TEMA I Señales y sistemas de tiempo discreto Señales en tiempo
Anuncio

II. Análisis de señales en tiempo
discreto.
TEMA I
Señales y sistemas de tiempo
discreto
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
Introducción.
Señales de tiempo discreto.
Sistemas de tiempo discreto. Sistemas lineales e
invariantes en el tiempo (LIT).
Propiedades de los sistemas LIT.
Representación de sistemas LIT.
Transformada de Fourier (TF)
20
12/08/02
Señales en tiempo discreto
• Muestra unitaria (impulso en tiempo discreto):
0, n ≠ 0
1, n = 0
δ ( n) =
−∞ < n< ∞
• Escalón unitario:
• Su dominio es el conjunto de enteros.
• No está definida para valores no enteros, pero
es incorrecto pensar que es cero si n no es
entero!
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
21
Ejemplos de secuencias (1)
• Las señales en tiempo discreto se representan
mediante secuencias.
• Una secuencia de números x, en la cual el nésimo miembro de la familia es x(n), se denota
formalmente como:
x = {x (n)}
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
1, n ≥ 0
u( n) =
0, n < 0
22
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
23
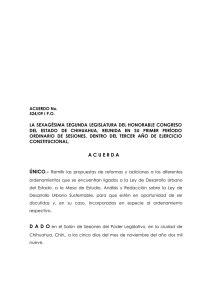
Ejemplos de secuencias (2)
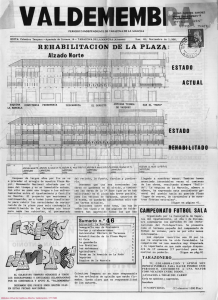
• Es posible expresar cualquier secuencia como una
suma de muestras unitarias escaladas y
desplazadas. Sea la secuencia p(n) en la figura
siguiente:
α
• u(n) está relacionado con δ(n):
u ( n) =
α-4
n
∑ δ (k )
k = −∞
(1.1)
α2
Entonces,
δ (n) = u(n) − u(n − 1)
α5
0
p(n) = α-4.δ(n+3) + α0.δ(n) + α2.δ(n-2) + α5.δ(n-5)
(1.2)
Y en general, para cualquier secuencia x:
x ( n) =
∞
∑ x (k ) ⋅ δ (n − k )
(1.3)
k = −∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
24
12/08/02
Ejemplos de secuencias (3)
• Exponencial real: x ( n) = Aα
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
Ejemplos de secuencias (4)
n
• Note que para r entero:
j (ω + 2πr ) n
12/08/02
• Esto nos indica que para las secuencias
exponenciales complejas o sinusoidales
reales, solamente es necesario considerar
frecuencias en un intervalo de longitud 2π.
x ( n ) = e (σ + j ω 0 ) n
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
jω n
Ae 0
= Ae 0
A cos[(ω 0 + 2πr )n + φ ] = A cos(ω 0 n + φ )
• Senoidal: x (n) = A cos(ω 0 n + φ )
• Exponencial compleja:
25
26
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
27
Operaciones con señales discretas
Operaciones con secuencias:
•
•
•
•
•
12/08/02
Combinación de Desplazamiento y Reflexión (inversión
en el tiempo):
La señal y(n) = x(-n - α) puede obtenerse de dos modos:
(a) Se desplaza x(n) a la derecha α unidades para obtener
x(n - α) y luego se refleja esta nueva señal para obtener
x(-n - α) .
(b) Se refleja x(n) para obtener x(-n) y luego se desplaza a
la izquierda α unidades esta nueva señal para obtener
x(-n - α).
Suma:
x + y = {x(n) + y(n)} (muestra a muestra)
Producto:
x . y = {x(n) . y(n)} (muestra a muestra)
Multiplicación por un escalar:
α.x = {α.x(n)}
Retardo o desplazamiento:
y(n) = x(n –n0) , n0 entero
y(n) es la versión desplazada de x(n).
Reflexión:
y(n) = x(–n)
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
En ambos casos, una muestra de x(n) ubicada en el índice
original n estará ubicada en un nuevo índice nN, dado
por n = -nN - α.
28
12/08/02
Secuencias periódicas (1)
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
Secuencias periódicas (2)
• En el caso de secuencias exponenciales
complejas y suinusoidales reales periodicas:
• Una secuencia x(n) es periódica con periodo N
si:
(1.4)
x(n) = x(n+N)
Para todo n.
• N debe se necesariamente un entero!
jω n
jω ( n + N )
e 0 =e 0
A cos(ω 0 n + φ ) = A cos(ω 0 n + ω 0 N + φ )
Esto requiere que:
ω0N = 2πk, con k entero
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
29
30
12/08/02
(1.5)
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
31
Secuencias periódicas (3)
Secuencias periódicas (4)
Ejemplo:
Calcular el periodo de las siguientes señales:
Cuando se combina la condición (1.5):
ω0N = 2πk, con k entero
Con el hecho de que:
x(n) = cos(πn/4),
y(n) = cos(3πn/8)
z(n) = cos(n)
j (ω 0 + 2πr ) n
jω n
= Ae 0
A cos[(ω 0 + 2πr )n + φ ] = A cos(ω 0 n + φ )
Ae
Se concluye que existen solamente N frecuencias
distintas para las cuales las secuencias
correspondientes son periódicas con periodo N.
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
32
Secuencias periódicas (5)
2πk
,
N
k = 0,1,2,..., N − 1
• Estas propiedades de las secuencias senoidales
y exponenciales complejas constituyen la base
para la teoría y el diseño de algoritmos
computacionales para el análisis de Fourier en
tiempo discreto.
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
33
Altas y bajas frecuencias en secuencias
exponenciales y sinusoidales
• Por ejemplo, el conjunto de frecuencias
ωk =
12/08/02
34
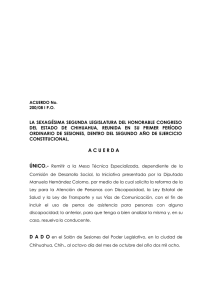
La interpretación de altas y bajas frecuencias
en tiempo discreto es algo diferente a la de
tiempo continuo:
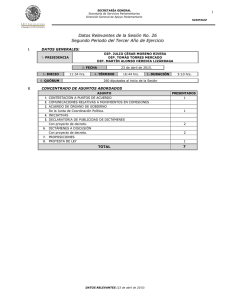
• Si ω0 se incrementa de 0 a π, la sinusoide
oscila más rápidante
• Si ω0 se incrementa de π a 2π, la sinusoide
oscila más lentamente.
Ej: veamos gráficamente que sucede con
x(n) = cos(ω0 n) para ω0 = 0, π/8, π/4, π,
15π/8,7π/4, 2π
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
35
Medidas de señales discretas:
ω0 = 0 ó
ω0 = 2π
SD =
Suma Discreta:
ω0 = π/8 ó
ω0 =15π/8
∑ x ( n)
(1.6a)
n = −∞
SA =
Suma Absoluta:
ω0 = π/4 ó
ω0 = 7π/4
∞
∞
∑ x ( n)
(1.6b)
n = −∞
Suma Acumulativa:
s C ( n) =
∞
∑ x (k )
(1.6c)
k = −∞
ω0 = π
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
36
Medidas de señales discretas:
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
37
Simetría:
• Secuencias con simetría par:
Energía de una secuencia
(señales aperiódicas):
ε=
∞
∑ x ( n)
2
(1.6d)
n = −∞
Valor promedio:
Potencia de una secuencia:
(señales periódicas):
x av
P=
1
=
N
1
N
xe(n) = xe(-n)
• Secuencias con simetría impar o antisimétricas:
xo(n) = - xo(-n)
N −1
∑ x ( n)
(1.6e)
n= 0
N −1
∑ x ( n)
(1.6f)
n= 0
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
38
(1.9)
De donde se puede obtener, usando las propiedades
de simetría (¿cómo?):
xe(n) = 0.5x(n) + 0.5x(-n)
xo(n) = 0.5x(n) - 0.5x(-n)
12/08/02
(1.8)
• Partes par e impar de una secuencia:
x(n) = xe(n) + xo(n)
2
(1.7)
12/08/02
(1.10)
(1.11)
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
39
Sistemas de tiempo discreto
Sistemas lineales
Sea un sistema definido por:
• Un sistema de tiempo discreto se define
matemáticamente como una transformación o un
operador que mapea una secuencia de entrada x(n)
en una secuencia de salida y(n):
y(n) = T[x(n)]
Si y1(n) es la respuesta del sistema a x1(n) y y2(n) es la
respuesta del sistema a x2(n), un sistema es lineal si y
sólo si:
y(n) = T[x(n)]
•
T[ax1(n) + bx2(n)] = aT[x1(n)] + bT[x2(n)]
= ay1(n) + by2(n)
(1.12)
Representación gráfica:
x(n)
(principio de superposición)
y(n)
T[ ]
para constantes arbitarias a y b.
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
40
Sistemas lineales
• Esta propiedad implica que si h(n) es la respuesta
a δ(n), entonces h(n-k) ser’a la respuesta a δ(n-k).
si además el sistema es lineal, entonces (1.13) se
transforma en:
∞
∑ x(k )T [δ (n − k )]
k = −∞
y ( n) =
∞
∑ x (k )h
k
( n)
k = −∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
41
• Sea un sistema con respuesta y(n) a una entrada
x(n). Este sistema es invariante al desplazamiento
si para todo k entero, una secuencia x1(n) = x(n-k)
produce una respuesta y1(n)=y(n-k).
∞
y (n) = T ∑ x (k )δ (n − k )
k = −∞
y ( n) =
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
Sistemas invariantes al desplazamiento
(invariantes en el tiempo)
La propiedad anterior sugiere que un sistema lineal
puede caracterizarse completamente mediante su
respuesta a la muestra unitaria:
• Sea h(k) = T[δ(n - k)] (respuesta a un impulso que
ocurre en n=k), entonces:
Usando (1.12):
12/08/02
y ( n) =
(1.13)
42
∞
∑ x (k )h(n − k )
(1.14)
k = −∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
43
Cálculo de la suma de convolución –
ejemplo.
Suma de Convolución y sistemas LIT
y ( n) =
∞
∑ x(k )h(n − k )
k = −∞
• Sea un sistema con h(n) = anu(n), con a<1.
Encuentre la respuesta y(n)=h(n)*x(n) a la entrada
x(n) = u(n)-u(n-8).
• A la ecuación (1.14) se le denomina suma de
convolución. (1.14) indica que un sistema lineal
invariante en el tiempo (linear time-invariant system –
LTI) ó LIT puede caracterizarse completamente por su
respuesta al impulso. En este caso, y(n) es el resultado
de la Convolución de x(n) y h(n) y se escribe:
• Solución: Se debe construir la suma de convolución.
En las siguientes laminas se muestra el proceso:
Primero se obtiene x(k) y h(k). Luego se obtiene h(-k)
y se le desplaza n unidades para obtener h(n-k). Se
realiza la multiplicación x(k).h(n-k) y se acumula el
resultado para obtener la muestra n-esima de y(n).
Se continua desplazando h(n-k) hasta obtener todas
las muestras de y(n)
y(n) = x(n)*h(n)
• Se puede demostrar que la convolución es conmutativa,
es decir:
x(n)*h(n) = h(n)*x(n)
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
44
Cálculo de la suma de convolución – ejemplo.
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
45
Cálculo de la suma de convolución – ejemplo.
46
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
47
Combinación de sistemas LIT:
Conexión en Cascada
x(n)
h1(n)
h2(n)
Combinación de sistemas LIT:
Conexión en paralelo
y(n)
h1(n)
x(n)
x(n)
h2(n)
x(n)
h1(n)
y(n)
x(n)
Los 3 sistemas representados arriba son equivalentes
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
48
12/08/02
S=
y ( n) ≤ B y < ∞
∑ h(k ) < ∞
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
49
• Un sistema es causal si su salida para cualquier
n = n0 depende solamente de la entrada para
n ≤ n0. Esto implica que si x1(n) = x2(n) para
n ≤ n0 entonces y1(n)=y2(n) para n ≤ n0. Es decir, el
sistema es no anticipativo
• Un sistema LIT es estable si su respuesta al
impulso es sumable absolutamente, es decir,
si:
∞
y(n)
Causalidad
• Un sistema es estable si para toda entrada
acotada x(n) éstre produce una salida
acotada y(n), es decir si
entonces
h1(n) + h2(n)
Los dos sistemas representados arriba son equivalentes
Estabilidad
x ( n) ≤ B x < ∞
y(n)
h2(n)
y(n)
h1(n)* h2(n)
+
• Un sistema LIT es causal si y solo si:
h(n) = 0,
(1.15)
n<0
(1.16)
k = −∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
50
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
51
Estabilidad y causalidad - Ejercicios
•
•
Estabilidad y causalidad - Ejercicios
2. Promedio móvil:
Determine si el sistema con respuesta al
impulso
h(n) = anu(n)
es estable y causal
M2
1
y ( n) =
∑ x (n − k )
M 1 + M 2 + 1 k = − M1
3. Acumulador:
y ( n) =
Encuentre la respuesta al impulso de los
siguientes sistema y determine si son
estables y causales.
1. Retardo ideal:
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
4. Diferencia hacia adelante:
y(n) = x(n+1)-x(n)
5. Diferencia hacia atrás:
y(n) = x(n)-x(n-1)
52
12/08/02
• Los sistemas cuya respuesta al impulso tiene
un número finito de muestras no nulas se
denominan sistemas con respuesta al
impulso de duración finita (finite-duration
impulse response – FIR)
53
• Una subclase de sistemas LIT de importancia
práctica consiste en aquellos sistemas para
los cuales la entrada x(n) y la salida y(n)
satisfacen una ecuación en diferencias de la
forma:
• Los sistemas cuya respuesta el impulso es
finita en duración se denominan sistemas con
respuesta al impulso de duración infinita
(infinite-duration impulse response – IIR)
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
Ecuaciones en diferencias lineales con
coeficientes constantes.
Sistemas FIR y Sistemas IIR
12/08/02
∑ x (k )
k = −∞
y(n)=x(n-nd)
12/08/02
n
N
∑a
k =0
54
12/08/02
M
k
y ( n − k ) = ∑ br x ( n − r )
r =0
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
(1.17)
55
Ejemplo: El sistema acumulador
y ( n) =
n
∑ x (k )
• En el caso anterior, N=1, a0=1, a1=-1, M=0, b0=1
• Sin información adicional, una ecuación en
diferencias como (1.17) no especifica únicamente la
relación E/S de un sistema. Como en las ecuaciones
diferenciales, existe una familia de soluciones.
• En general, a una solución yp(n) que satisfaga (1.17)
se le puede agregar una solución yh(n) de la
ecuación homogénea (es decir, (1.17) con el lado
derecho igual a 0) y esta suma será también una
solución de 1.17.
k = −∞
y ( n) = x ( n) +
n −1
∑ x (k )
k = −∞
• Para n – 1:
y (n − 1) =
n −1
∑ x (k )
k = −∞
• Por lo tanto,
y ( n) = x (n) + y (n − 1)
y ( n) − y ( n − 1) = x ( n)
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
56
Representación de sistemas LIT causales
mediante ecuaciones en diferencias (1)
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
57
Representación de sistemas LIT causales
mediante ecuaciones en diferencias (2)
• Si lo anterior se satisface (1.17) nos dará la
relación E/S al reescribirla así:
• Un sistema que satisfaga (1.17) será LIT y
causal sólo si se elige adecuadamente la
componente homogénea. En este caso, se
requiere que el sistema esté inicialmente en
reposo, es decir, si x(n) = 0 para todo n < n0
entonces y(n) = 0 para todo n < n0.
M
b
ak
y (n − k ) + ∑ k x (n − r ) (1.18)
k =1 a 0
r =0 a 0
N
y ( n) = − ∑
• Para sistemas FIR: N=0
• Para sistemas IIR: N>0
• Ejemplo: hallar la respuesta al impulso de
sistema LIT causal definido por:
y(n)=a.y(n-1) + x(n)
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
58
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
59
Representación de señales y sistemas de
tiempo discreto en el dominio de la
frecuencia (1)
Representación de señales y sistemas de
tiempo discreto en el dominio de la
frecuencia (2)
• Esta propiedad permite que los sistemas LIT
puedan representarse en términos de
sinusoides o exponenciales complejas
(Representación de Fourier).
• La representación en el dominio de la
frecuencia de una señal o sistema puede
proporcionar en muchos casos una forma
matemáticamente más simple para manipular
la información acerca de la señal o el sistema.
• Una propiedad fundamental de los sistemas
LIT es que la respuesta en régimen
permanente a una entrada sinusoidal es
también sinusoidal de la misma frecuencia,
con amplitud y fase determinadas por el
sistema.
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
60
Respuesta de un sistema de tiempo
discreto a una entrada exponencial
compleja
y ( n) =
jω
H (e ) =
∞
∑ h(k )e
− jωk
(1.19)
• Entonces,
y (n) = H (e jω )e jωn
∑ h(k )e ω
= e jω n
61
k = −∞
(1.20)
j ( n− k )
k = −∞
∞
∑ h(k )e
• H(ejω) describe los cambios en amplitud
compleja de una exponencial compleja de
frecuencia ω.
− jω k
k = −∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
• Si definimos
• Si a un sistema de tiempo discreto se le
aplica una secuencia de entrada x(n)=ejωn
para -∞ < n < ∞, entonces, usando la suma
de convolución:
∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
62
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
63
Respuesta en frecuencia
Respuesta en fase y retardo de grupo
• H(ejω) describe los cambios en amplitud
compleja de una exponencial compleja de
frecuencia ω.
• A H(ejω) se le denomina respuesta en frecuencia
del sistema con respuesta al impulso h(n).
• H(ejω) es compleja y puede expresarse bien en
forma rectangular o polar:
H (e jω ) = H R (e jω ) + jH I (e jω )
H (e jω ) = H (e jω ) e j arg[ H ( e
12/08/02
jω
)]
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
64
Ejemplo – Respuesta en frecuencia (1)
• arg[H(ejω)] = respuesta en fase
• A veces es conveniente referirse al retardo de
grupo en lugar de la fase:
Retardo de grupo = −
∂
arg[ H (e jω )]
∂ω
{
}
(1.21)
• Note que H(ejω) es una función continua de ω y
que además es periódica de periodo 2π
(recuerde que ej(ω+2π)k = ejωk).
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
65
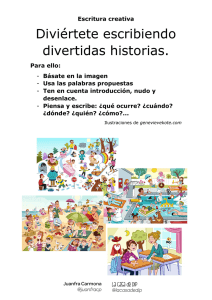
Ejemplo – Respuesta en frecuencia (2)
• Hallar la respuesta en frecuencia de un sistema
definido por
1, 0 ≤ n ≤ N − 1
h(n) =
0, en otros casos
• Las gráficas para N= 6 de h(n), H(ejω) y arg[H(ejω) ] se
muestran a continuación.
• Solución: sustituyendo h(n) en (1.13):
1 − e − jω N
H (e ) = ∑ e
=
1 − e − jω
k =0
sen(ωN / 2) − j ( N −1)ω / 2
=
e
sen(ω / 2)
jω
12/08/02
N −1
− jω k
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
66
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
67
Transformada de Fourier (1)
Transformada de Fourier (2)
• Como H(ejω) es una función periódica de ω, se puede
representar mediante una serie de Fourier, que es de
hecho la representación dada por (2.13), donde los
coeficientes de Fourier corresponden a los valores de la
respuesta al impulso h(n). Por lo tanto, es posible hallar
h(n) mediante la fórmula usada para hallar los
coeficientes de Fourier:
1
h(n) =
2π
π
∫ H ( e )e
jω
jω n
dω
−π
∞
∑ h(n)e
− jω n
X (e ) =
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
1
x ( n) =
2π
68
12/08/02
Transformada de Fourier (2)
π
∫π H (e
jω
jω
) X (e )e
jω n
(1.24)
π
∫π X (e
jω
)e jωn dω
(1.25)
−
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
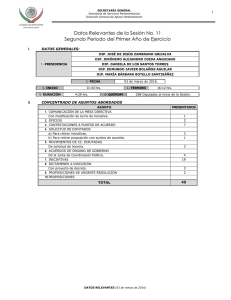
Si ωco = π/2
dω
69
1, ω ≤ ω co
H ( e jω ) =
0, ω co < ω ≤ π
|H(ejω)|
−
jω
jω
Y (e ) = H (e ) X (e )
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
π
-π
(1.26)
-2π -(2π-ωco)
-ωco
-ωco
2π-ωco
2π
arg[H(ejω)]
• Nota: (1.26) se puede obtener formalmente tomando la
transformada de (1.14).
12/08/02
− jω n
Hallar la respuesta al impulso del filtro ideal pasa-bajo en
tiempo discreto, definido por:
• Por lo que:
jω
∑ x ( n) e
Ejemplo – Transformada inversa (1)
• (1.25) puede interpretarse como una superposición de
exponenciales complejas de amplitud incremental.
Entonces, para un sistema LIT (por el principio de
superposición) la salida será la superposición de las
respuestas incrementales a cada exponencial. Como
cada secuencia se obtiene al multiplicar por H(ejω):
1
y ( n) =
2π
∞
n = −∞
(1.22)
(1.23)
n = −∞
12/08/02
jω
• y la transformada inversa como
• donde
H ( e jω ) =
• Las ecuaciones (2.16) y (2.17) constituyen el par de
transformadas de Fourier para la secuencia h(n)
siempre y cuando la serie en (2.17) converja.
• Para una secuencia general x(n), se define la
transformada de Fourier como
70
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
71
Ejemplo – Transformada inversa (2)
Propiedades de simetría de la T.F.
• Solución:Usando la ecuación de la transformada
inversa de Fourier (2.19):
1
h(n) =
2π
ω co
∫ω e
−
jω n
dω =
co
Secuencia
x(n)
1. x*(n)
2. x*(-n)
3. Re[x*(n)]
sen(ω co n) sen(πn / 2)
=
πn
πn
• Gráfica de h(n):
Transformada de Fourier
X(ejω)
X*(e-jω)
X*(ejω)
Xe(ejω) [parte conj. simétrica de X(ejω)]
4. jIm[x*(n)]
5. xe(n) [parte conj.
Xo(ejω) [parte conj. antisim. de X(ejω)]
Re[ X(ejω)]
simétrica de x(n)]
6. xo(n) [parte conj.
jIm[ X(ejω)]
antisim. de x(n)]
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
72
12/08/02
Propiedades de simetría de la T.F.
para secuencias reales (1)
Secuencia
x(n)
Secuencia
x(n)
X(ejω)= X*(e-jω)
11. Cualquier x(n) real
Re[X(ejω)]=Re[X(e-jω)]
12. xe(n) [parte par de x(n)] Re[ X(ejω)]
13. xo(n) [parte impar de x(n)] jIm[ X(ejω)]
Im[X(ejω)]= - Im[X(e-jω)]
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
arg[X(ejω)]= - arg[X(e-jω)]
(la fase es impar)
(la parte imaginaria es impar)
12/08/02
|X(ejω)|= |X(e-jω)|
(la magnitud es par)
(la parte real es par)
9. Cualquier x(n) real
Transformada de Fourier
X(ejω)
10. Cualquier x(n) real
(la transformada de Fourier es
conjugada simétrica)
8. Cualquier x(n) real
73
Propiedades de simetría de la T.F.
para secuencias reales (2)
Transformada de Fourier
X(ejω)
7. Cualquier x(n) real
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
74
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
75
Teoremas de la transformada de Fourier (2)
Teoremas de la transformada de Fourier (1)
Secuencia
1.
2.
3.
4.
5.
6.
12/08/02
x(n)
x(n)
y(n)
ax(n) + by(n)
x(n - nd)
e-jωo x(n)
x(-n)
Secuencia
x(n)
Transformada de Fourier
X(ejω)
X(ejω)
Y(ejω)
aX(ejω) + bY(ejω)
e-jωnd X(ejω)
X(ej(ω-ωo))
X(e-jω)
X*(ejω) si x(n) es real
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
j
8. x(n)* y(n)
X(ejω) Y(ejω)
9. x(n) y(n)
1
2π
Teorema de Parseval:
∞
1
∑
2
π
n = −∞
∞
1
x ( n) y * ( n) =
∑
2
π
n = −∞
76
12/08/02
2
x ( n) =
π
∫
π
∫π X (e
jθ
Teorema de
modulación
)Y (ej (ω −θ ) )dθ
−
2
X ( e jω ) d ω
−π
π
∫π X (e
jω
)Y * (e jω )dω
−
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
77
REPASO:
Secuencias periódicas
En general, para que:
• En la literatura se encuentran tablas de pares
de transformadas de Fourier (secuencia –
Transformada de Fourier) para las señales
fundamentales ( impulso unitario, escalón,
exponencial, tren de impulsos, coseno y
otras que aparecen con frecuencia en
problemas prácticos).
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
dX (e jω )
dω
7. nx(n)
Tablas de pares de transformadas
de Fourier para señales discretas
12/08/02
Transformada de Fourier
X(ejω)
jω ( n + N )
=e 0
A cos(ω 0 n + φ ) = A cos(ω 0 n + ω 0 N + φ )
e
jω 0 n
sean periódicas, se debe cumplir que:
ω0N = 2πk, con k entero
78
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
79
REPASO: Suma de Convolución y
sistemas
LIT
∞
REPASO
Operaciones con señales discretas
y ( n) =
∑ x(k )h(n − k )
Combinación de Desplazamiento y Reflexión (inversión
en el tiempo):
La señal y(n) = x(-n - α) puede obtenerse de dos modos:
(a) Se desplaza x(n) a la derecha α unidades para obtener
x(n - α) y luego se refleja esta nueva señal para obtener
x(-n - α) .
(b) Se refleja x(n) para obtener x(-n) y luego se desplaza a
la izquierda α unidades esta nueva señal para obtener
x(-n - α).
• A la ecuación (2.8) se le denomina suma de
convolución. (2.8) indica que un sistema lineal
invariante en el tiempo (linear time-invariant system –
LTI) ó LIT puede caracterizarse completamente por su
respuesta al impulso. En este caso, y(n) es el resultado
de la Convolución de x(n) y h(n) y se escribe:
En ambos casos, una muestra de x(n) ubicada en el índice
original n estará ubicada en un nuevo índice nN, dado
por n = -nN - α.
• Se puede demostrar que la convolución es conmutativa,
es decir:
x(n)*h(n) = h(n)*x(n)
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
80
• Un sistema LIT es estable si su respuesta al
impulso es sumable absolutamente, es decir,
si:
∞
S = ∑ h(k ) < ∞
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
81
M
b
ak
y ( n) = − ∑
y (n − k ) + ∑ k x (n − r )
k =1 a 0
r =0 a 0
Estabilidad en en
sentido Entrada
acotada-salida
acotada
• Para sistemas FIR: N=0
• Para sistemas IIR: N>0
• Esto se cumple siempre y cuando el sistema
esté inicialmente en reposo
n<0
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
12/08/02
N
• Un sistema LIT es causal si y solo si:
h(n) = 0,
y(n) = x(n)*h(n)
Representación de sistemas LIT causales
mediante ecuaciones en diferencia
REPASO: Estabilidad y Causalidad
k = −∞
k = −∞
82
12/08/02
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
83
REPASO: Transformada de Fourier
• Para una secuencia general x(n), se define la
transformada de Fourier como
∞
jω
X (e ) =
∑ x ( n) e
− jω n
(1.18)
n = −∞
• y la transformada inversa como
1
x ( n) =
2π
12/08/02
π
jω
jω n
X
(
e
)
e
dω
∫
(1.19)
−π
EL-500020 Proc. Digital de Señales - DIP UNEXPO Bqto - L. Tarazona
84