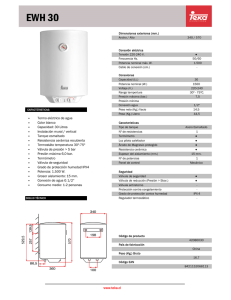
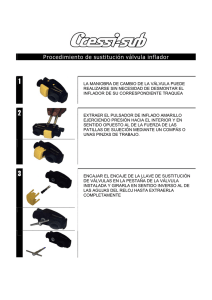
UNIVERSIDAD CENTRAL DE VENEZUELA FACULTAD DE INGENIERÍA ESCUELA DE INGENIERÍA QUÍMICA DEPARTAMENTO DE DISEÑO Y CONTROL DE PROCESOS CONTROL DE PROCESOS (5412) Elaborado por: Farias Ammarhit Guzmán Rosmaryan Heredia Rossi Lara Karla Caracas, abril del 2019 a) Completar el diagrama ISA del sistema mostrado. A,B TC 01 Vapor a baja presión TY 01 I/P LT 01 TT 01 TC 01 TY 01 A,B,C,D H20 b) Dimensionar la válvula de control de temperatura para 100% de sobrecapacidad. Especificar la posición de falla segura de la válvula de control y la acción apropiada del controlador. Dimensionamiento de la válvula Datos: fd=200 gpm ΔP= 10 psi ρAceite=0,88 g/ml ρref=1 g/ml Primeramente, se realiza el calculo de la gravedad específica a partir de las densidades respectivas 𝐺𝐸 = 𝜌𝐴𝑐𝑒𝑖𝑡𝑒 0,88 = = 0,88 𝑔/𝑚𝑙 𝜌𝑟𝑒𝑓 1 Ahora se calcula el fmax para el 100% de su sobrecapacidad 𝑓𝑚𝑎𝑥 = 𝑓𝑠𝑜𝑏𝑟𝑒𝑑𝑖𝑠𝑒ñ𝑜 ∗ 𝑓𝑑𝑖𝑠𝑒ñ𝑜 = 2 ∗ 200 = 400 𝑔𝑝𝑚 Una vez se tiene el valor de fmax, se calcula el Cv de la Válvula como se muestra a continuación: 𝐶𝑣𝑚𝑎𝑥 = 𝑓𝑚𝑎𝑥 √∆𝑃 𝐺𝐸 = 400 10 0,88 √ = 118,66 𝑔𝑝𝑚 √𝑝𝑠𝑖 Falla de la Válvula Válvula TCV-01 TCV-01 Condición de Seguridad Evitar sobrecalentamiento Evitar sobrecalentamiento Falla FO(ATC) FO(ATC) Acción del Controlador Controlador TC-01 LC-01 Acción Inversa Directa Tipo PID P Apertura de la Valvula (%) FO (ATC) 100 90 80 70 60 50 40 30 20 10 0 4 6 8 10 12 14 16 18 20 Señal (mA) c) Si la caída de presión a través de los tubos de la caldera varía con el cuadrado del flujo y la válvula es isoporcentual con parámetro de rangeabilidad (α) de 50, ¿cuál es la posición de la válvula en las condiciones de diseño? ¿Cuál es el flujo a través de la válvula cuando está completamente abierta? Calculo del Cv para un caudal de 200 gpm 𝐶𝑣 = 𝑓𝑑 √∆𝑃 𝐺𝐸 = 200 10 0,88 √ = 59,33 𝑔𝑝𝑚 √𝑝𝑠𝑖 Calculando el delta de presión a partir del Cv y el flujo de diseño 𝑓𝑑 2 200 2 ∆𝑃 = ( ) = ( ) = 11,36 𝑝𝑠𝑖 𝐶𝑣 59,33 Calculando Cvmax a partir de la siguiente formula 𝐶𝑣𝑚𝑎𝑥 = 𝑓𝑑 400 = √∆𝑃 𝐺𝐸 11,36 0,88 = 111,31 √ 𝑔𝑝𝑚 √𝑝𝑠𝑖 Calculando la abertura de la válvula (Vp) 𝑓𝑑 = 𝐶𝑣𝑚𝑎𝑥 ∗ 𝛼 𝑉𝑝−1 ∗ √ ∆𝑃 11,36 => 200 = 111,31 ∗ 50𝑉𝑝−1 ∗ √ 𝐺𝐸 0,88 La posición de la válvula en las condiciones de diseño es igual a Vp=0,82. d) Realizar el diagrama de bloques del lazo de temperatura. ToAB Tsp + mA - Gc(s) mA Gv(s) H(s) (4-20) mA gpm L1(s) Gp(s) ++ T(s) °F (150-350) °F e) Calcular la ganancia del proceso en las condiciones de diseño, incluyendo la válvula de control y el transmisor de temperatura. Para calcular la ganancia del proceso se tiene un cambio de 5% en la posición de la válvula (asumiendo que se abre 0,05 adicional a la apertura ya establecida, con lo que se calcula el nuevo flujo para una apertura de 0,87) resulta en un cambio de la temperatura de 4.4ºF después de un tiempo muy largo. ∆𝑃 11,36 𝑓𝑑 = 𝐶𝑣𝑚𝑎𝑥 ∗ 𝛼 𝑉𝑝−1 ∗ √ = 111,31 ∗ 500,87−1 ∗ √ = 240,54 𝑔𝑝𝑚 𝐺𝐸 0,88 Se calcula la Ganancia del Proceso 𝑘𝑝 = ∆𝑆 4.4 = = 0,108 °𝐹/𝑔𝑝𝑚 ∆𝐸 240,50 − 200 Función de Transferencia del Proceso 𝐺𝑝(𝑠) = 𝑘𝑝 0,108 = °𝐹/𝑔𝑝𝑚 𝜏𝑃 𝑆 + 1 20. 𝑆 + 1 Ganancia del Transmisor 𝑘𝐻 = ∆𝑆 (4 − 20) = = 0,08 𝑚𝐴/°𝐹 ∆𝐸 (150 − 350) Función de transferencia del Transmisor 𝐻(𝑠) = 𝑘𝐻 0,08 = 𝑚𝐴/°𝐹 𝜏𝐻 𝑆 + 1 3. 𝑆 + 1 Ganancia de la Válvula Por ser isoporcentual se sabe que la ganancia de la válvula corresponde a 𝑘𝑣 = 𝑘𝑣 ∗ ∗ 𝑘𝑣 ′ 𝑘𝑣 ∗ = 𝐶𝑣𝑚𝑎𝑥 ∗ ln 𝛼 ∗ √ ∆𝑃 11,36 𝑔𝑝𝑚 ∗ 𝛼 𝑉𝑝−1 = 111,31 ∗ ln 50 ∗ √ ∗ 𝛼 0,87−1 = 782,40 𝐺𝐸 0,88 𝐴. 𝑉 𝑘𝑣 ′ = ∆𝑆 (0 − 1) = = 0,08 𝐴. 𝑉/𝑚𝐴 ∆𝐸 (4 − 20) 𝑘𝑣 = 782,40 ∗ 0,08 = 48,9𝑔𝑝𝑚/𝑚𝐴 Función de transferencia de la Válvula 𝐺𝑣(𝑠) = 𝑘𝑣 48,9 = 𝑔𝑝𝑚/𝑚𝐴 𝜏𝑣 𝑆 + 1 10. 𝑆 + 1 f) Utilizando las herramientas de Matlab® calcular los valores de ganancia y periodos últimos gráficamente y analíticamente usando la función rlocus y allmargin. Gráficamente se observan a continuación los valores de ganancia y periodos últimos: Analíticamente los valores de ganancia y periodo ultimo corresponden a: GainMargin: 35.3850 GMFrequency: 0.2345 g) Calcular los parámetros de ajuste PID a partir de los datos obtenidos anteriormente. Kcu=35.3850 Wu=0.2345 Ganancia (k) 21.231 Tiempo Integral (TI) 13.396 Tiempo Derivativo 3.349 h) Utilizar la función feedback para una función de primer y segundo orden y step para representar la curva de reacción (puede utilizar también la función ltiview). I)Sintonizar el controlador utilizando la herramienta de simulink de Matlab® y representar los parámetros de ajuste PID. Realizar el gráfico correspondiente del comportamiento del controlador.