Tecnologías de Control Unidad 1 - Lecturas complementarias (fecha
Anuncio

Tecnologías de Control
Unidad 1 - Lecturas complementarias
(fecha de revisión 30/03/00)
Automatización
Sistema de fabricación diseñado con el fin de usar la capacidad de las máquinas para llevar
a cabo determinadas tareas anteriormente efectuadas por seres humanos, y para controlar la
secuencia de las operaciones sin intervención humana. El término automatización también se ha
utilizado para describir sistemas no destinados a la fabricación en los que dispositivos programados
o automáticos pueden funcionar de forma independiente o semiindependiente del control humano.
En comunicaciones, aviación y astronáutica, dispositivos como los equipos automáticos de
conmutación telefónica, los pilotos automáticos y los sistemas automatizados de guía y control se
utilizan para efectuar diversas tareas con más rapidez o mejor de lo que podría hacerlo un ser
humano.
Elementos de la automatización
La fabricación automatizada surgió de la íntima relación entre fuerzas económicas e
innovaciones técnicas como la división del trabajo, la transferencia de energía y la mecanización de
las fábricas, y el desarrollo de las máquinas de transferencia y sistemas de realimentación, como se
explica a continuación.
La división del trabajo (esto es, la reducción de un proceso de fabricación o de prestación de
servicios a sus fases independientes más pequeñas) se desarrolló en la segunda mitad del siglo
XVIII, y fue analizada por primera vez por el economista británico Adam Smith en su libro
Investigación sobre la naturaleza y causas de la riqueza de las naciones (1776). En la fabricación,
la división del trabajo permitió incrementar la producción y reducir el nivel de especialización de los
obreros.
La mecanización fue la siguiente etapa necesaria para la evolución hacia la automatización.
La simplificación del trabajo permitida por la división del trabajo también posibilitó el diseño y
construcción de máquinas que reproducían los movimientos del trabajador. A medida que
evolucionó la tecnología de transferencia de energía, estas máquinas especializadas se
motorizaron, aumentando así su eficacia productiva. El desarrollo de la tecnología energética
también dio lugar al surgimiento del sistema fabril de producción, ya que todos los trabajadores y
máquinas debían estar situados junto a la fuente de energía.
La máquina de transferencia es un dispositivo utilizado para mover la pieza que se está
trabajando desde una máquina herramienta especializada hasta otra, colocándola de forma
adecuada para la siguiente operación de maquinado. Los robots industriales, diseñados en un
principio para realizar tareas sencillas en entornos peligrosos para los trabajadores, son hoy
extremadamente hábiles y se utilizan para trasladar, manipular y situar piezas ligeras y pesadas,
realizando así todas las funciones de una máquina de transferencia. En realidad, se trata de varias
máquinas separadas que están integradas en lo que a simple vista podría considerarse una sola.
En la década de 1920 la industria del automóvil combinó estos conceptos en un sistema de
producción integrado. El objetivo de este sistema de línea de montaje era abaratar los precios. A
pesar de los avances más recientes, éste es el sistema de producción con el que la mayoría de la
gente asocia el término automatización.
Realimentación
Un elemento esencial de todos los mecanismos de control automático es el principio de
realimentación, que permite al diseñador dotar a una máquina de capacidad de autocorrección. Un
ciclo o bucle de realimentación es un dispositivo mecánico, neumático o electrónico que detecta una
magnitud física como una temperatura, un tamaño o una velocidad, la compara con una norma
preestablecida, y realiza aquella acción preprogramada necesaria para mantener la cantidad
medida dentro de los límites de la norma aceptable.
El principio de realimentación se utiliza desde hace varios siglos. Un notable ejemplo es el
regulador de bolas inventado en 1788 por el ingeniero escocés James Watt para controlar la
Tecnologías de Control - Lecturas complementarias 1 - Hoja 1/28
velocidad de la máquina de vapor. El conocido termostato doméstico es otro ejemplo de dispositivo
de realimentación.
En la fabricación y en la producción, los ciclos de realimentación requieren la determinación
de límites aceptables para que el proceso pueda efectuarse; que estas características físicas sean
medidas y comparadas con el conjunto de límites, y que el sistema de realimentación sea capaz de
corregir el proceso para que los elementos medidos cumplan la norma. Mediante los dispositivos de
realimentación las máquinas pueden ponerse en marcha, pararse, acelerar, disminuir su velocidad,
contar, inspeccionar, comprobar, comparar y medir. Estas operaciones suelen aplicarse a una
amplia variedad de operaciones de producción, por ejemplo el fresado, el embotellado y el refinado.
Uso en informática
El advenimiento del ordenador o computadora ha facilitado enormemente el uso de ciclos de
realimentación en los procesos de fabricación. En combinación, las computadoras y los ciclos de
realimentación han permitido el desarrollo de máquinas controladas numéricamente (cuyos
movimientos están controlados por papel perforado o cintas magnéticas) y centros de maquinado
(máquinas herramientas que pueden realizar varias operaciones de maquinado diferentes).
La aparición de las combinaciones de microprocesadores y computadoras ha posibilitado el
desarrollo de la tecnología de diseño y fabricación asistidos por computadora (CAD/CAM).
Empleando estos sistemas, el diseñador traza el plano de una pieza e indica sus dimensiones con
la ayuda de un ratón o mouse, un lápiz óptico u otro dispositivo de introducción de datos. Una vez
que el boceto ha sido terminado, la computadora genera automáticamente las instrucciones que
dirigirán el centro de maquinado para elaborar dicha pieza.
Otro avance que ha permitido ampliar el uso de la automatización es el de los sistemas de
fabricación flexibles (FMS). Los FMS han llevado la automatización a las empresas cuyos bajos
volúmenes de producción no justificaban una automatización plena. Se emplea una computadora
para supervisar y dirigir todo el funcionamiento de la fábrica, desde la programación de cada fase
de la producción hasta el seguimiento de los niveles de inventario y de utilización de herramientas.
Asimismo, aparte de la fabricación, la automatización ha influido enormemente sobre otras
áreas de la economía. Se utilizan computadoras pequeñas en sistemas denominados procesadores
de textos, que se están convirtiendo en la norma de la oficina moderna. Esta tecnología combina
una pequeña computadora con una pantalla de monitor de rayos catódicos, un teclado de máquina
de escribir y una impresora. Se utiliza para editar texto, preparar cartas modelo personalizadas para
su destinatario y gestionar listas de correo y otros datos. El sistema es capaz de realizar muchas
otras tareas que han incrementado la productividad de la oficina. Véase Ofimática.
La automatización en la industria
Muchas industrias están muy automatizadas, o bien utilizan tecnología de automatización en
alguna etapa de sus actividades. En las comunicaciones, y sobre todo en el sector telefónico, la
marcación, la transmisión y la facturación se realizan automáticamente. También los ferrocarriles
están controlados por dispositivos de señalización automáticos, que disponen de sensores para
detectar los convoyes que atraviesan determinado punto. De esta manera siempre puede
mantenerse un control sobre el movimiento y ubicación de los trenes.
No todas las industrias requieren el mismo grado de automatización. La agricultura, las
ventas y algunos sectores de servicios son difíciles de automatizar. Es posible que la agricultura
llegue a estar más mecanizada, sobre todo en el procesamiento y envasado de productos
alimenticios. Sin embargo, en muchos sectores de servicios, como los supermercados, las cajas
pueden llegar a automatizarse, pero sigue siendo necesario reponer manualmente los productos en
las estanterías.
El concepto de automatización está evolucionando rápidamente, en parte debido a que las
técnicas avanzan tanto dentro de una instalación o sector como entre las industrias. Por ejemplo, el
sector petroquímico ha desarrollado el método de flujo continuo de producción, posible debido a la
naturaleza de las materias primas utilizadas. En una refinería, el petróleo crudo entra por un punto y
fluye por los conductos a través de dispositivos de destilación y reacción, a medida que va siendo
procesado para obtener productos como la gasolina y el fueloil. Un conjunto de dispositivos
controlados automáticamente, dirigidos por microprocesadores y controlados por una computadora
central, controla las válvulas, calderas y demás equipos, regulando así el flujo y las velocidades de
reacción.
Por otra parte, en las industrias metalúrgica, de bebidas y de alimentos envasados, algunos
productos se elaboran por lotes. Por ejemplo, se carga un horno de acero con los ingredientes
necesarios, se calienta y se produce un lote de lingotes de acero. En esta fase, el contenido de
Tecnologías de Control - Lecturas complementarias 1 - Hoja 2/28
automatización es mínimo. Sin embargo, a continuación los lingotes pueden procesarse
automáticamente como láminas o dándoles determinadas formas estructurales mediante una serie
de rodillos hasta alcanzar la configuración deseada. Véase Siderurgia.
Los sectores de automoción y de otros productos de consumo utilizan las técnicas de
producción masivas de la fabricación y montaje paso a paso. Esta técnica se aproxima al concepto
de flujo continuo, aunque incluye máquinas de transferencia. Por consiguiente, desde el punto de
vista de la industria del automóvil, las máquinas de transferencia son esenciales para la definición
de la automatización.
Cada una de estas industrias utiliza máquinas automatizadas en la totalidad o en parte de
sus procesos de fabricación. Como resultado, cada sector tiene un concepto de automatización
adaptado a sus necesidades específicas. En casi todas las fases del comercio pueden hallarse más
ejemplos. La propagación de la automatización y su influencia sobre la vida cotidiana constituye la
base de la preocupación expresada por muchos acerca de las consecuencias de la automatización
sobre la sociedad y el individuo.
La automatización y la sociedad
La automatización ha contribuido en gran medida al incremento del tiempo libre y de los
salarios reales de la mayoría de los trabajadores de los países industrializados. También ha
permitido incrementar la producción y reducir los costes, poniendo coches, refrigeradores,
televisiones, teléfonos y otros productos al alcance de más gente.
Sin embargo, no todos los resultados de la automatización han sido positivos. Algunos
observadores argumentan que la automatización ha llevado al exceso de producción y al derroche,
que ha provocado la alienación del trabajador y que ha generado desempleo. De todos estos
temas, el que mayor atención ha recibido es la relación entre la automatización y el paro. Ciertos
economistas defienden que la automatización ha tenido un efecto mínimo, o ninguno, sobre el
desempleo. Sostienen que los trabajadores son desplazados, y no cesados, y que por lo general
son contratados para otras tareas dentro de la misma empresa, o bien en el mismo trabajo en otra
empresa que todavía no se ha automatizado.
Hay quienes sostienen que la automatización genera más puestos de trabajo de los que
elimina. Señalan que aunque algunos trabajadores pueden quedar en el paro, la industria que
produce la maquinaria automatizada genera más trabajos que los eliminados. Para sostener este
argumento suele citarse como ejemplo la industria informática. Los ejecutivos de las empresas
suelen coincidir en que aunque las computadoras han sustituido a muchos trabajadores, el propio
sector ha generado más empleos en fabricación, venta y mantenimiento de ordenadores que los
que ha eliminado el dispositivo.
Por el otro lado, hay líderes sindicales y economistas que afirman que la automatización
genera paro y que, si no se controla, llevará a la creación de un vasto ejército de desempleados.
Sostienen que el crecimiento de los puestos de trabajo generados por la administración pública y en
los sectores de servicio han absorbido a quienes han quedado desempleados como consecuencia
de la automatización, y que en cuanto dichos sectores se saturen o se reduzcan los programas
gubernamentales se conocerá la auténtica relación entre la automatización y el desempleo.
Cibernética
Ciencia interdisciplinar que trata de los sistemas de comunicación y control en los
organismos vivos, las máquinas y las organizaciones. La palabra, que proviene del griego
kybernes ('timonel' o 'gobernador'), fue aplicado por primera vez en 1948 por el matemático
Norbert Wiener a la teoría de los mecanismos de control.
La cibernética se desarrolló como investigación de las técnicas por las cuales la información
se transforma en la actuación deseada. Esta ciencia surgió de los problemas planteados durante la
Segunda Guerra Mundial a la hora de desarrollar los denominados cerebros electrónicos y los
mecanismos de control automático para los equipos militares como los visores de bombardeo.
La cibernética contempla de igual forma los sistemas de comunicación y control de los
organismos vivos que los de las máquinas. Para obtener la respuesta deseada en un organismo
humano o en un dispositivo mecánico, habrá que proporcionarle, como guía para acciones futuras,
la información relativa a los resultados reales de la acción prevista. En el cuerpo humano, el cerebro
y el sistema nervioso coordinan dicha información, que sirve para determinar una futura línea de
conducta; los mecanismos de control y de autocorrección en las máquinas sirven para lo mismo. El
Tecnologías de Control - Lecturas complementarias 1 - Hoja 3/28
principio se conoce como feedback (realimentación), que constituye el concepto fundamental de la
automatización.
Según la teoría de la información, uno de los principios básicos de la cibernética establece
que la información es estadística por naturaleza y se mide de acuerdo con las leyes de la
probabilidad. En este sentido, la información es concebida como una medida de la libertad de
elección implícita en la selección. A medida que aumenta la libertad de elección, disminuye la
probabilidad de que sea elegido un determinado mensaje. La medida de la probabilidad se conoce
como entropía. De acuerdo con la segunda ley de la termodinámica, en los procesos naturales
existe una tendencia hacia un estado de desorganización, o caos, que se produce sin ninguna
intervención o control. En consecuencia, de acuerdo con los principios de la cibernética, el orden
(disminución de la entropía) es lo menos probable, y el caos (aumento de la entropía) es lo más
probable. La conducta intencionada en las personas o en las máquinas exige mecanismos de
control que mantengan el orden, contrarrestando la tendencia natural hacia la desorganización.
La cibernética también se aplica al estudio de la psicología, la inteligencia artificial, los
servomecanismos, la economía, la neurofisiología, la ingeniería de sistemas y al de los sistemas
sociales. La palabra cibernética ha dejado de identificar un área independiente de estudio y la
mayor parte de la actividad investigadora se centra ahora en el estudio y diseño de redes neurales
artificiales.
Robot
Máquina controlada por ordenador y programada para moverse, manipular objetos y realizar
trabajos a la vez que interacciona con su entorno. Los robots son capaces de realizar tareas
repetitivas de forma más rápida, barata y precisa que los seres humanos. El término procede de la
palabra checa robota, que significa 'trabajo obligatorio'; fue empleado por primera vez en la obra
teatral de 1921 R.U.R. (Robots Universales de Rossum) por el novelista y dramaturgo checo Karel
apek. Desde entonces se ha empleado la palabra robot para referirse a una máquina que realiza
trabajos para ayudar a las personas o efectúa tareas difíciles o desagradables para los humanos.
Historia
El concepto de máquinas automatizadas se remonta a la antigüedad, con mitos de seres
mecánicos vivientes. Los autómatas, o máquinas semejantes a personas, ya aparecían en los
relojes de las iglesias medievales, y los relojeros del siglo XVIII eran famosos por sus ingeniosas
criaturas mecánicas.
Algunos de los primeros robots empleaban mecanismos de realimentación para corregir
errores, mecanismos que siguen empleándose actualmente. Un ejemplo de control por
realimentación es un bebedero que emplea un flotador para determinar el nivel del agua. Cuando el
agua cae por debajo de un nivel determinado, el flotador baja, abre una válvula y deja entrar más
agua en el bebedero. Al subir el agua, el flotador también sube, y al llegar a cierta altura se cierra la
válvula y se corta el paso del agua.
El primer auténtico controlador realimentado fue el regulador de Watt, inventado en 1788 por
el ingeniero británico James Watt. Este dispositivo constaba de dos bolas metálicas unidas al eje
motor de una máquina de vapor y conectadas con una válvula que regulaba el flujo de vapor. A
medida que aumentaba la velocidad de la máquina de vapor, las bolas se alejaban del eje debido a
la fuerza centrífuga, con lo que cerraban la válvula. Esto hacía que disminuyera el flujo de vapor a
la máquina y por tanto la velocidad.
El control por realimentación, el desarrollo de herramientas especializadas y la división del
trabajo en tareas más pequeñas que pudieran realizar obreros o máquinas fueron ingredientes
esenciales en la automatización de las fábricas en el siglo XVIII. A medida que mejoraba la
tecnología se desarrollaron máquinas especializadas para tareas como poner tapones a las botellas
o verter caucho líquido en moldes para neumáticos. Sin embargo, ninguna de estas máquinas tenía
la versatilidad del brazo humano, y no podían alcanzar objetos alejados y colocarlos en la posición
deseada.
El desarrollo del brazo artificial multiarticulado, o manipulador, llevó al moderno robot. El
inventor estadounidense George Devol desarrolló en 1954 un brazo primitivo que se podía
programar para realizar tareas específicas. En 1975, el ingeniero mecánico estadounidense Victor
Scheinman, cuando estudiaba la carrera en la Universidad de Stanford, en California, desarrolló un
manipulador polivalente realmente flexible conocido como Brazo Manipulador Universal
Programable (PUMA, siglas en inglés). El PUMA era capaz de mover un objeto y colocarlo en
Tecnologías de Control - Lecturas complementarias 1 - Hoja 4/28
cualquer orientación en un lugar deseado que estuviera a su alcance. El concepto básico
multiarticulado del PUMA es la base de la mayoría de los robots actuales.
Cómo funcionan los robots
El diseño de un manipulador robótico se inspira en el brazo humano, aunque con algunas
diferencias. Por ejemplo, un brazo robótico puede extenderse telescópicamente, es decir,
deslizando unas secciones cilíndricas dentro de otras para alargar el brazo. También pueden
construirse brazos robóticos de forma que puedan doblarse como la trompa de un elefante. Las
pinzas están diseñadas para imitar la función y estructura de la mano humana. Muchos robots están
equipados con pinzas especializadas para agarrar dispositivos concretos, como una gradilla de
tubos de ensayo o un soldador de arco.
Las articulaciones de un brazo robótico suelen moverse mediante motores eléctricos. En la
mayoría de los robots, la pinza se mueve de una posición a otra cambiando su orientación. Una
computadora calcula los ángulos de articulación necesarios para llevar la pinza a la posición
deseada, un proceso conocido como cinemática inversa.
Algunos brazos multiarticulados están equipados con servocontroladores, o controladores
por realimentación, que reciben datos de un ordenador. Cada articulación del brazo tiene un
dispositivo que mide su ángulo y envía ese dato al controlador. Si el ángulo real del brazo no es
igual al ángulo calculado para la posición deseada, el servocontrolador mueve la articulación hasta
que el ángulo del brazo coincida con el ángulo calculado. Los controladores y los ordenadores
asociados también deben procesar los datos recogidos por cámaras que localizan los objetos que
se van a agarrar o las informaciones de sensores situados en las pinzas que regulan la fuerza de
agarre.
Cualquier robot diseñado para moverse en un entorno no estructurado o desconocido
necesita múltiples sensores y controles (por ejemplo, sensores ultrasónicos o infrarrojos) para evitar
los obstáculos. Los robots como los vehículos planetarios de la NASA necesitan una gran cantidad
de sensores y unas computadoras de a bordo muy potentes para procesar la compleja información
que les permite moverse. Eso es particularmente cierto para robots diseñados para trabajar en
estrecha proximidad de seres humanos, como robots que ayuden a personas discapacitadas o
sirvan comidas en un hospital. La seguridad debe ser esencial en el diseño de robots para el
servicio humano.
Usos de los robots
En 1995 funcionaban unos 700.000 robots en el mundo industrializado. Más de 500.000 se
empleaban en Japón, unos 120.000 en Europa Occidental y unos 60.000 en Estados Unidos.
Muchas aplicaciones de los robots corresponden a tareas peligrosas o desagradables para los
humanos. En los laboratorios médicos, los robots manejan materiales que conlleven posibles
riesgos, como muestras de sangre u orina. En otros casos, los robots se emplean en tareas
repetitivas y monótonas en las que el rendimiento de una persona podría disminuir con el tiempo.
Los robots pueden realizar estas operaciones repetitivas de alta precisión durante 24 horas al día
sin cansarse. Uno de los principales usuarios de robots es la industria del automóvil. La empresa
General Motors utiliza aproximadamente 16.000 robots para trabajos como soldadura por puntos,
pintura, carga de máquinas, transferencia de piezas y montaje. El montaje es una de las
aplicaciones industriales de la robótica que más está creciendo. Exige una mayor precisión que la
soldadura o la pintura y emplea sistemas de sensores de bajo coste y computadoras potentes y
baratas. Los robots se usan por ejemplo en el montaje de aparatos electrónicos, para montar
microchips en placas de circuito.
Las actividades que entrañan gran peligro para las personas, como la localización de barcos
hundidos, la búsqueda de depósitos minerales submarinos o la exploración de volcanes activos,
son especialmente apropiadas para emplear robots. Los robots también pueden explorar planetas
distantes. La sonda espacial no tripulada Galileo, de la NASA, viajó a Júpiter en 1996 y realizó
tareas como la detección del contenido químico de la atmósfera joviana.
Ya se emplean robots para ayudar a los cirujanos a instalar caderas artificiales, y ciertos
robots especializados de altísima precisión pueden ayudar en operaciones quirúrgicas delicadas en
los ojos. La investigación en telecirugía emplea robots controlados de forma remota por cirujanos
expertos; estos robots podrían algún día efectuar operaciones en campos de batalla distantes.
Impacto de los robots
Tecnologías de Control - Lecturas complementarias 1 - Hoja 5/28
Los manipuladores robóticos crean productos manufacturados de mayor calidad y menor
coste. Sin embargo, también pueden provocar la pérdida de empleos no cualificados,
especialmente en cadenas de montaje industriales. Aunque crean trabajos en los sectores de
soporte lógico y desarrollo de sensores, en la instalación y mantenimiento de robots y en la
conversión de fábricas antiguas y el diseño de fábricas nuevas, estos nuevos empleos exigen
mayores niveles de capacidad y formación. Las sociedades orientadas hacia la tecnología deben
enfrentarse a la tarea de volver a formar a los trabajadores que pierden su empleo debido a la
automatización y enseñarles nuevas capacidades para que puedan tener un puesto de trabajo en
las industrias del siglo XXI.
Tecnologías del futuro
Las máquinas automatizadas ayudarán cada vez más a los humanos en la fabricación de
nuevos productos, el mantenimiento de las infraestructuras y el cuidado de hogares y empresas.
Los robots podrán fabricar nuevas autopistas, construir estructuras de acero para edificios, limpiar
conducciones subterráneas o cortar el césped. Ya existen prototipos que realizan todas esas
tareas.
Una tendencia importante es el desarrollo de sistemas microelectromecánicos, cuyo tamaño
va desde centímetros hasta milímetros. Estos robots minúsculos podrían emplearse para avanzar
por vasos sanguíneos con el fin de suministrar medicamentos o eliminar bloqueos arteriales.
También podrían trabajar en el interior de grandes máquinas para diagnosticar con antelación
posibles problemas mecánicos.
Puede que los cambios más espectaculares en los robots del futuro provengan de su
capacidad de razonamiento cada vez mayor. El campo de la inteligencia artificial está pasando
rápidamente de los laboratorios universitarios a la aplicación práctica en la industria, y se están
desarrollando máquinas capaces de realizar tareas cognitivas como la planificación estratégica o el
aprendizaje por experiencia. El diagnóstico de fallos en aviones o satélites, el mando en un campo
de batalla o el control de grandes fábricas correrán cada vez más a cargo de ordenadores
inteligentes.
Servomecanismo
En ingeniería, dispositivo o conjunto de ellos que permite la automatización del control de un
mecanismo o de una fuente de energía. Los servomecanismos pueden ser mecánicos, eléctricos,
hidráulicos y ópticos. Su característica principal es que se activa por la llamada señal de error, que
viene determinada por la diferencia entre la señal establecida como salida para una determinada
señal de entrada y la señal de salida real. Esta señal de error se envía a la entrada para compensar
ese error, de forma que el mecanismo se autorregula. Esta técnica se llama realimentación.
La dirección de los automóviles es un ejemplo de servomecanismo. La orientación de las
ruedas delanteras se controla mediante el giro del volante. Cuando soltamos el volante, un
servomecanismo, que en este caso es un sistema hidráulico y mecánico, obliga a las ruedas a
volver a la posición normal. Otro ejemplo de servomecanismo es el control automático que efectúa
un termostato del calor generado por un radiador doméstico. Otros ejemplos son los pilotos
automáticos utilizados en barcos, aviones y naves espaciales, en los que el movimiento del vehículo
está regido por las instrucciones de la brújula. En las naves espaciales no tripuladas los
servomecanismos se encargan de orientar las cámaras, las antenas de radio y los paneles solares.
En este caso la señal de entrada es la que proporcionan los sensores, que captan la situación del
Sol y las estrellas, y la señal de salida es la que se aplica a unos pequeños motores a reacción que
giran y orientan la nave.
Sistema experto
Tipo de programa de aplicación informática que adopta decisiones o resuelve problemas de
un determinado campo, como las finanzas o la medicina, utilizando los conocimientos y las reglas
analíticas definidas por los expertos en dicho campo. Los expertos solucionan los problemas
utilizando una combinación de conocimientos basados en hechos y en su capacidad de
razonamiento. En los sistemas expertos, estos dos elementos básicos están contenidos en dos
componentes separados, aunque relacionados: una base de conocimientos y una máquina de
Tecnologías de Control - Lecturas complementarias 1 - Hoja 6/28
deducción, o de inferencia. La base de conocimientos proporciona hechos objetivos y reglas sobre
el tema, mientras que la máquina de deducción proporciona la capacidad de razonamiento que
permite al sistema experto extraer conclusiones. Los sistemas expertos facilitan también
herramientas adicionales en forma de interfaces de usuario y los mecanismos de explicación. Las
interfaces de usuario, al igual que en cualquier otra aplicación, permiten al usuario formular
consultas, proporcionar información e interactuar de otras formas con el sistema. Los mecanismos
de explicación, la parte más fascinante de los sistemas expertos, permiten a los sistemas explicar o
justificar sus conclusiones, y también posibilitan a los programadores verificar el funcionamiento de
los propios sistemas. Los sistemas expertos comenzaron a aparecer en la década de 1960. Sus
campos de aplicación son la química, la geología, la medicina, la banca e inversiones y los seguros.
Inteligencia artificial
Término que, en su sentido más amplio, indicaría la capacidad de un artefacto de realizar los
mismos tipos de funciones que caracterizan al pensamiento humano. La posibilidad de desarrollar
un artefacto así ha despertado la curiosidad del ser humano desde la antigüedad. Con el avance de
la ciencia moderna la búsqueda de la IA (inteligencia artificial) ha tomado dos caminos
fundamentales: la investigación psicológica y fisiológica de la naturaleza del pensamiento humano,
y el desarrollo tecnológico de sistemas informáticos cada vez más complejos.
En este sentido, el término IA se ha aplicado a sistemas y programas informáticos capaces
de realizar tareas complejas, simulando el funcionamiento del pensamiento humano, aunque
todavía muy lejos de éste. En esta esfera los campos de investigación más importantes son el
procesamiento de la información, el reconocimiento de modelos, los juegos y las áreas aplicadas
como el diagnóstico médico. Algunas áreas de la investigación actual del procesamiento de la
información están centradas en programas que permiten a un ordenador o computadora
comprender la información escrita o hablada, y generar resúmenes, responder a preguntas
específicas o redistribuir datos a los usuarios interesados en determinados sectores de esta
información. En esos programas es esencial la capacidad del sistema de generar frases
gramaticalmente correctas y de establecer vínculos entre palabras e ideas. La investigación ha
demostrado que mientras que la lógica de la estructura del lenguaje, su sintaxis, está relacionada
con la programación, el problema del significado, o semántica, es mucho más profundo, y va en la
dirección de una auténtica inteligencia artificial.
Actualmente existen dos tendencias en cuanto al desarrollo de sistemas de IA: los sistemas
expertos y las redes neuronales. Los sistemas expertos intentan reproducir el razonamiento
humano de forma simbólica. Las redes neuronales lo hacen desde una perspectiva más biológica
(recrean la estructura de un cerebro humano mediante algoritmos genéticos). A pesar de la
complejidad de ambos sistemas los resultados distan mucho de un auténtico pensamiento
inteligente.
Muchos científicos se muestran escépticos acerca de la posibilidad de que alguna vez pueda
desarrollarse una verdadera IA. El funcionamiento de la mente humana todavía no ha llegado a
conocerse en profundidad y, en consecuencia, el diseño informático seguirá siendo esencialmente
incapaz de reproducir esos procesos desconocidos y complejos.
CAD/CAM
Proceso en el cual se utilizan los ordenadores o computadoras para mejorar la fabricación,
desarrollo y diseño de los productos. Éstos pueden fabricarse más rápido, con mayor precisión o a
menor precio, con la aplicación adecuada de tecnología informática.
Los sistemas de Diseño Asistido por Ordenador (CAD, acrónimo de Computer Aided Design)
pueden utilizarse para generar modelos con muchas, si no todas, de las características de un
determinado producto. Estas características podrían ser el tamaño, el contorno y la forma de cada
componente, almacenados como dibujos bi y tridimensionales. Una vez que estos datos
dimensionales han sido introducidos y almacenados en el sistema informático, el diseñador puede
manipularlos o modificar las ideas del diseño con mayor facilidad para avanzar en el desarrollo del
producto. Además, pueden compartirse e integrarse las ideas combinadas de varios diseñadores,
ya que es posible mover los datos dentro de redes informáticas, con lo que los diseñadores e
ingenieros situados en lugares distantes entre sí pueden trabajar como un equipo. Los sistemas
CAD también permiten simular el funcionamiento de un producto. Hacen posible verificar si un
circuito electrónico propuesto funcionará tal y como está previsto, si un puente será capaz de
Tecnologías de Control - Lecturas complementarias 1 - Hoja 7/28
soportar las cargas pronosticadas sin peligros e incluso si una salsa de tomate fluirá
adecuadamente desde un envase de nuevo diseño.
Cuando los sistemas CAD se conectan a equipos de fabricación también controlados por
ordenador conforman un sistema integrado CAD/CAM (CAM, acrónimo de Computer Aided
Manufacturing). La Fabricación Asistida por Ordenador ofrece significativas ventajas con respecto a
los métodos más tradicionales de controlar equipos de fabricación con ordenadores en lugar de
hacerlo con operadores humanos. Por lo general, los equipos CAM conllevan la eliminación de los
errores del operador y la reducción de los costes de mano de obra. Sin embargo, la precisión
constante y el uso óptimo previsto del equipo representan ventajas aún mayores. Por ejemplo, las
cuchillas y herramientas de corte se desgastarán más lentamente y se estropearían con menos
frecuencia, lo que reduciría todavía más los costes de fabricación. Frente a este ahorro pueden
aducirse los mayores costes de bienes de capital o las posibles implicaciones sociales de mantener
la productividad con una reducción de la fuerza de trabajo. Los equipos CAM se basan en una serie
de códigos numéricos, almacenados en archivos informáticos, para controlar las tareas de
fabricación. Este Control Numérico por Computadora (CNC) se obtiene describiendo las
operaciones de la máquina en términos de los códigos especiales y de la geometría de formas de
los componentes, creando archivos informáticos especializados o programas de piezas. La creación
de estos programas de piezas es una tarea que, en gran medida, se realiza hoy día por software
informático especial que crea el vínculo entre los sistemas CAD y CAM.
Las características de los sistemas CAD/CAM son aprovechadas por los diseñadores,
ingenieros y fabricantes para adaptarlas a las necesidades específicas de sus situaciones. Por
ejemplo, un diseñador puede utilizar el sistema para crear rápidamente un primer prototipo y
analizar la viabilidad de un producto, mientras que un fabricante quizá emplee el sistema porque es
el único modo de poder fabricar con precisión un componente complejo. La gama de prestaciones
que se ofrecen a los usuarios de CAD/CAM está en constante expansión. Los fabricantes de
indumentaria pueden diseñar el patrón de una prenda en un sistema CAD, patrón que se sitúa de
forma automática sobre la tela para reducir al máximo el derroche de material al ser cortado con
una sierra o un láser CNC. Además de la información de CAD que describe el contorno de un
componente de ingeniería, es posible elegir el material más adecuado para su fabricación en la
base de datos informática, y emplear una variedad de máquinas CNC combinadas para producirlo.
La Fabricación Integrada por Computadora (CIM) aprovecha plenamente el potencial de esta
tecnología al combinar una amplia gama de actividades asistidas por ordenador, que pueden incluir
el control de existencias, el cálculo de costes de materiales y el control total de cada proceso de
producción. Esto ofrece una mayor flexibilidad al fabricante, permitiendo a la empresa responder
con mayor agilidad a las demandas del mercado y al desarrollo de nuevos productos.
La futura evolución incluirá la integración aún mayor de sistemas de realidad virtual, que
permitirá a los diseñadores interactuar con los prototipos virtuales de los productos mediante la
computadora, en lugar de tener que construir costosos modelos o simuladores para comprobar su
viabilidad. También el área de prototipos rápidos es una evolución de las técnicas de CAD/CAM, en
la que las imágenes informatizadas tridimensionales se convierten en modelos reales empleando
equipos de fabricación especializado, como por ejemplo un sistema de estereolitografía.
Ordenador o Computadora
Dispositivo electrónico capaz de recibir un conjunto de instrucciones, o programa, y, a
continuación, ejecutarlo realizando cálculos sobre los datos numéricos, o bien compilando y
correlacionando otros tipos de información.
El mundo moderno de la alta tecnología nunca hubiese existido de no ser por el desarrollo
del ordenador o computadora. Toda la sociedad utiliza estas máquinas, en distintos tipos y
tamaños, para el almacenamiento y manipulación de datos, desde archivos gubernamentales
secretos y transacciones bancarias hasta las cuentas domésticas privadas. Los equipos
informáticos han abierto una nueva era en la fabricación gracias a las técnicas de automatización y
han permitido mejorar los sistemas modernos de comunicación. Son herramientas esenciales
prácticamente en todos los campos de investigación y tecnología aplicada, desde la construcción de
modelos del universo hasta la generación de las previsiones meteorológicas. Los servicios de bases
de datos y redes informáticas permiten acceder a una gran variedad de fuentes de información,
pero esas mismas técnicas avanzadas también posibilitan la invasión sobre lo privado y las fuentes
de información restringidas. Con todo, el delito informático se ha convertido en uno de los riesgos al
que la sociedad deberá enfrentarse si desea gozar de las ventajas de la tecnología moderna.
Tipos de ordenadores o computadoras
Tecnologías de Control - Lecturas complementarias 1 - Hoja 8/28
En la actualidad se utilizan dos tipos principales de ordenadores: analógicos y digitales. Sin
embargo, el término ordenador o computadora suele utilizarse para referirse exclusivamente al tipo
digital. Los ordenadores analógicos aprovechan la similitud matemática entre las interrelaciones
físicas de determinados problemas y emplean circuitos electrónicos o hidráulicos para simular el
problema físico. Los ordenadores digitales resuelven los problemas realizando cálculos y tratando
cada número dígito por dígito.
Las instalaciones que contienen elementos de ordenadores digitales y analógicos se
denominan ordenadores híbridos. Por lo general se utilizan para problemas en los que hay que
calcular grandes cantidades de ecuaciones complejas, conocidas como integrales de tiempo. En un
ordenador digital también pueden introducirse datos en forma analógica mediante un convertidor
analógico digital, y viceversa (convertidor digital a analógico).
Ordenadores analógicos
El ordenador analógico es un dispositivo electrónico o hidráulico diseñado para manipular la
entrada de datos en términos de, por ejemplo, niveles de tensión o presiones hidráulicas, en lugar
de hacerlo como datos numéricos. El dispositivo de cálculo analógico más sencillo es la regla de
cálculo, que utiliza longitudes de escalas especialmente calibradas para facilitar la multiplicación, la
división y otras funciones. En el típico ordenador analógico electrónico, las entradas se convierten
en tensiones que pueden sumarse o multiplicarse empleando elementos de circuito de diseño
especial. Las respuestas se generan continuamente para su visualización o para su conversión en
otra forma deseada.
Ordenadores digitales
Todo lo que hace un ordenador digital se basa en una operación: la capacidad de determinar
si un conmutador, o 'puerta', está abierto o cerrado. Es decir, el ordenador puede reconocer sólo
dos estados en cualquiera de sus circuitos microscópicos: abierto o cerrado, alta o baja tensión o,
en el caso de números, 0 o 1. Sin embargo, es la velocidad con la cual el ordenador realiza este
acto tan sencillo lo que lo convierte en una maravilla de la tecnología moderna. Las velocidades del
ordenador se miden en megahercios, o millones de ciclos por segundo. Un ordenador con una
velocidad de reloj de 100 MHz, velocidad bastante representativa de un microordenador o
microcomputadora, es capaz de ejecutar 100 millones de operaciones discretas por segundo. Las
microcomputadoras de las compañías pueden ejecutar entre 150 y 200 millones de operaciones por
segundo, mientras que las supercomputadoras utilizadas en aplicaciones de investigación y de
defensa alcanzan velocidades de miles de millones de ciclos por segundo.
La velocidad y la potencia de cálculo de los ordenadores digitales se incrementan aún más
por la cantidad de datos manipulados durante cada ciclo. Si un ordenador verifica sólo un
conmutador cada vez, dicho conmutador puede representar solamente dos comandos o números.
Así, ON simbolizaría una operación o un número, mientras que OFF simbolizará otra u otro. Sin
embargo, al verificar grupos de conmutadores enlazados como una sola unidad, el ordenador
aumenta el número de operaciones que puede reconocer en cada ciclo. Por ejemplo, un ordenador
que verifica dos conmutadores cada vez, puede representar cuatro números (del 0 al 3), o bien
ejecutar en cada ciclo una de las cuatro operaciones, una para cada uno de los siguientes modelos
de conmutador: OFF-OFF (0), OFF-ON (1), ON-OFF (2) u ON-ON (3). En general, los ordenadores
de la década de 1970 eran capaces de verificar 8 conmutadores simultáneamente; es decir, podían
verificar ocho dígitos binarios, de ahí el término bit de datos en cada ciclo. Un grupo de ocho bits se
denomina byte y cada uno contiene 256 configuraciones posibles de ON y OFF (o 1 y 0). Cada
configuración equivale a una instrucción, a una parte de una instrucción o a un determinado tipo de
dato; estos últimos pueden ser un número, un carácter o un símbolo gráfico. Por ejemplo, la
configuración 11010010 puede representar datos binarios, en este caso el número decimal 210
(véase Sistemas numéricos), o bien estar indicando al ordenador que compare los datos
almacenados en estos conmutadores con los datos almacenados en determinada ubicación del chip
de memoria. El desarrollo de procesadores capaces de manejar simultáneamente 16, 32 y 64 bits
de datos ha permitido incrementar la velocidad de los ordenadores. La colección completa de
configuraciones reconocibles, es decir, la lista total de operaciones que una computadora es capaz
de procesar, se denomina conjunto, o repertorio, de instrucciones. Ambos factores, el número de
bits simultáneos y el tamaño de los conjuntos de instrucciones, continúa incrementándose a medida
que avanza el desarrollo de los ordenadores digitales modernos.
Historia
Tecnologías de Control - Lecturas complementarias 1 - Hoja 9/28
La primera máquina de calcular mecánica, un precursor del ordenador digital, fue inventada
en 1642 por el matemático francés Blaise Pascal. Aquel dispositivo utilizaba una serie de ruedas de
diez dientes en las que cada uno de los dientes representaba un dígito del 0 al 9. Las ruedas
estaban conectadas de tal manera que podían sumarse números haciéndolas avanzar el número de
dientes correcto. En 1670 el filósofo y matemático alemán Gottfried Wilhelm Leibniz perfeccionó
esta máquina e inventó una que también podía multiplicar.
El inventor francés Joseph Marie Jacquard, al diseñar un telar automático, utilizó delgadas
placas de madera perforadas para controlar el tejido utilizado en los diseños complejos. Durante la
década de 1880 el estadístico estadounidense Herman Hollerith concibió la idea de utilizar tarjetas
perforadas, similares a las placas de Jacquard, para procesar datos. Hollerith consiguió compilar la
información estadística destinada al censo de población de 1890 de Estados Unidos mediante la
utilización de un sistema que hacía pasar tarjetas perforadas sobre contactos eléctricos.
Microprocesador
Circuito electrónico que actúa como unidad central de proceso de un ordenador,
proporcionando el control de las operaciones de cálculo. Los microprocesadores también se utilizan
en otros sistemas informáticos avanzados, como impresoras, automóviles o aviones. En 1995 se
produjeron unos 4.000 millones de microprocesadores en todo el mundo.
El microprocesador es un tipo de circuito súmamente integrado. Los circuitos integrados,
también conocidos como microchips o chips, son circuitos electrónicos complejos formados por
componentes extremadamente pequeños formados en una única pieza plana de poco espesor de
un material conocido como semiconductor. Los microprocesadores modernos incorporan hasta 10
millones de transistores (que actúan como amplificadores electrónicos, osciladores o, más a
menudo, como conmutadores), además de otros componentes como resistencias, diodos,
condensadores y conexiones, todo ello en una superficie comparable a la de un sello postal.
Un microprocesador consta de varias secciones diferentes. La unidad aritmético-lógica
(ALU, siglas en inglés) efectúa cálculos con números y toma decisiones lógicas; los registros son
zonas de memoria especiales para almacenar información temporalmente; la unidad de control
descodifica los programas; los buses transportan información digital a través del chip y de la
computadora; la memoria local se emplea para los cómputos realizados en el mismo chip. Los
microprocesadores más complejos contienen a menudo otras secciones; por ejemplo, secciones de
memoria especializada denominadas memoria cache, que sirven para acelerar el acceso a los
dispositivos externos de almacenamiento de datos. Los microprocesadores modernos funcionan
con una anchura de bus de 64 bits (un bit es un dígito binario, una unidad de información que puede
ser un uno o un cero): esto significa que pueden transmitirse simultáneamente 64 bits de datos.
Un cristal oscilante situado en el ordenador proporciona una señal de sincronización, o señal
de reloj, para coordinar todas las actividades del microprocesador. La velocidad de reloj de los
microprocesadores más avanzados es de unos 300 megahercios (MHz) —unos 300 millones de
ciclos por segundo—, lo que permite ejecutar unos 1.000 millones de instrucciones cada segundo.
Memoria de computadora
Como el microprocesador no es capaz por sí solo de albergar la gran cantidad de memoria
necesaria para almacenar instrucciones y datos de programa (por ejemplo, el texto de un programa
de tratamiento de texto), pueden emplearse transistores como elementos de memoria en
combinación con el microprocesador. Para proporcionar la memoria necesaria se emplean otros
circuitos integrados llamados chips de memoria de acceso aleatorio (RAM, siglas en inglés), que
contienen grandes cantidades de transistores. Existen diversos tipos de memoria de acceso
aleatorio. La RAM estática (SRAM) conserva la información mientras esté conectada la tensión de
alimentación, y suele emplearse como memoria cache porque funciona a gran velocidad. Otro tipo
de memoria, la RAM dinámica (DRAM), es más lenta que la SRAM y debe recibir electricidad
periódicamente para no borrarse. La DRAM resulta más económica que la SRAM y se emplea
como elemento principal de memoria en la mayoría de las computadoras.
Microcontrolador
Tecnologías de Control - Lecturas complementarias 1 - Hoja 10/28
Un microprocesador no es un ordenador completo. No contiene grandes cantidades de
memoria ni es capaz de comunicarse con dispositivos de entrada —como un teclado, un joystick o
un ratón— o dispositivos de salida como un monitor o una impresora. Un tipo diferente de circuito
integrado llamado microcontrolador es de hecho una computadora completa situada en un único
chip, que contiene todos los elementos del microprocesador básico además de otras funciones
especializadas. Los microcontroladores se emplean en videojuegos, reproductores de vídeo,
automóviles y otras máquinas.
Fabricación de microprocesadores
Los microprocesadores se fabrican empleando técnicas similares a las usadas para otros
circuitos integrados, como chips de memoria. Generalmente, los microprocesadores tienen una
estructura más compleja que otros chips, y su fabricación exige técnicas extremadamente precisas.
La fabricación económica de microprocesadores exige su producción masiva. Sobre la
superficie de una oblea de silicio se crean simultáneamente varios cientos de grupos de circuitos. El
proceso de fabricación de microprocesadores consiste en una sucesión de deposición y eliminación
de capas finísimas de materiales conductores, aislantes y semiconductores, hasta que después de
cientos de pasos se llega a un complejo "bocadillo" que contiene todos los circuitos interconectados
del microprocesador. Para el circuito electrónico sólo se emplea la superficie externa de la oblea de
silicio, una capa de unas 10 micras de espesor (unos 0,01 mm, la décima parte del espesor de un
cabello humano). Entre las etapas del proceso figuran la creación de sustrato, la oxidación, la
litografía, el grabado, la implantación iónica y la deposición de capas.
La primera etapa en la producción de un microprocesador es la creación de un sustrato de
silicio de enorme pureza, una rodaja de silicio en forma de una oblea redonda pulida hasta quedar
lisa como un espejo. En la actualidad, las obleas más grandes empleadas en la industria tienen 200
mm de diámetro.
En la etapa de oxidación se coloca una capa eléctricamente no conductora, llamada
dieléctrico. El tipo de dieléctrico más importante es el dióxido de silicio, que se "cultiva" exponiendo
la oblea de silicio a una atmósfera de oxígeno en un horno a unos 1.000 ºC. El oxígeno se combina
con el silicio para formar una delgada capa de óxido de unos 75 angstroms de espesor (un
angstrom es una diezmilmillonésima de metro).
Casi todas las capas que se depositan sobre la oblea deben corresponder con la forma y
disposición de los transistores y otros elementos electrónicos. Generalmente esto se logra mediante
un proceso llamado fotolitografía, que equivale a convertir la oblea en un trozo de película
fotográfica y proyectar sobre la misma una imagen del circuito deseado. Para ello se deposita sobre
la superficie de la oblea una capa fotosensible cuyas propiedades cambian al ser expuesta a la luz.
Los detalles del circuito pueden llegar a tener un tamaño de sólo 0,25 micras. Como la longitud de
onda más corta de la luz visible es de unas 0,5 micras, es necesario emplear luz ultravioleta de baja
longitud de onda para resolver los detalles más pequeños. Después de proyectar el circuito sobre la
capa fotorresistente y revelar la misma, la oblea se graba: esto es, se elimina la parte de la oblea no
protegida por la imagen grabada del circuito mediante productos químicos (un proceso conocido
como grabado húmedo) o exponiéndola a un gas corrosivo llamado plasma en una cámara de vacío
especial.
En el siguiente paso del proceso, la implantación iónica, se introducen en el silicio impurezas
como boro o fósforo para alterar su conductividad. Esto se logra ionizando los átomos de boro o de
fósforo (quitándoles uno o dos electrones) y lanzándolos contra la oblea a grandes energías
mediante un implantador iónico. Los iones quedan incrustados en la superficie de la oblea.
En el último paso del proceso, las capas o películas de material empleadas para fabricar un
microprocesador se depositan mediante el bombardeo atómico en un plasma, la evaporación (en la
que el material se funde y posteriormente se evapora para cubrir la oblea) o la deposición de vapor
químico, en la que el material se condensa a partir de un gas a baja presión o a presión
atmosférica. En todos los casos, la película debe ser de gran pureza, y su espesor debe controlarse
con una precisión de una fracción de micra.
Los detalles de un microprocesador son tan pequeños y precisos que una única mota de
polvo puede destruir todo un grupo de circuitos. Las salas empleadas para la fabricación de
microprocesadores se denominan salas limpias, porque el aire de las mismas se somete a un
filtrado exhaustivo y está prácticamente libre de polvo. Las salas limpias más puras de la actualidad
se denominan de clase 1. La cifra indica el número máximo de partículas mayores de 0,12 micras
que puede haber en un pie cúbico de aire (0,028 metros cúbicos). Como comparación, un hogar
normal sería de clase 1 millón.
Historia del microprocesador
Tecnologías de Control - Lecturas complementarias 1 - Hoja 11/28
El primer microprocesador fue el Intel 4004, producido en 1971. Se desarrolló originalmente
para una calculadora, y resultaba revolucionario para su época. Contenía 2.300 transistores en un
microprocesador de 4 bits que sólo podía realizar 60.000 operaciones por segundo. El primer
microprocesador de 8 bits fue el Intel 8008, desarrollado en 1979 para su empleo en terminales
informáticos. El Intel 8008 contenía 3.300 transistores. El primer microprocesador realmente
diseñado para uso general, desarrollado en 1974, fue el Intel 8080 de 8 bits, que contenía 4.500
transistores y podía ejecutar 200.000 instrucciones por segundo. Los microprocesadores modernos
tienen una capacidad y velocidad mucho mayores. Entre ellos figuran el Intel Pentium Pro, con 5,5
millones de transistores; el UltraSparc-II, de Sun Microsystems, que contiene 5,4 millones de
transistores; el PowerPC 620, desarrollado conjuntamente por Apple, IBM y Motorola, con 7
millones de transistores, y el Alpha 21164A, de Digital Equipment Corporation, con 9,3 millones de
transistores.
Tecnologías futuras
La tecnología de los microprocesadores y de la fabricación de circuitos integrados está
cambiando rápidamente. En la actualidad, los microprocesadores más complejos contienen unos 10
millones de transistores. Se prevé que en el 2000 los microprocesadores avanzados contengan
más de 50 millones de transistores, y unos 800 millones en el 2010.
Las técnicas de litografía también tendrán que ser mejoradas. En el año 2000, el tamaño
mínimo de los elementos de circuito será inferior a 0,2 micras. Con esas dimensiones, es probable
que incluso la luz ultravioleta de baja longitud de onda no alcance la resolución necesaria. Otras
posibilidades alternativas son el uso de haces muy estrechos de electrones e iones o la sustitución
de la litografía óptica por litografía que emplee rayos X de longitud de onda extremadamente corta.
Mediante estas tecnologías, las velocidades de reloj podrían superar los 1.000 MHz en el 2010.
Se cree que el factor limitante en la potencia de los microprocesadores acabará siendo el
comportamiento de los propios electrones al circular por los transistores. Cuando las dimensiones
se hacen muy bajas, los efectos cuánticos debidos a la naturaleza ondulatoria de los electrones
podrían dominar el comportamiento de los transistores y circuitos. Puede que sean necesarios
nuevos dispositivos y diseños de circuitos a medida que los microprocesadores se aproximan a
dimensiones atómicas. Para producir las generaciones futuras de microchips se necesitarán
técnicas como la epitaxia por haz molecular, en la que los semiconductores se depositan átomo a
átomo en una cámara de vacío ultraelevado, o la microscopía de barrido de efecto túnel, que
permite ver e incluso desplazar átomos individuales con precisión.
Bibliografía:
- Enciclopedia ENCARTA 97 de Microsoft.
Tecnologías de Control - Lecturas complementarias 1 - Hoja 12/28
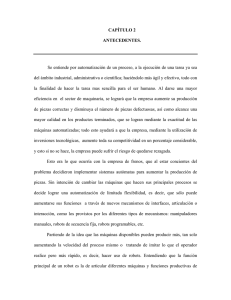
Máquina
o
Proceso de Fabricación
Captadores
Accionadores
Informaciones
Ordenes
Unidad de Control
Consignas
Información
Operador
Tecnologías de Control - Lecturas complementarias 1 - Hoja 13/28
Figura 1
Tecnologías de Control - Lecturas complementarias 1 - Hoja 14/28
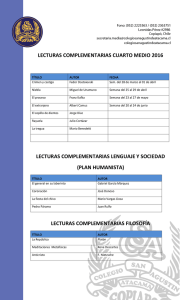
Tecnología de
Automatización
Tecnología Cableada
Neumática
Fluídica
Tecnología Programada
Eléctrica
Relés
Miniordenador
Microordenador
Autómata
Programable
Electrónica
Estática
Figura 2
Bibliografía:
- Autómatas Programables – Albert Mayol i Badia – Serie Prodúctica – Editorial Marcombo
Tecnologías de Control - Lecturas complementarias 1 - Hoja 15/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 16/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 17/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 18/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 19/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 20/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 21/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 22/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 23/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 24/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 25/28
Bibliografía:
- Automatización – Romera, Lorite, Montoro – Editorial Paraninfo.
Tecnologías de Control - Lecturas complementarias 1 - Hoja 26/28
Tecnologías de Control - Lecturas complementarias 1 - Hoja 27/28
Bibliografía:
- Microrobótica – Angulo, Romero, Angulo – Editorial Paraninfo.
Tecnologías de Control - Lecturas complementarias 1 - Hoja 28/28