- Ninguna Categoria
Lenguajes de Programación: Sintaxis, Semántica y Paradigmas
Anuncio
LENGUAJES DE
PROGRAMACIÓN
Javier Martín
Centro Asociado de Móstoles
UNED
1
¿Porqué estudiar lenguajes de
programación?
La pregunta es ¿cuál es la ventaja de estudiar una
variedad de lenguajes diferentes que es poco
probable que uno llegue a utilizar?:
Mejorar
la habilidad para desarrollar algoritmos eficaces.
Mejorar el uso del lenguaje de programación disponible.
Acrecentar el propio vocabulario con construcciones
útiles sobre programación.
Hacer posible una mejor elección del lenguaje de
programación.
Facilitar el aprendizaje de un nuevo lenguaje.
Facilitar el diseño de un nuevo lenguaje.
2
Breve historia de los lenguajes
de programación:
Desarrollo de los primeros lenguajes:
Lenguajes
basados en el cálculo numérico
(Ejemplo: FORTRAN).
Lenguajes para negocios (Ejemplo:
COBOL).
Lenguajes para Inteligencia Artificial
(Ejemplo: LISP).
Lenguajes para sistemas (Ejemplo: C).
3
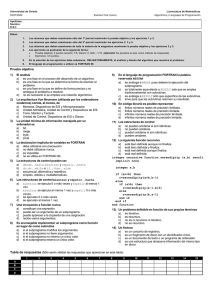
Atributos de un buen lenguaje
Claridad, sencillez y unidad (legibilidad): La sintaxis del lenguaje afecta la
facilidad con la que un programa se puede escribir, por a prueba, y más tarde
entender y modificar.
Ortogonalidad: Capacidad para combinar varias características de un lenguaje en
todas las combinaciones posibles, de manera que todas ellas tengan significado.
Naturalidad para la aplicación: La sintaxis del programa debe permitir que la
estructura del programa refleje la estructura lógica subyacente.
Apoyo para la abstracción: Una parte importante de la tarea del programador es
proyectar las abstracciones adecuadas para la solución del problema y luego
implementar esas abstracciones empleando las capacidades más primitivas que
provee el lenguaje de programación mismo.
Facilidad para verificar programas: La sencillez de la estructura semántica y
sintáctica ayuda a simplificar la verificación de programas.
Entorno de programación: Facilita el trabajo con un lenguaje técnicamente débil
en comparación con un lenguaje más fuerte con poco apoyo externo.
Portabilidad de programas
Costo de uso:
1. Costo de ejecución del programa.
2. Costo de traducción de programas.
3. Costo de creación, prueba y uso de programas.
4. Costo de mantenimiento de los programas: costo total del ciclo de vida.
4
Efectos de los entornos sobre
los lenguajes
Cuatro clases generales de entornos objetivo
cubre casi todas las aplicaciones de
programación:
de
procesamiento por lotes,
interactivo,
de sistema empotrado, y
de programación (entorno interactivo).
Cada uno plantea distintos requerimientos
sobre los lenguajes adaptados a esos
entornos.
5
Entornos de procesamiento por
lotes
El más simple entorno operativo se compone sólo de
archivos externos de datos. Un programa toma un cierto
conjunto de archivos de datos como entrada, procesa los
datos y produce un conjunto de archivos de datos de salida.
El nombre de procesamiento por lotes viene porque los
datos de entrada se reúnen en “lotes” de archivos y son
procesados en lotes por programas.
Los archivos constituyen la base para casi toda la estructura de E/S.
Un error que termine la ejecución del programa es aceptable aunque
costoso. No es posible la ayuda externa por parte del usuario para
manejar o corregir errores de inmediato.
Carencia de restricciones de regulación de tiempo. No hay recursos
para monitorear o afectar directamente la velocidad de ejecución del
programa.
6
Entornos interactivos
El programa interactúa durante su ejecución directa con un
usuario en una consola de visualización, enviando
alternativamente salidas hacia ésta y recibiendo entradas
desde el teclado o ratón (procesadores de texto, hojas de
cálculo, juegos, etc.).
Las características de E/S interactivas son diferentes de las
operaciones ordinarias con archivos.
El programa debe ser capaz de gestionar el manejo de errores. La
terminación del programa como respuesta aun error no es
ordinariamente aceptable (a diferencia del procesamiento por lotes).
Los programas interactivos deben utilizar con frecuencia algún
concepto de restricciones de tiempo.
El concepto de programa principal suele estar ausente. En su lugar,
el programa se compone de un conjunto de subprogramas y el
usuario introduce el “programa principal como una serie de
comandos en el terminal.
7
Entornos de sistemas incrustados (empotrados)
Un sistema de computadora que se usa para controlar parte de
un sistema más grande como una planta industrial, una
aeronave, etc., se conoce con el nombre de sistema de
computadora incrustado. El fallo de una aplicación empotrada
puede poner en peligro la vida. La seguridad de
funcionamiento y corrección son atributos principales.
Suelen operar sin un sistema operativo subyacente y sin archivos de
entorno y dispositivos de E/S usuales. El programa debe interactuar
directamente con la máquina.
El manejo de errores tiene gran importancia. Cada programa debe estar
preparado para manejar todos los errores en forma interna, adoptando
acciones apropiadas para recuperarse y continuar. La interrupción del
programa no es aceptable y no hay un usuario en el entorno que pueda
proporcionar la corrección interactiva del error.
Operan en tiempo real, donde la respuesta las entradas debe producirse
en intervalos de tiempo restringidos.
Suele ser un sistema distribuido, compuesto por más de una
computadora.
Una vez iniciadas las tareas, se ejecutan por lo común de forma
8
simultánea e indefinida.
Entornos de programación
Es el entorno en el cual los programas se crean y se ponen a prueba. Consiste en
un conjunto de herramientas (editor, depurador, verificador, generadores de datos
de prueba, etc.) de apoyo y un lenguaje para invocarlas.
Al compilar por separado cada subprograma el compilador necesita información
de:
La especificación del número, orden y tipo de parámetros.
La declaración de tipo de datos.
La definición de un tipo de datos (para la declaración local de variables).
Un problema común, es encontrar, durante el ensamblado del programa final
completo, que varios subprogramas y otras unidades de programa tienen
nombres (de variables) iguales. Métodos para evitar este problema:
Todo nombre compartido debe ser único. Se deben usar convenciones para la
asignación de nombres desde un principio.
2. Definir, en el lenguaje, reglas de ámbito, para ocultar nombre.
3. Los nombres se pueden conocer agregando explícitamente sus definiciones desde una
biblioteca externa (herencia en POO).
1.
Características que ayudan a poner a prueba y depurar programas.
Características para rastreo de ejecución.
Puntos de interrupción. Cuando se alcanza un punto de interrupción durante la
ejecución del programa, la misma se interrumpe y el control se traslada al programador
en un terminal.
3. Asertos: expresan relaciones que deben cumplirse entre los valores de las variables en
ese punto del programa.
1.
2.
9
Marcos de ambiente
Un ambiente de apoyo
consiste en servicios
de infraestructura que
se conocen como
marco de ambiente.
Este marco suministra
servicios como un
depósito de datos,
interfaz gráfica de
usuario, seguridad y
servicios de
comunicación. Los
programas se escriben
de modo que utilicen
estos servicios.
10
Lenguajes intermedios
Las ventajas de utilizar un lenguaje tan establecido
como C como lenguaje intermedio son:
•La
facilidad de portar el lenguaje a una nueva máquina
(sólo hay que tener un compilador C disponible allí).
•La generación de código máquina es una tarea muy
compleja que requiere un conocimiento profundo de la
arquitectura de la máquina en cuestión – y de cada
máquina en que se quiere una versión del lenguaje.
•La facilidad de modificar algún rasgo del comportamiento
del lenguaje en alguna máquina en concreto (por ejemplo,
características de memoria o rendimiento – se pueden
añadir librerías C customizadas sin grandes problemas).
•Las posibilidades disponibles para mapear estructuras
intermedias del nuevo lenguaje a estructuras de datos de
C.
11
Lenguajes intermedios
Y las desventajas son:
•La
depuración es muy difícil porque, entre otras cosas, los
errores que ocurren en el código C no son muy fáciles de
localizar en lo que ha escrito el programador originalmente
en el nuevo lenguaje.
•Las características de rendimiento y eficiencia del
lenguaje están determinadas por el
compilador C.
•Habrá ocasiones en las que no exista una buena
traducción entre una estructura en el nuevo lenguaje y las
estructuras de datos en C, por lo que habrá una pérdida de
eficiencia en el programa resultante (como, por ejemplo,
ocurre en la mayoría de las ocasiones en que se compilan
estructuras de Prolog a C – sólo se puede expresar
iteración en Prolog utilizando recursión).
12
Unidad Didáctica 1: “Sintaxis y
Semántica de los Lenguajes de
Programación”
Tema 2:
“Sintaxis formal de los lenguajes de
programación”
13
Ver Sintaxis y Semántica del resumen en
Problema de traducción de lenguajes
(Capitulo 2)
14
Unidad Didáctica 2:
“Paradigmas y lenguajes ”
Tema 4:
“Descripción de los paradigmas más
representativos ”
15
PARADIGMAS DE PROGRAMACIÓN
La clasificación de los lenguajes atendiendo a sus
características intrínsecas conduce a los llamados
paradigmas de programación. Un paradigma de
programación es un modelo de programación que
engloba a ciertos lenguajes que comparten:
Elementos estructurales: ¿con qué se confeccionan los
programas?
Elementos metodológicos: ¿cómo se confecciona un programa?
16
Programación Imperativa o
Procedural: FORTRAN
Es la primera que se desarrolla porque va determinando
las operaciones que hay que realizar sobre una máquina
ideal de Von Neumann. Desde este punto de vista un
programa es una secuencia de acciones (instrucciones)
que se realizan en un cierto orden determinado por el
flujo del programa.
Las estructuras para el control son generalmente
sentencias condicionales y bucles. Como un ejemplo
ilustrativo veamos el aspecto de un programa en
lenguaje Pascal que calcula el factorial de un número
positivo x:
17
FORTRAN. Historia
Primer lenguaje de alto nivel (1957).
Desarrollado por IBM para el IBM 704.
Estaba orientado a la eficiencia en la
ejecución.
Definición estándar del lenguaje en el 66.
Otras versiones:
FORTRAN
77
FORTRAN 90
18
FORTRAN. Ejemplo
PROGRAM TRIVIAL
INTEGER I
I=2
IF(I .GE. 2) CALL PRINTIT
STOP
END
SUBROUTINE PRINTIT
PRINT *,’Hola Mundo’
RETURN
END
19
FORTRAN. Características
Tipos de datos:
Numéricos
(enteros, reales, complejos y doble
precisión).
Booleanos (logical)
Arreglos
Cadenas de caracteres
Archivos
FORTRAN 90 ya es estructurado, y no requiere
sentencias GOTO.
Sólo dos ámbitos para las variables: local y
global
20
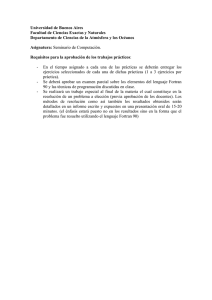
Ejemplo anotado
21
FORTRAN. Objetos de datos
Variables y constantes
FORTRAN no es sensible a mayúsculas y minúsculas. Los
nombre de variables tienen de 6 a 31 caracteres máximo y
deben comenzar por una letra. Los blancos son
significativos.
Declaración explicita de variables.
Enteras (I-N), el resto reales. (se modifica con IMPLICIT).
Punteros: en los primeros FORTRAN no hay punteros y
todas las variables se almacenan en memoria estática. En
FORTRAN 90 se declaran INTEGER, POINTER::P.
Para memoria dinámica ALLOCATE y DEALLOCATE
22
FORTRAN. Objetos de datos
Tipos de datos estructurados
Arrays, pueden tener hasta 7 dimensiones y se guardan por
colummnas.
REAL M(20),N(-5:5)
DIMENSION I(20,20) (tipo por nomenclatura implícita)
Cadenas de caracteres, el primer carácter es el 1, el operador //
permite concatenar cadenas.
Almacenamiento de datos. Se usa COMMON para datos compartidos
y EQUIVALENCE cuando almacenamos una variable con dos posibles
tipos en la misma posición de memoria (como union en C). Se usa
DATA para inicializar datos estáticos.
CHARACTER S*10, T*25
DATA X/1.0/,Y/3.1416/,K/20/
Tipos definidos por el usuario, con TYPE <nombre>... END TYPE
<nombre>
23
FORTRAN. Control de secuencia
EL conjunto de estructuras de control es limitado:
Expresiones, prioridad de operadores
Enunciados
Asignación,
cuando se hace entre cadenas hay ajuste
de tamaño con blancos o truncamiento.
Condicional. Permite IF <cond> ELSE IF... Para
selección múltiple SELECT CASE <expr>
CASE.....CASE DEFAULT.... END SELECT
Iteración. DO....END DO
Nulo, se usa solo para la etiqueta. CONTINUE.
Control de subprogramas. CALL invoca al
subprograma y RETURN devuelve un valor al
programa llamante.
Construcciones propensas a error: GOTO.
24
FORTRAN. Entrada y Salida
Tipos de archivos:
Secuenciales
De
acceso directo
Comandos: READ, WRITE, PRINT, OPEN ,
CLASE, INQUIRE (propiedades o estado del
archivo) REWIND y ENDFILE (para ubicar el
puntero del fichero).
Para el tratamiento de excepciones en las
sentencias READ/WRITE se puede introducir la
posición de la rutina de dicho tratamiento
(ERR=90).
25
FORTRAN. Subprogramas
Hay tres tipos de subprogramas:
Function,
devuelven un solo valor de tipo numérico,
lógico o cadena de caracteres.
Subroutine, devuelve valores a través de variables no
locales COMMON.
Función de enunciado, permite calcular una sola
expresión aritmética o lógica.
FN(X,Y)=SIN(X)**2-COS(Y)**2
Gestión de almacenamiento.
Las
variables son locales o globales (COMMON)
Recursividad: RECURSIVE FUNCTION FACTORIAL(X)
Parámetros de subprograma. Paso por referencia.
26
Abstracción y encapsulamiento
FORTRAN. Evaluación del lenguaje
La abstracción es posible mediante los
subprogramas y el uso de variables COMMON,
aunque su uso es propenso a errores.
FORTRAN sigue siendo utilizado en el ámbito
científico y es muy eficiente realizando cálculos.
La
estructura del programa suele ser dificil de entender.
En FORTRAN 90 se incluye la recursividad y la memoria
dinámica.
Las etiquetas de las sentencias ya no son necesarias, ni
el GOTO, pues se ha transformado en un lenguaje
estructurado.
El aspecto de los programas sigue siendo de
procesamiento por lotes
27
Programación Imperativa o
Procedural: C
Desarrollado por Ritchie y Thompson en el 72.
Multiuso (inicialmente
Sintaxis compacta
para sistemas)
Historia
60
Thompson desarrolla en Bell Multics, se crea un
lenguaje llamado B.
70, el proyecto UNIX avanza y el lenguaje B se
queda pequeño, se comienza a desarrollar C
82, C es distribuido con Unix y muy usado en las
universidades. ANSI comienza a desarrollar un
estándar
28
Perspectiva del lenguaje C
La programación en C se compone de:
El
lenguaje C, con un limitado nº de estructuras
de control. No hay primitivas si no se usan las
librerías.
El preprocesador de C (#), estos enunciados no
forman parte del lenguaje C y son
preprocesados antes de la compilación.
Los supuestos de interfaz C (.h), lor archivos
“header” informan al usuario de las funciones
incluidad en una biblioteca.
Las bibliotecas de C. Archivos obj o lib
conteniendo la implementación de las funciones.
29
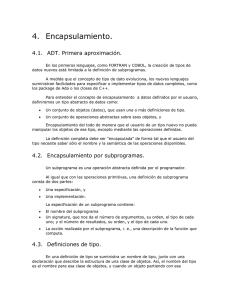
Ejemplo anotado
30
Objetos de datos
Tipos de datos primitivos
Los
nombres de variables no pueden comenzar con
dígito. Sensible a may-min.
Los datos son enteros (char, short, long),
enumerados (enum) o float. Los punteros se declaran
con el tipo seguido de ‘*’.
No hay booleanos.
Tipos de datos estructurados
Arrays,
comienzan en 0 y se guardan por filas.
Tipos definidos por el usuario. Struct { }.
Union, es una definición de tipo si tácticamente con
un struct, pero todos los componentes ocupan la
misma memoria.
31
Representación de almacenamiento
Los tipos de C emplean básicamente la
representación hardware de sus datos.
Una variable de tipo array es también el
puntero al primer elemento del array que
comienza con el índice 0.
Es posible inicializar cualquier variable
declarada estáticamente.
32
Control de secuencia
Expresiones.Se emplea notación infija.
Coerciones, pueden ser forzadas haciendo una cast unaria
antes de un valor.
Enunciados. Pueden ser bloques de sentencias entre
llaves.
A + (int)b
Condicional, if...then...else...;
Condicinal múltiple, switch...{case....case...default...;}
Iterativos: while, do , for.
Transferencia del control: brak, continue, goto, return.
De preprocesador: #define, #include, #ifdef, #if...#undef...#else
C no tiene enunciados E/S, están en stdio.h.
33
Subprogramas y Gestión de
almacenamiento
main() es la función de entrada al programa
principal.
Cada función tiene asociado un registro de
activación, que la invoca cuando es llamada.
No hay anidamiento de funciones, por lo que las
variables son globales o locales. Las globales
deben ser declaradas por extern, para que sea
vistas por otros módulos. extern int i, j, k;
Las funciones de C sólo toman argumentos por
valor. Para simular paso por referencia hay que
pasar el puntero “por valor”.
34
Abstracción y encapsulamiento
El lenguaje da facilidades para la
definición de tipos, pero no implementa el
ocultamiento de la información, de manera
que si se tiene acceso a un struct, tambien
se accederá a todos sus componentes.
El uso de bibliotecas con interfaces
header también permite la abstracción.
35
Evaluación del lenguaje
C es muy potente y popular:
Flexible
Eficiente
Disponible
(se distribuye con Unix)
Portatil
Pero C también permite una programación
descuidada y propensa a errores.
36
Lenguajes funcionales: LISP
60. McCarthy en el MIT
Muy usado en IA
En LISP la recursión se emplea a menudo
como estructura de control, lo que resta
eficiencia a las ejecuciones.
La últimas versiones de LISP incluyen un
recolector de basura
37
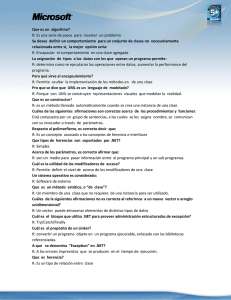
Hola Mundo en LISP
38
Perspectiva del lenguaje
Interactivo (usualmente)
Los datos en LISP son muy restringidos:
Átomos literales (símbolos)
Átomos numéricos
La estructura de datos básica es la lista. Incluye
primitivas para su manipulación.
Los comentarios comienzan por ‘;’
Los parámetros de función van todos por valor o por
referencia según la clasificación de la función.
LISP es interpretado y usa una estructura de gestión de
almacenamiento en montículo con recolección de
basura como almacenamiento primario para datos y
programas.
39
Gestión de almacenamiento
La memoria se estructura en forma de montículo, que
maneja unidades de una palabra de tamaño fijo usando
una lista de espacios libres y un recolector de basura.
Entorno de referencia:
Local, es el que se da en las listas, como asociaciones de átomos
relacionados de una determinada manera.
Global o común, se consigue mediante asociación de un átomo
con una propiedad del mismo que contiene un puntero al datos
referenciado. Se usa set y setq.
Paso de parámetros:
Transmisión por valor, consiste en evaluar las expresiones de una
lista de parámetros y transmitir los valores resultantes.
Transmisión por nombre, transmitir las expresiones de la lista de
parámetros sin evaluar, y dejar que la función llamada los evalue
usando eval. En funciones macro la transmisión por nombre es la
norma. Para funciones lambda se puede especificar la transmisión
por nombre usando nlambda, en lugar de lambda.
40
Objetos de datos
Tipos de datos primitivos: variables y constantes:
Enteros
Reales
Caracteres
Los identificadores con minúscula representan hechos,
los que van con mayúscula variables.
El alcance de una variable es la regla donde aparece.
Tipos de datos estructurados:
Átomos:
constantes y variables de cadena
Listas, representadas entre [ ]
Tipos definidos por el usuario. Las reglas para
definir relaciones pueden actuar como tipos de
41
usuario.
Representación de almacenamiento
Las reglas y hechos son almacenadas en
memoria como listas enlazadas.
La ejecución de prolog consiste en una
búsqueda en profundidad de un árbol
conteniendo todas las posibles soluciones.
Para cada una de ellas se evaluará su
corrección. La búsqueda se puede hacer
más eficiente mediante la poda del árbol
de búsqueda (corte).
42
Control de secuencia
El orden de evaluación es secuencial
Expresiones, operaciones aritméticas y operadores
relacionales. Not().
Enunciados
Hechos, relaciones que se expresan en una consulta. Son
tuplas con un nombre de predicado y unos argumentos.
Reglas, implicaiones que se expresan en una operación consult
Preguntas, sucesión de términos que finalizan con un punto.
Cortes, (!), fuerza el retroceso en la búsqueda. Esto puede
impedir que se encuentren ciertas soluciones, pero puede hacer
más eficiente la búsqueda.
Entrada y salida, nl y write.
43
Unidad Didáctica 2:
“Paradigmas y lenguajes ”
Tema 5:
“El paradigma de la programación orientada a
objetos (POO)”
44
PROG. ORIENTADA A OBJETO
Ver Apuntes sobre la POO
45
HERENCIA
Con frecuencia la información se pasa entre
componentes de programa de manera implícita,
a este traspaso de información le llamamos
herencia.
La herencia consiste en la recepción en un
componente de programa de propiedades o
características de otro componente de acuerdo
con la relación especial que existe entre ambos
componentes.
Las reglas de alcance de variables son una
forma de herencia.
La herencia múltiple se da cuando una clase
tienen varias superclases de las que hereda.
46
Clases derivadas
La herencia se implementa en los lenguajes orientados
a objetos a través de clases derivadas, que heredan
propiedades y métodos de sus superclases.
La visibilidad de los objetos heredados depende de la
forma en que se declaran:
PRIVATE
PUBLIC
PROTECTED
Implementación: En la clase derivada los nombre
derivados de la superclase se agregan al espacio.
Si en la definición hay una función constructora, hay que incluir
en la declaración una llamada a dicha función.
El objeto guarda la referencia de los apuntadores a todas las
propiedades y métodos, a esto se llama enfoque con base en
copia de la herencia (usado en C++).
47
Métodos
La herencia de métodos para crear objetos
nuevos proporciona un poder adicional que va
más allá del simple encapsulamiento.
En las clases derivadas, cuando se quiere
cambiar uno de los métodos hay dos
posibilidades:
Redefinir
el método en la clase derivada
Usar una función virtual, que se enlaza
dinámicamente en el momento de llamada del
subprograma.
48
Herencia de clases
Si se envía un mensaje a un objeto con un
método que no está definido en su clase
se pasa a la clase progenitora, y así
sucesivamente.
En los métodos de palabra clave el
parámetro se nombra de forma explícita
en la declaración del método
49
Conceptos de abstracción
El encapsulamiento es un mecanismo divide y vencerás
para proporcionar control sobre el programa en
desarrollo.
La abstracción y la herencia puede ser usada para
impedir al programador ver el contenido de los objetos
de datos que no convenga. La herencia,
fundamentalmente, es un mecanismo para pasar
información entre objetos en clases relacionadas.
Permite:
Especialización, para que los objetos derivados contengan
caracterísiticas de otros objetos.
Descomposición, permite separar una abstracción en sus
componentes. Lo contrario es la agregación.
Ejemplarización, es el proceso de crear ocurrencias de una
clase (se trata de un proceso de copia).
Individualización, objetos similares se agrupan con otros para
propósitos comunes. Es lo contrario de agrupamiento.
50
POLIMORFISMO
El polimorfismo es la capacidad de un solo
operador o nombre de subprograma para
referirse a varias definiciones en función
del contexto, es decir, de los tipos de daos
de los argumentos y del resultado.
51
Unidad Didáctica 3:
“Mecanismos de los LP”
Tema 7:
“Tipos, declaraciones y control”
52
Control de secuencia
Las estructuras para el control de la secuencia
son de 3 tipos:
Estructuras
que se usan en expresiones: precedencia
y paréntesis.
Estructuras que se usan en enunciados:
condicionales e iterativos.
Estructuras que se usan en subprogramas: llamadas
a subprogramas.
Estructuras de control explícitas, son las que el
programador usa de forma optativa; mientras
que las implícitas son las que el lenguaje define.
53
Secuenciamiento en expresiones
La evaluación de expresiones depende de las
prioridades y de los paréntesis. Se puede
representar la evaluación en una estructura de
árbol. Tres órdenes:
Prefijo
(polaca prefija), el operador antecede a los n
operandos.
Se puede evaluar en un solo examen de la expresión
Se puede usar para cualquier número de operandos
Traducción a código fácil y almacenamiento en pila
Postfija,
el operador sigue a sus operandos.
Ventajas parecidas a la prefija.
Infija, sólo es adecuada para dos operandos.
Requiere reglas de precedencia y paréntesis. La
evaluación suele ser de izquierda a derecha, pero en
la potenciación es al revés.
54
Representación de expresiones en
tiempo de ejecución
Es necesario traducir las expresiones a una
forma ejecutable:
Secuencias
de código máquina, que deben hacer uso
de localizaciones absolutas de los datos y registros
para guardar datos intermedios.
Estructuras de árbol, luego se ejecutan usando
intérpretes software.
Formas prefija y postfija, pueden ser ejecutadas
almacenándolas en la pila de forma fácil.
55
Evaluación de expresiones en árbol
Se pueden presentar algunos problemas:
Reglas de validación uniforme.
Impaciente. Consiste en evaluar todos los operandos que
cuelgan de un operador para luego realizar la operación.
Frecuente y conceptualmente sencilla.
Perezosa. No evaluar la operación, sino pasar los operandos sin
evaluar hasta que no quede otro remedio. Se pueden ahorrar
operaciones, pero es difícil de implementar.
Efectos colaterales, si un operando aparece varias
veces en una expresión, pero del momento dela primera
evaluación a la segunda cambia su valor por un efecto
colateral, no se puede ahorrar su cálculo.
Condiciones de error, determinadas operaciones en la
secuencia de cálculo pueden fallar (división por 0).
Expresiones booleanas en cortocircuito. Una evaluación
impaciente de expresiones booleanas puede conducir a
un error no previsto por el programador.
56
Secuenciamiento con expresiones
no aritméticas
Este tipo de operaciones son muy utilizadas en lenguajes
lógicos:
Concordancia de patrones
Reescritura de términos (reglas de producción)
Unificación, que consiste, ante una consulta (predicado
conteniendo variables), en la sustitución de variables para
concordar patrones congruentes con las reglas y hechos de la base
de datos.
En la implementacion de la unificación en PROLOG las
pilas desempeñan un papel importante. Además, para el
recorrido del árbol de búsqueda se emplea el
RETROCESO, salvo que se encuentre la función ! (corte),
que hace que se produzca siempre fracaso al retroceder a
la última solución plausible.
57
Control de secuencia mediante
enunciados
Asignaciones a objetos de datos. El valor de los datos
puede variar la secuencia.
Formas de control de secuencia:
Enunciado de asignación. Suele ser un operador binario que
asigna a la variable izquierda el resultado de evaluar la derecha.
Enunciado de entrada. Leer datos desde un terminal u otro
periférico.
Otras operaciones de asignación. La más usada es la
transmisión de parámetros.
Composición o secuencia
Alternancia
Iteración
Control explícito de secuencia: GOTO
Otras sentencias (ya estructuradas): BRAK y CONTINUE.
58
Control de secuencia estructurado
Enunciados compuestos. Serie de enunciados
que se pueden tratar como un solo enunciado
(bloques).
Enunciados condicionales, expresan alternancia
de dos o más enunciados:
If
Case
Enunciados de iteración, es le mecanismo
básico para la repetición de un proceso:
Repetición
simple: perform (FORTRAN)
Repetición mientras: while.
Repetición mientras con contador: for
Repetición indefinida: loop
59
El problema del control de
secuencia estructurado.
La estructura puede ir complicándose por:
Programas primos, tienen:
Enunciado de iteración con salidas múltiples.
Condiciones excepcionales (errores y su tratamiento)
Un solo arco de entrada
Un solo arco de salida
Unas sola ruta del arco de entrada a cada nodo, y de cada nodo
al arco de salida
El teorema de la estructura (Jacobini) establece que
todos los programas se pueden reescribir usando los
enunciados de la programación estructurada.
60
Control de secuencia en los
subprogramas: Llamada/Regreso simple
Tienen el mismo efecto que si se copia el código
del subprograma en la llamada call (regla de
copia):
Los
subprogramas no pueden ser recursivos
Se requieren enunciados call explícitos
Los subprogramas se deben ejecutar por completo
en cada llamada
Transferencia inmediata del control en el punto de
llamada
Secuencia única de ejecución
61
Control de secuencia en los
subprogramas: Subprograma simple
Llamada/Regreso
Es posible el control sobre los datos:
Transmisión de parámetros
Variables locales
Variables
globales
Para la implementación es necesario:
La definición del subprograma, estática e invariable.
Un registro de activación, cambiante, que almacena:
Datos locales
Parámetros
Otros elementos de datos:
Apuntador a la instrucción presente (CIP)
Apuntador del ambiente presente (CEP). El ambiente de
referencia es el registro de activación.
Dirección de retorno
62
Control de secuencia en los
subprogramas: Subprogramas recursivos
La recursividad es un procedimiento para el
control de secuencia consistente en que un
programa se llama a sí mismo, de manera que
se crea una segunda activación del subprograma
durante el tiempo de vida de la primera
activación.
Implementación:
No
es conceptualmente distinto del caso anterior, sólo
es necesario disponer de espacio para los registros de
activación de las llamadas recursivas (pila).
63
Atributos del control de datos
Es necesario, durante la ejecución, conocer el significado o valor de
cada identificador que aparece en el programa.
Nombres, sirven para asociar un identificador a un dato. Clases:
De variables
De parámetros formales
De subprogramas
Para tipos definidos
Para constantes definidas
De enunciados
De excepciones
Para operaciones primitas
Para constantes de literales
Un nombre compuesto corresponde a una estructura de datos.
Según el ambiente de referencia, cada ASOCIACIÓN representa la
pareja de un identificador y su objeto de datos.
64
Ambientes de referencia
Ambiente local de referencia:
Parámetros formales
Variables locales
Subprogramas definidos
Ambiente no local de referencia, son identificadores que
se pueden usar desde el subprograma, pero no se crean
en él.
Ambiente global de referencia, es la parte del ambiente
no local. Una variable local oculta a la global del mismo
nombre.
Ambiente predefinido de referencia. Algunos
identificadores son predefinidos por el lenguaje
65
Alcance estático y dinámico
El alcance estático de un identificador
para una asociación es el conjunto de
activaciones de subprograma en las
cuales la asociación es visible.
Una regla de alcance dinámico define las
asociaciones en el curso dinámico de
activaciones de subprogramas.
66
Datos compartidos en subprogramas
Los objetos de daots suelen ser
compartidos para la comunicación con y
entre los distintos subprogramas.
Enfoques:
Ambientes
comunes explícitos
Ambientes no explícitos con base a alcance
dinámico
Alcances estático
herencia
67
Parámetros y transmisión de parámetros
Los parámetros y resultados transmitidos de
manera explícita son el método principal para
compartir datos entre subprogramas.
Parámetro real, es una clase de objeto de datos
dentro de un subprograma que aparece declarado
en el encabezamiento.
El parámetro real es el objeto de datos que se
comparte con el subprograma llamado.
El establecimiento de correspondencia entre el
parámetro real y el formal puede ser:
Correspondencia
Correspondencia
de posición (lo más frecuente)
por nombre explícito, ambos
parámetros se aparean en la llamada:
Sub(Y => B, X => 27)
68
Métodos para transmitir parámetros
Llamada por nombre, se copia.
Llamada por referencia, se pasa el puntero al
parámetro real.
Llamada por valor – resultado, se copia y
caundo finaliza se escribe el valor resultado
sobre el parámetro real.
Llamada por valor constante, el parámetro real
se pasa al formal como valor constante, no se
puede modificar.
Llamada por resultado, se usa sólo para
transferir un resultado de regreso al programa.
No importa su valor inicial.
69
Semántica de la transmisión
Independientemente de la la implementación
los parámetros pueden ser:
De
entrada (IN)
De salida (OUT)
De entrada/salida (IN/OUT)
Lo normal es que los parámetros con tipos
elementales de datos admitan las 3
posibilidades, y que los tipos de datos
compuestos (arrays y registros) se pasen
por referencia.
70
Subprogramas como parámetros
Para transmitir un subprograma como parámetro al
subprograma que se llama hay que tener en
cuenta que:
El
parámetro real es el nombre del subprograma que se
transmite
El parámetro formal especifica el tipo de subprograma
Procedure Q(x:integer, function R(y,z:integer):integer)
Problemas asociados con los parámetros de
subprograma:
Verificación estática de tipos, pues en la llamada se debe hacer
esta comprobación.
Referencias no locales (variables libres), es decir variables que
no tienen enlaces dentro de la definición del subprograma.
Son necesarias reglas de asociación más reciente para
referencias no locales.
71
 0
0
Anuncio
Documentos relacionados


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados