4. diseño ingenieril del sistema
Anuncio

RAE
1.
TIPO DE DOCUMENTO: Proyecto de grado para optar al título de Ingeniero Electrónico
2. TITULO: DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO PARA UN SISTEMA DE CONTROL
REMOTO DE ANTENA DE MICROONDAS
3.
AUTORES: VASQUEZ DIAZ, Nohora Elena; ORTIZ ÁVILA, Andrés y TRUJILLO ROJAS, Germán
Augusto.
4.
LUGAR: Bogotá (Cundinamarca). Universidad de San Buenaventura. Facultad de Ingeniería,
Programa Ingeniería Electrónica.
5.
FECHA: Octubre de 2010.
6.
PALABRAS CLAVE: Antena, Control, Enlace, GP32, LabView, Microcontrolador, Microondas,
Motorola, Potencia, Remoto, Serial, Servomotor, Win IDE, Xbee, ZigBee
7.
DESCRIPCIÓN DEL TRABAJO: Este trabajo es desarrollado a escala (prototipo) y plantea la
posibilidad de crear un sistema que permita manejar de manera remota una antena receptora de
microondas digitales, anclada sobre un servomotor, ubicados en el cerro La Calera, desde el centro
de noticias del Canal Caracol localizado en Bogotá, utilizando el sistema de control del servomotor
para mover la antena, es decir, un sistema de control remoto para la antena receptora.
8.
LINEA DE INVESTIGACIÓN: El presente trabajo se enfoca por la línea de investigación de
Tecnologías Actuales y Sociedad, que corresponde a las establecidas en la Universidad de San
Buenaventura y dentro de esta, se orienta en las sublíneas de Sistemas de Comunicación e
Información, Instrumentación y Control de Procesos. El campo de investigación está encaminado a
las Comunicaciones y al Control.
9.
FUENTES CONSULTADAS: CARDAMA AZNAR, Angel y otros. Antenas. España: Ediciones UPC,
Universidad Politecnica de Cataluña, 2002. 127p. RAMIREZ ARTUNDUAGA, Jaime. Antenas.
Bogotá: Editorial Universidad de San Buenaventura, 2008. VESGA FERREIRA, Juan Carlos.
Microcontroladores Motorola-Freescale: programación, familias y sus distintas aplicaciones en la
industria. Bogotá: Alfa Omega Colombiana, 2007. 1p.
10. CONTENIDOS: PLANTEAMIENTO DEL PROBLEMA En este capítulo se describe de forma general
el problema ingenieril, teniendo en cuenta los antecedentes sobre desarrollos parecidos. Se
describen el objetivo general y los objetivos específicos, mediante los cuales se establecen los
alcances y limitaciones del proyecto. DISEÑO INGENIERIL DEL SISTEMA En este capítulo se
describe de manera detallada, el diseño y desarrollo ingenieril que se implemento, para dar solución
al problema planteado. Se describen los componentes físicos que se utilizaron, como circuitería,
dispositivos de movimiento (servomotor), también como los componentes lógicos.
11. METODOLOGIA: La metodología con la cual se desarrolló el presente trabajo comprendió en la
recopilación de información detallada correspondiente al tema, a través de artículos especializados y
científicos, enlaces de la Internet y libros especializados, que aportaron contenidos, logrando la más
completa recopilación de normas, desarrollos y alcances correspondientes al objetivo del presente
trabajo de grado. Dentro de esta actividad, también se incluyó lo relacionado con los recursos
necesarios y existentes (hardware y software), mediante los cuales se lograría su culminación.
12. CONCLUSIONES: El diseño y desarrollo de las tareas destinadas para lograr el objetivo propuesto
del presente trabajo de grado, motivaron la aplicación de diferentes opciones de solución, que
mediante su ejercicio, lograron que sus participantes tuvieran el suficiente criterio, basado en el
conocimiento adquirido durante la etapa de aprendizaje, para alcanzar la opción más apropiada de
resolución. En dicho proceso se pudo evidenciar el comportamiento real de las antenas de
microondas (transmisor y receptor) a la hora de establecer el enlace entre ellos, así como, el
comportamiento de la señal al encontrar obstáculos o elementos de reflexión y refracción. Así
mismo, la investigación realizada motivó la profundización en el manejo y configuración de los
programas utilizados que llevaron al desarrollo de las diferentes acciones que se requerían ejecutar.
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO PARA UN SISTEMA DE CONTROL
REMOTO DE ANTENA DE MICROONDAS
NOHORA ELENA VÁSQUEZ DÍAZ
ANDRÉS ORTIZ ÁVILA
GERMÁN AUGUSTO TRUJILLO ROJAS
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA ELECTRÓNICA
BOGOTÁ D.C.
2010
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO PARA UN SISTEMA DE CONTROL
REMOTO DE ANTENA DE MICROONDAS
NOHORA ELENA VÁSQUEZ DÍAZ
ANDRÉS ORTÍZ ÁVILA
GERMÁN AUGUSTO TRUJILLO ROJAS
Trabajo de Grado como requisito para optar al título de Ingeniero Electrónico
Asesor
JAIME RAMIREZ ARTUNDUAGA
Ingeniero Electrónico
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA ELECTRÓNICA
BOGOTÁ D.C.
2010
Nota de aceptación:
________________________________
________________________________
________________________________
________________________________
_________________________________
Firma del presidente del jurado
_________________________________
Firma Jurado
_________________________________
Firma Jurado
Bogotá D.C., octubre de 2010
CONTENIDO
pág.
GLOSARIO ...................................................................................................................... 12
INTRODUCCIÓN ............................................................................................................. 17
1. PLANTEAMIENTO DEL PROBLEMA .......................................................................... 19
1.1 ANTECEDENTES ...................................................................................................... 19
1.1.1 Antenas satélite Cubesat Libertad I......................................................................... 19
1.1.2 Sistema de Control de Antena “Troll” de Microondas de Radio Comunicaciones (MRC: Microwave Radio Communications)...................................................................... 21
1.1.3 Control de antena SAT-NMS. E .............................................................................. 22
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA ............................................... 25
1.3 JUSTIFICACIÓN ........................................................................................................ 26
1.4 OBJETIVOS DE LA INVESTIGACIÓN ....................................................................... 27
1.4.1 Objetivo General.. ................................................................................................... 27
1.4.2 Objetivos Específicos. ............................................................................................. 27
2. METODOLOGÍA .......................................................................................................... 29
3. LÍNEA DE INVESTIGACIÓN DE USB / SUB-LÍNEA DE FACULTAD / CAMPO
TEMÁTICO DEL PROGRAMA ......................................................................................... 30
4. DISEÑO INGENIERIL DEL SISTEMA.......................................................................... 31
4.1 ENLACES DE MICROONDAS ................................................................................... 31
4.1.1 Frecuencias asignadas para operación................................................................... 33
4.1.1.1 Dipolo. ................................................................................................................ 34
4.1.1.2 Antena Isotrópica. ............................................................................................... 35
4.1.1.3 Antena Loop. ....................................................................................................... 35
4.1.1.4 Antenas Parabólicas. ........................................................................................... 35
4.2 MOTORES................................................................................................................. 37
4.2.1 Motor eléctrico. ....................................................................................................... 37
4.2.1.1 Motor de corriente continua. ................................................................................ 37
4.3 DISPOSITIVOS Y PROGRAMAS PARA EL DISEÑO DE CONTROL ELECTRÓNICO
........................................................................................................................................ 47
4.3.1 Dispositivos de control. ........................................................................................... 47
4.3.1.1 Microcontrolador. ................................................................................................. 47
4.3.2 Programas para el diseño del Control Electrónico................................................... 51
4.3.2.1 Labview. ............................................................................................................. 51
4.3.2.2 VISUAL BASIC.. .................................................................................................. 52
4.3.2.3 MATLAB. . ........................................................................................................... 53
4.3.2.4 WIN IDE 32. ......................................................................................................... 54
4.3.2.5 MPLAB................................................................................................................. 54
4.3.3 Tipos de conexión para enlace de programas de control electrónico y los dispositivos
de control. ........................................................................................................................ 54
4.3.3.1 Puerto RS-232. .................................................................................................... 54
4.3.3.2 Puerto Paralelo. ................................................................................................... 58
4.3.3.3 Puerto Ethernet. ................................................................................................... 59
4.3.3.4 Bus Universal en Serie (USB). ............................................................................. 60
4.3.3.5 Bluetooth.............................................................................................................. 61
4.4 OPCIONES DE ACCESO REMOTO.......................................................................... 63
4.4.1 Acceso escritorio remoto......................................................................................... 63
4.4.2 Acceso escritorio remoto a través de VPN. . ........................................................... 63
4.5 ESTRUCTURA GENERAL DEL SISTEMA ................................................................ 66
4.5.1 Diagrama de bloques. ............................................................................................. 68
4.5.2 Diagrama de flujo general del prototipo del sistema de control remoto de una antena
de microondas. ................................................................................................................ 70
4.6 ADAPTACIÓN ANTENA DE MICROONDAS PARA EL MONTAJE DEL ENLACE DE
MICROONDAS PROTOTIPO .......................................................................................... 71
4.7 SERVOMOTOR PARA EL MOVIMIENTO DE LA ANTENA ....................................... 80
4.8 TERMINAL E INTERFACE PARA EL CONTROL LOCAL DEL SERVOMOTOR Y LA
ANTENA RECEPTORA DE MICROONDAS .................................................................... 81
4.8.1 Circuito de control del servomotor.. ......................................................................... 82
4.8.1.1 Programación del control del servo en el microcontrolador. ................................. 83
4.8.1.2 Programación del control del servo en el programa gráfico de control usado como
interfaz para el usuario final. ............................................................................................ 88
4.8.2 Recepción del nivel de la señal del enlace de microondas.. .................................... 92
4.8.2.1 Circuito receptor del nivel de potencia de la señal del enlace de microondas.. .... 93
4.8.2.2 Configuración del nivel de la señal del enlace de microondas en el
microcontrolador. ............................................................................................................. 94
4.8.2.3 Configuración del nivel de la señal del enlace de microondas en el programa
gráfico de control usado como interfaz para el usuario final.. ........................................... 96
4.8.3 Interfaz de comunicación entre el microcontrolador y programa gráfico de control
usado como interfaz para el usuario final. ........................................................................ 96
4.8.3.1 Circuito electrónico interfaz serial......................................................................... 97
4.8.3.2 Configuración del puerto serial en el microcontrolador.. ....................................... 99
4.8.3.3 Configuración del puerto serial en el programa Labview. ................................... 100
4.9 ACCESO REMOTO AL SISTEMA DE CONTROL. .................................................. 101
5. CONCLUSIONES ...................................................................................................... 107
6. RECOMENDACIONES .............................................................................................. 108
BIBLIOGRAFÍA .............................................................................................................. 109
ANEXOS........................................................................................................................ 113
LISTA DE FIGURAS
pág.
Figura 1. Satélite Cubesat Libertad I
19
Figura 2. Antena Estación Terrena.
20
Figura 3. Panel de Control Sistema Control Antena Troll MRC.
22
Figura 4. Composición Sistema de Control de Antena SAT-NMS ACU-ODM.
23
Figura 5. Panel de Control Unidad Interna.
24
Figura 6. Control Remoto Antena.
24
Figura 7. Esquema de red de microondas.
31
Figura 8. Antenas de microondas
34
.
Figura 9. Tipos de antenas parabólicas.
36
Figura 10. Motor Serie.
38
Figura 11. Motor Compound.
39
Figura 12. Motor Shunt.
39
Figura 13. Motores paso a paso.
40
Figura 14. Estructura típica de un servomotor.
41
Figura 15. Servomotor AC típico.
41
Figura 16. Componentes de un servomotor DC.
44
Figura 17. Conexión de un servomotor DC y tipos de conector.
45
Figura 18. Ambiente gráfico de Labview.
52
Figura 19. Niveles lógicos del protocolo RS – 232.
55
Figura 20. Conector DB-9.
55
Figura 21. Conexión entre dos dispositivos con conector DB-9.
56
Figura 22. Interfaz ENC28J60.
60
Figura 23. Conformación de pines de un conector USB.
61
Figura 24. Estructura de una Piconet.
62
Figura 25. Esquema general funcionamiento prototipo.
67
Figura 26. Diagrama de bloques de funcionamiento general del sistema.
69
Figura 27. Diagrama de flujo general del sistema.
70
Figura 28. Antena de fábrica junto a su integrado.
72
Figura 29. Antena completa con el módulo de comunicación.
72
Figura 30. Diagrama de radiación de un dipolo de /2.
74
Figura 31. Campo de radiación del dipolo para la polarización vertical y horizontal.
75
Figura 32. Ejemplo de un dipolo con polarización vertical.
76
Figura 33. Pasos para la elaboración de los dipolos.
77
Figura 34. Armado del dipolo.
78
Figura 35. Montaje de la estructura del dipolo.
78
Figura 36. Pasos para el montaje del dipolo transmisor.
79
Figura 37. Estructuras finales de los dipolos.
79
Figura 38. Servomotor utilizado.
80
Figura 39. Circuito de Control del Servomotor por el microcontrolador GP32.
83
Figura 40. Composición del periodo.
85
Figura 41. Instrumentos utilizados durante la obtención de la frecuencia de trabajo del
servo.
86
Figura 42. Programación dato indexado.
90
Figura 43. Detalle comparación dato.
91
Figura 44. Opciones de selección posición del dato.
91
Figura 45. Panel de control selección posición dato.
92
Figura 46. Circuito electrónico receptor de potencia de la señal del enlace de microondas.
93
Figura 47. Configuración nivel de señal potencia de recepción.
96
Figura 48. Esquema de conexión puerto serial con el microcontrolador.
98
Figura 49. Configuración del puerto serial en Labview.
100
Figura 50. Configuración de computadores en red.
103
Figura 51. Configuración Grupo de Trabajo.
104
Figura 52. Configuración de acceso a escritorio remoto.
105
Figura 53. Acceso a conexión escritorio remoto.
106
LISTA DE TABLAS
pág.
Tabla 1. Cuadro comparativo motores eléctricos de corriente continua.
Tabla 2. Cuadro comparativo de microcontroladores.
46
50
LISTA DE ANEXOS
pág.
Anexo 1. Presentación final prototipo sistema de control remoto para antena de
microondas.
113
Anexo 2. Esquemático circuito electrónico.
116
Anexo 3. Código programa diseñado para el microcontrolador.
117
Anexo 4. Diagrama de flujo programa diseñado en Labview.
122
Anexo 5. Hoja de datos módulo XBEE – PRO.
123
Anexo 6. Configuración programa X CTU para establecimiento del enlace con módulos
Xbee Pro.
.
124
Anexo 7. Manual de operación sistema prototipo control remoto antena de microondas.
.
127
GLOSARIO
ALINEACIÓN: en el campo de las antenas, consiste en ajustar un dispositivo con otro, de
tal forma que se obtenga la mayor potencia, ganancia y menores pérdidas de paquetes de
información.
ANTENA: es un dispositivo que sirve para transmitir y recibir ondas de radio. Convierte la
onda guiada por la línea de transmisión (el cable o guía de onda) en ondas
electromagnéticas que se pueden transmitir por el espacio libre.
BALIZA: objeto señalizador, utilizado para indicar un lugar geográfico o una situación de
peligro potencial.
BUFFER: es un dispositivo electrónico que evita el efecto de carga en un circuito.
C++: es un lenguaje de programación considerado como híbrido, puesto que tiene la
opción de ser orientado a objetos, pero también utiliza programación genérica.
MOS: tecnología de semiconductores que utiliza circuitos de polaridad negativa (NMOS) y
positiva (PMOS) y requiere menos energía para su funcionamiento.
CSMA/CD: (Carrier Sense Multiple Access / Collision Detection). Es un protocolo usado
en Ethernet, para garantizar que sólo un nodo de red se transmite en el cable de red en
un momento dado; es decir, que cada dispositivo que vaya a transmitir escucha antes de
hacerlo, lo que permite controlar las colisiones.
DECIBELIO: expresa la relación logarítmica entre dos magnitudes acústicas o eléctricas o
la que se estudia y una de referencia. Su unidad es el belio (B), que equivale a 10
decibelios, que representa un aumento de potencia de 10 veces sobre la magnitud de
referencia.
DIFRACCIÓN: es el curvado y esparcido de las ondas al encontrar un obstáculo o al
atravesar una rendija.
FADING (desvanecimiento): desviación de la atenuación de una señal, que varía con el
tiempo o con la posición geográfica, debido a la propagación multicamino, es decir,
desvanecimiento múltiple inducido y a la sombra de los obstáculos que afectan la
propagación de la onda.
FIRMWARE: también llamada programación en firme, es el conjunto de instrucciones de
programa para propósitos específicos, grabado en una memoria volátil donde se
establece la lógica de bajo nivel para controlar los circuitos electrónicos de cualquier
dispositivo.
JAVA: es un lenguaje de programación orientado a objetos, se basa en C y C++, pero
elimina herramientas de bajo nivel, que inducen errores.
LENGUAJE C: Lenguaje de programación, orientado a la implementación de sistemas
operativos, creación de programas y aplicaciones.
LENGUAJE ENSAMBLADOR: denominado Assembly, es un lenguaje de bajo nivel
usado para escribir programas informáticos y representa el código máquina específico
para cada arquitectura de computador legible por un programador.
MEMORIA FLASH: memoria no volátil, de bajo consumo, que se puede escribir y borrar,
es programable en el circuito.
MONOPOLO: o también llamada antena vertical, es una antena constituida por un solo
brazo que irradia en posición vertical.
OPTOACOPLADOR: es un dispositivo de emisión y recepción que actúa como interruptor
excitado por una luz emitida por un diodo led que lo satura.
OSI: (Open System Interconnection) utilizado como referencia para la definición de
arquitecturas de interconexión de sistemas de comunicaciones.
OTP: (One Time Programmable), memoria no volátil de sólo lectura "programable una
sola vez" por el usuario.
PDA: Personal Digital Assistant o Ayudante personal digital, dispositivo manual de
pequeño tamaño que combina un ordenador, teléfono/fax, Internet y conexiones de red.
POLMORFISMO: es una característica donde varios objetos de distintas clases pueden
recibir el mismo mensaje y ser capaces de responderlo.
PROTOCOLO: conjunto de reglas usadas por computadoras para comunicarse unas con
otras a través de una red.
PROTOCOLO X25: protocolo que especifica una interfaz entre un sistema host y una red
de conmutación de paquetes.
QAM: (Modulación de Amplitud en Cuadratura). Este tipo de modulación consiste en
modular en amplitud (ASK, Amplitude Shift Keying, Modulación por Desplazamiento de
Amplitud) de manera independiente, dos portadoras que tienen la misma frecuencia, pero
están desfasadas entre si 90º. La señal modulada QAM resulta de sumar ambas señales
ASK, las cuales operan en el mismo canal sin interferirse mutuamente, porque sus
portadoras están en cuadratura.
REFLEXIÓN: cambio de dirección de una onda o un rayo que ocurre en la superficie de
separación entre dos medios, regresando al medio inicial.
REFRACCIÓN: cambio de dirección de una onda al pasar de un medio transparente a
otro.
RESISTENCIA PULL UP: también llamada resistencia de polarización que indica que uno
de sus terminales está conectado al positivo de la fuente de alimentación.
RL: (Return Loss) es la pérdida de retorno o coeficiente de reflexión con base a la
impedancia característica de la línea de 50 ohm conectada a la antena y la impedancia de
la antena a la frecuencia de medida.
SHF: (Super High Frequency), es una banda del espectro electromagnético que ocupa el
rango de frecuencias de 3 GHz a 30 GHz: También llamada banda centimétrica, en el
rango de 10 a 1 cm.
SWITCH: es un dispositivo digital que interconecta redes de computadores en un mismo o
diferente segmento, operando en la capa 2 y 3 del modelo OSI, teniendo cuenta las
direcciones MAC de destino de las tramas de red.
TCP / IP: es el conjunto de protocolo base del Internet, usados para enlazar
computadores con diferentes sistemas operativos tanto de área local como de área
extendida.
TORQUE: corresponde al momento de una fuerza ejercida en un punto dado.
TTL: tecnología usada en circuitos electrónicos digitales, cuyos elementos de entrada y
salida son transistores bipolares.
TROLL S750: es un mando a distancia muy avanzado y utilizado actualmente en
periodismo electrónico, controla antenas, receptores y routers.
VIA 2-WIRE DIALUP: una forma de acceso a Internet, a través de una conexión por línea
conmutada.
VSWR: es la relación o tasa de ondas estacionarias medida en voltaje en una línea de
transmisión. Su valor es 0% cuando la transmisión es óptima o bien adaptada y 100%
cuando es muy mala o que no existe transmisión.
WI-FI: es un conjunto de estándares para redes inalámbricas basados en las
especificaciones IEEE 802.11.
WIRE LEASED LINE: es un circuito dedicado, usado en compañías telefónicas, que
conecta permanentemente dos usuarios.
WLAN: es un sistema de comunicación de datos inalámbrico flexible, como alternativa a
las redes cableadas o como complemento de estas.
INTRODUCCIÓN
Dentro de las tecnologías de avanzada que se han aplicado a los dispositivos electrónicos
y de comunicaciones inalámbricas, como es el caso de las antenas, en el ámbito mundial
se han desarrollado herramientas que permiten el acceso desde un sitio remoto con el fin
de controlar su movimiento y alineación, optimizando las diferentes funciones que
desempeñan y a la vez permitiendo que los equipos y servicios asociados tengan un alto
nivel de eficiencia.
El alcance de estos avances para los países en vía de desarrollo como Colombia, resulta
demasiado costoso y de difícil adquisición.
En Colombia, y de forma más precisa en la ciudad de Bogotá, existe un canal de
televisión llamado CARACOL, y en su departamento de IN/OUT es necesario, por
exigencia de comunicación, establecer una enlace de microondas digitales con una
antena ubicada en el cerro La Calera. Actualmente, la alineación de este dispositivo se
realiza de forma manual, es decir, se requiere de una persona en el sitio, para que
ejecute esta tarea. De esta forma, es difícil contar con una persona que haga ese trabajo
en el momento indicado y con la rapidez que lo amerita el trabajo de un noticiero en vivo
que necesita transmitir con mucha agilidad las señales desde cualquier localidad de
Bogotá.
Al analizar esta situación, y observando los diferentes desarrollos en el área de la
electrónica, el presente trabajo plantea la posibilidad de crear un sistema que permita
manejar la antena receptora de microondas digitales ubicada en el cerro La Calera, desde
el centro de noticias ubicado en Bogotá, utilizando el sistema de control del servomotor
que mueve la antena y que se encuentra ubicado en el cerro. En otras palabras un
sistema de control remoto para la antena receptora.
17
Otra propiedad que se busca con este sistema es la de tener acceso al dispositivo de
alineación de la antena a cualquier hora del día sin importar las condiciones climáticas en
el cerro La Calera.
18
1. PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES
Dentro del campo enfocado al desarrollo de control de antenas se han encontrado
algunas fuentes que permiten dar una idea de lo que se pretende realizar con el presente
proyecto. A continuación se relacionan.
1.1.1 Antenas satélite Cubesat Libertad I. Este es el Microsatélite Cubesat Libertad I
(Satélite cúbico cuyas dimensiones son 10x10x10 cm y su masa no mayor a 1 Kg), que
aparece en la Figura 1, lanzado a órbita por la Universidad Sergio Arboleda, el 17 de abril
de 2007, desde Baikonur, Kazajstán. Dentro de las funciones que realiza se encuentra
enviar desde el espacio distintas señales comprimidas para ser escuchadas por diferentes
estaciones terrenas en el mundo. Así mismo, envía señales que comprueban su estado
de funcionamiento (comunicaciones, energía, software) e información que permite
conocer su posición respecto al sol y a la tierra.
Figura 1. Satélite Cubesat Libertad I.
Fuente: www.usergioarboleda.edu.co/proyecto_espacial.
19
Está constituido por un sistema de vuelo, que se maneja a través de un microcontrolador
(cerebro satélite). Posee un sistema electrónico de potencia para regular y suministrar la
energía a todos los circuitos. Cuenta con un sistema de comunicaciones, compuesto de
una tarjeta electrónica con su receptor y transmisor.
Para el desarrollo de todas sus funciones mecánicas en el espacio el equipo de
investigadores colombiano, diseñó y construyó el conjunto de antenas ubicadas en el
satélite, como en la estación terrena, que mediante protocolo X25, permiten al satélite
moverse de la forma diseñada.
Esta antena que se puede observar en la figura 2, está ubicada en la estación terrena y
cumple con especificaciones técnicas diseñadas donde se involucran: rango de
frecuencias, ganancias, ancho de banda, polaridad, impedancias1.
Figura 2. Antena Estación Terrena.
Fuente: www.usergioarboleda.edu.co/proyecto_espacial.
1
Universidad Sergio
Arboleda, [Internet] [consultado 30 de octubre de 2009]. Disponible en
www.usergioarboleda.edu.co/proyecto_espacial/ccontrol.html.
20
1.1.2 Sistema de Control de Antena “Troll” de Microondas
Comunicaciones
(MRC:
Microwave
Radio
Communications).
de
Este
Radio
sistema
denominado Receptor MRC adquiere y captura vídeo en directo a distancia mediante
microondas. Ofrece control remoto de controladores de esclavos (como el Troll S750), a
los sistemas de antenas remotas (como el ProScan y UltraScan DR) y otros equipos
situados en una o más centrales de recepción.
Las comunicaciones con el equipo remoto pueden ser transmitidas via 2-wire dialup, 2/4
wire leased line, conexión directa de RS-232, Ethernet, o Internet. El método se basa en
las necesidades de los clientes para una configuración específica.
El corazón del control “Sistema de control MC-17” es el TouchStar, basado en un PC,
montado en un bastidor que está diseñado para controlar múltiples dispositivos de
microondas situado en los sitios remotos. El sistema de control opera dispositivos remotos
a través de una interfaz común de usuario gráfica (GUI), según se muestra en la figura 3,
que minimiza la necesidad de un operador TouchStar PRO que es un programa que
ofrece una interfaz de usuario accesible a través de un montaje de rack con pantalla
touch-scren. La interfaz de usuario proporciona acceso a y control de, antenas remotas,
cámaras y otros equipos de comunicaciones basados en microondas.
Un ratón y un teclado son proporcionados, pero en general no son necesarios para la
operación diaria. Un built-in "teclado suave" ofrece la utilidad de caracteres, según sea
necesario. MRC configura cada sistema basado en las necesidades del cliente. Esto
incluye todos los parámetros relacionados con las antenas, Receptores, Decodificador /
demoduladores, y otros dispositivos controlados a distancia. Puede controlar hasta 10
sitios remotos. Durante la operación, se puede acceder a cada sitio remoto a través de un
solo botón.
21
Figura 3. Panel de Control Sistema Control Antena Troll MRC.
Fuente: Microwave Radio Communications. Manual Sistema Central de Recepción.
1.1.3 Control de antena SAT-NMS. El sistema SAT-NMS ACU-ODM puede ser
controlado remotamente por una aplicación de monitoreo y control, mostrada en la figura
4, ya sea a través de la interfaz TCP / IP o a través de una interfaz de serie RS232.
Ambos métodos de comunicación utilizan los mismos
comandos y parámetros, sin
embargo, existen diferentes marcos alrededor de cada mensaje, según el método de
comunicación utilizado.
22
Figura 4. Composición Sistema de Control de Antena SAT-NMS ACU-ODM.
Fuente: Microwave Radio Communications. Manual Sistema Central de Recepción.
En la figura 5 se puede apreciar la arquitectura de un sistema de control de antena con
tres componentes. El “dispositivo posicionador de la antena" únicamente de los controles
de la antena. El 'Receptor Beacon” mide el nivel de baliza del satélite. Ambos dispositivos
son controlados por la Unidad Interna con interfaces arbitrarias (de serie, TCP / IP).
Algunas funciones de seguimiento son realizadas por un módulo de software en el “SATNMS ACU” que es la unidad interior.
23
Figura 5. Panel de Control Unidad Interna.
Fuente: Microwave Radio Communications. Manual Sistema Central de Recepción.
La tarea principal de la unidad interior es la de realizar el seguimiento por satélite en esta
configuración. Donde se lee el nivel de faro a través de un receptor y dirige a la interfaz de
la antena para el seguimiento de pasos. La figura 6 visualiza la pantalla para el control
remoto de la antena, donde se tiene acceso a varias opciones para su movimiento según
la necesidad.
Figura 6. Control Remoto Antena.
Fuente: Microwave Radio Communications. Manual Sistema Central de Recepción.
24
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
En la actualidad, el canal de televisión CARACOL, posee enlaces de microondas
(transmisores portátiles) los cuales necesitan de una repetidora ubicada en el cerro La
Calera (Municipio ubicado el Nororiente de la ciudad de Bogotá). Esta repetidora tiene una
antena receptora que necesita ser posicionada cada vez que uno de los transmisores
portátiles, requiere enviar una señal al centro de noticias, (ubicado en la sede del barrio
La Floresta, Bogotá D.C.). Esta antena es alineada por un operador quien mueve un
servomotor, el cual tiene un movimiento horizontal, permitiendo a la antena alcanzar un
ángulo de apertura de 210°. De esta manera, la antena es movida en este rango hasta
que detecte el mayor nivel de señal y en ese punto es “asegurada””. En ese momento la señal se puede utilizar en el centro de noticias para ser procesada o emitida “al aire”.
La señal emitida por el transmisor portátil opera en la banda de 2 GHz, mientras que el
enlace hacia el centro de noticias opera en 18 GHz.
Una de las condiciones exigidas al operario encargado de realizar la alineación de la
antena receptora, es la de contar con disponibilidad permanente, para realizar esta labor.
De igual forma, cabe resaltar el riesgo latente al que está expuesto, no solo por errores de
maniobra, sino, por las constantes variaciones del clima, que pueden afectar de manera
importante su salud.
El operador encargado de alinear manualmente la antena, en ciertas ocasiones no se
encuentra en la caseta de operación de la antena y el tiempo que se tarda en ubicarlo es
muy largo para esperar a emitir una noticia de última hora, teniendo en cuenta que el
tiempo es un factor primordial a la hora de transmitir en televisión y que afecta de manera
trascendental a este medio de comunicación, como lo es el rating.
Las actividades propias de un canal de televisión exigen, que en el caso de ser necesario,
sin importar las variaciones del clima se pueda realizar la alineación de las antenas sin
excusas.
25
¿Cómo mejorar el proceso de alineación de la antena de microondas, de tal manera, que
se vean beneficiados tanto el canal de noticias, como el operario encargado de realizar
este trabajo?
1.3 JUSTIFICACIÓN
Dentro de las actividades propias que se ejecutan en el centro de noticias del CANAL
CARACOL (Canal de Televisión de Colombia, cuya sede principal es la ciudad de
Bogotá), se encuentra una de gran importancia y que es vital para que las diferentes
transmisiones que surjan, cumplan el propósito de llegar al público en general. Consiste
en la alineación de la antena receptora de microondas, ubicada en el cerro de La Calera y
que permite el enlace con los transmisores portátiles de microondas, ubicados en
cualquier parte de la ciudad de Bogotá, dependiendo del lugar donde se origine la noticia.
La función de esta antena principal, es servir de repetidora de las señales recibidas para
luego ser enviadas al centro de noticias del canal.
Para que la citada actividad resulte exitosa, es necesario realizar la alineación de la
antena ubicada en el cerro con la antena portátil respectiva, que puede estar ubicada en
cualquier lugar de la ciudad, donde se produzca la noticia.
Para la ejecución de este trabajo se presentan los siguientes inconvenientes:
Se debe contar con un operario que posea la suficiente destreza, pericia y vocación de
trabajo para realizar esta maniobra, pues la ausencia de estas capacidades puede
ocasionar retardos en la obtención de la señal, así mismo, generar accidentes que
perjudiquen tanto al operario, como al normal desempeño de las actividades propias
del canal de noticias.
La inclemencia del clima a las que se ve abocado el operario que realiza esta tarea,
pues el sitio y las condiciones que rodean esta antena lo obligan a encontrarse
totalmente al aire libre, situación que puede afectar su salud.
26
Por estas razones, es necesario optimizar esta tarea, de tal manera que a través de un
dispositivo electrónico que involucre control y los elementos necesarios para el
movimiento de la antena ubicada en el Cerro de La Calera, se genere la facilidad de
acceso a este elemento y la posibilidad de realizar los ajustes necesarios en cualquier
momento requerido desde el centro de noticias ubicado en la ciudad de Bogotá.
Así mismo, se protege en gran medida al operario, tanto de cualquier falla de operación o
de maniobrabilidad que tenga en la ejecución de esta tarea, como de las variaciones del
clima y de los cambios de temperatura que pueden afectar su salud.
Este proyecto, va orientado a la aplicación de técnicas de control electrónico, que
involucra herramientas de gestión propias del campo; también involucra el campo de las
comunicaciones donde se analiza el sistema más adecuado para implementar en este
proyecto.
1.4 OBJETIVOS DE LA INVESTIGACIÓN
1.4.1 Objetivo General. Diseñar y construir un prototipo de un sistema enfocado a
permitir el control remoto del movimiento horizontal de la antena de microondas de 2 GHz
encargada de la recepción de las señales de microondas móviles de Bogotá, ubicada en
el Cerro La Calera en Cundinamarca.
1.4.2 Objetivos Específicos.
Determinar las características técnicas y de desempeño de la antena que se quiere
controlar remotamente (prototipo).
Identificar y analizar las variables que intervienen en la alineación de la antena
receptora, con el fin de establecer su alcance.
Seleccionar los sensores o dispositivos similares que se utilizarán para la ubicación de
la antena.
Determinar los dispositivos mediante los cuales se realizará el control del sistema.
27
Diseñar e implementar el circuito que permita obtener el control remoto de la antena
receptora (prototipo) desde el Centro de Noticias del Canal Caracol.
Adecuar un método de comunicación existente, para tener acceso remoto al control de
la antena (prototipo) en el cerro La Calera desde el centro de noticias en Bogotá.
28
2. METODOLOGÍA
La metodología con la cual se desarrolló el presente trabajo comprendió en primera
instancia la recopilación de información detallada correspondiente al tema, a través de
artículos especializados y científicos, enlaces de la Internet y libros especializados, que
aportaron contenidos, logrando la más completa recopilación de normas, desarrollos y
alcances correspondientes al objetivo del presente trabajo de grado. Dentro de esta
actividad, también se incluyó lo relacionado con los recursos necesarios y existentes
(hardware y software), mediante los cuales se lograría su culminación.
En segunda instancia, se realizó un análisis minucioso de toda la información recolectada
que permitió establecer y definir el método más conveniente y benéfico, en el campo
tecnológico como en el social y de esta manera lograr un óptimo diseño e implementación
del prototipo del sistema de control que se buscaba desarrollar.
En tercera instancia, se procedió a la realización del diseño del prototipo del sistema de
control remoto para la antena de microondas, que incluyó detalles de los equipos que se
debían implementar, soluciones de software, tipo de medio de comunicación más
apropiado, así como, los demás aspectos que tuvieran relación y que se hubiesen
descubierto durante la etapa del análisis, que fueran conveniente mencionar y aclarar,
para luego pasar a la implementación del prototipo.
Como parte final se realizó la implementación del prototipo del sistema de control remoto
de la antena de microondas, donde se materializó el diseño propuesto.
29
3. LÍNEA DE INVESTIGACIÓN DE USB / SUB-LÍNEA DE FACULTAD / CAMPO
TEMÁTICO DEL PROGRAMA
El presente trabajo se enfoca por la línea de investigación de Tecnologías Actuales y
Sociedad, que corresponde a las establecidas en la Universidad de San Buenaventura y
dentro de esta, se orienta en las sublíneas de Sistemas de Comunicación e Información,
Instrumentación y Control de Procesos. El campo de investigación está encaminado a las
Comunicaciones y al Control.
Dentro de la sublínea de Comunicación e Información, el presente trabajo está orientado
al análisis de las señales que se transmiten y su manejo analógico y digital.
En relación con la sublinea de Instrumentación y Control de Procesos, el presente trabajo
se orienta a la automatización de un proceso, donde se analizan las variables que
intervienen, que llevará al cálculo matemático y al diseño e implementación del sistema.
En cuanto al alcance y limitaciones, el proyecto es desarrollado a nivel de prototipo y
comprende el diseño e implementación de un sistema de control remoto de la antena
receptora de microondas digitales dirigible únicamente en paneo, que ofrece un ángulo de
movimiento de 180 horizontalmente.
El control remoto concluye cuando la alineación establecida entre el emisor y el
transmisor obtiene el mayor nivel de potencia.
El sistema debe ser manual dado que el canal de noticias cuenta con varias estaciones
móviles, cada una con sus respectivas antenas que trabajan en la misma frecuencia de
transmisión, originando que al momento de alinearse la antena receptora con alguna de
ellas, pueda enlazarse con alguna cercana y no con la requerida.
Es un sistema que ofrece características de confiabilidad y de fácil manejo, además de un
acceso a cualquier hora del día y bajo cualquier condición climática.
30
4. DISEÑO INGENIERIL DEL SISTEMA
4.1 ENLACES DE MICROONDAS
Un enlace vía microondas está conformado por tres elementos fundamentales: El
transmisor, el receptor y el canal aéreo. El transmisor se encarga de modular una señal
digital a la frecuencia utilizada para transmitir. El canal aéreo significa el camino abierto
entre el transmisor y el receptor, donde éste último se encarga de capturar la señal
transmitida y convertirla de nuevo en señal digital.
Un factor que limita la propagación de la señal en los enlaces de microondas es la
distancia existente entre el transmisor y el receptor. Además se requiere que esta
trayectoria se encuentre libre de obstáculos. Otro factor que influye en el establecimiento
de estos enlaces, es que el camino entre el transmisor y el receptor debe tener una altura
mínima sobre los obstáculos en la vía. Para compensar el efecto se utilizan torres para
ajustar dichas alturas.
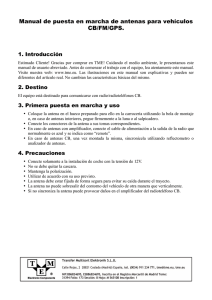
De acuerdo a lo que se observa en la figura 7, la distancia cubierta por enlaces de
microondas puede ser incrementada por el uso de repetidoras, las cuales amplifican y
redireccionan la señal. Si se presentase obstáculos, estos pueden ser salvados mediante
reflectores pasivos.
Figura 7. Esquema de red de microondas.
Terminal C
Repetidora
Antena
Receptora
Amplificador
Conversor
Driver
Bajo
Frecuencia
Pre
Ruido
Amplific.
Antena
Salida
Transmisora
Amplif.
(LNA)
Terminal A
31
Repetidora
Repetidora
Repetidora
Repetidora
Terminal B
La señal de microondas transmitida es distorsionada y atenuada mientras viaja desde el
transmisor hasta el receptor, debido a que la longitud de onda de las microondas es
relativamente pequeña. Estas atenuaciones y distorsiones son causadas por una pérdida
de poder dependiente a la distancia, reflexión y refracción originada por obstáculos y
superficies reflectoras, así como, por pérdidas atmosféricas. Esto se presenta, porque la
onda no sufre el fenómeno de difracción, que permite la restitución de las mismas, al
incidir sobre otros obstáculos, sino que son reflejadas por ellos, impidiendo así su
propagación.
Un enlace de microondas utiliza frecuencias en la banda SHF, debido a que en esta
banda se puede disponer de un ancho de banda más grande. Dependiendo de las
distancias existentes entre los puntos que requieren una comunicación, las transmisiones
se pueden realizar en un solo enlace (salto) o en varios enlaces (saltos), mediante la
utilización de estaciones repetidoras. La distancia entre saltos, sin obstáculos que impidan
que las antenas que intervienen tengan línea de vista, se encuentra aproximadamente en
40 km.
El tipo de enlace que se puede utilizar en estos enlaces terrestres por microondas, puede
ser analógico o digital. Sin embargo, el más utilizado es el QAM (Modulación de Amplitud
en Cuadratura). Así mismo, las potencias de los transmisores son bajas, lo que se
compensa con antenas de alta ganancia. Por lo general, se utilizan antenas parabólicas
de ganancias que alcanzan los 40 dB. En los radioenlaces de microondas, se presenta
un desvanecimiento (fading) en la intensidad de la señal que se transmite, lo que se
origina por:
Atenuación debido a la lluvia. Las señales de radio que se encuentran por encima de
los 10 GHz, son absorbidas por las gotas de agua, generando pérdida de energía en
estas señales.
Refracción. Las señales de alta frecuencia, siguen una trayectoria que presenta una
ligera curvatura descendente (refracción), debido a que el índice de refracción de la
tropósfera disminuye a medida que se aumenta la altura sobre la superficie terrestre.
Desgaste de los equipos. Debido al uso constante de los equipos, elementos y
dispositivos que hacen parte del enlace de microondas, estos van perdiendo eficiencia,
32
se van envejeciendo, bien por su tiempo prolongado en uso o por falta de
mantenimiento oportuno y adecuado.
4.1.1 Frecuencias asignadas para operación. Las microondas ocupan una porción del
espectro de frecuencias entre 1 y 300 GHz, que corresponde a 10 cm y 10 mm, en
longitudes de onda. En la práctica son ondas del orden del 1 GHz a 12 GHz.
La banda espectral de las microondas se divide en sub-bandas de la siguiente forma:
Sub-banda S, cuya frecuencia de trabajo es de 1.5 a 8 GHz, con una longitud de onda
aproximada de 10 cm.
Sub-banda X, cuya frecuencia de trabajo es de 8 a 12.5 GHz, con una longitud de onda
aproximada de 3 cm.
Sub-banda K, cuya frecuencia de trabajo es de 12.5 a 40 GHz, con una longitud de
onda aproximada de 1.1 cm.
Sub-banda Q, cuya frecuencia de trabajo es de 40 a 50 GHz, con una longitud de onda
aproximada de 0.8 cm.
Las ventajas obtenidas por el uso de estas frecuencias son:
Las antenas pequeñas son efectivas.
Con estas frecuencias, las ondas de radio se comportan como ondas de luz, por ello la
señal puede ser enfocada utilizando antenas parabólicas y antenas de embudo,
además, pueden ser reflejadas con reflectores pasivos.
Su ancho de banda va de 2 a 24 GHz.
Es importante indicar que no se deben reasignar frecuencias que correspondan a enlaces
alineados, porque puede provocar problemas de intermodulación entre sus componentes.
De igual manera, se deben utilizar antenas tanto transmisoras como receptoras, lo más
33
directivas posibles, es decir, que sus radiaciones laterales y traseras sean mínimas,
donde su relación delante detrás (RDD, F/B (Front/Back), relación existente entre la
máxima potencia radiada en una dirección geométrica y la potencia radiada en la
dirección opuesta a esta), sea de por lo menos 20 dB.
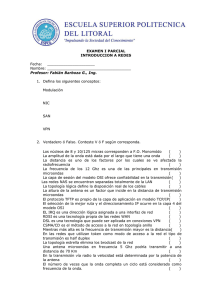
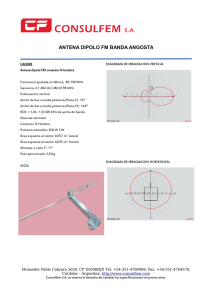
Tipos de Antenas. Para el caso de las microondas se utilizan antenas parabólicas, tal
como la mostrada en la figura 8, donde se puede observar el domo de protección que
lleva para el uso en intemperie, así como, la instalación de la misma dentro de ese domo.
En algunos sistemas, como en el caso de Wi-Fi (Wireless-Fidelity), se usan dipolos para
corta distancia y antenas de loop o horn para mayores distancias. A continuación se hace
una descripción de este tipo de antenas.
Figura 8. Antena de microondas.
Domo protector
Instalación antena de microondas
Fuente: Tomada durante el desarrollo del presente trabajo.
4.1.1.1 Dipolo. Es una antena con alimentación central empleada para transmitir o recibir
ondas de radiofrecuencia. El dipolo simple, consiste en dos elementos conductores
rectilíneos colineares de igual longitud, alimentados en el centro y de radio mucho menor
que el largo. Su longitud corresponde a la mitad de la longitud de onda de la frecuencia de
34
resonancia del dipolo y su cálculo se hace mediante: (150/frecuencia en MHz). Por el
efecto de bordes, la longitud real es algo inferior equivalente al 95% de la longitud
calculada.
4.1.1.2 Antena Isotrópica. Es de tipo omnidireccional. Su patrón de radiación se
encuentra alrededor de todo este dispositivo, generando una esfera con centro en la
antena. Lo que indica, que esta antena puede enviar o recibir señal con las mismas
condiciones, sin importar la posición en la que se encuentre.
4.1.1.3 Antena Loop. Como su nombre lo indica, forma un lazo en su configuración
geométrica. Es empleada principalmente en recepción para determinar la dirección de la
que procede la radiación. Es común encontrarla en televisores UHF. Posee pequeñas
dimensiones, mayor radiación en el plano del lazo y gran ancho de banda.
4.1.1.4 Antenas Parabólicas. Este tipo de antenas que se aprecian en la figura 9, resulta
ser el más utilizado en los enlaces de microondas, tanto para enlaces terrestres punto a
punto, como en los satelitales.
Antena Grid (Grilla) o de Reflector de Rejilla. Este tipo de antena es usada en
frecuencias de microondas bajas, por debajo y cerca de 2.5 GHz. Su ventaja es poseer
menos carga de viento (wind loading) sobre la torre. Desde el punto de vista eléctrico,
tienen los mismos parámetros de la antena de plato sólido, de esta manera, puede ser
usado el mismo terminal alimentador (conector) y no existe diferencia entre un reflector
sólido y uno tipo rejilla. Antena estándar. Este tipo de antena es simplemente parabólica convencional. Son
usualmente construidas de aluminio, por el bajo peso del material, manufacturadas por
planchado de una hoja de aluminio alrededor de un spinning. Los reflectores no dependen
de la frecuencia, pero a medida que aumenta ésta última, la superficie requiere de mayor
perfección. Posee parámetros estándares de ganancia, relación F/B (Delante/Detras),
ancho de haz y RL (Return Loss). Si se requiere modificar alguno de estos parámetros, es
necesario realizar cambios a la antena.
35
Figura 9. Tipos de antenas parabólicas.
Fuente:
www.gemini.udistrital.edu.co/comunidad/profesores/jruiz/jairocd/texto/usm/cd/documento5.pdf
Antena de plano focal. Mejora la supresión de los lados laterales y la razón F/B
(delante / detrás). Esta antena, extiende la superficie del paraboloide hasta el plano donde
se ubica el foco para evitar los lóbulos laterales e intentar mejorar la relación F/B.
Antena de alto rendimiento. Es usada cuando se requiere una muy buena relación
F/B, con muy buena supresión del lóbulo lateral. Estas antenas usan un montaje en
material absorbente, alrededor del borde del plato, para eliminar la radiación desde los
lados laterales y posteriores de la antena. Para el caso de antenas de muy alto
rendimiento, usadas cuando se requiere la reutilización de frecuencias, el terminal
alimentador, es envuelto también con este material absorbente lo que genera reducción
en la ganancia.
Antena Cassegrain. Diseñada por Cassegrain en el Siglo XVII, se caracteriza por
llevar un segundo reflector cerca de su foco. El mayor apunta al lugar de recepción y las
36
ondas al chocar, se reflejan y van al foco donde está el reflector menor, al chocar las
ondas, van al último foco donde estará colocado el detector.
Antena Slipfit. Esta antena es montada en conjunto con el equipo de radiofrecuencia,
cuando éste último es montado al aire libre, con el fin de evitar atenuaciones debido a
largos tramos de líneas de transmisión. Se utiliza cuando se manejan altas frecuencias,
debido a que la atenuación crece con la frecuencia en las líneas de transmisión. La
conexión utilizada en este montaje es propietaria, debido a ello es desarrollado por un
diseño de empalme entre los fabricantes de radio y antenas.
4.2 MOTORES
En términos generales, el motor es un mecanismo encargado de transformar la energía
originada por diferentes factores (hidráulicos, químicos, eléctricos, etc.), en energía
mecánica destinada a realizar un trabajo. Su campo de aplicación es muy amplio, como
compresores, generadores, bombas de superficie, vehículos, entre otros.
Los motores se clasifican en diferentes tipos, sin embargo, para el presente trabajo sólo
se describirán los motores de corriente continua.
4.2.1 Motor eléctrico. Es una máquina eléctrica que transforma la energía eléctrica en
energía mecánica, a través de interacciones electromagnéticas. Para su funcionamiento,
se debe conectar a una red de suministro de energía eléctrica o como alternativa puede
utilizar baterías. La cantidad de elementos que lo conforman es mucho más pequeña que
un motor térmico, lo que disminuye las opciones de falla. Es utilizado ampliamente en el
campo industrial.
4.2.1.1 Motor de corriente continua. En un motor eléctrico la conversión de energía se
origina por la interacción entre una corriente eléctrica y un campo magnético, mediante un
movimiento rotatorio. Este campo magnético, se forma entre los dos polos opuestos de un
imán, que es una zona donde se ejerce una fuerza para hacer girar un eje, generando la
transformación de la energía eléctrica en movimiento mecánico. Se clasifican en:
37
Motor Serie. En esta clase de motor, el inducido y el devanado inductor de excitación
van conectados en serie, como se muestra en la figura 10. En este dispositivo, la corriente
del inductor, es la corriente del inducido absorbida por el motor. Este motor se caracteriza
porque su potencia es constante a cualquier velocidad y teniendo en cuenta que al
disminuir el flujo inductor, aumenta la velocidad debido a que la intensidad en el inductor
es igual a la del inducido, este motor se embala en vacío.
Figura 10. Motor Serie.
Fuente: http://elvisacarrillog.blogspot.com/2008/09/motor-serie-cc.html.
Motor Compound. Se caracteriza porque su excitación es generada por dos
bobinados inductores independientes, tal como se indica en la figura 11; uno de ellos
conectado en serie con el bobinado inducido y el otro conectado con el circuito constituido
por los bobinados inducido, inductor serie e inductor auxiliar.
38
Figura 11. Motor Compound.
Fuente: http://zone.ni.com/devzone/cda/ph/p/id/48.
Su velocidad es más suave que la del motor shunt y más fuerte que el motor serie, ambos
motores de corriente continua.
Motor Shunt o Motor de Excitación en Paralelo. Su bobinado inductor principal está
conectado en derivación o paralelo con el circuito formado por los bobinados inducido e
inductor auxiliar, según se muestra en la figura 12.
Figura 12. Motor Shunt.
Fuente: http://www2.ubu.es/ingelec/ingelect/Montse/Web/MotorShunt/motor_shunt.htm.
39
El uso de estos motores se recomienda cuando en el proceso que se maneja, existen
acumuladores como reserva o para servicios auxiliares, de esta manera, se protege el
dispositivo que lo contenga de que se invierta la polaridad del circuito de excitación.
Motor eléctrico sin escobillas. Este tipo de motor no emplea escobillas para realizar
el cambio de polaridad en el rotor. Su rotor, la parte móvil, está compuesto por el eje y los
imanes permanentes; en la carcasa estator, se encuentra el bobinado del hilo conductor,
que no se mueve. La corriente eléctrica pasa por el hilo conductor que está bobinado en
la carcasa y produce el campo electromagnético que hace girar a los imanes permanentes
y al eje donde están unidos. Por esta razón, ni las escobillas ni el conmutador son
necesarios, puesto que la corriente va al estator.
Motor paso a paso. Está constituido por un rotor sobre el que van aplicados distintos
imanes permanentes y por un número de bobinas excitadoras bobinadas en su estator.
Las bobinas son parte del estator y el rotor es un imán permanente. Toda la conmutación
(o excitación de las bobinas) deben ser externamente manejada por un controlador. En la
figura 13 se puede observar la forma de presentación de este tipo de motor.
Figura 13. Motores paso a paso.
Fuente: http://axxon.com.ar/rob/MotorPP_basico.htm.
40
El motor paso a paso puede ser de dos categorías: de imán permanente y de reluctancia
variable. Así mismo, existe una combinación de ambos que se denominan híbridos.
Los motores paso a paso se usan en sistemas simples de control en lazo abierto,
generalmente en sistemas que operan a bajas aceleraciones con cargas estáticas. Estos
motores son ideales para la construcción de mecanismos donde se requieren
movimientos muy precisos. Su característica principal es el poder moverlos un paso, par
cada pulso que se le aplique. Además poseen la habilidad de poder quedar enclavados en
una posición, o bien totalmente libres.
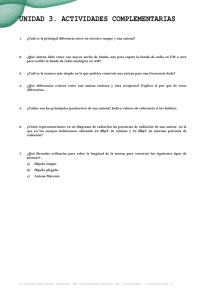
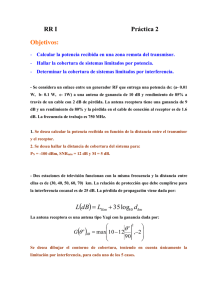
Servomotor. Este tipo de motor tiene la capacidad de ubicarse en cualquier posición
dentro de su rango de operación y mantenerse estable en dicha posición. Está constituido
por un motor, una caja reductora y un circuito de control. Su rango de operación es de
aproximadamente 180º. Se utiliza con frecuencia en sistemas de radio control, de control
(posicionar palancas, ascensores, timones) y en robótica. En las figuras 14 y 15, se
observa detalladamente cada uno de los componentes de este tipo de dispositivo.
Figura 14. Estructura típica de un servomotor.
Fuente:http://www.monografias.com/trabajos60/servo-motores/servo-motores.shtml.
Figura 15. Servomotor AC típico.
Fuente: www.castor.es/servomotor_g.jpg
41
Estos dispositivos son capaces de manejar altas capacidades de torque, control preciso
de velocidad y de posición. Dentro de sus características principales se encuentran:
Producen grandes torques a altas velocidades.
Mantienen una posición estática.
Mantienen bajas velocidades o movimiento nulo sin sobrecalentarse.
Pueden invertir su dirección de movimiento rápidamente para alcanzar una posición
o velocidad determinada.
Pueden acelerar o desacelerar rápidamente.
Pueden retornar a una posición específica después de un intervalo de tiempo, sin
generar movimientos errados.
Pueden tener cuatro, seis o más polos.
Están diseñados para utilizar suministro de potencia trifásica.
Tanto la velocidad rotacional, como el torque se controlan por la diferencia de fase
entre el devanado principal y el de control.
Los servomotores pueden ser de muchos tipos y tamaños, pero en general se clasifican
en servomotores de corriente alterna (AC) y corriente directa (DC). Los primeros se
utilizan en sistemas de gran potencia, como por ejemplo en maquinaria industrial; los
segundos están diseñados para baja corriente lo que redunda en su bajo costo y son
utilizados principalmente en robótica.
Servomotor DC. Es un motor de corriente continua que tiene la capacidad de ser
controlado en posición. Un servomotor normal posee un torque de 3 Kg por cm, medida
que resulta ser bastante fuerte para su tamaño. Así mismo, su potencia es proporcional
para cargas mecánicas, por consiguiente, no consume mucha energía. La corriente que
requiere, depende de su tamaño. Normalmente, es el fabricante quien lo indica. Sin
embargo, la corriente depende principalmente del par y puede exceder un amperio si el
servo está enclavado.
Este tipo de servo está compuesto de cuatro elementos fundamentales:
42
Motor de corriente continua (DC), que permite la movilidad del servo. Cuando se aplica
un potencial en sus dos terminales, este motor gira en un sentido a la velocidad
máxima. Cuando el voltaje aplicado en sus dos terminales se invierte, el sentido de giro
también lo hace.
Engranajes reductores. Se encarga de reducir la alta velocidad de giro del motor para
aumentar su capacidad de torque (o par-motor).
Sensor de desplazamiento. Generalmente es un potenciómetro instalado en el eje de
salida del servo, que permite conocer la posición angular del motor.
Circuito de Control. Está conformado por una placa electrónica donde se encierra todo
lo concerniente al control de la posición por realimentación. En ella se compara la señal
de entrada de referencia (posición deseada) con la posición actual medida por el
potenciómetro. La diferencia entre la posición actual y la deseada es amplificada y
usada para mover el motor en la dirección requerida para reducir el error. En la Figura
16, se observa de manera detallada los componentes de un servormotor, que aparecen
marcados de la siguiente forma: (a).Carcasa. (b).Motor DC. (c).Potenciómetro. (d)
Circuito de control. (e) Tren reductor (f).Brazo (elemento terminal del eje).2
2
Tomado de Universidad de Alicante, [Internet] [Consultado 20 de agosto de 2010]. Disponible en
http://www.aurova.ua.es:8080/proyectos/dpi2005/docs/publicaciones/pub09-ServoMotores /servos.pdf.
43
Figura 16. Componentes de un servomotor DC.
Fuente: Universidad de Alicante, Grupo de Automática, Robótica y Visión Artificial.
Publicación Interna 9.
Los servomotores DC, pueden ser analógicos y digitales. Los primeros fueron explicados
anteriormente y los segundos se diferencian de los analógicos, en que a la placa de
control se le agrega un microcontrolador que se hace cargo de analizar la señal,
procesarla y controlar el motor.
Los servos digitales poseen un mayor rendimiento en la velocidad a la que reacciona el
servo a un cambio en la señal, lo que genera mejoras en el rendimiento electromecánico
del motor (mayor velocidad y más fuerza).
En la figura 17 se ilustra la forma en que se conecta un servomotor DC, y las diferentes
configuraciones que se pueden encontrar en el mercado.
44
Figura 17. Conexión de un servomotor DC y tipos de conector.
Fuente: http://www.superrobotica.com/Servosrc.htm.
A pesar de todo esto, los servos digitales tiene la desventaja a la hora del consumo de
energía, dado que el circuito y los ajustes más continuos, producen un gasto mayor de
energía y por ende, mayor desgaste del motor.
Motor sin núcleo. Se caracteriza por presentar baja inercia (arranque y parada muy
cortos), porque al no poseer núcleo, este motor tiene menos masa y permite mayor
aceleración.
En la Tabla 1, se hace una comparación de los motores antes descritos, explicando los
aspectos más importantes de cada uno de ellos.
45
Motor
Compound
Posee dos
bobinados
inductores
independientes.
Su velocidad es
más fuerte que
el motor serie y
más suave que
el motor shunt.
Motor serie
Potencia
constante a
cualquier
velocidad. Al
disminuir el
flujo
indusctor
aumenta su
velocidad de
giro.
Motor sin
escobillas
Motor paso a paso
Constituido por un
rotor con varios
Para el cambio de
imanes y bobina
Su excitación es en
polaridad este
excitadoras en el
paralelo o en
motor utiliza un eje
estator. Su operación
derivación. Se
e imanes
se hace a través de un
utiliza para
permanentes, la
controlador. Se utiliza
procesos de
carcasa es el
en sistemas simples
reserva o servicios estator y el campo
en lazo abierto, con
auxiliares, para
electromagnético
bajas aceleraciones y
proteccion del
es generado por un
cargas estáticas; en
circuito que lo
hilo que está
mecanisimos con
contenga.
bobinado a la
movimiento precisos,
carcasa.
donce por cada pulso
avanza un paso.
Motor Shunt
2.1 MOTOR DE CORRIENTE CONTINUA
Motor sin
Núcleo
Se caracteriza
por presentar
baja inercia
(arranque y
parada muy
cortos) porque
no posee
núcleo. En su
estructura
posee menos
masa y tiene
mayor
aceleración.
Servomotor
Constituido por un
motor, una caja
reductora y un
circuito de control.
Su rango de
operación alcanza
los 180º. Puede
ubicarse en
cualquier posición
dentro del rango de
operación y
mantenerse estable
en ella. Su uso esta
destinado para
sistemas de radio
control, de control y
de robótica.
Utiliza interacciones electromagnéticas para su funcionamiento, se alimenta de energía electrica o en su defecto de baterias.. Un
tipo de motor eléctrico es el motor de corriente continua.
2. MOTOR ELÉCTRICO
Tabla 1. Cuadro comparativo motores eléctricos de corriente continua.
Fuente: Obtenida durante la realización del presente trabajo.
46
4.3 DISPOSITIVOS Y PROGRAMAS PARA EL DISEÑO DE CONTROL ELECTRÓNICO
Dentro del campo del diseño de un sistema de control electrónico, se involucran una serie
de elementos, dispositivos y programas que desempeñan una función específica dentro
del conjunto total que se desea implementar. Con el fin de de conocer de forma más
detallada cada unos de estos componentes, a continuación se hace un descripción de
ellos, permitiendo dar una idea general de su funcionalidad y desempeño.
4.3.1 Dispositivos de control.
4.3.1.1 Microcontrolador. Es un dispositivo electrónico capaz de llevar a cabo procesos
lógicos. Estos procesos son programados por el usuario en lenguaje ensamblador y son
introducidos en este dispositivo a través de un programador (quemador).
“Sus aplicaciones están limitadas únicamente por la imaginación. Cada día es más
frecuente encontrar equipos que
los utilicen como elementos de control de
comunicaciones, de señalización, entre otros”.3.
Las aplicaciones comunes donde se recurre a este tipo de dispositivo son: sistemas de
monitoreo y control de variables analógicas, en sistemas de desarrollo y experimentación
o en sistemas embebidos.
Arquitectura del microcontrolador. La arquitectura define el modo de operación del
microcontrolador en cuanto al conjunto de instrucciones y modo de ejecución.
Cuando se refiere al conjunto de instrucciones, la arquitectura se clasifica en dos grupos:
CISC (Complex Instruction Set Computer), RISC (Reduced Instruction Set Computer).
Arquitectura CISC, son instrucciones especializadas, donde se requiere un set de
instrucciones amplio para dar soporte a una arquitectura, donde la ejecución de las
instrucciones no es homogéneo y los programas requieren menos código fuente.
3
VESGA FERREIRA, Juan Carlos. Microcontroladores Motorola-Freescale: programación, familias y sus
distintas aplicaciones en la industria. Bogotá: Alfa Omega Colombiana, 2007. 1p.
47
Arquitectura RISC, es un set de instrucciones reducido, las cuales son de carácter
general, donde su duración es homogénea cuando se ejecutan. En este tipo de
arquitectura, se requiere más código para describir una operación que con la
arquitectura CISC.
En cuanto al modo de ejecución de las instrucciones, las arquitecturas se clasifican en:
Von Neuman, segmentada y paralela o Harvard. En este tipo de clasificación es muy
importante conocer cómo está dispuesto el bus de direcciones y el bus de datos.
Arquitectura Von Neuman. Esta arquitectura es la común utilizada por los
computadores, donde la unidad central del proceso (CPU), está conectada a una
memoria única donde se almacenan las instrucciones del programa y los datos.
Se caracteriza porque la ejecución de sus instrucciones es secuencial, es decir, la
siguiente instrucción se realiza hasta que la actual termine, porque posee sólo una
unidad de búsqueda y una unidad de ejecución.
Este tipo de arquitectura, presenta limitación de la velocidad de operación a causa del
bus único para datos e instrucciones que no deja acceder simultáneamente a unos y
otras, lo cual impide superponer ambos tiempos de acceso.
Arquitectura Segmentada. Esta arquitectura divide la búsqueda de las instrucciones de
tal forma, que cuando se ejecute la instrucción actual, ya se alista la siguiente, es decir,
su velocidad es el doble que la Von Neuman.
Arquitectura Harvard. También llamada paralela. Compuesta de dos memorias: datos y
programa, donde cada una posee su respectivo bus que permite a la CPU (Unidad
Central de Procesamiento) acceder de forma independiente y simultánea a cada una
de las dos memorias antes mencionadas. Este tipo de arquitectura está orientada a
sistema multitarea.
48
Los microcontroladores han sido diseñados con gran variedad de opciones que le
permiten entre otros: establecer diferentes formas de comunicación con otros dispositivos,
recepción y transmisión de señales analógicas y digitales al mismo tiempo o según el
diseño lo requiera. Entre las opciones y elementos más comunes en este tipo de
dispositivos se encuentran:
Módulo ADC. Es el convertidor análogo digital que permite que el microcontrolador
procese una variable analógica, donde su valor máximo y mínimo es ajustable, de igual
forma, la resolución que maneja es ajustable, donde a mayor cantidad de bits, esta
aumenta.
Módulo USART. (Universal Synchronous / Asynchronous Receiver Transmitter). Este
modulo permite conexión serie con otros dispositivos. Su configuración y habilitación se
realiza mediante registros internos, con el manejo de interrupciones. La velocidad que
maneja es de transferencia variable, así como, el formato de la trama.
Módulo RTC. (Real Time Clock). Su función es acelerar el trabajo del programador. Se
basa en la operación de las interrupciones que ocurren cada segundo para actualizar el
tiempo.
Puertos de entrada y salida. Pueden funcionar de manera unidireccional y
bidireccional. Su configuración se realiza mediante un registro diseñado para tal fin. Su
acceso a ellos se hace mediante una dirección específica. Estos puertos, pueden ser
TTL (Transistor Transistor Logic), CMOS (Complemtary Metal Oxide Semiconductor),
ST, de acuerdo con el dispositivo con el que se comunican.
Módulo PWM. (Pulse Width Modulation). Es una modulación que se le hace a una
señal y que se utiliza para transmitir información mediante un canal de comunicaciones
o también, para controlar la cantidad de energía que se envía a una carga.
En el mercado se encuentran varios fabricantes de microcontroladores, entre los cuales
están:
Microchip, tiene a su cargo la familia de los PIC’s, arquitecturas RISC, Harvard.
49
Motorola - Freeescale, tiene a su cargo la familia 68XX, arquitecturas CISC,
Segmentada.
Intel, tiene a su cargo las familias 80XX, arquitecturas CISC, Von Neuman.
NEC (Nippon electric Company, Limited).
En la Tabla 2 se describen las características técnicas de dos de las marcas mencionadas
anteriormente y utilizadas con gran frecuencia en los proyectos adelantados en varias
oportunidades durante el estudio de la carrera de ingeniería electrónica por quienes
realizaron el presente trabajo.
Tabla 2. Cuadro Comparativo Microcontroladores.
MICROCHIP PIC (Programmable Interface
Controller ) / (Programmable Intelligent
Computer) (Peripheral Interface Controller)
MOTOROLA – FREESCALE
Utiliza en su interior arquitectura Harvard, con un
número de instrucciones que va desde 35 hasta
70. Estas instrucciones se ejecutan en un solo
ciclo, lo que equivale a 4 ciclos de reloj,
característica de la arquitectura RISC. Posee
Memoria Flash reprogramable, OTP, ROM, de 8 a
32 bits. La cantidad de pines que los conforma
varía de 6 (donde 4 son de Entrada y Salida) hasta
100 (donde 85 son de Entrada y Salida). Su
programación se realiza mediante lenguaje
ensamblador, en Basic y en lenguajes de alto nivel
como C.
Este microcontrolador que posee arquitectura CISC,
segmentada, tiene 16 modos de direccionamiento,
transferencia de datos de memoria a memoria, muy rápidas
instrucciones de multiplicación y división. La frecuencia
interna del bus alcanza los 8 MHz, posee al igual que el PIC
memoria Flash con código de seguridad para lectura y
programación; para el caso del GP32 posee 33 pines de
entradas y salidas de propósito general. Cuenta con variedad
de referencias con variedad de pines (por ejemplo, el GP32
posee modelos de 40, 42 y 44 pines). Posee sistemas de
protección como el watch dog (perro guardian), detección a
baja tensión con reset (reinicio) opcional, detección de
código ilegal con reset. Puede fácilmente programarse en
lenguaje C o en ensamblador.
Fuente: Obtenida durante la realización del presente trabajo.
50
4.3.2 Programas para el diseño del Control Electrónico.
4.3.2.1 Labview.
“Es un lenguaje de programación gráfico utilizado en el diseño de
sistemas de adquisición de datos, instrumentación y control. Mediante esta herramienta
es posible diseñar interfaces de usuario mediante una consola interactiva basada en
programación. Es uno de los entornos gráficos más populares en el manejo de módulos
de control y comunicación electrónica. Debido a su fácil y práctica forma de programar se
ha hecho común en el entorno ingenieril”4.
Una de las grandes ventajas que posee es el permitir una fácil integración con hardware,
en especial con tarjetas de medición, adquisición y procesamiento de datos. De igual
manera, es utilizado en procesamiento digital de señales, procesamiento en tiempo real
de aplicaciones biomédicas, manipulación de imágenes y audio, automatización, diseño
de filtros digitales, generación de señales, entre otras.
En la figura 18 se observa el entorno gráfico que posee Labview, el cual está
comprendido por un panel frontal, donde se diseña la interfaz de usuario y se ubican los
controladores e indicadores (parte izquierda) y el panel de código donde se encuentran
las funciones (parte derecha).
Para el establecimiento de la comunicación entre Labview y los diferentes dispositivos que
son controlados por este lenguaje de programación, la conexión se realiza mediante el
puerto serial (RS-232) y puerto USB.
4
LAJARA VIZCAÍNO, José Rafael y PELEGRÍ SEBASTIÁ,
José.
programación. México D.F.: Alfaomega Grupo Editor S.A., 2007, 115p.
51
Lab
View
Entorno
gráfico
de
Figura 18. Ambiente gráfico de Labview.
Fuente: tomada durante el desarrollo del presente trabajo.
Para el uso del puerto serial RS-232, Labview posee una librería denominada VISA que
permite configurar este puerto, teniendo en cuenta los parámetros de velocidad, protocolo,
paridad, entre otros, que corresponden a las características de un puerto RS-232.
4.3.2.2 VISUAL BASIC. Este lenguaje de programación, fue desarrollado por el alemán
Alan Cooper para
la empresa Microsoft, mediante el cual se pueden desarrollar
aplicaciones complejas en corto tiempo. Es llamado lenguaje de cuarta generación porque
gran número de sus tareas se realizan sin escribir código, solamente
se usan
operaciones gráficas a través del uso del ratón sobre la pantalla.
Este lenguaje de programación es basado en objetos, aunque no orientado a objetos
como C++ o Java. Se diferencia de estos porque utiliza objetos con propiedades y
métodos, pero carece de los mecanismos de herencia y polimorfismo que son propios de
los lenguajes orientados a objetos como Java y C++.
52
Visual Basic constituye un IDE (Integrated Development Enviroment, Entorno de
Desarrollo integrado), conformado por:
un programa de aplicación, donde un editor de código (programa donde se escribe el
código fuente).
un depurador (programa que corrige errores en el código fuente, con el fin de que se
compile sin problemas).
un compilador (programa que traduce el código fuente al lenguaje de máquina).
un constructor de interfaz gráfica, conocida como GUI (donde de forma gráfica se
realiza la programación, sin necesidad de escribir código).
4.3.2.3 MATLAB. Es un lenguaje de programación diseñado específicamente para el
cálculo numérico, cálculo matricial, proceso de señal y su visualización gráfica donde los
problemas y sus soluciones son expresados, sin necesidad de hacer uso de la
programación tradicional.
MATLAB, posee funciones incorporadas en el programa principal, denominadas
Toolboxes, que cubren áreas principales en el campo de la ingeniería y la simulación,
como por ejemplo, procesos de imágenes, señales, control robusto, estadística, análisis
financiero, matemáticas simbólicas, redes neuronales, lógica difusa, identificación de
sistemas, simulación de sistemas dinámicos, entre otros.
Las principales características de MATLAB son: Cálculo intensivo desde un punto de vista
numérico, gráficos y visualización avanzada, lenguaje de alto nivel basado en vectores,
arreglos, matrices y funciones de aplicación de múltiple variedad.
Dentro de sus funciones, MATLAB posee: manipulación y reducción de datos (décimas,
promedios, umbrales y filtros), gráficos para explorar y representar los datos, entrada y
salida de datos, computación simbólica integrada, análisis de datos para procesamiento
digital de señales, análisis de datos en aplicaciones de imágenes y desarrollo de
algoritmos.
53
4.3.2.4 WIN IDE 32. WinIDE (Windows Integrated Development Environment). Este
programa fue desarrollado por la empresa
P&E Microcomputer
Systems. Es una
herramienta de aplicación integral para los microcontroladores, que permite al usuario
editar el proyecto en lenguaje ensamblador (assembler), compilarlo, depurarlo y simularlo.
El programa corre en la PC e interactúa con los puertos del microcontrolador, carga el
programa en la memoria flash de este último y efectúa emulación en tiempo real (el
programa corre en el microcontrolador).
Si se configura correctamente, el programa puede determinar errores que se han
presentado en la ejecución del mismo. De esta forma un solo programa maneja todas las
herramientas de software necesarias para la prueba y programación de rutinas para los
microcontroladores.
4.3.2.5 MPLAB. Es una herramienta de software gratuita utilizada para escribir y
desarrollar código en lenguaje ensamblador o en C, en los microcontroladores PIC
(Programmable Interrupt Controller, Controlador de Interrupciones Programable) de la
marca Microchip. Dentro sus componentes, MPLAB incluye herramientas necesarias para
el desarrollo de cualquier proyecto. Cuenta con editor de texto, simulador para ejecutar el
código paso a paso, con el fin de verificar el estado de sus registros de manera constante.
Esta herramienta corre en Windows. Posee editor de texto, compilador y simulación (no
en tiempo real).
El programa que se diseña es escrito siguiendo una sintaxis exigida, luego se compila
para luego grabarlo en el PIC seleccionado mediante una interfaz o programador. A
continuación se hace la respectiva alimentación al microcontrolador y el programa se
ejecutará en este.
4.3.3 Tipos de conexión para enlace de programas de control electrónico y los
dispositivos de control.
4.3.3.1 Puerto RS-232. Es un estándar de telecomunicaciones para comunicación serial
binaria entre dispositivos. Los dispositivos se conocen comúnmente como DTE (equipo
54
terminal de datos) y DCE (equipo de comunicaciones de datos), por ejemplo, un
ordenador y un microprocesador, respectivamente. En la figura 19, se observan los
niveles lógicos del protocolo RS-232, tanto para el transmisor, como para el receptor.
Figura 19. Niveles lógicos del protocolo RS – 232.
Fuente: http://www.unet.edu.ve/~ielectro/Guia%20de%20puertos.pdf.
Para la conexión de los dispositivos a través de puerto serial, existe el conector de 25
pines, mostrado en la figura 20, que fue simplificado a una versión de 9 pines, conocido
como DB-9.
Figura 20. Conector DB-9.
Fuente: http://www.unet.edu.ve/~ielectro/Guia%20de%20puertos.pdf.
En este conector, los pines que permiten la comunicación son los RxD (Recepción de
Datos), el TxD (Transmisión de Datos) y el SG (Signal Ground) o GND (nivel de referencia
cero o tierra). El pin de transmisión de un dispositivo, se conecta con el de recepción de
55
otro equipo y viceversa, referenciados ambos a un mismo nivel cero, tal como lo detalla la
figura 21.
Figura 21. Conexión entre dos dispositivos con conector DB-9.
Fuente: http://www.unet.edu.ve/~ielectro/Guia%20de%20puertos.pdf.
La variedad más actual de RS-232 es compatible con un estándar conocido como ITU
V.24, (Unión Internacional de Telecomunicaciones). El cumplimiento de la norma
internacional ayuda a los fabricantes a convertir sus productos para trabajar en un
mercado global.
Este estándar del RS-232 presenta conjuntos de tensión aceptable y los niveles de señal,
junto con las denominaciones de cada pin, para el cableado de puertos de conectores de
serie. También especifica los protocolos para el control y comunicación entre dispositivos,
que incluye eventos tales como indicar el comienzo o al final de una secuencia de datos.
El puerto serie transmite y recibe los datos por una UART (Universal Asynchronous
Receiver/Transmitter), es universal porque los protocolos son estandarizados. También
actúa como Receptor y Transmisor porque es utilizado tanto para enviar como para recibir
datos5.
Asíncrono significa que no lleva señal de sincronismo (frente a las transmisiones
síncronas que sí la llevan). Asíncrono no quiere decir que no necesite sincronismo, al
5
Tomado
de
CIDETEC,
[Internet]
[Consultado
http://www.cidetec.ipn.mx/profesores/jcrls/doctos/serial.pdf.
56
17
de
abril
de
2010].
Disponible
en
contrario, al no llevarlo explícitamente en una línea debe tenerlo implícitamente en su
funcionamiento6.
Puede ser full-dúplex si lleva líneas y circuitos independientes para transmitir y recibir. Si
solo lleva una línea y un circuito será simplex (solo puede transmitir o solo puede recibir).
Mientras no exista una transmisión, la línea esta se encontrará en reposo. El estado de
reposo en una UART es el equivalente a un 1 lógico.
Si se quiere transmitir un dato, se debe enviar primero un bit de inicio El bit de inicio es un
0 lógico, por lo que se cambia el estado de la línea de 1 a 0 y para mantener la velocidad
de transmisión la duración de un nivel alto o bajo de un bit es de 104µs aproximadamente,
razón por la que se llama bit de inicio. A partir de este tiempo se envían los bits de
transmisión.
Desde el punto de vista del receptor se observa que la línea está en nivel 1 y en un
momento determinado cambia a 0. Esto es muy importante, ya que este instante es
empleado para la sincronización entre el transmisor y el receptor. El receptor verá que
este valor se mantiene por el tiempo de un bit (si cambia antes dará la recepción por
errónea). Pasado este tiempo realizará la recepción de los bits del dato.
Una vez transmitido el dato (y si lleva, otra información extra, bit de paridad) se envía el
bit de parada. El bit de parada siempre es un 1 lógico. El bit de parada se utiliza para
asegurar que no se transmite nada por la línea hasta pasado determinado tiempo (da
tiempo al receptor de tratar el dato antes de recibir otro), es un valor que se puede
configurar. Generalmente nos dan 3 opciones: 1 bit, 2 bits y 1.5bits.
6
Tomado de AXELSON, Jan. Serial Port Complete: Programming and Circuits for RS-232 and Rs-485 Links
and Networks. Madison: Lakeview Research, 2000, p. 11 – 15.
57
Hay un bit que se utiliza para marcar la paridad. Se llama bit de paridad. Este puede ser
par o impar. En caso de que no esté correcto el valor se deberá desechar el dato recibido
ya que ha sido corrompido durante la transmisión.
El estándar RS-232 original especifica una velocidad máxima de 19,200 baudios (19.2
Kbps) y una longitud máxima de cable en 50 pies, aproximadamente 16 metros.
4.3.3.2 Puerto Paralelo. Es una interfaz entre el computador y un dispositivo periférico,
que se caracteriza en que los bits de datos viajan juntos, en un paquete de un byte (8 bits)
a la vez, a través de una cable físico que forma un bus (8 cables individuales), envía y
recibe datos en forma paralela (al mismo tiempo).
Ha sido utilizado generalmente para conectar impresoras, escaners con un computador,
donde además de los 8 bits, este puerto utiliza 5 señales para control de los dispositivos y
5 que provienen de estos últimos. El puerto paralelo utiliza voltajes tipo TTL con señales no balanceadas, lo que ocasiona
que reciba mucho ruido, generando errores. Su longitud máxima de conexión puede ser
de 4.5 m, pero si se utiliza cable blindado puede alcanzar una longitud máxima de 15 m.
Se recomienda utilizar un cable corto, acompañado de un circuito buffer, dado que esta
interfaz, junto con la que conforma el computador son muy delicadas en cuestión de
voltajes y corrientes (a razón de miliamperios). Por esta razón, es necesario utilizar
optoacopladores, con el fin de impedir conectar la tierra de la interfaz, con la tierra del
circuito a controlar, porque al presentarse alguna falla, el retorno de corrientes se hace
por tierra, ocasionando el daño del puerto.
La velocidad del puerto paralelo para realizar un ciclo de leer o escribir de 1,3 Mhz, donde
se puede decir que la lectura se hace cada 1 ms (idealmente, ya que siempre existen
otras instrucciones software, etc; En la práctica pueden ser desde 1.2 ms a 2 ms).
Algunos puertos soportan un modo "turbo" que elimina los 3 estados de espera de la
CPU, con lo que la velocidad de lectura/escritura del puerto se duplica (2,7 MHz). Algunos
puertos mejorados alcanzan los 8 a 16 Mbps.
58
4.3.3.3 Puerto Ethernet. Es un estándar utilizado en las redes de computadores de área
local que utilizan la técnica CSMA/CD (Carrier Sense Multiple Access with Collision
Detection, Acceso Múltiple por Detección de Portadora con Detección de Colisiones).
Dentro de este estándar se define las características de cableado y señalización de nivel
físico, el formato de las tramas de datos, el nivel del enlace de datos, todo según el
modelo OSI.
La Ethernet se ha basado en el estándar internacional IEEE 802.3, que aunque se
diferencian en algunos campos de sus tramas de datos, pueden coexistir en la misma red.
El puerto Ethernet además de comunicar los dispositivos de una red de datos como son
las tarjetas de red instalados en los computadores, los equipos activos que permiten el
enlace y establecimiento de las redes de datos con diferentes topologías como son los
switches y routers, también es usado en otros dispositivos electrónicos diseñados para
ejecutar diferentes tareas de control y medición, para que la información obtenida de
estos sea transmitida a través de la red de datos a un equipo de cómputo o similar y
poder procesar esta información para un objeto determinado.
Es el caso de algunos equipos electrónicos que realizan labores complejas a través de
PLC (Controladores Lógicos Programables) y también de microcontroladores, utilizando
control por lazos de tipo PID de variables análogas o discretas, manejo de funciones
trigonométricas, manejo de redes de variadores de frecuencia, lo que permite la
incorporación de estos equipos tanto a redes industriales como corporativas.
En el mercado de los microcontroladores, se pueden encontrar interfaces que permiten
enlazar este dispositivo a un puerto Ethernet; es el caso de Microchip, que tiene el
controlador Stand Alone de referencia ENC28J60, mostrado en la figura 22. Otros
fabricantes como Gigabit Ethernet, tienen un controlador de Interconexión de
Componentes Periféricos de referencia RTL8111C.
59
Figura 22. Interfaz ENC28J60.
Fuente: http://www.microcontroller.com/news/microchip_ethernet.asp.
La conexión Ethernet, presenta velocidades de transmisión que van desde 100 Mbps en
cable par trenzado hasta 10 Gbps actualmente, aunque ya hay interfaces de 100 Gbps.
4.3.3.4 Bus Universal en Serie (USB). Este puerto permite conectar periféricos a un
computador. Cuando se conecta un dispositivo con conector USB el servidor o
computador que lo recibe lo enumera y agrega el programa necesario para que sea
reconocido y pueda funcionar. Tiene la ventaja de poder instalar y desinstalar dispositivos
sin existir la necesidad de abrir el sistema, es el caso de las memorias (dispositivos de
almacenamiento externo).
El puerto USB, posee varias velocidades:
Baja velocidad (1.0), cuya tasa de transferencia va hasta 1.5 Mbps. Utilizado para
teclados, ratones, cámaras web.
Velocidad completa (1.1), su tasa de transferencia va hasta 12 Mbps.
Alta velocidad (2.0), su tasa de transferencia va hasta 125 Mbps. Es el utilizado por
la mayoría de los computadores actuales.
Super alta velocidad (3.0), su tasa de transferencia va hasta 4.8 Gbps, que es diez
veces más veloz que la anterior.
60
La figura 23 describe cada uno de los cables que componen el conector USB.
Figura 23. Conformación de pines de un conector USB.
Fuente: http://www.taringa.net/comunidades/serviciotecnico/174593/Mi-un-puerto-USB-daElectricidad.html.
Para establecer la comunicación del puerto USB entre un microcontrolador y un PC, es
algo similar que la conexión por puerto serie. En ella se conecta el microcontrolador al
computador, se ejecuta el envío y recepción de información en ambos sentidos.
Para la configuración de puerto USB, hay varias formas de comunicarlo con la PC, tales
como HID (Mouse y teclados), CDC (Clase genérica de transferencia de datos), BULK
(Transferencia de archivos grandes), COM (Emula un puerto serie virtual).
4.3.3.5 Bluetooth. Es un estándar, que utiliza la técnica FHSS (Frequency Hopping
Spread Spectrum, Espectro ensanchado por saltos de frecuencia), consistente en dividir
la banda de frecuencia de 2.402 – 2.480 GHz en 79 canales (denominados saltos) de 1
MHz de ancho de banda cada uno y después se transmite la señal utilizando una
secuencia de canales conocida tanto para la estación emisora como la receptora. De esta
61
manera, al cambiar de canales con una frecuencia de 1600 veces por segundo, el
estándar Bluetooth puede evitar la interferencia con otras señales de radio.
El estándar Bluetooth opera bajo el esquema de maestro / esclavo. La red que conforma
se denomina Piconet, tal como se observa en la figura 24, que hace referencia a una red
constituida por un dispositivo y todos aquellos que se encuentran dentro de su rango.
Pueden coexistir hasta 10 piconets en una sola área de cobertura. Un dispositivo maestro
conecta simultáneamente hasta 7 dispositivos esclavos activos (255 cuando se encuentra
en modo en espera)7.
Figura 24. Estructura de una Piconet.
Fuente: http://es.kioskea.net/contents/bluetooth/bluetooth-fonctionnement.php3.
Dentro de este tipo de conexión, se pueden contestar dos piconets para formar una red
más amplia denominada “scatternet”
Esta tecnología inalámbrica de ondas de radio corto simplifica las comunicaciones entre
dispositivos informáticos, como computadores portátiles, teléfonos móviles, entre otros.
Permite comunicaciones, a través de obstáculos, a distancias máximas de 10 metros.
También admite conexión a Internet inalámbrico desde un computador portátil, usando el
teléfono móvil, así como, sincroniza libretas de direcciones, calendarios en una PDA,
teléfono móvil, computador personal y portátil.
7
Tomado
de
KIOSKEA.NET,
[Internet]
[Consultado
18
de
http://es.kioskea.net/contents/bluetooth/bluetooth-fonctionnement.php3.
62
junio
de
2010].
Disponible
en
Mediante esta tecnología, se puede: eliminar la necesidad de conexión por cable físico
entre los dispositivos, sincronización e intercambio de archivos entre usuarios, conexión a
determinados contenidos en áreas públicas, funciona como un mando a distancia (llave,
entradas y monederos electrónicos).
4.4 OPCIONES DE ACCESO REMOTO
4.4.1 Acceso escritorio remoto. Un escritorio remoto es una herramienta que permite
trabajar en un computador, utilizando su escritorio gráfico, en otro computador que se
encuentra en otro sitio. Puede estar en la misma red LAN (Local Area Network) o en la red
MAN (Red de Área Metropolitana). Resulta ser muy útil para controlar o ejecutar tareas
que se encuentran habilitadas en ese equipo remoto, generando la sensación de estar
frente a él.
La opción brindada por esta herramienta permite que se centralicen las aplicaciones que
generalmente se ejecutan en el entorno de usuario, donde éste último, se convierte en un
terminal de entrada y salida.
4.4.2 Acceso escritorio remoto a través de VPN. Con el transcurrir del tiempo, la
necesidad de conectarse a Internet ha tenido un crecimiento vertiginoso, puesto que las
empresas han encontrado que superar la barrera de realizar sus actividades locales para
extenderse a nivel global.
Sin embargo, el poder expandirse nivel local, nacional o internacional, requiere de un
costo económico muy elevado. Es por esto, que gracias a Internet, las organizaciones en
general cuentan con la opción de crear una Red Privada Virtual (VPN, Virtual Private
Network), que otorga mediante una muy liviana inversión económica, la posibilidad de
conexión entre diferentes sitios, sin importar la distancia entre ellos.
Este tipo de red utiliza protocolos especiales de seguridad que permiten obtener acceso a
servicios de carácter privado, únicamente a personal autorizado de la empresa o que
tengan relación con esa empresa.
63
Cuando un usuario requiere conectarse a su empresa o al organismo que pertenece, lo
hace mediante Internet usando una configuración especial previa de la red privada virtual
y accede a los recursos disponibles de la misma, como si estuviera sentado en su oficina.
En sí, la VPN “es una estructura de red corporativa establecida sobre una red de recursos
de carácter público, pero que utiliza el mismo sistema de gestión y las mismas políticas de
acceso que se usan en las redes privadas. En resumen, es una creación en una red
pública de un entorno de carácter confidencial y privado, que permite trabajar al usuario
como si estuviera en su misma red local”8.
Para el debido funcionamiento de la VPN, se configuran túneles virtuales en cada
extremo, mediante sistemas de encriptación y autentificación, con el fin de asegurar la
confidencialidad e integridad de la información transmitida a través de la red pública.
Esta tecnología de encriptación, se denomina Túneles (Tunneling), que consiste en un
método de envío de datos, en el que se encapsula un tipo de paquetes de datos dentro
del paquete de datos original, de esta forma, al llegar al destino, el paquete original se
desencapsula para ser recibido.
Es esencial que en la configuración de una VPN, siempre se establezcan técnicas de
autenticación que aseguren que la comunicación se realice entre los directamente
involucrados, evitando la suplantación o intrusión.
En cuanto a los tipos de encriptación que se usan en las VPN, se encuentran:
Encriptación de clave secreta. Aquí se utiliza una contraseña secreta conocida por
todos los usuarios que deben tener acceso a la información encriptada. La contraseña
debe ser usada para encriptar y desencriptar.
8
Tomado de CONFIGURAR EQUIPOS, [Internet] [Consultado 12 de agosto de 2010]. Disponible en
www.configurarequipos.com/doc499.html.
64
Este sistema presenta problemas de seguridad, en la medida que la contraseña debe ser
conocida por varios usuarios, situación que genera que haya filtración de la misma y que
por ende, origine su cambio constante.
Encriptación de clave pública. Mediante este tipo de encriptación, se usan dos claves,
una pública y una secreta. De esta manera, para encriptar la información, se usa la clave
privada propia de quien la envía y la clave pública del destinatario. Una vez entregada la
información, esta es desencriptada usando la clave privada propia del destinatario y la
pública de quién la envió. Este tipo de encriptación, tiene la desventaja de ser un poco
más lenta que la encriptación con clave secreta.
En las VPN, la encriptación se realiza en tiempo real, de esta forma, sólo estará vigente
mientras la comunicación se encuentre establecida.
Dentro de los tipos de VPN se encuentran:
VPN de acceso remoto. Este tipo es el más utilizado en la actualidad, donde el usuario
(empleado o proveedor de una empresa) se conecta desde un sitio remoto a través de
Internet. Al conectarse, presenta un nivel de acceso similar al que se tiene en la red local
de la empresa.
VPN punto a punto. Permite conectar sitios remotos de una empresa con su sede
principal. Se establece un vínculo permanente a Internet, donde las conexiones originadas
de los sitios remotos son aceptadas, estableciéndose el túnel VPN. Este tipo de conexión
disminuye en gran medida los costos de una conexión punto a punto tradicional, en
especial cuando son internacionales.
VPN over LAN. Este tipo de conexión es poco conocida pero eficaz a la hora de
utilizarlo dentro de una empresa. Se puede ver como una variación de la VPN de acceso
remoto, pero la diferencia radica, en que no se utiliza Internet como medio de conexión,
sino la red de área local (LAN) de la empresa. Su uso está enfocado a aislar zonas y
servicios de la red interna, característica importante para mejorar la seguridad de las
redes inalámbricas existentes en la empresa.
65
Para su implementación se utiliza diferentes protocolos, donde se encuentran:
IPSEC, (Internet Protocol Security), es el estándar utilizado en este tipo de conexión
que asegura las comunicaciones sobre el Protocolo de Internet (IP).
PPTP, (Point to Point Tunneling Protocol), es un protocolo desarrollado por Microsoft
(Empresa multinacional estadounidense, fundada en 1975, especializada en el sector de
la informática). Permite la realización de transferencias seguras desde clientes remotos a
servidores emplazados en redes privadas, empleando para ello tanto líneas telefónicas
conmutadas como Internet.
L2TP, (Layer 2 Tunneling Protocol), corrige las deficiencias de los protocolos PPTP y
L2F (Layer 2 Forwarding).
SSL, (Secure Sockets Layer) y TLS, (Transport Layer Security), Seguridad de la capa
de transporte, son protocolos de capa de conexión segura que proporciona autenticación
y privacidad de la información ente extremos sobre Internet, mediante el uso de
criptografía.
SSH, (Secure Shell), Interprete de Ordenes Segura. Este protocolo sirve para acceder
a máquinas remotas, a través de la una red. También permite copiar datos de forma
segura, gestionar claves.
4.5 ESTRUCTURA GENERAL DEL SISTEMA
El sistema prototipo que se diseño y construyó, destinado al control remoto de una antena
de microondas y que aparece en el figura 25, se compone de tres partes fundamentales:
Un enlace de microondas, conformado por una antena transmisora de microondas
portátiles y una antena receptora fija sobre un servomotor, marcada con el número 1.
Una terminal de interfaz para el control local del servomotor y la antena receptora de
microondas, marcada con el número 2.
Una terminal para el control remoto, marcado con el número 3.
66
Figura 25. Esquema general funcionamiento prototipo.
Fuente: Esquema realizado durante el desarrollo del presente trabajo.
El enlace de microondas está compuesto por una antena transmisora portátil que se
encuentra ubicada en cualquier lugar de la ciudad de Bogotá, dependiendo del sitio donde
se produzca la noticia. Una vez seleccionado el sitio, la antena transmisora es dirigida por
el operador de la misma hacia la antena receptora, que para el caso del prototipo está
ubicada en un sitio preestablecido y permanente. En este punto, se habilita la terminal de
interfaz para el control local del servo, que basará los movimientos de éste último, en el
nivel de potencia recibido del enlace de microondas establecido. De esta forma, se inicia
el proceso de alineación entre las dos antenas.
Todo este sistema es operado remotamente mediante el terminal destinado para este fin,
mediante conexión de escritorio remoto de la siguiente manera: la antena receptora, es
dirigida al sitio donde se encuentra la antena de microondas transmisora y es alineada de
tal manera que alcance el máximo nivel de potencia de la señal. Este nivel de potencia
puede estar dentro de un rango aceptable para establecer la conexión. Una vez en esta
posición el enlace queda establecido y se comienza la transmisión.
67
Con el fin de establecer la estructura general del prototipo del sistema de control remoto
para una antena de microondas, se realizó el diagrama de bloques respectivo, y los
correspondientes diagramas de flujo, que permiten vislumbrar el comportamiento total del
sistema diseñado.
4.5.1 Diagrama de bloques.
En el diagrama de bloques general, que aparece en la figura 26, se describe en la parte
superior, el funcionamiento general del prototipo diseñado. En él se detalla el terminal de
interfaz para el control local del servomotor, el cual genera una señal modulada por ancho
de pulso (PWM)al servomotor, permitiendo su movimiento. Esta señal varía de acuerdo al
nivel de potencia vi (voltaje de entrada) entregado por la antena receptora, que equivale al
nivel de potencia del enlace de microondas. Todo el sistema se controla remotamente
mediante el terminal destinado para este fin, consistente en un computador que se
comunica vía protocolo de red TCP/IP con el terminal de interfaz que controla localmente
el servomotor.
En la parte inferior del diagrama, aparece de forma detallada, la terminal de interfaz del
control local del sistema, compuesto por: el módulo ADC (Conversor Análogo Digital), el
PC en el cual se mostrará la interfaz con el operador y el modulo PWM (Modulación por
Ancho de Pulso).
El módulo ADC es implementado mediante un microcontrolador. Éste módulo está
encargado de la recepción del nivel de potencia vi, entregado por la antena receptora y de
su conversión a formato digital para alimentar el software de control.
El software de control se encuentra instalado en un computador (PC) y sirve de interfaz
con el operario, quien observando el nivel de potencia del enlace de microondas y de
acuerdo a su porcentaje, determina si es necesario o no mover el servomotor. En el caso
de que se requiera mover el motor, el operario hará uso de la interfaz de control que le
permitirá ajustar en forma manual la posición de la antena hasta obtener el nivel de
potencia deseado para la transmisión.
El último bloque (PWM) permite actuar sobre el servomotor para efectuar el movimiento
que se requiere para el ajuste de posición de la antena.
68
Figura 26. Diagrama de bloques de funcionamiento general del sistema.
TERMINAL CONTROL REMOTO DEL SISTEMA DE CONTROL
Vi
TERMINAL E
INTERFACE
CONTROL LOCAL
DEL SERVOMOTOR
SERVOMOTOR
ANTENA
TERMINAL E INTERFACE
CONTROL LOCAL
DEL SERVOMOTOR
Vi
ADC
PC
PWM
Fuente: Diagrama realizado durante el desarrollo del presente trabajo.
69
Servomotor
4.5.2 Diagrama de flujo general del prototipo del sistema de control remoto de una
antena de microondas.
Figura 27. Diagrama de flujo general del sistema.
INICIO
Realizar acceso remoto
vía enlace dedicado
NO
Acceso remoto
exitoso?
SI
Ajustar posición de la
antena receptora a un nivel
óptimo del enlace
NO
Nivel óptimo
alcanzado?
SI
FIN
Fuente: diagrama realizado durante el desarrollo del presente trabajo.
En el diagrama de flujo mostrado en la figura 27, se observa el proceso general que se
realiza en el prototipo del control remoto de una antena de microondas, donde el primer
paso es establecer el acceso remoto a la terminal de interfaz para el control local del
70
servomotor mediante el enlace dedicado, desde el terminal diseñado para este fin
(Terminal para el control remoto). Si el acceso remoto se logra, se procede a la tarea del
ajuste de la posición de la antena hasta alcanzar un nivel óptimo del enlace de
microondas establecido, nivel donde finaliza el proceso.
4.6 ADAPTACIÓN ANTENA DE MICROONDAS PARA EL MONTAJE DEL ENLACE DE
MICROONDAS PROTOTIPO
Para la implementación del prototipo de la antena de microondas, se utilizó un módulo
denominado XBee-PROOEM (original equipment manufacturer), que es compatible con la
familia IEEE 802.15.4 (Estándar que define el nivel físico y control de acceso al medio, en
redes inalámbricas de área personal). Opera dentro del protocolo ZigBee, que soporta
redes de sensores de bajo costo y consumo, pues requiere alimentación mínima y permite
un transporte de datos confiable. Este módulo XBee-PRO, viene de fábrica con una
antena de microondas omnidireccional (monopolo), mostrada en la figura 28 y que trabaja
dentro de la banda de frecuencia ISM (Industrial, Scientific and Medical, reservada
internacionalmente para uso no comercial y que se ha popularizado en comunicaciones
WLAN (Wi-Fi) y WPAN (Bluetooth)),de 2,4 GHz,
con una potencia de (1 mW).Para
conocer en detalle su estructura de pines remítase a la hoja datos que se encuentra en el
Anexo 5, del presente documento.
El módulo de comunicación, según se observa en la figura 29, viene con la antena, y
permite configurarla como transmisor o receptor, dependiendo de la necesidad. Dicho
módulo tiene la opción de ser conectado al computador por puerto USB, a través del cual
se energiza.
71
Figura 28. Antena de fábrica junto a su integrado.
Antena de microondas
(monopolo)
Fuente: tomada durante el desarrollo del presente trabajo.
Figura 29. Antena completa con el módulo de comunicación.
Fuente: tomada durante el desarrollo del presente trabajo.
Para poder establecer el enlace de microondas, fue necesario contar con dos módulos
XBee-PRO. Su configuración lógica se realiza mediante el programa que trae de fábrica
llamado XCTU, (Provisto por www.digi.com). Los pasos que se deben seguir para la
72
configuración y puesta en marcha del enlace entre los dos módulos utilizados, se describe
detalladamente en el Anexo 6 del presente documento.
Este programa de configuración, permite definir varias características de la antena como:
la función que desempeñará en un enlace (transmisor o receptor), el nivel de potencia de
transmisión (muy bajo, bajo, medio, alto, muy alto), la intensidad de la señal de recepción
en decibelios (dB),la velocidad de transmisión en baudios (desde 1200 hasta 230.400) y
también es posible actualizar la versión del firmware.
Con el objetivo de conocer su forma de operación, se realizaron varias pruebas utilizando
el programa XCTU, consistentes en el establecimiento de un enlace entre dos módulos
similares, configurados de tal manera que entre los dos existiera un comunicación donde
uno se comportara como receptor y el otro como transmisor (Half dúplex, característica de
un medio de comunicación por la cual no se pueden enviar y recibir datos
simultáneamente). De esta manera, se pudo comprobar el nivel de potencia de la
comunicación establecida, mediante la medición de la señal RSSI (Receive Signal
Strengh Indication), Indicador de Fuerza de la Señal de Recepción. Esta medida es
tomada en decibelios (dB) e indica la intensidad de la señal, la cual es generada por el pin
Nº 6 del chip que conforma el módulo y que como se mencionó en el Numeral 4.1 enlaces
de Microondas, puede llegar hasta 40 dB como ganancia máxima.
Durante la realización de estas pruebas se pudo analizar que el enlace establecido era
demasiado potente (a pesar de que se trabajó con el mínimo valor de potencia de
transmisión del dispositivo) para poder mostrar a corta distancia lo que sucede con el
enlace real del Cerro de La Calera; es decir, a pesar de utilizar grandes distancias
(proporcionales para hacer una demostración a escala (prototipo)), el enlace no variaba lo
suficiente. Esta situación era originada por la forma de la antena original (monopolo
omnidireccional), que irradiaba en todos los sentidos, generando el fenómeno de reflexión
por la presencia de materiales cercanos y que permitía a la señal radiada llegar a su
destino con mínimas pérdidas. De esta manera, la manipulación de esta señal era algo
difícil para el objetivo que pretendía el presente trabajo.
73
Por esta razón, fue necesario realizar varios ajustes en la estructura de la antena para
lograr la manipulación de la señal radiada, que involucraron el cambio del diseño de la
antena. Para esto, se evaluó el diseño más apropiado que estuviera acorde con el tamaño
del prototipo, que permitiera llevar la señal radiada en una dirección definida, logrando el
objetivo de manipular su intensidad en cortas distancias; por tal razón, se escogió el
dipolo de /4, por su fácil diseño y construcción.
Para determinar las características técnicas y de desempeño de la antena que se debía
controlar remotamente, se analizó el diagrama de radiación teórico de una antena dipolo
de /2.
Figura 30. Diagrama de radiación de un dipolo de /2.
Fuente: www.com.uvigo.es/asignaturas/ant/java_dipolo/java_dipolo.htm
En la figura 30 se observa la simetría radial del dipolo, sólo en los planos X, Y y Z para
una mayor claridad. La forma del campo radiado, depende básicamente de la longitud de
la antena medida en longitudes de onda y de las terminaciones que determinan el grado
de adaptación que tiene la antena, lo que significa una mayor o menor cantidad de
pérdidas.
74
De esta manera, la forma del lóbulo puede cambiar, variando en su anchura o extensión.
En el plano azimuth (polarización vertical), el dipolo presenta un campo omnidireccional y
en el plano de elevación (polarización Horizontal) el campo es direccional y está
compuesto por dos lóbulos. La figura 31 muestra el campo de radiación teórico para
ambos casos de polarización.
Figura 31. Campo de radiación del dipolo para la polarización vertical y horizontal.
Fuente: www.com.uvigo.es/asignaturas/ant/java_dipolo/java_dipolo.htm
Para el análisis de los parámetros de alineación se evaluó el tipo de polarización que
presenta el dispositivo inalámbrico construido, determinado por el vector del campo
eléctrico con respecto a una superficie reflectora, que generalmente es la superficie
terrestre. En el casodel presente prototipo se escogió la polarización vertical, porque se
acomodaba de manera eficiente en la simulación del enlace de microondas.
75
Según la figura 32, ilustra un caso de polarización vertical, con el vector de campo
eléctrico (E) paralelo al dipolo:
Figura 32. Ejemplo de un dipolo con polarización vertical.
Fuente: www.com.uvigo.es/asignaturas/ant/java_dipolo/java_dipolo.htm
Conforme a esto, los dipolos fueron montados en estructuras que fueron diseñadas
especialmente para obtener el tipo de polarización deseado. El material utilizado fue
acrílico, pues presentaba características de reflexión bastante favorables.
Para iniciar la construcción de los dipolos prototipo, se utilizaron dos trozos de varillas de
cobre de longitud λ/8 y 2mm de diámetro cada uno, utilizando para esto el alma de un
cable TRIAX RG-11, que comúnmente es usado en cámaras de video y que cumplía con
la impedancia característica de 75 Ω, usada en este tipo de dispositivos.
El cálculo de
f/
Donde,
, longitud de onda, se obtiene de la ecuación:
c
c: es la velocidad de la luz (300 [Mt/s])
f : frecuencia de trabajo
λ = c / f(MHz) = (300.000 / 2.400) = 12.5 cm
76
(λ / 8) = (12.5 cm / 8) = 1.56 cm
Es decir, que cada elemento del dipolo se debía fabricar con una longitud L= 1.56 cm,
obteniendo una longitud para el dipolo completo de
/4 equivalente a L = 3.1 cm.
Figura 33. Pasos para la elaboración de los dipolos.
Cable TRIAX RG – 11
Cable TRIAX RG – 11 con blindaje
Alma de cobre de 2mm
Alma del cable TRIAX RG-11
Trozos de λ/8, medidos con calibrador.
Fuente: tomado durante el desarrollo del presente trabajo.
En la figura 33, se detalla la fabricación de los dipolos. Para esto se tomó el cable triaxial,
se le extrajo el alma de cobre y luego se cortaron los elementos de /8 (1.56 cm).
A continuación, se realizó el proceso de construcción de los dos dipolos que conformarían
el enlace de microondas prototipo. Para esto, se soldó un trozo de semiconductor al
núcleo del cable coaxial de 75 Ω y el otro trozo a la cubierta o blindaje del cable,
77
quedando armado el dipolo. Este procedimiento se repitió para el otro dipolo. Ver figura
34.
Figura 34. Armado del dipolo.
Fuente: tomada durante el desarrollo del presente trabajo.
Para proporcionar una mayor rigidez a este nuevo dispositivo inalámbrico se montó sobre
un soporte no conductivo, de material plástico, aplicando una capa de silicona sobre la
soldadura. Ver figura 35.
Figura 35. Montaje de la estructura del dipolo.
Fuente: tomada durante el desarrollo del presente trabajo.
Para el caso del transmisor, el dipolo construido se instaló sobre un soporte plástico y se
aseguró con silicona, para luego ser montada y ajustada a un trípode tipo fotográfico. Ver
figura 36.
78
Figura 36. Pasos para el montaje del dipolo transmisor.
Ajuste dipolo a soporte plástico.
Montaje del dipolo sobre trípode.
Fuente: tomada durante el desarrollo del presente trabajo.
Finalmente, las estructuras obtenidas tanto para el dipolo receptor como el transmisor se
muestran en la figura 37.
Figura 37. Estructuras finales de los dipolos.
Dipolo transmisor
Dipolo Receptor
Fuente: tomada durante el desarrollo del presente trabajo.
79
4.7 SERVOMOTOR PARA EL MOVIMIENTO DE LA ANTENA
Teniendo en cuenta las condiciones exigidas para el sistema a diseñar, se requería de un
dispositivo que fuera capaz de realizar el movimiento con el torque suficiente para mover
la antena receptora de microondas (descrita anteriormente), para ajustar su posición a la
máxima recepción. Para realizar esta tarea se seleccionó el servomotor de corriente
continua mostrado en la figura 38, cuyas características técnicas, cumplían con las
condiciones requeridas para el desarrollo del presente prototipo y mencionadas en el
numeral 4.3.
Figura 38. Servomotor utilizado.
Fuente: tomada durante el desarrollo del presente trabajo.
El servomotor utilizado es de marca y referencia EK2-0509, cuyas características técnicas
y de funcionamiento son las siguientes:
Voltaje de funcionamiento: 4.8 a 6.0 VDC
Velocidad: 0.2 s por 60º
Torque: 4.0 Kg / cm (VCC = 5V)
Temperatura de operación: -20 ºC a 75 ºC
40.4 x 20 x 36.1 mm
80
4.8 TERMINAL DE INTERFAZ PARA EL CONTROL LOCAL DEL SERVOMOTOR Y LA
ANTENA RECEPTORA DE MICROONDAS
La terminal de interfaz es el encargado de captar la potencia de la antena, para ser
visualizada en una interfaz de usuario, para que el operador con base en su observación,
controle manualmente el servomotor. Este terminal está compuesto por tres módulos:
Modulo ADC
Modulo de Interfaz con el usuario (PC)
Módulo PWM
Para la implementación de estos módulos se realizó el diseño y el montaje de un circuito
electrónico que contiene los módulos ADC y PWM, capaz de desempeñar las acciones
requeridas por los mismos y un programa que sirve de interfaz gráfica (Labview), para
visualizar el nivel de potencia de la antena y la alineación de la misma por parte del
operario.
Tanto el circuito electrónico como la interfaz gráfica, estarán ubicados cerca a la antena
receptora. Todo este montaje puede ser también controlado remotamente mediante
enlace de comunicaciones, vía protocolo TCP/IP.
Inicialmente el circuito electrónico recibirá un valor de voltaje, que genera la antena
receptora, el cual varía de acuerdo a la potencia del enlace microondas. La recepción de
este voltaje se hace a través de lo que se denomino “Modulo de recepción del enlace microondas”. La función de este modulo es cuantificar la señal recibida de la antena receptora, para posteriormente enviar el valor cuantificado a la interfaz gráfica, que le
indicará al operario el nivel de potencia del enlace.
La comunicación entre el circuito electrónico y la interfaz gráfica se realiza a través del
módulo de comunicación serial.
El operador mueve el servomotor de acuerdo al nivel de potencia del enlace, llevándolo
hacia un valor óptimo. Este movimiento se realiza con la interfaz gráfica, a través de la
81
cual se envía un dato al circuito electrónico generando un ancho de pulso que permite el
movimiento del servomotor.
4.8.1 Circuito de control del servomotor. Para poder obtener el control del movimiento
del servomotor y que a la vez se pudiera lograr la precisión y óptimo desempeño de este
dispositivo se realizó un diseño y montaje de un circuito electrónico, donde se incluyó un
componente de control capaz de poder desempeñar esta acción con las variables
requeridas y necesarias para un eficiente desempeño y cumplimiento del objetivo
propuesto.
Para el desarrollo de las funciones en el circuito electrónico, de los tres módulos ya
descritos, se escogió el microcontrolador de la empresa Motorola – Freescale, cuya
referencia es MC68HC908GP32, el cual se llamará en el presente trabajo como GP32. La
elección de este microcontrolador frente a otros, como el PIC de Microchip, el ST-62XX de
SGS-Thomson o el 80XX de Intel, se debe a características como la variedad de opciones
en su programación que permiten la reducción en instrucciones en comparación de los ya
mencionados, velocidad, reducido consumo de energía, la capacidad de resistir errores de
conexión de hardware, su amplio uso en la industria y sobre todo por la variedad de
opciones que este microcontrolador posee a la hora de diseñar cualquier aplicación.
La parte del circuito que corresponde al módulo del control del servomotor se puede
observar en la figura 39.
Se dejó un pulsador como reseteo, es decir, opera como un reinicio del microcontrolador,
en el caso de presentarse bloqueo en su funcionamiento.
Para el presente diseño se habilitó el pin 21 del microcontrolador, que corresponde a la
entrada y salida número cuatro (4) del puerto D, como conexión directa con el servomotor.
A través de este enlace, se establecen y se ordenan los parámetros configurados en el
GP32 en su módulo PWM (Modulación por Ancho de Pulso), que permiten ejecutar el
movimiento que se requiere ejecutar en el servomotor.
82
Figura 39. Circuito de Control del Servomotor por el microcontrolador GP32.
PTB0 / AD0
GND
SEÑAL
PTB1 / AD1
PTD2/ MOSI
PTD3/ SPSCK
PTD4 / T1CH0
PTB2 / AD2
PTD1/ MISO
PTD5 / T1CH1
PTB3 / AD3
PTB4 / AD4
PTD0/SS
PTB5 / AD5
PTB6 / AD6
PTB7 / AD7
VDDAD / VREFH (ADC)
VSSAD / VREFL (ADC)
PTA0 / KBD1
PTA1 / KBD1
PTA2 / KBD2
PTA3 / KBD3
PTA4 / KBD4
PTA5 / KBD5
PTA6 / KBD6
PTA7 / KBD7
+5VDC
CONECTOR SERVOMOTOR
VDD
VSS
IRQ
PTE0/RxD
PTC4
PTE0/TxD
PTC3
PTC2
PTC1
PTC0
RST
OSC1
OSC2
CGMXFC (PLL)
VSSA (PLL)
MCU-GP32
10M
10K
C:333
C:333
CRISTAL
C22 C22
Pulsador
C104
+5VDC
GND
Fuente: diagrama realizado durante el desarrollo del presente trabajo.
4.8.1.1 Programación del control del servo en el microcontrolador. La función que
debe cumplir la parte del circuito que corresponde al módulo de control del servomotor, es
generar un ancho de pulso, cuyo porcentaje de servicio corresponde a un dato enviado
por el operador a través de la interfaz gráfica (se explicará de forma más detallada en el
capítulo 4.8.1.2 Programación del control del servo en el programa gráfico de control
usado como interfaz para el usuario final.)
,
83
Para adelantar la configuración del programa en el microcontrolador GP32, destinado al
control del movimiento del servomotor, así como, todas las tareas que se requerían
ejecutar para el óptimo desempeño del sistema, se seleccionó el programa Win IDE,
detallado en el numeral 4.3.2.4, como herramienta para elaborar el código y posterior
grabación del mismo en el microcontrolador GP32. Su selección se basó en las destrezas
y conocimientos adquiridos por su constante manejo, así como, su estructura es enfocada
a la programación de microcontroladores del fabricante Motorola - Freescale apto para ser
utilizado en microcontroladores Motorola – Freescale con un completo menú que contiene
las opciones de configuración y de simulación de los programas que en él se codifiquen.
Con la configuración del módulo PWM, se logró controlar el movimiento horizontal del
servomotor. Mediante esta opción, es posible generar una onda cuadrada, logrando que
el tiempo que dura el pulso en el nivel alto sea diferente (ciclo de servicio), pero
mantenimiento un mismo periodo, de esta manera, se logra que la posición del servo
cambie según lo deseado.
La modulación del ancho de pulso (PWM) se usa para generar una forma de onda
cuadrada, logrando que el tiempo que dura el pulso en el nivel alto sea diferente (ciclo de
servicio), pero mantenimiento un mismo periodo, de esta manera, se logra que la posición
del servo cambie según lo deseado.
El ciclo de servicio relaciona el tiempo que la señal permanece en un nivel alto “1” y el tiempo que dura en un nivel bajo “0”, alcanzando diferentes frecuencias y resoluciones. La
frecuencia se obtiene con el periodo (T) y la resolución con el número de pasos discretos
del ciclo de servicio que se pueden llevar a 1.
El periodo está compuesto por los registros: TH, que es el tiempo de duración de la señal
en nivel alto y TL, que es el tiempo de duración de la señal en nivel bajo, como se explica
en la figura 40.
84
Figura 40. Composición del periodo
TH
TL
PERIODO
Para la generación del PWM se usó el módulo TIM. El TIM es un modulo de tiempo de
dos canales que recibe, compara, envía y tiene funciones de modulación de ancho de
pulso. Contiene comparadores (interrupciones asociadas), con el fin de permitir al
microcontrolador realizar otras tareas y que la habilitación del PWM fuera más efectiva y
automática. La función TIM, se compone de la comparación de entradas y salidas.
En el puerto D del microcontrolador, se encuentran dos pines que manejan los dos
canales ya mencionados de I/O (entrada/salida), siendo estos PTD4 para el canal 1
(TCH0, es el nombre del registro de el canal 1) y PTD5 (TCH1, es el nombre del registro
de el canal 2). Cada canal es programado de manera independiente como un pin de
comparación de salida o captura de entrada. Para el la generación del PWM se utilizó
como comparación de salida. Se debe resaltar que cada canal maneja datos de hasta 16
bits por lo que posee dos registros, uno alto y otro bajo, que para efectos de programación
se denominara TCH0L y TCH0H para el canal 1, donde TCH0L pertenece a la parte baja
y TCH0H a la parte alta; y para el canal 2 se denominaran TCH1L y TCH1H, donde el
primero es la parte baja del registro y el segundo la parte alta.
Inicialmente se halló la frecuencia de trabajo del servomotor. Para esto, se utilizó un
generador de señal, el servomotor y un osciloscopio. Se alimentó el servomotor con una
señal cuadrada; se varió el periodo del pulso hasta encontrar el rango de operación, el
cual fue de 0 a 20ms. En el microcontrolador se configuro un ancho de pulso de 57ms,
modificando el porcentaje de servicio. En la figura 41, pueden verse los instrumentos
utilizados durante este procedimiento.
85
Figura 41. Instrumentos utilizados durante la obtención de la frecuencia de trabajo del
servo.
Generación y variación de una señal PWM
Medición del Periodo en el cual trabaja el servomotor
Fuente: tomada durante el desarrollo del presente trabajo.
Con base en la frecuencia de trabajo del servomotor, se realizó el cálculo para establecer
el retardo requerido de acuerdo al ciclo de máquina. Teniendo en cuenta que el ciclo de
máquina es equivalente a 4 ciclos del oscilador y que para el presente trabajo se utilizó un
oscilador (reloj – cristal) de 4 MHz, el ciclo de maquina tiene una duración de 1µs.
86
Para comenzar la configuración del módulo PWM, fue necesario configurar el periodo de
57,35ms en el módulo del contador TIM y en los registros TMODH y TMODL se configuró
el ancho del pulso realizando el siguiente cálculo:
TMODH:TMODL= (0.05735s x frec. Oscilador) / (4 x preescalador)
TMODH:TMODL= (0.05735x4x10^`6) / (4 x 64) = 896
Los registros TMODH y TMODL, contienen el valor módulo (valor de rebosamiento o
tamaño del periodo). Cuando el contador del TIM alcanza el valor modulo o valor de
rebosamiento, el sistema se reinicia y comienza nuevamente el conteo hasta el valor
deseado.
El valor colocado en los registros TMODH Y TMODL, para nuestro caso 896, es un valor
decimal adimensional, que corresponde al periodo del PWM.
El equivalente en hexadecimal de 896 es 380, el cual se distribuyo en los registros
TMODH y TMODL, respectivamente. La variación del porcentaje de servicio se realizó en
el modulo T1CH0L, que eso thch10l se explico arriba.
El valor correspondiente a 896 en hexadecimal (380) supera la resolución de 8 bits (2^8),
se hace uso de la parte alta y baja del registro dividiendo el valor hexadecimal en dos
partes; en la parte alta (TMODH) se coloca el 3 y en la parte baja el 80.
A continuación se observa el código diseñado y programado en el microcontrolador,
Inicialmente se explican los pasos para la configuración de la modulación por ancho de
pulso (PWM). Más adelante aparecen las líneas del programa codificado, con los
respectivos comentarios al frente de cada una, separados del código por el signo de punto
y coma.
87
MODULO PWM
Los siguientes son los pasos para la configuración del timer:
*********************************************************
*1. Se desahabilita la interrupcion por TIM, TOIE=0
*2. Se detiene el TIM, TSTOP = 1
*3. Se borra el TIM,TRST=1
*
*
*
*4. Se borra el prescalador, en este caso se
*
* configura a 64, el reloj interno se divide en 64
*
*5. Se establecen los valores de rebosamiento en los
*
* registros TMODH/L. Para el caso el tiempo es: 57mS *
*6. Se dehabilita el TIM para interrupción TOIE = 0
*7. Se desahabilita el reset del TIM, TRST=0
*
*
*8. Activa el contador del TIM, TSTOP=0
*
*********************************************************
MOV
#$FF,DDRD
;CONFIGURACION DEL PUERTO D COMO SALIDA
CLR
PORTD
MOV
#$36,T1SC
;PASOS 1,2,3 Y 4
MOV
#$03,T1MODH
;PASO 5
MOV
#$80,T1MODL
;PASO 5
MOV
#$00,T1CH0H
MOV
#$4A,T1CH0L
MOV
#%00101010,T1SC0 ;PASO 6,7 Y 8
MOV
#$06,T1SC
;SE INICIA CON EL 8% DE SERVICIO
;CONFIGURACION DEL PREESTALADOR A 64
4.8.1.2 Programación del control del servo en el programa gráfico de control usado
como interfaz para el usuario final. Para el desarrollo de esta tarea donde era necesario
disponer de un programa de control electrónico que permitiera la creación de un panel de
control a disposición del usuario final, con muchas opciones de manejo, con la posibilidad
de generar la interfaz entre éste y el dispositivo físico objeto del control; así mismo,
contar con un conocimiento previo de su configuración y desempeño, para el presente
trabajo se seleccionó el programa Labview, el cual cumple con los requisitos para el
desarrollo ingenieril del presente sistema de control. La interfaz gráfica diseñada en
88
Labview, se encuentra instalado en el computador (Terminal para el control local del
servomotor) que está cerca de la antena receptora.
Dentro de este programa, se configuró el envió de datos indexados, para controlar el giro
del motor. Los datos se encuentran guardados en un arreglo matricial. La posición del
arreglo matricial será variada por el operario de dos maneras, las cuales se explican más
adelante en la figura 43.
El dato del arreglo matricial que elija el operario, se envía al microcontrolador, este lo
compara con la tabla DATOS, mostrada en la figura 43. La tabla DATOS, está guardada
en un espacio de la memoria del microcontrolador y corresponde a los mismos valores
guardados en el arreglo matricial de la interfaz gráfica.
Hecha la comparación del dato del arreglo matricial de la interfaz gráfica con la tabla
DATOS guardada en el microcontrolador, éste procede a enviar un valor al registro
TCH01, (explicado en el apartado 4.8.1.1 Programación del control del servo en el
microcontrolador). Este valor corresponde a un porcentaje de servicio del PWM. La
respuesta de este ancho de pulso se refleja en el pin 21, que es donde se encuentra
conectado el servomotor.
Para el operario variar la posición del arreglo matricial, corresponde a variar el movimiento
del servomotor de manera angular.
El bloque “ELEMENT” de la figura 42, es el dato indexado que ha elegido el operario del
arreglo matricial. Se seleccionó como una variable local, que originalmente viene del
arreglo matricial puro que se muestra en la figura 43.
89
Figura 42. Programación dato indexado.
Dato
indexado
Fuente: diagrama realizado durante el desarrollo del presente trabajo.
En el recuadro de la figura 43 (izquierda), se detalla el arreglo matricial de labview y el
programa codificado en el microcontrolador donde se realiza la comparación del dato
enviado por Labview y la tabla DATOS guardada en el microcontrolador. También se
muestra en el recuadro, el dato enviado al pin 21 del microcontrolador que corresponde al
porcentaje de servicio del PWM. Este valor está guardado en la tabla llamada TABLA 1 de
la misma figura.
90
Figura 43. Detalle comparación dato.
DATOS
DB
DB
DB
DB
DB
$40,$41,$42,$43,$44,$45,$46,$47,$48,$49
$4A,$4B,$4C,$4D,$4E,$4F,$50,$51,$52,$53
$54,$55,$56,$57,$58,$59,$5A,$5B,$5C,$5D
$5E,$5F,$60,$61,$62,$63,$64,$65,$66,$67
$68,$69
TABLA1
DB
DB
DB
DB
DB
$2B,$2A,$29,$28,$27,$26,$25,$24,$23,$22
$21,$20,$1F,$1E,$1D,$1C,$1B,$1A,$19,$18
$17,$16,$15,$14,$13,$12,$11,$10,$0F,$0E
$0D,$0C,$0B,$0A,$09,$08,$07,$06,$05,$04
$03,$02
*********************************************************
*
SUBRUTINA DE COMPARACIÓN
*
*********************************************************
COMPARACION
LDA VAR1
;CARGA EL ACUMULADOR CON EL VALOR LEIDO
CMP DATOS,X
;COMPARA EL VALOR DE RECEPCIÓN CON LA TABLA DATOS
BLS UNO
;SI ES IGUAL SALTA LA ETIQUETA 1
INCX
;SI NO ES IGUAL INCREMENTA REGISTRO INDICE
CMPX #$1E
;COMPARA EL REGISTRO INDICE CON 30
BHI PRUEBA
;SI ES MAYOR SALE DE LA INTERRUPCIÒN
BRA COMPARACION ;SI NO ES MAYOR RETORNA AL CICLO INDEXADO DE LA TABLA
UNO
CLRA
LDA TABLA1,X
STA
MOV
JSR
JSR
BRA
VAR3
VAR3,T1CH0L
MODADC
PROCESO
PRUEBA
;CARGA EL ACUMULADOR CON EL VALOR QUE CORRESPONDE DE LA BASE DE
;DATOS TABLA1(CICLO DE TRABAJO PWM) CON EL VALRO DEL REGISTRO INDICE
;DESCARGA EL VALOR DEL CILO DE TRABAJO DEL PWM
;MUEVE ESTE VALOR AL CANAL Y MODULO PWM
;SUBRUTINA MUDULO ADC
;SUBRUTINA TRANSMISION DE DATOS
;FIN DE SUBRUTINA
Fuente: diagrama realizado durante el desarrollo del presente trabajo.
Para la elección de la posición del dato, la interfaz del usuario fue diseñada para que
existieran dos opciones de selección.
Figura 44. Opciones de selección posición del dato.
selector
Fuente: configuración realizada durante el desarrollo del presente trabajo.
91
En la figura 44, se detalla un selector. Si envía un “1” (True), significa que el usuario ha
elegido el modo de operación donde puede controlar la dirección y la velocidad del envío
del dato indexado, es decir, controla la dirección y la velocidad del motor. En el caso
contrario, dibujo de la derecha, si el selector envía un “0” (False), significa que el usuario
ha elegido el modo de operación con el controlador “Grados”, el cual es un slide (manija
deslizable) de giro donde se controla la velocidad y dirección del motor de una manera
más rustica e imprecisa (el movimiento del motor va ser mas brusco). En la figura
siguiente se observa a la izquierda la presentación del control del dato indexado y a la
derecha el control del dato a través de un slide.
En la figura 45 se observa los controles pertenecientes a la interfaz de control, mediante
los cuales el operario podrá dar movimiento al servomotor para ajustar la posición de la
antena. Una descripción detallada de esta interfaz y su forma de operación se encuentra
detallada en el anexo #7
Figura 45. Panel de control selección posición dato.
Fuente: configuración realizada durante el desarrollo del presente trabajo.
4.8.2 Recepción del nivel de la señal del enlace de microondas. Dentro del diseño del
presente prototipo, se requería contar con un instrumento que permitiera establecer el
92
nivel de potencia de recepción del enlace de microondas, el cual sería la base para definir
la posición que debía tener el servomotor.
4.8.2.1 Circuito receptor del nivel de potencia de la señal del enlace de microondas.
Para poder tener acceso al dato del nivel de potencia de recepción de la señal establecida
entre las dos antenas de microondas, se procedió a montar el circuito de la figura 46.
Figura 46. Circuito electrónico receptor de potencia de la señal del enlace de microondas.
CONECTOR POTENCIA ANTENA
Señal variable proveniente
de la antena (Voltaje)
2K
(Trimer)
100K
+5V
PTD4 / T1CH0
PTA0 / KBD1
PTA1 / KBD1
PTA2 / KBD2
PTA3 / KBD3
PTA4 / KBD4
PTA5 / KBD5
PTA6 / KBD6
VDD
VSS
IRQ
PTE0/RxD
PTE0/TxD
PTC4
PTC3
PTC2
PTC1
RST
OSC1
OSC2
CGMXFC (PLL)
VSSA (PLL)
MCU-GP32
PTC0
2.7K
(Trimer)
PTA7 / KBD7
GND
PTD5 / T1CH1
GND
PTB0 / AD0
A
PTD3/ SPSCK
A
PTB1 / AD1
A
PTD2/ MOSI
A
PTB2 / AD2
A
PTD1/ MISO
A
PTB3 / AD3
A
GND
1.5uF
PTD0/SS
K
PTB4 / AD4
K
PTB5 / AD5
K
PTB6 / AD6
K
PTB7 / AD7
K
VDDAD / VREFH (ADC)
K
VSSAD / VREFL (ADC)
K
Fuente: diagrama realizado durante el desarrollo del presente trabajo.
La antena receptora emite una señal correspondiente al nivel de potencia de la señal
recibida y que es medible en voltaje. Esta señal se conectó a uno de los pines del
93
microcontrolador que está definido de fábrica como entrada/salida AD (Análoga Digital),
correspondiente al pin 30 (Puerto B7 de este dispositivo) a través de un filtro pasabajos
sugerido por el fabricante del módulo. En el siguiente numeral se dará la respectiva
explicación sobre el tratamiento que se le dio a esta señal.
Como el nivel de potencia de la señal recibida variaba según el porcentaje de alineación
que tuvieran las dos antenas de microondas involucradas (receptora y transmisora), el
valor
del
voltaje
recibido
por
el
microcontrolador
también
se
modificaba
proporcionalmente, es decir, que a mayor (óptima) alineación, mayor era el valor del
voltaje recibido y lo contrario, a menor o deficiente alineación, el valor del voltaje recibido
por el microcontrolador disminuía.
Para poder recibir y hacer la respectiva conversión de la señal de entrada de la antena
receptora de microondas, fue necesario habilitar las entradas ADC, Voltajes de referencia
alto y bajo (entradas ADC, Convertidores Análogo Digital), del microcontrolador, mediante
sus pines 31 y 32. Estas entradas operan en el rango de 0 voltios(alineación deficiente) a
3.7 voltios (alineación muy buena).
4.8.2.2 Configuración del nivel de la señal del enlace de microondas en el
microcontrolador. Para la determinar la ubicación de la antena no fue necesario el uso
de sensores como inicialmente se había planteado, puesto que esta función fue
desarrollada por el microcontrolador, que actúa de manera tal que percibe los diferentes
valores enviado por el pin Nº6 del integrado de la antena. Para recibir esta señal, en el
microcontrolador se utilizó el conversor análogo digital (pin 30).
La potencia de la antena se reflejó por una variación de voltaje de 0 a 3.7 VDC. Estos
voltajes fueron la guía para representar el mínimo y el máximo valor de potencia de
recepción de la antena de microondas, los cuales se configuraron en los pines 32 y 31 del
microcontrolador (Voltajes de referencia). Por ende, fue necesario calcular un divisor de
voltaje para obtener el valor de 3.7 voltios y luego llevarlo al pin respectivo (31).
94
Para calcular el divisor de voltaje para la entrada analógica 31, se asumió que una de las
resistencias que conformaba tuviera el valor de 2 KΩ; de esta manera se calculó el valor de la otra resistencia de acuerdo a la siguiente fórmula:
Vout = (R1) / (R1+R2) (Vin)
Despejando, R2 = ((R1)(Vin) / (Vout)) – (R1)
Divisor de voltaje para la entrada 3.7 voltios:
R2 = ((2KΩ)(5V) / (3.7V)) – (2KΩ) = 2.702 KΩ
Cada variación del voltaje emitida por la antena de microondas se representó en un
registro de 8 bits, es decir, que se contó con una resolución de 2^8=256, para la variación
del voltaje antes mencionado.
A continuación, se muestra la parte del código generado en el microcontrolador, para la
respectiva recepción de la señal del nivel de potencia. Los comentarios de cada línea
aparecen después del punto y coma.
*********************************************************
*
SUBRUTINA MODULO ADC
*
*********************************************************
MODADC MOV
#%00100111,ADSCR
;CONFIGURACIÓN CONTINUA Y PIN 7 PUERTO B
CONFUGURADO COMO RECEPTOR
CASA
BRCLR 7,ADSCR,CASA
;SI LA CONVERCIÓN NO SE HA REALIZADO CONTINUA EN
UN BUCLE HASTA QUE SE REALICE
LDA
MOV
STA
ADR
#%00011111,ADSCR
SCDR
;CARGA EL VAOR LEIDO EN EL ACUMULADOR
;SE DESCONECTA EL MODULO ADC
;DESCARGA EL VALOR TOMADO DEL PIN 7 EN EL MODULO
DE TRANSMISION SERIAL
RTS
;FIN SUBRUTINA
95
4.8.2.3 Configuración del nivel de la señal del enlace de microondas en el programa
gráfico de control usado como interfaz para el usuario final. Para cada comparación
de voltaje, el microcontrolador envía un valor entre 0 y 255 al Labview, el cual mediante
un slide muestra el nivel de potencia de recepción, donde 100, corresponde al valor
máximo y el 0 al valor mínimo.
La figura 47 visualiza la configuración realizada en Labview para esta acción, con el
correspondiente slide mostrado en el panel de control.
Figura 47. Configuración nivel de señal potencia de recepción.
Fuente: configuración realizada durante el desarrollo del presente trabajo.
4.8.3 Interfaz de comunicación entre el microcontrolador y programa gráfico de
control usado como interfaz para el usuario final. Finalizada la programación en el
microcontrolador GP32 y la configuración el Labview de cada uno de las acciones y
mecanismos que componen el presente sistema, el siguiente paso consistió en la
configuración del medio de comunicación que permitiera la comunicación entre el
hardware (circuito electrónico completo) y el programa Labview, elegido para establecer la
interfaz gráfica del usuario.
96
Como interfaz de comunicación se escogió el puerto serial (RS232), teniendo en cuenta
que la distancia para establecer un enlace a través de este medio es mucho mayor y más
segura que hacerlo por puerto paralelo, dado que trabaja con voltajes positivos y
negativos, a diferencia de los TTL, que trabajan sólo con voltajes positivos, lo que permite
al puerto serial trabajar en dos estados: encendido (valor binario de 1, transmite una señal
entre -3 y - 25 Voltios) y apagado (valor binario de 0, transmite una señal entre +3 y +25
Voltios).
De igual forma, el puerto serial hace parte del estándar industrial, donde los dispositivos
utilizados a nivel mundial se les exigen como mínimo contar una interfaz RS232 para
establecer una comunicación básica. Además, sus requerimientos de hardware y software
son sencillos y muy baratos. También es compatible con otros estándares, que usan
voltajes más bajos y señales diferenciales que permiten extender la longitud del cable
hasta 300 metros como lo son RS-422 y RS-574.
Hoy en día los computadores vienen sin conector DB9, sin embargo, no existe problema
para su conexión, dado que en el mercado se consiguen adaptadores USB a puerto serie.
Cabe resaltar que la conexión USB directa con el hardware se descartó, por encontrarse
todavía en desarrollo, por ende, requería de tiempo adicional para su implementación, lo
que afectaba el cumplimiento de las actividades programadas para el presente trabajo.
En cuanto a su conexión física, el puerto serial sólo requiere de 3 cables para una
comunicación full dúplex (en los dos sentidos), haciéndolo más práctico en comparación
con el puerto paralelo, que posee 8 líneas de datos, dos o más cables de control y de
tierra.
4.8.3.1 Circuito electrónico interfaz serial. El circuito que compone la implementación
de la conexión serial aparece en la Figura 48. Dado que el microcontrolador GP32 trabaja
con niveles TTL y el puerto serial del computador trabaja con niveles de voltaje, según la
norma RS232, lo que significaba la imposibilidad de conectar estos dos elementos de
manera directa. Por tal razón, se utilizó el integrado MAX 232, cuya tarea fundamental es
convertir los niveles de voltaje de RS232 a TTL para ejecutar la transmisión de datos
97
(desde el computador) y de TTL a RS232 para realizar la recepción de datos (desde el
microcontrolador).
Figura 48. Esquema de conexión puerto serial con el microcontrolador.
PTD4 / T1CH0
PTD5 / T1CH1
PTB0 / AD0
PTB1 / AD1
PTB2 / AD2
PTB3 / AD3
PTB4 / AD4
PTB5 / AD5
PTB6 / AD6
PTB7 / AD7
VDDAD / VREFH (ADC)
VSSAD / VREFL (ADC)
PTA0 / KBD1
PTA1 / KBD1
PTA2 / KBD2
PTA3 / KBD3
PTA4 / KBD4
PTA5 / KBD5
PTA6 / KBD6
1K
1K
A
K
Diodo LED
MCU-GP32
+5V
GND
+5V
VDD
VSS
PTD3/ SPSCK
PTD2/ MOSI
PTD1/ MISO
PTD0/SS
IRQ
PTE0/RxD
PTE0/TxD
PTC4
PTC3
PTC2
PTC1
PTC0
RST
OSC1
OSC2
CGMXFC (PLL)
GND
VSSA (PLL)
PTA7 / KBD7
+5V
10K
5N400
1mu
C3
C4
1mu
1mu
C2
C1
1mu
CONECTOR SERIAL
Fuente: diagrama realizado durante el desarrollo del presente trabajo.
El MAX232 requiere para su funcionamiento de cuatro condensadores electrolíticos, cada
uno de 1µF y ser alimentado por una fuente de 5VDC. Este integrado internamente cuenta
con dos fuentes conmutadas, donde una de ellas junto a los condensadores C3 y C2
adaptan el nivel de voltaje tomado de la alimentación de +5V a +10V. La segunda fuente
conmutada junto a los condensadores electrolíticos C1 y C4, invierten los niveles de
voltaje para obtener -10V. De esta manera, se realiza la adaptación de los voltajes a
niveles RS232 dentro de sus parámetros permitidos.
El MAX232 posee en sus pines 10 y 11 entradas TTL/CMOS y en sus pines 9 y 12 salidas
TTL/CMOS. Para el presente diseño se tomó una entrada y una salida TTL/CMOS: los
98
pines 10 y 9 respectivamente. Cada uno de ellos se conectó con el pin respectivo en el
microcontrolador: el pin 10 (entrada) con el pin 12 del microcontrolador (transmisor) y el
pin 9 (salida) con el pin 13 del microcontrolador (receptor). Estos pines 12 y 13 del
microcontrolador
están
configurados especialmente
para
realizar
este
tipo
de
comunicación serial.
Para verificar que los pines 9 y 10 del MAX232 estuviesen realizando su respectiva
acción, se colocó un diodo led en cada uno de ellos debidamente aterrizados con
resistencias de pull up.
Los pines 11 (entrada TTL/CMOS) y 12 (salida TTL/CMOS) se conectaron mediante diodo
y resistencia, con el fin de evitar que por su no conexión causaran inestabilidad al
MAX232.
Así mismo, el MAX232 posee en sus pines 8 y 13 (entradas RS232) y en sus pines 7 y 14
(salidas RS232). El presente diseño tomó como entrada y salida los pines 8 y 7
respectivamente, los cuales se conectaron a las pines del conector serial, donde el pin 8
(entrada RS232 del MAX232), recibe el pin 3 (Transmisor del puerto serial) y el pin 7
(salida RS232 del MAX232), recibe el pin 2 (Receptor del puerto serial). El pin 5 del
conector serial, es conectado a tierra.
4.8.3.2 Configuración del puerto serial en el microcontrolador. De acuerdo a las
instrucciones descritas en el manual de configuración del microcontrolador utilizado GP32,
la habilitación de la comunicación serial en este dispositivo se establece realizando la
siguiente rutina.
99
**************************************************
*
MODULO COMUNICACIÓN SERIAL
*
**************************************************
MOV
#%00000011,SCBR
;Selecciona 9600 Baudios con un reloj de 4.9152 Mhz
MOV
#%01000000,SCC1
;Activa el SCI
MOV
#%00101100,SCC2
;Activa receptor y transmisor
LDA
SCS1
;condición para borrar bit vacío SCT Tx
CLI
4.8.3.3 Configuración del puerto serial en el programa Labview. Se realizó a través
del módulo que posee este programa llamado Serial Port, donde se configuraron las
características de velocidad de transmisión a 9600 Baudios, con 8 bits de datos, 1 bit de
parada y un tamaño del buffer de 1024. La selección del puerto como su activación es
realizada manualmente por el usuario, es decir el operario podrá seleccionar
manualmente, que puerto va a utilizar para lo comunicación serial.
En la figura 49 se observa el programa desarrollado para la habilitación de este puerto.
Figura 49. Configuración del puerto serial en Labview.
Fuente: configuración realizada durante el desarrollo del presente trabajo.
100
4.9 ACCESO REMOTO AL SISTEMA DE CONTROL.
El sistema de control desarrollado en el presente trabajo, que opera desde la terminal
destinada para este fin (Terminal para el control remoto), actúa desde un sitio diferente al
lugar donde se encuentra ubicado el sistema de control, conformado por la terminal de
interfaz de control del servo, el servo y el dispositivo inalámbrico de microondas que opera
como receptor.
Para poder controlar remotamente este sistema, se realizó un análisis de la forma más
apropiada que debería ser aplicada, teniendo en cuenta que:
Durante la realización de la alineación y respectiva recepción de información a través
del enlace de microondas, es indispensable encontrarse dentro de la sede del centro de
noticias de Caracol (ubicado en La Floresta), porque en el proceso de ubicación de la
antena trasmisora, no sólo se puede localizar la requerida en ese momento, sino que es
posible enlazarse con otra del mismo canal,
ubicada en otro sitio y disponiblepara
unatransmisión diferente. Para esto, el operario que realiza esta accióncuenta con varias
herramientas visuales y de audio, disponibles en el Centro de noticias (pantallas de video
y equipos de radio operación) y de esta forma, estar seguro de que se ha enlazado con la
antena transmisora que corresponde.
El canal Caracol, cuenta con un enlace dedicado de datos ente el Centro de noticias de
La Floresta y el Cerro de La Calera, que corresponde a un enlace LAN (Red de Area
Local) mediante el cual es posible establecer una comunicación por protocolo TCP / IP en
ambos sentidos (Full Duplex).
Los equipos del canal Caracol cuentan con sistema operativo Windows XP
Professional debidamente licenciado.
Evaluadas estas características y las condiciones del medio que originaron el diseño y
construcción del sistema descrito en el presente trabajo, se estableció que el sistema de
acceso remoto más adecuado, seguro y optimo, es el acceso a escritorio remoto, puesto
101
que no requiere de la inversión en software o infraestructura tecnológica. Así mismo,
cuenta con la seguridad establecida para la protección de la red, según políticas internas
del administrador encargado.
Teniendo en cuenta que en la realidad, para habilitar la opción de acceso remoto desde
un computador a otro se debe contar con la autorización respectiva del administrador de
la red (para el presente caso, red de Caracol). El acceso mencionado permite a los dos
equipos de cómputo enlazarse a través de una conexión de red. El control de acceso
remoto a este enlace tiene como fin restringir el acceso de cualquier computador al equipo
instalado en la Calera o al Centro de Noticias, evitando cualquier acción errónea o
malintencionada que pueda generar situaciones indeseadas.
Habiendo superado estas condiciones iniciales, lo siguiente es configurar en cada uno de
los dos computadores algunas opciones que trae el sistema operativo Windows XP
Professional.
Para el presente trabajo, contamos con dos terminales o computadores, que harán las
veces de los dos computadores que se requieren enlazar (el del Cerro La Calera y el del
Centro de Noticias).Ambos equipos fueron conectados a un switch, mediante cable UTP
directo, con el fin de configurar una red pequeña entre los dos.
De esta manera, se le configuró a cada uno una dirección IP en el mismo segmento de
red. Para esto se accedió a la opción en el sistema operativo Inicio / mis sitios de red. Allí
se oprimió el botón derecho del mouse y se escogió la opción, propiedades. Luego, en el
ícono conexión de área local, se oprimió el botón derecho del mouse y se eligió la opción
propiedades. Allí, se seleccionó la opción Protocolo Internet (TCP/IP), luego se oprimió el
botón marcado con propiedades, donde aparece una ventana que permite asignar una
dirección IP de forma manual, como se muestra en la figura 50. A cada uno de los
portátiles se le asignó la siguiente dirección IP:
Computador de la Calera: 19.168.0.13
Computador de La Floresta: 19.168.0.14
102
Figura 50. Configuración de computadores en red.
Fuente: tomada durante el desarrollo del presente trabajo.
Después, se incluyeron ambos computadores en un mismo grupo de trabajo, como se
muestra en la figura 51. Este paso se configuró dirigiéndose a Inicio / Mi PC, oprimiendo
el botón derecho del mouse, seleccionando la opción Propiedades, pasando a la pestaña
Nombre de Equipo. Allí se seleccionó el botón Cambiar, que permite crear un grupo de
trabajo. El nombre asignado fue: A_REMOTO_CALERA.
Realizados estos ajustes a ambos computadores portátiles, se continuó con la
configuración en cada uno de la habilitación del escritorio remoto para el equipo de la
Calera y la respectiva autorización para realizar esta conexión al equipo de La Floresta.
103
Figura 51. Configuración Grupo de Trabajo.
Fuente: tomada durante el desarrollo del presente trabajo.
Para el caso del computador ubicado en el Cerro de la Calera, el cual debe ser accedido
remotamente se le configuró esta opción de la siguiente manera:
A través del botón Inicio, se accedió al ícono de Mi PC.
Se dio clic derecho sobre éste ícono y dentro del menú se accedió a la opción
Propiedades.
104
Allí en la pestaña marcada con la palabra Remoto, se activó la opción: Permitir a los
usuarios conectarse remotamente a este equipo. Ver figura 52.
Luego se confirmaron los cambios.
A continuación se seleccionó la opción seleccionar usuarios remotos, donde se agrega
el usuario al que se permite el acceso remoto a este equipo, en este caso, es el
equipo con IP: 192.168.0.14 (computador de La Floresta).
Figura 52. Configuración de acceso a escritorio remoto.
Fuente: tomada durante el desarrollo del presente trabajo.
En el caso del computador ubicado en La Floresta, una vez agregado y autorizado en la
configuración del equipo de la Calera para acceder a su escritorio remotamente, el equipo
de la Floresta no tuvo inconvenientes de acceso a dicho equipo.
105
Sin embargo, cabe indicar que si hubiese existido algún problema, se hubiera instalado la
opción que trae el CD de instalación del sistema operativo Windows XP Professional:
Conexión a escritorio remoto.
Finalizada la configuración de ambos equipos de cómputo, la forma de acceder a través
del equipo de La Floresta, cada vez que sea necesario, al equipo de La Calera, es
siguiendo los siguientes pasos:
Se da clic en Inicio, luego en la opción Programas, a continuación en Accesorios y por
último en la opción Conexión a Escritorio Remoto. Allí aparecerá una ventana,
solicitando la dirección IP del equipo a quien se desea conectar, se digita la dirección
192.168.0.13. Si el equipo fue configurado con clave de usuario se digita, si no se
oprime el botón de confirmación y se accede remotamente al escritorio del equipo de la
Calera remotamente. Ver figura 53.
Figura 53. Acceso a conexión escritorio remoto.
Fuente: tomada durante el desarrollo del presente trabajo.
106
5. CONCLUSIONES
El diseño y desarrollo de las tareas destinadas para lograr el objetivo propuesto del
presente trabajo de grado, motivaron la aplicación de diferentes opciones de solución, que
mediante su ejercicio, lograron que sus participantes tuvieran el suficiente criterio, basado
en el conocimiento adquirido durante la etapa de aprendizaje, para alcanzar la opción más
apropiada de resolución.
Durante la construcción del enlace de microondas prototipo, se evidenció el
comportamiento real de sus componentes (transmisor y receptor) a la hora de establecer
el enlace entre ellos, as{i como, el comportamiento de la señal al encontrar obstáculos o
elementos de reflexión y refracción.
Así mismo, la investigación realizada motivó la profundización en el manejo y
configuración de los programas utilizados que llevaron al desarrollo de las diferentes
acciones que se requerían ejecutar.
Se logró con un alto grado de satisfacción simular el enlace de microondas, utilizado por
el centro de noticias del canal caracol, en la transmisión de las noticias desde diferentes
sitios de Bogotá.
107
6. RECOMENDACIONES
El permanente avance tecnológico en el campo de las comunicaciones, permite que el
presente diseño propuesto sea complementado con un sistema de posicionamiento global
que permita la ubicación de la antena transmisora. Esto generaría un costo adicional en
equipos y en servicio, pero brindaría una gran ventaja con relación a la rapidez de
ubicación consumiendo menos tiempo, aspecto importante en las actividades propias de
una canal de noticias.
Las características propias de la topografía de la ciudad de Bogotá generan dificultades
en la transmisión de microondas, así como también los edificios de gran altura; sería
interesante analizar la posibilidad de tener un pedestal tipo telescópico que nos permita
elevar el transmisor para superar obstáculos y edificios bajos y no tener problemas con
reflexión de las ondas y absorción de las mismas en árboles o arbustos densos.
Debido a la permanente actividad de la antena receptora de microondas, bajo las
variaciones climáticas y a la importante función que desempeña, se recomienda contar
con un equipo de respaldo en el mismo sitio, que puede habilitarse en caso de que el
existente salga de operación.
108
BIBLIOGRAFÍA
CARDAMA AZNAR, Angel y otros. Antenas. España: Ediciones UPC, Universidad
Politecnica de Cataluña, 2002. 127p.
RAMIREZ ARTUNDUAGA, Jaime. Antenas. Bogotá: Editorial Universidad de San
Buenaventura, 2008.
VESGA FERREIRA, Juan Carlos. Microcontroladores Motorola-Freescale: programación,
familias y sus distintas aplicaciones en la industria. Bogotá: Alfa Omega Colombiana,
2007. 1p.
Enlaces de Internet:
AVIANCIÓN
ULM,
[Internet]
[Consultado
4
de
julio
de
2010].
Disponible
enhttp://www.aviacionulm.com/definicionytipos.html.
CENTRAL RECEIVE SYSTEM. [Internet] [Consultado octubre 11 de 2009] Disponible en:
http://www.mrcbroadcast.com/files/other/products_88_460100.pdf
CIDETEC,
[Internet]
[Consultado
17
de
abril
de
2010].
Disponible
en
http://www.cidetec.ipn.mx/profesores/jcrls/doctos/serial.pdf.
CONFIGURAR EQUIPOS, [Internet] [Consultado 12 de agosto de 2010]. Disponible en
www.configurarequipos.com/doc499.html.
DIRECT
INDUSTRY,
[Internet]
[Consultado
7
de
julio
de
2010].
Disponible
enhttp://pdf.directindustry.es/pdf/weg/motor-alta-tension/12491-25465-_8.html.
ELECTRICIDAD Y AUTOMATISMOS, [Internet] [Consultado 6 de julio de 2010].
Disponible enhttp://www.nichese.com/motor.html.
109
IEEE, XBee-Pro 802.15.4 OEM. Estado Unidos, Octubre, 2005, pag.4.
IKKARO,
[Internet]
[Consultado
7
de
julio
de
2010].
Disponible
enhttp://www.ikkaro.com/Control%20de%20servomotores%20en%20Arduino.
I+D
ELECTRÓNICA,
[Internet]
[Consultado
20
de
julio
de
2010].
Disponible
enhttp://www.didacticaselectronicas.com/index.php?page=shop.product_details&category
_id=68&flypage=flypage.tpl&product_id=50&option=com_virtuemart&Itemid=3.
INTRODUCCIÓN AL MICROCONTROLADOR, [Internet] [Consultado 18 de julio de 2010].
Disponible enhttp://usuarios.multimania.es/sfriswolker/pic/uno.htm.
KIOSKEA.NET,
[Internet]
[Consultado
18
de
abril
de
2010].
Disponible
en
http://es.kioskea.net/contents/bluetooth/bluetooth-fonctionnement.php3.
LA ENCICLOPEDIA LIBRE UNIVERSAL EN ESPAÑOL, [Internet] [Consultado 4 de julio
de 2010]. Disponible enhttp://enciclopedia.us.es/index.php/Motor_t%C3%A9rmico.
LAJARA VIZCAÍNO, José Rafael y Pelegrí Sebastiá, José. Labview Entorno gráfico de
programación. México D.F.: Alfaomega Grupo Editor S.A., 2007, 115p.
MAILXMAIL.COM,
[Internet]
[Consultado
4
de
julio
de
2010].
Disponible
enhttp://www.mailxmail.com/curso-motores-combustion-interna/que-es-motorcomponentes-funcionamiento.
MICROCONTROLADORES, [Internet] [Consultado 18 de julio de 2010]. Disponible
enhttp://www.terra.es/personal/fremiro/arquitectura.htm.
MONOGRAFÍAS.COM, [Internet] [Consultado 22 de julio de 2010]. Disponible
enhttp://www.monografias.com/trabajos60/servo-motores/servo-motores.shtml.
110
MOTORES DE CORREINTE CONTINUA (BLOG), [Internet] [Consultado 6 de julio de
2010]. Disponible en
http://www.google.com.co/imgres?imgurl=http://1.bp.blogspot.com/_8jaslqrlTQg/SOTRkXi
hVHI/AAAAAAAAAC0/Opqn6EkbZuk/s320/Motor%2Bserie%2B2.JPG&imgrefurl=http://elvi
sacarrillog.blogspot.com/2008/09/motor-seriecc.html&usg=__jPgWdS5ZzE3P79xtcKKyEgHM2_Q=&h=240&w=320&sz=26&hl=es&start
=53&sig2=liBSD9qxlwRugLzUaiDFCA&um=1&itbs=1&tbnid=te0kKneT3Eg7HM:&tbnh=89
&tbnw=118&prev=/images%3Fq%3Dmotor%2Bserie%26start%3D40%26um%3D1%26hl
%3Des%26sa%3DN%26ndsp%3D20%26tbs%3Disch:1&ei=2apETLHJGsGclgfAv5nTDQ.
MOTORES DE EXCITACIÓN SHUNT, [Internet] [Consultado 22 de julio de 2010].
Disponible en
http://www2.ubu.es/ingelec/ingelect/Montse/Web/MotorShunt/motor_shunt.htm.
PETROQUÍMICA Y SOCIEDAD, [Internet] [Consultado 4 de julio de 2010]. Disponible
enhttp://bibliotecadigital.ilce.edu.mx/sites/ciencia/volumen1/ciencia2/39/html/sec_10.html
PLANETA
SEDNA,
[Internet]
[Consultado
5
de
julio
de
2010].
Disponible
enhttp://www.portalplanetasedna.com.ar/motor_electrico.htm.
ROBOTS,
[Internet]
[Consultado
5
de
julio
de
2010].
Disponible
enhttp://axxon.com.ar/rob/MotorPP_basico.htm.
SAT-NMS,
[Internet]
[Consultado
septiembre
20
de
2009]
Disponible
en:
http://www.satnms.com/en/products/acu.html
SCRIBD,
[Internet]
[Consultado
5
de
julio
de
2010].
Disponible
2010].
Disponible
enhttp://www.scribd.com/doc/2448049/Manual-de-motores-electricos.
SCRIBD,
[Internet]
[Consultado
5
de
julio
de
enhttp://www.scribd.com/doc/15980578/Motor-de-Corriente-Alterna.
111
SERVOMOTORES,
[Internet]
[Consultado
20
de
julio
de
2010].
Disponible
enhttp://cfievalladolid2.net/tecno/cyr_01/robotica/sistema/motores_servo.htm#PWM.
SUPERROBÓTICA.COM, [Internet] [Consultado 20 de julio de 2010]. Disponible
enhttp://www.superrobotica.com/Servosrc.htm.
TARINGA INTELIGENCIACOLECTIVA, [Internet] [Consultado 22 de julio de 2010].
Disponible
enhttp://www.taringa.net/comunidades/serviciotecnico/174593/Mi-un-puerto-
USB-da-Electricidad.html.
UNIVERSIDAD DE ALICANTE, [Internet] [Consultado 20 de agosto de 2010]. Disponible
enhttp://www.aurova.ua.es:8080/proyectos/dpi2005/docs/publicaciones/pub09ServoMotores /servos.pdf.
UNIVERSIDAD SERGIO
ARBOLEDA, [Internet] [consultado 30 de octubre de 2009].
Disponible en www.usergioarboleda.edu.co/proyecto_espacial/ccontrol.html
112
ANEXOS
ANEXO 1
PRESENTACIÓN FINAL PROTOTIPO SISTEMA DE CONTROL REMOTO PARA
ANTENA DE MICROONDAS
Interfaz gráfica para el usuario final diseñada en Labview.
113
Circuito encargado del control del sistema.
Antena Receptora (Estación fija controlada por el servomotor).
114
Antena Transmisora (Estación móvil).
Conjunto Antenas (Receptora y Transmisora).
115
ANEXO 2
ESQUEMÁTICO CIRCUITO ELECTRÓNICO
116
ANEXO 3
CÓDIGO PROGRAMA DISEÑADO PARA EL MICROCONTROLADOR
RAM
EQU
$0040
FLASH EQU
$8000
VRESERT EQU
FFF
EQU
$FFFE
$FFF6
ORG
RAM
VAR1
DS
2
VAR2
DS
2
CONT
DS
2
VAR3
DS
2
ORG
;asignación de variables
FLASH
**************************************************
*
INICIO BASES DE DATOS DE COMPARACIÓN
*
**************************************************
DATOS
DB
$40,$41,$42,$43,$44,$45,$46,$47,$48,$49
DB
$4A,$4B,$4C,$4D,$4E,$4F,$50,$51,$52,$53
DB
$54,$55,$56,$57,$58,$59,$5A,$5B,$5C,$5D
DB
$5E,$5F,$60,$61,$62,$63,$64,$65,$66,$67
DB
$68,$69
TABLA1 DB
$2B,$2A,$29,$28,$27,$26,$25,$24,$23,$22
DB
$21,$20,$1F,$1E,$1D,$1C,$1B,$1A,$19,$18
DB
$17,$16,$15,$14,$13,$12,$11,$10,$0F,$0E
DB
$0D,$0C,$0B,$0A,$09,$08,$07,$06,$05,$04
DB
$03,$02
117
INICIO
bset
0,CONFIG1
MOV
;desactivacion watch dog
#$02,CONFIG2
CLRA
CLRH
CLRX
MOV
#$FF,DDRA
CLR
PORTA
;configuración puerto A como salida
**************************************************
*
MODULO COMUNICACIÓN SERIAL
*
**************************************************
MOV
#%00000011,SCBR
;Selecciona 9600 Baudios con un reloj de 4.9152 Mhz
MOV
#%01000000,SCC1
;Activa el SCI
MOV
#%00101100,SCC2
;Activa recetor y transmisor
LDA
SCS1
;condición para borrar bit vacío SCT Tx
CLI
*********************************************************
*
MODULO PWM
*
*Pasos para la configuracion optima del timer:
*
*
*
*1. Se desahabilita la interrupcion por TIM, TOIE=0
*2. Se detiene el TIM, TSTOP = 1
*3. Se borra el TIM,TRST=1
*
*
*
*4. Se borra el prescalador, en este caso se
*
* configura a 64, el reloj interno se divide en 64
*
*5. Se establecen los valores de rebosamiento en los
*
* registros TMODH/L. Para el caso el tiempo es: 57mS *
*6. Se dehabilita el TIM para interrupción TOIE = 0
*7. Se desahabilita el reset del TIM, TRST=0
*8. Activa el contador del TIM, TSTOP=0
*
*
*
*********************************************************
118
MOV
#$FF,DDRD
CLR
PORTD
MOV
#$36,T1SC
MOV
;CONFIGURACION DEL PUERTO D COMO SALIDA
;PASOS 1,2,3 Y 4
#$03,T1MODH
;PASO 5
MOV
#$80,T1MODL
;PASO 5
MOV
#$00,T1CH0H
MOV
#$4A,T1CH0L
MOV
#%00101010,T1SC0
MOV
#$06,T1SC
;SE INICIA CON EL 8% DE SERVICIO
;PASO 6,7 Y 8
;CONFIGURACION DEL PREESTALADOR A 64
*********************************************************
*RUTINA DE INTERRUPCIÓN MÓDULO COMUNICACION SERIAL
*
*********************************************************
MAIN:
JMP MAIN
;BUCLE DE ESPERA PARA LA INTERRUPCIÓN
RXEVENT:
;INICIO DE LA INTERRUPCIÓN
CLRX
;CLAREO EL REGISTRO INDICE
LDA SCS1
;BORRA EL FLAG DE RECEPCIÓN
LDA SCDR
;LEE EL CARACTER ENTRANTE
STA VAR1
;DESCARGA EL VALOR ENTRANTE EN VAR1
MOV VAR1,PORTA
;MUEVE EL VALOR ENTRANTE AL PUERTO A
JSR MODADC
;VA A LA SUBRUTINA DEL MODULO ADC
JSR PROCESO
;VA A LA SUBRUTINA DE TRANSMISIÓN
BRA COMPARACION
PRUEBA1 BRA
EndIRQ
RTI
BRA MAIN
EndIRQ
;VA A LA SUBRUTINA DE COMPORACIÓN
;SALTA A LA ETIQUETA FIN DE INTERUPCIÓN
;FIN DE INTERUPCIÓN
;SALTA A BUCLE DE ESPERA
119
*********************************************************
*
SUBRUTINA DE COMPARACIÓN
*
*********************************************************
COMPARACION
LDA
VAR1
;CARGA EL ACUMULADOR CON EL VALOR LEIDO
CMP
DATOS,X
;COMPARA EL VALOR DE RECEPCIÓN CON LA TABLA DATOS
BLS
UNO
;SI ES IGUAL SALTA LA ETIQUETA 1
INCX
;SI NO ES IGUAL INCREMENTA REGISTRO INDICE
CMPX
BHI
BRA
UNO
#$1E
;COMPARA EL REGISTRO INDICE CON 30
PRUEBA
;SI ES MAYOR SALE DE LA INTERRUPCIÒN
COMPARACION
;SI NO ES MAYOR RETORNA AL CICLO INDEXADO DE LA TABLA
CLRA
LDA
TABLA1,X
;CARGA EL ACUMULADOR CON EL VALOR QUE CORRESPONDE DE
LABASE DE DATOS TABLA1(CICLO DE TRABAJO PWM) CON EL
VALOR DEL REGISTRO INDICE
STA
MOV
VAR3
;DESCARGA EL VALOR DEL CILO DE TRABAJO DEL PWM
VAR3,T1CH0L
;MUEVE ESTE VALOR AL CANAL Y MODULO PWM
JSR
MODADC
;SUBRUTINA MUDULO ADC
JSR
PROCESO
;SUBRUTINA TRANSMISION DE DATOS
BRA
PRUEBA
;FIN DE SUBRUTINA
*********************************************************
*
SUBRUTINA MODULO ADC
*
*********************************************************
MODADC MOV
#%00100111,ADSCR
;CONFIGURACIÓN CONTINUA Y PIN 7 PUERTO B
CONFUGURADO COMO RECEPTOR
CASA
BRCLR 7,ADSCR,CASA
;SI LA CONVERCIÓN NO SE HA REALIZADO CONTINUA EN
UN BUCLE HASTA QUE SE REALICE
LDA
MOV
STA
ADR
#%00011111,ADSCR
SCDR
;CARGA EL VAOR LEIDO EN EL ACUMULADOR
;SE DESCONECTA EL MODULO ADC
;DESCARGA EL VALOR TOMADO DEL PIN 7 EN EL MODULO
DE TRANSMISION SERIAL
RTS
;FIN SUBRUTINA
120
MMMM
BCLR
PSHH
7,T1SC0
PULH
RTI
PROCESO
BRCLR 7,SCS1,*
MOV #$0013,SCDR
BRCLR 7,SCS1,*
RTS
ORG VRESERT
DW
INICIO
ORG $FFE4
DW
RXEVENT
ORG
DW
FFF
MMMM
121
ANEXO 4
DIAGRAMA FLUJO PROGRAMA DISEÑADO EN LABVIEW
INICIO
Configuración
Comunicación Serial
Transmisión
Recepción
Nivel de
potencia =
Dato Recibido
Datos Manúal no si Incrementa o decrementa Posición Posición>
=0 Incrementa o decrementa Posición no si Posición>
=30 Posición<
=10 si Ilumina
Zona 1
no no no Ilumina
Posición<
=21 si Ilumina
Zona 3
Transmitir =Arreglo,
Posición
122
si Zona 2
ANEXO 5
HOJA DE DATOS MÓDULO XBEE – PRO
123
ANEXO 6
CONFIGURACIÓN PROGRAMA X-CTU PARA ESTABLECIMIENTO DEL ENLACE
CON EL MÓDULO XBEE PRO
Para el establecimiento del enlace entre las dos antenas transmisor y receptor, el módulo
Xbee Pro, viene con un programa de fábricaX-CTU, que permite realizar la configuración
de los parámetros necesarios para el establecimiento del enlace entre las dos antenas.
Para esto es necesario energizar los dos módulos que harán parte del enlace.Ambos
pueden ser conectados a dos computadores diferentes ó en su defecto uno a un
computador y el otro alimentado por una pila. Luego se carga el programa apareciendo la
siguiente ventana.
Figura 1. Ventana Inicio.
En esta ventana aparece en primer término la pestaña PC Settings, donde se realiza la
configuración del computador y del módulo con su respectiva antena que se encuentra
conectado a éste. De esta forma, se habilita en la ventana Select Com Port, el puerto
donde se encuentra ubicada (USB Serial Port), el cual se selecciona y luego al lado
124
derecho se configura la velocidad a la que irá a trabajar dicho puerto. Cabe indicar, que
esta configuración debe ser la misma para el otro módulo que cumple el papel de
transmisor. Luego se accede a la opción Test/Query, la cual realiza un test para verificar
la comunicación entre el computador y el módulo conectado a él.
Figura 2. Habilitación conexión puerto serial (USB)
Luego se procede a configurar la identificación de cada módulo, para esto, en la pestaña
Modem Configuration, Networking & Security, se le asigna una dirección al módulo que
está conectado al computador utilizando la opción MY e igualmente se asigna la dirección
de destino en la opción DL. Para ambos módulos se deben configurar las dos direcciones,
pero en sentidos opuestos, por ejemplo, si al módulo transmisor se le asignó la dirección
123 (MY) y como destino la 321 (DL), entonces al módulo receptor se le debe asignar
como dirección 321 (MY) y como destino 123 (DL).
125
Figura 3. Asignación de dirección a cada módulo.
A continuación se establece la comunicación entre ambos módulos, mediante la pestaña
Range Test. Antes de Iniciar se activa la opción RSSI (Indicador de Fuerza de la Señal de
Recepción) y luego se presiona el botón de inicio (Start).
Figura 4. Establecimiento del enlace.
126
ANEXO 7
MANUAL DE OPERACIÓN SISTEMA PROTOTIPO CONTROL REMOTO ANTENA DE
MICROONDAS
PÁNEL DE CONTROL DE USUARIO
Figura 1. Ventana de comandos.
127
1. OPCIONES Y COMANDOS
1.1 INICIO COMUNICACIÓN
Para comenzar la comunicación entre el software de control y el hardware, se debe
habilitar el “Número de puerto”(A).Este número corresponde al puerto donde se conecta
físicamente el cable serial que comunica el hardware (circuito de control) con el
computador donde se encuentra instalado programa de control. Inmediatamente después
se debe pulsar el botón “HABILITAR”(B) para iniciar el programa CONTROL REMOTO
DE ANTENA.Una vez hecho esto,se debe seleccionar el modo de operación (D). En este
punto, si se requiere que la antena se mueva hasta una posición que ya es conocida, se
escoge la opción “AUTOMATICO” en (D). Cuando no se conoce la posición y se debe
buscar la señal, se selecciona MANUAL en (D).
Cuando el programa está en ejecución, en el indicador de “COMUNICACIÓN” (C) se
muestran los datos de la potencia de recepción de la antena en código binario desde
00000000 hasta 11111111; según este nivel(cuando el LED está apagado corresponde a
un nivel “0” y cuando está encendido corresponde a “1”).
Figura 2. Configuración inicio de comunicación.
A
B
C
D
128
1.2 CONTROL MANUAL
En primer lugar, moviendo los interruptores de “VELOCIDAD” (E)y “DIRECCION” (F) se
selecciona la opción deseada para operar la antena. Escogida uno de estas opciones, se
pulsatantas veces como se requiera, el botón “MOVER MOTOR” (G) en la ventana
CONTROL MANUAL hasta que se obtenga la máxima señal posible. Cuando se pulsa
“MOVER MOTOR”, la aguja de posición (H) se moverá según el la “DIRECCION” Y “VELOCIDAD” escogidos. La opción de “VELOCIDAD” “RAPIDO” permite un movimiento grueso y en el modo
“DESPACIO” el movimiento de la antena es fino.
En el sentido “S.A.H.” (Sentido Anti Horario), como su nombre lo indica, la antena se mueve en sentido contrario al giro de las manecillas del reloj y en “S.H.” (Sentido Horario) la antena se mueve en la misma forma en que lo hacen las manecillas de un reloj.
Figura 3. Control manual.
G
E
F
H
129
1.3 CONTROL AUTOMATICO DE POSICIÓN.
En este cuadro de AUTOMÁTICO, usando el cursor, se mueve la aguja (I), hasta la
posición escogida y la antena se ubicará en ese sitio de manera automática.
Figura 4. Control de posición automático.
I
1.4 NIVEL DE SEÑAL DE RECEPCIÓN
Contiene la lectura de la posición de la antena, esta sección de la ventana indica el nivel
(fuerza) de la señal de recepción, que varía entre 0 y 100%, en dos modos, grafico de
barra (J)e indicador analógico (K). Esta información es actualizada en tiempo real.
Figura 5. Nivel señal potencia de recepción.
J
K
130
1.5 MAPA
El mapa corresponde a la ciudad de Bogotá D.C. (Distrito Capital), Colombia, dividido en 3
zonas. Cuando la antena receptora se encuentre dirigida hacia cualquiera de estas zonas
y se halle dentro de los límites de una de ellas, se encenderá un led (L) en la pantalla,
indicando la zona donde se encuentra apuntando para hacer la búsqueda de la señal de
la antena transmisora.
Figura 5. Nivel señal potencia de recepción.
L
131