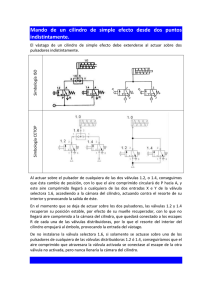
Manual de Laboratorio NEUMATICA Y ELECTRONEUMATICA BASICA CENTRO TECNICO HONDUREÑO ALEMAN DEPARTAMENTO DE ELECTRONICA – AREA DE AUTOMATIZACION PROFESOR. HENRY AUGUSTO GARCIA. Derechos de Autor 2009 Manual de Neumática y Electroneumática Básica Contenido Capitulo 1 LOGICA Introducción a la Lógica Lógica cableada Esquemas de conexión y esquemas de principio Relés Operaciones lógicas con Bits .……………………… 4 ……………………… 13 ........…………………14 ……………………… 16 ……………………… 16 Capítulo 2 De Lógica Cableada a Lógica Digital ……………………… 21 ……………………… 21 ……………………… 11 Problema No. 1 Problema No. 2 Problema No. 3 Capitulo 3 Neumática y Electroneumática Básica Generalidades de la neumática Ventajas Desventajas Comparación entre medios de trabajo Aplicación de la neumática ……………………… 23 ……………………… 24 ……………………… 25 ……………………… 26 ……………………… 27 Fundamentos Físicos Leyes de los Gases con Aplicación a la Compresión del Aire Componentes de la neumática Simbología neumática Elementos neumáticos y electroneumáticos ……………………… 32 ……………………… 37 ……………………… 38 ……………………… 45 Capitulo 4 Prácticas de Laboratorio Circuitos neumáticos Circuitos electroneumáticos Resolver problemas Problema No. 1 Configuración y montaje de un ……………………… 56 ……………………… 58 ……………………… 60 sistema de clasificación de piezas Problema No. 2 Accionamiento de un cargador ……………………… 61 ……………………… 69 ……………………… 77 Problema No. 3 Clasificación de paquetes 2 CAPITULO 1 LOGICA 3 Introducción a la lógica Definición Lógica (Del griego logos: "palabra", "hablar", "raz ón") s e define c omo la ciencia que t rata los principios de validez de los razonamientos y argumentos. El estudio de la lógica constituye el esfuerzo por determinar las condiciones bajo las cuales se justifica pasar de ciertas afirmaciones dadas, llamadas premisas, a una conclusión que se manifiesta que deriva de ellas . La validez lógica es una relación entre premisas y conclusión, de tal manera que si las premisas son verdaderas, la conclusión también lo es. La lógica es un campo de las mat emáticas. Presenta una manera de obtener conclusiones consistentes, por medio de deducciones basadas en un conjunto de hechos y las relaciones ent re ellos. Los "hechos" utilizados en lógica se denominan variables lógica s. Las características de estas variables es que pueden tener los estados verdadero o falso. La lógica no se ocupa de hechos o variables que no concuerden con esta definición. La deducción lógica puede definir claramente cuál debe ser el resultado (salida) de un cierto estado factual (entrada). Circuito lógi co es aquel que maneja la información en forma de "1" y "0", dos niveles lógicos de voltaje fijos. "1" nivel alto o "high" y "0" nivel bajo o "low". Los circuitos lógicos están compuestos por elementos digitales como la compuerta AND (Y), compuert a OR (O), compuerta NOT (NO)...... y combinaciones poco o muy complejas de los circuitos antes mencionados. Estas combinaciones dan lugar a otros tipos de elementos digitales como los compuertas, entre otros. Aunque los circui tos electrónicos podrían parec er muy complejos, en realidad s e construyen de un número muy grande de circuitos muy simples. En un circuito lógico digital se transmite información binaria (ceros y unos) entre estos circuitos y se consigue un circuito complejo con la combinación de bloques de circuitos simples. La información binaria se represent a en la forma de: - "0" ó "1", - "abierto" ó "cerrado" (int erruptor), - "On" y "Off", - "falso" o " verdadero", etc. Los circuitos lógicos se pueden representar de muchas maneras. En los circuitos de los gráficos anteriores la lámpara puede estar enc endida o apagada ("on" o "off"), dependiendo de la posición del interruptor. (apagado o encendido) Los posibles estados del interruptor o int erruptores que afectan un circ uito se pueden representar en una tabla de verdad. 4 Tabla de verdad La tabla de verdad es un instrumento utilizado para la simplificación de circui tos digitales a través de su ecuación booleana. Las tablas de verdad pueden tener muchas columnas, pero todas las tablas funcionan de igual forma. Hay siempre una columna de salida (última columna a la derecha) que representa el resultado de todas las posibles combinaciones de las entradas. El número total de columnas en una tabla de verdad es la suma de las entradas que hay + 1 (la columna de la salida). El número de filas de la tabla de verdad es la cantidad de combinaciones que se pueden lograr con las n entradas y es igual a 2 , donde n es el número de columnas de la tabla de verdad (sin tomar en cuenta la columna de salida) Ejemplo: en la siguiente tabla de verdad hay 3 columnas de ent rada, entonces habrán: 3 2 = 8 combinaciones (8 filas) Un circuito con 3 interruptores de entrada (con estados binarios "0" o "1"), tendrá 8 posibles combinaciones. Siendo el resultado (la columna salida ) det erminado por el estado de los interruptores de entrada. Los circuitos lógicos son básicamente un arreglo de interruptores, conocidos como "compuertas lógicas" (compuertas AND, NA ND, OR, NOR, NOT, etc.). Cada compuerta lógica tiene su tabla de verdad. Si pudiéramos ver con más detalle la construcción de las "compuertas lógicas", veríamos que son circuit os constituidos por transistores, resistencias, diodos, etc., conectados de manera que se obtienen salidas específicas para entradas espec ífic as La utilización extendida de las compuertas lógica s, simplifica el diseño y análisis de circuitos complejos. La tecnología moderna actual permite la construcción de circuitos integrados (ICs) que s e componen de miles (o millones) de compuerta s lógicas formando asi circuitos Digitales. La palabra "digital" tiene origen latino: digitus = dedos (contar con los dedos) 5 En la técnica digital solamente existen dos posibles valores de la señal y si bien son solo dos, hay varias maneras de representarlos. En la siguiente tabla se muestran los diferentes tipos de interpretaciones. Valor lógico Símbolo Realización Si / "1" 1 No / "0" 0 Hay corriente No hay corriente Nivel de tensión alta (High) Nivel de tensión baja (Low) Característica s Técnica digital Técnica Analógica - Sólo tensión "High" y "Low" son posibles - Cualquier valor de tensión es posible - Gran escala de integración - Problemas de ajuste y distorsión - Alta seguridad - Influencia de señales por interferencia - Ausencia de interferencias BIT y Byte s Bit es el acrónimo de Binary digit. (dígito binario). Un bit es un dígito del sistema de numeración binario. La Real Academia Española (RAE) ha ac eptado la palabra bit con el plural bits. Mientras que en el sistema de numeración decimal se usan diez dígitos, en el binario se usan sólo dos dígitos, el 0 y el 1. Un bit o dígit o binario puede represent ar uno de esos dos valores, 0 ó 1. Podemos imaginarnos un bit como una bombilla que puede estar en uno de los siguientes dos estados: apagada o encendida El bit es la unidad mínima de información empleada en informática, en cualquier dispositivo digital, o en la teoría de la información. Con él, podemos representar dos valores cuales quiera, como verdadero o fals o, abierto o cerrado, blanco o negro, norte o sur, masculino o femenino, rojo o azul, etc. Basta con asignar uno de esos valores al estado de "apagado" (0), y el otro al estado de "enc endido" (1). Con un bit podemos representar solamente dos valores, que suelen represent arse como 0 ó 1. Para representar o c odificar más información en un dispositivo digital, necesitamos una mayor cantidad de bits. Si usamos dos bits, tendremos cuatro combinaciones posibles: 0 0 - Los dos están "apagados" 0 1 - El primero (de derecha a izquierda) está "encendido" y el segundo "apagado" 1 0 - El primero (de derecha a izquierda) está "apagado" y el segundo "encendid o" 1 1 - Los dos están "encendidos" Con estas cuatro combinaciones podemos representar hasta cuatro valores diferentes, como por ejemplo, los colores rojo, verde, azul y negro. 6 A través de secuencias de bits, se puede codific ar cualquier valor discreto como números, palabras, e 4 imágenes. Cuatro bits forman un nibble, y pueden representar hasta 2 = 16 valores diferentes; ocho bits 8 forman un octeto, y se pueden represent ar hasta 2 = 256 valores diferentes. En general, con un número de n bits pueden representarse hasta 2 valores diferent es. Nota: Un byte y un octeto no son la misma c osa. Mientras que un octeto siempre tiene 8 bits, un byte contiene un número fijo de bits, que no necesariamente son 8. E n los c omput adores antiguos, el byte podría estar conformado por 6, 7, 8 ó 9 bits. Hoy en día, en la inmensa mayoría de los computadores, y en la mayoría de los campos, un byte tiene 8 bits, siendo equivalente al octeto, pero hay excepciones. Valor de posición En cualquier sistema de numeración posicional, el valor de los dígit os depende del lugar en el que se encuentren. En el sistema decimal, por ejemplo, el dígito 5 puede valer 5 si está en la posición de las unidades, pero vale 50 si está en la posición de las decenas, y 500 si está en la posición de las centenas. Generalizando, cada vez que nos movemos una posición hacia la izquierda el dígito vale 10 veces más, y cada vez que nos movemos una posición hacia la derecha, vale 10 veces menos. Esto también es aplicable a números con decimales. +---------+---------+---------+ | Centena | Decena | Unidad | +---------+---------+---------+ | x 100 | x 10 | x 1 | +---------+---------+---------+ Por tanto, el número 153 en realidad es: 1 centena + 5 decenas + 3 unidades, es decir, 100 + 50 + 3 = 153. En el sistema binario es similar, excepto que cada vez que un dígit o binario (bit) se desplaza una posición hacia la izquierda vale el doble (2 veces más), y cada vez que se mueve hacia la derecha, vale la mitad (2 veces menos). +----+----+----+----+----+ Valor del bit | 16 | 8 | 4 | 2 | 1 | <-- de acuerdo a +----+----+----+----+----+ su posición Abajo vemos represent ado el número 19. 16 + 2 + 1 = 19. 16 8 4 2 1 <-- Valor de posición Representación gráfica de los bits como bombillas encendidas y apagadas 1 0 0 1 1 <-- Dígitos binarios (bits) 7 También se pueden representar valores "decimales" (números reales , de punto flotante). Abajo vemos el número 5,25 representado en forma binaria. 4 + 1 + 0,25 = 5,25 4 2 1 1/2 1/4 <-- Valor de posición Representación gráfica de los bits como bombillas encendidas y apagadas 1 0 1 0 1 <-- Dígitos binarios (bits) Aunque la representación de números reales no es exactamente como lo que se muestra arriba, el esquema da una idea del conc epto. Subíndices Cuando se trabaja con varios sistemas de numeración o cuando no está claro con cual se está trabajando, es típico usar un subíndice para indicar el sistema de numeración con el que se ha repres entado un número. El 10 es el subíndic e para los números en el sistema decimal y el 2 para los del binario. En los ejemplos de abajo se muestran dos números en el sistema dec imal y su equivalente en binario. Esta igualdad se representa de la siguient e manera: 1910 = 100112 5,2510 = 101,012 Bits má s y menos significativos Un conjunto de bits, como por ejemplo un byte, representa un conjunto de elementos ordenados. Se llama bit más significativo (MSB) al bit que tiene un mayor peso (may or valor) dentro del conjunto, análogamente, se llama bit menos significativo (LSB) al bit que tiene un menor peso dentro del conjunto. En un Byte, el bit más significativo es el de la posición 7, y el menos signific ativo es el de la posición 0 +---+---+---+ ---+ ---+---+---+---+ | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | <-- Posición del bit +---+---+---+ ---+ ---+---+---+---+ |128|64 |32 |16 | 8 | 4 | 2 | 1 | <-- Valor del bit de acuerdo a su posición +---+---+---+ ---+ ---+---+---+---+ | | | (-)- Bit menos significativo (+)----------------------------- Bit más significativo En una palabra de 16 bits, el bit más significativo es el de la posición 15 y el menos significativo el de la posición 0. +----+----+----+----+----+----+ ---+ ---+---+---+---+---+---+---+ ---+ ---+ | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | <-- Posición del bit 8 +----+----+----+----+----+----+ ---+ ---+---+---+---+---+---+---+ ---+ ---+ |2^15|2^14|2^13|2^12|2^11|2^10|512|256|128|64 |32 |16 | 8 | 4 | 2 | 1 | < -- Valor del bit de acuerdo +----+----+----+----+----+----+ ---+ ---+---+---+---+---+---+---+ ---+ ---+ a su posición | | | +-- Bit menos significativo +-------------------------------------------------------------------- Bit más significativo Conversión entre binario y decimal Decimal a binario Se divide el número del sistema decimal entre 2, cuyo resultado entero se vuelve a dividir entre 2, y así sucesivamente. Ordenados los restos, del último al primero, este será el número binario que buscamos. Ejemplo Trans formar el número decimal 131 en binario. El método es muy simple: 131 dividido por 2 da 65 y el resto es igual a 1 65 dividido por 2 da 32 y el resto es igual a 1 32 dividido por 2 da 16 y el resto es igual a 0 16 dividido por 2 da 8 y el resto es igual a 0 8 dividido por 2 da 4 y el resto es igual a 0 4 dividido por 2 da 2 y el resto es igual a 0 2 dividido por 2 da 1 y el resto es igual a 0 1 dividido por 2 da 0 y el resto es igual a 1 -> Ordenamos los restos, del último al primero: 10000011 en sistema binario, 131 se escribe 10000011 Ejemplo: Trans formar el número decimal 100 en binario: 100 |_2 0 50 |_2 0 25 |_2 1 12 |_2 0 6 |_2 0 3 |_2 1 1 |_2 1 0 -> (100)10 = (1100100)2 Otra forma de conversión consiste en un mét odo parecido a la factorización en números primos. Es relativamente fácil dividir cualquier número ent re 2. Este método consiste también en divisiones sucesivas. Dependiendo de si el número es par o impar, colocaremos un cero o un uno en la columna de la derecha. Si es impar, le restaremos uno y seguiremos dividiendo entre dos, hasta llegar a 1. Después sólo nos queda tomar el último resultado de la columna izquierda (que siempre será 1) y todos los de la columna de la derecha y ordenar los dígitos de abajo a arriba. Ejemplo 100|0 50|0 9 25|1 --> 1, 25-1= 24 y seguimos dividiendo por 2 12|0 6|0 3|1 1|1 --> (100)10 = (1100100)2 Existe un último método denominado de distribución. Consiste en distribuir los unos necesarios entre las potencias sucesivas de 2 de modo que su suma result e ser el número decimal a convertir. Sea por ejemplo el 8 número 151, para el que se necesitarán las 8 primeras potencias de 2, ya que la siguiente, 2 =256, es superior al número a convertir. Se comienza poniendo un 1 en 128, por lo que aún faltarán 23, 151 - 128 = 23, para llegar al 151. Este valor se conseguirá distribuyendo unos entre las potencias cuya suma de el result ado buscado y poniendo ceros en el resto. En el ejemplo resultan ser las potencias 4, 2, 1 y 0, esto es, 16, 4, 2 y 1, respectivamente. Ejemplo: 0 2= 1 2= 2 2= 3 2= 4 2= 5 2= 6 2= 7 2= 1|1 2|1 4|1 8|0 16|1 32|0 64|0 128|1 128 + 16 + 4 + 2 + 1 = (151)10 = (10010111)2 Binario a decimal Para realizar la conversión de binario a decimal, realice lo siguiente: 1. 2. Inicie por el lado derecho del número en binario, cada número multiplíquelo por 2 y elévelo a la potencia consecutiva (comenzando por la potencia 0). Después de realizar cada una de las multiplicaciones, sume todas y el número resultante será el equivalente al sistema decimal. Ejemplos: (Los números de arriba indican la potencia a la que hay que elevar 2) También se puede optar por utilizar los valores que presenta cada posici ón del número binario a ser transformado, comenzando de derecha a izquierda, y sumando los valores de las posiciones que tienen un 1. Ejemplo El número binario 1010010 corresponde en decimal al 82 se puede representar de la siguiente manera: 10 Entonces se suma los números 64, 16 y 2: Sistema hexadecimal El si stema hexadecimal, a veces abreviado como hex, es el sistema de numeración posicional de base 16 —empleando por tant o 16 símbolos—. Su uso actual está muy vinculado a la informática y ciencias de la computación, pues los computadores suelen utilizar el byte u octeto como unidad básica de memoria; y, 8 debido a que un byte representa 2 valores posibles, y esto puede representarse como , que, según el teorema general de la numeración posicional, equivale al número en base 16 10016, dos dígitos hexadecimales corresponden exactamente —permiten representar la misma línea de enteros— a un byte. En principio dado que el sistema usual de numer ación es de base decimal y, por ello, sólo se dispone de diez dígitos, se adoptó la convención de usar las seis primeras letras del alfabeto latino para suplir los dígitos que nos faltan. El conjunto de símbolos sería, por tanto, el siguiente: Tipos de Datos Máquina Bit La unidad más pequeña de información en una computadora se le llama bit. Con un bit se puede representar solo un valor de dos posibles valores diferentes, ejemplo: cero o uno, falso o verdadero, rojo o azul, 56 o 2458, etc. Nibble Un nibble es una colección de 4 bits. No sería un tipo de dato interesante a excepción de que con un nibble se presenta un número BCD y también que un nibble puede representar un dígito hexadecimal. Byte Sin lugar a dudas el tipo de datos más importante para los microprocesadores es el byte. Un byte consiste de 8 bits. Las referencias hacia cierta localidad de memoria en todos los microprocesadores nunca es menor que un byte, (la mayoría usan múltiplos de bytes), por lo tant o, se considera el dato loc alizable más pequeño. Los bits de un byte normalment e se numeran desde 0 hasta 7. El bit 0 se le llama bit de más bajo orden o menos significante, el bit 7 se considera el bit de más alto orden o el más significante. Un byte consta también de 2 nibbles, los bits 0, 1, 2 y 3 forman el llamado nibble de menor orden, y los bits 4, 5, 6 y 7 forman el nibble de mayor orden. Como un byte está formado de exactamente dos nibbles, es posible representar cualquier valor con dos dígitos hexadecimales. Palabra Una palabra es un grupo de 16 bits, el bit 0 es el bit de más bajo orden y el bit 15 es el de más alto orden. Una palabra se puede dividir en 2 bytes llamados igualmente de bajo y alto orden. También una palabra puede considerarse como un grupo de 4 nibbles. 11 Se considera una palabra doble a un grupo de 32 bits. Un grupo de mayor número de bits simplemente se nombra por su número de bits, ejemplo: palabra de 64 bits, palabra de 128 bits, etc. Números enteros Con un número fijo de bits podemos representar ciert o número de objetos. Por ejemplo, con 8 bits podemos representar 256 objetos diferent es. Si se usara un esquema de números enteros pos itivos cada uno de éstos objetos se numerarían de 0 a 255: Bits Número decimal 00000000 0 00000001 1 00000010 2 00000011 3 00000100 4 ... ... 11111110 254 11111111 255 Números coma flotante La forma en que la arquitectura de computadoras resuelve el problema de representar números reales es por medio de los números coma flotante. Un número coma flotante se divide en 3 secciones de bits: signo, mantisa y exponente con signo. Ejemplo de coma flotante de 8 bits b7 b6 b5 1 2 b4 0 2 b3 2 −1 b2 2 −2 b1 2 −3 b0 2 −4 12 Lógica cableada En la acepción de los técnicos electromecánicos, la lógica cableada industrial es la técnica de diseño de pequeños a complejos autómatas utilizados en plantas industriales, básicamente con relés cableados. En la acepción de los técnicos en telecomunicaciones y en informática, la lógica cableada utiliza compuert as lógicas discretas (TTL, CMOS, HCMOS), para implementar circuitos digitales de comunicaciones y computadores. La lógica cableada industrial consiste en el diseño de automatismos con circuitos cableados entre contactos auxiliares de relés electromecánicos, contactores de potencia, relés temporizados, diodos, relés de protección, válvulas óleo-hidráulicas o neumáticas y otros componentes. Los cableados incluyen funciones de comando y control, de señalización, de prot ección y de potencia. La pot encia además de circuitos eléctricos comprende a los circuitos neumáticos (mando por aire a presión) u óleo hidráulicos (mando por aceite a presión). Crea automatismos rígidos, capaces de re alizar una serie de tareas en forma secuencial, sin posibilidad de cambiar variables y parámet ros. Si se ha de realizar otra tarea será necesario realizar un nuevo diseño. S e emplea en automatismos pequeños, o en lugares críticos, donde la seguridad de per sonas y máquinas, no puede depender de la falla de un programa de computación. En sistemas mayores también se emplea el autómata programable, entre los que se encuent ran los PLC controlador lógic o programable, la RTU Unidad Terminal Remot a o los relés programables, o comput adoras o servidores de uso industrial. Estos autómatas no se programan en lenguajes tradicionales como cualquier computador, se programan en Ladder, lenguaje en el cual las instrucciones no son otra cosa que líneas de lógica cableada. Así el conocimiento de la lógica cableada es de fundamental importancia para quien programa un autómata programable o P LC. La lógica cableada más que una técnica, hoy en día constituye una filos ofía que permit e estructurar circuitos en forma ordenada, prolija y segura, sea en circuit os cableados o programados. La práctica de la lógica cableada ha sido asimilada por otras ramas de la tecnología como las telecomunicaciones y la informática, con la introducción del cableado estructurado en edificios, oficinas y locales comerciales, lugares do nde es poco usual el manejo de esquemas y dibujos de las instalaciones eléctricas, excepto la de potencia, la elaboración de proyectos de detalle y el cableado en forma ordenada mediante el uso borneras y reglet as, que pasaron a llamarse ―patcheras ‖ en el caso de las redes de datos y telefonía. A continuación se describen los elementos, circuitos básicos y la filosofía comúnmente empleada en la lógica cableada. Los dibujos de los componentes presentados no siguen una normativa en particular, correspondiendo al estilo europeo de dibujo de esquemas eléctricos (normas CEI internacional, DIN de Alemania, NF de Francia). Estados OFF y ON Desde un punto de vista teórico la lógica cableada opera de igual forma que la lógica tradicional, donde las variables solamente pueden tener dos estados posibles, ―verdadero‖ o ―falso‖. E n la lógica cableada ―verdadero‖ es igual a un relé energizado o en ON, en el caso de los contactos el estado ―verdadero‖ es el contacto CE RRA DO. E n la lógica cableada un ―falso‖ es igual a un relé desenergizado o en OFF, para los contactos el estado ―falso‖ es el c ontacto AB IERTO. o estas puedes ser todas las estradas que cruzan por el circuito primario las abiertas 13 Variables lógicas empleadas en lógica cableada en comparación con la lógica, c ircuitos digitales, neumática y óleo-hidráulica. En los circuitos electrónicos digitales o compuerta lógica, se utiliza el sistema numérico binario; donde verdadero es igual a ―1‖ y falso es igual a ―0‖. Si se trata de un sistema neumático u óleo -hidráulico, ―verdadero‖ es igual a una válvula ABIE RTA y ―falso‖ es igual a una válvula CE RRA DA. Si se trata del mando de la válvula, ―verdadero‖ corresponde al mando accionado (puede ser un solenoide, una palanca de accionamiento manual o un simple volante), y ―falso‖ corresponde al estado no accionado del mando. Esquemas de conexión y esquemas de principio Los relés y otros elementos empleados en la t écnica de comando y control , pueden ser dibujados con s us bornes de conexión tal cual son físicamente, y luego conectar c on conductores los distintos bornes, conformando lo que s e denomina un ―esquema de conexión‖. El esquema de conexión debe dar los dat os constructivos y la ubic ación de cada elemento, pero no es la mejor forma de representar un circuito a la hora de comprender y vis ualizar su funcionamiento, como si lo es el esquema de principio. 14 Dibujos y planos Los dibujos o planos de los esquemas de con exión y es quemas de principio, antiguamente eran realizados por dibujantes técnicos en folios de papel de gran tamaño, por ejemplo; 1,50 x 2,00 met ros, donde se dibujaban todos los cables del circuito en un solo folio. Actualmente los dibujos son realizado s directamente por los electricistas, en programas CA D e impresos en hojas A4 o A 3. Un circuito de automatización de lógica cableada se dibuja en varias hojas numeradas, y los cables y aparatos son referenciados de una hoja a otra, marcando el número de hoja y las coordenadas columna-fila donde se ubic a el cable, borne o aparato cableado. 15 Relés En la lógica cableada, la mención de ―relé‖ comprende diversos equipamientos eléctricos y electrónicos, de distinta tecnología y función. Todos estos equipos, aparatos o instrumentos, son considerados como ―relés‖ en la medida de que cuenten con cont actos eléctricos NA o NC de salida, y realicen una función particular de Lógica Cableada. Las entradas pueden ser bobinas, circuitos de medida de tensión, corriente, temperatura, nivel, accionamientos físicos y manuales, comandos remotos, por cable o por radiofrecuencia. Así por ejemplo, un relé puede ser un control de nivel o temperatura, un relé electromecánico, un contactor con contactos auxiliares, un relé de sub o sobre tensión, un relé de protección y decenas de ot ras funciones, que distintos fabricantes de equipamiento industrial catalogan como ―relés‖. Elementos de mando Los elementos de mando básicos en lógica cableada son los siguientes; 16 Contactos NA y NC Los contactos eléctricos de los relés pueden ser contactos normalmente abiert os NA, o normalmente cerrados NC. En los esquemas de conexión y de principio siempre se dibuja el contacto en su posición de reposo, con la bobina del relé desenergizada o en OFF. El contacto NC se dibuja cerrado y el contacto NA se dibuja abierto. Los relés se dibujan sin energizar. Señalización La señalización comprende la indicación de los estados de marcha, parada, falla o defectos, posición de interruptores abiertos o cerrados. Para lo cual se emplea luminosos con lámpara incandescente o con LE D. La lámpara en energizada mediant e cont actos auxiliares de contactores e interruptores, o con relés que copian la posición de los mismos. En autómatas de relés de gran tamaño, la polaridad empleada para la señalización es independiente de la polaridad de mando, ya que un cortocirc uito en un luminoso no debería dejar fuera de servicio el autómata. 17 Operaciones lógicas con bits Descripción Las operaciones lógicas con bits operan con dos dígitos, 1 y 0. Estos dos dígitos constituyen la base de un sistema numérico denominado sistema binario. Los dos dígitos 1 y 0 se denominan dígitos binarios o bits. En el ámbit o de los contactos y bobinas, un 1 significa activado ("conductor") y un 0 significa desactivado ("no conductor"). Las operaciones lógicas con bits interpretan los estados de señal 1 y 0, y los combinan de acuerdo con la lógica de B oole. Estas combinaciones producen un 1 ó un 0 como resultado y se denominan "resultado lógico" (RLO). Las operaciones lógicas con bits pe rmiten ejecutar las más diversas funciones. >=1 : Operación lógica O (SUMA) Descripción La operación O lógica sirve para consultar los estados de señal de dos o más operandos especificados en las entradas de un cuadro O. Si el estado de señal de uno de estos operandos es "1", la operación da como resulta Si el estado de señal de todos los operandos es "0" no se cumple la condición exigida operación lógica, por lo que el resultado de la misma será "0". A 0 0 1 1 B 0 1 0 1 Y 0 1 1 1 & : Operación lógica Y (PRODUCTO) Descripción La operación Y lógica sirve para consultar los estados de señal de dos o más operandos especificados en las entradas de un cuadro Y. Si el estado de señal de todos los operandos es "1", y sólo en este caso, la operación da como resultado "1". Cuando el estado de señal de un operando es "0" no se cumple la condición exigida por la operación lógica, por lo que el res ultado de la operación será "0". A 0 0 1 1 B 0 1 0 1 Y 0 0 0 1 18 XOR : Operación lógica O-exclusiva Descripción La operación lógica O-exclusiva sirve para consultar el estado de señal de acuerdo con la tabla de verdad O-exclusiva. En una operación lógica O-exclusiva, el estado de señal es "1" cuando el estado de señal de uno de los dos operandos es "1". En los elementos XOR para consultar más de dos operandos el resultado lógico común es "1" si un número impar de los operandos cons ultados da el resultado lógic o "1". A 0 0 1 1 B 0 1 0 1 Y 0 1 1 0 NOT : Operación Negación - (negación, inversor) Descripción La salida ocupa el estado 1 cuando la entrada tiene estado 0. El bloque NOT invierte el estado en la entrada. La ventaja de NOT consiste, por ejemplo, en que no es necesario ningún contacto normalmente cerrado pues basta con utilizar un contacto de cierre y convertirlo en uno de apert ura mediante NOT. A 0 0 Y 1 0 19 CAPITULO 2 DE LOGICA CABLEADA A LOGICA DIGITAL 20 Problema No. 1 Convierta el siguiente esquema de circuito de lógica cableada a lógica digital El interruptor S1 o el S2 conecta el consumidor. En lógica digital, con bloques de funciones, la conexión en paralelo de los interruptores es un ’O’ porque los interruptores S1 o S2 activan la salida. La ent rada del bloque OR va seguida de S1 y S2. Solución: a. b. c. d. Explique el funcionamiento de cada uno de los elementos de los circuitos. Realice el circuito del esquema de lógica cableada utilizando el software de simulación CADES IMU Realice el circuito del esquema de lógica Digital utilizando el software de simulación que el profesor le asigne. (Recomendado LOGOSOFT) Realice un informe de prácticas con sus respectivas observaciones y conclusiones. Problema No. 2 Convierta el siguiente esquema de circuito de lógica cableada a lógica digital El consumidor E1 se activa y desactiva mediant e los interruptores (S1 O S2) Y S3 (O=OR; Y=AND) Se excita el relé K1 al cerrarse S1 ó S2 y además S3. Solución: 21 a. b. c. d. Explique el funcionamiento de cada uno de los elementos de los circuitos. Realice el circuito del esquema de lógica cableada utilizando el software de simulación CADESIMU Realice el circuito del esquema de lógica Digital utilizando el software de simulación que el profesor le asigne. (Recomendado LOGOSOFT) Realice un informe de prácticas con sus respectivas observaciones y conclusiones. Problema No. 3 Convierta el esquema de una Puerta automática de lógica cableada a lógica digital Requisitos impuestos a una puerta automática _ La puert a debe abrirse automáticament e al acercarse una persona. _ La puert a debe permanecer abierta mientras se halle alguien en la zona de acceso. _ Cuando ya no haya ninguna persona en la zona de acceso, debe cerrarse automáticamente la puerta tras un breve tiempo de espera. La mayoría de las veces, la puerta es accionada por un motor que la desplaza a través de un acoplamiento elástico. Se evitan así las posibles lesiones de personas que queden aprisionadas. El control entero está conectado a la red a través de un interruptor principal. 22 Tan pront o como uno de los detectores de movimiento B1 ó B2 distingue una persona, se inicia la apertura de la puerta a través de K3. Tras quedar libre durante un tiempo mínimo la zona de captación de ambos detectores de movimiento, K4 inicia el proc eso de cierre. K1 Protección principal Abrir _ K 2 Protección principal Cerrar S1 (Contacto de reposo) Interruptor de fin de carrera Cerrado S2 (Contacto de reposo) Interruptor de fin de carrera Abierto B1 (Contacto de cierre) Sensor de movimiento por infrarrojo exterior B2 (Contacto de cierre) Sensor de movimiento por infrarrojo interior e. f. g. h. Explique el funcionamiento de cada uno de los elementos de los circuitos. Realice el circuito del esquema de lógica cableada utilizando el software de simulación CADESIMU . Realice el circuito del esquema de lógica Digital utilizando el software de simulación que el profesor le asigne. (Recomendado LOGOSOFT) Realice un informe de prácticas con sus respectivas observaciones y conclusiones. Tarea Presente para la próxima semana la conversión de dos e squemas de lógica cableada a esquemas en lógica digital. 23 CAPITULO 3 Neumática y Electroneumática Básica 24 Tema 1. Generalidades de la Neumática Contextualización Una industria cada vez mas aut omatizada, con exigencias de mayor flexibilidad, productividad, rapidez y confiabilidad de las tareas programadas, exigen personal especializado y muy altamente entrenado en los sistemas que logran realizar estas funciones. La ignorancia o falta de atención en la instalación o funcionamiento de los component es neumáticos, puede generar gastos innecesarios en forma de reducción de capacidad o, en el peor de los casos, paradas en las máquinas o procesos. La neumática ofrece una amplia gama de posibilidades de entrenamiento y de aplicación actual en la industria. El aire comprimido ha experimentado en estos últimos tiempos un auge inusitado debido a su alto poder de adaptación a cualquier sistema de trabajo organizado, siendo evidente que sus cualidades innatas lo hacen recomendable para ejecutar labores que difícilmente puede n cubrir otras energías; bajo ésta apreciación debemos tener en cuenta que el cont rol de las máquinas está dado por la integración de sensores, element os procesadores, mecanismos de accionamiento y actuadores. La técnica neumática se emplea hoy en muchos campos, se prevé que en el fut uro ocupe un puesto importante en la automatización de instalaciones y procesos industriales por su manejo sencillo y su amplia gama de soluciones; esto se debe, entre otras cosas, a que en el resultado de algunos problemas de automatización no puede disponerse de otro medio que sea más simple y más económico. Definición de Neumática La neumática trat a de la generación y trans formación de movimientos mediante el aire como fuente de energía; aplica también al conjunto de aparatos destinados a operar con aire. El término proviene de la expresión griega pneuma que significa hálito, soplo, aire. Para las aplicaciones de la neumática el aire lo obtenemos del mant o gaseoso con el que está envuelta la tierra y, especialmente, de la parte más cercana llamada troposfera. El aire comprimido es una de las formas de energía más antiguas que conoce el hombre y que aprovecha para fortalecer sus capacidades físicas. Aunque sus aplicaciones datan entre los más antiguos conocimient os de la humanidad, no fue sino hasta el siglo pasado cuando empezaron a investigarse sistemáticamente su comport amiento y sus reglas. Sólo desde aprox. 1950 podemos hablar de una verdadera aplicación industrial de la neumática en los proc esos de fabricación. Evolución Hi stórica del Aire Comprimido El ser humano, sin saberlo, lleva repres entado en sus pulmones el compresor más antiguo de la historia y el más natural, pudiendo tratar 100 litros de aire por minut o. En estado de salud normal, este compresor humano posee una seguridad inigualable y los costos de funcionamiento son casi nulos. La impulsión del aire para conseguir un fin útil, figura inmerso desde épocas prehistóricas en las vivencias del hombre. Ejemplos: los cazadores utilizando la cerbatana para lanzar una flecha; la acción de soplar para encender y activar el fuego; actualmente, el inflar una bomba para el adorno de eventos familiares, etc. Como primer compresor mecánico s e puede citar el fuelle manual y el fuelle de pie, que no c omenz ó a emplearse sino hasta unos mil quinientos años antes de nuestra Era. Las primeras máquinas soplantes sirvieron para suministrar aire de combustión a los hornos de fundición y en la ventilación de explotaciones mineras. El conocimiento y las aplicaciones empleando aire comprimido, tomaron consistencia científica a partir de la segunda mit ad del siglo XV II, cuando el estudio de los gases era el objeto de cient íficos como Torricelli, Pascal, Boyle, Marriotte, Gay Lussac, entre otros, quienes desarrollaron formulaciones prácticas para lograr una mayor eficiencia en el uso de esta técnica. 25 Ventajas de la Neumática La determinación de cuando se ha de preferir la neumática, frente a otras tecnologías como la mecánica, la hidráulica, la electricidad o la electrónica, depende de muchos factores; solamente después de un análisis exhaustivo del cas o particular y teniendo en cuent a condiciones de medio ambient e, tamaño de la instalación, conocimient o del personal de planta, tecnologías en uso o disponibles es posible acercarse a una posible solución. Por ese motivo es conveniente también conocer las des ventajas y ventajas de los diferent es sistemas. En forma genérica destacamos las ventajas: - Reducción de costos de mano de obra directos en la operación de los equipos. - Uniformidad en el proceso de producción y reducción de producto no conforme. - Posibilidad de reprogramar a mediano y largo plazo. - Aument o de la capacidad de la instalación y eficiencia en los procesos. - Cantidad: el aire se encuentra disponible prácticamente en todos los lugares en cantidades ilimitadas. -Almacenamiento: Mediante acumuladores es posible recopilar aire para abastecer el equipo de trabajo. -Transporte: El aire puede ser llevado a través de tuberías a grandes distancias sin necesidad de in stalar una red de ret orno y puede también ser trasladado mediante recipient es Cilindros o bot ellas con aire comprimido. - Seguridad: No existe riesgo de explosión ni de incendio, lo que minimiza la necesidad de adecuar sistemas de seguridad en industrias textiles, del papel, de la madera y de la goma. -Velocidad: Los actuadores neumáticos pres entan gran rapidez en sus movimientos que pueden ser fácilmente regulables. -Temperatura: Las variaciones de temperatura no afectan de manera representativa el comportamient o de los equipos neumáticos, permitiendo un funcionamiento seguro sin importar las condiciones extremas de trabajo. -Limpio: El aire no contamina el medio ambiente, siempre y cuando no se le acondicionen lubricantes; este detalle es importante tenerlo en cuenta en aplicaciones donde se trabaja con alimentos, con productos farmacéuticos y aquellos productos que requieran algunas condiciones de higiene. - Constitución de los elementos: La c oncepción de los elementos de trabajo es simple, por t anto el precio es económic o. - A prueba de sobrecargas: Las herramientas y elementos de trabajo neumáticos pueden ir hasta su parada completa sin ries go alguno, puesto que éstos paran en caso de sobrecarga de los sistemas. - Tecnología de fácil aprendizaje y agradable manejo, debido a la sencillez de sus componentes. - Resistente a factores extremos de trabajo como instalaciones expuestas a la suciedad, la humedad, campos magnéticos etc. Al respecto ver punto 6 de este mismo tema denominado: Comparación ent re Medios de Trabajo. Desventajas de la Neumática La neumática comparativament e con otras tecnologías presenta algunas deficiencias: - Fuerza: El aire comprimido es económic o sólo hasta cierta fuerza. Condicionado por la presión de servicio normalmente usual de 700 kPa (7 bar), el límite, también en función de la carrera y la velocidad, es de 20.000 a 30.000 N. 26 - Ruido: El aire que escapa de los elementos neumáticos ocasiona bastante ruido, sin embargo éste puede ser controlado ubicando elementos silenciadores o utilizando materiales insonorizantes. - Preparación: Antes de ser utilizado el aire debe ser llevado a un proceso de limpieza y secado, procurando conservar los elementos neumáticos exentos de desgaste, esto lo hace demasiado costoso. - Movimientos heterogéneos: Debido a la compresión del aire se presentan variaciones en el comport amiento de las velocidades de los actuadores no s e pueden obtener movimientos uniformes ni precisos. - Costos: La preparación del aire hac e que ésta tecnología, tenga c ostos de funcionamiento elevados, esto es compensado con el bajo valor de sus componentes. 27 COMP ARACIÓN ENTRE MEDIOS DE TRABAJO 28 Aplicaciones de la Neumática Esta información nos va a permitir ubicarnos en diferentes contextos de procesos industriales y de producción, Nos va a facultar para observar y hac er un análisis del amplio campo tecnológico que comprende la neumática. Actualmente no se proyecta una moderna explotación industrial sin el aire c omprimido. Este es el motivo de que en los ramos industriales más variados se utilicen aparatos neumáticos. Es ese sentido, la neumática es utilizada para la ejecución de las siguientes funciones: . Detección de estados mediante sensores. . Procesamiento de informaciones mediante procesadores. . Accionamiento de actuadores mediante elementos de control. . Ejecución de trabajos mediant e actuadores. Para controlar máquinas y equipos suele ser necesario efectuar una concatenación lógica y compleja de estados y conexiones. Ello se logra mediante la actuación conjunta de sensores, procesadores, elementos de accionamiento y actuadores incluidos en un sistema neumático. Aplicaciones generales de la técnica de manipulación: 29 Posi cionamiento de piezas. 30 Bifurcación del flujo de materiales. 31 Tema 2. Fundamentos Físicos Leyes de los Gases con Aplicación a la Compresión del Aire En el compresor, los fluidos que son comprimidos pueden s er de diversa nat uraleza, generalmente son una mezcla de gases. En determinadas ocasiones estos gases se comportan como gas es perfectos. El aire si lo definiéramos severamente, no es un gas perfecto, pero dadas las pequeñas variaciones que en él ocurren y para un estudio de los principios de funcionamiento de los compresores, podemos considerarlo como un gas que satisface las condiciones de un gas perfecto. Para una mejor comprensión de éste tema hemos habilitado varias tablas de equivalencias de unidades, las cuales esperamos sean de gran ayuda para solucionar los problemas propuestos. El aire no tiene una forma determinada, toma la forma del recipiente que lo contiene, permite ser comprimido y tiene la tendencia a dilatarse, este comport amient o lo vamos a comprender mejor observando la propuesta de Boyle. Ley De Boyle- Mariotte Relación entre la presión y el volumen de un gas cuando la temperatura es constante. Fue descubierta por Robert Boyle en 1662. Edme Mariotte también llegó a la misma conclusión que B oyle, pero no publicó s us trabajos hasta 1676. Esta es la razón por la que en muchos libros encontramos esta ley con el nombre de Ley de Boyle y Mariotte. El volumen es inversamente proporcional a la presión: Si la presión aumenta, el volumen disminuye. Si la presión disminuye, el volumen aumenta. ¿Por qué ocurre esto? Al aumentar el volumen, las part ículas (átomos o moléculas) del gas tardan más en llegar a las paredes del recipiente y por lo tanto chocan menos veces por unidad de tiempo contra ellas. Esto significa que la presión será menor ya que ésta representa la frecuencia de choques del gas contra las paredes. Cuando disminuy e el volumen la distancia que tienen que recorrer las partículas es menor y por tanto se producen más choques en cada uni dad de tiempo: aumenta la presión. Lo que Boyle descubrió es que si la cantidad de gas y la temperatura permanecen constantes, el producto de la presión por el volumen siempre tiene el mismo valor. Como hemos visto, la expresión matemática de esta ley es: El producto de la presión por el volumen es constante. Supongamos que tenemos un cierto volumen de gas V 1 que se encuentra a una presión P 1 al comienz o del experimento. Si variamos el volumen de gas hasta un nuevo valor V 2 , entonces la presión cambiará a P 2 , y se cumplirá: 32 Y de esa manera podemos expresar la ley de Boyle. Ejemplo: 6.0 L de un gas están a 10 PSI de presión. ¿Cuál será su nuevo volumen si aumentamos la presión hasta 30 PSI? Solución: Sustituimos los valores en la ecuación (10 PSI) ( 6.0 L ) = (30 PSI) (V 2 ) Si despejas V 2 obtendrás un valor para el nuevo volumen = 2L. Ley de Gay-Lussa c Relación entre la presión y la temperatura de un gas c uando el volumen es constant e. Fue enunciada por Joseph Louis Gay-Lussac a principios de 1800. Establece la relación entre la temperatura y la presión de un gas cuando el volumen es constant e. La presión del gas es directamente proporcional a su temperatura: Si aumentamos la temperat ura, aumentará la presión. Si disminuimos la temperat ura, disminuirá la presión. ¿Por qué ocurre esto? Al aumentar la temperatura las moléculas del gas se mueven más rápidamente y por tanto aumenta el número de choques contra las paredes, es decir aumenta la presión ya que el recipiente es de paredes fija s y su volumen no puede cambiar. Gay-Lussac descubrió que, en cualquier momento de este proceso, el cociente entre la presión y la temperatura siempre tenía el mismo valor: Supongamos que tenemos un gas que se encuentra a una presión P 1 y a una temperatura T 1 al comienzo del experimento. Si variamos la temperatura hasta un nuevo valor T 2 , ent onces la presión cambiará a P 2 , y se cumplirá: que es otra manera de expresar la ley de Gay-Lussac. 33 Esta ley, al igual que la de Charles, está expresada en f unción de la temperatura absoluta. Al igual que en la ley de Charles, las temperaturas han de expresarse en Kelvin. Ejemplo: Cierto volumen de un gas se encuentra a una presión de 130 kpas cuando su temperatura es de 25.0°C. ¿A qué temperatura deberá estar para que su presión sea 102 kpas? Solución: Primero expresamos la temperat ura en kelvin: T 1 = (25 + 273) K= 298 K Ahora sustituimos los datos en la ecuación: Si despejas T 2 obt endrás que la nueva temperatura deberá ser 233.8 K o lo que es lo mism o -39.2 °C. Ley de Charles Relación ent re la temperatura y el volumen de un gas cuando la presión es constante. En 1787, Jack Charles estudió por primera vez la relación entre el volumen y la temperatura de una muestra de gas a presión constante y observó que cuando se aumentaba la t emperatura el volumen del gas también aumentaba y que al enfriar el volumen disminuía. El volumen es directamente proporcional a la temperatura del gas: Si la temperatura aumenta, el volumen del gas aumenta. Si la temperatura del gas disminuye, el volumen disminuye. 34 ¿Por qué ocurre esto? Cuando aumentamos la temperatura del gas las moléculas se mueven con más rapidez y tardan menos tiempo en alcanzar las paredes del recipiente. Esto quiere decir que el número de choques por unidad de tiempo será mayor. Es decir se producirá un aumento (por un instant e) de la presión en el interior del recipiente y aumentará el volumen (el émbolo se desplazará hacia arriba hasta que la presión se iguale con la exterior). Lo que Charles descubrió es que si la cantidad de gas y la presión permanec en constantes, el cociente entre el volumen y la temperatura siempre tiene el mismo valor. Matemáticament e podemos expresarlo as í: que es otra manera de expresar la ley de Charles. Esta ley se descubre casi ciento cuarenta años después de la de Boyle debido a que cuando Charles la enunció se encontró con el inconveniente de tener que relacionar el volumen con la temperatura Celsius ya que aún no existía la escala absolut a de temperatura. Ejemplo: Un gas tiene un volumen de 2.5 L a 25 °C . ¿Cuál será su nuevo volumen si bajamos la temperatura a 10 °C ? Recuerda que en estos ejercicios siempre hay que usar la escala Kelvin. Solución: Primero expresamos la temperat ura en kelvin: T 1 = (25 + 273) K= 298 K T 2 = (10 + 273 ) K= 283 K Ahora sustituimos los datos en la ecuación: Si despejas V 2 obtendrás un valor para el nuevo volumen = 2.37 L . Ley General de Los Ga se s Nos permiten solucionar problemas en los cuales se presentan cambios en las condici ones de las variables desde P 1, V 1, T 1 hasta P 2 , V 2 , T 2. Así la ley general de los gases se escribe como: Ejemplo: Una masa de oxigeno ocupa 0.0200 m 3 a la presión atmos férica, 101 kpa, y 5 0 C . Determínese su volumen si su presión se incrementa a 108 kpa mientras su temperatura cambia a 30 0 C. 35 Pero si T 1 = 5+278k, T 2 = 30+273 = 303k y así: Conversión de unidades Esta unidad busca brindarle herramientas para que pueda solucionar problemas relacionados con el manejo de magnitudes físicas aplicadas a la neumática. Vamos a mostrar las unidades mas utilizadas para que usted se familiarice con ellas. La unidad ―presión‖ está compuesta de dos unidades derivadas: fuerza, la cual está dada en Newton y Área o 2 superficie la cual está dada en m La unidad de presión del sistema internacional se llama Pascal. Dado que ésta presión de 1 Pa es un valor muy pequeño comparativamente con las unidades que se manejan a nivel de ingeniería, debemos utilizar una unidad que sea múltiplo del pascal y cuya magnitud sea mayor. Por eso vamos a utilizar el bar. 1 Bar = 10 5 pascales = 100.000 pas = 100.000 Por lo tanto al convertir m 2 a cm2 tendríamos: 36 Tema 3. Componentes de la Neumática Estructura de un Sistema Neumático Cumplimiento del mandato Transferencia de señales Procesamiento de señales Entrada de señales Suministro de energía 37 Simbología Neumática El comité europeo de transmision es oleohidráulicas y pneumáticas (CE TOP) hizo una propuesta de la representación de los elementos neumáticos e hidráulicos en el año de 1964; La organización internacional para la estandarización (ISO) la aprobó posteriorment e y la dio en circulación. El grupo de símbolos que aparecen en la part e inferior corres ponden al grupo de s ímbolos más corrient es según DIN 24300. Recuerde que los símbolos son apenas una representación gráfica y no ilustran una marca determinada. La simbología que aparece a c ontinuación es apenas una parte de t odos los elementos existentes y a que este módulo presenta solo conceptos básicos de la neumática. Esperamos que dicha simbología le permita servir de apoyo para estructurar los circuitos neumáticos básicos. 38 39 40 41 42 43 44 ELEMENTOS NEUMATICOS Y ELECTRONEUMATICOS Cilindro de Simple Efecto Funcionamiento: Aplicando aire comprimido, el vástago del cilindro de simple efecto avanza hacia su posición final delantera. Al desconectar el aire comprimido, el muelle de re posición aplica fuerza sobre el émbolo y el vástago se desplaza hacia su posición final posterior. El émbolo del cilindro está provisto de un imán permanente, cuyo campo magnético se aprovec ha para activar detectores de posición. . Tipos de cilindros de simple efecto Cilindros de émbolo, cilindros de membrana, cilindros de membrana enrollable. Cilindros de Doble Efecto Funcionamiento: El vástago del cilindro de doble efecto ejecuta movimientos alternos, cambiando de sentido cuando se aplica aire comprimido en uno de los dos lados. La amortiguación en las dos posiciones finales evita que el émbolo choque con fuerza en los extremos. La amortiguación puede ajustarse mediante dos tornillos. El émbolo del cilindro está provisto de un imán permanente, cuyo campo magnético se aprovec ha para activar detectores de posición. 45 Válvula de estrangulación y antirretorno Funcionamiento: La válvula de estrangulación y antirretorno es una combinación de válvula de estrangulación y válvul a de antirretorno. La válvula de antirretorno bloquea el pas o de aire en un sentido. E n es e caso, el aire fluye a través de la válvula de estrangulación. La sección de esta válvula puede regularse mediante un tornillo moleteado. La posición de este tornillo puede asegurarse con una tuerca moleteada. El sentido de la estrangulación se indica mediante dos flechas en el cuerpo de la unidad. En el sentido contrario, el aire fluye libremente a través de la válvula antirretorno. Bloque de distribución Funcionamiento: El bloque de distribución tiene un colector de alimentación de aire c omprimido para funciones de c ontrol a través de ocho conexiones individuales. 46 Electroválvula de 2 x 3/2vías con LED, cerrada en posición normal Funcionamiento: La electroválvula conmuta (1 _ 2) al conectar tensión a la bobina. Al retirar la señal, vuelve a su posición inicial (1 _ 0) por efecto de un muelle de reposición. El estado de conmutación se indica mediante un diodo luminoso. La válvula dispone de un accionamiento manual auxiliar. La electroválvula se caracteriza por consumir muy poc a potencia eléctrica y por calentarse poco. El diodo luminoso y el circuit o protector tienen polos inconfundibles. Las conexiones d e las bobinas están identificadas con los números 12 y 14. Electroválvula de 5/2 vías con LED Funcionamiento: La electroválvula conmuta (1 _ 4) al conectar tensión a la bobina. Al retirar la señal, vuelve a su posición inicial (1 _ 2) por efecto de un muelle de reposición. El estado de conmutación se indica mediante un diodo luminoso. La válvula dispone de un accionamiento manual auxiliar. 47 Electroválvula biestable de 5/2 vías con LED Funcionamiento: La electroválvula biestable conmuta al aplicar tensión en una bobina y al retirar la señal mantiene su estado de conmutación hasta la siguient e señal. El diodo luminoso indica el estado de conmutación. La válvula dispone de dos accionamientos manuales auxiliares. Válvula de cierre con unidad de filtro y regulador Funcionamiento: El filtro con separador de agua limpia el aire comprimido eliminando suciedad, partículas corroídas de tubo, óxido y condensado. La válvula regula la alimentación de aire comprimido, manteniendo una det erminada presión de funcionamiento y compensa oscilaciones de la presión. El sentido de flujo está indicado con una flecha en el cuerpo de la unidad. El tornillo de evacuación de condensado se encuentra en el dep ósito del filt ro. El manómetro indica la presión ajustada. La válvula de cierre alimenta y descarga aire en todo el sistema de mando. La válvula de 3/2 vías se acciona con el botón giratorio rojo. 48 Relé triple La unidad incluye tres relés con conexiones y dos barras colectoras para la alimentación de tensión. Todos los conectores de seguridad son de 4 mm. La unidad se monta sobre un bastidor o en el panel de prácticas perfilado mediante cuatro adaptadores enchufables. Unidad para entrada de señales eléctricas Funcionamiento: La tecla luminosa de contacto con retención del estado de conmutación tiene un conjunt o de contactos que incluye dos contactos normalmente abiertos y ot ros dos normalmente c errados. La tapa de la tecla es transparente e incluye una lámpara miniaturizada. Pulsando la t ecla se activa el c onjunto de cont actos. Estos contactos abren o cierran circuitos eléctricos. Al soltar la tecla se mantiene el estado de conmutación. Pulsándola nuevamente, los contactos vuelven a su posición inicial. La tecla de contactos sin retención del estado de conmutación tiene un conjunto de contactos que incluye dos contactos normalmente abiertos y otros dos normalmente cerrados. La tapa de la tecla es transparente e incluye una lámpara miniaturizada. Pulsando la t ecla se activa el conjunto de contactos. Estos contactos abren o cierran circuitos eléctricos. Al soltar la tecla, los contactos vuelven a su posición inicial. 49 Detector de posición óptico Funcionamiento: Los detectores de posición ópticos tienen un emisor y un receptor. Tratándose de detectores de reflexión directa, el emis or y el receptor se enc uent ra en un mismo cuerpo. El emisor emite intermitentemente rayos de luz roja visible. El objeto detectado refleja una part e de dicha luz. El semiconductor del receptor detecta esta luz reflejada, provocando un cambio del estado de conmutación. El objeto det ectado puede tener una superficie brillante, mate, transparente u opaca. Únicamente tiene que reflejar de modo directo o difuso una suficiente cantidad de luz. La distancia de conmutación puede regularse mediante un potenciómetro. El detector de posición tiene una salida P NP, es decir que la línea que recibe la señal conmuta a positivo. El conmutador está normalmente abierto. La carga se conecta entre el detector de posición y la conexión a masa. Un diodo luminoso (LED) amarillo indica el estado de conmutación. El detector tiene polos inconfundibles y es resistente a sobrecargas y cortocircuitos. Detector de posiciones finales eléctrico Funcionamiento: El detector de posiciones finales tiene un microinterruptor de accionamiento mecánico. Aplicando presión sobre la palanca con rodillo (por ejemplo con la leva de conmutación de un cilindro), se activa el microinterruptor. Los contactos abren o cierran un circuito eléctrico. Al retirars e la presión aplicada s obre la palanca con rodillo, el microinterruptor vuelve a su posición inicial. 50 Sensor de presión con indicador Funcionamiento: El sensor de presión piezorresistivo es un det ector de presión relativa con amplificador int egrado y con compens ación de temperatura. La presión medida se t ransmite a un elemento piezorresistivo a través de una capa de silicona. La modificación de la señal se amplifica y se t ransmite como señal de tensión o de conmutación al conector tipo clavija. Válvula Selectora Funcionamiento: La válvula selectora abre el paso (función O) hacia la salida 2 al aplicar presión en la salida 1. Si se aplican presiones diferentes en las dos entradas, la mayor llega a la salida. 51 Válvula de simultaneidad Funcionamiento: La válvula de simultaneidad abre el paso (función de Y) hacia la salida 2 al aplicar presión en las entradas 1. Si se aplican presiones diferentes en las dos entradas, la señal que tiene la mayor presión llega a la salida. Detector de posición capacitivo Funcionamiento: El detector de posición capacitivo funciona detectando el cambio de capacidad de un condensador en un circuito oscilante RC. Si se acerca una pieza al detector, aumenta la capacidad del condensador. Ello provoca una modificación de la oscilación en el circuito RC. Esta modificación puede detectarse. El cambio de la capacidad depende principalmente de la distancia, de las dimensiones y de la constant e dieléctrica del material de la pieza en cuestión. El detector de posición tiene una salida P NP, es decir que la línea que recibe la señal conmuta a positivo. El conmutador está normalmente abierto. La carga se conecta entre el detector de posición y la conexión a masa. Un diodo luminoso (LED) amarillo indica el estado de conmutación. El detector tiene polos inconfundibles y es resistente a sobrecargas y cortocircuitos. 52 Detector de posición inductivo Funcionamiento: El detector de posición inductivo incluye un oscilador constituido por un circuito de resonancia paralelo con bobina y condensador y de un amplificador. El campo electromagnético está dirigido hacia el exterior gracias al núcleo ferrítico de la bobina. Si se acerca una pieza de material conductivo a la zona de dispersión del campo electromagnético, se produc en corrientes parásitas en la pieza, con lo que s e amortiguan las oscilaciones. Dependiendo de la conductividad, de las dimensiones y de la cercanía de la pieza, el oscilador puede atenuarse hasta el punto de anularse las oscilaciones. Esta atenuación se det ecta electrónicamente para emitir la señal de salida correspondiente. El detector de posición tiene una salida PNP, es decir que la línea que recibe la señal conmuta a positivo. El conmutador está normalmente abiert o. La carga se conecta entre el detector de posición y la conexión a masa. La superficie activa está identificada con una placa de material sintético de color azul. Un diodo luminos o (LE D) amarillo indica el estado de conmut ación. El detector tiene polos inconfundibles y es resistente a sobrec argas y cortocircuitos. Válvula de 3/2vías con pulsador, abierta en posición normal Funcionamiento: Oprimiendo el pulsador se activa la válvula. Al soltar el pulsador, la válvula conmuta a su posición normal por efecto de un muelle de recuperación. 53 Válvula de 3/2 vías con interruptor selector, cerrada en posición normal Funcionamiento: Girando el selector se acciona la válvula. Al soltar el selector se mantiene el estado de conmutación. Al girar el selector a su posición inicial, la válvula vuelve a su posición normal, accionada por un muelle de recuperación. 54 CAPITULO 3 PRACTICAS DE LABORATORIO NEUMATICA Y ELECTRONEUMATICA 55 Circuitos Neumáticos y electroneumáticos Hay dos tipos de circuitos neumáticos. 1. Circuito de anillo cerrado: Aquel c uyo final de circuito vuelve al origen evitando brincos por fluctuaciones y ofrecen mayor velocidad de rec uperación ante las fugas, ya que el flujo llega por dos lados. Estos circuitos a su vez se pueden dividir en cuatro tipos de sub-sistemas neumáticos: 1. Sistema manual 2. Sistemas semiautomáticos 3. Sistemas automáticos 4. Sistemas lógicos En estas prácticas se pretende que el alumno se familiarice con los element os de la neumática, la electroneumática y su funcionamiento, y que sea capaz de desarrollar circuitos que cumplan las especificaciones de un proceso industrial. Cada uno de los ejercicios se desarrolló siguiendo los puntos que se detallan a continuación: - Para los circuitos neumáticos, dibujar el diagrama de fases, incluidas las líneas de Señales. - Proyectar y dibujar el esquema del circuito, y simular su funcionamient o, ayudándose de los programas FluidS IM®. Para ello sólo se podrá hacer uso de los componentes relacionados más adelante, y se seguirá el criterio de mínimo número de elementos empleados. - Montar el circuito en el banco corres pondiente. - Realizar los ajustes y medidas propuestos en cada práctica. - Contestar a las cuestiones que se plantean en cada práctica. - Desmontar el circuito y guardar los componentes. - Realizar el informe de la práctica. CIRCUITOS NEUMATICOS PRACTICA No. 1 FUNCIONAMI ENTO DE CILINDRO DE SIMPLE EFECTO Este es el circuito más sencillo que podemos montar en la práctica, y consta de: 1 cilindro de simple efecto 1 válvula 3/2 accionada por botón pulsador y retorno con muelle Al moment o de presionar el botón, las vías de la válvula cambian, permitiendo que la presión circule hacia el cilindro, el cual expulsa el embolo, el cual regresa mediante su retorno de muelle. 56 PRACTICA No. 2 FUNCIONAMI ENTO DE CILINDRO DE DOBLE EFECTO Este circuito se realiza con: 1 cilindro de doble efecto 2 válvulas 3/2 accionadas por bot ón pulsador y retorno con muelle Cuando se pulsa el primer botón, el embolo es expulsado por la presión, y para regresarlo es neces ario presionar el botón 2. PRACTICA No. 3 FUNCIONAMI ENTO DE VALVULAS 3/2 Y 5/2 Este circuito se realiza con: 1 cilindro de doble efecto 1 válvula 5/2, accionamiento neumático 2 válvulas 3/2 accionadas por botón pulsador y retorno con muelle Cuando el botón 1 es presionado, la válvula 5/2 cambia de posición y el embolo es expulsado, para regresarlo se tiene que presionar el botón 2 que causa el mismo efecto en la válvula 5/2. PRACTICA No. 4 FUNCIONAMI ENTO DE UNA VALV ULA S ELECTORA (OR) Este circuito se realiza con: 1 cilindro de doble efecto 1 válvula 5/2, accionamiento neumático 3 válvulas 3/2 accionadas por botón pulsador y retorno con muelle. 1 compuerta OR La compuert a OR actúa sin importar de qué lado se le aplique presión, ya sea el botón 1 o 2, la presión circula hacia la válvula 5/2, permitiendo que el embolo salga del cilindro, y para regres arlo basta con presionar el botón 3, el cual cambia las vías de la 57válvula 5/2. PRACTICA No. 5 FUNCIONAMI ENTO DE UNA VALV ULA DE SIMULTANEI DAD (AND) Este circuito se realiza con: 1 cilindro de doble efecto 1 válvula 5/2, accionamiento neumático y retorno con muelle. 2 válvulas 3/2 accionadas por botón pulsador y retorno con muelle. 1 compuerta AND Para lograr que el embolo del cilindro sea expuls ado, se tienen que presionar los botones 1 y 2 al mismo tiempo, para que la compuerta AND se active y permita el flujo de presión, no es necesario un tercer botón, ya que la válvula 5/2 tiene un retorno con muelle. CIRCUITOS ELECTRONEUMATICOS PRACTICA No. 6 ARRANQUE Y P ARO Este es un circuito muy sencillo, realizado con una válvula electroneumática, la cual se activa dependiendo del pulso de inducción que obtenga del relevador, el cual se enclava para hacer un simple accionamiento, y cuando el PB2 es accionado corta el suministro del relevador, y este se des activa, dando pas o a Y2 para regresar el embolo del cilindro. 58 PRACTICA No. 7 AV ANCE Y RETROCESO ELECTRONEUMATI CO CI CLADO Nota: si se usa un botón de enclavamiento el circuito queda ciclado. Este circuito tiene la peculiaridad de tener dos usos, dependiendo del tipo de bot ones que se utilicen; en el caso de tener botones de enclavamiento el circuito se queda ciclado, y en caso de botones simples solo realiza un ciclo. Hasta aquí usted ha realizado prácticas de laboratorio, en las que ha tenido los datos de los circuitos en forma completa dada por su profesor, ahora realizará prácticas donde debe completar los esquemas de los circuitos y luego realizar los montajes correspondientes. Se le presentaran problemas reales que se present an en la industria, ponga a prueba sus conocimientos y destrezas téc nicas adquiridas en el paso de estas dos semanas para resolver cada uno de los problemas propuestos. 59 RESOLVER PROBLEMAS PROBLEMA No. 1: Configuración y montaje de un sistema de clasificación de piezas Objetivos didácticos Los estudiantes conocen la construcción y el funcionamiento de un cilindro de simple efecto. Los estudiantes conocen la construcción y el funcionamiento de una electroválvula de 3/2 vías. Los estudiantes conocen las formas de accionamiento de válvulas de vías y pueden explicarlas. Los estudiantes pueden ex plicar el funcionamiento de un accionamient o directo y pueden montar un sistema correspondiente. Descripción del problema Con este equipo se clasifican pruebas de agua en función del tamaño de los frascos. La tarea consiste en desarrollar un sistema de mando que permite ejecutar este proc eso. Condicione s a tener en cuenta Deberá utilizarse un cilindro de simple efecto. El cilindro deberá controlarse mediante un pulsador. En caso de un corte de energía, el vástago del cilindro deberá desplazarse hacia la posición final posterior. Tareas a resolver en el proyecto 1. Responder las preguntas y solucionar las tareas relacionadas c on los aspectos básicos correspondientes a los contenidos didácticos. 2. Dibujar el es quema neumático y el esquema eléctrico. 3. Efectuar una simulación en concordancia con el esquema electroneumático y comprobar el funcionamiento. 4. Redactar una lista de los componentes utilizados. 5. Efectuar el mont aje de los circuitos neumático y eléctrico. 6. Cont rolar las secuencias según el circuito. Esquema de situación 60 Sistema de clasificación de piezas 1. Oprimiendo el pulsador, avanza el vástago del cilindro de simple efecto desplazando los frascos para retirarlos de la cinta de transporte. 2. Al soltar el pulsador, el vástago se desplaza hacia la posición final posterior. 3. Fundamentos teóricos: Funcionamiento de actuadores neumáticos Los actuadores neumáticos pueden clasific arse en dos categorías: • Actuadores con movimiento lineal • Actuadores con movimiento giratorio – Describir el funcionamiento de los siguientes actuadores: 61 Fundamentos teóricos: Completar los símbolos de electroválvulas – Completar los símbolos. Recurrir con ese fin a las descripciones de los actuadores correspondientes. Nota s y Observacione s: 62 Fundamentos teóricos: Posi ción normal de válvulas de vías Una electroválvula de 3/2 vías tiene dos posiciones. Puede encontrarse en su posición normal (no activada) o en posición de conmutación (estando activada). En posición normal, la válvula puede estar cerrada o abierta. – Describir las secuencias de los movimientos de un cilindro de simple efecto accionado por una electroválvula de 3/2 vías, una vez con posición normal cerrada y otra vez con posición normal abierta. 63 Fundamentos teóricos: Accionamiento directo e indirecto Una electroválvula puede accionarse de modo directo o indirecto. – Describir la diferencia entre accionamient o directo y accionamient o indirecto recurriendo al siguiente ejemplo: electroválvula de 3/2 vías con reposición por muelle, accionada mediante pulsador interruptor. 64 Fundamentos teóricos: Construcción y funcionamiento de un interruptor eléctrico Los interruptores pueden ser de tipo pulsador o selector. Pueden estar normalmente abiertos, normalmente cerrados o pueden tener contacto conmutador. – Describir la construcción y el funcionamiento de los siguientes interruptores: COMPA RA TUS RESP UESTAS CON LAS DEL PROFESOR 65 Fundamentos teóricos: Denominación de las conexiones de válvulas Para evitar equivocaciones al conectar los tubos flexibles a las válvulas de vías, las conexiones de estas válvulas (utilizaciones y conexiones de mando) están identificadas según la norma ISO 5599-3, tanto en las válvulas mismas como también en el esquema de distribución. – Describir el significado/funcionamiento de las denominaciones que constan a continuación: Nota s y Observacione s: 66 Completar el esquema neumático y el esquema eléctrico – Completar el esquema neumático y el esquema eléctrico del sistema de clasificación de piezas. COMPA RA TUS RESP UESTAS CON LAS DEL PROFESOR 67 Redactar una lista de componentes Además de completar el esquema de distribución, deberá redactars e una lista de componentes para que la documentación del proyecto esté complet a. – Redactar la lista incluyendo los componentes neces arios en la tabla siguiente. Descripción de los proce sos Situación inicial El cilindro se encuentra en su posición final posterior. Pasos 1-2 Oprimiendo el pulsador S1 (contacto normalment e abierto), se aplica corriente eléctrica a la bobina 1M1 de la electroválvula de 3/2 vías. La válvula 1V1 conmuta y el cilindro 1A1 avanza. Pasos 2-3 Al soltar el pulsador S1 (contacto normalmente abiert o), la bobina 1M1 no recibe c orriente eléctrica y la válvula 1V1 conmuta a su posición normal por efecto del muelle recuperador. El aire contenido en el cilindro 1A1 se descarga y el muelle desplaza el cilindro hacia su posición final posterior. REALICE E L MONTA JE EN EL BAS TIDOR CORRESPONDIE NTE Y HAGA UN INFORME QUE INCLUYA LAS CONCLUS IONES ACERCA DE L EJERCICIO. 68 PROBLEMA No. 2: ACCIONAMIENTO DE UN CARGADOR Objetivos didácticos Los estudiantes saben utilizar cilindros de doble efecto. Los estudiantes conocen la construcción y el funcionamiento de una electroválvula de impulsos. Los estudiantes conocen las posibilidades existentes para detectar las posiciones finales de los cilindros. Descripción del problema Desplazamiento de tablas de madera provenientes de un cargador hacia un sistema de rec ogida. Condicione s a tener en cuenta Deberá detectarse la posición final delantera del cilindro. Tareas a resolver en el proyecto 1. 2. 3. 4. 5. 6. Responder las preguntas y solucionar las tareas relacionadas con los aspectos básicos correspondientes a los contenidos didácticos. Dibujar el es quema de distribución neumático y el esquema de distribución eléctrico. Efectuar una simulación en concordancia con el esquema electroneumático y comprobar el funcionamiento. Redactar una lista de los componentes utilizados. Efectuar el mont aje de los circuitos neumático y eléctrico. Cont rolar las secuencias según el circuito. Esquema de situación 1. Oprimiendo un pulsador, la corredera retira una tabla de madera del cargador. 2. Una vez que el cilindro alcanza su posición final delant era, la corredera vuelve a su posición inicial. 69 Fundamentos teóricos: Componente s de un si stema electroneumático Los component es de un sistema electroneumático se representan en un esquema de distribución neumático y/o en un esquema de circuitos eléctricos. – Especificar dónde deben representarse los siguientes component es: Los detectores utilizados en sistemas de control electroneumáticos tienen la función de capt ar señales y transmitirlas a las unidades de procesamiento de señales. – ¿Qué función o funciones puede asumir un detector de final de carrera electromec ánico en un sistema de control electroneumático? 70 Fundamentos teóricos: Símbolos de detectore s de posi ciones finales Los detectores de posiciones finales puede activarse de diversos modos. Pueden estar normalmente cerrados o abiertos o pueden ser de tipo conmutador. Además, pueden estar activados o desactivados en su posición normal. – Describir la construcción y el funcionamiento de los detectores representados en los símbolos. Fundamentos teóricos: Redactar una tabla de elementos de conmutació n Esquema de distribución eléctrico 71 Otra forma de determinar los conjuntos de contactos ocupados de un relé consiste en analizar el esquema de distribución eléctrico. En la siguient e pagina analice el es quema de distribución eléctrico para un cargador 72 73 Fundamentos teóricos: Redactar una tabla de elementos de conmutación – Completar las informaciones sobre el relé aquí representado. Para ello deberá indicarse el circuito de corriente correspondient e a cada uno de los contactos. Indicar la función que cumple el contacto (normalmente abierto o normalmente cerrado). Completar el esquema neumático y el esquema eléctrico Esquema de distribución neumático 74 Esquema de distribución eléctrico Redactar una lista de componentes 75 Descripción de los proce sos Situación inicial El cilindro 1A1 se encuentra en su posición final posterior. Pasos 1-2 Oprimiendo el pulsador S1 (contacto normalmente abierto) se aplica corriente en el relé K1. El contacto conmutador K 1 (contacto normalment e abierto) se cierra y la bobina 1M1 de la válvula de 5/2 vías 1V1 recibe corriente. La válvula 1V1 conmuta. La cámara posterior del cilindro 1A1 se llena de aire comprimido mientras que el aire contenido en la cámara delantera se descarga. El cilindro 1A 1 avanza. Al soltar el pulsador S1 (cont acto normalmente abierto), el relé K1 no recibe corriente, el contacto conmutador K1 (contacto normalmente abierto) se abre. De esta manera, no se aplic a corriente en la bobina 1M1. Pasos 2-3 Cuando el cilindro llega a su posición final delantera, el vástago activa el detector eléctrico 1B 2. El contacto conmutador 1B1 (contacto normalmente abierto) se cierra y el relé K2 recibe corriente. El contacto conmutador K2 (contacto normalmente abierto) se cierra y la bobina 1M2 recibe corriente. La válvula 1V1 vuelve a conmut ar a su posición normal. La cámara delantera del cilindro 1A1 s e llena con aire comprimido mientas que se descarga el aire contenido en la cámara posterior. El cilindro vuelve a su posición final posterior. Al dejar de estar accionado el detector de final de carrera 1B2 (contacto conmutador, normalmente abierto), el relé K2 no recibe corriente y el contacto conmutador K2 (normalmente abiert o) se abre. De esta manera, la bobina 1M2 no recibe corriente. Propuesta s de mejoras: Di señe el mismo circuito usando sensore s, detectores de posición ópticos, capacitivos e inductivos. 76 PROBLEMA No. 3: CLASIFICACIÓN DE PAQUETES Objetivos didácticos Los estudiant es pueden calcular las fuerzas de los émbolos en función de determinados valores definidos previament e. Los estudiantes pueden calcular valores característicos eléctricos. Los estudiantes pueden explicar el funcionamiento de un accionamiento indirecto y pueden montar un sistema correspondiente. Los estudiantes conocen las funciones lógicas y pueden montar un sistema correspondiente. Descripción del problema Los paquetes avanzan sobre una vía de rodillos y pasan delante de los puestos de trabajo. En determinados lugares pueden des viarse los paquetes. Condicione s a tener en cuenta Deberá utilizarse un cilindro de doble efecto. Accionamiento indirecto del cilindro mediante pulsador o detector electromecánico de final de carrera. El cilindro únicamente puede avanzar si el vástago se encuentra en su posición final posterior. Tareas a resolver en el proyecto 1. Responder las preguntas y solucionar las tareas relacionadas con los aspectos básicos correspondientes a los contenidos didácticos. 2. Dibujar el es quema de distribución neumático y el esquema de distribución eléctrico. 3. Efectuar una simulación en concordancia con el esquema electroneumático y comprobar el funcionamiento. 4. Redactar una lista de los componentes utilizados. 5. Efectuar el mont aje de los circuitos neumático y eléc trico. 6. Cont rolar las secuencias según el circuito. 77 Esquema de situación Vía de rodillos para el transporte de paquetes 1. Cuando se oprime el puls ador S1, deberá avanzar el vástago del cilindro. 2. Al soltar el pulsador, el vástago d eberá retroceder hacia su posición final posterior. 78 Fundamentos teóricos: Cálculo de la fuerza del émbolo El émbolo de un cilindro de doble efecto tiene un diámet ro de 16 mm; el diámetro del vástago es de 8 mm. La pérdida de fuerza del cilindro por efecto de la fricción es de un 10 por ciento. Magnitudes válidas en un cilindro de doble efecto: 79 Fundamentos teóricos: Cálculo de magnitudes eléctricas El relé utilizado en un circuito electroneumático está identificado de la siguiente manera: 580 �, 1 W. – Calcular la tensión de funcionamiento máxima admisible para que no se produzca una sobrecarga en el relé. Fundamentos teóricos: El vástago de un cilindro deberá avanzar al oprimir los pulsadores S1 y S2. Utilizando simultáneamente los dos pulsadores, recibe corriente la bobina 1M1 y se activa la electroválvula 1V1, por lo que el vástago avanza. Si se suelta por lo menos uno de los dos pulsadores, la válvula conmuta a posición normal, por lo que el vástago retrocede. – Rellenar la tabla de funciones e incluir el símbolo del enlac e lógico. Nota 0 significa: no están oprimidos los pulsadores y el vástago no avanza 1 significa: están oprimidos los pulsadores y el vástago avanza Tabla de funciones Símbolo del enlace lógico 80 Completar el esquema neumático y el esquema eléctrico – Confeccionar el esquema de distribución neumático y el esquema de distribución eléctrico para el sistema de clasificación de paquetes. Esquema de distribución neumático 81 Esquema de distribución eléctrico 82 Redactar una lista de componentes Además de completar el esquema de distribución, deberá redactars e una lista de componentes para que la documentación del proyecto esté complet a. – Redactar la lista incluyendo los componentes neces arios en la tabla siguiente. Descripción de los proce sos Situación inicial El cilindro 1A1 se encuentra en su posición final posterior. Si el cilindro 1A1 se encuentra en su posición final posterior, está activado el detector eléctrico de posiciones finales 1B1 (contacto conmutador, normalmente abierto), el contacto conmutador 1B 1 está cerrado y el relé K2 recibe corriente. Pasos 1-2 Oprimiendo el pulsador S1 (contacto normalmente abierto) se aplica corriente en el relé K1. El contacto conmutador K1 (contacto normalmente abierto) se cierra y la bobina 1M1 de la válvula biestable de 5/2 vías 1V1 recibe corriente. La válvula biestable 1V 1 conmuta. La cámara del lado del émbolo del cilindro 1A1 se llena de aire comprimido mientras que el ai re contenido en la cámara del lado del vástago s e descarga. El cilindro 1A 1 avanza. Cuando el cilindro 1A1 abandona su posición final posterior, ya no está accionado el detector de posiciones finales 1B1 y el contacto conmutador 1B1 se abre. Por ello también se abre el contacto K2 (normalmente abierto) y ya no fluye corriente a través de la bobina 1M1. Sin embargo, la válvula biestable mantiene su posición de conmutación hacia la derecha. Pasos 2-3 Cuando el cilindro alcanza su posición final delantera, el vástago actúa sobre el detector eléctrico de posiciones finales 1B2 (contacto conmutador, normalmente abierto). El contacto conmutador 1B2 se cierra. El relé K3 recibe corriente. Al cerrarse el contacto conmutador K3 (normalmente abierto), también la bobina 1M2 recibe corriente. La válvula 1V1 vuelve a conmutar. 83 La cámara del lado del vástago del cilindro 1A 1 se llena de aire comprimido, mientras que la cámara del lado del émbolo se descarga. El cilindro vuelve hacia su posición final posterior. Cuando ya no está activo el detector eléctrico de posiciones finales 1B2 (contacto conmutador, normalmente abierto), el relé K 3 ya no recibe corriente y el contacto conmutador K3 (normalment e abierto) se abre. P or ello, la bobina 1M2 ya no recibe corriente. El cilindro mantiene su posición final posterior. Notas y observaciones: PROBLEMA NO. 4: CONFIGURACIÓN DE UN SISTEMA DE PUNZONADO Y CORTE Objetivos didácticos Los estudiantes pueden configurar sistemas de control que funcionan en función de la presión. Los estudiantes conocen la construcción y el funcionamiento de detectores de proximidad magnéticos. Descripción del problema Para fabricar marcos de puertas se necesitan pequeños tarugos. Estos tarugos se cortan con una máquina de punzonado y corte. Condicione s a tener en cuenta La presión aplicada deberá ser de 550 kPa (5,5 bar). Tareas a resolver en el proyecto 1. Responder las preguntas y solucionar las tareas relacionadas con los aspectos básicos correspondientes a los contenidos didácticos. 2. Dibujar el es quema de distribución neumático y el esquema de distribución eléctrico. 3. Efectuar una simulación en concordancia con el esquema electroneumático y comprobar el funcionamiento. 4. Redactar una lista de los componentes utilizados. 5. 6. Efectuar el mont aje de los circuitos neumático y eléctrico. Cont rolar las secuencias según el circuito. 84 Esquema de situación Máquina de corte 1. Oprimiendo un pulsador int erruptor se desplaza la herramienta que corta las piezas. 2. Una vez alcanzada la presión necesari a para la operación de corte y efectuada la operación, la herramienta se desplaza nuevamente a su posición inicial. 85 Fundamentos teóricos: Detectore s de proximidad magnéticos A diferencia de los detectores de posiciones finales, los detectores de proximidad se activan sin contacto y sin aplicar fuerzas mecánic as exteriores. – Describir la construcción y el funcionamiento de un detector de proximidad magnético (cont acto Reed). Fundamentos teóricos: Detectore s de proximidad magnéticos Los detectores electrónicos se clasifican por su polaridad en tipos PNP y NPN. – Describir la diferencia entre estos dos tipos de detectores. 86 Fundamentos teóricos: Pre sostatos Para medir o controlar la presión en un sistema, se utilizan sensores s ensibles a la presión, denominados convertidores PE. – Describir el funcionamiento de un convertidor PE. Existen dos tipos de sensores de presión: • Sensores de presión con contacto mecánico (accionamiento mecánico) • Sensores de presión de conmutación electrónica (accionamiento electrónico) – Describir las funciones y el funcionamiento del sensor de presión siguiente: 87 Fundamentos teóricos: Selección de detectores de proximidad En este ejercicio se deberán detectar las posiciones finales de un cilindro utili zando detectores de proximidad. Éstos deberán cumplir las siguient es condiciones: • Detección sin contacto de las posiciones finales del vástago • Los detectores de proximidad deberán ser resistentes al polvo • El vástago y la leva de conmutación del cilindro son metálicos – Seleccionar los detectores de proximidad que cumplen estas condiciones. Explicar la selección. Completar el esquema neumático y el esquema eléctrico – Confeccionar el esquema de distribución neumático y el esquema de distribución eléctrico para la máquina de corte. 88 Esquema de distribución neumático 89 Esquema de distribución eléctrico 90 Redactar una lista de componentes Además de completar el esquema de distribución, deberá redactars e una lista de componentes para que la documentación del proyecto esté complet a. – Redactar la lista incluyendo los componentes neces arios en la tabla siguiente. Lista de componentes 91 Descripción de los proce sos Situación inicial El cilindro 1A1 se encuentra en su posición final posterior. Si el cilindro 1A 1 se encuentra en su posición final posterior, está activado el detector de proximidad electrónic o 1B 1 (c ontacto normalmente abierto), por lo que el relé K 1 recibe corrient e y el contacto conmutador K1 (normalmente abierto) está cerrado en el circuito de corriente 7. Pasos 1-2 Oprimiendo el pulsador S 1 (c ontacto normalmente abierto) se aplica corriente en la bobina 1M1 de la válvula biestable de 5/2 vías 1V1. La válvula biestable 1V 1 conmuta. El cilindro 1A 1 avanza. Cuando el cilindro 1A1 abandona su posición final posterior, ya no está accionado el detector de proximidad electrónico 1B1 (contacto normalmente abierto). Por ello también se abre el contacto K1 (normalmente abierto) del circuito de corriente 7 y ya no fluye corriente a través de la bobina 1M1. Sin embargo, la válvula biestable mantiene su posición de conmutación de la derecha. Pasos 2-3 Cuando el cilindro alc anza su posición final delantera, el vástago actúa sobre el detector de proximidad electrónic o 1B 2 (c ontacto normalmente abierto) y el relé K2 recibe corriente. El contacto conmutador K2 (normalmente abierto) del circuito de corriente 8 se cierra. El sensor de presión 1B3 mide la presión que está puesta en el cilindro 1A1. Si la presión es igual o superior al valor nominal ajustado previament e, el sensor de presión (contacto normalment e abierto) conmuta, el relé K 3 recibe corriente y el contacto conmutador K3 (normalmente abierto) del circuito de c orriente 8 se cierra. En esas condiciones, la bobina 1M2 recibe corriente. Por ello, la válvula 1V1 vuelve a conmutar y el cilindro retrocede a su posición inicial posterior. Cuando ya no está activo el detector de proximidad electrónico 1B2 (contacto normalment e abierto), el relé K2 no recibe corrient e y se abre el cont acto conmutador K2 (normalmente abierto). Si la presión es inferior a la presión nominal ajustada previamente, el sensor de presión (contacto normalmente abierto) se desconecta, el relé K3 no recibe corriente y el contacto conmutador K3 (normalmente abierto) del circuito de corriente 8 se abre. Por ello, la bobina 1M2 ya no recibe corriente. Bibliografías Manuales de Festo Didactic Neumática Hidráulica Electricidad Aplicada – Thompson Editorial Paraninfo Manual LogoSoft Siemens 92 93