Título: “Arquitectura y Reparación de MotherBoard Pentium 4”
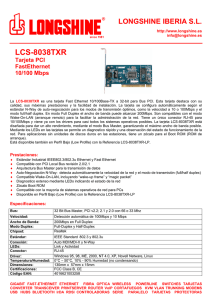
Anuncio

UNIVERSIDAD CENTRAL”MARTA ABREU” DE LAS VILLAS FACULTAD DE INGENIERIA ELÉCTRICA Dpto. de Telecomunicaciones y Electrónica Título: “Arquitectura y Reparación de MotherBoard Pentium 4” Autor: Alberto Orduña Rodríguez E-mail [email protected] Tutor: Ing. Silvio Machado Iglesias Copextel Villa Clara E-mail [email protected] Santa Clara 2007 Año 49 de la Revolución 1 DEDICATORIA A mi hija que es el motor impulsor de toda mi vida por la que emprendí este largo camino que ahora culmino. 2 TAREA TECNICA Búsqueda de información en soporte digital de manuales de fabricantes y ediciones especializadas. Visitas a sitios en Internet especializados a fin con el trabajo a realizar. Traducción de documentación del ingles al español. Estudio teórico de todo lo concerniente al trabajo a realizar. Comprobación de conocimiento y encuentro de conocimientos con el tutor. Practicas de laboratorio encaminada a ejercitar lo estudiado. Preparación de la pre defensa del trabajo. Presentación de la pre defensa. Redacción y ejecución del trabajo de diploma. Practica de reparación de MotherBoard defectuosa. Revisión del trabajo y corrección de errores. Impresión y encuadernación del trabajo de diploma. 3 RESUMEN La informática permite al hombre múltiples utilidades, dentro de los beneficios que ella ofrece están los diferentes tipos de hardware que mediante ellos se logra una mayor calidad, eficiencia, ahorro de tiempo y un avanzado desarrollo de las tecnologías. Desde su apertura en 1991 la Empresa COPEXTEL, no cuenta con un registro bibliográfico para la superación de los técnicos en cuanto a la arquitectura y reparación de los componentes y Hardware que ha ido en ascenso y en constante cambios. Las condiciones antes señaladas manifiestan la necesidad de realizar este trabajo: Este trabajo esta encaminado en primer lugar a las interrogantes científicas planteadas en cuanto a las ventajas de los nuevos hardwares su desarrollo y potencialidades para una eficiente explotación además la necesidad de recuperar por medio de la reparación los equipamientos en este caso las Mother Board P4 que casi siempre que presentan algún problema se procede a su sustitución, pudiendo en algunos casos repararlas y así ahorrarle al país gastos importantes por la compra de dicho equipamiento. El objetivo fundamental de este trabajo fue crear una metodología la cual refleja de una forma fácil de entender como enfrentarse a los problemas que los técnicos pueden encontrarse al intentar reparar una Mother Board y los pasos a seguir para la solución de dichos problemas. Además un acercamiento al desarrollo de los distintos hardware sus cosas novedosas como trabajan que posibilidades nos brindan para así tener una idea mas clara y un conocimiento mas profundo a la hora de acometer una reparación. Mediante este trabajo logramos recopilar mucha información en otros idiomas de distintos fabricantes, así como de manuales técnicos y confeccionamos un trabajo mas sintetizado y enfocado a una sola problemática que era la que nos ocupaba, la reparación de Mother Board P4. El aporte fundamental de este trabajo fue lograr mediante horas de trabajos y pruebas de laboratorio encontrar soluciones a problemas de los cuales no se tenían referencia, así como detectar los problemas por varios lugares, y encontrar los componentes defectuosos de diferentes maneras y por diferentes vías. 4 INDICE Introducción 1-2 CAPITULO I: COMPONENTES FUNDAMENTALES DE UNA MOTHER BOARD PENTIUM 4 1. La MotherBoard 3 1.1. Componentes principales de la MotherBoard 3 1.2. El Chipset 4 1.3. Principales fabricantes de Chipset 5 1.4. Zócalos P4 6 1.5. Bios 7 1.6. Bancos de memorias 7 1.7. Memorias Caché 8 1.8. Buses 8 1.8.4. El bus AGP 10 1.8.5. PCI-Express 10 1.9. Conectores y Puertos 11 CAPÍTULO II: FUNDAMENTOS TEÓRICOS ACERCA DE LA ARQUITECTURA DE MÁQUINA Y SU NOTABLE DESARROLLO 2.1. Características y funciones del Chipset 14 2.1.1. Chipset Intel® 925X Express 16 2.1.2. La familia de Chipsets Intel® 915 Express 17 2.2. Memorias más utilizadas 18 2.3. Características de los Buses 21 2.3.1. El bus PS/2: Arquitectura de Micro Canal (MCA) 21 2.3.2. PCI: El bus local de alto rendimiento de Intel 23 2.3.3. Universal Serial Bus 25 2.3.4. El bus AGP 26 2.3.5. PCI-Express 27 5 2.4. Conectores de la MotherBoard 29 2.5. Procesadores Pentium 4 32 CAPITULO III: REPARACIÓN DE MOTHER BOARD PENTIUM 4 3. Reparación de la Mother Board. 36 3.1. Pasos a seguir para la reparación de una M.B 36 3.2. Voltajes a medir. 40 3.2.1. Voltajes Funcionales de las Mother Board P4 41 3.3. Secuencia de arranque 41 3.3.1. Secuencia del Encendido y el Reset 42 3.4. Señales Reloj (CLK). 44 3.4.1. Problemas más frecuentes cuando mides el cuarzo: 44 3.5. Estructuras de algunas Mother Board. (PENTIUM 4). 45 Conclusiones y Recomendaciones 47 REFERENCIAS BIBLIOGRAFICAS 48 Anexos Manual de Reparación de MotherBoard P4 6 Introducción La informática es una de las ciencias que en la actualidad presta muchos beneficios a la humanidad, cuando se emplea en función del bienestar del hombre, en el mundo de hoy se lucha por dominarla para aumentar los intereses de las grandes potencias, que emplean dichos hardware por las ventajas que ellos ofrecen. Desde la pasada década se ha ido intensificando notablemente la aplicación de la Informática, lo que ha estado influenciado por el marcado desarrollo de la computación y de las nuevas tecnologías de la información. Cada sistema con el de cursar histórico que ha creado la informática tiene sus ventajas y desventajas y sus utilidades. La ciencia de la informática forma parte de la política científica nacional con la finalidad de emplear esta a favor de mejorar las condiciones de vida y de trabajo del hombre de la sociedad. Para el dominio de esta ciencia existen diferentes planes como son: su inserción dentro de los diferentes niveles educacionales por los que transita la enseñanza, desde la mas intricada escuelita primaria en lo ultimo de la Sierra Maestra hasta las mas importantes Universidades cuenta con un plan de estudio sobre la informática, además de que los Joven Club de Computación imparten clases sobre arquitectura de maquina entre otros contenido a niños jóvenes y hasta personas de la tercera edad que se interesen por aprender el maravilloso mundo de la informática. En Cuba el tratamiento al desarrollo de la Informática presenta una singularidad que exige el estudio acelerado por la importancia que este reviste para el trabajo en todos los sectores, así como en los programas de la Revolución. Para las diferentes empresas que se desarrollan en el mundo de hoy es fundamental realizar una adecuada utilización de los hardwares que ofrece la informática, porque ella permite el desarrollo acelerado del conocimiento del hombre. La Empresa COPEXTEL se a dado a la tarea por los problemas de financiamiento que tiene el país y también ayudando a la conservación del medio ambiente, tratar de recuperar por medio de la reparación todo el equipamiento que no tenia solución y se votaba como es el caso de las MotherBoard que cuando presentaban un problema se desechaban y ahora podemos en algunos casos recuperar y en un futuro seremos capaces de lograr un nivel mas alto en la recuperación de este y otros equipamientos y así lograr una mejor explotación y aumentar la vida útil del equipamiento informático de todas las empresas en nuestro país y 7 ahorrarle al país una importante suma de divisas que se puede revertir en desarrollo y beneficio de nuestra sociedad. También se tiene como objetivo Registrar, divulgar y dar a conocer el avance de los diferentes equipamientos así como la capacitación de los técnicos para que sean capaces de absorber rápido todo el conocimiento referido al desarrollo acelerado de la informática. 8 CAPITULO I: COMPONENTES FUNDAMENTALES DE UNA MOTHER BOARD PENTIUM 4 1. La Mother Board. En la arquitectura PC, el núcleo del sistema está integrado en una sola placa, denominada placa-base ("Motherboard" o "Mainboard"). En los sistemas actuales de sobremesa, es una placa de circuito impreso multicapa de unos 600 cm2 en la que se incluyen elementos de montaje superficial (soldados), amén de zócalos y conectores para diversos elementos desmontables. 1.1. Componentes principales de la MotherBoard. • Slot o socket del procesador. • Chipset (North/South Bridge o Memory y I/O Controller Hubs). • Super I/O Chip. • BIOS (Flash ROM/firmware hub). • Memorias sockets. • Slots ISA/PCI/AGP/PCI-EX. • Reguladores del voltaje del CPU. • Audio codec. Partes fundamentales de una MB. Figura 1 9 Partes Fundamentales de una MB. Figura 2 1.2. El Chipset. Chipset de Intel Figura 3 El "chipset" es el conjunto (set) de chips que se encargan de controlar determinadas funciones del ordenador, como la forma en que interacciona el microprocesador con la memoria o la caché, o el control de los puertos y slots ISA, PCI, AGP, USB. 10 1.3. Principales fabricantes de Chipset. • Intel • VIA Technologies • Acer Laboratories, Ltd. (ALi) • Silicon Integrated Systems (SiS) • Advanced Micro Devices (AMD) • PCChips Manufacturing, Ltd. • VLSI Technology, Inc. Arquitectura tipo Nort/South Bridge. La mayoría de los primeros chipsets Intel (y de todos los no-Intel, prácticamente) fueron diseñados con una arquitectura de forma modular, divididos en lo que se llamó el North Bridge y South Bridge, así como frecuentemente se incluía aquí también el CI Super I/O. • North Bridge (Puente Norte): Es el principal componente en la MB. Nombrado así porque es el que entrelaza los dispositivos rápidos de la MB – El bus de alta velocidad del procesador (400/266/200/133/100/ 66MHz), el bus AGP de video, la memoria y el bus PCI. • South Bridge (Puente Sur): Es el enlace entre el bus PCI y los demás dispositivos lentos en la MB – IDE, USB, BIOS, etc. • Super I/O: Es un CI conectado al bus ISA, que no se considera parte del chipset y es frecuentemente fabricado por un tercero. Contiene en un solo chip los controladores y/o interfases de la mayoría de los periféricos usados comúnmente (Puerto de Teclado y Mouse, Floppy, Puerto Serie y Paralelo, etc.). Algunos South Bridge modernos lo incluyen en su interior. Algunos Chipset para P4. Tabla 1. Fabeicante Southbridge Northbridge Intel ICH5 82865PE SIS 963L 648FX Intel ICH6R Grants Dale-P 915 Intel 82801G ICH7R Glenwood 82955 11 1.4. Zócalos P4. Existen varios tipos de zócalos para P4 pero los más conocidos y utilizados son el 478 y el 775. Zócalo 478. Zócalo y Procesador 478. Figura 4 Puede soportar procesadores de 1.5GHZ hasta 3GHZ P4, Celerones y Celerones D, con una FSB de hasta 800MB/s. Zócalo 775. Zócalo de procesador soket 775. Figura 5. Puede soportar procesadores Celerones D, P4 y Dual Core de 2.66MHZ ,3GHZ y superiores velocidades con FSB de hasta 1066MB/s. 12 1.5. Bios. Bios VIA. Figura 6. En realidad, el BIOS es una serie de subrutinas básicas de Entrada/Salida, de ahí su nombre, agrupadas en la memoria ROM de la tarjeta madre. Ellas suministran al Sistema Operativo el soporte a bajo nivel del Hardware. Esto significa que es el BIOS el que interactúa directamente con el Hardware, inicializa todos los dispositivos y periféricos y el que realiza en última instancia las operaciones de E/S. Como dijimos anteriormente, en las páginas introductorias, el BIOS garantiza que independientemente de que cambie el hardware, se introduzcan nuevas características y otras facilidades en la tarjeta madre, los sistemas operativos y programas funcionarán adecuadamente, puesto que ellos le piden al BIOS que realice las operaciones de E/S por ellos. El BIOS es normalmente soportado por una Memoria ROM, en las tarjetas madres más modernas está ubicado en una memoria Flash ROM, que además de permitir actualizarlo en cualquier momento, permite que se creen nuevas facilidades como almacenar la configuración de los dispositivos Plug & Play en tiempo real. 1.6. Bancos de memorias. Bancos de Memorias DDR. Figura 7. 13 La memoria es el área de trabajo para el procesador de la computadora. Es un área de almacenamiento temporal donde los programas y datos que se operan por el procesador deben residir. El almacenamiento de memorias considerado temporal porque los datos y programas permanecen allí solo cuando la computadora este alimentada. Varios tipos de bancos de memorias que se usan en los PCs actuales: • SDRAM: Es el tipo de memoria se utiliza en Mother Board PENTIUM, PENTIUN-II, P-III y hasta las Pentium-4. • DDR: se utiliza mayormente en MB soket478. • DDR-2: se utiliza en MB soket775 1.7. Memorias Caché. Memoria de alta velocidad que posee las siguientes características: Mas rápida y costosa que la memoria principal. Los programas son traspasados de la memoria principal al caché antes de su ejecución. Los programas se ejecutan más rápido en la memoria caché que en la principal. La memoria caché permite acelerar el acceso a los datos trasladándolos a un medio mas rápido cuando se suponen que van a leerse o modificarse pronto. Por ejemplo, si cierto dato acaba de leerse es probable que al poco tiempo esos mismos datos y los siguientes vuelvan a leerse. 1.8. Buses: Es un standard de comunicación, un acuerdo acerca de cómo construir tarjetas que puedan trabajar en una PC standard. Sin embargo, por diversas razones no solo existe un standard sino varios en el mundo de las PC además de algunos fuera de lo común. 14 El bus PS/2. Conectores PS/2. Figura 8. IBM cambió las reglas en abril 2 de 1987, cuando anunciaron la línea PS/2 para facilitar la transferencia rápida de datos dentro de la computadora y bajar los niveles de ruido. El bus PCI. Slot PCI. Figura 9. El PCI se distingue principalmente por ser un bus de 64 bits. Da soporte a una ruta de datos apropiada por computadoras basadas en el nuevo chip Pentium, que requiere 64 bits por cada ciclo del reloj. Sin embargo, PCI también da soporte a la ruta de datos de 32 bits haciéndolo apropiado para usarse en sistemas 486 de alto rendimiento. Universal Serial Bus. Puerto USB. Figura 10. 15 El Universal Serial Bus (Bus Serie Universal), Más conocido por sus siglas USB, está diseñado para la conexión de dispositivos externos que no necesitan un ancho de banda demasiado elevado. El bus AGP. Ranura AGP. Figura 11. La principal función del bus AGP es proporcionar un medio de alta velocidad a través del cual el procesador gráfico de una tarjeta aceleradora 3D pueda acceder de una manera lo más rápida posible a la memoria RAM del sistema. De esta forma las imágenes que se aplican como textura a los polígonos tridimensionales generados por la tarjeta gráfica pueden almacenarse en la memoria de la tarjeta madre. De esta forma es posible almacenar un mayor número de texturas o texturas de mayor calidad, lo cual redunda en la posibilidad de crear aplicaciones 3D mucho más realistas. PCI-Express. Ranura PCI-EX 1X. Figura 12. Es un nuevo desarrollo del bus PCI que usa los conceptos de programación y los estándares de comunicación existentes, pero se basa en un sistema de comunicación serie mucho más rápido. 16 1.9. Conectores y Puertos. Conectores y Puertos de una MB P4. Figura 13. 17 Las MotherBoard incorporan conectores de tipo PS/2 para el ratón, teclado, disco duro, disquete y puertos USB, serie (COM1, COM2), paralelo (LPT1), infrarrojos etc. Puertos USB: Conector USB. Figura 14. En ellos se pueden conectar periféricos como ratones y teclados hasta impresoras, cámaras digitales, memorias Flash, quemadores externos etc. Puerto LPT1: Puerto LPT1. Figura 15. Se pueden conectar Impresoras, Scanner etc. Conector IDE: Conector IDE. Figura 16. Se conectan discos duros, CD-ROM, Quemadores de CD-ROM y DVD. 18 Conector ATX: Conector de Fuente ATX. Figura 17. A el se conecta la fuente de alimentación de la PC. Conector Serial -ATA: Conector S-ATA. Figura 18. Es una interfaz para discos que sustituye a la tradicional Parallel ATA. Puertos PS/2 Puertos PS/2. Figura 19. Existen dos tipos de conectores PS/2 para Teclado y para Mouse que en las MotherBoard modernas se diferencian por el color, el de Mouse es verde y el de teclado es violeta. 19 CAPÍTULO II: FUNDAMENTOS TEÓRICOS ACERCA DE LA ARQUITECTURA DE MÁQUINA Y SU NOTABLE DESARROLLO 2.1. Características y funciones del Chipset. Es un conjunto de circuitos integrados que se encarga de realizar las funciones que el microprocesador delega en ellos. Chipset traducido literalmente del inglés significa conjunto de circuitos integrados. Se designa circuito integrado auxiliar al circuito integrado que es periférico a un sistema pero necesario para el funcionamiento del mismo. La mayoría de los sistemas necesitan más de un circuito integrado auxiliar. En los PC y otros sistemas el chipset está formado por 2 circuitos auxiliares al procesador principal: • • El puente norte se usa como puente de enlace entre dicho procesador y la memoria. Controla las funciones de acceso hacia y entre el microprocesador, la memoria RAM, el puerto gráfico AGP, y las comunicaciones con el puente sur. El puente sur controla los dispositivos asociados como son la controladora de discos IDE, puertos USB, Firewire, SATA, RAID, ranuras PCI, ranura AMR, ranura CNR, puertos infrarrojos, disquetera, LAN y una larga lista de todos los elementos que podamos imaginar integrados en la placa madre. Es el encargado de comunicar el procesador con el resto de los periféricos Puente Norte. Es el chip más importante del conjunto de chips (Chipset) que constituye el corazón de la placa madre. Recibe el nombre por situarse en la parte superior de las placas madres con formato ATX y por tanto no es un término utilizado antes de la aparición de este formato para ordenadores de sobremesa. Su función principal es la de controlar el funcionamiento del bus del procesador, la memoria y el puerto AGP. De esa forma, sirve de conexión (de ahí su denominación de "puente") entre la placa madre y los principales componentes de la PC: microprocesador, memoria RAM y tarjeta de vídeo AGP. Generalmente, las grandes innovaciones tecnológicas, como el soporte de memoria DDR o nuevos FSB, se implementan en este chip. Es decir, el soporte que tenga una placa madre para determinado tipo de microprocesadores, memorias RAM o placas AGP estará limitado por las capacidades del Northbridge de que disponga. 20 La tecnología de fabricación de un Northbridge es muy avanzada, y su complejidad, comparable a la de un microprocesador moderno. Por ejemplo, en un Chipset, el Northbridge debe encargarse de sostener el bus frontal de alta velocidad que lo conecta con el procesador. Si pensamos en el bus de 400 MHZ utilizado por ejemplo en el último Athlon XP, y el de 800 MHZ del Intel Prescott, nos damos cuenta de que es una tarea bastante exigente. Además en algunas placas tienen un adaptador de vídeo integrado lo que le añade trabajo al sistema. Debido a esto, la mayoría de los fabricantes de placas madres colocan un enfriador encima del Northbridge para mantenerlo bien refrigerado. Antiguamente, el Northbridge estaba compuesto por tres controladores principales: memoria RAM, puerto AGP y bus PCI. Hoy en día, el controlador PCI se inserta directamente en el Southbridge ("puente sur"), y en algunas arquitecturas más nuevas el controlador de memoria se encuentra integrado en el procesador; este es el caso de los Athlon 64. Los Northbridges tienen un bus de datos de 64 bit en la arquitectura X86 y funcionan en frecuencias que van desde los 66Mhz de las primeras placas que lo integraban en 1998 hasta 1Ghz de los modelos actuales de sis para procesadores amd64. Puente Sur. También conocido como Concentrador de Controladores de Entrada/Salida - I/O Controller Hub (ICH), es un circuito integrado que se encarga de coordinar los diferentes dispositivos de entrada y salida y algunas otras funcionalidades de baja velocidad dentro de la tarjeta madre. El southbridge no está conectado a la CPU y se comunica con ella indirectamente a través del northbridge - Puente Norte. La funcionalidad encontrada en los southbridges actuales incluye soporte para: • Bus PCI • Bus ISA • SMBus • Controlador DMA 21 • Controlador de Interrupciones • Controlador IDE (SATA o PATA) • Puente LPC • Reloj en Tiempo Real - Real Time Clock • Administración de potencia eléctrica - Power Management (APM y ACPI) • BIOS • Interfaz de sonido AC97. Adicionalmente el southbridge puede incluir soporte para Ethernet, RAID, USB y Codec de Audio. El southbridge algunas veces incluye soporte para el teclado, el ratón y los puertos seriales, sin embargo, aún en el 2007 los computadores personales (PC) gestionaban esos recursos por medio de otro dispositivo conocido como Super I/O. En los últimos modelos de placas el Southbridge acapara cada vez mayor número de dispositivos a conectar y comunicar por lo que fabricantes como AMD o VIA han desarrollado tecnologías como HyperTransport o V-Link respectivamente para evitar el efecto cuello de botella en el transporte de datos entre dispositivos. 2.1.1. Chipset Intel® 925X Express: Complementa el procesador Intel® Pentium® 4 Extreme Edition a 3,4GHz con tecnología Hyper-Threading. El chipset Intel 925X Express también es el primer chipset Intel que ofrece un ancho de banda dramáticamente mejorado de gráficos PCI Express* x16 para satisfacer las demandas de las aplicaciones que precisan vídeo de alta definición. Los gráficos PCI Express proveen hasta 4 (Gbps) por dirección o más de 3,5 veces el ancho de banda de las soluciones gráficas anteriores basadas en AGP 8X. Esta combinación de procesador y chipset está diseñada para proporcionar el rendimiento superior exigido por los entusiastas informáticos, los usuarios de juegos de gama alta y otros usuarios de potencia. Lleva la experiencia PC óptima más allá con un espectro de capacidades integradas que incluyen el Sonido Intel® de alta definición y la memoria DDR2 (velocidad de datos doble) de dos canales a 533 MHz. 22 2.1.2. La familia de Chipsets Intel® 915 Express: Incluye los chipsets Intel 915G y 915P Express, ofrece interfaces de alto ancho de banda y opciones gráficas flexibles que complementan los procesadores Intel Pentium 4 con tecnología Hyper-Threading. El chipset Intel 915G Express constituye la médula de la siguiente plataforma estable empresarial de Intel e incluye la tecnología gráfica más reciente de Intel para ofrecer una extraordinaria experiencia de entretenimiento digital basado en PC, en sistemas de nivel medio en su hogar. El chipset Intel 915P Express provee gráficos PCI Express x16 y está diseñado para permitir configuraciones de PC flexibles. Los nuevos chipsets de Intel permiten una gama amplia de nuevas capacidades de plataforma: El Acelerador Intel® 900 para medios gráficos, integrado en el chipset Intel 915G Express, está optimizado para Microsoft* DirectX* 9 y brinda capacidad para dos pantallas independientes con compatibilidad para los monitores de proporción 16:9 más recientes, además de las pantallas 4:3 tradicionales. El Sonido Intel® de alta definición permite el multiflujo, el sonido envolvente 7.1 y el reuso dinámico de conectores en una solución de sonido de PC sin precedentes que brinda un rendimiento comparado al de los equipos electrónicos de consumo (CE). La Tecnología de almacenamiento en matriz Intel® brinda las ventajas de rendimiento de RAID 0 en las aplicaciones con medios suntuosos y la protección adicional de RAID 1 para los archivos y datos de medios en sólo dos unidades. El Concentrador controlador de E/S 6 (versión ICH6R) admite cuatro puertos ATA* serie (SATA) de 1,5 Gbps con capacidad para la interfaz avanzada de controlador host (AHCI), lo cual permite la cola de comandos nativos para un mejor rendimiento del almacenamiento. Cuatro puertos de ampliación PCI Express x1 de alta velocidad están preparados para Gigabit Ethernet y aplicaciones futuras, lo cual incluye varios afinadores de televisión implementados en una sola tarjeta. 23 La Tecnología Intel® para conexiones inalámbricas permite que los usuarios creen o amplíen redes inalámbricas sin necesidad de hardware de punto de acceso externo. La Tecnología Intel para conexiones inalámbricas requiere un chipset Intel 9XX Express específico en una solución de red local inalámbrica Intel separada para su funcionamiento. La disponibilidad es limitada. La memoria DDR2 de dos canales brinda ancho de banda de memoria adicional para alimentar procesadores de rendimiento superior y el nuevo motor de gráficos GMA 900 de Intel. 2.2. Memorias más utilizadas. Memoria RAM Dinámica (DRAM). Este tipo de memoria utiliza pequeñas cargas eléctricas para almacenar el estado de la Memoria. Estas cargas son almacenadas en pequeños capacitores. El capacitor puede funcionar como memoria porque es posible controlar su carga. Un capacitor cargado o descargado puede significar uno de dos estados posibles lo cual puede ser reconocido como un bit de información digital. Un capacitor ideal debe mantener la carga. Pero los capacitores reales, tienen inevitablemente, una pequeña corriente de fuga, lo cual hace que estos no retengan la información durante mucho tiempo. Afortunadamente, estos sistemas de memorias basados en capacitores pueden mantener la carga unos milisegundos antes de que esta desaparezca. Estos milisegundos son suficientes para que los circuitos prácticos se diseñen de forma tal que periódicamente recarguen los capacitores y refresquen la Memoria. Debido a la necesidad de este refrescamiento en las memorias basadas en capacitores, es por lo que se les llama Memoria Dinámica. Los circuitos integrados que suministran este tipo de memoria son conocidos como RAM dinámica o DRAM. En estos se usan circuitos semiconductores especiales que funcionan como capacitores en vez de un capacitor real. 24 Static RAM, SRAM. Comúnmente abreviada como SRAM. Este tipo de memoria se caracteriza por: No tratan de almacenar la carga, por tanto no tienen capacitores. Ellas operan como un interruptor o switch que potencialmente permite o detiene el flujo de electricidad. Estos interruptores, son materializados con transistores los cuales son alambrados como circuitos latch o biestables. Estos se caracterizan por almacenar un bit de información. Un gran número de estos flip-flops convenientemente miniaturizados y arreglados, conforman el chip de Memoria Estática. Debido al elemento digital que utilizan como almacenador no permiten chips con muy alta capacidad. La principal diferencia entre la memoria estática y dinámica es que la SRAM no necesita ser periódicamente refrescada y es notablemente más rápida. La principal semejanza es que ambas necesitan una fuente de corriente continua para mantener la información. SDRAM. (Sinchronous DRAM). Las SDRAM son una nueva generación de tecnología de las DRAM que les permite usar el mismo reloj que el bus del procesador. Las memorias EDO y FPM son asincrónicas y no tienen señal de reloj. A diferencia de sus predecesores, la SDRAM tiene una entrada de reloj al igual que el microprocesador y sus operaciones son igualmente controladas, es decir, que el controlador de memoria conoce el momento exacto en el que los datos están disponibles, sin necesidad de esperas innecesarias por parte del micro entre accesos a la memoria. Por otro lado, el núcleo DRAM es mucho más rápido que la memoria convencional, llegando a alcanzar velocidades de hasta 4 veces más. Una arquitectura de doble banco permite entrelazarlos, de forma que mientras un banco prepara los datos el otro los proporciona. Asimismo, la longitud de la ráfaga es programable, permitiendo un diseño flexible en función del sistema que deba soportarlo. El funcionamiento de las SDRAM es similar al trabajo en ráfaga, requieren solamente un pulso de reloj para la segunda, tercera y cuarta Qword, es decir su esquema de trabajo es de 5-1-1-1. (Comparadas con la EDO que requiere 5-2-2-2). Con memorias de 15 (ns) se 25 puede alcanzar los 66 MHz de las tarjetas madres actuales y con 10 ns. Se llega a los 100 MHz, muy recomendables cuando se sobrepasa la barrera de los 66 MHz. La SDRAM se presenta en forma de DIMM de 128 pines y 64 bits de datos y opera a 3.3V. Algunos de los DIMM´s más viejos están fabricados con memorias FPM o EDO y operan solamente a 5V, note que estos no deben ser confundidos con los SDRAM DIMM. En el momento actual este tipo de memoria se eleva como única alternativa a los problemas de velocidad. Por otro lado, parte del futuro del AGP, puerto acelerador de gráficos que permite que las tarjetas gráficas utilicen memoria principal del equipo, pasa por la utilización de SDRAM. Por último, las memorias SDRAM tienen una nomenclatura distinta a las memorias convencionales y su velocidad se expresa directamente en MHz. RDDRAM. Desarrollado por Intel y Rambus. Este último no es actualmente un fabricante de memorias, sino que diseña una interface de memoria de alta velocidad y lo licencia a nueve fabricantes líderes de memorias. Rambus puede manejar su bus especial de 16 Bits a velocidades de hasta 600 MHz y añade cerca de 100 MHz por año. Por el momento RDRAM puede alcanzar un ancho de banda sobre un Bus de 16bits de 1.6 Gb/s, el doble de rapidez de las DRAM a 100 MHz. Sobre un Bus de 32 bits el ancho de banda se duplica nuevamente a 3,2 Gb/s. Rambus plantea que su Bus de memoria podría eventualmente correr a 1000 MHz (1 GHz), alcanzando un ancho de banda de 4 Gb/s DDR SDRAM o SDRAM II (Double Data Rate SDRAM). Este tipo de DRAM que es sincrónica al igual que la SDRAM, añade la capacidad de doble reloj, es decir transfiere la información tanto en el flanco de subida como en el de bajada de cada ciclo de reloj, con lo cual duplica la cantidad de información que puede transferir. Según esto, hablaríamos de un ancho de banda de justo el doble, es decir, 200MHz, con lo cual tendríamos en el bus del PC tasas de hasta 1.6 Gb/s. 26 Características de DDR2: • Funcionamiento a 1,8 voltios, reduciendo la potencia de consumo en un 50%. • On-Die Termination: los buses necesitan una terminación para evitar que la señal rebote. En la DDR si observamos la MB veremos unas resistencias en uno de los extremos del bus. Esto en la DDR2 se ha trasladado dentro del módulo de RAM. Así la integridad de la señal será mejor. • Mejoras operacionales para incrementar el rendimiento de la memoria, su eficiencia y los márgenes de tiempo. • Latencia CAS (3,4 y 5): Para evitar colisiones en el bus, al aumentar la velocidad, se ha aumentado la latencia. Los chips de memoria DDR2 están disponibles en paquetes Fine-pitch BGA (FBGA) para lograr características térmicas y eléctricas mejoradas. Además, los chips DDR2 incorporan "On-Die Termination" (ODT) para minimizar reflejos a altas velocidades en la señal de memoria, al mismo tiempo que se mejoran los márgenes de tiempo. Los módulos DDR2 tienen diferentes configuraciones de pins, necesidades de voltaje y tecnologías chip DRAM que los DDR tradicionales. Por estas razones, DDR2 no es compatible con las placas base DDR existentes. Para prevenir la inserción accidental en una placa base incompatible, los módulos DDR2 tienen una entrada diferente o muesca en el conector, que se acopla perfectamente con un socket de memoria preparado para este tipo de módulos. Tiene 240 pines. 2.3. Características de los Buses. 2.3.1. El bus PS/2: Arquitectura de Micro Canal (MCA). Características físicas: • El bus permite algunas variaciones: implementación de 16-bit, implementación de 32bit; extensión opcional que permite incrementar la velocidad del bus. • Se reduce las dimensiones de las tarjetas de expansión en comparación con las AT(4.75x13.5 de AT por 3.5x11.5 pulgadas). Esto es posible porque se usan componentes y conectores más pequeños. Estos componentes requieren de menos energía, liberan menos calor y se logra una mayor minituarización. 27 • En este bus existe una redistribución completa de las señales. Cada cuatro pines hay una tierra. La existencia de varias señales de tierra y su proximidad a señales digitales de alta frecuencia reducen más la interferencia. Este mejor arreglo de las señales permite también el incremento de la máxima velocidad con las cuales las tarjetas de expansión pueden trabajar, porque se incrementa además el ancho de datos del bus. De hecho, después de una revisión de este bus realizado en 1990, algunos test muestran que este bus puede operar hasta velocidades de 80Mhz. Descripción de las señales del bus. − El MCA usa señales especiales para identificar el ancho de cada tarjeta de expansión que se inserta en el conector (Card Data Size 16 y Card Data Size 32). − Se usan señales Byte Enable Bits 0 al 3 para identificar el tipo de dato que es transferido a través del bus. Así, se puede mover información de 8, 16, 24, 32 bits de una sola vez sin ambigüedades. − La señal Memory Address Enable 24 se usa para indicar si estamos usando el rango de 24 bit del 80286 o el rango de direccionamiento de 32 bit del 80386 y superiores. − En vez de usar líneas separadas para operaciones de memoria y de I/O como hace el bus de PC, el MCA usa una combinación de tres señales Memory/Input-Output, Status Bit One y Status Bit Two para definir el tipo de ciclo de bus a realizar. − Otras extensiones permiten integrar un canal simple de señal análoga de audio de fidelidad media Ej: voz sintetizada, música con la estructura del bus IBM. − La extensión de video del MCA permite a las tarjetas de expansión acceder al circuito de video gráfico (VGA ) construido dentro de algunas tarjetas madres. − La extensión de video de MCA habilita la conexión del coprocesador de video de su tarjeta en su sistema y permite tener conectado su monitor a su coprocesador de video sin necesidad de un cable adicional. Esto no ocurre con las máquinas no MCA. − La extensión de video tiene otras importantes señales. Están presentes las señales de sincronismo horizontal y vertical, una señal especial de control de línea llamada ESYNC ó Enable Sync. Esta línea determina si la señal de sincronismo usada en el video es originada en la tarjeta madre o en otro adaptador conectado en el MCA. 28 − El dato de video que es transferido a través de la extensión de video se realiza en forma digital usando ocho líneas de datos de video. El dato aquí, se suele llevar de VGA digital a análoga en el sistema de tarjeta. − Se tiene dos señales de reloj y una señal especial de blanking. − Para lograr una mayor efectividad en el manejo del sistema se agregan nuevas líneas Ej: Card Select Feadback, Channel Ready Line, Channel Ready Return, etc. Card Select Feadback: es una señal proveniente de la tarjeta de expansión donde indica que dicha tarjeta está en la dirección que se suponía que esté. Channel Ready Line: es usada por los dispositivos conectados al bus para solicitar más tiempo (no mayor de 3.5 microseg) para completar una operación. Channel Ready Return: es usada para monitorear la señal anterior cuando todas ellas indican que no necesitan tiempo adicional. − El MCA permite un nuevo modo de transferencia de datos llamado Matched Memory. Cuando la memoria y los periféricos internos de 16 o 32 bit pueden trabajar a velocidades superiores se introducen pulsos adicionales acelerados para la transferencia de datos permitiendo una mejora en el rendimiento de un 25%. 2.3.2. PCI: El bus local de alto rendimiento de Intel. Características físicas: Para obtener operaciones reales a altas velocidades sin necesidad de terminaciones (como requiere el bus SCSI), Intel seleccionó el sistema de señalización reflejada en vez del sistema de señalización directa. Para activar una señal del bus, los dispositivos elevan(o bajan) la señal en el bus a la mitad del nivel de activación requerida. Como con cualquier otro bus, las señales de alta frecuencia se propagan por las líneas del bus y son reflejadas por los extremos de los conductores sin terminaciones. La señal reflejada se combina con la señal original doblando su valor hasta el voltaje de activación requerido. 29 El interface PCI básico requiere solo de 47 conexiones discretas por tarjetas esclavas(o dispositivos) con dos o más tarjetas bus masters. Para acomodar señales múltiples de alimentación, señales de tierra y espacios en blanco en la llave del conector para una correcta inserción, físicamente el conector de 32 bit PCI incluye 124 pines. La 64 bit implementación del PCI usa 188 pines en el conector. Ciclos de transferencias de datos. Aunque el número de conexiones suena alto, Intel realmente tiene su mecanismo para mantener el número de pines manejable. Así tenemos, que las señales de direccionamiento y de datos del PCI son multiplexadas en el tiempo en los mismos 32 pines, es decir que señales de direcciones y de datos comparten las mismas conexiones del bus (AD00 hasta AD31). En un ciclo del reloj, estas líneas llevan los valores de direcciones de donde tomarán o llevarán la información. En el siguiente ciclo, las mismas líneas transportan los valores del dato. Este ciclo de direcciones/datos no reduce la velocidad del bus. PCI tiene su modo burst propio que elimina la necesidad de la alteración entre los ciclos de direcciones y datos. Durante la transferencia en el modo burst a un ciclo de dirección sencillo lo siguen ciclos múltiples de datos de acceso secuencial a localizaciones de memoria, limitado solamente por las necesidades de otros dispositivos a usar el bus y de otras funciones ( como refrescamiento de memoria),. PCI logra la multiplexación usando la señal del bus llamada Cycle Frame (FRAME# ). La aparición de esta señal indica que en el bus está la dirección válida. Después, esta señal se mantiene activa durante la transferencia de datos. Este modo en el PCI es equivalente al modo Streaming Data del MCA y el EISA, donde si esta señal(FRAME#) se mantiene activa durante varios ciclos múltiples de datos, el modo burst ocurre. Este modo burst logra 132 MB/seg para el diseño 32 bit PCI( para la 64 bit extensión, PCI logra 264 MB/seg). También, las señales Byte Enable (C/BE0# hasta C/BE3#) son usadas para indicar cual de los cuatro bloques del PCI de 32 bit contiene el dato válido. En los 64 bit sistemas, otras cuatro señales ( C/BE4# hasta C/BE7# ) indican los byte adicionales activos . 30 Para acomodar dispositivos que no pueden operar a la máxima velocidad del bus PCI, el diseño incorpora tres nuevas señales de control: Initiator Ready( IRDY# del pin B35), Target Ready (TRDY# del pin A36 ) y Stop (Stop# del pin A38 ). Target Ready cuando es activada, indica que el dispositivo del bus está listo para suministrar el dato durante el ciclo de lectura o aceptarlo durante el ciclo de escritura. Cuando Initiator Ready es activada indica que el bus master está listo para completar la transacción. La señal Stop es enviada por el dispositivo fuente al master para detener la transacción actual. 2.3.3. Universal Serial Bus. Fue originalmente concebido por un grupo de siete grandes compañías de computación incluyendo a Intel, Microsoft, NEC e IBM. Es capaz de conectar a un solo puerto hasta 127 periféricos externos, de naturaleza tan diversa como los monitores, teclados, scanners, CD-ROM, módems y cámaras digitales. Combina las mejores características de la interfaces SCSI con el estándar Plug and Play. Su velocidad de transferencia de datos alcanza desde 1.5 Mbps hasta 12 Mbps, mucho mayor que la de las actuales interfaces series (115.2 Kbps). Todos los periféricos conectados por medio de una interfaces USB son manejados por un controlador USB incorporado en la propia tarjeta madre o en una tarjeta PCI. Este toma en sus manos el control de los dispositivos, reduciendo la carga del procesador y aumentando el rendimiento del sistema. El controlador se enlaza a un conector, que proporciona la salida externa necesaria para incorporar los periféricos deseados El USB se presenta como una ventajosa opción para la conexión de periféricos, al ofrecer una interfaces única para los más diversos tipos de dispositivos. Por medio de un solo puerto y con una envidiable economía de recursos, podrán ser manejados todos los periféricos que hoy requieren del uso de conectores, puertos, tarjetas, slots, interrupciones, direcciones individuales, simplificando de forma considerable la adición de hardware a su PC y el manejo de los dispositivos instalados. 31 2.3.4. El bus AGP Mientras que el bus PCI soporta un máximo de 132 MB/s, el AGP (con reloj a 66 MHz) alcanza los 533 MB/s. Logra esta sorprendente velocidad debido a que transfiere datos, tanto en la subida como en la caída del pulso del reloj a 66 MHz, y con el uso de modos de transferencia más eficientes. En realidad, el rendimiento puede variar en dependencia del sistema y la aplicación usados, pero generalmente se obtiene entre 50 y 80% de los valores picos en transferencias. Beneficios del AGP a) El ancho de banda pico es cuatro veces mayor que el del bus PCI gracias a todas las técnicas usadas. b) Los mapas de textura se ejecutan directamente desde la memoria del sistema. El AGP permite que el controlador gráfico haga accesos de alta velocidad a esta memoria, en lugar de obligarlo a precargar los datos de la textura en su memoria local. c) Se reduce la congestión del bus PCI, que queda disponible para el uso de nuevos dispositivos de alta velocidad. Además, los accesos de la CPU a la memoria del sistema pueden seguir realizándose a la vez que el controlador gráfico accede a la memoria AGP. d) Se mejora el rendimiento total del sistema debido a que el procesador puede realizar otras actividades mientras el chip gráfico accede a los datos de textura en la memoria del sistema. Principales características: ¾ Es una modificación de la versión de 66Mhz del bus PCI. ¾ El diseño AGP solo permite que haya una ranura de este tipo en la tarjeta madre. ¾ Posee un bus de direcciones de 32 bits y otro de datos, también de 32 bits. ¾ Utiliza tanto el flanco de subida como el de bajada de la señal de reloj que controla el bus para el envío de datos. ¾ Cuando se envían los datos por el bus durante el flanco de subida (modo 1) se obtiene una velocidad efectiva de 66Mhz (251 Mb por segundo). ¾ Cuando se envían los datos tanto durante el flanco de subida como durante el de bajada ( modo 2 ) se logra una velocidad de 132Mhz ( 503 Mb/s) 32 ¾ Tiene varias líneas de datos adicionales que permite que por ejemplo, el acelerador 3D envíe al bus varias peticiones de lectura de la RAM del sistema. Estas peticiones no serán satisfechas inmediatamente, sino que el acelerador 3D podrá continuar enviando peticiones de lectura y a medida que vayan siendo completadas se irán enviando al acelerador 3D los datos solicitados. Tipos de AGP Tipo 1: Este hardware tiene una interfaz AGP, pero no explota las características de textura del AGP. Simplemente se limita a transferir los datos de forma más rápida que un dispositivo PCI. Muy probablemente no explote la capacidad de “pipelining” o el direccionamiento de banda lateral. Tipo 2: “Renderiza” texturas desde la memoria AGP, por lo que la aplicación no tiene que cargar las texturas en la memoria local. El hardware puede ser capaz o no de texturizar desde la memoria local. Tipo 3: Corre mejor cuando explota concurrentemente la memoria local y la AGP para texturas. Las de uso frecuente o texturas pequeñas residirán mejor en la memoria local, mientras que texturas grandes de uso menos común deben residir en la memoria del sistema. Por lo tanto, el drenaje de ancho de banda en la memoria principal es minimizado, y reduce así los conflictos entre la CPU y el controlador gráfico. 2.3.5. PCI-Express Es un nuevo desarrollo del bus PCI que usa los conceptos de programación y los estándares de comunicación existentes, pero se basa en un sistema de comunicación serie mucho más rápido. Que consiste en aumentar el ancho de banda mediante el incremento de la frecuencia, llegando a ser 32 veces más rápido que el PCI 2.1. PCI-Express está pensado para ser usado sólo como bus local. Debido a que se basa en el bus PCI, las tarjetas actuales pueden ser reconvertidas a PCI-Express cambiando solamente la capa física. La velocidad superior del PCI-Express permitirá reemplazar casi todos los demás buses, AGP y PCI incluidos. La idea de Intel es tener un solo controlador PCI- 33 Express comunicándose con todos los dispositivos, en vez de con el actual sistema de puente norte y puente sur. PCI Express está pensado para sustituir no sólo al bus PCI para dispositivos como Módems y tarjetas de red, sino también al bus AGP, lugar de conexión para la tarjeta gráfica desde 1997. Al contrario que su predecesor paralelo, PCI Express es un sistema de interconexión serie punto a punto, capaz de ofrecer transferencias con un altísimo ancho de banda, desde 200MB/seg para la implementación 1X, hasta 4GB/seg para el PCI Express 16X que se empleará con las tarjetas gráficas. La conexión en el PCI Express es, además, bidireccional, lo que permite un ancho de banda teórico de hasta 8GB/seg para un conector 16X, o unos asombrosos 16GB/seg para el actual máximo de 32X. También incluye características novedosas, tales como gestión de energía, conexión y desconexión en caliente de dispositivos, y la capacidad de manejar transferencias de datos punto a punto, dirigidas todas desde un host. Esto último es importante porque permite a PCI Express emular un entorno de red, enviando datos entre dos dispositivos compatibles sin necesidad de que éstos pasen primero a través del chip host (un ejemplo sería la transferencia directa de datos desde una capturadora de vídeo hasta la tarjeta gráfica, sin que éstos se almacenen temporalmente en la memoria principal). Optimiza el diseño de placas base, pues su tecnología serie precisa tan sólo de un único cable para los datos, frente a los 32 necesarios para el PCI clásico, el cual también necesitaba que las longitudes de estos fuesen extremadamente precisas. La escalabilidad es otra característica clave, pues se pretende que las versiones posteriores de PCI Express sustituyan cualquier característica que PCI o, en el segmento de servidores, PCI-X, puedan ofrecer. 34 En el siguiente gráfico podemos apreciar una comparación de las capacidades de los buses a lo largo del tiempo: Desarrollo de los Buses. Figura 20. 2.4. Conectores de la MotherBoard. Fuente ATX: Las nuevas fuentes de alimentación responden a la especificación ATX, estas proporcionan algunos cambios en los conectores de entrada de tarjeta madre: Primero, se obtienen 3.3 V directamente de la fuente alimentación. Segundo, aparece un conector de 20 pines donde se incorporan a los voltajes estándar (+5v, -5v, +12v, -12v) el nuevo voltaje de 3.3v junto con las señales que permiten un encendido y apagado del sistema por software”. 35 Descripción de las nuevas señales del conector de la fuente ATX • • • • PSON: Esta es una señal de salida de la tarjeta madre y tiene como objetivo el encendido desde el procesador de la fuente de alimentación. Para que se produzca el encendido de la fuente es necesario que esta señal permanezca en "0" volt. Si esta señal no es cero entonces todos los voltajes de salida de la fuente serán "0" excepto el de 5VSB. 5VSB (Stand By): Voltaje de salida de la fuente de alimentación, encargado de garantizar el trabajo de los circuitos de Stand By en el procesador. Los requerimientos de corriente de este voltaje son actualmente de 720 ma para poder garantizar las nuevas facilidades como es por ejemplo la posibilidad de "wake on LAN’’. Serial ATA Serial ATA o S-ATA es una interfaz para discos que sustituye a la tradicional Parallel ATA o P-ATA (estándar que también se conoce como IDE o ATA). El S-ATA proporciona mayores velocidades, mejor aprovechamiento cuando hay varios discos, mayor longitud del cable de transmisión de datos y capacidad para conectar discos en caliente (con la computadora encendida). Mientras que la especificación SATA1 llega como máximo a unos 150 MB/s, SATA2 incrementa el límite a 300 MB/s. Actualmente es una interfaz ampliamente aceptada y estandarizada en las placas base de PC. Cable y conector El cable se compone de dos pares apantallados a los que se suministra una impedancia de 100 Ohmios 36 Distribución de los pines del SATA. Tabla 2. Pin Nombre Descripción 1 GND Tierra 2 A+ Transmisión + 3 A- Transmisión - 4 GND Tierras 5 B- Recepción - 6 B+ Recepción + 7 GND Tierra SATA Externo. Fue estandarizado a mediados de 2004, con definiciones específicas de cables, conectores, y requisitos de la señal para unidades ESATA externas. ESATA se caracteriza por: • Velocidad de SATA en los discos externos (se han medido 115 MB/s con RAID externos) • Sin conversión de protocolos de PATA/SATA a USB/Firewire, todas las características del disco están disponibles para el anfitrión. • La longitud de cable se restringe a 2 metros; USB y Firewire permiten mayores distancias. • Se aumentó el voltaje de transmisión mínimo y máximo a 500mV - 600mV (de 400mV - 600mV). • Voltaje recibido disminuido a 240mV - 600mV (de 325 mV - 600 mV). 37 2.5. Procesadores Pentium 4. Aunque a partir del Pentium y hasta los más recientes procesadores P4 (Socket 478 y 775) todos tienen un bus de datos de 64-bit, sus registros internos son de 32-bit, por lo que desde el punto de vista de software, los sistemas que incorporan estos procesadores solo pueden ejecutar programas e instrucciones de 32-bit de longitud. A esto es lo que se conoce como Arquitectura Intel de 32-bit. Desde el punto de vista electrónico o físico, estos sistemas que incorporan procesadores compatibles con la arquitectura 32-bit, han salido al mercado en variantes de 16-bit, 32-bit y 64-bit de ancho de su bus de datos. La aparición del procesador Itanium marca el origen de una nueva arquitectura (IA-64), la de 64-bit, ya que el mismo posee un set de instrucciones de este tamaño, aunque mantiene la compatibilidad con la arquitectura de 32-bit. El ancho del bus de datos es el factor más importante a tener en cuenta en el diseño de una MB y del sistema de memoria, pues es el que dicta qué cantidad de información (bits) se moverá hacia dentro o fuera de un CI en un ciclo de reloj. Ejemplos de CPU Intel. Tabla 3. 38 Willamette. Willamette, la primera versión del Pentium 4, sufrió de importantes demoras durante el diseño. De hecho, muchos expertos aseguran que los primeros modelos de 1,3, 1,4 y 1,5 y 2.0GHz fueron lanzados prematuramente para evitar que se extienda demasiado el lapso de demora de los Pentium 4. Además, los modelos más nuevos del AMD Thunderbird tenían un rendimiento superior al Pentium III, pero la línea de producción se encontraba al límite de su capacidad por el momento. Fueron fabricados utilizando un proceso de 180 nm y utilizaban el Socket 423 para conectarse a la placa base. El Willamette de 2,0 GHz fue el primer Pentium 4 que puso en duda el liderazgo en rendimiento, que hasta ese momento estaba liderado indiscutiblemente por la línea Thunderbird de AMD. Si bien algunos resultados arrojaban una leve diferencia a favor de AMD, los analistas concluyeron que la diferencia no era significativa para decir que un procesador era claramente superior al otro. Esto fue un gran paso para Intel, que hasta la salida del AMD Athlon había sido el rey de la velocidad en los microprocesadores por 16 años en forma casi ininterrumpida. Northwood. En octubre de 2001, el Athlon XP reconquistó el liderazgo en la velocidad de los procesadores, pero en enero de 2002 Intel lanzó al mercado los nuevos Northwood de 2,0 y 2,2 GHz. Esta nueva versión combina un incremento de 256 a 512 KB en la memoria caché con la transición a la tecnología de producción de 130 nanómetros. Al estar el microprocesador compuesto por transistores más pequeños, podía alcanzar mayores velocidades y a la vez consumir menos energía. El nuevo procesador funcionaba con el Socket 478, el cual se había visto en los últimos modelos de la serie Willamette. Con la serie Northwood, los Pentium 4 alcanzaron su madurez. La lucha por la cima del desempeño se mantuvo reñida, a medida que AMD introducía versiones más veloces del Athlon XP. Sin embargo, la mayoría de los observadores concluyeron que el Northwood más veloz siempre estaba ligeramente por encima de los modelos de AMD. Esto se hizo 39 notorio cuando el paso de AMD a la manufactura de 130 nanómetros fue postergada. Los Pentium 4 entre 2,4 y 2,8 GHz fueron, claramente, los más veloces del mercado. Un Pentium 4 de 2,4 GHz fue introducido en abril de 2002, uno de 2,53 GHz en mayo (que incluyó un aumento del FSB de 400 a 533 MHz). En agosto vieron la luz los modelos de 2,6 y 2,8 GHz, y en noviembre la versión de 3,06 GHz. El Procesador de 3,06 GHz soporta Hyper Threading, una tecnología originalmente aparecida en los Xeon que permite al sistema operativo trabajar como si la máquina tuviese dos procesadores. Prescott. El primero de febrero de 2004, Intel introdujo una nueva versión de Pentium 4 denominada Prescott. Al principio se utilizó en su manufactura un proceso de fabricación de 90 nm y luego se cambió a 65nm; además se hicieron significativos cambios en la arquitectura del microprocesador, por lo cual muchos pensaron que Intel lo promocionaría como Pentium 5. A pesar de que un Prescott funcionando a la misma velocidad que un Northwood rinde menos, la renovada arquitectura del Prescott permite alcanzar mayores velocidades y el overclock es más viable. El modelo de 3,8 GHz es el más veloz de los que hasta ahora han entrado en el mercado. Su diferencia con los anteriores es que éstos poseen 1Mb ó 2Mb de caché L2 y 16Kb de caché L1 (el doble que los Northwood), EDB, EIST, C1E State, un Hyper-Threading mejorado, instrucciones SSE3, manejo de 64 bits, también recibió unas mejoras en el sistema de predicción de datos, y tiene un pipeline de 31 etapas, que por cierto, fue unos de los mayores errores de dicho núcleo. Además, los primeros Prescott producían un 60% más de calor que un Northwood a la misma velocidad, y por ese motivo muchos lo criticaron con dureza. Se experimentó con un cambio en el tipo de zócalo (de Socket 478 a LGA 775) lo cual incrementó en un 10% el consumo de energía del microprocesador, pero al ser más efectivo el sistema de refrigeración de este zócalo, la temperatura final bajó algunos grados. En posteriores revisiones del procesador los ingenieros de Intel esperaban reducir las temperaturas, pero esto nunca ocurrió fuera salvo a bajas velocidades. 40 Doble Procesador. Intel tiene planeadas cuatro variantes con doble procesador del Pentium 4. La primera es denominada Paxville, que consiste en poco más que dos procesadores Prescott colocados en el mismo substrato. Le seguirá, situándose el más básico de los Core2 Duo (E6300, 1.86 GHz) por encima del más potente de los Pentium D (965 EE, 3.73 GHz). Esto se debe a que la arquitectura Core 2 Duo es muy eficiente, realiza mucho más trabajo por clock que NetBurst (Pentium 4); asemejándose al K8 (Athlon 64) de AMD en este sentido. Intel Core Duo Microprocesador con dos núcleos de ejecución, lanzado en enero del 2006. El microprocesador Intel® Core Duo está optimizado para las aplicaciones de subprocesos múltiples y para la multitarea. Puede ejecutar varias aplicaciones exigentes simultáneamente, como juegos con gráficos potentes o programas que requieran muchos cálculos, al mismo tiempo que puede descargar música o analizar su PC con su antivirus en segundo plano. Este microprocesador implementa 2Mb de caché compartida para ambos núcleos más un bus frontal de 667Mhz; además implementa un nuevo juego de instrucciones para multimedia (SSE3) y mejoras para las SSE y SSE2, sin embargo, el desempeño con enteros es ligeramente inferior debido a su caché con mayor latencia. También incluye soporte para la tecnología Bit NX. 41 CAPITULO III: REPARACIÓN DE MOTHERBOARD PENTIUM 4 3. Reparación de la Mother Board. Lo primero que se tiene en cuenta en la reparación de una MotherBoard es realizarle un exhaustivo análisis visual para comprobar que no tenga componentes levantados, dañados ó carbonizados o daños introducidos por el cliente (DIC), después se comprueba que esta energizada y se verifican los voltajes de esta para después hacer un análisis mas profundo. 3.1. Pasos a seguir para la reparación de una M.B 1. Inspección visual: a. Observar detenidamente la MB para detectar cualquier componente quemado o reventado (MOSFET, reguladores, transistores, CI, etc.) o DIC (Daños introducidos por los clientes – CID en Ingles). b. Se buscan daños físicos en la MB. líneas abiertas, componentes quemados ó levantados etc. c. Se revisan los Jumpers, que no falten los que dan voltaje a los diferentes dispositivos (USB, Teclado, etc); que el jumper de CLRCMOS (CLRTC) no esté mal colocado, que no haya un jumper puesto en un lugar donde no vaya, etc. 2. Comprobar no haya voltaje en corte. a. Chequear que no estén en corte los circuitos de los diferentes voltajes por separado (+12v, +5v, Vcore, +5vsb, 3vsb, 2.5v, 1.25v, etc.) y que no haya corte entre ellos. Por ejemplo, a veces los 12v_4p y el Vcore están bien, pero entre ellos tienen corte. b. Sin conectar nada a la MB se debe chequear el circuito Standby (5Vsb y 3Vsb) y los demás voltajes, que no estén en corte respecto a GND o entre ellos ( en el caso de 12V_4P y Vcore), o que el valor del voltaje BIAS no esté por debajo de lo normal, en caso de dudas comparar con una MB buena. Para esto se pone el Multímetro en la posición de diodo, la punta roja se conecta a tierra y con la negra se hacen las mediciones. Si hay algún 42 elemento en corte, quemado o reventado hay que cambiarlo primero antes de proseguir. c. Vcore: La alimentación de procesador se genera en un modulo llamado VRM (voltaje regulator module) el cual se encuentra el la MB y al principio se alimentaban con +5v por el menor requerimiento de corriente. Ahora se alimentan con +12v creándose el conector ATX12V. Si no hay voltaje de salida: 9 Comprobar que los +5v y los +12v están bien. 9 Comprobar si los Power mosfets están en corte. 9 Comprobar que los VIDs en PWM no estén en un nivel alto. 9 Comprobar que la señal EN/FS en el PWM no estén en un nivel bajo. Si el voltaje de salida no es el correcto: 9 Comprobar que el VIDs no este mal configurado. 9 Comprobar que las resistencias del divisor de la línea del feedback no estén desvalorizadas. 9 Comprobar las salidas LGATE y UGATE del regulador. 9 Comprobar que los Mosfets no estén defectuosos d. Voltaje de la memoria: SDRAM 3V_Dual. DDR 2,5V_Dual,1.2Vtt_DDR. DDR2 1.8Dual,0.8 Vtt_DDR. El Vtt_DDR es usualmente igual al Vdd (core voltage) dividido entre dos. 3. Comprobar el V_BAT y el cristal de 32,7 Khz. Use un multímetro para medir el voltaje en la resistencia de 1kohm, debe de estar entre 1mV-10 mV. Fuera de este rango no está bien. Según la Ley de Ohm I=U/R, la corriente en ella debe estar entre 1uA-10uA. 43 Si este valor no está bien chequee el voltaje de la batería (3v), si tiene menos de 2.8v, cámbiela. Vuelva a chequear la corriente de drenaje en la resistencia de 1kohm. Si este valor continúa estando mal, compruebe el diodo (RB715F), que está cercano a la batería. Si está defectuoso, cámbielo y mida nuevamente. Si continúa con problemas, verifique a qué circuitos de la MB les llega el Vbat. En la mayoría de las MB el Vbat llega al SB, Super I/O y al ASUS ASIC. Trate de levantar el pin que lleva el Vbat a el ASUS ASIC y al Super I/O, para definir cual pueda estar defectuoso. Si ellos no están defectuosos, pruebe cambiar el SB. 4. Comprobar 5VSB y 3VSB. La fuente de alimentación también posee un circuito adicional, muchas veces denominado fuente auxiliar, el cual suministra un voltaje adicional de +5 volts, llamado vsb del inglés (Standby voltage). Este voltaje está presente en la fuente desde que ella se conecta a la red AC y aún cuando, teóricamente, esta se encuentra apagada. De estos 5vsb, a través de un regulador de voltaje, se obtienen los 3vsb. Estos dos voltajes son de gran importancia en las MB modernos porque participan y permiten implementar una serie de nuevas funciones en los sistemas actuales. Sin conectar nada a la MB se debe chequear el circuito Standby (5Vsb y 3Vsb) y los demás voltajes, que no estén en corte respecto a GND o entre ellos ( en el caso de 12V_4P y Vcore), o que el valor del voltaje BIAS no esté por debajo de lo normal, en caso de dudas comparar con una MB buena. Para esto se pone el Multímetro en la posición de diodo, la punta roja se conecta a tierra y con la negra se hacen las mediciones. Si hay algún elemento en corte, quemado o reventado hay que cambiarlo primero antes de proseguir. Se conecta la toma ATX_20 (24) de la fuente y se enciende (la fuente, no el PC), se chequean los 5Vsb y 3Vsb. En caso de estar muy bajos o no existir es que algo anda mal (LAN, ASIC, Super I/O, S.B.). Se deben ir levantando estos componentes en un orden según la ley del menor esfuerzo y del menor costo, entonces se verifica si el voltaje toma su valor. 44 5. Comprobar las señales PWRBTN# y PSON#. a. PS_ON# (Power Switch ON): Se utiliza para encender y apagar la fuente y, por tanto, todo el sistema vía el software. Puede ser generada físicamente por el botón de arranque del PC o electrónicamente por el S.O. Su uso es evidente con los S.O. como Windows que poseen la características APM (Advanced Power Management) y ACPI (Advanced Configuration and Power Interface). Es una señal activa cuando tiene nivel bajo (0 lógico). b. Señal Power_Good (Power_OK o PWR_OK): Es una señal de +5v que emite la fuente de alimentación una vez que todos los voltajes estén estabilizados y evita que el PC arranque antes de que todos los voltajes alcancen el nivel requerido. 6. Comprobar el valor de todos los voltajes. Se pone el “CPU tool” en el socket del procesador, se enciende la MB y de miden todos los voltajes (Vcore, 12V, 5Vsb, 3Vsb, 3V, 3V_dual, 1.5V, 2.5V_dual, 1,25Vtt, etc). En el caso del Vcore debemos verificar también la frecuencia, que esta sea en forma de pulso y no sinusoidal, pues en este caso está mal y no se debe poner el CPU. Se chequea en cualquiera de las bobinas (ferritas). 7. Arrancar la MB. Si todo esta correcto se arranca la MB. 45 3.2. Voltajes a medir. . Otros voltajes importantes. Figura 21. 46 3.2.1. Voltajes Funcionales de las Mother Board P4 Distribución de Voltaje MotherBoard con Chipset 915 y 925.Figura 22. . Si los voltajes en la MotherBoard son los correctos y no obstante la MB no despierta el siguiente paso es verificar el correcto rango de la señales de reset y reloj respectivamente. 3.3. Secuencia de arranque (Boot sequence). El término boot proviene de la palabra bootstrap y describe el método por el cual las PC se ponen operacionales o listas para funcionar. Una cadena de acontecimientos ocurre desde el momento que oprimimos el botón de encendido (power button) y hasta que la MB se vuelve funcional. El correcto entendimiento de estos acontecimientos para los distintos diseños de MB, nos permite detectar y llegar a reparar los distintos fallos que puedan existir en esta parte de las MB. 47 3.3.1. Secuencia del Encendido y el Reset. Secuencia del Encendido general. Figura 23. Secuencia del Encendido y Reset General. Figura 24. 48 Secuencia del Encendido y Reset general de M.B P5GD1. Figura 25. 49 Secuencia del Encendido y Reset Gneral de MB P4P800. Figura 26. 3.4. Señales Reloj (CLK). Las computadoras son máquinas síncronas, lo que significa que todas sus partes funcionan de forma armónica. En el PC ese ritmo o “música” por la que se guía o sincroniza todo el sistema se forma en un dispositivo llamado Generador de reloj (CLK Generator). De él salen las distintas señales de reloj para los diferentes dispositivos. 3.4.1. Problemas más frecuentes cuando mides el cuarzo: • • Hay voltaje pero no hay frecuencia. Por lo general en este caso es el cristal el del problema. No hay nada, ni voltaje ni frecuencia. Casi siempre es el chip. Distribución del Generador de Reloj. Figura 27. 50 3.5. Estructuras de algunas Mother Board. (PENTIUM 4). MB P4 con Intel (865 + ICH5). Figura 28. MB P4 con SIS(648+963). Figura 29. 51 MB P4 con Intel (915 + ICH6). Figura 30. 52 Conclusiones y Recomendaciones La explotación y utilización de la tecnología de nueva generación a pesar de que es imprescindible y necesario porque nos proporciona amplias ventajas para el trabajo económico y social de nuestro país nos permite humanizar mas el trabajo hacerlo mas ágil, eficiente, cómodo y eficaz. Ya no existe una empresa que no cuente con su equipamiento informático sea una industria de alta tecnología como una empresa agrícola, de ahí la importancia que reviste una buena utilización y aprovechamiento de las bondades que nos brinda, así como el cuidado que hay que tener para su conservación y mantenimiento porque por lo general son equipamientos muy costosos y frágiles. La empresa COPEXTEL tiene el compromiso por ser el proveedor más importante del país de equipamientos informáticos garantizar un buen servicio de posventa cada vez mas eficiente logrando cada día una mejor capacitación de su personal ya sea técnico como directivo en los avances tecnológicos para que el país pueda aprovechar mejor los beneficios que nos brinda el desarrollo tecnológico de una forma mas rápida y eficiente logrando un mejor aprovechamiento de las bondades de la tecnología de nueva generación. Son varias las exigencias técnicas que deben tenerse en cuenta para la utilización de la arquitectura de nueva generación, las cuales se convierten en una necesidad conocer de los Procesadores, las MotherBoard, las Memorias y por ello deberán estar preparados desde el punto de vista teórico y desarrollar una experiencia practica que no los da el trabajo con estas tecnologías . Se sugiere que se siga estudiado mas sobre la arquitectura de maquinas que se trabaje en la búsquedas de alternativas para la recuperación de equipos que se desechan y pueden tener solución. Facilitar un entrenamiento en el puesto de trabajo a directivos y técnicos que necesiten de los nuevos conocimientos sobre el avance de la tecnología de nueva generación. Difundir los resultados del trabajo y continuar profundizando en los estudios de estos hardware para futuros trabajos y proyectos. 53 REFERENCIAS BIBLIOGRAFICAS www.intel.com/cd/products/services/emea/spa/viiv/index.htm. http://es.wikipedia.org/wiki/PCI-Express". http://es.wikipedia.org/wiki/Serial_ATA". http://en.wikipedia.org/wiki/Universal_Serial_Bus" . http://www.intel.com/ http://www.soloprofecional.com/ http://www.asus.com/ http://support.intel.com/support/processors/pentium4-sb/cs-011986.htm http://support.intel.com/support/processors/celerond/sb/cs-015820.htm http://www.intel.com/products/processor number/info.htm Manual de MotherBoard ASUS. Cursos preparatorios para la certificación A+. 54 Anexo 1. Glosario. CPU (central processing unit) – Unidad Central de Procesamiento FSB (front side bus) – Bus Frontal CI – Circuito Integrado Prescott – Tecnología de Fabricación Hyperthreading – Tecnología de Procesamiento Múltiple MultThreading – Tecnología de Procesamiento Múltiple Dual Corel – Dos Núcleos Slot – Ranura Socket – Soporte ROM (read only memory) – Memoria de solo lectura DRAM (dynamic RAM) – Memoria de Acceso aleatorio dinámica SRAM (static RAM) – Memoria de Acceso Aleatório Estático DIMM (dual inline memory module) – Módulo Dual de Memoria en Línea SDRAM DIMM (synchronous DRAM) – Memoria de Acceso Aleatorio Dinamica Sincronica DDR DIMM (double data rate) – Razón de Doble Dato I/O (input/output) – Entrada/Salida BIOS – Sistema Básico de Entrada y Salida North Bridge – Puente Norte South Bridge – Puente Sur AMR (Áudio Modem Riser) – Ranura de Audio Modem CNR (Communications and Networking Riser) – Ranura de Comunicación de Redes Overclocking – Aumentar Frecuencia Firewire – Protocolo de redes Wireless – Inalámbrica Stack Cool – Enfriamiento Fine-Pitch – Punto Fino ODT (On-Die Termination) – Resistencia de Voltaje de Terminación 55 Anexo 1. Glosario. CPU (central processing unit) – Unidad Central de Procesamiento FSB (front side bus) – Bus Frontal CI – Circuito Integrado Prescott – Tecnología de Fabricación Hyperthreading – Tecnología de Procesamiento Múltiple MultThreading – Tecnología de Procesamiento Múltiple Dual Corel – Dos Núcleos Slot – Ranura Socket – Soporte ROM (read only memory) – Memoria de solo lectura DRAM (dynamic RAM) – Memoria de Acceso aleatorio dinámica SRAM (static RAM) – Memoria de Acceso Aleatório Estático DIMM (dual inline memory module) – Módulo Dual de Memoria en Línea SDRAM DIMM (synchronous DRAM) – Memoria de Acceso Aleatorio Dinamica Sincronica DDR DIMM (double data rate) – Razón de Doble Dato I/O (input/output) – Entrada/Salida BIOS – Sistema Básico de Entrada y Salida North Bridge – Puente Norte South Bridge – Puente Sur AMR (Áudio Modem Riser) – Ranura de Audio Modem CNR (Communications and Networking Riser) – Ranura de Comunicación de Redes Overclocking – Aumentar Frecuencia Firewire – Protocolo de redes Wireless – Inalámbrica Stack Cool – Enfriamiento Fine-Pitch – Punto Fino ODT (On-Die Termination) – Resistencia de Voltaje de Terminación 56 Manual de Reparación 57 REPARACION DEL PS/2 MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Use el multimetro para verificar los 5volt del PS/2. ¾ Verificar si el jumper del KBPWR está montado. ¾ Verifique con el multimetro en modo de diodo los valores de K/B CLK, el Data & Mouse CLK, Si los valores son altos verifique los componentes RLC estén abiertos y si los valores son bajos revise que los componentes estén en corte. ¾ Si el problema todavía está existiendo por favor cambie el I/O o el Puente Sur. 58 REPARACION DEL USB MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Compruebe el USB 5 volt Vcc y 5volt Dual. ¾ Compruebe que el valor del Generador de reloj es de 48mhz. ¾ Use el multimetro y compruebe el valor de voltaje del USB- y el USB+. Los valores deben ser los mismos. ¾ Si los valores son altos verifique la resistencia y los inductores no estén abiertos y si los valores son bajos revise que los componentes estén en corte. ¾ Si los problemas persisten cambie el puente sur. 59 REPARACION DEL PUERTO LPT1 MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Asegúrese que el LPT esta habilitado en modo EPP en el Bios. ¾ Use el multimetro para verificar los 5volt del LPT. ¾ Verifique con el multimetro en modo de diodo los valores del LPT. Si los valores son altos verifique los componentes RLC estén abiertos y si los valores son bajos revise que los componentes estén en corte. ¾ Si los componentes RLC están abierto ó en Corte intente arreglarlos. ¾ Si el problema persiste pruebe cambiar el puerto I/O ó en algunos modelos el Puente Sur. 60 REPARACION DEL VGA MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR Si hay problemas con el color: ¾ Use el multimero para medir que el R.G.B no tenga errores. ¾ Compruebe que los componentes R.L.C estén bien. ¾ Si el problema no es causado por los componentes RLC ó por los otros componentes pequeños intente cambiar el Puente Norte. Si no hay video: ¾ Use el multimetro para medir los valores de voltaje del VGACLK&DATA, VSYNC & HSYNC. ¾ Sin los componentes RLC y la pastilla 74xx están bien intente cambiar el Puente Norte. 61 REPARACION DE LA LAN MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Mida el voltaje Lan 3VSB, 2.5VSB,1.2VSB, ¾ Use el Osciloscopio para verificar Lan X'TAL 25Mhz y el 33.3Mhz para la sincronización con el PCI. ¾ Use el Multimetro para medir los signos del Transformador. ¾ Si el problema todavía está existiendo cambie el controlador Lan. ¾ Si cambio que controlador Lan y sigue el problema por favor cambie el Puerto Sur. 62 REPARACION DEL AUDIO MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Asegúrese que este activado el audio en el Bios y que este bien los jumper. ¾ Use el Multimetro para medir AUD + 5V & 3.3V. ¾ Use el Osciloscopio para medir el reloj de audio 24.576Mhz ó 14.318Mhz (del Generador de reloj) ¾ Si los problemas persisten cambie el puente sur. 63 REPARACION DEL FDD. MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Asegúrese que este activado FDD en el Bios. ¾ Use el multimetro para verificar los valores de voltaje. compruébelo con MB buenas. ¾ Si usted encuentra que el valor es impropio, compruebe la conexión del circuito a I/O. ¾ Si hay algún componente abierto o en cortocircuito, intente arreglarlo. ¾ Si el problema persiste pruebe cambiar el puerto I/O ó en algunos modelos el Puente Sur. 64 REPARACION DEL IDE MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Use el multimetro para verificar los valores de voltaje. compruébelo con MB buenas. ¾ Si los valores son altos verifique los componentes RLC estén abiertos y si los valores son bajos revise que los componentes estén en corte. ¾ Si los componentes RLC están abierto ó en Corte intente arreglarlos. ¾ Si el problema persiste pruebe cambiar el Puente Sur. 65 REPARACION DEL SATA MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Use el Multimetro para medir SATA señala (A+ & UN -, el B+ & B -). ¾ Mida la frecuencia del SATA CLK debe ser 100MHZ. ¾ Use el multimetro en modo diodo los pines 2, 3, 4 y 5 debe estar por los 0.276V. ¾ Si los valores son altos verifique los componentes RLC estén abiertos y si los valores son bajos revise que los componentes estén en corte. ¾ Si el problema persiste pruebe cambiar el Puente Sur. 66 REPARACION DELBANCO DE MEMORIA DDR PASOS A SEGUIR ¾ Use Multimetro para medir el Voltaje de Memoria. SDRAM: 3V Dual DDR: 2.5V Dual, 1.2Vtt_DDR. DDR2: 1.8 dual, 0.8Vtt_DDR. ¾ Use el Osciloscopio para medir el Reloj de Memoria (100Mhz o 133Mhz, 166Mhz según Chipset. ¾ Usando una tarjeta Signal Pin Out para medir los valores del banco y se sugiere comparar con una MB en buen estado. ¾ Comprobar todos los componentes RLC no este abiertos ó en corte. ¾ Si el problema persiste intente cambiar el Puente Norte. 67 REPARACION DEL AGP MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Use el Multimetro para medir el AGP que trabaja con Voltajes 1.5V, 3.3V, 5V y 12V. ¾ Use el Osciloscopio para medir el AGP CLK = 66 Mhz. ¾ Nosotros podemos usar una tarjeta Signals Pin Out para hacer las mediciones. ¾ Use el Multimetro para verificar la dirección / Data Line (DC) & Control Signal. ¾ Verifique los componentes RLC estén abiertos ó estén en corte. ¾ Si el problema persiste pruebe cambiar el Puente Norte. 68 REPARACION DEL PCI MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Nosotros podemos usar una tarjeta Signals Pin Out para hacer las mediciones. ¾ Use el Multimetro para medir los voltajes del PCI (+12V, -12V,5V,3.3V) ¾ Use el Osciloscopio para medir el Reloj de PCI =33Mhz ¾ Use el Multimetro para medir otros signos de PCI: ¾ AD0~AD31 (P16) & los signos del mando (el MARCO #, IRDY #, TRDY # (P17). ¾ Compare con el MB. bueno Si el error persiste comprobar si hay algún componente en corte ó abierto. . ¾ Si no se puede encontrar la causa intente cambiar el Puente Sur. 69 REPARACION DEL PCI-E MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Use el Multimetro para medir el PCI-E que trabaja con Voltajes 12V, 3V, 3VSB. ¾ Nosotros podemos usar una tarjeta Signals Pin Out para hacer las mediciones. ¾ Use el Osciloscopio para medir el PCI-E CLK =100 Mhz. ¾ Use el Multimetro para medir las señales PCI-E TX/RX, compare con una MB buena si persiste el error comprobar los componentes RLC. ¾ Si no pruebe cambiar NB (PCI-E X16) o el SB (PCI-E X1). 70 REPARACION DEL RELOJ MAPA DE FLUJO DE REPARACIÓN PASOS A SEGUIR ¾ Medir con el Osciloscopio la frecuencia del X'TAL 14.318Mhz. ¾ Use el Osciloscopio para medir cada valor de reloj individual. ¾ Use Multimetro para medir el voltaje del Reloj 3.3volt. ¾ Si los componentes de RLC relacionados están bien pero el reloj no lo esta intenté cambiar el generador de CLK 71