- Ninguna Categoria
Estabilidad en Sistemas de Potencia: Ejercicios PowerFactory
Anuncio
Estabilidad en Sistemas de Potencia
Material de entrenamiento
- Ejercicios -
Training Course Documents [Last modified: 10/31/2008]
-2-
INDICE
- EJERCICIOS -.................................................................................................................................................................... 1
1 EL PROBLEMA DE UNA MÁQUINA EN POWERFACTORY ........................................................................................ 3
2 ESTABILIDAD DE PEQUEÑA SEÑAL EN EL SISTEMA DE UNA MÁQUINA. .............................................................. 7
3 ESTABILIDAD DE TENSIÓN................................................................................................................................... 8
4 SISTEMA DE EXCITACIÓN INCORPORADO (BUILT-IN) ...................................................................................... 10
4.1 AVR ............................................................................................................................................................................ 10
4.2 PSS............................................................................................................................................................................. 13
5 ARRANQUE DE MOTORES.................................................................................................................................... 17
5.1 ARRANQUE DIRECTO................................................................................................................................................... 18
5.2 MÉTODOS DE ARRANQUE ............................................................................................................................................ 18
5.3 ARRANQUE CON MODIFICACIÓN DEL TAP DEL TRANSFORMADOR................................................................................. 19
5.4 MOTOR DRIVEN MACHINE (ELMMDM) .......................................................................................................................... 19
6 APPENDIX: DETAILED INSTRUCTIONS............................................................................................................... 21
Training Course Documents [Last modified: 10/31/2008]
-3-El problema de una máquina en PowerFactory
Seminario DIgSILENT
Análisis de estabilidad de sistemas de potencia en PowerFactory
El propósito de los siguientes ejercicios es introducir los métodos fundamentales para el estudio de los
diferentes fenómenos asociados a la estabilidad de sistemas eléctricos de potencia (SEPs). Los
diferentes tipos de cálculos y las herramientas disponibles en PowerFactory serán introducidas
gradualmente durante los ejercicios de manera de permitir una familiarización con los métodos de
análisis para estabilidad de SEPs, visualización e interpretación de los resultados.
Los instrucciones en los ejercicios procuran ser precisas y concisas. Es la intención que Ud. intente
resolver las tareas por sí mismo. En todos los casos encontrará al final de esta guía instrucciones
detalladas para cada tarea según la referencia [n], donde “n” es el número bajo el cual encontrará las
instrucciones en el apéndice. Podrá usar también estas instrucciones detalladas para repetir los
ejercicios por si mismo luego del entrenamiento.
Durante los ejercicios el instructor le brindará ayuda para la realización de las tareas y estará a su
disposición para contestar preguntas y atender dudas. Por favor, no dude en consultarlo.
¡ Le deseamos éxito con la tarea !
1 El problema de una máquina en PowerFactory
Iniciar PowerFactory con su nombre de usuario (o usuario de entrenamiento) y crear un nuevo
proyecto “PS-Estabilidad” [1] o similar. Puede también elegir un nombre para la red o dejar el nombre
propuesto por el programa.
Antes de comenzar a definir la red en el diagrama unifilar, se deberá construir la librería del proyecto
incluyendo todos los datos eléctricos/tipos de los dispositivos eléctricos necesarios.
Ingreso de datos para los tipos:
•
En las siguientes tablas se muestran los datos eléctricos correspondientes a una línea aérea,
un transformador de 2 arrollamientes y un generador. Estos tipos deberán ser definidos en la
librería local del proyecto y se usarán para definir la red [2].
Linea ‘Tipo CCT’:
Un
Irated
X’
500 kV
1 kA
0.56306 Ohm/km
Training Course Documents [Last modified: 10/31/2008]
-4-El problema de una máquina en PowerFactory
Transformador ‘Trf 500kV/24kV/2220MVA’:
Sn
UnHV
UnLV
Xshc
2220 MVA
500 kV
24 kV
15 %
Generador ‘Gen 2220MVA/24kV’:
Datos básicos:
Sn
Un
cosn
RMS/EMT-Simulación:
Tag
rstr
xl
xrl
xd
xd’
xd’’
xq
xq’
xq’’
Td’
Td’’
Tq’
Tq’’
Saturación flujo principal:
SG10
SG12
2220 MVA
24 kV
1
7s
0.003 p.u.
0.15 p.u.
0
1.81 p.u.
0.3 p.u.
0.23 p.u.
1.76 p.u.
0.65 p.u.
0.25 p.u.
1.325967 s
0.023 s
0.3693182 s
0.02692308 s
0.12396 p.u.
0.177575 p.u.
Ingreso de elementos en el diagrama unifilar:
•
•
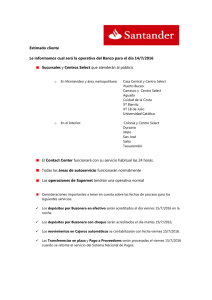
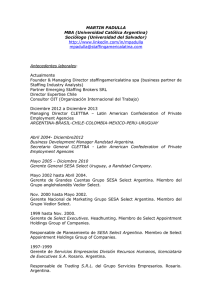
Crear el caso de estudio de acuerdo al diagrama unifilar mostrado abajo. Insertar los
elementos con los datos dados en la Figura 1 [1].
Datos adicionales al flujo de carga se muestran a continuación:
- La amplitud de la fuente de tension es puesta a: 0.90081 p.u.
- El generador es definido como tipo PQ constante.
- El generador es despachado con S = 2220MVA y un factor de potencia 0.9
Training Course Documents [Last modified: 10/31/2008]
Infinite Bus
500. kV
HV
500. kV
DIgSILENT
G
~
1998.00
967.68
53.41
LV
24. kV
472.13
0.94
20.12
24.00
1.00
28.34
1299.40
412.74
1.67
CCT1
Type CCT
100. km
1998.00
967.68
53.41
-1998.00
-634.64
2.56
Trf
Trf 500kV/24kV/2220MVA
G1
Gen 2220MVA/24kV
698.60
221.90
0.90
CCT2
Type CCT
186. km
450.41
0.90
0.00
-1299.40
56.79
1.67
-1998.00
87.32
2.56
~
V
Infinite Source
-698.60
30.53
0.90
DIgSILENT
-5-El problema de una máquina en PowerFactory
Exercise 1
Power System Stability and Control
One Machine Problem
PowerFactory 13.1.252
Project: PF Seminar
Graphic: Grid
Date: 11/11/2004
Annex:
Figura 1:Diagrama unifilar de la red
Simulación de un cortocircuito en la barra HV:
Simular un cortocircuito en la barra ‘HV’ con una duración de 110ms y visualizar [6]:
•
•
•
•
•
•
Potencia active del generador
Potencia reactiva del generador
Corriente del generador
Ángulo del rotor del generador (referido al ángulo de la barra de referencia)
Tensión en la barra HT y LT
Mostrar el diagrama P-phi de la simulación [7]
Para ello se deberán definer primero las variables del generador como de las barras/terminals que
se desean monitorear [8]. Luego se deberá definir dos eventos en la barra “HV” donde se definirá
un cortocircuito pata t=0 s y es despejado para t= 110 ms. [9].
Determinar el tiempo crítico de despeje de falla para el sistema.
Training Course Documents [Last modified: 10/31/2008]
-6-El problema de una máquina en PowerFactory
Simulación de cortocircuito en la línea CCT2:
Simular un cortocircuito a la mitad (50%) de la línea ‘CCT2’ con una duración de 100ms. Despejar
la falla abriendo la línea.
Determinar el tiempo crítico para el despeje de la falla.
Adicionalmente chequear la corriente a través de las líneas CCT1 y CCT2 durante la simulación,
como así tambien la velocidad del generador.
Simular un cortocircuito al final (99,99%) de la línea CCT2 con una duración de 100 ms. Despejar
la falla abriendo la línea como en el caso anterior.
Determinar nuevamente el tiempo crítico para el despeje de la falla.
Comparar los resultados de los tiempos críticos para el despeje de falla en estos casos con el caso
de la falla directamente sobre la barra “HV”. Analizar los resultados.
Training Course Documents [Last modified: 10/31/2008]
-7-Estabilidad de pequeña señal en el sistema de una máquina.
2 Estabilidad de pequeña señal en el sistema de una
máquina.
Antes de realizar un análisis de valores propios se desea investigar el sistema de una máquina
mediante una simulación transitoria como la realizada en el ejercicio 1. Por lo tanto, se introducirá
primero una pequeña perturbación en el sistema y se analizará luego el comportamiento de la
máquina.
Poner primero todos los eventos definidos en el ejercicio anterior fuera de servicio.
Introduciendo una pequeña perturbación:
•
•
•
Mediante la definición de un evento para la máquina sincrónica incrementar el torque en la
máquina en 0,01p.u. para t=0s. [10].
Reducir el torque eléctrico del generador G1 nuevamente al valor previo a la perturbación.
Graficar la velocidad del generador.
•
Determinar la frecuencia y el amortiguamiento de la oscilación de la velocidad del generador.
•
Desconectar a continuación la línea CCT2 e investigar las diferencias en las oscilaciones de la
velocidad del generador.
En vez de investigar el sistema mediante simulaciones transitorias, se analizará ahora la estabilidad de
pequeña señal mediante la función “Análisis Modal” en PowerFactory. Los autovalores del sistema son
ahora calculados, mostrándose como resultado las frecuencias de oscilación propias y los coeficientes
de amortiguamiento de cada una.
Análisis modal:
•
•
•
•
•
Ejecutar un flujo de carga y calcular las condiciones iniciales
Ejecutar un análisis modal y calcular todos los autovalores para la velocidad del generador.
Imprimir todos los resultados del análisis de autovalores en la ventana de salida. Analizar aquí
primero los resultados a partir de los autovalores únicamente, y luego incluyendo la
información detallada con los factores de participación [12]
Comparar los resultados de la simulación en dominio del tiempo con aquellos del análisis
modal para ambos casos
Training Course Documents [Last modified: 10/31/2008]
-8-Estabilidad de tensión
3 Estabilidad de tensión
A continuación se analizará la estabilidad de tensión del sistema de una máquina. Esto puede ser
llevado a cabo mediante el uso de curvas tensión-potencia reactiva (V-Q) y curvas potencia activatensión (P-V). Para agilizar el cambio de los parámetros del sistema (por ejemplo el P de las cargas) y
generar las curvas P-V y V-Q se proveen de escritos DPL que automatizan esta tarea.
Curvas V-Q:
•
•
•
Desactivar primero el proyecto [3].
Importar el archivo denominado ‘V-Q-Curve.dz’ directamente dentro del caso de estudio [13].
Activar el proyecto nuevamente.
•
•
Cambiar la tension de operación de la barra de potencia infinita a 1p.u.
Antes de ejecutar el escrito DPL se deberá definir primero un “set de comandos DPL” con el
generador “G1” y la barra “LV” [14].
Editar luego el escrito DPL “V-Q-Curve” y elegir el set de comandos DPL recientemente creado
como selección general del escrito [15].
Ingresar a continuación el rango de tensión a ser analizado:
-máxima tensión en la barra LV
-Mínima tensión en la barra LV
-Paso de tensión para el cálculo
Además, ajustar la salida de potencia activa del generador para producir diferentes curvas VQ.
-máxima potencia activa del generador G1
-mínima potencia activa del generador G1
- paso para al potencia activa del generador
•
•
•
El escrito DPL generará automáticamente tantas curves V-Q como pasos para al potencia active del
generador se hayan elegido. Tambien es posible mostrar todas las curvas sobre un mismo diagrama.
Observar además que el escrito DPL cambia el despacho del generador de P-Q a P-V (tensión en la
barra “LV”) para la generación de las curvas V-Q.
Curvas P-V:
Para visualizar las curves P-V se deberá importar otro escrito DPL y realizar algunas
modificaciones en la red. Es por lo tanto aconsejable el realizar una copia de seguridad del
proyecto en el disco rígido o bien trabajar sobre una revisión del proyecto.
•
•
•
•
•
Desactivar primero el proyecto [3].
Importar el archive denominado ‘P-V-Curve.dz’. Como destino elegir directamente el caso de
estudio con el que se estás trabajando [13].
Activar el proyecto nuevamente
Para analizar la característica P-V el generador debe ser puesto fuera de servicio y se debe
conectar una carga en el Terminal “LV”. Definir para esta carga una potencia activa y un
factor de potencia constante.
Definir un “set de comandos DPL” con la carga recientemente agregada y el Terminal “LV”.
Training Course Documents [Last modified: 10/31/2008]
-9-Estabilidad de tensión
•
•
•
Editar luego el escrito DPL “P-V-Curve” y elegir el set de comandos DPL recientemente creado
como selección general del escrito [15].
Definir ahora el factor de escalonamiento para al carga de acuerdo con el valor de la potencia
activa que haya definido para al misma. Mas aún se puede especificar el factor de potencia
para al carga, indicando si este es capacitivo o inductivo.
Observar las diferencias en la curva para al máxima potencia transmitida usando diferentes
valores de factor de potencia.
Training Course Documents [Last modified: 10/31/2008]
-10-Sistema de excitación incorporado (Built-in)
4 Sistema de excitación incorporado (Built-in)
A continuación se incluirá un regulador de tensión (AVR) y un estabilizador (PSS) para el generador.
De esta manera se incluirá en el estudio los reguladores del generador y se analizará su influencia
sobre la estabilidad del sistema que está siendo analizado.
4.1 AVR
En primer lugar se creará un regulador de tensión y se verificará su respuesta en lazo abierto. Luego
el regulador de tensión se conectará al generador y se verificará su respuesta en lazo cerrado.
Respuesta en lazo abierto:
•
•
•
•
Mediante el administrador de datos crear un nuevo “Modelo común” (Common-Model) dentro
de la carpeta de la red del sistema [16].
Seleccionar el bloque “vco_EXAC1A” de la librería IEEE estandard de controladores que
encontrará dentro de la librería global de PowerFactory [16].
Ingresar el nombre y los parámetros de acuerdo con la tabla de la página siguiente.
Ejecutar un flujo de carga y calcular las condiciones iniciales para verificar la no existencia de
errores.
Verificar la respuesta del modelo a lazo abierto:
•
•
•
Chequear el modelo con una respuesta al escalón en la entrada de tensión “usetp” (respuesta
a lazo abierto) [17]
Definir un set de variables para monitorear la respuesta del AVR y visualizar los resultados de
la simulación [18].
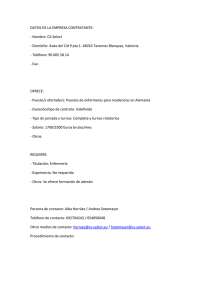
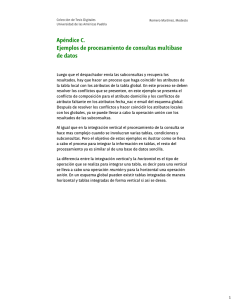
Para verificar la configuración del controlador, mostrar el diagrama de bloques del mismo
[19].
Respuesta a lazo cerrado:
•
•
•
•
•
Mediante el administrador de datos crear un nuevo modelo compuesto (Composite Model)
dentro de la red [20]..
Seleccionar el frame “IEEE-frame no droop” dentro de la librerüia IEEE estándar provista en la
librería global de PowerFactory [20]..
Definir un nombre para este nuevo modelo de planta.
Setear las referencias al generador sincrónico “G1” y al regulador de tensión (AVR)
previamente definido [20]..
Ejecutar un flujo de carga y calcular las condiciones iniciales para verificar la no existencia de
errores.
Verificación el modelo en lazo cerrado aplicando un escalón en el valor de referencia de la tensión
(setpoint):
Training Course Documents [Last modified: 10/31/2008]
-11-Sistema de excitación incorporado (Built-in)
•
•
•
Aplicar un escalón a la tensión de referencia “usetp” [17].
Puede cambiar los ajustes de los parámetros del regulador de tensión (AVR) y observar su
influencia en la respuesta al escalón.
Visualizar los resultados de la respuesta al escalón [18]..
Ajustes del regulador de tensión (AVR) the ‘vco_EXAC1A’:
-------------------------------------------------------------------------------|
|
DIgSILENT | Project:
|
|
| PowerFactory |------------------------------|
|
13.0.252 | Date: 11/11/2011
|
-------------------------------------------------------------------------------|Grid:Grid
Syst.Stage:Grid
| Annex:
/ 1 |
-------------------------------------------------------------------------------|AVR G1
Common Model
1
/1
|
-------------------------------------------------------------------------------|Model Definition
\Library\Models\IEEE\Models\vco_EXAC1A
|
|Out of Service
No
|
| Parameter
|
|
Tr
Measurement Delay [s]
0.0000
|
|
Tb
Filter Delay Time [s]
1.0000
|
|
Tc
Filter Derivative Time Constant [s]
1.0000
|
|
Ka
Controller Gain [p.u.]
500.0000
|
|
Ta
Controller Time Constant [s]
0.2000
|
|
Te
Excitor Time Constant [s]
0.0100
|
|
Kf
Stabilization Path Gain [p.u.]
0.0300
|
|
Tf
Stabilization Path Delay Time [s]
1.0000
|
|
Kc
Excitor Current Compensation Factor [p.u.]
0.3470
|
|
Kd
Excitor Current Derivative Factor [p.u.]
0.0500
|
|
Ke
Excitor Constant [p.u.]
1.0000
|
|
E1
Saturation Factor 1 [p.u.]
7.4025
|
|
Se1
Saturation Factor 2 [p.u.]
0.2416
|
|
E2
Saturation Factor 3 [p.u.]
9.8700
|
|
Se2
Saturation Factor 4 [p.u.]
1.5373
|
|
Vrmin Controller Minimum Output [p.u.]
-10.0000
|
|
Vrmax Controller Maximum Output [p.u.]
10.0000
|
|
|
--------------------------------------------------------------------------------
Training Course Documents [Last modified: 10/31/2008]
DIgSILENT
usetp
Vs
0
Vrmax
1
u
1/(1+sT)
Tr
Vc-
o12
yi1
-
(1+sTb)/(1+sTa)
Tb,Tc
yi
_{K/(1+sT)}_
Ka,Ta
Vr
yi3
[1/sT
Te
-
uerrs
O
Vrmin
upss
Vf
Fex
Vfe
2
Ve
K
Kd
o18
KeSe
Se(efd)+Ke
Ke,E1,Se1,E2,..
0
3
_Fex_
Kc
curex
1
sK/(1+sT)
Kf,Tf
uerrs..
-12-Sistema de excitación incorporado (Built-in)
Training Course Documents [Last modified: 10/31/2008]
Figura 2: Diagrama de bloques del regulador de tensión vco_EXAC1A
vco_EXAC1A: IEEE Modified Type AC1 Excitation System
-13-Sistema de excitación incorporado (Built-in)
A continuación se analiza la influencia del regulador de tensión (AVR) sobre la estabilidad de pequeña
y grandes señales. Por lo tanto, se deberá verificar que tanto el modelo compuesto como el regulador
estén puestos en servicio.
•
_
_
Simular las perturbaciones introducidas en el ejercicio 1:
Cortocircuito en la barra “HV”
Cortocircuito en la mitad de la línea “CCT2”. Despejar la falla desconectando la línea como
se realizó en el ejercicio 1.
•
Determinar el tiempo crítico de despeje de falla para ambos casos.
•
Comparar los resultados y los tiempos críticos de despeje de fallas con aquellos obtenidos
sin el regulador.
•
•
Ejecutar un análisis modal para el sistema con el AVR.
Generar una salida para los valores propios, amortiguamientos y frecuencias propias del
sistema, comparando estos resultados con aquellos del sistema sin regulador.
4.2 PSS
Luego de haber analizado la respuesta del generador incluido su regulador de tensión, se agregará a
continuación un estabilizador de potencia (PSS). El PSS es conectado al frame de control del
generador y se simulará la respuesta en lazo cerrado.
Respuesta en lazo abierto:
•
•
•
•
Mediante el administrador de datos crear un nuevo “Modelo común” (Common-Model) dentro
de la carpeta de la red del sistema [16].
Seleccionar el diagrama de bloques “pss_STAB2A” desde la librería standard IEEE provista en
la librería global de PowerFactory [16].
Ingresar el nombre y los parámetros de acuerdo a la tabla en la página siguiente.
Ejecutar un flujo de carga y calcular las condiciones iniciales para verificar la no presencia de
errores.
Verificar la respuesta en lazo abierto del modelo procediendo de manera similar a la usada con el
regulador de tensión:
•
•
•
Chequear el modelo con una respuesta al escalón aplicada en la potencia de entrada “pgt”
(test de lazo abierto) [17].
Definir un set de variables para monitorear el PSS y visualizar los resultados de la simulación
de la respuesta al escalón durante aproximadamente un segundo [18].
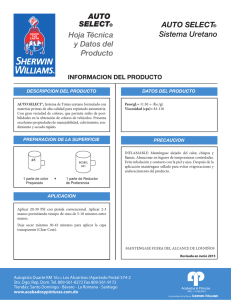
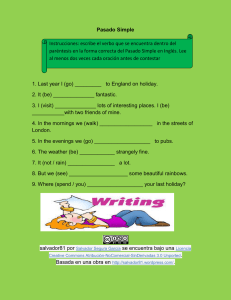
Para verificar el armado del PSS, mostrar un diagrama de bloques del controlador [19].
Training Course Documents [Last modified: 10/31/2008]
-14-Sistema de excitación incorporado (Built-in)
Respuesta en lazo cerrado:
•
Editar el modelo compuesto (composite model) para el generador y elegir el PSS
recientemente definido para el slot del estabilizador de potencia [20].
•
Ejecutar un flujo de carga y calcular las condiciones iniciales para verificar la no presencia de
errores.
Ajustes para el PSS ‘pss_STAB2A’:
-------------------------------------------------------------------------------|
|
DIgSILENT | Project:
|
|
| PowerFactory |------------------------------|
|
13.0.252 | Date: 11/11/2011
|
-------------------------------------------------------------------------------|Grid:Grid
Syst.Stage:Grid
| Annex:
/ 1 |
-------------------------------------------------------------------------------|PSS G1
Common Model
1
/1
|
-------------------------------------------------------------------------------|Model Definition
\Library\Models\IEEE\Models\pss_STAB2A
|
|Out of Service
No
|
| Parameter
|
|
K2
Washout Factor [p.u.]
1.0000
|
|
T2
Washout Time Constant [s]
4.5000
|
|
K3
Signal Transducer 1th Factor [p.u.]
1.3000
|
|
T3
Signal Transducer Time Constant [s]
2.0000
|
|
K5
Output Filter Factor [p.u.]
1.5000
|
|
T5
Output Filter Time Constant [s]
0.0100
|
|
inv
-1 [-1]
-1.0000
|
|
K4
Signal Transducer 2th Factor [p.u.]
1.0000
|
|
Hlim Controller Maximum Output [p.u.]
0.0500
|
|
|
--------------------------------------------------------------------------------
Verificar el modelo mediante la respuesta al escalón en lazo cerrado en la referencia de tensión:
•
•
•
Verificar la respuesta del modelo aplicando un escalón en la referencia de tensión “paux”
[17].
Se pueden modificar los ajustes de los parámetros del estabilizador de manera de observar su
influencia en la resuesta al escalón.
Visualizar los resultados de la respuesta al escalón [18].
A continuación se analizará la influencia del estabilizador PSS recientemente agregado sobre la
estabilidad de pequeñas y grandes señales. Verificar por lo tanto que el AVR y el PSS estén puestos
en servicio.
Training Course Documents [Last modified: 10/31/2008]
-15-Sistema de excitación incorporado (Built-in)
•
_
_
Simular las perturbaciones introducidas en el ejercicio 1:
Cortocircuito en la barra “HV”
Cortocircuito en la mitad de la línea “CCT2”. Despejar la falla desconectando la línea como
se realizó en el ejercicio 1.
•
Determinar el tiempo crítico de despeje de falla para ambos casos.
•
Comparar los resultados y los tiempos críticos de despeje de fallas con aquellos obtenidos
sin el estabilizador.
•
Ejecutar un análisis modal para el sistema incluyendo el regulador de tensión (AVR) y el
estabilizador (PSS).
Generar una salida para los valores propios, amortiguamientos y frecuencias propias del
sistema, comparando estos resultados con aquellos del sistema sin estabilizador.
•
Training Course Documents [Last modified: 10/31/2008]
DIgSILENT
paux
0
1
pgt
KsTd/(1+sT1)
K2,T2,T2
KsTd/(1+sT1)
K2,T2,T2
KsTd/(1+sT1)
K2,T2,T2
KB
inv
K/(1+sT)
K3,T3
Hlim
K/(1+sT)
K5,T5
KB
K4
K/(1+sT)
K5,T5
Limiter
upss
-16-Sistema de excitación incorporado (Built-in)
Training Course Documents [Last modified: 10/31/2008]
Figura 3: Diagrama de bloques del pss_STAB2A (power system stabilizer).
pss_STAB2A: Power System Stabilizing Unit (ASEA)
-17-Arranque de motores
5 Arranque de motores
En este ejemplo se usará un sistema de 9 barras de 230 kV, que contiene 3 diferentes generadores y
algunas cargas. En el ejercicio, se modelará el motor asincrónico auxiliar del generador G3. Luego se
simularán diferentes tipos de arranque para este motor, de manera de evaluar el impacto sobre la
red.
Importar y activar el proyecto file “Arranque de Motores_Inicio” [4]
Definir una revisión del caso de estudio base del proyecto utilizando algún otro nombre, por
ejemplo “Arranque Motor”.
M
~
Motor
2.23 MW
0.84 Mvar
3.50 kA
0.39
0.98
26.00
Motor Bus
G3
G
~
14.14
1.02
1.40
85.74 MW
-10.00 Mvar
3.52 kA
83.50 MW
-11.09 Mvar
3.44 kA
Bus 3
Bus 9
237.42
1.03
148.75
-83.50 MW
15.05 Mvar
0.21 kA
47.29 MW
-17.12 Mvar
0.12 kA
Line 5
T3
-2.23 MW
-0.84 Mvar
3.50 kA
Motor Trf
2.24 MW
1.09 Mvar
0.10 kA
Line 4
36.21 MW
2.08 Mvar
0.09 kA
-22.59 Mvar
0.11 kA
Load C
36.00 Mvar
0.27 kA
•
•
-46.47 MW
-16.79 Mvar
0.12 kA
-45.57 MW
-13.98 Mvar
0.12 kA
92.04 MW
30.77 Mvar
0.24 kA
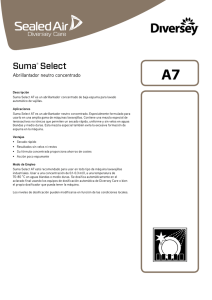
Figura 4: Diagrama unifilar del motor a ser agregado al sistema de nueva barras.
Agregar el elemento motor al sistema de nueve barras de acuerdo a como se indica en la Figura 4.
Para ello:
•
•
•
Definir una nueba barra de Un = 0,4 kV en el sistema.
Agregar el transformador del motor utilizando el tipo “Motor-Trf” de la librería de proyecto.
Agregar a continuación el motor utilizando el tipo (TypAsmo) “2500kW Motor” de la librería
del proyecto.
Training Course Documents [Last modified: 10/31/2008]
-18-Arranque de motores
•
•
Editar el elemento motor y ajustarlo en la página para el flujo de carga como tipo “AS” con
una potencia activa de 2.23 MW.
Verificar los resultados mostrados en la Figura 4 mediante un cálculo de flujo de carga.
5.1 Arranque Directo
Simular un arranque de motor utilizando para ello primero la función de arranque directo predefinida
en PowerFactory. Para ello:
•
•
•
Seleccionar el motor y aquellas barras (selección múltiples) para las cuales se quiera
monitorear la tensión durante el arranque.
Correr la simulación de arranque automática por 10 s.
Observar los diagramas creados automáticamente por la función, como así tambien los
eventos definidos.
5.2 Métodos de Arranque
•
•
Editar el motor.
En la página correspondiente a la simulación RMS (segunda página) habilitar la opción para el
uso de diferentes métodos de arranque.
Caso A:
• Seleccionar un arranque estrella triángulo.
• Ajustar el cambio de estrella a triángulo luego de 10 s.
• Ejecutar nuevamente la simulación durante 20 s. Utilizar un archivo de resultados diferentes
de manera de poder comparar las curvas del arranque directo con el arranque estrellatriángulo.
Caso B:
• Seleccionar un arranque con resistencia variable de rotor.
• Completar la tabla con los siguientes datos:
Resistencia
Adicional [p.u.]
0,5
0,3
0,15
0
•
Tiempo
[s]
0
10
15
20
Ejecutar nuevamente la simulación durante 20 s. Utilizar un archivo de resultados diferentes
de manera de poder comparar las curvas con los métodos de arranque anteriores.
Training Course Documents [Last modified: 10/31/2008]
-19-Arranque de motores
5.3 Arranque con modificación del tap del transformador
•
Se simulará el arranque del motor modificando la posición del tap del transformador “Motor
Trf”. El tap del transformador está dividido en pasos de 2,5%. Verificar este dato en la página
del flujo de carga del tipo correspondiente del transformador.
•
•
Definir un evento de parámetro para “nntap_int” del transformador del motor.
Inicialmente definir la variable “nntap_int” en la posición 20 para t=0 (correspondiente al
50%)
Cambiar luego a la posición 10 (75%) para t=10s.
Seguidamente cambiar a la posición 4 (90%) para t=15s.
Finalmente cambiar a la posición 0 (100%) para t=20s.
Correr la simulación y observar los resultados.
Graficar la característica torque eléctrico/mecánico en función de la velocidad. ¿Qué diferencia
se aprecia respecto a los casos anteriores?
•
•
•
•
•
5.4 Motor Driven Machine (ElmMdm)
Por el momento se ha usado para las simulaciones el modelo de carga mecánica incorporado en el
elemento motor. A continuación se aplicará un modelo mas detallado de carga, lo que se implementa
en PF mediante el elemento ElmMdm o “Motor Driven Machine”.
Para definir un modelo de carga mecánica externo al motor proceder de la siguiente manera:
•
•
•
•
•
•
•
Clic con el botón derecho del ratón sobre el símbolo del motor y seleccionar “Define -> Motor
Driven Machine (mdm)”.
Seleccionar el modelo “ElmMdm_3”.
En la página RMS del elemento MDM ingresar los datos mostrados en la tabla a continuación.
Chequear la nueva curva de carga mecánica y la característica torque – velocidad en la página
RMS del elemento motor.
Ejecutar la simulación RMS para el nuevo modelo de carga mecánica.
Visualizar las curvas de torque mecánico vs. velocidad y de torque eléctrico vs. velocidad
resultante de la simulación. Para ello hacer uso de un diagrama X-Y.
Comparar estas curvas con aquellas mostradas en la ventana de diálogo del motor.
Training Course Documents [Last modified: 10/31/2008]
-20-Arranque de motores
-------------------------------------------------------------------------------|
|
DIgSILENT | Project:
|
|
| PowerFactory |------------------------------|
|
13.1.252 | Date: 11/11/2004
|
-------------------------------------------------------------------------------|Grid:Nine_Bus
Syst.Stage:Motor Starting | Annex:
/ 1 |
-------------------------------------------------------------------------------|Vers. 10.31-Model mdm__3
Vers. 10.31-Model mdm__3
1
/1
|
-------------------------------------------------------------------------------|Out of Service
No
|
|
|
|alf1;Torque at synchronous speed
1.0000 p.u.
|
|slipm;Slip at min. torque
0.8000 p.u.
|
|exp1;Exponent of first polynom. function
2.0000
|
|alf2;Torque at standstill
0.2000 p.u.
|
|exp2;Exponent of second polynom. function
2.0000
|
|xkmm;Torque at slip = Slipm (min. torque)
0.1000 p.u.
|
|
|
--------------------------------------------------------------------------------
Training Course Documents [Last modified: 10/31/2008]
-21-Appendix: Detailed Instructions
6 Appendix: Detailed Instructions
#1: To create a new project
Main Menu: "File - New" (Ctrl + N). This opens the "New" dialog. Tick the option "New - Project".
Enter the project's name. Make sure that the 'Target Folder' points to the folder in which you want to
create the project (normally that is your user account folder).
Press Execute. A grid is automatically created in the new project and a dialog will pop up asking you
for the name of that grid. The empty single line diagram for the newly created grid will be shown.
You may change the name of the project after you have created it through the main menu: "Edit Project". This menu-option opens the project dialog. Be careful not to change any settings or buttons
which you do not know.
You can change the name of the Study Case through the main menu : "Edit - Study Case". Here you
can change the name of the study case, but you can also change the settings of the Grids that are
activated by the study case. To change the grids, press the button "Grids/System Stages". This opens
a list of all Grids. You can either double-click the name to change it (press "return" twice to confirm
the change), or you can select the Grid that you want to change (by left-clicking the icon in the first
column), and press the "Edit Object" Button in the current window.
#2: Inserting Elements inside the Library
First open the data manager and select the local library of your active project. Then press the “New
and select the right device type for inserting into the library for the list shown.
object” button
When the data is inserted, you can select this type for the according element from its edit dialog by
using the option “Select project type…”
#3: (De)activating a Project
The last 5 active projects are listed at the "File" menu on the main menu bar. The currently active
project is the first one in this list. To deactivate the currently active project, select it in the list (left
click it). Alternatively, you may choose the option "File - Close Project" from the main menu.
To activate a project, select it in the list of 5 last active projects. To activate a project that is not in
the list of 5 last active projects, use the option on the main menu "File - Open project". This brings a
tree with all the projects in your user account. Select the project that you want to activate.
#4: Import a DZ File from Disk
Press Main Menu: “File” -> "Import" or the
button in the data manager. Select the file on disk
that you want to import. If required, press the black arrow button to select another path to which you
Training Course Documents [Last modified: 10/31/2008]
-22-Appendix: Detailed Instructions
want to import the objects in the file. This opens a tree with all the folders in your database from
which you can select the correct folder (normally, this would be your user account folder).
Training Course Documents [Last modified: 10/31/2008]
-23-Appendix: Detailed Instructions
#5: Inserting Elements into the Single Line Graphic
•
You may want to maximise the drawing area by pressing the
again to return to normal viewing mode.
•
Select an object in the drawing toolbox. (start with a busbar or terminal)
•
Move to the drawing area. Position the element by a left click. When you want to move it,
select it with a left mouse click, then drag it along.
•
Select a busbar/terminal and drag the small black squares to resize the busbar/terminal
•
Connect a branch/load/generator etc. by clicking on a busbar/terminal
•
Double-click an element to open its dialog
button. Press this button
In an element's dialog, press the small button with the down-arrow to select a type. Choose "Select
Project Type" to jump to the local, project specific, type-library.
Tips:
•
Start entering a new grid by drawing all busbars/terminals. Then connect the branches
between them.
•
Use the zoom function.
•
Use the undo button if you have drawn an object of the wrong type
#6: Visualizing Results
•
add an new graphics page to the case and select “Virtual Instrument
With the button
Panel”. This will create a new VI page, where plot can be shown.
•
Append a number of virtual instruments (VIs) to the empty page by using the “Append VIs”
button
and entering the number of VIs. Thus a specified number of empty plots will occur
in the page.
•
For a normal plot use the “Subplot (VisPlot)” VI for showing time dependent variables.
•
In the edit dialog of the plot you can then define the variables to look at.
#7: Visualizing Dependent Variables
•
Append a virtual instrument to the VI page by using the “Append VIs” button
. For
showing a variable depending on a second variable use the “X-Y Plot (VisXyplot)” and then
define a variable for the x-axis and one for the y-axis in the edit dialog of the plot.
Training Course Documents [Last modified: 10/31/2008]
-24-Appendix: Detailed Instructions
#8: Defining a Variable Selection
•
Before defining the variables to monitor the initial conditions have to be calculated (using the
button)
•
Then right-click on the element to be monitored and select “Define -> Variable Set (Sim)”
from the context sensitive menu.
•
All variable sets of selected elements are now shown. Double-click the element you just
selected.
•
This brings a selection window, where you can create, select or edit a set of variables. If a
variable set is edited, then a variable set manager will pop up. This variable set manager
shows in the left pane the available variables, and in the right pane the selected variables.
Press the [<<] or [>>] buttons to move the selected variable from the one to the other pane.
Use the various filter settings to show more available variables.
•
The variable set will now consist of the selected variables, which are now ready to show in a
plot.
#9: Defining Simulation Events
Before running the simulation it is often necessary to define simulation events, which will take place
during the next simulation.
•
Before specifying an event the initial conditions have to be calculated (using the
•
Then events can be created and defined by opening the current event list (
create new events using the “New Object” button
button)
) and then
.
#10: Changing the Generator Torque
•
Similar to defining the short-circuit events for this exercise a “Event of Synchronous Machine
(ElmSym)” is created in the event list (
) using the “New Object” button
.
•
Make sure you reset the calculation
change the events.
•
Enter the additional torque 0.01p.u. for the first event.
•
Enter the additional torque -0.01p.u. for the second event to get back to the pre-disturbance
values
or run the initial conditions
before trying to
Training Course Documents [Last modified: 10/31/2008]
-25-Appendix: Detailed Instructions
#11: Calculate the Eigenvalues
•
Before calculating the eigenvalues with the modal analysis you have first to calculate the
initial conditions using the
•
button
Then the button for the Modal Analysis is becoming active
calculate all system eigenvalues.
. Run the modal analysis to
#12: Output the Calculated Eigenvalues
•
Using the function “Output Calculation Analysis”
and then selecting the option
‘Eigenvalues’ the output of Eigenvalues is activated.
•
Select from the options, which information should be printed to the output window:
- Eigenvalues
- Participations
- Participations detailed
•
When using the Participation/Participation detailed option the ‘Select Eigenvalue(s)’ dorp down
menu should be set to “filtered”. You can edit the filter to a specific maximal damping of the
mode or to a maximal period duration time.
#13: Import of DLP Scripts
Press Main Menu: “File” -> "Import" or the
disk that you want to import.
button in the data manager. Select the project file on
Press the black arrow button to select the study case to which you want to import the script. This
opens a tree with all the folders in your database from which you can select the correct folder
(normally, this would be your user account folder).
#14: Defining a DPL Command Selection
•
Multi-select the required elements in the grid or in the data manager.
•
Right-click the selection.
•
Select ‘Define -> DPL Command Set’ from the context sensitive menu.
The DPL command set is stored inside the study case.
Training Course Documents [Last modified: 10/31/2008]
-26-Appendix: Detailed Instructions
#15: Running a DPL command
•
Double-click the DPL command.
•
Insert/Change the listed parameters.
•
Select the DPL command set for the general selection of the script.
#16: Creating a Common Model
•
Open the data manager and select the “grid” in the left window of the manager.
•
Select the “New Object” button
•
Chose the controller definition “vco_ESDC1A” from the global library in the folder
“\Library\Models\IEEE\Models\”.
•
Press OK and insert the controller parameter.
and select “Common Model” in the upcoming dialog.
#17: Open-Loop Test
•
Open the event list (
(EvtPara)” event
•
Select the AVR controller for the element.
•
Insert the name of the variable ‘usetp’ and the new value for this variable (=0.9).
) and use the “New Object” button
to insert a “Set Parameter
#18: Defining Variables and Visualizing Results
•
According to [8] and [6] define and visualize the input variables ‘u’ and ‘usetp’ and the output
(excitation) voltage ‘uerrs’ to the generator.
#19: Show Block Diagram
•
Open the data manager and select the AVR element inside the ‘grid’ or
•
Select the AVR using the button “edit calculation relevant objects”
•
Right-click the element “AVR G1”.
.
Training Course Documents [Last modified: 10/31/2008]
-27-Appendix: Detailed Instructions
•
Select the option “Show Graphic” in the context-sensitive menu.
#20: Creating a Composite Model
•
Open the data manager and select the “grid” in the left window of the manager.
•
Select the “New Object” button
•
Chose the controller definition “IEEE-frame no droop” from the global library in the folder
“\Library\Models\IEEE\Frames\”.
•
Press OK and insert the references to the generator and the AVR by right-clicking the slot and
select “select element/type”.
and select “Composite Model” in the upcoming dialog.
#21: Defining a new Revision
•
Right-click the active study case in the data manager and select the option “New -> Revision”.
•
Insert a name for the new study case (i.e. “motor start-up”).
•
Input a name for the new system stage (i.e. also “motor start-up”).
•
Now the new study case is activated.
#22: Running an Automatic Motor Start-Up
•
Select one motor and at least one bus bar or several in the network.
•
Right-click the motor symbol or another selected element.
•
Select the option “Calculate… -> Motor Startup…”
•
Insert the time period for the simulation.
Training Course Documents [Last modified: 10/31/2008]
 0
0
Anuncio
Documentos relacionados



Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados