UNIVERSIDAD DE ALMERÍA ESCUELA POLITÉCNICA SUPERIOR
Anuncio

UNIVERSIDAD DE ALMERÍA
ESCUELA POLITÉCNICA SUPERIOR
Departamento de Lenguajes y Computación
TESIS DOCTORAL
MODELADO Y CONTROL JERÁRQUICO DE
CRECIMIENTO DE CULTIVOS EN
INVERNADERO
Francisco Rodríguez Díaz
Dirigida por el Dr. Manuel Berenguel Soria
Almería, noviembre 2002
TESIS DOCTORAL
MODELADO Y CONTROL JERÁRQUICO DE
CRECIMIENTO DE CULTIVOS EN
INVERNADERO
por
Francisco Rodríguez Díaz
Presentada en el
Departamento de Lenguajes y Computación
Escuela Politécnica Superior
de la
Universidad de Almería
Para la obtención del
Grado de Doctor en Informática
Director
Autor
Dr. Manuel Berenguel Soria
Francisco Rodríguez Díaz
A Marimar
Agradecimientos
Cuando se alcanza un objetivo como éste y se recuerda quién ha ayudado de alguna
manera, técnica o moralmente, la lista de personas es casi interminable, así que espero
que estén todos los que son.
En primer lugar, mi más sentido agradecimiento a Manolo Berenguel por todo: sus
conocimientos, ideas, intuiciones, observaciones, trabajo, ilusión, ánimo, confianza y
amistad han constituido uno de los pilares básicos para el desarrollo de la presente tesis.
Es un lujo trabajar con Manolo en los temas relacionados con ingeniería de control y
tenerlo como amigo en el ámbito personal.
Una mención especial tengo que dedicarle a Fernando Bienvenido, que fue el que
dirigió mis primeros pasos en el mundo de la investigación y me enseñó las diferentes
formas de abordar los problemas a los que me debería enfrentar a lo largo de mi carrera.
También hemos disfrutado de charlas técnicas y personales que me han enriquecido en
los dos aspectos y que espero sigamos teniendo.
A José Ramón Díaz y Alfredo Sánchez les debo el que me introdujeran en el sector de
la agricultura que me atrajo desde el principio, además de su apoyo incondicional a lo
largo de los últimos años.
Dos personas que me han apoyado técnica y moralmente, y de las que me considero
afortunado de disfrutar de una relación no sólo laboral son Manuel Ruiz Arahal y Luis
Yebra, que han aguantado estoicamente tardes de trabajo y, también, de ocio.
El Director del Departamento de Lenguajes y Computación, Samuel Túnez, confió en
mí hace unos años, y por eso le estoy agradecido, además de por algunas cosas que me
ha enseñado que, aunque no sean del ámbito técnico o de investigación, seguro que me
ayudan a lo largo de mi trayectoria en la Universidad.
También quiero mostrar mi gratitud a todos mis compañeros del Departamento de
Lenguajes y Computación y del grupo de Investigación Automática, Electrónica y
Robótica por el interés mostrado y por su constante apoyo, en especial a mi compañero
de despacho Rafa Guirado que ha aguantado algunos malos momentos, a Manolo
Torres, Antonio Corral, Antonio Becerra, José Carlos Moreno, Daniel Landa, Isabel
Flores, José Rafael García y un infiltrado de Arquitectura, Julián García.
Hay otro grupo amplio de personas que me han aconsejado en aspectos puntuales de
esta investigación y a los que les agradezco su interés como José López Gálvez, José
Antonio Gázquez, Gabriel Acién y Manuel Pérez de la Universidad de Almería, Allain
Baille y María Milagros González de la Universidad de Cartagena, Ep Heuvelink y
Cecilia Stanghellini de la Universidad de Wageningen, Armando Ramírez de la
Universidad de Chapingo, Juan Carlos López de la Estación Experimental “Las
Palmerillas”, José Ángel Navarro de la empresa Sunsaver y Eduardo García, Rafa y
Joaquín de la empresa ITC.
Un agradecimiento especial a la gerencia y personal de la empresa Dunia Export por la
cesión de sus instalaciones para la realización de los ensayos.
Tengo que agradecer su ayuda en determinados momentos a los becarios José Luis
Guzmán y Jorge Fernández.
Evidentemente, sin el apoyo de mi familia, tanto natural como política, no habría sido
posible llegar a este momento, en especial el de mi madre y seguro que el de mi padre si
estuviera aquí.
Por último, y el orden no está relacionado con la importancia, gracias Marimar por tu
amor, que me lo has demostrado con creces desde hace bastante tiempo. Te prometo
que voy a intentar devolverte todo lo que me has dado, me das y, como tu eres, seguro
que me darás, y recompensarte por los malos momentos que hayas podido sufrir por mi
culpa.
RESUMEN
La agricultura es uno de los principales motores económicos de la provincia de Almería
(sudeste de España), en la que se sitúa la mayor concentración de invernaderos del mundo.
Hasta hace unos años, se ha mantenido una alta presencia en el mercado internacional,
debido fundamentalmente a los relativamente bajos costes de producción y a la oferta de
productos fuera de estación, existiendo además poca competencia por parte de países en
vías de desarrollo. Esta competencia está creciendo actualmente, tanto por parte de sectores
muy tecnificados de países desarrollados, que ofertan buena calidad y servicio a costo
medio, como con nuevos sectores en países menos desarrollados con costes de producción
muy bajos. Únicamente la mejora de la productividad y la calidad pueden permitir el
mantenimiento de la rentabilidad, siendo la tecnología parte esencial de este proceso.
Actualmente, se está realizando un gran esfuerzo encaminado a la introducción de
tecnología en cada una de las fases de la cadena de comercialización agrícola.
Evidentemente, la fase de producción en el invernadero es la más importante, por lo que
deben realizarse los mayores esfuerzos por mejorar tanto la cantidad como la calidad de los
frutos. El crecimiento de un cultivo se encuentra fundamentalmente determinado por las
variables climáticas del entorno en el que se encuentra y por la cantidad de agua y
fertilizantes que se le aplican mediante el riego; por tanto, el adecuado manejo de estas
variables permitirá controlar el crecimiento del cultivo. Por esta razón un invernadero es
ideal para cultivar, ya que al ser un recinto cerrado, se pueden manipular estas variables
para alcanzar un crecimiento y desarrollo óptimo de las plantas. Sin embargo, el hecho de
conseguir las condiciones óptimas de las variables climáticas y de fertirrigación1 supone un
coste económico en cuanto a energía, agua y fertilizantes. Por tanto, lo ideal desde el punto
de vista económico no será obtener el máximo de producción, sino maximizar el beneficio
entendido como la diferencia entre los ingresos procedentes de la venta de la producción
final y sus costes asociados.
El clima y la fertirrigación son dos sistemas independientes, por lo que plantean problemas
de control diferentes. Empíricamente, se conocen las necesidades de agua y nutrientes de
cada especie de cultivo y, de hecho, los primeros sistemas que se automatizaron son los que
controlan estas variables. Como el problema de control de crecimiento de un cultivo bajo
invernadero es complejo, una base de partida común en este ámbito consiste en suponer que
las plantas reciben la cantidad de agua y fertilizantes que requieren en cada momento. De
esta forma el problema se reduce al control del crecimiento de cultivos en función de las
condiciones climáticas de su entorno. Por tanto, el objetivo principal de la presente tesis es
el diseño e implementación de un sistema de control óptimo jerárquico del crecimiento de
cultivos bajo invernadero en función de las variables climáticas internas y externas, en el
que se puedan integrar criterios económicos de forma que se maximice la diferencia entre el
beneficio bruto obtenido por la venta del cultivo y los costes de producción asociados a los
sistemas de actuación climáticos.
1
Riego y fertilización.
ix
Resumen
Para llevarlo a cabo se ha requerido el cumplimiento de algunos objetivos específicos,
como el estudio y modelado de las variables climáticas del interior del invernadero que
afectan al crecimiento del cultivo, estudio y modelado de las variables que caracterizan al
crecimiento del cultivo, así como el diseño y prueba de algoritmos de control de las
variables climáticas en el interior de un invernadero.
Como solución integrada se ha propuesto una arquitectura de control jerárquica de dos
capas que controle el sistema cultivo/clima, basándose en la existencia de dos escalas de
tiempo distintas en el problema de optimización. La capa superior, en función de la
producción esperada y sus costes asociados o de la fecha de recolección, resuelve un
problema de optimización que maximiza una función objetivo que representa el beneficio
obtenido en función de las variables climáticas que afectan al crecimiento de las plantas,
proporcionando las consignas que deben seguir dichas variables climáticas a lo largo de la
campaña. La capa inferior incluye los controladores necesarios para que se alcancen las
consignas calculadas en la capa superior. Utilizando una estrategia de horizonte deslizante,
en cada transición de noche a día, o viceversa, se vuelve a resolver el problema de
optimización realimentando con los datos reales que se han medido de las variables
climáticas y del crecimiento hasta ese momento, tratando así de reducir los errores que se
pueden cometer debido a aspectos dinámicos no contemplados por los modelos usados para
la predicción, a desviaciones en la predicción meteorológica o al no poderse alcanzar las
consignas climáticas por efecto de las perturbaciones y limitaciones en los dispositivos de
actuación.
La presente tesis no se ha limitado simplemente al desarrollo de modelos y estructuras de
control, sino que ha requerido una importante labor de experimentación en campo durante
varios años con la finalidad de obtener datos necesarios para la calibración y validación de
modelos, así como para ensayar diversos algoritmos de control. Algunos de los desarrollos
contenidos en esta tesis han sido incluso implantados en sistemas de control comerciales a
través de contratos de transferencia de tecnología.
x
ABSTRACT
Agriculture is one of the main economic sectors of the province of Almería (South-East
Spain), where the largest concentration of greenhouses of the world is located. Until now,
an important presence has been maintained in the international market, mainly due to the
relatively low production costs and to the capability of supplying products outside station,
in addition suffering little competence from developing countries. Currently, this
competition is growing, due to the increase of production in developed countries, that
supply good quality and service at average cost, and to the import of products coming from
new sectors in less developed countries, characterised by low production costs. Only the
improvement of the productivity and the quality will allow the maintenance of the yield, the
technology being an essential part in this process. A large effort is nowadays being carried
out directed to the introduction of technology in each one of the phases of the agricultural
commercialisation chain. Obviously, the most important phase is that of greenhouse crop
production and so, great efforts are required to improve quality and quantity of horticultural
products. Crop growth is mainly influenced by surrounding environmental climatic
variables and by the amount of water and fertilizers supplied by irrigation; therefore, the
proper handling of these variables will allow the control of crop growth. This is the main
reason of why a greenhouse is ideal to cultivate, as it constitutes a closed environment in
which climatic and fertirrigation variables can be controlled to allow an optimal growth and
development of the crop. Nevertheless, the control of climatic and fertirrigation variables
has associate costs related to energy, water and fertilizers. Therefore, the objective from the
economic point of view will not be to obtain the maximum production, but to maximize the
benefit understood as the difference between the incomes coming from the sale of the final
production and its associate costs.
The climate and the fertirrigation are two independent systems with different control
problems. Empirically, the requirements of water and nutrients of different crop species are
known and, in fact, the first automated systems were those that control these variables. As
the problem of greenhouse crop production is a complex issue, an extended simplification
consists of supposing that the plants receive the amount of water and fertilizers that they
require at every moment. In this way the problem is reduced to the control of crop growth
as a function of climate environmental conditions. Therefore, the main objective of this
thesis is the design and implementation of a hierarchical optimal control system of
greenhouse crop growth as a function of inside and outside environmental conditions taking
into account economic criteria, in such a way that the difference between the gross benefit
obtained by the sale of the production and the associate costs is maximized.
The fulfillment of some specific objectives has been required to account for the main
objective of this thesis, such as studying and modelling those greenhouse inside climatic
variables that affect crop growth, those that characterise crop growth, as well as the design
and test of climate control algorithms.
xi
Abstract
A hierarchical control architecture has been proposed as an integral solution, constituted by
two layers that control the system composed by crop and climate, based on the existence of
two different time scales. The upper layer solves an optimisation problem as a function of
the awaited production and associate costs or the desired date of harvesting. This
optimisation problem maximize an objective function that represents the benefit obtained
based on the climatic variables that affect the growth of the plants, providing the set points
that must follow these climatic variables throughout the campaign. The lower layer
includes the controllers that try to cancel set point tracking errors (these set points are those
calculated by the upper layer). By using a receding horizon strategy, each time a transition
night-day or vice versa occurs, the optimisation problem is again solved by using new real
measured data of climatic variables and crop growth, trying to reduce errors coming from
plant-model mismatch, deviations in the weather forecast or those appearing when the
climatic variables are not able to reach the climatic set points due to disturbances or
limitations in the actuators.
The thesis has not been limited to the development of models and control strategies, but it
has required an important work of experimentation in greenhouses during several years,
with the purpose of collecting data required for the calibration and validation of models, as
well as to test different control algorithms. Some of the developments included in the thesis
have been implemented in commercial control systems through technology transference
contracts.
xii
ÍNDICE GENERAL
Resumen
ix
Nomenclatura
xix
1. INTRODUCCIÓN
1
1.1. MOTIVACIÓN DE LA INVESTIGACIÓN Y OBJETIVOS ............................. 1
1.2. CONTEXTO DE INVESTIGACIÓN .................................................................. 5
1.3. PRINCIPALES CONTRIBUCIONES ................................................................ 7
1.4. ESTRUCTURA DE LA TESIS ................................................ .......................... 8
2. MATERIALES Y MÉTODOS
11
2.1. INTRODUCCIÓN ............................................................................................. 11
2.2. SISTEMA INVERNADERO.............................................................................. 12
2.2.1. Descripción de la explotación .................................................................. 12
2.2.2. Estructuras de los invernaderos ................................................................ 12
2.2.3. Sistemas de actuación sobre el clima instalados ...................................... 13
2.2.3.1. Ventilación natural ...................................................................... 13
2.2.3.2. Sistemas de calefacción ............................................................... 15
2.2.3.3. Malla de sombreo ........................................................................ 16
2.3. SISTEMA DE CULTIVO .................................................................................. 17
2.3.1. Descripción del cultivo de tomate y relación con el clima ...................... 17
2.3.2. Sistema NFT ............................................................................................ 19
2.3.3. Experiencias realizadas ............................................................................ 20
2.3.4. Medidas tomadas ...................................................................................... 21
2.4. SISTEMA DE MEDIDA Y CONTROL DE LAS VARIABLES
CLIMÁTICAS ................................................................................................... 23
2.4.1. Sistema de medida y control climático comercial ................................... 23
2.4.2. Sistema de medida y control desarrollado ............................................... 25
2.4.3. Experiencias realizadas ............................................................................ 26
2.4.4. Validación de datos .................................................................................. 28
2.5. HERRAMIENTAS DE MODELADO Y SIMULACIÓN ................................ 30
2.5.1. Modelado orientado a bloques frente a modelado orientado a objetos .... 30
2.5.2. Modelado con Simulink ........................................................................... 33
2.5.3. Modelado con Modelica ........................................................................... 35
2.5.4. Comparación Simulink/Modelica ............................................................ 35
2.6. HERRAMIENTAS DE AJUSTE DE LOS PARÁMETROS
CARACTERÍSTICOS DE LOS MODELOS ................................................... 38
xiii
Índice general
2.6.1. Conceptos generales .................................................................................38
2.6.2. Algoritmos genéticos ................................................................................39
2.6.3. Metodología utilizada ............................................................................... 42
3. OBTENCIÓN DE MODELOS PARA SIMULACIÓN DEL CLIMA EN
EL INTERIOR DE UN INVERNADERO
45
3.1. MODELADO DEL CLIMA DE UN INVERNADERO .................................... 45
3.2. PROCESOS FÍSICOS QUE SE PRODUCEN EN EL INTERIOR DE UN
INVERNADERO ............................................................................................... 53
3.2.1. Introducción .............................................................................................. 53
3.2.2. Procesos de conducción ............................................................................54
3.2.3. Procesos de convección ............................................................................57
3.2.4. Procesos de absorción, reflexión y transmisión de radiación solar ..........59
3.2.5. Procesos de absorción de radiación térmica .............................................63
3.2.6. Procesos de evaporación y condensación de vapor de agua .....................65
3.2.7. Procesos de transpiración del cultivo .......................................................68
3.2.8. Procesos debidos a los sistemas de actuación ..........................................71
3.2.8.1. Ventilación .................................................................................71
3.2.8.2. Sistemas de calefacción ............................................................. 73
3.2.8.3. Malla de sombreo ......................................................................74
3.2.8.4. Malla térmica ............................................................................. 75
3.2.8.5. Sistemas estáticos de sombreo. Encalado .................................76
3.2.8.6. Sistemas de evaporación de agua .............................................. 77
3.2.9. Relación entre los elementos del invernadero ..........................................77
3.3. ESTADO ACTUAL DE LOS ESTUDIOS DE MODELADO DEL CLIMA EN
INVERNADERO .................................................................................................. 81
3.3.1. Introducción .............................................................................................. 81
3.3.2. Clasificación de modelos ..........................................................................82
3.3.3. Descripción de modelos de simulación existentes ...................................83
3.4. DESARROLLO DEL SIMULADOR DE CLIMA ..............................................88
3.4.1. Descripción del modelo ............................................................................88
3.4.1.1. Estructura del modelo e hipótesis generales de partida ...........88
3.4.1.2. Modelado de la radiación PAR ................................................. 91
3.4.1.3. Modelado de la temperatura en la cubierta del invernadero ....92
3.4.1.4. Modelado de la temperatura en la superficie del suelo ............99
3.4.1.5. Modelado de la temperatura en las capas del suelo ...............103
3.4.1.6. Modelado de la temperatura del aire del invernadero ............104
3.4.1.7. Modelado de la humedad del aire del invernadero ................. 110
3.4.2. Implementación del modelo ...................................................................111
3.4.2.1. Descomposición jerárquica ..................................................... 111
3.4.2.2. Modelado orientado a bloques ................................................113
3.4.3.3. Modelado orientado a objetos ................................................. 115
3.4.3. Obtención de parámetros del modelo .....................................................117
3.4.3.1. Problemática de la calibración de parámetros y metodología
propuesta ................................................................................117
xiv
Índice general
3.4.3.2. Estimación de los parámetros ............................................................. 119
3.4.3.2.1. Metodología utilizada ............................................... 119
3.4.3.2.2. Calibración del modelo de la temperatura de la
superficie y la primera capa del suelo ..................... 121
3.4.3.2.3. Calibración del modelo de la temperatura de
cubierta .................................................................... 124
3.4.3.2.4. Calibración de los modelos de humedad y
temperatura del aire con el invernadero en vacío ... 125
3.4.3.2.5. Calibración de los modelos de humedad y
temperatura del aire con cultivo y calefacción ...... 128
3.4.3.2.6. Calibración del modelo de la radiación PAR .......... 130
3.4.3.3. Análisis de sensibilidad ........................................................... 131
3.4.3.3.1. Análisis de sensibilidad del modelo de la temperatura
del aire ................................................................... 131
3.4.3.3.2. Análisis de sensibilidad del modelo de la temperatura
de la primera capa del suelo .................................... 133
3.4.3.3.3. Análisis de sensibilidad del modelo de la temperatura
de la cubierta ........................................................... 133
3.4.3.3.4. Análisis de sensibilidad del modelo de la temperatura
de la superficie de suelo ........................................... 133
3.4.3.3.5. Análisis de sensibilidad del modelo de la humedad
del aire ..................................................................... 134
3.4.4. Validación del modelo ........................................................................... 135
3.4.4.1. Metodología utilizada ............................................................. 135
3.4.4.2. Validación del modelo en el invernadero Araba número 2 .... 138
3.4.4.3. Validación del modelo en el invernadero Araba número 3 .... 143
3.4.4.4. Validación del modelo en el invernadero Inamed número 1 .. 145
3.5. CONCLUSIONES Y RESUMEN DE APORTACIONES ............................. 148
4. OBTENCIÓN DE MODELOS PARA CONTROL DEL CLIMA EN EL INTERIOR
DE UN INVERNADERO
151
4.1. NECESIDADES Y TIPOS DE MODELOS DE CONTROL ......................... 151
4.2. MODELOS APROXIMADOS BASADOS EN PRINCIPIOS FÍSICOS ....... 153
4.2.1. Características de los modelos simplificados y referencias ................... 153
4.2.2. Diseño del modelo ................................................................................. 157
4.2.2.1. Estructura e hipótesis generales de partida ............................ 157
4.2.2.2. Modelo simplificado de temperatura de aire ........................... 158
4.2.2.3. Modelo simplificado de humedad de aire ............................... 161
4.2.3. Implementación del modelo ................................................................... 162
4.2.4. Calibración del modelo .......................................................................... 163
4.2.5. Validación del modelo ........................................................................... 166
4.3. MODELOS DINÁMICOS OBTENIDOS A PARTIR DE ENSAYOS
Y DATOS DE ENTRADA/SALIDA ............................................................... 168
4.3.1. Introducción ....................................................................................... 168
4.3.2. Modelos lineales obtenidos a partir del ensayo de la curva de reacción. 170
4.3.2.1. Conceptos generales y referencias .......................................... 170
xv
Índice general
4.3.2.2. Diseño del modelo propuesto .................................................. 172
4.3.2.3. Validación del modelo propuesto ............................................177
4.3.3. Modelos lineales obtenidos a partir de datos de entrada/salida ..............178
4.3.3.1. Conceptos generales y referencias ...........................................178
4.3.3.2. Diseño del modelo propuesto .................................................. 183
4.3.3.3. Calibración del modelo propuesto ...........................................184
4.3.3.4. Validación del modelo propuesto ............................................186
4.3.4. Modelos no lineales basados en redes neuronales ..................................189
4.3.4.1. Conceptos generales y referencias ...........................................189
4.3.4.2. Diseño del modelo propuesto .................................................. 195
4.3.4.3. Calibración del modelo propuesto ...........................................197
4.3.4.4. Validación del modelo propuesto ............................................199
4.4. CONCLUSIONES Y RESUMEN DE APORTACIONES ............................. 201
5. MODELADO DEL CRECIMIENTO DEL CULTIVO DE TOMATE EN EL
INTERIOR DE UN INVERNADERO
205
5.1. CRECIMIENTO Y DESARROLLO DE CULTIVOS .................................... 205
5.2. INFLUENCIA DEL CLIMA SOBRE EL CRECIMIENTO DE CULTIVOS 208
5.2.1. Factores climáticos limitantes y límites de tolerancia ............................208
5.2.2. Fotosíntesis y clima ................................................................................209
5.2.3. Respiración y clima ................................................................................211
5.3. MODELADO DEL CRECIMIENTO DE CULTIVOS ................................... 212
5.3.1. Introducción ............................................................................................212
5.3.2. Modelos empíricos ................................................................................. 212
5.3.3. Modelos basados en principios fisiológicos ............................................ 213
5.3.4. Escalas de tiempo ...................................................................................217
5.4. MODELADO DEL CRECIMIENTO DEL CULTIVO DE TOMATE ........... 218
5.5. DESARROLLO DEL MODELO DE CRECIMIENTO DEL TOMATE ........ 222
5.5.1. Descripción del modelo ..........................................................................222
5.5.2. Implementación del modelo ...................................................................224
5.5.2.1. Implementación con Simulink .................................................... 224
5.5.2.2. Implementación con Modelica .................................................... 225
5.5.3. Obtención de los parámetros del modelo ...............................................226
5.5.4. Análisis de sensibilidad del modelo .......................................................229
5.5.5. Validación del modelo ............................................................................ 231
5.6. CONCLUSIONES Y RESUMEN DE APORTACIONES .............................. 236
6. ESTRATEGIAS DE CONTROL DEL CLIMA EN UN INVERNADERO
239
6.1. PROBLEMA DE CONTROL DE LAS VARIABLES CLIMÁTICAS ........... 239
6.2. ESTADO ACTUAL DE LOS ESTUDIOS DE CONTROL DEL CLIMA
EN INVERNADERO ....................................................................................... 244
6.2.1. Clasificación de las estrategias de control en la actualidad..................... 244
6.2.2. Referencias de estrategias de control de un invernadero ........................ 245
6.3. CONTROL DE LA TEMPERATURA INTERIOR ........................................ 250
6.3.1. Problema general de control de la temperatura ......................................250
xvi
Índice general
6.3.2. Control de la temperatura diurna utilizando ventilación natural ............ 252
6.3.2.1. Problema de control de la temperatura utilizando
ventilación natural ................................................................... 252
6.3.2.2. Control con ajuste por tabla ...................................................... 254
6.3.2.3. Control PI por adelanto ............................................................ 263
6.3.2.4. Otras estrategias de control ...................................................... 271
6.3.2.5. Supervisión de condiciones climáticas extremas ....................... 271
6.3.3. Control de la temperatura nocturna utilizando calefacción ................... 272
6.3.3.1. Problema de control de la temperatura utilizando calefacción 272
6.3.3.2. Esquema de control de la temperatura utilizando calefacción . 275
6.3.3.3. Inclusión de un término por prealimentación basado en
modelos ..................................................................................... 278
6.4. CONTROL DE LA HUMEDAD RELATIVA INTERIOR ............................ 280
6.4.1. Problema general de control de la humedad relativa ............................. 280
6.4.2. Efecto de la ventilación y calefacción sobre la humedad relativa ......... 281
6.4.3. Control de la humedad relativa .............................................................. 282
6.4.3.1. Control de la humedad relativa en periodos diurnos ................ 282
6.4.3.2. Control de la humedad relativa en periodos nocturnos ............. 284
6.5. CONTROL DE LA RADIACIÓN SOLAR ..................................................... 286
6.5.1. Problema general de control de la radiación solar ................................. 286
6.5.2. Control de la radiación solar .................................................................. 287
6.6. EXPERIENCIAS REALES EN UN INVERNADERO .................................. 288
6.7. CONCLUSIONES Y RESUMEN DE APORTACIONES ............................. 290
7. CONTROL JERÁRQUICO DEL CRECIMIENTO
DE CULTIVOS BAJO INVERNADERO
295
7.1. INTRODUCCIÓN AL CONTROL JERÁRQUICO MULTICAPA ............... 295
7.2. ESTADO ACTUAL DE LOS ESTUDIOS DEL CONTROL DEL
CRECIMIENTO DE CULTIVOS BAJO INVERNADERO .......................... 301
7.2.1. Control del crecimiento de cultivos bajo invernadero como
sistema jerárquico ................................................................................... 301
7.2.2. Estado actual del control jerárquico del crecimiento de cultivos
bajo invernadero ..................................................................................... 303
7.3. SISTEMA DE CONTROL JERÁRQUICO PROPUESTO ............................. 308
7.3.1. Arquitectura de control propuesta y algoritmo
general de funcionamiento ...................................................................... 308
7.3.1.1. Definición del problema e hipótesis generales de partida ......... 308
7.3.1.2. Arquitectura jerárquica propuesta ............................................ 310
7.3.1.3. Principio de funcionamiento de la arquitectura propuesta ....... 313
7.3.2. Aspectos particulares de la arquitectura de control propuesta ............... 317
7.3.2.1. Predicción de condiciones climáticas ....................................... 317
7.3.2.2. Proceso de optimización............................................................. 321
7.3.2.2.1. Modelos utilizados en el proceso de optimización ... 321
7.3.2.2.2. Función de coste ....................................................... 324
7.3.2.2.3. Algoritmo de optimización ....................................... 327
xvii
Índice general
7.3.3. Ensayos y resultados ...............................................................................329
7.3.3.1. Hipótesis generales de los ensayos ............................................329
7.3.3.2. Estudio de las tendencias de las trayectorias de referencia
de la temperatura ...................................................................... 330
7.3.3.3. Respuesta del sistema a cambios en los precios
del combustible .........................................................................332
7.3.3.4. Respuesta del sistema ante distintas predicciones ..................... 333
7.3.3.5. Respuesta del sistema ante modificaciones en la fecha
de recolección ............................................................................335
7.4. CONCLUSIONES Y RESUMEN DE APORTACIONES .............................. 336
8. CONCLUSIONES Y FUTURAS LÍNEAS DE INVESTIGACIÓN
339
ANEXO A. CONCEPTOS BÁSICOS DE PSICROMETRÍA
343
Referencias bibliográficas
349
xviii
NOMENCLATURA
ABREVIATURAS
Abreviatura
AR
ARMA
ARX
NFT
ODE
OE
OMT
Denominación original
Auto Regresive
Auto Regresive Moving Average
Auto Regresive with eXogenous
inputs
AutoRegresive Moving Average with
eXogeneous inputs
Box-Jenkins
Differential Algebraic Ecuation
Descentralised Model Based
Predictive Control
Electrical Conductivity
Fast Fourier Transform
Feedback Linearization
Generalised Predictive Control
Leaf Area Index
Linear Matrix Inequalities
Model Based Predictive Control
Modified Extended Linearised
Predictive Control
Nonlinear AutoRegresive with
eXogenous inputs
Nutrient Film Technique
Ordinary differential equation
Output Error
Object Modeling Technique
P
PAR
PDF
PE
PI
PID
PIP
PRBS
QFT
QP
RAM
RHOC
Proportional
Photosynthetically Active Radiation
Pseudo-Derivative Feedback
Polyethylene
Proportional Integral
Proportional Integral Derivative
Proportional Integral Plus
Pseudo Random Binary Sequence
Quantitative Feedback Theory
Quadratic Programming
Random Allocation Memory
Receding Horizon Optimal Control
SQP
Sequential Quadratic Programming
ARMAX
BJ
DAE
DMBPC
CE
FFT
FL
GPC
LAI
LMI
MBPC
MELPC
NARX
xix
Significado
Auto-regresivo
Auto-regresivo de media móvil
Auto-regresivo con entradas exógenas
Auto-regresivo con entradas exógenas
de media móvil
Box-Jenkins
Ecuación algebraico diferencial
Control predictivo basado en modelo
descentralizado
Conductividad eléctrica
Transformada rápida de Fourier
Linealización por realimentación
Control predictivo generalizado
Índice de área foliar
Desigualdad matricial lineal
Control predictivo basado en modelo
Control predictivo modificado
extendido y linealizado
Auto-regresivo no lineal con entradas
exógenas
Técnica de película de nutrientes
Ecuación diferencial ordinaria
Error de salida
Técnica de modelado orientado a
objetos
Proporcional
Radiación fotosintéticamente activa
Realimentación seudo-derivativa
Polietileno
Proporcional Integral
Proporcional Integral Derivativo
Proporcional Integral Plus
Secuencia binaria seudo-aleatoria
Teoría de realimentación cuantitativa
Programación cuadrática
Memoria de acceso aleatorio
Control óptimo con horizonte
deslizante
Programación cuadrática secuencial
Nomenclatura
NOTACIÓN
La notación utilizada se compone de dos o tres elementos (Ts1,s2): el primero identifica el
tipo de variable o constante, el primer subíndice indica el nombre de la variable o
constante, el proceso físico al que se refiere o algún modificador de la variable, y el
segundo subíndice, separado del primero por una coma, indica el elemento del sistema al
que se refiere el primer subíndice, relaciones entre ellos separados por un guión o, bien se
refiere a propiedades de las variables o constantes. Se han incluido también las unidades de
las distintas variables o constantes1.
Tipo de variable o constante
Notación
c
J
M
P
Q
τ
U
V
X
Significado
Unidades
Coeficientes o constantes del sistema
Función de coste o criterio de optimización
Flujos de masa
Perturbaciones
Flujos de energía
Tiempo
f
final
i
inicial
Variables de control
Variables algebraicas
Variables de estado
[kg/m2 s]
[W/m2]
[s]
Segundo subíndice
Notación
a
as
ax
balsa
bc
bl
cal
cb
cilindro
cl
cu
e
fluido
hum
malla
material
nr
objeto
r
sx
se
1
Significado
Aire interior
Aire seco
Volumen de aire interior número x
Balsas del sistema de fertirrigación recirculante
Bóveda celeste
Blanqueo de la cubierta
Calefacción
Cubierta
Hace referencia a un objeto de forma cilíndrica (tuberías)
Clima
Cultivo
Exterior
Hace referencia a cualquier fluido en contacto con un cuerpo sólido
Humidificador
Malla
Material que forma un sistema sólido, líquido o gaseoso
Planta sin considerar raíces
Hace referencia a cualquier objeto sólido, líquido o gaseoso
Raíces
Capa de suelo número x
Suelo exterior
A lo largo del texto en algunas gráficas no se han utilizado unidades del sistema internacional (por ejemplo,
grados Centígrados [ºC] en vez de Kelvin [K]) para facilitar la interpretación de los resultados.
xx
Nomenclatura
Notación
solido
ss
v
volumen
Significado
Hace referencia a cualquier cuerpo sólido
Superficie del suelo
Vapor de agua
Volumen de distintos materiales donde se acumula energía
Primer subíndice
Procesos físicos y variables o constantes relacionadas
Notación
cnd
cnd-cnv
cnv
evp
foto
lt
perd
rad
resp
sol
tra
ven
Significado
Unidades
Conducción
ccnd,X
Coeficiente de conducción del elemento X
Conducción-convección
a-e
Coeficiente de pérdidas por conducción y convección
entre aire interior y exterior
Convección
Coeficiente de convección entre los elementos X e Y
Vcnv,X-Y
Evaporación
Velocidad de fotosíntesis del cultivo
c
Coeficiente de conversión de fotosíntesis
tmax
Temperatura a la que la fotosíntesis es máxima
tmin
Temperatura a la que la fotosíntesis es mínima
Calor latente por condensación, evaporación o humidificación
vap
Calor latente de vaporización
Pérdidas por infiltración
va
Pérdidas por infiltración con ventilación cerrada y
viento alto
vb
Pérdidas por infiltración con ventilación cerrada y
viento bajo
Radiación térmica
Velocidad de respiración del cultivo
ref
Respiración a la temperatura de referencia
t
Temperatura de referencia de respiración
Radiación solar
Transpiración
Ventilación
aef
Apertura efectiva de la ventilación
areap
Área de la sección del invernadero perpendicular al flujo
de ventilación
cd
Coeficiente de descarga
cv
Coeficiente de viento
flujo
Flujo de ventilación
l
Longitud de la ventilación
n
Número de ventilaciones
reg
Régimen de flujo de aire
[W/m K]
[W/m2 K]
[W/m2 K]
[kgCH2O/m2 s]
[(kgCO2/m2s)/
(µmolCO2/m2s)]
[K]
[K]
[J/kg]
[m3/s]
[m3/s]
[kgCH2O/kgtejido s]
[kgCH2O/kgtejido s]
[K]
[m]
[m2]
[-]
[-]
[m3/s]
[m]
[ventilaciones]
[-]
Variables o constantes
Notación
∆τ
abn
ac
alo
aoc
Significado
Unidades
Duración de un intervalo de tiempo
Coeficiente de absorción de nutrientes
Calor acumulado
Coeficiente de absorción de radiación de una longitud de onda
Coeficiente de absorción de onda corta
xxi
[s]
[-]
[W/m2]
[-]
[-]
Nomenclatura
Notación
aol
area
cesp
CO2
cos
cpms
cτ
ct
den
dim
dpv
dv
eol
esp
ext
FF
fMS
gv
H
H2O
ha
he
hmax
hmin
hr
hsat
ing
LAI
k
kp
lc
ll
m
ni
P
p
precio
prof
PS
Significado
Unidades
Coeficiente de absorción de onda larga
Superficie
Calor específico
Concentración de CO2
Referente al flujo de masa de CO2
Coste de utilización de un sistema de actuación
Capacidad potencial de creación de materia seca de un órgano de
una planta
Constante de tiempo
sw
Constante de tiempo del sistema antiwindup
Capacidad térmica
Densidad
Densidad de cultivo
cu
v
Densidad de vapor de agua
Diámetro de las hojas
Déficit de presión de vapor
Dirección del viento
Coeficiente de emisividad de onda larga
Espesor
Coeficiente de extinción del cultivo
ol
de onda larga
oc
de onda corta
Factor de forma de radiación de onda larga entre dos superficies
Fracción de materia seca
Aceleración de la gravedad
Número de hojas
Referente al flujo de masa de vapor de agua
Humedad absoluta
Humedad específica
Humedad relativa máxima
Humedad relativa mínima
Humedad relativa
Humedad de saturación
Ingresos
Índice de área foliar
Ganancia estática del sistema
bl
Temperatura frente a radiación solar con blanqueo
rs
Temperatura frente a radiación solar
Ganancia del controlador de
kptub
Temperatura de aire utilizando calefacción
kpval
Apertura de válvulas del sistema de calefacción
kpven
Temperatura de aire utilizando ventilación
Longitud característica
Cantidad de agua de lluvia
Masa de un cuerpo
Número de individuos de una población
Probabilidad
Probabilidad asociada al individuo i
Pi
Presión
atm
Presión atmosférica
Precio de venta del cultivo
Profundidad
Peso seco
efi
Eficiencia del cultivo
xxii
[-]
[m2]
[J/ K kg]
[µmolCO2/molaire]
[kg/m2 s]
[euros/s]
[-]
[s]
[s]
[J/ K m2]
[kg/m3]
[plantas/m2]
[kg/m3]
[m]
[Hpa]
[rad]
[-]
[m]
[-]
[-]
[-]
[-]
[kg]
[m/s2]
[Hojas]
[kg/m2 s]
[kgagua/kgaire seco]
[kgagua/kgaire]
[%]
[%]
[%]
[kgagua/kgaire]
[euros]
[-]
[K/ W/m2]
[K/ W/m2]
[Kagua/Kaire],
[ºCagua/ºCaire]
[%/Kagua] [%/ºCagua]
[rad/Kaire] [º/ºCaire]
[m]
[l/m2]
[kg]
[individuos]
[-]
[-]
[Pa]
[Pa]
[euros/kg]
[m]
[kg/m2]
[kgtejido/kgCH2O]
Nomenclatura
Notación
psat
pcsat
psico
r
rank
rd
rlo
roc
rn
rp
rpmax
rs
τΙ
t
tcalmax
tcalmin
teva
tlo
tmH2O
tmax
tmin
toc
tol
tr
tro
tvenmax
tvenmin
SB
SPi
val
vH
vol
Significado
Unidades
Presión de saturación
Pendiente de la curva de saturación
Constante psicométrica
Resistencia
cav
Resistencia de la cavidad estomática
cl
Resistencia de la capa límite
cu
Resistencia de la hojas a la difusión de agua
cut
Resistencia de la cutícula
ds
Resistencia a la difusión de agua en el suelo
e
Resistencia estomática
tra
Resistencia de transpiración del cultivo
Ranking. Lugar que ocupa un individuo de una determinada
población en función de un criterio clasificación
Radio
Coeficiente de reflexión de radiación de una determinada longitud de
onda
Coeficiente de reflexión de onda corta
Radiación neta
Radiación PAR
[Hpa]
[Hpa/s]
[HPa/K]
[s/m]
[s/m]
[s/m]
[s/m]
[s/m]
[s/m]
[s/m]
[s/m]
[-]
[m]
[-]
[-]
[W/m2]
[W/m2]
[µmol (fotón)/m2 s]
efi
Eficiencia de utilización de la luz de las hojas
[µmolCO2/µmolfoton]
Radiación PAR máxima
[W/m2]
Radiación solar global
[W/m2]
Tiempo integral
[s]
Temperatura
[K]
base
Temperatura base de tuberías de calefacción
[K]
con
Temperatura de consigna
[K]
ref
Temperatura de referencia
[K]
Temperatura máxima de tuberías de calefacción con
[K]
vmax
Velocidad de viento máxima
[K]
vmin
Sin viento
[K]
Temperatura mínima de tuberías de calefacción con
[K]
vmax
Velocidad de viento máxima
[K]
vmin
Sin viento
[K]
Temperatura de evacuación o desalojo
[K]
Coeficiente de transmisión de radiación de una determinada longitud
[-]
de onda
Coeficiente de transferencia másica de agua
[-]
Temperatura máxima
[K]
Temperatura mínima
[K]
Coeficiente de transmisión de onda corta
[-]
Coeficiente de transmisión de onda larga
[-]
Tiempo de retardo
[s]
Temperatura de rocío
[K]
Temperatura exterior máxima de ventilación con
[K]
vmax
Velocidad de viento máxima
[K]
vmin
Sin viento
[K]
Temperatura exterior mínima de ventilación con
[K]
vmax
Velocidad de viento máxima
[K]
vmin
Sin viento
[K]
Constante de Stefan-Boltzmann
[W/K4 m2]
Suma de probabilidades de una población
[-]
Apertura de válvula del sistema de calefacción
[%]
Velocidad de aparición de hojas
[Hojas/s]
Volumen
[m3]
xxiii
Nomenclatura
Notación
vv
Significado
Unidades
Velocidad del viento
limcnv
Velocidad viento límite para considerar el término de
convección lineal o exponencial
limven
Velocidad viento límite para considerarlo alto o bajo
Otros modificadores
Notación
λ
act
aleatorio
art
con
ent
error
gen
Hm
indv-x
intp
max
min
neuronal
real
sal
sim
tot
U(ai,bi)
Significado
Coestados de la función Hamiltoniana
Estado del actuador
Número aleatorio
Enriquecimiento de CO2 artificial
Concentración de vapor de agua o CO2 en un volumen
Cantidad de energía o masa que entra en un volumen
Señal de error
Cantidad de energía o masa que genera un volumen
Hamiltoniana
Individuo x de una determinada población
Valores interpolados
Máximo
Mínimo
Valores estimados por un modelo basado en redes de neuronas
Valores reales
Cantidad de energía o masa que abandona un volumen
Valores estimados por el modelo
Cantidad de energía o masa total acumulada en un volumen
Distribución Uniforme de límite inferior ai y límite superior bi
xxiv
[m/s]
[m/s]
[m/s]
CAPÍTULO 1
INTRODUCCIÓN
1.1. MOTIVACIÓN DE LA INVESTIGACIÓN Y OBJETIVOS
La agricultura es uno de los motores de la economía de la provincia de Almería, cuya
principal actividad económica es el sector de comercios y servicios (incluido el turismo).
Supone el 24 % del valor añadido bruto al coste de los factores1, frente al 9 % de la
industria y al 9 % de la construcción [Cam01]. La evolución y éxito de la agricultura en
esta provincia se debe a tres factores básicos [Gal99]. En primer lugar, las condiciones
naturales son favorables: existen numerosos acuíferos, además de que el clima es el idóneo
ya que presenta una temperatura media anual de 19.2 ºC y, aproximadamente, 3000 horas
de sol anuales (la mayor cifra de toda Europa) con una media de 8.3 horas de sol al día. Por
otra parte, gracias al apoyo del antiguo Instituto Nacional de Colonización (Ministerio de
Agricultura), se abrieron numerosos pozos y se extendió el uso del enarenado2
aprovechando la situación costera de la zona, que conllevó, casi inmediatamente, a la
construcción del primer invernadero en 1963. Estas dos técnicas permitieron producir en
los meses más fríos, cuando no se cultiva en el resto de España ni en Europa, lo que supuso
el lanzamiento económico del sector. En último lugar, es el factor humano el elemento
clave para consolidar dicho sector, emigrando de las zonas del interior a la costa,
adquiriendo terrenos que se encontraban a precios bajos, construyendo estructuras de
invernadero económicas y basándose en una estructura familiar de propiedad que es el tipo
ideal para esta agricultura por la cantidad de mano de obra necesaria, resaltando la
capacidad emprendedora de estos productores (ayudados por los buenos resultados de las
cosechas). A éstos, hay que añadir otros profesionales autóctonos de igual importancia que
son los comercializadores, que han ido abriendo y consolidando unos canales de venta de
los productos hortícolas que llegan a los mercados más exigentes de Europa y
Norteamérica, y en constante expansión, alcanzando un volumen de exportación de
1451462 toneladas en la campaña 2000/2001 [Nov01].
1
El valor añadido bruto al coste de los factores es la diferencia entre el valor de la producción y los costes de
materia prima, los productos intermedios y los servicios adquiridos de otros sectores o empresas.
2
El enarenado es una técnica de cultivo basada en la utilización de arena junto a otros materiales como
sustrato para cultivo que se sitúa sobre un terreno natural no apropiado o poco rentable para la agricultura.
1
Capítulo 1. Introducción
Actualmente, existen 27800 Hectáreas de cultivo bajo invernadero en Almería [San01],
extendiéndose su construcción a otras provincias cercanas y convirtiéndose en el modelo
productivo del sudeste de España.
El escenario comercial que supuso la aparición y explosión de este sector se está
manteniendo, como demuestran los buenos resultados de las campañas de los últimos años,
pero existen algunos factores que pueden afectar negativamente. Hasta hace unos años se
ha podido competir en el mercado por los relativamente bajos costos de producción (debido
a las condiciones climáticas favorables y bajo precio de la mano de obra) y por la oferta de
productos fuera de estación, siendo en esta época la competencia con países en vías de
desarrollo poco importante. Sin embargo, actualmente, se tiene que competir con sectores
muy tecnificados de países desarrollados, que ofertan buena calidad y servicio a costo
medio, y con nuevos sectores en países menos desarrollados con costes de producción muy
bajos como Marruecos o Turquía. Por otra parte, el proceso de globalización que se está
desarrollando a nivel mundial, favorece que las multinacionales de alimentación dicten el
camino de la producción agraria y, en concreto, de la horticultura [Ali00]. Únicamente, la
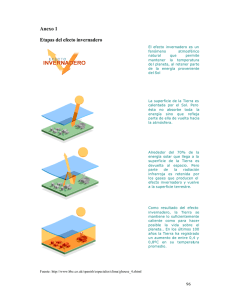
mejora de la productividad y la calidad
pueden permitir el mantenimiento de la
rentabilidad, siendo la tecnología parte
esencial de este proceso, como se
muestra en la figura 1.1, donde se
indica la evolución de la rentabilidad
de la producción hortícola total y, en
particular, la del cultivo del tomate a lo
largo de las últimas décadas,
destacando los años donde se han ido
incorporando
las
innovaciones
tecnológicas
más
destacables,
observándose cómo favorecen el
Fig. 1.1. Rendimientos de algunos productos y fecha de
aumento de rentabilidad [Cam00].
Control c lim á tico (00)
90
Rendim iento general
Rendim iento tom ate
80
Cabezal autom atizado
Rendimiento (Tm/Ha)
70
Cultivo sin suelo (90)
de riego (99)
S em illas hí bridas (80)
60
50
Invernadero industrial (97)
Plá stico té rm ico (84)
40
30
Tuberí a con gotero
integrado (86)
R iego por goteo (81)
20
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
C ampañ a agrí cola
introducción de diversas innovaciones
Actualmente, se está realizando un gran esfuerzo para la introducción de tecnología en cada
una de las fases de la cadena de comercialización agrícola (desde la germinación de las
semillas hasta la venta al consumidor). Evidentemente, la fase de producción en el
invernadero es la principal, por lo que deben realizarse los mayores esfuerzos por mejorar
tanto la cantidad como la calidad de los frutos. El crecimiento de un cultivo se encuentra
fundamentalmente determinado por las variables climáticas del entorno en el que se
encuentra y por la cantidad de agua y fertilizantes que se le aplican mediante el riego; por
tanto, controlando estas variables se podrá controlar el crecimiento del cultivo. Por esta
razón, un invernadero es ideal para cultivar, ya que al ser un recinto cerrado, se pueden
manipular estas variables para alcanzar un crecimiento y desarrollo óptimo de las plantas.
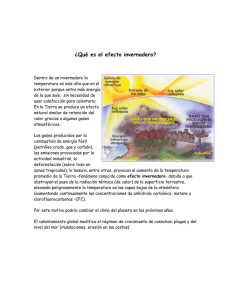
Un aspecto del problema que no hay que olvidar es el económico, bajo dos puntos de vista.
Por una parte, como se muestra en la figura 1.2, los precios de compra en origen (los que se
pagan al agricultor) fluctúan a lo largo de la campaña ([Nov99], [Nov00], [Nov01]), por lo
que lo ideal sería obtener la producción y vender cuando los precios fueran máximos, o
bien, atrasar o adelantar el crecimiento del cultivo para recolectar en esos instantes. Hay
que indicar que, aunque existan patrones de comportamiento, el mercado es impredecible.
2
Capítulo 1. Introducción
Además, para llevar a cabo esta política hay que considerar que el intervalo de tiempo en el
que se puede adelantar/retrasar el cultivo está limitado a diez o quince días. Por otra parte,
el hecho de conseguir las condiciones óptimas de las variables climáticas y de
fertirrigación1 supone un coste económico en cuanto a energía (electricidad y combustible),
agua y fertilizantes se refiere. Por tanto, lo ideal desde el punto de vista económico no será
en principio obtener el máximo de producción, sino optimizar el beneficio entendido como
la diferencia entre los ingresos procedentes de la venta de la producción final y sus costes
asociados.
1
1.1
0.9
1
0.8
0.9
P recio (euros/kg)
P recios (euros/K g)
0.7
0.6
0.5
0.4
0.3
1998/99
1999/00
2000/01
0.2
0.8
0.7
0.6
0.5
0.4
0.3
0.1
Oc t
Dic
Feb
A br
Jun
0.2
0
1
2
3
4
5
6
7
8
9
10
5
11
10
15
20
Tiempo (semanas)
Tiempo (meses)
a. Evolución mensual por campañas
b. Evolución por semanas en parte de campaña 99/00
Fig. 1.2. Evolución de los precios del cultivo de tomate a lo largo de las campañas
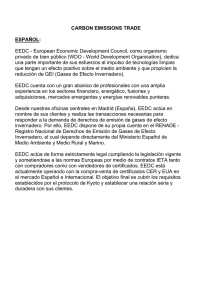
Este problema se puede considerar compuesto por tres sistemas que interactúan entre sí:
invernadero (clima y fertirrigación), cultivo y mercado, con tres dinámicas temporales
distintas representadas por escalas de tiempo de minutos, días y meses, respectivamente.
Para resolverlo, se han planteado en la literatura especializada distintas estrategias, que se
describirán posteriormente, basándose en la idea de utilizar un sistema de control jerárquico
con tres niveles, como el que se puede observar en la figura 1.3:
Clima/fertirrigación
(minutos)
Cultivo
(días)
Mercado
(campaña)
Cultivo
Mercado
Modelos
fertirrigación
Modelos
crecimiento
Modelos
mercado
Control
fertirrigación
Control
cultivo
Control
táctico
Invernadero
Modelos
clima
Control
clima
Beneficio
Bene
ficio
Usuario
Fig. 1.3. Sistema de control jerárquico del crecimiento de cultivos bajo invernadero
1
Riego y fertilización.
3
Capítulo 1. Introducción
• Capa superior: Mercado. En función de unas condiciones iniciales estratégicas, como
fecha de recolección o cantidad de producción esperada, y de cómo evolucione el
mercado a lo largo de la campaña, se determina la trayectoria de crecimiento que debe
seguir el cultivo para optimizar el beneficio. Se le denomina control táctico y sería
conveniente disponer de modelos de mercado que puedan predecir la demanda de los
productos y otra serie de parámetros económicos de interés.
• Capa intermedia: Cultivo. En base a las consignas recibidas de la capa superior, debe
determinar las trayectorias que deben seguir las variables climáticas y de fertirrigación
implicadas en el crecimiento del cultivo para conseguir los objetivos fijados por el
usuario. Como todo el sistema se basa en predicciones a largo plazo, es necesaria la
utilización de modelos para poder conocer en qué estado se encontrará el cultivo en
función de las condiciones climáticas en el interior del invernadero y los aportes de agua
y nutrientes.
• Capa inferior: Invernadero. En base a las consignas recibidas de la capa intermedia,
debe calcular el estado en el que deben encontrarse los sistemas de actuación instalados
para modificar las condiciones climáticas y de fertirrigación, de forma que se alcance el
estado deseado del cultivo que optimice el beneficio económico. En este nivel, también
es aconsejable la utilización de modelos para el diseño e implementación de los
controladores.
Actualmente, es complicada la implementación e integración de la capa superior en una
estructura de control jerárquico, ya que es necesaria la utilización de modelos de mercado
de productos hortofrutícolas que todavía no se han desarrollado, por lo que el problema del
control del crecimiento queda reducido a un sistema con dos capas, permitiendo que el
usuario en base a su experiencia y las observaciones en el mercado, modifique las
condiciones del proceso de optimización del beneficio. Por otra parte, el clima y la
fertirrigación son dos sistemas independientes, por lo que plantean problemas diferentes.
Empíricamente, se conocen las necesidades de agua y nutrientes de cada especie de cultivo
y, de hecho, los primeros sistemas que se automatizaron son los que controlan estas
variables. Como el problema de control de crecimiento de un cultivo bajo invernadero es
complejo, una base de partida consiste en suponer que las plantas reciben la cantidad de
agua y fertilizantes que requieren en cada momento. De esta forma el problema se reduce al
control del crecimiento de cultivos en función de las condiciones climáticas de su entorno.
Este problema ha sido abordado en otras zonas tradicionales de cultivo bajo invernadero,
como Estados Unidos [Jon90a], Israel [Seg93], Japón [Mor00a], etc., destacando los
estudios de la Universidad de Wageningen en Holanda [Tap00], que son los principales
productores de Europa central, llegando a probar en campo un sistema completo basado en
la filosofía descrita en la figura 1.3. Aunque en esta experiencia preliminar se han obtenido
resultados aceptables, los efectos económicos son difíciles de evaluar con las pocas
experiencias realizadas, y sólo se puede probar su validez con una extensiva aplicación de
estas técnicas en instalaciones comerciales reales [Str00]. El principal inconveniente de la
utilización directa de los resultados obtenidos en otras zonas agrícolas en el sistema de
producción del sudeste español radica en que el clima es bastante diferente y en la
utilización de distintas estructuras de invernadero, así como de materiales de cerramiento y
sistemas de actuación instalados (ventilación, calefacción, etc.); además de diferir en los
objetivos económicos que se desean optimizar.
4
Capítulo 1. Introducción
Por tanto, el objetivo principal de la presente tesis es el diseño e implementación de un
sistema de control óptimo jerárquico del crecimiento de cultivos bajo invernadero en
función de las variables climáticas internas y externas, en el que se puedan integrar criterios
económicos de forma que se maximice la diferencia entre el beneficio bruto obtenido por la
venta del cultivo y los costes de producción asociados a los sistemas de actuación
climáticos. Concretamente se ha seleccionado el cultivo del tomate, ya que junto con el
pimiento son los que más se producen en la provincia de Almería, representando,
respectivamente, el 16.48% y el 17.39% de la superficie invernada total, con un valor
económico de 406 y 372 millones de euros en la campaña 1999/00 [Nov01]. Para llevarlo a
cabo se requiere el cumplimiento de los siguientes objetivos específicos:
• Estudio, diseño, implementación, calibración y validación de modelos de las variables
climáticas en el interior del invernadero que afecten directa o indirectamente al
crecimiento del cultivo, tanto para su utilización en simulación como en el diseño de
controladores.
• Estudio, diseño, implementación, calibración y validación de modelos de las variables
que caracterizan al crecimiento del cultivo de tomate.
• Estudio, diseño, implementación y prueba de algoritmos de control de las variables
climáticas en el interior de un invernadero.
• Estudio, diseño, implementación y prueba de una estructura de control jerárquica
multicapa que controle el crecimiento del cultivo en función de las variables climáticas
de forma que se optimice el beneficio económico.
En este sentido, como indica el profesor Åström [Ast99], es fundamental comprender y
caracterizar adecuadamente la dinámica del proceso que se va a controlar, aunque para ello
haya que realizar un esfuerzo importante y combinar fundamentos y herramientas de
distintas disciplinas.
1.2. CONTEXTO DE INVESTIGACIÓN
La presente tesis se ha desarrollado en el contexto de tres proyectos de investigación,
requiriendo un esfuerzo importante de experimentación en campo:
• Diseño asistido mediante ordenador para la construcción de invernaderos
automatizados (DAMOCIA), financiado por el Programa ESPRIT de la Unión Europea
(Acción Especial P7510 PACE; 1994-1996) y el Ministerio de Industria Español
(C.D.T.I.) (PATI PC191), cuyo investigador principal fue D. José Ramón Díaz Álvarez
y con D. Fernando Bienvenido Bárcena como responsable técnico. El autor de la
presente tesis participó como investigador y responsable de la línea de monitorización y
control. Su objetivo principal era el diseño de nuevas estructuras de invernaderos en las
que se pudiera tener mejor control sobre las condiciones climáticas de su interior. Para
ello, una de las líneas de trabajo era el modelado y simulación de las mismas, por lo que
se dieron los primeros pasos en la comprensión de los procesos físicos que tienen lugar
entre los distintos elementos del sistema invernadero obteniéndose modelos basados en
principios físicos de la radiación interior y empíricos de temperatura del aire. Otra de las
principales aportaciones fue la adquisición y el tratamiento de las señales procedentes de
los sensores climáticos que han servido de base para posteriores ensayos en campo.
5
Capítulo 1. Introducción
• Control y gestión del agrosistema invernadero mediterráneo (CAMED)
(C.D.T.I./C.I.C.Y.T.; expediente 970068; 1997-1999) cuyo investigador principal fue D.
José Ramón Díaz Álvarez. Su objetivo principal era la mejora de las prácticas de un
manejo de cultivo de tomate de crecimiento determinado con frutos para cosecha
individual en sistema NFT1 optimizando las condiciones climáticas del invernadero. El
autor de esta tesis participó en el citado proyecto como investigador en la línea de
trabajo correspondiente a los sistemas de medida, modelado y control de variables
climáticas y de crecimiento del cultivo. En este contexto se desarrolló un modelo de las
variables climáticas (radiación, temperatura y humedad del aire) basándose en principios
físicos, y se tomaron datos para el desarrollo del modelo de crecimiento del cultivo de
tomate. Además, se realizaron los primeros ensayos de control de la temperatura y
humedad utilizando algoritmos de control por prealimentación que aprovechan la
información procedente de perturbaciones medibles.
• Modelado y control óptimo de sistemas no lineales multivariables (CICYT QUI990663-C02-01/02, 1999-2002) coordinado entre la Universidad de Sevilla (D. Eduardo
Fernández Camacho) y la Universidad de Almería (D. Manuel Berenguel Soria). Como
su nombre indica su objetivo principal consistía en el modelado y control de sistemas no
lineales multivariables. En concreto, la Universidad de Almería realizó sus
investigaciones en el control de un fotobiorreactor para la producción de microalgas y en
el control del crecimiento de un cultivo bajo invernadero, donde se han diseñado,
implementado y probado en planta, técnicas de control de las variables climáticas,
integrándolas en una arquitectura de control jerárquico para optimizar el beneficio.
Recientemente se ha solicitado un proyecto en el ámbito del convenio Universidad de
Almería-Cajamar titulado Control jerárquico del crecimiento de cultivos bajo invernadero
en función de las condiciones climáticas y de fertirrigación, con la finalidad de ensayar,
durante varias campañas agrícolas, las estrategias de control jerárquico que se han
desarrollado en esta tesis y ampliar sus prestaciones, incorporando aspectos como la
fertirrigación.
Por otra parte, cabe indicar que como consecuencia de los desarrollos de esta tesis, se han
realizado algunos contratos de transferencia de tecnología como los siguientes:
• Asesoramiento al desarrollo de herramientas informáticas de control climático de
invernaderos, con referencia 400216, firmado a petición de Industria de
Telecomunicación y Control, durante los años 1999 y 2000. La citada empresa
desarrolló un sistema de adquisición y control propio, firmándose el contrato para
mejorar los algoritmos de control que se estaban utilizando y adaptarlos a las estructuras
de invernaderos, sistemas de actuación y clima de la zona.
• Diseño y desarrollo de un sistema de control climático bajo invernadero abierto y
configurable, con referencia 400343, firmado a petición del Institut de Recèrca I
Tecnología Agroalimentàries de Cataluña, en el año 2002. El proyecto consistía en el
desarrollo de una herramienta para el control de las variables climáticas en el interior de
un invernadero, de forma que su arquitectura fuera modular y se pudieran modificar
fácilmente los algoritmos que se utilizaban. En una primera fase, se incluyeron las
técnicas de control que se describen en el capítulo 6 de la presente tesis.
1
Técnica de cultivo sin suelo que se describirá en el capítulo 2.
6
Capítulo 1. Introducción
• Sistema de control distribuido de temperatura y humedad bajo invernadero utilizando
ventilación forzada, con referencia 400331, firmado a petición de la Estación
Experimental “Las Palmerillas” (Cajamar), en el año 2002. El proyecto consistió en el
diseño y desarrollo de una herramienta para identificar y caracterizar el efecto de la
ventilación forzada sobre la temperatura y humedad del aire del invernadero. Este
sistema de actuación no se ha utilizado típicamente en la zona del sudeste de España,
pero, como se está generalizando su uso por la necesidad de evacuar calor y vapor de
agua, este centro de investigación ha comenzado un estudio profundo sobre sus
prestaciones. Además, incluía el control de las citadas variables en distintos
invernaderos mediante un sistema de control distribuido.
1.3. PRINCIPALES CONTRIBUCIONES
En el sector agrícola del sudeste español no se han desarrollado técnicas de control propias
para el problema del control del crecimiento de un cultivo en base a las condiciones
climáticas. Además, generalmente, sólo se aborda la capa inferior de la estructura
jerárquica correspondiente al control climático, que se soluciona importando tecnología de
otros países, no diseñada para las características específicas de esta zona sino para otras con
diferentes climas, estructuras de invernadero, cultivos y técnicas culturales de producción.
En base a este comentario, esta tesis en sí pretende ser una aportación, ya que no se había
realizado hasta el momento un trabajo adaptado a estas características, que integre los
niveles de clima y crecimiento, pudiendo ser la base para futuros trabajos relacionados con
este tema. Además, como aportaciones fundamentales de la presente tesis cabe destacar:
• Análisis, caracterización e identificación con modelos empíricos lineales y no lineales de
las variables climáticas principales que se producen en el interior de un invernadero del
sudeste español, y que afectan, directa e indirectamente, al crecimiento del cultivo.
• Desarrollo de un simulador de las variables climáticas del interior de un invernadero del
sudeste español basado en principios físicos. Se ha diseñado e implementado utilizando
una estructura modular a cinco niveles, lo que permite un estudio independiente de cada
una de las variables modeladas, la sustitución de alguno de los módulos sin necesidad de
reprogramar el resto, la ampliación del modelo con nuevas variables de estado y la
inclusión fácil de nuevos sistemas de actuación. Un aspecto importante es su
portabilidad, pues se ha propuesto una metodología para poder obtener los parámetros
que lo caracterizan (más de treinta) utilizando técnicas heurísticas de optimización, y se
han probado sus prestaciones con tres estructuras de invernadero diferentes
proporcionando buenos resultados.
• Comparación del comportamiento de los modelos en función de las herramientas de
modelado y simulación que se utilicen, en concreto, utilizando un paradigma basado en
bloques y un paradigma basado en objetos. En este sentido, que se tenga noticia, es el
primer modelo del clima y crecimiento de cultivos bajo invernadero desarrollado con
herramientas orientadas a objetos.
• Validación de un modelo de crecimiento de cultivo de tomate, que es dependiente de las
condiciones climáticas del entorno y de las técnicas culturales de producción del área
geográfica.
7
Capítulo 1. Introducción
• Desarrollo, implementación y prueba de técnicas de control que se han utilizado con
éxito en otros campos industriales, aplicándolas en el ámbito del control de las variables
climáticas del interior del invernadero. Se ha hecho especial énfasis en técnicas que
aprovechen la información procedente de perturbaciones medibles, comparándose las
distintas alternativas. También, se han tratado de desarrollar técnicas que sean
fácilmente comprensibles por parte del usuario final y que permitan una fácil e intuitiva
sintonización de los parámetros principales de control.
• Propuesta, desarrollo e implementación de una arquitectura de control jerárquico con
dos capas de forma que se optimice el beneficio que se obtiene de la venta del producto
en función de las variables climáticas en el interior del invernadero. Se incluye el
procesamiento necesario de la información entre las dos capas, la predicción
meteorológica requerida y el proceso de optimización, de forma que se integran todos
los desarrollos realizados para dar una solución completa al problema y cubrir el
objetivo principal de esta tesis.
• Transferencia de tecnología, ya que algunas de las técnicas y herramientas desarrolladas
en esta tesis se encuentran actualmente en funcionamiento en invernaderos comerciales
de la provincia de Almería.
Además, la presente tesis no sólo contiene los estudios teóricos que se han llevado a cabo,
sino que expone una extensa colección de ensayos realizados en distintas estructuras de
invernaderos que demuestran los buenos resultados obtenidos.
El campo de estudio abarcado por esta tesis es muy amplio y cada uno de los capítulos
propuestos y desarrollados podrían constituir trabajos de investigación de entidad. Como se
ha indicado anteriormente, el objetivo principal de la presente tesis ha sido aportar una
solución integrada al problema del control del crecimiento de cultivos bajo invernadero,
para lo cual ha sido preciso estudiar y desarrollar objetivos parciales que pueden ser objeto
de estudios futuros para ampliar los contenidos de esta tesis o proponer soluciones
alternativas a los mismos.
1.4. ESTRUCTURA DE LA TESIS
Esta tesis se encuentra estructurada en ocho capítulos donde se profundiza en los aspectos
fundamentales que se han desarrollado para cumplir con el objetivo principal de la misma.
En cada uno de los capítulos se ha abordado uno de los objetivos específicos que ha habido
que cubrir hasta alcanzar el objetivo principal.
El capítulo 2 corresponde a los materiales y métodos utilizados en el desarrollo de esta
tesis. Se describirán las estructuras de los invernaderos en los que se han realizado las
experiencias, así como los sistemas de medida y control utilizados y los sistemas de
actuación instalados en los mismos con el objeto de controlar las principales variables que
describen el clima en su interior. Además, se expondrán las herramientas utilizadas para el
desarrollo y la implementación de los modelos diseñados para simulación y control, así
como las técnicas de búsqueda de parámetros para la calibración de los mismos, tanto para
variables climáticas como para las variables que describen el crecimiento del cultivo de
tomate.
8
Capítulo 1. Introducción
El capítulo 3 está dedicado a la obtención de modelos basados en principios físicos, para
simulación de las principales variables climáticas del interior de un invernadero. Los
ensayos en invernaderos reales son problemáticos ya que en su interior crece un ser vivo,
las plantas, y una prueba con un mal resultado puede dañar al cultivo. Por otra parte, una
campaña de ciclo corto tiene una duración mínima de cien días, por lo que los ensayos son
demasiado largos. Por estas dos razones se deben desarrollar modelos climáticos para poder
simular las distintas estrategias diseñadas antes de implantarlas en las instalaciones reales.
En este capítulo se van a describir los principales procesos físicos que tienen lugar en el
interior del invernadero y que modifican su clima, describiendo los estudios particulares
más importantes realizados sobre ellos, así como el efecto de los sistemas de actuación más
comúnmente utilizados. Además, se expondrá el estado actual en cuanto a las
características principales de los modelos climáticos existentes. A continuación, se
describirá el desarrollo del simulador de clima, haciendo hincapié en las etapas de diseño,
calibración y validación. El capítulo finaliza con una exposición de las conclusiones
obtenidas en este ámbito, aportaciones y los futuros trabajos relacionados.
Para controlar el clima de un invernadero se deben determinar los valores adecuados de las
entradas de control de forma que las variables de estado del sistema alcancen valores
deseados teniendo en cuenta que el sistema está sometido a fuertes perturbaciones que
tienen un efecto dominante sobre el clima en el interior del invernadero. Dada la
complejidad inherente, el desarrollo de sistemas de control climático de invernaderos se ha
basado a menudo en sistemas heurísticos basados en la experiencia de manejo climático. En
los últimos años se están aplicando técnicas de control que conllevan la necesidad de
disponer de un modelo dinámico fiable del sistema a controlar. En el capítulo 4 se expone
el desarrollo de estructuras de modelos simplificados del clima que se genera en el interior
de un invernadero basadas en procesos físicos y en datos de entrada/salida (lineales y no
lineales) para su utilización en el diseño de controladores. De cada una de ellas se
comentarán sus fundamentos, sus hipótesis generales, los autores que las han utilizado en el
ámbito del control climático de invernaderos, así como la metodología seguida para la
obtención de sus parámetros característicos, su implementación y la validación de los
mismos, mostrando los resultados experimentales obtenidos. Por último, se expondrán las
conclusiones del estudio y los futuros trabajos relacionados.
El otro sistema que aparece en el problema de control planteado es el cultivo,
concretamente el tomate. En el capítulo 5 se van a describir, en un primer apartado, las
relaciones generales entre el crecimiento del cultivo y las condiciones climáticas del
entorno en el que se encuentra. Posteriormente, se expondrán los tipos de modelos de
crecimiento de cultivos hortícolas que existen en la bibliografía, así como las ideas
generales en las que se basan, haciendo especial énfasis en los modelos existentes del
crecimiento del cultivo del tomate. Además, se describirá el desarrollo del modelo de
crecimiento de un cultivo de tomate utilizado en esta tesis incluyendo las etapas de
implementación, calibración y validación. Finalmente, se exponen las conclusiones, así
como las mejoras y los futuros trabajos.
El capítulo 6 está dedicado al problema del control de las variables climáticas del interior
de un invernadero, así como las técnicas utilizadas en la presente tesis para llevarlo a cabo.
En este capítulo se expondrá una profunda revisión acerca de las diversas técnicas de
control utilizadas por distintos autores.
9
Capítulo 1. Introducción
A continuación, se describirán los esquemas y estrategias de control utilizadas en la
presente tesis para controlar la temperatura diurna con la ventilación y la nocturna con la
calefacción, así como el tratamiento de la humedad relativa. Además, se expondrá
brevemente el control de la radiación en el interior del invernadero. El capítulo finaliza con
una serie de conclusiones y los futuros trabajos a realizar en este campo.
Una vez que se describen las soluciones a cada uno de los problemas específicos
planteados, en el capítulo 7 se expone la solución aportada al problema del control óptimo
del crecimiento de un cultivo bajo invernadero, consistente en la obtención del máximo
beneficio cuando se proceda a la venta de la producción. Una de las principales
características de este problema consiste en las notables diferencias en cuanto a la respuesta
en el tiempo de los distintos sistemas que forman el problema (clima y cultivo). Cuando un
sistema complejo contiene subsistemas que interactúan entre sí y poseen diferencias en
cuanto a su respuesta en el tiempo, es común realizar simplificaciones de forma que las
variables del proceso se dividen en “lentas” y “rápidas”, de modo que a corto plazo sólo se
consideran los efectos de las variables rápidas y a largo plazo sólo los de las lentas. De esta
manera se produce una descomposición jerárquica del problema de control. Evidentemente,
por la propia naturaleza del problema, una forma de resolverlo es la utilización de técnicas
de control jerárquico, basadas en la idea de la división en la responsabilidad en la toma de
decisiones. En este capítulo se van a describir las soluciones aportadas por otros autores, así
como la solución desarrollada en esta tesis junto con los resultados obtenidos. Se
comentarán las conclusiones del análisis de los resultados y los futuros trabajos a realizar
en este campo.
La tesis finaliza con una exposición de las conclusiones globales más significativas y
proponiendo futuras líneas de investigación. Hay que recordar que en cada uno de los
capítulos se han comentado las conclusiones y los futuros trabajos a realizar en cada uno de
esos campos.
10
CAPÍTULO 2
MATERIALES Y MÉTODOS
2.1. INTRODUCCIÓN
En este capítulo se van a exponer los principales materiales y métodos utilizados en el
desarrollo de la presente tesis. Se comenzará con la descripción de la estructura de los
invernaderos en los que se han realizado las experiencias, así como de los sistemas de
actuación instalados en los mismos con el objeto de controlar las principales variables que
describen el clima en su interior, es decir, temperatura y humedad del aire, así como la
radiación solar que atraviesa la cubierta y alcanza al cultivo. Posteriormente, se expondrán
las principales características del cultivo de tomate utilizado y las experiencias realizadas
en el marco del proyecto Control y gestión del agrosistema invernadero mediterráneo
(CAMED).
A continuación, se van a describir los sistemas de medida y control utilizados, tanto el
sistema comercial adquirido que se usa de referencia, como el diseñado y desarrollado por
el Grupo de investigación Automática, Electrónica y Robótica (TEP197), perteneciente al
Plan Andaluz de Investigación y que se implantó y utilizó en las mismas instalaciones
dentro del marco del proyecto de investigación Modelado y control óptimo de sistemas no
lineales multivariables.
Para cumplir los objetivos fijados en esta tesis, ha sido necesario el desarrollo de distintos
modelos tanto para las variables que caracterizan el clima interior de un invernadero como
para las variables que describen el crecimiento del cultivo de tomate. Para finalizar este
capítulo, se describirán y compararán las dos herramientas utilizadas para el desarrollo y la
implementación de los modelos diseñados para simulación y control: Simulink, basado en
una metodología orientada a bloques, y Modelica, basado en una metodología orientada a
objetos. Por otra parte, una de las principales fases del modelado consiste en la calibración
y ajuste de los parámetros característicos de los modelos, por lo que se van a mostrar las
técnicas que se han utilizado en esta tesis para llevar a cabo esta tarea, concretamente, el
método de búsqueda secuencial directo y métodos heurísticos basados en algoritmos
genéticos, de forma que se optimice un criterio de mínimos cuadrados.
11
Capítulo 2.- Materiales y métodos
2.2. SISTEMA INVERNADERO
2.2.1. Descripción de la explotación
Las experiencias realizadas han tenido lugar en las instalaciones de la S.A.T. Duniagro,
situada en el Término Municipal de El Ejido (Almería) en el paraje La Cumbre s/n, a
36º42’ N y 2º47’ O y a una altura de 45 m sobre el nivel del mar. La finca, que la empresa
utiliza para investigación, se compone de cuatro invernaderos cuya estructura se describirá
en los siguientes apartados. Los invernaderos numerados como 2 y 3 son de tipo Araba con
las mismas dimensiones y se utilizan para producción. Los invernaderos 1 y 4 son de tipo
Inamed, utilizándose el primero para producción y el cuarto como semillero. Este último,
aunque de dimensiones similares, presenta singularidades respecto al resto tanto en el tipo
de suelo, como en los sistemas de actuación instalados, por lo que no se ha utilizado en las
experiencias relativas a la investigación a que se refiere esta tesis. El emplazamiento de los
invernaderos reúne las condiciones adecuadas tanto de radiación, como de temperatura y
humedad, encontrándose protegidos de los vientos, tan perjudiciales para su estructura. Por
otra parte, al no ubicarse en ninguna vaguada,
se encuentran aislados de las masas de aire frío
que se suelen producir en ellas. Además, la
Invernadero
Invernadero
Inamed
finca consta de una construcción
ón industrial
Araba
Nº 4
donde se encuentran los distintos elementos
Nº 3
del cabezal del sistema de fertirrigación, la
Caseta
caldera y las válvulas del sistema de
control
calefacción, así como los sistemas de
Invernadero
adquisición de datos y control del clima y la
Invernadero
Araba
Inamed
fertirrigación de los cuatro invernaderos.
Nº
2
Nº 1
También se utiliza como almacén de apoyo a
la instalación de investigación y como soporte
de la instalación meteorológica en el exterior.
Fig. 2.1. Esquema de la finca de investigación
2.2.2. Estructuras de los invernaderos
Las dos estructuras de los invernaderos se caracterizan por ser de bóveda a dos aguas, con
una altura de cumbrera algo superior a los invernaderos tradicionales de la zona y con gran
anchura entre pilares, lo que facilita la entrada y trabajo de operarios y máquinas en su
interior. Estas estructuras son calculadas y fabricadas de manera industrial, de forma que
todas sus piezas son ensambladas posteriormente como si se tratara de un kit de
construcción. Actualmente, se está extendiendo el uso de este tipo de estructuras
industriales, si bien, todavía no presentan una extensa implantación en el sector agrícola del
sudeste español, donde todavía dominan los invernaderos tradicionales que no permiten su
automatización. En todo caso, si se desea realizar un control climático automático donde
crezca un determinado cultivo es necesario disponer de estructuras de invernaderos de este
tipo debido a su alto grado de estanqueidad, lograda con el cuidado diseño de todas las
piezas de su estructura, lo que evita pérdidas de calor por la noche, manteniendo más
tiempo la temperatura interior lograda durante el día. Además, la instalación de sistemas de
actuación se puede realizar de forma más fácil y efectiva. Por otra parte, cumplen las
actuales normativas españolas y europeas de construcción de invernaderos.
12
Capítulo 2.- Materiales y métodos
La tabla 2.1 muestra las características físicas más importantes de ambas estructuras
([Lao98] y [Rue98]), cuyo aspecto se puede observar en las figuras 2.2 y 2.3.
Características
Araba
Inamed
Cubierta
Simétrica curva
Asimétrica curva
Orientación cumbrera
Norte-Sur
Este-Oeste
Planta
Rectangular
Rectangular
Material de cubierta
Polietileno 800 galgas
Polietileno 800 galgas
Superficie [m2]
1500
1575
Anchura [m]
37.5
45
Longitud [m]
40
35
Altura cumbrera [m]
5.50
5.60
Altura lateral [m]
3.75
4
Número capillas
5
6
Anchura capilla [m]
7.5
7.5
Longitud capilla [m]
40
35
Tabla 2.1. Características físicas de las estructuras de invernaderos utilizados
Fig. 2.2. Estructura invernadero tipo Araba Nº 2
Fig. 2.3. Estructura invernadero tipo Inamed Nº 1
2.2.3. Sistemas de actuación sobre el clima instalados
2.2.3.1. Ventilación natural
La ventilación natural consiste en un conjunto de ventanas laterales que normalmente
recorren todo el perímetro del invernadero, ventanas cenitales situadas en la cubierta, o
bien, una combinación de ambas. Cuando se encuentran abiertas se produce un intercambio
de aire entre el interior y exterior del invernadero debido a la distribución de presiones
distintas en la superficie de la estructura causadas por el viento exterior y a la diferencia de
temperatura entre los dos volúmenes de aire (interior y exterior). Debido a este intercambio
de aire con el exterior, se utilizan para controlar la temperatura, humedad y concentración
de CO2 del aire interior.
Estas ventanas se mueven con un motor eléctrico de corriente alterna. En función de las
condiciones que se den en el interior y exterior del invernadero, el controlador determinará
cuánto se deben abrir las ventilaciones, dando la orden correspondiente al motor.
Generalmente, no se mide la apertura real de la ventilación, sino que se calcula el tiempo
que tarda en abrir hasta la posición que se desea, y la orden de apertura permanece activa
durante ese periodo de tiempo. Esto presenta el problema de que las ventilaciones se cierran
más rápidamente que se abren (efecto de la gravedad) y que, evidentemente, se producen
errores que se van acumulando a lo largo del tiempo de funcionamiento.
13
Capítulo 2.- Materiales y métodos
Estos problemas se pueden resolver colocando sensores de posición en las ventilaciones tal
y como se puede observar en la figura 2.4, o bien, calculando tiempos diferentes de
mantenimiento de la señal de orden para una
misma posición, dependiendo de que la
ventilación este subiendo o bajando. Hay que
Sensor posición
indicar que cuando la ventilación alcance el
punto de máxima apertura o al cerrarse
completamente, se debe informar al
Motor
controlador, ya que si el motor sigue
ventilación
funcionando se puede llegar a averiar tanto
éste como las ventilaciones. Siempre habrá
que colocar unos sensores de final de carrera
(micro-interruptores que abren el circuito de
alimentación del motor) que indiquen Fig. 2.4.Detalle de motor de ventilación junto con
cuando se llega a los extremos de cierre o
el sensor de posición invernadero Araba
apertura.
Las figuras 2.5 y 2.6 muestran los sistemas de ventilación natural de los tipos de
invernaderos utilizados en las que se puede observar la ventilación cenital de tipo
cremallera abierta y la lateral completamente cerrada, consistente en una barra que enrolla
un plástico, produciendo una apertura en la pared del invernadero. Las características
principales de las ventilaciones instaladas son:
Características
Araba
Inamed
Ventilación lateral
Tipo
Enrollada
Enrollada
Número
2
2
Longitud [m]
37.5
35
Anchura [m]
1.8
1.7
Ventilación cenital
Tipo
Cremallera
Cremallera
Número
5
6
Longitud [m]
40
35
Anchura [m]
2.22
2.75
Ángulo apertura máximo [º]
38
33
Tabla 2.2. Características de las ventilaciones naturales instaladas
Ventilación cenital
Ventilación cenital
Ventilación lateral
Ventilación
lateral
Fig. 2.5. Ventilación natural invernadero Araba Nº 2 Fig. 2.6. Ventilación natural invernadero Inamed Nº 1
14
Capítulo 2.- Materiales y métodos
2.2.3.2. Sistema de calefacción
Existen distintos tipos de sistemas de calefacción que se utilizan en invernaderos para
controlar la temperatura y humedad del aire interior. Concretamente, se ha utilizado un
sistema que consiste en tuberías de acero situadas cerca del suelo que conducen agua
caliente. Por radiación y convección
de calor, estas tuberías hacen que se
Araba 3
Inamed 1
Araba 2
eleve la temperatura del interior del
invernadero. Un esquema de este
tipo de instalaciones se muestra en la
t
t
t
t
b
b
b
figura 2.7, formado por los
V
V
V
V b t
siguientes elementos fundamentales:
•
•
•
•
Caldera con quemador (Q).
Circuito de tuberías.
Válvulas de mezclas (V)
Motobomba para circulación de
agua (b).
• Sensores de temperatura (t).
• Controlador.
Q
Fig. 2.7. Sistema de calefacción por tuberías agua caliente
El quemador calienta el agua de la caldera. Este agua ya calentada pasa a través de las
tuberías principales y éstas reparten el agua a las tuberías de calefacción de cada uno de los
invernaderos que se desean calefactar. El agua de las tuberías principales tiene una
temperatura inferior al agua de la caldera. La misión de las válvulas de mezclas y las
bombas es mantener la temperatura correcta del agua que circula por las tuberías. Como se
puede observar existen otras válvulas de mezcla que conectan las tuberías principales con
las tuberías de calefacción de cada invernadero o sector. El quemador, las bombas y las
válvulas se encuentran conectadas al sistema de control, que funciona de la siguiente forma:
• El controlador mide la temperatura del agua de la caldera y, dependiendo de ésta, da las
órdenes oportunas para encender o apagar el quemador. Hay que señalar que este control
se debe hacer de manera independiente del control climático, ya que sólo se controla la
temperatura del agua de la caldera.
• Las válvulas de mezcla de aguas se abrirán más o menos según la temperatura que se
desea alcanzar. La temperatura del agua se mide a un metro o metro y medio de la
válvula de mezclas. Su misión consiste en mantener el agua de la tubería principal a la
temperatura idónea.
• El controlador gobierna las bombas cuando hace falta introducir agua en las tuberías o
bien cuando no se desea calefactar. Es un control todo o nada, pero en algunos casos
existe la posibilidad de escoger entre tres posibilidades: apagado, rápido y lento, en
función de las necesidades de calefacción.
La caldera utilizada es presurizada con hogar cilíndrico y tubos de humos, con una potencia
de 2000000 Kcal, para funcionamiento con combustibles líquidos o gaseosos, y un
envolvente fuertemente aislado (60 mm de lana mineral). Proporciona una temperatura del
agua constante en torno a los 80 ºC.
15
Capítulo 2.- Materiales y métodos
Una vez que el agua se calienta en la caldera, es impulsada al invernadero mediante una
bomba de circulación de acero inoxidable, con una potencia de 2.5 CV y un caudal de
circulación de 25 m3/h. La válvula de mezclas permite modificar la proporción de agua
procedente de la caldera que entra en las tuberías (proviniendo la otra fracción de la tubería
de recirculación), y es el elemento que se utiliza para el control de la temperatura. El agua
circula por una tubería de acero de 8.2 cm de diámetro, sujetada mediante apoyos en los
pilares secundarios, en los laterales y en el frontal posterior del invernadero. De la tubería
anterior sale, cada 1.9 m, una tubería de acero de 5.2 cm de diámetro, situada a once
centímetros sobre el suelo, que llega hasta el final de las líneas de cultivo y retorna de
nuevo para alcanzar a la tubería de retorno del invernadero. Ambas tuberías están colocadas
sobre unos apoyos situados cada 1.9 m entre las líneas de cultivo. Una vez llega el agua
caliente a la tubería de retorno, ésta realiza el mismo recorrido que la tubería de salida y
vuelve a la caldera, donde es calentada para comenzar de nuevo el ciclo del sistema de
calefacción. La siguiente figura muestra detalles del sistema de calefacción instalado en los
invernaderos de experimentación.
a. Caldera
d. Tuberías de calefacción en el
c. Tuberías de salida de la
interior del invernadero
calefacción y de retorno
Fig. 2.8. Elementos del sistema de calefacción
b. Válvulas de mezclas y bombas
2.2.3.3. Malla de sombreo
Una malla de sombreo consiste en una pantalla que un motor eléctrico de corriente alterna
extiende sobre el cultivo para controlar la radiación solar que alcanza al cultivo. El
funcionamiento es similar al control de los motores de las ventilaciones, y presenta el
mismo problema de que no suele realizarse en bucle cerrado, por lo que no conoce la
posición de la malla. Se da la orden de cierre o apertura en función de la radiación solar, y
se mantiene el tiempo necesario para alcanzar la posición deseada. El problema se resuelve
cerrando o abriendo completamente la malla, y a partir de detectar esta posición, por medio
de sensores de fin de carrera, se procede a efectuar la tarea de control requerida. Realmente,
en la mayoría de ocasiones se mantiene completamente extendida para impedir que zonas
de cultivo crezcan más rápidamente que otras.
16
Capítulo 2.- Materiales y métodos
En los invernaderos industriales de experimentación, las mallas utilizadas son de Aluminet
(pantalla termo-reflectora) fabricada por Polysack Plastic Industries (Israel), con un
coeficiente de transmisión de la radiación global igual a 0.5. Se disponen a lo largo de su
longitud máxima, dividiéndose en 10 pantallas de 4 metros cada una, recorriendo los 40
metros longitudinales del invernadero. La disposición de la malla en divisiones equitativas
facilita el movimiento de extensión de las mismas más que si se tratara de una sola unidad.
Cinco motores de 0,5 CV se encargan de
la extensión de las mismas, por lo que
cada motor se encarga del deslizamiento
de dos unidades. Además, el movimiento
longitudinal de las pantallas se realiza
gracias a una cremallera y engranaje,
similar al de las ventilaciones, pero con
posición paralela al eje horizontal que
forma la malla, tal y como se puede
observar en la figura 2.9.
Fig. 2.9. Mecanismo de extensión de la malla sombreo
2.3. SISTEMA CULTIVO
2.3.1. Descripción del cultivo de tomate y relación con el clima
El tomate pertenece a la familia de las Solanáceas, con nombre botánico Solanum
lycopersicum esculentem, siendo, tras la patata, la hortaliza más cultiva en el mundo.
Dependiendo de las condiciones climáticas, el tomate es cultivado en muy diversos ciclos,
según las fechas deseadas de producción, cultivares empleados y destino del fruto (mercado
en fresco o industria) [Cas95]. En la zona del sudeste español y en cultivos bajo
invernadero los ciclos de cultivo más comunes son:
• Ciclo corto de otoño, desde julio a enero o febrero, transplantándose desde finales de
agosto a mediados de septiembre, alargándose la recolección hasta enero o febrero.
Julio
Agosto
Septiembre
Siembra y transplante
Octubre
Noviembre Diciembre
Enero
Febrero
Floración y cuajado de los frutos
Recolección de frutos
• Ciclo corto de primavera desde noviembre a junio, transplantándose a mediados de
enero, alargándose la recolección hasta junio.
Noviembre
Diciembre
Enero
Siembra y transplante
Febrero
Marzo
Abril
Mayo
Junio
Floración y cuajado de los frutos
Recolección de frutos
• Ciclo largo desde final de julio hasta mediados o finales de la siguiente primavera.
Agosto Septiembre Octubre Noviembre Diciembre Enero Febrero Marzo Abril
Siembra y transplante
Floración y cuajado de los frutos
Recolección de frutos
17
Mayo
Junio
Capítulo 2.- Materiales y métodos
La gestión racional de los factores climáticos de forma conjunta es fundamental para el
crecimiento adecuado del cultivo, ya que todos se encuentran fuertemente correlacionados
y la actuación sobre uno de ellos incide en el resto. Las necesidades de este cultivo son:
• Radiación. La radiación interviene en la fotosíntesis, donde se crea la materia orgánica
de la planta. Para la floración y el cuajado el umbral mínimo de radiación total es 0.85
MJ/m2, aunque es preferible mayor radiación en menor periodo de tiempo, que radiación
más débil durante más tiempo [Cas95]. En función de cada fase del cultivo, las
necesidades son diferentes, como se puede observar en la siguiente tabla que describe la
radiación acumulada diaria necesaria para un cultivo de tomate de ciclo largo [Por96]:
Objetivo
Fecha
Radiación [MJ/m2 día]
Crecimiento vegetativo antes de que aparezcan las flores Nov-Dic
0.5-1.5
Desarrollo de fuertes racimos y flores
Ene-Feb
1.0-10.0
Mantenimiento el balance de la planta
Feb-Abr
2.0-20.0
Mantenimiento la calidad de las flores
May-Jul
10.0-27.0
Mantenimiento la calidad de los frutos
Ago-Nov
3.0-12.0
Tabla 2.3. Intervalo de radiación media diaria en el cultivo del tomate en función de la fase de crecimiento
• Temperatura. Cada función vital de la planta necesita unas temperaturas óptimas,
definiéndose unos limites, fuera de los cuales no se realizan o se producen de forma no
óptima [Ser96]. El tomate es una planta termoperiódica, creciendo mejor con
temperatura variable que constante, cuyo valor es función del estado de desarrollo de la
planta. Diferencias noche/día de 6 a 7 ºC son las deseables [Cas95]. Los óptimos de
temperatura varían entre los distintos autores, como se puede observar en la tabla 2.4,
aunque dependen de las condiciones climáticas de la zona (por ejemplo de la radiación),
de forma que es recomendable una mayor temperatura a mayor radiación.
Temperatura [ºC]
Castilla
Serrano
Maroto
Elías
Elías
Temperatura óptima media de crecimiento
15-25
16-27
18-25
20-25
20-24
Temperatura óptima diurna crecimiento
21-27
18-21
18-21
18-21
Temperatura óptima nocturna crecimiento
12-15
13-16
13-16
15-18
Temperatura máxima biológica
30
35-40
26-30
35
Temperatura mínima biológica
13
10-12
10-12
10-15
Temperatura óptima germinación
15
25-30
18-20
>14
25-30
Temperatura óptima floración
22
12-25
22-25
15-30
15-26
Temperatura helada
-2
0-2
-0.5
2
Referencia
[Cas95]
[Ser96]
[Mar95a]
[Eli96]
[Gon99]
Tabla 2.4. Intervalo óptimo de temperatura para distintas funciones vitales del cultivo del tomate
• Humedad relativa. Como en cualquier cultivo, humedades relativas superiores al 90%
favorecen el desarrollo de enfermedades criptogámicas, aparte de disminuir la
transpiración, lo que reduce la absorción de agua y nutrientes, pudiendo generar déficit
de elementos como el calcio. Una humedad relativa baja también es perjudicial ya que la
tasa de transpiración crece, lo que puede acarrear estrés hídrico, el cierre de los estomas
y, por tanto, la reducción de la fotosíntesis. Los valores óptimos también varían en
función del autor, proponiendo Castilla [Cas95] valores del 70% al 80%; Elías y
colaboradores [Eli96], entre el 45% y el 55%, y Maroto [Mar95a] entre el 50 y el 60%,
al igual que Serrano [Ser96].
18
Capítulo 2.- Materiales y métodos
• Concentración de CO2. Este parámetro es uno de los principales determinantes de la
producción, ya que forma parte de la fórmula base de la fotosíntesis como se describirá
en el capítulo 5, dedicado al modelado del crecimiento de un cultivo de tomate. En
función del objetivo que se desea alcanzar en cada fase del cultivo, las necesidades son
diferentes como se puede observar en la siguiente tabla que describe la concentración de
CO2 necesaria para un cultivo de ciclo largo durante un año [Por96]:
Objetivo
Fecha
Concentración CO2 [ppm]
Crecimiento vegetativo antes de que aparezcan las flores
Nov-Dic
700-1000
Desarrollo de fuertes racimos y flores
Ene-Feb
500-700
Mantenimiento el balance de la planta
Feb-Abr
900-1500
Mantenimiento la calidad de las flores
May-Jul
>400
Mantenimiento la calidad de los frutos
Ago-Nov
1000-1250
Tabla 2.5. Intervalo de concentración de CO2 media diaria en función de la fase de crecimiento del tomate
2.3.2. Sistema NFT
El cultivo se realizó mediante la técnica de cultivo con flujo laminar de nutrientes
denominada NFT (Nutrient Film Technique) que es una técnica de cultivo en agua en la
cual las plantas crecen teniendo su sistema radicular dentro de una lámina de agua, a través
de la cual circula continuadamente la solución de nutrientes. Se produce un movimiento
continuo de una capa de nutrientes a través de los canales de plástico, que es bombeada por
un sistema hasta los extremos de los mismos donde hay un desagüe, y por gravedad
vuelven a un aljibe de recogida, tal y como se puede observar en la figura 2.10.
0.55 m
1.33 m
Desagüe
Válvula
Agua
Válvula
Filtro Bomba
F
B
Canales de cultivo
(pendiente 2%)
Inyectores
I
Bomba
Tanques de fertilizantes
Aljibe de recirculación
B
Fig. 2.10. Representación esquemática del sistema NFT
El sistema NFT instalado está formado por canales de polietileno flexible blanco-negro de
200 µm de espesor, longitud de 9.20 m, anchura de 0.30 m, pendiente del 2 %, altura de la
lámina de agua de 3 mm y la circulación permanente presenta un caudal de 3 l/min. La
disposición de los canales y las líneas de cultivo se ha realizado en líneas dobles, con una
distancia de 0.55 m y un pasillo de 1.33 m de anchura, direccionándose en sentido nortesur. El sistema de riego está constituido por tres partes diferenciadas [Rue98]:
• Red ramificada de tuberías para el aporte y recogida de la solución nutriente.
• Aljibe de recirculación de 60 m3 con dos entradas (recogida de los canales y solución de
nutrientes) y una salida que aporta la solución a los canales.
19
Capítulo 2.- Materiales y métodos
• Cabezal de riego instalado en la caseta auxiliar de la finca de experimentación
compuesto por los depósitos que contienen los fertilizantes y los ácidos, los sistemas de
filtrado, bombas de circulación y equipo fitosanitario.
Además, se dispone de un sistema automático conectado a un computador (distinto del de
clima), para el control del sistema de recirculación de la solución, del pH y de la
conductividad eléctrica (CE), fijando la consigna en torno a 5.5 de pH y 2 dS/m de CE. El
agua que se utiliza para la solución nutritiva tiene una CE de 0.5 a 0.8 dS/m. Las soluciones
nutritivas tienen que aportar al cultivo el agua y elementos necesarios para su normal
desarrollo, teniendo en cuenta que deben contener los macro y micronutrientes que precisen
los cultivos. La composición de la solución nutritiva fue (en mg/l): 1000 (NO3)Ca, 333
NO3K, 333 SO4K2, 167 SO4 Mg, 155 H3PO4 y 22 de micronutrientes, a propuesta de los
ingenieros agrónomos responsables del cultivo.
2.3.3. Experiencias realizadas
Como se ha comentado en la introducción, en el marco del proyecto CAMED una de las
líneas de investigación se centraba en la evaluación de los parámetros de crecimiento y
desarrollo, así como validación de modelos de previsión de rendimiento para un cultivo de
tomate en NFT en relación al número de tallos, dirigida por D. José López Gálvez y
desarrollada por Dña. Claudia Virgen Acosta. El objetivo principal era mejorar las prácticas
de un manejo de cultivo de tomate de crecimiento determinado con frutos para cosecha
individual en sistema NFT optimizando las condiciones microclimáticas del invernadero
principalmente la radiación solar. Otros objetivos eran:
• Estudiar las relaciones entre la radiación global exterior y radiación interceptada y el
crecimiento del cultivo.
• Obtener funciones de producción en las condiciones de manejo y ambiente del cultivo.
• Determinar las condiciones de cultivo más adecuadas para plantas de tomate en sistema
NFT a lo largo del cultivo variando la densidad de los tallos.
• Comparación de la calidad de cosecha y determinación de funciones de producción.
• Obtener el número de tallos más rentable económicamente para cultivo de tomate en las
condiciones de estudio.
El cultivo que se implantó fue un tomate de crecimiento determinado Ramy, para cosecha
de frutos individuales. La siembra se realizó el 15 de diciembre de 1998 en un semillero
comercial, en bandejas multilóculo. Se repicaron las plántulas (el 14 de enero de 1999
cuando éstas tenían una media de tres hojas verdaderas) a unos tacos de lana de roca a
razón de dos plántulas en cada uno. Los tacos se colocaron en un semillero de inundación y
permanecieron allí hasta que la planta estuvo lista para el transplante al invernadero
industrial, que se realizó el 11 de marzo de 1999 cuando la planta tenía una media de 10.8
hojas verdaderas. La duración del ciclo productivo del cultivo fue de 98 días (hasta el 16 de
junio de 1999). Los ensayos se realizaron en el invernadero Araba número 2 equipado con
un sistema comercial de control climático ya que, aunque la planta de tomate es autógama,
necesita unas condiciones mínimas de radiación, temperatura y humedad para la realización
de los procesos fisiológicos, fijándose en torno a los 400/500 W/m2 de radiación y 20 ºC de
temperatura diurna.
20
Capítulo 2.- Materiales y métodos
Para evitar en lo posible el efecto de plagas y enfermedades, se realizaron muestreos
semanales de los niveles de plagas y/o insectos beneficiosos en unas determinadas plantas
patrón situadas en las zonas de máximo riesgo. En función de estos datos se aplicaban los
tratamientos oportunos.
Durante la investigación se realizaron tres ensayos con objeto de conocer la respuesta
productiva de la variedad de tomate Ramy frente a distintas densidades, distinto número de
tallos por planta y distinto número de frutos por inflorescencia:
• Ensayo 1. Este ensayo constaba de 6 tratamientos y en cada tratamiento se realizaron 3
repeticiones, analizando dos densidades diferentes de plantación (3.04 y 4.02 plantas/m2
de suelo de invernadero) y tres niveles de pinzamiento de las inflorescencias. Las plantas
se dejaron a un tallo.
• Ensayo 2: Este ensayo constaba de 12 tratamientos y en cada tratamiento se realizaron 3
repeticiones, analizando cuatro densidades diferentes de plantación (3.04, 2.04, 1.52 y
1.22 plantas/m2 de suelo de invernadero) y tres niveles de pinzamiento de las
inflorescencias. Las plantas se dejaron a uno y dos tallos secundarios.
• Ensayo 3: Este ensayo constaba de 6 tratamientos y en cada tratamiento se realizaron 3
repeticiones analizando plantas sin tallo secundario y plantas con tallo secundario, y tres
niveles de pinzamiento de las inflorescencias. La densidad era la misma para todas las
plantas (3.04 plantas/m2).
2.3.4. Medidas tomadas
Para el desarrollo del modelo del crecimiento del tomate en función del clima en el que se
encuentra, es necesario disponer de datos de las siguientes variables que describan su
estado:
• Número de hojas de las plantas.
• Índice de área foliar, definido como la superficie de las hojas por unidad de superficie de
suelo [Gua90].
• Materia seca del cultivo, consistente en la materia que resulta al desecar la planta,
evaporando el agua que la compone.
Al iniciarse las experiencias se seleccionan un determinado número de plantas por sector,
que son las que se utilizarán como representantes de crecimiento del cultivo. El número de
hojas representativo de un determinado sector se determina mediante un conteo del número
de hojas de todas las plantas patrón que existen en cada sector, y se calcula la media
aritmética (por esta razón aparecen decimales en las medidas). Las medidas del índice de
área foliar y la materia seca se realizan cortando a ras de las raíces cada una de esas plantas
patrones del invernadero, ya que para obtener el valor de estas variables hay que destruirlas.
Se desmontan las plantas en cuatro fracciones: hojas, tallos, flores y frutos. A continuación
se mide el área de las hojas, se pesan cada una de estas fracciones para determinar el peso
fresco y se acaba desecándolas y pesándolas de nuevo para determinar el peso seco, tal y
como se describe a continuación. Por esta razón y por lo laborioso de estas medidas que se
hacen de forma manual, no es posible realizarlas de forma continuada y en línea, que sería
lo ideal para poder realizar un control del crecimiento de forma automática.
21
Capítulo 2.- Materiales y métodos
Existen prototipos que permiten realizar medidas parciales de algunos de los parámetros
indicados ([Tan93c], [Hen95], [Ure01]). En el caso reseñado, la superficie foliar se ha
obtenido utilizando un equipo analizador de imágenes modelo DIAS-BASIC de la empresa
Delta-T, compuesto por una cámara y una tarjeta de adquisición de imágenes que digitaliza
una imagen de una hoja. Además, proporciona una herramienta informática que analiza las
imágenes de las hojas y calcula el área de cada una de ellas. Para el cálculo del índice de
área foliar se obtiene la superficie total integrada de cada planta en la fecha de la medida,
retirando todas las hojas, midiendo su área independientemente y calculando el área total
como la suma del área de cada una de ellas. Este resultado se divide por la superficie de
suelo correspondiente a una planta. Una vez determinada el área foliar, se procede a la
medida de la materia seca, pesando cada una de las cuatro fracciones indicadas
anteriormente en balanzas electrónicas de precisión (Adam Equipment Co. y A&D
Instruments), y a continuación se secan por separado en una estufa armario con ventilación
forzada a 80ºC (Incubat 380 L de J.P. Selecta, S.A.) durante 48 horas las hojas, tallos y
flores y durante 96 horas los frutos. Cuando ya se han desecado, se vuelve a pesar la
materia seca resultante. De esta forma se obtienen medidas de peso fresco y peso seco de
cada fracción de las plantas experimentales. El peso total de la planta corresponde a la suma
de los pesos secos de las hojas, tallo, flores y frutos. El intervalo de tiempo en el que se
toma la medida de estas variables es distinto para cada una de ellas, e incluso no es
periódico, basándose en el estado y las características de las plantas durante los distintos
ensayos. Como ejemplo, se muestran algunas de las medidas tomadas en algunos de ellos:
•
Número medio de hojas.
Fecha
11/03/99
19/03/99
30/03/99
08/04/99
14/04/99
21/04/99
29/04/99
05/05/99
17/05/99
25/05/99
14/06/99
•
Muestra 1 Muestra 2 Muestra 3 Muestra 4 Muestra 5 Muestra 6
11
10
11
10
11
11
15
14.83
15
15
15.33
15
18.67
18.83
18.17
18
18.33
18.33
21.5
21.17
20.83
20.83
20.67
20.67
24.17
23.17
22.5
23.5
22.83
22.67
26.67
25
25
25.33
25
25.17
29.5
27.33
27.33
27.83
27.5
27
30.33
29
29.17
29.5
28.83
28
35.43
36.1
35.9
35.2
35.4
35.1
38.4
39.2
38.3
37.9
38.2
37.4
46.1
45.8
45.9
44.3
45.4
44.5
Tabla 2.6. Número medio de hojas
Índice de área foliar para un ensayo con densidad de 3.04 plantas/m2.
Fecha Muestra 1 Muestra 2 Muestra 3 Muestra 4 Muestra 5 Muestra 6
11/03/99
0.35
0.42
0.37
0.41
0.39
0.45
19/03/99
0.45
0.44
0.54
0.50
0.43
0.53
06/04/99
1.12
1.12
1.09
0.88
0.66
1.00
10/04/99
1.32
1.28
1.19
1.01
0.78
1.08
20/04/99
1.63
1.80
1.77
1.82
1.34
1.75
29/04/99
2.17
1.91
1.91
1.97
1.91
1.87
05/05/99
2.40
2.23
2.17
2.23
2.16
2.12
17/05/99
2.99
2.91
2.88
2.97
2.91
2.87
22/05/99
3.01
2.92
3.12
3.24
3.16
3.29
16/06/99
3.62
4.27
4.00
4.25
3.84
3.96
Tabla 2.7. Índice de área foliar con densidad de 3.04 plantas/m2
22
Capítulo 2.- Materiales y métodos
•
Peso seco de tallos, hojas, flores, frutos y total en una planta patrón y rendimiento por
m2 de invernadero. El rendimiento del cultivo se suele considerar como la producción
por m2 de invernadero, por lo que se calcula como el producto de la materia seca de una
planta por el número de plantas que existen por m2, es decir, por la densidad de la
plantación.
Fecha
Peso seco [gr]
Rendimiento
[gr/m2]
Hojas
Tallos
Flores
Frutos
Total
11/03/99
12.9
6.3
0
0
19.2
58.4
19/03/99
17.2
9.3
0
0
26.5
80.6
06/04/99
24.0
13.1
0
0
37.1
112.8
10/04/99
30.0
16.4
0.19
32.0
78.59
238.9
20/04/99
21.1
13.2
0.21
61.0
95.51
290.3
29/04/99
36.37
18.9
0.83
76.5
132.6
403.1
05/05/99
36.38
22.3
1.02
98.0
157.7
479.4
17/05/99
56.29
25.2
3.31
121.3
206.1
626.5
22/05/99
65.7
32.0
0
130.5
228.2
693.8
16/06/99
126.2
67.0
10.7
110.7
314.6
956.4
Tabla 2.8. Peso seco con densidad de plantación de 3.04 plantas/m2
2.4. SISTEMA DE MEDIDA Y CONTROL DE LAS VARIABLES
CLIMÁTICAS
2.4.1. Sistema de medida y control climático comercial
Para realizar las experiencias agronómicas en el marco del proyecto CAMED, se optó por
instalar un sistema de medida y control comercial ya contrastado, modelo Multi-Climate de
la empresa holandesa Royal Brinkman. Consiste en un sistema de medida y control digital
directo que presenta las siguientes características:
• Puede controlar el clima en el interior de cuatro sectores o invernaderos, además de
medir las variables del clima exterior mediante una estación meteorológica.
• Permite dividir el día (24 horas) en cuatro periodos con distintas consignas y parámetros
de los controladores.
• Controla las siguientes variables climáticas: temperatura, humedad, radiación en el
interior y concentración de CO2.
• Los sistemas de actuación que permite utilizar son: calefacción por tuberías de agua
caliente, ventilación natural, ventilación forzada, nebulizadores, enriquecedores de CO2,
mallas de sombreo y mallas térmicas.
• Los algoritmos de control que utiliza son todo/nada corregidos con una zona neutra o
histéresis para la radiación y la concentración de CO2 y PI con ajuste por tabla de
ganancias para temperatura y humedad con ajustes empíricos de las parámetros de los
controladores. Se consideran actuaciones con una prioridad superior que los lazos
citados cuando se producen situaciones extremas como lluvias o velocidades de viento
elevadas.
23
Capítulo 2.- Materiales y métodos
• Las variables climáticas que se almacenan cada minuto son las siguientes:
Estación meteorológica exterior: radiación global, radiación PAR, temperatura y
humedad del aire, velocidad de viento, dirección de viento e indicador de lluvia. La
estación se situó a 1.5 metros sobre la caseta de control, tal y como se puede observar
en la figura 2.11. De esta forma se evita que cualquier obstáculo falsee las medidas de
los sensores de viento.
Interior de cada invernadero: temperatura y humedad relativa del aire, radiación
global y radiación PAR.
Estado de sistemas de actuación: posición de las ventilaciones, posición de las mallas
de sombreo, temperatura del agua que sale de la caldera y temperatura del agua que
circula por las tuberías de calefacción de cada uno de los invernaderos.
• Las características de los sensores climáticos son las siguientes:
Fabricante
Sensor
Rango
Precisión
Temperatura Radiación
Radiación
Velocidad
Dirección
Concentración
aire
global
PAR
viento
viento
CO2
Brinkman
Brinkman
Li-Cor
Brinkman
Brinkman
Siemens
Pt-100
Termopilas Fotodiodos Codificador Potenciómetro
Infrarrojos
-20/60 ºC 0/2000W/m2 0/600 W/m2
0/36 m/s
0/360º
0/3000 ppm
±0.1 ºC
±20 W/m2
±5%
±1.5 m/s
±5º
±80 ppm
Tabla 2.9. Características de los sensores climáticos del sistema comercial
La humedad relativa se calcula basándose en la medida de la temperatura de aire
(temperatura seca) y la temperatura de un pequeño depósito de agua destilada
(temperatura húmeda). Unas tablas o fórmulas de conversión de diferencia de
temperaturas en presión relativa del vapor de agua en forma de tanto por ciento de
humedad, permiten llevar a cabo la estimación de la variable en un margen entre 0 y
100%, con una precisión de ± 5% (véase el anexo A donde se describen los conceptos
básicos de psicometría). Ambos sensores de temperatura se sitúan en el interior de una
caseta con ventilación forzada para renovar el aire en su interior e introducir el aire del
invernadero, del que mide su temperatura. Si no se realiza de esta manera, mediría la
temperatura del aire interior de la caseta que, evidentemente, es diferente a la del
invernadero y con una temperatura más elevada. La altura de la caseta es graduable
gracias a un sistema de engranajes, que permiten, en función de la altura del cultivo,
elevar o descender la estación, tal y como se puede observar en la figura 2.12.
Fig. 2.11. Estación meteorológica exterior
Fig. 2.12. Estación de medida de temperatura y humedad
24
Capítulo 2.- Materiales y métodos
• El sistema presenta un cuadro de conexiones en la caseta de control donde se encuentran
los acondicionadores de señal de todos los sensores procedentes de los cuatro
invernaderos y la estación meteorológica exterior. Además, contiene las tarjetas de
salida que controlan los motores y válvulas de los sistemas de actuación.
Este sistema comercial presenta dos grandes inconvenientes. El principal consiste en que no
se pueden modificar los algoritmos de control ya que no se suministra el código fuente del
programa de control, ni los controladores para comunicarse con las tarjetas de
entrada/salida del sistema. Por otra parte, el sistema no es ampliable en el sentido de que no
se pueden añadir nuevos sensores o sistemas de actuación.
2.4.2. Sistema de medida y control desarrollado
Como se podrá deducir de la lectura de los próximos capítulos, es necesario llevar a cabo la
medida de otros parámetros como la temperatura de la superficie del suelo o la cubierta
para el desarrollo de los modelos de temperatura y humedad del aire interior del
invernadero, siendo imposible realizar estas medidas con el sistema descrito en el apartado
anterior. Además, uno de los objetivos del proyecto Modelado y control óptimo de sistemas
no lineales multivariables consistía en el diseño de controladores óptimos del clima del
invernadero, tarea que tampoco permitía realizar el sistema instalado. Por estas razones ha
sido necesaria la utilización de un sistema que sea fácilmente configurable según las
necesidades y que permita la programación de diferentes algoritmos de control. Como
sistema de adquisición y control se ha utilizado uno desarrollado por la empresa Industria
de Telecomunicación y Control (ITC), consistente en un bus de campo al que se le pueden
conectar hasta 80 estaciones remotas capaces de gestionar cada una hasta ocho elementos
como sensores, sistemas de actuación o combinación de ambos. Una tarjeta de control
central se comunica con el computador que gestiona todo el proceso por el puerto serie con
un protocolo RS-232 y con el resto de los elementos vía módem. Este sistema presenta las
siguientes ventajas con respecto al descrito en el apartado anterior:
• Es fácilmente configurable ya que para ampliarlo, sólo hay que incluir nuevas cajas de
conexión.
• La conversión analógica/digital de los sensores se hace en las estaciones remotas. La
transmisión hasta el computador se realiza de forma digital para evitar pérdidas.
• Sólo es necesario llevar a cabo un cableado con cuatro hilos, dos para datos y dos para
alimentación de las cajas de conexión y los acondicionadores de señal, por lo que el
ahorro económico en este concepto es apreciable, además de la facilidad de instalación.
Las principales características del conjunto de sensores adquiridos se exponen en la tabla
2.10.
Por otra parte, en el ámbito de esta tesis se ha diseñado y desarrollado en lenguaje C++ un
programa que adquiere la señal de los sensores, los almacena en formato texto separado por
tabuladores y calcula el estado de los sistemas de actuación mediante funciones que
implementan distintos algoritmos de control. Cuando se desee probar nuevos controladores,
sólo hay que sustituir esas funciones por las nuevas y realizar los ensayos. De esta forma,
se dispone de un sistema completamente abierto que permite realizar distintos tipos de
experiencias de forma sencilla, así como la ampliación del mismo cuando sea necesario.
25
Capítulo 2.- Materiales y métodos
Fabricante
Modelo
Sensor
Rango
Precisión
ITC
MTH-A1
Semiconductor
-40/110 ºC
Temperatura aire
±0.3 ºC
ITC
MT-S1
Semiconductor
-40/110 ºC
Temperatura suelo
±0.3 ºC
ITC
MT-C1
Semiconductor
-40/110 ºC
Temperatura cubierta
±0.3 ºC
ITC
MTH-A1
Condensador
0/100%
Humedad relativa
±5%
ITC
MRG-1P
Termopilas
0/1400 W/m2 ±10 W/m2
Radiación global
ITC
MRP-1P
Fotodiodos
0/700 W/m2 ±10 W/m2
Radiación PAR
Young
03102
Codificador
0/50 m/s
Velocidad viento
±1.1 m/s
Young
03302
Potenciómetro
0/360º
Dirección viento
±1º
Tabla 2.10. Características de los sensores climáticos del sistema desarrollado
2.4.3. Experiencias realizadas
Las experiencias en el marco del proyecto CAMED comenzaron en noviembre de 1997 con
el estudio y la puesta a punto del sistema de adquisición de datos y control comercial
instalado. Esta herramienta almacenaba cada minuto los datos de temperatura, humedad y
radiación PAR en cada uno de los invernaderos, así como las medidas características de la
estación meteorológica exterior (temperatura, humedad, radiación, velocidad del viento,
dirección del viento y presencia de lluvia). Además, guardaba el estado de los sistemas de
actuación instalados (posición de las ventilaciones y mallas de sombreo, temperatura de las
tuberías de calefacción de cada uno de los invernaderos y del agua de salida de la caldera y
el estado de las bombas de circulación del agua por las tuberías). Todos estos datos se
comprimían con un formato propio de la empresa fabricante, por lo que el sistema disponía
de una herramienta de explotación de los datos, que los mostraba, permitiendo un análisis
muy elemental de los mismos. Además, mediante un proceso largo y tedioso, se podían
exportar a archivos de texto separados por tabuladores. Después de realizar unos ensayos en
bucle abierto y de analizar los datos procedentes del control en bucle cerrado que realizaba
el sistema, se observó que para completar los estudios que se pretendían hacer en el
modelado y simulación del clima que se genera en el interior de un invernadero, este
sistema no ofrecía las prestaciones necesarias. Hay que indicar que para los ensayos
agronómicos que estaban realizando otros investigadores del proyecto, este sistema cubría
sus necesidades.
Como se ha comentado anteriormente, se desarrolló un sistema propio de adquisición y
control que permite modificar fácilmente su configuración (inclusión de nuevos sensores o
sistemas de actuación) y una instalación en la planta de forma rápida y sencilla. Se indica a
continuación el número y la ubicación de los sensores que se utilizan:
• Un sensor de temperatura y humedad en el interior del invernadero a 2.5 metros de
altura (figura 2.13.a).
• Un sensor de radiación global y otro de radiación PAR en el interior a la altura de 4 m,
superior a la altura lateral de la estructura (figura 2.13.b).
• Un sensor de temperatura de la superficie del suelo (figura 2.13.c).
• Un sensor de temperatura del suelo a 30 cm (figura 2.13.c), compuesto por un tubo de
aluminio en cuyo extremo se sitúa el sensor de temperatura.
26
Capítulo 2.- Materiales y métodos
• Ocho sensores para medir la temperatura de cubierta, de forma que instalan cuatro en
cada una de las superficies que forman su bóveda a dos aguas, ya que cada una se
orienta de forma distinta según la posición del sol (figura 2.13.d). Cada uno de ellos
dispone de dos sensores semiconductores de pequeño tamaño (4 mm2) que miden la
temperatura en contacto con la cubierta y la temperatura del aire en su proximidad, de
forma que con las dos medidas, se pueda calcular la temperatura real de la cubierta,
evitando el efecto del calentamiento debido a la incidencia directa de la radiación solar
sobre el sensor. Como se considera a la cubierta como un elemento homogéneo, su
temperatura se determina como la media aritmética de las medidas procedentes de los
ocho sensores.
• Se instala sobre la propia estructura del invernadero una estación exterior de forma que
los sensores de temperatura, humedad, radiación global y PAR y los sensores de
velocidad y dirección del viento que la forman, se encuentren por encima de la cumbrera
del invernadero (figura 2.13.e).
a. Temperatura y humedad
b. Radiación
c. Suelo
d. Temperatura cubierta
e. Estación exterior
Fig. 2.13. Sensores instalados en los invernaderos
Aparte de todos estos datos, se almacenan los estados de los sistemas de actuación
(posición de las ventilaciones, posición de las mallas de sombreo, temperatura de las
tuberías de calefacción de cada uno de los invernaderos, estado de las bombas de
circulación del agua por las tuberías y temperatura del agua de salida de la caldera), con un
periodo de muestreo de 60 segundos.
Ya en el marco del proyecto Modelado y control óptimo de sistemas no lineales
multivariables se realizaron los siguientes ensayos:
• Ensayo 1. A finales del año 1999, se realizaron medidas puntuales en el invernadero
Araba número 2 y en el exterior con el fin de comparar las medidas procedentes de los
dos sistemas de medida, comprobando la validez del nuevo sistema. Además, se estudió
la posibilidad de utilizar los datos almacenados por el sistema comercial para validar los
modelos a diseñar, obteniéndose unos resultados aceptables.
• Ensayo 2. En el mes de enero del año 2000, se instala el sistema en el invernadero Araba
número 2 y se toman datos con cultivo, realizando ensayos en bucle abierto con
ventilación y calefacción.
27
Capítulo 2.- Materiales y métodos
• Ensayo 3. Durante los meses de julio y agosto del año 2000, se instala el sistema en los
invernadero Araba número 2 e Inamed número 1 para realizar ensayos con los
invernaderos en vacío (sin cultivo) completamente cerrados, y utilizando la ventilación
natural y la malla de sombreo. En los últimos días de las pruebas, se realizaron ensayos
en bucle cerrado de control de la temperatura del aire en periodos diurnos utilizando
ventilación natural con estrategias ya comprobadas en simulación, cuyos resultados se
muestran en el capítulo 6 dedicado a estrategias de control de las variables climáticas.
2.4.4. Validación de datos
La utilización datos procedentes de sensores que permitan el desarrollo y la validación de
modelos de simulación de variables climáticas, exige disponer de medidas de una cierta
calidad y precisión. En el marco del proyecto DAMOCIA en el que el autor de la presente
tesis participó como investigador y responsable de la línea de monitorización y control, se
realizó un exhaustivo análisis de las medidas procedentes de sensores climáticos instalados
en un invernadero. Se observó que existen una serie de factores que afectan a las medidas
que proceden del sistema de adquisición, que son inevitables, y que se comportan como
errores a la hora del análisis y explotación de los datos climáticos. Estos se pueden
clasificar en los siguientes[Rod98]:
• Errores producidos por la propia instalación, pero inevitables. Un ejemplo típico puede
ser una caída en la tensión de alimentación de los sensores, lo que produce una medida
anormal en ese punto de la curva, como se puede observar en la figura 2.14 donde a
primera hora del día todas las medidas presentan un pico.
• Falta de calidad de la señal debido al ruido inherente en el sistema. Como se observa en
la figura 2.14 donde las dos señales de radiación global y PAR presentan un rizado
debido a la presencia de ruidos.
• Errores debidos a la propia naturaleza del sensor. Un ejemplo típico son los sensores de
radiación PAR, basados en fotodiodos que son muy sensibles y cualquier perturbación
afecta a su medida. La curva inferior de la figura 2.14 representa la radiación PAR y
como se puede observar, el error presente es mayor.
• Errores debido a acciones humanas como la desconexión de algún sensor.
• Errores producidos por causa desconocida. Se observan comportamientos extraños de
los sensores, que en un principio, no corresponden a una causa explicable. La figura 2.14
muestra un comportamiento no explicable en la radiación al finalizar el periodo diurno.
Ruido
Comportamiento
anómalo
Error de instalación
Ruido y sensibilidad sensor
Fig. 2.14. Medidas de radiación global y PAR donde se observan errores en las señales
28
Capítulo 2.- Materiales y métodos
Estos errores pueden llegar a ser inevitables, y su efecto sólo se puede minimizar, actuando
sobre los datos ya adquiridos. Por tanto, hay que someter a los archivos de datos, a una
serie de filtros que eliminen las medidas no válidas, o que disminuyan los efectos que
introducen. Se planteó un sistema, que se ha mantenido en los siguientes proyectos, que
consiste en mantener dos niveles de validación, como se muestra en la figura 2.15, hasta
que se obtienen los datos validados para el análisis y el proceso de modelado [Rod99b]:
• Validación mientras se están midiendo los datos, que consiste en introducir en la
herramienta de adquisición de datos un módulo, únicamente indicativo, que informa, en
tiempo real, que se ha producido una medida no válida, pero no la corrige. Para ello se
establecen unos límites dentro de cada variable medida por el sensor para considerar una
medida correcta. Si sobrepasa esos límites, la medida se considera errónea, y habrá que
proceder a encontrar el factor externo que lo provoca. El sistema de adquisición
almacenará ese dato, para que quede constancia de qué tipo de error se ha producido. Es
útil para detectar las averías más frecuentes que se producen en los sensores, o bien,
interpretar los datos para intentar explicar la causa del fenómeno que se ha producido
(bajadas de tensión, averías en los amplificadores o convertidores de señal, etc.)
• Validación de los datos almacenados. Se diseñó e implementó una herramienta que se
aplica a los archivos de datos, conteniendo una serie de filtros en un orden establecido,
que detectan los errores descritos anteriormente, corrigiéndolos y generando archivos
informe de las modificaciones realizadas. Esto se realiza conforme a la clasificación de
errores establecida previamente y a la aplicación de unos criterios de validación, para
eliminar o minimizar los efectos de los posibles. Los criterios de validación que se
suelen aplicar en las medidas de variables climáticas son:
Eliminación o, si es posible, interpolación de muestras individuales con medidas
erróneas significativas.
Información de periodos de tiempo en
VISUAL EN
los que ha habido un comportamiento ALARMA
TIEMPO REAL
extraño del sensor, no teniéndose en
cuenta en su tratamiento posterior.
Información de la inexistencia
medida en algún intervalo.
de
Detección y puesta a cero de todos los
valores nocturnos procedentes de los
sensores de radiación PAR y global.
Este tipo de error se produce por algunos
sistemas electrónicos que pueden
introducir una fuente de ruido.
Detección e información de cambios de
canal en un determinado archivo de
datos, alta/baja de un sensor en la
configuración de un invernadero, o la
sustitución de un sensor de un tipo por
otro distinto.
29
Datos procedentes
de los sensores
HERRAMIENTA DE
VALIDACIÓN DE DATOS
Errores producidos por el
sistema de adquisición
Errores debidos al ruido
en el sistema
Datos validados
ANALISIS
Errores debidos a la propia
naturaleza del sensor
MODELADO
Errores de tipo humano
Errores producidos por
causas desconocidas
Fig. 2.15. Niveles de validación de datos
Capítulo 2.- Materiales y métodos
Como ejemplo, la figura 2.16 muestra
estra la medida de un sensor de radiación con una serie de
errores producido por fallos en la alimentación eléctrica muy común en las zonas agrícolas
y la corrección que realiza la herramienta de validación. La figura 2.17 muestra los archivos
de informes de las acciones realizadas que genera el proceso de validación.
Fig. 2.16. Ejemplo de validación de datos
Fig. 2.17. Ejemplo de informes de validación
Este proceso se ha utilizado para la validación de los datos utilizados para la calibración y
validación de los modelos que se describen en los próximos capítulos.
2.5. HERRAMIENTAS DE MODELADO Y SIMULACIÓN
2.5.1. Modelado orientado a bloques frente a modelado orientado a objetos
Para la elaboración de esta tesis ha sido necesario desarrollar distintos modelos, tanto de
variables climáticas como de crecimiento del cultivo de tomate. Los modelos desarrollados
son de gran interés en el estudio de la dinámica de la producción de cultivos en invernadero
bajo distintas estrategias de control de las variables climáticas del aire interior para evitar
condiciones extremas y optimizar el crecimiento de las plantas, a la vez que se reduce el
consumo de energía y se reduce la contaminación que puedan producir los sistemas de
actuación climática. Para ello, ha habido que desarrollar un modelo complejo no lineal de la
producción de cultivos bajo invernadero que engloba un modelo del clima que se genera en
su interior y un modelo del crecimiento del cultivo de tomate tal y como se describirá en los
siguientes capítulos. Existen varias clasificaciones de los paradigmas de modelado de
propósito general, como los que propuso Fishwick descritos en [Sin01]:
• Modelos basados en gráficos frente a modelos basado en lenguajes. Los gráficos se han
utilizado ampliamente en modelado de sistemas para representar las relaciones entre sus
elementos. Actualmente, se centran en tres paradigmas:
Bond-graphs, que se basan en las uniones de conservación de energía que conectan
elementos de almacenamiento o transformación de energía. Los elementos son
conectados a través de lazos de valor 0 ó 1 que representan las leyes de Kirchhoff de
corriente o voltaje respectivamente.
Grafos lineales. La idea es similar a la de los bond-graphs sólo que basados en la
representación del flujo de energía que se produce en el sistema mediante grafos
lineales. Cada nodo del grafo corresponde a una componente del sistema, y los arcos
que los unen representan la existencia de un flujo de energía entre ambos.
30
Capítulo 2.- Materiales y métodos
Diagramas de bloques, de forma que los modelos se especifican por la interconexión
de los elementos en función de las entradas y salidas de los mismos. Los sistemas
muy complejos pueden ser modelados jerárquicamente, implementado modelos más
sencillos de los componentes del sistema y encapsulándolos, de forma que la relación
entre ellos se establezca en función de sus entradas y salidas.
Los modelos basados en lenguajes se refieren a que su implementación se realiza con
herramientas clásicas de programación basadas en líneas de instrucciones.
• Modelos procedimentales frente a modelos declarativos. El paradigma de modelado
procedimental se basa en definir los modelos a través de asignaciones como se realiza en
la mayor parte de los lenguajes de programación basados en líneas de instrucciones, es
decir, cada asignación expresa una variable dependiente como función de una o más
variables independientes. De esta manera la causalidad del modelo es fija, es decir,
siempre se evalúan las ecuaciones en el orden que indique el usuario. Sin embargo, el
paradigma declarativo no impone una causalidad permanente en el modelo. En estos
lenguajes, el modelo se define por un conjunto de ecuaciones que establecen las
relaciones entre los estados, sus derivadas y el tiempo. El motor de la simulación es el
responsable de convertir estas ecuaciones en procedimientos que puedan ser evaluados
por el computador. Su principal ventaja es que el usuario no tiene que fijar la causalidad
de las ecuaciones, ya que el mismo modelo puede ser utilizado para cualquier causalidad
impuesta por otros componentes del sistema.
• Modelos continuos frente a modelos discretos. Existen sistemas cuyo comportamiento se
puede modelar como una función continua en el tiempo utilizando un sistema de
ecuaciones diferenciales algebraicas. Por otra parte, en algunos procesos físicos y en
sistemas que contienen elementos digitales, se generan las salidas del sistema en puntos
discretos del espacio y el tiempo, por lo que se deben modelar utilizando variables
discretas. Además, es muy común encontrarse con sistemas que son una combinación de
fenómenos físicos y eventos que ocurren en el espacio discreto y en el tiempo, por lo que
es necesario disponer de un paradigma híbrido de forma que los procesos continuos y
discretos puedan ser representados simultáneamente. Por tanto, en función de la
respuesta del sistema, habrá que utilizar herramientas que permitan su modelado.
• Paradigmas basados en funciones frente a paradigmas orientados a objetos. La
programación orientada a objetos, se ha aplicado también al modelado de sistemas, ya
que simplifica la creación y el mantenimiento de los modelos diseñados. En el modelado
orientado a objetos, cada modelo se considera como un objeto descrito por una clase que
posee unos atributos especiales como variables, ecuaciones u otros objetos. Una de las
principales ventajas es el encapsulamiento o la ocultación de la información, de forma
que un objeto sólo puede ser accesible a través de una interfaz pública [Ebo01]. De esta
forma, un sistema puede ser modelado combinando e interconectando las interfaces de
sus componentes, independientemente de la futura implementación que se realice de
esos subsistemas. Otro importante aspecto de este paradigma es la herencia, de forma
que los objetos derivados de una clase padre, heredan su interfaz y sus características.
Esto es importante, ya que un modelo que deriva de un modelo padre hereda su interfaz
y sus ecuaciones, por lo que puede ampliarse, incluyendo nuevas entradas o salidas en su
interfaz o añadiendo nuevas ecuaciones.
31
Capítulo 2.- Materiales y métodos
Este tipo de implementación proporciona una organización jerárquica de modelos que
facilita las tareas de reutilización y mantenimiento, así como la extensión a nuevas
familias de modelos. Un estudio profundo acerca del modelado orientado a objetos se
puede consultar en [And94].
• Paradigma de propósito general frente a paradigmas de propósito específico. Existen
herramientas de modelado de propósito específico que se han diseñado para modelar
sólo sistemas de unas determinadas características, como eléctricos, mecánicos o
térmicos. Opuesto a este paradigma se encuentran el modelado de propósito general con
el cual se pueden realizar simulaciones de cualquier tipo de sistemas ya que se basan en
la resolución de una serie de ecuaciones matemáticas.
Para la implementación de los modelos que ha sido necesario desarrollar en esta tesis, se
han utilizado dos herramientas:
• Simulink. Se trata de una herramienta para modelar, simular y analizar sistemas
dinámicos desarrollada por Mathworks Inc [Mat98b] y diseñada como una extensión de
Matlab, que consiste en un entorno de computación y desarrollo de aplicaciones
orientado a bloques para llevar a cabo proyectos en donde se encuentren implicados
grandes cálculos matemáticos y la visualización gráfica de los mismos [Mat98a]. Con
relación a los paradigmas descritos anteriormente, Simulink es una herramienta de
propósito general basada en gráficos, orientada al desarrollo de los modelos como
diagramas de bloques de sistemas continuos, discretos e híbridos y cuya programación
es procedimental y basada en funciones.
• Modelica. Al igual que Simulink, se trata de una herramienta para modelar, simular y
analizar sistemas dinámicos, desarrollada por Modelica Association [Mod00]. Con
respecto a su clasificación en base a los paradigmas anteriores, se trata de una
herramienta de propósito general basada en un lenguaje de programación diseñado
específicamente para el modelado de sistemas continuos, discretos e híbridos y cuya
programación es declarativa y orientada a objetos.
A continuación se van a comparar algunas de las principales características del modelado
orientado a bloques (Simulink) frente al modelado orientado a objetos (Modelica):
• Simplicidad de utilización. El modelado orientado a bloques proporciona una interfaz de
usuario gráfica para la implementación de modelos como si se representara al sistema
por medio de diagramas de bloques, lo que facilita la construcción de modelos, incluso,
para usuarios que no sean especialistas. Sin embargo, para sistemas complejos, el
modelo se convierte en un diagrama multinivel que puede llegar a ser difícil de manejar
y a no reflejar la estructura del sistema que se desea analizar. Aunque el paradigma
orientado a objetos es bastante diferente porque la implementación del modelo se realiza
por medio de instrucciones, también proporciona una interfaz gráfica de usuario que
facilita la programación.
• Jerarquización de los modelos. Los modelos orientados a bloques son jerárquicos por
naturaleza, ya que la construcción de modelos se realiza interconectando bloques que
pueden corresponder a submodelos encapsulados.
32
Capítulo 2.- Materiales y métodos
Por otra parte, el modelado orientado a objetos muestra cómo es la organización del
modelo y cómo interactúan sus distintos elementos. Como se ha comentado
anteriormente cada elemento se encuentra encapsulado de forma que la comunicación
entre ellos se realiza mediante su interfaz, que consiste en puertos que discretizan el
intercambio de energía, masa o información a un número finito de puntos de los distintos
componentes de la interfaz. Por tanto, del diseño de modelos con el paradigma orientado
a objetos resulta una organización jerárquica de submodelos, al igual que el diseño
orientado a bloques.
• Construcción y descripción de los modelos (ODEs/DAEs). Tradicionalmente, en control
y en simulación por computador, el modelado se ha realizado orientado a bloques y de
forma procedimental, más por aspectos computacionales que por deseos de los usuarios.
Para diseñar el modelo hay que realizar la tarea de transformar una descripción física en
términos de balance de energía o masa, de forma que se obtengan un sistema de
ecuaciones diferenciales ordinarias (ODE) del tipo dx/dτ=f(τ,x). Este modelo
matemático es casi un programa de computador (en realidad es un procedimiento para
calcular la derivada de los estados del sistema). Por tanto, estas herramientas deben
incluir módulos que resuelvan numéricamente este tipo de ecuaciones. Proporcionan una
interfaz a los algoritmos numéricos y una interfaz gráfica para programar un modelo,
pero no ayudan a la construcción del modelo [Ebo01]. Por otra parte, el modelado
orientado a objetos describe cada parte del sistema como un objeto con un determinado
comportamiento. Cada uno de estos objetos se describe por relaciones físicas y leyes de
la naturaleza, y no procedimientos que relacionan entradas con salidas. Este paradigma
confía en los métodos simbólicos ya que las ecuaciones del modelo, antes de la
simulación, necesitan ser manipuladas para convertirlas en sistemas de ecuaciones
diferenciales y algebraicas (DAE) de la forma g(τ,x,dx/dτ,u)=0. La diferencia es que esta
manipulación la realiza el computador y no el usuario [Ebo01].
2.5.2. Modelado con Simulink
Con Simulink los modelos se implementan de forma jerárquica. Cada bloque del modelo se
compone de un vector de entrada, U, un vector de salida, Y, y un vector de estados
continuos, discretos o una combinación de ambos, X. La relación entre ellos viene dada por
las siguientes ecuaciones:
y = f o ( τ , X ,U )
Salidas
X dk +1 = f u ( τ , X ,U ) Actualización
dX c
= f d ( τ , X ,U )
Derivada
dτ
(2.1)
donde las funciones fo, fu y fd pueden ser lineales o no lineales. Xc corresponde a los estados
continuos y los Xd a los discretos.
Una vez que el modelo se ha implementado, para llevar a cabo la simulación, se realizan las
siguientes fases:
33
Capítulo 2.- Materiales y métodos
1. Inicialización de la simulación. Se compone de las siguientes operaciones:
• Los parámetros de los bloques se pasan a Matlab para su evaluación y el resultado
numérico de las operaciones se utiliza como los parámetros que va a utilizar el
modelo para realizar la simulación.
• Los bloques que corresponden a submodelos del sistema jerárquico se reemplazan
por sus bloques constituyentes de bajo nivel.
• Se clasifican los bloques en función del orden en el que se necesita que se actualicen.
Los algoritmos de clasificación construyen una lista en la que cada bloque no se
actualiza hasta que los bloques que generan sus entradas no se han actualizado.
Durante este paso, se detectan los lazos algebraicos. En el caso de que el modelo
contenga un lazo algebraico, Simulink ejecuta la rutina de Newton-Rahpson en cada
paso de integración para encontrar una solución si es posible [Mat98b]. Otra solución
es incluir un bloque de memoria en el lazo algebraico, ya que éste aplica un retardo
de un paso de integración, rompiendo el lazo.
• Se comprueban las conexiones entre los bloques que componen el modelo para
asegurarse que la dimensión de los vectores de salida de cada bloque es similar a la
dimensión de los vectores de entrada de los bloques a los que se encuentran
conectados.
2. Ejecución de la simulación. El modelo es simulado utilizando métodos de integración
numérica. La selección de uno de los algoritmos de integración que proporciona
Simulink depende de su habilidad para resolver la derivada de los estados continuos del
sistema modelado, por lo algunos serán más eficientes que otros según el problema que
se está analizando. Por ejemplo, en el problema del control del crecimiento de cultivos
bajo invernadero en función de las condiciones climáticas, que se está tratando en esta
tesis, aparecen dos dinámicas temporales: una lenta que es el cultivo (días, semanas) y
otra rápida que es el clima en el interior (segundos, minutos), característica principal de
los sistemas con escalas temporales (stiff). Por tanto, es necesario seleccionar algoritmos
de integración numérica que sean capaces de resolver este tipo de ecuaciones de forma
eficiente como los métodos Gear. Otros tipos de algoritmos no serían tan efectivos en
intervalos donde la solución evoluciona lentamente, ya que utilizarían intervalos de
integración demasiado pequeños para poder resolver los posibles cambios más rápidos.
La derivada se realiza en un proceso de dos pasos. Primero, se calculan las salidas de
cada bloque en el orden que hayan determinado los algoritmos de clasificación. A
continuación, cada bloque calcula su derivada en base al instante de tiempo actual, sus
entradas y sus estados. El vector derivada resultante se devuelve al algoritmo de
integración que lo utiliza para calcular un nuevo vector de estado para el siguiente
instante de tiempo. Algunos de estos algoritmos utilizan un paso de integración variable,
de forma que en cada uno de ellos calcula el error local (error estimado de los valores de
los estados) y lo compara con el error aceptable definido por el usuario. En el caso de
que sea superior, el algoritmo de integración reduce el paso y lo vuelve a integrar,
repitiendo el proceso.
34
Capítulo 2.- Materiales y métodos
2.5.3. Modelado con Modelica
Modelica es un lenguaje orientado a objetos de modelado de sistemas dinámicos. Utiliza
una forma canónica de ecuaciones, permitiendo tres tipos de ecuaciones: diferenciales,
algebraicas y fórmulas. Cualquier conjunto de ecuaciones que aparezcan en el modelo debe
estar escrito en forma canónica definida de la siguiente manera:
• Las ecuaciones diferenciales son calculadas a partir de su primera derivada
dx/dτ=f(x,y,τ).
• Las ecuaciones algebraicas son de la forma 0=g(x,y,τ).
• Las fórmulas se representan de la forma x= h(y,z).
La diferencia entre ecuaciones algebraicas y fórmulas radica en la forma en las que son
tratadas por Modelica. Las ecuaciones algebraicas se resuelven utilizando algoritmos
numéricos y las fórmulas se calculan directamente.
Incluye una gran variedad de algoritmos de integración numérica y utiliza la manipulación
simbólica para resolver y simplificar el sistema de ecuaciones. Automáticamente, resuelve
los problemas de asignación de la causalidad, genera las ecuaciones que resultan de los
acoplamientos entre los diferentes objetos, reduce el orden de los sistemas y realiza un
tratamiento especial de los lazos algebraicos. Para la gestión de discontinuidades, se han
incluido elementos de eventos discretos.
2.5.4. Comparación Simulink/Modelica
Como se ha indicado, en la presente tesis ha sido necesaria la implementación de modelos
de las variables climáticas que se generan en el interior de un invernadero y del crecimiento
de un cultivo de tomate para el diseño de controladores y para tareas de simulación tal y
como se describirán en los siguientes capítulos. Con el objeto de comparar distintos
paradigmas de modelado se han implementado los modelos desarrollados utilizando las dos
herramientas descritas anteriormente: Simulink y Modelica. Como ejemplo, en la figura
2.18 se representan las diferencias obtenidas con cada una de ellas en distintos ensayos. La
figura 2.18.a muestra un ensayo en bucle abierto del modelado de la temperatura del aire
interior del invernadero, en la que la temperatura real se representa en línea continua y las
resultantes de ambas herramientas en línea discontinua (como se puede observar, no existen
diferencias apreciables entre las dos temperaturas simuladas). Aunque el ensayo
corresponde a quince días, sólo se muestran cinco de ellos para que sea apreciable la
diferencia entre la variable real y la estimada por los modelos. La figura 2.18.b muestra la
diferencia real entre ellas (en los quince días en los que se han realizado los ensayos),
pudiéndose apreciar un pequeño residuo que en valor absoluto posee un valor medio de
0.0012 ºC, un máximo de 0.22 ºC y una desviación estándar de 0.0067. Esta aceptable
diferencia entre las salidas estimadas por las dos herramientas también se repite en el caso
de utilizar un controlador de realimentación que complica el modelo, así como la resolución
de las ecuaciones involucradas. La figura 2.18.c representa la temperatura interior del aire
del invernadero con una consigna de 30 ºC y un controlador tipo P, obtenida con ambas
herramientas.
35
Capítulo 2.- Materiales y métodos
Al igual que en el ensayo anterior, no se aprecian diferencias relevantes entre las
estimaciones de ambas aplicaciones, aunque como se puede observar en la figura 2.18.d,
(donde se representa la diferencias entre ambas salidas), existe un pequeño residuo con
media del valor absoluto igual a 0.0004 ºC, un máximo de 0.08 ºC y desviación estándar de
0.0035 ºC, menores que los obtenidos en el ensayo anterior. Aunque no se muestran, se han
realizado estos mismos análisis con todas las variables que intervienen en el problema,
obteniéndose resultados similares.
0.1
45
40
Temperatura (º C )
Te mperatura interi o r (º C )
0.05
35
30
0
-0.05
-0.1
-0.15
25
-0.2
200
220
240
260
280
300
50
100
Tiempo (Horas)
150
200
250
300
Tiempo (Horas)
a. Temperatura real y simulada en lazo abierto
b. Diferencia entre simulaciones en lazo abierto
x 10
-3
5
30
0
Temperatura (º C )
Temperatura (º C )
28
26
24
22
-5
-10
-15
20
-20
18
0
50
100
150
200
250
300
50
Tiempo (Horas)
100
150
200
250
300
Tiempo (Horas)
c. Temperatura real y simulada en lazo cerrado
d. Diferencia entre simulaciones en lazo cerrado
Fig. 2.18. Comparación de resultados obtenidos con Simulink y con Modelica
Estas diferencias son debidas, principalmente, a las siguientes razones:
•
La manipulación simbólica que se hace sobre el modelo del invernadero implementado
en Modelica genera un sistema de ecuaciones DAE diferente al generado por
Matlab/Simulink.
• Es probable que se estén utilizando diferentes algoritmos para resolver el sistema de
ecuaciones diferenciales en cada una de las herramientas de simulación (no se encuentra
bien documentado este aspecto en Simulink). En Dymola/Modelica se ha utilizado el
algoritmo Dassl descrito en [Bre89], mientras que en Simulink se han utilizado
algoritmos explícitos propietarios de Matlab.
36
Capítulo 2.- Materiales y métodos
•
Existen diferencias en el cálculo de funciones matemáticas elementales debido a una
distinta resolución numérica de las mismas. Por ejemplo, la figura 2.19 representa la
diferencia entre el cálculo del seno de una
función de amplitud igual a la unidad por
parte de cada una de las herramientas,
pudiéndose observar diferencias del orden
10-7, que aunque parezcan despreciables
influyen en el resultado final ya que se
trabaja con algunas variables que pueden
llegar a tomar valores del orden de 10-5. Se
ha estudiado este problema y no se trata de
errores debido a la utilización de distintos
formatos numéricos de los datos, ya que se
ha comprobado este aspecto, además de que Fig 2.19. Diferencia en el cálculo de la operación
con otras operaciones elementales no
seno entre Simulink y Modelica
existen diferencias.
x 10
-7
D iferencia operació n seno S im ulink/Modelica
4
3
2
1
0
-1
-2
-3
-4
20
30
40
50
60
70
80
90
100
110
Instante evaluació n
En base a estos resultados se puede llegar a la conclusión de que es indistinta la utilización
de ambas herramientas (de hecho en los siguientes capítulos se incluyen resultados
obtenidos con las dos). Aún así, existen unas consideraciones con respecto a su utilización
que es conveniente realizar:
• El tiempo de ejecución de los ensayos realizados con los modelos es menor en Modelica
que en Simulink. Por ejemplo, en el modelado del clima completo para quince días de
simulación, con un periodo de evaluación de un minuto, sobre un procesador Pentium
Celeron de 450 MHz y 96 MBytes de memoria RAM, se han consumido 61.5 segundos
en Modelica y 237.83 segundos en Simulink, siendo Modelica aproximadamente 4 veces
más rápido. Esto es debido a que Simulink es un lenguaje interpretado mientras que
Modelica genera un modelo ejecutable. Simulink también permite la creación de un
ejecutable a partir de la implementación en Matlab y, quizás, la comparación habría que
haberla realizado de esta manera, pero no se dispone de la aplicación necesaria para
crearlo, ya que Matlab/Simulink no la incluyen en su versión estándar de la que se
dispone.
• Con respecto a la causalidad, aunque Modelica, basada en un paradigma orientado a
objetos, presenta ciertas ventajas con respecto a este concepto, las ecuaciones que
describen a los sistemas a modelar presentan una causalidad ya establecida por lo que
esto no representa un problema para Simulink.
• Para trabajar con proyectos de modelado complejos, en los que las distintas variables de
salida se encuentren relacionadas y compartan procesos, es preferible la utilización de
Modelica, ya que al estar basado en un paradigma orientado a objetos trabaja con clases
lo que facilita su mantenimiento y el intercambio de la información. Aún así, la elección
va a depender de la destreza y habilidad del usuario en la implementación de los
modelos utilizando ambas herramientas y sobre todo de sus preferencias sobre la
metodología de trabajo de cada una de ellas.
37
Capítulo 2.- Materiales y métodos
2.6.
TÉCNICAS
DE
AJUSTE
DE
LOS
CARACTERÍSTICOS DE LOS MODELOS
PARÁMETROS
2.6.1. Conceptos generales
Una de las fases del modelado consiste en la calibración o la estimación y ajuste de los
parámetros característicos de un modelo. Como esta fase es común para todos los modelos
desarrollados, se ha optado por describir las técnicas utilizadas para llevarla a cabo en este
capítulo de materiales y métodos y hacer referencia a este apartado cuando se describan los
modelos implementados en esta tesis. Como se podrá comprobar en capítulos posteriores,
los modelos desarrollados contienen un elevado número de parámetros a estimar. Algunos
de los valores de estos parámetros pueden ser asignados por estudios basados en los
principios físicos que rigen a los procesos involucrados, o bien, por medidas directas e
indirectas realizadas en el sistema real, pero en algunos casos esto no es posible o resulta
muy costoso. Por tanto, hay que resolver el problema inverso, es decir, utilizando datos de
entrada y salida medidos en los sistemas reales, ajustar los parámetros a estimar de cada
modelo, de forma que los datos de salida del modelo se ajusten a los medidos. Este proceso
debe llevarse cabo mediante una técnica de optimización de forma que se minimice una
función objetivo que mida o estime de alguna forma cómo se ajusta la salida del modelo a
los datos reales [Wan97]. Concretamente, se han utilizado técnicas de optimización que
minimicen el criterio de mínimos cuadrados ponderados que se indica la siguiente ecuación
J = X real − X sim = ∑ (X real ,i − X sim,i )
2
n
2
(2.2)
i =1
donde Xreal=(Xreal,1, ..., Xreal,n) es un conjunto de n medidas tomadas cada minuto en el
invernadero y Xsim=(Xsim,1, ..., Xsim,n) es el conjunto de las estimaciones del modelo
implementado para esos n instantes de tiempo (cada minuto).
Los modelos a calibrar contienen un número elevado de parámetros a estimar por lo que no
es fácil optimizar la función de coste propuesta utilizando técnicas clásicas de optimización
no lineal. Puede que no converja por la alta dimensionalidad del problema y las
irregularidades contenidas en la función objetivo como
discontinuidades en las ecuaciones del modelo o los
Inicialización
cambios bruscos que se producen en algunas variables
como la velocidad del viento o la radiación. Además, el
comportamiento de los modelos es complejo,
Algoritmo de
apareciendo una interacción no lineal entre los
búsqueda
parámetros y las distintas variables de salida, de forma
que algunas de ellas son muy sensibles a unos
parámetros y otras no, por lo que pequeñas variaciones
Criterio
en los parámetros pueden provocar grandes cambios en
finalización
las salidas. De todas estas consideraciones, se puede
deducir que este problema de minimización no tiene una
solución analítica por lo que se utilizan técnicas de
Fin
optimización iterativas cuya estructura general se
Fig. 2.20. Optimización iterativa
muestra en la figura 2.20 [Bla99].
38
Capítulo 2.- Materiales y métodos
Existen distintas técnicas de optimización de problemas multivariables sin restricciones
basados en métodos iterativos. En una primera fase se utilizó el método de búsqueda
secuencial directa [Pre95], que consiste en un método iterativo en el que se utilizan todos
los valores entre dos límites con un incremento determinado de forma que se obtenga la nupla de parámetros que minimizan el criterio descrito en la ecuación (2.2) después de
ejecutar el modelo. Los valores de los parámetros a estimar se van refinando en sucesivas
ejecuciones del algoritmo, disminuyendo los límites del intervalo de búsqueda y el
incremento de variación de los parámetros. Como se puede observar, únicamente requiere
evaluaciones de la función a minimizar y no de sus derivadas. La idea general es la de
reducir iterativamente el tamaño de ese intervalo, partiendo de un entorno en el que se
puede asegurar o se estime que se encuentra el mínimo. Esta búsqueda secuencial presenta
la ventaja de que para incrementos de búsqueda no muy pequeños, el coste computacional
es bajo, por lo que la obtención de los límites entre los que se encuentra el mínimo se
realiza de forma sencilla y rápida. Sin embargo para refinar el resultado, conforme el
incremento de búsqueda se hace menor, el coste computacional crece exponencialmente,
resultando un tiempo de estimación demasiado elevado. Además, no son métodos muy
eficientes en cuanto al número de evaluaciones a realizar de la función a minimizar. Por
esta razón hubo que utilizar un método alternativo de búsqueda. Como se trata de un
problema multivariable sin restricciones, se podrían utilizar el método del gradiente o las
técnicas basadas en el método de Newton, pero requieren que la función a minimizar sea
derivable, es decir, que no presente discontinuidades, que no es el caso que se está
estudiando. Por estas razones se optó por utilizar métodos de optimización heurísticos.
Una de las opciones que se suelen utilizar en la ingeniería para la obtención de una solución
óptima de un problema son los algoritmos genéticos [Mat00]. Esta técnica se ha utilizado
con éxito para la obtención de los parámetros característicos de un modelo en distintas
áreas de aplicación como la cantidad de agua de lluvia [Wan97], procesos de fabricación de
acero [Pau98], dinámica de un rebaño de ovejas [May99] o los procesos de cristalización de
algunas sustancias químicas [Sah00]. El principal inconveniente de estas técnicas consiste
en que no existe garantía de encontrar el óptimo global y el coste computacional es
demasiado elevado para encontrar unos márgenes de variación que aseguren el mínimo,
pero una vez que se encuentran, el algoritmo de búsqueda es más eficiente que la búsqueda
directa secuencial ya que no barre todos los valores, sino que lo realiza de forma aleatoria.
En el siguiente apartado se realizará una breve descripción de los principios de
funcionamiento de este tipo de algoritmos.
2.6.2. Algoritmos genéticos
Los algoritmos genéticos son métodos heurísticos sistemáticos para la resolución de
problemas de búsqueda y optimización que aplican los mismos principios de la evolución
biológica, es decir selección basada en la población, reproducción sexual y mutación
[Mer97]. Por tanto, los algoritmos genéticos pueden resolver el problema de encontrar los
valores de los parámetros que describan del modelo, (c1,c2,...,cn), de forma que la función
de coste descrita en la ecuación (2.2) sea mínima. A cada n-upla de parámetros se le
denomina cromosoma, y al conjunto de todos los que se analizan para encontrar la solución
óptima se le conoce como población. Los cromosomas compiten entre sí para ver cual
constituye la mejor solución, aunque no necesariamente la mejor de todas las posibles.
39
Capítulo 2.- Materiales y métodos
El ambiente, constituido por otras soluciones, ejercerá una presión selectiva sobre la
población, de forma que sólo los mejor adaptados, es decir, aquellos que resuelvan mejor el
problema, sobrevivan o leguen su material genético a las siguientes generaciones, igual que
en la evolución de las especies. La diversidad genética se introduce mediante mutaciones y
cruces o reproducción sexual. Por tanto, un algoritmo genético se puede describir de la
siguiente manera, de forma que lo más habitual, es que la condición de terminación sea la
convergencia del algoritmo genético (el valor de la función objetivo es menor que un límite
predefinido) o un número prefijado de generaciones:
Inicio
tiempo← 0;
Generación de población inicial, P0;
Evaluación de la población inicial P0;
Mientras (no(condición de finalización))
inicio
tiempo← tiempo+1;
Selección de la solución potencial Mtiempo partiendo de la población anterior
Ptiempo-1;
Modificar la solución potencial Mtiempo utilizando operadores genéticos;
Crear una nueva población Ptiempo de la solución potencial Mtiempo;
Evaluación de la población actual, Ptiempo;
Fin_mientras;
Fin.
Los algoritmos genéticos requieren que cada cromosoma sea codificado para poder trabajar
con ellos en un computador, así que cada individuo se puede considerar a dos niveles
[Fon95]:
• Fenotipo. Son los valores que toman los parámetros a estimar en el dominio en el que se
define la función objetivo. El concepto es similar al que se utiliza en biología para
referirse a las características externas de las especies como en un ser humano puede ser
la altura, peso, color de pelo, etc.
• Genotipo. Es la representación del fenotipo a bajo nivel, es decir, la codificación del
genotipo, generalmente, por una cadena de bits. Evidentemente, este proceso es
necesario para poder trabajar con los cromosomas en un computador y que puedan ser
manipulados por los operadores (programas) genéticos. Como se puede observar, es un
concepto similar a las secuencias genéticas de los cromosomas en biología.
Por tanto, cada uno de los pasos del algoritmo genético que se describen a continuación,
consisten en una actuación sobre las cadenas de bits que representan a los individuos de las
poblaciones a analizar [Hou96]:
• Generación de la población inicial. El algoritmo genético debe proporcionar una
población inicial, siendo el método más común la generación aleatoria de un número de
posibles soluciones (individuos) en el espacio de búsqueda (población total). Sin
embargo, como los algoritmos genéticos mejoran iterativamente las soluciones
existentes, parte de la población inicial puede consistir en un conjunto de posibles
buenas soluciones potenciales obtenidos por algún otro método de optimización y
completarlas con un conjunto de individuos seleccionados de forma aleatoria en el
espacio de búsqueda.
40
Capítulo 2.- Materiales y métodos
• Evaluación y selección. Durante el proceso de evaluación, se decodifica el cromosoma,
convirtiéndose en una serie de parámetros, se calcula la solución del problema, y se le
asigna una puntuación, denominada fitness, en función del coste o de lo cerca que se
encuentre de la mejor solución. Esencialmente, existen dos estrategias para asignar la
puntuación a un individuo [Fon95]:
Escalando. La puntuación se calcula como una función del coste. Evidentemente, esa
función debe dar ventaja al mejor individuo sobre el resto de la población. La función
Sigma suele dar un buen resultado.
Clasificando. Se clasifica la población por el coste producido y se le asigna una
puntuación de acuerdo con su posición siguiendo una función lineal o exponencial.
En base a esta puntuación, se seleccionan los cromosomas que se van a reproducir y
cuales se van a eliminar. Existen varias formas de considerar la puntuación para
seleccionar los mejores individuos. En esta tesis, se ha utilizado un método
probabilístico, de forma que se le asigna a cada individuo j de la población, una
probabilidad, cPj, en base a la puntuación obtenida. Se genera una serie de cni números
aleatorios y se compara con la suma de las probabilidades de la población, cSPi:
c SPi =
i
∑ cPj
(2.3)
j =1
Se selecciona el individuo i que cumpla la siguiente condición:
c SPi −1 < VU ( 0 ,1 ) ≤ c SPi
(2.4)
donde VU(0,1) es una distribución uniforme. La probabilidad de seleccionar el individuo j,
VPj, se basa en la posición que ocupa el mismo en la clasificación o ranking realizada en
función del coste producido por cada uno al evaluar la función de coste, crank, (donde 1
es el valor del mejor individuo de la población) por medio de la siguiente ecuación
exponencial:
c Pmejor
c rank − 1
( 1 − c Pmejor )
(2.5)
VPj =
1 − ( 1 − c Pmejor ) c ni
donde cPmejor es la probabilidad de seleccionar el mejor individuo y cni es el número de
individuos de la población. Se seleccionan los individuos que cumplan la condición
descrita en la ecuación (2.4) de manera que formen la nueva población teniendo en
cuenta que se trasmitan los buenos rasgos de los mejores.
• Modificación de la población potencial. La selección iterativa a partir de la misma
población podría producir múltiples copias del mejor individuo original, por lo que hay
que introducir alguna operación entre las distintas fases de selección. Los operadores
genéticos son la base del mecanismo de búsqueda de este tipo de algoritmos, ya que son
los que crean nuevas soluciones a partir de los individuos seleccionados de una
determinada población, modificando los cromosomas por manipulación de sus
genotipos. Los operadores genéticos se pueden dividir en dos categorías:
41
Capítulo 2.- Materiales y métodos
Cruce. Consiste en el intercambio de material genético entre dos o más cromosomas
de dos individuos. Existen distintos operadores de cruce, aunque en la aplicación
implementada se ha utilizado el cruce simple de valores reales (Real-Value Simple
Crossover) que selecciona de forma aleatoria dos individuos Vindv-x e Vindv-y y genera
dos nuevos individuos V’indv-x e V’indv-y, representados como vectores m-dimensional
de números reales. Este operador genera un número aleatorio caleatorio a partir de una
distribución uniforme VU(0,1) y genera los nuevos individuos como se indica en las
siguientes expresiones:
′ − x = c aleatorioVindv − x + (1 − caleatorio )Vindv − y
Vindv
′ − y = (1 − caleatorio )Vindv − x + caleatorioVindv − y
Vindv
(2.6)
Mutación. Este operador modifica el genotipo de un individuo Vindv-x para producir
uno nuevo, V’indv-x, utilizando un método probabilístico. Se ha utilizado el algoritmo
de Mutación Uniforme, que consiste en la selección aleatoria de una variable j, que
determina qué elemento del vector del individuo Vindv-x se cambia por un valor
aleatorio procedente de una distribución uniforme VU(ai,bi), donde ai y bi son el límite
inferior y superior del intervalo de variación del parámetro que ocupa la posición j del
cromosoma padre, es decir:
⎧VU ( ai ,bi ) si i = j
V 'ind − x ( i ) = ⎨
⎩Vind − x ( i ) si i ≠ j
(2.7)
La implementación de la herramienta de búsqueda de los parámetros característicos de un
modelo se ha desarrollado utilizando el Genetic Algorithms for Optimization Toolbox para
Matlab realizado por Houck y colaboradores de la Universidad de North Carolina (USA)
[Hou96]. Los distintos módulos necesarios para el desarrollo de una aplicación de este tipo
las han implementado como funciones de Matlab. Se mantiene un alto grado de
modularidad y flexibilidad, de forma que se puede realizar cualquier aplicación basada en
algoritmos genéticos combinando las funciones de evaluación, selección, cruce, mutación y
terminación que se encuentran en el toolbox. Concretamente, se han utilizado las funciones
que se han descrito anteriormente.
2.6.3. Metodología utilizada
Como se ha comentado, la búsqueda directa secuencial presenta el principal inconveniente
del elevado coste computacional cuando el incremento de búsqueda de los parámetros es
muy pequeño, mientras que cuando es de uno o dos órdenes menor que los límites del
intervalo de búsqueda, es sencillo acotar esta región, asegurando que los parámetros a
encontrar se localizan en ella. Con las técnicas genéticas ocurre lo contrario, el coste
computacional es demasiado elevado para encontrar unos márgenes de variación que
aseguren un mínimo, pero una vez que se encuentran, el algoritmo de búsqueda es más
eficiente que la búsqueda secuencial a la hora de encontrar, al menos una solución local, ya
que no barre todos los valores, sino que lo realiza de forma aleatoria. Por esta razón, la
estimación de parámetros utilizada se ha realizado en dos etapas que se describen a
continuación, combinando estas dos técnicas:
42
Capítulo 2.- Materiales y métodos
1. Búsqueda directa secuencial para la obtención del intervalo de variación de cada
parámetro que asegure el mínimo de la función de coste, encontrando un valor
aproximado para cada parámetro. Evidentemente, se han utilizado conocimientos a
priori en forma de rangos de posibles valores de los parámetros que aparecen en los
estudios teóricos de los procesos físicos involucrados (manuales de termodinámica y
fluidodinámica) y las experiencias publicadas por otros autores en el modelado del clima
que se genera en el interior de un invernadero y el crecimiento de cultivos.
2. En el intervalo de búsqueda obtenido por el método anterior, se utiliza la búsqueda
genética para la obtención definitiva de los parámetros óptimos.
Como ejemplo, la figura 2.22 muestra la temperatura del aire estimada por un modelo en el
que se han calibrado los parámetros obtenidos mediante búsqueda secuencial y con
aquellos obtenidos después del proceso de refinamiento utilizando algoritmos genéticos y
como se puede observar, el resultado final se mejora apreciablemente. Las principales
entradas al sistema durante ese día de simulación, se muestran en la siguiente figura 2.21
que corresponden a las variables meteorológicas en el exterior del invernadero que actúan
como perturbaciones (temperatura, radiación global y velocidad de viento) y a la posición
de las ventilaciones naturales como entrada de control.
30
900
Radiació n global exte rior (W/m2)
Temperatura exte rior (º C )
29
28
27
26
25
24
23
22
21
800
700
600
500
400
300
200
100
20
0
0
5
10
15
20
2
4
6
Tiempo (Horas)
10
12
14
16
18
20
Tiempo (Horas)
a. Temperatura exterior
b. Radiación exterior
35
P osició n de la ventilació n (º )
6
V elocidad viento exterior (m /s)
8
5
4
3
2
1
30
25
20
15
10
5
0
0
5
10
15
0
20
5
10
15
Tiempo (Horas)
Tiempo (Horas)
c. Velocidad viento exterior
d. Posición de la ventilación
Fig. 2.21. Perturbaciones y entradas de control
43
20
22
Capítulo 2.- Materiales y métodos
Tem peratura real
Tem peratura sim ulada bú s queda s ec uenc ial
Tem peratura sim ulada bú s queda gené tic a
Temperatura aire invernadero (º C )
50
45
40
35
30
25
0
5
10
15
20
Tiempo (Horas)
Fig.2.22.Comparación de la salida del modelo de temperatura del invernadero
utilizando parámetros obtenidos por búsqueda directa y genética
La tabla 2.11 muestra unos estadísticos (media, máximo y desviación estándar del error
absoluto entre la medida real y la estimada) que cuantitativamente ayudan a corroborar el
hecho anterior, observándose que los parámetros obtenidos mediante métodos genéticos
producen mejores resultados en todos los submodelos implementados de temperatura y
humedad relativa que se describirán en el capítulo 3.
Temperatura
aire
Sec.
AG
1.13
0.93
5.15
4.63
0.88
0.65
Temperatura
cubierta
Sec.
AG
0.89
0.79
5.17
4.81
0.79
0.64
Temperatura
Temperatura Humedad relativa
superficie suelo capa 1 suelo
aire
Sec.
AG
Sec.
AG
Sec.
AG
0.74
0.64
0.34 0.32
4.29
3.92
4.66
4.65
1.36 1.26
29.47
24.32
0.63
0.50
0.28 0.26
3.76
3.69
Media
Máximo
Desviación
estándar
Tabla 2.11. Estadísticos de comparación de las estimaciones del modelo utilizando parámetros
obtenidos con búsqueda secuencial (Sec.) y genética (AG).
Por otra parte, el algoritmo genético es más eficiente ya que no barre todo el espacio de
búsqueda que, además, se ha reducido con la búsqueda secuencial. Como ejemplo, de
ineficacia del algoritmo directo para el proceso de refinado en la búsqueda de los valores
óptimos de los parámetros a estimar, la media del tiempo de ejecución del modelo de
temperatura de la cubierta, descrito en el siguiente capítulo, para un solo día en un
procesador Pentium III a 450 MHz con 256 MB de RAM es de 1.43 segundos y 173833
flops. Si se realizara una búsqueda de nueve parámetros con un incremento de forma que se
prueben 5 valores de cada uno de ellos, se necesitarían 33 días para la ejecución de la
búsqueda, lo que hace inviable este tipo de análisis.
44
CAPÍTULO 3
OBTENCIÓN DE MODELOS PARA
SIMULACIÓN DEL CLIMA EN EL
INTERIOR DE UN INVERNADERO
3.1. MODELADO DEL CLIMA DE UN INVERNADERO
En este capítulo se va a estudiar la dinámica del clima que se genera en el interior de un
invernadero, así como los procesos físicos relacionados que en él tienen lugar. Además, se
va a desarrollar, implementar y validar un modelo que describe al clima y que se utilizará
como simulador para el diseño de controladores del crecimiento de cultivos.
En meteorología, se denomina tiempo al conjunto de valores de las magnitudes físicas que
caracterizan al estado atmosférico en un momento y un lugar determinado, y se denomina
clima al estado a largo plazo de la atmósfera, es decir, la secuencia más probable de esas
variables a lo largo de un determinado intervalo de tiempo [Bar85]. El clima es como el
tiempo promedio en un determinado lugar. En el ámbito de cultivos protegidos, el término
“clima de un invernadero” se utiliza para indicar el conjunto de magnitudes físicas
ambientales que se producen en un invernadero y que afectan al crecimiento y desarrollo de
un cultivo en un determinado instante [Bot83]. Según las definiciones anteriores, sería más
correcto denominarlo tiempo de un invernadero, pero por razones prácticas y debido a la
amplia utilización del primer término, a lo largo de esta tesis, se le seguirá denominando
clima de un invernadero.
Un invernadero es un recinto en el que se pueden mantener constantes la temperatura,
humedad y otros factores ambientales para favorecer el cultivo de plantas [RAE01], por
tanto su finalidad es proporcionar unas condiciones ambientales que se aproximen a las
óptimas para un cultivo en las distintas fases de su desarrollo vegetativo e incluso la
obtención de producción en estaciones diferentes a las normales. En realidad, es una
superficie cerrada por un determinado material que permite la transmisión de un
determinado porcentaje de radiación solar, y que confina total o parcialmente una zona de
atmósfera. Esta configuración produce el denominado efecto invernadero debido a que el
material de cubierta transmite un amplio porcentaje de radiación solar (visible e infrarrojo
cercano) pero no transmite las longitudes de onda superiores (infrarrojo medio y lejano).
45
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La cubierta transmite gran parte de la radiación solar que es absorbida por los sólidos que
se encuentran en el invernadero (en principio, el suelo y el cultivo) aumentando su
temperatura, lo que provoca que reemitan energía en forma de radiación térmica que la
cubierta no transmite (o sólo una pequeña parte) al exterior, quedando esta energía emitida
atrapada en el recinto. Aunque se ha mantenido que este efecto era la causa de la diferencia
de clima entre el interior y el exterior del invernadero, hay que señalar que el hecho de
encontrarse la atmósfera confinada por la cubierta produce una disminución de la velocidad
del aire en el interior que afecta a los procesos convectivos y difusivos entre el aire interior
y los distintos elementos físicos del invernadero. En 1963, Bussinger probó que este
mecanismo es predominante en el incremento de la temperatura del aire en el interior del
invernadero, por lo que la acepción común del efecto invernadero, como asociado
únicamente a una trampa en procesos radiativos, es engañosa [Bot83]. El clima de un
invernadero se encuentra descrito por un conjunto de variables que lo caracterizan, aunque
no todos los autores están de acuerdo en cuales son esas variables. Ya que el principal
objetivo de un invernadero es permitir alcanzar las condiciones óptimas para un
determinado cultivo y estación del año, basándose en las necesidades de las plantas y tal y
como se describe en el Capítulo 5. Modelado del crecimiento del cultivo de tomate, se ha
considerado que las variables que describen al clima interior de un invernadero e influyen
sobre el crecimiento del cultivo son:
•
Temperatura del aire.
•
Concentración de CO2 en el aire.
•
Radiación PAR1 que alcanza el cultivo.
Indirectamente, la humedad del aire afecta al desarrollo y crecimiento del cultivo ya que
influye en la transpiración del mismo, que como se estudiará mas adelante en el apartado
3.2.7. Procesos de transpiración del cultivo, modula los flujos energéticos del ambiente,
afectando de esta forma a todos los procesos de crecimiento [Sta98].
Evidentemente, para comprender lo que sucede en el invernadero y poder realizar las
acciones pertinentes cuando se desea modificar su clima interior utilizando los sistemas de
actuación instalados, es necesario conocer las siguientes condiciones climáticas en el
exterior, ya que son las perturbaciones del sistema:
•
Radiación exterior.
•
Temperatura del aire en el exterior.
•
Humedad del aire en el exterior.
•
Concentración de CO2 en el aire exterior.
•
Velocidad del viento en el exterior.
•
Dirección del viento en el exterior.
•
Lluvia.
1
Photosynthetically Active Radiation: es la radiación cuya longitud de onda está comprendida entre los 0.4 y
los 0.7 µm que es la que utiliza el cultivo para realizar la fotosíntesis.
46
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Uno de los objetivos de la presente tesis consiste en establecer las bases que faciliten el
diseño y desarrollo de algoritmos de control que optimicen el rendimiento global de un
cultivo en una determinada campaña, de forma que se maximice la diferencia entre los
ingresos procedentes de la venta de los productos y el gasto de energía que consumen los
sistemas de actuación instalados para que se alcancen la condiciones climáticas deseadas.
Como se trata de algoritmos a ejecutar a largo plazo (un ciclo corto de cultivo son
aproximadamente 100 días) la prueba de los mismos y sus correcciones en condiciones
reales consumirían una gran cantidad de tiempo y recursos, por lo que se optó por
desarrollar un simulador del clima interior de un invernadero. La principal ventaja de la
utilización de un simulador es que permite la evaluación del resultado de una decisión del
mundo real sin llegar a tomar efectivamente la misma [Rio97]. Otras ventajas adicionales
que presenta son que:
•
Permite la organización del conocimiento y las observaciones sobre el sistema así como
las posibles deducciones lógicas que se puedan tener de esta organización.
•
Proporciona un marco para contrastar el sistema y sus posibles modificaciones.
•
Proporciona una perspectiva sobre detalles y aspectos relevantes del sistema.
•
Posibilita una mayor y mejor manipulación que la asequible con el propio sistema.
•
Facilita el análisis de los resultados.
•
Permite controlar mejor las fuentes de variación que lo que permitiría el estudio directo
del sistema.
•
En general, es menos costoso que experimentar con el sistema real.
Una decisión a tomar es el tipo de modelo a utilizar para el diseño del simulador, es decir,
si se usan técnicas de modelado basadas en principios físicos o técnicas de modelado
empíricas basadas en la adquisición de datos reales. Debido a que se conocen las leyes
físicas y químicas por las que se rigen los procesos que se producen en el interior de un
invernadero se ha optado por desarrollar un modelo matemático lo más completo posible,
ya que ayuda a comprender mejor las respuestas del sistema a sus entradas y
perturbaciones, así como el comportamiento de los distintos elementos que forman el
invernadero y las relaciones que se producen entre ellos, si bien, como principal desventaja
destaca la mayor dificultad en su obtención.
Para modelar el clima que se genera en el interior de un invernadero basándose en los
principios físicos y químicos que lo producen, hay que utilizar métodos de balance de
energía y masa en todos los elementos que lo constituyen. Por tanto, lo primero que hay
que determinar es la identificación de cada uno de estos subsistemas. Básicamente son los
cuatro siguientes [Pal92]:
•
Cubierta. Se trata de un medio sólido y homogéneo que transmite parcialmente la
radiación solar y térmica. Su principal objetivo es aislar la atmósfera interna de las
condiciones meteorológicas exteriores, haciendo de puente entre los dos entornos.
•
Cultivo. Se trata de un organismo vivo que constituye un sistema termodinámico abierto
que extrae energía del medio que lo rodea para crear y mantener su propia ordenación
esencial.
47
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
•
Aire. Es un medio gaseoso que sirve de unión entre los distintos elementos sólidos del
invernadero.
•
Suelo. Se trata de un medio poroso donde se puede distinguir una fase sólida (tierra y
materia orgánica), una fase líquida (agua) y una fase gaseosa (vapor de agua y aire). Es
el responsable de la inercia térmica del invernadero, absorbiendo energía durante el día
y emitiéndola durante la noche. Realmente, el subsistema suelo, se divide en:
Superficie donde se produce el acoplamiento con el resto del invernadero.
Capas inferiores que separan las capas de suelo que poseen distintas características
térmicas entre las que se producen procesos de conducción.
Por tanto, se van a considerar nuevas variables que describan a estos elementos y su
relación con el clima del invernadero como:
•
Temperatura de la superficie exterior de la cubierta.
•
Temperatura de la superficie interior de la cubierta.
•
Temperatura del cultivo.
•
Temperatura de la superficie del suelo.
•
Temperatura de cada una de las capas en las que se divide el suelo.
Entre estos elementos se producen los distintos procesos de transporte de energía y masa
como conducción, convección, radiación, condensación, evaporación y transpiración, cuyos
mecanismos de funcionamiento se describen en el siguiente apartado 3.2. Procesos físicos
que se producen en el interior de un invernadero. En estos procesos influyen otras
variables climáticas como:
•
Velocidad del aire en el interior del invernadero.
•
Temperatura aparente del cielo (bóveda celeste), que se define como la temperatura de
una semiesfera negra que intercambia radiación térmica con los distintos elementos del
invernadero de acuerdo con la ley de Stefan-Boltzman en la misma cantidad que el
intercambio real que se produce entre el invernadero y la atmósfera [Bot94].
Otros dispositivos que hay que considerar en el modelado del clima del invernadero son los
sistemas de actuación instalados con el objetivo de modificar las variables climáticas y que
constituyen las entradas al sistema que pueden ser manipuladas artificialmente. Como se ha
comentado anteriormente, existe una amplia variedad de actuadores climáticos, aunque los
más utilizados en el sector agrícola del sudeste español son:
•
Ventilación natural.
•
Sistemas de calefacción.
•
Mallas de sombreo y térmicas.
•
Sistemas de humidificación.
48
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
En un invernadero se cumple el Principio de Continuidad entre sus elementos en los que en
cada uno se pueden estudiar los procesos de transferencia de calor y de masa por medio de
ecuaciones de balance de energía y masas. El balance de energía en un determinado
volumen se determina por la siguiente ecuación:
dQtot,volumen
= Qent,volumen − Qsal,volumen + Qgen,volumen
dτ
(3.1)
donde Qtot,volumen [J] es la cantidad total de energía acumulada en un volumen, Qent,volumen
[J/s] es la energía por unidad de tiempo que entra en el volumen, Qsal,volumen [J/s], es el flujo
de energía que abandona el volumen y Qgen,volumen [J/s] es la energía generada en el propio
volumen.
El término de la izquierda representa el cambio de energía por unidad de tiempo, τ, en el
volumen considerado, que se encuentra directamente relacionado con la temperatura,
Vt,volumen [K], a través de la capacidad térmica, cct,volumen [J/K], por lo que la ecuación del
balance de energía quedaría:
cct ,volumen
dVt ,volumen
dτ
= Qent,volumen − Qsal,volumen + Qgen,volumen
(3.2)
Las mismas consideraciones se pueden realizar con los balances de masas en un volumen,
de forma que la variación con el tiempo de la masa en un determinado volumen, Mtot,volumen
[kg], es igual a la diferencia entre los flujos de masa de entrada, Ment,volumen [kg/s], y los de
salida, Msal,volumen [kg/s], más la masa generada por unidad de tiempo en ese volumen,
Mgen,volumen [kg/s], de acuerdo con la siguiente ecuación de balance:
dMtot,volumen
dτ
= M ent,volumen − M sal,volumen + M gen,volumen
(3.3)
La masa total se encuentra directamente relacionado con la concentración, Vcon,volumen
[kg/m3] y el volumen, cvol,volumen [m3], de forma que la ecuación de balance se puede
expresar como:
cvol,volumen
dVcon,volumen
dτ
= M ent,volumen − M sal,volumen + M gen,volumen
(3.4)
En un invernadero, la concentración (masa) del vapor de agua y del CO2 en el aire es lo que
más interesa, aunque se puede desarrollar un balance para cualquier sustancia de interés.
Por tanto el clima del invernadero quedará definido por un sistema de ecuaciones
diferenciales que describan los balances de energía y masa en cada elemento, es decir:
•
Balance de energía en la superficie externa de la cubierta.
•
Balance de energía en la superficie interna de la cubierta.
•
Balance de energía en el aire del invernadero.
•
Balance de energía en el cultivo.
•
Balance de energía en la superficie de suelo.
49
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
•
Balance de energía en las capas consideradas en el suelo (de 2 a 5 según autores).
•
Balance de concentración de vapor de agua en el aire del invernadero.
•
Balance de concentración de CO2 en el aire del invernadero.
El número de ecuaciones a resolver dependerá de las variables conocidas o medidas, es
decir, las condiciones de contorno que se consideren. Todos los autores coinciden en
adoptar como condiciones de contorno todas las perturbaciones al clima del invernadero, es
decir, las condiciones climáticas exteriores, la temperatura del suelo a una determinada
profundidad y la velocidad del viento en el interior. Como lo que realmente interesa
modelar son las variables del aire interior (temperatura, humedad y concentración de CO2),
si se miden las variables que describen al resto de elementos del invernadero, se pueden
considerar como condiciones de contorno, reduciéndose la complejidad del problema de
modelado, ya que se reduce el número de ecuaciones diferenciales.
Sin embargo, debido a problemas técnicos o económicos, existen ocasiones donde algunas
de estas variables de contorno no se miden, siendo necesario estimarlas o simularlas. Una
representación esquemática del simulador se muestra en la figura 3.1.
CONDICIONES CONTORNO
Temperatura
exterior
Humedad
Velocidad
Viento Dirección exterior
Viento
Temperatura
Bóveda celeste
Conc. CO2
exterior
Radiación
exterior
SALIDAS
ENTRADAS
Ventilación
Velocidad
Viento interior
Temperatura aire
Calefacción
Radiación PAR
Mallas
Conc. CO2 aire
Humidificador
Humedad aire
Temperatura
capa suelo
Temperatura Temperatura
Temperatura Temperatura
cubierta
cultivo
Superficie suelo capas de suelo
SALIDAS
Fig. 3.1. Esquema del modelado de las variables características de los elementos del invernadero.
Si las salidas inferiores correspondientes a las variables descriptivas de los elementos se
miden, se convierten en condiciones de contorno, excepto las temperaturas de las capas del
suelo, ya que la única que se necesita para conocer las condiciones climáticas del aire
interior es la superficie del suelo al ser la única que está en contacto con él. El esquema del
modelo se convierte en este caso en el que muestra la figura 3.2.
50
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
CONDICIONES CONTORNO
Temperatura
exterior
Velocidad
Viento Dirección
Viento
Humedad
exterior
Temperatura
Bóveda celeste
Conc. CO 2
exterior
Radiación
exterior
SALIDAS
ENTRADAS
Velocidad
Viento interior
Ventilación
Calefacción
Temperatura aire
Radiación PAR
M allas
Conc. CO 2 aire
Humidificador
Humedad aire
Temperatura
cubierta
Temperatura
cultivo
Temperatura
Superficie suelo
CONDICIONES CONTORNO
Fig 3.2. Esquema del modelo de variables características del aire conocidas las del resto de elementos.
La dinámica de las variables climáticas en un invernadero es muy compleja debido a
([Rod00], [Rod01c]):
•
Presencia de distintas escalas de tiempo de interés, desde minutos hasta meses.
•
Presencia de no linealidades de los procesos, tanto estáticas como dinámicas.
•
Variabilidad en el tiempo de parámetros.
•
Presencia de fuertes perturbaciones (medibles y no medibles).
•
Alto grado de correlación de las variables.
•
Combinación de variables continuas y discretas.
•
Presencia de dinámicas desconocidas y, por tanto, no modelables.
•
Dinámica cambiante con las características del invernadero y con la zona geográfica.
Por tanto, se trata de un problema muy complejo de analizar y aunque los procesos físicos
que tienen lugar en un invernadero son conocidos, hay que realizar una serie de hipótesis de
partida en cada uno de los elementos y de los procesos. Las hipótesis aceptadas por la
mayoría de autores son los siguientes [Pal92]:
•
Cubierta. Se considera formada por un material homogéneo con propiedades
termodinámicas y ópticas constantes en el tiempo y con una capacidad calorífica
despreciable. Se considera una temperatura en cada superficie.
•
Cultivo. Se considera como un subsistema con densidad de vegetación uniforme que
absorbe y transmite la radiación solar y térmica. Se suele despreciar su capacidad
térmica y se supone la temperatura uniforme en todo su volumen.
•
Aire. Se considera homogéneo en cuanto a propiedades termodinámicas excepto en
aquellos modelos que incluyan ventilación forzada.
51
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
•
Suelo. Se le considera como un medio dividido en un número finito de capas
horizontales que se suponen homogéneas en cuanto a sus propiedades termodinámicas y
composición química. El flujo de calor se suele considerar unidireccional,
prescindiendo del estudio del movimiento de agua.
En el apartado 3.3. Estado actual de los estudios de modelado del clima en invernadero se
analizan los modelos realizados por otros autores donde se describen las características
principales de cada uno de ellos.
Como se puede observar, todos los elementos se consideran homogéneos respecto a sus
propiedades termodinámicas, pero realmente existen gradientes de las variables climáticas
tanto horizontal como verticalmente, existiendo un clima temporal y espacial. Este hecho se
pudo comprobar durante el desarrollo del proyecto DAMOCIA [Bie96]. Uno de los
principales objetivos de este proyecto era diseñar nuevas estructuras de invernadero
fácilmente controlables, por lo que hubo que desarrollar modelos para estudiar la dinámica
de las variables climáticas en el interior de las estructuras propuestas. En principio se
desarrolló un simulador de radiación, principal fuente de energía natural en los
invernaderos, para analizar, en una fase posterior, el comportamiento de la temperatura de
forma empírica. Como el objetivo era desarrollar herramientas que ayudaran a la obtención
de nuevas estructuras, uno de los factores principales era el espacial, ya que interesaba
estudiar la evolución de las variables climáticas en distintas zonas de los invernaderos. Con
respecto a la radiación, las observaciones espaciales se expusieron en [Bie97a] y en
[Bie97b], y con respecto a la temperatura, algunas observaciones espaciales se expusieron
en [Rod98]. Como ejemplo, se muestra la evolución temporal y espacial de la temperatura
en un invernadero asimétrico de cubierta curva (tipo Inamed) durante el día 15 de mayo de
1995 en una capa de aire paralela a la superficie de suelo, situada a 2 metros de altura.
07:50
10:10
11:30
13:40
16:30
17:20
Escala de temperatura
18:10
Fig. 3.3. Evolución temporal y espacial de la temperatura en un invernadero tipo Inamed
52
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Los gradientes son debidos a los patrones de circulación de aire verticales y horizontales
que se pueden producir porque el aire entre del exterior por barlovento y salga al exterior
por sotavento, por las no estanqueidades de la estructura o por roturas en la cubierta.
Generalmente, este efecto es más sensible en la parte superior de la estructura por encima
del cultivo y como consecuencia se induce un flujo de circulación sobre la superficie del
suelo a través del cultivo. Estos efectos se ven acrecentados en el caso de disponer
actuadores como tuberías de calefacción, ventilación o mallas de sombreo [Bot83].
Es evidente que las distribuciones no son homogéneas, pero se parte de la hipótesis
contraria ya que de otro modo los problemas de simulación, predicción y control serían
prácticamente inabordables, por lo que los modelos se centran en el clima medio espacial
de la atmósfera del invernadero [Pal92]. El simulador de radiación basado en principios
físicos desarrollado a lo largo del proyecto DAMOCIA se implementó utilizando técnicas
de elementos finitos lo que suponía un coste computacional enorme.
Bajo el punto de vista de control del clima en un invernadero, el hecho de utilizar modelos
espaciales no aporta mejoras, debido a que los sistemas de actuación instalados en la
actualidad no se encuentran distribuidos por el invernadero, además el coste que supondría
monitorizar todas las zonas sería demasiado elevado. Una primera tentativa de control
distribuido es utilizar aerotermos repartidos por el volumen del invernadero de forma que
se pueda uniformizar la temperatura nocturna, pero la inversión inicial es demasiado
costosa y su uso no se encuentra extendido.
En este capítulo se van a describir los principales procesos físicos que se producen en el
interior del invernadero y que modifican su clima, incluyendo los estudios particulares más
importantes realizados sobre ellos, así como el efecto de los sistemas de actuación más
comúnmente utilizados. Posteriormente, se expondrá el estado actual en cuanto a las
características principales de los modelos climáticos existentes. A continuación, se
describirá el desarrollo del simulador de clima, haciendo hincapié en las etapas de diseño,
calibración y validación, para terminar exponiendo las conclusiones y los futuros trabajos
relacionados.
3.2. PROCESOS FÍSICOS QUE SE PRODUCEN EN EL INTERIOR DE
UN INVERNADERO
3.2.1. Introducción
Como se ha comentado en el apartado anterior, un invernadero es un sistema
termodinámico compuesto por un conjunto de elementos físicos sólidos, líquidos y
gaseosos en cuyo interior se genera un microclima cuya complejidad proviene del
acoplamiento y simultaneidad de todos los procesos de transporte de materia y energía.
En las ecuaciones de balance de energía y masas en un determinado volumen, el cambio
con el tiempo de la temperatura o la concentración de una determinada materia es función
de los flujos de energía y masa de entrada, los de salida y la producción propia de ese
determinado volumen. Por tanto, hay que formular estos flujos de forma que se relacionen
con las variables que se desean calcular.
53
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
En este apartado, se van a describir los flujos de transferencia de calor y masa que se
producen entre los distintos elementos que forman un invernadero, así como el efecto de los
sistemas de actuación que se instalan. En principio se describirán en general todos los
procesos involucrados, para posteriormente particularizarlo a los elementos del
invernadero. Los fenómenos de transporte que se van a considerar son los siguientes:
•
Procesos básicos de transferencia de calor:
Conducción.
Convección.
Absorción, reflexión y transmisión de radiación solar.
Emisión, absorción, reflexión y transmisión de radiación térmica.
•
Procesos básicos de transferencia de masa y calor combinados:
Condensación de vapor de agua.
Evaporación de vapor de agua.
Transpiración del cultivo.
•
Efectos de los sistemas de actuación:
Ventilación natural.
Sistemas de calefacción.
Mallas de sombreo y térmicas.
Sistemas de humidificación.
3.2.2. Procesos de conducción
Se define la conducción térmica como el proceso que tiene lugar desde una zona de un
cuerpo de mayor temperatura a otra zona de menor temperatura, o bien desde un cuerpo de
mayor temperatura a otro distinto de menor temperatura y en contacto físico directo con él
o a través de cuerpos intermedios que establezcan una unión material [Cha84]. Es la forma
de transmisión de calor propia de los sólidos. Se rige por la ley de Fourier, que para una
determinada dirección (p.e. eje X) establece que el flujo de calor debido a la conducción,
Qcnd,x (W) es proporcional a la superficie del sólido, carea,solido, y a la diferencia de
temperatura entre las dos caras del objeto (Vt,x y Vt,x+esp), e inversamente proporcional al
espesor del material, cesp,solido:
carea,solido
( Vt ,x − Vt ,x + cesp,solido )
Qcnd,x = ccnd,solido
(3.5)
cesp,solido
donde ccnd,solido es conductividad térmica que depende exclusivamente del material del
objeto.
La ecuación general de la condución en coordenadas cartesianas [Cor81], se puede
establecer aplicando la ecuación (3.5) a un elemento paralelepípedo de dimensiones dx, dy
y dz (Figura 3.4). La temperatura en cualquier punto depende de sus coordenadas y del
instante considerado, es decir, del tiempo.
54
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Qz+dz
Según la dirección del eje X, la cantidad de
calor recibido, Qcnd,x, y el cedido, Qcnd,x+dx,
vienen dadas por las siguientes ecuaciones,
función de la conductividad térmica respecto a
ese eje:
Qcnd,x = − ccnd,x dy dz
∂Vt
∂x
Qx
dy
Qy+dy
Qx+dx
dz
Qy
(3.6)
dx
X
⎡
∂V ∂ ⎛
∂V ⎞ ⎤
Qcnd,x + dx = − ⎢ccnd,x t + ⎜ ccnd,x t ⎟dx⎥ dy dz (3.7)
∂x ∂x ⎝
∂x ⎠ ⎦
⎣
Qz
Y
Fig. 3.4. Conducción en un elemento cúbico
El calor que atraviesa la cara x menos el que atraviesa la cara x+dx es el calor absorbido
por el paralelepípedo en la dirección del eje X, Qx, es decir:
Q x = Qcnd , x − Qcnd , x + dx = ccnd , x dxdy dz
∂ 2Vt
(3.8)
∂ x2
En las direcciones z e y, se produce un proceso similar que se puede formular de la misma
manera.
Por tanto, el calor absorbido total por el elemento a través de sus caras por unidad de
tiempo, Qcnd, es:
⎛
∂ 2Vt
∂ 2Vt
∂ 2Vt
+ ccnd , y
+ ccnd , z
Qcnd = dxdy dz ⎜ ccnd , x
⎜
∂ x2
∂ y2
∂ z2
⎝
⎞
⎟
⎟
⎠
(3.9)
Si no existe generación o consumo de energía en el interior del elemento, el calor absorbido
por unidad de tiempo será:
cct,solido
dVt ,solido
dτ
⎛
∂ 2Vt
∂ 2Vt
∂ 2Vt ⎞⎟
= dxdydz ⎜ ccnd,x
+ ccnd, y
+ ccnd,z
⎜
∂ x2
∂ y2
∂ z 2 ⎟⎠
⎝
(3.10)
En un invernadero el proceso de conducción se produce en los principales sólidos donde
exista un gradiente de temperatura en su volumen. Los principales procesos de conducción
son:
• Conducción de calor a través del material de la cubierta (plástico o vidrio). Entre la
superficie exterior e interior de la cubierta existe una diferencia de temperatura, por lo
que debe producirse un proceso de conducción en su interior. Debido a que se trata de un
material cuyo espesor es de unas pocas micras, este flujo de energía no se suele
considerar ya que es cuantitativamente menor que el resto de flujos y se puede
despreciar, como Garzoli y Blackwell [Gar81] o Weimann [Wei89] probaron en sus
estudios.
55
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Conducción entre las distintas capas que componen el suelo del invernadero. Una
hipótesis de partida de gran parte de autores que han modelado la temperatura de la
superficie del suelo y sus distintas capas consiste en considerar un flujo de energía
unidimensional a lo largo de la dirección z (profundidad del invernadero), por lo que
∂ Vt
∂x
=
∂ Vt
∂y
=0
(3.11)
Aún así, algunos autores como Takakura y colaboradores consideran flujos de
conducción en dos direcciones Z y X [Tak71] modelando el suelo como un conjunto de
capas formadas por paralelepídepos situados unos juntos a otros. En estos casos, una
aproximación muy extendida consiste en considerar que los distintos elementos que
forman el suelo se componen de un material homogéneo, por lo que el coeficiente de
conducción es el mismo para las dos o tres direcciones en las que se produce el flujo de
energía.
Por otra parte, para la resolución de la ecuación (3.10), con la hipótesis de la isotropía
del material de la capas de suelo mostrada en la ecuación (3.11), es necesario definir una
condición de contorno (temperatura de superficie de suelo) y utilizar algún método para
resolver numéricamente esta ecuación de difusión, por ejemplo transformadas o series
de Fourier, lo que complica el proceso de modelado. En los estudios de Kindelan
[Kin80], Albright [Alb84], Halleux [Hal89] o Tavares y colaboradores [Tav01] se
proponen algunos métodos de resolución de este tipo de ecuaciones aplicadas al suelo en
invernaderos. A este respecto, una aproximación muy habitual es considerar únicamente
el régimen permanente del proceso de conducción, por lo que:
dVt ,solido
dτ
=0
(3.12)
Si las capas del suelo se consideran como láminas o placas planas, la cantidad de calor
transmitido por conducción desde la primera capa de suelo a una profundidad cp,s1 y con
temperatura Vt,s1 a la siguiente capa de suelo a una profundidad cp,s2, con temperatura
Vt,s2 y con el coeficiente de conductividad constante, ccnd,s2, la solución de la ecuación de
Fourier considerando régimen permanente y flujo unidimensional, es la que se indica en
la siguiente ecuación:
Qcnd ,t = ccnd ,s 2 carea ,ss
Vt ,s 2 − Vt ,s1
c p ,s 2 − c p ,s 1
(3.13)
Esta aproximación se justificará convenientemente en el apartado 3.4.1.4 y 3.4.1.5
correspondientes al modelado de la temperatura en la superficie y las distintas capas de
suelo consideradas.
• En el caso de utilizar un sistema de calefacción consistente en tuberías enterradas en el
suelo por las que circula agua caliente, habría que añadir este proceso que se estudiará
en el apartado 3.2.8 correspondiente a los procesos físicos debidos a los sistemas de
actuación.
56
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.2.3. Procesos de convección
Se define la convección térmica como el proceso por el cual se transmite calor desde una
superficie a un fluido en movimiento en contacto con dicha superficie [Mon93]. La
convección la originan los fluidos (gases y líquidos) en los que las partículas próximas a la
superficie se calientan y al desplazarse calientan, por conducción, a aquéllas que se
encuentran en su camino, a la vez que dejan su posición a otras partículas más frías. Existen
dos tipos de convección térmica :
• Convección natural o libre. El movimiento del fluido se produce porque la transmisión
de calor a través suyo ocasiona diferencias de temperatura dentro del fluido y por tanto
diferencias de densidad. La diferencia de temperaturas entre la superficie y el fluido es el
factor determinante.
• Convección forzada. El movimiento del fluido es producido por causas mecánicas
externas como un ventilador. El principal parámetro de este tipo de convección es la
velocidad del fluido.
Cuando un fluido se mueve a lo largo de una superficie sólida, se observa que su velocidad
varía desde un valor nulo inmediatamente adyacente a la pared, hasta un valor finito en un
punto a cierta distancia de ésta [Cha84]. Por tanto, existe una región en la que la viscosidad
del fluido desempeña un papel relevante, denominada capa límite. Dentro de esta región el
efecto de la pared es muy importante y fuera de ella, puede despreciarse. Por otra parte,
dentro de esta capa el flujo del fluido puede ser:
• Flujo laminar. Las capas próximas al fluido se deslizan unas con respecto a otras pero
no se mezclan en la dirección de la normal a las líneas de corriente del fluido. El flujo de
aire es paralelo a la superficie.
• Flujo turbulento. El flujo intermedio es paralelo a la superficie, aunque se le suponga un
movimiento de fluctuación en las direcciones paralelas y normal a aquella. El flujo de
aire es desordenado con remolinos que caracterizan a la turbulencia.
Todos estos factores se pueden reunir en un parámetro denominado coeficiente de
convección térmica [W/m2 ºC], Vcnv, utilizando la Ley de Enfriamiento de Newton [Cha84],
por la cual, la cantidad de calor transmitida por unidad de tiempo debido a la convección
[W], Qcnv, desde la superficie al fluido es proporcional a la superficie [m2], carea, y a la
diferencia de temperatura entre el sólido, Vt,solido, y la del fluido Vt,fluido:
Qcnv =Vcnv carea( Vt ,solido −Vt , fluido )
(3.14)
Como se puede observar el coeficiente de convección se trata de una conductancia térmica
y no de una propiedad del material. Además, es variable ya que depende de las propiedades
del fluido (densidad, conductividad térmica, calor específico y viscosidad), su velocidad,
espesor y tipo de la capa límite y de otros factores adicionales. Este parámetro es difícil de
determinar y por ello se suele recurrir al análisis dimensional y a la experimentación para
poder calcularlo. El análisis dimensional agrupa las variables implicadas en el proceso de
transmisión de calor en los números adimensionales de Nusselt, Prandtl, Grashof y
Reynolds. Existen criterios basados en combinaciones de estos números que permiten
determinar el tipo de flujo de transporte que se produce en cada instante (distingue entre
natural y forzada, y dentro de esta clasificación entre laminar y turbulento).
57
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
En cualquiera de los casos, el coeficiente de convección es función de la diferencia de
temperatura entre el fluido y el sólido y de la velocidad del fluido, Vvv,fluido:
Vcnv = f 1 ( Vt ,solido − Vt , fluido ) + f 2 ( Vvv , fluido )
(3.15)
En función del tipo de régimen de funcionamiento, f1 y f2 presentarán ecuaciones distintas.
En el caso de un invernadero se producen procesos de convección entre los sólidos básicos
que lo forman (cubierta, cultivo y superficie de suelo) que se encuentran en contacto con un
fluido (aire exterior y aire interior). Los procesos convectivos que se producen en un
invernadero han sido estudiados por numerosos autores, destacando las aportaciones de
Takakura y colaboradores [Tak71], Iqbal y Khatry [Iqb77], Chalabi y Bailey, como se
indica en [Mon93], Halleux [Hal89] y sobre todo de Bot [Bot83] en cuya tesis describe
profundamente las experiencias realizadas para la obtención de los distintos coeficientes de
convección y los resultados obtenidos. Otro trabajo a destacar es el realizado por Boisson
[Boi91] en el que se muestra una amplia revisión bibliográfica sobre este tema.
En función de dónde se produzcan los procesos de convección, el tratamiento es distinto:
• Aire exterior con superficie de cubierta exterior. Por las experiencias realizadas, el
efecto predominante es el debido a la velocidad del viento en el exterior, pudiendo
despreciar el efecto térmico debido a la diferencia de temperatura entre la superficie de
la cubiertas y la temperatura del aire exterior. La relación del coeficiente de convección
de la cubierta exterior, Vcnv,cb-e, con el viento exterior Vvv,e, puede ser de tres tipos
[Boi91]:
Lineal.
Exponencial
Mixta
Vcnv ,cb − e = ccnv ,cb − e3 Vvv ,e + ccnv ,cb − e4
c
Vcnv ,cb − e = ccnv ,cb − e1 Vvv ,e cnv ,cb −e 2
⎧⎪ccnv ,cb − e3 Vvv ,e + ccnv ,cb − e4
Vcnv ,cb − e = ⎨
c
⎪⎩ ccnv ,cb − e1 Vvv ,e cnv ,cb −e 2
(3.16)
(3.17)
Vvv ,e < cvv ,lim cnv
(3.18)
Vvv ,e ≥ cvv ,lim cnv
Donde cvv,lim cnv es la velocidad de viento exterior límite, calculada experimentalmente,
para realizar el cambio en la utilización de un coeficiente de convección lineal o
exponencial y los parámetros ccnv,cb-ex son empíricos y hay que estimarlos. Cada estudio
proporciona unos parámetros distintos presentando una amplia variabilidad. Otros
autores proponen un coeficiente de convección de la cubierta con el exterior constante
como Tchamitchian y Tantau [Tch96], Tap y colaboradores [Tap96a] o van Henten
[Hen94], aunque se trata de una simplificación poco realista que no se utiliza con fines
de realizar un simulador sino para la obtención de modelos simplificados de control.
•
Aire interior con superficie de cubierta interior. En este caso, el efecto predominante es
la diferencia de temperatura entre el aire interior y la cubierta, ya que la velocidad del
aire interior en el invernadero cerrado es casi despreciable. Aún así en la literatura se
pueden encontrar dos tipos de expresiones que relacionan el coeficiente de convección
de la cubierta interior, Vcnv,cb-a, con la diferencia de temperatura entre la cubierta, Vt,cb, y
el aire interior, Vt,a; y la velocidad del aire en el interior Vvv,a:
58
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Sólo de temperatura.
Vcnv ,cb − a = ccnv ,cb − a1 Vt ,cb − Vt ,a
c cnv ,cb − a 2
(3.19)
Temperatura y velocidad del aire interior
Vcnv ,cb − a = ccnv ,cb − a1 Vt ,cb − Vt ,a
c cnv ,cb − a 2
+ ccnv ,cb − a 3 (Vvv ,a )
c cnv ,cb − a 4
(3.20)
donde ccnv,cb-ax son parámetros empíricos a estimar. Los parámetros relacionados con la
temperatura, ccnv,cb-a1 y ccnv,cb-a2, dependen del tipo de régimen. Como ejemplo, ccnv,cb-a2,
toma el valor 1/3 en presencia de régimen turbulento y 1/4 en presencia de régimen
laminar. Algunos autores proponen que se considere como constante aunque sea poco
realista.
•
Aire interior con superficie de cultivo. En este caso, el coeficiente de convección se
calcula para una superficie de una hoja, con las mismas consideraciones anteriores
excepto que algunos autores dividen la diferencia de temperatura entre la hoja, Vt,cu, y el
aire interior y la velocidad del viento sobre el cultivo por el diámetro de la hoja, cdim,cu,
resultando [Boi91]:
⎛ Vt ,cu − Vt ,a
Vcnv ,cu − a = ccnv ,cu − a1 ⎜
⎜ c dim,cu
⎝
⎞
⎟
⎟
⎠
ccnv ,cu − a 2
⎛ V
+ ccnv ,cu − a 3 ⎜ vv ,a
⎜c
⎝ dim,cu
⎞
⎟
⎟
⎠
c cnv ,cu − a 4
(3.21)
Evidentemente en la literatura, existen algunos autores que no consideran el efecto
eólico. También hay autores que proponen parámetros de convección, ccnv,cv-a1,
distintos para la superficie superior e inferior de la hoja [Cha86].
•
Aire interior con superficie del suelo. El proceso de convección entre el aire interior y
la superficie de suelo es similar al que ocurre entre la superficie interior de la cubierta y
el aire, por lo que todo lo que se ha expuesto en ese apartado es extrapolable a este caso,
considerando la diferencia de temperatura entre el aire interior y la superficie del suelo
y la velocidad del aire sobre la superficie del suelo que depende del estado del cultivo.
•
Aire interior con las tuberías de calefacción. En el caso de utilizar sistemas de
calefacción por tuberías de agua caliente, hay que añadir un nuevo proceso entre la
superficie de las tuberías con el aire interior.
Si se utilizan mallas de sombreo o térmicas, el problema se hace más complejo ya que
divide el volumen del invernadero en dos, por lo que existen dos volúmenes de aire en el
interior con temperaturas distintas, teniendo que añadir dos procesos de convección: aire
interior entre cubierta superior y malla, y la superficie superior de la malla; y el aire interior
entre malla y suelo, y la superficie inferior de la malla. Estos procesos se estudiarán en el
apartado 3.2.8 correspondiente a los procesos físicos debidos a los sistemas de actuación.
3.2.4. Procesos de absorción, reflexión y transmisión de radiación solar
La energía que llega a un cuerpo puede ser absorbida, reflejada o transmitida. Estas
fracciones de energía son interpretadas como propiedades de los cuerpos y se denominan
absortividad, reflectividad y transmisividad.
59
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Dependiendo del comportamiento del material que forma el objeto respecto a la energía
incidente de una determinada longitud de onda, se definen los siguientes valores
monocromáticos adimensionales:
•
calo,material. Coeficiente de absorción para una determinada longitud de onda.
•
crlo,material. Coeficiente de reflexión para una determinada longitud de onda.
•
ctlo,material. Coeficiente de transmisión para una determinada longitud de onda.
Por la conservación de la energía se cumple que:
calo ,material + crlo ,material + ctlo ,material = 1
(3.22)
En función de estos coeficientes, los cuerpos se clasifican en:
Cuerpo
calo crlo ctlo Propiedades
Negro
1 0 0 Absorbe toda la energía que le llega
Blanco
0 1 0 Refleja toda la energía que le llega
Diatérmico
0 0 1 Transmite toda la energía que le llega
Mate
0 - No reflejan ninguna energía de la que le llega
Tabla 3.1. Clasificación de cuerpos en función de la radiación
Por tanto, un sistema sometido a una determinada radiación absorbe parte de ella,
almacenando energía y por lo tanto aumentado su temperatura. La energía almacenada en el
objeto, Qalo,material [W/m2] se calcula como una fracción, calo [-] de la energía que alcanza al
objeto, Qrad,material [W/m2], utilizando la siguiente expresión:
Qalo ,material = calo ,objeto Qrad ,material
(3.23)
En el caso de los gases, estas propiedades están sometidas a la dimensión geométrica y
forma de la masa a través de la cual pasa la radiación. Los gases más elementales como el
hidrógeno, oxígeno, nitrógeno y mezclas de ellos, como el aire, poseen una transmisividad
igual a uno, por lo que son inertes a la radiación ya que su absortividad es nula.
En un sistema invernadero, la principal fuente de energía natural es la radiación solar,
comprendida entre una longitud de onda de 0.3 y 2.5 µm. Se divide en ultravioleta (0.3000.380 µm), visible (0.380-0.760 µm) e infrarroja solar (0.760-2.500 µm). La radiación
PAR., que influye directamente en la fotosíntesis y por tanto en el crecimiento del cultivo,
es una parte de la radiación solar entre los 0.4 y los 0.7 µm. En un invernadero, todos los
sólidos absorben radiación solar por lo que si se considera el aire como inerte a la radiación
solar, se observan los siguientes procesos relacionados:
• Cubierta. Absorción, reflexión y transmisión de radiación solar por parte de la cubierta
en función de las propiedades del material que la forma, de la orientación del
invernadero y de la pendiente de la misma. Sobre este proceso existen gran cantidad de
trabajos ya que la radiación que atraviesa la cubierta es la principal fuente de energía en
un invernadero, destacando los últimos trabajos de Kittas y Baille [Kit98] y Papadakis y
colaboradores [Pap00] en los que se estudian las propiedades térmicas y ópticas de los
distintos materiales que se utilizan como cubiertas, así como los métodos para la
obtención de esas características. Otro tipo de trabajos se centran en el efecto de factores
externos sobre la transmisión de la cubierta como el polvo, suciedad o la condensación.
60
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Destacan los realizados por Geoola y colaboradores [Geo98] en el que se diseña un
modelo a escala de un invernadero para el estudio de la transmisión de la radiación por
parte de la cubierta en función del tiempo y deterioro del material, o los de Pollet y
Pieters [Pol99] acerca de la transmisión de la radiación PAR en cubiertas secas y
mojadas y sus estudios sobre el efecto de la condensación [Pol00].
• Cultivo. Absorción, reflexión y transmisión de radiación solar transmitida a través la
cubierta por parte del cultivo en función del estado del mismo y de la orientación de las
hojas. Sobre este aspecto, destaca el compendio de estudios que realiza el INRA (Institut
National de la Recherche Agronomique) francés acerca de la relación entre la estructura
de cultivo y la radiación que le alcanza [Inr93]. Algunos de estos trabajos se referencian
en esta tesis. Para analizar la radiación que alcanza el cultivo, éste se puede modelar de
varias formas [Dau93]:
Modelo de la “hoja grande”. Se considera el cultivo como un todo y la radiación
solar incide verticalmente.
Modelo homogéneo. Se consideran dos clases de hojas: hojas con sombras que sólo
reciben radiación difusa y hojas que reciben radiación difusa y directa.
Modelo heterogéneo. Se considera la geometría de la estructura del cultivo en dos o
tres dimensiones.
Es evidente que existen perfiles verticales de radiación en el cultivo pero como no se
suele disponer de medidas a distintas alturas, se considera el cultivo del invernadero
como una única hoja grande, existiendo un solo valor de radiación para toda la superficie
foliar. A medida que en el futuro se implanten sistemas de medida y control distribuidos,
se podrá abordar el uso de modelos heterogéneos.
•
Superficie de suelo. Absorción y reflexión de la radiación solar transmitida a través del
cultivo por parte de la primera capa de suelo. Si se trata de tierra o arena, la
transmisividad suele ser nula por lo que absorbe casi toda la radiación que le alcanza.
Sin embargo, una costumbre habitual en los invernaderos es utilizar una manta blanca
con un factor de reflexión muy alto y el de absorción muy bajo, por lo que en cada caso
hay que realizar un estudio adecuado.
•
Malla de sombreo. En caso de disponer de una malla de sombreo, hay que considerar la
absorción, reflexión y transmisión de la radiación debida a este elemento físico en el
caso de que se encuentre extendida. Lo que se pretende con la utilización de una malla
de sombreo es controlar la radiación que alcanza al cultivo. Existe una amplia gama de
mallas con distinto coeficiente de transmisión y reflexión, debiendo seleccionar aquella
que al mediodía solar deje transmitir una cantidad de radiación cercana al punto de
saturación lumínica del cultivo. Un amplio estudio sobre ellas se encuentra en los
trabajos de Montero y Antón [Mon93].
Con respecto a estos procesos, se pueden considerar los siguientes casos:
•
En función de las características del material de que esté formada, en la cubierta se
absorbe la parte correspondiente de la radiación global procedente de la atmósfera, que
es una condición de contorno del modelo que se mide.
61
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
•
La malla de sombreo, en el caso de que se encuentre extendida, absorbe una fracción de
la radiación solar que haya transmitido la cubierta.
•
Con respecto al cultivo, se pueden considerar dos alternativas:
Si no existe malla de sombreo o si no se encuentra extendida, absorbe la parte
correspondiente de radiación solar que transmite la cubierta.
Si existe malla de sombreo y se encuentra extendida, absorbe la parte correspondiente
de radiación solar que transmite la malla de sombreo que es una fracción de la que
transmite la cubierta.
•
Con respecto a la superficie del suelo, se pueden considerar las siguientes alternativas:
Si no hay cultivo y:
o Si no existe malla de sombreo o no se encuentra extendida, absorbe la parte
correspondiente de radiación solar que transmite la cubierta.
o Si existe malla de sombreo y se encuentra extendida, absorbe la parte
correspondiente de radiación solar que transmite la malla de sombreo que es una
fracción de la que transmite la cubierta.
Si hay cultivo y:
o Si no existe malla de sombreo o si no se encuentra extendida, absorbe la parte
correspondiente de radiación solar que transmite el cultivo (función del estado
de crecimiento del cultivo) que es una fracción de la que transmite la cubierta.
o Si existe malla de sombreo y se encuentra extendida, absorbe la parte
correspondiente de radiación solar que transmite el cultivo, que es una fracción
de la que transmite la cubierta y la malla de sombreo.
Un aspecto importante a tener en cuenta es la calidad de la radiación [Mon93]. Al atravesar
la atmósfera, los componentes atmosféricos actúan sobre la radiación solar en parte
reflejándola (nubes), en parte absorbiéndola (vapor de agua, etc.) y en parte dispersándola
(moléculas sólidas, gotas de agua, polvo en suspensión, etc.). Además, la radiación que
alcanza al suelo se absorbe en parte y se refleja el resto hacia la atmósfera. El resultado de
estos efectos es la descomposición de la radiación solar incidente, denominada Radiación
global, en tres componentes bien diferenciadas [Duf79]:
•
Radiación directa. Radiación solar recibida desde el sol sin cambio de dirección.
•
Radiación difusa. Radiación solar recibida desde el sol después de que la reflexión y la
difusión por la atmósfera hayan cambiado su dirección.
•
Radiación del albedo. Radiación procedente del suelo y debido a la reflexión de la
radiación incidente en él.
Existen varios estudios importantes acerca de este tema considerando modelos de
transmisión de las componentes de radiación en diferentes estructuras como los realizados
por Takakura y colaboradores ([Tak71], [Tak93]), Critten [Crit83], Baille y Tchamitchian
[Bai93]; destacando el estudio de Bot [Bot83] en el que distingue entre radiación solar
directa y difusa relacionándolas con las características geométricas de la cubierta y el efecto
de las sombras en invernaderos multicapilla e incorporando componentes estructurales
opacos como las canaletas de desagüe.
62
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.2.5. Procesos de absorción de radiación térmica
Si un cuerpo es calentado, por ejemplo debido a la absorción de radiación solar, y se le aísla
físicamente, es decir, se sitúa en el vacío, se observa que la temperatura disminuye con el
tiempo, perdiendo energía. Se produce un mecanismo de transmisión de calor denominado
radiación térmica que es la radiación electromagnética emitida por un cuerpo en virtud de
su temperatura comprendida en una longitud de onda entre 5 y 50 µm. Esta energía, Qrad
[W/m2], se calcula en función de la temperatura del objeto, Vt,objeto [K], utilizando la Ley de
Stefan-Boltzman formulada con la siguiente expresión [Cha84]:
Qrad = Veol ,objeto c SB Vt4,objeto
(3.24)
donde cSB es la constante de Stefan-Boltzman de valor 5.67 10-8 [W/m2 K4] y Veol,objeto es
emitancia de radiación térmica (onda larga) del cuerpo [-], dependiendo su valor de las
características del cuerpo y de su temperatura. Asimismo, cuando la energía térmica que
emite un cuerpo alcanza otro objeto, es absorbida, reflejada y transmitida dependiendo de la
naturaleza de la radiación incidente y de la sustancia de la que está compuesto el cuerpo
caracterizada por los coeficientes de absorción, Vaol,objeto, reflexión, Vrol,objeto, y transmisión,
Vtol,objeto, de radiación de onda larga. Si existen j cuerpos a diferentes temperaturas, Vt,objetoi
desde i=1 hasta j, cada uno con una emisividad distinta, Veol,objetoi , el balance de radiación
térmica en el cuerpo i, Qrad,objetoi, se puede calcular como la diferencia de la radiación
térmica que emite y la radiación térmica que absorbe procedente del resto de cuerpos:
Qrad ,objetoi = Veol ,objetoi c SB Vt4,objetoi − Vaol ,objetoi c SB
j ≠i
j
∑VFF ,ki Veol ,objetok Vt4,objetok
(3.25)
k =1
donde VFF,ki es la fracción de energía que emite el cuerpo k que alcanza al cuerpo i sin tener
en cuenta cual es transferida por reflexión o reradiación de otras superficies que puedan
estar presentes. Existen distintas denominaciones de esta variable como factor de forma,
factor geométrico, factor de configuración o factor de visión.
Suponiendo que se cumpla la Ley de Lambert (un cuerpo que radia obedece a la ley de
Lambert si su luminancia espectral energética es la misma para un elemento cualquiera de
su superficie y no depende de la dirección de emisión) [Cha84], el factor de forma sólo
depende de la geometría del problema. Aunque se pueden calcular analíticamente, existen
tablas con la expresión de los factores de forma entre dos superficies en los casos más
comunes que se pueden encontrar en transferencia de calor. Siegel y Howell, realizaron un
estudio completo sobre la radiación térmica, dedicando algunos capítulos y apéndices a los
factores de forma, donde se pueden encontrar factores de forma para más de 200 tipos de
geometrías diferentes [Sie92].
Unos estudios profundos sobre los intercambios de radiación en un invernadero son los
realizados por Rosa en invernaderos multicapilla [Ros88] y Frangoudakis y colaboradores
[Fra88]. Si se considera al aire como inerte a la radiación térmica, se produce un
intercambio de radiación de onda larga entre los elementos físicos del sistema, es decir,
cubierta, superficie de suelo y el cultivo. Además, hay que considerar la energía térmica
que se intercambia con la bóveda celeste, siendo necesario considerar los siguientes
efectos:
63
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
•
Cubierta. En la cubierta se produce una emisión de radiación térmica en sus dos
superficies: hacia la bóveda celeste desde la superficie externa y hacia el interior del
invernadero desde la superficie interna. Por otra parte absorbe la procedente de la
bóveda celeste por su superficie externa y la procedente del suelo y cultivo que alcanza
su superficie interna. Hay que señalar que la radiación que recibe del cultivo es sólo la
mitad del total que emite (superficie superior de las hojas) y que la radiación térmica
que recibe del suelo es función del estado de crecimiento del cultivo (cuanto más
desarrollado se encuentre el mismo, menor será la radiación térmica ya que absorberá
mayor cantidad de la misma). Las propiedades de los materiales de cubierta con
respecto a la radiación térmica así como su evolución en el tiempo se encuentran
analizadas en los estudios de Papadakis y colaboradores [Pap00], ya referenciados en el
apartado anterior correspondiente a la radiación solar.
•
Cultivo. El cultivo emite radiación térmica, principalmente desde la superficie de hojas
(inferior y superior), por lo que dicha emisión depende del estado de crecimiento de la
planta. Recibe radiación de la cara interna de la cubierta y de la superficie del suelo.
Además, recibe la radiación emitida por la bóveda celeste que atraviesa la cubierta, ya
que ésta no es opaca a este tipo de radiación. Stanghellini realiza un amplio estudio
acerca de los procesos radiativos en el cultivo, principalmente en el tomate,
considerando incluso la reducción de la absorción debida a la geometría de las filas del
cultivo [Sta87].
•
Superficie de suelo. El suelo emite radiación térmica hacia el invernadero y recibe de la
cara interna de la cubierta (como se ha comentado anteriormente, función del estado del
cultivo), de la superficie interna de las hojas del cultivo y la parte correspondiente a la
bóveda celeste que atraviesa la cubierta y el cultivo.
•
Tuberías de calefacción. Si se utiliza un sistema de calefacción por tuberías de agua
caliente, como la temperatura de las mismas es elevada en comparación con la
temperatura de los elementos básicos, habría que añadir a cada uno de los balances de
energía de ellos, el término correspondiente a la absorción de la radiación térmica
emitida por la superficie total de tuberías.
•
Mallas térmicas. En el caso de haber instalado una malla térmica para retener radiación
térmica en el interior de un invernadero, habría que reducir la radiación que alcanza la
cara interna de la cubierta, ya que la malla dispone de un coeficiente de transmisión de
la radiación térmica muy bajo. Por el contrario, el coeficiente de reflexión térmica es
muy alto, de forma que gran parte de la radiación térmica que proviene del suelo y
cultivo la devuelve al interior del invernadero.
Algunos modelos consideran la superficie del suelo que se encuentra en el exterior del
invernadero y el intercambio de radiación térmica que se produce entre él y el resto de
elementos [Boi91], aunque la mayoría de los autores desprecian este flujo ya que es
despreciable.
Otro aspecto importante a considerar es el cálculo de los factores de forma entre los
distintos elementos sólidos que componen el sistema invernadero/cultivo. Depende en gran
medida de la geometría de la estructura del invernadero a analizar y de las aproximaciones
que se realicen.
64
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
El método de cálculo más utilizado es partir de factores de forma básicos (existen tablas
con los factores de formas entre distintos tipos de superficies y posiciones relativas entre
ellas como en los apéndices B y C del estudio de Siegel y Howell [Sie92]) y utilizar las
siguientes propiedades:
• Adición. La suma de los factores de forma de una determinada superficie i con respecto
a los demás debe ser la unidad.
j
∑ VFF ,k = 1
(3.26)
K =1
• Reprocidad. Entre dos superficies de área carea,s1 y carea,s2, se cumple que:
V FF ,s1 − s 2 c area ,s1 = V FF ,s 2 − s1 c area ,s 2
(3.27)
Las dos configuraciones básicas que se consideran son planos infinitos paralelos como la
bóveda celeste o planos perpendiculares como el suelo y las paredes del invernadero. Un
ejemplo de este tipo de análisis se encuentra en la tesis de Chaabane, en la que se analiza el
clima nocturno de un invernadero tipo túnel [Cha86].
Otra aproximación que se suele utilizar en este campo es que aunque el valor del
coeficiente de absorción y la emisividad varían enormemente con la temperatura, se
considera que la emisividad de una superficie del invernadero es igual a su coeficiente de
absorción. Esta propiedad se conoce con el nombre de Ley de Kirchoff. Realmente esto se
cumple cuando el emisor y el receptor presentan la misma temperatura (recinto isotémico)
y cuando la superficie receptora es un cuerpo gris ideal en el que la emisividad no depende
de la longitud de onda de la radiación, situaciones que no se suelen cumplir [Cha84].
El último aspecto a considerar con respecto a los procesos radiativos en un invernadero es
el cálculo de la temperatura de bóveda celeste, ya que no se suele medir. Existen varias
aproximaciones a partir de la temperatura del aire exterior, humedad y la nubosidad. Una
profunda revisión sobre esta estimación se encuentra en el trabajo de Halleux donde expone
más de quince tipos distintos de fórmulas de aproximadamente treinta autores diferentes
[Hal89].
3.2.6. Procesos de evaporación y condensación de vapor de agua1
Cuando se producen cambios de fase, como en la condensación y la evaporación, se genera
una combinación de transferencia de calor y masa. La evaporación tiene lugar cuando se
comunica energía a una superficie capaz de evaporarse si la presión de vapor de agua se
encuentra por debajo del valor de saturación (humedad absoluta del aire saturado de vapor
de agua a la temperatura del aire). Cuando se evapora agua en una superficie, el vapor de
agua se transporta al aire (aumentando su humedad) y absorbe energía de la superficie
denominado calor latente de vaporización, disminuyendo la temperatura de la misma. Si
por el contrario, el vapor de agua se condensa, el aire pierde humedad y la superficie donde
se condensa recibe energía denominada calor latente de condensación.
1
En el Anexo A se exponen los conceptos básicos de psicrometría donde se describen las variables
involucradas en este tipo de procesos.
65
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La humedad del aire atenúa la oscilación diurna de temperatura, ya que durante el día se
produce la evaporación y durante la noche la condensación. Las analogías existentes entre
la difusión térmica (transmisión de calor) y molecular (transmisión de masa) a través de la
capa límite, permite considerar los procesos de condensación y evaporación como un
proceso de convección, por lo que las ecuaciones que los describen son similares.
Por tanto, el flujo de vapor de agua, MH2O,objeto [kg/m2s], entre la superficie del objeto,
carea,objeto, y el aire que se calcula en base al coeficiente de convección, Vcnv,objeto y a la
diferencia entre la humedad de saturación a nivel de la superficie del objeto (humedad
absoluta del aire saturado de vapor de agua a la temperatura de la cubierta) Vhsat,objeto
[kgH2O/kgaire] y la humedad absoluta del aire Vha,a [kgH2O/kgaire]:
M H 2O ,objeto =
Vcnv ,objeto
c area ,objeto (Vhsat ,objeto − Vha ,a )
Vcesp ,a
(3.28)
donde Vcesp,a es el calor específico del aire función de la humedad absoluta del aire. Como
se puede observar, cuando la humedad de saturación de la superficie del objeto es mayor
que la humedad absoluta del aire que lo rodea se produce siempre un proceso de
condensación.
Como se ha comentado anteriormente, estos procesos provocan un intercambio de calor
denominado calor latente, Qlt,objeto, que representa la transmisión de calor desde o hacia una
superficie de un determinado objeto cuando el vapor se evapora o se condensa, quedando
descrita por la siguiente ecuación:
Qlt ,objeto = Vlt ,vap M H 2O ,objeto
(3.29)
donde Vlt,vap es el calor latente de vaporización [J/kg] que representa la cantidad de energía
necesaria para vaporizar un kg de agua. Es función de la temperatura del aire a nivel de la
superficie, Vt,a, [ºC] y se calcula de la siguiente manera:
Vlt ,vap = 4185 .5 (597 − 0.56 Vt ,a )
(3.30)
La condensación de un gramo de vapor aumenta la temperatura de un metro cúbico de aire
en cerca de 2ºC. La gran diferencia entre el calor específico del aire (Vcesp,a ≅ 103J/kgK) y el
calor latente de vaporación del agua (Vlt,vap ≅ 2.5 106 J/kg) hace que los cambios de fase de
agua sean importantes en el balance energético de un invernadero [Sta98], en el que se
producen los siguientes fenómenos relacionados con los procesos de calor latente:
•
Condensación en la cara exterior de la cubierta. El proceso de condensación del vapor
de agua del aire exterior sobre la cubierta se produce cuando la temperatura de la
superficie externa es inferior a la de saturación de dicho vapor a la presión reinante. La
liberación de energía térmica del vapor hace que éste ceda su calor latente de
vaporización y, consecuentemente, se condense sobre la cubierta. Las siguientes
relaciones proporcionan las condiciones necesarias para que se produzca condensación
en la superficie exterior de la cubierta:
66
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Vt ,cb − e > Vt ,e
Vt ,cb − e < Vt ,e y Vhsat ,cb − e > Vha ,e
Vt ,cb − e < Vt ,e y Vhsat ,cb − e ≤ Vha ,e
No se produce condensaci ón
No se produce condensaci ón
(3.31)
Existe condensaci ón
• Condensación en la cara interna de la cubierta. En la superficie interna de la cubierta se
produce un fenómeno de condensación similar al descrito anteriormente con respecto a
la superficie exterior, siempre que la humedad de saturación del aire a la temperatura de
la cubierta sea mayor o igual a la humedad absoluta del aire en el invernadero. Es
importante evitar la condensación sobre esta superficie de la cubierta ya que el vapor de
agua condensado se suele desprender por la acción de la gravedad, cayendo sobre el
cultivo y mojando sus hojas, lo que favorece la aparición de enfermedades criptogámicas
perjudiciales para las plantas, por lo que es un proceso que es necesario controlar.
• Evaporación en la superficie del suelo. La superficie de suelo no es una superficie libre
de agua que se va evaporando sino que la va extrayendo de las capas inferiores; por
tanto se producen dos mecanismos: la difusión del agua de las capas inferiores al suelo y
la evaporación propiamente dicha. Por tanto, es necesario considerar una resistencia a la
difusión de agua en el suelo, Vr,ds, que está físicamente relacionada con el estado hídrico
de la superficie del suelo. Una forma de hacerlo es definir un coeficiente de transferencia
másica, VtmH2O,ss, cuyo valor se determina por:
VtmH 20 , ss
Vcnv , ss
Vcesp ,a
=
Vcnv , ss ⎞
⎛
1 + ⎜ Vr ,ds
⎟
Vcesp ,a ⎠
⎝
(3.32)
El flujo de vapor de agua entre la superficie del suelo y el aire del invernadero, calculado
según la ecuación (3.28) se convierte en:
M H 2O ,ss = VtmH 2 O ,ss carea ,ss (Vhsat ,ss − Vha ,a )
(3.33)
siendo Vhsat,ss la humedad de saturación del aire a la temperatura de la superficie del
suelo y Vha,a la humedad absoluta del aire del invernadero.
El valor de la resistencia de difusión es difícil de determinar, aunque en el caso de un
suelo bien regado se puede considerar aproximadamente nula [Boi91] igualándose las
ecuaciones (3.28) y (3.33). Otro factor a considerar es que se suele instalar una manta
plástica sobre el suelo lo que reduce en gran medida el proceso de evaporación, llegando
incluso a poder despreciarlo con respecto al resto de flujos [Sta93].
• Evaporación en superficies libres de agua. En algunas ocasiones, se encuentran
superficies libres de agua en los invernaderos como las balsas de sistemas recirculantes o
conductos de agua abiertos en cultivos hidropónicos. Como no se mide la temperatura de
estas masas de agua, se puede utilizar un método combinado aerodinámico y de balance
de energía, apropiado para áreas pequeñas con información climatológica detallada
(radiación y temperatura, presión y humedad del aire) para estimar la evaporación.
67
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Los dos principales factores que afectan en la evaporación desde una superficie son el
suministro de energía para proveer el calor latente de vaporización (función de la
radiación neta) y la habilidad para transportar el vapor de agua fuera de la superficie de
evaporación (función del déficit de presión de vapor del aire), resultando la siguiente
expresión para la obtención de un valor estimado de la evaporación [Cho94]:
M evp , p =
V pcsat
V pcsat + c psico
cevp ,1 Vrn ,objeto +
c psico
V pcsat + c psico
cevp ,2 Vdpv ,a
(3.34)
donde Vpcsat es la pendiente de la curva de presión de saturación del vapor a la
temperatura de aire, cpsico es la constante psicométrica y cevp,1 y cevp,2 son dos factores de
calibración de cada uno de los procesos involucrados.
Evidentemente, como en estos procesos se produce transferencia de calor y de masa (vapor
de agua) afectan tanto a la temperatura como a la humedad del aire interior del invernadero,
así como a la temperatura de las superficies donde se producen los procesos
3.2.7. Procesos de transpiración del cultivo
Generalmente, el agua representa más del 70% del peso fresco de los tejidos vegetales y
valores superiores al 90% en órganos de crecimiento como hojas y frutos. El agua forma
una fase líquida continua en toda la planta que se prolonga en el suelo o sustrato donde se
encuentre a través de la superficie de las raíces, formando el denominado continuo sueloplanta-atmósfera. En los cultivos hortícolas, la cantidad de agua retenida en los tejidos de
la planta representa una fracción muy pequeña de la cantidad total absorbida por las raíces.
La mayor parte del agua se escapa por las hojas a la atmósfera en forma de vapor, lo que
constituye el fenómeno de la transpiración [Gua90].
La tasa de transpiración presenta una periodicidad diaria que se puede relacionar con las
condiciones climáticas del ambiente donde se encuentra. De noche, los valores de las tasas
transpiratorias son muy bajos, incrementándose tras la salida del sol, alcanzándose un
máximo a finales de la mañana o principios de la tarde, para caer gradualmente hasta
alcanzar los valores típicamente nocturnos al anochecer. Las diferencias entre el día y la
noche son tan notables, que en una sola hora del día puede transpirar más agua que en toda
la noche [Gil95].
De las variables climáticas que fluctúan diariamente, la radiación solar incidente es la que
mejor se correlaciona con la transpiración, pero existen relaciones con la temperatura y la
humedad relativa (con esta variable existe una correlación inversa y ligeramente
desplazada), además de con otros factores en menor medida como la velocidad del viento o
el contenido de agua del suelo. Una de las principales razones por las que la radiación es la
variable que se relaciona mejor con la transpiración es que se trata del factor que suministra
la energía al proceso. Por otra parte, una superficie mojada cede tanto más vapor de agua
cuanto mayor sea el gradiente de presión de vapor. En cierto sentido, la transpiración puede
considerarse como un proceso de difusión en el que su intensidad depende tanto del
suministro de energía para vaporizar el agua como del gradiente de concentración o presión
de vapor y de las resistencias a la pérdidas de agua.
68
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La descripción del transporte de agua de la hoja hacia la superficie se basa en su propia
morfología. El agua se evapora en las cavidades internas y tiene que atravesar la piel o
cutícula y los poros o estomas. Por tanto, el agua se evapora en las cavidades internas a
presión de saturación y a temperatura de la hoja. El vapor
de agua encuentra una resistencia para salir al exterior en
V pv,he
las cavidades, la cutícula, el estoma y en la capa límite de
V r,cl
la superficie de la hoja. La figura 3.5 muestra un esquema
eléctrico simplificado de la hoja que no tiene en cuenta la
resistencia del mesófilo. La resistencia de la capa límite,
Vr,cl, es función de la velocidad del viento. La resistencia
total de la hoja depende de la apertura estomatal y por lo
V r,e
tanto de su resistencia, Vr,e, (nula con los estomas abiertos V r,cut
y, aproximadamente, 100 [s/m] con los estomas cerrados).
La resistencia de la cavidad, Vr,cav, es muy pequeña y la de
V r,cav
la cutícula muy grande, Vr,cut, por lo que se puede
considerar sólo la resistencia estomatal, que depende de la
radiación neta y de la humedad. En la mayoría de las
V pv,hi
plantas y durante la mayor parte del tiempo, la resistencia
Fig 3.5. Esquema eléctrico de una
estomática es la que normalmente limita la tasa de
hoja para transferencia
transpiración.
de vapor de agua
Como se puede observar, la transpiración depende tanto de factores ambientales como de
factores de la propia planta, aunque hay que señalar que un cambio en uno de estos factores
no produce necesariamente un cambio proporcional en la tasa transpiratoria ya que la
intensidad está controlada por más de un factor [Azc96].
La forma de modelar este efecto varía de unos a otros autores, encontrándose tres tipos de
formulación:
• Basándose en la ecuación de Penman-Monteith o de gran hoja. En 1948 Penman dedujo
una ecuación que combinaba el balance de energía y el transporte convectivo de vapor,
que fue adaptada por Monteith para estimar la evapotranspiración real de las plantas
[Map96]. El flujo de calor latente por transpiración, Qtra,cu, se puede estimar a partir de
la conocida ecuación de Penman-Monteith:
Qtra ,cu =
V pcps
V pcps + V psico
(Vrn ,cu − Qss )+
cden ,aire ccesp ,aire Vdpv ,a
(V pcps + V psico )
Vr ,cl
(3.35)
donde cden,aire es la densidad del aire, ccesp,aire es el calor específico del aire, Vrn,cu es la
radiación neta en el cultivo, Qss es el flujo de calor en la superficie del suelo, Vdpv,a es el
déficit de presión de vapor de la atmósfera, Vpcps es la pendiente de la curva de presión
de saturación y Vpsico es una variable función de la constante psicométrica, cpsico, el
índice de área foliar, VLAI, la resistencia estomática, Vr,e, y la resistencia aerodinámica al
flujo de calor sensible Vr,cl:
⎛
2 Vr , e
V psico = c psico ⎜⎜1 +
⎝ VLAI Vr ,cl
69
⎞
⎟
⎟
⎠
(3.36)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Basándose en esta ecuación, diversos autores han obtenido nuevas formulaciones sin
resultados satisfactorios para distintos cultivos, destacando el estudio de Stanghellini
sobre el tomate [Sta87]. El principal inconveniente de este método es la estimación de
las resistencias existiendo numerosos estudios sobre ellas. Un estudio a destacar es el de
Boulard y Wang [Bou00] que proponen un nuevo modelo muy simple en base a la
ecuación de Penman-Monteith, que proporciona buenos resultados para predecir la
transpiración de un cultivo bajo invernadero a partir de las condiciones climáticas
externas que se miden comúnmente en un invernadero, ya que con los otros métodos
era necesario realizar mediciones de variables muy específicas.
• Considerando la transpiración como un proceso de convección y difusión. Algunos
autores modelan la transpiración igual que el fenómeno de la evaporación en el suelo, de
forma que se va extrayendo el agua del interior de las hojas que se evapora en su
superficie. Por tanto, es necesario considerar una resistencia a la difusión de agua a
través de la hojas y se define un coeficiente de transferencia másica función del
coeficiente de convección. Algunos ejemplos de este enfoque se exponen en los trabajos
de Chaabane [Cha86], Halleux [Hal89] o Boisson [Boi91].
• Relaciones empíricas con variables ambientales como los trabajos de Jolliet y Bailey,
comentadas en [Mon93], que propusieron que la energía utilizada por el cultivo para la
transpiración en un cultivo de tomate es:
Qlt ,vap = 0.32Vrad ,cu + 5.5 Vdpv ,a + 5.3Vvv ,c
(3.37)
donde Vrad,cu es la radiación que alcanza al cultivo, Vdpv,a corresponde al déficit de
presión de vapor y Vvv,cu es la velocidad del viento sobre el cultivo.
La influencia del proceso de transpiración sobre la temperatura y humedad del aire en el
interior de un invernadero es muy importante como se muestra en las siguientes figuras
para un día con las mismas condiciones límites sin y con cultivo con un índice de área
foliar igual a 2, en las que se observan grandes diferencias entre ellas, aumentando la
humedad relativa y disminuyendo la temperatura del aire.
100
32
LA I= 2
31
90
LA I= 0
30
LA I= 0
Hum edad relativa (% )
Tem peratura (º C)
29
28
27
26
LA I= 2
80
70
60
25
24
50
23
5
10
15
Tiem po (horas )
0
20
5
10
15
Tiem po (horas )
20
a. Temperatura con y sin cultivo (ºC)
b. Humedad relativa con y sin cultivo (%)
Fig. 6. Influencia de la transpiración sobre la temperatura y humedad relativa del aire
70
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.2.8. Procesos debidos a los sistemas de actuación
3.2.8.1. Ventilación
La ventilación es un proceso fundamental que influye en el clima interior del invernadero
ya que contribuye en los procesos de intercambio de masa y energía con el ambiente
exterior influyendo en variables como la temperatura, humedad y concentración de CO2 de
las que depende directamente el crecimiento del cultivo. Físicamente, la ventilación natural
tiene su origen en dos factores [Bot83]:
•
Distribución de presiones en la superficie de la estructura debido al viento.
•
Diferencias de temperatura y por lo tanto de presión entre el invernadero y el exterior.
Hay que señalar que es necesario considerar otros parámetros como el tipo y localización
de las ventanas, altura, anchura y tipo de la estructura del invernadero, que afectan a la
resistencia que opone la ventana al flujo de aire. Esta dependencia se encuentra
estandarizada por la normativa EP406.3 de 1998 por la ASAE (American Society of
Agricultural Engineering) [Asa98], en la que se indica que el calor perdido por el
invernadero por ventilación natural, Qven,a-e, viene definido por la siguiente expresión:
Qven ,a − e =Vven , flujo Vden ,a Vcesp ,a (Vteva ,a − Vt ,e )
(3.38)
donde Vden,a es la densidad del aire seco, Vcesp,a es el calor específico, Vven,flujo es el flujo de
ventilación o flujo volumétrico [m3/s] y Vteva,a es la temperatura de evacuación o desalojo
del aire que puede ser calculada como una combinación lineal de la temperatura del aire
interior y la temperatura del aire exterior:
Vteva ,a =Vven ,reg Vt ,a + ( 1 − Vven ,reg )Vt ,e
(3.39)
donde Vven,reg considera dos regímenes de flujo de aire:
•
Mezcla completa del aire del invernadero, con Vven,reg =1, como es el caso de la
ventilación natural
•
Flujo turbulento con Vven,reg =2, apropiado para ventilación forzada montada en las
paredes del invernadero.
En el caso de este tipo de invernaderos sin ventilación forzada, Vteva,a=Vt,a resultando la
expresión:
Qven ,a − e =Vven , flujo Vden ,a Vcesp ,a (Vt ,a − Vt ,e )
(3.40)
Como se puede observar y sobre la base de que ya existe una estandarización entre la
energía perdida y la diferencia de temperatura entre el aire exterior e interior del
invernadero, el problema radica en calcular el flujo de ventilación, Vven,flujo. La
cuantificación de esta tasa de ventilación es difícil y en la actualidad se sigue investigando
sobre esta cuestión ya que los modelos de cálculo son, en general, imprecisos [Muñ98],
publicándose cada año una amplia variedad de estudios. En la literatura, se pueden
distinguir dos formas de modelar del flujo de ventilación:
71
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Modelado teórico. Los principales modelos teóricos se han realizado sobre el
invernadero tipo Venlo utilizado en Centroeuropa (Holanda) principalmente por Bot
[Bot83] y de Jong [Jon90b] y en invernaderos multitúnel en zonas mediterráneas
desarrollados por Boulard y Baille [Bou95b]. Como se ha comentado anteriormente, las
diferencias de presión causantes de la ventilación natural son debidas a dos fuerzas
principales: eólicas (originadas por la velocidad del viento exterior, Vvv,e) y gravitatorias
(originadas por diferencias de temperatura entre el aire interior y exterior), por lo que el
flujo de ventilación es una función de estas dos variables:
Vven , flujo = f ven ((Vt ,a − Vt ,e ) ,Vvv ,e )
(3.41)
Evidentemente, cada uno de los efectos es función de la apertura de la ventilación. Para
cada estructura de invernadero la forma de tratar cada fuerza es distinta, incluso la forma
de combinar los dos efectos es diferente: suma vectorial o suma de ambos flujos
considerados de forma independiente. En lo que si coinciden todos los autores es en la
existencia de dos parámetros que caracterizan el flujo de ventilación:
Coeficiente de descarga, función de la geometría de la ventana, de la posición de
éstas en la cubierta y del coeficiente de fluctuación de presión.
Coeficiente de viento, que recoge los efectos debidos a la diferencia de presión
originada por el viento (permanente y turbulento).
• Modelado empírico. Según algunos autores, el mejor método para determinar la
ventilación de los invernaderos es medirla directamente mediante la técnica de gas
trazador, que consiste en introducir un gas inerte y no reactivo (gas trazador) que se
distribuye por el invernadero, cuya concentración se determina y monitoriza
relacionándola con la tasa de ventilación [Muñ98]. El flujo de ventilación será función
de la tasa de pérdidas del gas utilizado. Evidentemente, la tasa de ventilación depende
fuertemente de la apertura de las ventanas, Uven, y de la velocidad del viento, Vvv,e,
pudiéndose relacionar con la siguiente expresión:
Vven , flujo = c area ,ven Vvv ,e f ven (U ven )
(3.42)
donde carea,ven es el área de la ventilación. Para invernaderos tipo Venlo la función de la
apertura de ventilación ha sido estudiada por varios autores, resultando exponencial para
los estudios de Bot [Bot83] y de Jong [Jon90b], y lineales para Wang y Deltour o
Fernández y Bailey como se indica en [Muñ98]. Para invernaderos multitunel destacan
los estudios de Boulard y Draoui [Bou95a] para los que resulta una función lineal con la
apertura.
Una práctica habitual es instalar en la apertura de las ventilaciones una mallas muy porosas,
que se extienden conforme se van abriendo las ventanas, para evitar que insectos
perjudiciales como el pulgón se introduzcan en el invernadero. Evidentemente, esto influye
en la tasa de ventilación provocando un importante descenso, como lo han probado los
estudios de Montero y colaboradores ([Mon96], [Muñ99]), ya que se produce una
reducción en el coeficiente de descarga y afecta de distintas maneras al coeficiente de
viento.
72
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.2.8.2. Sistemas de calefacción
Como se ha comentado, en un invernadero se producen pérdidas de calor que puede ser
aportadas al aire interior por los sistemas de calefacción. Los más utilizados son [Gon98]:
• Sistemas de calefacción de tipo convectivo. El calentamiento del aire se produce por
convección entre el aire del invernadero y el cambiador de calor de que disponen estos
equipos; por tanto, la forma de modelar este proceso es similar a la expresada en las
ecuaciones (3.14) y (3.15). La disipación de calor se realiza únicamente por convección
forzada pudiéndose expresar el coeficiente de intercambio por convección, Vcnv,cal-a, en
m2 de cambiador por la fórmula propuesta por Monteith [Gon98]:
V 0.62
Vcnv ,cal − a = ccnv ,cal − a vv ,a
0.38
clc
,cal
(3.43)
donde ccnv,cal-a es un coeficiente que depende de las propiedades térmicas del aire, clc,cal
es la longitud característica del cambiador que si es un cilindro coincide con su diámetro
y Vvv,a es la velocidad del aire junto al cambiador.
• Sistemas de calefacción de suelo por conducción. El calentamiento del aire se produce
indirectamente a través de la superficie del suelo que es calentada desde las capas
inferiores. La transmisión de calor se efectúa por conducción entre la superficie de las
tuberías enterradas y el suelo adyacente, por lo que la forma de modelarlo es utilizar la
ecuación (3.9), obteniéndose la siguiente expresión para la densidad de flujo de
conducción inducida, Qcnd,cilindro (W/m2tubo) por un cilindro de radio crd,cilindro y
temperatura Vt,cilindro a la distancia crd2,cilindro del mismo:
ccnd ,sx
1
(Vt ,cilindro − Vt ,sx ) (3.44)
Qcnd ,cilindro = −
crd ,cilindro ln(crd 2 ,cilindro crd ,cilindro )
donde ccnd,sx es el coeficiente de conductividad del suelo y Vt,sx es la temperatura del
suelo a la distancia crd2,cilindro del cilindro.
• Sistemas de calefacción por convección y radiación. En este caso, la red de distribución
de calor es aérea formada por superficies cilíndricas uniformemente distribuidas bajo
invernadero por las que circula agua a una temperatura mayor que la del aire y situadas a
pocos centímetros de la superficie del suelo. El aire se calienta por convección al
encontrarse en contacto con los tubos aéreos, por lo que esté término se puede modelar
basándose en las ecuaciones (3.14) y (3.15) para tubos cilíndricos. El problema principal
es que no se mide la temperatura de la superficie externa de las tuberías sino la del agua
que circula por las tuberías. Por tanto, para modelar correctamente el efecto de la
convección es necesario utilizar dos ecuaciones de balance de energía:
Ecuación para determinar la temperatura de la superficie interna de las tuberías en la
que se produce un efecto de convección con el agua y unas pérdidas de conducción
hacia la superficie externa de las tuberías.
Ecuación para determinar la temperatura de la superficie externa de las tuberías en la
que se produce un efecto de convección con el aire exterior, un proceso de
conducción con la superficie interior de las tuberías y un proceso de radiación con el
resto de elementos físicos del invernadero y la bóveda celeste.
73
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Si se desprecian los efectos de los procesos de convección entre el agua caliente y la
superficie interior de las tuberías y las pérdidas de conducción entre las dos superficies
de las tuberías (por lo que se considera que la temperatura de la superficie exterior de las
tuberías es igual a la del agua que circula por ellas) y se desprecia el efecto del viento en
el interior del invernadero, considerando a la convección del aire interior con las tuberías
de calefacción sólo dependiente de la diferencia de temperatura entre ellas, Vt,cal-Vt,a, la
transmisión de calor por convección entre las tuberías del sistema de calefacción y el
aire interior del invernadero, Qcnv,cal-a, se puede modelar utilizando la siguiente ecuación
propuesta por González-Real y Baille [Gon98]:
Qcnv ,cal − a = (Vt ,cal − Vt ,a ) Vcnv ,cal − a
(3.45)
donde Vcnv,cal-a es el coeficiente de convección determinado por:
⎛ Vt ,cal − Vt ,a
Vcnv ,cal − a = ccnv ,cal − a1 ⎜
⎜ clc ,cal
⎝
⎞
⎟
⎟
⎠
c cnv ,cal − a 2
(3.46)
clc,cal es la longitud característica de las tuberías, que coincide con su diámetro en tubos
cilíndricos y ccnv,cal-a1 y ccnv,cal-a2 son parámetros a determinar, función del régimen de
transferencia (laminar o turbulento). Este coeficiente también se puede determinar por
métodos empíricos como la formula propuesta por Stanghellini para tubos cilíndricos
bajo invernadero como se indica en [Gon98]:
⎛ Vt ,cal − Vt ,a
Vcnv ,cal − a = 3.505 ⎜
⎜ Vt ,a clc ,cal
⎝
⎞
⎟
⎟
⎠
0.25
(3.47)
Por otra parte, las tuberías de calefacción emiten radiación térmica hacia la cubierta,
cultivo, superficie del suelo y bóveda celeste que es absorbida por estos elementos que, a
su vez, transfieren calor al aire, por tanto hay que añadir este proceso indirecto, que se
puede modelar utilizando la ecuación (3.25). Para calcular los factores de forma de las
tuberías con el cultivo, se pueden utilizar las expresiones que proponen Teitel y Tanny
función de la altura de las tuberías, distancia entre las líneas de cultivo, distancia de las
tuberías al cultivo y la altura del mismo [Tei98].
En función del tipo de sistema de calefacción, habrá que utilizar un determinado modelo o
la combinación de varios de ellos si se dispusiera de más de un sistema de actuación de
aporte de calor al aire interior instalado en el invernadero.
3.2.8.3. Malla de sombreo
La malla de sombreo se utiliza para reducir la radiación solar que alcanza el cultivo y por
tanto su efecto se puede modelar multiplicando la radiación que la alcanza por el
coeficiente de transmisión de la radiación solar del material del que está compuesta. Por
tanto, la radiación que alcanza el cultivo y la superficie del suelo cuando la malla se
encuentra extendida se reduce un determinado valor constante función del material de que
ha sido fabricada.
74
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Indirectamente, afecta a otras variables del clima como son la temperatura y humedad,
aumentando o disminuyendo su valor, debido a que:
•
Se reduce el volumen de aire en el que se encuentra el cultivo, ya que divide el volumen
del invernadero en dos partes tal y como se muestra en la figura 3.7.
•
Al no alcanzar al cultivo y a la superficie de suelo toda la radiación solar que transmite
la cubierta, estos elementos absorben menos radiación, por lo que los flujos de calor
disminuyen.
•
Afecta a la renovación de aire por ventilación natural ya que, aunque la malla es porosa,
el intercambio de aire en contacto con el cultivo con el exterior es menor. Miguel y
colaboradores realizaron un estudio experimental y teórico sobre el intercambio de aire
a través de mallas de sombreo y ventilación natural para caracterizar la influencia de la
resistencia de los poros de las mallas y las aperturas de la ventilación en función de la
velocidad del viento y la diferencia de temperatura entre interior y exterior, obteniendo
un modelo que proporciona buenas predicciones [Mig98b].
•
La malla absorbe radiación, lo que la convierte en un foco de calor dentro del
invernadero, que transmite energía al aire interior.
La forma correcta de modelar el efecto de la malla de sombreo consistiría en que cuando se
encuentra la malla extendida, hay que dejar de utilizar la ecuación de balance energético y
de masas correspondiente al aire del invernadero, e introducir cuatro nuevas ecuaciones de
balance de energía correspondientes a la superficie superior e inferior de la malla, más la
correspondiente a la temperatura de aire entre la superficie superior de la malla y la
cubierta, y entre la superficie inferior de la malla y la superficie de suelo. En caso de medir
la temperatura de las dos superficies de la mallas, se podrían considerar como condiciones
límite y sólo habría que incluir los dos balances correspondientes a los volúmenes de aire
entre la malla y la cubierta, y entre la malla y la superficie del suelo.
Volumen aire 1
Volumen aire
Volumen aire 2
a. Sin malla de sombreo
b. Con malla de sombreo
Fig 3.7. Elementos a considerar en un invernadero sin y con malla de sombreo
3.2.8.4. Malla térmica
El principal objetivo de la utilización de una malla térmica es que no se pierda la radiación
térmica que se emite desde el interior del invernadero (cultivo, suelo y elementos de
calefacción). Para ello se utiliza un material que refleje el máximo y transmita el mínimo de
este tipo de radiación.
75
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La forma de modelar este efecto consiste en multiplicar los flujos de radiación térmica
hacia el exterior (cubierta y bóveda celeste) por el coeficiente de transmisión de onda larga
de la malla térmica de forma que se disminuyen. Además, hay que incluir en los flujos de
radiación térmica del cultivo y superficie del suelo, los términos correspondientes a la
reflexión que se produce en la malla. Evidentemente habría que calcular los respectivos
factores de forma.
Como Miguel y colaboradores demostraron, la inclusión de la malla térmica afecta a la
transferencia de calor por convección entre las tuberías de calefacción y el aire interior, así
como con la cubierta y el cultivo, observándose hechos como la importancia de la distancia
existente entre las mallas y las tuberías, o que los coeficientes que describen la convección
son mucho más elevados que en el caso de no encontrarse instaladas las mallas [Mig98a].
Al incluirse un nuevo sólido en el sistema invernadero, se producen, entre otros, procesos
de convección en sus dos superficies, por lo que la forma de modelarlo es similar a la que
se ha descrito en el caso de mallas de sombreo: habría que incluir cuatro nuevas ecuaciones
correspondientes a cada una de las superficies de la malla de sombreo, y a los dos
volúmenes de aire del invernadero que separa.
3.2.8.5. Sistemas estáticos de sombreo. Encalado
Los sistemas estáticos de sombreo son aquéllos que una vez instalados sombrean al
invernadero de una manera constante sin posibilidad de graduación o control [Mon98]. El
blanqueo de la cubierta utilizando carbonato cálcico es el sistema de sombreo más
extendido en la horticultura bajo invernadero en el Mediterráneo. Se blanquea el
invernadero cuando empiezan los meses de mayor radiación y se lava cuando empieza la
temporada fría. El efecto que produce sobre el clima es que reduce la transmisión de
radiación solar sobre el cultivo, Qsol,cu. Por tanto la forma de modelarlo es multiplicar el
coeficiente de transmisión de radiación solar de la cubierta, ctoc,cb, por un coeficiente de
transmisión de radiación solar de la cubierta, Vtoc,bl, que tendrá una determinado valor
constante cuando el invernadero se encuentre encalado y otro en el caso contrario:
Qsol ,ms = Vtoc ,bl ctoc ,cb Qsol ,e
(3.48)
El principal problema radica en determinar el valor del coeficiente de transmisión del
encalado ya que depende de la concentración de carbonato cálcico empleado, pudiendo
variar entre 0.1 para una concentración de 4 kg /4 lH2O, y 0.65 para 0.7 kg/4 lH2O [Mon98].
Por tanto, cada vez que se encale habría que medir la reducción de radiación para
determinar este parámetro.
Evidentemente, si reduce la transmisión de radiación al interior, afectará indirectamente a la
temperatura y humedad como se indica en el estudio realizado por Baille y colaboradores
[Bai01], en el que se muestra que al encalar un invernadero, se produce una drástica
diferencia en la temperatura y déficit de presión de vapor del aire y en la diferencia de
temperatura entre el cultivo y el aire; mientras que no afecta en gran medida a la tasa de
transpiración de las plantas. Realmente no es un sistema de actuación tal y como se conoce
en el ámbito de la automática ya que no se tiene control sobre él. Se ha incluido en este
apartado ya que es una acción del hombre que afecta en gran medida al clima del
invernadero, aunque bien se podría haber considerado como una perturbación al sistema.
76
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.2.8.6. Sistemas de evaporación de agua
Cuando el agua se evapora absorbe calor, por lo que si en un invernadero se dispone de un
sistema de evaporación de agua, por una parte absorberá calor del aire del invernadero,
disminuyendo la temperatura ambiente, y por otra aumentará el contenido de vapor de
agua, aumentando la humedad del invernadero [Mon98]. Estos sistemas de vaporización
artificial, aportan una determinada cantidad de agua al aire del invernadero, Mevp,art
[kg/m2s], que directamente se incluye como un término aditivo en el balance de masa de
agua en el aire del invernadero, y como un término sustractivo, Qevp,art [W/m2], en el
balance de energía del aire del invernadero multiplicado por el calor latente de
vaporización:
Qevp ,art = Vlt ,vap M evp ,art
(3.49)
3.2.9. Relación entre los elementos del invernadero
Basándose en todo lo descrito anteriormente, para modelar la temperatura y humedad en el
volumen de aire que se encuentra en contacto directo con el cultivo, es necesario considerar
al sistema dividido en los siguientes elementos:
• Cubierta.
• Volumen de aire entre la cubierta y la superficie del suelo.
• Cultivo.
• Superficie del suelo.
• El número de capas de suelo que se considere necesario
En el caso de que exista una malla de sombreo instalada, el volumen de aire entre la
cubierta y la superficie del suelo, se divide en dos:
• Volumen de aire entre la cubierta y la superficie superior de la malla de sombreo.
• Volumen de aire entre la superficie inferior de la malla de sombreo y la superficie de
suelo.
Además hay que considerar que este sistema se encuentra ubicado en un lugar del espacio
en el que se encuentran cuatro sistemas:
• Sol.
• Bóveda celeste.
• Aire exterior.
• Suelo exterior al invernadero.
Las relaciones entre estos elementos se muestran en la figura 3.8 en la que se indican los
procesos físicos de transferencia de energía y masas que se producen entre ellos sin
considerar los efectos de los sistemas de actuación. Únicamente se indica la presencia de la
malla ya que divide al elemento volumen de aire en dos elementos de características
diferentes.
77
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Sol
Rad. solar
Suelo
Ext.
Rad. térmica
• Convección
• Condensación
Cubierta
Rad. térmica
Bóveda
celeste
Aire
Ext.
Aire
Ext.
Sol
• Infiltración
• Ventilación
Rad. solar
Rad. térmica
Rad.térmica
• Convección
• Condensación
Cultivo
Rad. térmica
Aire 1
Convección
Bóveda
celeste
Infiltración
Malla sombreo/térmica
Radiación
térmica
Suelo
Ext.
• Convección
• Transpiración
Convección
Radiación
térmica
Aire 2
• Convección
• Evaporación
Sol
Rad. solar
Superficie
Suelo
Conducción
Capa 1
Suelo
Rad. térmica
Suelo
Rad. térmica Ext.
Bóveda
celeste
Conducción
Capa x
Suelo
Fig. 3.8. Relación entre los elementos que forman el invernadero y el exterior.
Como resumen, la relación entre los sistemas de actuación más utilizados, los elementos del
invernadero y los sistemas exteriores son:
• Ventilación natural. Afecta al balance térmico y de vapor de agua del aire interior ya
que lo mezcla con el exterior.
• Malla de sombreo. Se produce un proceso de convección entre el aire que la rodea y las
superficies de la malla. Reduce la cantidad de radiación que alcanza al cultivo y a la
superficie del suelo. También se pueden producir fenómenos de condensación en sus
superficies. Finalmente, como está compuesta por un material poroso, se produce un
fenómeno de infiltración entre los dos volúmenes de aire que separa.
• Malla térmica. Exactamente igual que la malla se sombreo, sólo que es menos porosa y
además, reduce la perdida de radiación térmica procedente del suelo y cultivo.
• Calefacción. En caso de utilizarse tuberías de agua caliente, se produce un fenómeno de
convección con el aire que lo rodea y procesos de intercambio de radiación térmica con
el suelo, cultivo, cubierta, malla, suelo exterior y bóveda celeste.
78
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Humidificadores. Además de aumentar la concentración de vapor de agua en el aire,
produce una reducción de la temperatura en el mismo.
La nomenclatura utilizada para definir a cada elemento del sistema y a cada proceso es la
siguiente1:
• El tipo de flujo se nombra Q si es de calor y M si es de masa de vapor de agua.
• El primer subíndice indica el tipo de proceso y el segundo entre qué elementos se
produce el flujo de energía o masa, tal y como se indica en la siguiente tabla. El hecho
de considerar a la transpiración como un proceso independiente del calor latente
(condensación, evaporación) es para indicar la importancia del mismo y el efecto que
produce sobre el cultivo sobre el clima del volumen de aire en el que se encuentra.
Elementos
Procesos
Nomenclatura
Descripción
Nomenclatura
Descripción
a
Aire interior (1-2)
cnd
Conducción
bc
Bóveda celeste
cnv
Convección
cal
Calefacción
lt
Latente:
• Condensación
cb
Cubierta
• Evaporación
cu
Cultivo
• Humidificación
e
Exterior
hum
Humidificador
rad
Radiación térmica
malla
Malla
sol
Radiación solar
snúmero
Capa de suelo Número
tra
Transpiración
se
Suelo exterior
ven
Ventilación
ss
Superficie del suelo
perd
Perdidas por infiltración
sx
Capa x de suelo
Tabla 3.2. Nomenclatura de flujos de energía y masa en ecuaciones de balance.
En un invernadero se cumple el principio de continuidad entre los elementos [Mon98], así
que se puede escribir la ecuación de continuidad para cada uno de ellos obteniéndose los
siguientes balances de energía y masa descritos de una forma esquemática.
•
Balance energético de la cubierta. El calor acumulado en la cubierta, función de su
temperatura, Vt,cb, y de su capacidad térmica, cct,cb, viene dado por los siguientes flujos:
cct,cb
dVt ,cb
dτ
= Qsol,cb + Qcnv,cb−e + Qcnv,cb− a + Qlt ,cb−e + Qlt ,cb− a + Qrad,cb−bc +
(3.50)
+ Qrad,cb−cu + Qrad,cb− ss + Qrad,cb−cal + Qrad,cb− malla + Qrad,cb− se
• Balance energético del aire 1. El calor acumulado en el volumen de aire comprendido
entre la cubierta y la malla, función de su temperatura, Vt,a1, y de su capacidad térmica,
cct,a1, viene dado por los siguientes flujos:
cct,a1
1
dVt ,a1
dτ
= Qcnv,a1−cb + Qcnv,a1− malla + Qven,a1−e + Q perd,a1− a2
(3.51)
Aunque se ha incluido una tabla general de nomenclatura, se ha considerado interesante repetirlo aquí para
facilitar la lectura y comprensión de los siguientes apartados.
79
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Balance energético del aire 2. El calor acumulado en el volumen de aire comprendido
entre la malla y la superficie de suelo, función de su temperatura, Vt,a2, y de su capacidad
térmica, cct,a2, viene dado por los siguientes flujos:
cct ,a2
dVt ,a2
dτ
= Qcnv,a2 − malla + Qcnv,a2 −cu + Qcnv,a2 − ss +
(3.52)
+ Qcnv,a2 −cal + Qven,a2 −e + Q perd,a2 − a1 + Qlt ,hum
• Balance energético del único volumen de aire en el caso de no encontrarse la malla
extendida. El calor acumulado en el volumen de aire comprendido entre la cubierta y la
superficie de suelo, función de su temperatura, Vt,a, y de su capacidad térmica, cct,a, viene
dado por los siguientes flujos:
cct,a
dVt ,a
= Qcnv,a −cb + Qcnv,a −cu + Qcnv,a − ss + Qcnv,a −cal + Qven,a −e + Qlt ,hum
dτ
(3.53)
• Balance energético en el cultivo. El calor acumulado en el cultivo, función de su
temperatura, Vt,cu, y de su capacidad térmica, cct,cu, viene dado por los siguientes flujos:
cct,cu
dVt ,cu
dτ
= Qsol,cu + Qcnv,cu − a + Qtrp,cu + Qrad,cu −bc + Qrad,cu −cb +
(3.54)
+ Qrad,cu − se + Qrad,cu − ss + Qrad,cu − malla + Qrad,cu −cal
• Balance energético en la superficie del suelo. El calor acumulado en la superficie del
suelo, función de su temperatura, Vt,ss, y de su capacidad térmica, cct,ss, viene dado por
los siguientes flujos:
cct,ss
dVt ,ss
dτ
= Qsol,su + Qcnv,ss − a + Qlt ,ss + Qcnd,ss − s1 + Qrad,ss −bc +
(3.55)
+ Qrad,ss −cb + Qrad,ss − se + Qss −cu + Qrad,ss − malla + Qrad,ss −cal
• Balance energético en las capas del suelo. El calor acumulado en la capa número n del
suelo, función de su temperatura, Vt,sx, y de su capacidad térmica, cct,sx, viene dado por
dos flujos de conducción de calor desde o hacia la capa superior, sx-1, y la capa inferior,
sx+1 :
cct,sx
dVt ,sx
dτ
= Qcnd,s x − s x−1 + Qcnd,s x − s x+1
(3.56)
• Balance concentración de vapor de agua en el volumen de aire 1. La masa de vapor de
agua en el volumen de aire comprendido entre la cubierta y la malla, función de su
humedad, Vha,a1, y de su volumen, cvol,a1, viene dado por los siguientes flujos:
cvol,a1
dVha,a1
dτ
= M lt ,a1−cb + M lt ,a1− malla + M ven,a1−e + M perd,a1− a2
80
(3.57)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Balance concentración de vapor de agua en el volumen de aire 2. La masa de vapor de
agua en el volumen de aire comprendido entre la malla y la superficie de suelo, función
de su humedad, Vha,a2, y de su volumen, cvol,a2, viene dado por los siguientes flujos:
cvol,a2
dVha,a2
dτ
= M lt ,a2 − malla + M lt ,a2 − ss + M tra,a2 −cu + M perd,a2 − a1 + M lt ,hum (3.58)
• Balance concentración de vapor de agua en el único volumen de aire en el caso de no
encontrarse la malla extendida. La masa de vapor de agua en el volumen de aire
comprendido entre la cubierta y la superficie de suelo, función de su humedad, Vha,a, y
de su volumen, cvol,a, viene dado por los siguientes flujos:
cvol,a
dVha,a
dτ
= M lt ,a −cb + M lt ,a − ss + M tra,a −cu + M ven,a −e + M lt ,hum
(3.59)
Estas ecuaciones de balance de energía y masas forman el conjunto de ecuaciones
fundamental de cualquier modelo del clima que se genera en el interior de un invernadero.
Por otra parte, en determinadas situaciones es imposible realizar todas las medidas
necesarias para determinar los parámetros o variables del modelo, por lo que es necesario
realizar simplificaciones, debiendo modificar los flujos de forma adecuada, e incluso no
considerar alguno de ellos.
Si se miden las condiciones climáticas en el exterior del invernadero y se conocen las
principales características de la estructura y las propiedades ópticas y térmicas del material
de cerramiento, así como los principios de funcionamiento y las características técnicas de
los sistemas de actuación instalados, los balances de masa y energía anteriores permitirán
conocer las temperaturas de los distintos elementos en los que se divide al sistema
invernadero y el contenido de vapor de agua del aire interior. Para esto, es necesario
conocer los modelos o expresiones de cálculo de cada uno de los términos o flujos de los
balances y resolver las ecuaciones simultáneamente [Mon93]. Como se analizará en
apartados posteriores, la utilización de herramientas adecuadas de modelado y simulación
facilitan esta tarea.
3.3. ESTADO ACTUAL DE LOS ESTUDIOS DE MODELADO DEL
CLIMA EN INVERNADERO
3.3.1. Introducción
Desde la década de los años 60 hasta la actualidad se han desarrollado diversos modelos
que describen el comportamiento del clima que se genera en el interior de un invernadero.
Aunque los principios físicos que rigen la evolución del clima deben ser comunes para
todos, hay que estudiar las consideraciones que se realizan en cada uno de ellos ya que
existen numerosas diferencias, destacando:
• Variables climáticas a modelar.
• Elementos en los que se divide el sistema invernadero.
81
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Fenómenos físicos que se consideran.
• Formulación y simplificación de los fenómenos físicos considerados.
Además, el sistema invernadero a modelar es distinto según las latitudes donde se
encuentre ubicado, evidentemente, también, influenciado por el clima que exista en estas
zonas. Las diferencias que se encuentran entre los distintos sistemas utilizados son:
• Estructura física del invernadero.
• Material de cubierta.
• Sistemas de actuación instalados para modificar el clima que se genera en el interior.
• Sistema de producción del cultivo, destacando el tipo de sustrato y el sistema de
fertirrigación.
También, hay que considerar, las aportaciones que han realizado distintos autores a
aspectos puntuales de los procesos que se producen, como los numerosos estudios de
ventilación realizados o el efecto del cultivo en el clima debido a la transpiración. La
mayoría de estos estudios se han referenciado en el apartado anterior acerca de los procesos
que se producen en el interior de un invernadero.
Por otra parte, se han desarrollado modelos empíricos basados en la utilización de unas
estructuras matemáticas muy flexibles cuyos parámetros se estiman a partir de datos
experimentales de entrada/salida, sin considerar los principios físicos que rigen el clima en
el interior de un invernadero, como los modelos neuronales. Estos se detallarán en el
próximo capítulo.
3.3.2. Clasificación de modelos
Existen distintos criterios para clasificar los distintos tipos de modelos del clima interior de
un invernadero, algunos de ellos ya indicados en el apartado anterior:
• Número de variables a modelar:
Monovariables. Sólo modelan una variable.
Multivariables. Modelan más de una variable.
• Variación con el tiempo.
Estáticos. No se utiliza la variable tiempo, analizándose el comportamiento de las
variables a modelar en determinados instantes de tiempo en régimen permanente.
Dinámicos. Muestran la evolución en el tiempo de las variables a modelar.
Mixtos. Algunas variables se modelan en función del tiempo y otras no.
• Naturaleza del modelo.
Basados en principios físicos.
Empíricos o basados en datos experimentales.
Mixtos. Algunos procesos los describen en función de los principios físicos y otros en
función de datos experimentales.
82
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Periodo del día modelado.
Diurno. Sólo modela el comportamiento del invernadero durante el día.
Nocturno. Sólo modela el comportamiento del invernadero durante la noche.
Completo. Modela todo el periodo que abarca un día.
• Utilización final.
Simulación. Se utilizan para simular el comportamiento del clima de un invernadero,
pudiendo sustituir al invernadero en fases de diseño y prueba, o bien para diseñar
sistemas de actuación o estudiar fenómenos físicos concretos como convección, etc.
Constituyen una herramienta clave de diseño y optimización de la producción.
Control. Modelos simplificados que se utilizan para diseñar y construir sistemas de
control basado en modelo, como se analizará en el capítulo 6 de la presente tesis.
3.3.3. Descripción de modelos de simulación existentes
En este apartado, se va a realizar un estudio muy resumido de algunos de los modelos
existentes en la bibliografía utilizados para simulación y que se ajustan en mayor o menor
medida a los balances descritos en las ecuaciones (3.50) a la (3.59). Como realizar una
descripción detallada de cada uno de ellos resultaría demasiado extensa, se ha optado por
exponer en la tabla 3.3 las principales características de forma que se pueda llevar a cabo
una rápida y fácil comparación entre ellos, es decir :
• Autores, para poder conocer los distintos grupos de investigación dedicados a estos
temas.
• Elementos en los que divide al invernadero y variables que modela de cada uno de ellos,
incluyendo el modelado de variables auxiliares como la temperatura de las tuberías del
sistema de calefacción, etc.
• Sistemas de actuación instalados en el invernadero utilizado para realizar las
experiencias.
• Herramienta utilizada para la construcción o implementación del modelo y el método de
resolución del sistema de ecuaciones diferenciales que describen al sistema.
• Experiencias realizadas y descripción del sistema real utilizado: estructura del
invernadero, superficie, material de cubierta, localización geográfica y tipo de cultivo.
• Utilización que se ha hecho del modelo.
• Referencias bibliográficas para consultar los aspectos que interesen en cada momento
como el modelado de cada uno de los procesos físicos que lo describen o las tablas y
figuras de los resultados obtenidos con los modelos propuestos.
No se van a describir los primeros modelos como el de Bussinger en 1963, Walker en 1965
o Kimball en 1973 que aunque muy referenciados, se encuentran ya superados. Hay que
señalar que en su día sirvieron para aproximarse al conocimiento de la física de
invernaderos y para analizar los efectos de los primeros sistemas de actuación como las
mallas de sombreo o la ventilación natural [Pal92].
83
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
El desarrollo de los métodos numéricos que coincide con la evolución de los computadores
y por tanto de los diferentes lenguajes de programación a partir de la década de los 70,
provoca que el problema de solucionar sistemas de ecuaciones diferenciales no lineales se
pueda abordar con cierta rapidez, permitiendo el diseño y desarrollo de modelos más
completos para invernaderos, introduciendo, por ejemplo, el balance de humedad del aire o
un mayor número de elementos de suelo para analizar flujos de calor multidimensionales
como realizó Takakura y colaboradores en 1971 [Tak71].
No se han incluido los modelos de simulación que se han desarrollado para estudiar
aspectos muy concretos del clima del invernadero, ya que se pretende dar una visión
general de los modelos que describen en mayor o menor medida el clima completo y las
variables que caracterizan a cada uno de los elementos que componen al invernadero. Aún
así, cabe destacar los siguientes trabajos:
• Stanghellini y de Jong proponen un modelo que se centra exclusivamente en la humedad
del aire interior de un invernadero, describiendo cada uno de los procesos físicos que
intervienen. Muestran los buenos resultados de la validación del mismo para un
invernadero tipo Venlo ubicado en Holanda, con un cultivo maduro de tomate y durante
los meses de abril a julio. Lo utilizan para el diseño de controladores de humedad y
como generador de consignas para los sistemas de control de forma que se pueda evitar
el punto de condensación sobre las hojas del cultivo o en la cubierta [Sta93].
• Garzoli y Blackwell proponen un modelo de simulación de la temperatura de la cubierta
para estudiar las perdidas que se producen a través de un material plástico durante los
periodos nocturnos. Las experiencias las desarrollan en un invernadero tipo túnel de 148
m2 de cubierta ubicado en Australia. Entre los datos reales medidos y los estimados por
el modelo se observa un alto grado de afinidad. Este modelo de la temperatura de la
cubierta se ha utilizado para ajustar los coeficientes de convección con la cubierta,
obteniendo un método para calcular las perdidas de calor y así poder diseñar nuevas
estructuras de invernadero que reduzcan los requerimientos de energía ([Gar81],
[Gar85]).
• Albright propone dos métodos para predecir la acción de la masa térmica en el clima de
un invernadero, es decir modelar la evolución en el tiempo de la temperatura de la
superficie del suelo. El primero de los métodos resuelve una ecuación de difusión por
medio de series de Fourier. El segundo método se basa en dos ecuaciones que describen
la evolución de la temperatura del aire y de la temperatura de la superficie de suelo. Para
ajustar y validar el modelo se utiliza un invernadero situado en la Universidad de
Cornell (Estados Unidos) de 106.58 m2 en condiciones de invierno y verano, así como
con cultivo y sin cultivo. Estos modelos han sido utilizados para estudiar el efecto de
cada actuador en diferentes circunstancias, analizar la importancia de cada uno de los
procesos físicos que intervienen en la transferencia de calor al suelo, el diseño de nuevas
estructuras de invernadero y el dimensionado de las mismas [Alb84].
En el siguiente capítulo, se realizará una revisión bibliográfica acerca de modelos
simplificados basados en principios físicos de las principales variables que caracterizan el
clima de un invernadero y del modelado empírico de las mismas (lineal y no lineal) basados
en diferentes técnicas como las redes de neuronas artificiales.
84
85
Cormary,
Nicolas
Chaabane
Bot
Boisson
Modelo
Autores
Ahmadi
Glockner
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
No lo indica
Fortran
No lo indica
Implementación
Fortran
térmica No indica la
implementación.
térmica Método resolver
ecuaciones
diferenciales:
Runge-Kutta
modificado por
Gill
Ventilación
natural
Humidificadores
Calefacción
Mallas térmicas
Malla
fija
Malla
móvil
Ventilación
natural
Calefacción
Ventilación
natural
Malla térmica
Ventilación
natural
Calefacción
Actuadores
Túnel
1000 m2
Cristal/plástico
Paris (FRAN)
Tomate
Túnel
210 m2
Polietileno
Perpignan (FRAN)
Con cultivo
Sólo de noche
Venlo
1382 m2
Naaldwijk (HOL)
Tomate y pepino
Túnel
9 m2
PVC
Alberta (CAN)
Sin cultivo
Enero
Túnel
400 m2
Polietileno
Perpignan (FRAN)
Tomate
Experiencias
Sin actuadores y
vacío 2ºC máximo
temperatura aire 1ºC
máximo temperatura
suelo.
Actuadores y vacío
3/4 ºC temperatura
suelo
Análisis aportes de
cada proceso.
Análisis efectos
sistemas actuación.
No se comenta la Estudio
de
la
validación
del influencia de una
modelo.
malla térmica sobre
el clima nocturno
[Cor85]
[Cha86]
[Bot83]
Análisis de relación
entre cultivo y clima
en distintas escalas
de tiempo.
Análisis de distintas
estrategias de ahorro
de energía.
Valida el modelo de
cada uno de los
procesos físicos con
experiencias.
Muestra
resultados
aceptables
de
temperatura de aire
[Ahm82a]
[Ahm82b]
[Ahm84]
Ref.
[Boi91]
Diseño de sistemas
calefacción
Análisis del efecto
de las perturbaciones
(viento y radiación)
Utilización
No se comenta la Análisis ventilación
validación
del natural
modelo.
Resultados
Validación modelo
Alto
grado
de
coincidencia
entre
valores medidos y
estimados
de
la
temperatura
Tabla 3.3.a. Descripción de modelos de simulación completos del clima que se genera en el interior de un invernadero
Cubierta (sólo una temperatura)
Aire (temperatura y humedad)
Cultivo (temperatura)
Superficie suelo (temperatura)
Tres capas de suelo (temperatura)
Cubierta
(temperatura
superficie
interior y exterior)
Aire (temperatura y humedad)
Cultivo (temperatura)
Superficie suelo (temperatura)
Tres capas de suelo (temperatura)
Tuberías calefacción (temperatura)
Otras variables: radiación
Cubierta (sólo una temperatura.)
Aire (temperatura y humedad). En caso
de malla extendida se consideran dos
volúmenes de aire
Cultivo (temperatura)
Superficie suelo (temperatura)
Cuatro capas de suelo (temperatura)
Malla térmica (temperatura)
Cubierta
(temperatura
superficie
interior y exterior)
Aire (temperatura y humedad)
Cultivo (temperatura)
Superficie suelo (temperatura)
Tres capas de suelo (temperatura)
Cubierta (sólo una temperatura)
Aire (temperatura y humedad)
Cultivo (temperatura)
Superficie suelo (temperatura)
Tres capas de suelo (temperatura)
Elementos y variables que modela
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
86
Tchamitchan
Tantau
Manera
Picuno
Scarascia
Kindelan
Halleaux
Modelo
Autores
DeChristopher
Elwell
Fynn
Curry
Sin actuadores
Ventilación
natural
Humidificadores
Calefacción
Ventilación
forzada
Aerotermos
Malla térmica
Ventilación
natural
Malla térmica
Ventilación
natural
Calefacción
Actuadores
[Kin80]
[Hal89]
No se comenta la Diseño control óptimo
validación
del
modelo.
[Tch96]
Análisis aportes de [Man89]
cada proceso.
[Man90]
Diseño de nuevas
estructuras.
Dimensionamiento de
sistemas calefacción
No se comenta la Análisis aportes de
validación
del cada proceso.
modelo.
Análisis
efectos
sistemas actuación.
14.9 m2
Cristal
Madrid (ESP)
Septiembre
45 % de los casos las
diferencias
entre
reales y estimados es
menor que 1ºC y en
el resto no es mayor
que 3ºC
Durante un año de
experiencias y en
casos con/sin cultivo
y con/sin calefacción,
los errores medios
menores de 2ºC para
temperatura y 5%
para humedad
Análisis material de
cubierta
Análisis
influencia
cultivo en clima
Análisis sistemas de
calefacción
Resultados
Utilización
Ref.
Validación modelo
No se comenta la Análisis del efecto de [Dec71]
validación
del distintos materiales de
modelo.
cubierta
Diseño de sistemas de
actuación
Simétrico plano
2240 m2
Polietileno
Gembloux (BEL)
Simétrico curvo
192 m2
Polietileno
Quebec (CAN)
No lo indica
Sin cultivo
Experiencias
No indica la Simétrico plano
implementación 24 m2
PVC
Bari (ITALIA)
Sin cultivo
Febrero-Marzo
Sólo nocturno
No lo indica
No lo indica
Sin cultivo
No lo indica
No indica la
implementación.
Método resolver
ecuaciones
diferenciales:
Runge-Kutta
Fortran
Implementación
Tabla 3.3.b. Descripción de modelos de simulación completos del clima que se genera en el interior de un invernadero (Continuación)
• Cubierta (sólo una temperatura). Ventilación
natural
Ecuación estática
Calefacción
• Aire (temperatura y humedad)
• Superficie suelo (temperatura)
Cubierta (sólo una temperatura)
Aire (temperatura y humedad)
Cultivo (temperatura)
Superficie suelo (temperatura)
Tres capas de suelo (temperatura)
Cubierta
(temperatura
superficie
interior y exterior)
• Aire (temperatura y humedad). En caso
de malla extendida se consideran dos
volúmenes de aire
• Cultivo (temperatura)
• Superficie suelo (temperatura)
• Tres capas de suelo (temperatura)
• Cubierta
(temperatura
superficie
interior y exterior)
• Aire (temperatura y humedad)
• Cultivo (temperatura)
• Sup. Suelo (temperatura)
• Suelo (temperatura: difusión eje Z)
Modelo estático
• Cubierta (sólo una temperatura)
• Aire (condición de contorno)
• Superficie suelo (temperatura)
• Una capa suelo (condición contorno)
•
•
•
•
•
•
Elementos y variables que modela
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Elementos y variables que modela
87
Wang
Boulard
• Cubierta (temperatura superficie interior y
exterior)
• Aire (temperatura y humedad)
• Cultivo (temperatura y condensación sobre
hojas)
• Superficie suelo (temperatura)
• Suelo (temperatura: difusión eje Z)
Se basa en el modelo de Halleeux,
modificando el modelado de los procesos de
ventilación y transpiración del cultivo.
• Cubierta (temperatura superficie interior y
exterior)
• Aire (temperatura y humedad)
• Cultivo (temperatura)
• Superficie suelo (temperatura)
• Tres capas de suelo (temperatura)
Zhang
Mahrer
Margolin
Avissar
No lo indica
Túnel
416 m2
Plástico
Avignon (FRAN)
Tomate
Marzo-Abril 1992
Desviación estándar
Temperatura suelo:0.5 ºC
Temperatura aire:0.8 ºC
Humedad aire:4.3 %
Error cuadrático medio:
Temperatura aire:1.2 ºC
Temperatura hojas:1.8 ºC
Humedad aire:5.8 %
Condensación hojas:1.9
h/d
Alto
grado
de
coincidencia
entre
valores
medidos
y
estimados
de
la
temperatura
[Zha97]
[Avi82]
Análisis
relación [Wan00]
clima/cultivo
vía
transpiración.
Análisis equilibrio
riego/transpiración
Análisis del clima
para
predecir
situaciones
como
condensación sobre
hojas que provoca
enfermedades.
[Sha99]
[Tav01]
Resultados aceptables
Identificación
de
parámetros del clima.
Predecir el consumo
durante una campaña
y situaciones límites
como heladas
Análisis espacial y
temporal
de
la
temperatura de los
distintos elementos
del invernadero
[Tak71]
[Tak93]
Ref.
Resultados
Utilización
Validación modelo
Resultados aceptables de Análisis de relación
temperatura de superficie entre cultivo y clima.
de suelo, aire y radiación Diseño control
sobre cultivo
Tabla 3.3.c. Descripción de modelos de simulación completos del clima que se genera en el interior de un invernadero (Continuación)
Ventilación
natural
Ventilación
natural
Divide el volumen encerrado por el Ventilación
invernadero en cuatro zonas donde estudia:
Natural
Humidificador
• Aire (temperatura)
• Cultivo (temperatura)
• Suelo (temperatura: difusión eje Z)
Maple V
Modelmaker
Ventilación
natural
Simétrico
283 m2
Minnesota (USA)
Agosto/septiembre
Con cultivo
Experiencias
Túnel
150 m2
Polietileno
Lisboa (POR)
Sin cultivo
Noviembre 98
No indica la Simétrico plano
implementación. 24 m2
Método resolver Polietileno
Delhi (INDIA)
ecuaciones
diferenciales:
Tomate
Runge-Kutta
Diciembre
No lo indica
Invernadero
comercial
4004 m2
Polietileno
Uza (ISRAEL)
Tomate
Febrero-Marzo 95
Fortran
Mimic
CSMP
Implementación
Ventilación
natural
Humidificador
Actuadores
Sharma
Tiwari
Sorayan
• Cubierta (temperatura superficie interior y
exterior)
• Aire
(temperatura,
humedad
y
concentración CO2)
• Cultivo (temperatura)
• Superficie suelo (temperatura, humedad y
concentración CO2)
• Suelo divido en 20 bloques en plano YZ
(temperatura, humedad y concentración
CO2)
Tavares
• Cubierta (sólo una temperatura)
Gonçalves • Aire (temperatura)
Castro
• Superficie suelo (condición contorno)
Loureiro
• Suelo (temperatura: difusión eje Z)
Joyce
Modelo
Autores
Takakura
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4. DESARROLLO DEL SIMULADOR DE CLIMA
3.4.1. Descripción del modelo
3.4.1.1. Estructura del modelo e hipótesis generales de partida
El clima que se genera en el interior de un invernadero se va describir por un modelo
dinámico representado por un sistema de ecuaciones diferenciales de la forma:
dX
= f ( X ,U , P ,V ,C ,τ ) con X ( τ i ) = X i
dτ
(3.60)
donde
•
•
•
•
•
•
•
•
X=X(τ) es un vector de dimensión n correspondiente a las variables de estado.
U=U(τ) es un vector de dimensión m correspondiente a las entradas de control.
P=P(τ) es un vector de dimensión o correspondiente a las perturbaciones del sistema.
V=V(τ) es un vector de dimensión p correspondiente a las variables del sistema no
consideradas como variables de estado.
C=C(τ) es un vector de dimensión q correspondiente a las constantes del sistema.
τ es el tiempo.
Xi es el valor inicial de las variables de estado en el tiempo inicial τi.
f=f(τ) es una función no lineal basada en balances de energía y masa en los distintos
elementos del sistema.
El número de ecuaciones que describen al sistema y sus características dependen de los
elementos en los que se divide al invernadero, los sistemas de actuación instalados y el tipo
de método de cultivo. El modelo desarrollado en esta tesis corresponde a un típico
invernadero industrial localizado en zona mediterránea, asumiendo las siguientes hipótesis:
• El invernadero se ha dividido en cuatro elementos: cubierta, aire en el interior, superficie
del suelo y una capa de suelo a una profundidad de 31.5 cms. El cultivo no se ha
considerado como un elemento ya que no se ha dispuesto de medidas de la temperatura
de las hojas, por lo que sería imposible ajustar los parámetros correspondiente a este
balance de energía. Por tanto, el cultivo se ha considerado como una fuente de
perturbación para el modelado del clima, aunque en el capítulo 5 se describe el
desarrollo de un modelo de crecimiento de cultivo de tomate que permite complementar
ambos modelos. Como en la descripción de los procesos de radiación térmica se necesita
conocer la temperatura de todos los cuerpos, se ha optado por utilizar la temperatura del
aire como temperatura del cultivo.
• Las variables de estado del sistema son la temperatura del aire, Xt,a, humedad del aire
(absoluta, Xha,a, y relativa, Xhr,a), temperatura de la cubierta, Xt,cb, temperatura de la
superficie del suelo, Xt,ss y temperatura de la primera capa de suelo, Xt,s1. La radiación
PAR que alcanza al cultivo también se modela, pero como no se calcula a partir de una
ecuación diferencial, se considera como variable algebraica del sistema, Vrp,a. La
concentración de CO2 en el aire, que es una de las principales variables que afectan al
crecimiento de las plantas, no se modela por falta de datos experimentales ya que
actualmente en estas zonas geográficas no se suele monitorizar ni controlar por su
elevado coste, aunque esta tendencia se está venciendo.
88
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Existen cuatro sistemas externos que interaccionan con el sistema invernadero: aire
exterior, bóveda celeste, segunda capa de suelo y balsas del sistema NFT.
• Como el espesor de la cubierta es del orden de las micras, se considera que el flujo de
conducción es cuantitativamente despreciable respecto al resto de flujos que aparecen en
el balance, por lo que se considera que las temperaturas de ambas superficies son
similares.
• Las variables exógenas y perturbaciones que actúan sobre el sistema y que se consideran
como condiciones de contorno son la temperatura del aire exterior, Pt,e, la humedad
absoluta del aire exterior, Pha,e, la velocidad del viento, Pvv,e, la dirección del viento,
Pdv,e, la temperatura de la bóveda celeste, Pt,bc, calculada utilizando la fórmula propuesta
por Swinbank [Boi91], la radiación global en el exterior, Prs,e, la radiación PAR en el
exterior, Prp,e, el blanqueo de la cubierta, Pbl,cb, la temperatura de la segunda capa de
suelo, Pt,s2 y el índice de área foliar como medida del estadio del cultivo, PLAI.
• Las entradas de control del sistema son la posición de las ventilaciones, Uven, la posición
de la malla de sombreo, Umalla, y la temperatura del agua que circula por las tuberías del
sistema de calefacción, Ut,cal.
PERTURBACIONES
Temperatura
Exterior (Pt,e)
Velocidad
Viento (Pvv,e)
Humedad
Exterior (Pha,e) Temperatura
Dirección
Bóveda celeste (Pt,bc)
Viento (Pdv,e)
Radiación PAR
Exterior (Prp,e)
Radiación global
Exterior (Prs,e)
SALIDAS
ENTRADAS
Radiación PAR (Xrp,a)
Ventilación (Uven)
Cultivo
(Índice área foliar, PLAI,cu)
Temperatura aire (Xt,a)
Humedad aire (Xha,a, Xhr,a)
Calefacción (Ut,cal)
Temperatura cubierta (Xt,cb)
Temperatura sup. Suelo (Xt,ss)
Malla sombreo
(Umalla)
Temperatura capa 1 suelo(Xt,s1)
Temperatura
capa 2 de suelo (Pts2,e)
Fig. 3.9. Esquema de entradas/salidas del modelo climático desarrollado.
• Aunque se conoce que existe una transferencia de calor y vapor de agua en tres
dimensiones, se van a considerar los flujos únicamente en la dirección vertical de
cubierta a suelo.
• Debido al sistema de medida y al tipo de sistemas de actuación instalados que se
encuentran muy localizados, se va a considerar el principio de distribución homogénea
de las variables, es decir, que se supone el mismo valor de las variables en los
volúmenes o superficies donde se formulan las ecuaciones de balance.
89
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Los modelos de temperatura se basan en balances de transferencia de calor donde se
consideran los siguientes procesos: absorción de radiación solar, convección,
conducción, intercambio de calor con el exterior debido a ventilación y a pérdidas por
infiltración, absorción de radiación térmica, calor latente por condensación y
evaporación y procesos de transpiración del cultivo (figura 3.10).
• El modelo de humedad del aire se basa en una ecuación de balance de vapor de agua en
el que se considera el proceso de intercambio de vapor de agua con el exterior por
ventilación y pérdidas por infiltración, la transpiración del cultivo y los procesos de
condensación y evaporación en las distintas superficies del invernadero (figura 3.10).
Procesos
Convectivos
Procesos
Radiación solar
Procesos
Radiación térmica
Pt,bc
Pt,e
Pvv,e
Qven,a-e
Qcnv,cb-e
Prs,e
Qcnv,cb-a
Mlt,cb-e
Qlt,cb-e
Qrad,ss-bc
Bóveda
celeste
Qrad,cal-cb
Xt,a
Qsol,cu
Qcnv,ss-a
Xt,ss
Xt,ss
Procesos
Conducción
Qrad,ss-cu
Xt,a
Qrad,cal-cu
Vrs,ss
Qsol,ss
Ph,e
Pvv,e
Mven,a-e
Mlt,cb-a
Qlt,cb-a
Qrad,cu-cb
Qrad,ss-cb
Vrs,cu
Minf,a-e
Qrad,cal-bc
Qrad,cb-bc Xt,cb
Qsol,cb
Qcnv,cal-e
Qrad,cu-bc
Sol
Qinf,a-e
Procesos relacionados
con vapor de agua
Qrad,ss-cal
Xh,a
Mlt,ss
Qlt,ss
Mtra,cu
Qtra,cu
Mlt,balsa
Qlt,balsa
Ut,cal
Xt,ss
Qcnd,ss-s1 Xt,s1
Qcnd,s1-s2 Pt,s2
Fig. 3.10.Representación esquemática de los flujos considerados en el modelo desarrollado.
• Con respecto a los procesos relacionados con la radiación, tanto solar y PAR como
térmica, se establecen las siguientes hipótesis:
El aire es inerte a la radiación (no la absorbe, sólo la transmite).
No se consideran los efectos de la reflexión.
Los factores de forma entre los distintos elementos del invernadero son difíciles de
determinar por el elevado número de superficies que hay que analizar y la forma de
alguna de ellas (superficies curvas), por lo que se ha optado por considerarlos como
parámetros del modelo a estimar, y se ha comprobado que los valores obtenidos se
aproximan a ejemplos con estructuras parecidas.
• El efecto de la malla de sombreo sobre el clima se modela modificando los coeficientes
de convección con la cubierta, ya que no se dispone de la medida de la temperatura del
aire en los dos volúmenes de aire en los que se divide, además de que no se mide la
temperatura de las dos superficies de la malla.
• En las instalaciones de calefacción por tuberías de agua caliente, se mide la temperatura
del agua a un metro de la válvula de mezclas, pero la convección con el aire la realiza la
superficie externa de las tuberías. Se parte de la hipótesis de despreciar los efectos de
convección entre el agua caliente y la superficie interior de las tuberías y las perdidas de
conducción entre las dos superficies de las tuberías, por lo que se considera que la
temperatura de la superficie exterior de las tuberías es igual a la del agua que circula por
ellas.
90
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Las capacidades caloríficas de las distintas capas de suelo no se conocen y no ha sido
posible medirlas, por lo que se han considerado como parámetros a estimar.
• Las características físicas de los diferentes elementos, como la densidad o el calor
específico, se consideran constantes con la temperatura y el tiempo (hipótesis lógica por
el rango de temperatura de trabajo).
• Los coeficientes de convección dependen de la velocidad del fluido, pero la mayoría de
los autores desprecian su influencia en el interior de los invernaderos ya que es muy
baja, entre 0 y 1 m/s. A lo largo del desarrollo del modelo se ha observado que sí tiene
influencia, sobre todo cuando se encuentra la ventilación abierta por lo que, como es
difícil medirlo, se ha utilizado una estudio realizado por Wang y colaboradores
[Wan99b] que lo determina en función del flujo de ventilación.
En el siguiente apartado, se describirán en detalle los balances de energía en cada uno de
elementos del invernadero (aire, cubierta, superficie de suelo y primera capa de suelo), el
balance de vapor de agua en el aire del invernadero y la radiación PAR que alcanza al
cultivo por su importancia en el crecimiento de las plantas.
3.4.1.2. Modelado de la radiación PAR.
La radiación PAR que alcanza el cultivo es la principal fuente de energía para que las
plantas realicen la fotosíntesis, por lo que es necesario modelarla para poder estudiar la
influencia del clima en el crecimiento del cultivo. La radiación PAR sobre el cultivo se
puede modelar utilizando una ecuación algebraica, ya que su dinámica es similar a la
radiación PAR en el exterior, que se mide y se utiliza como condición de contorno,
disminuida por los factores de transmisión de los elementos del invernadero que debe
atravesar la radiación antes de alcanzar el cultivo:
• Cubierta, caracterizada por su coeficiente de transmisión de la radiación de onda corta,
ctoc,cb.
• Malla de sombreo, caracterizada por su coeficiente de transmisión de la radiación de
onda corta, ctoc,malla, que afecta a la radiación cuando la malla se encuentre extendida.
También hay que considerar el efecto del blanqueo de la cubierta del invernadero utilizando
carbonato cálcico, que reduce la transmisión de la radiación de onda corta en un
determinado factor, ctoc,bl, que se considera homogéneo para toda la cubierta, y constante a
lo largo de la campaña. El principal problema radica en determinar este factor como se ha
descrito anteriormente. Es un parámetro que hay que estimar cada vez que se utilice el
blanqueado en el invernadero. Por tanto, se define un coeficiente global de transmisión de
radiación de onda corta hasta que alcanza el cultivo Vtoc,cu, que es variable y función de los
coeficientes de transmisión de la cubierta, malla de sombreo y el blanqueado de la cubierta,
según la siguiente ecuación:
ctoc ,cb
⎧
⎪
ctoc ,cb ⋅ ctoc .bl
⎪
Vtoc ,cu = ⎨
⎪ ctoc ,cb ⋅ ctoc ,malla
⎪⎩ctoc ,cb ⋅ ctoc ,bl ⋅ ctoc ,malla
Malla sin extender , sin blanquear
Malla sin extender , blanqueado
Malla extendida , sin blanquear
Malla extendida , blanqueado
91
(3.61)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Por tanto, el modelo que describe la radiación PAR, Vrp,cu, que alcanza el cultivo en función
de la radiación PAR del exterior, Prp,e, viene dado por la siguiente ecuación:
Vrp ,cu =Vtoc ,cu ⋅ Prp ,e
(3.62)
3.4.1.3. Modelado de la temperatura en la cubierta del invernadero
Como se muestra en la figura 3.11.a, la cubierta presenta dos superficies con diferente
temperatura, pero debido a que el material utilizado es una película de plástico de 800
galgas (200 micras) de espesor, el flujo de energía debido a la conducción de calor de una
superficie a otra de la cubierta, Qcnd,cb, no es cuantitativamente significativo comparado con
el resto de flujos que aparecen en la ecuación de balance de energía, por lo que se supone
que la temperatura de ambas superficies es la misma, modelándose una única temperatura
de la cubierta, Xt,cb, basándose en los flujos mostrados en la figura 3.11.b.
Pt,bc
Pt,bc
Qrad,cb-e
Qcnv,cb-e
Qrad,cb-e
Xh,e
Pt,e
Qlt,cb-e
Prs,e
Qcnv,cb-e
Xh,e
Qcnd,cb
Xh,a
Xt,a
Qcnv,cb-a
Xt,a
Vrs,cu
Qcnv,cb-a
Prs,e
Xt,cbe
Xt,cbi
Qlt,cb-a
Xt,cb
Qlt,cb-e
Qsol,cb
cesp,cb
Pt,e
Qsol,cb
Qlt,cb-a
Xh,a
Qrad,cb-a
Vrs,cu
Qrad,cb-a
a. Considerando los procesos de conducción
b. Sin considerar los procesos de conducción
Fig. 3.11. Flujos de energía y masa en la cubierta del invernadero
El calor acumulado en la cubierta, se puede calcular en función del siguiente balance de
energía:
Qac ,cb = Qsol ,cb − Qcnv ,cb − a − Qcnv ,cb − e − Qlt ,cb + Qrad ,cb
(3.63)
donde Qsol,cb es la radiación de onda corta absorbida por la cubierta, Qcnv,cb-e es la
transferencia de calor por convección con el aire exterior, Qcnv,cb-a es la transferencia de
calor por convección con el aire interior, Qlt,cb es el calor latente producido por
condensación en las superficies de la cubierta y Qrad,cb es la radiación de onda larga
procedente del exterior y del interior del invernadero absorbida por la cubierta. Si se
expresa el calor acumulado como la variación de la temperatura de la cubierta, Xt,cb, en
función del tiempo, τ, que es lo que realmente interesa, se obtiene:
c
dX t ,cb
ccesp ,cb cden ,cb vol ,cb
= Qsol ,cb − Qcnv ,cb − a − Qcnv ,cb − e − Qlt ,cb + Qrad ,cb (3.64)
carea ,ss dτ
92
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
donde ccesp,cb es el calor específico del material que forma la cubierta, cden,cb es la densidad
del material que forma la cubierta, cvol,cb es el volumen de la cubierta y carea,ss es el área de
la superficie del suelo.
A continuación se describirán brevemente cada uno de los flujos de calor enumerados en
las ecuaciones (3.63) y (3.64):
• Radiación solar absorbida por la cubierta. La radiación solar procedente del sol, Prs,e, al
alcanzar la cubierta, parte se refleja, parte se absorbe y parte se transmite. Frente a la
radiación de onda corta, el material de cubierta se caracteriza por el coeficiente de
absorción, caoc,cb, por lo que la radiación solar absorbida vendrá dada por:
Qsol ,cb = caoc ,cb ⋅ Prs ,e
(3.65)
• Transferencia de calor por convección con el aire exterior. El flujo de transmisión de
calor por convección con el aire exterior, Qcnv,cb-e, se modela según la ecuación descrita
en (3.16), por lo que es función de la diferencia entre la temperatura de la cubierta, Xt,cb,
y la temperatura del aire exterior, Pt,e:
c
Qcnv ,cb − e =Vcnv ,cb − e area ,cb ( X t ,cb − Pt ,e )
carea ,ss
(3.66)
donde carea,cb es el área de la superficie exterior de la cubierta, carea,ss es el área de la
superficie del suelo y Vcnv,cb-e es el coeficiente de convección con el exterior que por
definición es función de la diferencia de temperatura entre la cubierta y el exterior, y la
velocidad del viento en el exterior. En todos lo estudios realizados, que se han
corroborado en las experiencias realizadas, el efecto predominante es el viento, pudiendo
despreciar el efecto debido a la diferencia de temperaturas. Se han probado las distintas
dependencias del coeficiente de convección con la velocidad del viento (véase apartado
3.2.3. Procesos de convección) y se ha encontrado que los mejores resultados, obtenidos
de la comparación entre los valores reales y los valores estimados por el modelo,
corresponden a un modelo mixto de forma que se utiliza una relación lineal para
velocidades de viento menores que una velocidad determinada, cvv,lim cnv, y una fórmula
exponencial para velocidades de viento superiores a esa velocidad, es decir:
c cnv ,cb−e 2
⎧⎪ c
cnv ,cb − e1 Pvv ,e
Vcnv ,cb − e = ⎨
⎪⎩ccnv ,cb − e3 Pvv ,e + ccnv ,cb − e4
Pvv ,e > cvv ,lim cnv
Pvv ,e ≤ cvv ,lim cnv
(3.67)
donde los parámetros ccnv,cb-e1, ccnv,cb-e2, ccnv,cb-e3 y ccnv,cb-e4 son coeficientes empíricos a
estimar. La velocidad del viento donde se conmuta de modelo lineal a exponencial y
viceversa, también hay que estimarla, ya que los distintos autores proponen valores
diferentes entre 4 y 8 m/s. Para evitar discontinuidades no reales que puedan afectar a las
estimaciones del modelo y a los algoritmos numéricos de resolución de las ecuaciones
diferenciales, es imprescindible que el valor del coeficiente de convección a esa
velocidad del viento sea el mismo calculado con los dos modelos.
93
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Transferencia de calor por convección con el aire interior. El flujo de transmisión de
calor por convección con el aire interior del invernadero, Qcnv,cb-a, se modela de la misma
manera que la convección con el exterior, es decir, función de la diferencia entre la
temperatura de la cubierta, Xt,cb, y la temperatura del aire interior, Xt,a:
c
Qcnv ,cb − a =Vcnv ,cb − a area ,cb ( X t ,cb − X t ,a )
carea ,ss
(3.68)
donde carea,cb es el área de la superficie interna de la cubierta, carea,ss es el área de la
superficie del suelo y Vcnv,cb-a es el coeficiente de convección con el interior. En este
caso, aunque el invernadero sea estanco, hay que considerar el efecto de la velocidad del
aire en el interior del invernadero, Vvv,a, sobre el coeficiente de convección ya que en
función de la apertura de la ventilación, esta velocidad puede llegar a ser considerable.
El efecto eólico es del mismo orden de magnitud que el debido a la diferencia de
temperatura, por lo que el coeficiente de convección se puede formular de la siguiente
forma:
Vcnv ,cb − a = ccnv ,cb − a1 X t ,cb − X t ,a
ccnv ,cb−a 2
c
,cb − a 4
+ ccnv ,cb − a 3 Vvvcnv
,a
(3.69)
donde los parámetros ccnv,cb-a1, ccnv,cb-a2, ccnv,cb-a3 y ccnv,cb-a4 son coeficientes empíricos a
estimar. Con respecto a los coeficientes relativos al término debido a la diferencia de
temperatura hay que indicar que modifican su valor en función del tipo de régimen en el
que circula el fluido (laminar o turbulento). Para determinar el cambio de valor, los
análisis utilizan los números de Nusselt, Prandtl, Grashof y Reynolds, y las variables
climáticas implicadas en el proceso. Existen tablas para casos generales que facilitan los
cálculos [Cha84]. En el modelo desarrollado, se ha utilizado un estudio realizado por
Chalabi y Bailey en 1989, descrito en [Mon93], en el que se propone que, en un
invernadero, si la temperatura del aire interior es más elevada que la temperatura de la
cubierta, el flujo de transferencia de calor es turbulento, y en caso contrario es laminar.
Por otra parte, cuando se extiende la malla de sombreo, el aire entre el cultivo y la
cubierta se divide en dos volúmenes distintos: entre la cubierta y la superficie superior
de la malla de sombreo y entre la superficie inferior de la malla de sombreo y el cultivo.
Como ya se ha comentado, habría que incluir una nueva ecuación de balance
correspondiente al volumen de aire superior. El problema radica en que los sensores de
temperatura de aire se suelen situar por encima del cultivo, por lo que no se dispone de
medidas del volumen superior. Por otra parte, al incluir el efecto de la malla es necesario
medir la temperatura de las dos superficies de la malla, que nunca se miden. Para
modelar el efecto de la malla de sombreo sobre la convección entre el aire interior y la
cubierta, se ha optado por modificar los coeficientes ccnv,cb-a1 y ccnv,cb-a3 obteniéndose
unos resultados aceptables con esta simplificación, como se puede observar en los
siguientes apartados.
Con respecto al término eólico, la velocidad del aire en el interior del invernadero no se
suele medir ya que durante largos intervalos de tiempo su valor es muy bajo (menor de 1
m/s), lo cual obliga a utilizar anemómetros especiales y de coste elevado como los
basados en ultrasonidos o en hilo caliente.
94
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Para estimar su valor, se han utilizado los estudios de Wang y colaboradores [Wan99b]
que proponen la siguiente expresión de la velocidad del viento interior sobre el cultivo
función del flujo de ventilación, Vven,flujo y del área de la sección del invernadero
perpendicular al flujo de ventilación, cven,areap:
Vvv ,a =
Vven , flujo
(3.70)
cven ,areap
Como se ha comentado en el apartado 3.2.8.1 correspondiente a los efectos de la
ventilación, existen distintas teorías para modelar el flujo de ventilación. Por la similitud
de clima (Mediterráneo) y de estructura de invernadero utilizada (cubierta curva de
plástico), se ha optado por utilizar los estudios de Boulard y Baille realizados en 1995 en
el que proponen cinco tipos de modelos para estimar esta variable. Después de
implementar y estudiar cada uno de estos modelos, comparando datos reales y
estimados, se llega a la conclusión que el modelo que más se ajusta a las condiciones de
los invernaderos tipo industrial en Almería, es el siguiente, basado en una combinación
de efecto térmico y efecto eólico:
0.5
cven ,l cven ,cd Vven ,aef ⎧⎪⎛
Vven ,aef (X t ,a − Pt ,e ) ⎞
0.5
⎜
⎟
+ cven
Vven , flujo = cven ,n
⎨⎜ c gv
,cv Pvv ,e
⎟
2
2
Pt ,e
⎪⎩⎝
⎠
(
donde cven,n es el número de ventilaciones que dispone el
invernadero, cven,l es la longitud de la ventilación, cven,cd es el
coeficiente de descarga y cven,cv es el coeficiente debido al
viento. Es necesario estimar estos dos últimos coeficientes.
La apertura efectiva de la ventana, Vven,aef, tal y como se
muestra en la figura 3.12, se calcula en función de la
apertura de la misma, Uven, y a su anchura, cven,a.
Corresponde a la longitud del segmento que une los
extremos de la apertura, por lo que por trigonometría:
⎞
⎛U
Vven ,aef = 2 cven ,a sen⎜ ven ⎟
⎝ 2 ⎠
(3.72)
⎫
)⎪⎬ + V perd (3.71)
⎪⎭
cven,a
Uven
Vven,aef
Fig 3.12. Esquema apertura
efectiva ventilación
Cuando el invernadero se encuentra con la ventilación cerrada, existe un flujo de
ventilación debido a que no es completamente estanco y a las posibles roturas que
presente la cubierta, por lo que por infiltración se produce una corriente de aire entre el
interior y el exterior del invernadero que se conoce como flujo de pérdidas, Vperd.
Evidentemente, es función del viento en el exterior y la forma de modelarlo consiste en
utilizar un valor constante, cperd,vb, para una velocidad de viento menor que una
determinada, cvv,limven, (también a estimar ya que varía según los estudios realizados por
distintos autores) y otro valor cperd,va si supera esa determinada velocidad del viento, es
decir:
⎧c perd ,vb
V perd = ⎨
⎩c perd ,va
95
Pvv ,e < cvv ,lim ven
Pvv ,e ≥ cvv ,lim ven
(3.73)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Con respecto a los parámetros que hay que estimar para calibrar el modelo, Boulard y
Baille en 1995 [Bou95b] demostraron empíricamente que el coeficiente de descarga y el
coeficiente debido al viento no son constantes, sino función de otras variables como la
velocidad del viento, pero se han considerado constantes debido a la dificultad
encontrada en la obtención de estas relaciones tal y como proponen la mayoría de
autores. De hecho, los estudios realizados lo presentan como un función que toma
valores constantes en diferentes intervalos de la velocidad del viento en el exterior,
siendo este aspecto un tema de debate continuo y actual en la comunidad agronómica.
Un estudio que se realizado en el ámbito de esta tesis, fue el análisis del efecto de la
dirección del viento en el exterior sobre el modelado del flujo de ventilación. Se moduló
la velocidad del viento en función del ángulo que forma la dirección del viento con la
orientación de la ventilación, correspondiendo 0º y 360º con el Norte. Los resultados
preliminares obtenidos mostraron que la influencia era mínima, que coincide con las
conclusiones que Boulard y Draoui expusieron acerca de sus estudios [Bou95a]. Hay
que indicar que los datos reales utilizados fueron la temperatura y la humedad absoluta
en el interior y exterior, pero no se han medido datos reales de flujos de ventilación.
• Transferencia de calor latente producido por condensación. La transferencia por calor
latente en la cubierta, Qlt,cb, se produce por condensación del vapor de agua en sus dos
superficies por lo que se puede modelar siguiendo los principios expuestos en el
apartado 3.2.6. Procesos de evaporación y condensación de vapor de agua descritos por
la siguiente ecuación:
Qlt ,cb =Vlt ,vap − e M lt ,cb − e + Vlt ,vap − a M lt ,cb − a
(3.74)
donde Vlt,vap es el calor latente de vaporización, función de la temperatura del aire en el
exterior para la superficie externa y de la temperatura del aire del invernadero para la
superficie interna. La fórmula de cálculo se presenta en la ecuación (3.32). El flujo de
vapor de agua producido por la condensación en la superficie externa de la cubierta,
Mlt,cb-e, se calcula como un término convectivo siempre que la humedad absoluta del aire
saturado de vapor de agua a la temperatura de la cubierta, Vhsat,cb, sea menor que la
humedad absoluta del aire en el exterior, Pha,e, y la temperatura de la cubierta, Xt,cb, sea
menor que la temperatura del aire en el exterior, Pt,e, es decir:
⎧
⎪
0
X t ,cb ≥ Pt ,e
⎪⎪
M lt ,cb − e = ⎨
0
X t ,cb < Pt ,e y Pha ,e < Vhsat ,cb
⎪
Vcnv,cb - e Varea,cb
(Vhsat ,cb − Pha ,e ) X t ,cb < Pt ,e y Pha ,e ≥ Vhsat ,cb
⎪cden,a
ccesp Varea,s
⎪⎩
(3.75)
La humedad de saturación a nivel de la cubierta se calcula según la siguiente ecuación:
Vhsat ,cb =
0.622V psat ,cb
c p ,atm − V psat ,cb
96
(3.76)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
donde cden,a es la densidad del aire, la presión de referencia, cp,atm se toma con el valor
101325 [Pa] y la presión de saturación, Vpsat,cb, depende de la temperatura de la cubierta
en ºC, calculándose con la siguiente expresión (véase el anexo A):
⎛ 17.27 X t ,cb ⎞
⎟
V psat ,cb = 6.108 exp⎜⎜
⎟
X
+
239
.
3
⎝ t ,cb
⎠
(3.77)
El flujo de vapor de agua producido por la condensación en la superficie interna de la
cubierta, Mlt,cb-a, se calcula, al igual que el término anterior, como un efecto convectivo
aunque en este caso, se produce siempre que la humedad absoluta del aire saturado de
vapor de agua a la temperatura de la cubierta, Vhsat,cb, sea menor que la humedad
absoluta del aire en el interior, Xha,a, es decir:
0
X h ,a < Vhsat ,cb
⎧
⎪
V
c
M lt ,cb − a = ⎨
cden,a cnv,cv - a area,cb (Vhsat ,cb − X ha ,a ) X h ,a ≥ Vhsat ,cb
⎪
cesp,a carea,ss
⎩
(3.78)
• Radiación térmica absorbida por la cubierta. La radiación térmica absorbida por la
cubierta se ha modelado utilizando la teoría de Stefan-Boltzmann calculada como la
radiación de onda larga que emite menos la radiación que recibe del exterior del resto de
elementos, resultando las siguientes expresiones por m2 de cubierta:
Radiación térmica que emite la cubierta. Hay que considerar que emiten las dos
superficies de la cubierta, por tanto:
Qeol ,cb = 2 ceol ,cb c SB X t4,cb
(3.79)
donde ceol,cb es el coeficiente de emisividad de onda larga de la cubierta y cSB es la
constante de Stefan-Boltzmann.
Radiación térmica que emite la bóveda celeste y absorbe la cubierta.
Qaol ,cb − bc = caol ,cb c SB c FF ,cb − bc X t4,bc
(3.80)
donde caol,cb es el coeficiente de absorción de onda larga de la cubierta y cFF,cb-bc es el
factor de forma entre la cubierta y la bóveda celeste. La temperatura de la bóveda
celeste, Xt,bc, se estima utilizando la aproximación propuesta por Swinbank [Boi91]:
X t ,bc = 0.00552 Pt1,e.5
(3.81)
Radiación térmica que emite la superficie de suelo del invernadero y absorbe la
cubierta. La radiación de onda larga que emite el suelo y alcanza la superficie interna
de la cubierta debe atravesar el cultivo, por lo que para modelar este efecto, se define
un coeficiente de extinción del cultivo para la radiación de onda larga, cext,ol.
97
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Este coeficiente se relaciona con el índice de área foliar, PLAI, indicando la cantidad
de radiación térmica que atraviesa el cultivo en función de su estado de crecimiento,
es decir:
Qaol ,cb − ss = caol ,cb ceol ,ss c SB c FF ,cb − ss X t4,ss exp( −cext ,ol PLAI )
(3.82)
donde ceol,ss es el coeficiente de emisión de onda larga de la superficie del suelo,
cFF,cb-ss es el factor de forma entre la cubierta y la superficie del suelo y Xt,ss es la
temperatura de la superficie de suelo.
Radiación térmica que emite el cultivo del invernadero y absorbe la cubierta. Como
la emisión de radiación de onda larga depende del área de la superficie emisora y el
área foliar del cultivo es variable con el tiempo, hay que modelar este hecho. Para
calcular la radiación térmica que atraviesa el cultivo se ha utilizado el coeficiente de
extinción, y como se ha supuesto que no se refleja radiación, el coeficiente de
absorción de onda larga (que por la ley de Kirchoff coincide con el de emisión) será:
Vaol ,cu = Veol ,cu = 1 − exp(− cext ,ol PLAI )
(3.83)
por lo que la radiación térmica que emite el cultivo y absorbe la cubierta viene dada
por la siguiente expresión
Qaol ,cb − cu = caol ,cb c SB c FF ,cb − cu X t4,cu (1 − exp(− cext ,ol PLAI ))
(3.84)
donde cFF,cb-cu es el factor de forma entre la cubierta y el cultivo y Xt,cu es la
temperatura del cultivo, pero como no se mide, se ha supuesto que coincide con la del
aire interior, Xt,a.
Radiación térmica que emiten las tuberías de calefacción y absorbe la cubierta. Al
instalarse debajo del cultivo, parte de la radiación térmica que emiten, la absorbe el
cultivo, por lo que se utiliza la misma aproximación que con la superficie de suelo:
Qaol ,cb − cal = caol ,cb ceol ,cal c SB c FF ,cb − cal X t4,cal exp( −cext ,ol PLAI )
(3.85)
donde ceol,cal es el coeficiente de emisión de onda larga de las tuberías de calefacción,
cFF,cb-cal es el factor de forma entre la cubierta y la superficie del suelo y Xt,cal es la
temperatura del agua que circula por las tuberías de calefacción.
Se ha supuesto que se cumple la ley de Kirchoff, por lo que el coeficiente de absorción
de onda larga se considera igual al coeficiente de emisión de onda larga. Por otra parte,
los flujos descritos anteriormente se miden en W/m2cb y como todo el modelo se mide en
W/m2ss, la radiación térmica que absorbe la cubierta se modela utilizando la siguiente
expresión:
Qrad,cb =
carea,cb
carea,ss
[(
)
ceol,cb cSB ceol,ss c FF,cb−ss X t4,ss + ceol,cal c FF,cb−cal X t4,cal exp(−cext,ol PLAI ) +
(3.86)
+ c FF,cb−bc X t4,bc + Veol,cu c FF ,cb−cu X t4,cu − 2 ceol,cb X t ,cb
98
]
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Debido a la dificultad en la obtención teórica de los factores de forma (por ejemplo la
cubierta del invernadero la forman catorce superficies, diez de ellas curvas), se han
considerado como parámetros a estimar utilizando datos de entrada y salida.
3.4.1.4. Modelado de la temperatura en la superficie del suelo del invernadero
Como se muestra en la figura 3.13, se
ha considerado un modelo simple del
Prs,
rs,e
suelo del invernadero, dividiéndolo en
Q rad ,,ssss
tres capas (aunque se podrían haber
Xt,a
Q cnv ,ss -a
considerado
más,
simplemente
Xha,a
-a
Q
l
,ss
,
ss
midiendo la temperatura del suelo en
Vrs,ss
distintas profundidades): superficie del
Xtt,ss
,ss
suelo de 5 cms de espesor, cesp,ss, cesp,ss
Q cnd ,,ss-s1
primera capa de suelo a una cprof,s1
ss -s1
Xtt,s1
,s1
profundidad de 31.5 cms, cprof,s1, y una
Q cnd ,s1 --s2
cprof,s2
s2
Ptt,s2
,s2
capa donde se considera la temperatura
Fig. 3.13. Flujos de energía en la superficie del suelo
constante a una profundidad cprof,s2.
El suelo (masa térmica del invernadero) juega un papel importante sobre el clima del
invernadero, sobre todo su superficie (interfaz entre el suelo y el aire del invernadero) ya
que durante el día absorbe la radiación solar que alcanza su superficie, transfiriendo calor a
las capas más profundas. Durante la noche, el proceso es el contrario ya que el calor se
transfiere por conducción desde las capas más profundas hasta la superficie y de ésta al aire
por convección. Por tanto, los flujos conductivos son muy importantes ya que son la fuente
de transferencia de calor entre las distintas capas que forman el suelo. El proceso de
conducción no se resuelve utilizando ecuaciones de difusión (aunque han sido
implementadas y analizados los resultados obtenidos). Como se ha comentado
anteriormente, se obtienen buenos resultados resolviendo la ecuación de Fourier (3.5)
considerando la transmisión de calor unidimensional (a lo largo del eje z de profundidad de
suelo) en régimen permanente y a las capas como láminas planas paralelas. La validez de
esta aproximación se justificará en el apartado 3.4.3.2. Estimación de los parámetros del
modelo de suelo. Basándose en estas hipótesis, el calor acumulado en la superficie del
suelo, Qac,ss, se puede calcular en función del siguiente balance de energía:
Qac ,ss = Qsol ,ss − Qcnv ,ss − a − Qcnd ,ss − s1 − Qlt ,ss + Qrad ,ss
(3.87)
donde Qsol,ss es la radiación de onda corta absorbida por la superficie de suelo, Qcnv,ss-a es la
transferencia de calor por convección con el aire interior del invernadero, Qcnd,ss-s1 es la
transferencia de calor por conducción con la primera capa de suelo, Qlt,ss es el calor latente
producido por la evaporación de agua en la superficie del suelo y Qrad,ss es la radiación de
onda larga procedente del exterior y del interior del invernadero absorbida por la superficie
del suelo. Si se expresa el calor acumulado como la variación de la temperatura de la
superficie del suelo, Xt,ss, en función del tiempo, τ, se obtiene:
ccesp ,ss cden ,ss cesp ,ss
dX t ,ss
dτ
= Qsol ,ss − Qcnv ,ss − a − Qcnd ,ss − s1 − Qlt ,ss + Qrad ,ss
99
(3.88)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
donde ccesp,ss es el calor específico del material que forma la superficie del suelo, cden,ss es su
densidad y cesp,ss es el espesor de la superficie del suelo. A continuación se describirán cada
uno de los flujos de calor enumerados en las ecuaciones (3.87) y (3.88):
• Radiación solar absorbida por la superficie de suelo. La radiación solar que alcanza al
suelo es función de la radiación solar sobre el cultivo, Vrs,cu, y del crecimiento del
mismo, en concreto del índice de área foliar, PLAI. Se utiliza un coeficiente denominado
de extinción de onda corta, cext,oc, que modela la radiación que atraviesa el cultivo. Por
tanto, la radiación solar que absorbe el cultivo, Qsol,ss, viene expresada por:
Qsol ,ss = caoc ,ssVrs ,cu exp(− cext ,oc PLAI )
(3.89)
La radiación solar que alcanza al cultivo se puede modelar igual que la radiación PAR
de forma que utilizando las mismas hipótesis, se obtiene:
Vrs ,cu = Vtoc ,cu ⋅ Prs ,e
(3.90)
donde Prs,e es la radiación solar en el exterior y Vtoc,cu es el coeficiente de transmisión de
onda corta función del coeficiente de transmisión de la cubierta, del estado del
blanqueado de la misma y del estado de la malla de sombreo como se indica en (3.61).
• Transferencia de calor por convección entre la superficie del suelo y el aire interior. El
modelado de este proceso, Qcnv,ss-a, es similar al de proceso de transferencia de calor por
convección entre la superficie interior de la cubierta y el aire del invernadero, es decir,
es función de la diferencia entre la temperatura de la superficie del suelo, Xt,ss, y la
temperatura del aire interior, Xt,a:
Qcnv ,ss − a =Vcnv ,ss − a (X t ,ss − X t ,a )
(3.91)
donde Vcnv,ss-a es el coeficiente de convección función de la diferencia de temperaturas
entre el suelo y el aire, y de la velocidad del aire en el interior. Los estudios de Wang y
colaboradores utilizados para modelar la velocidad del aire en el interior en función del
flujo de ventilación, se referían al promedio de la velocidad sobre el cultivo, por lo que
para calcularla en la superficie del suelo se ha modulado en función del estado del
cultivo y por tanto del índice de área foliar en forma de exponencial negativa, como se
indica en la siguiente expresión:
Vcnv,ss−a = ccnv,ss−a1 X t ,ss − X t ,a
ccnv,ss−a2
+ ccnv,ss−a3 [Vvv,a exp (− ccnv,ss−a4 PLAI )]
ccnv,ss−a5
(3.92)
donde los parámetros ccnv,ss-a1, ccnv,ss-a2, ccnv,ss-a3, ccnv,ss-a4 y ccnvssb-a5 son coeficientes
empíricos a estimar. Con respecto a los coeficientes relativos al término debido a la
diferencia de temperatura hay que indicar que modifican su valor en función del tipo de
régimen en el que circula el fluido (laminar o turbulento), utilizándose la misma
aproximación que en la cubierta propuesta por Chalabi y Bailey, descrita en [Mon93], de
forma que si la temperatura del aire interior es más elevada que la temperatura de la
superficie del suelo, el flujo de transferencia de calor es turbulento, y en caso contrario
es laminar.
100
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Transferencia de calor por conducción entre la superficie y la primera capa de suelo. El
flujo de conducción entre la superficie del suelo y la primera capa se modela basándose
en las hipótesis de flujo unidimensional a lo largo del eje Z, considerando sólo el
régimen permanente de este proceso y a las capas como láminas o placas planas, por lo
que el flujo de calor por conducción viene expresado por:
Qcnd ,ss − s1 = ccnd ,s1
X t ,ss − X t ,s1
c prof ,s1 − cesp ,ss
(3.93)
donde ccnd,s1 es el coeficiente de conducción de la primera capa de suelo, cprof,s1 es la
profundidad de la primera capa, Xt,ss es la temperatura de la superficie del suelo y Xt,s1 es
la temperatura de la primera capa de suelo. Como se ha comentado anteriormente, esta
aproximación se justificará cuando se analicen los datos experimentales.
• Transferencia de calor latente producido por evaporación. El calor latente se produce
en la superficie del suelo principalmente por evaporación, modelada utilizando la
siguiente expresión:
Qlt ,ss − a =Vlt ,vap M lt ,ss
(3.94)
donde Vlt,vap es el calor latente de vaporización, función de la temperatura del aire del
invernadero cuya forma de cálculo se presenta en la ecuación (3.30). El flujo de vapor de
agua producido por la evaporación en la superficie del suelo, Mlt,ss, se calcula como un
término convectivo de la siguiente forma:
V
M lt ,ss = cden,a cnv,ss - a (Vhsat ,ss − X ha ,a )
ccesp,a
(3.95)
donde Vcnv,ss-a es el coeficiente de convección entre la superficie del suelo y el aire
interior descrito en la ecuación (3.92) y Vhsat,ss es la humedad absoluta del aire saturado
de vapor de agua a la temperatura de la superficie del suelo y se calcula con las mismas
expresiones (3.76) y (3.77) utilizadas para la cubierta, con la única diferencia de
calcularlas en función de la temperatura de la superficie del suelo. El efecto de difusión
del contenido de agua de las capas internas del suelo hacia la superficie no se ha
considerado ya que en algunos estudios [Sta93] se ha demostrado que este efecto es
cuantitativamente poco significativo comparado con otros flujos en suelos cuya
superficie se encuentre acolchada.
• Radiación térmica absorbida por la superficie del suelo. Para modelar la radiación
térmica absorbida por la superficie del suelo, se han utilizando los mismos
razonamientos que en la cubierta resultando las siguientes flujos por m2 de suelo:
Radiación térmica que emite la superficie del suelo. Se calcula en función de la
temperatura de la superficie del suelo, Xt,ss, siguiendo la ley de Stefan-Boltzmann,
siendo ceol,ss es el coeficiente de emisividad de onda larga de la superficie del suelo :
Qeol ,ss = ceol ,ss c SB X t4,ss
101
(3.96)
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Radiación térmica que emite la bóveda celeste y absorbe la superficie del suelo. En
este caso hay que considerar que la radiación que emite la bóveda celeste debe
atravesar la cubierta, que deja traspasar sólo una fracción del total y el cultivo que
absorbe una determinada fracción de la radiación que lo alcanza en función de su
estado de crecimiento. Al igual que en el caso de la radiación de onda corta que
alcanza al suelo, se utiliza un coeficiente de extinción de onda larga, cext,ol, y el índice
de área foliar, PLAI, resultando:
Qaol ,ss − bc = caol ,ss c SB c FF ,ss − bc X t4,bc ctol ,cb exp( −cext ,ol PLAI )
(3.97)
donde caol,ss es el coeficiente de absorción de onda larga de la superficie del suelo y
cFF,ss-bc es el factor de forma entre la superficie del suelo y la bóveda celeste, ctol,cb es
el coeficiente de transmisión de onda larga de la cubierta y Xt,bc es la temperatura de
la bóveda celeste
Radiación térmica que emite la cubierta y absorbe la superficie del suelo. Al igual
que sucedía anteriormente, la radiación térmica que emite la superficie interna de la
cubierta hacia el suelo, debe atravesar el cultivo, modelándose con la siguiente
expresión:
Qaol ,ss − cb = caol ,ss ceol ,cb c SB c FF ,ss − cb X t4,cb exp( −cext ,ol PLAI )
(3.98)
donde ceol,cb es el coeficiente de emisión de onda larga de la cubierta, cFF,ss-cb es el
factor de forma entre la superficie del suelo y la cubierta, y Xt,cb es la temperatura de
la cubierta.
Radiación térmica que emite el cultivo del invernadero y absorbe la superficie del
suelo. Como la emisión de radiación de onda larga depende del área foliar que se
incluye en el coeficiente de emisión de onda larga del cultivo, Veol,cu, descrito en la
ecuación (3.83), se obtiene la expresión:
Qaol ,ss − cu = caol ,ss Veol ,cu c SB c FF ,ss − cu X t4,cu
(3.99)
donde, cFF,ss-cu es el factor de forma entre la superficie del suelo y el cultivo y Xt,cu es
la temperatura del cultivo (como no se mide, se ha supuesto que coincide con la del
aire interior, Xt,a).
Radiación térmica que emiten las tuberías de calefacción y absorbe la superficie del
suelo. Como las tuberías se encuentran situadas a poca distancia del suelo, no se ven
afectadas por el cultivo, por lo que éste no influye en la radiación que emiten las
tuberías y absorbe el suelo.
Qaol ,ss − cal = caol ,ss ceol ,cal c SB c FF ,ss − cal X t4,cal
(3.100)
donde ceol,cal es el coeficiente de emisión de onda larga de las tuberías de calefacción,
cFF,ss-cal es el factor de forma entre la superficie del suelo y las tuberías de calefacción
y Xt,cal es la temperatura del agua que circula por las tuberías de calefacción.
102
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Se ha supuesto que se cumple la ley de Kirchoff y por tanto el coeficiente de absorción
de onda larga se considera igual al coeficiente de emisión de onda larga, por lo que la
radiación térmica que absorbe la superficie del suelo se modela utilizando la siguiente
expresión:
[(
)
Qrad ,ss = ceol,ss cSB cFF ,ss −bc X t4,bc ctol,cb + ceol,cb cFF ,ss − cb X t4,cb exp(−cext,ol PLAI ) +
+ Veol,cu cFF ,ss − cu X t4,cu + ceol,cal cFF ,ss − cal X t4,cal − ceol,ss X t ,ss
]
(3.101)
Debido a la dificultad en la obtención teórica de los factores de forma, se han
considerado como parámetros a estimar utilizando datos de entrada y salida y se ha
comprobado que los resultados obtenidos son coherentes.
3.4.1.5. Modelado de la temperatura en las capas del suelo del invernadero
En la primera capa de suelo sólo se consideran flujos conductivos tal y como se puede
observar en la figura 3.13, por lo que el balance de energía en esa capa en función de su
temperatura, Xt,s1 viene dada por la siguiente ecuación:
ccesp ,s1 cden ,s1cesp ,s1
dX t ,s1
dτ
= Qcnd ,ss − s1 − Qcnd ,s1− s 2
(3.102)
donde ccesp,s1 es el calor específico del material que forma la primera capa, cden,s1 es la
densidad de ese material y cesp,s1 es el espesor de la primera capa que viene dado por la
diferencia entre la profundidad de la primera capa, cprof,c1, y el espesor de la superficie de
suelo, cesp,ss.
Como se ha comentado, se considera sólo el régimen permanente de los procesos de
conducción y a las capas como láminas planas, por lo que el flujo de calor por conducción
en la primera capa viene dado por la transmisión de calor por conducción entre la superficie
del suelo y la primera capa, Qcnd,ss-s1, calculado en la expresión (3.93) y la transmisión de
calor por conducción entre la primera y la segunda capa de suelo, Qcnd,s1-s2, que viene dada
por la siguiente ecuación:
Qcnd ,s1− s 2 = ccnd ,s 2
X t ,s1 − Pt ,s 2
c prof ,s 2 − c prof ,s1
(3.103)
donde ccnd,s2 es el coeficiente de conducción de la segunda capa de suelo, cprof,s2 es la
profundidad de la segunda capa, cprof,s1 es la profundidad de la primera capa, Xt,s1 es la
temperatura de la primera capa de suelo y Pt,s2 es la temperatura de la segunda capa de
suelo, que se puede medir por lo que se sería una condición de contorno. Como no se ha
podido profundizar más debido a la dureza del suelo, se ha considerado que existe una capa
a una profundidad en la que su temperatura es constante y coincide con la media de la
temperatura exterior anual, que se ha tomado como condición de contorno [Boi91]. Como
en la bibliografía indican distintas profundidades a la que ocurre este fenómeno, este
parámetro, cprof,s2, se ha estimado con datos de entrada/salida, al igual que el producto entre
la densidad y el calor específico del material que forma esta capa ya que es desconocido.
103
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.1.6. Modelado de la temperatura del aire del invernadero
La figura 3.14 muestra los flujos de calor y masa que se han considerado en la ecuación de
balance de energía del aire en el interior del invernadero. Destacan los dos flujos de calor
latente que aparecen. El cultivo afecta a la temperatura del aire del invernadero, proceso
que se debe modelar considerando un efecto convectivo entre la superficie de las hojas y el
aire, de forma que si la temperatura foliar se modifica por la transpiración del cultivo, se
modifica la temperatura del aire por convección. Se ha incluido el termino de calor latente
en el aire por la transpiración del cultivo ya que no se dispone de medidas de temperatura
de las hojas. Por otra parte, el
Pha,e
método de cultivo utilizado es
Uven
Qven,a-e
NFT, por lo que es necesario
Pt,e
Xt,cb
instalar unas balsas estancas en el
interior del invernadero para
Qcnv,cb-a
Xt,a
Qperd,a-e
recircular el agua y poder
Xha,a
Q
trp,cu
mantener un flujo de la misma
constante. Se ha observado que
las balsas no se encuentran
Qcnv,cal-a
totalmente
aisladas,
Qlt,balsa
Qcnv,ss-a
produciéndose la evaporación del
agua que contienen, lo que
Ut,cal
modifica la temperatura del aire
Xt,ss
Balsas
del invernadero, debiendo incluir
este nuevo término de calor
Fig 3.14. Flujos de calor y masa que influyen en el aire interior
latente.
Basándose en todos los procesos que se indican, el calor acumulado en el aire del
invernadero viene dado por la ecuación de balance siguiente:
Qac,a = Qcnv,cb−a + Qcnv,ss−a + Qcnv,cal−a − Qven,a−e − Q perd,a−e − Qtra,cu − Qlt ,balsa
(3.104)
donde Qcnv,cb-a es la transferencia de calor por convección entre la superficie interior de la
cubierta y el aire, Qcnv,ss-a es la transferencia de calor por convección con la superficie del
suelo, Qcnv,cal-a es la transferencia de calor por convección con las tuberías del sistema de
calefacción, Qven,a-e es el intercambio de calor con el aire exterior debido a la ventilación
natural, Qperd,a-e es el intercambio de calor con el aire exterior por infiltración por la no
estanqueidad de la estructura y las roturas en la cubierta, Qtra,cu es el calor latente producido
por la transpiración del cultivo y Qlt,balsa es el calor latente producido por evaporación en la
superficie de las balsas. Si se expresa el calor acumulado como la variación de la
temperatura del aire del invernadero, Xt,a, en función del tiempo, τ, resulta:
ccesp ,a cden ,a
cvol ,a dX t ,a
= Qcnv ,cb − a + Qcnv ,ss − a + Qcnv ,cal − a − Qven ,a − e −
carea ,ss dτ
(3.105)
− Q perd ,a − e − Qtra ,cu − Qlt ,balsa
donde ccesp,a es el calor específico del aire, cden,a es la densidad del aire, cvol,a es el volumen
de aire que ocupa el invernadero y carea,ss es el área de la superficie del suelo.
104
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
De estos flujos de calor, los de transmisión de calor por convección con la superficie
interior de la cubierta, Qcnv,cb-a, y con la superficie del suelo, Qcnv,ss-a ya se han descrito en
las ecuaciones (3.68) y (3.91) respectivamente. A continuación, se describen el resto de los
procesos que se encuentran involucrados en las ecuaciones generales de balance de energía
(3.104) y (3.105):
• Transferencia de calor por convección entre las tuberías de calefacción y el aire
interior. El modelado de este proceso, Qcnv,cal-a, se ha descrito en el apartado 3.2.8.2
correspondiente al efecto de los sistemas de actuación sobre el clima del invernadero.
Como no se conoce la temperatura de la superficie exterior de las tuberías y lo que se
mide es la temperatura del agua que circula por ellas, se desprecian los efectos de
convección entre el agua caliente y la superficie interior de las tuberías y las perdidas de
conducción entre las dos superficies de las tuberías, por lo que se considera que la
temperatura de la superficie exterior de las tuberías es igual a la del agua que circula por
ellas, Ut,cal, que es una entrada de control del sistema. Este proceso se modela con la
siguiente expresión:
c
Qcnv ,cal − a = Vcnv ,cal − a area ,cal (U t ,cal − X t ,a )
c area ,ss
(3.106)
donde carea,cal es el área de las superficie de las tuberías que se encuentran en el
invernadero y Vcnv,cal-a es el coeficiente de convección de la calefacción. Como la
diferencia de temperatura entre las tuberías y el aire del invernadero es elevada, se
calcula el coeficiente de convección únicamente dependiente de esta diferencia,
despreciando el efecto eólico, por lo que este parámetro viene dado por:
⎛ U t ,cal − X t ,a
Vcnv ,cal − a = ccnv ,cal − a1 ⎜
⎜
clc ,cal
⎝
⎞
⎟
⎟
⎠
c cnv ,cal − a 2
(3.107)
donde clc,cal es la longitud característica de las tuberías, que coincide con su diámetro en
tubos cilíndricos y, ccnv,cal-a1 y ccnv,cal-a2 son parámetros a determinar, función del régimen
de transferencia (laminar o turbulento).
• Transferencia de calor con el aire exterior debido a ventilación e infiltración. Se tratan
los dos flujos simultáneamente ya que el proceso de las pérdidas por infiltración entre el
exterior y el interior, Qperd,a-e, se incluye como un efecto constante en el flujo de
ventilación, tal y como se pone de manifiesto en las ecuaciones (3.71) y (3.73). Como se
ha comentado en el apartado 3.2.8.1 correspondiente al efecto de la ventilación sobre el
clima del invernadero, este término se encuentra estandarizado según la norma EP406.3
de 1998 de la ASAE [Asa98], que para régimen de flujo de aire entre interior y exterior
de mezcla completa, propone el siguiente modelo:
Qven ,a − e + Q perd ,a − e =
cden ,a cesp ,a
carea ,ss
Vven , flujo ( X t ,a − Pt ,e )
(3.108)
donde el flujo de ventilación, Vven,flujo, se encuentra modelado por las ecuaciones (3.71),
(3.72) y (3.73).
105
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Transferencia de calor latente por transpiración del cultivo. El efecto de la transpiración
del cultivo sobre la temperatura del aire del interior del invernadero se ha modelado
como un proceso de calor latente descrito por la siguiente ecuación:
Qtra ,cu = Vlt ,vap M tra ,cu
(3.109)
donde Vlt,vap es el calor latente de vaporización, función de la temperatura del aire del
invernadero descrito por la ecuación (3.30). El flujo de vapor de agua producido por la
transpiración del cultivo, Mtra,cu, se modela utilizando los trabajos de Stanghellini
basados en la ecuación de Penman-Monteith y centrados en el cultivo del tomate
([Sta87], [Sta93]) y que se resumen en la siguiente ecuación:
M tra ,cu =
⎛
⎞
V
V
V
⎜ cden ,a Vhsat ,a + pcsat ,a r ,cu rn ,cu − cden ,a X ha ,a ⎟
⎟
Vr ,tra ⎜⎝
c psico 2 PLAI Vlt ,vap
⎠
1
(3.110)
donde cpsico es la constante psicométrica termodinámica. La humedad de saturación del
aire, Vhsat,a, se calcula según la siguiente ecuación:
Vhsat ,a =
0.622V psat ,a
c p ,atm − V psat ,a
(3.111)
donde la presión de saturación, Vp,sat, depende de la temperatura de la cubierta en ºC, con
la siguiente relación:
⎛ 17.27 X t ,a ⎞
⎟
V psat ,a = 6.108 exp⎜⎜
⎟
X
+
239
.
3
⎝ t ,a
⎠
(3.112)
Su derivada es la pendiente de la curva de presión de saturación del aire, por tanto,
también función de la temperatura del aire en ºC:
V pcsat ,a =
⎛ 17.27 X t ,a ⎞
⎟
exp⎜⎜
(X t ,a + 239.3)2 ⎝ X t ,a + 239.3 ⎟⎠
2504000
(3.113)
Vr,tra es la resistencia a la transpiración del cultivo, dada por la ecuación [Sta87]:
Vr ,tra =
1
2 PLAI
⎡⎛ V pcsat ,a
⎢⎜ 1 +
c psico
⎢⎣⎜⎝
⎤
⎞
⎟Vr ,cl + Vr ,cu ⎥
⎟
⎥⎦
⎠
(3.114)
donde Vr,cl es la resistencia de la capa límite y Vr,cu es la resistencia de los estomas de las
hojas al proceso de difusión de agua al exterior. La resistencia de la capa límite depende
del régimen aerodinámico que prevalezca en el invernadero y su valor es función de la
diferencia de temperatura entre el aire y las hojas y de la velocidad del aire. Boulard y
Wang proponen despreciar el efecto de la temperatura debido a que no es significativo
respecto al eólico, por lo que esta resistencia se puede calcular en base a la velocidad
media del aire en el interior del invernadero de la siguiente manera [Bou00]:
106
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Vr ,cl = 220
0.2
clc
,cu
0.8
Vvv
,a
(3.115)
donde clc,cu es la longitud característica de las hojas del cultivo de tomate. La resistencia
del cultivo, Vr,cu, depende de la radiación solar que alcanza al cultivo, de la temperatura
del cultivo y de la diferencia entre la concentración de vapor de agua en el cultivo y en
al aire del invernadero [Sta87]. Aún así, el efecto más significativo es el correspondiente
a la radiación solar, por lo que se utiliza la siguiente ecuación propuesta por Boulard y
Wang [Bou00]:
⎛
⎞
1
⎟
Vr ,cu = 200 ⎜⎜ 1 +
⎟
(
(
))
exp
0
.
05
V
−
50
rs
,
cu
⎝
⎠
(3.116)
La radiación neta que absorbe el cultivo, Vrn,cu, vital para el proceso de transpiración, se
puede expresar como la suma de la radiación solar y la radiación térmica que absorbe, es
decir:
Vrn ,cu = Qsol ,cu + Qrad ,cu = Vaoc ,cu Vrs ,cu + Vaol Vrt ,cu
(3.117)
Para calcular la radiación que atraviesa el cultivo se ha utilizado el coeficiente de
extinción, y como se ha supuesto que no se refleja radiación, los coeficientes de
absorción de radiación de onda corta y onda larga, se calculan con las siguientes
expresiones:
Vaoc ,cu = 1 − exp(− cext ,oc PLAI )
Vaol ,cu = 1 − exp(− cext ,ol PLAI )
(3.118)
La radiación solar que alcanza al cultivo, Vrs,cu, se encuentra modelada por la ecuación
(3.90) y el balance de radiación térmica en el cultivo se puede descomponer en los
siguientes flujos:
Radiación térmica que emite el cultivo. Basándose en la ley de Stefan-Boltzmann, y
como las hojas disponen de dos superficies:
Qeol ,ss = 2Veol ,cu c SB X t4,cu
(3.119)
donde Veol,cu es el coeficiente de emisividad de onda larga del cultivo que depende del
índice de área foliar como se indica en la ecuación (3.83).
Radiación térmica que emite la bóveda celeste y absorbe el cultivo. En este caso hay
que considerar que la radiación que emite la bóveda celeste debe atravesar la cubierta
que deja traspasar sólo una fracción del total, es decir:
Qaol ,cu − bc = Vaol ,cu c SB c FF ,cu − bc X t4,bc ctol ,cb
(3.120)
donde cFF,cu-bc es el factor de forma entre el cultivo y la bóveda celeste, ctol,cb es el
coeficiente de transmisión de onda larga de la cubierta y Xt,bc es la temperatura de la
bóveda celeste.
107
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Radiación térmica que emite la cubierta y absorbe el cultivo. La radiación que emite
la superficie interior de la cubierta y que alcanza al cultivo se determina por:
Qaol ,cu − cb = Vaol ,cu ceol ,cb cSB c FF ,cu − cb X t4,cb
(3.121)
donde ceol,cb es el coeficiente de emisión de onda larga de la cubierta, cFF,cu-cb es el
factor de forma entre el cultivo y la cubierta, y Xt,cb es la temperatura de la cubierta.
Radiación térmica que emite la superficie del suelo del invernadero y absorbe el
cultivo. Al igual que en el proceso anterior:
Qaol ,cu − ss = Vaol ,cu ceol ,ss c SB c FF ,cu − ss X t4,ss
(3.122)
donde ceol,ss es el coeficiente de emisión de onda larga de la superficie del suelo,
cFF,cu-ss es el factor de forma entre el cultivo y la superficie del suelo y Xt,ss es la
temperatura de la superficie del suelo.
Radiación térmica que emiten las tuberías de calefacción y absorbe el cultivo.
Qaol ,cu − cal = Vaol ,cu ceol ,cal cSB c FF ,cu − cal X t4,cal
(3.123)
donde ceol,cal es el coeficiente de emisión de onda larga de las tuberías de calefacción,
cFF,cu-cal es el factor de forma entre el cultivo y las tuberías de calefacción y Xt,cal es la
temperatura del agua que circula por las tuberías de calefacción.
Se ha supuesto que se cumple la ley de Kirchoff (el coeficiente de absorción de onda
larga se considera igual al coeficiente de emisión de onda larga), por lo que la radiación
térmica que absorbe el cultivo se modela utilizando la siguiente expresión:
[
Qrad ,cu =Veol,cu cSB cFF ,cu −bc X t4,bc ctol,cb + ceol,cb cFF ,cu − cb X t4,cb +
+ ceol,ss cFF ,cu − ss X t4,ss
+ ceol,cal cFF ,cu − cal X t4,cal
− 2Veol,cu X t ,cu
]
(3.124)
Debido a la dificultad en la obtención teórica de los factores de forma, se han
considerado como parámetros a estimar utilizando datos de entrada y salida. Por otra
parte como no se conoce la temperatura foliar, se ha aproximado, suponiendo que
coincide con la del aire interior del invernadero, Xt,a.
• Transferencia de calor latente evaporación en las balsas. La evaporación que se
produce en las balsas del sistema de riego (al no encontrarse aisladas) influye en la
temperatura del invernadero, ya que se produce un flujo de vapor de agua al aire. Como
no se analiza la superficie de agua de las balsas como un elemento individual, es decir,
descrita por una ecuación de balance de energía ya que se desconoce su temperatura, se
considera como un flujo de calor latente modelado por la siguiente ecuación:
Qlt ,balsa = Vlt ,vap M lt ,balsa
(3.125)
donde Mlt,balsa es el flujo de vapor de agua producido por evaporación en las balsas.
108
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Como se comento en el apartado 3.2.6. correspondiente a los procesos de relacionados
con el calor latente, la evaporación en una superficie de agua puede ser modelada
considerando el método aerodinámico, basado en el déficit de presión de vapor en el aire
del invernadero, Vdpv,a , junto al método energético basado en la radiación neta que
alcanza la superficie de agua, Vrn,balsa . Por tanto, el flujo de evaporación viene dado por
una combinación de ambos:
M lt ,balsa =
V pcsat
V pcsat + c psico
clt ,balsa1 Vrn ,balsa +
c psico
V pcsat + c psico
clt ,balsa 2 Vdpv ,a
(3.126)
donde clt,balsa1 y clt,balsa2 son dos factores de calibración de cada uno de los métodos
involucrados. El déficit de presión de vapor es una forma de indicar la cantidad de vapor
de agua que contiene el aire, al igual que la humedad absoluta o la humedad relativa
(véase anexo A). El modelo de clima que se ha diseñado e implementado calcula la
humedad absoluta como se describe en el siguiente apartado. Los sensores que se
utilizan normalmente en estas aplicaciones para estimar la concentración de vapor de
agua en el aire miden la humedad relativa, por lo que hay que utilizar la siguiente
expresión que la relacione ambas variables por medio de la temperatura del aire del
invernadero, Xt,a:
X hr ,a =
cden ,a ⎛ X ha ,a X t ,a
⎜
0.00217 ⎜⎝ V psat ,a
⎞
⎟
⎟
⎠
(3.127)
El déficit de presión de vapor se relaciona con la humedad relativa por la siguiente
ecuación:
X hr , a
⎛
Vdpv , a = V psat , a ⎜⎜1 −
100
⎝
⎞
⎟⎟
⎠
(3.128)
Existen otras fórmulas que relacionan estas variables, como se muestra en el anexo A
correspondiente a los principales conceptos de psicrometría, pero se han utilizado los
indicados en las ecuaciones (3.127) y (3.128) ya que permiten obtener resultados
bastantes exactos.
La radiación neta que alcanza la superficie de las balsas es difícil de estimar ya que se
desconocen algunos datos necesarios para modelar la componente de radiación térmica,
pero como se ha observado que en este proceso, el término correspondiente a la
radiación solar es cuantitativamente más significativo, se ha considerado la radiación
neta igual a la radiación solar que alcanza la superficie de agua, que es la misma que
alcanza la superficie del suelo, descrita por la ecuación
Vrn ,balsa = Vtoc ,cu Prs ,e exp(− cext ,oc PLAI )
(3.129)
donde Prs,e es la radiación solar en el exterior y Vtoc,cu es el coeficiente de transmisión de
onda corta descrito en la ecuación (3.61) siendo el producto de ambos la radiación solar
sobre el cultivo. Debido a la situación de las balsas en el invernadero, la radiación solar
debe atravesar el cultivo, modelando este proceso mediante el coeficiente de extinción
descrito anteriormente.
109
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.1.7. Modelado de la humedad del aire del invernadero
El modelo de concentración de vapor de agua en el aire del invernadero se basa en una
ecuación de balance de masas. Como se indica la figura 3.15, las principales fuentes de
vapor de agua (ya que no se dispone de ningún sistema de humidificación artificial) son la
transpiración del cultivo, Mtra,cu, descrita en la ecuación (3.110); la evaporación en la
superficie de suelo, Mlt.ss, descrita en la ecuación (3.95) y la evaporación en las balsas del
sistema de riego recirculante,
Pha,e
Mlt,balsa, descrita en la ecuación
Uven Mven,a-e
Pt,e
(3.126). Por otra parte, el aire
Xt,cb
pierde vapor de agua por
condensación en la superficie
Xt,a
interior de la cubierta, Mlt,cb-a,
Mlt,cb-a
Xha,a Mperd,a-e
descrito en la ecuación (3.78) y
Qtrp,cu
por el intercambio de aire con el
exterior debido a la ventilación,
Mven,a-e, e infiltración por
Mlt,balsa
Mlt,ss
pérdidas, Mperd,a-e. Por tanto, la
ecuación de balance de masas
utilizada para modelar la
Xt,ss
Balsas
humedad absoluta del aire, Xha,a,
medida en kgagua/kgaire, viene
Fig 3.15. Flujos de vapor de agua en el aire del invernadero
dada por la siguiente ecuación:
cden ,a
cvol ,a dX ha ,a
= M tra ,cu + M lt ,ss + M lt ,balsa − M lt ,cb − a − M ven ,a − e − M perd ,a − e (3.130)
carea ,ss dτ
donde cden,a es la densidad del aire y cvol,a /carea,ss el la altura eficaz del invernadero
(volumen del invernadero / área de suelo).
El flujo de vapor de agua por intercambio entre el aire interior y exterior debido a
ventilación e infiltración se modela conjuntamente, de la misma forma que el flujo de
energía sólo, que se produce un intercambio de vapor de agua, es decir:
M ven ,a − e + M perd ,a − e =
cden ,a
carea ,ss
Vven , flujo (X ha ,a − Pha ,e )
(3.131)
donde Pha,e es la humedad absoluta del aire en el exterior del invernadero que actúa como
condición de contorno del modelo y Vven,flujo es el flujo de ventilación descrito en la
ecuación (3.71). En este último término es donde se modela el efecto de perdidas por
infiltración, considerándolo como un término función de la velocidad del viento, descrito
en la ecuación (3.73).
Como se ha indicado en el apartado anterior, el modelo general necesita utilizar la humedad
relativa para calcular el déficit de presión de vapor y comparar con los datos procedentes de
los sensores, por lo que el modelo de humedad presenta dos salidas: humedad absoluta,
Xha,a, y humedad relativa, Xhr,a, del aire interior del invernadero.
110
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.2. Implementación del modelo
3.4.2.1. Descomposición jerárquica
El modelo completo del clima que se genera en el interior de un invernadero se compone de
cinco ecuaciones diferenciales que modelan las principales variables de estado (temperatura
de aire, humedad de aire, temperatura de cubierta, temperatura de superficie de suelo y
temperatura de la primera capa de suelo) y cincuenta y ocho ecuaciones algebraicas,
incluyendo la radiación PAR sobre el cultivo. El modelo se ha descompuesto de forma
jerárquica desde un nivel superior, que engloba todo el modelo, hasta el nivel inferior
donde se modelan cada uno de los procesos que tienen lugar en sus elementos. De esta
forma se observa la organización del modelo y cómo interactúan sus partes. Las principales
ventajas de utilizar la descomposición jerárquica son:
• Cada submodelo puede ser estudiado de forma individual simplificando el problema de
su calibración cuando se estiman los parámetros que describen cada proceso. Se pueden
establecer metodologías específicas para la calibración modular y jerárquica de los
parámetros del modelo.
• La ampliación del modelo general con nuevas variables de estado, como la temperatura
foliar del cultivo o la concentración de CO2 en el aire interior del invernadero, se realiza
fácilmente programando las ecuaciones de balance necesarias y añadiendo o eliminado
los submodelos correspondientes a los procesos físicos que se vean afectados.
• Si se instalan en el invernadero nuevos sistemas de actuación o se desea estudiar sus
efectos o dimensionarlos, sólo hay que diseñar e implementar un nuevo submodelo de
proceso y añadirlo a las ecuaciones de balance del modelo general en las que influye.
Por ejemplo, si se instala un sistema de humidificación, se implementa el proceso de
aporte de vapor de agua al aire interior del invernadero y se añade el submodelo
correspondiente al modelo de humedad del aire y un modelo de temperatura de aire
como un proceso de calor latente.
• Es posible sustituir cualquier submodelo que describe alguno de los procesos físicos por
otro que realice la misma función porque lo modele mejor o porque se deseen
comprobar distintas teorías o enfoques. Por ejemplo, existen distintos enfoques sobre el
modelado del flujo de ventilación, por lo que se pueden implementar las diferentes
teorías existentes y comprobar cual de ellas se ajusta mejor al invernadero estudiado tal
y como se ha realizado en la presente tesis.
• Las salidas de un submodelo pueden sustituirse por medidas reales cuando se encuentren
disponibles, reduciendo incertidumbres ya que el número de variables a estimar es
menor. En caso de disponer de medidas de temperatura de suelo y de cubierta, se pueden
utilizar como condiciones de contorno de forma que sólo habría que utilizar los modelos
de temperatura y humedad de aire, reduciendo los errores de modelado al no tener que
estimar valores conocidos.
• Cada submodelo independiente puede actuar como un sensor virtual que proporciona
una estimación del estado de variables que no se midan normalmente, como la
temperatura de la cubierta (basada en las medidas del resto de variables).
Así que el modelo del clima implementado, cuyo esquema general se puede observar en la
figura 3. 9. se descompone en los siguientes submodelos:
111
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
A. Submodelo de temperatura.
A.1. Submodelo de temperatura de cubierta.
A.1.1. Submodelo de absorción de radiación solar en la cubierta.
A.1.2. Submodelo de transferencia de calor por convección entre el aire exterior y la
superficie exterior de la cubierta.
A.1.3. Submodelo de transferencia de calor por convección entre el aire interior y la
superficie interior de la cubierta.
A.1.4. Submodelo de transferencia de calor latente por condensación en la superficie
exterior de la cubierta.
A.1.5. Submodelo de transferencia de calor latente por condensación en la superficie
interior de la cubierta.
A.1.6. Submodelo de absorción de radiación térmica en la cubierta.
A.2. Submodelo de temperatura de la superficie del suelo.
A.2.1. Submodelo de absorción de radiación térmica en la superficie del suelo.
A.2.2. Submodelo de transferencia de calor por convección entre el aire interior y la
superficie del suelo.
A.2.3. Submodelo de transferencia de calor por conducción entre la superficie del suelo
y la primera capa de suelo.
A.2.4. Submodelo de transferencia de calor latente por evaporación en el suelo.
A.2.5. Submodelo de absorción de radiación térmica en la superficie del suelo.
A.3. Submodelo de temperatura de la primera capa de suelo.
A.3.1. Submodelo de transferencia de calor por conducción entre la superficie del suelo
y la primera capa de suelo.
A.3.2. Submodelo de transferencia de calor por conducción entre la primera y la
segunda capa del suelo.
A.4. Submodelo de temperatura del aire interior del invernadero.
A.4.1. Submodelo de transferencia de calor por convección entre el aire interior y la
superficie interior de la cubierta.
A.4.2. Submodelo de transferencia de calor por convección entre el aire interior y la
superficie del suelo.
A.4.3. Submodelo de transferencia de calor por convección entre el aire interior y las
tuberías del sistema de calefacción.
A.4.4. Submodelo de transferencia de calor por intercambio de energía con el aire
exterior debido a la ventilación y a la infiltración por la cubierta.
A.4.5. Submodelo de transferencia de calor latente por transpiración del cultivo.
A.4.6. Submodelo de transferencia de calor latente por evaporación en la balsas.
B. Submodelo de la humedad en el aire interior del invernadero.
B.1. Submodelo de flujo de vapor de agua por condensación en la superficie interior de
la cubierta.
B.2. Submodelo de flujo de vapor de agua por evaporación en la superficie del suelo.
B.3. Submodelo de flujo de vapor de agua por transpiración del cultivo.
B.4. Submodelo de flujo de vapor de agua por evaporación en las balsas.
B.5. Submodelo de flujo de vapor de agua por intercambio entre el aire interior y
exterior debido a la ventilación e infiltración por la cubierta.
C. Submodelo de radiación PAR sobre el cultivo
112
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.2.2. Modelado orientado a bloques
El modelo diseñado se ha implementado utilizando la herramienta de simulación Simulink
que se ejecuta sobre el entorno matemático Matlab. La inicialización del modelo se realiza
ejecutando un programa implementado en Matlab que facilita la utilización del modelo para
nuevas estructuras de invernadero, modificación de los sistemas de actuación o para otras
estructuras distintas, ya que simplemente hay que modificar las variables correspondientes
para que se actualicen automáticamente los bloques del modelo implementado en Simulink.
Este prograna carga los siguientes datos:
• Estructura del invernadero (superficie de suelo y cubierta, volumen que ocupa, etc.).
• Constantes físicas universales utilizadas por el modelo (gravedad, constante
psicométrica, constante de Stefan-Boltzmann, etc.).
• Características físicas y químicas de los materiales que componen los distintos
elementos del invernadero (cubierta, suelo, aire, etc.).
• Características físicas de los sistemas de actuación (longitud, anchura, ángulo de
apertura máxima de ventilación, diámetros y longitud de las tuberías de calefacción, etc.)
• Parámetros que caracterizan a todos los procesos de transmisión de calor y vapor de
agua, así como los parámetros que describen los procesos de convección.
• Datos de las condiciones de contorno y perturbaciones para realizar la simulación.
• Inicialización de las variables de salida.
Por otra parte, la simulación del modelo completo necesita resolver cinco ecuaciones
diferenciales, que describen sistemas con distintos comportamientos temporales, de forma
que se combinan elementos con dinámicas rápidas con elementos con dinámicas lentas, es
decir, se está modelando un sistema stiff. Simulink proporciona varios algoritmos de
integración numérica, así que, en función del tipo de sistema, unos serán más eficientes que
otros. Para sistemas como los que se están analizando (stiff), Simulink proporciona varias
opciones, permitiendo seleccionar el método de Gear que es el que ha resultado más
eficiente cuando se han realizado las simulaciones.
Cada uno de los modelos descritos en el apartado anterior se ha implementado como un
bloque con un conjunto de variables de entrada y salida que comparten e interaccionan
entre sí. Cada uno de los bloques de cada nivel jerárquico se ha agrupado en un nuevo
bloque correspondiente al siguiente nivel, de forma que se obtienen cinco niveles:
1. Nivel de clima del invernadero compuesto por un solo bloque, donde se indican las
entradas del modelo (perturbaciones y control) y salidas correspondientes a las variables
a simular, tal y como se muestra en la figura 3.16.a.
2. Nivel de tipo de variable a modelar, compuesto por tres bloques: radiación, temperatura
y humedad. Se muestra en la figura 3.16.b.
3. Nivel de variable climática a modelar, compuesto por cuatro bloques en el nivel anterior
de temperatura: cubierta, aire, superficie del suelo y primera capa de suelo, tal y como
muestra la figura 3.16.c
4. Nivel de proceso físico o químico, compuesto por un número determinado de bloques
según cada variable a modelar. En la figura 3.16.d se muestran los bloques
correspondientes a los procesos necesarios para modelar la temperatura de cubierta.
5. Nivel de implementación de cada proceso físico.
113
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
ENTRADAS
[T,PRAD]
SALIDAS SIMULADAS
Radiacioń exterior
Radiacioń exterior
[T,PTEXT+273]
Temperatura cubierta
XTSU_sim
Temperatura superf icie suelo
Posicio´n v entilacion
1
Radiacioń
exterior
Temperatura superficie suelo
Malla sombreo
Temperatura aire
Temperatura cubierta
Temperatura 1ª capa suelo
2
Temperatura cubierta
Humedad absoluta aire
Temperatura aire
XTINV_sim
Humedad relativ a aire
LAI
3
Velocidad viento
exterior
4
Posicioń
ventilacion
XHINV_sim
Humedad relativa aire
Humedad absoluta aire
Humedad absoluta exterior
XHINV_abs_sim
Humedad absoluta aire
Humedad absoluta exterior
2
Temperatura
exterior
Temperatura aire
Temperatura calef accio´n
Indice aŕea foliar
[T,PHEXT_abs]
Radiacioń exterior
Blanqueo
Temperatura calefaccio´n
[T,XLAI]
XTS4_sim
Temperatura 1ª capa suelo
Blanqueo
[T,XTCAL+273]
1
Radiacio´ n PAR interior
M ODELO DE RADIACIÓN PAR
XTCB_sim
Temperatura cubierta
Velocidad v iento exterior
Malla sombreo
[T,VBLAN]
Radiacio´ n PAR interior
Blanqueo
Posicioń ventilacioń
[T,UMALLA]
Malla
Radiacio´ n PAR interior
Velocidad viento exterior
[T,UVENT]
Radiacio´ n PAR exterior
Temperatura exterior
Temperatura exterior
[T,PVV]
0.2
Global/PAR
XRPAR_sim
Radiacio´ n PAR interior
Temperatura exterior
Velocidad viento exterior
Temperatura superficie suelo
Posicio´n ventilacio´n.
3
Temperatura superficie suelo
Temperatura suelo
CLIMA INVERNADERO
5
Malla sombreo
Malla sombreo
Temperatura 1ª capa suelo
6
Blanqueo
a. Primer nivel. Modelo del clima
4
Temperatura 1ª capa suelo
Blanqueo
Humedad relativa aire
1
Radiacioń exterior
2
Temperatura aire
3
Humedad absoluta aire
Temperatura cubierta
7
Temperatura
calefaccio´ n
Radiacioń exterior
Temperatura aire
Temperatura exterior
6
Posicio´n ventilacio´ n.
Temperatura suelo
Temperatura cubierta
Velocidad viento exterior
5
Temperatura aire
MODELO DE TEM PERATURA
LAI
Blanqueo
1
Temperatura cubierta
6
Humedad relativa aire
Humedad relativa aire
Malla
Radiacioń exterior
Posicio´n ventilacio´n
Temperatura aire
7
Humedad absoluta aire
Temperatura cubierta
Temperatura calefaccio´ n
7
Temperatura suelo
Temperatura aire
LAI
8
LAI
Humedad absoluta aire
4
Temperatura exterior
5
Velocidad viento
exterior
Temperatura calefaccio´ n
9
Humedad absoluta
exterior
Temperatura cubierta
Humedad absoluta exterior
Temperatura exterior
Humedad absoluta aire
Posicio´n ventilacioń
Velocidad viento exterior
MODELO DE HUM EDAD
8
Malla sombreo
9
Blanqueo
Radiacioń exterior
Malla
Blanqueo
b. Segundo nivel. Modelo del tipo de variable
Temperatura aire
Temperatura exterior
Posicio´n ventilacioń
Velocidad viento
10
Humedad relativa
aire
11
Temperatura
cubierta
12
Temperatura
calefaccio´ n
Temperatura superficie suelo
1
Humedad relativa aire
-K-
Radiacioń exterior
Temperatura 2 capa suelo
2
Temperatura superficie
suelo
Temperatura cubierta
Temperatura calefaccio´ n
2
Coeficiente absorcio´ n cubierta
Temperatura aire
Temperatura aire
Temperatura cubierta
Condensacio´ n Cubierta
LAI
3
MODELO TEMPERATURA SUPERFICIE SUELO
13
LAI
Temperatura superficie suelo
Temperatura 2ª capa suelo
Humedad absoluta aire
Humedad absoluta
aire
Calor latente condensacion cubierta
Temperatura cubierta
3
Temperatura
1ª capa suelo
4
Temperatura exterior
Conv eccio´n cubierta exterior
Temperatura
exterior
M ODELO TEMPERATURA 2ª CAPA SUELO
-K-
1
s
1/Capacidad
Calori´ fica
cubierta
Velocidad v iento
1
T emperatura cubierta
5
Temperatura cubierta
Conveccio´n cubierta exterior
Velocidad
viento
exterior
Temperatura suelo
Temperatura cubierta
Temperatura calefaccio´ n
Temperatura aire
Temperatura exterior
Temperatura exterior
6
Posicio´n ventilacioń
Velocidad viento
Temperatura aire
LAI
Conv eccio´ n cubierta interior
Posicio´n v entilacioń
Posicioń
ventilacioń
Velocidad v iento
Conveccio´ n cubierta interior
4
Temperatura aire
Temperatura cubierta
Radiacio´ n exterior
Malla
7
Blanqueo
Temperatura suelo
T emperatura suelo
Radiacio´ n absorbida OL cubierta
Temperatura exterior
Humedad absoluta aire
Humedad relativa aire
8
Temperatura calef accio´ n
T emperatura
calefaccio´ n
MODELO TEMPERATURA INVERNADERO
c. Tercer nivel. Modelo global de temperatura
d. Cuarto nivel. Modelo de temperatura de cubierta
Fig. 3.16. Modelo jerárquico del clima del invernadero con la herramienta modelado a bloques Simulink
Como se puede observar, el número de niveles depende del tipo de variable a modelar ya
que el modelo de humedad sólo presenta tres niveles y el de temperatura cuatro niveles. El
modelo de temperatura presenta un nivel más porque agrupa a los modelos de temperatura
de cada uno de los elementos del invernadero. La interacción entre los distintos niveles se
realiza a través de las entradas y salidas de los distintos módulos que los forman, tal y como
se puede observar en las figuras 3.16.b y c.
114
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.2.3. Modelado orientado a objetos
Como se ha comentado en el capítulo 2, el modelo diseñado también se ha implementado
utilizando la herramienta de simulación Dymola, con el lenguaje de programación Modelica
[Rod02]. Para ello se ha utilizado la Técnica de Modelado de Objetos (OMT) que es una
metodología orientada a objetos para el desarrollo (desde el análisis a la implementación
pasando por el diseño) de herramientas informáticas propuesta por Rumbaugh y
colaboradores [Rum96], siendo de las más maduras y eficientes que existen en la
actualidad. Esta metodología consiste en construir un modelo de un dominio de aplicación
añadiendo detalles de implementación durante el diseño de un sistema. Además propone
una notación gráfica formal que muestra las distintas relaciones entre las clases de objetos
que componen el sistema. El diagrama OMT del modelo del clima que se genera en el
interior de un invernadero que se ha utilizado se muestra en la figura 3.17.
Cubierta
Constantes_físicas
Suelo_superficie
Estructura
Ventilación
Suelo_capa1
Calefacción
Suelo_capa2
Invernadero
Utilizado_por_cb
Utilizado_por_sc
Utilizado_por_h
Utilizado_en_sc
Modelo_suelo_capa1
Utilizado_en_cb
Modelo_Cubierta
Utilizado_en_h
Utilizado_por_ss
Utilizado_en_ss
Modelo_suelo_superficie
Utilizado_en_t
Modelo_Humedad
Modelo_Temperatura
Modelo_suelo
Modelo_invernadero
utilizado_por_c
utilizado_por_i
Modelo_Cultivo
Fig. 3.17. Diagrama OMT del modelo desarrollado del interior de un invernadero
Los rectángulos indican las clases de objetos, y en su interior se representan su nombre,
atributos (característica común para todos los objetos de una clase) y operaciones (función
o transformación que se puede aplicar a los objetos de una clase), aunque para no complicar
la figura no se muestran estos dos últimos. Los enlaces y asociaciones son los métodos para
establecer relaciones entre los objetos y se representan por líneas que unen los rectángulos
que representan las clases y, en algunos casos, figuras geométricas que indican el tipo de
relación. En la representación OMT existen varios tipos de relaciones:
• Asociación. Describe el tipo de relación entre clases de objetos, indicándose mediante un
nombre sobre la línea en letra cursiva.
115
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Agregación. Es una forma especial de asociación que corresponde a una relación “partetodo” o “una-parte-de” en la cual los objetos que representan los componentes de algo se
asocian a un objeto que representa el ensamblaje completo. Se representa por un rombo
situándose en el extremo de la línea que indica el ensamblaje de la relación.
• Generalización. Corresponde a la relación entre una clase (superclase) y una o más
versiones refinadas de esa misma clase (subclase). Los atributos y operaciones comunes
a un grupo de subclases se asocian a la superclase y son compartidos por todas las
subclases. Se dice que cada subclase hereda las características de su superclase. Se
representa por un triángulo que conecta una superclase con sus subclases.
Como se puede observar en la figura 3.17 se han definido dos clases de objetos generales
que se forman por agregación de otras muchas:
• Clase Invernadero. Representa el invernadero donde se va a realizar el ensayo de
simulación. Sus atributos son los parámetros característicos de los distintos elementos
que forman el sistema invernadero junto con las constantes físicas universales utilizadas
por el modelo. Se ha diseñado de esta manera ya que si se modifica o cambia alguno de
los elementos, sólo hay que modificar la clase que lo representa. Estas clases son las
siguientes que quedan descritas por su nombre:
Constantes_físicas.
Estructura. Tipo de estructura (superficie, volumen, etc.) .
Ventilación. Tipo de ventilación instalada (longitud, coeficiente de descarga, etc.).
Calefacción. Tipo de calefacción instalada (longitud de tuberías, diámetro, etc.).
Suelo_superficie. Material y dimensiones de la superficie suelo.
Suelo_capa1. Material y dimensiones de la primera capa de suelo.
Suelo_capa2. Material y dimensiones de la segunda capa de suelo.
Cubierta. Material y dimensiones de la cubierta.
• Clase modelo_invernadero. Representa el modelado del clima completo que se genera
en el interior del invernadero, relacionado con la clase Invernadero mediante la relación
“utiliza” para obtener los parámetros característicos del invernadero donde se realizan
las simulaciones. A su vez, esta clase se compone de la agregación de las siguientes:
Modelo_temperatura. Clase de modelos de la temperatura del aire interior.
Modelo_cubierta. Clase de modelos de la temperatura de la cubierta.
Modelo_humedad. Clase de modelos de la humedad del aire interior.
Modelo_suelo, compuesto por otras dos clases:
o Modelo_suelo_superficie. Clase de modelos de la temperatura de su superficie.
o Modelo_suelo_capa1. Clase de modelos de la temperatura de su primera capa .
También se muestra la clase Modelo_cultivo ya que, aunque realmente no pertenece al
modelo del clima, el cultivo afecta a las variables climáticas mediante el índice de área
foliar, que se puede medir en el invernadero, o bien, estimar por el modelo que se describirá
en el capítulo 5.
Por otra parte, la simulación del modelo completo del clima necesita resolver cinco
ecuaciones diferenciales y cincuenta y ocho ecuaciones algebraicas y, para ello, se utiliza el
algoritmo de resolución Dassl descrito en [Bre89], que proporciona buenos prestaciones en
cuanto a resultados y a tiempos de ejecución en este tipo de sistemas de ecuaciones.
116
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.3. Obtención de parámetros del modelo
3.4.3.1. Problemática de la calibración de parámetros y metodología propuesta
Debido al elevado número de parámetros a estimar (más de treinta), resulta difícil la
obtención de sus valores utilizando un método de búsqueda con el modelo completo que
engloba a las siete variables de salida. Lo más conveniente sería realizar análisis
experimentales de cada uno de los procesos involucrados para la obtención de los
parámetros que los caracterizan, al estilo del estudio realizado por Bot [Bot83]. El
problema es que no son estudios fáciles de realizar, además de que alguno de ellos presenta
gastos económicos elevados por la infraestructura necesaria y su duración en el tiempo. Por
otra parte, lo normal es disponer de datos correspondientes a las variables climáticas en el
interior y exterior del invernadero, y al estado de los sistemas de actuación. Debido a esta
razón se ha trabajado en la estimación de los parámetros de un modelo matemático
basándose en estos datos sin perder información de cada uno de los procesos físicos
involucrados en las ecuaciones de balance de energía y vapor de agua. El problema de la
búsqueda y obtención de los parámetros característicos del modelo se puede simplificar
teniendo en cuenta las siguientes consideraciones:
• Se han medido cada una de las variables implicadas, por lo que se pueden implementar y
utilizar modelos independientes para cada una de las variables de salida, estimando
únicamente los parámetros involucrados en cada uno de ellos.
• Algunos de los procesos físicos que se consideran en las ecuaciones de balance que
describen cada uno de los modelos, no se producen simultáneamente o durante todo el
día (como la absorción de radiación solar) por lo que, para un modelo independiente, no
hay que estimar todos los parámetros involucrados simultáneamente.
• Algunos de los procesos físicos se describen con distintas ecuaciones en función de
determinadas situaciones como en la transmisión de calor por convección entre la
superficie interior de la cubierta y el aire del invernadero, en la que los parámetros a
estimar del coeficiente de transmisión varían si el régimen del fluido es laminar o
turbulento. Para estimar estos valores, hay que analizar el modelo correspondiente a
cada una de esas posibles circunstancias particulares.
• Para la obtención de los parámetros involucrados en el modelado de los sistemas de
actuación instalados, se han realizado ensayos en la planta como el análisis de la
respuesta del sistema a entradas en escalón o impulsos y el análisis de la temperatura y
humedad ante distintas aperturas de la ventilación en torno al mediodía solar (para que
las variables no sean influenciadas por la radiación). Ensayos de secuencias de entradas
pseudoaleatorias (PRBS) no se han realizado debido a la larga duración de las pruebas y
a los cambios de la radiación solar durante el día.
Se ha propuesto una metodología para la calibración de los submodelos descritos en los
apartados anteriores, basándose en la realización de distintos ensayos y análisis de los datos
resultantes. A continuación, se describe la secuencia de pasos a realizar para calibrar el
modelo implementado para cualquier invernadero, conociendo las perturbaciones y las
variables de salida sin necesidad de tomar medidas adicionales sobre procesos concretos.
En cada uno de los pasos se indica los parámetros a estimar y su justificación en la
metodología propuesta:
117
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
1. Calibración del clima del invernadero en vacío (sin cultivo).
1.1. Calibración del clima en vacío y sin el efecto de los sistemas de actuación (sin
ventilación ni sistema de calefacción).
1.1.1. Calibración del modelo de la temperatura de la primera capa de suelo. En este
balance de energía se consideran sólo procesos de conducción de los que hay que
estimar los coeficientes de conducción de cada una de las capas y la profundidad
de la capa cuya temperatura es constante. Por otra parte, como no se conoce el
material que forma el suelo, se ha considerado su capacidad térmica como otro
parámetro a estimar (4 parámetros a estimar)
1.1.2. Calibración de periodos nocturnos (Radiación solar nula).
1.1.2.1. Calibración del modelo de temperatura de cubierta.
1.1.2.1.1. Velocidad del viento exterior mayor que un valor determinado. En este
caso el modelo se reduce al proceso de convección con el aire interior en
régimen laminar, Qcnv,cb-a, (2 parámetros a estimar), al proceso de
convección con el aire exterior y velocidad del viento exterior alta, Qcnv,cb-e,
(2 parámetros a estimar), al proceso de radiación térmica sin considerar al
objeto cultivo, Qrad,cb (3 parámetros a estimar) y a los procesos de
condensación en ambas caras de la cubierta, Qlt,cb-e y Qlt,cb-a, pero como
estos dos procesos dependen de los coeficientes de convección son los dos
mismos que en los procesos anteriores. Como es necesario conocer la
velocidad del aire en el interior, función del flujo de ventilación con
ventanas cerradas, hay que determinar el flujo por pérdidas con velocidad
del viento alto (1 parámetro a estimar).
1.1.2.1.2.Velocidad del viento exterior menor que un valor determinado. Los
procesos son similares a los anteriores, y sólo hay que determinar los
parámetros correspondientes a la convección con el exterior y viento bajo
(2 parámetros a estimar) y las pérdidas del flujo de ventilación con viento
bajo (1 parámetro a estimar), considerados también en el flujo de calor
latente en la superficie exterior.
1.1.2.2. Calibración del modelo de temperatura de la superficie del suelo. Conocida la
estimación de la velocidad del aire en el interior y el proceso de conducción
con la primera capa calibrado en el primer punto, el modelo se reduce al
proceso de convección con el aire interior en régimen turbulento, Qcnv,ss-a, (4
parámetros a estimar) y al proceso de absorción de radiación térmica, Qrad,ss,
sin considerar el objeto cultivo (3 parámetros a estimar).
1.1.3. Calibración de periodos diurnos (Influenciado por la radiación solar).
1.1.3.1. Calibración del modelo de temperatura de cubierta. Conocidos los flujos
energéticos anteriores, en este caso el modelo se reduce a la estimación de los
parámetros correspondientes a los proceso de convección con el aire interior
en régimen turbulento, Qcnv,cb-a, (2 parámetros a estimar) y al proceso de
absorción de radiación solar, Qsol,cb (1 parámetro a estimar).
1.1.3.2. Calibración del modelo de temperatura de la superficie del suelo. En este caso
el análisis consiste en estimar los parámetros del proceso de convección con el
aire interior en régimen laminar, Qcnv,ss-a, (2 parámetros a estimar), al proceso
de absorción de radiación solar, Qrad,ss, (1 parámetro a estimar) y al proceso de
evaporación en la superficie del suelo, Qlt,ss-a que dependen del coeficiente de
convección considerado en el primer proceso.
118
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
1.1.4. Calibración del modelo de la humedad del aire interior. En este balance de vapor
de agua hay que calibrar únicamente los parámetros del proceso de evaporación
en las balsas, Mlt,balsa (2 parámetros) ya que el resto ya se han estimado en las
fases anteriores (condensación en la cubierta interior, Mlt,cb-a, y exterior, Mlt,cb-e, y
la evaporación en la superficie del suelo).
1.2. Calibración del efecto de la ventilación (sin considerar el sistema de calefacción).
Realizando ensayos de ventilación se estiman los dos parámetros necesarios para
calibrar el flujo de ventilación necesario para el modelar de intercambio de energía
y vapor de agua con el aire exterior en los modelos de temperatura, Qven,a-e, y
humedad, Mven,a-e, del aire interior.
1.3. Calibración del efecto de la calefacción (sin considerar la ventilación). La
calefacción actúa mediante un proceso de radiación térmica con el resto de
elementos, ya calibrado en los pasos anteriores, quedando por estimar los dos
parámetros correspondientes a la de convección con el aire interior, Qcnv,cal-a.
2. Calibración del clima del invernadero con cultivo
2.1. Calibración del modelo de la temperatura de cubierta. Falta por estimar un
parámetro correspondiente al proceso de absorción de radiación térmica procedente
del cultivo, Qrad,cb .
2.2. Calibración del modelo de la temperatura de la superficie del suelo. Falta por estimar
un parámetro correspondiente al proceso de absorción de radiación térmica
procedente del cultivo, Qrad,ss, y otro parámetro debido al efecto del cultivo sobre la
velocidad del aire en el interior, necesario para analizar la convección, Qcnv,ss-a.
2.3. Calibración del proceso de transpiración del cultivo. Faltan por estimar cuatro
parámetros correspondientes al proceso de intercambio de radiación térmica entre el
cultivo y el resto de elementos para calcular la radiación neta, necesaria en la
transpiración del cultivo, Mtrp,cu y Qtrp,cu.
3. Calibración del modelo de radiación PAR. La radiación PAR sobre el cultivo depende
del coeficiente de transmisión de la cubierta y de la malla de sombreo, que son dos
parámetros conocidos ya que los proporciona el fabricante. El único parámetro a estimar
es la reducción del coeficiente de transmisión de la cubierta cuando se blanquea.
3.4.3.2. Estimación de los parámetros
3.4.3.2.1. Metodología utilizada
Se ha utilizado la metodología propuesta en el apartado anterior, estimando los parámetros
con los algoritmos de búsqueda descritos en el apartado 2.6. Técnicas de ajuste de los
parámetros característicos de modelos de forma que se minimice la siguiente función
J = X real − X sim
2
= ∑ ( X real ,i − X sim,i )
n
2
(3.132)
i =1
donde Xreal=(Xreal,1, ..., Xreal,n) es un conjunto de n medidas tomadas cada minuto en el
invernadero y Xsim=(Xsim,1, ..., Xsim,n) es el conjunto de las estimaciones del modelo
implementado para esos n instantes de tiempo (cada minuto).
119
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La búsqueda se realizado en dos pasos, con dos métodos de estimación diferentes:
•
Búsqueda secuencial directa, para la obtención del intervalo de variación de cada
parámetro que asegure el mínimo de la función de coste, encontrando un valor
aproximado para cada uno de ellos.
•
Búsqueda genética, para la obtención definitiva de los parámetros óptimos en el espacio
de búsqueda estimado en el paso anterior.
Como se ha comentado en el apartado 2.4. Sistemas de medida y control de la variables
climáticas en el capítulo 2, se desarrolló un sistema de medida y control y se realizaron una
serie de ensayos en los invernaderos para estimar los parámetros desconocidos del modelo.
Concretamente, se llevaron a cabo dos ensayos, uno en invierno (enero 2002) con cultivo,
realizando experiencias con la calefacción y otro en verano (julio/agosto 2000) con el
invernadero en vacío y realizando experiencias con la malla de sombreo y la ventilación
natural. De esta forma, se dispone de una amplia cantidad de datos (1440 medidas por día y
sensor) de entrada y salida de dos invernaderos, Inamed número 1 y Araba número 2. Se
han utilizado quince días en cada uno de los dos periodos del 2000 con un tiempo de
muestreo de un minuto, es decir, 21600 medidas reales por periodo de estimación y sensor.
Ya que el proceso de calibración es el mismo para cualquier invernadero, para no extender
la exposición, sólo se describirán los resultados obtenidos en el invernadero Araba número
2. Los modelos se han ajustado independientemente, es decir, como se dispone de la
medida real de todas las variables, se utilizan todas como entradas al modelo excepto la que
se desea ajustar. Los datos procedentes de las experiencias realizadas durante los meses de
verano del año 2000 se han utilizado para calibrar los modelos completos de temperatura de
la superficie de la cubierta, de la superficie del suelo y de su primera capa. Además, se han
calibrado los modelos de temperatura y humedad del aire en el caso de invernadero sin
cultivo. Los datos correspondientes a las experiencias de enero de 2000 se han utilizado
para completar de calibrar los modelos de temperatura y humedad del aire, estimando los
parámetros característicos de los procesos de evapotranspiración debido al cultivo y a los
aportes de energía del sistema de calefacción instalado en el invernadero. Para comprender
mejor los resultados obtenidos, la figura 3.18 muestra las perturbaciones a las que se
encuentran sometidos los invernaderos y las entradas de control empleadas en el
invernadero Araba número 2.
1000
32
30
800
Temperatura exterior (º C )
Radiació n global exterior (W /m2)
900
700
600
500
400
300
28
26
24
22
200
100
20
0
50
100
150
200
250
300
0
Tiempo (Horas)
50
100
150
200
Tiempo (Horas)
a. Radiación global en el exterior
b. Temperatura exterior
120
250
300
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
300
8
D irecció n viento exterior (m/s)
Velocidad viento exterior (m/s)
9
7
6
5
4
3
2
250
200
150
100
1
50
50
100
150
200
250
300
50
100
Tiempo (Horas)
150
200
250
300
Tiempo (Horas)
c. Velocidad del viento en el exterior filtrada
d. Dirección del viento en el exterior filtrada
100
35
30
Apertura ventilació n (º )
Humedad relativa exterior (%)
90
80
70
60
50
25
20
15
10
40
5
30
0
0
50
100
150
200
250
300
50
100
Tiempo (Horas)
150
200
250
300
Tiempo (Horas)
e. Humedad relativa en el exterior
f. Apertura de ventilación natural
Tempertura tuberí as calefacció n (º C )
400
Apertura malla de sombreo (cm)
350
300
250
200
150
100
50
0
50
100
150
200
250
45
40
35
30
25
50
Tiempo (Horas)
100
150
200
250
300
Tiempo (Horas)
g. Apertura malla de sombreo
h. Temperatura tuberías de calefacción
Fig. 3.18. Perturbaciones y variables de control durante agosto 2000
3.4.3.2.2. Calibración de los modelos de la temperatura de la superficie y la primera capa de
suelo
En el apartado 3.2.1 se han tratado de forma genérica los procesos de conducción,
incluyendo tanto las formulaciones exactas basadas en ecuaciones en derivadas parciales
como formulaciones aproximadas suponiendo en algunos casos condiciones de
estacionario.
121
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Al modelar los procesos de conducción en las distintas capas del suelo del invernadero, se
optó inicialmente por utilizar aproximaciones de régimen permanente para estimar los
flujos de calor que inciden sobre una determinada capa de suelo, tomando como
condiciones de contorno las temperaturas medidas en el invernadero en diversos ensayos,
como son las de la superficie del suelo y a una profundidad de 31.5 cms y considerando que
a partir de una cierta profundidad la temperatura permanece constante y es igual a la media
anual. La evolución temporal de la temperatura de una capa de suelo queda por tanto
determinada por una constante de tiempo dominante dependiente fundamentalmente de la
densidad del material, de su calor específico y del espesor de la capa considerada. Aunque
este tipo de aproximaciones son adoptadas por casi la totalidad de los investigadores sobre
modelado de clima en invernaderos, se decidió comparar la solución que proporcionaba
esta aproximación (computacionalmente poco costosa) con la que se obtiene de la
resolución de la ecuación en derivadas parciales unidimensional que define la conducción
en una dirección (computacionalmente más costosa) y además, comparar antes con las
medidas obtenidas experimentalmente en un invernadero.
En la figura 3.19 se puede observar la comparación entre la medida real de la temperatura
de la primera capa del suelo y la estimada por el modelo basado en simplificaciones.
Aparece un desfase entre ellas debido a las aproximaciones realizadas de considerar sólo el
régimen permanente de los flujos de calor que inciden sobre una capa. Muchos autores
consideran este resultado como aceptable. Como se ha indicado, se ha comparado el
resultado con el obtenido a partir de un modelo de difusión térmica basado en ecuaciones
diferenciales en derivadas parciales (de primer orden respecto al tiempo y de segundo orden
respecto a las coordenadas espaciales). Hay que hacer notar que incluso en este caso se está
adoptando una simplificación, fundamentalmente debido a la carencia de datos
experimentales, consistente en suponer que a una determinada profundidad la temperatura
del suelo permanece constante e igual a la media anual. Esta es una suposición adoptada
por casi la totalidad de los autores pero que no deja de introducir algunos errores en el
modelo. Otro problema ya indicado estriba en conocer de forma exacta los parámetros que
caracterizan el proceso de conducción en una capa, es decir la densidad del material, el
calor específico y la conductividad térmica. Se han utilizado datos obtenidos de la literatura
y se han comparado los valores con los obtenidos de identificación a partir de datos
experimentales, obteniendo resultados bastante similares y satisfactorios. En la formulación
de la ecuación de la conducción/difusión, se pueden agrupar todos los parámetros en uno
sólo que se suele denominar difusividad. En la resolución de la ecuación de conductividad
se han considerado dos condiciones de contorno de tipo Dirichlet [Cha84] en la superficie
del suelo y en la capa límite, en la que se considera temperatura constante. A la vista de los
resultados mostrados en la figura 3.20 se puede ver cómo el retardo que aparecía al adoptar
la solución simplificada no aparece en el caso de la resolución de la ecuación en derivadas
parciales. Se puede optar por tanto por utilizar esta última solución o por seguir utilizando
la solución simplificada (y computacionalmente menos costosa), pero introduciendo un
retardo correspondiente a los transitorios en los procesos de flujo de calor desde las
condiciones de contorno hasta la capa en cuestión. Como se indica en [Cam99] un proceso
de alto orden como el tratado se suele modelar como diversos elementos de primer orden
para representar el almacenamiento de energía en cada elemento. Cuando una de las
constantes de tiempo es dominante, las constantes de tiempo más pequeñas se unen para
producir un desfase que actúa como un retardo puro.
122
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
31.4
Tem peratura de la capa 1 de suelo (º C)
Tem peratura de la capa 1 de suelo (º C)
31.4
31.2
31
30.8
30.6
30.4
30.2
30
31.2
31
30.8
30.6
30.4
30.2
Real
M odelo s in retardo
M odelo c om pleto
30
Real
M odelo s in retardo
29.8
0.8
0.9
1
1.1
1.2
1.3
Tiempo (Minutos)
0.85
x 10
0.9
0.95
4
1
1.05
1.1
1.15
1.2
1.25
1.3
Tiempo (Minutos)
1.35
x 10
4
Fig 3.19. Comparación temperatura primera capa Fig 3.20. Comparación temperatura primera capa del
de suelo real y la modelada
suelo real y la obtenida con modelos
completo y simplificado de conducción
Con los datos experimentales con los que se cuenta se ha observado que este retardo no
sufre variaciones sustanciales a lo largo del tiempo. La figura 3.21 muestra el resultado
obtenido de modificar el modelo simplificado incluyendo el retardo. Hay que hacer notar
que incluso si se utiliza la opción simplificada, se mejoran en gran medida los resultados
obtenidos por otros investigadores en este campo. La figura 3.22 muestra un ejemplo de la
evolución temporal de los perfiles de temperatura en diversas capas usando el modelo
completo de conducción basado ecuaciones de difusión.
40
31.2
Tem peratura c apas de suelo (º C)
Tem peratura de la capa 1 de suelo (º C)
31.4
31
30.8
30.6
30.4
30.2
30
Real
M odelo c on retardo
M odelo c om pleto
29.8
0.8
0.9
1
1.1
Tiempo (Minutos)
1.2
35
30
25
20
1.3
2000
x 10
4
Fig 3.21. Comparación temperatura primera capa
del suelo real y la obtenida con modelos
completo y simplificado con retardo
4000
6000
8000 10000 12000
Tiem po (m inutos )
14000
16000
18000
Fig 3.22. Evolución de la temperatura predicha
por el modelo de conducción basado en
PDEs en distintas capas de suelo
Con respecto a la temperatura de la superficie del suelo, que se muestra en la figura 3.23,
aunque el modelo capta la dinámica y proporciona resultados aceptables, se puede observar
que no se ajusta completamente, debido a que está cubierto por una malla de plástico blanca
que en parte del invernadero se encontraba en mal estado y no se ha podido modelar
correctamente su efecto sobre la temperatura de la superficie, sobre todo en los procesos
convectivos con el aire del invernadero y los relacionados con el calor latente debido a la
evaporación de agua procedente del suelo por difusión.
123
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
T em peratura de la superficie del suelo (º C )
40
38
36
34
32
30
28
26
1.2
1.3
1.4
1.5
1.6
1.7
1.8
Tiem po (m inutos)
x 10
4
Fig 3.23. Comparación temperatura superficie del
suelo real y la modelada
Fig 3.24. Imagen de la superficie del suelo donde se
puede observar la iluminación directa
Por otra parte, se puede observar que en torno al mediodía solar, la radiación incidía
directamente sobre el sensor, tal y como se puede observar en la figura 3.24 que muestra las
zonas del invernadero donde se produce la iluminación directa, y aunque en el proceso de
calibración, se han filtrado los datos, la temperatura medida no es correcta en esos
intervalos de tiempo, falseando los datos estadísticos del valor absoluto de la diferencia
entre los valores estimados por el modelo y los valores reales medidos en el invernadero
que se muestran en la tabla 3.4. Esto es debido a que el máximo del error absoluto ocurre
en uno de esos momentos de iluminación directa, desvirtuando, por tanto la media y la
desviación estándar. Aún así, se utilizan esos valores porque son los únicos de los que se
dispone.
Temperatura sup. suelo
Temperatura capa 1 suelo
25.5-42
28.19-31.4
(16.5 ºC)
(5.9 ºC)
0.68
0.25
Media
4.12
0.79
Máximo
0.44
0.17
Desviación estándar
Tabla 3.4. Estadísticos de la diferencia entre los valores reales y simulados
en el proceso de calibración de la temperatura de suelo
Intervalo variación
Como se puede observar en la figura 3.25 la
dinámica de la temperatura de la cubierta se ha
modelado correctamente, no observándose
diferencias notables entre los valores reales,
obtenidos como la media de las medidas de los
ocho sensores instalados en la cubierta y los
valores estimados por el modelo. En un intervalo
de variación de la temperatura de la cubierta
entre 20.55 y 52.1 ºC, es decir, 31.55 ºC, la
media del error absoluto es de 0.52 ºC, con un
máximo de 3.38 ºC y una desviación estándar de
0.53 ºC, obteniéndose un error relativo medio
menor de un 2%.
124
Temperatura de la cubierta (º C )
3.4.3.2.3. Calibración del modelo de la temperatura de cubierta
45
40
35
30
25
20
1.2
1.3
1.4
1.5
1.6
Tiempo (minutos)
1.7
1.8
x 10
4
Fig 3.25. Comparación temperatura de cubierta
real y simulada
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.3.2.4. Calibración de los modelos de humedad y temperatura del aire con el invernadero
en vacío
El resultado del modelo de humedad sin cultivo, se muestra en forma de humedad absoluta
en la figura 3.26 y humedad relativa en la figura 3.27, donde la gráfica más gruesa muestra
los valores reales medidos. Como se puede observar los valores estimados no se ajustan
completamente a los valores reales medidos debido, como se ha comentado anteriormente,
a algún factor que influye en los modelos diseñados e implementados de procesos de
evaporación y en particular en la superficie del suelo. Además, existen algunos factores no
modelados como los canales de agua donde se sitúan las plantas en cultivo hidropónico
NFT, que deben estar aislados, y puede que alguno de ellos estuviera abierto. También,
puede ser debido a la manta de plástico que cubre la superficie del suelo que, como se
encuentra en mal estado en algunos sectores, afecta al proceso de evaporación.
90
80
0.018
Hum edad relativa del aire (% )
Hum edad absoluta del aire (Kgagua/K gaire)
0.02
0.016
0.014
70
60
50
40
0.012
30
0.01
1.2
1.3
1.4
1.5
Tiem po (minutos)
1.6
1.7
1.2
1.8
x 10
1.3
1.4
1.5
1.6
T iem po (m inutos)
4
Fig 3.26. Comparación humedad absoluta del aire
real y modelada
1.7
1.8
x 10
4
Fig 3.27. Comparación humedad relativa del aire
real y modelada
La tabla 3.5 muestra los estadísticos de la diferencia en valor absoluto entre los valores
reales y simulados de la humedad relativa y la humedad absoluta, observándose que el error
relativo no es mayor de un 6% y un 7% respectivamente.
Humedad relativa
Humedad absoluta
21-94
8.9 10-3-25 10-3
Intervalo
(73 %)
(16.1 10-3 kg/kg)
variación
3.96
0.001
Media
24.32
0.0084
Máximo
3.75
0.000995
Desviación
estándar
Tabla 3.5. Estadísticos de la diferencia entre los valores reales y simulados
en el proceso de calibración de la humedad del aire
Como se puede observar en la figura 3.28, el modelo de la temperatura del aire capta la
dinámica del sistema, observándose que con el invernadero cerrado y en días muy soleados
y calurosos, la temperatura modelada es un poco menor que la real, entre 1 y 1.5 ºC. Este
efecto puede ser debido a algún proceso no contemplado o a pequeños errores introducidos
por el proceso de calibración. Después de realizar algunas simulaciones en distintas
circunstancias, se ha llegado a la conclusión de que es debido a algún proceso relacionado
con la evaporación en la superficie del suelo o en las balsas, ya que los modelos de
humedad presentan el mismo efecto como se observa en las figuras 3.26 y 3.27.
125
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
50
40
45
30
40
20
35
10
40
35
30
Apertura ventana (º )
Temperatura aire (º C )
T em peratura d el aire d el invernadero (º C )
45
25
30
1.2
1.3
1.4
1.5
1.6
1.7
8
1.8
Tiem p o (m inutos)
x 10
9
10
11
12
13
14
15
16
17
0
18
Tiem po (Hora solar)
4
Fig 3.28. Comparación temperatura aire real y la
modelada
Fig 3.29. Ensayos de ventilación y respuesta de la
temperatura
Un aspecto a destacar es la estimación de los
parámetros correspondientes a la ventilación
natural. Se han realizado ensayos tipo escalón de
apertura y cierre de la ventana durante el
mediodía solar para evitar en lo posible el efecto
de la radiación, tal y como se muestra en la figura
3.18.f. Las figuras 3.31 y 3.32 muestran detalles
de la humedad relativa y la temperatura del aire
donde se puede observar la buena respuesta del
modelo durante los días 8 y 9 de agosto del año
2000, correspondientes a un día con el
invernadero cerrado y un día de ensayos de
ventilación (figura 3.30).
Apertura de ventilació n (º )
35
30
25
20
15
10
5
0
1.45
1.5
1.55
1.6
1.65
Tiempo (minutos)
1.7
x 10
4
Fig. 3.30. Apertura ventilación días 8 y 9 de
agosto del año 2000
90
Tem peratura del aire del invernadero (º C )
45
Hum edad relativa d el aire (% )
80
70
60
50
40
40
35
30
25
30
1.45
1.5
1.55
1.6
Tiempo (minutos)
1.65
1.5
1.7
x 10
1.55
1.6
Tiempo (minutos)
4
1.65
1.7
x 10
4
Fig 3.31. Detalle de comparación humedad relativa Fig 3.32. Detalle de comparación temperatura aire
real y la modelada debido a ventilación
real y la modelada debido a ventilación
Cuantitativamente, durante los días utilizados para la calibración, en un intervalo de
variación de la temperatura del aire entre 21.1 y 49.0 ºC, es decir, 27.9 ºC, la media del
error absoluto es de 0.51 ºC, con un máximo de 2.81 ºC y una desviación estándar de 0.52
ºC, obteniéndose un error relativo medio menor de un 2%.
126
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Estos resultados se han obtenido con los modelos independientes, pero por el diseño
jerárquico y modular del modelo implementado, en función de las variables conocidas
(medidas en el invernadero), se pueden considerar distintas configuraciones para estimar la
temperatura del aire entre las que se destacan las siguientes:
• Configuración 1. Se conocen y miden todas las variables del sistema. Es el análisis que
se ha realizado hasta ahora, es decir, el modelo sólo tiene que resolver la ecuación
diferencial correspondiente a la temperatura del aire.
• Configuración 2. Se parte de medidas de temperatura de cubierta y superficie de suelo,
por lo que se debe resolver un sistema de dos ecuaciones diferenciales correspondiente a
la temperatura y a la humedad relativa del aire interior.
• Configuración 3. Se conocen únicamente los valores reales de la superficie del suelo,
por lo que el sistema a resolver consta de tres ecuaciones diferenciales para la
temperatura y humedad del aire interior y la temperatura de la cubierta.
• Configuración 4. Se conoce la humedad relativa del aire y no se mide ni la temperatura
de cubierta y ni la de la superficie del suelo, que es la configuración más común en los
invernaderos de la zona. En este caso es necesario resolver el balance de energía
correspondiente a la primera capa de suelo, por lo que se trata de un sistema de cuatro
ecuaciones diferenciales.
• Configuración 5. Se desconocen todas las variables de salida del modelo y se tienen que
resolver las cinco ecuaciones diferenciales del modelos completo.
La tabla 3.6 muestra estadísticos de comparación del valor absoluto de la diferencia entre la
temperatura real y la estimada por el modelo en cada uno de las cinco configuraciones.
Configuración 1 Configuración 2 Configuración 3 Configuración 4 Configuración 5
0.51
0.52
0.61
0.93
0.95
Media
2.81
2.83
3.12
4.63
4.73
Máximo
0.52
0.53
0.59
0.65
0.66
Desviación
estándar
Tabla 3.6. Estadísticos de la diferencia entre los valores reales y simulados de la temperatura del aire en
función de las variables de salida conocidas.
127
45
T em pe ratura aire invernadero (º C)
Como se puede observar, tanto en los
resultados de la tabla 3.6 como en la figura
3.33, que muestra la comparación entre la
temperatura real y la estimada con el modelo
en las configuraciones 1 y 5, cuantas más
variables hay que estimar, el error que se
produce es mayor debido a que aumentan las
incertidumbres en el proceso de modelado y,
evidentemente, aumentan los errores
numéricos al tener que resolver un número
mayor de ecuaciones. Este resultado era
previsible, aunque la respuesta del modelo
sigue siendo correcta ya que la media de los
errores absolutos no es mayor de un 4% con
respecto al intervalo de variación de la
temperatura del aire interior.
40
35
30
Tem peratura aire real
Tem peratura aire c onfiguració n 1
Tem peratura aire c onfiguració n 5
25
2
4
6
8
10
12
14
16
18
20
22
T ie m p o (Ho ra s olar)
Fig 3.33. Comparación temperatura de aire modelado
en función de configuración utilizada
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.3.2.5. Calibración de los modelos de la humedad y temperatura del aire con cultivo y
con sistema de calefacción
Se han utilizado 15 días del mes de enero de 2000 con un periodo de muestreo de un
minuto (21600 medidas). Las perturbaciones a las que se encuentra sometido el
invernadero, así como las acciones de control aplicadas se muestran en la figura 3.34.
20
600
18
Temperatura exterior (º C )
Radiació n global exterior (W /m2)
700
500
400
300
200
16
14
12
10
8
100
6
0
50
100
150
200
250
50
300
100
150
200
250
Tiempo (Horas)
Tiempo (Horas)
a. Radiación global en el exterior
b. Temperatura exterior
10
300
8
D irecció n viento exterior (º )
V elocidad viento exterior (m/s)
9
7
6
5
4
3
250
200
150
100
2
50
1
0
50
100
150
200
50
250
100
200
250
c. Velocidad del viento en el exterior filtrada
d. Dirección del viento en el exterior filtrada
80
25
75
Posició n ventilació n (º )
Humedad relativa exterior (%)
150
Tiempo (Horas)
Tiempo (Horas)
70
65
60
20
15
10
5
55
0
20
40
60
80
100
120
140
160
180
50
200
100
150
200
Tiempo (Horas)
Tiempo (Horas)
e. Humedad relativa en el exterior
f. Apertura de ventilación natural
128
250
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
65
Temperatura tuberí as calefacció n (º C )
400
P osició n malla sombreo (cm)
350
300
250
200
150
100
50
60
55
50
45
40
35
30
25
20
15
50
100
150
200
250
20
40
60
80
Tiempo (horas)
100
120
140
160
180
200
Tiempo (Horas)
g. Apertura malla de sombreo
h. Temperatura tuberías de calefacción
Fig. 3.34. Perturbaciones y variables de control durante enero 2000
Se han llevado a cabo los pasos que quedaban de la metodología de calibración propuesta y
se han obtenido resultados aceptables. Las figuras 3.35 y 3.36 muestran respectivamente la
temperatura del aire y humedad relativa con calefacción y cultivo con un índice de área
foliar igual a 2, en las que se puede observar la buena respuesta del sistema a un cambio de
las perturbaciones, concretamente la temperatura exterior. El modelo capta correctamente la
dinámica del sistema, presentando peores resultados en el modelo de humedad al igual que
ocurría en el análisis anterior correspondiente al mes de agosto. Lo que sí se observa es que
el efecto del cultivo se ha modelado correctamente.
22
90
21
Hum edad relativa (% )
Te m peratura de l aire (º C)
85
20
19
18
80
75
17
70
16
4000
5000
6000
7000
8000
9000
500
Tie m p o (m inutos)
1000
1500
2000
2500
3000
3500
4000
Tiem po (m inutos)
Fig 3.35. Comparación temperatura aire real
y la modelada
Fig 3.36. Comparación humedad relativa del aire
real y modelada
La tabla 3.7 muestra los estadísticos utilizados hasta ahora de los resultados obtenidos en
estos análisis correspondientes al mes de enero. Lo primero que se observa es una
reducción del intervalo de variación de las variables a modelar, y aún así, la media de los
errores absolutos entre los valores medidos y los estimados por los modelos no son
mayores de un 5 %.
Temperatura aire
Humedad absoluta
Humedad relativa
11.5-25.5
7.6 10-3-13.6 10-3
49.7-100
(14 ºC)
(6 10-3 kg/kg)
(50.3 %)
0.52
2.82 10-4
2.53
Media
2.06
0.0036
17.19
Máximo
0.48
3.06 10-4
2.39
Desviación estándar
Tabla 3.7. Estadísticos de la diferencia entre los valores reales y simulados en el proceso de calibración.
Intervalo variación
129
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.3.2.6. Calibración del modelo de la radiación PAR
Con respecto al modelo de radiación PAR, representado mediante una ecuación algebraíca,
se ha utilizado un mes de datos sin blanqueo (enero de 2000) para comprobar los datos
proporcionados por los fabricantes del material de cubierta y de la malla de sombreo. Se
han corregido ligeramente los valores ya que con el tiempo se van perdiendo las
propiedades originales. Esta variación de los parámetros no la contempla el modelo ya que
no se conocen las ecuaciones que rigen la degradación de las características físicas y
químicas del material que forma la cubierta del invernadero. Como la degradación se
produce lentamente, se puede suponer que estos parámetros son constantes durante un
experimento de simulación que como máximo será de una campaña de cultivo.
Evidentemente, habrá que estimar sus valores en cada uno de los experimentos. Los
resultados para días soleados y nubosos, junto con la acción de la malla de sombreo, se
muestran en la figura 3.37, donde se puede observar que los datos reales presentan más
irregularidades que los estimados ya que el sensor se basa en fotocélulas, muy sensibles a
cualquier movimiento provocado, por ejemplo, por el viento sobre la estructura del
invernadero. De hecho, se observan medidas distintas de cero en periodos nocturnos. Por
otra parte, se observa cómo el modelo estima un valor mayor en los periodos de tiempo
posteriores al mediodía solar, debido a que por la situación del sensor en el invernadero,
recibe menos radiación por sombras de la estructura o porque atraviesa más capillas de la
estructura. Hay que recordar, que el modelo estima la radiación PAR en el interior a partir
de la radiación PAR en el exterior donde el sensor no se encuentra afectado por la
estructura del invernadero. Además, no se tiene en cuenta la orientación del invernadero, ni
el cambio de la posición del sol a lo largo de los días.
80
80
70
70
R adiació n PAR interior (W /m 2)
Radiació n P AR interior (W /m 2)
60
60
50
40
30
50
40
30
20
20
10
10
1000
2000
3000
4000
5000
6000
7000
8000
2000
9000
4000
6000
8000
10000
12000
14000
Tiem po (Minutos)
Tiem po (Minutos)
Fig. 3.37. Comparación radiación PAR interior real y Fig 3.38. Comparación radiación PAR interior con
modelada
blanqueado en la simulación
Los datos utilizados para estimar el efecto sobre el coeficiente de transmisión de la cubierta
cuando se blanquea, corresponde a un mes de datos entre el 10 de mayo y 10 de junio de
2000. La figura 3.38 muestra la disminución que experimenta la radiación cuando se
blanquea la cubierta, y cómo el modelo capta el cambio de la dinámica de esta variable.
Cuantitativamente, el error máximo del valor absoluto de la diferencia entre el valor real y
el estimado durante ese mes de datos es de 19 W/m2, con una media de 3.6 W/m2, y una
desviación estándar de 4.9 W/m2 sobre un intervalo de variación entre 0 y 91.73 W/m2, lo
que supone un error medio menor de un 6%.
130
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.3.3. Análisis de sensibilidad
Para estudiar la robustez de la formulación del modelo frente a la variación de los
parámetros óptimos obtenidos, cop, se ha realizado un análisis de sensibilidad utilizando
métodos numéricos [Cam96]. Se calcula la función de coste descrita en la ecuación (3.132)
para 21 valores de cada uno de los parámetros estimados, en un intervalo de variación de
±10% con respecto al valor óptimo, es decir en el intervalo [0.9cop , 1.1cop].
Un detalle que se observa en la mayoría de las figuras que se muestran a continuación,
correspondientes a las curvas de la variación de la función de coste en función de los
parámetros que caracterizan a los modelos, es que no son simétricas con respecto al
mínimo. Esto es debido, principalmente, a la dependencia no lineal de los modelos con los
parámetros. Aún así, se observa que en torno al ± 5% del valor óptimo de los parámetros, la
hipótesis de linealización es válida por lo que la elección de una función de coste cuadrática
se puede considerar correcta.
3.4.3.3.1 Análisis de sensibilidad del modelo de la temperatura del aire
La figura 3.39 muestra el análisis de sensibilidad para la temperatura del aire utilizando
datos de agosto del año 2000 en el invernadero sin cultivo y sin utilizar la calefacción,
observándose que una gran sensibilidad con respecto al parámetro Ccnv,cb-a1l correspondiente
al proceso de convección entre la superficie interior de la cubierta y el aire del invernadero
cuando la transmisión de calor se realiza en régimen laminar. Este hecho se puede explicar
debido a que la temperatura del invernadero depende del clima que se produce en el
exterior y la cubierta actúa como medio de unión entre ellos, por tanto una variación en este
proceso provocará una gran diferencia entre el valor real de la temperatura en el
invernadero y el valor que estima el modelo. También se puede observar que existen dos
grupos de parámetros que proporcionan una misma variación de la función de coste. La
figura 3.40 muestra con más detalle estos dos grupos, observándose que, después de la
cubierta, los parámetros a los que el modelo de la temperatura del aire es más sensible son
aquellos relacionados con los procesos de convección con el suelo ya que éste actúa como
regulador del clima aportando energía durante los periodos nocturnos por lo que influye en
gran medida sobre el clima interior.
Ccnv,ss-a3
100.5
Ccnv,c b-a1l
Ccnv,ss-a1l
100.4
99.76
Ccnv,ss-a1t
Ccnv,cb-a1t
100.3
99.75
Ccnv,cb-a1lm
||Xta,real-Xta,sim||2
||X ta,real-X ta,sim||2
Cven,cd
100.2
100.1
99.74
100
99.73
99.9
99.72
99.8
Cven,cv
99.71
-8
-6
-4
2
0
-2
Rango de variació n de pará metros
4
6
8
Fig 3.39. Análisis sensibilidad temperatura del aire
sin calefacción ni cultivo
Cperd,vb
Cperd,va
-10
-8
-6
-4
-2
0
2
Rango de variació n de pará m etros
4
6
8
Fig 3.40. Detalle de análisis sensibilidad temperatura
del aire sin calefacción ni cultivo
131
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La figura 3.40 también muestra que la temperatura del aire es muy poco sensible a los
parámetros relacionados con la ventilación, cven,cd, cven,cv, cperd,va y cperd,vb, hecho que resulta
extraño ya que es el principal sistema de actuación para refrigerar el invernadero, por lo que
se realizó un análisis de sensibilidad para un periodo diurno de 10 horas donde la
ventilación estuviera actuando durante un largo periodo de tiempo. Los resultados se
muestran en la figura 3.41 donde se puede observar que el resultado es similar. Una posible
causa del resultado obtenido es la baja tasa de ventilación que presentan los invernaderos
analizados por lo que este resultado puede que no sea extrapolable a otras estructuras.
C c nv,c b-a1l
108
30.02
106
30
104
C c nv,c al-a2
29.98
||X ta,real-X ta,sim||2
||X ta,real-X ta,sim||2
102
29.96
29.94
C c nv,s s -a3
29.92
100
98
C c nv,c al-a1
C c nv,s s -a1t
96
29.9
94
C ven,c d
29.88
92
C ven,c v
C perd,va
-10
-8
-6
-4
-2
0
2
Rango de variac ió n de pará m etros
4
6
8
10
Fig 3.41. Análisis sensibilidad temperatura del aire
durante periodo diurno en verano
-10
-8
-6
-4
-2
0
2
R ango d e variac ió n de pará m etros
4
6
8
10
Fig 3.42. Análisis sensibilidad temperatura del aire
con calefacción y cultivo
Se ha repetido el análisis en el periodo correspondiente al mes de enero de 2000 con un
cultivo medio desarrollado con utilización de la calefacción y se observa que en este caso,
la temperatura del aire es muy sensible a la variación de los parámetros correspondientes al
proceso de convección con las tuberías de calefacción, ccnv,cal-a1 y ccnv,cal-a2, tal y como se
muestra en la figura 3.42, donde no se puede observar la sensibilidad frente al resto de
parámetros. La figura 3.43 muestra una ampliación de esta zona de variación de la función
de coste, observándose una sensibilidad mayor frente a los parámetros correspondientes a la
convección con la cubierta y el suelo, tal y como se había deducido en los estudios
anteriores. Por tanto, la temperatura del aire interior es muy sensible a los parámetros de
convección con la cubierta y la calefacción, moderadamente robusta frente a los parámetros
de convección con el suelo y muy robusta frente a la variación de los parámetros que
caracterizan el intercambio de aire entre el interior y el exterior debido a la ventilación.
C c nv,c b-a1t
C c nd,s 1
90.8
47.2
90.78
47
C prof,s 2
C c nv,c b-a1tl
46.8
90.76
46.6
||Xts1,real-Xts1,s im ||2
||X ta,real-X ta,sim||2
90.74
90.72
C ven,c d
90.7
46.4
C c nd,s 2
46.2
46
45.8
90.68
45.6
C c nv,s s -a1l
C c t,s 1
90.66
45.4
45.2
90.64
C c nv,s s -a3
C perd,vb
-10
-5
0
Rango de variac ió n de pará m etros
5
-10
10
-8
-6
-4
-2
0
2
Rango de variac ió n de pará m etros
4
6
8
10
Fig 3.43. Detalle análisis sensibilidad temperatura Fig 3.44. Análisis sensibilidad temperatura primera
del aire con calefacción y cultivo
capa de suelo
132
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.3.3.2 Análisis de sensibilidad del modelo de la temperatura de la primera capa de suelo
Con respecto al análisis de sensibilidad de la temperatura de la primera capa de suelo, los
resultados se muestran en la figura 3.44 donde se puede observar que el modelo es más
sensible al coeficiente de conducción con la superficie de suelo, ccond,s1, a continuación a los
parámetros correspondientes al proceso de conducción con la segunda capa de suelo, para
terminar con la sensibilidad frente a la capacidad térmica de la primera cada de suelo. Aún
así, se observa que el grado de sensibilidad con respecto a todos los parámetros es de orden
similar ya que el valor de la función de coste varía entre 45 y 48 por lo que no se puede
deducir una fuerte sensibilidad frente a alguno de los parámetros.
3.4.3.3.3 Análisis de sensibilidad del modelo de la temperatura de cubierta
En la figura 3.45 se puede observar el alto grado de sensibilidad del modelo de la
temperatura de la cubierta frente a los parámetros correspondientes a los procesos de
radiación térmica debidos a la calefacción y el suelo, considerados como el producto del
coeficiente de emisión de radiación térmica del elemento considerado por el factor de
forma que presenta con la cubierta. Esto es evidente, ya que la diferencia de temperatura
entre los distintos elementos es la fuente de los procesos de transmisión de calor. La
temperatura de calefacción es alta en relación a la del resto de elementos por lo que su
efecto es mayor, así que hay que estimar adecuadamente los parámetros que rigen la
transmisión de calor por radiación térmica, ya que en estos procesos, la diferencia de
temperatura se encuentra elevada a 4, por lo que su aportación es muy importante. Frente al
resto de parámetros (figura 3.46) presenta el mismo grado de robustez, aunque es más
sensible a aquellos relacionados con el proceso de convección con el exterior ya que, como
se ha indicado en el análisis de sensibilidad de la temperatura del aire, el clima exterior es
el que condiciona el comportamiento del resto de elementos.
190
Cc nv,cb-e3
Cc nv,cb-e2
180
98
170
Crt,c b-c al
Cc nv,cb-e4
160
||X tc,real-X tcb,sim||
||Xtc,real-X tcb,sim||
97.5
150
140
130
Crt,c b-s s
97
Cc nv,cb-i1t
Cc nv,cb-e1
120
96.5
Cc nv,cb-i1l
110
100
Crt,c b-bc
96
90
-10
Cc nv,cb-i1lm
Cvv,limc nv
-8
-6
-4
-2
0
2
4
6
8
10
-10
Fig 3.45. Análisis sensibilidad temperatura de la
cubierta
-8
-6
-4
-2
0
2
4
6
8
10
Rango de variació n de pará metros
Rango de variació n de pará metros
Fig 3.46. Detalle análisis sensibilidad temperatura de
la cubierta
3.4.3.3.4 Análisis de sensibilidad del modelo de la temperatura de la superficie de suelo
Algunos de las conclusiones anteriores son extrapolables a la temperatura de la superficie
del suelo, donde el modelo es muy sensible a la variación de los parámetros relacionados
con los procesos de radiación térmica como se observa en la figura 3.47, aunque es más
sensible al parámetro correspondiente al intercambio de radiación térmica con la bóveda
celeste, siendo la sensibilidad con respecto a la cubierta y a la calefacción casi similares.
133
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La figura 3.48 muestra una ampliación del análisis de sensibilidad correspondiente al resto
de parámetros y como era de esperar el modelo es más sensible al proceso de conducción
con la primera capa de suelo que al proceso de convección con el aire interior, frente al que
es muy robusto. Al tratarse de una masa térmica de gran extensión, los procesos de
conducción térmica son determinantes.
170
Cc nd,s 1
Crt,ss -bc
97.5
160
97
150
96.5
||Xts s ,real-Xts s ,s im ||2
||Xtss ,real-Xts s ,s im ||2
140
Crt,ss -c b
Crt,ss -c al
130
96
95.5
120
95
Cc t,s s
110
94.5
100
94
Cc nv,s s-a1t
Cc nv,s s-a1l
90
-10
-8
-6
2
0
-2
Rango de variació n de pará metros
-4
6
4
8
-10
10
Fig 3.47. Análisis sensibilidad temperatura de la
superficie del suelo
-8
-6
-4
-2
0
2
Rango de variació n de pará m etros
4
6
8
10
Fig 3.48. Detalle análisis de sensibilidad temperatura
superficie de suelo
3.4.3.3.5 Análisis de sensibilidad del modelo de la humedad del aire
Se ha realizado el análisis de sensibilidad de la humedad relativa en dos periodos distintos
de tiempo. El primero de ellos corresponde a un periodo sin calefacción y sin cultivo,
pudiéndose observar en la figura 3.49, que el modelo de humedad es más sensible a los
parámetros relacionados con el proceso de evaporación en las balsas y, más concretamente,
al término relacionado con la radiación solar. Esto es debido a que, en estas condiciones,
este proceso es la principal fuente de aporte de vapor de agua al aire del invernadero,
producido por el déficit de presión de vapor del aire del invernadero y, evidentemente en
más medida, con la evaporación del agua de las balsas función de la radiación que alcanza
su superficie. Por otra parte, es menos sensible a los parámetros relacionados con las
pérdidas con el exterior y al coeficiente de viento que caracteriza al proceso de ventilación
natural, al igual que ocurre con el modelo de la temperatura de aire como se ha comentado
anteriormente.
Crt,cu-cal
729.04
1205
Clt,bals a1
729.02
1204.5
Clt,bals a2
1204
||Xha,real-Xha,s im ||2
||Xha,real-Xha,s im ||2
729
728.98
728.96
1203.5
Crt,cu-bc
1203
Crt,cu-cb
Cven,cd
1202.5
728.94
Clt,balsa1
1202
728.92
Ccnv,ss-a1
Cven,cv
Cperd,va
Cperd,vb
1201.5
Cperd,vb
-10
-5
0
Rango de variació n de pará metros
5
-10
10
Fig 3.49. Análisis sensibilidad humedad relativa del
aire sin cultivo
-8
-6
-4
2
0
-2
Rango de variació n de pará metros
4
6
8
10
Fig 3.50. Análisis sensibilidad humedad relativa del
aire con cultivo
134
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
En el segundo periodo de tiempo en el que se encuentra un cultivo en un estado de
desarrollo medio, se observa que el modelo de humedad es muy sensible a los parámetros
relacionados con los procesos de radiación térmica, en este caso los correspondientes al
cultivo, tal y como se muestra en la figura 3.50. Esto es debido a que, en este caso, la
principal fuente de aporte de vapor de agua es el cultivo mediante la transpiración que
depende directamente de la radiación neta que alcanza al cultivo, es decir, los procesos
relacionados con la radiación de onda corta y la radiación térmica. La sensibilidad con
respecto al resto de parámetros es similar al periodo de tiempo correspondiente a un
invernadero sin cultivo. Por esta razón, en la figura 3.50 no se muestran el parámetro al que
corresponden todas las gráficas ya que coinciden con los resultados mostrados en la figura
3.49.
3.4.4. Validación del modelo
3.4.4.1. Metodología utilizada
Para validar el modelo, se han utilizado los datos procedentes de las experiencias realizadas
en el marco del proyecto CAMED donde se almacenan cada minuto los datos de
temperatura, humedad y radiación PAR en cada uno de los cuatro invernaderos que se
encuentran en la parcela de ensayos, así como las medidas características de la estación
meteorológica exterior (temperatura, humedad, radiación, velocidad del viento, dirección
del viento y presencia de lluvia) y el estado de los sistemas de actuación instalados
(posición de las ventilaciones y mallas de sombreo, temperatura de las tuberías de
calefacción de cada uno de los invernaderos y del agua de salida de la caldera, así como del
estado de las bombas de circulación del agua).
Como ya se ha indicado, no se adquirieron datos de algunas variables de estado del sistema
como la temperatura de la cubierta, de la superficie de suelo y de su primera capa, por lo
que se va a utilizar el modelo del clima completo (configuración número 5, descrita en el
apartado 3.4.3.2.4. Calibración de la humedad y temperatura del aire con el invernadero
en vacío) para validar únicamente las salidas correspondientes a la temperatura y humedad
del aire del invernadero. Como todas las variables se encuentran íntimamente relacionadas,
si se validan dos de ellas, se puede suponer que el comportamiento del resto de ellas es
correcto. Además, las dos variables más importantes, ya que son las que influyen en el
crecimiento del cultivo, son las que se han validado. En cualquier caso, y aunque no se
muestren las gráficas, se ha comprobado que el comportamiento de las variables de estado
restantes es el que cabe esperar.
Las experiencias realizadas para validar el modelo son las siguientes:
• Validación en el invernadero tipo Araba número 2. Después de calibrar el modelo en
este invernadero, proceso descrito en el apartado anterior, con datos de campañas de
cultivo de invierno y verano del año 2000, se han realizado los siguientes ensayos:
Evaluación del modelo en las mismas campañas de cultivo de otro año, en concreto,
enero y agosto de 1998.
Evaluación del modelo en una campaña de cultivo distinta de las utilizadas para la
estimación de los parámetros concretamente con datos del mes de abril de la
primavera de 1998.
135
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• Validación en el invernadero tipo Araba número 3. Utilizando los mismos parámetros
obtenidos en el invernadero Araba número 2, se comprueba la validez del modelo en el
invernadero Araba número 3 cuya estructura y sistemas de actuación son similares entre
si, en tres campañas de cultivo diferentes: invierno (enero 1998), primavera (abril 1998)
y verano (agosto 1998).
• Validación en el invernadero tipo Inamed número 1. Después de estimar los parámetros
característicos del modelo para la estructura Inamed (completamente diferente al tipo
Araba y con sistemas de actuación distintos) y utilizando los datos correspondientes a las
campañas de invierno y verano del año 2000, se procede a validar el modelo, realizando
ensayos en tres campañas de cultivo diferentes: invierno (enero 1998), primavera (abril
1998) y verano (agosto 1998).
Como se observa, para validar el modelo se han llevado a cabo simulaciones con un alto
grado de exigencia, por lo que si el comportamiento de las salidas del modelo es correcto
con datos de otras campañas distintas de las utilizadas para la estimación de los parámetros
y en estructuras de invernaderos distintas, se puede confirmar la validez del modelo. A
continuación, y para una mejor comprensión de los resultados, se muestran las
perturbaciones a las que se encuentran sometidos los invernaderos en los meses de enero,
abril y agosto de 1998 en las figuras 3.51, 3.52 y 3.53 respectivamente.
900
20
18
700
Temperatura exterior (º C )
Radiació n global exterior (W /m2)
800
600
500
400
300
200
16
14
12
10
100
8
0
50
100
150
200
50
250
a. Radiación global en el exterior
150
200
250
b. Temperatura exterior
82
10
80
Humedad relativa exterior (%)
9
Velocidad viento exterior (m/s)
100
Tiempo (Horas)
Tiempo (Horas)
8
7
6
5
4
3
2
78
76
74
72
70
68
66
64
1
62
50
100
150
200
50
250
100
150
200
Tiempo (Horas)
Tiempo (Horas)
c. Velocidad del viento en el exterior filtrada
d. Humedad relativa en el exterior
Fig. 3.51. Perturbaciones durante enero 1998
136
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
22
1000
Temperatura exterior (º C )
Radiació n global exterior (W /m2)
1200
800
600
400
200
20
18
16
14
12
0
50
100
150
200
0
50
Tiempo (Horas)
a.
Radiación global en el exterior
150
200
b. Temperatura exterior
12
90
Humedad relativa exterior (%)
V elocidad viento exterior (º )
100
Tiempo (Horas)
10
8
6
4
85
80
75
70
2
65
0
50
100
150
200
50
Tiempo (Horas)
100
150
200
Tiempo (Horas)
c. Velocidad del viento en el exterior filtrada
d. Humedad relativa en el exterior
Fig. 3.52. Perturbaciones durante abril 1998
1000
32
800
Temperatura exterior (º C )
Radiació n global exterior (W /m2)
900
700
600
500
400
300
30
28
26
24
22
200
20
100
50
100
150
200
50
Tiempo (Horas)
100
150
Tiempo (Horas)
a. Radiación global en el exterior
b. Temperatura exterior
137
200
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
10
90
9
Humedad relativa exterior (%)
Velocidad viento exterior (m/s)
80
8
7
6
5
4
3
2
70
60
50
40
1
30
50
100
150
200
20
250
40
60
80
100
120
140
160
180
200
220
Tiempo (Horas)
Tiempo (Horas)
c. Velocidad del viento en el exterior filtrada
d. Humedad relativa en el exterior
Fig. 3.53. Perturbaciones durante agosto 1998
3.4.4.2. Validación del modelo en el invernadero Araba número 2
El primer ensayo realizado para validar el modelo climático diseñado ha consistido en
comprobar el comportamiento del modelo en los mismos meses que se han utilizado para
calibrar el modelo, pero en otras campañas, concretamente con los meses de enero y agosto
de 1998. En cada una de las experiencias de validación se han utilizado los datos
correspondientes a quince días tomados con un periodo de muestreo de un minuto, es decir
21600 datos. La figura 3.54 muestra las entradas de control del modelo calculadas por el
sistema de control comercial que se instaló durante el mes de agosto de 1998, en función de
las consignas de temperatura nocturna y diurna, humedad y radiación solar que los técnicos
responsables del cultivo estimaron convenientes para un cultivo de tomate en una fase de
desarrollo temprano (índice área foliar 0.5). La temperatura de las tuberías de calefacción
no se muestra ya que en ese periodo de tiempo no se utilizó. Como se puede observar, la
malla de sombreo permanecía extendida durante todo el día para bajar la temperatura, al
igual que la ventilación, que permanecía abierta incluso en periodos nocturnos. Este tipo de
dinámica de los sistemas de actuación proporciona un buen banco de pruebas para estudiar
el comportamiento del modelo ante distintas situaciones.
400
35
350
Apertura malla de sombreo (cm)
Apertura ventilació n (º )
30
25
20
15
10
5
300
250
200
150
100
50
50
100
150
200
50
Tiempo (Horas)
100
150
Tiempo (Horas)
a. Posición de ventilación
b. Posición malla de sombreo
Fig. 3.54. Variables de control durante agosto 1998 en invernadero Araba número 2
138
200
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La figura 3.55 muestra la respuesta del modelo de temperatura de aire. Las gráficas
continuas y oscuras representan a las medidas reales y las gráficas de color más claro o
discontinuo representan a los valores estimados por el modelo. Para apreciar mejor el
comportamiento del modelo, en la figura 3.55.b se muestra un detalle de dos días. Como se
puede observar, se estima correctamente la temperatura del aire, tanto en periodos diurnos
como nocturnos, aunque la subestima para días claros y con el invernadero cerrado. Este
comportamiento también se apreciaba en la fase de calibración del modelo y puede que se
deba a algún factor relacionado con el balance de masas de vapor de agua, al sobrestimar
alguno de los aportes.
42
45
40
T em pe ratura aire invernade ro (º C )
Tem peratura aire invernadero (º C )
38
40
35
30
36
34
32
30
28
26
25
24
22
20
2000
4000
6000
8000
10000
12000
4500
4000
3500
3000
2500
2000
14000
Tiempo(minutos)
Tiempo(minutos)
a. Resultado en diez días
b. Detalle comparación durante dos días
Fig. 3.55. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 1998
La respuesta del modelo de humedad se muestra en la figura 3.56, y como se puede
observar, capta la dinámica del sistema, aunque como era de esperar sobrestima la humedad
en algunos intervalos de tiempo.
85
85
80
Humedad relativa aire invernadero (% )
Humedad relativa aire invernadero (% )
80
75
70
65
60
55
50
45
75
70
65
60
55
50
45
40
40
0
2000
4000
6000
8000
10000
12000
14000
6500
Tiempo (Minutos)
7000
7500
8000
8500
9000
9500
10000
10500
11000
Tiempo (Minutos)
a. Resultado en diez días
b. Detalle comparación durante dos días
Fig. 3.56. Comparación humedad relativa real y modelada del invernadero Araba número 2 agosto 1998
Estas experiencias se han repetido para el mes de enero de 1998, con un cultivo con índice
de área foliar de 4, unas perturbaciones completamente distintas al caso anterior (figura
3.51) y unas entradas de control (figura 3.57) acordes a estos periodos del año. Como se
puede observar, la malla de sombreo casi no se utiliza, al igual que ocurre con la
ventilación, con aperturas muy pequeñas. Sin embargo, como la temperatura exterior es
baja, se utiliza la calefacción por lo que la temperatura de las tuberías es elevada.
139
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
En la noche del sexto día no se utilizó la
calefacción, tal y como se puede observar en
la figura 3.57.c, por lo que se puede analizar la
respuesta del modelo a este tipo de cambios en
la señal de control. La figura 3.58, muestra
que los resultados obtenidos de temperatura de
aire con el modelo son correctos, captando la
dinámica del sistema con este tipo de
perturbaciones de invierno, y ante distintos
estados de los sistemas de actuación. La figura
3.58.b muestra, con más detalle, el
comportamiento del modelo con respecto a
periodos nocturnos con y sin calefacción.
Apertura ventilació n (º )
30
20
15
10
5
0
50
100
150
200
250
Tiempo (Horas)
a. Posición de ventilación
400
Temperatura tuberí as calefacció n (º C )
80
350
Apertura malla de sombreo (cm)
25
300
250
200
150
100
50
70
60
50
40
30
20
0
50
100
150
200
250
300
20
40
60
80
Tiempo (Horas)
100
120
140
160
180
200
220
Tiempo (Horas)
b. Apertura malla de sombreo
c. Temperatura tuberías de calefacción
Fig. 3.57. Perturbaciones y variables de control durante enero 1998 en invernadero Araba 2
23
23
22
T em peratura aire invernadero (º C)
T em peratura aire invernadero (º C)
22
21
20
19
18
17
16
21
20
19
18
17
16
15
15
14
14
2000
4000
6000
8000
10000
12000
5000
Tiem po (Minutos)
5500
6000
6500
7000
7500
8000
8500
Tiem po (Minutos)
a. Resultado en nueve días
b. Detalle comparación durante tres días
Fig. 3.58. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 1998
Con respecto a la humedad, los resultados se muestran en la figura 3.59, y como se puede
observar, la mayor parte del tiempo los valores son elevados, mayores de un 80%, debido a
la evapotranspiración por la masa vegetal que existía en esa fase de desarrollo del cultivo.
El modelo capta la dinámica del sistema y, como ocurría en los análisis anteriores,
sobrestima su valor en días claros con alta radiación y con la ventilación cerrada.
140
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
90
Hum edad relativa aire invernadero (% )
Hum edad relativa aire invernadero (% )
90
85
80
75
70
85
80
75
70
65
65
60
2000
4000
6000
8000
10000
12000
14000
5000
5500
6000
Tiem po (Minutos)
6500
7000
7500
8000
8500
Tiem po (Minutos)
a. Resultado en nueve días
b. Detalle comparación durante tres días
Fig. 3.59. Comparación humedad relativa real y modelada del invernadero Araba número 2 enero 1998
El siguiente ensayo de validación realizado
consiste en simular para otros periodos del año
distintos a los utilizados para calibrar el
modelo, por ejemplo durante una campaña de
primavera con un cultivo de tomate distinto al
anterior con área foliar de 2.8. Las entradas de
control que estimó el sistema comercial son las
que se muestran en la figura 3.60, en la que se
observa que debido a las mejoras climáticas en
el exterior, se utiliza la malla de sombreo y la
ventilación, dejando la calefacción de actuar a
altas temperatura a partir del sexto día que se
muestra en la gráfica.
35
A pertura ventilació n (º )
30
25
20
15
10
5
0
20
40
60
80
100
120
140
160
180
200
220
Tiempo (Horas)
a. Posición de ventilación
Temperatura tuberí as de calefacció n (º C )
400
A pertura malla de sombreo (cm)
350
300
250
200
150
100
50
50
100
150
200
55
50
45
40
35
30
25
20
50
Tiempo (Horas)
100
150
200
Tiempo (Horas)
b. Apertura malla de sombreo
c. Temperatura tuberías de calefacción
Fig. 3.60. Perturbaciones y variables de control durante abril 1998 en invernadero Araba 2
La figura 3.61 muestra los resultados obtenidos durante el mes de abril de 1998, y como se
puede observar, el comportamiento de la temperatura es correcto, tanto para días nublados
como soleados (figura 3.61.b) Los resultados de la salida de humedad relativa también son
correctos y no se han incluido las gráficas por no aumentar en demasía el número de
figuras.
141
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
36
34
35
T em peratura aire invernadero (º C )
T em peratura aire invernadero (º C )
32
30
25
20
30
28
26
24
22
20
18
16
15
1000
2000
3000
4000
5000
6000
7000
8000
9000
8000
10000
8500
9000
9500
10000
Tiempo (Minutos)
Tiempo (Minutos)
a. Resultado en siete días
b. Detalle comparación durante dos días
Fig. 3.61. Comparación temperatura real y modelada del invernadero Araba número 2 en abril 1998
Cuantitativamente, la tabla 3.8 muestra los estadísticos de comparación entre las muestras
de temperatura real utilizadas y los datos que proporciona el modelo en los mismos
instantes en los que se realizaron las medidas. Como se puede observar, el error relativo en
el intervalo de variación de la temperatura de la media de los errores absolutos no es mayor
de un 6.5 %.
Enero 1998
Abril 1998
Agosto 1998
13.76-23.55
14.5-38.6
19.4-48.6
(9.79 ºC)
(24.1 ºC)
(29.2 ºC)
0.63
0.95
0.77
Media
3.02
5.5
4.07
Máximo
0.51
1.1
0.64
Desviación estándar
Tabla 3.8. Estadísticos de validación del modelo de temperatura en el invernadero tipo Araba número 2.
Intervalo variación
De forma similar, la tabla 3.9 se muestra los estadísticos de comparación entre los valores
reales y los estimados por el modelo de humedad cada minuto. En los intervalos de
variación de la humedad en cada uno de los ensayos, el error relativo de la media de los
errores absolutos no es mayor de un 7%.
Enero 1998
Abril 1998
Agosto 1998
55.64-100
58.95-92.05
36.36-87.47
(44.36 %)
(33.1 %)
(51.11 %)
3.04
2.12
2.56
Media
19.61
11.74
17.46
Máximo
2.98
2.67
2.31
Desviación estándar
Tabla 3.9. Estadísticos de validación del modelo de humedad en el invernadero tipo Araba número 2
Intervalo variación
Del análisis realizado en los ensayos anteriores, tanto de forma cuantitativa como
cualitativa, se puede confirmar la validez del modelo desarrollado ya que capta
completamente la dinámica de las dos variables principales del sistema y los errores
cometidos se encuentran en un intervalo aceptable para este tipo de aplicaciones.
Evidentemente, esta afirmación es válida sólo para este invernadero, por lo que para poder
generalizar esta conclusión, en los siguientes apartados se van a mostrar los resultados de
los ensayos de validación del modelo similares a los descritos, en otros invernaderos con
distintas estructuras, distintos sistemas de actuación y sometidos a estrategias de control
diferentes.
142
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
3.4.4.3. Validación del modelo en el invernadero Araba número 3
Apertura de ventilació n (º )
Como se ha descrito en el capítulo 2, este invernadero es exactamente igual, incluso con la
misma orientación, que el invernadero tipo Araba número 2 utilizado para diseñar y calibrar
el modelo. Se ha supuesto que los parámetros obtenidos en el proceso de calibración son
similares ya que los invernaderos son de la
misma estructura y del mismo tamaño.
35
Además, los sistemas de actuación instalados
30
(ventilación, calefacción y malla de sombreo)
presentan las mismas características ya que se
25
han dimensionado para el mismo sistema
20
invernadero. Evidentemente, las acciones de
15
control son diferentes ya que las consignas de
temperatura y humedad han sido diferentes en
10
los distintos invernaderos, tal y como se
5
observa en la figura 3.62, donde se muestran la
posición de la ventilación, malla de sombreo y
20
40
60
80
100 120 140 160 180 200 220
Tiempo (Horas)
temperatura de las tuberías de calefacción en el
mes de abril de 1998.
a. Posición ventilación natural
Temperatura tuberí as de calefacció n (º C )
400
Apertura malla de sombreo (cm)
350
300
250
200
150
100
50
55
50
45
40
35
30
25
20
15
50
100
150
200
50
Tiempo (Horas)
100
150
200
Tiempo (Horas)
b. Apertura malla de sombreo
c. Temperatura tuberías de calefacción
Fig. 3.62. Variables de control durante abril 1998 en invernadero Araba 3
La figuras 3.63 y 3.64 muestran los resultados de la simulación del modelo con estas
entradas de control y las perturbaciones mostradas en la figura 3.52, en comparación con
las medidas reales de temperatura y humedad relativa. Como se puede observar el
comportamiento del modelo de temperatura del aire es adecuado y capta las variaciones en
las entradas de control tanto en la ventilación natural, como con la calefacción, tal y como
se muestra en la figura 3.63.b donde se presenta un detalle de tres días con variaciones
bruscas en la posición de la ventilación y distintos comportamientos de la temperatura
exterior durante periodos nocturnos. Con respecto a la humedad del aire, presenta un
comportamiento peor que los resultados de la temperatura, aunque aceptables ya que capta
la dinámica dominante de esta variable y los errores se encuentran dentro de unos límites
aceptables. Las diferencias pueden ser debidas a que las balsas en este invernadero
evaporen menos o que se encuentren más aisladas, y a que no se conoce completamente el
estado real del cultivo.
143
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
26
50
24
Te m pe ratura aire invernadero (º C)
T em pe ratura aire invernadero (º C)
45
40
35
30
22
20
18
16
25
14
12
20
0.8
1
1.2
1.4
1.6
1.8
2
2.2
Tiem po (Minutos)
1.05
x 10
1.1
1.15
1.2
1.25
1.3
1.35
1.4
Tiem po (Minutos)
4
x 10
4
a. Resultado en diez días
b. Detalle comparación durante tres días
Fig. 3.63. Comparación temperatura real y modelada del invernadero Araba número 3 en abril 1998
90
90
Hum ed ad relativa aire invernad ero (% )
Hum ed ad relativa aire invernad ero (% )
80
80
70
60
50
70
60
50
40
40
30
1000
2000
3000
4000
5000
6000
7000
8000
9000
1000
1500
2000
Tiem po (Minutos)
2500
3000
3500
4000
Tiem po (Minutos)
a. Resultado en siete días
b. Detalle comparación durante dos días
Fig. 3.64. Comparación humedad relativa real y modelada del invernadero Araba número 3 en abril 1998
El siguiente ensayo de validación realizado consiste en estudiar el comportamiento del
modelo en condiciones de verano (perturbaciones mostradas en la figura 3.53 para agosto
de 1998), con un cultivo en los primeros estados de desarrollo con un índice de área foliar
menor que la unidad y con las siguientes entradas de control. No se incluye la temperatura
de las tuberías de calefacción ya que, en este periodo, no se utilizó este actuador.
400
35
Posició n malla de sombreo (cm)
350
Apertura ventilació n (º )
30
25
20
15
10
5
300
250
200
150
100
50
50
100
150
200
250
50
Tiempo (Horas)
100
150
200
Tiempo (Horas)
a. Posición ventilación natural
b. Apertura malla de sombreo
Fig. 3.65. Variables de control durante agosto 1998 en invernadero Araba 3
144
250
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
La figura 3.66 muestra los resultados de la estimación de la temperatura del aire en el
interior del invernadero araba número 3, y como se puede observar presenta un buen
comportamiento, similar al comentado en el ensayo anterior correspondiente al mes de
abril.
50
50
45
Tem peratura aire invernadero (º C )
Tem peratura aire invernadero (º C)
45
40
35
30
40
35
30
25
25
20
0.8
1
1.2
1.4
1.6
1.8
2
Tiempo (Minutos)
1.35
2.2
x 10
1.4
1.45
1.5
1.55
Tiem po (Minutos)
4
x 10
4
a. Resultado en diez días
b. Detalle comparación durante dos días
Fig. 3.66. Comparación temperatura real y modelada del invernadero Araba número 3 en agosto 1998
Aunque no se han mostrado gráficamente todos los ensayos de validación realizados en este
invernadero (no proporcionan más información a las conclusiones) en la tabla 3.10 se
resumen los estadísticos de comparación de los valores reales de las medidas y los
estimados por el modelo (error absoluto), obteniéndose resultados similares a los obtenidos
en el invernadero patrón tipo Araba número 2. El error medio de temperatura en cada uno
de los tres periodos no es mayor de un 6% y el de humedad relativa no es superior a un 8%.
Enero 1998
11.43-21.67
(10.24 ºC)
0.56
4.25
0.52
Temperatura
Abril 1998
11.3-27.3
(16.0 ºC)
0.58
3.99
0.58
Agosto 1998
18.5-51.1
(32.6 ºC)
1.12
6.05
0.94
Enero 1998
45.4-99.1
(53.7 %)
4.11
17.85
3.99
Humedad
Abril 1998
29.3-88.66
(59.36 %)
4.54
20.84
4.09
Agosto 1998
31.42-92.21
Intervalo
(60.79 %)
variación
3.62
Media
14.89
Máximo
3.43
Desviación
estándar
Tabla 3.10. Estadísticos de validación del modelo en el invernadero tipo Araba número 3
3.4.4.4. Validación del modelo en el invernadero Inamed número 1
Como se ha comentado en el capítulo 2, este invernadero presenta un tamaño y un
estructura distinta a los analizados anteriormente tipo Araba (es de cubierta asimétrica),
además de estar orientada de forma diferente (este-oeste). Además, los sistemas de
actuación, excepto la malla de sombreo que no se ha instalado, aunque son similares, se han
dimensionado con distintas características como la longitud de tuberías de calefacción,
ángulo máximo de apertura de las ventilaciones o su localización en la cubierta del
invernadero. Evidentemente, debido a estas consideraciones, se deben estimar los
parámetros que caracterizan al modelo. Utilizando la metodología propuesta en el apartado
3.4.3. y con los datos de agosto y enero del año 2000, se ha calibrado el modelo del clima
para este invernadero.
145
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Temperatura tuberí as de calefacció n (º C )
El proceso de validación ha seguido las pautas del realizado en el invernadero tipo Araba
número 3, es decir, se han realizado ensayos con los datos de quince días de los meses de
enero, abril y agosto de 1998. Como ejemplo, se muestran los resultados obtenidos en abril
de 1998 con un cultivo en estado de desarrollo medio e índice de área foliar de 3, las
perturbaciones que se muestran en la figura 3.52, y con las siguientes entradas de control
para ventilación y calefacción.
35
A pertura ventilació n (º )
30
25
20
15
10
5
70
60
50
40
30
20
0
20
40
60
80
100
120
140
160
180
200
220
50
100
Tiempo (Horas)
150
200
Tiempo (Horas)
a. Apertura de ventilación natural
b. Temperatura tuberías de calefacción
Fig. 3.67. Variables de control durante abril 1998 invernadero Inamed número 1
Como se puede observar en la figura 3.68, la estimación de la temperatura por parte del
modelo presenta un buen comportamiento, respondiendo correctamente a los cambios en
las entradas de control de ventilación en los periodos diurnos, así como las variaciones en
la temperatura de las tuberías de calefacción durante la noche. Se observa, al igual que en
los casos anteriores, que con el invernadero cerrado subestima los valores de temperatura
en torno al mediodía solar (radiación solar máxima) por causas similares a las descritas
anteriormente.
32
32
30
Tem peratura aire invernadero (º C )
Tem peratura aire invernadero (º C)
30
28
26
24
22
20
28
26
24
22
20
18
18
16
16
2000
4000
6000
8000
10000
12000
3000
14000
Tiempo (Minutos)
3500
4000
4500
5000
5500
6000
6500
7000
7500
Tiempo (Minutos)
a. Resultado en diez días
b. Detalle comparación durante tres días
Fig. 3.68. Comparación temperatura real y modelada del invernadero Araba número 3 en abril 1998
Con respecto a la humedad, la figura 3.69 muestra los resultados obtenidos y como se
puede observar, capta perfectamente la dinámica de la variable a modelar, presentando un
mejor comportamiento que la estimación de la humedad relativa por parte del modelo
completo simulado en los otros dos invernaderos tipo Araba y con los mismos datos de
perturbación.
146
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
90
Hum edad relativa aire invernadero (% )
Hum edad relativa aire invernadero (% )
90
85
80
75
70
85
80
75
70
65
65
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
4500
4000
11000
5000
8000
7500
7000
6500
6000
5500
Tiempo (Minutos)
Tiempo (Minutos)
a. Resultado en nueve días
b. Detalle comparación durante tres días
Fig. 3.69. Comparación humedad real y modelada del invernadero Araba número 3 en abril 1998
La figura 3.71 muestra los resultados de la
temperatura del aire durante doce días del mes
de agosto de 1998, con las perturbaciones de la
figura 3.53 y con la entrada de ventilación que
se indica en la figura 3.70. En este periodo de
tiempo no se utiliza la calefacción por lo que no
se muestra el valor de las tuberías de
calefacción. Como se puede observar la
estimación del modelo se puede considerar
como correcta ya que evoluciona de forma
similar a la dinámica real y las desviaciones se
encuentran en los márgenes aceptables para en
este tipo de aplicaciones agrícolas.
35
A pertura ventilació n (º )
30
25
20
15
10
5
50
100
150
200
250
Tiempo (Horas)
Fig. 3 70. Posición ventilación del invernadero
Inamed número 1 en agosto 1998
42
40
40
Tem peratura aire invernadero (º C )
Tem peratura aire invernadero (º C )
38
35
30
25
36
34
32
30
28
26
24
22
20
2000
4000
6000
8000
10000
12000
14000
1.05
16000
1.1
1.15
1.2
1.25
1.3
Tiempo (Minutos)
Tiempo (Minutos)
1.35
1.4
1.45
x 10
4
a. Resultado en doce días
b. Detalle comparación durante dos días
Fig. 3.71. Comparación temperatura real y modelada del invernadero Inamed número 1 en agosto 1998
La tabla 3.11. muestra los estadísticos resultantes del análisis del valor absoluto de la
diferencia entre el valor de las medidas reales tomadas en el invernadero y los valores
estimados por el modelo, obteniéndose resultados similares y del mismo orden que los
resultantes del análisis de los otros dos invernaderos. Como se puede observar, el error
relativo en el intervalo de variación no es mayor de un 4.5 % con respecto a la temperatura
y de un 7 % con respecto a la humedad relativa.
147
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
Enero 1998
12.54-23.66
(11.12 ºC)
0.48
3.12
0.43
Temperatura
Abril 1998
14.72-32.53
(17.81 ºC)
0.63
4.89
0.55
Agosto 1998
18.5-51.1
(32.6 ºC)
1.12
6.05
0.94
Enero 1998
59.4-100
(40.6 %)
3.26
16.01
3.17
Humedad
Abril 1998
63.18-93.41
(30.23 %)
2.11
12.99
2.19
Agosto 1998
31.42-92.21
Intervalo
(60.79 %)
variación
4.01
Media
15.54
Máximo
3.97
Desviación
estándar
Tabla 3.11. Estadísticos de validación del modelo en el invernadero tipo Inamed número 1
Basándose en todas estas experiencias y al buen comportamiento que ha presentado el
modelo completo del clima de un invernadero en cada uno de los tres invernaderos
analizados, se puede concluir admitiendo la validez del modelo diseñado para su aplicación
en la simulación del clima que se genera en los invernaderos de zonas mediterráneas. Este
tipo de resultados no se había obtenido nunca en invernaderos ubicados en las zonas de
producción del sudeste de España, mejorando los resultados obtenidos por otros autores en
zonas mediterráneas y estructuras de invernadero industriales como los que se obtienen en
[Wan00].
3.5. CONCLUSIONES Y RESUMEN DE APORTACIONES
En este capítulo se han descrito los principales procesos físicos que se producen en los
distintos elementos que forman un invernadero y cómo afectan al clima interior,
principalmente a la temperatura y la humedad del aire interior, así como el efecto de los
sistemas de actuación que se instalan comúnmente en los invernaderos de la zona
mediterránea. A continuación se ha expuesto la estructura del modelo diseñado y las
hipótesis de partida, junto con las ecuaciones que describen a las seis variables de salida
(radiación PAR, temperatura y humedad del aire interior, temperatura de cubierta,
temperatura de la superficie de suelo y temperatura de la primera capa de suelo).
Posteriormente, se ha descrito la implementación del mismo y las técnicas utilizadas para la
estimación de los parámetros que caracterizan a cada uno de los procesos físicos
modelados, así como un análisis de la sensibilidad de los submodelos a cada uno de los
parámetros en un invernadero que se ha considerado como patrón. Para finalizar se han
expuesto las experiencias realizadas en tres invernaderos diferentes que han demostrado la
validez del modelo diseñado. De estas experiencias se extraen las siguientes conclusiones y
aportaciones:
• Como se conocen los procesos internos que determinan la dinámica del clima que se
genera en el interior de un invernadero, se pueden diseñar e implementar modelos
basados en principios físicos que se puedan utilizar para simulación. La bondad del
modelo va a depender de cómo se traten todos esos procesos, de las hipótesis de partida
y de las aproximaciones realizadas.
• El modelo diseñado responde coherentemente frente a variaciones de las variables
climáticas en el exterior y a variaciones del estado de los sistemas de actuación
instalados, obteniendo el estado correcto de cada una de las variables que describen el
clima del invernadero.
148
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• El modelo se ha diseñado e implementado utilizando un sistema jerárquico a cinco
niveles, lo que permite un estudio independiente de cada una de las variables modeladas,
la sustitución de alguno de los módulos sin necesidad de reprogramar el resto, la
ampliación del modelo con nuevas variables de salida y la inclusión fácil de nuevos
sistemas de actuación ya que sólo habría que implementar un nuevo módulo y añadir su
efecto (aditivo o substractivo) a la ecuación diferencial correspondiente.
• Como todos los procesos no se producen simultáneamente, se ha propuesto una
metodología teórica para poder obtener los parámetros que los caracterizan sin necesidad
de estimarlos todos a la vez. Como se han de obtener más de treinta parámetros, si se
realizará una búsqueda simultánea de todos ellos, aparte de ser computacionalmente
muy costosa, resultaría difícil obtener la solución óptima ya que distintas combinaciones
de los valores de los parámetros proporcionarían resultados similares. Esta metodología
propuesta ha resultado satisfactoria como se ha puesto de manifiesto en las pruebas
realizadas.
• Una vez determinado el ensayo preciso para realizar la estimación de un conjunto
reducido de los parámetros que caracterizan a procesos físicos que se produzcan
simultáneamente, se han implementado una serie de algoritmos basados en la
minimización de un criterio de mínimos cuadrados. La combinación de técnicas de
búsqueda directa secuencial para obtener los intervalos de variación donde se encuentran
los óptimos de cada uno de los parámetros, junto con técnicas de búsqueda aleatoria,
como los algoritmos genéticos (para refinar el valor de cada uno de ellos) ha
proporcionado unos resultados aceptables, ya que se soslayan los inconvenientes de cada
uno de los procedimientos.
• Como los parámetros obtenidos en el proceso de calibración se basan en datos tomados
en el interior de un invernadero concreto, los resultados obtenidos no son extrapolables a
otros invernaderos, a no ser que sean de la misma estructura, dimensiones, similar
orientación de la cumbrera y que los sistemas de actuación presenten las mismas
características, como se ha demostrado en el análisis realizado en los dos invernaderos
tipo Araba. Hay que indicar que la metodología de obtención de parámetros propuesta
permite obtenerlos en cada caso concreto de forma sencilla y rápida, como se ha
demostrado en el caso de aplicación del invernadero Inamed número 1.
• Una ventaja importante de esta metodología es que no es necesario realizar pruebas
específicas para obtener los parámetros de cada proceso involucrado tal y como se
describe, por ejemplo, en las aportaciones de Bot [Bot83], en las que era necesario
utilizar un elevado número de sensores y una metodología muy precisa para cada tipo de
proceso. En la metodología propuesta, con los datos de las variables climáticas que se
miden generalmente en una instalación junto con las medidas de la temperatura de la
cubierta y primera capa de suelo se puede implementar y ajustar un modelo completo
que describa el clima que se genera en el interior.
• El hecho de que la metodología y el modelo presenten resultados aceptables en tres
invernaderos independientes prueba su validez, aunque se podrían realizar nuevos
ensayos en otras estructuras de invernadero y en otras localizaciones geográficas con
climas distintos al del sudeste español.
149
Capítulo 3. Obtención de modelos de simulación del clima en el interior de un invernadero
• El modelo implementado es una potente herramienta que se puede utilizar para el diseño
de controladores de variables climáticas, para el dimensionamiento de sistemas de
actuación (por ejemplo, anchura y ángulo máximo de apertura de la ventilación;
transparencia de malla de sombreo, diámetro de tuberías de calefacción, etc.), para
estudiar el efecto de diferentes materiales de cubierta sobre el clima o de distintos
substratos de cultivo.
• A nivel de modelado y simulación, se han comparado dos paradigmas diferentes para
implementar el modelo (orientado a bloques y a objetos), analizándose las ventajas e
inconvenientes de cada enfoque para un caso concreto.
• Hasta ahora no se habían desarrollado o probado modelos de simulación de las variables
climáticas para las características propias del sector agrícola bajo invernadero del
sudeste de España, aunque las estructuras y el clima son parecidos al de otras zonas
mediterráneas como Francia, Italia o Grecia. Los resultados obtenidos son comparables
y en algunos casos presentan mejores comportamientos que otros modelos de simulación
que existen en la bibliografía especializada.
Las principales tareas que se deberían realizar para que el modelo ofreciera más
prestaciones son las siguientes:
• Incorporación del modelo de concentración de CO2 en el aire del invernadero, que es de
suma importancia para el crecimiento del cultivo y que no se ha considerado por no
disponer de datos en el interior y exterior del invernadero.
• Modelado, diseño e implementación del efecto de sistemas de actuación no considerados
hasta ahora pero que se prevé su utilización como ventilación forzada, sistemas de
humidificación, aerotermos o mallas térmicas.
• Considerar el aire del invernadero dividido en dos volúmenes cuando se extiende la
malla de sombreo, por lo que habría que añadir dos nuevas variables correspondientes a
la temperatura y humedad de ese volumen de aire, lo que equivale a añadir dos nuevas
ecuaciones diferenciales. No se ha considerado en el modelo implementado ya que no se
disponía de medidas en los dos volúmenes de aire.
• Validación del modelo con más datos experimentales, en distintas estructuras de
invernadero y distintos tipos de cultivos.
• Con la aparición de sistemas de actuación distribuidos como los aerotermos sería
interesante modelar las variables climáticas en el tiempo y en el espacio tanto en planos
paralelos a la superficie de suelo como a lo largo de un eje vertical, ya que se han
detectado diferencias en la temperatura del aire en función de la altura dentro del
invernadero.
150
CAPÍTULO 4
OBTENCIÓN DE MODELOS PARA
CONTROL
DEL
CLIMA
EN
EL
INTERIOR DE UN INVERNADERO
4.1. NECESIDAD Y TIPOS DE MODELOS DE CONTROL
Como se ha analizado en capítulos previos, las principales variables climáticas que afectan
al crecimiento y desarrollo de cultivos en invernaderos se pueden agrupar en:
•
Variables de estado: temperatura, humedad y concentración de CO2 del aire en el
interior del invernadero, junto a la radiación solar a nivel de planta.
•
Entradas de control: todos los sistemas de actuación instalados como calefacción,
ventilación, mallas de sombreo y térmicas, sistemas de humidificación, sistemas de
enriquecimiento de CO2, etc.
•
Perturbaciones: variables climáticas en el exterior (radiación solar, temperatura,
humedad y concentración de CO2 en el exterior, lluvia, velocidad y dirección del
viento) y elementos en el interior como las balsas del sistema de fertirrigación
recirculante. La influencia del cultivo sobre el clima interior es debida a la fotosíntesis y
a la transpiración. En un invernadero con un buen sistema de fertirrigación ambas
propiedades se encuentran muy correlacionadas con el índice de área foliar, el cual
puede ser considerado como una perturbación medible.
Para controlar el clima de un invernadero se deben determinar los valores adecuados de las
entradas de control de forma que las variables de estado del sistema alcancen valores
deseados teniendo en cuenta que el sistema está sometido a fuertes perturbaciones que
tienen un efecto dominante sobre el clima en el interior del invernadero [Sig96]. Cuando se
dispone de medidas de estas variables, se pueden utilizar en el desarrollo de controladores
para intentar cancelar los efectos perjudiciales que sus cambios provocan en los valores de
las variables de estado y aprovechar sus efectos beneficiosos. Dada la complejidad
inherente, el desarrollo de sistemas de control climático de invernaderos se ha basado, a
menudo, en sistemas heurísticos basados en la experiencia de manejo climático. En los
últimos años se están aplicando técnicas de control que se han utilizado con éxito en otros
ámbitos industriales, como las relacionadas con el control adaptativo ([Udi83], [Sig96]),
óptimo ([Hen94], [Tap93]) o robusto [Lin99].
151
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Estas técnicas conllevan la necesidad de disponer de un modelo dinámico del sistema a
controlar. La obtención de modelos de un sistema dinámico es un proceso complejo, que
depende de las características de la dinámica del proceso objeto de estudio. Como se indica
en [Pea95], cuando se modela un sistema complejo, una de las cuestiones que hay que
discernir es si se utilizan modelos basados en primeros principios o modelos empíricos de
entrada/salida basados en la adquisición de datos experimentales. Los primeros
generalmente proporcionan una información más detallada sobre el proceso en cuestión en
comparación con los modelos empíricos, pero por el contrario son generalmente mucho
más complejos y requieren mucho más tiempo en su desarrollo, como se ha podido
comprobar en el capítulo 3. Aunque los modelos basados en primeros principios pueden ser
utilizados en estructuras de control basado en modelo, en la práctica se suelen utilizar más
en el ámbito de la simulación y los modelos empíricos tipo entrada/salida para control. Un
valor añadido del uso de modelos empíricos es que pueden proporcionar información sobre
la dinámica del proceso que pueda ser utilizada para refinar los modelos fundamentales,
que se suelen basar en una serie de suposiciones (en las que generalmente se considera que
determinados términos y sus efectos se pueden despreciar) que, en cierta medida, puedan
no ser muy acertadas [Seg93]. Evidentemente, los modelos empíricos presentan, en este
caso, la limitación de que reproducen de forma aproximada la dinámica de un invernadero
concreto y de un determinado cultivo. Sin embargo, presentan una serie de ventajas, entre
las que destaca la relativa simplicidad de obtención del modelo partiendo de una
metodología adecuada. En el ámbito de esta tesis se han utilizado las siguientes estructuras
para la obtención de modelos del clima interior de un invernadero:
• Modelos basados en principios físicos. Basándose en los mismos principios descritos en
el capítulo 3 Obtención de modelos para simulación del clima en el interior de un
invernadero, se ha diseñado un modelo simplificando el número de elementos del
invernadero y las ecuaciones que describen los procesos físicos que se producen.
• Modelos basados en datos de entrada/salida. Otra alternativa consiste en la obtención de
modelos dinámicos de caja negra en los que se plantea una estructura matemática muy
flexible con parámetros modificables que se estiman a partir de datos experimentales sin
tener en cuenta ninguna consideración sobre los principios físicos que lo rigen. En
concreto se han utilizado las siguientes estructuras:
Modelos lineales. Como la respuesta de las variables climáticas a una entrada en
escalón es de tipo sigmoidal, se han utilizado técnicas como el ensayo de la curva de
reacción o el ajuste de modelos ARX por el método de mínimos cuadrados para la
obtención de modelos lineales de primer orden que describan su comportamiento en
torno a un punto de trabajo.
Modelos no lineales. Se han utilizado redes neuronales artificiales para la
identificación de un modelo no lineal NARX que describa la dinámica de las variables
fundamentales del clima en el interior de un invernadero.
En este capítulo se describen las mencionadas estructuras de modelos simplificados del
clima interior de un invernadero. De cada una de ellas se comentan sus fundamentos, sus
hipótesis generales, los autores que las han utilizado en el ámbito del control climático de
invernaderos, así como la metodología seguida para la obtención de sus parámetros
característicos, su implementación y la validación de los mismos, mostrando los resultados
obtenidos. Por último, se expondrán las conclusiones y los futuros trabajos relacionados.
152
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.2. MODELOS APROXIMADOS BASADOS EN PRINCIPIOS FÍSICOS
4.2.1. Características de los modelos simplificados y referencias
Tal y como se ha analizado en el capítulo anterior, el clima que se genera en el interior de
un invernadero se puede describir mediante un sistema de ecuaciones diferenciales de
primer orden que caracterizan la dinámica de la temperatura del aire, temperatura del
cultivo, temperatura del suelo, temperatura de la cubierta, humedad del aire y concentración
de CO2 en el aire. Lo importante de un modelo para control es su capacidad de captar la
dinámica dominante del sistema, por lo que se pueden utilizar modelos basados en
principios físicos simplificados que sean capaces de captar la dinámica de las variables
principales del clima de un invernadero y que, al igual que en los modelos para simulación,
se representan mediante un sistema de ecuaciones diferenciales de la forma:
dX
= f ( X ,U , P ,V ,C ,τ ) con X ( τ i ) = X i
dτ
(4.1)
donde los elementos que aparecen en la formulación ya han sido comentados en el capítulo
3 (ecuación 3.60).
Al plantear un modelo simplificado para control, se han llevado a cabo una serie de
simplificaciones que se recogen a continuación:
• No se considera la cubierta como un elemento del invernadero caracterizada por su
temperatura sino como una interfaz entre el aire interior y exterior, por la que el
invernadero pierde energía que se suele modelar de forma proporcional a la diferencia de
temperatura entre ambos volúmenes de aire. De esta forma se sustituyen los modelos de
los procesos de convección entre la cubierta y el aire exterior e interior y el proceso de
conducción entre sus dos superficies.
• El cultivo tampoco se considera como un elemento y su efecto sobre el clima se modela
mediante la transpiración y su aporte o consumo de CO2 debido a la acción de la
fotosíntesis y la respiración. El modelado de estos aportes se realiza de diferentes
formas, utilizando relaciones empíricas con las variables climáticas o modelos
contrastados de otros autores especialistas en esos temas concretos.
• En el modelado de la temperatura del aire se consideran como aportes fundamentales de
calor el debido al efecto del sol y al sistema de calefacción, mientras que la ventilación y
las perdidas hacia el exterior a través de la cubierta son las principales pérdidas de
energía. El efecto del cultivo sobre la temperatura se suele tener en cuenta considerando
que la radiación que atraviesa la cubierta se utiliza parte que las plantas realicen sus
procesos vitales de transpiración y fotosíntesis, y el resto, para calentar el aire. No se
suele considerar el efecto debido al calor latente como la condensación en la cubierta o
la evaporación en la superficie del suelo y en otros elementos como las balsas del
sistema de fertirrigación.
• El modelado del contenido de vapor de agua en el aire considera como aportes
fundamentales la transpiración del cultivo y los sistemas de humidificación en el caso de
que se encuentren instalados, y la ventilación como principal causa de pérdida de
humedad por intercambio con el exterior.
153
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• En el modelado de la concentración de CO2 en el aire se consideran los sistemas
artificiales de enriquecimiento de CO2 y la respiración del cultivo como flujos de aporte,
y la ventilación y la fotosíntesis de las plantas como los principales flujos de pérdidas.
• Algunos autores incluyen el modelado de la temperatura de la superficie del suelo en el
que se consideran únicamente los flujos de energía debido a los procesos de convección
con el aire del invernadero y los de conducción con la primera capa de suelo, cuya
temperatura se utiliza como condición de contorno. No modelan los efectos de los
procesos de radiación térmica entre los distintos elementos físicos del invernadero.
• Aunque el aire es inerte a la radiación, en el modelo de temperatura del aire se añade un
término dependiente de la radiación global que modela al efecto de calentamiento del
aire debido al sol. Se trata de un coeficiente constante entre 0 y 1 que multiplica a la
radiación solar que atraviesa la cubierta.
• Los coeficientes de convección con el suelo o tuberías de calefacción se suelen
considerar constantes y no como una función de la diferencia de temperatura del sólido y
el fluido o de la velocidad de este último.
• Se simplifica el modelado de algunos procesos físicos como la ventilación, llegando a
utilizar relaciones empíricas entre las variables a considerar, o a considerar algunos
flujos de energía constantes como la aportación de calor al aire debido a la calefacción.
En la tabla 4.1 se muestra una descripción detallada de los modelos de este tipo más
referenciados, así como los implementados en zonas cercanas a las que se han desarrollado
las experiencias, de los que se indica la siguiente información:
• Autores que han desarrollado los modelos y los distintos grupos de investigación
dedicados a estos temas.
• Variables que se modelan, incluyendo el modelado de variables auxiliares como la
temperatura de suelo o la temperatura de las tuberías del sistema de calefacción.
• Descripción del modelado de la temperatura del aire con los flujos de energía que se
consideran con un breve comentario acerca de cómo modelan cada uno de ellos.
• Descripción del modelado de la humedad del aire con los flujos de vapor de agua que se
consideran como aportes y pérdidas con un breve comentario acerca de cómo modelan
cada uno de ellos.
• Descripción del modelado de la concentración de CO2 del aire con los flujos de CO2 que
se consideran como aportes y pérdidas con un breve comentario acerca de cómo
modelan cada uno de ellos.
• Experiencias realizadas y descripción del sistema real utilizado: estructura del
invernadero, superficie del suelo, localización geográfica, sistemas de actuación
instalados y tipo de cultivo.
• Utilización que se ha hecho del modelo, que como se podrá observar, se usa
generalmente para diseño de controladores.
• Referencias bibliográficas donde se describen los modelos para poder consultar los
aspectos que interesen en cada momento.
154
155
Temperatura
Humedad
Concentración
CO2
Temperatura
suelo
Temperatura
tubos
calefacción
Tap
Willigenburg
Van Straten
No lo modela
Aporte
agua:
transpiración
Pérdida
agua:
ventilación,
condensación
cubierta
Transpiración:
modelo Nederhoff
Ventilación:
modelo Jong
Condensación:
ecuación Bakker
Aporte
agua:
transpiración
Pérdida
agua:
ventilación
Transpiración:
función de dpv de
aire y peso seco
Ventilación:
modelo Jong
No lo modela
Aporte energía: calefacción y
sol
Pérdidas energía: ventilación
y cubierta
Calefacción:
convección
constante
Ventilación: modelo de Jong
Sol: Constante
Cubierta Constante
Aporte energía: sol
Pérdidas energía: ventilación
y cubierta
Ventilación: función lineal
incremento temperatura
Sol: constante
Cubierta: constante
Aporte:calefacción,sol, suelo
Pérdidas:
ventilación,
cubierta y condensación,
transpiración
Calefacción:
convección
constante
Ventilación: modelo Jong
Sol: constante
Cubierta: constante
Suelo: convección constante
Transpiración:
modelo
Nederhoff
Conducción:
ecuación
Bakker
Aporte: calefacción, sol
Pérdidas:
ventilación,
cubierta
Calefacción:flujo constante
Ventilación: función lineal
flujo renovación
Sol: constante
Cubierta: constante
Humedad
Temperatura
No lo modela
Concentración
CO2
Aporte
CO2:
artificial,
respiración
Pérdidas CO2: ventilación,
fotosintesis
Artificial: flujo constante
Ventilación: modelo Jong
Fotosíntesis:
modelo
Goudrian
Respiración: modelo propio
artificial,
Aporte
CO2:
respiración
Pérdidas CO2: ventilación
Artificial: flujo constante
Ventilación: función lineal
temperatura
Respiración:
respuesta
Michaelis-Menten
artificial,
Aporte
CO2:
respiración
Pérdidas CO2: ventilación,
fotosíntesis
Artificial: flujo constante
Ventilación: modelo Jong
Fotosíntesis:
modelo
Nederhoff
Respiración: modelo de
Koning
Resultados
aceptables
Problemas en
ocasiones
con humedad
Resultados
aceptables
Sobrestima la
humedad
Problemas
CO2
con
flujos
ventilación
bajos
No
se
comenta la
validación
del modelo
Resultados
Invernadero Venlo Resultados
aceptables
224 m2
Actuadores:
ventilación natural,
calefacción agua
Naaldwijk (HOL)
Tomate
Invernadero Venlo
300 m2
Actuadores:
ventilación natural,
calefacción agua
caliente,
enriquecedor CO2
Wageningen
(HOL)
Tomate, lechuga
Invernadero Venlo
300 m2
Actuadores:
ventilación natural,
calefacción agua,
enriquecedor CO2
Wageningen
(HOL)
Lechuga (NFT)
Distintas pruebas
en simulación con
perturbaciones en
estacionario
Experiencias
[Hen94]
[Ios95]
Junto modelos
de crecimiento
cultivo, diseño
control óptimo
producción de
lechuga
Control óptimo
CO2 utilizando
ventilación
y
enriquecedores
artificiales
Diseño control
adaptativo de
temperatura
[Udi83]
Junto modelos [Tap00]
de crecimiento [Tap96a]
cultivo, diseño [Tap96b]
control óptimo
producción de
tomate
Ref.
Utilización
Tabla 4.1.a. Descripción de modelos simplificados del clima que se genera en el interior de un invernadero basados en principios físicos
ten Temperatura
Temperatura
Concentración
CO2
Ioslovich
Seginer
Udink
Cate
Variables
que modela
Temperatura
Humedad
Concentración
CO2
Modelo
Autores
Van Henten
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Variables
que modela
Temperatura
Humedad
156
Temperatura
Humedad
Concentración
CO2
Aporte energía: calefacción,
sol, suelo,
Pérdidas
energía:
ventilación, cubierta,
Calefacción: flujo constante
Ventilación: función lineal
velocidad
viento
y
temperaturas
Sol: constante
Cubierta: función diferencia
de temperatura interior y
exterior
Suelo: convección constante
Aporte agua: transpiración,
humidificadores
Pérdida agua: ventilación,
condensación
cubierta
Transpiración: función de
dpv de aire y radiación
(modelo Jolliert)
Ventilación: función lineal
velocidad
viento
y
temperatura
Condensación: convección
Humidificador:
flujo
constante
Aporte
CO2:
artificial, respiración
Pérdidas
CO2:
ventilación,
fotosíntesis
Artificial:
flujo
constante
Ventilación: función
lineal
velocidad
viento y apertura
Fotosíntesis: modelo
Nederhoff
Respiración: modelo
Koning
Aporte CO2: artificial
Pérdidas
CO2:
ventilación,
fotosíntesis
Artificial:
flujo
constante
Ventilación: función
lineal
velocidad
viento y temperatura
Fotosíntesis: función
temperatura,
radiación y CO2
(modelo propio)
Concentración
CO2
Aporte agua: transpiración, No lo modela
nebulización
Pérdida agua: ventilación
Transpiración:
modelo
González
Ventilación:
modelo
Boulard
Nebulización:
flujo
constante
Humedad
Aporte energía: sol
Pérdidas energía: ventilación
cubierta,
transpiración
cultivo, nebulización
Sol: constante
Ventilación: modelo Boulard
Cubierta: función velocidad
viento
Transpiración:
modelo
González
Nebulización: flujo constante
Aporte energía: calefacción, No lo modela
sol, suelo.
Pérdidas energía: ventilación
cubierta,
Calefacción: flujo constante
Ventilación: función lineal
velocidad viento y apertura
Sol: constante
Cubierta: constante
Suelo: convección constante
Temperatura
Invernadero Venlo
Actuadores:
ventilación natural,
luz artificial, malla
térmica,
calefacción agua,
enriquecedor CO2
Quebec (CAN)
Tomate
Invernadero Venlo
Actuadores:
ventilación natural,
calefacción agua,
enriquecedor CO2
Wageningen
(HOL)
Tomate
Invernadero túnel
96 m2
Actuadores:
ventilación natural,
nebulización
Valencia (ESP)
Rosas
Experiencias
Resultados
aceptables,
sin mostrar
datos
ni
gráficas
No
se
comenta la
validación
del modelo
No se ajusta
exactamente,
pero capta la
dinámica de
las variables
del clima
Resultados
Diseño control
óptimo
producción de
tomate
Junto modelos
de crecimiento
cultivo, diseño
control óptimo
producción de
tomate
Diseño control
predictivo
multivariable
de temperatura
y humedad
Utilización
[Tri01a]
[Tri01b]
[Tch93]
[Sen98]
[Bla99]
[Mar97]
Ref
Tabla 4.1.b. Descripción de modelos simplificados del clima que se genera en el interior de un invernadero basados en principios físicos (continuación)
Trigui
Barrington
Gauthier
Tchamitchan Temperatura
Willigenburg Concentración
CO2
Straten
Temperatura
suelo
Modelo
Autores
Senent
Martínez
Blasco
Sanchís
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.2.2. Diseño del modelo
4.2.2.1. Estructura e hipótesis generales de partida
El modelo simplificado del clima interior de un invernadero que se va a describir en este
capítulo, se compone de una conjunto de dos ecuaciones diferenciales cuya estructura es
similar a la expuesta en la ecuación (4.1), asumiendo las siguientes hipótesis generales:
• Sólo se considera al aire como elemento del invernadero.
• Las variables de estado del sistema son la temperatura del aire, Xt,a y la humedad del aire
(absoluta, Xha,a y relativa, Xhr,a). La concentración de CO2 en el aire no se modela por las
razones descritas anteriormente.
• Existen tres sistemas externos que interaccionan con el sistema invernadero: aire
exterior, superficie del suelo y cultivo.
• Las variables exógenas y perturbaciones que actúan sobre el sistema y que se consideran
como condiciones de contorno son la temperatura del aire exterior, Pt,e, la humedad
absoluta del aire exterior, Pha,e, la velocidad del viento, Pvv,e, la dirección del viento,
Pdv,e, la radiación global en el exterior, Prs,e, la temperatura de la superficie del suelo,
Pt,ss y el índice de área foliar como medida del estado del cultivo, PLAI.
• Las entradas de control del sistema son la posición de las ventilaciones, Uven, la posición
de la malla de sombreo, Umalla y la temperatura del agua que circula por las tuberías del
sistema de calefacción, Ut,cal.
CONDICIONES CONTORNO
Temperatura
exterior
Velocidad
Radiación
Viento Dirección exterior
Humedad
exterior
Viento
SALIDAS
ENTRADAS
Ventilación
Temperatura
Superficie suelo
Índice área
foliar
Temperatura aire
Calefacción
Humedad aire
Malla sombreo
Fig. 4.1. Esquema de entradas/salidas del modelo climático simplificado desarrollado.
• Debido al sistema de medida y al tipo de sistemas de actuación instalados que se
encuentran muy localizados, se considera el principio de distribución homogénea de las
variables, es decir, que se supone el mismo valor de las variables en el volumen de aire
del invernadero.
157
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Con respecto a los procesos relacionados con la radiación solar se establecen las
siguientes hipótesis:
El aire no es inerte a la radiación (la absorbe y la transmite).
No se consideran los efectos de la reflexión.
• En las instalaciones de calefacción por tuberías de agua caliente, se mide la temperatura
del agua a un metro de la válvula de mezclas, pero la convección con el aire la realiza la
superficie externa de las tuberías. Se parte de la hipótesis de despreciar los efectos de
convección entre el agua caliente y la superficie interior de las tuberías y las perdidas de
conducción entre las dos superficies de las tuberías, por lo que se considera que la
temperatura de la superficie exterior de las tuberías es igual a la del agua que circula por
ellas.
• Las características físicas del aire, como la densidad o el calor específico, se consideran
constantes con la temperatura y el tiempo.
En el siguiente apartado, se describirá en detalle el balance simplificado de energía así
como el balance simplificado de vapor de agua en el aire del invernadero.
4.2.2.2. Modelo simplificado de temperatura de aire
La figura 4.2 muestra los flujos que se han considerado en el diseño del modelo
simplificado de la temperatura del aire. Basándose en todos los procesos que se indican, el
calor acumulado en el aire del invernadero viene dado por la siguiente ecuación de balance:
Qac,a = Qsol,a + Qcnv,ss−a + Qcnv,cal−a − Qcnd _ cnv,a−e − Qven,a−e − Q perd,a−e − Qtra,cu
(4.2)
donde Qsol,a es la radiación solar que absorbe el aire del invernadero, Qcnd_cnv,a-e es la
transferencia de calor por convección y conducción entre el aire interior y exterior del
invernadero, Qcnv,ss-a es la transferencia de calor por convección con la superficie del suelo,
Qcnv,cal-a es la transferencia de calor por convección con las tuberías del sistema de
calefacción, Qven,a-e es el intercambio de calor con el aire exterior debido a la ventilación
natural, Qperd,a-e es el
intercambio de calor con
Pha,e
el aire exterior por
Prs,e
Uven
Q
infiltración por la no
ven,a-e
Pt,e
estanqueidad
de
la
estructura y las roturas en
la cubierta y Qtra,cu es el
Xt,a
Qperd,a-e
calor latente producido
X
ha,a
Vrs,cu
Q
tra,cu
por el proceso de
Qcnv-cnd,a-e
transpiración del cultivo.
Qsol,a
Si se expresa el calor
acumulado
como
la
Qcnv,cal-a
variación
de
la
Qcnv,ss-a
temperatura del aire del
Ut,cal
invernadero, Xt,a, en
Pt,ss
función del tiempo, τ,
Fig. 4.2. Flujos de energía y vapor de agua en el aire del invernadero
resulta:
158
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
ccesp ,a cden ,a
cvol ,a dX t ,a
= Qsol ,a + Qcnv ,ss − a + Qcnv ,cal − a − Qcnv _ cnd ,a − e
carea ,ss dτ
(4.3)
− Qven ,a − e − Q perd ,a − e − Qtra ,cu
donde ccesp,a es el calor específico del aire, cden,a es la densidad del aire, cvol,a es el volumen
de aire que ocupa el invernadero y carea,ss es el área de la superficie del suelo. Cada uno de
estos flujos de energía se modelan de la siguiente manera:
• Radiación solar absorbida por el aire interior del invernadero. La radiación solar que
atraviesa la cubierta y alcanza el cultivo, Vrs,cu, que es la que, en parte, absorbe el aire
viene determinada por:
Vrs ,cu = Vtoc ,cu ⋅ Prs ,e
(4.4)
donde Prs,e es la radiación solar en el exterior y Vtoc,cu es el coeficiente de transmisión de
onda corta función del coeficiente de transmisión de la cubierta, del estado del
blanqueado de la misma y del estado de la malla de sombreo tal y como se indica en la
ecuación (3.61). Por tanto, la radiación solar que absorbe el aire, Qsol,a, viene expresada
por:
Qsol ,a = caoc ,aVrs ,cu
(4.5)
donde caoc,a es el coeficiente de absorción de radiación de onda corta del aire del
invernadero, aunque, como realmente el aire es inerte a la radiación solar, se trata de un
parámetro de eficiencia térmica de la energía solar. Este coeficiente hay que estimarlo en
el proceso de calibración del modelo.
• Transferencia de calor por convección entre la superficie del suelo y el aire interior. El
modelado de este proceso, Qcnv,ss-a es función de la diferencia entre la temperatura de la
superficie del suelo, Xt,ss, y la temperatura del aire interior, Xt,a:
Qcnv ,ss − a = ccnv ,ss − a (X t ,ss − X t ,a )
(4.6)
donde ccnv,ss-a es el coeficiente de convección que se considera constante y que hay que
estimar.
• Transferencia de calor por convección entre las tuberías de calefacción y el aire
interior. En el modelado de este proceso, Qcnv,cal-a, se considera que la temperatura de la
superficie exterior de las tuberías es igual a la del agua que circula por ellas, Ut,cal, que es
una entrada de control del sistema. Este proceso se modela como una función de su
diferencia con la temperatura del aire interior, Xt,a, mediante la siguiente expresión:
Qcnv ,cal − a = ccnv ,cal − a (U t ,cal − X t ,a )
(4.7)
donde ccnv,cal-a es el coeficiente de convección de la calefacción que se considera
constante y que hay que estimar.
159
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Transferencia de calor por convección y conducción en la cubierta entre el aire exterior
y el aire interior. El modelado de este proceso, Qcnd_cnv,a-e es una función lineal
proporcional a la diferencia entre la temperatura del aire exterior, Pt,e, y la temperatura
del aire interior, Xt,a, es decir:
Qcnd _ cnv ,a − e = ccnd _ cnv ,a − e ( X t ,a − Pt ,e )
(4.8)
donde ccnd_cvd,a-e es el coeficiente de pérdidas que se considera constante y se estima
empíricamente.
• Transferencia de calor con el aire exterior debido a ventilación y pérdidas por
infiltración. Como se ha comentado anteriormente, los dos flujos se modelan
simultáneamente ya que el proceso de las pérdidas por infiltración entre el exterior y el
interior se incluye como un efecto constante en el flujo de ventilación, Vven,flujo, tal y
como se pone de manifiesto en las ecuaciones (3.71) y (3.73). Por tanto, se utiliza el
siguiente modelo para describir estos procesos:
Qven ,a − e + Q perd ,a − e =
cden ,a cesp ,a
carea ,ss
Vven , flujo ( X t ,a − Pt ,e )
(4.9)
El flujo de ventilación se encuentra modelado por las ecuaciones (3.71), (3.72) y (3.73),
función de la diferencia de temperatura entre el aire interior y exterior, y de la velocidad
del viento. Este modelo se caracteriza por el coeficiente de descarga, cven,cd, y el
coeficiente debido al viento, cven,cv, que es necesario estimar.
• Transferencia de calor latente por transpiración del cultivo. El efecto de la transpiración
del cultivo sobre la temperatura del aire del interior del invernadero se ha modelado
como un proceso de calor latente descrito por la siguiente ecuación:
Qtra ,cu = Vlt ,vap M tra ,cu
(4.10)
donde Vlt,vap es el calor latente de vaporización función de la temperatura del aire, Xt,a,
[ºC] y se calcula de la siguiente manera:
Vlt ,vap = 4185 .5 (597 − 0.56 X t ,a )
(4.11)
El flujo de vapor de agua producido por la transpiración del cultivo, Mtra,cu, se modela
utilizando los trabajos de Stanghellini basados en la ecuación de Penman-Monteith y
centrados en el cultivo del tomate tal y como se ha descrito en el capítulo anterior, y que
se resumen en la siguiente ecuación:
M tra ,cu =
⎛
⎞
V
V
V
⎜ cden ,a Vhsat ,a + pcsat ,a r ,cu rn ,cu − cden ,a X ha ,a ⎟
⎟
Vr ,tra ⎜⎝
c psico 2 PLAI Vlt ,vap
⎠
1
(4.12)
donde cpsico es la constante psicométrica termodinámica. La humedad de saturación del
aire, Vhsat,a, se calcula según (3.111), la pendiente de la curva de presión de saturación
del aire, Vpcsat,a, según la ecuación (3.113), la resistencia a la transpiración del cultivo,
Vr,tra, según la ecuación (3.114) y la resistencia del cultivo, Vr,cu, según (3.116).
160
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Las principales diferencias con respecto al modelado de este proceso descrito en el
capítulo anterior son las siguientes simplificaciones:
La radiación neta que absorbe el cultivo, Vrn,cu, vital para el proceso de transpiración,
se considera igual a la radiación solar despreciando el efecto de la radiación térmica o
de onda larga, de forma que:
Vrn ,cu = Qsol ,cu = Vaoc ,cu Vrs ,cu
(4.13)
donde Vaoc,cu es el coeficiente de absorción de radiación de onda corta descrito en la
ecuación (3.118), función del índice de área foliar para considerar el estado del
cultivo.
La resistencia de la capa límite, Vr,cl, se considera constante e igual a 200 s/m.
4.2.2.3. Modelo simplificado de humedad de aire
El modelo de concentración de vapor de
agua en el aire del invernadero se basa en
una ecuación de balance de masa de vapor
de agua. Como se indica en la figura 4.3, la
principal fuente de vapor de agua es la
transpiración del cultivo, Mtra,cu, descrita en
la ecuación (4.12), mientras que la principal
fuente de perdida de vapor de agua se
produce por el intercambio de aire con el
exterior a través de la ventilación, Mven,a-e, y
la infiltración por pérdidas, Mperd,a-e. Por
tanto, la ecuación de balance de masas
utilizada para modelar la humedad absoluta
del aire, Xha,a, medida en Kgagua/Kgaire, viene
dada por la siguiente ecuación:
cden ,a
U ven
Q tra,cu
M ven,a-e
X t,a
X ha,a
P ha,e
P t,e
M perd,a-e
Fig. 4.3. Flujos de vapor de agua en invernadero
cvol ,a dX ha ,a
= M tra ,cu − M ven ,a − e − M perd ,a − e
carea ,ss dτ
(4.14)
El flujo de vapor de agua debido a ventilación e infiltración se modela conjuntamente, igual
que se ha realizado con el flujo de energía, con la única diferencia de que se produce un
intercambio de vapor de agua. Para modelar este proceso se utiliza la misma ecuación que
se utilizó para el modelo de simulación, es decir:
M ven ,a − e + M perd ,a − e =
cden ,a
carea ,ss
Vven , flujo (X ha ,a − Pha ,e )
(4.15)
donde Pha,e es la humedad absoluta del aire en el exterior del invernadero y Vven,flujo es el
flujo de ventilación descrito en la ecuación (3.71). En este último término es donde se
modela el efecto de perdidas por infiltración, considerándolo como un término función de
la velocidad del viento, descrito en la ecuación (3.73).
161
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.2.3. Implementación del modelo
Al igual que se ha realizado con el modelo del clima para simulación y por las mismas
razones, se ha implementado jerárquicamente el modelo simplificado descomponiéndose en
los siguientes niveles y submodelos:
A. Submodelo de la temperatura de aire.
A.1. Submodelo de absorción de radiación solar.
A.2. Submodelo de transferencia de calor por convección entre el aire interior y la
superficie del suelo.
A.3. Submodelo de transferencia de calor por convección entre el aire interior y las
tuberías del sistema de calefacción.
A.4. Submodelo de transferencia de calor por convección y conducción en la cubierta
entre el aire exterior y el aire interior.
A.5. Submodelo de transferencia de calor por intercambio de energía con el aire
exterior debido a la ventilación y a la infiltración por la cubierta.
A.6. Submodelo de transferencia de calor latente por transpiración del cultivo.
B. Submodelo de la humedad de aire.
B.1. Submodelo de flujo de vapor de agua por transpiración del cultivo.
B.2. Submodelo de flujo de vapor de agua por intercambio entre el aire interior y
exterior debido a la ventilación e infiltración por la cubierta.
En este caso y dada su simplicidad, el modelo diseñado se ha implementado utilizando la
herramienta de simulación Simulink que se ejecuta sobre el entorno matemático MATLAB.
La inicialización del modelo se realiza ejecutando un programa implementado en MATLAB
que carga los datos de configuración del invernadero y los sistemas de actuación instalados,
los parámetros que caracterizan a cada uno de los procesos considerados y las condiciones
iniciales de la simulación correspondiente, al igual que se ha realizado con el modelo
completo descrito en el capítulo anterior. Basándose en la experiencia adquirida con el
desarrollo del modelo completo, se ha resuelto el sistema de las dos ecuaciones
diferenciales con los mismos métodos que en el modelo completo, de forma que el proceso
de simulación sea lo más eficiente posible.
Cada uno de los submodelos descritos se ha implementado como un bloque de Simulink
con un conjunto de variables de entrada y salida que comparten, agrupándose entre sí para
formar cada uno de los siguientes niveles jerárquicos:
1. Nivel clima del invernadero compuesto por un solo bloque, donde se indican las
entradas del modelo (perturbaciones y control) y salidas correspondientes a las variables
a simular, tal y como se muestra en la figura 4.1.
2. Nivel tipo de variable a modelar, compuesto por dos bloques: temperatura y humedad
del aire.
3. Nivel de proceso físico o químico, compuesto por un número determinado de bloques
según cada variable a modelar, dos para el de humedad y seis para el de la temperatura
del aire del invernadero.
4. Nivel de implementación de cada uno de los procesos físicos.
162
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.2.4. Calibración del modelo
En este modelo hay que estimar diez parámetros, que se obtienen utilizando datos de
entrada, salida y perturbaciones, de forma que se optimice el criterio de mínimo cuadrados
indicado en la ecuación (2.2). Aunque el número de parámetros no es elevado, se ha
propuesto la siguiente metodología para la calibración de los submodelos descritos en los
apartados anteriores, basándose en el hecho de que algunos procesos no se producen
simultáneamente, sino que se encuentran desacoplados:
1. Ensayos en vacío (sin cultivo) para estimar los cuatro coeficientes característicos del
proceso de ventilación utilizando el modelo de humedad.
2. Ensayos con cultivo para la determinación de los coeficientes de evapotranspiración en
función de los datos obtenidos del invernadero con el cultivo en diferentes estados en el
modelo de humedad, utilizando los parámetros calculados anteriormente. De esta
manera queda el submodelo de humedad completamente calibrado.
3. Ensayos en vacío durante la noche y sin que se utilice calefacción ni ventilación,
estimándose así los parámetros de convección con el suelo e intercambio de energía con
el exterior a través de la cubierta.
4. Ensayos en vacío durante el día, sin calefacción ni ventilación, utilizando los
parámetros calculados anteriormente, estimándose así la eficiencia térmica de la
radiación solar.
5. Ensayos de calefacción en vacío durante la noche para calcular el coeficiente de
transferencia de calor del sistema de calefacción, utilizando los parámetros calculados
anteriormente.
6. Ensayos de ventilación en vacío durante el mediodía solar para verificar los parámetros
obtenidos en el paso primero con el modelo de humedad.
7. Ensayos con cultivo para la verificación de los parámetros del proceso de
evapotranspiración obtenidos en el segundo paso con el modelo de humedad.
Como se ha comentado en el apartado Técnicas de ajuste de los parámetros característicos
de modelos del Capítulo 2, y al igual que se ha calibrado el modelo de simulación, se han
utilizado los dos métodos de búsqueda ya descritos, de forma que con la Búsqueda
secuencial directa se obtiene el intervalo de variación de cada parámetro que asegure el
mínimo de la función de coste y, a continuación, se aplica el método de la Búsqueda
genética en esos intervalos para la obtención definitiva de los parámetros óptimos con una
mayor precisión con un coste computacional menor.
Siguiendo la metodología expuesta, se han realizado los ensayos en vacío (sin cultivo) en el
invernadero Araba número 2 (considerado como patrón a lo largo de la presente tesis)
durante quince días del mes de agosto del año 2000 con un periodo de muestreo de un
minuto, es decir, 21600 medidas reales. Para al ajuste de los parámetros relacionados con el
proceso de calefacción y con el cultivo, se han utilizado 15 días del mes de enero del
mismo año con un periodo de muestreo de un minuto (21600 medidas) y un índice de área
foliar igual a 2. Las perturbaciones a las que se encuentra sometido el sistema durante el
mes de agosto de 2000 se muestran en la figura 3.18 y las del mes de enero de 2000 en la
figura 3.34 del capítulo 3.
163
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
La tabla 4.2 muestra los estadísticos del valor absoluto de la diferencia entre los valores de
temperatura estimados por el modelo simplificado y los valores reales medidos en el
invernadero. Se han incluido los mismos estadísticos obtenidos con el modelo de
simulación para comparar los estimaciones de cada uno de los modelos. La primera fila se
indica el margen de variación de cada variable en esos días que se utiliza como referencia
Agosto 2000
Modelo
Modelo de
simplificado
simulación
21.1-49
(27.9 ºC)
1.47
0.51
4.23
2.81
Enero 2000
Modelo
Modelo de
simplificado
simulación
11.5-25.5
(14 ºC)
0.64
0.52
3.21
2.06
Intervalo
variación
Media
Máximo
Desviación
1.17
0.52
0.57
0.48
estándar
Tabla 4.2. Estadísticos de la diferencia entre los valores reales y simulados en el proceso
de calibración de la temperatura para modelos físicos simplificados
Como se puede observar, la media de los errores absolutos no es mayor de un 5.5 % en el
modelo simplificado, mientras que en el modelo de simulación no son mayores de un 4 %,
por lo que se pueden considerar resultados aceptables. Para poder realizar una comparación
cualitativa, se muestran en la figura 4.4 los resultados obtenidos en el proceso de
calibración de la temperatura durante el mes de agosto y en la 4.5 los resultados para el mes
de enero del mismo año, en las que la gráfica continua corresponde a la variable medida en
el invernadero y la discontinua corresponde a la estimada por el modelo. Aunque existen
diferencias notables en algunos de los periodos de tiempo (sobre todo nocturnos) el modelo
capta la respuesta dinámica dominante de la temperatura a variaciones en las señales de
control y a las perturbaciones del exterior del invernadero. Las posibles causas de estos
errores se deben a las simplificaciones realizadas, sobre todo al no considerar al aire inerte
a la radiación, modelar los coeficientes de transmisión de calor por convección con el suelo
y las tuberías de calefacción como constantes y no modelar completamente todos los
procesos de calor latente como la evaporación en las balsas del sistema de fertirrigación.
Por esta misma razón el modelo simplificado de humedad presenta peores resultados que el
modelo completo como se describe a continuación.
45
45
40
Tem peratura (º C )
Tem peratura (º C )
40
35
35
30
30
25
25
2000
4000
6000
8000
10000
12000
14000
16000
18000
1.45
T iempo (M inutos)
1.5
1.55
1.6
1.65
1.7
1.75
1.8
T iempo (M inutos)
a. Resultado comparación
b. Detalle comparación
Fig. 4.4. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 2000
164
1.85
x 10
4
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
22
22
21
21
20
Tem peratura (º C)
Tem peratura (º C)
20
19
18
17
19
18
17
16
16
2000
4000
6000
8000
10000
12000
5000
5500
T iem po (Minutos)
6000
6500
7000
7500
T iem po (Minutos)
a. Resultado comparación
b. Detalle comparación
Fig. 4.5. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 2000
Los resultados obtenidos con respecto al modelo simplificado de humedad se resumen en la
tabla 4.3 donde se muestran los estadísticos del modelo simplificado y los valores reales
medidos en el invernadero y los obtenidos con el modelo de simulación para comparar los
estimaciones de cada uno de los modelos. Como se puede observar, la media de los errores
absolutos no es mayor de un 9 % en el modelo simplificado, mientras que en el modelo de
simulación no son mayores de un 7 %, por lo que se pueden considerar resultados
aceptables. Las figuras 4.6 y 4.7 muestran los resultados de forma gráfica para cada uno de
los periodos de tiempo considerados.
Agosto 2000
Modelo
Modelo de
simplificado
simulación
21-94
(73 %)
5.01
3.96
25.31
24.32
Enero 2000
Modelo
Modelo de
simplificado
simulación
49.7-100
(50.3 %)
3.66
2.53
18.72
17.19
Intervalo
variación
Media
Máximo
Desviación
4.28
3.75
3.34
2.39
estándar
Tabla 4.3. Estadísticos de la diferencia entre los valores reales y simulados en el proceso
de calibración de la humedad relativa en modelos físicos simplicados
90
90
85
Hum edad relativa (% )
Hum edad relativa (% )
80
70
60
50
80
75
70
40
65
30
60
20
2000
4000
6000
8000
10000
12000
14000
16000
1000
18000
2000
3000
4000
5000
6000
T iem po (Minutos)
Tiem po (Minutos)
Fig. 4.6. Humedad relativa del aire del invernadero
tipo Araba agosto 2000
165
Fig. 4.7. Humedad relativa del aire del invernadero
tipo Araba enero 2000
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Las figuras 4.8 y 4.9 muestran una comparación gráfica entre las salidas de temperatura y
humedad de los modelos simplificados mostrados en línea discontinua y el de simulación
mostrado en línea continua de color claro frente a las medidas en el invernadero
representada con una línea continua de color oscuro. Evidentemente, el modelo
simplificado presenta peores resultados cuantitativos y cualitativos aunque capta la
dinámica dominante del sistema como se puede observar en la figura 4.8, donde se muestra
la respuesta de temperatura frente a escalones de la entrada de ventilación durante dos días.
90
45
80
Humedad relativa (% )
Te m peratura (º C )
40
35
30
70
60
50
40
25
30
1.75
1.7
1.65
1.6
1.55
1.5
1.45
Tiem p o (Minutos)
8000
x 10
8500
9000
4
Fig. 4.8. Comparación modelo de simulación y
simplificado de la temperatura del aire
invernadero Araba en agosto 2000
9500
10000
10500
11000
Tiem po (Minutos)
Figura 4.9. Comparación modelo de simulación y
simplificado de la humedad del aire
invernadero Araba en agosto 2000
4.2.5. Validación del modelo
Al igual que se hizo en la validación del modelo de simulación, se han utilizado los datos
tomados durante 1998 en el invernadero tipo Araba número 2 de la parcela de experiencias,
considerado como patrón. Como la calibración del modelo se ha realizado con datos de
agosto y enero del año 2000 se ha validado el modelo con datos de los mismos periodos de
tiempo del año 1998 junto con datos correspondientes a una campaña de primavera,
concretamente de abril de 1998. Para cada una de las experiencias de validación se han
utilizado los datos correspondientes a quince días tomados con un periodo de muestreo de
un minuto, es decir, 21600 datos. La figura 4.10 muestra los resultados correspondientes a
la validación del modelo de temperatura de aire durante el mes de agosto de 1998. Las
perturbaciones a las que se encuentra sometido se muestran en la figura 3.53 del capítulo 3.
45
45
40
Tem peratura (º C )
Temperatura (º C )
40
35
30
25
35
30
25
20
20
2000
4000
6000
8000
10000
12000
14000
0.9
Tiem po (Minutos)
0.95
1
1.05
1.1
Tiem po (Minutos)
1.15
1.2
1.25
1. 3
x 10
a. Resultado comparación
b. Detalle comparación
Fig. 4.10. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 1998
166
4
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
En la figura 4.10.b se muestra un detalle de tres días para poder comparar mejor los
resultados, observándose una buena respuesta del modelo, aunque al igual que ocurría con
el modelo de simulación, subestima la temperatura para días claros y muy soleados. Los
resultados obtenidos para el mes de abril de 1998, sometido a las perturbaciones que se
indican en la figura 3.52 del capítulo 3, se muestran en la figura 4.11, en el que se pueden
encontrar días con calefacción y días nublados y soleados, pudiéndose observar que el
modelo capta completamente la dinámica, tal y como se muestra en la figura 4.11.b.
36
34
35
32
30
T em peratura (º C )
Tem peratura (º C )
30
25
28
26
24
22
20
20
18
15
16
2000
4000
6000
8000
10000
12000
1.2
14000
1.25
1.3
1.35
1.4
Tiem po (Minutos)
Tiem po (Minutos)
x 10
4
a. Resultado comparación
b. Detalle comparación
Fig. 4.11. Comparación temperatura real y modelada del invernadero Araba número 2 en abril 1998
Los resultados obtenidos para la humedad también son aceptables y se muestran en la
figura 4.12 para agosto de 1998 y la 4.13 para abril de 1998. Se puede observar que el
modelo simplificado tiende a sobreestimar los valores de humedad relativa.
90
90
80
Hum edad relativo (% )
Humedad relativa (% )
80
70
60
50
70
60
50
40
40
30
3000
4000
5000
6000
7000
8000
9000
10000
11000
12000
1000
13000
Tiem po (Minutos)
Fig. 4.12. Humedad aire del invernadero tipo Araba
en agosto 1998
2000
3000
4000
5000
6000
7000
Tiem po (Minutos)
Fig. 4.13. Humedad aire del invernadero tipo Araba
en abril 1998
Para no mostrar más resultados gráficos, la tabla 4.4 muestra los estadísticos de
comparación entre las muestras de temperatura y humedad real utilizadas y los datos que
proporciona el modelo en los mismos instantes en los que se realizaron las medidas durante
enero, abril y agosto de 1998. Como se puede observar, el error relativo en el intervalo de
variación de la temperatura de la media de los errores absolutos no es mayor de un 7 %, y el
de humedad no es mayor de un 9 %, valores del mismo orden que el modelo de simulación,
aunque los valores medios son, evidentemente, superiores ya que en éste, el valor medio de
los errores absolutos es menor de 1 ºC para la temperatura y 2.5 % para la humedad. Aún
así, a la vista de los resultados se puede confirmar la validez del modelo.
167
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Enero 1998
13.76-23.55
(9.79 ºC)
0.74
3.67
Temperatura
Abril 1998
14.5-38.6
(24.1 ºC)
1.31
6.71
Agosto 1998
19.4-48.6
(29.2 ºC)
1.14
5.32
Enero 1998
55.64-100
(44.36 %)
3.64
17.10
Humedad relativa
Abril 1998
Agosto 1998
36.2-87.7
36.36-87.47
(51.5 %)
(51.11 %)
4.32
4.71
20.02
22.01
Intervalo
variación
Media
Máximo
Desviación
0.71
1.36
1.09
3.23
3.86
3.79
estándar
Tabla 4.4. Estadísticos de la diferencia entre los valores reales y simulados en el proceso de validación en
modelos físicos simplificados
En base a estos resultados y a los errores obtenidos, se puede concluir indicando que este
tipo de modelos simplificados basados en principios físicos se puede tener en cuenta en el
desarrollo de técnicas de control predictivo, adaptativo, etc., que regulen las principales
variables del clima en el interior del invernadero (temperatura y humedad).
4.3. MODELOS DINÁMICOS OBTENIDOS A PARTIR DE ENSAYOS Y DATOS DE
ENTRADA/SALIDA
4.3.1. Introducción
Como ha quedado patente en el capítulo anterior en el diseño, implementación, calibración
y validación del modelo no lineal para simulación, la obtención rigurosa de modelos
dinámicos para la simulación del sistema de producción en un invernadero es una tarea que
requiere un gran conocimiento de los procesos físicos que tienen lugar en el sistema y una
alta dedicación, tanto en la etapa de elaboración del modelo como en la de validación.
Como ya se ha comentado, para controlar un
D iseño
sistema dinámico se recurre en la mayoría de las
experiencias
ocasiones a simplificaciones mediante las cuáles se
captura la dinámica dominante del sistema,
E jecución y
incurriendo en los denominados errores de tom
a de datos
modelado, de modo que se alcanza una solución de
compromiso entre dificultad de obtención del
Selección
estructuras
modelo y grado de fiabilidad del mismo. Una
alternativa a los modelos simplificados basados en
Criterio de
principios físicos, descritos en el apartado anterior
ajuste
de este capítulo, consiste en el concepto de
identificación definido por Ljung [Lju99] como “el
Estim ación del m odelo
problema de construir modelos matemáticos de
sistemas dinámicos basados en datos observados de
No
los mismos”. Por tanto, se trata de la obtención de
¿Validación?
modelos dinámicos empíricos en los que se plantea
una estructura matemática muy flexible con
Si
parámetros modificables que se estiman a partir de
U tilización
m odelo
datos experimentales sin tener en cuenta ninguna
consideración sobre los principios físicos que lo
Fig. 4.14. Proceso de identificación
rigen.
168
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
El proceso de identificación se muestra en la figura 4.14, en la que se puede observar que
comienza con el diseño y posterior ejecución de las experiencias en la planta a analizar,
tomándose los datos necesarios de entrada y salida del sistema durante un determinado
periodo de tiempo. A continuación, se prefija la naturaleza, dimensión y estructura
paramétrica del modelo a ajustar. En base a un criterio de ajuste predeterminado de
antemano, se estima el modelo, obteniéndose los parámetros libres de la estructura
seleccionada. Para determinar si el modelo es aceptable, se procede a su validación
utilizando datos reales no utilizados en el proceso de estimación. Como se puede observar,
se trata de un proceso iterativo, ya que si no se valida correctamente el modelo, habrá que
volver a replantear alguna o varias de las fases anteriores [Pal92]. Evidentemente, estos
modelos son limitados, pues reproducen la dinámica de un sistema concreto, además de
proporcionar un conocimiento muy limitado del mismo. Sin embargo, presentan una serie
de ventajas, entre las que destaca la relativa simplicidad de obtención del modelo partiendo
de una metodología adecuada. En la literatura se encuentran distintas técnicas para la
obtención de modelos que utilizan datos reales, tanto basados en estructuras lineales como
no lineales. Para el caso de estudio de la presente tesis se han utilizado distintas
metodologías, concretamente:
• Modelos lineales. Como la respuesta del clima del invernadero a una entrada en escalón
es de tipo sigmoidal, se han utilizado técnicas como el ensayo de la curva de reacción o
el ajuste de modelos con estructura lineal. El hecho de modelar los procesos como
sistemas lineales con retardo se debe al comportamiento de las variables climáticas del
invernadero frente a las variables de perturbación y de control, tal y como se muestra en
la tabla 4.5, para la temperatura del aire interior.
Variable
Radiación solar
Comportamiento
El invernadero es un acumulador de energía, por lo que se trata de un integrador
de radiación, pudiéndose aproximar como tal.
Temperatura
La temperatura exterior afecta de distintas formas a la temperatura interior como
en los procesos de intercambio de aire (ventilación e infiltración) que se
comentarán a continuación. Su efecto general se produce a través de la cubierta
con procesos de convección, pudiéndose tratar como un proceso que regula la
temperatura interior de forma general dándole el nivel a partir del cual afectan el
resto de variables de perturbación y control, por lo que se puede modelar como un
sistema lineal de ganancia unidad.
Velocidad viento
Las pérdidas de calor por infiltración debido a la falta de estanqueidad o a roturas
en la cubierta producen una bajada en la temperatura en función de la velocidad de
viento al intercambiarse el aire interior y exterior, y a la diferencia de temperatura
entre ambos. Se trata de un intercambio de calor modulado por la velocidad del
aire exterior por lo que puede modelarse como un sistema lineal.
Ventilación natural La ventilación produce un intercambio de aire entre el interior y el exterior
función de la apertura de la misma y la diferencia de temperatura entre ambos, por
lo que al tratarse de un proceso de intercambio de calor, la respuesta puede ser
modelada como un sistema lineal de primer orden con retardo.
Calefacción
También se trata de un proceso de intercambio de calor entre las tuberías de
calefacción y el aire debido a su diferencia de temperatura por lo que su respuesta
es similar a la de un sistema sobreamortiguado con retardo.
Malla de sombreo La malla de sombreo reduce la radiación que alcanza al cultivo y suelo del
invernadero disminuyendo la eficiencia de conversión de la energía solar en
térmica, por lo se puede modelar como un cambio en la ganancia del integrador.
Tabla 4.5. Comportamiento de temperatura del aire interior frente a variables de perturbación y control
169
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Modelos no lineales. Se han utilizado redes neuronales artificiales para la identificación
de un modelo no lineal NARX que describa la dinámica de las variables fundamentales
del clima en el interior de un invernadero.
En este apartado se van a describir estas metodologías de obtención de modelos empíricos
basados en datos de entrada/salida susceptibles de ser utilizados en estrategias de control
que hagan uso de modelos. Evidentemente, existen otras posibilidades pero se han
seleccionado éstas por considerarlas las más adecuadas para el sistema objeto de estudio.
4.3.2. Modelos lineales obtenidos a partir del ensayo de la curva de reacción
4.3.2.1. Conceptos generales y referencias
Cuando se consideran pequeños cambios en torno a un punto de funcionamiento, la
mayoría de los procesos industriales pueden ser descritos mediante un modelo lineal,
generalmente de alto orden [Cam99]. La razón de esto estriba en que la mayoría de los
procesos están compuestos de muchos elementos dinámicos, usualmente de primer orden,
de forma tal que el modelo completo es de orden igual al número de elementos. Si, como
ocurre en muchos procesos, una de las constantes de tiempo es mucho mayor que el resto,
las constantes de tiempo más pequeñas se unen para producir un retraso que actúa como un
retardo puro. Por tanto es posible aproximar el modelo de un sistema dinámico complejo de
orden elevado mediante un proceso de primer orden combinado con un retardo. Por tanto,
una de las prácticas más comunes en control de procesos consiste en la estimación de
modelos simplificados de sistemas dinámicos estables a partir de ensayos tipo, siendo el
más extendido el denominado método de la curva de reacción, mediante el cuál, el sistema
en bucle abierto se somete a un cambio en la entrada en forma de escalón y se intenta
asimilar la salida a la de un sistema de primer orden con retardo, quedando descrita por tres
parámetros: ganancia estática ck, constante de tiempo ccτ y tiempo de retardo ctr, de forma
que la salida del sistema y(τ), en función de la entrada x(τ) puede considerar como un
sistemas lineal de primer orden con retardo [Oll98]:
ccτ
dy( τ )
+ y( τ ) = ck x( τ − ctr )
dτ
(4.16)
La ventaja fundamental de este método es su sencillez, facilidad de comprensión por parte
de personal con escasos conocimientos matemáticos, la generalmente corta duración del
mismo (del orden de magnitud que la dinámica dominante del sistema) y la existencia de
métodos de control específicos para este tipo de sistemas [Cam99]. Por otra parte, el
método de la curva de reacción presenta las siguientes limitaciones[Oll98]:
• Este método es apropiado para las variables que son manipuladas directamente por el
sistema como es el caso de la ventilación o la calefacción en un invernadero, pero en el
caso de perturbaciones externas (radiación, temperatura exterior, velocidad de viento,
etc.) es más complicado el aplicar una entrada en escalón para obtener la respuesta de la
variable de la salida que permita la determinación de las constantes características del
sistema y hay que realizar una exhaustiva búsqueda en los archivos de datos para
encontrar variaciones en las perturbaciones que sean asimilables a escalones para poder
aplicar el método, debiendo permanecer el resto de variables en condiciones de
estacionario o cuasi-estacionario.
170
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• La selección de la magnitud del escalón de entrada debe ser la adecuada para optimizar
la señal de respuesta de la salida ante un cambio en escalón, es decir, éste debe ser el que
proporcione la mejor curva de reacción. Si la amplitud es demasiado pequeña se pueden
producir perturbaciones como ruido o el efecto de otras variables de entrada en esa
respuesta, lo que no es deseable ya que falsea el experimento realizado. Cambios
demasiado grandes pueden acentuar el carácter no lineal de las variables a modelar. Para
comprobar si el carácter no lineal es limitante, se utiliza una técnica que consiste en
aplicar cambios de la misma magnitud pero de signo contrario y observar la desviación
entre los distintos valores que se obtienen de los tres parámetros que caracterizan el
sistema. Si hay diferencias se puede realizar la media aritmética de los mismos.
• Otra cuestión importante es la duración de cada experiencia. La evolución de las
variables climáticas ante variaciones de los sistemas de actuación en un invernadero
requiere un tiempo determinado, durante el cual pueden provocarse cambios
significativos en otras variables de entrada (perturbaciones) que afecten a los resultados
obtenidos. Para comprobar esto, al final de la experiencia se aplica un cambio de igual
magnitud pero de signo contrario. Si la variable de salida no recupera su estado inicial
antes de realizar el primer cambio, es de esperar la influencia de otras variables de
entrada en la respuesta.
30
32
0
20
40
60
80
100
Temperatura (º C )
Temperatura (º C )
36
A pertura ventilació n (%)
40
40
23
56
19
50
15
24
120
0
Fig. 4.15. Respuesta de la temperatura del aire
a entradas escalón de ventilación
1
20
40
60
80
100
120
140
160
180
44
200
Tiempo (minutos)
Tiempo (minutos)
Fig. 4.16. Respuesta de la temperatura del aire
a entradas escalón de calefacción
Sus escalas se encuentran en la parte derecha de las figuras.
171
C onsigna emperatura tuberí as calefacció n (º C )
Este método suele aplicarse en el caso del clima de invernaderos para la obtención de
funciones de transferencia que relacionen principalmente ventilación y calefacción con
temperatura y humedad. A modo de ejemplo, la figuras 4.15 y 4.16 muestran las curvas de
reacción de la temperatura del aire ante entradas de escalón en la ventilación y la
calefacción1 obtenidas en el invernadero patrón tipo Araba número 2, pudiéndose observar
la respuesta aproximada de un sistema sobreamortiguado con retardo. En el caso de la
ventilación el ensayo se hizo sin viento y en torno al mediodía solar de forma que la
temperatura exterior y la radiación solar presentaban un estado cuasi-estacionario. El resto
de sistemas de actuación (calefacción y malla de sombreo) no se encontraban en
funcionamiento. El ensayo de calefacción también se realizó de forma que el resto de
variables que afectan a la temperatura se encontraban en estado cuasi-estacionario
(radiación solar nula por tratarse de un periodo nocturno, viento nulo, temperatura exterior
constante, ventilación cerrada y malla de sombreo sin extender).
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Un primer estudio sobre este método de modelado aplicado a las variables que caracterizan
al clima de un invernadero lo realizó Udink ten Cate [Udi83], que plantea un modelo
simplificado del clima utilizando una aproximación idealizada del invernadero al que
considera como un depósito con el aire perfectamente agitado en el que todas las variables
son uniformes. Utiliza una única ecuación de balance de energía para calcular la
temperatura del aire interior, considerando los siguientes efectos: calentamiento del aire
debido a la radiación solar, intercambio de calor con el exterior simulando el efecto por
medio de una resistencia térmica de la cubierta que modula a la diferencia de temperatura
entre el aire interior y exterior, una pérdida de calor por ventilación y un aporte debido al
sistema de calefacción. Analiza cada término independientemente obteniendo una serie de
modelos de relaciones simples (SISO), de forma que calcula la función de transferencia,
Gv(s), de la temperatura del aire, Xt,a, con respecto a la ventilación, Uvent, la función de
transferencia, Gc(s), de la temperatura del aire con respecto a la calefacción, Ut,cal y la
función de transferencia, Gr(s), de la temperatura del aire con respecto a la radiación
exterior como perturbación principal, Prs,e. No calcula la función de transferencia de la
temperatura del aire interior respecto al aire exterior ya que presenta una constante de
tiempo tan alta que puede ser considerada como una pequeña y lenta variación del punto de
trabajo. Como estos aportes o fuentes de energía pueden ocurrir simultáneamente, asume
que el efecto de ellas es aditivo. La estructura del modelo global se muestra en la figura
4.17. Los ensayos los realizó en un
invernadero tipo Venlo de 224 m2 ubicado en
P rs,e
G r(s)
Naaldwijk (Holanda) con un cultivo de
tomate. Los resultados obtenidos fueron
+
+
aceptables con un alto grado de coincidencia
U ven
X t,a
G v(s)
entre los valores reales medidos en los
+
invernadero y los estimados por el modelo. Se
utilizó este método para la obtención de los
U cal
G c(s)
parámetros de un modelo basado en principios
físicos y para el diseño de un controladores Fig. 4.17. Modelo de temperatura propuesto
clásicos PI y adaptativos.
por Udink ten Cate
Sigrimis y colaboradores ([Sig96], [Sig99a]) también utilizan este método de obtención de
modelos de la temperatura del aire de un invernadero equipado con ventilación y
calefacción para el diseño de controladores adaptativos y robustos H∞-PI. Considera a la
temperatura del aire función de la calefacción y de la temperatura exterior, considerando la
ventilación como fuente de incertidumbre, al igual que la radiación exterior, por tanto,
calculan la función de transferencia de la temperatura del aire frente a la entrada de
calefacción y la función de transferencia de la temperatura del aire con respecto a la
temperatura exterior. El modelo de la temperatura del aire se calcula como la suma de las
dos anteriores funciones de transferencia. No indican donde se han realizado las
experiencias ni la descripción de las mismas, ni los resultados obtenidos del proceso de
modelado.
4.3.2.2. Diseño del modelo propuesto
El modelo simplificado diseñado del clima que se genera en el interior de un invernadero
basado en sistemas lineales de primer orden, obtenidos con el método de la curva de
reacción, parte de las siguientes hipótesis generales:
172
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Sólo se considera al aire como elemento del invernadero.
• La variable de estado del sistema es la temperatura del aire, Xt,a. No se modela la
humedad del aire del invernadero ya que depende principalmente de tres factores: la
humedad exterior y el cultivo como aportes de vapor de agua y la ventilación como
pérdida. La ventilación permite realizar ensayos tipo escalón, pudiéndose estudiar su
efecto sobre la humedad del aire sin ningún problema. Analizando la serie de datos
históricos de los que se dispone se pueden encontrar comportamientos de la humedad
exterior que se pueden asimilar a entradas en escalón. Sin embargo, el índice de área
foliar varía tan lentamente que no permite ser analizado por el método de la curva de
reacción. Una posibilidad es relacionar el efecto del cultivo sobre la humedad con la
radiación solar ya que ésta influye directamente en el proceso de transpiración, pero aún
así, no se han obtenido buenos resultados por lo que no se va a modelar esta variable.
• Existen dos sistemas externos que interaccionan con el sistema invernadero: el aire
exterior y el cultivo. Sería conveniente considerar el efecto del suelo, pero como no es
una variable que se suele medir en las instalaciones típicas, no se incluye en el proceso
de modelado.
• Las variables exógenas y perturbaciones que actúan sobre el sistema y que se consideran
como condiciones de contorno son la temperatura del aire exterior, Pt,e, la velocidad del
viento, Pvv,e, la radiación global en el exterior, Prs,e, que se ve afectada por el blanqueo
de la cubierta y el cultivo a través del índice de área foliar, PLAI.
• Las entradas de control del sistema son la posición de las ventilaciones, Uven, la posición
de la malla de sombreo, Umalla y la temperatura del agua que circula por las tuberías del
sistema de calefacción, Ut,cal.
CONDICIONES CONTORNO
Temperatura
exterior
ENTRADAS
Velocidad
Viento
Índice área
foliar
Radiación
exterior
SALIDA
Ventilación
Temperatura aire
Calefacción
Malla sombreo
Fig. 4.18. Esquema de entradas/salidas del modelo climático lineal basado en la curva de reacción
• La influencia del cultivo sobre el clima se ha tenido en cuenta en la función de
transferencia de la temperatura con respecto a la radiación, ya que las plantas absorben
parte de la misma para sus funciones vitales, entre ellas la transpiración, influyendo
sobre la variable de estado. Evidentemente, el efecto del cultivo depende del estado de
crecimiento de las plantas por lo que la ganancia estática de esta función de transferencia
es función del índice de área foliar, PLAI.
• Se considera el principio de distribución homogénea de las variables.
173
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Se ha analizado la influencia de cada una de las perturbaciones y de las entradas de
control sobre la temperatura del aire del
invernadero, obteniéndose una serie de
Prs,e
Gr(s)
modelos de relaciones simples. Se calcula la
función de transferencia Gv(s) de la
Pvv,e
Gvv(s)
temperatura del aire interior, con respecto a la
ventilación, Gc(s) con respecto a la
calefacción, Gm(s) con respecto a la malla de
Pt,e
Gt(s)
sombreo, Gr(s) con respecto a la radiación
Xt,a
+
exterior, Gt(s) con respecto a la temperatura
Umalla
Gm(s)
exterior y Gvv(s) con respecto a la velocidad
del viento. Se asume que el efecto de cada una
Uven
Gv(s)
de estas variables sobre la temperatura es
independiente, por lo que para modelarla hay
que sumar cada uno de los efectos (figura
Ut,cal
Gc(s)
4.19). Esta simplificación corresponde a la
aplicación del principio de la superposición en Fig. 4.19. Estructura del modelo diseñado
basado en el método de la curva de reacción
sistemas lineales.
Como se puede observar en las hipótesis generales se deben obtener seis modelos SISO,
tres de los cuales tienen entradas que se pueden manipular (malla de sombreo, ventilación y
calefacción) y el resto con entradas no manipulables (radiación, velocidad de viento y
temperatura) que son las que presentan el mayor problema. En los archivos de datos de las
experiencias realizadas en bucle abierto, se han tenido que localizar cambios bruscos en
estas perturbaciones que se asemejen a escalones, sin que los sistemas de actuación se
encuentren en funcionamiento1. En la velocidad de viento se producen este tipo de cambios
por la propia naturaleza de la variable. Con respecto a la radiación, no es difícil encontrar
este tipo de comportamientos ya que el efecto de las nubes provoca variaciones bruscas en
esta perturbación, si bien es complicado que su comportamiento sea el de un escalón. Un
ejemplo de ambos, se puede observar en las figuras 4.20 y 4.21, donde se muestra la
respuesta de la temperatura del aire (línea continua) a variaciones en las perturbaciones
asimilables a un escalón (línea discontinua). Algo más complicado es encontrar este tipo de
comportamientos en la temperatura exterior, aunque es necesario el modelado de esta
variable para proporcionar un valor en torno al cual se producen los cambios (valor medio
del punto de operación) dado que los modelos lineales que se obtienen son válidos para
trabajar en torno a un punto de operación, de ahí que la ganancia estática sea cercana a la
unidad respecto a esa variable. Con respecto a la obtención de los modelos relacionados
con las entradas de control, se pueden obtener más fácilmente ya que se pueden realizar las
siguientes experiencias específicas en el invernadero:
• La obtención de modelos de temperatura en función de la calefacción, generalmente en
periodos nocturnos, no suele revestir ningún tipo de problema, dado que la radiación
solar en ese caso es nula y las ventilaciones suelen estar completamente cerradas. Las
variaciones de la temperatura del aire dependen casi exclusivamente de los escalones de
la temperatura del agua que circula por las tuberías del sistema de calefacción.
1
Existen otras metodologías válidas cuando no se dispone de perfiles en forma de escalón en lazo abierto que
se analizarán en el apartado 4.2.3.
174
20.5
575
19.5
0
20
40
60
80
100
120
140
160
180
400
200
17
6.1
16.7
4.3
16.4
0
Tiempo (minutos)
10
20
30
40
50
60
70
80
Velocidad del viento (m/s)
750
Temperatura (º C )
21.5
Radiació n global exterior (W /m2)
Temperatura (º C )
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
2.5
90
Tiempo (minutos)
Fig. 4.20. Respuesta de la temperatura del aire
a escalones de radiación exterior
Fig. 4.21. Respuesta de la temperatura del aire
a escalones de velocidad viento
• La realización de los ensayos de la curva de reacción para obtener relaciones entre
ventilación y temperatura es algo más complicado, dado que durante el día, el sistema
está sometido a una perturbación continua debido a la variación de la radiación solar en
su ciclo diario y a la posible presencia de cambios rápidos en esta variable, consecuencia
del paso de nubes. Por tanto, si se desea obtener modelos que relacionen ventilación y
temperatura, es recomendable llevar a cabo los ensayos en torno al mediodía solar, en
una franja de una hora aproximadamente (a ser posible sin cultivo) y para distintas
condiciones medias de velocidad de viento (que también influye sobre el proceso de
ventilación) para minimizar la influencia de las perturbaciones en la obtención del
modelo SISO. Con la finalidad de ampliar el periodo en el que se puedan realizar
ensayos, se puede utilizar el modelo lineal que relaciona la radiación solar con la
temperatura y aplicar el principio de superposición (evidentemente realizando una
aproximación dado que el sistema objeto de estudio es no lineal), de forma que se pueda
sustraer su efecto solar sobre la salida (temperatura) cuando se realizan ensayos de curva
de reacción en zonas donde la radiación solar está aumentando o decreciendo siguiendo
su ciclo diario. Evidentemente, hay que evitar la presencia de nubes.
• Para la obtención del modelo de la temperatura con respecto a la malla de sombreo se
deben realizar ensayos con la ventilación completamente cerrada y en torno al mediodía
solar para evitar en lo posible el efecto de la radiación solar. Al igual que con la
ventilación, también es posible utilizar el principio de la superposición, para sustraer el
efecto de la radiación solar y poder ampliar el periodo de realización de ensayos.
También habría que evitar el efecto de las nubes.
La obtención de los parámetros que caracterizan los modelos SISO se ha realizado
utilizando datos correspondientes a los meses de enero, abril y agosto de 1998 ya que fue el
primer intento de modelar las variables climáticas en el interior de un invernadero [Mar99].
En este caso, se han utilizado series de datos independientes donde se han producido
variaciones en las perturbaciones que se pueden asemejar a una entrada en escalón y donde
se han realizado ensayos en las entradas de control para estudiar la respuesta de la
temperatura interior del invernadero, es decir, se han utilizado series de datos de dos horas
en el peor de los casos.
175
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Tras las experiencias realizadas se ha observado que con distintos ensayos no se obtienen
los mismos parámetros para cada uno de los modelos SISO aunque son del mismo orden, al
igual que cuando se aplican escalones de distinto signo, tal y como era de esperar ya que el
sistema es no lineal1. Se han realizado las medias aritméticas de los parámetros
obteniéndose los siguientes resultados:
Radiación
Ganancia
0.015*Vk,rs
[ºC/W/m2]
Velocidad
de viento
-0.1
[ºC/m/s]
Temperatura
exterior
1
[ºC/ºC]
Ventilación
Calefacción
-0.09
[ºC/%]
0.1
[ºC/ºC]
Malla de
sombreo
-0.023
[ºC/%]
Cte. Tiempo
42
3
30
3
25
6
(minutos)
Retardo
1
1
1
1
10
1
(minutos)
Tabla 4.6. Parámetros de los sistemas lineales SISO de primer orden con retardo que relacionan la
temperatura del aire con las perturbaciones y las entradas de control
Como se ha comentado anteriormente, la ganancia del modelo SISO que relaciona la
temperatura interior con la radiación depende del blanqueo de la cubierta y del estado del
cultivo, modelándose de la siguiente forma:
1
sin cultivo , sin blanqueo
⎧
⎪
ck ,bl
sin cultivo , con blanqueo
⎪
Vk ,rs = ⎨
con cultivo , sin blanqueo
⎪ exp( −cext ,oc PLAI )
⎪⎩ck ,bl exp( −cext ,oc PLAI ) con cultivo , con blanqueo
(4.17)
donde ck,bl es un factor de reducción de la ganancia del sistema con respecto a la radiación
por efecto del blanqueo de la cubierta. Su valor se encuentra entre cero y uno y hay que
estimarlo cada vez que se blanquea la cubierta, ya que no se realiza con la misma
concentración de carbonato cálcico, que es lo que modifica el coeficiente de transmisión de
onda corta de la cubierta del invernadero. Por otra parte, como se ha comentado en el
capítulo anterior, las plantas utilizan la fracción [1-exp(-cext,oc PLAI)] de la radiación solar
para el proceso de transpiración, por lo que el resto, [exp(-cext,oc PLAI)], constituye la
fracción útil de la radiación que eleva la temperatura del aire.
Cabe destacar el hecho de las constantes de tiempo de tiempo tan elevadas que resultan en
relación a algunas de las variables de entrada. Con respecto a la radiación, realmente el aire
es inerte a este factor y su dependencia se debe a los procesos de convección con los
sólidos que componen el invernadero que son los que la absorben (sobre todo con el suelo).
Como las capacidades térmicas de ellos son elevadas en comparación con la del aire, las
variaciones que se producen en ésta se ven reflejadas en la temperatura del aire lentamente.
La temperatura exterior es una variable que varía muy lentamente por lo que su efecto
sobre la temperatura interior también será muy lento. El caso de la calefacción es distinto,
ya que se basa en un proceso de convección entre un sólido (tuberías) y un fluido (aire
interior) cuya velocidad de movimiento es muy pequeña ya que se encuentra estancado por
la cubierta y más aún cuando existe cultivo, por lo que la transmisión de calor se produce
de forma lenta.
1
Esto justificaría su utilización en esquemas de control adaptativo o robusto.
176
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.3.2.3. Validación del modelo propuesto
45
45
40
40
Tem peratura (º C)
Tem peratura (º C)
Para validar el modelo, se van a utilizar series temporales de varios días para asegurar que
el modelo capta la dinámica predominante del sistema a lo largo del tiempo en distintas
situaciones de clima exterior y en distintos estados del cultivo. Concretamente se han
utilizado los datos de los ensayos realizados en los meses de enero y agosto del año 2000,
sometidos a la perturbaciones y entradas de control que se muestran en las figuras 3.18 y
3.34. La figura 4.22 muestra una comparación gráfica entre la temperatura real durante el
mes de agosto de dicho año, mostrada en color oscuro y trazo continúo y la obtenida con el
modelo simplificado lineal basado en la curva de reacción representada con una trazo
continua de color claro. Como se puede observar, el modelo capta la dinámica
predominante del invernadero en distintas situaciones como día claro o el efecto del
funcionamiento continuado de los sistemas de actuación, aunque en los periodos nocturnos
el modelo presenta una desviación apreciable con respecto a la temperatura real, debido
principalmente a que no ha sido modelado el efecto de la masa térmica del suelo durante
esos periodos de tiempo.
35
35
30
30
25
25
0.6
0.8
1
1.2
1.4
1.6
1.8
Tiem po (Minutos)
1.5
x 10
1.55
4
1.6
1.65
1.7
1.75
Tiem po (Minutos)
x 10
4
a. Resultado comparación
b. Detalle comparación
Fig. 4.22. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 2000
22
22
21
21
Tem peratura (º C)
Tem peratura (º C)
La figura 4.23 muestra los resultados obtenidos al modelar la temperatura durante enero,
extrayéndose conclusiones similares. Capta la dinámica predominante, como se observa en
el cambio de la temperatura exterior nocturna a partir del quinto día, presentando una
desviación apreciable de la dinámica rápida sobre todo en los periodos nocturnos.
20
19
18
20
19
18
17
17
16
16
1000
2000
3000
4000
5000
6000
7000
8000
9000
5000
Tiem po (Minutos)
5500
6000
6500
7000
7500
Tiem po (Minutos)
a. Resultado comparación
b. Detalle comparación
Fig. 4.23. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 2000
177
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Para realizar una comparación cuantitativa, la tabla 4.7 muestra los datos estadísticos del
valor absoluto de los residuos obtenidos entre los datos reales de la temperatura y los datos
estimados por el modelo lineal en los mismos instantes de tiempo, observándose que, en el
intervalo de variación, la media de los errores absolutos no es mayor de un 6.5 %.
Agosto 2000
Enero 2000
Modelo lineal
Modelo de
Modelo lineal
Modelo de
curva reacción
simulación
curva reacción
simulación
21.41-49.0 (27.9 ºC)
11.5-25.5 (14 ºC)
Intervalo variación
1.02
0.51
0.89
0.52
Media
4.93
2.81
3.67
2.06
Máximo
0.99
0.52
0.76
0.48
Desviación estándar
Tabla 4.7. Estadísticos de la diferencia entre los valores de temperatura reales y simulados
por el modelo lineal obtenido por el método de la curva de reacción
45
Tem peratura real
Tem peratura m odelo sim ulac ió n
Tem peratura m odelo lineal
40
Tem peratura (º C )
Para comparar los resultados obtenidos con el
modelo de simulación, se muestran en la tabla
4.7 los estadísticos resultantes con ambos
modelos, así como una comparación gráfica en
la figura 4.24 con la estimación del modelo
lineal representada en trazo discontinuo y la
del modelo de simulación en trazo continuo
claro. El modelo simplificado presenta peores
resultados cuantitativos y cualitativos, aunque
capta la dinámica principal del sistema,
pudiéndose confirmar la validez del modelo
lineal obtenido mediante el método de la curva
de reacción para un tipo de aplicaciones que
necesite modelos simplificados como algunos
algoritmos de control.
35
30
25
1.76
1.78
1.8
1.82
1.84
1.86
T ie m po (Minuto s)
x 10
Fig. 4.24. Comparación modelo de simulación y
lineal de la temperatura del aire
invernadero Araba en agosto 2000
4.3.3. Modelos lineales obtenidos a partir de datos de entrada/salida
4.3.3.1. Conceptos generales y referencias
Debido a la existencia de una teoría matemática muy establecida y a que los sistemas
presentan un comportamiento lineal en torno a determinados puntos de trabajo, los modelos
lineales constituyen una de las herramientas más utilizadas en la identificación para control
[Ara99]. Un sistema lineal, invariante en el tiempo y causal queda completamente
caracterizado por su respuesta al impulso, de forma que las salidas del sistema, y(k), en el
instante de tiempo discreto k, se relacionan con las entradas (perturbaciones medibles y
entradas de control), u(k), a través de la ecuación general de convolución, que en tiempo
discreto adopta la siguiente descripción:
∞
∞
i =1
i =1
y (k ) = ∑ g (i ) u (k − i ) + ∑ h(i ) v(k − i )
(4.18)
donde v(k) es un ruido blanco con media nula que representa a una señal no manipulable
que afecta al sistema y que presenta un comportamiento impredecible. En función del
operador z-1, resulta:
178
4
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
y (k ) = G ( z −1 ) u (k ) + H ( z −1 ) v(k )
(4.19)
donde G(z-1) contiene las funciones de transferencia asociadas a las entradas del sistema y
H(z-1) representa la función de transferencia asociada a las perturbaciones.
Los modelos paramétricos lineales de uso más extendido responden a la siguiente
estructura general:
A( z −1 ) y (k ) =
C ( z −1 )
B( z −1 )
+
v(k )
u
(k
)
D( z −1 )
F ( z −1 )
(4.20)
Para un modelo de este tipo, las funciones de transferencia a asociadas a las entradas y a las
perturbaciones vendrán dadas por:
G ( z −1 ) =
B( z −1 )
A( z −1 ) F ( z −1 )
(4.21)
G ( z −1 ) =
C ( z −1 )
A( z −1 ) D( z −1 )
(4.22)
En función de la utilización de los polinomios que describen estas funciones de
transferencia, resultan las siguientes estructuras de modelo:
Polinomios utilizados
Nombre del modelo
A, C=1
AR(AutoRegresive)
A, C
ARMA (AutoRegresive Moving Average)
A, B, C=1
ARX (AutoRegresive eXogeneous)
A, B, C
ARMAX (AutoRegresive Moving Average eXogeneous)
B,F
OE (Output Error)
B, F, C, D
BJ (Box-Jenkins)
Tabla 4.8. Estructuras de modelos lineales
La diferencia fundamental entre unas y otras estructuras se refiere a la consideración del
modelo de perturbaciones. Las estructuras AR y ARX suponen que el término de
perturbaciones constituye un ruido blanco, mientras que en ARMA y ARMAX suponen
cierta estructura temporal. Por otra parte, mientras que en los modelo ARX y ARMAX, las
funciones de transferencia comparten denominador, en los modelos OE y BJ son
completamente independientes. Por último, los modelos ARX, ARMAX y BJ se utilizan
como modelos de predicción, mientras que los del tipo OE son modelos de simulación que
no incluyen hipótesis alguna acerca de la estructura de las perturbaciones y sólo modelan la
función de transferencia de las entradas [Pal92].
Un aspecto importante cuando se utiliza este tipo de modelos es determinar el orden de los
polinomios que los caracterizan ya que, en gran medida, de él depende la calidad de la
identificación posterior. Si el orden estimado es menor que el necesario, se llega a una
situación en la que el modelo sólo puede aproximar el sistema real para una banda de
frecuencias reducida. Si la señal de entrada cambia sus contenidos en frecuencia, el modelo
estimado evoluciona hasta que los parámetros adoptan otros valores que estimen mejor los
resultados en torno a la nueva frecuencia. En cambio, si el orden estimado es mayor de lo
necesario, se llega a que existen parámetros del modelo que pueden tomar cualquier valor
sin que se modifique la relación que liga las entradas con las salidas.
179
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Por esta razón, se han de considerar varias estructuras con órdenes diferentes y seleccionar
aquella que proporciona los mejores resultados de operación que son de interés. Su
estimación puede llevarse a cabo a partir de observaciones experimentales del sistema
[Ara99].
Estas técnicas han sido utilizadas en la ingeniería de control para el diseño de controladores
en una amplia variedad de aplicaciones. En los últimos años se están utilizando técnicas de
control óptimo en la producción de cultivos protegidos. Debido a la propia naturaleza de
estos controladores es necesario la utilización de modelos de las variables a controlar, por
lo que este tipo de estructuras de modelos lineales paramétricos basados en datos de
entrada/salida se han utilizado para modelar las variables que caracterizan el clima interior
de un invernadero [Sig96]. Existen distintos autores que han utilizado estas técnicas y han
obtenido resultados más que aceptables, destacando los estudios que realizó Palomo en
1992 en el que se comparan distintas estructuras de modelos lineales (ARX, ARMAX, BJ,
OE) con distintos órdenes[Pal92]. El mayor inconveniente que presentó este estudio fue
que los ensayos que se llevaron a cabo para obtener los datos y desarrollar los modelos, se
realizaron en un invernadero a escala (32 m2 de superficie) por lo que no se puede afirmar
si las conclusiones obtenidas pueden ser extrapoladas a un invernadero real en producción.
La tabla 4.9 muestra una descripción detallada de los distintos estudios realizados en el
modelado de las principales variables climáticas que se generan en el interior de un
invernadero utilizando este tipo de técnicas y que se pueden encontrar en la bibliografía
especializada. De cada uno de estos estudios se detalla la siguiente información que se ha
considerado interesante para su descripción:
• Autores que han desarrollado los modelos y los distintos grupos de investigación
dedicados a estos temas.
• Variables climáticas que se modelan.
• Estructura de modelo lineal que utilizan y descripción de las características principales
de la misma (tipo de estructura utilizada y orden de cada uno de los polinomios que las
caracterizan).
• Entradas del modelo lineal, tanto perturbaciones como estados de los sistemas de
actuación.
• Experiencias realizadas y descripción del sistema real utilizado: estructura del
invernadero, tipo de cubierta, sistemas de actuación instalados, superficie, localización
geográfica y tipo de cultivo en el caso de que se haya incluido su efecto en el proceso de
modelado.
• Resultados obtenidos con los modelos desarrollados en comparación con las variables
reales a modelar medidas en el interior del invernadero, así como la forma de
presentación de los mismos.
• Utilización que se ha hecho del modelo (como se podrá observar, la mayoría de ellos
han sido desarrollados para el diseño de controladores basados en modelos de las
variables climáticas).
• Referencias bibliográficas donde se describen los modelos para poder consultar y
profundizar en los aspectos que interesen en cada momento.
180
Temperatura aire
Young
Lees
Chotai
Tych
181
Davis
Hooper
BJ
ARX
(orden 2)
Estructura del
modelo lineal
ARX
(orden 1 y 2)
ARMAX
(orden 1 y 2)
BJ
(orden 1 y 2)
OE
(orden 1 y 2)
ARX
(orden 1)
Calefacción
Radiación exterior
Temperatura exterior
Velocidad viento
Temperatura exterior
Humedad exterior
Radiación exterior
Ventilación forzada
Válvula calefacción
Entradas del
modelo
Sin cultivo:
radiación solar
Con cultivo:
radiación solar
déficit hídrico
Modelos ajustados son
buenos e indistinguibles
Para un día rms≈0.45
para todos los modelos
Mejores resultados los
presentan los modelos
BJ
Invernadero túnel
Cubierta polietileno
32 m2 (10 x 3.2)
Actuadores:
ventilación forzada
malla sombreo
Madrid (ESP)
Tomate
Invernadero Venlo
Cubierta cristal
400 m2 (13.8 x 29)
Actuadores:
calefacción agua
Silsoe (UK)
Tomate
Invernadero túnel
Cubierta polietileno
210 m2
Actuadores:
ventilación forzada
Vila Real (POR)
Tomate
Invernadero Venlo
Cubierta cristal
400 m2 (13.8 x 29)
Actuadores:
calefacción agua
Silsoe (UK)
Tomate
Diseño de estructuras
Diseño de actuadores
Diseño de sistemas
de control óptimo
Diagnóstico de fallos
Utilización
[Pal92]
Ref.
Modelos ajustados y Diseño controladores
resultados aceptables
digitales
Gráficos correctos de
comparación entre datos
reales/ estimados
Gráficos correctos de Diseño controladores
comparación entre datos
reales/ estimados
[Dav91]
[Boa97]
Gráficos correctos de Diseño controladores [You93]
[You01]
comparación entre datos
reales/ estimados
Resultados
Experiencias
Tabla 4.9.a. Descripción de modelos lineales del clima que se genera en el interior de un invernadero basados en datos de entrada/salida
Temperatura aire
Boaventura Temperatura aire
Couto
Ruano
Variables
que modela
Sin cultivo:
diferencia temperaturas
interior/exterior
Con cultivo:
diferencia temperaturas
interior/exterior
humedad específica
Modelo
Autores
Palomo
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
182
ARX
(orden 1)
Cubierta cristal
172 m2 (8 x 21.5)
Actuadores:
calefacción
Con cultivo
Arlsev (Dinamarca)
No lo indican
Experiencias
Calefacción aire
Ventilación natural
Ventilación forzada
Calefacción substrato
Humidificadores
Radiación exterior
Temperatura exterior
Humedad exterior
Evapotranspiración
Velocidad viento
Dirección viento
Temperatura
tuberías Invernadero Venlo
de calefacción
300 m2
Actuadores:
ventilación natural
calefacción agua
caliente
enriquecedor CO2
Wageningen (HOL)
Lechuga (NFT)
Entradas del
modelo
Calefacción
Radiación exterior
Temperatura exterior
y Diseño controladores
Utilización
Modelos ajustados
resultados aceptables
y Diseño controladores
adaptativos
No compara datos reales Identificación
en
y estimados por el línea para sistemas
modelo lineal
de control óptimo
Modelos ajustados
resultados aceptables
Resultados
[Udi83]
[Udi78]
[Sig96]
[Nie92]
[Nie94]
[Nie95]
[Nie96]
Ref.
Tabla 4.9.b. Descripción de modelos lineales del clima que se genera en el interior de un invernadero basados en datos de entrada/salida (continuación)
Temperatura aire
ARMA
(orden 1)
Temperatura aire
Humedad relativa aire
Temperatura substrato
Sigrimis
Rerras
Van
Henten
Estructura del
modelo lineal
Modelo principal
BJ (Orden 3)
Modelo ruido
ARMA
Variables
que modela
Temperatura aire
Modelo
Autores
Nielsen
Madsen
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.3.3.2. Diseño del modelo propuesto
El modelo simplificado del clima interior de un invernadero basado en técnicas de
identificación lineal parte de las siguientes hipótesis generales:
• Sólo se considera al aire como elemento del invernadero.
• Las variables de estado del sistema son la temperatura del aire, Xt,a y la humedad
relativa, Xh,a.
• Existen dos sistemas externos que interaccionan con el sistema invernadero: el aire
exterior y el cultivo. Sería conveniente considerar el efecto del suelo, pero como no es
una variable que se suele medir en las instalaciones típicas, no se ha incluido en el
proceso de modelado.
• Las variables exógenas y perturbaciones que actúan sobre el sistema y que se consideran
como condiciones de contorno son la temperatura del aire exterior, Pt,e, la velocidad del
viento, Pvv,e, la dirección del viento, Pdv,e, la radiación global en el exterior, Prs,e, que se
ve afectada por el blanqueo de la cubierta y el cultivo a través del índice de área foliar,
PLAI.
• Las entradas de control del sistema son las mimas que en la sección anterior.
CONDICIONES CONTORNO
Temperatura
exterior
Radiación
exterior
Velocidad
Viento
Dirección
Viento
ENTRADAS
Índice área
foliar
Ventilación
SALIDAS
Temperatura aire
Calefacción
Humedad aire
Malla sombreo
Fig. 4.25. Esquema de entradas/salidas del modelo climático basado en redes neuronales
• Se considera el principio de distribución homogénea de las variables.
Se han utilizado diversas estructuras de las incluidas en la tabla 4.8. A modo de ejemplo, se
comenta a continuación los pasos realizados para obtener modelos lineales del sistema,
utilizado una estructura de modelo ARX, descrita por la siguiente ecuación lineal en
diferencias:
A( z −1 ) y (k ) = B( z −1 ) u (k ) + v(k )
(4.23)
En este caso, se han considerado como salidas del sistema tanto la temperatura como la
humedad, de modo que y(k) es un vector columna que contiene los valores de la
temperatura y la humedad en un instante discreto de tiempo k.
183
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
También, se puede modelar considerando como salida únicamente la temperatura e
introducir la humedad como una entrada más (perturbación medible) al modelo. El vector
columna u(k) contiene los valores de las entradas y las perturbaciones y v(k) corresponde a
un vector de ruido blanco. En el caso en que se consideren simultáneamente la temperatura
y la humedad como salidas del sistema, A(z-1) es una matriz cuadrada de 2x2 cuyas entradas
son polinomios en el operador de desplazamiento unitario z -1 del tipo Aij(z-1)= 1+ a1_ij z-1 +
...+ ana_ij z-na_ij y B(z-1) es una matriz de dimensión 2x6 de polinomios en el operador z -1,
correspondientes sucesivamente a ventilación, temperatura exterior, radiación, velocidad
del viento exterior, calefacción y malla de sombreo. Hay que hacer notar que se podrían
obtener modelos dinámicos distintos para el día y la noche, considerando que ventilación y
calefacción no van a estar funcionando de forma simultánea. En el caso expuesto, un primer
problema surge a la hora de obtener los grados de los polinomios de las matrices A(z-1) y
B(z-1). Existen numerosas herramientas, como las que proporciona el System Identification
Toolbox de Matlab [Lju97] que facilitan la selección de los órdenes de los polinomios de
modelos, fundamentalmente para sistemas con una única salida. Por esta razón, la selección
de los órdenes de los polinomios que aparecen en la formulación del modelo ARX se
seleccionaron tomando como salida únicamente la temperatura y adoptando el valor de la
humedad como una entrada de perturbación más. A partir de datos de entrada/salida, se
obtuvieron los grados de dichos polinomios y de los retardos respectivos asociados a cada
una de las entradas y perturbaciones de forma que se minimiza el denominado “Akaike’s
Information Theoretic Criterion” [Lju97]. Este criterio adopta una solución de compromiso
entre dimensión del modelo y errores de predicción cometidos con dicha estructura. De
hecho, el grado de los polinomios A(z-1) (na_ij=3, i=1,2, j=1,2) debería ser superior si se
tiene en consideración que el modelo cuenta con cinco entradas que afectan a las salidas
con distintas constantes de tiempo, como se ha analizado en la sección anterior. El orden
nb_kl de los polinomios Bkl(z-1) y los retardos nd_kl respectivos son: nb_1l = nb_2l =[8,2,1,2,2,2]
y nd_1l = nd_2l =[1,1,1,1,10,1].
Una vez seleccionados los órdenes de los polinomios, se llevó a cabo la identificación de
los coeficientes mediante métodos de mínimos cuadrados que hacen uso de un conjunto de
datos de entrada/salida para identificación y otro distinto para validación (validación
cruzada), obteniéndose constantes de tiempo dominantes similares a las obtenidas en la
sección anterior y un comportamiento dinámico aceptable.
4.3.3.3. Calibración del modelo propuesto
Los datos que se han utilizado en el proceso de calibración del modelo han sido los de
enero de 2000 en el invernadero tipo Araba número 2, divididos en un conjunto para
identificación y otro para validación cruzada (conjunto de prueba). El hecho de utilizar
estos datos para calibrar es porque contienen riqueza dinámica suficiente en todas las
entradas tanto de perturbación como de control (ventilación, calefacción, malla de sombreo,
etc.), hecho que no ocurre con los otros conjuntos de datos de los que se dispone. La figura
4.26 muestra los resultados obtenidos con respecto a la temperatura del aire, pudiéndose
observar que se capta la dinámica dominante aunque no las variaciones rápidas de la
variable real.
184
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
22
21
21
20
20
Temperatura (ºC)
Temperatura (ºC)
22
19
18
19
18
17
17
16
16
15
2000
4000
6000
8000
Tiempo (minutos)
10000
5000
12000
5500
6000
6500
Tiempo (minutos)
7000
7500
a. Resultado comparación
b. Detalle comparación
Fig. 4.26. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 2000
90
90
85
85
80
80
Humedad (%)
Humedad (%)
Con respecto a la humedad, la figura 4.27 muestra los resultados obtenidos y, como se
puede observar, se modela bastante mal con este tipo de técnicas. No se están teniendo en
cuenta directamente los efectos de la evaporación en las balsas del sistema de fertirrigación,
sino a través de las perturbaciones, y esto puede ser una fuente importante de error. Además
durante este periodo de tiempo (quince días) el índice de área foliar sufre una pequeña
variación de su valor por lo que el proceso de transpiración no se modela correctamente ya
que es necesario una gran riqueza dinámica de todas las variables de entrada del sistema a
identificar. Por otra parte, quizás hagan falta órdenes más altos en la matriz A(z-1) de la
ecuación que caracteriza al modelo lineal.
75
70
75
70
65
65
60
60
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
2000
3000
4000
5000
Tiempo (minutos)
6000
7000
a. Resultado comparación
b. Detalle comparación
Fig. 4.27. Comparación humedad relativa real y modelada del invernadero Araba número 2 en enero 2000
La tabla 4.10 muestra una comparación cuantitativa de los datos estadísticos del valor
absoluto de las diferencias obtenidas entre los datos reales de la temperatura y humedad
relativa y los datos estimados por el modelo lineal ARX en los mismos instantes de tiempo,
observándose que, en el intervalo de variación, la media de los errores absolutos no es
mayor de un 4 % para temperatura y un 10% para la humedad. También se muestran los
estadísticos correspondientes a la estimación de las variables utilizando el modelo completo
de simulación en ese mismo periodo de tiempo, resultando valores cuantitativos similares
en temperatura y bastante peores para la humedad (6.2% frente al 10% de error).
185
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Temperatura
Humedad relativa
Modelo lineal
Modelo de
Modelo lineal
Modelo de
ARX
simulación
ARX
simulación
11.5-25.5 (14 ºC)
49.7-100 (50.3 %)
Intervalo variación
0.53
0.52
5.08
2.53
Media
2.86
2.06
18.77
17.19
Máximo
0.51
0.48
3.70
2.39
Desviación estándar
Tabla 4.10. Estadísticos de la diferencia entre los valores de temperatura y humedad reales y simulados
por el modelo lineal ARX en el mes de enero de 2000
4.3.3.4. Validación del modelo propuesto
Para validar el modelo lineal ARX de temperatura y humedad relativa del aire, se han
utilizado datos tomados en el mismo invernadero y en la misma época del año en la que se
ha calibrado el modelo, pero en una campaña distinta, concretamente en enero de 1998,
sometido a las perturbaciones y a las señales de control mostradas en las figuras 3.51 y 3.57
respectivamente. Los resultados se exponen en las figuras 4.28 y 4.29 en las que la variable
real medida se representa por una línea continua oscura y la estimada por el modelo por una
línea continua de color más claro.
22
24
23
21
22
20
Temperatura (ºC)
Temperatura (ºC)
21
20
19
18
19
18
17
16
17
15
14
16
2000
4000
6000
8000
Tiempo (minutos)
10000
500
12000
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
5000
95
95
90
90
Humedad (%)
Humedad (%)
a. Resultado comparación
b. Detalle comparación
Fig. 4.28. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 1998
85
80
85
80
75
75
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
500
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
a. Resultado comparación
b. Detalle comparación
Fig. 4.29. Comparación humedad relativa real y modelada del invernadero Araba número 2 en enero 1998
186
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Como se puede observar, el modelo capta la dinámica predominante de la temperatura y
los errores cometidos no son muy elevados, pero el comportamiento general no es bueno
durante los periodos nocturnos y en algunos diurnos en torno al mediodía solar con días
nublados. Con respecto a la humedad relativa, como en el proceso de identificación resultó
un modelado mediocre, evidentemente, el resultado en el proceso de validación es similar,
aunque se observa que capta los grandes cambios en la variable y se mantiene en los
valores medios de cada intervalo de tiempo. Conclusiones similares se pueden extraer al
analizar las figuras 4.30, 4.31 y 4.32, correspondientes a otras épocas del año como la
campaña de verano del año 1998 (sometidos a las perturbaciones indicadas en la figura
3.53, a las señales de control de la figura 3.54 y con un cultivo en un estado inicial de
crecimiento) y las pruebas realizadas en vacío durante el mes de agosto del año 2000
(sometidos a las perturbaciones y señales de control de la figura 3.18). Es de destacar que
en estas campañas de verano, el comportamiento general del modelo mejora notablemente,
incluida la humedad relativa. La única diferencia con los otros dos periodos de invierno y
los de verano, radica en que el cultivo se encuentra en una fase de desarrollo inicial durante
agosto de 1998 y no hay cultivo en agosto de 2000, por lo que se deduce que el efecto de la
transpiración sobre la humedad y la temperatura no se ha modelado correctamente.
45
45
40
Temperatura (ºC)
Temperatura (ºC)
40
35
30
35
30
25
25
20
20
2000
4000
6000
8000
Tiempo (minutos)
10000
500
12000
1000 1500
2000 2500 3000 3500 4000
Tiempo (minutos)
4500 5000
45
45
40
40
Temperatura (ºC)
Temperatura (ºC)
a. Resultado comparación
b. Detalle comparación
Fig. 4.30. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 1998
35
35
30
30
25
25
0
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
500
1000 1500 2000 2500 3000 3500 4000 4500 5000
Tiempo (minutos)
a. Resultado comparación
b. Detalle comparación
Fig. 4.31. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 2000
187
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
90
90
80
80
70
70
Hum edad (% )
Humedad (%)
60
50
40
60
50
30
40
20
30
10
0
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
500
1000
1500
2000
Tiem po (m inutos)
2500
3000
a. Resultado comparación
b. Detalle comparación
Fig. 4.32. Comparación humedad relativa real y modelada del invernadero Araba número 2 en agosto 1998
Otra consideración a realizar es que el modelo de humedad no ha captado el efecto de la
malla de sombreo, como se puede observar en la figura 4.32.a que muestra el
comportamiento de esta variable en el tercer día de la serie simulada en el que la malla de
sombreo se encontraba completamente extendida durante todo el periodo diurno. Este tipo
de problemas es clásico en estos modelos ya que los datos utilizados para su calibración son
sólo una parte del espacio de entrada/salida del sistema [Ara98] y por lo que se ha visto, no
se dispone de suficientes datos que puedan relacionar la malla de sombreo con la humedad
relativa, además de que se necesita una riqueza dinámica que esta entrada de control no
posee, ya que es un sistema de actuación discreto que sólo toma dos valores: recogida o
extendida, aunque en este último estado se permite un margen de apertura para evitar que el
cultivo no sufra condiciones extremas.
En la tabla 4.11 se muestran los estadísticos de la diferencia en valor absoluto de los
valores reales de temperatura y humedad relativa del aire interior del invernadero y los
estimados por el modelo lineal ARX. El error relativo medio en el intervalo de variación de
cada periodo no es mayor de un 7.5 % para la temperatura y un 12 % de la humedad
relativa. Aunque los resultados obtenidos son peores que los modelados con las otras
técnicas empleadas, se pueden considerar aceptables para algunas aplicaciones, como su
utilización para el diseño y desarrollo de algoritmos de control basado en modelo de las
principales variables climáticas del interior del invernadero.
Enero 1998
13.76-23.55
(9.79 ºC)
0.76
3.38
Temperatura
Agosto 1998
19.4-48.6
(29.2ºC)
1.79
5.82
Agosto 2000
21.1-49
(27.9 ºC)
1.29
4.16
Enero 1998
55.64-100
(44.36 %)
3.75
21.54
Humedad relativa
Agosto 1998 Agosto 20001
36.36-87.47
21-94
(51.11 %)
(73 %)
6.01
7.85
22.56
26.83
Intervalo
variación
Media
Máximo
Desviación
0.45
1.22
0.86
2.61
5.66
5.73
estándar
Tabla 4.11. Estadísticos de la diferencia entre los valores reales y simulados en el proceso de validación del
modelo lineal ARX
1
En este periodo no se han incluido en el cálculo de estadísticos los resultados correspondientes al tercer día
en el que la malla de sombreo se encontraba extendida.
188
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.3.4. Modelos no lineales obtenidos basados en redes neuronales
4.3.4.1. Conceptos generales y referencias
El clima que se genera en el interior de un invernadero, descrito por la temperatura y la
humedad del aire, es de naturaleza no lineal y observando las deficiencias que presentan los
modelos lineales descritos en los apartados anteriores, se puede optar por las redes
neuronales artificiales para obtener una estructura de modelo no lineal basado en datos de
entrada/salida, de forma que los resultados estimados por el modelo se ajusten mejor a los
datos reales medidos en el invernadero. Desde hace ya algún tiempo, las redes de neuronas
artificiales han recibido una especial atención para la realización de modelos
autorregresivos no lineales (NARX) y se han aplicado en la identificación de sistemas.
Además se han utilizado en una amplia variedad de controladores basados en modelo
[Nar90].
Las redes neuronales artificiales son unos elementos de cálculo inspirados en las redes de
neuronas del sistema nervioso de los seres vivos. Se componen de elementos (neuronas o
nodos) conectados en paralelo, cuya acción conjunta es capaz de reproducir funciones
complejas. Además las conexiones entre nodos son adaptables de forma que la función
global de la red se puede modificar [Ara98]. Aunque existen modelos muy completos del
funcionamiento de una red neuronal real, la estructura que se utiliza normalmente en las
redes artificiales es muy simple y se muestra en la figura 4.33. Las entradas de una neurona
que recibe de cada una de las neuronas a las que se encuentra conectada, se ven afectadas
por un coeficiente de ponderación que mide la intensidad de la conexión entre las neuronas
receptora y emisora. La integración de todas las entradas se reduce a un proceso de adición
que representa la actividad interna de la célula. La señal que emite la neurona es el valor
que una cierta función, denominada función de activación, toma cuando su argumento se
identifica con el número que mide esa actividad interna de la célula. El tipo de función que
se emplea como función de transferencia a otras neuronas es muy variado, siendo la más
sencilla la función signo que devuelve el valor 1 si la actividad es positiva y –1 si es
negativa. Para evitar transiciones bruscas, se suele utilizar una función sigmoide [Cot98].
Una red neuronal se configura a base de interconectar una serie de neuronas de manera que
las salidas de unas sean las entradas de otras, tal y como se muestra en la figura 4.34, donde
cada neurona se ha representado por un rectángulo con dos partes, una para el sumador y
otra para la función de activación. Existen una gran número de arquitecturas de redes
neuronales donde cada neurona funciona como un elemento básico de procesamiento de
forma que la cooperación de todas ellas producen el efecto global deseado.
Entradas
Pesos ajustables
de conexión
Sumador Función de Salida
activación
Capa de
entrada
x1
...
+| f
x1
x2
f
y
xn
Fig. 4.33. Modelo no lineal de una neurona
p11
+| f
...
xn
Capa de salida
p1m
x2
+
Capa oculta
...
+| f
+| f
y1
...
pn1
+| f
ym
pnm
Fig. 4.34. Red neuronal con una capa oculta
189
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Debido a este alto grado de paralelismo la red neuronal dispone de una gran potencia de
cálculo. Las neuronas se suelen agrupar en capas, donde cada una de las neuronas que las
forman reciben la misma información, que procesan independientemente. La capa de
entrada de la figura 4.34 distribuye las señales que entran en los nodos de la siguiente capa,
que se denomina interna u oculta porque no es ni de entrada, ni de salida. Las conexiones
entre nodos se llevan a cabo multiplicando la señal por un factor denominado peso de
conexión, pxy. Finalmente, se encuentra la capa de salida, que proporciona los resultados.
De acuerdo con Kohonen, las redes neuronales pueden agruparse en tres grandes clases
según sus principios de funcionamiento y su funcionalidad: redes de prealimentación, redes
de realimentación y redes auto-organizadas [Cot98]. La naturaleza de los problemas de
identificación que se necesitan realizar en esta tesis hace que el tipo de red más adecuada
sean las redes de prealimentación (feedforward), en las que cada nodo produce una señal
que es entrada de otros nodos en las capas siguientes, pero no en la misma capa o en capas
anteriores. El prototipo de este tipo de redes es el perceptrón multicapa que consiste en un
conjunto de capas, de forma que las entradas a la red inciden sobre la unidades que
constituyen la capa de entrada, que propagan las señales a una serie de nodos que forman la
primera capa oculta. De esta capa parten conexiones hacia la siguiente, y de ésta a la
siguiente, hasta llegar a la capa de salida, cuya salida es la de toda la red. La figura 4.35
muestra un ejemplo de un perceptrón de
Capa 3
Capa 2
Capa de salida
dos capas ocultas, con una capa de Capa de
entrada +1
+1
+1
entrada de dos nodos y un solo nodo que
+|f
forma la capa de salida. Las
x
características que definen la arquitectura
1
+|f
de este tipo de red son la función de
f(x)
+|f
+
activación, el número de capas ocultas y
su número de nodos, así como la x2
+|f
conectividad entre cada neurona. Una
+|f
vez definidos estos parámetros, comienza
el proceso de aprendizaje o selección de
Fig. 4.35. Red perceptrón multicapa
los pesos de conexión [Ara98].
El procedimiento por el cual una red neuronal almacena la información se denomina
entrenamiento de la red debido a que se imita el modo de aprendizaje de una determinada
disciplina a base de la repetición de ejercicios relacionados con ella. De esta forma, la red
adapta los pesos de conexión entre sus neuronas a base de observar ejemplos de los pares
entrada-salida que debe realizar. Antes de este proceso hay que determinar el número de
capas o de neuronas por capa, que sólo se puede realizar tras una serie de ensayos que
permitan decidir cuales son los valores razonablemente adecuados. Básicamente existen
dos tipos de aprendizajes, aunque se encuentran otros en la bibliografía especializada:
• Aprendizaje supervisado. A partir de un conjunto de entrenamiento de pares de entradasalida conocido, se van modificando los parámetros ajustables de la red según alguna
regla que trate de minimizar el error entre el valor estimado por la red y el valor real de
la salida. El proceso se repite hasta que el error que proporcione la red sea menor que el
establecido para considerar los valores estimados como correctos. Un esquema de este
tipo de aprendizaje se muestra en la figura 4.36.a. Este método es el típico de la redes
concebidas para el ajuste de datos o la clasificación de objetos etiquetados.
190
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Aprendizaje no supervisado. Se utiliza para las redes en las que los datos no tienen a
priori ningún tipo de clasificación, siendo la función que se desea implementar la que
detecta la regularidades intrínsecas de los datos para elaborar la mejor clasificación
posible, partiendo exclusivamente de ellos, tal y como se muestra en la figura 4.36.
Entre las reglas de aprendizaje no supervisado destacan el aprendizaje competitivo, la
regla de Hebb o el aprendizaje de mapas de características autoorganizados [Ara98].
Entradas
Salidas
Red neuronal de la red
adaptativa
Entradas
Salidas
Red neuronal de la red
adaptativa
Salidas
reales
Error
a. Aprendizaje supervisado
b. Aprendizaje no supervisado
Fig. 4.36. Tipos de aprendizaje en red neuronal
Existen distintos algoritmos para adaptar los pesos de la red, aunque el más utilizado en
redes neuronales del tipo perceptrón multicapa para el entrenamiento supervisado es el
conocido como propagación hacia atrás (Backpropagation). Para ello es necesario utilizar
un conjunto de entrenamiento de datos, CEn, compuesto por un vector de entradas reales,
Xreal y un vector de salidas reales, Yreal, de forma que el patrón n-ésimo será (xreal,n,yreal,n).
Además hay que utilizar una función de error a minimizar, ferror, que en la mayoría de los
casos es la suma de los errores cuadráticos entre las salidas reales, Yreal y las estimadas por
la red, Yneuronal, es decir:.
f error =
∑ ( yreal ,n − yneuronal ,n )T ( yreal ,n − yneuronal ,n )
(4.24)
n∈CEn
El método de la propagación hacia atrás consiste en adaptar los pesos de la red en la
dirección negativa del gradiente de la función de error. Por tanto, los pasos a seguir son
inicializar los pesos de conexión con valores aleatorios pequeños; a continuación y para
cada par de entradas y salidas, se obtienen las salidas, se calcula el error y se propaga el
error hacia atrás, ajustando los pesos de conexión siguiendo la dirección dada por el
gradiente de error. Este proceso se repite hasta que se obtenga un valor aceptable o el
proceso quede detenido en un valor estable.
Un problema genérico que se suele resolver mediante redes neuronales es la síntesis de
sistemas que realizan una determinada asociación de datos de entrada-salida. La red es una
caja negra cuyos parámetros internos, los pesos de conexión, se ajustan de forma que ante
cada entrada responda de una manera preestablecida. Concretamente, se puede concebir
como un problema de aproximación de funciones. Los datos de entrada y salida son
vectores multidimensionales y lo que se pretende es que la red neuronal efectúe un ajuste
entre esos datos. De esta manera, el valor de la salida estimado por la red, cuando se
estimula con un cierto vector de entrada, se debe parecer lo más posible al valor real de la
salida. Por tanto, se ajusta al concepto de identificación de sistemas descrito en el apartado
anterior como la construcción de modelos matemáticos basándose en medidas obtenidas en
el propio sistema.
191
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Las razones para utilizar las redes neuronales como sistemas de identificación se debe a su
rapidez de respuesta (debido a su procesamiento paralelo), a su capacidad para interpolar, a
su flexibilidad para describir funciones no lineales y a su habilidad para trabajar con
espacios de gran dimensión. Existen distintos modelos neuronales para la identificación de
sistemas dinámicos, la mayoría de ellos extensiones al caso no lineal de modelos
paramétricos lineales, aunque el modelo NARX (Non-linear AutoRegressive with
eXogenous inputs) proporciona una gran flexibilidad y permite ser ajustado con algoritmos
simples [Ara98]. La salida del modelo necesita valores anteriores de entradas y salidas
reales tal y como se muestra en el esquema del modelo NARX, representado en la figura
4.37, en el que se puede observar que
los valores pasados de las entradas y x
real,k
Línea
salidas del sistema se obtienen con
retardo
yneuronal,k+1
líneas de retraso. Este modelo se puede
f
implementar con una red de neuronas y
Línea
real,k
sin bucles. Matemáticamente la
retardo
predicción del modelo viene dada por
Fig. 4.37. Diagrama de identificación
la siguiente expresión [Ara98]:
(
)
y neuronal ( k + 1 ) = f y real ( k ),..., y real ( k − n y ), xreal ( k ),..., xreal ( k − n x )
(4.25)
Las redes neuronales se han aplicado en distintas aplicaciones del proceso de producción de
cultivos bajo invernadero, entre las que destacan las siguientes [Seg97]:
• Obtención de modelos no lineales de las variables climáticas de un invernadero en
función de entradas de control y de perturbaciones, que es el problema del que se ocupa
este capítulo. En la tabla 4.12 se describen detalladamente los principales modelos
desarrollados basados en redes neuronales, destacando el estudio de Seginer y
colaboradores [Seg94]. Se indican los autores de los mismos, las variables que modela,
las entradas que utiliza la red así como su estructura. Además se muestran las
experiencias realizadas y la utilización que se hace del modelo resultante. Se incluyen
las referencias de los trabajos publicados para una posterior consulta si se considera
conveniente.
• Algunos de los modelos desarrollados se utilizan para el diseño de controladores
basados en modelo o la obtención de las trayectorias de consigna que deben seguir las
variables climáticas como se describe en algunos trabajos de Seginer y colaboradores
([Seg97], [Seg93]) para la obtención de máximo beneficio, o de Morimoto y
colaboradores ([Mor00a], [Mor00b]) que relacionan las propiedades de los frutos con el
clima y las variables de fertirrigación en el crecimiento del cultivo y en el
almacenamiento de los frutos. Otra utilidad es la conmutación de controladores basados
en reglas [Sig00c].
• Modelado de la predicción de las variables meteorológicas externas que actúan como
perturbaciones del clima del invernadero para el diseño de algoritmos de control, tal y
como se ha descrito en [Ale94].
• Reducción de modelos basados en un número elevado de entradas o de variables de
estado. En determinadas aplicaciones se puede reducir un modelo de forma que funcione
correctamente la aplicación en que se utiliza como se describe en [Seg96b] y [Seg98b]
para un modelo de crecimiento del cultivo del tomate.
192
193
Tres capas (1 oculta)
Función activación:
sigmoide
5 nodos capa oculta
Invernadero Venlo
Cubierta cristal
422.4 m2
Actuadores:
ventilación natural
Silsoe (UK)
Cultivo tomate
R2 (validación)=0.967
Se realizan análisis de
reducción de entradas
obteniéndose
resultados
interesantes
R2 (validación)
Radiación
0.974
Temperatura aire
0.916
Temperatura húmeda 0.715
Temperatura suelo 0.718
Temperatura cultivo 0.926
R2 (validación)=0.944
Se realizan análisis de
reducción de entradas
obteniéndose
resultados
interesantes
Tres capas (1 oculta)
Función activación:
sigmoide
5 nodos capa oculta
Tres capas (1 oculta)
Función activación:
sigmoide
6 nodos capa oculta
Diseño controladores
óptimos de variables
climáticas
R2 (validación)
Radiación
0.993
Temperatura aire
0.965
Temperatura húmeda 0.896
Temperatura suelo 0.936
Se realizan análisis de
reducción de entradas con
resultados interesantes
R2 (validación)
Radiación
0.990
Temperatura aire
0.965
Temperatura húmeda 0.867
Temperatura suelo 0.905
Invernadero túnel
Cubierta
polietileno
416 m2
Actuadores:
ventilación natural,
calefacción,
humidificador
Tres capas (1 oculta) Avignon (FRA)
Función activación: Cultivo tomate
sigmoide
6 nodos capa oculta
Analizar las entradas
más
significativas
cuando se diseñe un
modelo de variables
climáticas basado en
principios físicos
Utilización
Experiencias
Resultados
Estructura de la
red neuronal
Tres capas (1 oculta)
Función activación:
sigmoide
7 nodos capa oculta
Ref.
[Seg94]
[Seg97]
Tabla 4.12.a. Descripción de modelos no lineales del clima que se genera en el interior de un invernadero basados en redes neuronales
Entradas de la
red neuronal
Radiación exterior
Temperatura exterior
Temperatura húmeda exterior
Velocidad viento
Calefacción
Ventilación natural
Humidificación
Índice área foliar
Modelo MISO de las Radiación exterior
siguientes variables
Temperatura exterior
Radiación interior
Temperatura húmeda exterior
Temperatura interior Velocidad viento
Temperatura húmeda Calefacción
Ventilación natural
Temperatura suelo
Humidificación
Índice área foliar
Modelo MISO
Velocidad viento
Flujo ventilación
Dirección viento
∆ temperatura interior y
exterior
Ventilación este lateral
Ventilación este cenital
Ventilación oeste lateral
Ventilación oeste cenital
Modelo MIMO
Radiación solar exterior
Radiación interior
Rad. Onda larga cielo
Temperatura interior Temperatura exterior
Temperatura húmeda Temperatura húmeda exterior
Temperatura suelo
Velocidad viento
Temperatura cultivo Dirección viento
Ventilación natural
Modelo MISO
Velocidad viento
Flujo ventilación
Dirección viento
Temperatura aire exterior
Temperatura húmeda ext.
Radiación solar exterior
Radiación onda larga cielo
Ventilación
Modelo
Variables
Autores
que modela
Seginer Modelo MIMO
Boulard Radiación interior
Bailey
Temperatura interior
Temperatura húmeda
Temperatura suelo
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
194
Flujo calefacción principal
Flujo calefacción secundaria
Temperatura tubería principal
Temperatura tubería secundaria
Radiación
Temperatura exterior
Radiación solar exterior
Humedad relativa interior
Modelo MIMO
N Temperaturas en
un plano vertical
del
aire
del
invernadero
Modelo MISO
Temperatura
Wan
Qi-Di
No lo indican
Invernadero cubierta
plana
Cubierta polietileno
48 m2
Actuadores:
ventilación forzada,
malla
sombreo,
enriquecedor CO2
Haifa (ISR)
Sin cultivo
Experiencias
Utilización
Utilización como
modelo
controladores
óptimos
Diseño
controladores
óptimos
Diseño
controladores
No compara datos Obtención
reales y estimados por referencias de
control
el modelo neuronal
Correctos cuantitativa y
cualitativamente
R2 (test)=0.86
Correctos cuantitativa
y cualitativamente
R2 (test)=0.97
Correctos cuantitativa Diseño
controladores
y cualitativamente
óptimos de CO2
R2 (test)=0.97
Resultados
Gráficos correctos de
4 capas (2 ocultas)
entre
comparación
Función activación:
datos reales/ estimados
sigmoide
Utiliza una estructura Invernadero Venlo
Error residuos< ± 10%
Actuadores:
neurofuzzy
Error absoluto máximo
Tres capas (1 oculta) ventilación natural, < ± 2ºC
calefacción agua ,
enriquecedor CO2
Wageningen (HOL)
Tomate
Tres capas (1 oculta) Invernadero 6 naves No compara datos
Actuadores:
reales y estimados por
calefacción principal el modelo neuronal
calefacción
secundaria
Tres capas (1 oculta) No
indica
las Gráficos correctos de
características
del comparación
datos
invernadero
reales/ estimados
RMSE<0.05
Estructura de la
red neuronal
Tres capas (1 oculta)
Función activación:
sigmoide
4 nodos capa oculta
Tres capas (1 oculta)
Función activación:
sigmoide
4/5
nodos
capa
oculta
Tres capas (1 oculta)
Función activación:
sigmoide 4 nodos
capa oculta
4 capas (2 ocultas)
Función activación:
sigmoide
[Fer02a]
[Fer02b]
[Wan99a]
[Tie98]
[Tan93a]
[Lin98]
Ref.
Tabla 4.12.b. Descripción de modelos no lineales del clima que se genera en el interior de un invernadero basados en redes neuronales (continuación)
Ferreira
Ruano
Temperatura exterior
Radiación solar exterior
Velocidad viento
Dirección viento
Calefacción
Ventilación
Modelo MISO
Temperatura
Tien
V. Straten
Modelo MISO
Radiación
Modelo MISO
Temperatura
Tanaka
Tanino
Watanabe
Arima
Kita
Temperatura exterior
Calefacción
Ventilación natural
Malla de sombreo
Humidificador
Malla de sombreo
Luz artificial
Variables
Entradas de la
que modela
red neuronal
Modelos MISO
Radiación solar exterior
Temperatura suelo Temperatura exterior
seco
Velocidad ventiladores
Posición mallas sombreo
Modelo MISO
Radiación solar exterior
Temperatura suelo Temperatura exterior
húmedo
Velocidad ventiladores
Posición mallas sombreo
Humedad relativa interior
Velocidad ventiladores
Modelo MISO
Concentración CO2 Posición mallas sombreo
Flujo enriquecedores CO2
Modelo
Autores
Linker
Seginer
Gutman
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.3.4.2. Diseño del modelo propuesto
El modelo simplificado del clima que se genera en el interior de un invernadero basado en
redes neuronales, parte de las siguientes hipótesis generales:
• Sólo se considera al aire como elemento del invernadero.
• Las variables de estado del sistema son la temperatura del aire, Xt,a y la humedad
relativa, Xh,a.
• Existen dos sistemas externos que interaccionan con el sistema invernadero: el aire
exterior y el cultivo. Como se ha comentado en los modelos anteriores, sería conveniente
considerar el efecto del suelo, pero como no es una variable que se suele medir en las
instalaciones típicas, no se ha incluido en el proceso de modelado.
• Las variables exógenas y perturbaciones que actúan sobre el sistema y que se consideran
como condiciones de contorno son la temperatura del aire exterior, Pt,e, la velocidad del
viento, Pvv,e, la dirección del viento, Pdv,e, la radiación global en el exterior, Prs,e, que se
ve afectada por el blanqueo de la cubierta y el cultivo a través del índice de área foliar,
PLAI.
• Las entradas de control del sistema son la posición de las ventilaciones, Uven, la posición
de la malla de sombreo, Umalla y la temperatura del agua que circula por las tuberías del
sistema de calefacción, Ut,cal.
CONDICIONES CONTORNO
Temperatura
exterior
Radiación
exterior
Velocidad
Viento
Dirección
Viento
ENTRADAS
Índice área
foliar
Ventilación
SALIDAS
Temperatura aire
Calefacción
Humedad aire
Malla sombreo
Figura 4.38. Esquema de entradas/salidas del modelo climático basado en redes neuronales
• Se considera el principio de distribución homogénea de las variables.
Como se ha comentado anteriormente, para obtener un modelo que obtenga predicciones
aceptables se deben resolver dos problemas:
•
Seleccionar un modelo entre todos los de la familia NARX. Este problema incluye la
elección del número de nodos, conexiones y otras características de la red neuronal. En
esta aplicación, primero, se seleccionan las entradas que alimentan a la red y después se
determina la estructura neuronal.
•
Obtener los valores de los parámetros ajustables del modelo.
195
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
El modelo NARX representado en la ecuación 4.25 puede ser realizado por redes neuronales
utilizando como vector de entrada un histórico de valores de las variables medidas. Si el
número de valores pasados utilizados son ny para las salidas, nx para las entradas de control
y np para las perturbaciones, el modelo neuronal puede proporcionar predicciones de la
salida del invernadero de la forma siguiente:
(
)
yneuronal( k + 1 ) = f yreal( k ),...,yreal( k − n y ),xreal( k ),...,xreal( k − nx ), preal( k ),...,p( k − n p ),W f (4.26)
donde Wf es un vector que contiene todos los parámetros de la red neuronal.
Como se puede comprobar, el dominio temporal se ha considerado tratando los valores
pasados de las variables como diferentes entradas al sistema que alimentan a una red
neuronal estática por medio de las líneas de retardo temporal, tal y como se muestra en la
figura 4.37. El número de los valores pasados utilizados, por regla general, es desconocido
y difícil de determinar. Para un número de valores pasados más elevado, más segura será la
predicción, pero, a su vez, puede que el modelo sea ineficiente debido al elevado número de
entradas que necesitaría. Por otro lado, un número menor provocaría que el modelo no
pudiera predecir correctamente las salidas futuras. Existen una serie de métodos para la
selección de variables de entrada para modelos no lineales. Una breve revisión de los
mismos se puede encontrar en [Ber98] y para aplicaciones en modelado del clima de
invernaderos en la referencia destacan los estudios de Seginer y colaboradores ([Seg94],
[Seg97]). Se han utilizado dos métodos para seleccionar el número de los valores pasados
de las señales como entrada de una red neuronal en el proceso de modelado del microclima
interior de un invernadero:
•
•
Arahal propuso un método basado en el gradiente estimado como cociente de distancias
entre puntos encerrados en el espacio de las entradas [Ara98], aplicándolo al modelado
y control de plantas solares [Ber98]. El valor del gradiente estimado podría disminuir
cuando se añade una nueva Línea de Retardo Temporal que describe la diferencia de las
salidas. En base a este hecho, el método comienza con valores pequeños de nx, ny y np
que secuencialmente van cambiando entre [nx+1, ny+1 y np+1], según la variable que
proporciona una mayor reducción del gradiente.
El segundo método, que puede ser combinado con el primero, se basa en la utilización
de la información obtenida con métodos lineales. Los modelos lineales aproximados
ARX de invernaderos, descritos en el apartado 4.3.3 de este capítulo, han sido
desarrollados para obtener una predicción de la temperatura y la humedad utilizando
valores previos de las variables de entrada. El número de valores pasados de entradas y
salidas de realimentación de los modelos lineales ha sido utilizado como valores
indicativos para los modelos no lineales neuronales [Rod99].
A partir de estos valores se va incrementando el número de entradas y salidas de valores
pasados y se alimenta a la red para seleccionar el mejor caso utilizando validación cruzada
(para cada entrada se prueba en la red un número diferente de nodos). En cada caso, se
realizan las suficientes pruebas para evitar el efecto aleatorio de la selección inicial de los
pesos de la red. Los valores pasados utilizados para obtener un modelo de la temperatura y
humedad del aire en el interior del invernadero Araba número 2 en un instante determinado
k, se muestran en la siguiente tabla:
196
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Valores pasados utilizados
Variable
Temperatura
3
Humedad
3
Temperatura exterior
4
Radiación
2
Velocidad del viento
9
Ventilación
5
Calefacción
10
Mallas de sombreo
2
Tabla 4.13. Valores pasados utilizados de las entradas de la red neuronal
La estructura neuronal seleccionada ha sido un perceptrón multicapa, como el que se
muestra en la figura 4.35, con una capa de entrada con 38 nodos, una capa oculta con 8
nodos y activación no lineal, y una capa de salida con dos nodos. Los pesos se han
configurado como conexiones a nodos con valores constantes. El número de nodos se ha
determinado entrenando las diferentes redes y determinando, por el método de la validación
cruzada, su capacidad de aproximación y generalización. Este proceso se ha llevado a cabo
utilizando dos conjuntos de datos disjuntos: uno para entrenar la red y otro para validarlo.
4.3.4.3. Calibración del modelo propuesto
El entrenamiento de la red neuronal implementada se ha realizado por el método de
aprendizaje supervisado de propagación hacia atrás, de forma que se minimice el criterio de
mínimos cuadrados indicado en la ecuación 4.24, función del cuadrado de la diferencia
entre las medidas de las variables reales adquiridas en los invernaderos y los valores
estimados por el modelo, al igual que se ha realizado en el proceso de calibración de los
otros modelos desarrollados. Para ello se han utilizado los datos correspondientes al mes de
enero del año 2000, en el que el invernadero Araba número 2 se encuentra sometido a las
perturbaciones y entradas de control mostradas en la figura 3.34. Los resultados obtenidos
en este proceso se pueden observar en las figuras 4.39 para la temperatura del aire y 4.40
para la humedad relativa, pudiéndose deducir que el comportamiento del modelo es
correcto, ya que capta completamente la dinámica de las variables a estimar, además de que
los errores cometidos son pequeños, tal y como se indica en la tabla 4.14, con errores
relativos medios menores del 1.5% para temperatura y 3.5 % para la humedad relativa.
24
22
23
21
22
20
Temperatura (ºC)
Temperatura (ºC)
21
20
19
18
17
19
18
17
16
16
15
0
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
500
14000
1000
1500
2000 2500 3000 3500
Tiempo (minutos)
4000
4500
5000
a. Resultado comparación
b. Detalle comparación
Fig. 4.39. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 2000
197
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
90
80
80
Humedad relativa (%)
Humedad relativa (%)
85
75
70
65
75
70
65
60
60
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
500
14000
1000
1500
2000 2500 3000 3500
Tiempo (minutos)
4000
4500
5000
a. Resultado comparación
b. Detalle comparación
Fig. 4.40. Comparación humedad relativa real y modelada del invernadero Araba número 2 en enero 2000
La tabla 4.14 también muestra los estadísticos obtenidos con el modelo de simulación
basado en principios físicos durante el mismo periodo de tiempo, pudiéndose observar que
los resultados medios son peores que los obtenidos con el modelo neuronal. Estos datos
llevan a pensar que también se podría utilizar el modelo neuronal como simulador del
comportamiento del clima del invernadero ya que es el que se adapta mejor a su dinámica,
con menores errores absolutos. Además, para modelar estas variables en otra estructura de
invernadero, sólo se debe de repetir este proceso de calibración con nuevos datos, al igual
que ocurre con los modelos basados en principios físicos en los que se debe repetir el
proceso de estimación de sus parámetros característicos siempre que se trate de nuevos
invernaderos. En el modelo completo descrito en el capítulo 3, eran más de treinta
parámetros a estimar, por lo que el proceso de calibración de ambos tipos de modelo puede
llegar a ser igual de costoso. Sin embargo, la principal ventaja del modelo de simulación es
que se conoce el funcionamiento de cada uno de los procesos que rigen la dinámica de las
variables climáticas en el interior del invernadero por lo que se pueden utilizar para otros
fines, como el diseño de sistemas de actuación o banco de pruebas para probar el
comportamiento frente a distintos materiales de cubierta. Además, con el diseño modular
jerárquico que se ha utilizado en el modelo de simulación, el añadir el modelado de nuevas
variables climáticas, como la concentración de CO2, o el efecto de nuevos procesos, como
la instalación de nuevos sistemas de actuación, sólo supone la calibración de estos nuevos
submodelos y su inclusión en el nivel correspondiente del modelo general; en cambio, en
un modelo neuronal, supone el diseño completo de una nueva estructura de la red y la
repetición de todo el proceso de entrenamiento.
Temperatura
Humedad relativa
Modelo
Modelo de
Modelo
Modelo de
neuronal
simulación
neuronal
simulación
11.5-25.5
49.7-100
Intervalo variación
(14 ºC)
(50.3 %)
0.18
0.52
1.62
2.53
Media
2.18
2.06
25.50
17.19
Máximo
0.17
0.48
1.11
2.39
Desviación estándar
Tabla 4.14. Estadísticos de la diferencia entre los valores de temperatura y humedad reales y
simulados por el modelo neuronal en enero 2000
198
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
4.3.4.4. Validación del modelo propuesto
Al igual que se ha realizado para el resto de técnicas de modelado, para validar el modelo
neuronal de temperatura y humedad relativa del aire, se han utilizado datos tomados en el
invernadero Araba número 2 y en la misma época del año en la que se ha calibrado el
modelo, pero en una campaña distinta, concretamente en enero de 1998, sometido a las
perturbaciones y a las señales de control mostradas en las figuras 3.51 y 3.57,
respectivamente. Los resultados obtenidos para la temperatura se exponen en la figura 4.41
y para la humedad relativa del aire en la 4.42 en las que la variable real medida se
representa por una línea continua oscura y la estimada por el modelo por una línea continua
de color más claro.
24
23
23
22
22
Temperatura (ºC)
Temperatura (ºC)
21
20
19
18
17
21
20
19
18
16
17
15
14
16
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
14000
500
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
5000
a. Resultado comparación
b. Detalle comparación
Fig. 4.41. Comparación temperatura real y modelada del invernadero Araba número 2 en enero 1998
95
95
90
Humedad relativa (%)
Humedad relativa (%)
90
85
80
75
85
80
75
0
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
14000
0
500
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
a. Resultado comparación
b. Detalle comparación
Fig. 4.42. Comparación humedad relativa real y modelada del invernadero Araba número 2 en enero 1998
Como se puede observar, las estimaciones del modelo neuronal presentan un buen
comportamiento, aunque sobreestima el valor de la temperatura cuando la calefacción se
encuentra apagada como se muestra en la figura 4.41.a durante la quinta noche, aunque la
diferencia entre el valor real y el estimado es menor de 1 ºC. Evidentemente, este efecto es
debido a que no se utilizaron suficientes datos del espacio de entrada/salida del sistema en
el proceso de calibración del modelo neuronal.
199
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Las figuras 4.43, 4.44 y 4.45 muestran los resultados obtenidos con datos de otras épocas
del año como en verano del año 1998 (perturbaciones indicadas en la figura 3.53, señales
de control de la figura 3.65 y con un cultivo en estado inicial) y el mes de agosto del año
2000 (sometidos a las perturbaciones y señales de control de la figura 3.18, sin cultivo).
42
45
40
38
36
Temperatura (ºC)
Temperatura (ºC)
40
35
30
34
32
30
28
26
24
25
22
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
14000
0
500
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
45
45
40
40
Temperatura (ºC)
Temperatura (ºC)
a. Resultado comparación
b. Detalle comparación
Fig. 4.43. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 1998
35
35
30
30
25
25
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
500
14000
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
90
90
80
80
Humedad relativa (%)
Humedad relativa (%)
a. Resultado comparación
b. Detalle comparación
Fig. 4.44. Comparación temperatura real y modelada del invernadero Araba número 2 en agosto 2000
70
60
50
70
60
50
40
40
30
30
2000
4000
6000
8000
Tiempo (minutos)
10000
12000
14000
0
500
1000
1500
2000 2500 3000
Tiempo (minutos)
3500
4000
4500
a. Resultado comparación
b. Detalle comparación
Fig. 4.45. Comparación humedad relativa real y modelada del invernadero Araba número 2 en agosto 2000
200
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Como se puede observar, en verano, los resultados de temperatura se sobreestiman debido
principalmente a que se blanquea la cubierta del invernadero, lo que afecta al resultado
final. En la tabla 4.15 se muestran los estadísticos de la diferencia en valor absoluto de los
valores reales de temperatura y humedad relativa y los estimados por el modelo neuronal.
Con respecto a la temperatura, el error relativo es de un 2.4 % en enero de 1998, mientras
que sube a más de un 6% para el verano, confirmándose las conclusiones del estudio
realizado de las gráficas. La red neuronal se ha entrenado con datos de invierno, por lo que
es lógico que estime mejor las variables con datos cercanos al espacio de entrada/salida
utilizado para la identificación ya que la interpolación producirá resultados aceptables para
puntos próximos a estos. En cambio la extrapolación a puntos lejanos del espacio de
entrenamiento puede que no produzca los resultados deseables [Ara98] tal y como se
observa en los resultados obtenidos para los meses de agosto cuyas condiciones de
perturbaciones no pertenecen al espacio de entrenamiento formado por las perturbaciones
correspondientes a un mes de enero. Aún así, los resultados obtenidos son aceptables para
ser utilizados en algoritmos de control basados en modelo. Sin embargo, con respecto a la
humedad relativa, el modelo se comporta correctamente en todos los ensayos realizados en
distintos periodos del año, manteniéndose el error constante durante todos ellos, no siendo
superior al 5% en el intervalo de variación de la humedad.
Enero 1998
13.76-23.55
(9.79 ºC)
0.24
2.59
Temperatura
Agosto 1998
19.4-48.6
(29.2ºC)
1.75
3.72
Agosto 2000
21.1-49
(27.9 ºC)
1.62
3.27
Enero 1998
55.64-100
(44.36 %)
1.96
23.71
Humedad relativa
Agosto 1998 Agosto 2000
36.36-87.47
21-94
(51.11 %)
(73 %)
2.46
3.24
24.28
29.84
Intervalo
variación
Media
Máximo
Desviación
0.21
1.12
1.02
1.12
2.09
2.51
estándar
Tabla 4.15. Estadísticos de la diferencia entre los valores reales y simulados en el proceso de validación de
modelos neuronales
Si se utilizara el modelo neuronal como simulador del sistema, habría que utilizar un
espacio de datos de entrada/salida más amplio para evitar este tipo de problemas y que los
errores de modelado fueran los mínimos posibles.
4.4. CONCLUSIONES
Para el diseño de controladores de las principales variables que describen el clima de un
invernadero (temperatura, humedad y radiación) es necesario la utilización de modelos que
sean capaces de captar la dinámica predominante del sistema. En este capítulo se han
estudiado distintas estructuras de modelos simplificados del clima. En un primer apartado
se ha descrito un modelo simplificado basado en los procesos físicos que se producen entre
los distintos elementos del invernadero considerados. Posteriormente, se han analizado
distintas estructuras basadas exclusivamente en datos de entrada/salida, concretamente, dos
técnicas lineales (identificación de modelos ARX y basados en ensayos de la curva de
reacción) y una técnica no lineal basada en redes neuronales artificiales. De cada una de
estos modelos se han descrito sus fundamentos, las hipótesis generales de partida, así como
la metodología seguida para la obtención de sus parámetros característicos, su
implementación y la validación de los mismos. De todas las estudios realizados se pueden
extraer las siguientes conclusiones [Rod01b]:
201
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
• Si se conocen los procesos internos que determinan la dinámica del sistema, se pueden
utilizar modelos basados en principios físicos. La bondad del modelo va a depender de
cómo se contemplen todos esos procesos y de las aproximaciones realizadas. No hay que
olvidar que un modelo teórico es sólo una aproximación a la realidad, que en el caso del
clima de un invernadero es complicada. En función del uso que se haga de un modelo se
considerará más o menos correcto.
• Utilizando datos experimentales de entrada/salida del modelo, sin necesidad de conocer
la naturaleza del sistema, con las técnicas alternativas para la obtención de modelos
simplificados basadas en la utilización de unas estructuras matemáticas muy flexibles, se
obtienen resultados aceptables.
• La obtención de modelos empíricos en el caso del control climático de invernaderos se
puede abordar desde dos puntos de vista:
Considerar que pueden ser descritos de una forma precisa por un modelo dinámico
lineal cuando el rango de operación del sistema es limitado (evidentemente
realizando numerosas simplificaciones). Cuando se cambia de un rango de operación
limitado a otro, hay que utilizar otro modelo lineal, siendo necesario el desarrollo de
mecanismos que eviten los transitorios a que pueden dar lugar los cambios de
modelo (por ejemplo, estructuras de control adaptativo, ajuste por tabla, etc.).
Considerar todo el rango de funcionamiento y desarrollar un modelo no lineal que
después pueda ser utilizado en esquemas de control, como por ejemplo, utilizando
redes neuronales ([Rod99], [Seg94]).
• Como los modelos empíricos se basan en datos tomados en invernaderos y no se basan
en principios físicos, los resultados obtenidos no son extrapolables a otros invernaderos,
aunque la metodología es lo suficientemente conocida y sencilla como para obtenerlos
en cada caso. Si se utilizan modelos basados en primeros principios, la estructura es
similar para cualquier invernadero, pero habría que calibrarlo, obteniendo los parámetros
característicos propios del sistema a modelar.
• Por la propia naturaleza no lineal de las variables climáticas en el interior de un
invernadero (temperatura y humedad relativa), se puede observar que los modelos no
lineales, basados en principios físicos (completo (PFC) y simplificado (PFS)) y redes
neuronales (NN) se comportan mejor que los modelos lineales basados en el método de
la curva de reacción (CR) y en datos de entrada/salida (ARX), tal y como se muestra en
las tablas 4.16 y 4.17, en las que se comparan los resultados obtenidos por cada una de
las técnicas de modelado utilizadas en los periodos de enero y agosto de 1998
respectivamente.
Enero 1998
Temperatura
Humedad relativa
Modelos no lineales
Modelos lineales
Modelos no lineales
Modelos lineales
PFC
PFS
NN
CR
ARX
PFC
PFS
NN
CR
ARX
0.48
0.74
0.24
0.81
0.76
3.26
3.64
1.96
3.75
3.12
3.67
2.59
4.12
3.38
16.01
17.10
23.71
21.54
Media
Máximo
Desviación
0.43
0.71
0.21
0.75
0.45
3.17
3.23
1.12
2.61
estándar
Tabla 4.16. Comparación de resultados obtenidos en los procesos de validación de los modelos desarrollados
en el mes de enero de 1998
202
Capítulo 4. Obtención de modelos para control del clima en el interior de un invernadero
Agosto 1998
Temperatura
Humedad relativa
Modelos no lineales
Modelos lineales
Modelos no lineales
Modelos lineales
PFC
PFS
NN
CR
ARX
PFC
PFS
NN
CR
ARX
1.12
1.14
1.75
1.84
1.79
4.01
4.71
2.46
6.01
6.05
5.32
3.72
4.01
5.82
15.54
22.01
24.28
22.56
Media
Máximo
Desviación
0.94
1.09
1.12
1.22
1.22
3.97
3.79
2.09
5.66
estándar
Tabla 4.17. Comparación de resultados obtenidos en los procesos de validación de los modelos desarrollados
en el mes de agosto de 1998
• En sistemas no estacionarios (como un invernadero) expuestos a duras perturbaciones,
es difícil obtener modelos de predicción a largo plazo porque no se conocen las
variaciones de las perturbaciones, como por ejemplo, la radiación o el viento que sufren
cambios significativos de manera brusca.
• Se ha demostrado que los modelos obtenidos son suficientemente efectivos para ser
empleados en el control en tiempo real de las variables que describen el clima interior de
un invernadero. El modelo teórico simplificado basado en principios físicos se ha
utilizado en el diseño de controladores por adelanto, obteniéndose resultados aceptables
[Rod01a], como se analiza en el capítulo 6. Los modelos lineales se han utilizado para el
diseño de controladores robustos [Mor02] y adaptativos [Ber03], y el modelo basado en
redes neuronales se va a utilizar para el diseño de un controlador predictivo no lineal.
Hay que indicar que en la presente tesis, sólo se ha incluido la descripción de los
controladores que se han probado en las instalaciones y de los que se disponen de datos
reales, concretamente controladores con ajuste por tabla y controladores PI con una
compensación por adelanto en serie y paralelo.
203
CAPÍTULO 5
MODELADO DEL CRECIMIENTO
DEL CULTIVO DE TOMATE
5.1. CRECIMIENTO Y DESARROLLO DE CULTIVOS
En este capítulo se va a estudiar la dinámica de crecimiento del cultivo (tomate en este
caso) y se van a desarrollar y validar los modelos que la describen y la relacionan con las
condiciones climáticas en las que se encuentra el cultivo (clima del invernadero).
En primer lugar, hay que distinguir entre crecimiento y desarrollo de un cultivo, ya que se
utilizan indistintamente y son dos conceptos diferentes [Cha95]. El crecimiento del cultivo
se define como el incremento de biomasa o de las dimensiones físicas de las plantas. El
desarrollo del cultivo se define como el conjunto de cambios ordenados o los progresos
que sufren las plantas para alcanzar un estado superior, más ordenado y complejo. Esta
definición la propuso Bidwell en 1974 [Bid74] y en ella, el desarrollo no sólo se refiere a
transición entre las distintas fases (por ejemplo, juvenil a adulta) sino también a la
formación y desarrollo de nuevos órganos, envejecimiento, etc. El desarrollo de un cultivo
puede considerarse como un patrón básico que refleja las propiedades genéticas de cada
cultivo cuyo comportamiento puede ser modificado por el clima. Por contra los procesos
que se producen en el crecimiento son comunes a distintos tipos de cultivos. La relación
entre los factores ambientales y el desarrollo se reflejan en una adaptación genética de los
cultivos a su entorno, pudiendo esta relación ser bastante específica para un cultivo. Estos
hechos dificultan trabajar en general con los procesos de desarrollo, donde puede ser más
fácil encontrar la excepción que la regla. De la definición de ambos conceptos se puede
observar que el crecimiento se refiere a aspectos más cuantitativos que el desarrollo de
cultivos. Por esta razón se ha optado por trabajar con las variables relacionadas con el
crecimiento que permiten un estudio, una medida de variables de interés y un modelado
más objetivo, de forma que el crecimiento se considera como un incremento del peso y el
tamaño de las plantas.
Una planta está formada por células que durante el crecimiento se dividen sucesivamente
en dos exactamente iguales cuyo tamaño es la mitad de la célula original. Durante este
proceso, el peso de la planta casi no se incrementa. Para generar las distintas partes de la
célula, así como su membrana, se necesitan azúcares que proporcionan las hojas a través de
la fotosíntesis y una determinada cantidad de nutrientes (sales) disueltas en el agua de riego
que la planta toma a través de las raíces.
205
Capítulo 5. Modelado del crecimiento del cultivo de tomate
El siguiente paso es el aumento del tamaño de las células o elongación hasta que alcanzan
el de la célula original lo que produce un aumento del peso de la planta. En este proceso
principalmente es necesario el aporte de agua aunque también hay que suministrar azúcares
y nutrientes. Por tanto, el crecimiento del cultivo se alcanza a partir de dos procesos que
pueden ser influenciados por las condiciones climáticas en el que se encuentren las plantas:
• División de las células.
• Elongación de las células.
Como se ha comentado anteriormente, en el proceso de crecimiento es necesario el aporte
de azúcares que produce la misma planta. En la parte inferior de las hojas, se encuentran los
estomas a través de los cuales toman las células el CO2 del aire del invernadero que junto
con la influencia de la radiación (luz solar) y el agua, convierten los cloroplastos en
azúcares. Este proceso de reacción se denomina fotosíntesis o asimilación descrito por la
siguiente ecuación:
CO2 + H 2 O + Radiación ( energía ) → CH 2 O + O 2
(5.1)
Como se puede observar, la fotosíntesis necesita radiación que proporciona la energía
necesaria para transformar el CO2 y el agua en azúcares, por tanto, sólo se produce durante
el día. Un incremento de la actividad fotosintética se traduce en un crecimiento más rápido
de la planta ya que se producen nuevas células. Los azúcares creados, los utiliza la planta
para dos propósitos [Kam96]:
• Los azúcares son principalmente creados en las hojas, transportándose a los puntos de
crecimiento donde se utilizan como materia prima para la creación de nuevas células tal
y como se muestra en la figura 5.1. Después de varios días soleados y en condiciones
óptimas de crecimiento, la planta continúa el proceso de producción de nuevas células
durante la noche. Si la velocidad de fotosíntesis es alta, la producción de azúcares se
incrementa de forma que incluso la planta los almacena en forma de almidón para volver
a convertirlos en azúcares cuando sea necesario.
Energía
Energía
Energía
Energía
Temperatura
Temperatura
Azúcares
Azúcares
CO2
Agua
Fig 5.1. Ilustración de proceso de fotosíntesis
Energía
CO2
Agua
Fig 5.2. Ilustración proceso de respiración
206
Capítulo 5. Modelado del crecimiento del cultivo de tomate
• La planta respira y durante este proceso consume azúcares. La energía procedente de la
luz solar es necesaria para la producción de azúcares y se libera en el proceso de ruptura
de los mismos en agua y CO2 que se utiliza en todos los procesos internos de la planta
(figura 5.2). Este proceso se denomina respiración o desasimilación y es el proceso
inverso a la fotosíntesis. La respiración proporciona energía para los procesos que se
producen diariamente denominándose energía de mantenimiento. Durante la producción
de nuevas células debe aumentarse la velocidad de respiración para producir una
cantidad adicional de energía denominada energía de construcción. Se produce en todos
los órganos de las plantas de forma continúa durante el día y la noche. Durante la noche
la planta libera CO2 pudiéndose alcanzar unos niveles elevados, pero durante el día, la
cantidad de CO2 que las plantas necesitan es más elevado que el que han producido
durante la noche por lo que es necesario un aporte artificial del mismo.
Las plantas se componen de agua y materia seca denominada así ya que consiste en la
materia que resulta al desecar la planta, evaporando el agua que la compone. Está formada
principalmente por las paredes de las células, sus componentes y los azúcares que
contienen. Un incremento en la materia seca quiere decir que la planta ha creado azúcares.
El crecimiento de una planta se refiere al incremento de peso, tanto de materia seca como
de agua, por tanto un incremento de materia seca proporciona un criterio de medida del
crecimiento de un cultivo, aunque no sea del todo coincidente. Hay que indicar que en el
concepto de materia seca se engloba el total de la planta, pero realmente se produce un
proceso de distribución entre los distintos órganos: raíces, tallos, hojas y frutos que en
determinadas circunstancias sería necesario estudiar. Una representación esquemática del
crecimiento del cultivo propuesta por Curry, se muestra en la siguiente figura [Cur69]:
Concentración CO2
Radiación
Materia seca total
Velocidad viento
Humedad
Temperatura
aire
Con. CO2
Sistema de hojas
(Índice área foliar)
Radiación
Temperatura
Hojas
FOTOSÍNTESIS
ASIMILACIÓN
NUTRIENTES
Y AGUA
Temperatura
raíces
+
Frutos
-
Tallos
+
RESPIRACIÓN
Raíces
Raíces
Temperatura
raíces
Fig 5.3. Crecimiento de cultivos
En cultivos bajo invernadero, una prioridad es el modelado del crecimiento que depende del
clima, de la fertirrigación y de las enfermedades o plagas. Actualmente, pocos trabajos han
sido publicados con respecto a la absorción de nutrientes, destacando el estudio de Le Bot
et al. [LeB98] en el que realizan una revisión acerca de los modelos existentes de la
nutrición de plantas. Por otra parte, las interacciones entre el cultivo y las enfermedades o
plagas se encuentran todavía en su infancia.
207
Capítulo 5. Modelado del crecimiento del cultivo de tomate
En este capítulo se va a describir la relación del cultivo con el clima del entorno que lo
rodea ya que existen estudios avanzados sobre el tema y modelos validados que se utilizan
para distintas aplicaciones, suponiendo que el proceso de fertirrigación se lleva a cabo de
forma idónea (hecho que suele ocurrir fundamentalmente en cultivos hidropónicos) y que
no existen enfermedades o plagas actuando sobre el cultivo.
El desarrollo de estos modelos ha sido motivado por la necesidad de disponer de
información cuantitativa para mejorar la toma de decisiones en la gestión de los cultivos y
se ha impulsado por la utilización masiva del computador como herramienta de trabajo con
altas prestaciones y bajo coste [Gar98a]. Estos modelos son unas herramientas que sirven
para probar hipótesis, sintetizar el conocimiento y describir y comprender sistemas
complejos para comparar distintos escenarios. Los modelos de crecimiento pueden ser
utilizados para la toma de decisiones en la gestión de la producción a tres niveles ([Jon91b],
[Gar98b]):
• Estratégico. Los modelos se utilizan para estimar la producción, beneficios, gastos y
riesgos asociados con la inversión de capital en sistemas como los de control climático o
de fertirrigación con una escala de tiempo de años.
• Táctico. Los modelos se utilizan junto a los climáticos para determinar cuando debe
plantarse, recolectar o para determinar una estrategia general del clima del invernadero
para toda la campaña con una escala de tiempo de meses.
• Operación. Se utilizan para ajustar hora a hora o día a día las desviaciones que se
producen en las condiciones del entorno modeladas en el nivel táctico, por lo que tienen
una escala de tiempo de horas o días.
En este capítulo se van a describir, en un primer apartado, las relaciones generales entre el
crecimiento de cultivo y las condiciones climáticas. Posteriormente, se expondrán los tipos
de modelos de crecimiento de cultivos hortícolas, así como de las ideas generales en las que
se basan, haciendo especial énfasis en los modelos existentes del crecimiento del cultivo
del tomate que es con el que se ha trabajado y del que se pretende controlar su
comportamiento a partir de las variables climáticas del entorno en el que se encuentra. En el
siguiente apartado, se describirá el desarrollo del modelo de crecimiento de tomate
utilizado en este tesis incluyendo las etapas de implementación, calibración y validación.
Finalmente, se exponen las conclusiones finales, así como los futuros trabajos relacionados.
5.2. INFLUENCIA DEL CLIMA SOBRE EL CRECIMIENTO DE
CULTIVOS
5.2.1. Factores climáticos limitantes y límites de tolerancia
El concepto de que un organismo vivo no es más fuerte que el eslabón más débil en su
cadena ecológica de requerimientos fue expresado por Liebig en 1840. Estudiando los
factores que afectan al crecimiento de las plantas descubrió que el nutriente que se
encuentra menos disponible es el que limita la producción, aún cuando los demás se
encuentren en cantidades suficientes, y enunció la denominada Ley del mínimo: “el
desarrollo de una planta depende de la cantidad de alimento que le es presentado en
cantidad mínima”.
208
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Ampliando este concepto a otro tipo de factores, no sólo nutricionales, el crecimiento de un
cultivo depende, como se ha comentado anteriormente, de la fotosíntesis y la respiración,
que a su vez dependen de condiciones climáticas como temperatura, radiación o
concentración de CO2. Por tanto, el clima se puede considerar como un factor limitante en
el crecimiento de una planta. Por ejemplo, el cultivo absorbe CO2 bajo la influencia de la
radiación solar. Si la radiación es baja, el CO2 absorbido es bajo, por tanto, elevar de forma
artificial la concentración de CO2 en el invernadero no es beneficioso ya que un nivel bajo
de este factor es suficiente. En un día claro, el enriquecimiento de CO2 debe ser
incrementado ya que la planta necesita más cantidad de esta variable. Por tanto, la radiación
es un factor limitante. Por otra parte, los factores limitantes no solo afectan por escasez sino
también por exceso (radiación, agua, etc.), de forma que las plantas tienen un máximo y un
mínimo ecológico que representan los límites de tolerancia. Este concepto se conoce como
la Ley de tolerancia de Shelford, propuesta en 1913: “la existencia y prosperidad de un
organismo depende del carácter completo de un conjunto de condiciones. La ausencia o el
mal estado de un organismo podrán ser debidos a la deficiencia o al exceso, cualitativo o
cuantitativo, con respecto a uno cualquiera de diversos factores que se acercarán a los
límites de tolerancia del organismo en cuestión”.
Como lo que se pretende en esta tesis es controlar el crecimiento del cultivo modificando
sus condiciones climáticas, se van a describir en este apartado las relaciones de la
fotosíntesis y la respiración con las variables climáticas principales, de forma que se
determinen sus factores limitantes, así como los limites de tolerancia a cada uno de ellos.
5.2.2. Fotosíntesis y clima
Como se ha comentado anteriormente, la fotosíntesis es función de tres variables
climáticas: radiación, temperatura y concentración de CO2. En caso de concentración de
CO2 y temperatura constantes, las plantas producen azúcares bajo la influencia de la
radiación, de forma que si aumenta la radiación aumenta la producción de azúcares. Es una
función exponencial, de forma que si el incremento de radiación se produce a bajos niveles
de radiación, la velocidad de fotosíntesis se incrementa rápidamente; en cambio si el
incremento se produce a altos niveles de radiación, el aumento de la fotosíntesis es bastante
menor, tal y como se muestra en las figura 5.4 y 5.6. En el caso de que se trate de una sola
hoja, la fotosíntesis puede llegar a saturarse a partir de un determinado valor de radiación.
Este hecho es importante ya que en algunos modelos de crecimiento de cultivos, se
aproxima el cultivo a una sola hoja (modelo de hoja grande) [Dau93].
Además, una planta absorbe CO2 bajo la influencia de la radiación y en combinación con
agua se transforma en azúcares. La concentración de CO2 en el aire exterior se encuentra
habitualmente en el margen de 300 y 400 ppm. Como se observa en la figura 5.5, si la
concentración en el aire del invernadero es menor de que este nivel, la actividad
fotosintética cae rápidamente. Aumentando la concentración de CO2, aumenta la
fotosíntesis hasta que llega a saturarse entre 700 y 800 ppm, aunque este valor depende del
tipo de cultivo. Por encima de este límite, el enriquecimiento de CO2 produce un beneficio
muy reducido, pudiendo llegar a causar daños a la planta ya que el estoma de las hojas se
cierra, reduciéndose la transpiración del cultivo y aumentando perjudicialmente la
temperatura de la planta.
209
Capítulo 5. Modelado del crecimiento del cultivo de tomate
0.14
0.06
Fotosí ntesis (gr C H2O/m2 min)
Fotosí ntesis (gr C H2O/m2 min)
0.12
0.1
0.08
0.06
0.04
0.02
0.05
0.04
0.03
0.02
0.01
0
0
100
200
300
400
500
600
0
700
100
200
Radiació n PA R (W /m2)
300
400
500
600
700
800
900
1000
1100
C oncentració n C O2 (ppm)
Fig 5. 4. Fotosíntesis en función de radiación
(LAI=3; CO2=300 pp;, Temperatura=25ºC)
Fig 5. 5. Fotosíntesis en función concentración CO2
(LAI=3; Rad=300 W/m2; Temperatura=25ºC)
Realmente, la fotosíntesis que realizan las plantas se ve afectada por ambos factores
simultáneamente, aunque la radiación es un factor más limitante. De las figuras 5.6 y 5.7,
en las que se muestra la relación entre la fotosíntesis con la concentración de CO2 y la
radiación, se pueden extraer las siguientes conclusiones:
• A mayor radiación, mayor actividad fotosintética.
• A mayor concentración de CO2 (dentro de ciertos límites permitidos), mayor actividad
fotosintética.
• A mayor radiación, el nivel óptimo de CO2 es más alto, por lo que debe ser modificado
en tiempo real si se dispone de un sistema de control que lo permita.
900 ppm
700 ppm
0.15
700 W /m 2
500 ppm
300 ppm
Fotosí ntesis (gr C H2O/m2 min)
Fotosí ntesis (gr C H2O/m2 min)
0.14
0.12
0.1
100 ppm
0.08
0.06
0.04
500 W /m 2
0.1
300 W /m 2
0.05
0.02
100 W /m 2
0
100
200
300
400
500
600
0
700
Fig 5. 6. Fotosíntesis en función de radiación y CO2
(LAI=3; Temperatura=25ºC)
200
400
600
800
1000
C oncentració n C O2 (ppm)
Radiació n PAR (W /m2)
Fig 5. 7. Fotosíntesis en función de CO2 y radiación
(LAI=3; Temperatura=25ºC)
Por otra parte, la temperatura influye sobre todo en la velocidad de producción de azúcares
debido al proceso de fotosíntesis y su ruptura debido al proceso de respiración. La
diferencia entre fotosíntesis y respiración muestra la cantidad de azúcares disponible para la
producción de nuevas células (es decir, se produce el crecimiento del cultivo) por lo que es
necesario encontrar un nivel óptimo para nivelar ambos efectos. Con respecto a la
fotosíntesis, por debajo de 5ºC se paraliza la producción de azúcares en la mayoría de los
cultivos.
210
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Como muestra la figura 5.8, por encima de este valor, se incrementa la actividad
fotosintética hasta que se llega a un óptimo en el que empieza una zona de saturación. Para
valores de temperatura superiores a los 35-45 ºC (dependiendo del cultivo), la fotosíntesis
decrece, llegando a alcanzar niveles muy bajos. Evidentemente, la radiación afecta a este
comportamiento simultáneamente con la temperatura, de forma que a mayor radiación, el
óptimo de temperatura crece tal y como muestra la figura 5.9.
0.07
0.14
0.06
0.12
Fotosí ntesis (gr C H2O/m2 min)
Fotosí ntesis (gr C H2O/m2 min)
700 W /m 2
0.05
0.04
0.03
0.02
0.1
500 W /m 2
0.08
0.06
300 W /m 2
0.04
0.01
0.02
0
0
100 W /m 2
0
10
20
30
40
50
0
60
10
20
30
40
50
60
Temperatura (º C )
Temperatura (º C )
Fig 5. 8. Fotosíntesis en función de la temperatura
(LAI=3;CO2=350 ppm;Radiación=450 W/m2)
Fig 5. 9. Fotosíntesis función de la radiación y la
temperatura (LAI=3; CO2=350 ppm)
5.2.3. Respiración y clima
La respiración, como proceso que consume azúcares, esta fuertemente influenciado por la
temperatura. A partir de 5ºC comienza el proceso de respiración, y a partir de ese momento,
la velocidad de respiración crece rápidamente hasta un máximo, donde empieza a decrecer
hasta alcanzar un punto donde la planta no respira, llegando a dañarse. Este
comportamiento se muestra en la figura 5.10.
0.08
Fotosí ntesis y Respirac ió n (gr CH2O/m 2 m in)
0.08
Respiració n (gr CH2O/m 2 m in)
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
0
10
20
30
40
50
60
0
Temperatura (º C )
10
20
30
40
50
60
Temperatura (º C )
Fig 5. 11. Fotosíntesis y respiración en función de
Fig 5. 10. Respiración en función de la temperatura
(LAI=3; CO2=350 ppm; Radiación=450 W/m2)
Temperatura (LAI=3; CO2=350 ppm;
Radiación=450 W/m2)
Si se muestran en la misma figura la respiración y la fotosíntesis (Fig 5.11), la substracción
de las dos curvas proporciona la fotosíntesis neta que es la que se utiliza para la producción
de nuevas células.
211
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Como se puede observar, a alta temperatura, más energía es disponible por lo que la
producción de nuevas células se incrementa, pero no es máxima ya que se consumen
azúcares en la respiración de mantenimiento. A baja temperatura, la respiración se reduce
pero también se reduce el proceso de división de células por lo que se retrasa el crecimiento
del cultivo aunque al final se obtendrá una mayor producción. Por tanto, se puede deducir
que con la temperatura se puede controlar el ritmo de crecimiento de un determinado
cultivo.
5.3. MODELADO DEL CRECIMIENTO DE CULTIVOS
5.3.1. Introducción
Los cultivos son organismos biológicos que se ven afectados por una gran cantidad de
factores físicos, químicos y biológicos de su entorno. Se han desarrollado modelos que
usualmente se centran en la respuesta de los cultivos a alguno de esos factores, asumiendo
que el resto se encuentran a niveles óptimos. En los modelos que se estudiarán y
desarrollarán en este capítulo, se describe el efecto del clima del invernadero (temperatura,
radiación solar y concentración de CO2) sobre el crecimiento del cultivo. Se asume que el
cultivo tiene un adecuado plan de riego y fertilización, que no presentará problemas de
enfermedades y no sufrirá ningún tipo de plagas. Es una simplificación necesaria, aunque
limita la aplicabilidad de los modelos en el caso de que algunas de esas condiciones no se
cumplan. Afortunadamente, en cultivos bajo invernadero el aporte de agua y nutrientes se
controla fácilmente y los sistemas utilizados actualmente funcionan adecuadamente.
En este apartado se van a describir los distintos tipos de modelos que existen de
crecimiento de cultivo en función del clima del invernadero y las características de cada
uno de ellos.
5.3.2. Modelos empíricos
Los modelos empíricos se basan en datos de entrada y salida que ajustan curvas
predefinidas o estructuras matemáticas más o menos complejas. Generalmente, modelan
pocas variables de estado, lo que supone un coste computacional bajo que permite ser
utilizado para sistemas de control climático del invernadero [Str96]. Aunque el valor
predicho por el modelo se suele aproximar al valor real, la extrapolación de estos modelos a
otras especies o localizaciones no suele ser adecuado. Además el hecho de añadir nuevos
factores de entrada requiere la construcción de un nuevo modelo. Por otra parte, la
utilización de valores fuera del rango de los datos con los que se ha validado el modelo,
produce generalmente resultados poco fiables.
En la literatura se pueden encontrar modelos de crecimiento basados en la obtención de
curvas polinomiales, exponenciales o sigmoidales en función de datos ambientales para
lechuga, espárragos, pepinos y distintas plantas ornamentales como rosas. También se han
desarrollado modelos empíricos para la predicción de la fecha de recolección de interés
para la estrategia de la producción en base a la integración de la temperatura o la radiación
a lo largo de la campaña para cultivos de lechuga, coliflor o flores como poinsettia (flor de
Pascua) [Mar98].
212
Capítulo 5. Modelado del crecimiento del cultivo de tomate
5.3.3. Modelos basados en principios fisiológicos
Este tipo de modelos describe cuantitativamente los mecanismos y procesos que causan el
crecimiento de los cultivos. Suelen ser modelos jerárquicos de al menos un nivel de
profundidad en los que el nivel más alto describe la producción de la materia seca
(crecimiento) y un nivel inferior describe la fotosíntesis y la expansión del índice de área
foliar. Estos modelos se expresan en forma de ecuaciones diferenciales de la siguiente
forma:
dX cu
= f cu ( X cu , X cl ,U , P ,V ,C ,τ )
dτ
con X cu ( τ i ) = X cu ,i
(5.2)
donde:
Xcu=Xcu(τ) ∈ Rn1 es un vector n1-dimensional de variables de estado relativas al cultivo.
Xcl=Xcl(τ) ∈ Rn2 es un vector n2-dimensional de variables de estado relativas la clima del
invernadero.
U=U(τ) ∈ Rm es un vector m-dimensional de variables de entrada.
P=P(τ) ∈ Ro es un vector m-dimensional de perturbaciones.
V=V(τ) ∈ Rp es un vector p-dimensional de variables propias del sistema.
C ∈ Rq es un vector q-dimensional de constantes del sistema.
τ es el tiempo.
Xci es el estado inicial del cultivo y τ0 es el tiempo de inicio
La función fc:Rn1+n2+m+o+p+q → Rn2 suele ser una función no lineal.
Todos estos modelos se basan en el cálculo de la fotosíntesis. Para esto, lo primero que hay
que modelar es la radiación que intercepta el cultivo a través del área foliar. A
continuación, hay que modelar la respiración para poder calcular la conversión en materia
seca total y su división entre los distintos órganos de la planta. Finalmente, se debe estimar
el peso real (materia seca más agua) de los distintos órganos de la planta. A continuación,
se va a realizar una breve descripción de cada uno de estos procesos y en una sección
posterior, se particularizará para el modelo de crecimiento del tomate desarrollado.
• Modelado del crecimiento de las hojas. A pesar de su importancia, su predicción todavía
no se ha resuelto completamente ya que no se conocen los procesos que regulan el
desarrollo del área de las hojas o su funcionamiento, además de formar un conjunto muy
heterogéneo en edad y propiedades. En numerosos modelos de cultivo, se mide el índice
de área foliar y se considera como una entrada al modelo de crecimiento. Existen dos
formas de modelar este parámetro, aunque en algunos modelos se combinan:
En función del estado de crecimiento de la planta (a veces determinado por el
acumulado de energía en forma de temperatura desde que se planta el cultivo)
En función del peso seco de las hojas modelado.
Un problema adicional es la necesidad de modelar la reducción del área foliar a lo largo
de una campaña como resultado de la maduración o las podas a las que se someta al
cultivo. Este hecho puede ser simulado por una función predeterminada a lo largo del
tiempo o basándose en el estado desarrollo de los frutos, como muestran los estudios de
Heuvelink en cultivo de tomate [Heu96a].
213
Capítulo 5. Modelado del crecimiento del cultivo de tomate
• Modelado de la luz interceptada por el cultivo. La absorción de radiación por parte del
cultivo puede ser modelada partiendo del principio de que se incrementa cuanto mayor
es el área foliar, pero no es del todo cierto ya que las hojas se hacen sombra unas a otras
lo que produce una disminución en la absorción. Para modelar este efecto, se hace uso
de la ley de Lambert-Beer [Mar98]:
Vrs, prof =V rs,cu exp(−cext,cu c prof )
(5.3)
donde cext,cu es el coeficiente de extinción del cultivo, Vrs,prof es la radiación a una
profundidad del cultivo cprof y Vrs,cu es la radiación que alcanza la parte superior del
cultivo, profundidad de cultivo = 0, (esta variable se ha descrito en el apartado 3.4.1.4
Modelado de la temperatura en la superficie del suelo del invernadero del Capítulo 3).
Una de las hipótesis de este modelo es que supone que no se refleja radiación sobre el
cultivo cuando realmente se ha demostrado la dependencia de las características
vegetativas con los distintos flujos de radiación que se producen dentro y fuera de él
incluidos los de reflexión, lo que ha llevado a su medida [Guy93] y modelado [Kuu93].
El principal problema de este modelo es que la extinción de la radiación depende de su
geometría y de la posición y orientación de las hojas. En cualquier lugar del cultivo, la
radiación se compone de una suma de radiaciones que provienen de casi todas las
direcciones. Además, en una hoja, el ángulo de incidencia de la radiación depende de la
dirección de la que proviene y de la orientación de la hoja. Por tanto, el coeficiente de
extinción debería ser diferente para cada dirección de la radiación y el perfil de la
radiación que atraviese un cultivo se debería modelar como la suma de varios perfiles
exponenciales (uno para cada dirección). La medida directa y automática de estos
parámetros es difícil y requiere sistemas muy sofisticados, por lo que su modelado es
complejo [Sin93]. A pesar de todas estas consideraciones, la ecuación (5.3) se utiliza
comúnmente, con unos resultados prácticos aceptables [Heu96b]. En base a estas
consideraciones, se puede deducir que la radiación absorbida, Vsol,cu por un cultivo con
un determinado índice de área foliar, VLAI, es la radiación que alcanza el cultivo menos la
que lo atraviesa, es decir:
Vsol ,cu = ( 1 −c roc ,cu )V rs ,cu [1 − exp( −cext ,cu VLAI )]
(5.4)
donde croc,cu es el coeficiente de reflexión de la radiación sobre el cultivo. Esta hipótesis
se denomina de “hoja grande”. Algunos autores [Sta95] modulan este factor teniendo en
cuenta la geometría de los marcos de plantación en función de la anchura y altura de los
pasillos que forman los cultivos. Existen modelos que consideran otros efectos reales
como los modelos homogéneos, donde existen dos tipos de hojas (sombreadas que sólo
reciben radiación difusa y hojas sin sombras que reciben radiación directa y difusa); o
los modelos heterogéneos que consideran la geometría del cultivo en dos o tres
dimensiones ([Dau93], [Gui98]).
• Modelado de la fotosíntesis. Existen un gran número de modelos de fotosíntesis, aunque
los más utilizados son aquellos que la describen en función de la radiación PAR que
absorbe los cultivos. Los modelos de fotosíntesis total de un cultivo, Vfoto,cu, suelen
responder a la siguiente expresión:
214
Capítulo 5. Modelado del crecimiento del cultivo de tomate
V foto ,cu =V foto ,max f ( cefi ,cu Vsol ,cu / c foto ,max )
(5.5)
donde cfoto,max es la fotosíntesis máxima y cefi,cu es la eficiencia del cultivo en la
utilización de la radiación. La función f varía en un rango de 0 para una oscuridad total y
1 para una determinada intensidad de radiación donde la fotosíntesis se satura a su valor
máximo. Una de las funciones f más utilizada es una hipérbola no rectangular. Una
comparación entre distintas funciones f se exponen en los estudios de Pachepsky
([Pac96a], [Pac96b]). Por otra parte, la fotosíntesis también depende de la concentración
de CO2 y de la temperatura como describen los estudios bioquímicos de la misma
[Gua90]. Su efecto se considera en las variables fotosíntesis máxima y la eficiencia en la
utilización de la radiación. Especialmente a altos niveles de radiación, la resistencia
estomática puede limitar la fotosíntesis y este efecto lo consideran algunos modelos
simulando una influencia negativa de la resistencia estomática sobre la fotosíntesis
máxima [Mar98]. La estructura general del modelo de la fotosíntesis no depende de la
especie de cultivo, sólo los valores de las propiedades fotosintéticas de las hojas y de la
forma de intercepción de la radiación.
• Modelado de respiración. En la mayor parte de los modelos de crecimiento, la
respiración se divide en dos componentes:
Respiración de mantenimiento. Se suele modelar como el producto del peso seco y un
coeficiente de mantenimiento que se calcula en función de la temperatura y del tipo
de órgano de la planta. Algunos estudios han demostrado que este coeficiente
también se ve afectado por la edad del cultivo, disminuyendo su valor.
Respiración de crecimiento. Generalmente, se modela como el producto de la
velocidad de producción de peso seco y un coeficiente de crecimiento que depende de
la composición química de la biomasa formada y del sustrato del que se deriva e
independiente de los factores ambientales, incluida la temperatura.
Otros modelos simplifican este enfoque calculando la respiración como una fracción
constante de la fotosíntesis, mientras que otros autores proponen otros más complejos
dividiendo la respiración entre 3 y 5 componentes [Mar98].
• Modelado del contenido total de materia seca. La producción de materia seca diaria,
XPS, se modela en función de la diferencia de la materia seca producida por la
fotosíntesis, Vfoto,cu, y la que consume por la respiración de mantenimiento, Vrm,cu, de
acuerdo con la siguiente expresión:
(
dX PS
= c E V foto ,cu − Vrm ,cu
dτ
)
(5.6)
donde cE es el Coeficiente de eficiencia de conversión de crecimiento (gr de materia seca
por gr de CH2O). Está relacionado con el coeficiente de crecimiento con el que se
calcula la respiración de crecimiento. Según algunos estudios realizados, esta ecuación
subestima la producción de materia seca [Heu96b] y proponen su modificación,
reduciendo la respiración en los periodos en los que la velocidad de respiración sea baja,
utilizando una función de tipo exponencial como la siguiente:
215
Capítulo 5. Modelado del crecimiento del cultivo de tomate
[
(
dX PS
'
− cte
= c E V foto ,cu − Vrm
,cu 1 − e
dτ
)]
(5.7)
• Modelado de la división de materia seca en los distintos órganos. Aunque existe una
considerable información acerca de los procesos individuales como la fotosíntesis, el
metabolismo de los azúcares o la expansión de las células, los procesos que controlan la
división de materia seca total entre los distintos órganos del cultivo son poco conocidos.
Aún así, se están realizando grandes progresos en la cuantificación y modelado de la
división de materia seca en algunas variedades de frutos y hortalizas. Actualmente,
existen tres metodologías para modelar estos procesos ([Mar93a], [Mar95b]):
Alometría descriptiva. Se asumen unos porcentajes empíricos para cada uno de los
órganos. Pueden ser constantes o variables en función de el estado de crecimiento del
cultivo y se pueden ver afectados por las condiciones climáticas del entorno. No
describen los procesos de crecimiento y son completamente empíricos.
Equilibrio funcional. Se utiliza para diferenciar la materia seca entre la raíz y el resto
de la planta. Se basa en el hecho de que existe un equilibrio entre los procesos que
producen materia seca en la raíz (absorción de agua y nutrientes) y los que la
producen en el resto de la planta (fotosíntesis):
X PS ,r ⋅ Vabn ,r ∝ X PS ,nr ⋅ V foto ,cu
(5.8)
donde XPS,r es el peso seco de las raíces, XPS,nr es el peso seco en el resto de la planta,
Vabn,r es la velocidad de absorción de nutrientes de las raíces [gr/gr día] y Vfoto,cu es la
fotosíntesis [gr/gr día].
Regulación de la materia seca a los órganos destino. Se trata de modelos
mecanicistas donde el transporte de azúcares y/o el nitrógeno desde las fuentes de
creación a los órganos destino es una función proporcional al gradiente de presión
osmótica o a las diferencias de la concentración de carbono y/o nitrógeno e
inversamente proporcional a la resistencia al transporte. En estos modelos, las
variables climáticas afectan a los procesos de transporte. El principal inconveniente
de este proceso es su complejidad y la dificultad en la medida de los parámetros
relevantes como la concentración de carbono o la resistencia al transporte. Otro
enfoque de esta aproximación es la división de la materia seca en función de la
capacidad potencial de un órgano para acumular azúcares que puede ser cuantificada
por la velocidad de crecimiento potencial de ese órgano [Mar98]. La fracción de
materia seca en cada órgano i, VfMS,i, se determina por la capacidad potencial del
órgano, ccpms,i, dividida por la capacidad potencial de todos órganos:
V f MS ,i =
ccpms ,i
∑ ccpms ,i
(5.9)
Debido a su simplicidad y a la falta de conocimiento de los procesos que intervienen, los
modelos más utilizados son los alométricos ya que son completamente empíricos y
aunque no son extrapolables, si son muy útiles en algunas aplicaciones. Otros modelos
utilizados son los basados en la demanda potencial de los órganos y han proporcionado
resultados aceptables.
216
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Marcelis y colaboradores en 1998 [Mar98] exponen una lista de los principales modelos de
crecimiento basados en la fotosíntesis para distintos tipos de cultivos como:
• Hortícolas: pepino, tomate, judía, lechuga, cebolla o zanahoria.
• Plantas ornamentales: rosa, tulipán, scheflera.
• Frutos de árboles: manzana, uva, kiwi, cítricos, melocotón, etc.
Por otra parte, Gary en 1998 [Gar98b] muestra una lista de los principales grupos de
investigación internacionales dedicados al modelado del crecimiento del cultivos bajo
invernaderos, así como las bases y aplicaciones de cada uno de ellos.
5.3.4. Escalas de tiempo
Un aspecto a destacar es que el cultivo puede responder en una escala de tiempo rápida
(minutos, horas) en procesos como la fotosíntesis y la transpiración. Sin embargo, otros
relacionados con el crecimiento y la morfogénesis responden a las condiciones climáticas
de una forma más lenta (días) [Cha89]. Ejemplos de este tipo de procesos son la formación
de hojas, flores o frutos. Por tanto, los intervalos de integración varían de unos a otros
modelos. La figura 5.12 muestra los procesos que se producen en cada escala de tiempo
según el modelo TOMGRO de crecimiento de tomate [Gar97], que se comentará más en
detalle en la siguiente sección.
Integración de
variables horarias
para escala diaria
Inicialización
diaria
Reservas de
carbohidratos
Respiración de
crecimiento
Radiación, CO2 y
temperatura en
invernadero
Respiración de
mantenimiento
BUCLE HORARIO
Crecimiento
de órganos
individuales
Aparición de
órganos
Desarrollo de
órganos
Fotosíntesis
Equilibrio
azúcares
órganos
BUCLE DIARIO
Envejecimiento
de órganos
Cálculo de
potencial de
órganos
Fig 5.12. Escalas de tiempo en modelo de crecimiento de cultivo bajo invernadero
217
Capítulo 5. Modelado del crecimiento del cultivo de tomate
5.4. MODELADO DEL CRECIMIENTO DEl CULTIVO DE TOMATE
Hasta 1991 se habían realizado algunos intentos para modelar el crecimiento del cultivo del
tomate, pero es en esta fecha, cuando Jones y sus colaboradores de la Universidad de
Florida publican la primera versión de un modelo dinámico de crecimiento y producción de
tomate al que denominaron TOMGRO [Jon91a], que ha servido como base y referencia
para los siguientes estudios y desarrollos de nuevos modelos de crecimiento de tomate, así
como para otras funciones como generación de consignas [Sch98], control óptimo [Seg98]
o validación de modelos de variables relacionadas con el crecimiento del cultivo como la
fotosíntesis [Zek99]. TOMGRO se desarrolló para que respondiera dinámicamente a los
cambios en la temperatura, radiación solar y la concentración de CO2. Se asume que el
cultivo se encuentra correctamente regado y fertilizado, y que sólo se trabaja con un tallo
principal, práctica habitual en cultivo de tomate bajo invernadero. El cultivo se divide en
los siguientes órganos: raíces, tallos, hojas y frutos. Para los últimos tres órganos se
consideran veinte clases en función del estado de envejecimiento del cultivo. El área de las
hojas y el número y la masa de hojas, frutos y segmentos del tallo principal se predicen
para cada una de estas clases, excepto para la última clase de los frutos que no afectan a los
procesos de la planta, de forma que se trabaja con sesenta y nueve variables de estado que
describen completamente al estado del cultivo.
El desarrollo fisiológico se modela con una nueva variable de estado: número de nodos en
el tallo principal de la planta. El peso total de la planta se calcula como la suma de las
masas de hojas y tallos en cada una de las veinte clases más la masa de los frutos en las
primeras nueve clases. La estructura matemática es similar a la descrita en el apartado 5.3.3
de este capítulo Modelos basados en principios físicos, basándose en el balance de carbono
en el que la fotosíntesis y la respiración se utilizan para calcular la síntesis de tejidos y el
enfoque de la capacidad potencial de cada órgano para calcular la división de materia seca
en función de las condiciones ambientales. Para calibrar el modelo es necesario determinar
el valor de 21 coeficientes repartidos entre los distintos procesos (respiración, fotosíntesis y
crecimiento). Las experiencias se realizaron en Gainesville (Florida, USA) en seis cámaras
de crecimiento expuestas a luz natural con temperatura y CO2 controladas. Cada dos o tres
semanas una o más plantas de cada cámara se trasladaban a un laboratorio donde se
midieron cada una de las variables que se desean modelar. Las enfermedades y los insectos
se controlaron con tratamientos preventivos de pesticidas y otros productos. Los resultados
obtenidos aconsejaban realizar nuevos ensayos aunque el modelo se puede utilizar para
diseñar estrategias de control climático de invernaderos.
En 1995, se modificó el modelo original [Gar95], obteniendo una versión en la que se
describía el incremento del área de las hojas en función de las condiciones climáticas de
una forma más adecuada, así como el número de frutos y el crecimiento de los ramos. Las
experiencias se realizaron en Avignon (Francia) en 1993 en cultivos de tomate para ciclos
de cultivo largo bajo invernaderos de cristal. Cada dos semanas se medían las variables del
cultivo que se deseaban modelar. La evaluación del modelo utilizando análisis de
sensibilidad y comparación con datos experimentales mostraron que no era adecuado
utilizar el modelo en condiciones de altas temperaturas. Por esta razón, se desarrolló una
diferente versión del modelo descrita en [Jon99].
218
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Se incorporan mejoras en el desarrollo del área foliar, en la dinámica de los ramos de frutos
y se incluye una nueva función para reducir el crecimiento bajo condiciones de alta
temperatura. En este modelo, la planta consiste en un tallo principal compuesto por
segmentos unidos por nodos. Se asume que todos los tallos secundarios son podados. En
cada nodo del tallo principal hay una hoja o un ramo de frutos, de forma que existen 3 hojas
por ramo. El modelo simula el número de nodos, hojas y ramos en función de la
temperatura y las características morfológicas de las plantas. Se modela el crecimiento de
los frutos en función de su situación en el ramo y la posición de éste sobre el tallo principal.
El área foliar depende de las condiciones climáticas y el peso de las hojas de la fotosíntesis.
El crecimiento del tallo se asume directamente proporcional a la masa de las hojas.
Además, una determinada fracción de carbohidratos se asigna diariamente a las raíces que
es función del estado de la planta. En esta versión, se trabaja con 574 variables de estado.
Este número de variables de estado es demasiado elevado para utilizar este modelo para
diseñar estrategias de control del crecimiento en base a las condiciones climáticas del
invernadero por lo que es necesario utilizar una versión reducida del modelo TOMGRO. En
1991, Jones [Jon91b] propone que para determinados problemas se puede reducir el modelo
con un número reducido de variables de estado (de dos a cuatro) que proporcionen una
adecuada predicción de la respuesta del cultivo. En concreto, se propone un modelo con dos
variables de estado: número de hojas y materia seca total del cultivo. El índice de área
foliar se calcula como una función algebraica no lineal del número de hojas. El
comportamiento del modelo es correcto y ha sido utilizado en algunas aplicaciones como la
obtención de consignas de temperatura para controlar el crecimiento de plántulas de tomate
en semilleros [Sch98]. En 1999, Jones [Jon99] describe una nueva reducción del modelo
original, pero más completo que el anterior ya que el número de variables de estado es
cinco: número de nodos del tallo principal, índice de área foliar, peso seco total de la
planta, peso seco total de las frutos y peso seco de los frutos maduros. Este modelo se
calibró y validó en distintos puntos de Estados Unidos y en Francia para probar su
utilización en otras localizaciones con diferentes condiciones climáticas y variedades de
tomate distintas. Las diferencias observadas se atribuyen a las diferencias varietales de las
distintas variedades de tomate utilizadas.
Tomando TOMGRO como referencia, algunos autores han desarrollado modelo reducidos.
Seginer y colaboradores, en una primera fase [Seg96b] y basándose en el hecho de la alta
correlación existente entre las variables de estado originales, utilizaron un análisis de
componentes principales para encontrar un vector de variables de estado equivalente a
TOMGRO pero de menor dimensión sin que se pierda demasiada información,
obteniéndose un número óptimo de ocho variables. En un segundo estudio, proponen el uso
de un modelo de una única variable de estado (materia seca total) pero con dos estados que
conmutan cuando se alcanza un contenido determinado de materia seca (que depende de las
condiciones climáticas) desde una fase puramente vegetativa a un estado reproductivo
[Seg98]. Se utiliza el modelo TOMGRO como referencia para calibrar el modelo.
Otra línea importante de investigación y desarrollo de modelos de crecimiento de tomate se
lleva a cabo en Holanda, concretamente en la Universidad de Wageningen. En 1994, de
Koning presento un modelo basado también en la fotosíntesis que describe la demanda de
asimilados y la distribución de materia seca entre los distintos órganos de un cultivo de
tomate basándose en el potencial de crecimiento de cada uno de ellos [Kon94].
219
Capítulo 5. Modelado del crecimiento del cultivo de tomate
El modelo consiste en un conjunto de ecuaciones diferenciales con un intervalo de
integración de un día. La producción de asimilados depende de la integral de temperatura y
de radiación que se utilizan como entrada del modelo. Los frutos se organizan en ramos que
pertenecen a una unidad vegetativa formada por tallo, hojas (media de tres hojas) y dos
ramos. La planta se describe con los siguientes estados:
• Los ramos de frutos se describen por dos estados (número y porcentaje de frutos).
• Cada fruto se describe por seis estados (temperatura media antes de la formación,
número de días desde su formación, radiación recibida durante las primeras tres semanas
desde la formación, el estado de desarrollo, el peso seco y un estado indicando la
existencia del fruto).
• Las unidades vegetativas se describen con cuatro estados (desarrollo vegetativo, materia
seca, temperatura media desde que se formó la unidad vegetativa y un estado indicando
la existencia de la unidad).
• Cuatro estados generales (temperatura media diaria, factor de adaptación para la
disponibilidad de materia seca, materia seca disponible para crecimiento y edad
fisiológica de la planta).
Por tanto, en un cultivo estándar de tomate, una sola planta puede ser descrita por más de
300 estados. Para determinar la velocidad de crecimiento vegetativo y de frutos se calcula
la necesidad total de los órganos y se compara con los asimilados disponibles al final de
cada día. Si es menor, se distribuye entre todos los órganos y se almacena el resto; si es
mayor, se divide entre los órganos en función del potencial de cada uno de ellos que se
calcula en función de su estado. Las experiencias se realizaron en once invernaderos tipo
venlo en Holanda y se utilizaron cinco variedades de tomate comerciales, obteniéndose
buenos resultados cuantitativos para el crecimiento del tomate, aunque el modelado del
número de frutos por ramo no se adecuaba completamente a la realidad ya que no se
describía correctamente la interrupción en la formación de los frutos por diversas razones.
Tap et al., en 1996, desarrollaron una versión reducida de este modelo convirtiéndolo en un
modelo de hoja grande-fruto grande (las hojas se consideran como una sola y los ramos y
frutos se consideran como un solo fruto) [Tap96a]. El modelo se describe con cuatro
estados: peso seco de hojas, peso seco de frutos, almacenamiento de asimilados y estado de
desarrollo medio de los frutos (para determinar la fecha de recolección). Este modelo se ha
calibrado y validado utilizando dos campañas de verano en Holanda obteniendo buenos
resultados aunque sería necesario validarlo para todas las campañas y en otros lugares. Esta
simplificación se ha utilizado para resolver problemas de control óptimo de la producción
de tomate basándose en criterios económicos [Tap00].
Continuando con el modelo de Koning, en 1996, Heuvelink publica los resultados de su
investigación en la que analiza y cuantifica las respuestas del crecimiento y la producción
de un cultivo de tomate al clima del interior de un invernadero (radiación, temperatura y
concentración de CO2) y a la gestión del cultivo (densidad de cultivo y corte de frutos). De
este estudio surgió un modelo basado en principios físicos (fotosíntesis) de crecimiento del
tomate denominado TOMSIM [Heu96a]. Este modelo está formado por los siguientes
submodelos: transmisividad del invernadero a la radiación solar, fotosíntesis, producción de
materia seca y división de esa materia seca.
220
Capítulo 5. Modelado del crecimiento del cultivo de tomate
La velocidad de crecimiento es simulada basándose en la fotosíntesis, intercepción de luz
por el cultivo, respiración de mantenimiento y la eficiencia de conversión de carbohidratos
en materia seca estructural. La división de materia seca se basa en el potencial de
crecimiento de cada órgano de la planta. Las experiencias se realizaron en invernaderos tipo
venlo en Holanda. TOMSIM fue validado a dos niveles:
• Nivel inferior. Cada submodelo se validó independientemente con ensayos orientados a
este fin.
• Nivel superior. Se validó el modelo como un todo, utilizando datos experimentales
independientes o procedentes de medidas realizadas en cultivos comerciales.
En general, el modelo predijo resultados que se ajustaban a las medidas, evaluándose
posteriormente el modelo en otras condiciones [Heu99]. Si se realiza una comparativa de
TOMSIM con TOMGRO se pueden hacer las siguientes observaciones:
• Producción de materia seca. Los resultados de ambos modelos son similares bajo ciertas
condiciones. TOMSIM modela el efecto del CO2 de una forma más realista y es más
descriptivo en cuanto a la fotosíntesis en la hoja y a la distribución de luz en el cultivo.
En cuanto a la producción de materia seca y a la fotosíntesis global del cultivo
TOMGRO utiliza unos modelos más sencillos y por tanto facilita su uso para predecir la
producción en condiciones reales.
• Distribución de la materia seca. Aunque ambos modelos se basan en el potencial de los
órganos, TOMGRO presenta un rendimiento menor debido a la ausencia de
almacenamiento de azúcares. Por otra parte, el modelo TOMSIM es menos general
debido a la ausencia de realimentación en la producción del número de frutos.
Gary y colaboradores, después de participar en el desarrollo y validación de las versiones
avanzadas de TOMGRO y utilizando algunos resultados de Koning, proponen un modelo
propio, al que denominan TOMPOUSSE, destinado a simular la producción semanal de
cultivo de tomate bajo invernadero en función de las condiciones climáticas [Gar96]. A
partir de la fecha de plantación, la duración del ciclo de producción, la variedad de tomate,
densidad de plantas, poda de ramos de frutos y la radiación acumulada, temperatura y CO2,
modela la masa y el número de frutos por m2 de invernadero. Para ello divide el proceso de
simulación en cuatro etapas: conversión de radiación incidente en biomasa, cálculo del
número de frutos debido al nacimiento de nuevos y a la recolección, reparto de la biomasa
producida entre las partes vegetativas y reproductivas, y la integración del crecimiento de
los frutos durante el periodo de tiempo desde que nace hasta que madura. Las variables de
estado del modelo son: índice de área foliar, peso seco total, peso seco de los órganos
vegetativos, peso seco de los órganos reproductivos, número de frutos y peso seco y fresco
de los frutos durante una semana. El modelo se calibró y validó en una primera fase para
invernaderos provistos de calefacción en distintas regiones y climas como La Bretaña
francesa o el sur de Francia. Comparado con TOMGRO, los resultados son similares,
aunque las formulaciones de los submodelos son diferentes. En estudios posteriores, se
generalizó el modelo para invernaderos sin calefacción y en otras regiones como Portugal
obteniendo resultados similares [Abr00]. Su principal ventaja es su simplicidad (pocos
parámetros y pocas variables de entrada) y por tanto su fácil incorporación como elemento
de decisión para el agricultor.
221
Capítulo 5. Modelado del crecimiento del cultivo de tomate
5.5. DESARROLLO DEL MODELO DE CRECIMIENTO DEL TOMATE
5.5.1. Descripción del modelo
Para poder realizar un control óptimo del crecimiento del tomate modificando las
condiciones climáticas de su entorno es necesario la utilización de un modelo del cultivo.
Como se ha comentado anteriormente, existen distintos tipos de modelos de crecimiento de
tomate abordados desde distintos puntos de vista. Después de evaluar cada uno de ellos, se
ha optado por utilizar la estructura del modelo TOMGRO ya que es el más referenciado en
la bibliografía relacionada y se encuentra lo suficientemente descrito para su total
comprensión. Además, se ha contrastado con diferentes variedades de tomate, distintos
tipos de invernadero y en varias zonas geográficas proporcionando resultados aceptables.
De las diferentes versiones de TOMGRO se ha seleccionado el modelo reducido a dos
variables de estado [Jon91] por las siguientes razones:
• Predice el comportamiento del cultivo de forma no completa, pero útil para algunas
aplicaciones como el control en tiempo real.
• El número de parámetros a estimar para la calibración del modelo es reducido,
pudiéndose aplicar técnicas de búsqueda simples.
• Es fácilmente ampliable a más variables de estado en el caso de que fueran necesario.
• Comprensión fácil por el usuario.
El modelo presenta dos variables de estado y una variable algebraica como salida:
• Número de hojas o nodos, XH, dependiente únicamente de la temperatura del aire en el
interior del invernadero, Xt,a [ºC].
• Peso seco total de materia seca por m2 de invernadero, XPS [g/m2], dependiente de la
temperatura del aire interior del invernadero, Xt,a [ºC], radiación PAR incidente en la
parte superior del cultivo, Xrp,cu [µmol fotón/m2 s] y la concentración de CO2 del aire
interior del invernadero, XCO2,a [µmol CO2/mol aire].
• Índice de área foliar, VLAI, función del número de hojas, XH y de la densidad de plantas,
cden,cu [plantas/m2].
Concentración CO2
Radiación PAR
Número de nodos
MODELO
CRECIMIENTO
TOMATE
Temperatura
Índice área foliar
Materia seca total
Fig 5.13. Modelo TOMGRO simplificado de crecimiento de tomate
El hecho de nombrar a las variables de entrada de este modelo (temperatura, radiación PAR
y concentración de CO2), U, como variables de estado, X, es debido a que en modelo
general del sistema invernadero/cultivo estas variables tienen esta consideración.
La velocidad de desarrollo de nodos se modela como un máximo de velocidad de aparición
de nodos en un día, cvH, modulado por una función de la temperatura que reduce el
crecimiento vegetativo bajo condiciones no óptimas de temperatura, fXH(Xt,a). Se describe
por las siguientes ecuaciones:
222
Capítulo 5. Modelado del crecimiento del cultivo de tomate
dX H
= cvH f XH ( X t ,a )
dτ
con X H ( τ i ) = c X Hi
(5.10)
La modulación de la aparición de nodos, viene determinada por la siguiente función de la
temperatura no lineal a tramos, cuya forma se muestra en la figura 5.14:
1
0 .9
0 .8
0 .7
(5.11)
0 .6
fXH ( )
0
X t ,a < 8º C
⎧
⎪ 0.1375 ( X − 8)
8
º
≤ X t , a < 12 º C
C
t
,
a
⎪
⎪⎪ 0.025 ( X t , a − 30 ) + 1 12 º C ≤ X t , a < 30 º C
f XH ( X t , a ) = ⎨
1
30 º C ≤ X t , a < 35 º C
⎪
⎪ − 0.0666 ( X t , a − 50 ) 35 º C ≤ X t , a < 50 º C
⎪
0
X t , a ≥ 50 º C
⎪⎩
0 .5
0 .4
0 .3
Esta ecuación es similar en todas las versiones del
modelo TOMGRO, por lo que las predicciones
realizadas por el modelo simplificado son iguales a
los de las versiones más completas.
0 .2
0 .1
0
5
15
10
30
25
20
Te m p e ra tu ra (º C )
35
40
45
50
Fig 5.14. Modulación de la aparición
Para el modelado del índice de área foliar, se utiliza la ecuación propuesta por Goudriaan y
Monteith [Jon91a] como base de la expansión de las hojas:
⎛c
X LAI = cden ,cu ⎜ δ
⎜ cβ
⎝
⎞
⎟ ln 1 + exp c β ( X H − c H )
⎟
⎠
{
[
]}
(5.12)
donde cδ, cβ y cH son coeficientes empíricos. Esta ecuación expresa el índice de área foliar
como una función explícita de la posición de las hojas sobre la planta. Como la aparición de
nodos depende de la temperatura, el desarrollo del índice de área foliar depende también de
la temperatura y de la misma manera.
El incremento con respecto al tiempo del peso seco es el principal factor para determinar la
producción de frutos y tejido vegetativo de los cultivos. Depende directamente de la
actividad fotosintética de la planta que a su vez depende de las condiciones climáticas y el
tamaño de la planta. Para un cultivo de tomate, la fotosíntesis [g CH2O/m2 min] se puede
modelar con la siguiente expresión [Jon91a]:
V foto = c foto ,c
cr ,cu X CO 2 ,a f foto ( X t ,a )
cext
⋅
⎡
crp ,efi cext X rp ,cu + ( 1 − ctoc ) cr ,cu X CO 2 ,a f foto ( X t ,a )
⋅ ln ⎢
⎢⎣ crp ,efi cext X rp ,cu exp( −cext X LAI ) + ( 1 − ctoc ) cr ,cu X CO 2 ,a f foto ( X t ,a
⎤
⎥
) ⎥⎦
(5.13)
donde:
cfoto,c es el coeficiente de conversión de fotosíntesis de [µmolCO2/m2 s] a [gCH2O/m2 min],
cr,cu es la conductancia de la hoja al CO2 [µmol CO2/m2 s],
cext es el coeficiente de extinción a la radiación del cultivo [-],
crp,efi es la eficiencia de la hoja para la utilización de la radiación [µmol CO2/µmol fotón],
ctoc es el coeficiente de transmisión de radiación de onda corta de las hojas [-].
223
Capítulo 5. Modelado del crecimiento del cultivo de tomate
La función ffoto(Xt,a) indica el efecto de la temperatura a la máxima actividad fotosintética
mediante la siguiente ecuación cuadrática:
⎛ c foto,t max −X t ,a
f foto ( X t ,a ) = 1 − ⎜
⎜ c foto,t max − c foto,t min
⎝
⎞
⎟
⎟
⎠
2
(5.14)
donde cfoto,tmax es la temperatura a la cual la fotosíntesis es máxima (30 ºC) y cfoto,tmin es la
temperatura a la cual la fotosíntesis es nula (5 ºC).
La respiración de mantenimiento, Vresp [gr CH2O/gr tejido min] se refiere a la pérdida de
CO2 debido a la rotura de tejido y depende exclusivamente de la temperatura de acuerdo
con la siguiente expresión:
(
Vresp = cresp,ref exp 0.0693( X t ,a − cresp,t )
)
(5.15)
donde cresp,ref es la respiración [gr CH2O/gr tejido min] a la temperatura de referencia de
respiración, cresp,t (25 ºC).
La ecuación diferencial que describe el incremento de materia seca en el tiempo es:
dX PS
= c PS ,efi ( V foto −Vresp X PS )
con X PS ( τ i ) = c X PSi
dτ
(5.16)
En función de la composición del tejido de la planta, hay que calcular un coeficiente de
eficiencia, cPS,efi [gr tejido / gr CH2O], utilizado para convertir el producto de la fotosíntesis,
CH2O, en tejido vegetativo (acumulación de materia seca). Este coeficiente toma valores
entre 0.65 y 0.75. Los autores del modelo TOMGRO no lo justifican pero en las
experiencias realizadas en esta tesis se verifica este hecho.
Los principales inconvenientes que presenta este modelo son:
• No considera el envejecimiento de los órganos, ni las retiradas de material de la planta
como hojas (poda) o frutos (recolección).
• No realiza la división de materia seca total entre los distintos órganos de la planta.
Aún así, ofrece buenas predicciones de futuro y es fácilmente ampliable para modelar otras
variables como el peso seco de los frutos, añadiendo nuevas ecuaciones diferenciales.
5.5.2. Implementación del modelo
5.5.2.1. Implementación con Simulink
El modelo se ha implementado jerárquicamente con tres niveles utilizando la herramienta
Simulink:
• 1er nivel. Interconexión con el modelo de clima del invernadero. La estructura es similar
a la que se muestra en la figura 5.13, con las entradas procedentes del modelo de clima
(temperatura del aire, radiación PAR y concentración de CO2) y las salidas del modelo
de cultivo general (número de hojas, índice de área foliar y materia seca total por m2 de
suelo de invernadero).
224
Capítulo 5. Modelado del crecimiento del cultivo de tomate
• 2º nivel. Submodelos de variables descriptoras del crecimiento del cultivo. Corresponde
a la interacción entre las variables que describen el crecimiento del cultivo. Su estructura
se muestra en la figura 5.15.
• 3er nivel. Submodelos de procesos físico/químicos. Corresponden a los procesos físicos o
químicos que generan a las variables del crecimiento del cultivo. La figura 5.16 muestra
el modelo de materia seca total, en el que se pueden observar dos submodelos necesarios
para su producción: respiración y fotosíntesis.
1
1
Nº Ho j a s
respiracion
Tem p.
N º nodos
T e m p In v.
Resp
1
Nú m e ro d e n o d o s
Temp.
Resp.
Product5
Temp.
2
N º nodos
Respiración
LAI
CE
1
s
Sum Efic. convers Integrator1
LAI
1
Materiaseca
Temp.
Í n d i ce á re a fo l i a r
2
CO2
Tem p.
2
Rad. PAR.
C O2
CO 2
3
CO2
Fotosintesis
Rad. PAR
3
Mat eria s ec a
R ad. PAR .
fotosintesis
LAI
Fotosí ntesis
3
4
M a te ri a se ca
Fotosintesis
LAI
Ra d . P a r
LAI
M a te ri a se ca to ta l
Fig 5.16. 3er nivel modelo producción materia seca
Fig 5.15. 2º nivel modelo crecimiento del cultivo
Al igual que se comentó en la implementación del modelo de clima, el hecho de esta
jerarquización se debe a las ventajas que presenta su estudio independiente tanto para
calibración como validación y sobre todo por la facilidad para sustituir un submodelo sin
tener que modificar el modelo global. Por ejemplo, existen varios modelos de fotosíntesis
que se podrían probar cambiando únicamente el bloque correspondiente a este proceso en el
tercer nivel de jerarquización, o bien, cambiar el modelo estático que se está utilizando para
el cálculo del índice de área foliar por un modelo dinámico. Otra ventaja es la posibilidad
de aumentar el número de variables de estado del modelo, añadiendo nuevos bloques como
la división de materia seca total en cada uno de los órganos de la planta como los frutos.
Por otra parte, la simulación del modelo necesita integrar dos ecuaciones diferenciales
ordinarias. De entre los distintos algoritmos que ofrece Simulink, se ha utilizado el método
de Gear que es más eficiente para sistemas que presentan dinámicas lentas y rápidas (stiff)
como es el crecimiento de cultivos interactuando con el clima.
5.5.2.2. Implementación con Modelica
Este modelo se ha implementado en Modelica utilizando dos clases con una relación de
utilización:
• Clase modelo_cultivo. Engloba a todos los modelos del crecimiento del cultivo de
tomate que estimen sus tres variables características (materia seca, número de hojas e
índice de área foliar), en función de las variables climáticas de su entorno.
• Clase Cultivo. Engloba todos los objetos referentes a las distintas variedades de tomate,
cuyo crecimiento se pueda modelar con algún objetos de la clase anterior. Según el tipo
de tomate y de las características del periodo de cultivo, los parámetros del modelo de
crecimiento serán diferentes. En un futuro, incluirá a distintos cultivos como pepino, etc.
225
Capítulo 5. Modelado del crecimiento del cultivo de tomate
La figura 5.17, muestra el diagrama OMT del modelo del cultivo, en el que se puede
observar la relación “utiliza” que la clase Modelo_cultivo hace de la clase cultivo para su
funcionamiento. Además, se ha incluido en el diagrama, la clase Modelo_invernadero que
mediante la relación “utilizado_por_c” proporciona al modelo de cultivo las variables
climáticas interiores necesarias
Parámetros_cultivo
Modelo_cultivo
(temperatura, radiación PAR y
Utiliza
concentración de CO2) para la
Utilizado_por
ejecución de sus operaciones.
Utilizado_por_inv
Como se puede observar, a su
vez, el modelo de cultivo
Utilizado_por_c
proporciona al modelo de clima
Modelo_invernadero
el índice de área foliar que es la
variables de crecimiento que
actúa directamente sobre el
Fig. 5. 17. Diagrama OMT del modelo del crecimiento del cultivo
clima interior del invernadero.
Como se ha comentado en el capítulo 2, los resultados estimados por las dos herramientas
son similares, por ejemplo, el valor absoluto de la diferencia entre el peso seco estimado
por Simulink y por Dymola, presenta una media de 0.0325 gr., un máximo de 0.1 gr. y una
desviación estándar de 0.0255 gr., en un intervalo de variación de 10 a 1000 gr., por lo que
la elección de una de las herramientas se realizará en base a otros criterios como el tiempo
consumido en realizar las simulaciones o en las preferencias del usuario.
5.5.3. Obtención de los parámetros del modelo
La calibración del modelo de crecimiento del tomate se ha divido en tres fases
independientes, ya que las tres variables que describen el sistema dependen unas de otras de
formas secuencial, además de disponer de datos de ellas:
• Calibración del submodelo Número de hojas. De acuerdo con la ecuación (5.10), hubo
que obtener el parámetro cvH o Máximo de velocidad de aparición de nodos.
• Calibración del submodelo Índice de área foliar en función de la ecuación (5.12) en la
que hay que obtener el valor de los coeficientes empíricos cδ, cβ y cH.
• Calibración del submodelo Producción de materia seca utilizando la ecuación
diferencial (5.16), para calibrar el parámetro cPS,efi y las algebraicas (5.13), (5.14) y
(5.15), en las que hay que obtener los parámetros cresp,ref, cfoto,c, cr,cu, cext y crp,efi.
Debido a que la escala de tiempo de estas variables es lenta (días, semanas) y a que un
proceso de medida automático es demasiado costoso y sofisticado ya que habría que utilizar
visión artificial y balanzas electrónicas ([Tan93c], [Hen95] y [Ure01]), se han realizado las
siguientes tomas de datos de forma manual desde el 11 de marzo hasta el 16 de junio de
1999, tal y como se ha descrito en el apartado 2.3 Sistema cultivo del capítulo 2:
Densidad cultivo
Días de muestra
Muestras/días
Número de hojas
Índice área foliar Materia seca total
3.04
4.02
3.04
4.02
3.04
4.02
11
10
10
10
10
10
9
3
9
3
7
3
Tabla 5.1. Medidas realizadas en los cultivos de tomate
226
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Para la calibración de los submodelos se han utilizado 6 muestras del número de hojas e
índice de área foliar y 4 muestras de materia seca total de cada uno de los días de medida
correspondientes a una densidad de cultivo de 3.04 plantas/m2. Para cada uno de los
submodelos descritos anteriormente, la búsqueda de los parámetros se ha obtenido con el
siguiente procedimiento:
1. Cálculo de la media aritmética de las muestras seleccionadas por día.
2. Interpolación lineal entre las medias obtenidas en el paso anterior.
3. Obtención de los parámetros correspondientes utilizando un algoritmo de búsqueda
secuencial de forma que se optimice el siguiente criterio de mínimos cuadrados
ponderados:
J = X int p − X sim
2
(
n
)
= ∑ X int p ,i − X sim ,i 2
(5.17)
i =1
Donde Xintp es un conjunto de datos de las variables interpoladas a partir de las medidas
reales tomadas en el invernadero y Xsim son los datos procedentes de la simulación. Es
un método iterativo en el que se utilizan todos los valores entre dos límites con un
incremento determinado de forma que se obtenga la n-upla de parámetros que
minimizan el criterio utilizado. Los valores se van refinando en sucesivas búsquedas,
disminuyendo los límites y el incremento
1000
1000
900
900
800
800
P eso s ec o interpolado(gr/m 2)
M uestras de pes o sec o (gr/m 2)
Se ha seguido este procedimiento ya que al utilizar un criterio de mínimos cuadrados, es
necesario disponer de muestras con las que comparar (preferiblemente reales) en los
mismos instantes en los que el modelo proporciona los resultados, es decir cada minuto.
Como el número de medidas reales en el tiempo es reducido, se han probado distintas
interpolaciones (mantenedores de primer orden, lineal, splines cúbicos y polinómicos)
obtenido resultados más coherentes con el método lineal. Como en cada instante de tiempo
se han tomado varias muestras reales, se ha utilizado la media para realizar la interpolación,
como valor que represente a todas las plantas en las que se han tomado las medidas. Como
ejemplo, la figura 5.18 muestra los datos reales utilizados de materia seca total,
representados por círculos, junto a su media representada por un punto.
700
600
500
400
300
700
600
500
400
300
200
200
100
100
0
0
0
10
20
30
40
50
60
Tiem po (Dí as )
70
80
90
100
Fig. 5.18. Muestras materia seca total y media
0
10
20
30
40
50
60
Tiem po (Dí as )
70
80
90
Fig. 5.19. Interpolación lineal materia seca
227
100
Capítulo 5. Modelado del crecimiento del cultivo de tomate
En la figura 5.19, se muestra la interpolación lineal utilizada para utilizar el algoritmo de
minimización del criterio de mínimos cuadrados. La implementación de este algoritmo se
ha realizado en el entorno MATLAB, que utiliza la estructura de modelo de crecimiento
implementada en Simulink, ejecutándola en cada iteración de la búsqueda de parámetros.
El valor de los parámetros obtenidos se muestra en la tabla 5.2 junto a los valores que
indican la bibliografía en otras localizaciones como Estados Unidos [Jon91a] o Francia
[Jon99], pudiéndose observar que son del mismo orden. El hecho de que aparezcan celdas
sin valores, es debido a que no se han calculado los parámetros utilizando los originalmente
obtenidos en los ensayos de Gainesville. También, se muestran los límites utilizados en la
búsqueda para que se observe que no se han forzado estos valores.
Coeficiente Gainesville Lake City Avignon Almería Límite inferior Límite superior
(USA)
(USA) (Francia) (España) de búsqueda
de búsqueda
0.021
0.021
0.0229
0.0
0.1
0.0208
cvH
0.038
0.030
0.0
0.1
0.042
cδ
0.169
cβ
cH
cPS,efi
cresp,ref
cfoto,c
cr,cu
cext
crp,efi
-
0.169
0.0
0.154
1
16
16
0.0
30
13
0.7
0.7
0.7
0.0
3
0.7
0.0007
0.0007
0.0007
0.0
0.01
0.0006
0.108
0.108
0.0
1
0.089
0.0693
0.0664
0.0
1
0.095
0.58
0.58
0.0
3
0.51
0.0645
0.056
0.0
0.1
0.03
Tabla 5.2. Parámetros del modelo TOMGRO en diferentes localizaciones
Las figuras 5.20, 5.21 y 5.22 muestran gráficamente los valores reales obtenidos en el
invernadero utilizados para la calibración, junto a las salidas del modelo con los parámetros
obtenidos. Cualitativamente, los modelos presentan un comportamiento apropiado. Si se
analiza en más detalle, el modelo de índice de área foliar (figura 5.21) sobreestima el valor
para los primeros 40 días, subestimándolo al final de la campaña. También, se observa una
pequeña discrepancia en la producción de materia seca total (figura 5.22) subestimando el
valor durante los días intermedios y sobreestimándolo al final de la campaña.
50
4.5
45
4
40
3.5
3
Indic e á rea foliar
Nº de hojas
35
30
25
2.5
2
1.5
20
1
15
0.5
0
10
0
10
20
30
40
50
60
Tiem po (Dí as)
70
80
90
100
Fig. 5.20. Número de hojas
0
10
20
30
60
50
40
Tiem po (Dí as )
70
80
Fig. 5.21. Índice de área foliar
228
90
100
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Evidentemente, estos dos hechos se encuentran relacionados ya que estas variables
interaccionan en las ecuaciones del modelo general (el índice de área foliar es una entrada
del modelo de materia seca). La figura 5.23 muestra la comparación de la materia seca
simulada y la interpolación utilizada para la calibración pudiéndose observar mejor el
hecho comentado anteriormente.
1000
1000
900
900
800
P es o s ec o interpolado(gr/m 2)
800
P es o seco (gr/m 2)
700
600
500
400
300
700
600
500
400
300
200
200
100
100
0
0
0
10
20
30
40
50
60
Tiem po (Dí as)
70
80
90
Fig. 5.22. Materia seca total
0
100
10
20
30
60
50
40
Tiem po (Dí as )
70
80
90
100
Fig. 5.23. Matera seca modelada junto a interpolada
Para mostrar cuantitativamente la validez del proceso de calibración, se muestra en la tabla
5.3 unos estadísticos de comparación entre las muestras reales utilizadas y los datos que
proporciona el modelo. El intervalo de variación del número de hojas durante la campaña
se encuentra entre 10 y 50 hojas por lo que una desviación medía de 0.61 hojas y una
máxima de 1.65 se considera aceptable, al igual que para el índice de área foliar, cuyo
intervalo de variación es [0 4.5] y la materia seca total entre [50 1000 gr/m2].
Número hojas Índice área foliar Materia seca total
0.61
0.12
16.54
Media
1.65
0.50
38.49
Máximo
0.45
0.11
14.45
Desviación estándar
Tabla 5.3. Estadísticos de la diferencia entre las muestras reales y las simuladas en proceso de calibración
5.5.4. Análisis de sensibilidad del modelo
Para evaluar la influencia de los parámetros obtenidos sobre algún aspecto de la salida del
modelo se ha realizado un análisis de sensibilidad utilizando métodos numéricos [Cam96].
Se ha verificado la sensibilidad de la función de coste utilizada en la ecuación (5.17),
modificando todos los parámetros del modelo, denominados en general como cop, en el
rango de variación del 10%. Concretamente se han tomado 21 valores en el margen de
variación 0.9cop ≤ cop ≤ 1.1cop de cada uno de ellos, obteniéndose los resultados que se
muestran en las figuras 5.24, 5.26 y 5.28, donde se representa la función de coste frente a la
variación de los parámetros normalizada. Como se puede observar, los modelos son más
sensibles a determinados parámetros, siendo muy robustos frente a variaciones de otros.
Por otra parte, algunas de las funciones de coste mostradas presentan una ligera asimetría
debido al carácter no lineal de esos parámetros, aunque en un rango de ± 5% se puede
asumir que la linealización en torno al valor óptimo es válida (función de coste simétrica)
por lo que la función de coste se puede considerar cuadrática en torno a ese valor. Esto
indica que es una buena elección la utilización de una función de coste cuadrática
229
Capítulo 5. Modelado del crecimiento del cultivo de tomate
55
18
50
1.1*CvH
16
45
CvH
40
Nú m e ro de hojas
||Xint-Xs im ||2
14
12
0.9*CvH
35
30
25
10
20
8
15
10
6
-10
-4
-6
-8
0
10
8
6
4
2
0
-2
Rango variac ió n pará m etros
Fig. 5.24. Análisis sensibilidad Número de hojas
20
30
40
50
60
Tiem po (Dí as)
70
80
90
100
Fig. 5.25.Número de hojas en función de parámetros
100
5
90
4.5
Cd
80
1.1*Cd
4
1.1*CH
3.5
Í ndic e á rea foliar
70
||Xint-Xs im ||2
10
60
CH
50
40
30
1.1*Cß
3
2.5
0.9*Cß
2
0.9*CH
1.5
0.9*Cd
20
1
Cß
10
0.5
0
-10
0
-8
-6
-4
-2
0
2
4
Rango variació n pará m etros
6
8
10
Fig. 5.26. Análisis sensibilidad índice área foliar
x 10
0
10
20
30
70
80
90
100
Fig. 5.27. Índice área foliar en función de parámetros
4
2
1.1*Cfoto,c
1000
1020
1.1*C foto,c
1.1*C rp,efi
1000
900
800
Cfoto,c
M ateria s ec a (gr/m 2)
1.6
Crp,efi
1.4
Cps,efi
1.2
700
1.1*C ps ,efi
980
M ateria seca (gr/m2)
1.8
||Xint-Xs im ||2
40
50
60
Tiem po (Dí as)
1.1*C ex t
960
1.1*C res p,ref
940
1.1*C r,c u
XP S opt im o
920
0.9*C r,c u
900
0.9*C res p,ref
880
0.9*C ex t
860
0.9*C ps ,efi
0.9*C rp,efi
840
600
0.9*C foto,c
0.9*Cfoto,c
820
96
96.5
97
97.5
Tiem po (D í as )
98
98.5
500
400
Cext
1
300
Cresp,ref
0.8
200
Cr,cu
0.6
-10
-8
100
-6
-4
-2
0
2
4
Rango variac ió n pará m etros
6
8
10
10
Fig. 5.28. Análisis sensibilidad materia seca
20
30
40
50
60
Tiempo (Dí as)
70
80
90
Fig. 5.29. Materia seca en función parámetros
Las figuras 5.25, 5.27 y 5.29, representan la variación real de los modelos en función
exclusivamente de la variación de los parámetros. Excepto en el parámetro cβ del modelo
de la variable de crecimiento índice de área foliar, la variación de las salidas de los modelos
debido a la modificación de los parámetros crece en función del tiempo, observándose una
variación no superior del 7.7 % en valor absoluto en el modelo del número de hojas con
respecto al parámetro cvH.
230
Capítulo 5. Modelado del crecimiento del cultivo de tomate
En el modelo de Índice de área foliar el error no es mayor de un 10 % respecto a cδ y un
3.75 % respecto a cH. El comportamiento del parámetro cβ es tal que en los primeros días es
alto, no mayor de un 9.1 % en valores muy bajos de la variable (por lo que, evidentemente,
el valor relativo es mayor), disminuyendo hasta un 0.02 % al final de la campaña. Con
respecto al modelo de producción de materia seca total, se puede observar que los errores
relativos no son mayores que los que muestra la siguiente tabla con respecto a cada uno de
los seis parámetros que lo caracterizan:
Error (%)
cfoto,c
9.7
crp,efi
cps,efi
cext
cresp,ref
8.7
6.5
3.6
2.9
Tabla 5.4.Errores máximos por variación de parámetros
cr,cu
0.8
De las gráficas anteriores y de los valores máximos de error en valor absoluto, se puede
indicar que las ecuaciones del modelo teórico son moderadamente robustas ya que las
respuestas no dependen exclusivamente de los parámetros, aunque el efecto de algunos de
ellos es significativo porque perturbaciones en su valor de un ±10% producen una variación
de un 10% en la salida.
5.5.5. Validación del modelo
Para la calibración de los submodelos se han utilizado 6 muestras del número de hojas e
índice de área foliar y 4 muestras de materia seca total de cada uno de los días de medida
correspondientes a una densidad de cultivo de 3.04 plantas/m2. Para la validación de los
modelos, como se muestra en la tabla 5.5, se han utilizado los datos restantes
correspondientes a las mismas fechas (11 de marzo hasta el 16 de junio de 1999), es decir
seis muestras para cada una de las variables, tres con una densidad de población de 3.04
plantas/m2, similar que en el proceso de calibración y de 4.02 plantas/m2, para poder validar
el modelo con marcos de plantación diferentes.
Número de hojas
Índice área foliar Materia seca total
Densidad cultivo
3.04
4.02
3.04
4.02
3.04
4.02
Días de muestra
11
10
10
10
10
10
Muestras/días
3
3
3
3
3
3
Tabla 5.5. Medidas utilizadas en el proceso de validación del modelos de crecimiento de tomate
A continuación, se muestran los resultados de la validación del modelo para cada una de las
tres variables y para cada marco de plantación, observándose claramente que describe
correctamente el crecimiento del cultivo. En el número de hojas (figuras 5.30 y 5.31), el
modelo subestima el valor en los primeros días de la campaña, sobrestimándolo al final de
la misma, debido esto último a la caída o poda de hojas por envejecimiento. Con respecto al
índice de área foliar, figuras 5.32 y 5.33, el efecto que se produce es el complementario
debido a su relación directa con el número de hojas mediante una exponencial modulada, es
decir sobrestima al principio de la campaña, subestimándolo al final de la misma. En el
modelo de materia seca total, figuras 5.34 y 5.35, no se observa un comportamiento de este
tipo, aunque si presenta una subestimación del valor al final de la campaña. Evidentemente
el número de muestras es pequeño para poder generalizar comportamientos, por lo que sería
conveniente realizar más ensayos, aunque como se ha comentado anteriormente, el coste de
los mismos es muy elevado debido a que se trata de ensayos destructivos.
231
50
50
45
45
40
40
35
35
Nº de hojas
Nº de hojas
Capítulo 5. Modelado del crecimiento del cultivo de tomate
30
25
30
25
20
20
15
15
10
0
10
20
30
60
50
40
Tiem po (Dí as)
70
80
90
10
100
Fig. 5.30. Validación número hojas (3.04 pls/m2)
0
10
20
30
60
40
50
Tiem po (Dí as )
70
80
90
100
Fig. 5.31. Validación número hojas (4.02 pls/m2)
Algunos valores cuantitativos se muestran en la tabla 5.6, representando los estadísticos de
comparación entre las muestras reales utilizadas y los datos que proporciona el modelo en
los mismos instantes en los que se realizaron las medidas.
Número hojas Índice área foliar Materia seca total
3.04
4.02
3.04
4.02
3.04
4.02
Densidad cultivo
0.71
0.86
0.13
0.14
17.85
21.37
Media
2.09
2.64
0.56
0.63
39.14
51.03
Máximo
0.56
0.13
0.14
16.57
16.60
Desviación estándar 0.57
Tabla 5.6. Estadísticos de la diferencia entre las muestras reales y las simuladas en proceso de validación
7
4.5
4
6
3.5
5
Indic e á rea foliar
Indice á rea foliar
3
2.5
2
1.5
4
3
2
1
0.5
1
0
0
10
20
30
40
50
60
Tiem po (Dí as)
70
80
90
100
Fig. 5.32. Validación índice área foliar (3.04 pls/m2)
0
0
10
20
30
40
50
60
Tiem po (Dí as )
70
80
90
100
Fig. 5.33. Validación índice área foliar (4.02 pls/m2)
Se puede observar que los resultados para la densidad de plantación de 3.04 plantas/m2 son
menores en media y error absoluto máximo debido a que el modelo se ajustó para ese
marco de plantación, aunque la desviación estándar es similar. Aún así, los resultados para
el marco de 4.02 plantas/m2 son aceptables ya que la desviación de la salida del número de
hojas no es mayor del 8.7 % en valor absoluto, la del índice de área foliar no es mayor de
un 11% (0.63 en valor absoluto de un margen entre 0 y 7) y la de la materia seca total no es
superior al 5%.
232
Capítulo 5. Modelado del crecimiento del cultivo de tomate
1000
1200
900
1000
800
800
P es o s ec o (gr/m 2)
Peso s eco (gr/m 2)
700
600
500
400
300
600
400
200
200
100
0
0
10
20
30
40
50
60
Tiem po (Dí as )
70
80
90
100
0
0
10
20
30
40
50
60
Tiem po (Dí as )
70
80
90
100
Fig. 5.34. Validación materia seca total (3.04 pls/m2) Fig. 5.35. Validación materia seca total (4.02 pls/m2)
Un método para validar cualitativa y cuantitativamente un modelo es analizar los residuos
procedentes de la comparación entre los datos reales y los salidas simuladas [Cam96].
Como se indica en la tabla 5.1, se dispone de doce series temporales para el número de
hojas y el índice de área foliar y diez para la materia seca total. El problema radica en que
el número de muestras por cada serie es de diez, insuficiente para poder realizar un análisis
de residuos del que se puedan extraer conclusiones definitivas acerca del modelo. Con los
pocos datos de los que se dispone, se ha podido observar que los residuos de los tres
modelos principales no presentan una distribución aleatoria uniforme, sino una
estructuración que induce a pensar que habría que añadir algún termino no lineal en las
ecuaciones que describen el sistema. Hay que recordar que el modelo utilizado no se ha
diseñado sino que se propuso como una simplificación del modelo TOMGRO (compuesto
por 69 variables de estado) a un modelo para control descrito con dos variables de estado,
por lo que se puede explicar la no aleatoriedad de los residuos y la necesidad de la inclusión
de nuevos términos. Aún así, esta afirmación no es definitiva ya que si se dispusiera de
suficientes datos, se extraerían más conclusiones a partir del análisis de residuos.
Otra forma de validar un modelo, aunque de manera cualitativa, es someterlo a
determinadas entradas y comprobar que su comportamiento es el esperado. Las
experiencias realizadas han sido:
• Comprobación de distintas consignas de temperatura constantes durante toda la
campaña. Con una densidad de cultivo de 4 plantas/m2, para una concentración de CO2
constante igual a 400 ppm y utilizando un modelo de radiación solar de día claro [Ber95]
del que se ha extrapolado el valor de la radiación PAR en el interior del invernadero, se
han probado distintas estrategias de control de temperatura constantes para toda la
campaña, consistente en dos consignas al día: diurna y nocturna. Se han probado las
siguientes consignas: 16/8, 20/10, 22/14, 28/20, 38/25 y 40/30 ºC dia/noche. Estas dos
últimas se han incluido para observar los efectos de las altas temperaturas aunque nunca
se utilizarían en un invernadero. Las figuras 5.36 y 5.37 muestran respectivamente, la
variación que se produce en el índice de área foliar y en la producción de materia seca
debido a la estrategia de consigna seguida. El número de hojas no se representa ya que
se encuentra directamente relacionado con el índice de área foliar por lo que se muestra
la misma información.
233
Capítulo 5. Modelado del crecimiento del cultivo de tomate
38/25
1600
28/20
22/14
1400
38/25
20/10
5.5
28/20
5
40/30
4.5
M ateria seca total (gr/m 2)
Í ndic e á rea foliar
22/14
4
3.5
20/10
3
2.5
16/8
2
1200
40/30
1000
16/8
800
600
400
1.5
1
200
0.5
0
10
20
30
40
50
60
70
80
90
100
10
20
30
40
Tiem po (Dí as )
Fig 5.36. Índice área foliar función de temperatura
50
60
70
Tiem po (Dí as)
80
90
100
Fig 5.37. Materia seca total función de temperatura
El máximo de producción de hojas, y por tanto de índice de área foliar, ocurre entre 30 y
35 ºC y el de materia seca total a los 30 ºC. Para altas temperaturas, el comportamiento
del modelo es el esperado, aumentando en función de la temperatura hasta que alcanzan
las variables un máximo a partir de la cual la fotosíntesis decrece (llegando a niveles
muy bajos), al igual que ocurre en el proceso de respiración. Estos hechos pueden,
incluso, dañar a la planta ya que se superan sus condiciones vitales, manifestándose
antes en la producción de materia seca en la que una consigna de 38/25 ºC es perjudicial,
mientras que la producción de hojas es máxima, por lo que hay que llegar a un
compromiso entre las variables. Todo esto se debe al término de modulación lineal a
trozos de la ecuación 5.11. Por otra parte, para bajas temperaturas, 16/8 ºC, se puede
observar que la producción de hojas y materia seca es menor, requiriendo 50 días más
para alcanzar un índice de área foliar de 2 respecto a una consigna típicamente utilizada
de 22/14 ºC. De estas observaciones se puede deducir que el comportamiento del modelo
con respecto a la temperatura es correcto.
1600
800
350
1800
500
1600
350
250
1200
M ate ria seca total (gr/m 2)
M ate ria seca total (gr/m 2)
1400
1000
175
800
100
600
1400
250
1200
1000
800
600
400
400
200
200
10
20
30
40
50
60
Tiem po (Dí as)
70
80
90
10
100
Fig 5.38. Materia seca función de Radiación PAR
20
30
40
50
60
70
Tiem po (Dí as)
80
90
100
Fig 5.39. Materia seca total en función de CO2
• Comprobación de distintas consignas de radiación PAR constantes durante toda la
campaña. Con una densidad de cultivo de 3 plantas/m2, para una concentración de CO2
constante igual a 400 ppm y una temperatura 22/14 ºC dia/noche durante los cien días de
la campaña, se han probado distintas estrategias de control de radiación PAR constantes
para toda la campaña: 100, 175, 250 y 350 W/m2.
234
Capítulo 5. Modelado del crecimiento del cultivo de tomate
La figura 5.38 muestra la variación de la producción de materia seca en función de
distintos valores de radiación. Como era de esperar, debido a la dependencia
exponencial de la fotosíntesis con respecto a la radiación, figura 5.4, la producción de
materia seca aumenta conforme la radiación es mayor. El número de hojas, y por tanto,
el índice de área foliar no se estudian debido a que no dependen de esta variable,
únicamente de la temperatura.
• Comprobación de distintas consignas de concentración de CO2 constantes durante toda
la campaña. Con una densidad de cultivo de 3 plantas/m2, para una temperatura 22/14
ºC dia/noche y utilizando un modelo de radiación solar de día claro durante los cien días
de la campaña, se han probado distintas consignas de concentración de CO2 constantes
para toda la campaña: 250, 350, 500 y 800 ppm. La figura 5.39 muestra la variación de
la producción de materia seca en función de la concentración de CO2 del aire del
invernadero. La dependencia de la fotosíntesis con respecto a la concentración de CO2 es
tal que para valores menores de 300 ppm, cae rápidamente, llegando a saturase en 700 u
800 ppm. Como se puede observar en la salida del modelo, la producción de materia
seca crece conforme aumenta la concentración de CO2, pudiéndose observar el efecto de
la saturación ya que el incremento de materia seca al cambiar de consiga de 250 ppm a
500 ppm (250 ppm de diferencia con un incremento de producción de 400 gr/m2 a los
100 días) es el doble que al cambiar de consigna de 500 ppm a 800 ppm (300 ppm de
diferencia con un incremento de producción a los 100 días de 200 gr/m2).
• Comprobación del efecto de la variación de las consignas de temperatura a lo largo de
la campaña. Con una densidad de cultivo de 4 plantas/m2, para una concentración de
CO2 constante igual a 400 ppm y utilizando un modelo de radiación solar de día claro, se
han probado distintas estrategias de cambio de consignas para reducir o acelerar el
crecimiento. Se han probado las siguientes consignas: 16/8 ºC hasta la mitad de campaña
y 22/14 ºC hasta el final para aumentar el crecimiento del cultivo, y 28/20 ºC hasta la
mitad de la campaña y 22/14ºC hasta el final de la misma para observar si se reduce el
crecimiento. Las figuras 5.40 y 5.41 muestran el índice de área foliar y la producción de
materia seca para consignas constante durante toda la campaña (línea discontinua) y para
cambios de consignas de temperaturas a lo largo de la campaña en función de
determinadas decisiones (línea continua).
5.5
28/20
2000
28/20 a 22/14
1800
28/20
5
28/20 a 22/14
4.5
1600
M ateria s ec a total (gr/m 2)
Í ndic e á rea foliar
4
3.5
16/8 a 22/14
3
2.5
16/8
2
16/8 a 22/14
1400
1200
16/8
1000
800
600
1.5
400
1
200
0.5
0
20
40
80
60
Tiem po (Dí as )
100
120
20
40
60
80
Tiem po (Dí as )
100
120
Fig 5.40. Índice área foliar modificando estrategia de Fig 5.41. Materia seca modificando estrategia de
control de temperatura a media campaña
control de temperatura a media campaña
235
Capítulo 5. Modelado del crecimiento del cultivo de tomate
Dentro de un margen de temperatura adecuado, se puede observar que se puede
aumentar o disminuir la velocidad de crecimiento de un cultivo modificando las
variables climáticas como, en este caso, la temperatura. Este hecho se observa en
invernaderos reales y en las instalaciones que cuentan con sistemas de actuación
adecuados se utilizan este tipo de estrategias para intentar adecuar la producción a las
demandas del mercado.
Por otra parte, se realizaron las siguientes simulaciones para validar los submodelos de
fotosíntesis y respiración:
• Índice área foliar = 3, CO2 = 300 ppm y Temperatura = 25 ºC constantes, para estudiar el
efecto de la radiación PAR desde 0 a 600 W/m2 sobre la fotosíntesis.
• Índice área foliar = 3 y temperatura = 25 ºC constantes, para estudiar el efecto sobre la
fotosíntesis de la radiación PAR desde 0 a 700 W/m2, combinándola con una variación
de la concentración de CO2 desde 100 a 1000 ppm.
• Índice área foliar = 3 y CO2 = 350 ppm constantes, para estudiar el efecto sobre la
fotosíntesis de la temperatura modificando su valor de 0 a 60 ºC, combinándola con una
variación de la concentración de CO2 desde 100 a 1000 ppm.
• Índice área foliar = 3, CO2 = 350 ppm y radiación PAR = 450 W/m2 constantes, para
estudiar el efecto sobre la respiración de la temperatura modificando su valor entre 0 y
60 ºC.
Los resultados de estas experiencias se muestran a lo largo del apartado 2 de este capítulo
en las figuras de la 5.4 a la 5.11, sirviendo estos resultados para ilustrar las influencia del
clima sobre el crecimiento de cultivos, coincidiendo con la bibliografía y estudios
experimentales existentes y muy contrastados sobre este tema.
En base a todos estos estudios se puede determinar la validez del modelo utilizado para la
aplicación que se está tratando de resolver.
5.6. CONCLUSIONES Y RESUMEN DE APORTACIONES
En este capítulo se ha expuesto la relación entre el crecimiento del cultivo y las distintas
variables climáticas del entorno que lo rodea, así como de los distintos modelos existentes
en la bibliografía que formalizan esa relación. De entre estos modelos se ha seleccionado la
estructura del modelo TOMGRO reducido, que se describe con dos variables de estado
(número de hojas y materia seca total) y una algebraica (índice de área foliar). Además, se
han descrito las metodologías seguidas para su implementación, calibración y validación.
De todo este proceso y después de analizar los resultados obtenidos, se pueden extraer las
siguientes conclusiones:
• El modelo seleccionado reacciona correctamente frente a variaciones del clima, por lo
que permite el control del crecimiento del cultivo, modificando las variables climáticas
del interior del invernadero. Este modelo proporciona un primer nivel en la descripción
cuantitativa de las necesidades biológicas de un cultivo de tomate para el diseño de
sistemas de control de la producción bajo invernadero.
236
Capítulo 5. Modelado del crecimiento del cultivo de tomate
• El modelo se ha implementado utilizando un sistema jerárquico a tres niveles lo que
permite un estudio independiente de cada una de las variables modeladas, la sustitución
de alguno de los módulos sin necesidad de reprogramar el resto y la ampliación del
modelo con nuevas variables de salida.
• El modelo se ha calibrado utilizando una serie de datos de una campaña de primavera.
Se han implementado una serie de algoritmos basados en la minimización de un criterio
de mínimos cuadrados, estableciendo una metodología de obtención de parámetros,
sencilla de utilizar cuando se desee calibrar el modelo para otras variedades de tomate u
otras localizaciones o invernaderos.
El principal inconveniente que presenta el modelo es que simula el peso seco total de la
planta, y en una optimización económica lo que interesa es conocer el peso fresco de los
frutos que es de donde se obtiene los ingresos económicos del sistema, aún así, y como se
describirá en el capítulo 7 se puede realizar una extrapolación empírica para calcular el
peso fresco de los frutos a partir del peso seco total en base a datos experimentales. Hay
que indicar que el diseño y desarrollo de modelos teóricos de producción y división de la
materia seca entre los distintos elementos de la planta es un trabajo de ingenieros
agrónomos con los que se colaboraría para la implementación, calibración y validación.
Para un ingeniero de control, el principal interés de estos modelos radica en la posibilidad
de probar estrategias de control sin necesidad de esperar toda una campaña, cuya duración
oscila entre los tres y los seis meses. Para un estudio, como el que se pretende realizar en
esta tesis, consistente en probar la validez del control óptimo de la producción de cultivos
bajo invernadero, bastaría con trabajar con modelos de producción de materia seca total ya
que si se puede controlar este parámetro en base a las variables climáticas, es posible
controlar la producción de los frutos al encontrarse fuertemente relacionados entre si.
En el marco del modelado del crecimiento de cultivos, las principales tareas a realizar en
futuros trabajos son las siguientes:
• Validación del modelo con más datos experimentales y con distintas variedades.
• Prueba de distintos modelos de fotosíntesis y respiración, para obtener el que mejor se
adecue a las condiciones del sector agrícola del sudeste español.
• La inclusión en el modelo de otros detalles del cultivo como procesos culturales tipo
poda, la división de la materia seca total en los distintos elementos de la planta, sobre
todo los frutos y la predicción de la maduración de los frutos para poder determinar las
fechas de recolección.
• Utilización y prueba de técnicas de modelado tipo caja negra frente a los modelos
existentes basados en principios físicos y químicos.
• Obtención de modelos de otras variedades hortofrutícolas como pepino, pimiento, etc.,
de gran interés en el sector hortofrutícola.
237
CAPÍTULO 6
ESTRATEGIAS DE CONTROL DEL
CLIMA DE UN INVERNADERO
6.1. PROBLEMA DEL CONTROL DE LAS VARIABLES CLIMÁTICAS
En este capítulo se va a describir el problema del control de las variables climáticas del
interior de un invernadero, así como las técnicas utilizadas en la presente tesis para llevarlo
a cabo. Como se ha comentado en el capítulo anterior, la producción del cultivo bajo
invernadero es influenciada por el clima en su interior, por lo que hay que mantener las
variables que lo caracterizan dentro de un determinado rango de valores. En este problema
de control intervienen las siguientes variables:
• Variables a controlar: la radiación PAR que alcanza al cultivo, Vrp,a, y la temperatura,
Xt,a, y humedad relativa del aire, Xhr,a. Generalmente, en los invernaderos del sudeste
español no se controla la concentración de CO2 ya que su producción es excesivamente
cara, por lo que no se trata en la presente tesis. Se prevé que con la llegada del gas
natural a esta zona (cuya combustión produce exclusivamente agua y CO2) se empiece a
extender su utilización.
• Variables de control. El conjunto de actuadores utilizados son los más comunes en la
zona: ventilación natural, Uven, malla de sombreo, Umalla, calefacción, Ut,cal.
• Variables de perturbación. Las perturbaciones corresponden a las variables que
describen el clima en el exterior del invernadero (temperatura, Pt,e, y humedad relativa
del aire, Phr,e, radiación solar, Prs,e, velocidad, Pvv,e, y dirección del viento, Pdv,e,
temperatura de la bóveda celeste, Pt,bc, y lluvia, Pll,e), el cultivo a través de la
transpiración (que es función del estado de crecimiento de las plantas a medida que
aumenta el índice de área foliar, PLAI) y un conjunto de variables que describen el estado
del resto de elementos del invernadero (temperatura de la cubierta, Pt,cb, y temperatura
de la superficie del suelo, Pt,ss). Realmente, estas últimas son variables de estado (y así
se han tratado en los capítulos de modelado), pero debido a la dificultad (a veces
imposibilidad) de su control se van a considerar como perturbaciones ya que afectan a
las tres variables de estado que se desean controlar pues son las que intervienen
directamente en el crecimiento del cultivo.
La figura 6.1 muestra un esquema de las variables que se consideran en este problema de
control.
239
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
PERTURBACIONES
Temperatura
exterior
Humedad Temperatura
Velocidad
Viento Dirección exterior Bóveda celeste
Viento
Radiación
exterior
Lluvia
VARIABLES A
CONTROLAR
Temperatura
cubierta
Ventilación
Temperatura
Superficie suelo
Temperatura aire
Índice área foliar
Calefacción
Radiación PAR
Malla sombreo
Humedad aire
Fig. 6.1. Esquema de las variables que intervienen en el problema de control climático.
Las características principales de estas variables se describen en la siguiente tabla:
VARIABLES A CONTROLAR
Variable
(Unidades)
Temperatura aire
(ºC,K)
Naturaleza
señal
• Continua
• No lineal
Radiación PAR
(W/m2)
Humedad relativa
aire
(%)
• Continua
• No lineal
• Continua
• No lineal
Perturbaciones
• Temperatura exterior
• Velocidad viento exterior
• Dirección viento exterior
• Temperatura cubierta
• Temperatura suelo
• Temperatura bóveda celeste
• Índice área foliar
• Indirectamente:radiación/malla
sombreo
• Radiación exterior
• Humedad exterior
• Temperatura cultivo
• Radiación exterior
• Temperatura cubierta
• Velocidad viento exterior
• Dirección viento exterior
• Índice área foliar
Variables
de control
• Ventilación
• Calefacción
Efecto de otras
variables a controlar
• Humedad interior
• Malla sombreo
• Ventilación
• Calefacción
Incertidumbres
• Paramétricas
• Paramétricas
• Temperatura
• Paramétricas
VARIABLES DE CONTROL
Variable
(Unidades)
Ventilación
(º)
Calefacción
(ºC)
Malla de sombreo
(%)
Naturaleza señal
Variables que controla
• Continua
• No lineal
• Temperatura aire
• Humedad aire
• 3 señales de control
• Continuas/ discretas
• No lineal
• Temperatura aire
• Humedad aire
• Discreta
• No lineal
• Radiación PAR
Perturbaciones medibles que se
pueden incorporar en el control
• Temperatura exterior
• Velocidad viento
• Dirección viento
• Lluvia
• Temperatura exterior
• Velocidad viento
• Dirección viento
• Radiación exterior
Tabla 6.1.a. Características de las variables del problema de control
240
Incertidumbre
• Paramétricas
• Estructurales
• Paramétricas
• Estructurales
• Paramétricas
• Estructurales
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
VARIABLES DE PERTURBACIÓN
Variable
(Unidades)
Temperatura exterior
(ºC, K)
Radiación exterior
(W/m2)
Humedad relativa
aire exterior
(%)
Velocidad viento
exterior
(m/s)
Dirección viento
exterior
(º)
Lluvia
(-)
Naturaleza señal
• Medible
• Continua
• Medible
• Continua
• Cambios bruscos
• Medible
• Continua
• Medible
• Continua
• Cambios bruscos
• Medible
• Discreta
• Cambios bruscos
• Medible
• Discreta
• Cambios bruscos
Temperatura
• Medible
superficie suelo
• Continua
(ºC, K)
• No lineal
Temperatura cubierta • Medible
(ºC, K)
• Continua
• No lineal
Temperatura bóveda • Discontinua
Celeste (K)
• Estimada
Variables de estado
que perturba
• Temperatura aire
• Humedad aire
• Radiación PAR
• Temperatura aire
• Humedad aire
• Humedad aire
Variables de control
que perturba
• Ventilación
• Calefacción
• Calefacción
• Temperatura aire
• Humedad aire
• Ventilación
• Calefacción
• Temperatura aire
• Humedad aire
• Ventilación
• Temperatura aire
• Ventilación
Otras variables que perturba
• Temperatura cubierta
• Temperatura cubierta
• Temperatura superficie suelo
• Ventilación
• Temperatura cubierta
• Temperatura aire
• Humedad aire
• Temperatura cubierta
• Temperatura aire
• Humedad aire
• Temperatura suelo
• Temperatura aire
• Temperatura cubierta
• Temperatura suelo
Tabla 6.1.b. Características de las variables del problema de control (Continuación)
Analizando en profundidad este problema de control se deduce que presenta las siguientes
características:
• El sistema (clima del invernadero) se encuentra sometido a fuertes perturbaciones
medibles y no medibles. Las características de las perturbaciones imponen limitaciones
fundamentales en el comportamiento de los sistemas a controlar. En el sistema que se
está tratando se pueden encontrar dos tipos fundamentales de perturbaciones:
Perturbaciones en la carga que afectan a las variables del proceso y son debidas a
variables que influyen en la salida del proceso pero que no pueden ser manipuladas.
Corresponden con las que se han descrito anteriormente en el apartado 6.1. La
mayoría de ellas son medibles o se pueden estimar utilizando modelos.
Errores en los sistemas de medida debidos a ruidos de alta frecuencia en los sensores
y otras causas descritas en el apartado 2.4 Sistemas de medida y control de las
variables climáticas del capítulo 2.
• Existe un alto grado de correlación entre las variables a controlar, tal y como se puede
observar en la tabla 6.2 (calculada con una serie completa de 6 meses con medidas cada
minuto), de forma que la modificación del valor de una de ellas conlleva la variación de
las otras. La temperatura y la humedad relativa se encuentran inversamente
correlacionadas. La modificación de la radiación produce una variación en la
temperatura ya que es la principal fuente de energía del sistema y por lo tanto afectaría a
la humedad relativa. De esta forma, el control de una de ellas puede llevar a que alguna
de las otras no se encuentre entre los límites que los expertos han considerado como
idóneos.
241
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Temperatura Humedad relativa Radiación
1.00
-0.9172
0.8813
Temperatura
-0.9172
1.00
-0.9147
Humedad relativa
0.8813
-0.9147
1.00
Radiación
Tabla 6.2. Matriz de correlaciones de las variables a controlar
• Para controlar la temperatura y humedad se utilizan los mismos sistemas de actuación,
por lo que el control de una de ellas puede provocar que la otra presente un
comportamiento no deseado, fuera de los límites permitidos.
• Es un sistema variable en el tiempo en el que los parámetros que caracterizan a los
sistemas de actuación (generalmente convectivos) y determinan su efecto sobre las
variables a controlar, se ven afectados por las perturbaciones, por lo que el mismo estado
en los actuadores puede producir consecuencias diferentes.
• El sistema presenta restricciones en las señales de entrada con una saturación en
amplitud y, en algunas situaciones, en velocidad de los sistemas de actuación:
La ventilación puede abrirse entre un valor mínimo (0% = 0º), Uven,min, y valor
máximo (100% = 38º), Uven,max, de forma que:
Uven,min ≤ Uven ≤ Uven,max
(6.1)
Por otra parte, el tiempo que la ventilación requiere para pasar de una posición a otra
puede ser mayor que el periodo de muestreo que se ha considerado, por lo que:
∆Uven,min ≤ Uven( t ) − Uven( t − 1 ) ≤ ∆Uven,max
(6.2)
En los invernaderos en los que se ha trabajado no se ha presentado este problema,
pero se han analizado otros que si presentaban este tipo de saturaciones. Otra nolinealidad que suele aparecer en estas instalaciones es la cuantización, debido a la
estructura mecánica de cremallera de las ventilaciones, que hace que la apertura de
ventilación tenga un paso discreto de 2º.
La temperatura de las tuberías del sistema de calefacción se encuentra entre un valor
mínimo variable (que se ha considerado igual a la temperatura del aire del
invernadero, Xt,a) y valor máximo menor que la temperatura del agua que proporciona
la caldera (80 ºC) para evitar trabajar en el límite, Utmax,cal, de forma que:
X t ,a ≤ Ut ,cal ≤ Ut max,cal
(6.3)
La malla de sombreo presenta dos estados para la limitación de la radiación incidente,
por lo que se encuentra cerrada (0% = 0 cm), Umalla,min, o abierta (100% = 400 cm.),
Umalla,max, de forma que:
U malla,min ≤ U malla ≤ U malla,max
(6.4)
Por la propia naturaleza del actuador, permite un posicionamiento continuo entre sus
valores extremos, hecho que podría ser útil si se usara por ejemplo para controlar
temperatura, en cuyo caso habría que tener en cuenta una no-linealidad de velocidad de
apertura. Esto sin embargo tendría el inconveniente de someter distintas zonas del
invernadero a distintos niveles de radiación, lo que provocaría un crecimiento irregular
del cultivo que no es deseable con vistas a una recolección masiva.
242
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• Aunque la dinámica del crecimiento del cultivo tiene una escala de tiempo diferente de
la dinámica del clima del invernadero, las plantas necesitan encontrarse en un ambiente
apropiado para su desarrollo, por lo que el problema del control climático presenta unas
restricciones de las variables a controlar:
La temperatura del aire debe encontrarse entre un máximo, Xtmax,a, y un mínimo,
Xtmin,a, para favorecer el crecimiento y evitar situaciones de estrés o daños en las
plantas, de forma que:
X t min,a ( t ) ≤ X t ,a ≤ X t max,a ( t )
(6.5)
Con respecto a la temperatura, actualmente existe un debate sobre la conveniencia de
utilizar una restricción de la integral de temperatura [Sig00a], pero no se ha tenido en
cuenta en la presente tesis1.
La humedad relativa del aire debe encontrarse entre un máximo, Xhmax,a, y un mínimo,
Xhmin,a. Hay que evitar alcanzar la saturación de vapor de agua y que se produzca
condensación en la cubierta o en las plantas, pues podría provocar la aparición de
enfermedades criptogámicas como el mildium o la botrytis. Por otra parte, humedades
relativas elevadas no son aconsejables ya que reducen la transpiración y una correcta
polinización. Por otra parte, humedades relativas bajas cierran los estomas y reducen
la fotosíntesis [Mar95a]. Por tanto, esto se traduce en una restricción de la forma:
X h min,a ( t ) ≤ X h,a ≤ X h max,a ( t )
(6.6)
Aunque en otras zonas geográficas no se consideran restricciones en la radiación, en
la zona mediterránea, debido al gran número de horas de sol y a la elevada radiación
que se alcanza, en algunas situaciones se incluye una restricción para controlar el
fotoperiodo del cultivo, intentando evitar que se alcance una radiación máxima,
Vrpmax,a:
Vrp,a ≤ X rp max,a ( t )
(6.7)
Los límites de las restricciones son variables en el tiempo, ya que el crecimiento del
cultivo pasa por distintas fases (siembra, transplante, cuaje y recolección) en las que
necesita exigencias climáticas distintas. Además, en determinadas situaciones, como
posibles problemas de enfermedades, se requieren condiciones climáticas determinadas
para minimizar sus efectos perjudiciales. Por otra parte, y como se ha comentado en el
capítulo 2, existen distintos tipos de ciclos de cultivos (largo, corto de otoño y corto de
primavera) que evidentemente presentan perturbaciones climáticas distintas que se
traducen en límites diferentes en las restricciones.
• El clima del invernadero es un proceso complejo que no se ha descrito de forma
absolutamente precisa por los modelos considerados, ya que existen dinámicas
desconocidas o no modeladas e imprecisiones en el método de identificación o
estimación de parámetros, por lo que existen errores de modelado que se hacen patentes
sobre todo cuando se utilizan modelos lineales e invariantes en el tiempo. Por tanto, si se
desea controlar adecuadamente este sistema se deberá tener información sobre las
posibles fuentes de incertidumbre (paramétricas o estructurales), evaluando su efecto
sobre el comportamiento del sistema completo [Ber95].
1
Se han desarrollado herramientas de control predictivo que permitirían su inclusión [Dor03].
243
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• Como se ha comentado en capítulos anteriores, se ha considerado el aire homogéneo
respecto a sus propiedades termodinámicas, pero realmente existen gradientes de las
variables climáticas tanto horizontal como verticalmente, distinguiéndose un clima
temporal y espacial. Como no se dispone de actuadores distribuidos en estas
instalaciones, se considera que el clima del invernadero viene representado por el lugar
donde se encuentran ubicados los sensores de temperatura, humedad y radiación PAR,
no considerándose el carácter distribuido del clima en el espacio.
Después de analizar todas estas características se ha optado por considerar dos lazos de
control independientes tal y como se describirá en los siguientes apartados: uno para
controlar la radiación PAR y otro para la temperatura y humedad.
En este capítulo se expone una revisión en detalle sobre las diversas técnicas de control
utilizadas por distintos autores para controlar las principales variables climáticas que
afectan al crecimiento del cultivo. A continuación, se describirán los esquemas y estrategias
de control utilizadas en la presente tesis para controlar la temperatura diurna con la
ventilación y la nocturna con la calefacción, así como el tratamiento de la humedad relativa.
Además, se expondrá brevemente el control de la radiación PAR en el interior del
invernadero. Se finalizará con las conclusiones relacionadas con este capítulo, los futuros
trabajos a realizar en este campo y las principales aportaciones.
6.2. ESTADO ACTUAL DE LOS ESTUDIOS DE CONTROL DEL CLIMA
EN INVERNADERO
6.2.1. Clasificación de las estrategias de control en la actualidad
La mayoría de los procesos en la actualidad se controlan con distintas variedades de
controladores PID (aproximadamente el 90% de las aplicaciones industriales), que son una
buena solución a numerosos problemas de control. Sin embargo, existen casos en los que la
dificultad del sistema a controlar requiere la utilización de nuevas estrategias de control de
procesos, a las que se denomina control avanzado. Este término es muy subjetivo y puede
tener distintos significados en función de los conocimientos y experiencia de la persona que
lo utilice [Ber95].
La tabla 6.3 muestra una clasificación de estrategias de control convencional y avanzado
propuesta por Seborg en [Seb99] en función del grado de utilización en la industria de cada
una de estas técnicas. La categoría I agrupa las estrategias de control estándar que han sido
utilizadas ampliamente durante las últimas cinco décadas. Las estrategias de control que
componen la categoría II se consideran como control avanzado clásico ya que se llevan
utilizando en la industria durante los últimos 30 años y son descritos en los libros de texto
de los años sesenta. Aunque no se utilicen en todas las plantas, proporcionan un buena
solución para un importante tipo de problemas de control. Las estrategias de control de la
categoría III aglutinan técnicas que se utilizan generalmente en la industria y se describen
en los libros de texto actuales. La categoría IV contiene las estrategias actuales que
aparentemente no se utilizan en la industria incluso después de haberse probado su buen
funcionamiento en distintos informes y publicaciones. Por último, la categoría V incluye
todas las técnicas que se han publicado con pocas o ninguna aplicación industrial.
244
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Categoría I. Estrategias convencionales de control
• Control manual
• Control PID
• Control por ratio
• Control en cascada
• Control en adelanto
Categoría II. Control avanzado: técnicas clásicas
• Control con ajuste por tabla
• Compensación del retardo
• Control por desacoplo
• Controladores selectivos
Categoría III. Control avanzado: técnicas ampliamente utilizadas
• Control predictivo basado en modelo
• Control de calidad estadístico
• Control por modelo interno
• Control adaptativo
Categoría IV. Control avanzado: nuevas técnicas con algunas aplicaciones industriales
• Control óptimo LQG
• Control no lineal
• Control robusto
• Control neuronal
• Control borroso
• Control basado en sistemas expertos
Categoría V. Control avanzado: estrategias propuestas con pocas o ninguna aplicación industrial
Tabla 6.3. Clasificación de estrategias de control propuesta por Seborg
6.2.2. Referencias de estrategias de control del clima de un invernadero
Los sistemas de control del clima en un invernadero han evolucionado desde simples
termostatos y controladores analógicos hasta controladores basados en computador, capaces
de aplicar complejos algoritmos de control que relacionen todas las variables [Bai98].
Intentando seguir el orden propuesto en la clasificación descrita en la tabla anterior, se van
a exponer las distintas estrategias de control que se han utilizado para controlar las
variables climáticas en el interior de un invernadero. Las siguientes tablas muestran una
descripción detallada de controladores que se pueden encontrar en la bibliografía
especializada acerca de este tema, de los que se indica la siguiente información para una
mejor comprensión de los mismos:
•
•
•
•
•
•
Autores que han desarrollado los controladores.
Variables climáticas que controlan.
Sistemas de actuación que han utilizado como variables de control.
Perturbaciones al clima que consideran.
Estrategias de control utilizadas.
Experiencias realizadas y descripción del sistema real utilizado: estructura del
invernadero, superficie, localización geográfica y tipo de cultivo.
• Descripción de los resultados obtenidos.
• Referencias bibliográficas donde se describen los controladores desarrollados para poder
consultar los aspectos que interesen en cada momento.
245
246
Temperatura
Humedad
Radiación PAR
Concentración
CO2
Ventilación forzada Temperatura exterior
Calefacción
Radiación exterior
Humedad interior
Ventilación
Temperatura exterior
Humedad exterior
Velocidad viento
Dirección viento
Radiación exterior
Lluvia
Velocidad viento en el
interior
Temperatura exterior
Radiación exterior
Experiencias
Resultados
[Tan85a]
[Tan85b]
[Tan93b]
[Kam96]
[Alb01]
[You93a]
[You93b]
[You01]
[Dav91]
[Udi83]
Ref.
Control adaptativo basado No se indican
Resultados de simulación.
[Sig99a]
en control multifrecuencia Se basa en un Buenos resultados a:
Cambios de consigna
modelo existente
Seguimiento trayectorias
Control PID
Invernadero túnel Problemas seguimiento de [Boa97]
trayectorias
210 m2
Vila Real (POR)
Buenos resultados
Control predictivo GPC
Tomate
(error menor de 0.3 ºC)
Radiación y CO2
Todo/nada con zona muerta
No se indican experiencias ni resultados
Temperatura y humedad:
Control por ajuste con tabla
Invernadero Venlo No se indican resultados
224 m2
Naaldwijk (HOL) Cambios de carga:
Nocturno:
Control PI + anti-windup Tomate
Comportamiento aceptable
(Varias estructuras)
en permanente.
Control PID
Sobreoscilación elevada
No mejora control PI.
Control adaptativo con
Mala política energética
modelo de referencia
Control PI + bucle de Invernadero Venlo Resultados
obtenidos
mejores que PI.
42.8 m2
realimentación de la
Bedford (UK)
Error cuadrático medio
temperatura de tuberías
Tomate
menor de 0.39 K.
Máximo error de 1 K.
Control PIP
Invernadero Venlo Resultados de simulación
Bedford (UK)
Buenos resultados a:
Cambios de consigna
Tomate
Seguimiento trayectorias
Resultados de simulación
Control PDF
1000 m2
Buenos resultados a:
Cambios de consigna
Seguimiento trayectorias
Control por adelanto
Temperatura estable y
cercana a la consigna
Técnicas de control
utilizadas
Diurno: Control P
Tabla 6.4.a. Descripción de técnicas de control del clima de un invernadero utilizadas por distintos autores
Sigrimis
Temperatura
Paraskevopoulos
Arvanitis
Rerras
Boaventura
Temperatura
Cuoto
Ruano
Kamp
Timmerman
Ventilación natural
Calefacción agua
y aerotermos
Mallas de sombreo
Enriquecedor CO2
Temperatura exterior
Radiación solar
Ventilación
Calefacción
Humidificador
Malla de sombreo
Calefacción
Temperatura
Humedad
Temperatura
Temperatura exterior
Radiación solar
Calefacción
Temperatura
Young
Lees
Chotai
Tych
Albraight
Gates
Arvanitis
Drysdale
Tantau
Radiación exterior
Calefacción
Temperatura
Davis
Hooper
Udink ten Cate
Perturbaciones
consideradas
Temperatura exterior
Humedad exterior
Velocidad viento
Dirección viento
Radiación exterior
Variables
de control
Ventilación
natural
Calefacción agua
caliente
Variables
controladas
Temperatura
Autores
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Ventilación natural
Calefacción
Temperatura
Piñón
Camacho
Kuchen
247
Temperatura exterior
Radiación exterior
Temperatura suelo
Temperatura exterior
Humedad exterior
Velocidad viento
Radiación exterior
Temperatura exterior
Humedad exterior
Velocidad viento
Radiación exterior
Temperatura exterior
Radiación exterior
Perturbaciones
consideradas
Temperatura exterior
Radiación exterior
Experiencias
Resultados
Ref.
Mejor comportamiento que [Nie96]
Cubierta cristal
172 m2 (8 x 21.5) un PID.
Con cultivo
Arlsev (DIN)
Control MBPC predictivo Invernadero túnel Resultados aceptables en [Bla99]
seguimiento de trayectorias [Sen98]
multivariable
96 m2
Valencia (ESP)
y cambios de consignas
[Mar97]
Rosas
Control Predictivo basado Es una propuesta y no se indican experiencias ni [Kyr02]
en modelo descentralizado resultados
(DMBPC)
Control predictivo MELPC Invernadero Venlo Resultados aceptables en [ElG02]
seguimiento
de [ElG01]
200 m2
Hannover (ALE)
trayectorias.
[Meg99]
Sin cultivo
Mejor comportamiento que
un PI adaptativo.
Se utilizan datos Mejor comportamiento que [Piñ02a]
Control MBPC
[Piñ02b]
climáticos de San un PID.
Juan (ARG) y un Se requiere una acción de [Piñ01]
modelo
para control agresivo que puede
simular
el violar restricciones.
comportamiento
Error cuadrático medio
de un invernadero =1.8 ºC.
Esfuerzo
computacional
=13 segundos.
Control MBPC+FL
Salida y señal de control
presentan comportamiento
similar a MBPC.
Error cuadrático medio
menor =1.5 ºC.
Esfuerzo
computacional
=0.006 segundos.
Control MBPC+ FL + LMI
Respuesta muy similar a
distintos
tipos
de
incertidumbres.
Resultado similar a los
Control MBPC
Planta piloto
obtenidos con simulación
2.28 m2
Con cultivo
Técnicas de control
utilizadas
Control predictivo GPC
Tabla 6.4.b. Descripción de técnicas de control del clima de un invernadero utilizadas por distintos autores (continuación)
Calefacción
Calefacción
Temperatura
Temperatura
Ventilación natural
Humidificador
Temperatura
Humedad
Senent
Martínez
Blasco
Sanchís
Kyriannakis
Arvanitis
Sigrimis
El Ghoumari
Tantau
Megías
Serrano
Nielsen
Madsen
Variables
de control
Calefacción
Variables
controladas
Temperatura
Autores
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Temperatura
Humedad
Temperatura
CO2
Incertis
van Straten
Tap
Willigenburg
248
Tchamitchian
Tantau
Alessandri
Bini
Parisini
Torrini
Linker
Gutman
Seginer
van Henten
Ventilación forzada
Enriquecedores CO2
Calefacción
CO2
Temperatura
Radiación Solar
Temperatura exterior
Velocidad viento
Dirección viento
CO2 exterior
Humedad del suelo
Temperatura exterior
Radiación exterior
Velocidad viento
Humedad exterior
Temperatura exterior
Radiación exterior
CO2 exterior
Temperatura exterior
Humedad exterior
Velocidad viento
Dirección viento
Radiación exterior
CO2 exterior
Temperatura exterior
Humedad exterior
Velocidad viento
Dirección viento
Radiación exterior
Temperatura exterior
Humedad exterior
Velocidad viento
Perturbaciones
consideradas
Temperatura exterior
Radiación exterior
Resultados
Ref.
Invernadero túnel
210 m2
Vila Real (POR)
Tomate
Control óptimo basado en No se indican.
el Principio de Pontryagin Latitudes de clima
para ahorrar energía
frío.
Sin cultivo.
[Inc81]
[Inc79]
Resultados de simulación.
Se consigue el objetivo del
ahorro en calefacción en
distintas situaciones
Resultados de simulación.
Demuestran la viabilidad
de la utilización de este
tipo de técnicas.
Resultados de simulación.
Ayuda a la toma de
decisiones en distintas
situaciones.
[Tch96]
[Lin98]
[Ale94]
[Str02]
[Tap00]
[Str99]
[Tap96a]
[Tap96b]
Resultados de simulación y [Hen94]
experimentales.
Resultados aceptables.
Resultados experimentales
aceptables: Error medio
Temperatura 0.9 ºC, error
medio Humedad 8%
Resultados de simulación y
experimentales.
Resultados aceptables.
Resultados de simulación.
[Coe02]
Buenos
resultados
en
seguimiento de consignas.
Algoritmo
de
Swarm
mejora en 40% al genético
Se especifica una Resultados de simulación. [Wan99a]
experiencia pero Buenos resultados.
no se describe
Experiencias
Se especifica una
experiencia pero
no se describe.
Tomate.
Control predictivo basado Invernadero Venlo
300 m2
en modelo RHOC.
Wageningen
(HOL)
Tomate, lechuga
Control óptimo aplicando
el Principio de Pontryagin
combinando realimentación
y control por adelanto
Control óptimo basado en No se indican
redes
neuronales,
que
combina realimentación y
compensación por adelanto
Control óptimo basado en Invernadero gótico
una búsqueda (entre 8000 48 m2
posibles configuraciones) Haifa (ISR)
que minimice el consumo Sin cultivo
de CO2
Técnicas de control
utilizadas
Control predictivo basado
en modelo utilizando el
algoritmo de optimización
de partículas Swarm y
algoritmos genéticos.
Control predictivo basado
en redes neuronales para
temperatura combinado con
un sistema experto para la
concentración de CO2
Control predictivo con
capacidad de aprendizaje
Tabla 6.4.c. Descripción de técnicas de control del clima de un invernadero utilizadas por distintos autores (continuación)
Calefacción
Ventilación
Temperatura
CO2
Ventilación natural
Calefacción
Enriquecedores CO2
Ventilación natural
Calefacción
Humidificadores
Calefacción
Enriquecedores CO2
Temperatura
Wang
Wu
Coelho
Moura
Boaventura
Variables
de control
Ventilación forzada
Calefacción
Variables
controladas
Temperatura
Autores
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Temperatura exterior
Radiación exterior
Velocidad viento
Radiación PAR interior
Temperatura exterior
Radiación exterior
CO2 exterior
Temperatura Ventilación natural
Calefacción
Temperatura Ventilación natural
CO2
Enriquecedores CO2
249
López
Hernández
Feijoo
Balsa
No considera
Temperatura
Humedad
Radiación
Temperatura exterior
Humedad exterior
Velocidad viento
Radiación exterior
No se indican
No se indican
No se indican
No se indican
Experiencias
Se
expone
sólo
la
descripción teórica de la
solución propuesta.
Demuestra la viabilidad de
resolver el problemas del
control del clima en un
invernadero utilizando este
tipo de técnicas.
Resultados de simulación.
Buen comportamiento
Resultados
[Ios95]
[Ios96]
[Gut93]
Ref.
Resultados de simulación.
[Sig99b]
Presenta buenos resultados
para grandes variaciones de
los parámetros.
Resultados de simulación.
[Iwa94]
Control borroso
Semillero
Se
obtienen
buenos
16 m2
Lechuga
resultados en seguimiento
de consignas
[Laf02]
Control borroso
Invernadero cristal Resultados de simulación.
Se
obtienen
buenos
40 m2
resultados mejores que los
Francia
todo/nada comerciales
Control borroso
Invernadero túnel Resultados de simulación.
[Gat01]
1872 m2
Comparan con control PI.
Más ventajas los borrosos.
Control neuronal
No se indican
Resultados de simulación.
[Sig00]
Se
obtienen
buenos
resultados en seguimiento
de consignas
Control basado en sistemas No se indican experiencias ni resultados
[Lop89a]
expertos
[Lop89b]
Técnicas de control
utilizadas
Control óptimo aplicando
Programación Lineal y el
Principio de Pontryagin,
para minimizar consumo de
calefacción.
Control óptimo aplicando
el Principio de Pontryagin
para minimizar el coste de
calefacción y ventilación.
Control óptimo basado en
el Principio de Pontryagin
proporcional combinando
realimentación
y
compensación por adelanto
en serie
PI robusto con técnica H∞
Tabla 6.4.d. Descripción de técnicas de control del clima de un invernadero utilizadas por distintos autores (continuación)
Temperatura Calefacción
Humedad
Humidificadores
Humidificadores
Temperatura Ventilación forzada
Calefacción
Gates
Chao
Sigrimis
Sigrimis
Arvanitis
Gates
Humedad
Temperatura Ventilación natural
Humedad
Calefacción
Humidificadores
Lafont
Balmat
No considera
Ventilación
Velocidad viento
Perturbaciones
consideradas
Temperatura exterior
Radiación exterior
Velocidad viento
Variables
Variables
controladas
de control
Temperatura Calefacción
Ventilación natural
Temperatura Calefacción
Sigrimis
Arvanitis
Kookos
Paraskevopoulos
Iwao
Temperatura Calefacción
Humedad
Humidificadores
Gutman
Seginer
Ioslovich
Autores
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
6.3. CONTROL DE LA TEMPERATURA INTERIOR
6.3.1. Problema general de control de la temperatura
La temperatura es la variable climática de las que influyen directamente sobre el
crecimiento del cultivo que tradicionalmente se ha controlado en los invernaderos del
sudeste de España, ya que las estructuras existentes y los sistemas de actuación instalados
lo permitían, convirtiéndose en la principal variable a controlar. No ocurre lo mismo con la
concentración de CO2, ya que los sistemas enriquecedores encarecen mucho el producto
final (hasta que se utilice gas natural) por lo que no se suelen instalar. En los últimos años
se está controlando la radiación PAR que alcanza el cultivo mediante la instalación de
mallas de sombreo para disminuir su incidencia y regular el fotoperiodo de las plantas,
aunque su utilización no se encuentra muy extendida. Por estas razones, este capítulo se va
a centrar en el control de la temperatura del aire interior del invernadero.
Una planta sólo crece bajo la influencia de la luz, es decir, cuando realiza la fotosíntesis,
requiriendo además una temperatura relativamente alta. Durante la noche el cultivo no se
encuentra activo (no existe crecimiento) por lo que no es necesario mantenerlo a una
temperatura elevada. Por tanto, es conveniente una temperatura más alta durante el día que
durante la noche. Por esta razón se definen dos consignas diarias: una para el periodo
nocturno y otra más alta para el periodo diurno. Debido a las favorables condiciones
meteorológicas del sudeste de España, durante los periodos diurnos, la energía necesaria
para alcanzar la temperatura óptima la proporciona el sol, no siendo necesario el aporte de
una energía suplementaria salvo en situaciones extremas. El problema de control de la
temperatura diurna radica en evitar que la temperatura sea superior a ese óptimo, ya que su
efecto es perjudicial para el cultivo. Para esto se utiliza la ventilación natural que es el
sistema de actuación más implantado en los invernaderos de la zona. En el caso de que la
temperatura sea menor que la consigna, se cierra la ventilación y se debería utilizar la
calefacción para alcanzar el valor deseado de referencia, pero se desestima esta opción ya
que económicamente es muy costoso encender la calefacción y el beneficio que se produce
no compensa este gasto. Además se podría producir un control errático como se describirá
más adelante. Durante los periodos nocturnos, como no es necesario mantener una
temperatura elevada para el cultivo, se determina una consigna menor pero apropiada para
las plantas y así se evita consumir energía, reduciendo el coste económico de la producción
(gasto del combustible que utiliza la calefacción, que es uno de los costes más elevados de
la producción bajo invernaderos automatizados). Mientras la temperatura se mantenga por
encima del valor de consigna nocturna el controlador no actúa, encendiéndose la
calefacción cuando su valor sea inferior. No importa que la temperatura se encuentre por
encima de la consigna. La producción de materia seca del cultivo no se ve afectada ya que
no se produce la fotosíntesis por la ausencia de radiación. Por tanto, el problema de control
de la temperatura nocturna consiste en evitar que sea inferior a la consigna, sin importar
que tome un valor superior. Como se puede observar estos sistemas de actuación no actúan
simultáneamente ya que sus efectos son contrarios, utilizándose la ventilación para
periodos diurnos, donde es necesario disminuir la temperatura, y la calefacción para
periodos nocturnos donde se debe elevar la temperatura. En algunas circunstancias debidas
a exceso de humedad se deberían utilizar los dos sistemas a la vez, pero no se va a
considerar en el presente análisis ya que corresponde a un problema muy concreto.
250
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
La consigna de temperatura diurna es aquélla a partir de la cual se empieza a abrir la
ventilación. Existe un intervalo de temperatura permitido donde no funcionaría ningún
actuador ya que la consigna diurna debe ser mayor que la consigna nocturna. El tamaño de
esta zona muerta varía según la respuesta del invernadero, tomando valores comunes entre
0.5 y 6 ºC [Kam96]. La función de esta zona es conseguir un control estable de la
temperatura. Si sólo existiera una consigna de temperatura óptima para todo el día (zona
muerta igual a cero), para temperaturas superiores a ella, funcionaría la ventilación y para
temperaturas inferiores, se activaría la calefacción. Generalmente la temperatura presenta
una sobreoscilación de 0.1 a 0.3 ºC al utilizar la calefacción, por lo que al activarla, la
temperatura sería superior a ese valor óptimo y se abriría la ventilación lo que produciría
una caída de la temperatura del invernadero por debajo del óptimo, lo que produciría, a su
vez, el funcionamiento de la calefacción y así sucesivamente, produciendo un control
errático. Por otra parte, los cambios bruscos repentinos en la temperatura del invernadero
no son deseables. Por ejemplo, si en el paso de la noche al día el cambio de consignas se
llevara a cabo pudiendo actuar los dos sistemas simultáneamente, la calefacción daría un
fuerte golpe de calor en la transición, calentándose el aire del invernadero rápidamente. Las
partes sólidas del sistema (estructura, cubierta, plantas, etc.) tardarían un tiempo superior en
calentarse debido a que su capacidad térmica es mayor, lo que produciría una condensación
del vapor de agua del aire sobre la superficie de los cuerpos, particularmente en las hojas y
frutos del cultivo o en la cubierta, cayendo el agua sobre las plantas, tal y como se observa
en la figura 6.2. Este efecto puede producir algún tipo de enfermedad criptogámica.
a. Condensación en la cubierta
b. Gotas de agua sobre hojas
Fig. 6.2. Condensación en los cuerpos sólidos del sistema invernadero
El controlador debe conocer cuándo ha de realizar el cambio de consigna nocturna a diurna
y viceversa. La hora a la que amanece o anochece en una determinada zona y un
determinado día se puede estimar utilizando un reloj astronómico, pero en la herramienta
desarrollada se utiliza el sensor de radiación global que se instala en el exterior. Cuando
después de medir 0 W/m2 durante un cierto número de periodos de muestreo, mide durante
otro número de periodos de muestreo más de una radiación prefijada, se estima que ha
amanecido. Al cambiar de consigna en la transición de noche a día, hay que enviar la orden
de apagar el sistema de calefacción ya que si no se hiciera así, al utilizar una consigna más
elevada, como el sol todavía no proporciona la suficiente energía para alcanzar la
temperatura deseada, empezaría a funcionar la calefacción. Un razonamiento similar se
utiliza para estimar cuándo anochece. En la transición de día a noche se produce un
problema similar ya que el invernadero se comporta como un acumulador de energía
durante el día, debiendo evitar que la temperatura sea superior a la consigna.
251
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
A partir del mediodía solar, la energía que proporciona el sol va disminuyendo hasta que
llega un momento en el que la temperatura del aire interior es menor que la consigna,
debiéndose activar la calefacción1. Para evitar ese gasto, el sistema de control no actúa
hasta que anochece y se conmuta la consigna, empezando, si es necesario, a utilizar el
sistema de calefacción. Por otra parte, en situaciones especiales, como en días muy fríos
donde se pueden producir heladas o noches muy calurosas, se debe utilizar la calefacción y
la ventilación respectivamente, por lo que se definen unas temperaturas de seguridad, pero
son situaciones aisladas y generalmente no ocurren en estas latitudes. En la siguiente figura
se muestra un ejemplo de control de la temperatura del aire del invernadero durante dos
días, en las que se comentan las características principales de este problema de control.
21
Día
20
Noche
Día
Noche
19
18
Consigna diurna
17
21
16
15.2
15
15
20
14
0
20
40
60
80
100
120
140
14.8
160
14.6
Transición de consigna
nocturna a diurna y
viceversa, donde se observa
la zona donde no se activan
ninguno de los actuadores
14.4
19
14.2
14
13.8
18
13.6
13.4
600
80 0
100 0
1200
1 400
16 00
17
21
Periodo nocturno donde
se activa la calefacción
ya que la temperatura es
menor que la consigna.
Se observan zonas de
saturación del actuador
20
16
19
18
15
17
16
15
14
Consigna nocturna
14
500
550
600
650
700
750
800
850
1000
500
0
1500
21
3000
2500
2000
17
Periodo nocturno
donde no se activa
la calefacción ya
que la temperatura
es mayor que la
consigna
20.8
Control de la temperatura
diurna donde se observan
zonas con la temperatura
menor y no se activa la
calefacción
16.5
20.6
20.4
16
20.2
15.5
20
19.8
15
19.6
14.5
19.4
19.2
14
19
100
200
30 0
4 00
500
600
700
2 000
210 0
2200
2300
2 400
2500
2600
2700
28 00
2900
3000
Fig. 6.3. Ejemplo de control de temperatura donde se ilustran las características principales de la respuesta
de sus acciones de control
6.3.2. Control de la temperatura diurna utilizando ventilación natural
6.3.2.1. Problema de control de la temperatura utilizando ventilación natural
La ventilación natural proporciona un intercambio de aire entre el interior y el exterior del
invernadero. Como el aire exterior es, generalmente, más frío que el aire interior, se sitúa
en las capas inferiores del volumen de aire invernadero y el aire caliente asciende a las
capas superiores saliendo al exterior por la ventilación abierta. De esta forma disminuye la
temperatura del aire interior del invernadero. El controlador debe calcular la apertura de la
ventilación necesaria para alcanzar la consigna deseada.
1
Nótese que los umbrales de radiación a partir de los cuáles se considera que anochece o amanece pueden ser
libremente definidos por el diseñador.
252
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
El problema de control de la temperatura diurna utilizando la ventilación natural presenta
las siguientes características:
• Estructuralmente el sistema de actuación posee dos inconvenientes principales:
Saturación. La ventilación puede estar abierta entre un 0 y un 100% (0-38 º).
Resolución de la salida. Aunque es un sistema de actuación continuo, el
posicionamiento de la ventana se realiza utilizando una cremallera cuyos dientes
permiten un movimiento mínimo de un 5% (2º).
• La respuesta de la temperatura del aire interior frente a escalones en la ventilación se
comporta como un sistema de primer orden con retardo de un minuto aproximadamente,
tal y como se puede observar en las siguientes figuras. Tras hacer distintas experiencias,
aparece la naturaleza no lineal entre la ventilación y la temperatura, como se comentó en
el capítulo 3 acerca del modelado de este proceso. La figura 6.4.a muestra la respuesta
de la temperatura ante distintos escalones de ventilación a partir del mismo punto de
trabajo y con las mismas perturbaciones, obteniéndose parámetros característicos
distintos tal y como se puede consultar en la tabla 6.5. En la figura 6.4.b se muestra la
respuesta de la temperatura sometida a las mismas perturbaciones y a un incremento de
la ventilación de 10º, mostrando el comportamiento no lineal esperado.
25
25
V entilac ió n 0-10º
24
Temperatura (º C )
Temperatura (º C )
24
23
V entilac ió n (0-10º )
22
23
22
V entilació n 10-20º
21
V entilac ió n (0-20º )
21
20
V entilac ió n (0-30º )
20
5
10
15
20
25
10
Tiempo (minutos)
20
30
40
50
60
70
80
90
100
Tiempo (minutos)
a. Distintos escalones en el mismo punto de trabajo
b. Misma apertura en distintos puntos de trabajo
Fig. 6.4.Respuesta de la temperatura a variaciones de la ventilación
Señal de entrada
Ganancia
Constante de tiempo Retardo
(º apertura)
(ºC/ºapertura)
(minutos)
(minutos)
0-10
- 0.36
2.6
1
0-20
- 0.23
2.3
1
0-30
- 0.18
2
1
Tabla 6.5.Parámetros característicos de la respuesta de temperatura ante
ventilación caracterizándola como un sistema de primer orden con retardo
• Las perturbaciones externas influyen notablemente en el efecto de la ventilación sobre la
temperatura. Al abrirse la ventilación, el aire caliente del invernadero se reemplaza por
el aire más frío del exterior. La velocidad con la que se extrae el aire caliente es función
del tamaño de las ventilaciones (constante de diseño del invernadero), de la diferencia
entre la temperatura interior y exterior y de la velocidad del viento, por tanto el
controlador debe tener en cuenta las condiciones meteorológicas en el exterior para
calcular la apertura de la ventilación.
253
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• En la figura 6.5, se observa que para la misma temperatura exterior, a medida que el
viento es mayor, la ganancia del sistema aumenta; lo contrario ocurre con la temperatura
exterior, que conforme disminuye, aumenta la ganancia. Después de un profundo
análisis de los datos, se observa que en función de las condiciones climáticas externas y
la temperatura interior, la ganancia del sistema ventilación/temperatura varía entre -0.02
y -0.42 ºC/ºapertura, y la constante de tiempo generalmente varía entre 2 y 7 minutos,
aunque en algunas circunstancias extremas sus valores no pertenezcan a esos intervalos.
25.2
25
25
24.8
V eloc idad viento= 0 (m /s )
24
Temperatura (º C )
Temperatura (º C )
24.5
23.5
23
22.5
V eloc idad viento= 5 (m /s )
24.6
24.4
M edia tem peratura ex terior= 25 (º C)
24.2
24
M edia tem peratura ex terior= 15 (º C)
22
23.8
V eloc idad viento= 10 (m /s )
21.5
23.6
M edia tem peratura ex terior= 5 (º C)
23.4
21
5
10
15
20
25
30
5
35
10
15
20
25
30
Tiem po (m inutos)
Tiem p o (m inutos)
a. Temperatura ante un cambio en ventilación de
b. Temperatura ante un cambio en ventilación de
0-10º con distintas condiciones de viento
0-10º con distintas condiciones de temperatura
Fig. 6.5.Respuesta de la temperatura a variaciones de la ventilación en función de condiciones externas
Considerando todas estas características se pueden utilizar diferentes técnicas para abordar
este problema de control como se ha indicado en la revisión bibliográfica resumida en la
tabla 6.4. Este control de bajo nivel en la estrategia jerarquizada que se ha propuesto para la
solución del control óptimo de la producción bajo invernadero, no ha sido un objetivo
prioritario en la presente tesis, si bien es necesario su desarrollo para demostrar el adecuado
funcionamiento del sistema de control global. Se han diseñado e implementado varios
algoritmos de control ([Rod01a], [Mor02], [Ber03]) que, aunque son mejorables, han
proporcionado buenos resultados tanto en simulación como en invernaderos reales y son
fácilmente comprensibles por el personal encargado de la supervisión. Se tratan en detalle
en esta sección sólo aquellos algoritmos desarrollados que han sido ensayados en
instalaciones reales.
6.3.2.2. Control con ajuste por tabla
Evidentemente, como el sistema de actuación permite una variación continua de la posición
de la ventilación entre el 0% y el 100% de apertura, se utiliza un controlador proporcional
integral con realimentación de la temperatura del aire interior del invernadero. La
realimentación reduce notablemente la sensibilidad del sistema con respecto a las
perturbaciones y a variaciones del sistema, pero en el problema que se está tratando, éstas
pueden llegar a ser tan diferentes que un controlador con coeficientes constantes no es
capaz de controlar a la variable en cuestión. Una alternativa es la utilización de un
controlador adaptativo que modifique su comportamiento cuando el sistema o las
perturbaciones cambien ([Ast97b], [Ber03]). Existen distintos tipos de controladores
adaptativos, siendo un esquema muy utilizado el controlador con ajuste por tabla (gain
scheduling).
254
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Aunque en algunas clasificaciones no se considera estrictamente un esquema de control
adaptativo, se utiliza cuando se puede relacionar directamente o mediante variables
auxiliares las perturbaciones con la dinámica del sistema a controlar. Los parámetros del
controlador se modifican a partir de una tabla o función calculada previamente para
distintos puntos de funcionamiento en función de esas variables auxiliares. Puede
considerarse como un sistema con un controlador en bucle cerrado donde su ganancia es
ajustada mediante una compensación por adelanto. Realmente, se trata de una adaptación
en bucle abierto ya que no hay realimentación que compense una elección incorrecta de los
parámetros [Ast97b]. Por esta razón, existe una controversia acerca de considerar este tipo
de estructura como un controlador adaptativo, ya que autores como Mosca [Mos95] o
Landau [Rub96] indican que la característica que deben cumplir es la presencia de un bucle
de realimentación en el que se compare un índice de funcionamiento del comportamiento
del sistema en bucle cerrado.
Un inconveniente de este tipo de algoritmo es la construcción y el diseño de la tabla o la
función que relacione los parámetros del controlador con las variables que se miden, ya que
hay que probar gran cantidad de condiciones de operación y comprobar el buen
funcionamiento del sistema con numerosas simulaciones. Además, en general no hay
resultados acerca de la robustez, comportamiento o estabilidad del sistema completo
controlado, existiendo algunos estudios para casos en que la variable de acceso a la tabla
sea la referencia o la salida del sistema, que como se podrá comprobar a continuación no es
el caso que se está tratando. Sin embargo, presenta la ventaja de que el controlador puede
ser modificado muy rápidamente, dependiendo de cómo la variable de entrada sea capaz de
captar los posibles cambios en la dinámica del proceso [Rub96].
Uno de los objetivos de la ventilación es eliminar el exceso de calor. Cuando la temperatura
es elevada y alcanza la consigna, si la ventilación se abre sin retardo, se elimina
rápidamente el exceso de calor, lo que produce una caída brusca de la temperatura,
pudiendo provocar que sea de nuevo inferior a la consigna y se cierre la ventilación. Esto
supone que vuelva a subir la temperatura y se vuelva a repetir el proceso varias veces
durante un corto periodo de tiempo, lo que provoca un control errático. Esta forma de
control espera a que se produzcan las variaciones en la señal a controlar debido al efecto de
las perturbaciones para comenzar a actuar. Sin embargo sería más conveniente que el
controlador compensara de manera inmediata una variación de los factores externos que
influyen en la temperatura del invernadero que, como se ha comentado anteriormente,
depende de la temperatura y la velocidad del viento en el exterior. Hay que conseguir que la
eliminación del aire caliente interior se realice a la velocidad óptima calculando la apertura
de la ventilación conveniente en cada caso en función de las condiciones exteriores. Por
esta razón, se propone la estructura del controlador basado en la técnica de control con
ajuste por tabla que se muestra en la figura 6.6.
La relación entre la temperatura del aire exterior y la temperatura del aire interior a través
de la ventilación es conocida, cumpliéndose que a menor temperatura exterior más
disminuye la temperatura del invernadero, por lo que la ganancia del controlador en función
de la temperatura exterior debería ser de la forma que se muestra en el ejemplo de la figura
6.7.a [Kam96].
255
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Mecanismo
de ajuste de
parámetros
Consigna
temperatura
+
Temperatura exterior
Velocidad viento exterior
Temperatura
Controlador
PI
-
Invernadero
Ventilación
Fig. 6.6. Esquema de control con ajuste por tabla utilizado
Como se puede comprobar, para una variación constante entre la consigna y la temperatura
exterior, cuanto menor sea ésta, menor será la apertura de la ventilación manteniendo en
todos los casos la misma velocidad de eliminación del aire caliente interior. Con respecto a
la velocidad del viento, se puede incluir en el cálculo de la constante del término
proporcional del controlador de la misma manera. Su efecto es el contrario que la
temperatura exterior ya que a mayor velocidad de viento se favorece la renovación de aire,
por eso su influencia es la que se muestra en la figura 6.7.b., de forma que, en condiciones
constantes, a mayor velocidad de viento menor es la apertura de la ventilación. Se usa en
los cálculos un valor filtrado de la velocidad del viento para evitar cambios excesivos en los
parámetros del controlador debidos a la naturaleza ruidosa de esta señal.
25
K p del controlador P I (% apertura/º C )
K p del controlador P I (% apertura/º C )
25
20
15
10
5
5
10
15
20
25
20
V eloc idad viento=0 (m /s)
15
V eloc idad viento= 5 (m /s )
10
V eloc idad viento= 15 (m /s )
5
5
Temperatura exterior (º C )
10
15
20
25
30
35
Temperatura exterior (º C )
a. Relación con la temperatura exterior
b. Relación con la temperatura exterior y el viento
Fig. 6.7.Relación entre el termino proporcional del controlador PI y las condiciones externas
En la implementación del controlador no se ha incluido una tabla como se supone en este
tipo de estructuras, sino una fórmula matemática que en base a la temperatura exterior y la
velocidad de viento calcula el parámetro característico del término proporcional del
controlador en lazo cerrado. Esta función depende de la ventilación instalada en el
invernadero a controlar, de la temperatura interior deseada y del clima en la zona, de forma
que hay que estimar seis parámetros con los que se puede caracterizar, tal y como se
muestra en la figura 6.8. Realizando ensayos en la ventilación en distintas circunstancias se
determinan los valores entre los que varía el término proporcional (ckpven,max y ckpven,min) y en
función de la temperatura deseada para un determinado cultivo y de las condiciones
meteorológicas de la zona y de la época del año, se determinan el resto de parámetros de la
curva (temperatura máxima y mínima exterior para viento máximo y mínimo).
256
Ganancia del controlador PI
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
ckpven,max
Pvv,e=cvv,max
Pvv,e=0
ckpven,min
ctvenmin,vmin ctvenmin,vmax ctvenmax,vmin ctvenmax,vmax
Temperatura exterior (ºC)
Fig. 6.8. Parámetros característicos de la función que calcula el término proporcional del controlador
Por otra parte, es posible que la temperatura del invernadero permanezca constante sin
alcanzar la consigna si la posición de la ventilación no se corrige y se mantienen constantes
las condiciones exteriores de temperatura y velocidad de viento que, por lo tanto, no
modificarían el término proporcional del controlador. Se produce el típico error en régimen
permanente del control proporcional que se eliminaría con una acción integral. La forma de
implementarla ha sido escalonada para conseguir una respuesta suave ya que una vez que
actúa la acción proporcional, si todas las variables que intervienen permanecen constantes y
se produce una desviación, la ventilación se abre o cierra un escalón definido. En el
siguiente instante de control, si sigue la desviación se abre/cierra otro pequeño escalón y así
hasta que se alcanza la consigna o se modifican las condiciones de operación del sistema.
Evidentemente, se puede incluir una acción PI clásica, como se analizará en el apartado
siguiente.
Como se ha comentado, la ganancia del controlador es función de la temperatura exterior y
de la velocidad del viento, que son dos variables con dinámicas distintas. La velocidad del
viento es una perturbación rápida cuyo valor puede variar sustancialmente en un periodo de
control (un minuto). Además, durante toda la campaña agrícola su valor medio puede
encontrarse entre 0 y 15 m/s, aunque puede tomar valores superiores cuya presencia puede
ser perjudicial para la propia estructura y cuyo tratamiento se comentará en un apartado
posterior. Sin embargo, la temperatura del aire exterior, influenciada por la radiación solar,
varía de forma distinta en las distintas estaciones climáticas del año, influyendo con una
dinámica mucho más lenta que la velocidad del viento. Por ejemplo, si se analizan las
campañas agrícolas desde la 1976/77 hasta la 1994/95 [Pal97] en un mes frío como
diciembre la media se encuentra en torno a los 13 ºC (con temperaturas medias de máximas
y mínimas entre 9.8 ºC y 17.4 ºC), en un mes típico de primavera como abril presenta una
media de 16 ºC (entre 11.7 ºC y 20.6 ºC) y en un mes de verano como agosto la temperatura
exterior media es de 25.8 ºC (entre 21.3 ºC y 31.6 ºC).
257
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
De estas afirmaciones se puede deducir que existen dos dinámicas de adaptación, una
rápida, en una escala de tiempo de minutos, y otra lenta, en una escala de tiempo de meses.
Al diseñar este tipo de controladores se pueden tratar de dos maneras. La primera de ellas
consiste en desarrollar un controlador distinto para cada campaña agrícola, por lo que
habría que basarse sólo en la velocidad de viento. Su inconveniente radica en que hay que
modificar el algoritmo del controlador lo que supone un problema para decidir cuándo se
realiza la conmutación, además de que los productores actuales no poseen los
conocimientos adecuados, lo que supondría un elevado coste de mantenimiento. Sin
embargo, si se diseña un controlador general que presente un buen comportamiento ante
cualquier situación climática de temperatura exterior y velocidad de viento se evita este
inconveniente. Esta opción es la que se ha realizado en la presente tesis, mostrándose en la
tabla 6.6 los parámetros de la función que calcula el término proporcional del controlador.
Estos datos se han obtenido de forma empírica en función de las condiciones climatológicas
del sudeste de España, del efecto de la ventilación utilizada sobre la temperatura interior del
invernadero, y después de analizar los datos de los que se dispone y de realizar algunas
experiencias. Evidentemente, estos parámetros dependerán del invernadero donde se instale
y del clima en esa zona, por lo que habrá que proceder a un nuevo proceso de obtención de
los parámetros idóneos para cada instalación.
Parámetro
Descripción
Valor
Unidades
Valor máximo del término proporcional
20
[ºapertura/ºC]
Valor mínimo del término proporcional
0
[ºapertura/ºC]
Temperatura exterior mínima de apertura sin viento (0 m/s)
10
[ºC]
Temperatura exterior mínima de apertura con viento máximo
20
[ºC]
permitido (15 m/s)
25
[ºC]
ctvenmax,vmin Temperatura exterior para apertura máxima sin viento (0 m/s)
35
[ºC]
ctvenmax,vmax Temperatura exterior para apertura máxima con viento máximo
permitido (15 m/s)
Tabla 6.6.Parámetros característicos de la función de adaptación del controlador
ckpven,max
ckpven,min
ctvenmin,vmin
ctvenmin,vmax
Las figuras 6.9, 6.10 y 6.11 muestran unos ensayos en simulación del comportamiento del
controlador en un periodo de diez días de invierno, primavera y verano respectivamente,
con condiciones climáticas completamente distintas en cuanto a radiación solar y
temperatura exterior se refiere y con velocidades de viento variables (entre 0 y 10 m/s) en
cada uno de ellos. Las consignas a alcanzar en cada periodo dependen de las necesidades
del cultivo y evidentemente de la temperatura exterior, ya que por la propia naturaleza de la
ventilación nunca se puede obtener una temperatura del aire del invernadero menor que la
del exterior en periodos diurnos (el fenómeno de la inversión térmica se puede producir
durante periodos nocturnos y en condiciones muy especiales, siendo un problema que no se
va a abordar). Por esta razón, se han utilizado consignas distintas. La temperatura interior
diurna óptima a la que debe permanecer el cultivo del tomate, se encuentra entre 18 y 29 ºC
según distintos autores (véase tabla 2.4), por lo que en función de la temperatura exterior,
se han considerado 20ºC para invierno y 24 ºC y 25 ºC para primavera. En este último caso
se ha modificado la referencia en algunos días para mostrar el comportamiento del
controlador ante cambios de consigna. Debido a la meteorología de esta zona, en verano es
muy difícil mantener la temperatura dentro del intervalo óptimo, por lo que, como mal
menor, se intenta que se mantenga en torno a los 30 ºC donde la fotosíntesis es máxima,
aunque no óptima ya que se favorece la respiración.
258
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
10
20
9
8
Velocidad viento exterior (m/s)
Temperatura exterior (º C )
18
16
14
12
10
7
6
5
4
3
2
1
8
0
20
40
60
80
100
120
140
160
180
200
20
220
40
60
80
a. Temperatura exterior
Pará metro Kp del controlador P I (º A pertura/º C )
Radiació n global exterior (W /m2)
500
400
300
200
100
40
60
80
10 0
120
140
120
140
160
180
200
220
b. Velocidad del viento en exterior
600
20
100
Tiempo (Horas)
Tie m p o (Ho ra s)
1 60
180
200
2 20
5
4
3
2
1
0
20
40
60
80
Tie m p o (H o ra s )
100
120
160
140
200
180
220
Tie m p o (Ho ra s)
c. Radiación solar
d. Valor del parámetro Kp del controlador
20
20
19.5
Temperatura interior (ºC )
Temperatura interior (º C )
19
19
18
17
16
18.5
18
17.5
17
16.5
16
15.5
15
15
20
40
60
80
100
120
140
160
180
200
10
220
15
20
25
30
35
40
Tiempo (Horas)
Tie m p o (Ho ra s)
f. Detalle temperatura interior controlada
e. Temperatura interior controlada durante el día
15
14
Apertura ventilació n (º )
Apertura ventilacioń (º)
12
10
5
10
8
6
4
2
0
20
40
60
80
100
120
140
160
180
200
220
10
Tiempo (Horas)
15
20
25
30
35
40
Tie m po (Ho ras)
g. Posición de la ventilación
h. Detalle de la posición de la ventilación
Fig. 6.9. Ensayo de simulación de control de temperatura utilizando ventilación en invierno
259
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
12
20
10
Velocidad viento (m/s)
Temperatura exterior (º C )
22
18
16
14
8
6
4
2
12
0
50
100
150
200
50
100
Tie m p o (Ho ra s)
a. Temperatura exterior
P ará metro K p del controlador P I (º A pertura/º C )
Radiació
n global exterior (W/m2)
900
800
700
600
500
400
300
200
100
0
20
18
16
14
12
10
8
6
4
2
200
150
100
200
b. Velocidad del viento en exterior
1000
50
150
Tie m p o (Ho ra s)
0
50
100
Tiempo (Horas)
150
200
Tie m p o (Ho ra s)
c. Radiación solar
d. Valor del parámetro Kp del controlador
26
25
24
Temperatura interior (º C )
Temperatura interior (º C )
24
22
20
18
16
23
22
21
20
19
18
17
14
16
50
100
150
85
200
90
Tie m p o (Ho ra s)
100
95
105
115
110
Tie m p o (Ho ra s)
e. Temperatura interior controlada durante el día
f. Detalle temperatura interior controlada
20
18
16
30
Apertura ventilació n (º )
Apertura ventilació n (º )
35
25
20
15
10
14
12
10
8
6
4
5
2
0
0
20
40
60
80
100
120
140
160
180
200
220
85
Tiem po (Horas)
90
95
100
105
110
Tiem p o (Horas)
g. Posición de la ventilación
h. Detalle de la posición de la ventilación
Fig. 6.10. Ensayo de simulación de control de temperatura utilizando ventilación en primavera
260
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
29
9
8
27
V elocidad viento (m/s)
Temperatura exterior (º C )
28
26
25
24
23
22
7
6
5
4
3
21
2
20
1
19
20
40
60
80
100
120
140
160
180
200
220
20
60
40
80
a. Temperatura exterior
140
180
160
200
220
b. Velocidad del viento en exterior
22
Parámetro Kp del controlador PI (ºApertura/ºC)
1000
900
Radiacion global exterior (W /m2)
120
100
Tie m p o (Hora s)
Tie m p o (Ho ra s)
800
700
600
500
400
300
200
100
0
50
100
150
20
18
16
14
12
10
8
6
4
2
0
20
200
40
60
80
100
120
140
160
180
200
220
Tiempo (Horas)
Tiempo (Horas)
c. Radiación solar
d. Valor del parámetro Kp del controlador
31
32
Temperatura interior (º C )
Temperatura interior (º C )
30
30
28
26
24
29
28
27
26
25
24
22
23
22
20
20
40
60
80
100
120
140
160
180
200
80
220
85
90
Tie m p o (Ho ra s )
95
100
105
110
115
Tie m p o (Ho ra s)
f. Detalle temperatura interior controlada
e. Temperatura interior controlada durante el día
30
35
25
Apertura ventilacioń (º)
A pertura ventilació n (º )
30
25
20
15
10
20
15
10
5
5
0
0
20
40
60
80
100
120
140
160
180
200
220
80
85
90
95
100
105
110
115
Tiempo (Horas)
Tiem po (Horas)
g. Posición de la ventilación
h. Detalle de la posición de la ventilación
Fig. 6.11. Ensayo de simulación de control de temperatura utilizando ventilación en verano
261
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Como se puede observar en el apartado d de cada una de las figuras, a mayor velocidad de
viento la ganancia del controlador es más pequeña, ajustándose convenientemente a la
dinámica rápida que caracteriza a esta perturbación. Por otra parte, si se comparan estas
mismas figuras en función de la época del año, conforme la temperatura exterior es mayor,
aumenta el valor de la misma variando desde 1.75 de media en invierno (máximo de 6),
hasta 18.32 de media en verano (máximo de 20), pasando por una media de 3.97 en
primavera (máximo de 20 en alguna ocasión). Por tanto, el controlador también tiene en
cuenta implícitamente la dinámica lenta durante las distintas campañas agrícolas que se
producen a lo largo de un año. En relación a los resultados obtenidos en regulación se
considera un control apropiado ya que la máxima desviación con respecto a la consigna es
de 0.2 ºC, que para este tipo de aplicaciones se considera suficiente, además de que esa
desviación no es importante para el cultivo. Por otra parte, se encuentra dentro del orden de
magnitud de la precisión de los sensores de temperatura que se están utilizando.
5.5
32
Velocidad viento filtrada (m/s)
Temperatura exterior (º C )
5
30
28
26
24
4.5
4
3.5
3
2.5
2
1.5
1
22
0.5
5
10
15
20
25
30
35
40
5
45
10
15
Tie m p o (Ho ra s)
25
30
35
40
45
b. Velocidad viento en exterior
a. Temperatura exterior
900
20
Pará
metro Kp del controlador PI (ºApertura/ºC )
Radiació n global exterior (W /m2)
20
Tiem po (Ho ra s)
800
700
600
500
400
300
200
100
5
10
15
20
25
30
35
40
18
16
14
12
10
8
6
4
2
0
5
45
10
15
20
25
30
35
40
45
Tiempo (Horas)
Tiem po (Ho ras)
d. Valor del parámetro Kp del controlador
c. Radiación solar
33
35
32
30
30
Apertura ventilacioń (º)
Temperatura interior (ºC)
31
29
28
27
26
25
25
20
15
10
24
5
23
0
22
5
10
15
20
25
30
35
40
5
45
10
15
20
25
30
35
Tiempo (Horas)
Tiempo (Horas)
e. Temperatura interior controlada durante el día
f. Posición de la ventilación
Fig. 6.12. Ensayo real de control de temperatura utilizando ventilación en verano
262
40
45
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Durante el mes de agosto del 2000, se realizaron algunas experiencias de control en el
invernadero Araba número 2 con la malla de sombreo totalmente extendida. Durante dos
días se probó el algoritmo de control con ajuste por tabla descrito anteriormente basándose
en los ensayos en bucle abierto realizados con la ventilación. Durante un día se utilizó una
consigna variable, mientras que al día siguiente se consideró constante. Como se puede
observar en la figura 6.12, las condiciones climáticas son las típicas de verano con altas
radiaciones, temperatura exterior en torno a los 28 ºC y velocidad de viento variable. La
figura 6.12.e. muestra la temperatura controlada con una desviación media con respecto a la
consigna de 0.35 ºC y un máximo de 0.6 ºC, resultados aceptables para este tipo de
aplicaciones. El parámetro del controlador proporcional (figura 6.12.d) es muy sensible a la
velocidad del viento filtrada, disminuyendo su valor cuando la velocidad aumenta, además
debido a las elevadas temperaturas exteriores los valores que toma son elevados. Hay que
destacar que, con temperatura exterior elevada y velocidad de viento baja, se puede
alcanzar la saturación del actuador, como se observa en simulación en los dos primeros días
de la figura 6.11.e y en el primer día del ensayo real. Sólo se podría evitar modificando el
diseño mecánico de la ventilación o cambiando la consigna.
6.3.2.3. Control PI por adelanto
Otro esquema de control que se puede utilizar para eliminar o reducir el efecto de las
perturbaciones medibles es el control por adelanto o prealimentación, cuyo esquema
general se expone en la figura 6.13. La perturbación se mide y se introduce una señal de
control que trata de eliminar su efecto sobre la variable controlada. Si las funciones de
transferencia que relacionan la salida con la perturbación y la variable de control son Hyp y
Hyu respectivamente, la función de transferencia ideal del controlador por adelanto debe ser
Hff=-Hyu-1Hyp. En el caso de que ésta fuera inestable o irrealizable, se selecciona una
aproximación. Otras veces, se suele diseñar el controlador por adelanto como un modelo
estático, por ejemplo si el sistema no es lineal, en cuyo caso consiste únicamente en una
ganancia.
Perturbación
medible
Relación
Salida/perturbación
Hyp
Controlador
por adelanto
Hff
+
+ Señal de
control
Relación
Salida/control
Hyu
+
+
Salida a
controlar
Proceso
Fig 6.13. Esquema de control por adelanto para compensación de perturbaciones
En el caso del control de la temperatura del aire del invernadero utilizando ventilación
natural, las relaciones entre la salida del sistema y la entrada de control y las perturbaciones
son fuertemente no lineales. Como se ha comentado en el apartado 4.3 del capítulo 4, se
han diseñado modelos lineales basados en funciones de transferencia entre las variables del
sistema, pero se obtienen mejores resultados con los modelos no lineales.
263
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Por esta razón, se ha desarrollado un controlador por adelanto basado directamente en el
balance energético en régimen permanente descrito en la ecuación (4.3) correspondiente a
un modelo simplificado de la temperatura basado en principios físicos:
ccesp ,a cden ,a
cvol ,a dX t ,a
carea ,ss
dτ
= Qsol ,a + Qcnv ,a − ss + Qcnv ,a − cal − Qcnv _ cnd ,a − e
(6.8)
− Qven ,a − e − Q perd ,a − e − Qtra ,cu
donde Qsol,a es la radiación solar que absorbe el aire del invernadero, Qcnv_cnd,a-e es la
transferencia de calor por convección y conducción entre el aire interior y exterior, Qcnv,a-ss
es la transferencia de calor por convección con la superficie del suelo, Qcnv,a-cal es la
transferencia de calor por convección con las tuberías del sistema de calefacción, Qven,a-e es
el intercambio de calor con el aire exterior debido a la ventilación natural, Qperd,a-e es el
intercambio de calor con el aire exterior por infiltración y Qtra,cu es el calor latente
producido por la transpiración del cultivo. Cada uno de estos términos se describe en el
apartado 4.2.2.2 del capítulo 4.
Utilizando los modelos que relacionan la variable a controlar y las entradas al sistema, se
puede calcular la variable de control de forma que se cancele parte del efecto de las
perturbaciones en la salida del sistema. La desviación de la salida respecto a la consigna
resultante de los errores de modelado se puede eliminar añadiendo un controlador por
realimentación, obteniéndose un controlador que combina la realimentación y la
compensación por adelanto. Sin la acción por adelanto, el controlador por realimentación se
utiliza para seguir todas los cambios de carga que se produzcan en el proceso, sin embargo,
con la compensación por adelanto, la realimentación sólo modifica su salida en un cantidad
igual al error que se comete con el controlador por adelanto debido a los errores de
modelado. Existen dos formas básicas de implementar la compensación por adelanto: en
paralelo y en serie [Cam92], [Ber95], [Cam97]. En ambos casos, las perturbaciones
medibles se utilizan para mantener a la temperatura del aire interior del invernadero en el
nivel deseado.
Perturbaciones
Velocidad
viento
Índice
área foliar
Radiación
exterior
Temperatura Temperatura
exterior
suelo
Consigna
temperatura
+
-
Controlador
PI
Control en
adelanto
Temperatura
de referencia, Ut,ref
Temperatura
Invernadero
Apertura
ventilación, Uven
Fig. 6.14. Controlador por adelanto en serie de la temperatura del invernadero utilizando ventilación
264
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Se ha optado por utilizar la implementación en serie, tal y como se muestra en la figura
6.14, ya que formaría parte de la planta, y al utilizar como señal de control la temperatura
de referencia al controlador por adelanto, se puede trabajar con un sistema equivalente con
una ganancia cercana a la unidad. Por tanto, la señal de entrada al controlador por adelanto
es la temperatura de referencia obtenida por el controlador situado en la cadena directa, y la
salida del controlador por adelanto será directamente la apertura de la ventilación. Esta
configuración tiene especial interés cuando se utilizan técnicas de control adaptativo, pues
en este caso se identifica el sistema formado por la planta y el controlador por adelanto en
serie, de modo que mediante la cancelación del efecto de las perturbaciones la dinámica
identificada corresponda a la relación entre la temperatura de referencia al controlador por
adelanto y la temperatura del aire.
Para estimar las relaciones entre la variable de entrada (ventilación) como función de las
condiciones meteorológicas (perturbaciones) y de la variable de salida (temperatura del aire
interior del invernadero), se considera la ecuación (6.8) de balance de energía en régimen
permanente, es decir, dXt,a/dτ = 0, simplificación que introducirá errores (además de los
intrínsecos al modelo aproximado descrito por la ecuación (6.8)) que se compensarán por el
efecto del controlador por realimentación. La consideración de un balance estacionario
para la obtención de un controlador por prealimentación suele producir acciones enérgicas
que se pueden suavizar introduciendo filtros (añadiendo algo de dinámica al controlador
por adelanto). En la aplicación contemplada en la tesis, como se podrá comprobar, la
aproximación considerada ha proporcionado resultados bastante aceptables. Además, hay
que realizar las siguientes consideraciones:
• Como la ventilación y la calefacción son sistemas de actuación complementarios,
durante los periodos diurnos (que es cuando se utiliza la ventilación) no se considera la
aportación de la convección de calefacción, lo que facilita los cálculos.
• La transpiración del cultivo se considera función del estado de las plantas, medido por el
índice de área foliar, y de la radiación solar que atraviesa la cubierta del invernadero, por
lo que este término se incluye en el de absorción de radiación solar por parte del aire
interior, como se ha descrito en la ecuación (4.17).
La ecuación (6.8) en régimen permanente y con las consideraciones realizadas quedaría:
0 = c aoc , a Vtoc ,cu exp(−c ext ,oc PLAI ) Prs ,e + c cnv, ss − a ( X t , ss − X t , a ) − c cnv _ cnd , a − e (X t , a − Pt ,e ) −
−
c den, a c esp , a
c area, ss
Vven, flujo (X t , a − Pt ,e ) − V perd ( X t , a − Pt ,e )
(6.9)
donde los coeficientes se describen en el apartado 4.2.2.2 del capítulo 4. Por tanto, el
controlador por adelanto se obtiene sustituyendo la temperatura del aire, Xt,a, por la
temperatura deseada de referencia dada por el controlador por realimentación, Ut,ref. La
señal de control de la ventilación, Uven, se encuentra relacionada con el flujo de ventilación,
Vven,flujo, a través de la apertura efectiva de la ventana, Vven,aef, por tanto lo primero es
determinar el flujo de ventilación en base a las perturbaciones y a la temperatura de
referencia a partir de la ecuación (6.9):
265
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Vven, flujo =
carea, ss
cden, a cesp , a
⎛ caoc, a Vtoc,cu exp(−cext ,oc PLAI ) Prs ,e + ccnv, ss − a (X t , ss − U t , ref )
⎜
−
⎜
U
P
−
,
,
t
ref
t
e
⎝
(c
+ V perd ) (U t , ref − Pt ,e ) ⎞
⎟
− cnv _ cnd , a − e
⎟
U t , ref − Pt ,e
⎠
(6.10)
Basándose en un modelo de flujo de ventilación propuesto por Boulard y Baille [Bou95a]
similar al utilizado y descrito en la ecuación (3.71), la apertura efectiva en función del flujo
de ventilación viene dada por:
Vven , aef
⎧⎡ V
3 cgv (U t , ref − Pt , e )
⎪
= ⎨⎢ ven , flujo
+ cven , cv Pvv2 , e
⎪⎩⎣⎢ cden , a cesp , a cven ,l cven ,cd Pt ,e
(
)
3/ 2
⎤
⎥
⎦⎥
2/3
⎫
Pt , e
⎪
(6.11)
− cven , cv Pvv2 , e ⎬
⎪⎭ cgv (U t , ref − Pt , e )
Por medio de la ecuación (3.72) se puede relacionar la apertura de la ventilación con la
apertura efectiva con la siguiente expresión1:
⎛ Vven ,aef
U ven = 2 arcsen ⎜⎜
⎝ 2 cven ,a
⎞
⎟
⎟
⎠
(6.12)
Por tanto, en función de la temperatura de referencia proporcionada por el controlador por
realimentación y en base a las tres últimas ecuaciones, se puede implementar el controlador
por adelanto en serie, donde se debe aplicar un filtro paso bajo a la radiación solar y a la
velocidad del viento para evitar cambios repentinos en la señal de control, ya que estas
perturbaciones puedan variar con una constante de tiempo más pequeña que el resto de
variables. El término proporcionado por el controlador por adelanto, basado directamente
en la ecuación de balance de energía, permite alcanzar un compromiso aceptable entre
complejidad e implementación del mismo, requiriendo solamente el filtrado de las
perturbaciones más rápidas. Este hecho ya ha sido expuesto por otros autores [Häg91],
indicando que en gran cantidad de los casos es suficiente la utilización de un controlador
por adelanto constituido sólo por un simple término proporcional para compensar las
perturbaciones medibles.
Como se ha comentado anteriormente, es necesario utilizar una acción integral en el
controlador por realimentación para regular la temperatura, sobre todo con perturbaciones
constantes. Por otra parte, el sistema sufre frecuentes saturaciones en la señal de entrada
(ventilación) debido a las fuertes perturbaciones, cambios en el punto de operación y
deficiencias en el diseño estructural del sistema de actuación, lo que limita en gran medida
el margen de regulación de control. Si la señal de error es tan grande que la acción integral
satura al actuador, se abre el lazo de realimentación, ya que el actuador puede permanecer
saturado incluso cuando cambia la señal a controlar, pudiendo alcanzar el integrador
valores muy elevados. Cuando el error es finalmente reducido, el valor de la integral puede
haber sido tan elevado que hasta que alcance un nivel aceptable puede pasar un intervalo de
tiempo considerable.
1
Nótese que estas relaciones son aplicables siempre que la temperatura interior del invernadero sea superior a
la temperatura exterior, que es la situación lógica cuando se usa ventilación.
266
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Este efecto se denomina windup y se puede solucionar de varias formas [Ast97a]. Lo más
sencillo es no actualizar el integrador mientras el actuador se encuentre saturado, aunque la
técnica clásica consiste en añadir un nuevo lazo de realimentación proporcional, cuya señal
de error, Verror,sat, sea la diferencia entre la salida del controlador PI, Uact, y el estado real
del actuador (medido o estimado por un modelo del sistema de actuación), Uact,sat; y cuya
salida se sume al término integral del controlador PI, tal y como se muestra en la figura
6.15. Cuando el actuador no se encuentre saturado la señal de error del controlador del
antiwindup será cero, mientras que cuando se sature intentará que este error sea cero,
llevando el integrador a un valor apropiado usando una constante de tiempo, cτ,sw,.
Controlador PI
Consigna
ckp
+
-
ckp /cτI
+
+
+
1/s
Actuador
Uact
Uact,sat
+
Verror,sat
Señal a
controlar
Sistema
+
ckp/cτ,sw
Antiwindup
Fig. 6.15. Sistema de control con antiwindup
En el problema que se está tratando del control de la temperatura mediante ventilación
natural utilizando una compensación por adelanto en serie con un controlador PI, para
introducir la acción antiwindup, tal y como se ha propuesto anteriormente, existe el
inconveniente de que el controlador PI no proporciona el estado en el que debe encontrarse
el controlador sino la temperatura de referencia del controlador por adelanto, que es el que
realmente calcula la apertura de las ventilaciones en función de las variables climáticas
ambientales. Por tanto, la primera entrada del bloque antiwindup debe ser la salida del
controlador PI cuya señal corresponde a una temperatura. Afortunadamente, cuando el
actuador se satura, la correspondiente temperatura de referencia puede calcularse en cada
instante de control a través del modelo simplificado que se ha utilizado para el diseño del
controlador por adelanto (se trata de invertir este modelo1) con los valores de las
perturbaciones que haya en ese momento. De esta forma, se reproduce el esquema
antiwindup clásico pero comparando temperaturas, como se muestra en la figura 6.16.
Como ejemplo se muestran a continuación los resultados obtenidos en simulación con el
controlador PI de realimentación diseñado para días claros [Rod01a]. Se han utilizado los
mismos datos que para el controlador por ajuste por tabla en verano para el invernadero
Araba 2, con las perturbaciones que se muestran en las figura 6.11.(a-c) y con una consigna
de 31 ºC para poder comparar las salidas de los dos esquemas de control utilizados, aunque
durante el séptimo día se realiza un cambio de consigna de ± 2 ºC para demostrar la buena
respuesta del controlador en seguimiento de consignas.
1
El modelo es invertible siempre que la temperatura interior del invernadero sea superior a la exterior, hecho
que ocurre siempre que hay que usar ventilación.
267
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Perturbaciones
Consigna
temperatura
Controlador PI
ckp
+
-
+
ckp /cτI
+
+
1/s
Ut,ref
+
ckp /cτ,sw
Controlador
por adelanto
+ Ut,sat
Uven
Ventilación
Uven,sat
Temperatura
Invernadero
Inversa
controlador
por adelanto
Antiwindup
Fig 6.16. Controlador por adelanto en serie y antiwindup de la temperatura del invernadero con ventilación
Los resultados se muestran en la figura 6.17, pudiéndose observar que la temperatura sigue
a la consigna de una manera adecuada, con una desviación máxima de 0.2 ºC, ante distintas
condiciones de las perturbaciones (velocidad del viento varía entre 0 y 12 m/s), aunque al
finalizar el periodo diurno, se aprecia una subida de la temperatura debido a que como la
radiación solar comienza a disminuir, el controlador por adelanto tiende a cerrar la
ventilación para contrarrestar este efecto. También se puede apreciar el funcionamiento
correcto del mecanismo antiwindup en la recuperación al cambiar el día. Hay que indicar
que se han filtrado las señales necesarias ya que el controlador tendía a sobreactuar, lo que
puede dañar a los motores debido a los continuos arranques, además de incrementar los
costes. Aún así, se adelanta en exceso al estar basado en un balance estacionario.
Comparando la acción de las dos estrategias de control descritas, lo primero que se observa
es que el controlador por adelanto en serie reduce notablemente los esfuerzos de la señal de
control, lo que provoca que, en los días analizados, no se llegue a la saturación superior en
el actuador (ventilación completamente abierta), mientras que en el controlador con ajuste
por tabla se llega en cuatro de los días, provocando la subida de la temperatura no pudiendo
por tanto seguir la consigna determinada, tal y como se pude observar en las figuras 6.17.g
y h (la traza continua corresponde al controlador por adelanto y la discontinua al
controlador con ajuste por tabla). Por otra parte, debido a la acción integral del controlador
de realimentación del esquema de la figura 6.16, el seguimiento de la consigna presenta
mejores resultados, ya que el controlador con ajuste por tabla incluye un término integral
que sólo actúa cuando las condiciones de perturbación son constantes y el término
proporcional no varía, lo que produce una pequeña desviación respecto a la consigna. Aún
así, los resultados de ambos esquemas se consideran adecuados en este tipo de aplicaciones,
además de que reaccionan rápidamente a cambios de las condiciones climáticas exteriores
que es otro de los factores determinantes.
Se han incluido simulaciones sólo de un periodo de verano porque los resultados obtenidos
en las otras campañas (primavera e invierno) para las que se han mostrado resultados de
simulación del controlador con ajuste por tabla son similares a los obtenidos en las
simulaciones recogidas en la figura 6.17. De hecho, el estudio de controladores adaptativos
para este problema [Ber03] ha demostrado que no se consigue una notable mejoría cuando
se utiliza un esquema de control autoajustable donde se identifica como sistema el
invernadero en serie con el controlador por prealimentación.
268
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
18
30
A pertura ventilació n (º )
Temperatura interior (º C )
16
28
26
24
14
12
10
8
6
4
22
2
20
0
20
60
40
80
100
120
140
160
180
200
40
20
220
80
60
100
120
140
160
180
220
200
Tiem po (Horas)
Tiem po (Ho ras)
a. Temperatura interior controlada durante el día
b. Posición de la ventilación
20
31.4
18
31.2
A pertura ventilació n (º )
Temperatura interior (º C )
16
31
30.8
30.6
30.4
14
12
10
8
6
4
30.2
2
30
10
35
30
25
20
15
40
5
10
15
Tiempo (Horas)
20
25
30
35
40
Tiem po (Horas)
d. Detalle de la posición de la ventilación
c. Detalle temperatura interior controlada
14
31
12
A pertura ventilació n (º )
Temperatura interior (º C )
30.8
30.6
30.4
30.2
30
29.8
29.6
10
8
6
4
29.4
2
29.2
29
0
153
155
154
156
157
159
158
160
153
154
155
Tiempo (Horas)
156
157
158
159
160
Tiem po (Horas)
e. Respuesta ante cambios de consigna
f. Posición ventilación frente a cambios de consigna
35
31.8
A pertura ventilació n (º )
Temperatura interior (º C )
30
31.6
31.4
31.2
31
25
20
15
30.8
10
30.6
5
180
190
200
210
220
180
230
190
200
210
220
230
Tiempo (Horas)
Tiempo (Horas)
g. Comparación con ajuste por tabla
h. Comparación de apertura de ventilación
Fig. 6.17. Ensayo de simulación de control por adelanto de temperatura utilizando ventilación en verano
269
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
La justificación radica en que la estructura del controlador por adelanto, además de
compensar las perturbaciones, lleva a cabo una linealización de la estructura no lineal que
relaciona la ventilación con la temperatura interior, siendo este término por realimentación
responsable de las buenas características de regulación del sistema.
Al igual que en el caso del controlador con ajuste por tabla, en verano de 2000 se llevó a
cabo un ensayo real durante dos días en el invernadero Araba número 2 utilizando un
controlador por prealimentación. La figura 6.18 muestra los resultados más relevantes del
control, donde como se puede observar tanto el comportamiento en regulación frente a
perturbaciones como el seguimiento de consignas es bastante aceptable. La radiación solar
en los dos días correspondió a día claro1, con temperaturas exteriores del orden de 29 ºC y
velocidad del viento variable. La figura 6.18.d muestra la temperatura controlada con una
desviación media con respecto a la consigna de 0.15 ºC y un máximo de 0.3 ºC.
32
7
V elocidad del viento filtrada (m/s)
Temperatura exterior (ºC )
30
28
26
24
22
6
5
4
3
2
1
20
10
5
25
20
15
35
30
40
45
10
15
Tiempo (horas)
20
25
30
35
40
45
Tiempo (horas)
a. Temperatura exterior
b. Velocidad viento en exterior
1000
32
900
28
Temperatura interior (ºC )
Radiacioń global exterior (W/m2)
30
800
700
600
500
400
300
26
24
22
20
18
200
16
100
14
0
5
10
15
20
25
30
35
40
12
45
5
10
15
Tiempo (horas)
20
25
30
35
40
45
Tiempo (horas)
d. Temperatura interior controlada durante el día
c. Radiación solar
35
30
Apertura ventilacioń (º)
Temperatura interior (º C )
32
31.5
31
30.5
25
20
15
10
5
30
0
12
1 2 .5
13
1 3 .5
14
5
10
15
20
25
30
35
Tiempo (horas)
Tie m p o (ho ra s )
e. Detalle de seguimiento de consignas
f. Posición de la ventilación
Fig. 6.18. Ensayo real de control de temperatura utilizando ventilación en verano
1
No existió la posibilidad de realizar más ensayos en las instalaciones.
270
40
45
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
6.3.2.4. Otras estrategias de control
Los esquemas de control que se muestran en las figuras 6.15 y 6.16, se pueden considerar
como generales y base para futuros trabajos, ya que el controlador de realimentación se
puede diseñar utilizando distintas estrategias como control adaptativo, predictivo y robusto.
Como se ha comentado previamente, se han incluido en la tesis las estrategias de control de
bajo nivel de las que se dispone ensayos en invernaderos reales. Sin embargo, también se
están ensayando estrategias en simulación como etapa previa a su implementación en un
invernadero real. Concretamente, en [Mor02] se expone el diseño de un controlador PI
robusto basado en la técnica QFT, aprovechando que el controlador por adelanto en serie
con la planta presenta un comportamiento similar a un sistema de primer orden con
incertidumbre en los parámetros de ganancia y la constante de tiempo. Los resultados
obtenidos en simulación para días calurosos de verano son buenos tanto en seguimiento de
trayectorias como a cambios de consigna, sometido a fuertes cambios en las perturbaciones
correspondientes a las condiciones climáticas externas. En [Ber03] se muestra una
comparativa de esquemas de control adaptativo (incluyendo también el controlador por
prealimentación desarrollado en este capítulo) donde se demuestra que la inclusión de una
estrategia de autoajuste de parámetros de un controlador PI (identificando el controlador
por adelanto en serie con el invernadero como un sistema de primer orden con un retardo de
un periodo de muestreo) no mejora sustancialmente el comportamiento del sistema
controlado, pues gran parte de la acción de control es debida al controlador por
prealimentación. El hecho de ensayar estrategias de control adaptativo y robusto se justifica
en principio por la variabilidad temporal de la dinámica del sistema (debida a crecimiento
de cultivo, modificaciones en parámetros del invernadero por envejecimiento, etc.), al
carácter no lineal de su dinámica y presencia de dinámica no modelada fundamentalmente.
Otra estrategia de gran interés y que está siendo objeto de estudio en la actualidad y como
trabajo futuro en el ámbito de la tesis es la de control predictivo basado en modelo, pues
otra característica importante del problema del control climático es la presencia de
restricciones tanto en las entradas como en las salidas del sistema y la presencia de
perturbaciones. Aunque en los esquemas mostrados se han incluido estrategias del tipo
antiwindup para compensar el efecto de la saturación de la ventilación y un controlador por
adelanto para compensar las perturbaciones medibles, las técnicas de control predictivo
basado en modelo permiten de forma natural incorporar las restricciones y el efecto de
perturbaciones medibles en la etapa de diseño del controlador, además de otras múltiples
ventajas que se citan en la literatura especializada [Cam99]. En ese sentido, ya se está
desarrollando un paquete de rutinas que permitan incorporar las restricciones típicas
(saturación, velocidad de apertura de ventilación y malla de sombreo, limitaciones de la
temperatura y humedad, etc.) de control predictivo así como otras relacionadas con la
integral de temperatura en un determinado periodo [Dor03].
6.3.2.5. Supervisión de condiciones climáticas extremas
Existen situaciones climáticas adversas especiales que necesitan de un sistema de
supervisión con una prioridad de funcionamiento superior a la que poseen los esquemas de
control descritos anteriormente, de forma que toman la decisión de anular el algoritmo de
control climático seleccionado y la ejecución acciones especiales. Concretamente, se han
considerado dos situaciones:
271
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• Lluvia. La presencia de agua sobre las hojas y frutos de las plantas puede provocar cierto
tipo de enfermedades criptogámicas en el cultivo, debiéndose evitar que el agua de
lluvia caiga sobre las plantas en el caso de que las condiciones en el interior y exterior
del invernadero indiquen que la ventilación deba encontrarse abierta, por lo que se toma
la decisión de que la ventilación cenital no supere una cierta apertura, o bien, se cierre
completamente. Se debe determinar experimentalmente una posición de la ventilación,
que se denomina Máxima apertura de lluvia, en la cual no cae agua sobre cultivo. En el
caso que se está tratando se ha determinado que cuando llueva las ventilaciones deben
permanecer completamente cerradas ya que, como en esta zona suele existir viento, no
hay seguridad de que el agua de lluvia no se introduzca en el invernadero.
• Alta velocidad de viento. El mantener intacta la estructura del invernadero tiene
prioridad sobre las condiciones climáticas en el interior, y ésta es muy vulnerable a la
velocidad del viento ya que la ventilación cenital actúa como una vela en la que sopla el
viento, y como se encuentra unida rígidamente a la estructura puede llegar a dañarla. La
acción a realizar es cerrar completamente la ventilación cuando la velocidad del viento
supere un valor determinado, que en las instalaciones utilizadas se ha fijado a 60 km/h
(16.6 m/s) cuando la dirección del viento sea de barlovento. Si la dirección del viento es
de sotavento, se ha definido una apertura máxima permitida de un 5%, para que en el
caso que sea necesario, permita un intercambio mínimo de aire entre el interior y el
exterior, aunque si la velocidad del viento supera los 70 km/h (19.4 m/s), se cierra
completamente. El problema radica en determinar cuándo cambia la dirección del
viento, ya que existen situaciones frecuentes en las que se producen turbulencias y el
viento parece que modifica su dirección. En la práctica se ha fijado un tiempo de retardo
(5 minutos) desde que se detecta un cambio brusco en la dirección del viento hasta que
el sistema supervisor decide que se ha producido realmente un cambio en la dirección
del viento. Si durante ese periodo la dirección del viento es la misma, se considera que
realmente se ha producido un cambio y se toman las acciones pertinentes.
6.3.3. Control de la temperatura nocturna utilizando calefacción
6.3.3.1. Problema de control de la temperatura utilizando calefacción
El sistema de calefacción está compuesto por un conjunto de tuberías de acero repartidas
por toda la superficie del invernadero que son calentadas debido a la circulación de agua
por su interior y éstas a su vez por convección transmiten calor al aire y por radiación
transmiten calor al resto de sólidos (cultivo, cubierta y superficie del suelo) calentándolos,
por lo que éstos, a su vez, transmiten calor al aire por convección al encontrarse en contacto
con él. Estos fenómenos físicos hacen que se eleve la temperatura del aire interior del
invernadero. El problema de control de la temperatura nocturna del aire utilizando
calefacción radica en calcular la temperatura a la que debe encontrarse el agua que circula
por las tuberías para mantener la temperatura del aire en el valor deseado. Para ello se
dispone de una válvula de tres vías que mezcla el agua calentada por la caldera, que es de
temperatura constante, con el agua a menor temperatura que proviene del retorno del
circuito de tuberías, obteniéndose la temperatura de agua deseada. En estos sistemas
industriales, la temperatura del agua se mide aproximadamente a un metro de la válvula
principal de mezclas.
272
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
De este razonamiento se deduce que se trata de un sistema de control en cascada [Cre93],
cuyo esquema se muestra en la figura 6.19. Además, el sistema de control debe gobernar
otros dispositivos que no aparecen en la figura como el quemador de la caldera y las
bombas que producen la recirculación del agua por las tuberías, pero como son señales
discretas del tipo encendido/apagado no se considerarán en este apartado, aunque son de
interés para calcular el consumo de este tipo de instalaciones.
Consigna
temperatura
tuberías
Consigna
temperatura
+
aire
-
Controlador
temperatura
invernadero
+
-
Posición
válvula
Controlador
temperatura
tuberías
Temperatura
tuberías
Válvula
Tuberías
Invernadero
Temperatura
aire
Sistema de calefacción
Fig. 6.19. Esquema de control en cascada de la temperatura del aire utilizando calefacción
Por otra parte, este problema de control presenta las siguientes características:
• Es un sistema de actuación con saturación ya que la temperatura del agua que circula por
las tuberías no puede ser mayor que la que produce la caldera, que se diseñó para que
fuera constante a 80 ºC. Operativamente, se fija a 70 ºC, para evitar las oscilaciones que
se producen en la caldera ya que la temperatura del agua no es completamente constante.
Por otra parte, se considera que la temperatura del agua de las tuberías no puede ser
menor que la del aire del invernadero, ya que en caso contrario el aire cedería calor hasta
que se equilibraran, por tanto el límite inferior de la saturación es variable.
• La válvula de mezclas dispone de una resolución limitada, ya que posee un paso mínimo
de apertura/cierre, aunque después de analizar los datos experimentales se observa que
es suficientemente pequeño como para considerarlo como un continuo sin que afecte
este hecho al control de la temperatura del agua de las tuberías.
• La respuesta de la temperatura del aire interior frente a cambios tipo escalón en la
temperatura del agua de las tuberías se puede asimilar a la de un sistema de primer orden
con retardo de 7 a 11 minutos, tal y como se puede observar en las siguientes figuras.
Tras hacer distintas experiencias, aparece la naturaleza no lineal entre la calefacción y la
temperatura, como se comentó en el capítulo 3 acerca del modelado de esta proceso. La
figura 6.20.a muestra la respuesta de la temperatura ante distintas variaciones de la
temperatura de las tuberías a partir del mismo punto de trabajo y con las mismas
perturbaciones, obteniéndose parámetros característicos distintos. En la figura 6.20.b se
muestra la respuesta de la temperatura sometida a las mismas perturbaciones y a un
incremento de la temperatura de las tuberías de 20 ºC, mostrando el comportamiento no
lineal que era de esperar en distintos puntos de trabajo.
Señal de entrada Ganancia Constante de tiempo Retardo
(º C aumento)
(ºC/ºC)
(minutos)
(minutos)
10
0.1
13.6
11
20
0.085
8.39
9
30
0.07
6.45
8
Tabla 6.7.Parámetros característicos de la respuesta de temperatura ante variaciones
273
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
de la temperatura de tuberías caracterizándola como un sistema de primer orden con retardo.
17.5
17
A um ento 30º C en agua tuberí as
Temperatura aire interior (º C )
Temperatura aire interior (º C )
16.8
16.6
A um ento 20º C en agua tuberí as
16.4
16.2
16
15.8
A um ento 10º C en agua tuberí as
15.6
15.4
17
16.5
16
15.5
15.2
15
10
15
20
25
30
35
40
45
10
50
20
30
40
50
60
70
80
90
Tiempo (minutos)
Tiempo (minutos)
a. Distintos escalones en el mismo punto de trabajo b. Misma temperatura en distintos puntos de trabajo
Fig. 6.20.Respuesta de temperatura a variaciones de la temperatura del agua de las tuberías de calefacción
• Las perturbaciones externas influyen en el efecto de la calefacción sobre la temperatura
del aire interior. Durante los periodos nocturnos, el invernadero pierde calor hacia el
exterior a través de la cubierta por procesos de conducción/convección y por infiltración
debido a roturas del material de cubierta. Estos procesos dependen de la temperatura
exterior y de la velocidad del viento como ya se describió en el capítulo 3; por tanto el
controlador debe tener en cuenta las condiciones meteorológicas en el exterior para
calcular la temperatura del agua de las tuberías. La figura 6.21.b, muestra que para unas
mismas condiciones de viento, la ganancia del sistema aumenta conforme la temperatura
del aire en el exterior es mayor, debido a que a cuanto mayor sea, se producen menores
pérdidas de calor, por lo que con la misma señal de control aumentaría la temperatura
del invernadero en mayor medida. Ocurre lo contrario con la velocidad del viento, que
para una misma temperatura exterior, a medida que aumenta la velocidad del viento
disminuye la ganancia del sistema, ya que se favorece el flujo de perdidas de calor por
infiltración del interior al exterior, aunque, como se puede observar, con una influencia
bastante menor que la de la temperatura exterior.
16.8
17.2
V eloc idad viento= 0 (m /s )
16.6
Temperatura aire interior (º C )
Temperatura interior (º C )
Tem peratura ex terior= 15 º C
17
V eloc idad viento= 10 (m /s )
16.4
16.2
16
15.8
15.6
15.4
15.2
16.8
Tem peratura ex terior= 10 º C
16.6
16.4
Tem peratura ex terior= 5 º C
16.2
16
15.8
15.6
15.4
15
5
10
15
20
25
30
35
2
Tiempo (minutos)
4
6
8
10
12
14
Tiempo (minutos)
a. Temperatura ante un cambio de calefacción de
b. Temperatura ante un cambio de calefacción de
20ºC con diferentes condiciones de viento
20ºC con diferentes condiciones de temperatura
Fig. 6.21.Respuesta de la temperatura a variaciones de la calefacción en función de condiciones externas
274
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Considerando estas características se pueden utilizar diferentes técnicas para abordar este
problema de control como se ha indicado en la revisión bibliográfica resumida en la tabla
6.4. Como se ha comentado en el caso de la ventilación, este control de bajo nivel no ha
sido un objetivo prioritario en la presente tesis, por lo que se ha diseñado e implementado
un algoritmo de control que ha proporcionado buenos resultados cubriendo los objetivos
fijados.
6.3.3.2. Esquema de control de la temperatura nocturna utilizando calefacción
Basándose en las consideraciones realizadas acerca de las características principales del
control de la temperatura utilizando calefacción se ha optado por el esquema de control que
se muestra en la figura 6.22.
Temperatura exterior
Control en
adelanto
Consigna
temperatura
calefacción
Velocidad viento exterior
Temperatura
base
+
-
Controlador
PI con
antiwindup
Posición
válvula
+
+
+
-
Controlador
PI con
antiwindup
-
-
Temperatura
tuberías
Sistema de
calefacción
Temperatura
Invernadero
+
+
Temperatura de
referencia tuberías
Fig. 6.22. Esquema de control de la temperatura nocturna utilizando calefacción
Cuando la temperatura del aire del invernadero sea menor que la consigna nocturna,
denominada temperatura de calefacción, debe empezar a funcionar el sistema de
calefacción calculando el algoritmo de control maestro la temperatura que debe tener el
agua que circula por las tuberías para compensar la pérdida de calor. A continuación el
segundo controlador (esclavo) debe ajustar la válvula de mezclas para controlar la
temperatura del agua. Como se ha comentado anteriormente, se trata de dos controladores
en cascada cuyo funcionamiento es el siguiente:
• Control de la temperatura del aire interior del invernadero. Este primer controlador
debe calcular la temperatura a la que debe encontrarse el agua de las tuberías del sistema
de calefacción para mantener la temperatura del aire interior en los valores deseados.
Para ello se utiliza un controlador PI junto con un controlador por adelanto en paralelo
para compensar la acción de las perturbaciones externas. Se ha optado por esta
configuración ya que cuando la calefacción no se encuentra activada, la temperatura de
las tuberías no es cero sino que posee una cierta inercia térmica que hace que la
temperatura del agua tienda a ser igual a la del aire del invernadero. Cuando se activa la
calefacción, hay que partir de una cierta temperatura de las tuberías, a la que se le suma
la acción del controlador PI de realimentación de forma que la temperatura de referencia
de las tuberías, Ut,cal, es:
275
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
donde ckptub,cal y cτI,cal son respectivamente
la ganancia y el tiempo integral del
controlador PI de realimentación, Vt,con es la
consigna de temperatura y Ut,base es la
temperatura base que proporciona el
controlador por adelanto en función de las
perturbaciones y la consigna. El cálculo de
la temperatura base se realiza en función de
las condiciones climáticas exteriores de
forma que a mayor velocidad del viento y a
menor temperatura exterior, mayores son las
pérdidas de calor hacia el exterior por lo que
mayor debe ser el aporte de calor por parte
de la calefacción.
Temperatura
Temperatu
ra ext
exterior
erior (ºC)
⎡
1
U t ,cal = U t ,base + ckptub ,cal ⎢(Vt ,con − X t ,a ) +
cτI ,cal
⎣⎢
⎤
∫ (Vt ,con − X t ,a )dτ ⎥⎥
(6.13)
⎦
Ctmax,e
Pvv,e=0
ctcalmax,,vmin
Pvv,e=cvv,max
ctcalmax,vmax ctcalmin,vmin
ctcalmin,vmax
Temperatura base de tuberías (ºC)
Fig 6.23. Relación entre temperatura base de
tuberías, temperatura exterior y
velocidad de viento
Como se analizará en el siguiente apartado, los modelos matemáticos basados en
primeros principios desarrollados en la presente tesis proporcionan una relación entre las
perturbaciones (temperatura exterior, Pt,e, y velocidad de viento, Pvv,e) y la temperatura
de calefacción, que podría ser utilizada como control por prealimentación. Otra opción
que se ha adoptado en este diseño es usar una relación empírica propuesta en [Kam96] y
que se muestra en la figura 6.23 (el uso de este tipo de relaciones empíricas se debe a
que son fácilmente comprensibles por el usuario final, pudiendo proporcionarle
parámetros intuitivos de sintonización). La línea horizontal discontinua representa la
consigna de temperatura nocturna, de forma que cuando la temperatura exterior es
mayor o igual, ctmax,e, la temperatura base de las tuberías coincide con la consigna y
cuando es menor, en base a su valor y a la velocidad del viento eleva la temperatura base
un cierto valor. Como se puede observar cuanto mayor sea la velocidad de viento y
menor la temperatura exterior, mayor será la temperatura base, por lo que el problema
radica en encontrar los parámetros característicos de esta relación descrita por la
siguiente ecuación:
Pt ,e +
U t ,base =
⎡
Pvv ,e
·( ctcal min,v max − ctcal min,v min
·⎢ctcal max,v min +
c vv ,max
ct cal min,v min − ctcal max,v min ⎢⎣
ct max,e
ct max,e
⎤
)⎥
⎥⎦
(6.14)
ct cal min,v min − ctcal max,v min
siempre que la temperatura del invernadero sea menor que la de consigna de temperatura
nocturna, en caso contrario se considera igual que la de consigna. En la tabla 6.8 se
indica el significado de los parámetros y el valor de cada uno de ellos que se estiman en
función de las diferentes experiencias realizadas, de la estructura del invernadero, de las
características del sistema de calefacción y de las condiciones climatológicas de esta
zona:
276
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Parámetro
Descripción
Valor
ctcalmin,vmin
Temperatura mínima de tuberías con viento igual a cero
50
ctcalmin,vmax
Temperatura máxima de tuberías con viento máximo
40
ctcalmax,vmin
Temperatura máxima de tuberías con viento igual a cero
20
ctcalmax,vmax
Temperatura máxima de tuberías con viento máximo
70
cvv,max
Máxima velocidad de viento
15
Tabla 6.8.Parámetros característicos de la función de adaptación del controlador
Unidades
[ºC]
[ºC]
[ºC]
[ºC]
[m/s]
La sintonización del controlador de realimentación se ha realizado basándose en las
fórmulas de Ziegler-Nichols en lazo abierto, en torno a un punto de operación de 16 ºC y
con unas perturbaciones de 6 m/s de velocidad del viento (mitad de la excursión normal
de la variable [0,10-12 m/s]) y con una temperatura exterior de 11 ºC que es la
temperatura media de las horas nocturnas en esta zona en los meses en los que se suele
utilizar la calefacción (diciembre 11.7 ºC, enero 10.6 ºC y febrero 11.3 ºC) calculada en
base a las campañas agrícolas desde la 83/84 hasta la 94/95 [Pal97]. Se han obtenido
unos valores de ckptub,cal=12.8 [ºCcal/ºCaire] y cτI,cal= 1800 [s]. Tal y como se indica en la
figura 6.22, se ha introducido un mecanismo antiwindup clásico para evitar el problema
que la saturación del actuador induce en la acción integral; concretamente con la
temperatura de las tuberías que se ha considerado no puede ser mayor de 70 ºC, ni
menor que la temperatura interior del invernadero (saturación inferior variable).
• Control de la temperatura del agua de las tuberías. Una vez que el controlador anterior
calcula la temperatura correcta a la que debe encontrarse el agua que circula por las
tuberías debe abrir/cerrar la válvula de mezclas para alcanzar ese valor. Para ello se
utiliza un controlador PI de forma que en cada instante, por cada grado de diferencia
entre la temperatura de tubería de referencia, Ut,cal, y la temperatura de tubería real
(medida a un metro de la válvula de mezclas), Utreal,cal, la válvula, Uval,cal, debe ajustarse
un determinado tanto por cierto, ckpval,cal, en base a su estado anterior, es decir:
U val ,cal ( i ) = U val ,cal ( i − 1 ) + ckpval ,cal (U t ,cal − U treal ,cal )
(6.15)
Debido al tipo de válvula que se utiliza en este tipo de instalaciones, la posición de la
válvula no se mide, sino que se ajusta en base al tiempo que se encuentra activada. El
fabricante debe indicar el tiempo que tarda en abrirse completamente cuando se
encuentra cerrada y el controlador en función de este tiempo y de la apertura calculada
debe mantener una determinada señal sobre la válvula hasta alcanzar el valor deseado
(no existe realimentación de la posición real de la válvula). Aún así, se ha implementado
también un mecanismo antiwindup como en el caso del controlador maestro.
Aparte de estas acciones de control, el sistema debe enviar las órdenes de activar el
quemador de la caldera y las bombas de circulación de agua por el circuito de tuberías,
cuando la temperatura del aire del invernadero sea menor que la consigna. El problema
radica en que estos equipos no deben activarse y desactivarse frecuentemente ya que aparte
de disminuir el tiempo de vida de los motores, se produce una distribución no uniforme de
temperatura en el invernadero y en el agua que circula por las tuberías. Para evitar este tipo
de problemas, que ocurren con valores de la temperatura del aire interior cercanos a la
consigna nocturna de temperatura, se ha implementado una acción todo/nada con una zona
muerta de ± 0.5 ºC en torno a la consigna, de forma que estos sistemas permanezcan
activados aunque no sea necesario en esa banda de funcionamiento.
277
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Para comprobar los algoritmos propuestos se han realizado numerosos ensayos en
simulación que muestran su buen funcionamiento. Como ejemplo, en la figura 6.24 se
puede observar la respuesta de la temperatura del aire durante unos días correspondientes al
mes de enero de 1998 con temperatura nocturna exterior baja pero modificando su valor
medio en las distintas noches consideradas y velocidades de viento que toman valores
desde 0 a 10 m/s. Para una consigna de 17 ºC, se puede observar (fig 6.24.e) que el
controlador propuesto mantiene a la temperatura del aire interior en el valor deseado con
unas desviaciones máximas de 0.2 ºC; valores aceptables en este tipo de aplicaciones y más
teniendo en cuenta que son del orden de magnitud de la exactitud de los sensores de
temperatura. En la novena noche se ha propuesto un cambio en la consigna para verificar
que el sistema también es capaz de seguir este tipo de variaciones, como se muestra en la
figura 6.24.g, aunque en los instantes en los que se produce el escalón en la señal de entrada
requiere esfuerzos elevados en la señal de control (fig. 6.24.h) que llegan, incluso, a
saturarla. Hay que recordar que como el sensor de temperatura de agua se encuentra situado
a pocos centímetros de la válvula de mezclas de tres vías y a que la temperatura del agua
proporcionada por la caldera es muy elevada (aproximadamente 80 ºC) en comparación con
la de retorno de las tuberías procedente del invernadero, el retardo en el calentamiento del
agua es mínimo.
Con respecto a la señal de control, las figuras 6.24.c, d y f representan respectivamente la
apertura de la válvula de calefacción, la temperatura base calculada por el controlador por
adelanto y la temperatura de tubería necesaria para que la temperatura del aire siga a la
consigna deseada, pudiéndose comprobar que la apertura de la válvula presenta la misma
forma que la temperatura de las tuberías de calefacción. En los periodos nocturnos
correspondientes a las cuatro primeras noches (horas de la 1 a la 80) con velocidades de
viento bajo (en torno a los 2-3 m/s), se puede observar que conforme la temperatura
exterior va disminuyendo, la temperatura base aumenta. Por otra parte, en las noches
correspondientes a las horas de la 100 a la 140, con temperatura exterior constante y más
elevada que las noches anteriores, pero con velocidades de viento más altas, la temperatura
base eleva su valor para contrarrestar las pérdidas de calor que se producen debido al
viento. Aún así, en la figura 6.24.f, que representa la temperatura que deben tener las
tuberías, se observa que en ese periodo es necesario aportar menos calor, lo que demuestra
lo que se indicó anteriormente, que la perturbación determinante es la temperatura exterior
y no la velocidad del viento.
En un apartado posterior se mostrarán resultados reales obtenidos de probar estos
algoritmos en un invernadero comercial distinto al usado en las experiencias de modelado1.
6.3.3.3. Inclusión de un término por prealimentación basado en modelos
Del mismo modo que en la sección 6.3.2.1.2. se ha explicado la inclusión de un término por
adelanto en serie con la planta basado en modelos físicos simplificados para el control de
ventilación, se puede obtener una expresión similar en el caso del control con calefacción,
más simplificada incluso porque por la noche no existe radiación solar y la ventilación está
completamente cerrada.
1 La razón de incluirlo en un apartado distinto es debido a que los algoritmos incluyen corrección en base a
humedad (apartado 6.4), de modo se ahorra espacio sin limitar la información que se quiere transmitir.
278
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
10
20
9
8
V elocidad viento (m/s)
Temperatura exterior (º C )
18
16
14
12
10
7
6
5
4
3
2
8
1
50
100
150
200
20
60
40
80
100
120
140
160
200
180
220
Tiem po (Horas)
Tiem po (Horas)
a. Temperatura exterior
b. Velocidad viento
40
80
Temperatura base (º C )
A pertura vá lvula calefacció n (%)
90
70
60
50
40
30
35
30
25
20
10
20
0
0
50
100
150
200
200
150
100
50
Tiem p o (Hora s)
Tiem po (Horas)
c. Apertura válvula de calefacción
d. Temperatura base (término por adelanto)
70
23
65
Temperatura tuberí as (º C )
Temperatura interior (º C )
22
21
20
19
18
17
60
55
50
45
40
35
30
25
16
20
15
50
100
150
200
Tiempo (Horas)
e. Temperatura interior
f. Temperatura tuberías de calefacción
17
65
16.8
60
Temperatura tuberí as (º C )
Temperatura interior (º C )
200
150
100
50
Tiem po (Horas)
16.6
16.4
16.2
16
15.8
15.6
15.4
55
50
45
40
35
30
25
15.2
20
15
15
165
170
175
180
185
190
195
160
200
Tie m po (Horas)
165
170
175
180
185
190
195
200
205
Tiem po (Horas)
g. Detalle de temperatura con cambio de consigna
h. Detalle de temperatura tuberías de calefacción
Fig. 6.24. Ensayo de simulación de control de temperatura utilizando calefacción
279
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Por tanto, haciendo un balance de estado estacionario en la ecuación (4.3), eliminando los
términos que son nulos en periodos nocturnos y despreciando el efecto de la transferencia
de calor latente por transpiración de cultivo, se puede obtener una expresión que ligue la
temperatura interior del aire del invernadero con las perturbaciones que afectan al
comportamiento nocturno de esta variable y con la temperatura de calefacción de tubería:
0 = ccnv,cal −a (U t ,cal − X t ,a ) + ccnv,ss−a (X t ,ss − X t ,a ) − ccnv _ cnd ,a−e (X t ,a − Pt ,e )− V perd (X t ,a − Pt ,e ) (6.16)
Si al igual que se ha procedido en el caso de la ventilación, se sustituye la temperatura del
aire interior, Xt,a, por la temperatura de referencia al controlador por adelanto, Ut,ref,
obtenida del controlador por realimentación, se puede obtener la expresión del control por
adelanto en serie para el control de la temperatura nocturna del aire utilizando un sistema
de calefacción:
U t ,cal =
ccnv _ cnd ,a−e (U t ,ref − Pt ,e )+ V perd (U t ,ref − Pt ,e ) − ccnv ,ss−a (X t ,ss − U t ,ref )
ccnv,cal −a
+ U t ,ref
(6.17)
Este término es una alternativa al calculado en la sección previa, habiendo demostrado
buenos resultados en simulación, pero sin aportar una notable mejoría a los alcanzados en
dicha sección.
6.4. CONTROL DE LA HUMEDAD RELATIVA INTERIOR
6.4.1. Problema general de control de la humedad relativa
El contenido de vapor de agua en el aire interior del invernadero, medido por ejemplo
mediante la humedad relativa, no es una de las variables climáticas que afectan
directamente al crecimiento del cultivo, aunque su control tiene un interés especial. Como
se describió en el capítulo 2, con humedades relativas elevadas se favorece la aparición y
desarrollo de enfermedades criptogámicas, además de disminuir la transpiración, lo que
reduce la absorción de agua y nutrientes, pudiendo generar déficit de elementos como el
calcio. Sin embargo, con humedades relativas bajas, la tasa de transpiración crece, lo que
puede acarrear estrés hídrico, el cierre de los estomas y, por tanto, la reducción de la
fotosíntesis [Cas95]. En base a estos hechos, es necesario mantener la humedad relativa del
aire en un intervalo determinado, que para el tomate se puede establecer entre un 60% y un
80%. El control de la humedad relativa del aire interior del invernadero presenta dos
inconvenientes principales:
• La temperatura del aire y su humedad relativa se encuentran altamente relacionadas de
forma inversa (el coeficiente de correlación es superior a –0.9), por lo que una variación
en una de las dos variables produce una variación inversa en la otra. Generalmente, a
mayor temperatura del aire menor humedad relativa y viceversa, ya que a mayor
temperatura, mayor es también la cantidad de vapor de agua que necesita para saturarse.
• Los sistemas de actuación que se utilizan para controlar la temperatura son los mismos
que se utilizan para controlar la humedad, por lo que una acción de uno de ellos,
modifica el valor de las dos variables.
280
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Como la variable principal del sistema es la temperatura del aire ya que afecta directamente
al crecimiento de las plantas, se considera que es la variable a controlar, tratando de
mantener la humedad en un intervalo considerado como ideal, adaptando el controlador
según los efectos de la ventilación y la calefacción sobre la humedad, tal y como se
describirá a continuación. No se controla la humedad relativa del aire interior, en el sentido
de seguir una consigna, sino que se intenta que se mantenga dentro de unos límites. Las
acciones generales que se suelen realizar cuando la humedad relativa toma un valor fuera
del intervalo definido son las siguientes:
• Humedad relativa baja. Este problema generalmente se encuentra relacionado con el
exceso de temperatura y la solución consiste en aportar agua al invernadero mediante
nebulizadores, humidificadores o paneles húmedos, pero la instalación de este tipo de
sistemas no se encuentra extendidos en la zona, además de no disponer de ellos en las
instalaciones en donde se han realizado los ensayos, por lo que no se ha incluido su
gestión en la presente tesis.
• Humedad relativa alta. Generalmente se presenta esta situación en invernaderos
cerrados, sin ventilar, en épocas frías y generalmente en horas nocturnas o al empezar y
finalizar el día. La solución es combinar la acción de la calefacción y la ventilación de
forma que extraiga aire caliente y húmedo del invernadero y lo sustituya por aire frío del
exterior que al elevar su temperatura queda con una humedad relativa baja.
A continuación, se describirán las acciones que se han implementado en el controlador de
la temperatura de forma que se pueda mantener la humedad relativa en un intervalo
deseado.
6.4.2. Efecto de la ventilación y calefacción sobre la humedad relativa
Para comprender mejor los algoritmos de control que se han utilizado para la humedad
relativa, se va a describir brevemente el efecto de los dos actuadores principales, utilizando
el diagrama de Mollier y el concepto de humedad relativa (véase el anexo A). La humedad
absoluta se define como la relación de la masa de vapor de agua con respecto a la masa de
aire seco que la contiene [kgagua/kgaire]. El aire del invernadero puede contener una cantidad
máxima de vapor de agua función de su temperatura, y se dice que el aire se encuentra
saturado. La humedad relativa proporciona una medida entre la cantidad de vapor de agua
que contiene el aire y la que tendría si estuviera saturado a la misma temperatura, estando
directamente relacionado con la humedad absoluta e inversamente con la temperatura,
variables que se ven afectadas por los sistemas de actuación:
• Cuando se activa la calefacción, el invernadero suele encontrarse con la ventilación
completamente cerrada, por lo que no hay intercambio de vapor de agua con el exterior,
y si no se considera un aporte del mismo por la transpiración del cultivo, la humedad
absoluta permanece constante. Un aumento de la temperatura del aire, produce una
disminución de la humedad relativa como se puede observar en la figura 6.25.a, donde el
aire del invernadero se encuentra inicialmente en el punto A en el diagrama de Mollier, y
al aumentar la temperatura por la calefacción pasa al punto B, es decir, se produce un
desplazamiento vertical en este tipo de diagramas. Esta disminución de humedad estará
compensada en la realidad por un aumento en la transpiración del cultivo.
281
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• Debido a la ventilación, se mezcla el aire interior y exterior, produciéndose dos efectos.
Por una parte, la temperatura interior disminuye, ya que la temperatura exterior es
menor, y por otra, la humedad absoluta también disminuye, ya que, generalmente, la
cantidad de vapor de agua en el interior del invernadero es superior a la que contiene el
aire exterior. Se producen dos desplazamientos en el diagrama de Mollier: uno hacia
abajo debido a la disminución de temperatura y otro hacia la izquierda debido a la
disminución de la humedad absoluta, lo que provoca una disminución en la humedad
relativa, tal y como se observa en la figura 6.25.b, al pasar del punto de trabajo A al B.
40
40
Vhr= 10 (% )
Vh r= 5 0 (% )
35
35
30
30
B
25
Temperatura (ºC)
Temperatura (ºC)
Vhr= 10 (% )
Vhr= 100 (% )
20
A
15
25
5
5
15
20
5
25
Vh r= 1 00 (% )
B
15
10
10
A
20
10
5
Vhr= 50 (% )
10
15
20
25
Humedad absoluta (g/kg)
Humedad absoluta (g/kg)
a. Efecto de la calefacción
b. Efecto de la ventilación
Fig. 6.25. Efecto de los sistemas de actuación sobre la humedad relativa
6.4.3. Control de la humedad relativa
6.4.3.1. Control de la humedad relativa en periodo diurnos
El control de la temperatura diurna del aire interior se realiza utilizando la ventilación
natural como sistema de actuación, pero su efecto también modifica la humedad relativa del
aire interior. En relación a estas dos variables se pueden encontrar dos situaciones
especiales, en las que hay que alcanzar un compromiso entre el valor que se obtiene de cada
una de las variables:
• Temperatura interior elevada y la humedad relativa demasiado baja. Si se opta por abrir
la ventilación, la temperatura alcanza el valor deseado, pero la humedad disminuirá su
valor ya que como, generalmente, la humedad exterior suele ser menor, se elimina el
vapor de agua que contiene el aire interior. En cambio, si se opta por cerrar la
ventilación, no se elimina el vapor de agua, manteniéndose el valor de la humedad,
aunque la temperatura permanece demasiado elevada.
• Temperatura interior baja y la humedad relativa demasiado alta. El caso es el contrario al
descrito anteriormente, es decir, si se abre la ventilación, la humedad disminuiría su
valor, pero la temperatura bajaría todavía más. Sin embargo, si se decide cerrarla, la
temperatura alcanzaría un valor más adecuado, pero puede que se mantenga el valor de
la humedad (o que sea mayor) ya que el contenido de vapor de agua es igual o superior
por la evaporación en el suelo y la transpiración del cultivo.
282
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
La solución adoptada ha sido modificar la consigna de temperatura en función de la
humedad relativa, tal y como se muestra en la figura 6.26, donde como controlador de
realimentación de temperatura de aire puede utilizarse cualquiera de los descritos en los
apartados anteriores.
Apertura
ventilación, Uven
Consigna temperatura
modificada por humedad
Consigna
temperatura
Generador
consigna
real
+
-
Humedad relativa
Controlador
temperatura
Ventilación
Invernadero
Temperatura
Fig. 6.26. Esquema de control de temperatura en función de la humedad
En el generador de consigna se define una humedad relativa de referencia, que sería la
deseable a obtener en el caso de que la temperatura del aire del invernadero fuera igual a la
consigna deseada. Si la humedad relativa real es mayor que esa óptima se disminuye el
valor de la consigna de temperatura para que la ventilación comience a abrirse antes y así se
evacue el vapor de agua lo antes posible. En el caso de que sea muy baja, se aumenta el
valor de la consigna de temperatura para retrasar la apertura de ventilación y mantener el
vapor de agua que se encuentra en el interior. Evidentemente, se determina un intervalo en
el que debe mantenerse la temperatura del aire (consigna) ya que es la variable principal a
controlar y no se puede permitir que tome cualquier valor. La relación entre la consigna de
temperatura y la humedad relativa es lineal con pendiente negativa en un intervalo
simétrico y con una saturación inferior y superior.
C onsigna de te mperatura (º C )
Como ejemplo del funcionamiento de este sistema, en la figura 6.28, se muestra el
resultado de su aplicación en un día claro de radiación media con algunas nubes, velocidad
de viento elevando su valor a lo largo del día,
29
con temperatura de aire típica de un día de
28
primavera y una humedad exterior con valores
27
nocturnos elevados y diurnos bajos. El cultivo
26
presenta un índice de área foliar de 2.2. La
25
consigna de temperatura diurna se fija a 24 ºC
24
y, como se trata de un cultivo de tomate en el
23
que la humedad relativa debe permanecer entre
22
el 60 % y el 80%, se toma como valor de
21
referencia óptimo el 70%. Además, se permite
20
que la consigna de temperatura pueda
19
40
50
60
70
80
90
modificar su valor un máximo de ± 5ºC, de tal
Humedad relativa (%)
modo que la relación entre la consigna y la
Fig. 6.27. Relación consigna de temperatura y
humedad es la que se indica en la figura 6.27.
humedad relativa interior
En la figura 6.28.e se puede observar el perfil típico que se obtiene de aplicar la relación a
los datos medidos en el invernadero, a partir del instante en que se considera que ha
amanecido hasta que anochece que es el intervalo en el que se aplica la consigna diurna
para controlar la temperatura utilizando la ventilación.
283
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Como la humedad relativa suele ser menor durante el día, interesa que no se elimine el
vapor de agua por lo que se eleva la consigna para retrasar la apertura de la ventilación, y
como se puede observar en la figura 6.28.g, el valor inferior que toma la humedad durante
el día no es menor que el límite determinado del 60%. En los periodos iniciales y finales
del día, como la humedad relativa suele ser elevada, el sistema disminuye la consigna de
temperatura para que se adelante la apertura de la ventilación y se pueda evacuar el exceso
de vapor de agua. Evidentemente, sin ayuda de aporte de calor en esos periodos por parte
de la calefacción, no se puede disminuir la humedad relativa hasta que sea inferior al límite
óptimo del 80%. Esta situación se acepta ya que si se activa la calefacción hasta que el sol
pueda producir la energía necesaria, el coste en combustible es demasiado elevado. Otra
consideración a realizar es la comprobación de que el sistema de control de realimentación
de la temperatura del aire interior es capaz de seguir la consigna que se propone en función
de la humedad relativa. Como se puede observar en la figura 6.28.f, donde la línea
discontinua representa la consigna calculada, a partir del momento en que se dispone de la
energía suficiente proporcionada por el sol, la temperatura del aire interior del invernadero
sigue correctamente a la consigna. En este caso, la variación de la consigna ha sido de hasta
5 ºC, dándose por tanto más prioridad a la humedad relativa que a la temperatura del aire,
hecho que no es muy común ya que, generalmente, sólo se permite una pequeña desviación
de la consigna. La figura 6.29 muestra, bajo las mismas condiciones del ejemplo que se ha
descrito, una comparación del efecto del tamaño del intervalo permitido de variación de la
temperatura en tres casos: sin considerar la humedad con la consigna de temperatura
constante (línea discontinua con guión), con prioridad a la temperatura con variación
máxima de 1 ºC (línea discontinua con punto) y prioridad a la humedad con variación de 5
ºC (línea continua). La figura 6.29.b muestra el efecto que se produce sobre la humedad
relativa cuando se le da la máxima prioridad, aumentado su valor en torno al mediodía y
disminuyendo su valor al amanecer y oscurecer que, como se puede observar, mejora
notablemente su comportamiento, ya que permanece más tiempo en el intervalo
considerado como óptimo. Evidentemente, lo consigue a costa de alejar a la temperatura del
valor deseado. En la figura 6.29.d. se puede observar la posición de la ventilación en cada
uno de los casos. Con prioridad a la humedad, en torno al mediodía la ventilación no se
abre tanto como en el resto de situaciones, manteniendo el vapor de agua en el interior del
invernadero. Por otra parte, permanece abierta en los extremos del día para favorecer la
evacuación del mismo en estos intervalos de tiempo donde la humedad suele ser más
elevada (con prioridad a la humedad permanece abierta desde las 11:00 hasta las 19:00
horas y sin considerar la humedad desde las 13:00 hasta las 17:00 horas).
6.4.3.2. Control de la humedad en periodo nocturnos
Durante la noche se utiliza la calefacción para que eleve la temperatura (reduciendo la
humedad relativa), por lo que cuando se utiliza no suele existir problemas de exceso de
vapor de agua, excepto al amanecer por problemas de condensación. En primavera, verano
y otoño, cuando la demanda de aporte de calor durante la noche es mínima o nula, se
mantiene la temperatura del agua de las tuberías a una valor mínimo determinado para que
el aire no se sature de vapor de agua (100% de humedad relativa). No se muestran
resultados de esta acción, ya que su efecto se describe perfectamente en la figura 6.25.a y
no se aporta más información para la comprensión del proceso.
284
20
85
19
80
Humedad relativa exterior (%)
Temperatura exterior (ºC)
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
18
17
16
15
14
13
75
70
65
60
55
50
45
12
2
4
6
8
10
12
14
16
18
20
2
22
4
6
8
a. Temperatura exterior
12
14
16
18
20
22
b. Humedad relativa exterior
900
8
800
7
Velocidad viento filtrada (m/s)
Radiació n global exterior (W /m2)
10
Tiempo (Horas)
Tiempo (Horas)
700
600
500
400
300
200
6
5
4
3
2
1
100
0
2
4
6
8
10
12
14
16
18
20
22
2
4
6
8
Tiempo (Horas)
10
12
14
16
18
20
22
Tiempo (Horas)
c. Radiación solar
d. Velocidad viento en exterior
27
26
Cons igna variable c ons iderano hum edad
24
25
24
Temperatura interior (ºC )
C onsigna de temperatura (º C )
26
Consigna c ons tante sin cons iderar hum edad (24 º C)
23
22
21
20
22
20
18
16
19
14
18
2
4
6
8
10
12
14
16
18
20
10
8
22
14
12
20
18
16
22
Tiempo (Horas)
Tiempo (Horas)
e. Consignas de temperatura diurna
f. Temperatura interior
10
90
9
8
85
Apertura ventilació
n (º)
Humedad relativa interior (%)
11
95
80
75
70
7
6
5
4
3
65
2
60
1
10
11
12
13
14
15
16
17
18
19
20
10
Tiempo (Horas)
11
12
13
14
15
16
17
18
Tiempo (Horas)
g. Humedad relativa interior
h. Posición de la ventilación
Fig. 6.28. Ensayo de simulación de control de humedad utilizando ventilación
285
19
20
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
26
95
90
24
Humedad relativa interior (%)
C onsigna de temperatura (º C )
25
S in c onsiderar hum edad
23
M á x im a variac ió n de c ons igna= 1º C
22
21
20
85
80
75
70
65
M á xim a variac ió n de c ons igna= 5º C
60
19
M á xim a variació n de c onsigna= 1º C
M á x im a variac ió n de c ons igna= 5º C
55
S in c onsiderar hum edad
18
8
10
12
14
16
18
20
22
11
12
13
Tiempo (Horas)
15
16
17
18
19
20
Tiempo (Horas)
a. Comparación consignas
b. Comparación de humedad relativa interior
11
27
M á x im a variac ió n de c ons igna= 5º C
9
Apertura ventilació n (º )
M á x im a variac ió n de c ons igna= 1º C
25
S in c ons iderar hum edad
10
26
Temperatura interior (º C )
14
24
S in c ons iderar hum edad
23
22
21
20
8
7
M á x im a variac ió n de c ons igna = 1º C
6
5
M á x im a variac ió n de c ons igna = 5º C
4
3
19
2
18
1
17
11
12
13
14
15
16
17
18
19
20
11
21
12
13
14
15
16
17
18
19
Tiempo (Horas)
Tiempo (Horas)
c. Comparación temperatura interior
d. Comparación posición de ventilación
Fig. 6.29. Comparación de prioridades al control de temperatura y humedad utilizando ventilación
6.5. CONTROL DE LA RADIACIÓN SOLAR
6.5.1. Problema general de control de la radiación solar
La radiación solar se compone aproximadamente de un 44% de radiación PAR, un 52 % de
radiación infrarroja y de un 4% de ultravioleta. La radiación PAR es una de las tres
variables climáticas que afectan directamente al crecimiento del cultivo, por lo que su
control es importante. Los procesos fundamentales que realizan las plantas como la
fotosíntesis y la transpiración dependen directamente de la radiación que captan. Por otra
parte, la radiación solar está involucrada directamente en los procesos de transmisión de
calor que se producen en el invernadero ya que los elementos sólidos del mismo (cubierta,
cultivo y suelo) la absorben aumentando su temperatura, por lo que también es necesario su
control bajo este punto de vista. Se pueden encontrar dos situaciones en las que es
necesario el control de la radiación:
• Exceso de radiación. No suele ser un problema para el cultivo ya que la planta aumenta
su actividad fotosintética hasta el punto de saturación y el resto de radiación no lo
utiliza. El problema radica que junto a la radiación PAR, recibe radiación infrarroja que
produce un aumento de la temperatura que es necesario disminuir, además de los daños
que se pueden producir en hojas y frutos. La solución es utilizar una malla de sombreo
que sólo deje pasar un determinado porcentaje de la radiación solar que la alcanza.
286
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• Falta de radiación. Suele ser un problema para el crecimiento óptimo del cultivo en
ciertas latitudes, principalmente en invierno con días cortos. Directamente se puede
suplir esa falta instalando un alumbrado especial que permite llegar al nivel de
iluminación adecuado y alargar el periodo fotosintético hasta una duración óptima, pero
a costa de un elevado consumo de energía que sólo es rentable para determinados
cultivos como plantas ornamentales. Como este problema no suele aparecer en el sudeste
español, además de que no se dispone de este tipo de instalaciones, no se ha tratado en
esta tesis.
El único método activo que se utiliza en esta zona para controlar la radiación solar es la
malla de sombreo que reduce la transmisión de la radiación hacia el cultivo y el suelo
provocando dos efectos: reducción de la radiación PAR, ralentizando el crecimiento del
cultivo por la disminución de la actividad de fotosíntesis y, generalmente, disminución de
la temperatura del aire ya que el suelo y el cultivo no absorben toda la radiación que emite
el sol. Por tanto, el control de la radiación se puede estudiar desde estos dos puntos de vista,
aunque, por regla general, se suele utilizar para la disminución de temperatura. Aún así,
como el problema que se está tratando en la presente tesis radica en el control óptimo de la
producción, puede que en algún caso sea necesario disminuir la velocidad de crecimiento
del cultivo para adaptarla a algunas situaciones del mercado, siendo necesario disminuir la
radiación par que absorbe el cultivo.
6.5.2. Control de la radiación PAR
La malla de sombreo es un sistema de actuación discontinuo, ya que o se encuentra
recogida o extendida. Aunque su funcionamiento real permite que alcance cualquier
posición ya que se trata de un motor que la extiende o recoge, no tiene sentido sombrear
sólo parte de la superficie del invernadero ya que el cultivo no crecería uniformemente. Por
esta razón, se utiliza un controlador todo/nada con una corrección de zona muerta en torno
a la consigna de radiación para evitar el funcionamiento frecuente de los motores, ya que se
pueden averiar, además de elevar el coste de la producción. Cada uno de los motores debe
mover una malla de 35 metros de anchura a lo largo de 4 metros, lo que supone un gran
esfuerzo, por lo que la zona muerta se diseña muy ancha (40% de la consigna) para evitar
las oscilaciones en torno a la consigna. Se busca, así, una situación de compromiso entre
alcanzar el valor deseado y las activaciones de los motores. La figura 6.30 muestra los
resultados de este tipo de control para una campaña de primavera con días de radiación
claros y con nubes, con una malla de sombreo con coeficiente de transmisión de 0.5. La
consigna se ha fijado en 100 W/m2 de radiación PAR y como se puede observar en la figura
6.30.c y d cuando se alcanza un valor determinado de radiación, el algoritmo todo/nada con
zona muerta extiende la malla de sombreo, reduciéndose la radiación interior a la mitad (la
línea discontinua muestra la radiación PAR si no se utiliza la malla). Cuando la radiación
diminuye, se recoge la malla, aumentando en una determinada cantidad la radiación
captada. Evidentemente, no se puede fijar la radiación interior a la consigna ya que la malla
sólo realiza una acción fija que consiste en disminuir a la mitad la radiación exterior que
atraviesa la cubierta, que no es constante ya que varía en forma sinusoidal a la largo del día,
pudiéndose observar en la figura 6.30.d, el perfil típico que presenta la radiación solar
interior, dividido en tres tramos debido a la acción de la malla.
287
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
La figura 6.30.b, muestra la posición de la malla en cada uno de los día del ensayo,
observándose el efecto de la zona muerta ya que en la mayoría de ellos la malla se extiende
y se recoge una sola vez, lo cual favorece el mantenimiento de la instalación.
100
350
80
P osició n de malla (%)
Radiació n P A R exterior(W /m2)
90
300
250
200
150
70
60
50
40
30
100
20
50
10
20
40
60
80
100
120
140
160
180
200
50
220
100
150
200
Tiempo (Horas)
Tiempo (Horas)
b. Posición de la malla de sombreo
a. Radiación PAR exterior
250
Radiació n PA R interior(W /m2)
Radiació n PAR interior(W /m2)
120
200
150
100
50
100
80
60
40
20
0
50
100
150
10
200
Tiempo (Horas)
15
20
25
30
35
40
45
Tiempo (Horas)
c. Radiación PAR interior con y sin malla
d. Detalle de la radiación PAR interior con malla
Fig. 6.30. Control de la radiación PAR utilizando la malla de sombreo
6.6. EXPERIENCIAS REALES EN UN INVERNADERO
En el marco del contrato I+D Asesoramiento al desarrollo de herramientas informáticas de
control climático de invernaderos, con referencia 400216, firmado a petición de la empresa
Industria de Telecomunicación y Control con el grupo de investigación Automática,
Electrónica y Robótica de la Universidad de Almería (PAI-TEP197) al que pertenece el
autor de la presente tesis, se planteó la mejora de los algoritmos de control que se utilizan
actualmente en los sistemas de control climático comerciales. La citada empresa desarrolló
un sistema de adquisición y control propio descrito en la sección 2.4.2 del capítulo 2, desde
los sensores hasta los sistemas de transmisión de datos consistentes en un bus de campo. Se
firmó el contrato para mejorar los algoritmos de control que se estaban utilizando, para
adaptarlos a las estructuras de invernaderos existentes en la zona, al clima de la misma y a
los sistemas de actuación que generalmente se utilizan. Así mismo, otro de los objetivos era
probar la metodología de obtención de los parámetros característicos de los controladores
desarrollados para adaptarlos a las condiciones especificas de cada invernadero y cultivo.
288
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Se optó por un sistema modular en el que fuera sencillo la ampliación de nuevas variables
climáticas a controlar, como la concentración de CO2 y la inclusión de sistemas de
actuación distintos a los que se utilizan normalmente como humidificadores, aerotermos,
ventilación forzada, enriquecedores de CO2, etc.
Tras diversos ensayos de simulación, las pruebas reales se han realizado en una instalación
particular situada en el término municipal de la Mojonera (Almería), consistente en un
invernadero tipo túnel de una hectárea, aunque sólo se utiliza un sector del mismo de 2000
m2 aislado del resto de sectores, equipado con ventilación natural, malla de sombreo y
sistema de calefacción. En la figura 6.31 se muestra la estructura del invernadero con la
ventilación cenital abierta y parte del sistema de calefacción (depósito de combustible y
almacén donde se encuentra la caldera).
Fig. 6.31. Instalaciones privadas donde se utiliza el sistema de control propuesto
Los algoritmos de control utilizados son los descritos en este capítulo, concretamente el
controlador con ajuste por tabla (función de las perturbaciones externas) de la temperatura
diurna utilizando ventilación natural, con la consigna modificada por la humedad relativa
del aire interior, y el controlador PI con compensación por adelanto en paralelo de las
perturbaciones del clima exterior (temperatura y velocidad de viento) para el control de la
temperatura nocturna utilizando el sistema de calefacción. Para la malla de sombreo, se
utiliza el algoritmo todo/nada con zona muerta.
Las pruebas comenzaron en diciembre del año 2000, y continuaron hasta junio del siguiente
año, aunque como se han obtenido buenos resultados, actualmente, los propietarios de la
instalación siguen utilizando el sistema para obtener las condiciones deseadas del
crecimiento del cultivo. Como ejemplo, la figura 6.32 muestra el resultado obtenido en el
control de la temperatura diurna y nocturna durante un periodo de tiempo correspondiente
al mes de enero del año 2001, con un cultivo de pepino con índice de área foliar de 4 y una
consigna nocturna de 11.5 ºC y diurna de 21 ºC los primeros días y 23 ºC los últimos, con
variación debida a la humedad relativa de hasta un máximo de 2 ºC, por lo que se le da
prioridad a la humedad relativa. Como se puede observar en las figuras 6.32.d y e, la
temperatura sigue correctamente la consigna nocturna con un error máximo de 0.5 ºC. La
consigna diurna disminuye a primeras horas para evacuar el exceso de vapor de agua, al
contrario que en las últimas horas que intenta evitar su pérdida. Con respecto a la humedad
relativa se ha considerado como consigna el 80% con un intervalo óptimo de variación de
un 10 %, indicado en las figuras con dos líneas continuas.
289
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
Existen periodos de tiempo en los que la humedad relativa se encuentra fuera del intervalo,
pero con un máximo de un 10%, lo que se considera aceptable en este tipo de aplicaciones.
Para mostrar el buen funcionamiento del sistema bajo otro tipo de perturbaciones, la figura
6.33 muestra el mismo análisis realizado durante el mes de junio del año 2001 con un
cultivo de tomate. En estas condiciones, no se utiliza el sistema de calefacción ya que las
temperaturas son elevadas, controlando la temperatura y humedad en los periodos diurnos,
con consignas variables en función de la humedad. Se puede observar que el
comportamiento es correcto, aunque la humedad relativa llega en algunos instantes a
saturar el aire. Debería haberse utilizado la calefacción a una temperatura mínima, pero
como el coste es muy elevado, el responsable desestimó esta opción, corriendo el riesgo de
sufrir enfermedades en su cultivo. Como se ha comprobado este invernadero presenta
problemas de humedad elevada con el cultivo en las fases de producción, y por esta razón
se le ha dado prioridad a la humedad sobre la temperatura que se permite una variación de
hasta 2 ºC.
No se han mostrado datos del estado de los sistemas de actuación ya que tanto la empresa
como el usuario no han considerado necesario su almacenamiento. Además, se observa
falta de resolución en los gráficos debido a que, aunque miden y controlan con un periodo
de muestreo de un minuto, almacenan los datos cada quince minutos, por lo que se pierde
parte de la dinámica del proceso tan importante en el ámbito de la Ingeniería de Sistemas y
Automática. A pesar de eso, se han expuesto estos resultados para mostrar la validez de los
algoritmos de control incluidos en este capítulo en una instalación comercial en plena
producción.
6.7. CONCLUSIONES Y RESUMEN DE APORTACIONES
La producción del cultivo bajo invernadero es influenciada por el clima en su interior, por
lo que se hace preciso mantener las variables que lo caracterizan dentro de un determinado
intervalo considerado como idóneo. En este capítulo se ha descrito el problema general del
control del clima que se genera en el interior de un invernadero, así como la problemática
particular relacionada con cada una de las variables climáticas que se suelen controlar en la
zona del sudeste de España: temperatura, humedad relativa y radiación. Además, se han
mostrado las estrategias que se han desarrollado, implementado y validado tanto en
simulación como en invernadero reales, así como la utilización de los sistemas de actuación
instalados. Los algoritmos desarrollados han tratado en todo momento de utilizar la
información disponible de las perturbaciones medibles, dado que en este problema son la
principal fuente de energía necesaria para el crecimiento del cultivo, destacando la
aportación de un controlador por adelanto basado en balances de energía simplificados. En
las estrategias desarrolladas, se ha tratado de llegar a una solución de compromiso entre
prestaciones de los controladores y la facilidad de comprensión por parte de usuarios
finales, dado que se está realizando transferencia de tecnología al entorno agrícola.
También, se ha expuesto un informe detallado del estado actual de los estudios de control
del clima en invernadero que realizan los distintos grupos de investigación que se dedican o
se han dedicado a este tema.
290
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
18
90
Humedad relativa exterior (%)
Temperatura exterior (º C )
16
14
12
10
80
70
60
50
40
8
30
6
50
100
150
200
250
300
350
150
100
50
400
200
300
250
350
400
350
400
Tiem po (Horas)
Tiempo (Horas)
a. Temperatura exterior
b. Humedad relativa exterior
12
Velocidad viento exterior (m/s)
Radiació n global exterior (W/m2)
500
400
300
200
100
10
8
6
4
2
0
50
100
150
200
250
300
350
50
400
100
150
c. Radiación solar
250
300
d. Velocidad viento en exterior
25
Temperatura interior (º C )
25
Temperatura interior (º C )
200
Tiempo (Horas)
Tiempo (Horas)
20
15
20
15
10
10
50
100
150
200
250
300
350
400
50
60
100
130
120
110
Tiempo (Horas)
e. Temperatura interior
f. Detalle de temperatura interior
95
95
90
Humedad relativa interior (%)
Humedad relativa interior (%)
90
80
70
Tiem po (Horas)
85
80
75
70
65
60
90
85
80
75
70
65
60
55
0
50
100
150
200
250
300
350
50
400
60
70
80
90
100
110
120
130
Tiempo (Horas)
Tiempo (Horas)
g. Humedad relativa interior
h. Detalle de humedad relativa interior
Fig. 6.32. Resultados de control de temperatura en un invernadero real en enero 2001
291
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
90
32
30
80
Humedad relativa exterior (%)
Temperatura exterior (º C )
28
26
24
22
20
18
16
70
60
50
40
14
30
12
50
100
150
200
250
300
350
400
450
500
50
100
150
250
300
350
500
450
400
b. Humedad relativa exterior
a. Temperatura exterior
800
12
Velocidad viento exterior (m/s)
Radiació n global exterior (W/m2)
200
Tiempo (Horas)
Tiempo (Horas)
700
600
500
400
300
200
10
8
6
4
2
100
0
50
100
150
200
250
300
350
400
450
500
50
100
150
Tiempo (Horas)
200
250
300
350
400
450
500
Tiem po (Horas)
c. Radiación solar
d. Velocidad viento en exterior
32
28
Temperatura interior (º C )
Temperatura interior (º C )
30
28
26
24
22
20
18
16
26
24
22
20
18
14
16
50
100
150
200
250
300
350
400
450
500
10
20
30
e. Temperatura interior
50
60
70
80
90
100
f. Detalle de temperatura interior
100
100
95
Humedad relativa interior (%)
90
Humedad relativa interior (%)
40
Tiempo (Horas)
Tiempo (Horas)
80
70
60
50
90
85
80
75
70
65
40
50
100
150
200
250
300
350
400
450
10
500
20
30
40
50
60
70
80
90
100
Tiempo (Horas)
Tiempo (Horas)
g. Humedad relativa interior
h. Detalle de humedad relativa interior
Fig. 6.33. Resultados de control de temperatura en un invernadero real en junio 2001
292
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
De todas las experiencias en este capítulo se pueden extraer las siguientes conclusiones:
• Aunque las variables climáticas que afectan al crecimiento del cultivo son la
temperatura, la radiación PAR y la concentración de CO2, debido a los sistemas de
actuación que se instalan típicamente en el sudeste español, sólo es posible controlar, en
el sentido de seguir una determinada consigna, la temperatura del aire interior.
• Los dos principales sistemas de actuación son la calefacción y la ventilación que
presentan acciones inversas con respecto a la temperatura. Se ha optado por que no
actúen simultáneamente ya que, aunque se mejoran algunos aspectos del problema,
(sobre todo el control de la temperatura), el gasto en combustible es demasiado elevado.
• Debido a que las especificaciones en el control de la temperatura no son muy restrictivas
en esta aplicación y a la propia naturaleza de las señales que intervienen en el sistema, se
ha demostrado que su control es posible utilizando estrategias clásicas como ajuste por
tabla o controladores por adelanto (se están utilizando en controladores comerciales).
• La humedad relativa del aire interior afecta indirectamente al desarrollo del cultivo, por
lo que es conveniente mantenerla en un intervalo de valores determinado. Como se
encuentra relacionada con la temperatura, utilizando los mismos actuadores, se pueden
controlar las dos variables. El problema aparece debido a que cualquier variación en una
de ellas provoca una variación en la otra. Ya que la temperatura es la variable que
realmente influye sobre el crecimiento de las plantas, se considera como variable
principal a controlar y se mantiene la humedad en un intervalo determinado,
modificando la consigna de temperatura, de forma que en función de la prioridad que se
le desee dar en distintos momentos se modifica más o menos esa consigna.
La necesidad del desarrollo de controladores de las variables climáticas en la presente tesis
viene justificada porque afectan al crecimiento del cultivo, que es lo que se pretende
optimizar. En base a criterios económicos un sistema debe proporcionar a los controladores
de clima, las consignas que deben seguir. Para el desarrollo de este trabajo sólo era
necesario disponer de unos controladores que fueran capaces de realizar esta misión. Por
esta razón, no se ha profundizado más en la obtención de mejores sistemas de control
utilizando otras estrategias. Además, existen unos aspectos importantes del problema que
debería ser incluidos en los controladores climáticos que no se han tenido en cuenta por
considerarse situaciones especiales, y caen fuera de los propósitos principales. Por tanto, las
principales tareas que se deberían realizar en este aspecto son las siguientes:
• Considerar en el problema de control de la temperatura otro tipo de restricciones
importantes para el cultivo, como el que su integral a lo largo de una campaña no sea
menor que un valor1 o evitar los procesos de condensación en la cubierta o en el cultivo.
• Resolver el problema de control con otro tipo de técnicas más avanzadas. El control de
la temperatura del aire presenta una combinación de distintas dinámicas, se encuentra
sometido a fuertes perturbaciones medibles, se conocen los referencias futuras, los
sistemas de actuación presentan saturaciones y existen unas restricciones especiales,
descritas anteriormente, por lo que el control predictivo basado en modelo presenta más
ventajas que otros métodos para resolverlo.
1
Ya se están desarrollando herramientas en este sentido [Dor03].
293
Capítulo 6. Estrategias de control del clima en el interior de un invernadero
• Aunque tradicionalmente no se utilizan en esta zona, sería conveniente el estudio de la
acción de otros sistemas de actuación como los aerotermos, humidificadores, ventilación
forzada, etc, que se están empezando a instalar debido a la modernización de los
invernaderos existentes. Habría que empezar a desarrollar los sistemas de control de las
variables climáticas utilizando estos actuadores porque ayudarían a su dimensionamiento
y se vería la verdadera necesidad de su utilización.
• En otras latitudes, el control de la concentración de CO2 permite un mejor control sobre
el crecimiento del cultivo, obteniéndose mayores beneficios. Actualmente, el
enriquecimiento de CO2 en esta zona presenta un coste demasiado elevado ya que no
existe suministro de gas natural a las zonas agrícolas, aunque está prevista su llegada. Al
igual que se ha comentado en el punto anterior, sería muy interesante empezar a trabajar
en los algoritmos de control de esta variable.
294
CAPÍTULO 7
CONTROL
JERÁRQUICO
CRECIMIENTO
DE
DEL
CULTIVOS
BAJO INVERNADERO
7.1. INTRODUCCIÓN AL CONTROL JERÁRQUICO MULTICAPA
Como se ha comentado en el capítulo 1, el control óptimo del crecimiento de un cultivo
bajo invernadero consiste en la obtención del máximo beneficio cuando se proceda a la
venta de la producción, es decir, la optimización de la relación entre los ingresos obtenidos
por la venta de la producción y los costes asociados a su obtención. En el caso analizado en
la presente tesis, se ha considerado el problema del control del crecimiento en función de
las condiciones climáticas de su entorno. Una de las principales características de este
problema consiste en la existencia de dos escalas de tiempo en las dinámicas que
caracterizan al sistema: la dinámica característica del cultivo evoluciona en horas/días y la
de las variables climáticas en minutos/segundos. Cuando un sistema complejo contiene
subsistemas que interactúan entre sí y poseen diferencias en cuanto a su respuesta en el
tiempo, es común en la práctica realizar simplificaciones de forma que las variables del
proceso se dividen en “lentas” y “rápidas”. De esta manera, a corto plazo sólo se consideran
los efectos de las variables rápidas y a largo plazo sólo los de las variables lentas. Se
produce, por tanto, una descomposición jerárquica del problema de control. Evidentemente,
por la propia naturaleza del problema, una forma de resolverlo es la utilización de técnicas
de control jerárquico. El control y coordinación de sistemas jerárquicos se basa en la idea
de la división en la responsabilidad en la toma de decisiones [Fin80]. Existen dos ideas
clásicas en control jerárquico:
• Control multicapa. El control de un subsistema es dividido en algoritmos o capas, cada
una de las cuales actúa en diferentes intervalos de tiempo. Su estructura se muestra en la
figura 7.1.a, donde se puede observar que el control se divide en las siguientes etapas:
Regulación. Calcula las acciones necesarias, Vu, para que las variables a controlar, Vy,
sean iguales a las consignas, Vcy.
Optimización. Se trata de un algoritmo que determina los valores óptimos de las
consignas, Vcy, asumiendo que los parámetros del modelo que se utilizan son
constantes.
295
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Adaptación. Calcula los parámetros óptimos característicos del modelo, Vp, de forma
que los valores estimados por el modelo sean lo más parecidos posibles a los valores
reales medidos en la planta.
La principal característica de esta estructura es la interacción que se produce entre todas
las capas en diferentes instantes de tiempo, siendo la escala de tiempo menor cuanto más
cercana se encuentre la capa al sistema a controlar. Por esta razón, los enlaces entre las
últimas capas se muestran en línea discontinua. Este tipo de estructuras jerárquicas de
control se pueden aplicar en cualquier campo, aunque generalmente se encuentran
asociadas a procesos industriales como, por ejemplo, en la división del petróleo en sus
distintos componentes ([Loe99a], [Loe99b], [Kas00]), control del oxígeno disuelto en
procesos de depuración de agua [Brd02], producción de distintos componentes químicos
en reactores y columnas de destilación ([Sko00a], [Sko00b], [Lar00], [Zhe99], [Pra97],
[Pra96]), líneas de fabricación de semiconductores [Var00], fertirrigación de cultivos en
invernadero [Sig00c], etc. Siempre que exista una división de funciones en la toma de
decisiones de un determinado sistema se puede utilizar un sistema jerárquico multicapa.
Este concepto de multicapa también se puede aplicar a sistemas donde el horizonte de la
dinámica de optimización se divide en varias etapas, como se puede observar en la
figura 7.1.b. Cada una de las etapas considera un horizonte de tiempo diferente, siendo
la capa superior la que posee un horizonte mas largo. El modelo que se utiliza en cada
capa, o el grado de detalle del sistema a controlar, es diferente. Este tipo de estructura se
utiliza en los ámbitos de administración y gestión de procesos de producción.
Adaptación
Largo plazo
Vp
Optimización
Medio plazo
Vcy
Vcy
Regulación
Corto plazo
Vu
Vu
Sistema a controlar
Sistema a controlar
Vy
Vy
a. Jerarquía funcional
b. Multicapa formada por separación de horizontes
Fig. 7.1. Control jerárquico multicapa
Estos sistemas son diseñados para calcular una ley de control, Vu, que no es
estrictamente la óptima ya que las acciones de las capas superiores son discretas. Es de
esperar que el coste computacional total de realizar todos los cálculos de control sea
menor cuando se utiliza una estructura jerárquica que cuando se utiliza un algoritmo de
optimización directamente para calcular la ley de control sin dividir la toma de
decisiones. El problema esencial es alcanzar un compromiso entre la pérdida de
optimalidad y los costes computacionales del control.
296
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Control multinivel. Cada uno de los elementos del sistema a controlar presenta objetivos
concretos, por lo que hay que introducir controladores locales, cuya acción es
coordinada por un sistema controlador supervisor, tal y como se muestra en la figura 7.2.
Ha sido inspirado en los
Coordinación
métodos de descomposición y
coordinación desarrollados en
la programación matemática.
Optimiza 1 ... Optimiza n
Se
puede
utilizar
esta
estructura tanto en bucle
abierto como cerrado, aunque
Control 1
es preferible la utilización de
Sistema a
realimentación para la toma de
...
controlar
decisiones, por lo que las
unidades de optimización y
Control n
coordinación
utilizan
la
información en forma de
medidas reales o estimaciones
de modelos matemáticos.
Fig. 7.2. Control jerárquico multinivel
En ambos puntos de vista (control multicapa y multinivel), la característica común es que
existen distintas unidades de toma de decisiones en la estructura, pero sólo algunas de ellas
tienen un acceso directo al sistema a controlar. El resto de unidades se encuentran en un
nivel superior de la jerarquía y definen las tareas que deben llevar a cabo las unidades
inferiores, además de coordinarlas, aunque no anulan sus funciones. Por tanto, siempre que
exista una división en el proceso de toma de decisiones, se debe utilizar una estructura de
control jerárquico.
El problema que se está estudiando en la presente tesis, se adapta mejor al problema de
control jerárquico multicapa, por lo que a continuación se tratarán los aspectos más
característicos de este tipo de sistemas y, más concretamente, el control jerárquico
multicapa y multihorizonte. En los problemas de control óptimo o predictivo, la toma de
decisiones en un instante de tiempo, τ, requiere el
conocimiento o la predicción de los estados del
Largo plazo
sistema en el futuro, así como las acciones de
control que se han realizado en el pasado. La
Vu,largo_plazo
Vcy2
ventana temporal futura en la que es preciso
predecir los estados se denomina horizonte de
Medio plazo
optimización, que se divide cuando se utiliza una
estructura de control jerárquico como se muestra
Vcy1
Vu,medio_plazo
en la figura 7.3. Las distintas capas resuelven un
problema de optimización con un horizonte
Corto plazo
diferente, de forma que a la capa inmediatamente
superior le indica las trayectorias o consignas que
Vu
Vu,actual
debe seguir para optimizar un determinado criterio
y la capa inferior determina las señales de control.
Sistema a controlar
Vy
Evidentemente, es necesario conocer o predecir el
Vp
estado que alcanza en cada uno de los horizontes.
Fig. 7.3. Sistema multicapa multihorizonte
297
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Formalmente, considérese un sistema dinámico descrito por la siguiente ecuación donde Vy
es la variable de salida, Vp las perturbaciones y Vu las señales de control:
dVy
dτ
(
= f Vy ,V p ,Vu
)
(7.1)
en el que se desea maximizar el beneficio neto Jy de la producción de la variable de salida
en un instante final, τf:
τ
max ⎛⎜ f J y Vy ,V p ,Vu ⎞⎟
(7.2)
(
⎝∫ 0
)⎠
Se puede dividir el problema en varias capas (por ejemplo, tres) de forma que en la capa
superior, se resuelva el problema de optimización a largo plazo:
(
)
τf
max ⎛⎜ ∫ J y3 Vy3 ,Vp3 ,Vu3 ⎞⎟
⎝ 0
⎠
(7.3)
donde Vy3 ,Vu3 ,Vp3 son simplificaciones del estado del sistema descrito por Vy, Vu y Vp de las
señales de control y las perturbaciones respectivamente y J y3 es una relación que representa
el beneficio en función de las variables simplificadas. La solución de este problema
determina, entre otras cosas, el estado de la variable a controlar, Vy3 , en el instante final del
siguiente horizonte de control, τ 'f , que representa el objetivo para la siguiente capa del
sistema jerárquico correspondiente al medio plazo:
τf
max ⎛⎜ ∫ J y2 (Vy2 ,Vp2 ,Vu2 )⎞⎟
⎝ 0
⎠
'
(7.4)
donde Vy2 ,Vu2 ,Vp2 son dados por modelos o medidas y el estado al que se debe llegar en el
instante final del siguiente horizonte de control, Vy2 (τ 'f ) , viene dado por el objetivo estimado
en la capa superior Vy3 (τ 'f ) y J y2 es una relación que representa el beneficio en función de las
variables simplificadas en esta capa. Este estado final no puede ser introducido
directamente, ya que el vector Vy2 tiene una dimensión menor que Vy3 , de acuerdo con el
principio del aumento de detalle en el modelo conforme se desciende una capa en la
jerarquía, por lo que se debe introducir una función f 2 (en realidad se trata de un modelo
simplificado) de forma que:
f 2 (Vy2 (τ 'f )) = Vy3 (τ 'f )
(7.5)
La solución de este problema determina el estado de la variable a controlar, Vy2 , en el
instante final del siguiente horizonte de control, τ 'f' , que representa el objetivo para la
siguiente capa del sistema jerárquico correspondiente al corto plazo:
τf
max ⎛⎜ ∫ J 1y (Vy1,Vp1,Vu1 )⎞⎟
⎝ 0
⎠
''
(7.6)
donde Vy1 ,Vu1,Vp1 son dados por modelos o medidas y el estado al que se debe llegar en el
instante final del siguiente horizonte de control, Vy1 (τ 'f' ) , viene dado por el objetivo estimado
en la capa superior Vy2 (τ 'f' ) y J 1y es una relación que representa el beneficio en función de las
variables en esta capa que coincide con el problema original.
298
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Al igual que en la capa superior, este estado final no puede ser introducido directamente,
por lo que se debe introducir una función f 1 de forma que:
f 1 (Vy1 (τ 'f' )) = Vy2 (τ 'f' )
(7.7)
Este último problema de optimización determina las acciones de control, Vu, que deben
aplicarse al sistema real. Evidentemente, se supone que τ f > τ 'f > τ 'f' . Si no se utilizaran
modelos simplificados, la estructura multicapa podría hacerse menos sensible, en el sentido
de que si se usara el modelo completo en la capa superior, ésta determinaría las señales de
control Vu1 para todo el horizonte de optimización [0, τf], por lo que las capas inferiores sólo
repetirían los cálculos. Como se puede deducir, se trata de una optimización en bucle
abierto, por lo que un aspecto interesante a considerar es la introducción de realimentación
en el proceso de forma que se mejore el control del sistema. Se podría utilizar el valor
Vy1 (τ 'f' ) como condición inicial para la capa intermedia, es decir, en el instante de tiempo τ 'f'
se resuelve el problema de optimización de la siguiente capa con condición inicial:
Vy2 (τ 'f' ) = f 1(Vy1(τ 'f' ))
(7.8)
repitiendo el proceso en los siguientes instantes de tiempo ( τ =2 τ 'f' , τ =3 τ 'f' , ...).
Evidentemente, esta realimentación debe transmitirse hacia las capas superiores del sistema
jerárquico. Así, al utilizar la realimentación, se produce una optimización repetitiva ya que
la solución del problema de optimización en bucle abierto se repite varias veces en el curso
de la operación del sistema de control. Aún así, con el sistema de control jerárquico se
reduce la frecuencia de la optimización y, por tanto, los esfuerzos computacionales para
tomar las decisiones de control. En esta tesis, además de esta aproximación, se utiliza una
estrategia de horizonte deslizante para tener en cuenta modificaciones en las perturbaciones
futuras y el hecho que se utilicen horizontes de predicción finitos.
Un caso particular y muy extendido de este tipo de estructuras es el control jerárquico de
dos capas, tal y como se muestra en la figura 7.4:
• Capa de control directo. Su misión es calcular el estado de los sistemas de actuación, Vu,
para que la variable de salida a controlar, Vy, alcance la consigna deseada, Vcy.
• Capa de optimización. Calcula la trayectoria que debe seguir la variable de salida para
que se maximice un determinado criterio, es decir, proporciona la consigna a la capa
inferior de control directo.
Perturbaciones
Optimizador
+
-
Vc,y
Controlador
directo
Vu
Vy
Sistema a controlar
Fig. 7.4. Sistema jerárquico de dos capas
299
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Como se puede observar, se trata de un problema de optimización de consignas donde se ha
producido una división de funciones, en la que el optimizador determina dónde ir y el
controlador directo calcula cómo ir [Pra98]. Por tanto, para resolver el problema hay que
considerar los siguientes aspectos:
• Estudio del sistema para determinar qué variables constituyen los grados de libertad del
proceso y de qué tipo son (fijadas por consideraciones tecnológicas o susceptibles de ser
manipuladas en un determinado rango).
• Formulación del problema de optimización para establecer una función de coste
relacionada con las variables de decisión a través de un modelo, además de los
condicionantes de rangos permitidos de las variables, etc., es decir, las restricciones de la
optimización para establecer la zona de factibilidad del problema donde deben
encontrarse las soluciones.
• Optimización de la función de coste respecto a los grados de libertad considerando las
restricciones impuestas por el proceso. Para ello, se debe utilizar el algoritmo de
optimización más apropiado al problema, desde programación lineal a búsqueda con
algoritmos evolutivos. Con respecto a este punto, la optimización estática o en régimen
permanente es una práctica habitual. Excluyendo los casos donde la solución exacta para
el estado óptimo es una constante, la optimización estática proporciona una buena
solución. Se asume que la variable de salida Vy es constante durante determinados
periodos de tiempo, por lo que la descripción del sistema dado en la ecuación (7.1) se
convierte en:
0 = f Vy ,V p ,Vu
(7.9)
(
)
simplificando el problema de la optimización en cada uno de los intervalos donde se
considera esta aproximación. La importancia de la sustitución del problema de
optimización dinámica original por un problema de optimización estática casi
equivalente, radica en el coste computacional, ya que siempre es necesario un mayor
esfuerzo en los problemas dinámicos. Existen problemas donde la optimización
dinámica no se puede resolver en un tiempo determinado, por lo que se utiliza la
aproximación considerada, al igual que cuando no se conoce perfectamente la dinámica
de la planta y se puede establecer algún modelo de balance estacionario que la describa.
Es necesario estudiar esta posibilidad al diseñar este tipo de sistemas jerárquicos para
minimizar el coste computacional y, por tanto, el tiempo de respuesta.
• Modelado de los procesos que encuentran involucrados. Como se ha descrito en el
problema de optimización, es necesario disponer de modelos que estimen
convenientemente el comportamiento del sistema a controlar, ya que en ellos se basan
las predicciones de los futuros estados en función de las entradas anteriores y las futuras.
• Gestión de la información entre las capas del sistema jerárquico. Como se observa en la
figura 7.1, entre las distintas capas se producen dos procesos independientes: decisión y
observación. Hasta ahora, sólo se ha tratado el problema de la toma de decisiones de
control, pero los procesos de observación son importantes ya que captan la información
del sistema a controlar y de su entorno, y la envían al resto de capas para que puedan
realizar sus tareas. El problema fundamental es determinar qué información hay que
enviar, a quién y cuando. Por tanto, cuando se diseñe un sistema de control jerárquico,
hay que considerar convenientemente este aspecto.
300
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Una solución particular de este problema la proporciona el control predictivo ya que posee
la propiedad de tener en cuenta la futura evolución de las consignas durante la selección de
la señal de control. En [Bem97] se propone un sistema de gestión de consignas (reference
governors) basado en las ideas del control predictivo. Esta unidad proporciona una
trayectoria de referencia que es la entrada de un sistema de control primario que ha sido
diseñado para estabilizar la planta y proporcionar un buen comportamiento de seguimiento
de consignas frente a perturbaciones en ausencia de restricciones. El módulo predictivo
hace que se cumplan las restricciones modificando, cuando es necesario, la consigna del
controlador de la capa inferior. Al contrario que las ideas básicas del control predictivo que
intentan resolver el problema de la estabilización y seguimiento de consignas sujeto a
determinadas restricciones, se introduce una nueva filosofía basada en la separación de
funciones. De esta forma, se puede utilizar esta idea para el problema de control jerárquico
ya que la capa que genera las consignas se puede implementar mediante un controlador
predictivo. Ideas parecidas ya han sido aplicadas en el control de procesos químicos como
en [Pra96] o [Kas00].
En base a esta introducción de control jerárquico multicapa con varios horizontes, se puede
deducir que esta técnica es directamente aplicable al problema que se ha pretendido
resolver en la presente tesis, sobre el control del crecimiento de cultivos bajo invernadero
en función de las variables climáticas. En este capítulo se describen las soluciones
aportadas por otros autores, así como la solución desarrollada junto con los resultados
obtenidos. Por último, se muestran las conclusiones del análisis de los resultados y los
futuros trabajos a realizar en este campo.
7.2.
ESTADO ACTUAL DE LOS ESTUDIOS DEL CONTROL DEL
CRECIMIENTO DE CULTIVOS BAJO INVERNADERO
7.2.1. Control del crecimiento de cultivos en invernadero como sistema jerárquico
El hecho de cultivar en invernadero se debe a que se busca mejorar o crear las condiciones
favorables para las plantas (clima), de forma que el agricultor o empresario obtenga un
máximo beneficio de la producción. Por tanto, como ya propusieron algunos autores
[Udi83], [Bot83] o [Tan93b], se puede considerar como un sistema compuesto por tres
elementos: clima, cultivo y mercado, cada uno con un horizonte de control distinto:
minutos, horas y meses respectivamente, por lo que se puede resolver como un problema de
control jerárquico multicapa y multihorizonte donde se distinguen las siguientes capas:
• Capa inferior: control del clima. En base a unas consignas de las variables climáticas
que afectan al crecimiento de los cultivos, es necesario la utilización de controladores
que sean capaces de seguir esas trayectorias calculadas en una capa superior de la
estructura jerárquica.
• Capa media: control del crecimiento del cultivo. En función de la producción esperada o
de la fecha de recolección, se resuelve el problema de optimización que maximice una
función objetivo que representa el beneficio obtenido (relación venta de la producción
con el coste asociado para obtenerla) en función de las variables climáticas que afectan
al crecimiento de las plantas. Su salida corresponde a las consignas que deben seguir las
variables climáticas y que el controlador del nivel inferior debe ser capaz de conseguir.
301
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Esta capa se puede dividir en los siguientes dos subniveles:
Control del crecimiento a corto plazo. En un horizonte temporal de horas, se
producen procesos fisiológicos en las plantas, como la fotosíntesis y la respiración,
que condicionan el crecimiento de las mismas (consulte la figura 5.12 donde se
muestran las dos escalas de tiempo de los procesos relacionados con el cultivo). Las
consignas estimadas en la capa superior de control táctico (descrito posteriormente),
que se calculan en base a respuesta del cultivo a largo plazo, pueden ser modificadas
por los agricultores o técnicos según su propia experiencia y el aspecto y rendimiento
del cultivo [Bai98] para optimizar los procesos fisiológicos de corto plazo. Lo ideal
sería cerrar el bucle y modificar las consignas de forma automática. Se puede utilizar
el enfoque speaking plant propuesto en 1978 [Udi83] que trata de medir directamente
la respuesta de las plantas. Hashimoto y colaboradores identificaron modelos
empíricos para determinar las respuestas de las plantas a corto plazo (horas) frente a
los cambios producidos en el ambiente [Has81]. Se estudió el efecto de la
temperatura de la hoja sobre la apertura estomática de forma que se maximice la
absorción de CO2 y la influencia de la radiación y la concentración de CO2 en la
fotosíntesis ([Has85], [Has89]).
Control del crecimiento a largo plazo. Se refiere a las decisiones de planificación de
la producción global del cultivo, basadas en las tasas de crecimiento y desarrollo
vegetativo obtenidas en experiencias para establecer las consignas de las variables
climáticas específicas para cada cultivo. Las variables que se tienen en cuenta son la
producción de materia seca y de hojas, que corresponden a los procesos con escala de
tiempo más lenta en el crecimiento del cultivo del orden de días o semanas (figura
5.12). En base a una fecha de recolección o una trayectoria de crecimiento deseada, se
calculan las trayectorias que deben seguir las variables climáticas.
• Capa superior: control táctico. Durante la campaña agrícola se pueden producir
situaciones especiales que desvíen el crecimiento del cultivo de la trayectoria deseada o
bien cambios inesperados en el mercado; por tanto, se resuelve otro problema de
optimización en el que se toman decisiones sobre las consecuencias de modificar las
consignas de las variables climáticas controladas para modificar fechas de recolección o
paliar situaciones climáticas específicas de perturbación que no se habían considerado
como campañas muy lluviosas o épocas de helada. Los criterios que se deben
contemplar en este nivel son la producción final (kilogramos finales de producción), la
calidad del cultivo (sobre todo en campañas de ciclo largo hay que mantener al cultivo
en buenas condiciones para la producción, por lo que hay que mantener un balance
interno adecuado entre el crecimiento vegetativo (raíces, tallos y hojas) y reproductivo
(flores y frutos) que se consigue mediante la temperatura), calidad de los frutos (peso,
color, sabor, etc.), fecha de recolección (el mercado puede mostrar patrones predecibles
como la flor de pascua en Navidad, por lo que la fecha de recolección es clave para el
rendimiento final), costes de producción (lo ideal es que sean mínimos) y la prevención
de riesgos (el cultivo se encuentra sometido a continuos riesgos que dañan la producción
como plagas, enfermedades o desordenes fisiológicos, que se pueden evitar, en cierta
medida, con el control del clima) [Cha93].
302
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Una característica de algunos de estos criterios es que no se pueden cuantificar en
términos económicos de una forma exacta, aunque sí existen situaciones ideales o
inaceptables, por lo que se deben obviar algunos de ellos o bien considerarlos como
restricciones para definir el espacio de búsqueda del problema de optimización de forma
que no se produzcan soluciones que lleven al clima interior del invernadero a esos
estados inaceptables para alguno de los criterios.
La figura 7.5 muestra esquemáticamente la estructura simplificada del controlador
jerárquico multicapa del crecimiento de cultivos bajo invernadero en función de las
condiciones climáticas en su interior. Evidentemente, se podrían considerar algunas capas
superiores de ámbito estratégico, con una escala de tiempo de años, similares a las que se
utilizan en la gestión de empresas, donde se tomen decisiones acerca de inversión de capital
en nuevos sistemas de actuación climática, cambios de estructura e, incluso, tipo o variedad
de cultivo, es decir, para políticas de largo plazo. Este nivel no se va a tratar en la presente
tesis ya que se encuentra fuera de los objetivos iniciales planteados, al igual que la capa de
nivel superior (campaña) debido a la falta de modelos de mercado y evolución de la
demanda en el sector agrícola del sudeste de España, aunque se propone como futuro
trabajo a realizar.
Capa inferior
(segundos/minutos)
Capa intermedia 1
(horas)
Capa intermedia 2
(meses)
Capa superior
(campaña)
Invernadero
Plantas
Cultivo
Mercado
Modelos
clima
Modelos
Fotosíntesis
respiración
Modelos
crecimiento
Modelos
mercado
Control
clima
Control
planta
Control
cultivo
Control
táctico
Usuario
Fig. 7.5. Control jerárquico multicapa del crecimiento de un cultivo bajo invernadero
7.2.2. Estado actual del control jerárquico del crecimiento de cultivos bajo invernadero
Basándose en la anterior estructura de control jerárquico existen un número reducido de
estudios en la bibliografía en los que se suele tratar el problema de optimización de la
campaña (desde la capa intermedia 2), es decir, calcular las consignas de las variables
climáticas para optimizar un criterio relacionado con el crecimiento del cultivo. Como se ha
comentado anteriormente, no se suele tratar el problema del control táctico por la falta de
modelos de mercado y, aunque existen ciertos patrones en el comportamiento de la
demanda de productos, es difícil determinar cuándo se producen los instantes en los que los
precios son máximos. A continuación se describirá la solución que distintos grupos de
investigación han propuesto ante este problema:
303
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Universidad de Ehime y Tokio (Japón). Se propone un enfoque cuyo objetivo es
encontrar las trayectorias de las variables climáticas y de fertirrigación de forma que se
maximice la producción y que el cultivo permanezca en el mejor estado posible, sin
considerar los costes asociados [Mor00a], [Has01]. Parten de un estudio previo descrito
en [Mor93a] y [Mor95] donde se controlan dos procesos fisiológicos de las plantas: el
estado hídrico (a partir de la medida del diámetro del tallo) en función de la radiación, y
la fotosíntesis en función del drenaje y el aporte de nutrientes (conductividad eléctrica).
Los ensayos se realizaron para cultivos de tomate y tabaco sin suelo (hidroponía), con
condiciones ambientales constantes de temperatura y humedad. Se utiliza un controlador
óptimo con un filtro de Kalman para controlar el estado hídrico de las plantas que estima
las consignas de radiación y un controlador óptimo inteligente en el que una red
neuronal se usa como modelo para la identificación de la fotosíntesis en función del
drenaje y aporte de la solución de nutrientes del cultivo hidropónico con un algoritmo
genético como optimizador para estimar las consignas del drenaje. Es una arquitectura
jerárquica a dos niveles que corresponde con la capa inferior de control y la de
optimización de los procesos de corto plazo (horas) que se producen en las plantas. Este
sistema se ha ido mejorando añadiéndose en la capa superior un sistema experto que
determina las consignas adecuadas a lo largo de todo el crecimiento, mientras que el
optimizador neuronal/genético descrito anteriormente modifica esas consignas en
determinadas fases importantes del crecimiento en base a las respuestas de las plantas
(speaking plants) [Mor00a]. Como controlador de la primera capa, se propone la
utilización de técnicas borrosas proporcionando buenos resultados [Mor00b]. Este
estudio se ha realizado para la primera fase de crecimiento del cultivo, correspondiente a
los primeros 30 días y como se puede observar trata el problema del crecimiento tanto
con variables climáticas como de fertirrigación, aunque hacen mayor hincapié en estas
últimas.
• Universidad de Haifa (Israel). Se basan en un un enfoque en el que se intenta maximizar
el rendimiento de la producción, entendido como la diferencia entre los ingresos debidos
a la venta del producto y los costes debido al funcionamiento de los sistemas de
actuación climáticos a lo largo de toda la campaña. En [Seg93] se propone el estudio del
control del crecimiento de un cultivo de tomate en un invernadero equipado con
ventilación forzada (con una capacidad de enfriamiento limitada) y un sistema de
calefacción (con una capacidad de aporte de calor ilimitada). Se trata de un sistema de
control jerárquico a dos niveles, aunque sólo se estudia la capa intermedia para la
determinación de las consignas en función de la fecha de recolección, sin considerar la
respuesta a corto plazo de las plantas. Las condiciones climáticas futuras y la evolución
de los precios se asumen conocidas a lo largo de toda la campaña. Se determinan las
consignas diurnas óptimas para cada día independientemente, mientras que la consigna
nocturna se considera constante. El criterio de optimización que se utiliza es maximizar
la relación entre los ingresos de la venta del producto y los costes debido a la
calefacción, ventilación y alquiler del invernadero o la amortización de compra. Se
utilizan dos métodos de optimización. El primero de ellos se basa en que se conocen las
condiciones climáticas, así como las políticas de control razonables futuras (heurística
en gran medida), por lo que se prueban todas ellas en simulación y se selecciona la que
maximice el criterio anterior. Para implementarlo se utilizan redes de neuronas
artificiales que determinan las consignas diurnas óptimas.
304
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
El segundo de los métodos se basa en el Principio del Máximo de Pontryagin. La idea
general es descomponer el problema de la optimización sobre el horizonte de
optimización en la solución de problemas de decisión en etapas o estáticos que se
pueden resolver de forma analítica para cada espacio de tiempo considerado. El
procedimiento consiste en maximizar la Hamiltoniana, VHm, respecto a las entradas de
control, Vu, teniendo en cuenta los estados del cultivo y del clima del invernadero, Vy:
(
)
VHm( Vy ,Vu ,Vλ ) = f L Vy ,Vu + Vλ ( τ ) f λ ( Vy ,Vu ,Vλ )
(7.10)
donde el vector Vλ(τ) se denomina función de coestados, que representa el valor
marginal asociado a la unidad de salida del sistema producida [euros por kilogramo de
materia seca] a lo largo de la campaña. La parte derecha de la ecuación (7.10) puede
interpretarse de la siguiente forma: el primer término representa el valor actual del
beneficio neto, mientras que el segundo se corresponde con la velocidad a la cual se
crean las futuras ganancias. Un buen equilibrio entre ambos términos se mantiene a
través de las variables de coestado. Por ejemplo, durante el crecimiento vegetativo de un
cultivo de tomate, el valor de la función fL es negativo ya que no se producen frutos que
puedan ser vendidos, aunque esto no implica que no se deben utilizar los sistemas de
actuación ya que su efecto produce un crecimiento de las hojas que, en un determinado
instante del crecimiento, aportarán los carbohidratos a los futuros frutos que se
produzcan. Durante los últimos días de la campaña, no se justifica la inversión ya que el
efecto de las acciones actuales no van a producir nuevos frutos, por lo que alguna de las
variables de coestado deben acercarse a valores pequeños o nulos en esos instantes. La
velocidad de cambio de las variables de coestado debe satisfacer la ecuación:
∂V
dVλ
=− H
dτ
∂Vy
(7.11)
la cual muestra que si la Hamiltoniana no es un función explícita de una determinada
variable de salida, la correspondiente variable de coestado permanece constante con el
tiempo. Como se puede observar, las variables de coestado son el concepto básico del
Principio de Pontryagin, y pueden ser interpretadas en términos económicos de forma
que se utilicen para determinar estrategias de control local para periodos de tiempo
prolongados [Seg96a].
Los resultados obtenidos con cada uno de los dos métodos fueron preliminares y en
simulación, pretendiéndose sólo demostrar la validez de la arquitectura propuesta y la
aplicabilidad de los métodos de optimización propuestos. En [Ios98] proponen una
solución completa óptima basada en la misma idea, con un horizonte de optimización de
una hora utilizando modelos en estado cuasi-estacionario, para evitar problemas locales
como la condensación en la cubierta. El coestado de la materia seca se ajusta para que
permanezca constante a lo largo de toda la campaña, o por lo menos que no se presenten
las tendencias descendentes observadas en estudios previos. Además, se determinan
unas restricciones de temperatura, humedad y concentración de CO2, que limitan el
espacio de búsqueda. Se utilizaron datos climáticos históricos de Ohio (clima frío) y de
Florida (clima cálido) y se obtuvieron resultados aceptables en simulación. Un trabajo
adicional [Seg98] estudia la posibilidad de cambiar la política de control óptimo cuando
el cultivo cambia de un estado vegetativo a uno reproductivo y los cambios que se deben
producir en el coestado de producción de materia seca.
305
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Otro enfoque para la generación de consignas es imitar la acción que realizan los
agricultores según su propia experiencia [Seg96a]. En base a esta idea, se propuso una
red de neuronas artificiales que en función de la información meteorológica y el estado
de crecimiento proporciona las consignas de temperatura de los siguientes días,
generando resultados similares a una optimización basada en modelos descritos
anteriormente. Además, en presencia de enfermedades y su vigor, se proponen
modificaciones de las trayectorias para las variables climáticas, implementando un
sistemas experto [Seg97].
• Universidad de Wageningen (Holanda). Actualmente, forman el grupo puntero en el
control óptimo de cultivos en función de las condiciones climáticas en el invernadero.
Los primeros trabajos incluyeron las propuestas de la arquitectura jerárquica de Bot
[Bot83] y Udink [Udi83], estudiando los aspectos de modelado y control (de la capa
inferior) de las variables climáticas, obteniendo en 1994 una primera aproximación al
control óptimo jerárquico para el cultivo de la lechuga basado en el principio de
Pontryagin [Hen94]. Tras estudiar la influencia de las dos escalas de tiempo (clima y
cultivo) [Tap93], se proponen dos enfoques de división jerárquica. En el primero, la
capa superior calcula los coestados y las trayectorias del crecimiento a lo largo de la
campaña y los envía directamente al controlador de clima de la capa inferior que calcula
directamente las señales de control utilizando un algoritmo de control óptimo con
horizonte deslizante (RHOC), con una función de coste en la que se tienen en cuenta
criterios económicos de venta de productos y coste de combustible para calefacción y
CO2 puro. En el segundo de ellos, la capa superior calcula directamente las consignas
que deben seguir las variables climáticas, utilizando un controlador de realimentación
con compensación por adelanto. Con ambos esquemas se obtienen resultados aceptables
en simulación aunque cada uno presenta una serie de ventajas e inconvenientes en la
implementación y en los resultados.
En base a estos resultados se planteó el estudio del mismo problema para cultivos con
frutos como el tomate, ya que con la lechuga toda la planta es comercial. Los resultados
finales se exponen en [Tap00]. Utiliza el primero de los enfoques jerárquicos, es decir,
en primer lugar, se lleva a cabo una optimización sobre un periodo de cultivo
suponiendo unas condiciones ambientales medias y utilizando un modelo de invernadero
estático. En base a la Hamiltoniana, se asocia a cada estado del cultivo (ej. peso seco) un
coestado que depende del tiempo cuyo significado se describe en [Str02]. En segundo
lugar, y en la capa inferior, se utilizan los coestados obtenidos del problema estático de
optimización a largo plazo considerándolos como precios que varían dinámicamente en
una función objetivo económica similar a la utilizada en la optimización realizada en el
paso primero (sobre un periodo de cultivo), pero teniendo ahora en cuenta la dinámica
del invernadero y las restricciones dinámicas debidas a condiciones de operación y
perturbaciones. El criterio de optimización tiene en cuenta aspectos económicos
(ingresos y gastos), unas penalizaciones cuando se violen las restricciones blandas
(sobre todo de humedad relativa) y el valor de la inversión en biomasa, que proporciona
el nexo entre la optimización a largo plazo y a corto plazo, de modo que previene que la
optimización a corto plazo ignore la importancia de invertir en la formación de biomasa
para garantizar la producción final.
306
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
La optimización a corto plazo se implementa mediante una estrategia de horizonte
deslizante en la que cada minuto se obtiene una trayectoria de las señales de control con
un horizonte de una hora, utilizando una predicción del clima suponiéndola constante en
el horizonte e igual a la medida de las variables climáticas exteriores en el instante de
muestreo en el que empieza la optimización ([Str99], [Tap96b]). Este esquema se ha
implementado en la práctica mostrando que es factible su utilización [Tap96a]. Aunque
las trayectorias obtenidas fueron diferentes a las que se utilizan generalmente en el
cultivo bajo invernadero, no se han observado efectos negativos ni en el estado de
cultivo ni en los tomates recolectados. Aún así, los efectos económicos son difíciles de
evaluar con las pocas experiencias realizadas, y sólo se puede probar su validez
operacional con una extensiva aplicación de estas técnicas en instalaciones comerciales
reales [Str00].
Estos tres grupos son los que más desarrollada presentan la investigación aunque se han
realizado otros estudios centrados en problemas particulares como los siguientes:
• Universidad Nacional de San Juan (Argentina). En [Sch98] se describe el desarrollo de
un algoritmo de Programación Dinámica Regresiva con interpolaciones lineales para
sistemas con una variable de estado, con el fin de obtener las trayectorias óptimas de la
variable de decisión. Este sistema se utiliza con un modelo dinámico no lineal de tomate
considerando restricciones para la producción de tandas de plántulas con características
predeterminadas. Sólo se presenta la capa superior del sistema jerárquico, que calcula la
trayectoria óptima de temperatura que lleva el peso seco del cultivo desde su valor
inicial hasta un valor final deseado en un tiempo determinado. Se presentan resultados
de simulación para condiciones climáticas constantes y en la fase de crecimiento desde
la germinación hasta que se transplanta (aproximadamente un mes). La principal
conclusión es que la programación dinámica es una herramienta útil en este tipo de
problemas, ya que facilita el tratamiento de modelos no lineales, la introducción de
restricciones y la fijación de las condiciones iniciales y finales.
• Silsoe Research Institute (Reino Unido). En 1994 proponen un desarrollo de una
estrategia de control jerárquico a tres niveles para maximizar el beneficio de un cultivo
de tomate [Bai94]. Utilizan modelos físicos que describen las variables climáticas del
invernadero, modelos biológicos para predecir la influencia del cultivo sobre el clima y
modelos económicos que proporcionan los costes y los valores del cultivo en el
mercado. Se plantea el problema del ahorro en el combustible que utiliza la calefacción
en base a mantener la integral térmica a lo largo de un determinado intervalo de tiempo
o utilizando mallas térmicas y el control óptimo de la concentración de CO2. Este
planteamiento consiste en intentar ahorrar energía (eléctrica y combustible) así como
CO2 mientras se mantiene la producción del cultivo, por ejemplo, para minimizar costes
bajo restricciones de producción o minimizar los recursos necesarios para producir una
unidad de producto. Este enfoque trata de explotar la dinámica de las condiciones
climáticas exteriores (velocidad de viento, radiación solar, etc.) para ahorrar energía,
dejando que las variables climáticas del interior del invernadero sufran modificaciones
permitidas respecto a sus referencias óptimas. Se basa en el supuesto de que el cultivo
amortigua las fluctuaciones ambientales, ya que realmente interesa que se aseguren
ciertas condiciones medias, como la integral de la temperatura durante un periodo de
tiempo.
307
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
En 1996 presentan resultados sobre el control óptimo de la temperatura utilizando la
calefacción para mantener la integral de temperatura durante 24 horas proporcionando
buenos resultados [Cha96]. Actualmente, este grupo ha planteado el sistema jerárquico y
la solución de algunos de los problemas asociados, aunque no se muestran resultados
sobre optimización de consignas a lo largo de una campaña, ni descripciones detalladas
de algunos de los aspectos importantes.
• Institut National de la Recherche Agronomique (Francia). Analizan el problema de la
determinación de las consignas de las variables climáticas en el proceso de producción
en un invernadero. Sobre un espacio de búsqueda determinado por el conocimiento de
los productores, el crecimiento del cultivo, el invernadero, la predicción meteorológica y
otros factores adicionales, con una serie de restricciones suaves o blandas, desarrollan
una aplicación basada en técnicas de inteligencia artificial (como la lógica borrosa) para
encontrar las consignas climáticas óptimas en un horizonte de 24 horas, es decir, para la
dinámica rápida del cultivo ([Mar93b], [Mar93c]) .
• Universidad de McGill-Universidad de Laval (Canadá). Se presenta una estrategia
jerárquica a dos niveles para predecir la dinámica de las variables climáticas interiores
(radiación, temperatura, concentración de CO2 y humedad) que optimizan los beneficios
de un cultivo de tomate bajo invernadero. Se calcula la producción en función de las
variables climáticas interiores y los costes de energía (calefacción y deshumidificación)
en función de las condiciones climáticas exteriores obtenidas por predicciones
meteorológicas. Utilizando el Principio de Pontryagin, obtienen las consignas óptimas
de las variables que optimizan la diferencias de los cálculos anteriores [Tri01a].
Actualmente, el problema se tiene planteado y sólo se ha publicado resultados acerca de
la validación de los modelos climáticos utilizados [Tri01b].
Como se puede observar el control del crecimiento de un cultivo bajo invernadero es un
problema abierto que aún no se ha resuelto, abordándose aspectos particulares del mismo.
Únicamente el grupo de la Universidad de Wageningen ha propuesto una solución
completa, aunque no se han podido validar todas las conclusiones con los datos reales
obtenidos en las experiencias realizadas. En el siguiente apartado se describe la solución
aportada en la presente tesis adaptada a las condiciones particulares del sector agrícola del
sudeste de España, que son completamente distintas a las zonas donde se han realizado
experiencias similares, tanto en condiciones climáticas como en estructuras de invernadero
y variedades de cultivos.
7.3. SISTEMA DE CONTROL JERARQUICO PROPUESTO
7.3.1. Arquitectura de control propuesta y algoritmo general de funcionamiento
7.3.1.1. Definición del problema e hipótesis generales de partida
El problema del control del crecimiento de cultivos bajo invernadero basándose en las
condiciones climáticas del interior presenta distintas variantes en función de los aspectos a
tratar, del enfoque y de los objetivos finales que se deseen obtener. En concreto, el
problema que se plantea resolver en la presente tesis parte de las siguientes hipótesis
generales:
308
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• La recolección de la producción se realiza una única vez al final de la campaña agrícola
en cuestión. Aunque en la práctica se produce una recolección continua a lo largo de la
estación, la extrapolación del problema de una sola fecha de recolección a una
continuada es muy sencilla y lógica, como se mostrará a lo largo de este capítulo.
• La variable a controlar que describe el crecimiento del cultivo es el peso seco global de
la planta, que incluye tallo, hojas y frutos. Esto es debido a que se utiliza un modelo
simplificado para simular el crecimiento del cultivo del tomate (véase el capítulo 5).
Existen distintos estudios en los que se demuestra que al final de una campaña, la
fracción de la materia seca total que corresponde a los frutos de tomate es
aproximadamente un 60 %, como se indica en [Heu96a] y [Heu96b]. En los ensayos que
se realizaron a este respecto en el marco del proyecto CAMED, se corroboraron estos
hechos obteniéndose resultados como los que se incluyen en la tabla 7.1, donde se
muestra el porcentaje del peso seco total de la planta que corresponde a los frutos. Por
tanto, para los criterios de optimización en los que interviene el precio de los frutos, se
toma como referencia, que el 60% de la materia seca total corresponde a los frutos. En
futuros trabajos se pretende trabajar con modelos de crecimiento más completos que
permitan la descomposición en tallos, hojas y frutos.
Ensayo Peso seco total Peso seco frutos Porcentaje peso seco frutos/total
[g/m2]
[g/m2]
[%]
1
663.02
416.37
62.8
2
956.39
562.35
58.8
3
921.73
510.63
55.4
4
843.67
536.57
63.6
Tabla 7.1. Porcentaje obtenido en los ensayos de peso seco de frutos con respecto al total de la planta
• En el invernadero se dispone de ventilación natural, calefacción y malla de sombreo
como sistemas de actuación, lo que permite controlar la temperatura y humedad relativa
del aire interior del invernadero, y la radiación PAR que incide sobre el cultivo. La
concentración de CO2, que es la otra variable climática que afecta directamente al
crecimiento del cultivo, no se puede controlar ya que, generalmente, no se suelen
instalar enriquecedores de CO2 en los invernaderos del sudeste español, por su elevado
coste. Se toman medidas de su valor para monitorizarla ya que es una entrada al modelo
de crecimiento que es necesario en el proceso de generación de las trayectorias de las
consignas, como se describirá más adelante.
• En el proceso de optimización se obtienen las trayectorias óptimas de la consigna de
temperatura del aire, que es la principal variable controlable que afecta al crecimiento
del cultivo. Como se ha comentado en el capítulo 6, la humedad relativa se debe
mantener en un determinado intervalo y, como se encuentra inversamente relacionada
con la temperatura, su control se realiza modificando la consigna de temperatura diurna
en función de su valor en cada instante de muestreo. Como se ha comentado, se dispone
de la malla de sombreo que afecta directamente a la radiación, disminuyendo la cantidad
de la misma que alcanza al cultivo, por lo que se reduce la velocidad del crecimiento del
mismo. Este hecho proporciona un grado de libertad más para controlar la producción.
El problema radica en que, realmente, se utiliza más como sistema de refrigeración para
disminuir la temperatura, que para controlar el fotoperiodo de las plantas.
309
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Por otra parte, su efecto es el de disminuir la velocidad de crecimiento, por lo que sólo
se utilizaría en el caso puntual de retrasar la fecha de recolección. En futuros trabajos,
está previsto la introducción del control de la radiación en el proceso de optimización,
aunque ésta última se utilice sólo en determinadas circunstancias de carácter estratégico
o táctico, ya que el sistema va a tender siempre a obtener la máxima producción, por lo
que fijaría una consigna de radiación de forma que no se extendiera la malla de sombreo.
• Se estiman dos consignas por día: una para periodos diurnos y otra para periodos
nocturnos, ya que los expertos lo consideran conveniente (las plantas no realizan las
mismas funciones vitales de noche y de día). La conmutación de la consigna de noche a
día se realiza en el instante en el que se detecta que se ha amanecido, estableciéndose
este hecho cuando la radiación global exterior alcanza los 100 W/m2. De forma similar
se detecta el paso del día a la noche. La elección de este valor es debida a que para
alcanzar la consigna diurna, pasa un determinado intervalo de tiempo (horas) hasta que
el sol proporciona la suficiente energía para elevar la temperatura y alcanzar el valor
deseado. En ese instante comienza el control. Seleccionando un valor de 100 W/m2 se
divide el error que se produce al cambiar de consigna bruscamente entre los periodos
nocturnos y diurnos, no repercutiendo exclusivamente en los intervalos de tiempo
correspondiente a los días.
• El sistema debe obtener las consignas de temperatura diurna y nocturna que optimicen el
beneficio de la producción de tomates al final de la campaña agrícola, entendido como la
diferencia entre los ingresos obtenidos por la venta directa de los frutos y los gastos
asociados a los sistemas de actuación climáticos instalados (costes de energía eléctrica
para los motores y quemadores, y combustible para la caldera de la calefacción).
• El otro factor importante que afecta al crecimiento de cultivos es la fertirrigación, y
como no se va a analizar este problema en la presenta tesis, se supone que las plantas
reciben la cantidad de agua y fertilizantes suficientes en los momentos adecuados, por lo
que su crecimiento se puede controlar únicamente mediante la regulación de las
variables climáticas de su entorno. Por otra parte, también se supone que las plantas no
sufren enfermedades ni se encuentran sometidas al efecto de plagas en la campaña.
7.3.1.2. Arquitectura jerárquica propuesta
En el problema del control del crecimiento de cultivos bajo invernadero basándose en las
condiciones climáticas se dispone de tres sistemas relacionados entre sí con escalas
temporales distintas: cultivo (días/meses), variables climáticas (horas/minutos) y los
sistemas de actuación para obtener las condiciones climáticas (minutos/segundos). El
problema consiste en obtener las señales de control que se le envían a los sistemas de
actuación para que se obtengan los valores del clima óptimos para que el crecimiento del
cultivo produzca el máximo beneficio, que se relaciona con el sistema cultivo (ya que de la
venta de la producción se obtienen los ingresos) y con los sistemas de actuación (ya que de
su funcionamiento se derivan los gastos de la producción). Como se ha indicado en los
capítulos anteriores, se conocen las relaciones entre los tres sistemas, descritas mediante
distintos modelos, por lo que se dispone de tres alternativas para el planteamiento del
problema del control del crecimiento de cultivos en función de qué consignas de referencia
se deben obtener en el proceso de optimización a resolver (cultivo, variables climáticas o
variables de control), tal y como se indica en la figura 7.6:
310
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Obtención de trayectorias de las variables de crecimiento. En base a unas condiciones
iniciales de fecha de recolección o cantidad de producción y en función a la predicción
de las perturbaciones (clima en el exterior), se optimiza el beneficio obteniendo la
trayectoria de referencia que debe seguir la producción de materia seca a lo largo de la
campaña, ya que por medio de los modelos que relacionan sistemas de actuación/clima y
clima/cultivo, se plantea el problema únicamente en función de las variables de
crecimiento, como se muestra en la figura 7.6.a. Este planteamiento presenta dos
problemas: como lo que interesa es obtener las entradas de control, hay que calcularlas a
partir de la trayectoria óptima obtenida y los modelos desarrollados, por lo que se
resuelve el problema dos veces. Por otra parte, se está resolviendo el problema
considerando la escala de tiempo más lenta, y como los gastos se relacionan con la
escala de tiempo más rápida, las estimaciones no serían realistas.
• Obtención de las trayectorias de las variables de control. El problema es el opuesto al
anterior. En base a unas condiciones iniciales y a una predicción de las perturbaciones,
se optimiza el beneficio obteniendo la trayectoria de referencia que deben seguir las
variables de control a lo largo de la campaña, ya que por medio de los modelos que
relacionan sistemas de cultivo/clima y clima/sistemas de actuación, se plantea el
problema únicamente en función de las variables de control, (figura 7.6.b). El problema
que presenta este enfoque es que, para que sea realista, se deben conocer las
predicciones meteorológicas con una precisión de minutos (ya que lo que se estima en la
optimización son las variables de control) y esto es imposible y poco realista.
Ingresos por venta
de la producción
Ingresos por venta
de la producción
Ingresos por venta
de la producción
Cultivo
Cultivo
Cultivo
Modelo
crecimiento
Modelo
crecimiento
Modelo
crecimiento
Clima
invernadero
Clima
invernadero
Clima
invernadero
Modelo
clima
Modelo
clima
Modelo
clima
Sistemas de
actuación
Sistemas de
actuación
Sistemas de
actuación
Gastos por funcionamiento
sistemas de actuación
Gastos por funcionamiento
sistemas de actuación
Gastos por funcionamiento
sistemas de actuación
a. Obtención trayectorias de
b. Obtención trayectorias de
c. Obtención trayectorias de
variables de crecimiento
variables de control
variables climáticas
Fig. 7.6. Alternativas de planteamiento del problema de control jerárquico del crecimiento de cultivos
311
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Obtención de las trayectorias de las variables climáticas. Este enfoque presenta una
solución intermedia a las dos anteriores y aprovecha convenientemente todas las
posibilidades del control jerárquico multicapa. La producción de materia seca se
encuentra directamente relacionada con la temperatura mediante el modelo
cultivo/clima, por lo que los ingresos económicos son función directa de las variables
climáticas. Por otra parte, los gastos procedentes de los sistemas de actuación son
función de las consignas de las variables climáticas, relacionándose ambas por los
modelos sistemas de actuación/clima. Por tanto, en base a unas condiciones iniciales y a
una predicción de las perturbaciones, se optimiza el beneficio obteniendo la trayectoria
de referencia que deben seguir las variables climáticas a lo largo de la campaña, como se
muestra en la figura 7.6.c. En este caso, se trabaja en la escala temporal intermedia
(horas), en la que la predicción meteorológica es más exacta. Además, no se calcula la
trayectoria de las variables de control (como en los dos primeros enfoques), dejándose
esta misión para una capa de nivel inferior, que puede tener en cuenta el valor real de las
perturbaciones en una escala de tiempo de minutos.
Por tanto, para la resolución del problema planteado se propone la arquitectura de control
jerárquica que se muestra en la figura 7.7 en las que se distinguen dos capas que interactúan
entre sí:
CAPA INFERIOR
Control climático
(escala temporal: minutos)
Trayectorias
climáticas
de referencia
Objetivos a
corto plazo
CAPA SUPERIOR
Control crecimiento cultivo
(escala temporal: días/meses)
Predicción clima
a largo plazo
(campaña)
Predicción clima
a corto plazo
(horas/días)
• Tipo de campaña
Gestor de decisión
de consignas
CONTROL CULTIVO
CONTROL CLIMÁTICO
Algoritmos y criterios
de optimización
Control clásico/
/ajuste por tabla/
/por adelanto/ etc.
ENTRADAS
DE CONTROL
SALIDAS
CLIMA
Ventilación
Malla sombreo
•
•
•
•
•
• Fecha de finalización del cultivo
• Precio productos
• Datos económicos
• Precios energía
• Reglas de decisión
Modelo cultivo
Modelo clima
invernadero
Calefacción
Objetivos a
largo plazo
INVERNADERO
Perturbaciones
Perturbaciones
climáticas:
del cultivo:
SALIDAS
CULTIVO
Temperatura
Humedad
Radiación PAR
(Concentración CO2)
CULTIVO
Peso seco
Número de hojas
Índice área foliar
Radiación exterior
Índice área foliar
Temperatura exterior
Humedad exterior
Velocidad viento,
Dirección viento
Fig. 7.7.Sistema de control jerárquico multicapa del crecimiento de cultivo propuesto
312
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Capa de control del crecimiento de cultivo (capa superior). En función de los objetivos
a largo plazo (fechas de recolección o producción deseada), de las predicciones
meteorológicas a corto y largo plazo, del estado de crecimiento de cultivo (medido por el
número de hojas y la producción de materia seca total) y del clima del invernadero
(temperatura, humedad y radiación PAR), calcula la trayectoria que debe seguir la
temperatura del aire interior del invernadero a lo largo de toda la campaña para
optimizar el beneficio del cultivo al final de la misma.
• Capa de control climático (capa inferior). En esta capa se realizan dos tareas
fundamentales. Por una parte, en función de los objetivos a corto plazo que plantea el
agricultor (en base a su experiencia y al estado de las plantas) y de la humedad relativa
del aire del invernadero (se controla modificando la consigna de temperatura), un gestor
de decisión de consignas modifica en cada periodo de control, si es necesario, la
trayectoria de referencia de la temperatura que se calcula en la capa superior. Una vez
que se obtiene la consigna a corto plazo, los controladores de las variables climáticas
calculan el estado en el que deben encontrarse los sistemas de actuación. Como se ha
descrito en el capítulo 6 se han utilizado en ensayos reales algoritmos de control clásicos
de realimentación PI por ajuste de tabla y con compensación por adelanto en serie y en
paralelo. En la figura 7.7, la concentración de CO2 se ha indicado entre paréntesis ya que
no se tiene control sobre ella, pero se ha incluido ya que el crecimiento del cultivo
depende directamente de su valor.
7.3.1.3. Principio de funcionamiento de la arquitectura de control jerárquica propuesta
Una vez que se plantea la arquitectura jerárquica de control, hay que articular su diseño e
implementación, en el que se ha de incluir la coordinación entre las dos capas. Después de
analizar y probar distintas alternativas, se ha optado por un algoritmo de horizonte
deslizante, cuyo organigrama se muestra en la figura 7.8. A continuación, se describen cada
uno de estos pasos, aunque aspectos particulares de alguno de ellos se abordarán en
posteriores apartados para comprender mejor el funcionamiento global del algoritmo
propuesto y no entrar en particularidades que limiten la visión general del mismo.
1. Introducción de los parámetros iniciales. El usuario debe indicar una serie de datos para
inicializar el proceso de control del crecimiento del cultivo. De todos los datos, los más
significativos son:
• Tipo de campaña: ciclo de primavera, o ciclo de otoño. Es necesario para determinar
el patrón de clima que va a utilizar el optimizador como predicción meteorológica a
largo plazo.
• Fecha de recolección. En función de la experiencia de campañas anteriores, se indica
la fecha final de recolección en la que se prevé que los precios de los productos van a
ser más elevados, por ejemplo cdias días.
• Estado inicial del cultivo, es decir el peso seco y el número de hojas (a partir de esta
variable se calcula el índice de área foliar). Las semillas germinan en un semillero y
se mantienen allí hasta que alcanzan un determinado estado de desarrollo. A
continuación, las plántulas se transplantan al invernadero para comenzar la fase de
crecimiento y producción, por lo que hay que conocer las condiciones iniciales en las
que se comienza la experiencia.
313
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Datos económicos. Como el proceso de optimización se basa en criterios económicos,
es necesario indicar el precio final previsto de venta de la producción y la evolución
esperada de los precios de la electricidad y el combustible a lo largo de la campaña.
2. Determinación de los periodos nocturnos y diurnos. En función del tipo de campaña, de
la fecha de recolección y de datos astronómicos, se determinan los 2cdias +1 intervalos
de tiempo en los que se debe calcular una consigna de temperatura y la duración de los
mismos, ya que como se sabe la duración de los periodos diurnos/nocturnos es variable a
lo largo de un año. Como se puede observar, en este paso se calcula el valor inicial de
las variables que debe determinar el proceso de optimización.
3. Generación de datos para predicción a largo plazo. Como se describirá posteriormente,
la predicción meteorológica proporcionada por el Instituto Nacional de Meteorología
presenta un horizonte de cuatro días. Como la duración mínima de una campaña de ciclo
corto es de noventa días, es necesario una predicción con ese horizonte. Las variables
climatológicas siguen unos patrones que se pueden ir repitiendo de forma aproximada
cada año, por tanto, como se dispone de series históricas de datos, se toma una de ellas
como predicción a largo plazo para esa campaña. Como en el proceso de optimización se
obtiene un valor de consigna de temperatura en cada uno de los intervalos
nocturnos/diurnos, lo que se utiliza como predicción es el valor medio de las variables
climáticas externas en cada uno de esos intervalos, considerando, por tanto, para la capa
superior, que el sistema se encuentra en régimen permanente.
4. Optimización con restricciones para determinar la consigna de temperatura en el
horizonte de predicción. Se utiliza un algoritmo de optimización con restricciones de
forma que se optimice una determinada función de coste (descrita en un apartado
posterior) y se obtengan las trayectoria de las consignas que debe seguir la temperatura a
lo largo del horizonte de optimización. Las restricciones de este proceso son debidas a
que la temperatura del invernadero se encuentra acotada entre un límite inferior y
superior, variables a lo largo del tiempo, con un patrón que se repite anualmente. Por
ejemplo, en un mes de enero no puede alcanzar los 30ºC durante un periodo diurno ya
que la energía que proporciona el sol no es suficiente, o bien, en un mes de agosto no
puede alcanzar 15ºC durante la noche ya que el aire exterior presenta una media de 21ºC
[Pal97].
5. Generación de datos para predicción a corto plazo. El periodo de medida y control es
de un minuto, por lo que basándose en las predicciones del Instituto Nacional de
Meteorología, se genera una serie de datos con un intervalo entre muestras de un
minuto, buscando, entre los históricos de datos de los que se dispone, cuatro días que
correspondan a ese patrón.
6. Simulación a corto plazo. Se realiza una simulación del proceso con los datos generados
en el paso anterior para comprobar si el sistema es capaz de alcanzar las consignas
correspondientes a los ocho primeros intervalos (cuatro periodos diurnos y cuatro
nocturnos) calculadas en el proceso de optimización. En el caso de que no las alcance, se
vuelve a repetir el proceso de optimización modificando las restricciones (volver al paso
4), es decir, modificando los límites del intervalo en el que se encuentra acotada la
temperatura, disminuyendo las consignas diurnas (el problema radica en que el sol no
suministre la suficiente energía para alcanzarlas) y aumentando las nocturnas (en el caso
de que la temperatura exterior sea significativamente mayor que la consigna obtenida).
314
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
En caso contrario, se envía a la capa inferior la primera consigna calculada, que
corresponde al siguiente intervalo de tiempo nocturno o diurno. La razón de este paso es
debida a que si se garantiza que el sistema alcanza las consignas propuestas a lo largo de
la campaña, la desviación entre la producción real que se alcanzará en la fecha prevista
de recolección y la esperada será menor.
7. Modificación de la consigna enviada y control de las variables climáticas. Como se ha
comentado anteriormente, la consigna que se envía a la capa inferior, correspondiente al
control climático, es modificada en función de los objetivos a corto plazo que determine
el productor y a la humedad relativa del aire interior del invernadero. Este proceso se
realiza cada minuto y los controladores de temperatura (diurno y nocturno) deben
calcular las señales de control necesarias para alcanzar estas nuevas consignas
(ventilación y calefacción respectivamente).
8. Repetición de todo el proceso. Quince minutos antes de finalizar el intervalo de tiempo
en el que se están realizando las tareas de control, hasta que no se alcanza el último
intervalo de la campaña, se repite todo el proceso desde el paso 3, modificando la
condiciones iniciales de la optimización. Se ha fijado un intervalo de quince minutos ya
que, después de numerosas pruebas, se ha determinado que para resolver los procesos de
optimización no se ha requerido más tiempo para un computador con las características
de un Pentium IV de 450 MHz y 256 MBytes de RAM, además de que, como se
optimizan variables correspondientes a la escala de tiempo lenta (materia seca total y
número de hojas), éstas no van a sufrir una variación significativa de su valor durante
quince minutos. Por una parte, se utiliza el modelo del crecimiento del cultivo para
determinar la materia seca y el número de hojas que se han obtenido con las condiciones
climatológicas reales a las que se ha encontrado sometido el cultivo durante el proceso
de control en el intervalo de tiempo actual. Esta estimación es la realimentación que
necesita la capa superior para volver a calcular las nuevas trayectorias. Lo ideal sería
disponer de medidas reales del estado del cultivo en cada instante en el que se ejecuta la
optimización pero, como se ha comentado en los capítulos 2 y 5, el proceso de medida
es muy laborioso y costoso, por lo que se suele realizar con un periodo de muestreo de
una o dos semanas. Aún así, se deberían utilizar estas medidas en los instantes que se
realicen para reducir la incertidumbre del modelado. Por otra parte, se permite al
productor que modifique las condiciones iniciales de la optimización como la fecha de
recolección en el caso de que observen tendencias en los precios de venta del producto e
interese adelantar o atrasar ese instante. Evidentemente, se trata de una política a corto
plazo ya que no existen modelos que predigan estas tendencias. Además, controlando el
clima no se puede modificar indefinidamente el crecimiento del cultivo, pudiéndose
realizar variaciones en cuanto a la maduración de los frutos en un intervalo de siete a
diez días. También se deben introducir las posibles futuras modificaciones que sufran los
precios de electricidad y combustible, ya que se comunican con algunos días de
antelación.
De esta forma se implementa un sistema de control jerárquico con dos capas que sea capaz
de optimizar el beneficio de un cultivo de tomate a lo largo de una campaña, reduciendo el
problema de los errores de la predicción meteorológica mediante una técnica de horizonte
deslizante.
315
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Inicio
Carga parámetros iniciales:
• Tipo de campaña
• Fecha recolección (n días)
• Estado cultivo
• Datos económicos
Determinación periodos
nocturnos/diurnos
(2n+1 intervalos)
Horizonte ← 2n+1
Generación de datos para
predicción a largo plazo
(horizonte)
Optimización con
restricciones para
generar trayectorias
Modificación condiciones
de optimización:
• Fecha recolección (n días)
• Datos económicos
Generación de datos para
predicción a corto plazo
(4 días)
Modificación
de las restricciones
No
Simulación a corto plazo
(4 días)
Si
No
¿alcanza consignas?
¿Modificar condiciones
optimización?
Si
Envía consigna del
periodo de tiempo actual
a la capa inferior
Modificación condiciones
iniciales de optimización:
• Materia seca producida
• Número de hojas
• Condiciones climáticas
Decisión de consignas en base
a objetivos a corto plazo
Espera a fin del periodo de
tiempo actual (horas)
Horizonte ← Horizonte-1
No
¿Horizonte=0?
Si
Fin
Fig 7.8. Algoritmo de funcionamiento de la arquitectura jerárquica de control propuesta
316
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
7.3.2. Aspectos particulares de la arquitectura de control propuesta
En este apartado se profundizará en algunos de los aspectos particulares del funcionamiento
e implementación de la arquitectura de control propuesta que son fundamentales en el
proceso de optimización y que no se han descrito en el apartado anterior para no perder la
visión general del funcionamiento.
7.3.2.1. Predicción de condiciones climáticas
Una de las principales fuentes de error de este tipo de sistema es la predicción
meteorológica a lo largo de la campaña, ya que de ella depende la trayectoria óptima de
referencia de la temperatura. El Instituto Nacional de Meteorología de España dependiente
del Ministerio de Medioambiente es la referencia que se utiliza para la predicción
meteorológica en este país, ofreciendo una estimación del clima por provincia para un día y
tres días más por Comunidad Autónoma. La información se publica en su página web
(www.inm.es), como se muestra en la figura 7.9, ofreciendo los siguientes datos:
• Temperatura. Para el día siguiente indican la temperatura máxima y mínima, y para los
tres siguientes muestran las tendencias (ascenso, descenso y sin cambios) con distintos
calificativos que representan la intensidad de la variación (ligero, fuerte, etc.).
• Velocidad del viento. Representan la velocidad mediante calificativos como flojos,
moderados o fuertes.
• Dirección del viento. Muestran la dirección del viento predominante Norte, Sur, Este y
Oeste.
• Radiación. Utilizan como índice la nubosidad, clasificando los días en claros, claros y
nubes, nubosos y muy nubosos.
a. Predicción provincial para un día
b. Predicción autonómica para tres días
Fig. 7.9. Predicción meteorológica del Instituto Nacional de Meteorología de España
Evidentemente, esta información no es suficiente para la estimación meteorológica en una
campaña agrícola cuya duración mínima en un cultivo de ciclo corto es de noventa a cien
días, por lo que hay que buscar una solución alternativa.
317
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Realmente, la variables climáticas repiten, en cierta medida, patrones de comportamiento
cada año, por lo que se pueden utilizar series de datos históricos y considerarlas como
predicciones meteorológicas para una determinada campaña. La propuesta que se presenta
en esta tesis es unir la información que ofrece el Instituto Nacional de Meteorología con las
series de datos temporales de las que se dispone, adquiridas en los proyectos de
investigación que se han desarrollado desde 1995. La idea básica para realizar la predicción
a largo plazo consiste en:
• Extraer la información de la predicción meteorológica de los cuatro días siguientes.
• Parametrizarla, de forma que se le asignen valores a cada una de las cuatro variables
climáticas de las que ofrecen información (temperatura, radiación y velocidad y
dirección del viento).
• Buscar en las series de datos históricos1 cuatro días seguidos que presenten los patrones
deseados.
• La serie de datos de predicción a largo plazo estará constituida por datos de la serie
temporal seleccionada comenzando por los cuatro seleccionados y escogiendo el número
de días necesario hasta completar el horizonte.
Para llevar a cabo este procedimiento, lo primero que hay que hacer es parametrizar la
información meteorológica. Al analizarla, se puede deducir que un día queda determinado
por cinco índices: temperatura mínima, temperatura máxima, velocidad del viento,
dirección del viento y la nubosidad (relacionada con la radiación). Por tanto, a cada uno de
estos índices hay que asociarles un valor para establecer los criterios de búsqueda,
comparando con los datos históricos clasificados, a su vez, en base a esos índices:
• Temperatura mínima. Analizando trece campañas [Pal97], se observa un patrón de
comportamiento similar a lo largo de cada una de ellas de la temperatura mínima,
máxima y media. En valores absolutos, las variaciones entre las temperaturas mínimas
en un determinado mes en las trece campañas, no superan los 2ºC. Por tanto, el valor que
se proporciona como temperatura mínima prevista se puede tomar como un índice de
búsqueda permitiendo una variación en la serie de datos de ±2 ºC.
• Temperatura máxima. El análisis es similar al anterior; por tanto, se toma como índice el
valor que proporciona la predicción con un intervalo permitido de ±2ºC.
• Velocidad del viento. La predicción meteorológica suele establecer una clasificación de
la velocidad del viento en flojos, moderados, fuertes y muy fuertes, por lo que se puede
tomar como índice la velocidad del viento media a lo largo del periodo de tiempo
medida en m/s, de forma que la clasificación se realiza según la tabla 7.22.
elocidad de viento Patrón Límite inferior Limite superior
Flojo
1
0
5
Moderado
2
5
10
Fuerte
3
10
20
Muy fuerte
4
20
Tabla 7.2. Patrones de velocidad de viento
1
2
Se recuerda que se dispone de datos adquiridos cada minuto.
Se podrían establecer otras clasificaciones utilizando, por ejemplo, lógica borrosa.
318
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Dirección del viento. La dirección del viento se almacena numéricamente con un valor
entre 0º y 360º, donde ambos extremos representan al Norte. Por tanto, si se divide el
intervalo en cuatro sectores, cuando la media de los valores de dirección durante un día
se encuentre en uno de ellos se le asigna el número de patrón que se indica en la tabla
7.3. Por ejemplo, cuando en la predicción se refieran a un día con predominio Sur, se
referirán a un día cuya media de dirección de viento se encuentre entre 135 y 225º.
Dirección predominante Patrón Límite inferior Limite superior
Norte
1
315
45
Sur
2
135
225
Este
3
225
315
Oeste
4
45
135
Tabla 7.3.Patrones de dirección de viento
900
35
800
30
600
FFT de radiació n
Radiació n (W /m2)
700
500
400
300
25
20
15
10
200
5
100
0
0
0
100
200
300
400
500
600
700
0
50
100
150
Tiempo (minutos)
250
300
350
400
b. FFT de la radiación de un día claro
a. Radiación solar en un día claro
800
40
700
35
600
30
FFT de radiació n
Radiació n (W/m2)
200
Frecuencia
500
400
300
25
20
15
200
10
100
5
0
0
0
100
200
300
400
500
600
700
50
Tiempo (minutos)
100
150
200
250
300
350
400
Frecuencia
c. Radiación solar en un día con nubes
d. FFT de la radiación de un día con nubes
Fig. 7.10. Análisis en frecuencia de la radiación solar
• Radiación. Este parámetro se predice en función de la nubosidad. Después de analizar
los datos disponibles y probar con distintos índices se ha optado por seleccionar el área
de la curva del análisis en frecuencia de la señal de radiación, sin incluir la baja
frecuencia. Esta idea se basa en el análisis de ruido en comunicaciones. La señal de
radiación solar presenta una componente principal en forma campana y la presencia de
nubes se puede interpretar como un ruido sobre esa señal. La figura 7.10 muestra la
respuesta en frecuencia para un día claro y un día con nubes, calculada con la
transformada rápida de Fourier (FFT) de la señal de radiación, después de eliminar la
componente de continua.
319
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Como se puede observar, un día con nubes presenta más componentes de alta frecuencia,
por lo que un índice para determinar el patrón de día con respecto a la
radiación/nubosidad puede ser el área de la señal proporcionada por la FFT sin
considerar las componentes de baja frecuencia que todos los días presentan. Basándose
en este índice y en la información que proporciona la predicción meteorológica, se han
analizado gran cantidad de datos, llegando a la siguiente clasificación en función del
área de la señal proporcionada por la FFT de la señal de radiación, eliminado su
componente continua:
Radiación/nubosidad Patrón Límite inferior Limite superior
Claro
1
80
400
Claros/nubes
2
400
800
Nuboso
3
800
1300
Tabla 7.4.Patrones de radiación/nubosidad
Una vez que se le asignan estos cinco índices a cada uno de los cuatro días que proporciona
la predicción, se busca en la serie de datos históricos, cuatro días seguidos que presenten
los mismos cinco índices. Se construye la predicción a largo plazo con esos días más los
siguientes necesarios para cubrir el horizonte de optimización. Actualmente, no se ha
implementado este algoritmo de predicción meteorológica, aunque se han realizado algunas
pruebas en las que se puede observar su buen funcionamiento, como se muestra en la figura
7.11 acerca de la búsqueda de patrones similares de radiación. Aún así, son resultados
preliminares en los que hay que seguir trabajando. Como se indica posteriormente, en los
resultados obtenidos en las pruebas a las que se ha sometido la arquitectura jerárquica
propuesta, este proceso de predicción y búsqueda de patrones se ha simulado para describir
distintos aspectos.
1400
1000
900
1200
800
Radiació n (W /m2)
Radiació n (W /m2)
1000
700
600
500
400
300
800
600
400
200
200
100
0
100
200
300
400
500
600
700
800
0
Tiempo (minutos)
100
200
300
400
500
600
700
800
Tiempo (minutos)
a. Días claros
b. Días nubosos
Fig 7.11. Búsqueda de patrones similares de radiación
Uno de los problemas que presenta esta propuesta es qué hacer cuando no se encuentren en
la base de datos históricos cuatro días seguidos que correspondan con los índices de
búsqueda. La solución es considerar como predicción a corto plazo los cuatro que más se
parezcan al comportamiento deseado. Existen distintos algoritmos de búsqueda en bases de
datos espacio-temporales que se pueden utilizar en este problema, como los descritos en
[Cor01].
320
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Por otra parte, un problema que se presentará cuando se integre este sistema en la
herramienta general, será la introducción de los datos que proporciona la predicción
meteorológica a corto plazo. La solución más sencilla es consultar diariamente la página del
Instituto Nacional de Meteorología y que el usuario introduzca los datos manualmente
después de interpretarlos. Evidentemente, la solución óptima sería automatizar el proceso,
de forma que el sistema consulte diariamente las predicciones e interprete la información
que se expone, ya que la información se presenta de forma estructurada, además de tratarse
de cadenas de caracteres. Actualmente, la búsqueda de información e interpretación de
cadenas de caracteres publicadas en Internet es un campo abierto en el que se está
invirtiendo gran cantidad de esfuerzos, aunque no se ha abordado ya que se encuentra fuera
de los objetivos principales de la presente tesis.
7.3.2.2. Proceso de optimización
El núcleo de la segunda capa de la arquitectura jerárquica propuesta es el proceso de
optimización que calcula la trayectoria de referencia que debe seguir la temperatura del aire
del invernadero para obtener el máximo beneficio posible. En este apartado se describirán
los aspectos fundamentales de este proceso.
7.3.2.2.1. Modelos utilizados en el proceso de optimización
El objetivo de este proceso es optimizar el beneficio, entendido como la diferencia entre el
precio obtenido por la venta del producto y los gastos ocasionados por el funcionamiento
de los sistemas de actuación, en función de la predicción meteorológica a largo plazo. Por
tanto, es necesario utilizar modelos para que el optimizador estime la cantidad de materia
seca que habrá en el instante de recolección en función de las consignas de temperatura
óptimas, así como el estado de los actuadores para alcanzar las citadas consignas.
Como se ha comentado anteriormente, el sistema de optimización calcula dos consignas
diarias (una para el periodo nocturno y otro para el periodo diurno) con una duración
mínima de diez horas cada una, por lo que se pueden utilizar, como aproximación, los
modelos en régimen estacionario. Por una parte, facilita la tarea al optimizador,
disminuyendo el coste computacional de cálculo, muy importante en este tipo de
aplicaciones, ya que debe realizar todos los cálculos en un determinado intervalo de tiempo.
Por otra parte, como las predicciones meteorológicas a largo plazo son vagas e inducen a
errores, no tiene sentido calcular la consigna en cada instante de control (un minuto)
porque, seguramente, no se van a producir las condiciones climáticas que se estimaron con
treinta o sesenta días de adelanto. Como se ha comentado anteriormente, estos errores se
van compensando con la técnica del horizonte deslizante. Por tanto, ha sido preciso analizar
el comportamiento de los modelos desarrollados en régimen permanente para considerar su
inclusión en este esquema.
La serie de datos que se genera como predicción a largo plazo, se construye con un periodo
de muestreo de un minuto, ya que así se almacenan en los archivos de históricos. Como el
proceso de optimización se realiza en condiciones de estado estacionario, se calcula la
media aritmética de la serie de datos de predicción para cada uno de los intervalos diurnos y
nocturnos en los que se ha dividido el horizonte, considerando estos valores como las
perturbaciones climáticas al sistema invernadero/cultivo.
321
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Evidentemente, el valor que estiman los modelos en permanente corresponde a la media de
cada variable en esos intervalos de tiempo, como se muestra en la figura 7.12.a con la
temperatura real en el invernadero (cada minuto) y la media en los periodos de tiempo
nocturnos/diurnos. Los modelos que son necesarios en el proceso de optimización son el de
temperatura del aire del invernadero y el de producción de materia seca, además de todos
los submodelos necesarios para estimarlos. Para la temperatura se ha utilizado como partida
el modelo simplificado basado en principios físicos que se describe por la ecuación de
balance de energía (4.3) en el apartado 4.2.2. Diseño del modelo. Si se considera en estado
estacionario, queda de la siguiente forma:
0 = Qsol,a + Qcnv,a−ss + Qcnv,a−cal − Qcnv _ cnd,a−e − Qven,a−e − Q perd,a−e − Qtra,cu
(7.12)
donde cada uno de los términos de energía se describen en el citado apartado.
Para simplificar el problema, el término correspondiente a la transpiración del cultivo,
Qtra,cu, se ha incluido en el relacionado con la absorción de radiación solar, Qsol,a, mediante
la aproximación descrita por la ecuación (4.17), resultando la siguiente expresión para
calcular la temperatura del aire en condiciones de régimen permanente, donde cada uno de
las variables y coeficientes se describen en el apartado 4.2.2:
cden,a cesp,a
⎛
⎞
Vven, flujo + V perd ⎟Pt ,e + ccnv,ss−a X t ,ss + ccnv,cal−a U t ,cal
Vk ,rs Prs,e + ⎜ ccnv−cnd,a−e +
⎜
⎟
carea,ss
⎝
⎠
X t ,a =
c
c
⎛
⎞
⎜ ccnv−cnd,a−e + den,a esp,a Vven, flujo + V perd + ccnv,ss−a + ccnv,cal−a ⎟
⎜
⎟
carea,ss
⎝
⎠
(
)
(
(7.13)
)
Del análisis de esta ecuación hay que realizar dos consideraciones:
• Durante la noche, el flujo de ventilación es nulo, mientras que durante el día, el aporte
de calefacción es nulo. Estos dos sistemas de actuación no funcionan conjuntamente por
lo que la ecuación (7.13) se simplifica en este aspecto.
• Es necesario conocer la temperatura de la superficie del suelo, Xt,ss, para calcular la
convección entre el suelo y el aire, por tanto, hay que estimar su valor para que pueda
calcularse la consigna de temperatura a lo largo de toda la campaña. En este caso, se
utiliza el modelo de suelo descrito en los apartados 3.4.1.4. y 3.4.1.5. en régimen
permanente. Si se simplifica el modelo, considerando el coeficiente de convección entre
el aire y la superficie del suelo constante (igual que en el modelo simplificado de la
temperatura del aire) y no se incluyen los términos de evaporación, ni el intercambio de
calor por radiación térmica, se puede deducir que la temperatura de la superficie de
suelo, Xt,ss, y la de la primera capa de suelo, Xt,s1, en régimen permanente vienen
determinadas por las siguientes expresiones:
caoc ,ssVtoc ,cu exp(− cext ,oc PLAI )Prs ,e + ccnv ,ss − a X t ,a +
X t ,ss =
ccnv ,ss − a +
ccnd ,s1
c prof ,s1 − cesp ,ss
322
ccnd ,s1
c prof ,s1 − cesp ,ss
X t ,s1
(7.14)
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
ccnd ,s1
c prof ,s1 − cesp ,ss
X t ,s 1 =
ccnd ,s1
X t ,ss +
c prof ,s1 − cesp ,ss
+
ccnd ,s 2
c prof ,s 2 − c prof ,s1
ccnd ,s 2
Pt ,s 2
(7.15)
c prof ,s 2 − c prof ,s1
Por tanto, se dispone de un sistema de tres ecuaciones, (7.13), (7.14) y (7.15), para calcular
tres incógnitas (temperatura del aire, superficie y primera capa de suelo) que se puede
resolver con cualquier método tradicional. Como resultado de estas consideraciones en las
figuras 7.12.b, c y d se muestran los resultados obtenidos considerando los valores medios
de las perturbaciones en los intervalos diurnos y nocturnos en agosto del año 2000, con los
modelos en régimen permanente. Como era de esperar, el comportamiento es similar, con
pequeñas discrepancias, a las medias de los valores reales medidos en el invernadero.
40
38
Temperatura invernadero (º C )
Temperatura invernadero (º C )
45
40
35
30
25
36
34
32
30
28
26
24
50
100
150
200
250
300
50
100
Tiempo (Horas)
150
200
250
300
Tiempo (Horas)
a. Temperatura real y en estacionario
b. Temperatura de aire media y estimada por modelo
estacionario
Temperatura capa 1 de suelo (º C )
Temperatura superficie suelo (º C )
34
33
32
31
30
29
28
31
30.5
30
29.5
29
28.5
27
0
50
100
150
200
250
300
50
Tiempo (Horas)
100
150
200
250
300
Tiempo (Horas)
c. Temperatura superficie suelo media y estimada por d. Temperatura capa 1 de suelo media y estimada
modelo estacionario
por modelo estacionario
Fig. 7.12. Resultados modelos de clima y crecimiento en estacionario
Basándose en el modelo de crecimiento, correspondiente a la escala lenta del sistema,
descrito en el apartado 5.5.1. Descripción del modelo, se observa que las dos variables de
estado que lo describen, el número de hojas, XH y la materia seca total, XPS, integran el
valor de la temperatura del aire del invernadero y la radiación que alcanza al cultivo; por
tanto no se puede utilizar la aproximación de régimen permanente, ya se estimarían
únicamente los incrementos que se produciría en ese estado. Se ha optado por discretizar
las ecuaciones características del modelo que se muestran en (5.10) y (5.16), resultando que
en el instante k, el valor de estas variable viene determinado por las siguientes ecuaciones:
323
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
X H ( k ) = X H ( k − 1 ) + V∆τ cvH f XH (X t ,a ( k ))
X PS ( k ) =
(7.16)
V∆τ c PS ,efi V foto ( k ) + X PS ( k − 1 )
(7.17)
1 + V∆τ c PS ,efi Vresp ( k )
donde V∆τ es la duración en minutos del intervalo de tiempo nocturno o diurno [k-1,k].
Como ejemplo, en la figura 7.13, se muestra el comportamiento de la variable índice de
área foliar (que se calcula por medio de una función algebraica del número de hojas) y de la
producción de materia seca total estimada por el modelo desarrollado en el capítulo 5,
tomando valores cada minuto (considerado como el comportamiento real del cultivo) y por
el modelo discretizado utilizando los datos de valores medios de las variables climáticas en
cada periodo nocturno/diurno y calculando el incremento que suponen esas condiciones
ambientales. Evidentemente, se observa que esta aproximación produce una evolución
escalonada de las variables, aunque el comportamiento es muy similar al que se considera
como evolución real del cultivo. El valor final de la materia seca estimado por ambos
modelos, que es lo que realmente interesa para obtener los ingresos por venta, no difiere
significativamente entre ambos (< 2%), por lo que se considera aceptable la utilización de
este tipo de modelos en el proceso de optimización.
900
800
3.5
Materia seca (gr/m2)
Í ndice de á rea foliar (m2/m2)
4
3
2.5
2
1.5
700
600
500
400
300
200
1
100
0.5
10
20
30
40
50
60
70
80
90
0
10
20
30
Tiempo (dí as)
40
50
60
70
80
90
Tiempo (dí as)
a. Índice de área foliar estimada por modelo b. Materia seca estimada por modelo completo y por
completo y por modelo estacionario
modelo estacionario
Fig 7.13. Resultado de discretizar el modelo de crecimiento usando datos climáticos de régimen permanente
7.3.2.2.2. Función de coste
En un proceso de optimización se debe maximizar o minimizar una determinada función de
coste, que constituye el criterio por el cual se optimiza. El problema que se aborda en la
presente tesis consiste, como se ha reiterado en apartados anteriores, en optimizar el
beneficio de la producción de un cultivo bajo invernadero.
Los ingresos, Ving,cu, debidos a la venta de productos a lo largo de una campaña de duración
τf, en función de los precios, Vprecio,cu, vienen determinados por la siguiente expresión por
m2 de superficie invernada:
Ving ,cu = ∫
τf
0
V precio,cu ( τ )
324
dX PS ( t )
dτ
dτ
(7.18)
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Basándose en la hipótesis inicial de que existe una única recolección al finalizar la
campaña, los ingresos totales se expresan por la siguiente expresión, donde carea,ss es la
superficie de suelo:
Ving ,cu = carea ,ss V precio,cu ( τ f ) X PS ( τ f )
(7.19)
Los gastos ocasionados por los sistemas de actuación son los debidos a la electricidad y al
combustible que necesita la caldera para producir calor a lo largo de toda la campaña, que
se desglosan de la siguiente manera, considerando el precio actual de la electricidad como
0.1 euros/KW/h y 0.4 euros/l de gasoil de calefacción.
• El sistema de calefacción se compone una motobomba de recirculación de 1.875 kW, un
quemador de 7.5 kW y una caldera de 2000000 kcal. Evidentemente, la caldera se
sobredimensionó en las instalaciones ya que, aparte de calefactar los cuatro invernaderos
de investigación, se quería evitar la instalación de nuevas calderas de apoyo en el caso
de ampliación de la superficie invernada. Para ser más realistas en los cálculos, si se
utiliza la regla general de 100 kcal por m2 de superficie de suelo del invernadero, para
una estructura de las analizadas (1500 m2) bastaría con una caldera de 150000 kcal, que
es el valor que se va a utilizar en las simulaciones posteriores, que presentan un
consumo medio de aproximadamente 16 litros por hora de funcionamiento. Por otra
parte, se considera que en el arranque de una máquina eléctrica se consume 1.5 veces
más que cuando se encuentra funcionando en permanente a plena carga y que la
duración de esa fase de arranque es de 10 segundos [CEE83]. El consumo por hora de
funcionamiento del sistema de calefacción, ccos,cal, será la suma del consumo de cada uno
de los tres subsistemas, es decir, la suma del coste de la motobomba, (ccos,mot-cal = 0.18
euros/h) del quemador, (ccos,que-cal=0.75 euros/h) y de la caldera, (ccos,cal-cal = 6.4 euros/h):
ccos,cal = ccos,mot _ cal + ccos,que _ cal + ccos,cal _ cal = 7.33 [euros / h]
(7.20)
Como se puede observar, el coste de combustible representa el 87.3 % del coste total.
• El sistema de ventilación se compone de cinco motores de 0.262 kW/h, por tanto, el
coste de ventilación asciende a 0.13 euros por hora de funcionamiento. Habría que
sumarle una pequeña cantidad más para considerar los picos de consumo cuando
arrancan los motores. Hay que indicar que el tiempo que se tarda en abrir completamente
una ventilación cerrada es de 40 segundos. Por otra parte, la ventilación se ancla
mecánicamente cuando alcanza la posición deseada, sin consumir energía eléctrica.
• Para extender la malla de sombreo se dispone de cinco motores de 0.35 kW/h, por lo que
el coste de utilización de la malla asciende a 0.18 euros por hora de funcionamiento.
Habría que sumarle una pequeña cantidad más para considerar los picos de consumo
cuando arrancan los motores. El tiempo que transcurre en extenderse o recogerse la
malla de sombreo es de tres minutos.
En un día típico en la que la calefacción funciona durante toda la noche (8 horas), la malla
de sombreo se extiende y se recoge una sola vez (al amanecer y al anochecer) y la
ventilación se activa cuarenta veces, el consumo total en ese día se puede desglosar como
se indica en la tabla 7.5, donde se han considerado la fase de arranque de los motores:
325
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Sistema actuación
Consumo por hora Tiempo funcionamiento Consumo total Porcentaje total
[euros/h]
[horas]
[euros/día]
[%]
7.33
8
58.64
99.8
Calefacción
0.13
0.45
0.09
0.15
Ventilación
0.18
0.1
0.02
0.05
Malla de sombreo
Tabla 7.5. Coste de funcionamiento de los sistemas de actuación en un día típico
Como se puede deducir del análisis de los datos anteriores, el 99% del coste es debido al
sistema de calefacción, por lo que en el proceso de optimización no se incluirán los costes
producidos por la utilización de la ventilación y de la malla de sombreo por considerarlos
insignificantes. Por tanto, la función de coste J se puede formular como la diferencia entre
los ingresos por la venta final del producto menos el coste total asociado a calefacción a lo
largo de toda la campaña, Vcos,cal, es decir:
J = c area ,ss V precio,cu ( τ f ) X PS ( τ f ) − ∫
τf
0
Vcos,cal ( t ) dτ
(7.21)
El proceso de optimización debe obtener la trayectoria de referencia de la temperatura para
que la función de coste sea máxima y, como se indicó en la figura 7.6.c, hay que utilizar los
modelos de cultivo/clima y de clima/sistemas de actuación para formularla en función de la
temperatura, sin que aparezcan las variables relacionadas con el crecimiento y con la
calefacción. Por una parte, si se consideran cdías como la duración de la campaña desde que
se transplanta, el número de intervalos en los que se ha dividido es 2cdías +1. Por otra parte,
como se ha asignado un coste a la calefacción por hora de funcionamiento, para calcular el
coste total de calefacción habrá que localizar los intervalos de tiempo donde es necesario la
utilización de la calefacción y sumar el producto de la duración de cada uno de ellos en
horas, V∆τ, por el coste que supone el funcionamiento de la calefacción por hora, ccos,cal:
τf
∫0
Vcos,cal ( τ ) dτ =
2 c días + 1
∑ ccos,cal V∆τ
k =1
f act ,cal (U t ,cal − X t ,a )
(7.22)
donde la función que detecta si es necesario calefactar, fact,cal, viene dada por:
⎧1 si (U t ,cal − X t ,a ) > 0
f act ,cal (U t ,cal − X t ,a ) = ⎨
⎩0 si (U t ,cal − X t ,a ) ≤ 0
(7.23)
El problema que presenta esta función es que habrá intervalos donde la diferencia de
temperaturas sea cercana a cero y se decida si se calefacta o no, por un pequeño valor.
Además, como la predicción meteorológica a largo plazo no es exacta, esta decisión puede
influir en el cálculo de las consignas. Por tanto, se propone una función que proporcione
una transición continua y más suave, tipo sigmoidal, en la decisión de la activación de la
calefacción1. De esta forma toma el valor 1 cuando realmente necesita calefactar
(diferencias entre la temperatura de calefacción y aire positivas mayores que un
determinado valor positivo), el 0 en caso contrario (diferencias entre la temperatura de
calefacción y aire negativas menores que un determinado valor negativo) y un valor entre 0
y 1 cuando las diferencias entre la temperatura de calefacción y aire negativas se
encuentren en torno a cero.
1
Esta aproximación presenta también ventajas en relación a la convergencia del algoritmo de optimización.
326
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
De esta forma se modula la posibilidad de calefactar modificando el coste de su
funcionamiento. Hay que recordar que con la técnica del horizonte deslizante, conforme se
avance en la campaña, estos errores se van reduciendo ya que se va actualizando la
predicción meteorológica con valores más realistas. La función de detección de la
activación de la calefacción que se propone es la siguiente:
⎡1
f act , cal (U t , cal − X t , a ) = tanh ⎢
⎣2
⎛ (U t , cal − X t , a )
⎞⎤
⎜⎜
+ 1 ⎟⎟ ⎥
2
⎝
⎠⎦
(7.24)
Por otra parte, basándose en la ecuación (7.12) y en las simplificaciones realizadas, la
diferencia entre la temperatura de calefacción y la del aire en régimen permanente viene
dada por la expresión (7.25) que, como se puede observar, es función de la temperatura del
aire, las perturbaciones exteriores y la temperatura de la superficie de suelo que se han
descrito en las ecuaciones (7.14) y (7.15).
U t ,cal − X t ,a =
Vk ,rs
ccnv,cal−a
Prs,e +
cden,a cesp,a
ccnv,cal−a carea,ss
(Vven, flujo +V perd )(X t ,a − Pt ,e ) − cccnv,ss−a (X t ,ss − X t ,a )
(7.25)
cnv,cal−a
Por tanto, la función de coste a optimizar viene dada por:
J = c area,ss V precio,cu ( τ f )
2 cdías +1
⎡ 1 ⎛ (U t ,cal − X t ,a ) ⎞⎤
ccos,cal V∆ ,τ tanh ⎢ ⎜⎜
+ 1⎟⎟⎥
2
⎢⎣ 2 ⎝
⎠⎥⎦
k =1
2 cdías +1
∑ ( X PS ( k ) − X PS ( k − 1 )) − ∑
k =1
(7.26)
X PS ( 2 c dias + 1 )
que es exclusivamente función de las variables climáticas, que es lo que se pretendía, para
calcular las trayectorias de referencia de la temperatura, Xt,a, a lo largo de la campaña.
7.3.2.2.3. Algoritmo de optimización
Una vez que ya se ha formulado la función de coste, es necesario decidir el método de
optimización, así como las restricciones a las que se encuentra sometido. Existen distintas
técnicas de resolver este problema, así como diferentes herramientas informáticas que
proporcionan la implementación de estos algoritmos [Mor93b]. Como una de las
herramientas principales con la que se ha trabajado en la presente tesis es Matlab, se ha
optado por utilizar la función constr que incluye el toolbox adicional de optimización
[Mat97], ya que permite resolver el problema que se está tratando. Constr encuentra el
mínimo de una función multivariable no lineal sometida a un conjunto de restricciones de
igualdad y desigualdad que también pueden ser no lineales. Utiliza un método de
Programación Secuencial Cuadrática (SQP), de forma que se resuelve un subproblema de
Programación Cuadrática (QP) en cada iteración. La descripción completa de este
algoritmo se encuentra en [Mat97]. Hay que hacer notar que la utilización de este algoritmo
puede alcanzar óptimos locales, que pueden ser una solución aceptable en esta aplicación.
Para aplicar este algoritmo al problema tratado hay que cambiar el signo a la función de
coste descrita en la ecuación (7.25), ya que resuelve un problema de minimización. Las
restricciones a las que se encuentra sometido el problema son las temperaturas máximas y
mínimas que se pueden alcanzar en el invernadero a lo largo de una campaña.
327
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Si se analiza la evolución de las temperaturas medias, máximas y mínimas en el exterior de
series de datos históricas (desde la 82/83 a la 94/95), se observa que siguen un patrón de
comportamiento. Por tanto, la temperatura del aire interior de un invernadero, sin la
intervención de los sistemas de actuación climáticos, debe seguir un patrón similar, de
forma que, como se comentó anteriormente, durante el invierno no puede alcanzar los 30 ºC
durante los días ya que la energía que proporciona el sol no es suficiente para calentarlo
tanto, o por el contrario, durante el verano no puede alcanzar 15 ºC en periodos nocturnos
ya que el aire en el exterior suele encontrarse a una media de 25 ºC y unas mínimas de 20
ºC [Pal97]. Después de analizar los datos históricos que se han tomado en distintas
campañas en el invernadero Araba número 2, se han definido unas restricciones inferiores y
superiores en función del tiempo (modificando su valor mensualmente) y diferentes para
los periodos nocturno y diurnos, cuyos valores se indican en las tablas 7.6 y 7.7, y
gráficamente en la figura 7.14.
Máximo
Mínimo
Ene. Feb. Mar. Abr. May. Jun.
Jul.
Ago.
Sep.
Oct.
Nov.
23
24
26
27
29
30
32
32
30
29
25
14
15
16
18
20
24
25
25
23
20
17
Tabla 7.6. Restricción superior e inferior de temperatura de aire en periodos diurnos
Dic.
23
15
Máximo
Mínimo
Ene. Feb. Mar. Abr. May. Jun.
Jul.
Ago.
Sep.
Oct.
Nov.
16
16
16
16
16
20
23
25
24
21
16
8
9
10
11
14
17
20
21
19
15
12
Tabla 7.7. Restricción superior e inferior de temperatura de aire en periodos nocturnos
Dic.
16
9
Los mínimos de cada una de los periodos se han considerado iguales a las medias
mensuales de la temperatura exterior en intervalos nocturnos y diurnos. Con esta
restricción, se puede evitar el fenómeno no deseable de la inversión térmica. Los limites
superiores nocturnos aparecen constantes e iguales a 17 ºC de noviembre a mayo, que es
donde existen posibilidades de que aparezca la necesidad de calefactar, aunque el alcanzar
este valor va a depender del salto térmico que tenga que proporcionar el sistema de
calefacción. Con respecto a los límites superiores diurnos, de mayo a octubre se han fijado
en torno a los 30 ºC, aunque en el invernadero se puedan alcanzar valores superiores, ya
que a partir de este valor, las funciones vitales de las plantas (fotosíntesis y respiración)
pierden el rendimiento esperado, como se ha comentado en el apartado 5.2 del capítulo 5.
32
24
Temperatura invernadero (º C )
Temperatura invernadero (º C )
30
28
26
24
22
20
18
22
20
18
16
14
12
10
16
14
8
2
3
4
5
6
7
8
9
10
11
12
2
Meses
3
4
5
6
7
8
9
10
11
Meses
a. Periodos de tiempo diurnos
b. Periodos de tiempo nocturnos
Fig. 7.14. Restricciones de temperatura para el proceso de optimización en función del tiempo
328
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Las limitaciones de utilización del algoritmo implementado en la función constr son que
tanto la función de coste a minimizar como la función de las restricciones deben ser
continuas, y deben devolver sólo valores reales, factores que se satisfacen en la propuesta
que se ha realizado del problema.
7.3.3. Ensayos y resultados
7.3.3.1. Hipótesis generales de los ensayos
En los ensayos que se van a describir, existen una serie de hipótesis generales a todos ellos
que se van a describir a continuación:
• Como se ha mostrado en la figura 1.2, los precios a los que el agricultor vende los
productos son variables con el tiempo, por lo que para los ensayos que se van a describir
a continuación, como se parte de la hipótesis de una única recolección, se van a
considerar constantes con un valor de 0.6 euros/kg de fruto de tomate, en base a los
datos medios de las últimas campañas. Realmente, este precio corresponde al fruto
completo, formado por materia seca y agua. Existen distintos estudios en la bibliografía
en los que se aportan algunos datos. Por ejemplo, Heuvenlink estimó que de los frutos,
el 6.5% correspondía a materia seca [Heu96b], Jones y colaboradores calcularon un
5.5%, y en las experiencias realizadas en el proyecto CAMED se estimaron en torno al
7%, coincidiendo con los resultados de los estudios anteriores. Por otra parte, el modelo
de crecimiento estima la materia seca global de la planta, de la que el 60% corresponde a
los frutos como se ha descrito en el apartado 7.3.1.1, que es la variable que realmente se
modela en el problema que se está abordando. Por tanto, teniendo en cuenta estas
consideraciones, se ha estimado que el precio de la materia seca total de la planta
asciende a 5.15 euros/kg. Hay que indicar que realmente, este precio no es significativo
para el problema de optimización ya que como se parte de la hipótesis de una única
recolección final, el sistema va a tender siempre a maximizar la producción final sin
considerar su precio de venta.
• Debido a la climatología del sudeste español, la calefacción sólo suele ser necesaria
entre los meses de noviembre a marzo. Por otra parte, como la función de coste expuesta
en la ecuación (7.30) sólo considera los costes de calefacción, despreciando el del resto
de sistemas de actuación (que incurren en costes debidos a consumo eléctrico,
considerablemente menores que los de combustible), se ha considerado que la campaña
agrícola que interesa estudiar es la correspondiente a otoño/invierno, por lo que todos los
ensayos se refieren a los meses de septiembre a febrero. En cualquier caso, la
arquitectura y algoritmos de control propuestos son genéricos y aplicables a cualquier
campaña, habiéndose realizado ensayos con una campaña de primavera (marzo a junio),
obteniendo resultados similares.
• El estado inicial del cultivo se considera el mismo para todos los ensayos con un valor
de 10.8 hojas y una materia seca total de 60 gr/m2, que son valores típicos que se
producen al transplantar del semillero al invernadero de producción con una densidad de
3 plantas por m2 de superficie de suelo. En cualquier caso, son datos medibles que, como
se ha observado en la estrategia utilizada, pueden ayudar a compensar errores de
modelado.
329
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Como patrón de predicción meteorológica a largo plazo se han seleccionado los datos de
la campaña 1997/1998, ya que presenta el perfil típico de este época del año. En la
figura 7.15, se muestran los datos correspondientes a la radiación y temperatura exterior
a lo largo de la campaña de septiembre a febrero, donde se puede observar la curva
característica de radiación de finales de año, y la tendencia descendente de la
temperatura desde las altas de finales de verano hasta los meses más fríos de enero y
febrero.
a. Radiación solar
b. Temperatura exterior
Fig. 7.15. Patrón a largo plazo de la predicción meteorológica en la campaña de otoño/invierno
7.3.3.2. Estudio de las tendencias de las trayectorias de referencia de la temperatura
En un primer ensayo se pretende conocer las tendencias de las trayectorias de referencia
que debe seguir la temperatura a lo largo de la campaña. Para ello, se ha considerado como
predicción meteorológica los datos de la campaña de 1997/98, con los precios de
combustible constantes a lo largo de toda la campaña y con distintos límites en la zona de
búsqueda que establecen las restricciones de la optimización, que se consideran constantes
en algunos de los ensayos y variables con el tiempo en otros, como se indica en la figura
7.14.
• Límites constantes en el tiempo definiendo una región de búsqueda pequeña. Las
restricciones del proceso de optimización se definen con unos límites diurnos permitidos
entre 16 y 23 ºC y los nocturnos entre 13 y 18 ºC. Estas consignas son posibles de
alcanzar con los sistemas de actuación climática y los controladores instalados, en las
estaciones del año que se están analizando.
• Límites constantes en el tiempo definiendo una región búsqueda intermedia. Los límites
diurnos permitidos se encuentran entre 16 y 25 ºC y los nocturnos entre 10 y 15 ºC,
consignas que no siempre se podrán alcanzar en las instalaciones utilizadas y en estas
épocas del año.
• Límites constantes en el tiempo definiendo una región de búsqueda amplia con
restricciones lejanas. Los límites diurnos permitidos se encuentran entre 15 y 30 ºC y los
nocturnos entre 10 y 22 ºC, consignas difíciles de alcanzar en algunas situaciones con las
instalaciones utilizadas y en estas épocas del año.
330
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Límites variables en el tiempo según lo indicado en la figura 7.14. en base al análisis
realizado de las variables climáticas externas en las últimas campañas, que es lo
aconsejable por los patrones de comportamiento repetitivos que presentan a lo largo de
un año.
La figura 7.16 muestra las trayectorias de referencia de la temperatura obtenidas por el
proceso de optimización en cada uno de los casos.
26
24
C onsignas de temperatura (º C )
C onsignas de temperatura (º C )
22
20
18
16
14
22
20
18
16
14
12
10
12
20
40
60
80
100
120
140
160
20
180
40
Tiempo (intervalos noche/dí a)
80
100
120
140
160
b. Límites constantes y región de búsqueda media
a. Límites constantes y región de búsqueda pequeña
28
28
C onsignas de temperatura (º C )
C onsignas de temperatura (º C )
60
Tiempo (intervalos noche/dí a)
26
24
22
20
18
16
14
26
24
22
20
18
16
12
14
10
20
40
60
80
100
120
140
20
160
40
60
80
100
120
140
160
180
Tiempo (intervalos noche/dí a)
Tiempo (intervalos noche/dí a)
c. Límites constantes y región de búsqueda amplia
d. Límites variables
Fig. 7.16. Comparación de trayectorias óptimas en función de límites de restriccciones
Como se puede comprobar, las trayectorias óptimas en cada uno de los ensayos presentan
una tendencia descendente, manteniendo altas temperaturas (máximas permitidas) al
principio de la campaña para bajarlas incluso hasta el mínimo permitido en cada uno de los
periodos nocturnos/diurnos al final de la misma. Este resultado no es una estrategia común
y típica en el cultivo del tomate bajo invernadero en la zona del sudeste español que opta
por utilizar temperaturas relativamente constantes y moderadas a lo largo de toda la
campaña de cultivo. Este comportamiento se puede explicar estudiando el modelo utilizado
del crecimiento del cultivo. La ecuación diferencial que describe el incremento de materia
seca en función del tiempo es la siguiente:
dX PS
= c PS ,efi ⋅ ( V foto − Vresp X PS )
dτ
331
con X PS ( τ o ) = c X PS 0
(7.27)
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Hay que recordar que el proceso de fotosíntesis, Vfoto, produce un incremento de la materia
seca, mientras que el proceso de respiración, Vresp, destruye parte de esa materia seca
formada, como se explicó en el apartado 5.1. Crecimiento y desarrollo de cultivos. Si se
observa la ecuación (7.27), la respiración se encuentra modulada por la cantidad de materia
seca, de forma que a mayor cantidad de ésta, mayor es el consumo de azúcares. Por otra
parte, la respiración es función exclusiva de la temperatura como se muestra en la ecuación
(5.15), de forma que a mayor temperatura mayor es el proceso de respiración. Por tanto, el
sistema va disminuyendo la temperatura conforme el cultivo va aumentando su materia
seca, para no favorecer las pérdidas por respiración. Hay que indicar, que con esta
estrategia también disminuye el proceso de generación de materia por fotosíntesis, pero al
final de la campaña la producción será mayor.
Materia seca (gr/m2)
La figura 7.17 muestra la curva de producción de materia seca con la estrategia descrita en
la figura 7.16.a. y otra con consignas de temperatura elevadas y constantes a lo largo de
toda la campaña (23/18ºC). Con la estrategia
Tray ec toria ó ptim a
550
de ir disminuyendo las trayectorias de
500
temperatura, los ingresos por ventas en un
450
invernadero de 1500 m2, como los que están
400
Tray ec toria c ons tante
utilizando en la presente tesis, serían de
350
4402.6 euros, mientras que con la
300
tradicional sería sensiblemente menor,
250
200
ascendiendo a 4074.9, es decir, un 10 %
150
menor. Hay que señalar que la extensión
100
media de los invernaderos actuales del
2
50
sudeste español es de 7000 m [San01], por
10
20
30
40
50
60
70
80
lo que si se extrapolan los resultados
Tiempo (D í as)
obtenidos, las cantidades comienzan a ser Fig. 7.17. Comparación de producción de materia
seca con distintas estrategias de control
considerables.
Por otra parte, hay que indicar que algunas de las consignas obtenidas que se muestran en la
figura 7.16, son difíciles de conseguir ya que, por ejemplo, no son normales consignas de
15 ºC en periodos diurnos, pero se ha considerado conveniente mostrarlos para demostrar
que en cualquier circunstancia, el sistema tiende a disminuir la temperatura conforme va
avanzado la campaña. Como se ha descrito anteriormente, con la estrategia completa, se
detecta si las consignas son alcanzables por el sistema o no, modificando los límites de
búsqueda para adaptarse a cualquier circunstancia.
7.3.3.3. Respuesta del sistema a cambios en los precios del combustible
Se pretende estudiar la respuesta del sistema a cambios en los precios de combustible del
sistema de calefacción. Para ello, se va a realizar una simulación considerando como
perturbaciones los datos meteorológicos de la campaña 1997/1998, con un horizonte de
cien días y una región de búsqueda cuyos límites varían en el tiempo en función del clima
exterior, como se muestra en la figura 7.14. Se van a considerar cuatro casos:
• Precios constantes a lo largo de toda la campaña.
• Precios altos al comienzo de la campaña y bajos al final de la misma.
332
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Precios bajos al comienzo de la campaña y altos al final de la misma.
• No se consideran costes por calefacción, es decir, se supone que el combustible es
gratuito o insignificante.
Los resultados obtenidos se muestran en la figura 7.18, donde se puede observar que
cuando el coste de utilizar el sistema de calefacción es menor, el algoritmo general tiende a
utilizarlo mas a menudo, como era de esperar. Aún así, si se comparan los parámetros que
se muestran en la tabla 7.8, se llega a la conclusión de que no existe una diferencia
significativa en la producción de materia seca final en cada uno de los casos analizados.
Hay que indicar que la diferencia en cuanto al número de intervalos de tiempo en los que
calefacta no es mayor de tres días, por lo que su efecto no influye en demasía a la
producción final.
Producción de materia seca final
Intervalos que calefacta el sistema
[gr/m2]
[noches]
576.87
23
Costes constantes
580.76
24
Costes altos al comienzo
581.61
24
Costes bajos al comienzo
590.45
26
Sin costes
Tabla 7.8. Resultados de las distintas estrategias de control
7.3.3.4. Respuesta del sistema ante distintas predicciones
Con este ensayo se pretende evaluar la respuesta del sistema ante distintos tipos de
predicciones meteorológicas, concretamente, se van a estudiar dos situaciones:
• Predicciones meteorológicas correctas. Esta situación se ha simulado utilizando los
mismos datos de la campaña 1997/98, que se consideran como predicciones a largo
plazo, tanto para obtener las consignas óptimas de la temperatura a lo largo de la
campaña, como perturbaciones reales en el proceso de control de la capa inferior de la
estructura jerárquica propuesta. De esta manera la predicción meteorológica se puede
considerar correcta.
• Predicciones meteorológicas erróneas. En este caso, esta situación se ha simulado el
proceso utilizando series de datos diferentes para las predicciones a largo plazo y para
considerarlas como perturbaciones reales al control de las variables climáticas del
invernadero. Para ello, se ha utilizado la serie de datos histórica de la campaña 1997/98
como predicción y los datos de la 1998/99 como perturbaciones reales al sistema. Habrá
pues días en los que las predicciones coincidan, ya que se trata de las misma estación del
año y se repiten los patrones, pero habrá otros en los que no, por lo que el sistema irá
ajustándose en cada instante de optimización a través de la estrategia de horizonte
deslizante.
Un ejemplo de predicción meteorológica errónea se muestra en la figura 7.19, en la que se
observa claramente el fenómeno citado de ajuste de las trayectorias de la temperatura a lo
largo de la campaña, utilizando la técnica del horizonte deslizante. Debido a los errores de
predicción, el sistema es incapaz de seguir las consignas y la transición de la zona de altas
temperaturas a bajas se va desplazando en el tiempo, retrasándolas. Como no se van
obteniendo la producción prevista en cada instante, sino que es menor, el sistema tiende a
mantener la temperatura alta para producir más materia seca.
333
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
120
C oste de calefacció n (euros)
C onsignas de temperatura (º C )
28
26
24
22
20
18
100
80
60
40
20
16
14
0
20
40
60
80
100
120
140
160
180
20
40
Tiempo (Intervalo noche/dí as)
80
100
120
140
160
180
b. Consumo con precios constantes
a. Trayectoria con precios constantes
90
C oste de calefacció n (euros)
28
C onsignas de temperatura (º C )
60
Tiempo (Intervalo noche/dí a)
26
24
22
20
18
16
80
70
60
50
40
30
20
10
14
20
40
60
80
100
120
140
160
20
180
40
60
80
100
120
140
160
180
Tiempo (Intervalo noche/dí a)
c. Trayectoria con precios altos al comienzo
d. Consumo con precios altos al comienzo
120
26
C oste de calefacció n (euros)
C onsignas de temperatura (º C )
28
24
22
20
18
16
100
80
60
40
20
14
0
20
40
60
80
100
120
140
160
180
20
40
Tiempo (Intervalo noche/dí a)
60
80
100
120
140
160
180
Tiempo (Intervalo noche/dí a)
f. Consumo con precios bajos al comienzo
e. Trayectoria con precios bajos al comienzo
15
C oste de calefacció n (euros)
C onsignas de temperatura (º C )
28
26
24
22
20
18
16
10
5
14
0
20
40
60
80
100
120
140
160
20
180
Tiempo (Intervalo noche/dí a)
40
60
80
100
120
140
160
180
Tiempo (Intervalo noche/dí a)
g. Trayectoria sin considerar costes
h. Consumo de calefacción con precio constante
Fig. 7.18. Comparación trayectorias óptimas en función del precio del combustible
334
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
28
C onsignas de temperatura (º C )
C onsignas de temperatura (º C )
28
26
Trans ic ió n 1= 70
24
Trans ic ió n 2= 120
22
20
18
16
26
Trans ició n 1= 85
24
Transició n 2= 150
22
20
18
16
14
14
20
40
60
80
100
120
140
160
180
40
Tiempo (Intervalos noche/dí a)
60
80
100
120
140
160
180
Tiempo (Intervalos noche/dí a)
a. Optimización día 1
b. Optimización día 16
Fig. 7.19. Comparación trayectorias óptimas con predicción errónea
Te mpe ratura i nve rnadero (º C )
Este hecho, también ocurre cuando las predicciones son correctas, pero en menor medida
ya que si se van consiguiendo la mayoría de los consignas, las transiciones se producen en
los mismos instantes y las estimaciones de las referencias son similares en cada uno de los
procesos de optimización. La figura 7.20 muestra la respuesta del sistema cuando las
predicciones son las correctas durante una transición de temperaturas elevadas a otras más
bajas. Se pueden observar intervalos nocturnos donde no se alcanzan las consignas
calculadas ya que la temperatura del aire interior es superior a la temperatura de
calefacción, al igual que algunos intervalos diurnos donde, debido a la saturación de la
ventilación, no se puede alcanzar
29
la temperatura deseada. Debido a
28
estos hechos y a que las
transiciones
noche/día
y
27
viceversa no son instantáneas (la
26
temperatura diurna aumenta
25
debido al sol), aunque las
predicciones sean correctas, se
24
van acumulando errores, que
23
obligan
a
corregir
las
22
estimaciones de las consignas de
21
temperatura óptimas en cada
intervalo de transición entre
20
noche y día y que justifican la
19
utilización de la técnica del
50
100
150
200
250
horizonte
deslizante,
para
Tiempo (Horas)
compensar este efecto no Fig. 7.20. Respuesta del sistema ante las consignas calculadas
deseable.
7.3.3.5. Respuesta del sistema ante modificaciones en la fecha de recolección
Con este ensayo se pretende evaluar la respuesta del sistema ante cambios en la fecha de
recolección, es decir, cómo el sistema modifica las consignas de temperatura cuando se
adelanta o retrasa la fecha de finalización de la campaña.
335
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Después de numerosos ensayos, la respuesta del sistema es la esperada y consiste en
aumentar las temperaturas cuando se desea adelantar la recolección para favorecer el
crecimiento del cultivo y disminuir las temperaturas cuando se desea retrasar la recolección
para disminuir la velocidad de crecimiento de las plantas. Como ejemplo, se muestra la
respuesta del sistema, cuando en el día 36 de una campaña de 90 días, se decide adelantar la
recolección 10 días, mientras que en la 7.21.b se puede observar que eleva las temperaturas
al finalizar la campaña para maximizar el beneficio.
26
C onsignas de temperatura (º C )
C onsignas de temperatura (º C )
26
24
22
20
18
16
25
24
23
22
21
20
19
18
17
14
70
80
90
100
110
120
130
140
150
160
170
80
90
Tiempo (Intervalos noche/dí a)
100
110
120
130
140
150
160
Tiempo (Intervalos noche/dí a)
a. Fecha de recolección 90 días
b. Fecha de recolección 80 días
Fig. 7.21. Modificación de trayectorias al adelantar la fecha de recolección
La figura 7.22 muestra la respuesta del sistema cuando en el día 30 de una campaña de 80
días, se decide atrasar la recolección 10 días. Como se puede observar, se alarga la
transición media y se adelanta el paso a la zona de bajas temperaturas como era de esperar.
28
C onsignas de temperatura (º C )
C onsignas de temperatura (º C )
28
26
24
22
20
18
16
26
24
22
20
18
16
14
14
60
70
80
90
100
110
120
130
140
60
150
80
100
120
140
160
Tiempo (Intervalos noche/dia)
Tiempo (Intervalos noche/dia)
a. Fecha de recolección 80 días
b. Fecha de recolección 90 días
Fig. 7.22. Modificación de trayectorias al atrasar la fecha de recolección
7.4. CONCLUSIONES Y RESUMEN DE APORTACIONES
En este capítulo se ha expuesto la solución propuesta al problema del control óptimo del
crecimiento de un cultivo bajo invernadero, consistente en la obtención del máximo
beneficio cuando se proceda a la venta de la producción. Para ello, y en base a la presencia
de distintas escalas de tiempo, se ha descompuesto el problema, proponiendo una
arquitectura jerárquica de dos capas, de forma que la superior, mediante un proceso de
optimización, calcula las trayectorias de referencia que debe seguir la temperatura del
invernadero para obtener el máximo beneficio de la producción.
336
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
Una vez que se envían las consignas a la capa inferior, ésta las modifica en función de los
criterios a corto plazo y aplica los algoritmos de control propuestos en el capítulo 6 para
intentar alcanzar las referencias óptimas.
De las pruebas y ensayos realizados con la arquitectura propuesta se pueden extraer las
siguientes conclusiones:
• El control del crecimiento de un cultivo es un sistema complejo que contiene
subsistemas que interactúan entre sí y poseen diferencias en cuanto a su respuesta en el
tiempo, de forma que las variables del proceso se pueden dividir en “lentas” y “rápidas”,
produciéndose una descomposición jerárquica del problema de control. Evidentemente,
por la propia naturaleza del problema, la utilización de técnicas de control jerárquico,
basadas en la idea de la división en la responsabilidad en la toma de decisiones, es la
idónea para su resolución.
• La información que calcula la capa superior debe ser la trayectoria de consigna de la
temperatura del invernadero a lo largo de la campaña, permitiendo a la capa inferior su
modificación en función de las perturbaciones reales y a los objetivos a corto plazo. Se
estima que el cálculo de la señal de control es preferible que sea misión de la capa
inferior, en vez de que la superior la calcule como proponen otros autores, ya que se
duplica la utilización de las relaciones entre las tres escalas: cultivo, clima y actuadores.
• Es imprescindible la utilización de la técnica del horizonte deslizante, de forma que se
ejecute el proceso de optimización en la transición de cada intervalo de tiempo
nocturno/diurno, debido a la inexactitud de las predicciones de las perturbaciones y a la
utilización de un horizonte finito en la optimización. Por otra parte, aunque la predicción
sea correcta, el sistema de control no mantiene la consigna en el valor óptimo durante
todo el tiempo para la que se ha calculado, por problemas de saturación de los
actuadores o por modificaciones de la referencia para cumplir objetivos a corto plazo,
como mantener la humedad relativa. Por tanto, es necesario volver a calcular las
referencias partiendo de las condiciones reales que ha alcanzado el cultivo.
• De esta última conclusión, se deduce que es necesario disponer de un buen sistema de
control de las variables climáticas en la capa inferior, ya que si no es así y no se alcanzan
las consignas, toda la misión de la capa superior carece de sentido.
• El estado del cultivo se utiliza como realimentación de la segunda capa del sistema de
control jerárquico y se estima mediante el modelo de crecimiento, lo que provoca que
los errores de modelado se acumulen a lo largo de la campaña. Por tanto, sería
conveniente disponer de un sistema de medida del estado real del cultivo.
• Un factor determinante para el buen funcionamiento de este sistema es la predicción
meteorológica a largo/medio y corto plazo. El sistema propuesto de utilizar las series de
datos históricas para que, en base a la predicción propuesta por el Instituto Nacional de
Meteorología para las próximos cuatro días, buscar patrones con comportamiento
similares para considerarlos como predicciones a largo plazo, ofrece una aceptable
solución.
Con respecto a futuros trabajos en esta línea de trabajo destacan los siguientes:
337
Capítulo 7. Control jerárquico del crecimiento de cultivos bajo invernadero
• Prueba en instalaciones reales de la arquitectura propuesta. Para llevar a cabo este
objetivo se ha solicitado el proyecto titulado Control óptimo jerárquico del crecimiento
de cultivos bajo invernadero basado en variables climáticas y de fertirrigación, en el
marco de colaboración de la Universidad de Almería y Cajamar, para utilizar sus
instalaciones del centro Las Palmerillas, dedicadas a investigación agraria.
• Las trayectorias óptimas que calcula el optimizador presentan temperaturas altas al
principio de la campaña, y van disminuyendo conforme avanza la misma. Es preferible
no favorecer el proceso de respiración, en el que se destruye materia seca, aunque
suponga, también, la disminución de la fotosíntesis, que crea materia seca.
Hay que recordar que se está utilizando un modelo de materia seca total de la planta, por
lo que habría que analizar el efecto de utilizar un modelo en el que se dividiera la
materia seca en cada uno de los elementos de la planta para comprobar que se repite este
comportamiento de las trayectorias al optimizar sólo la producción de materia seca de
los frutos.
• Modificación de la función de coste para tener en cuenta los siguientes casos:
Consideración de más de una recolección a lo largo de la campaña. Esta ampliación
consistiría en integrar los beneficios a lo largo de toda la campaña, tal y como se ha
indicado en la expresión (7.18).
Considerar el efecto negativo de no mantener la humedad relativa en el intervalo
permitido, introduciendo una penalización en la función de coste.
• Comparación de distintos algoritmos de optimización para estudiar si se pueden mejorar
el tiempo de cómputo, o encontrar soluciones de óptimo global, ya que el algoritmo
utilizado no lo asegura.
• Desarrollo de la automatización del sistema de predicción meteorológica a largo plazo,
extrayendo la información directamente de la web del Instituto Nacional de
Meteorología.
338
CAPÍTULO 8
CONCLUSIONES Y FUTURAS
LÍNEAS DE INVESTIGACIÓN
En este capítulo se exponen las conclusiones extraídas en el desarrollo de esta tesis, así
como algunas de las futuras líneas de investigación.
En la tesis se ha propuesto una solución al problema del control del crecimiento de un
cultivo bajo invernadero modificando las variables climáticas del entorno en el que se
encuentra, de forma que el beneficio final de la producción sea el óptimo, entendido como
la diferencia entre los ingresos debidos a la venta directa del producto y los gastos
asociados a los sistemas de actuación climáticos. Evidentemente, este desarrollo se ha
orientado a las características del sector productivo hortofrutícola del sudeste de España,
completamente distinto al de otras latitudes como el centro de Europa, que es el más
tecnificado. Del cumplimiento de este objetivo han surgido dos tipos de aportaciones:
• Originales, en el sentido de que no existían en el marco de aplicación de la presente
tesis. Se pueden destacar dos aportaciones:
Simulador de las variables climáticas en el interior de un invernadero industrial típico
del sudeste de España. El modelo implementado es una potente herramienta, ya que
aparte de su objetivo principal de permitir realizar ensayos de diferentes estrategias
de optimización y control previamente a su implementación final en las instalaciones
reales, se puede utilizar para el diseño de controladores de las variables climáticas,
para el dimensionamiento de sistemas de actuación, para estudiar el efecto de
diferentes materiales de cubierta o de distintos substratos de cultivo, etc. Se ha
demostrado además que el simulador desarrollado se puede adaptar a otras estructuras
y configuraciones de invernaderos que se instalan en la zona.
Diseño de la arquitectura de control jerárquico con dos capas de forma que se
optimice el beneficio que se obtiene de la venta del producto en función de las
variables climáticas en el interior del invernadero y los costes asociados a la
producción. Se incluye el procesamiento necesario de la información entre las dos
capas, la predicción meteorológica y el proceso de optimización, de forma que se
integran todos los desarrollos realizados para dar una solución completa al problema.
339
Capítulo 8. Conclusiones y futuras líneas de investigación
Se mejoran los sistemas que se utilizan actualmente, ya que sólo abordan la capa
inferior correspondiente al control climático, importando tecnología de otros países,
no diseñada para las características específicas de esta zona sino para otras con
diferentes climas, estructuras de invernadero, cultivos y técnicas culturales de
producción.
• Metodológicas. Para alcanzar el objetivo principal se ha tenido que desarrollar una serie
de objetivos específicos cuyo estudio ha proporcionado unas aportaciones en cuanto a la
metodología utilizada para resolver algunos aspectos concretos como:
Metodología en cuanto a la toma de datos en campo para poder calibrar los modelos
de las variables climáticas y del crecimiento del cultivo.
Metodología para la obtención de parámetros que caracterizan el modelo climático
utilizando técnicas heurísticas de optimización. Se han probado sus prestaciones con
tres estructuras de invernadero diferentes, obteniéndose buenos resultados.
En cuanto a la implementación de los modelos, se ha utilizado una metodología
orientada a objetos frente a la habitual (orientada a bloques) que ha proporcionado
mejores resultados en cuanto a coste computacional, aunque la estimación de las
variables a modelar ha sido similar.
En cada uno de los capítulos se han comentado las conclusiones relacionadas con los
aspectos particulares del problema que tratan, así como los futuros trabajos a realizar en
cada uno de esos campos.
Hay que insistir en que la solución integrada propuesta se ha diseñado para las condiciones
del sector agrícola del sudeste de España, considerando sus propias características tanto en
las condiciones climáticas, las estructuras de invernaderos utilizadas, los sistemas de
actuación que se suelen instalar y las variedades de cultivo, como en las técnicas culturales
propias de la zona. Actualmente, algunos de los resultados obtenidos se han probado en
instalaciones reales. Concretamente, los algoritmos de control desarrollados para la capa
inferior de la arquitectura de control jerárquica se han incorporado en herramientas
comerciales y en aplicaciones abiertas utilizadas en distintos centros de investigación
agraria. Sin embargo, la capa superior, que estima las consignas que optimicen el beneficio,
se encuentra en fase de simulación, aunque, de esta forma, ya se puede utilizar como ayuda
para la toma de decisiones como se ha observado en los resultados obtenidos.
Como futuras líneas generales de investigación se pueden destacar las siguientes:
• Validación en instalaciones reales de la arquitectura completa propuesta y ampliación de
la misma, incorporando el control óptimo de otras variables climáticas (incluyendo
nuevos actuadores) y de riego y fertilización para disponer de más grados de libertad
para el control del crecimiento del cultivo, tanto en producción como en calidad de los
frutos. Para llevar a cabo este objetivo se ha solicitado el proyecto titulado Control
óptimo jerárquico del crecimiento de cultivos bajo invernadero basado en variables
climáticas y de fertirrigación, a una convocatoria en el marco de colaboración de la
Universidad de Almería y Cajamar, para utilizar sus instalaciones de la Estación
experimental “Las Palmerillas”, dedicada a investigación agraria, durante al menos 2
años (4 ó 5 campañas agrícolas).
340
Capítulo 8. Conclusiones y futuras líneas de investigación
• Desarrollo y validación de nuevos modelos de cultivos, en los que se consideren, no sólo
la producción de materia seca total sino, también, la división en sus componentes, para
estimar convenientemente la parte correspondiente a los frutos. Además, se deben
incorporar otros aspectos como procesos culturales tipo poda, o número de tallos
principales y la predicción de la maduración de los frutos para poder determinar las
fechas de recolección. Por otra parte, hay que combinarlos con modelos de crecimiento
en función de las variables de fertirrigación, para poder controlar el proceso con todas
las variables posibles. También, sería interesante la obtención de modelos de otras
variedades hortofrutícolas importantes para el sector agrícola de la provincia, como el
pimiento o pepino, para aumentar la versatilidad de la arquitectura propuesta.
• Resolver el problema de control de la capa inferior con otro tipo de técnicas. Tanto las
variables climáticas como las de fertirrigación presentan una combinación de distintas
dinámicas, se encuentran sometidas a fuertes perturbaciones medibles, se conocen las
referencias futuras, los sistemas de actuación presentan saturaciones y existen unas
restricciones especiales, por lo que técnicas como el control predictivo basado en
modelo pueden suponer una solución adecuada a este tipo de problemas.
A las mencionadas habrá que añadir probablemente otras líneas de investigación que surjan
como consecuencia de nuevos avances en distintos ámbitos de la tecnología de producción
bajo invernadero.
341
ANEXO A
CONCEPTOS BÁSICOS
DE PSICROMETRÍA
A.1. CARACTERÍSTICAS DEL AIRE HÚMEDO
Un volumen de aire a una determinada temperatura es una mezcla de aire seco y agua en
proporciones variables. La mezcla de gases que forman el aire seco (nitrógeno, oxígeno,
anhídrido carbónico y pequeñas proporciones de gases nobles) se puede considerar con
comportamiento ideal sin error apreciable, ya que su estado se encuentra muy alejado de los
estados críticos de sus componentes. Sin embargo, para el agua no puede afirmarse lo
mismo, constituyendo un sistema heterogéneo aire-agua que cumple las leyes de los gases
ideales. De acuerdo con la Ley de Dalton, cada gas se comporta en la mezcla como si él
solo, a la temperatura de la misma, ocupara todo el volumen o, lo que es lo mismo, la suma
de las presiones parciales de cada uno de los componentes (aire seco, Vp,as, y vapor de agua,
Vp,v) es igual a la presión total de la mezcla, Vp,a:
V p ,a = V p ,as + V p ,v
(A.1)
Cuando la masa de aire es encuentra completamente llena de vapor de agua, se dice que se
encuentra saturada, y el vapor ejerce una presión máxima [Hpa] que depende de la
temperatura de la mezcla en ese instante, Vt,a, según la siguiente expresión, en la que la
temperatura se utiliza en ºC [Mon93]:
⎛ 17.27 Vt ,a ⎞
⎟
V psat ,a = 6.108 exp⎜⎜
⎟
V
+
239
.
3
t
,
a
⎝
⎠
(A.2)
El agua puede encontrarse en el aire en uno de sus tres estados, distinguiéndose tres tipos
de aire húmedo:
• Aire húmedo no saturado. Ambos componentes se encuentran en estado gaseoso. El
agua se encuentra en forma de calor calentado y su presión parcial es inferior a la
presión de saturación a esa temperatura.
343
Anexo A. Conceptos básicos de psicrometría
• Aire húmedo saturado con condensado líquido. Contiene vapor de agua saturado y el
resto del agua se condensa en estado líquido.
• Aire húmedo saturado con condensado sólido. Contiene vapor de agua saturado y el
resto del agua se condensa en estado sólido (hielo o escarcha).
El contenido de vapor de agua en un invernadero es de gran importancia tanto desde el
punto de vista energético, por su relación con la temperatura del aire interior, como del
aspecto fisiológico del cultivo. Aunque el crecimiento del cultivo no dependa directamente
de esta variable, excesos de vapor de agua favorecen la aparición y desarrollo de
enfermedades criptogámicas, además de disminuir la transpiración, lo que reduce la
absorción de agua y nutrientes, pudiendo generar déficit de elementos como el calcio. Sin
embargo, con concentraciones de vapor de agua muy bajas, la tasa de transpiración crece,
lo que puede acarrear estrés hídrico, el cierre de los estomas y, por tanto, la reducción de la
fotosíntesis [Cas95].
A.2. VARIABLES QUE INDICAN EL CONTENIDO DE VAPOR DE
AGUA EN EL AIRE
El contenido de vapor de agua en el aire puede ser expresado de diferentes maneras que se
indican a continuación:
• Humedad absoluta. En una mezcla de vapor de agua y de aire seco, la humedad absoluta
se define como la relación entre la masa del vapor de agua, Vm,v, y la masa de aire seco
que la contiene, Vm,a, medido en [kgagua/kgaire], es decir:
Vha ,a =
Vm ,v
(A.3)
Vm ,as
Otra acepción aceptada es definirla como la relación entre la masa de vapor de agua
referida al volumen total de aire que la contiene, expresada en [kgagua/m3], y se le suele
conocer como densidad de vapor de agua:
Vden ,v =
Vm ,v
(A.4)
Vvol ,a
La presión parcial en [Hpa] o [mb] que en un volumen de aire dado, ejerce el agua
contenida en él, se relaciona con la humedad absoluta y la temperatura en [K] mediante
la siguiente expresión:
Vh ,a = 2.17 ⋅ 10 − 3
V p ,v
Vt ,a
(A.5)
• Humedad específica. En una mezcla de vapor de agua y de aire seco, la humedad
específica se define como la relación entre la masa de vapor de agua y la masa total del
aire (seco mas húmedo):
344
Anexo A. Conceptos básicos de psicrometría
Vhe ,a =
Vm ,v
Vm ,v + Vm ,as
(A.6)
• Humedad absoluta de saturación. Se refiere a la humedad absoluta de una masa de aire
saturado en unas determinadas condiciones de temperatura. En el caso de que la presión
de vapor sea mayor que presión de saturación en unas determinadas condiciones de
temperatura, la humedad absoluta de saturación se puede calcular utilizando la siguiente
expresión:
V psat ,a
(A.7)
Vhsat ,a = 0.622
V p ,v
• Déficit de presión de vapor. En un determinado instante y para una determinada
temperatura, es la diferencia entre la presión de vapor de saturación a la misma
temperatura y la presión de vapor en ese instante. Es una medida utilizada para evaluar
la velocidad y la cantidad de agua que puede evaporarse. Cuanto mayor sea la
diferencia, más fácilmente se produce la evaporación.
Vdpv ,a = V psat ,a − V p ,v
(A.8)
• Humedad relativa. Es la relación, en tanto por ciento, entre el vapor de agua contenido
en el aire y el necesario para saturarlo, es decir, la relación entre la presión de vapor que
existe y la máxima que puede existir a una temperatura dada (presión de saturación).
Vhr ,a = 100
V p ,v
V psat ,a
(A.9)
Teniendo en cuenta las definiciones anteriores, existe la siguiente relación entre la humedad
absoluta y la relativa:
2.17 ⋅ 10 −3 V p ,v 2.17 ⋅ 10 −5 Vhr ,a V psat ,a
Vha ,a =
(A.10)
=
cden ,a
Vt ,a
cden ,a
Vt ,a
con la temperatura expresada en [K], la presión de saturación en [Hpa] y la humedad
relativa en [%].
A.3. TEMPERATURA DEL AIRE HÚMEDO
Una de las variables que caracterizan al aire húmedo es su temperatura, pudiéndose definir
las siguientes:
• Temperatura seca. Es la temperatura normal o de bulbo seco, y coincide con la que
mediría un sensor de temperatura o un termómetro ordinario situado en el aire.
• Temperatura húmeda. Es la temperatura que toma el agua cuando con ella se satura el
aire. También se le denomina de bulbo húmedo. Su determinación se realiza exponiendo
al aire húmedo que se estudia un sensor de temperatura en un depósito de agua destilada
en contacto con él, o un termómetro cuyo bulbo se ha cubierto con un algodón
empapado en agua
345
Anexo A. Conceptos básicos de psicrometría
• Temperatura del punto de rocío. Es la temperatura a la cual el vapor de agua comienza
a condensarse, es decir, a cambiar de estado gaseoso a líquido. En este caso, la presión
de vapor coincide con la de saturación. Se puede calcular utilizando la expresión
propuesta en [Mon93]:
⎛ V p ,v ⎞
⎟
ln⎜⎜
6.108 ⎟⎠
⎝
(A.11)
Vtro ,a = 13.74
⎛ 1
⎛ V p ,v ⎞ ⎞
⎟⎟
1−⎜
ln⎜
⎜ 17.27 ⎜ 6.108 ⎟ ⎟
⎠⎠
⎝
⎝
A.4. DIAGRAMA DE MOLLIER
La determinación del estado del aire con respecto al vapor de agua en las diferentes
transformaciones a las que se somete, se realiza en la práctica utilizando diagramas como el
de Mollier, que relaciona temperatura, humedad y contenido de vapor, tal y como se
muestra en la figura A.1. En él se representan las propiedades del aire húmedo tomando
como abscisas la humedad absoluta y como ordenadas la temperatura seca. Además, se
indican las familias de curvas de humedades relativas, de forma que cuando dos de estos
valores se conocen, el otro valor se puede calcular por intersección.
40
V hr= 10 (% )
V hr= 50 (% )
35
Temperatura (º C )
30
25
V hr= 100 (% )
20
15
10
5
5
10
15
20
25
Humedad absoluta (g/kg)
Fig. A.1. Diagrama de Mollier
Con este diagrama es fácil comprender los conceptos fundamentales de psicrometría, por
ejemplo, el déficit de vapor de agua se define como la cantidad de vapor de agua necesaria
para llevar a la saturación al aire con temperatura constante, cuando se encuentra a una
determinada humedad relativa (punto A). Gráficamente, se puede calcular utilizando este
diagrama como se muestra en la figura A.2.a. Al igual ocurre con la temperatura de rocío,
que para calcularlo, basta con trazar una línea horizontal de desde el punto de trabajo (A)
hasta que corte con la curva de humedad relativa igual al 100%, como se indica en la figura
A.2.b.
346
Anexo A. Conceptos básicos de psicrometría
40
40
Vhr= 10 (% )
Vhr= 10 (% )
Vhr= 50 (% )
30
25
Vhr= 100 (% )
20
Déficit de
vapor de agua
15
25
Vhr= 100 (% )
20
15
10
10
5
5
5
10
A
30
A
Temperatura (ºC)
Temperatura (ºC)
Vhr= 50 (% )
35
35
15
20
25
Temperatura
De rocío
5
10
15
20
25
Humedad absoluta (g/kg)
Humedad absoluta (g/kg)
a. Cálculo del déficit de vapor de agua
b. Cálculo del punto de rocío
Fig. A.2. Aplicaciones del Diagrama de Mollier
Como se puede comprobar, el Diagrama de Mollier es una potente herramienta para
resolver de forma gráfica los problemas relacionados con la humedad y la temperatura,
como el diseño de sistemas de actuación o el estudio de sus efectos, como se ha descrito en
el apartado 6.4.2. del capítulo 6 sobre el efecto de la ventilación natural y la calefacción
sobre la humedad relativa del aire interior de un invernadero.
A.5. CONTENIDO DE CALOR DEL AIRE
El calor contenido en el aire se divide entre el que contiene el aire seco y el que contiene el
vapor de agua. Cuando se calienta el aire, la temperatura de ambos es la misma, aunque se
requiera más calor para elevar un grado centígrado la temperatura del vapor de agua (1,86
kJ/kgagua) que el que se requiere que para el aire seco (1 kJ/kgaire seco).
El cambio de fase de líquido a vapor de agua (evaporación) absorbe energía denominada
calor latente de vaporización y se almacena en dicho vapor. Si el agua se encuentra en
contacto con una superficie, la energía la toma de ella y, por tanto, será refrigerada. Si por
el contrario el vapor de agua se condensa sobre una superficie, ésta recibe la energía y se
eleva la temperatura [Mon93]. La condensación de un gramo de vapor aumenta la
temperatura de un metro cúbico de aire en cerca de 2ºC. La gran diferencia entre el calor
específico del aire (Vcsep,a≅103 J/kg K) y el calor latente de vaporación del agua (Vlt,vap ≅ 2.5
106 J/kg) hace que los cambios de fase de agua sean importantes en el balance energético de
un invernadero [Sta98], en el que se producen distintos fenómenos relacionados con los
procesos de calor latente.
347
REFERENCIAS
BIBLIOGRÁFICAS
[Abr00]
Abreu, P.; Meneses, J.F.; Gary, C.; 2000; Tompousse, a model of yield
prediction for tomato crops: calibration study for unheated plastic greenhouse;
Acta Horticulturae; Nº 519; 141-150 pp.
[Ahm84] Ahmadi, G.; Glockner, P.G.; 1982; Dynamic simulation of the performance of
an inflatable greenhouse in the southern part of Alberta. III. Efects of
cloudiness factor; Agricultural and Forest Meteorology; Nº 31; pp. 183-191.
[Ahm82a] Ahmadi, G.; Glockner, P.G.; 1982; Dynamic simulation of the performance of
an inflatable greenhouse in the southern part of Alberta. I. Analysis and
average winter conditions; Agricultural Meteorology; Nº 27; pp. 155-180.
[Ahm82b] Ahmadi, G.; Glockner, P.G.; Kessey, K.O.; 1982; Dynamic simulation of the
performance of an inflatable greenhouse in the southern part of Alberta. II.
Comparisons with experimental data; Agricultural Meteorology, Nº 27; pp.
181-190.
[Alb01]
Albright, L.D.; Gates, R.S.; Arvanitis, K.G.; Drysdale, A.E.; 2001;
Environmental control for plants on earth and in space; IEEE Control Systems
Magazine; Vol. 21; Nº 5; pp. 28-47.
[Alb84]
Albright, L.D.; 1984; Modeling thermal mass effects in commercial
greenhouses, Acta Horticulturae, Nº 148, pp. 359-368.
[Ale94]
Alessandri, A.; Bini, F.; Parisini, T.; Torrini, A.; 1994; Neural approximation
for the optimal control of heating systems; 3rd IEEE Conference on Control
Applications; Glasgow; Reino Unido; Vol. 3; pp. 1613-1618.
[Ali00]
Aliaga, J.A.; 2000; Evolución de la horticultura intensiva en Almería: claves
para la modernización; Anuario de la agricultura almeriense 2000; Ed.
Novatécnica; Almería; España; pp. 52-65.
[And94] Andersson, M.; 1994; Object-Oriented Modeling and Simulation of Hybrid
Systems. PhD Thesis; Lund University; Sweden; 125 pp.
[Ara99]
Arahal, M.R.; 1999; Identificación de sistemas dinámicos; Universidad de
Sevilla; 45 pp.
[Ara98]
Arahal, M.R.; 1998; Identificación y control mediante redes neuronales, PhD
Thesis; Universidad de Sevilla; España; 188 pp.
[Asa98]
American Society of Agricultural Engineering; 1998; Heating, Ventilating, and
Cooling Greenhouses (EP406.3); American Society of Agricultural
Engineering Standards; Michigan; Estados Unidos.
[Ast99]
Åström, K.J.; 1999; Automatic control. The hidden technology; Advances in
control. Highlights of ECC’99 (Ed. P.M. Frank); Ed. Springer; pp. 1-28.
[Ast97a] Åström, K.J.; Wittenmark, B.; 1997; Computer-controlled systems; Ed. Prentice
Hall; New Jersey; Estados Unidos; 555 pp.
349
Referencias bibliográficas
[Ast97b]
[Avi82]
[Azc96]
[Bai01]
[Bai98]
[Bai94]
[Bai93]
[Bar85]
[Bem97]
[Ber03]
[Ber98]
[Ber95]
[Bid74]
[Bie97a]
[Bie97b]
Åström, K.J.; 1997; Tuning and adaptation; Curso Internacional Nuevas
tendencias en sistemas y control; Fundación Ramón Areces; Escuela Superior
de Ingenieros de la Universidad de Sevilla; Sevilla; España; pp. 19-36.
Avissar, R.; Mahrer, Y.; 1982; Verification study of a numerical greenhouse
microclimate model; Transactions of the ASAE, Nº 25, pp. 1711-1720.
Azcon-Bieto, J.; Talón, M.; 1996; Fisiología y bioquímica vegetal; Editorial
McGraw Hill; Madrid; España; 581 pp.
Baille, A.; Kittas, C.; Katsoulas, N.; 2001; Influence of whitening on
greenhouse microclimate and crop energy partitioning; Agricultural and Forest
Meteorology; Nº 107; 293-306 pp.
Bailey, B.J.; 1998; Modelización de la gestión del clima en invernadero; Curso
superior de especialización sobre tecnología de invernaderos II; Editado por la
Dirección General de Investigación y Formación Agroalimentaria de la Junta de
Andalucía, FIAPA y Caja Rural de Almería; pp. 417-456.
Bailey, B.J.; Chalabi, Z.S.; Improving the cost effectiveness of greenhouse
climate control; Computers and Electronics in Agriculture; Vol. 10; pp. 203214.
Baille, A.; Tchamitchian, M.; 1993; Solar Radiation in greenhouse; Crop
structure and light microclimate. Characterisations and applications; INRA
Editions, pp 93-105.
Barry, R.G.; Chorley, R.; 1985; Atmósfera, tiempo y clima; Editorial Omega;
500 pp.
Bemporad, A.; 1997; Reference Governors: on-line set-point optimization
techniques for constraints fulfillment. PhD Thesis; Universidad de Florencia;
Italia; 151 pp.
Berenguel, M.; Yebra, L.J.; Rodríguez, F.; 2003; Adaptive control strategies for
greenhouse temperature control; enviado a ECC’03, Cambridge, Reino Unido.
Berenguel, M., Arahal, M.R., Camacho, E.F.; 1998; Modelling free response of
a solar plant for predictive control, Control Engineering Practice, Vol. 6, pp
1257-1266.
Berenguel, M.; 1995; Contribuciones al control de colectores solares
distribuidos; PhD Thesis; Universidad de Sevilla; España; 344 pp.
Bidwell, R.G.S.; 1974; Plant physiology; Collier McMillan Publishers; London;
643 pp.
Bienvenido, F.; Díaz J.R.; Ayala, R.; Becerra, A.; Bosch, A.; García, J.R.;
Guirado, R.; Iribarne, L.; Rodríguez, F.; Túnez, S.; Casado, A.; Corral, A.;
1997; Application of modern information technologies on the design and
simulation of Mediterranean greenhouses. An experience; Mediterranean
Colloquium on protected cultivation; Agadir; Marruecos; 12 pps.
Bienvenido, F.; Iribarne, L.; Guirado, R.; Becerra, A.; Rodríguez, F.; Ayala, R.;
Corral, A.; 1997; DAMOCIA-SIM, a generic tool for radiation simulation into
mild winter region greenhouses; First European Conference of the European
Federation for Information Technology in Agriculture, Food and the
Environment, EFITA’97; Copenhage; Dinamarca; pp. 179-182; 8 pp (Versión
completa).
350
Referencias bibliográficas
[Bie96]
Bienvenido, F.; Bosch, A.; Flores, I.; García, J.R.; Guirado, R.; Iribarne, L.;
Ayala, R.; Rodríguez, F.; Díaz, J.R.; 1996; Computer-Aided Design for the
Construction of Automated Greenhouses; European Conference on Agricultural
Engineering, AgEng’96; Madrid; España; 376-377 pp; 8 pp (Versión completa).
[Bla99]
Blasco, F.X.; 1999; Control predictivo basado en modelos mediante técnicas de
optimización heurística. Aplicación a procesos no lineales y multivariables;
PhD Thesis; Universidad Politécnica de Valencia; España; 334 pp.
[Boa97] Boaventura, J.; Couto, C.; Ruano, A.E.; 1997; Real-Time parameters estimation
of dynamic temperature models for greenhouse environmental control; Control
Engineering Practice; Vol. 5; Nº 10; pp. 1473-1481.
[Boi91]
Boisson, D.; 1991, Etudes de la climatisation de serres par ventilation
naturelle, en periode estivale: modelisations et simulations, PhD Thesis,
Universite of Perpignan; Francia; 262 pp.
[Bot94]
Bot, G.P.A.; van de Braak, N.J.; 1994; Physics of greenhouse climate.
Greenhouse climate control: an integrated approach; Wageningen Pers;
Holanda; pp 125-162.
[Bot83]
Bot, G.P.A; 1983; Greenhouse climate: from physical process to a dynamic
model; PhD Thesis; Universidad de Wageningen; Holanda; 239 pp.
[Bou00] Boulard, T.; Wang, S.; 2000; Greenhouse crop transpiration simulation from
external climate conditions; Agricultural and Forest Meteorology; Nº 100; pp.
25-34.
[Bou95a] Boulard, T.; Draoui, B.; 1995; Natural ventilation of a greenhouse with
continuous roofs vents: measurements and data analysis; Journal of
Agricultural Engineering Research, Nº 61, pp. 27-36.
[Bou95b] Boulard, T.; Baille, A.; 1995; Modelling of air exchange in a greenhouse
equipped with continuous roof vents; Journal of Agricultural Engineering
Research, Nº 61, pp. 37-48.
[Brd02]
Brdys, M.A.; Chotkowski, W.; Duzinkiewicz, K.; Konarczak, K.; Poitrowski,
R.; 2002; Two-level disolved oxygen control for activated sludge processes;
15th IFAC World Congress; Barcelona; España; pp. 104 (Abstract); 6 pp.
(Versión completa).
[Bre89]
Brenan K.E., Campbell S.L. and Petzold L.R; 1989; Numerical Solution of
InitialValue Problems in Differential-Algebraic Equations. Elsevier Science
Publishers, 210 pp.
[Cam01] Cámara Oficial de Comercio de Almería; 2001; Almería en cifras 2001; Ed.
Cámara Oficial de Comercio de Almería; Almería; España; 38 pp.
[Cam00] Cámara Oficial de Comercio de Almería; 2001; Almería en cifras. Nuevo
Milenio; Ed. Cámara Oficial de Comercio de Almería; Almería; España; 36 pp.
[Cam99] Camacho, E.F.; Bordons, C.; 1999; Model Predictive Control; Ed. SpringerVerlarg; Londres; Reino Unido; 280 pp.
[Cam97] Camacho, E.F.; Berenguel, M.; Rubio, F.R.; 1997; Advanced control of solar
plants; Ed. Springer Verlag; Londres; Reino Unido; 268 pp.
[Cam96] Cameron, R.; 1996; Validación de modelos; XVI Curso de automática en la
industria; Cádiz; España; 144 pp.
[Cam92] Camacho, E.F.; Rubio, F.R.; Hugues, F.M.; 1992; Self-tuning control of a solar
power plant with a distributed collector field. IEEE Control Systems Magazine,
vol. april, pp. 72-78.
351
Referencias bibliográficas
[Cas95]
[CEE83]
[Coe02]
[Cor02]
[Cor85]
[Cor81]
[Cot98]
[Cre93]
[Crit83]
[Cur69]
[Cha96]
[Cha95]
[Cha93]
[Cha89]
[Cha86]
[Cha84]
[Cho94]
[Dau93]
Castilla, N.; 1995; Manejo del cultivo intensivo con suelo. El cultivo del
tomate; Ed. Mundi-prensa; Madrid; España; pp 190-225.
Ministerio de Industria y Energía; 1983; Manuales técnicos de instrucción para
la conservación de energía 9. Centros de transformación, centros de control de
motores y redes eléctricas; Editado por el Centro de Estudios de la Energía;
Ministerio de Industria y Energía de España; 200 pp.
Coelho, J.P.; Moura, P.B.; Boaventura, J.; 2002; Greenhouse air temperature
control using the particle swarm optimization algorithm; 15th IFAC World
Congress; Barcelona; España; pp. 65 (Abstracs); 6 pp (Versión completa).
Corral, A.; 2002; Algoritmo para el procesamiento de consultas utilizando RTREES. La consulta de los pares más cercanos y su aplicación en bases de
datos espaciales. PhD Thesis. Universidad de Almería; 266 pp.
Cormary, Y.; Nicolas, C.; 1985, La thermique des serres, Editions Eyrolles,
Paris. 357 pp.
Cornwell, C.; 1981, Transferencia de calor, Editorial Limusa, S.A., Mexico;
299 pp.
Fundación Cotec para la Innovación Tecnológica; 1998; Redes Neuronales;
Documentos Cotec sobre oportunidades tecnológicas; Madrid; 103 pp.
Creus, A.; 1993; Instrumentación industrial; Ed. Marcombo Boixareu Editores;
Barcelona; España; 732 pp.
Critten, D.L.; 1983; The evaluation of a computer model to calculate the daily
light integral and transmissivity of a greenhouse; Journal of Agricultural
Engineering Research, Nº 28, pp. 61-76.
Curry, R.B.; 1969; Dynamic simulation of plant growth. Part I. Development of
a model; Winter meeting of the ASAE, 5 pp; Chicago, Estados Unidos.
Chalabi, Z.S.; Bailey, B.J.; Wilkinson, D.J.; A real time optimal control
algorithm for greenhouse heating; Computers and Electronics in Agriculture;
Vol. 15; pp. 1-13.
Challa, H.; Heuvelink, E.; van Meeteren; U.; 1995; Crop growth and
development; Greenhouse climate control: an integrated approach; Wageningen
Pers; pp 62-84.
Challa, H.; 1993; Optimal diurnal climate control in greenhouse as related to
greenhouse management and crop requirements; The Computerized
greenhouse; Academic Press, San Diego; California; Estados Unidos; pp. 119137.
Challa, H.; 1989; Modelling for crop growth control; Acta Horticulturae; Nº
248; pp. 209-216.
Chaabane, D.E.; 1986; Influence d’un ecran thermique sur le microclimat
nocturne d’une serre agricole, PhD Thesis, Universite of Perpignan; Francia;
105 pp.
Chapman, J.; 1984; Transmisión de calor; Librería Editorial Bellisco; Madrid;
731 pp.
Chow, V.T.; Maidment, D.R.; Mays, L. W.; 1994; Applied Hydrology. Ed. Mc
Graw-Hill, 580 pp.
Daudet, F. A.; Tchamitchian, M.; 1993; Radiative exchange and
photosynthesis; Crop structure and light microclimate. Characterisations and
applications; INRA Editions, pp 401-417.
352
Referencias bibliográficas
[Dav91]
[Dec71]
[Dor03]
[Duf79]
[Ebo01]
[ElG02]
[ElG01]
[Eli96]
[Fer02a]
[Fer02b]
[Fin80]
[Fon95]
[Fra88]
[Gal99]
[Gar98a]
[Gar98b]
[Gar97]
[Gar96]
Davis, P.F.; Hooper, A.W.; 1991; Improvement of greenhouse heating control;
IEE Proceedings-D; Vol. 138; Nº 3; 249-255 pp.
DeChristopher, G.E.; Elwell, D.L.; Fynn, R.P.; Curry, R.B.; 1971; Simulator of
greenhouse environment. Internal Report; The Ohio State University.
Dormido, S.; Berenguel, M.; Dormido-Cantó, S; Rodríguez, F.; 2003;
Interactive learning of constrained generalized predictive control. Enviado a
IFAC ACE’03 Symposium; Oulu; Finlandia.
Duffie, J.A.; Beckman, W.A.; 1979; Procesos térmicos en energía solar;
Editorial Grupo Cero; Madrid; 386 pp.
Eborn, J.; 2001; On Model Libraries for Thermo-hydraulic Applications. PhD
Thesis; Lund University; Sweden; 125 pp.
El Ghoumari, M.Y.; Tantau, H.J.; Megías, D.; Serrano, J.; 2002; Real Time non
linear constrained model predictive control of a greenhouse; 15th IFAC World
Congress; Barcelona; España; pp. 65 (Abstracs); 6 pp (Versión completa).
El Ghoumari, M.Y.; Megias, D.; Montero, J.I.; Serrano, J.; 2001; Model
predictive control of greenhouse climatic processes using on-line linearization;
European Control Conference, ECC01; Porto; Portugal; pp. 3452-3457.
Elías, F.; Castellví, F.; 1996; Agrometeorología; Ediciones Mundi-Prensa;
Madrid; España; 517 pp.
Ferreira, P.M.; Ruano, A.E.; 2002; Choice of RBF model structure for
predicting greenhouse inside air temperature; 15th IFAC World Congress;
Barcelona; España; pp. 211 (Abtracs); 6 pp (Versión completa)..
Ferreira, P.M.; Faria, E.A.; Ruano, A.E.; 2002; Neural network models in
greenhouse air temperature prediction; Neurocomputing; Vol. 43; pp. 51-75.
Findeisen, W.; Bailey, F.N.; Brdys, M.; Malinowski, K.; Tatjewski, P.;
Wozniak, A.; 1980; Control and coordination in hierarchical systems; Ed. John
Wiley & Sons; Chichister-New York; Estados Unidos; 467 pp.
Fonseca, C.M.; 1995; Multiobjetctive Genetic Algorithms with Application to
control Engineering Problems; PhD Thesis; University of Sheffield; Reino
Unido; 172 pp.
Frangoudakis, A.; Papadakis, G.; Kyristis, S.; 1988; Radiation exchange
calculations in enclosures composed of boundary walls partly transparent at
long wave lengths; International Journal on Solar Energy; Nº 6; pp. 221-234.
Galdeano, E.; 1999; El contexto actual del sector hortofrutícola almeriense y la
necesidad de estrategias de conjunto; Anuario de la agricultura almeriense
1999; Ed. Novatécnica; Almería; España; pp. 12-20.
Gary, C.; 1998; Modelling greenhouse crops: state of arts and perspectives;
World Conference on Horticultural Research; 5 pp.; Roma, Italia.
Gary, C.; Jones, J.W.; Tchamitchan, M.; 1998; Crop modelling in horticulture:
state of art; Sciencia Horticulturae, Nº 74; 3-20 pp.
Gary, C.; Bertin, N.; 1997; Greenhouse crop models for research and
management; INCO-DC Seminar; 18 pp.; Avignon; France.
Gary, C.; Baille, A.; Navarrete, M.; Espanet; R.; 1996; “Tompousse”, un
modele simplifie de prevision du rendement et du calibre de la tomate; Actes du
Séminaire de l’AIP Serres; pp. 100-109; Alenya, France.
353
Referencias bibliográficas
[Gar95]
[Gar85]
[Gar81]
[Gat01]
[Geo98]
[Gil95]
[Gon99]
[Gon98]
[Gou90]
[Gua90]
[Gua90]
[Gui98]
[Gut93]
[Guy93]
[Häg91]
[Hal89]
Gary, C.; Barczi, J.F.; Bertin, N.; Tchamitchan, M.; 1995; Simulation of
individual organ growth and development of tomato plants: a model and userfriendly interface; Acta Horticulturae; Nº 328; 205-210 pp.
Garzoli, K.V.; 1985, A simple greenhouse climate model, Acta Horticulturae,
Nº 174, pp. 393-400.
Garzoli, K.V.; Blackwell, J.; 1981, An analysis of the nocturnal heat loss from
a single skin plastic greenhouse, Journal of Agricultural Engineering Research,
Nº 26, pp. 203-214.
Gates, R.S.; Chao, K.; Sigrimis, N.; 2001; Identifying design parameters for
fuzzy control of staged ventialtion control systems; Computers and Electronics
in Agriculture; Vol. 31; pp. 61-74.
Geoola, F.; Kashti; Y.; Peiper; U.M.; 1998; A model greenhouse for testing the
role of condensation, dust and dirt on the solar radiation transmissivity of
greenhouse cladding materials; Journal of Agricultural Engineering Research;
Nº 71; pp. 339-346.
Gil, F.; 1995; Elementos de fisiología vegetal: Relaciones hídricas. Nutrición
mineral. Transporte. Metabolismo; Ediciones Mundi-Prensa; Madrid; 1147 pps.
González, J.; 1999; El cultivo del tomate en La Cañada y Vega de Almería.
Técnicas de producción de frutas y hortalizas en los cultivos protegidos del
Sureste español; Caja Rural de Almería; pp. 257-291.
González-Real, María M.; Baille, A.; 1998; Calefacción de invernaderos;
Curso Superior de Especialización: Tecnología de Invernaderos II; Editado por
la Dirección General de Investigación y Formación Agroalimentaria de la Junta
de Andalucía, FIAPA y Caja Rural de Almería; 339-398 pp.
Goudriaan, J.; Monteith, J.L.; 1990; A mathematical function for crop growth
based on light interception and leaf area expansion; Annals of Botany; Vol. 66;
pp. 695-701.
Guardiola, J.L.; García, A.; 1990; Fisiología vegetal I: nutrición y transporte;
Ed. Síntesis; Madrid; España; 440 pp.
Guardiola, J.L.; García, A.; 1990; Fisiología vegetal I: nutrición y transporte;
Ed. Síntesis, 44º pp.
Guirado, R.; Iribarne, L.; Becerra, A.; Ayala, R.; Bienvenido, J.F.; 1998;
Multimodel simulation of the canopy effect on an inner radiation model for
parametrized greenhouse; International Conference Engineering of Decision
Support Systems in Bio-Industries; pp 65-66 (8 pp. ed. CD-ROM); Montpellier,
France.
Gutman, P.O.; Lindber, P.O.; Ioslovich, I.; Seginer, I.; 1993; A non-linear
optimal greenhouse control problem solved by linear programming; Journal of
Agricultural Research; Vol. 55; pp. 335-351.
Guyot, G.; Gu, 5.F.; 1993; Measurement of plant canopy reflectance; Crop
structure and light microclimate; INRA Editions, pp 322-337.
Hägglund, T.; Äström, K.J.; 1991; Industrial adaptive controllers based on
frecuency response techniques; Automatica; Vol. 27; Nº 4; pp. 599-609.
Halleux, D.; 1989; Modele dynamique des échanges énergétiques des serres:
étude théorique et expérimentale; PhD Thesis; Facultad de Ciencias
Agronómicas de Gembloux; Belgica; 278 pp.
354
Referencias bibliográficas
[Has01]
Hashimoto, Y.; Murase, H.; Morimoto, T.; Torii, T.; 2001; Intelligent systems
for agriculture in Japan; IEEE Control System Magazine; Vol. 21; Nº 5; pp.7185.
[Has89]
Hashimoto, Y.; Yi, Y.; 1989; Dynamic model of CO2 uptake based on system
identification; Acta Horticulturae; Vol. 248; pp. 295-300.
[Has85]
Hashimoto, Y.; Morimoto, T.; Fukuyama, S.; 1985; Some speaking plant
approach to the synthesis of control system in the greenhouse; Acta
Horticulturae; Vol. 174; pp. 219-226.
[Has81]
Hashimoto, Y.; 1981; Computer processing of speaking plant for climate
control and computer aided plantation; Acta Horticulturae; Vol. 115; pp. 317325.
[Hen95] van Henten, E. J.; Bontsema, J.; 1995; Non-destructive crop measurements by
images processing for crop growth control; ; Journal of Agricultural
Engineering Research, Nº 61, pp. 97-105.
[Hen94] van Henten, E.J.; 1994; Greenhouse climate management: an optimal control
approach; PhD Thesis; Agricultural University of Wageningen; Holanda; 329
pp.
[Heu99] Heuvelink, E.; 1999; Evaluation of a dynamic simulation model for tomato crop
growth and development; Annals of Botany., Nº 83; 413-422 pp.
[Heu96a] Heuvelink, E.; 1996; Dry matter partitioning in tomato: validation of a
dynamic model; Annals of Botany., Nº 77; 71-80 pp.
[Heu96b] Heuvelink, E.; 1996; Tomato growth and yield: quantitative analysis and
synthesis; PhD Thesis Dissertation; Agricultural University of Wageningen;
Wageneningen; The Netherlands; 326 pp.
[Hou96] Houck, C.R.; Joines, J.A.; Kay, M.G.; 1996; A Genetic Algorithm for Function
Optimization: A Matlab Implementation; NCSU-IE Technical Report 9509;
North Carolina State University; Estados Unidos; 14 pp.
[Inc81]
Incertis, F.; 1981; Control de invernaderos con computador; Mundo
electrónico; Nº 113; pp. 59-113.
[Inc79]
Incertis, F.; 1979; Diseño de sistemas de control operando en entornos
parcialmente definidos. Aplicación a los problemas de control ambiental de
invernaderos; Convención Informática Latina; Barcelona; España; pp. 784-791.
[Inr93]
INRA; Varios autores; 1993; Crop Structure and light microclimate.
Characterization and applications; INRA Editions; 518 pp.
[Ios98]
Ioslovich; I.; Seginer, I.; 1998; Approximate seasonal optimization of the
greenhouse environment for a multi-state-variable tomato model; Transactions
of the ASAE, Vol. 41; Nº 4, pp. 1139-1149.
[Ios96]
Ioslovich, I.; Gutman, P.O.; Seginer, I.; 1996; A non-linear optimal greenhouse
control problem with heating and ventilation; Optimal Control Applications &
Methods; Vol. 17; pp. 157-169.
[Ios95]
Ioslovich, I.; Seginer, I.; Gutman, P.O.; Borshchevsky, M.; 1995; Sub-optimal
CO2 enrichment of greenhouses; Journal of Agricultural Engineering Research,
Vol. 60, pp. 117-136.
[Iqb77]
Iqbal, M.; Khatry, A.K.; 1977; Wind-Induced heat transfer coefficients from
glasshouse; Transactions of the ASAE; Nº 20; pp. 157-160.
[Iwa94]
Iwao, K.; 1994; Application of fuzzy theory to a plant factory with artificial
intelligence; Electrothecnology Applications; Vol. 1; pp. 317-320.
355
Referencias bibliográficas
[Jon99]
[Jon91a]
[Jon91b]
[Jon90a]
[Jon90b]
[Kam96]
[Kas00]
[Kin80]
[Kit98]
[Kon94]
[Kuu93]
[Kyr02]
[Laf02]
[Lao98]
[Lar00]
[LeB98]
[Lin99]
Jones, J.W.; Kening, A.; Vallejos, C.E.; 1999; Reduced state-variable tomato
growth model; Transactions of the ASAE; Vol. 42 (1); 255-265 pp.
Jones, J.W.; 1991; A dynamic-tomato growth and yield model (TOMGRO);
Transactions of the ASAE; Vol. 34 (2); 663-672 pp.
Jones, J.W.; 1991; Crop growth, development and production modeling; 1991
Symposium on Automated Agriculture for the 21st Century; pp 447-457.
Jones, P.; Jones, J.W.; Hwang, Y.; 1990; Simulation for determining
greenhouse temperature setpoints; Transactions of the ASAE; Vol. 33; Nº 5;
1722-1728 pp.
de Jong, T.; 1990; Natural ventilation of large multispan grenhouses; PhD
Thesis; University of Wageningen; Holanda; 116 pp.
Kamp, P.G.H.; Timmerman, G.J.; 1996; Computerized environmental control
in greenhouses. A step by step approach; IPC Plant, Ede, The Netherlands, 273
pp.
Kassman, D.E.; Badgwell, T.A.; Hawkins, R.B.; 2000; Robust steady-state
target calculation for model predictive control; AIChE Journal; Vol. 46; Nº 5;
1007-1024.
Kindelan, M.; 1980, Dynamic modeling of greenhouse environment,
Transactions of the ASAE, Nº 23, pp. 1232-1239.
Kittas, C.; Baille, A.; 1998; Determination of the spectral properties of several
greenhouse cover materials and evaluation of specific parameters related to
plant response; Journal of Agricultural Engineering Research; Nº 71; pp. 193202.
Koning, A.N.M. de; 1994; Development and dry matter distribution in
glasshouse tomato: a quantitative approach; PhD Thesis Dissertation;
Agricultural University of Wageneningen; Wageneningen; The Netherlands;
240 pp.
Kuusk, A.; 1993; Simulation of crop reflectance; Crop structure and light
microclimate; INRA Editions, pp 263-270.
Kyriannakis, E.J.; Arvanitis, K.G.; Sigrimis, N.; 2002; On-Line improvement
for the descentralized predictive control of the heat dynamics of a greenhouse;
15th IFAC World Congress; Barcelona; España; pp. 64 (Abstracs); 6 pp
(Versión completa).
Lafont, F.; Balmat, J.F.; 2002; Optimized fuzzy control of greenhouse; Fuzzy
Sets and Systems; Vol. 128; pp. 47-59.
Lao, J.L.; 1998; Análisis técnico-económico de un invernadero asimétrico en
comparación con un invernadero parral de Almería; Proyecto fin de carrera;
Universidad de Almería, 278 pp .
Larsson, T.; Skogestad, S.; 2000; Plantwide control. A review and a new design
procedure; Modeling, Identification and Control; Vol. 21; pp. 209-240.
Le Bot, J.; Adamowicz, S.; Robin, P.; 1998; Modelling plant nutrition of
horticultural crops: a review; Sciencia Horticulturae, Nº 74; 225-239 pp.
Linker, R.; Gutman, P.O.; Seginer, I; 1999; Robust controllers for simultaneous
control of temperature and CO2 concentration in greenhouses; Control
Engineering Practice, Vol. 7,pp. 851-862.
356
Referencias bibliográficas
[Lin98]
[Lju99]
[Lju97]
[Loe99a]
[Loe99b]
[Lop89b]
[Lop89a]
[Man90]
[Man89]
[Map96]
[Mar99]
[Mar98]
[Mar97]
[Mar95a]
[Mar95b]
[Mar93a]
[Mar93b]
Linker, R.; Seginer, I.; Gutman, P.O.; 1998; Optimal CO2 control in a
greenhouse modeled with neural networks; Computers and Electronics in
Agriculture; Vol. 19; pp. 289-310.
Ljung, L.; 1999; System identification. Theory for the user; Prentice Hall;
Englewood Cliffs; New Jersey; Estados Unidos; 672 pp.
Ljung, L.; 1997; System Identification Toolbox. The MathWorks Inc; 274 pp.
Loeblein, C.; Perkins, J.D.; 1999; Structural design for on-line process
optimization: I. Dynamic Economics of MPC; AIChE Journal; Vol. 45; Nº 5;
1018-1029.
Loeblein, C.; Perkins, J.D.; 1999; Structural design for on-line process
optimization: II. Application to a simulated FCC; AIChE Journal; Vol. 45; Nº
5; 1030-1040.
López, J.; Hernández, C.; Feijoo, S.; Balsa, R.; 1989; Expert system control of
greenhouse crops; IASTED International Symposium of Applied Informatics,
AI’89; Anaheim; Estados Unidos; pp 9-11.
López, J.; Hernández, C.; Feijoo, S.; Balsa, R.; 1989; Balanced climate in
protected crops; 39th ISMM International Conference on Mini and
Microcomputers and their applications; MIMI’89; Zurich, Suiza; pp 142-162.
Manera, C.; Picuno, P.; Scarascia, G.; 1990, Analisis of nocturnal microclimate
in a single skin cold greenhouse in Mediterranean countries, Acta
Horticulturae, Nº 281, pp. 47-56.
Manera, C.; Picuno, P.; Scarascia, G.; 1989, Studio di un modello matamatico
previsionale del microclima notturno nelle serre fredde con signolo strato di
copertura, Colture Protette, Nº 10, pp. 81-88.
Varios autores; 1996; Agrometeorología; Coedición de Ministerio de
Agricutura, Pesca y Alimentación; Ediciones Mundi-Prensa; 517 pp.
Martínez, P.; Caracterización y simulación de la evolución de variables
climáticas y acciones de control en el cultivo forzado del tomate; Proyecto Fin de
Carrera; Director. Francisco Rodríguez Díaz; Universidad de Almería; España;
272 pp.
Marcelis, L.F.M.; Heuvelink, E.; Goudriaan, J.; 1998; Modelling biomass
production and yields of horticultural crops: a review; Scientia Horticulturae;
Nº 74; pp. 83-111.
Martínez, M.; Senent, J.S.; Sanchís, J.; Blasco, X.; 1997; Control predictivo
multivariable de un invernadero optimizado mediante Simulated Annealing;
XVII Jornadas de Automática; España; pp. 145-150.
Maroto, J.V.; 1995; Horticultura herbácea especial; Ediciones Mundi-Prensa;
Madrid; España; 566 pp.
Marcelis, L.F.M.; de Koning, N.M.; U; 1995; Biomass partitioning in plants;
Greenhouse climate control: an integrated approach; Wageningen Pers; pp 8492.
Marcelis, L.F.M.; 199311z; Simulation of biomass allocation in greenhouse
crops. A review; Acta Horticulturae; Nº 328; pp. 49-67.
Martin-Clouaire, R.; Boulard, T.; Cros, M.J.; Jeannequin, B.; 1993; Using
empirical knowledge for the determination of climatic setpoints: an artificial
intelligence approach; The Computerized greenhouse; Academic Press, San
Diego; California; Estados Unidos; pp. 197-224.
357
Referencias bibliográficas
[Mar93c] Martin-Clouaire, R.; 1993; Determination of climate setpoints by satisfaction of
soft constraints; 12th IFAC World Congress; Sidney; Australia; Vol. 1; pp. 321324.
[Mat00] Matous, K.; Leps, M.; Zeman. J.; Sejnoha; 2000; Applying genetic algorithms
to selected topics commonly encountered in engineering practice; Computers
Methods in applied mechanics and engineering; Nº 190; pp. 1629-1650.
[Mat98a] The MathWorks Inc.; 1998; Using Matlab. The Language of Technical
Computing; Estados Unidos; 531 pp.
[Mat98b] The MathWorks Inc.; 1998; Using Simulink. Dynamic Systems Simulation for
Matlab; Estados Unidos; 645 pp.
[Mat97] The MathWorks Inc.; 1997; Optimization Toolbox User’s Guide; Ed.
MathWorks Inc.; Estados Unidos; 170 pp.
[May99] Mayer, D.G.; Belward, J.A.; Widell, H.; Burrage; 1999; Survival of the fittestgenetic algorithms versus evolution strategies in the optimization of sytems
models; Agricultural Systems; Nº 60; pp. 113-122.
[Meg99] Megías, D.; El Ghoumari, M.Y.; Serrano, J.; 1999; Extended linearised
predictive control: practical control algorithms for non linear systems;
European Control Conference; Karlsruhe; Alemania; pp. 791 (Abstract); 6 pp.
(Versión completa).
[Mer97] Merelo, J.J.; 1997; Tutorial de informática evolutiva; Curso de doctorado;
Universidad del País Vasco; 46 pp.
[Mig98a] Miguel, A.F.; van de Braak, N.J.; Silva, A.M.; Bot, G.P.A.; 1998; Free
convection heat transfer in screened greenhouses; Journal of Agricultural
Engineering Research, Nº 69, pp. 133-139.
[Mig98b] Miguel, A.F.; van de Braak, N.J.; Silva, A.M.; Bot, G.P.A.; 1998; Physical
modelling of natural ventilation through screens and windows in greenhouses;
Journal of Agricultural Engineering Research, Nº 70, pp. 165-176.
[Mod00] Modelica Association; 2000; Modelica TM - An Unified Object-Oriented
Language for Physical Systems Modeling. Language Specification; Modelica
Association; Suecia; 71 pp.
[Mon98] Montero, J.I.; Antón, A.; Muñoz, P.; 1998; Refrigeración de invernaderos;
Curso Superior de Especialización: Tecnología de Invernaderos II; Editado por
la Dirección General de Investigación y Formación Agroalimentaria de la Junta
de Andalucía, FIAPA y Caja Rural de Almería; 313-338 pp.
[Mon96] Montero, J.I.; Muñoz, P.; Antón, A.; 1996; Discharge coefficients of
greenhouse windows with insect-proof screens; Acta Horticulturae; Nº 443; pp.
71-77.
[Mon93] Montero, J.I.; Antón, A.; 1993; Tecnología del invernadero; Curso de
formación; Universidad de Buenos Aires; Argentina; 128 pp.
[Mor02] Moreno, J.C., Berenguel, M.; Rodríguez, F.; Baños, A.; 2002; Robust control of
greenhouse climate exploiting measurable disturbances; 15th IFAC World
Congress; Barcelona; España; pp. 365 (Abstract); 6 pp. (Versión completa).
[Mor00a] Morimoto, T.; Hashimoto, Y.; 2000; An intelligent control for greenhouse
automation, oriented by the concepts of SPA and SFA. An application to a postharvest process; Computers and Electronics in Agriculture; Vol. 8; pp. 555-567.
358
Referencias bibliográficas
[Mor00b] Morimoto, T.; Hashimoto, Y.; 2000; AI approaches to identification and control
of total plant production systems; Control Engineering Practice; Vol. 29; pp. 320.
[Mor95] Morimoto, T.; Torii, T.; Hashimoto, Y.; 1995; Optimal control of physiological
processes of plants in a green plant factory; Control Engineering Practice; Nº 29;
pp. 3-20.
[Mor93a] Morimoto, T.; Torii, T.; Hashimoto, Y.; 1993; Computer integrated system for
plant factory. Application of optimal regulator and genetic algorithm to the
optimal control of physiological processes of plant; 12th IFAC World Congress;
Sidney; Australia; Vol. 1; pp. 313-316.
[Mor93b] Moré, J.J.; Wright, S.J.; 1993; Optimization software guide; Ed. Society for
Industrial and Applied Mathematics; Philadelphia; Estados Unidos; 154 pp.
[Mos95] Mosca, E.; 1995; Optimal, Predictive and Adaptive Control; Ed. Prentice-Hall;
477 pp
[Muñ99] Muñoz, P.; Montero, J.I.; Antón, A.; Giuffrida, F.; 1998; Effect of insect-proof
screens and roof openings on greenhouse ventilation; Journal of Agricultural
Engineering Research; Nº 73; pp. 171-178.
[Muñ98] Muñoz, P.; Montero, J.I.; Antón, A.; 1998; Ventilación natural de
invernaderos; Curso Superior de Especialización: Tecnología de Invernaderos
II; Editado por la Dirección General de Investigación y Formación
Agroalimentaria de la Junta de Andalucía, FIAPA y Caja Rural de Almería;
267-311 pp.
[Nar90]
Narendra, K.S. and Parthasarathy, D.; 1990; Identification and control of
dynamical systems using neural networks; IEEE Transactions on Neural
Networks, Vol. 1, pp. 4-27.
[Nie96]
Nielsen, B.; Madsen, H.; 1996; Predictive control of air temperature in
greenhouses; 13th IFAC World Congress; San Francisco; Estados Unidos; pp.
64-69.
[Nie95]
Nielsen, B.; Madsen, H.; 1995; Identification of transfer functions for control of
greenhouse air temperature; Journal of Agricultural Engineering Research;
Vol. 60, pp. 25-34.
[Nie94]
Nielsen, B.; Madsen, H.; 1994; Identification of a continuous time model of the
heat dinamics of a greenhouse; 2nd IFAC/ISHS Workshop on Mathematical and
Control applications in Agriculture and Horticulture; Acta Horticulturae;
Silsoe; Reino Unido; Vol. 406; 39-48 pp.
[Nie92]
Nielsen, B.; Madsen, H.; 1992; Identification of thermal parameters of
greenhouse; Dina Research Report; Nº 9; Danish Informatics Network in the
Agriculture Sciences; 18 pp.
[Nov01] Novotécnica; 2001; Anuario de la agricultura almeriense 2001; Ed.
Novotécnica; Almería; España; 226 pp.
[Nov00] Novotécnica; 2000; Anuario de la agricultura almeriense 2000; Ed.
Novotécnica; Almería; España; 202 pp.
[Nov99] Novotécnica; 1999; Anuario de la agricultura almeriense 1999; Ed.
Novotécnica; Almería; España; 168 pp.
[Oll98]
Ollero, P.; Camacho, E.F.; 1998; Control e instrumentación de procesos
químicos.; Ed. Síntesis, 455 pp.
359
Referencias bibliográficas
[Pac96a]
[Pac96b]
[Pal97]
[Pal92]
[Pap00]
[Pau98]
[Pea95]
[Piñ02a]
[Piñ02b]
[Piñ01]
[Pol00]
[Pol99]
[Por96]
[Pra97]
[Pra96]
[Pre95]
[RAE01]
Pachepsky, L.B.; Haskett, J.D.; Acock, B.; 1996; An adequate model of
photosynthesis I. Parametrization, validation and comparison models.
Agricultural Systems; Nº 5; pp. 227-237.
Pachepsky, L.B.; Haskett, J.D.; Acock, B.; 1996; An adequate model of
photosynthesis II. Dependence of parameters on environmental factors.
Agricultural Systems; Nº 5; pp. 209-225.
Estación Experimental “Las Palmerillas”; 1997; Datos meteorológicos.
Campañas agrícolas 76/77-94/95; Edita Caja Rural de Almería; 54 pp.
Palomo, E.; 1992; Desarrollo de una metodología teórico experimental de
caracterización de invernaderos; Universidad Complutense de Madrid; España;
234 pp.
Papadakis, G.; Briassoulis, D.; Scarascia, G.; Vox, G.; Feuilloley, P.; Stoffers,
J.A.; 2000; Radiometric and thermal properties of, and testings methods for,
greenhouse covering materials; Journal of Agricultural Engineering Research;
Nº 77; pp. 7-38.
Paul, R.J.; Chanev, T.S.; 1998; Simulation optimisation using a genetic
algorithm; Simulation Practice and Theory ; Nº 6; pp. 601-611.
R.K. Pearson; 1995; Nonlinear input/output modelling; Journal of Process
Control; Vol. 5, Nº 4; pp. 197-211.
Piñón, S.M.; Peña, M.; Camacho, E.F.; 2002; Control predictivo robusto:
aplicación al control de temperatura de un invernadero; XXIII Jornadas de
Automática; Tenerife; España
Piñón, S.M.; Camacho, E. F.; Kuchen, B.; 2002; Constrained predictive control
of a greenhouse; 15th IFAC World Congress; Barcelona; España; pp. 65
(Abstracs); 6 pp (Versión completa).
Piñón, S.M.; 2001; Control predictivo basado en modelo para cultivos
protegidos; PhD Thesis; Universidad de San Juan; Argentina; 199 pp.
Pollet, I.V.; Pieters, J.G.; 2000; Condensation and radiation transmittance of
greenhouse cladding materials. Part2: Results for a complete condensation
cycle; Journal of Agricultural Engineering Research; Nº 75; pp. 65-72.
Pollet, I.V.; Pieters, J.G.; 1999; Laboratory measurements of PAR
transmittance of wet and dry greenhouse cladding materials; Agricultural and
Forest Meteorology; Nº 93; pp. 149-152.
Portree, J.; 1996; Greenhouse Vegetable Production Guide for
commercial growers; Ministery of Agriculture, Fisheries and Food;
Victoria; Canadá; 122 pp.
de Prada, C.; 1997; Optimización de consignas en control predictivo;
Universidad de Valladolid; Curso de doctorado Control predictivo de procesos;
42 pp.
de Prada, C.; Valentín, A.; 1996; Set-point optimization in multivariable
constrained predictive control; 13th IFAC World Congress; San Francisco;
Estados Unidos; pp. 351-356.
Press, W.H.; Teukolsky, S.A.; Vetterling, T.W.; Flannery, B.P.; 1995;
Numerical recipes in C: The art of scientific computing; Cambridge University
Press; 994 pp.
Real Academia Española; 2001; Diccionario de la lengua española; Vigésimo
segunda edición; Editorial Espasa Calpe; 2368 pp.
360
Referencias bibliográficas
[Rio97]
[Rod02]
[Rod01a]
[Rod01b]
[Rod01c]
[Rod00]
[Rod99a]
[Rod99b]
[Rod98]
[Ros88]
[Rub96]
[Rue98]
[Rum96]
[Sah00]
[San01]
Ríos Insua, D.; Ríos Insua, S.; Martín, J.; 1997; Simulación. Métodos y
aplicaciones; Editorial RA-MA; 371 pp.
Rodríguez, F.; Yebra, L.,J.; Berenguel, M.; Dormido, S.; 2002; Modelling and
simulation of greenhouse climate using Dymola; 15th IFAC World Congress;
Barcelona; España; pp. 209 (Abtracs); 6 pp. (Versión completa).
Rodríguez, F.; Berenguel, M.; Arahal, M.R.; 2001; Feedforward controllers for
greenhouse climate control based on physical models; European Control
Conference 2001; Oporto; Portugal; pp. 2158-2163.
Rodríguez, F.; Berenguel, M.; 2001; Obtención de modelos simplificados para
el control climático de invernaderos; 1er Congreso Nacional para la Agricultura
y el Medio Rural; Valencia; España; 429-437 pp.
Rodríguez, F.; Berenguel, M.; 2001; Sistemas de control climático de
invernaderos (II); Riegos y Drenajes XXI (Elsevier); Vol. 116; pp. 28-37.
Rodríguez, F.; Berenguel, M.; 2000; Sistemas de control climático de
invernaderos (I); Riegos y Drenajes XXI (Elsevier); Vol. 115; pp. 30-36.
Rodríguez, F.; Arahal, M.R.; Berenguel, M.; 1999; Application of artificial
neural networks for greenhouse climate modelling; European Control
Conference 1999; Karlsruhe, Germany, pp. 1098 (Proceedings), 6 pp (CDROM).
Rodríguez, F.; Corral, A.; Bienvenido, F.; 1999; Application of distributed
techniques in a set of tools to climatic sensor signal validation and data
analysis; Advances in intelligent systems: Concepts, tools and