Los métodos numéricos en la e dos numéricos en la
Anuncio

XVIII Reunión Nacional de Profesores de
Mecánica de Suelos e Ingeniería Geotécnica
Sociedad Mexicana de
Ingeniería Geotécnica, A.C.
Noviembre 14, 2012 – Cancún, Quintana Roo
Los métodos numéricos en la enseñanza de dinámica de suelos
Numerical methods in the teaching of soil dynamics
1
1
Roberto MAGAÑA , Armando HERMOSILLO y Marcelo PÉREZ
2
1
2
Instituto de Ingeniería, UNAM
Centro Tecnológico, FES Aragón
RESUMEN: En el presente trabajo se hace una reflexión acerca de la necesidad de enseñar a los alumnos el manejo de
algunos métodos numéricos, que son indispensables para analizar diferentes si
situaciones
tuaciones en las que se presentan
problemas de dinámica no lineal en geotecnia, comentando que éstas involucran mucho más que la interpretación de
pruebas dinámicas de laboratorio, ya que comprenden el análisis del comportamiento global dinámico de obras civiles
c
junto con su entorno, en el que intervienen las características del terreno y otros componentes (por ejemplo, máquinas,
etc.). Así por ejemplo se tienen los trabajos de compactación o de hincado de pilotes, o bien, situaciones como la
licuación de arenas,
renas, etc. En general todo esto implica un comportamiento no lineal del suelo ante solicitaciones, lo que
obliga a la modelación de problemas con ecuaciones diferenciales no lineales, cuya solución en la mayoría de los casos
sólo es posible a través de procedimientos
ocedimientos numéricos.
ABSTRACT: In the present paper a reflection is made about the necessity of teach students the management of some
numerical methods,, which are essential to analyze different situations in wh
where problems are nonlinear dynamics in
geotechnics, commenting that they involve much more that the interpretation of laboratory dynamic tests, since they
comprise the overall dynamic behavior analysis of civil works together with its surroundings, in the intervening terrain
features and other components (e.g.,, machines, etc..). For example, it is had the compaction work or pile driving, or
situations such as the liquefaction of sands, etc.. Generally this involves non
non-linear soil behavior to solicitations, which
requires the modeling of problemss with nonlinear differential equations whose solution in most cases is only possible
through numerical procedures.
1 INTRODUCCIÓN
En el presente trabajo se hace una reflexión
acerca de la necesidad de enseñar a los alumnos el
manejo de algunos métodos numéricos, que son
indispensables para analizar diferentes situaciones
en las que se presentan
ntan problemas de dinámica no
lineal en geotecnia, comentando que éstas
involucran mucho más que la interpretación de
pruebas dinámicas de laboratorio, ya que
comprenden el análisis del comportamiento global
dinámico de obras civiles junto con su entorno, en el
que intervienen las características del terreno y otros
componentes (por ejemplo, máquinas, etc.). Así por
ejemplo se tienen los trabajos de compactación o de
hincado de pilotes, o bien, situaciones como la
licuación de arenas, etc. En general todo e
esto
implica un comportamiento no lineal del suelo ante
solicitaciones, lo que obliga a la modelación de
problemas con ecuaciones diferenciales no lineales,
cuya solución en la mayoría de los casos sólo es
posible a través de procedimientos numéricos.
Por tanto,
anto, en este artículo se comentan algunos
de estos procedimientos, así como los contextos de
situaciones dinámicas en donde es indispensable su
empleo. Asimismo, se hacen sugerencias para
considerar su inclusión en los planes de estudio de
los ingenieros civiles de nuestro país, ya que esto se
está haciendo en otros países, y esto implica un
rezago en nuestra ingeniería.
El comportamiento dinámico no lineal de los
suelos, exige que los métodos numéricos requeridos
para la solución de las ecuaciones diferenciales
difer
involucradas,
sean
con
procedimientos
de
integración paso a paso iterativos, lo que obliga a un
proceso de cálculo numérico masivo, el cual además
puede cambiar según sea el tipo de no linealidad
considerada, por lo cual se requiere habilidad en el
e
manejo de técnicas numéricas, así como de
habilidad en programación, ya que es imposible
decir que existen paquetes de computadora para
todas las posibles variantes. Esto obliga por tanto a
que este tipo de enseñanzas sea recomendable.
SOCIEDAD
AD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
2
Los métodos numéricos en la enseñanza de dinámica de suelos
2 DINÁMICA NO LINEAL EN GEOTECNIA
2.1 Oscilaciones lineales
Una gran cantidad de sistemas mecánicos y
estructurales pueden ser considerados como
sistemas de un grado de libertad. En muchos
sistemas prácticos la masa está distribuida. Sin
embargo para simplificar el análisis de dichos
sistemas la masa puede aproximarse a través de
una masa puntual, convirtiendo un problema
continuo en uno discreto más fácil de analizar.
Vibración. Cualquier movimiento que se repite a si
mismo en intervalos de tiempo es considerado
oscilación o vibración. La teoría de vibraciones
estudia este tipo de movimientos y las fuerzas
asociadas con los mismos. Los sistemas vibratorios
tienen, en general, un medio que almacena energía
potencial (resorte o elastómero), un medio que
almacena energía cinética (masa o inercia) y un
medio a través del cual se disipa energía en forma
gradual La vibración de un sistema implica la
transferencia de su energía potencial a energía
cinética y la de su energía cinética a energía
potencial alternadamente. Si el sistema está
amortiguado, la energía se irá disipando en cada
ciclo de vibración
Grados de libertad. Es el mínimo número de
coordenadas independientes necesarias para
determinar completamente las posiciones de todas
las partes de un sistema en cualquier instante.
2.2
Clasificación de las vibraciones
A. Vibración libre. Si un sistema que es perturbado
inicialmente se deja vibrando por si mismo se dice
que está en vibración libre. No existe una fuerza
externa actuando en el sistema. La oscilación de un
péndulo simple es un ejemplo de vibración libre.
B. Vibración forzada. Si un sistema se sujeta a una
fuerza externa, la vibración resultante se conoce
como vibración forzada. Si la frecuencia de la fuerza
externa coincide con una de las frecuencias
naturales del sistema, entonces éste entrará en
resonancia.
C. Vibración no amortiguada. Si durante un
movimiento oscilatorio no se pierde energía en
fricción o cualquier otro tipo de resistencia, la
vibración se conoce como vibración no amortiguada.
D. Vibración amortiguada. Si existe pérdida de
energía durante un movimiento oscilatorio, la
vibración
presente
se
denomina
vibración
amortiguada. En muchos sistemas físicos, la
cantidad de amortiguamiento es tan pequeña que
puede despreciarse para fines prácticos. Sin
embargo, el considerar el amortiguamiento es
sumamente importante cuando se analizan sistemas
de vibración cercanos a resonancia.
E. Vibración lineal. Si todos los componentes
esenciales de un sistema en vibración (resorte,
masa y amortiguador) se comportan dentro de su
rango lineal, la vibración resultante se conoce como
vibración lineal. Las ecuaciones diferenciales que
gobiernan el comportamiento del sistema son
lineales y en consecuencia el principio de
superposición puede ser empleado, además existen
fundamentos matemáticos para su análisis
completamente desarrollado.
F. Vibración no lineal. Si uno de los componentes
esenciales de un sistema en vibración se comporta
de manera no lineal, la vibración resultante se
conoce como vibración no lineal. Las ecuaciones
diferenciales que gobiernan el comportamiento del
sistema son no lineales y el principio de
superposición no es válido y las técnicas para su
análisis son más complejas y funcionan a base de
aproximaciones.
2.3 Oscilaciones no lineales (caóticas)
Un péndulo se modela adecuadamente mediante
un oscilador armónico sólo cuando existen
pequeños ángulos de elongación. Se ha observado
en el laboratorio que el período de oscilación
aumenta al crecer la amplitud de la oscilación. De
hecho, el período se aproxima a infinito para el
máximo
valor del ángulo (de 180 °). En el
laboratorio virtual (y en la realidad) nunca se alcanza
este límite (Elmer, 1998).
A pesar de que la ecuación de movimiento de un
péndulo no amortiguado y no forzado es no lineal, se
puede calcular su frecuencia como una función de la
máxima amplitud. Con el fin de resolver esta
ecuación diferencial no lineal.
d 2ϕ
+ ω 0 2 sen ϕ = 0
dt 2
(1)
Debido a que el integrando en el lado izquierdo es
una función par, se obtendrá
T =
2 2
ω0
ϕ max
∫
0
dϕ
cos ϕ − cos ϕ max
(2)
Esta integral no puede ser expresada por
funciones elementales como polinomios o funciones
trigonométricas. Esto es posible solamente en el
límite de cuando el ángulo ϕ max → 0 , para el cual se
tiene que la función coseno se pude aproximar por
una serie de Taylor. Bastando solo con tomar el
primer y el segundo término, entonces al integrar se
obtendrá el resultado conocido para el periodo de
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
MAGAÑA R. et al.
T = 2π / ω0 . Para un valor arbitrario del ángulo ϕ max ,
la integración define una integral elíptica completa.
Sistema no lineal. En matemáticas, un sistema no
lineal es aquel que no satisface el principio de
superposición, o cuando
su salida no es
directamente proporcional a su entrada; ya que un
sistema lineal cumple estas condiciones. En otras
palabras, un sistema no lineal es cualquier problema
en el que la variable o variables de salida (s) no se
pueden expresar como una combinación lineal de
las componentes independientes.
Los problemas no lineales son de interés para
ingenieros, físicos y matemáticos, porque la mayoría
de los sistemas físicos son inherentemente no
lineales en la naturaleza. Las ecuaciones no lineales
son difíciles de resolver y dan lugar a fenómenos tan
interesantes como el caos. El clima es el fenómeno
caótico más conocido, donde los cambios simples en
una parte del sistema pueden producir efectos
complejos en todas partes.
Ecuaciones algebraicas no lineales. Las ecuaciones
algebraicas no lineales, que también se llaman
ecuaciones polinómicas, están constituidas por
polinomios igualados a cero. En una ecuación
polinómica única, para encontrar sus raíces se
pueden utilizar los algoritmos conocidos. Sin
embargo, para los sistemas de varias ecuaciones
algebraicas los métodos de solución son más
complicados, su estudio cae en el campo de la
geometría algebraica. Tipos de comportamiento no
lineal:
Indeterminismo. El comportamiento del sistema
no puede predecirse.
Estabilidad múltiple. Alternancia entre dos o más
estados
Oscilaciones aperiódicas. Funciones que no
repiten valores después de algún tiempo (conocidas
como oscilaciones caóticas o caos).
2.4 Vibraciones no lineales en suelos
En lo que sigue se presentan algunos casos en
geotecnia donde se presentan condiciones no
lineales en geotecnia.
2.4.1 Comportamiento caótico de temblores
Grandes terremotos (magnitud> 7) aparentemente
ocurren estocásticamente, pero hay una posibilidad
de que la estocasticidad sea debida a algún
mecanismo determinista, es decir, debido al caos. El
estudio detallado de un modelo simple de terremoto
se presenta y muestra un comportamiento caótico.
Este es también el modelo más simple de los
osciladores de relajación acoplados y tiene
topológicamente la misma estructura que el modelo
de Lorenz (Thompson et al., 1986)
3
Los terremotos y las fallas sobre las cuales se
producen interactúan a través de una amplia gama
de escalas espaciales y temporales. Además,
muchos aspectos de la sismicidad regional parecen
ser estocásticos, tanto en el espacio y el tiempo. Sin
embargo, dentro de esta complejidad, existe una
considerable auto-organización. La ocurrencia de
terremotos es un problema que puede ser estudiado
con los fundamentos de la física estadística.
2.4.2 Compactación
Las vibraciones dinámicas no lineales originadas
por equipos de compactación de suelo se toman
como dato para los sistemas de control de
retroalimentación, en los sistemas de compactación
inteligente (Anderegg et al., 2006). De acuerdo con
la compactación alcanzada por el suelo, se varían
los parámetros del suelo empleados en el modelo de
manera continua. El rodillo vibratorio mide
permanentemente la rigidez del terreno. En
conjunción con datos obtenidos con GPS. Los datos
de rigidez están directamente relacionados a la
prueba placa para obtener la resistencia al corte. En
la práctica, la compactación inteligente asegura que
el trabajo de compactación se complete en un
número mínimo de pasadas, de esta manera se
controla la energía de compactación la cual se
ajusta automáticamente mientras se mide la rigidez
del suelo.
Así que la compactación inteligente en el sector
de movimiento de tierras permite llevar a cabo un
trabajo de compactación en un tiempo muy corto y
de manera verificable. La vinculación de los datos de
la medida de la rigidez del suelo durante la
compactación controlado con los datos obtenidos
con el sistema GPS permite la visualización gráfica
del proceso que se está llevando a cabo,
proporcionándole al operador de la máquina una
ayuda sencilla y muy eficaz para trabajar.
2.4.3 Hincado de pilotes
En el artículo (Pavlovskaia et al., 2003) se
describe la investigación actual sobre el modelado
matemático de un sistema de tierra de vibro-impacto.
Debido a la complejidad estructural de tales
sistemas, se investigó en primera instancia la
respuesta dinámica de un oscilador de impacto
idealizado. El modelo se compone de una masa
(armónicamente excitada) simulando la parte
penetrante del equipo para pilotear y un deslizador
visco-elástico, que representa la resistencia del
suelo.
El
modelo
ha
sido
formulado
matemáticamente, y se desarrollaron las ecuaciones
del movimiento. Un análisis dinámico típico no lineal
revela un comportamiento complejo que va desde
movimiento periódico hasta un movimiento caótico.
Se encontró que la máxima evolución coincide con
el final del régimen de periódico.
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
4
Los métodos numéricos en la enseñanza de dinámica de suelos
Matemáticamente los sistemas de vibro-impacto
pueden ser clasificados como sistemas de
movimiento con discontinuidades dependientes.
Como puede verse de lo anterior, se ha llevado a
cabo una cantidad considerable de investigación
centrándose tanto en estudios fundamentales como
en aplicaciones prácticas.
2.4.4 Licuación
La dependencia de la escala y los aspectos
temporales sugieren algún aspecto fractal en el
comportamiento (Quinn, 2012). Como un primer
intento de una explicación, en términos muy
simplistas, a una densidad mayor de lo que algunos
llaman "densidad crítica" o estado crítico, no hay
conectividad íntima entre todas las partículas del
suelo dentro de la matriz del suelo, y por lo menos
hay un contacto continuo, a través de varias rutas
diferentes, a través del modelo. Por lo tanto una falla
de corte puede ocurrir de forma instantánea a lo
largo de alguna superficie de falla continua a través
de todo el modelo, Por lo tanto, los supuestos de
equilibrio limite, y falla instantánea son válidas en
una densidad menor que la densidad crítica, la
matriz del suelo se desconecta, o al menos no está
totalmente conectada a través del modelo. Sabemos
que a partir de simulaciones con computadora
relacionadas con los fenómenos de percolación que
a medida que aumenta la densidad, la interconexión
entre las partículas en la matriz se incrementará, y
en algún momento los grupos interconectados de
partículas desarrollarán una forma fractal, con la
auto-afinidad en todas las escalas (de partícula a
escala del modelo) la densidad en la matriz del suelo
se ha interconectado en una geometría fractal, y
entonces el comportamiento será caótico. La
transmisión de esfuerzos y deformaciones a través
de la matriz de suelo fractal no será instantánea,
sino más bien se producirá con el tiempo, de manera
tal que no se puede determinar con precisión a partir
del estado inicial.
3 ECUACIONES DIFERENCIALES NO LINEALES
A continuación se presentan situaciones que
originan no linealidad en sistemas así como la
modelación
necesaria
mediante
ecuaciones
diferenciales.
3.1 Métodos numéricos para ecuaciones
diferenciales lineales
Los métodos numéricos son técnicas mediante las
cuales es posible formular problemas de tal forma
que puedan resolverse usando operaciones
aritméticas. Aunque hay muchos tipos de métodos
numéricos, todos comparten la característica común
de llevar a cabo un buen número de tediosos
cálculos aritméticos. Con el desarrollo de
computadoras digitales eficientes y rápidas, el papel
de los métodos numéricos ha aumentado
considerablemente
en
los
últimos
años,
convirtiéndose en herramientas extremadamente
poderosas para la solución de problemas de
ingeniería. Son capaces de manejar sistemas de
ecuaciones grandes, no linealidades y geometrías
complicadas que son comunes en la práctica de la
ingeniería y que, a menudo, son imposibles de
resolver analíticamente.
Los métodos numéricos clásicos que son
indispensables para tratar los problemas lineales
son: obtención de raíces de polinomios (NewtonRapson, etc), solución de sistemas de ecuaciones
lineales (Gauss-Jordan, Gauss-Seidel, etc), solución
del problema de vectores y valores característicos,
diferenciación e integración numérica, interpolación
polinomial, diferencias finitas para ecuaciones
diferenciales ordinarias y parciales.
3.2 Ecuaciones diferenciales no lineales para
sistemas dinámicos
Se estudian modernos conceptos geométricos,
matemáticos y estadísticos para tratar los sistemas
no lineales. Los fenómenos naturales son
esencialmente no lineales, característica que les
permite diversos de comportamientos; estados
estacionarios, oscilatorios, cuasi periódicos y
caóticos que en general no puede ser tratada con
modelos o ecuaciones lineales.
Se pretende que el estudiante adquiera una visión
más amplia de los problemas, que trascienda al
predecible comportamiento lineal, y que no quede
desorientado
al
observar
comportamientos
complicados. Esto le permitirá plantear una solución
innovadora no lineal quizás más eficiente o más
general que una solución lineal restringiendo el
rango de aplicación del modelo. Ver el Programa
Académico del Departamento de Ingeniería
Electrónica, Facultad de Ciencias Exactas y
Tecnología, Universidad Nacional de Tucumán,
Argentina (Savino, 2012)
Se adopta una metodología ingenieril que hace
extensivo uso de la computadora que trata Aborda
los conceptos matemáticos para tratar los problemas
de sistemas no lineales desde un enfoque ingenieril.
3.3 Sistemas de ecuaciones diferenciales no
lineales
Un sistema de ecuaciones diferenciales se dice
que es no lineal si modela un sistema físico no lineal.
Los
problemas
que
involucran
ecuaciones
diferenciales no lineales son muy diversos, y los
métodos de solución o análisis son dependientes del
problema. Ejemplos de ecuaciones diferenciales no
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
MAGAÑA R. et al.
lineales son las ecuaciones de Navier-Stokes en
dinámica de fluidos, las ecuaciones de LotkaVolterra en biología, y el Black–Scholes PDE en
finanzas.
Una de las mayores dificultades de problemas no
lineales es que generalmente no es posible
combinar soluciones conocidas en nuevas
soluciones. En problemas lineales, por ejemplo, una
familia de soluciones linealmente independientes
pueden ser utilizados para construir las soluciones
generales a través del principio de superposición. A
menudo es posible encontrar varias soluciones muy
específicas a ecuaciones no lineales, sin embargo
la falta de un principio de superposición impide la
construcción de nuevas soluciones.
3.4 Soluciones especiales para ecuaciones
diferenciales no lineales
Las ecuaciones diferenciales son muy utilizadas
en un gran número de ramas del conocimiento
científico para modelar el comportamiento de ciertos
fenómenos. Su uso no se limita única y
exclusivamente al campo de las matemáticas o al de
la física, teniendo gran aplicabilidad en campos
como la biología, la química y las ciencias sociales
(Rodríguez, 2012).
En muchos de los procesos que se modelan se
estudian tanto los llamados puntos de equilibrio
(puntos en lo que el sistema no presenta variación
alguna) como la estabilidad de estos puntos
(sensibilidad a pequeñas perturbaciones), así como
la existencia de soluciones periódicas.
3.5 Métodos numéricos para E.D.O. de primer
orden
A menudo, existen problemas prácticos que
conducen a ecuaciones diferenciales que no pueden
resolverse mediante los procedimientos expuestos
anteriormente o también a ecuaciones cuyas
soluciones vienen expresadas en términos tan
complicados que, con frecuencia, es preferible
obtener una tabla de valores aproximados de la
solución en los puntos de un determinado intervalo.
Si suponemos que existe una solución de una
ecuación diferencial dada, entonces aquélla
representa un lugar geométrico (curva) en el plano.
En esta sección estudiaremos procedimientos
numéricos que utilizan la ecuación diferencial para
obtener una sucesión de puntos cuyas coordenadas
aproximan las coordenadas de los puntos de la
curva que efectivamente es la solución. Dado un
problema de valor inicial
y 0 = f ( x, y ) ; y ( x0 ) = y 0
se trata de obtener aproximadamente los valores
de la solución, si existe, en un conjunto de puntos
del intervalo [a, b] que interese, entre los cuales ha
5
de estar el punto x = x0 . Para ello, se fija un h > 0 y
se
obtiene
un
conjunto
de
puntos
{x0 , x1 ,K, xn } ⊂ [a, b] , de la forma x1 = x0 + h ,
x2 = x0 + 2h , x3 = x0 + 3h , L , xn = x0 + nh para los
que se calcularán los valores aproximados de la
solución y1 , y 2 , L , y n de la ecuación diferencial,
con la condición y ( x0 ) = y 0 . A la longitud h de cada
subintervalo [xi , xi +1 ] se le llama paso.
Una forma general de efectuar el cálculo de los
valores aproximados de la solución en cada paso es
mediante el uso de polinomios de Taylor:
y ( x + h) ≈ y ( x ) +
h
h2
h k (k )
y ( x) (3)
y ′( x) +
y ′′( x) + L +
1!
2!
k!
teniendo en cuenta que si el valor de h es pequeño,
las potencias más altas h 2 , h 3 ,K son muy
pequeñas.
3.5.1 Aproximación local de Taylor
Hemos visto que podemos aproximar mediante su
recta tangente a una función derivable localmente en
un punto. Si se cumple que la función es
suficientemente suave en el punto o dominio de
estudio (esto es, la función es de clase (C ∞ ) cabe la
posibilidad de intentar aproximar a la función no por
polinomios de grado uno, sino por polinomios de
grado dos, tres, cuatro y sucesivamente. Esta
aproximación recibe el nombre de "desarrollo
polinómico de Taylor" y se define de la siguiente
manera:
f ′(a )
f ′′(a )
( x − a) +
( x − a) 2 +
1!
2!
f ′′′(a )
f ( n ) ( a)
( x − a) 3 + L +
( x − a) n
3!
n!
P ( x) = f (a ) +
(4)
Donde P (x) es el polinomio de grado n que
mejor aproxima a la función en el punto x = a .
Nótese que si evaluamos P (x) en x = a todos los
términos salvo el f (a ) se anulan, luego P ( a ) = f ( a ) .
Nótese también que la ecuación de la recta tangente
del apartado anterior corresponde al caso en el que
n =1.
El polinomio de Taylor es un polinomio
"osculador". De entre todos los polinomios de orden
no mayor que n y que pasan por f (a ) el desarrollo
polinómico de Taylor de f (x ) en x = a es el que
posee el contacto de mayor orden con f (x ) en "a" .
Puntos singulares. Se denominan puntos singulares
ó estacionarios a los valores de la variable en los
que se anula la derivada f ′(x) de una función f (x )
, es decir, si f ′( x) = 0 en x1 , x2 , x3 , L , xn , entonces
x1 , x2 , x3 , L , xn son puntos singulares de f (x ) . Los
valores f ( x1 ) , f ( x2 ) , f ( x3 ) , L , f ( xn ) se llaman
valores singulares.
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
6
Los métodos numéricos en la enseñanza de dinámica de suelos
Puntos críticos. Por punto crítico se entiende: un
punto singular, un punto donde no exista la derivada
o un punto extremo a o b del dominio [a,b] de
definición de la función.
Si la segunda derivada es positiva en un punto
crítico, se dice que el punto es un mínimo local; si es
negativa, se dice que el punto es un máximo local; si
vale cero, puede ser tanto un mínimo, como un
máximo o un punto de inflexión. Derivar y resolver
en los puntos críticos es a menudo una forma simple
de encontrar máximos y mínimos locales, que
pueden ser empleados en optimización. Aunque
nunca hay que despreciar los extremos en dichos
problemas
llevarlo a la inestabilidad.
continuación algunas de ellas:
Se
describirán
a
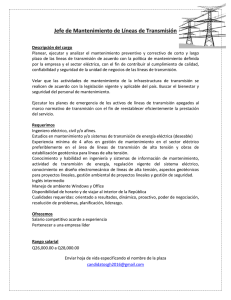
Saturación
Para señales de entrada pequeñas, la salida de
un elemento de saturación es proporcional a la
entrada. Para señales mayores de entrada, la salida
no se incrementa proporcionalmente y finalmente
para valores muy elevados de las señales de
entrada, la salida se mantiene constante. Ver figura
1.
3.6 Oscilaciones no lineales
En este artículo (Mickens 2010), se consideran
sólo los sistemas de un grado de libertad que
pueden ser modelados matemáticamente por
ecuaciones diferenciales que tienen (en el caso más
simple) la forma genérica
(5)
&x& + f ( x) = 0
Donde los puntos denotan derivación.
ejemplo: x& = dx / dt y &x& ≡ d 2 x / dt 2 .
Por
Definición. Si f (x ) es una función no lineal,
entonces la ecuación diferencial de segundo orden
diferencial, (ec. 5), es un oscilador no lineal.
Utilizando representaciones específicas de f (x ) los
siguientes son ejemplos particulares de osciladores
no lineales:
3
&x& + x = 0 ,
1/ 3
&x& + x = 0 ,
1/ 3
&x& + x + x = 0 ,
Figura 1: Curva
característica de saturación
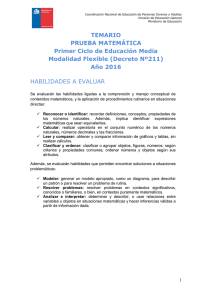
Figura 2. Curva
característica de zona
muerta
Zona muerta
En un elemento de zona muerta o no-linealidad de
umbral, no hay salida para entradas que caen dentro
de la amplitud de zona muerta. Ver figura 2.
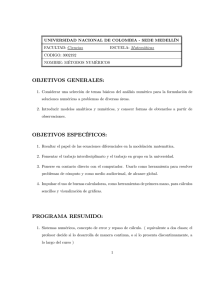
Conexión-desconexión
La no-linealidad conexión-desconexión, se
denomina también no-linealidad de dos posiciones,
todo-nada (on-off). Sea un elemento todo-nada cuya
curva característica de entrada-salida se muestra en
la Fig. 3. La salida de este elemento es, o bien una
constante positiva o una constante negativa.
(6)
3.7 Control no lineal
El control no-lineal es el conjunto de técnicas de
análisis y diseño para sistemas de control no
lineales; un sistema de control no-lineal es aquel que
tenga al menos un componente no-lineal; un
componente es no-lineal si no cumple con las
propiedades de homogeneidad o superposición.
(Kuo, 1996).
Los sistemas de control prácticamente siempre
presentan no-linealidades inevitables, llamadas
inherentes. Las siguientes son ejemplos de las más
frecuentes de ellas: saturación, zona muerta,
histéresis, todo-nada, juego o Huelgo, fricción
estática, fricción de Coulomb, etc., resorte no-lineal,
compresibilidad de fluido, producto de variables,
raíz, polinomio, función trigonométrica, etc.
La presencia de alguna de estas no-linealidades
puede afectar muy adversamente el comportamiento
del sistema. Así, la zona muerta puede producir error
de régimen estable, y la saturación a su vez puede
Figura 3. Curva
característica de conexióndesconexión
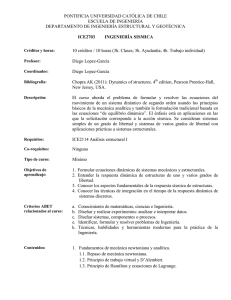
Figura 4. Curva
característica de Huelgo
Histéresis
Es un elemento (conexión-desconexión) con una
banda de histéresis.
Huelgo
En este elemento si la entrada cambia de
dirección, el cambio inicial no tiene efecto en la
salida; este fenómeno se presenta en engranajes
con desgaste, teniendo separación entre los dientes;
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
MAGAÑA R. et al.
su curva característica de entrada- salida, se
muestra en la Fig. 4.
Justificación. La necesidad de estudiar los sistemas
de control no-lineales se justifica por varias razones:
Los sistemas de control no-lineales presentan
mejoras
sobre
los
métodos
lineales,
particularmente porque son válidos en todo el
rango de variación de las variables y no solo en
pequeña señal.
Permiten tratar las incertidumbres paramétricas
del modelo mediante estrategias de adaptación del
control; en control lineal es frecuente utilizar
hipótesis de conocimiento e invarianza de los
parámetros del modelo.
El análisis y diseño puede ser más simple,
particularmente con estrategias basadas en la
física del proceso; es más fácil analizar el
comportamiento de un péndulo en términos
energéticos que en términos de los valores propios
del modelo lineal.
El mundo real es inherentemente no lineal
4 MÉTODOS NUMÉRICOS ITERATIVOS Y
PROGRAMACIÓN
4.1 Métodos para sistemas de ecuaciones no
lineales (Magaña et al. 2006)
Aquí se presentan brevemente las técnicas que
permiten resolver este tipo de ecuaciones. Como
ejemplo se ilustrará la metodología con un sistema
de dos ecuaciones con dos incógnitas, el cual se
puede generalizar a n ecuaciones con n incógnitas.
Esto facilita la explicación y la visualización. Se
ilustra con el método de Newton Raspón de punto
fijo, y se puede generalizar con el método de Gauss
Seidel. Por una parte se sabe cómo encontrar las
raíces de una ecuación de la forma: f ( x) = 0 . Por
otro lado, se conocen las técnicas iterativas de
solución de un sistema de ecuaciones lineales
Ax = b .
Por todo esto, es fácil entender que los métodos
iterativos de solución de la ecuación (7) son
extensiones de los métodos para ecuaciones no
lineales con una incógnita y emplean ideas que se
aplicaron al desarrollar los algoritmos iterativos para
resolver Ax = b .
4.2
Osciladores caóticos
Con el propósito de lograr una comprensión mejor
de los fenómenos caóticos, se elaboró un programa
capaz de generar resultados semejantes a los
obtenidos por otros investigadores en el campo de la
dinámica no lineal (Magaña et al., 2011). En este
caso se logró dicho objetivo y el programa
desarrollado es capaz de simular el comportamiento
de osciladores lineales y no lineales. En este último
caso se presentaron dos ejemplos de osciladores
caóticos, el de Duffing y el de Van der Pol, dados por
las ecuaciones 8 y 9 respectivamente.
m&x& + Cx& + x3 = 7.5 cos(t )
(8)
m&x& + µ (1 − x 2 ) x& + Kx = Asen(ωt )
(9)
4.2.1 Sistema Caótico Duffing
Este sistema describe un movimiento caótico, el
cual está gobernado por la ecuación diferencial (ec.
8) y para la cual f (t) ≠ 0 . Para este sistema, las
condiciones iniciales son y(0) = 3.0 y y& (0) = 4.0 , con
valores de m = 1.0 , C = 0.05 y K = 1.0 . La evolución
en el tiempo de dicho sistema se presenta en la
figura 5, correspondiente a la gráfica t − &x& que
representa el acelerograma. En la figura 6 se
presenta el diagrama de fases x − x& .
Estos dos son casos particulares de la situación
más general, donde se tiene un sistema de varias
ecuaciones
con
varias
incógnitas,
cuya
representación es:
f1 ( x1 , x2 , x3 ,K , xn ) = 0
Figura 5. Acelerograma t − &x&
f 2 ( x1 , x2 , x3 ,K , xn ) = 0
K
f n ( x1 , x2 , x3 ,K , xn ) = 0
7
(7)
donde f n ( x1 , x2 , x3 ,K , xn ) para i = n es una
función (lineal o no) de las variables independientes
x1 , x2 , x3 ,K, xn .
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
8
Los métodos numéricos en la enseñanza de dinámica de suelos
Figura 6. Diagrama de fases x − x&
4.2.2 Oscilador Van Der Pol
Este sistema describe un movimiento caótico, el
cual está gobernado por la ecuación diferencial (ec.
9) y para la cual f (t ) ≠ 0 . Para este sistema, las
condiciones iniciales son y(0) = 2.0 y y& (0) = 4.0 , con
valores de m = 1.0 , µ = 8.53 , K = 1.0 , A = 1.2 y
ω = 2π / 10 . La evolución en el tiempo de dicho
sistema se presenta en la figura 7 correspondiente a
la gráfica t − &x& que representa el acelerograma. En
la figura 8 se presenta el diagrama de fases x − x& .
un programa capaz de generar resultados
semejantes a los obtenidos por otros investigadores
en el campo de la dinámica no lineal. En este caso
se logró dicho objetivo y el programa desarrollado es
capaz de simular el comportamiento de osciladores
lineales y no lineales. En este último caso se
presentan dos ejemplos de osciladores caóticos, el
de Duffing y el de Van der Pol. Es importante
recalcar que las simulaciones se lograron a partir de
un mismo procedimiento general, con la misma
fórmula de recurrencia con la que se hacen las
integraciones paso a paso en el tiempo. Su
característica básica es que los parámetros de la
ecuación de movimiento clásica (amortiguamiento y
rigidez) se pueden manejar como funciones en vez
de ser constantes.
Para los análisis dinámicos se resolvió mediante
diferencias finitas la ecuación general de movimiento
como la presentada en la ec. 3, en donde C y K
pueden incluso ser variables o funciones. La
solución de la ecuación diferencial es una ecuación
de recurrencia como la presentada en la ec. 4. Como
se mencionó antes se simuló el comportamiento de
los osciladores de Duffing y el de Van der Pol, dados
por las ecuaciones 1 y 2 respectivamente.
m&x& + Cx& + Kx = f (t )
4m − 2Kh2
xi + Ch − 2m xi −1 +
xi +1 =
2m + Ch
2m + Ch
2h2 K
fi
2m + Ch
(3)
(4)
5 PLANTEAMIENTO DE INCLUSIÓN EN PLANES
DE ESTUDIO
Figura 7. Gráfica t − &x&
Se tiene que los métodos numéricos son
indispensables para pronosticar el comportamiento
de procesos no lineales, como los que se presentan
en diversos trabajos en geotecnia. Esto es para
poder establecer criterios de toma de decisiones
más adecuados a la realidad y con ello generar
diseños, con menores gastos por reparaciones,
ocasionadas por una valoración insuficiente de
modelos matemáticos simplistas.
Figura 8. Diagrama de fases x − x&
4.3 PROGRAMA NUMÉRICO PARA OBTENER
HISTORIAS DE MOVIMIENTO
Con el propósito de lograr una comprensión mejor
de los fenómenos caóticos, se procedió a elaborar
Para lograr lo anterior, es necesario proporcionar
a los ingenieros, herramientas matemáticas que
puedan modelar mejor el comportamiento real del
medio ambiente geotécnico. De esta manera surge
la propuesta de poner más atención a la enseñanza
de métodos numéricos iterativos (como el de GaussSeidel) para problemas no lineales. Es decir el
origen de esto es la no linealidad, la cual origina que
en muchas ocasiones no exista determinismo (a lo
cual está muy acostumbrado el ingeniero). Esto es
un asunto muy importante ya que ocurre la mayoría
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
MAGAÑA R. et al.
de las veces en la realidad y en especial en
geotecnia, por lo que la preparación en estos
métodos es indispensable.
Para confirmar lo anterior, en lo que sigue se
proporciona una relación de las diferentes causas
que dan origen al empleo de métodos numéricos
(donde los analíticos no se pueden aplicar):
• Geometría irregular.
• Heterogeneidad.
• No linealidad de los materiales.
• Inexistencia de métodos únicos en casos no
lineales, sino que hay diferencias que obligan a
programaciones diferentes.
En geotecnia abundan los casos no lineales, por
ejemplo,
en
propagación
de
temblores,
compactación, hincado de pilotes, licuación,
agrietamiento, etc.
No existen métodos analíticos para tratar casos
no lineales; todo esto ya se trabaja en otros países.
En resumen, la habilidad en métodos numéricos y
programación son indispensables para el trabajo en
dinámica no lineal en geotecnia, y esto será una
necesidad muy frecuente en el futuro, sin que exista
posibilidad de que se sature el conocimiento en este
campo, ya que es muy amplio y no se puede pensar
en tener paquetes de computadora para todo.
Finalmente, es conveniente hacer un comentario
relevante, en geotecnia los criterios de diseño están
regidos por la consideración de evitar la falla total del
sistema (capacidad de carga, factor de seguridad,
etc.), sin atender mucho a los estados de esfuerzos
y deformaciones y mucho menos a la evolución de
agrietamientos, cuyo estudio es factible con
herramientas matemáticas modernas como la
geometría fractal apoyada con métodos numéricos.
6 CONCLUSIONES
6.1 Conclusiones generales
• En los problemas de dinámica no lineal la curva
de la función de amplificación, sufre un
encorvamiento hacia la izquierda o derecha
según diferentes no linealidades. Esto provoca
que para una cierta frecuencia se tengan dos
valores diferentes de amplificación.
• Por la presencia de atractores múltiples se
presenta el fenómeno de bifurcación, en el que a
partir de un punto se tienen dos posibles
trayectorias de evolución del movimiento.
Además se pueden tener a lo largo de la historia
de movimiento diferentes puntos de bifurcación
generándose una especie de árboles con las
posibles trayectorias.
9
• Un mismo procedimiento numérico puede
conducir
a
comportamientos
dinámicos
diferentes, al variar los parámetros del modelo
simultáneamente con la historia de movimiento.
• En un oscilador caótico aunque la entrada sea
periódica la salida es irregular (pareciendo
aleatoria),
pero
tiene
patrones
de
comportamiento.
• Los espectros de respuesta tienen varios picos,
aunque el oscilador sea de un grado de libertad
(es decir son de banda ancha)..
• Son de esperarse efectos caóticos en el diseño
inelástico de estructuras. Asimismo, estos
existirán en la interacción suelo-estructura debido
a la no linealidad del suelo.
6.2 Conclusiones sobre temblores
Grandes terremotos (magnitud> 7) aparentemente
ocurren estocásticamente, pero hay una posibilidad
de que la estocasticidad sea debida a algún
mecanismo determinista, es decir, debida al caos.
Algunos estudios detallados de modelos simples de
terremotos han mostrado un comportamiento
caótico. Esto también ocurre con el modelo más
simple de los osciladores de relajación acoplados
que tiene topológicamente la misma estructura que
el modelo de Lorenz.
Los terremotos y las fallas sobre las cuales se
producen interactúan a través de una amplia gama
de escalas espaciales y temporales. Además,
muchos aspectos de la sismicidad regional parecen
ser estocásticos, tanto en el espacio y el tiempo. Sin
embargo, dentro de esta complejidad, existe una
considerable auto-organización. La ocurrencia de
terremotos es un problema que puede ser analizada
con los fundamentos de la física estadística.
Para abordar el estudio de terremotos, se puede
considerar la relación entre la fractura frágil y la
física estadística. La fractura frágil de un sólido es un
fenómeno complejo que ha recibido una gran
atención de los ingenieros, geofísicos y físicos. Un
ejemplo límite de fractura frágil es la propagación de
una fractura única a través de un sólido homogéneo.
Los sistemas de fallas sísmicas representan una
clase de sistemas dinámicos forzados no lineales
que se caracterizan por una amplia gama de escalas
de espacio y tiempo, de centímetros a miles de
kilómetros, y desde segundos hasta varios miles de
años. Así entonces los patrones de comportamiento
(con dimensión alta) de los sistemas naturales
suelen ser caóticos y complejos.
6.3 Conclusiones sobre compactación
La vigilancia continua de las propiedades del
suelo usando un rodillo compactador instrumentado
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.
10
Los métodos numéricos en la enseñanza de dinámica de suelos
requiere modelos matemáticos que pueden captar
los rasgos esenciales observados durante la
vibración del sistema tambor-suelo. El modelado del
sistema (tambor / suelo) considera principalmente la
no linealidad observada experimentalmente. La
consideración de la rigidez no lineal del suelo,
debido al efecto de la curvatura del tambor y el
endurecimiento del suelo explican la no-linealidad
observada experimentalmente. El análisis de los
resultados obtenidos reveló que comúnmente la
heterogeneidad observada en el suelo da lugar a
una respuesta transitoria que puede tener una
influencia significativa en el comportamiento de las
vibraciones.
6.4 Conclusiones sobre hincado de pilotes
En la investigación actual sobre el modelado
matemático de un sistema de tierra de vibro-impacto.
Se tiene que debido a la complejidad estructural de
tales sistemas, se investigó en primera instancia la
respuesta dinámica de un oscilador de impacto
idealizado. El modelo se compone de una masa
(armónicamente excitada) simulando la parte
penetrante del equipo para pilotear y un deslizador
visco-elástico, que representa la resistencia del
suelo.
El
modelo
ha
sido
formulado
matemáticamente, y se desarrollaron las ecuaciones
del movimiento. Un análisis dinámico típico no lineal
revela un comportamiento complejo que va desde
movimiento periódico hasta un movimiento caótico.
6.5 Conclusiones sobre licuación
Muchas observaciones han demostrado que
después de la licuefacción se tiene una mayor
movilidad debido a una cierta forma de fluidización
parcial que conduce a movimientos rápidos en
distancias más largas de lo que podría esperarse.
En la referencia (Quinn, 2012) se investiga un
modelo simple para este efecto. El modelo produce
una rica variedad de respuestas velocidad-fuerza,
incluida la atenuación de la fuerza a altas
velocidades. El objetivo en dicha referencia es
construir un modelo numérico simple para el flujo de
una masa grande saturada y para evaluar el efecto
de la velocidad en la fuerza media de rozamiento en
la interfaz entre el flujo y su medio de soporte. Existe
la motivación por la necesidad de tener una
descripción racional para el comportamiento de los
flujos en la licuefacción.
7 REFERENCIAS
Technology Age. Feb 26 - Mar 1, 2006, Atlanta,
GA
Elmer, Franz-Josef (1998). “Nonlinear Oscillations”.
http://www.elmer.unibas.ch/pendulum/nonosc.htm
Kuo Benjamín C. (1996) “Sistemas de Control
Automático” . Pearson Educación. México.
http://www.univalle.edu.co/~automatica/Cursos/M
oldelaPreg/Material/CNL1.pdf
Magaña R., Hermosillo A. (2006). “La Teoría del
caos en la didáctica”. Memorias de la XXIII
Reunión Nacional De Profesores de Mecánica de
suelos, celebrado en Tuxtla Gutierrez, Chiapas,
en Noviembre de 2006.
Magaña R., Hermosillo A. y Pérez M. (2011).
“Conceptos Fisico-Matemáticos del Caos para
Ingeniería Sísmica”,
Memorias del XVIII
Congreso Nacional de Ingenieria Sísmica
celebrado en octubre de 2011 en aguascalientes,
ags.
Mickens Ronald E (2010). “TRULY NONLINEAR
OSCILLATIONS - Harmonic Balance, Parameter
Expansions, Iteration, and Averaging Methods”.
World Scientific Publishing Co. Pte. Ltd. Clark
Atlanta
University,
USA.
http://www.worldscibooks.com/mathematics/7561.
html
Pavlovskaia Ekaterina, Wiercigroch Marian, KoChoongwoo and Rodger Albert A. (2003).
“Modelling of Ground Moling Dynamics by an
Impact Oscillator with a Frictional Slider”, Centre
for Applied Dynamics Research, Department of
Engineering, University of Aberdeen, Fraser Noble
Bldg. King’s College; AB24 3UE, Aberdeen,
Scotland, U.K. © 2003 Kluwer Academic
Publishers. Printed in the Netherlands
Quinn
Pete
(2012).
“Collapse,
bifurcation,
liquefaction, progressive failure… percolation
phenomena
in
geotechnique?”.
http://petequinnramblings.wordpress.com/2012/02
/06/collapse-bifurcation-liquefaction-progressivefailure-percolation-phenomena-in-geotechnique/
Rodríguez Luis, Daniel (2012) “Ecuaciones
diferenciales no lineales y soluciones especiales”
Universidad
de
Zaragoza.
http://sdmatull.blogspot.mx/2012/01/ecuacionesdiferenciales-no-lineales-y.html
Savino Guillermo V. (2012), Departamento de
ingeniería electrónica, Facultad de ciencias
exactas y tecnologia, Universidad Nacional de
Tucuman.
http://www.herrera.unt.edu.ar/deec/historia.htm
Thompson J.M.T. and Stewart H. B. (1986)
Nonlinear Dynamics and Chaos. Ed. John Wiley
and Sons: Chichester, 1986.
Anderegg R., Von Felten, D. A., and Kaufmann Kuno
(2006) “Compaction Monitoring Using Intelligent
Soil
Compactors”.
GeoCongress
2006:
Geotechnical Engineering in the Information
SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.