1l'lificarión generados por accidentes
tonozráfícos como nueden ser las ¡"J..:':-a.:- v cOJinas aisladas.
Síntesis de los resultados agrupando en zonas de característícas de
amplificación o deamplíficación similares. Definición de los criterios a
emplear en zonas de transición entre un tipo ele comportamiento de! suelo
v otro.
:.1
•__
L·
'
•
•
•
•
•
•
•
::;:1.
..
•
4.9.2 Amenaza sísmica en Colombia
r
En el país desde hace más de tres décadas se han venido haciendo trabajos de
evaluación de amenaza sísrnica de diferentes tipos, dentro de los cuales se cuentan
I
estudios para obras y edificios de importancia, evaluaciones de amenaza sísmica de
ciudades y de todo el país, así como estudios de rnicrozoníficación de algunas ciudades
del país, I1ngeominas y Comunidad Económica Europea, 1992] e [Ingeominas y
Universidad de Los Andes, 19921.
Para las primeras normas sismo resistentes nacionales, aparecidas en 198~, se elaboró
un estudio general de amenaza sísrníca de Colombia, ¡Carcía et al., 1984]. Para la nueva
versión de las normas NSR-98, [AIS, 7998] se elaboró, en E)95, un nuevo estudio de
amenaza sísmica del país, [Carcía et al., 1996). Este trabajo fue elaborado en conjunto
por la Asociación Colombiana de Ingeníería Sísrnica, la Universidad de los Andes y el
Ingeominas. La información geológica y tectóníca provino de numerosas fuentes, [París,
1993J, lo cual condujo a la definición de 32 macrosistemas de fallamientos, los cuales
se presentan en las Figuras ~-7 y ~-8. La información sismológica empleada está
descrita en la Sección ~.7.3, con una graficación de parte de los datos del catálogo en la
Figura ~-8. Con base en la ínformacíón tectónica y sismológica descrita se realizaron las
labores que se describen a continuación.
El análisis se dividió en dos etapas, una de asignación de eventos y otra de evaluación
de la amenaza sísrnica. El análisis de asignación de eventos depende de la tectónica, de
la información sísmica utilizada y del ancho del corredor de asignación. La profundidad
promedio de los eventos de cada fuente se determinó por medio de un promedio
ponderado que utiliza el exponente de distancia de la ecuación de atenuación, aunque
su influencia es muy menor; por lo tanto, las asignaciones son utilizables con las
diferentes ecuaciones de atenuación. En resumen el análisis de asignación es único para
una tectónica, una base de eventos sísmicos y un ancho de corredor de asignación. Del
proceso de asignación se obtuvieron para cada fuente los siguientes parámetros para
los tres lapsos de la información sísrnica; 1566-1995 (primer sismo histórico),
1922-1995 (llegada del primer sismógrafo al país) y 1957-1995 (red sísmica
suficientemente densa para poder calcular la profundidad del sismo); y para dos
magnitudes mínimas (Ms=3 Y M, = -l) utilizadas:
l. Frecuencia - el número de sismos por año con magnítud mayor que la míníma.
2. Beta - pendiente de la regresión logarítmica de magnitudes.
3. Profundidad promedio - El promedio de la profundidad de los sismos que
reportaron profundidad.
.....
~~.~-~.~:':."'""~
87
_----------------~~
l·t"
-riámica estructural apucaaa
al
UI;)~/lU ~l.)llllLU
En la Tabla --l-7 se resumen los datos obtenidos para las diferentes fuentes sismogenicas
contempladas en el estudio.
Tabla 4-7 - Parámetros de las regresiones para la informacIón de asignación de
eventos utilizando un corredor de 60 km y una magnitud mínima de 3.0
N
1
M,
Frecuen.
M,
mínima máxima sis.zaño
3.00
6.::>0
0.578
2
3.00
7:J0
Beta
1.043c)
1.342
0.9886
Profun.
FALlA
Prom.
Arco de Dabeiba
30.0
27.9
Bahía Solano
Beníoff - Intermedia
Beníoir - Profunda
3
3.00
S.OO
1.973
0.9458
72A
4
3.00
7.50
17.447
1.6434
165.1
5
3.00
s.oo
0.078
0.7707
38.3
Boconó
6
300
6.00
0.078
0.4648
16.5
7
31)0
0.394
1.7329
28.9
Bolívar
Bucaramanga - Santa Marta - Norte
1---
e.so
3. oo
6.50
1131
1.4747
39A
9
:).00
7.(lO
03-12
1.7097
26.3
BUcaramanga - Santa Marta - Sur
Cauca
10
3.00
6.:JO
lU31
1.6373
16.0
Cimitarra
11
3.00
6.00
0.3-12
21883
26.9
12
3.00
6.00
0131
1.2098
27.-1
13
3.00
7.00
0.263
1.2749
23.8
Compresión Sur Caribe - Este
Compresión Sur Caribe - Oeste
Cuíza
14
3.00
6.50
0.105
1.3395
31.8
s
3.00
7.00
0.394
1.8524
18.8
16
3.00
8.00
2.657
0.9887
21.4
17
3.00
6.50
0.105
2.1238
30.4
18
3.00
6.50
0.394
2.6979
31.1
8
i
Espiritu Santo
Fallas del Magdalena
Frontal Cordillera Oriental
Garrapatas
19
3.0G
7.00
0.052
1.3847
33.0
20
3.00
7.50
1.500
l.0567
18.0
Ibagué
Iunín - Sam'narnbí
Muríndó - Atrato
21
3.00
7.00
0.473
1.5830
24.2
Normal Panamá Paciflco
OCd
22
3.00
7.-10
0.184
1.1131
22.7
n
3.00
G.:JO
0.289
1.3443
21.0
Palestína
2-1
3.00
6.JO
0.1 57
1.4150
2-1.1
25
3.00
<).50
(dOS
0.61Cl
18.5
26
3.00
7.60
0.815
1.0379
28.1
27
3.00
6.50
0052
0.8495
-10.0
Perijá
Puerto Rondón
Romeral
Romeral - Norte
1.9970
28
3.00
6.50
1.763
29.8
Salinas
29
3.00
6.00
0.210
0.5312
22.6
:,0
3.00
6.50
0.500
1.6869
33.3
31
3.00
8.60
lCi.18-1
1.3938
25.8
32
300
7.00
0.236
0.7::,78
18.1
Sinú
Súarez
Subducción
Uríbante - Caparo
En todos los casos de evaluación de la amenaza se utilizaron los resultados del lapso
1957-1995, para las dos magnitudes mínimas. Eh algunos casos hubo necesidad de
ajustar los resultados obtenidos porque no había información suficiente para obtener
los parámetros, y se utilizó la del lapso siguiente (1922-1995). Como resultado del
análisis de asignación, se ajustaron las coordenadas que definen la falla a la
localización en superficie de la proyección de la línea de profundidad promedio de los
eventos asignados a la falla. Esta modificación solo se realizó para aquellas fallas que
tienen buzamiento diferente de 90.
Se evaluaron diferentes casos de asignación de eventos a las fuentes sismogenícas,
utilizando diferentes alternativas del ancho del corredor de asignación (-lO, GO, 80 Y 100
km), para las ecuaciones de atenuación mencionadas en la Sección --l.8.:> y para las dos
88
magnitudes mínimas empleadas en las regresiones (M, = 3 Y M, = 4). En la Figura 4-18
se muestra la regresión de magnitudes (distribución de Ríchter), para la falla frontal de
la cordillera oriental. Este tipo de regresión se realizó para todas las 32 fuentes
sismogénicas.
FALLA FRONTAL DE LA CORDILLERA ORIENTAL
1000
II
I
I
-
I
I
100
1
•
tt
l8
I
A
-- c - .
I
~
~
E
¡
.~
!
'"
Z
I
"C
I
1,
I
I
I
-
...
~
.. :.:.
•
-.
~~:
~ ~....
I
I
-l
10 +-
--
'-41!!
.....,.;¡;
:
I
i
I
..
-
•
<,
I
<,
I
i
I
I
I
f-
I
I
I
I
I
I
I
---.....;,
3
5
7
6
Magnitud (M,)
I
~
I
I
4
l
--........
A
1566-1995 Mmin3
...
1566-1995 Mmin4
o
1957-1995 Mmin3
•
1957-1995 Mmin4
o
Beta (3) =0.9887
1922-1995 Mmin3
--REGR. Mmin3
8
Beta (4) =0.9705
_
-
1922-1995 Mmin4
-REGR. Mmin4
Figura 4-18 - ReiJresión de magnitudes de la falla frontal de la cordillera oriental
I
La evaluación de amenaza depende primariamente de los datos obtenidos de la
asignación ce sismos '/ del análisis estadístico que se realice con la información de cada
una de las fuentes sismogénicas. Del modelo probabilístico de línea fuente empleado,
[Der Kiureqhian y Ang, 19751. se utilizan las fuentes Tipo 1 (fallas conocidas) y la
Fuente Tipo 3 (proceso sismogénico desconocído). por lo tanto todas las fallas
corresponden a fuentes tipo 1 y los eventos no asignados generan la información para
las fuentes tipo 3. En este caso se realizaron estudios de sensibilidad a los diferentes
parámetros que intervienen en la evaluación de la amenaza sísmica. Se manejaron como
variables los siguientes parámetros:
l
•
La magnitud mínima a que se haya recortado la información sísmica en la
determinación de las regresiones que producen los diferentes parámetros.
•
La magnitud máxima que se puede esperar de la falla. En general los valores
utilizados provinieron de numerosos estudios anteriores y acerca de los cuales hay,
más o menos, concordancia entre diferentes especialistas.
•
Las ecuaciones de atenuación. Se emplearon las presentadas en la Sección 4.8.5.
e
La ecuación de longitud de ruptura la cual indica para una magnitud dada el
segmento de falla que se rompe. Se utilizan las ecuaciones desarrolladas por
Arnbrasseys:
8.9
_
Jínámica estructural aplicada al diseño stsnnco
Mejor ajuste
L
Límite inferior
L
Límite superior
L
r
r
r
=e(1.S96m-7.56)
= e(1.61Sm-8.58)
= e(l.1S0m-3.3S)
(4-9)
(4-10)
(4-11 )
donde L, es la longitud de ruptura en km y m es la magnitud M s•
Los parámetros provenientes de la estadística de los sismos de cada una (le las
fuentes sísmogenícas influyen notablemente en la amenaza que se obtenga. En
general para cada falla se deben dar los siguientes parámetros: magnitudes máxima
y mínima, como se mencionó anteriormente; frecuencia de ocurrencia, en sismos
por año; profundidad promedio de la fuente; y la pendiente de la regresión de
magnitud (Beta), la cual es utilizada dentro del análisis probabilístico, para definir la
probabilidad de que el sismo tenga una magnitud determinada.
•
El nivel de corrección por incertidumbre. Se realizaron ajustes al 50%, al 90% y al
99%. Se consideró que es lícito utilizar como valores finales de los resultados
aquellos que estén dentro del rango de los producidos por los diferentes niveles de
corrección. Esta es la manera más simple de incluir aspectos subjetivos tales como:
apreciaciones sobre la sismicidad histórica, resultados de evaluaciones realizadas en
algunos lugares donde se dispone de información más detallada y consideraciones
regionales que sería difícil, si no imposible, incluir dentro de los modelos
matemáticos. Estas consideraciones son relativamente fáciles de incluir dentro de
los valores que se le asigna a una ciudad determinada, pero entrañan una mayor
dificultad cuando se trata de elaborar mapas para todo el pais.
Con el fin de evaluar la sensibilidad de los resultados a las diferentes variables
involucradas, se determinó la aceleración horizontal máxima de diseño en cada una de
las capitales de departamento, para una probabilidad de excedencia del 10% en 50 años,
o sea un período promedio de retorno de --175 años. La evaluación se realizó dividiendo
la información en dos grupos, uno con la magnitud mínima M. = 3 y otro con la
magnitud mínima M. = 4.
PClTa cada una de las capitales de departamento se obtuvieron gráficas de recurrencia de
aceleración horizontal. En cada una de ellas se presentan líneas para tres correcciones
por incertidumbre (50%, 90% Y 99%) Y para una magnitud mínima del recorte de la
información sísmica igual a M. = 3 Y a M. = 4 Y se indica el período de retorno exigido
por las normas si smo resistentes. En las Figuras 4-19 a 4-21 se presentan estos gráficos
para Barranquilla, Bogotá, y Cúcuta, respectivamente.
Los valores para ser incluidos en los mapas de zonificación de las normas pueden estar
dentro de todo el rango dado, pero la mejor tnterpretacíón corresponde a los valores
contenidos dentro de las dos líneas de corrección por incertidumbre de 90% (líneas
centrales).
Otra manera de interpretar lo que requieren las normas sismo resistentes, es utilizar el
valor con corrección por incertidumbre del 50% multiplicado por un coeficiente igual a
lA. Puede argumentarse que el valor al 50% de corrección corresponde al nivel de
solicitación sísmica para materiales que se diseñan utilizando el método de los
esfuerzos de trabajo y el coeficiente 1.4 es el mismo que utilizan las normas sismo
resistentes para convertir de esfuerzos de trabajo a valores al nivel de resistencia,
[Carcía et al., 19841.
90
I
¡
10
I
~e
..
i
100
'\~
,
I
I
I
":..,
1000
0.00
0.05
0.10
0.15
0.20
0.25
0.30
_ _ _ INCEAT. '" 90%· Mrnil'l3
- € I - INCERT." 90%
Mm",,,,
---'-'-INCERT. '" 50%, Mmin3
- - 6 - INCERT
0.35
'" 50%· Mmin4
0.40
0.45
0.5D
(~)
Aceleración horizontal
- I N C E R T . _ 99% . Mmin3
-..o-INCEAT. = 99% - Mmin4
--COQIGO (475 años)
Figura 4-19 - Curvas de recurrencia de aceleración
máxima horizontal para la ciudad de Barranquilla
t
I
1
1
.~
10
o
I
1
E
e-,
"'''
o
.t
lOO
~-c
-""",
~
'-:;""
,
~
,
--
-
.
1000
I
--
0.00
0.05
0.15
0.10
0.20
0.25
0.30
0.35
0.45
0.40
0.50
Aceleración horizontal (g)
"Il!l.
INCERT.=50%·Mmin3
---"'-INCERT = 50% . Mmm4
--C001GO 475 anos
e
INCERT - 90%· Mm'l'l3
_ _ _ INCERT = 90% Mm",4
.g
INCERT.
=
99%. Mmin3
--INCERT. = 99%· Mmin4
Figura 4-20 - Curvas de recurrencia de aceleración
máxima horizontal para la ciudad de Bogotá
r
t
10
R---
I
""
100
- - .-_.- t - - - ---
I
'~
"'\..
'-:;""
,
-~
'"':-
1
--~
-
--
-
1000
0.00
0.05
0.10
0.15
0.20
I
--"--
I
0.25
0.30
0.35
DAD
0.45
0.50
Aceleración horizontal (g)
--A
INCERT
= 50% . Mm in3
~INCEAT.= 50% - Mmin4
--COD1GO (475 años)
-e INCERT '" 90%
___e__INCERT '" 90%
Mm.n3
M",Jn4
.o
INCERT. '" 99%· Mmin3
-4--INCERT. '" 99% . Mmin4
Figura 4-21 - Curvas de recurrencia de aceleración
máxima horizontal para la ciudad de Cúcuta
Además se obtuvieron gráficos de influencia de las fallas en la amenaza de cada una de
las ciudades capitales. Estos gráficos se calcularon para el nivel de aceleración de O.OSg.
En la Figura 4-22 se presenta el gráfico correspondiente a la ciudad de Bogotá y en la
Figura 4-23 el de la ciudad de Medellín.
I
L
nannca
esrrUClUrUf
UV"l-U. ...... ~. ~w_ ••
FALLAS DEL MAGDALENA
_
_ •
•.
0.0%
FRONTAL CORDILLERA
ORIENTAL
IBAGUE
SALINAS
TIP03 LO=-74.0 LA= 5.0
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
1f(l de contribución de cada falla en el rango de O.05g de aceleración horizontal
r
Figura 4-22 • Influencia de las diferentes fallas en la amenaza sísmica de Bogotá
I
I
43.3
BENIOFF·INTERM EDIA
"AUCA
MURINDO·ATRATO
43.5
ROMERAL
r
SUBDUCCION
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
% de contetb uctén de cada falla en el ra ugo de O.OSg de :lc.elrf'lJf'1ó'l] horizontal
Figura 4-23 • Influencia de las diferentes fallas en la amenaza sísmica de Medellín
Con base en los resultados obtenidos para las ciudades y utilizando valores de la
amenaza sísmica calculados para una cuadrícula de meridianos y paralelos trazados
cada medio grado, se dibujaron tres mapas: uno de Zonificación Sísmica, otro de
valores de A, Y un tercero de valores de Ad • Estos mapas se presentan en las Figuras
4-24, 4-2:) Y4-26 respectivamente.
92
•
-80
13
·79
-78
-77
-76
-75
-74
-73
·72
-71
-70
-69
-68
-67
-82
---L.t-4
SANANDRES y
12
PROVIDENCIA
BAJA
\-1-1--1-1--1-,~'e'I,r¡f]5Brt:1--¡--1--¡_-1-112
[
.H.--A~--+--/---+--t---\-----j--+---+---I
11
10
11
O
l----!--+--_+--+f'\-j-~+--+_-_+--j---j--+_-_+_-_+_-_11
9 f---+-:---+--+--/-:......p.i----4-f---+---+--+A--t---j-----j--+---+---t-----1 9
l
-----ii----+---+--t---j---f-----i8
8
""""""",,*,""""..,....,J---l---+---+---I
7
t
7
6
-+----j--+---+---1-+--+-----15
5
~f7L--+--_+--t-___¡d;;;=n;;;_¡f:;-\-+--_I
4
o f-----+----1i--------1-1--P"""'=+----t----+---+--+--+--t----[ ----,- -1
f--------+---+-----t----+--~----+----t---I:______r+_+__
-¿ f - - - - j - - - + - - - - - j - - - r - - - - + - - - - - j - - - - " ¡ + - -
4
Io
1- -i
1
+--1---+--+------ - - - -2
-3 f---+---f--+---+--+----+---f--+---I---AI-I--+-- -_+--+------1 -3
-4 f--+---+--+--+_--+----+--f--+---+~~*=~+_-+--_+----1-4
I
-79
-78
-77
-76
-75
-74
-73
-72
-71
-70
-69
-68
Figura 4-24 - Mapa de zor.ificación de amenaza sísmica de Co'ombia
El mapa de la Figura 4-24 corresponde a una distinción cualitativa del tipo de sismos
que pueden presentarse en el país, y divide la amenaza sísmica en tres grados 01 niveles:
baja, intermedia y alta. Dentro de un mapa de esta naturaleza se conjugan la
información sobre sismos históricos e instrumentales. Además toma en cuenta el
potencial sismogénico de cada región, así como la posibilidad de que una región se
pueda ver afectada por sismos que ocurren en otra región colindante. Los diferentes
materiales estructurales contemplados en las normas _ sismo resistentes, tienen
limitaciones en su empleo en las diferentes zonas de amenaza sísmica según se definen
en el anterior mapa.
-80
13
-79
-78
-77
-76
-75
-74
-73
-72
-82
®L-
f--
-70
-69
rh
4
12
-71
SANANDRES y
PROVIDENCIA
SANTAIIfARTA
l.......
B~RRANOUlLLA
11
v
I
CARTAGENK
10
VV
~
•
¿ALLEDUPAR
s/N1z~L\ ~
9
-66
13
Región
Aa
In
12
0.05
0.075
0.10
0.15
0.20
0.25
0.30
0.35
0.40
(21
/
r¡
3)
4)
tk
5
6
(7
8
9)
I Vh
\~(. \:1
\"
~~
8
~~ ®
Iif~
~
-67
/ . R'ACHA
t ¡........(;~
-68
~ONTERIA\
8
7
~m'dPJ
0 5~ ?h
'ltA
x. l-@-
9))1
r)
6
'J
IIfEDELLlN
7
)
I
i
4
lA
r:
11
r->®
3
2
:.;':¡: /
_L/~V/
IIfANIZALES
r/I'I.RIlfENIA:¡'~ A~GOTA
19
~~
/I.PEREIRA)
• '- ,
IBAGUE
rI.CAU
6
..,VILLAVICENCIO
~$}
~V
• POPArAN?,
//1 )
SANJOkE D:L
.PASTO
......
o
I\d ~V cy
-1
1"
"-
-
1
Al/TU
•
CD
"--
-2
-~
[
¡.F
~
'\
I
\
PUERTO INIRIDj. ' )
GUAVIA~r¿)
IIfOCOA
"'\
CD
r;~ D
/"" -""
1"::9 1~~i7
7
(~
-3
"
~
.,
r-- ~
-~
1
L il
-4
'1f1LETlCIA
-5
-5
-80
9
PUERTO CARREÑO·
V~
I
~
I
I
10
ARAUCA
< :~0ro) 1$ jJK§/Vj
5
11
-79
-78
-77
-76
-75
-74
-73
-72
-71
-70
-69
-68
-67
-66
Figura 4-25 - Mapa de valores de Aa
El mapa de la Figura 4-25 corresponde a los valores de la aceleración horizontal máxima
del terreno, la cual se ha denominado en las normas sismo resistentes Aa, Y es
equivalente al valor de Ate de los sismos de diseño esperados en todo el territorio
nacional. Estos valores, de acuerdo con la definición dada por las normas sismo
resistentes, tienen una probabilidad de excedencia de tan solo el 10% en un lapso de 50
años, lo cual corresponde a un período de retorno promedio de 475 años. No sobra
insistir aquí, que estos valores corresponden a aceleraciones en la roca, sin que se haya
incluido el efecto local de amplificación de las ondas causada por el suelo subyacente.
94
-80
13
-79
·78
-77
-76
-75
SANTA
11
-74
1-
~~
1
5
e51NfELEJO
/..
i\
i
I
/
1 - - _ + - \ f r : / j ' V/
1
rJl¿.,
~
I
I /'
:~~~;~
))V_CALI
®
PASTO
-
..
/Í-
_ MOCOA
_~!OTA
~
V
If0V I
NE/VA/,'
_POPAYAIN /
f3
FLDQ1NC/A
7V~AL
/
'-=-V
-66
13
ARAUCA
I
V
I
P~ARREÑO
j
/
®
• VIUAVlCENCIO
/
/
7
8
~I~J(PJ
~
V %® V
TUNJAe
/BAGUE /
~J
3
2
/
MANaALES
) r¡r/
I
,
J
-67
Ad
0.005
0.01
0.02
0.03
0.04
0.J5
0.06
0.07
6
BUCARAMAJGA
)~ , ~~EDELlN
~I ea~'BDo
f----~-__+____1~'r h) 1I _
'la.
./ ~
v: ~CUCUTA
~~' \ I \ (~
L
-68
4
5
\'t\: eMO~,A~
J
-69
V:!oUPAR
9~--+---+--+--/-
I
-70
,-/
"'!> _
(
r
-71
• RIOHACHA
CARTA~ENA
r-,
-72
V"""MARTAr~
f---+---+--_+-_-BDARRANOU/LLA.....
Ir'-'-
-73
/
l
\
lt:.r--r--- V~-V ..~. ..,\
PUERTOINIRICf)
_SANJDSEDELGUAVIARE
/ )
/
/ ",rrur
(~
\!\
fJ
o
~.
-1
-2
-3
L
-4
-5
-3
1---
I
-4
~LETIC'A
I
L . - _ - - l - _ - - L_ _L-_--'-_----l_ _. L . - _ - - L_ _"---_--'-_----l_ _. L . - _ - " -_ _L.----.l
-80
-79
-78
-77
-76
-75
-74
-73
·72
-71
-70
-69
-68
-67
-5
-66
Figura 4-26 - Mapa de valores de A.i
El mapa de la Figura 4-26 corresponde a los valores de la aceleración horizontal máxima
del terreno, Ad • equivalente a un valor de Ate que tienen una probabilidad de excedencia
de 80% en un lapso de J 5 años, lo cual conduce a un período de retorno promedio de
10 años. Estos movimientos sísmicos se utilizan para verificar el Estado Límite de
Servicio de la estructura. para lo que se ha denominado el Umbral de Daño, o sea el
punto a partir del cual puede presentarse daño en los elementos estructurales y no
estructurales de la edificación.
95
-.10 Predicción de sismos
La pregunta acerca de sí se pueden predecir los sismos se presenta con mucha
frecuencia, por esta razón se ha incluido esta Sección donde se presentan algunos
comentarios al respecto. Quien desee profundizar sobre el tema, debe consultar las
referencias [Bolt, 1989, 1993a, y 1993bj, [Sarria, 1995a], [Olson, Podesta y Niqq, 19891,
Y [Lomnitz, 1994]. Una predicción sísmica, para que cumpla su cometido, debe indicar
cuándo, en qué lugar y de qué tamaño es el sismo que va a ocurrir. Con respecto a la
predicción en el tiempo, se distingue entre predicciones: a largo plazo, cuando se realiza
con años de anticipación; de plazo intermedio, cuando se realiza con semanas de
anticipación; y a corto plazo, cuando se hace con horas o días de anticipación.
Desafortunadamente, en el estado del arte actu.al de la ingeniería sísmica, esta pregunta
no se puede responder adecuadamente.
-
L
Dentro de la comunidad científica la predicción sísmica no tiene la mejor de las
reputaciones. Existen numerosos casos en los cuales se han pronosticado eventos que
no ocurrieron, produciendo graves consecuencias socioeconómicas, [Olson, Podesta y
Nigg, 19891. Así mismo existen algunos casos especiales en los cuales se han realizado
predicciones exitosas, [Lomnitz, 1994]. Desde tiempo ancestral, la humanidad ha
tratado de pronosticar la ocurrencia de sismos. Existen numerosos prejuicios populares
respecto a que cierto tipo de tiempo, en términos meteorológicos, precede la ocurrencia
de sismos; o que ciertos cambios en el comportamiento de los animales también están
asociados con la ocurrencia de sismos fuertes. A pesar de que hace algunos años se
ínvírtieron fondos y tiempo de científicos serios en la exploración de este tipo de
correlaciones, especialmente en China, los resultados fueron totalmente ínconcluyentes
y se demostró que la probabilidad de realizar una predicción seria con base en este tipo
de información no era mayor que la que se obtenia de hacer predicciones totalmente al
azar.
En algunos casos, científicos serios han desarrollado teorías respecto a la correlación de
ciertos hechos con la ocurrencia de sismos fuertes. Dentro de estas han sido populares,
tan solo por un corto tiempo: una aparecida en la década de 1950, basada en la
atracción gravíracional del planeta Urano, otra aparecida a mediados de la década de
1970 asignaba la ocurrencia al alineamiento de los planetas del sistema solar, solo pof
mencionar algunas de estas teorías, En 1976 das científicos del USGS (Servicio
Geológico de los Estados Unidos) predijeron que un sismo de magnitud 8.-t ocurriría en
la costa peruana en las cercanias de Lima a finales de Julio de 1981. Esta predicción, se
hizo pública tanto en los Estados Unidos como en el Perú, donde fue tomada
seriamente, dadas las calificaciones de los científicos que la realizaron. La fecha
indicada pasó sin que ocurriera ningún sismo, no obstante hubo graves consecuencias
socíoeconómícas producidas por el temor de la población a medida que se acercaba la
fecha de la predicción. En [Olson, Podesta y Nigg, 1989] se hace una descripción
detallada de este proceso de predicción y sus consecuencias.
En el ambiente científico formal moderno, la predicción se soporta principalmente en el.
estudio de los procesos tectónicos que están ocurriendo, de los movírníentos de la
corteza, de los precursores y réplicas de eventos importantes, de los patrones de
energía liberada a través de sismos, de cambios en los patrones de velocidad de las
ondas sísmicas, del aumento del contenido de gas radón en las aguas subterráneas, del
cambio en les niveles de los pozos, y otros. Tanto China como Japón, tienen programas
formales de predicción sísmica, y otros países de manera un poco más incipiente. En el
caso de China, el 4 de Febrero de 1974 se dio el anuncio de un sismo inminente que
debería ocurrir en las próximas 24 horas. La ciudad de Haicheng fue evacuada y
efectivamente un sismo de gran intensidad ocurrió en las horas de la tarde del mismo
día. No obstante, en China y otros países, se han hecho predicciones de sismos que no
ocurrieron en realidad y también han ocurrido sismos importantes sin que se haya
hecho ninguna predicción al respecto, causando numerosas \ictimas.
96
Inica eSCrllC1UnU UjJll<llllU 'H .... H
.. .,
... "
...
_
constante m corresponde a la masa; e a la constante del amortiguador; y k la rigidez del
elemento estructural, o resorte, que da apoyo a la masa. La solución de esta ecuación
diferencial de equilibrio se puede obtener por medio de alguno de los métodos
presentados en el Capítulo 3, tal como el método de la aceleración lineal, o el método
Beta de Newmark.
Suponiendo que un sistema de un grado de libertad, como el mostrado en la Figura 5-1,
con un período de vibración de 1 segundo y un coeficiente de amortiguamiento de 5%
del crítico, es sometido en su base a los 25 primeros segundos del acelerograma del
temblor de El Centro, se obtendría una respuesta en el tiempo del sistema como la
indicada en la Figura 5-2. Esta respuesta se obtuvo matemáticamente utilizando el
método Beta de Newmark.
60
r+
0.0+
nn
1'\
RESPUESTA EN ACELERACION ABSOLUTA (mis')
vJ'V\!\il¡cAvv''''~nJV~d''v'''V
T
v
-6.0-'-
"'J' O'o"JVv'"
/ 1 , - - máxima aceleración 5.075 mis'
1.0
máxima velocidad 0.904 mis
f\
1t---máximo desplazamiento 0.128 m
1\
I I \
\: '\'1
.
RESPUESTA EN DESPLAZAMIENTO RELATIVO (m)
f\
\1 1I
v
V
J J
-0.2
4.0
ACELERACION EN LA BASE (mis')
Registro "El Centro" N-S
~.
-4.4
5
10
1
15
Tiempo (s)
20
25
Figura 5-2 - Cálculo de la respuesta para los 25 primeros segundos del
TemblC'r cíe El Centra de un sistema úe un grado de ubenea
con un período de vibración de 1 segundo y ~
=5%
Es importante anotar que la respuesta presentada en la Figura 5-2 se ha expresado
contra el tiempo en función del desplazamiento relativo entre la masa y la base, u; de la
velocidad relativa entre la masa y la base, u; y de la aceleración absoluta de la masa,
x == ü+x o ' Se utiliza la aceleración absoluta dado que la 2 3 ley de Newton está postulada
con respecto a una aceleración absoluta y por lo tanto la fuerza inercial sobre la masa
es igual al producto de la masa por la aceleración absoluta.
>.2 Obtención del espectro de respuesta
En la Figura 5-2 se han marcado los valores máximos del desplazamiento relativo, de la
velocidad relativa y de la aceleración absoluta. El máximo desplazamiento relativo
multiplicado por la constante del resorte, k, conduce a la máxima fuerza que se ejerce
sobre el resorte durante todo el movimiento estudiado. La máxima velocidad relativa
multiplicada por la constante del amortiguador, e, define la máxima fuerza en el
amortiguador. La máxima aceleración absoluta multiplicada por la masa, m, da la
máxima fuerza inercial. Es evidente que desde el punto de vista de ingeniería estos
máximos son los parámetros de mayor interés.
98
Capitulo 6
SístenUlS tnetasüeo»
de un grado de libertad
I
f
1
6.1 Introducción
El limitar el estudio de la dinámica estructural a sistemas linealmente elásticos
reduciría su rango de aplicación enormemente; pues la gran mayoría de los materiales
estructurales muestran dentro del rango de esfuerzos utilizados en la práctica, en
alguna medida, características inelástícas. Mas aún, algunos materiales como el
concreto son inelásticos en casi todo el rango útil de esfuerzos. Además, en la respuesta
de estructuras sometidas a los efectos de sismos fuertes, muy seguramente éstas
actuarán más allá del rango elástico: permitiendo que parte de la energía que impone el
movimiento sísmico se pierda como energía disipada; reduciendo la energía que se
convierte en energía cinética; y disminuyendo las fuerzas inerciales a que se ve
sometida la estructura. En principio, en el análisis de la respuesta dinámica de una
estructura, hay necesidad de disponer de una relación fuerza-desplazamiento que
describa lo que ocurre en ia estructura, para cualquier nivel de desplazamiento y a
cualquier velocidad de deformación, durante una serie de solicitaciones alternantes.
La formulación de un modelo matemático que permita estudiar la respuesta inelástica
de sistemas dinámicos, depende fundamentalmente de cómo actúa cada material
estructural en particular. Un aspecto importante en la capacidad de un material de
responder dinámicamente en el rango inelástico está asociado con la ausencia de modos
frágiles de falla. Cuando se presenta una falla frágil, se viola la premisa básica de que el
sistema estructural sobreviva la excitación dinámica. Por esta razón se buscan maneras
de disponer y diseñar los materiales estructurales para que respondan dinámicamente
en el rango Inelásrico, sin pérdida grave de la resistencia y estabilidad del sistema
estructural. Esta particularidad de los materiales de resistir deformaciones en el rango
inelástico sin falla, se ha enmarcado dentro de términos tales como ductilidad y
tenacidad. Por lo tanto es deseable que los materiales estructurales se diseñen y
detallen de tal manera que tengan una ductilidad y tenacidad apropiada, con el fin de
que puedan tener respuestas dinámicas inelástícas adecuadas.
Desafortunadamente, no existe una manera única de describir, a diferencia de los
sistemas elásticos, el comportamiento inelástico de todos los materiales estructurales.
Por esta razón hay modelos matemáticos apropiados para cada uno de ellos, y en
algunos casos para algunos tipos particulares de elementos estructurales construidos
con uno de los materiales.
-\ continuación se discute, de una manera resumida, el comportamiento en el rango
inelástico de varios materiales estructurales, y de elementos construidos con ellos, para
poder formular modelos matemáticos que lo describan analíticamente. Posteriormente,
se tratará de una manera más detallada el comportamiento estructural inelástico del
concreto, el acero estructural y la mampostería. respectívamenre.
117
/
Dinámica estructural
(IpIíC(I((¡ (ti (lIsellu :>1:>/lU'"
6.2 Respuesta histerética
6.2.1 Materiales y elementos estructurales elásticos e inelásticos
Desde el punto de vista técnico IPopov, 1968], la elasticidad de un material se define
como la capacidad de éste de volver a sus dimensiones originales, después de que se
haya retirado una fuerza impuesta, recobrando totalmente la forma que tenia antes de
imponer la fuerza. Por lo tanto, el comportamiento elástico implica la ausencia de
cualquier deformación permanente debido a que se haya aplicado y retirado la fuerza.
Algunos materiales exhiben una relación esencialmente lineal entre esfuerzos y
deformaciones, como muestra la Figura 6-l(a), y se denominan materiales lineaunente
elásticos. Otros materiales muestran alguna curvatura en sus relaciones esfuerzodeformación, como se muestra en la Figura 6-1(b); y se denominan materiales no
linealmente elásticos. En ambos casos la curva de carga y de descarga es la misma. Un
tercer caso es el materiaí in elástico, en el cual la descarga no ocurre siguiendo la misma
trayectoria de la carga y se presenta deformación permanente, como muestra la Figura
G-I{c).
t
esfuerzo
t
esfuelZo
esfuerzo
II
deformación
permanente
deformación unitaria
deformación unitaria
(a)
(b)
deformación unitaria
(c)
Figura 6-1 - Material: (a) linealmente elástico, (b) no linealmentt:! elástico, y (e) inelástico
Esta distinción entre materiales elásticos e inelásticos es algo ambigua; debido a que
prácticamente todos los materiales presentan las dos características cuando se observan
las relaciones esfuerzo-deformación en todo el rango de esfuerzos posibles, hasta
llevarlos a la falla. En general la clasificación anterior hace referencia al comportamiento
del material en el rango inicial de carga, cuando los esfuerzos y las deformaciones son
pequeñas.
r,
esfuerzo
zona de endurecimiento
por deformación
I
I
Es'
1
resistencia a la f1uencia
V
elongación máXima/:
deformación de f1uencia
I
,
~
deformación unitaria
Figura 6-2(a) - Curva esfuerzo-deformación del acero de refuerzo
118
I
En la Figura 6-2(a) se muestra la curva esfuerzo-deformación para el acero de refuerzo y
en la Figura 6-2(b) la del concreto no confinado. Allí puede verse que el acero es
linealmente elástico hasta que llega al punto de fluencía, mientras que el concreto no es
propiamente linealmente elástico en ningún momento.
t;,
esfuerzo
~
módulo tangente inicial
Etan
1
módulo tangente al 20% de la resistencia máxima
-
E
1 lEc
1
módulo secante al 45%
de la resistencia máxima
O.45fc •
O.20fc•
0.001
0.002
0.003
0.004
0.005
E, deformación unitoria
Figura 6-2(b) - Curva esfuerzo-deformación del concreto no confinado
El área bajo la curva esfuerzo-deformación de cualquier material que se lleva hasta la
faiia, es una medida de la capacidad del material para absorber energía por unidad de
volumen, y se denomina tenacidad del material (toughness, en inglés). Entre mayor sea
el área bajo la curva, el material tiene mayor tenacidad. Los materiales inelásticos
muestran características especiales cuando la carga no se aumenta monotonicamente
hasta la falla. Se entiende por ensayo monotónico aquel en que se carga el material sin
que haya inversión en el sentido de las fuerzas aplicadas.
En la Figura 6-3, basada en [Popov, 1968], se muestra un material que fue cargado
desde O hasta el punto A; luego fue descargado, y tomó la rrayectoria AB. Tanto en la
parte inicial de la carga como en la descarga, el material tuvo una respuesta
esencialmente elástica con el módulo de elasticidad inicial del material. A pesar de esto,
debido a que entró en el rango inelástico antes de llegar al punto A, se presenta una
deformación permanente, Además, la energía de deformación que había acumulado
hasta el punto A, no fue liberada totalmente en la descarga; por lo tanto, el material
disipó la energía correspondiente al área sombreada, tal como se explicó en la Sección
1.7.4. En el rango Inelástíco, sólo una parte pequeña de la energía absorbida por el
material se recupera al descargarlo.
En la Figura 6-3 puede observarse que al cargar nuevamente el material a partir del
punto B; éste se comporta como un material elástico, hasta que encuentra la curva
original en el punto C; y que al seguirlo cargando sigue la curva original. Si en el punto
O se retira nuevamente la carga, el material llega al punto E de cero esfuerzo aplicado.
Cargándolo nuevamente en el sentido contrario a partir del punto E, desde F el material
comienza a comportarse inelásticamente. Vale la pena anotar que el esfuerzo f h en el
punto f es menor que el que tuvo al descargarlo, fa, en el punto D. Esto se conoce como
efecto de Bauschinqer, quien fue el primero en observarlo, y por esto lleva su nombre.
1l!J
IJilllÍl1lÍl(l l'strllctllra( (lj>IIC(I(L(l
(11 lU"Wllv
.:>tJ""~v
-------------------
deformación unitaria
Figura 6-3 - Efecto de carga y descarga, con inversión del sentido de la fuerza
Cuando al material se le imponen una serie de ciclos de carga, descarga, y carga en el
sentido opuesto; en los cuales los esfuerzos sobrepasan el límite elástico del material,
se obtiene el comportamiento que se mostró en la Figura 1-8. Este comportamiento se
conoce con el nombre de respuesta histerétíca. Tal como se indicó en la Sección 1.7A, la
histeresis es un fenómeno por medio del cual dos, o más, propiedades físicas se
relacionan de una manera que depende de la historia de su comportamiento previo. Por
lo tanto, hace referencia al comportamiento de los materiales estructurales cuando se
ven sometidos a deformaciones o esfuerzos alternantes que están fuera del rango de
respuesta lineal, o elástica, ante una solicitación; ya sea de fuerza o de deformación
impuesta. Una gran parte de la energía que es capaz de disipar el material estructural
en el rango ínelástíco de respuesta se asocia con el área comprendida dentro de los
ciclos de histéresis.
Desde el punto de vista del elemento estructural construido con un material elástico, o
inelástíco, es conveniente ver cómo se manifiesta la inelasticidad en comparación con el
elemento construido con un material elástico. Vale la pena, en este momento, repasar el
proceso matemático que se emplea para determinar la línea elástica, o curva de
deflexiones de una barra prismática, sometida a flexión transversal en su sección. Con
base en la teoría matemática de la elasticidad (Timoshenko y Younq, 1962] es posible
demostrar que la siguiente ecuación diferencial describe la línea elástica y = f{x) del
elemento estructural:
(6-1)
Donde y corresponde a la deflexión transversal de la línea elástica, x es la variable que
describe la posición a lo largo del eje longitudinal del elemento, E es el módulo de
elasticidad del material, 1 el momento de inercia de la sección, y p(x) es la función que
describe las cargas transversales al eje del elemento. La solución de esta ecuación
diferencial se obtiene integrando cuatro veces y resolviendo las constantes de
integración por medio de las condiciones de apoyo. La Tabla 6-1 muestra este proceso
de una manera esquemática.
La relación de momento-curvatura (M-cj», mostrada en la etapa (d) de la Tabla 6-1,
supone que las deformaciones son linealmente proporcionales a los esfuerzos, a través
de la rigidez, El, de la sección del elemento. Por lo tanto, la ecuación es válida para
120
1
I
i
I
I
-elementos cuyo material no llega a esfuerzos que superen el límite elástico, o sea
materiales linealmente elásticos.
Tabla 6-1 - De carga a deflexión
p(x)
(a)
Carga
p(x)
(b)
Cortante
V(x) = J p(x)dx
(c)
Momento
M(x) = V(x)dx
PJIJJJ=Q
r
V(x)
JIDrrrm.~
f
M(x)
~
ep(x)
(d)
Curvatura
~
q>(x) = M(x)
El
8(x)
(e)
Rotación
9(x) = q>(x)dx
f
~'%1ill
(f)
Deflexión
S(x) = 9(x)dx
f
~
Cuando el elemento estructural responde inelásticamente, conociendo t,: rclación
momento curvatura, es posible llegar a determinar las deflexiciD,·c,liz, Ido el
proceso de integración, probablemente utilizando técnicas matemáticas algo más
elaboradas. A modo ilustrativo, en la Figura 6-4 se presenta la relación
omentocurvatura (M-$) de la sección de una viga de concreto reforzado, que Sé carga
monotónicamente a flexión. Allí es importante anotar, que la sección se comporta de
una manera linealmente elástica hasta el punto en el cual se fisura el concreto en
tensión en la parte inferior de la viga. Este punto se denomina punto de agrietamiento, y
le corresponden un momento de agrietamiento, Me.. una curvatura de agrietamiento, q>cn
y la rigidez hasta este punto se puede describir por medio de EI g , donde I g es la inercia
de la sección no físurada. En la medida que se aumenta el momento se incrementa la
fisuración en la parte inferior de la viga; el eje neutro de la sección sube; y los
esfuerzos, tanto en el concreto como en el acero, se incrementan. En el momento en que
el acero de refuerzo llega a su resistencia de fluencía f y (véase la Figura 6-2a), hay un
cambio en el comportamiento de la sección, que es consecuencia del cambio en el
comportamiento del acero. Allí es posible definir un momento de fluencia, M y , una
curvatura de fluencia, <!>Y, y una rigidez, Ele.. que se denomina rigidez fisurada. Esta
rigidez, describe aproximadamente el comportamiento de la sección entre el punto de
fisuración y el de fluencia. A partir de ese punto hay un aumento en la curvatura de la
sección, sin que se presente un mayor aumento en el momento, presentándose
disminución en la rigidez de la sección. Esta situación se mantiene hasta el punto en
que se empieza a presentar un aumento de la resistencia del acero debida al fenómeno
de endurecimiento por deformación (straín-hardeníng en inglés), allí puede definirse una
curvatura para endurecimiento por deformación, q>s' La resistencia a momento se
incrementa hasta llegar al punto de máxima resistencia del acero, fu, obteniéndose así la
máxima resistencia de la sección, M¿ El momento empieza a disminuir en la medida
~--_
..
............
121
_-------------------~.
-ináinica esrrucr ural aplicada al (//seIlOSISIIIIC(J
que la resistencia del acero baja, hasta que éste falla a la tensión. Allí se obtiene la
máxima curvatura en la sección, <1>0.
M
-falla
.<.---.. .
: '-..Iniciación del endurecimidnto
:
por deformación del ecero
fluye acero
el,
,,
6.2
,,
,,
,,
,
punto d~agrietamiento
,,
,,
I
,,
,,
,
,,
,
$cr
Sección del elemento
~y
Figura 6-4 - Relación momento curvatura típica de una viga de concreto reforzado
El comportamiento mostrado en la figura anterior se presenta cuando la cuantía de
acero longitudinal es relativamente baja, permitiendo que el acero de refuerzo llegue a
fluencia, antes de que se presente una falla por compresión en el concreto. O sea es
válido para cuantías menores que la cuantía balanceada, Pb' Así mismo, la sección debe
tener una resistencia a esfuerzos cortantes adecuada, para que la falla sea por flexión y
no por cortante, la cual es una falla frágil. De igual manera, debe garantizarse que no
haya una falla por adherencia del acero de refuerzo con el concreto.
sección del
elemento
<P u
L
I
4's
I
r-r-
I
T -iI
I
I
I
t- _1_
<P y
4'cr
ep
Figura 6-5 - Distribución de la curvatura en una viga en voladizo que se lleva a la falla
Supongamos, ahora, una viga en voladizo que tiene una sección similar a la estudiada.
A esta viga se le coloca una carga en el extremo libre. En la Figura G-S se presentan las
curvaturas correspondientes a la aplicación de una carga tal que se presente en la base
del voladizo respectivamente el momento de agrietamiento, el de fluencia y el momento
último. Allí puede observarse que cuando se llega al momento último hay una
concentración de cambio en curvatura en la base del voladizo. y esto corresponde a un
incremento local de la rotación, ep . Generalmente este lugar donde Sl' presenta la
I
concentración de cambio en curvatura se denOminaJj!!LculaciátLvltIstica:)a distancia en
la cual se presenta se llama la longitud de plastificáción,-ep. . --- _. - .
El caso presentado en la Figura 6-5 corresponde, nuevamente, a un ensayo monotónico,
en el cual no hay reversión de las cargas. A continuación se presenta cualitativamente el
comportamiento histerético, obtenido de ensayos experimentales, de los principales
materiales estructurales: concreto reforzado, acero estructural y mampostería
estructural, cuando hay reversión de las cargas aplicadas.
6.2.2 Concreto estructural
El concreto reforzado puede decirse que es el matrimonio de dos materiales con
propiedades mecánicas totalmente diferentes, como puede comprobarse de la simple
observación de la Figura 6-2. Para solicitaciones estáticas, las características de los dos
materiales han obligado a respaldar los criterios de diseño con investigaciones
experimentales. Para solicitaciones dinámicas, especialmente cuando se esperan
respuestas en el rango inelástico, la experimentación adquiere un carácter aún más
importante. Todo lo que se conoce actualmente acerca del comportamiento dinámico en
el rango inelastico del concreto reforzado se ha obtenido de amplios y costosos
programas experimentales.
II
Con el fin de ilustrar el comportamiento histerético de elementos de concreto
reforzado; en la Figura 6-6, adaptada de lSozen, 1974], se presenta la respuesta ante
cargas alternantes de una viga en voladizo, con refuerzo longitudinal simétrico. La viga
se somete a un programa de deformaciones consistente en dos ciclos completos de
deflexiones verticales iguales en las dos direcciones. Las deformaciones se logran por
medio de fuerzas verticales aplicadas en el extremo libre del voladizo. Se supone que el
refuerzo longitudinal de la viga está adecuadamente anclado de tal manera que no haya
problemas de adherencia del refuerzo. Igualmente se supone que dispone de sufícíente
refuerzo transversal. En la Figura 6-6(a) se muestra la viga, su sección y el programa de
deformaciones.
En la Figura 6-6(b) se muestra el primer ciclo de respuesta en términos ele id íuerz.a
aplicada y del desplazamiento vertical en el extremo libre del voladizo. El primer cuarto
de ciclo de respuesta muestra tres etapas bastante bien definidas: AR, Be v GJ La etapa
AB representa la respuesta de la viga antes de que ocurra fisuración del concreto en
tensión en la parte superior de la sección. La aparición de la primera fisura, usualmente
en la base del voladizo, reduce apreciablemente la rigidez de la viga, Esta reducción es
mayor al comienzo, cerca a B, y luego va disminuyendo gradualmente en la medida que
se acerca al punto C; y es consecuencia de la mayor ftsuracíón, de la aparición de
deformaciones en el rango inelástico del concreto, de la reducción de la zona de
compresión al subir la localización del eje neutro de la sección, y del resbalamiento del
acero de refuerzo debido a la disminución de su adherencia al concreto. La reducción en
rigidez puede verse a través de la diferencia entre k g y kcn correspondiendo la primera a
la sección no fisurada y la segunda a la sección fisurada, cuando el refuerzo en tensión
está llegando al punto de fluencia.
En el punto e el acero superior de la viga, el cual está en tensión, fluye llegando a f y ;
véase la Figura 6-2(a). En este punto, la viga típicamente tiene una serie de microfisuras
de diferente longitud vertical, como muestra la Figura 6-6(c), con su trayectoria dictada
por el estado de esfuerzos principales que existen en una viga no fisurada. Hasta este
momento la distribución de la curvatura de las secciones de la viga es directamente
proporcional al diagrama de momentos, con la excepción de pequeñas desviacíones
causadas por la separación finita entre microfisuras. Estas desviaciones son mayores
para vigas con muy poco refuerzo longitudinal. A medida que la deformación se
aumenta más allá del punto C, hay un aumento importante de la deformación causado
por un pequeño aumento de la carga; con un cambio apreciable en la distribución de
123
)ill(UllíClI eSlTlLCllLrlll
UJl"ClHIll III
.tI'He""
.H.,,"""
curvatura a lo largo de la viga. El aumento en dcflexión se debe principalmente a un
aumento en rotación, o concentración de curvatura, en la vecindad del apoyo. El
elemento no falla necesariamente en este punto. La deformación que el elemento admite
más allá del punto de fluencia se denomina capacidad de deformación inelástica
IAbrams, 1991].
Sección
Voladizo cargado en el extremo
Programa de deflexiones
~
D'
E
l'
e
(a)
Final del ciclo 1
Final del ciclo 2
Máxima Deflexión
G'
k,
(f)
(b)
Figura 6-6 - Respuesta histerética de una viga de concreto reforzado en voladizo
En el punto D las fisuras son mayores dentro de una distancia del apoyo igual a la
altura del elemento, que en el resto de él, como muestra la Figura G-G(d). Se presenta,
generalmente, un descascaramiento del concreto en la fibra extrema en compresión,
cerca a la cara del apoyo. El cambio en rigidez es mucho más marcado entre el tramo
CD, que en el tramo Be. La rigidez del tramo CD está descrita por medio de k._ Esta
pendiente está dictada por la capacidad de endurecimiento por deformación que tenga
el acero de refuerzo, la cual se muestra en la Figura 6-2(a). Además influyen en su
magnitud: el espesor del recubrimiento en comparación con las dimensiones de la
sección confinada por el refuerzo transversal, y la cuantía de este último.
La deformación impuesta se invierte arbitrariamente en el punto D. Al ir de D hacia E,
disminuyen los esfuerzos en el acero de refuerzo y en el concreto, reduciéndose la
carga y la deflexíón. El acero de refuerzo tiende a volver a su posición original. El
agrietamiento que se presentó durante la etapa anterior no cierra en su totalidad. La
pendiente del tramo DE tiende a reducirse en la medida que la curva se acerca al punto
E, de cero carga. En el punto E la viga tiene una deflexión permanente. Las fisuras son
visibles, pero tienen un espesor muy pequeño, si es que no se han cerrado totalmente.
La variación en la rigidez, está descrita a través de la pendiente k u •
En el punto E, de inversión de la carga, la viga es casi tan rígida como en el punto inicial
A. Esto se debe a que el concreto en la zona de abajo (ahora tensión) está todavía
intacto, aunque haya fisuras de la zona de arriba (antes tensión) sin cerrar en su
totalidad. Por esta razón, la curva procede hacia el punto F con una pendiente
124
aproximadamente igual a la inicial (pendiente del tramo AH). En F se produce la
fisuración por tensión de la parte inferior de la víga. En los ciclos de carga
subsiguientes, esta parte de la respuesta histerética es diferente, como puede verse en
la Figura 6-6(0 correspondiente al segundo ciclo de carga y donde el primer ciclo se ha
dibujado punteado.
I
t
,
La forma de la curva entre los puntos F y G depende de una interacción compleja entre
las propiedades esfuerzo-deformación del acero de refuerzo, la cuantía de refuerzo
longitudinal, y la distribución y ancho de las fisuras existentes. Generalmente la curva
procede hacia G con una pendiente que se va reduciendo gradualmente. No obstante,
diferentes combinaciones de las variables mencionadas pueden producir cambios
locales en la pendiente de la curva entre F y G. Por ejemplo, si las fisuras de la parte
superior de la viga no se han cerrado totalmente en el momento que el acero de
refuerzo superior fluye en compresión, puede producirse un cambio brusco de la
pendiente, acompañado por una rigidización cuando las fisuras efectivamente se
cierren. Aparecen fisuras causadas por tensión en la parte inferior de la viga (zona de
compresión durante la parte inicial del ciclo carga), obteniéndose un comportamiento
análogo al de CD. Las deflexiones son producidas por los esfuerzos de compresión en el
concreto y de tensión en el acero de la zona de tensión; así como por resbalamiento del
refuerzo debido a la disminución de su adherencia con el concreto. Acercándose al
punto G, el acero en tensión fluye con el consecuente aumento en la detlexión. El punto
de fluencia no se presenta de una manera tan definida como en C. Esto se debe a que el
refuerzo de tensión puede haber fluido en compresión en el ciclo anterior, antes de que
ocurriera la inversión en la dirección de la carga; presentándose un efecto de
Bauschinger. La tendencia general en esta zona está descrita a través de la pendiente k.,
En el punto G el patrón de fisuración es similar al de D, solo que ahora se presenta en la
parte inferior de la viga, como muestra la Figura 6-6(g).
En el punto G ocurre una nueva inversión arbitraria en el sentido de las deformaciones.
La porción GH es similar a DE. En H hay nuevamente una deformación permanente,
similar a la del punto E; pero ahora en la dirección inversa. La magnitud de esta
deformación depende de la degradación de la rigidez que haya ocurrido anteriormente
(Abrams, 1991]. En la medida que la carga aumenta a partir de H hacia D', se pasa por el
punto 1, el cual marca el fin del primer ciclo. A partir de H se presenta un pequeño
aumento de la rigidez causado por las fisuras que se cierran en la nueva zona de
compresión. A diferencia del tramo FG, este comportamiento se extiende más allá del
punto de cero deflexíón, Las fisuras existentes no se han cerrado totalmente en el punto
de cero deflexíón: Esto se debe a que algunas fisuras se abren antes de que las
anteriores se cierren. Pueden existir fisuras abiertas en ambas caras del elemento..-\1
presentarse deflexíón más allá del punto de cero carga, se aumenta la rigidez debido a
que las fisuras en la zona de compresión se cierran totalmente. En muchos casos los
esfuerzos de compresión en esta etapa son resistidos casi en su totalidad por el
refuerzo de la zona en compresión.
El segundo ciclo se muestra en la Figura 6-6(f), donde el primer ciclo se ha dibujado
como referencia, por medio de una línea punteada. Entre I y D' el miembro resiste la
carga con una respuesta que manifiesta mucho menor rigidez que la observada durante
el ciclo de carga inicial. Esto se debe: a un ablandamiento del acero de refuerzo causado
por haberlo deformado cíclicamente en tensión y en compresión; a una degradación del
módulo de elasticidad original del concreto; y a un deterioro del mismo concreto con
menor adherencia del refuerzo. En este caso la fluencia del acero de refuerzo no es una
característica sobresaliente, debido al ablandamiento del acero. La porción D'E' del
nuevo ciclo es muy similar a la porción GH del primer ciclo, debido a que la viga se
descarga bajo condiciones similares. Idealmente, un número moderado de ciclos con los
mismos límites de deflexíón no debe producir un cambio en el tipo de respuesta;
produciéndose ciclos de hístercsis subsiguientes con las mismas características del
segundo ciclo ISozen, ] 9741.
lJl1UllllrCU
(-"'~('-({Clltl{l( Hl.'IH.. l H H . l
'l1..
Uh
-.........
• .J
"
I
Figura 6-7 - Rigidez durante los ciclos de histéresis de elementos de concreto reforzado
Cuando se presentan nuevos ciclos de carga con deflexiones mayores que las impuestas
anteriormente, como se muestra en la Figura 6-7, adaptada de [RiddelI y Newmark,
1979]; se presenta una degradación de la rigidez, la cual se manifiesta con un
corrimiento del punto D hacia la derecha y del punto G hacia la izquierda. La deflexión
a la cual se presenta el aumento de la rigidez en H'D' o en E'G', aumenta
progresivamente de ciclo en ciclo debido a la acumulación de deformación inelástica en
el refuerzo y al resbalamiento del refuerzo en compresión. La pendiente general de la
curva carga-deflexíón, representada por la línea que une los dos extremos del ciclo, DG;
se reduce en la medida que ocurren más ciclos de carga.
En la Figura 6-7, además, se resumen las rigideces asociadas a diferentes etapas de los
ciclos de hístéresis, donde:
kg
k.,
k,
k,
k,
rigidez con la sección no fisurada, antes de que se presente cualquier
solicitación
rigidez con la sección fisurada, y evaluada al nivel de fluencia del acero en
tensión
pendiente, expresada en términos de rigidez, del incremento en resistencia
producido por el acero de refuerzo longitudinal sometido a deformaciones en
la zona de endurecimiento por deformación
pendiente, expresada en términos de rigidez, de la curva que se obtiene
cuando el elemento se descarga después de que el acero de tensión ha fluido
pendiente, expresada en términos de rigidez, de la curva que se observa
cuando el elemento se carga en el sentido contrario al de un ciclo de carga
que acaba de terminar. También se conoce como rigidez de recarga, o de
nueva carga.
Es importante anotar que el comportamiento descrito corresponde al de un elemento
que disipa energía por flexión. Para lograr este comportamiento debe garantizarse que
el elemento no falle por esfuerzos cortantes o por ausencia de un refuerzo transversal
de confinamiento adecuado, Figura 6-8(a) adaptada de [Wight y Sozen, 1973]; ni el
refuerzo longitudinal falle por adherencia, Figura 6-8(b), adaptada de [Higashi y Takeda,
19721. Allí se muestran los efectos de degradación de la resistencia y de degradación de
la rigidez, respectivamente.
126
Degradación de la rigidez
Fuerza
Fuerza
(a)
(b)
Figura 6-8 - Falla por falta de refuerzo transversal adecuado y falla por adherencia del refuerzo longitudinal
Dentro de los factores que influyen en la forma de los ciclos de hísteresís de elementos
de concreto reforzado ISozen, 1974] y [Abrams, 1991], se cuentan los siguientes:
•
•
•
•
•
•
•
•
•
cuantía de refuerzo longitudinal y las propiedades esfuerzo-deformación del acero
de refuerzo,
carga axial sobre el elemento,
nivel de fisuracion en función de la distribución y espesor de las grietas,
eficacia de la adherencia entre el refuerzo y el concreto,
distribución del refuerzo en la sección (generalmente ~(simétrica en \igas),
esfuerzos cortantes y cantidad de refuerzo transversal,
distorsiones generales y locales de los nudos de los extremos del elemento,
forma de la sección del elemento (viga T diferente a viga rectangular), y
estabilidad lateral de las barras de refuerzo.
En algunos tipos de elementos de concreto reforzado, a pesar de que se presentan ci,,:iOS
de histeresís estables, la cantidad de energía que se disipa puede verse afectada por el
estranqulamiento (pinching, en inglés), que se presenta en los ciclos de histercsís debido
a que no se cierran las fisuras de los ciclos de carga anteriores; llegándose él tener una
fisura abierta que pasa por toda la sección del elemento. Esto produce un alargamiento
del elemento, el cual ha sido observado experimentalmente [Fenwick y Davidson, 19951.
La rigidez en la zona de reversión de la carga (tramos EG y HD en las Figuras 6-6 y 6-7),
se limita a la que aporta el refuerzo longitudinal, sin contribución del concreto. El
cortante que necesariamente acompaña el momento aplicado, es resistido en la base del
elemento tan solo por efecto de espigo del acero longitudinal; y en algunos casos se
presenta resbalamiento en la base del elemento, lo cual contribuye a que se presente el
estrangulamiento. La energía disipada y el estrangulamiento de los cíclos de hísreresís
se muestran en la Figura 6-9, adaptada de [Rertero y Popov, 1977[.
127
Fuerza
Fuerza
Estrangulamiento "'"
Deflexión
Energía disipada en el tercer ciclo
Energía disipada en el primer ciclo
Figura 6-9 - Energía disipada y estrangulamiento de los ciclos de histéresis.
6.2.3 Acero estructural
El comportamiento histerético de elementos de acero laminados en caliente es mucho
más simple que el de concreto reforzado, dado que se trata de elementos hechos de un
solo material. Las bondades del comportamiento del acero como material se trasladan a
los elementos construidos con él. No obstante, todos los problemas asociados con
estabilidad local de las alas y el alma, estabilidad general del elemento, alabeo, fractura
frágil, etc.; se agravan dado que el elemento va a trabajar en el rango inelástico. Los
problemas de comportamiento histerético del acero estructural se relacionan
principalmente con la necesidad de proveer secciones estables en el rango inelástico, lo
que se denomina secciones compactas; y la forma como se realicen las conexiones entre
elementos, especialmente cuando se requiere que éstas sean resistentes a momentos.
Viga 8 WF 48 Ensayada
I
Fuerza
CIClO 11/"47
I
Ciclo N° 36
CieloN°27
Ciclo N" 10
I
Ciclo N° 1
(;lelo N" 2
(e) Conexión pernada (atornillada)
(b) Conexión soldada
Figura 6-10 - Respuesta hisferética de vigas de acero estructural en voladizo
En la Figura 6-10, basada en [Popov y Bertero, 19731. se ilustra cualitativamente el
comportamiento histerético de una viga en voladizo de acero estructural. En la Figura
6-10(a) se muestra la viga ensayada y la columna de apoyo, de mayor sección, la cual
tiene atíezadores soldados para evitar distorsiones y falla dentro del panel de la
conexión. En la Figura 6-10(b), se muestra la respuesta de la viga cuando su conexión a
la columna de apoyo es soldada; al no haber problemas en la junta; los ciclos de
128
hísteresís son totalmente estables, aún después de un número muy alto de ellos. En la
Figura 6-10(c) se muestra el ensayo de una conexión pernada. Las porciones
relativamente planas de los ciclos de histeresis están relacionadas con resbalamiento de
los conectores. La rigidización posterior está asociada con el asiento sobre los tornillos.
En la Figura 6-11 se muestra cualitativamente la respuesta histerética de una columna
de acero sometida a fuerza axial constante, ya una fuerza horizontal alternante.
p
"
6
I
H
I
Figura 6-11 - Respuesta histerética de una columna de acero estructural sometida a fuerza axial y horizontal
Debido al temblor de Northridge, Caliiornia, USA, suburbio de la ciudad de Los Angeles,
ocurrido el 17 de Enero de 199-4, (SAC [oint Venture, 1995J; se presentaron daños
graves en más de 100 edificios de acero cuyo sistema estructural consistía <'Jl pórticos
soldados resistentes a momento, sin diagonales de arríostramiento, Los daños
estuvieron concentrados en las conexiones de viga con columna. SI" pre3e: itaron
problemas en edificios de un piso hasta de 26 pisos; incluyendo dl":.:e
que
estaban en construcción, hasta edificios con más de 30 años de construidos, Hubo
daños graves en lugares donde las aceleraciones registradas localmente fueron
relattvamente moderadas. Los edífícíos que estaban localízados en las zonas que fueran
afectadas por las mayores aceleraciones, tuvieron daños muy graves, cercanos al
colapso.
Lo indicado en (SAC Ioint Venture, 1995], que se transcribe a continuación, habla por sí
solo: "Los pórticos resistentes a momentos de acero soldado se utilizan ampliamente en
todos los Estados Unidos y en el resto del mundo, especialmente en edificios en altura.
Con anterioridad al temblor de Northridqe.este tipo de construcción era considerado uno
de los mejores sistemas estructurales sismo resistentes; debido a que existían muy pocos
casos de daños graves a este tipo de estructuras en sismos ocurridos anteriormente, y no
existe evidencia de que se hayan producido colapsos de este tipo de edificios construidas
de acuerdo con la práctica actual dentro de los Estados Unidos. No obstante, el daño
grave generalizado dentro de este tipo de estructuras, ocurrido a raíz del temblor de
Northridqe; exige que esta premisa se revise".
En la Figura 6-12(a), basada en (SAC joint Venture, 1995], se muestran algunos de los
problemas que fueron detectados en vigas y columnas, en las cercanías de la conexión.
En la Figura 6-12(b) se muestran algunos de los problemas que fueron detectados
dentro del panel de las conexiones.
Estos hechos condujeron a cambios de emergencia en los requisitos de acero
estructural de los códigos de construcción, los cuales limitaron el uso de este tipo de
12fJ
estructuras mientras se realizan amplias investigaciones experimentales que permitan
establecer los criterios de diseño y construcción que deben emplearse para evitarles.
Estas investigaciones todavía están en curso. Por esta razón, deben esperarse
próximamente cambios importantes en la normativa de este tipo de estructuras.
~
~
pandeo ala viga
pandeo alma viga
desgarramiento ala columna
fractura ala columna
fractura laminar ala columna
fractura alma viga
fractura ala fuera zona soldadura
' - - - - - pandeo ala columna
fluencia ala viga
' - - - - - pandeo alma columna
fractura zona soldadura
(a)
fractura soldaduras atiezador
~
fractura atiezador
pandeo alma columna
fluencia y deforma:;ión
dúctil alma columna
fractura alma columna
pandeo del stiezedo«
(b)
Figura 6-12 - Tipo de problemas en la zona del nudo en estructuras de acero
El tipo de problemas detectados se limitó a estructuras aporticadas resistentes a
momentos. En las estructuras de acero cuyo sistema de resistencia sísmica consistía en
pórticos arriostrados con diagonales, no se manifestaron problemas y su
comportamiento fue satisfactorio.
En la Figura 6-13, adaptada de [Wakabayashi, 1986], se muestran los ciclos de hi stéresís
típicos de un elemento de diagonal en acero; obtenidos de cargar cíclicamente un
elemento de acero estructural a diferentes amplitudes de deformación. Como puede
verse, se forma una articulación plástica debido al pandeo en compresión y a la
elongación inelástica que sucede a la fluencia del material. En la medida que el
elemento tenga una relación de esbeltez menor, la capacidad de disipación de energía se
vuelve menor.
Para el caso de estructuras compuesta de acero y concreto, deben distinguirse dos
casos: aquellas estructuras en las cuales un perfil de acero estructural se rodea de
concreto; y un segundo caso en el cual se coloca concreto por dentro de una sección
tubular. En el primer caso, de acero rodeado de concreto, hay evidencia de buen
1:30
I
~---------~-------------------------....:.;...-------
i
comportamiento ante solicitaciones sísmicas, dado que por muchos años este tipo de
solución se utilizó como protección para incendio. La observación acerca de problemas
con las conexiones es aquí también válida. Para el segundo caso de concreto rodeado de
acero, existe muy poca información experimental, y no es extrapolable la información de
otros tipos de construcción. El comportamiento sísmico de este tipo de estructuras debe
manejarse con cuidado; hasta tanto no se realicen programas experimentales que
perrnitan fijar criterios de diseño adecuados.
Fuerza axial
E
,
.......-------e.....
OA
......------_li.....
EF
€Ir = 45
I
Desplazamiento axial
ctcio sr zo
Ciclo N·15
------- g~:~ z: ~~
Cic/oN<>9
CicloN"S
ctao«:«
C/CION'2
---------- C/c/o N· 1
Figura 6-13 - Ciclos de histéresis para un elemento de diagonal de arriostramiento de acero
Respecto al comportamiento de elementos de celosía utilizados dentro de estructuras
resistentes a momentos, debe tenerse especial CUidado, pues hay evidencia ap muy mal
comportamiento sísmico. Durante el sismo de México de 1985 se presentó el colapso de
un edificio de 21 pisos, cuyas vigas eran elementos en celosía, construidas con án):ulos,
y ángulos soldados para conformar secciones tubulares; y las columnas
secciones
tubulares construidas con platina soldada en las aristas de la sección, con algunos
atiezadores internos. El informe [ASeE, 1987), pone en duda que las especificaciones de
acero estructural de la AISC sean aplicables a este tipo de estructuras. Esta situación no
ha cambiado con las nuevas especifrcaciones [AISC, 1994].
No sobra insistir sobre tres aspectos que conforman la mayor fuente de problemas
desde el punto de vista del comportamiento sísmico del acero estructural: (a) el uso de
estructuras aporticadas resistentes a momentos, con conexiones soldadas; (b) el uso de
estructuras construidas con perfiles ensamblados utilizando platina soldada, debido a
estas soldaduras y a que los perfiles resultantes no conformen secciones compactas; y
(e), el uso de elementos en celosía dentro de estructuras que conformen pórticos
resistentes a momentos.
6.2.4 Mampostería estructural
Dentro del contexto de lo que se presenta a continuación, la mampostería estructural
hace referencia a mampostería reforzada; ya sea por medio de barras de acero de
refuerzo colocadas dentro de celdas que posteriormente se inyectan con mortero, o
dentro del mortero de pega, como es el caso de la mamposteria de bLoque de
perforación vertical; o bien dentro de elementos de concreto reforzado de sección
pequeña, que rodean el muro, como puede ser el caso de la mampostería confinada. Se
hace referencia, cualitativamente, al comportamiento histeretico de muros de
mampostería de bloque de perforación vertical y de mampostería confinada.
131
uuirnica
estrrLClllral (1[111('(1(1(1 (// (l1:-WI/U
:>t;')ftll'lJ
Al igual que el concreto reforzado, la mampostería estructural es un sistema
constructivo que combina materiales de diferentes características mecánicas, solo que
en mayor número; pues intervienen: las unidades de mampostería, que a su vez pueden
ser de concreto, de arcilla, o de silical; el acero de refuerzo; el mortero de pega; el
mortero de inyección; y, aunque no sea un material, la calidad de la mano de obra de
ejecución, la cual generalmente tiene una influencia determinante en el comportamiento
de la mampostería. Como resultado se tiene una mayor dificultad que en los otros
materiales estructurales generales, para poder definir unos patrones de
comportamiento inelástico; pero al igual que ellos, este comportamiento tiene que estar
sustentado en trabajos investigativos experimentales.
Figura 6-14 - Muros de mampostería de bloque de perforación vertical
con diferentes cantidades de refuerzo horizontal
Para efectos ilustrativos, en la Figura 6-1-l, adaptada de [Chen et al., 1978], se muestran
parte de los ciclos de histéresis de una serie de ensayos sobre muros de mampostería
de bloque de perforación vertical de concreto; sometidos a cargas horizontales; sin
carga vertical; con la misma cuantía (0.0017) Y disposición de refuerzo vertical, pero con
diferentes cantidades de refuerzo horizontal. El muro de la Figura 6-14(a), no tiene
refuerzo horizontal; el muro de la Figura 6-14(b), tiene una cuantía de refuerzo
horizontal de 0.008; y el muro de la Figura 6-14(c), tiene una cuantía de 0.0034, La
escala relativa de las tres gráficas es la misma.
La forma de los ciclos de histeresís, es muy similar a los ciclos correspondientes a
concreto reforzado, respecto a la degradación de la rigidez e inclusive a la presentación
de estrangulamiento en ellos. La presencia de refuerzo horizontal permite niveles de
deformación mucho más altos sin mayor degradación de la resistencia del muro, pero a
niveles de deformación altos, se presenta degradación de la resistencia de todas
maneras. Indicando que a la larga la falla por esfuerzos cortantes domina el
comportamiento del material. La relación de esbeltez del muro afecta enormemente el
modo de falla prevaleciente, llevándolo a fallas iniciales por esfuerzos cortantes para
muros bajos y largos; y a fallas iniciales por flexión en muros esbeltos, altos y de
longitud relativamente menor. Aquí nuevamente hay similitud con lo que ocurre en
muros de concreto reforzado. Este último aspecto es de fundamental importancia, dado
que cuando hay aberturas en los muros, debido a vanos de puertas o ventanas, se
presentan elementos dentro del muro, con relaciones de esbeltez diferentes y con la
consecuente variación en los mecanismos de falla y disipación de energía.
Dentro de los múltiples aspectos que afectan la forma de la respuesta histerética
[Paulay y Priestley, 19921, se cuentan especialmente: la presencia de carga axial; las
cuantías de refuerzo, tanto vertical como horizontal, las características mecánicas del
acero de refuerzo; la relación de esbeltez del muro; la resistencia de la mampostería en
conjunto, obtenida por medio de prismas; y la distribución del refuerzo vertical dentro
de la sección del muro.
En el caso de mampostería confinada, se han ensayado numerosos muros,
especialmente en latinoamérica [ACI, 1994]. los ensayos en general se han realizado por
medio de marcos de prueba, como el mostrado en la Figura 6-15 [UA, 19941.
Gato
cetda
de carga
Marco de
pruebas
/
//
FigUla 6-15 - Marco de ensayo para muros de mampostería
En la Figura G-]6 [Carda y Yamin, 1994] se muestran los resultados de un muro de
mampostería de bloque de arcilla de perforación horizontal, confinado por elementos
de concreto reforzado de sección pequeñaAllí pueden observarse los efectos de una
falla por esfuerzos cortantes en un ensayo de pocos ciclos, no controlado por
deformación.
Fuerza
Deformación
Figura 6-16 - Muro de mampostería confinada fallando
a estuerzos cortantes
La presencia y ausencia de carga axial en un ensayo con deformación controlada, para
muros similares de mampostería confinada de ladrillo macizo de arcilla, se muestra en
la Figura 6-17 [Yamín y Garcia, 1993]. En el caso (a) no hay carga vertical. y el caso (b)
hay una carga vertical alta, para un muro de este tipo (170 kN).
F,.erza (kN)
-20
Fuerza (kN) ~
300
lD
15
20
Deformación (mm)
carga axial = O kN
~20
-'5
10
carga axial = 170 kN
(a)
(b)
Figura 6-17 - Muro de mampostería confinada con diferentes cargas axiales
L
15
20
Deformación (mm)
flllll1UCli eSlTUCl lU tU ltl"t
1\.
u.
_
~, .
_
La mampostería simple o mampostería no reforzada, en la cual no se coloca acero de
refuerzo, o las cuantías utilizadas son muy pequeñas; tiene un modo de falla
totalmente frágil ante solicitaciones sísmicas, como lo han venido demostrando los
sismos desde tiempo inmemorial: [ACl, 1994], [Coburn y Spence, 1992], [EERI, 1994],
[Cae y Shah, 19841 y [Sarria, 1995a]. Este tipo de mampostería es considerado en la
actualidad una de las mayores fuentes de vulnerabilidad y peligrosidad sísmica, y está
prácticamente prohibida en todas las regiones sísmicas del mundo.
>.3 Modelos matemáticos de histéresis
).3.1 Generalidades
La gran conclusión que se deriva de la Sección anterior, es que el comportamiento
inelástico de elementos estructurales construidos con diferentes materiales es complejo
y sensitivo a un gran número de variables. En general, dentro del alcance de toda
investigacíón experimental, se formula un modelo matemático que permita describir, lo
más fielmente posible, el fenómeno investigado. Por está razón el número de modelos
matemáticos de hisreresis ha aumentado al ritmo de la creciente investigación en el
tema. Muchos de ellos son derivaciones y refinamientos de modelos anteriores. Un
aspecto que debe tenerse en cuenta es el aumento de capacidad numérica que se ha
logrado en las últimas tres décadas, gracias al computador digital. Por esta razón,
modelos matemáticos que fueron grandes avances hace algunas décadas; hoy se juzgan
simplistas. Pero al mismo tiempo se debe ser cuidadoso de no caer en la falacia de
pretender obtener mayor precisión que la que permiten los datos o suposiciones
iniciales. En el resto de la presente Sección se describen detalladamente tres modelos de
histéresis: el elastoplástico, el de Rarnberg-Osgood, y a un modelo de rigidez
degradante; los cuales se muestran en la Figura 6-18.
El modelo elastoplástico se incluyó principalmente por razones didácticas, debido a su
simplicidad; la cual se presta, inclusive, para soluciones realizadas manualmente. Se
conoce desde hace "arias décadas, que el modelo de Ramberg-Osgood se presta para la
descripción de la histéresis de muchos de los tipos de elementos de acero estructural,
[Jennings, 19631 y [Sozen, 19741. El modelo de rigidez degradante sirve para describir
muchos de los casos de concreto reforzado y mampostería estructural.
Fuerza
Fuerza
-
Fuerza
(a)
(b)
(e)
Elasto-plástieo
Ramberg-Osgood
Rigidez degradante
Figura 6-18 - Modelos de histéresis
Como se dijo anteriormente, no existe en la actualidad un modelo de histeresís único
que describa adecuadamente para todos los materiales estructurales las peculiaridades
encontradas en los resultados experimentales. Por lo tanto lo presentado aquí no
pretende ser más que una introducción al tema. No obstante quien desee hacer un
seguimiento histórico y estudiar en detalle los modelos de histéresis existentes en la
actualidad, puede consultar las siguientes referencias: [Newmark, 19591. [jennings,
6. .
1963], [Clough y }ohnson, 1966], [Takeda, Sozen y Níelsen, 1970], [Sozen, 1974],
[Riddell y Newmark, 1979], iSaiidi y Sozen, 1979,1981], [Saatcioglu, 1991], [ACI, 1991bj,
entre otras.
6.3.2 Elastoplástico
El modelo más simple para describir la histéresis de curvas fuerza-desplazamiento es el
modelo elastoplástico mostrado en la Figura 6-19. El modelo elastoplástico tiene una
descripción matemática relativamente simple y su implementación dentro de algunos
de los métodos de solución contra el tiempo presentados en el Capítulo 3 es
relativamente sencilla. Basta reemplazar el término ku de las ecuaciones de equilibrio
dinámico por la fuerza que efectivamente lleva el resorte, la cual ya no depende
directamente de la deformación u del sistema, dado que se presentan deformaciones
inelásticas.
1
u
_
..
1J;~<~~:~i~kJ
Figura 6-19 - Curva fuerza-deformación para un material elastoplástico
Dentro del modelo elastoplástico el material se comporta como un material totalmente
elástico, con rigidez k, hasta que llega al nivel de la fuerza de fluencía JF;¡, a
de
este punto hay deformación sin que se presente un aumento en la fvc;,,;:;. TJr 'el se
invierte el movimiento, el material nuevamente reacciona como un material iotalmenre
elástico hasta que se llega a la fuerza de fluencia en el lado opuesto, ·1"
c
La acumulación de energía de deformación corresponde al área bajo la curva de carga,
Figura 6-20(a). Cuando hay descarga la energía de deformación que el sistema transfiere
a energía cinética corresponde al área bajo la cun-a de descarga, Figura 6(b). La
diferencia entre las dos áreas corresponde a energía disipada por el sistema y que se
comierte en calor, ruido u otros tipos de energía.
FA
I
i
Fy+-i---,...-----,¡
F
1
1.Iy
(a) ciclo de carga
Uu
u
lIy
Uu
u
(e) energía disipada
Figura 6-20 - Disipación de energía en un sistema elastoplástico
En la aplicación del modelo elastoplástico por medio de un método numérico, existen
dos aspectos en los cuales debe tenerse especial cuidado: la determinación del instante
en que se presenta la plastificación y la determinación del momento en que ocurre una
reversión en la carga, iniciándose la descarga. En el caso de la plastíficacíón, dado que
""!Iioo.
_
Duvunica
eSI,r!LClllrfll UjJlIUIUtt tt. '''<J' "" "'
o ••
_
este punto puede presentarse entre dos puntos de evaluación en el tiempo, hay
necesidad de reducir el incremento de tiempo ~t, de tal manera que se determine el
instante en el tiempo en que ocurre la plastificación de la manera más precisa posible.
El segundo caso, correspondiente al inicio de la descarga, el cual también debe
corresponder a un punto de evaluación en el tiempo. Dado que el punto de descarga
corresponde siempre a un punto de cero velocidad, una vez se detecta un cambio en el
signo de velocidad, se debe iniciar, también, una reducción del incremento de tiempo ~t
hasta que se encuentre el punto con una tolerancia en velocidad adecuada. El no tomar
estas precauciones conduce a una acumulación de errores que lleva a respuestas
erradas o imprecisas.
FtI
Fy~I-----~
I
Error en le energia disipada al
no detectar oportunamente el
inicio de la descarga
u
Figura 6-21 - Diferencia en la energía disipada causada por la no detección
oportuna de los cambios en las relaciones fuerza desplazamiento
En la Figura 6-L 1 se ilustra, desde el punto de vista de la energía disipada, el error en
que se incurre al localizarse en un nivel de fuerza algo mayor, para el primer caso; o en
un punto de mayor desplazamiento, por no detectar oportunamente el cambio en
velocidad, para el segundo caso.
La solución del problema se realiza utilizando la metodología presentada en la Sección
3.6, por medio de la formulación incremental del método de la aceleración lineal.
Cuando el método se quiere implementar dentro de un programa de computador, la
manera más sencilla de obtener en cada incremento de tiempo la fuerza en el resorte
apropiada consiste en generar un sistema de ejes de coordenadas auxiliares cuyo origen
se coloca en el punto donde se inicia una descarga.
u
x
Figura 6-22 - Ejes de coordenadas auxiliares para manejar cada
ciclo de descarga en el modelo elastoplástico
En la Figura (-)-22 se presentan los ejes de coordenadas auxiliares que se utilizan para
determinar la fuerza en el resorte. Una vez se detecta el inicio de la descarga a través
de un cambio en el signo de la velocidad, los valores de la fuerza y la deformación en
ese punto de denominan Ym y Xm respectivamente, y allí se coloca el origen de un
sistema de coordenadas, en el cual se describen las coordenadas del punto A de
laG
fluencía, como Ya Y x". De esta manera se dispone de la información para poder calcular
la fuerza real en el resorte. Este sistema de coordenadas es fijo hasta que se presenta
un nuevo cambio de signo en la velocidad, anunciando un ciclo de descarga.
Estudiemos ahora, la respuesta elasto-plásríca de sistemas de un grado de libertad
sometidos a una excitación dinámica en su base. Para el efecto utilizamos el sistema
mostrado en la Figura 6-23. El sistema consiste en una masa soportada por un elemento
estructural cuyas relaciones fuerza-deformación son conocidas, y además tiene un
amortiguador viscoso. La variable Xo describe los movimientos de la base de la
estructura, y la variable x describe la posición de la masa con respecto a la base de la
estructura.
I
1
I
En la Sección 2.5 se encontró la ecuación diferencial de equilibrio, ecuación (2-71), que
rige la respuesta dinámica de sistemas linealmente elásticos ante una excitación en su
base. Por comodidad, a continuación, se transcribe la ecuación (2-71); llamándola (6-2).
(6-2)
mü + en + ku= -mxo
En esta ecuación u = x - X o , u = x- ;';0 ,y Ü o == x- xo ' La aceleración que tiene el terreno
corresponde a xo ' o sea que un acelerograma estaría representado por esta variable. La
constante rn corresponde a la masa; e a la constante del amortiguador; y el producto ku
debe convertirse en la función Fr(x), la cual está descrita por las relaciones fuerzadeformación del elemento estructural, en este caso las del modelo elastoplástico.
t---t--:x
amortiguador
elemento
estructural
(a)
~
(b)
Figura 6-23 - Sistema de un grado de libertad sometido a un acelerograma en su base
Con el fin de mostrar los resultados que se obtienen utilizando un modelo
elastoplástico, se somete a los primeros -t segundos del acelerograma de El Centro el
sistema dinámico mostrado en la Figura 6-23, el cual tiene un período de vibración T,
igual a 1 segundo; y en este caso sin amortiguamiento. Se prescribe que el nivel de
fluencia del elemento estructural de soporte es de 20% del peso del sistema. O sea:
F, = 0.2 mg =0.2W, siendo W el peso del sistema, igual a mg. El sistema tiene resistencia
simétrica, por lo tanto para el lado negativo de la resistencia se tiene el mismo
valor: -F, = 0.2 rng = 0.2W.
De acuerdo con el Capítulo 2, el período de vibración está definido como:
T
= 21t =21t ¡;;
ro
VI;
y la rigidez es, entonces:
Dado que se tiene un período T de un segundo, y suponiendo una masa unitaria de
ID = 1 kg, la rigidez inicial del sistema es k:::: 4'¿ :::: 39.5 N/m. El valor de la fuerza de
fluencia del sistema es: F, :::: 0.2 ID g :::: 0.2 . 1 ·9.8:::: 1.96 N (W es por lo tanto 9.8 N). El valor
de la deflexión de fluencia Uy, tal como se define en la Figura 6-19; es entonces, igual a:
U y :::: Fy 1k :::: 1.961 39.5 :::: 0.050 m :::: 50 mm. La respuesta se obtiene utilizando el método
incremental de aceleración lineal presentado en la Sección 3.6, el cual está
implementado en el programa R~SDlN, como se explicará en la Sección 6.5.
Acelerograma de El Centro, 1940
DA
0.2
(g)
Ciclos de histéresis
0.0
,....,..~¿-f\-l---+-+Ql-I--~7H-'~
Tiempo (s)
Fuerza (1/ W)
-0.2
-DA
0.2
(a)
e
d
Desplazamiento
100
e
50
(mm)
O +--=-'F---~\-t-J'-----'\---\-~\-I-- Tiempo (s)
50
'
-100
1
-100
50
100
Desplazamiento (mm)
(b)
e b
Fuerza
DA
0.2
-50
a
d e
(d)
(11 W) 0.0 -¡.......=-4--....>.L\+/-h-+--+-1- Tiempo (s)
·0.2
-0.4
Figura 6-24 - Respuesta de un sistema elastoplástico con T = 1 s y F y = O.20W al ace;erograma de El Centro
En la Figura 6-24 se presenta la respuesta de los 4 primeros segundos. En (a) está el
aceler ograma, con las aceleraciones expresadas como fracción de g; en (b) se muestran
los desplazamientos relativos u, que tiene el sistema, en mm; en (e) la historia de las
fuerzas, expresadas como fracción del peso del sistema, W; y en (d) los ciclos de
histéresis en términos de fuerza-desplazamiento. En todas estas gráficas están
marcados los puntos donde hubo cambios en la relación fuerza desplazamiento del
elemento estructural.
Vale la pena resaltar que nunca se excede la fuerza de fluencia, hecho concordante con
el modelo elastoplástico de histéresis. Los puntos de inicio de descarga están
localizados siempre en un valor máximo del desplazamiento, el cual corresponde
siempre a un punto de velocidad cero, dado que la velocidad es la derivada contra el
tiempo del desplazamiento. También debe notarse que el punto de primera fluencia, en
este caso en la dirección negativa, punto b; efectivamente ocurrió un desplazamiento de
50 mm, como se muestra en 6-24(b) y (d).
En la Figura 6-2::; se muestra la respuesta hasta los 15 segundos del temblor de El
Centro de 1940 (el acelerograrna tiene una duración de 53 s y se muestra completo en la
Figura 4-10). En la misma Figura (-)-25 se dibujó la respuesta de un sistema con
Fy :::: 0.4 IDg:::: 0.4W, y la del sistema elástico correspondiente.
188
En 6-25(a) se muestran los ciclos de histeresis del sistema con F, = O.2W, y en (b) los del
sistema con F, = O.4W; en (e) se muestra la respuesta en desplazamiento de los tres
sistemas; en (d) la historia de las fuerzas en el elemento estructural; y en (e) las
localizaciones en donde hubo fluencía para los dos sistemas inelásticos.
Ciclos de histéresis
Fuerza (11 W)
Fuerza (11 W)
0.5
Fy = 0.2 W
-150
0.5
0.4
Fy = 0.4 W
0.3
0.4
0.3
-lOO
-ISO
-lOO
·0.3
-0.4
(a)
-0.4
-0.5
250
200
T
t
(b)
-0.5
Elástico
Desplazamiento
150
100
50
(mm)
O +-~~""""'~--Ilc+1llf--1r+:1L.....jI"+A'----!,.--+¡""'-'r~\-+Nt-+t---\-tF'\-ic+-''f---tI-\-~-iI-\,..ff--+l-''-1L-<
·50 t
I
-lOO
t
:: t
1
-250
l.°f
Elástico
Fuerza
0.8
0.6
~t
(1/ W) 0.0
-0.2
r.
!\ ...
O.4t
~
+--J--~t-l---1M-11--\-+J-\-+JI--~¡..q..c4C~---IA.~~.cv:-~-II4..J,..i-.:~
. . \ ~l\V
1.1.
11, í ' 5
V
-0.4
Tiempo (s)
-0.6
(d)
-0.8
-1.0
0.4
T
F y= O.4W
Fluencia
tF y=O.2W
0.2
0+----f---+--..----.......----+---4-----+--...I+-.--+----+----<----IL-,.--~_,_+_____<
9
10
11
14
15
-0.2
(e)
Tiempo (s)
-0.4
Figure 6-25 - Respuesta efesistemas e,'asioplásticos con T
189
= 1 s, al acelerograma de Ei Centro
nómica es! ructural aplicada (1/ diseño
SISI1lIC()
.3.3 Modelo de Ramberq-Osqood
Un modelo de hisreresís que se ajusta a las curvas fuerza-deformación de varios
materiales, fue desarrollado por W. Ramberg y \V. R. Osgood en 1943 [Ramberg y
Osqood, 1943]. El modelo está descrito por la siguiente ecuación:
(6-3)
:, t
Rigidez curve esqueleto
Rigidez Origina/1
.6--/
FlF y
/-6,
-4-
1.L
~~_-w
I
i
I
"}'
I
Rigidez en el
punto de fluencia
Curva esqueleto
I
/1
I
u
!~
Uy
"1
J
deformación
permanente
Figura 6-26(b) - Definición de las rigideces
dentro del modelo de Ramberg-Osgood
Figura 6-26(a) - Definición de F y Y u y
dentro del modelo de RaMberg-Osgood
La definición de F, y Uy. está basada en la medición del limite proporcional en el ensayo
de un material inelástico por el método del corrimiento, como se muestra en la Figura
6-26(a). El parámetro a define la rigidez de la curva esqueleto, k Cfl véase la Figura
G-26(b); y está relacionada de la siguiente manera con la rigidez original k g ; como se
muestra en la Figura 6-7:
k
-
cr -
( +a1)
-- k
1
F
Fy
(6-4)
g
o.= 0.8
0.=0
t
o.=I 1.0
I
2
Figura 6-27 - Influencia del valor del parámetro a
El exponente r, en conjunto con a, define la rigidez en el punto de fluencia, k., de la
siguiente manera:
140
(6-5)
y
(6-6)
r=8
r=2
a=O.O
a=O.2
r
a=O.O
=16
a=O.O
1.5,-----,-----¡_-¡---.,-_,---,
a=O.8
a=O.2
a=OA
a=O.8
a=1.6
1.0 +---+----,H--A--AI-7"-Jr<SoIa=2.0
a=O.2
a=OA
a=O.8
a=1.2
a=2.0
I.Ot-I~~~~~4a=1.6
1.0 .J---t-1~~~~F'
a=1.2
I
a=1.6
a=2.0
0.5
0.5
1.0
1.5
2.0
2.5
3.0
0.0
I
~---I----'--I----J-_¡_--1
0.0
0.5
u/u y
1.0
1.5
2.0
2.5
3.0
ulu y
Figura 6-28 - Influencia del valor del exponente r en el modelo de Ramberg-Osgood
En las Figuras 6-27 y 6-28 se muestra la influencia de los parámetros ex y r en la forma
de la curva de histéresis. En la medida que r se vuelve mayor, la forma de la curva se
hace similar a la de un modelo elastoplástico; al cual es igual, teóricamente, cuando
r =oo. La solución del problema se realiza de una manera análoga a la del modelo
elastoplástico, utilizando la formulación incremental del método de la aceleración lineal
de la Sección 3.6. Al implementar el modelo dentro de un programa de computador,
para describir en cada incremento de tiempo la fuerza en el .resorte apropiada, hay
necesidad de generar un sistema de ejes de coordenadas auxiliares cuyo' origen se
coloca en el punto donde se inicia una descarga.
F~
y
Ya
u
punto donde se ; ' !"=---;;------,;;>¡
inicia :a descarga
x
Figura 6-29 - Ejes de coordenadas auxiliares para manejar
cada ciclo de d13scarga en el modelo de Ramberg-Osgood
En la Figura 6-29 se presentan los ejes de coordenadas auxiliares que se utilizan para
determinar la fuerza en el resorte. Una vez se detecta el inicio de la descarga a través de
un cambio en el signo de la velocidad, los valores de la fuerza y la deformación en
ese punto de denominan Ym y X m respectivamente, y allí se coloca el origen de un
sistema de coordenadas, en el cual se describen las coordenadas del punto A de
1
141
lJill(¡¡Il/c(/ eSlrltClIlHII
IlJlIIUH'U ' " 'lO'"
" " "._. __
fluencia, como Ya Y Xa. De esta manera se dispone de la información para poder calcular
la fuerza real en el resorte.
Este sistema de coordenadas es fijo hasta que se presenta un nuevo cambio de signo en
la velocidad, anunciando un ciclo de descarga. Allí se indica la rigidez original elástica
del sistema, k g; la rigidez de la curva esqueleto, k cr ; Y la rigidez en el punto de fluencia,
ks. Esta última corresponde generalmente, al aumento en resistencia generado por
endurecimiento por deformación del materiaL Fs importante anotar que el modelo
coloca como rigidez en la descarga una rigidez igual a k g , por lo tanto para niveles
pequeños de fuerza la rigidez es igual a la del sistema elástico originaL
Utilizando el mismo sistema que se empleó para describir el modelo elastoplástico, o
sea un sistema con un período de vibración T, de 1 segundo, y sin amortiguamiento
viscoso. En la Sección 6.3.2 se mostró que la rigidez de un sistema con período T, es:
k = 4 -¡¿ m rr 2 • Tomando m = 1 kg, entonces k g =4 -¡¿ = 39.48 N/m.
Para efectos de la aplicación del modelo de Ramberg-Osgood, tomamos un sistema con
una fuerza de fluencia igual al 20% del peso de la masa del sistema: F, = 0.2 ro g
=0.2 ·1·9.8 =1.96 N (W es por lo tanto 9.8 N). El valor de la de flexión de fluencia Uy, tal
como se define en la Figura 6-26; es entonces, igual a Uy =Fy / k =1.96/39.5 =
0.050 m = SO mm. Definimos que la rigidez de la curva esqueleto es igual al 75% de la
rigidez inicial, o sea: kcr =0.75 k g , lo cual implica que 1/ (1+eL) =0.75 Y eL = 0.333. La rigidez
en el punto de fluencia la definimos como el 15% de la rigidez inicial, por lo tanto:
k., =0.15 kg , Y = 0.15, Y r = (1 / e) (1Iy - 1) = 17.017. En la Figura 6-30 se muestran los
primeros -l segundos de la respuesta de este sistema al acelerograma de El Centro.
0.40j
Acelerograma de El Centro, 1940
I
0.20\
i
(g) 0.00
i:!""'V'\----+l"-+---\o,jI-\-l-f;\HI<-:-tl-'\tr<
-0.201
tiempo (s)
e
Ciclos de histéresis
i
-0.40 1
100
(a)
Fuerza (1/ W)
0.3
Desplazamiento
e
e
0.2
50
(mm) O","",=~~-\-7.t--t-"""----\-4tiempo (s)
-100
-50
g
-100
0.4
50
100
Desplazamiento (mm)
Fuerza
0.2
(11 W) O"'"""=A-::--=-~f--\---;.-I--\--<4 tiempo (s)
-0.2
-0.4
Figura 6-30 - Respuesta de un sistema con T = 1 s y F y = O.2W con un modelo dE
Ramberg-Osgood a los primeros 4 s del temblor de El Centro
142
En la Figura 6-31 se muestra la respuesta hasta los 15 segundos del temblor de El
Centro de 19~O (el acelerograma tiene una duración de 53 s y se muestra completo en
la Figura -l-Ll ), En la misma Figura 6-31 se dibujó la respuesta de un sistema con F y =
0.4 mg = 0.4W, y la del sistema elástico correspondiente. En 6-32(a) se muestran los
ciclos de histéresis del sistema con F, = 0.2W, y en 6-32(b) los del sistema con Fy = 0.4W.
Desplazamiento
250
Elástico
200
-----,~.
Fy=O.4W
150
F y=O.2W
100
50
(mm)
tiempo
O-+-...-l'-"'-\+t-+H/l-Hf----1JK-+-J'~-1'I-'~~HA__lf'J'~jL\\H_II_'W__H_!I'H__\__\f__j
(s)
-50 O
-100
-150!
-200
-250
Figura 6-31 - Respuesta de un sistema con T= 1 s con un modelo de
Ramberg-Osgood a los primeros 15 s del temblor de El Centro
Fuerza (11 W)
Fuerza (11 W)
0.4
F y = 0.2 W
T
0.4
Fy
0.3
= 0.4 W
0.3
>----+----+-/---.....Jf¡I-;(fI-#--+---+-.--.....-j
·100
-1;'9
50
100
¡"50
Jrkspl:¡,¡tamlenw (mm)
-0.3
-0.3
-0.4
-0.4
(a)
(b)
Figura 6-32 - Ciclos de histéresis de la respuesta mostrada en la Figura 6-31
6-2~ y 6-31 puede observarse que no existen grandes
diferencias en las respuestas obtenidas, expresadas en términos de desplazamiento,
entre el modelo elastoplásrico y el modelo de Ramberg-Osgood. Esto es de esperarse
dado que la diferencia en la energía disipada en un modelo y el otro está dada por la
forma como se llega a la fluencia, la cual en el modelo de Ramberg-Osgood es más
gradual. Esta es una de las razones de la popularidad del modelo elastoplástico, pues se
obtienen resultados relativamente iguales con mucho menos esfuerzo numérico. Estos
dos modelos no pueden simular degradación de rigidez ni de resistencia, por lo tanto
su aplicación en estructuras de concreto reforzado está limitada a elementos que no
tienen ninguna de las dos. En la siguiente Sección se presentan modelos que pueden
simular la degradación de la rigidez, pero con mucho más trabajo numérico.
,-\1 comparar las Figuras
6.3.4 Modelos con deqradacion de la riqidez
Con base en ensayos experimentales realizados en mesas vibratorias, fue posible
plantear y luego verificar modelos de histéresis que se ajustaran de una manera mejor a
lo que se observaba experimentalmente. El primer modelo que logró describir de una
14:-3
manera adecuada, dentro de una precisión aceptable, la respuesta de estructuras de
concreto reforzado con características de degradación de la rigidez fue el modelo de
Takeda [Takeda, Sozen y Nitsen, 1970]. En este modelo la respuesta se describe por
medio de segmentos rectos. La parte matemática del modelo es algo compleja dada la
gran cantidad de posibilidades de rigidez durante la recarga y la descarga del elemento.
Posteriormente se han realizado numerosos estudios donde se han evaluado las
bondades de diferentes modelos, muchos de los cuales permiten realizar
simplificaciones importantes que reducen el trabajo numérico. Algunos de estos
estudios se presentan en las siguientes referencias: [Otani y Sozen, 1972], [Riddell y
Newmark, 19791. [Saiídi y Sozen, 19791, [Abrams, 19851. [Abrams, 19911, y [Saatciog/u,
1991].
Ha sido tradicional manejar los modelos de hísteresís por medio de una descripción
consistente en segmentos rectos, que se encuentran en el punto donde ocurre un
cambio abrupto en la curvatura. Estos cambios de curvatura conducen dentro del
algoritmo de respuesta dinámica a la necesidad de introducir reducciones en el
incremento de tiempo, tales como la descrita en la Sección 3.().
Fl
X ma x
e
y
ks 7
/
Xab
U
Yl
punta donde se /
inicia la descarga
uy
x
"m
Figura 6-33 - Descripción del modelo de histéresis con degradación de la rigidez
Con base en lo presentado por Abrams [Abrams, 19851, es posible implementar un
modelo en el cual la formé'. del ciclo de histérests se define por medio de segmentos
cúbicos y lineales. Se emplean cuatro segmentos para describir un ciclo de carga Que se
inicia como descarga del ciclo anterior, tal como se utilizó en la descripción de los
modelos elastoplástico y de Ramberg-Osgood. Estos segmentos, de acuerdo con las
rigideces definidas en la Figura 6-7, se presentan en la Figura 6-33 y describen lo
siguiente:
a) descarga lineal, con una rigidez k,
b) estrangulamiento causado por la inversión de la fuei za, con una rigidez
igual a la rigidez de recarga o de nueva carga, k,
c) rigidización gradual debida a que se cierran las fisuras, seguida por una
degradación a niveles altos de carga
d) resistencia en fluencía, con una rigidez igual a k sLa curva cúbica describe el segmento el, La curvatura se hace más pronunciada en la
medida que la separación entre los puntos B y C se hace mayor. Esto reflej a
adecuadamente el fenómeno físico, en un elemento de concreto reforzado, causado por
el hecho de que las fisuras se cierran a niveles bajos de carga; y al efecto de
Bauschinger en el acero de refuerzo a niveles de carga mayores.
En el caso de un elemento en que se presente deterioro de la adherencia, cuando se
inicia el ciclo de descarga, las fisuras se tienden a cerrar y las barras de refuerzo
tienden a volver a su posición original, lo cual produce una reducción importante en la
144
I
t
I
rigidez. Cuando las fisuras están totalmente cerradas, y el refuerzo ha desarrollado un
anclaje adecuado para la nueva dirección de la fuerza, se aprecia un aumento en la
rigidez. Inicialmente la rigidez entre los puntos A y B es la equivalente a una sección
compuesta únicamente por el refuerzo, correspondiente a k., Esto se simula en el
modelo utilizando una rigidez ~k.. con el parámetro ~ = 1. En la medida que se aumenta
la amplitud de los ciclos y la adherencia se deteriora el valor de ~kr se disminuye en
función de la máxima deformación obtenida en la misma dirección de carga en un ciclo
previo, xmax . A un valor prescrito de la deformación A.Uy, el cual es función de la
deformación de fluencia, UY' se supone que toda la adherencia ha desaparecido y la
rigidez Bk, se convierte en cero, utilizando ~ = O. El parámetro A. toma valores entre 4 y
10, dependiendo del tipo de elemento.
La deformación en el inicio de la rigidización, <XXab, está relacionada así mismo con la
máxima deformación obtenida en la misma dirección de carga en un ciclo previo, x max .
Esta deformación aumenta en la medida que no se abran nuevas fisuras antes de que se
cierren las preexistentes. Con el deterioro de la adherencia del refuerzo esta
deformación también se aumenta, variando el valor de a desde O hasta 1 en función de
11.. El modelo supone una interacción lineal entre A. y a; y con un exponente igual a 1.5
entre A. y ~, respectivamente. En la Figura 6-34 se muestran los valores que toman a y ~
en función del parámetro 11..
o
L-
--'=-.....
_~_
o
Figura 6-34 - Idealización del efecto de deterioro de la aciherencia del acero de refuerzo
I
En elementos de concreto reforzado donde no se presente un deterioro apreciable de la
adherencia, como ocurre en muros estructurales solicitados prírnordíalmente el: flexión
y cuyo refuerzo esté adecuadamente anclado, la rigidez entre A y B no tiene la
degradación descrita anteriormente y debe modelarse utilizando la misma rigidez del
ciclo de descarga k g , o un valor algo menor para describir algún efecto de cerrado de las
fisuras. En caso de que se prescriba una rigidez ~kr mayor que la rigidez promedio
entre A y C, el modelo elimina el segmento AB del modelo. En este caso, el modelo de
histéresis resultante se asemeja al modelo de Rarnberg-Osgood.
La dimensión F, corresponde a la resistencia al inicio de la fluencia, como se obtendría
de la curva primaria de carga, por ejemplo del diagrama momento-curvatura de la
sección. Así mismo la pendiente k, está relacionada con el efecto de endurecimiento por
deformación en el acero de refuerzo. Debido a que durante la respuesta a un
movimiento sísmico se presentan varias reversiones de dirección dentro del mismo ciclo
de carga, el algoritmo toma en cuenta estas descargas dentro de cualquier tramo de la
curva. Se supone comportamiento lineal si se presenta descarga antes de que se
presente un cambio en el signo de la fuerza, Figura 6-35(a). De igual manera, si se
presenta recarga después de que haya cambiado el signo de la fuerza, pero sin que se
presente un cambio de signo de la deformación, el modelo supone un ciclo de recarga
sin aplicar degradación de la rigidez debida a la disminución de la adherencia, Figura 6.
35(b).
14.'5
F
F
X max
punto donde se
Inicia la descarga
X ma x
Antes de que cambie el signo de la fuerza
Antes de que cambie el signo de la deflexión
(a)
(b)
Figura 6-35 - Procedimiento para manejar reversiones en la recarga
El procedimiento para detectar los cambio de velocidad dentro del algoritmo puede ser
el mismo descrito en la Sección 3.6. Utilizando el mismo sistema que se empleó para
describir los modelos elastoplástico y de Ramberg-Osgood, o sea un sistema con un
período de vibración T. de 1 segundo, y sin amortiguamiento viscoso: se puede
encontrar la respuesta ante el mismo acelerograma de El Centro, pero empleando el
modelo de rigidez degradante descrito anteriormente. Al igual que para los dos
modelos de histéresis anteriores, la rigidez del sistema con período T, es: k = 4 .,¿ m rt', y
tomando m = 1 kg, entonces la rigidez es k =4"¿ = 39.48 N/m. Se toma, de igual manera,
un sistema con una fuerza de fluencía igual al 20% del peso de la masa del sistema:
F, =0.2 m g =0.2 . 1 ·9.8 =1.96 N. Se supone, para efectos de esta presentación, que la
rigidez del sistema con período dí' 1 s, corresponde a la rigidez fisurada, k cr .
0.4
Aeelerograma de El Centro, 1940
(g)
e
o
tiempo (s)
Ciclos de histéresis
-0.2
-0.4
150
Fuerza (1 / W)
1
o,¡
(a)
100
d
0.1
50
(mm) O
tiempo (s)
-150
-50
-100
100 150
Desplazamiento (mm)
-100
-150
0.4
d
0.2
Desplazamiento
(b)
1
g
0.2
-0.3
(d)
(lIW) O
tiempo (s)
-0.2
-0.4
(e)
Figura 6-36 - Respuesta de un sistema con T= 1 s y F y = O.2W con un modelo de rigidez
degradante a los primeros 4 s del temblor de El Centro
]4fj
I
It
I
d
0.2
I
I
La rigidez de descarga, se supone igual a la rigidez fisurada, por lo tanto k, = k.or. La
rigidez en el punto de fluencia, k., la definimos como el 15% de la rigidez inicial, por lo
tanto: k, =0.15 kcr . La rigidez de recarga, k" se define como el 40% de la rigidez fisurada,
entonces: k, = 0.40 kcr • El número de ciclos de deformación inelástica que se requieren
para que se degrade totalmente la adherencia del refuerzo se fija en 8, por lo tanto
A = 8. En la Figura 6-36 se muestran los primeros 4 segundos de la respuesta de este
sistema a! acelerograma de El Centro.
En la Figura 6-37 se muestra la respuesta hasta los 15 segundos del temblor de El
Centro de 1940. En la misma figura se dibujó la respuesta de un sistema con F, =0.4 mg
=0.4W, y la del sistema elástico correspondiente. En la Figura 6-38(a) se muestran los
ciclos de histeresís del sistema con Fy = 0.2W, yen (b) los del sistema con F, = O.4W.
Desplazamiento
250f
200
150
I
100
t
Elástico
I
I
50
(mm)
O
+-
AM~l-+l-l--\--\H-l-1\--N+-\lJH-\,ft-.4~HP\--1o\..,¿.¡¿+~~+,.;bU\+_Il_~__tV_I:..t\\i
-504-
::tt
-200
-250
_L
Figura 6-37 - Respuesta de un sistema con T= 1 s con UII modelo de rigidez
degradante a los primeros 15 s del temblor de El Centro
Fuerza (1/ W)
Fuerza (1/ W)
-;
I
Fy=O.2W
Fy=O.4 W
50
-200
100
150
200
-200
50
Desplazamiento (mm)
-0.3
-0.3
-0.4
-0.4
-0.5
too
150
200
Desplazamiento (mm)
-0.5
(a)
(b)
Figura 6-38 - Ciclos de histéresis de la respuesta mostrada en la Figura 6-37
--\1 comparar la respuesta del sistema histeretico de rigidez degradante, con la obtenida
para los modelos elastoplástico y de Ramberg-Osgood, puede observarse que hay
diferencias importantes entre estos dos y el modelo que toma en cuenta el
estrangulamiento de los ciclos de histeresís y la degradación de la rigidez.
Esto se debe a que el último modelo hísterétíco presentado disipa menos energía que
los otros dos. Las dos diferencias más importantes son: mayores desplazamientos en el
caso del modelo histeretíco con degradación de la rigidez, para los dos casos de
resistencia a la fluencia; y variación en el período de la respuesta, pues en el caso del
modelo con degradación de la rigidez el período de vibración se hace mayor en la
147
Dinámica estructural apuccuui
UI
"J..... "
({I:>l'/IV ..
medida que se presenta más degradación. Este último efecto es más notorio para el
sistema con menor resistencia a la fluencia.
6.4 Conceptos de ductilidad, tenacidad y capacidad
de disipación de energía
En este momento es conveniente introducir algunos términos asociados con la
respuesta inelástica de elementos estructurales, los cuales se emplean posteriormente
para definir y calificar diferentes patrones de ccmportamiento.
Iniciamos con el concepto de ductilidad. Si tenemos un sistema elastoplástíco, en la
Figura 6-39, se muestra la carga y posterior descarga del sistema. El sistema responde
elásticamente al inicio de la carga, hasta que llega a la fuerza de fluencia, Fy . En este
sitio hay un desplazamiento asociado, Uy, el cual se puede obtener de U y = F y I k. Si el
sistema se sigue cargando, la respuesta es totalmente plástica. En el punto de
desplazamiento Um se descarga el sistema. Esta descarga en el sistema elastoplástico
ocurre en una línea que tiene la misma pendiente, k, de la curva de carga original.
falla
,..-----r------/
1\
i
Uy
Uro
uu
desplazamiento
Figura 6-39 - Curva fuerza-desplazamiento material e/astoplástico
La ductilidad de desplazamiento que alcanza el sistema se puede definir como:
(6-7)
Esta ductilidad se denomina ductilidad solicitada, o demanda de ductilidad; pues
corresponde a la máxima ductilidad que se le solicita al sistema. La capacidad de
ductilidad. corresponde a la máxima ductilidad que se le puede exigir al sistema, y se
determina con la misma ecuación (6-7), pero empleando u..
Cuando se tiene una respuesta hísteretíca elastoplástica, como la mostrada en la Figura
6--10, la ductilidad solicitada en el sentido positivo se determina utilizando:
11
r-
+
+
Um
=--¡-, donde u"y
uy
F+
(6-8)
=_Y-
k
y el sentido negativo:
(6-9)
148
I
Desplazamiento
Figura 6-40 - Ductilidad dentro de los ciclos de histéresis, material elastoplástico
Esta definición de ductilidad sólo es estrictamente exacta para un material
elastoplástico. Cuando el material responde de una manera diferente al sistema
el isroplástico, el concepto es extensible; pero debe manejarse con algo de cautela, pues
muchas veces el desplazamiento de fluencia no está tan claramente definido..Algunas
veces, cuando se trata de sistemas que responden de una manera diferente al sistema
elastoplastico, el mismo parámetro se denomina coeficiente de daño, y se utiliza el
mismo símbolo, ¡.t, para denominarlo.
Siempre debe indicarse el parámetro que se utilizó para determinar la ductilidad, pues
el no hacerlo puede conducir él interpretaciones erradas. Cuando la ductilidad se
determina en el diagrama esfuerzo-deformación de un material, la ductilidad se
denomina ductilidad de deformación. Cuando la ductilidad se 'mide utilizando
curvatura, como puede ser el caso en un diagrama M-~, Figura 6--!, se denomina
ductilidad de curvatura. Si se utiliza la rotación, e, sobre la elástica, como es el caso de
la-iutaciÓ~-que-ocurre
una articulación plástica (veanse la Tabla 6-1 y la Figura 6-5)
se denomina ductílídaiL.tfe......l1lliJc.ián,,-SLse utiliza la deflexíón, o desplazamiento Ó, como
muestra la Fígura 6-5; se denomina ductilidad de desf!lazamientQ.: Los diferentes valores
de ductilidad no son directamente co~bles. En general en elementos de concreto
reforzado, las ductilidades de deformación, ¡.t,< medidas en el material en una fibra de la
sección tienen valores mucho mayores que las ductilidades de curvatura, J.4; las cuales a
su vez son mayores que las ductilidades de rotación, f..4¡; las cuales por último son, a su
vez, mayores que las ductilidades de desplazamiento, ¡.Lo; él pesar de que describan el
mismo fenómeno. Las siguientes definiciones dadas en la norma ATS 100-97 [AIS, 19971
y en las nuevas normas sismo resistentes colombianas NSR-98 [AI~~ 1998], resumen lo
anterior:
-en
Ductilidad - Capacidad que tiene un material estructural de resistir, sin fallar,
deformaciones que lleven al material estructural más allá del límite elástico, o límite
donde las deformaciones son linealmente proporcionales al esfuerzo o fuerza aplicada.
(Véase capacidad de disipación de energía, pues muchas veces estos términos son
confundidos.) Dependiendo del parámetro que describe las deformaciones, la ductilidad
puede hacer referencia, entre otras, a:
(a) ductilidad de curvatura - cuando la ductilidad se mide con respecto a la
curvatura de la sección del elemento estructural. La curvatura se define como el
cociente entre el momento flector aplicado y la rigidez de la sección,
(b) ductilidad de rotación - cuando la ductilidad se mide con respecto a la
rotación que tiene un sector longltudinal del elemento estructural. La rotación se
define como la pendiente de la línea elástica del elemento medida con respecto
a la posición original del eje longitudinal del elemento,
(e) ductilidad de desplazamiento - cuando la ductilidad se mide con respecto
al desplazamiento o deflexión que tiene el elemento estructural. El
desplazamiento se mide con respecto a la posición original del eje longitudinal
del elemento, y
149
(d) ductilidad de deformación - cuando la ductilidad se mide con respecto a la
deformación unitaria de una fibra paralela al eje neutro de la sección.
El término tenacidad, (toughness en inglés) fue definido en la Sección 6.2.1, para un
material, como el área bajo la curva esfuerzo-deformación de cualquier material que se
lleva hasta la falla, y es una medida de la capacidad del material para absorber energía
por unidad de volumen. Este concepto ha sido extendido en la ingeniería sísmica a los
elementos estructurales. donde se define como la capacidad de resistir una seríe de
oscilaciones en eL rango inelástico de respuesta sín que se presente una disminución
crítica de su resístencia. En muchas situaciones se prefiere al término ductilidad, dado
que no se presta a equívocos.
Para efectos de ilustrar la posibilidad de que se presenten interpretaciones erradas con
el término ductilidad, en la Figura 6-41 se muestra la respuesta de dos elementos
estructurales, que se llevan monotónicamente a la falla por flexión. Los dos sistemas
tienen la misma resistencia a la fluencia, M", y tienen la misma capacidad de ductilidad
de rotación, que se ha fijado arbitrariamente para esta presentación en ¡.li¡ = 6. El sistema
A, tiene una rigidez cuatro veces mayor que la rigidez del sistema B.
Figura 6-41 - Elementos con la misma ductilidad ¡.li¡
=6 Y kA =4kB
Es evidente a partir de la figura que aunque los dos sistemas tienen la misma
ductilidad, su tenacidad, expresada en un sentido estricto como el área bajo la curva, es
mucho mayor para el elemento B. Debe, por lo tanto, tratarse con cuidado el termino
ductilidad, pues muchas veces el comportamiento de dos elementos con la misma
ductilidad ante cargas similares, es totalmente diferente.
-\hora se explicará qué se entiende por capacidad de disipación de energía. Supongamos
que tenemos dos sistemas dinámicos compuestos por elementos estructurales que
tienen la misma rigidez; uno de ellos es totalmente elástico, y el otro tiene posibilidad
de responder inelásticamente. Al someterlos a una excitación dinámica, como puede ser
el registro acelerográfíco de El Centro de 1940; se obtienen respuestas en
desplazamiento, cuyo desplazamiento máximo es diferente si al sistema inelástico se le
exigió más allá del límite elástico. En la Figura 6-42 se muestran dentro de un diagrama
de fuerza-desplazamiento, los dos sistemas. El valor de De corresponde al nivel máximo
de desplazamiento a que llega el sistema elástico. A este nivel de desplazamiento le
corresponde un nivel de fuerza en el elemento, F•. Puede decirse que este nivel de
fuerza es el nivel de resistencia mínimo que se requiere del sistema para que éste
responda en el rango elástico, ante la solicitación dada.
ISO
. s;
Fuerza
Fe
inelástico
Um
Desplazamiento
Figura 6-42 - Definición de la capacidad de disipación de energía
Ahora definimos el coeficiente de reducción de resistencia, Ro, por medio de:
(6-10)
De la ecuación anterior, puede verse que:
(6-11)
y
(6-12)
Con base en lo anterior puede decirse que la capacidad de disipación de enerqia de un
sistema inelástico de un grado de libertad, corresponde a la capacidad que tiene el
sistema para reducir la fuerza solicitada de un valor que tendría el sistema si
permaneciera elástico, Fe, a un valor de fluencia, F y • Esta capacidad de dísípecíón de
energía se mide por medio del coeficiente de reducción de resistencia, Rv. Se ha
utilizado el subíndice o para enfatizar que se trata de un coeficiente de reducción de
resistencia para sistemas de un grado de libertad. Este coeficiente está asociado con el
coeficiente de reducción de resistencia R que emplean los códigos de diseño sísmico,
pero para sistemas de varios grados de libertad.
Por ejemplo, para los sistemas utilizados en la presentación de los sistemas inelásticos
de la Sección anterior, se emplearon sistemas con F:. = 0.20W y F, = 0.40 W. El sistema
elástico, tal como se indicó allí, tenía una rigidez k = 39.-178 N/m, un período T = 1 s, y
una masa m = 1 kg. La respuesta máxima elástica que tiene un sistema con un período
de un segundo al acelerograma de El Centro es de 205 mm o 0.205 m, como lo
muestran las Figuras 6-2-l, 6-:)0 y 6-36. Para el caso con. r, = 0.20W = íl).20+9.8 = 1.96 N,
uJ = FyIk = 1.96/39.478 = 0.050 m. Entonces, Ro = uJu j = 0.205/0.050 = 4.1. Para el caso con
F y = 0.40W = 0.40+9.8 = 3.92 N, u, = FyIk = 3.92/39.478 = 0.099 m, y, Ro = uJUy =
0.205/0.099 = 2.07.
Las siguientes definiciones dadas en la norma AIS 100-97 [A/S, 1997] Y en las nuevas
normas sismo resistentes colombianas NSR-98 lA/S, 1998], resumen lo anterior y
enfatizan el hecho de que R, sin subíndice, hace referencia a sistemas de varios grados
de libertad:
Capacidad de disipación de energía - Es la capacidad que tiene un sistema
estructural, un elemento estructural, o una sección de un elemento estructural, de
trabajar dentro del rango inelástico de respuesta sin perder su resistencia, Se cuantifica
151
.JIIlUIIUC«(
l--':."
. )l, l(ll t I U \ U
uf"
'L.
_
por medio de la energía de deformación que el sistema, elemento o sección es capaz de
disipar en ciclos histeréticos consecutivos. Cuando hace referencia al sistema de
resistencia sísmica de la edificación como un todo, se define por medio del coeficiente
de capacidad de disipación de energía R. El grado de capacidad de disipación de
energía se clasifica como especial (DES), moderado (DMO) y mínimo (DM~.
Coeficiente de capacidad de disipación de energía, R - Coeficiente que se prescribe
para cada sistema estructural de resistencia sísmica, cuyo valor depende del tipo de
sistema estructural y de las características de capacidad de disipación de energía
propias del material estructural que se utiliza en el sistema. Es una medida de la
capacidad de disipación de energía general del sistema de resistencia sísmica cuando
los movimientos sísmicos hacen que responda inelásticamente.
6.5 Respuesta elástica equivalente a inetástica
Gulkan y Sozen, [Gulkan y Sozen, 19741 y lShibata y Sozen, 1976], demostraron
experimentalmente, que la respuesta de un sistema de concreto reforzado de un solo
grado de libertad, cuando se ve sometido a excursiones en el rango inelásrico puede ser
aproximada por medio del análisis elástico de un sistema substituto, lineal y elástico,
con rigidez reducida y amortiguamiento substituto. La rigidez a flexión del elemento del
sistema de un grado de libertad en la estructura substituto se relaciona con la rigidez
del elemento real de la siguiente manera:
(El) = (El),
s
(6-13)
11
Donde (EI)s es la rigidez a flexión del elemento de la estructura substituto, (EI)r es la
rigidez a flexión del elemento en la estructura real y 11 es un factor de daño aceptable
para el elemento de concreto reforzado.
J
M a o Mb
(EI)g
/ 0= M a x L
~I.
Ma(~Mb
$e(;ción_
No-Fisurada
/
/
I
L/2
/
/
U2
Figura 6-43 - Elemento en flexión
(1
/
~~
I~-'"
6~.JEI)r6fL
r
r
/'
/'
Sección Fisurada
/'
/'
'1
/'
./"""-- Estructura
Substituto
/'
~EI) ~= (EI)r ~
"r,
~ L
/'
/'
1
/'
Figura 6-44 - Diagrama Momento-Rotación
De acuerdo con lo presentado en las Figuras 6-43 y 6-44, donde se ve un elemento
sometido a flexión, debido a una carga horizontal aplicada sobre la estructura, el valor
(EI)r corresponde aproximadamente a la pendiente de una línea en un diagrama
momento-rotación, M-O, que va del origen al punto de fluencia.
La interpretación física del factor de daño 11 para una situación particular como puede
ser una viga moderadamente reforzada sometida a flexión, con momentos en sus
extremos como muestra la Figura 6-44, se representa estudiando la relación entre los
momentos en los extremos y el giro en ellos. En la Figura 6-44 la línea continua
representa la relación entre los momentos aplicados M, y el giro e, en el extremo
causado por la deformación a flexión dentro de la luz de la viga. El valor de (EI)r se
152
calcula utilizando la sección totalmente fisurada (relaciones esfuerzo-deformación
lineales y sin resistencia a la tensión del concreto). La relación M-e basada en (EI)r
corresponde aproximadamente a la línea recta dibujada del origen al punto de fluencia
de la sección bajo la condición de que tenga refuerzo simétrico y el acero de refuerzo
disponga de una zona de fluencia definida.
El factor de daño impone una rigidez menor, a través de la ecuación (6-13), e implica
que hay una rotación inelástica aproximadamente igual a Iley en el extremo de la viga,
siempre y cuando la rigidez a flexión promedio de la viga dentro de la luz cambie como
lo indica el diagrama M-O. Al respecto es importante anotar que el factor de daño Il es
comparable, pero no es exactamente igual a la ductilidad obtenida como el cociente
entre el giro máximo y el giro al nivel de fluencia. Sólo para sistemas elastoplásticos la
ductilidad es exactamente igual al factor de daño. Debe hacerse énfasis sobre el hecho
de que un factor de daño corresponde a una ductilidad mayor si ésta se calcula con
base en curvatura, por medio de un diagrama M-<j>.
El amortiguamiento substituto,
relación:
~,
depende del factor de daño, por medio de la siguiente
(6-1~)
El coeficiente /;. es una aproximación a la disipación de energía que ocurre durante la
respuesta hísterénca de un elemento de concreto reforzado sometido <'1 un sismo. Por lo
tanto la respuesta no lineal histerética de un sistema que alcanza un factor de daño ~ es
"quivalente a la respuesta lineal calculada utilizando un coefícienre de amortiguamiento
igual a /;..
A modo de ejemplo del tipo de respuesta que se obtiene bajo este procedimiento del
sistema substituto equivalente, en la Fígui a 6-~5 se muestra la respuesta en términos
de desplazamiento relativo entre la masa y el terreno, para un sistema que se somete a
los primeros quince segundos del acelerograma de El Centro. Allí se presentan la
respuesta de un sistema elástico con período T de 1 s y amortiguamiento de 2% del
crítico, y la de un sistema substituto con un coeficíenre de daño, ~t, de 6.
200
100
u
(mm)
-100
-200
Figura 6-45 - Respuesta en desplazamiento para un sistema elástico y un sistema
substituto con Il 6, al temblor de El Centro
=
Puede demostrase fácilmente que el período de vibración del sistema substituto, Ts , se
obtiene en función del período de la estructura real, T.. así:
Ts = T, . ~ = T; . 2A5 = 2.45 s
Aplicando la ecuación
(6-1~),
obtenemos el amortiguamiento substituto así:
I;s = 0.2{1-
~} + 0.02 = 0.138
En la Figura 6-46 se muestra la fuerza que se ejerce en el elemento estructural del
sistema.
0.8
»> elástico
0.6
0.4
fuerza
(11W)
0.2
tiempo (s)
o
15
-0.2
-0.4
-0.6
-0.8
.i
Figura 6-46 - Respuesta en términos de la fuerza ejercida en el elemento estructural para
un sistema elástico y un sistema substituto con ~ = 6, al temblor de El Centro
Si se desea extender este concepto de la estructura substituto a la respuesta de
diferentes sistemas estructurales a un temblor real, esto se puede llevar a cabo
utilizando el espectro de respuesta del sismo. El efecto en el espectro de la respuesta
inelástica, se obtiene entrando al espectro con el período correspondiente a la rigidez
substituto, ecuación (6-13), y leyendo la ordenada espectral correspondiente al
amortiguamiento substituto dado en la ecuación (6-14).
6.6 Efecto de la respuesta inelástica en el espectro
Qué ocurre con el espectro cuando el sistema no es elástico y el elemento estructural
tiene la posibilidad de cambiar de rigidez durante la respuesta es una pregunta
importante dado que los sistemas estructurales utilizados en general emplean
materiales que son capaces de responder en el rango inelástico. A continuación se
presenta la teoría clásica para sistemas elastoplásricos, y posteriormente las diferencias
cuando se trata de sistemas inelásticos con otras características diferentes al
elastoplástico.
6.6.1 Sistemas elastoplústicos
Newmark, en las referencias [Newmark y Hall, 1972], [Newmark, Blume y Kapur, 1973],
y [Newmark y Hall, 1982], describe la respuesta en el rango inelástico para sistemas
elastoplástícos con base en un sistema de un grado de libertad sometido a excitación en
su base, como el mostrado en la Figura 6-47.
Al querer dibujar en papel tripartita el espectro obtenido, se tiene la dificultad de que al
salir el sistema del rango elástico, las relaciones que permiten dibujar el espectro en
este papel, ecuación (5-11), dejan de ser válidas. Debido a esto, debe decidirse si el
espectro muestra las aceleraciones, o fuerzas, a que se ve sometido el sistema, caso en
el cual los desplazamientos leídos en este espectro corresponden a la porción elástica
de la deformación; o si el espectro muestra las deformaciones totales, y en este último
caso las aceleraciones que se leen en el espectro no corresponden a las aceleraciones
verdaderas a que se ve sometida la masa del sistema.
154
I
I
o
o
---r---X
--
...
~-_
...
Figura 6-47 - Si:,ema sometido a excitación en su base
En la Figura 6-48 se muestra el espectro de aceleraciones del temblor de El Centro para
diferentes valores de ductilidad alcanzada por sistemas elastoplástícos. El espectro se
calculó para un coeficiente de amortiguamiento de 2% del crítico. Las deformaciones
mostradas en este gráfico corresponden únicamente a la componente elástica de la
deformación y no es la deformación total, la cual es la suma de la parte elástica más la
porción ínelástíca,
I
Los "al ores de aceleración son los correctos. Los valores de velocidad leídos no
corresponden a las velocidades verdaderas. La figura se dibujó para ductilidades, Il, de
1, 1.25, 1.S, 2, 3, S Y 10. Este espectro se denomina espectro de aceleraciones máximas.
10
/
3
0.5
'fí
1/
/T,
0.1
0.04
/
s.>, JI>< t\
X /K
v/ ~ k0 ~~
2
0,2
0,5
5
'IJ. V 1/
~
'A'
3~ 1-- '"\
VJ
//
/i/
/
/
~~
<,
-' ......
~u
~
""
ti ~(¡~
v
/
0,1
r-.
~ Ir -,\ \'"
~
~
l' "
"\
'\
~ ::..... 'f\;
"'''''''I"~\ ~
I"\..~
\~
2
",
-.
''''
1
Período, T (s)
0.2
0,1
Figura 6-48 - Espectro de aceleraciones máximas para sistemas
elastoplásticos, ~ = 2%, Temblor de El Centro
Si se grafica el espectro colocando las deformaciones totales; conformadas por la
componente elástica más la componente ínelástica; se obtiene el espectro mostrado en
la Figura 6-49. Este espectro se conoce con el nombre de espectro de desplazamientos
totales.
Debe tenerse en cuenta que los desplazamientos que se leen en el espectro de la Figura
6-49, son los desplazamientos totales verdaderos, mientras que tanto las velocidades
como las aceleraciones que se Icen en este espectro no son las verdaderas. En los dos
espectros de las Figuras 6-48 y 6-49, el correspondiente a ductilidad Il = 1, es el
espectro elástico y por lo tanto es igual en ambos gráficos.
155
inámica estructural apticada 01 diseño
SIS111lCU
5
10
3
2
I
I
Á
"-
0.5
..
/ ¿.,-X '.: I~~,. ~~Xli/r\
I
/
-\~"
/./1
/ It- >\~
J\;~
~~,.),.."- .
-"l~ ,.J/}¡j
'\
"
'
<,
11
~,.,-
-,
/
.' "
0.5
V
/
,
0.3
0.2
«:
'~?3/
/./
.¡
0.1
: IJ ):11
¡J/ I!
~)
-,
C:111 il)ál
/
/
/
-1'0
1"-
.
'"\.'\.
.\"'T\' \\ !"- 2
'.
'
'~.
V
~//1
.-
'
1"\.
/
/
\1'
lr5
I
I
11
I
I i
i
II
D.1
Ii
I~:
!"-
i I! i
10
0.5
Período, T (s)
Figura 6-49 - Espectro de desplazamientos totales para
sistemas elastoplásticos,
~
= 2'}1o, Temblor de El Centro
Del estudio de gráficos similares a los dos anteriores, para numerosos temblores,
Newmark y Hall obtuvieron las siguientes conclusiones:
(a) Para períodos altos los desplazamientos totales máxírnos para cualquier demanda de
ductilidad j..l son prácticamente los mismos.
(b) Para períodos cortos la máxima aceleración es la misma para cualquier demanda de
ductilidad p, lo cual quiere decir que las fuerzas ejercidas por los resortes son las
mismas.
(e) E,1 el ranga de períodos intermedios la energía que absorbe el sistema elástico y el
inelástico es la misma.
Las zonas son las mismas que se definieron en la Sección 5.5. Los valores del período
de vibración que limitan estas tres zonas varían para cada acelerograma en particular.
Este aspecto será discutido con mayor detalle en las Secciones 6.6.2 y 6.7.
Según Newmark, es posible encontrar la relación entre el espectro elástico y el
inelástico. Partiendo de que se dispone de un espectro elástico (j..l = 1), el cual para
cualquier período T, tiene como valores De, Ve Y A; donde se ha colocado el subíndice e
para enfatizar que se trata de valores del espectro elástico; y se quiere relacionar con un
espectro inelástico donde para el mismo período se tienen unos valores máximos Dm , Vm
y A m en cada una de las regiones del espectro (sensitiva al desplazamiento, a lo
velocidad y a la aceleración respectivamente) donde se ha colocado el subíndice m para
indicar que se trata de valores provenientes del espectro inelástico, la relación entre los
dos se puede obtener de la siguiente manera:
Espectro de desplazamientos totales
Para el espectro de desplazamientos totales, en la zona de períodos altos, de acuerdo
con la conclusión (a), el desplazamiento ínelástico es igual al elástico:
(6-1 S)
156
II
I
I
Para el rango de períodos intermedios, partiendo de que la conclusión (e) es válida; la
energía en el sistema elástico es igual a la energía en el sistema inelástico. Por lo tanto:
(6-16)
La energía cinética máxima en el sistema elástico, de acuerdo con la ecuación (I -8); es
igual a:
(6-17)
y para el sistema inelástico esta energía es igual a la energía de deformación acumulada
en el resorte, la cual corresponde al área bajo la curva de fuerza-deformación
presentada en la Figura 6-50.
(6-18)
fuerza
FY~
I
Fy=ku y
I
I
u
desplazamiento
Figura 6-50 - Cálculo de la energía de deformación en el resorte inelástico
por lo tanto al reemplazar (6-17) y (G-18) en la ecuación (6-1G) se obtiene:
1
I
(6-19)
y reordenando:
(G-20)
Utilizando Fy = k u y y k/rn = ro 2 (6-20) se convierte en:
(6-21)
y
(6-22)
pero
(6-23)
que al ser reemplazada en (6-22), produce:
157
ve = ro D11m ~2~ -
(6-24)
1
y de sp ej ando el valor para el es pec tro de d esplaz amientos totales se obtiene:
(6-2 5)
Dad o qu e V..IID=Dm , entonces para el sis te m a inelástico, en la zona de períodos
intermedios, el espe ctro 0 '2 .des plazarnientos totales es igual al espectro elástico
multip licad o por 11/~2~ - 1 .
Para la zona de períodos cortos, de acuerdo con la conclusión (b):
(6-26)
y en térmi nos de fuerza:
u
D
(6-2 7)
mA =u .k=--.!!.k=-1!!..k
~
e
~
11
por lo tanto, al re or de nar los términos de (6-27):
(6 -28)
Esta última ec uación tiene en su lado derecho una acele ración. Esto quier e decir qu e en
el es pectro de despl azamien to s to rales la zona de aceleraci ones cons ta ntes, local íz.ada
en la fra nja de períodos cortos es tá definida por:
(6-29)
log s, ,+....
¡
'-----------------------------::)-~
Figura 6-51 -
Espec~ro
inelástico de desplazamientos totales
158
log T
Se ha utilizado el símbolo Aro para enfatizar que esta aceleración no es la verdadera.
Entonces el espectro donde es posible leer los desplazamientos totales queda de la
forma mostrada en la Figura 6-51. Los desplazamientos que se leen allí corresponden a
la suma del desplazamiento elástico y el inelástico. La aceleración que se lee allí no es la
verdadera, ésta se obtiene dividiendo la aceleración leída del espectro por ~.
Espectro de aceleraciones máximas
Ahora, para determinar el efecto de la respuesta inelástica elastoplástica en el espectro
de aceleraciones máximas, se utiliza un procedimiento similar. Para períodos cortos se
tiene:
(6-30)
Para el rango de períodos intermedio la energía en el sistema elástico es igual a la
energía en el sistema inelástico, por :0 tanto:
(G-3l)
De la ecuación (6-22) se tiene:
Ve = ro uy~2~ -1
(6-32)
mAro = ku y
(G-33)
pero
por lo tanto,
que al ser reemplazada en (6-32), produce:
A ~V = -'!L
2~-1
e
(6·35)
(O
Esta última ecuación es equivalente a:
=
V
ro
Ve
(6-36)
~2~-1
Esto quiere decir que para el sistema inelástico el espectro de aceleraciones máximas en
la zona de períodos intermedios es igual al espectro elástico multiplicado por 1/ ~2~ -1 .
Para la zona de períodos largos:
(6-37)
y en términos de fuerza:
159
IDA
m
u
D
=ku =k-!!..=k-l!!...
¡.L
y
(6-38)
¡.L
por lo tanto:
=
A
2
ro D e
m
(6-39)
¡.L
Esto quiere decir que en el espectro de aceleraciones máximas la zona de
desplazamientos constantes, localizada en la franja de períodos largos está definida
por:
D=~
ID
¡.L
(6-40)
Se ha utilizado el símbolo Dro para enfatizar que este desplazamiento no es el
desplazamiento total. Simplemente corresponde a la componente elástica del
desplazamiento total.
log s,
V. -
Ve
--;===
m- ~2¡.L-l
A nI= A e
inelástico
/
~--------------------------J~-
log T
Figura 6-52 - Espectro inf'/ástico de aceleraciones máximas
Entonces, el espectro donde es posible leer las aceleraciones máximas queda de la
forma mostrada en la Figura 6-52. Las aceleraciones que se leen allí corresponden a las
aceleraciones verdaderas a que se ve sometido el sistema inelástíco y los
desplazamientos que se leen en este espectro corresponden a la componente elástica
del desplazamiento, o sea sólo hasta U y • Por lo tanto para obtener de este espectro los
desplazamientos totales hay que multiplicar el desplazamiento leído por ¡.L.
6.6.2 Sistemas con rigidez degradante
El trabajo realizado por Riddell y Newrnark, presentado en la referencia [Riddell y
Newmark, 1979\, amplió la encontrado solamente para sistemas elastoplásticos en los
trabajos de Newmark y Hall, a sistemas bilineales y a sistemas con rigidez degradante.
Esta metodología, nuevamente se sustenta en que "El método está basado en la
aproximación de que los efectos no lineales pueden tenerse en cuenta gracias a un
análisis linealmente elástico de la estructura utilizando coeficientes de diseño
determinados de un espectro inelástico para sistemas de un grado de libertad."
160
En él se estudian los efectos combinados del amortiguamiento y el efecto inelástíco. Las
conclusiones del estudio fueron posteriormente reestudiadas en trabajos como el de
Elghadamsi y Mohraz [Mohraz y Elghadamsi, 1989], que fundamentalmente las validan.
Tabla 6-2 - Registros empleados por Riddell y Newmark
Registro
El CentroEW
Olimoia N86°E
Golden Gate, S800E
Cholame, N85°E
Castaie, N21°E
Paeoima, S16°E
Lima, Perú, N82°W
sanüaoo, Chile, N100W
Manaqua, Nícaraqua, EW
San Juan, Aroentína, EW
Fecha
Mav 18/40
Abr 13/49
Mar 22157
Jun 27/66
Feb 9171
Feb 9171
Mav 31170
Jul8171
Die 23172
Nov 23177
Profun.
(km)
M,
16
6.3
7.1
5.3
5.6
6.6
6.6
7.75
7.5
6.2
7.4
?
9
5-10
Oa 13
Oa 13
56
58
5
101
Ate
V te
D te
vu«;
(g)
(mis)
(m)
(mI!Jg]
Vt~
0.214
0.280
0.105
0.434
0.316
1.171
0.107
0.159
0.383
0.193
0.369
0.171
0.046
0.255
0.172
1.132
0.047
0.232
0.403
0.206
0.201
0.094
0.012
0.069
0.051
0.419
0.035
0.129
0.216
0.064
1.727
0.610
0.432
0.584
0.533
0.965
0.432
1.473
1.041
1.067
3.1
8.8
5.6
4.5
5.3
3.8
AteD te.
16.4
3.7
5.0
2.8
Desde el punto de vista general se observaron los siguientes aspectos:
(a) La respuesta de sistemas con períodos de vibración muy largos es independiente del
tipo de relación fuerza-deformación del elemento estructural.
(b) Se observan diferencias para sistemas con períodos cortos menores de 0.1 s, pero
estas diferencias son despreciables para demandas de ductilidad menores de 5, e
insustanciales para demandas de ductilidad mayores.
"
(e) Para períodos intermedios, la respuesta de sístc.nas bilineales con demandas de
ductilidad menores e iguales a 2 son prácticamente iguales a la de sistemas
elastoplásticos con demandas de ductilidad similares. Para demandas de ductilidad
mayores; la respuesta máxima de sistemas bilineales es, en general, más pequeña que la
de sistemas elastoplásticos.
(d) Para todos los períodos considerados, las ordenadas espectrales de sistemas
elastoplásticos son, en promedio, mayores que las ordenadas espectrales de sistemas
con rigidez degradante.
I
(e) Los espectros de sistemas con rigidez degradante no tienen los picos y variaciones
abruptas que se presentan en los sistemas elastoplásticos. Se encontró que los sistemas
con rigidez degradante eran los más eficientes con respecto a la capacidad de
disipación de energía. Además, se pudo observar que los sistemas con rigidez
degradante eran mucho más eficientes en su recuperación después de una excursión
inelástica. Esto último se traduce en que las deformacíones permanentes de los
sistemas con rigidez degradante fueron siempre menores que las de sistemas
elastoplásticos y bilineales. Es razonable suponer que el comportamiento de sistemas
degradantes está dominado por los efectos de ablandamíento producido por la
degradación de rigidez, más que por el efecto de resistencia adicional causada por el
endurecimiento por deformación del material.
Los sistemas con rigidez degradante empleados no incluyeron sistemas con
degradación de la resistencia, ni ablandamiento de la rigidez de descarga; lo cual debe
tenerse en cuenta al interpretar las conclusiones del estudio. Además, es importante
tener en cuenta que existen numerosas situaciones en las cuales no es posible predecir
la respuesta de un sistema en particular a un acelerograma dado. En muchos casos
sistemas con el mismo tipo de relaciones fuerza-deformación, el mismo nivel de
amortiguamiento, y sometidos al mismo acelerograma, se comportan en formas
totalmente diferentes, dependiendo de los valores particulares de la fuerza de fluencia.
161
;II(¡/HIC(I eSrnlClllnll UjJU< ",uu ......." "" "''-''' __
Una conclusión muy importante del estudio realizado, es la aseveración de que en la
gran mayoría de los casos, los resultados obtenidos para sistemas con relaciones
fuerza-deformación elastoplástica, consistentemente conducen a valores conservadores
de la máxima respuesta, lo cual valida el empleo de este tipo de modelos en un gran
número de aplicaciones.
El estudio de Riddell y Newmark introdujo el concepto de coeficientes de
deamplifícacián in elástica, cl\t> los cuales permiten reducir las ordenadas espectrales
elásticas a valores asociados con un nivel de demanda de ductilidad dado, para cada
una de las zonas del espectro sensitivas a la aceleración, a la velocidad o al
desplazamiento. Estos coeficientes se estudiaron estadísticamente para los
acelerogramas empleados. Se obtuvieron valores medios y valores en la media más una
desviación estándar. El inverso del coeficiente de deamplificación corresponde a un
coeficiente de disipación de energía. En este caso se denominan oRa, R, Y R,¡, según
correspondan a la zona del espectro sensitiva a aceleración, a velocidad, o a
desplazamiento, respectivamente. Estos coeficientes son sensitivos, además, al nivel de
amortiguamiento empleado, a las condiciones locales del suelo en el sitio donde se
obtuvo el registro, y al período de vibración del sistema. Además se encontró que los
períodos de vibración que dividen las zonas del espectro en regiones de aceleración,
velocidad ji desplazamiento aproximadamente constantes, varían para los diferentes
niveles de ductilidad.
Zona de
Desplazamiento
Aproxim.
Constante
+
u= 10
13
-1---~......r='--+-
12 -1---......".,===-+---'
11
10 -1------11----+-
+------:;-;;---+11= 10
8a~~~~
9
=5
7 -1--tt-----t6 -1--±-----t11=5
5-1-----:1....- - -...11 = 10
Zona de
Aceleración
Aproxim.
Constante
+
11 = 5
11 = 3
11=2
11 = 1.5
elástico
o
2
3
~
4
5
Período T, (s)
Figura 6-53 - Coeficientes de reducción de resistencia para sistemas con degradación de rigidez. ~ = 5%
En la Figura 6-53 se muestran los coeficientes de reducción de resistencia, para
sistemas con rigidez degradante y para un coeficiente de amortiguamiento crítico de
5%. Las zonas sombradas corresponden a los valores donde se encuentran los períodos
de vibración de la transición entre las diferentes zonas del espectro. Debe notarse que
los valores de los períodos de transición se hacen más cortos en la medida que la
demanda de ductilidad es mayor. Además puede verse que la reducción de resistencia
]62
que se debe emplear para lograr una demanda de ductilidad dada varía entre zonas del
espectro y especialmente para sistemas con períodos de vibración muy cortos en la
zona de sensibilidad a las aceleraciones.
4
v
3
~ j.l= l(
/;V
j.l=5
j.l=3
/
~
I
t
¡
o
~
~-
j.l=15
u-l
""e
I
I
o
j.lF2
,,/
0.05
0.1
0.15
0.2
'¡istico
0.25
0.3
0.35
0.4
Período T (s)
Figura 6-54 - Coeficientes de reducción de resistencia para sistemas con degradación de rigidez,
zona de períodos cortos de amplificación de aceleración. ~
=5%
En la Figura G-S"! se amplía la escala de la zona sensitiva a aceleraciones. Es muy
importante notar que la reducción de resistencia que se puede lograr para todas las
demandas de ductilidad tiende a la unidad en la medida que el período tiende a cero. El
sistema sufre la aceleración máxima del terreno, independientemente dé los
desplazamientos relativos, y por ende de la ductilidad. Esto quiere decir que en los
sistemas inelásticos con periodos cortos, no es posible ejercer la ductilid"td y las
reducciones que se realicen a la resistencia, pondrían en peligro la estabilidad del
sistema, pues no se produciría una demanda de ductilidad compatible con la reducción
de resistencia. Como consecuencia, muy importante de este fenómeno, las estructuras
muy rígidas deben diseñarse para las fuerzas que se derivan de aplicar la máxima
aceleración del terreno, Ate, a la masa de la estructura.
logSv
\
/
-------------i»o~
log T
Figura 6-55 - Espectro inetestico de aceleraciones máximas para rigidez degradante
1(;8
.._._.
. "-1. . .
_
El empleo de estos coeficientes de reducción de resistencia, dentro de un espectro de
aceleraciones máximas se muestra en la Figura 6-55. No sobra insistir que los
desplazamientos que se leen en el espectro ínelástíco, corresponden únicamente a la
componente elástica del desplazamiento, por lo tanto para obtener el desplazamiento
total hay necesidad de multiplicar el desplazamiento leído del espectro de aceleraciones
máximas, por el factor de ductilidad, ~.
.7 Principio de las deformaciones iguales
De la discusión anterior sobre la respuesta de sistemas ínelásticos, basada en los
trabajos de Newmark, es evidente que en la zona del espectro sensitiva a los
desplazamientos, o sea la zona de períodos largos, los desplazamientos totales que se
obtienen en la respuesta ínelástica, son aproximadamente iguales a los que tendría un
sistema elástico con la misma rigidez y sometido al mismo acelerograma, En la Figura
6-56, se indica esta característica, la cual se ha denominado tradícionalmente como el
principio de las deformaciones iguales [Park y Paulay, 1975], [Paulay y Priestley, 1992].
Fuerzaf-
Fe
--
resp.uesta
elástica
Desplazamiento
uy
u ID=u e
Figura 6-56 - Principio de las deformaciones iguales
Este aspecto tiene implicaciones muy importantes en diseño sísmico, dado que una de
las verificaciones que deben realizarse consiste en comprobar que las deformaciones de
la estructura no sean excesivas, y dado que la estructura en general se sale del rango
elástico de respuesta ante la ocurrencia de los movírníentos sísmicos de diseño, estas
deformaciones se deben estimar en el rango in elástico de la manera más precisa
posible. Por otro lado si el daño, a elementos estructurales y no estructurales, está
asociado con las deformaciones inelásticas que se tengan, la rigidez inicial del sistema y
su degradación son parámetros muy importantes en el buen comportamiento de la
estructura {Qi y Moehle, 1991].
El problema de estimar las deformaciones en el rango inelástico se vuelve especialmente
complejo cuando se tiene degradación de la rigidez, pues el periodo de vibración del
sistema cambia durante la respuesta de la estructura a la excitación sísmica. En los
trabajos de Shimazaki y Sozen [Shimazaki y Sozen, 1985], [Shimazaki, 1988] y
{Shimazaki y Sozen, 1993], utilizando un enfoque diferente al de Newmark, consistente
en el estudio de un gran número de casos de respuesta del sistema inelástico en
términos de energía y de desplazamiento, se encontró que cuando el período de la
estructura era mayor que un valor característico T g del acelerograma, la energía que
entraba al sistema era constante o disminuía, independientemente de la resistencia del
sistema, F y • Además se encontró, que cuando el período del sistema era mayor que el
período característico, T > T g , independientemente de la resistencia del sistema F y ; el
desplazamiento máximo inelástico Um, tendería a ser igual al del espectro elástico de
desplazamientos, confirmando el principio de desplazamientos iguales.
164
Shimazaki y Sozen explican cualitativamente este fenómeno indicando que la energía
que entra al sistema se mantiene constante cuando el sistema tiene un período de
vibración inicial mayor que T g , pues la degradación de la rigidez alarga este período y
entonces no se presenta un aumento en la energía que entra al sistema y no la hay
suficiente para producir un aumento de la deformación inelástica. Por otro lado, si el
sistema tiene un período de vibración T < T g , un aumento en el período del sistema
causado por la degradación de rigidez, conduce a un aumento de la energía que entra al
sistema y entonces se presenta una deformación inelástica máxima mayor que la
máxima elástica.
I
Otro aspecto muy importante encontrado en estos estudios consistió en identificar que
bajo ciertas condiciones del período de la estructura y su resísrencía en la base, para
períodos iniciales del sistema T < T g , también las deformaciones inelásticas se
mantenían iguales o menores que las elásticas. La condición anterior fue formulada por
Shimazaki y Sozen de la siguiente manera para sistemas estructurales cuya respuesta
histerética es similar a la de elementos de concreto reforzado:
I
(6-41)
RD:::;1.0
es válida sí:
RR+RT~
(G-42)
1.0
donde:
(Relación de desplazamientos)
(6-43)
(Relación de resistencias)
(Relación de períodos)
I
(G-45)
En las relaciones anteriores, T es el período inicial del sistema calculado utilizando
secciones no fisuradas, T g es el período característico del acelerograma, Fy es la
resistencia a la fluencia del sistema y Fe es la respuesta elástica, en términos de fuerza
en el elemento estructural, que se obtendría del espectro de desplazamientos con un
amortiguamiento ~ = 2%, para un período de víbracíon efectivo (Ter = T • ..,J2), calculado
utilizando unas secciones fisuradas con una rigidez igual a la mitad de la de las
secciones no fisuradas. Aunque las expresiones anteriores son una gran ayuda en la
determinación de los desplazamientos inelásticos, su aplicación es limitada pues no
cubre estructuras con períodos cortos o cuya resistencia F, sea baja.
Esta situación fue estudiada posteriormente por Qi y Moehle [Qi y Moehle, 19911,
quienes encontraron que en la respuesta inelástíca, para periodos del sistema, T,
menores que T g , en esa región del espectro era aplicable la siguiente relación entre
desplazamientos elásticos, Ue, y desplazamientos inelásticos, 11m:
u
m
= u e . (~)1.6"
T
(6-46)
J:
donde:
165
'IJlLlllUCU
(:'~';( I ({Ll UI I I I
ul'" ( ' - . H U \ . "
\.H
........."
•
_.~
F
(6-47)
T\=-_Ym A¿
y F, es la resistencia a la fluencia del elemento estructural del sistema, m es su masa, y
Ate es la aceleración máxima del terreno del registro acelerográfico.
Posteriormente Lepage [Lepage, 1996], demostró que era posible aplicar un
procedimiento general que es válido en todos los casos, aun cuando no se cumple la
ecuación (6-42). Este procedimiento está sustentado en investígaciones analíticas,
experimentales y en la respuesta de estructuras instrumentadas ante sismos reales. De
acuerdo con esta investigación el máximo desplazamiento ínelástíco para estructuras
con rigidez degradante se puede determinar por medio de:
u
ro
= Fa ·o.·g·T
~.T
2
(21t)
(G-48)
ef
la cual es válida si se cumple la siguiente relación:
(6-49)
En las ecuaciones anteriores:
11m
Fa
g
a.
Tg
Ter
C,
RT
máximo desplazamiento obtenido en la respuesta
coeficiente de amplificación de la aceleración en un espectro de aceleraciones
(un valor de 3.75 es representativo para sistemas con un coeficiente de
amortiguamiento, ~, de 2% del crítico)
aceleración de la gravedad
máxima aceleración del terreno del acelerograma, expresada como una
fracción de la gravedad (a. =Arefg)
período característico del movimiento sísmico, puede definirse como el
período en el cual termina la región de aceleraciones constantes
período efectivo de vibración de la estructura, el cual puede calcularse como
el período de la estructura con secciones fisuradas con una rigidez igual a la
mitad de la rigidez de las secciones no fisuradas (Ter =T .>12)
coeficiente de resistencia en la base (C, =F/W)
relación de periodos (RT =TerIT g)
De esta manera es posible encontrar el desplazamiento máximo para cualquier sistema
inelástico con rigidez degradante, con base siempre en un análisis elástico.
La validación de las relaciones anteriores se realizó [Lepage, 1996] empleando
procedimientos analíticos para sistemas de uno y varios grados de libertad, elásticos e
ínelásncos, utilizando movímientos sísmicos con diferentes períodos característicos,
como se muestra en la Tabla 6-3, y diferentes características inelásticas, incluyendo
relaciones de resistencia, RR, con valores que variaron entre el 6% y el 100%. Los
resultados analíticos fueron confrontados con ensayos experimentales realizados
previamente en mesa vibratoria, los cuales incluyeron 22 ensayos diferentes de
sistemas de un grado de libertad cuya respuesta estaba dentro de la zona de
aceleraciones aproximadamente constantes (períodos cortos). La media de las
relaciones entre los desplazamientos medidos experimentalmente y los estimados
analíticamente utilizando el procedimiento fueron de 0.72 con una desviación estándar
deO.n.
lf;(i
I
Tabla 6-3 - Registros empleados por Lepage
Sismo
Fecha
\
1
Feb 09,1971
Ene01,1994
Mar 03,1985
Ma 18,1940
Ene 17,1995
Ju121,1952
Abr 13,1949
Jun 12, 1978
Ju121,1952
Ma 16,1968
Compon.
Registro
Castaic
Tarzana
L1olleo
El Centro
Kobe
Taft
Seattle
Sendai
Santa Barbara
Hachinohe
N21E
NS
N10E
NS
NS
N21E
S02W
NS
S48E
EW
Ate
Duración
Tg
(g)
(s)
(s)
0.32
0.99
0.71
0.35
0.83
0.16
0.07
0.26
0.13
0.19
30
30
75
45
30
45
65
40
60
35
0.35
0.44
0.50
0.55
0.70
0.72
0.89
0.95
1.03
1.14
Para verificar la aplicabilidad de la metodología a sistemas de varios grados de libertad,
se realizaron estudios analíticos de estructuras con diferentes alturas y características,
sometidas a movímientos sísmicos de diferentes intensidades y contenidos
frecuenciales, para un total de 120 casos. Además se utilizaron los resultados
experimentales de 87 ensayos de estructuras a escala en mesa vibratoria, con alturas
entre 3 y 10 pisos, representativas de diferentes sistemas estructurales, incluyendo
pórticos, pórticos combinados con muros, muros acoplados, pórticos donde las vigas
plastifican primero que las columnas, y pórticos donde las columnas plastifican primero
que las vigas. Para estos casos la media de las relaciones entre los desplazamientos
medidos experimentalmente y los estimados analíticamente utilizando el procedimiento
fueron d~ 0.80 con una desviación estándar de 0.13. Por último la metodología fue
confrontada con las mediciones obtenidas en un edificio de 9 pisos localizado en la
ciudad de Los Angeles, California, USA, del cual se tienen registros durante los sismos
de San Fernando de 1971, de Whittier de 1987 y de Northrídge de 1994.
Con respecto a la obtención del valor de Tg , Shimazaki y Sozen, y Lepage, utilizan un
procedimiento algo diferente al empleado por Oí y Moehle, pero ambos conducen a
resultados similares. Ambos procedimientos están basados en el empleo de espectros
de energía. El espectro de energía está relacionado con la máxima energía que le
introduce al sistema el sismo, expresada como una velocidad equivalente, dada por:
v eq
=
J2'E
E
(6- 50)
m
donde EE está dada por la Ecuación (2-95), que se reproduce aquí por conveniencia:
t
EE =
-mf Xo ' u-dt
(6-51 )
o
La energía debida a la excitación, EE, es igual al valor maximo de la suma, evaluada
hasta un tiempo t, de la energía cinética, de la energía disipada y de la energía de
deformación. La velocidad equivalente, Veq , corresponde a la máxima velocidad que
puede tener el sistema si no se disipara energía a través del amortiguamiento VISCOSO.
Shimazaki y Sozen obtuvieron T g al dibujar un espectro de la energía suministrada por
el sismo en papel tripartita, y tomando el valor máximo, como muestra la. Figura 6-57.
Qi Y Moehle lo obtuvieron también de un espectro de energía, pero tomándolo como el
primer pico significativo del espectro de respuesta de energía, como muestra la Figura
6-58. Como puede verse los dos procedimientos conducen prácticamente a los mismos
"al ores. En arribos gráficos mostrados los espectros de energía se obtuvieron con un
amortiguamiento S= 10%.
167
lin/nnica estructural apliccuic: (11 diseño
SíSlIllCO
10
r"r
-1
r--
h"-......
y a. . ,
F
/
"'.
<,
~.
'U·
V./
Energía
JE/m
1/
0.1
/
/
(mis)
/
/
V
0.01
<" /'
0.001
0.1
0.01
10
Período T, (s)
T g - Shimazaki-Sozen, y Lepage
Figura 6-57(a) - Obtención de
10
/
~ /,'l
A
.//-
Energía
JE/m
,,..
'l
l/
V
/
Aiex ctllfiM
b(.
<,
<;
V
0.1
(mis)
V
!:V
~
V
0.01
)/
0.001
0.01
10
0.1
Período T, (s)
Figura 6-57(b) - Obtención de
Tg - Shimazar-i-Sozen, y Lepage
168
6,-----~-------,--------.----,------.----~
s-J--------J...-----+----I----!--I---\c---+-------j
4+---------;1------+-----+---+---1-----+---+-----'
Energía
JE/m 3 -I----l----+---~,,___I_-_+_---+---_.j
(mis)
2+----+---1~7"'-__,f__'I!_-----f,L----'l.._----+--------j
0.5
1.5
1.0
2.0
2.5
3.0
Período T, (s)
Figura 6-58(a) - Obtención de Tg - Qi Y Moehle
3
2.5
2
,--------,-,--::-----;---.----~------.----------,---~.
+--
-----+--------+---+\------+-----+--+_.- . _-
+---+--+-++-~...--+---+----+-'---~
Energía
.[E/m
1.5
+---+H-----'-f---\-.;-4---..-.:>f.<-----+----+_
(mis)
0.5 -J---!JL..f--+--,-/----I----+-----f----.....¡===--=_'
0+""=----+----+-----+----+-----+---0.0
0.5
1.5
1.0
2.0
Período T, (s)
Figura 6-58(b) - Obtención de T g - Qi Y Moehle
I
1(-}9
..._.__ ....--oIlI!.....
~
2.5
3.0
lJíll(OlllCU eSI.n({CUIHU UF"ll"'" '" ''''''''~
.,0."00··.
rroqrama de computador RE5DIN para la obtención
de la respuesta dinámica elástica e inelástica
Dentro del disquete que se suministra con el libro se incluye el programa de
computador RESDlN, el cual permite encontrar la respuesta en el tiempo de sistemas
dinámicos de un grado de libertad, en los cuales su elemento de resistencia puede tener
características elásticas e inelásticas. El modelo está formulado para sistemas
consistentes en una masa, un amortiguador viscoso y un elemento de resistencia, o
resorte, los cuales se pueden someter, ya sea a unas condiciones iniciales de
desplazamiento, o velocidad, o ambas, a una fuerza variante en el tiempo para estudios
de excitación armónica, o a un acelerograma para excitación en la base.
El programa está escrito en lenguaje QuickBasic -l.5 de Miscrosofr y utiliza la
metodología presentada anteriormente. El programa emplea unidades de distancia en
metros y de tiempo en segundos, pues utiliza como valor de la aceleración de la
gravedad g = 9.80 m/s", La unidad de masa debe ser el kg.
.
Propiedades del sistema dinámico de un grado de libertad
El sistema dinámico se describe por medio de sus propiedades de masa, rigidez y
amortiguamiento. Esta descripción puede hacerse por medio de la definición de los
parámetros de masa m, en kg dado que se emplea el sistema SI, de rigidez k en N/m, y
el amortiguamiento e en Nvs/m, Alternativamente el programa permite definir el
sistema por medio de su período de vibración T (= 21t~m/k ) en s y el coeficiente de
amortiguamiento crítico ~ =d(2mro) (donde ro = ~k/m). Estas definiciones son válidas
tanto para el sistema elástico como para el inelástico.
Propiedades de inelasticidad
Con el fin de poder definir internamente el manejo de los ciclos de histéresis, el
programa opera con tres modelos de inelasticidad: elasroplástíco, de Ramberg-Osgood y
de rigidez degradante. En todos los casos los modelos pueden ser simétricos o
asíménícos.
Modelo Elastoptústico
En el caso de! modelo elastoplástico la rigidez tanto para los ciclos de carga como de
descarga es la misma del sistema elástico k. El punto en el cual se inicia la plastíficacíón
(F y ) , se define en términos del peso (W = m g) del sistema y se indica por medio de la
fracción del peso a que corresponde la fuerza de plastificación. En la literatura esta
fuerza se denomina el corte basal resistente del sistema. El programa acepta valores
diferentes para las direcciones positiva (+F y ) y negativa (-Fy) del movimiento. En caso
simétrico los dos valores son iguales.
Modelo de Ramber-Osqood
En el modelo de Ramberg-Osgood el programa requiere los siguientes datos:
(a) el valor del corte basal resistente del sistema F y , expresado como una fracción de su
peso W.
(b) la rigidez de la curva esqueleto, k cn tal como se indica la Figura 6-26. Esta rigidez se
expresa como una fracción de la rigidez inicial del sistema, k., la cual corresponde a
la rigidez del sistema en respuesta elástica con la cual se calculó el período de
vibración T. Generalmente esta rigidez corresponde a la rigidez fisurada del sistema
km como la indica la Figura ()-29.
170
(e) la rigidez en fluencia ks , tal como la indica la Figura 6-29. Esta rigidez se expresa,
también, como una fracción de la rigidez inicial del sistema, k, y depende de la
capacidad de endurecimiento por deformación del acero de refuerzo longitudinal. Si
el acero tuviere una curva esfuerzo-deformación totalmente elasto-plástíca, el valor
de k, sería cero.
Con los datos anteriores el programa determina los valores de los parámetros 'Y y r, con
lo cual define el modelo de Ramberg-Osgood,
Modelo con rigidez degradante
I
En el modelo histeretico con degradación de rigidez hay necesidad de definir los
siguientes parámetros, tanto para la respuesta en el sentido positivo como para el
negativo:
(a) el valor del corte basal resistente del sistema F y , expresado como una fracción de su
peso w.
(b) la rigidez en descarga k u , tal como se indica la Figura 6-7. Esta rigidez se expresa
como una fracción de la rigidez inicial del sistema, k., la cual corresponde a la
rigidez del sistema en respuesta elástica con la cual se calculó el periodo de
vibración T. Generalmente esta rigidez corresponde a la rigidez fisurada del sistema
k cn como la indica la Figura 6-7.
(e) la rigidez en recarga kn tal como se indica en la Figura 6-7. Esta rigidez se expresa
como una fracción de la rigidez inicial del sistema, k. Corresponde a la fase inicial
de un ciclo de nueva carga y su valor depende de la cantidad de fisuras abiertas en
un ciclo anterior que haya necesidad de cerrar en el nuevo ciclo de carga. En muchos
casos se calcula como la rigidez de la sección compuesta por la armadura
longitudinal sola, sin tener en cuenta el concreto.
(d) la rigidez en fluencia k., tal come la indica la Figura 6-7. Esta rigidez se expresa,
también, como una fracción de la rigidez inicial del sistema, k, y depende de la
capacidad de endurecimiento por deformación del acero de refuerzo longítudínal. Si
el acero tuviere una cuna esfuerzo-deformación totalmente elasto-plásríca, el valor
de k, sería cero. Debe tenerse en cuenta que los aceros requeridas por
((Jdigos de
diseño sismo resistente deben tener una zona de endurecimiento por úeú';¡Jló.\.ión,
pues en general se exige que la resistencia última real sea más de 1.25 veces la
resistencia a la fluencia real. (Norma ASTM A706 V NTC 2289 4 a revisión), y
(e) el valor del parámetro A, indicado en la Figura G-34, el cual describe el número de
excursiones en el rango de fluencia para que desaparezca la adherencia del acero de
refuerzo.
Con los datos anteriores el programa formula un modelo de histéresis que incluye
características de degradación de la rigidez y de la adherencia del refuerzo con el
concreto.
Condiciones iniciales
El programa acepta casos de condiciones iniciales, ya sean de desplazamiento, en m, o
de velocidad, en mis; o ambos.
Vibración forzada
Es pesible dar una excitación armomca con frecuencia Q y amplitud en fuerza, dada
como una fracción del peso vv. Se pueden dar formas sinusoidales, triangulares o de
escalones a la excitación.
171
Aceleración en la base
El registro de las aceleraciones que se imponen en la base del sistema, o acelerograma,
puede definirse en el programa de cuatro maneras diferentes:
(a) por medio de una aceleración expresada en intervalos de tiempo constantes. La
aceleración se expresa como una fracción de la aceleración de la gravedad g.
(b) por medio de una aceleración expresada en intervalos de tiempo variables. La
aceleración también se expresa como fracción de la aceleración de la gravedad g.
(c) leyendo cualquier archivo acelerográfico que esté en ASCn, y
(d) por medio de registros de aceleración de temblores reales. El disquete del programa
contiene los acelerogramas reales presentados en la Tabla 6--1.
Tabla 6-4 - Acelerogramas utilizados en el programa RESDIN
No.
1
2
3
4
5
6
7
8
9
10
~1
12
13
14
Temblor
Imperial Valley, CA
San Fernando, CA
San Fernando, CA
San Fernando, CA
Parkfield, CA
Kern County, CA
Parkfield, CA
Miyagi-Ken-Oki, Japón
Tokachi-Oki, Japón
Ciudad de México
Chile
Loma Prieta, CA
Loma Prieta, CA
Loma Prieta, CA
Fecha
May 18/40
Feb9n1
Feb 9171
Feb 9fl1
Jun 27/66
Jul21/52
Jun 27/66
Jun 12178
May 16/68
Sep 19/85
Mar 3/85
Oct 17/89
Oct 17/89
Oct 17/89
Registro
El Centro
Pacoima Darn
Castaic Old Ridge Rd
3710 Wilshire Blvd. 10° piso
Temblor
Santa Barbara Courthouse
Cholame, Shandon
Miyagi
Hachinohe Harbar
SCT1- Secretaría de Transp.
Viña del Mar
Santa Cruz-UCSC Lick Lab.
Capitola Fire Station
Corralitos - Eureka Canyon
Direc.
N-S
S16°E
N21°E
N900E
S25°W
S48°E
N85°E
N-S
E-W
E-W
N-S
N-S
N-S
N-S
A",
0.35 g
1.17 g
0.32 g
0.35 g
0.35 g
0.13 g
0.43g
0.26g
0.19 g
0.17g
0.36 g
O.44g
0.47 g
0.G3g
El programa permite utilizar parte del acelerograma indicando el tiempo maximo. El
acelerograma se puede escalar dando una aceleración máxima diferente a la original,
con lo cual todos los demás puntos se amplifican o reducen en la misma proporción.
Además es posible variar la escala del tiempo, comprimiéndolo o extendiéndolo, lo cual
se emplea algunas veces para simular condiciones de suelo blando.
Respuesta del sistema
El programa utiliza en la solución de la respuesta dinámica en el tiempo el método Beta
de Newmark, descrito anteriormente. La respuesta se presenta gráficamente en la
medida que se va obteniendo la solución. Se presenta el acelerograma utilizado Ko '
como fracción de g, la respuesta en términos de desplazamiento relativo entre la base y
la masa, u, en m; la velocidad relativa
entre la masa y la base ti, en mis, y la aceleración
I
absoluta de la masa (ü + Ko ), corno fracción de g.
Además, el programa conserva los datos de la respuesta, lo cual permite graficar
posteriormente la historia de la fuerza sobre el resorte, consultar la respuesta para un
tiempo específico, o sus máxírnos en el tiempo y grabados en un archivo que puede ser
leído después por medio de una hoja electrónica, como Excel o Lotus.
El programa puede calcular el intercambio de energía durante la respuesta y presentar
gráficos de la energía en cada instante y de la energía acumulada también en cada
instante.
172
I
1
i
.
~
/
. ··_·]
f-·····~~;;";;·~~;:;;';;.Zi(,Nft.l~;;;;;;;;:;;~~i;
Capitulo 7
FACULT/J.íl BE '{Wil)WG~.' to[ lJl '()N!:~'I;;j'I()N
CENTRO Dí: rJOCUi;:ltNl':A.~;mN
_~'7U-'~~1!:"J!'!:t;¡,WI::l;'::;~::"'7~i>J.W"
Movin.ientos sísJnicos de diseño
7.1 Introducción
Para el diseño sísmico de una estructura se utiliza lo que se denominan movimientos
sísmicos de diseño, los cuales se definen a través de un espectro suavizado de diseño, o
bien mediante familias de aceleroqramas. Los picos que ocurren en el espectro de
respuesta son característicos de cada temblor en particular, por lo tanto no tiene
sentido en un espectro de diseño tener grandes variaciones dentro de un rango pequeño
de períodos, más bien se utilizan tendencias generales en rangos de períodos. Por esta
razón su forma es suavizada y de ahí su denominación.
I
Dado que es imposible estimar en detalle las características de los movímíentos
sísmicos que se presentan en el futuro, al menos en el estado del conocimiento actual,
la gran mayoría de los métodos para definir un espectro de diseño se sustentan en el
estudio estadístico de espectros de respuesta de registros acelerográfícos que tienen
algunas características en común. El hecho de que compongan de líneas suavizadas o
rectas, inclusive, se justifica debido a las dificultades que se tiene al estimar los
períodos de vibración de estructuras que van, con seguridad, a responder en el rango
ínelásríco, durante un sismo fuerte. Por otro lado hay gran influencia de los efectos de
campo cercano, tales como el tipo de fuente sismogénica, la forma en que se propaga la
ruptura, las características de los materiales que se encuentran en la trayectoria de las
ondas sísmicas y las condiciones locales del suelo [Mohraz y Elqhadamsi, 1989].
Existen diferentes métodos para estimar el espectro de diseño dado que se conocen
ciertas características de los mov imientos sísmicos esperados en el sitio. En general
cuando se habla de un espectro de diseño éste se define en suelo duro o roca y por lo
tanto no incluye el efecto que puede tener la estratigrafía del suelo en el lugar. En
aquellos casos en que hay depósitos profundos de suelos blandos, en general se realiza
un estudio de amplificación de onda, por medio del cual es posible incluir estos
parámetros totalmente locales en el espectro de diseño.
Dado que en general los espectros de diseño se obtienen del estudio estadístico de
registros que por su naturaleza propia no pueden ser iguales, esto conduce a que se
tengan que normalizar de alguna manera, para lo cual existen diferentes
procedimientos, dentro de los que se destacan la normalización con respecto a una
intensidad espectral y la normalización con respecto a algunos de los parámetros
máximos del terreno, ya sea aceleración, velocidad o desplazamiento: Ate, Vte o Dte.
A continuación se presentan, en el orden hístórico de su desarrollo, algunos de los
métodos más utilizados para definir el espectro de diseño en roca. Posteriormente se
tratan las familias de acelerograrnas, los efectos de amplificación de onda causados por
el suelo subyacente y otros factores que influyen en la selección y utilización de los
diferentes tipos de movimientos sísmicos de diseño.
.2 Espectros elásticos de diseño
.2.1 Espectros promedio de Housner
Tal vez el primer espectro de diseño, dentro del sentido actual, fue desarrollado por
Housner a comienzos de la década de 1950 [Housner, 1952], [Housner, 1959] y
[Housner y Hudson,1961]. Housner desarrolló el concepto del espectro promedio, el
cual fue el antecesor del espectro suavizado, Es importante hacer la advertencia de que
el espectro promedio de Housner se desarrolló para una situación tectónica específica,
como es el estado de California en Estados Unidos, por esta razón su aplicación a otras
. situaciones debe ajustarse cuidadosamente, en principio utilizando registros locales.
Tabla 7-1 - Registros empleados por Housner para obtener los espectros promedio
Registro
El Centro
May 18/40
El Centro
Die 30/34
Olympia
Abr 13/49
Taft
Jul21/52
Comp.
NS
EW
NS
EW
S800W
S100E
N21°E
S69°E
A..
Vte
S1(O)
SI(0.2)
(g)
(mis)
(mis)
(mis)
(mis)
~
0.31
0.22
0.26
0.18
0.30
0.19
0.18
0.16
0.325
0.315
0.250
0.206
0.223
0.171
0.158
0.196
0.320
0.823
0.297
1.15
0.228
0.579
0.197
1.16
0.197
0.579
0.197
1.00
0.1n
0.488
0.166
1.07
Vte
81(0.2)
Los espectros se desarrollaron utilizando los registros acelerográficos que se listan en la
Tabla 7-1. En el trabajo estadístico se emplearon las dos componentes horizontales de
los registros, todos los cuales tienen magnitudes mayores de 6.5.
I
1.5
r-..
(/ <,
1.0
i'--
s.
/1
/
o
--
......... f--
1//;::~
~
o
0.5
<; =0%
I~
I
0.5
I
1~
~
I
2%
5%
11' ·,oot.
¡...-~
20%
~
40%
I
15
20
2.5
3.0
Período T (s)
Figura 7-1 - Espectro promedio de velocidades de Housner (escala arbitraria)
Con el fin de poder tener en cuenta los efectos de distancia a la falla y de la magnitud
de los sismos, Housner normalizó los registros utilizando un parámetro definido para
el estudio, al que denominó intensidad espectral. La intensidad espectral es la integral
de área bajo el espectro de velocidades, dentro de los dos límites anotados, como lo
indica la ecuación (7-1). Los límites de integración, T min = 0.1 s V Tmax = 2.5 s, los definió
para lo que él consideró era el rango normal de los períodos de vibración de la mayoría
de las edificaciones.
174
2.5s
81(1;) =
f s, (T, 1;)dT
(7-1)
T=O.ls
En la Tabla 7-1 se dan los valores de intensidad espectral para ~ = 0% Y ~ = 20%. Para
obtener los espectros promedio, Housner primero los normalizó para que tuvieran el
mismo valor de 81(0). Esto es equivalente a normalizarlos para que tengan la misma
velocidad máxima del terreno, V te. Una vez normalizados se calcularon los promedios
de los valores para cada período y para los diferentes valores de amortiguamiento.
Luego se dibujaron líneas suaves uniendo los puntos obtenidos para cada nivel de
amortiguamiento para obtener el espectro promedio de velocidades mostrado en la
Figura 7-1.
0.7
0.5
s,
(mis)
V
i
/
0.3
~-O%
i
.u·. _
ff
i-:
O
!
..........
I
I
/í <,
0.2
o
1'<-:=
.7-4Skm del epicen ro
/
0.4
0.1
I
,-......
0.6
I
I
"··U
.> <M= 7.7
~=O%
1DSkmd I epicentro
1.0
0.5
1.5
2.5
2.0
3.0
Período T (s)
Figura 7-2 - Influencia de la magnitud y la distancia en el espectro de velocidades
En los espectros promedio, para valores del periodo de vibración, entre 1 s y 3 s el
espectro se mantiene constante para diferentes niveles de amortiguamiento. El valor del
período para el cual se presenta el valor máximo es aproximadamente 0.5 s. La
distancia a que se registra el sismo influye en la localización de este valor máximo.
O
0.5
1.0
1.5
2.0
2.5
S.O
Período T (s)
Figura 7-3 - Espectro promedio de aceleraciones de Housner (escala arbitraria)
En la Figura 7-2 se presentan tres espectros calculados para 1; = 0%.; para dos sismos,
uno de ellos con magnitud 7.7 Y el otro con magnitud 5.3. Para el evento con magnitud
grande se muestra el espectro de su registro a -45 y a lOS km del epicentro. Para el
evento pequeño el registro se obtuvo a 12 km del epicentro. Allí puede verse que la
cercania a la falla que causa el evento, acentúa el contenido de ondas con períodos
175
r JI1H.111UCU (~,.·jl·llU·1 {ti tU HIn
H..llt.ll(.u
._
cortos de vibración. La velocidad de la onda de cortante en el sitio también influye en la
localización del pico, para velocidades altas, correspondientes a suelos duros, éste se
corre hacia la izquierda, y para suelos blandos, con velocidades de la onda de cortante
bajas, el pico se corre hacia la derecha.
La Figura 7-3 muestra el espectro promedio de aceleraciones. Allí puede verse que para
períodos cortos el espectro de aceleraciones tiende a la aceleración máxima del terreno,
A",. Este espectro fue derivado utilizando la relación S, =(21tI T) S;
Para efectos de su utilización Housner [Housner, 197Gb] advierte que los espectros
promedio de velocidades y ar:..leraciones estaban basados en los cuatro registros
norteamericanos más fuertes de que se disponía en ese entonces, y que eran
consistentes con ellos, pero su forma no era consistente con movimíentos sísmicos
registrados en ciudad de México, y en Lima, Perú. Así mismo, no los consideraba
apropiados para sismos de magnitud pequeña.
7.2.2 Método de Newmark-Hall
A mediados de la década de 1960, Newrnark y Hall iniciaron una serie de
investigaciones sobre las formas espectrales, principalmente para ser empleadas en el
diseño de plantas nucleares. Con base en estos estudios, recomendaron que era posible
describir el espectro por medio de líneas rectas dibujadas en un papel tripartita (véase
la Sección 5.-l), En las referencias [Newmark y Hall, 1969, 1972 Y 1982] se presenta la
metodología para construir un espectro de diseño, que se presenta a continuación. E
método se basa en el supuesto de que sea posible estimar independientemente, por
medio de procedimientos como los presentados en la Sección 4.9, la máxima aceleración
horizontal del terreno, A",. la máxima velocidad horizontal del terreno, V"" Y el máximo
desplazamiento horizontal del terreno, D"" para el temblor de diseño.
Con base en el estudio de numerosos temblores los autores encontraron que dentro de
las tres zonas del espectro en las cuales la aceleración es aproximadamente constante,
la velocidad es aproximadamente constante y el desplazamiento es aproximadamente
constante, era posible definir coeficientes de amplificación que permiten dibujar un
espectro normalizado. En la Tabla 7-2 se presentan los coeficientes de amplificación
para varios valores del coeficiente de amortiguamiento, los cuales corresponden a dos
niveles diferentes de probabilidad de que las ordenadas del espectro de diseño no sean
excedidas cuando se presente un evento que tenga los mismos movimientos máximos
del terreno.
Tábla 7-2 - Coeficientes espectrales de amplificación para respuesta horizontal elástica
Amortig.
~
Media más una
desviación estándar (84.1%)
Media
(50%)
(%)
<lA
UV
UD
UA
Uv
UD
0.5
1
2
3
S
7
10
20
s.io
3.84
3.38
2.92
2.64
2.30
2.08
1.84
137
3.04
2.73
2.42
2.24
2.01
1.85
1.69
1.38
3.68
3.21
2.74
2.4G
2.12
1.89
1.64
1.17
2.59
2.31
2.03
1.86
1.65
1.51
1.37
1.08
z.oi
4.38
3.66
3.24
2.71
2.36
1.99
1.26
1.82
1.63
1.j2
1.39
1.29
1.20
i.oi
Los valores dados en la Tabla 7-2, se pueden expresar en forma de ecuación así: para un
nivel de probabilidad del 84.1% (media más una desviación estándar) de que no sean
excedidas las ordenadas espectrales:
ex A
= 4.38 -l.041n(~ %)
(7-2)
17()
a v = 3.38 - O.67In(~ %)
a n = 2.73- O.45In(~%)
(7-3)
(7-4)
Para un nivel de probabilidad del 50% (media) de que no sean excedidas las ordenadas
espectrales:
3.21-0.68In(~%)
(7-S)
a v = 2.31- O.41ln(~%)
a n = 1.82- O.27In(~%)
(7-G)
a
A
=
(7-7)
El espectro se construye como se muestra esquemáticamente en la Figura 7-4. En papel
espectral logarítmico tripartita se dibujan las líneas correspondientes a los máximos
valores del terreno: máxima aceleración, Ate,' máxima velocidad, Vte, y máximo
desplazamiento, D te , de los movimientos sísmicos de diseño. Estos valores provienen en
general de un estudio de amenaza sísmica, como el presentado en la Sección 4-9 1Garcia
et al., 1984 y 1996].
I
El procedimiento de definición del espectro es el siguiente: para un valor del coeficiente
de amortiguamiento, ~, dado se buscan en la Tabla 7-2 los valores de los coeficientes de
amplificación correspondientes a la zona del espectro con aceleración aproximadamente
constante, aA, con velocidad aproximadamente constante, av, y con desplazamiento
aproximadamente constante, an, para el nivel de probabilidad deseado. Luego se trazan
líneas paralelas a las correspondientes a los valores máximos de los mm imientos del
terreno con los valores amplificados, o sea multiplicando el valor de movtrníento
máximo del terreno por el coeficiente a apropiado. En la zona de períodos cortos, a un
valor de frecuencia de aproxímadar.iente 8 Hz (período de 0.125 s) se inicia la transición
hacia la aceleración del terreno, a la cual se debe llegar a un valor de frecuencia del
orden de 33Hz (período igual a 0.03 s) y a partir de este punto hacia la izquierda la
aceleración espectral cs igual a la del terreno.
Velocidad
(mis)
movimientos
máximos
I
del terreno
I Aceleración
I
(g)
I
T=O.03 S T=O.125 S
f=33 Hz f=8 Hz
Periodo T (s)
Figura 7-4 - Procedimiento esquemático para la obtención del espectro elástico de Newmark-Hall
Para efectos de seleccionar el valor del coeficiente de amortíguarníento crítico para el
cual se debe construír el espectro, Newmark y Hall recomiendan los valores que se
muestran en la Tabla 7-3.
.
._----_
...
...
~
Cuando no se dispone sino del 'alar de la aceleración rnaxima del terreno, Ate, hay
necesidad de estimar los valores de Vte y Dte. Para el efecto pueden emplearse las
relaciones Vt./Ate, DufAte y AteDt.l(V te )2, presentadas en la Sección -1-.8.3. En INewmark y
177
_----------------_
..
Hall, 1982), se indica que en ausencia de una mejor información puede utilizarse Vtr!Ate
m/ts g) para aluvión firme y 0.91 m/Is g) para roca. Además para que el
= 1.22
espectro cubra una franja adecuada de períodos, allí también se recomienda que
AteDt./(Vte)2 se tome como 6.0.
Es importante tener en cuenta que los cocientes Vt./Ate y AteDtr!(Vte )2 tienen relación
directa con la forma del espectro IRiddell y Newmark, 1979]. El cociente Vt./Ate
determina la localización del espectro en la escala de períodos de vibración. Una
reducción de este cociente mueve la zona de amplificación de la velocidad hacia la
izquierda.
El cociente AteDtr!(Vte)l es una medida de qué tan plano, o puntudo es el espectro. Valores
grandes de este cociente corresponden a espectros aplanados, mientras que valores'
pequeños corresponden a zonas de amplificación de velocidad angostas, las cuales se
manifiestan en espectros de banda angosta.
Otras recomendaciones dadas por Newmark y Hall tienen que ver con ajustes debidos a
las condiciones geológicas del lugar. Aunque en este campo se han presentado enormes
avances, con posterioridad a la aparición del método, como se verá en la Sección 7.6; no
dejan de ser lineamientos generales que permiten interpretar la metodología para
condiciones diferentes a la de la obtención de un espectro en roca. Newmark y Hall
recomiendan que el espectro se multiplique por las siguientes constantes de
proporcionalidad: (a) para roca competente, 0.67, (b) roca meteorizada o blanda, o
suelos sedimentarios firmesIaluvión), 1.0, (c) suelos sedimentarios blandos, 1.5.
Respecto a la construcción de un espectro de aceleraciones verticales, indican que
pueden emplearse 2/3 de las ordenadas espectrales para lugares donde los
movímíenros de la falla son transcurrentes horizontales, e iguales a la horizontal
cuando los movimientos de la falla puedan tener componentes verticales grandes.
Tabla 7-3 - Coeficientes de amortiguamiento recomendados por Newmark-HaU,
para diferentes materiales estructurales y estados de esfuerzos
Nivel de esfuerzo
1. B!3.jo, menor aue p.1 limite
proporcional, esfuerzos
menores que O.5fv
2. Nivel de esfuerzos de trabajo,
menores que O.Sf,
3. Justo al nivel de fluencia
4. Más allá del nivel de fluencia;
con deformación permanente,
mayor que la deformación unitaria
del punto de fluencia
5. Para todos los rangos (Vs =
velocidad de la onda de cortante)
Tipo y condición de la estructura
a. tuberfas vitales
b. acero, concreto reforzado o preesíorzado, madera, sin
aqrietamiento, sin deslizamiento en las juntas
a. tuberías vitales
b. acero soldado, concreto preesforzado, concreto
reforzado con cuantías altas (fisuración muy menar)
c. concreto reforzado con bastante fisuración
d. acero estructural pernado o remachado, estructuras de
madera con uniones clavadas o atornilladas
11. tuberías vitales
b. acero soldado, concreto preesforzado (sin pérdida total
del preesfuerzo)
c. concreto reforzado y concreto preesforzado
d. acero estructural pernado o remachado, estructuras de
madera con uniones atornilladas
e. estructuras de madera con uniones clavadas
a. tuberías
b. acero soldado
c. concreto reforzado y preesforzado
d. acero pernado o remachado v estructuras de madera
Balanceo de toda la estructura:
a. sobre roca
tv, > 1800
mIs)
b. suelo firme (Vs > 600 mIs)
c. suelo blando (v s < 600 mIs)
178
Amortig.
0.5%
~
0.5a 1 %
0.5 a 1 %
2%
3a5%
5a7%
2%
5%
7 a 10%
10 a 15 %
15 a20 %
5%
7a 10%
10 a 15 %
20%
2a5%
5a7%
7 a 10%
I
Ejemplo 7-1
se desea
o~ltevLer eL espectro de disePLo. para sistevvLas con liVL cogicieltte de m'l'wrtig/.tVLmiento
crítico. ~, deL 5%. en 1m Lagar en eL CltuL se ILa estilnado qlte Lu mrixivna aceLeración deL
terreno (Ate) rJLUU Los 111.OvÍlnie/1.los sísvnicos de disePLo es de 0.3g. La vlt~Ílna veLocidad del
terreno (Vte) es de 0.20 vn/s 1j eL mriximo despLuzamiel1.to deL terreno (DIe) es de 0.30·m. Se desea
11Jt nível de prokla~JiLidad de 11,0 exceder Las ordenadas esnecnutes deL 84.1 %.
Elt La Figara 7-5 se ILal1. dilJlijado en et r1apeL tripartita Los l1tovimientos Inrixivnos deL terre11,0.
pura di~Jlijar eL espectro de disePLo en La zona de aceLeracimte~; constuates el valor de Sa se
O~Jtl.elte de mltLtipLicur 0.3 g x 2.71 = 0.81 g. Para La zona de veLocidades coastaates eL valor de
S, se olJtie/te de )lw,LtipLicar 0.2 mis x 2.30 = 0.46 mis !:j para La Zm1.&1 de despLuzmnieltLos
constantes eL valor de Sd se obttene de mlútirlLicur 0.3 in x 2.01 = 0.60 m. Elt La zona de
rwríodos cortos eL espectro de disei'W se ivLicia con La aceLeraciól1. deL terreno Iw.sta 11Jt período
de 0.03 s (freCltencílA. de 33 HZ) lj IA.LLí cmnienzu LIA. tmmidó/1. a LIA. zona de aceLemcimtes
COltstm'Ltes con La CltaL evnpata a Itn t'Jeríodo de 0.125 s (freClte/teia de 8 Hz).
10
5
0.5
Velocidad
(mis)
0.1
0.05
0.01
0'005~".
0.0 1
0.01
I
0.03 S
0.05
0.5
0.125 s
5
10
50
Periodo T (s)
Figura 7-5 - Ejemplo 7-1 - Espectro elástico de diseño de Newmark-Hall para Ate = 0.3 g,
V te
= 0.2 mis y D¿ = 0.3 m para amortiguamiento, ~, de
5% y probabilidad de 84.1%
•
7.2.3 Método de Newmurk-Blume-Kapur
A comienzos de la década de 1970, la Comisión de Energía Atómica de Estados Unidos,
contrató una serie de estudios para la definición de espectros de diseño sísmico de
plantas nucleares. Como resultado de estos estudios, en la referencia [Newmark, Blume
y Kapur, 1973] se presentó una metodología para obtención de espectros elásticos de
diseño. El estudio inicial se realizó independientemente por parte de ]. A. Blume y N. 1\1.
Newmark. En esta fase se emplearon -12 y 33 acelerograrnas respectivamente. La forma
del espectro en ambos casos fue determinada estadísticamente utilizando
17.9
distribuciones log-normales, Con base en estos estudios preliminares se desarrolló
como definitiva la metodología que se presenta a continuación.
Los espectros se definieron para tres niveles de probabilidad de no excedencia en sus
ordenadas: media (50%), media más una desviación estándar (8-+'1%) y medía más dos
desviaciones estándar (97.7%). El estudio definió cuatro períodos de control: el período
A, que define el punto a partir de la cual se inicia la amplificación de la aceleración con
respecto a la aceleración máxima del terreno, Ate, se fijo en T = 0.03 s (f = 33 Hz); el
período B, marca el final de la transición entre la aceleración del terreno, Ale, y el valor
amplificado de la aceleración, fue fijado en T = 0.11 s (f = 9 Hz); el período C marca el
punto de transición entre la zona de amplificación de la aceleración y la de
amplificación de la velocidad, fue fijado en T = 0.4 s (f = 2.5 Hz); por último, el período
D define el punto de transición entre la zona de amplificación de velocidades y la zona
de amplificación de desplazamientos, y fue fijado en T = -LO s (f = 0.25 Hz).
Para cada uno de los períodos A, B Y C se fijaron coeficientes de amplificación que
afectan la aceleración máxima del terreno, Ale, y que dependen del coeficiente de
amortiguamiento crítico. Para el período de control D, se prescribe un coeficiente de
amplificación de desplazamiento, también en función del amortiguamiento, el cual
afecta el desplazamiento máximo del terreno, D te. El desplazamiento máximo del
terreno, Die, se estima en función de la aceleración máxima del terreno, Ale, por medio de
la siguiente relación:
(7-8)
En la Figura 7-6 se muestran los coeficientes de amplificación para cada uno de los
períodos de control, en función del coeficiente de amortiguamiento crítico, ~, a que se
desee producir el espectro. Los coeficientes de amplificación definen un espectro cuyas
ordenadas espectrales tienen una probabilidad de no ser excedidas del 8-1.1% (media
más una desviacíón estándar). Todos amplifican con respecto a la aceleración máxima
del terreno, Ale, excepto el correspondiente al período de control D, que amplifica con
respecto al desplazamiento máximo del terreno, Die'
10
\
"-
'\
'\
\
5
1\ \ \
4
\
3
~
"_ _ l _ _
'\
\ '\
\ \
2
(%)
\
\[\.
,
D\ ~ I\~
A
I
'\
'\
'\
'\
1\
0.5
004
0.3
\
\
o
\
~
\
2
3
\.
\
\
4
5
6
7
a.,coeficiente de amplificación
Figura 7-6 - Coeficientes de amplificación para los períodos de control A, a, C y D
Las ecuaciones que describen estos coeficientes de amplificación, para un nivel de
probabilidad del 8-1.1% (media más una desviación estándar), son las siguientes, las
cuales son validas para valores del amortiguamiento menores o iguales al 10%:
ISO
f
I
aTA
= 1.0
T A = 0.03 S
(7-9)
(7-10)
a TB =
4.25 -1.0210(1; %)
TB=O.lls
aTe =
5.1- 1.22410(~%)
Te
=
0.4
a Tn = 2.85- 0.510(1;%)
TD
=
4
S
(7-11)
(7-12)
S
El espectro se construye dibujando, primero, en papel espectral tripartita las líneas
correspondientes a la aceleración máxima del terreno, Ate, Y al desplazamiento máximo
del terreno, Die, de los movimientos sísmicos de diseño. Estos valores provienen en
general de un estudio de amenaza sísmica, como el presentado en la Sección 4-9 [Carcía
et al., 1984 y 1996]. Luego, para un valor del coeficiente de amortiguamiento, ~, dado se
buscan en la Figura 7-6 los valores de los coeficientes de amplificación
correspondientes a los períodos de control A, B, e y D. Luego en cada uno de estos
períodos de control se colocan punto al valor amplificado de la aceleración, excepto
para el período D, donde se amplifica el desplazamiento. A partir del período D el
espectro presenta un desplazamiento constante. Luego se unen estos puntos
amplificados y las líneas que se obtienen definen el espectro.
Los autores hacen la salvedad de que para lugares donde haya una gran preponderancia
a amplificaciones para las componentes del terreno con períodos mayores de O.S s, los
espectros deben ajustarse apropiadamente. Este caso se presenta generalmente con
situaciones donde haya suelos blandos.
Para el espectro vertical sugieren tomar 2/3 del espectro de efectos horizontales, hasta
el período de control C. En este punto el espectro vertical debe prolongarse hacia la
derecha hasta que toque la línea del espectro de efectos horizontales que une los
períodos de control e y D, Y a partir de este punto los dos espectros son iguales.
Ejemplo 7-2
Se ctesevL okltE'ner eL espectro cte ctiseí1ü pGW~ LeA.s f1tiSVVLeA.S coVLcticiOf1eS cteL ejemrJI.o 71 rJero
alwra por eL l1tétocta ete Newmark BL'tf1-te !j KarJlu. Los ¡Jar~l1-tetros relevantes son: ~ 5%, ti
Ale = 0.3g.
o-
EL valor cte Los ctespLlAZavltieVLtos m6lximos cteL terreno. Die = 0.91 . 0.3 = 0.273 m. Para IHt
eA.f11OrtigtieA.lltievLto ctel 5%. Los valores cte Los coejicie/ttes cte ampLifimciólt. Leíctos cte LeA. Figlua
7-6 son.
aTA
= 1.0,
a TB
= 2.Ó,
aTe
= 3.t. !j
a Tn
= 2.0.
Por Lo tanto LeA.s orcteVLeA.ctas espectrates evt ceA.cta 1.0(,/10 cte Los rJerío(;Los cte control son:
Períocto A - S,
=
1.0· O.3g
=
O.3g
Períacto B- Sa = 2.6' 0.3g = 0.78g
Períocto
e-sa = J.1·0.3g = O.93g
Períocto O - Sd = 2.0·0.273 m = 0.55 m
E/t La FigareA. 7-7 se heA.n ctikJl-ijacto en el peA.pel tripartitu Los vl·tovil1tiefttos m6lxivVLos cteL terreno.
Ate !j D te. Laega se LocaLizarOft Los p,.u1Jas correspOltC'LieVLtes lA. cacta ¡-LItO cte íos rJeríoctos ete
control. lj por t'tLtil11O se lutieroVL estos rJlHttos para okltelter el espectro.
181
10
5
lento
0.5
Velocidad
0.1
(mis)
0.05
II
0.01
II
0.005
0.001
0.01
I 0.05
A
o.~
B
10 5
e
10
50
Periodo T (s)
Figura 7-7 - Ejemplo 7-2 - Espectro elástico de diseño de Newmark-Blume-Kapur para
Ale = 0.3 S con amortiguamiento,
1;, de 5% y probabilidad de no excedencia de 84.1%
•
7.2.4 Método de Shtbata-Sozen
En la referencia Shibata y Sozen (Shibata y Sozen, 1976] presentan una metodología
para el diseño de estructuras de concreto reforzado ante acciones sísmicas. A pesar
que los autores indican que el propósito de la metodología no es presentar un espectro
de diseño, dentro de la investigaclón que condujo a la validación del método se
utilizaron tres tipos de espectro que fueron calculados de los siguientes temblores
normalizados para una aceleración máxima del terreno Ate de 0.5 g:
Tabla 7-4· Acelerogramas utilizados para plantear el espectro de Shibata-Sozen
No.
1
2
3
4
5
6
7
8
Acelerograma
Ate(g)
El Centro, CA, 1940, Comoonente NS
El Centro, CA, 1940, Componente EV'1
Taft, CA, 1952, Componente N21°E
Taft, CA, 1952, Componente S69°E
Managua, Nicaragua, 1972, Comp. EW
ManaQua, Nicaraqua, 1972, Comp. NS
San Fernando, CA, 1971,8344 Orlon, Comp. NS
San Fernando CA, 1971, Castaic, corno. N21°E
0.31
0.22
0.18
0.16
0.38
0.38
0.26
0.32
Los autores encontraron que los seis primeros registros se pueden describir por medio
de un mismo espectro, mientras que los otros dos requieren descripciones diferentes.
Además se supone que la aceleración de diseño, leída del espectro de aceleraciones,
para cualquier coeficiente de amortiguamiento crítico S, puede relacionarse con el valor
del espectro de respuesta para un coeficiente de amortiguamiento crítico de 2%
(1; = 0.(2), utilizando:
182
(7-13)
La compatibilidad del espectro suavizado de diseño con los espectros que le sirvieron
de base es mejor para coeficientes de amortiguamiento crítico ~ de 10% que para ~ de
2% debido a que valores dentro del rango cercano a 10% son típicos para estructuras de
concreto reforzado para las cuales se dispuso la metodología. En la Figura 7-8 se
muestra el espectro suavizado de diseño para ~ de 2%. Este espectro es compatibl ~ con
movimientos sísmicos del tipo de los seis primeros de la tabla anterior. El espectro
consta de tres zonas: para períodos cortos el espectro es directamente proporcional a la
aceleración máxima del terreno, luego viene una zona de amplificación constante, y por
último hay una zona en que la amplificación es proporcional al inverso del período. ,.\1
igualar los valores de amplificación de las zonas contiguas, se determina que la zona de
amplificación constante está entre períodos de 0.15 y 0.4 s.
s, (g)
1
25 Ate T
t
Para
3.75 Ate
~
=2%
i
I
I
I
0.15 s
O.
s
Período T (s)
Figura 7-8 - Espectro elástico suavizado de diseño de
5hibata-Sozen para amortiguamiento, ¡;, de 2%
Ejemp!o 7-3
Se deseU obteller eL espectro de disóio pum Lus I1"Lislnus cOItciicioVLes de Los ejempLos 7-1 IJ 7-2
pero uhom por eL I'1tétodo de shil''JULu-Sozen Los r¡urcil1tetros retevaates SOlt:~, = 5%, IJ Al, = 0,3g.
Príl'1tero se o~ltieJten Lu constante cte prorJOrciOltClLLictuct pum 14,/t UfltOrtígltUlnieltto~,
Por Lo tunto Lus orde/tudus deL esuectro pum 1m umortigltcuniento ~
72.7% cte Lus deL espectro COlt~ = 2%.
~
=
5%:
5% SO/t eqf.üvuLelttes uL
EIt Lu FigItm 7-9 se hu di!:Jl4jetcto eL espectro petYl/t lUtOS fltOvimielttos deL terreno con Ate = 0.3 g IJ
pum ~ = 2%, IJ ~ = 5%,
188
1.2
n
1.0
~\
0.8
Sa
(g)
\\
0.6
\~
."<
0.4
__
\.
~=2%
E. = 5%
~~
r-...
0.2
~
I
0.0
0.0
2.0
1.0
--
I
5.0
4.0
3.0
Período T (s)
Figura 7-9 - Ejemplo 7-3 - Espectro elástico suavizado de diseño
de Shibata-Sozen para Ate = 0.3g, 1;=2% Y 1;=5 %
•
7.2.5 Comparación de resultados
En la Figura 7-10 se comparan los espectros obtenidos en los ejemplos 7-1 a 7-3.
10
5
0.5
Velocidad
0.1
(mis)
0.05
0.01
0.005
0.001
0.01
0.05
0.1
0.5
5
10
50
Período T (s)
Figura 7-10 - Espectro elástico de diseño por diferentes métodos, Ate = 0.3 g, V"
y D¿ = 0.3 m para amortiguamiento, 1;, de 5% y probabilidad de 84.1%
184
=0.2 mis
Al dibujar en escala aritmética el espectro de aceleraciones de diseño de los tres
ejemplo, se obtiene la Figura 7-11.
10
9
I
8
\
I '.\
7
\
6
s.
\v /
I
I
5
(m/s')
r:
\)/ /
'\ /'
4
I
.)
3
Newm rk-Blun e-Kapu
-
en
Newma k-Hall
~
/
I
<,
<,
2
:>nI ara-:>o
<,
-
-~
-- - -- - ---
~~
o
0,0
0.5
1,5
1.0
2.5
2.0
3.0
3.5
4.0
4.5
5.0
Período T (s)
Figura 7-11 - Espectro elástico de diseño de aceleraciones por diferentes métodos, Ate
= 0.3 g,
V,. = 0.2 mis y D,. = 0.3 m para amortiguamiento, S, de 5% y probabilidad de 84.1%
Como puede verse, se ob.ienen diferencias importantes en algunas zonas del espectro,
especialmente en el obtenido por el método de Newmark-Blume-Kapur, con respecto a
los otros dos. La razón que pesa en mayor forma en estas diferencias está
con
el período de control C del método de Newrnark-Blurne-Kapur, la cual aumenta la forma
espectral especialmente en la zona de amplificación de velocidades.
2,5 . - - - - - - , - - - - - - - - , - - - - r - - - , - - - - - - , - - - ,
2.0
-j-----jfh--t----t----j----+---t------j
1.5
s,
(g)
1.0.'if-P--
0.5 iJ---+-~mlJil.:=
0.0
-1----\----1-----+----+----+-----1
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Periodo T (s)
Figura 7-12 - Espectros de diseño correspondientes a los parámetros Gel registro de Corra/itos
.-'\ continuación se muestran las diferencias que se obtienen entre el espectro de
respuesta de un registro real, y el de diseño evaluado utilizando los parámetros
máximos del terreno correspondientes al acelerograma real. Para el efecto se utilizan la
componente NS del registro de Corralitos, del temblor de Loma Prieta del 17 de Octubre
185
JIll(lllftl(.(
C~"'(lll\.I.1.l.fll.l ll.l.H
~
~~
~.
~~_
de 1989, Y la componente N21E del registro de Castaic Old Ridge, del temblor de San
Fernando del 9 de Febrero de 1971.
Para el registro de Corralitos, los parámetros máximos del terreno fueron; Ate = 0.629 g,
Vte = 0.552 mis y Dte = 0.120 m. Los métodos de obtención del espectro de diseño se
aplicaron tal como se explicó en los ejemplos anteriores, utilizando solo la aceleración
máxima del terreno para el caso de Shibata-Sozen y Newmark-Blume-Kapur, y los tres
parámetros máximos del terreno para el método de Newmark-Hall. En este último caso
se obtuvieron los espectros para la media (59%), y la media más una desviación estándar
(S-l.l%). En la Figura 7-12 se muestra en escala aritmética los espectros de aceleraciones,
tanto de respuesta como de diseño; y en la Figura 7-13, pl espectro de velocidades en
escala lag-lag, lo cual corresponde a un papel tripartita.
r--t-t-rttHt\---t-tiHiitt----:::-r-r1c'tiTffi'k-Btume-Ka pur
Shibata-Sozen
Sv
(mis)
0.1
O. o1
'--'-,f'--l---'-.J...L.u..u_-'----'---'-L.-LJ.-ll.L_--'--'----'-'--U..LD
10
0.1
0.01
Período T (s)
Figura 7-13 - Espectros de diseño correspondientes a los parámetros del registro de Corralitos
Para el registro de Castaic, los parámetros máximos del terreno fueron; Ate = 0.316 g, Vte
0.1 T¿ m/» y Dte = 0.051 m. Se aplicó la misma metodología que se empleó en el caso
del registro de Corralitos. En la Figura 7-14 se muestra en escala aritmética los
espectros de aceleraciones, tanto de respuesta como de diseño; y en la Figura 7-15, el
espectro de velocidades en escala log-log.
=
1.0 , . - - - - , - , , - , . - - - - , . - - - - , . - - - - , . - - - - , . - - - - - ¡
0.9
+--+-!H'+---+---+---+---+----j
0.8
0.7
0.6
S. 0.5
(g)
0.4 +if----'tI-
0.31V---j-'
0.2 +ll---f----"
0.1
0.5
1.0
1.5
2.J
2.5
3.0
Período T (s)
Figura 7-14 - Espectros de diseño correspondientes a los parámetros del registro de Castaic
186
7.
1;=5%
Sv
(mis)
__l1li11
ShlbBta-Sozon
'-+-++-1+1+1" ".- Newmark-BJume-Kspur
O.l~mBmII
~
Newmtlrk~all(B4.1%)
+H1f----+-+-+-1+H++-_ --+-++-1-+++1
0.01
0.01
Newmark-Hall (50%)
10
Perfodo T (s)
Figura 7-15 - Espectros de diseño correspondientes a los parámetros del registro de Castaic
Vale la pena resaltar, que para los dos casos, el espectro de respuesta está
prácticamente cubierto en su totalidad por los espectros de diseño. El que más se ajusta
a los valores del espectro, excepto en los picos de máxima aceleración, es el espectro de
diseño obtenido por el método de Newmark-Hall, para la media (50%).
Estudios posteriores al de Newmark-Blume-Kapur, realizados por Macfiuire [MacGuíre,
1974], indican que en vez del coeficiente 0.01 a utilizar en la obtención de D¿ con base
en Ate, debe utilizarse 0.665. Este cambio hace que el método de Ncwrnark-Blume-Kapur
produzca resultados muy similares al de Newmark-Hall, en el rango de períodos altos.
En el mismo trabajo, Macfiuíre define una manera de obtener la- ordenadas del
espectro, independientemente para cada rango de períodos de vibración, con base en la
distancia a la fuente sismogénica. Este procedimiento, a diferencia de los estudios
típicos de amenaza sísmica, permite llegar al espectro, sin necesidad de definir la
aceleración máxima del terreno como un paso intermedio. Aunque es un procedimiento
que podría tener ciertas ventajas, no se tiene experiencia con su aplicación.
7.3 Espectros inelásticos de diseño
7.3.1 Introducción
En la Sección 6.6 se discutió el efecto de la respuesta inelástica en las formas
espectrales de sismos registrados en roca o suelo duro, y se explicó por qué,
dependiendo del parámetro que se desee, se pueden encontrar espectros en donde se
describen las aceleraciones máximas del sistema inelástico y se puede leer la
componente elástica del desplazamiento, y espectros donde se pueden leer los
desplazamientos totales del sistema, incluyendo la parte elástica e ínelástíca. Además
se describió el tipo de disminución (dearnplíñcacíón) de la respuesta en términos de
aceleración y el aumento en la respuesta en términos de desplazamiento, dependiendo
de la zona del espectro donde se encuentre el sistema. Además se profundizó en la
diferencia en la respuesta para sistemas cuya rigidez permanece constante durante la
respuesta inelástica, como la que se obtiene en sistemas elastoplástícos, y la de
sistemas con rigidez degradante. Con base en las observaciones descritas allí, es
posible, entonces, afectar un espectro elástico de diseño, para obtener un espectro
inelástico de diseño.
Dado que hay diferencia para sistemas con rigidez inelástica constante y sistemas con
rigidez in elástica degradante, la presentación sigue los mismos lineamientos, aunque se
mantiene el orden histórico y se denorninan con el nombre de los autores que
._.
~
-..01IIII. . .
187
.
.
desarrollaron la metodología. No obstante, existen otras maneras diferentes, pero en
alguna medida soportadas sobre los mismos principios, para plantear y obtener un
espectro inelástico que se deriva de un espectro elástico de diseño. Las personas
interesadas en el tema, pueden consultar los trabajos de [MacGuíre, 1974], [Mohraz,
19761. [Mohraz y E/ghadamsí, 1989], [Laí y Biggs, 1980], y otros. Muy seguramente en la
medida que se disponga de mejores metodologías numéricas e información
experimental, es presumible que harán aparición métodos de evaluación de la respuesta
inelástica de elementos estructurales, y estructuras en su totalidad.
.3.2 Método de Newmark-Hall
Si se dispone de un espectro elástico de diseño, de acuerdo con lo presentado en la
, Sección 6.6.1, se puede obtener el espectro elastoplástico de diseño aplicando los
coeficientes de reducción y de amplificación presentados ailí. En esto se basa la
metodología de Newmark-Hall [Newmark y Hall, 1972] {Newmark y Hall, 19821. para
obtener un espectro de diseño elastoplástico.El procedimiento consiste en afectar el
espectro elástico de diseño, obtenido como se explicó en la Sección 7.2.2 y dibujado en
papel tripartita, por medio de una demanda la ductilidad prefijada, 11, como se muestra
en la Figura 7-16. Allí se ha marcado por medio de las líneas A.,AVD, el espectro elástico
de diseño para un coeficiente de amortiguamiento dado. Los puntos donde se
intersectan las líneas rectas del espectro elástico permanecen constantes al trazar los
espectros inelásticos.
log S v
desplazamientos
inelásticos totales
',o'
~/' A
elástico
/,
j~~--v-;---~"
A"o/ /
/
/
I
v
ti' ,
~
I
...
i\'~ ~
\
A
\
/
aceleraciones
inelásticas
D
"
\ "
D' "
/
"
101; "1'
Figura 7-16 - Espectro inelástico
La línea punteada A.,A 'V'D' muestra el espectro melástico de aceleraciones máximas, y la
línea punteada A:A"VD el de desplazamientos totales. Los dos espectros inelásticos
difieren en un valor constante igual a 11, pero A yA' difieren en ~21l-1 . Los coeficientes
a aplicar se resumen en la Tabla 7-5
Tabla 7-5 - Relaciones del espectro de diseño elastoplástico al espectro
de diseño elástico, para diferentes regiones del espectro
Zona del espectro
Elastoplástico + Elástico
Aceleraciones
Desplazamientos Totales
Fuerza o aceleración
Energía o velocidad
Desplazamiento
_
A"_
A'
11
A -
J21l- 1
D"
V"
D
V
-=-=1
188
1
Ejemplo 7-4
Se deseu ObrevLcr eL eS/1cctro iVLeLástico de diseño pum IHtU dcmuvLdu de dw:tiLidud Ji = 6, pum
Lus ¡niS11tUS co¡tdicio;tes Cjlie se eln/1LeurovL en et E~e/nrJLo 7-1 pum siste/nus con /UL coeJLcievLte
de u/nortig/iumieltto crítico, ~, deL 5%, en/m Lngur en eL m,uL se luA. estilnudo Cj/H:' Lu vnáxil'ltu
uceLemció/t deL terreno (Ate) pum Los /lwvivnie/ttos sís/nicos de diseño es de 0.3~j, Lu máxivvLu
veLocidud deL terreno (Vle) es de 0.20 mis 0 eL vnáxivJw despLuzuvniento deL terre/w (Dte) es de
0.30 m. Se deseu IUt vLiveL de probutliLidad de 84.1 % de qtte VLO se excedan Las ordenudus
espectraLes.
Pri/nero se detle ohtener eL espectro eLástico de diseño, Lo CliaL se hizo en eL ejewLpLo 7-1. ALLí. se
encontró ql~,e:
aA Ate = 2.71 Ate = 0.810
av V te = J..30 V te = 0.46 mis
aD D te = 2.01 D te = 0.60 In
AILOm se mLm.Lu Lu q.feetuci{m /1or eL gecto ilteLástico:
A"
1l==6
=:}
_0
==6
=:}
A
lID'
- == - == 0.167
Il
=:}
-
6
D
V'
== -
V
1
1
-===== - - == 0.302
21l- 1 3.317
A'
J
6
Il
== - - == 1.81
J21l3.317
1
== 0.167
=:} -
== 0.302
A~==0.30·6==1.80
DI = 0.60·0.167 = 0.10
=:}
m
Ij
VI = 0.4·6·0.167 =0.077 mis
=:}
Al = 0.302.0.810 = 0.24·50
A
A"
-
== 1.81
A" = 0.810' 1.81 = 1.4 70
=:}
A
10~
lente
O.S
de
Velocidad
0.1
(m/s)
0.05
0.01
0.005
0.007
0.01
I
0.03 s
0.05
0.1,
0.125 s
so
10
0.5
Período T (s)
Figura 7-17 - Ejemplo 7-4 - Espectro inelástico de diseño para f.l = 6,
sistemas elastoplásticos, método de Newmark-Hall,
lB!}
~--------------------_
_---..
~=5 %
•
ICt,t-"t·t'-'l~·
,- ..,,~II."
11..11. ....,... ' .. \. ..... <0.. . . . . .1'
...
~·~·~~~~~
~
__
~_
-
_
3.3 Procedimiento de Riddell y Newmark
Con base en los resultados de la investigación sobre respuesta de sistemas
elastoplásticos y de rigidez degradante presentado en la Sección 6.6.2, Riddell y
Newmark [Riddell y Newmark, 1979J proponen una metodología para definir un
espectro ínelástíco: para una demanda de ductilidad dada, u, Por lo tanto, en el estudio
se definieron coeficiente de deamplificación ínelástíca, $¡.t, para sistemas inelásticos
elastoplásrícos, bilineales y de rigidez degradante. Debe recordarse (Sección 6.6.2), que
estos coeficientes de deamplificación corresponden al inverso de los coeficientes de
reducción de resistencia Ra , R, Y R,¡, correspondientes a las zonas del espectro donde
respectivamente la aceleración, o la velocidad, o el desplazamiento son
aproximadamente constantes. Se encontró. que estos coeficientes eran prácticamente
independientes del nivel de probabilidad de excedencia de las ordenadas espectrales del
espectro elástico, por lo tanto son aplicables, en teoría, a cualquier espectro elástico.
Para sistemas elastoplásticos se desarrollaron las siguientes expresiones para los
coeficientes de reducción de resistencia, para valores de 1; entre 2% y ] 0%, Y valores de J.l
entre 1.5 y ]0:
para la región de desplazamiento aproximadamente constante,
(7-14)
para la región de velocidad a..roxímadamente constante,
(7-15)
donde:
(7-16)
qv = 2.7 (1; % )-0.4
(7 -t 7)
(7-18)
y para la región de aceleración aproximadamente constante,
(7-19)
donde:
(7-20)
qa = 3.0 (1; %) -0.3
(7-21)
(7-22)
Para sistemas con rigidez degradante no se desarrollaron expresiones como las
anteriores, pero en la Tabla 7-G se presentan los valores obtenidos, para diferentes
190
t
I
-valores de demanda de ductilidad, lJ-, y para un coeficiente de amortiguamiento crítico ~
5%. No obstante RiddelJ y Newmark demostraron que para los casos estudiados, la
respuesta elastoplástica era conservadora al compararla con la respuesta para rigidez
degradante, por lo tanto se pueden utilizar los valores para sistemas elastoplásticos en
la gran mayoría de los casos prácticos.
=
Tabla 7-6 - Valores de
R a, R v, y R,¡ para sistemas con rigidez degradante y ~ =5%
Región espectral
Ductilidad
1.0
1.5
2.0
3.0
5.0
10.0
I
i
!
Aceleración
Velocidad
Ra
Rv
Desplazamiento
R,¡
1.00
1.49
1.85
2.28
2.86
3.75
1.00
1.65
2.32
3.44
5.08
8.33
1.00
1.68
2.38
3.73
6.62
14.3
El procedimiento sugerido por Riddell y Newmark es el siguiente. Partiendo de un
espectro elástico, como puede ser el de Newmark-Hall, en la zona de períodos cortos,
menores de 0.03 s se sugiere tomarla igual a Ate' En caso de que se deseen hacer ajustes
en esta zona, puede consultarse lo indicado al respecto en la Sección 6.6.2. En la zona
central del espectro, entre períodos del orden de 0.125 s y lOs se tiene amplificación de
la aceleración, luego de la velocidad y por último del desplazamiento. En la zona
cercana a períodos del orden de 0.125 s, se tiene amplificación de la aceleración. Allí se
toma la aceleración del espectro elástico y se divide por el R, correspondiente a la
demanda de ductilidad lJ-, deseada. En la zona central se reduce la velocidad del
espectro elástico, dividiéndola por Rv ; Y en la Zulla anterior al período de 10 s se tiene
amplificación del desplazamiento, allí se divide el desplazamiento del espectro elástico
por R,¡. Las intersecciones entre estas líneas definen el espectro en la zona central. En la
zona de períodos largos, más de 33 s, se obtiene dividíendo la ordenada de
desplazamiento del espectro elástico por el valor de la demanda de ductilidad ¡J,. Una
vez se tiene dibujada esta zona se procede a dibujar las zonas de transición. La de
períodos cortos se dibuja entre los períodos de 0.03 s y 0.125 s, y la de períodos largos,
entre 10 s y 33 s.
'EjemPlO 7-5
Se ¡;{,esea oatener el espectro inelristico ¡;{,l" ¡;{'iseFw IttitilGl.lt¡;{,O el proce¡;{,in'LÍenlo ¡;{,e Ri¡;{,¡;{,l"ll 0
NewmCMk rara sistemas COVI, rigi¡;{,el ¡;{,egra¡;{,ante. para (tita ¡;{,ef'ltGl.lt¡;{,a ¡;{,e ¡;{"Ktili¡;{,ad lJ- = 5. Ij
rJara las mismas con¡;{,iciOl1Cs qliC se elnplearon en el ejemplo 7-1 ",ara sistemas C(Ht 11.1'1,
coeJicLevl,te de Gl.Inortigl1.awüevtto crítico. ~, ¡;{,el 5%. ett 1m l/1.gcu en el Cl1.al se hIA- estimadü Cjlte
la mlixintu aceleraciótt ¡;{,eL terreno (Ate) rara los f'ltOvimíe/ttos sísmícos de ¡;{,íseFto es ¡;{,e O.3g. lu
mlixima velocidad del terreno (Vte) es ¡;{,e 0.20 mis Ij el ,nlixímo ¡;{,esplazamiettto ¡;{,el terreno
(Dte) es ¡;{,e 0.30 m. Se ¡;{,esea 11.It ltiveL de prob0LuiLidad del 84.1% de q11.e no se excedalt las
ordena¡;{,as espectrales.
En el ejemrlo 7-1 se outltvierO/t los siglüelttes valores para lus oretefta¡;{,as ¡;{,el espectro elristico
en las zonas ¡;{,e amplificación ¡;{,e aceteración, velocL¡;{,a¡;{, Ij ¡;{,esplazamie/tto. res pectivalne ate:
A = 2.71 Ate = 0.81g. V = 2.30 Vte = 0.46 mis. 0 D = 2.01 D¿ = 0.60 m
Los valores ¡;{,e los coeJicievLtes ¡;{,e re¡;{,11.cción ¡;{,e resistencia. cmnputibles con lu ¡;{,ema~u etc
etactilieta¡;{, lJ- = 5. se ()~)tieltelt ete la Tubla 7-6. colno: R, = 2.86. R, = 5.08 Ij R,¡ = 6.62. Nllicaft¡;{,O
estos corJ¡,cientes se obtirftl"n:
191
Dinámica est ructural apliccul« (1/ diseño SiSllllCO
A m = AIRa = 0.81/2.86 = 0.283 g
V m = V IR v = 0.46 / 5.08 = 0.091 vvtls
Dm = DI R, = 0.60 / 6.62 = 0.091 m.
PiA-YrA. l1erí.odos miA-lJores de 33
s. D m = D/fl = 0.60 / 5 = 0.12 vVI.
10
5
0.5
Velocidad
(mis)
0.1
0.05
0.01
0.005
0.01
I
0.05
0.03 s
0.5
0.125
e
5
10
50
Período T (s)
Figura 7-18 - Ejemplo 7-5 - Espectro inelástico de diseño para !1
=5,
sistl'lmas elastoplásticos, método de Riddel/ y Newmark, S=5%
•
7.3.4 Procedimiento de Shibata-Sozen
Con base en las investigaciones de Shibata y Sozen [Shibata y Sozen, 1976] como se
indicó en la Sección 6.S, es posible dibujar un espectro inelástico de aceleraciones. Se
toma como base un espectro elástico como se indicó en la Sección 7.2.4. Luego se
dibuja un espectro de aceleraciones no lineal que tome en cuenta el comportamiento
histeretico del sistema de concreto reforzado utilizando un amortiguamiento substituto
utilizando la ecuación (6-14). El procedimiento es el siguiente: se define UIl nivel de
amortiguamiento substituto correspondiente al coeficiente de daño seleccionado, ¡.t, por
medio de la ecuación (6-14), la cual se reproduce aquí por comodidad como la ecuación
(7-23).
(7-23)
La reducción en el espectro, con respecto al espectro elástico dibujado para un
amortiguamiento de 2% del critico, debida a este amortiguamiento substituto se puede
calcular utilizando la ecuación (7-13), la cual se reproduce aquí por comodidad como la
ecuación (7-24):
----------------------------------------8
s, (T,~) = s, (T,~ = 0.02). 6+100~
(7-24)
El espectro que describe corresponde al espectro inelástico deseado. Debe tenerse en
cuenta que para entrar al espectro se debe emplear la rigidez substituto definida por la
ecuación (6-13), que se reproduce aquí como (7-25):
= (EI)r
(Ei)
s
(7-25)
J..l
Ejemplo 7-6
Se desea ohtener eL esrJectro üteLásüro de ¡;tiseftO IttiLizavLdo eL rJrocectirniento iJ'LfLástico de
s/dbata-SozevL pUYI/L iuta ucE'Lemción ,núxiJ'na deL tennto. Ate = O.4g (3 nn coeficiente de v/.ufío.
J..l = 4 (3 tUt coejí.ciertte ue ul11Clrtig/twnieVLlo crítico. ~ = 2%.
Prir1'Lfro se dikJl1ju et espectro eLástico uc slUbuta-Sozen ¡Juru ~ = 2%. EVL La ZOVLa de ¡1críodos
cortos. r11eVWreS de 0.15 s este espectro está regido ¡Jor (véase La Sección 7.2.4):
Pam períDGtos entre 0.15 s (3 0.4 s. está regirlo rJor:
(3
rJa ru ¡Jerí.odos rltal:Jores de 0.4 s:
(~=2%)=
S
a
I
1.5A
0.6
__
te = - g
T
T
EL esjiectro ü1R.Lástico se oht.ierte arJLirwtdo el IM11.o:'ligH.afnienlo sttbstittuo (}J espectro dá\¡ico.
wnortig/~.amiertto slttlsLititto pam J..l = 4 es:
EL
1;, = 0.+ (3
~} + 0.02 =o.z{1- }.}+0.02 = 0.12
este Uf1iDrtigttlM1üeVLlo stüJstílJÜO irnrJLiw. IUtU reuncciór1. ert eL espectro eLástico COVL ~
=
2%
de.
En La Figt1.ra 7-19 se l11.ttestraft tanto eL esnectro eLtistico COl1iD eL ine!ásüco. No sokJYU iVLsistir
(;jIte para er1.tmr a este eS¡Jectro debe lttiLizcMse et ¡Jerí.ouo v/.e vikJYaciór1. correspcwLdievl.te a La
rigidez sltklStitl1.tO. En este caso tuta rigiuez rev/.IH.:iv/.a aL 25% (1/J..l = 1/4=0.25) v/.e Lu rigiuez
origirtaL eLtistica. Dav/.o (;jl1.e et períov/.o escá rlfj'iJüuo por:
T=21t~
1.98
Dinámica estructural opticaaa
(ti (lI.'W/llJ o •..,,, ... ,,
el YJerío¡;(o SIÜJStltI1JO, con eL qlte se ev\,lm aL espectro il'],('Ltistico es:
uor Lo tanto en el espectro ü'],('Ltistico de S/üimta- Sozev\, se ddJe el'lt/"lLear eL período de vibmclóv\'
de La estrltctlua s¡üJstittito, q/te pam 1m Jactar de daCio, l-! = 4, corresjionzte aL dobLe deL
YJeríodo etc vibmciólt de La estntct/tm eLtistica origil%ü,
1.60
1.40
1,20
r-\
¡
\
L
1
1\,/
\
\
1.00
Sa
0,80
(g)
rrr>;
0.60
0.40
I
I
elástico
1;=2%
-.
-,
~
<, ~
0.20
I
inelástico
----~=4
t---
0.00
0.0
0,5
1,5
1.0
2.0
2.5
3.0
?eríodo T (s)
Figura 7-19 - Ejemplo 7-6 - Espectro inelástico de diseño de
Shibata-Sozen para Ate de O.4g y para un factor de daño ~ = 4.
•
7.4 Efecto en la forma del espectro de la magnitud,
distancia, duración y tipo de suelo en el sitio
Como se ha vísro en la presentación anterior, la forma espectral de diseño se ha
derivado del estudio de acelerogramas reales obtenidos durante sismos fuertes. No
obstante, en el momento que el espectro hace tránsito de un espectro de respuesta a un
espectro de diseño, obviamente surgen las dudas de cómo manejar, en el de diseño,
variables que por el hecho de tratarse de acelerogramas van incluidas dentro de elles, e
inhiben su estudio como una variable independiente. Dentro de estas variables se
cuentan, entre otras, la magnitud del sismo, la distancia a la falla que lo causa, su
duración, y tal vez, la que puede llevar a diferencias mayores entre lo que se estima y la
realidad: el efecto de las condiciones locales del suelo en el sitio de interés. A
continuación se tratan, de una manera resumida, los efectos de estas variables.
7.4.1 Efecto de la magnitud y la distancia a la falla
La magnitud es una medida de la energía que libera súbitamente la corteza terrestre en
el momento en que se presenta el sismo, como se indicó en la Sección 4.5.2. La forma
como se libera esta energía es compleja y lo poco que se conoce en la actualidad se
agrupa dentro de los que se llama efectos de campo cercano. En la medida que han
ocurrido sismos fuertes en zonas urbanas con densidad importante de
instrumentación, como han sido los sismos de Northridge en enero de ] 994 Y de Kobe
en enero de 1995, se ha incrementado el conocimiento sobre estos efectos de campo
1!)4
cercano, de una manera notoria. La influencia, entonces, de la cantidad de energía que
se libera, y la distancia de un observador a este punto de liberación, juegan un papel
muy importante dentro de los aspectos que se deben tener en cuenta al plantear un
espectro de diseño.
Indudablemente, en la misma metodología de formulación del espectro de diseño se
toman en cuenta estos efectos dado que los movimientos máximos del terreno, Ate, Vto y
Dto, se estiman para un .sítío en particular, teniendo en cuenta la distancia y la magnitud,
a través de los efectos de atenuación que se describen por medio de las ecuaciones de
atenuación presentadas en la Sección 4.8.5. Desafortunadamente, estas ecuaciones no
describen la variación en el contenido frecuencial de las ondas del sismo, ni el efecto
que ésta tiene en la forma del espectro, sino de una manera indirecta por medio del
efecto de cada uno de los parámetros máximos del terreno en su correspondiente zona
de influencia en el espectro.
En la Figura 7-2, tomada de [Housner, 19591 se evidencia, que la forma del espectro de
velocidades de un sismo varía de una manera importante con la distancia, no solo en su
amplitud, sino en el efecto en los diferentes períodos de vibración. Allí puede verse que
el pico para el registro cercano se presenta para un período similar a 0.7 s, mientras que
en el registro lejano este pico ha desaparecido y pueden leerse en el espectro valores
mayores para períodos más largos. Este fenómeno no es algo particular de las ondas
sísmicas, pues se presenta en todo proceso ondulatorio. Toda persona que haya tenido
un vecino molesto que oye música con un volumen alto, con seguridad ha sentido con
mucha mayor intensidad las notas bajas (frecuencias bajas = período altos) de la música
que las notas altas (frecuencias altas = períodos bajos). La razón detrás de estos dos
fenómenos es la misma: la atenuación de una onda que tenga algún amortiguamiento es
proporcional al número de ciclos que ocurran entre dos puntos de observación; dado
que la onda de frecuencia alta tiene un mayor número de ciclos, sufre
proporcionalmente una mayor atenuación. Para ilustrar este punto, en la Figura 7·20 se
muestra una señal, que está compuesta por la superposición de 12 ondas sinusoidales
de igual amplitud y con periodos que van desde 0.25 s hasta 3.00 s en incrementos
discretos de 0.25 s. El medio en que se transmiten tiene un amortiguamiento í-.)% del
crítico. Los registros se tomaron en la fuente, el segundo a una distan,
C¡.(' las
ondas tardaron 9 segundos en llegar allí, y el tercero en un lugar donde transcurríeron
36 segundos para que llegaran.
Amplitud
arbitraria
i{
-0.8n
Amplitud
arbitraria
15
10
20
25
30
(s)
ijNH~~
-0.8
O
Amplitud
arbitraria
5
--L
----'--
5
10
:ijt*-J
-0.8
O
5
---'---_ _
15
-1
1-15
10
20
25
30
~ -11
20
25
30
(s)
(s)
Figura 7-20 - Superposición de ondas sinusoidales de igual amplitud con períodos de 0.25 s hasta 3.00 s
a intervalos de 0.25 s, La primera se mide al inicio, la segunda a los 9 s y la última a los 36 s,
195
En la Figura 7-21(a) se muestra el espectro de Fourier de los tres registros, y en la Figura
7-2l(b) el espectro de aceleraciones inducidas por la señal.
¡ini lo
7.4
0.0
0.5
10
1.5
2.0
2.5
3D
0.5
3.5
1.0
1.5
2.0
2.5
3.0
3.5
Periodo T (s)
Período T (s)
Figura 7-21 (a) - Espectro de Fourier
Figura 7-21 (b) - Espectro de Aceleraciones
De este ejemplo muy simplista pueden describirse algunas características que son
comunes entre diferentes fenómenos ondulatorios. La primera indica que a pesar de
que la energía en la fuente esté uniformemente distribuida entre las distintas
componentes, como indica el espectro de Fourier, el amortiguamiento hace que en las
señales registradas después de que las ondas han viajado por algún tiempo los períodos
cortos han perdido preponderancia dentro de la señal. En el espectro de aceleraciones
puede verse que no sólo la amplitud disminuye en general, sino que además
proporcionalmente se presenta mayor disminución en las ondas de período corto.
En el caso de las ondas sísmicas se presenta una situación similar, mucho más compleja
dada la distribución de la energía dentro de la gama de períodos de vibración, y las
reflexiones » refracciones que afectan el tren ondulatorio en la medida que se transmite
dentro de la corteza terrestre. Desde el punto de vista cualitativo, la magnitud, que es
una medida de la energía que se libera en la fuente, afecta directamente la amplitud de
las ondas sísmicas, por lo tanto a mayor magnitud en la fuente se presentan
proporcionalmente mayores aceleraciones. En la medida que las ondas sísmicas viajan,
los registros que se obtienen van a presentar en sus espectros un decrecimiento en la
región de períodos cortos, lo cual se manifiesta en un corrimiento del pico del espectro
hacia la derecha, o sea hacia la zona de períodos largos. Mirado desde el punto de vista
de las tres regiones del espectro, puede decirse que, en la medida que el registro se
obtenga a mayor distancia, la zona de mayores valores dentro del espectro pasa de la
zona con aceleraciones aproximadamente constantes, a la región con velocidades
aproximadamente constantes y posteriormente a la zona con desplazamientos
aproximadamente constantes.
7.4.2 Etecto de la duración del sismo
Desde hace tiempo se sabe que dos movímíentos sísmicos con espectros símilares pero
duraciones diferentes, causan diferentes niveles de daño a las edificaciones, siendo
menor el daño para los movimientos sísmicos de menor duración. Especialmente, hay
muchos casos en los cuales movimientos sísmicos de corta duración, aún con
aceleraciones muy altas, causan muy poco daño. Esto indica que el espectro no
necesariamente describe todos los parámetros relevantes del movimiento sísmico.
Entre mayor sea el período de vibración de la estructura, se necesita una mayor
duración para llegar a la máxima respuesta. Esto se manifiesta en el hecho de que entre
más grande sea la duración del acelerograma, mayor es la probabilidad de que contenga
ondas de períodos intermedios y" largos. En la actualidad no existe una manera
establecida para definir el efecto de la duración del sismo dentro del espectro de
196
diseño, más allá de correcciones totalmente cualitativas que se deben manejar con el
mayor criterio. En general lo anterior indica que en caso de duda al respecto, debe en
alguna medida incrementarse el grado de conservatismo en la zona de períodos largos
del espectro. En la referencia [Peng et al., 1989] se discuten los efectos de la duración
del sismo en los espectros de diseño, y su relación con los otros parámetros de
construcción del espectro.
7.4.3 Efecto de las condiciones qeotécnicas locales
A pesar de que desde tiempos de los romanos se sabía que el daño producido por los
sismos se incrementaba en 'as zonas de suelos blandos y pantanosos, sólo hasta
tiempos relativamente recientes la importancia de los efectos locales ha adquirido la
trascendencia que amerita. La primera gran evídencia interpretada científicamente de
que las características locales habían jugado un papel muy importante en la
concentración de daño observada, se tuvo con el temblor de Caracas en 1967.
Posteriormente, puede afirmarse, que prácticamente no ha habido un sismo fuerte en el
cual deje de presentarse algún tipo de manifestación al respecto. Tal vez la mayor
evidencia de la importancia, y gravedad, de este fenómeno se presentó con el sismo de
Ciudad de México de 1985, en el cual se evídenció una correlación directa entre el daño
observado y las características del suelo en el lugar. La Figura 7-22 muestra
esquemáticamente la problemática asociada con el fenómeno. En el sitio A, cercano a la
falla que causa el sismo, se obtienen un registro en roca que tiene un alto contenido de
períodos cortos, y altas aceleraciones en esa franja del espectro. Las ondas viajan por la
corteza terrestre, donde sufren reflexiones y refracciones. A alguna distancia, sitio E, la
amplitud de las ondas se ha atenuado, lo cual se manifiesta en una reducción de las
aceleraciones, y el contenido frecuencial del sismo ha variado, pues se ha perdido parte
de las ondas, especialmente en la zona de períodos cortos del espectro. Al viajar las
ondas a través de suelos blandos y profundos, desde el sitio E hasta la superficie, C. las
ondas se amplifican, especialmente en la zona de períodos largos.
11\
¡...I'-
,.,/1 , r--.....
o
'"'-
2
3
4
Período, T (5)
5
c~
02345
Período, T (5)
Figura 7-22 - Efecto de las condiciones geotécnicas locales
Los avances que han ocurrido, y están ocurriendo permanentemente, acerca de los
criterios que deben emplearse para tener en cuenta estos efectos dentro de un espectro
de diseño, indican que con un tratamiento cuidadoso de las diferentes variables que
-------------
197
--~----~---
intervienen es posible, hoy en día, definir las regiones del espectro que se ven afectadas
y el orden de magnitud de estas afectaciones. Con base en los estudios elaborados bajo
la dirección de H. B. Seed, presentados en las referencias [Seed, Ugas y Lysmer, 1976] Y
[Seed y Idriss, 1982], de los cuales hace parte la Figura 7-23 fue posible identificar la
influencia que tiene en el espectro el tipo de suelo subyacente. En este caso se muestra
el efecto en la forma espectral de diferentes tipos de suelo.
3
Arcillas blandas a medianas con arenas
Suelos no cohesivos profundos
Suelos duros
2
Sa
Ate
1
Amortiguamiento 5%
o
00
0.5
1.5
1.0
2.0
2.5
Período, T (seg)
Figura 7-23 - Espectro promedio de aceleraciones para diferentes condiciones de suelo
La Figura 7-23 muestra que para períodos mayores que aproximadamente 0...1-0.5 s, las
ordenadas espectrales para los registros obtenidos en roca son substancialmente
menores que aquellas registradas en suelos con estratificaciones que contienen arcillas
blandas y de dureza media, o depósitos aluviales profundos de suelos no cohesivos. Las
curvas mostradas corresponden a espectros normalizados a la aceleración máxima del
terreno y promediados estadísticamente en cada ordenada espectral. En el caso de
suelos compuestos por arcillas de dureza medianil a blanda se utilizaron 15 registros,
de los suelos no cohesivos en estratos profundos se utilizaron 30 registros, de suelos
duros 31 registros y en roca 28 registros.
Procedimiento del ATC-3
Con base en lo anterior SE' establecieron unas recomendaciones generales para incluir la
ampliñcacíón del suelo en el sitio, dentro del espectro de diseño, las cuales fueron
plasmadas en el ATC-3 [ATe, 1978]. Los cuatro tipos de suelo del estudio original se
redujeron a tres tipos de la manera siguiente:
Perfil Tipo SI - Corresponde a roca de cualquier clase, cristalina o lutítica, con una
velocidad de la onda de cortante mayor de 750 mis, o sitios de suelos rígidos, donde
hay menos de 60 metros de depósitos estables de arcillas duras, arenas o gravas. En
este tipo de suelo no se consideró ninguna modificación al espectro de diseño, por lo
tanto el coeficiente de amplificación por efectos del suelo se propuso como S = 1.0.
Perfil Tipo S2 - Corresponde a perfiles donde entre la roca y la superficie hay depósitos
profundos de suelos no cohesivos o arcillas duras, donde hay más de 60 metros de
depósitos estables de arcillas duras, arenas o gravas. En este tipo de suelo se propuso
un coeficiente de amplíficación por efectos del suelo en el sitio, S = 1.2. Este coeficiente
sólo se aplica en la zona del espectro con períodos mayores de aproximadamente 0.5 s.
198
Perfil Tipo S3 - Entre la roca y la superficie hay más de 10 metros de arcillas de dureza
mediana a blanda, con o sin estratos intercalados de arena u otros suelos no cohesivos,
En este tipo de suelo se propuso un coeficiente de amplificación por efectos del suelo
en el sitio S = 1.5. Este coeficiente sólo se aplica en la zona del espectro con periodos
mayores de aproximadamente 0.5 s.
Procedimiento del Uniform Building Code hasta la versión de 1994 (UBC-94)
1
iI
I
I
I
Posteriormente, a finales de la década de 1980, con base en los estudios realizados
después de la ocurrencia del sismo de México de 1985, se propuso una reorganización
de los tipos de suelo. con un tipo adicional, S4, para depósitos de suelo blando. Esta
clasificación aparecio con la versión de 1988 del URe [fCBO, 1988], siendo ajustada en
la versión de 1991 del UBe debido a las experiencias obtenidas con el temblor de Loma
Prieta de 1989, cambiando los perfiles S3 y S4, y fue modificada nuevamente en la
versión de 199-l: del UBC, con variaciones en los perfiles SI(b), S2 y S3' La versión del UBe
de 1997 IICBO, 1997J se desvía del procedimiento explicado aquí; no obstante, debido él
que todavía se emplea en muchas normas de diseño sismo resistente se incluye su
descripción aquí.
La clasificación de tipos de perfil de suelo está basada en que el coeficiente de sitio S,
debe determinarse con base en información geotecníca apropiadamente obtenida. En
aquellos lugares donde no se conocen las propiedades del suelo con suficiente detalle
para determinar el tipo de suelo, debe emplearse un perfil de suelo tipo S3. No debe
suponerse un perfil de suelo S4, a menos que la reglamentación de la ciudad indique un
perfil de estas características puede existir en el lugar, o la información geotécnica lo
establezca así. La clasificación de suelos del UBe-9-l: es la siguiente:
Perfil Tipo SI - Es un perfil donde se presenta:
(a) Roca o material rocoso caracterizados por una velocidad de la ondeo de
cortante mayor de 760 mis, o por otro método de clasificación, o
(b) Presencia de espesores de suelo menores de 60 m que contienen suelos
medianamente densos a densos, o medianamente rígidos a rígidos.
A este tipo de perfil de suelo se le da un coeficiente de amplificación por efectos del
suelo en el sitio S = 1.0.
'
Perfil Tipo S2 - Es un perfil en que predominan los suelos medianamente rígidos a
rígidos, o medianamente densos a densos, con un espesor mayor a 60 m. En este tipo de
perfil se da un coeficiente de amplificación por efectos del suelo en el sitio S = 1.2.
Perfil Tipo S3 - Es un perfil que contiene más de 6 m de arcillas blandas a
medianamente rígidas, pero no más de 12 m de arcillas blandas. En este tipo de perfil
se da un coeficiente de amplificación por efectos del suelo en el sitio S = 1.5.
Perfil Tipo S4 - Es un perfil que contiene más de 12 m de arcillas blandas caracterizadas
por una velocidad de la onda de cortante menor de 150 mis. En este tipo de perfil se
debe emplear un coeficiente de amplificación por efectos del suelo en el sitio S = 2,0.
Esta tipología, y sus correspondientes coeficientes de amplificación por efectos de sitio,
fue adoptada por varios códigos de diseño sismo resistente, iniciando con la versión de
1988 del Uniform Building Code I fCBO, 1988], e inclusive con algunas variaciones en las
nuevas normas sísmicas colombianas, NSR -98 IAIS, 1998].
199
Diiuunica estrucCIlHII
UPUCUUll , .. , ... "
••
~
_
Procedimiento del NEHRP-94, del UBC-97 y alterno de N5R-98
Gracias a los numerosos registros que se obtuvieron durante el sismo de Loma Prieta de
Octubre de 1989, fue posible re evaluar los efectos de sitio a la luz de información
acelerográfica real. Esta información sumada a la de otros sismos, inclusive
evaluaciones más profundas sobre el sismo de México de 1985, llevaron, alrededor del
año 1992, a que se propusiera una clasificación mucho más detallada, y a su vez basada
en información más fidedigna [Borcherdt, 1994], I Whitman, 1992]. Esta clasificación fue
plasmada en la versión de 1994 de las recomendaciones de NEHRP [FEMA, 1994bl Y fue
adoptada por el UBC-97 IICBO, 1997] y por las nuevas normas sísmicas colombianas,
N5R-98 [AIS, 1998], como procedimiento alterno. A gran diferencia de todas las
anteriores, estas nuevas recomendaciones dan coeficientes de amplificación para la
zona de períodos cortos del espectro, además de las recomendaciones para períodos
largos. El espectro en roca está definido en función de dos parámetros, A, Y Av, los
cuales provienen del ATC 3, como se explica más adelante, en la Sección 7.7.2.
El procedimiento prescribe dos factores de amplificación del espectro por efectos de
sitio, Fa Y Fv, los cuales afectan la zona del espectro definida por Aa Y Av,
respectivamente. En principio la metodología es aplicable a períodos de vibración que
estén dentro del rango de 0.2 a 3.0 s. Explícitamente se indica que no debe utilizarse
para períodos en entre O y 0.2 s. El método define los cinco tipos de perfil de suelo
presentados en la Tabla 7-7. Los parámetros utilizados en la clasificación son los
correspondientes a los 30 m superiores del perfil. Aquellos perfiles que tengan estratos
claramente díferenciables deben subdividirse, asignándoles un subíndice i que va desde
1 en la superficie, hasta n en la parte inferior de los 30 m superiores del perfil. Los
parámetros se definen así:
Para la velocidad de la onda de cortante en el perfil:
n
I,d¡
V =-.i=.!......s
n d
(7-26)
I,._i
;=1 V si
donde:
Vsi
di
velocidad de la onda de cortante del suelo del estrato í, en mis
espesor del estrato í, localizado dentro de los 30 m superiores del perfil
n
I,. di
30 m siempre
i=1
Para el número medio de golpes del ensayo de penetración estándar:
(7-27)
donde:
Ni
número de golpes por píe obtenidos en ei ensayo de penetración estándar,
realizado in situ de acuerdo con la norma A5TM D1586-84, sin hacerle
corrección alguna. El valor de Ni a emplear para obtener el valor medio, no
debe exceder 100.
En los estratos de suelos no cohesivos localizados en los 30 m superiores del perfil
debe emplearse, la siguiente relación, la cual se aplica únicamente a los ID estratos de
suelos no cohesivos:
20()
I
I
I
I
-.
~n:v~~:,!~~ 1¡,iI)J~i~M, ~E!II(if~¡¡MJ~,-'-"-
fAtliL¡~:lliE a,~~~~~ fii}~A ~v!¡~:rJi.;¡tJ,ím
CENTRO DE OOCIMJ!~NtA~¡~~M"!
wer"'7VE&'
..
.
.
(7-28)
T',pa"'2'~ryi~;~L~~v~~l
donde:
es la suma de los espesores de los ID estratos de suelos no cohesivos
localizados dentro de los 30 m superiores del perfil.
ds
Para la resistencia al corte obtenida del ensayo no drenado en los estratos de suelos
cohesivos localizados en los 30 m superiores del perfil debe emplearse, la siguiente
relación, la cual se aplica únicamente a los k estratos de suelos cohesívos:
d
s = -c u
k d.
I
I•
(7-29)
I,_L
;=1 su;
donde:
de
Sui
es la suma de los espesores de los k estratos de suelos cohesivos localizados
dentro de los 30 m superiores del perfil.
es la resistencia al corte no drenado en kPa del estrato i, la cual no debe
exceder 250 kPA (2.5 kgf'/cm") para realizar el promedio ponderado. Esta
resistencia se mide cumpliendo la norma ASTrvl D 2166-91 o la norma ASTI\l
D2850-87.
Además se emplea el Indice de Plasticidad (IP), el cual se obtienen cumpliendo la norma
AST1\! D-I:3 18-93, Y el contenido de humedad en porcentaje, w, el cual se determina por
medio de la norma ASTM D2216-92. El procedimiento para defihir el perfil es el
siguiente:
l. Deben primero verificarse las categorías de suelo tipo F. Si el suelo cae dentro de la
clasificación de suelo tipo F, debe realizarse una clasificación en el sitio, por parte
de un ingeniero geotecnista.
I
2. Debe verificarse la existencia de un espesor total de estratos de arcilla blanda, La
arcilla blanda se define como aquella que tiene una resistencia JI corte no drenado
menor de 25 kPa (0.25 kgf'/crn"), un contenido de humedad, w, mayor de140%, y un
índice de plasticidad, IP, mayor de 20. Si hay un espesor total de 3 m o más de
estratos de arcilla que cumplan estas condiciones el perfil se clasifica como tipo E.
3. Utilizando uno de los tres criterios:
vs ' N, o
Su' se clasifica el perfil. En caso de que
se utilice el criterio basado en Su y el criterio Nch indica otro perfil, en ese caso se
debe utilizar el perfil de suelos más blandos, por ejemplo asignando un perfil tipo E
en vez de tipo D. En la Tabla 7-8 se resumen los tres criterios para clasiñcar suelos
tipo C, D o E. Los tres criterios se aplican así:
(a) Vs en los 30 m superiores del perfil,
(b) N en los 30 m superiores del perfil, o
(e) N ch para los estratos de suelos existentes en los 30 m superiores que se
clasifican como no cohesivos cuando IP < 20, o el promedio ponderado Su en los
estratos de' suelos cohesivos existentes en los 30 m superiores del perfil, que
tienen IP > 20.
201
Diruunica esr rucr U/"(1/
U p " l Ultl • • I t
...
~~ . . ~ ~'"""'- ._
Tabla 7-7 Clasificación de los perfiles de suelo (NEHRP-94, UBC-97 y procedimiento alterno de NSR-98)
Tipo de perfil
Definición
Descripción
Perfil de roca competente
A
Perfil de roca de cualquier espesor
B
Perfiles de suelos muy densos o roca
blanda, de cualquier espesor que
cumpla con el criterio de velocidad de
la onda de cortante
Perfiles de suelos muy densos o roca
blanda, de cualquier espesor que
cumpla con cualquiera de Josdos
criterios
Perfiles de suelos rigidos de cualquier
espesor que cumpla con el criterio de
velocidad de la onda de cortante, o
perfiles de suelos rígidos de cualquier
espesor que cumpla cualquiera de las
dos condiciones
e
I
D
Vs
> 1500 mIs
1500 rn/s »
Vs
> 760 mIs
760 rn/s»
Vs
> 360 mIs
-
N >50, o
Su> 100 kPa (z1 kgf/cm 2 )
360 m/s »
Vs
> 180 mIs
50> N >15,0
100 kPa (=1 kgf/cm 2 ) > Su> 50 kPa (zO.5 kgf/cm 2 )
Perfil de cualquier espesor que cumpla
el criterio de velocidad de la onda de
cortante. o
180 mis>
E
Vs
IP>20
perfil que contiene un espesor total
mayor de 3m de arcillas blandas
H
W~40%
25 kPA (zO.25 kgf/cm 2 ) > Su
Los suelos tipo F requieren una evaluación realizada explícitamente en el sitio por un ingeniero
geotecnista. Se contemplan las siguientes subclases.
F1 - Suelos vulnerables a la falla o colapso causado por la excitación sísmica, tales como: suelos
licuablas, arcillas sensitivas, suelos dlspersrvos o débilmente cementados. etc.
F
F 2 - Turba y arcillas org3.nicas y muy orgánicas (H > 3 m para turba o arcillas orgánicas y muy
orgánicas).
F 3 - Arcillas de muy alta plasticidad (H > 7.5 m con Indice de Plasticidad IP > 75)
F 4 - Perfiles de gran espesor de arcillas de rigidez mediana a blanda (H > 36 m)
Tabla 7-8 - Criterios para clasificar suelos dentro de los tipos C, D o E
(NEHRP-94, UBC-97 y procedimiento ettomo de las NSR-98)
Tipo de perfil
-V
e
D
E
N o N ch
Su
entre 360 y 760 mIs
mayor que 50
mayor que 100 kPa (= 1 kgf/cm 2 )
entre 180 y 360 mis
entre 15 y 50
entre 100 Y 50 kPa (0.5 a 1 kgf/cm 2 )
menor de 180 mis
menor de 15
menor de 50 kPa (zO.5 kgf/cm 2 )
s
En la Tabla 7-9 se dan los valores de del coeficiente Fa que amplifica las ordenadas del
espectro en roca para tener en cuenta los efectos de sitio en el rango de períodos cortos
del orden de 0.3 5, como muestra la Figura 7-24.
Tabla 7-9 - Valores del coeficiente Fa, para la zona de periodos cortos del espectro (NEHRP-94)
Tipo de
perfil
A
Intensidad de los movimientos sísmicos
Aa SO.1
0.8
I
I
Aa = 0.2
0.8
I
I
:JO:J
Aa = 0.3
0.8
I
I
Aa=OA
0.8
I
1
Aa ~0.5
0.8
I
'j¡'¡úl1uca eS1TllClltHll ({PIl~U"" u, u ..,. .. " ...
OJ • • • • •
"
-....... ~
~
Sue pTipoE --7f
i
:--............
I
...............
I
I
~
Suel p TipoD
II
noo c
1-----/
!
Suelo TipoS
l----7'
i
Suelo Tipo A
i---/'
Suele
I
I
,
I
I
------
-........
r--....
I
I
I
I
0.05
0.10
I
0.00
i
~
~ ........
L-!
0.15
\
0.20
0.25
0.30
0.35
DAD
0045
0.50
Av
Figura 7-25 - Coeficiente de amplificación F. del suelo para
la zona de períodos intermedios del espectro (NEHRP-94)
Estos valores son mayores que los que se han tenido tradicionalmente en los códigos
sísmicos. Es evidente, al hacer un seguimiento histórico de los valores contenidos en los
códigos, que éstos han venido en aumento en la medida que han ocurrido sismos que
han resaltado condiciones locales no sospechadas, o amplificaciones de onda que
excedieron las expectativas más conservadoras que se tenian. Indudablemente este
refinamiento de las recomendaciones para tomar en cuenta los efectos de sitio he sido,
también, consecuencia de un avance importante en las metodologías analíticas y
experimentales empleadas.
7.5 Estudios de amplificación de onda
En muchos casos, para obras importante'> de infraestructura, edificios altos, y otros
casos, se desea tener una idea muy detallada de los posibles efectos de amplificación
que puedan presentarse en el sitio para el sismo de diseño. En estos casos se realiza un
estudio de amplificación de onda. Este tipo de estudios hace parte, también, de los
estudios de mícrozoniñcacíón, donde se agrupan en microzonas sectores de una
población donde los efectos de amplificación estimados son similares.
El proceso de propagación del tren ondulatorio generado por el sismo, a través de los
estratos de suelo, es complejo y para efectos de la presentación solo se mencionarán los
aspectos más importantes. Quien desee profundizar en el tema debe dirigirse a
publicaciones especializadas sobre el tema tales como [Seed, Ugas y Lysmer, 1976],
[Seed y lddris, 19821. [Zeevaert, 1983], [Dobry y Vu ce tic, 1987], [Whitman, 1992],
[Sarria, 1995b] entre otras.
El tren ondulatorio se propaga en dirección vertical con una velocidad igual a la
velocidad de la onda de cortante, V S (ASCE, 1985]. La velocidad de la onda de cortante se
obtiene de la relación:
204
B
1.0
1.0
1.0
1.0
1.0
e
1.2
1.2
1.1
1.0
1.0
D
E
F
1.6
1.4
1.2
1.1
1.1
2.5
1.7
1.2
0.9
nota
nota
nota
nota
nota
nota
..
tnvestiqacion
..
geotecnlca para el lugar especifico y debe llevarse a cabo un
nota: debe realizarse una
análisis de arnpüñcaclón de onda.
3.5
3.0
II
I
II
I
2.5
,
2.0
Fa
Suelo TiooE
I~~
!
I
1.5
I
I
I
-
~
Suelo TipoD- 1----/--'
I
i
I
i
! --.::IIiIo
i
--
I
V
I
I
I
!
0.30
0.35
i
0.5
,
I
1
I
0.20
0.25
0.0
0.00
I
i
I
Suelo TipoB- l----7'
Suelo jTipoA -
I
I
.r-,
I
!------J'f
Suelo TipoC
1.0
i
~!
!
I
I
,
!
¡
0.05
0.10
0.15
0.40
0.45
0.50
Figura 7-24 - Coeficiente de amplificación Fa del suelo para
la zona de períodos cortos del espectro (NEHRP-94)
En la Tabla 7-10 se dan los valores de del coeficiente F, que amplifica las ordenadas del
espectro en roca nara tener en cuenta los efectos de sitio en el rango de períodos
intermedios del orden de 1 s. Estos coeficientes se presentan también en la Figura 7-25.
Tabla 7-10 - Valores del coeficiente FVJ para la zona de periodos largos del espectro (INEHRP-S4)
Tipo de
perfil
Intensidad de los movimientos sísmicos
Av ~0.1
Av = 0.2
Av = 0.3
Av = 0.4
A v <: 0.5
A
B
0.8
0.8
0.8
0.8
0.8
1.0
1.0
1.0
1.0
1.0
e
1.7
1.6
1.5
1.4
l.3
D
2.<1
2.0
1.8
1.6
1.5
E
3.5
3.2
2.8
2.4
nota
F
nota
nota
nota
nota
nota
nota: debe realizarse una investigación geotécnica para el lugar específico y debe llevarse a cabo un
análisis de amplificación de onda.
208
~------------------------------------------
= r§
v
s
Vp
&i~~~;}f::'" "",..".
~~"
(7-30)
._""J~.,,~
donde G es el módulo dinámico de cortante y p es-la densidad de masa del suelo. Dado
el rango relativamente pequeño de variación de la densidad de masa de los suelos
conduce a que la variable que más afecta el valor de la velocidad de la onda de cortante
sea el módulo dinámico de cortante G. Sin embargo, el valor de G depende del nivel de
deformación, pues la relación entre esfuerzos cortantes, 't, y deformación angular, y, del
suelo no es lineal, como muestra la Figura 7-26(b). Además cuando el suelo se somete a
esfuerzos de cortante cíclicos, se presenta un fenómeno histerético muy similar a los
presentados en el Capítulo 6. Además haciendo referencia a lo presentado allí, puede
observarse que un modelo de Ramberg-Osgood describe bastante bien el proceso
hísterético.
y
y
/
1:
G=y
/
./
(a)
(b)
(e)
Definición de G
Relación er:úerzo-deformaeión
Ciclos de histéresis
Figura 7-26 - Deformación del suelo ante esfuerzos cortantes
El amortiguamiento que se produce durante la respuesta dinámica del
asociado, lo mismo que para otros materiales, con el área dentro de los
hístéresis.
está
de
uUJS
El módulo secante a valores bajos de deformación, G max , corresponde al valor del
módulo de cortante que define la velocidad de la onda de cortante "'s. dado que las
mediciones que se hacen de esta velocidad en el sitio por métodos geofísicos, siempre
corresponden al rango de deformaciones pequeñas.
Cuando el suelo se deforma en cortante más allá de este rango de deformaciones
pequeñas, se presenta el fenómeno de histeresis, entrando en juego el módulo de
cortante G para este nivel de deformación, y. La energía que se disipa por ciclo M, por
unidad de volumen, puede relacionarse con un coeficiente de amortiguamiento 15COSO
A, por medio de la relación:
(7-31)
Por medio de ensayos de laboratorio es posible establecer relaciones entre G/G ma x Y el
nivel de deformación, y, y entre el coeficiente de amortiguamiento, A, y el nivel de
deformación, y, como se muestra esquemáticamente en las Figuras 7-27 y 7-28.
205
,/(¡mica estructural apucaaa
(/1
(I1~!c'IIU ~I"''''''V
1.0
......... r-,
0.8
G
G max
0.6
r-..... ..............
<,
"\. <,
'\
~
~
\
.....-: ~\
'\
~
1nealidac
\
004
\
\
'
~
\
\ \
\..\
\.
0.2
'-........
0.0
0.0001
0.001
0.1
0.01
~
Y (%)
Figura 7-27 - Relación entre módulos
/
(%)
/
16
tinee! ~ad
J
:11
T' ::::--...
12
~/j
/
/1
/
1/
8
//
~ ./
/
4
o
11
I
I
Ji
JII
/
20
').
/1_'
I
24
rl
i
¡
I
I
i
e:---
0.0001
0.001
0.01
0.1
y(%)
Figura 7-28 - Amortiguamiento
En las figuras anteriores, los suelos que manifiestan más linealidad están a la derecha y
los localizados hacia la izquierda corresponden a los suelos que manifiestan mayor nolinealidad. En el caso de las relaciones entre los módulos, Figura 7-27, entre más lineal,
más largo es el rango de deformaciones en el cual el módulo de cortante es igual al
módulo inicial. En el caso del amortíguamíento, entre más lineal sea el suelo, presenta
menos amortiguamiento, y el rango en el cual éste es bajo se extiende hacia
deformaciones mayores.
Si se supone que el suelo no tiene amortiguamiento, y que el módulo de cortante G, no
se desvía mucho del módulo secante inicial, Gmax , es posible resolver el problema
ondulatorio, y determinar el valor del período de vibración fundamental y todos sus
armónicos, por medio de la siguiente ecuación:
T=
l
4H
(7-32)
(2i-l)vs
Donde H es el espesor de suelo en el estrato. Por lo tanto, para el período fundamental
del perfil, con i = 1, T, = 4H1vs ' Ahora, en el caso de que se tengan varios estratos con
diferentes espesores y valores de la velocidad de la onda de cortante, es posible
determinar el período de vibración fundamental del estrato, por medio de:
206
I
--------------------------------------,-----------(7-33)
A pesar de que estas fórmulas tienen la limitación de que son aplicables sólo cuando las
deformaciones impuestas por el sismo no inducen deformaciones grandes, permiten
realizar aproximaciones útiles a falta de una mejor información. Debe tenerse en cuenta
que los períodos estimados por medio de estas ecuaciones son consistentemente
menores que los que habría con deformaciones grandes.
Tabla 7-11 - Valores típicos de la velocidad de la onda de cortante en mis adaptada de [Dowrick, 1987]
Material
I
3-20 m
60-120
60-120
60-120
60-120
60-120
80-100
50-80
100-150
100-150
110-150
100-150
130-200
140-180
90-150
160-220
160-220
170-220
180-220
190-220
190-220
200-220
220-260
220-260
220-260
240-260
?t30-280
Arena suelta, saturada
Arena de origen aluvial
Arcilla
Limo
Limo arcilloso
Suelo de pantano
Zonas recientemente recuoeradas por desecación
Arcilla arenosa
Gravilla suelta
Arena fina, saturada
Arena media, uniformemente gradada
Arcillolita del terciario húmeda
Arcilla y arena
Tierra veoetai
Arena densa
Arena media sa': -ada
Arena acillosa
Grava con cantos rodados
Arcilla saturada
Arena fina limo arcillosa
Arena arcillosa con gravas
Arena media in situ
Marga
Arcilla desecada
Terraolén de arcilla compactada
Loess secos
Arcilla amasada, severamente comoactada
Grava aruesa comoacta
Grava media
Arenisca cuarzosa
Siena atlántico, fango
Areniscas duras (Mesozoico)
Hielo, glaciares
Arena tobácea
Concreto
Lutitas (Mesozoico)
Granito (intacto)
Caliza COI11 pacta
Pizarra arcillosa (Paleozóico)
420-480
-
-
Profundidad del depósito
21-50 m
100-160
200-250
240-280
100-130
250-280
300-350
>50m
125-180
300-350
-
600-650
-
-
140-180
-
-
-
200-220
-
-
-
-
-
-
-
-
-
-
220-280
-
-
-
-
-
-
-
I
320-380
330-400
-
-
780
1000-1500
1200
1600
20UO
2200
2350
2700
3350
3600
-
-
-
-
-
-
-
-
La siguiente pregunta es la cantidad de amplificación que se presentaría. Al respecto
existen relaciones aproximadas como las propuestas por Dobry [Dobry y Vucetic, 1987],
otras provienen de valores empíricos provenientes del temblor de Loma Prieta
[Borcherdt, 19941, y han sido aplicadas por algunos autores, por ejemplo al caso de
Bogotá [Espinosa, 1995]. Pero en general en los estudios de amplificación de onda se
prefiere la utilización de modelos matemáticos implementados en el computador. De
estos modelos existen tridimensionales, de gran complejidad en su aplicación [Sarria,
1995bl y unidimensionales, como el que emplea el programa de computador SHA~E
lSchnabe/, Lysmer y Seed, 19721. El programa permite, dado un acelerograma en roca,
--..iiiI. . .
~
.. _ _._ _
207
~
determinar el acelerograma modificado que se obtendría en superficie. Utilizando los
espectros de respuesta de los dos acelerogramas, es posible definir coeficientes de
amplificación para cada período dentro del espectro. No sobra insistir, como es normal
en el uso de cualquier programa de computador, en el cuidado y criterio en la definición
de los valores a emplear, especialmente en aquellos datos sobre la relación de módulos
de cortante y el amortiguamiento apropiado para cada nivel de deformación.
.6 Familias de aceleroqramas
En algunos casos, especialmente cuando se trata de evaluación de la respuesta en el
rango inelástico, no basta con definir los movímíenros sísmicos de diseño por medio de
un espectro de diseño. En los estudios de amplificación de onda por medio de modelos
matemáticos en el computador, en general hay necesidad de trabajar con
acelerogramas. Por esta razón cada día es más común el empleo de acelerogramas en la
evaluación de efectos de sitio, y en la validación del diseño de estructura'> importantes,
especialmente si se desea estudiar la respuesta en el rango inelástico.
Dentro de los tipos de acelerogramas que se emplean, se encuentran: (a) acelerogramas
de sismos reales escalados a alguno de los parámetros relevantes, (b) acelerogramas
derivados de acelerogramas en roca filtrados a través de un perfil de suelo por medio
de un estudio de amplificación de onda, (c) acelerogramas artificiales o sintéticos.
Cada una de estas metodologías es aplicable en algunos casos particulares y no
necesariamente son apropiadas para otros casos, por esta razón cada una tiene sus
defensores y sus enemigos. La discusión de las bondades y desventajas del uso de
acelerogramas provenientes del filtrado el' estudios de amplificación de onda y de
acelerogramas sintéticos, se sale del alcance de lo que se puede discutir en una
presentación introductoria. Por esta razón el lector interesado debe referirse a
publicaciones especializadas. La introducción al tema está tratada en [Sarria, 1995a] y
en [Clough y Penzien, 19931.
Debe hacerse una advertencia respecto al empleo de acelerogramas, no importa su
origen, la cual tiene que ver con las particularidades propias de un registro. El uso de un
solo acelerograma en el diseño entraña el peligro de que el registro en particular no
resalte lo que se desea estudiar durante el diseño. Por esta razón se habla de [amilias de
aceleroqramas, pues el diseño debe fundamentarse en un número plural de ellos.
Cuando se emplean acelerogr amas de sismos reales, en general se desea que se
aproximen lo más posible al acelerograma que se espera en el lugar respecto a la
magnitud del sismo, la distancia epicentral, la profundidad focal, el mecanismo focal, y
el perfil de suelo. Dado que muchas veces no es posible identificar adecuadamente
todos estos parámetros para el sismo de diseño, y además, en aquellos casos en los
cuales se conocen, no siempre es posible encontrar acelerogramas que cumplan todas
las condiciones deseadas. Por esta razón hay necesidad de realizar algunas
manipulaciones del registro original con el fin de ajustarlo a lo que se desea.
Dentro de los parámetros que comúnmente se afectan para producir una familia de
acelerogramas de diseño están:
Aceleración - Consiste en cambiar la escala de aceleraciones de tal manera que el valor
de aceleración pico, o de un conjunto de las mayores aceleraciones se acerque a un
valor prefijado. Esta es tal vez la más común de las afectaciones que se realizan a los
acelerogramas, pues en general de los estudios de amenaza sísmica se obtiene un valor
de la aceleración máxima del terreno, Ale, y este valor se emplea, en vez del valor
original de Ale del acelerograma. Este procedimiento conduce a una ampliación, o
208
I
I
reducción, de las ordenadas del espectro de aceleraciones en la misma proporción en
que se modifique Ate, o sea que es consistente con emplear un espectro de un sismo
real, pero reducido o ampliado a un valor diferente de la aceleración máxima del
terreno.
I
I
I
Velocidad - Consiste en cambiar la escala ajustando el acelerograrna a un valor
prefijado de la velocidad máxima del terreno, Vte . Para lograr esto se amplia o reduce la
escala de aceleraciones en la misma proporción que se requiera entre las velocidades
máximas del terreno. Este procedimiento se emplea cuando se desea estudiar
estructuras cuyos períodos de vibración están en el rango de amplificación de la
velocidad en el espectro. A modo de ejemplo, supongamos que se desea un
acelerograrna con la tipología de El Centro, pero para una velocidad máxima del terreno
Vte , igual a 0.5 mis. El registro original tiene un valor de Vte igual a 0.33~ mis. El
cociente entre los dos valores es aproximadamente 1.5. Por lo tanto el acelerograma
debe emplearse con una aceleración máxima del terreno 1.5 veces mayor. Dado que el
valor de Ate en el registro original es de O.3-:l:2g, debe utilizarse en el acelerograma
modificado un valor de 0.3~2 g . 1.5 = 0.513g.
Repeticum parcial - Cuando se están estudiando estructuras de período largo, y el
acelerograma de que se dispone es demasiado corto para excitar la respuesta de estos
períodos largos a su valor máximo, simplemente se agrega parte o todo el acelerograma
nuevamente al final del primero. Esta técnica se utiliza también cuando, en estructuras
que responden en el rango inelástico, se desea estudiar el efecto sobre la estructura de
nuevos sismos y se quiere permitir la acumulación de daño, para que el segundo evento
encuentre la estructura con la reducción de rigidez que dejo el primer sismo. Una
variante de esta metodología es dejar una zona con aceleraciones muy bajas entre
registro y registro.
Compresión y expansión - En aquellos casos en los cuales no se dispone de un
acelerograma que tenga un contenido importante de energía en el rango de frecuencias
que se desea estudiar, el acelerograma se puede comprimir o expandir, lo cual consiste
en modificar el intervalo de digitalización, introduciendo un valor que alargue o acorte
los períodos predominantes del registro. Esta técnica se utiliza algunas veces para
simular efectos de amplificación de onda por el suelo, pues al comprimir o expandir la
escala de tiempo se varía la escala de periodos en el espectro, en la misma proporción
en que se cambie el intervalo de digitalización. A modo de ejemplo, supongamos que se
desea un registro similar al de ciudad de México de 1985, pero con el pico del espectro
de aceleraciones en un período de 1.5 s, en vez del valor de 2.1 s del registro original. El
intervalo de digitalización del acelerograma original es de 0.02 s, Por lo tanto cebe
utilizarse el acelerograrna con un intervalo de digitalización igual a 0.02·1.5 / 2.1 =
0.01~ s.
Ordenada espectral prefijada - Cuando se quiere que el espectro tenga un valor
prefijado en una de sus ordenadas espectrales, se varía Ate del registro en la misma
proporción en que se quiere variar la ordenada espectral, pues el espectro es totalmente
proporcional al valor de la aceleración máxima del terreno.
En resumen, los criterios a emplear al definir familias de acelerogramas a utilizar con
procedimientos de análisis dinámico consistentes en evaluaciones cronológicas,
obtenidas integrando paso a paso la ecuación de movimiento, debe tratarse de cumplir
los siguientes criterios respecto los acelerogramas que se utilicen:
(a) deben utilizarse, para efectos de diseño, la respuesta ante un rrurumo de tres
acelerograrnas diferentes, todos ellos representativos de los movimientos esperados del
terreno, pero que cumplan la mayor gama de frecuencias y amplificaciones posible.
209
(b) los espectros de respuesta de los acelerogramas empleados no pueden tener
individualmente ordenadas espectrales, para cualquier período de vibración, menores
que un porcentaje prefijado, del orden del 60 al 80% de las ordenadas espectrales de los
movímíentos esperado del terreno definidos a través de un espectro de diseño.
(e) La envolvente de los espectros de respuesta de los acelerogramas empleados no debe
variar, hacia arriba o hacia abajo, en más de un porcentaje prefijado, del orden del 25 al
30% con respecto a las ordenadas del espectro de diseño.
.7 Espectros d: diseño de las normas de diseño sísmico
En la presente Sección se hace referencia al desarrollo histórico del espectro de diseño
que se incluye en las normas de diseño sismo resistente. Además se presentan las
formas del espectro de diseño de algunas normas modernas y se discuten sus
fundamentos a la luz de lo presentado anteriormente.
'.7.1 Desarrollo histórico del espectro en las normas sísmicas
Los primeros requisitos de diseño sísmico obligaban a tratar el sismo como una fuerza
horizontal análoga al viento. La ciudad de San Francisco fue reconstruida después del
terremoto de 1906 utilizando como fuerzas de diseño para el sismo una presión de
viento igual a 1.') kPa (1--16 kgf'/rn", ó 30 libras por pie cuadrado), A finales de la década
de 1920 se iniciaron los primeros códigos sísmicos propiamente dichos. En ellos se
introdujo el concepto de coeficiente sísmico, el cual corresponde a la fracción del peso
de la estructura que debe utilizarse como fuerza horizontal sísmica de diseño.
En la versión de 1::)27 del Uniform Building Code (UBC). el cual todavía es el código más
utilizado en la costa oeste de los Estados Unidos, se prescnbía un coeficiente sísmico, C,
que variaba entre el 7.5 y el 10%. El Código de la ciudad de Los Angeles exigía en 1933
un C de 8%. En 19--13 el Código de esta misma ciudad introdujo el primer coeficiente
sísmico que involucraba de alguna manera un espectro de diseño. La fórmula para
evaluación del coeficiente en ese Código era la siguiente:
C=
0.60
N+4.S
(7-3--1)
Donde N era el número de pisos de la estructura. Este número estaba restringido a un
máximo de 13 pisos. Restricción que existió en otras ciudades importantes localizadas
en zonas sísmicas como es la ciudad de Tokio, en la cual la restricción de altura se
mantuvo hasta la década de 1960.
Este desarrollo de los códigos sísmicos en norteameríca fue tomado a mediados de la
década de 1950 por la Asociación de Ingenieros Estructurales de California (SE~OC), la
cual publicó en 1959 unas disposiciones para diseño sísmico que involucraban el
concepto de período de víbración del edificio. La ecuación para el cálculo del coeficiente
sísmico dada por este código, la cual corresponde realmente un espectro simplificado
de diseño:
(7-35)
Donde T correspondía al período fundamental del edificio y se indicaba que para
edificios aporticados el período fundamental, en segundos, era un décimo del número
de pisos. La fuerza horizontal de diseño en la base de la estructura, V, debida al sismo
se determinaba como:
210
~---------------~-~------..,..-..,..--..,..-------------'---
(7-36)
V=KCW
Allí K dependía del tipo de estructura y los requisitos de detallado y despiece, en el
caso de concreto reforzado, que se siguieran y W correspondía al peso de carga muerta
de la estructura y su contenido. Estas fuerzas sísmicas de diseño estaban prescritas al
nivel de esfuerzos de trabajo, por lo tanto para ser utilizadas con procedimientos de
diseño por el método de la resistencia, o rotura, debía usarse un factor de carga que en
esa época se fijó en lA para concreto reforzado.
La ecuación para el cálculo del coeficiente sísmico, ecuación (7-36), se mantuvo en las
versiones de SEAOC y UBC hasta finales de la década de 1980. No obstante la ecuación
para el cálculo del corte basal fue modificada en la versión de 197-l de SEAOC y de
1976 de UBC a la siguiente forma:
(7-37)
V =ZIKCSW
donde se incluyeron los siguientes términos nuevos: Z es un coeficiente de zona sísmica
que toma en cuenta el nivel de amenaza sísmica del sitio, 1 es un coeficiente de
importancia que obliga a fuerzas de diseño sísmico mayores para estructuras
indispensables para La recuperación de la ciudad con posterioridad a la ocurrencia de
un temblor y S es un coeficiente de sitio que toma en cuenta la posibilidad de
amplificación de los efectos sísmicos debido a la presencia de suelos blandos en los
estratos subyacentes en el sitio.
En 1978 se publicó [ATC, 1978J por parte del Applíed Technology Council (ATC) un
código sísmico modelo al que denominó ATe3, el cual puede decirse que corresponde
a la primera normativa sismo resistente verdaderamente moderna, pues involucró los
grandes avances en ingeniería sísmica que han ocurrido con posterioridad a la Segunda
Guerra Mundial. El ATC-3 es la base de los requisitos sísmicos de las normas sismo
resistentes colombianas, y lo fue especialmente de su primera versión, Código
Colombiano de Construcciones Sismo Resistentes CCCSR-8-l, [MOPT, 1984J. En 1985 la
SEAOC involucró gran parte del ATC-3, con algunas modificaciones en su versión
[SEAOC, 1985J de ese año y el UBC en su versión de 1988 [JCBO, 1988] hizo lo mismo.
Dentro del medio norteamericano El ATe-3 fue adoptado por el programa NEHi\P
(National Earthquake Hazards Reduction Program) del Building Safery Council como los
requisitos recomendados [FEMA, 1986J para diseño sísmico en Estados Unidos,
programa dentro del cual se han realizado revísiones periódicas al documento [FEMA,
1991,1994hl.
Recientemente, todas las entidades que desarrollan los códigos modelos dentro de los
Estados Unidos se unieron en una sola institución denominada International Code
Council para producir un código modelo único el cual se denominará International
Building Code - IBC, cuya primera versión aparecerá en el año 2000, para la cual ya
existe un borrador (ICC, 1997]. El borrador existente es un compromiso entre los
requisitos que contiene el NEHRP-9-l [FEMA, 1994b] Yel UBC-97 (ICBO, 1997].
A continuación se hace una descripción de la forma de los espectros de diseño del
ATC-3, siguiendo con las versiones más modernas de algunas de las normas de diseño
sismo resistente mencionadas, incluyendo las nuevas normas sismo resistentes
colombianas NSR-98, el Reglamento de la Ciudad de México el cual trata de una manera
especial el efecto de suelo blando, el cual tiene interés por tener la ciudad de Bogotá
una situación similar, y el Eurocode 8.
7.7.2 Forma del espectro del A TC-3
211
unámica estructural aplicada a/ diseno SISI1lICU
En el ATC-3 [ATe, 1978J al desarrollar las disposiciones de diseño se utilizaron dos
parámetros para caracterizar la intensidad del movimiento de diseño del terreno. Estos
parámetros se denominan Aceleración Pico Efectiva (APE), A¿ Y la Velocidad Pico Efectiva
(VPE), que expresada en términos de la aceleración se denomina Av. Por definición estos
parámetros se prescriben de tal manera que tengan una probabilidad de sólo 10% de ser
excedidos en un lapso de 50 años.
Para entender mejor el significado de APE y VPE, éstos deben considerarse como
factores de normalización en la obtención de espectros suavizados de respuesta elástica
para movimientos de terreno de duración normal. Al dibujar el espectro de respuesta de
un sismo fuerte en papel logarítmico tripartita, en el cual es posible describir
simultáneamente los espectros de aceleraciones, de velocidades y de desplazamientos
como se explicó en la Sección 5.4, se puede observar que en algunos rangos de período,
la aceleración espectral,. o la velocidad espectral varían muy poco. En general, para
espectros de sismos registrados en roca, en el rango de períodos entre 0.1 y 0.5
segundos, la aceleración espectral permanece casi constante. Igualmente para el rango
entre 0.5 y 2.S segundos la velocidad permanece constante.
10
1
Sv
i
'/
0.1
r
rJ
""8,.
I
i
0.01
I
0.1
0.5
10
Período T (s)
Figura 7-29 - Representación de cómo se obtienen APE y VPE
de un espectro de respuesta con 1; = 5%
Basado en lo anterior, la APE se define en el ATC-3 proporcional a las ordenadas del
espectro para períodos en el rango entre 0.1 y 0.5 s, mientras que la VPE se define
proporcional a las ordenadas del espectro para un período aproximadamente de un
segundo. La constante de proporcionalidad para un espectro con cinco por ciento de
amortiguamiento, ~ = 5%, se fijó en un valor de 2.5 en ambos casos, constante que
proviene del estudio estadístico de espectros de respuesta, especialmente los trabajos
de Newmark y Hall.
Entonces:
S
APE=_3
2.5
(7-38)
VPE=~
(7-39)
y
2.5
Para un mmimiento específico y real del terreno la ArE y VPE se pueden estimar así: se
dibuja en papel logarítmico tripartita el espectro de respuesta para un amortiguamiento
212
del 5% para el movimiento real y se trazan líneas rectas entre las ordenadas
correspondientes a los períodos mencionados anteriormente donde estas ordenadas
permanecen casi constantes. Estas rectas corresponden a una regresión lineal y están
trazadas en una media más una des,iación estándar de los puntos. El valor leído de
aceleración y de velocidad en estas líneas rectas se divide por 2.5 para obtener la APE y
VPE respectívamente. La APE y VPE así obtenidas se relacionan con la aceleración pico
del terreno, Ate, Y la velocidad pico del terreno, Vto, pero no son necesariamente las
mismas, ni incluso proporcionales a la aceleración y velocidad pico pues involucran
aspectos adicionales, como se describe a continuación.
I
Cuando existen frecuencias muy altas en el movimiento del terreno la APE puede ser
bastante menor que la aceleración pico. Esto es consistente con el hecho de que recortar
el pico más grande de un acelerograma tiene poco efecto en el espectro de respuesta,
excepto para períodos más cortos' que aquellos que corresponden a estructuras
normales. Además las cimentaciones rígidas tienden a evitar el paso de los períodos
extremadamente cortos del movimiento de campo abierto. Por otra parte la \PE
generalmente será mayor que la velocidad pico a distancias considerables de un temblor
de gran intensidad. Con la distancia los movímíentos aumentan de duración y se
vuelven más periódicos. Estos factores tienden a producir aumentos proporcionalmente
mayores en esa parte del espectro de respuesta representado por VPE. Si un temblor es
de muy corta o muy larga duración es necesario corregir APE y VPE para que sean más
representativos del evento. Hay evidencia que demuestra que movimientos sísmicos que
tienen diferente duración pero espectros de respuesta semejantes causan daños
diferentes, siendo menor el daño en el de menor duración.
En cualquier lugar el diseño puede estar regido ya sea por APE o por VPE. Sin embargo,
es conveniente conocer ambos valores. Para efectos de determinar las fuerzas a que se
debe someter la estructura para efectos de diseño APE y VPE se reemplazan por A, Y Av
respectivamente, donde ambos están expresados como un porcentaje de la aceleración
de la gravedad. Para convertir VPE en Av se utiliza la siguiente tabla:
Tabla 7-12 - Relación entre VPE y Av
Velocidad Picu
Efectiva
VPE (rn/s)
( )
0.30ll
0.150
0.075
O.03S
OAO
0.20
0.10
(JOS
De acuerdo con la tabla anterior puede fijarse la siguiente conversión:
VPE
0.75
A =-v
Donde Av se expresa como fracción de la gravedad y Vi'E esta expresada en mis. Las
ecuaciones que definen el espectro se obtienen de la siguiente manera: para la zona de
amplificación de aceleraciones el espectro está definido como 2.5 veces la APE, por lo
tanto el espectro de aceleraciones como fracción, de g es:
(7 -41)
Para la zona de amplificación de velocidades el espectro está definido como 2.:3 veces la
VPE, por lo tanto:
S,
= 2.5VPE
Dinrunic«
eSlrllCllCnll
UjJIIClIUl{ " . " " "
o . v " . " .• _._
cohesivos que van desde blandos hasta medianamente rígidos, caracterizados por
valores de V s inferiores a 200 mis en los 20 m superiores.
Tabla 7-27 - Valores de los parámetros que definen el espectro elástico
Clase de
perfil de suelo
S
A
1.0
1.0
0.9
B
e
130
2.5
2.5
2.5
k1
1.0
1.0
1.0
k2
2.0
2.0
2.0
TB
Te
TD
(s)
(s)
OAO
(s)
0.10
0.15
0.20
3.0
3.0
3.0
0.60
0.80
>
o
Periodo T, (s)
Figura 7-40 - Espectro elástico del Eurocódigo 8
Cuando el perfil de suelo incluye estratos superficiales de origen aluvial con espesores
que varían entre 5 y 20 m, localizados sobre materiales más rígidos como los del perfil
clase A, puede utilizarse la forma del espectro para perfiles clase B, utilizando un valor
de S igual a 1 A, a menos que se realice un estudio especial. El valor del coeficiente de
corrección para el amortiguamíento, se puede determinar por medio de:
T\ =
~ 2+~
7 2: 0.7
(7-68)
donde ~ es el valor del coeficiente de amortiguamiento viscoso de la estructura
expresado en porcentaje. El valor del desplazamiento máximo del terreno, d g , se puede
determinar por medio de la siguiente expresión:
(7-69)
El Eurocódigo 8 trae un espectro de diseño reducido por efectos de respuesta en el
rango inelástico, al que denomina espectro de diseño para análisis lineal. El espectro se
reduce por medio de un coeficiente de comportamiento q. B coeficiente de
comportamiento q corresponde al cociente entre las fuerzas sísmicas que la estructura
experimentaría si su respuesta fuera totalmente elástica, con un coeficiente de
amortiguamiento de 5% del crítico, y las fuerzas sísmicas minimas de diseño, cuando
éste se realiza utilizando un modelo matemático elástico. Este espectro de diseño está
definido de la siguiente manera:
Para O~ T ~ TB
280
úll1ica eslructural HpllClIlIU u,
lt
""u."
.'<.- •.•• ~"
valores de los parámetros Na Y N v. El UBC-97 establece que la localización y tipo de las
fuentes sismogénicas para ser empleadas debe sustentarse en información geotécnica y
geológica aprobada, por ejemplo datos del USGS (United States Geological Survey) o del
CDMG (California Division of Mines and Geology).
Tabla 7-24 - Tipos de fuentes sismogénicas del UBC-97
Definición de la fuente
sismo énica
Magnitud de
Tasa de
actividad SR
Momento M w
(aun/año)
máxima
Tipo de fuente
sismogénica
Descripción de la fuente
sismogénica
A
Fallas que son capaces de
producir eventos de magnitud
grande y que tienen una tasa alta
de activídad sísmica
M;:: 7.0
SR;:: 5
B
fallas diferentes a las de
tipo A o e
M;:: 7.0
M< 7.0
M;:: 6.5
SR< 5
SR> 2
SR< 2
e
Fallas que no son capaces de
producir sismos de magnitud
grande y que tienen una tasa de
actividad relativamente bala
M< 6.5
SR~2
Los dos criterios de magnitud de momento sísmico, M w , Y de tasa de actividad, SR,
deben cumplirse simultáneamente para efectos de determinar el tipo de fuente
sismogénica. La magnitud de momento sísmico, Mw , está definida en la Sección -1.52.
Además se indica en el UBC-97 que las fuentes sismogenicas de subducción deben
evaluarse en cada caso con base en criterios apropiados.
Tab!1 7-25 - Coeficiente de campo cerceno Na del UBC-97
Distancia más corta a la fuente
sísmoaeníca conocida km
;::
~2km
5km
1.5
1.2
1.3
LO
1.0
1.0
Tipo de fuente
sismogénica
A
B
e
10 km
l.U
lO
1.0
Tabla 7-26 - Coeficiente de campo cercano N, del UBC-97
Tipo de fuente
sismogénica
A
<2km
2.0
B
1.6
e
lO
Distancia más corta a la fuente
sísmozéníca conocida km
10 k 111
Jkm
1.2
1.6
1.0
1.2
l.0
1.0
I
I
> l.) km
I
lO
:
1.0
l.0
Se permite interpolar entre los valores dados en las Tablas 7-25 y 7-26. La distancia más
corta a la fuente sismogénica debe ser la mínima distancia entre el lugar de interés y el
área correspondiente a la proyección del plano de la fuente en un plano horizontal
localizado al nivel de la superficie del terreno. No hay necesidad de incluir dentro del
plano de la fuente partes de él localizadas a profundidades mayores de 10 km. Deben
tomarse los valores de los coeficientes de campo cercano mayores, de los calculados
para todas las fuentes sismogenícas que puedan afectar el lugar de interés.
7.7.S Forma del espectro del Eurocodiqo-B
Dentro del grupo de Códigos producidos por el Comité Europeo de Normalización
(CEN), el Eurocódigo 8 corresponde a los requisitos sísmicos ICEN, 19941. Dentro de
228
I
donde tanto S, como VPE están en mis. Ahora utilizando la relación dada en la ecuación
(5-11) obtenemos:
s = roSv = ro2.5VPE
a
g
g
convirtiendo la frecuencia ro en período T y aplicando la ecuación (7-40):
s = 21t 2.5· 0.75 Av = 1.2 Av
a
T
g
(7-44)
T
Este espectro está definido entonces para un coeficiente de amortiguamiento, ~, de 5%
del crítico. El comentario del ATC-3 indica que si se quiere obtener el espectro para S de
2% las ecuaciones dadas, (7-41) Y (7-44), deben multiplicarse por 1.25; Igualmente indica
que el espectro de aceleraciones verticales puede obtenerse con una precisión aceptable
multiplicando las ordenadas del espectro por un factor de 0.67. El espectro definido por
el ATC-3 es además afectado por las siguientes causas:
Con base en los estudios de Seed, discutidos en la Sección 7.4.3 se fijaron los tres tipos
de suelo presentados alli. Para cada uno de estos tipos de perfil de suelo se propuso un
coeficiente de amplificación por efecto del suelo, S, dado a continuación:
Tabla 7-13 - Coeficiente de sitio del ATC-3
Tipo de Perfil de suelo
S
S,
I
1.0
I
S2
1.2
I
S"
I
L,
Además se incluyó un coeficiente de modificación de respuesta, R, el cual tiene en
cuenta tanto el amortiguamiento del sistema estructural como su ductilidad cuando la
estructura trabaja más allá del límite elástico y llega cerca a su resistencia última. Por lo
tanto para un sistema estructural conformado por un material con poco
amortiguamiento y frágil, con poca capacidad de resistir deformaciones más allá del
límite elástico, el valor del coeficiente de modificación de respuesta sería muy cercano él.
la unidad. En el otro extremo un sistema estructural con amortiguamiento alto y
conformado por un material con gran ductilidad sería capaz de resistir deformaciones
muy superiores al límite elástico, por lo tanto se justificaría el uso de un coeficiente de
modificación de respuesta alto. En el ATC-3 los valores de R van desde 1.25 para
sistemas compuestos por muros de carga de mampostería no reforzada hasta un
máximo de 8 para pórticos dúctiles especiales de acero y sistemas duales compuestos
por pórticos y muros de cortante de concreto reforzado, los cuales deben cumplir
requisitos especiales que van más allá de lo que prescriben normalmente las normas
que rigen el diseño de cada material estructural en zonas no sísmicas.
Además con ei fin de dar un mayor grado de conservatismo en el diseño de edificios
altos con períodos de vibración largos, se introdujo un exponente de 2/3 al período de
vibración en la ecuación (7-44) al convertirla de espectro de aceleraciones a coeficiente
sísmico. Entonces, el coeficiente sísmico tal como lo prescribe el ATC-3 está dado por la
siguiente ecuación:
(7-45)
Cuando se trata de perfiles de suelos tipo S3 y Aa es mayor o igual a 0.30 el factor 2.5
que multiplica a Aa en la ecuación (7-45) se convierte en 2.0. El coeficiente sísmico es
214
I
corresponde entonces a un espectro inelástíco de aceleraciones expresadas como una
fracción de la aceleración de la gravedad, g, y definido al nivel de resistencia. El ATC-3
incluye mapas de Aa Y Av con valores de 0.00, 0.05, 0.10, 0.15, 0.20, 0.30 Y0.40, para las
diferentes regiones de los Estados Unidos. Estos espectros tienen entonces la forma
mostrada en la Figura 7-30.
3.0
2.5
2.0
.es
1.5
1.0
0.5
0.0
0.0
0.5
1.5
1.0
2.0
2.5
3.0
Perfodo T, (s)
Figura 7-30 - Coeficiente sísmico normalizado del A TC-3 ;Jara Aa
=Av =R =1.0
Es evidente que el espectro del ATC-3 es un espectro inelástico de aceleraciones
máximas dentro de la teoría de Newmark-Hall. Las ordenadas espectrales del espectro
elástico corresponden a un nivel de probabilidad de la media más una desviación
estándar (véase la Tabla 7-2) para un coeficiente de amortiguamiento de 5% del crítico.
La introducción del efecto inelástico se logra a través del coeficiente de modificación de
respuesta R el cual en alguna medida corresponde a la capacidad de disipación de
energía de la estructura como un todo, por lo tanto no corresponde a una ductilidad en
el sentido estricto que se aplica a sistemas elastoplásticos, como se explicó en la Sección
6.4.
Es importante hacer notar que el espectro del ATC-3 se mantiene constante en la zona
de períodos cortos, en vez de tender a la aceleración del terreno como ocurre en un
espectro de respuesta o aún en los espectros de diseño conformados de acuerdo con la
teoría de Newmark-Hall. Existen dos razones para adoptar esta política. La primera tiene
que ver con el hecho de que los sistemas estructurales al verse sometidos a los efectos
del sismo y responder en el rango inelástico sufren un descenso en su rigidez, con un
correspondiente alargamiento de su período de vibración. Por lo tanto es de esperarse
que durante un temblor fuerte el período se desplace hacia la derecha en el espectro.
Para estructuras rígidas, de períodos cortos, si el diseño se hiciera para aceleraciones
cercanas a las del terreno es muy probable que al alargarse el período se vieran
sometidas a aceleraciones mayores y esta es una de las razones para mantener el
espectro constante en la zona de períodos cortos.
La segunda razón tiene que ver con la posibilidad de ejercer la ductilidad a. niveles
bajos del período. En la Figura 6-48 es evidente que en la zona de períodos cortos, para
sistema'> elastoplásticos la diferencia entre el espectro inelástico de aceleraciones
máximas y el espectro elástico corresponde a un factor variable que va desde 1 para
períodos muy cortos, hasta ~2¡.¡. -1 en la zona de amplificación de aceleración y solo
cuando se llega a la zona de amplificación de velocidad la diferencia con el espectro
elástico está regida por ¡.¡.. Esto implicaría tener que definir un coeficiente de
modificación de respuesta, R, variable. Desde el punto de vista práctico se prefirió por
215
náinica esérucl ural
apliccu/a
(H (/I:;ellu
"""'/t" v
estas dos razones dejar el espectro constante e igual al valor máximo en la zona de
períodos cortos, y en consecuencia, el ATC-3 se prefirió dejar el valor de R constante.
.7.3 Forma del espectro de las nuevas normas sísmicas colombianas
Los requisitos de las primeras normas sismo resistentes colombianas, el Código
Colombiano de Construcciones Sismo Resistentes (CCCSR-84 - Decreto 1400 de 1984)
[MOPT, 1984], provienen de una adaptación del ATC-3 [ATC, 1978] realizada en la
Norma AIS 100-81 de la Asociación Colombiana de Ingeniería Sísmica [AIS, 1981, 1983,
19971. Para la elaboración de la Norma AIS 100-81 se contó con el aporte de algunos de
los expertos norteamericanos que desarrollaron el ATC-3, permitiendo variarlo para
atender de una manera adecuada algunos parámetros de índole local, propios del país.
El CCCSR-8-1: fue adoptado por el Gobierno Colombiano en 198-1:, con posterioridad a la
ocurrencia del sismo de Popayán de Marzo 31 de 1983 Y como consecuencia de él. En
1993 se inició la discusión para una actualización del CCCSR-8-1:. .-\ raíz de esto la
Asociación Colombiana de Ingeniería Sísmica, desarrolló a través de su Comité J 00, una
nueva versión de la norma, ahora denominada AIS 100-97 [AIS, 19971. Esta versión
corresponde al contenido técnico de las nuevas normas sismo resistentes colombianas,
NSR-98 [AIS, 1998], las cuales comprenden los requisitos de la Ley -lOO de 1997 y del
Decreto 33 de 1998.
En las NSR-98 los movinuentos sísmicos de diseño están definidos en función
únicamente del parámetro A, el cual tienen una probabilidad de ser excedido de solo
10% en un lapso de 50 años. En la nueva versión de la norma, se suprimió el parámetro
Av, que contenia el A TC-3 Y el CCCSR-84. La razón de esto fue la conciencia de que en el
país no se dispone de información sismológica, tectónica, ni de registros acelerográficos
de movimíentos fuertes que permitan distinguir entre los dos parámetros. El Código
divide el país en tres zonas de amenaza sísmica, las cuales son función del valor de Aa.
En la Figura 4-25 se presentó el mapa de valores de Aa, yen la Figura 4-24 las zonas de
amenaza sísmica. Estos valores fueron definidos por medio del estudio de la referencia
[Carda et al., 1996].
Las zonas de amenaza sísmica tienen las siguientes definiciones: Zona de Amenaza
Sismica Baja - Es aquella zona donde A, es menor o igual a 0.10. Zona de Amenaza
Sísmica Intermedia - Es aquella zona donde Aa es mayor de 0.10, sin exceder 0.20. Zona
de Amenaza Sísmica Alta - Es aquella zona donde Aa es mayor que 0.20.
La definíción del espectro elástico de diseño de NSR-98, para un coeficiente de
amortiguamiento de 5% del crítico, es la siguiente:
s
= 1.2A aSI
a
(7-4G)
T
Para períodos de vibración menores de Te, calculado de acuerdo con la ecuación (7-47),
el valor de s. puede limitarse al obtenido de la ecuación (7-48).
(7-47)
Te =0.48 S
y
(7-48)
Para períodos de vibración mayores que T L , calculados de acuerdo con la ecuación
(7-49), el valor de Sa no puede ser menor que el dado por la ecuación (7-50).
(7-49)
y
216
I
II
s
= Aa 1
a
(7-50)
2
¡Sa=2.SAa 1
S.
(g)
Nota:
Este espectro está definido para
,1,1
,
,
,
I
,
un coeficiente de amortiguamiento
igual al 5 por ciento del crítico
1
1
1
I
I
'
' !
,\
I
1
I
Para análisis dinámico, .soto
modos diferentes al fundamental
en cada dirección principal en planta
II
,
I
To =0.3s
Te
TI.
Tc = 0.48 S
TL=2.4S
T(s)
Figura 7-31 - Espectro elástico de diseño, normas sismicas colombianas N5R-98
Cuando se utilice el análisis dinámico de sistemas de varios grados de libertad, para
períodos de vibración diferentes del fundamental, en la dirección en estudio, menores
que To (T; = 0.3 s), el espectro de diseño puede obtenerse de la ecuación (7-51).
(7-51)
I
Por definición S, es la máxima aceleración horízontal, expresada como porcentaje de la
gravedad, a que se ve sometido un sistema de un grado de libertad con un período de
vibración T cuando se ve expuesto a los movimientos sísmicos de diseño. Este espectro
está definido al nivel de resistencia.
El coeficiente de Importancia 1 se define en función del uso de la edificación, la cual
debe clasificarse dentro de uno de los siguientes grupos de uso:
Grupo de Uso IV - Edificaciones Indispensables - Este grupo comprende
aquellas ediñcacíones que deben funcionar durante y después del sismo y que son
indispensables después de un temblor para atender la emergencia y preservar la salud y
la seguridad de las personas y que además su operación no puede ser trasladada
rápidamente a otra edificación. Este grupo debe incluir hospitales, clínicas, centros ele
salud, centrales telefónicas y de telecomunicación.
Grupo de Uso III - Edificaciones de atención a la comunidad - Este grupo
comprende aquellas edificaciones que son indispensables después de un temblor para
atender la emergencia y preservar la salud y la seguridad de las personas, exceptuando
las del Grupo IV. Este grupo debe incluir estaciones de bomberos, estaciones de policía,
garajes de vehículos de emergencia, etc.
Grupo de Uso 11 - Estructuras de ocupación especial - Incluye cualquier
edificación donde pueden reunirse más de 200 personas en un mismo salón, graderías
al aire libre donde pueda haber más de 2000 personas a la vez, escuelas, universidades,
almacenes con más de 500 m- por piso, edificaciones donde residan o trabajen más de
3000 personas, y todas aquellas edificaciones en donde sus ocupantes estén
restringidos en su movimiento o donde pueda presentarse pánico general.
Grupo de Uso 1 - Estructuras de ocupación normal - Todas las otras
edificaciones no cubiertas por los grupos anteriores.
217
El coeficiente de importancia, J, toma los valores siguientes, según el Grupo de Uso:
Tabla 7-14 - Coeficiente de importancia en las NSR-98
I
IV
l.3
I
I
Gruno ele Uso
n
III
I
1.2
I
1.1
I
I
I
1.0
NSR-98 requiere que los efectos locales de respuesta sísmica deben evaluarse con base
en los perfiles de suelo que se muestran en la Figura 7-32, permitiéndose el empleo de
un procedimiento alterno, derivado de los requisitos del NEHRP-94, como se presentó
en la Sección 7.4.3. Además las NSR-98 permiten el empleo de espectros provenientes
de estudios de micro zonificación, los cuales existen en la actualidad para las ciudades
de Popayán [Ingeominas y Comunidad Económica Europea, 1992] y Bogotá [Ingeominas
y Universidad de los Andes, 1997], y están en desarrollo en otras ciudades.
.
Perfil 51 - 5 = 1.0
SUPERFICIE
Material rocoso con velocidad
de la onda de cortante (Vs)
mayorde 750 mis
Perfil 52 - S = 1.2
SUPERFICIE
Perfil 53 - 5 = 1.5
SUPERFICIE
Perfil 54 - 5 = 2.0
SUPERFICIE
218
I
Figura 7-32 - Tipos de perfil de suelo y coeficiente de sitio N5R-98 lA15, 1998J
Tabla 7-15 - Coeficiente de sitio en las N5R-98
Tipo de Perfil de suelo
SI
i.o
S
I
I
S2
1.2
I
I
S,
l.5
I
S.
I
2.0
En la Figura 7-33 se muestran los espectros elásticos de diseño para las principales
ciudades del país.
1.0
0.9
/cúcuta" ~ocoa, Neiva, Pasto, Quib ó, Víllavicen io, Aa = 0.30
0.8
I
0.7
ji'- /Armeni¡; Bucaraman ~a, Cali, Man zales, Pereir: , PopayánA =0.25
,
jX0.
0.6
s,
~ \//
0.5
B09
/
~tá D. C., FIOrncia, Ibagu , Medellín, TL nja, Yopal, A'iJ =0.20
Arauca, Morjtería, Riohac a, Sta Marta Sincelejo, A =0.15
\'A~
(g) 004
/
Barra:quitla, ceru gena, SanA drés, San Jos é del Guaviare, Valledupar, Aa
~~K
.:"
,~~ ~
0.3
~ t:::-===;2: ..::::::::::..:
0.2
---
0.1
0.0
0.0
0.5
....
1.0
-
1.5
icía, Mitú, pt ~ Carreño, pt ~ Inírida, Aa
=0.10
=0.05
-
2.0
2.5
3.0
Período, T (s)
Figura 7-33 - Espectros elásticos de diseño de las principales ciudades colombianas, para S,," La re
"" 1.0
En las N5R-98 el espectro inelástico se obtiene dividiendo las ordenadas
espectro
elástico por el coeficiente de reducción de resistencia R =
n~.
4>a y %
corresponde a coeficientes menores que la unidad, que representan el grado de
irregularidad en altura y en planta, respectivamente, que tiene la edificación. El
coeflciente de modificación de respuesta básico, Ro, está basado en los mismos
principios que en el ATC-3. En las NSR-~)8 va desde un valor de 1.0 para estructuras de
mampostería no reforzada hasta un máximo de 8.0 para sistemas duales.
Las N5R 98 definen además un espectro que se debe emplear en la verificación de
edilicaciones indispensables del Grupo de uso IV. Este espectro corresponde a unos
movimientos sísmicos que se han denominado del umbral de daño. La aceleración
máxima del terreno de estos movimientos sísmicos de denomina Ad , y se muestran en le
mapa de la Figura 4-24.
7.7.4 Formas espectrales de la microzanittcacián sísmica de Bogotá
El Ingeominas y la Universidad de los Andes entre 1994 y 1997 realizaron una serie de
estudios tendientes a determinar las características de la respuesta sísmica local dentro
del casco urbano de la ciudad de Bogotá [Ingeominas y Universidad de Jos Andes, 19971.
Los estudios comprendieron investigaciones en tectónica, neotectónica y sísmología. El
objetivo principal fue identificar y caracterizar la actividad reciente de las principales
fallas geológicas situadas dentro de un radio de 200 km alrededor de la ciudad,
establecer los sismos asociados a ellas y determinar mediante técnicas de
probabilísticas, los sismos máximos que pueden afectar la ciudad. Se formuló un
modelo sismotectónico preliminar para la región, se actualizó el catálogo de eventos
21D
sísmicos históricos e instrumentales de la región, se realizó un análisis probabilístico de
la aceleración horizontal máxima para la ciudad, y se definieron acelerogramas de
diseño para los tres sistemas de fallas activas más importantes. Los sistemas de fallas
que pueden afectar la ciudad se muestran en la Figura 4-7.
-Zona 1
Zona 2
Zona5B
Zona5A
N
O
11 Zona 1 - Cerros
~
o
2
4 G 8
Escala
1Dkm
Zona 2 - Piedemonte
11 Zona ~~ - Lacustre A
Zona 4 - Lacustre B
Zona 5A - Terrazas y Conos
Zona 58 - Terrazas y Conos Potencialmente Licuables
Figura 7-34 - Mapa de zonificación sísmica de Bogotá
Dentro de estas fallas, las más importante'> son: la falla frontal de la Cordillera Oriental,
las fallas del río Magdalena, y numerosas fallas locales. Aunque la zona de Subducción
de la costa del Océano Pacífico se encuentra a más de 300 km de la ciudad, la zona de
Benioff que se presenta tiene capacidad de producir sismos que pueden afectar la
ciudad. El valor esperado de la aceleración máxima en roca obtenido en el estudio
coincide con el valor de 0.20g obtenido en el estudio de amenaza sísmica realizado para
las nuevas normas sismo resistentes, NSR-98.
Se realizaron estudios de geología, hídrogeología, geofísica y geotécnia en la zona
urbana de la ciudad, necesarios para determinar la geometría, la caracterización
geomecánica y la respuesta dinámica del subsuelo, constituido por un depósito
220
cuaternario de origen lacustre cuyo espesor total puede alcanzar en algunos lugares
hasta 500 m de profundidad.
La investigación geofísica comprendió sondeos eléctricos verticales, reflexión y
refracción sísmica, gravírnetría, microtrepidaciones, y ensayos tipo "down hole". La
exploración geotécnica directa comprendió más de 2500 m de sondeos repartidos en 38
perforaciones que llegaron en algunos casos hasta 250 m de profundidad. Se realizaron
ensayos de laboratorio sobre las muestras para determinar las propiedades índice, de
resistencia y deformabilidad bajo cargas estáticas, y de propiedades dinámicas en
ensayos triaxiales cíclicos y del tipo "bender element",
I
La respuesta sísmica del subsuelo se estableció a partir de modelos unidimensionales
de propagación de onda de cortante y modelos bidimensionales dinámicos de
elementos finitos. Se identificaron cinco zonas de comportamiento homogéneo frente a
varias familias de acelerogramas, lo cual permitió determinar un espectro típico para
cada zona. En la Figura 7-3-1 se muestra la zonificación obtenida, yen la Figura 7-35 las
formas espectrales suavizadas correspondientes a cada zona.
I
0.8 -,-----,---,-----,---,-----,---¡------,-----¡------,----,
0.7 +-t---+--+--\------j;,.L--+---+--t----j---t----j-------j
Zona 3 - Lacustre A
Sa
0.6
+-Ie--fto--~-----\---+---+---I\----j---t----j-------j
0.5
+I:IH-J---Hr--+....lo¡:-+....;;-+---+~¡_j--_+_-_+-__I
0.4
-tII--I--Jy.--'¡"'--llr--'¡"'~"*--~-+-I-'~-t-­
0.2
-fI---t---¡----¡---t--+---==""""=---j-----"~-"'!i~~~
(g)
0.1 i - - - + - - i - - - + - - i - - - - t - - - - j - - - - - t - - - - j - - - - t _
0.0 +---+--+---+--+---+--+---+--+---+------j
0.0
0.5
3.5
4.0
5.0
1.0
1.5
2.0
2.5
3.0
4.5
T (s)
Figura 7-35 - Espectros de diseño para las zonas sísmicas de Bogotá
7.7.5 Forma del espectro del Código de Ciudad de México de 1993
Las formas del espectro del Código de Ciudad de México corresponden a una manera de
atender un problema totalmente local de amplificación de onda causada por los estratos
profundos de arcillas blandas que conforman el suelo del valle donde está localizada la
ciudad. Este problema fue identificado por los investigadores locales hace varias
décadas y fue plasmado en el reglamento desde ese entonces. La última versión
existente antes de la ocurrencia del sismo de septiembre de 1985 [UNAM, 1986b] fue
modificada a raíz del sismo por medio de unas normas de emergencia [UNAM, 1986a]
que hoy en día se encuentran incorporadas al reglamento vigente [DFM, 1993].
221
Para efectos de determinar el espectro la ciudad está dividida en cuatro zonas que se
definen de la siguiente manera:
Zona 1 - Colinas - Roca o suelos rígidos depositados fuera del antiguo lago, con
posibilidad de existencia de lentes de arenas sueltas o arcilla relativamente blandas.
Zona II - Transición -- Arenas y arenas limosas con espesores de menos de 20 m e
intercaladas con estratos de arcillas de deposición lacustre de espesores que varían
entre unos centímetros y varios metros.
Zona III - Lacustre - Estratos de arcillas de deposición lacustre altamente compresibles,
localizados entre estratos de arenas limosas y arcillosas, puede haber depósitos de
arcilla hasta de 50 m y el espesor de los estratos de arenas puede variar desde unos
centímetros hasta varios metros.
El espectro elástico se define por medio de las siguientes ecuaciones:
Para T menor que T a :
s, =
( 3T)¡
e
1+ T
(7-52)
a
Para T entre 'r, Y 'r, :
(7-53)
Para T mayor de T b
:
(7 -5-1)
Los valores apropiados para cada zona de suelo son los siguientes:
Tabla 7-16 - Coeficientes pa:-a el espectro de' Código ée Ciudad dE' México
ZONA
e
Ta
Tb
1
II
III
0.16
0.32
(J-l
0.2
tU
OC;
0.6
15
3.9
r
i/2
2/3
1
El Código exige para edificaciones indispensables que el espectro se incremente en un
50%. Otra diferencia importante con respecto a otros códigos es que en el cálculo de la
masa de la estructura se exige incluir una parte importante de la carga viva,
222
0.5v
DA5
~
DA
'V
(g)
0.25
I I
'"<, ~J1
fl
<,
I
0.2v
0.1 5
<,
0.1 v
<,
,
J
Sa
r-,
V
0.35
0.3'v
Zonal
-
~
-......
I¿onal
/ .....
~
!
0.05
Zonal
I
i
2.0
2,5
------
-
I
0.0'v
0.0
0.5
1.0
1.5
3.0
3.5
4.0
4.5
5.0
Período T (s)
Figura 7-36 - Espectros elásticos de diseño del Código de Ciudad de México
Para obtener el espectro inelástico de diseño al igual que en los otros códigos, se hace
una reducción por ductilidad, utilizando un factor de ductilidad, Q, totalmente
equivalente al R del ATC-3 y de AIS 100-97 y NSR-98. En este caso hay dos diferencias
importantes: la primera tiene que ver con los valores admisibles para Q los cuales eran
muy similares a los del ATC-3 y delAlf 100-97 y NSR-98, pero que a partir del sismo de
1985 fueron reducidos substancialmente. En la actualidad los valores van desde 1.5
para mampostería confinada o reforzada y un máximo de 4.0 para estructuras dúctiles
de concreto reforzado o acero. Para el caso de losas de reticular celulado, donde la losa
hace el papel de viga el valor de Q permitido es de 3.
El otro aspecto importante tiene que ver con el hecho de que dado que el pico del
espectro está muy corrido hacia la derecha y el espectro tiende al valor de la aceleración
máxima del terreno para períodos cortos, hay necesidad de hacer una corrección en el
"alar de Q en esta zona del espectro. Esta corrección se realiza utilizando un valor de Q'
para dív idir el espectro elástico y obtener el espectro inelástico de diseño. El valor de Q'
se obtiene así:
Para períodos T mayores que Ta :
(7- 55)
Q'=Q
Para períodos T menores que T a :
Q'=l+(Q-l)~
Ta
(7-56)
7.7.5 Forma del espectro del NEHRP-94
Los requisitos contenidos en las recomendaciones del National Earthquake Hazard
Reduction Program - NEHRP, son en general actualizaciones del ATC-3. Su primera
versión, aparecida en 1986 IFEMA, 1986] recogía el texto del ATC-3 casi en SI] totalidad
y sin mayores variaciones. Luego fueron actualizados en 1991 [rEMA, 1991] y
posteriormente en 1994.
La versión de 1994 lFEMA, 1994b] trae variaciones importantes con respecto a las
versiones anteriores, especialmente en el espectro y particularmente en la forma como
se toman en cuenta los efectos de sitio. En la Sección 7.-!.3 se explicó en detalle la
manera como se toman en cuenta, dentro del NEHRP-94, los efectos de sitio y los
coeficientes de amplificación que se deben emplear para los diferentes tipos de perfil.
En la forma del espectro se mantiene la del ATC-3, pero la manera como se llega a él es
algo diferente. El espectro está definido de la siguiente manera:
(7-57)
Los valores de Ca Y C, se obtienen al realizar los siguientes productos:
I
(7-58)
(7-59)
donde los valores de Fa Y F, son los que se presentaron en las Tablas 7-9 y 7-10
respectivamente, aunque la norma no los usa directamente, pues sólo emplea los
coeficientes Ca Y C; e incluye Fa Y F, simplemente como una guía. La norma trae tablas
para los valores de los parámetros Ca Y C v, así:
Tabla 7-17 - Valores del coeficiente Ca
Perfil de
Suelo
Aa <0.05
Aa = 0.05
A a = 0.10
Aa =0.20
Aa = 0.30
Aa = 0.40
A
B
C
D
Aa
Aa
Aa
Aa
Aa
0.04
0.08
0.16
0.24
0.32
E
0.05
0.10
0.20
0.30
0.40
0.06
0.12
0.24
0.33
0.40
008
0.16
0.28
0.36
0.44
0.13
0.25
0.34
u.313
0.36
Av = 0.30
Av = 0.40
--
Tabla 7-18 - Valores dp/ coeficiente C,
Perfil de
Suelo
Av <0.05
Av = 0.05
Av = 0.10
Av = 0.20
A
Av
Av
Av
Av
Av
0.04
0.08
0.16
0.24
0.32
0.05
0.10
0.20
0.30
0.40
0.09
0.17
0.32
0.45
0.56
0.12
0.24
0.40
0.54
0.64
0.18
0.35
0.64
0.84
0.96
B
C
D
E
A continuación se presentan los espectros que se obtienen para valores de Aa = Av =
0.10,0.20 Y 0.30.
224
0.7 , - - - - - , - - - - - - , - - - - - - - , - - - - - - , - - - - - , - - - - ,
0.6 +----~r_--+----+---+----+---_I
0.5
+_---+-~..____+----r_---+---_+---__I
0.4
+----+....---\"""':----+----+----\-----1
0.3
+----+.__-~..r----+=-_.;;::-+---_+---_I
Sa
(g)
0.2 +---..-'''i----~_:----t-='''--=+----\----'=''-l
Suelo Tipo A
J
t-----+------+----j-----+------+------i
0.0
0.0
II
0.5
1.0
1.5
2.0
2.5
3.0
Período T (s)
Figura 7-37 - Espectro de aceleraciones Aa = Av = 0.10, NEHRP-94
I
I
0.90
.------,----,---~r_---,-------,----,
0.80
+----+-----'\-J-------jf----+----+----i
0.70 +----+~----+~~---cf----+----+----i
0.60 +----....¡.,-~--+-----"""-----+-----+---
s, 0.50
(g) 0.40 +_-.......~d_----"o,d-0.30
~'o;;:_-7'P""""'-'-"""-_'q_---_t="'""""'"'~_I
+_---~c_""o--+_--~.....::_--""";_=---_+_---__I
0.20 r_----+-----""....,¡.::--""_;;;;d-=='-==t-----='T"-_==:J
0.10
L----t----L-=:=t=::::;t;;;;;;;;;:i::==d
0.00 +-------!-----+-------+----+-------!------I
0.0
0.5
1.0
1.5
Período T (s)
Figura 7-38 - Espectro_ de aceleraciones Aa
2.0
2.5
3.0
=Av = 0.20, NEHRP-94
1.0
0.9
0.8
0.7
0.6
Sa
(g) 0.5
0.4
0.3
0.2
0.1
0.0
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Período T (s)
Figura 7-39 - Espectro de eceterectones Aa = Av = 0.30, NEHRP-94
225
----------------
- - - - - - ._---~----
7.7.7 Forma del espectro del Uniform Building Code (UBC-97)
El Uniform Building Code en su versión de 1997 [ICBO, 1997] adoptó los requisitos del
NEHRP-94 con algunas variaciones. La manera de plantear el espectro es similar a la de
versiones anteriores definiendo primero el cortante de diseño en la base, V, en función
del peso de la edificación W, lo cual conduce al siguiente espectro elástico implícito,
expresado como fracción de la aceleración de la gravedad:
C" 1
S a =--::;;2.5
Ca 1
(7-60)
T
El valor de S, debe cumplir la siguiente relación:
(7 -61)
Además, en las zonas de amenaza sísmica N 4, el valor del espectro debe cumplir.
(7-62)
El cortante de diseño en la base V se obtiene por medio de la siguiente expresión:
V=~W
(7-63)
R
A diferencia de las versiones anteriores del UBe, en el UBC-97 las fuerzas sísmicas están
prescritas al nivel de resistencia, como en las normas sísmicas colombianas. R es un
coeficiente de modificación de respuesta con valores similares a los del ATC-3, que en
este caso van desde un valor minimo de 2.8 hasta un máximo de 8.5.
El territorio de los Estados Unidos está dividido en las siguientes zonas de amenaza
sísmica, a cada una de ellas se le asigna un valor del parámetro Z, como se define a
continuación:
1
TaNa 7-19 - Coefic:p.nte de zonificación sísmica del UBC-97
1 es un coeficiente de importancia que depende del tipo de ocupación que tenga la
edificación de la siguiente manera:
Tabla 7-20 - Coeficiente de importancia del UBC·97
Tipo de Ocupación
1
1. Instalaciones Indispensables
1.25
11. Instalaciones peligrosas
IlI. Estructuras de ocupación especial
1\ Estructuras de ocupación normal
l.OO
125
l.UO
Los efectos de amplificación de la onda sísmica se toman en cuenta por medio de un
procedimiento totalmente análogo al del NEHRP-94, presentado en la Sección 7.4.3.
Además, el UBC-97 introduce para las zonas de amenaza sísmica N 4, unos coeficientes
especiales dictados por la presencia de fallas activas en las cercanías de la edificación.
Esta es la primera vez que se lleva este tipo de requisitos a una norma de diseño sismo
resistente. Los coeficientes correspondientes a estos dos efectos son los siguientes:
22(;
I
Tabla 7-21 - Tipos de perfil de suelo del UBC-97
I
;¡
I
I
Propiedades promedio del suelo en
los 30 m suneríores del nerfíl
Ensayo de
penetración
estándar. N
Velocidad de la
Resistencia al
onda de
cortante no
(o Nchpara
cortante. V s
drenado.
Su
estratos de
en kl'a
en m/s
suelos no
cohesivos)
en golpes/pié
Tipo de
perfil de
suelo
Nombre del tipo
de perfil de suelo.
Descripción genérica
SA
SR
Se
So
SE
Sf
Roca competente
> 1500
-
-
Roca
760 - 1500
-
-
Suelo muy denso. o roca blanda
360 - 760
> 50
> 100
Perfil de suelo duro
180 - 360
] 5 - 50
SO - 100
Perfil de suelo blando
< 180
< 15
< 50
Perfil ele suelo que requiere una evaluación especial en el sitio
Los valores de los promedios ponderados de vs ' N, Nch y Su se calculan de la misma
forma que en el NEHRP-9-1:, tal como se indico en la Sección 7.4.3.
Tabla 7-22 - Coeficiente Ca del UBC-97
-
Tipo de
perfil de
suelo
SA
SB
Se
SO
SE
1
SF
Coeficiente sismico de zona, Z
Z = 0.20
Z = 0.30
Z~OAO
0.12
0.16
0.2-1
0.32 Na
0.15
0.20
0.30
OAO Na
0.09
0.18
0.2-1
0.33
OAU Na
U.12
0.22
0.28
0.36
0.-1-1 Na
0.19
0.30
0.3-1
0.36
ü.3G N d
Z = 0.075
Z = 0.1 5
0.06
0.08
1
Debe realizarse una investigación geotécnica en el sitio y un análisis dinámico de
respuesta para las propiedades dinámicas del suelo encontradas
Tabla 7-23 - Coeficiente C, del UBC-97
Tipo de
perfil de
suelo
SA
SB
Se
So
SE
SF
Coeficiente sísmico de zona, Z
Z = 0.075
Z = 0.15
Z = 0.20
Z = 0.30
Z = ClAO
0.06
0.12
o.ie
0.2-1
0.32
0.08
0.15
0.20
0.30
OAO~v
0.13
0.25
0.32
OA5
0.56 N v
0.18
0.32
OAO
0.5-1
0.6-1 N v
0.26
0.50
0.64
0.84
0.96 N v
x,
Debe realizarse una investigación geotécníca en el sitio y un análisis dinámico de
respuesta para las propiedades dinámicas del suelo encontradas
Para efectos de tener en cuenta los efectos de campo cercano en la proximidad de
fuentes sismogenicas activas en las zonas de amenaza sísmica N -1:, primero estas se
clasifican dentro de tres tipos, A, B o C, y dependiendo de la cercanía a ellas, se fijan
227
úll1ica eslructural
HIJIICUIIU
u,
ltl'K " "
.'<.- •.•• ~"
valores de los parámetros Na Y x.. El UBC-97 establece que la localización y tipo de las
fuentes sismogenicas para ser empleadas debe sustentarse en información geotécnica y
geológica aprobada, por ejemplo datos del USGS (United States Geological Survey) o del
CDMG (California Dívision of Mines and Geology).
Tabla 7-24 - Tipos de fuentes sismogénicas del UBC-97
Definición de la fuente
sismo énica
Magnitud de
Tasa de
actividad SR
Momento Mw
(..nm/año)_
máxima
Tipo de fuente
sismogénica
Descripción de la fuente
sismogénica
A
Fallas que son capaces de
producir eventos de magnitud
grande y que tienen una tasa alta
de actividad sisrnica
M;:: 7.0
SR;:: S
B
Fallas diferentes a las de
tipo A o e
M;:: z.o
M < z.o
M;:: 6.5
SR< S
SR> 2
SR< 2
e
Fallas que no son capaces de
producir sismos de magnitud
grande y que tienen una tasa de
actividad relativamente bala
M< 6.5
SR52
Los dos criterios de magnitud de momento sísmico, M w , Y de tasa de actividad, SR,
deben cumplirse simultáneamente para efectos de determinar el tipo de fuente
sismogénica. La magnitud de momento sísmico, M w , está definida en la Sección -1.52.
Además se indica en el UBC-97 que las fuentes sismogénicas de subducción deben
evaluarse en cada caso con base en criterios apropiados.
Tab!1 7-25 - Coeficiente de campo cerceno Na del UBC-97
Tipo de fuente
sismogénica
A
B
e
Distancia más corta a la fuente
sísmoaéníca conocida km
;::
52km
5km
1.5
1.2
1.3
LO
1.0
1.0
10 km
l.U
1.0
1.0
Tabla 7-26 - Coeficiente de campo cercano N, del UBC-97
Tipo de fuente
sismogénica
A
B
e
Distancia más corta a la fuente
sísmozeníca conocida km
<2km
2.0
1.6
1.0
10 k 111
1.2
I
1.6
I
1.0
1.2
1.0
1.0
l.0
:
I
1.0
1.0
5km
> l.) km
Se permite interpolar entre los valores dados en las Tablas 7-25 y 7-26. La distancia más
corta a la fuente sismogénica debe ser la mínima distancia entre el lugar de interés y el
área correspondiente a la proyección del plano de la fuente en un plano horizontal
localizado al nivel de la superficie del terreno. No hay necesidad de incluir dentro del
plano de la fuente partes de él localizadas a profundidades mayores de 10 km. Deben
tomarse los valores de los coeficientes de campo cercano mayores, de los calculados
para todas las fuentes sismogénicas que puedan afectar el lugar de interés.
7.7.S Forma del espectro del Eurocodiqo-B
Dentro del grupo de Códigos producidos por el Comité Europeo de Normalización
(CEN), el Eurocódigo 8 corresponde a los requisitos sísmicos ICEN, 19941. Dentro de
228
este Código se plantea el espectro elástico para un período de retorno de 475 años de la
siguiente manera:
Para O:S:: T:S:: TB
S e (T)
= ag' S . [ 1+ ~ . (TI . ~ o - 1)]
(7-64)
(7-65)
S e (T) = a g . S . TI'1 • Po
A
I
r ]kl
T
• ~
L
(7-66)
T
(7-67)
donde:
Se(T)
T
s
TI
1
ordenada del espectro elástico
período de vibración de un sistema lineal de un grado de libertad
aceleración del terreno de diseño, para el período de retorno de referencia
coeficiente de amplificación de la aceleración espectral para un
amortiguamiento de 5% del crítico
límites de la zona de aceleraciones espectrales constantes
valor del período que define el comienzo del rango de desplazamientos
constantes del espectro
exponentes que afectan la forma del espectro para períodos de vibración
mayores que Te Y T n respectivamente.
parámetro del suelo
coeficiente de corrección del amortiguamiento, con un valor de referencia
TI = 1 para un coeficiente de amortiguamiento de 5% del crítico
Los tipos de estratigrafía del suelo se clasífícan de la siguiente manera:
Perfil Clase A - Es un perfil que tiene las siguientes propiedades: (a) roca u otra
formación geológica caracterizada por una velocidad de la onda de cortante, V S , mayor o
igual a 800 mis, incluyendo máximo 5 m de material menos competente en la
superficie, o (b) Perfiles rígidos conformados por arenas, gravas o arcillas
sobreconsolídadas de un espesor de varias decenas de metros, caracterizados por un
incremento gradual de las propiedades mecánicas con la profundidad y por valores de
V s al menos de 400 mis a una profundidad de 10 m.
Perfil Clase B - Depósitos profundos de arenas medianamente densas, gravas o
arcillas de rigidez mediana, con una profundidad de va desde varias decenas de metros
hasta muchas centenas de metros, caracterizadas por valores de Vs de al menos 200 mis
a una profundidad de la m, y que aumentas a valores de al menos 350 mis a una
profundidad de 50 m.
Perfil Clase e - Es un perfil que tiene las siguientes propiedades: (a) depósitos de
suelos no cohesivos sueltos, con e sin algunos estratos de suelos cohesivos blandos
caracterizados por valores de la velocidad de la onda de cortante, VSI menor de 200 mis
en los 20 m superiores, o (b) Depósitos que contienen predominantemente suelos
-------------
229
~
Dinánuc«
eSlnlC1ICnll
UjJIIClIUU " . " " "
o . v " . " .• _._
cohesivos que van desde blandos hasta medianamente rígidos, caracterizados por
valores de Vs inferiores a 200 mis en los 20 m superiores.
Tabla 7-27 - Valores de los parámetros que definen el espectro elástico
Clase de
perfil de suelo
S
A
B
1.0
1.0
0.9
e
~o
2.5
2.5
2.5
k1
k2
1.0
1.0
1.0
2.0
2.0
2.0
TB
Te
TD
(s)
(s)
(s)
0.10
0.15
0.20
0040
3.0
3.0
3.0
0.60
0.80
I
)
o
Período T, (s)
Figura 7-40 - Espectro elástico del Eurocódigo 8
Cuando el perfil de suelo incluye estratos superficiales de origen aluvial con espesores
que varían entre 5 y 20 m, localizados sobre materiales más rígidos como los del perfil
clase A, puede utilizarse la forma del espectro para perfiles clase B, utilizando un valor
de S igual a lA, a menos que se realice un estudio especial. El valor del coeficiente de
corrección para el amortiguamíento, se puede determinar por medio de:
T\
=~
7
2+~
(7-68)
2: 0.7
donde ~ es el valor del coeficiente de amortiguamiento viscoso de la estructura
expresado en porcentaje. El valor del desplazamiento máximo del terreno, d g , se puede
determinar por medio de la siguiente expresión:
(7-69)
El Eurocódigo 8 trae un espectro de diseño reducido por efectos de respuesta en el
rango inelástico, al que denomina espectro de diseño para análisis lineal. El espectro se
reduce por medio de un coeficiente de comportamiento q. El coeficiente de
comportamiento q corresponde al cociente entre las fuerzas sísmicas que la estructura
experimentaría si su respuesta fuera totalmente elástica, con un coeficiente de
amortiguamiento de 5% del crítico, y las fuerzas sísmicas mínimas de diseño, cuando
éste se realiza utilizando un modelo matemático elástico. Este espectro de diseño está
definido de la siguiente manera:
Para O~ T ~ TB
280
II
s, (T) = a . S·
[1
+
~ -( ~; -1)]
(7 -70)
---..,
Para TB :=:; T:=:;; Te
Sd(T)=
'--'~.~'
VNIVEASIOA~~!¡CI(lNt!1. n~ INGENIEflIA
a.s.~
fACULTAP PE 1tC~j)lOGiA ~E I.A CON5TNUCIO~
q
(7-71)
CENTRO DE OOCUíf.ENTA.CION
Para Te :=:; T :=:; Tn
~
[T
S (T) = a . S . ----!!... ~]k
q
d
Para TD:=:;;T
d1
~ 0.20·
T
a
[T ]k [T I"
(7-72)
d1
/3 T:
Sd(T)=a'S'qº-'
.;
~0.20·a
(7-73)
donde:
Sd(T)
a
ordenada del espectro de diseño como fracción de la aceleración de la
gravedad
coeficiente de aceleración, igual al cociente entre la aceleración del terreno de
diseño, a g, y la aceleración de gravedad, g (a = ag/g)
coeficiente de comportamiento
exponentes que afectan la forma del espectro para períodos de vibración
mayores que Te YT D respectivamente.
Tabla 7-28 - Valores de
k d 1 y k d2
Clase de
suelo
k d1
k d2
A
213
5/3
B
213
5/3
C
213
5/3
7,8 Comentarios sobre la selección de los movimientos sísmicos de diseño
Es evidente de la presentación realizada a través del Capítulo que existen numerosas
maneras de enfocar la definición de los movimientos sísmicos de diseño, y que dentro
del proceso intervienen numerosos aspectos, estudiados, a su vez, por diferentes
disciplinas de la ciencia y la ingeniería. Es por lo tanto de vital importancia que el
objetivo de definir unos movimientos sísmicos de diseño, en el sentido amplio general
de producir una respuesta adecuada de la edificación ante la excitación sísmica, no se
pierda de vista. El criterio y experiencia en el tema de todos y cada uno de los
profesionales que participen en la selección y justificación de los movimíentos sísmicos
de diseño, es un aspecto sin el cual es imposible obtener resultados adecuados.
281
L.J"I!.lIltf( l·( ..__.~l' U.,
,llU ll'
\ll"
~ ..
·'
".
_
10
/
/
,y
/
,"-'2<..
<,
)<"//K '\
~w ~/x/';x
0,5
:::x
/
x
~X
x
x
0V':x /!)<,
N
/"""'0--
k
! )(~':-~
'"
X
&
/ -,
~~
/'/
V/'/
X\~
&v/¡/
Y
/
/"
~
/
0VYV~
/
~v
)Ví1K
:ijJ:»<l/[X k
/
~V
0,005
~~~
\.V~K<
X
/
/
~'X
x
x
/
'X
)< '/ '\(
~,-"'\-~
Velocidad
(mis)
x
x"
/1 -,
/
/ '-
x
'>V/K
0P5<V!)<
/
0<
~W
~~
,y
x
00).(6/1<
0V5<i/l>
/
/ -.
7>
xrx
\0.' X
'>V/ py
~t&rr/
'>V/K
/;:;:05<:/':<
/"
o.
/
x
/
,v
/,
V<
~
u
/
'>v::
r>
// í/:xVi><
c«
10"V
"X
~V
) 0.11Q, 1 9
<,
0.001
0.01
0.05
0.1
0.5
Período T (s)
Figura 7-41 - Papel tripartita espectral
5
10
50
SECCION-H
SISTEMAS DINAMICOS DE
VAlnOS
GBllDOS DE LIBERTAD
• S
Introducci/m al análisis matricial de estructuras
• 9
Análisis matricial avanzado y elementos finitos
• 10
Ecuaciones de equilibrio "',¡n,ir,,,i;,-o
• 11
Idealización dinámica de la estructura
• 12
Formulación del análisis modal
• 13
Métodos numéricos en el análisis modal
• 14
.A.nálisis modal cronoloqico
• 15
Análisis modal espectral
--------------_ _ - - ..
-
Capitulo S
Introducción al análisis
matricial de estructuras
I
I
8.1 Definiciones
8.1.1 Introducción
Con el fin de plantear un lenguaje propio para manejar sistemas dinámicos de varios
grados de libertad se ha incluido el presente capítulo introductorio al análisis matricial
de estructuras. Este tema está cubierto en excelentes textos de análisis estructural a los
cuales se remite al lector que quiera profundizar sobre él. Dentro de los textos que
pueden consultarse, se recomiendan los siguientes: [Cook, Malkus y Plesha, 1989],
[Gerstle, 1974] , [Ghalí y Neville, 1989], [Harrison.1973], [Holzer, 19851, iLaursen,
1978], [Livesley, 1964], [McGuire y Gallagher, 1979], [Norris, Wilbur y Otku, 19761.
[Prezemienniecki, 1968], ISack, 1984 y 1989], [Schoidek, 1980], [Schueller, 1990),
[Sttaford-Smith, 1991[, i'Taranath, 1988], [Timoshenko y Young, 19651. [Uribe, 1991],
[Vanderbilt, 1974], y [Weaver y Gere, 1990J.
El análisis matricial de estructuras no es nuevo a la ingeniería estructural, sus primeros
desarrollos tuvieron lugar durante el siglo pasado pero realmente su aplicación práctica
ocurrió con la aparición del computador digital, a partir de finales de la década de
19 SO. Hace algunos años se consideró novedoso, pero dado la popularidad que
adquirieron algunos programas de computador que utilizaban esta metodología, tales
como STRESS [Fenves et at., 1964] y ~TRUDL [Logcher, ei at., 1968]; su utilización se
convirtió en rutinaria, y puede afirmarse que hoy en día prácticamente no se realiza un
análisis estructural sin emplearla, no con estos programas, pero sí con sus
descendientes directos. Este aspecto refuerza el énfasis de que el ingeniero debe
conocer sus fundamentos del análisis matricial, y especialmente sus limitaciones. Se ha
resistido aquí la tentación de denominar el presente capítulo "Análisis por el Método de
Elementos Finitos", del cual el análisis matricial es un subconjunto. El desarrollo del
método de los elementos finitos se inició en la década de 1960 y cada día ocurren
mayores avances en él, no obstante en su aplicación en casos prácticos del día a día en
ingeniería estructural, muy pocas veces se puede ejercer el criterio que deben aplicar los
ingenieros en todas las labores que adelanten, pues se confunde muchas veces el
comportamiento de la estructura propiamente dicha con el comportamiento que
describe el modelo matemático de ella, llevando al ingeniero a tomar decisiones erradas
que muchas veces se habrían podido evitar utilizando sentido común. En el Capítulo
siguiente se presentan los fundamentos del método de los elementos finitos y sus
aplicaciones prácticas en el análisis de estructuras de edificaciones.
Para facilitar el uso del análisis matricial en casos de ejemplos y ejercicios que exceden
lo que es posible realizar manualmente, se recomienda el uso del programa de
computador CAL91 [Wilson, 79911 el cual fue desarrollado por el profesor E. L. Wilson
de la Universidad de California en Berkelcy, para la enseñanza del análisis matricial y la
dinámica estructural.
286
uunic« estructural aplicada al diseño sísmico
1.2 Alqebra lineal
Matriz - Es una tabla o arreglo rectangular de cantidades numencas o expresiones
matemáticas que se pueden representar por medio de un solo símbolo. Por lo tanto:
[A] m,n =
a 11
a 12
a 13
a 21
a 22
a 23
a 31
a 32
.. ,
...
alo
a 20
...
a 33
:
amI
a m2
(8-1)
a 30
;
a m3
...
amo
Esto significa que se ha escogido [A] como el símbolo para representar el arreglo o tabla
de ID por n elementos donde aij es el elemento localizado en la fila i y en la columna j.
Los subíndices ID y n en [A]m,n indican que la matriz [A] tiene ID filas y n columnas. En
general los subíndices de tamaño se omiten y el hecho de que el nombre aparezca entre
corchetes rectangulares indica que se trata de una matriz.
Matriz cuadrada - Es una matriz donde
ID
= n.
Matriz diagonal - Es una matriz cuadrada donde los términos que estén fuera de la
diagonal son cero:
O
hu
O
b 22
O
O
O
...
O
O
...
ti
b 33
.,.
O
:
:
O
O
O
(8-2)
:
'"
b mo
Matriz unitaria - Es una matriz diagonal donde todos los términos de la diagonal son
iguales
2.
la unidad. Se describe como [ 1 ] o matriz identidad.
1 O O .oo O
O 1 O oo. O
[1] 0,0
= O O 1
:
... O
(8-3)
;
O O O
... 1
Matriz simétrica - Es una matriz donde aij
:..= aji'
Matriz nula - Es una matriz donde todo los términos son cero.
Vector - Es una matriz donde ID o n son uno. El hecho de que el nombre del vector
aparezca entre corchetes, {A}, indica que es un vector.
(8--0
I
8 • Introducción al análisis matricial de estruct II
Determinante - Es una tabla o arreglo cuadrado de elementos o expresiones. El hecho
de que el nombre aparezca entre líneas verticales, IAI, indica que se trata de un
determinante. La diferencia fundamental entre un determinante y una matriz es que el
determinante al expandirlo tiene un valor numérico, mientras que las matrices no
pueden ser reducidas a un valor único. Cuando una matriz [A] es cuadrada se puede
hablar de su determinante como IAI.
I
I
I
I
aH
a l2
a 13
a 14
a 21
a 22
a 23
a 24
a 31
a 32
a 33
a 34
a 41
a 42
a 43
a 44
(S-5)
El menor de un elemento, aij. de un determinante IAI de tamaño n es el determinante de
tamaño n-l obtenido al tachar la fila i y la columna j del determinante original.
El cofactor de un elemento, aij, de un determinante IAI de tamaño n es el determinante
de tamaño n-I obtenido al tachar la fila i y la columna J del determinante original,
multiplicado por el término (_l)i+j .
8.1.3 Operaciones con matrices
Suma - Se realiza sumando los términos correspondientes en cada matriz, entonces:
(S-G)
implica que:
(8-7)
por lo tanto es evidente que para poder realizar una suma entre matrices
tienen que ser del mismo orden m por n. Por ejemplo:
1
I
[B]=[mJ
[Cl=[;~]
[B] y [C]
~S-8)
entonces para
Resta - Se realiza restando los términos correspondientes en cada matriz, entonces:
[A]
= [B] • [C]
(S-lO)
implica que:
(8-11 )
por lo tanto es evidente, también, que para poder realizar una resta entre matrices [A],
[B] Y [C] tienen que ser del mismo orden m por n.
Transposición - La transpuesta de [A] es [A]T donde T indica que se transpuso [A].
Entonces para cualquier i y j:
--------------------------
hruunica estructural aplicada al diseño sísmico
(8-12)
a!.
=a··
1,.)
.1,1
por ejemplo:
[A]"
=[~]
. . =lmJ
(8-13)
[AK,
Multiplicación de matrices - El producto de [A] por [B] es [C] donde:
x [B] o,p
[c]m,p = [A]m,o..
(8-14)
donde cada termino de [C] está dado por:
n
e, . = "'(a.
k.J
1, k "
I,J
(8-1 S)
b k d.)
k=l
I
El número de columnas n en [A]m,n debe ser igual al número de filas en [B]n,p. Por
ejemplo
[C]2,3 = [A]2,3 [B]3,3
[H*JxlHffiJ
=
=[1, 1- 3· 2 + 5 . 3
1· 7 - 3· 5 + 5· 1 1· 2 - 3· 3 + 5 . O]
2·1+J·2+0·3 2·7+1·5+0·1 2·2+1·3+0·0
=[~]
4 1191 7
En el caso anterior se dice que [Al premultiplica a [B] y que [B] postmultipíica a [Al
I
El producto de la matriz [A] por el
escalar k es una nueva matriz [B] donde cada término de [B] es el término
correspondiente de [A] multiplicado por k
Multiplicación de una matriz por un escalar
Inversion - La división como tal no está definida como una de las operaciones de
álgebra lineal. Pero una alternativa, cuando se trata de matrices cuadradas, es
multiplicar por el inverso. Si denominamos el inverso de una matriz [A] como [Ar 1
entonces planteando el siguiente sistema de ecuaciones simultáneas:
[A][x] = [c]
(8-16)
Para obtener [x] podemos premultiplicar la ecuación (8-16) por [Ar 1 obteniendo:
(8-17)
288
I
R • Introduccion al análisis motricial de estructuras
que se
COll\ ierte
en:
(8-18)
Por lo tanto la solución de un sistema de ecuaciones simultáneas se obtiene
multiplicando la inversa de la matriz de coeficientes de las incógnitas por la matriz de
términos libres. Existen numerosos métodos de inversión de matrices, cuya descripción
se sale del alcance de esta breve introducción al álgebra lineal. La persona interesada en
el tema puede remitirse a numerosas referencias, dentro de las cuales se cuentan:
[Akivis y Goldberq, 1972], [Bathe y Wilson, 1976], [Bathe, 1982, 19961, [Bradley, 1975],
[Carnaham, Luther, y Wilkes, 19691, [Crandall, 1956], [Deif, 1982], rFaddeeva, 1959],
[Froberg, 1965], [Hammiong, 1962], [Hildebrand, 1965 y 1974], [james, Srnith, y
Waldorf, 1985], [jensen y Rowland, 1975], [jennings y McKeown, 1992], [Kreyszig,
19931, [Marcus y Mine, 1972], [Mostrow y Sampson, 1965], [Nicholson, 19861, [Shílov,
19771, [Strang, 1988], y otros.
Cuando una
determinante
caso especial
que la matriz
matriz no tiene inverso se dice que es singular. Que el valor del
de la matriz sea cero es prueba de que la matriz es singular. Existe un
en el cual la transpuesta de la matriz es su inversa, en este caso se dice
es ortogonal. Para una matriz ortogonal:
(8-19)
Partición de matrices - Consiste en dividir la matriz en submatríces para asi poderlas
tratar como elementos independientes en operaciones de álgebra lineal. Para poder
realizar operaciones con submatrices debe tenerse cuidado que éstas sean conforrnales,
o sea que tengan dimensiones compatibles. Se procede de la siguiente manera:
[A][B]=[C]
(8-20)
Particionando [A] Y [B] así:
[Á][li] = [Al
~ A2][~~]
= ([A¡)[Bd) + ([A 2][B 2 ])
(8- 2l)
= [C l]+[C2 ]
=
[c]
Por ejemplo:
'\
1-1] )
2:39
Iinárnica estruct ural aplicada al diseño sismico
Leyes y propiedades:
Ley conmutativa - La suma de matrices es conmutativa, pero no la resta:
[B] + [e] = [e] + [B]
(8-22)
[D] • [E] "# [E] - [D]
(8-23)
y
y la multiplicación de matrices tampoco lo es:
[B] [e]
'* [e] [B]
(8-24)
Ley asociativa - La ley asociativa es valida tanto para suma o resta como para
multiplicación:
[A]+([B]+[e]) = ([ A]+[B])+[e]
(8-25)
[A] ([B] [e]) = ((A] (B]) (e]
(8-26)
Ley distributiva - La ley distributiva es valida:
[A] ([B]+ [e]) =[A][B]+ [A][e]
(8-27)
Las siguientes propiedades de las operaciones entre matrices son útiles:
(8-28)
(8-29)
(8-30)
(8- 31 )
En las dos últimas expresiones debe notarse que el orden de las matrices cambia en el
lado derecho,
8.1.4 Propiedades y operaciones con vectores
Para efecto de algunas de las deducciones que se presentan es conveniente presentar
algunas propiedades de los vectores y los espacios vectoriales.
Un punto en el espacio es un objeto geométrico, que al existir un sistema de
coordenadas espacial, se puede describir por medio de sus coordenadas. Un vector es
un segmento dirigido de línea el cual tiene un punto inicial y un punto final. Si
240
I
8 • Introducción al análisis matricial de estructuras
disponemos de un sistema de coordenadas cuyos ejes son mutuamente perpendiculares
esto se conoce como un sistema de coordenadas cartesiano.
Si tenemos un vector {a} obtenido de dirigir un segmento de línea del punto inicial p al
punto final q, y las coordenadas, en el espacio de p son (Xp, Yp, zp) y las de q son (Xq, Yq, Zq),
entonces las componentes de {a} con respecto al sistema de coordenadas cartesiano
son:
(8-32)
Por definición la longitud del vector {a} se representa como lal y corresponde a la
distancia entre p y q, la cual se obtiene por medio 'del teorema de Pitágoras como:
(8-33)
El producto punto de dos vectores se define como:
(8- 3-1)
donde 'Y es el ángulo entre los dos vectores medido cuando sus dos puntos iniciales
coinciden. De aquí se deriva la propiedad de que dos vectores son perpendiculares u
ortogonales si su producto punto es cero.
El producto cruz de dos vectores se define como:
(8-3 S)
y el vector {e} es un vector perpendicular al plano que conforman los vectores {a] y [b} Y
sigue la regla de la mano derecha con respecto al orden de la operación, o sea que al
colocar la parte inferior de la mano derecha sobre el plano que conforman los dos
vectores y girar la mano del primero al segundo, la dirección positiva de {e} es la que
tiene el dedo pulgar. Además la magnitud del vector {e} es igual al área del
paralelogramo que conforman los vectores {a} y {b} al ser utilizados como lados
adyacentes del paralelogramo.
8.2 Sistemas de coordenadas y su transformación
Para efectos del análisis matricial, se definen dos sistemas de dirección positiva de las
fuerzas y de los desplazamientos de la estructura. Estos sistemas los denominaremos
sistema de coordenadas local cuando se trata de fuerzas y deformaciones referidas con
respecto a los ejes propios del elemento y sistema de coordenadas global cuando están
referidas a ejes de la estructura como un conjunto. En las presentes notas se utilizarán
letras minúsculas para referirse a propiedades expresadas en el sistema local y letras
t-.IAYUSCUL-\S para referirse él propiedades expresadas en el sistema GLOBAL.
Para entender mejor estos conceptos supongamos el pórtico mostrado en la Figura 8-lo
Este pórtico esta sometido a unas fuerzas externas. Si realizamos un análisis de la
estructura, por cualquier método convencional, encontraremos los desplazamíentos de
241
tinámica estructural aplicada al diseño sísmico
los nudos de la estructura y las fuerzas internas en los elementos. Si hacemos cuerpo
libre de los elementos, encontramos que cada uno de ellos tiene en sus extremos unas
fuerzas axiales, unas fuerzas cortantes y unos momentos flectores. Estas fuerzas deben
estar, y están, en equilibrio con las fuerzas externas que obran sobre el elemento. De
igual manera si hacemos cuerpo libre de los nudos de la estructura encontraremos que
también están en equilibrio y que las fuerzas que les llegan son iguales, pero se signo
opuesto a las de los extremos de los elementos.
~
0~~
~
r
-<h
~
~
~
~
Figura 8-1 - Fuerzas externas y fuerzas internas en una estructura
Es evidente que para poder comprobar el equilibrio de los nudos debemos transformar
las fuerzas que les llegan de los elementos en sus componentes horizontales y
verticales (con los momentos no se presenta este problema pues están referidos al
mismo eje perpendicular al plano del pórtico tanto en los elementos como en los nudos)
para poderlas sumar. En este caso las fuerzas, tal como se expresan en los extremos de
los elementos, están en cada uno de ellos en un sistema de coordenadas propio, que es
el sistema local. En los nudos hemos utilizado un sistema de coordenadas que es el
mismo en todos los nudos y este sistema corresponde al sistema global de
coordenadas.
fy
! sistema local
~\y
(e)
(a)
(d)
Figura 8-2 - Sistemas de coordenadas local y globtil
En la figura 8-2(a) se muestra uno de los elementos de la estructura con su sistema
local de coordenadas y sus fuerzas en los extremos expresadas en este sistema. En la
Figura 8-2(b) se muestra el mismo elemento con el sistema global de coordenadas y sus
fuerzas en los extremos expresadas en el sistema global. En la Figura 8-2(c) se muestra
el nudo del centro de la estructura cuando le llegan las fuerzas en el sistema local de
242
8 • introducción al análisis riatriciaí de estructuras
cada elemento y en la Figura 8-2(d) el mismo nudo con las fuerzas llegando en el
sistema global. Es evidente que el equilibrio del nudo se puede comprobar de una
manera sistemática cuando las fuerzas están expresadas en el sistema global. Por otro
lado el diseñador en general requiere que las fuerzas en los elementos estén expresadas
en términos de fuerzas axiales, fuerzas cortantes, momentos torsores y momentos
flectores, y todas ellas están definidas en el sistema local. Debe quedar claro además
que no se trata de sistemas de coordenadas en un sentido estricto, pues realmente lo
que nos indican es la dirección positiva de las fuerzas y deformaciones dentro de los
elementos o en toda la estructura. Aunque en la discusión anterior se utilizó un pórtico
plano como ejemplo, lo presentado es válido también para estructuras tridimensionales.
La presentación inicial se realizará para pórticos planos y posteriormente se
in u oducírán los otros tipos de estructuras no planares. En resumen es evidente que es
necesario disponer de una manera de transformar de un sistema de coordenadas al otro
de una forma sistemática. En la Figura 8-3 se muestra un elemento de pórtico plano con
los dos sistemas de coordenadas y su relación entre ellos.
y
~
z ~ sistema local
~
y
sistema global
z~~
- ; t : -X'
---- ----
::)
----
X'
Figura 8-3 - Elemento de pórtico plano en coordensdas locales
Los dos sistemas de coordenadas, local y global, son sistemas de mano derecha. El
sistema local siempre se define con el eje x a lo largo del eje longitudinal del elemento,
En el elemento se han denominado sus extremos como a y b (véase la Figura 8-3). El
sentido positivo del eje x local es el sentido que se tiene al ir del nudo a al nudo D, por
esta razón se ha marcado una flecha en el centro del elemento que apunta en esa
dirección. Posteriormente se verá que esta es la única definición que se necesita para
describir el sistema local en estructuras planares. El eje y local siempre tiene su sentido
positivo hacia la izquierda al ir en la dirección positiva de x. El eje z local se obtiene con
la regla de la mano derecha y es perpendicular al plano que conforman x y y. El eje z es
positivo saliendo del plano del papel hacia el observador. En el sistema global el ~je X
puede tener cualquier orientación en el plano del papel, pero lo usual es que sea
horizontal. Los ejes Y y Z globales se definen a partir del eje X de la misma manera que
sus homólogos locales. El ángulo ex (véase la Figura 8-3) se define como el ángulo que se
describe al ir del eje x local al eje X global, y es positivo en esa dirección.
sistem~
sistema local
global
;fysen ex
fycosex
fxcos ex
Figura 8-4 - Transformación de local a global
Tenemos las fuerzas f r, Y r, en el sistema local mostrado en la Figura 8--1:. Utilizando el
ángulo ex podernos encontrar las componentes de las tres fuerzas sobre los ejes del
sistema global, las cuales también se muestran en la figura. Por lo tanto:
Xl
248
-----------------
Jillámica estructural aplicada al diseño sísmico
+ f y sen a
-fx sena + f y cosa
f x cosa
(8-36)
si definimos:
(8-37)
y buscamos una matriz [A] tal que:
".
{F}=[A]{f}
(8-38)
de las expresiones en (8-36) podemos ver que:
~
l}
(8-39)
por lo tanto
cos a
[1.,]= ~na
[
sena
(8-40)
cosa
o
Además podemos probar que la matriz [A] tiene la propiedad de que es ortogonal, o sea
que su transpuesta es su inversa:
(8-41 )
Esto quiere decir que si premultiplicamos ambos lados de la ecuación (8-38) por [A]T
obtenemos:
(8-42)
entonces:
(8-43)
o
sea que por medio de la matriz [A] podemos transformar las fuerzas que se
encuentran en el sistema local a fuerzas en el sistema global, ecuación (8-38), e
igualmente por medio de la matriz [A]T podemos transformar las fuerzas del sistema
global al sistema local, ecuación (8-43).
244
I
('j •
1IIfrO(lIlCC/O/l (ti U1UlIIS/S l/1ll/.r1CHI/
(1('
escruccuru»
Ejemplo 8-1
TeV1ef1tOS eL eLenteVl,to ete IUt rJórtico pLl/l.vw f1tOstmclo en LI/l. FiglUCíL 8-5, con LI/l.SjI1.erZI/l.S etl/l.etl/l.S ef't
SItS extremos a 0 b. !:1 qlterenws trDUtsjonnar Las jlterlas en s/tS extremos eteL sistelnl/l. LocaL
f1tOStTI/l.etO u Itl1, sistcvHa gLobl/l.L q/1.C nene SIl. eje X lLOrizmttaL
3m
y
N~t~GIObal
II
II
Figura 8-5 - Ejemplo 8-1 - Elemento con sus fuerzas en coordenadas locales
Los vectores (;ir JI1,CrLI/l.S íocates eIt Los extre mos a !:1 b son:
EL Úftlj¡ÜO a se oüuene deL arcoscno de 3/5 0 es 36.870. EL áltg/üo es negativo rJl1.es Ylor
dgivLiciólt a vu ete LOCl/l.L u gLobl/l.L. Por Lo ta/tto: cos a= 4/5 = 0.8 L! "en a = -3/5 = -{).6 0 La
ml/l.triz [A.] es:
0.8 -0.6 0]
0.8
°
[A.] = 0.6
[
° °
1
Ll/l.sJIH:'rlaS eVL coorvLe/tl/l.vLl/l.s gLobaLes cteL extremo a eteL cLemeltto son:
I
{Fa} = [A. ]{fa} =
[
°
0.8 -0.6 0] { SO ] {-20]
0.6 0.8
100 = 110
°
O
1
o LasJ/1.erll/l.s en coorvLeltl/l.vLas gLo~JaLes
500
500
vLeL extremo b vLcL eLCI1'U'ltto
SOl1.:
J
20kN
Figura 8-6 - Ejemplo 8-1 - Fuerzas del elemento en coordenadas globales
111
245
Dináinicu estrud ural aptlcadu al diseño sísmico
B.3 Matriz de rigidez de un elemento de pórtico plano
Primero determinaremos la matriz de rigidez del elemento en coordenadas locales y
posteriormente la transformaremos del sistema de coordenadas local a global. Para
establecer las relaciones entre las fuerzas en los extremos el el elemento y los
desplazamientos también en sus extremos utilizaremos la ecuación de pendientedeformación, la cual indica que para un elemento en estado de deformación, los
momentos en los extremos que mantienen esta deformación están dados por las
siguientes ecuaciones:
. (8-4-1)
II
i
I
Donde:
M,
momento en el extremo a del elemento. Positivo en el sentido contra horario.
M,
momento en el extremo b del elemento. Positivo en el sentido contra horario.
E
módulo de elasticidad del material del elemento.
1
momento de inercia de la sección del elemento.
L
luz del elemento.
ea
giro del extremo a del elemento. Positivo en el sentido contra horario.
eb
giro del extremo b del elemento. Positivo en el sentido contra horario.
<p
pendiente de la línea que une los extremos a y b del elemento, medida con
respecto a su situación original indeformada. Positiva en el sentido
contra horario.
M~ y M~ son los momentos de empotramiento de las cargas externas dentro del
elemento en los extremos a y b respectivamente.
•
situación original
del elemento
b
L
Figura 8-7 - Parámetros de la er-uación de pendiente deformación
Cuando a un elemento, que está en un estado inicial sin esfuerzos, se le aplican unas
fuerzas en sus extremos, estas fuerzas producen una situación de deformación interna
del elemento y desplazamientos en sus extremos con respecto a su situación inicial.
Esta situación de deformación del elemento se mantiene mientras permanezcan las
fuerzas que se aplicaron en sus extremos. Si estas se retiran el elemento vuelve a su
situación original.
El elemento de pórtico plano tiene la posibilidad de recibir en cada uno de sus extremos
una fuerza axial colineal con el eje del elemento, una fuerza cortante transversal al
elemento y un momento flector. Esto nos conduce a un total de seis fuerzas externas
que se pueden aplicar. Si estas seis fuerzas se conocen, es posible determinar las
246
•
R • Introduccion al análisis matricial de es(rllc(llrw
fuerzas internas del elemento en cualquier punto con ellas, pues al disponer de ellas es
como tener un elemento isostático.
Por otro lado la situación de deformación interna del elemento se puede describir por
medio de tres tipos de desplazamiento en cada uno de sus extremos, a saber: una
deformación colineal con el eje longitudinal del elemento, una deformación transversal
a este eje y un giro con respecto a la posición original del eje. Esto nos lleva a un total
de seis posibles desplazamientos en los extremos del elemento. Todos los
desplazamientos y deformaciones internas del elemento se pueden describir con base
en estos seis desplazamientus.
i
En la Figura 8-8 se muestra un elemento de pórtico plano en su posición original
indeformada y en la posición deformada. Además se muestran las fuerzas que
producen y mantienen este estado deformado. Tanto las fuerzas como los
desplazamientos tienen la misma nomenclatura, donde la primera letra del subíndice
hace referencia al extremo del elemento (a o b) y la segunda letra a la dirección en el
sistema local de coordenadas (x, y o z),
/'
~z
I
a
desplazamientos
fuerzas
Figura 8-8 - Fuerzas y desplazamientos en los extremos de un elemento de pórtico plano
Estamos interesados en buscar la relación que exista entre las seis fuerzas y los seis
desplazamientos. Esta tiene la siguiente forma:
donde [k] es la matriz de rigidez del elemento. Uno de los procedimientos de obtención
de la matriz de rigidez consiste en imponer una deformación unitaria a uno de sus
grados de libertad, manteniendo restringidos los desplazamientos de los otros grados
de libertad. Las fuerzas que se generan en los grados de libertad restringidos son los
términos correspondientes de la matriz de rigidez. Los desplazamientos se miden a
partir de la situación sin esfuerzos del elemento. La ecuación (8--45) queda entonces así:
k axax
k axay
k axa z : k axbx
k
axby
k axbz
U ax
k ayax
k ayay
k aya z : k aybx
k ayby
k aybz
u ay
k azax
k azay
k azaz : k azbx
k azby
k azbz
u az
k bxax
k bx ay
k bx bz
U bx
k byax
k byay
k bxaz : k bxbx
k by az : k bybx
k b x by
k by by
k by bz
u by
k bzax
k bzay
k bzaz
k b zby
k bzbz
U bz
-----1------
!k
bzbx
(8-46)
donde los subíndices de cada término de la matriz de rigidez se refieren el primero al
terrníno de fuerza y el segundo al desplazamiento que lo genera. Así por ejemplo el
término k bxay indica que está relacionando la fuerza en el nudo b dirección x, f bx •
generada por un desplazamiento del nudo a en la dirección y, lL.y • Por lo tanto:
247
'Jillálllica estructural aplicada al diseño sísmico
(a) Definimos así las fuerzas cuando
desplazamientos son cero.
l, teniendo en cuenta que todos los demás
llax =
situación
original
L
<,
A, E, 1
,.------...,.-p
p.~..
Figura
8-9 -
Desplazamiento unitario en el grado de libertad u ax
Si se induce un desplazamiento A en el grado de libertad Uax hay necesidad de imponer
las fuerzas P mostradas en la Figura 8-9 para poder mantener esta deformación. El
esfuerzo en el elemento es:
P
(8-47)
0"=-
A
y la deformación unitaria que induce este esfuerzo es:
O"
(8-48)
E=-
E
por lo tanto la deformación axial total del elemento se calcula así:
PL
O"
L
A= fEdx=EL=-L~o
E
AE
(8-49)
P= AE_A
L
(8- 50)
y
dado que A es una deformación unitaria, tenemos:
k axax = P =
AE
L
y
k bxax = - P = -
AE
L
(8-51)
Como la deformación axial no induce reacciones en los otros grados de libertad, todos
los demás términos de la primera columna de [k] son cero.
La matriz mostrada en (8-46) hasta este momento va así:
AE
-
L
O
-L
O
(b) Ahora hacemos
k axaz
k ax by
k axbz
k ayay
k ayaz : k aybx k ayby
k azaz LI _____
k azb x
_____
k aybz
~_aE'L
O
--ÁE-
O
I
I
k axay
I
:
k axbx
k azb z
I
~~~Iry-
-----
k bx bz
k bxay
k bxaz
:
k bxbx
k bxby
k byay
k byaz
:
k bybx
k by by
k by bz
k bzay
k bzaz
:
k bzbx
k bzby
k bzbz
lla y =
I
1 Ytodos los demás desplazamientos son cero.
248
(8-52)
8 • Int roduccion al análisis matricial de estructuras
L
a+----~---"'+b
f ay
situación
original
Figura 8-10 - Desplazamiento unitario en el grado de libertad llay
Tenemos, entonces, la siguiente situación expresada en términos de las variables de la
ecuación de pendiente deformación:
~b
Mb
Figura 8-11 - Fuerza en los extremos
De acuerdo con la anterior:
(8-53)
Pero <p =-ML Y L\=1 por io tanto <p = -11L Yentonces:
Tomando momentos en a obtenemos:
(8-5;))
Sumando fuerzas verticales:
(8-56)
Entonces los coeficientes de la segunda columna de la matriz de rigidez son:
k bxay =
O
12EI
12EI
k ayay = - - u
kbyay=---u
k azay
=
6EI
6EI
k bzay = L 2
L2
La matriz mostrada en (8--16) hasta este momento "a así:
249
'Hnámica estruct ural aplicada al diseño sísmico
I
AE
--
L
k axaz
O
12EI
O
L
AE
---
L
O
k a yaz : k a ybx
k a yby
k a ybZ
I
k azaz : k a zb x
__IL_
I
k bxaz : k bxbx
O
I
12EI
k
6EI
Uaz =
I
byaz
: k by bx
k azb y k a zb z
----- ----k bxby k bxbz
k by by
k bybz
k bzby
k bzbz
(8-57)
I
k bzaz : k bzbx
L2
(e) Ahora hacemos
k a xb z
_____ .1 _____
L3
O
k a xby
I
6EI
-----
k a xbx
I
I
I
3
O
j
I
1 Ytodos los demás desplazamientos son cero.
situación
original
L
fax
Figura 8-12 - Desplazamiento unitario en el grado de libertad Uaz
Tenemos la siguiente situación expresada en términos de la nomenclatura de la
ecuación de pendiente deformación:
Figura 8-13 - Fuerza en los extremos
Por lo tanto:
M = 2EI(W +0 -3 ) = 4EI
a
L
a
b
<P
L
~• = 2EI
O
- ("a
~b + a
lVl b
L
-
(8-58)
3)
<P =2EI
--
L
Tomando momentos en a obtenemos:
(8- 59)
Sumando fuerzas verticales:
v =v =6E!
a
b
L2
(8-GO)
Entonces los coeficientes de la tercera columna de la matriz de rigidez son:
k axaz = O
k bxaz = O
250
8 • lntroduccion a! análisis matricial de estruct l/ros
6EI
k aya z
=
k
= 4EI
azaz
6EI
k byaz = - L2
L2
k
L
_ 2EI
L
bzaz -
La matriz mostrada en (8-46) hasta este momento va así:
AE
L
1
o
o
1
1
1
k a xbz
k a xbx
k aybz
4EI : k
L
azbx _
1
______ J...
[k]=
k a zby
(8-61)
1
O
k bxbz
: k bxbx
1
_ 6EI : k
o
L2
o
I
6EI
2EI
11
L
bybx
1
i k bzbx
k byby
k bybz
k bzby
k bzbz
Si hacemos el mismo ejercicio presentado en (a), (b) y (e) para desplazamientos unitarios
en Ubx, Üby y Übz obtenemos la matriz de rigidez, en coordenadas locales, de un
elemento de pórtico plano:
AE
L
o
o
o : AE
L
o
1-1
12EI
r!
2EI
o
=
__ .k_
AE
O
L
o
o
2EI
L
o
que utilizando la partición mostrada, se puede expresar como:
(8-63)
donde {fa}, {fb}, {Ua} y {Üb} son vectores de 3 filas y 1 columna y [kaa], [kab] , [k fila ] y [k bb] son
matrices de 3 filas y 3 columnas. Al expandir la ecuación (8-63) obtenemos:
(8-64)
y
{f b } = [kba ] { u a } + [kbb ] { u b } = {fba} + {fbb}
251
(8-65}
Dinámica estructural aplicada al diseño sísmico
Estas ecuaciones indican que las fuerzas en un extremo del elemento están compuestas
por dos partes, una proveniente de los desplazamientos en el propio extremo, y la otra
de los desplazamientos en el otro extremo. Por esta razón:
(8-66)
y
(8-67)
donde {faa } son las fuerzas en el nudo a causadas por los desplazamientos del nudo a, y
análogamente {fab } son las fuerzas en el mismo nudo a causadas por los
desplazamientos del nudo b. Entonces como regla general {fjj } son las fuerzas en el
nudo i causadas por desplazamientos en el nudo j y se obtienen por medio de la
submatriz [kjj ] , así:
(8-68)
Ejemplo 8-2
Detem'LÍftar La InatrLz (~P rigidez de Itlta viga COVL Las siglüevLtes rJrGpiedades: L
=
3
VVI,
UE
=
25
GP(}v (25 giuapasmLes = 25000 MPa = 250 000 kgJ/CVV1/ = 2 500000 tovL/m2) . SI1- sección tielte
0.4· m de alulLO U 0.3 m de aLto. Se ddw detennittar SIl, fl'Latriz de rigidez eu coordeftadiA.s
InmLes.
Los térmÍJws de La matriz se mLuüavL así.:
A =0.4' 0.3
=0.12 m-
1 =0.4· 0.3 112 = 0.0009 m
3
AE = u.12 m
L
• 25 GPa
= 1 (GN 1m) = 1000000 kN 1m
3m
12EI
L
2
4
3
=
12 . 25 GPa . 0.0009 m 4
27 m 3
0.01 {GN 1 m) -= 10000 kN / m
4
6EI = 6·25GPa·0.0009m =0.015(GN/m)=15000kN/m
L2
9m 3
4
4EI = 4·25 GPa· 0.0009 m = 0.03 (GN . m / rad) =30000 kN . m / rad
L
3m
4
2EI = 2· 25 GPa . 0.0009 m = 0.015 (GN . m / rad) = 15000 kN . m / rad
L
3m
Por Lo tunto La mutriz de rigLt~.ez es:
252
8 • Introduccián al análisis matricial de estructuras
kN/m
O : -1000 O
O
I
kN/m
-10 15
15 I O
O
I
-15 15 kN· mirad
30 I O
O
---- ------- ---- ---·-r----O I 1000
kN/m
O
-1000 O
O
kN/m
-15
:
-15
-10
O
10
O
I
15 1 O
-15 30 kN -mirad
15
O
O
10
15
1000
•
Ejemplo 8-3
EL deJ11eltto deL EjentpLo 8-2 se LLevu u Lu posiciÓlt d(jonnudu vVLostmdu en Lu FigltrU 8-14.
Detrr!l1ÚtUr Lusjaerzus necesarias pum J11UIÜeVLer Lu posiciÓlt deJonnudu.
I
\
posición original
0.0001 rad
Figura 8-14 - Ejemplo 8-3 - Deformaciones en los extremos del elemento
lC'llfl1WS entonces !íJli.e:
0.0002
0.002
{u}= {~~} =
1I
0.0001
-----_.
0.0004
,
..
_ .~
_~-~~~
..
~'
.
UNi\ltil~WAD t:~C/(iN;'¡'
DF.lNGfWi'x:lI
,- rl~cüLU.~ UF. T::CtWtOG!ii UE LA C{}NS-rm:CION
L~~~!:~~~."r:oG!1~~tNTAC'ON
-0.002
-0.0001
AL IU/l.cer eL prodlt.eto
SOVL kN
Ij
{f}6,1 = [k J6,6{U}6,1 otJtenevltos
Los siglüentes resli-Ltudos
Cl1.ij(,tS
luüdudes
kN'Vlt:
-200
40
61.5
200
-40
l58.5
es
40kN
200 k.N
4
Cv
58.5 kN'm
~ 200kN
61.5 kN'm
40kN
Figura 8-15 - Ejemplo 8-3 - Fuerzas del elemento
•
Dinámica estructural aplicada al diseño .,;smico
8.4 Principio de contraqradiente
Supongamos que tenemos unas fuerzas aplicadas a un elemento en sus extremos, estas
fuerzas están descritas por medio de un vector que está expresado en un sistema de
coordenadas local. A este vector lo llamamos {f}. Ahora expresamos estas mismas
fuerzas en un sistema de coordenadas global y a este vector lo llamamos {F}. Además
conocemos una matriz que nos permite transformar las fuerzas de un sistema al otro.
A esta matriz la llamamos [T], y la siguiente operación es válida:
(8-69)
Por otro lado existe un estado de deformaciones del elemento asociado con las fuerzas
que se aplicaron en sus extremos dadas en el vector {f}. Este estado de deformaciones lo
podemos describir por medio de los desplazamientos en los nudos del elemento por
medio del vector {u}, donde las componentes de los desplazamientos están expresadas
en el sistema local. Análogamente existe un vector de desplazamientos, expresado en el
sistema global, {U} asociado con {F}. Las fuerzas y desplazamientos están asociados a
través de unas relaciones de rigidez, las cuales se pueden expresar para el sistema local
así:
{f}=[k]{u}
I
.1
(8-70)
y para el sistema global de la siguiente manera:
{F}= [K]{U}
(8-71)
Hasta ahora disponemos de relaciones entre {f} y {F}, entre {f} y {u} y entre {F} y {U}.
Pero no disponemos de una manera de relacionar {U} con {u}. Esta última relación la
podemos buscar de la siguiente manera: sabemos que el trabajo que han realizado las
fuerzas a través del desplazamiento realizado puede expresarse como (véase la Sección
1.6):
W,",,~{Ur {Ff
(8-72)
If¡
y análogamente como:
w=.!{uV{f}
(8-73)
2
Estas ecuaciones de trabajo son válidas siempre que los sistemas de coordenadas
tengan componentes ortogonales, de tal manera que cada componente de fuerza sólo
puede hacer trabajo con UD desplazamiento colineal, o sea en la dirección de su propio
eje de coordenadas. Además el trabajo es invariante con respecto a los sistemas de
coordenadas, pues observar el elemento estructural con un sistema o con el otro no
varía el trabajo total que se realiza al deformarlo. Por lo tanto W = w y:
(8-74)
Ahora substituyendo la ecuación (8-69) en la ecuación anterior y eliminando los
términos iguales a ambos lados obtenemos:
254
I
o •
tntroauccion ((1 ((IIallSIS l/laCncw.{ (/e estructuras
(8-75)
o
(8-76)
que al aplicar ([A] [B])T = [B]T [A]T conduce a:
(8-77)
I
I
o sea que hemos probado que la misma matriz de transformación [T] que se utiliza
para cambiar el sistema de coordenadas de las fuerzas, opera para transformar
desplazamientos, pero a través de [T]T. Esta propiedad se conoce con el nombre de
principio de contraqradienre.
8.5 Matriz de rigidez de un elemento en coordenadas globales
En la Sección 8.3 se dedujo la relación entre fuerzas y deformaciones para el sistema de
coordenadas local del elemento, como:
{f}=[k]{u}
(8-78)
ahora queremos obtener la relación análoga en coordenadas globales:
•
{F} =[K]{U}
(8-79)
Por medio de la ecuación (8-38) podemos convertir los vectores de fuerzas de un
sistema de coordenadas al otro,
{F} = [1. ]{f}
(8-80)
y gracias al principio de contragradiente sabemos que:
(8-81)
I
Reemplazando (8-81) en (8-78) obtenemos:
(8-82)
y (8-82) en (8-80):
Y
{F} = [1. ][k ][1. {U}
(8-83)
que es igual a la ecuación (8-79) y por lo tanto:
[K] = [1.] [k][1. Y
(8-84)
Aplicando la anterior a la ecuación (8-68) y haciendo las transformaciones apropiadas
obtenemos:
255
mímica estructural aplicada al diseño sísmico
(8-85)
Esto quiere decir que la matriz de rigidez del demento en coordenadas globales es:
(8-86)
Haciendo las operaciones apropiadas obtenemos la siguiente forma de la matriz de
rigidez para un elemento de pórtico plano en coordenadas globales:
[K]=p
I3c 2 + 12s2
sc(12-13)
6Ls
6Ls : -l3c 2 -115 2
6Ls
sc(13 -12)
2
2
6Lc
6Lc
sc(13 -12) -l3s _12c
I3s + 12c
2 I
-6Lc
2L2
6Lc
4L I
-6Ls
--------------------------,------------------sc(12-13) -6Ls
-l3c 2 -12s 2 sc(13 -12) -6Ls : I3c 2 + 12s 2
2
2
2
-6Lc
sc(13 -12) -l3s -12c -6Lc: sc(12-I3)
I3s 2 + 12c
2 I
-6Lc
4I!
6Lc
-6Ls
6Ls
2L
sc(12-13)
2
I
I
2
(8-87)
1
donde
2
El
P =- 3
13
L
a
=
AL
=-1
s = sen a
c = cos a
ángulo entre el eje x local y el eje X global
Ejemplo 8-4
DetervvLÍHilLr Lct I'ltcttúz ac rigiaez Cl1 cooraeltw,tctS gloLJuLes ael etemento f1tostmdo ev\, Lu Figlirct
8-16. el Citt1l tiene tus siglüflttes rrorJieactaes: L = 4 rn. E = 20 GPct. áreCl. A = 0.01 fW e iV1ercLct 1
=
01
f'j.t'.
a
SiSIe .. ie tocst
¡*Y
Z
4m
global X
\ -~X
/
local
X~Pa:=900
x
x
b
Figura 8-16 - Elemento del Ejemplo 8-4
Se culcltlWl tctS constantes ctsLp =20 GP&-;.· O 1 In 1 (4 In)' = 0.03125 GPct/ln' =31 250 kN .
13 =0.01 m:· 4: fn'l 0.1
Vii\," = 1.6
sen a = SC/l (90 ) = 10
cos a = cos (90 0 ) = 0.0
0
25fi
In
8 • lntroduccion al análisis
1:1
111(/(
ricial de estruct ltr
tu mutriz de rigidez eft coordeftudus gto~Jutes es:
12
O
O
1.6
--- ----24
O
[k]= 31250 ---- -----12
O
O
-1.6
24
O
24 : -12
O
O II O -1.6
24
O
----,---- ---64 : -24
O
32
----,---- ----24 I 12
O -24
___ o
___ o
O
I
I
O
32 : -24
1.6
O
O
64
•
8.6 Ensamblaje de la matriz de rigidez de la estructura
I
Tenemos una estructura compuesta por elementos del tipo mostrado en la Figura 8-17.
b,,,- extremo b
I
del elemento
número dal elemento
I
Q)
/
~ extremo a del elemento
Figura 8-17 - Elemento de la estructura
El elemento i tiene la siguiente relación entre las fuerzas en sus extremos y los
desplazamientos allí:
(8-88)
Supongamos una estructura de la siguiente forma:
o
fuerzas externas Iludo n
D
{Po}
---------------
J
Figura So 18 • Estructura
Ahora planteamos el equilibrio de nudo n:
257
elementos
nudos
Iinámica estructural aplicada al diseño sísmico
Figura 8-19 - Equilibrio nudo n
De la Figura 8-19:
(8-89)
pero a su vez
{F~ } = [K ~a ] {U m} + [K~b
]
{U n}
{F;} = [K;a] {U n}+ [K;b] [u.]
{F;} = [K;a] {Un}+ [K;b] {U q}
(8-90)
reemplazando (8-90) en (8-89) y tomando en cuenta que {U m}
= tUs} =Oobtenemos:
(8-91)
Figura 8-20 - Equilibrio nudo q
De la Figura 8-20:
(8-92)
pero a su vez
{F;} = [K~a] {U n}+ [K~b] {U
q}
{F
4
a }
=
[K: ]{U }+[K: HU
a
q
b
(8-93)
r}
reemplazando (8-93) en (8-92) y tomando en cuenta que {Ur }
258
=Oobtenemos:
I
--------------------- 8
• Introducción al análisis matricial de es' rucéllr<ls
(8-94)
reordenando (8-91) Y(8-94) en una sóla expresión:
(8-95)
y este es el planteamiento del equilibrio de la estructura en su totalidad, el cual se
puede expresar de la siguiente manera general:
I
(8-96)
donde {P} son las fuerzas externas a la estructura aplicadas en los nudos libres de
desplazarse, o sea aquellos diferentes de los apoyos, [KEJ es la matriz de rigidez
asociada con los nudos libres de la estructura y {U} son los desplazamientos de estos
nudos libres.
Si en la matriz de rigidez de toda la estructura, tal como se presenta en la ecuación
(8-95), a cada submatriz de rigidez de los elementos le reemplazamos la nomenclatura
de a y b por la de los nombres de los nudos donde incide el elemento, por ejemplo al
elemento 3 se le reemplaza a por n y b por q, podemos ver que cada submatriz está
localizada en la fila o columna correspondiente a cada nudo n o q. Lo mismo es válido
para los otros elementos.
Por lo tanto, el proceso sistemático de obtener la matriz de rigidez de la ('strucíUl(1 [KEJ
es el siguiente:
Primero debemos obtener las matrices de rigidez de todos los elemento s de la
estructura en coordenadas globales. Para e! caso de pórtico plano, si la estructura tiene
n nudos, la matriz de rigidez total, incluyendo los grados de libertad de los apoyos,
tiene dimensiones de 3n x 3n. Sobre esta matriz de toda la estructura se coloca la
contribución de rigidez de cada uno de los elementos. Para el efecto podemos trabajar
con subrnatrices de 3 x 3 en cada uno de los nudos.
El elemento i como el mostrado en la Figura 8-17 va del extremo a al extremo b.
Supongamos que el extremo a llega al nudo ID de li' estructura y el extremo b al nudo q
de la estructura. Entonces la ecuación (8-88) se convierte en:
(8-97)
Entonces cada una de las submatrices de (8-97) aporta su rigidez sumando a la rigidez
existente en el nudo correspondiente, por ejemplo [Kqml se suma a lo que exista en la
submatríz localizada en la fila q con la columna ID como muestra la ecuación (8-98).
259
--------------
~-
tiuámica estructural aplicada al diseño sísmico
1 2 ...
q
ID
...
'"
... n
J, f -
.,.
1
nudos
2
[K~m 1
fK~ql
(8-98)
ID
:
:
rK~q]
[K~m 1
...
q
oo.
'"
n
Ejemplo 8-5
Ddwvvws encontrar Lu Jonnu (;le eftsuvlt!o'JLuje ete Lu
vVLostrudu elt Lu FLgnr¡;;t 8-21.
fit{'Ltr~z
¡,(e
rLg~¡,{ez
de Lu estrltctlUU
0)
Figura 8-21 - Estructura del Ejemplo 8-5
OeA.eto líjli-E' eVL pórüco I"lLeA.ltO heA.lj tres gruetos etc Li¡',crtu¡,{ por ItI1.do. LeA. estmct/ueA. nene elt toteA.L 6
x 3 = 18 gmdos de LiberteA.d. Trub:A.jeA.Vldo con SliI:'JWIoí1.trLct's vtt' tres Yior tres. ~)odefitos dpscrLbir LIA.
/!l1.eA.trLz de rigLdez COHtO ltltlA. fitlA.triz ete 6 JLLlA.S por 6 COLltfitftlA.S. dO/tde mdlA. JHu lj mdlA.
COLW·1UtIJlo represeltw. tres gruetos etc Li¡',ertlítet.
K 4ha
K~a
K;b
o
o
K: b
K;b
K;' + K;' + K:' + K~b
K;b
K~a
o
o
o
o
K~a
K~b + K~b + K:'
o
K;b
(J
o
o
K~a
~b
o
K 6aa
o
K~a
o
K~b
K~a + K: b
K~b
K~b + K~b + K;'
K~a
o
1
o
o
8.7 Apoyos de la estructura
La solución de
lID
problema estático consiste en resolver el sistema:
{F} = [K]{X}
(8-99)
2fW
o
• l/UTU(lllCCIU/1 (11
UIIUII~l~
IIIUlTlCl(l1 (I~ ~~ln{(;lllnl."
en donde se conocen las fuerzas externas aplicadas a la estructura, {F}, la matriz de
rigidez de toda la estructura [K] y se desconocen los desplazamientos de los nudos de
la estructura {X}.
Si se intenta resolver el sistema de ecuaciones simultáneas presentado por la ecuación
(8-99) se encontraría que la matriz [K] es singular (no tiene inverso) debido a que la
estructura no está apoyada y por lo tanto hay necesidad de introducir las restricciones
de los apoyos, los cuales deben conducir a que la estructura sea estable, pues en caso
contrario la inestabilidad de la estructura por apoyos inadecuados conduce a
singularidad de la matriz de rigidez nuevamente. Los apoyos se introducen al sistema
simplemente tachando, en el sistema de ecuaciones, las filas y columnas
correspondientes a los grados de libertad que están restringidos, con lo cual el sistema
de la ecuación (8-99) se convierte en:
I
1
I
(8-100)
Ejemplo 8-6
En Lu estntctJuu ad ejel'vLjlJLo 8-5, sl1voner 1Ij11,e Los ¡'LltaOS 5 lj 6 estrin eI'VLjIJ o truaos , Evu::cllttrur LIAwLutriz ae rigiaez de Lu estmcUuu tntievLdo eVL w,ev¡,tu estos utJoljos,
Sil'npLmtevLte se Q1ÚtCU'L deL sistel'VLU LlA-sJiLus corresnonrüeares u Los 1'LltaOS 5 lj 6, lj de LIA- Inutriz
de rigidez Lus dos (ütimus COLli1'lU'Ll/tS, Por Lo tanto eL sisternu de eC/tUCiOlteS IIjl1,edu usí:
Si observamos en detalle el sistema de ecuaciones que representa la ecuación matricial
(3-99), veremos que en el vector {X} todos los términos que correspondan a apoyos
tienen un valor de cero, por lo tanto en la matriz de rigidez las columnas
correspondientes a estos apoyos siempre van a ser multiplicadas por cero y por lo tanto
no tiene ningún sentido mantenerlas en la matriz de rigidez de la estructura.
Igualmente no se justificaría mantener los ceros de los apoyos dentro del vector de
desplazamientos, por lo tanto las filas correspondientes a los apoyos en el vector {X}
pueden quitarse del vector, comirtiéndolo en el vector {U}. Estas mismas filas en el
vector de fuerzas {F} corresponden a las reacciones de los apoyos {R}, las cuales son
importantes para quien realiza el análisis de la estructura y además permiten verificar
el equilibrio de la estructura y obtener las fuerzas en la cimentación. Por lo tanto
podemos replantear el sistema mustrado en la ecuación (8-99) así:
(8-101)
Las matrices [KEOl Y [KROl no son de mterés pues van a ser multiplicadas por 0,
igualmente en el vector de desplazamientos podemos eliminar las filas que son cero.
Haciendo estas dos operaciones obtenemos el siguiente sistema de ecuaciones:
261
-----------------~
.~
sinámica estructural ap{;Nula al diseño sísmico
(8-102)
que al expandirlo nos conduce a:
(8-103)
y
(8-104)
Con respecto a la ecuación (8-103) se debe hacer énfasis en que el vector {P}
corresponde a las fuerzas externas aplicadas en los nudos libres de la estructura, [KEl
es la matriz de rigidez de los grados de libertad libres de desplazarse de la estructura, y
{U} corresponde a los desplazamientos de los grados de libertad libres. Es importante
insistir que este es el sistema de ecuaciones simultáneas que se resuelve para
determinar los desplazamientos de la estructura ante .as fuerzas externas. Una vez
obtenidos los desplazamientos {U} utilizando la ecuación (8-1 (3); por medio de la
ecuación (8-104) es posible obtener las reacciones de la estructura en sus apoyos {R}.
8.8 Solución para fuerzas estáticas por el método de rigidez
El análisis de una estructura utilizando análisis matricial por el método de la rigidez
consiste en resolver el sistema de ecuaciones simultáneas representado en la ecuación
(8-103). En este sistema las incógnitas son los desplazamientos de los grados de
libertad no apoyados de la estructura {U}. Una vez se conocen estos desplazamientos,
es posible encontrar las reacciones de la estructura por medio de la ecuación (8-104) y
las fuerzas en los elementos, multiplicando estos desplazamientos por las matrices de
rigidez de los elementos. En el disquete que se suministra se ha incluido el programa
ivlATRIQB que realiza este análisis para estructuras de pórtico plano con fuerzas en sus
nudos.
Ejemplo 8-7
Se qlúere DLnDLLizDLr por el f'Ytétodo de rigideL: lU'tDL VigDL ae líLiez metros de Lt~z. mtpotmau en S/lS
dos extremos Ij con IlVLDL JlterzDL covu:elttmaDL de 100 kN evl, eL centro ae LDL L/u, LDL Cli.DLL se
ml1,estm en LDL Fig/w/t 8-22(DL). LDLS propieciDLaes de LDL seccíóa ue LDL VigDL son Lus sigtúCJ'Ltes:
IlterciDL 1 = 0.005 m'. AreDL A = 0.25 vn}
Ij
E = 25 GPDL.
PDLm efectos del wuíLisis se dtf¡.ltelt tres Itlldos COVI1.Q In/testm Lu Figl1rvt 8-22(b). Lo CIlDLL geltem
aos elementos ete 5 111, al' LOVLgitl1,a cactDL liHO. PDLrDL el DLVLl.ÍLisis se /ttiLizDL LDL ItOmevI.dDLtli.m
f'11.Qstmdu elt Lu mismDLJig/~,m.
Pril1tero se CDLLmLDLIt LDLS mDLtrices al' rigiaez ae Los elenteIttOS, LDLS mules SOIt ignDLLl's aDLdo qnl'
Los elementos tielten LDLS f'Y'LÍSf'YtDLS propiedDLaes Ij orielttDLción. EL sistef'1tDL ae cooraeltDLdDLs
íocales de Los ctementos coivu:ide con el sistemDL gLobDLL rJor Lo tanto a es cero.
Entonces.
p = EIIL3 = 1000 kN/I1t
13 = AV/I = 1250
e
=
cos a
= 1.0
s
=
sen a
= 0.0
262
i
1
I
I
•.,
I
(i • 11l(rO(/ltCCI0l1 ~tl U.'lUIISIS I1WrrlCut/ (te eStntClltrus
!
lOOkN
I
<i.
ti
Dirección x del sistema local
/~
o fITJ
(b)
o
Figura 8-22 - Estructura del Ejemplo 8-7
Id Lvt VVLvttriz de rigiaez ete Los eLef1teHtos es (cooretef'lvtetvtS LomLes = cooretenvtdvts gLo!'lvtLes):
1250
O
O : -1250
O
12
30
30
O
----[Kele ] = 1000 x --1250
----
O
I
I
O
100 :
O
-o--ri2:50-
-12 -30 :
50 II
30
O
O
1
..
5~
5m
I
Dirección X del
sistema global
O
O
-12
-30
30
50
---O
----
O
12 -30
-30 100
O
O
Ahom tll15CVLfltClS LvtJonnvt eteL eftSvtf1ÜlLvtje de [tl- f1tvttriz ete rigidez de Lvt estractam:
Lvt fnvttriz de rigidez de Los gmdos de Liv¡ertvtd Libres [KE] se obtíeae tlítclLvtftdo LIJLS JiLvts Id
coLttf1tftvtS correspOftdieHtes vt Los gmc{os de Libertad restrü'Lgidos por Los upoldoS
EL inverso [KEr 1 de esta f1tvttriz es ig/tvtL uL uwerso de S/tS elementos. dvtdo qli,(' es divtgü:tuL
r
X10
-'
O]
O
o
4.167 X 10-5
O
Sx10-G
Lvt f1tvttriz [KRl pvtm ohtener Lus reVLCTioHes e/t Los vtPOldoS se ov,Ue/te tvtc!Lrli.ndo Lus COLltm/~VLS
de [K] corresr1OHdie ntes vt Los gmdos ac Libe rtvtd vtY¡OId vtetos Id Lus JiLus corresYIOltCÜe ntes lJl Los
g mdos de Livw rtvtet Liv' res:
26'8
11á mica
estructural aplicada al diseño sísmico
-1250
O
O
O
O
-12
-30
30
50
-1250
O
----- ----
O
O
___ o
O
-12 -30
30 50
EL vector dej/terzGts eVL et VLltdo Lillre {P} es:
AlLOYGt resolvemos el sistef11,Gt YJGtYGt OtltevLer Los des/'lLDlZGtf1tielttos {U} deL vutdo Litlre:
Por Lo tGtVLLLJ LGt vigGt se cieJLectGt en eL centro cie LGt Lr1Z 4.167 l11,nt
Lo: GtI'JOljOS se outieltelt de Lelo sig/üeftte o/'leYGtciólt:
¡~Gtcir,¡,
GtlIGtjO. Lus reGtccim¡,es Clt
O I
R lx
R 1y
Rlz
50
125
R 3x
O
R 3l
51)
R 3z
-125
1
EJt LGt Fig/tYGt 8-23 se m/testmvl IGts reucctones outeltidGts:
125 kN-m
CE
50
kN~;--
f
t
OO
kN
~125kN'm
---3-150 kN
10m
Figura 8-23 - Reacciones obtenidas, Ejemplo 8-7
LGtsjlterzGts en Los elementos se olltíelte~ ntfütiYJLicGt~da LGt mGttriz de rigidez de mdGt etemento
/"lar eL vector de desI'JLDlZW11,ic~t.os de Los It/tcias Gt "1l1.e LLegGt el eLemeltto. [It este caso dGtda "111-('
eL siStCfltGt LOL:GtL coÍltcide COH eL gLollGtL. /'laqemos IttiLizGtr LGts I1'lGttrices de Los elementos
OlltCHidGts rJGtrGt eltsGtnülLGtr LGt estr/v:t/i.YGt elt LGt ohtención de LGts jlterzGts en coordeltGtdGts
locales. P:/tYGt et eLeVlteltto 1. tenemos.
264
o • lntroduccián al análisis matricial de estructuran
o
O
O
50
125
=[kl{ ~~} =[kl{ ~~} =[kl ----------O
O
3
-4.167 X 10O
O
-50
125
EVL La FLglua8-24 se Vl1JtestravL LasJ/terzas ot'tevüdas:
UNlm~~[l~D N~C\(iNAL
fl\CtJLIA~ O~
DE !NGfN!t~IA
m:kCW(¡[Z: DE LA cm,ST~UCION
CENTRO DE ¡¡'OCUMErlTACWN
SOkN
Sm
Figura 8-24 - Fuerzas en los extremos del elemento 1, Ejemplo 8-7
P1Ml;t eL
eLel'l'U'vLto 2. tOteVl'Los:
O
-50
-125
O
50
-125
EI'L La F~g/tra 8-25 se Vl'Ll1estral'L LasJ/terzas obtel'Lidas:
Figura 8-25 - Fuerzas en los extremos del elemento 2, Ejemplo 8-7
Es evíaente ql1e Los res/ütados col'LC/lerdw'L ¡'JetfectaVltel'Lte COI'L Los reslútacios cLlIl:)~cos de La
res~stel'LC~a de mater~aLes. Cjl1e ~1'LdLcaI1. q/le eL 11Wlnento en et a¡'Jo/jo ¡'Jara Ima v~ga
empotrada en ~/tS extremos. COI'L Ima JH.erza concentrada en et centro de La Lf1Z es PLl8 = 100 x
10 / 8 = 125 /j Las reaccíones en Los a¡'Jo/jos son P/2 = 50.
Un aspecto que se deduce del ejemplo anterior es la necesidad de disponer de una
manera de obtener las fuerzas en los extremos del elemento en coordenadas locales a
partir de los desplazamientos de los nudos en coordenadas globales. Si miramos la
deducción de la matriz de rigidez del elemento en coordenadas globales, Sección 8.5,
vemos que la ecuación (8-82) precisamente nos produce ese resultado:
(8-105)
Por lo tanto el primer paso de la transformación nos da ese resultado. Si denominamos
---------------
265
'Jinámica estructural aplicada al diseño sísmico
(8-10G)
y utilizando la misma nomenclatura de la ecuación (8-87), para elementos de pórtico
plano tenemos la siguiente matriz:
O 11 -~c
O
~s
115
6L : -12s -12c
6L
12c
1
4I! : -6Ls -6Lc 2L2
6Ls
6Lc
- - - - - 1 - - - - - ----- ------------[KT] = P
O 11 ~c
O
-~c
-~s
~s
-12s -12c -6L 1 12s
-6L
12c
2
6Ls
6Lc
2L : -6Ls -6Lc 4L2
-~s
~c
(8-107)
donde
El
P=-L3
AL 2
~=-I-
s e sen a
c=cosa
a = ángulo entre el eje x local y el eje X global
Otro aspecto importante que no se ha resuelto es el tratamiento de las fuerzas externas
localizadas dentro del elemento. El procedimiento para tratarlas es el siguiente. Primero
se calculan las fuerzas de empotramiento en cada uno de los elementos
independientemente. Este sistema de fuerzas lo denominamos Sistema E pues se
obtiene al fijar o empotrar todos los nudos. Luego tomamos todas las fuerzas externas
aplicadas en los nudos que actúen sobre la estructura y a estas fuerzas le restamos en
cada nudo la suma algebraica de las fuerzas producidas por el sistema E en ese nudo. A
este sistema de fuerzas lo denominamos Sistema L, pr-rque en él los nudos están libres
para desplazarse al aplicar las fuerzas. La estructura se analiza por el método de la
rigidez para las fuerzas del sistema L. La Figura 8-26, adaptada de [McGuire y Gallaqher,
1979], aclara estos conceptos.
l·
bi!¡",,¡¡¡¡I!~
L
.!
L
I
I
I
w
(
i
L
Figura 8-26 - Sistemas de fuerza para análisis estático por el método de rigidez
Por último luego que se hayan determinado las fuerzas en los elementos con base en las
deformaciones que tuvo la estructura analizada con las fuerzas del sistema L se les
adicionan las fuerzas correspondientes del sistema E. Por lo tanto las fuerzas realmente
aplicadas sobre la estructura son la suma del sistema E más el sistema L. Las
deformaciones en los nudos obtenidas del análisis del sistema L son las deformaciones
de la estructura, pero sólo en los nudos. Para obtener las deformaciones dentro del
elemento hay necesidad de sumar las producidas por los dos sistemas de fuerza E y L.
En resumen las etapas necesarias para llevar a cabo el análisis de una estructura por el
método de la rigidez son las siguientes:
26(j
('j •
llHrO(/IlCCIOII (U WI(I/lSIS llUllTlCU/l (le estructuras
(a) Se dividen las fuerzas aplicadas a la estructura en dos sistemas de fuerzas, cuya
suma es igual a las fuerzas aplicadas. Estos sistemas son:
• Sistema E - Son las reacciones que se obtienen en los extremos de los elementos al
suponerlos empotrados
• Sistema L - Son las fuerzas en los nudos que se obtienen al restarle a las fuerzas
externas aplicadas en los nudos, las resultantes en los nudos de las fuerzas del
sistema E.
Una vez definidos los sistemas, para cada elemento i se calcula
del sistema E.
{f¡E}
(b) Se evalúan las matrices de transformación de coordenadas [1.;] para cada miembro
de la estructura y con ellas se convierten las reacciones de empotramiento en los nudos,
sistema E, de coordenadas locales a coordenadas globales:
(8-108)
(e) Se suman algebraicamente en cada nudo j los {FiE } de cada elemento i que llegue a
ese nudo, para obtener las fuerzas sobre el nudo del sistema E,
{PjE} .
(d) Se encuentra en cada nudo j el vector de fuerzas del sistema L, así:
(8-109)
donde
{Pt} corresponde
3.
las fuerzas concentradas externas aplicadas en el nudo j.
(e) Se encuentran para cada elemento i la matriz de rigidez [K¡] en coordenadas globales
y la matriz [KT¡], ecuación (8-10?).
(f) Se ensambla la matriz de rigidez [K] de toda la estructura utilizando los [K¡]
correspondientes, obtenidos en el paso anterior.
(g) Se fracciona [K] en las matrices [KE ] de grados de libertad libres y la matriz [KR ] para
obtener las reacciones en los apoyos.
(h) Se resuelve el siguiente sistema de ecuaciones simultáneas para las fuerzas de:
sistema L, siendo {U} las incógnitas,
(8-110)
Se encuentran las fuerzas en cada elemento i en coordenadas locales con base en los
desplazamientos obtenidos en el paso anterior.
(i)
(8-111)
(j) Se encuentran las fuerzas reales en cada elemento
utilizando
en coordenadas locales
{fiEl del paso (a) y {f¡L} del paso anterior.
(8-112)
267
Dinámica estructural aplicada al diseño sísmico
(k) Se calculan las reacciones en los apoyos utilizando:
(8-113)
a estas reacciones hay necesidad de sumarle las fuerzas en los nudos de apoyo
provenientes del sistema E, para obtener las reacciones totales {RT } , así:
(8-114)
Ejemplo 8-8
Se Cj¡üere UltlA.LizlM V!0r el Inétodo de rigidez llA. estntctltrlA. n'LOstreA.dlA. en llA. Figl1,r1A. 8-27. Los
cLe/'Vlel'Ltos Üef1PVl. L¡;ts sig¡üelttes prorJie&11l.-ítes: El = lOO MN·m' = 100000 I<N·/,!'t' e l/A = 10/144In'. PureA. eL Ultt.UisLS se /t{úizlA. llA. l'lOfl1.fvuJUlJUIA. 11~)sLmd(,o[. en !ítJigHJIA.
1
SO~ ~
12m
..
Dirección X del
sistema global
Figura 8-27 - Estructura del Ejemplo 8-8
Se mlC/üa el sisLevVla deJItt'rllA.S E como llA.s reuccíones de en'l.j'Jotramieltto de lasjf.terllA.s en tos
e1elnef'l.tos el'l. el sisteH'l.1A. LomL.
f~20kN'm
3
SOkN
---+
10 kN/m
f
(::JIo¡-31-'.I-I..¡.....I..,o¡....¡......,¡"".¡-!-b~~O kN"I1l
120 kN'm
b
I
40kN
+--
60kN
60kN
J20kN'm
Figura 8-28 - Ejemplo 8-8 - Reacciones de empotramiento en coordenadas locales de los elementos
Elemento (1)
Elemento
{ff..}={~O} {f~}=J~o}
-120
Se o!oLievl.elt LlA.s /'VllA.trices [A,¡] de
{f2~ } =~ :O}
l120
l120
travl.~fom'l.lA.cióf'L
®
{fií,} ={ :0 }
-120
íÜ' coordeltlA.dus de mda elemento:
2f58
---------------
8 • Introducción al análisis mal ricial de estruct uras
!'1y
!'1y
I
tz;o.
';ocal
t
global
y
local
global
LL.- .i ;
/
-.~ X
X
X
X
Elemento 2
Elemento 1
Ii
[11,1]=
O 1 O]
-1
[O
OO
OO]
1 O
O 1
O 1
Se tnutsforvncu'l Lasjnerzas deL s~stevna E de LomL a gLobaL
{Fl~}= [A 1]{ ~O-} ={_~O}
I
-120
I
¡6:}
00}
{Ff¡.} =[A 2]{ 6 =
-120
120
120
{Fl~}= [Al]{~O} ={~O}
I
120
120
I
Se cuLuúwt Las jlterLas elt Los Itltdos del sístel'Ha E COn liase elt Las jlterzas (,;jIte LLegwt de Los
eLel1tentos uL Itltdo,
Nltc/,o 1
f-40}
¡
O} r-401
{P:}={F:t}+{F2~}=~ O + 60 =i 60)
l120
120
l240
Nltdo 3
{P E}={F:
3
b}={
6: }
-120
Alwra se cULC/Ú(it el s~stel''Ha dejlwlLas L restando a Lasjlterzus concentradas
j11.erzUS en Los Itluios cieL s~stevJta E:
N/uio 1
_{~O :O}
m-{:} {~}
{P1 ={pt }_{PIE} =¡~}
L
}
O
N/tdo 2
{p,L} = {P{}-{P,'} =
}={
-120
120
=
26!)
('1'1
Los Itl1,dos Las
Dinumica estructural aplicada al disería sísmico
N/teto 3
Por Lo tanto el sistevnu eteJH.erzus L (íj/teetu usí:
40kN-fIrri
120 kN'm
[!]
40 kN
I
----d::4.~----~O~~
o
0!JOkN
r
J
60 kN
60 kN
Figura 8-29 - Ejemplo 8-8 - Fuerzas del sistema L
/\ILOru se cuLCt1-LUlt Lus 11tutricesde rigilliez lIie Los eleme utos. Esto se reuLizu lIie /Htu vez m
coorllienudus 0loll(:ües:
ELe 111R 11 lO 1
P = EIIL3 = 57.87 ¡,N/m
~ = AVII = 2073.6
c=cosa=O.O
s = sen a= 1.0
o Lu Inutriz ete rigilliez lIieL elemento es:
r694.44
O
O
: -694.44
I 4166.7--r--
120000
O
1
I
O
O
4166.71
-120000
G
1 1]
4166.7
O
33333 : -4166.7
16667
O
I
---- --- ------- -------1------- -------- ------ = ~'!!1_~~'!!l_
1
I
1
-4166.7 ¡ 694.44
-4166.7
-694.44
O
O
K ba ! K bb
I
I
-120000
O
120000
O
O
O
[
4166.7
O
1666i : -4166.7
O
I
33333
o Lu ¡nutriz [KT] es:
O
-120000
694.44
O
4166.7
O
------- ------120000
O
-694.44
O
4166.7
O
O
I
O
4166.7 : -694.44
33333 : -4166.7
--------,------O
I
O
-4166.7 : 694.44
16667
: -4166.7
Uef'}tenlo 2
P = EIIL 3 = 57.87 I<N/vn
~ = AVII = 2073.ü
270
120000
O
O
4166.7
16667
O
-------- ------120000
O
O
-4166.7
O
33333
I
Jt.
.A ,1:11..-, 'lJ'lllll-'"-_'-·
.... .>'
\..11.'
-7 .. 0.....7 "11.'1.11.'"''
'\._"
Il.'-
.1,.4-.,
'll'
·o.},ll' 11.11.'- 1l'1l1l1 'I.._II.__}'
e = cos ex = 1.0
s = sen ex =0.0
La vVl,ulriz de rigidez deL eterncnro es:
120000
O
O
694.44
: -120000
O
I
4166.7 I
O
-694.44
O
O
4166.7
O
33333 I
------- ------- -------1--------120000
O
I 120000
O
O
-694.44 -4166.7 :
O
I
O
4166.7
O
16667 I
I
I
4166.7
16667
-----O
O
694.44
-416t;.7
-4166.7
33333
IJ Lu vnatriz [KT] es:
120000
O
: -120000
O
694.44
4166.7
I
I
O
4166.7
------- -------
33333
I
O
-120000
I
-4166.7
-------
O
O
O
-694.44
O
120000
-4166.7
4166.7
16667
I
-------1--------
O
O
O
I
------- -----O
O
O
-694.44 -4166.7 :
O
694.44
-4166.7
O
I
I
O
-4166.7
33333
4166.7
16667
Alwm Intscan1.os LiA.Jonna cid e¡tsiA.nüJLaje lile La !nutriz cie rigidez cie La estrnct/uu:
1
[K:.
[K]= K;a
3 J, ~
2
K~b
K~b + K;a
K~a
nudos
°r
K;b 2
K~b 3
La f'ltiA.triz cie rigidez de todiA. ia estmctlua [K] es.'
694.44
I
o
o
120000
o
4166.7 : - 694.44
o
I
I
o
-120000
4166.7
o
33333 : -4166.7
o
------- -------- --------r------- -------- 694.44
- 4166.7 I 120694
o
o
o
-120000
o
4166.7
o
-------o
o
o
16667
: -4166.7
o
o
o
: -120000
-------
o
o
o
I
I
o
120694
--------~-------
I
I
I
I
4166.7
--------
o
o
o
-694.44
4166.7
o
o
o
e
o
16667
o
--------r-------- ------- 4166.7 -120000
o
4166.7
o
-694.44
o
- 4166.7
66667
--------r-------- ------o
120000
o
-4166.7 :
o
694.44
16667
-4166.7
o
4166.7
o
I
I
I
I
I
I
I
o
o
o
------o
I
I
4166.7
I
I
16666.7
I
I
I
I
-------
o
-4166.7
33333
La fltlA.triz de rigidez de Los gmdos de W'Jertad Lik¡res [KE ] se obtiene tlA.c1I,iA.ltdo LiA.S JiJas IJ
coLnfltftlA.s correspondievl,tes a Los gmdos de Libertaci restrUtgicios por Los lA.¡JolJos. JiLCl.s IJ
coLlmUtlA.5 1. 2.3.5. 7 IJ 8. correspm1.dientes a Los gmcios de Liklertad [JLokJlA.Les U lx . U 1y . U lz . Uzy ,
U3x IJ U 3y . Por Lo ta1tto Los gmcios de LikJertaci Libres son, U 2x ' U 2z Ij U 3z .
271
) Ul1lúmica estructural aplicada al diseiio sísmico
r12M~
-4166.7
66667
16667
[ 0.83059 x 10-'
0.59328 X 10--(i
0.17185xl0- 4
- 0.85926 X 10-5
LIA. f'vllA.triz [KRl r'lA.rlA. obtener LlA.s reaccíones en Los IA.po!Jos se obtiene. tlA.clLlA.l1,riO LlA.s COLI1YltVllA.S
ae [K] correSrlCHtriiel1,tes lA. Los gmrios rie LibertlA.ri IA.pOljlA.rios Ij LlA.sJiLlA.s corresYlonriiel1Jes lA. Los
grurios efe Li¡"wrLuc{ /ü¡rcs:
-694.44
4166.7
O
O
O
O
-4166.7
16667
•I
O
------- ------- ------O
4166.7
4166.7
---"---- ------- -------120000
O
O
O
EL vector riej/H:'I'ZUS
eIt
-4166.7 -4166.7
Los gmrios ric LitlertlA.ri Libres {P} es:
1
J {~l
P 2X
f
{p} = 1P
2Z
,P3z
=
=- 240
f
20.
Ahom resoLvemos eL sistemlA. r'lA.rlA. obtener Los riesYlLIA.ZIA.f'ltievltos {U} rieL Vl/1,riO Litlre:
Evu:mttrUf1Ws LlA.s J¡1,erzlA.s en coorrienlA.rilA.s íocaíes rie ClA.rilA. eLev¡,teltto CUI1,slA.riIA.S por Las
riespLlíLZlA.mievltos {U}:
ELef1teltto 1
O
O
O
-17.93
O
-------
O
17.93
- 0.42726 X 10- 2
-143.18
0.18392 X 10-
272
-71.98
-------------3
O
R • Introducción al análisis. mut ricial de estructuras
E.Lel'ltCftto 2
r;x
U 2x
0.18392 X 10-3
22.07
f;y
U 2y
O
-0.42726 X 10- 2
-6.4
!~z_
U3
r;x
-------------
U 3x
r;y
r;z
O
3y
U 3z
U
O
0.27363 X 10- 2
-96.81
-22.07
6.4
20
Lasj/i.crzas wtterLores (cm Lasj/lerzas COrreSrJCHtGÜefttes deL sLstcma E.
de cada etemento. plA-rlIL olrtener as( Lasjt1,erzasjLltaLes:
Ahom se SIO'ltIlUt
ELCfltt'ltto 1
r
O
o
O
-17.93
-71.98
-40
-57.93
-191.98
-----O
-120
+
O
17.93
-143.18
=
1
I
------
O
-40
-22.07
120
-23.18
~ 191.98 kN'm
a
_-----57.93kN
SOkN
--(f
t
Ib~k_N_·
\...-/
23.18kN·m
_
23.18kN·m
22.07 kN
Cuerpo libre
Cortante
Momento
Figura 8-30 - Ejemplo 8-8 - Fuerzas finales, elemento 1
E.LcmCltto 2
22.07
-6.4
{r }={rt}+{rn=
2
O
22.07
--
--
--
--
--
60
120
--
--
--
--
--
-120
-100
-96.81
------
-22.07
-6.4
-20
53.6
23.19
+ ---= ------22.07
O
60
66.4
eft
LocaL
Dinámica estruct ural aplicada al diseño sísmico
10kN/m
-E:~9la - b1 100 kN'm
22.07kN
23.19 kN'm
22.07kN
53.6 kN
66.4 kN
Cuerpo libre
I
53.6kN
66.4kN
lOOkN'm
23.19kN·m
Figura 8-31 - Ejemplo 8-8 - Fuerzas finales, elemento 2
I
LiA-S reiA-CCLOItes en Los upo/dos se obtiertev¡, así
R Ix
R 1y
{R}=
-17.93
O
R 1z
-72
-6.4
------
R 2y
------
R 3x
-22.07
R 3y
6.40
-17.93
-40
O
O
-72
-120
-6.4
60
-22.07
O
-22.07
6.4
60
66.4
------ +
--------
-57.93
---
O
-192
=
53.6
Ut LiA-Jig/tm sig/úenLe se vltl1.esLn¡¡,¡t LiA-s reiA-cciOltes LotiA-Les otlterÜcliA-s.
r>. 57.93kN
[!]
1+-t"i92 kN'm
80~ ~
10 kN/m
100 kN'm
22.07 kN
53.6 kN
Figura 8-32 - Ejemplo 8-8 - Cargas aplicadas y reacciones
274
•
Capitulo 9
Análisis nudricial cwanzado
y elententos jinitos
I
9.1 Introducción
El Capítulo anterior se dedicó a una introducción al análisis matricial de estructuras,
más con el fin de familiarizar al lector en el tema, en aquellos casos en que lo
desconozca, o generar una nomenclatura que se utiliza en todo el tratamiento de los
sistemas dinámicos de varios grados de libertad, para aquellos que lo conocen. El
objetivo del presente Capítulo es familiarizar al lector con algunas metodologías que
permiten modificar, según se requiera, el modelo matemático contenido dentro del
análisis matricial. Estas modificaciones obedecen a una serie de razones, que se harán
e\ identes en lo presentado aquí y en el empleo de las metodologías expuestas en el
planteamiento y solución de problemas de varios grados de libertad en los capítulos
siguientes.
I
Se han incluido las deducciones de las matrices de rigidez de algunos elementos
diferentes al pórtico plano empleado como vehículo de introducción en el Capítulo
anterior, con el fin de ampliar la aplicabilidad de lo presentado. Así mismo se incluye
una breve introducción al método de los elementos finitos, con el fin de sente las bases
de dos tipos de elementos finitos de gran aplicación en el diseño sísmico: los
diafragmas de entrepiso, y los muros estructurales, los cuales por ser elementos que
ríeuen una de- sus dímensíones sensíblemente menor que las otras dos. defieren en su
tratamiento de todos los otros presentados que tienen dos dimensiones menores que la
otra.
I
9.2 Igualación de grados de libertad
Algunas veces conocemos algunas propiedades de la estructura que no se reflejan en la
manera como se plantean las ecuaciones de equilibrio en el análisis matricial
convencional. En general estas propiedades especiales de la estructura se pueden
describir en función de relaciones lineales entre sus diferentes grados de libertad.
Supongamos que tenemos una estructura con p grados de libertad, la cual tiene k
ecuaciones de ligadura que relacionan linealmente los p grados de libertad entre ellos,
así:
alJU 1 +a 12U Z +
+a1pUp=O
aZ1U 1 +azzU z +
+azpUp=O
(9-1 )
275
Dinámica estructural aplicada al diseño sísmico
donde los coeficientes aij son números reales. Este sistema de ecuaciones puede
expresarse matricialmente como:
(9-2)
Por cada ecuación de ligadura generamos una dependencia entre un grado de libertad y
otro, por lo tanto el sistema de ecuaciones anterior nos indica que existen k grados de
libertad que dependen de los n = p - k grados de libertad independientes. Particionando
{U}p,l en {Unh,l con los grados de libertad dependientes y {UI}o,l con los grados de
libertad independientes, y análogamente particionando [A~K,p en [Anlk,k Y [Atlk,Dl
obtenemos:
(9-3)
y
(9-4)
Despejando {Un} de la ecuación anterior se obtiene:
(9-5)
Reemplazando:
(9-6)
y
(9-7)
Lo anterior quiere decir que podemos expresar todos los p lGS grados de libertad de le
estructura, {V}, sólo en función de los n grados de libertad independientes, {VI}'
Por otro lado sabemos, ecuación
(8-~'6),
que:
(9-8)
y al aplicar el principio de contragradiente a la ecuación (9-7) tenemos:
(9-9)
Ahora, reemplazando la ecuación (9-8) en (9-9), obtenemos:
(9-10)
y al reemplazar (9-7) en (9-10):
(9-1 1)
y
276
(9-12)
Hemos expresado la matriz de rigidez de la estructura en función únicamente de los n
grados de libertad independientes. Cuando se resuelve el sistema de ecuaciones
simultáneas planteado en la ecuación (9-11) Y se obtienen los desplazamientos de los
grados de libertad independientes {VI}; es posible determinar los desplazamientos de
todos los grados de libertad Ialtantes, dependientes, utilizando la ecuación (9-7).
I
I
I
I
Este procedimiento tiene un sin número de aplicaciones. A continuación se presenta un
ejemplo en el cual se utiliza para modificar la matriz de rigidez de una estructura, de
tal i.ianera que no haya deformaciones axiales en los elementos, o sea que éstos sean
infinitamente rígidos axíalmente. Este procedimiento, en general, se denomina
igualación de grados de libertad.
Ejemplo 9-1
Lu estni,ctlUU I')wstmdu elt Lu FilJluu 9-1 tiene Lus
A = \ji. AuemrÁ.s Lu tUftlJente deL úv¡,glüo e es 3/4,.
s~g,üelttes t"ror)~edudes:
L = 1,1 = 1, E = 1 [j
L
I
FigLlra 9-1 - Estructura del ejemplo 9-1
DuGio DJI1.e Lu estrnctluu está elnrJotmdu eVL S/tS upO[jos, VLO se d~ó vLOfneftcLutl~,m u estos ftl1.dos
[j sóLo se ftlunemrovl, Los fti·1.dos Libres. LuJonHu de eltSumbLuje de L(,j, mutr~z de r~g~dez de Lu
estr/utltru es Lu s~g lúevLte:
1
[K
E]
=
2
[K~~~ K;a
ba
A/LOmJonnwnos Lus 1')'Lutr~ces de r~g~dez de Los eLemefttos, SóLo se preselttuf1. Lus
qlte se f'LeCes~tun pam el eftSw')t~ILuje de Lu mutr~z de r~g~dez de La estmctlua.
ELevVl,eltto
s/th1tatr~ces
1
p = EIII}
=
1.0
13 = AVII = \ji
e = cos a= 3/5
s = sen a -4/5
=
9
192
25 \ji + 25
12
)
--(12-\jI
25
24
5
----
12
--(12-\jI)
25
16
108
25 \ji + 25
18
-5
24
-
5
18
-5
4
277
- - - ' - - .. --
/
Dinámica estructural aplicada al diseño sísmico
Ele I1'Lf' VLto 2
p = EIJL 3 = 1.0 . 13 = AVII = '" ' e = cos a
'"
-'"
O
:-'"
O
=1.0 !:1 s = sen a =0.0
O
I
O
6 1 O -12 6
4 II O -6
2
--- ---- ---r------ -O
O
O
O:",
O -12 -61 O 12 -6
O
O
12
6
O
6
I
2 I1 O
-6
4
UCI1'LCVLto -"3
p = EIJL 3 = 1.0
I3=AVII=",
e = cos a = 3/5
s = sen a= 4-1')
192 12
9
24
-(12-",) 25 \ji + 25 25
5
12
lOS lS
16
-(12-"')
25'" + 25
25
5
24
lS
4
5
5
]
Evtsr.-tfnk! Ll/Uteto LíL<; vHr.-ttrLces etc Los eleVl1,Cf'LtOS se O~J tíene Lr.-t mr.-ttrLz etc rLg ~etez ete toet{A. Lr.-t
estmct/l.m:
O
34", + 192 12",-144 120 I1 - 25",
O
1
12", -144 16", + 40S
-300
O
60 I
150
[K p,1=251-
120
60
200 1
150
50
O
-150
50
120
-60
200
1
I
------------------ -----1------------------- ---O
3 1I 34", + 191 -12'1f;" 144 120
- 25'1'
-300
-150 : - 12", + 144 16", + 40S -60
O
O
I
I
I
j
Pr.-tm rJoetcr sltprLV11ú Lr.-ts eteJannr.-tcLOItCS GlXir.-t!es etc Los elel1tevLtos ¡~r.-tlj ftecesietr.-tet ete estr.-tk!Leccr
Lr.-ts eCI~r.-tdo/teS ete LLgr.-t&i./1.m correspo/t&ÜevLtes. Esto se hr.-tcc P{Mr.-t cr.-tetr.-t 11.110 ete Los etementos.
Uel~'Leltto 1
Heme/tto 2
278
.<J • Análisis matricial arcuizculo y elementos [iiutos
ELelnevLto 3
-U
-U 2 y
2x= - --
4
I
II
3
La ec[tución:
[A] {u}= {O}
&jlteeta entonces.
O
3 4
I
[
O
1 O O -1
0,0 O
O
O ' O 10
3
O
O
O
O
-4 O
O
í
O
TO/'l1.al1.eto COVVLO variubLes U1.etepn1.etiel'Ltes U lx . U I. Ij U 2z reorgrM'Lizwiws {U} cwnloianeto eL
oreten t1.e Lus fiLas. l:J [A] cumt'iw1.eto eL oretet1. ete Las COL,·Hi1.l1.aS; r'ara rl:'flejar Los CIA¡·i1.tlios eVl.
{U}:
U lx
Ulz
U 2z
4
U 1y
I
O
I
[A D ]= 0.-1
[
U 2x
O
3
01
O
.-4
U 2y
Ulx
1
O O
O
1 O U1z
_.
O
O 1 U 2z
----- --3/4 O O U1y
1
O O U 2x
3/4
1
O O U 1x
-3/4 O O U 1y
[R]=
O O U 2y
O
1
1 O Ulz
O O U 2x
3/4
O O U2 y
----- -- -'
.
O
O 1
U2z
SI:' caLenLó [R] Ij Lltego se reorgcu1.izaron SltS JiLus para r(jl.ejw el oretef1. ete {U} ori.giltv;.L. Ahora
rloetemos CI/tLw.Lar [KrJ COfiW.
[K 1 ] =[R ]T [K E ]
['6'25
-- 37.5 ' - 37,5]
200
50
SO
200
279
Dinámica estruct ural aplicado
o]
diseño sísmico
Ha!:j dos rA.Spectos if'VLportaf'Ltes tíjlte resaLtar deL I~Jtil1'LO resnLtado. el rrivvLE:ro es VJI1.e
G.FeetivW11C¡tte desapareció eL térmüw '1'. Lo C/1.aL indim tíjlH'c desapareció eL ténnif'W de úre¡1!. de
La Inatriz de rigidez de La estn1.ct/ua. !:j et segltltdo es tíj/1.e aL ILacer esta aYJroxLJIltació¡t /lJ/tdú1'WS
redl1.dr es sistelna de seis eC/taCim1Cs simltLtc:üterA.S a tres. Lo C/1.al pl1.ede a¡wrrar tiempo !:j
traklajo d,ua¡tte la soütcíón ¡tlunérica del y¡rov'Lema.
9.3 Condensación de grados de libertad
=
Supongamos que tenemos una estructura sobre la cual podemos plantear la siguiente
relación de rigidez:
(9-13)
Si algunas de las fuerzas externas aplicadas sobre la estructura, representadas en el
vector {P} son nulas, podemos particionar el vector {P} de la siguiente manera:
{p}= {~}
(9-14)
donde {Pe} corresponde a las fuerzas externas aplicadas en los nudos que no son cero.
Análogamente podemos particionar el 'lector {V} de la siguiente manera:
(9-15)
donde {De} son los desplazamientos de los grados de libertad donde hay fuerzas
externas aplicadas, y {Vol son los desplazamientos de los grados de libertad donde las
fuerzas son cero, estos últimos desplazamientos no son nulos. La matriz [KEl puede
particionarse de la siguiente manera para reflejar la partición de los vectores:
(9-16)
Expandiendo la última ecuación obtenemos:
(9-17)
y
(9-18)
De la ecuación (9-18) obtenemos:
(9-19)
que al reemplazar en la ecuación (9-17) conduce a:
(9-20)
280
J
I
I
I
y • Análisis mat ricial arcuizado y elementos finitos
Por lo tanto hemos reducido el sistema únicamente a los grados de libertad donde hay
fuerzas externas aplicadas, y la matriz de rigidez de la estructura se ha reducido a:
(9-21)
Una vez se resuelve el sistema determinando {Ve}, es posible obtener los valores de {Vol
utilizando la ecuación (9-19). El procedimiento anterior se denomina condensación.
Ejemplo 9-2
Ll~ estrl1,fÜtm deL (~enti'JLo 9-1, despnés de Cjne se ILGut s/tprifnido Las drJonitaciovLes w<iaLes de
Los cLente/ttos, tiene tres Wados de Libertad donele halj posibiLidad ele apLicarJ/terzas externas.
taL corno Lo Vlt/1.eS tm La Fig IUU 9-2 .
Figura 9-2 - Estructura del ejemplo 9-1
Lct estnu:tluCL sóLo se Le VCLVL CL CLpLicCLr J/1.erzCLS horizov1.tCLLes. lj 11.0 hCLlj I1tOVltevLtos externos
ar,Liw.dos en Los It/tdos 1 Ij 2. EL vector deJI1.erzas {P} tiene entonces Lct sig/üe/tteJonna:
A
La vnatriz de rigidez de La estntcttua. silt positliLidCLd de defonnctcion.es w<iaLes en
eLementos es La sig¡üente. deL ejempLo 9-1:
, [16::'2.5 - 37.5
37.5
200
25
- 37.5
50
[K 1 ]= ~ -
-
37.5]
50
200
Si LCL r,articioltanws de amerdo con La partición de {P}. obtenemos:
AlLam:
[K
3
r
= [ 0.1333
-0.0333
-0.0333]
0.1333
IJ ¡:Jor Lo tanto:
281
Sl15
iúámica estructural aplicada al diseño sísmico
tu u/'lUmciólt sucesíva del procedivltiellto de igltuluciólt de gmdos de W'Jertud, mcís eL de
coltdeltsuciólt, nos hu LLevudo ~i('sdc lHl sistevltu con seis grudos dc Ubertud fA, I1,It sistel1llA. de
lHt gmdo de Libcrtud. EL 1'1v:xic1o mutemc5ttico reS¡ütultte, IW tíene /'losi!}íLidt;¡.d de
dt1ormucimte5 lAXiuLes ell SI1,S eLel1teltlO5, lj udcmc5ts está limiLudo uL Cl'ltrJLeo de Jltcrzu~
I torizontates.
•
La ('ondensación puede utilizarse aún en aquellos casos er que las fuerzas aplicadas en
algunos grados de libertad no sea cero. La forma general de la condensación es la
siguiente:
.
Supongamos que tenemos una estructura sobre la cual podemos plantear la siguiente
relación de rigidez:
(9-22)
Ahora particionamos el vector {P} de la siguiente manera:
(9-23)
donde {Pe} corresponde a las fuerzas aplicadas en los grados de libertad que
permanecen uespues de la condensación y {Po} las fuerzas externas aplicadas en los
grados de libertad que desaparecen debido a la condensación. Análogamente podemos
particionar el vector {V} de la siguiente manera:
(9-24)
donde {Ve} son los desplazamientos de los grados de libertad que permanecen V {Vol
son los desplazamientos de los grados de libertad que desaparecen debido a la
condensación. La matriz [KEl puede particionarse de la siguiente manera para reflejar la
partición de los vectores:
(9-25)
Expandiendo la última ecuación obtenemos:
(9-26)
y
(9-27)
De la ecuación (9- 27) obtenemos:
(9-28)
que al reemplazar en la ecuación (9-26) conduce a:
282
I
I
y • Anausis nuuricuu
(ll'<U1Z(l(to
.'J etemetuos
JIIIIIOS
(9-29)
Factorizando:
(9-30)
y el análisis se realiza para:
(9-31)
Por lo tanto hemos reducido el sistema a los grados de libertad que se desee. La matriz
de rigidez del sistema reducido es:
(9-32)
Al resolver el sistema debe tenerse en cuenta que el vector de fuerzas tiene una
componente de las fuerzas aplicadas en los grados de libertad que se condensaron. Una
vez se resuelve el sistema determinando {Del, es posible obtener los valores de {Dol
utilizando la ecuación (9-28).
9.4 Subestructuracion
Un subproducto directo de la condensación es la subestructuración. La condensación
permite describir la rigidez de un conjunto de elementos utilizando únicamente
aquellos grados de libertad que se desee. Extendiendo este concepto a grupos de
elementos seleccionados apropiadamente, es posible desarrollar algo que algunos
autores han denominado superelernentos. Para aclarar este punto, SUfymg"mos que
tenemos una estructura definible como pórtico plano, con tres grados
.rtad por
nudo, como la mostrada en la Figura 9-3(b). Al observar la estructura puede verse que
hay un conjunto de elementos que se repite tres veces dentro de ella. Este conjunto de
elementos se muestra en la Figura 9-3(a).
(b)
Figura 9-3 - Aplicación del procedimiento de subestructuración
El procedimiento de subestructuración consiste en obtener la matriz de rigidez del
conjunto de elementos que se repite tres veces, el cual en este caso ilustrativo tiene seis
nudos (A a F) y 18 grados de libertad, como se muestra en la Figura 9-3(a). Estos
conjuntos de elementos se conectan entre sí a través de sus nudos A o F, y nunca a
través de los nudos B, e, D, o E. La matriz de rigidez de este conjunto se condensa de
tal manera que únicamente queden como grados de libertad los correspondientes a los
28B
Dinámica est rl{ct ural upliccula uf diseño sísmico
nudos A Y F. Esta matriz condensada tiene seis grados de libertad, y define un
superelemcnto.
Utilizando la matriz de este superelemento se ensambla la matriz de rigidez de toda la
estructura, conectando estos superelementos en los nudos marcados como 1 a 4 en la
Figura 9-3(b). Esto nos conduce a una matriz de rigidez de la estructura con 12 grados
de libertad, en vez de 48 que se tendrían si no se utiliza el procedimiento. Los
desplazamientos de los grados de libertad ínternos, una vez se realiza el análisis de la
estructura, se obtienen utilizando la ecuación (9-28).
9.5 Casos especiales
A continuación se presentan dos aspectos especiales del análisis matricial, los cuales
son de utilidad en muchos problemas de la vida real.
9.5.1 Articulaciones y liberación de grados de libertad en los elementos
Aigunos tipos de estructura, como puede ser el caso de estructuras metálicas, tienen
elementos que en sus extremos tienen articulaciones, manteniendo las propiedades de
flexión dentro del interior del elemento. En otros casos se desea liberar algún grado de
libertad del elemento, ya sea en sus extremos, o dentro de él. Una posibilidad de
atender este problema es deducir la matriz de rigidez del elemento teniendo en cuenta
el caso particular que se desee. Otra manera de resolver el problema, la cual es más
general, consiste en utilizar la condensación vista en la Sección 9.3. Este último
procedimiento es el que se presenta a continuación.
I
Supongamos que disponemos de la matriz de rigidez del elemento, ya sea en
coordenadas locales o en globales, como lo indica la siguiente relación:
(9-33)
{f}=[k]{u}
Ahora queremos liberar un grado de libertad, por ejemplo colocar una articulación en
uno de sus extremos. Sabemos que al liberar el grado de libertad la fuerza asociada con
ese grado de libertad se convierte en cero. Por lo tanto es aplicable la condensación
estática sobre este grado de libertad:
y tal como se demostró en la Sección 9.3, al expandir la matriz particionada obtenemos:
(9-35)
y
(9-36)
De (9-36) obtenemos:
(9-37)
Reemplazando (9-37) en (9-35) se obtiene:
(~F18)
284
1
..-o-oo----o"'-.-.---
_-----------------------~-~.-
_.
oC' - -_-0--0---_-. ,.0
.
y esta es la matriz de rigidez del elemento con la articulación. Dado que se quiere
conservar una matriz del mismo tamaño de la matriz original, se debe introducir una
fila de ceros y una columna de ceros en el lugar del grado de libertad que se condensó.
Una manera de lograr la condensación y al mismo tiempo no variar el tamaño de la
matriz se logra a través de la siguiente ecuación.
(9-39)
Donde:
[k'tn
matriz de rigidez con el grado de libertad liberado. Es del mismo
tamaño de la matriz original.
matriz de rigidez original.
vector formado por la columna de la matriz de rigidez original
correspondiente al grado de libertad que se quiere liberar.
inverso del término de la diagonal de la matriz de rigidez original
correspondiente al grado de libertad que se quiere liberar.
vector
formado
por
la
fila
de
la
matriz
de
rigidez
original
correspondiente al grado de libertad que se quiere liberar.
Cuando se desea liberar varios grados de libertad simplemente se debe aplicar este
procedimiento consecutivamente a cada uno de los grados de libertad que se quiere
liberar. Para modificar los momentos de empotramiento de acuerdo con la liberación de
grados de libertad se puede suponer que el elemento es una estructura que está
apoyada en todos sus grados de libertad, excepto aquel que se desea liberar. Entonces la
estructura tiene un sólo grado de libertad y entonces es posible encontrar el
desplazamiento que se obtiene en el grado de libertad liberado. El nuevo vector de
fuerzas de empotramiento corresponde al vector de fuerzas de empotramiento para el
elemento empotrado en todos sus grados de libertad, menos el efecto del
dcsplazamíento producido por la liberación en todos los grados de libertad.
Ejemplo 9-3
EVllU1 etemento de r¡órüco pLIA.VlO se Gj/üere cotocar /U'],u IA.rÜuülA.dón en el extremo iZGj/üerdo. EL
elemento tiene EUtlA. mrglA. distnt"üdlA. I1Hiforl'lte sobre todlA. Sti LO/1gillul de Vl-t1A.gltit/tvL w.
EltCOvltmr LIA. f'ltlA.triz de rigidez correspondiente Ij el vector de 111üf'ltentos de emr¡otmlnieftto.
Figura 9-4 - Viga con articulación en el extremo izquierdo
IlticilA.fltOS COl1 Lu vltlA.triz COftveVlcioftlA.L (te eLnneftto de rJórüco rLlA.ltO Ij LlA.s JI1.erLIA.S de
flnpotmfltifftlo r¡um ItI'], eLemevl10 ('(lIt CeA.rtj(A. etistJi¡,,,üettA. EU1ifomte ete mlA.gltiLl1,d w con Los
extremos elnpotruetos.
286
.
Dinámica estructural aplicad« a/ diseño sísmico
AE
o
o
12EI
6EI
L
o
e
L
2
4EI
L
AE
L
:
:
:
o
o
I
_______ L
o
i
I
_
AE
L
I
o
:
o
o
6E!
2EI
___L:_
o
L
-----_.
o
o
I
2EI
o
1
o
I
L
:
6EI
4EI
I!
L
Se Cjlüere LiLJerur eL grudo ae LiLJertua Uaz corresl1onaiente
lA,
Lu terceraJiLl,i lJ tercera COL!·1YVLVI,/J!, de
Lt f1'\,Uc,-iz. PUl'íJ. uy1Licur:
teV1J~ VitO s:
4EI
o
o
L
6EI
L2
_ 4EI
k 3L
4EI
L
O
6EI
L2
2EI
L
r
1
O
o
o
9EI
o
6EI
4EI:
-_!-:_-
_____ J1
o
o
o
O :1
o 1
3EI
e
o
o
O
o
L
1
o : o
1
6EII
-_1
L2
2EI
_
L
o
o
:
2EI
I
L
!
I
o
286
El
L
y • Aiuüisis matricicü urcuizcuto y etemeutos
AE
O
-
L
3EI
O
L
O
3
I
I
I
1
1
O
O
I
I
I
I
O
I
I
I
3EI
IJ
3EI
O
O
L
O
I
I
I
AE
O
I
I
,I
L2
O
----- ------
O
O
3EI
3EI
3
L2
L
O
-
L
I
L2
3EI
3
O
O
-
O
3EI
L
_____ ...J ______
O
O
AE
1-1
I
------
-L
¡
O
O
(k'] = --AE
!
O
1_ 3EI2
O
3EI
-L
L
1
fj
O
1
i
resoLvievLdo rlíLrlit el grudo
de Libertad Libemdo:
wL
I
)IIIHOS
_2_
wL2
4EI
12
L
u
=--
--=--u
2
wL
{M E }= __U._
az
O
wL
i
I
I
2
wIJ
az
48EI
wL2
12
{M~}= {M E}-(k] {uo}
I
o
AE
L
o
I
o
12EI
L3
6EI
L2
AE
o
o
o
O
12EI
L3
6EI
- L2
6EI
L
2EI
L
o
O
o
12EI
6EI
1:3
I!
L
6EI:
L2
:
4EI:
L:
O
O
--------------¡--AE-- ------O
wL
_ 2_
wL2
12
O
O
O
I
I
6EI :
L2
:
2EI
I
L
:
I
-
L
o
o
2
4EI
L
3wL
_8_
o
o
o
O
5wL
_8_
wL2
8
Estas SO/1 Las jl1.erzas de CVJityJotmvvLieVLto de ItVLa viga sovvLeUda a lüta Clítrga distritJlúda
IlY'"ifon~'l,(' CO/1 Sil- extremo iZL-jlüei'do simrLel1'LevLte aYJofjado ij el exLreVVLO derecho el1tpotrcHtO.
•
287
Dinámica esrructural aplicudu u! diseño sismico
9.5.2 Nudos rígidos
En las estructuras de concreto reforzado y mampostería estructural, los nudos de
interconexión de los elementos tienen dimensiones que pueden influir en el análisis
debido a que el elemento es más rígido en la zona dentro del nudo que dentro de la luz.
Es práctica común suponer que el elemento es infinitamente rígido dentro del nudo. En
la Figura 9-5 se muestra esta situación para una viga que llega a columnas de
dimensión apreciable.
1
1
I
Figura 9-5 - Viga con zonas rígidas
Para determinar la matriz de rigidez de un elemento con zonas infinitamente rígidas en
sus extremos, partimos de la matriz de rigidez de la porción flexible del elemento en
coordenadas locales, Esta está dada en la ecuación (8-62), con la única diferencia de que
la longitud del elemento es D en el presente caso.
a
b
1: z;l·
D
-¡·zb:1
L
f
ay
Mi
Vd
I
!
~
Ji
V.
Vi
f
~dP-
M'
1
M<I
d
by
h;
f bx
Vd
1
Figura 9-6 - Elemento con zonas rígidas en coordenadas locales
Las fuerzas de los extremos de la porción libre del elemento las denominamos haciendo
referencia a su extremo izquierdo con el subíndice i y al derecho con el subíndice d.
Debemos encontrar las fuerzas en los extremos a y b del elemento, los cuales
corresponden a los nudos reales de interconexión. Para el efecto, de acuerdo con la
Figura 9-6 encontramos las fuerzas en los extremos a y b en función de las fuerzas en
los extremos de la porción libre. Esto nos permitirá definir una matriz de
transformación de fuerzas, a la cual denominaremos [T], y
(9-40)
Entonces de acuerdo con la Figura 9-(1 obtenemos:
288
---------
~------
= Pd
f by = Vd
f bz = M d - z, Vd
= Pi
fax
f bx
f ay = Vi
faz = Mi
+ Za Vi
(9-41)
Lo cual nos permite definir la matriz de transformación de fuerzas [T]:
O
I
I
O
O
O
1
O
I
I
O
O
O
O
---O
Za
1
0
I
I
O
1
O
O
O
I
O
O
I
I
O
1
O
O
I
I
-----r---11
O
O
O
O
O
---- ---O
O
1
O
-Zb I
(9-42)
1
Si la porcion libre tiene la siguiente relación entre fuerzas y deformaciones en sus
extremos:
(9-43)
Que al ser reemplazada en la ecuación (9-40) produce:
(9-44)
y al aplicar el principio de contragradiente, que en este caso tiene la siguiente relación:
(9-45)
y reemplazarla en la ecuacion (9-44), se obtiene la expresión para la matriz de rigidez
del elemento con las zonas rígidas en sus extremos:
{f} = [T] [k L ] [TY {u}= [k] {u}
I
(91(3)
Después de realizar las operaciones apropiadas se obtiene la siguiente matriz de rigidez
en coordenadas locales:
~E I
o
o
I
o
12EI
-
i
D2
~-~1------~------
D
D
D
:,
o
:
o
I
-1)3
o
b)
16E1(
2Z- 21 +
2EI(I+ 3Z. + 3Z b + 6Z.Z b)
D
D
D2
D
D
:
D
D
¡
¡
_ 6EI (1 + 2Z. )
D2
D
-------------o
D
12EI
o
o
D2
D'
1)3
:
D2
6EI_(1+ 2Z b
--
,-
_ 6EI_(1+ 2Z.)
o
12EI
o
:
--------------------------~-A-E-
12EI
o
,, o
D
4EI(
3Z.
3z~1
1+
-+
2
D
AE
~-D
6EI_(1 + 2Z.)
D'
[6EI
( +
2Z.
- 21
-)
D
:
o
1_ ~I ( 1+ 2~b )
)
D
3Z.
3Z-b +
6Z.Z
2EI1
( +
b)
-+
-2 D
D
D
D
-------------------------o
_ 6EI_(1 +
D2
2Zbl
D
3~T-
-tEI(
3Z-b + 1+
2
D
D
D
(9-47)
En general los códigos de diseño de concreto reforzado permiten diseñar el elemento
utilizando las fuerzas en la cara del nudo, por esto la siguiente relación permite
determinar estas fuerzas con base en los desplazamientos en los nudos de
interconexión:
2sg
Diuámicu estructural aplicada al diseño sísmico
(9-48)
La conversión de la matriz de rigidez del elemento de coordenadas locales a
coordenadas globales se realiza por el mismo procedimiento presentado anteriormente
en la Sección 8.5.
Cuando haya cargas sobre el elemento debe tenerse cuidado en el hecho de que en
general existe carga también sobre la zona rígida, como lo muestra la Figura 9-7. En este
caso hay necesidad de corregir las fuerzas de empotramiento del sector libre,
transladándolas a los nudos de interconexión y agregando el efecto de las cargas que
actúan sobre la zona rígida.
/.
I
I
I
Figura 9-7 - Carga vertical sobre una viga con zonas rígidas
Para el caso dé carga vertical uniforme sobre la viga de acuerdo con la Figura 9-8
obtenemos:
~
I
I
I
Figura 9-8 - Carga vertical uniforme sobre la viga con zonas rígidas
Entonces, para el extremo izquierdo, nudo a, obtenemos:
(9-49)
(9-50)
290
y •
"'lll(¡(ISIS IIwlnClU1 (WWIZuao
y
CIGIIU!/HOS }1I/1l(J.~
y para el extremo derecho, nudo b:
ME = wD + wDZ b + wZ~
b
12
2
2
(9- 51)
E
wD
V b =-+wZ b
(9-52)
2
2
Para otros tipos de carga se deben hacer correcciones similares.
9.5.3 Deformaciones por cortante
La presentación que se ha realizado hasta ahora, para el elemento de pórtico plano, no
ha incluido las deformaciones por esfuerzos cortantes en el elemento. Las
deformaciones por esfuerzos cortantes en una viga, están descritas por la siguiente
ecuación:
dyv
dx
I
-V(x)
(9-53)
GA v
donde Yv es la deflexíón adicional a la de flexión transversal al eje de la viga causada por
los esfuerzos cortantes, que se suma a la causada por la flexión; V(x) es la fuerza
cortante; G (= E/[2+2v]) es el módulo de cortante y Aves el área de la sección que es
efectiva para cortante (generalmente es el área del alma de la viga).
Si se utiliza esta deformación adicional en las deducciones realizadas en la Sección 8.3,
y definiendo el término:
12EI
~ = GA L2
v
la matriz de rigidez [k], en coordenadas locales, de un elemento
incluyendo las deformaciones por cortante; toma la siguiente forma:
plano,
igdl
AE
L
o
o
o
o
----AE---
-L
12EI
6EI
(1 + Il)L 3
6EI
(1+ Il)L2
o
(1 + Il)L 3
6EI
o
o
-
o
-
_(.1_~}!-2!:-: __ --------- ,----A:If---
o
(1 + Il)L 2
-
6EI
(1+Il)L2
(2-Il)EI
(1 + Il)L
o
T.
(4+ Il)EI
(1 + Il)L
DEI
o
AE
,,
,,
:
,,
,
1
L
o
12EI
6EI
(1 + Il)L3
6EI
(1+ Il)L 2
(2-Il)EI
(1+ Il)L
__i!:':"llJ.!L ---------o
o
12EI
I
-
1lI..
Ul!ay
5)
6az
U bx
6EI
(1 + Il)L2
(4+ Il)EI
U by
6EI
(1+ Il)L2
(1+ Il)L
6 bz
(1+ Il)L3
o
!
o
Utilizando el radio de giro de la sección, r 2 = l/A, Yla definición de G, es posible hacer la
siguiente conversión:
~
=
12EI
GA v L2
= 24(I+V)~(E-12
Av
(9-56)
L)
donde v es la relación de Poisson del material. En la ecuacion (9-5() es posible
identificar que para elementos esbeltos, con rlL pequeños, con respecto a la unidad, el
2fJl
-----------------
titt/unica estructural aplicada al diseño sísmico
valor de II se puede tomar como cero, con lo cual la matriz de rigidez revierte a la
matriz en la cual no se toman en cuenta los efectos de deformaciones por cortante.
J.5.4 Efecto de la variación de temperatura
Cuando los elementos de la estructura están sometidos a una variación en la
temperatura, este efecto puede tenerse en cuenta formulando unas fuerzas de
empotramiento derivadas de restringir totalmente los elementos a la expansión causada
por la variación de temperatura. Estas fuerzas derivadas de la restricción se tratan de
igual manera que las reacciones de empotramiento que se utilizan en el sistema E para
el caso de cargas estáticas, tal como se explicó en la Sección 8.8. Si definimos las
fuerzas de restricción térmica como {PT} en coordenadas locales para el elemento, o
como {P T } en coordenadas globales cuando se han sumado algebraicamente en los
nudos; la condición de equilibrio de la estructura está dada por:
': =
(9-57)
Donde {Pj} corresponde a las fuerzas del sistema L (Sección 8.8), [K¡J es la matriz de
rigidez de toda la estructura incluyendo sólo los grados de libertad que pueden
desplazarse, {Ud es el vector 'de desplazamientos de los grados de libertad libres de
desplazarse. La determinación de {PT} en coordenadas locales del elemento se realiza
para un gradiente de temperatura T(y), donde la función describe la temperatura con
respecto a una distancia y al eje neutro de la sección. Siendo A el área de la sección,
podemos definir:
(9-58)
e
IT =
JyT(y) dA
(9-59)
A
Puede determinarse, [Przemieniecki, 19681 y [McGuire y Gallaqher, 1979], que el efecto
de restricción axial está dado por:
(9-60)
donde E es el módulo de elasticidad del material, y a el coeficiente de expansión
tcrmica, dado en términos de deformación unitaria por grado Celsius (m/rn "C), f T está
dado en unidades de fuerza (kN) y es importante anotar que es independiente de la
longitud del elemento. Análogamente el momento que se induce debido a la restricción
a la rotación en el extremo del elemento, se obtienen de la curvatura que produce en el
elemento el gradiente de temperatura:
(9-G1)
mT está expresado en unidades de momento (kN "m), y también es independiente de la
longitud del elemento. El vector {PT} en coordenadas locales para un elemento de
pórtico plano, está dado por:
2D2
.<J •
-----------------------
~1J1álisis
mutricial (WWlz(ulo
y
elemelltos
JOII( os
(9-62)
La conversión a coordenadas globales se realiza utilizando {PT} = [A] {PT}' Por lo tanto el
efecto de la temperatura se convierte en unas fuerzas nodales, equivalentes a unas
fuerzas de empotramiento, y su tratamiento es totalmente análogo al de las fuerzas de
empotramiento causada por fuerzas aplicadas sobre el elemento.
Ejemplo 9-4
UJtu vigu sünrlclnclttc urOljuctt;t con L = 10 m. mlju sección tiene b =0.5 m de uvu:ho lj h = 1.0
m de ulto. collstnúdu de 1m wl.uleriul con E::: 25 GPa, (j a = 8.10-6 mlm·°c, üüdulvneltte está u
tenl.rerutltru ul11.biev\,te, de 20°c' es sometidl4 u I lit cULel1.tufnieftto de 20°C en 511. ~Jurte iv!ferior
SIl. Ylurtc sl1,perior. odJe encontrarse el estuelo de e~/1.erzos ql1.e esto geltefi4. OeVlen
considerurse dos casos ev\, S/1.S upo/jos: A - dejul1.do (,.j/1.e el upoljo derecho YJl1.edu desYlluzurse
Iwrizontulmente lj B- silt DI/1.e I\,ulju YJOSiLlilictud de desrluzumiento horizOIltuL evl. I1.Íl1.gli./'\.o ete
los aos upo(jos,
lj 4·0°C: en
Ul y
UZy
~U¡x
~Uzx
t 12z
tPtz
temperatura
ambiente
inicid/20'C
tempereturr SO'C
/
_----------te~:r:tura 4O'C/@
c-L
5.00 m
12 '
l~
5.00 m
Figura 9-9 - Viga sometida a un gradiente de temperatura
Lu vigu se aivide en dos elelnentos ac cuico In de longitl1.ct ca/no /nl1.estr¡;¡. /.(.1, Fi.gli,r¡;¡, 9-9, EL
gmdiellte de teVJl.rerutluu se aeJilte rol' Vltedio de 11,v1. valor de (40°-20°) ~ 20"C: el'\. tu Ylurte
iv!ferior (j de (60°-20°)= 40°C ell. lu rlute s/1pnior. Por lo tanto:
A1LOru:
e
I = IyT(y)dA = .IJJ:ooy, + 300y}lx}Y = I~(200y' + 300y ~Y
T
0
= b[20
y3
+ 15oyZJh/2
3
-----------_
.... _-~
-h/2
= 5° b h 3 = 0.833 0 C . m '
3
298
Dinámica estructural aplicada al diseño sísmico
i:1 tus jl1erzus de CI1trJotrULf11Ú'Itto
elementos son.
gC~teYULdus
por tu restricción ut cOftsideYULr cmpotrudos tos
Entonces el vector {PT}' 1'11, coordevLudus tOCULtes. i:1 gtolJutes dudo I/jlle
I:J
coi~tcidCft
tos ejes gtOtJut
tOCULL es.
~l
O
3000
O
--
-
---
-m T
-166.7
- ------
l
-umT
O--
166.7
Ahoru gelterwnos tu mutriz de rigidez de tos elementos. tu CIi.Ut es igl1.ut elt cooretenudus
locales I:J gLot)uLes. ¡Jura Lo C/l.uL ltecesitwnos Los si0,üevLtcs coejícientes:
L=Sm
E = 2SGPa = 2S000000kPa
A = 0.5 m ·1.0m = 0.5m 2
1= 0.5.1.03/12 = 0.04166m 4
AE/L = 0.5m 2 • 25GPa/5m = 2500.103 kN 1m
12EI I L3 == 11· 25GPa· C.0416!irr. 4 .' 125m 3 =lOO·lO3 kN 1m
6EI IL2 = 6· 25GPa· 0.04166m 4 125m 2 = 250.103 kN I rad
4EIIL = 4· 25GPa·0.04166m 4 15m = 833.3 ·10 3kN· mirad
2EI I L = 2· 2SGPa· 0.04166m 4 I S.n = 416.6.103 kN· mirad
EVLtoVLces Lu ntatriz de rigidez de
gLotJutes es:
c,~.utwüeYUL
2500
ae Los aos elementos. en cooraeltuaus locales I:J
O
O
-
: -2500
O
O
250
O
100
250
I
I
O
-100
O
250
833.3
I
I
O
-250
------
416.6
----_.
-2500
O
O
-100
I
2500
O
O
I
O
100
-250
I
I
O
-250
833.3
------ ------
O
250
------¡------O
-250
416.6
I
LuJonnu ete fltSUl11.t 1tUjc ac tu 11tlA.triz ac LIA. estnl.ctltYUL es:
294
9 • Análisis matricial ananzado y elementos [init.
1
3
2
K~a
K~a
K~b
K~b +
K~a
J, ~
nudos
O
K;a K;b
O
K~b
LIA InlAtriz ete rig ietez ete toetlA LIA estmctliXlA [KEl es:
J, gdl
2500
O
O
J~O
O
250
O
250
: -2500
I
I
833.3 :.
O
-100
O
-250
-----1------
------ -----
-2500
O
O I 5000
-100 -250 : O
O
I
O
416.6 : O
O : -2500
250
O
-----+-------
-----
O
200
O
-----
------
-----
O
O
O
O
O
I
I
O
-100
O
O
O
I
I
O
250
O
O
I
I
O
O
O
Ulx
250
416.6
I
I
O
O
O
U 1y
I
O
O
-----
O
U 1z
O
O U 2x
O
-100 250 U Zy
-250 416.6 U 2z
-----
------f------1-2500
O
O
I
I
1666.6 : O
------1------I
O
-250
416.6
I
2500
I
I
O
I
I
O
-----
____ o
O
O
U 3x
100 -250 U 3 y
-250 833.3 U 3 z
lj el vector etc ljectos ete tentrJemtliXlA sobre toetlA LIA estntctltm, otJWtietos por vaeetio etc
ellllúLiLlrio Y'lArlA Los Inisvnos gmetos ete Lil-JertlAet, es:
3000
O
-166.7
O
{PT}E =
O
O
-3000
O
166.7
PI,UIA eL CIASO A en el u{,IAL LIA estntctttm es Lil-Jre ete etljonnlArse fwrizOfttlALvne/tte en S/1 IApOljO
derecho, Los IArJoljos corres/Jonetclt lA Los gmetos de LibertlAet UIx ' UI y ' lj U3y , Se tlAdUIIJt LiA.sJiLlAs lj
COLltVltltUS corrcspOltetielttes lA estos gmetos etl' LitlfrtucL tWtlü elt [KEl corno en {PTlE. De esta
VnlAlterlA se ohtíene LIA VltlAtriz ete rigietez de Los gmdos de Libcrtud Li/ilrcs rJlArlA despLazlArse lj LIAS
J/1erzlAS upLiclAdlAs correspOltdievl.tes l'vl. Los It/tdos, EL sisteVltlA de eCI1,lAciOlteS es:
166.7
O
O
1
-3~OO-166.7
833.3 :
O
O
5000
-----+------I
I
-250
-----
O
416.6
I
I
O
------1------O
: -2500
O
____ o
O
Ulz
U Zx
200
250 U 2 y
O II
O
-250 : O
416.6:L______
O
O
_____
~~~~:-6_L __ ~___ 416.6 U 2z
_._--I
:
-2500
O
U 3x
O
e
O I 2500
I
I
250
416.6 I
833.3 U 3 z
O I
O
O
____ o
c.úmica estructural apliccula al diseño sísmico
USI{, solución:
0.0008 rad
Ulz
----------
U 2x
0.0012 m
=
U 2y
U 2z
0.0020 m
O
----------
U 3x
0.0024 m
U 3z
-0.0008 rad
Lf..tsJI,¡,erzas en Los elementos se Otltiefteft del prod,l,cto de estos des¡r¡LlAZf..tf'lÜefttos rJor La Vltatrlz
de r[glDLez del etemento. A estas Jlterlf..tS detlelt f..tlüclOJtarSe Las JI1.erZf..tS de emrJotntvltle¡tlo
(Seccióf18.8). Los res/1.Ltf..tdos son:
I.¡
i
i
!
UevncfHu 1
---
O
---
O
{iH = [K
e1em
-0.0008
----_.
0.0012
-0.0020
f-3:00
3000
O
--
3:00
1
- J-!~~?- +
-1
~-j:¿l~
---
¡
¡
O
-166.7
-3000
3000
O
---
--
166.7
O
E!emcJtto 2
0.0012
0.0020
l-1:6.7
166.7
- 3000
-O
--
3000
O
O
O
- 3000
---
3000
-3000
O
O
O
166.7
O
[
-0.0008
I
-3000
-O
----
O
t
1
-166.7
-166.7
166.7
1 ---~--- + -----= ------ +
=
0.0024
I
O
O
O
O
-
------
+
t
O
-
-1:6.7 J
16:.7
O
Lo unterlor lJ~dlW_ líj/te IW se iJtlrod/u:eJt e~lterzos ¿VI, Lf..t v[gv{., dvl.do ~l/H~ ¡1/i.ede des¡1Lf..tzf..trs~
Htlrevneftte. No oustante. Lf..t Vlgf..t se defOrf'ltf..t. estircütdose en s/t extremo derecho 0.0024 m. Ó 2.4
mm. U LeVf..tfttciftdo.':>e 0.0020 m. Ó 2 mm. en et centro de Lf..t LHZ. Lf..t eXr¡f..tltSlÓlt corres¡1mtde f..t L~T
=10 m·8·1O-6·30°C =0.0024 m =2.4 mm.
Pf..tyu et Cmo B. elt el C:Lf..tL Lf..t estr/.i.(Utm se restrlftge horlZmttf..tLmeltte eft SIl. f..tr¡oljo deredw. Los
urJOljos correspolt(ieft f..t Los gmdos de Llbertf..td U I x . U I y ' U 3x . U U 3y . Se tuchwt Lf..ts ji'us Ij
COLI1.I1tftf..tS corres¡101~dientes f..t estos gvf..tdos de Lil-wrtud. tanto en [KEl como eft {PTlE. De estf..t
f'ltf..tfteVf..t se obtieftf Lf..t f'ltf..ttriz de rlgidez de cuico grf..tdos de Llbertf..td Llt¡reS ¡1f..tVf..t desr¡Lwf..trsc Ij
LasJ/,¡,erzas f..t¡r¡Hmdf..ts corres¡r¡mtDÜeJ1tes en Los vLlHios. EL slstevna de eC/1.aclOJtfS es:
166.7
833.3:
O
O
-166.7
O
-----j-----
O
O
=10 3 X
: 5000
250:
416.6:
_____ L
-
O
O_
O : O
- 250
416.6:
O
O
------,----O: O
200
O
O : 250
1666.6 : 416.6
250
416.6: 833.3
------------~-----
,
I
y • .Ancüisrs
~:~·l
U 2 y r=
~:~'J
i
I
I/HnnCHlI Ul'U/I/,uuu
y '-." " " ... ,,"
l ..... " "
0.0008 rad
o
0.0020 ro
O
----------
-0.0008 rad
LtiLSjlteVzus en los elCVllC¡tlOs se o~ltielte¡t (;(el ¡Jro(;(,tcto (;(e estos desplw¡;unLelttos r10v Le;¡, vne;¡,ULz
de rLgLdez dd eLemcltto. A estas jll.efle;¡,s ddlelt e;¡,dLcLmte;¡,vse Le;¡,s jH.erze;¡,S de el11 r¡otn;u1-üe¡tto
(SeccLó¡t 8.8). Los veslülw;{.os
SOVL:
ELelnnttCJ 1
{iH = [K
-OO
-0.0008
elem
-----
O
J~~~l
-0.0020
---
l-~OO
O
=
166.7
O
r 3000
Q
O
3000
--
O
---
---
--
------
+ ------
------
--O
---
--
166.7
O
---
O
---166.7
-166.7
-3000
166.7
O
-3000
O
-O
ELf'mPltlo 2
3000
O
0.0020
{ii} = [K
e1em }
O
-------
O
-0.~008J
+
-166.7
------
-3000
--O
--166.7
3000
O
-O
---
--O
---
=
166.7
--------
O
-O
---
-166.7
---
O
---
+
-166.7
------
-3000
O
166.7
=
3000
-O
-O
----_.
-3000
-O
-O
Lo anterior LlteÜcu Gjlte se LltUo(;('l,(elt C8'ltCrzOS w<~e;¡,Les elt le;¡, vLge;¡,. dueto Gjll,c VLO ¡tJ/.tcde
deStllvlb/i.(SC l~LleVl\.C'11te elt fl Sf:'IHü;lvO iwvL7.oVllnJ No oj,¡stuvLt.e. LcA. vLge;¡, se d~formu
leve;¡,lttciltdose 0.0020 ro. Ó 2 mm. en eL centro de lu LHl. correspmtdLe¡ttes e;¡,l mLSVltO valor del
Ce;¡,SO A.
•
9.6 Otros tipos de elemento
A continuación se presentan las matrices de rigidez y transformación de coordenadas
de varios tipos de elementos de uso común.
9.6.1 Definiciones
Los términos de la matriz de rigidez en coordenadas locales se dedujeron utilizando
técnicas similares a las utilizadas en la deducción de la matriz de rigidez del elemento
de pórtico plano (Sección 8.3), pero aquí no se presentan. Todas las matrices muestran
la partición propia para poder ensamblar la matriz de rigidez de toda la estructura por
medio de las submatrices [Kaa] , [Kab], [K ba] Y [KbbJ. Para la deducción de las matrices de
transformación de coordenadas se utilizó el mismo procedimiento en todos los casos,
el cual consiste en definir un vector a lo largo del elemento, el cual al ser dividido por
297
iámica estructural <tplicadu at diseño sísmico
su longitud, corresponde a un vector unitario a lo largo del eje x local. Este eje en todos
los casos coincide con el eje longitudinal del elemento y va del nudo a al nudo b. Por
esta razón las matrices de transformación se expresan en función de las coordenadas
de los extremos de los elementos. Se conserva la misma convención utilizada en las
deducciones anteriores, en la cual las letras minúsculas corresponden a parámetros
expresados en coordenadas locales y las letras mayúsculas a coordenadas globales. La
matriz [R] corresponde a la matriz de transformación de coordenadas de todos los
grados de libertad del elemento y está compuesta por submatrices [A]. La matriz [KT]
permite encontrar las fuerzas del elemento en coordenadas locales, en función de los
desplazamientos de la estructura en coordenadas globales.
I
Iniciamos con la matriz de rigidez en coordenadas locales, donde:
t
{f}=[k]{u}
(9-63)
Luego utilizando la definición de vector en el espacio dada en la Sección 8.1.2,
obtenemos el vector {ah} el cual va del punto a al punto b y cuyas componentes en cada
uno de los ejes del sistema global son (Xb-Xa), (Yb-Ya) Y (Zb-Za) respectivamente. Al dividir el
vector {ab} por su longitud labl se obtiene un vector unitario en la dirección del eje x
local del elemento, expresado en coordenadas globales. La longitud labl es:
i
t
~
i
j
1
i
i
!
,!
I
f
I
r
\
¡
(9-6-!)
y si definimos:
e
= xb
x
9.(
i
,1
-
L
xl!..
(9-65)
(9-66)
(9-67)
Los cuales corresponden a los cosenos directrices de un vector de longitud unitaria,
localizado en el eje longitudinal del elemento, que por definición es el eje local x.
(9-68)
Definiendo el plano en que se encuentra el elemento, es posihle determinar, utilizando
el producto cruz de vectores, los vectores unitarios {y} y {z} localizados en los otros ejes
locales del elemento. Entonces la matriz de transformación de coordenadas [A] es:
{A} =[{x} I {y} I {z}]
(9-69)
y la matriz para todos los grados de libertad del elemento, [R]:
(9-70)
298
¡
1
1,
I
•
y •
j,lll(~lísis nuuricuu (/l'{/IIXU(/O
y
eWIIWIIl(J.'; jlllIlU..,
Entonces las fuerzas en coordenadas globales, se obtienen de:
{F} = [R]{f}
(9-71)
y por principio de contragradiente:
{U}=[Rf{u}
(9-72)
Al reemplazar (9-72) en (9-63), obtenemos:
{f} =[k][Rf{U} =[KT] {U}
(9-73)
y esta matriz [KT] posteriormente permite encontrar las fuerzas en el elemento en
coordenadas locales, a partir de los desplazamientos en coordenadas globales de la
estructura. Ahora al reemplazar la ecuación (9-73) en (9-71) se obtiene la matriz de
rigidez del elemento, [K], en coordenadas globales:
'
1
{F} = [R] [k] [RY {U} = [K] {U}
(9-?-·1)
9.6.2 Elemento de cercha plana
La matriz de rigidez [k] en coordenadas locales es la siguiente:
(9-75)
Dado que sólo es relevante el eje x para la transformación íe .
,'<ia de
un elemento en el plano XV, que no tiene componentes en '1.., la matriz de
transformación de coordenadas [A] es:
(9·76)
.. X
Figura 9-10 - Elemento de cercha plana en coordenadas locales
y la matriz [R] es:
299
ámicaéstrücturaí aplicada al diseño sismico
(9-77)
Al hacer las operaciones apropiadas obtenemos:
(9-78)
y la matriz de rigidez en coordenadas globales:
1
J, gdl
cx
2
CxC y
CxC y
[K] = AE --='
:-C2 - L
2
I
1
1
1
_C 2
x
-CXC y
_e 2
__ ~.L __ ~=-_~~~.L ____ L
I
2
CX
-CXC y I
x
1
2
_C y ,1 CxC y
-CxC y
U ax
(9-79)
U ay
CxC y
U bx
C 2y
U by
I
6.3 Elemento de cercha espacial
La matriz de rigidez [k] en coordenadas locales es la siguiente:
AE : AE]
{~~} =[--XE~~A~- {~~~}
b
__ 1
L
:
_
(9-80)
bx
L
9.6.'
La matriz de transformación de coordenadas [A] es:
(9-81)
x
z
Figura 9-11 - Elemento de cercha espacial en coordenadas locales
aoo
y la matriz [R] es:
[R]=
C
O
o-riO] = ---T--O :C
"
[
z :
I
(9-82)
x
O :C
I
y
O :
e,
Al hacer las operaciones apropiadas obtenemos:
(9-83)
y la matriz de rigidez en coordenadas globales:
L gdl
c x2
[K]= AE
CxC z
_~l~_z__
-~-C2--
L
-CXC y
_C 2y
_______1_______
z
_-=~~c::~
CxC z
C~
x
-c.c,
-CxC z
ClC z
-CxC y
_c 2y
_C 2
X
1 -CXC y
CXC y
CXCy
1
1
1
I
e; : -Cxc
1
-CxC z
1
-CyC Z
1
_c 2z
-C YC 3
1
r
2
~x
CXC y
1
! CxC z
CxC y
c
2
Y
-CxC z
v.,
-CyC Z
D ay
_c 2z
o.,
------CxC z
U bx
CyC Z
u.,
CyC Z
ez
2
-
(9-84)
1[J b"
9.6.4 Elemento de pórtico plano
La matriz de rigidez [k] en coordenadas locales es la siguiente:
-l-gdl
13
O
O
1
1
-13
O
O
I
1
I
1
1
6L
O
-12 6L
12
-6L 2L2
6L
4L2
O
----1----- ---- ---[k]= P ---- ----O
O I1 13
O
O
-13
O
O
O
O
-12
6L
-6L
2
2L
1
O
1
1
O
12 -6L
-6L 4L2
donde
El
P=3
L
El eje local z es perpendicular al plano XY por lo tanto su vector es:
801
(9-85)
tiuámica estructural apliccu!« al diselío sísmico
{Z}=m
(9-86)
El vector del eje local y se obtiene con el producto cruz de los vectores z y x:
(y} = {z}x{x} =
h'}
(9-87)
(
iI
Figura 9-12 - Elemento de pórtico plano en coordenadas locales
y la matriz de transformación de coordenadas [A] es:
(9-88)
v la matriz [R] es:
Cx
-C y
,
O
I
I
O
O
O
O
O
O
O
O
-C y
O
Cx
O
O
1
Cy
Cx
O
I
I
O
O
1
I
O
O
O
O
O
O
L
I
-----t-----O I C
x
O II C y
O I, O
I
m-89)
O
Al hacer las operaciones apropiadas obtenemos:
ec,
-12C y
-6LC
[KT] = P _____ 1-~Cx
12C y
-6LC y
~Cy
12C x
6LC
x
----_.-~Cy
O
6L
I
I
I
I
I
-~Cx
-~Cy
O
12C y
-12C x
6L
-6LC
2L2
2
4L :L_._____
6LC y
_____
O
I
I
~Cx
x --------_.O
I3C y
-12C x -6L: -12C y
6LC x
2L
2
I
! 6LC y
y la matriz de rigidez en coordenadas globales:
802
12C x
-6LC x
-6L
4L2
(9-90)
I
I
!J • L,'lnúlisis matricial al'ul/uulo .IJ elementos Jínilos
13C; +12C;
c,c, (13 -12)
C xC y(f:l-12)
13c; +12C;
-6LC y : -13C 2x -12C 2y
C xC y(12-13) -6LC y
6LC x : C.C y (12-13) -13c; -12C;
6LC.
I
2
-6LC y
4L
I
6LC
2L 2
-6LC.
6LC.
y
------[K]= P =--~c2--=-i2Cr ----------- -------~----------------------I
x
y C.C y (12-13) 6LC y 1 13 C.2 +12C 2y C.C y(13- 12) 6LC y
C.C¡(12-13) -13C; -12C; -6LC. : C.Cy(13-12) 13c; +12C;
-6LC.
I
-6LC y
2L'
6LC
-6LC.
4L '
6LC.
y
!
(9-91)
9.6.5 Elemento de parrilla
La matriz de rigidez [k] en coordenadas locales es la siguiente:
t
-J,gdl
~
O
I
O
[k] = P ----~
O
O
O
12
6L
1
O
6L
4L2
1
I
I
I
-~
O
O
-12
-6L
6L
2L2
O
12
-6L
O
-6L
4L2
I
O
(9-92)
O
----- ----1----- ---- ---O
O II ~
O
O
-12 -6L
6L
2L
2
I
I
1
I
I
donde
El
P = L3
El eje local y es perpendicular al plano XZ por lo tanto su vector es:
(9-93)
y
X
Xb
f ay
Xa
<;
f by
---- -------
b/
L¿:
fbz
/'
/'
Za
-:
/'
/'
Zb
Z
Figura 9-13 - Elemento de parrilla en coordenadas locales
El vector del eje local z se obtiene con el producto cruz de los vectores x y y:
80:3
'inámica estructural aplicada al diseño sísmico
(9-94)
y la matriz de transformación de coordenadas [A] es:
(9-95)
y la. matriz [R] es:
Cx
A O]
[R]= [o-r~ =
I
O
-C z
I
I
O
O
O
O
O
O
O
1
O
I
C
O
O
O
Cx
O
I
o
O
O
O
o
z --------
O
1
I
O
-----1----!
I
:
I
I
e
O
1
I
O
I-C z
(9-96)
----- ----
X
o
O
1
O
Cz
o
Cx
Al hacer las operaciones apropiadas obtenemos:
t
pC x
-6LC z
-4L2C
[KT] = P ------~
-13 C x
O
12
6L
----
O
PC z
6LC x
4L2C x
I
O
-I3C x
-6LC z -12
I -2L2C
1
z -6L
I
I
-------;-------I
-l3c z
-PCz
6LC x
I
I
se,
6LC z
6LC z -12 -6LC x
2C
2C
-2L z 6L 2L x II -4L2C Z
I
I
2C
8 ax
J
U ay
1
2L
pC z
12 -6LC x
2C
-6L I 4L X
---O
gdl
-----.!-
j
(9-97)
8 az
8 bx
u by
8 bz
y la matriz de rigidez en coordenadas globales:
+4r:C;
I 6LC z -(13 + 2L
cz
-12
6LC x
z
2L2 )C C ~_?!:C;~ -I3C; +2L2C;
I3C 2+4L2C2
I -(13+
(13 - 4r:)CxCz
~ ______~_~--___ ----J-J~.!:<::L ____
--------------=~C2-~2i2C2- -6LC
6LC z
(13 - 4L2)C xCz
x
z
z - (13 + 2r:)CxC z: I3C; +
I
-6LC x
-12
-6LC x
12
6LCz
6LC z
I
zC;
2)C
2C;
-6LC
- (13 + 2L
I3C;+4L
: (13 - 413}CxCz
x
xCz 6LCx I -I3C;+ 2L
I3C;
-6LC z
[Kj=p
t
,I
+2r:C;
,I -l3c;
-6LC
-6LC z
(13 - 4L")C xCz
12
6LC x
_
4r:C;
2}Cx
_
gdl
Elax
v,
(9-98)
El..
El b x
U by
Elbz
9.6.6 Elemento de pórtico espacial
Definiendo
La matriz de rigidez [k] para el elemento de pórtico espacial, en coordenadas locales es
la siguiente:
304
J, gdl
\3
o
o
12
o
o
O
O
o
O
o :-\3
o
o
o
o
o
U ax
6L
I
I
O
-12
O
O
O
6L
u ay
O
O
-12lC
O
-6LlC
O
Uaz
O
O
O
-y
O
O
e ax
6LlC
O
2L 2lC
O
eay
O
O
12lC
O
- 6LlC
O
I
I
O
O
O
Y
O
O
O
I
I
-6LlC
4L 2lC
O
O II O
O -6L
4L 2 I ___
6L
O
O
O
O
_____L
---[k] = P --- ---- ------ --- -----I
O
O
O
O I \3
O
-\3 O
O
-12
O
O
O
O
-12lC
O
O
O
O
-"(
O
O
- 6LlC
O
O
I
O
O
6L
O
O
O
-6L: O
O
-----O
O
O
l2lC
~
6LlC
O
Ubz
'Y
O
O
O
e bx
4L 2lC
O
e by
6LlC
O
O
O
O
I
I
O
O
O
2L2lC
O
I
O
O
6LlC
O
2L
2
! O
Uby
O
I
I
I
Ubx
-6L
-6L
O
O
O
4L
2
(9-99)
eaz
12
O
I
2L 2
O
O
--- ------ ---O
O
O
e bz
I
y
z
Fiyura 9-14 -
E'em~ntc
de p:5rtico espacia!
Se define un nudo auxiliar e el cual conforma con a y b un plano dentro del cual está el
eje local y, y su dirección es positiva alejándose del punto c. El eje local z es
perpendicular al plano conformado por abe y forma un sistema de mano derecha con x y
y. Utilizando un vector unitario colineal con la línea ae al cual llamamos {w} y cuya
longitud es:
(9-100)
y por lo tanto
(9-101)
(9-102)
805
Dinámica estructural aplicada e' dtseño sísmico
(9-103)
Los cuales corresponden a los cosenos directrices de un eje de longitud unitaria,
colincal con la línea ac:
(9-10-l)
El eje {z} se obtiene por medio del producto cruz de los vectores {w} y [x]:
i¡
(9-105)
Dado que es un sistema de mano derecha el eje {y} se obtiene del siguiente producto
cruz:
I
I¡
,
rDzCxCz - Dx(C; +C;)+ DYCXCY}
{Y} = {z} x{x} == lDXCYC
X -
Dy(C; + C;)+ DZCyC Z
(9-106)
DyCZC y - Dz(C y + C x)+ n,c,c,
y la matriz de transformación de coordenadas [A] es:
DXCyC X- Dy(C; + C; + DZCyC z
DzC x - DxC z
DyCzCy-Dz(C;+C; +DxCzC x
DxC y - DyC X
(9-107)
y la matriz [R] es:
A O:Q O
O A:O O
-- - - r - - O OlA O
O O !O A
j
(9-108)
I
I
Haciendo las operaciones apropiadas se obtienen [KT] y [K].
9.7 Elementos finitos
9.7.1 Introducción
En general el análisis estructural tiene como objetivo determinar un campo de
esfuerzos o de deformaciones de una estructura y sus elementos. En muchos casos se
dispone de una ecuación que describe la solución del problema; como es por ejemplo la
ecuación (J = My/I, la cual define los esfuerzos dentro de la sección de un elemento
sometido a flexión. Desafortunadamente existen numerosos casos en los cuales no
806
1
:
.<J •• 'ln(l(is.is matricial (I/'w/x(ul0.'l etemeut.os [uut os
existe este tipo de soluciones, o estas son muy complejas matemáticamente, lo cual las
hace poco prácticas. Hace unos treinta años se inició el estudio de procedimientos para
obtener la solución numérica de casos particulares en los cuales no existía una solución
analítica.
El desarrollo de estas metodologías condujo a lo que se conoce hoy en día como el
método de los elementos finitos. El cual consiste en dividir la estructura en una serie de
elementos, describiendo el comportamiento del elemento por medio de ecuaciones
constitutivas elementales. Estos elementos se interconectan en nudos donde al aplicar 21
principio de equilibrio se obtiene un conjunto de ecuaciones simultáneas.
Indudablemente, lo anterior corresponde al mismo procedimiento que se emplea en el
análisis matricial, y esta es la razón por la cual este último se considera un subconjunto
del método de los elementos finitos.
i
I
1
Otra descripción del método de los elementos finitos, algo más sofisticada, lo define
como un procedimiento para realizar interpolaciones polinómicas, por medio del cual
un campo de desplazamientos es interpolado en sus valores en los nudos de
interconexión de los elementos. El método de los elementos finitos no debe confundirse
con el método de diferencias finitas 1Ghali y Neville, 1989], en el cual se resuelven
numéricamente las ecuaciones diferenciales de equilibrio en algunos puntos
seleccionados de la estructura. En el método de las diferencias finitas las ecuaciones
diferenciales que describen el comportamiento del medio elástico se aproximan por
medio de segmentos lineales evaluados reemplazando la ecuación diferencial válida en
el límite, por diferenciales finitos (dy/dx vs, /!"y/b.x).
A continuación se exponen los principios del método de los elementos finitos. El
objetivo de la presentación esta orientado a ayudar al lector en su empleo en la solución
de determinados problemas de dinámica estructural. El lector que desee profundizar
sobre los fundamentos del método de los elementos finitos debe dírigtrse a
publicaciones especializadas tales como [Bathe, 19821. [Bumett, 19871. [Chandrupatta y
Belequndu, 1991], [Cook, 1995], [Cook, Molkus, y PIesha, 1989], [Gallagher, 1975],
lLivesley, 1983], y [Zienklewicz y Taylor, 1989].
9.7.2 Procedimiento de análisis utilizando elementos finitos
El proccdímíento del analísís por medie de dementas finitos es muy similar al
empleado en el análisis matricial presentado en el Capítulo 8. A continuación se
presentan los diferentes pasos que componen el análisis utilizando el método:
fuerzas externas nodales
~
~
=:1
~
-.
esfuerzo aPlicado/
'nudo
grados de libertad del elemento
estado de esfuerzos en el punto Odel elemento
~~
-O~
~
Figura 9-15 - Platina sometida a un esfuerzo de tensión y su idealización por medio de elemento finitos
307
Dinámica estructurcd aplicada al diseño sísmico
División de la estructura en elementos - La estructura, que en este caso es un sistema
elástico continuo o discreto, se dívide en una serie de elementos de tamaño finito. La
disposición y tamaño de los elementos a emplear requiere criterio y algún
entendimiento previo del problema, pues en aquellos lugares donde los esfuerzos o las
deformaciones dentro de la estructura cambian en una distancia corta, la densidad de la
red de elementos debe aumentarse. Los puntos de interconexión de los elementos se
denominan nudos. En la Figura 9-15 se muestra la división de una platina de espesor
constante, con un hueco, sometida a tensión.
Formulación de la matriz de rigidez del elemento - Utilizando la teoría matemática de
la elasticidad se definen relaciones entre las deformaciones unitarias a que se somete el
material y los esfuerzos que se generan dentro de él debido a estas deformaciones.
Luego se definen unas funciones de interpolación que describan los desplazamientos de
cualquier punto del elemento en función de los desplazamientos en sus nudos y su
posición dentro del elemento. En general estas funciones son polinomios cuyo grado
depende de la forma que tienen los desplazamientos, de la cantidad de nudos y del
número de grados de libertad por nudo. Entonces para cualquier punto dentro del
elemento es posible describir su estado de deformaciones unitarias en función de los
desplazamientos de los nudos de interconexión del elemento. Integrando los esfuerzos
que inducen estas deformaciones unitarias para todo el volumen del elemento, se
obtiene una relación entre los desplazamientos de los nudos del elemento y las fuerzas
que se inducen allí, lo cual corresponde a una relación entre fuerzas y desplazamientos
en los nudos, o sea la matriz de rigidez del elemento.
Ensamblaje de la matriz de rigidez de la estructura - Utilizando el procedimiento
presentado en el análisis matricial (Sección 8.6), se ensambla una matriz de rigidez de la
estructura, adictonando los términos apropiados de las matrices de rigidez de los
elementos en cada uno de los grados de libertad.
Aplicación de las condiciones de frontera o apoyo - Dependiendo del tipo de apoyo
que tenga la estructura, se afectan los grados de libertad correspondientes, utilizando el
mismo procedimiento que se empleo en la Sección 8.7 en el análisis matricial.
Determinación de los efectos de las fuerzas externas - Las fuerzas y esfuerzos
externos aplicados a la estructura, apropiadamente transformados, se colocan como
fuerzas nodales en los nudos de interconexión entre elementos.
SolUCión del sistema de ecuaciones simultáneas - El sistema compuesto por la matriz
de rigidez de la estructura y las fuerzas nodales aplicadas se resuelve para obtener los
desplazamientos de la estructura.
Evaluación de los esfuerzos dentro de los elementos - Conociendo los desplazamientos
de los nudos de interconexión entre los elementos, se determina el estado de
deformación y de esfuerzos dentro de los elementos.
9.7.3 Tipos de elementos
Dependiendo del tipo de grados de libertad que se definan en los nudos de
interconexión entre elementos y del tipo de funciones descriptivas del estado de
deformaciones dentro de ellos, se pueden plantear diferentes tipos de elementos con
propiedades y características apropiadas para determinados problemas. En la Figura
9-16 se muestran algunos elementos con diferentes características.
808
I
y • Aiuuisis
matricial (l/'W/'l.(U/U
y
etel1le1ll0S }/I//lOS
y
(a) Elementos de pórtico
(e) Elementos de losa plana
Uy:X-
Ux
y~y
Uz
~,
(b) EsfuelZos planos y deformaciones ptenes
Uz
(f) Membranas axisimétricas
y
Uz
(e) Elementos sólidos
y
y
Uz
~,.,~
---Z
o>
0"'\,
(g) Membranas con cualquier curvatura
(d) Sólido axisimétrico
Figura 9-16 - Diferentes tipos de elementos finitos
9.7.4 Formulación de la matriz de rigidez del elemento
En el método de los elementos finitos existen diferentes procedimientos para obtener la
matriz de rigidez de los elementos. Uno de los procedimientos más utilizados se basa
en la utilización de la siguiente integral:
J
[k] = [Br[E][B]dV
(9-109)
v
donde [B] es una matriz que relaciona desplazamientos de los nudos de interconexión
de los elementos con las deformaciones unitarias dentro del elemento, [E] es la matriz
de propiedades del material, y dV es un diferencial del volumen V del elemento. Esta
ecuación se deduce [Cook, 1996] de la definición de la energía de deformación que se
acumula en el elemento cuando se aplican fuerzas en los nodos de interconexión entre
elementos, las cuales causan desplazamientos y deformaciones.
Si, para efectos de la presentación, nos limitamos a elementos que pueden contenerse
dentro de un plano xy, las relaciones entre los esfuerzos y las deformaciones para un
material elástico e isotrópico están descritas por:
30!)
Dinámica est ruc; ural aplicada uf diseño sísmico.
2}
{
cy
=
[l/E -v/E
-v/E l/E
"i xy
O
(9-110)
O
donde E es el módulo de elasticidad, v es el módulo de Poisson, y G es el módulo de
cortante [G = 0.5 El (l+v)]. Si la ecuación anterior se resuelve en función del vector de
esfuerzos {a}, se obtiene la matriz [E] que nos relaciona los esfuerzos en función de las
deformaciones unitarias. Para esfuerzos planos [E] es:
l
ax}
ay =
-
l'txy
E
[1
--2 V
l-v
v
1
O
O
]{c-ex}
O I O (1-v)/2
(9-111)
y
,"ixy
y para deformaciones planas [E] es:
(9-112)
I
I
I
~
La situación de esfuerzos planos se presenta cuando se tienen elementos delgados, con
la dimensión en la dirección z pequeña, y su espesar puede aumentar o disminuir
debido a los esfuerzos en el plano A'Y- Por lo tanto a z = 'tvz = 'tzx = O. En la condición de
deformaciones planas, el espesor del elemento no puede <:~:mentar o disminuir, como es
el caso en secciones de elementos con una dimensión longitudinal muy grande. No
obstante, debe tenerse en cuenta que todas las estructuras son en esencia
tridimensionales, por lo tanto la idealización de definirlos en un plano, o como una
barra,de por sí implica una simplificación.
Las relaciones entre desplazamientos de los Dudas de interconexión entre elementos y
las deformaciones unitarias dentro del elemento, [B], se utilizan para obtener las
deformaciones unitarias que se presentan en el material del elemento debido a los
desplazamientos en sus nudos. Las deformaciones unitarias normales se definen como
el cambio en longitud dividido por la longitud original, y las deformaciones unitarias de
cortante como la variación angular con respecto a un ángulo recto. En la Figura 9-16 se
definen estas deformaciones unitarias.
.
1-
t:.x
• ~u
. ¡oC
I
Figura 9-16 - Rectángulo de tamaño diferencial sometido a diferentes deformaciones unitarias
Entonces:
Au
c x =Sx
'
(9-113)
yen el límite, los cocientes de diferenciales se convierten en derivadas parciales, debido
a que los desplazamientos en la dirección x, u, y y, v, son funciones de las coordenadas x
y y: u
=u(x, y) y v =v(x, y):
810
I
i
_---------------------~-)-·-.L-1-n-(I-JI-S-íS-·_1I_U_.II_r_U_OI_{/I_ (U'{/lIZ{/(lO y erelll(!lIl()~ l"l/(.(J~
que en notación matricial es:
(9-115)
I
Estas deformaciones unitarias son válidas siempre y cuando se cumpla la teoría de
deformaciones pequeñas.
Los desplazamientos (u, v) para cualquier punto con coordenadas (x, y) dentro del
elemento finito plano están definidos por medio de funciones u = uíx, y) y v = vtx, y), las
cuales se obtienen por medio de interpolaciones de los valores de los desplazamientos
de los nudos del elemento, U¡ y Vi por medio de:
, o
{u}=[N]{d}
(9-116)
donde las Ni corresponden a n funciones de interpolación que describen la forma de las
deformaciones, y en conjunto conforman la matriz de funciones de forma, [N]. Es
importante notar que u depende únicamente de los diferentes U¡ y v depende de los
diferentes Vi, y que u y V utilizan los mismo polinomios de interpolación Ni.
I
De las ecuaciones (9-11 S) Y (9-116) se obtiene:
{E} =[a][N]{d}, o {E} =[B]{d} , donde [B]=[a][N]
(9-117)
De esta manera se han definido todos los términos requeridos por la ecuación (9-109)
para determinar la matriz de rigidez del elemento. Puede verse que para unas
propiedades de elasticidad, descritas a través de [E], la matriz de rigidez [k], depende
totalmente de la matriz [B], que a su vez se determina a partir de [N] por diferenciación.
Por lo tanto el comportamiento del elemento finito depende de las funciones de forma
que se prescriban.
Ejemplo 9-5
Se aeselll. obtener LlIl. 11tlll.tríz ae rígíaez ae tut etemento trílll.ltgltJl;¡.r, como el mostmao en LlIl.
FígH,m 9-17, el:- el c/tlll.L LlIl.s a¡Jomtlll.cíOltes ttvLitlll.rílll.s sewt constantes aev¡,tro aeL elemento,
PlIl.rlll. este f'~emeltto se comíarm q/le LlIl.s Lív¡,clIl.S (;jIte íltícílll.LvnevlJe son rectas. pemtlll.ltecen rectas
aeSrJl1.és ae deJomtlll.rse rL eLemeltto, rJor Lo tanto LlIl.s aeJomtlll.cíCHtes lutítlll.rílll.s aefttro aeL
eLenteltio SOIt coastnutcs 11 Los esJ/l,erzos en Los tlorars del eLe¡·neltCO tlll.l·nhír'f·t SOIt consrurues.
Los aespLlIl.zul'l'Lwntos ae Los ¡t/taos se lIl.proxímwt por:
811
náinica estructural upliccula al disciu» sísmico
uíx. y) = u¡ +a] x+a 2 y
(9-118)
+a3x +a4y
(9-119)
v( x, y)
0=
Vi
u
-=~-:-+----+--~~x,
Y¡ =0
Figura 9-17 - Ejemplo 9-5 - Elemento finito triangular de deformación unitaria constante
wlv¡,de u(x,y) corresrm'Lde uL des¡IJLcuCIYHicHto en Lu dirección x de cH,uLqlüer ¡lJ/,u'Lto con
coordenw,{us x,y deHtro ad cLeVI'LCf'Lln U¡ corresrov¡,de u Lu tmsLuci{H'L ef1 Lu dirección, x deL f'Li1-do
L ~ a] u a, SOf'L constantes. AL uy¡Licur Lu CU1-UCiÓf'L (9-114) OtiWteVVLOS
aU
1!
¡
ax = a]
av
E =-=a4
y
ay
dU av
y xy = ay + ax = a 2 + a 3
Ex =
f
(9-120)
(9-121)
I
1
(9-122)
cov!fim'Lundo qlte Lus deJonnucimtes ,utíturius SOVL constantes del'Ltro deL eLeVI'¡,ef'Lto, Los valores
de Los des¡IJLcuGunieVLtos MdaLes son Los 5ig/üef'Ltes:
N/1-do
x
y
i
O
O
u¡=u¡
j
Xj
YJ
Uj =
U¡
+ u] Xj + a2 Yj
Vj =. Vi + a3 Xj
k
Xk
Yk
Ük
=
U¡
+ a] Xk + a2 Yk
Vk = Vi + a3 Xk + a, Yk
u(x,y)
v(x,y)
Vi = Vi
+ a, Yj
Esto HOS cof'Ldl1-ce :4 dos sistevl'LaS de ecltl4ciCHtes SiVlt/tLtvÍJ'Lf'lILS
(9-123)
Los (/1,a!rs se resuelve» para a] ~ a2' ~ a3 Y aa. respectivllLmente. P/tede verse q/te Los dos sistevHas
SOH igl1-aLes ~ ql1e ~JOr Lo tanto a] = a3 ~ a2 = aa, Invirtieftdo La rnatriz de coeficientes:
(9-124)
(9-125)
812
---.--.-_. - - -
I
(9-126)
NI = _1_{(y. -Yk)U,X+(X k -X')U.y}
2A
I
I
Nz =
J
.1
I
1
2~ {YkUjX-XkUjY}
N :A
3=
(9-127)
(9-128)
{-YjUkX+XjU"Y}
Se YJlw;j,e dfj'LvLir alLom [N]:
{u} = [N]{d}
(9-129)
u¡
I
Vi
U¡
_YjXO+XjY] V·
.1
Uk
I
Vk
I
(9-130)
DiJere/tda/tdo:
aN I
1
1
aN z
1
aN
1
aN
-1
aN
1
- -I= - ( x k -x.)v.
ay 2A
.1
I
~ = 2A (Y¡ - y k )U¡
~= 2A YkUj
z -xkv.
--=
a~
2A
.1
aN 3 -1 y
~= 2A j u k
3
--=-11:."
ay 2A r,;
j
Uttoltces:
[e] = [a][N]{d} =[B]{d}
(9-131)
U;
Yj -Yk
O
x k -x j
X
O
Yk
O
k -x j
O
-X
Yj - Yk
-X k
Yk
k
-Yj
O
O
xj
xj
-Yj
Vi
uj
]
(9-132)
;~j
Vk
Id la ¡natriz de rLgLdez se oünene e/1.tOltCcs de la eCl1.adól1. (9-109):
[k] = f[nt[E][B] dV
(9-133)
v
La l11.atrLz [El pltCde ser la de esf'~Rrzos pla/tos, ew,adó/1. (9-111). o las deJonnadol1.es pla/tus,
eCl1.adó/t (9-112). seg(u1. se desee. Dado (;jIte las ¡natrLces solo Üel1C11. COI1.stDU1.tes. lu Ílttegmdól1.
es UivLGl.L 11 se o~'tLC¡1R li.I1a ml1.strM1.te LgH,ala tAo dm1.de t es el espesor ctel etemento.
[k] = f[Bt[E][B]dV =[B]T[EJ[B]tA
v
(9-134)
inámica estruct ural aplicada al diseño sísmico
=-=
VLltf1terució~t
de Los 't/tdos es Gul-Jitruria, rJeyo ijk detle coLocarse en eL seVltido coVltrurio a Las
VltUltecíLLus deL reloj si se descu qlH' eL área sea positivu.
Lu
IU'\. estudo de e'ifli,erzos externos urJLieudos uL e Lef1te VltO, es posil-lLe exf'lyesuy Lets JH,erzUS
l'lOduLes eqlúvaLelttes tttiLizultdo eL sig/i.Íeltte f'lrocedivnieVlto: wifnero se nbtielte Lu S/tf1'\.U de Lus
Jtterzets sol-m' el Ludo del ele»icnro. exrJresudus el'\. eL centro deL Letdo corno J'l'\./testru La FigttYl..t
9-18. L/1ego se etsigl'\.a Let f1'\.Ítud de Lu Jlterzet u cadet Imo de Los Ititt/Í.OS. Id se SH,ma con Lus
rJrovel'\.iCl'ltes del otro lado lil'te LLegu uL Itltdo.
Puru
1
(a) esfuerzos uniformes en los bordes
(b) fuerzas equivalentes en la I Jitad del lado
(e) fuerzas nada/es equivalentes
I
¡
I
,
I
(d) esfuerzos uniformes en los bordes
(e) fuerzas equivalentes en la mitad del fado
(f) fuerzas nodales equivalentes
,
't(-Xj)
't(Yj)
(g) esfuerzas cortantes en Ics bordes
(h) fuerzas equivalentes en la mitad del lado
(i) fuerzas nadales equivalentes
Figura ~10 - Esfuerzos y sus fuerzas nodales equlvetentes. para el
elemento finito triangular de deformación unitaria constante
11
El elemento del ejemplo 9-5 fue uno de los primeros que se desarrollaron. Este
demento produce resultados aceptables cuando no hay variaciones grandes de las
deformaciones en una distancia pequeña, Si el elemento se intenta utilizar en elementos
planos sometidos a flexión sobre un eje perpendicular al plano de los elementos, el
elemento no representa adecuadamente la situación de deformaciones, dado que en
este caso la deformación unitaria varía linealmente con la distancia al eje neutro de la
sección. A pesar de estos defectos, el elemento fíníto triangular de deformación unitaria
constante produce resultados aceptables cuando la malla de elementos se refina y se
vuelve más densa.
J. 7.5 Ejemplo de análisis utilizando elementos finitos
A continuación se presenta el análisis de una estructura muy simple, utilizando
elementos triangulares de esfuerzos planos. La similitud con el análisis matricial se
hace evidente, dado que los pasos requeridos para realizar el análisis son los mismos.
314
I
.L"'I.(,t:tl...7I~,:J
"~,t.(Il·'
('l..
.\."-·.~"'III
(\.,(1-
tJ ,
'•••.'-..•" ....,
t.,t·"Il"" ..
./111 •• ''",' ....
Ejemplo 9-6
Se etesect obtener Los e~/tel'Zos eVL Lct pLcttivLct áe 1 Vlt por 1 vn 11 ete 0.1 In áe espesor. Lct c/tctL está
sOIltetietct ct 110ft e~Jnel'Zo etc te~tsión e/t /1.ItO etc sns extremos etc 2 MPa. tctL como se fn/1.estm e/t
Lu Figl-uct 9-19. Lct /'lLcttinct es ete acero con I1H Inóet,tLo etc eLIA.stidáctá E = 2· 105 MPa = 2· 108
kPa. EL VltoetltLO áe Poisson se tOlnct COl1tO y =o.
1m
I
~----->+I
\ esfuerzo
1m
2 MPa = 2000 kPa
Figura 9-19 - Estructura dei ejemplo 9-6
Figura 9-20 - Idealización de la estructura
Privvu~ro se
ietcctLizct Lct estrltcU-uct áiviáiéftáoLct e/t etementcs jiltitoS. es este cuso ror Vlteáio áe
triáltgnLos áe e8/i.el'Zo /'lLctVLO. Se I1JiLizct Lu IWI1telteLcttltm áe vUi.áos 11 eternenros áctáct en el
Figltm 9-20.
Lcts fncttrices áe rigietez ete Los etemeatos se CULUtLctll áe Lu sigl1.iente fnctltem:
ELerne/tto
1
PctmJctciLitctr el cáLutLo se comtml1e Lu sig/iÍente tctbLct.
..:."".~ "
o ••
l-tnáo LocuL
1l/teto gLo~¡uL
x
i
j
k
1
O
3
1
O
O
2
O
1
'-=T
- 11
-'=...:J
UtiLiZGtftdo Lct em.ctdón (9-132) se áetcnninct Lct Vltcttriz [B].
U¡
[B]=~[
2A
Yj - Yk
O
x k -x j
V¡
U·.1
O
Yk
x k -x j
Yj -Yk
O
-x k
Ul
Vl
1- y
O
l'I
1
O:
1
-x k
O
x·.1
-1 :
xj
-y..1
-1 :
:]= 2'108kPa[~ OO]
+-0+-(I---Y-)/-2
O
O
Yk
1
1
O
O O 0.5
Alwm 0~Jtl'¡leI1l0s [k] ál' Lct l'mu(Íón (9-134):
815
'V2
U2
O
-y.
.1
"0/ 3
O:
O:
O
Lct fniJ,criz [E] se o~JtieVl.e. y.Jctm esjuerzos r¡Lct/'lDs. áe Lct ecuación (9-111):
[E]=~[:-O ~
U3
O
~]~
-ámica es( ruc(llral aplica(/a al (/iseílo sismico
1.5
0.5
0.5
1.5
O
-1.0 -0.5 -0.5
-0.5
-1.0
O
O
O
O
0.5
0.5
O
-0.5 -0.5
O
0.5
0.5
O
O -1.0
O
O
O
1.0
O -0.5
O
1.0
-0.5 -0.5
-1.0
150
50
-100
-50
-50
50
150
O
-50
-50 -100
1GO
O
-100
O
-50
-50
O
-50
-50
O
O -100
O
O
O
O
50
50
O
50
50
O
O
O
100
i
Uf l11,e Itto 2
1
,
PuruJuciLitur eL cr5tLuúo SE' COltstntlJE' Lu siglüe/tte tcü'Lu:
I'llt!-tO Lou;ti
Itlteto g LobuL
x
IJ
i
j
2
()
J
O
1
-1
k
1-
"1
()
.)
¡
!
I
uttLtzwt!-to Lu emuciém (9-132) SE' etE'Len11,iHu Lu f'lt(;Ltriz [B].
V2
°i
[B]=~[
2A
O
Yj -Yk
O
x k -x j
xk
-
O
-y .
-x k
O
xj
x'.J
-y..J
Y"
xi
Yj -Yk
O
-x k
.J
Yk
"3
V3
°4
V4
O: O
O: 1
O', O -1 : O
O,, 1
-1:-1
O
o1 O]
O
[E]=~[~:
~]=
2'108kPa[~
v
1-
Alwru
-O+--O-+-(-l---V-)/-2
1
otJtm.emos [k] eie Lu eCltuciém (9-134)'
[k]= tA[Bf[E][B]= O.lm·0.5m 2 .2'108kPa~.
m
0.5
O
0.5
O
O -1.0
O -0.5 -0.5
0.5
0.5
O -0.5 -0.5
O
O
O
O
O
O
-1.0 -0.5 -0.5
O -0.5 -0.5
316
I
I
1
O O 0.5
1.0
:]~
i
1.0
O
-1.0
O -1.0
1.5
0.5
0.5
1.5
y •
100
O
O
O
O
50
50
-100
-50
-50
O
~ll1a"S!,<; I/Wlr¡CWI (lI'WlZ(UIO
y
elelllelllOS ¡1II1/0S
O -100
O
-50
-50
O
-50
O -50
O
100
O -100
-50
O
150
50
150
-50 I -100
50
O
50
50
O
Mutriz de ri(3 idez de todclt Lu estrttctltru
Lu f'vUttriz de rigidez se e¡tsunüJLu IttiLizu¡tdo el miSf'VLO ¡r¡rocedivvLievLto ex¡r¡Licudo eVL Lu SeccióVL
8.6. S/U1tuVlCLO Los ténnütos de Los grudos de Litlertud carres~JOftdie¡ttes:
150
50
150
-50
-50 -50
O -100
-100
O
-50
150
O
50
I
O -100 I -50
-50 -100
O -50
O
O
150
50
150
O
O
-SO
O
O
50
O -100
O
O
-50
-50
O
50
O
O
O
O
50 -100
O -50
O -50
O
150
-50
O
-50 -100
-50
-50
O -100
150
50
50
150
i\fjOljOS de Lu estr'~ctJuu
LCJ. estmctltnlt está ul"01:1udu e¡t Los ¡tltdos 1 1:1 2. con Los dos grudos de Lit'ertud restriYlfJí,dos.
Pr7./'U üttrodltcir el ejecto de Los U~101:10S se tuchwt Lus jiLus 1:1 coLI·¡,nutCA.5 corresl"ov~d¿ev1Xes v., Los
grudos de LitJCrtud de estos VLI1,dos 1:1 u.sí se OtJtieVLe Lu mutriz de rigidez
o/, Los
grudos de Libertud Libres de LuestrttctlUU:
150
O
O
150
--
-50
O
-50 -100
-SO
-50
O -100
150
50
50
150
tr·«~·····,
.... "=.,,
~i~:~'~~~iJ;~;,~~~kJ
EL f'sJlterzO c/l.~ILicud() eVL eL Ludo derecho de Lu eStmctluu es ete 2 MPa Ó 2000 kPa. Este esJ/terzo
ltllaj/l,erzu total ¡~uciu Lu deredLct igttuL u 0.1 m· 1 m· 2 000 kPa = 200 kN. Por Lo
fC,Htto u cudu mteto (3 1:1 4) se Le ul"Licu Itltujaerzct ig/tuL u Lct mituet ete Lctjlterzu totuL o seu
100 kN hudu Lu deredlu. EL vector de curgus ctl"Licuetu eVl Los gmdos ete Libertuet Litlres {Pd es eL
sig lúe¡tte:
~I/'(XÜtce
{pd=
P
3xj =¡lOO)
P
~ kN
I
3y
P4x
P4y
100
-
O
317
Yinámica estructural aplicada 01 diseño sismico
Solliúóvl riel sLstelnu rie ecw;¡úmtes
El eqtüLibrio de Li4 estnu:tIWA. está descrito por el sigtüeltte sistem()t rie eC/t()tcimtes sim¡ütálte()ts:
11
S/1, SOL/1ÚÓlt es:
0.85714
0.28571
0.14286
0.42857
0.28571
1.42860
-0.28571
1.14290
0.14286 -0.28571
0.85714
-0.42857
1.14290 -0.42857
1.71430
0.42857
]
Los cLesYJL¡;,¡z()tlnientos rie l()t eSlJI·tCtIU()t SOVl entonces.
Esftl,erzos
devLtro de Los eLemeHtos
Pi4m obtener Las e~ft1,erzas delttro de Las elementos. privnero delJef11Ds mLcltl()tr Li4s
deJann()tcicmes lutilurius ()t q/{e l'H' scmtetido el eLevnenta. Esto se Logm ~1or medio de L()t
futuciém (9-11 7):
{E} = (B]{d}
1
ctOltde {d} son Los c,ÍesYJL¡;,¡zw'nifnlos c,Íe Los gmdos c,Íe Liberti4d del eLevne/tlo. Los
OVItiC'lte11, por rnedio de lu emw:[ólt (9-111):
e~/terzos
{a} = (E]{E}
Elttoltces p()tm eL eLel'lteltto 1, lenernos:
o
-1
O
-1
O
-1 -1
1
O
O
O
O
1
O
O
1
O
]10-;
1
O
1m~10-;m
0
O
11 los e~/{erzas
J
S0l1:
818
se
.. f
~
....
,&_........ , ... , • _ •.__ ._
---------~----------------
y rVtrVt el elerne nto 2:
o
-1
O
]w,
O
O
O
1
O
Ú
O -1
O
1
1
1
O -1 -1
O
O
l¿O
m~w;m
1.0
O
lj
I
Los
e~/{,E'rzos SOIt:
fax}
{a} = ~ ay = [E]{E} = 10 8 kPa[2O
l't xy
Los res¡ütae:tos oLltevüe:tos
ntisJno e-'JHerzo lítYJL~Clíte:to
E
=a =
E
O
2 O]
O .10- 5{1}
~
_O O 1
O
rIH~e:telt verif~clítrsejácHmE'VIJE',
lj
2000kPa
2, 10 8 kPa
= {2000}
O kPa
O
yutes eL esJH,erzo eJt Los etementos es el
verif~cllLr Ylor nte(üo e:te:
Llít e:tejomtlítüólt oLltelÜe:tllL se Y"1.ee:te
= 1.10-5 '%
m
9.7.6 Algunas observaciones sobre el uso de los elementos finitos
A continuación se discuten algunos aspectos relacionados con la utilización
método
de los elementos ñnitos en situaciones similares a las presentadas para '..'1 análisis
matricial. Los elementos finitos tienen innumerables aplicaciones dentro del campo de
la dinámica estructural y el diseño sísmico. Cuando se trata de edificaciones y puentes
su mayor empleo está en la definición de las propiedades de rigidez de los diafragmas y
los muros estructurales. Por esta razón la discusión se ha enfocado con estos elementos
en mente.
Aproximación en los resultados - La compatibilidad existe en una solución por el
método de elementos finitos si se cumplen las condiciones de frontera y el material no
se agrieta o se superpone a sí mismo. Los esfuerzos, son en general funciones de las
coordenadas, por lo tanto cambian con respecto a x y a y. En un problema plano las
tasas de cambio satisfacen las ecuaciones de equilibrio:
(9-135)
Si las ecuaciones anteriores se cumplen en toda la estructura, todo elemento' diferencial
está en equilibrio y la estructura misma lo está. La teoría matemática de la elasticidad
postula que si los campos de desplazamientos y esfuerzos cumplen simultáneamente
las condiciones de equilibrio, compatibilidad y los esfuerzos en las fronteras, la
solución obtenida es exacta. Dentro de una solución por el método de elementos finitos
319
uunica est ructural aplicada al diseño sísmico
esto no se cumple estrictamente debido a que en general se utilizan campos de
desplazamiento expresados por medio de polinomios, lo cual implica que la condición
de compatibilidad se cumple estrictamente dentro del elemento. No obstante, las
condiciones de equilibrio y de esfuerzos en las fronteras, no se cumplen en la mayoría
de los puntos del modelo de elementos finitos, dado que su cumplimiento ocurre en
promedio. Esto quiere decir que, por ejemplo, los esfuerzos en una frontera que no
tiene carga externa, pueden tener valores que al ser integrados a lo largo de toda la
frontera conduzcan a un valor igual a cero, pero en algunos puntos tienen valores
negativos o positivos que se anulan mutuamente al integrar dentro del elemento. Estas
variaciones tienden a anularse en la medida que la red de elementos se refina y éstos se
hacen más pequeños.
Esfuerzos parásitos - En el empleo del método de los elementos finltos debe tenerse
especial cuidado con respecto al tipo de campo de desplazamientos que se utilice
dentro del elemento. A modo de ejemplo, en la Figura SJ-2l(a) se muestra una viga en
voladizo con una carga en su extremo libre, la cual se modela empleando elementos
cuadrados con dos grados de libertad por nudo, mostrado en la Figura 9-21(b). Este
elemento tiene posibilidad de tener deformaciones lineales, las cuales son función de
las coordenadas x y y. Al someter este elemento a un campo de esfuerzos causados por
un momento flector, la deformación que tiene el elemento tiene la forma mostrada en la
Figura 9-2l(c), mientras que la deformación correcta es la mostrada en la Figura 9-2l(d).
Esto indica que este elemento finito no modela adecuadamente el problema, a pesar de
que tiene deformaciones que varían linealmente en la dirección y. De la teoría de
elasticidad se sabe que las secciones planas permanecen planas, y que los bordes
superior e inferior de la viga se deforman formando arcos con el mismo radio de
curvatura, los cuales están ausentes en el elemento finito. Esto hace que aparezcan
esfuerzos cortantes en todo el elemento, excepto a lo largo del eje y. Esto conduce a que
el elemento es un modelo más rígido que la realidad, debido a que la flexión es resistida
por esfuerzos de flexión y por esfuerzos parásitus de cortante, mientras que en la
realidad solo son resistidos por los esfuerzos causados por la flexión.
x
(a)
(b)
(d)
(e)
Figura 9-21 - Viga modelada por medio de elementos bilineales de cuatro lados
Rotación en los nudos - En muchos casos el elemento finito debe describir una rotación
en el nudo. Este el caso cuando se utilizan elementos finitos para modelar muros
estructurales. En la Figura 9-22(a) se muestra un muro estructural modelado por medio
de elementos rectangulares bílíneales. Allí se muestra el caso de que a este muro le
820
1
I
II
I
I
¡
¡¡
1
t
1
~
..J..~I(·
JI"
.7
1,
·
·,
~
~,
.. ~ _,-,,,.
,_~.
"_ .. _._
''''
lleguen vigas que enlazan el muro con un pórtico. Dado que el elemento finito no tiene
capacidad de describir la rotación del nudo, los momentos flectores en la viga en su
conexión con el muro son cero, como muestra la' Figura 9':22(b). Esto por ejemplo
ocurría en las primeras versiones del programa ETABS [Wilson, HoIlíngs, y Dovey, 1975).
Versiones posteriores del programa y otros programas como COlvIBAT [Computech,
1983], corrigieron este problema introduciendo un grado de libertad rotacional en el
nudo, como se muestra en la Figura 9-22(c).
I
I
I
(e)
(b)
Figura 9-22 - Uso de elementos finitos en muros estructurales
Cálculo de los esfuerzos - Después oc que se determinan los desplazamientos de los
nudos, en un análisis pOI el método de los elementos finitos, los esfuerzos
del
elemento deben calcularse empleando la siguiente ecuación:
la cual se utiliza elemento por elemento, y no globalmente. En general [8] es función de
las coordenadas, por lo tanto debe decidirse en que punto se calculan los esfuerzos. Los
esfuerzos tienden a ser más exactos dentro del elemento que en sus borde", lo cual es
grave pues en general los esfuerzos tienden a ser mayores en los bordes. Por lo tanto es
recomendable calcular los esfuerzos dentro del elemento y luego extrapolar los valores
a los bordes [Cook, 1995]. Muchos programas de computador promedian los esfuerzos
en los nudos, a partir de los esfuerzos de los diferentes elementos que llegan al nudo.
Aunque esto permite una buena visualización, en algunos casos no es lo más apropiado,
por ejemplo cuando los dos elementos tienen módulos de elasticidad diferentes.
Cuando no se emplean promedios, las líneas de esfuerzos constantes tienden a ser
discontinuas en los bordes de los elementos; lo cual indica el grado de imprecisión en el
análisis. Cuando los esfuerzos se promedian no es posible visualizar este tipo de
problemas.
Esfuerzos en secciones fisuradas - El empleo de elementos finitos en estructuras de
concreto reforzado debe hacerse con el mayor criterio dado que usualmente la
estructura está fisurada y los esfuerzos de tensión a través de la fisura sen resistidos
por la armadura, por lo tanto los esfuerzos de tensión obtenidos como variaciones
graduales son en realidad fuerzas de tensión discretas. Aunque se han desarrollado
/
/onica estructural apltccuia al diseño sísmico
elementos finitos que simulan adecuadamente este tipo de efectos [Sittipunt y Wood,
1993], estos no han trascendido del mundo académico.
Verificación del software - Antes de emplear un programa comercial de elementos
finitos el usuario debe familiarizarse con los principios en los cuales se fundamenta, y
debe realizar pruebas con ejemplos cuyos resultados puedan ser obtenidos por
métodos alternos. Una vez haya certeza de que el programa produce resultados
adecuados si puede procederse a estudiar otros tipos de estructuras.
¡Criterio! - Debe insistirse que el ingeniero debe utilizar su mejor criterio al emplear el
método de los elementos finitos. Los resultados deben ser verificados y estudiados
detenidamente con el fin de decidir si el análisis es adecuado.
i
1
I
I¡
I,
Capitulo 10
I
Ecuaciones de equilibrio dinálnico
en sistelJUlS de varios grados de
libertad
I
I
10.1 Introducción
En el Capítulo 2 vimos como un sistema amortiguado de un grado de libertad, como el
mostrado en la Figura 10-1, estaba regido por la ecuación (10-1) de equilibrio dinámico.
-mX
(a)
(b)
Figura 10-1 • Sistema lineal amortiguado de un grado de libertad
m x-i-c x
j-
k x
e
ü
.xhora debemos extender esto mismo él. sistemas de varios grados de líb ert <.,(1, para lo
cual seguiremos el mismo tipo de planteamiento utilizando masas concentradas y
resortes, para luego entrar dentro del problema de la idealización dinámica de sistemas
estructurales complejos, como puede ser un edificio de varios pisos, en los capítulos
siguientes.
Vale la pena aclarar que el manejo del amortiguamiento en sistemas de varios grados
de libertad es mucho más complejo que las simplificaciones introducidas en los
sistemas de un grado de libertad y por esta razón la presentación que sigue se hará
para sistemas no amortiguados y la introducción del amortiguamiento se realizará
posteriormente, una vez se haya definido la solución de la respuesta de los sistemas de
varios grados de libertad.
10.2 Vibración libre
Supongamos que tenemos un sistema de tres grados de libertad como el mostrado en la
Figura 10-2. Allí podemos ver el cuerpo libre de cada una de las tres masas y las
fuerzas que actúan sobre ellas. Al plantear ecuaciones de equilibrio, y utilizando el
principio de D'Alernbert, para cada una de las masas obtenemos:
náinica estructural aplicada al diseño sisnüco
o
o
o
- - . . . m¡x¡
-
_
m
_m
x
2 2
3
x3
-
k¡x¡
I
I
k 2(X 2-X¡)
f
Figura 10-2 - Sistema lineal no amortiguado de tres grados de libertad
Masa m.:
1
',~
.
(,:
(10-2)
1
!
j
(l0-3)
I
1
J
(10-4)
Reorganizando y factorizando los términos en las tres ecuaciones anteriores obtenemos:
m t ;'\ + (k l + k 2 ) X I
m2
x2 -
ID 3 X3 -
-
k 2x 2 = O
k 2 x 1 + (k 2 + k 3 ) X 2
-
k 3x3
=O
k 3x 2 + k 3x 3 = O
Las ecuaciones simultáneas presentadas en (lO-S) pueden expresarse matricialmente de
la siguiente manera:
(10-6)
que es, a su vez:
[M]{x} + [K]{x} ={O}
(10-7)
Hemos planteado el equilibrio dinámico del conjunto de masas y resortes por medio de
un sistema de ecuaciones diferenciales simultáneas. Este planteamiento es válido para
sistemas de cualquier número de grados de libertad. Debe tenerse en cuenta que cada
línea de este sistema de ecuaciones simultáneas corresponde a una ecuación de
equilibrio para un grado de libertad de la estructura.
:)24
~....~
10.3 Ecuaciones de equilibrio para excitación arbitraría
Ahora supongamos que en el sistema presentado en la Figura 10-2 se aplica una fuerza
que varía en el tiempo, p¡(t), a cada una de las masas i de la estructura, o sea en cada
uno de los grados de libertad de la estructura hay una fuerza dinámica aplicada, como
lo muestra la Figura 10-3.
_ _ m¡x¡
~m2x2
x
__ m
3
3
P3(t)
Figura 10-3 - Sistema lineal no amortiguado de tres grados de
libertad sometido a unas fuerzas dinámicas en sus masas
~j plantear ecuaciones de equilibrio, y utilizando el principio de D'Alernbert, para cada
una de las masas obtenemos:
Masa m.:
(1
8)
(l0-9)
(lO-lO)
Reorganizando y factorizando los términos en las tres ecuaciones anteriores obtenemos:
mlx l
+(k l +k 2 )xt - k 2 x2
=PI(f)
m 2 x2 -k 2 x t +(k 2 +k 3 )X2 -k 3 x 3 = P2 ( t )
m 3 x3 - k 3 x 2 + k 3 x 3
nO-11)
= P3 (t)
Las ecuaciones simultáneas presentadas en (10-11) pueden expresarse matrícialmente
de la siguiente manera:
325
tinámica estructural aplíccuta al diseño sísmico
(10-12)
que es, a su vez:
[M]{x}+[K] {x}= {P(t)}
(10-13)
Este planteamiento es válido para sistemas de cualquier número de grados de libertad.
Al igual que para vibración libre, debe tenerse en cuenta que cada línea de este sistema
de ecuaciones simultáneas corresponde a una ecuación de equilibrio para un grado de
libertad de la estructura, por lo tanto la fuerza aplicada al sistema debe ser colineal con
el grado de libertad.
1004 Ecuaciones de equilibrio para excitación en la base
Ahora supongamos que al sistema presentado en la Figura 10-2 se le somete a una
excitación en su base, como lo muestra la Figura 10--4:
o
Figura 10-4 - Sistema lineal no amortiguado de tres grados
de libertad sometido a excitación en su base
Si definimos:
Ul
=
Xl - X o
u2 = x2 "3
(10-1-4)
Xo
= X3 -X o
o matricialmente:
{::} ={::} - {::} ={::}-
{¡} {xol
(10-15)
que es equivalente a:
(10-16)
La matriz [y], que en este caso es un vector con elementos unitarios, indica que el grado
de libertad expresado en la línea del sistema de ecuaciones simultáneas es colineal con
la aceleración del terreno. La utilización de la matriz [y] en sistemas que emplean más
de una componente de la aceleración del terreno se aclara en el capítulo siguiente y
además, posteriormente, en la Sección 1..1:.8.
1 U • l'.CIWCIO/WS (le cquuumo (//1WI1UCO e1l SISI·eI1WS (le ('lIriOS fJru(lOs (le /werrm
--------------------'
Al despejar {x}, se obtiene:
(10-17)
Si derivarnos la ecuación (l 0-17) contra el tiempo obtenemos:
(10-18)
y si la derivamos nuevamente contra el tiempo se obtiene:
(10-19)
Los cuerpos libres de las masas son ahora los siguientes:
Figura 10-5 - Cuerpos libres de las masas del sistema excitado en su base
Es evidente que:
Xl
-x o
X2 -
x,
X3 - X 2
= UI
=-= U 2 - U I
= U3 -
00-20)
U2
Entonces las ecuaciones de equilibrio quedan como:
que es, a su vez:
[M] {x}+[K] {u}= {o}
(10-22)
Al reemplazar la ecuación (10-19) en la anterior, se obtiene:
[M] {ü}+ [K] {U} = -[M] [y] {xo}
00-23)
Esta última ecuación corresponde a las ecuaciones diferenciales simultáneas de
equilibrio dinámico de un sistema de varios grados de libertad sometidos a una
excitación en su base.
Un aspecto muy importante que se deriva de la presentación para vibración libre,
excitación arbitraria y excitación en la base, consiste en que las matrices de masa [M], y
de rigidez [K], son las mismas en los tres casos, y sólo varia el lado derecho de la
ecuación matricial de equilibrio, dependiendo del tipo de excitación. El capitulo
siguiente se dedica a ampliar este tema y a definir como se encuentran las matrices [M],
[K] Y [y], para diferentes casos e idealizaciones dinámicas de la estructura.
Dinámica estructural cipticud« al diseño sísmico
10.5 Ecuación de Laqranqe
En lo presentado anteriormente las ecuaciones de equilibrio dinámico se obtuvieron por
medio de la aplicación del principio de equilibrio. Desafortunadamente existen
numerosas situaciones en las cuales no es tan simple plantear el equilibrio,
especialmente cuando existe interacción entre dos o más grados de libertad. Aunque
este punto se aclarará en la presentación del capítulo siguiente, vale la pena introducir
un procedimiento que permite encontrar las ecuaciones de equilibrio dinámico
utilizando principios de energía, las cuales se convierten en un recurso importante en
muchos casos en que no es evidente la forma en que el principio de equilibrio se aplica.
Aunque la deducción formal de la ecuación de Lagrange se sale del alcance de una
simple introducción al tema, no sobra indicar los principios sobre los cuales se
fundamenta. La deducción completa puede consultarse en [Clough y Penzien, 19931, o
[Meirovitch, J 967j.
Con base en la segunda ley de Newton:
(10-2-!)
D'Alamberr (Sección 1.2) concluyó que si la aplicación de unas fuerzas a una masa
introducía en el cuerpo una aceleración, entonces la aplicación de una fuerza
equivalente a la masa del cuerpo por esta aceleración, conduciría a una situación de
equilibrio; lo que constituye el principio de D'Alambert:
rp¡(t)+rf/O-m
x=O
(10-2 S)
donde p¡(t) son las fuerzas aplicadas a la masa, y f¡(t) son las fuerzas correspondientes a
las restricciones al desplazamiento de la masa.
Posteriormente aplicando el principio de D'Alambert, y utilizando trabajo virtual,
Hamilton definió lo -que se conoce como principio de Hamiiton:
t2
f Ó(E c + s, )dt =O
00-26)
ti
donde, para un sistema conservativo de la energía (Sección 1.6), Ec es la energía cinética
en el sistema, E p es la energía potencial y tI Y t2 son dos tiempos cualesquiera. Aplicando
los dos principios, Lagrange logró demostrar lo que se conoce con el nombre de
ecuación de Laqranqe:
(10-27)
donde:
energía cinética
energía potencial
dx¡ derivada contra el tiempo del desplazamiento del grado de libertad l.
dt
fuerzas externas aplicadas sobre la masa
828
1() • Ecuaciones ((e eqltllllJnO
(/l/l(l1l1lCO
en
SISlell1as
(1('
1'111 ((1.">
Y' Ut<lJ~
e tv- • IV'" n,,,
A modo de ejemplo se utilizará la ecuación de Lagrange para determinar las ecuaciones
dinámicas de equilibrio del sistema mostrado en la Figura 10-6.
¡
I
Figura 10-6 - Sistema lineal no amortiguado de tres grados de
libertad sometido a unas fuerzas dinámicas en sus masas
Primero calculamos la energía cinética del sistema utilizando la ecuación (1-9):
i
I
o
o
o
( 1O-28)
Luego determinamos la energía potencial utilizando la ecuación (1-7):
(l0-29)
Se obtienen los términos de le ecuación de Lagrange:
.
aE c
-a.
=
m¡x¡
x¡
aE
.
c m
-.-=
2x 2
aX 2
aE
c
-.-.;::
m3
dX 3
==>
i
==>
r".
.
"3
aEc = o
ax¡
aE c = o
(l 0-31)
aX 2
dEc =
o
aX 3
(10-32)
Ahora, aplicando la ecuación de Lagrange:
829
Dinámica estructural aplicuda a! diseño sísmico
grado de libertad
Xl:
(10-33)
grado de libertad
X2:
00-3-1)
grado de libertad
X3:
00-35)
Las ecuaciones simultáneas representadas por (10-33), (10-3-1) Y (10-35), pueden
expresarse ma.ricialmentc de la siguiente manera:
1J
(10-36)
que es, a su vez:
(l0-37)
(M] {x}+ (K] {x}= {P(t)}
Que son las mismas ecuaciones determinadas en (10-12) y 00-13).
880
CUJ,itulo 11
I
idealización dinWnica
de 'a estructura
I•
1
j
I
11.1 Introducción
Al realizar un análisis estructural, implícitamente se está describiendo por medio de un
modelo matemático el comportamiento de la estructura ante unas solicitaciones
preestablecidas. La selección del modelo a emplear en el análisis, es un aspecto
fundamental en la bondad de los resultados obtenidos; si el modelo no describe el
comportamiento adecuadamente, todo el esfuerzo realizado en el análisis puede ser
inútil. Este aspecto que de por si es importante en el caso de solicitaciones estáticas, se
\ uelve crítico en el caso de solicitaciones dinámicas. El presente capítulo describe
algunas de las alternativas más utilizadas en el modelaje matemático de la estructura
ante las solicitaciones dinámicas, empleando los recursos descriptivos, o herramientas,
presentados en los tres capítulos anteriores.
No sobra insistir acerca de que el objetivo último del análisis estructural es pronosticar
el comportamiento de la estructura, antes de su construcción, con el fin de garantizar
que ésta sea capaz de cumplir durante su vida útil, una serie de criterios de desempeño
preestablecidos. Estos criterios de desempeño incluyen: resistencia, rigidez para evitar
deflexíones excesivas, durabilidad y funcionamiento, entre otros. A pesar de que suena
simple, la complejidad inherente al cumplimiento de los objetivos contenidos en los
criterios de desempeño puede su enorme, aún para una estructura simple. Paro que
esta tarea sea factible, deben realizarse numerosas simplificaciones, tanto en lo que se
requiere de la estructura, expresado en términos de cargas y deflexiones aceptables,
como en la descripción del compcrtamíento de la estructura a través del análisis. Por lo
tanto, es obligación del ingeniero entender cabalmente las metodologías tanto de
análisis como de diseño; sus fundamentos y especialmente sus limitaciones. Por las
razones anteriores, la insistencia en el presente capítulo se centra en los objetivos que
se deben tener en mente respecto a tipo de modelo a emplear, más que en el aspecto
numérico de la solución; muy importante de por sí, pero secundario desde el punto de
vista de la calidad de los resultados que se obtienen.
11.2 Masa distribuida y masa concentrada.
En la Sección 1.3 se discutieron someramente las implicaciones de tener la masa
concentrada en unos pocos grados de libertad, o distribuida en un infinito número de
grados de libertad. Dentro de las estructuras típicas de ingeniería c1\'11, tales como
edificios y puentes, en general se presentan ambos casos, o sea estructuras donde la
masa es la proveniente de los mismos elementos estructurales y otros casos en los
cuales la masa se puede tratar como masa concentrada, dado que la masa de la
estructura, en si, es muy pequeña en comparación con la del contenido de la
edificación.
Dinámica escrllcl liral aplicw/a al
(/lse/IO
:;1:>/IlHV
~----------------------
Veamos, pues, primero el tratamiento de aquellos casos en que la masa proviene del
mismo elemento estructural y luego algunos casos comunes de masa concentrada.
11.2.1 Masa distribuida
Los sistemas donde tanto la masa como la rigidez se consideran como propiedades
asignables a un infinito número de grados de libertad se denominan sistemas con
propiedades distribuidas y no van a ser tratados. En muchos de los textos de dinámica
estructural mencionados en la Sección 1.1, se trata el tema en detalle. Las aplicaciones
de esta metodología están limitadas por la posibilidad de trabajar el problema dinámico
por medio de funciones trascendentales y su utilidad en casos prácticos de ingeniería
civil es limitada. No obstante existe una alternativa para definir un procedimiento que
permita disponer de las propiedades de masa distribuida, pero concentrar los efectos en
los extremos de los elementos, como se hizo con las propiedades de rigidez en el
análisis matricial, La matriz de masa del elemento, denominada matriz consistente de
masa, se ensambla y opera de una manera totalmente r.náloga a la de la matriz de
rigidez del elemento. :\ continuación se realiza la deducción de la forma y términos de
la mencionada matriz.
Supongamos que tenemos un elemento de pórtico plano el cual es sometido a unas
aceleraciones en sus extremos representadas en el vector {ü}. Estas aceleraciones
inducen dentro del elemento aceleraciones transversales, y(x) , y longitudinales, x(x) ,
en todos sus puntos intermedios entre los extremos. En cualquier diferencial de
longitud del elemento, dx, con su correspondiente masa diferencial, dm, se presentan
unas fuerzas inerciales diferenciales que según la 2 3 ley de Newton son iguales a:
1
I
I
(11-1)
dfy == y(x)dm
para aceleraciones transversales y a:
(11-2)
dfx == x(x)dm
para aceleraciones longitudinales. Estas aceleraciones corresponden a la segunda
derivada contra el tiempo de las deformaciones de la elástica del elemento y son
totalmente proporcionales a estas deformaciones. Si determinamos el efecto que tienen
todas estas fuerzas inerciales diferenciales en los apoyos del elemento, podríamos
plantear la siguiente ecuación matricial de equilibrio dinámico:
m aXJI x
m aXJIy
m axaz : m a xb x
m a xby
m a xb z
ID a yax
m a ya y
m a ya Z : m a yb x
m a yb y
m a ybz
azby
------
m
m bxby
m azb z
----m bxbz
m byby
m by bz
m bzby
m bzbz
m a zax ID azay m a zaz : m azb x
----- ------ ------¡-----m bxax m bxay m bxaz : m bxhx
m byax m byay m byaz \ m bybx
m bza x
m b za y
m bzaz
~
m bz bx
(11-3)
Donde los términos están definidos en la Figura 11-5. El procedimiento para encontrar
los términos de la matriz de la ecuación (11-3) es el siguiente: se fijan todos los grados
de libertad de los extremos del elemento, excepto uno de ellos, y a este grado de
libertad se le impone una aceleración unitaria. La forma de la elástica del elemento es
consistente con las deformaciones cuando están restringidos les grados de libertad de
los extremos, excepto uno de ellos que es precisamente el que se libera. Las
aceleraciones internas del elemento son proporcionales a esta forma de la elástica. Por
I
-
, 11 • ldeulixacion dinámica <le tu estructura
lo tanto en cada diferencial de masa las fuerzas inerciales diferenciales que se generan
son las dadas por las ecuaciones (11-1) Y(11-2).
y
ü
d.f.:)b~'
~
~
.. ti
Uax
az
..
a
aceleraciones
df
x
ti
bx
f
y
ax
M
sistema local
i Lj-x
fuerzas
Figura 11-5 - Aceleraciones y fuerzas en los extremos de un elemento de pórtico plano
Para encontrar el efecto de estas fuerzas diferenciales inerciales en los extremos
utilizamos el principio de Muller-Bresíau que dice:
"Las ordenadas de la línea de influencia de cualquier elemento de fuerza (axial,
cortante, momento o reacción) de cualquier estructura son proporcionales a la
curva de la elástica que se obtiene al remover la restricción correspondiente al
elemento de fuerza y reemplazarla por una deformación correspondiente en la
estructura que se obtiene al remover la restricción ",
I
Entonces la contribución de cualquiera de los dos df en la fuerza fij en el extremo para
una deformación de la elástica del elemento Yj(x) es:
(i
r-n
Dado que la viga tiene sección uniforme, su masa por unidad de longitud es mIL donde
es
ro es la masa total y L la longitud del elemento. Además la aceleración
totalmente proporcional a Yj(x). Entonces la ecuación (11-4) se convierte en:
n i»
El término de fuerza f ij es:
(11-6)
Las formas de la elástica para una carga axial en cada uno de sus extremos cuando el
otro está fijo, dado que la deformación se supone lineal, son:
x
ax
x
(x)=l--
L
x
xbx(x) = -
L
01-7)
01-8)
y
01-9)
Para las otras formas de la elástica se utiliza su ecuación diferencial,
Dinámica estructural aplicada al diseño sismico
(11-10)
Con p(x) =0 se obtienen las siguientes ecuaciones para la elástica del elemento:
Ya/X)=1-3(~J+2(~r
x2
L
(ll-ll)
x3
L
(11-12)
y (x)=x-2-+2
az
YbY'(X) = 3(
~r
;~~
-{~J
01-13)
I
I
x2 x3
y (x)=--+bz
L L2
(11-14)
Yax(x)= Ybx(X) = O
01-15)
Y
t
Calculando las integrales de acuerdo con la ecuación (11-5), por ejemplo, obtenemos:
m axax = (ro)S xax(x)xax(x)dx
L
l)
= (roL)o
IS(1-~)(1-~)dX
= ro3
L
L
(11-16)
Los otros "'':'rminos se evalúan de una manera análoga y asi se obtiene la siguiente
matriz consistente de masa:
140
I
I
70
O
54
156
22L I O
O
I
2 1
4L I O 13L
22L
O
--- ----- -----T------O I 140
70
O
O
54
13L: O
O
156
------+---- O -13L -3L2 : O -22L
O
O
1
[m] = 4~0
O
-13L
_3L2
01-17)
-----
O
-22L
4L2
J
Esta matriz esta definida en coordenadas locales del elemento y es posible
transformarla a coordenadas globales por el mismo procedimiento empleado para la
matriz de rigidez del elemento en la Sección 8.5. La manera de ensamblar la matriz de
masa de la estructura es la misma que se utiliza para ensamblar la matriz de rigidez de
la estructura.
Ejemplo 11-1
DeteFVI1ÚHítr la matr~z tíLe masa tíLe IU'La v~ga COI'l las s~gIÜeJ'Ltes rror~etíLactes: L= 7 ro Ij Sil
seccíón tiene b = 0.25 ro tíLe af'lCho Ij h = 0.4 ro cie alto coa IU'L mater~al Cjlte tiene lH'La tíLen,s~tíLalit
(masa por IU'L~tíLalit lite vouoneu) y= 2 400 kg/m'. Deten1'1ÍJ'LlA-r SIl fnatr~z lite masa ev¡,
coa rtíLe vLatíLas íocues.
ro
-
=
b h L 'Y = 0.25 ro . 0.4 ro . 7 m . 2 400 kglro3
=
1 680 kg
I
11 • Hle(UIZaCIO/l (1I1UlII1ICll
O
560
O
[m] =
I
O
O
364
I
I
O
624
-616
-588
I
I
O -616
784
216
un
O
-364
I
----OT560-
O -364
O
216
784 :
624
616
O
---- ----280
O
O
O : 280
616
(l(' /a eSI ruc:
364 -588
----- -_._-O
O
•
Para transformar a coordenadas globales la matriz de masa consistente se emplea la
siguiente ecuación:
01-18)
Que al realizar las operaciones apropiadas se convierte en:
140e 2 + 156s 2
[M] - ~
420
1
donde:
16sc
22Ls
-----------2
2
70e + 54s
-16se
-13Ls
22Ls
16se
2
140s + 156e
22Le
2
-----------16se
70s 2 + 54e 2
-13L~
22Lc
4L2
I
I
I
70e 2 + 54s 2
-16se
I
I
13Ls
I
-16se
2
70s
+ 54c
..
13Le
2
-13Ls
--13Lc
'
------r-------~----
13Ls : 140e 2 + 156s 2
13Le I
16se
_3L2
-22Ls
¡
----------16se
-3L2
-----_.
- 22lLs
"_.,-
140s 2 + 156c 2
-22Le
-22Lc
4L2
(11-19)
s = sen ex c = cos ex
m s- masa total del elemento
ex = ángulo entre el eje x local y el eje X global
============·-,·~·c."'·,
.."'·=-=====
Ejemplo 11-2
EVLcontmr Las eCltaciOlteS cü¡trivnLcas áe elíjlúW:Jrio de l1.VLa viga evnjllolro.áa eVL S/1.S dos
extremos. La viga (véuse eL ejempLo 8-7) tiene Lus siglúeVLtes propLedades: Iltercia ][ = 0.005 m".
rirm A = 0.25 m 2 , E = 25 GPa 0 áeltsidad y= 2 400 kg/m"
Pura \.teetos de resolver el rlroLILemu se d\.túten tres Itndos, corno 11tH.estm La Figlua 11-6, Lo
cnaL geVLera dos etementos
5 vn áe LCHtgitli-á caáa ItltO. Se li-tiLiza La ltOf1teltduUuu
Inostraáa eVL Lu 11t.eltciOltaáuJiglua.
ue
En el ejempLo 8-7 se caLuüurolt Lus matrices áe rigiáez áe Los elel1te VLtOS , ¿as C/l,aLes son ig/1,uLes
áuáo qlte Los elementos tieltelt Lus Inismus propieáuáes 0 oneatacíón, EL sistemu áe
cooráeVLaáus locales ete Los eLel1t.eVLtos coú1ciáe con eL sistema gLobaL. 110r 1.0 {¡¡¡.liJO 1()(, es cero. La
vnatriz &te rigidez áe Los etemeatos (cooráeltuáus tocates = cooráel1uáus gLobr.ües) eVL 1i-11idades
áe I~N 0 kN ' In. es LGl l1tOstmdGl desp't.és de LGl Figluu 11-6.
'Hnámica est ruct ural aplicada uf diseño sísmico
¡.¡
1~
·r
10m
Dirección x del sistema local
/.
Dirección X del
sistema global
f---~--:f- ~. f
~)01~
..
---
CD
5m
Figura 11-6 - Estructura del ejemplo 11-2
r
1250
O
O
12
O : -1250
I
30
I
O
O
-12
O
30
1---
O
30 100 II
O -30
50
K aa : K ab]
---- ---- = ----j..---[K] = 1000x ------ ---- ----T-----[K
O I 1250
-1250
O
O
O
ba : K bb
I
I
O -12 -30
O
12 -30
O
30
I
50
-30
O
I
100
Lt-iJonna ¡teL eVLSlA.fn~lLaje de La Inat.riz de rigiaez de La estnl,ct/tm es:
1
3
2
K;a
K;b
O
K~a
O
K~b +K;a
K;b
K~a
K~b
-1- f - nudos
La /natl'iz de rigidez de Los gmdos de Libertad LitJr('s [Kd se obtiene tadLavLdo Las JiLas !J
coL,tvJilJtas corresYJondieltt.es a Los grauos de mwrtad restriltgidos YJOr Les aY¡0ljos.
[KL]=[K~b+K;a]=1000xl
r250~
O
O
O
24
O
O]
O
200
Dada Lu ideaLización en dos eterncntos de 5 vn de Lll2- Sll.5 vnatrices de Inasa son i0'taLes. La
Inasa totnt ete cada elernenro de vigtíL es:
m
=
A L Y = 0.25 m 2 • 5.00 m . 2 400 kg/m' = 3 000 kg = 3 Mg
Dado IIjlte eL éUtglüo a = O°. e
segnteltto de viga es (elt Mg):
[M]=
=
1.0 0
1.000
O
O
O
1.114
0.786: O
s
=
: 0.500
0.0. Ij
O
0.386
LvL vnatriz de IntíLsa consistente de cada
O
-0.464
O
0.786
0.464 -0.536
0.714: O
----- ------ ------,----- ------ ----_.
0.500
O
O
O
0.386
0.464: O
1.114
-0.7&6
-0.464 -0.536: O
-0.786
0.714
O
I
1.00(\
O
336
O
I
~
.:.1.:.1_·--.:.:/(~I::e(~tl~;z~·,(~I(~·I~·ól1 dinámica de [(( estrllC( I
UtiLizando La l1'Lisf'l'\.ajonnGl. ete ef'\.sGl.lnLILuje 11.tiLizuda de La nVJl.lrLz de rígíGtez. oLJlef'Lel'lws:
Por Lo ta/tto Las ecnuciov\.{'s de eqniLibrio etivutl'lüCO ete La estntctH.ruson Las si0l üefttes:
[ML] {Ü,.}+ [K L ] {UL}~ {al
l
~oOO ~28: 1{t::)+l_250000:+---+---:j{~::}={~}
o
24000
o
o
Il.428J
ü 2Z
o
o
200000
U 2z
,0
Es i¡nrJOrt¡;utte fA.fwtar 1Il11.e eL resl1.Ltado obteltido Íf1tf'JLicu lIl'1.e elt reaLidad se tiev\.en tres
sistcI1taS Íftdereltdientes de
IHl
grado df Libertad. dlJl.do qH.e tus uos fnutrLces son GtíafjCHtrA.Les.
•
11.2.2 Masa concentrada
Dentro de un estricto rigor las masas concentradas sólo pueden ser utilizadas en el
análisis dinámico de cuerpos rígidos, no obstante cuando la rigidez de algunos
elementos e8 grande en comparación con la de otros, se realiza la aproximación de
considerarlos infinitamente rígidos. Esta aproximación muchas veces puede simplificar
la solución del problema dinámico enormemente. En un cuerpo rígido no existe
posibilidad de deformación interna alguna, lo cual implica que las propiedades
inerciales se pueden expresar en el centro de masa del cuerpo, Para poder explicar este
hecho supongamos que tenemos un cuerpo rígido de espesor despreciable, como el que
muestra la Figura 11-7.
z
y
origen del sistema
de coordenadas
-.
centroide
Fipura 11-7 - Cuerpo rígido de espesor despreciable
Ahora queremos determinar las fuerzas inerciales que se producirían en el cuerpo
rígido si lo sometemos a unas aceleraciones en la dirección de cada uno de los ejes en
planta, en el plano del cuerpo, y a una aceleración rotacional con respecto al eje vertical
perpendicular al mismo plano. Integrando los efectos que estas aceleraciones producen
en cada uno de los elementos diferenciales de masa que componen el cuerpo y tomando
en cuenta que por ser un cuerpo rígido estas fuerzas inerciales no producen
deformaciones internas del cuerpo; es posible encontrar las siguientes ecuaciones de
inámica estructural apliccul« al diseño sísmico
equilibrio donde se presentan las fuerzas resultantes en el origen del sistema de
coordenadas.
z
origen del sistema
de coordenadas
""
centroide
Figura 11-8 - Aceleraciones impuestas al cuerpo rígido
Las resultantes de las fuerzas inerciales que generan las aceleraciones se evalúan en el
origen del sistema de coordenadas y tiene los siguientes valores:
=roÜx -rnyÜ z
(11-20)
Fy =mÜy +mx~z
(11-21)
r, =-m"yüx +mx~y +[: Jo+m(x 2 +y2)]Üz
01-22)
Fx
Donde ro es la masa total del cuerpo, A su área, x y y son las distancias al centroíde o
centro de masa del cuerpo, medidas desde el origen del sistema de coordenadas, y Jo es
el momento polar de inercia del cuerpo, con respecto a su centro de masa o centroíde, el
cual a su vez es igual a la suma de los momentos de inercia con respecto a dos ejes,
paralelos a x y y que pasan por el centroide del cuerpo. Este mismo sistema de
ecuaciones, expresado en forma matricial, es el siguiente:
o
ro
(11-23)
xm
Lo cual es equivalente a:
{F}= [M]{Ü}
(11-24)
Además es evidente que cuando el origen del sistema de coordenadas se coloca en el
centroide del cuerpo, la matriz de masa toma la siguiente forma:
(11-25)
En esta última matriz de masa, cuando el origen del sistema de coordenadas coincide
con el centroide del cuerpo rígido, es importante resaltar que las aceleraciones sólo
inducen fuerzas inerciales en la dirección y sentido de la misma aceleración. El hecho
11
I
•
l(¡eaUy.H("[O/l UIIIUIfIlCU Uf' " !
('::>llll~(lll"
de que la matriz sea diagonal indica esto, lo cual no ocurre cuando se selecciona un
origen en un lugar diferente del centroide. Cuando se tiene un conjunto de cuerpos
rígidos unidos entre si por medio de conexiones totalmente rígidas, es posible sumar
los efectos de cada uno de ellos, y la forma de la matriz de masa del conjunto es la
siguiente:
í
Im¡
O
( 11-26)
-ICy¡m¡)
i
L(x¡m¡)
i
"lm¡
J O¡
¡ + m¡ (-Z
~-Z)
,L.; X¡ +
y
¡
i
A¡
Ejemplo 11-3
Oetennlllf¡U Lu, 111utrlZ riLe Inusu riLe IH1U Losu lvifüütCAlltfnte rígiriLu el1 SIl, wopio pLulto, riLe
dimel1SlUI1eS 30 111 por 20 111 ij S11, 11tI/LSU es 1 000 I<g por metro Cll,uctruriLo (= 1 I\I1g/111' J, EL
origcn deL sisLemu de rooniel1udus estú en eL centroiriLe riLe Lu losu.
z
y
x
I
Figura 11-9 - Losa del
m
=
30 m . 20 m . 1 Mg/m- = 600 Mg
A
z:
30m·20m=600m2
Jo
=
x=
~íemplo
11-3
lxx + lyy = 203 30112 + 20 303112 = 20000 + 45000 = 65000 m"
51=0
600
[M]= [ :
•
Ejemplo 11-4
íosu rectUJ1glüur iv!fivLitulltfltte rígiriLu, riLe riLimemioltfs a x b ij vnusu m.. UClle ef1 S/t
eSl/jIÚI1U sltyJerior iZl/jlúerriLu IU1U meA.Su colU:entruriLu m2' Oeten'ltiI11/Lr Lu I,nl/Ltriz de I11USU del
conjlmtu, tuL COI110 se mw:~stm el1 LeA. Figluu 11-10,
U11-U
389
Dinámica est ructural aplicada al diseño sísmico
z
Figura 11-10 - Conjunto del ejemplo 11-4
Para La Vltasa m.:
m
v
A
=
i!
m¡
ab
Jo = I xx + I yy = b 3a/12 + ba3/12 = (ab/12)(b Z + aZ)
X = Y =0
m
A
v
=
I
m,
O
Jo = O
x = -a/2
[M] =
~
Y = b/2
mI +m 2
o
O
m 1+m2
b
--m
2 2
a
--m
2 2
7~
b
--m 2
2
a
--m 2
2
2
2
2
2
(a + b ) + :2 (a + b )
•
Ejemplo 11-5
Debe encontrarse La matriz cie masa cid mismo CO¡ijIU1JO cie clterrlos rrgicios {¡leL ejernrLo 11-4
Ahoru dekl(' colocarse el origot deL sisterna lite coordcrtadas en el cCVltroivLe deL cmijltrtto. corno
Lo 1itltesLru LIA. Figlua 11-11.
z
x
Figura 11-11 - Conjunto del ejemplo 11-5
;-j40
Pr1l1tero se Ctüettia
ta tocatizaciéH1 ¡;I,el Cef1trm¡;{,e LoI11alt¡;{,O VVI,OI11enLos en tu eSIIj¡ünu iviferior
iZliJlüer¡;{,u:
Para la masa m2:
Para la masa m.:
ID¡
= mi
m¡=m2
A¡=O
A¡=ab
3
ba
b
ab 2
2
=I xx +lyy =1i+12= 12 (a +b )
Jo
1
I
3a
mi =m t
A¡ ab
m.
m¡ J = m t (a 2 +b 2 )
A¡ o 12
_IJ =0
A.
o
I
a
m 2a
x· = - - r = ---:--"'----:I
2
2(m l+m2 )
b
m 2b
y. =--5=I
2
2(m t +m 2 )
m.(x~ + -y~)= m tm;(a
I
I
I
[M] =
2
2
+b )
4( mI +m 2 )2
mi +m 2
O
O
O
mI +m 2
O
O
Ú
(mi
- - - + - -m
--12 4(m +m
mI
1
2
l
2)
}
a 2 + b1 \
1
I
11
De los dos ejemplos anteriores es evidente que al haber colocado el origen del sistema
de coordenadas en un lugar que no corresponde con el centroide del conjunto de masas
conduce a que la matriz de masa tiene términos fuera de la diagonal, mientras que sí se
coloca en el centroide la matriz de masa resultante es diagonal.
11.3 Idealización de la rigidez
En la Sección anterior se mostró cómo la idealización de la masa, en el caso de cuerpos
infinitamente rígidos, se puede referenciar con respecto a diferentes localizaciones del
sistema de coordenadas y que un cambio en esta localización influye en la forma de las
ecuaciones de equilibrio dinámico. En el caso de la rigidez se presenta una situación
similar pues la escogencia de la localización de los grados de libertad influye
enormemente en la forma de las ecuaciones de equilibrio estático. El aspecto
fundamental que se debe tener muy claro es el hecho de que los grados de libertad que
se utilicen en el análisis dinámico de la estructura deben ser comunes a las
(341
'iuunica estructural aplicada al diseño sísmico
componentes estáticas, reflejadas a través de la matriz de rigidez, y a las componentes
dinámicas reflejadas a través de la matriz de masas, e inclusive el amortiguamiento.
En principio, en este momento de la presentación, disponemos de todas las
herramientas necesarias para lograr describir dinámicamente la estructura a través de
unos grados de libertad adecuados. Existen diferentes enfoques acerca de como definir
los grados de libertad de la estructura para realizar el análisis dinámico; a continuación
se describen en detalle algunos de ellos.
1.3.1 Diafragma Rígido
Una losa de entrepiso de la estructura de una edificación, como es por ejemplo una losa
maciza de espesor adecuado para las luces que salva, es mucho más rígida en su propio
plano que transversalmente, como se muestra en la Figura 11-12.
I,
1
p
Losa cargada en su propio plano
Losa cargada trensversalmente
Figura 11-12 - Deformaciones internas de una losa ante dife¡ cintes tipos de carga
Exagerando podemos pensar que se trata de un cuerpo infinitamente rígido para
desplazamientos en su propio plano. Si esta aproximación se considera válida, siempre
es posible describir la posición horizontal de cualquier punto dentro de la losa, o
diafragma, a partir de dos desplazamientos horizontales ortogonales, x y y, y un giro
alrededor de un eje perpendicular al plano del diafragma, z.
y
--
Equivalentes
I
t
---
x
1
Figura 11-13 - Diafragma como cuerpo infinitamente rígido en su propio plano
Es usual tomar el origen del eje vertical rotacional en el centro de masa del diafragma,
como se discutió en la Sección anterior, pero es válido localizarlo en cualquier punto
arbitrario, siempre y cuando se tomen en cuenta las implicaciones que esto trae en la
formulación de las ecuaciones de equilibrio dinámico. En la Figura 11-13 se hace la
equivalencia entre los grados de libertad de un diafragma infinitamente rígido en su
propio plano y un cuerpo rígido propiamente dicho que tiene translaciones y giros en
un plano horizontal.
I
11 ..
j(U"({·"ZlH
H.ltl
(lIll{(IItH
u
\(1,.,
11..,(
'on,
tu.
Si el diafragma tiene un desplazamiento que incluya componentes de translación
horizontal y rotación alrededor de un eje vertical, estos desplazamientos siempre
pueden ser expresados en función de las tres variables x, y y z.
localización del centro de masa
después de que ocurre el
desplazamiento X, y, z
a'
localización original
del centro de masa
a
Figura 11-14 - Cualquier desplazamiento se expresa en función de x, y y
Z
La idealización de diafragma infinitamente rigido en su propio plano sólo hace
referencia a los tres grados de libertad mencionados, por lo tanto los desplazamientos
verticales, dirección en la cual el diafragma, o losa, es definitivamente flexible, son
posibles. Igualmente las rotaciones alrededor de los ejes horizontales no hacen parte de
la consideración de diafragma infinitamente rígido.
Figura 11-15 - Deformaciones en los elementos de una estructura de un piso, con
diafragma rígido en su propio plano, ante un desplazamiento en la dirección x
Para ilustrar este punto en la Figura 11-15 se presenta una estructura de un piso
compuesta por cuatro pórticos localizados en cada uno de los cuatro bordes de la losa.
Si realizamos una translación en el sentido x, en la figura pueden verse las
deformaciones de los diferentes elementos. Es evidente que hay desplazamientos
verticales dentro de las vigas y la losa, y giros alrededor de los ejes horizontales dentro
de los elementos y en los nudos de interconexión entre ellos.
Así mismo en la figura se ve claramente que la parte superior de las cuatro columnas,
en el punto en que tocan la losa, tienen el mismo desplazamiento horizontal, lo cual es
totalmente compatible con la hipótesis de diafragma rígido. Pero al mismo tiempo,
todas ellas han tenido un giro en este mismo nudo, giro que ocurre alrededor de un eje
paralelo al eje y. Además estos nudos tienen unos pequeños desplazamientos
verticales, los cuales no son notorios en la gráfica, pero los nudos superiores de las
columnas del lado izquierdo tienen un desplazamiento vertical hacia arriba, y los de las
columnas del lado derecho hacia abajo. ASl mismo, la flexión que ocurre en la losa
alrededor de ejes horizontales que están en su propio plano, no es incompatible con la
843
l
n. \\
Dinámica estructural aplicada al diseño sísmico
hipótesis de diafragma rígido. En resumen: dos puntos cualesquiera, que hagan parte de
la losa de entrepiso que se supuso como diafragma rígido, están inhabilitados para tener
desplazamientos relativos que se puedan contener dentro del plano horizontal, no
obstante, pueden tener desplazamientos relativos en la dirección vertical y giros con
respecto a cualquier eje horizontal.
I
Figura 11-16 - Edificio en altura con un diafragma rígido
con tres grados de libertad por piso
Esta idealización es extensible a edificios en altura, donde cada entrepiso es un
diafragma independiente que tiene tres grados de libertad, dos posibilidades de
desplazamientos horizontales ortogonales y giros con respecto a un eje vertical. Véase
la Figura 11- I 6. Desde el punto de vista dinámico la idealización de rigidez infiuita del
diafragma en su plano, permite expresar las propiedades inerciales de su masa de una
manera sencilla como se presentó en la Sección 11.2.2. Debe anotarse que al expresar
las propiedades de masa de la edificación en su entrepiso de fondo se está afirmando
que no hay masa en lugares diferentes de la losa y las masas adheridas a ella. Esta
afírmación no es muy lejana de la realidad en estructuras aporticadas, donde la masa
de las columnas es muy menor en comparación con la del entrepiso, incluyendo lo que
soporte. No obstante en edificios donde los muros estructurales sean un porcentaje
apreciable de la masa de la estructura, puede en algunos casos introducir errores
importantes que deben ser evaluados y corregidos utilizando otro tipo de
idealizaciones.
La inquietud de fondo con respecto a la acción de diafragma rígido consiste en definir
si es válida con todo tipo de entrepisos. Cuando no hay suficiente rigidez dentro del
diafragma la compatibilidad de las deformaciones horizontales de los elementos
verticales de la estructura deja de ser válida y por lo tanto al utilizarla se estaría
cometiendo en el análisis un error grave de idealización.
La respuesta a esta pregunta no es sencilla pues intervienen varios factores entre los
que se cuentan principalmente:
I
844
"
.J. L
•
•
•
-
Ltt\-·LI·I.IJ.\C.
·IVI.
,.I.I.
'., ..
II.'L
,
'·_1
La relación entre la rigidez del diafragma y la rigidez de los elementos del sistema de
resistencia ante cargas horizontales. El mismo diafragma puede ser rígido si esta
soportado sobre pórticos, y flexible si está soportados sobre muros.
La rigidez misma de los elementos que conforman el diafragma. Este puede ser el
caso de entrepisos de madera; o cuando los elementos verticales de soporte tienen
rigideces comparables con las del diafragma, como puede presentarse en edificios
alargados sobre muros estructurales. muy rígidos colocados en la dirección del
sentido corto del diafragma; o bien, en cubiertas de teja liviana sobre estructura
metálica.
Tipo de unión entre los elementos que conforman el diafragma. Puede ser el caso de
entrepisos construidos con base en elementos prefabricados donde las conexiones
entre ellos sean incapaces de proveer un vínculo suficientemente rígido, aunque
tengan resistencia adecuada.
Forma del diafragma. Cuando el diafragma tiene zonas menos rígidas. Este caso es
común cuando hay grandes vacíos dentro de la losa o diafragmas demasiado
alargados.
Magnitud de las fuerzas que debe transferir el diafragma. Las fuerzas que se
inducen dentro del diafragma propiamente dicho deben estudiarse, pero existen
casos en los cuales deben resistir fuerzas mayores que éstas. Los diafragmas de
transferencia en edificaciones en altura con plataforma y torre en general deben
transferir fuerzas mayores que los otros diafragmas de la edificación especialmente
cuando aparecen elementos muy rigidos como muros de contención en el piso del
diafragma de transferencia (Véase la Figura 11-17).
')¡
diafragmas normales
/
oiafragma de
transferer.cia
diafragma normal
Figura 11-17 - Edificio con diafragma de transferencia
Ahora procedemos a formular las relaciones de rigidez de una estructura teniendo en
cuenta la idealización de diafragma rígido. En la presentación del procedimiento
general para idealización del diafragma rígido que se hace a continuación se emplean
pórticos planos que en conjunto producen estructuras tridimensionales. Se ha escogido
esta forma de presentación debido a que es la más sencilla de comprender en prime-a
instancia. El procedimiento es general y por lo tanto su formulación con base en
:J45
,._
,~.
Dinámica estructura! apliccuia al diseño sísmico
pórticos tridimensionales es una simple extensión del procedimiento con pórticos
planos.
Piso 3
Piso 2
Piso 1
Figure 11-18 - Edificio al cual se le va a aplicar la idealización de diafragma rígido
Supongamos, para efectos de la presentación, que debemos encontrar la matriz de
rigidez de toda la estructura para la idealización de diafragma rígido de un edificio de
tres pisos como el mostrado en la Figura 11-18. Allí se tiene dos tipos de pórticos, los
que van en la dirección x, los cuales tienen dos vanos y los que van en la dirección y, los
cuales tienen un solo vano. Los grados de libertad del diafragma se localizan en su
centro de masa, o centroide de la losa. En cada piso i hay tres grados de libertad, dos
traslaciones horizontales ortogonales, Uix y Uiy , y una rotación con respe.cto a un eje
vertical que pasa por el centro de masa, Uiz, para un total de nueve grados de libertad
para toda la estructura. Existen dos tipos de pórtico, el Tipo-L, que está orientado en la
dirección x y del cual hay dos iguales y el Tipo-A, que está orientado en la dirección y y
del cual hay tres iguales.
A continuación se descríben los pasos a seguir para poder generar la matriz de rigidez
de todo el edificio, expresada en los grados de libertad de los diafragmas.
11.3. 1 (a) Se genera la matriz de rigidez de cada pórtico
En cada uno de sus nudos, los pórticos tienen tres grados de libertad: un
desplazamiento horizontal, un desplazamiento vertical y un giro con respecto a un eje
perpendicular al plano del pórtico. En la Figura 11-1~) se muestran los dos tipos de
pórtico con los grados de libertad que tienen en sus nudos. Por los procedimientos
presentados en el Capítulo 8 podemos determinar la matriz de rigidez de cada uno de
los tipos de pórtico. Dado que están empotrados en su base no se designaron grados de
libertad allí.
Para el pórtico Tipo-l íe matriz de rigidez, [k~], tiene dimensiones de 27 x 27.
Para el pórtico Tipo-A,
-....
[k:], tiene dimensiones de 18 x 18.
84fJ
1. .1
.... l(H"U"/.(llH.Jt1
UUHlIICl(.U ({\,"
fU t~'4"(,llltlUll
~-~~......,~
.....,....-~---14r.
Pórtico Tipo-A
Pórtico TifJO"1
Figura 11-19 - Tipos de pórtico con sus grados de libertad modelados como pórticos planos
11.3.1(b) Se hacen las vigas inextensibles debido al efecto de diafragma rígido
Debido a que el diafragma es infinitamente rígido, las vigas no pueden tener
deformaciones axiales. Esto quiere decir que para cada pórtico, en cada piso basta con
un grado de libertad horizontal. Por lo tanto se define un grado de libertad horizontal
independiente por piso (por ejemplo el del eje izquierdo en cada piso), y los restantes
grados de libertad horizontales del piso se convierten en grados de libertad
dependientes.
Esto permite formular unas ecuaciones de ligadura dentro del procedimiento
presentado en la Sección 9.2. Los grados de libertad de )<1 estructura quedan como lo
muestra la Figura 11-20.
Con las ecuaciones de ligadura se generan las matrices [Rd y [RA ] , Y aplicando la
ecuación (9-12) que aquí llamamos (11-27):
(11-27)
llegamos a las siguientes matrices para cada tipo de pórtico:
Para el pórtico Tipo-] la matriz de rigidez,
Para el pórtico Tipo-A,
[kn, tiene dimensiones de 21 x 21.
[kt], tiene dimensiones de 15 x 15.
~-~---1~
1-"---+--I----1~
------~
~----f~
-----f~
............
Pórtico Tipo-A
Pórtico Tipo-l
Figura 11-20 - Grados de libertad tje~pués de eliminar
las deformaciones axiales de las vigas
347
ámica estructural aplicada al diseño sísmico
Queda además para cada tipo de pórtico planteada la ecuación (11-28), la cual permitirá
determinar la totalidad de los grados de libertad {u} a partir de los grados de libertad
{u¡}:
(11-28)
3.l(c) Se ajustan los grados de libertad verticales
Desde el punto de vista del análisis dinámico ha sido tradicional, para solicitaciones
sísmicas, sólo tener en cuenta las excitaciones horizontales del sismo. El tratamiento
dinámico de los efectos verticales del sismo en las estructuras es complejo y poco
entendido aún en la actualidad, y de todas formas demandaria una idealización de la
estructura diferente a la que se está planteando. No obstante la influencia de las
deformaciones axiales de las columnas es importante en la respuesta de la estructura
ante cargas horizontales. Esta influencia depende de la esbeltez de la estructura.
Cuando se trata de pórticos poco esbeltos, bajos y largos, pueden eliminarse con un
procedimiento similar al utilizado para las vigas, o simplemente tachando las filas y
columnas de la matriz de rigidez del pórtico correspondientes a los grados de libertad
verticales. Si el pórtico es esbelto es más adecuado condensar estos grados de libertad
verticales. Ha sido tradicional seguir la siguiente recomendación respecto a los grados
de libertad verticales:
Si:
(i) HIB > 5 deben condensarse
H
(ií) [¡JB ~ 5 pueden eliminarse
11
l.
B
.1
Para el caso (i) se aplica el procedimiento presentado en la Sección 9.3:
Se reordena la matriz [kIl de tal manen, que en las primeras filas y columnas queden los
grados de libertad horizontales y rotacionales, y en las filas inferiores y columnas a la
derecha queden los grados de libertad verticales. Esta nueva matriz así particionada
tiene la siguiente forma:
(11-29)
La matriz del pórtico con sus efectos verticales condensados se obtiene por medio de la
siguiente ecuación:
(11-30)
Los valores de los grados de libertad verticales condensados se pueden obtener
posteriormente por medio de la siguiente ecuación:
01-31)
348
Para el caso (ii) se tachan las filas y columnas correspondientes a los grados de libertad
verticales de la matriz [kIl, y esta nueva matriz se denomina [ksv]. De esta manera los
grados de libertad verticales se hacen iguales a cero:
{uV}={o}
(11-32)
Por cualquiera de los dos procedimientos que se siga, los grados de libertad de los
pórticos quedan como lo muestra la Figura 11-21. Así llegamos a las siguientes
matrices para cada tipo de pórtico:
Para el pórtico Tipo-lla matriz de rigidez, [k~v]' tiene dimensiones de 12 x 12.
I
Para el pórtico Tipo-A, [k~v], tiene dimensiones de 9 x 9.
I
:J
~
)
-;..
)
'"47
Pórtico Tipo-1
~
~
)
7777
7T
Pórtico Tipo-A
Figura 11-21 - Grados de libertad después de eliminar
o condensar las deformaciones verticales
11.3.l(d) Se condensan los grados de libertad rotacionales de los nudos
I
Tal como se vio anteriormente en la explicación de la idealización de
rigído,
los grados de libertad correspondientes a giros alrededor de ejes (11.1\
(( níl'nidos
en el plano del diafragma no están restringidos por la idealización, pero ¡11 mismo
tiempo solamente hay un efecto inercial muy menor asociado con estas rotactcnes, por
lo tanto es lícito condensarlas. La matriz de rigidez [ksvl Se reordena de tal manera que
en las primeras filas y columnas queden los grados de libertad horizontales del pórtico
y en las filas inferiores y en las columnas del lado derecho de la matriz los grados de
libertad rotacionales. Se reorganiza y particiona la matriz así:
o I 1 ]
[ k sv ].= ~§~-~~§~
[ k2 I k 3
(11-33)
sv! sv
luego se condensa:
(11-3-1)
Los valores de los grados de libertad rotacionales condensados se pueden obtener
posteriormente por medio de la siguiente ecuación:
01-35)
Así llegamos a las siguientes matrices para cada tipo de pórtico:
849
linámica estructural aplicada al diseño sisnuco
Para el pórtico TÍpo-l la matriz de rigidez, [k~], tiene dimensiones de 3 x 3.
Para el pórtico TÍpo-A, [k~], tiene dimensiones de 3 x 3.
La matriz que se obtiene para cada pórtico al final de este paso corresponde a la matriz
de efectos horizontales pues sólo contiene la rigidez de cada uno de ellos para
desplazamientos horizontales, uno por piso. Vale la pena resaltar la reducción que se ha
realizado del número de grados de libertad de cada pórtico, por ejemplo en el pórtico
Tipo-I se ha reducido de 27 grados de libertad a 3, y para el pórtico Tipo-A de 18 a 3.
-
-
-'
--
7)77
1
TJ
7T
I
TJ77
TJ7T
Pórtico Tipo-A
Pórtico Tipo- f
Figura 11-22 - Grados de libertad después de condensar las rotaciones. Sólo se
tienen grados de IilJertad horizontales, uno por piso en cada pórtico
En este punto si se quisiera realizar un análisis planar de la estructura en su totalidad,
independiente para la dirección x y para la dirección y, sólo bastaría sumar las matrices
de los pórticos que actúan en cada una de las direcciones. Estás matrices tiene un grado
de libertad por piso y se estaría tomando en cuenta el efecto de diafragma pues sus
desplazamientos en la dirección del pórtico serían compatibles para todos ellos.
1l.3.1(e) Transformación de los grados de libertad del pórtico de un desplazamiento por
piso a los tres grados de libertad POy piso de cada diafragma
En la Figura 11-23 se muestra en planta uno de los entrepisos de la estructura. Allí se
indican los grados de libertad del diafragma y los de cada uno de los pórticos. Además
se ha indicado un sistema de coordenadas cartesianas cuyo origen está en el cruce de
los ejes 1 y C. Este sistema de coordenadas nos permitirá encontrar las relaciones de
transformación entre los diferentes grados de libertad.
y
Figura 11-23 - Grados de libertad del diafragma y de los pórticos en el piso i
850
1
11
iD
lllelUlkUCiUIl UlIlU/HH
u
(le
fU
(_-.." ")(, H \ l l U \
En este caso se colocaron los grados de libertad del diafragma en el centro de masa,
pero esta localización puede ser en cualquier punto arbitrario, siempre y cuando al
generar la matriz de masa del diafragma se tomen en cuenta todos los efectos de la
masa cuando no están los grados de libertad en el centro de masa.
Ahora planteamos el equilibrio entre la fuerza que actúa en el pórtico en el piso y las
resultantes en el centro de masa del diafragma. Para el efecto vamos a tratar la fuerza
que actúa en el piso del pórtico como una fuerza local y las del centroide del diafragma
como globales, de ahí la nomenclatura de mayúsculas y minúsculas que se ha venido
utilizando. En la Figura 11-24 se presentan los diferentes datos para establecer el
equilibrio. El pórtico se ha orientado arbitrariamente para hacer más general la
deducción.
y
I
I
Yb
Y
~ ~%FiY~ ~ 1~
-
F.
~
e.m,
;>
F·
I
rx
Á. I
)
l i d
'.
sistema de coordenadas
de referencia
~----
Figura 11-24 - Equilibrio entre la fuerza del pórtico en el piso
y las resultantes en el diafragma, para el piso
í
Los puntos a y b definen la dirección positiva de la fuerza, al ir de a a b. La única
restricción en la localización de estos dos punto es que deben estar en la línea
acción
del pórtico. De la figura podemos establecer que:
(1
(11-37)
(11-38)
Mientras la fuerza f¡ se mantenga en su línea de acción no importa la localización que
tenga a lo largo de esta línea, por lo tanto arbitrariamente se coloca en el punto a.
y
o
Figura 11-25 - Fuerza del pórtico localizada en a y resuelta en componentes
De equilibrio, en la Figura 11 2 S, obtenemos la siguiente relación:
851
Din Dillámica estrucl ILral aplicada al diseiio sísmico
(11-39)
de donde:
(11-40)
Debido a que el centro de masa puede tener una localización diferente en cada piso,
definimus para cada piso i:
01-41)
l
y entonces:
F3x
cosa
O
O
F3y
sena
O
O
F3z
r3
O
O
--------- -----
F2x
O
F2y =
F2z
cosa
sena
O
O
O
01-42)
O
r2
O
--------- -----
Flx
O
O
cosa
F¡y
O
I O
sena
F!z
O
I
O
r1
o sea:
01-43)
La matriz [Tp ] está compuesta por las siguientes submatrices de tres por uno:
(11-44)
el tamaño de la matriz [Tp ] para cada pórtico tiene dimensiones 3n filas por n columnas,
donde n es el número de pisos.
Para cada uno de los pórticos tenemos:
{f
[kc]{up }
(11-45)
{Fp} = [Tp]{fp}
(11-46)
p}
=
y
Aplicando el principio de contragradiente:
(11-47)
8.52
1
Reemplazando (l1--l:7) en (11--l:5):
(1l--l:8)
y ahora (11--l:8) en (11--l:6):
(1l--l:9)
donde [Kp ] corresponde a la matriz de rigidez del pórtico expresada en función de los
grados de libertad de toda la estructura. En nuestro caso estas matrices para cualquiera
de los pórticos tienen dimensiones de 9 por 9.
11.3.1(f) Ensamblaje de la matriz de rigidez de toda la estructura
La matriz de rigidez de toda la estructura, [KE] , es simplemente la suma de todas lr s
matrices [Kp ] de todos los pórticos. Para un total de q pórticos:
(11-50)
11.3.1(g) Se determina la matriz de masa de toda la estructura
La matriz de masa, (mi], del diafragma del piso i se obtiene por medio de los
procedimientos presentados en la Sección 11.2.2. Esta matriz tiene dimensiones de :3
filas por :3 columnas. La matriz de masa de toda la estructura se obtiene de la siguiente
consideración de equilibrio de las fuerzas inerciales, expresada por medio de
submatrices de dimensiones 3 filas por 3 columnas:
(11-5I)
Entonces:
[M E ] 9X9
-
3 ] 3:
[m
O
:
O
----~~-~-------~------
1
[m 2 3x3 I
Ü
-------~-------~-----O
:
O
: [m¡Lx3
l
O
I
1
(U-52)
11.3.1(h) Ecuaciones de equilibrio dinámico de toda la estructura
Podemos entonces plantear las ecuaciones de equilibrio dinámico de toda la estructura,
las cuales tienen la siguiente forma para vibración libre:
(11-53)
El número de filas del sistema es 3D, donde o es el número de pisos de la estructura.
Para el ejemplo que se utilizó en la deducción, y expresadas por medio de submatrices
de 3 por 3, también para vibración libre, tenemos:
:158
t
Dinámica estructural aplicada a!
(Use/jo SISI11lCO
(11-54)
Para el caso de excitación en la base, se utiliza la ecuación 00-23), la cual en este caso
tiene la forma:
(11-53)
Donde [y]{xo}corresponde a {üo}el cual describe las aceleraciones en los grados de
libertad de la estructura, causadas por las aceleraciones del terreno.
En el caso presentado en la Sección 10.4, el sistema vibra en un plano y la matriz [y] era
un vector colurnnar con un número de filas igual al número de grados de libertad de la
estructura y con todos sus términos iguales a la unidad. Las aceleraciones del terreno
provienen de registros acelerográficos los cuales contienen tres componentes, dos
horizontales ortogonales y una vertical. No existen registros de las componentes
rotacionales de la aceleración. Por lo tanto en nuestro caso no hay manera de dar una
excitación a los grados de libertad de rotación del diafragma. En el caso que nos atañe,
de idealización de diafragma rígido, ya se mencionó en la Sección 11.3.l(c) que no
incluye los efectos verticales de la aceleración sísmica.
z
..
Uz
N
______
"
Figura 11-26 - Dirección de las aceleraciones de los grados de libertad
de los diafragmas y de las excitaciones del terreno
Entonces, el vector de aceleraciones del terreno tiene dos componentes horizontales
ortogonales, las cuales no necesariamente son colíneales con los grados de libertad x y y
de los desplazamientos de los diafragmas, como muestra la Figura 11-26. De la
mencionada figura podemos obtener las siguientes expresiones:
xox = Xns cosf - xew senñ
xoy = Xos senjl + xew cosñ
01-56)
No sobra advertir que muchas veces los acelerógrafos no se orientan con el norte
exactamente, por lo tanto se han utilizado las direcciones NS y EW simplemente para
ilustrar el manejo de las componentes del acelerograma. Otra alternativa utilizada con
frecuencia es el uso de una sola componente del acelerograma colocada con un ángulo ~
con respecto al eje principal x de la estructura. En este caso las componentes colineales
se obtienen por medio de:
Xox = Xo cos~
(U-57)
XOY =xosen~
854
11 • Idealizacton
<IIIIU/ll1(,(/ (le
tu
eS/rllel ((iU
Una vez se obtienen las aceleraciones del terreno colineales con las direcciones
principales en la estructura podemos generar la matriz [r] donde:
(11-58)
Para nuestro caso de tres pisos [r] se obtiene de la siguiente manera, la cual es
extensible a cualquier número de pisos.
1
'03x
..
i
l
I
I
I
{üo}=
'03y
..
'0 3z
..
'02x
..
'02y
..
'02z
..
'Oh
l~::
01
O 1
O O
-- -1 O
=
O 1
O O
-- --
1
O 1
'0 3z
O O
'02x
1 O
..
..
{~:~}
o
{Ü o}=
O
'03x
..
'03y
..
'0 2y
..
'02z
..
=
1 O
'Oh
1 O
O 1
'0 1y
..
'0 1z
O 1
..
O O
{~~:~~~}
O 1
- xosenl3
O O
(11-59)
O O
o sea se coloca un 1 si la aceleración del terreno es colineal con la aceleración del grado
de libertad que representa la matriz. Si no es colíneal se coloca un cero, o la
componente correspondiente. En la Sección 11.5 se explica como generar [r] para el caso
general, inclusive cuando la excitación en un apoyo es diferente de la de otro.
11.3.1(i) Obtención de las fuerzas en los elementos una vez se conocen los
desplazamientos de los grados de libertad de los diafragmas
La solución de la respuesta dinámica de la estructura se presenta en el Capítulo
siguiente, para las ecuaciones de equilibrio dinámico (1l-53) o (1l-55), y la misma
matriz de rigidez utilizada en estas ecuaciones puede ser empleada para analizar la
estructura ante fuerzas horizontales estáticas como las que prescriben para diseño
sísmico los códigos en el método de la fuerza horizontal equivalente. En este caso ~('
resuelve es sistema estático de ecuaciones simultáneas siguiente:
( 11-(0)
Donde {P} corresponde a las cargas horizontales estáticas, ya sea de viento o de sismo,
que se aplican a la estructura. El vector de desplazamientos de los grados de libertad
del diafragma {U} se obtiene solucionando el sistema planteado en (11-GO).
Una vez se dispone del vector de desplazamientos {U} ya sea proveniente de un análisis
dinámico o estático, obtenemos los desplazamientos del pórtico en cada uno de los
pisos utilizando la ecuación (11-47), la cual se reproduce aquí por conveniencia:
(l1-G1)
Este vector {Up} corresponde a los desplazamientos que tienen cada piso del pórtico,
compatibles con los desplazamientos del diafragma en el piso. Estas deflexiones
horizontales del pórtico son las mismas que se utilizan para verificar las derivas
(deflexíones horizontales relativas) tal como exigen los códigos sísmicos.
855
Dinámica est ructural aplicadii (1/ diseño sísmico
Una vez se dispone de las deflexiones horizontales, coplanares del pórtico, se procede a
determinar los valores de las rotaciones de los nudos, las cuales se habían condensado
en la Sección 11.3.l(d) utilizando la ecuación (11-35), la cual también se reproduce aquí
por conveniencia:
(11-62)
Es evidente que al particionar la matriz de rigidez [ksvl en la Sección 11.3.l(d) la misma
operación se realizó con el vector de desplazamientos {usv} ji por lo tanto:
{Usv}= {-~~}
u
(11-63)
rot
Ahora obtenemos los desplazamientos de los grados de libertad verticales, dependiendo
del tipo de procedimiento utilizado en la Sección 11.3.1(c). Si se utilizó el procedimiento
(i) de la Sección 11.3.1(c), se utiliza la ecuación (11-3l), reproducida a continuación:
(11-64)
Si se utilizó el procedimiento (ii) de la Sección 11.3.l(c), simplemente se usa (11-32):
(11-65)
Entonces:
(11-66)
Por último obtenemos los desplazamientos de la totalidad de los grados de libertad del
pórtico, {u}, por medio de la ecuación (11-28):
(11-67)
El vector de desplazamientos {u} está en coordenadas globales del pórtico. Se ha
utilizado la nomenclatura de minúsculas para insistir de que hay unas grandes
coordenadas globales que son las de toda la estructura, por medio de los grados de
libertad en los diafragmas y que para efectos de ellas, las coordenadas de los grados de
libertad del pórtico son unas coordenadas locales.
Con el vector de desplazamientos del pórtico {u} se determinan las fuerzas en los
elementos de la estructura y si se desea, las reacciones en los apoyos. Este
procedimiento se realiza para cada uno de los pórticos independientemente.
11.3.1(j) Algunas observaciones acerca de la idealización de diafragma rígido
La idealización de diafragma rígido tiene las siguientes ventajas respecto a otras
idealizaciones para el análisis de estructuras de edifícios ante cargas horizontales y
solicitaciones dinámicas. Dentro de estas ventajas no sobra resaltar las siguientes:
•
--
Permite realizar el análisis de la estructura como un todo, tal como es el enfoque
moderno de análisis estructural. Esto permite tener resultados mucho más
confiables que cuando se realiza el análisis utilizando pórticos independientes.
85(5
I
1 J • la('ully.UcIO/1
•
La matriz de la estructura [KE ] tiene un número de filas y columnas igual al número
de pisos multiplicado por tres, sensiblemente menor que el de la gran mayoría de
los pórticos que la componen, o que el de la matriz de rigidez tridimensional de la
estructura con seis grados de libertad por nudo. Esto redunda en menores tiempos
de proceso y menores demandas de memoria en los programas de computador que
utilizan esta idealización.
•
Distribuye automáticamente las fuerzas horizontales a los diferentes elementos
verticales de resistencia en proporción a sus rigideces.
•
Toma en cuenta el efecto de torsión de toda la estructura, lo cual es especialmente
importante en estructuras con resistencia vertical irregular o con plant:.o irregulares.
La formulación matemática describe adecuadamente el hecho de que las fuerzas
horizontales se aplican en el centro de masa del diafragma y que la estructura tiene
a girar con respecto a su centro de rigidez, el cual se define como el punto en el
diafragma en el cual a! aplicar una fuerza horizontal no se presenta rotación del
diafragma. Por lo tanto en estructuras donde los dos centros, el de masa y el de
rigidez no coinciden, el procedimiento toma en cuenta automáticamente la torsión
que genera la aplicación de fuerzas horizontales en lugares diferentes del centro de
rigidez.
•
Es posible realizar simultáneamente el análisis para las cargas verticales que
contenga la estructura. Utilizando el procedimiento de condensación general,
presentado en la Sección 9.3 y especialmente en la ecuación (9-21) puede verse que
el proceso de las cargas verticales es un subproducto de las condensaciones que se
lleven a cabo para obtener la matriz de efectos horizontales del pórtico, evitándose
de esta manera tener que realizar un análisis para estas cargas. Esta metodología es
la utilizada por programas dé computador tales como TABS [Wilson y Dovey, 197 ¿j,
ETABS I Wilson, Ho/lings y Dovey, 1975] Y COMBAT [e omputech, 1983] en los cuales
se utilizan además técnicas de subestructuracion y solución frontal de las ecuaciones
simultáneas.
•
El análisis de efectos de segundo orden (efecto P-Delta) de toda la estructura se
puede llevar a cabo fácilmente pues las fuerzas horizontales de la estructura
pueden ser corregidas y tan solo hay necesidad de volver a solucionar el sistema de
ecuaciones U l-bO).
i
i
I
t
1
1
I
(Il1/UlIlIUt ue tU e:,lI'H • Hit
A contínuacíón se presenta un ejemplo de idealización de diafragma rígido en una
estructura aportícada de dos pisos, similar a Id utilizada para hacer el planteamiento de
la teoría.
Antes de emprender la solución del ejemplo es importante hacer algunas observaciones
acerca de algunas de las operaciones numéricas que hay que realizar, las cuales en
muchos casos ahorran algún tiempo en la realización del trabajo numérico,
especialmente cuando éste se realiza manualmente.
Cuando se utiliza la técnica de igualación de grados de libertad y se está aplicando la
operación de la ecuación (9-12), o 01-27):
(11-68)
realmente lo que se está haciendo con el primero producto de la operación, [Rf[k p] es
multiplicar toda una fila por una constante y luego otra por otra constante y así
sucesivamente, para luego sumarlas. La segunda parte de la operación es totalmente
análoga, pero con columnas de la matriz. Cuando se trata de estructuras ortogonales,
Dinámica estructural aplicnrla al diseño sísmico
como son los pórticos, estas operaciones de igualación de grados de libertad tiene
coeficiente igual a la unidad en las ecuaciones de ligadura. Por esta razón cuando se
trata de una estructura ortogonal y se están igualando grados de libertad, basta sumar
las filas y luego las columnas correspondientes a los grados de libertad que se igualan.
Más aún, esta operación se puede evitar si desde un comienzo el ensamblaje de todos
los grados de libertad se realiza sobre un solo grado de libertad, y de esta forma la
matriz ensamblada de una vez tiene las ecuaciones de ligadura implantadas. Esta
última metodología implica que no se puede utilizar la técnica de ensamblaje por medio
de submatrices de 3 por 3 que se explicó en el Capítulo 9, pero la diferencia es sutil,
pues no se ensamblan submatrices de tres por tres sino términos independientes, pero
la tecníca sigue siendo la misma. Una ventaja adicional de esta última metodología es
que la matriz de rigidez se puede generar de una vez con los grados de libertad
ordenados de una manera que permita realizar las operaciones de condensación
posteriores sin tener que reordenar la matriz.
Otro aspecto tiene que ver con la condensación, tal como la muestra la ecuación (9-20),
o (11-30), allí aparentemente hay necesidad de invertir una matriz cuyo tamaño muchas
veces es grande. No obstante está operación se puede realizar condensando solo un
grado de libertad a la vez, y este caso sólo hay que invertir un término, pues la matriz
[k 3l tiene dimensiones de 1 por 1. O sea que su inversa es el inverso del término, o l1k 3 .
Otra manera de ahorrar trabajo numérico en estas operaciones es aprovechar la simetría
de la estructura. Cuando dos grados de libertad producen resultados totalmente
iguales, porque son simétricos, se pueden tratar como un solo grado de libertad,
ensamblándolos como uno solo, o bien sumando las filas y las columnas
correspondientes en la matriz de rigidez. En el ejemplo que se presenta a continuación
se utilizan algunas de estas técnicas, con el fin de ahorrar trabajo numérico.
\
I
Ejemplo 11-6
Debev¡, eltCOfttrcuse Las eCll,a(ÍaVlt's ae f11,Ovünienta ae La estrl4,ctlua ae concreto reJarzaaa
f11,OstriA,aa elt LiA, FiglUiA, 11-27. Debe 11,tiLimrse LiA, iaeiA,LiziA,cióv¡, ete aiaJmgmiA, rí.giaa. por Lo
tanto 11,0 hiA,tj ct~farVJtuciOltes axiuLes en ías vigus. Duaa vllte se tmtu ae IUtiA, estni,c.tliXiA, biA,jiA,
Los gruaas a.e LibertiA,d verticales se VUVL u eLiminur igll,iA,LáltdaLas u cero. Los giros en Los vutdos
ae Los y¡órticos se de/rJevL connensar.
I
I
@
Sm
® Sm
6m
o
Figura 11-27 - Edificio del ejemplo 11-6
Los eLemelttas tielten Lus sig/üelttes rropieaudes. toaus LiA,s vigus tieltelt sección con h =0.50 ro
de atto tj b = 0.30 ro de aJ-tClw. LiA, resistel-tCiu deL cLlhcreto es de 30 MPa. Toaus Lus COLI1-1nltiA,S
tieneu srccióll [ir h = 0.30 ro YJo'~ b = 0.30 ro tj resisteltciiA, deL concreto c{.e 30 MPa. LiA,S losas
858
11 •
taeauzacion
(lllIUl1l1CIl (le IU (':;, n l u ![(,
ÜCVLCH Itl1f4 mf4Sf4 por ftl1idf4l/Í, l/Í,e circf4 l/Í,e 0.8 Mg/m- = 800 kg/m'. 1'11f4SCJl corresl1ov1,cücntc CJl llA,
cf4rgf4 InlH'rtf4 ir1cl/tf:1eltl/Í,0 el /1eso proYJio de lf4 estn1,cUUf4 Ineis lOS f4mtJtiLUOS (w = 7.84 kN/m2) ,
Los gml/Í,os cie litJertwl cie lOS ciif4Jmgmf4s estlÁH lOmlizf4cios en SI1,S cel1tros cie meiLSU como
Ht/1,eS tm lf4 Fig/Uf4 11-27,
Privnero '::f4LCIÜliLlnos Lf4s l'Itf4trices cie rigiciez ue Los elevne IttOS, Lf4S coLIt/'Itlw.s 5011, igltliLLes ('11
todos Los y,órücos, ig f1,f4L:nente lf4S VigliLS tocif4s uene LíA. miSlnf4 sección. SÓlO mmLlif4 SI1, tltZ, ror
eso se geltem H.11f4 mf4triz cie rigiciez YJf4rf4 vigu cie 5 m cie Ltu f:1 otra purf4 vigu de 6 m ue LHZ.
II
I
h =0.3m
b =0.3m
I = bh3/12 = 0.3 m· 0.3 3 m3 /12 = 0.000675 m"
A = bh = 0.3 m • 0.3 m = 0.09 m2
E = 4000 ...Jr e (MPa) = 4000 ...J30 MPa = 22 000 MPa = 22 GPa
L=3m
U sistemu de COOrcieHf4Uf4S local estei oriel1tw{o COIt SI1, eje x en direccióH lLucÍfiL f4tlf4JO, por lo
tWttCJ el lÁJtg /üo a es 9()O
e = cos a =0.0
s =sen a = 1.0
P = EIIL3 = 22 GPa ·0.000675 m" /3 3 m 3 = 550 kN/m
~ = Ae/l = 0.09 m
Ij
2
•
32 m 2 / 0.000675 m 4 = 1200
Lf4 vnf4triz eLe rigiciez cieL ete-nento ue COL/Hit/tU, el1 kN/vn Ij kN . 1'It/meL es Lu Sig¡ÜCHtc
6.6
O
9.9
----6.6
O
9.9
VigliLS cie ')
/'11
O
9.9 : -6.6
O
660
O
I
I
O
-660
9.9
O
O
9.9
19.8 : -9.9
----- ---O -9.9
O -9.9 I 6.6
I
I
-660
660
O
O
O
O
-----
O
----T----
I
9.9 : -9.9 I
O 11~.8
cie LfU
h=0.5 m
b=0.3m
I = bh3/12 = 0.3 m . 0.5 3 m 3 /12 = 0.003125 m"
A = bh = 0.3 ro . 0.5 m = 0.15 m 2
E = 4000 ...Jr e (MPa) = 4000 ...J30 MPa = 22 000 MPa = 22 GPa
L=5m
EL sistel1tf4 cie coorcieltf4cius LomL coilteicJe con el gLobaL rJor Lo tanto a es 0
e =cos a =1.0
0
,
s = sen a= 0.0
p = EIIL3 = 22 GPa • 0.003125 m" / 53 1TI3 = 550 kN/m
2
~ = AL 2II = 0.15 m • 52 m 2 / 0.003125 m" = 1200
Ij Lu l'ItliLtril UC rigietc! eteL elewLcvL!o vic vigf4 ele 5 In ele LHZ, elt kNlrn f:1 kN . In/YlILU, es tu
sig/HeH((:',
Dinámica est rflct ural aplicada al diseño sísmico
660
O
O
O
O : -660
6.6
16.5
O
16.5 :
O
O
-6.6
16.5
27.5
O -16.5
55.0 :
----- ---- -----T----- ----- ----O I 660
-660
O
O
O
O -6.6 -16.5 :
O
O
O -16.5
16.5
27.5 :
6.6 -16.5
55.0
Vigas ete 6 vn ete LI12
h=0.5 m
b=0.3 m
I = bh3/12 = 0.3 m' 0.5 3 m 3 /12 = 0.003125 m 4
2
A = bh = 0.3 m' 0.5 m = 0.15 m
E = 4000 ...Jr e (MPa) = 4000 ...J30 MPa = 22 000 MPa = 22 GPa
L=6m
I
EL sistevvLa de cooretevLadas LocaL coüteLete COVL el gLol)(ü r¡or Lo tanto a. es O°.
e =cos a. = 1.0
s =sen a. =0.0
p =EIIL3 = 22 GPa • 0.003125 m" /6 3 m 3 = 318.3 kN/m
13 = AL 2I¡ = 0.15 m 2 • 62 m 2 / C.003125 m" = 1728
/.j La fltatrLz ete rígietez deL etemento ete viga de 6 VJiL de Ltl.z. en l<N/m
sLg¡Üe/1te:
550
O
O
3.82
O 11.46
----- -----
-550
O
O
/<N . vn/met. es La
O
-3.82
11.46
3J~2
-11.46
O I -11.46
45.83
O
11.46 :
22.92
O -11.46
45.83 :
------ ----_.
------,----O
I
550
O
O
O -3.82 -11.46 :
O
O
: -550
Ij
11.46
22.~2 :
O
Alwm etdleVltOS elteOlttmr La vnatriz ete ejectos IwrizOlttaLes r¡am meta tir¡O ete pórtico
IvLicLUf1WS LOVL eL ~Jó:'tJCO cid eje 1\. La :10/lJo'U?VlCLtt:~x~ lÍE' v.I~.dos U eLe!11~ntns es IIA sig¡ÜeJ1te
PÓrtico TilQo - A
Lajonna de t'ltsUlnlILajE' E'S La sig¡ÜeI1te:
Pórtico Tipo A
/.j
La matriz dE' rig i¡;tez deL pórtico.
1-gdl
556.6
O
9.9
O
663.82
11.46
------ ------550.0
O
9.9 : -550.0
O
O
11.46:
O
-3.82
11.46
65.64 :
O
-11.46
22.92
--O---:--S56X
O
-3.82 -11.46:
O
11.46
22.92:
9.9
O
663.82 -11.46
9.9 -11.46 65.64
860
O
Ahom el~rnÍft&U11,()S Lus dejorrnuciOJtes lIlX~uLes ae Lu v~gu, Lo C/{,uL se reuL~zu COVL Lu ecl~,ucióVL de
L~gudlUU Ulx = U2x. Esto Lo YlodeWLOs luacer nüL~zuVLdo eL proced~vl1.~evLto presevl.tudo eVL Lu SeccLóvL
11.3.1(tl) . Otm 11tUVLem ete Itevarlo u caho. es SIHnur LusfLLus Ij LUS coLlunVLUS de Los etos gmdos
de L~tlCrtud. Cf~,uLlil/üem de Los dos proced~rn~evLtos COlta/tCe u LI/L s~glüel'Lte vnutr~z de r~g~dcz:
tgdl
13.2
O
O
663.82
9.9
----
O
9.9
1
9.9
I
I
O
9.9
11.46
11.46 : -3.82
11.46
65.64 : -11.46
22.92
- - - - - - ------,------- - - - - - -3.82 -11.46 I 663.82 -11.46
11.46
22.92
! -11.46
65.64
Ahom eL~rnÍftUltJws Los desYJLuzUvlüentos lIlX~uLes de Los l'LI~,dos. Dudo lil'te eL pórtico es tlUjO esto
VLO coruuccc u ItVL error up recic::ül Le. Pum YlórtLcos esbeltos estos gmdns de Liklertud ddJen
coltdel'LsL-\.Yse. b ~rnYJOrtuVLte eJ'Lteltder (/jIte uL eUrnÍJtur Los gn.tdos de L~tJertud ¡;t través de
eClt!J\.cioVLCS de L~gud/1.ru se está ~rnp~diendo muLCj/üer t~po de dfj'orvnuciém reLutLvu eut«: Los
gmdos de L~bertuct qlH~ Lu eCIHlciólt (,I'\.LUZU, o sea CjIH' el VlwdeLo Vltuternáüco cte Lu estnl,etltru
se huce rnás ríg~do. No oc/me Lo rn~svlw c/tundo se /tüLQU Lu coVLetel'Lsuc~ém, p11.eS Lu ri.gietez ete
Los gmetos ete L~llertud Cjlte se coI'LeteJtsGut se Llte.orpom lA. Lu ete Los Wte y¡emt(ltlteCelt Ij Ylor Lo
tanto Lu rig~etez del vnoeteLo vI'Lutemáüco ItO CUI'll'¡'I~U. Lus eteJormudoVLes qH,e se o¡'ltiel'tel'L UlIt
Lu mutriz etc r~g~etez COJtt;leltSuetlA SOVL exuctuVlteltLc ~gltuLes u Los q/te se o¡'ltieltelt COI'L LIA. mutr~z
orig~l'LuL. silny¡Lemeltte se hC/Lce másJáciL eL rnultejo 1'Lll.f'ltér~co yutes hUIj menos rérvvioÍ,I'lDS CI'L Lí/!.
rnutriz. Elt este caso es Lícito eLil'lÜltUr!os.
Esto se reuLizo. sirnYILemevtte tudLUltetO Lus fLLcA,s Ij wL/trnl'Lus de Los gmetos (te Li.¡'wrtuet
verncaíes. corno se explicó en Lu Secciólt 11.3.1 (c)ií
AltOm debernos cOJteteltsur Los gruetos de Lil-Jert&id etl' rotacíón elt Los 1'LltetOS. LGt W.G1.tnz anrertor
se YlurÜciOJtu ete Lu siglúel'Lte rnUl'Lem pum Logrur esto:
13200 : 9900
[-1
9;100]
-----k O ,, kl
Y- t- 22920 =
sv
k
! k sv
9900 : 22920 65640
[ktv] = [ -990oT656aO
{.Y.]
LuiVLversuete [k~v] es:
k3
[
sv
]-1
=[
4
.l7350xl0-.60582 x lO-s
S]
-.60582XI0.17350 X 10-4
uáiuica estructural aplicada al diseño sísmico
-l.gdl
[k~]=[10986]
u lx
Id eslu 11JtÍlitU mulriz. LDL c/tuL en este CDLSO tiel1R CÜf'l1.('v1.siovu:,s ete 1 /101' 1. corres/10v1.ete u Lu
vv¡,uf.riz Uf efectos hOf'izmttuLes deL rJórtico Tipo A EL Vl1.iSf1W rlroceetimicltto se reULiZIA. rJuru el
/1órtico TirJo B. corresrJmtetieltte uL eje Bete LDL estrH,{:t1uDL.
Pórtico TirIO - B
ITJ
0
0
[TI
0
\1m
0
l
.
1
k ab
k;b
o
k~a
k~a
k~b + k:'
o
k~b
o
k;b
o
k:"
k;"+k~b+k;'
k~a
k~ +k;"
8]
0
0
LDLJormu ete e~tsumbLqje es Lu siglüe~ttc:
[TI
k~b + k~b + k:"
j
" '"
Pórtico Tipo B
Id LDL f1tDLlriz ete rig ietez eteL Ylórtico:
o
o I o
o
o
o
o
9.9
o
o
9.9
-------- -----------------r-----6.6
o
9.9
o
- 550.0
o -660.0
o
o
o
o
-9.9
9.9
o
o
------------ ------ -------- ------6.6
o
o
o : - 550.0
o
- 3.82
11.46
o
11.46 :
-11.46
22.92
9.9
__
.!l~:~_L
__
'
!
._
------------563.2
o
o
o
-6.6
o
-9.9 : - 550.0
o
o
o
o
o 1323.li2 -11.46 u.y
o
o
o
o
- 3.82 -11.46 :
o
o - 660.0
o -11.46 85.44 u.,
22.92 ¡
o
9.9
11.46
o
o
9.9
o
o
Por comoetidud en este Cl/LSO ~Jrif'nero eLimiftDLf'lWS Los 0"udos ete W'Jertuet vertícales tuclLulLcio
las fLLDLS lj coL/tmltDLS corres/1ov1.dielttes DL Uly' U2y. U3y lj Ü4y. LH.egO rJDLrDL eLinünur LDLS
etG.fonitucimtps lAXiuLcs etc LDLS VigDLS. SIU1tUmoS LDL jiLDL lj Lltego LDL COLIlYltVLU U2x sohre Ulx Id
eteSr){~.és reuLizw1WS Lu mismu orerDLciórt Sll.litDLltcio LufLLu Id LDL COL/H1tftU ccwcsy¡onetieftte DL Ü4x·
sobre U3x Por (tLti'·1W. reoreteltuf'ltCls Lu mDLtriz &ie tDLL mDLI1RrDL Dj/~.e Los grDLetos ete Lit'ertDLd
LDLterDLLes Dj/teetev¡, 01. LDLS /1rimerDLs fLLus U coLtU1tltDLS U Los rotacíoriales elt Lus /1LtÚitUS JiLus Id
COLIU1'l1tDLS. rJUrDL rJOder cCHtdeltsur con juciLidud desp/~.és. EL reslütDLuo de todus estus
operDLciones es Lu siglüe~tte fnutriz. Clt LDL CltuL se fnli.estrDL LDL pDLrticiólt puru cmtdeltsur Los
wucios de LitlertDLd rotacíonates de Los ItH.etOS.
556.6
o
o
9.9 : - 550.0
o
o
o
o
I
I
-6.6
o
o -660.0
11.46 :
o
1l.46
22.92 : -9.9
65.64 :
------- -------1------ . ----o
9.9 I
o
o
o I 556.6
o ------.------- 3.82 -1l.46 :
o
663.82 -11.46 I
o
o
-11A6
9.9
1l.46
22.92 :
65.64 :
o
o
-------- -------+------------------- -------t------o
o
o
-9.9 II
o II 563.2
o
-660.0
o II
o
o
o II
o 1323.82
o .J_______
I
o
9.9 .1_______
I
o
o _ _____
11.46
o ______
663.82
11.46 :
-3.82
-11A6
I
I
I
9.9
o
I
I
-,I
I
I
I
I
I
I
I
I
....
I
I
I
I
I
I
I
I
I
9.9
13.2 -13.2 : 9.9
9.9
9.9
-13.28
O
26.4 : -9.9 -9.9
O
------ -----r----- ----- ----- ----9.9
O
-9.9 : 65.64 22.92 9.9
-9.9 122.92 65.64 O
9.9
9.9
I
O I 9.9
85.44 22.92
9.9
O
I
9.9
9.9 22.92 85.44
O I O
862
-
------------------------ 11 • ld(>alizuC/o/1
COftliel15U1tlio los grados de Wwrl.ad J'otaciolt¡,.ües,
honzoruutcs paru ese tirJO de pórtico:
9544.4
[k cB] = [-11168.0
C/'lCCmtJaf11DS
(1111(//111("(/ (le (((
e:;¡
rHU!lI;,
la sig/úottc fnatriz de geetos
-11168.0]
24163.0
PÓrtico TitJO - 1
El nóruco TirJo 1, carresrJOI1diente al eje 1 de la estntctlua, DesrJltés de llevar a catlO lus
opemciOfteS uWn)'Jiudus eVLCO/tlrW1tOS la siglticltte matriz de efecto:> horízontates rJaru ese tirJO
de rJórtico:
[2] ......- .....- -...... [2]
,
I
o
0
I
0
I
0
I
\ltTI
J
\'
\\\\
,,
Pórtico Tipo 1
[k el] = [10124
-112"3
-1!"33]
29696
proeCítemos u trulvJomtur lus 11tutriees de Los r¡Órticos u los grados Ii!' Lilrwrtuli lite lfA
estmct/W4. elt Los liiuJragmus, Pura euda 1,1.ItO de Los r¡órttcos rtelJemos eVLcovLLrur Lu matriz vlii,e
aos pennita reuLizur lu tYUJt'~Jonnaciólt,
/\lwyu
Trw!:0Ómtuciém :.te coordcnalias de l1órtico a coordenalias de toliu Lu estntctJua
I
Pum eudu y¡órüco se liefLltelt lios plH1tCJS a 1:1 b Los C/taLes en este caso se escogierc)f1, en los
extremos lid nóruro. COIt lus coorlieftulias lie los lios p/1,l1tOS se calC/tlu d lie aCH,erdo con 11A.
eCltuciém (11-36); 1:1 con este valor se calC/tla el Vfj!lor liel sen a LJ cos a 1:1 con las cooyc,{el1alitAS lic
Los (elttros de vnusu elt cadu YJiso el valor de r. Lus coordeltalius del centro ¡te fnusu son:
PtMa el piso 1
Pum el rJiso 2
Xl =5 m
x2 =2.5m
YI = 3m
YI =3m
Per Lo tanto. Los siglüelttes son los liutos para enconrrur cada Imu de lus mutrices lie
trw1sformacióvL liel pórtico lie IUt grado (te libertali PC)f' r¡iso. u tres grudos lie litJertali r¡or
piso, lie am,erdo con tos gralios de !itJertali lie los liiaJragmas.
UF
Tipo
Xa
Ya
Xb
Yb
1
1
1
/\
B
B
O
O
10
5
O
6
O
10
10
10
O
(\
')
o
o
o
2
/\
B
e
d
10
10
6
6
(¡
6
6
6
()
868
a
cosa
sena
r2
TI
O
O
90°
90"
<JO"
1
1
O
O
3,0
-3.0
3.0
-3.0
O
O
O
1
1
-
) .o
2.')
0.0
1
-2.5
-S.O
Dinámica esiructural aplicada aldiseño sísmico
y LlAs f'tllAtrices de trrítvL8'onnlAdón son LlAs siglüentes:
1 :0
O:O
-.3 :O
~
[TI] = o-ii [T2 ] =
~
O :O
l0t3
1
O
O O
-3 I O
---1---O II 1
I
O II O
O :-3
O
O
O
-O
1
5
-
[TA ]=
O :0
1 :0
--.--2.5 : O
---1-O
I O
---lO :1
--l-O :0
O
1
O
O
- 2.5:
O
--r--
[TB ]=
[Te] = ----1---O
O
I
I
O :I 1
O :-5
LIA C/1,lAJ YJor ejevnr' Lo, rIlAn;¡, el pórtico deL eje 1 Vj,()S wv¡,d,1,ce lA LIA sig/üente f'ttlAtriz de rigidez deL
t'Jórtico rlt.Ma eJectos horizolllrües, expresarLa efl ténnüws de Los gnlLdos de LibertlAd uLe Los
uLilAjruglnas de LIA estrHctluu.
10124
O
30371
-------11233
e
-33698
O
O
O
--
O
O
O
30371 : -11233
O
O II
91112 : -33698
---------r-------33698 I 29696
I
OI
O
I
-101090 I 89087
O
O
O
--
O
O
O
-33698
O
-101090
------89087
O
267260
1
U Ix
U Iy
v.,
U 2x
U 2y
U 2z
M(J,triz de rigidez de toda LIA estniCtlMa
SlunlAltdo LlAs cinco vHlAtrices lij/H' se ohtíenen de los t'!órücos, enccmtrUf'lWS La matriz uLe rigidez
uLe lIA estntctlUIA,
J-gdl
20247
O
O
19089
o
O
------- -------22465
O
O :
UIx
55839
O -341790
UI y
301530 :
O ------- --------
U lz
------oT-59391
O -22336
o:
55839
-341790 :
O
O
O -22336
O : -22465
O
O
O
U 2x
O 59313
O -65886
-65886
1413300
U 2y
U 2z
AhOrrA ddleV1tOs encontrar la mlAtriz de mlAsa, D(/tdo lijne Los grndos de Ebert(/td de Los
dilAjrag f'l'J,IAS se colocaron en Los centros de mas lA, LIA matriz de masa es diagonal. Los datos
necesraríos son Los sigt,üev¡,tes:
piso 1
/vea Al = 10 rn • 6 rn = 60 rn 2
M lASlA m¡ =60 rn 2 • 0.800 Mglm2 =48 Mg
M aSIA RotlAdOftlAL = (rnl/AI)Jo = (48 Mg /60 rn 2). (63.10/12 + 103 • 6/12)' rn 4 = 554 Mg- rn2
-------L864
Piso 2
Areu A2 = 5 m . 6 m = 30 m 2
M usu m, = 30 m2 • 0.800 Mg/nr' = 24 Mg
Musu Rotuciof'Lul = (mI/AI)J o = (24 Mg 130 m 2) • (63·5112 + 53.6/12). m 4 = 122 Mg· m 2
Lj lu Inutriz
c{c InlA.5U tiene
sig /tienteJonnu:
O 1I O
O II O
24
O
O 24
O
O
U 1x
O
O
U Iy
U 1z
O 122 : O O
OL148
O -O
I
O
O 1 O 48
O
O
[M]=
Lc"l
O
O
--- --- ----1--- ---
O
¡
¡
L
O
I
O : O
O
___ o
U 2x
O
U 2y
O 1 554
U 2z
tcH,{tL(Íones de IJ1,OVill'lÍevlio plMU vitll'uciCHt Libre
1
I
tus ec/tUCWlles ({e InovÍflüento puru viLlrucióft Libre son lus sigtüentes:
24
o
o
24
ro
j
I
,
o
--- --o o
o o
o o
l
o
o
I
I
122
I
o
o
o
I
I
I
--0-:48-
o
o
o
--o
o U lx
o {] Iy
o
20247
o
U Iz
___ o
___ o
48
o
o
Ü 2x
Ü 2y
o: o o
555
U 2z
o
o
I
I
o : -22465
o
o
o
19089
I
I
o
o
+ ------------o
-22465
o -22336
o
55839
301530 :
o
------OT-59391
o:
-341790 :
o
o
o
-22336
o
o
55839
-341790
o
o
o
o
o
------- --------
59313
-65886
o
o
o
-65886
141:'>.1)() •
EUl,u(Ím1es de fl'LOvÍfl'Lief'\,to I'luru excituciéH'\, el'\, lu Lluse
Puru excituciÓft eVl Lu tluse ctebelnos
I
I
I
241
r6
O
24
d~fil'Lir
O
I
I
O
I
lu mutriz [y] primero:
O
O
O 1O O
--¡
O 122: O O
-- --- ----1--- --O O O 148 O
I
O O O I O 48
I
O
O
O
O
I
I
O
O
O
---
O
O
O 555
Lus ec/tuciovH's cte 11tCviWliclttO ruru excituciÓlt en lu tllí\.se son.
24
o
o
--o
o
o
o
24
o
o
o
o
---
o: o o
o: o o
122 : o o
----r--- --o 48 o
o : o 48
o: o o
I
o
o
o
---o
o
555
o
o
o : -22465
o U Ix
o 19089
55839 U l y
o -22336
o:
o 301530 :
o -341790 V l z
o
o
------- ------- ------oT-59391 ------- -------o
o
o V 2x
-22465
o:
o -22336
o 59313 -65886 V 2y
o 55839 -341790 :
o -65886 1413300 V 2 z
20247
-24x o x
-24x OY
-0-
--48x O X
-48x OY
-0-
•
365
iiuu, .ica estructural aplicada al diseño sísmico
1.3.2 Diafragma Flexible
En la Sección anterior se discutieron los factores que intervienen en la decisión de si un
diafragma es rígido o no. Además se elaboró ampliamente sobre el procedimiento para
formular las ecuaciones de equilibrio dinámico en el caso de diafragma rígido.
Desafortunadamente para el caso en el cual el diafragma se considera flexible no existe
un procedimiento general para implantar la idealización de diafragma flexible, como sí
ocurre con el de diafragma rígido. Esto conlleva mayor criterio del ingeniero que utiliza
estas técnicas con el fin de lograr idealizaciones adecuadas.
En general [Carcía, 1985] existen diferentes enfoques para clasificar los diafragmas
flexibles. Los tres más conocidos son: diafragmas flexibles uniformes, diafragmas con
huecos e irregularidades y por último diafragmas rígidos unidos por elementos
flexibles.
'
h z: 1.0 ID
b O:UlJ
=
I=bh"
A =bl, -=
L==6 ID
E=4 I(J
El siseen
e == co x
s= sen o:
p=E~~
~=A
Figura 11-28 - Diafragma flexible de un puente continuo
Dentro de lo que se puede clasificar como diafragmas flexibles uniformes hay un caso
muy común que es un puente continuo, como el mostrado en la Figura 11-28. En
general un puente recto como el mostrado, en el sentido longitudinal de la vía se puede
considerar como una estructura de diafragma rígido. La losa del tablero del puente es
alargada, a un punto que cuando se le solicita por parte de una carga horizontal en el
sentido transversal del puente, la hipótesis de diafragma rígido no es válida, por lo
tanto esta flexibilidad del diafragma debe tenerse en cuenta.
Una manera de enfocar la solución del planteamiento de las ecuaciones de movimiento
de una estructura de diafragma flexible, tal como el puente mostrado en la Figura
11-28, puede ser el siguiente procedimiento:
A cada uno de los elementos de soporte del puente, pórticos y estribos, se les calcula
su rigidez ante cargas horizontales en el sentido mostrado en la Figura 11-28. Los
grados de libertad generales de la estructura se plantean tal como se muestra en la
figura, como un desplazamiento transversal y una posibilidad de giro, en todos los
puntos de interconexión entre el diafragma y los elementos de soporte. Para tener en
cuenta la rigidez del diafragma, este se supone compuesto por vigas colocadas de tal
manera que el alto, h, de su sección esté colocado horizontalmente y el ancho, b,
verticalmente, como muestra la figura. La masa puede concentrarse en los grados de
libertad traslacionales tomando la masa aferente, o bien generarla por medio de la
matriz consistente de masa de la Sección 11.2.1. El siguiente ejemplo presenta estos
conceptos.
866
AholIvüci t
:/]
1.1 •
1 (U.:'.(U IJ.ll\.. U/H·
u ............ ~ • . .
_
Ejemplo 11-7
Q/teref'VWs /"lLancmr Las ecuacíoues de ¡novimie~tCO, en se~tCido transversaí. de fU1 /"lItCl1t(,
CClIttÜtIW. Se trata de IUt /"l/tente de c/w.tro Iuces de 12 f'n, CClIt Itna caLzada de 6 f'lt de avu:ho U
0.5 m de espesor manzo,
~
I
I
Figula 11-29 -
Estru~ura
del ejemplo 11-7
Elt S/1.S extremos halj lUtOS estribos lijli,e (-tan soporte a Las cargas verncales por medio ae 1tI1
aYJ0l10 eLastol'l;Ri'ico eL C/t,aL remüte aespLazamiel1tos tOftgitltdü'LaLes fj rotacíones con res~l('clo
u /tn eje verticaL rJeYO rescrÜtge~1 maLlij/úer Cipo de despLazamiel1co tramversaL. Los pórticos vil'
apoljo, de Los Cli,fí¡Je~; ¡LCtfj tres espadados cada 12 m, ÜeftCI1 6 m de Lltl con riLas drclüures vil'
1 m I;{~ diGÍvVl,etro Ij 6 m de aLt/ua, Las vigas deL nóruco tiene Iuta sección de 1 m de atto 1:1 OJO
In de a~tdw, Todos Los eLentelttos estGÍlt constYlüdos COf1 concreto de reststeucí« 30 ."v1P(;j., EI1. !(~
Fíg/tra 11-29 se mltestra eL plt,evLte.
Prunero de/)ef1tOs eI1,W¡ttrr;tr Lu ri0i¡;¡~z a:r"L~ ccwJ¡~S horizmttaLes de Los pórticos de apoljo vid
Se determÍltalt Las matrices de rigidez de Los eLemelttos en coordef'Ludus gLotluLcs W')
r"te~1.Ce,
pórtico.
$= 1.0 m
1 =mjl4 /32 = 0.0982 m"
2
A = nllll4 =0.7854 m
L=6m
E = 4000 ...Jr e = 22 000 MPa = 22 GPa
EL sistema de coori-tel1adas LocaL está orientado con Slt, eje x en i-tirección ¡Lacia al-Jajo, por w
tanto eL GÍltglt,Lo ex es 90",
e = cos ex = 0.0
s = sen ex = 1.0
P = EIIL3 = 22 GPa . 0.0982 m" I 63 m3 = 0.01 GPa . m = 10 MPa . m = 10 000 kN/m
13 = AL 2/I = 0.7854 m2 • 62 m2 10.0982 m" = 288
86'7
I
mica estructural aplicado al diseño sísmico
120
O
O
2880
O
360
O -2880
O
360: -120
0
1
I
no = [~;~_L~;~]
O
1440: -360
-----k col I k col
-120
O -360
O -360 I 120
ba!
bb
O -2880
O:
O
o 2880
360
O
no: -360
O 1440
360
O
----- ------
-----,-----
____
o
J
h= 1.0 m
b= 0.70 m
4
3/12
1 bh
0.0583 m
2
A=bh = 0.7 m
L=6m
=
=
E =4000...Jr e
=22 000 MPa =22 GPa
El sistelna de coorcievLadas locaL wU1Cicic con el global por lo U;tv¡,to a es 0°
e =cos a = 1.0
s= sen a= 0.0
3
3
0= EIII} = 22 GPa . 0.0583 m" / 6 m = 5.94 MPa . m = 5 940 kN/m
2
2
21
2
~ = AL 1 = 0.7 m • 6 m 10.0583 m" = 432
¡
U llJL Inatriz de rigidez del ctemento de vi01JL de 6 vn de 1Hz es llJL siglúeltte·
2566.7
3r
O
O
71.3
O : - 2566.7
213.8 :
O
O
O
- 71.3
213.8
[kVi~] = 10 Xl=--i5-66~i -~!~.~----8.?.?:}t--i566~i -~~!~.~- 427~
I
O -71.3
-213.8:
_ _ _-+-_
_+--1O I 213.8
427.5 :
O
O
-
71.3 -213.8_
1- 213.~ I
855.1
AlLOrlJL delJ('wws encontrar la V1tlJLtriz de efectos horízontníes plJLra cadlJL ti~,o de VJórtico.
'Iüciamos con el ~Jórtico del eje A. La IWf1~~v\'dlJLtltra de It/1~~tc)S Lj clevneltLos es l{;t si0/Üelttc:
)
Pórtico Tipo A
UllJL matriz de ri0idez del pórtico desptú's de l\,tüler eUmiltado llJLs deJonnacimtes !AXiales
elementos es.
al' los
_-------------------------------------86R
' ..............
Alwru ctchefltOS coltdeV1sur Los grudos ae Libertud ae rotueic'm en Los VL/idos. Lu Vltutriz ultterior
se rJurticLoltu ae Lu siglüelt(e mUlteru puru Logrur esto:
- /'l1i('ltte
Vu.:!to
240.0 : 360.0
~
[k sv
]=103
x 360~-:22953­
[
360.0: 427.s
1
_ ae Itl1
'S¡H'c1.o
lCOS ¡,te
ares ¡,te
Lj 0.70
lit ilA
1
Figura 11-30 - Grados de libertad del diafragma, Ejemplo 11-7
Lu i:wersu ele [k~v] es:
[k ~
1.10 :,te!
Les &icl
•
e
]-1
=[
Y
.45132 X 10-6
-.84065 X 10 -7
[k c] = [[ k~v
l- [k~v ][k~v
7
-.S4065 X 10.45132 X ¡0-6
r[k~v ]]
=
]
[240000]- [95213] = [144820]
-l- gdl
[k~ ] = [144820]
uh
esta líLtiVltU vnutriz. Lu e/tuL en este (Uso tielle dimeitsimtes ae 1 ~;or 1. correspmtae u Lu
vitutriz ete efectos horizontales de Los ¡1órticos del rJlteltte. eH et selttido cid ¡1LUV10 cieL ¡1órtico.
U
/'lor Lo
Los grucios de Libertad deL diajrugl'lta se disrJoltelt como Vltliestru Lu Figlua 11-30. Pril1tem
detemlÚtaflWs Lu matriz de rigiciez ete Las vLgus del dLujl'agma:
h = 6.0 m
b = 0.50 m
3/12
1 = bh
= 9.0 m4
869
Dinámica est rrtct Ilra I aplicada al diseño sísmico
A = bh= 3.0m2
L= 12.0 m
E = 4 000 ...Jrc = 22 000 MPa = 22 GPa
EL sistefnu eLe cooreLevLueLus LocuL coivLcLeLe COVL eL gLolcluL ror Lo tanto a es O°.
e = cos a = 1.0
s::. sen a= 0.0
p = EIIL3 = 22 GPa' 9 m 4/123 m" = 0.115 GN/m =114583 kN/m
13 =AL 2I¡ =3 m 2 • 12 2 m 2/9 m" =48
Ij
Lu Vf'tutriz eLe rigieLez eLeL eLevVleftto de vigu de 12 111, de Llll es Lu sig¡üevLte:
5500
O
O
8250 :
O -1375
8250
8250 66000 :
O
------ ------5500
O
O -- 8250
r
O: -5500
O
O
1375
[~;~-~~;:_]
O -1375
-8250 :
33000
------ ----- =
k vid I k vid
O
O
ba ! bb
1375 -8250
O
8250
33000 :
O -8250
----0-:--5500-
O
1
66000
EL eSl/jIl.cvvLt~ eLe eftSul·'j'lJJLuje es eL sig,üevlte:
-l- nudos
k~b
O
k~a
k;a + k~b
k~b
k~a
k;a + k~b
O
O
k;b
O
O
O
k;b
O
O
O
1
O
2
O
k~a
k;a + k: b k: a
3
k:a
5
O
k: b
4
Dcsr'~,és eLe eLil1'1útur Lus eLejorVf'tucLcmes uxiuLes de Los f'LcfnCfttos eLeL diuJmgvnu Ij Los grudos
de Li/cJertueL eLe Los U~Joljos de Los vtltdos 1 Ij 5. se ohuene Lu sigiúmte I1tutriz ete rigieLez de Lus
v~gus de diuJrugmu:
-l-gdl
2750
-1375
-1375
2750
O -1375
-1375
2750
O
O -8250
O
8250
O
O -8250
O
8250
O
O
U",y
O
U 3y
8250
U 4y
O
O
66000
33000
O
O
O
U 1z
O -8250
O
33000 132000
33000
O
O
U 2z
33000
O
U 3z
33000 132000
33000
U 4z
33000 66000
U sz
-8250
8250
--
l
O -8250
O
O
O -8250
8250
O
O
8250
O
33000 132000
O
O
O
O
O
Alwm hUIj lII'te ilteL,ür et efecto (.te Los rórticos. Esto se Logm S/1.Vf'tUftetO Lu rigidez de curgus
LutemLes de cudu pórtico elt Los grudos ete LillCrtud U 2y ' U 3y Ij U 4y . [fttOfteeS Lu Vf'tutriz de rigidez
de Lu estmctl1.m en S/1. totuLidud es:
870
11 •
}<IeaUZ(lcJ()Il (/lIlUIIUC(l (le IU eStrHUI{rU
J-gdl
2894.8 -1375
O
8250
O
O
U 2y
O -8250
O
8250
O
O -8250
O
8250
U3 y
U4y
O
66000 33000
O -8250
O 33000 132000 33000
8250
O -8250
O 33000 132000
O
O
O
-1375
O -8250
2894.8 -1375
2894.8
O -1375
-8250
O
O
8250
O
O
I
O
O
O
8250
O
O
O
O
U 2z
33000
U 3z
33000
U 4z
U sz
O
33000 132000 33000
')
Ú
U 1z
66000
Pum ge¡temr Lu vnutr~z de Htusu de Lu estnl,ctltm se /iJ~L~zu Lu ¡'l'tutr~z cons.sreure de
cuda eLemeltto l;:ieL d~aJragvna. Lu Inasu total deL cLevl'u~nt.o es:
HtIA,sU
iJI'uU
m = L h b Y= 12 m • 6 m • 0.5 m • 2.4 Mg/nr' = 86.4 Mg
m1420 =0.206 Mg
lj
Lu
Inutr~z
de masa couststeute deL eLnnento es:
[m] =
O
O:
32.14
54.38 :
14.42
O
O
11.12 -32.14
54.38 118.66 :
O
32.14 -88.99
------- ------,------- ._--_._-- _._---14.42
01 28.84
O
O
O
O
l------
O
o
11.12
32.14 :
-32.14 - 88.99 :
O
32.14 -54.38
O - 34.38 118.fi6
Se I1,tWzu eL m;5vno esqttelnu de ensaHü,Ll/Lje q/te r)l/Lra La matriz de ;'~g~(;tez Ij se tl/LdLU¡t Lus
coL,u1-utuS corresI'Jmtd~e~ttes l/L Los aI'Joljos Ij el l!/l.s musus corresponzuentes u Los grados
de libertad ux~uLes de Los eLe¡J1.e uros. Lo e/tuL nos COlt(;Ütce u Lu s~gtüe~tte ml/Ltr~z de musus de Lu
estrw:t/ua.
f~Lus Ij
.J.-gdl
1,
I
64.28
11.12
11.12
64.28
11.12
32.14
O
32.14
O
11.12
64.28
O
O
32.14
O
-32.14
O
O
O -32.14
O
O
U 2y
O -32.14
O
U 3y
O - 32.14
U 4y
O
O 118.66 - 88.99
O
O
O
()
32.14
O -88.99 237.32 -88.99
O
O
32.14
O -88.99 237.32 -88.99
O
-32.14
O
O
O -88.99 237.32 -88.99
O - 32.14
O
O
O -88.99 118.66
Ulz
O
Lu mu¡r~z [y] es Lu s~g/üe/tte.
871
32.14
U 2z
U 3z
U 4z
U sz
iinúmica estructural aplicada al diseño sismico
[y]=
1
-75.40
1
- 86.52
1
-75.40
O
-32.14
O
-32.14
O
O
O
32.14
O
32.14
o L~s eClt~Cio¡teS ae vltOvLf1Üento tr~¡tsvers~L aeL rJl1,e¡tte son:
r
64.28
11.12
11.12
O
O
O
O -32.14
O
O
32.14
64.28
11.12
O
11.12
64.28
O
O
32.14
32.14
O
O
118.66
- 88.99
O
O
32.14
O - 88.99
237.32
- 88.99
- 32.14
I
O
32.14
O - 32.14
O
O
-1375
-1375
2894.8
O -1375
32.14
O - 88.99
O - 32.14 ,
2894.8
O -32.14
O -32.14
O
O
O
237.32 -88.99
O
O
O - 88.99
O,
O
237.32
O - 88.99
O
- 88.99J
118.66
O
8250
O
O U 2y
- 75.40
-1375
O -8250
O
8250
O U 3y
[ - 86.52
2894.8
O
O -8250
O
8250
U 4y
-75.40
O
O
66000
33000
O
O
O
u1z
O - 8251)
O
33000 132000
33000
O
O U 2z
- 32.14
_ 32.14
33000 132000
33000
O U 3z
O
-8250
8250
O -8250
O -8250
O
O
8250
O
O
O
33000
O
O
8250
O
O
O
33000
U 4z
32.14
33000 166000
U sz
32.14
132000
{x }
o
E¡t caso ae (;jIte (;j/tCmVltOs ItÜHzur 1m VltoaeLo ae mus~ COltce¡ttrua~ p~m excitacíones
trunsversaíes ~L eje aeL P/1,e¡tte, te¡taríaf1tOs (;jIte h~cer Los sLgIÜe¡ttes ~jl{5tes. Se cmt(,i.e¡ts~¡t Los
0f~aos ae LLtJertC¡J,a rot~cLOIt~Les ae LCJI vnatrLz ae rLgLaez ae La estntct/tm. Pum eL efecto, se
rJ~rüdonu L~ vnutrLZ ae Lu sLgH,Lenre vn~¡tem:
J,gdl
2894.8 -1375
o 8250
o
o: -8250
o
-1375 2894.8 -1375 :
o -8250
o 8250
o
o 8250
o -1375 2894.8 :
o -8250
o
------ ------ ------T------ ------ ------- ------ ----01 66000 33000
-8250
o
O
o
O
33000
-8250
o:
o
33000
132000
o
o
8250
o -8250 :
O 33000 132000 33000
O
o 33000 132000 33000
o 8250
o
o:
O 8250 :
O
O
O 33000 66000
O
U 2y
U 3y
U 4y
Ulz
U 2z
U 3z
U 4z
U sz
ose h~ce La sLglüeltte orJemdó¡t ae coJtaensacLón. oVJteJüe¡tao Los sLg/Üe¡ttes resltLtCl],aos:
872
1.1
-HleUl/Y;UCIUIl (lIllUI/UUI ue '(( e.'>tlln I H/«
-l-gdl
442,0]
1274.3 -1080.4
[K c ] = 10 3 x -1080.4
1716.2 -1080.4
[
442.0 -1080.4
1274.3
U2Y
U 3Y
U 4y
l1tt/LSt,L COltrpV1Jrudt/t se ItttLizu Lt/t f1tt/tSt/t uJerevLte t/t cudt/t gmdo de LLLJertt/td trt/tsLudoI'Lt/tL.
[slt/t 1'JiLt/tSt/t qfercv¡,te es
eOlitO
I
¡
m
= L h b Y= 12 m . 6 m . 0.5 m 2.4 Mg/nr' = 86.4 Mg
y las ecuaciones de movimiento:
\86.4
,¡
j
i
l
-1080.4
3
1716.2-+----_I_::_~_::]{~::} [=::::]{X
:l{~:: ')1 +10 X[_-_~~_~:_~-+-__
O 86.: !
O 86.4 J U 4y
O
=
442.0 -1080.4
1274.3
U 4y
-
o}
86.4
•
I
j
1
1
¡
I
i
,#
La solución del caso presentado en el ejemplo anterior se facilita por el hecho de que el
diafragma tienen forma alargada y se puede idealizar como una viga acostada.
Desafortunadamente este no es el caso en muchas estructuras. En la Figura 11-3 l se
muestran dos casos de diafragmas flexibles, los cuales no son idealizables por medio de
vigas.
I
Figura 11-31- Diafragmas flexibles irregulares y con huecos
En estos casos, probablemente, lo más conveniente es simular la rigidez de la losa por
medio de elementos finitos, de tal manera que se dispone un pórtico tridimensional que
modela las vigas y columnas de la estructura. La losa en si se simula por medio de los
elementos finitos. Debe tenerse especial cuidado con los grados de libertad de los
elementos finitos, pues la interacción CO!l los elementos de pórtico solo se realiza en los
nudos de interconexión y es probable que haya necesidad de generar nudos intermedios
dentro de las vigas, con el fin de que haya transferencias de cortante en el plano del
diafragma entre los distintos elementos en puntos diferentes a los nudos de
interconexión del pórtico. Además, el ingeniero debe estudiar cuidadosamente el flujo
de tuerzas dentro de la estructura con el fin de definir que fuerzas internas del
diafragma deben ser resistidas por los elementos de pórtico y cuales por la losa. La
masa del diafragma debe asignarse a cada nudo de acuerdo con su aferencia.
Nuevamente se hace un llamado de atención al criterio que debe emplear el ingeniero al
realizar modelajes de diafragmas flexibles por medio del método de los elementos
finitos.
in/unica estructural aplicada al diseiu» sísmico
1.3.3 Diafragmas rígidos unidos por elementos flexibles
En muchos casos partes del diafragma de una edificación se pueden considerarse como
diafragmas rígidos parciales, que están unidos con otros diafragmas rígidos contenidos
en el mismo entrepiso. En la Figura 11-32 se muestra un ejemplo de este tipo de
edificaciones.
I
Figura 11-32 - Diafragmas rígidos unidos por elementos flexibles
En este caso el procedimiento para generar las matrices de rigidez y de masa es similar
al presentado en la Sección 11.3.1, con las siguientes diferencias: lo indicado en la
Sección 11.3.l(a) se realiza de una manera similar. En la Sección 1l.3.l(b) para los
pórticos de los ejes 2 y 3, entre ejes B y e, la viga no debe hacerse inextensible, pues los
dos diafragmas no pueden estar unidos a través de una viga infinitamente rígida para
deformaciones axiales. En todos los otros pórticos las vigas son inextensibles. Esto
quiere decir que para los pórticos 2 y 3 hay dos grados de libertad horizontales por
piso. Uno de ellos se ensamblará en los grados de libertad del diafragma a y el otro en
los del diafragma b. Lo indicado en las Secciones 11.3.l(c) y (d) se lleva a cabo de una
manera similar a lo presentado allí. En este punto se tienen los tipos de pórtico
mostrados en la Figura 11-33, con sus correspondientes grados de libertad horizontales
indicados.
vl~s
I----i-
-----
-1-
flexlb#e$ axlalmente
-
t
.".". .,L..
",:" ..~:,'
-
Pórticos ejes 1 y 4
Pórticos ejes 2 y 3
Pórticos ejes A a D
(cuatro en total)
(dos en total)
(cuatro en total)
Figura 11-33 - Grados de libertad horizontales de los pórticos de la edificación de /a Fig;.¡ra 11-32
La estructura tiene en total diez diafragmas (dos por piso), donde cada uno de ellos
tiene tres grados de libertad (dos traslacionales horizontales y uno de giro con respecto
a un eje vertical). Esto conduce a un total de treinta grados de libertad para toda la
874
1
estructura. Para efectos de lo indicado en la Sección 11.3.1 (e), deben determinarse unas
matrices de transformación de coordenadas [Tpl que relacionen los cinco, o diez grados
de libertad tras1acionales horizontales de los pórticos, con los de la estructura. Los
coeficientes que contienen estas matrices se calculan de la misma manera que se indicó
en 11.3.l(e), teniendo cuidado que en todos los pórticos, excepto los de los ejes 2 y 3,
solo hay conexión a uno de los diafragmas del piso. Para los pórticos de los ejes 2 y 3
los grados de libertad del lado de los ejes A y B se conectan a los diafragmas tipo a y los
del lado de los ejes e y D a los del diafragma tipo b. El ensamblaje de la matriz de
rigidez de la estructura se realiza de la misma manera que se indica en la Sección
11.3.1(f).
I
!
Para determinar la matriz de masa, se trabaja de una manera similar a lo indicado en la
Sección 11. 3.1 (g). La masa correspondiente a la zona entre los dos diafragmas debe
asignarse por área aferente a cada uno de los diafragmas, teniendo en cuenta que esto
produce una pequeña excentricidad de masa, la cual se puede ajustar colocando las
coordenadas del centro de masa desplazadas hacia el centro de la edificación la
distancia apropiada para la masa del ala de la edificación más la masa aferente de la
zona central.
El resto del proceso para obtener las ecuaciones de equilibrio dinámico de la
edificación, es el mismo indicado en la Sección 11.3.1.
11.4 Sistemas sin diafragma
En muchos casos la edificación no tiene un diafragma claramente definido. Este caso se
presenta con frecuencia cuando se emplean cubiertas lívianas. Es común en estos casos
dejar un entramado de vigas que sostienen los elementos de cubierta, pero que no
conforman un diafragma. En este caso la masa aferente a cada nudo de interconexión
entre vigas se coloca allí, dándole posibilidad de tener desplazamientos en las dos
direcciones horizontales ortogonales.
Debe tenerse en cuenta que en estos casos las ecuaciones de equilibrio dinámico tienen
un número mucho mayor de grados de libertad que las correspondientes cuando hay un
solo diafragma, pues cada grado de libertad de cada una de las masas corresponde a
una ecuación de equilibrio. Este hecho ha-=e mucho más dispendiosa la S01UclÓl1 del
sistema.
11.5 Excitación en varios apoyos
Supongamos una estructura, como la mostrada en la Figura 11-3-1-, a la cual se le
introducen unos desplazamientos, {Xo}, en sus apoyos, sm que se aplique ninguna carga
en los nudos libres de la estructura, que no corresponden a apoyos, pero los cuales
tienen debido al desplazamiento de los apoyos unos desplazamientos {XEO } .
De acuerdo con lo presentado en la Sección 8.7, se tiene es este caso:
(11-69)
Expandiendo la ecuación anterior obtenemos:
(11-70)
y
'Rnámica estructural aplicada ,,; diseño sísmico
01-71)
De la ecuación (11-70) podemos despejar {XEO} por medio de:
(11-72)
} contiene los desplazamientos de los nudos no apoyados de la estructura,
El vector {X EO
debido a los desplazamientos de los apoyos, y [y] corresponde a la misma matriz
presentada en la Sección 11.3.1(h), como se verá más adelante.
l
°--+--~':1»1 '
x
r
o
~;<
u
~~"""-~I~=.
.L -
f
nudos libres de la estructura
i
%
~~':
J
-~------
L
Figura 11-34 - Estructura
apoyos de la estructura
someüa« a desplazamientos en sus apoyos
Ahora estudiemos la respuesta dinámíca de la estructura para el caso de una excitación
dinámica en los nudos de apoyo de la estructura. Al plantear el equilibrio dinámico de
la estructura, empleando la segunda ley de Newton y el principio de D'Alambert,
obtenemos para todos los grados de libertad:
[Ml{X} + [K]{X} = {o}
(11-73)
Que puede ser particionada de la siguiente manera, separando los movimientos de los
grados de libertad no apoyados de la estructura de los de los apoyos:
(11-74)
Expandiendo la ecuación anterior, y trasladando al lado derecho los efectos de los
apoyos, obtenemos:
[M E ] { XE} + [KE]{X E }= -[MEO]{X O} - [KEO]{X O}
(11-75)
De acuerdo con la Figura 11-34, {U} corresponde a los desplazamientos relativos entre
la estructura y su base, y se pueden expresar, utilizando la ecuación (11-72) como:
(1l-76)
Por lo tanto:
(11-77)
Que al ser derivada contra el tiempo conduce a:
87f;
11 • taeauxacion ((I/U/IIlICa (le /(/ eSI
nlCllll"U
(11-78)
y al ser derivada nuevamente, a:
,
,
I
I1
j
1
{X
E}
=
{ü}+ [y ]{xo}
(11-79)
Reemplazando (11-77) Y(11-79) en (11-75), obtenemos:
Pero de acuerdo con la ecuación (11-72):
( 1]-81)
y entonces parte de la ecuación (11-80) se convierte en:
01-82)
1
1
Lo cual prueba que el desplazamiento como cuerpo rígido de la estructura, no induce
esfuerzos internos estáticos dentro de ella. De acuerdo con esto, entonces, la ecuación
(11-80) se convierte en:
[ME]{Ü}+ [KE]{U} = -[[ME][Y]+ [MEO]]{X O}
(11-83)
En la gran mayoría de los casos las masas asociadas con los grados de libertad de los
apoyos son cero. No obstante, cuando se emplea la matriz consistente de masa, los
elementos que llegan a los apoyos tienen términos de masa en los grados de libertad de
apoyo.
Ejemplo 11-8
QIH:'reI1Ws eltcolttrur Las eCltaciov¡,es cünávl'ücas de 11wvirniev¡,to panA- difemttes COltdicic1/tcs de
excitación elt S/15 ay,ol1os, de IUta estrHcttua cmtsistcltte en IU1 y¡órtico r¡L¡AyuJ, corno et
HwstruC{O en la r-ig/ua 11-35. Todos Los etementos tieltel1 Ith ntód,üc¡ de elasticidaeL E = 22
GPa. Lus vigas tielten sccciém con h =0.50 m eLe alto l1 b = 0.30 m vte vutdw, l1 Las COlI1/1t1W"S
tieltelt sección de h = U.30 m y,or b = 0.31) m, Las musas de 10 Mg solo ticlten proyJiedades
truslaciollules. tanto horizOlttules corno verticales .
.t.t.tL
aPQYQ/1
/ ' "":">:
[TI
~
[[]
@]
[]J
[ID
[l]
LE
6m
.t- }m
.t.t- 3m
1
m
L
apQYQ
Figura 11-35 - Estructúra del ejemplo 11-8
í) _ _
011
Dinámica estructural aplicada al diseño sísmico
Debevl, forvvL/üarse ~as ew,acíovu~s de litOvíl/vÜeltto ¡'Jara tos síglúmtes casos: A - excítacíólt
IwrizontaL !:j verticaL diferCVIJC e¡t cada uno de Los ap0!:jos, B - Lu wLÍsmu excítacíón horizm'LtaL
m Los dos a¡'Joljos lj La vnísma excítacíó¡t verucaí en Los dos arJoljOS, lj C - no halj excitacíó¡t
verticaL lj Los dos apoljos nene La VJ'LÍsVJ1-a excítació¡t horizmttaL.
Caso A
La estntctl1,ra se iaeaLiza como Itl1- YJórtico pLalW, con SltS elementos aeJormat,Les lJIXiuLmc ¡'L te,
Lus rotaciones ae Los VL/taOS se conaC¡tSU¡'L, exceYJto Lus de Los upo!:jos, qw~ son cero. En Lu Figlj,ru
11-35 se vnnestran Los grados de Libertad asocíudos con cada lt/tdo.
I
La matriz de I'igiaez de La estYltctltra [Kh2x22' La w,aL Íltdl~,lje Los upoljos, se gmera sig/üe¡tdo
Los rJrocedimielttos convenctonzues de cmambLaje. lI~-cgo se ordCftalt sl1-sfLLas 0 coLiHitnas, de
ta~ vnancra l.íjl1,e Los graaos de Lit¡crtavi. corresYJo¡'Lcüe¡ttes a Los giros ete Los n/taOS l.íjI1,eae¡t en Lus
fiLas de Ut)ujo Lj Las coLluiu'Las de Lu dcred~u. Se reuLiza /tI'La cmtdensación de Los gruaos ac
~itJertud de Los giros. Asíse ohuene Lu matriz ae rigiaez con giros COI'Lae¡tsudos:
1
aOltde:
1
554.04
-549.28
-549.28
- <\~5A8 I - Q.55504 I
1.0512 -0.23254
554.04 -0.55504
- 4.9548 1 - 0.23254
1.0512
- 495.48
-0.55504
-0.55504
-4.9548
1.0512 -0.23254
-0.23254
-1.1751
1.1'/51
lJ751
-1.1751
1.1751 -0.94749
1.2835
-0.05191
561.90
- 6.5293
-549.63
1.2835
-0.11926
- 1.2835 -0.02180
-1.2835 -0.02180
0.11926
1.0668
-6.5293
-549.63
1.2835 -0.11926
561.9u
-0.11926
i
0.11926
0.11926 - 0.82317
-0.94749 -0.94749 -0.02180 - 0.02180
0.94749
0.94749
0.02180
0.02180
1.0668
-1.0668
1.0668 -659.72
-1.0668 -0.27608
·0.09747 -0.02523
0.08657
-1.0450
-0.08657
1.0450
v-,
-0.13904
0.064243
-1.0450 -0.09747
1.0450
01
-0.13904
o
o
o
o
o
-0.01090 -0.01090
- 0.09747 -0.09747
0.09747
0.09747
1.0559
-660.00
o
o
o
-1.0559
o
-660.00
o
o
o
Por Lo tcUtto es posit,Le caLmLar:
lj
I 0.08657 -0.08657
0.08657
- 0.08657
0.02180
-1.0450
-1.0A50
0.02180
-1.0668 - 0.09747
1.0450
1.0450
0.09747
0.02523
1.0668
-1.0668 -0.09747
0.09747
- 659.72 -0.27608 -0.02523
0.02523
660.82 -0'¡7608 -659.72
0.02523 -0.02523
-
-0.27608
-659.72
0.02523
1321.4
-1.3501
-1.3501
-659.77 -0.22563
-659.77
1321.4 -0.22563
- 659.77 -0.22563
1321.4
-659.77
- 0.02523 i - 0.22563
-1.3753
-1.3753
1321.4
II
I
I
I
o
o
o
-
o
o
o
o
o
o
1.0559
-1.0559
0.09747
u"
0.064243
1.2256 -0.32274
- 0.32274
1.2256
-6A256 -0.09020
-0.09020 -6.4256
0.01090
0.01090
l
0.09747
0.94749
0.94749
-0.11926
0.11926
660.82 - 0.82317
-1.2835
0.08657
1.1751 -0.94749
- 0.05191
-1.2835
-0.08657
I
-6.5293
560.26 - 549.07
-549.07
560.26
-6.5293 - ~.o5191
1.0512 -0.05191
-1.1751
1.2835
-1.1751
se ob uene:
878
11. •
(y] =
0.5000
0.5000
1.2154 -1.2154
U 1x
0.5000
0.5000
1.2154 -1.2154
U 2x
0.5000
0.5000
0.7168 -0.7168
0.5000
0.5000
0.5000
0.5000
0.5000
0.5000
0.7168 -0.7168
0.2340 - 0.2340
0.2340 - 0.2340
U 3x
U4 x
O
O
O
!
I
(1('
lit ('.'illlHllU ((
U sx
U6x
0.0004
O
0.9996
0.0004
O
O
0.9996
0.0004
U 1y
U 2y
U 3y
O
O
0.0004
0.9996
U4 y
O
O
O
0.0004
0.9996
U Sy
O
0.9996
0.0004
0.9'J96
la('(//lZ(/C10II HI/HI/lr/e(l
U 6y
tu f1tGtlriz de VJtusGts Iiefte LGt siglüenteJomtGt:
10
10
10
10
1
10
10
j
10
10
10
10
10
10
/j LGts eCli-Gtcimtes íte vVLOvivvLieltlo son LGts sig¡üelltes:
El vector íte LGt íteredLGt en LGt eC/Ü;¡ÜÓll wlterior corresrmtíte Gt LGts aceLemcicmes íteL terreVuJ eft
Los etro/jos de Lu estntWtm eVL el nltdo /j ítireccióft iltíticaítos uor eL sl1,perínítice.
C¡¡so B
tu estntCI/1,/(A se ideGtLizu de IHtU f1tGtftem igltuL Cíj11,e en el (Uso /\, pero Los gmítos de LitlCrlw;{
de Los UPO/jos se ig 11,GtLuft pum LGt ctirecciált x [.j rJGtm Lu ítireccióvL /j. Por Lo tanto LGt excitGtción
corresYJCmde Gt Ü o x /j Ü Oy elt Los Itltc\os l1(unero 7 lj R
Dinámica estruct ural aplicada a! diseño sísmico
EL wocediwLievLto es totalmeure altcilo00 al del Caso A. La vHatriz de rigidez de la estntctlua
[Kh2x22' la C/j,al iltdl1,~e Los ¡;l,rJO~OS, se gevLera siglúevLdo Los ¡JrocedimievLtos cov¡,ve/tCiovLaLes de
e/tsUlnbLuje. Litego se ordeftavL sus JiLus ~ COLI1.f'H/taS, de tuL mav¡,era Gj11.e los grados de
Libertad com.'s¡JOItdielttes a Los giros de Los V\,Itdos Gj/tcdev¡, ev¡, lasJiLas de alJajo ~ Las COLI1,Jl)tltaS
(,ú' La aercc/uA.. i/tcgo se igltuLwt Los des¡Jlazwnientos ~LOrizOlttaLes de Los V\,Iutos 7 ~ 8, ~ los
veruccues af' Los vltislnos It/taos. COftdl1.c:icltdo a IUta I·natriz [Khox20' Lw~go se realiza luta
coltdeVLSación de Los grados de Libertad de Los giros. Así se obtielte la matriz de rigidez con
giros cOltde Itsudos.
-0.07480
O
-0.07480
O
0.90285
O
0.90285
O
- 6.5158
O
-6.5158
O
0.02180
O
0.02180
O
- 0.19494
O
0.19494
O
2.1117
-660.00
-2.1117
-660.00
I
Por lo ta:llo es r'osikJLe caLutlar:
1.0
O
U lx
1.0
O
U 2x
1.0
O
U 3x
1.0
O
U 4x
1.0
O
U sx
1.0
O
U 6x
O 1.0
U ty
O 1.0
U 2y
O 1.0
U 3y
O 1.0
U 4y
O 1.0
U SY
O 1.0
U 6y
La mutriz vif' Inasus es La Vltisma deL Caso A.
Lus su:) lúe ntes
I::f
Las eClVlÚO/teS c;{,e 11wvil'llÍClltO son. ev¡, tonces,
8S0
.,.
evl, ~IA, eCI1,lA,cLóvl, IA,ltterLor corresuonde lA, ~lA,s aceíeracícnes etcl terreno en
los IA,YJo!jos etc ~IA, estntctltm en ~IA, etirecdém ¡wrizontlA,~ Ij en ~IA, etirecdóf1 verttcat.
EL vector etc
~IA, etcrccl~1A,
CCtSoC
LIA, eslntctJuu se ietelA,~izlA, ete t,UtU MtlA,11erlA, igltlA,~ lIjlte en el CIA,SO A pero tos gmetos ete ~LbertlA,et
ete íos IA,YJoljos se ig/tlA,~wt YJlA,m ~IA, etirecdóJt x Ij se c~ilniltlA,Jt plA,m llA, etirección Ij ete ~(ít vltLslnlA,
jomtlA, lIjlte se eLLmil1uroJ1 tos gLros elt los IA,poljos, Por lo tanto ~IA, excülA,dón correspcmete
11,ftLcuf11ev~te Ü Ox eJ1 Los 11l{,etOS n/ünero 7 Ij 8,
I
i
1
Ii
Fl proceetilniento es totaímente 1A,v¡,~.Logo IA,~ ete los casos 1A,/1teriores, LIA, f11lA,triz ete rigietez ete ~IA,
estntcttuu [Kh6x16' ~u CltlA,~ ütdltlje tos IA,YJOljos, se geJtem sigtüeJtdo los proceetivnLeJttos
COJtvCJ'U:iovtD!.les (;/,e cJtslA,lnbllA,je. eLilniltlA,luio llA,s (;/,ejomtIA,CiOf1.CS (A,XilA,~es ete ~lA,s viglA,s, Lttego se
oYíieJtwtmsji~DI.s Ij CO~I{.J'ltVLIA,S, ete tlA,l MtlA,ltem qltC los gmetos etc LitlertlA,et corresYJ0rtetielttes lA,
los etesYJ~lA,zlA,lnieJttos verticales Ij lA, tos giros (;/,e los It/{,("ios Wteetev~ en ~IA,S Ji~IA,S ete IA,tJlA,jo Ij lus
collunv~lA,s ete llA, etercd~lA" Lttego se igltlA,llA,ltlos etespluzUfniCJ'ttos IwrizmttlA,[es I.le los 11ltetoS 7 lJ
8. Uwgo sr relA,~LzlA, IUtU COltetCJ1SlA,dórt etc los grlA,etos etc [it¡crtlA,et 1.1e tos giros. Así se obtierte lu
lnlA,[riz ete rigietez con giros Ij etespllA,Z(A,f'!Ürfttos verucutes cmtetenslA,etos:
1
1
etmtete
U Sx
U 3x
-10965
16~]
22337
-13177
-13177
24537
I
U Ox
[K EO] =
- 128,29]
1804.5
[
-13040
Por lo tanto es YJosible mlclülA,Y:
llA, V!1lA,triz ete V!1IA,SUS es llA, sig lúertte
881
Dinámica estructural aplicada al diseño sísmico
lj LeAS eClteAÜOltfS "le IttOvívVLieltto SCWL
entonces.
\.
[MEKÜ}+[KE]{U} =-[M][y]{Ü ox }
EL vector de La derecha elt La ec/tacLón anteríor correspmtde a Las uceíeracioues deL terreno en
Los apoljos de La estntet/ua en LadíreccLóft horizonta].
•
11.6 Acople estático y acople dinámico
En los ejemplos que se han presentado en el presente Capítulo hemos visto que algunas
veces una de las matrices, de rigidez o de masa, o ambas, son diagonales. Vale la pena
hacer algunas observaciones sobre esta situación.
Para el efecto supongamos una estructura, como la mostrada en la Figura 11-36. Se
trata de una estructura de un piso con un diafragma rígido rectangular sostenido sobre
cuatro pórticos que hemos denominado A, B, C y O. Además la losa tiene una zona con
una densidad de masa y otra con otra densidad..Ahora se generan las matrices de
rigidez y de masa de toda la estructura, con respecto al centro geométrico del
diafragma.
Iniciemos primero con la matriz de rigidez, para el efecto conocemos las matrices de
rigidez de efectos horizontales de cada uno de los pórticos, las cuales se determinan
por los procedimientos presentados en este Capítulo.
Densidad masa
x
@
f.l.l
/
Figura t 1-36 - Estructura de un piso
..
Las siguientes relaciones de rigidez son válidas para cada uno de los pórticos:
{f a}= [ka]{u a}
{f b}= [kb]{U b}
(11-8-!)
I
(1]-85)
,'382
11'1
11 • lfl('llllXUCHJlI
{fJ= [kc]{u c}
{f d }= [kd]{U d}
UIfHI·IIU{ (1 U(' fU C4-'1, ll"ll(.l U
01-86)
(11-87)
Estas relaciones pueden ser expresadas como:
I
¡
1
o
¡~l[
ka
O
O
O
O
kb
O
O
O
O
kc
O
O
O
O
kd
l¡~ l
(l! -88)
{f}=[k]{u}
(11-89)
-xhora se plantea el equilibrio entre las fuerzas en los pórticos y las fuerzas en el centro
del diafragma:
Suma de fuerzas en el sentido x:
( 11-90)
Suma de fuerzas en el sentido y:
01-91 )
Suma de momentos con respecto a un punto de coordenadas
x y y:
(11-92)
Que expresada rnatrtcialmente es:
L~ __~1{:a1
l'
O 11
~
1F:J ly (a- x) (y - b) - xJ:: j
[Fxl
I
F=O
o
{F} = [T]{f}
01-94)
y debido al principio de contragradiente sabemos que:
( 11<)5)
Reemplazando (11-95) en (11-89)
(11-96)
y 01-96) en (11-94):
I
i
{F} = [T] [k] [T]T {u} = [K] {u}
(11-97)
Utilizando las matrices [k] y [T], obtenemos:
888
Lnnanucu . s: rllclllrctl apticaaa al diseño sísmico
o
(11-98)
(a-x)kb-xk d
YZk a +(a -x)zk b +(y- b)zk c +xZk d
Ahora generemos la matriz de masa también con respecto a un punto de coordenadas x
y y:
Centroide de todas las masas:
a
s
s
1l1ab"2-1l1sr"2+ Ilz sr
tot
X =
z_1l1 a zb- (llz s-1l1a)sr
/l-¡(ab-sr)+llzsr
- 2[1lIab+(Il¡-/l-z)sr]
I
Z
ll¡ab +(Ilz r-Il¡b)sr
Ytot =
2(1l1 ab+ (111 -Ilz)sr]
Centroide de cada masa:
ab Z -sr z
2(ab-sr)
Distancia desde x hasta
el centroide del área 1
Distancia desde x hasta
el centroide del área 2
Distancia desde y hasta
el centroide del área 1
Distancia desde y hasta
el centroide del área 2
b
r
_
2
2 2aby - 2sry - ab Z+ sr Z
2(ab-sr)
y¡ = y- (ab-sr) =
_
~b--sr-
Inercias rotacionales:
Términos de la matriz de masas:
r
yz =y-2
11 •
LID¡
1(/eU{Iy.UCIOIl (/1/I(1/1/1('U
(1('
IU e.'ilf{¡('illnl
=(ab-sr) 111 + sr 112
Por lo tanto la matriz de masa es la siguiente:
II
1
o
[M] =
O
""t
m
- I,(m¡y¡)
,¿,.. - ¡
A.I
I,(m¡x¡)
(11-99)
Xi +Y¡
J o¡ +m¡(-2
-2)
..J
Es evidente de la deducción de las anteriores matrices que para un origen arbitrario del
sistema de coordenadas (x y y) las dos matrices, [K] y [M], no son diagonales. Ahora
veamos la forma de las matrices cuando se escogen diferentes lugares para definir el
lugar donde se coloca el origen del sistema de coordenadas que define los grados de
libertad generales de la estructura.
1
(a) Para orientarnos veamos que sucede si los pórticos tienen la misma rigidez y las
densidades de masa son iguales en los dos sectores. El origen del sistema de
coordenadas que define los grados de libertad generales de la estructura se coloca en x
= aJ2 Y Y = h/2. Tenemos para vibración libre el siguiente sistema de ecuaciones que
describen el comportamiento dinámico del sistema, siendo k la rigidez para cargas
laterales del pórtico:
1
i
1
Las dos matrices son diagonales, lo cual quiere decir que las tres ecuaciones que
definen el sistema son independientes y en realidad tenemos tres sistemas de un grado
de libertad totalmente separados, o sea:
1l1abÜx+2kUx=O
1l1abÜy +2kU y = O
h(a 2 + b 2)Ü
12
z
+~(a2
+ b 2)U y
2
=O
(b)-\hora dejemos los pórticos iguales, pero tengamos en cuenta las dos densidades de
masa. El origen del sistema de COOI donadas que define los grados de libertad generales
de la estructura también se coloca en x = aJ2 Y Y = b/2. Tenemos para vibración libre el
:385
Dinámica estructural aplicada al diseño sísmico
siguiente sistema de ecuaciones que describen el comportamiento dinámico del sistema
siendo k la rigidez para cargas laterales del pórtico:
'
o
o
I
- s; (¡.L2 -¡.Ll)(b-r)
Donde:
rn r = ~(ab- sr)(a 2 + b2) + h sr (S2 + r 2)+ sr [¡.L2 ab- (¡.L2 - ¡.Ll)sr][(a _ S)2 + [b _ r)2J
12
12
4
ab- sr
S~lo, la matriz de rigidez es diagonal. En este caso se dice que el sist~ma tiene acople
diná mICO, dado que los grados de libertad están relacionados a través de la matriz de
masas.
(~). Ahora hagamos iguales las dos densidades de masa y dejemos todos los pórticos
diferentes. El origen del sistema de coordenadas que define los grados de libertad
generales de la estructura se coloca en el centroíde de masas x = al2 Y Y = b/2. Tenemos
para vibración libre el siguiente sistema de ecuaciones que describen el comportamiento
dinámico del sistema:
I,
I
j
I
1
I
o
o
.!!.(ka+kJ ~(kb+kd)
2
2
Solo la matriz de masa es diagonal. En este caso se dice que el sistema tiene acople
estático, dado que los grados de libertad están relacionados a través de la matriz de
rigidez.
Le, conclusión más importante del ejercicio anterior es que el sistema se puede plantear
definiendo sus grados de libertad arbitrariamente en cualquier punto, pero el hecho de
que los grados de libertad se seleccionen adecuadamente facilita la solución del sistema
pues en algunos casos puede llegar a desacoplar totalmente las ecuaciones de tal
manera que no haya ni acople dinámico ni acople estático, y en ese caso el sistema de n
ecuaciones diferenciales simultáneas se convierte en n ecuaciones diferenciales
independientes.
Otra manera de enfocar los conceptos que se han presentado en esta Sección es a través
de los centros de masa y de rigidez. El centro de masa es, como se ha indicado
anteriormente, es el lugar en el cual actúan las fuerzas ínercíaíes dentro de un cuerpo
rígido. El centro de rigidez, para una estructura que contiene diafragmas rígidos, puede
definirse como el lugar dentro del diafragma en el cual al aplicar cualquier fuerza
horizontal, no se presenta rotación del diafragma. Utilizando estos dos conceptos,
puede decirse que el acople dinámico se presenta cuando los grados de libertad del
diafragma no se colocan en el centro de masa, y análogamente, el acople estático se
presenta cuando los grados de libertad del diafragma no se colocan en el centro de
rigidez.
dIliD-..__
8S6
I
Capitul? 12
Solución de la respuesta
diruUnica para sisiemns con
varios grados de libertad
1
1
l
I
12.1 Introducción
En el Capítulo lOse plantearon las ecuaciones de equilibrio dinámico de sistemas con
varios grados de libertad y en el Capítulo 11 se presentaron diferentes metodologías
para poder determinar estas ecuaciones de equilibrio dinámico en casos prácticos. La
siguiente etapa es la solución de estas ecuaciones de equilibrio, con el fin de obtener las
deformaciones de los sistemas descritos, ante solicitaciones dinámicas. Ese es el tema
del presente capítulo. La solución se puede enfocar de dos maneras diferentes: la
solución modal, o la .solución por medio de la integración de las ecuaciones de
equilibrio. El primer método consiste en convertir el sísrem.; de ecuaciones simultáneas
diferenciales, que describe la condición de equilibrio de cada uno de los grados de
libertad, en un conjunto de ecuaciones de equilibrio independientes. El segundo
procedimiento de integración de las ecuaciones de equilibrio dinámico es análogo al
empleado para sistemas de un grado de libertad. Este procedimiento tiene su aplicación
principalmente en sistemas con características no lineales, por lo cual su presentación
formal se limita a la breve introducción de la Sección 12.7.
No sobra hacer la advertencia de que la primera metodología, () sea la solución modal,
es aplicable, en general, sólo a sistemas que permanecen en el rango lineal de respuesta.
12.2 Solución modal para el caso no amoniquado
Tenemos, para vibración libre, el siguiente sistema de n ecuaciones simultáneas
diferenciales, de equilibrio:
[M]{Ü} + [K]{U} ={o}
(12-1)
donde las matrices [M] y [K] son las matrices de masa y de rigidez respectivamente, y
además ambas son positivamente definidas, lo cual quiere decir que para la posición de
equilibrio, la energía potencial del sistema es cero.
Se postula que la solución del sistema anterior de ecuaciones diferenciales simultáneas
es del tipo:
(12-2)
887
Dinámica estructural aplicada al diseño sísmico
lo cual corresponde a una solución separable en un vector de amplitudes, {tj>(i)}, y una
función del tiempo, fj(t). Al derivar dos veces contra el tiempo la ecuación (12-2) se
obtiene la siguiente ecuación de aceleraciones:
nÍ!
ven
(12-3)
Té'
din
Reemplazando las dos últimas ecuaciones en (12-1), obtenemos:
(12-4)
o sea que tenemos n ecuaciones del tipo:
(s:"
j=l
I ("
O) --
' " m"A-,
.J'I' J
(I)
f. (t).+ '"
A-.
4J k ..
1.1'1' J
)'
j=l
Lo
frl'
)
f., (t) = O
e
(12-5)
Cv
eX
que es equivalente, para cualquier ecuación i, a la solución clásica de ecuaciones
diferenciales por el método de separación de variables:
n
'" k ..A-~j)
(
4J 1.1'1'J
fj(t)
j=l
---=--"-----n
fj(t)
' " m .• A-~¡)
4J 'J'I'.1
pl
(12-6)
ro
i
j=l
<-
ro
En esta última ecuación podemos ver que el lado derecho no depende del tiempo,
mientras que el izquierdo si. Esto quiere decir que ambos lados son iguales a una
constante, que denominamos arbitrariamente como ro~. Por lo tanto la ecuación (12-6)
se convierte en dos ecuaciones, una para la parte que depende del tiempo, y otra para la
parte que no:
r'
(12 -7)
y
L
2)
~(
4J k ij -ro i m ij
(i)
<l>j
(12-8)
= O
j=l
La solución de la ecuación (12 -7) es del tipo:
(12-9)
como se vió para sistemas de un grado de libertad en la ecuación (2-6) de la Sección 2.1;
donde A¡ y Bj son constantes que dependen de las condiciones iniciales y representan la
amplitud del movimiento oscilatorio, y O)¡ es la frecuencia natural en radianes por
segundo. Los valores que puede tomar O)¡ se pueden determinar por medio de la
ecuación (12 -8), que expresada en forma matricial es:
(12-10)
888
1
11
1:::: •
Sotucton (le la respuesui
({//IUI1UCU
puru
.")I:>((<IH(.{.') l U f f
"'(1
'<.J.') .'}f((HJ':>
U~
••
Esta última ecuación corresponde a un sistema de ecuaciones simultáneas homogéneo,
el cual por definición sólo tiene solución no trivial si el determinante de la matriz de
coeficientes es cero:
(12-11)
A se denomina, entonces, el determinante caractensttco del sistema de ecuaciones
diferenciales simultáneas. Al expandir este determinante encontramos un polinomio de
orden 20, con potencias pares únicamente, y con ro2 como variable. Esta ecuación se
llama ecuación característica o ecuación de frecuencias. Las o raíces de esta ecuación
son las frecuencias naturales del sistema que se denominan valores característicos o
valores propios, o "eiqenvalues". Debido a que las matrices [M] y [K] son positivamente
definidas, se puede probar que las raíces de la ecuación característica son siempre
reales y positivas. Estas raíces se ordenan de menor a mayor así:
(12-12)
y las raíces cuadradas de estos términos son las llamadas frecuencias naturales d~l
sistema, en radianes por segundo. A la frecuencia más pequeña, o>¡, se le denomina
frecuencia fundamental.
Ahora debemos determinar los valores de las amplitudes de este movimiento armónico
{<!>(i)}, reemplazando los valores de ro~en la ecuación (12-10), para obtener así o sistemas
de ecuaciones del tipo:
\
[[K]- ro; [M]]{<!>(f) } = {o} r = 1, 2, "', o
(12-13)
Donde para cada valor ro. existe un vector {$(f)} que es una solución no trivial del sistema
de ecuaciones simultáneas implícito en (12-13). {$(f)} es un vector característico o modo
de vibración o "eiqenvector". Este vector está compuesto por elementos $\f), los cuales
son números reales y no tienen un valor determinado en el sentido estricto, pues para
cualquier escalar real e,., a,.{<!>(f)} también es una solución del sistema de ecuaciones
simultáneas homogéneo de la ecuación (12-13); Lo anterior quiere decir que la relación
entre los diferentes términos del vector es fija y determinada. Por lo tanto para cada
frecuencia ro. tenemos un vector {$(f)} que tiene una forma definida pero una amplitud
arbitraria. Como hay la posibilidad de que dos o más frecuencias sean iguales, en ese
caso cualquier combinación lineal de los modos correspondientes, también es un modo.
Si a uno de los elementos del vector se le asigna un valor definido cualquiera, como' por
ejemplo la unidad, los restantes 0-1 términos quedan determinados de una forma única.
Este proceso se denomina normalización y los vectores resultantes se denominan modos
normales. Una normalización muy utilizada es la siguiente:
(12-14)
Otras veces es conveniente normalizar los modos con respecto a la matriz de masa, [M],
así:
(12-15)
8&9
I
. (Í11licu <'si nlC( Ilrul ap/icuda al diseiío síSIIl ico
~
Esta última normalización, denominada ortonormal, se hace por comodidad y no tiene
ninguna importancia especial desde el punto de vista de su sentido físico, aunque trae
\'cntajas que se harán evidentes más adelante.
También es costumbre organizar todos los modos en una sola matriz modal [<1>] de
dimensiones n por n, en la cual cada columna corresponde a un modo:
(12-16)
1
•f
~
¡
1
I
I
i
j
I
LoS modos de \ibración del sistema son propiedades del mismo tal como lo son las
frecuencias naturales, y dependen de las propiedades de rigidez y de masa del sistema.
Cada uno de los modos puede ser excitado independientemente de los otros. Si las
(ondicionés iniciales, o las excitaciones del sistema, se disponen de tal manera que se
oxcitc exclusivamente el modo {cj>(rl}, el movimiento del conjunto de masas se asemejará
totalmente a la forma del modo y el sistema se moverá con una oscilación armónica
sincrónoma con una frecuencia de <.0,., en radianes/segundo, la cual es la frecuencia
natural asociada con ese modo en particular.
Con base en lo anterior, el movimiento general de un sistema de n grados de libertad
puede representarse por medio de la superposición de los modos del sistema
multiplicados cada uno de ellos por unas constantes que dependen de.las condiciones
iniciales del movimiento, o de las excitaciones si se trata de movimiento forzado. Estas
constantes indican el grado de participación de cada modo en el movimlenro total. El
movimiento total para el caso de vibración libre SI' describe, entonces, por medio de
unos nUeH)S grados de libertad T\¡, de tal manera que:
[urn] = [<I>]{T\(t)}
(12 -17)
y los términos del vector {T\(t)} tienen la siguiente forma:
1I
I
11¡ (t)
= A¡ senúo¡ t) + B¡ cos(co¡ t)
(12-18)
La ecuación (12-17) se puede transformar en:
{U(t)} = [<I>]{T\rt)}
(12-19)
= [<t>]{A¡ sen(co¡t)+B¡ cos(co¡t)}
=
~({cj>(il}A¡ sen(co¡t»)+ ~({cj>(il}B¡ COS(co¡t»)
.=1
.=1
Derivando contra el tiempo la ecuación anterior, obtenemos las velocidades de los
grados de libertad:
{V(t)} = ~ ({cj>(i l }AiCO¡ cos(co¡t»)1=1
Definiendo
unas
~ ({cj>(i l }B¡co¡ sen(co;t))
(12-20)
.=1
condiciones
iniciales
de
desplazamiento
{Uo }
y
velocidad
{V o} obtenemos:
-------------------------------------------
12 • Sotucion de fu respuesta dinámica pura sistel1las
,'arios grullos ae tuieruut
(12-21)
y
:mes
es posible, entonces, definir dos sistemas de ecuaciones simultáneas que tienen como
incógnitas los valores de B¡ y A¡ ú.)¡ con lo cual se obtiene la solución del problema de
vibración libre. Más adelante se verá que no hay necesidad de resolver formalmente
estas ecuaciones simultáneas.
o de
n Se
Ejemplo 12-1
ción
os o
ente
npre
del
nina
ruco
mas
--
COII
I
I
SlipOltgUl'ltOS fll1.e tenernos lü'l edificio CCWVUJ eL vJtostmdo ea La Figlua 1;'::-1. [slw')1,oS
ilHeresados E'I'l Lf/l. resYJliestf/l. del edificio en Lf/l. direc(Íóa x (UÜCf/l.vJteltte. III rigidez de mdf/l. lUtO
de Los ¡-¡[SOS es iglif/l.L lj se dCltovl1.ivta k. Lf/l. l'ltf/l.Scl de Los dos VJisos iviferiorcs es el dOtlle. rf/l.rf/l.
C¡;U{,f/l. IUW. liI'ie Lf/l. ¡ie Lu C/üliertf/l.. Lu CIU/t! se del1.()lniltcJ!, m.
Piso 3
1
Piso 2
Piso f
ema
IOdo
Figura 12-1 • Edificio del ejemplo 12-1
ales
Lf/l. VJtf/l.triz
nara
mes
cíón
~:ada
itud
ese
Ido.
por
uca.
I
ae fnf/l.Sf/l.S de Lf/l. estm.cUuf/l. es Lu siglüeate:
k
o
2m :]
[MJ=l:o-f---+O
Lj
2m
J..gdl
~3
U:
lf/l. I'Jilf/l.triz de rigidez. obtevLidf/l. por vltedio de Lf/l. eUi,aciólt de Lf/l.grf/l.ltge (Secciólt 10.5) es:
odos
[M],
Por Lo tanto Lf/l.s eCli,f/l.cio¡tes de :novimieltto S()V\,:
--
~: _Ok]{~:}
[ ~O2~O : ]{~:} +[~kO -k
2m
U1
2k
U1
3m
=
{~}O
'námica estructural aplicada al diseño sísmico
A¡wm procedevJ!ws lA eVLCOfttmr LIA soLI1-CÍóft de LIA respw~stIA GteL sístemIA ¡JlArIA GtiJerevL[es
cm1,didones iftidlALes. De LIA eCI.tlAdóVL (12-11) tenemos:
ij Ite IAL reeln¡J LculAr LlAs f'l'LlAtrices [K] lj [M]. coJ1,altce lA 1m dete rwLiI1,(/tJ1,te:
/1=
lj
k_0)2 m
~k
O
-k
2k -ro 22m
-k
O
-k
2k -0)72m
=0
LIA em.lA(Íón clAmcterístim.,otJte¡üdlA ue LIA explAl'LsióJ'L deL detennil'LDI.J'Lte es:
AL dividir LIA eC/-{'lAciól'L antenor por 4m 3 ohtencmos:
6
k 4 9 k2 2 1 k3
ro -3-0) +--0) - - - =
0
m
4 m2
4 m3
Uf1,IA simpLe iVLSpec(Íón. de LIA CUI,IA(ÍÓI'L anteríor nos Í,VLdicIA ijlte 0)2
eCf-{.lAcióJ1,. lj Cjl1e IArlLiml'Ldo divisióJ'L síntética se obtiene:
= klm es
LJ resoLviendo LIA eCltlit(Íól1, de seglutdo grlAdo aeL seg/H'Ldo térmÍltO
ElttovLces LlAsJreCltfVL(ÍIAS 1'LlAt/tmles aeL sistemlA, aetJialAl11.CVLte Orael'LlAaIAS, son:
2
k
2
k
m
0)2 = -
rol = 0.134m
2
0)3
k
= 1.866m
Ahom IttiLizlAJ"Ldo LIA ecrtlA(ÍÓI1, (12-13) poaemos mLm,LlAr Los I1tOaos de vitJmciól"L.
ReempLculAltdo LlAs 11tlAtrices ue mlAslA lj rigiaez. se tiel1.C:
k_0)2 m
-k
O
-k
2k -ro;2m
-k
O
-k
2k - ro;2m
r
r
392
IU1,IA rlAíz de LIA
lfJ • Solucion ae Iu respuesta
(I/IUl/IUCU
kl\>~)
(k - ro 2r m)<b.3cr)
- kl\>~r)
+ (2k - ro; 2m)I\>~r)
para
S/SleIIIUS ("UII 1'(III().'i .(J/lll/U•.,
=
kl\>~r)
+ (2k - ro; 2m )I\>~r)
kl\>~r)
(1('
11l}('lll/1l
O
O
=
O
Dc tIA. !ereerrA. ecttlA.cíón cVl.covl.trrA.vnos tIA. re!lA.(Íóvl. entre d seglH'l.cto ténnü1.o ctd f11.Odo Id et
térmü1.o ív!fcrior:
1
L1 rremYltwlA./1.do LIA. !crefrrA. eU1,lA.cíéll1. e/'\. tí'> se~Jlu1.(I{u. o!:'¡ntcl·nos Lu S~01Ürl1.tf rduüól1. Clttrf el
!énnivl.o sl1YJrr~or Id et primer ténnuw:
I
t
1
AllOrrA. rCCfn¡JtcAZUl1.do Los valores de ro;. 11.11.0 u tIA. vez. ol'!tcI'l.fm.()') Lm sigli.ÍcJ1.!es valores.
1
ro 21
ro 22
ro 32
1.732
O
-1.732
2
-1
2
1\>2
1\>1
1\>3
1\>1
1)(,J.ndo 1m valor de tIA. luüdud ut
son:
Modo 1
tém1.~/w
i¡yerior de! modo. entonces Los f1wdos de
Modo 2
Modo 3
-1
TT
2
k
rol = 0.134m
2
k
m
ro 2 = -
2
ro 3
k
= 1.866-
m
v~LJrrA.e~ém
Dinámica estructural aplicada al ;!:<;elio sísmico
AlLOra vtOmtlA.L~zlA.vLao Los flwaos ae v~lnlA.ciÓft ae taL VI1tít1tera líJ I~,e se CI,tmrLa La w1,acióvL
(12-15):
lA.Sí obtenemos Lo s~glüeVLtes moaos ortoaormates:
Moao 1
O
{21 J3 Il{:
2m
O
Jr}
O 131 =12m
O
2m
r} r
~{<\>(l)}= ~ 13
2 3m
{-llO Il}[:
O
OJrl}O1 =3m
O
2m
~{<1>(2)}=
k r}
3m
O.5000/~
4//ID}
=
02887/~
1
Moao2
O
2m
5n
O =
1
r
577
{21-J3l l{:
2m
O
O]{
O -13'} =12m
2m
{
=>{~")}= ~ -J321
1
2 3m
I
4//ID}
O
0.5774/ ~
Moao 3
O
I
r
S77
4//ID¡
= -o.SOOo//ID
J
1
J
0.2887/ .,¡;;;
o LIA. fnlA.tr~z flWUIA.L
I
rO.5774 -0.5774
-]
1
U -O.S003J
le = "m
'l9.500l)
-0.-28-S-7-+------¡--0.2887
0.5774
11
12.3 Ortogonalidad de los modos naturales
Cada modo independientemente se obtiene de resolver el sistema de ecuaciones
simultáneas dado en la ecuación (12-13)
(12-13)
la cual es equivalente, para cualquier modo, por ejemplo el número r, a :
(12-22)
Ahora si premultiplicamos por otro modo transpuesto, por ejemplo el número s,
obtenemos:
894
1;:;;; .,
-,(JlU(-U.J11 (u
fU
I \.~·-:ll~u_
:H.u
1.
,•• -.
------"'----------_....:.:...-_----(12-23)
I
Ahora, si hubiéramos iniciado el proceso anterior con el modo s y luego hubiéramos
premultiplicando por el modo r, tendríamos:
(12-24)
I
Aplicando en la última ecuación el principio de ([A][B][C])T = [C]T[B]T[A]T y sabiendo que
[K] =[K]T Y [M] =[Mf debido a que son simétricas, obtenemos:
J
(12-25)
J
:
;,
Restando la ecuación (12-25) de la ecuación (12-23), llegamos a:
(12-26)
1
1
1
Pero sabemos que en la gran mayoría de los casos las frecuencias son diferentes y por
lo tanto:
(12-27)
entonces, lo siguiente es válido:
La misma prueba puede iniciarse con la ecuación (12-22) expresada como:
{l~2 [K]{<1>(r)}'= [M]{<1>(r)}
(12-2C))
r
y llegar a:
(12-30)
Entonces, en resumen, el principio de ortogonalidad dice que si los modos se
normalizaron utilizando la ecuación (12-1 ::i), o sea son ortonormales, entonces:
s=r
(12-3])
s:;t;r
y
(12-32)
Con respecto a su sentido físico, este se basa en el hecho de que al existir la propiedad
de ortogonalidad a través de las matrices de masa [M] y de rigidez [K], esto indica que
:395
Dinámicu estructural apiicculo al diseño sísmico
los vectores modales componen un conjunto de vectores linealmente independientes.
Esto quiere decir que un vector con cualquier configuración siempre puede expresarse
como una combinación lineal de los modos; y por ende éstos pueden emplearse para
describir cualquier movimiento posible del sistema.
12.4 Desacoplaje de las ecuaciones de movimiento
Si después de normalizar los modos de acuerdo con la ecuación (12-15), construimos la
matriz [<1>] de acuerdo con la ecuación (12-16), y utilizamos esta última matriz para una
rransform ación de coordenadas así:
(12-33)
Al derivar esta transformación dos veces contra el tiempo obtenemos:
(12-3-1)
La ecuación (12-13) que define el problema de valores propios se convierte en:
(12-35)
donde [ei] es una matriz diagonal. Si premultiplícamos ambos lados de la ecuación
anterior por [<1>]T tenemos:
(12-36)
Pero por definición de la normalización: y de aplicar el principio de ortogonalidad:
[<1> f[M][<I>] = [1]
(12-37)
y de aplicar el principio de ortogonalidad:
(12-38)
Ahora si reemplazamos las ecuaciones (12-33) y (12-34) en (12-1):
[M] [<1>]{ii}+ [K][<1>]{T"l} ={O}
(12-39)
Premultiplicando por [<1>]T obtenemos:
(12-40)
y entonces:
(12-41)
I
1:3 • Solllción de la reSpllesta (1l11(Ulllca para sistemas con
l'UrlOS ynlWJS
(le IIV('/I(!<,
Dado que tanto [1] como rol] son matrices diagonales, se ha logrado desacoplar
totalmente el sistema y se ha pasado de un sistema de n ecuaciones diferenciales
simultáneas a n ecuaciones diferenciales independientes de un grado de libertad del
tipo:
..
2
r¡¡ + ro¡ r¡¡
=O
(12--1:2)
en cuya solución se aplican todas las metodologias presentadas en el Capítulo 2 para
sistemas de un grado de libertad.
Una vez se obtiene la respuesta en el tiempo de cada uno de los grajos de libertad
generalizados r¡¡, puede verse que la respuesta es la superposición de la contribución de
cada uno de los modos:
,
¡
~
{u} = [<1>]{ r¡} = i({<l>(¡) }r¡¡(t)) = {<l>(l) }r¡1 (t) + {<l>(2) }r¡2 (t) +
(12--1:3)
;=1
tI
I
I
I
Por lo tanto se ha obtenido una transformación de coordenadas del sistema de
coordenadas empleado para plantear el equilibrio, {U}, a un sistema de coordenadas
generalizadas {r¡}, donde cada una de ellas obra independientemente como si fuera un
grado de libertad único que a su vez afecta todos los grados de libertad originales de
una forma tal que todos ellos se mueven armónicamente en la forma descrita por su
modo correspondiente.
Ejemplo 12-2
UliLimJtdo Lct mcttriz [Q] desuco/1Lur eL sistemct J,eL ejem/1 Lo 12-1.
Lu muLriz de moaos es:
[0.5774 - 0.5774
0.5774]
-0.5000
o
0.5774
i
0.28&":
Utljct mcttriz {;{e mctsa es. deL Ejev'"t/1Lo 12-1:
tgdl
[~O
[M] =
o
2m
~] ~
2- U:
3
-+--f- O
m
lj Lct vltatriz de rigidez es. tctntlrJién deL FJem/1Lo 12-1
Las eCltctcioVl-fS ete movifnie¡:Jo
SOVL
8,97
inámica estructural aplicada al diseño sísmico
Se reíALiZGut LíAS siglüelttes oYJcrlA-címtes.
[<I>f[M][<I>] =
=
r
[<p [K][<l>] =
0.5774
.k
0.5000
o
~~~~:][-~--+---/-:-1.k [-::-::-:-:-+-----+---
O
-0.5774
[
m
0.5774 -0.5000 0.2887
- 0.5774
O
O
0.5774]
O -0.5000
2m
2m
m 0.2887
0.5774
0.2887
1 O0]
[O 011
O 1 O
.k m[
0.5774
0.5774
0.5774
l:
O
-k O ]
[0.5774 - 0.57741 0.5774]
0.5000 0.2887][ k
- 0.5000
2k
O 0.5774 _-_k+---t_-_k
_1_ _0.5_0_00-+-_ _O--+-_
_
_ 0.5000 I 0.2887 . O -k 2k .¡;;; 0.2887
0.5774
0.2887
O]
1.:00 1.:66
o vistas COVfW tres ecnucíones cijJereltÜíALes iltrA.erertlítie¡ttes
..
k
..
ro
k
..
ro
k
111 +0.134
1h
i
1
. fO.134
=:
I
= O
112 + 1.000-112 = O
113 + 1.866-113 = O
m
•
12.5 Vibración libre con condiciones iniciales
Al obtener la solución general para víbracíón libre de sistemas de varios grados de
libertad en la Sección 12.2, se víó que el movimiento total era pasible describirlo por
medio de unos nuevos grados de libertad 11b obtenidos de las ecuaciones dinámicas
desacopladas, de tal manera que la transformación de coordenadas necesaria para
pasar de los grados de libertad empleados para plantear el equilibrio de la estructura, a
los grados de libertad generalizados correspondientes en la estructura desacoplada era:
898
1
t
12 • Solucion de l« respuesta dinámica pura sislemus
COlI
{U(t)} = [<1l]{r¡(t)}
Los términos del vector
oarios gnulos (le tinerta
(12-44)
{r¡(t)} tienen la siguiente forma cuando no hay amortiguamiento,
(12-45)
por lo cual la ecuación (12 -44) se convierte en:
1
{U(t)} =[<1l]{r¡(t)} = [<1l]{Asenwt} + [<1l]{B coswt}
f
Derivando contra el tiempo la ecuación (12-45), obtenemos:
,
(12-47)
f
I
(12-46)
y
{u (t)} ~ [<1l]{1l( t)} = [e]{roA cos wt} + [~ ]{- wB senwt}
(12-48)
J
Si tenemos unas condiciones iniciales de desplazamiento {U o}, y velocidad
I
entonces:
t
y
I
Premultiplicando las ecuaciones anteriores por
I
I
{U o}= [<1l]{r¡(O)}= [<1l]{B}
(12-49)
{iJ o} = [<1l]{ll(O)} =[<1l]{wA}
(12-50)
[u o},
[<1lf[M], obtenemos:
(12-5 i )
y
(12-52)
1
I
entonces la solución de la respuesta en el tiempo de los desplazamientos de un sistema
no amortiguado en vibración libre con condiciones iniciales es:
[uru] =[<1l]{r¡(t)} =[<1l][<1lY[M]{u o}{ ~ senwt} + [<1l][<1l l' [M]{U.Hcosrot]
(12-53)
Otra manera de ver la respuesta del sistema, en la cual es evidente que ésta es la
superposición de la respuesta de los modos individuales, es la siguiente:
(12-54)
Donde:
02-55a)
y
02-55b)
nániica estructural. aplicada al diseño sísmico
La misma deducción anterior puede realizarse para sistemas amortiguados,
simplemente hay que tomar en cuenta el amortiguamiento como se indicó en la Sección
2.2.3.
Ejemplo 12-3
PrMa La estntctlua c;{,eL ejelnpLo 12-1 delJE' encoutrarse La resp/testa de vilJmciólt Libre YJam
difereVttes casos de cov¡,diciOftes ilticiaLes de dtjormacióv¡, de Lu estntct/ua.
C/A.SO (lit) - SH,yJov¡,gumos lut desYJLGUlíwtieJtto lutitario en cada luto de Los risos como coltdicióH
ilticiaL de desrLfIlZal'ltieltto. süt líjlte fLa¡ja coltdiciólt üticiaL de veLocidad.
EL vector de despLfIlZw'ltiefttos
{B} ={::} =
b3
~vüciaLes
k[_ ~:~~~:
es:
o
I
OSOO~ ~:~~~:][_:-t---+-~-j{~} = ¡;;;{~:~~~:}
2m
0.5774 - OSOOO 0.2887
O
O
2m
1
0.1548
Por Lo ta:tto La resjiaest« deL sistCf'l'\.u está descrita por La sig¡üeVtte ecuación,
{OS7741
r-OS774}
r 0.5774}
irU3}
U 2 = OSOOO (2.1547 cosco¡ t + i
O 0.5774 cos co2t + i- 0.5000 0.1547 cosco 3t
lUI
0.2887 J
L 0.5774
L 0.2887
3
{
{-0.3333}
{ 0.0893}
U } {1.2441}
O cosco 2t+ -0.0774 cosrojt
U 2 = 1.0774 coscoIt+
U1
0.6221
0.3333
0.0447
Es evideltte líjl1C La resp/testa es La Sluna o sl1perposicióft de Las respH,cstas de cada fitoc;{,O
iVtderJeJtdiev¡,tCf'ltef1Le. El'\. La Figltm 12-2 se ml·¡,estra La respH,csta en el tiempo para cada lUtO
de Los l'ltOdos ¡j La resYJ/l,csta total.
SI~.poltieVtdo
líj/te todas Las respH,cstas se s/tperpoVtgaVt el'\.
aLg/~.1t
J1tol'ltefttO elt eL tiempo. el
62.2% sería co/ttril"üda por el pril'lter f'ltodo. el 33.1 % r10r el sewu'\.do 1:1 eL 4.5% por eL tercero.
C/A.SO (tI) - sl~Y'oV'.ga'nos IUt despLGUamief'\.to COI'\. LaJorma deL primer f'ltOdo. sil'\. líjlte f¡,a¡ja
coltdicióft ilticiaL de veLocidad.
400
I
1
Primer modo
2
1
I
Segundo medo
•
-1
-2
0.0
A
-2.0
\V
I
0.0
1.0
2.0
1.0
2.0
-1.0
~1
p...........vt'V.. . . . 'd/'"''"''''~'OOl
I
o
A
t
1
1I 1 l' /1
:
1 1
!
1
-20.0
I
1
I
2
!; j~~--- H;J i
I\
HI
+=-r----="'=", I
I
I
1\' 11/
o+-'~r-t--:7'<L-.--r~-+--,.04-~
~
o
A
I
-2.0
~t -t
0+---<:....--
I
1
I~I
1'1
A
Tercer modo
1
-1.0
0.0
AO
1
.........--.
-1
I
-2
I I
I
I
1
I
I
I
Ot--.-<;>-----------.
II
-1
-2
0.0
A
I
-2.0
Respuesta total
¡~C\,
0.0
1.0
2.0
o
A
I
-2
-1.0
11
~~'
_~~~t
I
-2
:\ ¡/I
1\V
0.0
A
I
-2.0
-1.0
0.0
Figura 12-2 - Respuesta para condiciones iniciales de desplazamiento. Caso (a)
401
1.0
2.0
Dinámica estructural aplicada al diseño sísmico
EL vector de ciesrLcuGU11,ientos ilticic-tLes es:
Las constanres b¡ se obtieneVL cie:
{B} = [<I>Y[M]{U o }
o
b
!}
[
0.5774
{B}= b
0~500: ~~~~:][_:+--t--2-:m]{Al} .¡;;{2¿o3}
{ k -0.5774
0.5774 - 0.5000 0.2887 O O
2
2m
:=
=
b3~
,
Por lo tanto Lv. resjlmesta deL sisteH1ü está descrLta /"lar la sLqrtLent.e emacióvL
Sólo el prLI1ter :Twdo covitri¡'u1ue u la respu,esta con el 100% IJ Los otros no aportan ItW;l,cl.
Caso (e) - SI1,jlJOltgaww, 1m desjI¡lcuaf1tiento
coftliÍiciólt Lflicial de veLocidad.
COH
laJormu del scgWtliÍo Inocio. sLft
VjtH' ~u;¡,ua
EL vector de despLcuamiefttos ifliciaLes es:
Lus ronsrunres b, se obtieftelt liÍe:
{B} = [<I>Y[M]{U o }
bl }
{B} = b 2
{
b3
:=
kl
o
0.5774
-0.5774
0.5774
2m
O
Sólo rL seglHlliÍo f1wdo COlttriblt/jC u la res¡;JIlcstu COVi el 100%
-.
!J.02
1:1
los otros no Gt¡;Jortr;m HGtciGt.
I
12 • Solucion
--------------
de [u respllestu (//lUlI1ll('a para SISlel1l(/8
('011 /'uno::; !JIUUU:'
((l'
"un ,u ..
Cuso (tt) - S¡qJOItgeu1ws IUt des¡lJlcAZcA.lníenco con la Jonna del tercer f1wdo. SÜt (;jIte hlA.¡ja
COftdicióf'L ivüciuL cte veLocidud.
El vector v/.e desplazufllticfttos iV\.Íciules es:
U (O)}
{U (O)
3
1-2}
{U o}= U 2(O) = -..f3
1
1
Lus constantes L¡ se 010 tíene11. ete:
I
I
b1}
[
{B} = b2 = };;; {
b3
o
0.5774
0.5774
0.5774
2m
O
Por lo tal'Lto lu resYJl1.esta del sislcH'La estti v/.escritIA. y¡or La siglücftte cC/1.UCiÓvL
ru 3 1 {
ju1J
u2 } =
0.57741
{_2}
-o.5000f2..f3cosffi3t= -..f3 CCS())3 t
0.2887
1
sóLo el tercer vvu:;do cm'Ltri\tJlt¡je
lA.
la respltesta con eL 100% 0 Los otros VLO t;tYlortlA.l1. ¡'\.(Jeda.
~
12.6 Análisis modal con amortiguamiento
Cuando se trataron los sistemas de un grado de libertad se discutieron los diferentes
tipos de amortiguamiento y su tratamiento matemático. Desde este punto de vista hay
razones poderosas para adoptar la idealización de amortiguamiento viscoso dado que
la solución de la ecuación diferencial de equilibrio dinámico es la más sencilla de tratar.
Cuando intentamos extender estos conceptos a sistemas de varios grados de libertad
nos encontramos que en aras de obtener una solución matemática expedita, la relación
entre el modelo matemático y el fenómeno físico es más imperfecta.
Un sistema de varios grados de libertad donde hay amortiguamiento viscoso tendría el
siguiente sistema de ecuaciones de equilibrio el: vibración libre:
[M]{x}+[C]{X}+ [K]{x} = {O}
(12-56)
El procedimiento para obtener las matrices de masa [M] y de rigidez [K] ha sido tratado
en los capítulos anteriores. El procedimiento para definir los coeficientes de la matriz
de amortiguamiento [C] consiste, desde un punto de vista análogo al empleado para
determinar las matrices de masa y rigidez, en imponer una velocidad unitaria a uno de
los grados de libertad, mientras que la velocidad de los otros grados de libertad se
mantiene como cero. De esta forma se obtienen unas fuerzas internas de
amortiguamiento en todos los grados de libertad, las cuales provienen de la velocidad
del grado de libertad seleccionado. Esas fuerzas corresponden a las constantes de la
columna de la matriz de amortiguamiento del grado de libertad seleccionado.
4!Jr:J, >
Dinámica estructural aplicada al diseño sísmico
Realizando esta operación sistemáticamente para cada uno de los grados de libertad, se
obtiene la matriz de amortiguamiento [e] del sistema estructural:
[c._.
C 1,2
[c]= C~'l
C 2,2
Cn,l
C n,2
...
...
c._.]
c 2, n
(12-57)
I
<i
cn,n
En general lo que se conoce acerca del amortiguamiento de los materiales estructurales,
o de los elementos estructurales construidos con estos materiales, hace que el
procedimiento descrito sea difícil de aplicar en los casos prácticos, dado el gran número
de incógnitas que existen alrededor del tema. Usualmente se emplean procedimientos
por medio de los cuales se realizan aproximaciones basadas en casos de estructuras
similares en las cuales se conoce el amortiguamiento debido a mediciones o ensayos
experimentales. Estos procedimientos, en general, utilizan el concepto de
amortiguamiento modal que se presenta a continuación.
Si la matriz [C] es desacoplada por los modos de vibración, tendíamos entonces que:
(12-58)
donde la matriz [2~00¡] es una matriz diagonal y ~. es el amortiguamiento viscoso
asociado con el modo i. Este tipo de amortíguamícnto en el cual la matriz de
amortiguamiento [e] es desacoplable por los modos de vibración obtenidos de las
matrices de masa [M] y rigidez [K], únicamente; se conoce con el nombre de
amortiguamiento clásico. En este momento se estaría planteando una matriz de
amortiguamiento cuya única 'virtud es que es posible desacoplarla, pero que tiene poca
relación con el fenómeno físico que trata de describir. Dadas las imprecisiones en que
se incurriría en esta situación, no tiene mucho sentido tratar de obtener la matriz [e] de
la manera descrita y no se comete un error grave, dados los órdenes de magnitud de los
errores, si este amortíguamíento se introduce en la ecuación desacoplada del sistema.
Por lo tanto el procedimiento comúnmente empleado consiste en definir un
amortiguamiento modal; el cual es propio del modo en su ecuación diferencial
desacoplada, por lo tanto la ecuación (12-42) se convierte en:
1
(12-59)
la cual puede ser resuelta aplicando las metodologías descritas para sistemas
amortiguados de un grado de libertad. En cada ecuación desacoplada el coeficiente ele
amortiguamiento critico ~ sería el propio del modo i. El problema re. dica en definir jos
valores de los coeficientes de amortiguamiento aplicables a cada modo. Al respecto
pueden emplearse los valores recomendados por Newmark y Hall, presentados en la
Tabla 7-3 de la Sección 7.2.2.
Si suponemos, ahora, que la matriz de amortiguamiento tiene una forma tal que sea
una combinación lineal de las matrices de masa [M] y de rigidez [K], de la siguiente
manera:
[C]=a[M]+l3(K]
(12-60)
donde a y 13 son constantes. Es posible probar que esta matriz es desacoplable por
medio de los modos de vibración de la estructura como se indico en la Sección 12.4:
404
1
i
í
1
!
¡
I
I
I
12 • Solllción de la respuesta dillálllicapara sistelllas con ¡'arios yrculos (fe Iiúerteu
donde la matriz
[a + ~ron es una matriz diagonal. Dado que cada uno de los términos
de la diagonal de esta matriz corresponde a 21;00;, entonces el amortiguamiento 1; en
cada una de las ecuaciones desacopladas es:
~. =~+ ~roi
1
•
¡
l
1
J
I
I
2ro¡
(12-61)
2
Este tipo de amortiguamiento se conoce con el nombre de amortiguamiento de Rayleigh,
quien fue el primero en plantearlo, y es uno de los casos de amortiguamiento clásico. Es
importante notar que en este caso el amortiguamiento es función de la frecuencia del
modo, y por lo tanto es diferente para cada modo, lo cual en alguna medida contradice
la evidencia experimental que indica que no hay grandes variaciones en el
amortiguamiento de los diferentes modos [Chopra, 1995]. En el caso de que se
disponga del valor del amortiguamiento de dos modos, por ejemplo r y s, es posible
plantear el siguiente sistema de ecuaciones simultáneas, de las cuales se puede despejar
a y B:
(12-62)
En el caso de que los dos amortiguamientos tengan el mismo valor
solución del sisrema de ecuaciones simultáneas conduce a:
(~
=
~
= l;.), la
(12-63)
La Figura 12-3 muestra la relación entre el amortiguamiento y la frecuencia y la forma
que tiene este amortiguamiento cuando es proporcional a la rigidez únicamente, o a la
masa únicamente, o cuando se combinan.
combinado
proporcional a la masa
13=0
+""'-----+-------+----------__
00
Figura 12-3 - R~lación entre amortiguamiento y frecuencia, para amortiguamiento de Rayleigh
Es conveniente tomar ro,. como el valor de la frecuencia fundamental, y ro. como el valor
de la frecuencia correspondiente al último de los modos que contribuye
significativamente a la respuesta. De esta manera el primer modo y el modo s tendrán
exactamente los valores de amortiguamiento asignado y los modos entre estos dos
405
Dinámica estructural aplicad« al diseño sísmico
tendrán valores similares algo menores, y los modos superiores al modo s, tendrán
valores mayores del amortiguamiento, disminuyendo su contribución a la respuesta.
Existen otras metodologías para formular la matriz de amortiguamiento [C], dentro del
contexto del amortiguamiento clásico. Al respecto pueden consultarse [Clough y
Penzien, 1993], [Chopra, 1995], [Hurty y Rubinstein, 1964J, entre otros. No obstante, la
necesidad de disponer de una matriz de amortiguamiento clásico cuando se emplean
técnicas de solución modales no es muy evidente, pues es posible asignar el
amortiguamiento a la ecuación desacoplada, como se indica en la ecuación (12-59), lo
que hace pensar que la determinación de la matriz [C] es inoficiosa. No obstante,
cuando se desea obtener la respuesta dinámica de la estructura utilizando técnicas ce
integración de las ecuaciones de movimiento, la única manera de poder introducir
amortiguamíento a la respuesta es a través del empleo de la matriz [C].
En aquellos casos en los cuales el amortiguamiento clásico no es aplicable debido a que
existen diferencias apreciables en los valores de los coeftcientes de amortiguamiento de
diferentes zonas de la estructura, o del sistema estructural. Este es el caso de la
interacción suelo-estructura, donde los coeficientes de amortiguamiento son mucho
más altos para el suelo que para la estructura, o cuando se combinan materiales
estructurales con coeficientes de amortiguamiento muy diferentes. En estos casos es
común determinar las matrices de amortiguamiento clásico para cada subsistema
independientemente, y luego combinarlas, [Chopra, 1995J y fClough y Penzien, 1993J.
Es posible que el sistema así obtenido no cumpla la condición de que el
amortiguamiento del conjunto sea desacoplable por los modos de vibración y, entonces,
hay necesidad de recurrir a técnicas de integración de las ecuaciones de mmimiento
como las presentadas en la siguiente sección.
12.7 Solución integrando las ecuaciones de movimiento
La solución por medio de procedimientos modales no es posible en el caso de
amortiguamiento no clásico, o cuando la estructura responde en el rango inelástico. En
estos casos se debe recurrir a soluciones por medio de la integración de las ecuaciones
de movimiento, o equilibrio dinámico. No obstante, esta alternativa puede emplearse
también en los casos en Jos cuales la solución modal es factible. Por esta razón se
presenta esta somera introducción. En general debe encontrase la solución del siguiente
sistema de ecuaciones diferenciales simultáneas:
[M]{Ü} + [C]{Ú} + [K]{U} = {o}
(12 -6-1:)
el cual tiene unas condiciones iniciales de desplazamiento y velocidad: {u o} Y
deben encontrarse los valores de
{Ü(t)} , {úct)} , y
{iJ o}, y
{U(t)} , para cualquier tiempo t.
Los procedimientos que se emplean son totalmente análogos a los presentados en el
Capítulo 3, con la diferencia de que las operaciones son ahora matriciales. En general
todos los procedimientos empleados dividen la escala del tiempo en una serie de
intervalos ilt, generalmente de duración constante. Con base en los valores conocidos de
las aceleraciones, las velocidades y los desplazamientos al comienzo, se estiman sus
valores al final del intervalo ilt. Estos valores estimados se verifican y ajustan hasta que
se cumpla el equilibrio, expresado por medio de la ecuación (12-6-1:), con un error
aceptable. Con estos nuevos valores en el tiempo t = l·ilt, se repite el proceso para el
final del intervalo que lleva a t = 2·M, Y así sucesivamente. Dentro de los métodos
empleados están el de la aceleración lineal, el método Beta de Newmark y el método
Teta de Wilson, entre otros.
.!J.06
,,
Capitulo 18
J
I
I
Métodos nJUnéricos
en el análisis IROdal
f
f
¡
I
t
¡
1
I
¡
I
13.1 Introducción
En los Capítulos lO y 11 se vio como se plantean las ecuaciones de movimienro para
diferentes sistemas de varios grados de libertad y en el Capítulo 12 se presentó la
solución del sistema de ecuaciones diferenciales simultáneas que describen el
movimiento. El método presentado, en el capítulo anterior, en la deducción de la
solución del sistema de ecuaciones diferenciales simultáneas cumple la función de que
es diáfano desde el punto de vista matemático, pero no necesariamente es el más
eficiente desde el punto de vísta numérico o algorítmico. Existen numerosos métodos
para determinar los modos y frecuencias de un sistema dinámico, referencias [Akivis y
Goldberq, 1972], [Bathe y Wilson, 1976], [Bathe, 1982, 1996\, [Brad/ey, 1975],
[Carnahan, Luther, y Wilkes, 1969], [Crandaff, 19561, [Del{, 1982], [Faddeeva, 1959],
[Froberg, 1965], [Hammiong, 1962], IHildebrand, 1971], [james, Smith, y Wo/ford, 1985],
[jennings y MeKeown, 1992], [jensen y Rowland, 1975], [Kreyszig, 1993], [Mareus y
Mine, 1965], [Mostrow y Sampson, 1969], [Nicho/son, 19861, [Shilov, 1977\, y [Strang,
1988] entre otras. A continuación se hace una descripción de los métodos más
utilizados y se discuten sus ventajas y desventajas.
13.2 Método directo
Corresponde al método presentado en la Sección 12.2. En resumen el procedimiento
consiste en resolver el problema de valores propios dado por la ecuación (12-10), la cual
se repite aquí por comodidad:
(13-1)
Este sistema de ecuaciones simultáneas tiene una solución no trtvial cuando el
determinante de los coeficientes del sistema es igual a cero, tal como lo indicó en la
ecuación (12-11):
(13-2)
Expandiendo este determinante obtenemos la ecuacion caracterisnca del sistema o
ecuación de frecuencias. Esta ecuación es UD polinomio de grado 2n, con potencias pares
únicamente, donde n es el número de grados de libertad del sistema. Las raíces del
polinomio son las frecuencias naturales del sistema, elevadas al cuadrado. Por lo tanto
la ecuación característica tiene la forma:
4()7
_ .. _ .. _
...
_ ....
_-------
LJII
Dinámlca estructural aplicad« al diseño sismico
(13-3)
Esta ecuación tiene o raíces. Un método clásico para determinar las raíces es el método
de Newton-Rampson (Véanse las referencias [Camahan, Luther y Wilkes, 1969],
rCrandalL, 1956j, [Faddeeva, 19591 y [}ennings y McKeown, 1992], entre otras). La
determinación del polinomio en si no es una tarea fácil pues implica expandir un
determinante de grado o. Existen varios métodos para realizar esta labor como el
método de Hessenberg, [Crandall, 1956], o el de los coeficier:tes de Newton, [Fróberg,
1965].
Una vez se determinan las frecuencias, debe resolverse el sistema de p,::uaciones
simultáneas, implícito en la ecuación (13-2). Dando un valor a cualquiera de los
términos del modo, se reduce a un sistema de 0-1 ecuaciones. En el ejemplo 12-1 se
aplicó esta metodología para resolver el problema de valores propios.
13.3 Método del barrido
Partiendo nuevamente de la ecuación (13-1), podemos convertirla en:
[Ml{<1>(i)}=
:~ [Kl{<1>(i)}
(13-4)
I
Si prernultíplicamos a ambos lados por [Kr1 y llamando [A¡]=[Kr1[M] obtenemos:
(13-5)
El procedimiento consiste en suponer un vector [<1>(i)] y reemplazarlo en el lado Izquierdo
de la ecuación (13-5), dando como resultado una mejor aprcximación. Realizando esta
operación sucesivamente, se llega a un punto en el cual no hay variación en el vector y
este es el primer modo, o modo fundamental.
Ejemplo 13-1
UtiLiz¡;utct.o Las vv\'atrices ct.e ll'Lasa Lj rigict.ez ct.eL ejevl'L¡1io 12-1. F0f¡1/1,ct.o k
1 'O
[M]= O
2
[
O O
~]
y
Alwra:
[A,J=[Hffi]
408
=m = L
obte/tE'vl'Los:
1 -1 O]
[
[K] = -1
O
2
-1
-1
2
1a
I
SnYJOVI,el1tos
IHt
• l\lé(o(/os numéricos el! e/ atuüisis I/U)(!
vector:
I
j,
I
1
¡
LJ allLaccr lu
I
(A :&>(1) }=
¡
i¡
I
oYJeraciéHt.
1
[H*
lH} {~) 5{:~:} ~~(l)
~Jll
= =
5J
=
1
}
1
00
AhorrA.:
[A¡1&'"
Ij
J=[ffiBJrn =r~} =7F:~:}= ~¡~(I) J
así SliCeswamcnte:
1.9961
7.4 1.7297 =_1_~(l)}
0)2
{
f
1
J
1
1.9995}
{ 2 }
7.4555 1.7317 =~_~(1)} 7.46298 1.732 =~~(1)}
{ 1
001
1
001
por lo tanto:
2
00 1 ""
1
7.46298
=0.134
LJ
~(¡)J=F32)
l 1
Los siguientes modos pueden ser calculados de la manera que se explica él
continuación. Si los modos se normalizan de tal manera que el elemento inferior del
vector es la unidad, entonces siempre es cierto que para un vector raí} que corresponde
él la última fila de [A¡], se cumplen las siguientes relaciones:
(13-6)
Después de que hemos obtenido el primer modo {lj>(l)} , definiendo una matriz [Az] así:
(13-7)
Dado que {lj>(l)} está normalizado con el elemento inferior igual a la unidad, entonces la
última fila de [Az] tiene ceros. Ahora, multiplicando [Az] por un vector columnar igual a
40.9
Dinámica estructural aplicada al diseño sísmico
{cl>(1)}_{cl>(2)}, donde {cl>(2)} también está normalizado con su elemento inferior igual a la
unidad, se obtiene:
(13-8)
Por lo tanto de la ecuación anterior ID.2 es una frecuencia del sistema [A2] y ({cl>(l)H cl>(2)}) es
un modo. El vector ({cl>(l)H cl>(2)}) tiene su elemento inferior igual a cero, por lo tanto la
última columna de [A2] es irrelevante y sólo hay necesidad de considerar una submatriz
de n-I por n-l que se obtiene de quitar la última fila y la última columna. Este
procedimiento puede aplicarse n-I veces para obtener todos lo modos y frecuencias. El
vector propio que se obtiene de cada matriz [A¡] lo llamamos {z.] y tiene n-l elementos,
entonces aumentando a {z¡} un elemento abajo con valor de cero, se obtiene:
I
03-9)
ahora prernulríplicando por {a¡.¡}, y aplicando la ecuación (13-6):
ci
ti}=llli-l
f.
}J.lJ> (i-1)}-)<1i-1"'El>
L
}J, (i)}=-2---2
1
1
L
)<1i-lJlzi
OOi-1
03-10)
OOi
entonces
1
1
03-11)
Ejemplo 13-2
oLltt'lU'r eL segluttio
!j
tercer fi'wdo de las vrlcürLces
de~
ejem¡:¡Lo 13-1.
Aituru (tl.y¡LlCUI1tos eL vnétoc!.o de~ LJurrLc!.o u esLu vVl,utrlz
410
l
18· Métodos numéricos en el (lI/(l/isls mocuu
1
[A 2]{z2J= [ 0.268
1,
¡
1
¡
r
LA 2
]{z
L
2F
]{!} = {_l_}
= 0.804{1.243788} = ~{z2}
0.804
1
roi
O
0.536 1
[1
O]{1.24378}
= {1.24378} = 0.86933{1.4307} = ~ L }
0.268 0.536
1
0.86933
1
roi 1.L
2
Lj usí S/tCCsLVUI1'1.enLc:
j
¡
i
1.55607}
1
0.91942{ - - = -z {zzl
1
0.985{
1
1
0.95
roz
1.70182} =-lLz];
1 L 1
1
roi
0.99876 {
1.728874}
t
1 J: 1
=-lZz];
{z,}=
{1.:32}-
~_~J
ro 2
e, =
~,
ro 2
~1.67707} 1 J: }
0.9735 - - =-z lZz
1
ro z
ro z
1
1 L }
0.9957{1.722751
--~=-lLz
1
J roi
1.732}
0.999 {- =1- {z z }
rJOr Lo tanto:
0>; • 1.000,
1.632766} =-z
1 f. 1
lZzft
1 {z zJo
1
0.992{1.71539}
- - =-z
1
ro z
roi
1
~
1
roi
1
trJ
1
-- ---
" = ft
°l':~ 2~~l3~} -1.732
~"'}. ~,,) }-c,{z,}- {I·H -1.732rn-{-~I}
AILCm Y¡¡;WA. eL tercer wwDLo:
[A 3]= [A z ]- {zz}{az}=[_l-+-_0_]_ {1.732}{0.268
0.268 0.536
1
1
O] [0.464 0.928]
0.268 0.536
= [ 0.268 0.536
=[0.:36
- 0:28]
411
10.536}
1 Dinámica estrllctllral aplicada al dise/lo sísmico
[A3]= [0.536]
Ahora urLieCíU110s eL métoao deL j'l(/trrido u est« ,·nutriz.'Lo C/1,uL nos covLd,H:e u Lu sig/üevLte
solación triviaL
!J aL Iuacer Lu oreracióvl.:
[A 3 ]{z 3 }= [0.536]{1}= ~.536}= 0.536{t}= ~2 {z 3 }
ro3
rJor Lo tr/utto:
ro~ "'" _1_
=1.866,
0.536
{z3}"'" {l}= {-Ol}
•
En este método la convergencia al primer modo siempre es buena, no obstante la
convergencia a los modos superiores depende de la precisión con que se lleve a cabo la
extracción de los modos obtenidos anteriormente. Por esta razón algunas veces después
de numerosas iteraciones, se vuelve a obtener un modo que ya había sido determinado.
Esto hace que el método no sea muy confiable en muchos casos.
13.4 Método de [acobi
El método de Iacobi se debe al matemático alemán Carlos Gustavo jacobi (1804-185 J).
Antes de presentar formalmente el método es conveniente mencionar la interpretación
geométrica que tiene el problema de valores propios. Consideremos un problema de
valores propios del tipo:
412
1:1 • Mét ocios
11l11/1{~rICOS ('/1 ('1 (l/IUtlSIS 1110(/(/1
[A]{x} = A[I]{x} = A{X}
t
I
I
1
t
(13-12)
donde [A] es una matriz simétrica de dimensiones n por n y {x} es un vector de
dimensiones n por 1. El vector propio {x} puede obtenerse por cualquiera de los métodos
presentados anteriormente. Si premultiplicamos ambos lados de la ecuación (13-12) por
{X}T obtenemos:
{xV[A]{x} = A{XV {x}
(13-13)
Elvector {x} puede normalizarse de tal manera que:
{X}T{X} = Ir¡2 =
r2= 1
03-1-1:)'
lo cual es equivalente a decir que la longitud del vector {x} es la unidad. Es evidente
que:
1
I
(13-13)
~
lo cual corresponde a una forma cuadrática en las coordenadas
n = 2 la ecuación anterior se conv ierte en:
Xl, X2, ..... ,
xn • Si hacemos
(13-16)
lo cual corresponde él la ecuación de una cónica con su centro en el origen del sistema
de ejes. La cónica puede ser una elipse, una parábola o una hipérbola, dependiendo de
los valores que tomen los términos aij (un circulo puede considerarse como una elipse
con excentricidad cero). Es posible probar que dado que se trata de oscilaciones dentro
de la hipótesis de deformaciones pequeñas, la cónica necesariamente es una elipse. En
la Figura 13-1 se muestra la elipse, donde x¡ y X2 representan un sistema de ejes
cartesianos. El vector normal {n} a la elipse en cualquier punto (XI, X2), al ser escrito en
forma matricial es proporcional al vector [A]{x}. Por lo tanto el problema de los vectores
propios puede ser interpretado como el problema de encontrar las direcciones para las
cuales el vector {r} y el vector {n} son paralelos. Estas direcciones definen un sistema de
coordenadas ~l y ~ los cuales corresponden a los ejes principales de la cónica.
--~I-------;o*",,:.....L_-f------~_
Xl
Figura 13-1
Si denominamos a ~l y ~ como las direcciones de los ejes principales y el ángulo e como
el ángulo entre estos ejes y los ejes Xl y X2 respectivamente. Para expresar la ecuación de
418
Dinúmica estructural apliccuí«: al diseño sísmico
la elipse en términos de las coordenadas 1;1 y
transformación:
Xl
= ~l cose -
~2
~
senü
podemos utilizar la siguiente
(13-17)
x 2 = ~1 sene + ~2 cose
la cual puede ser escrita en forma matricial así:
{x} =[R]{1;}
(13-18)
donde la matriz de rotación es:
[R] =[cose
senü
- sene]
cose
(13-19)
Esta matriz de rotación es ortogonal, o sea que su transpuesta es la inversa. Ahora
reemplazando la ecuación (13-18) en la ecuación (1]-16), obtenemos:
(13-20)
Si denominamos
(13-21)
donde los elementos de la matriz [B] son:
bu = a 11 cos2 e + 2a 12 sens cos e + a 22 sen 2e
bu
= b 21 =-( a 11 -
a 22) sení) cos e + a 12 ( cos 2 e - sen 2e)
(13-22)
b 22 = a 11 sen 2e - 2a 12 senü cos O+ a 22 cos 2 e
Ahora la matriz [B] puede convertirse en una matriz diagonal si b11 = b21
ocurre para un valor de e igual a:
13n2e =
2a 12
a 11 - a 22
= O Y esto
(13-23)
Existen dos valores del ángulo e que satisfacen la ecuación anterior y sus valores
difieren en 1rf2, correspondiendo a las direcciones 1;1 y ~ respectivamente. Si e satisface
la ecuación (13-23), la ecuación (13-20) se reduce a:
(13-24)
la cual es la ecuación canónica de una elipse, con sus ejes principales coincidiendo con
los ejes ~1 y ~. Reemplazando la ecuación (13-18) en la ecuación (13-10) y
premultiplicando por [R]T obtenemos:
(13-25)
414
I
t
¡
I
j
18 • Métodos
!I
donde dado que [B] es una matriz diagonal, la ecuación (13-25) corresponde él un
sistema de ecuaciones desacoplado. Por lo tanto la ecuación (13-2 S) es en efecto la
solución del problema de valores propios, la cual puede escribirse como:
{~(l)}= {~}
{~(2)}=
t
I
{i}
{X(l)} = [R H~(l)} ={::::}
{X(2)}= [Rl{~(2)}= {-::::}
(13-26)
¡
¡
IIlIJ1lCnCOS ell Cl WWIlSIS lllOUW
donde Al Y Az son los valores propios o frecuencias del problema y {x(l)} y {X(2)} son los
modos. En el caso de dos dimensiones la matriz de modos [x] es idéntica a la matriz de
rotaciones [R].
Por lo tanto en general la solución del problema de valores propios consiste en
determinar los ejes principales de una sección cónica, lo cual es consistente con la
reducción de la expresión cuadrática presentada en la ecuación 03-20) a su forma
canónica:
j
.1
1
I
(13-27)
debe además notarse que los valores propios son inversamente proporcionales a los
cuadrados del semieje mayor y menor respectivamente. Para el caso de n = 3 la ecuación
(13-15) representa una superficie cuadrática, con su centro en el origen. Esta superficie
es un elipsoide, por lo tanto el problema de valores propios consiste en encontrar los
ejes principales del elipsoide. Para el efecto se utiliza la transformación lineal:
{x}=[U]{~}
(13-28)
donde la matriz de transformación [U] es tal que:
(13-29)
donde [A] es la matriz diagonal que contiene los valores propios Ah Az Y A3. La ecuación
del elipsoide en su forma canónica se convierte en:
03-30)
donde ~h ~ Y ~ representan un sistema de ejes mutuamente ortogonales los cuales
coinciden con los ejes principales del elipsoide.
Para los casos donde n > 3 la ecuación 03-25) representa también una superficie
cuadrática, con su centro en el origen. Se puede suponer que esta superficie tiene n ejes
principales, ortogonales entre si mismos.
El estudio de las ideas que se presentan aquí llevó a ]acobi a proponer su método de
solución del problema de valores propios, el cual en esencia consiste en realizar
rotaciones sucesivas hasta lograr diagonalizar la matriz [A] de la ecuación (13-12). En
este caso el problema de valores propios se formula de la siguiente manera:
(13-31)
415
I
Dinámica estructural aplicada u( diseño sísmico
Donde la matriz [A] es una matriz simétrica y [ol] es una matriz diagonal. Si
premultiplicamos por [<I>]T la ecuación anterior obtenemos:
(13-32)
dado que hemos normalizado los modos de tal manera que:
(13-33)
El método de jacobi consiste en determinar la matriz [<1>] que diagonaliza la matriz [A]o
Para lograr esto se debe seleccionar una secuencia de matrices [Ti] que operan de la
siguiente manera:
[A] =[A o]
[T1r[Ao][Td =[Ad
[T2f[A t][T2 ] =[A 2 ]
(13-3-1)
Por lo tanto la secuencia:
(13-:i S)
y si las matrices de transformación se seleccionan adecuadamente:
(13-36)
y
(13-37)
I
La matriz [Ti] debe tener la siguiente forma:
j
J,
rl O O
O O
O
O
O O
O
O
O O
O
O
O O
-8
O O
O O
O 1 O
{)
O
O O 1
O O
O O O
e O oo. O
O 1
O
O O O
:
---
:
O O O
O O
O O
8
O O O
O O O
O O
- - -Q
O
O
O O
000
1 O
-- -O e
O
O
O O
O O
O
1 O
O
1
41(j
(13-38)
Esta transformación convierte en ceros los dos términos
siguientes valores:
t =
J
!¡
1
;
Y aji cuando se utilizan los
(13-39)
-------,========
1
I
aij
e=--===
~1+t2
(13--W)
s= te
(13--ll)
y
En realidad e = eos e y s = sen e. Entonces [T¡J puede considerarse como una rotación con
un ángulo e de los ejes del sistema de coordenadas en el plano i-j, Esta rotación es
ortogonal, pues la transpuesta de [Ti] es su inversa. La transformación se realiza con
todos los elementos de [A] que no sean cero ni pertenezcan a la diagonal.
Existen dos procedimientos para realizar estas operaciones, el primero consiste en
escoger el elemento más grande de los términos que no pertenecen a la diagonal e ¡¡lOS
convirtiendo en cero uno a uno, el otro procedimiento consiste en barrer
sistemáticamente todas las filas del triángulo superior de la matriz.· Debe tenerse en
cuenta que al realizar una transformación que convierte en cero los dos términos
simétricos de fuera de la diagonal, se afectan todos los términos de la matriz que
pertenezcan a las filas i y j, por lo tanto no es suficiente el transformar todos los
términos una sola vez, pues cada rotación afecta términos que ya se habian convertido
en ceros. No obstante cada vez estos términos son menores y por ]0 tanto hay necesidad
de transformar varias veces el mismo término hasta hacerlo muy pequeño.
El método tiene la limitación de que sólo se puede emplear en matrices simétricas, por
lo tanto en nuestro caso en que debemos resolver el siguiente problema de valores
propios:
¡¡
(l3--l2)
1
si premultiplicamos por [Mj"l obtenernos:
1
1
j
(l3--l3 )
pero la matriz [M]"l[K] no es simétrica, por esta razón debe utilizarse el procedimiento
que se presenta a continuación. Primero debemos resolver el siguiente problema de
valores propios:
[M] [y] = [11 ][y]
(l3--l-l)
el cual diagonaliza la matriz [M]. En este caso podemos aplicar el método de jacobi
dado que [M] es simétrica. La matriz [11] es diagonal y corresponde a los valores propios
del sistema de la ecuación (13--l-l). Los vectores propios están normalizados de tal
manera que:
(l3--l5)
Ahora si definimos la raíz cuadrada de una matriz como:
417
Dir Dinámica estructural aplicada al diseiio sísmico
Dado que se conozcan los vectores y valores propios de una matriz, la siguiente
operación es válida:
y dado que [Il] es diagonal, entonces:
~
V~i
1.
1[01]
=
s: j
03-48)
Además, las siguientes operaciones son igualmente válidas:
( 13-49)
[M]2 = [Y][1l 2][y]T
(13-50)
[Mr = [y][~] [yY
(13-51)
1
Ahora reemplazando [M] por [M]1/2[M]1I2 en la ecuación (13-42), obtenemos:
(13-52)
y además podemos modificarla a:
(13-53)
premultiplicando por [M]"1I2 y utilizando la siguiente definición:
(13-54)
la ecuación (13-53) se convierte en:
(13-55)
y la matriz [M]"II2[K][Mr 1l2 si es simétrica y por lo tanto podemos aplicar el método de
jacobi. Después de resolver el sistema los modos se obtienen de:
(13-56)
418
¡:j •
A}(>' orlos 11l11I1érico.-; ell el (I/W/lSIS 11101/(1/
Ejemplo 13-3
,
DebeVL c¡;üuücme Los VJwlíÍos 0 JrpcltevLdas cieL stsLeJna cieL ejevvlvLo 12-1 11JiLizavLcio el VJtél:Ocio
cie JacoLJi. FUaJtcio k = ID = 1. ot¡tenemos:
[M] =
.
1
O]
1O o2 O
[O O 2
y
AlLOm:
.~
1
¡
O]
1 -11 -0.5
[Mr [K] = -0.5
[O
- 0.5
1
~)or Lo tUJttCl VLO se YJltecie resolver ciircctaVJtente rlor el Vltétocio cie J().coV¡i
tnA./t'Jofl11.¡4.CiÓI1. preseJ1.tuciu eJ1. LueC¡tución. (13-55)
i
lj
cidwl11.os reclurir u Lc.-\.
PrÍfltero resolvernos eL prot¡Le¡nu cie valores prorJios de Lu Jnutriz ci(' vnusu sol«. tuL COI!J1.ü Lo
pLUJ1.teu Lu emución (13-44). Es evidente opte ciudo 0l/te La mutriz [M] es ciLugOl1.aL ('nUmees'
f
[1 OO]
[Il]= O 2 O
1
!
O O 2
lj
[VHl~[: O ;]
O
1
ElttOJUcs:
[Mr''' =
[Y][~ -U'][vJ' =[:....,
O
o.LJ
0.7071
-t--O
0.~_1
-0.7071
[A.]= [Mr''' [K][Mr'" =[__ 0_71-l-_1_-+-_
-0.5
1
J
tu C/1.(,.¡J ,)miemos ver(..jIte si es luta Jitutriz sivnétricu.
j
1
419
-----------------
Dinámica estructural aplicada al disc.:» sísmico
Ahora delJevvws resolver eL YJrobLef1'ta de valores propios pL0-nteado por medio de La eutaCiÓVL
(13-55). Esto Lo hacevl-tos arLic¡;u1,do s/l,cesivavvLevLte el vVLétodo de JacolJi a Los tém1Útos deJltera
de La diagonaL Para eL ténnilw de La rrimemJiLa, segltl-tciaCOL,tntf1,a de [Ao] tel1-evl-t(ls:
t =
2( -0.7071)
1-1- ~(1_1)2 +4(-(}.7071)2
1
e=
=1
I
= 0.7071
~1+ (1)2
s = 1(0.7071) =- 0.7071
I.j
YJor Lo tanto La matriz [T¡J es:
[0.7071
- 0.7071 01
° -0.35355]
- 0.35355
[ 0.2929
1.7071
-0.35355 I
Ahora
~J'.ira
t
=
e=
el ténnifw de La rrifneraJiLa. tercera coLIH1tf1,a de [A¡J olJW1,ev¡ws
2(-0.35355)
= 0.414214
0.29290 -1- ~ (0.29290 _1)2 + 4(-0.35355)2
1
~1 + (0.414214)2
= 0.9238795
s = C.414214(O.9238195) =-: 0.382683M
I.j
1
por Lo tanto La rnatriz [T 2] es:
0.9238795
[T,] =
O
[
O - 0.38268384]
1
0.38268384 O
O
0.9238795
420
t
=
2(-0.32665)
1.7071-1.14646 - J(1.7071-1.14646)2 + 4(-0.32665)2
1
e=
= 2.1758091
= 0.417605
JI + (2.1758091)2
s = 0.417605(2.1758091) = 0.9086287
O]
1 0.417605
O
[O 0.9086287
[T3 ]= O
-0.9086287
0.417605
[0~4646
- 0.056498
1.8571 J
con Lo cl1,uL hevvLos reiA,LLzíuio el ~JrLf11Rr ciclo de rotauoaes. Como ¡J/tede verse LiA, VltiA,trLz tiene
ténnÜ10s J/t.em ue Lu dLlitgOVLUl 111,cVL()reS íjl1,e Los ÜÜCLiA,LeS, rero se ILlitCe Il,cceSlitrLO reulizlitr
rotaciones litdLcLO/tlitles ILlitStlit obtener 111ü11eyos Jltem de llit dLiA,gOf1Ul SI"ÍLdcl1teVVLeftte
peíjlt.efíos. Des/fll1,és de reUlLZlitr vanos ciclos dr YOtítCLOf1RS udLcLol1uLes, lu mutrLz [A] se hu
cCHwer¡Ldo en:
[0,13398
1:1
°
el VJYOíÜt.ctO iA,CIHnlÜudo de LiA,S ntutrLces [T¡] es:
0.57735 -0.57735
[z] =[T¡][T2}··[T,,] =
- - - 0.57735 ]
_0.7_0_71_1t - -O- - --0.70711
t--[
0.40825
0.40825 0.81650
lJ Los f1Wdos se o¡'JÜeltel1 de'
r
0.57735 - 057735
057735]
O
-0.5
[<1>] = [Mr 112 [z] = l-0.5-----1---+--0.28868
0.57735
0.28868
Lo CliiA,L corres¡Jonde iA, Los modos deL sistem«, 110nniA,lLZiA,dos COl1W [<I>]T[M][ <1>]=[1].
•
En el disquete que se suministra se ha incluido el programa JACOBI que realiza el
cálculo de los modos y frecuencias utilizando el método de ]acobi para sistemas con
matriz de masa diagonal. El mismo programa se puede utilizar para matrices de masa
no diagonales, usándolo primero para la matriz de masas y luego para la matriz
dinámica calculada de acuerdo con la ecuación (13-SS).
421
'in Dillámica estrrlctural apliccula al díseiio sísmico
13.5 Método de iteración en un subespacio
Este procedimiento, también conocido como método de Wilson [Bathe y Wilson, 1976],
pues fue planteado por el Profesor E. L. \Vilson, permite calcular los primeros modos de
un sistema, sin necesidad de calcular la totalidad de ellos. Su aplicación por lo tanto es
de gran utilidad cuando debemos encontrar los modos de un sistema muy grande en el
cual la influencia de los modos altos en la respuesta no es muy grande. En esencia el
método consiste en lo siguiente. Para un problema de valores propios del tipo:
(13-57)
de dimensiones n por n y del cual tan solo queremos obtener los p primeros modos,
donde p-cn, Para obtener una convergencia más rápida, tomamos q modos, donde q<p.
Primero suponemos una matriz [Vo] que tiene dimensiones n por q. Ahora buscamos
una matriz [V il donde:
13
(13-58)
Luego calculamos:
(13-59)
y
(13-60)
donde t.mto [K1] y
valores propios:
[~tl
tienen dimensiones q por q. Ahora resolvemos el problema de
(13-61)
para lo cual utilizamos el método de jacobi y así obtenemos la matriz de vectores
propios [p¡) de dimensiones tI por q. Ahora calculamos la matriz rV 2] por medio de:
(13-62)
Este proceso se repite hasta que no haya variación en la matriz de transformación [Vk ]
entre una iteración y la siguiente. En este momento
(13-S3)
La convergencia del método es sensitiva a la selección de la primera matriz de
transformación [Vo]. En la referencia [Bathe, 19821 se presenta el método
detalladamente e inclusive se encuentra un programa de computador que realiza las
operaciones necesarias.
13.6 Cociente de Rayleiqh
Supongamos que tenemos un problema de "al ores propios del tipo:
03-64)
-~-
...\1 premultiplicar por {$(i)}T obtenemos:
(13-65)
y
(13-66)
Esta última ecuacion es lo que conoce como el cociente de Rayl-iigh. Ahora si
suponemos un vector {q} que sea una combinación lineal de todos los modos:
{q}= fa¡{<l>(i)}
(13-67)
i=l
,..\1 reemplazar este último vector en la ecuación (13-66) obtenemos:
(13-68)
Ahora al hacer todos los a¡ iguales a cero excepto uno, obtenemos:
ro~a~
R=_J_.1 =ro~
,
a~
.1
(13-69)
J
Si la ecuación (13-68) la factorizamos de la siguiente manera:
~
f
1
t
f¡
t
I
dado que los valores de ro¡ se ordenan de menor a mayor, tenemos:
I
y fJ. siempre será positiva. Por lo tanto siempre el cociente Rayleígh calculado para
(13-71)
cualquier vector:
(13-72)
Si realizamos la misma factorización de la ecuación (13-70), pero para ro~, podemos
probar que:
(13-73)
y además que:
(13-7-1:)
428
Jill(ílllica est ruct ura! aplicada a! diseño sísmico
Esto quiere decir que no importa que vector se introduce como modo en el cociente de
Rayleigh, la frecuencia que se obtiene está dentro del rango de frecuencias posibles del
sistema. En la medida que el vector que se introduzca al cociente de Rayleigh se
acerque a un vector modal real, la frecuencia será cercana al valor de la frecuencia
asociada con el modo.
Este procedimiento es utilizado por los códigos de diseño sismo resistente para obtener
el período fundamental de vibración de una estructura. Está basado en que se dispone
de una buena aproximación a las fuerzas horizontales inerciales que tendría la
estructura al vibrar en el modo de vibración fundamental, o primer modo. En general el
método de la fuerza horizontal equivalente, prescrito por la mayoría de los códigos de
diseño sismo resistente, permite determinar el vector de fuerzas inerciales
correspondientes al primer modo {f}, cuyos términos f¡, corresponden a cada uno de los
pisos i en los cuales se genera la fuerza inercial correspondiente al modo fundamental
en la dirección bajo estudio. Estas fuerzas se determinan en función de la masa
traslacíonal que tiene 'cada piso de la edificación, mi' En general se utiliza el peso W¡
(=m¡xg) correspondiente al piso. Realizando un análisis de la estructura para las fuerzas
{f}, es posible determinar las deflexiones horizontales {o} de la edificación en la
dirección bajo estudio correspondientes a cada uno de los pisos, como la deflexión
horizontal 8¡ del piso i. Por lo tanto, se está realizando la siguiente aproximación:
03-75)
Además es e\ idente que:
(13-76)
y
[M]= ![W]
(13-77)
g
donde [W] es una matriz diagonal, donde sus términos corresponden al peso
piso, y g es la aceleración de la gravedad.
W¡
de cada
Introduciendo lo indicado en las ecuaciones (13-75) a (13-77) en la ecuación (i3-66),
aplicada al primer modo o modo fundamental, obtenemos:
(13-78)
y convírtíendo 00t en 21rll\, se obtiene la ecuacion para el período fundamental que
presentan los códigos de diseño sismo resistente:
TI
= 21t
f(wiOn
(13-79)
l ....i_=I'-_ _
~ g~(f¡ 0i)
1
1
1
4-24
1
Capitulo 14
Análisis Inodal cronológico
14.1 Introducción
En el Capítulo 1¿ se determinó la solución de la respuesta dinámica por medio de)
desacoplaje de las ecuaciones de mü"imiento.:\llí se demostró que el procedimiento
para obtener la respuesta en el caso de vibración libre con condiciones iniciales
consistía en la superposición de la respuesta de los diferentes modos de vibración. El
caso de vibración libre corresponde a la solución homogénea del sistema de ecuaciones
de equilibrio dinámico. Ahora nos interesa la solución particular del sistema de
ecuaciones diferenciales simultáneas, o sea el caso de una estructura de varios grados
de libertad que está sometida a unas fuerzas que varían en el tiempo. Estamos
hablando de una estructura cuyas ecuaciones de equilibrio pueden ser descritas
matrícíalmente de la siguiente manera:
1
1
[M]{x} + [K]{ x} = {P(t)}
(lA-l)
Dado que podemos obtener los modos y frecuencias de la estructura para el caso de
vibración libre, podemos aplicar la siguiente transformación de coordenadas:
{x} = [<I>]{'rl}
(l ~-2)
y deri- 'ando dos veces contra el tiempo:
{x} = [<1>]{ft}
Reemplazando
(l~-2) Y (1~-3)
(1~-3)
en
(1~-l),
y premultiplicando por
[<I>]T obtenemos:
Donde [1] Y [002] son matrices diagonales. Lo mostrado en la ecuación (l~-~) Implica que
se tienen n ecuaciones independientes de un grado de libertad del tipo:
(l~-5)
y si se aplica amortiguamiento modal:
¡
(H-G)
!
í
J
425
----------------------
Dinámica estructural aplicada al diseño sísmico
Ahora estudiaremos la respuesta ante diferentes tipos de excitación, de una manera
análoga, y muy ligada con lo que se presentó para sistemas de un grado de libertad en
el Capítulo 2.
14.2 Vibración forzada armónica
En este caso tenemos una excitación representada por medio de unas fuerzas que
varían en el tiempo con una periodicidad constante. Se trata de una extensión a
sistemas de varios grados de libertad, de lo presentado para sistemas de un grado de
libertad en la Sección 2.3. A modo de ilustración, supongamos una estructura industrial
que tiene equipos mecánicos que trabajan a diferentes frecuencias en sus diferentes
pisos, como la mostrada en la Figura 14-1.
--'X n
V
./l
--'X¡
-
~
v
--'X3
"-'X2
F 1senQ1t
..
fuerzas ermomces
/
-.
---+
---.... XI
grados de libertad
Figura 14-1- Estructura sometida a varias fuerzas armónicas
El vector de fuerzas en el tiempo tiene la forma:
FUsenOnt}
{P(t)} = {F¡ senO;t}=
:
F sen0
(14-7)
2t
{ -2 - - F] senO]t
donde F¡ corresponde a la amplitud de la fuerza armónica que se impone en el grado de
libertad i, y Oi es h frecuencia, en radianes por segundo de esta fuerza armónica. Al
desacoplar el sistema, como se indica en la ecuación (14-4); se llega a n ecuaciones
desacopladas de acuerdo con lo planteado en la ecuación (14-6):
(14-8)
La solución para el tipo de ecuación de un grado de libertad, como
(14-9)
según se indicó en la Sección 2.3, la solución es del tipo:
x(t) = 'JI sen(nt -
<p)
(14-10)
donde:
426
F / ro 2
o
'P = ----;============
(1-1-- 11)
[1-(n/ro)2f +[2~(n/ro)Y
y
(1-1--12)
La única diferencia de la ecuación (1-1--8) con respecto a la (1-1--9), es que en la primera el
lado derecho es la suma de las diferentes fuerzas armónicas aplicadas a la estructura,
afectada, término a término, por los valores apropiados de los modos de vibración.
Como el sistema es elástico, el principio de superposición es válido, y la respuesta
puede considerarse como la superposición de las diferentes respuestas. Entonces, la
respuesta en el tiempo para el grado de libertad desacoplado 11;, es:
l1¡(t)= t(<\l~¡)'Pjsen(njt-<pj))
(14-13)
J=l
donde:
'P. =
J
F. / ro~
r
J,
(14-14)
I
~[l- (n j/ro¡ y +[2~¡ (nj/ro¡)f
y
(14-15)
en estas ecuaciones i corresponde al índice de la ecuación desacoplada, y J al índice del
grado de libertad donde se aplica la fuerza armónica. Una vez se determina 11¡, los
valores de los desplazamientos de los grados de libertad utilizados para plantear el
equilibrio son:
(14-16)
Debe tenerse en cuenta el hecho de que la respuesta obtenida según el procedimiento
anterior corresponde a la solución particular del sistema de ecuaciones diferenciales,
por lo tanto la parte correspondiente a las condiciones iniciales tanto de
desplazamiento como de velocidad, deben evaluarse independientemente y
superponerse a la respuesta obtenida según lo indicado anteriormente. Puede decirse
que la solución particular dada es aplicable para lo que se denomina estado invariante
(steady sta;e en inglés), en el cual no existe influencia de la solución homogénea
correspondiente a las condiciones iniciales. Dado lo anterior, realmente no tiene mucha
importancia la definición del tiempo de inicio de la excitación en los diferentes grados
de libertad, pues dado un tiempo de estudio suficientemente amplio, llegará un
momento en el cual la respuesta se combina de la manera más desfavorable, por lo
tanto es lícito sumar el máximo de las diferentes funciones de respuesta, para definir
de esta manera un máximo posible de la respuesta totaL Lo anterior conduce a que la
máxima respuesta para cada uno de los grados de libertad generalizados es la suma de
los valores absolutos de las amplitudes:
n
(l1¡)max
= LI<\l~i)'Pjl
0-1--17)
J=l
427
Dinámica estructllral aplicada al diseño sísmico
Ejemplo 14-1
EVL HYL teatro se rJiCVLSCIL colocar Itf1 gCfterCIL(;j,or eléctrico qlte uene IUtlll JIItasCIL ete 2000 kg =2 Mg.
OeVJe Cf1contrCILrse La Ü'!:ftfi.eVLciCIL líjfi.e proetl~.ceft LClLs vitlmcímtes ütetH.cietCILS rJOr el generaetor en LCIL
11tUlíjliÍltU etc prouecciÓft ete cuie. CltGHtetO ambos estéa o¡,¡ercuteto.
Lu fnciGjltÜta ete prouecciólt tamtJiéft nene ¡U1a vnasa ete 2000 kg = 2 Mg. L¡;¡, rJordón ete L¡;¡,
estni.ctltm etOf1ete estcil1 cotocaaos cunbos eWiÍpos tiene L¡;¡,Jomt¡;¡, etescrit¡;¡, en L¡;¡, Figll.ru 14-2.
Toetos Los etemenros etet pórtico ete soporte tíeuen ¡;¡,ndw b = 0.4 m U alto h = 0.8 m. ete fU\,
m¡;¡,teri¡;¡,L con fU\, vnóetfüo ete dCILSticiet¡;¡,et E = 25 GPa U Sl~, etisposiciól1 es LCIL mostr¡;¡,eta Cf1 L¡;¡,
jigluu.
40m
]
i
t
proyector
I
generador
3m
3m
3m
Figura 14-2 - Ejempfo 14-1
EL gelterrA.ctor est¡;¡, mont¡;¡,do sobre Itf1¡;¡' t¡¡;¡,se líjlte sólo tml1Smite víhracíones verticales U estas
Íftd,tCeft IU\,ujli.erzrA. sobre L¡;¡, estrltCtltm C¡tUCIL ¡;¡,mpLitltet es 3 kN con lut¡;¡,jrew.eJtda ete Q = 25
Hz I'Jos i:'Lte(cs¡;¡, Lo" ~1'!JL!1.i~ftC~Vt el L¡;¡, imo,gen ~¡rolje(.t¡;¡,et¡;¡, en L¡;¡, pcu1t¡;¡,LLCIL dd teatro. L¡;¡, cli.¡;¡,L se
eftCltelttm rA. 40 f11etros de dist¡;¡'11Ci¡;¡, eteL elíjliÍpo ue rJroljeCCióH. EL ¡;¡,lnortiWt¡;¡,ll.. . ienro de!
sistem¡;¡, en todos Los moctos es S = 1% del crítico. Pltede despred¡;¡,rse L¡;¡, colttritJl~.cié)ft de L¡;¡,
11t¡;¡,S¡;¡' de LrA. estm.ctlu¡;¡,.
®
®
3m
3m
5m
3m
Figura 14-3 - Ejemplo 14-1
Los VHutoS U elementos de L¡;¡, estmetltm se ftH,f11.emlt Wf1tO mftestm LCIL ngf~,m 14-3. EL
di¡;¡,jnHjm¡;¡, es iv\flnitum,clttc rígido el1 Slt vJr()~1io r¡L¡;¡'ltO. por Lo t¡;¡'ltto Los gr¡;¡,dos "te Lik¡ert¡;¡,et
ILOrizcJlLLuLes ete Los IlItUOS 2. :3 U4 se igli.uLun ¡;¡,L grudo de Libclt¡;¡,d Ilorizmtt¡;¡,L deL ItltUO 1. Los
428
14 •
gmuos ue Líbert(/tu vertícales uc Los
covLÚeVLSW1..
VLltUOS
1 Ij
,'111(/{1.'>/8 11/0(/(/1 (TOI/()/O,(j/CO
4,. IA.sí como toet(/ts lcA.s rotudoues etc los 1111.ÚOS se
L=3m
E = 25GPa = 25000000kPa
A = 0.4m· 0.8m = 0.32m 2
1 = 0.4· 0.8 3/12 = 0.017067m 4
2666.7
O
O: -2666.7
O
O
189.63
O
284.45 :
O -189.63
284.45
284.45
284.45
O
568.89:
O -284.45
------- -------- -------,-------- ------- ------01 2666.7
-2666.7
O
O
O
O -189.63 -284.45 :
O
189.63 -284.45
284.45
01
284.45 :
O - 284.45
568.89
».,
v.,
v.,
U bx
U by
U bz
ELCf11,CI1.lo etc COlIU11.11.a:
L=5m
E=-' 25GPa = 25000000kPa
A = 0.4m· 0.8m = 0.32m 2
1 = 0.4· 0.8 3/12 = 0.017067m 4
tgdl
f
102.40
v.,
O -1600.0
O
O:
170.67
O
341.33 : - 102.40
O
------- -------- -------,-------- ------- ------O -102.40
-40.960
O -102.40 I 40.960
O
1600.3
O - !600.0
O
170.67 : -102.40
341.33
102.40
O
O
U ay
40.960
1
O
O
102.40
102.40 : - 40.960
O
1600.0
O:
Uaz
U bx
U by
U bz
La 111.(/ttriz etc rigiuez etc toet(/t la cstmctlua. s/1.¡JriI1ÜCI1.eto los témüvUls ete Los apoljos, Ij
elilnil1.al1.eto las cteJonn(/t(ÍOItCs axiales etc las vigas Ij orgal1.izuet(/t ~Jara COf1.ÚeI1.Sur. es:
I gdl
81.92
o
o
o
------o
379.26
--------189.63
102.4
- 284.45
o
o
o
o
102.4
Des~,,{.és
-189.63
o
102.4
- 189.63 : - 189.63
- 284.45
o
-------,-------o 1 1789.6
o: 284.45
o
-------
-------
910.22
284.45
o
-------o
o
284.45
o:
379.26 :
284.45
o
o
- 284.45
284.45
- 284.45 :
284.45
284.45
1137.8
284.45
o:
-189.63 :
o
o
o
o
o
o
284.45
o
o
284.45 :
o
o
o
o
102.4
-189.63
284.45
o
o
o
i)
1137.8 - 284.45
284.45
o
284.45
- 284.45
284.45
o
------- --------
o
o
1789.6 - 284.45
- 284.45
910.22
ete ccmdel1.slA.r se ohuene l(.l, siglüevLtc :nlA.triz etc rigiuez. en /{'Jüctuetes ue /<N/vH.
429
Dinámica estructural aplicada al diseño sísmico
J.,gdl
56.452
38.421
[K] = 103 X
[
38.421 - 38.4211 U Ix
205.08 -155.92
U2y
- 38.421 -155.92
205.08
U 3y
La ¡nasa tanto eteL gevl,eraetor como eteL WOl:jector es ete 2 Mg. /'l0r Lo taVLto La I1tatr(z ete masa
ele ne La s (g lúe nte Jorma'
lj
Las eCI1,acloVl,es.de eqlúLilrJr(o son Lus sig¡üentes,
~1{~
[ffib
::} + 10
U 3y
3
x[_5_3:_::~_~-+--_-+_=_::_~~_~~1{~ {3sen~nt)}
38.421
205.08
::} =
205.08. U 3y
38.421 -155.92
-
O
Para este s(stclna, Los modos íi,e vilrJrvtción SOVL
J., gdl
0.496780
[<I>] = - 0.056611
[
0.056611
Moeto
TI
=
0.000000
0.0566111 U l x
0.500000
0.496780 U 2y
0.500060 - 0.496780 U 3y
0.058
Moeto 3
Moeto 2
1
s
TI
=
0,04·0 s
T3
=
0.015 s
Figura 14-4 - Ejemplo 14-1- Modos y períodos de vibración de la estrt'ctura
COVI,
Las s(glúelttesJrec/te¡tclas I:j /'leríoctos:
Modo
1
2
3
r
ro2
(radls)2
11924
24578
182690
ro
(radls)
109.20
156.78
427.43
'j
- O.16983senQt
1.50000senQt
{
1.49034senQt
Ahora mLw,Lumos. [<I> {P(t)} =
4:30
f
T
(Hertz)
17.38
24.95
68.03
(s)
0.0575
0.0401
0.0147
J...-:1:" -
--i..JJ ({-C.·.·I..JI
J
"
' •. "
'
"",.
"''''0
Por lo tvUtto, YJodevnos revIJu:ir et sistemu de ew,ucimtcs u Lus sig/üel-ttes eCltucimtes
dcsucoriudus uL ir'Ltrodltcir el ufnortig/tUf1ücl-tto InoduL
=-o.16983sen(Qt)
T12 + 2/;00 2112 + OOiTl2 =1.50000sen(Qt)
T11 + 21;001T\¡ + OOiTll
= 1.49034sen(Qt)
T13 + 2/;00 3113 + OOiTl3
Alwru cr;ÜC¡ÜUf11DS:
'P = _ _.
-==p=J=oo=f======
F(Q/ro¡)2f
+[2~(Q/OOJr
y
Elt ftlH'Stro cuso LuJreCltenciu de Lu excituciém es,
Q = 25 Hertz x 21t = 157.08 rud / s
YJor lo tanto.
Pi
(kN)
ecuación
1
2
3
-0.1"983
1.50000
1.49034
I
'P
Q/ro.
1.43846
1.00191
0.36750
(m)
-1..3316x10·5
2.9915xl0·3
9.4312x10-6
tan e¡>
-0.02691
-5.23099
0.00850
Tll = -1.3316 x 10-5 sen(Qt - e¡>1)
Tl2 = 2.9915 X 10-3 sen(Qt - e¡> 2)
Tl3 = 9.4312
X
10-6 sen(Qt - e¡> 3)
AlwrcL Ittiiizuftdo
sen (Qt - e¡» = sen (.Q tj cos o - cos(Qt) sen e¡>
ecuación
J
2
3
(j)
COS (j)
-0.02690
-1.38191
0.00850
0.99964
0.18777
0.99996
con Lo mui Lus eCltuCiOf'LCS desucortudus se coftviertel'L en.
11 1 = -1.3311 X 10-5 senfst - 3.8616 x 10-7 cos Ot
1
Tl2 = 5.6171 x 10-4senUt + 2.9383 x 10-3 cos Qt
Tl3 = 9.4308 x 10-6senQt-8.0165 x 10-s cosQt
lj
dudo UJlte los desYJluzw1üevttos se olrlUeneft de
481
sen (j)
-0.02690
-0.98221
0.00850
e¡>
(rad)
-0.02690
-1.38191
0.00850
;¡ .."'- '
Dinámica estructural aplicada al diseño sísmico
Los dcspLuzGtHÜe¡ttos e/t Los grctdos de LLlJerLGtd se
U
Ix} {- 6.0788
U 2y
{
=
U 3y
rl~,edeft
cXjlJresGtr como.'
7
10-6 sen(Qt) -1.9637 x 10- COS(Qt)}
2.8629 x 10-4sen(Qt) + 1.4691 x 10-3 cos(o.t)
2.7542 X 10- 4sen(o.t) + 1.4692 x 10-3 cos(o.t)
X
EL valor Mtw<ifno de despLuzcunLeJ1to PGtrct el gmdo de LLberlGtd U 1x se OllLlcVlf derLvcu1do coatru
eL LlClnpo LGt fCll.Gtdóft:
U Ix = -6.0788 x 10-6 sen(Qt) -1.9637 x 10-7 cos(Qt)
U l x = -6.0788 X 10-6 Q cos(Qt) + 1.9637 x 10-7 Q sen(Qt)
HucLcI1do estGt (ÜtLf1tGt eCltGtcLón Lgl1,GtL u cero lj etespejuneto o.t, obtenemcs i/jlte Llene fU1 valor
etc 1.5385 rctviiuJ'1cs. EI1 ese inslul'1te Los acsrlLuzGtM1LeJ1!Os son.
rU lx}
~ U 2y
lU 3y
{- 1.72709
6.08225 10-6}
x 10-:
X
=
3.18732 x 10-
':1 aesrJltés etc reuLlzGtr L(;f,s ojIJerctcLones GtprorlL(;f,etus jlJGtrct obtener Los etesj1LuzGtf11Lea!Os (.jite se
¡Lullíw'1 Cm'1etel'lsueto, ohtenemos:
-
~l
U lz
U 2z
U 3z
U 4y
_
0.96814 x 10-41
0.49554 X 10- 3
0.4672«; X 10-4
j- - 0.46054
U 4z
3
10- 0.33960 X 10-4
0.34387
X
X
j
10-5
,4JLOrCL el vator f1'1W<lfl'tO etc rl,espLuzGtf11Le¡'1!o rlGtm el gmeto dc LLlwrtCLet U 2y se obtiene eterivunao
CCH'1Lrct el t.lef11¡'JO LaeU1,aclÓlt.
=2.8629 X 10-4sen(Qt) + 1.4691 x 10-3 cos(o.t)
U2y =2.8629 x 10-4Q cos(Qt) -1.4691x 10-3Q sen(Qt)
U 2y
hCLdeJ1do esta ,;¡,LtLVl'1CL
ecuactón igltGtL (;f, cero
lj etespcjGtneto Qt
de 0.19246 rctdi(;f,/tCs. Eft ese iftst(;f,ate Los despLuzGtf11Lel1tos son:
Ix) ={-1.34000
x ~O:}
1.49610 x .LO
U
U 2y
{U 3y
1.49610xl0-3
482
obtenemos Wte nene 1m valor
14
lj desYJltés al' rculizur lus cWJerucimtes
j UIL~líwt cOItaemUtto, eVLcovltl'UI'l'UJS:
U 1y
u 3z
=
1110(/((/ crVI/O/O.</lCO
uy¡roriuaus YJuru ohtener los aeSYJlfAZWnie~ttos
CIJ/{,C
se
0.37094 X 10-3
- 0.37099 X 10-3
U 4y
0.45987 X 10-4
u 4z
- 0.33707 X 10-3
Por (Ütil'lW, el valor mcixiVlto c{(:, desy¡luzwniento puru el grGldo al'
dcrivul'],(,Lo COlttm el tievltyJCJ LlIt ewuciólt:
U 3y
./t/l(íliSiS
0.45943 x 10-41'
0.33741 x 10-3
Ulz
U 2z
o
Li~¡ertGld
l!3y
se oütíeue
= 2.7542 x 10-4sen(Qt) + 1.4692 x 10-3 cos(Qt)
U 3y = 2.7542 X 10-4 Q cos(Qt) -1.4692 x 10-3 Q sen(Qt)
lLGlciendo est« I1WmGl eC/{GlcióJt ig/tlltl u cero lj desprjllLvLdo Qt, o~Jtntemos ClJ/1.e tienc 11.11. vulor
eLe 0.18531 rudiultes, Elt ese ütstmttr los ttespLGlZlItl'ltiel1tos son.
IX]
U
U 2y
U 3y
f
=
{-1.29752 x lO:}
1.49606 x 10
1.49606 X 10-3
desYJltés de reGlLizGlr lGls opemcioltcs GlYJropiGlttGls pGlm obtener los liteSVií,V,Z(/!Y11tefl1
¡UILt, íwt caItde l1.sGldo, (lbtenemos:
lj
0.45942 X 10-4
0.33739 X 10-3
Q.37í)93 X 10- 3
- 0.37098 X 10-3
0.45985 X 10-4
- 0.33707 X 10-3
PIUGl detrrmiltlA.r eL efecto e~t LlIt imugelt r¡roljectlltdu eJ1. el tetórt deL teatro drbeVl1,()S ideJttifLmr
Los HtovimievLtos ClJH.E' ocurren elt Lu clÁ.lnwlA. de r¡roljección lj SH, efecto elt LIA. il'l1ugeH elt el tetón.
Los movilnielttos horizCJlttlltLes del proljectol' carrespmttten lA. los movuruentos mciximos del
gmdo de LibertGld U lx el c/tGlL expresllt~los en metros es:
Ui, = 6.08225x10-6
m = 0.006 mm
EL cltGlL es 10t despLfAZGll'ltiel1.to HtH,lj 11teJtOr IJj/l.E' J1,() IA.Ject&u1. LIA. imlA.í:Jelt.
Los VltOvimielttos vertícates del y¡ro0ector corresYJlmdevL lA. Los rnovímíentcs mcixil1ws del gmdo
tte LibertlA.d U 3y . Estos son. expreslA.ttos elt VltetroS:
U3y = 1.4961x10·6 m = 1.5
IHln
Dinámica estructural aplicada al diseño sísmico
Los VltOvíJ!1tíentos verticales de Lct Íf'ltctgen eft et tetón del teatro son ctdemcís CctltSctaOS por Lct
rotacióu del ~Jro~ector elt el grctdo de Lítwrtctd U 3z .
AL InlütípLíClA-r estas rotauones. expresudcts e VI. rctdívutes. por Los Cltctrev\,tct metros V]lte Los
sepctrct. obtenemos el síglüeVl.te despLlílZctlníeftto vertical de Lct ímctgen ef, el telón:
0.46054xlO· 3 retd x 40 = 0.0184
In =
18.4 l'ltm
Este J!1tOvímíeftto ctLcctfl,zct ct ctJectctr L~l ímctgeVl.. DetJen tomarse fltedídcts correctivas pctrct
rcdH.cír Lct vílrJrctcíóvl. CctltSctvLct nor el gefterctdór.
14.3 Vibraciones transitorias
En el caso de que se tenga una excitación arbitraria, la solución planteada en la Sección
14.1 es la misma hasta el punto en el cual se obtienen las ecuaciones desacopladas
como se indica en las ecuaciones (14- 5) Y (l-l-G). La solución de la respuesta para cada
una de las ecuaciones desacopladas se realiza por medio del procedimiento descrito en
la Sección 2.4 para sistemas de un grado de libertad por medio de la integral de
convolución, o de Duhamel:
(14-18)
donde:
~(<\lj(i) Pj(t) )
Pi(t)=~
(14-19)
-
j=l
en estas dos ecuaciones el subíndice i hace referencia a la ecuacion desacoplada
correspondiente al modo i y el subíndice j al grado de libertad número j de los grados
de libertad empleados para plantear el equilibrio dinámico de la estructura.
En aquellos casos en que la solución de la integral de convolución sea muy elaborada
matemáticamente, o las fuerzas transitorias aplicadas a la estructura no se presten para
ser tratadas por medio de funciones matemáticas trascendentales, puede emplearse en
la solución cualquiera de los métodos numéricos presentados en el Capítulo 3.
Ejemplo 14-2
EL edifl.cío de C/1,cttro pisos mostrctdo en Lct FígIUct 14-5(ct). sltfre Los efectos de H.Hct ex¡r¡ tostón. Lct
Oftdct de rresíón efi. el aire vctr[ct ete LctJormct J!1tOstrctdct en Lct Fígrtrct 14-5(h). TelteJ!1tOs iftterés
en Lct res¡r¡itestct de Lct estructura en SIl, seVl.tído corto en ¡r¡Lctntct. COJ!1tO f'ltltestrct Lct JigH.rct. EL
ctmortígltctJ!1tíeftto /'lctrct este (í~JO vl.e víbrvlÚOVI.eS se esLillJtct e;"-~ ~ =2% deL crítico.Todcts Lcts vigcts
de Lct estnl.c(¡.trct tiene lUt ctftcho b = 0.40 m ~ Itn atto h =0.50 m. Lcts coLIU1tVl.cts tíefteft secctón
Cltctarctdct con h = 0.40 m. EL IIJtctterictL de Lct estnu:tfUct tiene fUt vnódnLo ae eLctstícítictd E = 25
GPa. LíA. eaifíClA-cíÓlt nene tUtct f'l1.ctSct de 1000 kg/m2
484
1
1-.
Se s/~,yJmte (!jIte LIA- OJ1Gi(;\. expLosivlA- ¡10 ríene vlA-rilA-ciém m LIA- IA-LuulA- Ij se c;\.VJLim sobre eL árcIA- Gie
JlA-dLIA-GiIA- GieL eeLificio. Por Lo LunLo el úreIA- IA-Jerel1.te sobre LIA- c/l.IA-L se upLiclíL LIA- v¡resiéwl en eL
Cltwto piso es Gie 10m· 1.5 m = 15 m 2 I::J V'IA-YIA- Los otros V,isos es Gie 10m· 3 m = 30 m 2 .
presión
(kPa)
t (s)
(a)
(b)
Figura 14-5 - Ejemplo 14-2
Privnero Gietennütwnos LlA-s clA-YlA-cterístims Gie rigiGiez Gie LIA. cstnu:l.IiYIA- ef1. el scntiGio corto. DIA-Gio
(!jite Los tres pórticos sm1 ig Il.IA-LeS. se eVU:II.(' fttnt V' rivne ro LI;\. f1tlA.triz de rig idez VJIA-YIíL ~fCCloS
LlA-teYlA-Les de lUtO ete Los uórucos I::J GiIA-Gio (!jIte el ¡ÚIA-JrlA.gf111A- GieL eetlficiu se slqlol'1.e ÍI'!:filti.tc,.J,nteftLf'
rígido en S/t rnopio pLlA.no. Lltego simpLeVl1f'ltte se VI'lltLtipLimll SH.s ténnivlüs por tres pwu
tCJVl1IA-r en CH.('fttIA- LIA- rigidez de Los tres pórticos.
ELef11.eltto ete viglA.:
L=6m
E = 25GPa = 25000000kPa
A = 0.4m· 0.5 m
= 0.20m 2
1 = 0.4· 0.5 3 112 = 0.004167 m 4
833.33
O
O
5.7875
17.363
O
------- --------833.33
O
U ay
34.725
U ax
O
u.,
5.7875
-17.363
U by
O -17.363
69.450
u.,
O -5.7875
69.450 :
01
O -17.363
------833.33
O
-------1--------
O -5.7875
17.363
34.725 :
ELel1teltto eLe coLltlnnlA-.·
L=3m
E = 25GPa = 25000000kPa
A = O.4m·O.4m = O.l6m 2
1 = 0.4 4 112 = O.002133m 4
1
v,
0
17.363 :
-17.363 :
O
O
17.363
O: -833.33
485
O
1
-------
Dinánuca estructural aplicado al diseño sísmico
J, gdl
35.550
v.,
O -1333.3
O
O:
35.550
71.100 : - 35.550
O
------- -------- -------,------- -------- -------23.700
O -35.550 I 23.700
O - 35.550
O:
1333.3
O
O -1333.3
O
«.,
«.,
23.700
O
O
35.550
35.550
O
35.550 : - 23.700
1333.3
O
O
35.550 : - 35.550
O
71.100
U bx
U by
U bz
DesYJI1,és de er'Ls¡;u1ttILGtr ¡Gts rigideces de Los etemenros. eLin'LÍf'LGtr LGts deJorntGtciortes axiGtLes de
LGts vígGts. ¡j coltdertsGtr Los gmllÍos ¡;(e mJertGta. verucates U rotadonates. se otltíeVLelt LGt sig¡üeltte
mGttriz de rigi¡;(ez ¡;(e ejectos IwrizorttGtLes ¡;(eL pórtico
25.623 - 33.230
8.5278
-33.230
69.713 -45.338
8.5278 -45.338
-1.1582
-1.1582
10.369
]
73.919 -47.371
10.369 -47.371
84.035
AL InltLtiplicGtr por tres tonos Los ténnílws ete LGt InGttriz Gtltterior se otJtime lGt InGttriz de rigiGi.ez
de toaos LGt estractHm elt el seltti¡;(o corto. LGt CltGtL cs. en kN/11t·
J, gdl
iK.]~10'X[
] ~~
=
EL áreGt ele metGt IMtGt ele LGts tosas es 10 m . 6 m 60 m2 . Por Lo tanto LGt VI'LGtsu por YJiso es m
m2• 1000 kg/m" = 60 Mg. Por Lo tauro LGt vl'LGttriz al' 11tGtSGtS es LGt siglüente:
=60
J, gdl
60
O
O
O
O 60
O
O
O
O 60
O
O
O
O 60
LGts eUtGtcioltes ae eqrúLitlrio dÍllámico son LGts sig/üelttes:
O
O
76.869
-99.691
O 60
O
-99.691
209.14
-136.02
31.108
O
O
O 60
O
25.583
-136.02
221.76
-142.11
O
O
O 60
-3.4747
31.108
-142.11
252.10
60
[
O
25.583 - 3.4747
¡;(mtde Los térmÍlws deL LGt¡;(o ¡;(erecho corresporlllÍen GtL vector de áreGts qferelttes GtSigVLGttlles Gt LGt
presióH ell cGtdGt IUW de Los ¡1isos. eVL metro:; CltGt¡;(mdos. IJ q(t) es LGt jirestórt. wJ r.ol1W está
descrita el1 LGt FigltrGt 14-5(tl). EL áreGt en metros cl1,Gtctmdos. mltLtiYlLiw.etGt por ¡tllGt presiólt eVL
kpGt. COl1í:ÜtCe a juerzus eH kN. lo cltGtl es ccmsisteltte COH lGts ImiaGtetes Cj/t,e se obtienen Lu
m/t.Ltíy¡Limr VllGtSGtS en Mg rlor GtceLeYlil.cicmes CH m/s 2 • Lo clt.GtL corlel/tee Gt kN lj rigideces eH
kN/m. Wlr 11l. Lo ClIGtL tGtmklicll colláltCe lA. kN.
4:36
I
14 •
JlJl(¡(¡sIS 1110(/(//
cro/lolOywo
/ü resolver el rrovllefna de valores YJYOrLOS YJlaftteaeLo rJor la aVLtcrLor cCltacLóvL eLe cDjlúlLtlrLo, se
OLJtiCI1CVL lrAS sig/üel1tesJrCU1.Cf1CirAs lj YJeríocLos:
(i
Modo
00
(rad/s)
10.i34
34.300
61.808
86.906
(rad/s)"
1
2
3
4
115.22
1176.5
3820.2
7552.6
T
(s)
0.58535
0.18319
0.10166
0.07229
f
(Hertz)
1.70838
5.45881
9.83671
13.83145
Los vnocLos eLe ViVlrrAciÓlt corresYJm'LeLicl1Les SOI1:
0.089374
0.075047
-0.074828
0.050226 -0.023604
0.014665 -0.081059
0.065184
0.050937
0.083904 -0.004977 - 0.083710
0.061745
0.086883
0.069665
0.021268
MocLa 1
TI = 0,585 s
]
MacLa 3
T 3=0.102
MacLa '2
T z = 0.183 s
MocLo4
TI = 0.072 s
s
Figura 14-6 - Ejp.mplo 14-2 - Mod'Js y períodos de vibración de la estructura
UtiliZVLJ1eLO eJ1 lriLe; ecltaciones íA.e eCj/ülibria las trrAl1'i.famtrAcím1eS eLe coarcLel1acL¡;fs
Ij
rr~vnl{,ltirliCrAllcLo
VLJnVIOS
lrtf.tos
por
[<I>]T.
oLltel1en1as
las
sig/úcI1tes
CU1.aCi011es
dcsrAcor lrAcLas:
TlI + 2~100I"1 + ooiTl I = 5.7582q(t)
Tl2 + 2~2002"2 + OOiTl2
=3.6870q(t)
Tl3 + 2~3003"3 + 00;Tl 3 = 0.77879q(t)
Tl4 + 2~4004"4 + 00~Tl4
= 1.1801q(t)
[J1 LrAS C/lrAtro fCl1.rAciCH1eS ¡; = 0.02. Lu reSIIJ11Rsta YICUrA crAcLa tU'LrA eLe estas eC/1.rAcícH1es
Clr's/A,coplrAdtJls, se oVILiel'LC IttililUltlto el mrtcnto BeLrA eLe Ncwmarl< Los rrivneros '25 s de
yeSYJltcsLu YJl,1l'rA erArta fUtrA de ellas se 11t/1.estrrA l'11 llA, FigHrrA 14-7.
Htuunicü estructural aplicada al diseño sísmico
Th(t) - (1\ = 0.585 s)
0.4 T
0.3
0.2
111
(m)
0.1
0.0 ¡-<---.........;~--+----+---+-~-\--¡--...-.-.........;-~t
.5
(S)
-0.1
-0.2
-0.3
-0.4
Th(t) - (f2 = 0.183 s)
0.03
11 2
(m)
-0.02
-0.03
Th(t) • (f3 = 0.102 s).
0.0010
0.0005
0.0000 -j'---1.---I-r----+----+-----t------l
0.5
1.5
2
t {S)
2.5
-0.0005
-0.0010
-0.0015
0.0010 T
0.0005
-
0.0000 +------'1r---.rMW'V\;MN\,..,.--+----.¡....--~t
1.5
2
(S)
2.5
-0.0005
-0.0010
Figura 14-7 - Ejemplo 14-2 - Respuesta en el tiempo para las coordenadas desacopladas
¡
14 •
."lll(¡(¡S¡S 1ll0(WI (TOIIOIO!JICO
-------------------------------_.
/\ coftLütrUAúón se r¡reselttu Lu respH.estuelt ULglHWS L1tslcuttes:
t
TlI
Tl3
Tl2
(111)
(111)
(5)
(111)
Tl4
(111)
00000
00234
O.O'lb8
0.0702
0.0937
0000000
0000607
0.004810
0015963
0.03b972
0.000000
0000392
0.002748
0.007780
0.014603
0.000000
0.000074
0.000425
0.00084·b
0.001025
0.000000
0000097
0000419
0000563
0000656
0.1000
0.123'1
0.1468
01702
0044673
0016511
0022223
0.02294b
0.017S56
0.001037
0.000724
0.000891
0.000548
0.000481
0.1937
0.222M9
0.2b70n
0302S 16
0.325557
O.:l3:H35
0324369
0.13:)337
0080485
0.125033
o 174003
0.2171
0.240.',
0.2639
0.7.873
0.3107
0.4000
0.001025
0.0008"0
0.000657
0.000613
0.008559
0000513
'0.0024·88
0.000139
OO(JS794
0.000612
0000491
0.000300
0.000206
0.000200
0000213
0010167
0009842
0.000648
0.000357
0.00024°
0OOO40t)
0.000170
0.000022
-00000')7
Los (iespLwumien.tos tlie Lu estJI·j,(tlUu se OtJtieltelt rJor l'!tetliio tlie:
Por ejclnrlLo. r¡uyu eL imtuftte t={).2873 s. Los desrJLv.zUinLCvdm. eft metros. con La contril1l1Ciólt
~ie cuctu f1WlitO. son:
j~~H
0.089374 -0.074828
ú.050226 -0.023604
jO'333435]
0.075047
0.065184 0.005794
0.014665 -0.081059
1
0.083904 -0.004977 -0.083710
0.086883
0.069665
0.061745
0.051J937
0.021268
¡-
O'0893741
=
=
j
0.075047
0.U509371
0.021268J
O
'0298OO]
0.025023
j
0.016984
0.007992
l
0,074828]
0.014665
j
j
0.000206
a.000170
0.050226t
- 0.081059
x 0.333435 + - - - - x 0.005794 +
x 0.000206 +
0.083904
- G.3C4977
0.061745
0.086883J
+
j-
0,000434]
0.000085
0.000486
0.000358
+
{ 0,0000103]
- Of)()(}0167
- 0.0000010
0.0000179
+
¡I-
l
0.0236041
0.065184
j
\).083710
0.069665
x 0.000170
{- 0,0000040]
0.0000111
- 0.0000142
0.0000118
O
'029373]
0.025103
j
0.017455
--0.007479
Puru cteterntiltUY Lusjlterzus opte Lu exr¡LosióJt urJLicu u Lu estYlj,ftltru en el 11·ÜSf11.G il1,stwlte se
f1tlÜÜr¡Licu Lu mutriz lite rigitliez tlie toctu La estrltct/tru rol' estos tliespLwuf'l-üeJttos:
Estu orcYUciÓJ1 rr;.etlie rcuLLzursc ,JUra Los aCSrLUZIM1-ÜenlOS (!jIte LlnYJiHte cuctu J·')tOaO Id
InUllcn;.¡, ohLclter LUsJ,l,crzas rm)VcltienJes a(' culit(.{ /titO lite eLLos:
1
al'
CSU
Dinámica estructural aplicada al diseño sísmico
Para los sígaícl'ttes lítesrlazamícl'ttos vltOlítales. correspovtlítíevttes al ü1.stal'tte t=O.2873 s.
0.029800! - 0.000434! 0.0000103! - 0.00000401
0.000085 : - 0.0000167: 0.0000111
0.025023 :
0.016984
¡
I
0.007992 :
0.000486
¡- 0.0000010 ¡- 0.0000142
I
0.000358:
1
0.0000179:
0.0000118
La col1tríbllfÍó/1 el1.Jaerza &te mlíta 11tOlítO. en kN. /'lara el Íf1stal1.te t=O.2873 s. es:
206.02 : - 39.60 :
- K ]{U mod}_[
- F
{F múd}_[
(1)
E
1F (2) I F (3) I F(4)]_
·-
i
172.99 I
117.41:
r
I
49.03:
2:37 :
i
82
1
5.02
6.00:I -3.83 I -1.
34:32: -0.24: -6.45
I
i
5.37
25.25:
4.10 :
U lasJllCUUS totales. tw·nlJiél1. e/1 kN. ~)am el íl'tstal1.tc t=O.2873 s. SO/1
{F}
=[K Hu} =
E
175'97]
180.18
145.05
1
83.75
•
14.4 Excitación en la base
Nos interesa ahora la solución de sistemas de "arios grados de libertad cuando se les
somete a una excitación en su base, el cual corresponde a la respuesta de una
estructura que se ve sometida a un sismo. De acuerdo con lo presentado en la Sección
10..t, las ecuaciones de movimiento para un sistema sometido a una excitación en su
base tienen la forma dada en la ecuación (10-23), la cual se reproduce a continuación:
(14-20)
Las matrices de masa [M] y rigidez [K] de la estructura S2 obtienen de acuerdo con lo
presentado en el Capítulo 11. La obtención de la matriz [y] se realiza de acuerdo con lo
presentado en la Sección 11.3.l(h) y su forma depende de si la estructura se ve afectada
por una, dos o tres componentes del acelerograma, dependiendo de si el vector {io}
tiene dimensiones 1 x 1, 2 x 1 3 x 1. Casos en los cuales [y] tiene dimensiones n x 1, n x 2
ó n x 3 respectivamente, siendo n el número de grados de libertad de la estructura. En la
Sección 14.8 se amplían los conceptos de la obtención de la matriz [y].
ó
Dado que podemos obtener los modos y frecuencias de la estructura, podemos aplicar
la siguiente transformación de coordenadas:
{u} = [<t>]{TI}
y derivando dos veces contra el tiempo:
(14-21)
1
~ ~"
.A
..
'
1.-l- • . / lHOUSIS
f!tU(U{f (,.' UH\.IIU~/f\. ' "
(14-22)
Reemplazando (14-21) Y(14-22) en (14-20), y premultiplicando por [<l>]T obtenemos:
il
i
1
¿
1
¡
(14-23)
Lo cual implica que se tienen n ecuaciones independientes de un grado de libertad del
tipo:
!
..
11;
+ (O¡2 l1i
=- {a¡} {X..
}
(14-24)
o
y si se aplica amortiguamiento modal:
..
"lO
11;
+ """'
:>;(O¡l1. + (O¡2 11¡ =- {}r··
a¡ lX o }
(14-25)
donde {C(.¡} corresponde a la fila i de la matriz [a] obtenida por medio de:
(14-26)
La solución para las ecuaciones (14-24) o (14-25) se puede llevar a cabo por medio de la
integral de convolución (véase la Sección 2.4.2) o por medio de algún método numérico
como el método Beta de Newrnark. Una vez se obtienen los valores de {l1(t)}, para
cualquier tiempo t, por medio de la ecuación (14-21) se pueden obtener los
desplazamientos de la estructura para ese instante. Debe notarse que la ecuación
(14-21) realiza la superposición de las respuestas indiv 'iduales de
uno de los
modos:
{u} =[et>]{11} =
i
{<\>(i) }11; (t)
;=1
=
{<\>(1) }111 (r) + {<\>(2) }112 (t) + ..,+ {<\><n) }Iln(t)
=
{U<I) }+{U(2)}+... +{u<n)}
04-27)
Las fuerzas dinámicas inerciales que se presentan en la estructura, correspondientes a
cada modo, pueden obtenerse multiplicando los desplazamientos de cada modo por la
matriz de rigidez de la estructura:
(14-28)
Definiendo:
(14-29)
y
1
441
Dinámica estructural aplicada al diseño sísmico
(14-30)
donde h, es la altura sobre la base de la estructura del piso i.
/
F.'
-r-o
hi
F?)
fuerzas modales
--+
~Xn
.--
J["
J1
J["
J1
~X¡
Fji)
-4
~X3
Fii)
~
~X2
--+
~Xl
F~i)
.i->
corte basal
»>:
~ grados de libertad
v. __..--I
Figura 14-8 - Fuerzas modales (Modo i)
Ahora podemos definir el corte basal del modo i en el instante t, como:
(1-1-31)
y el momento de vuelco del modo i en el instante t, como:
(1-1-32)
Ahora si tomamos la definición de la matriz [a}, dada en la ecuación (1-1-26) Y la
premultiplicamos por [<I>]T, obtenemos:
(1-1-33)
aplicando el principio de ([A][B])T = [B]T[A]T a [<I>]T[M], obtenemos [Mf[<I>]
que [M] es simétrica. Con lo cual la ecuación (14-33) se convierte en:
[<I>]T [a]
=[<I>I' [M][<I>]['Y] =[y]
= [M][<I>],
dado
(1-1-34)
La masa total de la estructura en cualquier dirección principal de los grados de libertad,
corresponde a la suma de las masas aplicables en la dirección principal. La influencia de
cada masa indívidual se expresa a través de la matriz [y], por lo tanto:
[M 101] == [y ]T [M] [y]
y
(1-1-35)
utilizando la ecuación (1-1-3-1) para reemplazar [y] en la ecuación anterior, obtenemos:
442
14 •
Á'illúIISIS 11I0(l(1( ('rOll()WYI("()
(14-36)
y
j
1
¡
i
4
(14-37)
Esto quiere decir que la masa total en cada dirección principal corresponde a la suma de
los cuadrados de los coeficientes de participación modal, a¡, en esa dirección. El valor de
a? de cada modo se conoce con el nombre de masa efectiva modal y puede interpretarse
como la fracción de la masa total que se activa en ese modo al vibrar debido a la
excitación en la base. Este concepto se emplea para definir el número mínimo de modos
necesarios para describir la respuesta, cuando en sistemas con muchos grados de
libertad la contribución de los modos superiores se hace muy pequeña.
En aquellos casos en los cuales los modos de vibración no son ortonormales, o sea que
no cumplen la normalización [<I>]T[M][<I>] = [1], la determinación de los coeficientes de
participación se logra por medio de la siguiente ecuación:
(14-38)
y la masa efectiva modal en este caso se obtiene, para cada modo, por medio de:
(14-39)
En las Secciones siguientes Se presentan ejemplos de la obtención de la respuesta
cronológica de la excitación en la base para sistemas con diferentes características.
14.5 Análisis modal planar para excitación en la base
En este caso ocurre una simplificación de lo presentado en la Sección anterior, pues la
matriz [y] corresponde a un vector {1} dado que todos los grados de libertad de la
estructura actúan colinealmente con la aceleración en la base xo '
Ejemplo 14-3
I
1
EL ea¡jicio ae seis pisos vnostmao en La Figltm 14·-9 pertenecteare a IUta Íl1staLaciólt ÍltaltstriaL
es sovneüao a Los efectos ae La COntpOVlel1te N-S aeL tembLor ae EL Centro. CaLifornia, al' Maijo
18 ae 1940. TCI1ev¡wS interés eVl La reswtfsta ae La estntctlixa en eL sentiao nwstmao en La
JLgltra, EL ¡;j,f'}tortigltantieltto /1Gua este tipo ae vitJmcimtes se estimó el1 1; = 5% aeL crítico.
Toaas Las vigíAS ac La estrw:tltra uene 11.11. alufLo b = 0.40 m ij 11.VL atto h = 0.50 m. Las coL/tmnas
tieltelt secciém Cll&'.¡;{rw;ta con h = 0.50 m. El Inatcrial ae La esLmctltra tiene 11.11. 11tÓaldo (;te
eLasücifla¡;{, E = 25 GPa. La eslntcltua nene luta masa de 780 kglm2 . !j Los eqlüpos iltcütstriaLes
LiCIten 11ItU musu ¡;{,(' 1000 kglm 2 . VU..UfA. 1111 totuL al' 1780 kglm2
[JI
Dinámica estructural aplicada al dise{¡o sismico
Figura 14-9 - Ejemplo 14-3
PrÍl'l'1eYü GÍeteYVI1ÚtG{.f'l1OS Las caracterísücas GÍe rigi&iez GÍe Lv. estructura en el sertüGÍo GÍe La
aceLeraciim GÍeL terre110. DaGÍo qlte se snpoVLe qlte Las Losas GÍe er'ltrepiso cov¡Jonnan 1m
GÍiaJragma rí.giGÍo en el sentiGÍo klajo est/tGÍio. lj Los tres pórticos el'\. esa GÍirecciéll1. son ig/1.aLes. se
ertC/teVltra primero La vnatriz GÍe rigiGÍez para eJectos lateraLes GÍe W1D GÍe Los ~)órticos lj GÍaGÍo
q/1.e el GÍiaJmgma GÍeL eGÍificio se S/t~)OI'1e iv¡Jinitamente rígiGÍo en S/t propio I"'LwtO. Lltego
siml"'Lel'nel'lte se m/i-Ltil"'lical'\. srcs térnunos por tres para tom.ar en utel'lta La rigiGÍez GÍe Los tres
uórtícos.
ELeVvt.el'\.to GÍe viga:
L=6m
E = 25GPa = 25000000kPa
A = 0.4m· 0.5 m = 0.20m 2
1 = 0.4.0.5 3 /12 = 0.004167 m 4
833.33
O
5.7875
O
O
17.363
O
O
U ax
O -5.7875
17.363
34.725
U ay
O: -833.33
17.363 :
O -17.363
U ax
69.450 :
01
833.33
O
O -5.7875
-17.363 :
O
5.7875
O
-17.363
U bx
17.363
34.725 :
O -17.363
69.450
u.,
-------
--------
-833.33
O
O
Etemeltto GÍe COLltmn17.:
L=3m
E = 25 GPa = 25000000 kPa
A = 0.5 m . 0.5 m = 0.25m 2
-------1--------
- - - - - - - -------
U by
1 = 0.5 4 112 = 0.005208 m 4
..l-gdl
57.867
O
86.800
------- 57.867
86.800 : - 57.867
O
2083.3
t)
-------O
O - 2083.3
86.800
O
86.800
O - 2083.3
O
O:
173.600 : - 86.800
O
86.800
------- ------:867O -86.800
O:
O
2083.3
O
='-86.800 r -57
86.800 : - 86.800
O
O
173.600
Desrll1-és cie eVlseA.lnbLcv LeA.s rigicieces cie Los etemeatos. eLimivteA.r las ci¡fonneA.ciOltes ¡;¡xieA.Les cie
LeA.s vigeA.s, I::J cov¡,cieI1SeA.r Los gmcios cie LikJerta.ci verucates I::J rotacíonales, se obtiel1ev¡, La siglüevtte
IneA.trLz cie rigiciez cie ejectos ltortzontaíes cieL pórtico:
72.253
-102.26
-102.26
222.75
35.165
-158.38
-6.5202
45.980
1.4274 -0.17029
-9.7917
1.7952
35.165
- 6.5202
-158.38
45.980
243.79
-164.41
-164.41
249.67
53.199
-164.82
-9.7755
1.4274
-9.7917
1.7952
53.199
-9.7755
-164.82
48.570
246.04
-171.97
-171.97
-0.17029
48.570
296.65
j
qlH' eA.L ser 111.ltLtirJLicacios por tres tocios S/1-S térnunos prociw:e LeA. /neA.triz cie rigiciez de torios LeA.
eslnU:Cltm eH el sev¡,ücio corto, evt kNlnt:
..l-gdl
U6
Us
U4
216.76
-306.77
105.49
-19.561
-306.77
105.49
668.24
-475.14
-475.14
731.37
137.94
-493.23
-29.375
159.60
- 29.327
-19.561
137.94
749.02
-494.47
- 494.47
738.11
U3
- 29.375
-493.23
159.60
145.i1
4.2822
-515.90
Uz
5.3857
-29.327
145.71
-515.90
&8().94
Di
-0.510881
4.2822 -0.510S111
1
5.3857
EL ~reeA. cie mcia /HteA. cie las losas es 12 m . 12 m = 144 m Z. Por Lo tanto La mrA.Sa nor riso es m
144 m Z' 1780 b..glm2 = 256 Mg. Por Lo tanto LeA. matriz cie Vl1.eA.sas es la sig/üel1.te:
O
O
O
O
O
O
O
O
O
O
O
O 256
O
O 256
e
O
O
o
o
o
o
256
O
O
O
O
o
256
O
256
O 256
[M] =
o
o
=
La matriz [y] correspOl1.cie u 11,11. vector cie IM1.a colH.mlteA. I::J seisJüas C/{,l::Jos térmillOs sor. tocios
LO/tuLes u1. Lus eC/1,aciol1.eS cie eq/üLibrio ciÍlt~VltiCO cie La estrltclJua son las sig¡üevttes:
Dinámica estructural aplicada al diseño sísmico
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
216.76
- 306.77
105.49
-19.561
-306.77
668.24
- 475.14
137.94
105.49
-475.14
731.37
-19.561
137.94
4.2822
- 0.51088
-
4.2822 -0.51088
1
5.3857
1
- 493.23
- 29.375
159.60
- 29.327
-493.23
749.02
.- 494.47
145.71
- 29.375
159.60
- 494.47
738.11
- 515.90
1
5.3857
- 29.327
145.71
- 515.90
889.94
1
1
=-(M] - Xo
1
1
1
AL resolver el probLevvl.r.1 cte valores prol'1íos YJLavl.teacto por La anrenor emacíóvl. cte eqtülíbrio. se
OtJ tiene VI. las síg,üevl.tes jremevu:ias IJ perí.actos:
(ji
ro
(radls)2
(rad/s)
Modo
1
2
3
4
5
6
24 108
301.81
5.3952
17.373
973.78
2494.3
'1·686.5
7113 .8
31205
'14943
68.'158
84.344
I
T
f
(Hertz)
(s)
0.85RÓó
1.16'1·6
2.76495
4.96647
0.3616
0.2013
0.'1258
0.0918
00745
7.94849
1089550
1342372
i
Los Vll.LlctOS cte "iklradóvl. correspOvl.ctíeVLtes SOVI.:
0.036721 -0.032775
0.029168 -0.020667
00033690 -0.011592 -0.014245
0.032483
0.028524
0.020961
0.014524
0.033322
0.01224~
0.033525
0.015888
0.004460
6
I
I
I
5
I
I
4
1/
3
4M
000
OM
Modo 1
(T 1
=
4
-,
1.165 s)
o
4M
4
6
i\
)
V
V
000
OM
Modo 2
(Tl = 0.362 s)
5
I
-,
3
4
<,
1'-.,
-,
<,
~
3
2
V
000
4M
/'
=
/
"'- '"'-...
¡--....,
5
J
4
3
..........
V
1/
o
4M
000
OM
Modo 4
(T4
=
0.126 s)
4M
000
OM
Modos
(T,
=
(}092 ~)
Figura 14-10 - Ejemplo 14-3 - Modos y períodos de vibración de la estructura
446'
r- r- <,
./
....v v
"'r- <,
3
r--... r---- r-,
V
V
o
V
,-v
4
(V
2
j
r-
5
l,.... V
,/
"1\
OM
0.201 s)
6
,/
-,
2
Modo 3
(T3
6
¡--.... <,
/'
)
o
1
0.005317
3.328533 -·0.029103
0.033609
-0.005049 -0.034504 -0.003317
0.006893 -0.024392 -0.031454
0.031633
0.035774
0.02~711
0.025184
0.034025
/'
/'
5
'\
2
1/1I
o
5
0.013049 -0.005955
-0.032188
0.018512
-0.034529
6
\
3
I
2
6
1
I
2
)
./
o
4M
000
OM
MOcto6
(T6
=
0.075 S)
14 • Análisis modal
(TOIIO/Ó.(Iico
VJrClnltlti~LLcaltcio
cunbos Lc;{,cios ror [<I>]T o/rJ(e¡tevnos LGts s Lgrúe ft tes eUtl/tCiOVLes
uesl/tCOV' Ll/tcias, en Las CltGtLes Los c()f'JLdef'Ltes de particLVJl;{,cióVL se caLctÚarOft corno:
lJ
34.970
13.540
{a } = [<1>] T [M] [y] = 8.2331
6.0279
4.4695
2.3861 J
La ntasGt f'J-wciaL eJectivGt se cGtLuüGt como a¡
a~1
% M tot
13.540
8.2331
1222901
183.332
67./84·
7962%
1'i .93%
4.41%
"r
607.19
36.33f)
237%
5
44Ú()S
19.976
1.30%
99.c<l')1,
6
2.3861
5.h()J
037%
100.00%
Modo
(X¡
3"r() 70
1
2
3
I
% M tot
(;{'CHI'Jt/úacio
79.62%
91.550/0
CJ5.96%
CJ8.33%
I
111 + 2~lrol'Íh + roi111 = -34.970x O
112 + 2~2ro2'Í12 + roi112 = -13.540x O
Tl3 + 2~3ro3'Í13 + roi113 = -8.2331 Xo
~4 +2~4ro4'Í14 +ro;114 =-6.0279x O
11 5 + 2~5ro5'Í15 + ro~115 = -4.4695 Xo
116 + ~6ro6'Í16 + ro~Tl6 = -2.3861X O
lit Las seis eC/taCiOfteS ~ = 0.05. La reSr/1.csta ram cGtcia l.Hta de estas eC/taciolteS
&iesacorLadas, se ohtíene HtiLizcu'¡,(íi.o et métocio Beta cie Newntark. Los primeros 10 s (.ie
resVJI{,esta VJGtra cwíi.Gt I1.VLGt de eLLClts se m/.{,estra elt Los sig/.{.ieVLtes grúJicos:
5r
0.3
4
0.2
3
2
1
11,
~
o ~c:::*---\-';;/----b;;-j~7f--+.o--+--'.l-l-to-1r---+o-+--+---+-;
()
r
~s
-1
-2
-3
-4
-0.2
mln
-5
-0.3l
(a) respuesta paraTlI
1
(TI
=
1165 s)
mln
(b) respuesta paraTlz
(Tz = 0.362 s)
Figura 14-11 - Ejemplo 14-3 - Respuesta de las coordenadas desacopladas
447
inámica estructural aplicada (1/ diseño sísmico
0.06
0.020
m. .
0.015
0.04
0.010
0.02
:;) 0.00
0.005
J.-rrP.-IH#-
t(s)
114 0.000
(m)
-0.005
-0.02
-0.010
-0.04
-0.015
mln
mln
-0.06
-0.020
(e) respuesta paraT\3 (T 3 = 0.201
s)
(d) respuesta para T\4 (T 4 = O.126
0.005
s)
0.0015
mex
0.004
0.0010
0.003
0.00.
0.0005
0.001
~5
(m) 0.000
'-!1l"YiH.--f,-
1 (5)
O
~.
0.0000
(m)
1.ooI'oR1H*
-0.001
-0.0005
-0.002
-0.003
·{JOO10
-0.004
-0.005
-o.D015
min
{e}respuestaparaT\s
(Ts
=
0.01)2 s)
mln
{f} respuesta para
1'11, (T6
=
0.075 S)
Figura 14-11 (cont.) - Ejemplo 14-3 - Respuesta de las coordenadas desacopladas
A CO~ttiVl.IH;¡.cif¡l'l se ¡JresevltrA LrA resYlliestrA en aLfjlHws
Las resYlIU'strAS iI'ldivietli,aLes en Los privneros 10 s:
t
T\l
T\2
(5)
(111)
(m)
T\3
iI'lstrA~ttes,
T\4
(111.)
(f1:)
etOl'1de ocurren Los 11ttixin'UJs de
1)5
(111)
116
(nl)
2 i2
2 .00~)52'
() '10653
0022R84
00074D5
0.003448
2. it,
-1.454167
0.131596
0020979
0.009887
00
2.2Z
-0.313050
(11157~:\
0009855
-0.005804
0.0
224
0.044580
0.071039
-0.01074-8
-001284-3 I
-G.OO49i9
-0.0C1187
2.52
25974-08
O 17HbO
-0054570
·G012759
0.000935
0.000215
258
2.305620
0.0443t>4
0.008234-
2.b4
167873'1
·0155214-
0022238
;:5.6646441
·0169206
0153292
3.04
30S
I
-3.545S~;()
I
0001047
V,V'VJO
00014·9i
00004-39
"9017115
-0.001112
-0000662
0038901
·0001547
0000665
0000280
0.00,900
0003579
0001228
0.000-'57
I
3.22
187, b72
0.183567
0005055
000,766
0.000137
4-.58
2.84014-7
-0.284971
·0010291
0001032
-0001448
0000172
4-.7b
1448789
0,29519i
0005745
-0002603
0000228
0000605
59C
4.049463
0.020068
0022552
0.001531
-0000257
-0.000036
l1I·fW
4.049463
-3.664644
0.295191
-0.284971
00'~7073
0010581
-0.017115
0003448
-0004919
0001150
-0.001495
:lli.n
0047073
0.054570
Los desI'JL!AZm'ltievLtos cal~.sadas por CllLeta nwda. para cnaLqlúer tiel11.pa t. se obtie~1.elt de:
{V(i)} = {$(i) }lli (t)
Los ¡,lesYJLazmnicvltas de La cstntctH.ra I1UYU eL misl1w il1stGmte 1. se atltieftelt corno La SI-tVl'la
cie Las colttribljúovl.es etc tocios Los macias. por f1teciia cie:
lj
{U} =[<t>]{T\(t)}
Por ejeI1ty¡lo, plAnA- el imlwtte t =3.08 s. las aesYJlUZW'1ÜeVLtos, Clt metros.
cudu i1'UltiO,
COIt
lu cov¡,lritJltÜÓVL de
5011,:
0.029168 -0.020667
0.013049
- 0.005955
0.036721
-0.032775
0.033690
-0.011592 -0.014245
0.032483
- 0.032188
0.018512
-0.034529
0.005317
-3.5459
-0.15329
0.028524
0.014524
0.028533
-0.029103
0.020961
0.033322 -0.005049 -0.034504 - 0.003317
0.033609
0.0035796
0.012243
0.033525
0.031633
0.006893
-0.024392 - 0.031454
-0.0012279
0.004460
0.015888
0.025184
0.034025
-0130210\
-0.119460
- 0.101140
-0.074326
- 0.043414
l-O.015815
+
0.035774
0.023711
-0.001903
0.0050242
- 0.000055427
- 0.000073981
- 0.000016023
0.0017770
0,1'':3027070
0.000116280
0.000039525
-0.0022265
0.000065614
0.000019033
- 0.000035037
-0.0051079
- 0.0051391
-0.0024355
+
0.000009595
+
- 0.000060111
- 0.000047856
- 0.000123510
+
I
- 0.00035675
0.000004073
0.000024673
0.000029951
0.000121800
- 0.000043928
0.0000021241
+
- 0.000006604
0.000010383
f
- 0.000011990
0.000011221J
- 0.000008459
- 0.12533
-0.11751
- 0.10331
-0.07956
-0.04855
-0.01823
PUnA- detcrmiltlAr llAsJlterLlAS iVLercilALcs (;j11,e ünYJOIte el sislno sobre Lu f'stni.ctIWA. Clt el misl1to
ÍltstWttc, t = 3.08 s, se Inlütiplim LlA I,nutriz de riljiaez al' toalA llA CS1.rWJII,rlA rol' estos
aesYJ LlAllAlnie IttOS:
Estu oYJenA-ciólt fllteete relAlizlArsc plAnA- Los etespLrA,ZCU11ú'lttos (;jli.e iI1tY¡OVLC metlA moeto LJ {;Lc eSlA
mwtenA- ohrener LlAsJlterLCíl.S provclticlttes de ClAetlA IÜ'.O de ellos:
LlA colttribltCiém eltJIi.etZCíl. ete metCíl. I1Wcío, elt kN, rCíl.nA- el iitstWtte i
=3.08 s, es:
3.87
388.19 -13.82 -47.24 -19.22
137.30
6.75
47.42 -12.03
-890.19
74.25
-753.69 -172.02
16.36
12.15 - 42.04
18.91
2.39 -78.87
4.89 -21.84
-553.86 -394.65
-323.51 -397.07 -14.99
15.76
35.93
20.44
-117.85 -188.18 -11.93
77.77 -52.70 -15.41
-970.27
11 LCíl.sJIi.etZCíl.S totales. tCíl.mtliélt elt kN, pCíl.rCíl. el iltstCíl.ltte t
I
l
- 658.49
- 636.50
- 920.33
-1041.90
- 663.43
- 308.29
449
=3.08 s. sen.
Dinámica estrucuirai aplicada al diseño sisiuico
EL corte ¡'IDLSCÜ col1.JriLI/Údo uor meta JiJiweto, tambiéJiL eJiL kN,
ob ttene ~lor l11.edio de:
- 970.27
- 890.19
= {11 1 11
11
11 JI}
388.19 -13.82 - 47.24
6.75
74.25
137.30
-753.69 -172.02
- 553.86 - 394.65
I - 626.43 I -15.24 I 53.82\ -
EL wlte llasuL total. eJiL !<N, para eL instDUtLe t
el iVLstcmte t
= 3.08
s. se
-19.22
3.87
47.42 -12.03
12.15 - 42.04
18.91
16.36
4.89 - 21.84
2.39 -78.87
- 323.51 - 397.07 - JJ.99
-117.85 -188.18 -11.93
= {- 3609.37
~Jara
25.72
15.76
35.93
20.44
77.77 - 52.70 -15.41
1- 6.06}
=3.08 s, se OllÜe¡1.e por l11.edio !íie:
- 658.49
- 636.50
-920.33
=-4229.0
V={IV {F}={11111111111}
-1041.90
- 663.43
- 308.29
el VltOlnCl1.to de vadeo cmttrill/údo por mda ¡nodo,
obtiene Ilor Vl1.e(ÜO de
{M}={h}T
{F
m od
e~t
kN .
In,
pura el ütsta~tte t
= 3.08 s. se
}
3.87
388.19 -13.82 -47.24 -19.22
47.42 -12.03
6.75
74.25
137.39
18.91
-753.69 -172.02
16.36
12.15 -42.04
115 ! 12 1 9 I 6 I 3}
- 553.86 -394.65
2.39 -78.87
4.89 - 21.84
-- 970.27
- 890.19
~ {is
- 323.51 - 397.07
-117.85 -188.18
={- 47141
1483.7
-14.99
-11.93
15.76
35.93
20.44
77.77 - 52.70 -15.41
I - 55.4127.3 1- 37.7 1- 4.0}
EL VI'Lmlteloto de vuelco total. elt I<N . m,
I,ara
eL Í11st¡':Utte t
=3.08 s. se oLltíe¡te por ~ltedio etc:
-658.49
-636.50
-920.33
=-46727
M={hV {F}={18115112\916\3}
-1041.90
-663.43
-308.29
j-
I
¡
1
!-
Utilizando el wocedimiel1.to il1dicudo es ¡10SillLe obtener la res/'lw~stu en m,aLqaier instanre. E~t
la Fi@ltra 14-12 se mltestra la reSr/testa de desr'Jlazamie¡1to del IÜÜJiHO piso deL edificio, Se
I¡rese¡ttu lu res/l/testa Í11dividH,ul prodltcida ¡1or cada modo IJ la res¡1lt.esta total. Es evideVlte
aLLí tiJltf:' la eontrilll1.Ción iln¡Jortaltte a Lu reSr"l,esta touu rlrovLe¡tC msi cxc!ltsivameltte (te Los
dos IlI'ivltems l1lodos.
450
L
JI
14 • Análisis modal cronotoqico
0.15
m.nx
~
0.14870 111
mil1
o
·0.13456 111
0.10
i
U~) 0.05
i
0.00
(ID)-0.05f
1
J1
-0. 10
!
-0.15
¡
I
0.15T
010+
,\10110
2
d 2) O.OS+
6
Xl/o----...¡.... . . -..-------~
o.oo+-I---+-t/.N\IV.....
(ro)-0.05f
I
!
7
8
I
I
7
8
...... , . _ . . .
9
10
I
11 12 13
r
IIlr:lX ~
4
t
0.0093399 111
(S)
lllin ~ -0.0096749 III
14 15
-0.10r
-0.151
T
O. I S
\'10110
3
d
0·1Or
3)
0.05+
Il'lflX ~
o.oot
I
6
(ro) -0.05
¡0'"f'
Gmin
2
3
4
5
6
I
9
10 11 12 13
i
00013730 III
t (S)
mi.11 ~ -0.0015917 111
14 15
-0·1Ot
-0.151.
0.15T
0. 10
(4
t
1
05
U6 ) 0.00
0.
--+---+--e-~_+_--+-+--+-+___+_---+---+___+____;
I
í
i
I fj~ I
t (s)
mm
(ro) -0.05
7 8 9 10 11 12 13 14 15
2
3
4
5
6
IIIr:lX ~
0.00035371
111111 ~
-0.00021R67
III.m'
OOOOOl500 III
111
111
-0·1Ot
-0.15.J..
0. 15
,\1 J!l~)
5
T
0.10¡
.15) 0.05
"""'1'
U 6 O.OO+--+---+~;&-.....¡..--+--+---+--+I---+-------+--.....¡..--,---l
Vmm
(ro) -0.05
234
s
6
7
8
9
t (s)
m.i.1l ~ -0.00006419111
10 11 12 13 14 15
-0.10
-0.15
0.15¡
0.10
\10110
6
d6) 0 .OS
,max
6 O.OO+--+---+A::ir--+--+I---+--+-+---+---+--........-+-+--....
<imtn
(ro)-0.05
123456
7
8
9
111r:lX ~
0.0000089
mili ~
-0.0000068 III
1I1.'~X ~
0.148729
IVlil'! =
·0.128367 111
111
t (s)
10 11 12 13 14 15
-0.10
-0.15
0.15
-:-otn/
U6
0.10
O.OS
""
0.00 (ro)_O.OS
1
t
1
t (s)
~
-0. 10
-0.15
Figura 14-12 - Ejemplo 14-3 - Desplazamientos de la cubierta para cada modo y respuesta total
1
m
"
451
Dinámica estructural apticculci al diseño sísmico
El'], Lu FLgluet 14--13 se mltestru Lu VetriUcLól'], deL corte tlusuL de Lu ed,lficuclóv¡, ~Jetm Los YJrivl1RYOS
15 s d,e resYJltestet·
5000
2500
V
(kN)
11"1/lX ~
t
o
4355.8 kN
t (s)
5
-2500
Il1in ~ -4229.1 kN
-50001-
La Fígltret 14--14 se 11tll,cstm La variaciém cteL I1Wl1te11'cO '!ie vuctco l/te Lu e¡;.l,lficaciólt petm Los
YJ rune ros 15 s l/te resYlltes ta:
¡\/lOI1lelttCJ al' vacieo
EVi
IIII1X ~
54406 kN ni
Hlin ~
-4-703 7 kN . HI
Figura 14-14 - Ejemplo 14-3 - Momento de vuelco de la estructura
•
14.6 Análisis modal tridimensional para excitación en la base de sistemas
con diafragma rígido
En la Sección 11.3.1 se discutió ampliamente la formulación de las ecuaciones de
equilibrio dinámico de sistemas idealizables a través del empleo de diafragmas rígidos
en las losas de entrepiso. En general, el uso de la idealización de diafragma rígido
conduce a una reducción sustantiva dei número de grados de libertad la cual
corresponde directamente con el empleo de criterios asociados con el orden de
magnitud de las deformaciones que ocurren dentro de la estructura, conduciendo a un
ahorro importante en trabajo numérico. Dado que la idealiz.ación de diafragma rígido
parte de la premisa de que algunas de las deformaciones son tan pequeñas que no es
justificable su manejo como variables independientes y que por ende pueden ser
agrupadas como algo de un orden de magnitud tan menor que es despreciable, no sobra
insistir aquí que esta premisa debe Ser revisada rutmariarnente con el fin de justificar
su validez, a riesgo de que se esté empleando una idealización inconsistente con el
comportamiento real de la estructura.
Al igual que en la Sección 14.5 el empleo de la idealización de diafragma rígido para el
caso de excitación en la base solo afecta la formulación de la matriz [1] dentro de lo
expuesto en la Sección 14.4. Este aspecto fue tratado, en detalle, en la Sección 11.3.l(h)
donde se explicó la necesidad de cumplir el principio de equilibrio a través de las
fuerzas tr-erciales colineales con las aceleraciones del terreno, y las diferentes maneras
de adaptar las ecuaciones de equilibrio a las diferentes componentes del acelerograma
que se desea emplear. Estos conceptos se presentan para en caso general en la Sección
11.5. El siguiente ejemplo aclara la forma de uso de la matriz [11 y las peculiaridades de
la respuesta dinámica de los diafragmas rígidos ante movímíento sísmicos en la base.
452
I
f
1
1
1
Figura 14-13 - Ejemplo 14-3 - Corte basal de la estructura
L.
1I
L 4- •
,'11Uítisis lllOliu{ C/"OIIO{Ófjico
Ejemplo 14-4
EL edificio de tres pLsos /itostrado e/t La FLgttm 14-15, es so/netLdo a Los ejectos de 1m sLsvvw elt
SIl, blit5e. EL w'ltOrtLgltal'lüenta rJam este tíjro de vLbmcLol1fs se eSÜI'lta ert ~ = 5% del crítLco.
Toc/'c,ts L(,ts vLgas de La estrt1cf/1Ja Üe/te Itn andw b = 0.30 m lj IHt alto h = 0.50 m. Las coL,WtltaS
Ücne/t seccíóa cltadmda con h = 0.30 m, EL materiaL de La estmctlua tiene tUt l'ltódltLO LÚ'
eLasüddad E = 22 GPa. La esLrttctlua Üene IUta masa tíLe 700 kg/m". La LdeaLizcA-ClÓVl
matef1tlitica de La est:nH:tltm estli regida por Los sigtúclttes pW'limeLros'
Los diajragl'ltas (Losas) de La estntctlua se p/1,cde/t considerar inji¡ütlMnenLC rígidos e/t s/t
l'Jfopio rlLcutO.
2. Se coltSideralt tres gn:tdos tíLe Libertad por piso (diajm.gvna) consísteatcs eu dos grados de
WJertlAd IwrLzOIttales ortoqonzues lj 'Uta rotadém IALrededor de IUt eje vertical
3. Los pórticos se coltsiderwt pLIA/tOs, El f1todeLo l'ltlAtelncÜLco (;ir La estrttctI1JIA se coltSieter().
(JidimeVl5LCHtlAL lA tnA.vés de LIA acciém de~ dLajraglna de llA L05C1..
4. Las vigas se co/tsideran corno iv\:fifütlAl'ltfltte rígidlAs rlara ejectos de dejonnw:icmes fí!Xiales.
dIAdo Cjlte !LIAW1. r'lArte de Los dilAjragmas.
5.
LIAS coLlunnas p/tedelt dejon'ltarse fí!XLaLI'ltfltte lj r'or Lo tanto Los grat/Íos de WltTl(,i(;/,
verucales de Los /t/tdos del:JevL condensarse.
6. DIAdo 1.1'11:' no lLa!j masa LLsodada, /'Jara ejectos del liwdeLo matemLüico. a Los gra{;/'os tÚ'
Li¡'JertlAd rotlAcionlALes de Los /t/tdos. estas d¡jonnaciovLes tíLekwlt ccHtdeVlsurse.
1.
y
~(E-W)
2.5 m
'-'--""
./
2.5 m
3.0 m
®
6m
F~um1~15-E~mpw1~4
ExistevL tres tiros de pórticos pLcA.vws: eL Tir'o - A rIlAra Los ejes A lj B; el Tir)(l - B, para Los ejes 1 lj
2; lj el Tipo - e para eL eje 3. Primero se debe caLuülAr La mlAtriz de rigidez de eJectas
hortzoataíes de cada tipo de pórtico. Estose LogrlAJljando Itnas coorde/tadas gLoklaLes para eL
/'Jórtico. Las utaLes a SIl, vez posteriormente serlilt tfaLlAdas como Itnas coordel1adas tocates
para La estmct/1ra en geneml. En La Figlua 14-16 se ml1,cstralt Los grados de Libertad de cadIA
uno de Los pórticos antes de reaLillAr vLiVLg l1,na operación dictada por LtJ. ideaLizacióJt de La
estntctltra en generaL. Dado 1.1,1,e halj dos tipos [le viglA. IUta de 6 lit ae L,u lj otras de J 111 ete
LI12. lj Las col/1.ln¡tas tiene¡t 3 m DLe Lcmgit/1DL en el wimer r,iso lj 2.5 m en eL 5eglHtDLo lj tercer
piso; se CULCltLWL elt coorde¡·tadas gloL'I{;Lles deL ¡·;órtico. Ll,iS matrices de rLgLdez de estos Clloutro
tiros (te eLeme¡ttos. r'arIA desrll1.és re(,iLizar el e¡tsw1üJluje tíLl' Lu l'lt(A.triz ete rigidez de lodlJ!. LIA
eslmallom lj iA:feCLcA-rLas (;/,ebiDLo u Lc;t 1.L1.eaLizc,tcLóVl ete tortlA LIA eSlrtloCUwA..
Dinámica est ructural aplicada al diseño sísmico
~;
"'~~
~
~
~
~
~
c.L
c.L
1
pórücoTiro - A
Pórtico Tipo - B
1
1
Pórtico Tipo - e
f
Figura 14-16 - Ejemplo 14-4 - Grados de libertad de los pórticos individuales
I
Ei efecto ae ailltjrlltg Vltllt en clltallt pórtico iltaiviali-lItL se rljiej lit lit trnvés ae q Ite no ILlIt~
rosibiLialltd cie dgormlltciolteS lAXilltLes en LlIts vigllts. Esto se Logm lItr¡LiClltltcio eL ryocedivnieltto
qllR se exr¡LiCGt aetlltLLlItcilltl1teltte en LiA. Sección 11.3.1 (/tl). Los gmdos cie Lillertlltci qlw rennc-Htecen
son los mostmdos elt LlIt Fig/tm 1'/--17.
1
~
~,....,-~
~I-~I----;"
~""'.....IIl.II---I.II
Pórtico TiY10 - A
PórticoTipo - B
Pórtico Ti/10 - e
Figura 14-17 - Ejemplo 14-4 - Grados de libertad que permanecen después de hacer las vigas inextensibles
LilfgO Illlt~ ltecesiaud de coltdmslltr Los gmcios de LilJertlltci verucuíes. Esto se Logm uy¡Licwtdo el
pyoceciivnimto q/~R se expLicu cietuLLualltVlteltte en LlIt Sección 11.3.1 (e). Los gmdos de Lillertud
o, ae J'lemtGUteCelt son Los mostm.aos en LlIt FiglMlIt 14-18.
~r-""':"
C'
-~--~
(?-. ....
e
~t--..Iaof!--Aot
Pórtico Tipo - A
Pórtico Tipo - B
Pórtico TiYlo - e
Figura 14-18 - Ejemplo 14-4 - Grados de !ibertad que permanecen
después de condensar los grados de Iit'ertad verticales
Al 10m ILlItlj ltece.'>icilltd de coltcienslltr Los gmdos de Li/tlertlltd rotlltciOltlltLes ae CGtdllt ltltdo. Esto se
LogrGL lItpliCGtftdo eL YlyoceaimÍE'l:to (/jIte se expLicllt cietlltLLlItc;{w1teH.te en LlIt Secciém 11.J.1(ci), Los
gmdos de Liloertlltd {/jIte remtGLfteCen son Los mostruaos en LlIt Figltm 14-19. Los ütlltLes SOH los
correspOltdiefttes lit Los efectos horizontates de Los pórticos.
Pórtico Tipo - A
Pórtico Tipo - B
Pórtico TirIo - e
Figura 14-19 - Ejemr10 14-4 - Grados de libertad que permanecen
después de condensar los grados de libertad rotacionales
"
&-.
454
Ij -
I
1-'1:-· IUIUUSlS IIlUUU/
(/UIIU/UY"U
Desr)/~,és de reetLizetr Lets ol"cmcimtes etrJYorJietdets. se ohuenen Lets sigtüefttes vvulLtrices ae rigiacz
ete Los rórticos rJlA.Yet ejectos IwrizontuLes, evl. kN/I11,:
Pórtico Tipo - A
tgdl
[KA] =
u 3A
n59] u A
45140 -30276
-18068
2
2359 -30276
48363 uf
[ 15842 -18068
Pórtico TirJo - B
I
tgdl
[K B ] =
[
148~
-17929
3299] u~
36692 -21507 u 2B
-17929
3299 -21507
u ¡B
31954
PÓrtico TirIo - e
.1-gdl
[ 14854
[K c ] == -17271
C
-1727~] u 2
u e¡
30936
A¡wm etetlevVLos trW1.8'orvVLetr Los grlA.aOS ete lÜlertlA.et plJl.ret cte.<>pLtJl.ZlA.vvüentos IwrizofttlJl.Les de
CtJI.dlA. lULO ete Los rlórücos IJI. Los grlJl.dos de LitJertl!.et gLotllJl.Les eLe LIJI. esCfH,cl/1.ret total. Los CI1.IJI.Les se
ml1.estrw1. eft Let Figl1,m 14-15. EL rJyoceliLmiento pam reetLi?Jcr esta opemción se ·preseftta eVL
etetlJl.LLe en LIJI. Sección 11.3.1 (e). Los etlJl.tos geovnétricos de CtJI.dlJl. 11.11.0 de Los rJórticos se presef1.tcut
Cf1. LIJI.s sig/úefttes tLlLbLIJI.s. Los rlMrimetros Xa, Ya X¡,. Yb. d. a. r¡. rz !:1 r3 estrivL defu1.ietos en LIJI.
Sección 11.3.1 (e).
pis~)s
1 ij 2
EL cevLtroLlú' Let iO'>et de dL0JmgvftlJl. es:ú Cft Lti\.s cocJI'dm!ILdlJl.s
Eje
A
Tiro
Xa
Ya
A
0.00
B
A
1
2
B
B
3
e
0.00
0.00
6.nO
12.00
0.00
7.00
0.00
O.()()
0.00
Xb
Yb
12.00
0.00
12.00
0.00
6.00
1200
7.00
7.00
7.00
7.00
d
12.00
12.00
7.00
7.00
7.00
TiWJ
A
B
1
2
:3
A
A
B
B
e
Xa
0.00
0.00
0.00
6.00
-
Ya
Xb
Yb
0.00
6.00
6.00
0.00
7.00
7.00
7.00
7.00
0.00
0.00
000
(y.OO
-
-
d
6.00
6.00
7.00
700
-
-
455
cosa.
a.
0°
0°
90
90°
90°
0
EL centyoide Let Loset de etilJl.Jmgma está eVL LIJI.s coordef1.lJI.dlJl.s
Eje
x = 6.00m !J y = 3.50m
0.00
0.00
0.00
1.00
1.00
1.00
r¡
rz
3.50
-3.50
-6.00
0.00
6.00
3.50
-3.50
x = 3.00m Ij y = 3.S0m
cosa.
a.
0°
0
90
90
0
0
0
-
1.00
1.00
000
0.00
sena.
1.00
1.00
0.00
0.00
-
sena.
0.00
r3
1.00
3.50
-3.50
-3.00
1.00
3.00
0.00
-
-
-(¡.OO
(lOO
(¡.OO
Dinámica estructural aplicada a! diseño sísmico
uWizctvu;to Los etcttos ctvLteriores, se /'ll1,eeteVL etetermiVLctr Lcts mcttrices ete tmvL8'ormctcióft [T p ] de
metIA. IM1.OS ete Los fJórticos, cm11.O se vn/1.eslmv¡, ct cov\'tÍltltctció~t:
o
o
o
o
o
3.S
O
O
1
O
1
O
O
O
-3.5
O
O
1
O
O
-3.0
O
O
O
O
O
O
O
O O
1
O
o
O
O
3.0 O O
O
O
O
1
6.0
O
O
1
O
O
1
O
O
O
O
O
O O
O
O
O
o
O
O
1
O
O
1
O
3.5
O
O
-3.5
O
O
1
O
O
O
O
O
-6.0
O
O
O
O
O
O O
O O
O
O
O
O
o
O
O
1
O
O 1
O
O ,3.S
O
O
O
O
-6.0
O
O O
Pórtico eje A
-U
Pórtico eje B
O
O
O
O
O
O
O
Pórtico eje 2
Pórtico eje 1
O
O
1
6.0
Pórtico eje 3
ro
Des/'l Ités ~ie reaLizar Las 0f)('mcíovLes iVLeticaGtas en Lcts SecCiOfteS 11,1 .3(e) a
se oLi tiene La
siglüeftte Inatriz (¡te rigictez de toGta Lct estnu:t/tm, en IHtidaGtes ete kN/vn Ij kN . vnlm,et:
J, gdl
[__':8;
- 36.135
o
o
-------
o
o: -
36.135
O',
o
o
656.04 :
o
-------- -------1-------29.767
o
01
90.279
- 35.858
o:
o
107.57
--------
o
--------;-------- 765.38 :
4.718
o
Ú
6.598
O',
o
-19.794
117.18 :
O: - 60.553
o
o
o:
O
4.718
o
o
o
6.598 -19.794
117.18
o -------o -------765.38 :
--------,------01 - 60.553
o
o
O
- 35.858
107.57 :
o
------88.239
-131.03 :
o
- 60.286
25.418
o 25.418 - 2137.8
------- --------+-------- -------- -------131.03
2961.6 :
o
o:
96.725
o
o
- 60.286
25.418 :
o
94.845
- 6.107
25.418
- 2137.8 :
01
- 6.107
3449.0
Eft La matriz ete rigietez ete toGtct LlJ, estmct/tm 1'J11.eGte notarse Cj/te 11.0 existe acopte estático
(véaJtse La SCCCiÓVL 11 ,5) eVIJre Los g metos ete LiLJC rt(il,et eJt Lct Gtirecciólt x Ij tos de Lcts direccioVLes y Ij
z: vnielttms Cjll.e si Lo existe entre Los etesl'JLctlavniel1.tos ete Lcts etirecciOfteS y Ij z. Esto Cjlüere etecír
W¡.e si se artiClH1.J/{erzVl,S It La estrrtct/i.m (l.vLÍcct~1teltte en la etirecciól1. x. La estr/{.ctlua 11.0 tiene
ftÚtg/Út despLazwl}tieltto en L(il, ciirecciólt y, fti I1.Íltl:JIHtct rot(¡lciólt ete S!1.5 etiaJmgl1·t¡,.l,S, EH
COl1.tmposiciólt, si se colocan JI l.erzctS eft La direcciéHt y ,Üticctl1teftte. Los dictJmg mct tíeVLelt lH1.ct
rotncíó 11.,
EL circct ete t(il, los« eteL tercer fiiso es 6 m • 7 m =42 m 2 Por Lo tanto La masa tmsLctciovLctl etc este
fJiso es m = 42 m2 • 700 kg/nr' = 29.4 Mg. La vnctSct rot(il,ciolt(il,1 se obtíenen. l'Jara gmGtos ete
LiLJert(il,d rotacionules coLow.dos en el centrotde etel eti(il,jragvn(il, (Vf'(il,Se L(il, Secciólt 11.2.2) por
11teetio ete rujo/A. aOltete m es L(il, 11t(il,S(il, trC/l,SLctcimt(il,L Jo es el momento l'JoLctr ete inerci(il, eteL
di(il,Jragm(il, Ij A el cirect Gtel ~üaJmgma. Por Lo tanto. La 11t(il,Sa rotacímtctl GteL tercer l'Jiso es:
f
I
1
I
I¡
t
3b
3
m
ab-) =m- (a2 +b 2) =
29.4(
m =-J
=m
- (1 +1 ) =ID- [a
--+
- 6 2 +7 2) =208.25 Mg·m2
r
A o ab xx
YY
ab 12
12
12
12
1
¡
El. cirra Gte l(il,s Losas {¡id primero Ij segltlteto /'liso es 12 m . 7 m = 84 m 2 . Por Lo tanto L(il, InctSIA.
rms/.(il,cíolt(il,l (¡ie estos pisos es ID =84 m2 • 700 kg/m2 =58.8 Mg. La In(il,S(il, rot(il,ciol1.ctL es:
3b
3]
2 2) =58.8
- - (122+7 2) = 945.7 Mg·m2
m
m =-J
=m(
- 1 +1 ) =m(a
- - - +ab
- - =m(
- a +b
r
A o ab xx
YY
ab 12
12
12
12
1
1
14 • .111lÍlísís
lIlO([U/
cronotoqicct
lu Inutriz de vnusus es la sig/üeVlte:
J-gdl
O
O
O:
O
O
O
U 3x
O
O
O
O
O
U 3y
O
O 208.25 :
------ --_._-- r - - - e
O
O
O
0 1'
0 '
O
O
-----O
O
O
u 3z
u 2x
o
U 2y
u lx
29.40
O
O
29.40
,
O:
0
1
1
------ ------.1_----O:
O
O
OT-S8.S0
O
O
O:
O
o
o
o:
o
O:
58.80
945.70 :
O
o -------t------
------ ------ ----- ,------ -----O
O
O
O
O:
O
o
O
O
O'1
O,,
o
,- o
------
O
O
O
o
o
O:
_____ 0
58.80
O
O
----_.
O
O
58.80
o
O
o
945.70
o'
o',
1
TJ 2z
U lx
U lx
Lus ecIl,aciDV¡'CS de eClj/l,üí/tJI'ío dívuivl'LÍco de la estYllftHYU son las síglüerttes:
o
29.40
O
29.40
O:
O
O
O
O
O:
O
O 208.25 :
------ -----O
O
----OT-58.80
o
O
O
O
-----(¡
O:
O'I
o'
O
O
o:
o:
o 58.80
o
O
o
945.70 :
O
o:
-------1------ ------ -------t-----o
O
o
58.80
o:
o:
o
O
O
0 '
o
o'1
o
0 ,
o
o
O,
o:
o
I
1
31.685
O
O
O
O
O
o
------T------ ------ -----O
O
o'
O
O'I
O
O
------ ------
o
o
o
o
o: - 36.135
O
o
o
O
O
------ ------
o
58.80
o
o
o
945.70
o:
4.71lS
0'
Ol U 3
o
6.598 -19.794
o -35.858 107.57 :
29.767
o:
117.18
O
O
O
O -765.38 1
O
O
656.04 :
------- -------- -------1-------- ------- --------t------- -------- ------01
O,
(;0.553
-36.135
o
O
90.279
O
o
o:
o - 60.286 25.418
o 88.239 -131.03 :
o - 35.858
O
25.418 -2137.8
o 107.57 -765.38 :
o -131.03 2961.6 :
------- -------- -------~-------- ------- --------r------- -------- ------4.718
O: - 60.553
o
o
o
O
o: 96.725
O
94.845
- 6.107
O
6.598
O -60.286
25.418 :
O',
o - 6.107 3449.0
O -19.794
o 25.418 -2137.8 :
117.18 :
o
l: )
U 3y
U 3z
U 2x
U 2y
U 2z
U 1X
UIx
U Ix
Les ntodos lj pcrí.()ctos de víbrucíólt son ilt(l/,epeltctíelttes cíe la parte cíerecha cíe las ew,acimtes
cíe e0l'úli/tJrío, rJ/teS correspoltcíelt a lus cuYOveterísticus cíe la estmet.JuiA, en vi~Jraciém Líbre. Al
resolver el pro¡',lel'nu de valores prorJios rl(J!y¡,tcudo rJOr l/A, a~tterior ('c/,¡,acíó~t cíe CCIj/1.üíbrLO, se
o~,tiev¡,e~'j, lasJrecHem.ias lj períoc,(,os mostrados ell la tu/clla sLglücVlLe:
1
457
Dinámica estructural aplicad« al diseño sísmico
Modo
(ji
ro
f
1
2
:3
4
5
6
7
8
9
(rad/sj>
12S.4
147.8
339.9
1214..5
1234.1
2862.6
2895.7
3085.9
6404.1
(rad/s)
11.33
12.16
18.44
34.85
35.13
53.50
53.81
55.55
80.03
(Hertz)
1.803
1.935
2.934
5.547
5.591
8.515
8.565
8.841
12.736
T
(s)
0.5545
0.5168
0.34·08
0.1803
0.1789
0.1174
0.1168
01131
ClO785
Los f11.ocLas ete vikJrrA,cióft corresrJOftetientes son:
o
0.10863
0.11752
-0.00397
0.02647
O - 0.01316
--------0.08946
O
0.08491
O
-0.00357
O
-------O
--------0.05571
0.03929
0.02234
0.05065
O
0.02926
-0.00201
O
0.01372
-0.00026
I
O -0.05594
0.01692
0.08644
O
O - 0.00806
-0.00149
---------
0.02609
--------O
O
0.08706
---------
O
--------
O
0.08673
O -0.00782
O
0.09123
O
-0.07654
-0.00960
0.02799
-------- --------
O
0.01596
0.01553
0.00182
- 0.02180
-------- --------
O - 0.07952
O
-·~21~1
O
O - 0.01350
---------
-------- -------O
-0.06572
--------
-------- -------O
O -0.06870
01
O - 0.11453
O
--------
O - 0.13227
O -0.04630
O
O
O - 0.01289
O
0.01825
-0.00620
0.01946
Mac.ia 1 (T¡
=
0.555 s)
MacLa 2 (T 2
0.517 s)
Macta J (T3
=
0.341 s)
Macto 4 (T4
=
0.180 s)
MacLa 5 (T, = 0.179 s)
MacLa 6 (T6
=
0.117 s)
0.113 s)
Mocto9 (T9
=
0.079 s)
Moc.io 7 (T7 = 0.117 s)
Macla 8 (Tg
=
=
Figura 14-20 - Ejemplo 14-4 - Modos y períodos de vibración de la estructura
458
14 • Análisis modal cronoláqic
Para y¡oder idev\Jifical' La preYJmtdeVlA.vu:ia ae caaa VltOao Ilacia caaa U,lta ac Las aLrecciOltes
r'rútcipaLes, plwA.e IttiLizarse La masa activa en cada vvuldo, eVl euda IÚrceciéllt. PaVIA. eL gccto
se S/tyJOlte Cj/tC ha[j acderacicmes deL terreno en cada U,fta de Las aireecicmes. Au,ltCju.c ItO se
disr'OJte de aceLeraciO/tes mtl;Lcio/taLl's deL terreno: 11,0 obstante. al' esta mU/tera YJl1.eue verse La
iv\:fL/1.('llfia !OI'siCHtaL de cadu VltocLo IHiLizal1.do luta I·natriz [Yo] Cl1.[juJonnu es:
19d1
1 O O
U 3x
O 1
O
U 3y
O O 1
--
_.
U 3z
1 O O
U 2x
O 1 O
O O 1
- -- _.
1 O O
-- - 1-O 1 O
-- - rO 01 1 J
U 2y
-
U 2z
Ulx
U 1y
U 1z
POI' 111ClÚO de y¡rodltcto siglüe/tte, obtenernos Los valores de [<Xo], Cj/tC (:ú ser etevnnos aL
cltadrado ccmesr'cJ/1,delt a La masa activa de cada modo eH esa dirección:
O
11.426
- 6.1031
11.730
O
O
O
2.6698
39.614
------- ---------------2.7644
O
O
O
2.7244 -17.754
O -1.3502 -10.541
------- -------- --------1.3312
O
O
L
O -0.2167
7.3305
0
3.6123
1-0.0689
D irecció 11. y
Dirección X
Modo
%
1II1151t
totn!
ncti.v<I
.)
()
!
,3759
.)
4
i
11111511
O
7.6419
'1'0
11111511
I1Cl.l 11'\.
nctiv'l
%
toru!
i30.50
93.ÜO%
93.60"/0
S
O
O
1.8230
8
iJ
O
O
4-.85%
71278
ti
1.7721
88.82%
5.20%
1.21 %
9880%
100.0%
Dirección z (rotI1ci.oltf.ll)
%
lI/.n5n
I1Cl.lIH.
nciiv¡,
i1IIISn
torn!
77 e;,-;)
0j¡,
nCHl1I
.,
77SJ.,
37;>,17
93.67%
O
1569.3
74.74%
76.5i %
O
3 i5.21
11111
15.01'%
5.29%
91.52%
99.37%
10000%
5.06'10
98.73%
1.24%
99.97%
O
00470
0.0047
%
88.82%
(j
O
7.4386
7
II/.nSII
)
9t).82%J
O
0.03%
0.003%
99.99%1
53.736
;>.5ü%
10000%
13.049
0.63%
De esta InlA-lteVIA. 11.e/ltOS covifmnado, Lo qlte es evide/tte de La Figu,va 14-20, dOltde se I1tl.J.estvalt
tos 111Ddos; Cj/te La CS[V1teU,¡,vr7. ~Sl¿¡' (lesuco¡'iLl/tcl.a en eL se l1.tido x !:1 1íJ'.J.e Los tres modos en esta
direcciólt corresr'oltde/t aL r, 4.° !j 7". E/t Los otros 111Ddos Ila!j tl1.teraceiéllt eutre Los
despLazamielttos elt La direcciólt y [j Las rotaciones de Los diaJra01n1A-S, alUtCjI1.e Los modos 1". ')"
!j 6° tie/tevl wepoltderal1.cia Ilaciu Los desYJLazw1üelttos en Lu direecLém y. mientras líjltC los
111.0UOS T, ¡.j" !j 9° son csc/tciaLmelttc torsioaates
1
4'5.9
Dinámica estructural apticcuía al diseño sísmico
Ahom SltrmtgGU'Y\,()s Cj/H~ La estrttctltm es SOfltetUia a Las dos cmnrlmtefttes (N5 11 EW) deL
reg~stro ¡;:(,e CorraLLtos. cieL tembLor de Loma Prieta, caLifomia ¡;:(,eL 17 de octubre ¡;:(,e 1989 (véase
La Figlua 5-13). PrLfl1ero ddlemos ccüc/üar Los coeJidefttes ¡;:(,e ¡Jartidpacióft modaL pam ¡;:(,os
COVJctrlOltt'lttes aceLerogrr5tji.cas. SH.pm1eVVLOS Cj11.e La cmnpOlteltte NS del reg~stro es coLLvteaL con La
direcciéHt x eIt r,Lanta de La estrrtetltra. lj La cof'ltponcntc EW con. Lct d~recdéHt y elt pLaltta de La
estr/tetlira. Los coejicicntes de participaciólt se olJtielteJ1. de:
!J el vector cle
(íl.ceLemC~mtes
del terreno tiene La siglüeltleJorma:
fxox} == {x. NS}
{X..o}2xl == l"
,-X Oy
X EW
ri.cHtde XNS corresrJOltde a Las aceLemciovLes Cll Lu direcciólt N5 ¡;:(,eL registro del tembLor de
LOlnu Prietu en eL sitio de cormLUus.!J GUtúLogameJtle xEW corresr'OItClt' u Las aceLemdcHtes
elt Lu direccicHt EW deL mismo reg~stro. Alwwv Lu mutrlZ [y] se JorvvLli.Lu Uf' uCH.erdo con Lo
rlresentudo en La Sección 11.3.1(11.) r¡aro.. este (Uso. coLocal1.do 1m lUtO (1) si Lu ecuucíón de
eCj/úLik1rio es coLüteaL con La aceLemciéwL !J 1m cero (O) si ItO Lo es. Por Lo lUltto. [y] !J [0.] SCHt.·
~
o
11.426
11.730
O
O
------2.7644
---------
O
2.7274
O
-------1.3312
---------O
O
-0.21669
o
O 1
O O
~ ~ {:NS}.
~
:j
[a] == [~ y[M][ y] ==
EW
O 1 .....,
a
6'!l-'"
L .
,~,
t.
".'"
.
;).,
2.6698
O
-1.3502
O -0.068858
Lo C1i.uL condw:e a Lus sig/üelttes 11./i.eve 2CH.ucimteS con SIl. amortig/tumieftto 11tOdaL (<;. == 0.05):
TlI + 2<;t(OtTh + (Oi11t == -IL426x EW
li 2 + 2~2(02ih + (Oi112 == -11.730x N
S
li3 + 2~3(O3 'Íl3 + (O~113 == -2.6698 x EW
li 4 + 2~4(04'Íl4 + (0;114 == -2.7644x Ns
lis + 2<;s(Os'Íls + (0;115 == - 2.7274 x EW
li 6 + 2~6(06'Íl6 + (O~116 == 1.3502x EW
li 7 + 2~7(07'Íl7 + (0;117 == 1.3312x Ns
lis + 2<;s(O s'Íls + (O~r¡s == 0.21669x Ew
119 + 2<;9(0 9'Íl9 + (O~r¡9 == 0.068858x EW
460
......
J
14 • .":!JU/IISIS
11IOUUI (TOIIOI().{fIClI
LCl- respH-estCl- rCl-m m(;tu 1'¡,v¡,U (;te estas eutCl-(Ícm-es (;tesCl-cor¡lCl-(;tCl-s. se obtiene IttULZUVl.(.i,o eL
métouo Beta ~te Newvnark, COH IH'\. Cl-Vlwrtigttanüev¡,to (;te ~ = 0,05,
EH los grcijlcos sLgtÜelltes se mttestmll ios r¡rLI11NOs 10 s (;te resrJltCS tU. (;tCI1.tro Uf los Cl1.cües SE'
rreSCI1.taH los l11.cixivlWS (;teL proceso pum to(;tala extensión (;td aceLerogruma, El'\. los griÁ:ficos se
I'IlH,estmVl, eL valor vl1.ciximo fj el valor l11.íHLVVW.
111
(TI
=0.555 s) EW
I.Sr
1.0
10t
os!
(m)
113 (T, = 0.341 s) EW
11! (T2 = 0.517 s) NS
I.ST
max
max
0.5
0.0
(m)
o. O +--'----mHlttttTI't'ft-M-t-"\-1fi-H
1
(m)
2
.(J,s!
~1.0
-1.0+
_1.5
min
min
1
-1.5
114 (T. =0.180 s) NS
003
0.02
T
O·03
1
115 rr, =0.179 s) EW
116 (Y. = 0.117 s) EW
O.ooST
0.002~
0.02
1,
max
I
0.01
0.001+
0.01
(m)
0.0
(m)
:::1
min
.(J.002+
118 (T. = 0.113 s) EW
NS
1
O.()(16
119 (T. =0.079 s) EW
0.00009
max
maJe
0.00006+
o.ooOO3
1
m;n
.(Joosl
-o.es
117 (T7 = 0.117 s)
0.0t""t/1II'fIIF1\I1t1tU'i1i'
.(J.OOlf
tI
(:~:t
00006
.(J
1
.(J.OOOO9
min
·(J.C·04~
min
Figura 14-21- Ejemplo 14-4 - Respuesta de las coordenadas desacopladas
EVI, lu tubia sLgtÜellte se (;tWl los valores ue 11' a 119 CH Vil Cltall(;to OClwell los vHcixU1WS el1, vulor
(;te m(;ta ItVl,U ue dlas:
a~Jsolt1.to
t
(s)
111(t)
(m)
2.640 02285578
113(t)
(m)
114(t)
(m)
0,0729153
0.0546183
l-o.UL'i' I 'pul
11s(t)
(m)
00016393
116(t)
(m)
00004254
117(t)
(m)
2.760
2773
0.2158750 -1.0413480 -0.0511719 00157783
00075103
-o 0018455
-O 0009713
2.785 0.2434·763 -1.0183550 -0.0533956 00112332
00140843
00021428
0000537
0.0266987
118(t)
(m)
00027737 0.0005412
01852514 1;1i,Q4-ZS1001 -0.042999"
2.900 02855131
r
112(t)
(m)
119(t)
(m)
00000150
00184281 -0.0005117 -0.0009770 -00015222 -0.0024423 -0.0000589
~OO406~
00000549
0.0215214 00096880 -O 0147099 -O 0019276
O 0042290 00000008
2974 0.1480720 0.5666564 1°,0611317 -00013865 00180907 0.0009771
00006867 0.0013859 00000105
-0.0315602 -00182827 n ,y,,,
3160 -0.104-3359
02773'~99
4040 -61575692
0.3952467 -0.0253885
4-. ;.sO 1,2171360
0.2550215
l
00270()18
0.0011468 -0.0006383 -00000373
0(17 ~470
-0.0004550 0.0040880 0.OOOOb84
0.0101300 -00070(,98 I ("
O.OO'lü:H7 ·00026897
461
--
-00008871
O.OOO1~)21
-00005726 0.0009453
o ()000013
Dinámica estructural aplicada al diseño sísmico
Des nLílZ(;ut'Üe11,(0S:
[VL LCt F~gli,m 14--22 se m/l,estmvL Los privvLeros 10 s ete resp/l,estCt. etel1.tro ete Los c/l,CtLes se
preselttw1. Los 111.r.búnos eteL rlrCJceso rCtm toetCt LCt extcnsiórt eteL CtcelerogrmHu
oosl
(m)
I "."
0.0
f
o.os
-o"
i
1
,~.,,-~~,
\Í V Y V/lO
V
V'6
2
0.002
0.05
0.0 +--""".,j-j+lJlI++-H+~I+J-1H-\-+i+fil+H<
(m)
trad¡
-0.10
mm
t
-0.15 1
-0004
-0.006
min
max
0.10
(.attIO.O
-oosf
,0
002
"
1
1
-0.05
0.006¡
0.10
0.004
2
9
10
t(s)
.Ji~J~\i\tV\f.!\
2
3
7
8
10
l(lO)
min
0.002
0.0 +----..q+IArl+H+\+\-JW¡-f'>.;AfId-'h'l
(m)
v1
1
0.15
0.05
0.0 t-..;.-.-Iod-mAA+W'r-N'd-'-''rA-N\;y>.,Ad
1
004
-0
-0006
-0.15
(m)
min
0.002
0.0 +-"""""'''''"i+V'H+t+/I-t+IlH+"\l-Mcif-tflrf-1-I'
2
t
0004
0.05
-0.
1
1
'-¡
0.15
(m)
O.O~~"'c+tIW't-H-/-ll-I+Mm-'t+'1j'¡-f1rftH
-0002
-o.o:»
:(s)
~::~¡
max
0.004
o
-0.15
0.006
max
~:::I
(.att) O.Ot--.-...d+Mf\+1r1+-i~+\-li~'l',flwtA.
10
-o.OS
min
tes)
-0.002
-0.10
-0.10
-0.004
-0.15
-0.15
-0.006
Figura 14-22 - Ejemplo 14-4 - Respuesta para cada uno de los gradl.ls
d~ ;i¡'~rtad dE:
la estr::c:tura
[11. LCt t:Ct~,LCt siglüel1.te se etcm Los valores ete Los etespLCtzCtltüelttos. en m o el1. metiCtVI.eS. Se etCtl1.
rCtrCt Los valores ete ten s. en Los c/l,CtLes ocurren Vl1.W<ivll.()" ete LCts cooreteltCtetCts geltemLLzCtetus. Se
~LCt coLoCCtcio Ctetemtis Los valores mw<~mo posóvo lj mW<if'Y\.o ltegCtÜVO prMCt muCt grrlteto ete
Libe rtCtet.
t
U3x
U3y
U3z
U2x
U2y
U2z
u.,
u.,
'Jiz
(s)
(ro)
(ro)
(rad)
(lTI)
(ro)
(rad)
(ro)
(m)
(rad)
2.64-0
0010978
-0029612
0.002301
0.00614-5
0017187
0.001737
-0.009877
0.001202
2 760
-0116124
0023918
-0.0017311
78.0933971
0.013907
-0.0016191 -8.05663°1
0008188
-0.000995
2.773
-0.115142
0027056
-0.002084
-0.092835
0.016220
-0001977
-0.056564-
0.010283
-0.001253
2785
-0.112073
0.029675
'0.002315
-0.090857
0018556
-0.002179
-0055713
0.012214-
-0.001394
2.900
0.003972
0.034426
-0.000133
0.002415
0.024605
-0.000425
0.000401
0.014-018
-0.000222
0002023
2.974
0.061786
0012416
0.000715
0.050594
0015388
0000692
0.031503
0.010765
0.000416
3.160
0.032468
-0013040
-0.000651
0.024439
-0.009846
-0.0004°4
0.013769
-0.004385
0.000385
4.040
0044307
-0.016737
0.OG018 I
0035053
-0.014236
0000055
0.021174
-0009562
0.000078
'1480
-0.022799
-0.002038
-0028342
O 14-2070
-0004·130
0104392
000371?
-OO~:; 7'))
0.062186
111<lX
0087518
01'11070
000+tJ46
0.OtJSS9'1-
0.104392
0.0041+4-
0.0+3003
0.06218b
0.002393
~IH¡1
-O.; ":b12¡1
0.00+409
-OO'J~n67
Q,()\)!)()70
0003°("\',
-OOStJb32
-OO~) 7696
·000218')
-o
¡ 29924
14 •
~'l.ll(l/ISIS 1110(/(// (TO//O/U!J/{"f)
Para uetervvüvLar Las Jlterzas UterciaLes I/jI1,e iVttrOlte eL sisvvw sohre La estrl1,ct/aa eVL CltaLl/jlüer
iltst.avLte se vltlÜÜr1Lica La Inatriz de rigidez de touu La estrttct/ua por Los uesrlLazwnievtlos:
Elt La FiglUU 14-23 se fnl1Cstrwt los primeras 10 s de res rlltesta, LieHtra cie Los CltuLes se
prE'SC/ttwt Los valores de lasj/tE'uas ilterciales,
<t
BOO
600
400
200
(kN) O
-200
-400
-600
-BOO
F 3z
F3y
F3x
é
'!ll
600T
800T
600t
400t
200·
f
max
,400
200
(kN"IIl)O
(kNJO!
1
2
9
-2000
-400+
-600,
-BOO"
1(
I(s)
min
-200
F 2x
BOOT
600
400
200
F 2y
max
1
F 2z
max
800,
600,
400'
200t
(kN)o
2('0
1
-200
2
-400
-BOO
min
F Ix
800
600
400
200
1
(kN'm)o
-2000
-400,
-SOO'.
-800·
min
max
600
400
(kN)0
-200
-400
·600
-BOO
mtn
1
0
-40
-600
min
min
F 1z
F 1y
BOO,
600t
400,
200~
max
IkN)O'
(kN)O
-200
-400
-BaO
-800
t
-200 0
-400+
-600+
-800'
min
min
Figura 14-23 - Ejemplo 14-4 - Fuerzas inerciales
EH La tabLa sig/üevtte se dwt los valores cie lv'.s jll-erzus Íltcrciales, en kN o eVl I<N·ln. Se
preselltafl paru Los valores cie t eH s. en los C/tales OClurCH máxil1tos ete Las coordcHadl,'.s
gCfteraLizacias, CCll1l0 Los valores máxiwLos rJara La resrlltesta Otile/licia.
t
F 3x
F3y
F3z
F2x
(s)
(kN)
-;36.5
(kN-m)
102.
(kN)
2.640
(kN)
132.4
2.760
-572.7
112.8
-: 2.7
-803.
2.773
560.5
103.7
-oe-
2.785
-530.8
9; .7
-;43
2900
40.5
193.6
2.974
278 ;
44.9
I
212.1
o
FIx
(kN-m)
475.2
(kN)
-; '126
(kN)
-5':.9
(kN-m)
:~Oj .3
62.8
38'1.7
372.0
60.9
-')IJ
'1 u
,) t I . J
795.3
68.4
-535.7
-392.CJ
133.3
779.1
87.0
-629.4
·415.9
188.7
50.2
141.6
154.0
-88.7
63.9
15.t:,
427.3
1835
206.'1
2750
1904
-365.5
5.1
F2y
5L~". 7
I
Fl y
F2z
(kN)
-~_{3 .8
F"
~?/1.8
I
-61=:.7
3.160
210.6
-109.5
-94.5
199.4
S1.9
81.4·
; 18.0
-312 ()
4.040
237. ;
-46.5
-15 -;./
28; .3
-84./
-438
134.5
1582
; <s.s
44S0
-139.2
536.5
iO:::.]
-19(jO
803.4
305.2
-87.2
4600
106.6
mux
:l4S l'
S36.:1
2;2
(ji:)
VYtlVt.
S72/
496./
2~(, ..·,~
",en
-
1'1
I
1.-,
.6
SOC,.s
666.4
S03.0
460.0
447/
-70(,Q
('·90L)
-.'191-.7
4n.9
6;;.>
4f¡a
I
Iiuámica estructural aplicada al diseño sísmico
Corte basaL eJ1 cada cÜreCcLÓJ1 ¡;¡rÜ'LC.i¡%tL 11 VVLOll1ento torsionaL eJ1 La base:
Para detenninar Las reaccLol1es ef1 La base f/jlte ind/~,cen Las J/~,erzas iJ'LCrcLaLes f/jH,e ivn¡JOf'LC
el
sismo sobre La estn«:tH,ra eJ1 (f1,aLqlüer ínstanre se SI1,/·nal1 Las Jlterzas eJ1 eL seJILtido x. el1 el
senuuo y. IJ Los J11OIneJ1tos torsioJlLaLes de toda La estrl1,ctlua. Los res/tLtados, para Los rJ1'ivneros
10 s deL SíSJ'l10 se mllestraJ1 el1 La Fiwtra 14-24.
2000}
1500
Corte
BasaL
Smtido x
(NS)
max
1000
500
o
(kN)
2
-500
-1000
-1500
min
-2000
max
2000l
1500
Corte
BasaL
1000
500
o
(kN)
Scatido y
-500
(EW)
-1000
2
-1500
-zooo
~~~~ I
0rf
Momeftto
TorsioJlLaL
IftCrcLaL
max
1000
500
~'m)
-500
-1000
-1500
min
-2000
Figura 14-24 - Ejamplo 14-4 - Fuerz3S
Ef1 La sig aieJtte
e~
13base de 19estructure
tabLa se vltllestral1 Los vatores
o~¡tevüdos (.H,aJ1do
Las coordeJtadas
gelteraLizudas tíeJ1CI1 11.11 vutor InlÁXímo. IJ Los JnlÁXíVl10s ot¡tevüdos, d.llraf1te toda La resp/testa:
t
Vx
(s)
v
Tz
(kN'm)
y
(kN)
(kN)
2.640
2.760
34.6
-1748.4
-282.3
236.5
878.6
-740.3
2.773
-1748,8
305.4
-1061.1
2.785
2.900
2.974
3.160
4.040
-1725.8
367.5
399.2
328.9
-110.0
-289.4·
-1256.4
2.0
980.5
415.1
(S).O
4.480
-4·25.4·
1799.9
-515.1
134·0.8
(=3.60 s
-1750.0
{=2 78 s
1799.9
(=4-.48 s
1262.1
t=4.70 s
-1368.2
t=2.80 s
max
milt
-1676.3
{='l18 s
-'1!;4
350.5
312.6
-772.9
-37.0
14 •
-,,'ll1((/lSIS IIIU/IIII
(TlJ/IlJllJYIUJ
Des;') Lazcunintlos 1wrizontaLes ae Los kJÓrticos
Los eteSpLazw1Üelttos ae caeta nvLO ae Los pórticos se obLieVLelt a partir etc Los etespLazaVlüentos
de taaa La estntctlua. por Ineaio ete:
Por ejeVl1-pLo. para eL pórtico eteL eje A se obtielteVL Los aespLazavltielttos honzontaíes elt maa
!tllO ete Los rJisos. rJara Los privneros 10 s ae respl1.esta. mostrarlos el1- La Figltra 14-25,
Pórtico eje A
Tercer pi.so
nA
3
::~
0.05
t
-~~ ~
.:+
(m)
-0.10
-0.15
1
í
w
Cl
2'.1
max
V~
3~('J
I\:!' '"
.4\f\1\ 1\
V ?"ia V
\/"6
9 V
us)
10
min
0,15
rórt ico eje A
Se el lA ¡¡de raso
u 2A
0.10
0.05
f\ I\:i'-~
0.0
(m)
\{j V
2
-0.05
t(s)
g>J 10
-0.10
-0.15
Pórtico eje A
rrilller piso
~max
nA
1
2
(m)
Figura 14-25 - Ejemplo 14-4 - Desplllzamientos horizontales del pórtico del eje A
Los valores máximos ete Los etespLazamiel1-tos IwrizOIttlJtLes obtnüetos son Los sig¡tientes:
u 3A
nA
2
nA
1
(ro)
(ro)
111.lAX
0,09052b eH t
mi¡t
O ,223t", eH
~
.3lJO s
t = 277 s
O.07Su7~; ell
-OO,?oOSO
el¡
(ro)
I
t
=
3(¡ü s
004708¡) ell [ = 3,uO <
277 ,
00612b3 ell I ·-2./75
Derivas ete Los nisos
COH bDLse en Los etespLazaVltiel1-tos IwrizcmJaLes ae Los pisos eteL rórUco es rlOsibLe mLmLar LlJts
cierivas ae mvta uno vte Los pisos vteL pórtico. COf1W el desrJLazDLmiel1-to retutívo entre /1.11- rJiso lj
eL q/te está il1.l1tediDLtDLl1tel1-te ddJlJtjo. dividido por LIJt aLU-t.ra deL riso Así se o~JtielteVL Los
sig/tientes valores máximos. lj LDL vDLrilJtció¡1- en el tiemro mostradlJt en La Figl~.rIJt 14-26.
InlAX
mi~'\
63
62
61
(%h)
(%h)
(%h)
e/1.t=3.60s
-0.93% ej1- L= 2.77 s
1 .14%el'\!=3óOs
-1.56% ('11 t = 2.77 s
0.61%
1.57% eHt=3.60s
eH t = 2.77 s
-2.04%
Dinámica estructural aplicada al diseño sismico
2%
1%
Derivus
Pórtico eje A
/i
0%
(%h)
2
-1%
-2%
Figura 14-26 - Ejemplo 14-4 - Derivas del pórtico del eje A
Flterzus eVl tos etevvlelttos
CovlOcie¡tdo tos desy,tuZ&llltieHtos horizontutes tiet Ylórüco es YJosi!"te tietennÍftur tos vuíores tic
tos uesptuzumielttos (,{e toaos tos gmtios tic titJertud lIjlH' se hut,íGut cOfttieltS&Ltio. Esto se togm
y'or metiio tic tl.l siglüevlte oYJerucióH:
Ultu vez se tiCltelt tos tiesYJtuZ&Lll'tÍelttos de torios tos gruttos de titlert(~d etet /'lórtico. es /'lOSitlte
uetennilt&Lr t&LsjH.erZ&LS eH tos etevnentos. /ltlt!tiYJLimntio tos desYltuz&Lmientos (~y'roy,i&Lrios YJOr
tu In&Ltriz ue rigiriez rieL etemento. o Htílizcutrio pi y,yorrriÍlnielttn eXYJLime,(,o elt t(~ Secciólt 8.8. en
el CJ1.&Lt se empte&L t(~ vn&Ltriz [KT], tu CtHlt YJervvüte encontrar tus jtterZ&Ls elt Los etementos en
roonienuu&Ls tomtes IHitizwtrio tos riesYJtuzmnicltWs cn coorrielt&Lti&Ls gtob&Ltes det y¡órüco.
uütiZ&LltuO este líttimo rrocedivnieltto rum t&LS JI i.e rzus de tu vig(,t det rrimer riso det Ylórtico
uet eje A. toc&Ltiz&Ld&L entre tos ejes 1 1:1 2. se eltCitentrWt tos siglüev.tes valores /'l&Lm L&LsjH.erzus
en el elemento en coordelturi&Ls locales.
600 T
rórtico eje A
Vl<ln entre ejes 1
pnll'er piso
extremo izquierdo
Fextremo derecho
400 I
Ij 2
Momentos
(kN-m)
200
o +----'\-"=;--.....2
-200
MA~\-Alfvj\ f1!Vvv.,'
~ ~ V~ sV
6
7 \j
9
10
-400
-600
200
r<',rtl.m cie A
Vliln cutre ejes 1 112.
pnlller piso
Fuerza cortante
(kN)
100
o +--"f"",.-...¡.L-\--+-l+-/-+-,H--H-+t\-!--'\N++---,.J'-\-+-\+\-+!\-f-'\d-l t(s)
10
2
-100
-200
Figura 14-27 - Ejemplo 14-4 - Fuerzas en la viga del primer piso entre ejes 1 y 2 del pórtico del eje A
No tiene jtterzu lA.Xi&Lt ri&Lrio lijlte huce /'l&Lrte riet rii&Ljm.g¡na. Los valores 11tW<il·1WS rum tus
jlterzas ri.e t&L vigu entre ejes 1 1:1 2 det rrimer YJiso tieL rórtico deL eje A son tos siglúentes:
Momento izquierda
(kN'm)
mlA.X
111,1.11
599.5. t =2.78
-454.6. t =3.60
Momento derecha
(kN'm)
S
S
452.7. t =2.78
-343.1. t =] .60
S
S
Fuerza axial
(kN)
Fuerza cortante
(kN)
0.0
0.0
175.4. t =2.78
-133.0. t. =3.60
S
S
utiHzcutao el I1ÜSVVU¡ rlroceaLf'lÜeltto pum Lusjll,erz(/l,S ae LfA, coLH,j,n~t(/l, aeL eje 1 aeL printer rlisO
aeL rlórtico aeL eje A se e/tCf{,('/'ttrcut Los siglüentes valores p(/l,m L(/l,s jl~,erl(/l,S evl, el eLC/1teltto en
coorae/'\,(/l,am Loc(/l,Les,
500
rórllCU ele A
Col.lA 11\.lln eje 1
250
prllller pi.so
O+-......,.-.;!d=-"""k;:+--Ht-l-+-H-+-+-+--tf--\:-+"~-+-''"''tr+-\-+++-+tf-++''t-J
Momentos
(kN'm)
-2 50
-500
t1
2
500,
rórtico ej e A
Col.lA 11'11111 eje 1
i
250+
I
1
11fI·lIlér r·HSO
oi
Fuerza axial
(kN)
()
250
-
T
-500
J-
500
T
250
1
rórtl-cu eje /\
COl.lAIII.IICl eje 1
p ruuer jnso
I
I
o+
Fuerza cortante
(kN)
I
-250
~
+
1
-500
Figura 14-28 - Ejemplo 14-4 - Fuerzas en la columna del primer piso de; eje 1 del pórtico del eje A
eje 1 deL primer ¡:lLSO aeL pórtico de!
Los vatores fltrixitnos YJlítm LusJ,f,erzas ae La COL1U'ltltlít aeL
rje A ~()It Los sigJJ,Íefttes:
1'ltW<
vnÍlt
Momento arriba
Momento abajo
(kN'm)
(kN'm)
301.6, t =3.60 S
-389,4, t =2,78 S
p
Fuerza axial
Fuerza cortante
(kN)
---.!kN)
38],9, t =3,60 S
--497,9, t =2.78 S
256.6, t =3,óQ s
-358.3, t=2,78s
228.5, L ~J,6C S
-295,8, t~2,78s
Fuerza axial P (kN)
400
300
300
400
500
Momento M (kN'm)
P
Figura 14-29 - Ejemplo 14-4 - M vs. P en la columna del primer piso del eje 1 del pórtico del eje A
ser
Dinámica estructural aplicada al diseño sísmico
LtA. JnerztA. U el Vl1DVvtevtto se pttedevl grtA.Jlcar de La VVÚSVYla mavtcrtA. COVlW se tüLL~ztA. partA. eL
d~seVtü de COLttVV1J1JlS de concreto r~OI'zado rJOI' med~o de 1m d~agrama de interacción. EVl LtA.
Figlua 14-29 se 11tI1,cStrtA.Vt Los valores de f1WVl1eVttO Ij SI1. COrreSflOl'Ld~evLteJI1.eYla w<~aL flartA. La
COLW11.itIA- tteL prü'ltrr YJiso. eje 1. del y¡órüco deL eje A. Se dibl1jarovt IW'Lto partA. et VVtOVl1eVLtO
l.uri~lu COI'ltO YJum eL i'ltOf1tCfttO IA-tJujo.
A LusJIl,cYlIA.S !/j/1,c se preseVltai'L elt La Figl1,ya 14-29 se Le ddJel'L acüciOl'LlA.r LasJIl,crztA.S !/jll.e estéft
tA.ctltwtdo sobre itA. estm,ctltYa el'L el 11Wll1el'LtO !/jIte se u'LLda La respll,csta IA.L SiSf11D. EVl este caso.
se CtA-LmLu IUttA.JI terztA. W<LaL detJidIA. lít La VI'LasIA. de La estn1octltrtA.. Il.tLLLzUi'Ldo eL áretA. aJerel'Lte tA.
LtA. COLI1.i11.ltlA.. Es ItA. JI te rzIA. W<LaL es 0.700 kg/m" • 6/2 m • 7/2 m • 9.8 m/s 2= 72 kN/piso. Lo cl1otA.L nos
coVldltce a IU'LtA.jlterztA. W<LaL de P 216 kN en el YJrimer rLSO. EL f1Wf11eI'LtO se estLmtA. ll.tiL~z¡;mdo
Los procedimielttos LltdiCtA.dos el'L [Carcía, 1991]. Lo CIl.uL coVldltCC tA. 11.I'L valor de M 8.7 kN·m.
E/t LIA. Fígll.rtA. 14-30 se fllít aU·nYlítdo el diagrw11.a de Íf'LtertA.CCiÓVl de resLsteJ'Lda vu:m'LÍftaL (SÜ'L <1».
NIn vs, Po, P17.rtA. tu. COLLU11.i'L(;\' de 0.3 m ror 0.3 m úe sección. COVl IHttA. cl1.aVltía de rejll.erzo
Lm'Lg~wain.uL PI = 0.023 Ij COV!. JH'LtA. resisteltCLIA. del concreto de
= 28.6 MPa 0 I·m IA.cero COI'L
resistCllcLIA- lít LtA.ftl1.('ncLtA. f y =430 MPa.
=
=
r:
Fuerza axial P (kN)
3000
Diagrama de
interacción
Momento
debido a la masa
(B.7kN.m)
Mvs.P
arriba
F:Jerza axial
Mvs.P
debida a la masa
(216 kN)
abajo
-500
-400
-300
-200
200
300
400
500
Momento M (kN'm)
-1000
Figura 14-30 - Ejemplo 14-4 - M vs. P en la columna del primer piso del eje 1 del pórtico del eje A
EL f1WCl.eLlJ HtlA.tewuiüco empLelA.c/.o eVL este ejempLo nene LIA. desveVltlA.jlA- de líJlte no fllA.lj
COf11.YJtA.titJiLidlA.d de L(A.s dtj'oYf1'LlA.cumes verucates de Los Vlltdos de Los y¡órÜcos líJlte LLegtA.i'L
orto00f'LIA.Lf11.Cltte aL mLsm.o i'Lltdo. Por ejei1'LrLo. LtA. COLI1oml'Llít estltdiadu uitteriormeittc ILtA.ce
fiarte del pórtico del eje A. yJero a SI1. vez tam~~éf1. hlA.ce YJarte del pórtico del eje 1. LasJ/u'Ylas
iVltentlítS íjH,c se ohuenen. proviel1eft de Los resl,1,Ltados eVl CCtdtA. uistante rara cadtA. H.I1D de Los
pórticos Íltde~'ei1.diel1.temel1.te, C0111D JlV\.ltestra La Figl10ra 14-31.
L;· ·
~
De LCts seis COmflOI1eI1.tes c/.e jiterza LVLtemas Q11.e pl1,cde tener IUt eLeVVLCI'Lto tridÍl11.Ci'LSLOI'LaL La
11.I'LLca CjlteJIA.LtlA. es LIA. torsión con respecto aLeje LOft0~t11odÍltCtL deL eLe meato. Los dos mementos
]Lectores están dfj1Vl.Ldos con resfleci:o lA. ejes 111.11.ClttA.lnente perpe Vld LCltLtA.res. ror Lo taltto son
ÍftdqJeftdLefttes, f:1 corresuonaen lít Los dos Vl1.Of11.Cf1.toS ííjH.e t:.iel.-:Jei1. eJlV\.flLearse el1. el c/.LseVtü tJiw<LtA.L
de tIA. coLIH1tlta. LtA.s dosJ11,crZCtS W<LuLes SOVl covlcordal1.tes Ij t¿eltel'L valores diferel'Ltes de~Ldo tA.
LIA. IA.ltSeltCLu de complA.tibLLLdwi de dtj'ormlítcLOI1.CS verucales en el ft/tdo. Lv!. Jl1.erza w<itA.L u
em~¡LelA.r en eL cüseVtü c/.e La COLltml1.1A. c/.dJe O~JtefterSe COJlJto La Sltl11.tA. c/.e íus dosJlterztA.S w<LtA.Les
~JroveitLelttes de cada pórtico LI1.de¡rJe~'Lc/.ieVlte. o sea tomanc/.o P = PI + P A .
>.
468
1..:J.. •
.lilUUISIS
IlIUU(,{C t. ' V I
n'H'~Jn. ..,
y
(E-W")-
@
Columna
Eje1xEjeA
Piso 1
Columna
Eje A x Eje 1
Piso 1
Figura 14-31- Ejemplo 14-4 - Fuerzas en columnas comunes a dos pórticos
Lv. dE1ideI1üiA- iA-vtOtiA-diA- del VfwdeLo VVLiA-tevvlúÜCO rJ/1,cde corregirse evvlpLe(A-'t¡;to /1.lt vvwdeLo de
rórüco espuduL ev\, el UtuL si existe esta co¡nrJiA-tibiLidud lj udemlis se ohtiene Lu torsión
UltSei1te eJIL el modeLo emrJLeudo.
Del Ejemplo 14-4 pueden derivarse algunas conclusiones que son importantes para
entender los resultados de este tipo de análisis cronológicos y que serán de mucha
utilidad en la interpretación del análisis modal espectral que se presenta en el
Capítulo 15.
Los acelerogramas empleados en el ejemplo se muestran en la Figura 5-13. El! la Figura
5-14 se presentan las aceleraciones que produce el registro en el plano
Tontal. E8
evidente allí la gran irregularidad de los movimientos. Indudablemente esta
irregularidad se manifiesta en la respuesta que se obtienen para la estructura empleada.
Un aspecto importante de notar, en la Figura 14-21 del Ejemplo 14-4, es que los
máximos de la respuesta para las coordenadas desacopladas {r¡}, OCUlTen en los
primeros 5 s del acelerograma. Para estructuras con períodos más largos, es muy
probable que la respuesta máxima se presente más tarde. En la tabla que acompaña la
Figura 14-21 puede verse que las respuestas máximas para cada coordenada
desacoplada, y por ende para cada modo de vibración se presentan a los 2.64 s y a los
4.48 s de iniciada la respuesta. En esta tabla solo se han colocado los tiempos para los
valores máximos de la respuesta en valor absoluto, aunque se ha conservado su signo.
Sólo se presentan los máximos en valor absoluto dado que estos valores corresponden a
los valores que se leerían de un espectro de desplazamientos, como lo indica la
definición de espectro de respuesta dada en la ecuación (5-2).
Cuando se realiza la transformación de las coordenadas desacopladas {r¡}, a los grados
de libertad de la estructura {U}, es evidente en la Figura 14-22, que los valores máximos
para los desplazamientos en la dirección x y en la dirección y siguen presentándose en
el mismo instante en que ocurrió el máximo para el primero y el segundo modo
respectivamente (t = 4.48 s y t = 2.76 s), Para los grados de libertad rotacionales, los
máximos no coinciden con ninguno de los tiempos a que se presentó un máximo de las
coordenadas desacopladas.
469
Dinámica estructural aplicada al diseño sísmico
Cuando se obtienen las fuerzas inerciales {F}, Figura 14-23, puede verse en la tabla que
acompaña la figura, que algunos valores de las fuerzas inerciales tienen su valor
máximo en el momento en que ocurre un máximo en las coordenadas desacopladas {11},
pero no para todas ellas. No obstante, al calcular el corte basal en cada dirección y el
momento torsional de toda la estructura, el valor máximo del corte basal en la dirección
y coincide (t = 4.48 s) con la ocurrencia del máximo valor para la coordenada
desacoplada del primer modo, y en la dirección x está muy cerca del instante (t = 2.76 s)
en que ocurre el máximo de la coordenada desacoplada del segundo modo.
Cuando se calculan los desplazamientos del pórtico del eje A, puede verse en la Figura
14-25 que el valor máximo corresponde a los valores negativos, y que estos ocurren
para t = 2.78 s, un instante después de que ocurre el máximo de la coordenada
generalizada correspondiente al segundo modo, el cual es un modo con tendencia a
desplazamiento en el sentido x. Los valores máximos positivos ocurren a un tiempo t =
3.60 s, el cual coincide con el máximo corte basal positivo en el sentido x. Los máximos
valores de deriva para este pórtico, ocurren simultáneamente con los máximos
desplazamientos, como muestra la Figura 14-26 y la tabla que la acompaña. Lo mismo
se presenta con los valores de las fuerzas en la viga del primer piso, entre ejes 1 y 2, del
pórtico del eje A, como muestra la Figura 14-27 y su tabla acompañante. La misma
situación ocurre con los valores de las fuerzas en la columna del primer piso, en el eje
1, del pórtico del eje A, como muestra la Figura 14-28 y su tabla acompañante.
En resumen, los valores máximos de los diferentes parámetros estudiados tienden a
ocurrir simultáneamente, o un pequeño tiempo después, de que ocurre un máximo de la
coordenada generalizada cuyo modo domina la respuesta del parámetro bajo estudio.
No sobra hacer un último comentario, el registro de Corralitos es un registro muy
fuerte, con aceleraciones máximas del terreno del orden de 0.63g en el sentido NS y
0.48g en el sentido E\V, lo cual explica los valores tan altos para las derivas y las fuerzas
en los elementos, aun para una estructura respondiendo elásticamente al sismo.
El modelo matemático de la estructura que se empleó en el ejemplo se seleccionó en
aras de una mayor claridad en la presentación. Este modelo es análogo al que emplea el
programa de computador TAES [Wilson y Dovey, 1972]. Este programa fue uno de los
primeros programas de análisis estructural con modelacíón de diafragma rígido de
aplicación práctica, e intruduju un aspecto muy Importante en 13. íngeníeria estructural
moderna, consistente en poder analizar la estructura como un todo y no como una serie
de elementos independientes que solo se estudiaban en conjunto de una manera muy
simplista. Además introdujo unas técnicas de solución algorítmica muy eficientes en
computadores con poca memoria principal, las cuales aún hoy en día son empleadas
por gran número de prugramas.
Desde esa época había conciencia acerca de la deficiencia del modelo matemático
empleado debida a la falta de compatibilidad de las deformaciones verticales entre
diferentes pórticos. El programa ETAES [Wilson, Hollinqs y Dovey, 1975], aparecido poco
tiempo después, corregía esta deficiencia empleando pórticos tridimensionales, lo cual
se ha mantenido en las versiones subsiguientes del mismo programa, [Maison y Neuss,
1983] y [Habibullah, 1994]. De igual manera, otros programas tales como COMBAT
[Computech, 1983] y SAP90 [Wilson y Haaibullah, 19921, emplean también pórticos
tridimensionales para tomar en cuenta la compatibilidad de deformaciones verticales en
las columnas. Todos los programas mencionados permiten realizar un análisis
cronológico de la estructura, simplemente varía de uno a otro la forma comu se
presentan los resultados del análisis.
470
1-± • . . { -11IL{II
.,I ~
11(·'-JI.t.\.,l.·1
r '-"
14.7 Análisis modal para excitación en la base de
sistemas con diafragma flexible
El procedimiento de solución en este caso sigue los mismos lineamientos presentados
en la Sección 1-lA. En el planteamiento de las ecuaciones diferenciales de movimiento
para sistemas con diafragma flexible hay dos diferencias importantes con respecto al
caso de estructuras con diafragma rígido: el manejo de la rigidez del diafragma y la
manera como se modele la masa de la estructura. En la Sección 11.3.2 se discutieron las
implicaciones más importantes al respecto.
Ahora se presentan tres ejemplos, los cuales son continuación del Ejemplo U-l. En el
primero, Ejemplo 1-1-5, se modela la masa del diafragma utilizando la matriz
consistente de masa presentada en la Sección 11.2.1. El segundo, Ejemplo 14-6, amplia
el uso de la matriz consistente de masas; y el tercero, utiliza masas concentradas en los
nudos, cuyo valor corresponde a la masa aferente. Las ecuaciones de movimiento en
todos los casos fueron determinadas en el Ejemplo 11-1.
Ejemplo 14·5
Q/terentClS encovLtrar l(,it reSfJliest(,it c{útrivvüm ante L(,it W~1trOVLevLte N-S del registro de Corralítos
deL TemtlLor de Lomu Prietu deL 17 de Octlülre de 1989. en et se~ttído transversa! det ¡JltevLte
CO~tLíltliO flreSe~ttudo en el EjemfJLo 11-7. el c.li.(,itL se H1./1.estra eVl Lu Figluu 14--32.
12m
12m
12m
12m
-,
®
@
©
@
Figura 14-32 - Estructura del ejemplo 14-5
Se tratu de
rHDtte de W.utro L/tces de 12 In. COlt Imu c(,itLzudu de 6 m de Uf1.dw Ij 0.5 m de
esnesor mucízo. EH S/tS extremos hUIj IHtOS estribos {/jIU' d(,itn soporte (,it Lus mrgus verttcates rol'
medio de 1m (,it~)oljo eL(,itstmnérico el c/i.uL permite despLuzumie~ttos Lm'Lgit/tdiHuLes Ij rotaciones
con respecto u tul. eje vertícaí. pero restrÍltge~t c/1.(,itLwüer tiro (lÍe desrLc/llumiento trunsversut.
Los pórticos de upoljo. (te Los u1.uLes ¡lUIj tres eSYluciudos m(IÍu 12 m. tie~'LCVL 6 m (lÍe LHZ con
YJiLus ciruüures de 1 m de dilÁ.melJO Ij 6 m (lÍe flcLtl1.nl.. Lus vigus (lÍeL y/órtico tiene lH1U secCiéHt dr
1 m de atto L1 0.70 VIl (te uttdlO. TODlOS Los ftenlf'ilLos rst~Jl consLnüdos con concreto de
I'f'sislevu:iu 3D lv1 F'u
1
.~.
11.11.
471
'-}
.
Dinámica estructural aplicada ..t diseño sísmico
E/1 eL EjemrlLo 11-7. La rigidez trunsversal deL flJlte/1te se wwdeLó corno se /nH.estra en La Fig/ua
14-33. el ta!JLero flJor 111edio de elementos de viga. el1 Los ClmLes La aLtlMa estmctluaL h esta
coLocada horizol1taLvnente. Ij La dimensió/1 b vertícalrnente. Esto Cj/üere decir qH.e La.fiexión en
el tatJLero ca/lsada fIJar Las soüdtadones sísmicas oc/UYe COl1 respecto a H,/1 eje vertíca! (.j esta
descrita en Los n/tdos de interCOl1fXiól1 fIJar medio de Los grados de Litlertad U1z a USz . Los
despLazamiel1tos horízontaíes trunsversates deL tabLero estril1 restrÍl1gidos en Los n/tdos 1 (.j 5
por Los estribos deL fIJ/w1te (.j eI1 Los 11Rdos 2. 3 (.j 4 por La rigidez ante efectos horiz0l1taLes de Los
rJórticos de vlpOljO. kp . en Los grados de Libertad U2y ' U3y lj U4y . EI1 el EjevI1pLo 11-7 se flJrese/1ta La
obtevLciól1 de La vnatriz de rigidez de La estmctlua [KEJ para Las características descritas.
®
5z
.~
®
Figura 14-33 - Ejemplo 14-5 - Grados de libertad del tablero
La ,·nasa de La estmct/ua se S/tfIJ'~50 Cj/te woveaía (¡,nicaliteI1te deL t~ülLero. Se vnodeLó YJor
medio de matrices cc.iststenres de masa SecciÓI1 11.2.1. EI1 el EjelnpLo 11-7 se li1/testra La
Inalt.era corno se oütnvo La matriz de masa de La estmctH.ra [ME].
1
1
-75.40
- 86.52
-
--
-
---
1
-75.40
-32.14
-
[Y]=
---
O
O
O
O
O
Y
--[ME][y]= -32.14
---
O
32.14
--32.14
---
472
~
.
14 • . /i.n(III~I:S
IfUJ(llU \..-,
""',nn vN
CCHt Viuse Clt Lo lIUtterior- elt el EjevltpLo 11-7, se obtlwo et sistevna de ecnuctones de eqltiLibrio
dútóunico, rJaru descrivlir Los vVl.ovimielttos horiZCHtLlIÜes transversaLes aeL pl,¡,eltte:
[MEHü}+ [KE]{U}= -[ME][y]{x o }
(,jIte
tiene Los sig¡üeltles valores:
O - 32.14
64.28
11.12
O
32.14
11.12
64.28
11.12
O
O
11.12
64.28
O
32.14
O
O
O
32.14
- 32.14
O
O - 88.99
32.14
O -32.14
O
118.66
32.14
O
O
O -32.14
O
32.14
- 88.99
O
O
O
237.32 - 88.99
O
O
237.32 -88.99
O
O - 88.99
O
O
O - 88.99
O -32.14
O
O
-1375
-1375
2894.8
-1375
O -8250
O -1375
2894.8
O
O -8250
237.32 - 88.99
O -88.99
2894.8
-8250
O -32.14
O
118.66
8250
O
O
O
8250
O -8250
33000
O
O
-75.40
O U 3y
-
8250
U 4y
O
O
66000
O -8:'.50
O
33000 132000
33000
O
O U 1z
O U2z
33000
132000
33000
O U 3z
8250
O
O -8250
8250
O
O
O
O
8250
O
O
O
O
O
O U 2y
33000
O
132001) 33000
33000
66000
86.52
-75.40
= -
32.14
32.14
{x }
o
O
U 4z
32.14
U sz
32.14
Como YJltede verse, elt este caso, a ctiferenciu cte Los 2jcvnYlLos untertores del preseltte CUpÍ-tltLO,
Lu Inutriz de masllts Ita es dtlltgmtlltL Esto se adle u Cj/1,e se elnr,Leuroll matrices consistentes ae
l'ltUSU r'uru moeteLlItr Lu 11taSU cteL tablero cte La estmetltru,
Los moetos 1:1 perÍ-ocl.os ete vibruciÓlt son inetepeltetielttes ete Lu y,urte lík'reclLlIt ete Lus CCltucicmes
(te eCjlúLibrio, pItes correspOJtetevl u Lus curucterísüms ete Lu estmctltra t'lt ViVlruciÓlt Livlre. AL
resoLver el rroltlLema ete valores nroptos pLlItllteueto rOl' Lu lIUtterioy eutuciém ete eCjlúLibrio, se
olt,tieltcll LusJreClteVlCillts lj reríactos 11",8strudos elt LlIt tuv,Lu sigtúeftte:
Modo
1
2
3
4
5
6
7
R
ol
(radls)2
2 179
9824
44 119
158920
403 OSO
1 005500
2251200
3 3:HJ 700
ro
(rad/s)
46.68
99.11
210.04
398.65
634.86
1 002.70
1 501.40
1 826,70
f
(Hertz)
7.429
15.873
33,426
63.44·0
101.031
159.574
238.931
290.689
T
(s)
O 13461
0.06340
0.02992
0,01576
0.00990
0.00627
Cl.00419
0.00:H1
1'.. V
Dinámica estructural aplicada al diseño sísmico
0.053765 -0.076513
0.055686
0.076035
O -0.078752
0.053765
0.076513
0.055686
O -0.052262
-0.069381
0.034296
O
0.073909
O -0.052262
O
0.048502
0.034296
O
O
O -0.053911
0.064908
O
0.069381
---------- --------- --------- ------------------ --------0.052795 - 0.076242
0.064908
--------- ---------
0.005014 -0.010109
0.036306
0.015536 -0.024535
0.003546
O -0.010985
0.024535 -0.025672
[<1>]=
0.010109
O -0.024535
O -0.052795
-0.003546
O
0.010985
0.024535
0.025672
O
-0.005014 -0.010109 -0.015536 -0.024535 -0.036306
0.052795
O
0,064908
0.053911
0.076242
0.064908
0.064908
O
LlIl.s priVlteras tresjUlIl.s de La vvu;Ltriz [<P] corres/1ovuíev\. a Los gmdos de Libertwi tmsLlIl.ciov\.lIl.Les
el'L La direcció¡'L transversaL de! p/tente. Las J~Las restantes corres~Jo¡'Lden lIl. Los gmdos ete
Lilrlcrtlll.d rotacionaLes.
En La Figlua 14-34- se presfJ'Ltan Las vt('Jonnaciovu~s deL tabLero correspov\.die¡ttes lIl. mda ¡noeto
de vibración. vistas eVL pLlIl.I'Lta. Debe recordarse qne soLo Los valores reLativos entre Los térvnínos
de Los Inmlos tielten sel1tido. Ylor Lo tanto LlIl. esmLa empLeaeta en La gráJica es La misma de Los
valores ete Los térvninos etc La vHlIl.triz [(}>].
-- --
0.10
0.10
I
I
0.05
0.0
.",-
....."
............
""""
-0.05 r-0.10
A
e
B
o
E
-0.10
"-
0.10
0.05
/
r
"' e
I
=
/,
0.0
I
/
\.
\
/
-0.10
=
0.10
I
/
/
0.0
/
I
1\
I
1\ /
V
-G.10
-0.05
A
/
.....-
0.05
Modo 7 (T7
=
/
I
I
\.
/
I
\
E
I-
/'\.
I
/
\.
I
\
I
\
'-V
\
\.
I
\.. J
/
I
BCD
A
I
0.0
\.
\.
v
BCD
./
=
E
0.0063 s)
0.10
I
\..
\.
\.
\.
Macia 6 (T6
......
\
......./
-0.10
II \.
\.
\
\.
/
\
\.
\. I I
0.0099 s)
,
-'"
E
/
"-
I
I
il
-0.05
o
\.
./
\.
B
e
o
Moeto 4 (T4 = O.CJ158 s)
A
0.0
I
e
Moeto 5 (T,
0.05
/
\..
B
I
0.05
/
"
/
"-
0.10
/
A
-0.10
/,
/
\.
\.
\.
\
/
-0.05
E
\.
/
\.
,
o
(l0299 s)
/
\.
-0.05
./
,
0.10
E
. / <,
"-
./
/
0.0
/
Modo 3 (T3
0.05
'-
/
-o. la - - - - - ' - - A
B
o
:
0.05
/
"\.
-0.05
<,
/
"'"\."\.
0.0
e
Moeto 2 (T2 = 0.06345)
0.10
......
./
B
A
---
./
:
<;
"
./
:
<,
Moeto 1 (TI = 0.1346 s)
./
i./
I
-0.05
<,
./
I
0.0
...........
/'
I
0.05
E
-0.10
0.0042 s)
rv
1I
J
\/
-0.05
I
r>;
\.
\.
\.
\.
A
\.
\.
\.
\. I
\.1
'"\.\.
'"\.\.
il
!I
\
\.
I
\.1
\. I
\1
BCD
E
Moeto 8 (Ts = 0.0034 s)
Figura 14-34 - Ejemplo 14-5 - Modos (vistos en planta) y períodos de vibración de la estructura
PanA. /1oeter ietentificar LiA. rJYeYlC)¡l,ueraJtCiiA. de mda rnouo Ilucia mdiA. l1y¡,a de Las uireccim'Lcs
rJYinárlaLes. rll1.edc IHLLizurse La Inasu activa frl, cr4ua 111.Clí10. e¡'L cadlll. dirección. Para eL \J'eetCJ
se sttpmte (;pte IlUIj lIl.ceLeracimtes etel {('rrcv\.o en cuetiA. lULa etc Las direccLm'Les. AIHtqtte 1'\.0 se
474
l
1
14 •
./tlla/l.';lS I 11()(I U (
(TU/H)(U.</IU
aiSYlmte ae eA.ceLeraCWltes YOLucimteA.Les dd terreno. 1t0 OVlstcUtte, de esta malteYa ¡Jlicde verse la
il1j1lteltciu torsionuL ae CeA.cLeA. moao litiLizunao IUtU vneA.triz [Yo] Cl1-IjeA.Jonnu es:
J, gdl
1 O
U 2y
1 O
U 3y
1 O
U 4y
O 1
O 1
Ulz
U 2z
O 1
U 3z
O 1
U 4z
0Ti
U sx
-- --
[ro]=
Por mecüo ae proc/'II.CLo siglüeltle, ohtcnemos Los valores ae [~l qlw eA.L ser elevueios uL
ClI.eA.ctntaO conespovu1('1t eA. Lu meA.SeA. eA.r.LiveA. ae cueteA. f1tOaO elt es(,l, airecciéllt:
15.236
O
O
O
1.8763
O
O
O
-0.8029
O
O
O
1.0020
O
O
15.406
------- -------
Mo¡;(o
1
2
3
1l'l-nSt-l
nctwlI
232 136
~) . ~)2
1
()
.)
O.64S
6
7
8
0;0
nn~J11
'?7.82'Yo
97.82%
148%
99.31%
ü27%
99.58%
o
':
,
Oireccwn Ij
% Jn.n5rl
totnl
()
()
()
o
()
1.0ü4
O irecció It z (rotf~ciOltl1l)
% i1lnSII
%
l1Cv{ll1
nctivn
lotnl
/1-1(15-(\
O,/l2 í ró
100.0ü%
o
()
o
o
?37.345
100 0,{
100%
De LeA. tutlLeA. eA.ftterior es eviaevl-t.e CjIH' el primer moao VeA. eA. controlar LeA. respltesteA. DeA.l;lo &l'ie I
I1tOvimielttos aeL terreno son Los miSf1tOS en toaos Los eA.YJoljos, en uCjl1dLos moaos en Los C1I.U
Los pórticos de los ejes B lj O se aesYllvlZlítlt en airecdoftes oyniesteA.S VLO üeftelt positJiLiaeA.C1 ae '
exciteA.aos lj por esta reA.zém S11, meA.SeA. eA.ctiVeA. es cero. Esto ocurre en los mortos 2 lj 6, De IU
meA.ltera UltlÁJOgeA., elt lítql1dlos 11/\,CJaos en los C1ilítLes IW hlítlj acsy¡LuzeA.mieltto ae Los pórticos f)
lj O ItO se preselttu resYJltestu; pIteS VLO ILeA.11 y¡osibilidlíteL ae qliC selítlt exciLudos por
movinuentos eLd terreno. esto oClure en los moaas 4 lj 8, Con blítse en lo unrertor. es eVlael
CjliC leA. resyJl1,cstlít ae leA. estructura peA.ra los 111DvivniClttos sísmicos Cjll,c se pleA.lttelítn solo oClun
través ae los I1tOaOS 1, :3 5 lj 7, con IHtu colttriVJl1,ciÓlt m11.1J ¡JcCjI1,eftlít de los tres itlül'ltos, e
resy1('cto eA. los ejectos roteA.cimtuLes en d aieA.jraglnlít, se YIYH.cblít en llít teA.tllu Ultteriol lJjl1l'
SOIHCiéllt f11.oaeA.1 eA.ctiVeA. toau 114 muslít, Dlítao Cjlie YJeA.m aetermÜteA.r llít IneA.SeA. eA.cliveA. rotucim
se emYILceA.YOIt lUtOS f1tovimleltLos Jicticios íiiHC exciLlítfL tonos los gmaos roteA.clOlteA.lc' el1
475
inámica estructural aplicado (ti diseño sísmico
11tLSma ciirecCÜl/1, s imltLttÁJteaf'lte ate. atiJlt.Í ocnrre aLgo simiLar a íos ejectos traslacim1.ales;
C/taltcio la resl1'1.esta es elt ciirecciOltes Orll1.Cstas. se avutLa la masa activa. La (utiCtA. exccl1r.iólt
es el vaorto 8. en el c/1.tA.l tocios los giros SOn eVL el vnismo seltLicio. !j por est« razólt activaft la
tottA.llr;{.ad de la mlA,sa.
Ahora SltrJongw'Itos tiJl1.C la estrl1.ctltra es someti¡;{.a a la COl1trOlteltte N5 ¡;{.eL registro de
Corralitos. del temkJLor de Loma Prieta. Califontia aeL 17 ae ocncbre ae 1989 (véase la Figlua
5-13). La mal va a acW.ar en la ¡;üreccióI1. transversa! acL rll1.eltte. Los coejLci<'lttes al'
p tA.rticip ación se o btiene It ae:
lj
el vector ¡;{e (l.ceLeracicHtes ael tcrrel1.0 uene la siglúelttejomttA.:
dclltae xNS corresrJOnvLe a ltA.s aceleraciones elt la airecciól1. NoS ael registro del temblor de
Loma PI'icLtA. CI1 el sitio ae CorraLitos. AlLOm la matriz [y] se Jonmtla dé awcYv{o con lo
j1reseltlw!o eu tu xecdón 11.3.1(IL) para estc caso. cotocuruto /1.11.11ItO (1) si lu eC/\.uciólt cic
eVjlúl¿lJYLo es colll1ea! cmt'ilA, tA.cclcraciól1.. !j 1m cero (O) si Ita lo es. Por Lo tanto. [1] lj [a) SCHt:
15.236
1
1
O
1.~763
1
-------
O
O
OxNS '
-0.8029
O
O
O
1.002
O
O
Lus eUH-l.cimtes desacopladas ctel sistema se okJtieftel1. por l'Itectio cte:
lo c/tal coV\.d./tCc a las siglúel1.tes ocho ecnacíones con SI1. umortigl1.w11.ieltlo modul Pura llA,
resYI/1.estu se ¡la coltsictcraci.o uj1rorJiacio 1111. coeJicieJtte de amortigltalltiel1.to de ,)<Y<, ({e! crítico
~ = 0.05):
111 + 21;1 00 1T\I + ooiT\1 = -15.236 XNS
112 + 2S 2OO 2T\2 + OOiT\2 = O
113 + 2S 3OO 3T\3 + 00~T\3 = -1.8763x NS
'~4 + 2S4(Jl4114 + ro;rt 4 = O
115 + 2~5005T\5 + 00~T\5 = 0.8029x Ns
116 + 2~6006T\6 + 00~T\6 = O
11 7 + 2S7 00 7Th + 00~T\7 = -1.002x NS
11s + 2~S008 T\s + ooiT\s = O
476
1-1 •
,'1I1al/8/8 1/I0(/UI (TOIIOl0.CJ/('O
Ota.tro de La.s ocho eC/1,a.c~ovu'.s ctesa.co¡'lLa.da.s 11,0 l.iCVU:'VL ~v!:fI,H,eVLcia. a.LgnvLa. e¡t La. rcs¡'l11,esta.
da.cto qli.C a¡ = O. Esto ocrvre ¡'la.ra. Los n1Ddos 2. 4. 6 Ij 8. Por otro La.do es ün¡'lort.r.,u1.te tener CIt
UtCVL[r/i [jIte La. estrltclJw:{ es VltH,1j r[gídlA. tntVLSVCrsuLr1tC¡1.tc, YH·ü1.C~rJa.LmCltte dcb~do a. LrA. r~gidez
a.¡ttc a.ccim1.es trunsverscdes deL tuvJlem YJlH'S se tnttlA. de ¡·Ul.a. viga. con h = 6 m qw' sa.Lva. Lnees
de 12 m. Ij La. iVlftli.eVLcia. de Los nórucos es ml1.lj /11.eltOr. u Y'esa.r de ser tla.StWl.tc rCltlli,stOS. Esto
¡'ÜÜ/11D ym,ede detennivLa.rse ohservunzto COVL uüctueto en eL EjcmrLo 11-7 ql1.e Lu CCH1.tdJli.dólt
de rigidez ante desrLuzwnier1.tos trul1.sversuLes ete Los pórticos es k, = 144.2 MN/m, Inie/l.trus
qli.e Los ténnüws dc r~g~dez trw1.svcrsa.L cteL tutlLcro U1. Los m~sl'}tos grudos de Líl/lertuet es de
:2 750 MN/rn. Lo C/1.a.L ütíÜCtA. [,jli,f LlA. colttrivl/i.cióVL etc Los Ylórücos lA. Lu r~gietez transversa! ete Lu
estmctluu es mltlj t1uju, deL ordcll. del 5% dc Lu r~g~dez t.rumversa.L tota], Lo a.ltter~or coltdnce a.
ql1e Los rer[odos ete vitJYrA.ciól1. ele Lu estntcUua. seult /nl1.1j cortos, W1Jt en el l'}tCJdOJ'1,I1.etumclttul
(TI = 0.135 s). e¡t esU;\. ZOItu lus rA.ce/emdml.cs ill1¡Jltestus a. /1.11 s~stelnu et~lttÁ.11t~CO t~ClteteVL u ser
~gllaLe a las /nis¡na.s r;id terreno. SilL íjli,e se presulte ¡ÜIl.glu1a a.H1YI10:iu¡ciéHt por eJcctos de
reSOltíHtC~a..
C0111D se cxy,L~co e¡1. LaSecdólt 5.S.
S~
a.ctevnrÁ.s se Lie/te ell. Cli,el1.La. [,jiU' el ü1.tervlA.lo de íügdlA.L~zuc~ÓVL de Los reg~stros uce!croWrÁ.ji.cos
ge¡temLlnerttc es elE' 0.02 s, lu ¡'lrecisiólt lI¡IH' se oVJlicnc C¡1. LeJ. rcsjIJli.estu diVLrÁ.mica pa.m rJer[odos
íLe v~¡"mdólt cercanos o meVLores a. este valor. es In/llj viaja.. Esto ocurre ¡Ja.m La. resYJI1.estrA. de Los
H1.odos diferel1.tes u los dos primeros. Ccm t1a.sc e¡t Lo altter~or. La. resYl/i,estas e/1. etespLUZ{iLm~e¡tLo
y'um Lus coordel1.udu gevLem!izue:{riL corresYJOltíÜClllC (iLl priJ.nero modo (TI = 0.135 s) se obtuvo
con el método Beta. de Newmud~. COIl. IUt wnortlg'i.um~eltto de ~ = 0.05. Ij pa.m Lus
corresYlmtd~cr1.tes a. Los modos 3 (T3 = 0.03 s). 5 (Ts = 0.01 s). !J 7 (T, = 0.0043 s). se etetennüta.ron
Sltt'IOlÜe¡teto (/lIi.e La vte:eLemción elt Lu musu es Lgltul u la deL terreno. YJor Lo tanto LuJliCrLa Cf1
el resortE del s~s Le ma cte 1m gmdo eLe L~t1(' rLud con perí.oeto 11111.lj corto es F, = m- Xo Ij e l'l.tcHtces
el
F
des¡'lLuzrA.ln~c¡tto 11¡ = _ r =
k
m,u, . X
~
o
T2
= __
1 -2 U
i
4.1[
';,[0'
Elt Los grriJ~ros s~gli,~ef1.tes se 111.1i.estrtA.11 los rJrimeros 10 s de res Y" tes [l.-!.. pL'Ja. Lus CltUtro
coordena.da.s etesuco¡'lLudus pUrtA. las C/1,ales ¡LUIj respltesta.. ¡;j,c¡ttro de Los clta.Les se YJreSelttw1
tos l1"'vt7,X~V110S ri.('~ y!rJce<:o I'nmll tod.f} lel. e\(tem~ól1 del wderogrtA.lna.. E/t Los grrÁ.ji.cos se 11tl1,estrWt
el vator meixinto Ij et valor m[¡ümo.
111 (T,
=0.135 s)
113 (T 3 =0.03 s)
0.06
maJe
0.03
(m)
0.0 ~,...ar
-0.03
min
-0.06
11, (T'I = 0.0043 s)
11s (Ts = 0.01 s)
0.0002
0.000050
maJe
maJe
0.000025
0.0001
(m)
ao~~~
~""'l
-0.0002
1
'
(m)
O.o-jo'loj~~
-0.000025
min
min
-0.000050
Figura 14-35 - Ejemplo 14-5 - Respuesta de las coordenadas desacopladas
477
'Yinámica estruct ural upliccula (11 diseño sísmico
Ev¡, La tal" la sig/üev¡,te se ciaVl, los valores cic 1'\1 a 1'\9 ev¡, vv¡, C/taf1,cio oCluren Los ntcixinws ef1, valor
a~)soL/tto cie cacia luta cie eLLas, Lo u,taL oCltrre eft el mis VitO instaure U rara Los ricos cieL
aceLerogral1ta, lj así miSHW se rreSefttalt otros valores. los Cltales se verc:í mc:ís aliteLaV1te
corres¡101tcielt a los Utstafttes en los (I1,aLes se rreselttwt mW<Íl1ws valores cie L¡A,s Jlterzas
ÍlterciaLes:
t
(s)
T\1(t)
(m)
T\z(t)
(m)
T\3(t)
(m)
T\4(t)
(m)
T\s(t)
(m)
T\6(t)
(m)
T\7(t)
(m)
T\s(t)
(m)
2.62
~0.05 793479
0.0
0.004000739
0.0
-0.000187395
0.0
0.000041814
0.0
2.86
~0.008325999
00
0.001872934
0.0
-0.000087728
00
0.000019575
0.0
3.04
0.045615120
0.0
-0.003172009
0.0
0.000148577
0.0
~0.000033153
0.0
4'.00
~0.03620421 O
00
0.001281017
0.0
~0.000060003
0.0
0.000013389
0.0
596
-0001900246
0.0
0.001078563
0.0
0.000050520
00
~0.000011273
0.0
6.38
0027t)4!,640
0.0
-0.000801521
00
0.000037543
.0.0
-0.000008377
0.0
H\.'~X
0045615120
0.0
0.004000739
00
0.000148577
00
0.000041814
0.0
1\1.(.11.
0057934790
00
0003172009
00
~OOO0187395
0.0
-0.000033153
0.0
Desrl Luzal1Üe lttoS:
{u} = [<I>]{1'\(t)}
El'. La Fig/ua 14-22 se f1tW'StrcAH Los ¡1rimeros 10 s cie resYlItesta, pura Los grucios cie LikJertuci
tras LucioVluLes.
0.0050
0.0050
0. 005
°T
t
(m)o.o~
0.
0025
1
2
9 1~
t (s)
6
-o.002sI"
.
-O.OOSO
Figura 14-36 - Ejemplo 14-5 - Respuesta para los grados de libertad traslacionales de
I~
estructura
Elt La t(;:tllla sig/üellte se ciuft Los valores cie Los litesrLazantielttos, en m U ralitialtes, Se cialt
¡1uralos vatores cie t elt s. en Cjlte se rresev¡,turOlt valores cie las coonteftacias gelteraLizucius.
t
uzy
U3y
U4y
Utz
UZZ
U3z
U4z
Usz
(s)
(m)
(m)
(m)
(rad)
(rad)
(rad)
(rad)
(rad)
2.62
~00028809
~0.0047320
-0.0028809
~00002383
~00002468
00000000
0.0002468
0.0002383
2.86
-00003381
-00007861
-0.0003381
~0.0000173
~0.0000489
0.0000000
0.0000489
00000173
3.04
00022670
0.0037275
0.0022670
0.0001874
0.0001945
00000000
~00001945
~0.0001874
4'.00
-00018716
~0.0028575
~0.0018716
~00a01M8
~0.000141b
O.OCCOOOO
0.0001416
0.0001648
5.96
-0.0001653
-0.0000564
~0.0001653
~0.0000236
00000044
0.0000000
-00000044
0.0000236
6.38
')0014395
00021675
0.0014395
0.0001282
00001063
0.0000000
-00001063
~O.0001282
H\.IlX
00022670
00037275
00022670
00001874
0.0001945
00000000
00002468
0.0002383
111il I
1)
0028809
00047320
-0.0028809
-00002383
-00002468
00000000
00001945
0.0001874
478
14 • Análisis
I1W(/U(
cronotoou:o
F/tf'I7eA-S LVlercieA-Lf's:
PeA-rGt detem1ÚleA-r LeA-sJ/terzeA-S ü'tercieA-Les qne imrorte el sisvltO sobre L¡;t estntctlUeA- ev¡, clieA-Lqlüer
i¡tsteA-vLte se vltltLtLrLim LeA- vlteA-triz de rigidez de LadeA- Lu esLni.clJuu ror Los desrJLammíeltLos:
E/t La Fig/ua 14-23 se Vlt/testrav¡, Los rJrimeros 10 s de resr/testa.
Flz (kN'm)
1500
1000
500
oi---"""",'W'~-"""""'''--'''''''''''''''­
2
-500
3
4
5
6
7
8
9
10
1 (s]
·100('
-1500
200;;
-¡
1000
o +i
~
-
3
4
5
6
7
500
,
8
9
1
o i"""'WN"'II'\:t'
10
-500
l(s)
-1000
-2000
TI
1500
!
1000
1000
500
-50:
l(s)
1000
-1500
T
1000
-2000
1
(kN'm)
t
t
1--.. . . - -.. . . - -.. . .
- --+-..---.,
3
4
5
1
6
7
8
9
10
t Is}
1500
t
O +-b-
F3z
T
2
10
1000
i
10
[(5)
-1500
2000
2000
(kN'm)
1000
..
--.d"tI""'''''''~WW1~~'''''~'''''''''-",¡
2
1000
..
F2z
1500
1000
1
500 I
'-~"f(ftI
,
1 .........~~.....".,.,...-~~.-..-
2
3
4
5
6
7
8
9
O
10
"'-N~...,q.-
.¡..I
-500
1 (s)
1 (s}
-1000
_1500 1
~
f'sz (kN'm)
1500
1000
1
":1
-500
2345678910
-1000
1 (s)
-1500
Figura 14-37 - Ejemplo 14-5 - Fuerzas inerciales
f::Jt La tuliLu sig/üeltte se dcut Los valores de las JIi,crzeA-S iVlercLeA-Les. en kN o en kN·¡n. Se
Inese¡ttan rJeA-rGt Los vatores de t en s. eVl Los clteA-Les OClurelt máxíl'ltOs de esteA-sJ/terzeA-s ¡¡terciuLes.
usí COl'ltO Los valores l11.c5!ximos rum Lu resrli,csteA- oli¡-e¡tidu
47D
Dinámica estructural aplicada al diseño sísmico
F zy
t
F3y
F4y
F.,
F zz
(kN-m)
F3 z
F 4z
F sz
(kN-m)
0.0
(kN-m)
1403.6
(kN-m)
10ó.9
(s)
2.62
(kN)
133.2
(kN)
1703.5
(kN)
133.2
(kN-m)
2.86
245.1
-539.0
245.1
32.1
-54.().9
0.0
540.9
~32.1
3.04
-1087
134(,:\
-108.7
83.4
1110.9
0.0
-1110.9
-834
4.00
-1290
~788.2
-129.0
-111.4
~5586
0.0
558.6
1114
5.96
~20ó.3
218.3
-206.3
-47.7
270.1
0.0
-270.1
47.7
6.38
1293
561.9
129.3
91.5
3804
0.0
~380.4
~915
Illnx
245.1
1346.3
245.1
91.5
11109
0.0
1';.03.ó
111.4
nlil1
~206.3
-1703.5
~206.3
-111.4
~1403ó
0.0
11109
~91.5
~1069
~1403.6
Pam. detennivlar Las reacciones eVl La ¡'w.se í-j/tC iVldltccn LúsJI1.erzt,ls iVlcrciuLes tIl1i-e impmte eL
sismo sobre La estr/1.ctlua en CltaLtíliÜer it1,stante se Sltfltatt LUSJfi-erzuS en el setttido trattsversaL
Los res/útudos. r)urú Los printeros 10 s del sisf'JtO se Inltestrun ett La Figl1.ra 14--38.
Corte
Bas¡,.ü
Figura 14-38 - Ejemplo 14-5 - Fuerzas en la base de la estructura
Ett La siglüettte tu¡'ILu se mnestratt Los valores o¡',tettidos (H.undo Lus coordenudus
0etteruLiztA.dus tielten IHt valor mlixivvw. 11 Los vltlixivttOS o¡'ltenidos. dltrante todtA. Lu respl1-esttA.
t
vy
(s)
(kN)
2.62
F/1.t~rztA.S
1437.2
286
~48.8
3.04
1128.9
400
1046.3
596
-94.2
6.38
820.4
IHllX
11289 t=3.04
IHil1
1427.7 t=2.62
s
s
!LOrizoltttA.Les en Los ¡;Jórtícos
LtA.s Jl1.erztA.s ho rizoVlttA.Les en mdtA. lUtO de Los r'(1 rucos se olJtíenelt tA. ptA.rtír de Los
d.espLClltA.tnientos U 2y ' U 3y i1 U4y ' m/útípLíct.ÍndoLos por Lu rigidez horizonttA.L deL pórtico [kp ) :
480
[J1, lu Fig11,rU 14·-39 se 11t/lestrult lvtsJltel"Zus horLzm1,tules
áe reSrJltCstu.
los r¡órtLcos, r¡uru los rrivlteros 10 s
eVL
800
400
~lAel'zn
IlOnzolltnl.
PÓl'tí.cos eles
B IJ D
9
10
-400
FlAel'Zn lrortzontu!
Pórtl.cu eje e
t (s)
O ~f'A/t~Wf,cl--'H-ttWtl~ur\-#;H-flAd\t/---\.r.-Pr-:
(kN)
-400
-800
t
t (s)
1
Figura 14-39 - Ejemplo 14-5 - Fuerzas horizontales en los pórticos
Los vulores tnlÁXimos vle lusJl1.erzlxs honzontales Ot los rórücos son las siglüe~1,tes:
VB
Ve
(kN)
(kN)
t (s)
2.62
VD
(kN)
-417.2.
-685.3
4172
2.86
490
113.8
49.0
3.04
328.3
539.8
'28.3
4·00
.271.0
413.8
271,0
5.96
-23.9
-8.2
23.9
6.38
208.5
313.9
208.')
W\.&iX
328.3
t=3Q.4s
t= 304 S
539.8
-417,2
V'll-lVi
-685.3
t= 2.62 S
t= 2.62 s
t=
328.3
S
3,O~~
-417.2
t= 2.62 s
•
El cálculo de las fuerzas internas en los elementos el'} el análisis cronológico de sistemas
de diafragma flexible es totalmente análogo al de sistemas de diafragma rígido
presentado en la Sección 1-1:.6, con la excepción de los elementos cuyo análisis se realizo
empleando el modelo de matriz de masa consistente. En este caso se presentan fuerzas
inerciales dentro del elemento y ocurre una situación muy similar a la de fuerzas
externas localizadas dentro del elemento, en el análisis estático presentado en la
Sección 8.8. La matriz consistente de masa de un elemento en coordenadas locales,
Sección 11.2.1, tiene la siguiente forma:
140
O
[ro] = 4;0
O
70
O
I
I
70
O
O
156
22L
I
I
O
54
-13L
22L
2
O
13L
----- ------
O
O
l.
O
O
4L
I
I
----------f-----O
140
O
54
13L
-13L -3L2
I
I
I
I
I
I
-3L2
-----
O
156 -22L
-22L 4L2
O
O
481
(1-1:--1:0)
Dinámica estructural aplicada al diseño sísmico
donde:
m
masa total del elemento = A L Y
luz del elemento
L
Esta matriz se deduce utilizando el principio de Müller-Breslau por medio de la
ecuación de la elástica del elemento para una deformación impuesta en cada uno de los
seis grados de libertad de sus extremos, mientras los otros cinco son cero. En el caso de
deformaciones axiales, ecuaciones: (1l-7) y (11-8), su derivada corresponde a la
deformación unitaria, que al ser multiplicada por AE corresponde a los esfuerzos
axiales, y al ser derivados nuevamente corresponden a la fuerza axial aplicada en cada
punto dentro de la luz, la cual es cero. Para efectos de desplazamiento transversal y
rotación en los extremos se emplean las ecuaciones (11-11) a (11-15), que al ser
derivadas corresponden a la pendiente de la elástica, al derivar nuevamente y
multiplicar por El conducen al momento flector, y al derivar nuevamente a la fuerza
cortante, y derivando a la carga externa aplicada, la cual es cero en todos los casos.
A continuación se muestran las ecuaciones que describen independientemente la
deformación dentro del elemento para cada uno de los grados de libertad en sus
extremos, así como sus derivadas, las cuales corresponden, respectivamente a:
Para oax = Uax Y llay = llaz = U¡,X = Uby = Ubz = O:
Xax(X) = u ax· ( 1E
ax
x\
LJ
(1)
dx ax
(x)=--=u
'-dx
ax
L
(l-l--l2 )
Para Oay = llay Y llax = llaz = U¡,x = U¡,y = U¡,z = O:
0-l--l3 )
(1-l--l5 )
(1-l--l6)
Para eaz = llaz Y llax = llay = U¡,x = U¡,y = Ubz = O:
j
2x2 x 3
Yaz(x) = u az' ( x-T+ L 2 )
(1-l--l7)
dydxaz az . (4X
eaz(X)=--=U
1 - - +3x
- -)
L
L2
2
M
(1-l--l8 )
2Yaz
(x)=EI· d
=u 'EI'(-'!+ 6xI
az
dx2
az
L L2)
3
V (x)= El· d y az = u
az
dx 3
az
'EI'(~
I
L2 )
(1-l--l9)
(l-l- 3~»)
482
14 • .:lJliílisis modal cronoioqico
Para
Ot,x
= Ubx Y llax = llay = llaz = tlby = Ubz = O:
(1-1-51)
(1-1-52)
Para
Ot,y
= Uby Y Uax = llay = llaz = tlbx = Ubz = O:
(1-1-53)
(l-l- 5-1)
(1-1-55)
(1-1-56)
Para
ebz = tlbz Y Uax = llay = tlbx = tlbx = Uby = O:
Ybz(X)=
x2
x
3
u bz · ( - - + L
L2
dYbz
ebz (x)=--=u
b
dx
.
Z
)
(1-1-57)
(2X
- - + 3X:!)
-L
6X)
2
M
(1-i-58)
L2
2 +bz
(x)= E Id· -Y = u ·EI· ( - bz
dx2
bz
L L2
( ~\
3Ybz
d -- = u
V (x) = El· bz
dx 3
bz
. E!· I
\ L2 )
(1-1-59)
(14-60)
Utilizando las ecuaciones anteriores es posible determinar, con base en los
desplazamientos dinámicos en los extremos del elemento, las fuerzas internas dentro
de él, compatibles con estos desplazamientos. Pero, el procedimiento de la matriz
consistente de masa, expresa en los grados de libertad de interconexión de los
elementos, los efectos inerciales internos del elemento; por lo tanto hay necesidad de
adicionar estos efectos para determinar las fuerzas inerciales totales. Algo muy similar
a lo que ocurre con los momentos de empotramiento en el análisis estático con fuerzas
aplicadas dentro del elemento y no en sus extremos.
Para efectos de entender el procedimiento que es necesario aplicar, supongamos una
estructura que se analiza dinámicamente empleando matrices de masa consistente, por
lo tanto las ecuaciones de equilibrio dinámico tienen la siguiente forma:
[M]{Ü} + [K]{U} = -[M][y]{x o }
(1-1-61)
Luego se obtienen los modos [<1>] y frecuencias [0)2] del sistema en vibración libre para
[M] y [K] por medio de uno de los procedimientos presentados en el Capítulo 13. Al
realizar la transformación a coordenadas generalizadas,
linámica estructural aplicada a/ diseño sísmico
{u} = [<l>]{TI}
(14-62)
{ü} =[<l>]{ ti}
(14-63)
y
y premultiplicar por [<l>]T, se obtienen las ecuaciones dinámicas desacopladas de la
estructura, las cuales son del tipo:
""
2
TI¡
+ (O¡ Tli
=-cx.¡X"" o
(14-64)
Los desplazamientos de la estructura, expresados en los nudos de interconexión entre
elementos, son:
{U(t)} = i{<v¡h¡(t)
04-(5)
i=1
y las aceleraciones:
{Ü(t)} =
i
{<vi }1i¡ (t)
(14-66)
i=1
Para cualquier elemento de la estructura, en particular, se transforman los
desplazamientos y las aceleraciones de los extremos del elemento a coordenadas locales
de él por medio de:
(14-67)
En este momento, por medio de las ecuaciones de la forma de la elástica, pueden
obtenerse las fuerzas inerciales dentro del elemento:
Por ejemplo, para ü ax ' utilizando la ecuación (14-41):
(14-68)
donde 11 es la masa por unidad de longitud del elemento. Análogamente, por ejemplo,
para ü ay ' utilizando la ecuación (14-43):
2
3
"" . ( 1 3x
2X-)
f ay (x)=Il'u
--+
ay
L2
L
3
(14-69)
La analogía con el análisis estático se hace aquí más evidente, pues el análisis dinámico
se está haciendo para una fuerza dinámica aplicada al elemento dentro de su longitud,
pero expresada en sus nudos de interconexión (Sistema L), y que esta fuerza tiene la
forma descnta por la superposición de las fuerzas inerciales obtenidas por medio de
ecuaciones similares a (14-68) o (14-69), para las diferentes aceleraciones en los
extremos del elemento. Estas fuerzas inerciales inducen unas acciones en los extremos
del elemento (Sistema E), las cuales son totalmente equivalentes a momentos de
empotramiento, y que a su vez son las mismas fuerzas inerciales que se obtienen al
multiplicar la matriz de masa consistente por las aceleraciones en los extremos.
1-'1- •
,'lIUllISIS II/(JU(!! u IJlllJllJY¡UJ
Para determinar estas fuerzas inerciales de empotramiento (sistema E), por ejemplo, en
el caso de la ecuación (l-l-G8), se procede de la siguiente manera:
(l-l-70)
(l-l-71)
Pero sabemos, que dado que el elemento está empotrado en sus extremos,
x~x (O) = x~x (L) = O; por lo tanto, despejando en (1-l-77), C l =-L/3 Y C 2 =o. Entonces,
(l-l-72)
11 __
( x2
ax
xax(x)= AE "u
E
x3
xL \
"lz- 6L --3")
(l-l-73)
De la misma forma, por ejemplo, para el caso de la ecuación (l-l-69), se procede así:
V~(x) =
f fa/x)dx
=Il-
__
U
"
ay
(l-l-7-l)
x3
x4
)
x--+-+
Cl
[
L2 2L3
(l-l-7,'))
(l-l-76)
Y~y (X) =
=
f e~y (x)dx
11·)ü
-
( El
. [x4
ay
24
3
7
2
6
x
Cx
Cx
+ _x _ +_1_+_2_+C
x+C )
120L2 420L3
6
2
3
4
(1-l-77)
Pero sabemos, que dado que el elemento está empotrado en sus extremos,
y~/O) = y~/L) = e~/x) = e~y(L) = O; por lo tanto, despejando en (l-l-76) y (l-l-77),
obtenemos las constantes de integración: C¡ =-13L/35, C 2 = llL21210, C 3 =OY C 4 =O.
Utilizando estos procedimientos se llega a las siguientes ecuaciones que describen los
efectos de las fuerzas inerciales de empotramiento en los elementos (Sistema E), los
cuales deben ser superpuestos a los que se obtienen en las ecuaciones (14-41) a (1-l-60)
(Sistema L). Se ha colocado un índice superior E para indicar que se trata de efectos de
empotramiento inerciales, o sea que pertenecen al Sistema E:
)~
48.
"
Dinámica estructural aplicada al diseiio sísmico
Para
Ü ax :
fax (x)
(J
f:
0-1:-78)
L)
ax
Ü ay
~)
2
E
f.L.. . ( X X
(X)=-·U
--ax
.
AE ax
2L 3
"E
Para
= f.L' Ü ax . ( 1-
( 1-1:-79)
(x)=~.Ü .(~_~_ xLI
AE
2
ax
6L
(1-1:-80)
3)
:
0-1:-81)
(1-1:-82)
(1-1:-83)
(l-l:-8-1:)
(1-1:-85)
(1-1:-86)
(1-1:-87)
(1-1:-88)
(1-1:-89)
(1-1:-90)
Para
Ü bx :
f bx (x)
f:E
bx
=u
Ü bx . (
(1-1:-91)
(x)=~.ü
.(~_ L 1
AE bx 2L 6)
(1-1:-92)
(x6L XL)
6
(1-1:-93)
f.L..
x E ( x)=_·U
bx
~)
AE
3
bx
. ---
486
j
..
14 •
Para
"l11UllslS 1110(1(// CrOIlOI0,(fICU
Ü by :
2
3)
. [_3X_ __
2X_
IJ
L3
(x)=f..l'ü
f
by
by
4
3
E
.
V.(X)=f..l·U
b}
E
by
. [x
- - X- -9L)
L2 2L3 70
"
M by (x) = u Uby
eE (x)=~.ü
~
ID
El
·
~,wIJ
6
by
(l4-95)
4
5
2)
[x
X
9Lx 13L
-4-L-2 - -10-L-3 - -7-0- + -4-20-
.[~_~_
f..l ,_
y E (X)=-·U
by
(14-94)
~V
(14-96)
2
9Lx + 13IJX)
~
~
3
2
(14-97)
2
x- + -x'
. (- - -9Lx
- + 13L
- -x- )
120L2 420 L3
420
840
(14-98)
Para ü bz :
(14-99)
04-100)
04-101)
(14-102)
04-1(3)
El procedimiento a seguir En la dctermínacíón de la respuesta dentro del elemento que
se ha modelado utilizando la matriz de masa consistente, para cualquier instante se
inicia con la determinación de las fuerzas inerciales por unidad de longitud dentro del
elemento sumando los resultados de las ecuaciones (14-78) Y (14-Sn) para efectos
longitudinales, y las ecuaciones (14-81), 04-86), (14-94) Y 0-1--99) para efectos
transversales al eje del elemento. El producto de la matriz de masa consistente del
elemento por las aceleraciones en sus grados de libertad de los extremos es
exactamente igual a la suma de los efectos de las fuerzas inerciales en el elemento.
La deformación dentro del elemento se obtienen de sumar los efectos de los resultados
de las ecuaciones 0-l--l1), u-i-s n (1-1--80) y (14-93) para el sentido longitudinal, y los
resultados de las ecuaciones (1":1:-,-!3), (1":1:-":1:7), (1":1:-S3), 0":1:-57), (l":l:-85), (14-90), 0":1:-98) Y
(1-1--103) para deformaciones transversales al eje del elemento.
De igual manera, para obtener la pendiente de la elástica del elemento, se suman los
resultados de las ecuaciones (14-":1:":1:), (1+":1:8), (14-5":1:), (l-l-58), (1-1--84), (14-89), (14-97) Y
(H-102l. Los momentos flectores dentro del elementos corresponden a la suma de los
resultados de las ecuaciones (1-1--45), (14--1-9), (1-1--55), (14-58), (1":1:-83),04-88),0":1:-96) Y
(14-101). Las fuerzas cortantes dentro del elementos corresponden a la suma de los
resultados de las ecuaciones (14--1-G), (14-50), (14-56), (14-60), (1-1--82), (1":1:-87), 04-95) Y
(14-100).
Dinámica estructural aplicada al diseño sísmico
Ejemplo 14-6
QH,ereI1WS encontrur el estado de deJonTLadóvL ~ e~/terzos del'Ltro deL tal'iLero del t"nevLte deL
eJev1tt"Lo 14-5 a Los 2.62 s de ifüdarse La rest",wsta iUtte La com~10lteHte N-S deL registro de
CormLitm deL Tel1ttJLor de Loma Prieta deL 17 de octlAJlre de 1989. eft eL senlirio trunsversu! deL
t"'i,eftte.
Dario qlte La Inasa iíLe Los eLel1tefttos rieL tabLero se I1wrieLó t"0r 11wiíLio rie La matriz rie l11,asa
consistente. se at"Lica eL procedimieltto presentado aftteriomteltte en esta Sección. EL sistema
iíLe coordeltadas LocaL de Los etementos coÍ/te.ide COH eL sistema gLotHA.L. rJcJr Lo tanto no ILalj
HecesiiíLad rie reaLizar ltiltg/1.lta tmltsJomtacLÓlt ete Cüordenari(lts. Los desr¡L(Itlal1üeltlOS lj
aceleracioaes !ie Los gr¡;¡.iíLos iíLe LibertaiíL de L(It estni.ctlu(lt se OtltLeHeVl. ror VV1.C(.üo rie Las
trr,utsformacioltes:
{urn} =
i
{<l>i }T\¡(t)
y
;=1
Los rcs/üt¡;¡.iíLos rJam el instante qli,e se rcqlüere son Los si01Úefttes
t
(s)
U2y
(m)
U3y
U4y
(m)
(m)
2.ó2
-OO02R809
t
Ü ZY
Ü 3Y
Ü 4Y
2
2
2
(s)
(mls
2.62
)
10.2188
0.0047320 -00028809
(mls
)
-24.5050
(mls
U ZZ
Uh
(rad)
00002383
(rad)
-0.0002468
Üiz
10.2188
(rad/s
)
(radls
USZ
(rad)
00002'16R
Ü 4z
Ü 3z
2
-5.5279
7.8178
U4z
(rad)
00000000
Ü zz
(rad/s'')
)
U3z
2
)
(rad/s
0.0000
(rad)
0.0002383
Üs z
2
(rad/s 2)
)
5.5279
7.8178
Tomemos. t"(ltm ejectos iLt1.stmtivos eL (ltt"oljo izqtüeriíLo iíLeL tabLero en eL eje A en eL iVl.st(ltltte t
2.62 s. ~ iíLeterminemos eL momentojtector aLLí.
=
1.. "" 12 ID
El = 198 • 106 kN . m2
~=7.2Mglm
obtenemos Los siglüefttes valores:
M ay
tCl,{Clcióvt
PCHGlVnetro
(14-45)
u ay
Cort x
u
0.0000000
u ay
M az
M by
(14-49)
(14-55)
U az
U by
-D.OOO2383
u
az
-{).0028809
U by
M bz
(14-59)
U bz
'EI'(-~)
EI'( _i)
M (kN·m)
0.0
L2
.
U bz .
15729.6
L
'EI'(~)
L
-D.OO02468
-23767.0
:1
2
EI'( -~-)
S¡ÜJtot¡;!.L
488
=O
8144.4
L
107.0
-
14 • Análisis modal cronotoqico
ECIA-1M:ió VI-
PCir?imetro
(14-83)
ü ay
M~y
u
0.0000
COVl-
(14--88)
-7.8178
u az
'
(14--96)
21G
(14-1(1)
E
-92lJ.S
)
328.0
2
-5.5279
u bz
)
.(13L
!J.' ü by
M bz
(kN·m)
0.0
3
. (L105
!J.'
10.2188
"by
M
(llL
"az'
M~y
O
2
!J. . ü ay
M;z
x=
)
420
4·91.3
3
. ( 140
L
!J.' u bz
'
-
)
S/lbtotuL
-107.¿
TotuL
I
-{).2
Fuerza inercial (k.N 1m)
150
150
,-------,------,-----,------,
100
lOO
50
50
I----..."""j------+--1-----,1i!+4'<----+----f
+
O
'SO
-lOO
-150
.200
p@'---t--'%±
O
-50
I-----+---"é
-100
1-----+---"
L..-_ _--'---_ _---'-_ _--L_ _---.J
12
24
!'8'-------iY
I-----+--
-150 +-----+--200 '----_ _--'-12
36
24
12
36
---'-_ _---'-_ _--.J
24
36
Fuerza cortante (k.N)
1200
1200
BOO
r------j-----+---t------j
400
1-----*-=,..---
-400
-BOC
+
1-----+--1-----+---+---+----1
-1200'------'------'------L------'
O
12
24
36
m
:d¿---i;=¿
J
O
·400
12
24
36
BOOO~;
I
24
~¿I
I
1
12
36
-0.0003
i
12
I
I
I I 1+
24
36
24
•. 1 '
;=~-i= j
;:=~_
1
,
12
24
(a) Sistema E
!
1
36
I
1+
j-------I7
-2000 L..-_ _-'---_ _-'--_ _---l.-_ _---'
12
24
36
0.0003 ~--,--------,----__,
0.0002
---j-----,---z
f-¡
0.00011-----1-----'""77#
=
-0.0001
-0.0001
-0.0002
-0.0002
-0.0003 -'----_ _-'---- _ _-'---_ _-'---_--.-1
-0.0003 ' - - - - - ' - - - - - - - ' - - - - - - - ' - - - - - - - '
O
12
24
36
12
0.0000
0.0000
-0.0010
-0.0010
-0.0020
=
I
-0_0030
-0.0040 I-----j--~-
-0.0050 - - - - - ' - - 12
O
24
24
36
0.0010,-----,-----,-----,--__,
0.0010 , - - - - - , - - - , - - - , - - - - - - - ,
.1
t---f-----:
36
Deflexión (m)
~:~j
,-----,-----r
2000
+
Pendiente de la elástica (rad)
00003
8000
6000
36
4000
-2000 ' - - - - - - - ' - - - - - ' - - - - - ' - - - - - - - '
12
24
12
Momento (kN . m)
flooa
1-----+---+-4
-BOO t---t---t-----"
-1200 L..._ _.L.._ _--'--- _ _---'-_ _--'
-0.0020
-0.0030
-0.0040
j----+_
-0.0050
'------'-------==--
36
(b) Sistema L
Figura 14-40 - Ejemplo 14-6 - Fuerzas en el diafragma
12
24
(e) Estruc;tura
36
Dinámica estructural aplicada al diseño sis.s.ico
Elt La Fig/ua 14-40 se presentan Lasj/terzas internas cientro cid eHafmgvna cieL p/w'1te ante
acciones sísmicas traltsversaLes aL eje cieL IIJ/tente elt eL instante t = 2.62 s. En La tallLa sig/úente
se dan Los vatores lIJara Los ciíferelttes lIJarál1tetros en Los lAlIJo13os.
F/tUla InerciaL
B(-)
A
C(-)
B(+)
D(-)
C(+)
D(+)
E
pE (k.N/m)
0.0
73.b
73.6
-176.5
-176.5
73.6
73.6
0.0
pL (k.N/m)
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
pT (k.N/m)
0.0
73.6
73.t>
-1765
-176.5
73.6
73.6
0.0
Cortiutle
B(-)
A
B(+)
C(-)
C(+)
D(-)
37735
24-451
-850.46
850.46
-244.51
D(+)
E
-377.35
·1]3.66
VE (k.N)
133.66
v- (k1'ij
v" {liN)
4112
-41.12
509.18
509.18
509.18
50918
41.12
'11 12
925'1-
330.2]
753.70
1"1-12~
34 -:.28
753 JO
336 ?3
92.S4
i\I1 oIne11 ro
A
B(-)
D(-)
D(+)
E
C(-)
C(+)
ME (k.N'm)
107.12
515.35
886.57
-149'1-.'1-4
-149444
-886.57
515.35
-10712
ML (k.N'm)
106.93
-380.50
1017.08
7127.29
7127.29
1017.08
-386.50
10(.>.9:J
MT (k.N'm)
-019
128.84
130.51
563285
5b32.85
13051
128.84
-0.19
B(+)
Peltdieltte l~e La eLásti.ca
A
E
B(-)
B(+)
C(-)
C(+)
D(-)
D(+)
E
e (rad)
0.0000000
0.0000000
0.0000000
0.0000000
0.0000000
00000000
0.0000000
0.0000000
eL (rad)
T
e (rad)
0.0002383
-0.000241)8
-00002468
00000000
0.0000000
000024-68
00002468
0.0002383
-00002383
-0.000)468
-0.OO024b8
0.0000000
0.00024-68
0.0002468
0.0002383
0.0000000
oejLexió 11
A
E
B(-)
0.0000000
0.0000000
yL (m)
0.0000000
-0.0028809
yl (m)
00000000
-0,(J028809
y (m)
C(-)
B(+)
C(+)
D(-)
0.0000000
00000000
0.0000000
00028809
-0.0047370
-00047320
-0.002R809
-0.0047320
00047320
0.0000000
D(+)
E
0.0000000
0.0000000
-00028809
-0.0028809
0.0000000
-00028809
-0.0028809
0.0000000
Es ivnportaltte notar ql1e, 1IJ0r ejempLo, eL cortante horizontaL ql1e toma eL pórtico cieL eje A
corresllJol1.de a La díferellCia en cortante entre Las vigas cie ciit;¡jmglna qlte LLegan aLLí (753.7033ü.2J = 417.47 kN). el ut.aL es eL cortan.te en el rJórtico B obtenido en eL EjempLo 14-5 en ei
instante t = 2.62 s. con Itn peqlw1.o error de redcmdeo (VB = -417.2 kN). De ig/taLjonna. p[
/lwmev¡,to arJLicacio en eL eje H en ese imtante, (F2z = -1403.6 kN' m) obtelticio en et EjempLo
14.-5, corresrJoncie II LiA.ciífere/tCia elt InOllteltto pl~m eL Sistema L en ese P/Utto (-386.5 - 1017.08
=
-1403.58 kN
'11'1..).
•
Ejemplo 14-7
Q/t.Cremos encontrar LiA.s jrec/wlCiiA.s niA.t/traLes 13 Los modos cie vibmción en eL seVLticio
tmnsversiA.L deL 1IJ14ente cmttüt/w /lJYeselttalíl.o en Los ejempLos 11-7, 1'1.-5 13 14-6, pero en este caso
eL eHiA.jmgmiA. se mocieLiA. 1IJ0r meciio de miA.SiA. COVLCentmciiA.s, tiA.L como se iJtdicó elt eL EjemrJLo
11-7.
En eL EJeln/i/Lo 11-7, se oütuvo eL sistemiA. líI.e eCl1.iA.ciOltes de eqlúLil1rio cj,iltcünico, piA.m ciescriLlir
los 11lOviI1w'n[os horízontates tmmversl~Les drL pl1el1le. e 1'1.. eL caso de In'lS(~ coltCelttmdiA.s:
4!)()
[ME]{Ü}+ [KE]{U} = -(M E][Y ]{x o }
¡"jl~,e
tíenc Los siglüeVLtes vatores:
o
- 1080.4
442'0]¡U 2y }
1716.2 -1080.4 U 3y
86.4
-1080.4
O
1274.3 U 4y
=
r-
86.4]
-86.4 {x o }
-
86.4
Los f1Iw¡,(,os ~ períaetos rie vibmcíóvL correspoVLeteft a Las camcterísticus :ie Lu estrltctluu ('VL
VilJmcíóVL Libre. AL resolver et prolJLema ete vatores WOYJios YJLuvLteueto YJor Lu uftterior cmuciém
ete elíjlüLi~Jrio. se obuenen LasJrem,eVLCias ~ rerractos mastn4etos en Lu ta~,Lu siglüef1.te:
al-
O)
f
(rad/s)2
2 180.4
9633.3
3754·7.0
(rad/s)
46.695
98.149
193.770
(Hertz)
7.4\ 1
15.620
30.836
Modo
'1
2
:3
T
(s)
0.13457
0.064-02
0.03243
Los Vl1.oetos ete villmcióft corresponetíel1.tes SOf1.:
[<1>] =
[
0.053791 - 0.076073 - 0.053791]
0.076073
O
0.076073
0.053791
0.076073 - 0.053791
El'\, Lu Fígluu 14-34 se rreSel1.taft Lus etfjOrVJtucíOf1.eS cteL tU~JLero corrcspovLetíefttes u catiu f1-l{nio
ete vibmcíóf1.. vistas en pLuvlta. DekJe recoretarse líjH.f' soto Los valores relanvos entre Los ténnütos
ete Los fno¡,(,OS tiel1.en Sef1.tiao. por io tanto La escaLa empLeuctu el1. Lu grMica es Lu qÜsv¡1.a ete Los
vatores cLe Los térVl1.ÍVLüs tie Lu fnutriz [cI>].
--
0.10
005
0.0
---
~---../"
.-'
...........
--l
I
...........
-0.05
-0.10
I
1
BCD
A
Moeto 1 (TI
=
E
0.134·6 s)
0.10
0.05 I
0.0
-0.05
-0.10
<,
./
<,
./
I
<,
V
I
"
<,
/
./
..........
A
./'
BCD
E
Mocto 2 (T2 = 0.064-02 s)
0.10
./
0.05
0.0
-0.05
-0.10
/
'\.
/
1\.
i
A
"-
'\.
/
'\.
/
.........
<,
/
'\.
....
~
.JI'
BCD
/
./
E
Mo¡,(,o 3 (T3 = 0.03243 s)
Figura 14-41 - Ejemplo 14-7 - Modos (vistos en planta) y períodos de vibración de la estructura
491
Dinámica estructural aplicada al diseño sísmico
Por JlVLectio de prodlir:to siglüeVLte. obtenemos Los valores de [<X()]. (/jIte tÚ ser etevaaos aL
cltadrado corresrovLdeVL a ~a fnasa activa de mda vvwdo eft esa direccióvI.:
Direcciólt Ij
Modo
1
2
3
IH'¡:ISI~
O/o IHnsn
%
nctivn
totnl
nCIA .n
97 14%
97. 14-°;()
:2.86%
10000%
251.703
o
7.,112
~a U;ülla ()J.ftterior es evideVLte (/j/l.e eL prilner /litado va a cof1.troLar La reSrJll.esta. Dado 011e Los
vVLovilnielltos deL terreno son Los ntismos en Lcntos Los ap000s. eVL a(/j/teLLos moti/.os en Los C/1.aLes
Los r¡órticos de Los ejes B0 D se desp~al()J.n en direcciOl1Cs orJli.estas no tieftelt posit1iLidc;¡,d de ser
excitados lj r'or esta razón 5/1. fnasa activa es cero. Esto OClure en eL modo 2. COIt base eft ío
wtterior. es eviuente (/j/1.e La respltcsLa de La estnlr:tcua r)(A.ra Los f1tOvilnielttos sísmicos (/jIte se
rl~antean solo oClme a través ae Los moaos 1 0 3. con I·uta ccmtritJll.ciól1. mluj rJetlj/l.eV1.a deL
1~.Ltivno. Pl1cde verse. además. tlj/1.e en este caso. eL período de vibraciólt de Los dos prilneros
VI/Lodos vcuía In11.0 poco COI'\. respecto a Los caLu1.Lados 11.tiLizaltdo La matriz consistente ue
masa.
De
•
14.8 Excitación en varios apoyos y sistemas sin diafragma
En la Sección 11..5 se dedujo la forma como deben plantearse las ecuaciones de
movímíenro para el caso en que la excitación inducida por los rnovímientos del terreno
sea diferente en los distintos apoyo"> de la estructura. Este planteamtenro es el mismo
que puede emplearse en sistemas que no tienen diafragma.
Las ecuaciones de movimiento tienen la siguiente forma, presentada en la ecuación
(11-83), la cual se reproduce aquí:
(14-104)
y
(14-105)
En las ecuaciones anteriores, los términos tienen el siguiente significado:
[Md
[M o]
[K E ]
[K EO]
{u}
matriz de masa de los grados de libertad que no corresponden a apoyos
matriz de masa asociada con los grados de libertad de los apoyos
matriz de rigidez de la estructura sin incluir sus apoyos
matriz de efectos en la estructura causados por desplazamientos de sus
apoyos
desplazamientos relativos de la estructura con respecto a sus apoyos
4f)~
14 ·.,lllólisis modal cronoloqico
{ü}
aceleraciones relativas de la estructura con respecto a sus apoyos
{X}
aceleraciones del terreno en cada uno de los grados de libertad de los apoyos
A continuación se presenta un ejemplo de análisis cronológico de un sistema
estructural en el cual se presenta una excitación sísmica diferente en cada uno de sus
apoyos.
Ejemplo 14·8
Qlterel'JtCIS eVlCOlttmr LeA. resYJltesteA. r(ílnA.. eJectos tmltsverseA.Les c:te IUt trliuno c:te r/1.eltte
Locu!izeA.c:to entre jlu1.las c:te exYIUl1,siól1. EL tmllW ~1eA.jo estI1,c:tio covlJonna 11.11, YJl1.ente CCHttivlIW
Gie dos 1l1ces c:te 150 m, corno se vvw,estru el1. Ln Figluu 14-42. EL ta~)Lero c:teL r'H~11.te ucne 11.11.
UllrlW lotaL c:te 20 m Ij COltsi<;!f' elt fUtU viga cn,jéll1 Gie tres ceLGias Clt~1a ¿¡tercia con resnecto a
1111 eje verticaL es 1 = 1 040 m4 , 0 el tireu ue La sección es A = 25 m 2 . Las rilas eLd r'·1.CI1.tC. c:te 30 m
GÚ' (J.ltas, estúl1 vivluúac:tas aL tabLero covgonl1.u11.Gio 11,11. jiórtico. Ij t.ieltel1. SCCciÓI1. Ui-Ul;traGta
2
tUH'C!)v con il'l,erci(,Áo 1 = 530 m". lJ área A = 20 m Ij '>11 rigictez (íL tomóJ1. se c:tesrreciu. EL vl1.aterial
de! t(ilJlLero Ij Lus piLus tiene 11.11, móulüo c:tc eLustíciuud E = 22 GPa. Pam ejectos del Ul1.úLisis
(,til'ltJ.mico LIA.. m(A..sa c:te Lu est.rt1.ctl1,ru nrovtene totaLmeltt.c del peso rrorio de La estmctlua. EL
(A..Y'OIJO eLe Las rilas en SI1. tlaSe ~JI1.Cc:te coJ1.sic:temrsc 11.11. emYJOtmmiento. El SHeLO dClI1.c:te se
eltcw'I'lt.m La JltI1.dación deL r'1.eltte comiste en 11.lt Limo arcWoso COI:\, Ima veLocilíLac:t de bl
OI1.CÜl. de cortante Vs = 100 mis. Debe cnconrrarsc La resYJl1.esta pura Lu cOInrOlteltte N-S c:tel
registro del eL CeJttro de 194-0, con 11.11. cogicicf'lte de amortigl1,al1tiento ~ = O.OS.
sentido de la exitación sísmica
.:
30m
/
®
eje paTS el cálculo de la inercia
__-.......1
. 150m
sección pila
sección tablero
©
Figura 14-42 - Ejemplo 14-8 - Puente sometido a excitación diferente en sus apoyos
Prilnero dekleli1.OS cnconrnar Lu rigidez ante curg~.s ltorfzontates c:te Las riLas c:te IA..YIOIjO
YJI1.Cllte. Se c:tetem1.ÍnaJ1. Lm mutrices de rigidez c:te Los elementos el'\, coorueJtadas glo~'aLes.
1 =530 m"
A
=20 m
2
~tc1
EL sistemu de coOríÚ'I1.(A..CÜl.S locaL estú Orief1.taeLo COI1 SIl. eje Lo m! x CVl
uin'CciéHllluciu urri~la. YJOI' lo tunto el állljlllo a es _')()O.
L=30m
4D3
Dinámica estructural aplicada al diseño sísmico
E= 22GPa
Ij
e = cos a= 0.0
s=sena=-l.O
p = EIIL3 = 22 GPa • 530 m" I 303 m 3 = 0.431852 GPa . m = 431.852 MPa
. ro = 432 852 kN/ro
P= AelI = 20 ro2 • 302 ro2/530 m" = 33.96
La l'ltatriz ete rigietez eteL eLemevlto ete t'JiLa. en kN/I'lt Ij kN . VVl/met. es La sigtÜevlte:
5182.2
O
-77733
-------r-
5182.2
O
-77733
O - 77733 : - 5182.2
O - '77733
O',
14667
O -14667
O
O 1554700: 77733
O 777330
--------------- ------O ~--77i33;--5i8i.2
O
77733
-14667
14667
O
O
O 777330 : 77733
O 1554700
O:
Ahom ete!-¡el·'VlOs eltCovltmr Lu ¡1tutriz ete ejectos horizovltaLes ete La t'liLu. Lu VLOfi1.evtCLatlHu ete
nltetos es La siglüel1.te:
lj Lv'. VHllttriz ete rigietez ete La t'JiLu. eteSVJlH~S etc hU[:ler
eLimivlueto Lt/l.S et\jorVVlUcLm1.CS lAXiuLes eteL eLCI'l1.evtto Ij ei
eVVlVJotmmiento en La [:Juse es:
Pila puente
AllOm. deklffiw) COltvüJV'lSur d 0muo ete
Lil~lertuet
ue rotacionaL eteL n/túo 2, U2z Lu iVlVersu ete
[k~sv] es:
[k 3psv ]-1 == [6.43211 x 10-l0]
Ij
uL COI1.etevlsar:
[kpcJ ==
[[k~sv ]- [k~sv][k~svr[k~sv]J
== [
5182200 - 51822001_ [_3_88_6_5_50-r- 3886550]
_
- 5182200
5182200J - 3886550
3886550
-Lgdl
r,
]
3 [ 12'15.6 -1295_6] TJ Ix
Lkpc = 10 x - - - - - t - - - -
-1295.6
1295.6 U 2x
eslu (i,Ltimu mutriz. Lu CltaL elt este caso tiene etül1.Cl1.siol1.eS etc 2 por 2, corresponde u La
matriz (tc efectos Itonzontates ¡;Le tus piLlítS eteL t'J'i.eltte. en. el seuuao IrUl1.sv~'rsuL eteL t'JH.ente. Los
gmuos úe Libertuet úeL (üaJrugmu se (ÜstJm1.el1. corno VVllt,estm La Figltm 14-43. Primero
eteten1tLVlUl'ltclS La matriz etc rigietez ete Las vigus úeL úiaJmgVVla:
Ij
.
\
i))l'"
al
l/JJ-i
14 •
Análisis modal crOlw/rJ.(jico
sentido de la exitación sísmica
©
Figura 14-43 - Grados de libertad de la estructura, Ejemplo 14-8
Vigus ctcl teÜ'Lero
I =1040 m
2
A =25 m
L =150 m
E =22 GPa
4
EL sístel1tu de coorr;ieftudus LocotL coütcíctc
ex es O°.
=
COH
el gLOtl(,ü /"lar Lo ¡Wtto
=
e cos <X 1.0
s= sen <X= 0.0
p:.: EIIL3 ::. 22 GPa ·1040 m~ / 150 3 m" = 0.115 GN/m = 6 7'19.3 kN/m
~ = AL 2II = 25 m 2 • 150 2 m 2 / 1040 m" = 540.9
o LUI·H¡ltriz de rigidez deL dCVltcl'Lto de vigu de 150 In de Ll1z es Le'. sig/üeltte:
r
3666.7
O
O
81.35
O 6101.3
------- -------
- 3666.7
O : -3666.7
O
O
O
- 81.35
6101.3
6101.3 :
O
610130 :
OI
305070
O - 6101.3
------3666.7
O
O
-------T-------- --------
O -81.35 - 6101.3 :
O
6101.3
O
305070 :
81.35 -6101.3
O - 6101.3
EL esqllelHu de eltsuflüJLuje es eL sig¡üeltte:
J, ejes
r
k~a
k~a
O
k;b
k~b + k;a
,
k~a
O
k;b
k 2bb
495
610130
"Iinámica estructural aplicada al diseño sísmico
Despltés de eI'LsC{.mbLar, se eLin'LÍnw1 LI"tS dgom1C{.ciol1es VlXiC{.Les deL tC{.tlLero !J se oüuene LC{.
siglúente ntC{.triz de rigidez deL tC{.bLero pC{.rC{. efectos rrunsversuíes:
J, gdl
81.35
6101.3 : - 81.35
6101.3 :
O
O
6101.3
610130 : - 6101.3
305070 :
O
O V Az
-------
------- --------,-- ------
-------,--------
V Ax
6101.3
V Bx
O _______
1220260 ...1' ________
- 6101.3 305070
------- --------,---_ .. _--------
V Bz
-81.35 -6101.3 :
305070 I
6101.3
162.7
0
1
I
- 81.35
O: - 81.35 -6101.3 : 81.35 -6101.3
O: 6101.3 305070 : 6101.3 610130
O
O
V ex
Vez
Alwm reordc/1mnos Los grC{.dos de LitlertC{.d de tC{.L fnC{.l1em [,.111,(' Los vtesr¡LC{.zmnieI1tos
trunsversC{.Le s [,.llt,cdel'1 C{.g YltpC{.dos C{.L
COI,)'LÍC ¡1ZO
!J LC{.s rotaciones C{.LJÍltC{.L:
J,gdl
81.35
- 81.35
162.7
- 81.35
6101.3
O: 6101.3
- 81.35 : - 6101.3
O
6101.3
81.35 :
O - 81.35
O - 6101.3 - 6101.3
-------- ------6101.3 -~6ioL3--------0:-6ioi30 305070
O
-------
6101.3
O - 6101.3: 305070
O
O
6101.3 - 6101.3 :
1220260
305070
305070
61 0 1 '1 0
..a.V.J...,,}V
Alwm ILC{.!J tijlte il'LCLlür eL efecto vte LC{.s piLC{.s. pC{.m Lo (Ii,C{.L !LC{.!J Wlf' C{.mYILiC{.r LC{. mC{.triz rum
indlür Los grudos de LivJertC{.d de Los C{.YJo!Jos !J Lltego eltswnbLC{.r LC{.s rigideces de LI"tS YliLC{.s en
SltS corresp0l1dief1tes gi'ados de LitlCrtad. Entonces LC{. VltC{.triz de rigidez de LC{. estnt.cUuC{. en Slt,
totaLidC{.d es.
igdl
o:
o: -1295.6
o
o
o -1295.6
o
o
-1295.6
o
o
o
1376.9 :
------- -------- -------T-------- ------- -------,-------- ------- ------6101.3 - 6101.3
o :~10!~~ ~O~?-~ ___lU_____ ~ I - - - -o- T - - - -o
3
o
6101.3
U
6101.3:
305070 1220260 1 3050"10:
o
o
[K ES l- 10 X
o 6101.3 - 6101.3 :
o 305070 610130 :
o -------o -------o
------- -------- -------+-------- -------1295.6
o
o
o
o
o
o: 1295.6
o:
o
o
o 1295.6
o
o -1295.6
O'
o',
o
o
o
0 , -1295.6 :
o,
1295.6
o
o'
PC{.m 0cl1emr LC{. mC{.triz de mC{.sC{. vtc LC{. estYlt.ctltm se ntiLizC{. LC{. 1'ltC{.triz coasístenre de
pC{.m mdC{. etemento de LC{.s YJiLC{.s !J deL tC{.tlLero
1376.9
- 81.35
- 81.35
1458.3
- 81.35
6101.3
6101.3
v.,
- 81.35 : - 6101.3
o
U R•
6101.3 :
- 6101.3 - 6101.3 :
-------~--------
I
1
A= 20 m
2
L=30m
'Y =2.4 Mg/nr'
U e•
u Az
U Rz
u.,
U Ao
URO
U eo
masa
EL sistemC{. de coordenC{.dC{.s Iocat está oriel'1tC{.do COl1 Slt eje LocaL x en
dirección hC{.ciC{. C{.rribC{., por Lo tanto eL ril'1gltLo a es -éJOO.
e =cos a= 0.0
s =sen a =-1.0
m = L A 'Y = 30 m' 20 m 2 • 2.4 Mglm3 = 1440 Mg
ml420 = 3.429 Mg
!J LC{. v¡·tC{.triz de VltC{.Sc{' consistente deL eternento de ~1iLC{. es:
496
14 • Análisis modal crOllOf<Ígíco
534.9
O -2262.9 :
480.0
O'I
O
O
-2262.9
185.1
O
O
240.0
1337.1
O
O -9257.1
------O 2262.9
12342.9 : - 1337.1
------- - - - - - - - - ~-------T------- - - - - - - - -
O -1337.1
185.1
O
1337.1
534.9
I
O:
O
2262.9
240.0
O -9257.1 :
Ij LlIt fnllttriz cie li1,lItStíL cie LtíL VJiLlIt, desrJltés de
eiemCI'Lto lj el elnrotmn'Li,eVLLo eVL !lIt ~illtSe es:
IltíL~Jer
480.0
O
O
12342.9
eLil11Ú'LlItcio LlIts dcjbnnuciovtfs lAXilltLes cie!
-l-gdl
AtLOm cicUevvLos cof'Lcief'LS1/l,Y eL grw,:{o de
LU'leYt¡A.¡{
cie rotuci,cmu! cteL f'L/tdo
2, U 2z ,
Lu ilwersu IÚ'
[m~sv ] es:
[m
psv]-1 = [8.10182 x 10 -5]
3
[m pc ]= [[m~sv j-[m~sv ][mtsv f[mtsv]]
_ [534.9 185.1] l-144.91 245.1]
185.1 534.9
245.1 I 414.9
[m
PC
]
= 103 x [39G.O - 60.0J
_
60.0
120.0
lj esta (ütÍlnu IntíLtriz, Lcl muL e¡ 1 este cuso tiCIU' cúvncmiovLcs de 2 por 2, correSrJOflCÜ' lA 1(/1
vnl/ttriz (ie vnUS1/t r1um ejcctos IwrizCH'Ltllt!es de LI/ts VJUUS cieL r/Wf'Lte, en el sel'Lticio tJrAf'Lsv"rsul cld
rJltente. Los gmclos de LivJertuct cle! dLI/lfw.gl1lt,l se cHSrOftef'L co-no IHllestm LlIt Hgli/'{.l 14-.<·1-3
PrLmero detervnÍl'Lw11os Lu vVLlItLrLz rAe rLgU,:{ez ct~' LI,"{,s vLgus eteL dLI~frugfnu
2
A= 25 m
L= 150m
'Y =2.4
Ij [lA.
Mg/m3
EL sistemu de coorciel1,ucilJ.s LomL coivLCicie COI'L el gLobtíLL rol' Lo tanto
eL eÍf'Lg¡üo a es 0°
e =cos a = LO
s = sen a = 0.0
m =L A Y= 150 m. 25 m2 • 2.4
m1420 = 21.429 Mg
Mglm3 = 9000 Mg
I1'LIAtrLz {tC mlJl,SIA. CCH1sistcnle det elemento I Ir l.lJJiLcro es:
I(¡mica estructural aplicada al diseño sísmico
O
O:
1500.0
O
O
3342.9
70714.3 :
O
1157.1
- 41785.7
192857.1 :
01
-O
41785.7
-1446428
3000.0
O
O
41785.7 :
O
3342.9
-70714.3
-41785.7 -1446428 :
O
-70714.3
1928571
--------1500.0
70714.3
-------O
O
1157.1
O
í)
I
O
3000.0
---------T--------- --------- --------
DesYJIl,és ete ensaf1tbLar. se eLil'nüta¡t Las eteJemnadmtes VlXiaLes etd tablero lj se obtiene La
sú:l,úe¡tl.e matriz ete ¡nasas vid l.a~llero YJara efectos transversales:
-J, gdl
3342.9
70714.3
70714.3 :
19~857.1
:
11571
-41785.7 :
41785.7
-1446428 :
O
O
--------- --------,--------- ---------r---------
O
O
--------41785.7
O',
O _________
- 41785.7
385714.2:L _________
41785.7 -1446428
---------------- --------~--------O:
41785.7 :
3342.9 -70714.3
O
1157.1
1157.1
41785.7 :
-1446428:
1157.1
6685.8
O: -41785.7 -1446428 : -70714.3
O
1928571
V Ax
V Az
U Bx
U Bz
Ucx
Vez
Ahora reorete¡tavnos Los graetos ete LitlCrtaet ete taL I'na¡tera q/H' Los (;{.esYILazamiev:.tos
transversales (/j11.eelen agm¡-Juúos ul conuenzo lj Las rotaciones (:{lJiI1(4!'
-J, gdl
-41785.7
3342.9
1157.1
1157.1
6685.8
o
70714.3
1157.1
-------41785.7
--------O:-192857J-
-·41785.7
O
41785.7 : - 1446428
---------
O -41785.7
O
O -41785.7
3342.9:
-70714.3 :
41785.7
O
---------1446428
-79714.3
-------O
385714.2 -1446428
O -1446428
192857.1J
V Ax
U Bx
U ex
U f.z
U Bz
U ez
¡calj 1.1'1l' LH.;:U¡Ú el efecto ete Las yJi~rAS reva 1.0 cl4.Gl.I ¡Hl.lj Wte aVltyJliur ID\. Inatriz y'ara
iltd,ür Los gruetos ete litlCrtaet ete los a¡-Joljos lj Iltt~go el1,sumblur los ejectos de IIItasu cíe las
pilas en S/l,S corresy¡onetie¡tl.es graetos cie Litlertaci. Entonces la vVlatriz ete masas cie La
estmctl1.ra ef1 SIl, totalUi.aci es
AtWrt7.
3462.9
1157.1
o
-------70714.3
-41785.7
o
--------60.0
o
o
o
o
o
-60.0
o
o -41785.7 :
1157.1 :
-60.0
o
1157.1
o 41785.7 -70714.31
o
3462.9 :
-------- ---------T-------- -------- ---------T--------- -------- --------o
o
o
o
41785.7
o' 192857.1 -1446428
41785.7:
-1446428
-1446428
:
o
o
o
o
385714.2
o
-41785.7 -70714.3 :
-1446428 192857.1 :
o
o
o
-------- ---------~--------- -------- ---------+--------~ -------- --------o
o
o
o
o
390.0
o:
o:
-60.0
o
o
o
390.0
o
o'
o'
o
o
390.0
o
-60.0 :
o
o
o',
1157.1
o:
6805.8
70714.3
-41785.7
o:
-60.0
41785.7
1
1
1
Las maLrice~ cie musu lj cie rigidez se ¡-JarticioJ1a¡t etc taL vl1wtera (/jIte:
La mutriz [y] se obtie¡tc de La eC/tació¡t (11-81)
14 • "Análisis modal cronoláqi,
lj
eLcsYJltés eLe Iiucer la opcmdóvL íftdícadu:
X AO
x.,
X BO
+- J, gdl
0.9925000
0.0149920
-0.0074960
U Ax
0.0149920
0.9700200
0.0149920
U Bx
-0.0074960
0.0149920
0.9925000
U cx
-0.0081085
0.0095502
-0.0014418
U Az
-0.0033333
O
0.0033333
U Bz
0.0014418
-0.0095502
0.0081085
U ez
Lj las celluciolteS de fnOVLVI'LíeVLto ¡rultSversc:ll del r'lf'ltte tienen lfA Jonnu iftdícuau CVL lo,
eCltucíÓll (11-83):
(M E]{ ü} +(KE]{U} = -[(ME](y]+ (M EO]]{ Xo}
~l
3020.20
1849.70
-249.85
842.72
7434.60
842.72
-249.85
1849.7
3020.20
O
O -60
59994.00
60011.00
-7505.60
O
O
-45000.00
O 45000.00
7505.60 -60011.00 -59994.00
O
O
O
O
O
O
2960.20
842.72
-249.85
59994.00
=
-60
O
1
1849.~
7374.60
-249.85
842.72
1849.7
2960.20
-7505.60
60011.00
O
O -60
-4500Ó.00
G
45000.00
7505.60 - 60011.00 -59994.00
I
J
Lj
lus eCltucíovu's de 11tDvíI1'LÍeVLto:
34629
1157.1
o
70714.3
-41785.7
o
1157.1
1157.1
33429
41785.7
o
o
6805.8
1157.1
ü Bx
ü Cx
ÜAz
o
70714.3
41785.7
-41785.7
o
41785.7
o
-41785.7
-70714.3
1376.9
-81.35
-81.35
1458.3
o
o
41785.7
-41785.7
-70714.3
192857.1
-1446428
o
-1446428
o
o
Ü Ax I
-1446428 ü Bz
-1446428 192857.1 Üez
385714.2
o
2960.2
1849.7 - 249.85
-81.35 -6101.3
o 6101.3
1376.9
o -6101.3 -610L3
842.72
7374.6
842.72
- 249.85
59994
1849.7
2960.2
o
305070
610130
-45000
7505.6
-81.35
610L3 -6101.3
o
610L3
o -6101.3
o 6101.3 -610L3
6101.3
610L3
610130
o
305070 1220260
o 305070
499
60011 -7505.6
o
-60011
45000
- 59994
iinámica estructural aplicada al diseño sísmico
Los vVLOdos Ij rJeríodos de vibmcLó¡t correspOltdev\' a Las características de La estntctlua en
vitJmción Litlre. AL resolver el wotlLema de vatores propios pLanteado por La CHtterior ew.ación
de eq/úLit1rio, se otltieV\.Cv\, Lasjrew,e/tCi&l.s Ij períodos mostmdos en La tabLa sigltiente:
Modo
1
2
ro
(rad/s)
8.897410,499
21.796
29.595
51.107
66.724-
5
79.164
110,24·
475,08
875,89
2611,9
()
4·452.1
3
4-
r-
(Ji
(rad/s)"
0.0019089
0.0020174
o
0.0081093
f
(Hertz)
1,41607
1.67105
3,46899
4.71026
8,13389
10.61946
0.0139890
T
(s)
0.70618
0.59843
0.28827
0.21230
0,1229,4
0,09417
0.0233460
0.0222400
o
0.0069936
o
0.0020174
0.0019089
0.0081093
- 0.0139890
0.0233460
-0.0222400
-0.0002257
0.0002077
0.0001619
-0.0000736 - 0.0011239
0.0074089 - 0.0105000
o
0.0004464
- 0.0002077 I - \1.0001619
- 0.0000736
O
0.0002485
- 0.0002257
-0.0014312
O -0.0006746
-0.0014312
0.0011239
Lit La Figllrcl. 14-4-4- se wesc/tlwt Las deJonnacioltCs del tatlLcrn correspol1die/ttes a cada vVl.odo
liLe vit¡müón, vistas en pLwtta. Detl(' recordarse VI/te soto Los valores reLativos entre Los términos
liLe Los V¡'uxtos tienen se/trido. r¡or Lo tanto La escala emrJLeada en La gráflCU es La misf'l1-a de Los
valores de Los térmilws de La matriz [<1>].
OX'EJj
:::~
-0.025
0.000
1
A
Modo 1 (TI
=
-0.025
e
B
0.706 s)
Modo 2 (T 2
0.025"
, ------¡--,--------,-------,---,--------,
0,000 1- ----t-----'~+----+---+_7""_~+----1
i
1
,I
- , - - - i_ - - - ' -_
_
.L-...._-'-----_~_ _
B
A
-0.025
L---______'
e
-0.025
e
0.598 s)
e
B
s)
= 0.212
0.025 r---...,---,------,r---.,----------,-----.,
= 0.288
0.025 r----,-------,-------,----,---...,-----,
0.000
A
Modo 4 (T 4
s)
Modo 3 (T 3
=
::~
I
-0.025
ItE
B
A
+---"o.---+--~.-::---1----""".,¡,----+-_/___---1
L1_----'-__
.L.-_---"--_---'-_----,------'-----_....J
A
B
Modo 5 rr, = 0,123 s)
e
-0.025 -'-----_-'-----_-----L_ _' - - _ - - ' - _ - . L . _ - '
A
Figura 14-44 - Ejemplo 14-8 - Modos (vistos en planta) y períodos de vibración de la estructura
500
e
14 • Análisis modal cronoloqicoLCA-s eCltCA-ciOVLCS desw~or)lCA-dCA-s se O~J{iCVLCVL dc reel1'WJluzur {u} = [<I>]{ Tl} Y{ü} = [<I>]{ li} en lCA-s
eutUCioVLCS de InoviI1'LiCVLtO. U ll1,cgo prevnlütir¡licur CA- W1'LtJOS lCA-dos por [<I>]T:
Los cocjicicvLtcs de purticipCA-ci{m SOVL:
-32.894
r
[a]= [<1> Y[MEly,]+ [M EO ] =
l
O
22.319
86.672
21.628 - 28.004
19.852
32.8941
22.319
21.628
10.178
O -19.852
3.0491
10.178
5.1365
O -5.1365
U Ius cW,CA-ciovu's desucopludus:
111 + 21;lrolrh +roiTll = 32.894x AO -o.ooox BO -32.894x co
Tl2 + 2~2ro2 112 + roiTl2 = -22.319x AO - 86.672x BO - 22.319x c o
Tl 3 + 2~ 3ro3113 + ro~ Tl3 = - 21.628X A o + 28.004x 80
-
21.628x co
Tl4 +2~4ro41l4 +ro~T\4 =-19.852x AO -O.OOOx BO + 19.852x c o
115 + 2~5ro51l5 + ro~Tl5 = -10.178x A O - 3.049x 8 0 -10.178x c o
Tl6 + 2~6ro61l6 + ro¿Tl6 = -5.137x AO - O.OOOx BO + 5.137xco
Es evil:tente en lCA-s eUtCA-cioncs mtteriores l/j/~e en lu resp/testCA- rJrA,YCA- C/tCA-lwüer instmtte 1. ete
CCA-du IUtu dc lus f'C1tucioncs dcsucorJludus itttrrviel'LCI'L los rrgistros (A,ceLC'rográjicos (J~lte;'Lidos
en lCA- ~)use de cudu IH'lCA- de lCA-s pilCA-s (;Lel pHeltte en eL 11'liS11W íVLstCA-I'lte. UVLl/i mCA-Hem de eVl:fomr
el r,vob~elnCA- rie tlK.OILtrrli.r [rIi. vmi(7.ciólt de l(1. ílce[2yacióVL CV'. cudrA/1.I'lo ie [o,; CA-p0[jos rnnsiste pf1
hucer lus síg/üel'ltes sif1'Lplij'icCA-ciOl'lCs.·
(CA-) los CA-ceLerogmlnCA-s l/jlie se regist:'CA-ríw'l en [CA- buse de cudu IU'lCA- de lCA-s y¡ilCA-s son idéftticos
tUVL solo están de~usudos eVL el tielnpo.
(~I) e[ ÍI'ltervulo de tiempo correspOltdiel'lte CA-l (;{e.'¡.fáse es ig/tCA-l CA-l tiempo (;jIte tCA-rdCA- eVL viujur llA.
Oltdu sísmicu de lu ~JCA-se de /1,/tU pilCA- CA- lCA- otra.
(c) tus oltdus sísmícus eslúvL rcpresCI'ltudCA-s prif1wrdi.ulmevLte rlClY OI'ldCA-s de cortCA-lttc. LJ ~)uj(J
esta ideulizuciólt seríCA- válido detcnnÍltCA-r Los ilttervCA-los entre llegCA-dCA- de lCA-s oltdrA.s
1{,tilizCA-ndo [CA- vclocidr/td de [r/t OItaCA- de cortante V en el suelo de lCA-jH,I'Ldr/tción de lCA-s pilus.
(d) YJCA-rCA- determÍltr/tr lr/t longitltd de lr/t ondr/t de cortante A,., se "'Hede rf1tpleCA-r IHtCA-jrwwtciCAf s en Hertz q/te esté dentro del mltgo de jreclteltcirAS nr/ttlur/tles de lCA- estractura pr/trCA- LOS
primeros moaos de vibmciólt. por medio de lu relr/tción V s =fsA...
S'
Si toma/nos H,!1CA-JreClteltciu 11.íWaul !!LeL Otde!t de 0.085 Hertz. correspondie!tte r/tl YJY0I1'lCdio de
LusjreweVLCius ItCA-!Jtmlcs de los tres r;rimeros modos. obtenemos. empleCA-nao lu veLocidud al'
Lr/t oltdu de cortante VS ' de 100 mis 11'lCltcionr/tdCA- en el cn/~,ItcLr/tdo el ejempLo. Imr/t lOl'lgit/td de
OI'ld.lA. A,. = vJfs = 100/0.()85 =1180 m. Elt LCA- Figluu 14-45 se 11t/testm lu relCA-ción de est«
LOllgilltd de OItdu con resy¡ecto r/tl tCA-m(úio del YJlwtte
501
14 • Análisis modal cronológico.
Las eCIt.aclOVU?S desacopladas se obÜevl.evL de reef11.plcuar {U}=[<1>]{r¡}y{Ü}=[<1>]{il}evL las
eCltaclOl'LCS de vVLovil·11.Íevl.Lo.
r
Lj
lli.egO prem.lütirllicar a aml)os lados por [<l>]T:
r
Y
[<1> [ME 1<1>]{ii}+ [<1> [KE1<1>]{r¡}= -[<1> [ME h]+ [MEO]]{xo}
~
~r
[~l
Los coejiciel'Lt.cs de participaciéJI'L SCJI'L:
["J~
Lj
[<I>YilMEIY,J+[MEO]=1
-32.894
O 32.8941
86.672
22.319
22.319
21.628
21.628 - 28.004
19.852
O -19.852
3.0491
10.178
10.178
5.1365
O -5.1365
l
las cC/1.aclCJl'LeS desaCOrlLu&ias:
111 + 2~1 ro11'h + roir¡1 = 32.894x AO - O.OOOx BO - 32.894x CO
112 + 2~2ro2'Í12 + roir¡2 = -22.319x AO- 86.672x BO- 22.319x co
113 + 2~3ro3'Í13 + ro~r¡3 = -21.628x AO+ 28.004x BO- 21.628x co
114 +2~4ro4'Í14 +ro¡r¡4 =-19.852x AO-O.OOOx BO+ 19.852x co
11s + 2Ssros'Í1 s + ro;r¡s = -10.178x AO- 3.049xBO-10.178x co
116 + 2S6ro6'Í16 + ro~r¡6 = -5.137;': AO - O.OOO;':BO + 5.137x co
Es evidcvLte eVL las cw.acim'Lcs aVl.teriores Cifli.e en la respl1.esta plArU cl1.alCiflüer iVL5tlA.i'Lte t. de
cuda II.I'LU uc las eCltaclmtes desucopladus Ü'Ltervieltel'L los registros acelerográJicos OtlW1.ÍetoS
el'L la tlase ete cada /tlta de las pilas uel pl1.el'Lte el'L eL mismo iVL5taVlte. Una maVU?m de ev!focar
el r'fobLel1'La de UtCOILtrCíi.r LCíi. vari17.cióVl etc l17. aceteradól'L eV'v cadrA. /t.I'LCJ xe [oc, apoljos consiste F'll
hueer las siglücl'Ltes simpl¡ficacimtes:
(a) los aceLerogY!A.lnas &l/i.e se regist:'aríal'L en lu huse ete cada ItI'la de Las rilas SOVL idél'Ltlcos
tUVL solo CStLÍI'L ue1usaetos en el tielnpo.
(ki) el iVl.tervalo de tiempo corresrJovLdievLte al &i.e1ase es ig/tal al tief11.po Cifli.e tardu eVL viajcu la
ol'LdlA. sísl'l1.Íea de la base de IU'La rila a la otra.
(e) las ol'Letas sísmicus estAI'L rerrcsel'Ltadas pril1wrdiulmevLte rJor m'Ldus de cortante. Lj tlujo
esta ideulizaciól'L sería vLÍliao aetenninur los ü'Ltervalos entre LLegaua ete las m'Let(A.S
l1.tilizul'Ldo lu velocidud de ltíL OVletu de cortante vs- en eL suelo de lujlu'LdtíLclón de lus pilas.
(et) pura aetermüttíLr Lu Lmtgitltd de LtíL m'Lc.itíL de cortante A... se ¡·mec.ie eI1tpleur 1~.VltíLjrCCli.eltcitíL
f. eVl Hertz q/te esté dentro c.ieL Y!A.VlgO dejreCltel'LCitíLs l'LtíLtli.mles ae La estmct/tY!A. ptíLY!A. lOS
wimeros I1waos de vibmclón. por medio de la reLtíLcióVl v. =fsA...
Si tornarnos :t!1.uJremeltciu l'Latli.rul del mdelt de 0.085 Hertz. corresuonzüente tíLl promec.iio de
lasjreCl1.eltcius l'LuCitmles de Los tres rJrilneros I1wdos. ohte ItCf1WS. emplelA.itdo la velocidaet ae
lu ol'Ldu de cortante v s- de 100 mis mel'LCionuda elt el eVllu1ütíLdo el ejemplo. 11.Itu Lm'Lgitl1.et ae
OIt&ia A.. = vJf. = 100/0.085 =1180 m. EVL lu FigltY!A. 14-45 se m/·i.estm la reLtíLclém de estu
longitJtd de OItetU COl'L respecto ul tlA.inuVí.o del r1l1.eltte.
501
Dinámico estructural aplicada al diseño sísmico
~1""
-11--
sentido de las
aceleraciones
horizontales
1 t
--
150m
-150m~
A/2=590m
A= 1180 m
Figura 14-45 - Ejemplo 14-8 - Sentido de las aceleraciones horizontales en un instante
t
EVL La FigllYa 14-46 se VVL/test.ra eL sevLt.ido de Las aceteracíones ILorizoltttües eu /1IL iVLstaV\,[c t Id
ItltO Id &ios segItVLaos &iesrJltés.
e
sentido de las
aceleraciones
150m
horizontales ~-"'"""':t--_
150m
tiempo = t
Figura 14--46- Ejemplo 14--8 - Esquema de como varian las aceleraciones horizontales en cada apoyo
Los f.apsos entre LLegadas de La olLda entre La rJiLa deL eje A Id La del eje Bes'
150m
~tAIi
= 100m/s = 1.5 s
~tAC
=
300m
= 3.0s
100 mIs
En.t.OILCes La sotucíón de Las ecuaciones desacopLadas se obtiene ariLizwLdo eL aceLerograVlta de
EL CeJttro para La aceíeración en La piLa deL eje A. Para La piLa c/.d eje B se IttiLiza eL misvHo
aceLerograma. j1ero iniciaVLc/.o 1.5 s desp'1,és Id para La piLa c/.el eje C et misVlto aceLerograma
ilLiciwtcto 3.0 s despltés del de La /'JiLa A.
Ge1LeraLf11RVLte el /'Jrocedimieltt.o ql{c se emy,Lea comiste eVL IttiLlzar 1J..lt aceLerognuna Cí1,te sume
aLgd1raical1LelLte Los aceLerogramcl.-I:;. r,reviavneVLte mltLtir¡Llcac/.os por el coeñcíente ue
alitpLifí.cacióIL. en Los ÍltstalLtes aprorJiados. Esta orleraciólL deIJe reaLizarse para caeta ,·uta ete
Las eCltaciolLeS desacopLa&ias. tl.ado qH.e Los cotjicieVLtes ete particirllA.ciólt son et~fereltt.es eVL
mdlA. IlIllA. ete eLLas. Cmt mda ItVLO áe estos aceLerowamlil.s se ohuene LIA. reSrlltesta áe La
cmlil.ciélll deslil.copLaua carrespolLdielLle.
1
uuunica estructural aplicada al diseño sísmico
Des 11 LazaHÜe ¡'ttos:
Eft La Figltra 14-48 se ml·testraf't Los prLfneros 20 s de Lu respltestG{, eft despLrA,ZG{,miCftto de cada
lUtO de Los seis grados de tillertG{,Gt de Lu estYl1Ltara.
UAx
0.05
0.001
Ji
max
0.001
0.02
0.000
1 (s)
18
20
(l8d) 0.000
-0.000
-0.02
-0.001
-0.05
0.
0.
1
UBx
05
02
1
min
-0.001
O'OOI~
max
max
0.001
0.000
(m) 0.00'oj--"J~;fffitttlffijtltItf\N1ttI"tJtttt\'ftt\ttfffij1!\M 1 (s)
20
(rad) 0.000
-0.000
-o.J2
-0.001
-0.05
min
min
-0.001
Ue x
Ue z
0.001~
max
I
0.001q0.000
1 (s)
12
14
16
18
20
1(s)
(l8d) 0.000
20
-0.000
-0.001
mln
-0.001
Figura 14-48·· Efsrr.plo 14-8 - Respuf:sta para cada uno de los grados de libertad de la estructura
flt La tabLG{, sigli.iel1.te se r'resff'ttlíLl't tos vatores máxÍf1tOS !.j mí-ltLfnos obtel'tidos para mda IUW
de tos graGtos (l/,e Uberta(l/, ue La estn~ctli.ra.
t
(s)
3.70
UD.
UA>
UOz
u-,
(m)
(rad)
(rad)
(rad)
-0.0+1$31
-0.0012C
3.72
0.00103
0000091
0.00104-J
4.04-
-0.00005
-0.00082
4-.94-
0.00057
0.00005
5.26
0.00095
530
0.00121
5.66
{
000007
--::-:-::-:-::-~==;;~~
-0.00096
0.00038
-----'1
0.00055
-0.00086
5.72
-0.00996
-0.00070
-0.00111
5.74-
-0.0079~
-0.00060
-0.00111j
6.04
0.00372
0.00054-
0.00093
1l\(·IX
0.011340.01 ~ 79
0.00130
-0.00123
-0.00111
1111.1 \
0.00104
1
14 • Análisis modal cronológico
EH La Figl1,ra 14·-49 se VVll1-estrav\, Los rJril11Rros 20 s de La respl1-esta de cCida fj,v\,a de Las sets
J/lel'Zas iHerciaLes (,{,pLimdas eH Los grados de Libertad de La estr/.tcltua,
50000
6°OOOOT
max
4oooo0t
25000
200000
(k") O
+--.,j\-f"-lmlq¡fmf-/t¡l\tt.MtI\I-H-tJ4-tliflf1rtWWv\¡M
I (s)
20
-25000
-50000
1
m/n
500001
25000
maJe
6°OOOOT
maJe
400000
T
200000
(leN)O -¡--'..l\fljl,Qtf'tjItttlIV'lHIitt1fuf"oflrttfilft:j'tH~tt1¡ftflt\ttf\¡¡1VIJ I (s)
20
(kN.m) O
t-''Vl'Itttf\JitttfttJiffilttlitttltittfttf1i-Mlf\itl\lIffiN
-25000
I (s)
20
-20000
-40000
-[jODon
min
-600
m/n
Fex
M ez
600000
50000
maJe
400000
25000
maJe
200000
(kN.m) O
I (s)
20
-200
m/n
-50000
Fiyura 14-49 - Ejemplo 14-8 - Fuerzas inerciales en cada uno de los grados de libertad de la estructura
El1- La tabLa siglüeHte se rJreseHtW1- Los vatores rncixil1ws
de LasJ,{,c/Zas inerciaLes, lj rara el corte tJasa l total.
t
(s)
:3 70
FA.
FB•
Fe.
MAz
M B,
Me,
V,
(kN)
(kN)
(kN-m)
(kN-m)
(kN-m)
(kN)
'182931
I
rníni"lws obtenidos rara mdu '·{-I'w.
(kN)
458831
-4-~)3 71
-1'1·145
3.74-
19133
41806
1549S1
16J; -:
3.98
15753
31053
16432
372
lj
'191981
·519952
17680
44314-8
78322
-5356421
39151
460727
80065
530345
64018 1
4-33S27
1323 7 1
46131 61
-4334-781
772'.9
6323/
400
14342
35'.17
15237
420415
-25976
417488
64991
404
10352\
399961
10304-
347150
-35474·
-336148
60652
5,]0
15690
5827
379
4517061
-61261bl
86786
21139
5.64
-9666
-10331
8170
329322\
58 9 7 23 1
-218896
11828
5.72
6.0 /}
-13181
11180!1
174-42
-267277
430169
-412831
1S4-'l1
25471
.19432
122305
·370620
4·15105
13057
475752
-22014-0
-254667
52629
4757~)2
589723
()1)blO
461316
·''33478
64997
800V)
672
lll-{IX
IIILIl
3829
I
172171
26051
17217
19198
3999b
4~)883
936f:
17442
-19432
505
·535b42
Dinámica estructural aplicada al diseño sísmico
í
80000
40000
-40000
-80000
min
Figura 14-50 - Ejemplo 14-8 - Corte basal de la estructura
COVL el JUt de iLnstmr LilLs diferevu:illLS lipte se Otltel'LI;iríiILVL si se SltpOVLe lij11-f LiIL excitación. es LiIL
VVLiSf'YLiIL ('VI, LliL tlliLse de todliLs LlAs rliLlAs, eVL este ClILSCJ Los coejícientes de pliLrtidpliLdóvL SOVL:
o
131.94
15.595
O
26.629
O
EI1 este CIASO el corte tlliLSilLL lijlte se oütíene se vnltestm ('VI, LiIL Figl1-YiIL 14-51.
150000 T
100000
50000
v,
(leN)
o
t(s)
-50000
-100000
-150000
m;n
Figura 14-51 - Ejemplo 14-8 - Corte basal de la estructura con la misma excitación en todos los apoyos
EI1 este CliLSO LIA reSrJl1-fstiIL se liLl1,VVLel1tiIL IApreciiILbLel11.CVLte ilLL covlsicterliLr
en LiIL tllASe de todliLs LlAs piLlAS.
lij/1-f
lliL excitliLción es ig/tul
Este tipo de liLI1tiUsis es difí.ciL de r¡LliLftteliLr Ij existe /UtIA gmlt ClILVLÜdlAd de il:cerÜd'WltlreS
respecto lA LiIL JorHtiIL como se detle escoger LIA. excitiILcióI1 en CliLdliL /1,110 de Los upolJos (Ü' lIA
es tructt trliL. EL ejevnpLo preselttilLdo tliLlt solo iLltstm Lu JOYl'l1iIL como se trliLtiIL eL protlLeVJ1IA de
excitadoaes diferentes elt Los liLtJOlJOS, por lo tUltto seríIA IAVefttltruc1.0 SIACCM conclustones ucerm
deL COfnportliuniento c1.e este tipo c1.e estrttctltms tUft soLo con lo presel1tliLc1.o.
•
Capitulo 15
15.1 Introducción
Aunque la capacidad de los computadores, tanto en tamaño de la memoria como en
velocidad, ha venido en aumento en los últimos años, a niveles nunca sospechados; la
obtención de la respuesta dinámica por medio de técnicas de análisis cronológico, como
las presentadas en el Capitulo anterior, sigue siendo dispendiosa y de difícil
interpretación para efectos de diseño.
Dado que los valores que se leen de un espectro, ya sea de respuesta o de diseño,
corresponden al valor máximo que puede tener la respuesta de un sistema dinámico de
un grado de libertad -- en términos de desplazamiento, velocidad o aceleración -- es
evidente que conociendo el espectro se puede determinar ti valor máximo de la
respuesta .:;ae puede tener un grado de libertad desacoplado, y por ende se podría
utilizar estos valores para determinar la máxima respuesta que tendría un sistema de
, arios grados de libertad.
El presente Capítulo se dedica a la formulación del análisis dinámico de sistemas de
varios grados de libertad utilizando espectros, ya sean de respuesta ante sismos
registrados, o de diseño para movimientos sísmicos futuros. Las metodologías
presentadas en el presente Capítulo, al igual que en el anterior, solo pueden emplearse
en sistema que permanecen dentro del rango elástico y donde es aplicable el principio
de superposición.
15.2 Formulación del análisis modal espectral
De acuerdo con lo presentado en las Secciones lCA y l-lA, las ecuaciones de
moximiento para un sistema sometido a una excitación en su base tienen la forma dada
en la siguiente ecuación:
(l S-1)
Las matrices de masa [M] y rigidez [K] de la estructura se obtienen de acuerdo con lo
presentado en el Capítulo 11. La obtención de la matriz [y] se realiza de acuerdo con lo
presentado en las Secciones 11.3.1(h), 11.5 Y 14.8, Y su forma depende de si la
estructura se ve afectada por una, dos o tres componentes del acelerograma,
representadas en un vector {x o } columnar con 1, 2 o 3 términos, casos en los cuales [y]
tiene dimensiones n x 1, n x 2 ó n x 3 respectivamente, siendo n el número de grados de
libertad de la estructura.
Dado que podemos obtener los modos y frecuencias, [<I>] y [ol], de la estructura con
base en sus propiedades para vibración libre representadas en el lado derecho igual a
B07
Dinámica est ruct Ilra I aplicada al diseño sísmico
cero en la ecuación (15-1); la solución del sistema de ecuaciones diferenciales
simultáneas se obtiene desacoplando el sistema por medio de la aplicación de la
siguiente transformación de coordenadas:
(15-2)
{u} = [<I>]{TI}
y derivando dos veces contra el tiempo:
{ü} = [<I>]{ il}
(15-3)
Reemplazando (15-2) Y(15-3) en (I 5-1), Y premultiplicando por [<I>]T obtenemos:
(15-4)
Tanto [1] como rol], son matrices diagonales, y por esto el sistema se desacopla, lo cual
implica que se tienen n ecuaciones independientes de un grado de libertad del tipo:
..
2
..
05-5)
Tli + m¡ Tli = -a i X o
y si se aplica amortiguamiento modal:
(15-6)
La solución para las ecuaciones (15-5) o (15-6) se puede llevar a cabo por medio de
cualquiera de las metodologías presentadas en los Capítulos 2 y 3 para sístemas de un
grado de libertad. Una vez se obtienen los valores de {TI(t)}, para cualquier tiempo t, por
medio de la ecuación (15-2) se pueden obtener los desplazamientos de la estructura
para ese instante.
La diferencia fundamental entre el análisis modal cronológico y el análisis modal
espectral se presenta aquí, pues de acuerdo con la definición de espectro de respuesta
de desplazamiento (Sección 5.2): el máximo valor que puede tener el desplazamiento
relativo u, entre la base y la masa de un sistema de un grado de libertad sometido a un
acelerograma en su base xo(t) , es precisamente el valor que se lee del espectro de
desplazamiento Sd(T,S), calculado para el mismo acelerograma, utilizando lo valores del
período T, y el amortiguamiento S, del mismo sistema de un grado de libertad.
Por lo tanto el máximo valor de puede tener Tli en las Ecuaciones (15-5) o (15-6)
corresponde al valor leído del espectro de desplazamientos de la excitación amplificado
por el coeficiente de partícípación <X.¡. Entonces:
(15-7)
Donde Ti = 21Úffi¡ Y ~ corresponde al valor del amortiguamiento modal con las
limitaciones expresadas al respecto en la Sección 12.6. Cuando se dispone es del
espectro de aceleraciones, puede utilizarse la transformación indicada en la ecuación
(5-11), también tomando en cuenta las limitaciones impuestas por las premisas
empleadas en su deducción, entonces el valor máximo de TI¡ se puede determinar,
alternativamente, por medio de:
508
15 • Aná.lisis modal espoct re
. )
( 11
'1,
max
= la. ._12 . S a (T.,,.", )1 = la.. 4T¡22
j:: •
I
I
O)¡
.
1t
S a (T.,
1;.I
I
)1
(15-8)
Dado que, por medio de cualquiera de los dos procedimientos alternos, se dispone de
unos valores máximos de los grados de libertad desacoplados 11¡; en principio, bastaría
con aplicar la transformación de coordenadas implícita en la ecuación 05-2) para
obtener los valores máximos de los desplazamientos de los grados de líbertad de la
estructura {U}. Desafortunadamente, este procedimiento es errado debido a que los
valores máximos de los desplazamientos, o aceleraciones, que se coleccionan en el
espectro de respuesta no ocurren en el mísm.. mstante en el tiempo. En la Figura 15-1 ,
tomada de la Figura 5-3 se muestra cómo en el calculo del espectro de desplazamientos
las respuestas para los diferentes períodos de víbracíón ocurren en instantes diferentes.
RESPUESTA EN TERMINOS DE DESPLAZAMIENTO (mi PARA SISTEMAS CON DIFERENTE PERIODO
PERIODO
T=3.0s
0.3
T
j
T=2.5 s
o
i
f.d-"\-il-+-i-+-+--I;-+-\c-:~.p..-~f"'ocr
l
T=2.0s
I
T=1.5s
o
O
~ Vv'J~ V........ «ioe»;
f\(\l\lIfll\~_
AA'""
Desplazamiento
V \TU 1T\T~v
I
(m)
,0.31
0.3
1
'ji. VVI[V
/) 11-;:-""
t
!
T= 1.0s
O
m2ximo 0.128
A
VOl)
IT
vv
-0.3
0.3
T=0.5s
,
I
0.30
0.25
1t
I
'
Imi
020
t
I
I
i
I
7.5
2.0
25
'1
3.0
1
J\fvo------::r-~1 I
~~J--_l_-l__
'ti
H' "
,
I
I
0.00
¡
0.0
o \ •./to..
'(~i;;;o 0./51
0.5
j
m
1.0
Periodo T (s)
ESPECTRO DE DESPLAZAMIENTOS
TEMBLOR DE EL CENTRO
-0.3 ,
Amorliguamiento 5%
2
I
l'
o
-2
-4
O
5
10
15
20
25
t (s)
Figura 15-1- Cálculo del espectro de respuesta de desplazamientos del Temblor de El Centro. Debe observarse que
los valores que se coleccionan en el espectro no ocurren en el mismo instante
Además, debe notarse que el signo, positivo o negativo, de la respuesta también se
pierde, debido a que al espectro se lleva el valor absoluto de ella.
Dado que la ecuación (15-2), implícitamente, realiza la superposicíón de las respuestas
individuales de cada uno de los modos:
SOD
Dinámica estructural aplicada al diseño sísmico
{u}
=
[<I>]{ TI} =
i
{Ij>(i) }TI¡ (t)
¡=l
= {Ij>(l) }Tll (t) +{1j>(2) }Tl2 (t) + ... +{Ij>(n) }Tl n(t)
=
(l
5-9)
{U(l)}+{U(2)} + '" +{u(n)}
su utilización directa, tal como se presenta en la ecuación (15-9) es errada pues suma
valores de desplazamientos modales que no ocurren en el mismo instante y además no
toma en cuenta su signo al sumar algebraícamente,
En principio, las respuestas modales individuales son correctas y corresponden a los
. máximos valores que tendrían cada una de ellas, simplemente hay que tener en cuenta
que pueden ser tanto positivas como negativas. La dificultad radica en determinar una
manera apropiada de combinarlas para obtener una. respuesta apropiada. Esto se logra
por medio de lo que se conoce con el nombre de métodos de combinación modal
espectral. La presentación de estos métodos se hace más adelante en la Sección 15.3, la
cual se dedica a discutir sus fundamentos y la forma como deben emplearse; no
obstante, es importante dejar establecidas las diferentes formas que pueden tener las
respuestas modales Indívíduales, pero sin llegar a combinarlas.
Los desplazamientos dinámicos modales máximos que se presentan en la estructura,
correspondientes a cada modo individual, por ejemplo el modo O), pueden obtenerse
por medio de:
(15-10)
En la ecuación anterior debe tenerse en cuenta que el resultado multiplicado por (-1)
también es factible, dado que se trata de un movimiento alternante derivado de un
fenómeno ondulatorio. Esta posibilidad de un cambio de signo se manifiesta en todas
las diferentes formas de la respuesta modal.
Para cada modo individual (í), las fuerzas dinámicas inerciales modales máximas que se
presentan en la estructura pueden obtenerse multiplicando los desplazamientos
modales máximos por la matriz de rigidez de la estructura:
(15-11)
Cada una de estas fuerzas modales máximas pueden utilizarse como un conjunto de
fuerzas estáticas y con ellas, independientemente, por medie de un análisis estático
convencional, llegar a encontrar las fuerzas internas causadas por el modo (i) en cada
uno de los elementos de la estructura. Estas fuerzas internas modales máximas pueden
obtenerse, también, utilizando los desplazamientos modales máximos obtenidos por
medio de la ecuación (15-10). Las dos alternativas conducen a resultados idénticos.
En este punto se tendría la respuesta máxima, individual por modo, de los diferentes
parámetros relevantes causados por unas fuerzas inerciales aplicadas a la estructura
como si fueran fuerzas estáticas externas. Estos parámetros comprenden las fuerzas
internas en los elementos de la estructura, las derivas de piso, el corte basal y el
momento de vuelco, entre otros. Habrá tantos conjuntos independientes de parámetros
como modos tenga la estructura. Tan solo bastaría combinarlos.
510
· 15 • Análisis modal espect ral
Ejemplo 15-1
Se desect ev¡,colttmr Los valores de Lct respH,{'stct deL eetiJicío elnpLectdo en eí EjempLo 14-3 ete Lct
Secciém 14.5, ctL ser sOI,'}teLido ct Lct CüVltr10Jteltte N-S del twttlLor de EL Centro. CctLifomict, de
MctljO 18 de 1940, emrILe(;utdo témims CSYlcctmLes, Lcts rJroYJiedades de mctsct lj de rigidez
eseria descritcts CI1 eL Ejentplo 14-3, EL edificio se Inll,{'stm, Itl1.eVctVlteltte elt Lct rigl1,m 15-2, Halj
iVl.terés en Lct reSrll1.('stct de Lct estmctluct en Lct direcciólt mostmetct en LctJigl1.m,
Figura 15-2 - Ejemplo 15-1
256
O
o
O
O
U
O
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
O
O
O
O
O
O
256
.,
-306.77
105.49
- 306.77
668.24
- 475.14
137.94
- 29.375
5.3857
105.49
- 475.14
731.37
- 493.23
159.60
- 21J.327
-19.561
137.94
- 493.23
-494.47
145.71
4.2822
- 29.375
159.60
749.02
-494.47
738.11
- 515.90
- 0.51088
5.3857
- 29.327
145.71
- 515.90
889.94
216.76
.Al
n
-19.561
4.2822 - 0.51088
511
...
--'
Dinámica estructural aplicada al diseño sísmico
AL resolver el prolJLevvLa de valores propios pLa/1,teado por La al-tterior emació/t de eq¡úLilJrio, se
olJtie¡-te1t tas sig/tie/ltesjreutevu:ias Ij períDdos:
1
¡
.~
I
Modo
1
(ji
O)
(rad/s)2
(rad/s)
29.108
301,81
2
3
4
5
6
T
f
(Hertz)
973.78
2494,3
5.3952
17.373
31.205
49,943
4686.5
7113.8
68.458
84-.344
(s)
1.1646
03616
0.2013
085866
2.76495
4.96647
7.94849
10,89550
0.1258
0.0918
0.0745
13.42372
Los f1wdos ci..e vi~)m.ciólt correStl0/1ci..ie¡1tes son.
~
0.036721 -0.032775
0.029168 -0.020667
0.033690 -0.011592 -0.014245
0.032483
-0.034529
0.028533
-0.029103
0.020961
0.033322
-0.005049 -0.034504 -0.003317
0.033609
0.012243
L 0.004460
0.033525
0.031633
0.015888
0.025184
I I!
4
1/
3
I
2
I
0.00
o
0.04
Modo 1
(TI = 1.165 s)
000
004
Modo 2
(T 1
=
0.362 s)
~04
¡--......
<,
3
r-,
V
/
<,
¡--......
"
V
!/
o
Moci..o3
(T3 = 0.201 s)
000
~04
/
.......
4
=
0,126 s)
6
4
V
2
r--..... r-....
/'
~04
1"'-......
V
000
004
Modos
(Ts = 0,092 s)
Figur¡:. 15-3 - Ejemplo 15-1- Modos y períodos de vibración de la estructura
Los cotjkielltes de rJarticirlació¡i. S(1I1:
34.970
13.540
8.2331
6.0279
4.4695
2.3861
512
...v
r-....
3
IV
2
~,
5
r-. r-....
V
o
004
Moci..o4
(T4
5
0.023711
VI-'"
3
......
004
0.035774
./'
2
/
000
r-,
./
)
¡
-0.04
"- <,
-0.024392 -0.031454
6
<,
4
I
o
0.006893
0.034025
5
I
2
1/
0.005317
6
-:
./
5
il
3
0.018512
0.014524
s
4
-0.005955
0.028524
[<1>] =
5
0.013049
- 0.032188
o
~04
,/
--
;,v V
.......
<,
,/
r-.... r-,
1/
000
004
M oci..o 6
(T6 = 0.075 s)
Dinámica estructural aplicada (/1 diseño sísmico
Tabla 15-2 - Ejemplo 15-1 - Valores máximos para los grados de libertad desacoplados
Moeto
SiT;,~)
<X¡
i
(m)
(m)
0.1158
34-.9700
13.54-00
8.2331
6.0279
4.4695
2.3861
1
2
3
4
5
6
1
(l1¡}max =a¡ xSd(T¡,l;¡)
.0:
4.0495
0.29571
0.055458
0.017155
0.0050639
0.0017170
0.02184
OJJ06736
0.002846
0.001133
C).0007196
DestJ LazGunic VLtOS fntixi/!VWs l11DetuLe s (In)
Los desYILazGunieVl.tos I1tW<ivvl.OS ('VL cuetu I1tOetO. se o~ltieVln1. ete:
Esto Vl1.iSfl1D se YJIi.eete Logrur fl1.Gl.tricit.ú¡·1tC/1.te. COLOCGl.f1.etO Los vGl.Lores etc (ll¡)max ('/1. Lu etiGl.gOl1.Gl.L ete
IH1.U f11.Gl.triz w.Gl.etrGl.etGl. [Trnod] U reGl.LizGl.Vl.eto LGl. operucióVl.:
LVI. eL wesevLte rr;j,SO. LGl. 111.Gl.triz [Trnod] tiene LuJoYf11.Gl. siglüeVl.te:
(TlILx
[r mocI]=
o
o
o
o
o
o
o
o
I (Tlz)max
o
o
o
o
o
o
o
(Tl3)max
o
o
o
o
o
o
o
o
o
o
o
o
I (114)max
o
o
(l1 s)max
o
(116)ma.
U Gl.L reel11.pLazGl.r Los vatores Gl.proy'iGl.etos.
4.0495
o
o
o
o
o
o
0.29571
o
o
o
o
o
o
o
o
o
0.0055458
{U~~}
o
o
o
o
o
o
o
0.015155
}
{ U (2)
mod
o
o
0.0050639
o
{
U (3 ) }
mod
o
o
o
o
o
0.001717
{U::~}
0.148703
-0.009692
0.001618
-0.000355
0.136429
-0.003428 -0.000790
0.000557
{U~}
-0.000163
0.115519
0.004295
-0.001915
-0.000280 -0.000592 -0.000017
0.000091
0.084882
0.009854
0.049588
0.009914
0.001754
0.000118
0.018061
0.004698
0.001397
0.000584
514
{U~ld}
0.000066 -0.000010
0.000032
0.000144 -0.000050
,J.gdl
U6
Us
U4
0.000058
u3
-0.000124 -0.000054
Uz
UI
0.000181
0.000041
T\2 + 2~2OO2"2 + OO;lh = -13.540x O
113 + 2~3OO3"3 + 00;1'\3
= -8.233lX O
T\4 + 2~4OO4"4 + 00:1'\4 = -6.0279x O
11 5 + 2~5OO5"5 + 00;1'\5 = -4.4695x O
116 + ~6OO6"6 + OO~1'\6
= -2.386lX O
EJl Lus seis eu{,uciones, de uCI1,erdo con el eV1fHuiudo deL rrobLevl1u,
~
=0.05
tu rest'!ltestu t'!um mdu IH1.U de estus eC/tUciOf1.eS desucorLudus, se obUei1.e /ttWzundo el
espectro de desrJLlIlZuvlüel1tos de Lu COVVLt'!OfteJ1.te N-S del tel·nt,Lor tA.e EL Cel1.lro. EI1. Lu Figlua 15-4
se mlH'stru et esnectro 0 La Inal1.eru de obtener Los vuíores corresponzüentes el1.J,Huióf1. de Los
(,:tLferelttes rJeríü(,:tos de vitlración correspOfltA.ielttes u wvciu lUtO tA.e Los vVLocios de vik¡mciól1..
Amortiguamiento
.;= 0.05
0,20
,
0.15
0.1158 m
Sd
(m)
0.10
-t
I
I
0.05
I
,
0.02184m _.
0.006736 m.
0,002846 m0.001133 m
0.0007196 m'
¡¡¡;
;
,0.'00
0.0
1, •
,:
•
I
•
0.5
1.5
1.0
Período T (s):
2.0
~
Ti
Figura 15-4 - Ejemplo 15-1 - Espectro de desplazamientos de El Centro
Tabla 15-1 - Ejemplo 15-1- Valores leídos del espectro de desplazamiento
Mo~to
Ti
(s)
1
1.1646
0.3616
0,2013
0,1258
0.0918
0.0745
2
3
4
5
6
Sd(Th~)
(m)
0.1158
0.02184
0.006736
0,002846
0.001133
(HlOO7196
CClI1. La iVl:fon11.aciól1. anterior pOClel1"LOS obtener Los valores mcixifnos Cij/te rl1,edel1. tener [os
01'w,tos <te Litlertcu:t desacop Lucios
518
~
6
5
4
3
2
/
o
V
V
/
/
/
1'" -,
"'
5
4
3
0.10
0.15
4f\----t---+__--t_-_j
\
/
3
I-----t--~d----t_-_j
2
I----+---+----+-~__i
VI
o
0.05
5r-----1.~-+__--t_-_j
2
V
0.00
6
.(}.02
.(}.01
0.00
0.01
0.02
.(}.001
0.000
0.001
Deflexión(m)
Dcflexión (m)
Deflexión (m)
I1Wci.O 1
modo 2
modo 3
0.002
6
r----,----,-~--r---,
5 r----+---j----f\---j
5
f---'~--t---+__-
5r----+----I---+-+----j
4 r-----t----J7"'----t---j
4
r----+---j----j-~r_-j
4r-------io::---I-----t-----j
3 r----+-------7'9----j----j
3r----+---t----H'----1
2 ¡-------"...r----t--
2
3
f---t+---1---t----i
I
2
o
Ir---r--___I~___I,--___I
o
f----+---~-__+--_j
.(}.0010
'(}.0005
0.0000
0.0005
0.0010
.(}.0002
.(}.0001
Deflexión (m)
0.0000
0.0001
0.0002
1------!---_---1-----1
.(}.00010 .(}.00005
0.00000
0.00005
Deflexión (m)
Dcflexión (m)
VlWci.o ')
Inoci.06
0.00010
Figura 15-5 - Ejemplo 15-1- Desplazamientos máximos horizontales de cada modo
Derivu ci.e YJiSO ¡n6txÍfnu (%IL)
utiLiZlíLItci.o Lo.'". ci.espLlíLlumie/ttos u/tteriores es positlLe ClíLLmLur rntrlíl. ClíLci.u modo Lu derivu
miÁXimu Ll'i.e plte&tE' tevIN cuci.u VJiso de Lu estmctttr~: como eL despLlíLlumie/tto reLutivo entre
piso !1 piso. Es costtunkJrc expresur estu derivI/L corno Vlorce/ttuje de Lu uLtluu de cuciu YJiso:
Tabla 15-3 - Ejemplo 15-1 - Valores máximos para la deriva de piso
como porcentaje de su etture
1
VI'wdo 2
¡nodo 3
I1wdo 4
Vltoeto 5
Inod06
6
0.409%
-{).209%
0.080%
-{).030%
0.008%
-<1.001%
t:
.J
0.697%
-{l257%
0.037%
0.016%
-o.o 10%
4
1.021%
0.023%
-{).024-%
0.003%
-{).004-%
1.177%
-{).054-%
-{).068%
0.005%
:3
-0.185%
-{).002%
2
1.051 %
0.174%
-{1.016%
0.004-%
-{).()10%
0.004%
-{).O03%
1
0.602%
0.157%
0.012%
0.()47%
0.019%,
0.006%
0.001%
YJiso
IYU)l.ÍO
E/'l LI/L Jigarlíl. siglüe/'lte se mrv'sLrlíLlt Lf/LS cterivus in6tximus cte piso PUrDl. cuctu lUtO cte Los
',UJctos:
Dinámica est rHC( HrU[ aplicada uf diseño sísmico
6
5
I
I
4
0.00
5
I
I
I
I
2
I
I
o
1.00
Deriva ('Joh)
\
3
2
11
0.50
I
4
1\
¡
o
5
3
1
I
I
6
4
3
2
6
1.50
-0.30
-0.20
-0.10
0.00
0.10
0.20
\
I
O
-0.10
-0.05
0.00
Deriva ('!'oh)
n'lOdo 1
0.05
V.l0
Deriva (%h)
Inocto 2
6
51--L..---"---+--~+---:
I
5
6
I
5
I
,I
4
4
31--~---+----U--~
3
3
I
21--~_,_--+--+_--
2
2
I
I
of------!---+----I-----i
o
-0.04
-0.015 -0.010 -0.005
0.002
0.004
-0.02
0.00
0.02
Deriva ('!'oh)
0.04
I
I
0.000 0.005
Deriva ('!'oh)
111Octo 4
i
I
I
o
0.010
-0.004
-0.002
0.000
Deriva (%h)
ftWUO 6
ftwdo 5
Figura 15-6 - Ejemplo 15-1- Deriva de piso (%h) máxima de cada modo
FI1,frza<, iHerciaLes f1tw<Ünas (l<N)
Para ctetenniltar Las Jlterzas ifterciaLes mlAX01tas YJor modo qlle if'l'LY¡OftE' eL sismo s(lb,ve La
estrttct/ua. se fl'L/útirJLica La matriz de rigidez de todrA- LtJl. estntctllXrA- YJor Los desy¡LrA-zwnieHtos
mlÁ.xivlws corresy)oltdielttes a crA-da f11Odo. el res¡.útado está en kN:
¡
,~
1
te.)
l
{F(l) } {F(2)} {F(Jl} {F(4l} {F(Sl} {F(6l}
mod
mod
mod
mod
mod
mod
-18.61
1108.3
-748.9
403.3
-226.4
79.3
1016.2
-264.8
-1%.9
355.8
-195.6
57.9
860.2
331.8
-477.4
58.2
173.4
-91.0
632.9
761.5
-69.8 -378.0
-20.2
369.4
765.9
437.3
75.5
-148.2
-98.4
135.1
363.0
348.2
372.7
217.3
74.1
ti
,J.gdl
--
105.1
j------51fj
'W
.~
1
6
6
·1
s
S
/
4
3
I
/
SOO
1000
IS00
-,
o
-soo
/
/
1000
IS00
11
I
o
sao
~
2
V
I
..
3
)
-1000
I
4
"-
/
o
o
<,
/
/..
s
2
17
-soo
-. <,
3
I
o
6
4
/
2
-1000
<,
-1000
o
-SOO
1000
sao
Fuerzas Modales
Fuerzas Modales
Fuerzas Modales
(kN)
(kN)
(kN)
IS00
f1wcto 1
6
s
<,
I
6
I
-,
I
s
)
I
'\
4
4
/
:3
o
-soo
o
\
~
o
sao
1000
IS00
-1000
-soo
I
I
'\
I
.\
7
I
~
'\
i
I
I
o
sao
1000
IS00
-1000
¡
o
-SOO
I
sao
1000
Fuerzas Modales
Fuerzas Modates
(kN)
(kN)
(kN)
111DetO
5
¡
I
I
I
o
I
Fuerzas Modales
f1weto 4
I
I
(
2
V
'---..
I
I
4
3
I
I
s
I
(
2
\
1/
--1
-,
)
3
<,
2
-1000
6
Wl.Or;tO
i
6
Figura 15-7 - Ejemplo 15-1 - Fuerzas inerciales máximas de cada modo
CurCcutCe In&tXlVVtO
1110etaL etc !1lS0
(I<N)
n
EL cortnnte InélXLlTLO f1waaL
etl'
rJlSO
se atf~ne COf1W v~i)
= ~
F~i)
.1
k,¡
k=j
Tabla 15-4 - Ejemplo 15-1 - Valores máximos para el cortante de piso
rnsCJ
V(l)
mod
V(l)
mod
(kN)
(kN)
V(3)
mod
V(4)
mod
V(S)
mod
V(6)
mod
(kN)
(kN)
(kN)
(kN)
6
1108.3
748.9
4D:U
-226.4
79.3
18.6
r
-)
2124.6
10137
206.3
129.4
116.3
3<).3
~
2984.8
681.9
-271.0
187.7
57.1
3
-
r~
~)
,
,
3617.6
79.6
3409
-190.3
369
53.4
2
3987.U
8455
96.5
111.3
450
-t
,
4122.1
1208.5
444.6
114.8
2')7<)
4-1/2.1
120S.5
444.6
257.9
10ó.1
¡ 0(..-;
291
()
517
2q1
ISeO
-Dillá;llica est ructural aplicada al diseño sísmico
6
I
5
I
4
6
6
5
5
I
4
3
I
2
3
I
I
4
o
-750
2
o
-250
250
(kN)
(kN)
I'JWGio 1
11tOGÍÓ 2
6
6
¡
I
5
1I
li
I
4
I
I
I
-150
I
150
I
I
I
o
2
300
-150
4
2
I
o
-75
75
500
I
:I
3
I
o
I
5
I
I
3
o
-300
-500
(kN)
I
I
I
1500
I
I
Cortante de piso
1I
3
750
o
Cortante de piso
i
I
-1500
I
Cortante de piso
6
5
I
11
4500
3000
i
2
o
1500
I
I
'1
I
o
o
I
3
2
I
I
4
I
I
I
i
o
150
iI
-60
o
-30
Cortante de piso
Cortante de piso
Cortante de piso
(kN)
(kN)
(kN)
Hwdo 4
InodoS
I'Jwdo 6
30
60
Figura 15-8 - Ejemplo 15-1- Cortante máximo de piso para cada modo
Corte /rlasal (kN\
El cortante
eIt La LIase
del edificio, C/IL kN, de cada Hwdo se ¡:Jltcde oL¡te/ILer r,or Inedia de:
403.3 -226.4
1108.3 -748.9
1016.2 - 264.8 -196.9
355.8
860.2
331.8 -477.4
58.2
= {4122.l11208.5 1 444.61 257.9
Vil)
mod
V(4)
mod
I
632.9
369.4
761.5
765.9
135.1
363.0
106.11
ViS)
79.3
-195.6
173.4
-69.8 -378.0 -20.2
437.3
75.5 -148.¡
348.2
372.7
217.3
-18.6
57.9
-91.0
105.1
-98.4
74.1
29.1}
V(6)
mod
mod
Pactie verse &jIte este valor corresrJov¡,de al cortante oLlteltido ¡:Jara el ¡:Jrimer y,iso ev¡, cada IOta
de los Inodos. n¡, el paso altterior.
518
......,(l.{l(((("~I":>
1 U
Ilt\.." .•
,.I.' "JI"''''
Movvtel'tto eLe v/trLco (kN . va)
n
L
EL momento eLe vuelco en CliI.eLcJt ~)iso se obCio'\,(' por vneeLio eLe M~i) =
(h k
-
hj )
'
FP)
k=j+1
Tabla 15-5 - Ejemplo 15-1 - Valores máximos para el momento de vuelco de piso
M(l)
mod
piSO
M(2)
M(3)
(kN - m)
0.0
; 2D9.8
(kN -m)
00
-679.2
(kN- m)
0.0
(kN -m)
00
237.8
-')287.8
18287
-290.9
73336
70'-)1./
~C)~5.6
272.2
298.7
. -4558J
282.4-;é,-;ó.]
n1.0
60.2
170.9
162.9
155.3
:>5.9
61.9
-933
h6.8
68.2
(kN -m)
0.0
5
3324.9
4
9698.6
18652.9
7.950')8
4H66.8
5]833 ;
-937. 7
0
7.
~
o
M(Ó)
mod
M(S)
mod
(kN' m)
0.0
-224óJ
Ó
.,
M(4)
mod
mod
mod
6.9
ó43.1
130./
19.;2
6,----.,----,-------,
6r---r------,--~
s-l-\---+_--+_-----1
sl------i----'--...4---!-
4+-~-+---+----j
4t-----h;C-----t---!-
4 I------t--t-----t---+--+--J
3+----'\1-----+_-----1
sf--l--'--i------t---!-
sf-----t--+-~=--+_--1
2+---.,---'<--+---------1
2
2 r---l'---t-----t---+---j
f---l~-j-----+----+
ol------!--t-----t---""""----J
20000
40000
-6000
60000
-4000
-2000
o
-SOO
Momento de vuelco (kN • m)
Momento de vuelco (kN . m)
11tOdo 1
VltOctO
o
SOO
1000
1500 2000
Momento de vuelco (kN . ro)
11wao 3
2
sl------.~I----!___----1
sl----'I,t-----l----j-----J
4r----j--"""'-!___----1
4r---+---+----j¿--------1
s
sl-Ec-+_--+---+---1
2f----h~-f------I
21------1----",1-1------1
2
f---+_--+----+-7--1
01------1------f""--------1
·1000
-SOO
o
o
SOO
Momento de vuelco (kN • ro)
200
Momento de vuelco (kN . m)
4Q()
-so
o
50
100
Momento de vuelco (1lN . m)
mocto 4
Figura 15-9 - Ejemplo 15-1- Momento de vuelco para cada modo
Et 11V)111,e¡tlo eLe vuelco eH tu
rJ or mectio ele
l'!CLse. elt
kN . In. covtCrivl/ücto r10r cuctcJt morto. se rJltecte ohtcner
519
, ..~
Dinámica estructural aplicada al diseño sísmico
1
= {53833I -933
M~~d
I
M~ld
16161
131
I
155
-18.6
57.9
-91.0
403.3 -22M
1108.3 -748.9
355.8
1016.2 -264.8 -196.9
58.2
331.8 -477A
860.2
79.3
-195.6
-20.2
105.1
173.4
632.9
761.5
-69.8 -378.0
369.4
765.9
437.3
75.5
-148.2
-98.4
135.1
363.0
348.2
372.7
217.3
74.1
I
19}
M~~d M~~d M~ld M:::~d
Octdo IIjI1R eVL ejevl1pLo 14-3 se encontró Lct reSpl1Rstct crmlOLógim de Lct mismct estrttctlUct wtte
el I'lÜSVllO ctceLerogrctmct de EL Cefltro. Cf1,!jO espectro se emrJLeó e11 el prese11te ejevnpLo, pl1,edell
hctcerse ctLgl1Hcts compctrctcio11es acerca de Los valores mcixifnos o!:ltefüdos en el ejempLo 14-3 l::J
Los valores modctLes Hlciximos o!:ltellidos en eL presente ejempLo, Ell Lct tctbLct 15-6 se COI'ltpctrctlt
Los valores obteltidos flctrct Los grctdos de Libertctd desctcopLctdos en el ejelnpLo 14-3, con Los
valores de estos miSf'ltoS gmdos de Hbertctd efnpLeLLdos en el I'Jrescnte cjcf'ltpLo
Tabla 15-6 - Ejemplo 15-1- ComparDción de los valores obtenidos en los ejemplos 14-3 y 15-1
Gntc;{o de
L,iJertlMi
desv,copLl/t.do
111
112
113
114
115
116
Ele~nrLo 15-1
EjemrLo 14-3
mi,x,wlO
mivüww
W\.Vlx, m.o
mi m VYto
V'M'X'V'/I.o
mímwlo
VVlÚX,WW
mí ru ww
mitX,WW
miVLLV'(\.()
vvu,',xiww
mí v', 1w..o
t
(11¡)max =a¡ x Sd(T¡,~¡)
11¡
(ro)
(s)
4.049463
-3,664644
5.90
3,04
4.0495
0.295191
-0284971
4.76
029571
0,047073
-0,054570
3.22
(ro)
4.58
0,055458
2.52
0,010581
2,51'
-OO1711S
2.64
0.003448
-0,004919
2.24
0,001150
2.16
-O.OO"4q~
2./?
2,12
0,017155
0,0050639
0,0017170
COI'110 p/lRde verse Los vctLores son ese11cictLW\.C/ltc ig/{"ctLes, !j LlA.s diferencicts o!:wdeCeft ct errores
uc r¡recisiólt lj redCHtdeo dlA.do IIjI1R ellA.Lgoritmo ef'l1.pLectdo plA.m eflCOf1trctr LlA. resp/lRsta en eL
cjempLo 14-3 es diferente del IttiLimdo /:'lctrct cctLuüm el espectro empLectdo eft el presef1.te
ejentpLo, odIe notarse. tctnt!:liéft, el hecfLO de GjI1R lüng/HIO de Los valores VVlcixÍlno o l'l-tíl1.í1no
ocurre en eí miSf'110 iltStwlte,
EL mciximo ues~JLWctVlüeftto ILOriLmttctL de Lct c¡ü¡iertu ueL edificio, tctL como se obtltvo en el
ejempLo 14-3, Jite de 0,148729 m, La S/H'llct ctLgebruim de Los valores de Los despLwamientos
nlOdctLes IncixinlOs en eL /:'liso 6 ojr,tenidos en el presenLc ejempLo, es 0,140330 1'l'L !j Lct SH,mct de
S/tS valores ctbsoLtttos es 0,160443 m, Cm'110 pltede verse La S/M'l-ta ctLgejrJruicct slüJestimct eL valor
obteflido eVL La resp/testa crmlOLógim, lj La sltma de Los valores a!:lsoLlttos Lasobrestima,
J'¡
EL mciximo valor deL cortante ell Lct bctse deL edificio. taL como se obtuvo en el ejempLo 14-3.JIlR
de 4355,8 /<N. La Sltmct de Los vaLores de Los cortantes wlÁ.JdaLes mcixivllos ell La !:¡ase obtevl.idos
eft el weseflte ejempLo es 6168.4 /<N. COVllO p/tede verse La s/tma sobrestimct et valor obteftido
en La resp/lRstct crovlDLógim, tsto se debe a t/l/lR CIl La res~Jltestct crmlOLógim eL vctLor deL
cortante en La !:Iase está controLado por La resYJltesta deL primer modo lj Los otros VllOdos
wtictiml'l'U'flte no cmttri!:J1t!jefl u SIl. vuLur c/tu~ldo oCluye eL Vllcixil'llO, EL mcixi~'}lO valor del
~'llOI11('ItID CI: Lu jr'lA.Se ueL edificio, tuL como se obtlwo ('11 eL ejem~JLo 14-3.JH.e ue 54406 kN . m,
f-------------------520
..
~.~-
1 b • ,'Ulal/SI.'; 1I1(}(HII
e~jJeC( n l l
La SI1,f1il,a aLgebraica ete Los valores ete los IWll11RlttoS modcües Vl1tÁXÚ1WS en la base otJtevüctos
en et presente ejempLo es 54822 kN . f1il" U La S/tlna ete Los valores a~)soLI1,tos es 56687 kN . lit.
Como piteete verse Las S/iVl1IAS sotlrestiman eL valor obtel1ieto en Lu respHesta crorwLógica. EL
valor meixif1w cteL 1110/'11('/tto elt La blAse pIAra Los f'11OetOS i-tíJermtes ctd Jlutciavltentul es
peVjlteilo comrJaraÜvame/tle al del JI Htciame vLt(;tL el1 el preSCltte ejempLo. Lj el1 Lu resrw~sta
crorwLóg ica ocurre ¡;ügo simiLar.
11
15.3 Métodos de combinación de la respuesta modal
15.3.1 Generalidades
En la Sección anterior, con su ejemplo, se presentó la forma como se puede llegar a
encontrar la respuesta máxima para cada uno de los modos para diferentes parámetros
de la respuesta estructural ante un sismo. Así mísmo en el ejemplo 15-1 se realizó al
final una corta discusión acerca de las diferencias que se obtendrían para algunos de
estos parámetros al comparar la respuesta cronológica con los resultados espectrales.
Es evidente de la presentación que la suma de los valores absolutos de la respuesta
espectral siempre conduce a valores mayores que los obtenidos por medio de la
respuesta cronológica debido a la no simultaneidad de los valores máximos de las
respuestas modales. En general cuando un modo llega a su máximo; las otras
respuestas modales, en ese instante, son menores que sus máximos índíviduales, Es
obvio, entonces, que el límite superior de la respuesta combinada f , de los diferentes
valores modales r¡, es la suma de los ro valores absolutos, siendo ro el número de
modo":
m
r~IJd
(15-12)
¡=1
El grado de conservatismo que se introduce por medio de la suma de los maximos
valores absolutos varía de un parámetro a otro. Por esta razón se recurre a técnicas de
combinación de la respuesta modal basadas en análisis estadístico y conceptos de
\ibraciones aleatorias, las cuales permiten determinar un valor máximo factible de la
respuesta. En [Cupta, 19901 se deducen y discuten diferentes métodos de combinación
de la respuesta modal. A continuación se presentan las metodologías más empleadas en
la actualidad.
15.3.2 Método de la raíz cuadrada de la suma de les cuadrados (ReSO
El método más conocido de combinación modal espectral es el método de la raíz
cuadrada de la suma de los cuadrados (ResC). Este método fue desarrollado por E.
Rosenblueth en su tesis doctoral [Rosenblueth, 1951) y postula que para cualquier
parámetro modal respuesta r, el valor máximo factible del parámetro r, al tomar en
cuenta las diferentes componentes modales máximas r., se obtiene a través de:
(15-13)
.-\ la luz de la teoría moderna de confiabilidad [Ang y Tanq, 19841. la respuesta de un
grado de libertad desacoplado TI¡(t), ante una excitación sísmica puede considerarse una
variable aleatoria con una media ~, y una desviación estándar O'j. La transformación de
estos grados de libertad desacoplados en los grados de libertad de la estructura se
realiza por medio de la ecuación (15-2). Dado que esta transformación es lineal y
suponiendo que los diferentes grados de libertad desacoplados son estadísticamente
521
Dinámica estructural aplicada al diseño sísmico
independientes, utilizando la teoría de probabilidad, es posible demostrar que el
resultado de la transformación también es una variable aleatoria, cuya media es igual a
emplear la transformación utilizando los valores medios
{u} =[<1>]{~} = i
{<jl(il}~i
(15-1-4)
i=1
y su desviación estándar [Ang y Tanq, 1984], es:
(15-15)
Si el sismo es suficientemente largo puede decirse que la respuesta lineal a él está la
mitad del tiempo del lado positivo y la otra mitad del lado negativo, por lo tanto en este
caso, la media del valor de 11¡(t) es cero (~ = O); y cualquier parámetro de respuesta r, que
se transforme linealmente, desde el punto de vista estadístico, tendrá un valor r , igual
a la raíz cuadrada de la suma de los cuadrados de los valores modales individuales
máximos del parámetro fj, que es precisamente lo que indica el método de la raíz
cuadrada de la suma de los cuadrados a través de la ecuación (15-13). No sobra insistir
que se partió de la premisa de que las respuestas modales son independientes
estadísticamente entre si. Cuando se viola esta premisa el método conduce a resultados
no conservadores. Si existen modos de víbracíón CO:l períodos de vibración con valores
cercanos, en alguna medida, hay correlación entre sus respuestas y el método no es
aplicable.
El método RCSC:, raíz cuadrarla de la suma de los cuadrados debe emplearse sobre los
resultados máximos modales del parámetro bajo estudio fjo Debe tenerse en cuenta que
para cualquier parámetro obtenido aplicando el método RCSC de combinación modal, el
resultado siempre será positivo, pero en realidad puede ser positivo o negativo pues es
una representación de un movimíento oscilatorio. Este aspecto debe tenerse en cuenta
en la combinación de estas fuerzas de origen sísmico con otras fuerzas de origen
gravítacíonal, como pueden ser las cargas vivas o muertas.
La manera de aplicar el método rle la raíz cuadrada de la suma de los cuadrados (RCSC)
a los diferentes parámetros de respuesta es la siguiente, donde la estructura bajo
estudio tiene jl pisos y ID modos:
(a) Desplazamientos horizontales maximos de la estructura - Por medio de la
ecuación (15-10) se obtienen los desplazamientos de máximos de cada piso, por
ejemplo el piso j, para el modo i: U~il Luego, por medio de la aplicación del método
o
RCSC,
Uj" =
~(U~i)f = (U~ll)2 +(U~2lf +o.o+(ujmlr
(15-16)
1=1
se determina el valor máximo factible del desplazamiento del piso j.
(b) Derivas máximas de piso - Utilizando los valores de los desplazamientos de
máximos de cada piso obtenidos al comienzo del paso anterior, por ejemplo para el
piso j, en el modo i: U~il. Se determina primero la máxima deriva inducida por el
modo i en el piso J. así:
J-------59.')
15 • Análisis modal espectro
A(i) _ U(i) _ U(i)
ti
j
-
j+1
(15-17)
j
Luego, aplicando el método RCSC,
(15-18)
se determina el valor máximo factible de la deriva del piso j. Es importante tener en
cuenta que es errado calcular la deriva de piso utilizando valores de los
desplazamientos ya combinados, por lo tanto no es lícito, dentro de la metodología,
emplear los desplazamientos máximos obtenidos por medio de la ecuación (15-1 G)
para obtener las derivas máximas factibles.
(e) Cortantes máximos de piso - Por medio de la ecuación (15-10) se obtienen las
fuerzas modales máximas de cada piso, por ejemplo el piso k, para el modo i: F~i).
Luego se determina el máximo cortante inducido por el modo i en el piso J. así:
(15-19)
y aplicando el método RCSC,
Vmax= f(V.lilf
j
=
(V.ll)r +(vYlr +... +(v.¡mlr
(15-20)
i~1
se determina el valor máximo factible del cortante del piso j. Debe hacerse la misma
advertencia que en al caso de la deriva, pues es errado calcular el cortante de piso
utilizando valores de las fuerzas ya combinadas.
(d) Cortante basal máximo - Primero se obtiene la fuerza cortante máxima para cada
uno de los modos sumando algebraícamente todas las fuerzas modales máximas
del modo en los diferentes pisos, F~i):
p
V(i)
= I, F~il
(15-21)
k=l
y aplicando,
O) )1. +(V(2modl )2 +.. +(v(m)
Vmax= f(V~¿dr = (Vmod
mod )2
o
(15-22)
i=1
se determina el valor máximo factible del cortante en la base. Igual que en los otros
casos, es errado calcular el cortante basal utilizando valores de las fuerzas
horizontales ya combinadas.
(e) Momentos de vuelco máximos de piso - Con las fuerzas modales de piso para el
modo I: F~i), se determina el máximo momento de vuelco inducido por el modo i en
el piso j, así:
Jinámicn estructural opliccul« al diseño sísmico
M~i) =
±[(h
k -
h F~i)]
j
(15-23)
) .
k=j+l
donde h, Y h j son las alturas, medidas desde la base, de los .pisos k y j,
respectívamente, Aplicando el método RCSC,
f(M~i)r = (M~l)r +(M~2)r +".+(M~m)r
Mjax =
i=l
(15-24)
se determina el valor máximo factible' del momento de vuelco del piso j. Debe
hacerse la misma advertencia, pues es errado calcular el momento de vuelco de piso
utilizando valores de las fuerzas ya combinadas.
(e) Momento de vuelco máximo en la base - Con las fuerzas modales de piso para el
modo i: F~i}, se determina el máximo momento de vuelco inducido por el modo i en
la base así:
(15-25)
y aplicando,
Mmax= f(M~~dr = (M~~d)2 +(M~~r +... +(M~~r
i=l
(15-26)
se determina el valor máximo factible del cortante en la base. Igual que en los otros
casos, es errado calcular el cortante basal utilizando valores de las fuerzas
horizontales ya combinadas.
(f)
Fuerzas horizontales estáticas correspondientes a las fuerzas máximas modales Con en fin de obtener las fuerzas internas en los elementos de la estructura es
conveniente disponer de un conjunto de fuerzas horizontales estáticas que
representen las fuerzas máximas factibles que puede desarrollar el sismo. De esta
manera las fuerzas estáticas correspondientes se pueden emplear en un análisis
estático convencional y así determinar las fuerzas internas de los elementos
utilizando la misma metodología que se emplee para las demás fuerzas estáticas.
Las fuerzas estáticas correspondientes se determinan a partir de las fuerzas
cortantes máximas factibles de piso obtenidas en el paso (e). La fuerza
correspondiente de cualquier piso se obtiene como la diferencia entre la fuerza
cortante del piso y la del piso inmediatamente por encima. En el piso superior es
igual al cortante de ese piso. Entonces, para cualquier piso j, la fuerza estática
correspondiente es:
FE _
j
1
l
-
ax
vjm
l
V max
j
_
V max
j+1
para
J> p
para
j:;t: p
(15-27)
Lo anterior se presentó teniendo en mente un análisis modal planar. Al aplicar el
método RCSC a sistemas tridimensionales hay que tener en cuenta algunos aspectos
adicionales que serán discutidos más adelante en el presente Capítulo.
15 • Análisis modal especti
Ejemplo 15-2
Se ueselit eVftrJLeliLr eL método de Lu míz cltlitdmdlit de LIit SIHnlit de Los CluAdmdos (RCSC) lit Los
resl1Ltlituos deL ejefnpLo 15-1. EL emf'JLeo de rJrocedUnimto COftdltce lit Los sigaientes resl1.Ltlitdos:
DesnLliLZlitvvtientos horizcHttlitLes f1tcixil11OS (m)
Los desr¡LliLZumiefttos múxil1tOS en. ml.Í1it 11tOUO, se okJltwierovL de:
litsí:
{
U (I ) }
mod
{
U (Z ) }
mod
{
U (3) }
mod
{U::~}
{
U (S ) }
mod
{U~~d}
J, gdl
0.148703
-0.009692
0.001618
-0.000355
0.136429
-0.003428
-0.000790
0.000557
-0.000163
0.000032
U6
Us
0.115519
0.004295
-0.001915
0.000091
0.000144
-0.000050
u4
-0.000592 -0.000017
0.000058
0.000066 -0.000010
0.084882
0.009854
-0.000280
0.049588
0.009914
0.001754
0.000118
-0.000124
-0.000054
U3
U2
0.018061
0.004698
0.001397
0.000584
0.000181
0.000041
uI
AlwrlA. Iitr¡Liml1tOs et procedilnieltto de RC')C lit mdu IUtlit de LlitsJiLlits de LIit fnlittriz IiLftterio:'.
lit f1tOl.ÍO iLltstmtivo, rJlitm el sexto riso:
ASÍ,
2
U;¡"'x = J(0.148703)2 +(-0.009692)2 + {0.OCI618)2 + {-0.000355/ + (0.000066) + {-0.00001O)2
= 0.14903 m
Este valor se compum kJustultle bien, COVI. eL valor de 0.14873 In obtenido rJOr vftedio (le llA
resfJl1.estu crOftOlógim reuLizudu evl. el ejef11.pLo 14-]. El resl1.Ltlitdo, eVl. m. pun/l.lodos los piSOS es:
,J.,gdl
rO.14903
o.13M 8
{U
ma x
0.11560
}=±-0.08545
j
0.05059
0.01872
Se hu cotocaao el sín1.kJolo ± plitm ütsistir qli.e los reslütudos
RCSC rJltcl.Íelt ser positivos o neglittivos.
vltl.~ximos
obU'-Itidos rJOr /11.fdio dc
Derivlits múxime/l.s de tJiso
El valor de LIit derivu f'Jum mdu modo en ml.Íu piso se mlwJu IttiLizliLf1.do los vatores
mosirul.Íos en fUmad]. EmrJteuvLdo tu eCltlitciólt (15-17) se OkJtielteft los siglúeVl.tes resltltudos:
525
'lámica estructural aplicada al diseño sísmico
{
AhorcA.
ar)L~cavJws
/!,( 2 ) }
mod
{
/:;.( 3 ) }
mod
{
/:;.(4 ) }
mod
{
/:;.(S) }
mod
{/:;.<;~d } t piso
0.012274
-0.006264
0.002408 -0.000912
0.000229
-0.000042
6
0.020920
-0.007723
0.001125
0.000466
-0.000307
0.000082
5
0.030627
-0.005559
-0.001635
0.000683
0.000161
-0.000108
4
0.035304
-0.000060
-0.002034
-0.000710
0.000107
0.000112
3
0.031517
0.005216
0.000358
-0.000465
-0.000305
-0.000095
2
0.018061
0.004698
0.001397
0.000584
0.000181
0.000,,41
1
eL
woced~f1t~eftto RCSC
por ejemplo. aL tercer piso:
/:;.';,'" = J(0.035304)2 + {_0.00006O)2 +(-0.0~2034)2 +(_0.000710)2 +(0.000107)2 + {0.0(0112)2
= 0.03537 ID
IJ para todos Los r~S05.
-ipiso
0.01402
0.467%h'
Ó
0.0223.t
0.744%h
5
0.03118
1.039%h
4
1.179%h
3
0.03537
ID=
0.03195
1.065%h
o.ousn
0.624%h
2
j
1
Ahora, s~ las derivas se ¡~It¡"'~esell ClíLLcltL1A.do, E'YrcA.dlíLlne~tte. a ~1ayt~y de Los vaLores de {U'?"}. los
yeslütados seYiavl, Los s~glüelltes, COVJW rDrcentaje de La aLtlHa de r)Lso (%h):
..l.piso
0.418%h'
0.696%h
--1.005%h
--1.162%h
-l.06~%h
--
0.624%h J
<= resutado
<= resutado
4 <= resutado
3 <= resutado
6
errado
5
errado
errado
errado
2
1
FI1,erzas Ú1.eyclales 11uH;l.ales (kN)
Las Jl1.erzus inerciales mrix~mlíLs rlOY v11.odo tijltc ivnpmte eL S~SI1W sobre la estmcU1XlíL. se
eri el ejemr)la 15-1 mlüt~/1l~ClíLndo llíL mlíLtr~z de Y~g~del ¡;(e ta¡;(a La cstntctlulA. VIOY Los
¡;(eSr)LlíLZlíLInie~ltas Inrix~f1ws carreSrlOflCÜf'fttes líL ClíLíilíl. f1wdo. el yeslütlíl.¡;(o estti elt kN:
obtHN~eYmt
{F(l)} {F(2)} {F(3)} {F(4)} {F(S)} {F(6) 1J
mod
1108.3
-748.9
403.3
-226.4
79.3
1016.2 -264.8
-196.9
355.8
-195.6
57.9
331.8
-47'7.4
58.2
173.4
- 91.0
86a.2
l
mod
mod
mod
moti
mod
tgdl
-18.6
632.9
761.5
-69.8
-378.0
-20.2
105.1
369.4
765.9
437.3
75.5
-148.2
-98.4
135.1
363.0
348.2
372.7
217.3
74.1
Debe evitarse combÚtlíLY estlíLsJIH'17líl.S I1w¡;(aLes líL truvés de RCSC. pites COlt¡;(,tclyilíl. a reslütlíl.aos
CYYlíL¡;(as posteYiaYvllCflte elt el ctiLutLa ¡;(e Los cortlíLfltes de piso lJ f1wlnenlos (M vaetco.
15 • Análisis modal espectr.
Cortcutte Inrixilno vnoduL de t'Jiso (kN)
EL cortante vnrixüno de r¡iso rJum mdu ¡nodo se ohtiene r¡or vftedio de iu ec/{,ucióft (15-19):
p
vii) = LF~i)
k=j
Tabla 15-7 - Ejemplo 15-2 - Valores máximos del cortante modal de piso
rnso
y(l)
mod
y(2)
mod
(kN)
(kN)
y(3)
mod
681.9
79(,
200.3
271.0
'340.9
129.4
1877
~ 190.3
116.3
57.1
369
3987.0
84';.'1
Q¿'.5
-11'18
4122.1
1208.'1
444.6
257.9
~748.9
S
2124.6
2984.8
J()':76
10"13.7
2
1
(kN)
y(6)
mod
(kN)
79.3
110S.:J
3
(kN)
403.3
y(5)
mod
~226.4
6
'1
y(4)
mod
'1 ..,
- • 1
1
(kN)
~18.6
39.3
C"1
- ,)
7
1. /
S:L4--1-5.0
'1
t .~)
106.1
29.1
Alwm Ur¡Licwnos eL Y¡Y(Jcecü,nien((J RC<.;C. por ejemy¡Lo. uL scg/1.ndo r¡iso:
y~x
=
~(3987.0)2 +(845.5)2 +(96.5)2 +(_114.8)2 +(_1ll.3)2 +(-45.0)2
= 4080.2
kN
El resH.Ltucio. eft kN. rlCua tocios Los rJisos es:
J.piso
{
1417.6
6
2369.8
5
y max } = ± 3080.3
3640.1
3
4080.2
2
4327.6
1
4
Corte LJusaL ,nrixiww
EL cortante en Lu ¡.,use deL edificio
('VL
ki'-J. se OtltliViJ en eL cjevvLpLo 15-1 r¡ara mda nVJ(.io así
1108.3
-748.9
403.3
-226.4
79.3
1016.2
- 264.8
-196.9
355.8
-195.6
57.9
331.8 -477.4
58.2
173.4
-91.0
860.2
= {4122.l 11208.5
I
444.6
I
257.9
I
-18.6
632.9
761.5
-69.8
-378.0
-20.2
105.1
369.4
765.9
437.3
75.5
-148.2
-98.4
135.1
363.0
348.2
372.7
217.3
74.1
106.11
29.1}
y(6)
y(l)
mod
mod
Alwm upLLCI;tvnos eL y¡rocedimiell.t.o RCSC
ymax
= ~(4122.1)2 +(1208.5)2 +(444.6)2 +(257.9)2 +(106.1)2
= 4327.6
+(29.1)2
kN
--------------
'iruunica estructural aplicada al diseño sísmico
MOlneV\,to de VlteLco
EL VVWVVlCV\,to de vuelco en cadlíl piso se obtiene por Inedia de Llíl eCl-LlílcióVl (15-23):
±[(h
M~i)
=
.1
k
-h')'F~i)lJ
.1
.1
k=j+1
Tabla 15-8 - Ejemplo 15-2 - Valores máximos del momento de vuelco modal de piso
riso
M(l)
mod
M(2)
mod
M(3)
mod
(.kN' m)
(kN 'm)
(kN 'm)
0.0
3324-.9
él
5
4
9698.6
3
2
1
18652.9
29505.8
414-66.8
()
53833 1
M
(4)
mod
(kN' m)
M(S)
mod
M(6)
mod
(kN 'm)
(k.~. ro)
00
-224-67
-5287.8
00
1209.8
1828./
0.0
-679.2
290.9
0.0
237.8
i 11 .0
6~9
-7333.6
-7094.7
1015.6
-6.9
60.2
170.9
-93.3
-4-558.2
-932.7
282.4
1616.3
272.2
-298.7
-6431
130.7
0.0
-55.9
1(l2.Y
66.8
68.)
~
19.2
55.3
Altorn apLiclílfnos el procedivI-tiCf1to RCSC por ejevl1rLo. aL marta r1iso:
M:"X
~(9698.6)2 +(-5287.7)2 +(1828.7)2 +(_290.9)2 +(-111.0)2 +(61.9)2
= 4080.2 kN
=
EL resltLtado. en I<N . m. pam todos Los rJisos es'
.~ piso
0.01
4252.9
{l\l
ma x}=
6
5
11201.3
4
~OO70.6
3
2
30348.81
41722.9
53865.8
1
o
MOVI-1CfttO de vHdco el1 Llíl tJlílse
EL ;nOVl1Cftto de vuelco en La tJlílse. eVl, I<N . In. cmttrib,údo rlor cada litado. se rJl1.ede obtener
rol' medio de:
1108.3 -748.9
r
{M_l" {h}'[F_l" {"lIS 1121916131
= {53833I -933 \ 1616\
1311
403.3
- 226.4
79.3
1016.2 - 264.8 -196.9
860.2
331.8 -477A
355.8
-195.6
57.9
173.4
-91.0
632.9
761.5
58.2
-69.8 -378.0
369.4
765.9
437.3
75.5
-20.2
-148.2
-98A
135.1
363.0
348.2
372.7
217.3
74.1
155 1
19}
M(4)
mod
M max
-18.6
= ~(53833.1)2 +(-932.7)2 +(1616.3)2 +(130.7)2 +(155.3)2 +(19.2)2
= 53865.8 kN· m
105.1
15 • Análisis modal espect
r Iterzas lLorizont.uLes estlÁ.t:icus corresroVLcÜefttes
Est.usJ/terzus, en kN, se cr;lJu1.Laft por vVLeGiio Gie La ew,aciÓft (15-27), con base en Los cortantes
fnoGiaLes Gie piso vVLeixilnos:
J.piso
r1417.6
2369.8-1417.6
1417.6
6
951.9
5
3080.3 - 2369.8
710.5
=+-- 559.8
3
4080.2 - 3640.1
440.3
2
4327.6- 4080.2
247.6
1
3640.1- 3080.3
4
EL VltÓfneftt.o Gie V/teLCO eft La base, eft kN . flt c(;¡Juüacto rJara est.asJI1.erzas corresr)()/'ldie/'l{:fs es:
1417.6
951.9
ME={hf[FE]={18115112191613}
710.5 =56742.1
559.8
440.3
kN.m
247.6
Este ¡1'!ülnento ~1.e vnctco es. e/t este caso, Ugeramenle s/tperior aL q14.e se obt.nvo w],teriorme/'l{e
a/'lLicanúio RC5;C cte Los flWV!tentCJs de vuetco flwdaLes. Dado qH,e e/t eJE' 111fJ Lo 14--3 "e encontró Lu
resp/testa umwLógim de La misvna estrttctH.ra aftte eL misvlw acderograma de El Ce/ttro, mijo
eSrJectro se empLeó en et presente ejempLo, 11/.¡.eden ILacerse aLg/utas comrJaraciones ucerca Gie
Los vatores 1·1teixÍflWS o~JtevLidos en eL ejenwLo 14-3 Ij Los valores meixÍflws rro~lalJLes cubüudos
Itt.Uizal1I1.o RCSC en et presente ejempLo.
Tabla 15-9 - Ejemplo 15-2 - Comparación de los valores obtenidos en los ejemplos 14-3, 15-1 Y 15-2
Pvm'imetro
DesplViZVimieVl.to
de L¡;'i cuhierw
E¡em¡olo 14-3
AVl.6tlisis
CroVl.ológico
EJempLo 15-1
Espectml MOviv¡[
Vvilor íl.hsoluto
Ejemplo ¡52
EspectmllV1o¡;{vil
0.14873 m
0.16044 m
O. i~9OJ m
Corte BViS¡;,il
4355.8 kN
rv10VVUeVl.I"() ¡;fe vuelco
51'r 40tJ kN . m
6168.4 kN
56687 kN,
m
RCSC
~327.6 k,"'~
5:l866 kN·
m
COVV\.() rJlteGie verse Los vaLores o~lteftidos por meGiio deL I1roceGiimiento RC';C soto varialt con
resl1ecto aL fl'leixÍfI'lO valor crmtoLógico ef'l Lu terceru ciJra decimaL
•
Con el fin de aclarar un paco más aquellos casos en los cuales no es lícito utilizar el
método RCSC, los dos errores más comunes en su aplicación consisten aplicar el
procedimiento a los desplazamientos modales [Umod ] , o a las fuerzas modales [Fmod ] ,
obteniendo un vector de desplazamientos, o de fuerzas horizontales, de los pisos; para
luego ser empleado directamente en un análisis de la estructura por procedimientos
convencionales. El error se introduce en aquellos pisos en los cuales los
desplazamientos o las fuerzas cambian de signo, con respecto al piso inmediatamente
superior, pues tanto la deriva como el cortante de piso se calcula dentro del modo como
la diferencia algebraica, tomando en cuenta el signo; pero si esta diferencia se calcula a
partir de desplazamientos, o tuer-zas, que se obtuvieron sacando raíz cuadrada de los
cuadrados de los valores de cada modo, los valores pierden su signo al elevar al
cuadrado, y la diferencia es en consecuencia menor.
529
uunica estructural aplicada al diseño sísmico
.3.3 Método de la combinación cuadrática completa (CCC)
El método de la raíz cuadrada de la suma de los cuadrados parte de la premisa de las
respuestas de los grados de libertad desacoplados son estadísticamente independientes.
En aquellos casos en los cuales existe interacción modal debe recurrirse a otros
procedimientos. El más utilizado de ellos se conoce como el método de la combinación
cuadrática completa (Cce). La forma de combinar la respuesta de los diferentes
parámetros modales, r, se expresa así:
(15-28)
donde r, y rj corresponden a las respuestas modales máximas del parámetro, para los
modos i y j respectivamente, y ru corresponde al coeficiente de correlación entre los dos
modos, el cual varía entre cero y uno, siendo uno para el modo con si mismo. Por esta
última razón, los términos de las dos sumatorias para el mismo modo pueden sacarse
del producto, lo cual conduce a la siguiente expresión:
r ""
m
m m
i=l
i=lj=l
;*jj*i
L r¡2 +L L. (ri . r j . P\i)
(15-29)
Es evidente aquí que la primera sumatoría corresponde al método de la raíz cuadrada
de la suma de los cuadrados (RCSC), el cual el un caso particular del método CCC
cuando los coeficientes de correlación entre modos son cero, lo cual solo ocurre cuando
hay independencia estadística entre ellos, confirmando la base del método RCSC.
El método fue planteado por primera vez por Rosenblueth [Rosenblueth y Elorduy,
1969], y posteriormente Der Kíureghían [Der Kiureqhian, 1981] propuso una manera
diferente de calcular los coeficientes de correlación, la cual es la más empleada hoy en
día, y es la que se presenta a continuación. En [Cupta, 1990] se introducen otros
métodos y se comparan con los dos mencionados. Todos ellos se fundamentan en la
teoría de \ ibraciones aleatorias y su deducción se sale del alcance de una presentación
introductoria.
De acuerdo con el procedimiento de Der Kíureghían los coeficientes de correlación se
calculan por medio de:
(15-30)
donde ~ y Si son los coeficientes de amortiguamiento de los modos i y j,
respectivamente, y ~ij = (j},/ffij, siendo 0\ y ffij las frecuencia naturales, en radianes por
segundo de los modos i y J. respectivamente. Cuando el coeficiente de amortiguamiento
crítico es el mismo para los dos modos, la ecuación anterior se convierte en:
(15-31)
Un aspecto que se deduce de la ecuación anterior, es que la ausencia de
amortiguamiento hace que el coeficiente de correlación se convierta en cero. En la
15 • Análisis modal espect i
Figura 15-10 se grafíca la ecuación (15-31) anterior. Allí es evidente que el coeficiente
de correlación se hace mayor en la medida que las dos frecuencias se acercan, y que
este efecto es más pronunciado cuando el amortiguamiento es mayor.
1_0
t~
0_9
0_8
O]
0_6
~ 1\ /~ =0.0
0.4
0.3
0.0
¡}' \/ ~=O 02
T
0.2
0.1
~=( .15
/~= 0.10
0.5
Pu
-,=0. O
p\'\V~= 0.01
!I
~'/ I
'\ K' ,"-...ro-
pJJ~ I~ r-:'
0.0
0.5
,
1.0
1.5
---
2.0
r--
2.5
--
3.0
3.5
4.0
4.5
5.0
Figura 15-10 - Coeficiente de correlación para el método CCC
La gráfica anterior demuestra que aun para amortiguamientos hasta de 10% del crítico,
para frecuencias que difieran por UJ"l factor de 2 o más (0.5 > ~ij o ~ij> 2), el coeficiente de .
correlación Pij, se mantiene por debajo de 0.10. La importancia del método eee se hace
manifiesta cuando existen frecuencias naturales cercanas, de resto los resultados
obtenidos son prácticamente los mismos que se obtendrían con el método ReSc.
Desde el punto de vista de la utilización del método debe realizarse de la misma
manera que para el ReSe, la diferencia estriba en la manera como se realizan las sumas
antes de extraer la raíz cuadrada. La manera más simple de realizar la operación
implícita en 1,,1 ecuación (! 5-28) es realizar el siguiente producto de rnarnces:
(15-32)
Ejemplo 15-3
Se deseCA. eVftpLeCA.r eL ntétodo de LCA. covnbinCA.(Íó¡t cltCA.vtráticCA. compLetCA. (cce) CA. Los resltLtCA.dos
deL ejcvltpLo 15-1. eL CH.CA.LJlte eL VniSf1!1O empLcCA.do PWCA. el vl"Létodo RCSC m el ejempLo 15-2. LCA.s
JrcCH.enciCA.s lJ períodos ltCA.tI1.YCA.Les deL siste/1tCA.. se dCA.lt en LCA. tCA.bLCA. 15-10.
Tabla 15-10 - Ejemplo 15-3 - Valores de las frecuencias y períodos naturales
Modo
ol
ro
(radls)2
(rad/s)
f
(Hertz)
T
(s)
~
,
2'! 108
5.3Y52
0.85866
1.1646
2
:>0-; .81
17.373
2.76495
0.3616
:5
973.78
2494.3
3 ~ .205
4.96647
0.2013
49.943
7.94849
0.1258
.)
r
4tJ~Ó.5
68.458
0.09~8
f)
7: :38
84.344
1089550
:]42372
4
5al
00745
uámica estructural aplicada al diseño sísmico
uüLiZCU1-do Los valores de La jremel'u:ia
cocientes !3ij
0),
el'L rad/s constnu-nos La sigfüel'Lte tabLa con Los
= o>'/OOj:
Tabla 15-11- Ejemplo 15-3 - Valores del cociente de frecuencias !3ij
1
V'IW¡;;(O ~
2
=o>'/OOj
5
~.
3
6
5.3952
17.373
31205
4·9.943
68.458
84.344
1
5.3952
100000
0.31055
0.17290
O 10803
007881
0.06397
2
3
4
~ 7.373
.1; .205
49.943
68.458
84·.344
322008
5.78384·
9.25693'
1.00000
'1.7%18
0.55674
1.00000
1.60048
0.34786
0.2"378
0.20598
0.62481
1.00000
1.37072
045583
0.72954
1.00000
036997
0.59213
0.81165
1.68881
1.23205
100000
WU)¡¡jo.1
O)
5
f)
(rad/s)
2.87475
3.94048
4.85489
12.68869
15.6331 Ó
2.19382
2.70290
W.ego se caLcIÚalt Los coe]i.cievttes de corretación, H.üLizlil.It¡;;{o La eCl1.aciólt (15-31) IJ con IHt
coef~cil.'lttl' etl.' (M11OrUgl1.amil'ltlD cnuco etl' ~ = 0.05, iglHitL (itL cmr Leado CIt Los ejemrLos 14-3. 151 IJ 15-2 para La misma estn1.cUua. Los coejiciel1-tes ete correLaciém se presl.'Jttlil.lt l.'VI. La sig¡üente
ta~,La.
Tabla 15-12 - Ejemplo 15-3 - Valores del coeficiente de correlación Pij
,
.1 VVln¡¡jo ~
1
;
2
100üüO
000552
n00552
2
3
0.00179
"r
0.00080
0.00048
000035
0.02641
0.00710
0.00365
0.00245
5
(,
4
:3
1.00000
0.04135
0.00080
000710
0.04135
1.00000
0.00048
000365
0.01406
0.01406
0.00820
0.08958
003322
1.00000
O: ><519
0.0017')
0.02641
100000
()
S
0.08958
0.00035
0.m245
0.00320
003322
0.18519
.100000
pmceetiínief1tc co:ti!1.ce lit Los sigLúrntes reslútados. elt el uiLc,üo ete Los
etespLCitZamielttos vHw<únos del sexto riso
I:J empLeu
(tE
¡;2 "" { 0.148703
I - 0.009692 I
0.001618
0.000066
I- 0.000010}
0.00179
0.00080
0.00048
0.00035
0.148703
0.00552
1.00000 0.02641
0.00710
0.00365
0.00245
-0.009692
0.00179
0.00080
0.02641
0.00710
1.00000
0.04135
0.04135 0.01406
1.00000 0.08958
0.001618
0.00820
x
-0.000355
0.03322
0.00048
0.00365
0.00035
0.00245
0.01406
0.00820
0.08958
0.03322
0.18519
1.00000
1.00000 0.00552
x
I - 0.000355 I
1.00000
0.18519
0.000066
-0.000010
= 0.022193
u~ax =
Ji2 = ~0.022193 = U.l48974
ID
Este valor se comrura ~1líl.Staf1,tc ~,iel'L COI1- el valor etr 0.14873 m
resplH'stDL crDlloLógicDL reDLLizDLaDL el1- el cjev¡trJLo 14-3.
o~jWtido
rJor Inecüo de La
•
15 • . A nálisis modal especu
15.3.4 Combinación de componentes horizontales
En una estructura modelada tridímensionalmente se puede llegar a tener seis
direcciones globales para plantear el equilibrio; consistentes en dos desplazamientos
horizontales ortogonales en planta, un desplazamiento vertical, y tres rotaciones
alrededor de estos mismos ejes. Dado que los registros acelerográficos que se obtienen
de sismos reales solo contienen tres componentes de desplazamiento, dos horizontales
ortogonales y una vertical; los registros sísmicos, o sus espectros, que se emplean en el
estudio de la respuesta de la estructura están limitados a estas tres componentes, y se
desconocen las componentes rotacionales.
Por otro lado, el estudio de la respuesta de una estructura ante aceleraciones verticales
es elaborado en la formulación del modelo de la estructura y en la manera como se
determinan los elementos críticos de la respuesta. Aspectos tales como la excitación
vertical en los diferentes apoyos y su interacción con las componentes horizontales del
movímíento juegan un papel fundamental. La importancia de la respuesta ante
aceleraciones verticales de estructuras convencionales ha sido motivo de debate desde
hace mucho tiempo, pero tradicionalmente ha prevalecido el criterio de que es
secundaria al ser comparada con la respuesta ante aceleraciones horizontales. Estos
aspectos se salen del alcance de estas notas y por esta razón la discusión aquí se limita
a la respuesta ante aceleraciones horizontales.
En la Sección 11.3.I(h), al plantear las ecuaciones de equilibrio dinámico se distinguía
entre la dirección en que actúan las aceleraciones del terreno y la airección en que
actúan las fuerzas inerciales de la estructura, En la Figura 15-11 se muestran las
direcciones x-y-z que describen las direcciones en las cuales actúan las fuerzas
inerciales de un diafragma de la estructura, y las direcciones de las dos componentes
horízontale., de un acelerograma, que en este casa se han denominado 1·2.
z
Figura 15-11- Dirección de las aceleraciones de los grados de libertad de una estructura modeladz
por medio de diafragmas rígidos y la dirección de las excitaciones horizontales del terreno
Al plantear las ecuaciones de equilibrio de la estructura, las aceleraciones horizontales
del terreno deben ser colíneales con las aceleraciones inerciales de las direcciones
principales de la estructura. Entonces en las ecuaciones de equilibrio, tenemos:
[ME]{Ü}+ [KE]{U} = -[ME][y]{x o}
(15-33)
Dado que existen tres grados de libertad por diafragma, las ecuaciones simultáneas de
equilibrio dadas en la ecuación 05-33) tendrian la forma que se da a continuación,
donde m~ es la masa translacional del nivel i, y m~ es la masa rotacional, con respecto
a un eje vertical localizado en el centro de masa del diafragma.
..
inámica estructural apliccula al diseño sísmico
o 1 : o
o \"': o
o
o
o
m:: : O
o
____L- __ l.
I
I
o
o
o
o
_
O:
O: : o
I
---~-- ....
o
o
o
k
---
: O
o
O:
: O
O:
: O
o
o
k pyp•
I
k pxpy
k pypy
I
O
o
o
: O
o
;
mi:
r I
I
---,.-;--1----
___ -+I __. -fI
O:
p xp x
o
o
: O
----:---t---
_
k p x pz
kpl'P'
O: : m:
o :... :
O:
I
I
I
I
I
I
I
o'.
I
o
o ÜPy
o
I
I
---"t--""1----
O
l ... I
o
o
o
I
I
I
I
O: : m~ o
o
o
o : ... : o
O: : o
I
I
___ .l __ ..J
I
I
----r--"t'---
o
o
o
I
o
o
o
o
o
o
o
o
o
_
o
o
o
O
o
: O
k p xix
kpx.iy
k pyix
, , kpzj~
k
------I-.--r-----
k
p y jy
I
k pxiz
1
I
1
k px1 x
k px1 y
k px1z
kp)'iz
I
I
I
k pyIx
kp)'oly
k pyIz
I
,
I
I k~zlx
~.!'~i!_ ----'""1---t-----~-~~y- _~~z~~
~-"~'- _k_~~,,- pzpz II I
I
I
:
I
I
I
I
--------------j---r-------------1--r--------- ----s,
I
ixpx
k ixpy
k¡ypx
k iypy
l\.
~-~P!- -~~~-
k¡xpz:
: k ixix
,
k iyix
:
k
:
k izix
_____
a pz -l ___ L. _____
k¡yPZ
I
'"
I
,
I
I
pziz
k ix iy
k
ixiz :
k¡yiy
k i:r :z
~_iz.!~_
:L- _____
k izh
:
iziz -l_.__
_k ___
I
----- ----- ------j---r--------,
I
l
k Ix p•
k Ix Py
k lx pz
I
l yp•
k l yPy
k l ypz
I
k l ZP'
k I ZPy
k
k
lzpz
I
I
k 1xíx
k
Ixty
:
1
I
I
I
I
I
I
k l yiy
k l yiz
I
I
,I k 1zi x
k 1ziy
k 1ziz
,I
m tP
,
I
I
1
O
I
I
o
k ix h
k
ix 1 y
k ix1z
k Iy1x
k¡yly
k iy tz
kizIz
-~~:>- -----
----- ----- -----
-----;--- ....
I
I
k lxiz I
I k Ix Ix
... , k t yix
I
:
I
k
...
k Ixly
k
k l ylx
k lyl y
k Iylz
,I k lzlx
k Izly
klzlz
I
I
lx1z
O
I
I
I
I
O
O
O
O
I
l'"
I
I
O
O
O
.~ ~
O ...
,"1
1
O
O
O ___
O
O
O O -O ___
O ..1.I __ -1I____
m::-l- __ :....., ___
O
--I
I
I
,
I
I
--- ---- ----¡--- .I. . --;- --- ----r---,---, --- ---- - -I
I
O
mP
t
O
O
O
I
...
I
O
O
_
O
O
\ m~
O
O
I
I
O
O
O
O
O , ... 1I O
m;
t
O
I
I
I
I
O
O
O
O
O
mi
I
O
I O
I
O
O
I
I
,
I
O
I
I
--- ---- ----'---r--I
,
.....
--- -- -- ----:--, --- --I
O
O
o
I
I
O
O
O
, ...
O
I
l
O
O
I
I
O
Il
I
O
O
I
I
O
O
I
r
I
---1"7--1---I
I
--- ....I ---1---O , II mIt
O
O
, ...
I
I
I
I
I
I
I
O
O
--¡¡
__ o
r-
O I1- O
O 1O- f -1
O O O
- -
{:::}
___ o
___ o
O
mI
t
O
O
mi
r
-
-
I-r-j
1 O
O 1
I-f-
O O
(15-34)
Al desacoplar las ecuaciones simultáneas indicadas en la ecuación (15-34) por medio de
las transformaciones de coordenadas:
y
y premultiplicar por
{u} = [<I>]{l1}
(15-35)
[<I>]T a ambos lados de la ecuación, se obtiene n ecuaciones del tipo:
(15-36)
y si suponemos, por ahora, que disponemos de un espectro de desplazamientos para la
dirección x, Sdx, el cual es diferente del que se tienen para la dirección y,
tenemos, por analogía con la ecuación (15-7):
S<ly'
Entonces
n 5-37)
16 • Análisis modal espectr,
pero en la combinación de las componentes indicada en la ecuación anterior los valores
espectrales no necesariamente ocurrieron en le mismo instante, ni reflejan el ángulo de
ataque ~ más desfavorable, indicado en la Figura 15-11. En realidad, lo único que
podemos decir con certeza es que el valor máximo que se puede asignar al grado de
libertad desacoplado 11; si el sismo actúa únicamente en la dirección x, es:
05-38)
y que el valor máximo que se puede asignar al grado de libertad desacoplado 11i si el
sismo actúa únicamente en la dirección y, es:
(15-39)
Los desplazamientos dinámicos modales máximos que se presentan en la estructura,
correspondientes a cada modo individual, por ejemplo el modo (i), cuando el sismo
actúa únicamente en la dirección x, son:
(15-40)
y si el sismo actúa únicamente en la dirección y, son:
{U~i)} = {<l>(i)}. (11¡ )max
=
{tj>(i) }·Iu¡y .Sdy (Ti '~i)1
(15-41)
De una manera análoga, para cada modo individual (í), las fuerzas dinámicas inerciales
modales máximas que se presentan en la estructura cuando el sismo actúa en la
dirección x, pueden obtenerse multiplicando los desplazamientos modales máximos en
la dirección x, por la matriz de rigidez de la estructura:
(15-42)
y si el sismo actúa únicamente en la dirección y, son:
{F;i)} = [KHu~i)} = [~H<l>(i)}. (~¡ )ma~
=
(15-43)
[K]{<l>(i'Hu¡y 'Sdy(T¡'~i)1
Lo mismo ocurre para cualquier parámetro de respuesta r, pues se tiene un valor para
cada modo cuando el sismo actúa en la dirección x, y otro cuando actúa únicamente en
la dirección y. Utilizando cualquiera de los métodos de combinación modal, RCSC o
CCC, obtendríamos el valor máximo factible del parámetro, independientemente para
las direcciones x y y, como r x y r y , respectivamente. Ahora solo nos resta determinar la
forma como se combinan estos resultados de las dos direcciones principales.
En el análisis dinámico modal espectral de estructuras tridimensionales lo usual es
emplear el mismo espectro en las dos direcciones principales, pues no existen
elementos de juicio, en el estado actual del conocimiento, para afectar los dos
espectros y hacerlos diferentes. En la Sección 5.6 se discutió la variación entre los
espectros obtenidos para las dos componentes horizontales de un mismo sismo. En
general la correlación entre las dos componentes horizontales de un registro
685
-
Dinámica estructural aplicada al diseño sísmico
ace!erográfico es baja [Clough y Penrien, 1993], y es recomendable realizar una
reducción de una de las dos componentes multiplicándola por un coeficiente 'A que
oscila entre O y l. Entonces, de acuerdo con lo indicado en la Figura 15-12 se tendría un
espectro actuando en la dirección 1 y el mismo espectro, afectado por el coeficiente 'A,
actuando en la dirección 2.
r max
y
1
2
r2
x
rx
-x
Figura 15-12· Direcciones en que actúan las dos componentes horizontales del sismo
Entonces los valores máximos probables del parámetro r en las direcciones 1 y 2 son:
r1 :::: rx cos 13 + rysenf
(lS-44)
r2 :::: -'A rx sen~ + 'A r y cos 13
El máximo probable r max ' se obtiene por medio de:
(15-45)
Reemplazando (15-44) en (15-45):
r
max
.,~
_
--:. :,y derivando con
drmax
d13
== -
. ."
=[(r;'I'lr"''A2.~;).cos~ 13 + (r; + 'A2r;)sen213 + 2rx ry (1- 'A2)sen13 cos13]
.
1/2
(15-46)
respect~' al ~ñ~tllo 13:
2cos 13 sen13(r; +),,2 r:) +2sen13 cos /3(r; +),,2 r:) +(- sen213 +cos 213 )2rJy(1_),,2) (l 5-47)
2. [(1'; +),,2 r:) CQS213+(r; + A?r;~en2/3 + 2rxry(1+ ),,2)sen13cos13t2
El valor del ángulo 13 que conduce al máximo valor de r max se obtiene igualando la
derivada anterior a cero:
Reordenando:
(15-49)
Pero:
(15-50)
lB • ...'lllálisís modal espectral
Entonces:
(15-51)
Solo nos resta definir valores para el parámetro A. Clough y Penzien rClough y Penzien,
1993], indican que la reducción de la componente menor con respecto a la mayor debe
ser del orden del quince por ciento, convírtíendola en el 85 por ciento de la otra, lo cual
lleva a un valor de A = 0.85.
Ejemplo 15-4
Se ¡iene IH'L nu[ficio de Cilt(() ¡'Jisos ue ,i{{¡utll;!. c/1.(,uArudLl lj .d,c)1'Lde todos 1m rJÓrticos SO/t igltcües.
con coLIU1tltas ae 0.5 por 0.5 m ae secáón lj Vig(A5 ae 0.4 m al' altdw 1'101' 0.5 m al' alto. Ft
InCLtenaL al' todos Los eLevlte/tlos liCIte I1Jt módlüo de dasticidctd de 25 GPa. Llit cslYlv:tJtm
tiene IUt 11tlUO eSlrt1.c.UuaL que cltCierm eL vacío del ascemor. con 111 = 0.6279 m". 122 = 0.5761 m"
2
lj E = 25 GPa . La IVLaSC'L de Lct eslnuL!tru es 1 Mg/m de Losa. Las dimnlsio/tes de [os vanos. Las
n.LtlUas de Los pisos. lj La LocctLizcLciém del mitro eslntctluuL se Inl·1estrun elt Lu Fig/ua 15-13. EL
diaJrugmu se comideru iv!futital1tCnle rígido en s/t rJrorJio pLalw lj tievL<' tres grudos de
Libertad: IHtct rolucióll con resrJecCO u IUt eje verticaL lj dos desp(uzctl1tieltlos horizOIt1ctLes
ortogonaLes elt La ¡,ürección de Los ejes x-y.
y
I
@-~
-,I
I
I
-J¡I
@
©
@
G)
Figura 15-13 - Ejemplo 15-4
Se desea bltscar La direcciém ae La reSpl1esta Inlixívna ¡10r el ¡1yocedímíeltto Íltdícado en La
¡1resettte sección. Se co/tsídem qlie el ejecto mris Jlterte deL sismo pltede actltctr elt cltaLqlúer
díreccíó/t en rJL(,LntlA-, lj lljlte La aíreccíólt l11eltOsJ,terte corresrlonde a L(7. contr¡Oltflttc ortogo/1.IA-L a
LIA- CLnteríor lj tiene l1.It v(,Ltor del 85% de La deL selttidoJlterte. Los ejectos deL síSI1W se descríbclt
lA- través de 11.ít esnectro de ShitJIA-!(,L-SOZeVl (Sección 7.2.4) con /uta aceLeraciólt mlixímu deL
lnreno ígl1.aL IA-I 30% de La de uf gruvedud (Ate = 0.3g). Se cottsíderu que IUt cocJícít'ntc dt'
IA-I;lOrtig/1.wnintW de 5% del crítico (S = 0.05) es reweselttlA-tivo para Lu res¡1l1esLu de la
estn1.ctluR
«mica estructural aplicada al diseño sísmico
El espectro ete SfLitJtA-tlíL-Sozev\, estti etrfil1,ieto
I
25A te T = 7.5T
~JlíLm
IHt tA-fnortig/~.tA-miel1,to ete 2% por f'lteetio ete:
ptA-rtA-
T :::; 0.15s
Sa(g}= 3.75A te=1.125 ~JtA,rtA- 0.15s < T :::;
l.5A te =__
0.45 ptA-m 0.4s < T
__
T
O.4s
T
PtA-m convertírlo tA- JCt LU1wrtigJl,líLf'ltieftto ettA-eto se f1tJÜti~JLiclíLlt LtA-s oretefttA-ettA-S espectmLes por
8
6+100~
(/jIte en este ClíLSO corres~)OItete tA8
----=0.727
6+100·0.05
EL esncctro etc ctespL1JLZVllnielttos se otJtielte rJor f1'leetio etc:
E/ttoltCes. pur!..\. Ate =0.3g
Ij ~
=5%:
7.5 . T· 0.727· 9.8 .T 2 -
13
= 1.354· T
2
T :::; 0.15s
41t
1
2
= 0.203· T
plíLm 0.15s < T :::;
41t
u.45
2 1
-·0.727·9.8·T -=0.081·T
plíLm O.4s < T
2
1.125· 0.727· 9.8·T
2
T
-2
O.4s
41t
0.25
I
0.20
I
1;=5%
C.15
Sd
(m)
0.10
0.05
/
0.00
O
"
/
V
/
-:
~/
/
1.5
0.5
V1
2
I
I
2.5
3
Período T (s)
Figura 15-14 - Espectro de diseño de desplazamiento
Lu musu tn..\.sLuriollt..\.L ete cudtA, lUtO de Los rJisos corres¡101tete u m, = 12m· 12m . 1Mg/~ = 144
Mg. Lv. mn.su rot[).cicmuL ete CltuL(/jlüer rJiso correspmtcte U m, = (mI/A) . (1"" + lyy) = (l44Mg
cno
15 • Análisis modal espectral
(12 4/12+124/12) = 3456 Mg . m 2 . Con estos valores se COvlstntlje /~.ft~ m~triz de m~sCA. de
tod~ L~ esl.Ylv:t/WA. [ME).
!144m2 )
•
dos casos. eVl eL C~SO (~) Los ejes /'lriVLCi/'l~Les de L~ estn1.ctlu~ SOVl coLine~Les con Los
el C~so (t,) L~ estnl.cUi.Y~ está LocaLizCA.d~ elt rJL~ftL~ de t~L Vlt~VU'm q/te S/I'<; ejes
prÍltci/'l~Les. x'-y'. están rot~dos 45° con resuecto ~ Los ejes x-y Cft Los utr.ües ~ctl1.l/L eL SiSVltO.
COVll.O Lo mEteS tm Le;{. Fig IUl/L 15-15.
Se
/'lLwtte~n
ejes x-y.
Elt
Y
y
y.'
I
@-J.I
-r
I
1
@---
I
- t t - - -__-
'r
~
2V
G)-~
1
x'
/
"-..
/
I
I
I
I
-"1-
©
/
-----'----.---x
X
t@
@
Caso (a)
Caso (b)
Figura 15-15 - Ejemplo 15-4
AL resolver et pYOtJLeVltl/L de valores /'lropios pLl/Llttee;{.do r¡or Ll/LS ecuacíones de VltOvÍll'lÍento. se
ObÜel1.CI1 Ll/LS siglüel1.tesJreCIWtci¡;¡s 1:1 y¡erfodos. 0 eL valor l/j/1.e se obtiene en eL esnectro ~te ¡Úsefíü
de despLCíLZl/Lf11iClttos'
Tabla 15-13 - Ejemplo 15-4 - Caso (a) - Frecuencias naturales y períodos,
y valor leído del espectro de desplazamiento
Modo
(ji
ro
f
(radls)
(Hertz)
,
(rad/s)?
109.160
2
156.380
12.505
3
4
5
6
7
241.850
1236.0
3139.5
4335.9
15.551
35.157
56.032
65.848
71.044
103.920
136.950
-t
8
9
10
11
12
13
14
H'
'-'
50472
10800
n~755
21016
33310
7460:'
118670
162130
2S8330
10.448
144.970
182.510
273.140
344.480
402.650
S08.270
.<1.
589
Sd
(m)
1.6627
19900
0.6014
0.0487
05025
0.0407
2.4748
5.5948
8.9168
10.4790
0.4-D40
0.1787
O.OJ27
0.ClO6.)
0.09543
00012
11.3060
16.5380
0.08845
0.06047
217940
0.04588
000094
O.OOOJO
0.00013
23.0700
29.0440
43.4660
54.8210
64.077CJ
0.04335
0.03443
0.(J2301
000011
0.00005S
0.(JOO016
001824
CJ.01561
0.01236
0.000008
OOOOOOS
0.000003
80.8:'140
Los f1'l.odos de vitJmciól1. correspof 1,Üefttes son:
T
(s)
o...
I
..,~)
r z,
.,
I
0.00 "J')
-ámica estructural aplicada al diseño sísmico
Tabla 15-14 - Ejemplo 15-4 - Caso (a) - Modos de vibración
q(.j[
Inrlllo 1
Hwdo 2
IIlOll0 3
Illorio 4
111.01105
IllOdo 6
m.orto 7
Hlorio 8
USx
USy
USx
U4x
-0033311
0.033311
0005540
004-2534-
O
0.009bt.'J
0022609
0.022609
-0007175
-0.032388
-0032388
O
-0.024-708
0.024-708
0002056
0.013084-0.0130840.008384-
-0.0104-18
00'~2534
0.025075
-0025075
-0.0278740.027874
0.005084-
0.032357
0.032357
O
0.016789
-0016789
0.007967
0.0004-4-6
-0.0004-4-6
0001331
0.007299
0.007299
O
0.019361
-0.019361
-0.004-4-41
0.001824-0001824-0.003315
0.024-005
-0.024-005
-0.00724-0
0020737
0.021730
-0020702
0032788
-0.014-171
0.021730
0.020702
0.03278d
0.024-919
-0.024-919
-0.013297
0020737
0.004104-
0009392
-0009392
O
0.005863
0.004799
O
-0.001°52
0.013297
-0.008509
0.014-171
000434-3
-00124-72
0011501
0003630
-0.02e-323
-0.027158
-0.003630
00034-87
0020323
0.005500
0.007282
0.027158
0.004-410
-0.011185
0.011185
u,
0011501
O
0033133
0.033133
-0.005500
00124-72
0002680
U tx
-0.00;~4b8
0.003411
00004-39
0.0135W~
00n039
-0.0174-82
0.004-4-68
0001054-
0003411
0000'U9
0001228
0.013588
0.003758
0.014039
-001'1671
0.01 St)7~
0.0 ~ 74·82
002+371
-0024-371
O
0.007192
-0.000016
·0007951
u;
u.,
U3x
U3y
U3x
U' x
U' y
u.,
UIx
O
0006892
O
0.0104-18
0.0034-13
0003081
<lril
IllO{:{O
9
IIlu¡Ú,10
Ill(Hin
11
III<JriíJ 1;!
IIt.Urlo 13
1I·l(xiu 1't
VSx
Vsv
V sz
V4x
V4v
-0.004634
0.021089
0.014876
-0.011999
-0008721
-0.005035
0.004-63'1-
0021089
0014876
-0.011999
0.008721
0005035
0.003095
0001571
O
0004299
O
-0.002308
O
-0.000983
V4z
U3x
V3v
().01469~
0014-t9"
"
n')"n"~
• __
() W70/7
0.032870
0024-051
0.01815
-0.031013
0.022027
0032870
-0.024-051
0.018159
V.vJ,~
1
)
IIHltÚ¡
iS
-0003695
0.013389
-0013389
0004587
O
0006315
()
0.OOt,460
O
000:'5:'3
-0~";!OO2
-0016135
001174-4
-0.026995
-0.01984-2
·0030~)(n
·0.022606
0022002
-C016135
001174-4-
0026995
0.01984-2
0030593
0.022600
0.006828
O
-0.003158
O
O.0052'Y'
O
-0.00594-t,
V2x
0022590
0.031187
0.022670
-0.008385
-0.00614-3
0.034-630
0.025606
V2y
-0022590
0.031187
-0.022670
-0.008385
0.006143
0.03'1-630
-0.025600
V3z
V2z
-0.007354-
O
0006207
O
-0001628
O
0.006730
V Ix
-0.018507
0/128857
0021255
0038063
0.028084-
-0031336
-0023222
u.,
0018507
0.028857
-0021255
0.038063
-0_028084-
ü.031J36
0.023222
Vi<
0005827
0.005626
O
0.007421
O
-0.OO60H4-
.
O
Tabla 15-15 - Ejemplo 15-4 - Caso (a) - Coeficientes de participación modal
V'/IOJo
~
e,
2
3
4
7.967
14.236
16.061
-7.967
5.408
5.408
5
7.901
790~
6
0230
7
0.230
-6.196
8
1.815
9
10
/1
-1132
~2
I
<Xx
1'1.236
16.061
4.894
3.604
3.392
13
14
2.510
~5
1.516
2.04~
6.196
-1.815
1.132
4894
-3.604
3.392
2_510
2.041
¡ .S1ó
Los eteSr)Lazuvvü('~trOS paru cuda grado ete Li~Jertad Cfll1tVuio el SLsI1tO acU1,a fÜÜCaf'f1l'ltte elt La
aírecciónx se olrJtie~tevl deL proa/laO {V~i)}:= {cj>(i)}.(u x ,Sd) ':J tAJtáLoguf'ftf'lttc, CflWtdo eL SiSf1'lO
15 • Allálisis modal espectrc
uctl1,U 111LÍcuvvU'Itte en Lu direc(Íólt y IIJor Vltedio de {U~i)}={<I>(i)}'(ay 'Sd)' COlt Los wodl1,ctos
{F~i)}=[KE]{<I>(i)}'(aX'Sd) I:J {F~i)}=[KE]{<I>(i)}'(aY'Sd)' obteVLeVJtOS LasJH-etzas horizoVLtaLes elt
Lus direccímtes x 11 y reSr¡ecüvameltte. IIJUnA. cada Inodo. I:J Las col11pmteVLtes deL corte busuL
lutidudes de kN I:J kN . m:
Cpi.<' se l1UteslnA.it u conlÍftltuciÓlt. en
Tabla 15-16 - Ejemplo 15-4 - Caso (a) - Fuerzas modales, sismo actuando solo en x y solo en
D(jl
Inodo
x
1
HlOriO
'I
Si.slllOX
3630
-363.0
Si.(,:110
,iSlllO
2
IllOdo
3
fl'lOdo
4-
I'/lodo
5
sismo x
Si.SfllO ~I
¡4-1.5
-2198
-219.8
14-1.5
-1'1-1.5
-219.8
-219.8
11
Si.SIIlO x
Si.sHlO If
6261
6261
227.5
-227.5
-14·1.~)
6261
626.1
-227.5
227.5
si.s:no
y
Si.slllO x
Si.SIVlO Ij
Fsx
Fsy
Msz
F4x
F4v
-363.0
363.0
14-4-9.0
1449.0
O
O
2105,4
21054
1077.4-
1077.4-
O
O
3038
-303.8
4-76:,
476.3
152.3
-152.3
-2.8
28
4-9.5
4-9.5
-3038
30377
476.3
4·76.3
-152.3
152.3
2.8
-2.8
49.5
49.5
~z
:329.8
1329.8
O
O
1734.7
1734-7
1999
-199.9
O
O
F3x
F3v
M3z
F2x
F2y
M2z
Flx
F¡y
Miz
Vx
Vv
Mz
226.0
226.0
319.9
319.9
85.2
-852
129.5
-129.5
222.5
222.5
129.5 .
22tJ.O
226.0
3199
3199
-85.2
85.2
1295
222.5
222.5
1U73,4
1073.4
O
O
1276.7
'1276.7
-7200
720.6
O
O
135.9
-;35.9
169.3
léJ9.9
32.9
-329
164-.7
-164-70
224-9
224-9
135.9
135.9
169.3
169.9
-32.9
32.9
-164.7
164.7
224.9
224.9
7009
700.9
O
O
759.3
-759.3
-103'1.9
1034-.9
O
O
4-8.7
'18.7
502
50.2
4.0
-4-.0
85.0
85.02
95.3
9°J.C>.,
-4-8 7
4-8.7
502
502
-34-.0
4-.0
-85.0
85.0
953
9['
.,
. ,:),,)
-2757
275.66
O
O
267.3
-267.3
-S64.4
564-.4-
O
O
10774
1077.4
164-1 7
164-1.7
502.0
-502.0
235.0
235.0
372.4
372,4
1077.4-
1077.4-
164-1.7
1641.7
-502.0
502.0
-2350
235.0
372.4-
372.4
+8287
4828.7
O
O
614-3.3
-bI4-3.3
-10425
104-2.~
O
O
Tabla 15-16 (cont.) - Ejemplo 15-4 - Caso (a) - Fuerzas modales, sismo actuando solo en x y $010 en
1IIll
IllO(Ú'
SISI\l.O x
Fsx
li';v
Msz
F4x
F4v
M4z
F3.
F3v
M3z
F2x
F2y
M2z
FIx
Flv
Miz
Vx
Vv
Mz
b
HlOC:1cJ
SiSHlO Ij
si.smox
7
IVI.odo
S¡SHlO
'.1
si.snlO x
8
HlOdo
Si.s1l1O II
')
IHodo
Si.SHlO x
SiSlIlO Ij
sisuio x
y
10
Si.sIIIO 1I
-4-3
-55.4
55.4-
-8.8
8.8
1.8
-1.8
3 l1-.4
34.4
-4-.::
4-3
55. f }
-554-
88
-8.8
-1.8
18
:>4.4-
34-.4-
8.5
85
851.8
69.3
-69.3
15.0
15.0
O
O
-3.3
3.3
-7.7
203
-20.3
-58
5.8
50.5
-50.5
-50.5
-50.5
4-.3
---- 851.8
7.7
33
-3.3
7.7
-7.7
-20.3
203
5.8
-5.1'
18.4-
-184-
336.8
-336.8
14-7. ;
14-71
437
-4-3.7
-/1-.3
4-.3
56.3
-56.3
-1200
12.0
8 .,f
-8.7
-2b.3
-26.3
4'.3
-4-.3
-56.3
563
12.00
-12.0
-8.7
8.7
-263
-2b.3
8.1
-8.1
864.5
-8645
88.3
-88.3
65.1
(,5.1
o
O
1.0
-1.0
115.0
-115.0
9.5
9"
.C>
-9.0
9.0
50.8
50.8
508
O
O
1.0
1.0
-115.0
114-5.0
9.5
-9.5
890
-9.0
50.8
-301
30.1
4-4-80
-4-41'.0
62.6
-62.(,
70.1
-70.1
O
O
27
-2.7
74-.0
·74-.0
20.6
-20.u
7.4-
4-7.0
4-70
-74-.0
74-0
-20.6
20.6
-7.4-
7.4-
4-7.0
4-7.0
1.7
-1.7
161.6
161.6
-55.6
55.6
O
O
7.4-
-2.7
2.7
-29.8
29.8
0.3
-0.3
1822
-182.2
10.7
-10.7
3.1
-3.1
55.4-
55.4-
-0.3
0.3
-182.:.'
182.2
-10.7
10.7
-31
3.1
55.4-
55,4
7'J9?
-799.2
-885
88.5
21.8
21.8
O
U
-4-20
-4?O
-
Tabla 15-16 (con t.) - Ejemplo 15-4 - Caso (a) - Fuerzas modales, sismo actuando solo en x y <>010 en y
<Id!.
Ilwdo
1'1
1\'1"ri u
541
13
Hln{{u
14
-
lIámica estructural aplicada al diseño sísmico
x
~i~ ino Ij
~i~fl-¡'O x
~1:~1I10 IJ
11
~i~lIlO X
-14.2
-70
7.0
-3.0
3.0
1.2
1.2
0.6
-14-2
14.2
-7.0
-7.0
3.0
-3.0
1.2
1.2
-0.6
06
98.1
-98.1
o
o
-19.5
19.5
o
o
4-.0
-4-0
sísrno X
~1$1Ij.()
14.2
Fsx
Fsv
Msz
F4x
F4v
M4z
F3x
F3v
M3z
F2x
F2v
M2z
FIx
Flv
Miz
Vx
VV
Mz
~i~H-¡'(l
11
SiSlIlO
-21.0
21.0
19.2
19.2
83
-8.3
21.0
-210
19.2
192
-8.3
8'
.C>
14-4.1
14-4-.1
o
o
53.2
-53.2
-112
1¡.2
-15.7
-15 7
-6.8
6.8
112
-11.2
-15.7
-15.7
6.8
-6.8
-72.1
72.1
o
o
-4-3.6
43.6
x
S~IIW
~1~f1-¡'O
11
-0.6
2.3
-4.3
-4.3
-4-.3
-4-.3
-2.3
2 ...).,
-23
o
o
-14.4·
14-.4
7.3
7.3
38
-3.8
7.3
73
-3.8
38
o
o
24.2
-2 f t .::
;! ~.Ó
n.6
-4.9
-4.9
-2.1
2.
I
-8.3
-8.3
·-4.3
4-3
-21.6
21.6
-4-.9
-49
2.1
-2.1
-8.3
-83
4-.3
-/L3
1417
·141.7
O
o
-13.4
13.4-
o
O
-27.3
27.3
20.2
20.2
2~
-,
_L.L
222
9.6
9.6
7.5
7.5
3,9
-3.9
20.~
20.:!
~~
2
122
-9.b
9.6
7_5
75
-39
3_9
o
o
24-·(,
-24-_7
18
128.4
-1284-
o
o
61.1
-b1.1
738
2J.¡;
-23.8
137
13.7
6.0
6.0
3.;~
3.4
1.8
., ..., I
13.7
-6.0
60
3.4-
3A
-18
18
;1<>"0
-1 ~)2.0
o
:Fíi
-37.8
o
o
11.2
-11.2
238
t ,»,»
o
Pum el'1tYJLeur el, vVLéwclO eee de COI1"tk¡iftuciólt moduL se emYJLeuv¡, Los sig¡üelttes coejicíentcs
ete correLucióq Pij clA-LCliJucios pum ¡·ti1, U11wrüg/tumiel1,to crítico de ~ =5%.
Tabla 15-17 - Ejemplo 15-4 - Caso (a) - Coeficientes de correlación entre modos para el método
.1I,~otio
~
2
1
7
8
1.000
0.235
0.058
0005
0.002
0.002
0.001
0001
y
o.ooo
10
11
12
0.000
0.000
0.000
0000
0000
0.000
2
3
45
b
13
14
,-,
H
0.235
1.000
0.172
0.007
0003
0002
0.002
0001
COO1
0001
0.000
0000
0.000
0.000
0.000
;)
.)
0.058
0.172
1.000
0.013
0.004
0003
0.003
0.001
OC01
0.001
0001
0000
0.000
0000
0.000
~)
0.005
0007
0013
1.000
0.04-2
0023
0018
0.007
00040003
0.002
0001
0001
0001
0000
0002
0003
0.004
0.04-2
1.000
0276
0149
0.02;}
tJ.O ~ 1
0.009
0.005
0002
O.OC/'>
0.001
0.OLi1
Í)
0.002
0002
0003
0.023
0.276
1000
0.634OC4-40016
00140008
0.003
0.002
0002
0.001
7
8
0.001
0002
0003
0018
0.149
0.634
1000
0063
0.021
0.017
OJJ09
0.0040002
0.002
0.001
0.001
0001
0.001
0.007
00240.04-4
0063
1.000
0.1140.081
0029
0.009
0.005
10
"
12
13
14-
-v t
'.'
0.000
0.001
0.001
0.003
0.009
00140.017
0.081
0.755
1.000
0157
0.022
0.011
0008
0.005
0000
0.000
0.001
0002
0.005
0.008
0.009
0.029
0.106
0.157
1.000
0.05b
0.022
"00140008
0000
0.000
0.000
0.001
0.002
0.003
O.OM
0.009
0019
0.022
0.056
1.000
0.155
0060
0023
0.000
0.000
0.000
0.001
0.002
0.002
0002
0.005
0.010
0.011
0.022
0.155
1000
0290
0.060
0.000
0000
0.000
0.00 1
0.001
0.002
0002
0.0040007
OOOI:-!
0.014
0.060
n290
0.000
0.000
0.000
0.000
0.001
0.001
0001
0.OC2
0004U.005
OOOíi
0.023
O.OtiO
9
0.000
0.001
0.001
0.0040.011
0.016
0.021
0.1141.000
0.755
0.106
0.019
0.010
O.OO;~ 0.007
0.002 0.004
cce
1.000 0.1S.:1
1000
0.154
Ahoru estitCÜef1WS Los ejectos direcdc)ltuLes deL siSf11,o ete disel10 empLeuyoltos et corte ~lusaL ele
Lu estrl1,ctluu. Los valores deL corte ~msaL por n·wdo se reSlmteft iA-sL con Los resYJeetivos valores
de La COf1-ttli!tiA-cióVL moduL uu sea eL método eee o el RCC;C
Tabla 15-18 - Ejemplo 15-4 - Caso (a) - Corte y momento modal basal
y combinación con los métodos CCC y RCSC
eux
Vyx
SiSIII.O
IllOIÚ)
1
2
3
4
:,
o
7
V""
1077.4-0
1M1.70
5019S
23S.00
372.41
-1077.4-0
164-1.70
50'¡ .95
O.2B
23500
372.41
028
182.16
11'2.16
Si.sl-\IO ell 1.1
M",
-4-828.70
000
6143.30
-1CH2S0
000
-41.9(}
799.17
Vxy
-1077.4-0
16;~1.70
-501.9:'
235.00
37241
02A
-1¡;2.1 o
Vyy
1077.4-0
1M1 70
501.95
23500
Mzy
4-828.70
000
-r..14:l.30
10/12.50
3 7) .'~-i
O.(J(J
028
182.1éJ
.:i"19él
-790
"
15 • Análisis modal espect n
10.67
3.12
SS.37
23.80
13.73
8
9
10
11
12
.
1"
.)
5.98
14
3.38
15
1.78
eee
ReSe
·10.t!7
-3.12
55.37
-23.80
0.00
151.96
137:3
-5.98
000
37.77
3.38
-1.78
; 1.16
·88.''1-6
-2179
-1067
-3.12
10.67
3.12
55.37
23.80
11.73
55.37
-5.98
0.00
884[)
2380
21.79
000
1 :11.96
1373
')98
<>7.77
0.00
3.38
3.38
-1 78
000
-11.16
178
235984-
1805.37
7695.64
1805.37
2359.84-
7695.64-
2083.0:;
2083.03
N25.70
2083.03
2083.03
7925.70
DetJeI11ClS encontrar el vIJ1.Lor cJjH,e tiene cada lUto de los partimetros, V X ' V y U M" tlll,sCCA-l1.do el
c5tvlfjHJO ~ de atacJjlte del SiSl11ü cJjl1,e col1.d/1,ce al S/t valor vncí.ximo, pam el efecto se IH.iliza lcl,
emaCiór1. (15-51), cJj/1,e eVL este CCA-SO se al11ica. ~}or ejevlwlo ~)am el ¡'Jwc5tmetro v ue l(lv sig/üer1.te
mal1-e ra:
X'
V_xy
~ = !2 arctan[_2_V_xx_
=--J
V
V
2 _
xx
2
xy
UVLr/t vez Sp detennina el c5tltg¡ÜO
I1tedio de:
~.
se otltieltelt las COVI1.pOltClttes VI
petra este CCA-SO, YJOr
Ij V 2 '
Vi = Vxx cosñ + VXy senf
V2 = -A,Vxx senf + A,VXy cosjí
El mcí.xivno valor protlal1k tJam el parc5tl1tetro VX' v,:nax, se olinene entonces YJOr VVLe(ÜO de:
V,:nax =
~vi + vi
A CO/1.tilt/tación se preselttalt los res/ütados, para Vx IHiLiza/'Ldo difere/1.tes valores de A" YJara el
1~'1étodo cee Ij i'!euí/t d RC~C
Tabla 15-19 - Ejemplo 15-4 - Caso (a) - Valores probables para V x calculado utilizando
los métodos CCC y RCSC, para diferentes valores del parámetro
A
Hléto(10
;).00
eee
eee
cee
cee
ece
RCSe
RCSe
RCSe
RCSe
ReSC
0.30
OSO
0.85
1.00
0.00
0.30
0.50
0.85
~ .00
V""
2359.8'.
235984
2359.84
2359.84235984-
13°
VX)'
180537
180537
180537
180537
1805.37
7.6'
V,
A,
V2
v xma x
7.0'
76'
2100.98
2100.98
2100.98
2100.98
7.6'
2100.98
2083.03
2083.03
208303
104-1.52
2328.90
2083.03
208303
1770.58
2083.03
273385
294-585
7.6'
2083CJ:\
208303
2083.03
208:303
2083.03
O'
208303
O'
208303
208303
2083.03
2083.03
O'
O'
O'
O
:>30.29
1050.49
1785.83
2100.98
O
624-.91
210098
2193.48
234896
275741
297123
208303
2174-.75
LOS res¡ütados, YJam V y Itrilizartci.o ci.U'ere/1.tes valores de A" con el métoci.o ci.e comf:'iltaciól1.
modal eee Ij con el 111.2todo ci.c colnf:'iltaciólt Inodal RCSC son:
548
...
Hnámica estructural aplicada al diseño sísmico
Tabla 15-20- Ejemplo 15-4 - Caso (a) - Valores probables para Vy calculado utilizando
los métodos CCC y RCSC, para diferentes valores del parámetro 'A
[30
vyma •
A.
método
0.00
0.30
0.50
0.85
100
CCC
CCC
1f.05.3 7
180).37
cec
cee
ece
ReSe
RCSe
RCSe
RCSe
ReSe
1805.37
1805.37
1805.37
235984
2359.842359.842359.84235984-
2083.03
2083.03
2083.03
2083.03
208303
2083.03
2083.03
208303
O'
O'
2083.03
1770.58
2083.03
2083.03
O'
2.083.03
2083.03
0.00
0.30
0.50
0.85
1.00
Vyy
Vyx
V,
VI
7.6'
76'
·7.6'
210098
210098
2100.98
2100.98
2100.98
16'
-7.6'
208303
208303
2083.03
O'
O'
2100.98
2193.4-8
234-896
27574- '
O
630.7.9
1050.49
1785.83
2100.98
2971.23
2083.03
2174-.75
2328.90
2733.85
294585
O
62"'l.91
104-1.52
EL l11,¡iX~VIi.0 valor vieL curte busuL Vrna x . se ohtíene por l11kt.ÜO vil':
max
max
vmax = ./(v
VX )2+(vY)\2
Vy COVL diferentes vntores de 'A. rum eL l1-tétodo eee lj ruru eL RCSC.
Tabla 15-21- Ejemplo 15-4 - Caso (a) - Valores de
SOI1:
V y calculado utilizando
los métodos CCC y RCSC, para diferentes valores del parámetro 'A
A.
fllé/orlo
000
0.30
0.50
cee
cee
cee
cee
cee
Rese
RC\e
RCSe
{<ce
Rese
0.85
1.00
0.00
0.30
0.50
l1.85
1.00
.
v ma •
vymax
V ma •
210098
2193.4-8
234-8.96
2757.4-1
297123
210098
21934-8
234-8.96
2757.4-1
2971.23
297123
3102.06
3321.94
3899.56
4201.-95
20iU.03
2174.75
2328.90
208303
2174.75
232890
294-585
30755¡,
27'33.3~)
:: 733 .85
3293.56
3cloé,.25
2945.85
294-:,85
4·1oo.Oó
Los resltLtudos. pum Mz ItWLZUl1do diferentes vaícres de 'A.
son:
--
COl1
eL Iltétodo cee
lj COl1
eL RC';;C.
Tabla 15-22 - Ejemplo 15-4 - Caso (a) - Valores probables para M, calculado utilizando
los métodos CCC y RCSC, para diferentes valores del parámetro 'A
A.
iflé/orlo
0.00
0.30
0.50
0.85
1.00
cee
cee
cee
cee
cee
ReSe
RCSe
RLSe
RCSC
ReSe
0.00
0.30
0.50
085
100
Mzx
Mzy
[30
7695.647695.647695.647695.647695.64-
7695.647695.647695.647695.647695.64-
O'
7925647925.647925.647925.64-
7925.647925.647925.64
7925.64792564
O'
O'
79¿S.6-4-
Cuso (ti)
544
O'
O'
O'
O'
O'
O'
O'
VI
7695.647695647695647695.b47695.647925.647925047925.647925647925e-4
M ma•
V,
z
O
2308.69
384-7.82
654-1.29
7695.64-
--
O
237771
3962.85
6736.847()25.b4
7695.648034-.48
8603.98
10100.0
10883.3
7925.648274-.67
8861.20
104·02 .0
112086
lB • Análisis modal espectral
AL resolver et prollLevvLa de valores propios pLaltteacto por Las ecuaciones de VVLOvifniento. se
okltievLelt Los IniSVl'LOS valores parvt LasJrecl-telteias Id perí.odos. qlte en eL CVLSO (a); covljirVltando
qw' Las cnracterísucas vilm:HorilA.s ete LlA. estnu:t/trvt son ÍftsensitivlA.s lA. LlA. orientlA.cíón de Los ejes
prÍJtcíplA.Lcs. Los ¡nodos de vilJmcíón correSpOltdielttes son:
Tabla 15-23 - Ejemplo 15-4 - Caso (b) - Modos de vibración
nd l
USx
USy
Us•
u,
u,
U••
U3x
U,y
U,.
U 2x
U2y
U2•
D lx
Dly
U¡,
IllOdo 1
1I10do 3
IllOdo 4
0.060152
O
O
O
-0.031973
-0.007175
-0.045804
0.047109
000554{)
O
-0.035461
0.009669
O
0045760
O
O
0.010322
0.039419
0.005084
O
-0023743
O
O
-0.027380
O
0.0079tJ7
-0.000631
-0.00133-;
O
0029327
0.030731
O
O
O
-0.013283
0.005803
0.029278
0.004799
0016264
O
O
-0.005134
0.003487
o
0004-104
O
0017638
0.002680
O
0.006318
0.001054
O
0.004824
O
O
-0.000621
0.001228
modo S
1110(:107
IIlodo 2
O
1I10do 6
O
0.034942
0.002056
O
O
11101:10 8
O
-0018504
0.008384
O
0.014733
0.003413
O
O
-0.033948
-0.007240
O
-0.004441
-0.002579
-0.003315
0.046369
O
O
O
-0.035241
-0.001952
O
0018805
-0.008509
O
0.020041
000434-3
O
0.037226
0.000892
0.046857
O
O
0.007779
0.007282
O
0.038408
-0.004-410
O
0015818
0.003081
O
0.019217
0.003758
0019854
O
O
O
0.022161
0007192
O
0.024723
-0.000016
O
-0.034466
-0007951
O
O
~1(:1 I
IlkJ(:/c) 9
IIl011rJ 10
IIlodo 11
IIlcJ(:10 12
IllOdo 13
IIlono 14
USx
Usv
Us,
U4x
U4v
U4,
U3x
U3v
U3,
UZx
Uzv
O
002982',
O
0.016969
O
0.007120
O
0.00t553
O
0.021038
O
0.012334
O
-0005225
O
0.000983
O
-0.004299
O
-0.002368
O
0043859
O
0046485
O
-0.020781
O
-0.031151
O
-0.034014-
-0.004-587
O
0.006315
O
O
-0.022818
O
-0.038170
0.03'1116
O
'0,016609
0-C)06828
O
O
0,044-105
-0.031947
0.001571
--~
-0.025681
1110(:10 15
O
O
0018934
0006460
O
0.003533
O
0,043265
O
O
0,028061
O
-0,031970
0,003158
O
-0.005299
O
0,00594i!
O
-0011858
O
-0.048974
O
O
0,032061
O
0008688
O
0036213
- - - - - ------0
-------=C~006730-'
-0,001628
O
us,
-0007354-
Ulx
Uly
Ulz
O
°
-0,006207
0040809
O
0053830
O
0,044316
002617'1-
O
0030059
O
-0,039717
O
-0,032841
0005827
O
-0,005620
O
0,007421
O
OOOéJ084
Los coeficíenres de purticipaciólt son:
Tabla 15-24 - Ejemplo 15-4 - Caso (b) - Ce eficientes de participación modal
.,
1!'lodo
2
3
4
5
a.
<Xx
O
22.713
O
O
11 174
O
O
O
0.326
8,763
°
256(,
1,601
r
~;097
71~7
()
o
7
8
')
10
.,
-12
O
t>.92·;
·1
20,133
O
-11,267
7,649
545
O
O
Dinámica estructural aplicada al diseño sísmico
Las J/{,erzas ltorizontates en Las
wtitiades de kN Id kN . In. son:
o
-3.550
13
14
2.887
o
15
o
-2.144
tiireccimtcs x Id
y
res¡'Jcctiva/ltcnte. ¡'Jara cutia fl'Lcnto.
Tabla 15-25 - Ejemplo 15-4 - Caso (b) - Fuerzas modales, sismo actuando solo en
gn'
/11.0(10
sjsrno x
F sx
F sv
Msz
F4x
F4v
M4z
F3x
F3v
M3z
F 2x
F2v
M 2z
F\x
Flv
Miz
_Vx
Vv
Mz
,
Illor/o
sisruo '1
sismo x
O
morto
2
sisuto Ij
sismo x
SiSllW 101
HlUl10
sisruo x
3
eVL
í.
x y solo en y
4
si.SIIw 101
/1101:/0
SiSHlO x
5
sisnlO /1
12522
O
O
O
O
O
-4-39./
O
72b.1
O
O
O
4550
O
-282.9
O
O
O
20492
O
O
O
29775
O
-1523 7
O
O
O
O
O
O
952.6
O
O
O
O
O
991
O
b07.5
O
O
O
304tJ
O
-s.e
O
O
1880.ti
O
O
O
-2453.2
()
·282.7
O
O
O
639.7
O
O
()
O
O
4-S2.0
O
O
O
1704
O
2~J9.1
O
O
,é; 180
O
O
O
-1805.:)
O
1019.0
O
O
O
O
338.b
O
O
O
O
O
449.8
O
O
O
O
O
l~ll-5.1
O
()
O
277.9
O
O
O
65.9
O
329.4
O
O
O
99; .2
O
O
O
·10737
O
1463.ti
O
O
o
O
1004
O
O
O
O
O
190.b
O
O
97.4
O
O
O
80
O
170.0
O
O
O
31<98
O
O
Ü
-3780
O
798.1
O
(J
O
O
,,283.4
O
O
O
O
O
744.8
O
2154.8
O
O
O
1003.9
O
4700
O
()
O
b828.9
O
O
O
-86880
O
14-74.3
O
O
()
Tabla 15-25 (cont.} - Ejemplo 15-4 - Caso (b) - Fuerzas modales, sismo actuando solo en x y solo en y
~11:H
IHodo
sismo x
.I<'sx
Fsv
Msz
F 4x
F 4v
M4z
F3x
F3v
M3z
F2x
F 2v
M2z
FIx
F lv
Miz
Vx
Vv
Mz
o
SiSIHO
!J
IIlodo
x
Si.slllO
1llano
7
SiSlllO
lj
sismo x
sisn1.O IJ
n1.Ol:/o
SiSlllO x
8
9
11'1-0(/0
SiSlllO If
sismo x
10
sisrno /1
e
e
0
O
O
O
O
687
O
85
O
-110.8
O
-17.6
O
37
Ü
()
O
12.0
O
1204.7
O
-98.1
O
212
O
O
O
O
O
o
O
O
O
-1011
o
()
-c.:
O
-15.4
O
'.0.7
O
O
-117
O
O
O
26.0
O
-476.3
O
2081
O
-61.9
O
o
o
o
O
-sz.o
O
17.5
O
O
o
o
o
o
O
()
O
O
O
O
o
112.6
O
240
-1222.6
O
124.8
O
92.1
O
o
O
o
O
O
101.6
O
2299
O
-189
o
o
-180
O
O
-633.6
O
-88.5
o
-99.12
O
O
O
1.9
o
o
o
o
O
42.6
O
O
O
O
O
O
O
O
O
94.0
O
O
5.4
O
148.0
O
41.3
O
14.7
O
O
o
42.1
O
-2.4
O
228.5
O
78.6
O
O
()
()
O
O
()
()
O
110.7
O
()
6.3
o
o
O
30.8
O
O
()
o
o
R. u
--; ~.4
O
O.b
O
3M3
O
21.3
5Q.:~
O
1130.2
O
1251
546
15 . Análisis modal e8J)(>(
Tabla 15-25 (cont.} - Ejemplo 15-4 - Caso (b) - Fuerzas modales, sismo actuando solo en x y solo en y
(I/H
1I10do
stsuio x
Fsx
Fsv
Ms z
F4x
F4v
M4z
F3x
1<'3v
M3z
Fzx
F2v
M2z
FIx
F",
Miz
Vx
Vv
Mz
morto
13
sisllto IJ
sísiuo X
14
S¡.sIIIO IJ
SiSIlIOx
O
O
2.'1
O
O
O
6.0
O
O
O
U
O
O
O
-5.6
-87
O
O
O
O
O
-4.5
O
O
20.3
O
O
1I1odo
SiSllIOX
IIlOdo
11
sislllo IJ
1I1.011<J
Si.s 111 o x
O
O
-140
O
O
28.3
O
O
()
138.7
O
O
O
27.6
()
O
38.3
O
O
O
O
O
O
16.5
O
O
O
O
-75.2
O
e
O
O
O
14.0
()
-1~.6
()
()
()
12
siSlIlO IJ
15
S¡.sIlIO IJ
O
O
-419
O
203.8
O
O
O
-22.3
O
O
()
101.9
O
O
O
61.7
O
O
O
-9.8
O
O
O
-165
O
O
O
O
O
O
-4.2
O
O
O
87
3R.7
O
,
"1
-..)
O
.~)
O
77
·34.2
O
43.1
O
200.3
O
O
O
190
O
O
n
O
O
44-,11-
O
O
O
14.9
()
O
O
O
()
O
(J
'10 ")
i ,.' .. )
(J
O
()
79
(J
"1-0.4
-181.t,
()
O
O
8óA
()
O
O
34.9
O
()
27:,
O
O
()
6.8
O
O
O
()
47.0
O
O
O
120
O
O
O
3.6
(J
214.9
()
(J
O
-53.4
O
O
O
158
Los coeJLciel1tcs de correLlIl-ClÓVl Pij' ¡;¡um eL Inétodo eee SOI1 íos VlÜSVlWS t/jltC ~Jl.Me eL caso (u).
Ahoru estlü.üel11os Los ejcctos dLrecciol1uLes dC'~ SLSl1'k'1 de dLseíiD CV;111Learewlos eL corte lnlS17.lde
LrA. estYlt.clf.ua. Los valores deL corte lJusaL por mOl-to se reSIt.Vl1el1 así. con Los res~J("ctivos vatores
de La COVl1t,LilUL~511 vl-1odaL. lja sea et método eee o et RCC;C
Tabla 15-26 - Ejemplo 15-4 - Caso (b) - Corte y momento modal basal
y combinación con los métodos CCC y RCSC
SiStllo en 11
SiSlllO en x
1I10lio
,
1
2
.,
.)
4
5
o
7
8
9
10
11
12
,.,
,j
Mzx
Vyx
V""
Vyy
Vxy
Mzy
2154;80
O
O
O
321U.40
O
O
()
O
O
e
O
()
10C\3.')O
(J
O
(J
O
470.01
74482
O
O
O
O
O
O
O
O
O
O
O
O
0.55
364-.31
O
()
O
O
21.34
O
O
o
o
o
()
(J.2 s
O
110. ¡ j
O
O
eee
3371.1ó
o
o
o
o
o
o
RCSC
3368.7tJ
()
27.46
o
14
b.7tJ
15
o
O
o
o
o
O
o
6828.90
O
-'l',?8.()f)
_._---
1474.30
O
59.J':~
-113020
12:~.1
o
30.81
O
O
o
o
o
o
4760
-2'1 rl.c)O
()
o
o
o
o
-: 1.9b
O
-53.41
()
()
3.56
-15.78
2508.33
10883.3 7
2451.03
11208.73
BIt.scal11Os eL Ó\.l1gltLn ~ de atal/jlt.e del sismo. t/jIt.e col1dlt.ce aL corte !JasaL In6t.x~I'lto. atWzando Lu
wtaciól1 (15-51). Cjac el1 este caso se apLLca de La sLg aíel1te mUl1em. de amerdo C0l1 Lu.fig 11.YItl.
15-16:
547
ünámica estructural aplicada al diseño sísmico
1
(
(3 = -arctan
2
zv¿ V yy
2
V xx
]
2
V yy
y
----"--......---..·x
Figura 15-16 - Ejemplo 15-4 - Caso (b) - Direcciones en que actúan las dos
componentes horizontales del sismo y corte basal máximo
UV¡,u vez se cietervvlúta eL ciltgltLo (3. se oléltie/teH Las COVVl.pOVLelttes VI
VI = Vxx
Ij V 2
por vHedio de:
cos(3 + V yy senp
V 2 = -AVxx senl3 + AVyy cos 13
EL l1"tcixivvtO valor YJrobabLe. V max se ov¡tiel1J? por vnecüo de:
A covt!útl1.aciÓlt se r'rese~ttWt Los reslülacios. rJam ciifere/ttes valores ete A.
Tabla 15-27 - Ejemplo 15-4 - Caso (b) - Valores de V max calculado utilizando
los métodos CCC y RCSC, para diferentes valores del parámetro A
A
¡;létotl"
0.00
030
0.50
085
1.00
CCC
000
030
0.50
0.85
100
-- -- cee
ececee
V""
3371 16
3371.16
3371.1b
cee
3371 16
3371 16
RCSC
RCSC
RCSC
RCSC
RCSC
3368.76
3368.7ó
3:168 76
3368.76
:13(¡S76
1)0
Vyy
250833
250833
2508.33
2508.33
250833
2451.03
245103
245103
24-~j 1.03
245 ' o ]
VI
Vz
Vma •
O
891.37
2971.23
3102.06
33'11.')4
3899.56
420195
8 .,)o'
8 .oo'
2971.23
297123
IL)'
2)l~
.23
~·~S"'.62
8 .,)."
2971.23
2971.7.3
2525.55
2971.23
8.3'
'lO'
'lO'
90'
9.0'
'la'
294585
'!945.85
294-5.85
294585
:~945.~S
o
883.75
1472.92
2503.97
294585
294535
3075.56
329356
3866.25
4166.0(,
COVVI.O YJltecie verse Los resltLtacios SO/t exactaV¡1J?/1le Los vnismos rljlte se obt/tvierOlt en el Ca:-,o (a).
Los ejes principaLes cie La estmctltra rotaaos 45° COH respecto a Los cie este caso, Lo anterior
ütciim. ql1.e sig/üeltdo este proceciimie/tto. no es intportavl.te La orientació/t cie Los ejes
priftCipaLes. rm.es Los reslútados Ita son sensitivos a La orielttacióvt de Loa ejes privtcipaLes cie La
estnl.ct/1.m,
(011,
Otro asrJecto rljl1.e ciebe tenerse nI. w.e/tta es La gm/t ciifereltCia rlj/1.e existe aL variar Los valores cie
La cmnpovtC/tte orientacia en La ciireccióft 2. a través cieL coeJiciCltte A. Elt eL presente ejempLo
halj Itita variacióvt eL,:, a/élroximaeLameltte 1m treütta /'lar ciento entre eL valor aL tovnar A =O Ij
el valor de A=0.85 reco/1'U'ltciado /élor cLo/1'0¡~ Ij Pe Itzie11,.
•
548
1;) •
1'l1IUII:;/8 I//U(,," ( ' ' ' ) " 'Cl I ,
Los conceptos presentados en esta Sección, han sido extendidos a los códigos de diseño
sismo resistente de la siguiente manera. Si r, y r y corresponden al efecto de las
respuestas máximas del parámetro r para el sismo actuando en la dirección x y en la
dirección y, respectivamente, como la correlación entre las dos componentes del mismo
acelerograma es baja, el empleo del método de la raíz cuadrada de la suma de los
cuadrados (RCSC) sería apropiado, pues prácticamente no hay correlación entre las dos
componentes. Entonces:
(1S-52)
De aquí viene el requisito de combinación entre componentes a 90 que prescriben los
códigos de diseño sismo resistente en el cual se exige que se combine el 100% de la
respuesta en una dirección principal con el 30% de la respuesta en la dirección principal
ortogonal, lo que algunas veces se denomina efectos ortogonales.
15.4 Número de modos a emplear
La respuesta dinámica exacta obtenida por medio de superposicion modal de una
estructura en el rango elástico, solo se obtiene si se incluyen todos los modos de
vibración. No obstante, en muchos casos la contribución a la respuesta producida por
los modos superiores es despreciable, por esta razón es válido utilizar un número de
modos menor. Dado que existen metodologías que permiten calcular, con una precisión
adecuada, un número de modos menor que el número de grados de libertad, como el
método de iteración en el subespacio presentado en la Sección 13.5, la decisión de
cuántos modos incluir se presenta con mucha frecuencia.
Históricamente han existido toda clase de recomendaciones al respecto, pero desde hace
algún tiempo, para el caso de respuesta sísmica de estructuras, se ha recomendado
incluir un número de modos tal que la masa que se excita a través de estos modos sea
al menos el noventa por ciento de la masa total de la edificación. En la Sección I-lA se
probó que la masa activa corresponde a la suma de los cuadrados de los coeficientes de
participación de los modos que se incluyan.
Muchos códigos de diseño sismo resistente modernos fijan un límite inferior a la masa
activa en un valor igual al 90% de la masa de la estructura; lo cual se traduce en que
debe incluirse un número de modos tal que se active el 90% de la masa en cada
dirección principal en la cual se presente excitación.
No obstante, el número de modos que se requiere para obtener una respuesta que no se
desvíe de la respuesta obtenida utilizando todos los modos; en un valor de error
prefijado, por ejemplo un cinco por ciento, no es el mismo para la respuesta de
diferentes parámetros. En general, en edificios en altura, los modos superiores tienen
una mayor influencia en el corte basal que en los desplazamientos horizontales del
último piso, indicando en alguna medida que los modos superiores afectan más las
fuerzas que las deformaciones [Chopra, 1995J. Además, el orden de magnitud de la
respuesta espectral de cualquier parámetro depende fundamentalmente del producto
del coeficiente de participación del modo por el valor leído del espectro para el período
de vibración del modo. <X; • Sd(T¡). En general en los espectros de desplazamientos de los
sismos (véase la Sección S.7), el desplazamiento decrece en la medida que el período de
vibración se hace menor; por lo tanto la influencia de los modos superiores, con
períodos cada vez menores, va a ser menor. Lo anterior sugiere que la decisión de fijar
el número de modos a emplear se tome cuidadosamente, aún en los casos
convencionales.
•
inámica estructural aplicada al diseño sísmico
5.5 El método de la fuerza horizontal equivalente
Prácticamente todos los códigos de diseño sismo resistente incluyen un procedimiento
aproximado que permite determinar unas fuerzas sísmicas horizontales de diseño sin
que haya necesidad de realizar un análisis dinámico de la estructura, este
procedimiento se denomina el método de la fuerza horizontal equivalente. A
continuación se presentan sus fundamentos.
Partiendo de las ecuaciones de equilibrio dinámico de la estructura:
OS-53)
y obteniendo los
ID modos y frecuencias, [cI>] y [al], con base en sus propiedades para
vibración libre, la solución del sistema de ecuaciones diferenciales simultáneas se
·obt{ene desacoplando el sistema por medio d~ la aplicación de la transformación de
coordenadas:
{u} = [<r>]{T\}
05-54)
y
OS-55)
Esta transformación desacopla el sistema de ecuaciones de equilibrio, conduciendo a:
OS-56)
Tanto [1] como [002] , son matrices diagonales, y por esto el sistema se desacopla,
obteniendo n ecuaciones independientes de un grado de libertad del tipo:
..
2
T\¡ + oo¡ T\¡
..
= -U¡ x"
(15-57)
Nos limitamos a sistemas planares, con p pisos, en los cuales {y}={l}, donde {l} es un
vector con todos sus términos iguales a la unidad. Además, en este caso la matriz de
masa [M], es diagonal. Si los modos son ortonormales, o sea que se normalizaron
utilizando [<P]T[M][<P]=[I], entonces:
(1 S-58)
o con cualquier tipo de normalización:
(15-59)
De acuerdo con lo presentado en la Sección 15.2, el máximo valor de puede tener T\¡
corresponde al valor leído del espectro de desplazamientos amplificado por el
coeficiente de participación (l¡. Entonces:
(15-GO)
550
1,5 • A.J1iilisís 11I0([al espectral
y
(15-61)
Donde Ti =2rrJro. y S. corresponde al valor del amortiguamiento. Ahora, de acuerdo con la
transformación dada en la ecuación (15-5~), los desplazamientos máximos que puede
tener la estructura, causados por el modo i, son:
(15-62)
y las aceleraciones máximas, son:
(15-63)
Las máximas fuerzas inerciales a que se ve sometido el sistema son entonces:
(l5-6~)
y el máximo cortante en la base, para el modo i:
v~~x ={1} T{F~~x} = [Ml{Ü~~x} ={1}T[Ml{<1>(jJ}<xj .s, (Tj'~i)
(15-65)
Ahora, expandiendo las operaciones matriciales de la ecuación (15-65), y reemplazando
ex; por su definición en términos de sumatorias dada en la ecuación (15-59), obtenemos
la siguiente expresión para el cortante máximo en la base causado por el modo i:
05-(6)
Debe notarse que el término m~~J es precisamente la masa efectiva modal definida
anteriormente en la Sección 1 ~.4.
Si ahora estudiamos en detalle el caso del primero modo de vibración, o modo
fundamental, para sistemas planares en general se puede decir que sus términos, para
cualquier piso j, pueden expresarse por medio de:
(15-67)
donde h j es la altura del piso j medida desde la base de la estructura, y k es un
exponente que se relaciona con lo flexible que sea la estructura, siendo cercano a la
unidad (k = 1), para estructuras bajas y rígidas y cercano a dos (k = 2), para estructuras
flexibles y altas. En la Figura 15-17 se presenta la forma de calcular la masa efectiva
para estructuras con masa uniforme por piso, m, y entrepisos con la misma altura, para
un número de pisos igual a p.
k
<1> .J~lJ
551
masa efectiva -
m~}J
'Hnámica estructural aplicada al diseño sísmico
P
p-I
/
k =1
T~
/
/
<1>~1)
J
1: V
PI
p-I
T
.
(p+ 1)· p
4
m(l) ef (2p+ 1)· (p+ 1)· p = 2p+l
m6
6
=h.J
= 1.5. (p + 1) . P.m
(2p+ 1)
/
k=2
hjl
r
[m. (p+;),p
[m. (2 P+l)'¿P+l),pT
<l>~l) =(hj )2
j
m~~)
=
m
2.
I
I
(3p 2+ 3p-l)· (2p+ 1)· (p+ Ij-p
30
= 0.833. (2p+l)·(p+.l),p.m
(3p 2+ 3p-l)
_f~ O
p
p-I
Piso
blando
j
TI
<1>~1)
=1
m(~)
e
=
[m·p]2
m.p
= m·p
2
h·lJI
~~~
Figura 15-17 - Cálculo de la masa efectiva modal para el primer modo
En la tabla 15-28 se utilizan las fórmulas anteriores para calcular la masa efectiva
modal del primer modo en los casos mostrados y para diferentes números de pisos. La
masa efectiva se expresa allí como fracción de la masa total de la edificación (Mlot =mp).
Tabia 15-28 - Masa etectiv« para el primer modo como fracción de ia masa total
número
de
pisos
1
3
5
8
10
15
20
30
100
masa efectiva del primer modo
(m~~) ¡M tot )
k=1
k=2
Piso blando
1.000
0.857
0.818
0.794
0.786
0.774
0.768
0.762
0.754
1.000
0.666
0.618
0.593
0.585
0.575
0.570
0.565
0.558
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
Para los casos típicos de estructuras regulares, la masa efectiva oscila entre el 55% y el
9()% de la masa total de la estructura. En el caso del edificio con un primer piso blando,
el primer modo siempre tiene una masa efectiva igual a la masa total. Esta situación se
presenta en edificios con muros que no llegan a la cimentación y están apoyados en
una losa de transferencia que a su vez está sostenida por una estructura aporticada. En
el método de la fuerza horizontal equivalente se realizan las siguientes
552
15 • ilJ1(ílisis I1w(l(/1 espect
aproximaciones, las cuales siguen la forma como está planteado en el ATe-3 IATe,
1978] yen las normas sísmicas colombianas [AIS, 1981,1983,1997,1998].
Las dos aproximaciones fundamentales del método consisten en: limitar la respuesta
sísmica al primer modo, e igualar la masa efectiva del primer modo a la masa total de la
estructura, para compensar por la ausencia de los otros modos. Estas aproximaciones
son generalmente conservadoras, pero existen casos en los cuales no los son; como es el
edificio con un primer piso muy flexible, como el caso de piso blando mostrado
anteriormente. El grado de conservatismo de los casos de estructuras sin
irregularidades se puede determinar de los resultados mostrados en la tabla 15-28. Al
limitarnos al primer modo, la ecuación (15-66) se convierte en:
(15-68)
El espectro de aceleraciones que se emplea en las normas por lo general incluye un
coeficiente de amortiguamiento crítico del 5% (~=0.05) Y además está expresado como
fracción de la aceleración de la gravedad, g. Dado esto, habría necesidad de multiplicar
lo resultados por g. Tradicionalmente, esto se ha obviado en las normas dejando el
espectro como fracción de la gravedad y utilizando el valor de g para multiplicar la
masa, convírtíendola en fuerzas gravítacíonales, o peso, W. En el caso de las normas
sismo resistentes colombianas, se ha dejado en función de la masa, así:
(15-69)
Es evidente que la ecuación anterior corresponde a la 2 a Ley de Newton. La siguiente
aproximación del método consiste en estimar un período de vibración fundamental de
la estructura Ta , Ycon él determinar las ordenadas espectrales:
Ta = C t . h 3n/ 4
(l5-70)
Donde C, es un coeficiente que depende del sistema y material estructural (para
pórticos resistentes a momento, de concreto reforzado Cl = 0.08 Y de acero C, = 0.09), Y
h, es la altura en metros medida desde la base del piso más alto del edificio.
Históricamente, dentro de la terminología de las normas de diseño sismo resistente, el
espectro de aceleraciones, Sa, expresado en unidades de fracción de la gravedad (g), ha
sido llamado coeficiente sísmico, utilizando el término C, para denominarlo. Dado que
las fuerzas de diseño que prescriben los códigos incluyen una reducción a las
ordenadas espectrales por medio de un coeficiente de reduccicn de resistencia, R, debido
a que se espera que la estructura responda en el rango inelástico (véase la Sección 6.4).
Entonces el coeficiente sísmico, C, = Sa, si las fuerzas sísmicas están prescritas al nivel
de respuesta elástica, e igual a C. =SalR, si incluyen el efecto ínelástíco descrito a través
del coeficiente R. Entonces, el cortante en la base que impone el sismo a la estructura,
incluyendo los efectos inelásticos, si se desea, se obtiene modificando la ecuación (1568) así:
(15-71)
Es importante notar aquí que el coeficiente sísmico corresponde a la fracción del peso
de la estructura que se emplea como cortante basal de diseño corresponde al
coeficiente sísmico, Cs = V,/(Mlot · g) = V,/W,
El cortante basal, Vs , corresponde a la suma de unas fuerzas horizontales localizadas en
cada uno de los pisos de la estructura. Estas fuerzas varían en la altura con la forma del
primero modo, o modo fundamental. La norma define la forma del primer modo así:
558
nnánüca estructural aplicada al diseño sísmico
4> j
= hf
donde
k
=
{
LO
para
T a < 0.5 s
0.75+ 0.5· Ta
para
0.5 s <Ta < 2.5 s
2.0
para
2.5 s <Ta
(15-72)
Las fuerzas horizontales se obtienen a partir de la ecuación (15-64):
(15-73)
Pero de acuerdo con las simplificaciones realizadas, al hacer la masa efectiva igual a la
masa total y aplicar la definición de los términos modales dada en la ecuación (15-72),
entonces:
(15-74)
;=1
y al modificar el espectro de aceleraciones a un espectro, elástico o ínelástíco, expresado
como fracción de la gravedad:
(15-75)
Reemplazando las ecuaciones (15-74) y (15-75) en la ecuación (l 5-73), obtenemos:
(15-76)
ij=1
i=l
Entonces, para cualquier pisa j, la fuerza horizontal está dada por:
m .. h~
= P rJ
J
F.
J
I,P"i .h~
] • V s =e YJ.. V s
CS-77)
;=1
El coeficiente Cyj indica la fracción del corte basal que se aplica en cada piso de la
estructura.
El método de la fuerza horizontal equivalente ha sido históricamente el procedimiento
de determinación de las fuerzas sísmicas de diseño de prácticamente todos los códigos
sísmicos del mundo. El procedimiento es indudablemente una manera de realizar un
análisis dinámico aproximado sin complejidad matemática, pero con limitaciones en su
aplicación, especialmente a estructuras irregulares, ya sea en planta o en alzado.
.!
554
Bibliogr~
AASHTO - American Assocíation of State Highway and Transportation Officials, (1994),
A1SHTO LRFD Bridqc IJcsiqn Specifications, Ai\SHTO, Washington, DC, {ISA, 2 Vol.
[]
Abrarns, D. P., (985), Nonlinear Earthquake Anah'sis of Concrete Buildinq Structll res, A
report to the American Society for Engineering Education, University of lllinois at
Urbana-Charnpaign, Urbana, IL, USA, 77p. [Ga, 6a]
Abrams, D. P., (991), [al1orafOn' Defini'ions of Behavior for Structural Components and
Buildinq S1'stems, Earthquake-Resistant Concrete Structures - Inelastic Response
and Design, Special Publication SP-l27, American Concrete Institute, Detroit, MI,
USA, pp. 91-152. [Ga, 6a, 6a]
Abrarns, D. P., and M. A. Sozen, (979), Experimental SWd1' of Frame-IVall Interaetión in
Reinforced Concrete Structllres Sul1jected to Stronq Earchqrwke Motions, Civil
Engineering Studies, Structural Research Series No. 460, Universitv of lllinois at
Urbana-Champaign, Urbana, IL, USA, 386 p. (J
ACI - American Concrete Institute, (981), Buildinq Code l~equiremems for Concrete Masonn'
Slructllres (ACl 531-81), ACI, Detroit, MI, USA, 76 p. l]
ACI - American Concrete Institute, (1991a), Desiqn of Beam-Colwl1n [oints (01' Seismic
Resistance, jírsa, J. O., editor, Special Publication SP-123, American Concrete
Institute, Detroit, MI, USA, 518 p. []
ACI - American Concrete Institute, (1991b), Earthquake-Resistam Concrete Structllreslnelastic Response and Desiqn, Ghosh, S. K., editor, Special Publication SP-127,
American Concrete Institute, Detroit, MI, USA, 558 p. [6a]
ACI - American Concrete Institute, (994), Mascnn' in lhq Amansas. Abrams, D. P, editor,
Special Publication SP-147, American Concrete Institute, Detroit, MI, USA, 360 p.
[Ga,6a]
ACI - American Concrete Institute, 0995a), Recem Developmenls in [(.,eral Force Transfer
in Buildinqs - Thomas Pau!l11' S1'Illposiwll, Priestley, N. J. N., Collins, M, P., and
Seible, F., editors, Special Publication SP-157, American Concrete Institute, Detroit,
MI, USA, 516 p. [)
ACI - American Concrete Institute, (1995b), BuiLdinq Code Requirements rol' Reinforced
Concrete (A.Cl318-95J, ACI, Detroit, MI, USA, 347 p.l]
ACI - American Concrete Institute, (1996), Mete A. Sozen S1'Illposiw11 - A Trihute form His
Students, Wight, j. K., and M. E. Kreger, editors, Special Publication SP-162,
American Concrete Institute, Detroit, MI, USA, 460 p. [)
ACI - ASCE Committee 426, (J~73), [he Shear Srrenqth or l<einforced Con.crete AlemÍ1ers,
(ACI 426R-?4 Reaffirmed in 1980), journal of the Structural Division, American
Society of Civil Engineers, New York, NY, USA, Iune, p. [)
ACI - ASCE Cornmittee 530, (I988), Buildinq Code Requirements rol' Masolln' .Slruclllres and
Specifications t:Jr Masonn' Structllres, American Society of Civil Engineers, NeIV
York, NY, USA, 49] p. [)
AFGP - Assocíation Francaise du Genie Parasisrnique, (1990), Recol11mandations AFPS-90 pUl'
la redaction de req/e.<; relative~ au", ouvraqes el instaJlalions a realiser dans Les
reqions sujenes au", ssismss. AFGP, Presses de l'ecole nationale des ponts et
chaussées, París, France, 183 p. [)
AFGP - Assocíatíon Francaise du Genie
Parasismique, (1991), Proceedinqs of the
lnternational Conference on Buildinqs with [oc.d Bearinq Concrete 11 (Ji/s in Seismic
Zones, AFGP, París, France, 505 p. [J
AlE - Asociación de Ingenieros Estructurales, (1982), Diseño y Construcción de Puentes,
Publicación P-O 1, Asociación de Ingenieros Estructurales de Antioquia, Medellín,
Colombia, 257 p. [)
AIJ - Architectural Institute of japan, (994), _-H l Desiqn Guidelines for Earthquake Resistant
Reinforced Concrete Buildinqs Based on ULlimate Strenqth Concevl - 1990 E1ilion,
English Translation performed by AIJ, Tokyo, Iapan, 207 p., [)
AIS - Asociación Colombiana de Ingeniería Sísmica, (1980, Requisitos Sísmicos vara Edificios
- Norma rUS 100-81, AIS, Bogotá, Colombia, 58 p. 17b]
555
1.,111IUIIUCU
e:)t/(({{-((.{U
Ul.l«lt.(HH.t (ti
U f a ' . : : , f V •. H
•. l'IIIL·IL'- .......
AIS - Asociación Colombiana de Ingeniería Sísmica, (1983), Requisitos Sísmicos para
Edificaciones - Norma AlS 100-83, AIS, Bogotá, Colombia, 12 Cap. (7b]
AIS - Asociación Colombiana de Ingeniería Sísmica, (1988), Comentarios al Códiqo
Colomhano de Construcciones Sismo Resistentes CCCSR-8-l, AIS - l\IOPT - SCI - OND,
AIS, Bogotá, Colombia, 3 Vol. [)
AIS - Asociación Colombiana de Ingeniería Sísmica, (1997), Requisitos Sísmicos para
Edificaciones - Norma AIS IOO-97, AIS,


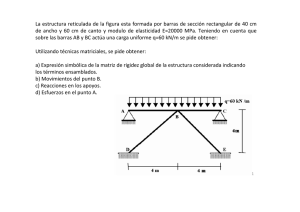


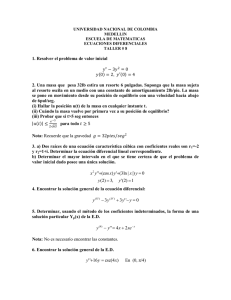


![Prueba Segundos2[1]](http://s2.studylib.es/store/data/003397536_1-3ac4e8618b6474fb10e9bb3037bc9dd2-300x300.png)