V - Cimec
Anuncio

v1
5
4
1
S
v2
2
Introducción al Método
de los Elementos Finitos
Parte 2
Formulación abstracta del MEF para problemas elípticos
Alberto Cardona, Víctor Fachinotti
Cimec-Intec (UNL/Conicet), Santa Fe, Argentina
7-Oct-2011
Espacios de Hilbert
1. En formulaciones variacionales para solución de BVP, trabajaremos con
espacios V más grandes que los vistos hasta ahora, llamados espacios de
Hilbert. Se dotará a V de varios productos escalares determinados por el BVP.
2. Sucesión de Cauchy: sucesión v1 , v2 ,
, vn V que verifica
0, N / vi v j si i, j N
La sucesión de Cauchy converge a v si v vi 0 cuando i
3. Espacio de Hilbert: Es un espacio lineal V, equipado de producto escalar y
norma asociada, completo (o sea que las sucesiones de Cauchy convergen
respecto de la norma del espacio).
Introducción al Método de los Elementos Finitos
2
Espacios de Hilbert: ejemplos 1D
•
Espacio L2(I) de funciones de cuadrado integrable en I=(a,b)
L2 (I) v : v está definida en I y v 2 dx
I
dotado del producto interno: (v, w) vwdx
y la norma:
v
L2 (I)
v dx
2
I
La desigualdad de Cauchy:
1
2
I
(v, v)
(v, w) v
1
2
L2 (I)
wL
2 (I)
Ejemplo: v( x) x , x I (0,1)
1
v
2
L2 (0,1)
x 2
0
1
ln x 0
si 1/ 2
dx x1 2 1
si 1/ 2
1
(1
2
)
si 1/ 2 v L2 (0,1) si <1/2
1
2
0
Introducción al Método de los Elementos Finitos
3
Espacios de Hilbert: ejemplos 1D (cont.)
•
Espacio H1(I) en I(a,b): H1 (I) v : v, v L2 (I)
dotado del producto interno: (v, w)H1 (I) vw vw dx
I
y la norma: v
H1 (I)
v v dx (v, v)
2
I
2
1
2
H1 (I)
1
2
•
Espacio H10 (I) en I=(a,b):
H10 (I) v : v H1 (I) y v(a) v(b) 0
•
Dado el problema modelo:
u '' f ( x),
(D)
u (a) u (b) 0
luego:
(V) Hallar u H10 (I) / u, v f , v v H10 (I)
•
xI
Nota:
– H10 (I) es más grande que el espacio V de funciones lineales a trozos que
veníamos usando.
– En MEF, la norma del error es simplemente la norma en H1(I).
Introducción al Método de los Elementos Finitos
4
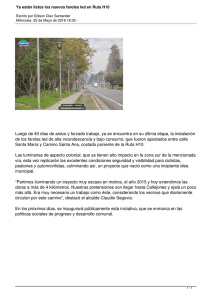
Ejemplos funciones polinomiales a trozos
0
0
Funcion constante por tramos, discontinua C 0,1
Funcion lineal por tramos, continua C 0,1
1
1
f ( x) L2 0,1
0
-0.5
-1
0
0
-0.5
0.2
0.4
0.6
0.8
-1
0
1
x
Derivada de func.cte. por tramos discontinua
0.2
0.4
0.6
10
10
f ( x) L2 0,1
1
f ( x) L2 0,1
5
f(x)
5
0.8
x por tramos continua
Derivada de funcion lineal
15
f(x)
2
0.5
f(x)
f(x)
0.5
L 0,1
f ( x) H 01 0,1
0
0
-5
-5
-10
-15
0
0.2
0.4
0.6
x
0.8
1
-10
0
0.2
0.4
0.6
0.8
1
x
Introducción al Método de los Elementos Finitos
5
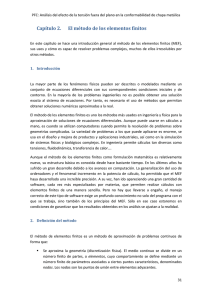
Ejemplos funciones polinomiales a trozos
Funcion constante por tramos, discontinua C 0 0,1
1
1
f ( x) L2 0,1
0
0.2
0.4
0.6
0.8
1
f ( x) H 0,1
1
0
L 0,1
f ( x) H 01 0,1
2
0.2
0.4
0.6
L 0,1
0.8
1
x
Funcion lineal por tramos, discontinua C 0 0,1
1
H 0,1
f ( x) L2 0,1
2
1
0
0.5
f(x)
0.5
f(x)
0
-1
0
1
x
0
Funcion cuadratica por tramos, continua C 0,1
0
0
-0.5
-0.5
-1
0
2
-0.5
-0.5
-1
0
L 0,1
f ( x) H 01 0,1
0.5
f(x)
f(x)
0.5
Funcion lineal por tramos, continua C 0 0,1
0.2
0.4
0.6
x
0.8
1
-1
0
0.2
Introducción al Método de los Elementos Finitos
0.4
0.6
x
0.8
1
6
Espacios de Hilbert en d, d=2,3
2
• L2 () v : v está definida en y v d
– Producto escalar: (v, w) vwd
– Norma:
v
v d
2
1
2
v
L2 (), i 1,
• H () v : v L2 (),
xi
1
,d
– Producto escalar: (v, w)H1 ( ) vw v w d
– Norma: v
•
v v v d (v, v)H1 ( )
2
H1 ( )
1
2
1
2
H10 () v : v H1 (), v 0
Introducción al Método de los Elementos Finitos
7
Espacios de Hilbert en d, d=2,3 (cont.)
•
Dado el problema modelo (ec. de Poisson + CB homogéneas)
Du f
(D)
u0
luego: (V)
en
sobre
Hallar u H10 () /
u v d fv d
v H10 ()
( f , v)
a(u, v)
o, equivalentemente:
(M) Hallar u H10 () /
1
1
a(u, u) ( f , u) a(v, v) ( f , v)
2
2
F(u )
•
v H10 ()
F (v )
Nota: (V) se dice la formulación débil de (D), y la solución de (V) es la
solución débil de (D). Ésta no es necesariamente una solución clásica de (D).
Para que lo sea, u debe ser suficientemente regular de modo que Du esté
definida en el sentido clásico.
Introducción al Método de los Elementos Finitos
8
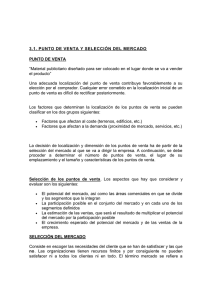
Interpretación geométrica del MEF
Consideremos el BVP de difusión-reacción con CB homogéneas:
en
Du u f
(D)
u0
sobre
(V) Hallar u H10 () / u v d uv d fv d v H10 ()
( f , v)
u, v
Sea Vh un subespacio de dimensión finita de H10 () . El MEF
aplicado al problema de difusión-reacción da:
(Vh ) Hallar uh Vh / uh , v ( f , v)
v Vh
Tomando v Vh H10 () en (V), (V)(Vh) resulta:
u uh , v 0 v Vh
La solución MEF uh es la proyección con resp a , de
la solución exacta u sobre Vh, o sea que uh es el
elemento de Vh más próximo u con resp a ||.|| H10 ( ), i.e.:
u uh H1 ( ) u v H1 ( ) v Vh
0
u
recta Vh
uh
plano H10 ()
0
Introducción al Método de los Elementos Finitos
9
CB naturales y esenciales
Consideremos el BVP de difusión-reacción con CB Neumann:
en
Du u f
(D)
u
g
sobre
n
(V) Hallar u H1 () /
u v uv d fv d gv d
v H1 ()
( f , v) ( g , v)
1
(M) Hallar u H1 () / F(u) a(u, u) ( f , u) ( g, u) F(v) v H1 ()
2
u, v
• La CB Neumann, que no tiene que ser impuesta explícitamente sobre u, se
denomina CB natural.
• La CB Dirichlet uu0 sobre , que debe ser satisfecha explícitamente por u, se
conoce como CB esencial.
Introducción al Método de los Elementos Finitos
10
Problema continuo en forma abstracta
•
•
Objetivos:
– Dar un tratamiento unificado a muchos problemas de la Mecánica y la Física,
a fin de no repetir el mismo argumento en distintos casos concretos.
Entender la estructura básica del MEF.
Los ingredientes de una formulación abstracta son:
1. Un espacio de Hilbert V, con producto escalar (.,.)V y norma ||.||V, donde se busca
la solución.
2. Una forma bilineal a:V×V, determinada por el problema (elíptico) a resolver,
t.q. u,vV:
a(u, v) a(v, u )
(simetría)
0 /
a(u, v) u
0 /
a(v, v) v
V
2
v
V
V
(continuidad)
(coercividad o V-elipticidad)
3. Una forma lineal L:V, determinada por los datos del problema, continua, i.e.,
0 / L(v) v
V
v V
Introducción al Método de los Elementos Finitos
11
Formulación abstracta del MEF para problemas elípticos (cont)
1
(M) Hallar u V / F(u) min F(v), con F(v) a(v, v) L(v)
vV
2
(V) Hallar u V / a(u, v) L(v), v V
Teorema: (M) y (V) son equivalentes, i.e., u satisface (M) si y sólo
si u satisface (V). Además, uV, y se verifica la estimación de
estabilidad
u
V
Introducción al Método de los Elementos Finitos
12
Formulación abstracta del MEF para problemas elípticos (cont)
Demo. (M )(V ): sea vV y arbitrarios. Luego, vuV, así que
F(u ) F(u v),
g(0)
g( ) g tiene un mínimo en 0
1
a(u v, u v) L(u v)
2
1
2
a(u, u ) a(u, v) a(v, u ) a(v, v) L(u ) L(v)
2
2
2
2
1
2
a(u, u ) L(u ) a(u , v) L(v) a(v, v)
2
2
luego g( ) a(u, v) L(v) a(v, v)
Siendo g( )
Como g tiene un mínimo en 0, debe cumplirse
g(0) a(u, v) L(v) 0
( V)
(QED)
Introducción al Método de los Elementos Finitos
13
Formulación abstracta del MEF para problemas elípticos (cont)
Demo. (V )(M ): dados u (solución) y w (arbitrario) en V, uwV, así que
1
F(u w) a(u w, u w) L(u w)
2
1
1
1
1
a(u, u ) a(u, w) a( w, u ) a( w, w) L(u ) L( w)
2
2
2
2
1
1
(M)
a(u, u ) L(u ) a(u, w) L( w) a( w, w) F(u ),
2
2 0
0 (V )
(QED)
F( u )
Introducción al Método de los Elementos Finitos
14
Formulación abstracta del MEF para problemas elípticos (cont)
Demo. estimación de estabilidad:
a(u, v) L(v)
v V
||u|| a(u, u ) L(u ) ||u||V
2
V
V-elipticidad de a
Continuidad de L
|| u ||V
(QED)
Demo. unicidad: supongamos que u1,u2V sean soluciones de (V)
a(u1 , v) L(v)
v V
a(u2 , v) L(v)
v V
a(u1 u2 , v) 0
v V
Definiendo uu1u2, llego a un nuevo BVP con L(v)0 vV, i.e. 0. Luego:
Estimación de estabilidad ||u||V 0 u u1 u2 0 u1 u2
Introducción al Método de los Elementos Finitos
(QED)
15
Estimación del error de discretización
• Sea Vh un subespacio de V, con dimensión finita M, y sea {1, 2,…, M}
una base para Vh, de modo que toda vVh puede representarse
M
v
i i,
i
i =1
• Usando Vh, obtenemos los problemas discretos análogos a (M) y (V):
(Mh ) Hallar uh Vh / F(uh ) F(v), v Vh
(Vh ) Hallar uh Vh / a(uh , v) L(v), v Vh
– Como j Vh a(uh , j ) L( j ), j 1, 2,
M
– Como uh Vh uh =i i , i
i =1
,M
M
a(i , j )i L( j ), j 1, 2,
,M
i 1
– Forma matricial de (Vh): Aξ b con Aij a(i , j ), b j L( j ).
Introducción al Método de los Elementos Finitos
16
Estimación del error de discretización (cont)
• Dado que a(.,.) es simétrica: a(i , j ) a( j , i ) Aij Aji
la matriz A es simétrica
• Dado que a(.,.) es V-elíptica:
M
M
M
M
a(v, v) a(
i i , j j ) i a(i , j ) j η Aη v
i 1
j 1
i 1 j 1
la matriz A es positiva definida
la matriz A es no singular
!ξ / Aξ = b !uh Vh solución de (Vh )
Además, uh Vh verifica la estimación de estabilidad ||uh ||V
Demo.:
a(uh , v) L(v)
2
V
0 si v 0 (η 0)
v Vh
||uh ||2V a(uh , uh ) L(uh ) ||uh ||V
V-elipticidad de a
Continuidad de L
Introducción al Método de los Elementos Finitos
17
Estimación del error de discretización (cont)
•
Teorema: Sea uV la solución de (V) y uhVhV. Entonces:
u uh
•
V
u v
V
v Vh
Demo.:
1. u solución de (V ) a(u, w) L( w), w Vh V
2. uh solución de (Vh ) a(uh , w) L( w), w Vh
3. Restando: a(u uh , w) 0, w Vh
4. Sea w uh v, con v Vh arbitrario.
2
5. Operando: u uh V a(u uh , u uh )
V-elipticidad de a
a(u uh , u uh ) a(u uh , w)
a(u uh , u uh w)
Continuidad de a
a(u uh , u v) u uh
Introducción al Método de los Elementos Finitos
V
u v
V
(QED)
18
Norma de energía
Considerando
1. a(.,.) es continua, i.e., 0 / a(u, v) u
V
v
V
u, v V
2. a(.,.) es V-elíptica o coerciva, i.e., 0 / a(v, v) v
2
V
v V
podemos definir una nueva norma llamada norma de energía:
v a a(v, v) , v V
1
2
Esta norma es equivalente a ||.||V, i.e., constantes positivas c , C , tal que
cv
V
v a C v
V
v V
El producto escalar asociado a ||.||a es (u, v)a a(u, v)
Verifica la desigualdad de Cauchy
(u, v)a || u ||a || v ||a
Introducción al Método de los Elementos Finitos
19
Estimación del error de discretización en norma de energía
•
Teorema: Sea uV la solución de (V) y uhVhV. Entonces:
u uh
a
u v
a
v Vh
Medida en la norma de energía, uh es la mejor aproximación a u.
•
Demo.:
1. u solución de (V ) (u, w)a L( w), w Vh V
2. uh solución de (Vh ) (uh , w)a L(w), w Vh
3. Restando: (u uh , w)a 0, w Vh
4. Sea w uh v, con v Vh arbitrario.
2
5. Operando: u uh a (u uh , u uh )a
(u uh , u uh )a (u uh , w)a
(u uh , u uh w)a
Desigualdad
de Cauchy
(u uh , u v)a u uh
a
u v
Introducción al Método de los Elementos Finitos
a
(QED)
20
Ejemplos concretos
1
Ejemplo 1: sea V=H (),
2
.
a(u, v) uv u v dx
L(v) fv dx,
f L2 ()
En este caso, a(u, v) L(v), v H1 () es la forma débil del problema de Neumann
u
(D) Du u f en ,
0 sobre
n
1
Se verifica v, w H ()
• a(v, w) a(w, v) a(.,.) es una forma bilineal simétrica
• a(v, v) v
2
H1 ( )
a(.,.) es V-elíptica con 1
• a(v, w) a(v, v)2 a(w, w) 2 v
1
• L(v) fv dx f
1
L2 ( )
v
L2 ( )
H1 ( )
w H1 ( ) a(.,.) es continua con 1
L(.) es continua con f
– Estimación de estabilidad:
u
– Estimación de error:
u uh
H1 ( )
f
H ()
1
L2 ( )
L2 ( )
u v
H ()
1
Introducción al Método de los Elementos Finitos
v H1 ()
21
Ejemplos concretos (cont)
Ejemplo 2: sea V=H10 (I), I (0,1), a(v, w)= vwdx, L(v)= fv dx.
I
I
En este caso, a(u, w) L(v), v H10 (I) es la forma débil del problema:
•
(D) u f en I, u(a) u(b) 0
Se verifica v, w H10 (I)
a(v, w) a(w, v) a(.,.) es simétrica
a(v, w) v L
a(v, v) v
2 (I)
w L
2
H1 (I)
L(v) fv dx f
I
2 (I)
v
H1 (I)
a(.,.) es continua con 1
w H1 (I)
a(.,.) es V-elíptica con 1 2
L2 (I)
v
L2 (I)
L(.) es continua con f
L2 (I)
• Luego:
– Estimación de error:
u uh
H (I)
– Estimación de estabilidad:
u
f
H1 (I)
1
2 u v
1
H (I)
v H10 (I)
L2 (I)
Introducción al Método de los Elementos Finitos
22
Ejemplos concretos (cont. Ejemplo 2)
Demo. de V-elipticidad de a(.,.):
0
x
v( x) v(0) + v( y) dy
Desigualdad de Cauchy
0
1
2
2
2
v( x) v ( y ) dy 1 v dy 1 dy v dy
0
0
0
0
x
1
1
1 1
1
1
1
2
1
v dx v dydx v dx
2
2
0
1
2
0 0
1
0
1
2
v
dx v dx 2 v dx
2
0
2
0
(QED)
0
||v||
a ( v ,v )
H1 ( 0,1)
Teorema: vH1(), cte. C dependiente de , t.q.
v
2
L2 ( )
C v
2
L2 ( )
v
2
L2 ( )
Desigualdad de
Poincaré-Friedrichs
• Para I(0,1), v(0)0, resulta C 1.
Introducción al Método de los Elementos Finitos
23
Ejemplos concretos (cont)
Ejemplo 3: sea V=H10 (),
2
, a(u, v)= u v d , L(v)= fv d .
En este caso, a (u, v)=L(v), v H () es la forma débil del problema de Poisson
(D) Du f en , u 0 sobre
• Se verifica v, w H10 ()
a (v, w) a (w, v) a(.,.) es simétrica
1
0
a(v, w) v
L2 ( )
w L
v
2 ( )
H1 ( )
w H1 ( )
a(v, v) v v d C 1 v 2 d , C
a(.,.) es continua con 1
Desigualdad de Poincaré-Friedrichs
C 1 a(v, v) v 2 d v v d a(.,.) es V-elíptica, con (C 1) 1
1/
L(v) fv d f
||v||2 1
H ()
L2 ( )
v
L(.) es continua con f
L2 ( )
• Estimación de error:
u uh
• Estimación de estabilidad:
u
H1 ( )
H ( )
1
C 1 u v
C 1 f
H ( )
1
L2 ( )
v H10 ()
L2 ( )
Introducción al Método de los Elementos Finitos
24
Ejemplos concretos (cont)
d 4u
f en I=(0,1), u (0) u(0) u (1) u(1)
Ejemplo 4: ( D)
4
dx
• Definimos los espacios H2 (I)= v : v, v, v L2 (I)
H02 (I)= v : v H2 (I), v(0) v(0) v(1) v(1) 0
con norma v
•
H
2
=
(I)
I
I
1
2
I
v H 02 (I)
a(u, v) L(v)
a(.,.) es una forma bilineal y simétrica
• a(v, w) v L2 (I) w L2 (I) v
H2 (I)
w H2 (I)
a(.,.) es continua con 1
2
2
2
v
v
v
I dx a(.,.) es V-elíptica con 1/3
H2 (I)
L(.) es continua con f L (I)
• a(v, v) v
•
2
2
La forma débil del problema (D) consiste en hallar u V=H02 (I) tal que
uvdx = fv dx
•
v v v dx
2
2
2
• Luego: u
2
H (I)
3 f
L2 (I)
u uh
2
H (I)
3 u v
Introducción al Método de los Elementos Finitos
2
H (I)
v H02 (I)
25
Ejemplos concretos (cont)
Ejemplo 5: Consideremos el problema bi-armónico:
u
(D) D 2u f en d , d 1,2,3,
u
0 sobre
n
D u D Du
2
• Definimos el espacio Hk ()= v : v L2 (), D v L2 (),| | k
con norma v
donde
=
Hk ( )
2
D
v d
| | k
| |v
D v 1 2 , (1 , 2 );| | 1 2 ;1 , 2 0,1, 2,
x1 x2
• La forma débil del problema (D) resulta:
v
Hallar u H02 ()= v : v H 2 (), v
0 sobre , tal que
n
0
(V )
0
v
Du v d Du Dv d Du d
n
n
fv d D 2u v d Du v d
=L( v )
=a ( u , v )
Introducción al Método de los Elementos Finitos
26
Ejemplos concretos (cont. Ejemplo 5)
Demostraremos la identidad :
Dv
1 v
(Dv)2 d D v d d , v suave t.q. v 0.
R n
2
2
2
L2 ( )
2
D) Aplicando Green
Dv
2
L2 ( )
(Dv)2 d v,ii v, jj d
v,i v, jj ni d v,i v,ijj d
v,i v, jj ni v,i v,ij n j d v,ij v,ij d
Cambiamos coordenadas en un punto del contorno. El borde, localmente,
resulta x2* g ( x1* ) y como v 0 v x1* , g ( x1* ) 0 en torno a x1* 0
Luego:
v,1 v,2 g ' 0,
*
en
torno
a
x
1 0
2
v,11 2v,12 g,1 v,22 g ' v,2 g '' 0.
Introducción al Método de los Elementos Finitos
27
Ejemplos concretos (cont. Ejemplo 5)
Al ser g '(0) 0 y por definición: g "(0) 1/ R
v,1 (0, 0) 0,
v,11 (0, 0) v,2 g ''
Por último, siendo n 0 1
T
v,2
R
en x 0 0
T
v,i v, jj ni v,i v,ij n j v,2v, jj v,i v,i 2 v,2 v,11 v,22 v,1v,12 v,2v,22 v,2v,11
0
v
2
,2
R
con lo cual logramos
2
v,ij v,ij v,11v,11 v,12v,12 v,21v,21 v,22v,22 D v
2
Dv
2
L2 ( )
1 v
(Dv) 2 d D v d d
R n
2
2
Introducción al Método de los Elementos Finitos
2
(QED)
28
Ejemplos concretos (cont. Ejemplo 5)
• a(.,.) es una forma bilineal simétrica, pues a(u, v) Du Dv d a(v, u)
• a(.,.) es continua con 1, pues
a(u, v) Du
L2 ( )
Dv
L2 ( )
Du
H2 ( )
Dv
H2 ( )
• a(.,.) es V-elíptica con 1(1CC2). Usamos la identidad :
Dv
1 v
(Dv)2 d D v d d , v suave t.q. v 0.
R n
2
2
2
2
L2 ( )
0
Luego añadimos los términos que faltan para lograr v
Dv
2
L2 ( )
v
2
L2 ( )
v
2
L2 ( )
2
2
D
v
d
v
2
L2 ( )
2
:
H2 ()
v
2
L2 ( )
v
2
H2 ( )
Usando Poincaré-Friedrichs :
v
2
H2 ( )
Dv
2
L2 ( )
(C 1) v
• L(.) es continua con
2
L2 ( )
f
Dv
2
L2 ( )
(C 1)C Dv
2
L2 ( )
1 C C 2 Dv
L2 ( )
Introducción al Método de los Elementos Finitos
29
2
L2 ( )
Ejemplos concretos (cont)
Ejemplo 6: Consideremos el problema estacionario de convección-difusión:
(D) mDu β u f en , m
,β
2
,
u 0 sobre
Supongamos ||||/m moderado.
• La forma débil del problema (D) se obtiene haciendo
(V )
0
u
fv d mDu β u v d mu v β u v d m v d
n
=L( v )
=a ( u , v )
• L(.) es una forma lineal continua.
• a(.,.) es una forma bilineal, continua y V-elíptica, pero no simétrica.
Teorema: si L(.) es una forma lineal continua, y a(.,.) es una forma bilineal, continua
y V-elíptica, pero no simétrica, se puede demostrar que hay solución única a (V), y
está acotada. Sin embargo, en este caso no existe problema de minimización
asociado a (V).
Introducción al Método de los Elementos Finitos
30
Ejemplos concretos (cont)
Ejemplo 7: Consideremos el problema estacionario de conducción de calor en 3
(D)
ku f
u 0
ku n g
k1
en , con k 0
0
en 1
0
k2
0
0
0 , ki
k3
Ecuación del calor
CB Dirichlet
en 2
CB Neumann
1
Definimos como espacio para la solución V v : v H (), v 0 sobre 1
• La forma débil del problema (D) se obtiene haciendo
fv d ku v d ku v d ku n v d ku v d g v d
2
ku v d fv d g v d
a ( u ,v )
2
L( v )
• L(.) es una forma lineal continua si f L2(), gL2(2).
• a(.,.) es una forma bilineal, simétrica, continua y V-elíptica si
c, C / c ki (x) C x
Introducción al Método de los Elementos Finitos
31