Dos siglos de crecimiento económico chileno: ¿hay etapas?
Anuncio

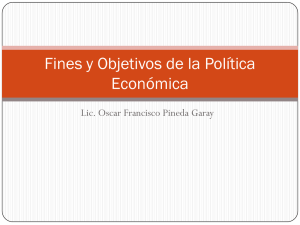
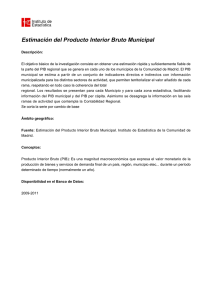
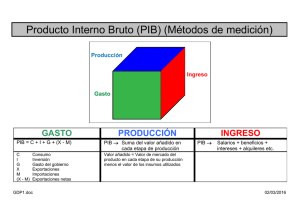
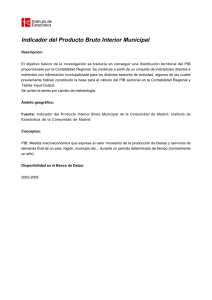
Dos siglos de crecimiento económico chileno: ¿hay etapas? José Díaz Rolf Lüders Gert Wagner Pontificia Universidad Católica de Chile, EH Clio Lab * 18-Jul-2008 Draft. Do not quote. Resumen El propósito de este trabajo es identificar, por medio de criterios estadísticos, cambios estructurales y etapas en la evolución económica de Chile. Se examina el PIB total, per cápita y por trabajador con diferentes instrumentos estadísticos. Los principales resultados obtenidos son: (1)no parece factible periodizar directamente a partir de la tasa de crecimiento; (2)distintos filtros (tendencias) proporcionan diferentes conjuntos de períodos, con extensiones variables; y (3)un análisis estado espacio no restringido propone un modelo de tendencia estocástica para los tres indicadores. Tras estimar dicha tendencia se determinan los años de cambio estructural. * Contact email: [email protected] 1 Índice 1. Trayectoria del crecimiento chileno y método general 1.1. Trayectoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2. Nota metodológica . . . . . . . . . . . . . . . . . . . . . . . . 4 4 5 2. Técnicas para la identificación de cambio estructural 7 2.1. Método frecuentista . . . . . . . . . . . . . . . . . . . . . . . . 8 2.2. Método bayesiano . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.3. Criterio para la detección de atípicos . . . . . . . . . . . . . . 10 3. Análisis del crecimiento anual observado 4. Análisis de tendencia 4.1. ¿Qué es la tendencia? . . . . . . . . . . . . . . . . . . . . . . 4.2. Tendencia determinista . . . . . . . . . . . . . . . . . . . . . 4.2.1. ¿Cuál es la tasa de crecimiento? . . . . . . . . . . . . 4.2.2. ¿Cuáles son las fases si la tasa de crecimiento es constante? . . . . . . . . . . . . . . . . . . . . . . . . . . 10 13 . 13 . 14 . 15 . 19 5. Tendencia con tasa de crecimiento no determinista 20 5.1. Regresión móvil . . . . . . . . . . . . . . . . . . . . . . . . . . 20 5.2. Filtros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 5.3. Identificación de quiebres estructurales . . . . . . . . . . . . . 24 6. Modelo estado espacio de la tendencia 27 7. Resultados y conclusiones 29 Referencias 31 2 Un primer paso conveniente al tratar de entender un fenómeno es comenzar por su identificación. En materia de crecimiento económico son el PIB y sus variantes, per cápita y per trabajador -sus variaciones- los indicadores que hoy día dominan la descripción agregada del fenómeno. Se trata de medidas definidas y aunque presentan diversas limitaciones, su carácter de amplia cobertura y su potencial para incorporar aspectos novedosos, han cooperado a consolidar esta posición dominante. Por otra parte, la construcción de este indicador para periodos anteriormente no cubiertos provee descripciones del fenómeno que cubren extensos periodos de tiempo, hasta de varios siglos. De este modo se ha ido configurando una descripción general de la evolución histórica del crecimiento económico, apreciándose que al entender éste en términos per cápita, el fenómeno es de data reciente. Sin embargo, y a medida que se ha ampliado la extensión temporal de estos indicadores y pulido su construcción, la idea inicial de un despegue más o menos repentino, el take off popularizado por Rostow (1960) ha ido cediendo su lugar a una lectura más gradual, donde el origen del fenómeno, aunque reciente, podría ubicarse hasta en la primera mitad del milenio. Pero prevalece el interés por identificar etapas en el proceso de crecimiento y no ha perdido vigencia la idea de que a través de la comparación de tales etapas sería posible extraer información útil para el entendimiento del fenómeno, al menos, para organizar un proceso de búsqueda de factores que sustenten tales diferencias. Seguramente es Angus Maddison el autor que ha logrado una cobertura y clasificación más amplia y exhaustiva del fenómeno, abarcando prácticamente todo el milenio para un amplio espectro de países. La estrategia de periodización que emplea Maddison se basa en una mezcla de criterios, algunos explícitos mientras pero otros son de carácter más intuitivo. En sus palabras, periodiza el desempeño mundial “por análisis inductivo e inspección iterativa de características empíricamente medibles” (Maddison, 1995, p. 59). El objetivo de las páginas que siguen es explorar la existencia de etapas en el proceso de desarrollo chileno durante sus dos siglos de vida republicana. Se 3 pretende que tales etapas -subperiodos- sean un reflejo directo de los datos y que no respondan a una periodificación a priori, sea ésta de índole comercial, de periodos de paz y guerra, de periodos fijados por la vigencia de estándares monetarios o países dominantes o cualquier criterio exógeno a la evolución del indicador. En otras palabras, se busca una descripción del crecimiento que obedezca exclusivamente a criterios estadísticos, es decir son el indicador y el instrumento estadístico los encargados de revelar la existencia, o la ausencia, de etapas y periodos. El desafío más específico es, entonces, comparar y discutir los resultados que en materia de periodización se obtienen con una batería de instrumentos estadísticos. 1. Trayectoria del crecimiento chileno y método general 1.1. Trayectoria El crecimiento económico chileno no ha sido sostenido. Una mirada a los datos representados en el Gráfico 1 permite apreciar la trayectoria irregular del PIB total y per cápita desde 1810. El análisis de esta trayectoria ha sido estudiado desde diferentes perspectivas. De Gregorio (2005) y Chumacero y Fuentes (2006) procuran modelar la dinámica en el período largo, concentrándose en particular en la segunda mitad del siglo XX. Haindl (2006) caracteriza el desarrollo en el siglo XX utilizando un filtro e identificando varias etapas en el procesos de crecimiento. Otra aproximación es la de Hausmann y otros (2005) que establecen períodos de aceleración de crecimiento para una muestra de países que incluye a Chile. Harberger (. . . ), en un estudio de amplia cobertura que incluye a Chile, identifica períodos de cuatro más años que registran un crecimiento anual igual a mayor a 5 %. 4 Gráfico 1: Chile: PIB total y per cápita (logs), 1810-2006 1.2. Nota metodológica En esta sección se describe brevemente el marco general de análisis. Llamamos Yt a la variable observada en nivel (PIB total, per cápita o por trabajador) e yt a su logaritmo natural (yt = ln Yt ). La primera diferencia de esta serie es una aproximación a la tasa de crecimiento (∆yt = yt − yt−1 = ln Yt − ln Yt−1 ). Básicamente, se exploran dos perspectivas: 1. El primer análisis identifica cambios estructurales directamente en la tasa de crecimiento, ∆yt 2. El segundo análisis modela la serie como la suma de dos componentes: uno de tendencia (µt ) y otro cíclico. (εt ). Es decir, yt = µt + εt . El problema, entonces, es la identificación de µt para lo cual se plantean dos conjeturas: a) Primera conjetura: la tendencia tiene un crecimiento constante. 5 Esto significa que µt = γ0 + γ1 t, donde t es un índice del tiempo (t = 1, 2, . . . , T , y γ1 t es la estimación de dicha tasa de tendencia. La conjetura implica que el objeto de análisis para la periodización es εt , es decir εt = yt − µt = yt − (γ0 + γ1 t). b) Segunda conjetura: no hay una tasa de tendencia única para el período completo, lo que puede reflejarse de dos maneras: 1) Suponer que se conserva el modelo µt = γ0 + γ1 t, pero que los coeficientes cambian en las distintas etapas identificadas. En este caso, el objeto de análisis son los coeficientes, especialmente γ1 , en las etapas identificadas por el instrumento estadístico. 2) La segunda manera otorga un carácter general a la función que configura la tendencia de modo que µt = f (t, y). Esto significa que la tendencia es un filtro elaborado con alguna combinación del índice temporal y de la variable yt . Para la identificación de las etapas se examina la tasa de variación de la tendencia, ∆µt . El contenido de este artículo es el siguiente. La sección 2 explica las técnicas empleadas en este artículo para la identificación de cambio estructural así como para el tratamiento de atípicos. La tercera sección presenta un análisis del crecimiento anual observado (corresponde al punto 1 indicado en la sección 1.2). La cuarta sección explora la identificación de cambio estructural cuando la tendencia es determinista (corresponde al punto 2a indicado en la sección 1.2). La quinta sección explora la identificación de cambio estructural en tendencias no deterministas: regresión móvil y filtros (corresponde al punto 2b indicado en la sección 1.2). La sexta sección aplica un modelo estado espacio para la identificación de la tendencia. Finalmente, se presentan las conclusiones. 6 La fuente de los datos empleados en este trabajo proviene de Díaz y otros (2007, 2008). 2. Técnicas para la identificación de cambio estructural Supongamos que X1 , . . . , Xn es una secuencia de datos. Los componentes de esta secuencia pueden ser agrupados en segmentos que, por compartir características estadísticas (media, varianza), constituyen regímenes, fases o períodos que finalizan con un cambio estructural (también denominado ruptura o punto de cambio). En general, se habla de cambio estructural cuando los parámetros de un modelo presentan una variación significativa en un período (Hansen, 2001). Por ejemplo, suponer que la tendencia de una serie es lineal, yt = γ0 + γ1 t, implica una tasa de crecimiento de tendencia constante (γ1 ). En este caso, el objetivo de la identificación de cambio estructural es determinar si efectivamente existe tal constancia. En caso contrario, se establecen los segmentos en que dicha tasa ha sido diferente. Si, en cambio, se ha identificado una serie para la tendencia con una tasa de crecimiento que no es constante, entonces el modelo de referencia es rt = θ +χt , donde θ es la tasa media de crecimiento y χt es un error aleatorio. En este caso, la prueba debe identificar segmentos en que esta tasa media es diferente. Los segmentos ordenados constituyen un conjunto H = {S1 , . . . , Sk }, con k − 1 quiebres estructurales (o puntos de cambio). Hay muchos conjuntos H posibles, incluyendo los casos k = 0 (no hay cambio estructural en la secuencia) y k = n (cada componente es un régimen). En estos términos, periodificar consiste en identificar en base a un criterio el conjunto H óptimo. Para ello se aplican dos métodos de identificación: uno frecuentista y otro bayesiano. 7 2.1. Método frecuentista Bai y Perron (1998, 2003) proponen un algoritmo para la identificación de las rupturas y las fases. Para cada número posible de rupturas se escoge aquel conjunto H cuya estimación por mínimos cuadrados produzca el mayor R2 , y se aplican pruebas secuenciales de k vs. k + 1 rupturas con valores críticos establecidos por los autores citados.1 El objetivo es determinar si el ajuste mejora lo suficiente al permitir una ruptura adicional, considerando la formación de errores. El conjunto H finalmente elegido es aquel que minimiza el criterio de información bayesiano. La duración mínima de las fases es dada por un parámetro expresado como porcentaje del total muestral. El algoritmo está implementado en la librería strucchange del lenguaje estadístico R.2 2.2. Método bayesiano El problema del punto de cambio bayesiano es analizado con el modelo de partición de producto (product partition model ) propuesto por Hartigan (1990). A diferencia de la metodología anterior que identifica los años de cambio estructural, este procedimiento entrega la probabilidad de ocurrencia de dicho cambio para cada año.3 Se denomina bayesiano pues procede por medio de una modelación teórica a la que se imponen características a priori ; por iteración se obtienen finalmente las incógnitas buscadas. Los postulados a priori son los siguientes: k 1. el conjunto H tiene la probabilidad P (H = {S1 , . . . , Sk }) = K Π c(Si ), i=1 donde c(S) ≥ 0 es un cohesión y K es elegido de manera que las probabilidades sumen 1 sobre todos los posibles conjuntos H 1 La función de distribución usada para los intervalos de confianza está en Bai (1997) y Bai y Perron (2003) 2 El método en detalle en Perron (2006) y Jones y Olken (2005). Su implementación en R Development Core Team (2007) y Zeileis y otros (2003). 3 Por ejemplo, indica que la probabilidad de cambio en t es x % mientras que la de t + 1 es z % 8 2. los componentes X1 , . . . , Xn son independientes dada una secuencia de parámetros µi , con Xi ∼ N (µi , σ 2 ) 3. la distribución de µij (promedio del segmento que comienza en i + 1 y σ02 finaliza en j) es N (µ0 , j−i ) 4. las cohesiones son cij = p(1 − p)j−i−1 cuando j < n y cij = (1 − p)j−i−1 cuando j = n 5. la probabilidad de que ocurra un cambio en la posición i es p (independiente para cada i) 6. se define el conjunto ρ = {U1 , U2 , . . . , Un }, donde Ui = 1 indica un punto de cambio en la posición i + 1. En el inicio, Ui = 0 (para todo i < n) y Un ≡ 1. Este modelo tiene cuatro parámetros, p, µ0 , σ02 y σ 2 . Su estimación procede maximizando la función de verosimilitud L(p, µ0 , σ02 , σ 2 ) = X f [X|ρ] f [ρ] P donde f [X|ρ] es la probabilidad del conjunto de datos dado el conjunto ρ, y f [ρ] es la probabilidad a priori del conjunto ρ. El algoritmo emplea cadenas de Markov mediante métodos de Monte Carlo (MCMC) y en cada paso se obtiene un valor de Ui desde su distribución condicional, dado el dato y la segmentación vigente. Luego, la posibilidad (odds) de observar un punto de cambio en i + j es P (Ui = 1|X, Uj , j = 6 i) pi = 1 − pi P (Ui = 0|X, Uj , j = 6 i) Dado un conjunto de segmentos, la estimación de µ̂r (r ∈ ij) es µ̂r = (1 − w)X̄ij + wµ0 9 σ2 σ02 +σ 2 Pj X i+1 y X̄ij = j−i con w = Tras cada iteración se actualizan las medias posteriores condicionadas a la segmentación vigente y es posible recuperar las probabilidades correspondientes.4 Este método está emparentado con los modelos markovianos de cambio de régimen estudiados, entre otros, por Hamilton (1994, Cap. 22). El algoritmo está implementado en la librería bcp del lenguaje estadístico R.5 2.3. Criterio para la detección de atípicos Los instrumentos estadísticos explicados anteriormente pueden verse afectados con la presencia de valores inusuales o atípicos. Para identificar estos casos se recurrió al criterio propuesto por Hampel (1985, Tabla 1, estimador X84) y Wilcox (2001). Si med(x) es la mediana de los valores xi y mad(x) es la mediana de las desviaciones absolutas, mad(x) = med (|xi − med(x)|), entonces xi se considera un atípico si |xi − med(x)| > 2 mad(x) . Este umbral de aceptación 0,6745 o rechazo está definido por una estimación indirecta de la desviación típica: . si la distribución es normal, entonces σ ≈ mad(x) 0,6745 El procedimiento tiene la ventaja de ser, en sí mismo, resistente a la presencia de atípicos. 3. Análisis del crecimiento anual observado En esta sección se examina directamente a la tasa de crecimiento anual (diferencia logarítmica) del PIB chileno total, per cápita y por trabajador; esta periodicidad es preferida pues cualquier agrupación (decenio, quinquenio) 4 El método es explicado en detalle en Barry y Hartigan (1992, 1993). Son recomendables Crowley (1997), Erdman y Emerson (2007a) y Loschi y otros (2008). 5 Ver Erdman y Emerson (2007b). 10 sería arbitraria -exógena-, condición que se desea evitar.6 Las series fueron sometidas a una corrección de atípicos con el criterio explicado en la primera sección de este artículo. Los años identificados con valores atípicos en la tasa de crecimiento del PIB fueron 1879, 1888, 1903, 1914-16, 1919, 1921, 1923, 1928, 1930-34, 1947-48, 1959, 1973, 1975 y 1982. Respecto a estos, en el caso del PIB per cápita se agregan 1898, 1910, y 1937, y en el caso del PIB por trabajador, 1897, 1898, 1900 y 1910. Los valores así identificados fueron reemplazados por los obtenidos con una interpolación lineal simple. La aplicación de la metodología de Bai y Perron (2003) identificó un cambio estructural en las series del PIB total y per cápita y ningún cambio en la correspondiente al PIB por trabajador. Los años identificados y el intervalo de confianza se reportan en la Tabla 1. El resultado es que en losc ais docientos años consdierados sólo se habría producido un cambio estructural, en el año 1976. Tabla 1: Cambio estructural en la tasa de crecimiento e intervalos de confianza Ruptura 2.5 % 97.5 % Total 1976 1960 1997 PIB Per Cápita Por Trabajador 1976 1961 1993 - La metodología bayesiana permite obtener los gráficos 2 y 3 que representan las medias posteriores y las probabilidades de cambio. Como antes, el PIB por trabajador no registró rupturas La principal impresión es que las probabilidades de cambio estructural reflejan muy levemente las fechas señaladas por el método de Bai y Perron 6 El PIB por trabajador sólo considera el período 1854-2006 dado que sólo cuenta con datos para fuerza de trabajo desde 1854. 11 Gráfico 2: Análisis bcp: diff(ln PIB), 1811-2006 Gráfico 3: Análisis bcp: diff(ln PIB per cápita), 1811-2006 12 (2003). De hecho, la probabilidad de existencia de dicho cambio es inferior a 50 %. Esto implicaría que la evidencia de cambio es bastante débil. 4. Análisis de tendencia En la sección anterior no hay una posición previa respecto al proceso estadístico de crecimiento registrado y la variable examinada es directamente la tasa de crecimiento anual. En esta sección tampoco hay una periodificación previa pero se supone que la serie puede ser descrita de una forma determinada. Como se indicó, una serie de tiempo anual puede ser representada como yt = µt + εt tras tomar logaritmos. µt es la tendencia o señal y εt es un componente irregular, y ambos son estadísticamente independientes. Una vez que µt es identificado, el componente irregular se obtiene por diferencia y es el objeto de estudio de la teoría de las fluctuaciones (Hamilton, 2005). La identificación de µt se denomina extracción de señales en ingeniería, filtro o suavizamiento en econometría, y gradación en ciencias actuariales (Proietti y Luati, 2007), y la discusión sobre la mejor metodología es de larga data (Klein, 1997). 4.1. ¿Qué es la tendencia? Según Phillips (2005, p. 405), “nadie comprende realmente las tendencias, aunque las veamos en los datos económicos.” En opinión de Schumpeter, su estudio debería constituir el problema central de la economía y la causa de sus dificultades (Schumpeter, 1930, p. 166). Originalmente, el término “tendencia” (trend ) designaba a una media móvil que correspondía a la “curva o línea representando los promedios instantáneos sucesivos . . . Cualquier punto en la tendencia será representado por el promedio de todas las observaciones en el período del cual ese momento es el punto central; es decir, si una curva muestra un período de p años, el 13 promedio instantáneo en cualquier año es la media de los p años en los que ese año particular está en el medio” (Hooker, 1901, p. 486). Hoy en día, tendencia alude a un movimiento secular o de largo plazo. Kuznets (1961, p. 41) consideraba dos elementos para una definición del término. En primer lugar, el movimiento sobre cualquier período largo es sostenido, ocurre repetidamente dentro de segmentos más cortos del período. En segundo lugar, el movimiento es significativo sólo si las desviaciones de corto plazo no alteran el ascenso o declinación de largo plazo. En este sentido, Feinstein y Thomas (2002, p. 21) definen tendencia como “el patrón amplio de movimiento que es sostenido en la misma dirección en largos períodos de tiempo . . . ignorando todas las variaciones de corto plazo”. En la práctica, la tendencia es la mejor descripción estadística posible de la trayectoria fundamental de una serie (Frickey, 1934). Ella representa cambios de baja frecuencia, en un período mayor que un determinado umbral. Por ejemplo, OECD (2007) considera usualmente ocho años como el largo máximo del ciclo de modo similar a la definición atribuida a Burns y Mitchell (1946). Así, si s es el número de observaciones en un año, la tendencia debe tener fluctuaciones con periodicidad mayor a 8s. Sin embargo, la “tendencia en media” de Granger (1966) incluye todo componente cíclico cuya longitud de onda (wavelength) excede el largo de la serie de tiempo observada (Chatfield, 1995, p. 10). Luego, el número de observaciones disponibles debe ser considerado al definir largo plazo. 4.2. Tendencia determinista Supongamos que el desempeño económico chileno se refleja en el modelo lineal yt = γ0 + γ1 t + ε. Esta conjetura implica que la tasa de crecimiento de la economía en el largo plazo es constante e igual al coeficiente γ1 , y que periodizar la economía chilena implica examinar ε. 14 4.2.1. ¿Cuál es la tasa de crecimiento? La Tabla 2 presenta los resultados obtenidos al estimar por mínimos cuadrados ordinarios las series del PIB total, per cápita y por trabajador (en logaritmos), considerando diferentes períodos. Nótese que ñas diferencias en las estimaciones de γ1 en los subperíodos deben comprenderse en el contexto de las altas tasa de crecimiento registradas en la última década del siglo XX. A modo de ilustración, el Gráfico 4 presenta los resultados de la estimación MCO del PIB total cuando se considera el rango temporal 1810-2006, mostrando el comportamiento del residuo (ε). Gráfico 4: Estimación de tendencia PIB total, 1810-2006 La estimación por MCO presenta diferentes problemas, como la sensibi15 Tabla 2: Tasa de crecimiento de tendencia: MCO, 1810-2006 y subperíodos (1) 1810-2006 (2) 1860-2006 (3) 1940-2006 11.56 (565) 0.0304 (170) 0.99 11.62 (289) 0.03 (97) 0.98 10.56 (84) 0.0364 (48) 0.97 11.85 (610) 0.0151 (88) 0.97 11.99 (335) 0.014 (51) 0.94 11.32 (80) 0.018 (21) 0.87 PIB por trabajador 1854-2006 γ0 13.51 (723) γ1 0.0157 (74) 2 R Aj. 0.97 13.52 (656) 0.0156 (68) 0.97 13.37 (156) 0.0168 (24) 0.89 Período PIB γ0 γ1 R2 Aj. PIB per cápita γ0 γ1 R2 Aj. Prueba t entre paréntesis 16 lidad ante atípicos. Para enfrentar esta dificultad se emplean las siguientes metodologías robustas de estimación: 1. Mínimos Cuadrados Ponderados: emplea como ponderador el cuadrado de los residuos obtenidos por MCO 2. Mínima Desviación Absoluta: minimiza la suma de los residuos en valor absoluto. Es una regresión por cuantiles en que se predice el cuantil 0.5 condicional de la variable dependiente. Ver Koenker y Hallock (2001) y Koenker (2005). Es equivalente a la “línea resistente” de Velleman y Hoaglin (1981). La Tabla 3 presenta los resultados de estimaciones para el período 18102006 empleando MCO, Mínimos Cuadrados Ponderados (MCP) y Mínima Desviación Absoluta (MDA). La estimación de γ1 es ligeramente sensible al método de estimación. Para evaluar esta sensibilidad es posible comparar el coeficiente obtenido por MCO con los que se obtendrían al estimar regresiones por cuantiles. El gráfico 5 muestra los resultados del ejercicio. Gráfico 5: Regresión por Cuantiles: γ1 : PIB total, per cápita y por trabajador Aunque es claro que el estimador MCO difiere de los obtenidos por el procedimiento de los cuantiles, el rango posible está bastante acotado. Mientras en el caso del PIB total está entre 2.9 % y 3.2 %, para el PIB per cápita y por trabajador está entre 1.4 % y 1.6 %. 17 Tabla 3: Ln PIB, 1810-2006: estimaciones robustas Período (1) MCO (2) MCP (3) MDA 11.56 (565) 0.0304 (170) 0.99 11.41 (205) 0.0314 (80) 0.97 11.57 11.85 (610) 0.0151 (88) 0.97 11.87 (276) 0.0146 (46) 0.91 PIB γ0 γ1 R2 Aj. 0.0302 PIB per cápita γ0 γ1 R2 Aj. 11.84 0.0149 PIB por trabajador 1854-2006 1854-2006 1854-2006 γ0 13.51 13.56 13.48 (723) (276) γ1 0.0157 0.0145 0.0161 (74) (28) 2 R Aj. 0.97 0.83 Prueba t entre paréntesis 18 4.2.2. ¿Cuáles son las fases si la tasa de crecimiento es constante? Si se acepta como conjetura que la tasa de crecimiento de la economía chilena es constante en el largo plazo y que corresponde a la obtenida por el método MCO, entonces la periodificación debe realizarse en base al residuo que se obtiene de la estimación. Este residuo es una aproximación a ε. Al aplicar el método de Bai y Perron (2003) para detectar cambio estructural en ε se identifican tres quiebres en el PIB total, y cuatro en el PIB per cápita y por trabajador. Los años detectados se reportan en la Tabla 4. Tabla 4: Cambio estructural en el residuo MCO e intervalos de confianza 2.5 % Rupturas 97.5 % PIB 1875 1914 1964 1878 1918 1977 1882 1919 1981 PIB per cápita 1847 1870 1927 1925 1848 1878 1930 1977 1856 1879 1932 1986 PIB por trabajador 1884 1927 1950 1959 1889 1930 1952 1974 1891 1932 1955 1979 El Gráfico 6 señala los cambios estimados en el PIB total. 19 Gráfico 6: Periodización en base a ε del PIB total 5. Tendencia con tasa de crecimiento no determinista Como se indicó en la primera sección, se explorará la conjetura de que no hay una tasa constante para todo el período bajo estudio. 5.1. Regresión móvil Para una exploración preliminar se efectúa una regresión móvil (rolling regression) al PIB total. El ejercicio consiste en estimar el modelo yt = γ0 +γ1 t+ε considerando tres ventanas temporales (12, 25 y 50 años) móviles. Es decir, en el año k se estima el modelo considerando la información de los períodos 1 a k; en el año k + 1 se emplea la información del período 2 a k + 1, y así sucesivamente. EL procedimiento permite observar cambios en el coeficiente γ1 . El Gráfico 7 muestra los resultados obtenidos. Es claro que el coeficiente depende de la ventana temporal considerada: 20 Gráfico 7: Regresión movil:γ1 PIB total, 12, 25 y 50 años a mayor longitud se obtienen coeficientes más similares en cada iteración. Luego, se requiere un criterio exógeno para determinar la extensión de la ventana, y si esta es fija o variable. Un camino para explorar la conjetura de que no hay una tasa constante para todo el período es conservar el modelo lineal µt = γ0 + γ1 t, pero considerando que los coeficientes cambian en distintas etapas. (ventanas) En este caso, el objeto de análisis son los coeficientes, especialmente γ1 , y las etapas identificadas se reportan en la primera parte de la Tabla 6. 5.2. Filtros Otro camino para explorar la conjetura de que no hay una tasa constante configura a la tendencia como un filtro elaborado con alguna combinación del índice temporal y de la variable yt , µt = f (t, y). El objeto de análisis para la identificación de cambio estructural es ∆µt , la tasa de variación de la tendencia. La identificación del componente µt es compleja y no existe una 21 solución definitiva (Canova, 1998; Zarnowitz y Ozyildirim, 2001). A continuación se reporta un conjunto representativo de filtros usualmente empleados en el tratamiento económetrico de series de tiempo y en el análisis exploratorio de datos. Aunque los métodos son conocidos y están implementados en diferentes paquetes estadísticos (Balcilar, 2007, por ejemplo), se presenta una breve explicación de cada uno de ellos. 1. Polinomio global. La tendencia se estima con una regresión de yt sobre un polinomio de grado k del índice temporal (t = 1, 2, . . . , T ). Es decir, P µt = ki=0 γ̂t ti , donde γ̂i son los coeficientes estimados de la regresión. El grado del polinomio se selecciona considerando la mínima suma de errores absolutos al cuadrado. Para el PIB total y per cápita, k = 4; para el PIB por trabajador, k = 6. 2. Filtro de Hodrick-Prescott, λ = 100. Es el filtro propuesto por Hodrick y Prescott (1997), basado en Whittaker (1923) y Leser (1961). Se obtiene de la solución al problema de minimizar εt = yt − µt sujeto a PT 2 una condición en la “suavidad” de µt . El problema es MTin t=1 εt + {µt }t=−1 PT 2 λ t=1 [(µt+1 − µt ) − (µt − µt−1 )] . λ es un multiplicador lagrangeano y el parámetro de suavizamiento; 100 es la opción usual para series anuales. Según Artis y otros (2003, p. 26) este valor implica que el filtro retiene fluctuaciones en períodos mayores a veinte años. 3. Filtro de Hodrick-Prescott, λ = 6. Como antes, pero con λ igual a seis. Muchos investigadores han buscado el parámetro óptimo para datos anuales y mensuales. Hodrick y Prescott (1997) trabajaron con series trimestrales usando λ = 1,600, reteniendo fluctuaciones en períodos mayores a diez años. Por tanto, para datos anuales λ debe estar entre 6 y 7 (Ravn y Uhlig, 2002; Maravall y del Río, 2007).7 7 Esta tendencia es similar a la obtenida con el filtro de Baxter y King (sin pérdida de datos en los extremos de la serie) y con el filtro de Christiano y Fitzgerald (suponiendo una raíz unitaria). Ver Baxter y King (1999) y Christiano y Fizgerald (2003). 22 4. Polinomio local. Es una regresión no paramétrica, donde ninguna clase de forma funcional es impuesta a la serie y el conjunto de datos es inseparable de la construcción del modelo (Engster y Parlitz, 2006, p. 42). En el punto focal t0 y considerando una ventana de vecinos próximos (bandwidth), se ajusta la ecuación yi = a + b1 (ti − t0 ) + b2 (ti − t0 )2 + ... + bp (ti − t0 )p + ei minimizando la suma de residuos P al cuadrado ponderada ni=1 wi e2i . La ponderación w es un kernel y el valor ajustado en t0 es a (Yatchew, 1998; Fox, 2000). En este caso, µt es una curva formada por la secuencia de coeficientes a estimados en cada punto focal. Siguiendo el criterio propuesto por Mills (2003, p. 117) se emplean un polinomio local de grado tres y un kernel Gaussiano. Para el PIB total y per cápita se consideraron quince datos vecinos, mientras que para el PIB por trabajador se consideraron doce. 5. Suavizamiento exponencial. La tendencia es una media móvil ponderada exponencialmente de las observaciones presentes y pasadas de yt . Es P j decir, µt = α ∞ j=0 (1 − α) yt−j . Esta expresión puede ser simplificada en forma de media ponderada µt = αyt + (1 − α)µt−1 o en forma de corrección de errores µt = µt−1 + α(yt − µt−1 ) (Hamilton, 1994). Para 1 P1819 el cálculo se supuso que µ0 = 10 1810 yt y α = 0,18. Esto implica que la tendencia es similar a una media móvil de diez años, de acuerdo a la regla α = N 2+1 , donde N es el número de años de una media móvil. Ver Gardner (2006). 6. Suavizamiento por mediana 4253H, doble. Es un procedimiento tradicional de análisis exploratorio de datos que consiste en calcular sucesivas medianas a la serie original. El algoritmo comienza con una mediana de cuatro datos, seguida por otra de dos, otra de cinco y otra de tres. Se eliminan zonas “planas” con promedios ponderados. Luego se calculan residuos entre la serie suavizada y la serie original y todo el procesos se repite sobre los residuos. Por último, los residuos suavizados 23 son sumados a los valores suavizados obtenidos la primera vez. Detalles en Velleman y Hoaglin (1981, p. 171) y Velleman (1982, p. 147). 7. Filtro Butterworth. Es un método usado en ingeniería eléctrica para el procesamiento de señales, y su empleo en economía fue sugerido por Pollock (1999, 2000). La versión del dominio temporal del filtro es 1 ψ i 1+L 1−L 2n −1 , donde L es el operador de rezago, n es el orden del 1+ filtro y ψ es un parámetro usado para variar la frecuencia de corte que delimita el rango de los elementos cíclicos. En este trabajo, el orden del filtro es dos y la frecuencia de corte es diez. Debe notarse que el filtro de Hodrick-Prescott es equivalente al de Butterworth basado en la función seno. Más detalles en Gómez y Bengoechea (2000, App. B) and Gómez (2001). 8. Tendencia intrínseca. Corresponde al residuo entre los datos y y funcioP nes modales intrínsecas (imfj ): µt = xt − nj=1 imftj . Estas funciones son obtenidas de un proceso llamado descomposición modal empírica propuesto por Huang y otros (1998). Una buena explicación del algoritmo en Magrin-Chagnolleau y Baraniuk (1999) y Wu y otros (2007). La Tabla 5 reporta estadísticos descriptivos para las series y los filtros calculados. 5.3. Identificación de quiebres estructurales Con la aplicación del procedimiento de Bai y Perron (2003), el principal resultado es que las periodificaciones son dependientes del filtro que se emplee (ver Tabla 6). Si usamos como referencia las fechas obtenidas con el modelo lineal (regresión móvil), observamos que algunos años se repiten en los filtros. No obstante, no hay manera de discriminar entre los conjuntos de periodificaciones así obtenidos. 24 Tabla 5: Tendencias estimadas del PIB total, per cápita y por trabajdor: promedios y desviaciones típicas de la primera diferencia Simple Average 0,0310 0,0324 0,0311 0,0310 0,0319 0,0302 0,0310 0,0317 0,0310 Standard Deviation 0,0645 0,0082 0,0135 0,0231 0,0064 0,0176 0,0287 0,0117 0,0121 Ln Per Capita GDP Global Polyn. HP100 HP006 Local Polyn. Expon. Smooth. T4253H Butterworth IT 0,0157 0,0165 0,0158 0,0157 0,0164 0,0154 0,0157 0,0164 0,0157 0,0645 0,0079 0,0130 0,0226 0,0060 0,0164 0,0282 0,0119 0,0176 Ln Per Worker GDP Global Polyn. HP100 HP006 Local Polyn. Expon. Smooth. T4253H Butterworth IT 0,0167 0,0165 0,0165 0,0166 0,0163 0,0156 0,0167 0,0167 0,0167 0,0717 0,0083 0,0119 0,0239 0,0077 0,0174 0,0300 0,0099 0,0045 Ln GDP Global Polyn. HP100 HP006 Local Polyn. Expon. Smooth. T4253H Butterworth IT 25 Tabla 6: Quiebres estructurales e intervalos de confianza: diferentes tendencias para el PIB total, per cápita y por trabajador (Bai y Perron) Trend Estimates Linear Model Global Poly HP100 HP006 Local Poly Exp. Smooth. T4253H BW EMD Total 2.5 % BP 1837 1838 1844 1879 1927 1930 1971 1974 1838 1894 1941 1974 1838 1899 1930 1958 1905 1838 1893 1939 1974 1837 1861 1926 1951 1834 1892 1928 1957 1838 1902 1933 1945 1839 1895 1948 1977 1839 1906 1935 1977 1933 1839 894 1940 1977 1839 1899 1934 1976 1839 1898 1933 1977 1839 1906 1935 1977 Per Capita 97.5 % 2.5 % BP 97.5 % 1845 1838 1839 1849 1864 1879 1880 1880 1926 1930 1931 1931 1975 1971 1974 1975 1845 1896 1949 1978 1860 1907 1941 1982 1960 1844 1895 1941 1978 1848 1901 1958 1988 1850 1900 1940 1981 1883 1907 1938 1983 Per Worker 2.5 % BP 97.5 % 1929 1930 1931 1973 1974 1975 1838 1895 1974 1839 1897 1977 1844 1898 1978 1875 1897 1971 1876 1898 1984 1898 1901 1985 1838 1897 1971 1839 1911 1977 1859 1912 1979 1908 1934 1954 1981 1915 1938 1963 1989 1960 1838 1900 1939 1974 1960 1976 1839 1901 1940 1977 1977 1990 1845 1902 1943 1978 1990 1913 1935 1962 1984 1912 1940 1962 1984 - 1953 1891 1966 1977 1911 1977 1996 1925 1979 1838 1867 1926 1976 1839 1868 1927 1977 1941 1972 1928 1978 1911 1939 1960 1976 1905 1932 1953 1981 1874 1904 1940 1962 Nota: Para EMD del PIB toal, el intervalo de confianza es 0.5-99.5 % 26 1911 1933 1962 1984 1876 1905 1941 1963 1914 1941 1963 1985 1913 1938 1964 1989 1879 1906 1943 1965 6. Modelo estado espacio de la tendencia En las secciones previas se examinaron los resultados obtenidos a partir de imponer una conjetura a la estructura de la información. A continuación se propone describir la dinámica no observada de la serie de tiempo e identificar así la tendencia. Para ello se estima un modelo de tendencia lineal local definido como yt = µt + ε t , εt ∼ NID(0, σε2 ) µt+1 = µt + vt + ξt , ξt ∼ NID(0, σξ2 ) vt+1 = vt + ζt , ζt ∼ NID(0, σζ2 ) Este modelo estado espacio tiene una ecuación de observación y dos ecuaciones de estado: una para el nivel (µt ) y otra para la pendiente o deriva (drift, vt ). Este último componente es el equivalente a la tasa de crecimiento de tendencia que intentamos identificar. Naturalmente, con este procedimiento es también posible construir un filtro ad hoc imponiendo restricciones a las varianzas. En esta sección se busca estimar todos los parámetros para determinar así la estructura más apropiada para la tendencia. Siguiendo a Durbin y Koopman (2001) y a Commandeur y Koopman (2007), los valores iniciales µ0 y v0 , así como las varianzas pueden ser estimadas por máxima verosimilitud con una metodología de inicialización difusa. Los resultados obtenidos por medio de los programas Ox/SsfPack y de las librerías StructTS y sspir de R (Ripley, 2002; Dethlefsen y LundbyeChristensen, 2006) se presentan en la Tabla 7. Puesto que la varianza de la observación y de la pendiente son iguales a cero, entonces el modelo implícito es ∆yt = v1 + ξt , que puede reescribirse P como yt = µ1 + v1 (t − 1) + t−1 i=0 ξi (ξ0 = 0). A diferencia del modelo lineal yt = γ0 + γ1 t + ε, el modelo identificado implica una tendencia estocástica y 27 Tabla 7: Estimación estado espacio σε2 σξ2 σζ2 v1 Total 0 0.004165 0 0.03102 PIB Per Cápita 0 0.004147 0 0.01567 Por Trabajador 0 0.005112 0 0.01671 el término de error depende del tiempo (Mills, 2003, p.54). Además, aunque E(yt ) = µt = γ0 + γ1 t, en el modelo con tendencia estocástica σy2 = tσξ2 . Lo anterior se confirma al realizar la prueba de Dickey-Fuller para detectar raíz unitaria: para las tres series no es posible rechazar la hipótesis de presencia de raíz unitaria (ver Tabla 8).8 Tabla 8: Prueba de raíz unitaria φ Prueba t Prob* Total -0.096 -3.000 0.13 PIB Per Cápita Por Trabajador -0.107 -0.193 -3.201 -3.979 0.08 0.01 Dado que la tendencia es estocástica, para su estimación se emplea la formulación estado espacio presentada en esta sección con las siguientes características: yt representa a la primera diferencia de la serie analizada y σζ2 = 0. Esto implica que se estima un modelo de nivel local. La Tabla 9 presenta las varianzas estimadas, lo que confirma que el modelo subyacente es ∆yt = v1 + ε. La tabla 10 reporta los cambios estructurales 8 La prueba consiste en examinar, con los valores apropiados, el coeficiente φ de la regresión ∆yt = α + φyt−1 + βt + Et . Una visión crítica a las pruebas en Chumacero (2000). 28 identificados en la tendencia estocástica estimada.9 Tabla 9: Modelo de tendencia estocástica: varianzas estimadas PIB PIB per cápita PIB por trabajador 7. σε2 σξ2 0.004167 0.004164 0.005139 0 0 0 Resultados y conclusiones En las páginas previas se utiliza una batería de instrumentos estadísticos con el fin de periodizar el crecimiento económico de Chile desde 1810 en adelante, considerando como indicadores al PIB total, per cápita y por trabajador. Los resultados obtenidos son los siguientes: 1. No parece factible periodizar directamente a partir de la tasa de crecimiento 2. Distintos filtros (tendencias) proporcionan diferentes conjuntos de períodos, con extensiones variables 3. El análisis con el modelo estado espacio no restringido propone un modelo de tendencia estocástica para los tres indicadores 4. Tras estimar dicha tendencia se identifican los siguientes años de cambio estructural: para el PIB, 1881, 1918, 1951 y 1984; para el PIB per cápita, 1881, 1918 y 1984; y para el PIB por trabajador, 1881, 1930 y 1952 9 Para la identificación de los cambios se consideró sólo el período 1860-2006 debido a las características de la construcción del PIB. Ver Díaz y otros (2007) 29 Tabla 10: Modelo de tendencia estocástica :cambios estructurales 2.5 % Rupturas 97.5 % PIB 1879 1914 1949 1977 1881 1918 1951 1984 1885 1920 1961 1986 PIB per cápita 1879 1914 1974 1881 1918 1984 1884 1921 1990 PIB por trabajador 1876 1928 1946 1881 1930 1952 1897 1933 1963 30 Esta investigación tiene al menos dos posibles extensiones. La primera es considerar como criterio para identificar fases a la variación de las tasa de crecimiento. La segunda es realizar un análisis comparativo con otras economías. Referencias Artis, M.; Marcellino, M. y Proietti, T. (2003). «Dating the euro area business cycle». Working Paper 237, Innocenzo Gasparini Institute for Economic Research. Bai, J. (1997). «Estimation of change point in multiple regression models». Review of Economics and Statistics, 79(4), pp. 551–563. Bai, J. y Perron, P. (1998). «Estimating and testing linear models with multiple structural changes». Econometrics, 66(1), pp. 47–48. —— (2003). «Computation and analysis of multiple structural change models». Journal of Applied Econometrics, 18(1), pp. 1–22. Balcilar, M. (2007). mFilter: Miscellaneous time series filters. R package version 0.1-3. http://www.mbalcilar.net/mFilter,http://www.r-project.org Barry, D. y Hartigan, J. (1992). «Product partition models for change point problems». The Annals of Statistics, 20(1), pp. 260–279. —— (1993). «A Bayesian analysis for change point problems». Journal of the American Statistical Association, 88(421), pp. 309–319. Baxter, M. y King, R. (1999). «Measuring business cycles: approximate bandpass filters for economic time series». The Review of Economics and Statistics, 81(4), pp. 575–593. Burns, A. y Mitchell, W. (1946). Measuring business cycles. National Bureau of Economic Research, New York. Canova, F. (1998). «Detrending and business cycle facts». Journal of Monetary Economics, 41(3), pp. 475–512. Chatfield, C. (1995). The analysis of time series. An introduction. 5th. Ed. Chapman & Hall, London. Christiano, L. y Fizgerald, T. (2003). «The bandpass filter». International Economic Review , 44(2), pp. 435–465. Chumacero, R. (2000). «Se busca una raíz unitaria: evidencia para Chile». Estudios de Economía, 27(1), pp. 55–68. 31 Chumacero, R. y Fuentes, J. (2006). «Chilean growth dynamics». Economic Modelling, 23(2), pp. 197–214. Commandeur, J. y Koopman, S. (2007). An introduction to state space time series analysis. Oxford University Press, King’s Lynn. Crowley, E. (1997). «Product partition models for normal means». Journal of the American Statistical Association, 92(437), pp. 192–198. Díaz, J.; Lüders, R. y Wagner, G. (2007). «Economía chilena 1810-2000. Producto total y sectorial. Una nueva mirada». Documento de Trabajo 315, Instituto de Economía de la Pontificia Universidad Católica de Chile. —— (2008). «Chile 1810-2000. La República en Cifras». Mimeo. De Gregorio, J. (2005). «Crecimiento económico en Chile: evidencia, fuentes y perspectivas». Estudios Públicos, 98, pp. 19–86. Dethlefsen, C. y Lundbye-Christensen, S. (2006). «Formulating state space models in R with focus on longitudinal regression models». Journal of Statistical Software, 16(1). Durbin, J. y Koopman, S. (2001). Time series analysis by state space methods. Oxford University Press, King’s Lynn. Engster, D. y Parlitz, U. (2006). «Local and cluster weighted modeling for time series prediction». En: B. Shelter; M. Winterhalder y J. Timmer (Eds.), Handbook of time series analysis. Recent theorical developments and aplications, pp. 39–65. Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim. Erdman, C. y Emerson, J. (2007a). «bcp: an R package for performing a Bayesian analysis of change point problems». Journal of Statistical Software, 23(3), pp. 1–13. —— (2007b). The bcp package. R package version 1.8.4. http://www.r-project.org Feinstein, C. y Thomas, M. (2002). Making history count. A primer in quantitative methods for historians. Cambridge University Press, Cambridge. Fox, J. (2000). Nonparametric simple regression: smoothing scatterplots. Sage Publications, Thousand Oaks. Frickey, E. (1934). «The problem of secular trend». The Review of Economic and Statistics, 16(10), pp. 199–206. Gardner, E. (2006). «Exponential smoothing: The state of the art-Part II». International Journal of Forecasting, 22(4), pp. 637–666. Gómez, V. (2001). «The use of Butterworth filters for trend and cycle estimation in economic time series». Journal of Business & Economic Statistics, 19(3), pp. 365–373. Gómez, V. y Bengoechea, P. (2000). «The quarterly national accounts trend- 32 cycle filter versus model-based filters». Spanish Economic Review , 2(1), pp. 29–48. Granger, C. (1966). «The typical spectral shape of an economic variable». Econometrica, 34(1), pp. 150–161. Haindl, E. (2006). Chile y su desarrollo económico en el siglo XX. Instituto de Economía, Universidad Gabriela Mistral, Santiago. Hamilton, J. (1994). Time series analysis. Princeton University Press, Princeton. —— (2005). «What’s Real About the Business Cycle?» Working Paper 11161, National Bureau of Economic Research, Inc. Hampel, F. (1985). «The breakdown points of the mean combined with some rejection rules». Technometrics, 27(2), pp. 95–107. Hansen, B. (2001). «The new econometrics of structural change: dating breaks in U.S. labor productivity». Journal of Economic Perspectives, 15(4), pp. 117–128. Hartigan, J. (1990). «Partition models». Communications in Statistics - Theory and Methods, 19(8), pp. 2745–2756. Hausmann, R.; Pritchett, L. y Rodrik, D. (2005). «Growth Accelerations». Journal of Economic Growth, 10(4), pp. 303–329. Hodrick, R. y Prescott, E. (1997). «Postwar U.S. business cycles: an empirical investigation». Journal of Money, Credit and Banking, 29(1), pp. 1–16. Hooker, R. (1901). «Correlation of the marriage-rate with trade». Journal of the Royal Statistical Society, 64(3), pp. 485–492. Huang, N.; Shen, Z.; Long, S.; Wu, M.; Shih, H.; Zheng, Q.; Yen, N.; Tung, C. y Liu, H. (1998). «The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis». Proceedings: Mathematical, Physical and Engineering Sciences, 454(1971), pp. 903–995. Jones, B. y Olken, B. (2005). «The Anatomy of Start-Stop Growth». Working Paper 11528, National Bureau of Economic Research. Klein, J. (1997). Statistical visions in time. A history of time series analysis, 1662-1938. Cambridge University Press, New York. Koenker, R. (2005). Quantile regression. Cambridge University Press, Cambridge. Koenker, R. y Hallock, K. (2001). «Quantile regression». Journal of Economic Perspectives, 15(4), pp. 143–156. Kuznets, S. (1961). Capital in the American economy. Its formation and financing. National Bureau of Economic Research, Princeton. Leser, C. (1961). «A Simple Method of Trend Construction». Journal of the Royal Statistical Society. Series B (Methodological), 23(1), pp. 91–107. Loschi, R.; Cruz, F.; Takahashi, R.; Iglesias, P.; Arellano-Valle, R. y 33 MacGregor, J. (2008). «A note on Bayesian identification of change points in data sequences». Computers & Operations Research, 35(1), pp. 156–170. Maddison, A. (1995). Monitoring the World Economy, 1820-1992. Organization for Economic Cooperation and Development, Washington. Magrin-Chagnolleau, I. y Baraniuk, R. (1999). «Empirical mode decomposition based time-frequency attributes». En: Proceedings of the 69th SEG Meeting, Houston, Texas. http://citeseer.ist.psu.edu/241017.html Maravall, A. y del Río, A. (2007). «Temporal aggregation, systematic sampling and the Hodrick-Prescott filter». Documento de Trabajo 0728, Banco de España. Mills, T. (2003). Modelling trends and cycles in economic time series. Palgrave Macmillan, Houndmills. OECD (2007). Glossary of statistical terms. Organisation for Economic Cooperation and Development, Paris. Perron, P. (2006). «Dealing with structural breaks». En: T. Mills y K. Patterson (Eds.), Palgrave Handbook of Econometrics. Vol. 1: Econometric Theory, pp. 278–351. Palgrave Macmillan, New York. Phillips, P. (2005). «Challenges of trending time series econometrics». Mathematics and Computers in Simulation, 68(5-6), pp. 401–416. Pollock, D. (1999). A handbook of time-series analysis, signal processing and dynamics. Academic Press, San Diego. —— (2000). «Trend estimation and de-trending via rational square-wave filters». Journal of Econometrics, 99(2), pp. 317–334. Proietti, T. y Luati, A. (2007). «Least square regression: graduation and filters». En: M. Boumans (Ed.), Measurement in economics. A handbook, pp. 377–411. Academic Press, London. R Development Core Team (2007). R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. ISBN 3-900051-07-0. http://www.R-project.org Ravn, M. y Uhlig, H. (2002). «On adjusting the Hodrick-Prescott filter for the frequency of observations». Review of Economics and Statistics, 84(2), pp. 371– 376. Ripley, B. (2002). «Time series in R 1.5.0». R News, 2(2), pp. 2–7. Rostow, W. W. (1960). The stages of economic growth: a non-communist manifesto. Cambridge University Press, Cambridge. Schumpeter, J. (1930). «Mitchell’s Business Cycles». Quarterly Journal of Economics, 45(1), pp. 150–172. 34 Velleman, P. (1982). «Applied Nonlinear Smoothing». Sociological Methodology, 13, pp. 141–177. Velleman, P. y Hoaglin, D. (1981). Aplications, basics and computing of exploratory data analysis. Duxbury Press, Boston. Whittaker, E. (1923). «On a New Method of Graduations». Proceedings of the Edinburgh Mathematical Society, 41, pp. 63–75. Wilcox, R. (2001). Fundamentals of modern statistical methods: substantially improving power and accuracy. Springer-Verlag, New York. Wu, Z.; Huang, N.; Long, S. y Peng, C. (2007). «On the trend, detrending, and variability of nonlinear and nonstationary time series». Proceedings of the National Academy of Sciences of the United States of America, 104(38), pp. 14889–14894. Yatchew, A. (1998). «Nonparametric regression techniques in economics». Journal of Economic Literature, 36(2), pp. 669–721. Zarnowitz, V. y Ozyildirim, A. (2001). «Time series decomposition and measurement of business cycles, trends and growth cycles». Working Paper 01-04, The Conference Board Economics Program. Zeileis, A.; Kleiber, C.; Krämer, W. y Hornik, K. (2003). «Testing and dating of structural changes in practice». Computational Statistics & Data Analysis, 44(1-2), pp. 109–123. 35