Fuerza de roce
Anuncio

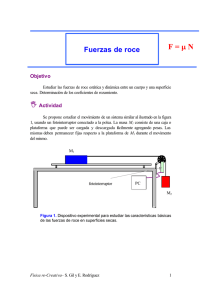
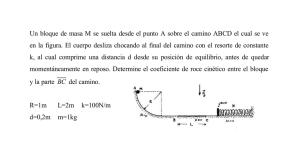
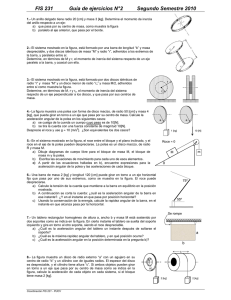
Actividad II.11 – Fuerza de rozamiento Objetivo Estudio de las fuerzas de roce estática y cinético entre un cuerpo y una superficie seca. Determinación de los coeficientes de rozamiento. Introducción Se propone estudiar el movimiento de un sistema usando un dispositivo similar al ilustrado en la Fig. 11.1. La masa M1 es una caja (o bloque) que apoya bien sobre una superficie plana y que puede ser cargada y descargada con facilidad agregando pesas. Las pesas deben permanecer fijas respecto de la caja durante el movimento. El movimiento se provoca liberando la masa M2 que cuelga de un hilo que tira de M1. Una polea y un fotointerruptor sirven para medir tiempos y obtener la velocidad del sistema. Asegúrese que la polea sea suficientemente fuerte para soportar el peso de M2 hasta que el sistema comienza a moverse. Para este experimento nivele el sistema de modo que el ánguloΘ entre el horizonte y el plano de deslizamiento donde se mueve M1 sea Θ = 0o. Figura 11.1 Dispositivo experimental para estudiar las características básicas de las fuerzas de roce en superficies secas. Proyecto 1. - Determinación del coeficiente de roce cinético, µc Elija las masas de modo tal que el movimiento sea detectado fácilmente con el fotointerruptor. Para ello, el movimiento no debe de ser demasiado lento. Además, parta de un valor de M1 que sea al menos el doble que la masa de la caja sin carga. 1 Determine la aceleración del sistema a lo largo de toda la trayectoria horizontal. En particular construya un gráfico de la velocidad del sistema en función del tiempo, y otro de la aceleración en función de la velocidad. ¿Puede deducir de estos gráficos si la fuerza de roce depende de la velocidad? Determine la aceleración del sistema, a, para por lo menos cuatro valores de M1, mientras mantiene el mismo valor de M2. Represente a.(M1+M2)/g en función de M1. Justifique esta representación sobre la base de las ecuaciones de movimiento del sistema y analice los resultados obtenidos. Eçn el apendice se discute el caso en que se tiene en cuenta el efecto del momento de inercia del la polea. Demuestre que si la masa de la polea es pequeña frente al resto de las masas del sistema y la fuerza de roce, fr, es proporcional al valor de la fuerza normal al plano, N, es decir fr = µd.N, la aceleración pude escribirse como: f M2 − r g ⋅g a= (M 2 + M 1 ) (1) o también: (M 2 + M1 ) ⋅ a = M 2 − fr / g = M 2 − µ d ⋅ M 1 . g (2) ¿Están de acuerdo las expresiones teóricas (1) y (2) con sus resultados experimentales? ¿Es posible obtener de sus resultados experimentales el coeficiente de roce cinético µd? Determine el valor del coeficiente de roce cinético µc para el sistema. Repita el estudio realizado hasta aquí con otra plataforma o caja (M1) del mismo material, pero de modo que el área de contacto con la plataforma horizontal sea menos que la mitad de la utilizada anteriormente. ¿Observa una variación significativa en el valor de µd con el área en contacto? Proyecto 2. - Determinación del coeficiente de roce estático, µe Un modo de determinar el coeficiente de roce estático, µe, entre un cuerpo y otra superficie, es determinar el ángulo mínimo que hay que inclinar el plano de deslizamiento respecto de la horizontal para que el cuerpo comience a moverse. En este caso, no es necesario usar la masa M2. 2 Para las plataformas utilizadas y con al menos tres estados de carga diferentes, determine el ángulo, Θc, para el cual comienza a moverse M1. Demuestre que para esta situación vale µe=tan (Θc). Obtenga µe y estime la incertidumbre de la determinación. Compare los valores de µe y µc. Apendice Estudio del movimiento del sistema de la Fig. 11.1. Para resolver este aplicamos las leyes de Newton a cada uno de los cuerpos que forma el sistema (diagrama de cuarpo libre) y supondremos además que la fuerza de roce es proporcionala la normal, esto es suponemos: Fr=µN. T1 N1 Fr T1 M1 T2 R M2 T2 M2g M1 g N1 = M 1 g M 1a = T1 − Fr r r r R = T1 + T2 a Ip = R p ⋅ (T2 − T1 ) Rp M 2 a = M 2 g − T2 Figura 11.2 Diagrama de cuarpo libre del sistema de la fig.11.1 Aquí Ip, Rp y a/Rp son el momento de inercia de la polea, su radio y su aceleración angular. De las ecuaciones de movimiento de cada uno de los cuerpos que forma el sistema, obtenemos: ( M 1 + M 2 + I p / R p2 ) ⋅ a = M 2 g − Fr . (3) Si Fr=µdM1g, tenemos: ( M 1 + M 2 + I p / R p2 ) ⋅ a = M 2 − µd ⋅ M 1 . g (4) Los parámetros M1, M2, Ip, Rp, a y g son accesibles a través de mediciones directas. Por lo tanto si realizamos un experimento manteniendo contante M2 y definiendo: y = ( M 1 + M 2 + I p / R p2 ) y x=M1, la expresión (4) puede escribirse como: y = M 2 − µd ⋅ x . (5) Por lo tanto, si la hipótesis Fr=µN, se cumple, la dependencia del parámetro y en función de x=M1, es lineal. Si esta hipótesis dejase de cumplirse, es claro que la dependencia de y con x dejaría de ser lineal. En otras palabras, la valides o no del la hipótesis Fr=µN, se reduce a la dependencia lineal o no de las variables y con x. Por otra parte, si de dependencia entre estas variables es efectivamente lineal, la pendiente de de la recta expresada por (5) no da el valor de µd y la ordenada al origen debería coincidir con M2. Bibliografía 1. M. Alonso y E. J. Finn, Física Vol.II, Campos y Onda (Fondo Educativo Interamericano, ed. inglesa, Addison-Wesle, Reaing, Mass., 1967). 3 2. R. Halliday, Resnick y Krane, Física para estudiantes de ciencias e ingeniería, 4ta. ed., vol. II (Cía. Editorial Continental, S.A., México, 1985). 3. “A strange behavior of friction,” R. Morrow, A. Grant, and D. P. Jackson Phys. Teach. 37(8) 412 (1999) 4