UNIVERSIDAD COMPLUTENSE DE MADRID
FACULTAD DE CIENCIAS MATEMÁTICAS
Sección Departamental de Astronomía y Geodesia
Grado en Ingeniería Matemática
ESTUDIO COMPARATIVO DE MÉTODOS DE
ANÁLISIS DE MAREA OCEÁNICA
Trabajo de Fin de Grado presentado por:
Rubén Cabrera Lozano
Bajo la dirección de:
Carmen de Toro y Llaca
Madrid, Junio 2016
Agradecimientos
Quiero expresar mi más sincera gratitud a la profesora Carmen de Toro y Llaca que me
dio la oportunidad de realizar este trabajo y me transmitió desde el primer momento su
entusiasmo e ilusión por este trabajo final de grado. Sin sus consejos, críticas y sobre
todo dedicación no me hubiera sido posible llevar a cabo este trabajo.
Por último, quiero manifestar mi gratitud a mis amigos y familiares, que han estado a mi
lado durante la realización de este trabajo. Aunque enumerarlos a todos no es posible,
me gustaría al menos citar a mi hermano y a mis padres.
Mira las estrellas. Los grandes reyes del pasado nos miran desde las estrellas así que,
cuando te sientas solo, recuerda que esos reyes siempre estarán ahí para guiarte... Y yo
también.
-El rey león-
2
Resumen
En el estudio de la dinámica oceánica es necesario disponer de técnicas de análisis de
series temporales, discretas e interrumpidas, adaptadas a las características propias del
comportamiento del océano. Se trata de procesos matemáticos mediante los cuales las
variaciones de nivel registradas son separadas en constituyentes armónicos que cubren un
amplio espectro de frecuencias. Dada la necesidad de disponer de métodos de análisis
precisos y eficientes, se ha realizado un estudio comparativo de los principales métodos
de análisis de observaciones mareográficas costeras. La correcta aplicación e
interpretación de un proceso de modelización matemático requiere el conocimiento del
fenómeno objeto de estudio. Por este motivo, se ha iniciado el trabajo estudiando
teóricamente los principales fenómenos de mareas. Posteriormente, se han estudiado
desde el punto de vista teórico los principales métodos de preproceso y análisis que serían
aplicados sobre una serie de observación de largo periodo. A continuación, se ha realizado
un estudio individual y comparativo en orden a su aplicación práctica. Se trata de analizar
su idoneidad en relación con las diferentes investigaciones que se realizan en la actualidad
en el ámbito de los estudios de las variaciones del nivel del mar. Finalmente, se ha
examinado, de forma independiente, el comportamiento de los tres métodos alternativos
más utilizados. Su validación y comparación se realizó estimando la idoneidad de su
respuesta frente a problemas específicos oceanográficos: largos periodos, altas
frecuencias y modulaciones astronómicas, entre otros.
3
Abstract
In the study of the oceanic dynamic is necessary to dispose of analysis techniques of
temporary, discreet and interrupted series, adapted to the intrinsic characteristics of the
ocean behavior. It consists in mathematical processes; through them, the registered level
variations are separated in harmonic constituents that cover a broad frequency spectrum.
Thus, is necessary to dispose of accurate and efficient analysis methods, a comparative
study of the principal analysis methods of mareographic coastal observations has been
done. The correct application and interpretation of a mathematical modelization process
require the knowledge of the phenomena under study. For this reason, the work has started
studying theoretically the principal tide phenomena. Lately, from a theorical point,
principal preprocess and analysis methods have been studied in order to apply them to a
long period observation series. Then, an individual and comparative study has been done
in order of their practical application. It consists in analyze their suitability in relation
with the different actual investigations in the ambit of studies about variations of sea level.
Finally, the behavior of the three alternative methods has been examined independently.
Their validation and comparation was done estimating the suitability of their response
versus specific oceanographic problems such as long period, high frequencies and
astronomical modulation, among other.
Índice general
1. Introducción .................................................................................................... 6
2. Marea oceánica ............................................................................................... 8
2.1. Fenómenos de marea ................................................................................. 8
2.2. Principales desarrollos armónicos del potencial de marea ........................ 9
2.3. Términos astronómicos y armónicos compuestos ................................... 11
2.4. Variaciones temporales de las constantes armónicas .............................. 12
3. Preproceso de las series de observación...................................................... 14
3.1. Base de datos mareográfica ..................................................................... 14
3.2. Detección de errores, lagunas y variaciones del
cero del mareógrafo ................................................................................. 15
3.2.1. Aplicación de filtros media móvil y Doodson .............................. 15
3.2.2. Errores en tiempo y contenido de la señal .................................... 17
3.3. Programas estándar de preproceso........................................................... 18
3.3.1. MT36 ............................................................................................ 18
3.3.2. TSOFT .......................................................................................... 20
3.3.3. OT2016 ......................................................................................... 21
4. Técnicas de análisis de mareas oceánicas ................................................... 22
4.1. Mínimos cuadrados .................................................................................. 22
4.2. Análisis espectral de Fourier ................................................................... 23
4.3. Métodos mixtos ....................................................................................... 24
4.4. Método de la respuesta ............................................................................ 25
5. Estudio comparativo de métodos de análisis .............................................. 27
5.1. VAV03..................................................................................................... 27
5.2. OT16 ........................................................................................................ 35
5.3. TIDANA .................................................................................................. 36
5.4. SPL64 ...................................................................................................... 41
6. Conclusiones .................................................................................................. 44
Apéndice A. Constituyentes armónicos ............................................................ 46
A.1. Principales constituyentes armónicos ..................................................... 46
A.2. Componentes en aguas someras. Programa VAV03 .............................. 47
Apéndice B. Salidas de programas de análisis ................................................. 48
B.1. VAV03 .................................................................................................... 48
B.1. TIDANA ................................................................................................. 50
B.1. Largos periodos ....................................................................................... 51
B.1. Armónicos compuestos ........................................................................... 52
B.1. Predicción SPL64 .................................................................................... 55
Apéndice C. Código de los programas desarrollados...................................... 56
C.1. Determinación de fechas julianas, señalización de gaps y
transformación de formatos .................................................................... 56
C.2. Filtro Media Móvil .................................................................................. 60
C.3. Filtro Doodson 𝑋𝑜 ................................................................................... 61
C.4. Corrección de desfasajes en tiempo ........................................................ 61
Referencias .......................................................................................................... 64
Capítulo 1
Introducción
Las variaciones del nivel del mar observadas en una cierta localización son el resultado
de la superposición de desplazamientos verticales inducidos por un amplio conjunto de
fenómenos. Entre ellos se incluyen armónicos astronómicos puros, de frecuencias
conocidas, términos no lineales, característicos de aguas someras, fenómenos locales de
carácter geodinámico y efectos atmosféricos. Se suman a los efectos anteriores
fluctuaciones globales de la superficie libre del océano ocasionadas por cambios
hidrosféricos y litosféricos; es decir, variaciones eustáticas del océano mundial que
ocurren con idéntica amplitud, pero en una diferente escala de tiempo.
En el estudio de la dinámica oceánica es necesario, en consecuencia, disponer de técnicas
de análisis de series temporales, discretas e interrumpidas, adaptadas a las características
propias del comportamiento del océano. Se trata de procesos matemáticos mediante los
cuales las variaciones de nivel registradas son separadas en constituyentes armónicos que
cubren un amplio espectro de frecuencias. Deben proporcionar factores de amplitud,
desfasajes y vectores residuales, entre otros parámetros, respecto de un modelo
hidrodinámico teórico. Suele considerarse como modelo de comparación la marea de
equilibrio, aunque este modelo no es único.
Este campo de estudio posee un gran interés práctico, ya que la determinación precisa de
las constantes armónicas de marea a lo largo de las costas es un paso previo fundamental
en numerosas investigaciones de geodesia marina. En particular, predicciones locales del
nivel de marea, necesarias en navegación marítima, validación de modelos globales y
regionales, y el estudio de las variaciones del nivel medio del océano en relación con el
cambio climático global (Pugh, 2004). Las constantes armónicas obtenidas a través del
análisis de series temporales intervienen en la apodización y reconstrucción de la señal.
Otra aplicación relevante es el levantamiento de cartas oceánicas donde intervienen como
condiciones de contorno.
No menos importante es su implicación en la determinación de las edades de la marea y
de la paralaje. El término “edad de la marea” fue utilizado por primera vez por Whewell
en 1983. Fue designado “edad de la desigualdad de fase” por Wood y “retardo
equinoccial” por Dehant (Garrett y Munk, 1971; Pugh, 1996, Ekman, 1998). Estas
constantes no armónicas, edades de las mareas diurna y semidiurna y edad de la paralaje.
Se obtienen empíricamente a partir del análisis de observaciones mareográficas costeras
y pelágicas. En su formación intervienen los armónicos de mayor amplitud lunar y solar
(𝑀2 , 𝑆2 , 𝑁2 , 𝐾1 , 𝑂1 ). Su importancia estriba en que proporcionan información relevante
sobre la distribución espacial de las anomalías existentes en el modo normal de oscilación
6
Capítulo 1. Introducción
de los océanos. Esto se debe a que los desfasajes están asociados con la disipación de
energía por fricción, resonancias locales, gradientes batimétricos y efectos radiacionales.
En definitiva, proporcionan información fundamental sobre la respuesta hidrodinámica
del océano a las fuerzas que derivan del potencial astronómico de mareas. Un claro
ejemplo podemos encontrarlo en el golfo de Gabes, donde una extensa región de baja
batimetría y fuertes gradientes batimétricos, dan lugar a fuertes anomalías en la
distribución espacial de estos parámetros en el Atlántico Nororiental y el Mediterráneo
(Gil, De Toro, 2005).
Dada la necesidad de disponer de métodos de análisis precisos y eficientes, el objetivo de
nuestro trabajo se ha centrado en realizar un estudio comparativo, teórico y práctico, de
los principales métodos de análisis de observaciones mareográficas costeras.
Dado que la correcta aplicación e interpretación de un proceso de modelización
matemática requiere el conocimiento del fenómeno objeto de estudio hemos iniciado el
trabajo estudiando teóricamente los principales fenómenos de mareas (Capítulo 1). Se
analizan términos astronómicos puros, armónicos compuestos y variaciones temporales
de las constantes armónicas asociadas al método de análisis.
Para la contrastación de cualquier método de análisis, es imprescindible disponer de una
serie de observación conveniente en cuanto a longitud, periodo de discretización y
sometida a una estricta etapa de preproceso. La serie de observación utilizada consta de
54 años de lecturas horarias del nivel del mar, realizadas en el puerto de La Coruña. En
este tercer capítulo se describen, aplican y comparan diversos métodos de preproceso.
Con este objetivo se han desarrollado diversas herramientas de proceso de datos aplicados
en combinación con los métodos de preproceso estándar, algunos de los cuales han sido
modificados a fin de adaptarlos a nuestras necesidades.
Se estudian a continuación (Capitulo 4) las principales técnicas de análisis, distinguiendo
entre aplicación de técnicas mínimos cuadrados, análisis espectral de Fourier y métodos
mixtos. Se describen además otras técnicas, en particular el método de la respuesta.
Finalmente (Capítulo 5) se examina, de forma independiente, el comportamiento de los
tres métodos alternativos utilizados de forma generalizada en el análisis de series
mareográficas interrumpidas. La validación de los métodos, se ha realizado sobre la base
de la serie de observación descrita en el capítulo 3. La comparación se realizó estimando
la idoneidad de su respuesta frente a problemas específicos oceanográficos: largos
periodos, altas frecuencias y modulaciones astronómicas, entre otros.
Presentamos las conclusiones de este estudio en el capítulo 6.
7
Capítulo 2
Marea oceánica
2.1
Fenómenos de marea
Consideramos una tierra real, cuya superficie está parcialmente recubierta de agua, y
sobre la que actúan fuerzas externas derivadas del potencial astronómico de marea. Bajo
su acción, las masas de agua oceánica sufren desplazamientos periódicos de amplitud e
inercia determinadas por sus propiedades físico-químicas, la posición geográfica, la
forma y profundidad de la cuenca y la constitución de los fondos submarinos. Al mismo
tiempo, el fondo oceánico sufre deformaciones por mareas terrestres de amplitud y
desfasaje dependientes de las propiedades viscoelásticas del medio. Por otro lado, los
desplazamientos de las masas de agua oceánicas dan lugar a fenómenos de carga sobre el
fondo, que producen efectos deformantes de sentido contrario a los inducidos por la marea
terrestre. Tendremos, por lo tanto, dos superficies, el fondo y la topografía del océano en
continuo movimiento, cuya posición determina la marea geocéntrica observada
(Schwiderski, 1982; De Toro, 1989). En consecuencia, la marea oceánica es el resultado
de dos superficies en continua transformación.
Figura 2.1. Desplazamientos verticales del fondo oceánico y de la superficie libre del
océano bajo las fuerzas que derivan del potencial astronómico de mareas.
Podemos describir el proceso más detalladamente siguiendo el esquema presentado en la
Figura 2.1. Suponiendo despreciables otro tipo de desplazamientos, como el determinado
por la marea atmosférica, las circulaciones generales oceánicas y los efectos estático y
8
Capítulo 2. Marea oceánica
dinámico de las variaciones de presión, las dos superficies, el fondo oceánico y la
superficie libre de océano, ocuparían las posiciones 𝐹1 𝑦 𝑆1 . Por efecto de la marea
oceánica 𝑚𝑜 , la superficie 𝑆1 pasaría a ocupar la posición 𝑆2 . Al introducir la elevación
provocada por la marea terrestre del fondo 𝑚𝑡 , estas superficies se desplazarían a 𝐹2 𝑦 𝑆3 ,
respectivamente. Finalmente, la carga 𝑚𝑐 ejercida por el incremento de masa oceánica,
producirá el hundimiento del fondo hasta la posición 𝐹3 , que se traduce en un descenso
de la superficie libre a 𝑆4 . Estos desplazamientos se producirán con los desfasajes
correspondientes, característicos de la cuenca oceánica, oscilando en función de
(𝑚𝑡 − 𝑚𝑐 ) 𝑦 (𝑚𝑜 + 𝑚𝑡 − 𝑚𝑐 ).
El proceso resultante de acciones directas e indirectas de las fuerzas solares, lunares y
planetarias es complejo en cuanto a respuesta de las masas oceánicas. Por otro lado, es
necesario tener en cuenta que la magnitud y dirección de las fuerzas actuantes es función
de la declinación y distancia del astro perturbador. Por lo tanto, existen efectos ligados a
la radiación intrínseca solar, que actúan en idénticas frecuencias de mareas. Constituye la
denominada marea radiacional.
Por último, en zonas poco profundas, como las que se extienden sobre las plataformas
continentales y a lo largo de canales en forma de embudo, el rango de marea es
amplificado una cantidad inversamente proporcional a la raíz cuarta de la profundidad y
a la raíz cuadrada de la anchura. La amplitud es asimismo amplificada en aguas someras
por un fenómeno de resonancia que se produce cuando el periodo libre de oscilación de
las masas de agua se aproxima al periodo de los constituyentes de marea (Bretreger,
1978).
El estudio de este conjunto de fenómenos se realiza a través de un modelo de comparación
constituido por la denominada marea de equilibrio. Su construcción es realizada sobre la
base de un desarrollo armónico del potencial de marea.
2.2. Principales desarrollos armónicos del potencial de
marea
La base del análisis armónico es la asunción de que las variaciones de mareas se pueden
representar por un número finito N de armónicos de la forma
𝐻𝑛 cos(𝜎𝑛 𝑡 − 𝑔𝑛 )
Donde 𝐻𝑛 es la amplitud, 𝑔𝑛 la fase de la marea de equilibrio en Greenwich y 𝜎𝑛 la
velocidad angular. Esto es consecuencia de que las componentes de los movimientos
orbitales se pueden separar de forma que el potencial lunisolar y planetario puede ser
expresado como una suma de ondas sinusoidales puras, es decir, ondas que tienen como
argumento funciones lineales del tiempo y cuyas frecuencias y amplitudes pueden ser
consideradas, en un periodo de tiempo próximo al siglo, constantes, pues varían muy
9
Capítulo 2. Marea oceánica
lentamente. Además, las amplitudes de estos argumentos sólo dependen de la latitud
geocéntrica del punto de observación.
Este punto es importante ya que la precisión del análisis y predicción de mareas depende
del número de términos utilizados en el desarrollo del Potencial de Marea.
El primer desarrollo de este tipo fue realizado por Ferrel en el año 1874, conteniendo un
número muy limitado de armónicos principales. Más tarde, Doodson (1921) efectuó un
desarrollo armónico puro de los 386 componentes de mayor amplitud, y Cartwright,
Tayler y Edden (1971, 1973) calcularon un total de 504 armónicos, distribuidos de la
siguiente forma: 127 componentes de largo periodo, 205 componentes diurnos, 155
componentes semidiurnos y 17 componentes terciodiurnos.
Siguiendo un proceso similar Büllesfeld (Büllesfeld, 1985) obtiene un desarrollo
armónico del potencial con 656 términos. Considera orden 4 para la Luna y orden 2 para
el Sol.
Tamura (1987) obtuvo un desarrollo de 1200 términos, 285 componentes de largo
periodo, 345 diurnos, 377 semidiurnos, 82 terciodiurnos y 10 cuartodiurnos. En este
desarrollo del potencial generador de mareas, se considera hasta orden cuatro para la Luna
y orden 3 para el Sol. Los coeficientes se dan con seis decimales significativos.
En cuanto a la influencia de los planetas, Tamura fue el primero en introducir términos
planetarios de Júpiter y Venus, Roosbeek y Harmann – Wenzel introdujeron argumentos
adicionales para Marte, Mercurio y Saturno, hasta llegar a un total de 11 elementos
astronómicos.
A partir de nuevas constantes astronómicas Q. Xi (Xi, 1985, 1987, 1989) repitió el
proceso seguido por Doodson para obtener su desarrollo del potencial. Así se corrigieron
algunos errores detectados en el desarrollo de Doodson, y se refirieron los cálculos a
J200.0 en lugar de 1900.0. Además, se tuvieron en cuenta las variaciones de la oblicuidad
eclíptica y de la excentricidad de la órbita terrestre, las cuales producen variaciones
seculares que son detectadas en las amplitudes de los distintos armónicos y se calcularon
los polinomios de Legendre de orden 4. El desarrollo constaba de 1178 términos en 1987,
mejorándose en 1989 con un total de 3070 términos, obtenidos con una precisión de 6
decimales significativos. En la banda semidiurna existen 136 términos de largo periodo,
12 términos diurnos en la banda terciodiurna y 2 términos de largo periodo en la banda
cuartodiurna.
Más tarde Roosbeek (1996) obtuvo un desarrollo de 6499 términos, Hartmann - Wenzel
(1995) obtuvieron 12935 términos. Recientemente, Kudryatsev (2004) propuso un
desarrollo del potencial de marea con 28806 términos.
10
Capítulo 2. Marea oceánica
2.3. Términos astronómicos y armónicos compuestos
Se designan constituyentes astronómicos o puros aquellos que derivan directamente del
potencial generador. En la tabla A.1 (Apéndice A) se pueden ver los principales
componentes.
Al contrario que en mareas terrestres, que puede ser considerado como medio infinito, las
interacciones no lineales con el fondo oceánico dan lugar a una amplificación de las
constantes astronómicas de marea que derivan del potencial astronómico. Son muy
significativas en el análisis de mareas, ya que se produce una elevación de los factores de
amplitud en regiones de baja batimetría (Pugh, 1996).
En las zonas costeras, donde las aguas son de baja batimetría, la progresión de las ondas
de mareas es modificada, además, por todo un conjunto de procesos hidrodinámicos. El
proceso se debe, principalmente, a dos factores: la fricción del fondo marino con la capa
límite de agua y la reflexión de las ondas de marea en dicho fondo. Las distorsiones
resultantes son función de las potencias sucesivas de la propia elevación (Pugh, 1996).
El principal efecto de las interacciones no lineales es la amplificación de las amplitudes
de los armónicos fundamentales, como ya hemos indicado, y la elevación del nivel medio
observado, al generarse términos constantes. También originan fuertes subarmónicos y
nuevos constituyentes, denominados compuestos, cuyos argumentos son suma, diferencia
o múltiplos de los argumentos de las ondas derivadas directamente del potencial
perturbador de marea (De Toro, 1989).
La importancia de los armónicos compuestos estriba en representar la distorsión de los
constituyentes principales en las zonas costeras en estudio,
Tabla 2.1 Principales armónicos compuestos.
11
Capítulo 2. Marea oceánica
En la Tabla 2.1 figuran los principales armónicos compuestos, pertenecientes a las bandas
de largo periodo, diurnas y semidiurnas. También se incluyen algunos de los armónicos
de frecuencias superiores, tanto compuestas como subarmónicos, que poseen una mayor
significación en aguas someras. Para cada uno de ellos se especifican los armónicos que
los generan, su argumento y su velocidad angular horaria.
La determinación de las frecuencias y argumentos de los armónicos compuestos es
fundamental en la etapa de análisis, ya que son necesarios para su separación a través del
análisis, así como en la determinación de los parámetros asociados.
2.4. Variaciones temporales de las constantes armónicas
Las amplitudes armónicas y los desfasajes de los principales constituyentes de marea
sufren variaciones de largo periodo debido a fenómenos de modulación. Tienen su origen
en la superposición de constituyentes armónicos puros, armónicos compuestos, marea del
polo, oscilaciones oceánicas y atmosféricas de baja frecuencia y componentes de largo
periodo de la marea radiacional. Los parámetros de marea son también significativamente
afectados por fenómenos transitorios que inducen variaciones sistemáticas claramente
aperiódicas. Finalmente, es necesario tener en cuenta otro tipo de variaciones en amplitud
de las ondas de marea, que Chojnicki clasificó en variaciones efectivas y ficticias
(Chojnicki, 1991). Las variaciones efectivas estarían provocadas por variaciones físicas
de la corteza o del interior de la Tierra y las variaciones ficticias tendrían su origen en
errores de escala, el método de análisis o efectos puramente locales, relacionados con el
emplazamiento del instrumento.
El origen de las modulaciones astronómicas reside, esencialmente, en el método utilizado
para la separación de las componentes durante el proceso de análisis. Al depender de las
diferencias entre sus velocidades angulares, constituyentes con frecuencias próximas
deben ser agrupados en términos de la forma
𝑀
𝑁
𝑃
𝐿(𝑡) = ∑ 𝛿𝑗 ∑ 𝐻𝑖 cos(𝜔𝑖 𝑡 + 𝜑𝑖𝑒
− 𝑘𝑗 )
𝑗=1
𝑖=1
donde L(t) representa la señal de marea en el instante t
𝐻𝑖 la amplitud dada por la marea de equilibrio
M es el número de grupos en función de la longitud de la serie de observación
(𝛿𝑗 , 𝑘𝑗 ) parámetros de marea comunes, velocidad y periodo de marea
Por este motivo, cada constituyente principal recibe la contribución de un conjunto de
términos de menor amplitud y frecuencias próximas. En consecuencia, los distintos
grupos obtenidos por análisis armónico de series anuales están afectados por ciclos
astronómicos, como el movimiento directo del perigeo lunar (8.847 años), de
12
Capítulo 2. Marea oceánica
retrogradación del nodo ascendente de la Luna (18.613 años) y del perihelio (20942.2
años) ya que no se pueden determinar individualmente las ondas que presentan una
diferencia de fase pequeña. En particular, el movimiento retrógrado del nodo ascendente
de la Luna modula todos los grupos separados a través del análisis de series anuales,
siendo el motivo de que numerosos autores consideren que los niveles medios del océano
deban ser definidos a partir de series que superen los 19 años de observación continuada.
Ahora en la Tabla 2.2 se muestra algunas de las principales modulaciones de origen
astronómico.
Variable
𝑝𝑠
2𝑝𝑠
𝑁′
Periodo
20𝑎 940 𝑅𝑒𝑣𝑜𝑙𝑢𝑐𝑖ó𝑛 𝑑𝑒𝑙 𝑝𝑒𝑟𝑖ℎ𝑒𝑙𝑖𝑜 𝑠𝑜𝑙𝑎𝑟
10𝑎 470
18𝑎 613 𝑅𝑒𝑣𝑜𝑙𝑢𝑐𝑖ó𝑛 𝑑𝑒 𝑙𝑜𝑠 𝑛𝑜𝑑𝑜𝑠
𝑑𝑒 𝑙𝑎 𝑙𝑢𝑛𝑎
Grupos modulados
𝑀2 , 𝑆2 𝐾2 , 𝑃1 𝑆1 𝐾1
𝑆2 𝐾2
𝑀2 , 𝑆2 𝐾2 , 𝑁2 , 𝑃1 𝑆1 𝐾1 , 𝑂1 ,
2𝑁2 , 𝑄1
p
8𝑎 847 Revolución del perigeo lunar
𝑀2 ,𝑁2 , 2𝑁2 , 𝑄1 , 𝐿2
2p
ℎ − 𝑝𝑠
ℎ
4𝑎 424
365𝑑 260 Año anomalístico medio
365𝑑 242 Año trópico
2(𝑝 − ℎ)
2(ℎ − 𝑝𝑠 )
205𝑑 892 Semirevolucion sinódica de la linea
de los ápsides de la órbita de la luna
182𝑑 630
2𝑁2 , 𝑄1
𝑀2 , 𝑆2 𝐾2 , 𝑃1 𝑆1 𝐾1
𝑀2 , 𝑆2 𝐾2 , 𝑃1 𝑆1 𝐾1 , 𝑂1 ,
2𝑁2 , 𝑄1
𝑁2 , 𝑄1
2ℎ
182𝑑 621
𝑆2 𝐾2
𝑀2 , 𝑆2 𝐾2 , 𝑁2 , 𝑃1 𝑆1 𝐾1 ,
2𝑁2 , 𝑄1,𝐿2
3ℎ
121𝑑 747
𝑃1 𝑆1 𝐾1 , 𝑂1 , 𝑄1
4ℎ
91𝑑 311
𝑁2 , 2𝑁2
Tabla 2.2: Principales modulaciones de origen astronómico.
13
Capítulo 3
Preproceso de las series de observación
Previo al contraste de métodos de análisis, es imprescindible disponer de una serie de
observación de alta calidad por lo que es de vital importancia la etapa de preproceso.
Aunque no es considerada como tal por algunos autores, consideramos que la etapa de
reducción de las observaciones previa al análisis es fundamental para la obtención de una
precisa determinación de las constantes armónicas de marea. Indican que se consideran
como intervalos erróneos, y en consecuencia son modificadas o eliminados, aquellos que
contienen fenómenos geodinámicos e hidrológicos de interés. Sin embargo, como
demostraremos en las siguientes secciones, un cuidadoso estudio de los errores
determinados en el proceso nos permite aislar errores de tipo instrumental.
En esta etapa del trabajo, se ha procedido a analizar una serie de observación
mareográfica, obtenida en una estación localizada en el puerto de La Coruña,
perteneciente a la Red Nacional de Mareógrafos del IGN. Fue adquirida en el CNIG
mediante subvención concedida al Grupo de Investigación UCM ‘GEODESIA’ de la
Facultad de Matemáticas (Ref. UCM2005-910505/CAM910505).
La elección de estas observaciones del nivel del mar fue realizada en función de tres
condiciones: el amplio rango de mareas que caracteriza el Litoral Cantábrico Español, la
longitud temporal de la serie disponible, 54 años (1950-2004), y su situación en
coincidencia con una estación permanente GPS de alta precisión.
3.1. Base de datos mareográfica
Figura 3.1: Edificio del mareógrafo y puerto de La Coruña.
14
Capítulo 3. Preproceso de las series de observación
Situación coincidente con la Estación Permanente ERGNSS, situada en el puerto de La
Coruña (Figura 3.1), de coordenadas:
-
longitud −8°23’56,16749’’,
latitud 43°21’51,77081’’ y
altitud episóidica 66.918 m
3.2. Detección de errores, lagunas y variaciones
del cero del mareógrafo
El objetivo central de la etapa de preproceso es la detección y corrección de errores
groseros, la señalización de lagunas y la determinación de las variaciones del cero del
mareógrafo respecto del cero hidrográfico local, que introducen discontinuidades en la
serie, y errores en tiempo, entre otros. La importancia del preproceso radica en que sin él
no se puede realizar, como ya hemos indicado, una buena etapa de análisis.
Con este fin, se han desarrollado una serie de programas para ayudarnos en esta etapa que
ha sido:
-
Determinación de fechas julianas, señalización de gaps y transformación de
formatos (TRANSFORMAT.FOR)
Filtro de media móvil (FiltroMediaMovil.m)
Filtro Doodson 𝑋0 (dibujardatos_y_doodson.m)
Corrección de desfasajes en tiempo (DESFASAJES.FOR)
Tras una primera visión gráfica de los datos, se aplicaron dos filtros que nos ayudaron a
entender y detectar algunos errores, entre los que destacan las variaciones del cero del
mareógrafo y el aislamiento de series independientes.
3.2.1.
Aplicación de filtros media móvil y Doodson
Hemos considerado filtros que operan sobre señales digitales. Su principal aplicación es
la separación de frecuencias en una señal. Se trata de una operación matemática que toma
una secuencia de números (señal de entrada) y la modifica, produciendo una nueva
secuencia (señal de salida) con el objetivo de resaltar o atenuar ciertas características, en
nuestro caso fenómenos periódicos de unas ciertas frecuencias.
En el análisis de mareas, normalmente es necesario obtener valores filtrados para tener
una mayor información sobre el contenido de la señal. En este campo los más utilizados
son los filtros paso bajo y paso banda. Para lo cual se han implementado, mediante
programas desarrollados al efecto, tanto un filtro de media móvil como el filtro de
Doodson. El proceso de filtrado paso bajo elimina las frecuencias altas que dependen de
una frecuencia de corte, mientras que el filtro paso banda deja pasar un determinado rango
de frecuencias y atenúa el resto.
15
Capítulo 3. Preproceso de las series de observación
El filtro Media Móvil es un filtro FIR (Respuesta al Impulso Finita) de paso bajo que se
utiliza normalmente para determinar saltos de la muestra (Shenoi,2006), al eliminar las
bajas frecuencias.
Al haber aplicado el filtro media móvil a la serie de observación sin haber obtenido
resultados concluyentes, pero si indicios de la presencia de diversos ceros y sensores
diferentes no normalizados, se implementó el filtro de Doodson X0 que es un método más
elaborado.
El filtro de Doodson 𝑋0 fue propuesto inicialmente por Doodson (1921) y más tarde,
ampliado por Pugh (1987). Es un filtro FIR de paso bajo y permite retirar de la señal la
parte diurna y semidiurna de la marea (González et al., 2011), dejando intactas las
componentes de largo periodo 𝑆𝑎 𝑦 𝑆𝑠𝑎 .
El filtro consiste en una media móvil centrada y ponderada. Recordemos que la media
ponderada se utiliza cuando en un conjunto de datos cada uno de ellos tiene una
importancia relativa (o peso) respecto a los demás datos. Se obtiene multiplicando cada
uno de los datos por su ponderación para luego sumarlos, después se divide entre la suma
de pesos, dando como resultado la media ponderada (Triola, 2009). En el caso del filtro
de Doodson 𝑋0, el valor filtrado 𝑋𝐹 (𝑡) puede expresarse como (Pugh, 1987)
19
1
𝑋𝐹 (𝑡) =
(𝐹0 · 𝑋(𝑡) + ∑ 𝐹𝑚 [𝑋(𝑡 + 𝑚) + 𝑋(𝑡 − 𝑚)])
𝐹0 + 2 ∑19
𝑚=1 𝐹𝑚
𝑚=1
Donde los valores de los coeficientes vienen dados por
𝐹𝑚 = (2,1,1,2,0,1,1,0,2,0,1,1,0,1,0,0,1,0,1)
Y el valor central 𝐹0 = 0.
Figura 3.2: Representación del filtro de Doodson sobre los datos observados.
16
Capítulo 3. Preproceso de las series de observación
En el caso del análisis de mareas, organismos internacionales como NOOA y PMSL
recomiendan la aplicación de filtros de Doodson en el estudio de las variaciones del nivel
del mar. En este caso, el valor 𝑋𝐹 (𝑡) tiene que ser normalizado dividiendo por un valor
que depende de la frecuencia de corte (Pugh, 1996).
3.2.2 Errores en tiempo y contenido de la señal
Otro de los problemas que se plantearon fue la posible existencia de problemas en la
asignación de tiempos a las lecturas horarias., Para ello se implementó el programa
DESFASAJES.FOR. Corrige los errores en tiempo, determinados a partir del estudio de
la variación de los desfasajes de los constituyentes principales de marea y asigna un
tiempo universal a las ordenadas horarias.
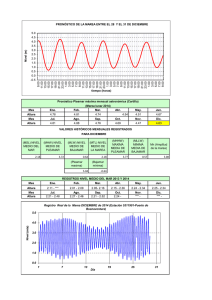
Para analizar el contenido de la señal se utilizó el programa FOURIER2016.FOR, que
consiste en una FFT con la que se obtienen los espectros de fase y de potencia. En la
Figura 3.3 se muestra el espectro de potencia en el que destaca sobre todo la banda
semidiurna. El programa en FORTRAN se desarrolló mediante la rutina FORIT,
subrutina SSP (Ralston y Wilf, 1960).
Figura 3.3: Espectro de potencia de nuestra serie de observación.
17
Capítulo 3. Preproceso de las series de observación
Figura 3.4: Organigrama de la etapa de preproceso.
3.3. Programas estándar de preproceso
Una vez realizada la primera fase del preproceso se aplicaron dos programas de cálculo
que usan técnicas diferentes pero complementarias: MT36 y TSOFT.
3.3.1.
MT36
Este programa fue desarrollado en el International Center of Earth Tides (ICET). El
primer problema que nos encontramos fue que estaba inicialmente diseñado para mareas
terrestres. Esto no lo invalida, pero los errores detectados deben ser tratados
cuidadosamente.
El proceso de detección y corrección de errores, así como discontinuidades (ausencia de
datos y variaciones del cero del sistema de registro) se efectúa, mediante la aplicación de
dos filtros:
-
Filtro DM47 de DE MEYER, Considera, para cada dato que se desea chequear.
los 24 anteriores y los 24 posteriores, sobre la serie se construye un filtro mínimos
cuadrados que elimina las frecuencias especiales a 0.15 ciclos/hora ≡ 3.6
18
Capítulo 3. Preproceso de las series de observación
ciclos/día≡ T = 6.666 horas, periodo inferior a las terciodiurnas. El problema que
presenta este método es la imposibilidad de detectar errores en los 24 primeros
datos y los 24 últimos.
-
Filtro 𝒁𝟓𝟏/𝟐 LECOLAZET. Está basado en la teoría de combinación de ordenadas
de Labroust. Determina el nivel de ruido y el valor de las correcciones de deriva
5
por el método de Lecolazet, que aplica el filtro 𝑍1/2
. Su idea está basada en
encontrar una combinación de ordenadas que elimine todas las ondas de marea y
la deriva instrumental. De esta forma, se separa el ruido y los errores de
observación de la señal.
Este autor es el primero en definir la idea de la selectividad basada en las propiedades de
la combinación de ordenadas. Esencialmente considera combinaciones elementales Y
selectividad, también denominada combinación de adición que permiten eliminar las
ondas de corto periodo D, SD, TD, etc., aunque amplifica los largos períodos. La
combinación elemental Z selectividad o combinación de sustracción, también es
considerada. Filtra largos periodos y amplifica las ondas de periodo medio.
De esta forma, mediante la aplicación sucesiva de estos dos tipos de combinaciones puede
5
conseguirse el resultado que se desee. El filtro de Lecolazet 𝑍1/2
es en realidad
5
5
𝑍1/2
: [𝑍1/2
𝑍 6 (𝑌3 − 𝑌0 /2)]
Elimina todas las ondas de marea y la deriva instrumental. Es claro que, aplicando esta
combinación a los intervalos de 24 horas, su resultado nos proporcionara los errores de
digitalización (Melchior, 1987).
Figura 3.5: Detección de errores instrumentales.
19
Capítulo 3. Preproceso de las series de observación
Mediante la aplicación de este proceso fue detectado un periodo continuado de
observación con errores regularmente distribuidos (Figura 3.5). Analizados,
comprobamos que correspondían al bloqueo del sensor en los mínimos.
Como crítica se podría decir que el programa está diseñado para Mareas terrestres, no
considera altas frecuencias (no superiores a 0.15 ciclos/hora) características de las mareas
oceánicas, donde son significativos armónicos generalmente hasta la sextodiurna.
3.3.2.
TSOFT
Tsoft es un programa desarrollado por Paul Vauterin et al (2005), con el fin de analizar,
en general, series temporales y en particular series de mareas terrestres, implementado en
el Real Observatorio de Bélgica. Calcula errores determinados por eventos geodinámicos
de muy corto periodo.
Este enfoque tiene muchas ventajas, particularmente a la hora de la detección y
procesamiento de eventos (oscilaciones libres). Además, Tsoft ofrece la posibilidad de
escribir archivos de comando, que permiten simplificar y acelerar las rutinas
considerablemente.
Su principal ventaja es que permite al usuario procesar los datos de una manera interactiva
y gráfica. Además, se pueden introducir calibraciones no lineales dependientes del
tiempo, compensar la variación de los desplazamientos del tiempo y calcular tanto el
tiempo de retardo como su correlación. Posee un amplio rango de filtros clásicos, FFT,
LSQ y ajuste polinomial de orden variable y la posibilidad de realizar el filtro
Butterworth. Tiene ventanas móviles dependiendo del ajuste mínimos cuadrados que se
quiera hacer y calcula los espectros de fase y de potencia entre otros.
La principal desventaja del programa TSOFT es que adolece del mismo problema que el
programa MT36 inicialmente desarrollado para mareas terrestres.
Figura 3.6: Aplicación de distintos filtros a la serie mareográfica
20
Capítulo 3. Preproceso de las series de observación
3.3.3.
OT16
El registro continuado del nivel del mar a lo largo de largos periodos de tiempo tiene
como consecuencia la utilización sucesiva de instrumentos de diferentes características
eso es lo que hace necesaria la homogeneización de la serie mareográfica (Figura 3.2). Se
trata de determinar los factores de normalización de los diferentes bloques que componen
la serie. Este proceso se realizó el programa OT16 (De Toro, 1989, 2016), basado en las
técnicas mínimos cuadrados, obtiene las variaciones con el tiempo en amplitud y fase de
los principales constituyentes de mareas.
Como ya hemos indicado, nuestra serie de observación constaba de 54 años, empezando
el 01/01/1950 hasta el 31/12/2004. A lo largo de este periodo de tiempo fueron instalados
diferentes tipos de instrumentos (flotador, sensores de presión de fondo, compensados o
no de presión atmosférica). Por este motivo los datos no eran homogéneos. La
normalización se ha realizado respecto del último periodo dado que fueron registrados
con el sensor de mejor calidad. Antes de considerar este periodo como base, hemos
comprobado que los resultados de este periodo eran coherentes, con los proporcionados
por la base de datos BAMAG (De Toro, 1994), el Permanet Service For Mean Sea Level
(PSMSL), así como los obtenidos por otros autores en el Litoral Cantábrico Español
(González et al, 2011) que utilizaron métodos similares de análisis.
Una vez obtenidos, se aplicaron los siguientes factores
-
01/01/1950 → 31/12/1955 con factor de homogeneización de 15
01/01/1956 → 31/12/1967 con factor de homogeneización de 10
01/01/1967 → 31/12/1996 con factor de homogeneización 11.2
01/01/1967 → 31/12/2004 con factor de homogeneización 1.635
21
Capítulo 4
Técnicas de análisis de mareas oceánicas
Una vez reducidas las observaciones del fenómeno de marea que queremos estudiar,
procedemos a estudiar las técnicas de análisis armónico, objetivo central de este trabajo.
Se trata de determinar los factores de amplitud y los desfasajes de todos los armónicos
que la longitud de registro nos permita separar.
Los métodos de análisis actuales pueden ser clasificados en función del método
matemático utilizado:
•
•
•
Métodos basados en la aplicación de filtros construidos mediante técnicas
mínimos cuadrados. En ellos se supone que la diferencia entre la señal
observada y la de marea es ruido blanco y su distribución es aleatoria. Los
más conocidos son los métodos desarrollados por A.P. Venedikov (en sus
distintas versiones: 1966, 1984, 1995, 2000 y 2003), el método
desarrollado por Usandivaras-Ducarme en 1969, el de Chojnicki en 1972,
Foreman en 1977 y Caldwell en 1998.
Métodos espectrales o analíticos. Los fundamentos matemáticos de estos
métodos son la determinación de la amplitud y fase reales de las
componentes de marea por análisis espectral de Fourier. Los principales
son los desarrollados por Sukhwani-Vieira en 1976 y Dejaiffe-Ducarme
en 1976.
Métodos mixtos. Combinan los métodos mínimos cuadrados con los
espectrales. Entre estos métodos destacan el método híbrido de K. Schüller
(HYCON, presentado en 1973) y el de H-G. Wenzel, denominado
ETERNA (1993 y 1997).
4.1. Mínimos cuadrados
El objetivo del método mínimos cuadrados, al igual que el resto de métodos de análisis,
es la determinación del factor de amplitud (cociente entre la amplitud real y teórica) y
desfasaje (diferencia entre fase real y teórica) de cada componente de marea a partir de la
determinación de la amplitud y fase reales, utilizando como modelo de comparación la
marea de equilibrio. La separación de las componentes se efectúa mediante la aplicación
de filtros numéricos construidos por el método de mínimos cuadrados, suponiendo que la
diferencia entre la señal observada y la de marea es ruido blanco y su distribución es
aleatoria. En los métodos armónicos de análisis queremos modelar una función
22
Capítulo 4. Técnicas de análisis de mareas oceánicas
donde
𝑇(𝑡) altura de marea para el instante t
N número de constituyentes de mareas usados para el análisis
𝑍0 altura del nivel medio observado sobre el Cero Hidrográfico Local
𝐻𝑛 amplitud del constituyente n
𝜎𝑛 velocidad angular
t tiempo
𝑔𝑛 desfasaje del constituyente en la marea de equilibrio
𝑓𝑛 factor nodal para el constituyente n
𝑉𝑛 + 𝑢𝑛 argumento del constituyente n en el instante t = 0
Donde los parámetros desconocidos son 𝑍0 y las constantes armónicas (𝐻𝑛 , 𝑔𝑛 ). El
modelado es tan ajustado que ∑ 𝑆 2 (𝑡) es el cuadrado de la diferencia entre el dato
observado y el calculado
𝑆(𝑡) = 𝑂(𝑡) − 𝑇(𝑡)
Y lo que se busca es minimizar ∑ 𝑆 2 (𝑡). (Pugh, 1987)
4.2. Análisis espectral de Fourier
Los métodos espectrales o analíticos tienen como principal fundamento matemático la
determinación de la amplitud y fase reales de las componentes de marea por análisis
espectral de Fourier. Este tipo de métodos presenta, en principio, una serie de problemas,
que son corregidos en algunos casos. Entre ellos, destacamos la necesidad de un registro
de gran longitud sin interrupciones, la aparición de oscilaciones secundarias por el efecto
ventana, la necesidad de eliminar la deriva con anterioridad al análisis en las
observaciones oceánicas, la disminución de la resolución debido a ondas cuyas
frecuencias no son múltiplo de las frecuencias fundamentales del análisis y la necesidad
de normalización de los datos horarios. Por otro lado, tiene la ventaja que permite la
detección de fenómenos periódicos cuyas frecuencias no coinciden con las de la marea.
Existen diversos métodos de análisis espectral, basados en diferentes procedimientos
matemáticos para la determinación de las constantes armónicas. Entre ellos, destacamos
dos, el desarrollado por Dejaiffe y Ducarme y el desarrollado por Sukhwani y Vieira.
23
Capítulo 4. Técnicas de análisis de mareas oceánicas
El método de análisis espectral desarrollado por (Dejaiffe-Ducarme, 1976) se basa en la
determinación de las transformadas de Fourier coseno y seno, 𝑢(𝜔)𝑦 𝑣(𝜔)
respectivamente, mediante la fórmula integral de Filon, donde estos parámetros están
expresados en función de la señal observada en un conjunto discreto de puntos.
El método matemático utilizado por Sukhwani-Vieira (Sukhwani, Vieira, 1978) se basa
en el algoritmo numérico de Cooley-Tukey para la transformada rápida de Fourier (FFT)
pero considerando un número de lecturas que no debe ser una potencia de dos. La deriva
(cuando resulta necesario) se ajusta por polinomios de Legendre o método de Pertsev y
se elige aquel ajuste que da menores errores cuadráticos medios para las constantes
armónicas. Además, utiliza el hecho de que se conoce a priori la frecuencia de cada
componente de marea para el cálculo de la serie de Fourier que ocasiona cada onda,
estableciendo un sistema de ecuaciones donde las incógnitas son el factor de amplitud y
el desfasaje. También se calcula el efecto de las interrupciones sobre el espectro y, a través
de convoluciones apropiadas de las series de Fourier para cada onda, se tiene en cuenta
este efecto. Este método llamado LEGENDRE, consideraba inicialmente el potencial de
Cartwright-Tayler-Edden en la determinación teórica de ondas. Posteriormente fue
adaptado al análisis de series mareográficas por C. de Toro en el año 1989 (De Toro,
1989) (programa LEMAG).
4.3. Métodos mixtos
Los métodos mixtos de análisis están basados en la utilización combinada de los métodos
de transformada de Fourier y métodos numéricos para la obtención del modelo de marea.
Uno de los primeros métodos de este tipo fue el método híbrido HYCON de Schüller
(Schüller, 1977). Este método aprovecha las propiedades de convolución de la ventana
de Hanning para determinar las funciones seno y coseno que dependen del tiempo. Esto
da lugar a los términos de una matriz, que establece un sistema de ecuaciones con
incógnitas los parámetros de marea. La principal diferencia entre este método y el método
mínimos cuadrados es que los parámetros de marea se estiman directamente por sus
“realizaciones”; es decir, por las funciones parámetro. El argumento que se emplea es que
los errores no deben ser estimados para que sean mínimos, sino que representen una
perturbación que pueda no ser mínima.
Basándose en este principio y en el método de Chojnicki, Wenzel desarrolló a partir de
1993 un nuevo método de análisis de mareas, llamado ETERNA (Wenzel, 1993, 1996).
Utiliza un ajuste mínimos cuadrados con una entrada en varios canales para derivar
parámetros de marea, parámetros de marea del polo y coeficientes de regresión de efectos
meteorológicos. El espectro de los residuales es utilizado para deducir la desviación
estándar de los parámetros ajustados. El modelo matemático usado en esta etapa fue el
desarrollado por Chojnicki en 1973 y completado por Schüller y Wenzel. Además,
permite elegir entre siete potenciales distintos de marea. También es posible predecir la
marea en un punto y calcular el efecto de carga oceánica.
24
Capítulo 4. Técnicas de análisis de mareas oceánicas
4.4. Método de la respuesta
Una alternativa a los métodos de análisis armónicos es el método de la respuesta, es la
técnica más usada y en la que se desarrollan mejoras, aunque estas no son suficientes para
proporcionar predicciones tan precisas como las de los métodos de análisis armónico.
El método de la respuesta fue propuesto por Walter Munk y David Cartwright (Munk y
Cartwright, 1966). Usan el desarrollo del potencial en la superficie de la Tierra mediante
armónicos esféricos complejos
∞
∞
Ω(𝜃, 𝜆, 𝑡) = ∑ ∑ 𝑔[𝑎𝑛𝑚 (𝑡)𝑈𝑛𝑚 ( 𝜃, 𝜆) + 𝑏𝑛𝑚 (𝑡)𝑉𝑛𝑚 (𝜃, 𝜆)]
𝑛=0 𝑚=0
donde
(𝜃, 𝜆, 𝑡) son la colatitud norte, longitud este y la variable tiempo respectivamente
𝑎𝑛𝑚 𝑦 𝑏𝑛𝑚 son la parte real e imaginaria del coeficiente complejo 𝐶𝑛𝑚 calculado
directamente de las efemérides lunar y solar
(𝑈𝑛𝑚 + 𝑖𝑉𝑛𝑚 ) representa la variación del potencial
Las variaciones de marea están representadas de la forma
∞
𝑇(𝑡) = ∫ 𝑤(𝜏)𝐶(𝑡 − 𝜏)𝑑𝜏
0
Donde 𝑤(𝜏) son los pesos ligados a los valores de Ω en el instante (𝑡 − 𝜏).
En el caso oceánico se utiliza la transformada de Fourier
∞
𝑍(𝜔) = ∫ 𝑤(𝜏) exp(−𝑖𝜔𝜏)𝑑𝜏
−∞
En la ecuación anterior cuantos más pesos y desfasajes son incluidos mayor es la precisión
que se obtiene. La amplitud y la fase obtenida por el método de la respuesta son
|𝑍(𝜔)| 𝑦 arg(𝑍(𝜔))
que son fácilmente calculados de la parte real e imaginaria.
Figura 4.1: Sistema Tierra – Sol
25
Capítulo 4. Técnicas de análisis de mareas oceánicas
Una ventaja del método de la respuesta es la introducción por Munk y Cartwright de la
idea del potencial radiacional, que varía con la radiación solar incidente en la superficie.
Un desarrollo armónico del potencial radiacional ha sido desarrollado para calcular los
constituyentes armónicos radiacionales y es definida como
𝑃𝑆
ℜ = 𝑠 ( ) cos(𝜑)
𝑅𝑠
−
𝜋
𝜋
<𝜑<
2
2
Esta aplicación posee un valor incalculable en el estudio de la dinámica oceánica, ya que
la distribución espacial está fuertemente influenciada por el efecto de la radiación
intrínseca solar.
26
Capítulo 5
Estudio comparativo de métodos de análisis
Una vez estudiadas teóricamente las principales técnicas de análisis utilizadas
tradicionalmente en la determinación de modelos locales de marea oceánica, se ha
realizado un estudio individual y comparativo en orden a su aplicación práctica. Se trata
de analizar su idoneidad en relación con las diferentes investigaciones que se realizan en
la actualidad en relación con el nivel del mar.
Con este objetivo se analizan cuatro de los métodos más utilizados en la actualidad, que
han sido: TIDANA (Foreman, 1977), OT16 (De Toro, 1989), y SPL64 (Caldwell, 1998)
y VAV03 (Venedikov, 2003). Todos de ellos utilizan técnicas mínimos cuadrados.
5.1. VAV03
El programa VAV03 (Venedikov et al., 2003), basado en un modelo de señal de mareas,
es el resultado de una mejora progresiva del algoritmo mínimos cuadrados desarrollado
en 1966 e implementado en el programa NSV (Venedikov et al., 1977).
El primer paso de este método consiste en la eliminación de la deriva instrumental, que
puede ser aproximada mediante un polinomio de grado n, puesto que se superpone a las
ondas de marea. Al mismo tiempo, se efectúa la separación de las mareas diurna (D),
semidiurna (SD) y terciodiurna (TD), aplicando para cada una de estas especies de marea
dos filtros (par e impar) sobre series de N lecturas horarias, generalmente 48 horas. En el
caso de las mareas oceánicas no se considera la eliminación de deriva en la determinación
de largos periodos y obtención de residuales determinantes del nivel medio del océano.
En principio, conoceremos el espectro teórico de la señal, S dado por las amplitudes,
frecuencias y fases correspondientes en el caso oceánico a la marea de equilibrio.
En las variaciones observadas del nivel del mar, las frecuencias permanecen invariables,
pero las amplitudes teóricas deben ser multiplicadas por un factor 𝛿 y su fase inicial
incrementada por un desfasaje 𝛼
𝑆 = ∑ 𝛿𝑖 𝐴𝑖 cos(𝜔𝑖 𝑡 + 𝜑𝑖 + 𝛼𝑖 )
𝑖
debido a la respuesta variable de las masas oceánicas a las fuerzas de mareas en función
de las condiciones de contorno.
27
Capítulo 5. Estudio comparativo de métodos de análisis
Ahora bien, dada la longitud habitual de las series de observación, es imposible
determinar estos factores para todas y cada una de los componentes que constituyen los
modelos teóricos (Tamura, 1987). Sin embargo, podemos formar grupos de ondas de
frecuencias próximas para las cuales sea válido considerar que 𝛿 y 𝛼 permanecen
constantes
𝑆 = ∑ 𝛿𝑗 ∑ 𝐴𝑖 cos(𝜔𝑖 𝑡 + 𝜑𝑖 + 𝛼𝑗 )
𝑗
𝑖
De esta forma, se reduce el problema a un número razonable de incógnitas.
Se inicia el proceso dividiendo el registro en intervalos INT, de longitud N horas, variable
en función de las frecuencias que se desean separar. N será así mismo el número de
coeficientes de los filtros. La curva de mareas comprendida en el interior de un cierto
intervalo puede ser aproximada por ecuaciones que incluirán las principales componentes
de marea. El conjunto de filtros que tratamos de construir será un operador lineal que
resuelve estas ecuaciones por mínimos cuadrados.
Cada una de las lecturas horarias puede ser representada por la suma de un número finito
de términos, armónicos y no armónicos, de la forma:
𝑠
𝑅
𝑙𝑡 = 𝑙(𝑇 + 𝑡) = ∑ 𝐴𝑖 cos(𝜔𝑖 (𝑇 + 𝑡) + 𝜑𝑖 ) + ∑ 𝑧𝑗 𝑝𝑗 (𝑡) + 𝑒(𝑡)
𝑖=1
𝑗=1
donde
T es la época central del intervalo
t es el intervalo de tiempo en horas, tomando como origen el instante T
𝐴𝑖 las amplitudes observadas de las principales componentes de frecuencia 𝜔𝑖
𝜑𝑖 fases iniciales observadas en la época inicial 𝑡0 = 0 elegida como origen
convencional
𝐷(𝑡𝑗 ) = ∑𝑅𝑗=1 𝑧𝑗 𝑝𝑗 (𝑡) es una función del tiempo que representa la deriva. En ella
se incluye la deriva instrumental, componentes de muy largo periodo, que no es
posible separar mediante el análisis en virtud de la longitud finita del intervalo de
observación, variaciones estacionales, etc. Esta deriva suele ser aproximada por
un polinomio de orden r. El polinomio de deriva no es considerado cuando se
trabaja con largos periodos.
𝑒(𝑡) es el ruido, que contiene las imperfecciones de la aproximación finita de la
curva registrada por la anterior ecuación, errores de observación no corregidos en
la etapa de preproceso, etc.
28
Capítulo 5. Estudio comparativo de métodos de análisis
Así, para las N ordenadas sucesivas tendremos un sistema formado por N ecuaciones de
observación, que pueden ser escritas de la forma
𝑠
𝑅
𝑙(𝑇 + 𝑡) = ∑ 𝐴𝑖 cos(𝜔𝑖 (𝑇 + 𝑡) + 𝜑𝑖 ) + ∑ 𝑧𝑗 𝑝𝑗 (𝑡) + 𝑒(𝑡) =
𝑖=1
𝑗=1
𝑠
= ∑[𝐴𝑖 cos(𝜔𝑖 𝑡) 𝑐𝑜𝑠(𝜔𝑖 𝑇 + 𝜑𝑖 ) − 𝐴𝑖 sen(𝜔𝑖 𝑡) 𝑠𝑒𝑛(𝜔𝑖 𝑇 + 𝜑𝑖 )] +
𝑖=1
𝑅
+ ∑ 𝑧𝑗 𝑝𝑗 (𝑡) + 𝑒(𝑡),
𝑡 = −𝑛, … , 𝑛
𝑗=1
Si realizamos el cambio
𝜚𝑖 = 𝐴𝑖 𝑐𝑜𝑠(𝜔𝑖 𝑇 + 𝜑𝑖 )
𝜂𝑖 = −𝐴𝑖 𝑠𝑒𝑛(𝜔𝑖 𝑇 + 𝜑𝑖 )
que podemos expresar en función de los parámetros de marea, factor de amplitud y
desfasajes
𝜚𝑖 = 𝛿𝑖 𝐴𝑖𝑟 𝑐𝑜𝑠(𝜔𝑖 𝑇 + 𝜑𝑖𝑟 + 𝛼𝑖 )
𝜂𝑖 = −𝛿𝑖 𝐴𝑖𝑟 𝑠𝑒𝑛(𝜔𝑖 𝑇 + 𝜑𝑖𝑟 + 𝛼𝑖 )
donde los valores teóricos 𝐴𝑖𝑟 , 𝜔𝑖 𝑦 𝜑𝑖𝑟 pueden ser calculados a partir de los potenciales,
quedando las ecuaciones en la forma
𝑠
𝑅
𝐿(𝑇 + 𝑡) = ∑ 𝜚𝑖 cos(𝜔𝑖 𝑡) + 𝜂𝑖 𝑠𝑒𝑛(𝜔𝑖 𝑡) + ∑ 𝑧𝑗 𝑝𝑗 (𝑡) + 𝑒(𝑡),
𝑖=1
𝑡 = −𝑛, … , 𝑛 (1)
𝑗=1
donde 𝜚𝑖 , 𝜂𝑖 , 𝑧𝑗 son incógnitas dependientes de T. Es decir, tendremos como incógnitas
𝑥𝑖 (𝑖 = 1, … , 𝑚) donde m=2S+R+1
𝜚𝑖 , … , 𝜚𝑠 → 𝑠
𝜂𝑖 , … , 𝜂𝑠 → 𝑠
𝑧𝑗 , . . , 𝑧𝑅 → 𝑅 + 1
Tendremos además como incógnitas
𝑒(−𝑛) … 𝑒(𝑛) → 𝑁
es decir, en total hay 2𝑆 + 𝑅 + 𝑁 + 1 incógnitas.
Sistema de N ecuaciones que puede ser escrito en la forma
𝐿̅(𝑇) = 𝑥1 ̅̅̅
𝐴1 + ⋯ + 𝑥𝑚 ̅̅̅̅
𝐴𝑚 + 𝑒̅
ecuación vectorial que tiene por elementos
29
Capítulo 5. Estudio comparativo de métodos de análisis
𝐿(𝑇 − 𝑛)
…
̅
𝐿(𝑇) = (
)
𝐿(𝑇 + 𝑛)
𝑒(−𝑛)
𝑒̅ = ( … )
𝑒(𝑛)
𝑥𝑖 : 𝜚1 … 𝜚𝑠 𝜂1 … 𝜂𝑠 𝑧0 … 𝑧𝑅 , 𝑖 = 1, … , 𝑚
𝐴̅𝑖 componentes armónicas en términos 𝑐𝑜𝑠𝜔𝑖 𝑡, 𝑠𝑒𝑛𝜔𝑖 𝑡 o términos de deriva y,
por tanto, variables a lo largo de las diferentes ordenadas horarias que componen
el intervalo de observación, son los coeficientes de las incógnitas 𝑥1 , … , 𝑥𝑚
𝑠𝑒𝑛𝜔 (−𝑛)
𝑐𝑜𝑠𝜔 (−𝑛)
1
1
𝑠𝑒𝑛𝜔𝑠 (−𝑛)
𝑐𝑜𝑠𝜔𝑠 (−𝑛)
…
…
𝐴̅𝑖 = ( 𝑐𝑜𝑠𝜔… (𝑛) ) … (
); ( 𝑠𝑒𝑛𝜔… (𝑛) ) … (
);
𝑐𝑜𝑠𝜔𝑠 (𝑛)
1
𝑝0 (−𝑛)
𝑝𝑅 (−𝑛)
( … )… ( … )
𝑝0 (𝑛)
𝑝𝑅 (𝑛)
1
La ecuación anterior puede ser escrita en forma vectorial
𝑠𝑒𝑛𝜔𝑠 (𝑛)
𝐿̅ = ̅̅̅̅
𝐴𝑋 + 𝑒̅ .
Por técnicas mínimos cuadrados se estiman los coeficientes 𝑥𝑖 mediante un algoritmo de
separación de variables.
Así, si se desea determinar una componente particular 𝑥𝑖 , se trata de construir un filtro
𝐹𝑗 que amplifique esta componente y elimine completamente las otras, es decir,
̅𝑗 ∗ 𝐿 valor filtrado, convolución de F y L
𝑥𝑖 = 𝐹
bajo las condiciones
1, 𝑖 = 𝑗
𝑅𝑖𝑗 = 𝐹𝑗𝑖 𝐴𝑖 = {
0, 𝑖 ≠ 𝑗
𝑖 = 1, … , 𝑚
Recordemos que si 𝐹 ∗ = (𝑓1 , … , 𝑓𝑛 ) son los coeficientes del filtro buscado, el valor
filtrado
𝑛
𝑈(𝑇) = ∑ 𝑓𝑡 𝑙𝑡 = 𝐹 ∗ 𝐿
𝑡=−𝑛
es la aplicación de F sobre L o convolución.
Los filtros empleados por Venedikov son obtenidos como combinaciones lineales de los
vectores ̅𝐴𝑘𝑖 (𝑘 = 1,2; 𝑖 = 1, … , 𝑚𝑘 ), a los que les corresponde el filtro 𝐹̅𝑘𝑖 (𝑘 =
1, 2; 𝑖=1, … , 𝑚𝑘 ) cuyos coeficientes 𝑓𝑘𝑖 (𝑡) son valores de una función del tiempo.
Los filtros que buscamos satisfacen dos condiciones
-
𝐹̅𝑖 es una combinación lineal de 𝐴1 , … , 𝐴𝑖
-
𝑅𝑖𝑗 = {
0, 𝑗 < 𝑖
1, 𝑗 = 𝑖
30
Capítulo 5. Estudio comparativo de métodos de análisis
Eliminando, por lo tanto, todas las componentes situadas a la izquierda de 𝐴𝑖 . Estas
condiciones forman un sistema de m ecuaciones con N incógnitas, que proporcionan
mediante la aplicación del método mínimos cuadrados los coeficientes del filtro.
Las dos condiciones impuestas transforman la expresión (2) en
𝑚𝑘
𝐿̅ = ∑ ∑ 𝑔𝑘𝑖 ̅̅̅̅
𝐹𝑘𝑖 𝑉𝑘𝑖 + 𝑒̅
𝑘=1,2 𝑖=1
donde
𝑔𝑘𝑖 =
1
̅
𝐹𝑖∗ 𝐹̅𝑖
denominada altura del filtro, y 𝑉𝑘𝑖 son las nuevas incógnitas, cuyo valor estimado por
mínimos cuadrados
∗ ̅
𝑉̃𝑘𝑖 = 𝐹̅𝑘𝑖
𝐿(𝑇) = 𝑢𝑘𝑖
es idéntico al número filtrado.
A fin de contrastar el método, sobre la serie de observación seleccionada se realizaron un
elevado número de análisis, considerando diversas separaciones tanto en cuanto a las
bandas como en la separación en número de constituyentes dentro de cada una de ellas.
En la Figura 5.1 presentamos los resultados de las bandas diurna a cuarto diurna.
Otro aspecto importante del programa es que elige la variable óptima, 𝑉0 𝑜 𝑉1, a través de
un test de hipótesis. Si 𝐻0 es rechazada entonces 𝑉1 es elegida y viceversa. Es realizado
por el método de análisis de varianzas. Se computa la F de Fisher, en este caso
(𝑆02 − 𝑆12 )
𝐹=
𝜎02
Cuando 𝐻0 es cierta y 𝑉0 debe ser elegida, F debe tomar valores pequeños; cuando 𝐻0 no
es cierta y 𝑉1 debe ser elegida, F debe tomar valores grandes. Para determinar cuándo un
valor es grande o pequeño usa la F – Snedecor con nivel de significación 𝛼 = 1 − 𝑃, con
𝑃 = 95% 𝑜 𝛼 = 5%. Se podría encontrar un valor crítico (𝐹𝑐𝑟𝑖𝑡 ) para la F y así determinar
cuando la F es grande o pequeña con
𝐹 ≥ 𝐹𝑐𝑟𝑖𝑡 𝑜 𝐹 < 𝐹𝑐𝑟𝑖𝑡
Un inconveniente práctico es que con la F se comparan dos variables únicamente. Cuando
tenemos que usar muchas variables se convierte en complicado comparar todas las
variables dos a dos. Aquí es donde interviene el criterio Akaike (AIC) (Sakamoto et al.,
1986) pues representa una forma más cómoda de elegir la variable óptima.
31
Capítulo 5. Estudio comparativo de métodos de análisis
Figura 5.1: Componentes armónicas significativas. Bandas centrales del espectro
Número de iteración
0
1
2
3
4
5
AIC
356825
299353
274240
259973
252095
248251
Tabla 5.1: Variación del AIC en el proceso iterativo
32
Capítulo 5. Estudio comparativo de métodos de análisis
Dado por
𝐴𝐼𝐶 = 𝑛 log(2𝜋) + 𝑛 log(𝜎 2 ) + 𝑛 + 2(𝑚 + 2)
donde
n es el número total de datos
m es el número total de desconocidos
𝜎 2 es una estimación de la varianza
A la hora de elegir una variable óptima basta con observar cual es la variable con menor
valor AIC.
El programa VAV03 presenta un número de ventajas considerables, empezando porque
permite el análisis de la marea atmosférica, imprescindible cuando se apodizan las
constituyentes de marea para determinar el nivel medio observado. Un error muy común
consiste en eliminar dos veces las componentes solares, al eliminar el efecto Barométrico
Inverso.
También posee una entrada multicanal y realiza una iteración de análisis de la misma
serie en las que se eliminan los intervalos que presentan perturbaciones geodinámicas o
instrumentales. En este caso se observa la disminución del valor AIC (Tabla 5.1).
Otra gran ventaja es la aplicación del criterio AIC para calcular para cada frecuencia y
tanto el valor individual como el valor global correspondiente.
Permite la utilización o no de la deriva, gracias a eso pueden ser halladas con precisión
las componentes de largo periodo, aunque dada la longitud de nuestra serie de
observación los resultados no fueron muy significativos dado un test de significación 3𝜎.
Sabiendo que la variabilidad del nivel del mar en los largos periodos contiene
componentes astronómicas, radiacionales y metereológicas con amplitudes para una
componente anual (28-39 mm), semianual (19-21 mm), mensual (3-6 mm) y semimensual
(2 mm), valores que oscilan en función de los bloques analizados. En virtud de la longitud
del registro no se han obtenido componentes significativas como se observa en Figura
5.2.
También es el programa que permite la determinación el número más elevado de
componentes armónicas en aguas someras. En la Figura 5.3 se muestran los
constituyentes significativos desde la banda terciodiurna hasta la banda de 11 ciclos por
día, observando que los constituyentes no son significativos a partir de la banda 8.
Presentamos en la Tabla 5.2 el valor AIC para cada uno de los análisis realizados.
33
Capítulo 5. Estudio comparativo de métodos de análisis
Figura 5.2. Análisis de largos periodos
Figura 5.3: Análisis en aguas someras
Componentes armónicas
Análisis simple
Largos periodos
Aguas someras
AIC
108884
109581
356825
Tabla 5.2: Comparación del valor AIC en el cálculo de diferentes componentes
34
Capítulo 5. Estudio comparativo de métodos de análisis
La alta complejidad para su uso es su principal inconveniente.
Otra ventaja del método VAV03 es la salida de los residuales con los que a través de un
test de significación 3𝜎 se observa cuales son significativos (Figura 5.4)
Figura 5.4: Residuales de la serie mareográfica
5.2. OT16
El programa OT16 (De Toro, 1989) además de haber sido utilizado para determinar los
factores de normalización en nuestra serie mareográfica con el objetivo de homogeneizar
la serie también se usa para realizar un análisis armónico de los constituyentes de marea.
Usa las mismas técnicas que el programa VAV03, aunque tiene como principal
innovación la incorporación del cálculo del vector residual respecto de la marea de
equilibrio.
Su determinación es de gran interés ya que, al estar contenidos en él todos los efectos y
perturbaciones no eliminados, nos permite, a través de su distribución espacial analizar
las características hidrodinámicas de las diferentes cuencas oceánicas. Expresa los
constituyentes en forma vectorial y se efectúa la diferencia entre el teórico y el observado.
35
Capítulo 5. Estudio comparativo de métodos de análisis
Figura 5.5: Salida OT16
5.3. TIDANA
Esta versión utilizada ha sido una mejora de los métodos tradicionales incluyendo una
mejor precisión de corrección nodal, inferencia y ajuste del argumento astronómico
mediante su directa incorporación en la matriz mínimos cuadrados, inferencias de un solo
constituyente, matriz de correlaciones y error estimado que facilita que constituyentes
elegir para el análisis. Esta nueva metodología ha sido evaluada mediante comparaciones
con resultados de viejas técnicas y posteriormente aplicados a dos problemas que no
pueden ser resueltos con precisión mediante el software antiguo.
El método implementado en el TIDANA ha sido el mismo que el de Venedikov (mínimos
cuadrados) pero modificado con el algoritmo de Gram-Schmidt (Foreman, 1977).
36
Capítulo 5. Estudio comparativo de métodos de análisis
El sistema original para determinar las ecuaciones que nos proporciona los mínimos
cuadrados es:
𝑀
𝑦(𝑡𝑖 ) − 𝑦𝑖 = 𝐴0 + ∑ 𝐴𝑗 𝑐𝑜𝑠2𝜋(𝜎𝑗 𝑡𝑖 − 𝜙𝑗 ) − 𝑦𝑖 = 0 ∀𝑖 = 1, … , 𝑁
𝑗=1
𝑀
𝑦 ′ (𝑡𝑖 )
= − ∑ 2𝜋𝐴𝑗 𝑠𝑖𝑛2𝜋(𝜎𝑗 𝑡𝑖 − 𝜙𝑗 ) = 0 ∀𝑖 = 1, … , 𝑁
𝑗=1
Sustituimos 𝐶0 = 𝐴0 , 𝐶𝑗 = 𝐴𝑗 𝑐𝑜𝑠2𝜋𝜙𝑗 , 𝑆𝑗 = 𝐴𝑗 𝑠𝑖𝑛2𝜋𝜙𝑗 𝑝𝑎𝑟𝑎 𝑗 = 1, … , 𝑀 y las
ecuaciones de arriba se convierten
𝑀
𝐶0 + ∑ 𝐶𝑗 cos(2𝜋𝜎𝑗 𝑡𝑖 ) + 𝑆𝑗 sin(2𝜋𝜎𝑗 𝑡𝑖 ) = 𝑦𝑖
𝑗=1
𝑀
∑ 2𝜋𝜎𝑗 (𝐶𝑗 sin(2𝜋𝜎𝑗 𝑡𝑖 ) − 𝑆𝑗 cos(2𝜋𝜎𝑗 𝑡𝑖 )) = 0
𝑗=1
Que son lineales con los parámetros nuevos 𝐶0 , 𝐶𝑗 , 𝑆𝑗 . Los 𝐴𝑗 𝑦 𝜙𝑗 pueden ser calculados
por las fórmulas
𝐴𝑗 = (𝐶𝑗2 + 𝑆𝑗2 )1/2
2𝜋𝜙𝑗 = 𝑡𝑎𝑛−1
𝑆𝑗
𝐶𝑗
Para preservar la precisión es preferible computar la solución mínimos cuadrados
directamente por procedimientos de ortogonalización, como la triangularización
Householder.
Aunque el número de ecuaciones N, es mucho mayor que el número de parámetros M la
aproximación de ecuaciones normales tiene sus ventajas. No solo da la solución de estas
ecuaciones, sino que también requiere la mitad de ecuaciones que los procesos de
ortogonalización. Se utiliza este procedimiento para salvar memoria.
Figura 5.6: Esquema TIDANA
37
Capítulo 5. Estudio comparativo de métodos de análisis
Algunos constituyentes lunares, notablemente 𝐿2 , son afectados por el ciclo de 8.85 años
y todos los constituyentes lunares son afectados por el ciclo nodal de 18.6 años; estas
modulaciones, que no pueden ser separadas, determinadas de un año de datos deben ser
representadas de otra manera. Cuando se representan todos los armónicos estos aparecen
separados del principal término con velocidades angulares
𝑖4 𝑤4 ; 𝑖5 𝑤5
Los términos que son separados por 𝑖6 𝑤6 pueden ser considerados constantes para todos
los objetivos prácticos. Las modulaciones que no pueden ser resueltas como
constituyentes independientes por análisis de un año de datos son representadas por
pequeños ajustes de factores f y u. Cada constituyente es escrito en grados.
𝐻𝑛 𝑓𝑛 cos[𝜎𝒏 𝑡 − 𝑔𝑛 + (𝑉𝑛 + 𝑢𝑛 )]
donde
𝑉𝑛 es el ángulo de fase en el momento 0
𝑓𝑛 y 𝑢𝑛 factor nodal y ángulo nodal respectivamente.
La aplicación de términos nodales puede ser ilustrada por la variación de 𝑀2 . Si el análisis
de un año está hecho a través de un periodo nodal de 18.61 años, la amplitud de la
𝑀2 aumenta y disminuye sobre un 4%. Además, expresando todos los armónicos, cerca
de la principal 𝑀2 (con velocidad angular 2𝜔1 ) existen muchos términos, el único
importante tiene como velocidad angular 2𝜔1 + 𝜔5 y una amplitud de -0.0373. Si lo
escribimos tenemos:
𝐻𝑀2 𝑐𝑜𝑠(2𝜔1 𝑡) − 𝛼𝐻𝑀2 𝑐𝑜𝑠(2𝜔1 𝑡 + 𝜔5 𝑡)
tenemos
𝐻𝑀2 [(1 − 𝛼𝑐𝑜𝑠(𝜔5 𝑡)) cos(2𝜔1 𝑡) − 𝛼𝑠𝑖𝑛(𝜔5 𝑡)sin(2𝜔1 𝑡)] =
= 𝐻𝑀2 [𝑓𝑐𝑜𝑠(2𝜔1 𝑡 + 𝑢)]
donde
𝑓𝑐𝑜𝑠(𝑢) = 1 − 𝛼cos(𝜔5 𝑡)
𝑓𝑠𝑖𝑛(𝑢) = −𝛼sin(𝜔5 𝑡)
y para valores pequeños de 𝛼 se verifica que
𝑓 2 = 1 − 2𝛼𝑐𝑜 𝑠(𝜔5 𝑡) + 𝑢2
𝑓 2 ≈ 1 − 𝛼𝑐𝑜 𝑠(𝜔5 𝑡) = 1 − 0.0373 cos(𝜔5 𝑡)
de tal manera que
tan(𝑢) =
−𝛼sin(𝜔5 𝑡)
1 − 𝛼cos(𝜔5 𝑡)
38
Capítulo 5. Estudio comparativo de métodos de análisis
donde u está en radianes
𝑢 ≈ −𝛼 sin(𝜔5 𝑡) = −2.1° sin(𝜔5 𝑡)
La fase del ángulo nodal 𝜔5 𝑡 está medida desde el momento donde asciende el nodo
lunar, cuando la luna cruza la eclíptica desde el sur hasta el norte, en el Primer Punto de
Aries. Cercano a este tiempo se alcanza una máxima declinación de 28° 36’ y el valor f
de la 𝑀2 tiene un valor mínimo de 0.963. Después de un intervalo de 9.3 años cuando la
luna tiene una declinación de 18° 18’ el valor de f alcanza su máximo 1.037. Si los ajustes
nodales no hubieran sido hechos, el análisis de la serie anual en el momento de máxima
declinación hubiera dado valores que son un 7.5 % menor que los valores que hemos
obtenido 9.3 años después.
Los factores que determinan f y u son mayormente constituyentes nodales. Para los
constituyentes 𝐾1 𝑦 𝐾2 sólo la parte lunar tiene una modulación nodal y esto ha sido
posible gracias a este desarrollo anterior. Los términos que representan los cambios en la
declinación tienen las mayores variaciones nodales. La amplitud de 𝑂1 varía un 18.7%,
la amplitud de 𝐾1 varía un 11.5% y la amplitud de 𝐾2 varía por un 28.6%.
𝑴𝒎
𝑴𝒇
𝑸𝟏 , 𝑶𝟏
𝑲𝟏
𝟐𝑵𝟐 , 𝝁𝟐 , 𝝊𝟐 , 𝑵𝟐 , 𝑴𝟐
𝑲𝟐
f
1.000 − 0.130cos(𝑁)
1.043 + 0.414cos(𝑁)
1.009 + 0.187cos(𝑁)
1.006 + 0.115cos(𝑁)
1.000 − 0.037cos(𝑁)
1.024 + 0.286cos(𝑁)
u
0.0°
−23.7°sin(𝑁)
10.8°sin(𝑁)
−8.9°sin(𝑁)
−2.1°sin(𝑁)
−17.7°sin(𝑁)
Tabla 5.3: Modulaciones nodales básicas para los mayores constituyentes lunares.
Como principal ventaja, el programa TIDANA además de un análisis armónico aplica
también el método de inferencia. Además, TIDANA incorpora factores nodales y
argumentos astronómicos a su análisis. Aunque no posee un número tan elevado de
componentes en aguas someras como el programa VAV03, tiene la posibilidad de obtener
hasta 77 armónicos compuestos, que no es un número despreciable teniendo en cuenta
que VAV03 proporciona a lo más 95.
Es de recalcar su sencillez, tanto para la entrada de datos como la interacción con el
programa.
39
Capítulo 5. Estudio comparativo de métodos de análisis
Figura 5.7: Salida TIDANA
40
Capítulo 5. Estudio comparativo de métodos de análisis
5.4. SPL64
Este programa analiza lecturas horarias de una serie de observación. Amplitudes y fases
son calculadas por el método mínimos cuadrados respecto de Greenwich, introduciendo
factores nodales para los constituyentes que pueden ser dados por la longitud del registro.
Este programa fue desarrollado por Caldwell y utiliza el mismo método de análisis
armónico y de predicción que el programa TIDANA (Foreman, 1977).
La predicción utiliza los constituyentes armónicos calculados por el análisis de marea,
realiza una predicción espaciados igualmente (en tiempo), en la Figura 5.8 se puede
observar la predicción de la marea de La Coruña en el año 2008.
Figura 5.8: Predicción del año 2008 en La Coruña.
Como principal innovación presenta un gran número de programas en PYTHON, con una
gran utilidad, tanto para dibujar la entrada de datos como para pintar salidas, también
realiza cambios de formatos, por ejemplo, a formato CSV, lista la ausencia de datos,
realiza bloques de los datos ausentes y puede añadir un valor constante a la serie de
observación.
Su principal inconveniente es que solo determina un máximo de 68 constituyentes para
una longitud de registro de 366 días pues los datos de entrada deben tener a lo más trece
meses de observaciones, aunque dispone de la posibilidad de realizar análisis de más de
41
Capítulo 5. Estudio comparativo de métodos de análisis
1 año, pero se ha de adaptar el programa FORTRAN original para ello, por lo que es un
gran inconveniente para el usuario.
Figura 5.9: Salida SPL64
42
Capítulo 5. Estudio comparativo de métodos de análisis
Se incluyen, a modo de ejemplo, una selección de salidas estándar de los programas
VAV03, TIDANA y SPL64 en el apéndice B.
Entre ellas destacan la sección B.3 y B.4. donde figuran la comparación de distintas
componentes de largo periodo y los armónicos de aguas someras proporcionados por los
tres programas. Así como la predicción del año 2008 en La Coruña en la sección B.5.
proporcionada por el programa SPL64.
43
Capítulo 6
Conclusiones
De acuerdo con el objetivo del trabajo, se ha realizado un amplio estudio comparativo,
teórico y práctico, de métodos de preproceso y análisis de series de observación de marea
oceánica.
Se ha realizado en primer lugar un estudio teórico de los fenómenos de marea, ya que su
conocimiento es necesario en la interpretación de los resultados obtenidos.
Posteriormente, se han estudiado desde el punto de vista teórico los principales métodos
de preproceso y análisis que serían aplicados sobre una serie de observación de largo
periodo. A continuación, se ha realizado un estudio individual y comparativo en orden a
su aplicación práctica. Se trata de analizar su idoneidad en relación con las diferentes
investigaciones que se realizan en la actualidad en el ámbito de los estudios de las
variaciones del nivel del mar.
Finalmente, se ha examinado, de forma independiente, el comportamiento de los tres
métodos alternativos más utilizados. Su validación y comparación se realizó estimando
la idoneidad de su respuesta frente a problemas específicos oceanográficos: largos
periodos, altas frecuencias y modulaciones astronómicas, entre otros.
Los resultados obtenidos en este estudio ponen de relieve:
-
En cuanto a los métodos de preproceso, el programa Tsoft tiene la ventaja de que
se pueden introducir calibraciones no lineales dependientes del tiempo,
compensar la variación de los desplazamientos de tiempo y calcular tanto el
tiempo de retardo como su correlación.
-
5
Por otro lado, la aplicación de los filtros DM47 de De Meyer y 𝑍1/2
de Lecolazet
proporcionan de forma simultánea para cada ordenada el ruido y los errores de
observación de la señal, lo que facilita la corrección. Proporcionan los valores
corregidos en un número de iteraciones relativamente bajo.
-
Es de señalar que TSOFT y MT36 están diseñados para reducción de series de
observación en mareas terrestres. Es de señalar que, en particular el método de
Lecolazet es fácilmente modificable adaptando sus resultados a marea oceánica,
que bastaría incluir combinaciones Y o Z selectividad adecuadas.
44
Capítulo 6. Conclusiones
-
En cuanto a los métodos de análisis comparados, los tres proporcionan resultados
esencialmente coincidentes en las bandas centrales del espectro (diurna,
semidiurna y terciodiurna). Los resultados obtenidos fueron coherentes con los
publicados por diferentes organismos (NOAA, PSMSL, …). Una comparación
sobre los resultados obtenidos para el constituyente 𝑀2 se presenta a modo de
ejemplo en la Tabla 6.1.
Amplitud
Fase
Desviación típica
VAV03
119.9998
111.61
0.1706
TIDANA
119.96213
113.988
0.13
SPL64
120.2951
270.06
-
Tabla 6.1: Componente 𝑀2
-
La más precisa determinación de las componentes armónicas características de
aguas someras, generadas por interacciones no lineales con el fondo, resultan de
la aplicación del método VAV03. Además, es el que considera un mayor número
de constituyentes, 95 frente a los 77 del método TIDANA.
-
El método TIDANA aplica técnicas mínimos cuadrado al igual que los anteriores,
su única diferencia radica en la triangularización Householder, que rebaja su
tiempo de ejecución. Quizás su principal característica es que permite el estudio
directo de las modulaciones astronómicas ya que proporciona el valor de los
factores nodales. Optativamente, aplica el método de inferencia. A pesar de su
simplicidad de uso proporciona óptimos resultados.
-
En cuanto a la predicción, el programa con una mayor facilidad de uso ha sido el
SPL64, que predice un año de observaciones mediante la entrada de una serie de
observación de un año. Al no incluir largos periodos, evidentemente la predicción
proporciona únicamente la elevación que determinaría la composición de los
constituyentes principales.
Podemos concluir que el resultado óptimo provendría de la aplicación combinada de los
métodos de análisis estudiados ya que cada uno de ellos posee características propias
idóneas en relación con diferentes investigaciones.
45
Apéndice A
Constituyentes armónicos
En este apéndice se presentan tablas de constituyentes armónicos.
A.1 Principales constituyentes armónicos
Tabla A.1 Componentes diurnas, semidiurnas y de largo periodo.
46
Apéndice A. Constituyentes armónicos
A.2. Componentes en aguas someras. Programa VAV03
Figura A.2: Componentes compuestas aguas someras
47
Apéndice B
Salidas de programas de análisis
B.1. VAV03
48
Apéndice B. Salidas de programas de análisis
Figura B.1: Salida VAV 03. Bandas D, SD, TD y QD.
Altas frecuencias hasta los 11 ciclos por día
49
Apéndice B. Salidas de programas de análisis
B.2. TIDANA
Figura B.2: Salida TIDANA. Análisis estándar, incluye largos periodos
y altas frecuencias hasta las sextodiurnas.
50
Apéndice B. Salidas de programas de análisis
B.3. Largos periodos
Se observa en la siguiente figura la comparación de distintos componentes de largo
periodo que nos proporcionan los programas.
VAV03
TIDANA
SPL64
Figura B.3: Comparación de los métodos para componentes de largo periodo
51
Apéndice B. Salidas de programas de análisis
B.4. Armónicos compuestos
Se observa en la siguiente figura la comparación de distintos componentes de aguas
someras que nos proporcionan los programas.
VAV03
52
Apéndice B. Salidas de programas de análisis
TIDANA
53
Apéndice B. Salidas de programas de análisis
SPL64
Figura B.4: Comparación de los métodos para componentes en aguas someras
54
Apéndice B. Salidas de programas de análisis
B.5. Predicción SPL64
En la siguiente figura se observa una pequeña parte de la salida de la predicción del año
2008 en Coruña
Figura B.5: Predicción año 2008 La Coruña
55
Apéndice C
Código de los programas desarrollados
Adjuntamos aquí los programas desarrollados en MATLAB y FORTRAN.
C.1. Determinación de fechas julianas, señalización de gaps y
transformación de formatos
El primer programa desarrollado en FORTRAN realiza cambios a formatos de datos que
necesitamos para la entrada de datos en distintos programas (TSOFT, TIDANA, VAV03
y SPL64), además calcula la Fecha Juliana y señaliza los gaps (TRANSFORMAT.FOR).
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
TRANSFORMACIÓN DE FORMATO: DE DATOS ORIGINALES DE LA ESTACIÓN DE
CORUÑA A DIVERSOS FORMATOS
DESCRITOS A CONTINUACIÓN
CORUÑA 24 LECTURAS HORARIAS, AÑO MES, DIA
READ(5,6666) (M24(J66),J66=1,24),IIA,IIM,IID FORMAT(24I5,3(3X,I2))
FORMATO INTERNACIONAL DE MAREAS:
COMPONENTE, INSTRUMENTO, ESTACIÓN, FECHA JULIANA, AÑO, MES DIA
INDICE HORARIO(O-11HORAS:0 ---12-23HORAS:2)
WRITE(1,400) IC,INS,IES,LJD,LA,LM,LD,LH,(M24(N),N=1,12--13,24 )
FORMAT(I1,I3,I4,I5,3I2,I1,12I5)
FORMATO TSOFT
AÑO, MES, DÍA, HORA(0-23), MINUTO, SEGUNDO, JM24
FORMAT(I4,2(1X,I2),2X,3(I2,1X),1X,E15.7)
FORMATO VENEDIKOV
AÑO, MES, DÍA, HORA(0-23), MINUTO, SEGUNDO, JM25
WRITE(10,125)KAC,LM,LD,LHOO(I),LMIN,LSEC,JM25(I),JM25(I),JM25(I),JM25(I)
FORMATO FOREMAN
DIA, MES, AÑO, HORA, MINUTO, JM25
WRITE(9,124)LD,LM,KAC,LHO2(I),LMIN,JM25(I)
FORMATO SPL64
'003CORUNA', AÑO, MES, DIA, INDICE HORARIO (O-11HORAS:1 ---12-23HORAS:2)
WRITE(11,126) KAC,LM,LD,(MW24(J66),J66=1,12)
WRITE(11,127) KAC,LM,LD,(MW24(J66),J66=13,24)
SEÑALIZACION DE LAGUNAS "GAPS", DETERMINA LA ÉPOCA Y EL NUMERO DE DATOS
INEXISTENTE
56
Apéndice C. Código de los programas desarrollados
IMPLICIT REAL*4(A-H,O-Z)
IMPLICIT INTEGER*4(I-N)
DIMENSION M24(24),MW24(24), LHOO(24),LHO2(24)
CHARACTER*4 IT(5),UNID*8,NFD*12,D(30)
DOUBLE PRECISION JM24(24),JM25(24)
DATA IT/' SEG',' MIN',' HOR',' DIA',' MES'
C
APERTURA DE FICHEROS DE ENTRADA Y SALIDA
WRITE(*,47)
47 FORMAT(25(/),1X,'=== FICHERO DE DATOS DE ENTRADA?')
READ(*,49)NFD
49 FORMAT(A12)
OPEN(5,FILE=NFD,STATUS='OLD',ERR=444)
OPEN(6,FILE='RES.RES')
OPEN(7,FILE='COR-FIM.RES')
OPEN(8,FILE='COR-TSOF.RES')
OPEN(9,FILE='COR-FOREMAN.RES')
OPEN(10,FILE='COR-VENEDIKOV.RES')
OPEN(11,FILE='COR-SLP64.RES')
C
INICIALIZACION DE VARIABLES
LMIN=0
LSEC=0
IC=0
INS=141
IES=1062
LJD=0
KAC=0
IFN=1
FN=1
C
FORMATO DATOS DE CORUÑA
7886 READ(5,6666,END=33) (M24(J66),J66=1,24),LA,LM,LD
DO 35 KJW=1,24
35
MW24(KJW)=M24(KJW)+6000
6666 FORMAT(24I5,3(3X,I2))
C
DETECCION DE GAPS. IC999 NUMERO DE DATOS EQ=0 DE LA FECHA
IC99=0
C
FMI
DO 777 K=1,24
IF(M24(K).NE.0) GO TO 777
WRITE (6,555) M24(K), LA,LM, LD, K
IC99=IC99+1
777 IC999=IC99
IF(IC999.EQ.0) GO TO 365
555 FORMAT(1X,I5,4(2X,I2))
57
Apéndice C. Código de los programas desarrollados
100
365
C
WRITE(6,100) IC999
FORMAT(2X, '** NUMERO DE CEROS ', I2)
LH=0
CALL JULIAN(LA,LM,LD,LH,LJD,KAC)
WRITE(7,7777) IC,INS,IES,LJD,LA,LM,LD,LH,(M24(J66),J66=1,12)
FORMATO SPL64
WRITE(11,126) KAC,LM,LD,(MW24(J66),J66=1,12)
LH=2
CALL JULIAN(LA,LM,LD,LH,LJD,KAC)
WRITE(7,7777) IC,INS,IES,LJD,LA,LM,LD,LH,(M24(J66),J66=13,24)
C
FORMATO SPL64
WRITE(11,127) KAC,LM,LD,(MW24(J66),J66=13,24)
7777 FORMAT(I1,I3,I4,I5,3I2,I1,12I5)
126 FORMAT('830LA COR',2X,I4,2I2,'1',12I5)
127 FORMAT('830LA COR',2X,I4,2I2,'2',12I5)
C
FORMATO TSOFT, FOREMAN Y VENEDIKOV
DO 27 I=1,24
LHOO(I)=I-1
LHO2(I)=I
JM24(I)=M24(I)
JM25(I)=M24(I)/10.0
IF(IFN.EQ.1) JM24(I)=JM24(I)* FN
C
FORMATO TSOFT
WRITE(8,123)KAC,LM,LD,LHOO(I),LMIN,LSEC,JM24(I)
C
FORMATO FOREMAN
WRITE(9,124)LD,LM,KAC,LHO2(I),LMIN,JM25(I)
C
FORMATO VENEDIKOV
123
124
125
27
444
445
33
99
WRITE(10,125)KAC,LM,LD,LHOO(I),LMIN,LSEC,JM25(I),JM25(I),JM25(I)
*,JM25(I)
FORMAT(I4,2(1X,I2),2X,3(I2,1X),1X,E15.7)
FORMAT(2I2,I4,2I2,F10.3)
FORMAT(I4,2I2,1X,3I2,4F10.3)
CONTINUE
GO TO 7886
WRITE(*,445)
FORMAT(25(/),20X,'** ERROR ** - FICHERO INEXISTENTE !'//)
CONTINUE
STOP
END
58
Apéndice C. Código de los programas desarrollados
C ********************************************************************
C*
SUBRUTINAS
*
C ********************************************************************
C (1) DETERMINACION DE LA FECHA JULIANA.
SUBROUTINE JULIAN(KAN,KME,KDI,LHO,JDR,KAC)
IMPLICIT REAL*8(A-H,O-Z)
IF(KAN.GT.40) KAC=KAN+1900
IF(KAN.LE.40) KAC=KAN+2000
AC=KAC
FJA=(4712.+AC)*365.25
TJA=DINT(FJA)
DIF=FJA-TJA
JA=TJA
IF(DIF.EQ.0.) JA=JA-1
3728 IF(KAC.GE.1583.AND.KAC.LE.1700) JA=JA-10
IF(KAC.GE.1701.AND.KAC.LE.1800) JA=JA-11
IF(KAC.GE.1801.AND.KAC.LE.1900) JA=JA-12
IF(KAC.GE.1901.AND.KAC.LE.2100) JA=JA-13
IEN=KAC*10000+KME*100+KDI
CALL DIAN(IEN,KAC)
NDA=IEN-KAC*10000
JDR=JA+NDA
IF(LHO.EQ.0) JDR=JDR-1
JDR=JDR-2400000
RETURN
END
C (2) DETERMINACION DEL DIA DEL ANO.
786
785
778
779
780
777
SUBROUTINE DIAN(IEN,IA)
DIMENSION NDM(12)
DATA NDM/0,31,59,90,120,151,181,212,243,273,304,334/
NBB=0
CALL BIS(NBB,IA)
MD=IEN-IA*10000
M=MD/100
ND=MD-M*100
IF(M.EQ.0.OR.ND.EQ.0) GO TO 4
IEF=NDM(M)+ND
IF(M.EQ.12) GO TO 786
IEEB=NDM(M+1)
GO TO 785
IEEB=365
IEFB=IEEB+NBB
IF(M.EQ.2) GO TO 778
IF(IEF.LE.IEEB) GO TO 777
GO TO 779
IF(IEF.LE.IEFB) GO TO 777
WRITE(1,780)
FORMAT(10X,'********** ERROR EN FECHA **********'///)
IEN=IA*10000+NDM(M)+ND
IF(M.GE.3) IEN=IEN+NBB
59
Apéndice C. Código de los programas desarrollados
4
CONTINUE
RETURN
END
C (3) DETERMINACION DE BISIESTOS:
31
SUBROUTINE BIS(NBB,LA)
IC=LA-(LA/100)*100
IF(IC.EQ.0) GO TO 31
AM4=(FLOAT(LA)/4.)-FLOAT(LA/4)
IF(AM4.EQ.0.) NBB=1
RETURN
AM400=(FLOAT(LA)/400.)-FLOAT(LA/400)
IF(AM400.EQ.0.) NBB=1
RETURN
END
C (4) CAMBIO DE FECHA
1
2
SUBROUTINE CAMFECH(IA,IM,ID,ICF)
DIMENSION NDM(12)
DATA NDM/31,28,31,30,31,30,31,31,30,31,30,31/
NBB=0
ICF=1
ID=ID+1
IF(IM.NE.2) GO TO 1
CALL BIS(NBB,IA)
WRITE(1,*) NBB
IF(NBB.EQ.1) NDM(2)=NDM(2)+1
IF(ID.LE.NDM(IM)) GO TO 2
ID=1
IM=IM+1
IF(IM.LE.12) GO TO 2
IM=1
IA=IA+1
RETURN
END
C.2. Filtro Media Móvil
El segundo programa desarrollado en MATLAB calcula el Filtro de Media Movil a través
del comando filter y representa los datos brutos junto a este filtro (FiltroMediaMovil.m).
clear all
A=load('BRUTOS_CON_0.C54');
D=A(1:20089,[1:24])';
t=210300:211440;
windowSize=18;
b = (1/windowSize)*ones(1,windowSize);
a = 1;
y = filter(b,a,D(210300:211440));
plot(t,D(210300:211440),'y')
hold on
plot(t,y,'m')
60
Apéndice C. Código de los programas desarrollados
legend('Input Data','Moving-Average
Filter','Location','NorthWest')
title('Plot of Input and Filtered Data')
C.3. Filtro Doodson 𝑿𝒐
El tercero programa desarrollado en MATLAB calcula el Filtro de Doodson 𝑋0 tal y como
se describe en la sección 3.2.1 y representa los datos brutos junto a este filtro
(dibujardatos_y_doodson.m).
clear all
A=load('BRUTOS_CON_0.C54');
D=A(1:20089,[1:24])';
L=length(D);
M=[];
F=[1 0 1 0 0 1 0 1 1 0 2 0 1 1 0 2 1 1 2 0 2 1 1 2 0 1 1 0 2 0 1 1
0 1 0 0 1 0 1];
k=length(F);
n=1;
while k<=(24*L)
X=D(n:k);
suma=0;
for i=n:k
suma=F*X';
i=i+1;
end
med=(1/30)*suma;
M(n)=med;
k=k+1;
n=n+1;
end
hold on
v=0;
for v=1:24*L
plot(v,D(v));
end
u=0;
hold on
for u=1:482098
plot(u,M(u),'m');
end
legend('Input Data','Doodson Filter','Location','SouthWest')
title('Plot of Input and Filtered Data')
C.4. Corrección de desfasajes en tiempo
El cuarto programa fue desarrollado en FORTRAN, corrige los errores en tiempo,
desfasajes determinados a través de constituyentes, también asigna un tiempo universal a
las ordenadas horarias (DESFASAJES.FOR).
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION JUL(600),IA(600),IM(600),ID(600),IHC(600),JDAT(600,12),
*IDAT(7200),LDAT(7200),ILH(12)
61
Apéndice C. Código de los programas desarrollados
C
APERTURA DE FICHEROS
OPEN(5,FILE='DATOS.DES',STATUS='OLD')
OPEN(7,FILE='RES.DES')
C
ENTRADA DE LOS CONTROLES
NC=0
IF(NC.EQ.8) GO TO 1002
WRITE(*,101)
101 FORMAT('INTRODUZCA EL NUMERO DE HORAS QUE SE DESEA DESPLAZAR'/
*5X,'-NH <=== ] ===> +NH')
READ(*,100) NH
100 FORMAT(I3)
NHP=IABS(NH)
WRITE(*,102)
102 FORMAT('INTRODUZCA LAS LECTURAS HORARIAS'/
*5X,'ILH(L), L=1...NH')
DO 33 I=1,NHP
READ(*,103) ILH(I)
103 FORMAT(I5)
33 CONTINUE
91
C
ENTRADA DE LOS DATOS
37 INDI9=9999
N=0
NN=1
1 N=N+1
READ(5,500) NC,INS,NES,JUL(N),IA(N),IM(N),ID(N),IHC(N),
*(JDAT(N,K),K=1,12)
500 FORMAT(I1,I3,I4,I5,3I2,I1,12I5)
WRITE(*,500) NC,INS,NES,JUL(N),IA(N),IM(N),ID(N),IHC(N),
*(JDAT(N,K),K=1,12)
IF(N.NE.1) GO TO 1111
NCC=NC
INSS=INS
NESS=NES
1111 IF(NC.EQ.9.OR.NC.EQ.8) GO TO 9
DO 2 K=1,12
IDAT(NN)=JDAT(N,K)
2 NN=NN+1
IF(N.LT.60) GO TO 1
9 NR=N-1
NHR=NN-1
C
FORMACION DEL VECTOR DE ORDENADAS
NCOMP=NR*12
IF(NCOMP.NE.NHR) GO TO 1000
IF(NH.LT.0) GO TO 3000
62
Apéndice C. Código de los programas desarrollados
C
DESPLAZAMIENTO + NH
DO 10 LL=1,NH
10 LDAT(LL)=ILH(LL)
NNR=NHR-NH
LLR=NH+1
NN=1
DO 20 LL=LLR,NHR
IF(NN.GT.NNR) GO TO 30
LDAT(LL)=IDAT(NN)
20 NN=NN+1
30 DO 40 L=1,NH
ILH(L)=IDAT(NN)
40 NN=NN+1
GO TO 6000
C
DESPLAZAMIENTO -NH
3000 NNR=NHR-NHP
NNR1=NNR+1
II=NHP
DO 50 LL=1,NNR
II=II+1
50 LDAT(LL)=IDAT(II)
L=1
DO 60 LL=NNR1,NHR
LDAT(LL)=ILH(L)
60 L=L+1
DO 70 L=1,NH
70 ILH(L)=IDAT(L)
6000 LL=0
DO 3 N=1,NR
DO 4 K=1,12
LL=LL+1
4 JDAT(N,K)=LDAT(LL)
WRITE(7,500) NCC,INSS,NESS,JUL(N),IA(N),IM(N),ID(N),IHC(N),
*(JDAT(N,K),K=1,12)
3 CONTINUE
IF(NC.NE.9.AND.NC.NE.8) GO TO 37
WRITE(7,527) INDI9
527 FORMAT(I4)
GO TO 91
1000 WRITE(7,1001)
1001 FORMAT('ERROR EN LA DISTRIBUCION DE DATOS')
1002 STOP
END
63
Referencias
Büllesfeld, F.J., (1985). Ein Beitrag zur harmonischen Darstellung des
gezeitenererzeugenden Potentials. Tesis doctoral, Ins. Theor. Gëodesie, Univ. Bonn.
Bretreger, K., (1978). Earth Tide Effects on Geodetic Observations. UNISURV
REPORT noS16.
Caldwell, P., y Kilonsky, B. (1992). Data processing and quality control at the TOGA
Sea Level Center. Joint IAPSO-IOC Workshop on Sea Level Measurements and
Quality Control, Paris, 12-13 October, 1992. IOC Workshop Report No. 81,
UNESCO. pp. 122-135.
Caldwell, P. (1998). Sea Level Data Processing on IBM-PC Compatible Computers,
Version 3.0 (Year 2000 Compliant). JIMAR Contribution No. 319, SOEST,
University of Hawaii, 72 pp.
Cartwright, D. E. y Tayler, R. J. (1971). New computations of the Tide-Generating
Potential. Royal Astron. Soc. Geophys. Jour. 23: 45-59,67-83
Cartwright, D. E. y Edden, A. C. (1973). Corrected Tables of Tidal Harmonics. Royal
Astron. Soc. Geophys. Jour. 33: 253-264.
Chojnicki, T. (1991). Continuation of Modulation Research. Bull. d’Inf. Marées
Terrestres, n. 110, 8002-8010.
Ducarme, B.; Dejaiffe, R. (1976). Spectral Analysis of Transworld Tidal Gravity Profile
Stations by using the Filon Integration Formulas. Proc. VIIIth Int. Sym. Earth Tides.
Bonn.
Eckert, W.J.; Jones, R.M; Clark, H.K. (1954). Improved lunar ephemeris 1952-1959.
U.S. Govt. Print Off., 283-363. Washington D.C.
Eckman, M. (1998). Secular change of the seasonal sea level variation in the Baltic Sea
and secular change of the winter climate. Geophysica 34 (3), 131-140.
Foreman, M.G.G., (1977). Manual for Tidal Heights Analysis and Prediction. Pacific
Marine Science Report 77-10, Institute of Ocean Sciences, Patricia Bay, Sidney,
B.C., 58 pp. (2004 revision).
Garrett, C. J. R.; Munk, W. H. (1971). The age of the tide and the “Q” factor of the
oceans. Deep-Sea Res., v. 18, 493-503.
Gil, E. (2001). Variaciones temporales del nivel del mar. Aplicaciones geodésicas,
geofísicas y oceanográficas. Tesis Doctoral. Universidad Complutense de Madrid.
Gil, E., De Toro, C. (2005). New determinations of the Ages of Tide in the North Atlantic
Ocean. Marine Geodesy.
64
Referencias
González M.; Fontán A.; Esnaola G.; Valencia V. (2011). Variaciones multidecadales
notables en la temperatura atmosférica, temperatura superficial y nivel del mar en
el sudeste del golfo de Vizcaya, detectadas mediantes filtros Kolmogorov-Zurbenko.
Heiskanen, W. A. y Moritz, H. (1985). Geodesia física. Instituto de Astronomía y
Geodesia – Instituto Geográfico Nacional. Madrid.
Lisitzin, E., (1974). Sea-Level Changes. Elsevier Publishing Company, Amsterdam, pp286.
Melchior, P. (1983). The tides of the planet Earth. Observatoire Royal de Belgique.
Bruxelles. Ed. Pergamon Press. Oxford.
Munk W. H., Cartwright, D. E. (1966). Tidal Spectroscopy and Prediction. DOI:
10.1098/rsta.1966.0024.
Pawlowicz R., Beardsley, B., y Lentz, S. (2002). Classical tidal harmonic analysis
including error estimates in MATLAB using T_TIDE, Computers and Geosciences
28, 929-937.
Pugh, D.T. (1996). Tides, surges and Mean Level. ISBN 0 471 91505 X; Univer.
International, S.L.
Pugh, D. T. (2004). Changing sea levels. Effects of tides, weather and climate.
Cambridge University. Press.
Ralston, A., Wilf, H. (1960). Mathematical methods for digital computers. New York,
chapter 24.
Ruiz, A., (1984). Introducción a la Oceanografía. Ed. Antonio Ruiz Cañavete. San
Fernando (Cádiz).
Sakamoto, Y., M. Ishiguro, and G. Kitagawa. (1986). Akaike information criterion
statistics. D. Reidel Publishing Company, Dordrecht, The Netherlands.
Sanchez, R. G. y Zabaleta, V. C. (1982). Curso de meteorología y oceanografía.
Dirección General de la Marina Mercante. Madrid.
Shenoi, (2006). Surface freshwater from Bay of Bengal runoff and Indonesian
Throughflow in the tropical Indian Ocean. Geophysical Research Letters.
Schüller, K (1977). Standard tidal analysis and its modification by frecuency domain
convolution. Proc. VIIIth Int. Sym. Earth Tides. Bonn.
Schüller, K (1977). Tidal analysis by the hybrid least squares domain convolution
method. Proc. VIIIth Int. Sym. Earth Tides. Bonn.
Schüller, K (1977). Simultaneous tidal and multi-channel input analysis as implemented
in the HYCON-method. Proc. Xth Int. Sym. Earth Tides. Madrid. 515-520.
Schwiderski, E. W. (1982). Ocean Tidal Research and its Applications Highlighted to
Promote Worldwode Cooperation. NSWC/K104.
65
Referencias
Sukhwani, P.K., Vieira, R. (1978). Spectral Analysis of Earth Tides. Proc. Of the VIIIth
Int. Symp. Earth Tides. Bonn, 50-65.
Tamura, Y., (1987). A harmonic development of the tide-generating potential for the
epoch J2000.0. Bull. d’Inf. Marées Terrestres, n.99, 6786-6812.
Triola, M. (2009). Estadística. Editorial Pearson. México. Décima edición.
De Toro, C. (1989). Determinación y evolución de las variaciones periódicas de la
gravedad y de las desviaciones de la vertical en la Península Ibérica producidas por
las mareas oceánicas. Tesis doctoral. Universidad Complutense de Madrid.
Van Camp, M., and Vauterin, P. (2005). Tsoft: graphical and interactive software for
the analysis of time series and Earth tides. Computers & Geosciences, 31(5) 631640, doi: 10.1016/j.cageo.2004.11.015.
Vieira, R. (1984). Investigaciones sobre Mareas Terrestres en la Península Ibérica.
Aplicaciones geodésicas, geofísicas y oceanográficas.
Venedikov, A.P.; Vieira, R.; de Toro, C. (1995). The Computer Program NSV used in
Madrid for Tidal Data Processing. Bull. d’Inf. Marées Terrestres, n. 121, 9108-9126.
Venedikov, A.P.; Vieira, R.; de Toro, C.; Arnoso, J. (1997). A new Program Developed
in Madrid for Tidal Data Processing. Publ. 189. Instituto de Astronomía y Geodesia
(CSIC-UCM). Madrid, Bull. d’Inf. Marées Terrestres, n. 126, 9669-9704.
Venedikov, A., Arnoso, J., Vieira, R., (2001). Program VAV/2000 for tidal analysis of
unevenly spaced data with irregular drift and colored noise. Journal Geodetic
Society Japan, 47,1,281-286.
Venedikov, A., Arnoso, J., Vieira, R., (2003). VAV: A program for tidal data
processing. Computers & Geosciences. 29, 487-502.
Wenzel, H. G. (1993). Tidal data processing on a personal computer. Proc. Xth Int.
Sym. Earth Tides. Beijing. 235-244.
Wenzel, H. G. (1996). The nanogal software: Earth tide data processing package
Eterna 3.30, Bull. d’Inf Marées Terrestres, n.124,9425-9439.
Xi, Q., (1985). The Algebraic Deduction of the Harmonic Development for the Tidegenerating Potential with the IBM-PC. Proc. of the Xth Int. Symp. Earth Tides,
Madrid, 481-489.
Xi, Q., (1987). A New Complete Development of the Tide-generanting Potential for the
Epoch J2000.0. Bull. d’Inf. Marées Terrestres, n.99, 6780-6812.
Xi, Q., (1989). The precision of the Development of the Tide-generating Potential and
some explanatory notes. Bull. d’Inf. Marées Terrestres, n.105, 7396-7404.
66